Chess Review November 21, 2005 Berkeley, CA Edited and presented by Industrial Collaboration: Automotive Electronics Alberto Sangiovanni- Vincentelli UC Berkeley

Chess Review November 21, 2005 Berkeley, CA Edited and presented by Industrial Collaboration: Automotive Electronics Alberto Sangiovanni-Vincentelli UC.
Dec 18, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Chess ReviewNovember 21, 2005Berkeley, CA
Edited and presented by
Industrial Collaboration:Automotive Electronics
Alberto Sangiovanni-VincentelliUC Berkeley

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 2
Automotive Collaborations
• General Motors (ASV)– Architecture Exploration Using Metropolis– FlexRay Scheduling– Cost Metrics
• Toyota (K. Hedrick, E. Lee)– Cold Start Engine Controller
• Pirelli (ASV)– Smart Tire
• Daimler-Chrysler (all)– Embedded Software design

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 3
ABS: Antilock Brake SystemACC: Adaptive Cruise ControlBCM: Body Control ModuleDoD: Displacement On DemandECS: Electronics, Controls, and Software
EGR: Exhaust Gas Recirculation.GDI: Gas Direct InjectionOBD: Onboard DiagnosticsTCC: Torque Converter ClutchPT: Powertrain
Valu
e f
rom
Ele
ctr
on
ics &
S
oft
ware
-More functions & features-Less hardware-Faster
Forefront of Innovation
Vehicle Integration
System Connection
Subsystem Controls & Features
Potential inflection point. Now! Hybrid PT Hybrid PT
Electric IgnitionElectric Ignition
ACCACC
Rear Vision Rear Vision
Passive Entry
Passive Entry Side
AirbagsSide
Airbags
Fuel CellFuel Cell
Wheel Motor Wheel Motor
……
OnStarOnStar
OBD IIOBD II
HI Spd DataHI Spd Data
Rear aud/vidRear
aud/vidCDsCDs
BCMBCM
ABS
ABS
TCCTCC
EGREGR
Electric FanElectric Fan
Head AirbagsHead
Airbags......
Electric BrakeElectric Brake
DoD DoD
GDIGDI
……
… …
… …
… … … …
… …
1970s 1980s 1990s 2000s 2010s 2020s
Electronics, Controls & Software is shifting the basis of competition in vehicles
$11
82
$
11
82
(+
196
%)
(+1
96
%)
$11
82
$
11
82
(+
196
%)
(+1
96
%)
50 E
CU
s
(+1
50
%)
50 E
CU
s
(+1
50
%)
100
M L
ines o
f C
od
e (+
990
0%
)
1
00
M L
ines o
f C
od
e (+
990
0%
)
$40
0$
40
0
20 E
CU
s2
0 E
CU
s
1M
Lin
es
1M
Lin
es
1M
Lin
es
1M
Lin
es
Software $Other $ Electronics $ Software $Other $
Mechanical $Mechanical $
Electronics $
AVG. AVG.
Source: Matt Tsien, GM

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 4
Specification
Analysis
Dev
elo
pm
ent
Pro
cess
BusesBusesMatlab
CPUs Buses OperatingSystems
Behavior Components Virtual Architectural Components
C-Code IPs
ASCET
ECU-1ECU-1 ECU-2ECU-2
ECU-3ECU-3BusBus
f1f1 f2f2
f3f3
System Behavior System Architecture
Mapping
Performance Analysis
Refinement
Evaluation ofArchitectural
and Partitioning Alternatives
Implementation
Metro: Separation of Concerns

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 5
ECU 1
CAN Bus
ECU n…...
Architecture Model: Abstraction Levels
SwTask 1
SwTask i
Middle-ware
OSEK RTOS/CPU
CAN Driver
CAN Controller
…...
(To CAN Bus)
Cpu/Rtos Medium
OSEK RTOSScheduler
Interrupt Handler
(Interrupt requests from devices)
(From Middleware)
(To CAN Driver)
CAN Driver
Sender
CAN Driver Medium
CAN Driver
Receiver
(To CAN Controller)
(To Middleware)
Bus Sender
Bus Receiver
(To CAN Bus)
(Interruption Request to
CPU)
send
receive
(From CAN Driver)

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 6
Matching Models of Computation
• The functional and architectural models should be described using the same model of computation
• Architecture Characteristics:– Network of processes connected by
point-to-point FIFOs– Non-blocking reads and writes– Messages may be lost or duplicated
within FIFO• Functional Model
– Functional blocks operate concurrently• Single rate• No synchronization across processes
– Non-blocking read, non-blocking write communication semantics
• Mapping: intersection of behaviors– Before mapping, nondeterministic loss
and/or duplication of messages in functional model
– After mapping, functional loss/duplication follows architecture
f1 f2
Nondeterministic Medium
Process Process
Functional Model

