FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E PHYSICS RANDALL D. KNIGHT Chapter 12 Lecture © 2017 Pearson Education, Inc.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E PHYSICS
RANDALL D. KNIGHT
Chapter 12 Lecture
© 2017 Pearson Education, Inc.
© 2017 Pearson Education, Inc.
Chapter 12 Rotation of a Rigid Body
IN THIS CHAPTER, you will learn to understand and apply the physics of rotation.
Slide 12-2
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-3
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-4
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-5
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-6
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-7
© 2017 Pearson Education, Inc.
Chapter 12 Preview
Slide 12-8
© 2017 Pearson Education, Inc.
Chapter 12 Reading Questions
Slide 12-9
© 2017 Pearson Education, Inc.
When floating in space with no external forces acting on it, an object tends to rotate about its
A. Axle. B. Center of mass. C. Edge. D. Geometrical center. E. Pivot point.
Reading Question 12.1
Slide 12-10
© 2017 Pearson Education, Inc.
When floating in space with no external forces acting on it, an object tends to rotate about its
A. Axle. B. Center of mass. C. Edge. D. Geometrical center. E. Pivot point.
Reading Question 12.1
Slide 12-11
© 2017 Pearson Education, Inc.
A rotating object has some rotational kinetic energy. If its angular speed is doubled, but nothing else changes, the rotational kinetic energy
A. Increases by a factor of 4. B. Doubles. C. Does not change. D. Halves. E. Decreases by a factor of 4.
Reading Question 12.2
Slide 12-12
© 2017 Pearson Education, Inc.
A rotating object has some rotational kinetic energy. If its angular speed is doubled, but nothing else changes, the rotational kinetic energy
A. Increases by a factor of 4. B. Doubles. C. Does not change. D. Halves. E. Decreases by a factor of 4.
Reading Question 12.2
Slide 12-13
© 2017 Pearson Education, Inc.
A single particle has a mass, m, and it is at a distance, r, away from the origin. The moment of inertia of this particle about the origin is
A. mr B. m2r C. m2r2
D. m2r4
E. mr2
Reading Question 12.3
Slide 12-14
© 2017 Pearson Education, Inc.
A single particle has a mass, m, and it is at a distance, r, away from the origin. The moment of inertia of this particle about the origin is
A. mr B. m2r C. m2r2
D. m2r4
E. mr2
Reading Question 12.3
Slide 12-15
© 2017 Pearson Education, Inc.
When discussing torque, the “line of action” is
A. The line connecting the pivot with the point where the force acts.
B. The line along which the force acts. C. The line that passes through the center of
mass. D. The line along which motion occurs. E. The axis around which the object rotates.
Reading Question 12.4
Slide 12-16
© 2017 Pearson Education, Inc.
When discussing torque, the “line of action” is
A. The line connecting the pivot with the point where the force acts.
B. The line along which the force acts. C. The line that passes through the center of
mass. D. The line along which motion occurs. E. The axis around which the object rotates.
Reading Question 12.4
Slide 12-17
© 2017 Pearson Education, Inc.
A new way of multiplying two vectors is introduced in this chapter. What is it called?
A. The dot product. B. The scalar product. C. The tensor product. D. The cross product. E. The angular product.
Reading Question 12.5
Slide 12-18
© 2017 Pearson Education, Inc.
A new way of multiplying two vectors is introduced in this chapter. What is it called?
A. The dot product. B. The scalar product. C. The tensor product. D. The cross product. E. The angular product.
Reading Question 12.5
Slide 12-19
© 2017 Pearson Education, Inc.
Moment of inertia is
A. The rotational equivalent of mass. B. The point at which all forces appear to act. C. The time at which inertia occurs. D. An alternative term for moment arm.
Reading Question 12.6
Slide 12-20
© 2017 Pearson Education, Inc.
Moment of inertia is
A. The rotational equivalent of mass. B. The point at which all forces appear to act. C. The time at which inertia occurs. D. An alternative term for moment arm.
Reading Question 12.6
Slide 12-21
© 2017 Pearson Education, Inc.
A rigid body is in equilibrium if
Reading Question 12.7
A. B. τnet = 0 C. Neither A nor B D. Either A or B E. Both A and B
Slide 12-22
© 2017 Pearson Education, Inc.
A rigid body is in equilibrium if
Reading Question 12.7
A. B. τnet = 0 C. Neither A nor B D. Either A or B E. Both A and B
Slide 12-23
© 2017 Pearson Education, Inc.
Chapter 12 Content, Examples, and QuickCheck Questions
Slide 12-24
© 2017 Pearson Education, Inc.
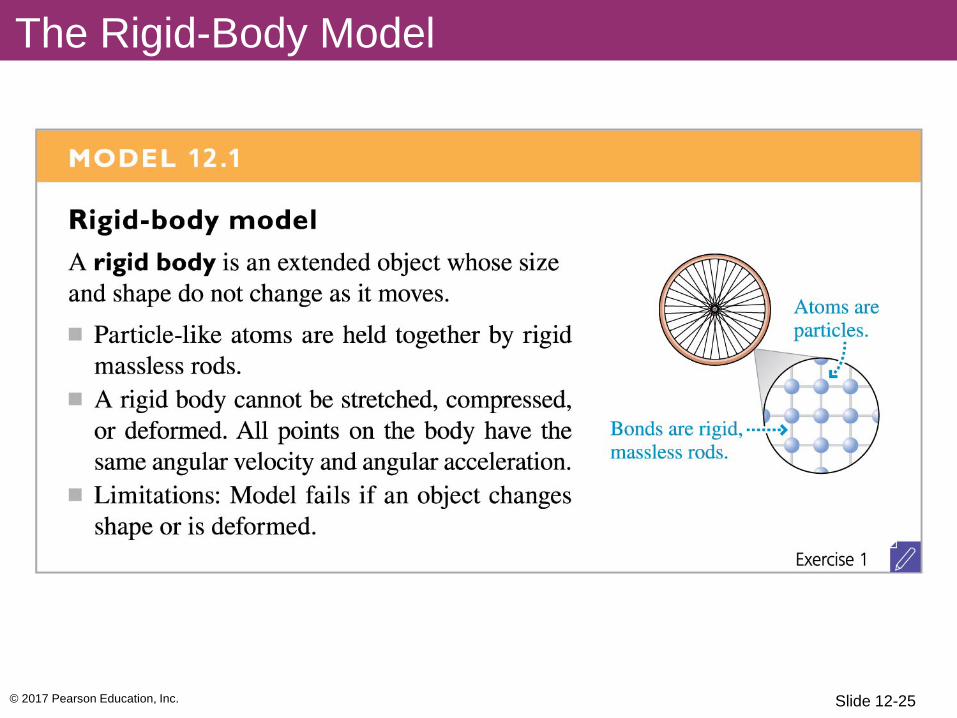
The Rigid-Body Model
Slide 12-25
© 2017 Pearson Education, Inc.
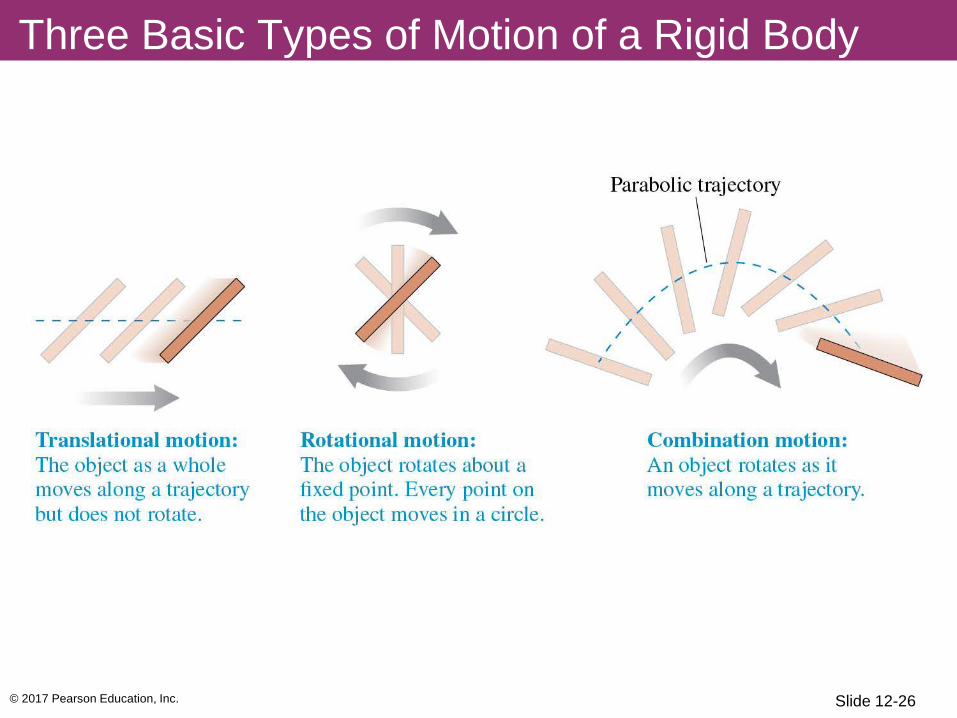
Three Basic Types of Motion of a Rigid Body
Slide 12-26
© 2017 Pearson Education, Inc.
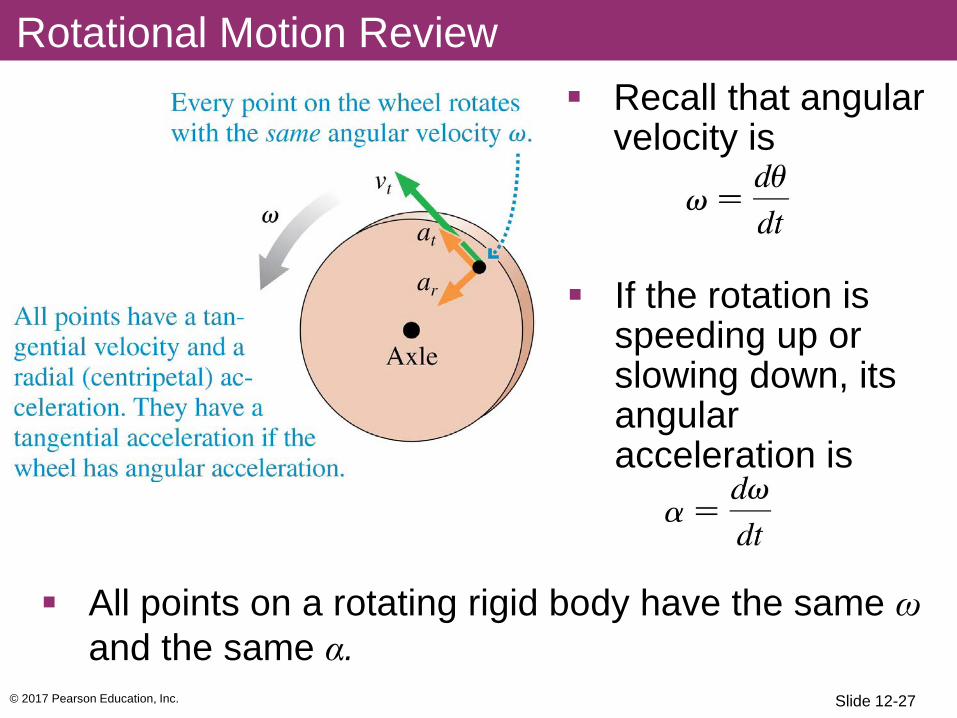
Rotational Motion Review Recall that angular
velocity is
All points on a rotating rigid body have the same ω and the same α.
If the rotation is speeding up or slowing down, its angular acceleration is
Slide 12-27
© 2017 Pearson Education, Inc.
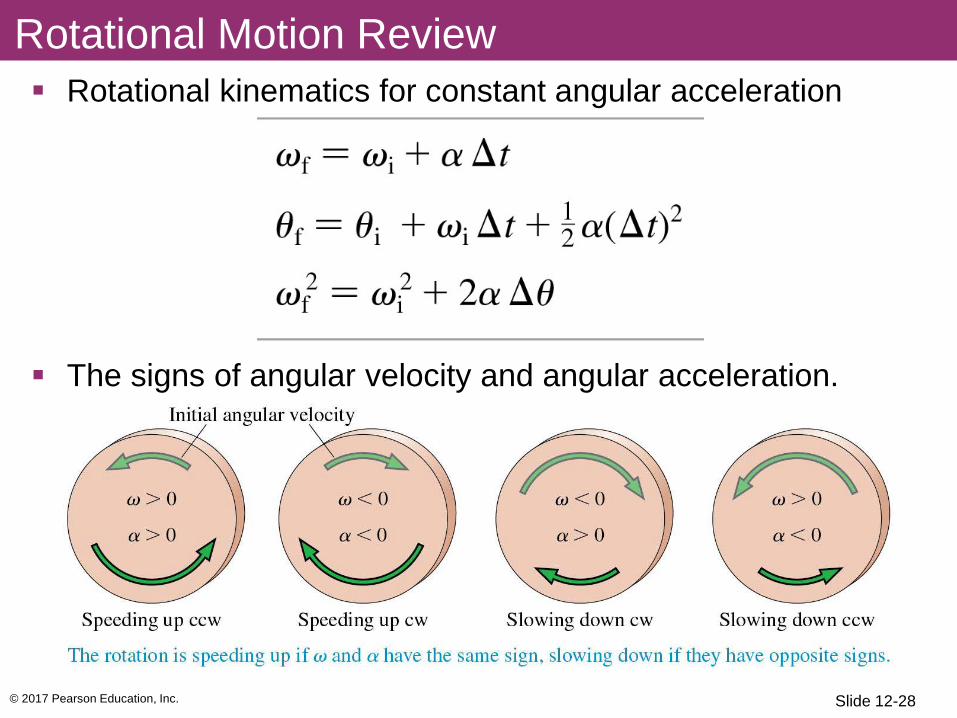
Rotational Motion Review Rotational kinematics for constant angular acceleration
The signs of angular velocity and angular acceleration.
Slide 12-28
© 2017 Pearson Education, Inc.
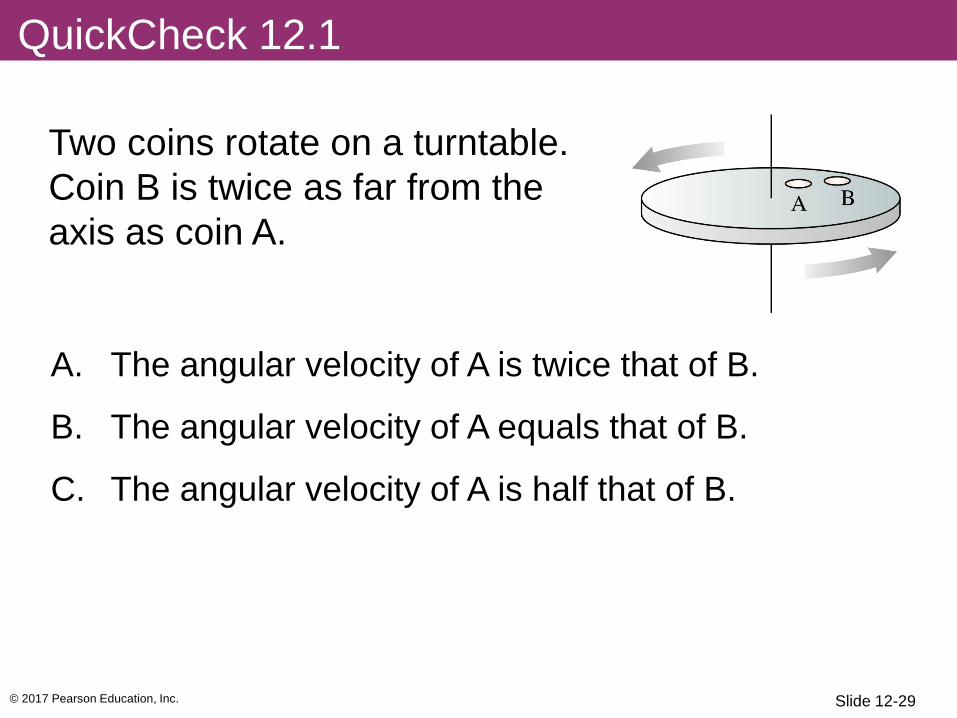
Two coins rotate on a turntable. Coin B is twice as far from the axis as coin A.
QuickCheck 12.1
A. The angular velocity of A is twice that of B.
B. The angular velocity of A equals that of B.
C. The angular velocity of A is half that of B.
Slide 12-29
© 2017 Pearson Education, Inc.
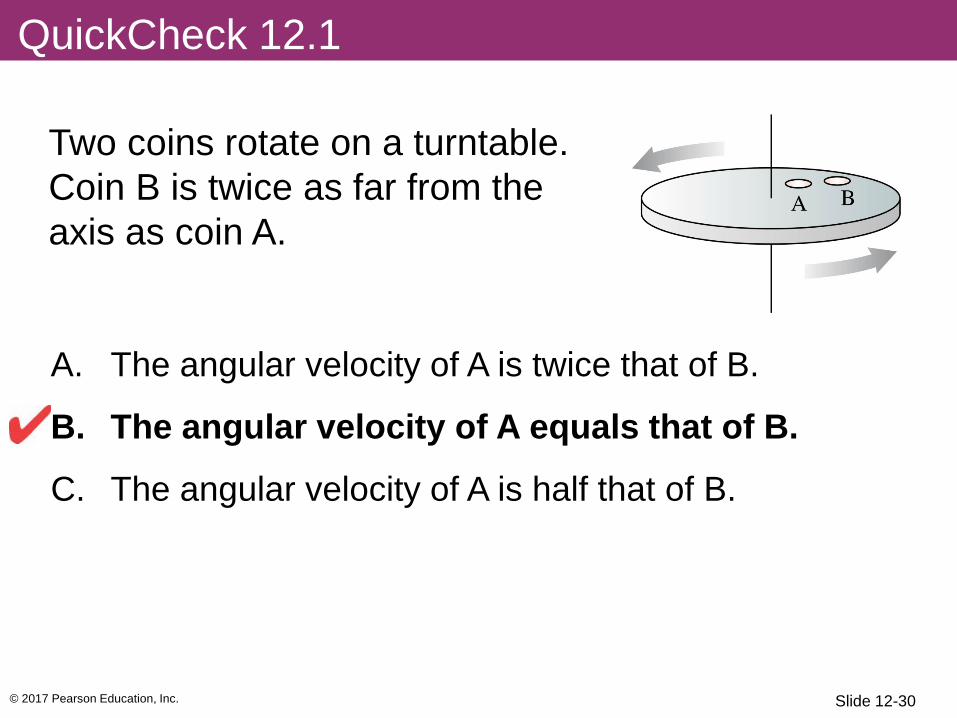
Two coins rotate on a turntable. Coin B is twice as far from the axis as coin A.
QuickCheck 12.1
A. The angular velocity of A is twice that of B.
B. The angular velocity of A equals that of B.
C. The angular velocity of A is half that of B.
Slide 12-30
© 2017 Pearson Education, Inc.
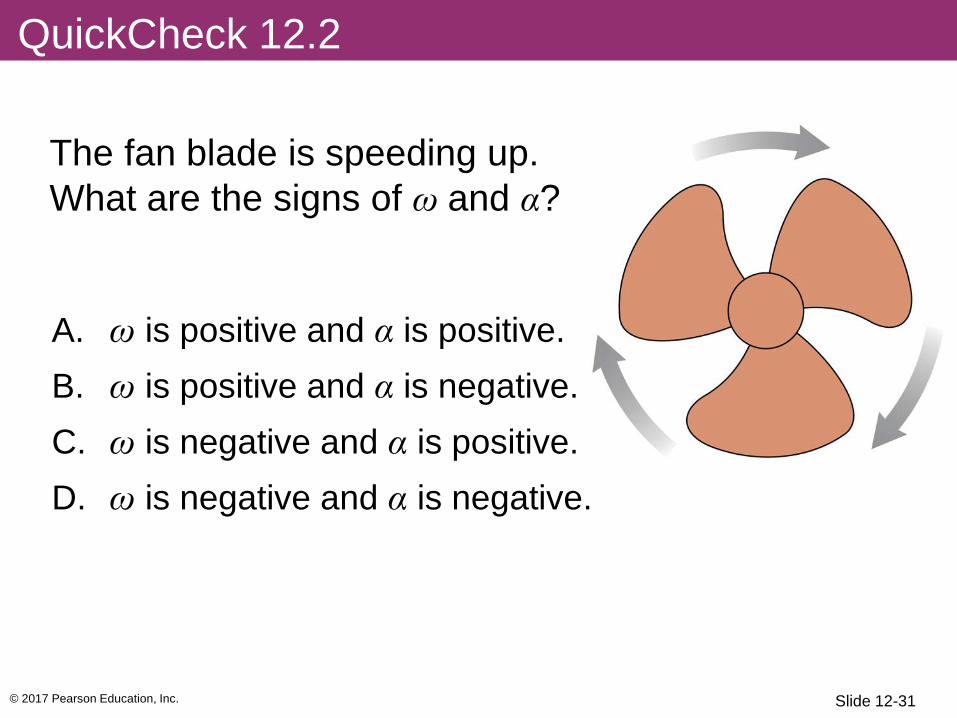
The fan blade is speeding up. What are the signs of ω and α?
A. ω is positive and α is positive. B. ω is positive and α is negative. C. ω is negative and α is positive. D. ω is negative and α is negative.
QuickCheck 12.2
Slide 12-31
© 2017 Pearson Education, Inc.
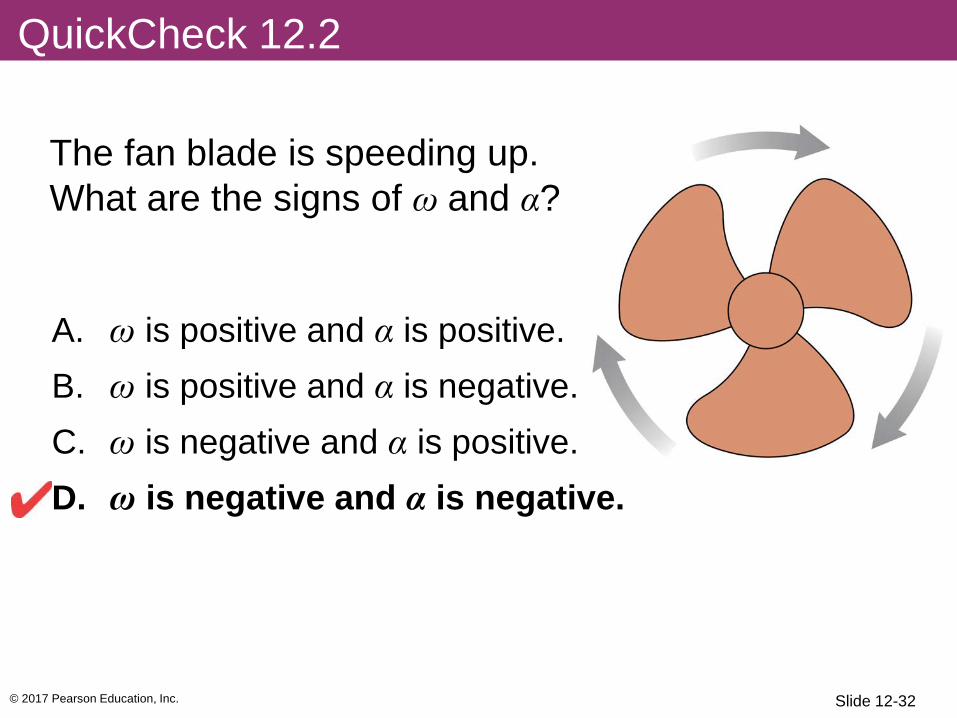
The fan blade is speeding up. What are the signs of ω and α?
A. ω is positive and α is positive. B. ω is positive and α is negative. C. ω is negative and α is positive. D. ω is negative and α is negative.
QuickCheck 12.2
Slide 12-32
© 2017 Pearson Education, Inc.
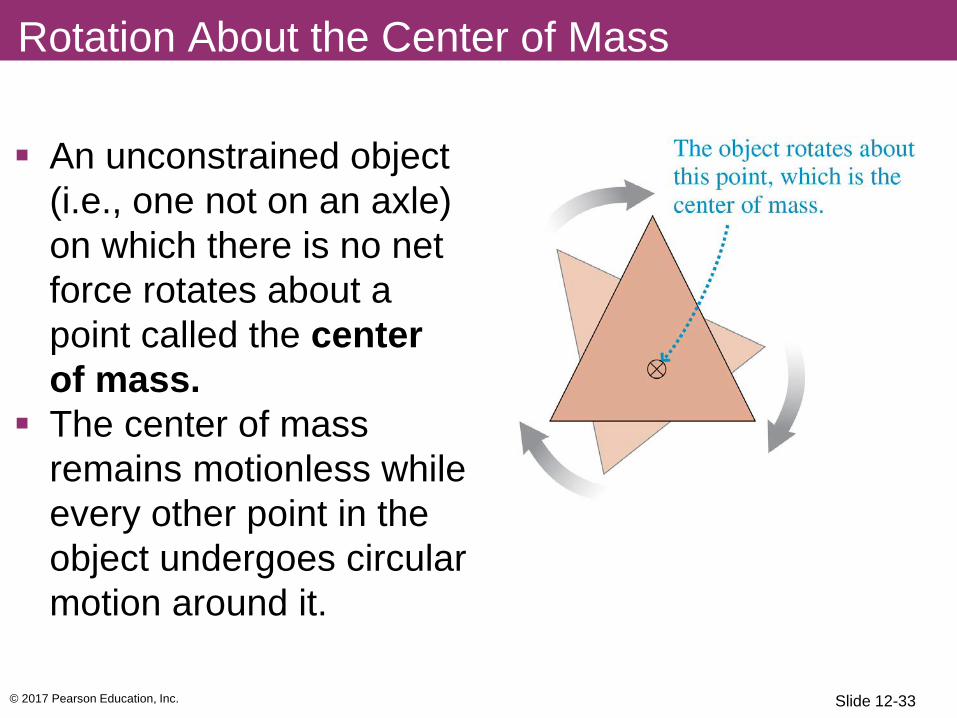
Rotation About the Center of Mass
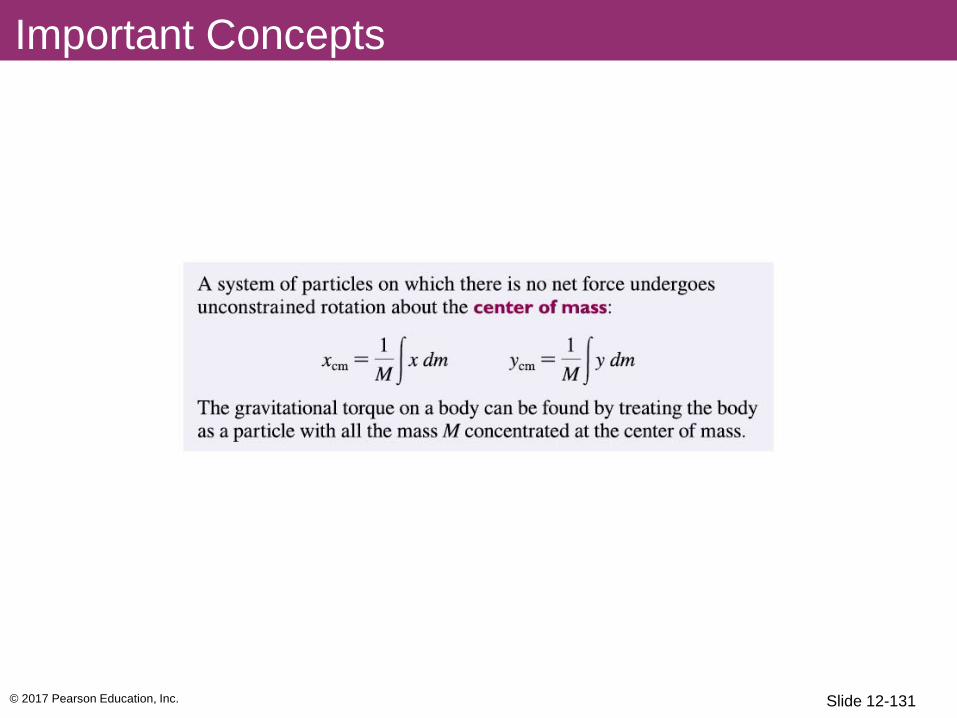
An unconstrained object (i.e., one not on an axle) on which there is no net force rotates about a point called the center of mass.
The center of mass remains motionless while every other point in the object undergoes circular motion around it.
Slide 12-33
© 2017 Pearson Education, Inc.
