Characterization of ICESat/GLAS waveforms over terrestrial ecosystems: Implications for vegetation mapping Amy L. Neuenschwander, 1 Timothy J. Urban, 1 Roberto Gutierrez, 1 and Bob E. Schutz 1 Received 20 July 2007; revised 17 November 2007; accepted 31 December 2007; published 23 April 2008. [1] ICESat/GLAS laser altimetry data have become increasingly utilized for vegetation mapping and canopy characterization. Waveform shapes are dependent upon complex relationships between several factors on the illuminated surface including topography, brightness, clouds, satellite pointing, laser energy, footprint size, shape and orientation, and vegetation height and position within the footprint. However, the understanding of these factors is presently unclear. We first examine the simple case introduced into the GLAS waveform by laser retro-reflectors placed at White Sands, New Mexico, as a proxy for vegetation height detection. We observed that the 1/e 2 energy distribution was only an approximation and that strong reflectors contribute to the returned energy beyond the estimated parameters. The precise position of the corner cube reflector within each footprint coupled with laser pointing angle is an important factor on the estimated vegetation height. Next we examine the implications of vegetation structure and surface topography on the waveform shape and derived elevations, compared with data from an airborne lidar system at Freeman Ranch, Texas, which has been targeted by ICESat since 2005. Small-footprint waveforms were combined to synthesize the energy distribution within a GLAS footprint, and they compared well (>90% correlation) to the GLAS waveforms. The GLAS-estimated canopy heights compared well (m = 0.21 m) to the airborne lidar estimates during leaf-on conditions. However, GLAS-estimated ground elevations are biased by 1 m compared to airborne lidar in vegetated regions. In this landscape, the GLAS-energy ratio (canopy-to-ground energy) was a good indicator (R 2 = 0.74) of the amount of woody cover within the footprint. Citation: Neuenschwander, A. L., T. J. Urban, R. Gutierrez, and B. E. Schutz (2008), Characterization of ICESat/GLAS waveforms over terrestrial ecosystems: Implications for vegetation mapping, J. Geophys. Res., 113, G02S03, doi:10.1029/2007JG000557. 1. Introduction [2] NASA’s Ice, Cloud, and land Elevation Satellite (ICESat) was launched 13 January 2003, carrying the Geoscience Laser Altimeter System (GLAS) payload. Its primary mission objective is to measure long-term polar ice changes. Additionally, ICESat obtains global measurements over all surface types including sea ice, land/vegetation, oceans, and the distribution of clouds and aerosols in the atmosphere. Laser degradation occurred more rapidly than predicted, and thus a modified mission scenario was devel- oped whereby the satellite operates in two or three laser-on operation periods per year (called ‘‘campaigns’’) to satisfy the primary mission goals [Schutz et al., 2005]. [3] The utilization of ICESat/GLAS laser altimetry for mapping terrestrial properties and for the validation of Digital Elevation Models (DEM) is becoming more common. Elevations derived from ICESat are used for calibrating DEMs from the Shuttle Radar Topography Mission (STRM) [Zwally et al., 2002; Carabajal and Harding, 2005; Carabajal and Harding, 2006]. Large foot- print airborne lidar systems such as SLICER and LVIS have been used to estimate canopy height and biomass [Harding et al., 2001] and most recently canopy height estimation methods have been applied to the space-based lidar system ICESat [Lefsky et al., 2005, 2007]. One advantage of ICESat over airborne systems is near global coverage of waveform lidar data. For flat, non-vegetated surfaces the vertical accuracy of ICESat has been measured at better than 10 cm and with a vertical precision of 2–3 cm [cf. Fricker et al., 2005; Martin et al., 2005; Magruder et al., 2007; Urban et al., 2008]. However, uncertainties arise in the accuracy of elevations computed for vegetated surfaces. [4] Magruder et al. [2007] examined an area of the White Sands Missile Range (WSMR), where ICESat/GLAS cali- bration and validation experiments are conducted. We revisit this site, which was surveyed by conventional airborne first-and-last-return lidar, and examine simple ‘‘proxy trees’’ (laser retro-reflectors mounted on an array of poles, see next section) in this otherwise flat, unvegetated area. With no discernable vertical or horizontal structure, our ‘‘proxy trees’’ introduce additional peaks to the wave- form solely according to their height. The resulting eleva- JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 113, G02S03, doi:10.1029/2007JG000557, 2008 1 Center for Space Research, University of Texas at Austin, Austin, Texas, USA. Copyright 2008 by the American Geophysical Union. 0148-0227/08/2007JG000557 G02S03 1 of 18