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 7
Results
• With 2 send buffers: 1. No priority inversion
2. Average message latency = 4.165ms
• With 1 send buffer: 1. Priority inversion: Message 7 < Message 1~62. Average message latency
= 4.936ms
Message Latencysent from Supervisor ECU
01234567
1 2 3 4 5 6 7 8 9 10
Message
End
-to-
end
Late
ncy
(ms
) 1 Send Buffer
2 Send Buffers
• Functional Model– 14
functional processes
– 48 signals
• CAN controller configurations:– Number of
send buffers
• Metric– Message
End-to-end Latency
Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 8
Automotive Collaborations
• General Motors (ASV)– Architecture Exploration Using Metropolis– FlexRay Scheduling– Cost Metrics
• Toyota (K. Hedrick, E. Lee)– Cold Start Engine Controller
• Pirelli (ASV)– Smart Tire
• Daimler-Chrysler (all)– Embedded Software design

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 9
Project Background and Motivation
• GM has decided to choose FlexRay as the future communication system
• Importance of deciding the Communication Cycle Length, Slot Size and Slot Order in the FlexRay based system design.
• There is currently no technique to determine these parameters for FlexRay.
• Scheduling is currently done manually in GM, which is time consuming and error prone.
• Need an incremental scheduling tool for FlexRay system which supports any form of automated bus/task schedule

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 10
FlexRay Timing Hierarchy
Application Cycle NApp Cycle N-1 App Cycle N+1
Communication Cycle XComm Cyc X-1 Comm Cyc X+1
STATIC SEG DYNAMIC SEG SYMBOL WIN NIT
... 1 ...
STATIC SLOT
2 3 4 5 6 7 8 9 10 11 12 13 14 15
ACTION POINT OFFSET
FRAME ID CHANNEL IDLE
SLOT YSLOT Y-1 SLOT Y+1
Header Segment Payload Segment Trailer Segment
FlexRay Frame 5+(0 … 254) + 3 bytes
Source: FlexRay Specification 2.1
Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 11
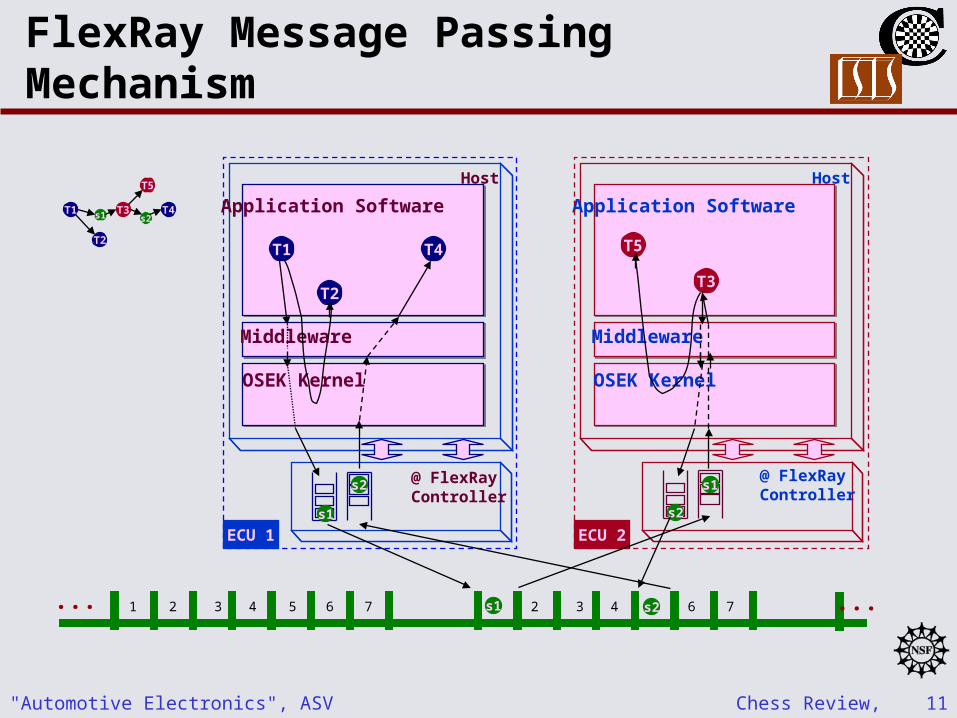
FlexRay Message Passing Mechanism
1 2 3 4 5 6 7... 1 2 3 4 5 6 7 ...
T1 T3 T4s1
T2
s2
T5
@ FlexRay Controller
OSEK Kernel
Middleware
Application Software
Host
ECU 1
T1 T4
T2
@ FlexRay Controller
OSEK Kernel
Middleware
Application Software
Host
ECU 2
T3
T5
s1
s1
s2
s2
s1s2