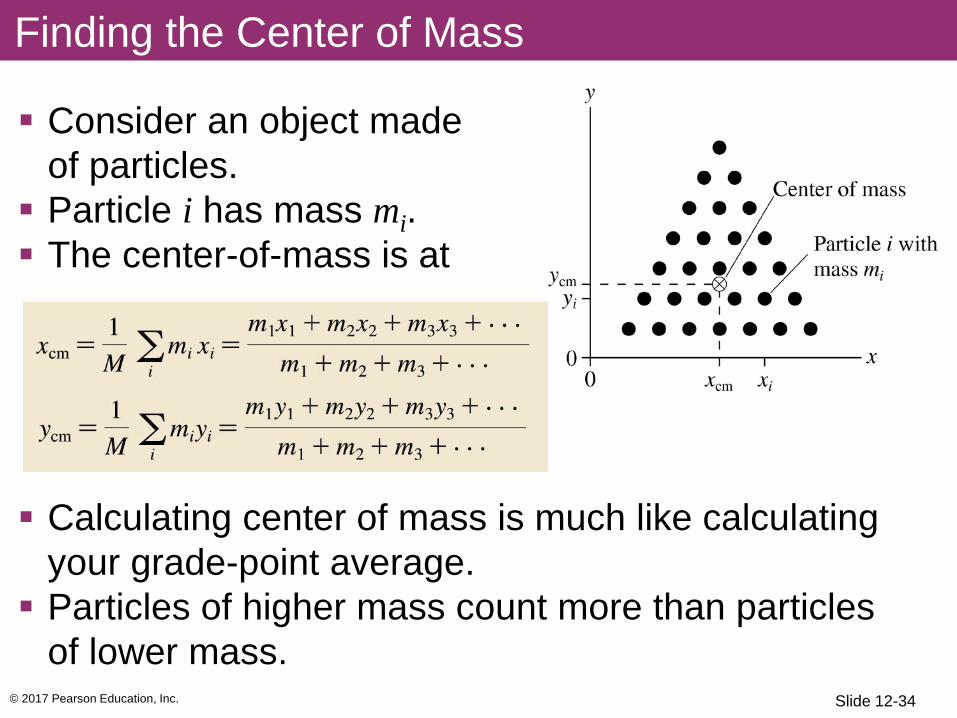
Finding the Center of Mass
Consider an object made of particles. Particle i has mass mi. The center-of-mass is at
Calculating center of mass is much like calculating your grade-point average. Particles of higher mass count more than particles
of lower mass. Slide 12-34
© 2017 Pearson Education, Inc.
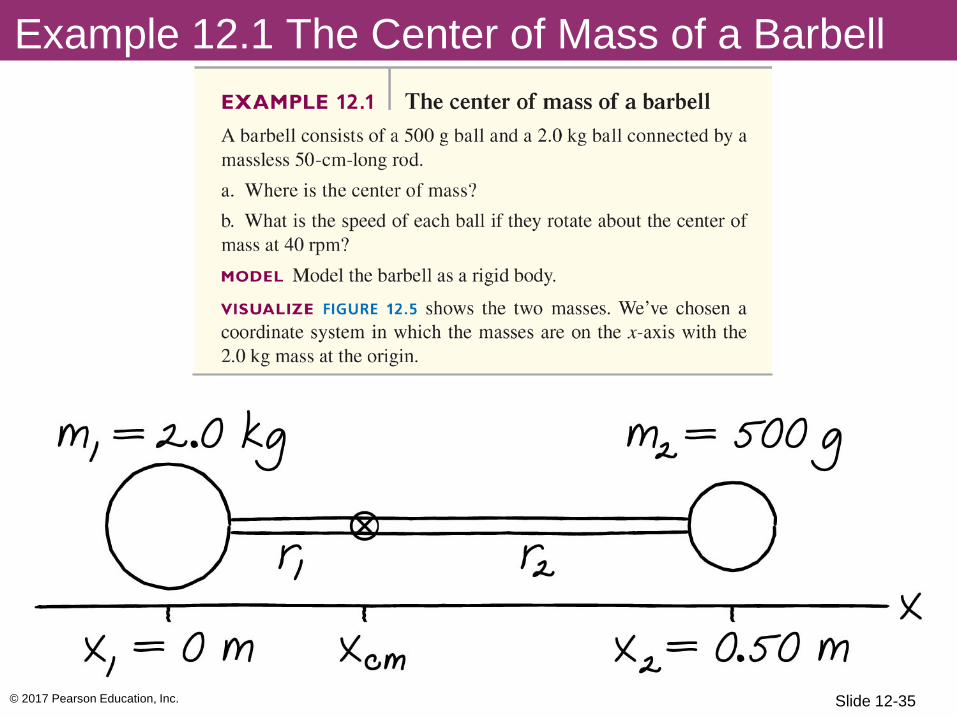
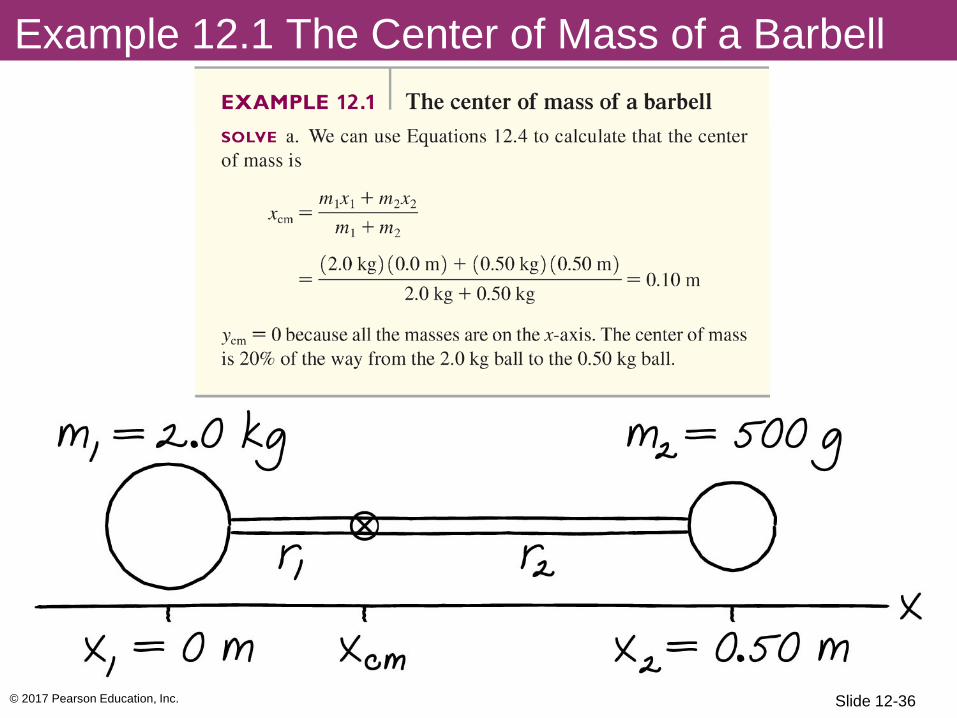
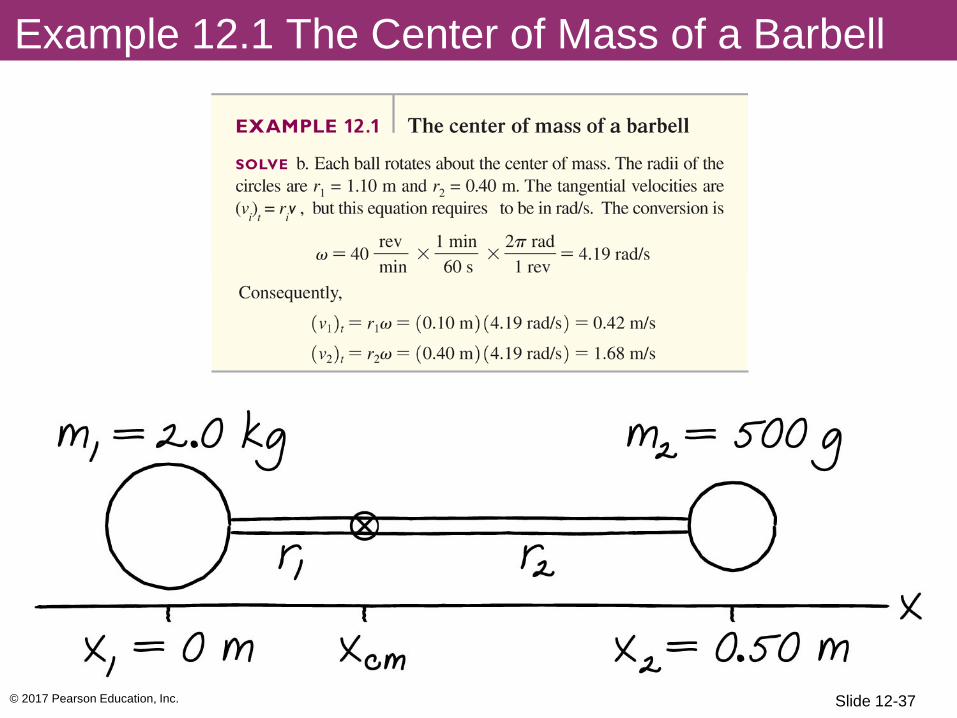
Example 12.1 The Center of Mass of a Barbell
Slide 12-35
© 2017 Pearson Education, Inc.
Example 12.1 The Center of Mass of a Barbell
Slide 12-36
© 2017 Pearson Education, Inc.
Example 12.1 The Center of Mass of a Barbell
Slide 12-37
© 2017 Pearson Education, Inc.
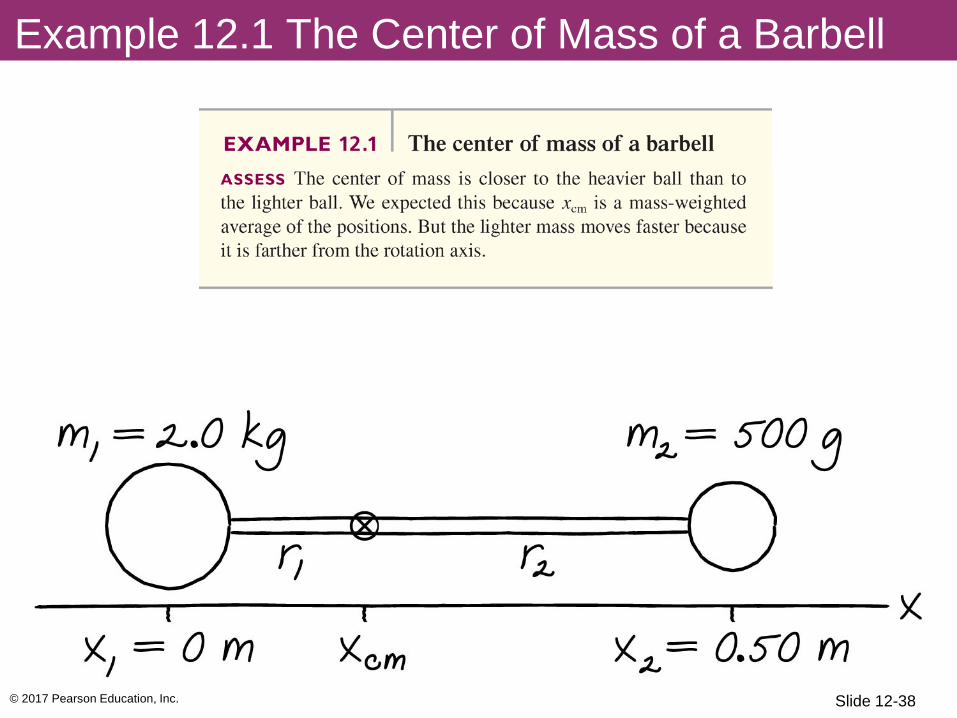
Example 12.1 The Center of Mass of a Barbell
Slide 12-38
© 2017 Pearson Education, Inc.
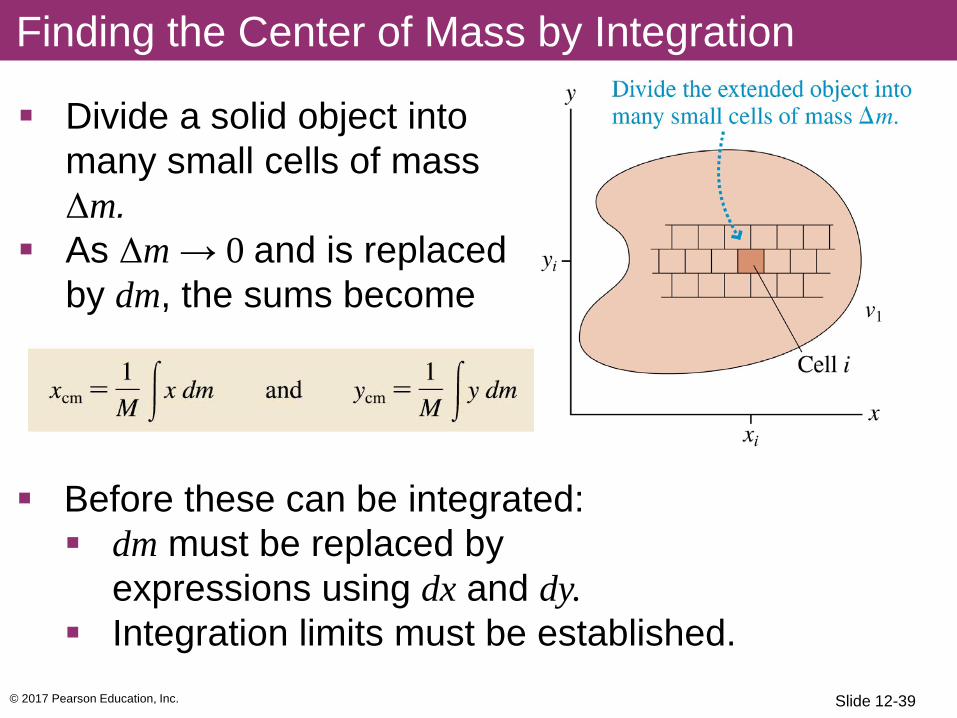
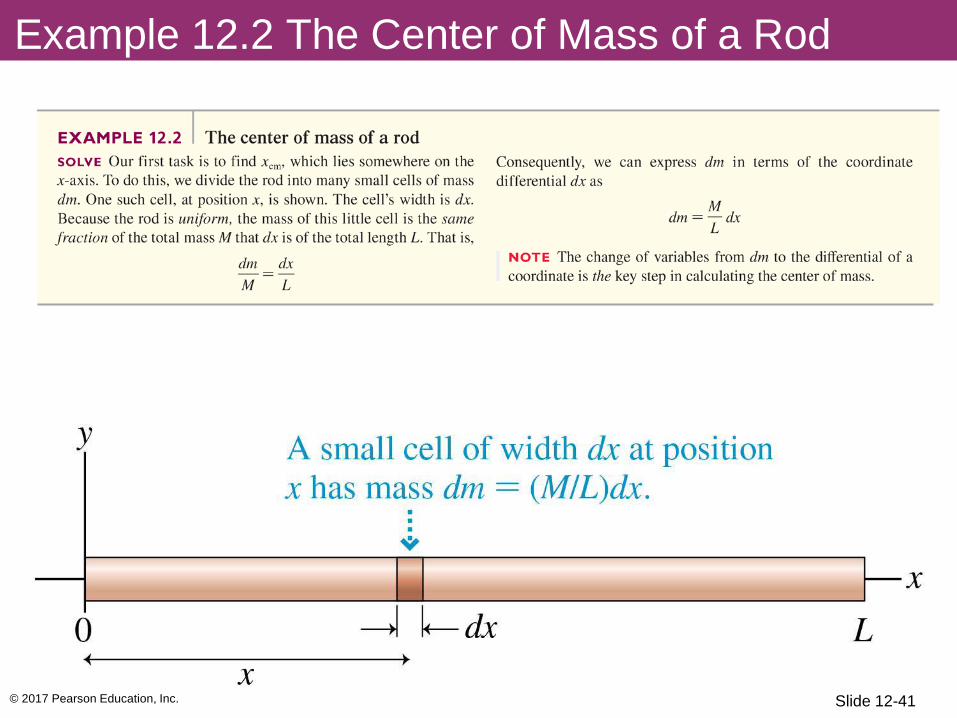
Finding the Center of Mass by Integration
Divide a solid object into many small cells of mass Δm.
As Δm → 0 and is replaced by dm, the sums become
Before these can be integrated: dm must be replaced by
expressions using dx and dy. Integration limits must be established.
Slide 12-39
© 2017 Pearson Education, Inc.
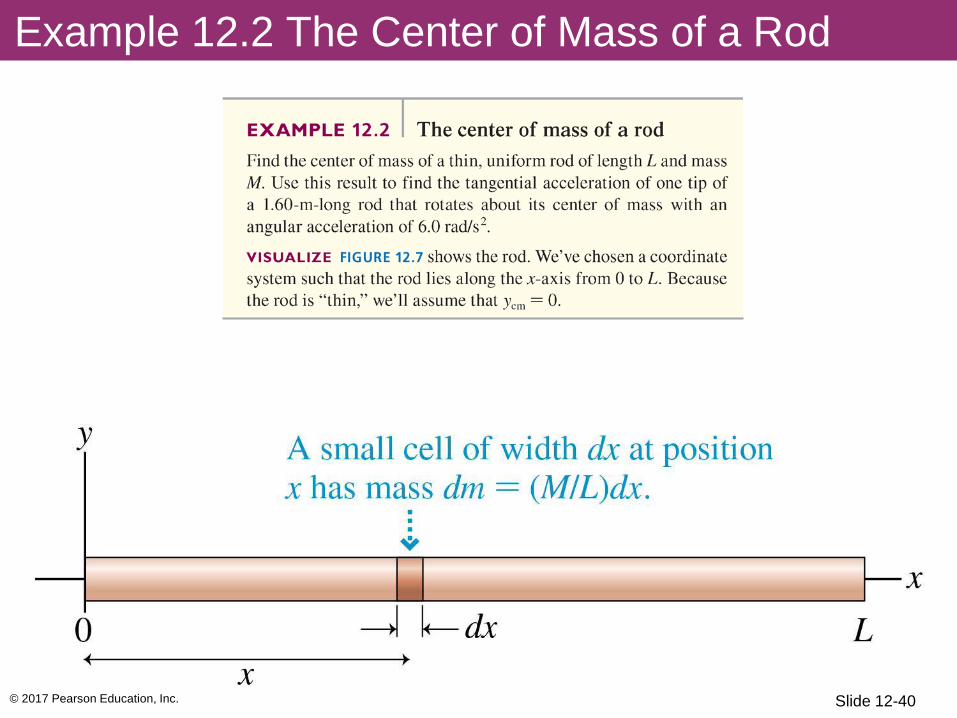
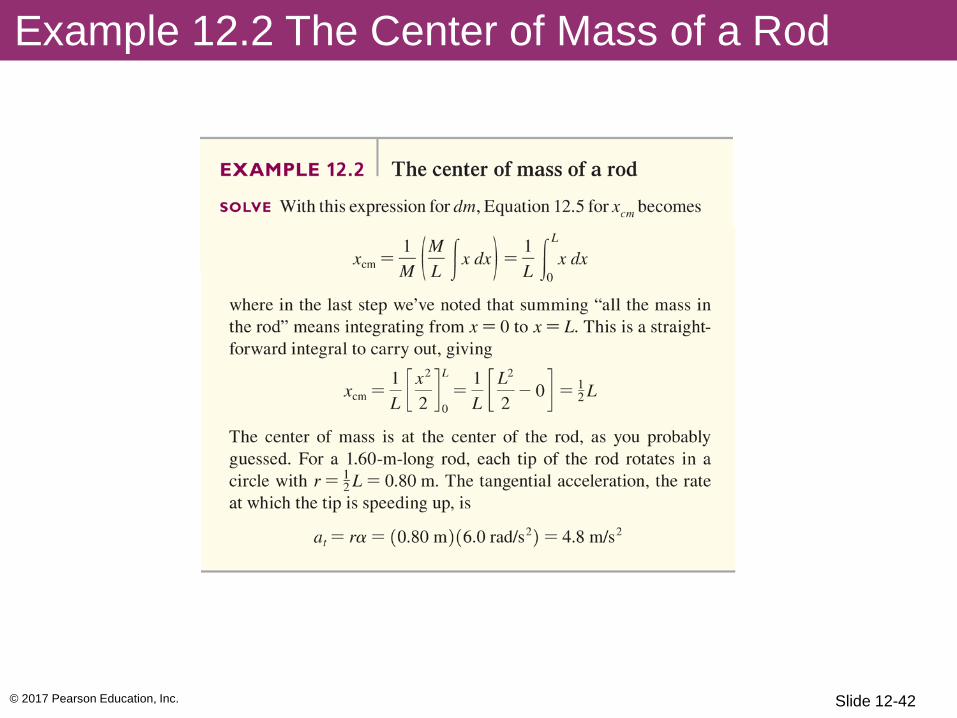
Example 12.2 The Center of Mass of a Rod
Slide 12-40
© 2017 Pearson Education, Inc.
Example 12.2 The Center of Mass of a Rod
Slide 12-41
© 2017 Pearson Education, Inc.
Example 12.2 The Center of Mass of a Rod
Slide 12-42
© 2017 Pearson Education, Inc.
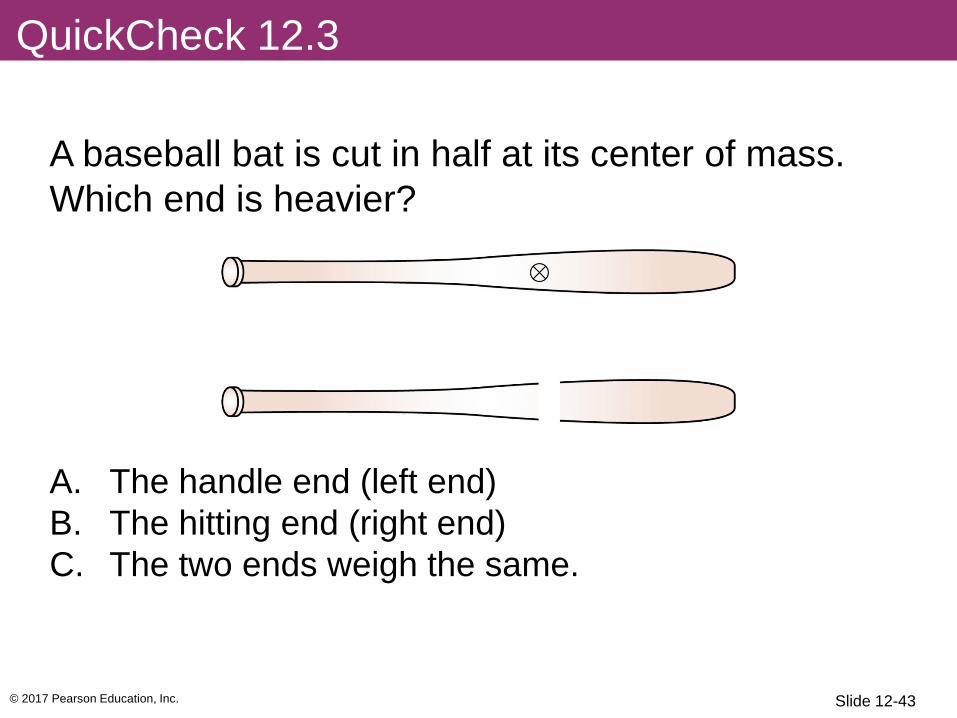
A baseball bat is cut in half at its center of mass. Which end is heavier?
A. The handle end (left end) B. The hitting end (right end) C. The two ends weigh the same.
QuickCheck 12.3
Slide 12-43
© 2017 Pearson Education, Inc.
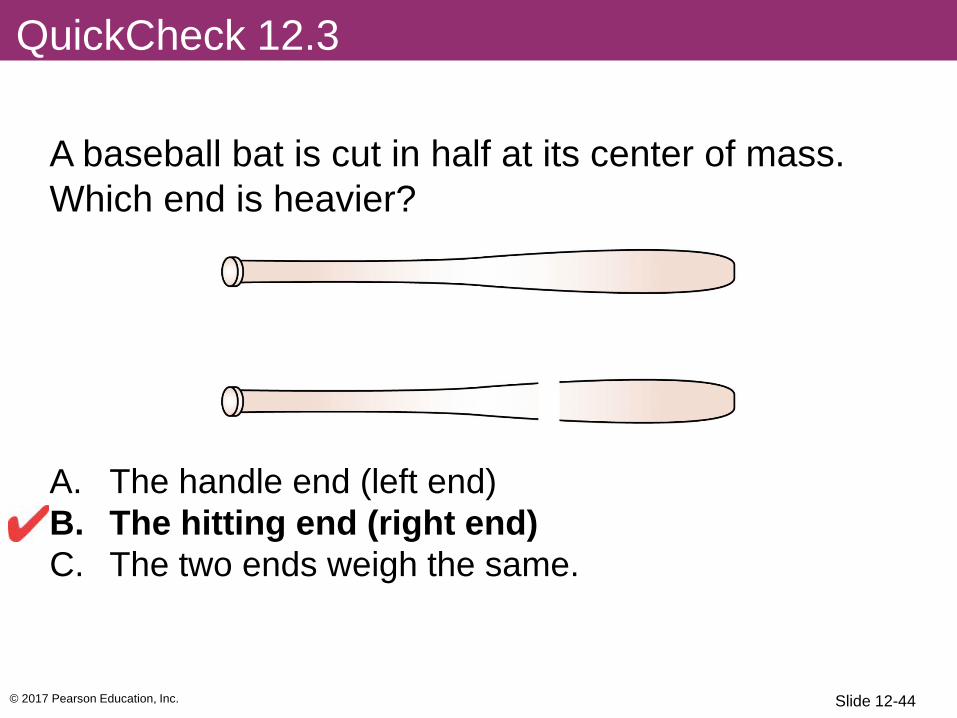
A baseball bat is cut in half at its center of mass. Which end is heavier?
A. The handle end (left end) B. The hitting end (right end) C. The two ends weigh the same.
QuickCheck 12.3
Slide 12-44
© 2017 Pearson Education, Inc.
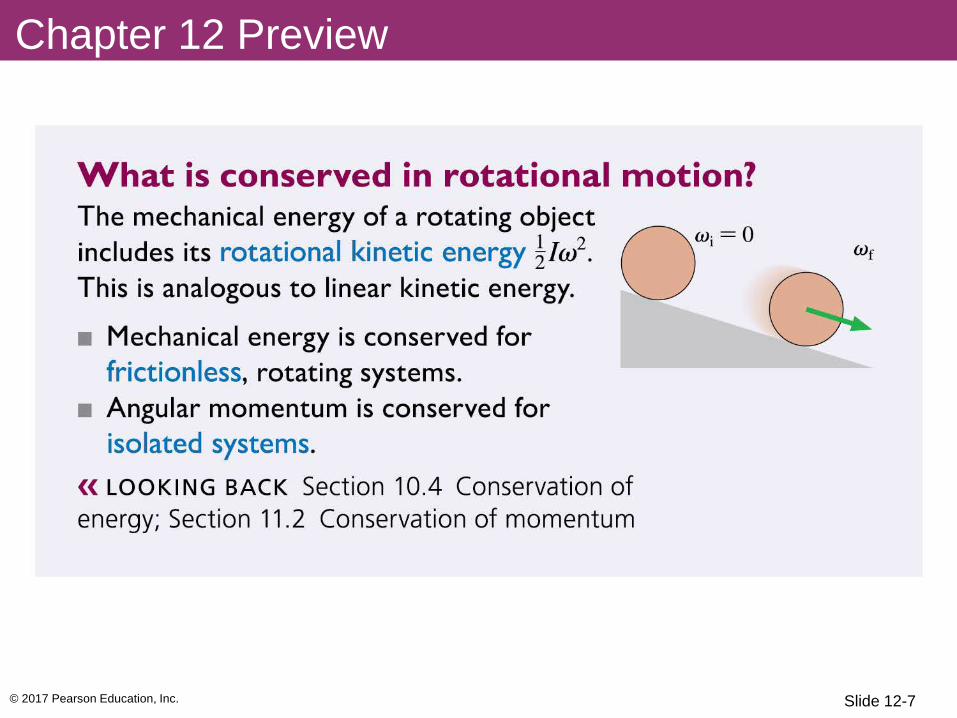
Rotational Energy
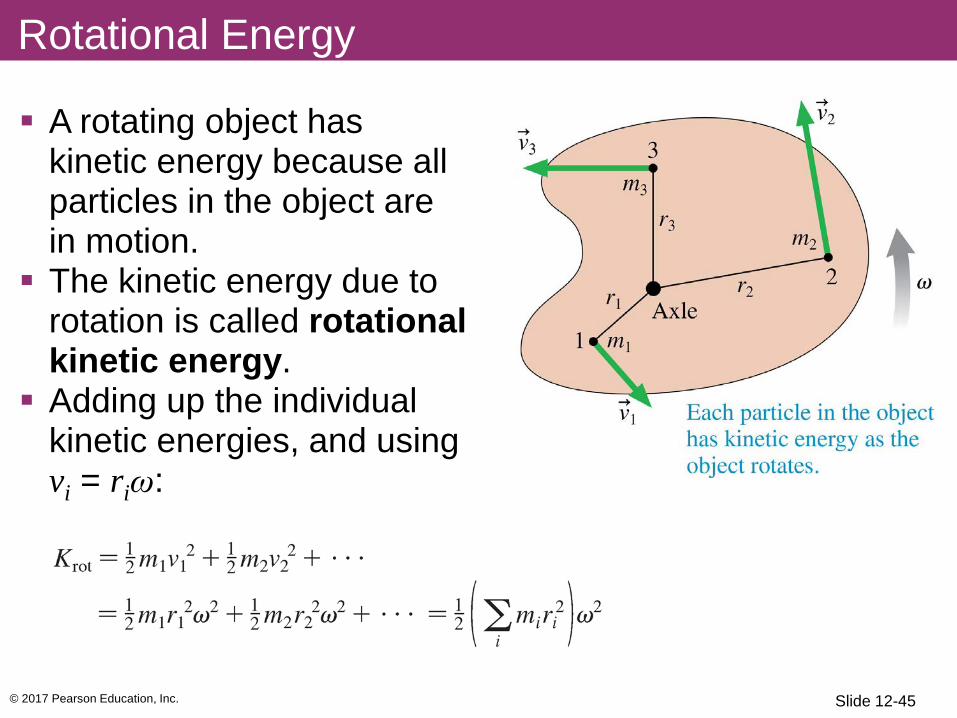
A rotating object has kinetic energy because all particles in the object are in motion. The kinetic energy due to
rotation is called rotational kinetic energy. Adding up the individual
kinetic energies, and using vi = riω:
Slide 12-45
© 2017 Pearson Education, Inc.