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Characterization of ICESat/GLAS waveforms over terrestrial
ecosystems: Implications for vegetation mapping
Amy L. Neuenschwander,1 Timothy J. Urban,1 Roberto Gutierrez,1 and Bob E. Schutz1
Received 20 July 2007; revised 17 November 2007; accepted 31 December 2007; published 23 April 2008.
[1] ICESat/GLAS laser altimetry data have become increasingly utilized for vegetationmapping and canopy characterization. Waveform shapes are dependent upon complexrelationships between several factors on the illuminated surface including topography,brightness, clouds, satellite pointing, laser energy, footprint size, shape and orientation,and vegetation height and position within the footprint. However, the understanding ofthese factors is presently unclear. We first examine the simple case introduced into theGLAS waveform by laser retro-reflectors placed at White Sands, New Mexico, as a proxyfor vegetation height detection. We observed that the 1/e2 energy distribution was onlyan approximation and that strong reflectors contribute to the returned energy beyond theestimated parameters. The precise position of the corner cube reflector within eachfootprint coupled with laser pointing angle is an important factor on the estimatedvegetation height. Next we examine the implications of vegetation structure and surfacetopography on the waveform shape and derived elevations, compared with data froman airborne lidar system at Freeman Ranch, Texas, which has been targeted by ICESatsince 2005. Small-footprint waveforms were combined to synthesize the energydistribution within a GLAS footprint, and they compared well (>90% correlation) to theGLAS waveforms. The GLAS-estimated canopy heights compared well (m = 0.21 m)to the airborne lidar estimates during leaf-on conditions. However, GLAS-estimatedground elevations are biased by �1 m compared to airborne lidar in vegetated regions. Inthis landscape, the GLAS-energy ratio (canopy-to-ground energy) was a good indicator(R2 = 0.74) of the amount of woody cover within the footprint.
Citation: Neuenschwander, A. L., T. J. Urban, R. Gutierrez, and B. E. Schutz (2008), Characterization of ICESat/GLAS waveforms
over terrestrial ecosystems: Implications for vegetation mapping, J. Geophys. Res., 113, G02S03, doi:10.1029/2007JG000557.
1. Introduction
[2] NASA’s Ice, Cloud, and land Elevation Satellite(ICESat) was launched 13 January 2003, carrying theGeoscience Laser Altimeter System (GLAS) payload. Itsprimary mission objective is to measure long-term polar icechanges. Additionally, ICESat obtains global measurementsover all surface types including sea ice, land/vegetation,oceans, and the distribution of clouds and aerosols in theatmosphere. Laser degradation occurred more rapidly thanpredicted, and thus a modified mission scenario was devel-oped whereby the satellite operates in two or three laser-onoperation periods per year (called ‘‘campaigns’’) to satisfythe primary mission goals [Schutz et al., 2005].[3] The utilization of ICESat/GLAS laser altimetry for
mapping terrestrial properties and for the validation ofDigital Elevation Models (DEM) is becoming morecommon. Elevations derived from ICESat are used forcalibrating DEMs from the Shuttle Radar Topography
Mission (STRM) [Zwally et al., 2002; Carabajal andHarding, 2005; Carabajal and Harding, 2006]. Large foot-print airborne lidar systems such as SLICER and LVIS havebeen used to estimate canopy height and biomass [Hardinget al., 2001] and most recently canopy height estimationmethods have been applied to the space-based lidar systemICESat [Lefsky et al., 2005, 2007]. One advantage ofICESat over airborne systems is near global coverage ofwaveform lidar data. For flat, non-vegetated surfaces thevertical accuracy of ICESat has been measured at better than10 cm and with a vertical precision of 2–3 cm [cf. Frickeret al., 2005; Martin et al., 2005; Magruder et al., 2007;Urban et al., 2008]. However, uncertainties arise in theaccuracy of elevations computed for vegetated surfaces.[4] Magruder et al. [2007] examined an area of the White
Sands Missile Range (WSMR), where ICESat/GLAS cali-bration and validation experiments are conducted. Werevisit this site, which was surveyed by conventionalairborne first-and-last-return lidar, and examine simple‘‘proxy trees’’ (laser retro-reflectors mounted on an arrayof poles, see next section) in this otherwise flat, unvegetatedarea. With no discernable vertical or horizontal structure,our ‘‘proxy trees’’ introduce additional peaks to the wave-form solely according to their height. The resulting eleva-
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 113, G02S03, doi:10.1029/2007JG000557, 2008
1Center for Space Research, University of Texas at Austin, Austin,Texas, USA.
Copyright 2008 by the American Geophysical Union.0148-0227/08/2007JG000557
G02S03 1 of 18

tion variations are chiefly due to laser incident angle (off-nadir pointing angle plus surface slope) (here essentiallyzero slope) and ‘‘proxy tree’’ location within the footprintrelative to the laser spot centroid or peak of the GLASenergy illumination. Note that the surface slope at WhiteSands is essentially zero and therefore the laser incidentangle is the spacecraft off-nadir pointing angle.[5] Real vegetation structure introduces more complexity
into the investigation of waveforms and derived elevations.Relatively unknown contributions arise from real vegetationstructure (height and leaf density) and distribution withinthe footprint. In addition, the ambiguity of laser incidentangle on the returned waveform has not been fully inves-tigated. Progress in identifying these uncertainties has beenslow, primarily due to insufficient field data available. Onebiome where very little research has been completed is innon-homogeneous woodland savanna ecosystems, whichhave a lack of both field data and waveform lidar collection.For this study, we target a non-homogeneous woodlandsavanna near San Marcos, Texas. The test site was selectedfrom special targeting by ICESat. Small-footprint airbornewaveform lidar has been acquired along the ICESat groundtracks within the test area and will serve as the ground truthfor comparison.
2. Study Site
2.1. White Sands Missile Range
[6] The White Sands Missile Range area in New Mexicois used as a precision calibration and validation site forICESat, with experiments operated and maintained by theUniversity of Texas at Austin Center for Space Research(UTCSR). See Magruder et al. [2007] for a detaileddescription of several experiments. A target site (experimentarray) for ICESat within the Space Harbor area was selected
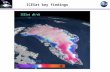
(32�580N, 106�260W), and ICESat routinely points to thissite 4 or more times per campaign, and more than 50 timessince launch, with necessary off-nadir (laser incident) anglesfrom 0.3� (nominal) to just over 5�. The topography of theICESat calibration array is flat (less than 40 cm verticalrelief) and there is sparse vegetation in the immediatevicinity of the array. Within the array, twenty-five cornercube reflectors (laser retro-reflectors) were placed on top ofpoles of various heights. The poles are grouped in columnsof 1.5, 3, 4.5, and 6 m heights to aid in the determination ofthe cross-track (longitudinal) footprint position. Each cornercube has a diameter of 13 mm, and is affixed to the top of a1-inch diameter PVC cap placed on top of each pole. Thearray, shown in Figure 1, is arranged such that 45 m existsbetween each approximate east-west (cross-track) orientedrow and 58 m exists between each north-south (along-track)oriented column. This size and arrangement ensures that atleast one ICESat footprint falls within the corner cubereflector array during each pass (assuming accurate pointingof the spacecraft and no cloud obscuration of the laser). Adiscrete return lidar survey covering an addition �30 km2
beyond the corner cube array was flown in 2003 by UTCSR
Figure 1. Corner cube reflector array at White Sands. The elevations above the TOPEX referenceellipsoid (in meters) of the surface as mapped by an airborne lidar survey conducted in 2003 are shown asthe backdrop. ICESat routinely targets the center of the array �4 times per laser campaign.
Table 1. ICESat/GLAS Campaign Parameters Over Freeman
Ranch, Texasa
GLAS Parameters
L3b L3d L3e L3g
DOY 2005073 2005299 2006057 2006302Date Mar 14 Oct 26 Feb 26 Oct 29Footprint Major Axis (m) 68 m 54 m 53 m 53 mEccentricity 0.651 0.519 0.557 0.546Off-nadir Pointing (�) 2.79� 2.07� 2.13� 2.25�Look Direction Left Right Right RightTrack Direction Descending Ascending Ascending Ascending
aPass averages are shown for the footprint and off-nadir parameters.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
2 of 18
G02S03