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 12
Comparison for scheduling
In Traditional Schedule:
Incremental changes impossible without full rescheduling
In Optimized Schedule:
A lot more porosity to accommodate new tasks and messages

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 13
Scheduling Tool Framework
AETM-DB (XML)
convert
FlexRay communicationSystem design tool-Graphical Design Front End
Internal Data Structure
Scheduling Engine
AETM-DB1 (XML)
Back-annotate
Gant Graph SchedulingResult Display

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 14
Automotive Collaborations
• General Motors (ASV)– Architecture Exploration Using Metropolis– FlexRay Scheduling– Cost Metrics
• Toyota (K. Hedrick, E. Lee)– Cold Start Engine Controller
• Pirelli (ASV)– Smart Tire
• Daimler-Chrysler (all)– Embedded Software design
Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 15
Toyota: Coldstart Engine Controller Design(C. Zavala and K. Hedrick)
• Objectives:– Minimize the HC emissions of
cold-start – Reduce design-to-
implementation controller cycle time.
• Challenges– Sensors not active, poor
combustion, keep development cost low.
• Strategies– Design of AFR and HC
observers, use of design of automated tools, use of modern controller design techniques Experimental facilities
Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 16
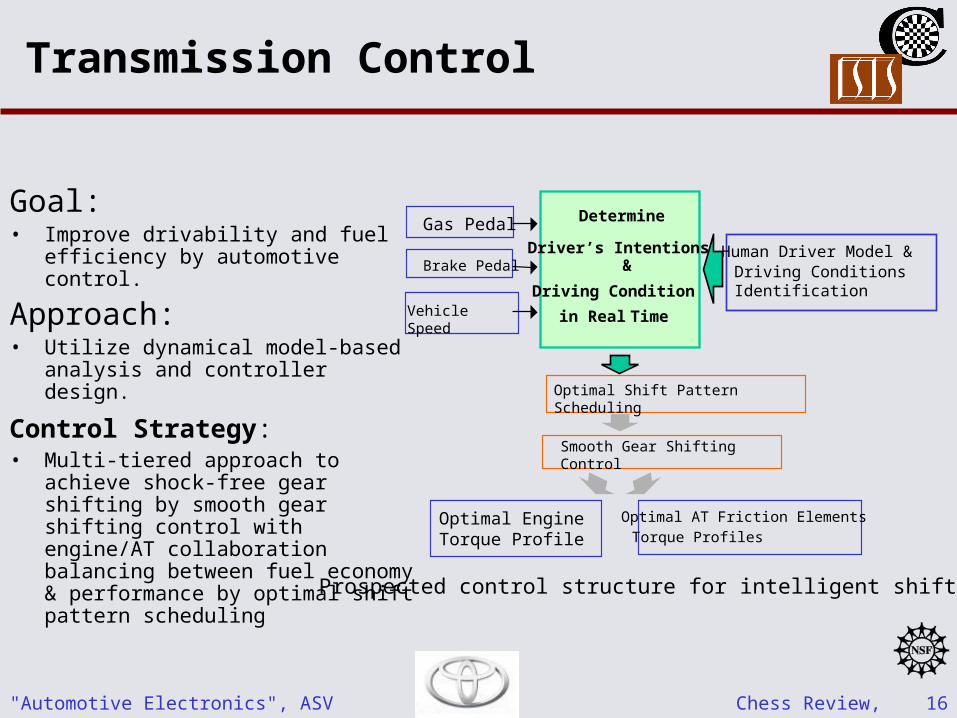
Transmission Control
Goal:• Improve drivability and fuel
efficiency by automotive control.
Approach:• Utilize dynamical model-based
analysis and controller design.
Control Strategy: • Multi-tiered approach to achieve
shock-free gear shifting by smooth gear shifting control with engine/AT collaboration balancing between fuel economy & performance by optimal shift pattern scheduling
Prospected control structure for intelligent shifting
Smooth Gear Shifting Control
Gas Pedal
Brake Pedal
Vehicle Speed
Optimal Shift Pattern Scheduling
Human Driver Model &Driving Conditions Identification
Optimal Engine Torque Profile
Optimal AT Friction Elements Torque Profiles
Determine
Driver’s Intentions &
Driving Condition in Real Time

Chess Review, Nov. 21, 2005"Automotive Electronics", ASV 17
Hybrid Systems Modeling
Objectives• Hybrid System Analysis: study of
a general semantics for simulator engines to execute hybrid system models.
• Study of representations of discontinuities and interactions between continuous-time dynamics and simultaneous discrete events
• The code generation project aims to produce application code automatically from graphical models in Ptolemy II
If an outgoing guard is true upon entering a state, because of the triggering semantics of transitions, the time spent in that
state is identically zero. This state is called a ¡°transient state¡±.
Related Documents