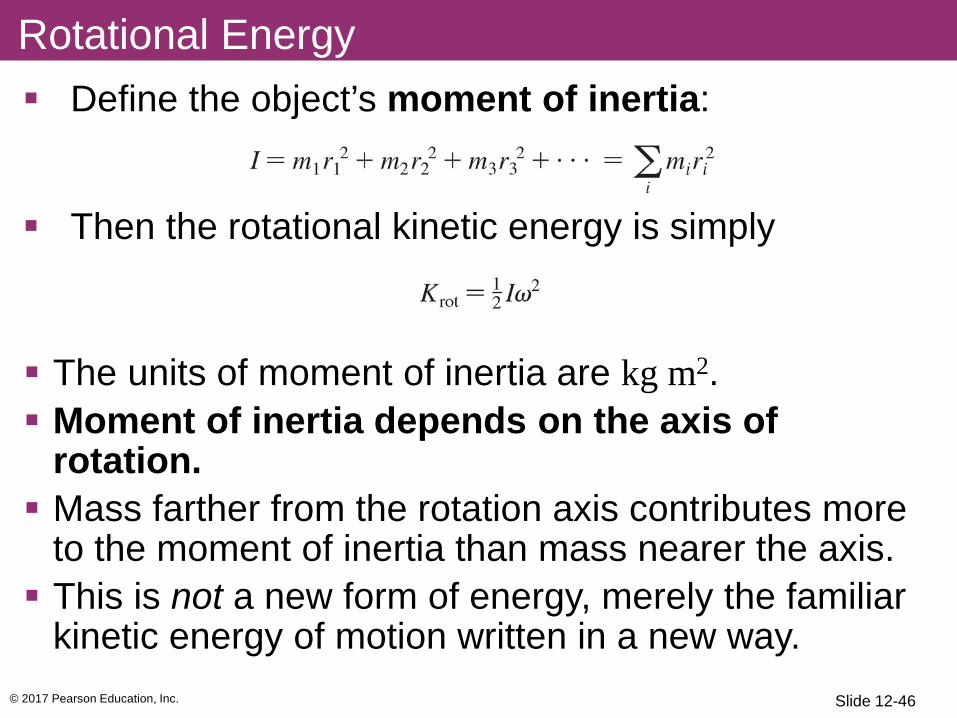
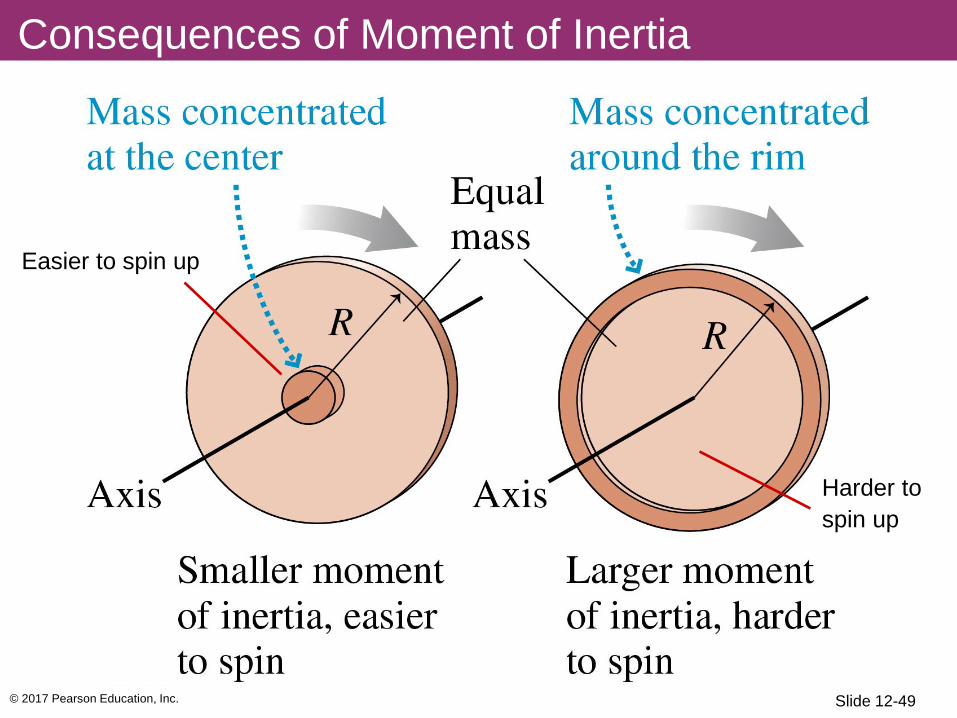
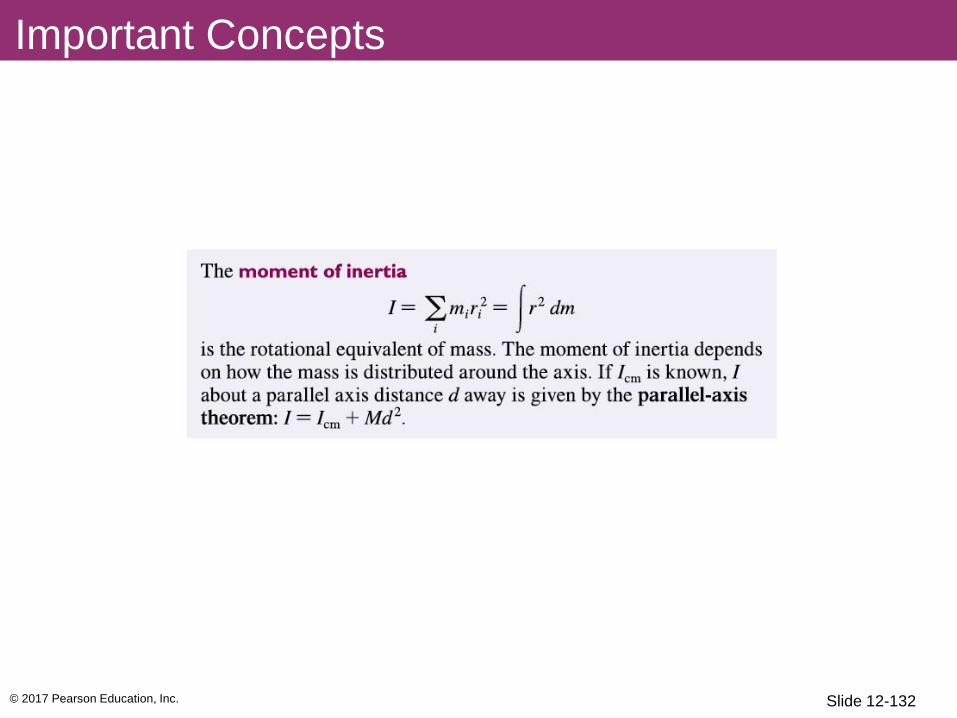
Define the object’s moment of inertia:
The units of moment of inertia are kg m2. Moment of inertia depends on the axis of
rotation. Mass farther from the rotation axis contributes more
to the moment of inertia than mass nearer the axis. This is not a new form of energy, merely the familiar
kinetic energy of motion written in a new way.
Then the rotational kinetic energy is simply
Rotational Energy
Slide 12-46
© 2017 Pearson Education, Inc.
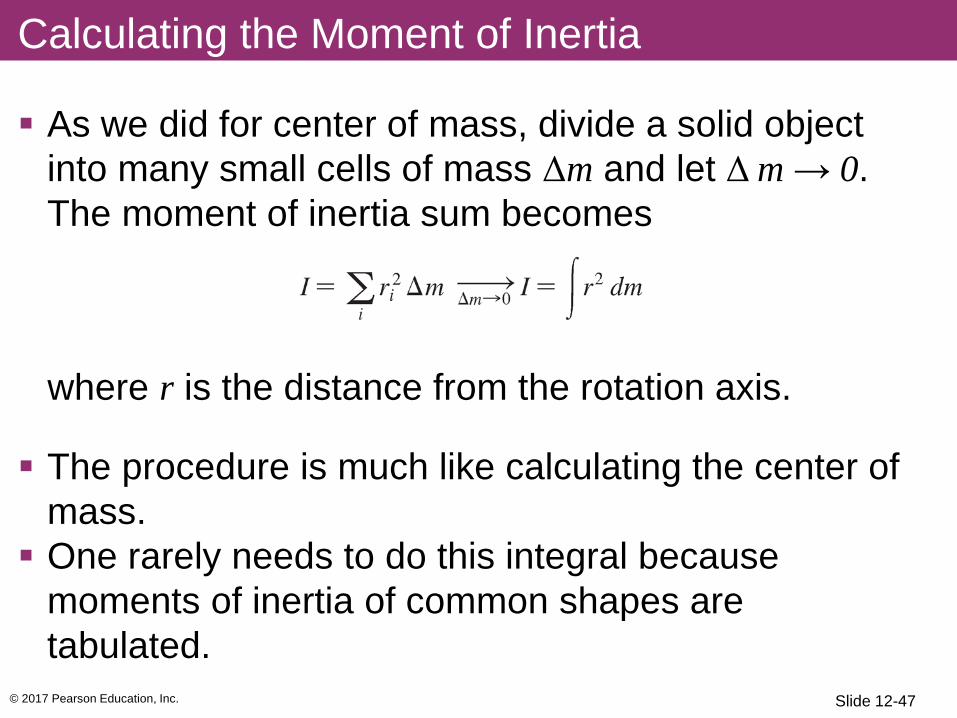
Calculating the Moment of Inertia
As we did for center of mass, divide a solid object into many small cells of mass Δm and let Δ m → 0. The moment of inertia sum becomes
The procedure is much like calculating the center of mass. One rarely needs to do this integral because
moments of inertia of common shapes are tabulated.
where r is the distance from the rotation axis.
Slide 12-47
© 2017 Pearson Education, Inc.
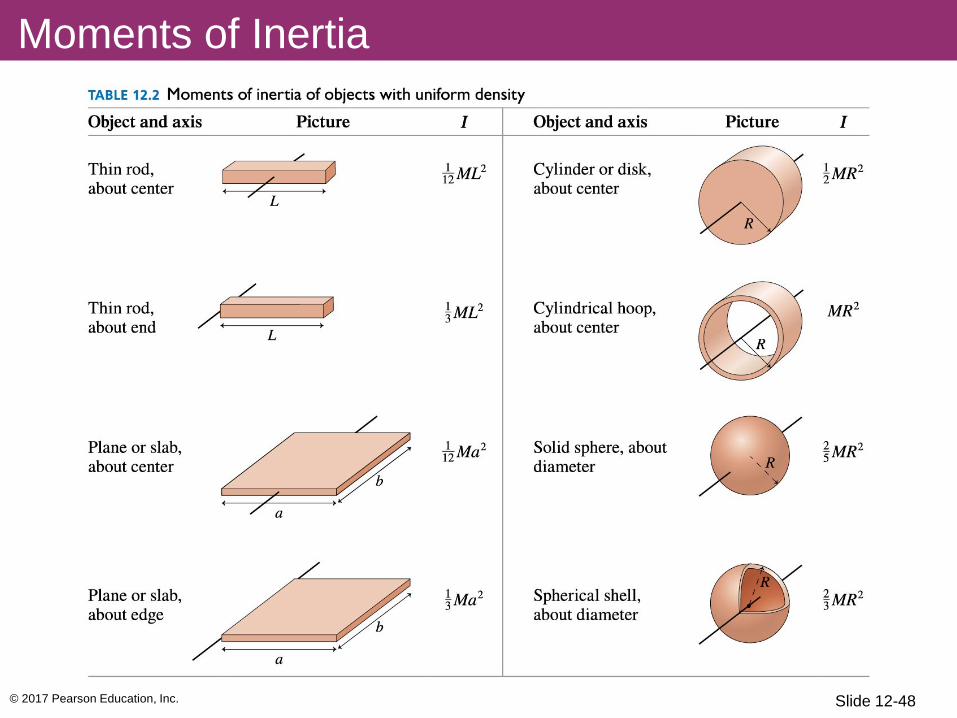
Moments of Inertia
Slide 12-48
© 2017 Pearson Education, Inc.
Consequences of Moment of Inertia
Easier to spin up
Harder to spin up
Slide 12-49
© 2017 Pearson Education, Inc.
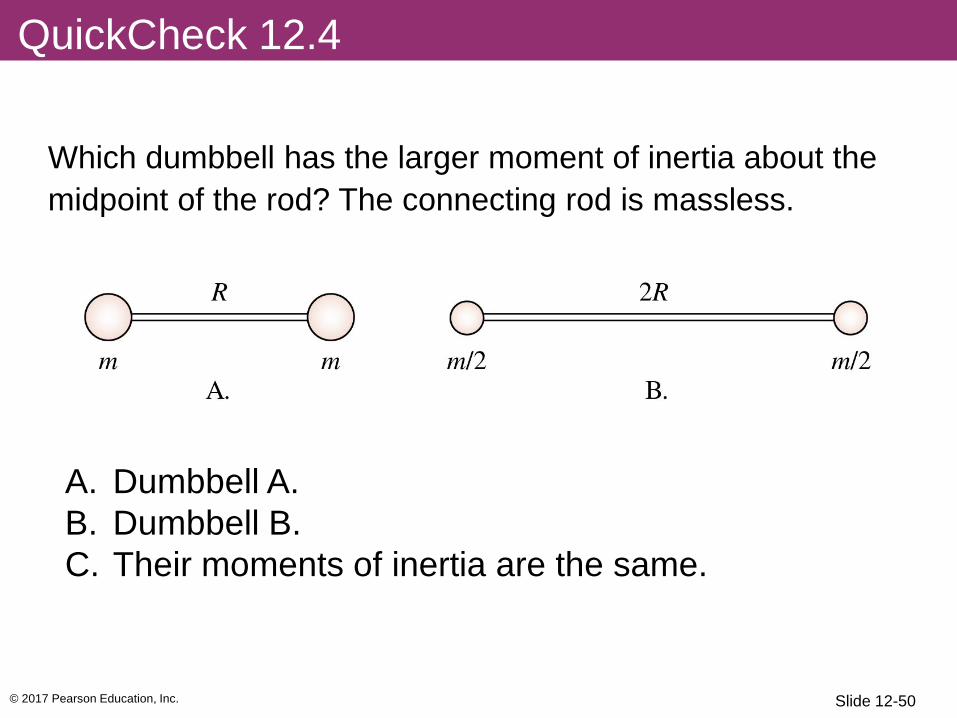
Which dumbbell has the larger moment of inertia about the midpoint of the rod? The connecting rod is massless.
QuickCheck 12.4
A. Dumbbell A. B. Dumbbell B. C. Their moments of inertia are the same.
Slide 12-50
© 2017 Pearson Education, Inc.
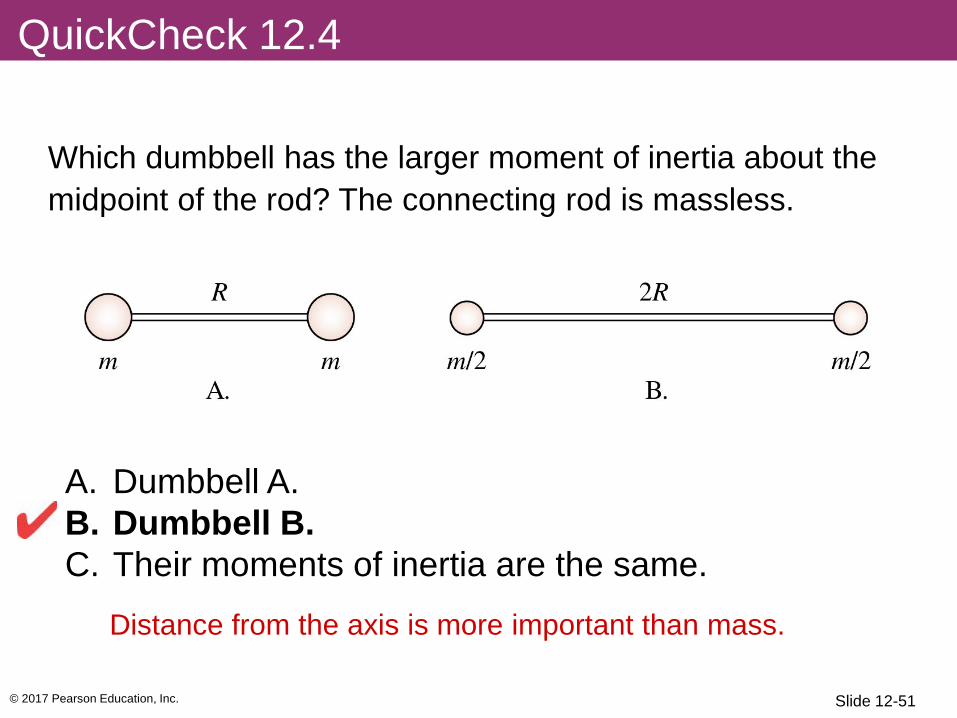
Which dumbbell has the larger moment of inertia about the midpoint of the rod? The connecting rod is massless.
QuickCheck 12.4
A. Dumbbell A. B. Dumbbell B. C. Their moments of inertia are the same.
Distance from the axis is more important than mass.
Slide 12-51
© 2017 Pearson Education, Inc.
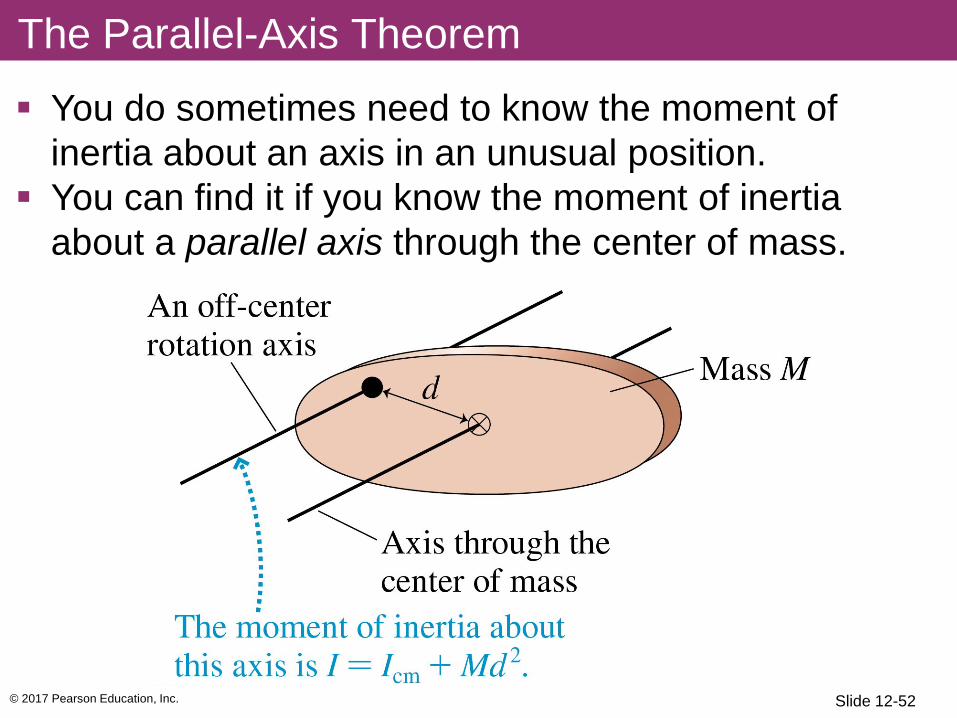
The Parallel-Axis Theorem You do sometimes need to know the moment of
inertia about an axis in an unusual position. You can find it if you know the moment of inertia
about a parallel axis through the center of mass.
Slide 12-52
© 2017 Pearson Education, Inc.
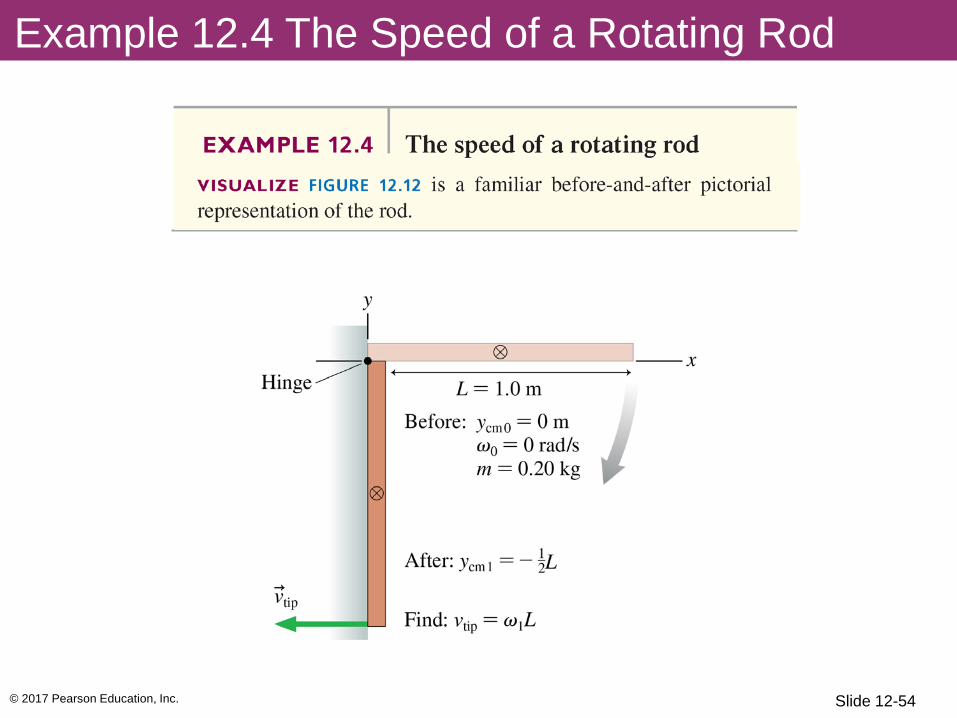
Example 12.4 The Speed of a Rotating Rod
Slide 12-53
© 2017 Pearson Education, Inc.
Example 12.4 The Speed of a Rotating Rod
Slide 12-54
© 2017 Pearson Education, Inc.
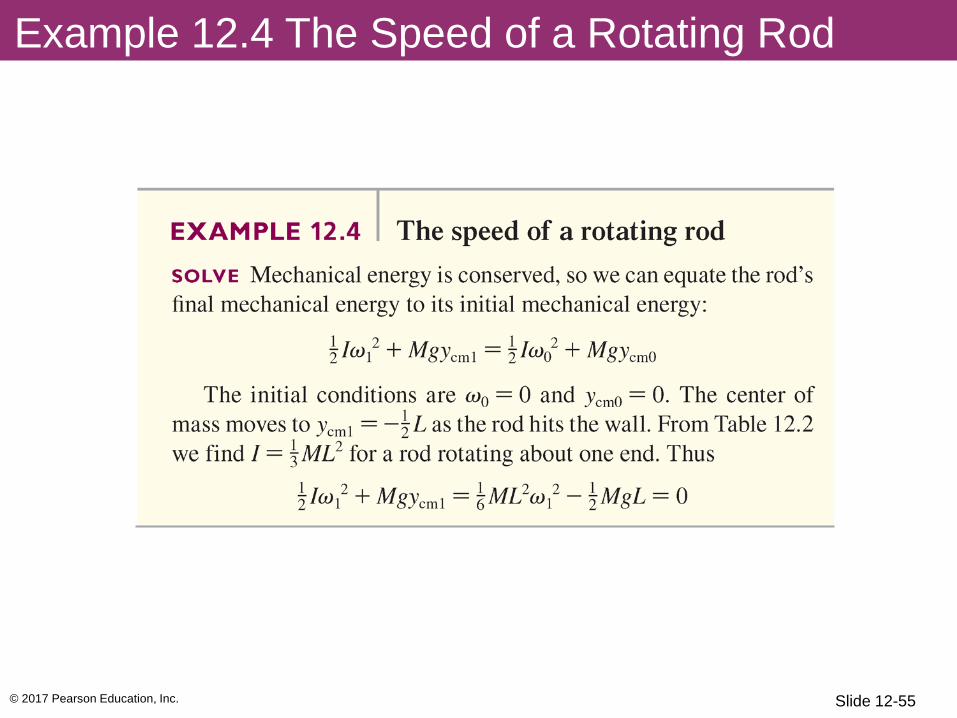
Example 12.4 The Speed of a Rotating Rod
Slide 12-55
© 2017 Pearson Education, Inc.
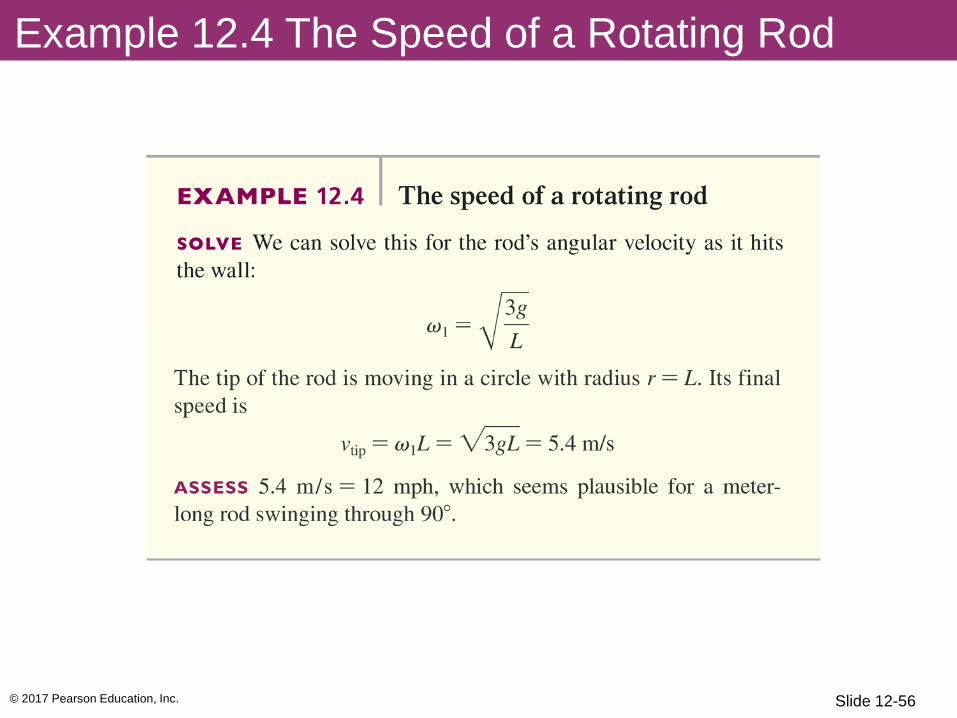
Example 12.4 The Speed of a Rotating Rod
Slide 12-56
© 2017 Pearson Education, Inc.
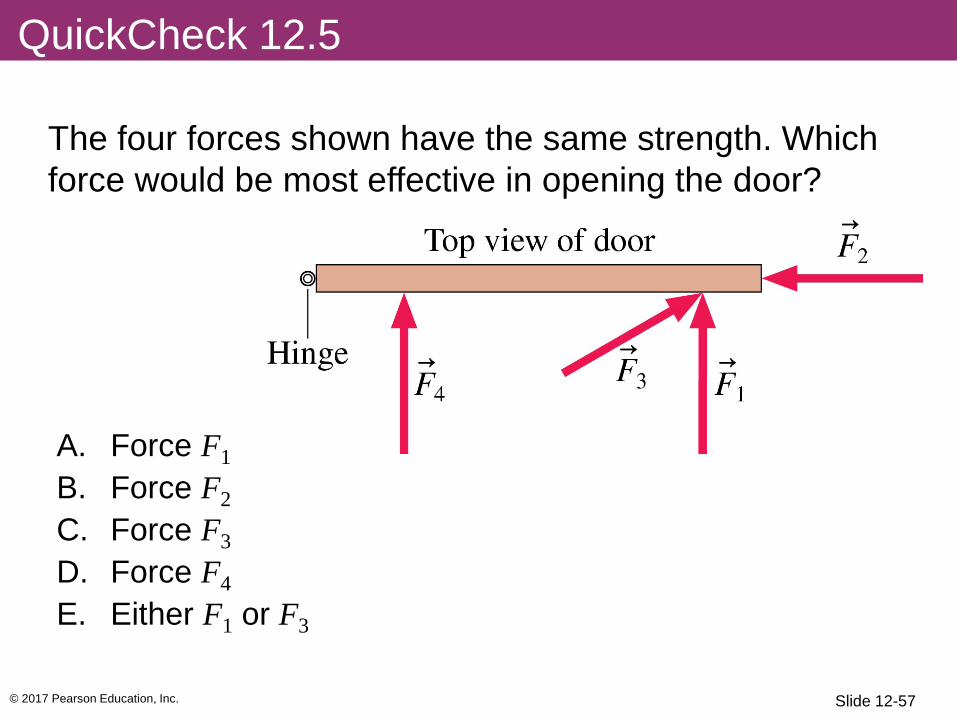
The four forces shown have the same strength. Which force would be most effective in opening the door?
A. Force F1 B. Force F2 C. Force F3 D. Force F4 E. Either F1 or F3
QuickCheck 12.5
Slide 12-57
© 2017 Pearson Education, Inc.