to provide a high resolution DEM of the White Sands area.The lidar data were projected into geographic coordinateswith respect to the TOPEX ellipsoid and have verticalprecision RMS of 7.4 cm.
2.2. Freeman Ranch, Texas
[7] The Freeman Ranch (�17 km2 in size), a research sitelocated near San Marcos, Texas, is operated by Texas StateUniversity and contains a mixture of rangeland and wood-lands. Freeman Ranch (29�560N, 98�W) lies within theBalcones Canyonland subregion of the Edwards Plateauand this region is undergoing successional change fromgrassland to Oak (Quercus virginiana)-Juniper (Juniperusashei) dominated woodlands. The topography at FreemanRanch has low hills dissected by small, typically dry,creeks. However, steep slopes do occur along the drainagechannels. While the property does function as a workingranch, Freeman Ranch has been utilized as a field site forrangeland and ecosystem studies conducted by Texas StateUniversity, Texas A&M University, and the University ofTexas at Austin. Three eddy covariance flux towers wereinstalled at Freeman Ranch by the University of Texas andTexas A&M University to measure CO2 and water vaporexchange of vegetation in areas experiencing woody en-croachment due to decades of fire suppression policies andgrazing practices. Airborne lidar was collected by theUniversity of Texas in August 2005 in an effort to derivevegetation structure information for the characterization ofcarbon stocks over a local area, which will subsequently beused to understand ecosystem processes in non-homogeneousland cover. Several on-site field campaigns have also beenconducted to measure the height distribution of vegetationstructure. However, the primary focus of the research pre-sented here is to investigate the ambiguities due to vegetationcanopy structure, vegetation distribution, and laser incidentangle on elevation data derived from spaceborne waveformlidar. Freeman Ranch was selected as a special Target ofOpportunity (TOO) for ICESat in 2005, and the spacecraft
has targeted the test area twice during each operationalcampaign since March 2005. The selection and analysis ofa well-established research area such as Freeman Ranch alsohighlights the site’s potential use as a calibration/validationsite for future spaceborne lidar missions.
3. Data and Methods
3.1. ICESat/GLAS
[8] The GLAS surface altimetry laser wavelength is1064 nm (near-infrared) and GLAS operates continuouslyat 40 Hz during each campaign, yielding footprints with acentroid separation of �165 m from ICESat’s 600 km, 94�inclination frozen orbit. The geolocation of the ICESatfootprint is determined through the combination of preciseorbit and attitude determination of the satellite [Schutz,2002; Bae and Schutz, 2002; Rim and Schutz, 2002]. ICESatorbit precision is �2 cm radially (5 cm mission require-ment) and fully calibrated data (data Release 428) have anattitude precision of 1.5 arcseconds (meets mission require-ment) [Schutz et al., 2003]. The ICESat satellite is operatedin a near-repeat ground track orbit to provide repeatablemeasurements throughout the mission, using �33 d of a91-d repeat orbit used for each campaign [Schutz et al.,2005]. The spacecraft targets reference ground tracks in thepolar regions and does not typically use active pointingelsewhere. However, the instrument can be pointed to targetsof opportunity (TOO), such as our test area to examineselected features on the Earth’s surface, up to �5� (or�50 km) from nadir. The pointing angle, depending ondirection, either adds or subtracts to the local surface slopewhich determines the total laser incident angle; it is this totalincident angle which affect the return waveforms.[9] The nominal GLAS footprint size was designed to be
�65 m, whereas the computed sizes determined frominstrumentation onboard the spacecraft are closer to about110, 90 and 55 m for lasers 1, 2 and 3, respectively [Schutzet al., 2005]. Footprint size may vary significantly during
Figure 2. GLAS laser far field patterns (LPA images) observed during two ICESat laser campaigns overthe corner cube array at White Sands Space Harbor. L2b major axis 95 m, 0.7701 eccentricity, 349�orientation angle. L3d major axis 53 m, 0.5574 eccentricity, and 328� orientation angle. These imageshave been smoothed, but calculations are computed on unsmoothed data. Each pixel in the LPA imagerepresents an IFOV of 3.38 arcseconds.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
3 of 18
G02S03

the span of each campaign, over the course of one orbit, andeven shot by shot, and so the footprint parameters reportedon the data product are examined. Each laser campaign isgiven a designation based on the laser number and asequential letter: the data examined in this paper span L2a(the first campaign from laser 2, Oct-Nov 2003) throughL3g (the seventh campaign from laser 3, Oct-Nov 2006).[10] ICESat has pointed to Freeman Ranch as a TOO
since March 2005 during one ascending and one descendingpass each campaign. Acquisitions have been made from thesecond through eighth operational periods of laser 3:campaigns L3b (Feb–Mar 2005), L3c (May–Jun 2005),L3d (Oct–Nov 2005), L3e (Feb–Mar 2006), L3f (May–Jun 2006), L3g (Oct–Nov 2006), and L3h (Mar–Apr2007). At the time of writing, the fully calibrated solutionsfor the L3c, L3f, and L3h campaigns have yet to be releasedpublicly; therefore data from those campaigns will not beincluded in this analysis. From the measurements collectedto date from each of the two opportunities during eachcampaign, one pass has been clear and the other cloudy(obscuring surface returns). The orbit, target angle, andfootprint parameters for each of the four clear passes overFreeman Ranch are listed in Table 1. The fully calibratedICESat products with nominal pointing (�0.3� pitchedforward, to avoid specular reflections) have a missionspecified accuracy of 1.5 arcseconds (1-sigma), equivalentto �4 m potential horizontal error and 2.25 cm potentialvertical error for flat, non-vegetated surfaces [Urban et al.,2008]. For off-nadir targeted acquisitions, the estimatedhorizontal error is not affected by incident angle, as thepotential error is only a function of the precision of satellite
attitude knowledge. The potential vertical error, however, isa function of both satellite attitude precision and laserincident angles, thereby increasing the potential elevationerrors at larger incident angles.[11] TheGLAS far-field footprint parameters are estimated
from ICESat’s Laser Profile Array (LPA) image for each lasershot. The LPA images for two laser shots over the corner cubearray at White Sands are shown in Figure 2. The LPAmeasures the far-field spatial pattern of the laser energy foreach transmitted pulse using an 80 � 80 pixel array imager,with a 20 � 20 portion selected onboard for transmission tothe ground. Each pixel in the LPA image represents aninstantaneous field of view (IFOV) of 3.38 arcseconds:equivalent to �10 m on the ground. The major axis, eccen-tricity, and footprint azimuth angle are estimated for eachLPA image assuming an elliptical distribution under a 1/e2
Figure 3. Representation of GLA14 Gaussian fitting (four pdfs shown in red) of raw GLAS waveform(shown in blue).
Table 2. Laser Specifications for UT Small-Footprint System and
ICESat/GLAS System
Characteristics UT Small-Footprint ICESat/GLAS
Laser Wavelength 1064 nm 1064 nmNominal FootprintDiameter
10 – 20 cm 70 m
Laser Frequency 25 kHz 40 HzLaser Pulse Width 10 ns 6 ns (nominal)Laser Field of View 1 mrad or
0.2 mrad70–110 mrad
Beam Divergence (1/e) (1/e2)Waveform PulseSampling Rate
1 ns 5/1 ns (600 records/400 records)
Return PulseRecord Length
440 1000
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
4 of 18
G02S03

energy distribution assuming an altitude of 600 km and noground slope in the calculations [Bae and Schutz, 2002].These values are averaged at 1 Hz and reported in the ICESatelevation products; however, the 1 Hz reported laser footprint
size does not take into account the variability of the 40 HzLPA images. The main cause of the variations in the footprintsizes of the different lasers is due to the initial GLAShardware fabrication (laser divergence). Beyond this, foot-
Figure 5. Depiction of waveform separability dependent upon the position of a corner cube reflector(‘‘proxy tree’’) within the ICESat/GLAS footprint with off-nadir pointing: (a) the corner cube placed atthe leading edge of the footprint results in an increase of Dt and therefore the apparent height ofthe reflector, (b) the corner cube placed in the center of the footprint results in a correct Dt between thereflector elevation and ground elevation, and (c) the corner cube placed at the trailing edge of thefootprint decreases the Dt and results in the reflector waveform convolved with the ground returnwaveform.
Figure 4. Elevation differences between GLA06 and GLA14 elevations and a 2003 airborne lidarsurvey as a function of look angle at White Sands. Negative pointing angles indicate the spacecraft islooking to the left, positive pointing angles indicate the spacecraft is looking to the right.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
5 of 18
G02S03