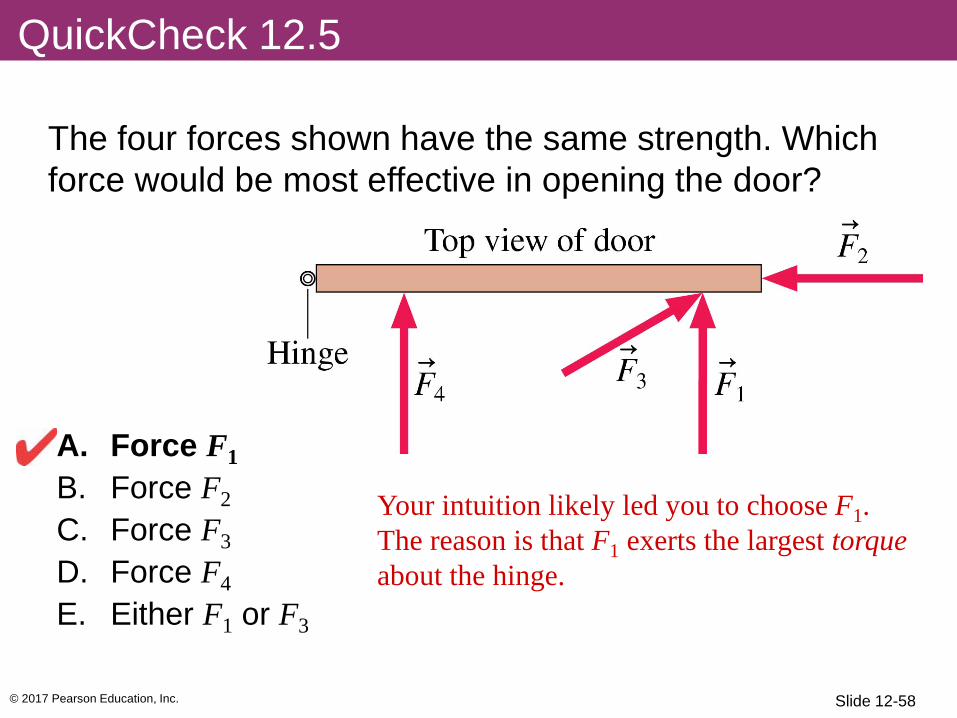
The four forces shown have the same strength. Which force would be most effective in opening the door?
A. Force F1 B. Force F2 C. Force F3 D. Force F4 E. Either F1 or F3
QuickCheck 12.5
Your intuition likely led you to choose F1. The reason is that F1 exerts the largest torque about the hinge.
Slide 12-58
© 2017 Pearson Education, Inc.
Torque Torque measures the “effectiveness” of the force at
causing an object to rotate about a pivot. Torque is the rotational equivalent of force. On a bicycle, your foot exerts a torque that rotates the
crank.
Slide 12-59
© 2017 Pearson Education, Inc.
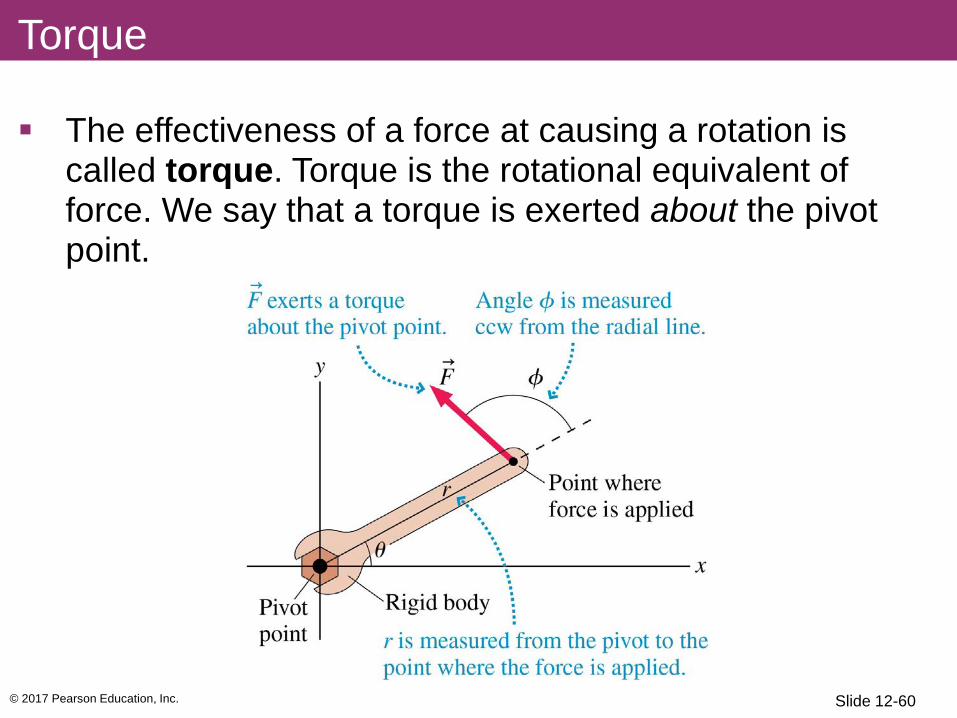
The effectiveness of a force at causing a rotation is called torque. Torque is the rotational equivalent of force. We say that a torque is exerted about the pivot point.
Torque
Slide 12-60
© 2017 Pearson Education, Inc.
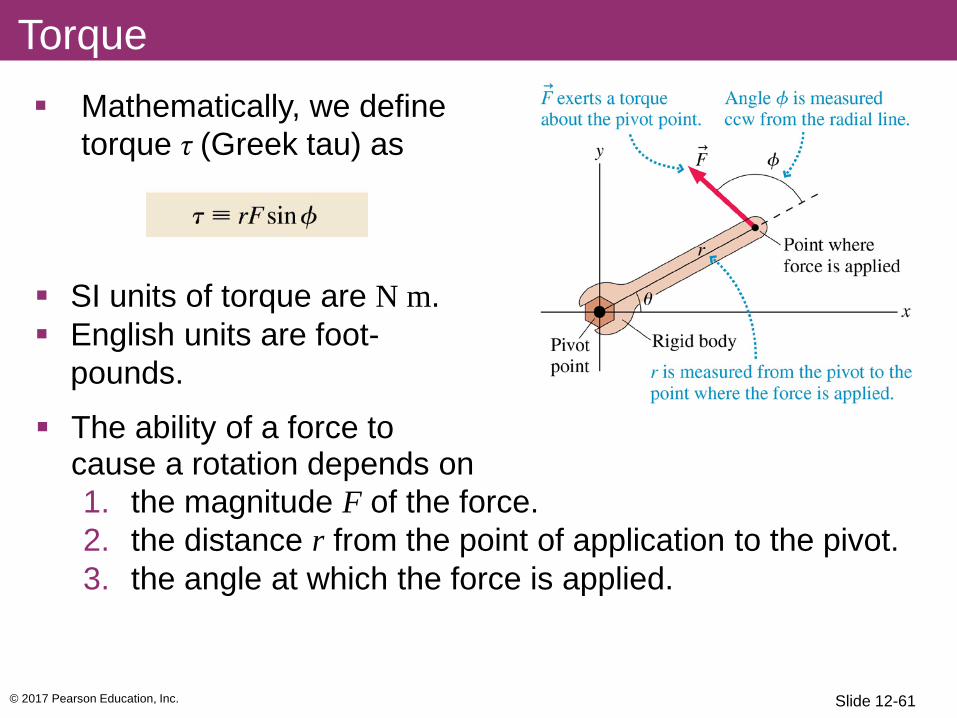
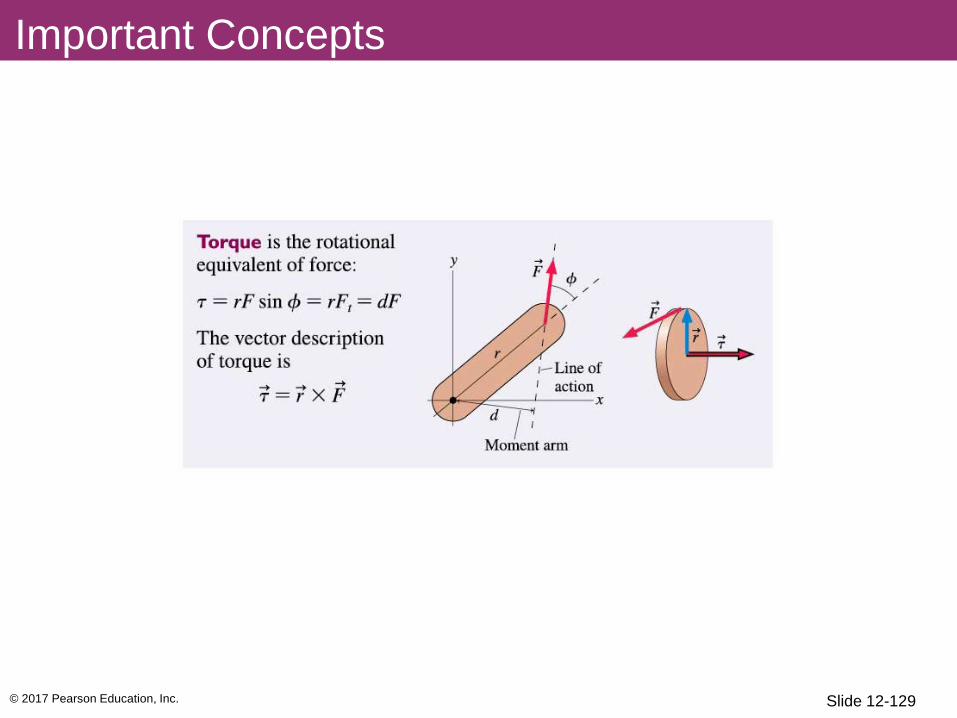
Mathematically, we define torque τ (Greek tau) as
The ability of a force to cause a rotation depends on 1. the magnitude F of the force. 2. the distance r from the point of application to the pivot. 3. the angle at which the force is applied.
SI units of torque are N m. English units are foot-
pounds.
Torque
Slide 12-61
© 2017 Pearson Education, Inc.
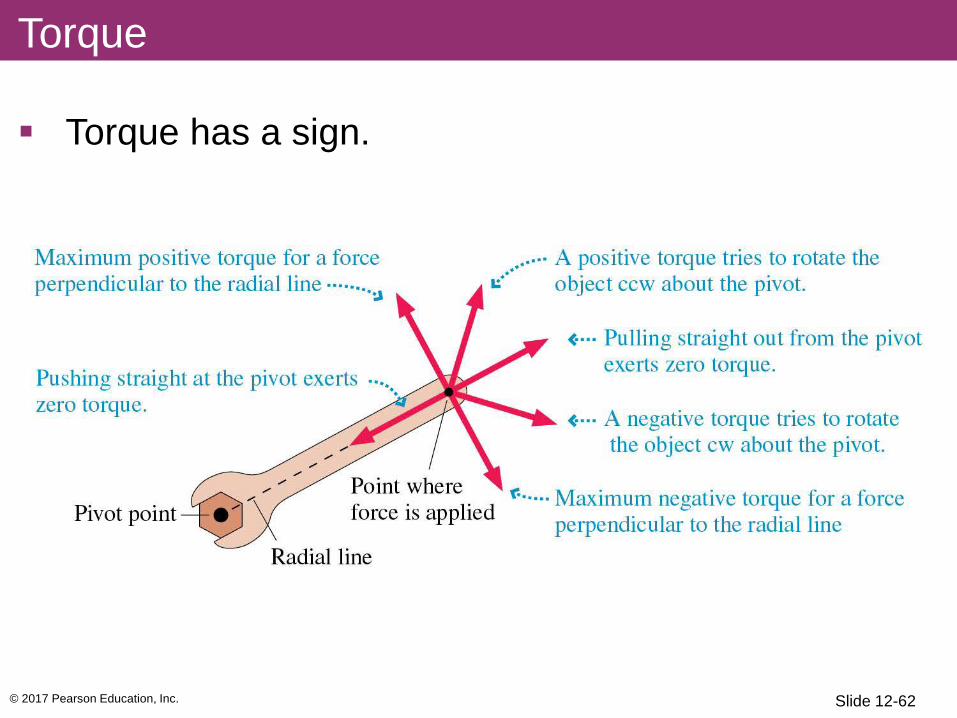
Torque
Torque has a sign.
Slide 12-62
© 2017 Pearson Education, Inc.
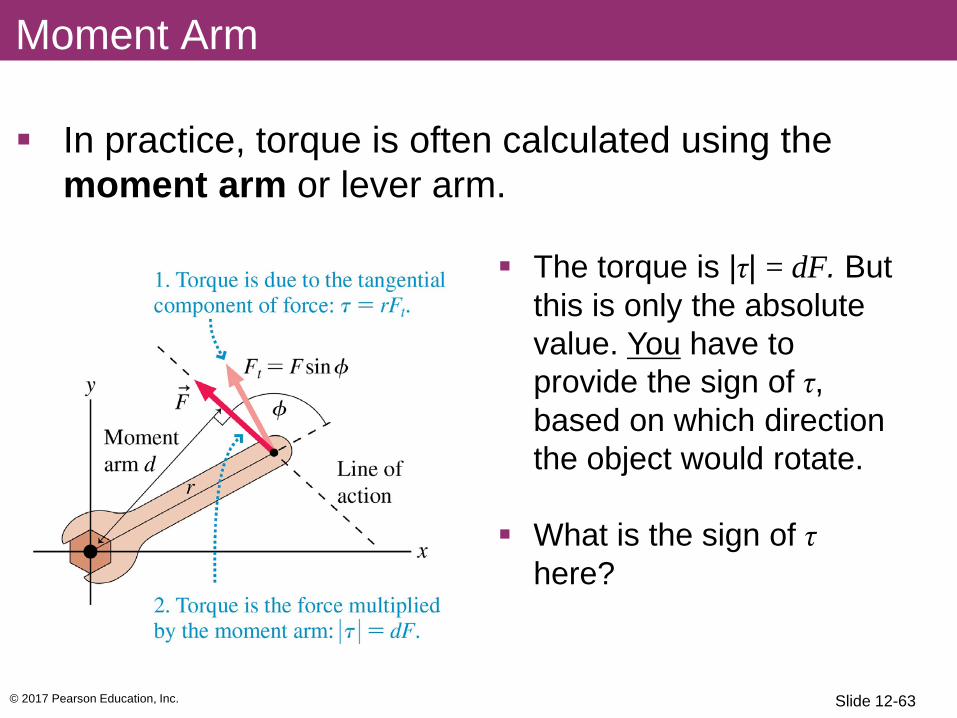
Moment Arm
In practice, torque is often calculated using the moment arm or lever arm.
The torque is |τ| = dF. But this is only the absolute value. You have to provide the sign of τ, based on which direction the object would rotate.
What is the sign of τ here?
Slide 12-63
© 2017 Pearson Education, Inc.
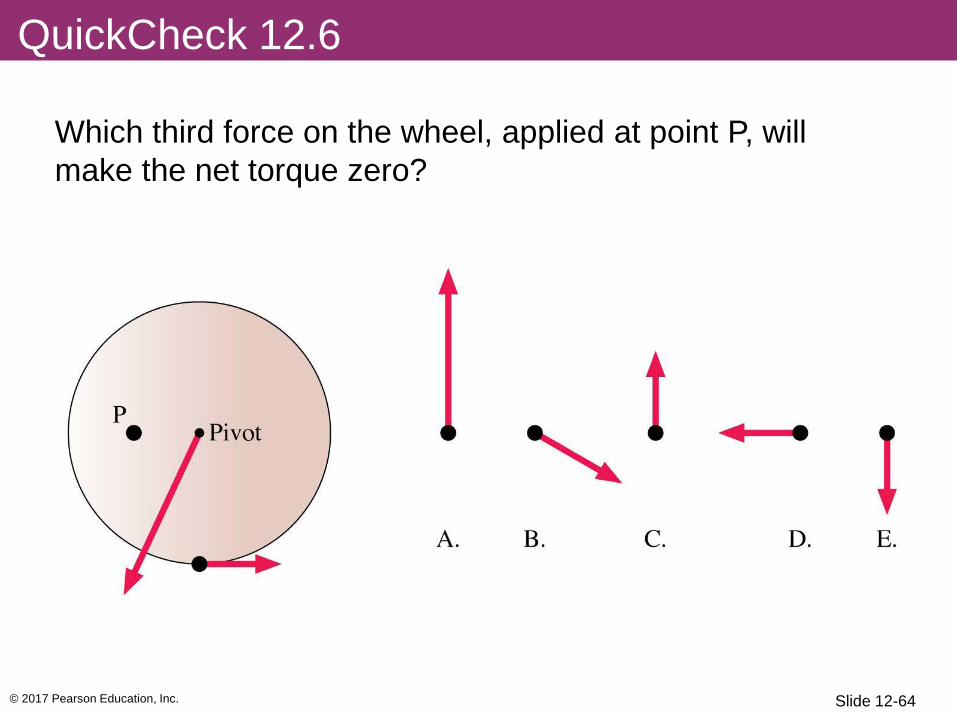
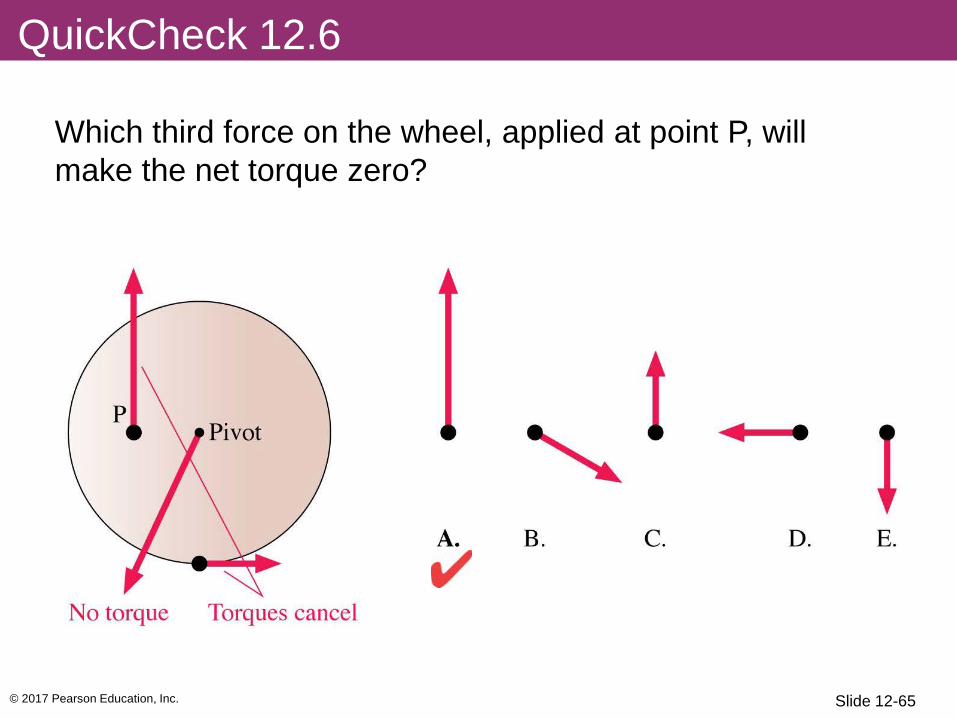
Which third force on the wheel, applied at point P, will make the net torque zero?
QuickCheck 12.6
Slide 12-64
© 2017 Pearson Education, Inc.
Which third force on the wheel, applied at point P, will make the net torque zero?
QuickCheck 12.6
Slide 12-65
© 2017 Pearson Education, Inc. Slide 12-66
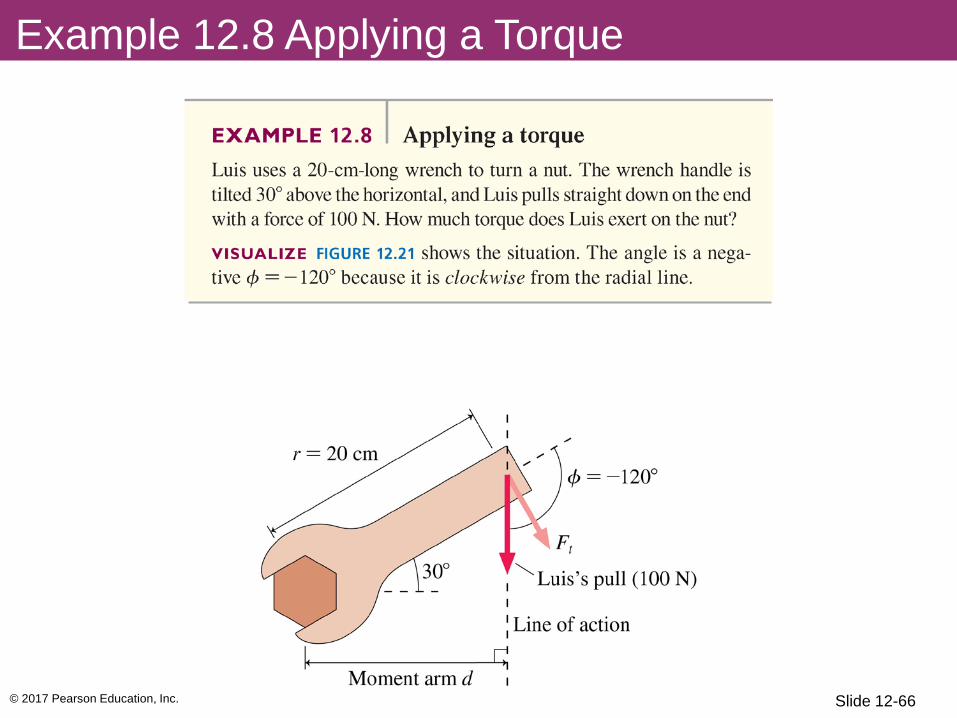
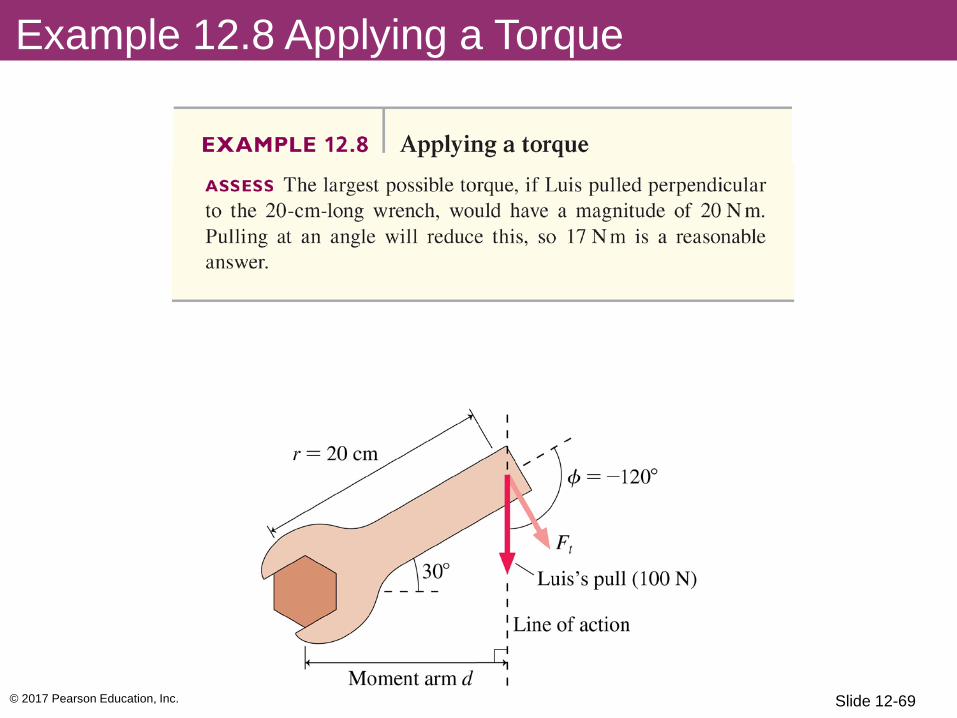
Example 12.8 Applying a Torque
© 2017 Pearson Education, Inc.
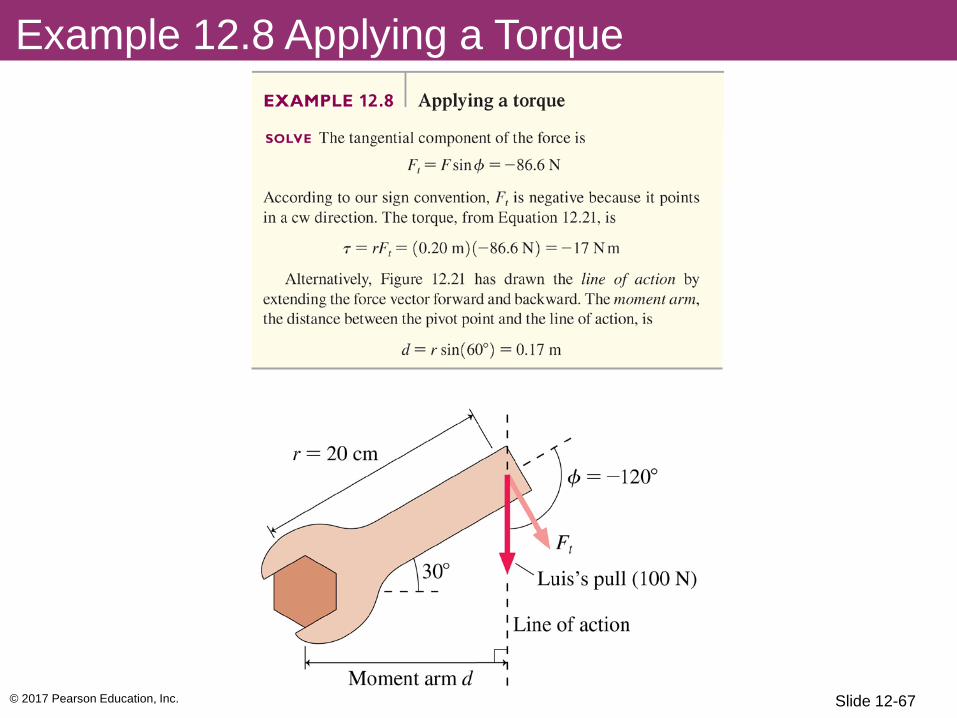
Example 12.8 Applying a Torque
Slide 12-67
© 2017 Pearson Education, Inc.
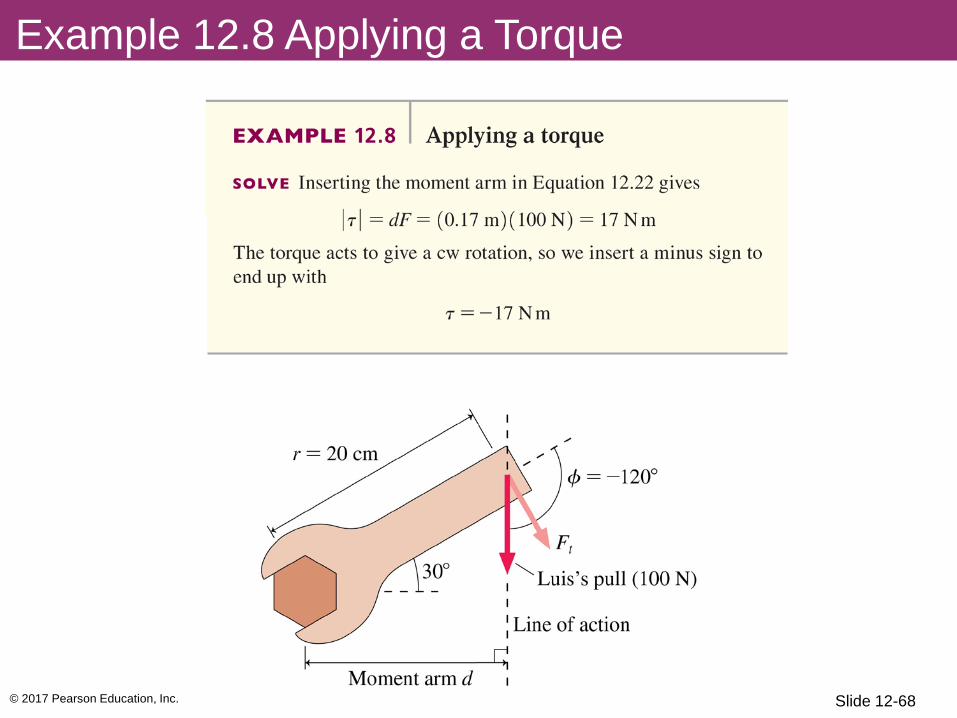
Example 12.8 Applying a Torque
Slide 12-68
© 2017 Pearson Education, Inc.
Example 12.8 Applying a Torque
Slide 12-69
© 2017 Pearson Education, Inc.
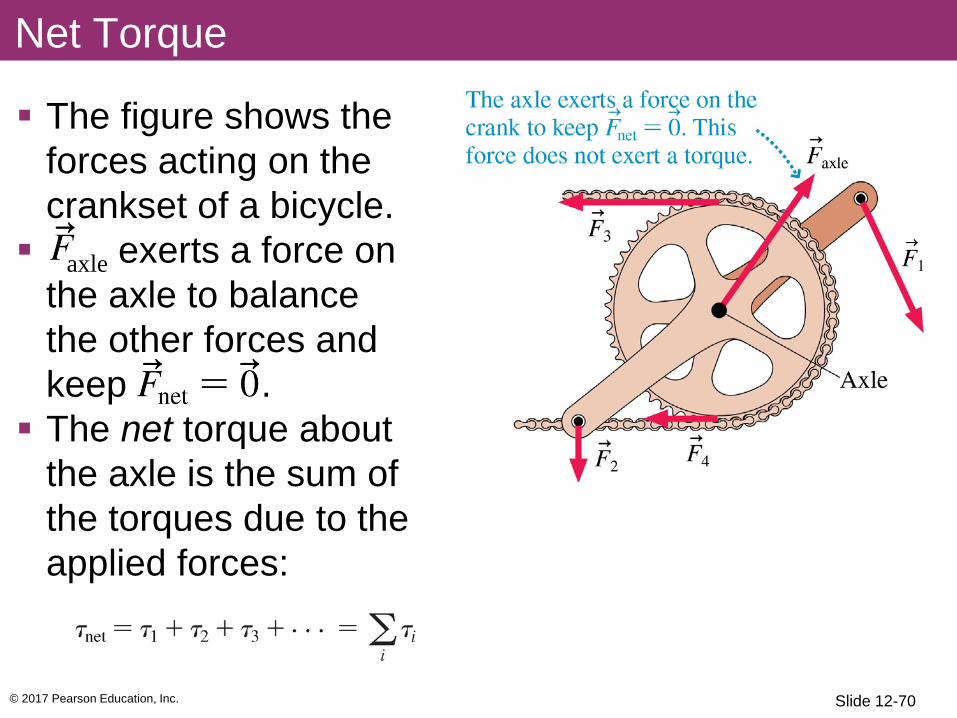
The figure shows the forces acting on the crankset of a bicycle. axle exerts a force on
the axle to balance the other forces and keep . The net torque about
the axle is the sum of the torques due to the applied forces:
Net Torque
Slide 12-70
© 2017 Pearson Education, Inc.
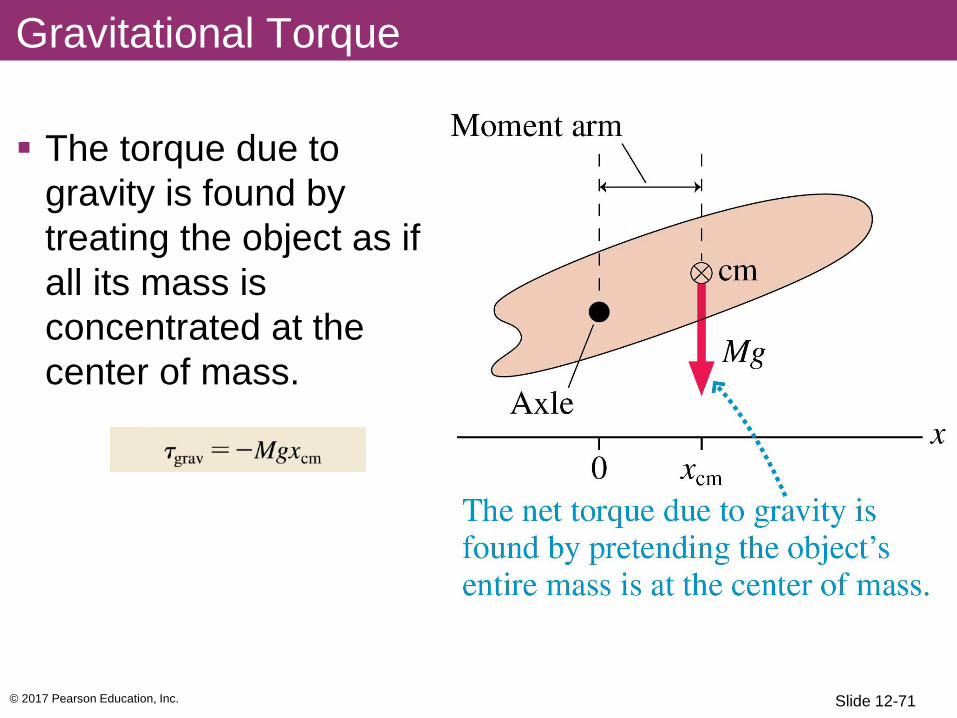
Gravitational Torque
The torque due to gravity is found by treating the object as if all its mass is concentrated at the center of mass.
Slide 12-71
© 2017 Pearson Education, Inc.
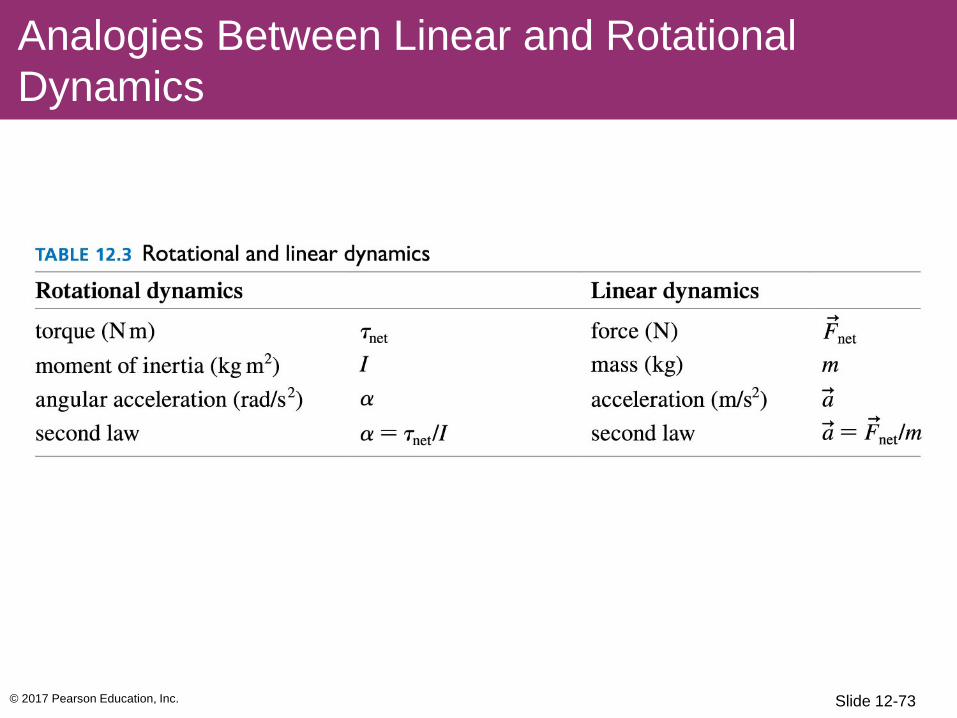
Rotational Dynamics
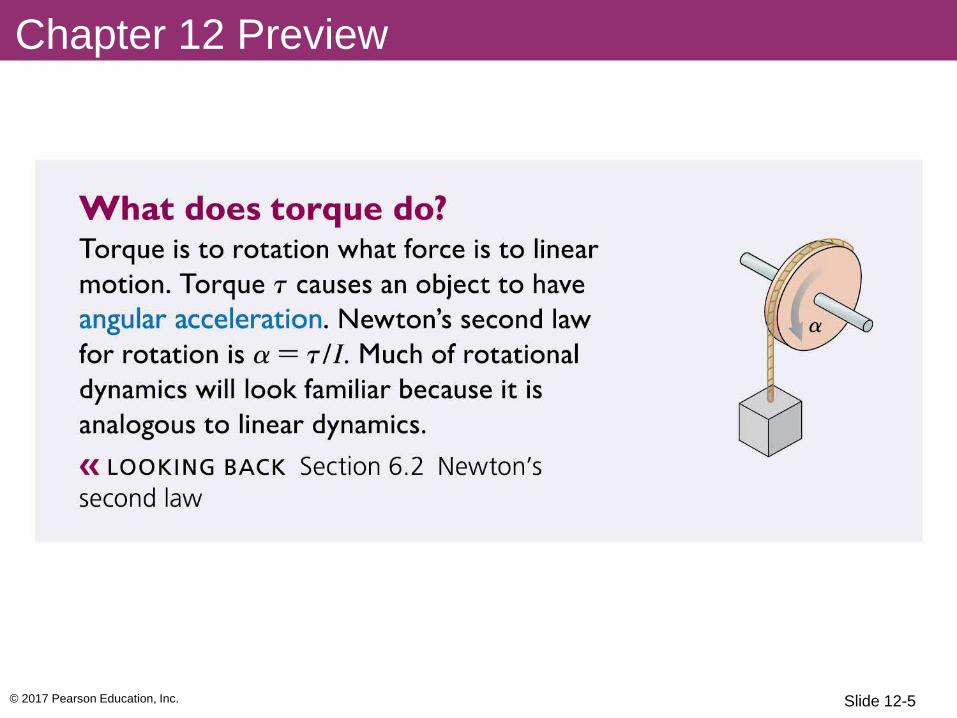
What does a torque do? For linear motion, a net force causes an object to
accelerate. For rotation, a net torque causes an object to
have angular acceleration.
In the absence of a net torque (τnet = 0), the object either does not rotate (ω = 0) or rotates with constant angular velocity (ω = constant).
Slide 12-72
© 2017 Pearson Education, Inc.
Analogies Between Linear and Rotational Dynamics
Slide 12-73
© 2017 Pearson Education, Inc.
A student gives a quick push to a puck that can rotate in a horizontal circle on a frictionless table. After the push has ended, the puck’s angular speed
QuickCheck 12.7
A. Steadily increases. B. Increases for awhile, then holds steady. C. Holds steady. D. Decreases for awhile, then holds steady. E. Steadily decreases.
Slide 12-74
© 2017 Pearson Education, Inc.
A student gives a quick push to a puck that can rotate in a horizontal circle on a frictionless table. After the push has ended, the puck’s angular speed
QuickCheck 12.7
A. Steadily increases. B. Increases for awhile, then holds steady. C. Holds steady. D. Decreases for awhile, then holds steady. E. Steadily decreases.
A torque changes the angular velocity. With no torque, the angular velocity stays the same. This is Newton’s first law for rotation.
Slide 12-75
© 2017 Pearson Education, Inc.
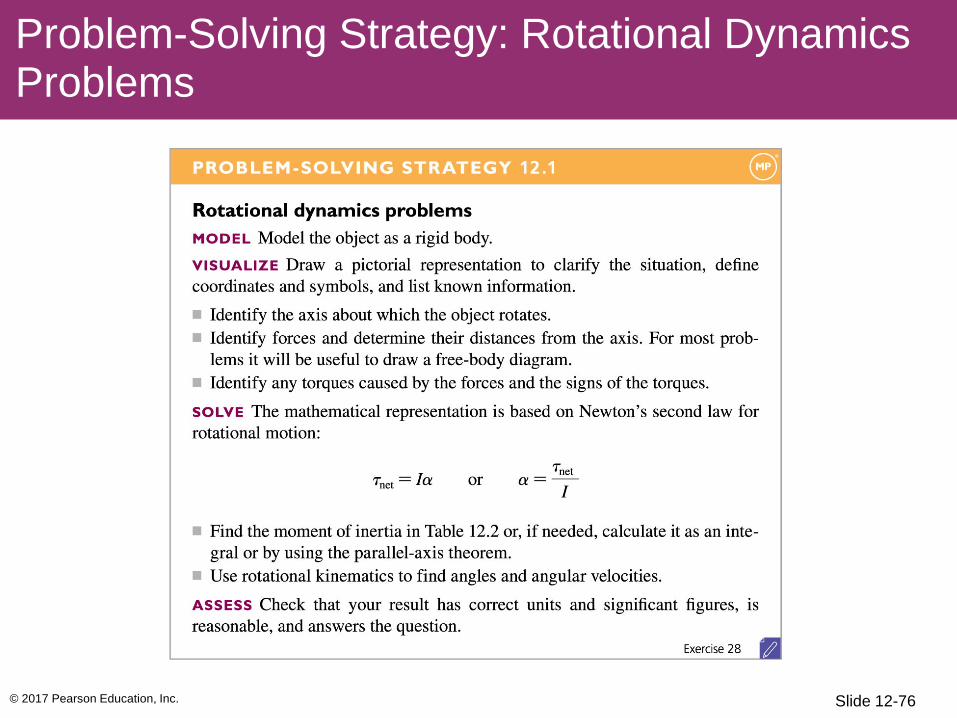
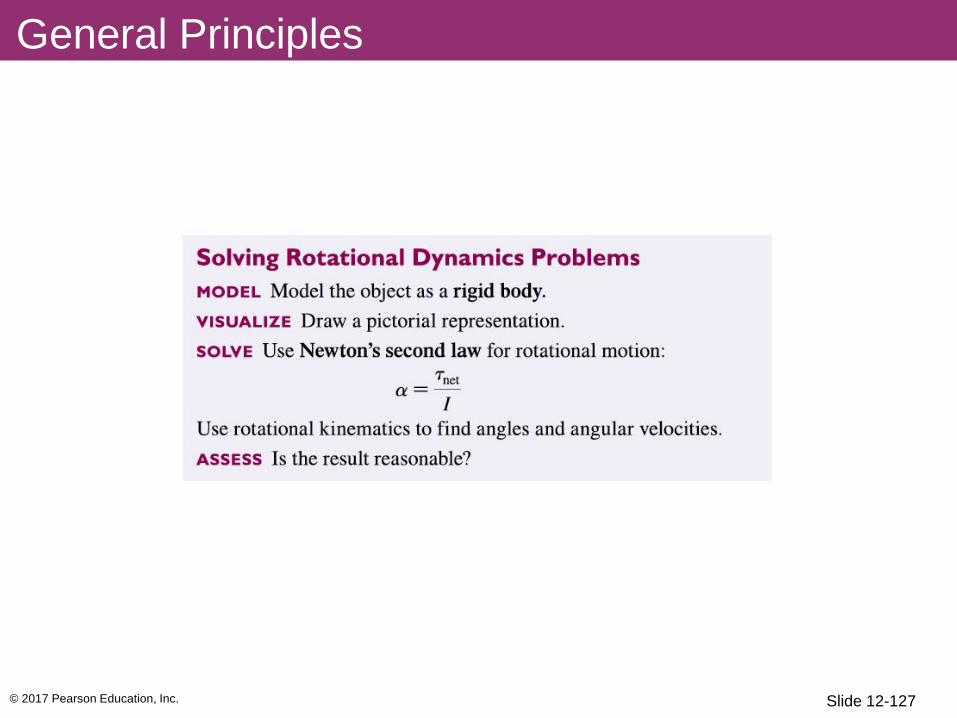
Problem-Solving Strategy: Rotational Dynamics Problems
Slide 12-76
© 2017 Pearson Education, Inc. Slide 12-77
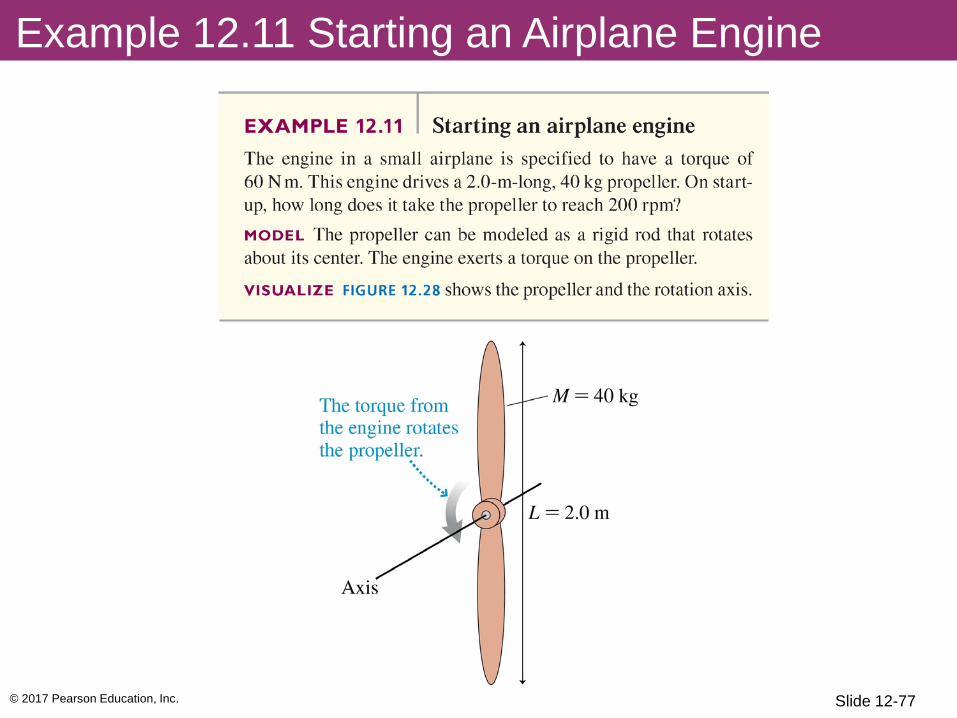
Example 12.11 Starting an Airplane Engine
© 2017 Pearson Education, Inc.
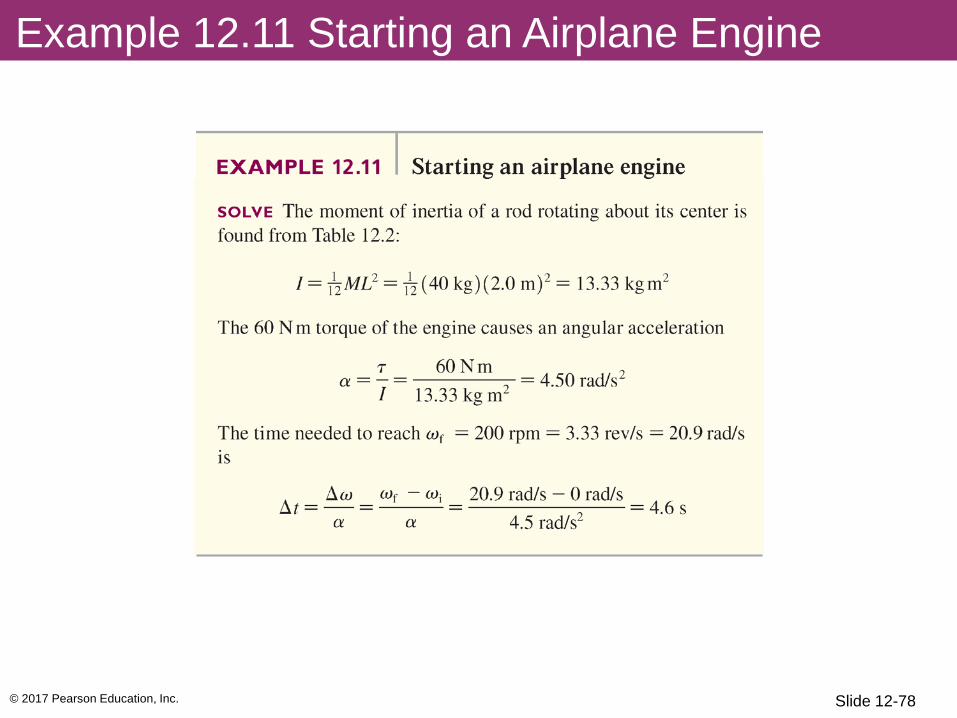
Example 12.11 Starting an Airplane Engine
Slide 12-78
© 2017 Pearson Education, Inc.
Example 12.11 Starting an Airplane Engine
Slide 12-79
© 2017 Pearson Education, Inc.
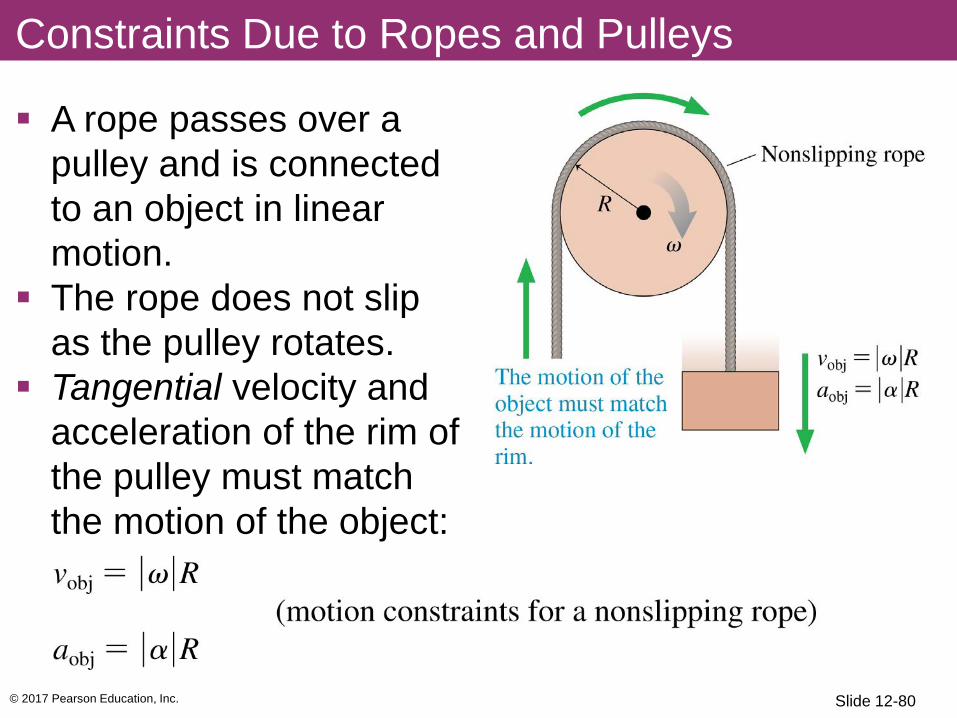
Constraints Due to Ropes and Pulleys
A rope passes over a pulley and is connected to an object in linear motion.
The rope does not slip as the pulley rotates.
Tangential velocity and acceleration of the rim of the pulley must match the motion of the object:
Slide 12-80
© 2017 Pearson Education, Inc.
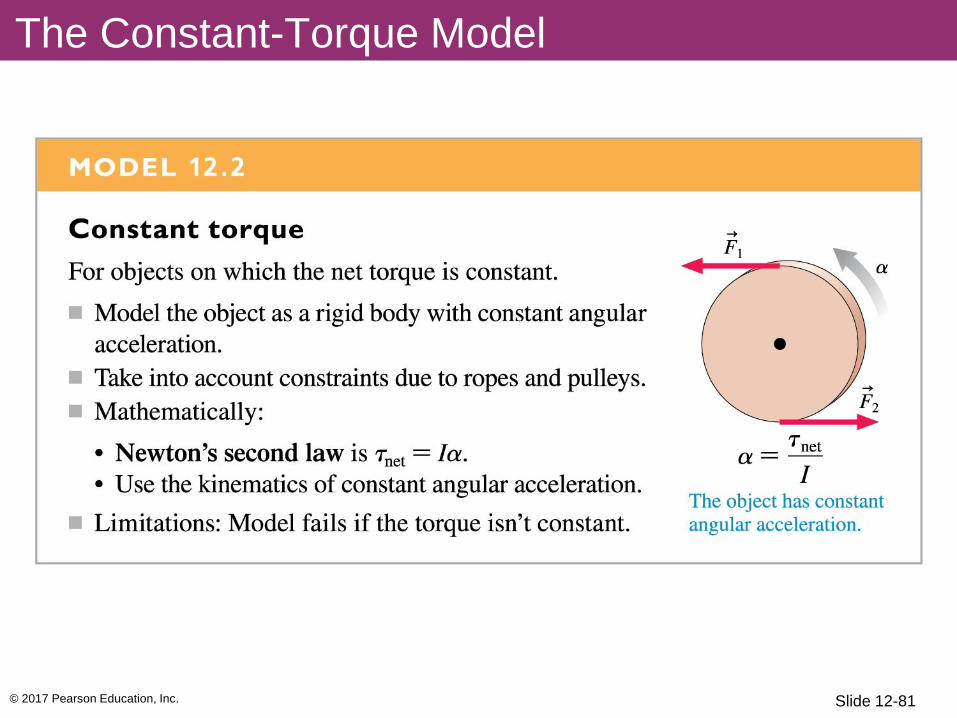
The Constant-Torque Model
Slide 12-81
© 2017 Pearson Education, Inc.
Static Equilibrium
A rigid body is in static equilibrium if there is no net force and no net torque.
An important branch of engineering called statics analyzes buildings, dams, bridges, and other structures in total static equilibrium.
For a rigid body in total equilibrium, there is no net torque about any point.
Slide 12-82
© 2017 Pearson Education, Inc.
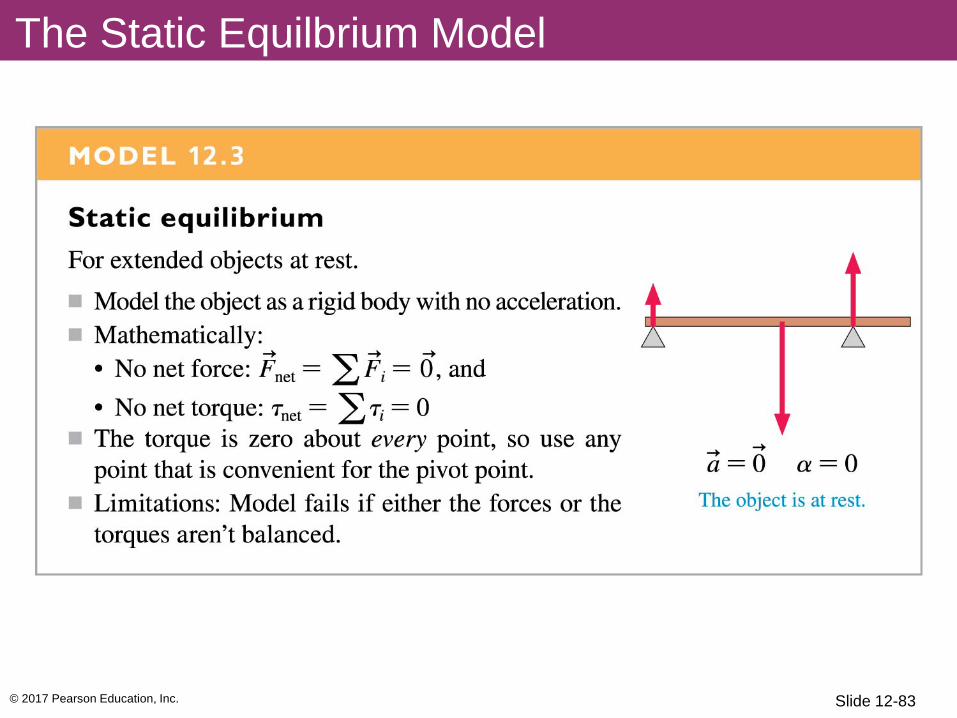
The Static Equilbrium Model
Slide 12-83
© 2017 Pearson Education, Inc.
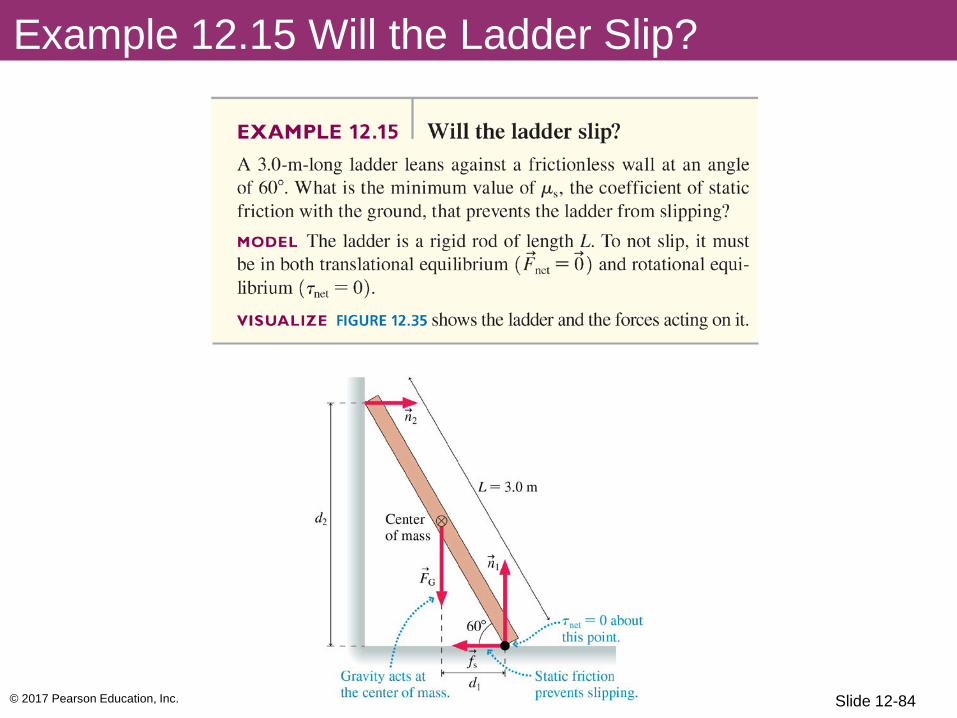
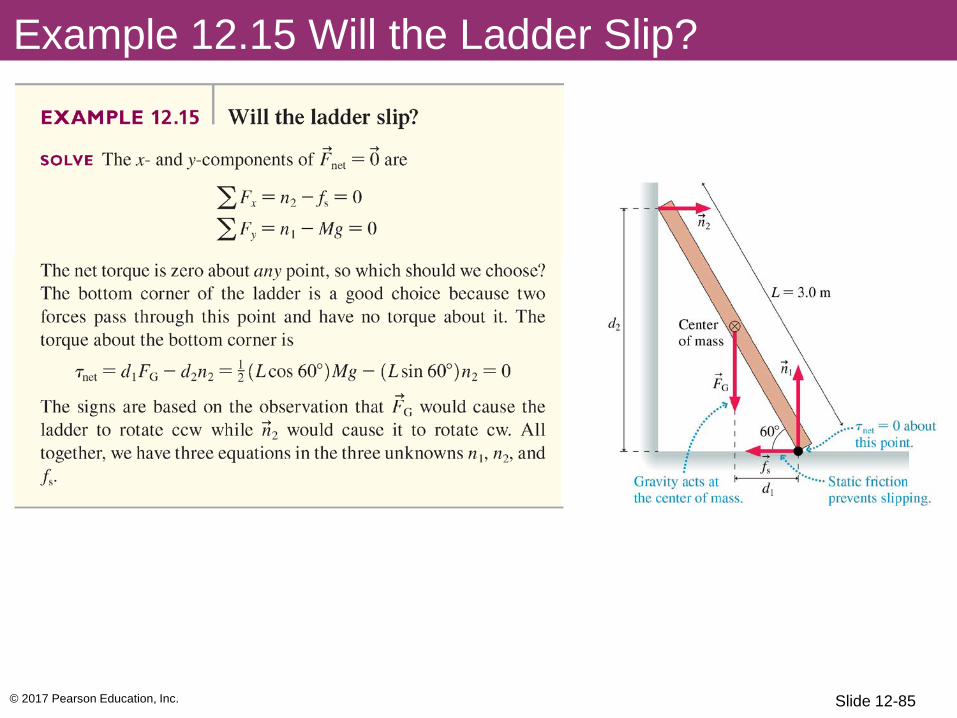
Example 12.15 Will the Ladder Slip?