Figure 6. (a) Location of ICESat energy distribution (1/e2) of shot L2b-075 on the calibration array atWhite Sands, NM. (b) Return waveform of L2b-075 from calibration array. Estimated height fromwaveforms is 5.99m. The ground track for this descending pass is located to the west of the array and thelaser is pointing 0.89� to the east (looking left). Laser centroid is 11.40 m from the closest 6 m cornercube pole. Arrow indicates a narrow ground pulse.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
6 of 18
G02S03

Figure 7. (a) Location of ICESat energy distribution (1/e2) of shot L3d-296 on the calibration array atWhite Sands, NM. (b) Return waveform of L3d-296 from calibration array. Estimated height fromwaveforms is 5.24 m. The ground track for this descending pass is located to the east of the array and thelaser is pointing 4.4� to the west (looking right). Laser centroid is 27.25 m from the closest 6 m cornercube pole. Arrow indicates a broadening of the ground pulse due to off-nadir pointing.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
7 of 18
G02S03

print characteristics may change due to thermal conditions,laser energy output, spacecraft altitude and other effects.[12] ICESat/GLAS surface elevations are reported with
respect to the TOPEX reference ellipsoid, and small-footprint
airborne LIDAR elevations are converted to the TOPEXellipsoid for comparison. The TOPEX ellipsoid is similar tothe WGS-84 ellipsoid with the primary exception being a60 cm difference in the semi-major axis and a small change
Figure 8. Differences in estimated ground height from ICESat/GLAS and airborne lidar as a function ofwoody cover within each ICESat footprint.
Figure 9. Differences in estimated vegetation height from ICESat/GLAS and airborne lidar as afunction of woody cover within each ICESat footprint.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
8 of 18
G02S03

in the flattening. The GLAS products used in this analysisinclude the GLA14 (land surface altimetry), GLA06 (max-imum peak global elevation) and GLA01 (waveforms). TheGLA14 land surface altimetry product is used to extract thevegetation height and ground height from multiple returnwaveforms. The last 392 records (392 ns) of each GLASwaveform (GLA01) were geolocated using the latitude andlongitude provided in the GLA06 product by matchingthe time-tags reported in both products. Since the last392 records of GLAS waveforms are sampled at a 1 nsrate, the GLAS energy can be equated to height above theTOPEX ellipsoid in �15 cm increments based on the speedof light.[13] The GLA14 land surface elevation products detail
several parameters which describe the return waveform. TheGLA14 product includes latitude, longitude, and heightabove the reference ellipsoid based upon the centroid ofthe returned energy pulse, sometimes referred to as a centerof gravity. However, it is easy to see from Figure 3 that inthe presence of vegetation, the reported elevation derivedfrom the centroid will neither represent the ground nor theheight of the vegetation. GLA14 contains up to six Gauss-ian distributions (mode, amplitude, and sigma) which are fitto characterize the shape of each total waveform by com-bining up to 6 distinct peaks after accounting for waveform
compression schemes. GLA14 parameters are derived byimplementing a first derivative on the return waveform, todetermine the number of Gaussians fit to represent the rawwaveform (e.g., four in Figure 3) and a second derivative onthe return waveform to locate inflection points which arerelated to each Gaussian’s width. If more than six reflectionsare detected, the six modes with the highest amplitudevalues are chosen. It has been observed in this research,however, that receiver noise within the trailing edge of theGLAS waveforms are often fit with a Gaussian distribution.To ensure that the correct Gaussian reflection is being usedto represent the ground surface, we implement an indepen-dent analysis on the waveforms examined in this research.Here, the mode locations from an independent first deriv-ative of the return waveform (GLA01) having an amplitudeabove a signal threshold are matched to the GLA14 firstderivative modes, to ensure a true ground measurement forthe last peak.[14] ICESat elevations derived from this quality-con-
trolled GLA14 product will be compared against elevationdata collected by small-footprint laser mapping mission attwo locations: White Sands, New Mexico and FreemanRanch, Texas. This study examines the implications ofvegetation structure, vegetation position within the foot-print, and surface topography on the ICESat waveformshape and derived elevations, compared with the small-footprint data.[15] One issue associated with laser mapping over terres-
trial surfaces is surface reflectance. The GLAS instrument isdesigned such that the detector gain will be activelyadjusted to the intensity of the backscatter with an effectivelag time of two to three shots. Over heterogeneous terrestrialsurfaces where the reflectance and topography vary fromshot to shot, the result is many saturated waveforms. Since
Table 3. Vegetation Height Differences at Freeman Ranch for
Each ICESat Campaign
ICESatCampaign Date AVG DH, m STD DH, m Sample Size, n
L3b Mar 2005 �0.50 1.15 8L3d Oct 2005 �0.21 0.80 9L3e Feb 2006 1.27 2.10 8L3g Oct 2006 �0.21 0.41 7
Figure 10. Percent woody cover within each ICESat footprint as a function of the ratio of ICESat/GLAS canopy/ground energy. A log trend was revealed for this savanna environment.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
9 of 18
G02S03