Slide 12-84
© 2017 Pearson Education, Inc.
Example 12.15 Will the Ladder Slip?
Slide 12-85
© 2017 Pearson Education, Inc.
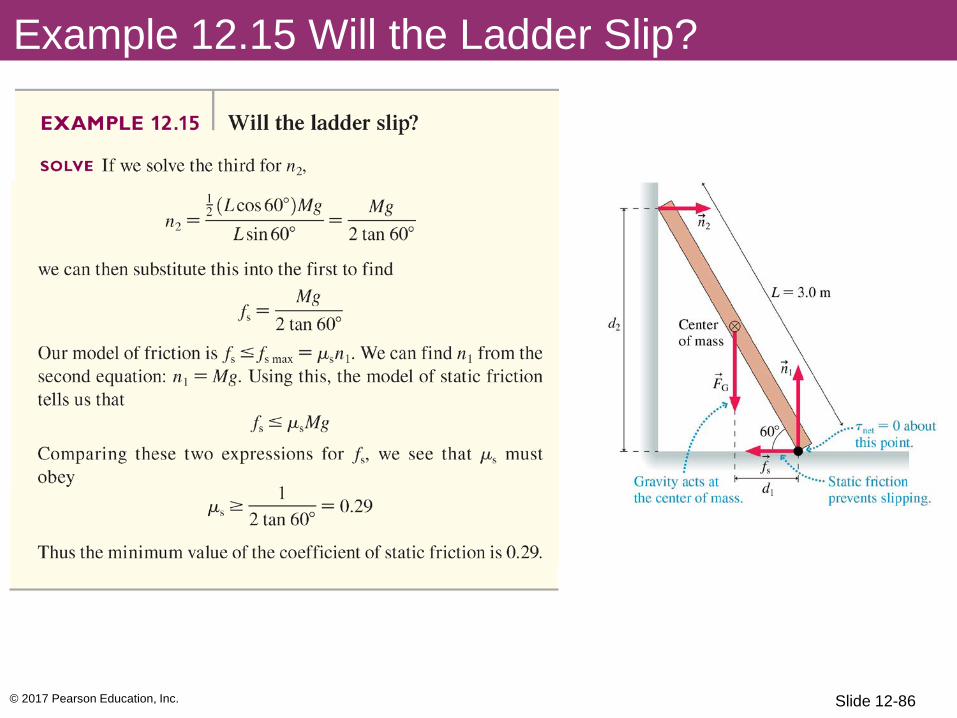
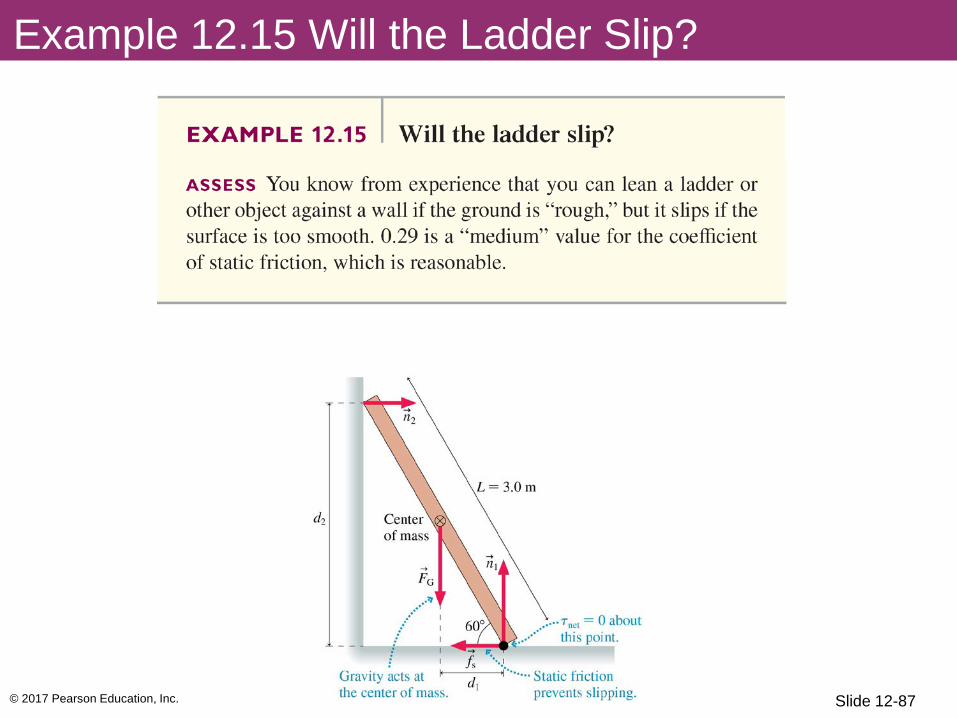
Example 12.15 Will the Ladder Slip?
Slide 12-86
© 2017 Pearson Education, Inc.
Example 12.15 Will the Ladder Slip?
Slide 12-87
© 2017 Pearson Education, Inc.
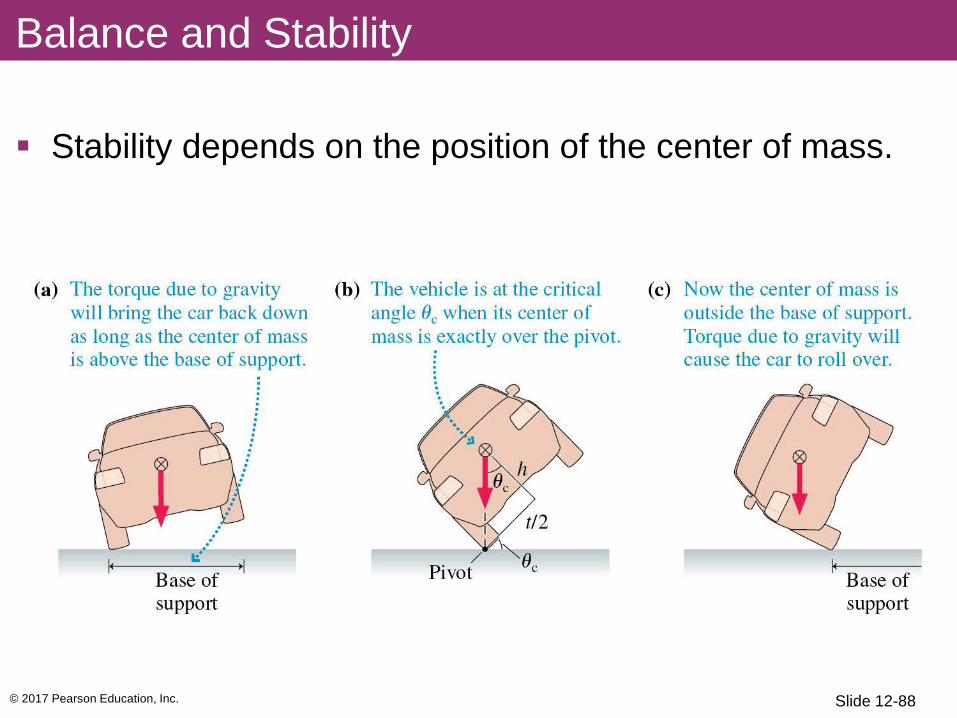
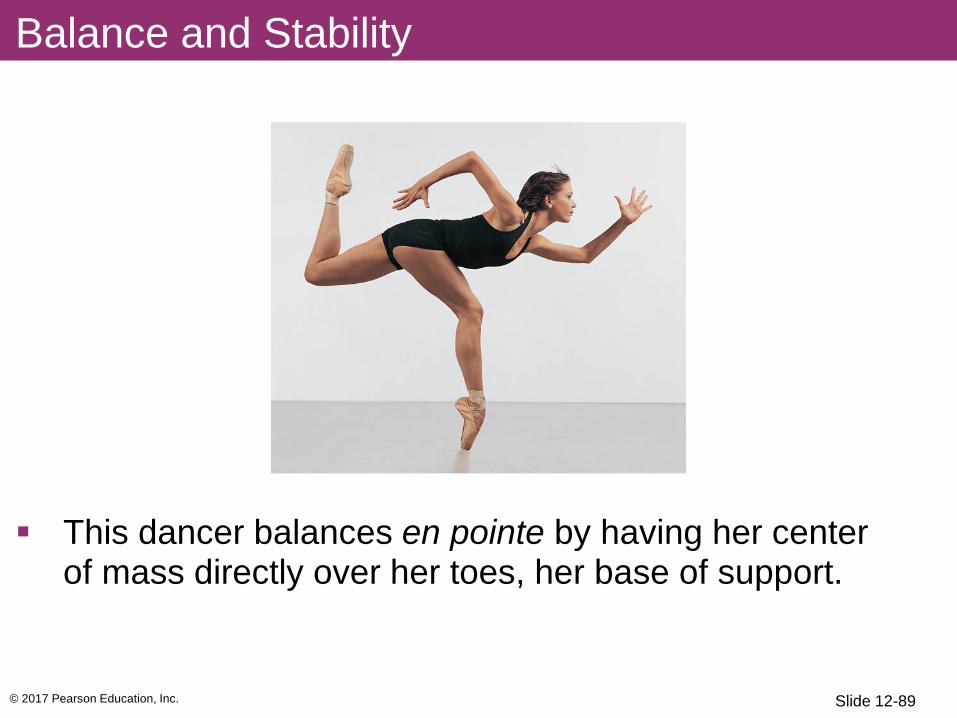
Balance and Stability
Stability depends on the position of the center of mass.
Slide 12-88
© 2017 Pearson Education, Inc.
This dancer balances en pointe by having her center of mass directly over her toes, her base of support.
Balance and Stability
Slide 12-89
© 2017 Pearson Education, Inc.
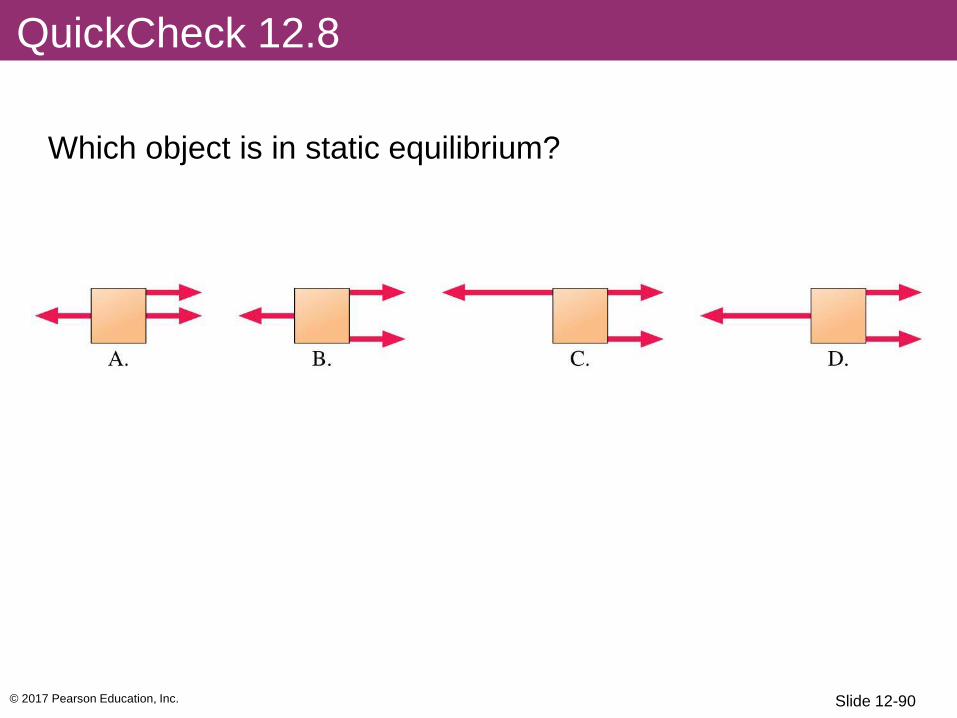
Which object is in static equilibrium?
QuickCheck 12.8
Slide 12-90
© 2017 Pearson Education, Inc.
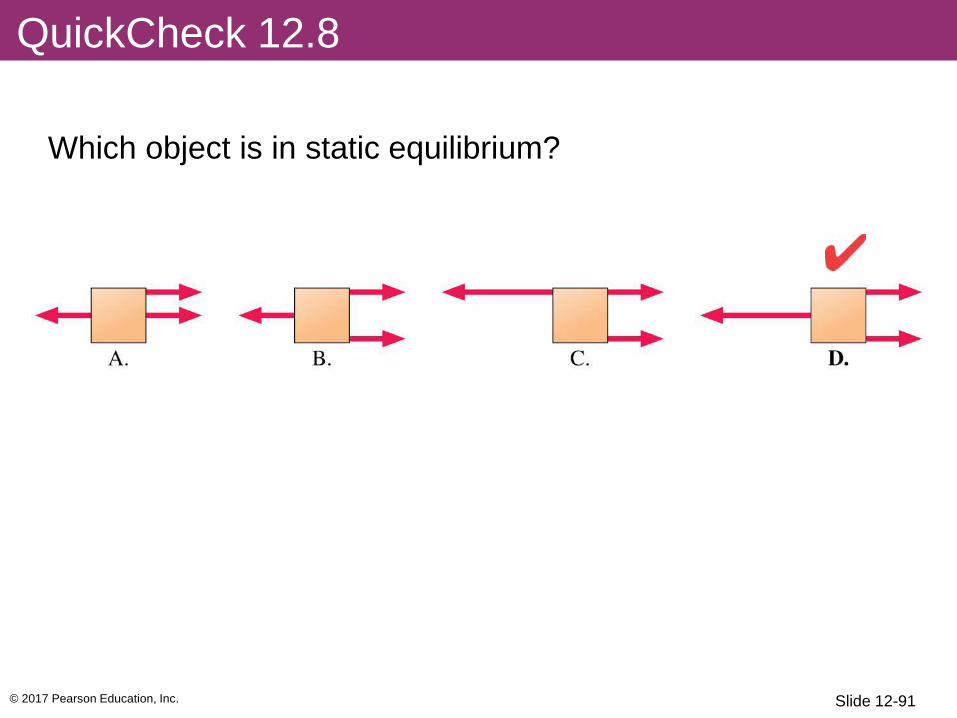
Which object is in static equilibrium?
QuickCheck 12.8
Slide 12-91
© 2017 Pearson Education, Inc.
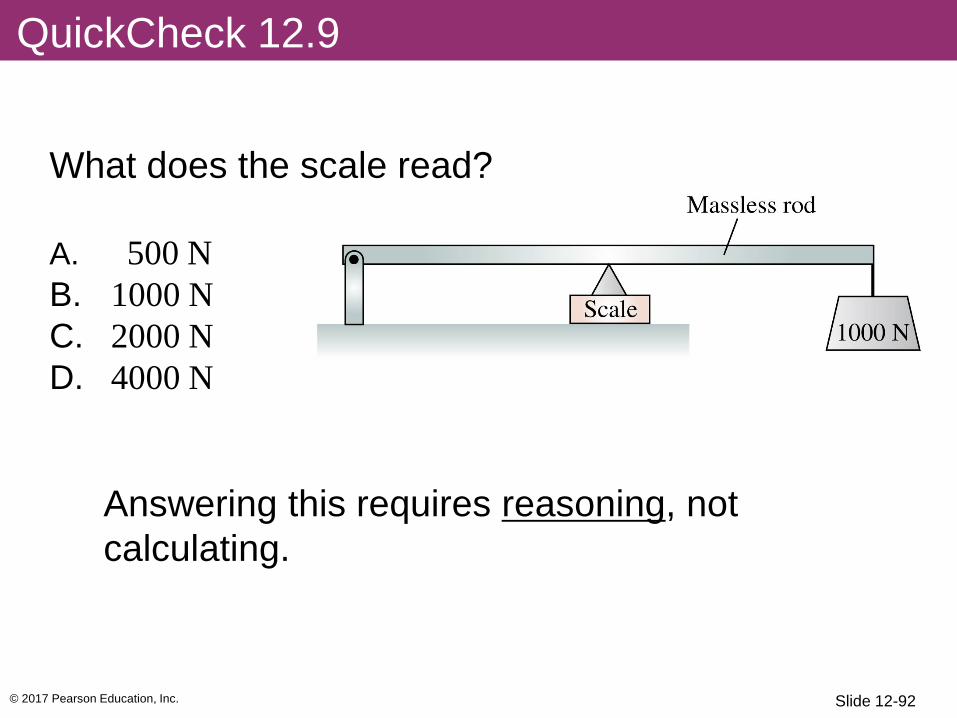
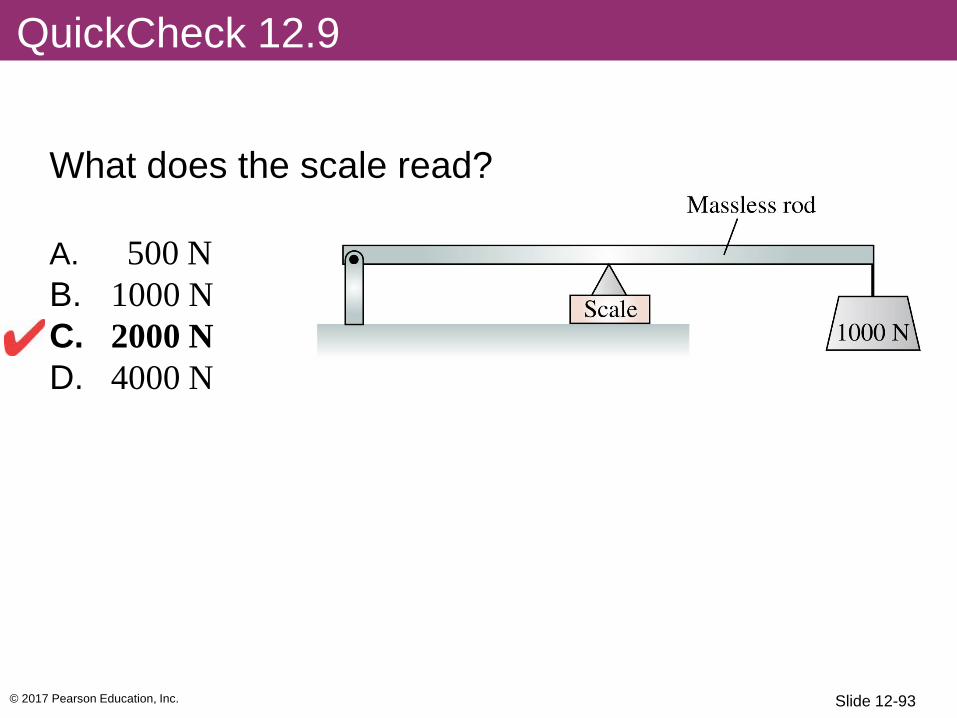
What does the scale read? A. 500 N B. 1000 N C. 2000 N D. 4000 N
Answering this requires reasoning, not calculating.
QuickCheck 12.9
Slide 12-92
© 2017 Pearson Education, Inc.
What does the scale read? A. 500 N B. 1000 N C. 2000 N D. 4000 N
QuickCheck 12.9
Slide 12-93
© 2017 Pearson Education, Inc.
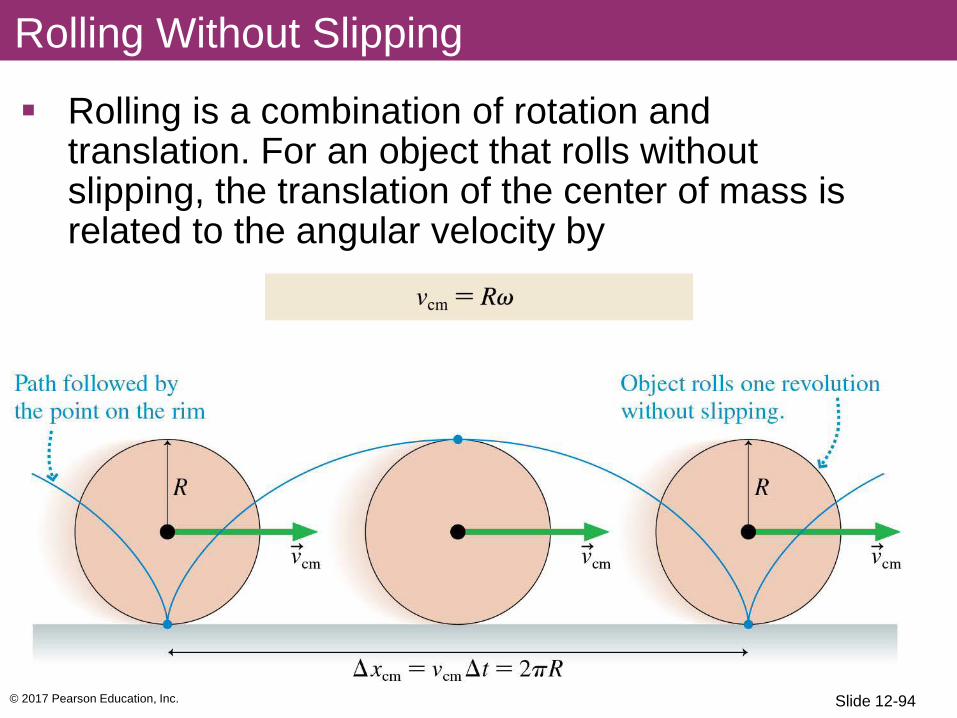
Rolling Without Slipping
Rolling is a combination of rotation and translation. For an object that rolls without slipping, the translation of the center of mass is related to the angular velocity by
Slide 12-94
© 2017 Pearson Education, Inc.
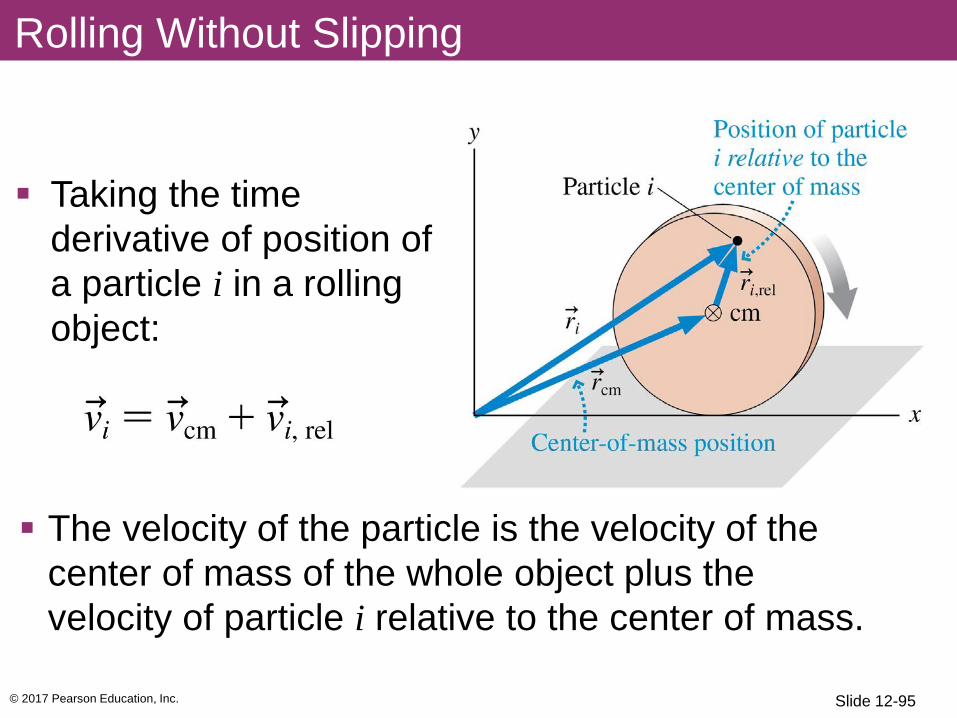
Taking the time derivative of position of a particle i in a rolling object:
The velocity of the particle is the velocity of the center of mass of the whole object plus the velocity of particle i relative to the center of mass.
Rolling Without Slipping
Slide 12-95
© 2017 Pearson Education, Inc.
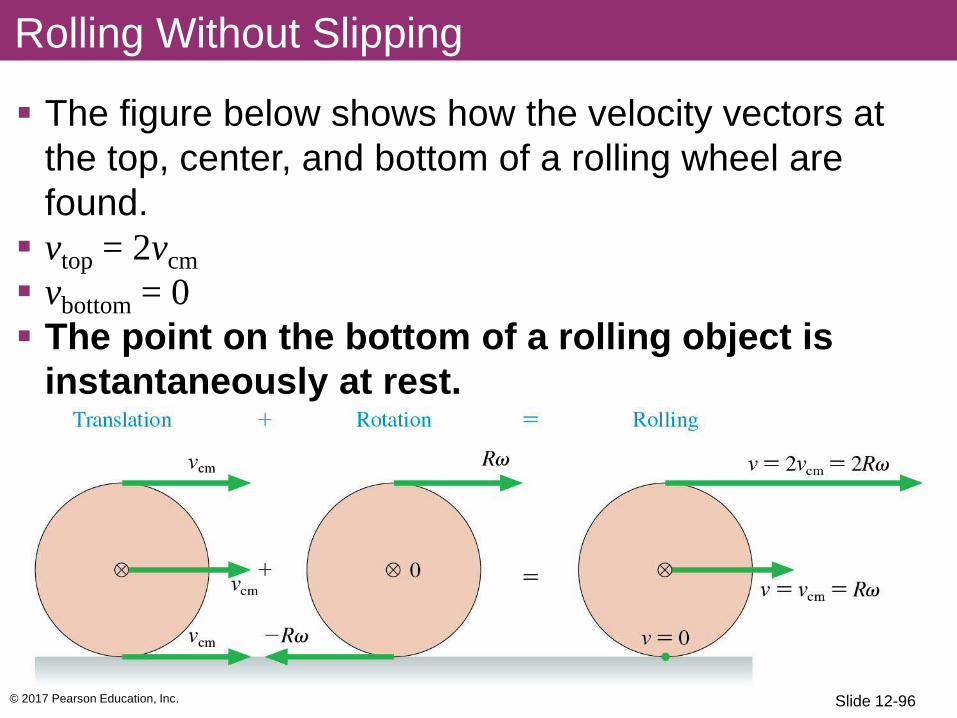
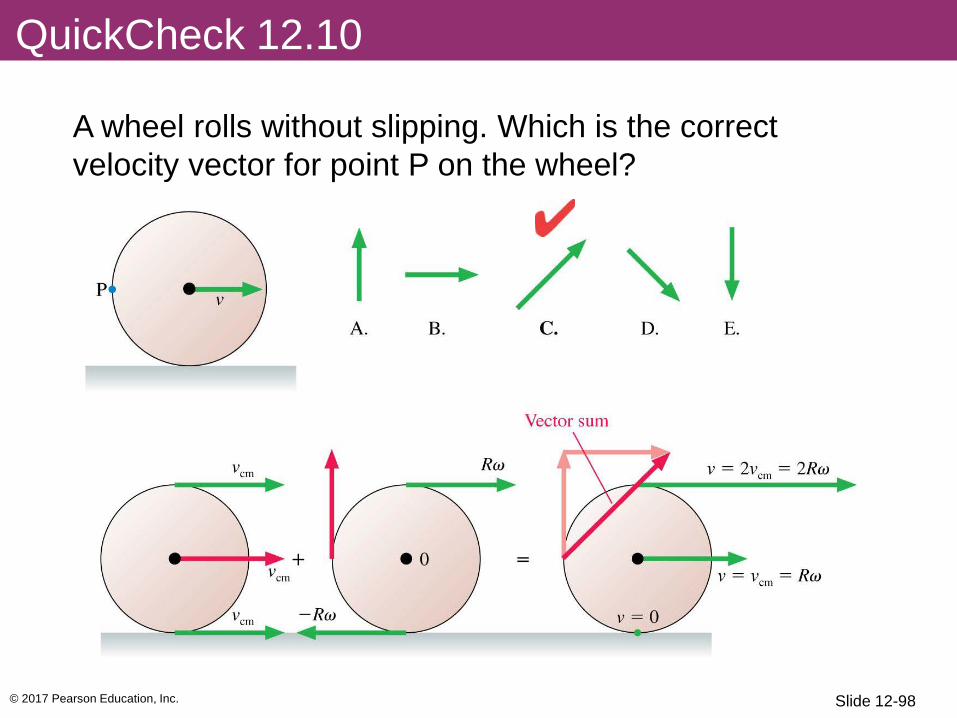
The figure below shows how the velocity vectors at the top, center, and bottom of a rolling wheel are found. vtop = 2vcm vbottom = 0 The point on the bottom of a rolling object is
instantaneously at rest.
Rolling Without Slipping
Slide 12-96
© 2017 Pearson Education, Inc.