the surface reflectivity and topography at White Sands isrelatively homogenous over the target array, many of thewaveforms are not saturated. However, a reflection from thenearest corner cube (usually the second main peak) is oftenhigh enough to saturate the waveform over the calibrationarray. An empirical saturation correction is provided on theGLAS data products to correct the elevation, but wasdesigned for single peaks over polar ice [Abshire et al.,2005], and no such correction can restore the waveformprofile. Hence, GLAS waveforms at White Sands that weresaturated were excluded from this analysis. At FreemanRanch, the presence of rolling topography, varying land-cover and residential areas along the ground track alsoresults in many saturated waveforms due to adjustment ofthe automatic gain controls. Of the potential �120 GLASshots which lie within the ALTM survey area over FreemanRanch from the L3b, L3d, L3e, and L3g campaigns, only37 waveforms were not saturated and used in subsequentanalysis.
3.2. Small-Footprint Waveform Lidar
[16] The University of Texas at Austin (UT) owns andoperates an Optech ALTM 1225 small-footprint lidar sys-tem with a full waveform digitizer. The integration of thewaveform digitizer into a commercial lidar system greatlyincreases the amount of information that can be derivedfrom each pulse. Commercial, topographic lidar systems
typically record a limited number of discrete reflections(2 to 6 returns are common) which limits their ability tocharacterize complex reflecting surfaces such as vegetation.The small-footprint mode of the UT system providesdetailed characterization of the Earth’s surface in both thehorizontal and vertical dimensions. The UT lidar systemoperates at 25 kHz and the waveform sampling rate is at 1ns or �15 cm in the vertical dimension. The waveformdigitizer is integrated into the Optech system so that bothfull waveform and the conventional first and last returns arerecorded for each transmitted laser pulse making directcomparison between the two systems possible [Gutierrez etal., 2005]. The specifications of the UT small-footprintlaser system and the ICESat/GLAS laser system are pro-vided in Table 2.[17] The small-footprint waveform lidar system was
flown over Freeman Ranch on 12 August 2005 along theascending and descending tracks of ICESat. Five passeswere flown at an altitude of 650–720 m above groundlevel (AGL) resulting in a footprint diameter of approxi-mately 13–14 cm. Geolocation of an individual small-footprint waveform is determined by computing the rangefrom the timing information and having precise knowledgeof the aircraft position, attitude and laser scanner angle.Small-footprint lidar data were projected to UTM Zone 14North coordinates with respect to the TOPEX ellipsoid.The ICESat/GLAS centroid locations were reprojected into
Figure 11. (a) Synthesized (blue dotted) waveform and GLAS (red) waveform and (b) vegetationheights (m) within GLAS footprint for L3d (October 2005) shot 178. Estimated 98.45% woody coverwithin the footprint. Correlation between two waveforms is 0.96.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
10 of 18
G02S03

UTM coordinates such that the locations were consistentwith the small-footprint lidar. The accuracy of the small-footprint lidar data was determined via comparison to akinematic GPS survey and had a vertical precision of 6.9 cm.
3.3. Synthesizing Small-Footprint Waveform Lidarto GLAS
[18] Small-footprint waveforms were combined to syn-thesize the energy distribution within a GLAS footprint. Thelast return of each small-footprint waveform was geolocatedto determine a X,Y,Z location in absolute space. Thewaveforms that fell within a GLAS footprint were averagedweighted based on their distance to the GLAS centroidfollowing equations:
d1 ¼ x sinaþ y cosad2 ¼ y sina� x cosa
w ¼ e�2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffid1=að Þ2þ d2=bð Þ
p 2� �
9>=>;
ð1Þ
where w is the raw weight, x is the distance of the small-footprint waveform along the major axis (a) from the GLAScentroid, y is the distance of the small-footprint waveformalong the minor axis (b) from the GLAS centroid, and a isfootprint azimuth orientation angle. For analysis, eachindividual waveform was evaluated to determine if the
signal-to-noise ratio (SNR) was above a threshold of three.The weights of all waveforms meeting the SNR criteriawere normalized such that their sum totaled to one. The firstand last returns of each waveform were computed and themaximum of the first return elevations was recorded as themaximum canopy height within the GLAS footprint. Todetermine an estimate of the ground elevation within theGLAS footprint, the last return elevations less than the meanof all the last return elevations were averaged together basedupon their distance to the GLAS centroid. Again, weightsbased upon the distance of each waveform to the GLAScentroid (equation (1)) were normalized such that their sumequals one. By averaging over only the points that fellbelow the mean of all the initial last return points, outliersdue to trees and shrubs were removed and did not bias theground elevation. With an initial height and standarddeviation of the ground elevations, this process wasrepeated by selecting ground returns less than 1 sigmafrom the initial ground elevation estimate. Next a canopyheight vector was constructed by computing the differencebetween the maximum canopy height and the weightedground average. Both GLAS and the small footprint lidarhave a 1 ns sampling rate, approximately 15 cm of verticalrelief. To integrate each individual waveform into thecanopy height vector, the first return was again geolocated
Figure 11. (continued)
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
11 of 18
G02S03

with the Z value representing the height at which eachwaveform is pinned and added into the canopy heightvector. The amplitude of each individual waveform wasmultiplied by the normalized weight and then added into thecanopy height vector at the appropriate location. For theanalysis conducted over Freeman Ranch, approximately5000–10,000 small-footprint waveforms were integrated torepresent each single GLAS waveform. Both the GLAS andsynthesized GLAS waveforms were normalized based upontheir maximum energy.[19] In addition to creating the synthesized GLAS wave-
form, simple statistics derived from the individual small-footprint waveforms were generated to examine the within-footprint variability of the GLAS footprint. These statisticsinclude the weighted average of the canopy height, thevariance of the canopy heights, the amount of woody cover,and the variance of the terrain elevations within the foot-print. The canopy height was determined by computing thetime difference between the first pulse and the last detectedpulse of each airborne waveform. The range computedbetween the first and last returns was adjusted to compen-sate for laser scan angle to reflect the canopy height. Theamount of woody cover within each GLAS footprint wasdetermined by dividing the number of waveforms with acanopy height range greater than 1 m by the total number ofwaveforms within the footprint. The variance of the under-lying topography was computed similar to the way that the
weighted ground elevation was computed where only thepoints that fell below the mean minus 1-sigma of all theinitial last return points were used.
4. Results
4.1. White Sands Missile Range, Calibration Array
[20] The White Sands calibration array is targeted for atleast two ascending and two descending passes during eachICESat campaign. To date, over 50 passes have beenacquired over White Sands since the launch of ICESat.After removing elevations influenced by the corner cubereflections, an elevation offset for each ICESat pass over thecalibration site is computed and compared to the airbornelidar survey flown in 2003. The biases between GLA06 andGLA14 elevations to the airborne lidar data for all fullycalibrated (Release 428) campaigns are plotted against laserpointing angle and shown in Figure 4. As laser pointingangle increases, the skewness of the returned waveform isaltered. The GLA06 elevations are determined by ranging tothe maximum peak whereas the GLA14 elevations aredetermined by ranging to the centroid of the returnedwaveform. There appears to be a trend or spread to theelevation difference between GLA06 and GLA14 as afunction of laser pointing angle, most likely related toskewness. Most elevation differences, however, fall withina 1.5-arcsecond 1-sigma pointing error which fulfills the
Figure 12. (a) Synthesized (blue dotted) waveform and GLAS (red) waveform and (b) vegetationheights (m) within GLAS footprint for L3g (October 2006) shot 172. Estimated 72.96% woody coverwithin the footprint. Correlation between two waveforms is 0.94.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
12 of 18
G02S03

mission requirement for fully calibrated campaigns. Thecause of the apparently systematic differences cannot beexplained definitively at this time.[21] For mult-ipeak waveforms, in addition to increasing
waveform skewness, off-nadir pointing affects the returntime of elements within the laser footprint. The relativetimes (and apparent relative heights) depend upon theirlocation with respect to the laser centroid. We call thiseffect waveform pulse compression and broadening. Asillustrated in Figure 5, an apparent timing difference be-tween the corner cube reflector and ground return decreasesas the corner cube reflector moves closer to the leading edgeof the laser footprint. At the nominal pointing angle ofICESat (0.3�) and using a footprint size of 50 m, the pulsecompression and broadening is ±1 ns (equivalent to ±15 cmin relative height) at the edges of the footprint. At a pointingangle of 4.4�, the effect of the pulse compression andbroadening is ±13 ns (±1.95 m). Two non-saturated cornercube hits over the calibration array were identified fromcampaigns L2b (day 075) and L3d (day 296) and are shownin Figures 6 and 7, respectively. The LPA images for thesetwo hits are those shown in Figure 2.[22] The geometry of the descending pass of L2b is such
that the ICESat nadir ground track is situated west of thearray and so the laser is pointing slightly to the east at anangle of 0.89� to hit the target. The reported centroid of this
GLAS footprint is 11.4 m from the closest corner cube pole.The laser footprint major axis is 95 m, minor axis is 60.6 m,and the footprint azimuth is 348�. In this case, the centroidof the laser footprint energy falls close to the 6 m cornercube and the height between the two detected Gaussians is5.99 m. Because the corner cube is close to the centroid andthe off-nadir pointing is relatively small (<1�), the height ofthe corner cube is accurately determined. Figure 6a showsthat two additional 6 m corner cube reflectors fall at theedge of the 1/e2 energy distribution, however they are notdetected in the return waveform. The standard deviation ofthe last (ground) pulse is 3.47 ns.[23] For the descending pass of L3d, the ICESat nadir
ground track is east of the array and so laser must point tothe west at an angle of 4.4� to illuminate the target. Figure 7ashows the 1/e2 energy distribution based upon the reportedfootprint major axis of 53 m, minor axis of 44 m, and afootprint azimuth of 328�. The centroid of the GLAS shot is27.25 m from the closest corner cube reflector, yet thewaveform indicates multiple scatterers. A corner cube on a6 m pole is located just outside the estimated footprint size,yet its influence is apparent in the waveform, indicatingthat the 1/e2 distribution is only an approximate represen-tation to the true returned energy, even assuming a �4 m(1-sigma) geolocation imprecision. The height differentialof the first detected Gaussian and the presumed ground
Figure 12. (continued)
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
13 of 18
G02S03

Gaussian is 5.24 m. The 0.76 m vertical difference betweenthe first Gaussian and the 6 m corner cube reflector is likelyan artifact of the ambiguity associated with the geolocationerror and pulse compression due to large-angle off-nadirpointing. In addition, the waveform shows two intermediateGaussians having elevations of 2.84 and 4.04 m above thesurface. Although a 3 m pole is located outside the 1/e2
distribution, the strong reflectivity of the corner cubereflector could be contributing to the 2.84 m detectedGaussian. Additionally, the LPA image for this shot indi-cates energy beyond edge of the nominal footprint charac-terization. The 4.04 m elevation appears to be an inflectionon the 6 m pulse, rather than a distinct target. It is plausiblethat this Gaussian is a result of a minor reflection fromthe pole or guide ropes supporting the 6 m reflector. Thestandard deviation of the ground pulse is 6.9 ns and thebroad pulse width is expected due to the large off-nadirpointing angle. In both L2b and L3d cases, the 1/e2
distribution appears to be an approximation of the laserenergy, which further complicates the characterization ofthe waveforms over terrestrial surfaces.
4.2. Freeman Ranch, Texas
[24] To examine the role of vegetation in the detectedground elevation from GLAS, the ground elevations for37 cloud-free, saturation-free GLAS shots over FreemanRanch were computed using the small-footprint synthesizedGLAS waveforms. Since the GLAS footprint is rather large,
the variance of the ground topography (VT) from the small-footprint lidar that fell within each GLAS footprint wascomputed. In addition, the variance of the canopy height(VC) and the mean canopy height (CH) were computedfrom the airborne lidar along with the percentage of woodycover (WC). Five GLAS shots over Freeman Ranch werefound to occur over significantly variable topographic reliefwithin the footprint and were eliminated from analysis.[25] To evaluate each GLAS waveform and corresponding
GLA14 elevation data, the ground elevations were deter-mined and compared to the airborne lidar. The GLA14ground elevation was determined by ranging to the modeof the last return in the waveform rather than using thereported elevation corresponding to the waveform centroid.As a reminder, the off-nadir pointing angle for the ICESatcampaigns over Freeman Ranch is approximately 2.2�. Forcomparison purposes, the ICESat passes having a 2.4� off-nadir pointing at White Sands were found to have an averageelevation offset of 18.5 cm (closely matching 18.0 cmpotential (1-sigma) error due to knowledge in pointingprecision) with a standard deviation of 8 cm in the deter-mined ground elevation compared to airborne lidar. Theaverage ground elevation difference (GLA14 ground –Airborne Lidar ground) for all four campaigns over FreemanRanch is 1.01 m with a standard deviation of 0.31 m. Theground elevation differences between ICESat GLA14ground elevations and the small-footprint system are plottedagainst the percentage of woody cover in Figure 8. The
Figure 13. (a) Synthesized (blue dotted) waveform and GLAS (red) waveform and (b) vegetationheights (m) within GLAS footprint for L3g (October 2006) shot 173. Estimated 74.34% woody coverwithin the footprint. Correlation between two waveforms is 0.92.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
14 of 18
G02S03