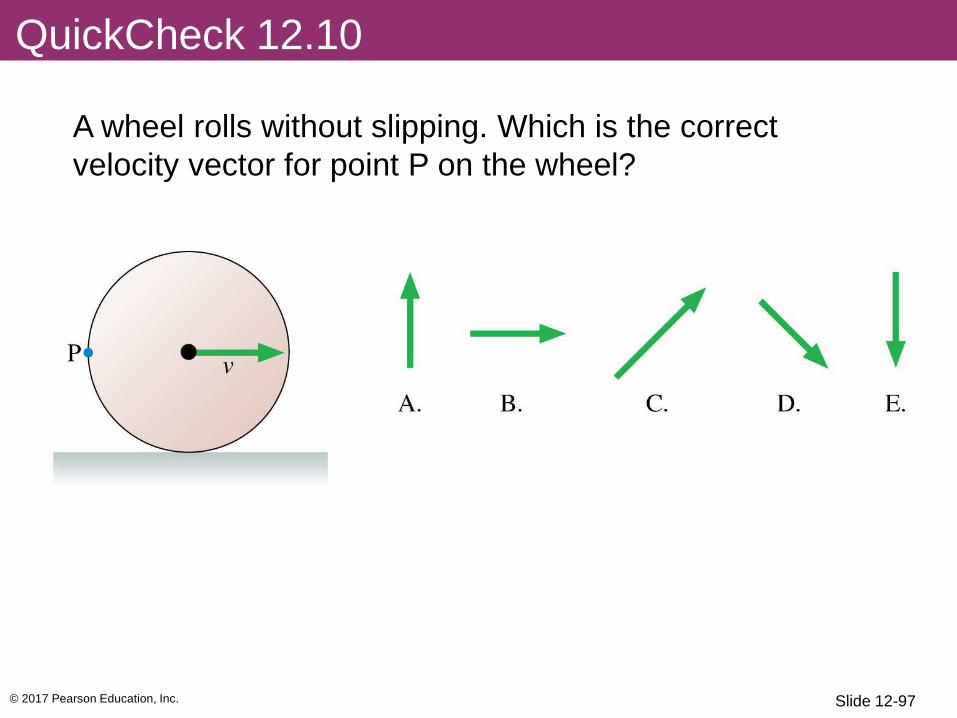
A wheel rolls without slipping. Which is the correct velocity vector for point P on the wheel?
QuickCheck 12.10
Slide 12-97
© 2017 Pearson Education, Inc.
A wheel rolls without slipping. Which is the correct velocity vector for point P on the wheel?
QuickCheck 12.10
Slide 12-98
© 2017 Pearson Education, Inc.
Kinetic Energy of Rolling
The kinetic energy of a rolling object is
In other words, the rolling motion of a rigid body can be described as a translation of the center of mass (with kinetic energy Kcm) plus a rotation about the center of mass (with kinetic energy Krot).
Slide 12-99
© 2017 Pearson Education, Inc.
One-dimensional motion uses a scalar velocity v and force F.
A more general understanding of motion requires vectors and .
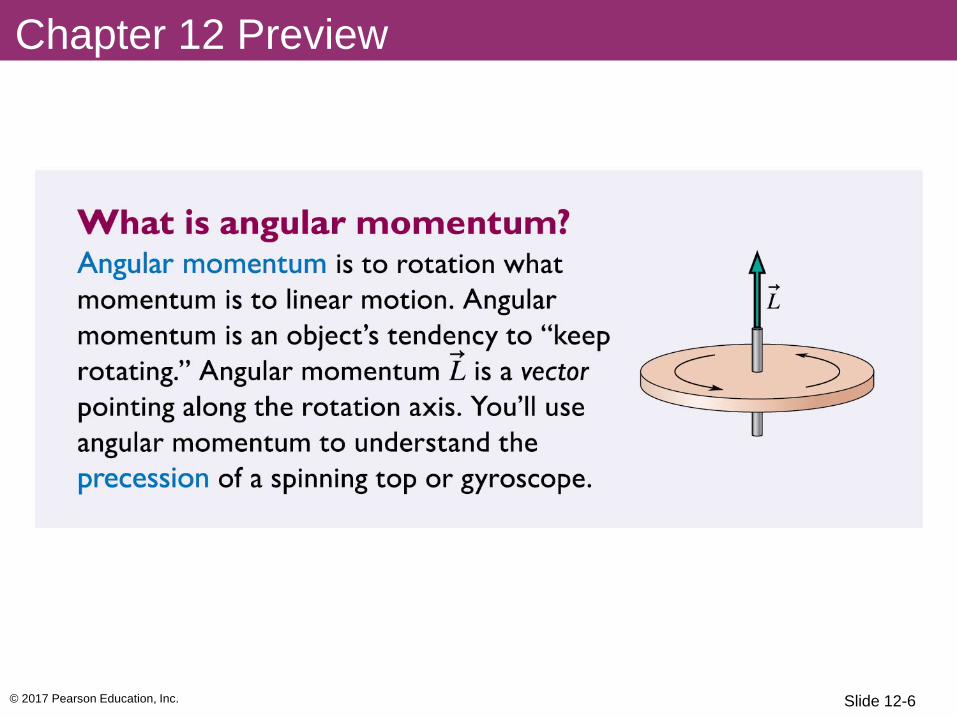
Similarly, a more general description of rotational motion requires us to replace the scalars ω and τ with the vector quantities and .
Doing so will lead us to the concept of angular momentum.
The Vector Description of Rotational Motion
Slide 12-100
© 2017 Pearson Education, Inc.
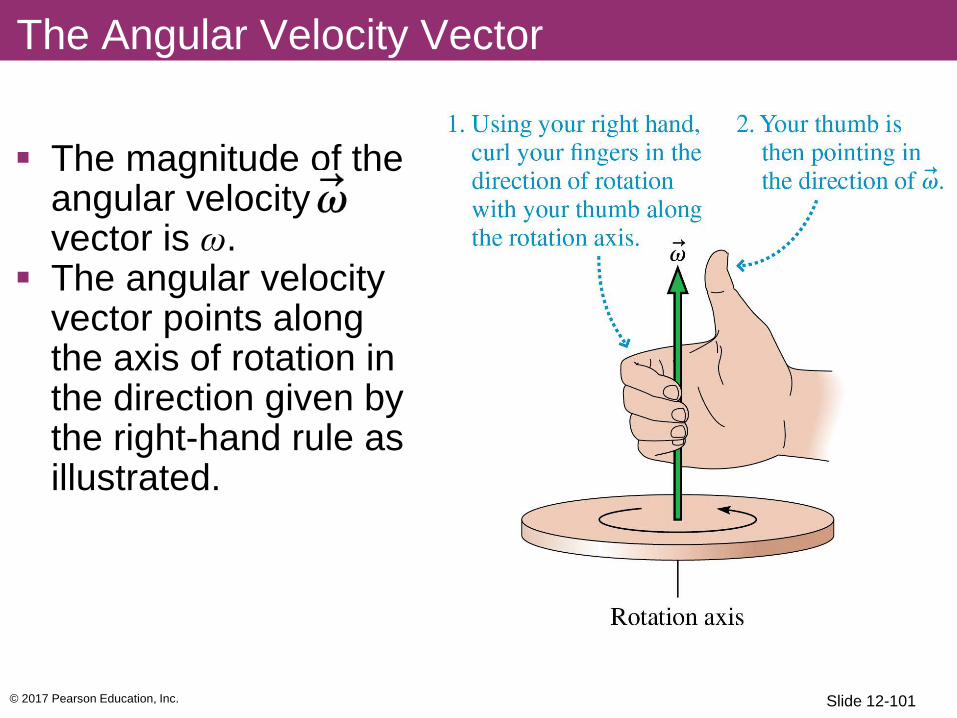
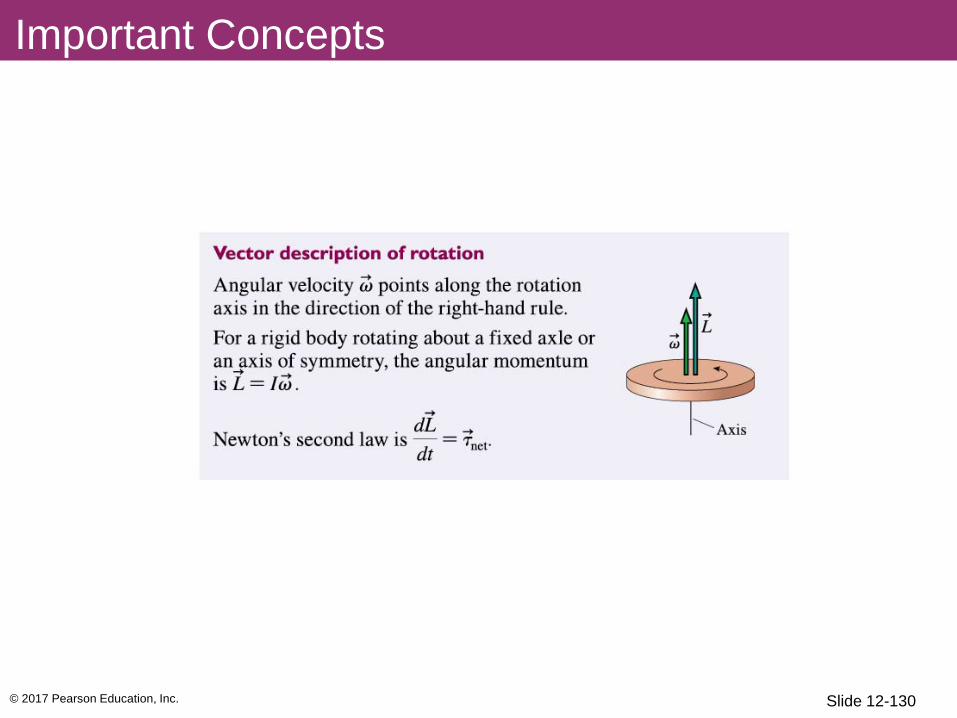
The magnitude of the angular velocity vector is ω.
The angular velocity vector points along the axis of rotation in the direction given by the right-hand rule as illustrated.
The Angular Velocity Vector
Slide 12-101
© 2017 Pearson Education, Inc.
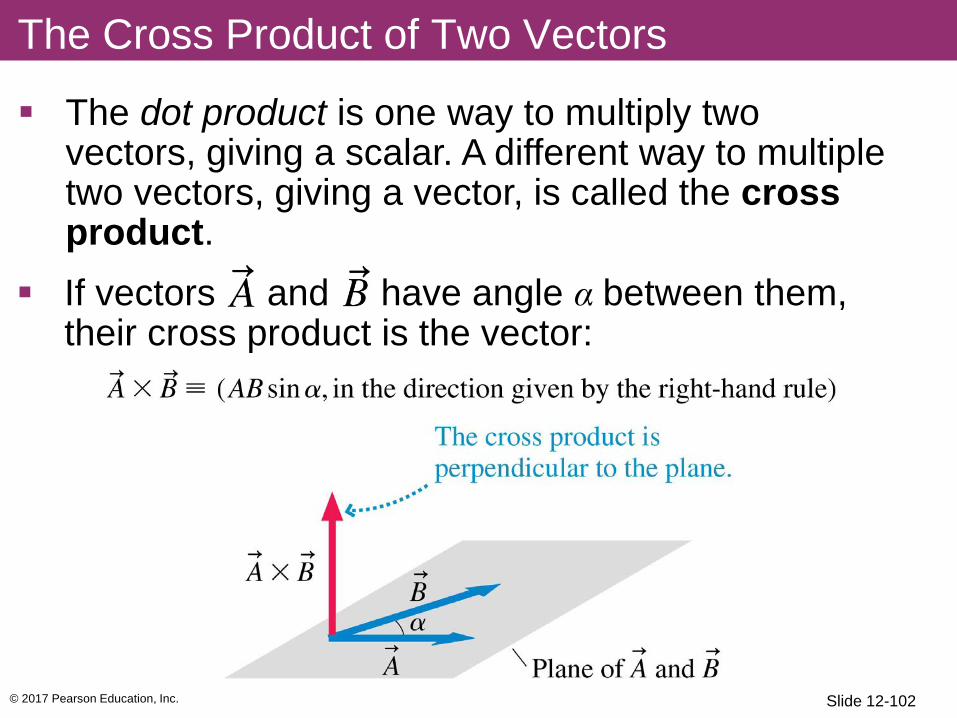
If vectors and have angle α between them, their cross product is the vector:
The Cross Product of Two Vectors
The dot product is one way to multiply two vectors, giving a scalar. A different way to multiple two vectors, giving a vector, is called the cross product.
Slide 12-102
© 2017 Pearson Education, Inc.
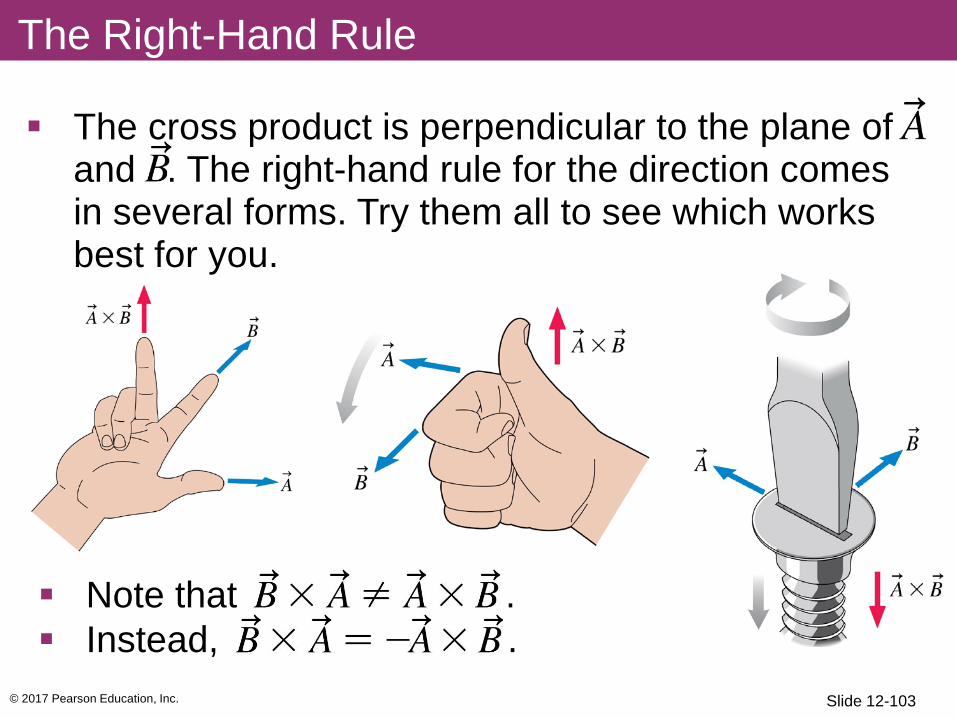
The Right-Hand Rule
Note that . Instead, .
The cross product is perpendicular to the plane of and . The right-hand rule for the direction comes in several forms. Try them all to see which works best for you.
Slide 12-103
© 2017 Pearson Education, Inc.
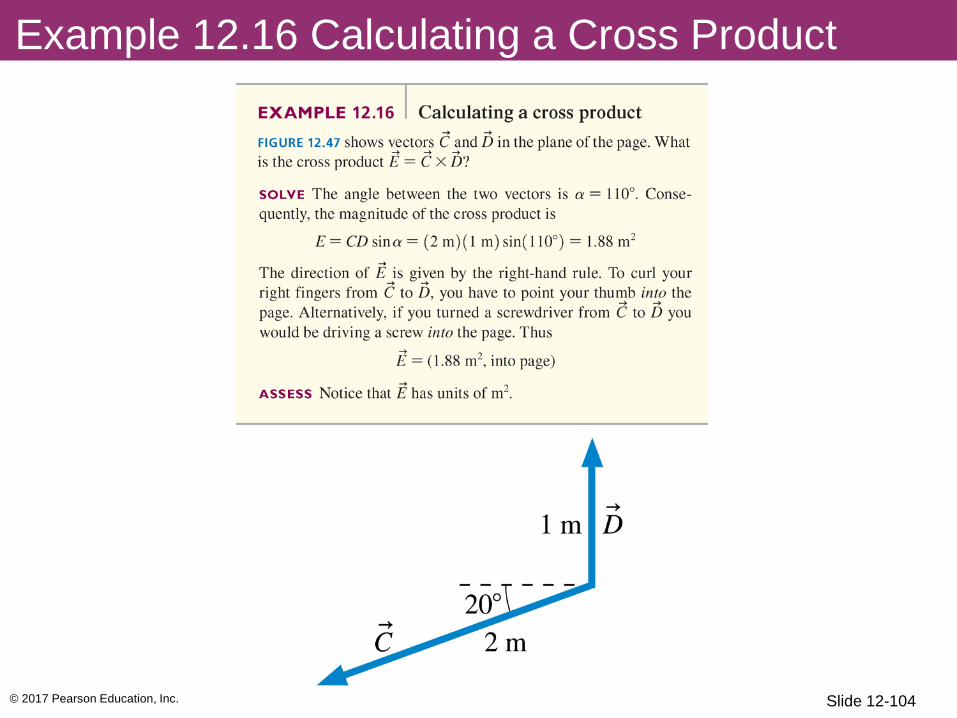
Example 12.16 Calculating a Cross Product
Slide 12-104
© 2017 Pearson Education, Inc.
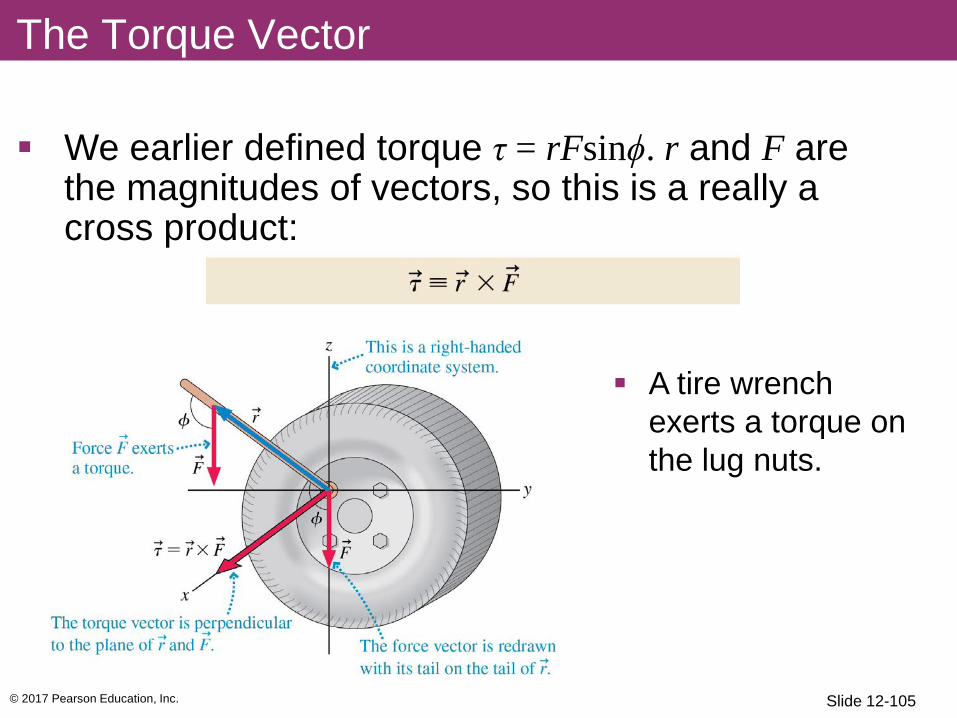
The Torque Vector
We earlier defined torque τ = rFsinϕ. r and F are the magnitudes of vectors, so this is a really a cross product:
A tire wrench exerts a torque on the lug nuts.
Slide 12-105
© 2017 Pearson Education, Inc.
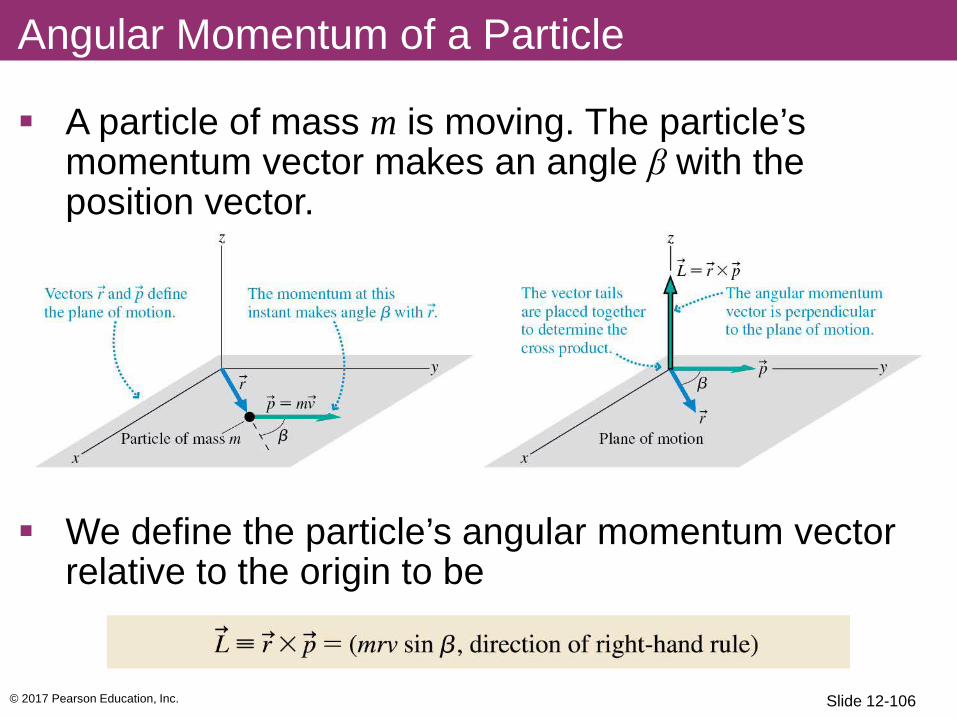
Angular Momentum of a Particle
A particle of mass m is moving. The particle’s momentum vector makes an angle β with the position vector.
We define the particle’s angular momentum vector relative to the origin to be
Slide 12-106
© 2017 Pearson Education, Inc.
Torque causes a particle’s angular momentum to change. This is the rotational equivalent of and is a general statement of Newton’s second law for rotation.
If you take the time derivative of and use the definition of the torque vector (see book for details), you find
Angular Momentum of a Particle
Why this definition?
Slide 12-107
© 2017 Pearson Education, Inc.
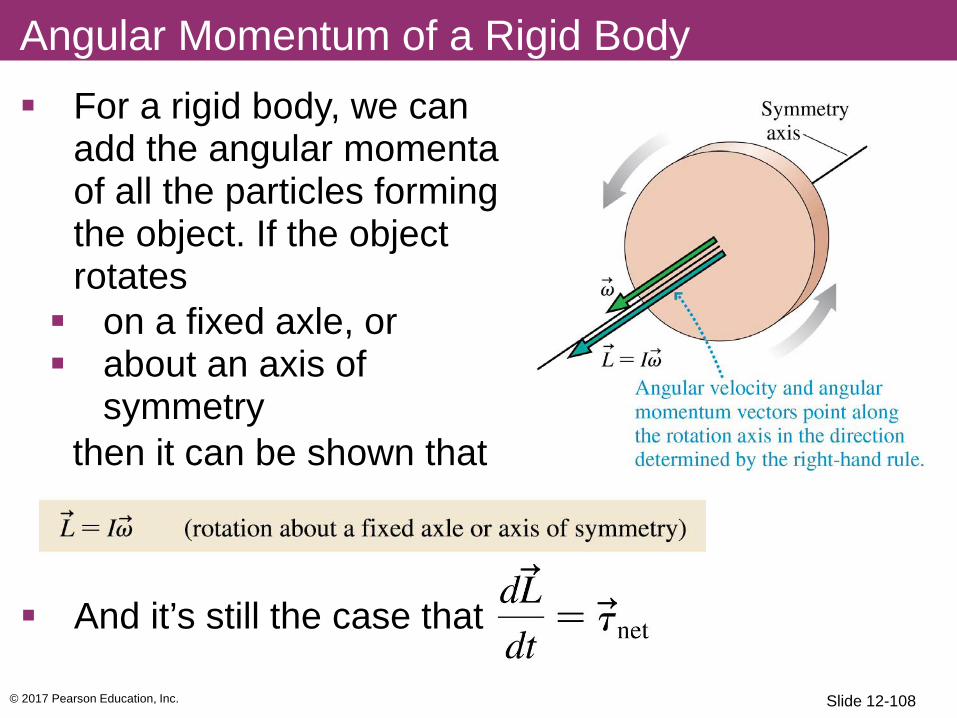
Angular Momentum of a Rigid Body
on a fixed axle, or about an axis of
symmetry
For a rigid body, we can add the angular momenta of all the particles forming the object. If the object rotates
then it can be shown that
And it’s still the case that
Slide 12-108
© 2017 Pearson Education, Inc.
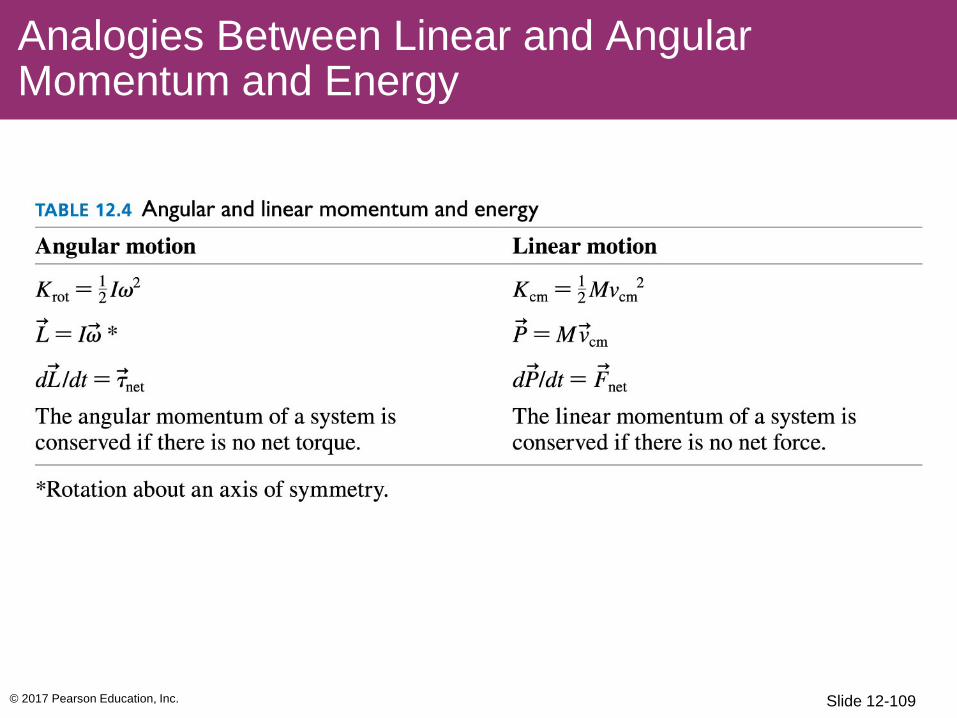
Analogies Between Linear and Angular Momentum and Energy
Slide 12-109
© 2017 Pearson Education, Inc.
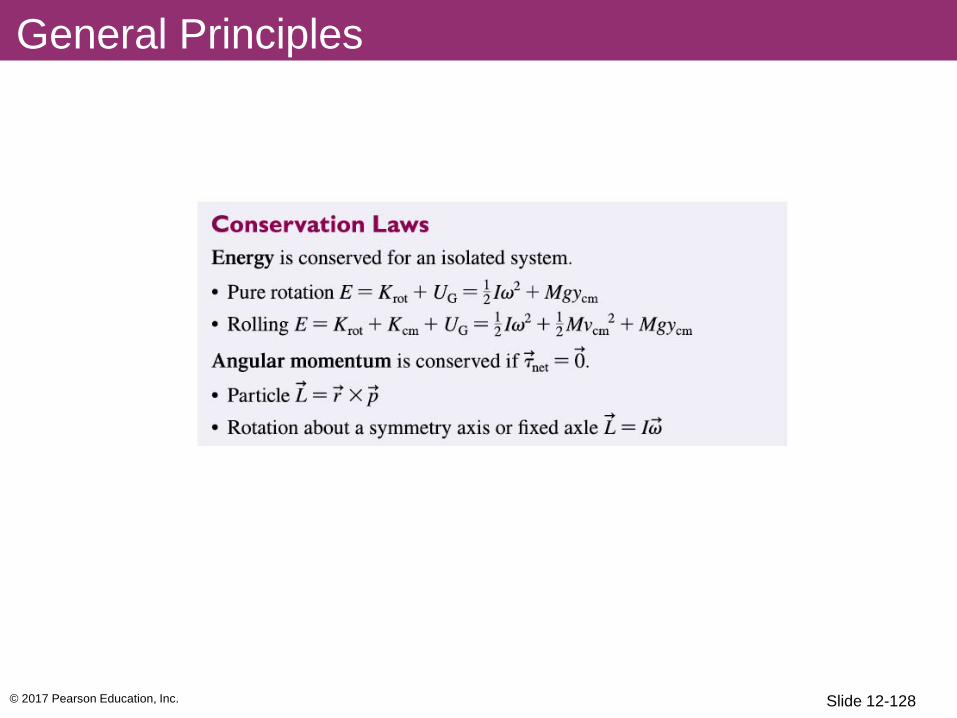
Conservation of Angular Momentum
An isolated system that experiences no net torque has
and thus the angular momentum vector is a constant:
Slide 12-110
© 2017 Pearson Education, Inc.