observed ground elevation differences do not show any trendas a function of the amount of vegetation present. Similarly,there was no trend observed between ground elevationdifferences and mean canopy height or variance of canopyheights and those plots are not shown. Thus, the presence ofvegetation does not appear to systematically impact theability of ICESat/GLAS to determine the ground elevation,however a �1 m bias is observed in this study. To determinethe effect of geolocation error on the robustness of results,the analysis was repeated with a 4 m offset to the centroidposition. This shift in geolocation position did not impact theestimated ground or canopy height derived from the airbornelidar.[26] Vegetation height is determined by subtracting the
ground elevation from the computed top of canopy eleva-tion. In savanna regions where woody cover is intermittent,the beginning of the GLAS waveform signal above thebackground noise was considered to be the top of thecanopy [Harding and Carabajal, 2005; Lefsky et al.,2005]. A comparable location in the synthesized waveformwas used to estimate the canopy height for comparison withthe airborne data. Figure 9 depicts the relative vegetationheights differences between GLAS waveforms and thesynthesized waveforms over Freeman Ranch for all fourlaser campaigns. In general, the vegetation height differ-ences between the airborne lidar and ICESat/GLAS are less
than a meter (see Table 3), despite the fact that two of thefour ICESat/GLAS campaigns were collected in a differentseason than the airborne lidar (i.e., March compared toAugust). Comparing the four campaigns, the two February/March campaigns (L3b and L3e) had the worst ability torepresent the vegetation heights when compared to airbornelidar, having larger means and standard deviations. Incentral Texas, many of the trees begin to leaf-out in themonth of March which could be the primary reason for thepoor comparison with the August (full leaf-on) airbornedata. In contrast, the two ICESat campaigns (L3d and L3g)that are acquired in October have an average relative canopyheight difference of 21 cm and a standard deviation lessthan one meter. The average differences between the GLASestimated canopy height and lidar estimated canopy heightfor each ICESat campaign are reported in Table 3.[27] The ability to estimate the amount of woody cover is
of great utility for vegetation mapping. For each GLASwaveform over Freeman Ranch, the returned energy waspartitioned into ground energy and canopy energy. Figure10 depicts the ratio of GLAS canopy energy to GLASground energy plotted against the percent woody cover asestimated by airborne lidar. Here, the ratio of GLAS energyagainst woody cover followed a log trend with 73.6% of thevariance explained. Freeman Ranch is a semi-arid savanna
Figure 13. (continued)
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
15 of 18
G02S03

and thus similar analysis should be conducted in other areasto develop local parameters for other types of ecosystems.
5. Discussion
5.1. Comparison of Waveform Shapes
[28] A fundamental question regarding the extraction ofvegetation structure is how well the ICESat/GLAS wave-forms capture vertical structure information despite thecoarse footprint size. Figures 11–13 depict several exam-ples of waveforms (left) and the vegetation distribution(right) within each footprint for a savanna environment.On the left side of each figure, the GLAS waveforms (inred) are plotted as a function of height above the referenceellipsoid and are matched to the synthesized (in blue)waveforms at the computed ground elevation. On the right,tree heights derived from the airborne waveform lidarsurvey of August 2005 are mapped within each footprint.The examples in Figures 11–13 were selected based uponthe relatively flat topography within each GLAS footprint.In all three waveform examples, the ground return energy(signal end) from GLAS extends beyond the synthesizedwaveform which is attributed to the response of the GLASsystem receiver. Despite some additional noise in thewaveform tails, the GLAS returned waveforms match the
synthesized waveforms well (r = 0.96, 0.94, and 0.92,respectively).[29] The laser incident (pointing) angle can cause either
waveform compression or broadening depending upon thegeometry and the location of each individual element withinthe footprint. For the corner cube reflectors at White Sands,the high laser pointing angle resulted in a compressionof the waveform. In the presence of multiple reflectors, suchas in Figures 11–13, the impacts of pulse compression andbroadening appear to be spread equally across the footprint.
5.2. Topography
[30] The effect of topography coupled with off-nadirpointing angle on the returned GLAS waveforms can beseen in Figure 14. The reference ground track for ICESat islocated west of Freeman Ranch and the spacecraft islooking to the right. In this example, the local topographywithin the footprint (�3� surface slope) combined with theoff-nadir pointing of 2.25� results in a return GLASwaveform where the vegetation signal is convolved withthe signal from the underlying topography (>5� apparentrelief). When the amount of topographic relief within eachfootprint (here �4 m) or laser incident angle is equivalent orgreater than the height of the vegetation, it will not bepossible to resolve the ground elevation or to directly
Figure 14. (a) Synthesized (blue dotted) waveform and GLAS (red) waveform and (b) vegetationheights (m) within GLAS footprint for L3g (October 2006) shot 165. Estimated 42.92% woody coverwithin the footprint. Reflections from a power line can be seen crossing the upper portion of the footprint.Correlation between two waveforms is 0.79.
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
16 of 18
G02S03

determine the relative vegetation height using GLAS alone.However, the elevation at the top of the canopy is stillcapable of being retrieved from ICESat/GLAS and thusvegetation height can be determined when utilizing analternate source of ground elevation data [Lefsky et al.,2005] or by using alternate waveform shape indices [Lefskyet al., 2007].
6. Conclusions
[31] Spaceborne laser altimeter measurements from theGLAS instrument are being used for the estimation ofterrestrial properties; however, the effect of vegetation onelevation accuracy is not known. Waveforms over the arrayof corner cube reflectors (‘‘proxy trees’’) at White Sandswere used to examine the effect of laser pointing angle andfootprint energy distribution on the return waveform. TheGLAS data product parameters describing the GLAS foot-print (major axis, eccentricity, and footprint azimuth angle)are estimated using a 1/e2 energy distribution and averagedto 1 Hz. At White Sands, it was apparent that the 1/e2
energy distribution was only an approximation and strongreflectors (such as corner cube reflectors) can contribute tothe returned energy beyond the estimated parameters. Theprecise position of the corner cube reflector within eachfootprint is an important factor, as significant as laser
pointing angle, and can affect the amplitude of the returnwaveform in as-yet uncharacterized ways. The combinationof laser pointing angle, surface topography, reflectivity, andreflector position within the footprint on the return wave-form energy, however, may be lessened or diluted in thepresence of multisurface scatters (i.e., vegetation withvertical and horizontal structure). Nevertheless, these factorsremain important considerations when examining vegeta-tion structure from large-footprint satellite-based lidar.[32] Comparisons between the airborne and space-based
lidar systems at Freeman Ranch, Texas show agreement inthe characterization of canopy height and structure. How-ever, the GLAS estimated ground elevations appear to bebiased by an average of 1.01 m in the presence of vegeta-tion. This bias, though, has only been examined in this onebiome and at this time cannot be regarded as a standard forall vegetated areas. It remains uncertain whether this offsetis primarily a function of the laser pointing angle or otherfactors. Certainly the vegetation location within the foot-print is important (as observed in White Sands), but it is stillunclear what relative importance may be attributed tovegetation position, true footprint size (compared to the1/e2 estimate), a �4 m (1-sigma) horizontal precision, orother unknown factors. Continuing investigation requiresmore data at Freeman Ranch and in different biomes, and
Figure 14. (continued)
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
17 of 18
G02S03

at different off-nadir angles, in order to better characterizethe cause of the apparent 1.01 m bias.[33] The shapes of the GLAS waveforms compared well
with GLAS waveforms synthesized from airborne lidarwaveforms (>90% correlation for flat terrain). However,the shapes of the returned waveforms from GLAS aredependent upon complex relationships between severalfactors on the illuminated surface including surface topog-raphy (roughness and slope), surface reflectance at the laserwavelength (1064 nm), cloud cover, satellite pointing, laserenergy, footprint size, shape and orientation, vegetationheight, canopy thickness, and position within the footprint.In this analysis we have excluded data affected by cloudcover (forward scattering) and reflectance (saturation)effects. We have also excluded steep topography, therebyconcentrating this study on the primary effects of ICESatoff-nadir pointing. A smaller footprint reduces the topo-graphic effects and uncertainties associated with steeptopography. In flat terrain, the vegetation height (that isthe relative height between the top of the canopy and theground) was accurately determined by ICESat/GLAS evenwithin a heterogeneous savanna landscape. In this savannalandscape, the GLAS energy ratio (canopy energy to groundenergy) was a good indicator (R2 = 0.74) of the amount ofwoody cover within the footprint yielding the empiricalequation
Pwc ¼ 20:043 ln xð Þ þ 60:09 ð2Þ
where Pwc is the percent woody cover within the GLASfootprint and x is the GLAS canopy to ground energy ratio.While these results are from a limited study area, they doprovide insight into the role of vegetation on the returnedenergy and thus the implication and potential of usingICESat/GLAS over terrestrial areas. As the use of laseraltimeters increases for vegetation characterization, it isrecommended that future laser altimetry missions target avariety of biomes including savanna/woodlands for vegeta-tion calibration and validation.
[34] Acknowledgments. This research was performed at the Univer-sity of Texas at Austin Center for Space Research (UTCSR), USA, insupport of ICESat. We are grateful to NASA for this funding providedthrough contract/grant NAS5–99005 and NNG06GA99. ICESat data aredistributed to the ICESat Science Team by the NASA Science ComputingFacility; identical ICESat data products from fully calibrated laser cam-paigns and analysis software are publicly available through NSIDC atwww.nsidc.org. We would like to thank the anonymous reviewers for theircomments and feedback on this manuscript.
ReferencesAbshire, J. B., X. Sun, H. Riris, J. M. Sirota, J. F. McGarry, S. Palm, D. Yi,and P. Liiva (2005), Geoscience Laser Altimeter System (GLAS) on theICESat Mission: On-orbit measurement performance, Geophys. Res.Lett., 32, L21S02, doi:10.1029/2005GL024028.
Bae, S., and B. E. Schutz (2002), Precision attitude determination (PAD),Geoscience Laser Altimeter System (GLAS) Algorithm Theoretical BasisDocument Version 2.2, http://www.csr.utexas.edu/glas/pdf/atbd_pad_10_02.pdf, last accessed 16 July 2007.
Carabajal, C. C., and D. J. Harding (2005), ICESat validation of SRTMC-band digital elevation models, Geophys. Res. Lett., 32, L22S01,doi:10.1029/2005GL023957.
Carabajal, C. C., and D. J. Harding (2006), SRTM C-band and ICESatLaser Altimetry Elevation Comparisons as a Function of Tree Coverand Relief, Photogrammetric Engineering and Remote Sensing, 72(3),287–298.
Fricker, H. A., A. Borsa, B. Minster, C. Carabajal, K. Quinn, and B. Bills(2005), Assessment of ICESat performance at the salar de Uyuni, Boliva,Geophys. Res. Lett., 32, L21S06, doi:10.1029/2005GL023423.
Gutierrez, R., A. L. Neuenschwander, and M. M. Crawford (2005), Devel-opment of laser waveform digitization for airborne lidar topographicmapping instrumentation, Proc. IEEE Int. Geosci. Remote Sens. Symp.,2, 1154–1157.
Harding, D. J., and C. C. Carabajal (2005), ICESat waveform measure-ments of within-footprint topographic relief and vegetation vertical struc-ture, Geophys. Res. Lett., 32, L21S10, doi:10.1029/2005GL023471.
Harding, D. J., M. A. Lefsky, G. G. Parker, and J. B. Blair (2001), Laseraltimeter canopy height profiles methods and validation for closed-canopy, broadleaf forests, Remote Sens. Environ., 76, 283–297.
Lefsky, M. A., D. J. Harding, M. Keller, W. B. Cohen, C. C. Carabajal,F. Del Bom Espirito-Santo, M. O. Hunter, and R. de Oliveira (2005),Estimates of forest canopy height and aboveground biomass usingICESat, Geophys. Res. Lett., 32, L22S02, doi:10.1029/2005GL023971.
Lefsky, M. A., M. Keller, Y. Pang, P. de Camargo, and M. O. Hunter(2007), Revised method for forest canopy height estimation from theGeoscience Laser Altimeter System waveforms, J. Appl. Remote Sens.,1, 013537, doi:10.1117/1.2795724.
Magruder, L., C. Webb, T. Urban, E. Silverberg, and B. Schutz (2007),ICESat Altimetry Data Product Verification at White Sands SpaceHarbor, IEEE Trans. Geosci. Rem. Sens., 45(1), 147–155.
Martin, C. F., R. H. Thomas, W. B. Krabill, and S. S. Manizade (2005),ICESat range and mounting bias estimation over precisely-surveyedterrain, Geophys. Res. Lett., 32, L21S07, doi:10.1029/2005GL023800.
Rim, H. J., and B. E. Schutz (2002), Precision orbit determination (POD),Geoscience Laser Altimeter System (GLAS) Algorithm Theoretical BasisDocument Version 2.2, http://www.csr.utexas.edu/glas/atbd.html, last ac-cessed 16 July 2007.
Schutz, B. E. (2002), Laser footprint location (geolocation) and surfaceprofiles, Geoscience Laser Altimeter System (GLAS) Algorithm Theore-tical Basis Document Version 3.0, http://www.csr.utexas.edu/glas/pdf/atbd_geoloc_10_02.pdf, last accessed 16 July 2007.
Schutz, B., S. Bae, L. Magruder, R. Rickletfs, R. Rim, E. Silverberg,C. Webb, and S. Yoon (2003), Precision orbit and attitude determinationfor ICESat, Adv. Astronaut., 115, suppl., 12.
Schutz, B., H. J. Zwally, C. A. Shuman, D. Hancock, and J. P. DiMarzio(2005), Overview of the ICESat Mission, Geophys. Res. Lett., 32,L21S01, doi:10.1029/2005GL024009.
Urban, T., B. Schutz, and A. Neuenschwander (2008), ICESat coastal alti-metry, Terr. Atmos. Oceanic Sci., in press.
Zwally, H. J., et al. (2002), ICESat’s laser measurements of polar ice,atmosphere, ocean, and land, J. Geodyn., 34, 405–445.
�����������������������R. Gutierrez, A. L. Neuenschwander, B. E. Schutz, and T. J. Urban,
Center for Space Research, University of Texas at Austin, 3925 W. BrakerLane, Suite 200, Austin, TX 78759-5321, USA. ([email protected])
G02S03 NEUENSCHWANDER ET AL.: ICESAT WAVEFORM CHARACTERIZATION
18 of 18
G02S03
Related Documents