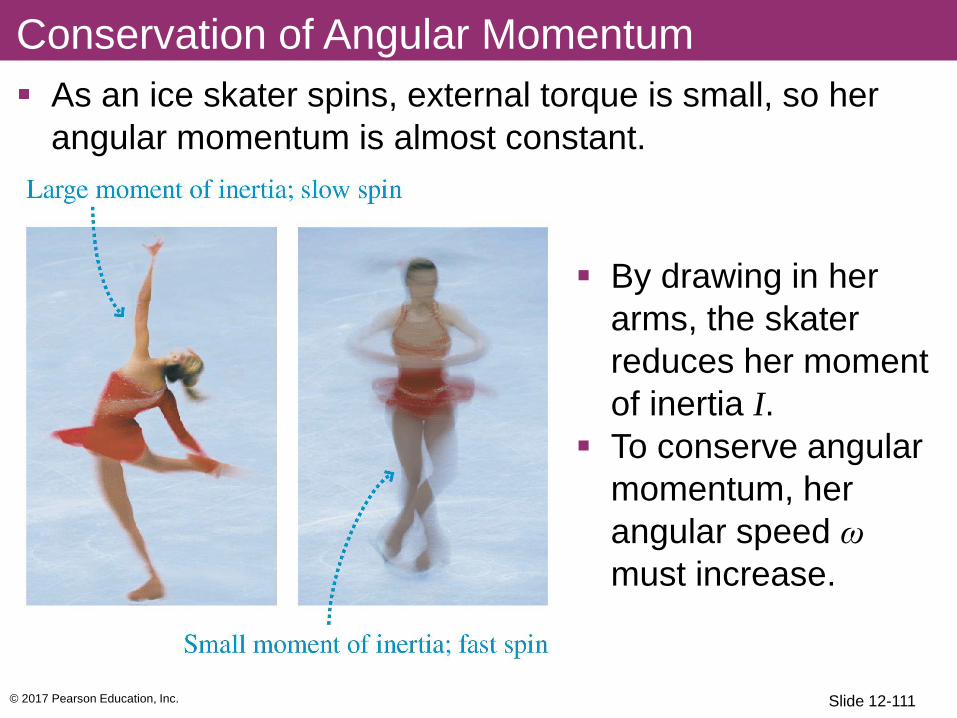
As an ice skater spins, external torque is small, so her angular momentum is almost constant.
Conservation of Angular Momentum
By drawing in her arms, the skater reduces her moment of inertia I.
To conserve angular momentum, her angular speed ω must increase.
Slide 12-111
© 2017 Pearson Education, Inc.
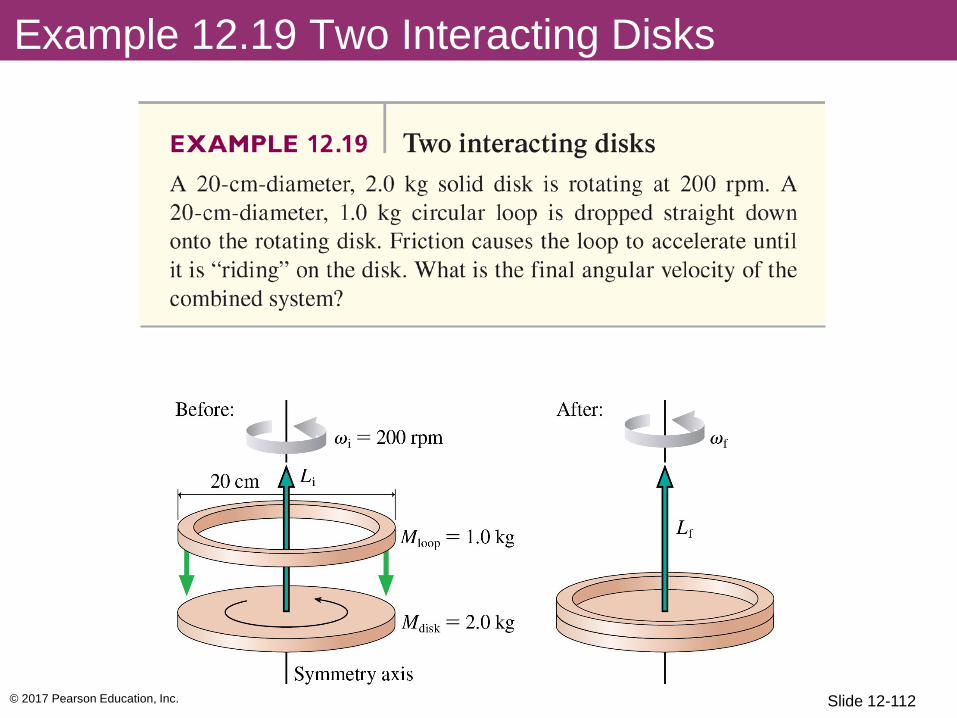
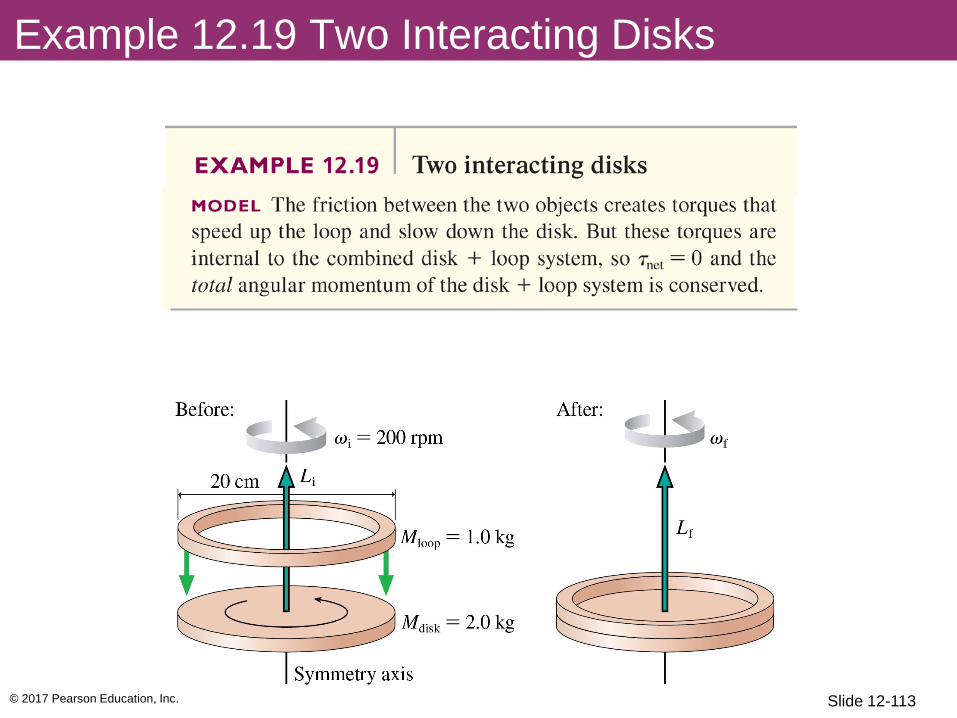
Example 12.19 Two Interacting Disks
Slide 12-112
© 2017 Pearson Education, Inc.
Example 12.19 Two Interacting Disks
Slide 12-113
© 2017 Pearson Education, Inc.
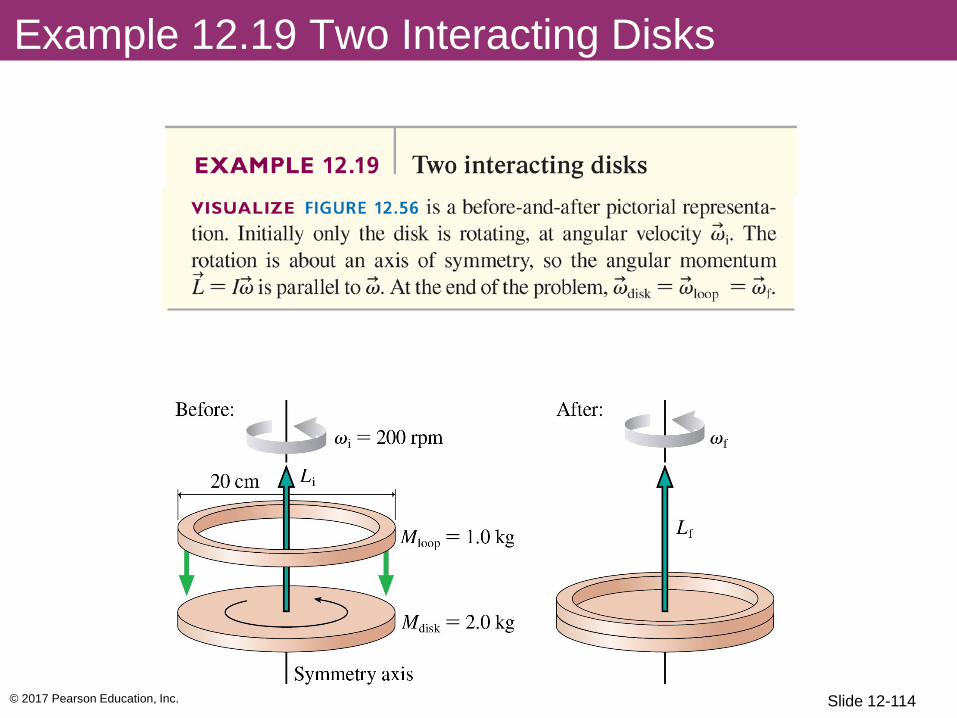
Example 12.19 Two Interacting Disks
Slide 12-114
© 2017 Pearson Education, Inc.
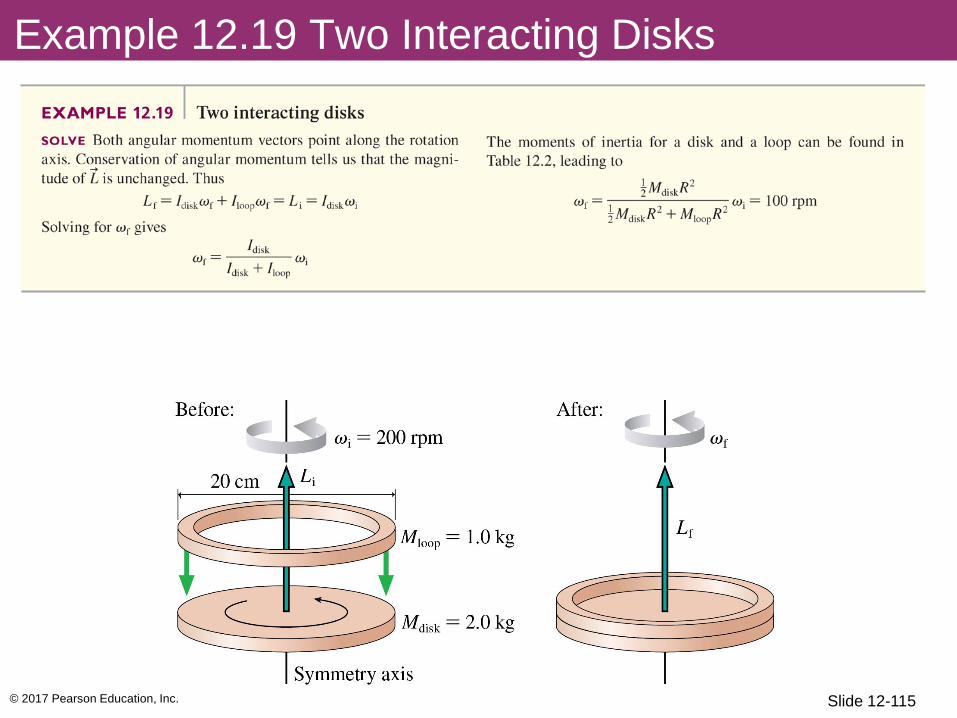
Example 12.19 Two Interacting Disks
Slide 12-115
© 2017 Pearson Education, Inc.
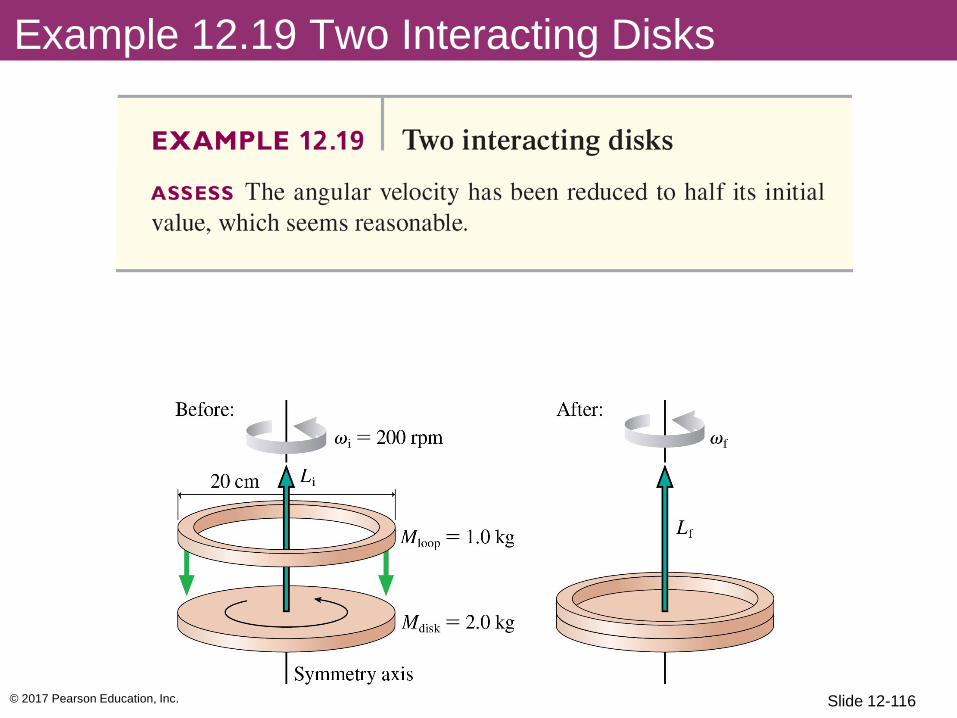
Example 12.19 Two Interacting Disks
Slide 12-116
© 2017 Pearson Education, Inc.
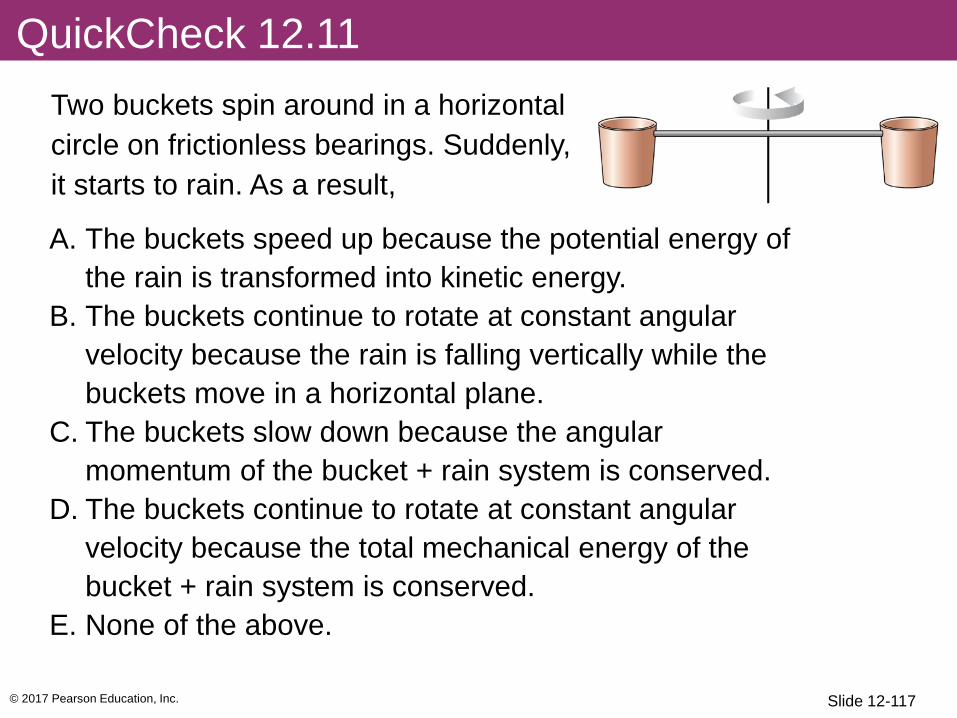
Two buckets spin around in a horizontal circle on frictionless bearings. Suddenly, it starts to rain. As a result,
A. The buckets speed up because the potential energy of the rain is transformed into kinetic energy.
B. The buckets continue to rotate at constant angular velocity because the rain is falling vertically while the buckets move in a horizontal plane.
C. The buckets slow down because the angular momentum of the bucket + rain system is conserved.
D. The buckets continue to rotate at constant angular velocity because the total mechanical energy of the bucket + rain system is conserved.
E. None of the above.
QuickCheck 12.11
Slide 12-117
© 2017 Pearson Education, Inc.
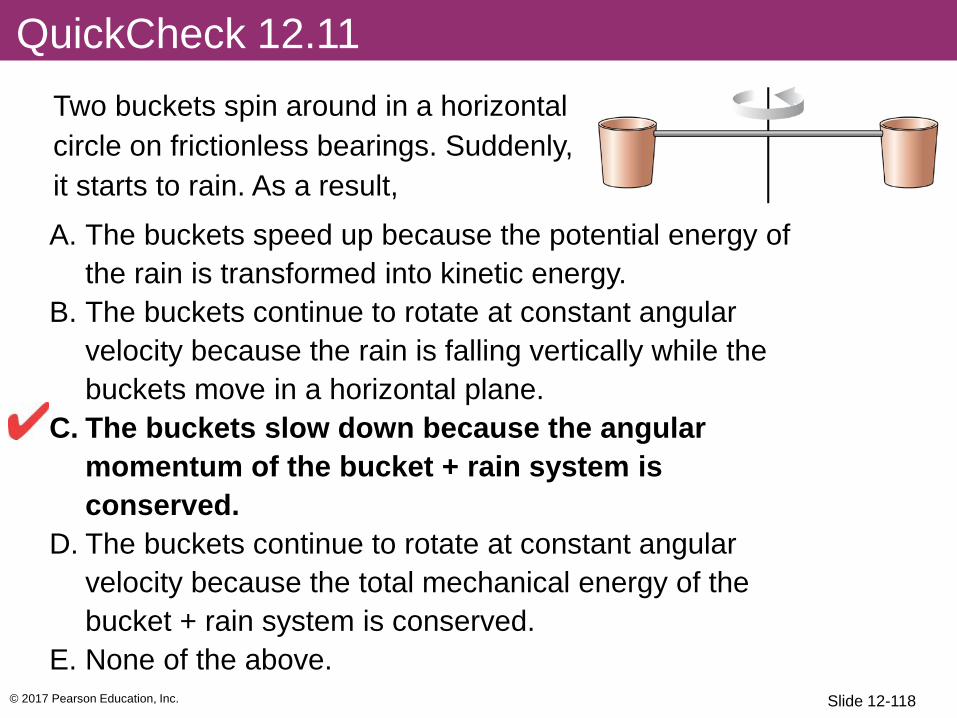
Two buckets spin around in a horizontal circle on frictionless bearings. Suddenly, it starts to rain. As a result,
A. The buckets speed up because the potential energy of the rain is transformed into kinetic energy.
B. The buckets continue to rotate at constant angular velocity because the rain is falling vertically while the buckets move in a horizontal plane.
C. The buckets slow down because the angular momentum of the bucket + rain system is conserved.
D. The buckets continue to rotate at constant angular velocity because the total mechanical energy of the bucket + rain system is conserved.
E. None of the above.
QuickCheck 12.11
Slide 12-118
© 2017 Pearson Education, Inc.
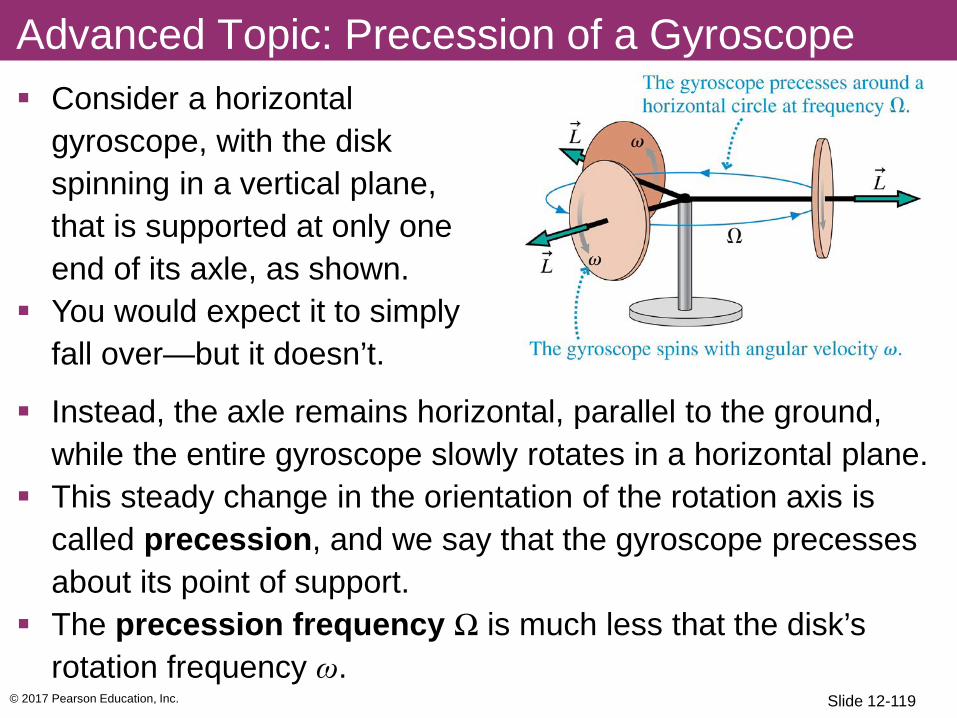
Advanced Topic: Precession of a Gyroscope Consider a horizontal
gyroscope, with the disk spinning in a vertical plane, that is supported at only one end of its axle, as shown.
You would expect it to simply fall over—but it doesn’t.
Instead, the axle remains horizontal, parallel to the ground, while the entire gyroscope slowly rotates in a horizontal plane.
This steady change in the orientation of the rotation axis is called precession, and we say that the gyroscope precesses about its point of support.
The precession frequency Ω is much less that the disk’s rotation frequency ω.
Slide 12-119
© 2017 Pearson Education, Inc.
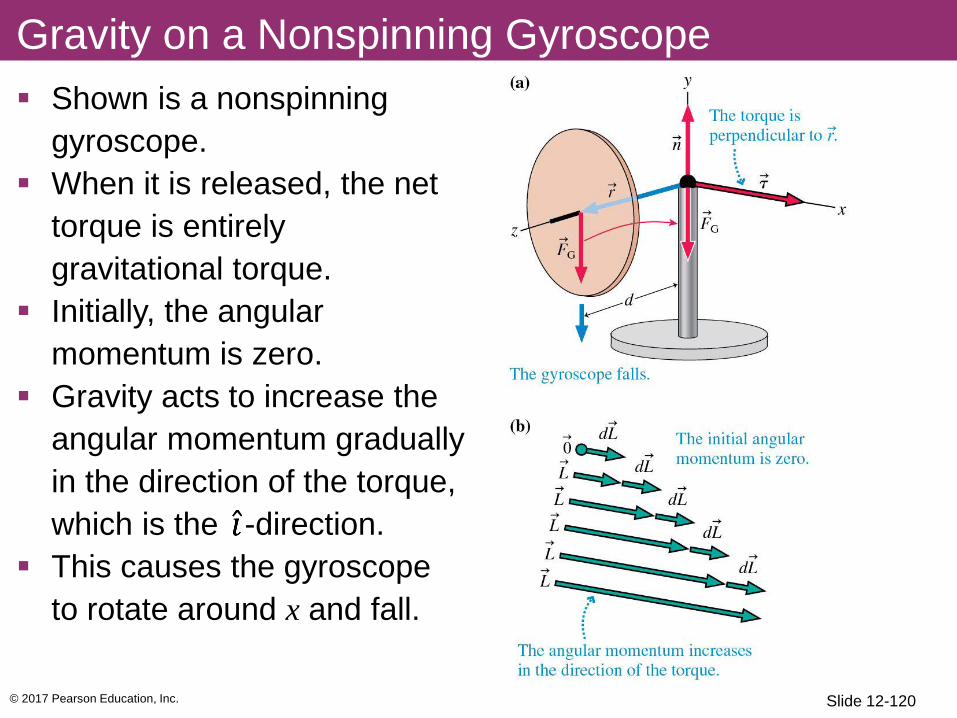
Gravity on a Nonspinning Gyroscope Shown is a nonspinning
gyroscope. When it is released, the net
torque is entirely gravitational torque.
Initially, the angular momentum is zero.
Gravity acts to increase the angular momentum gradually in the direction of the torque, which is the -direction.
This causes the gyroscope to rotate around x and fall.
Slide 12-120
© 2017 Pearson Education, Inc.
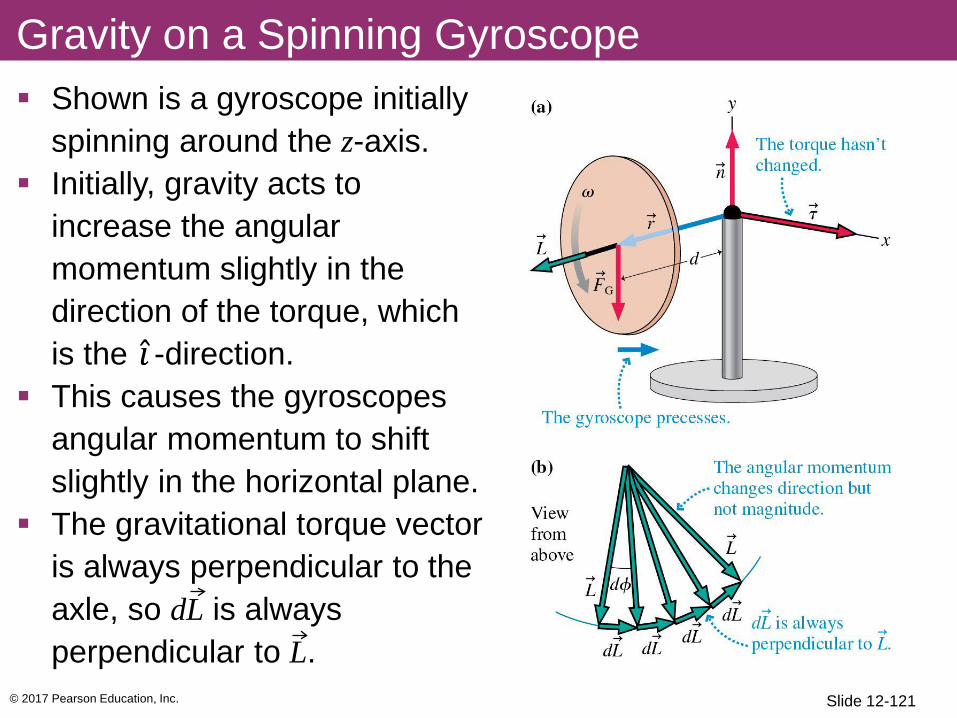
Gravity on a Spinning Gyroscope Shown is a gyroscope initially
spinning around the z-axis. Initially, gravity acts to
increase the angular momentum slightly in the direction of the torque, which is the -direction.
This causes the gyroscopes angular momentum to shift slightly in the horizontal plane.
The gravitational torque vector is always perpendicular to the axle, so dL is always perpendicular to L.
Slide 12-121
© 2017 Pearson Education, Inc.
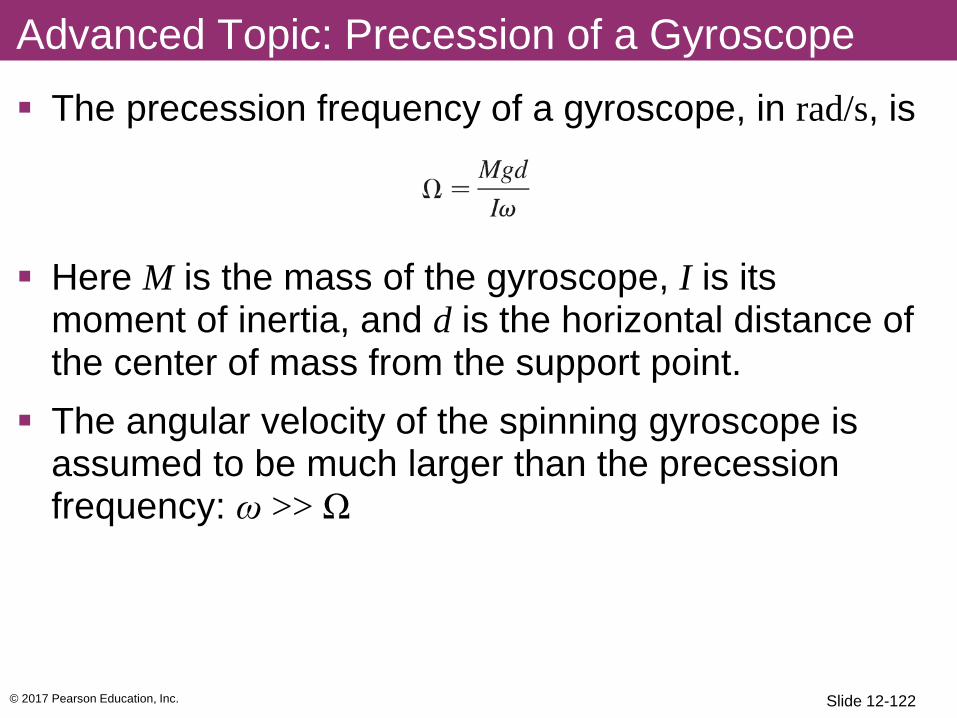
Advanced Topic: Precession of a Gyroscope The precession frequency of a gyroscope, in rad/s, is
Here M is the mass of the gyroscope, I is its moment of inertia, and d is the horizontal distance of the center of mass from the support point.
The angular velocity of the spinning gyroscope is assumed to be much larger than the precession frequency: ω >> Ω
Slide 12-122
© 2017 Pearson Education, Inc.
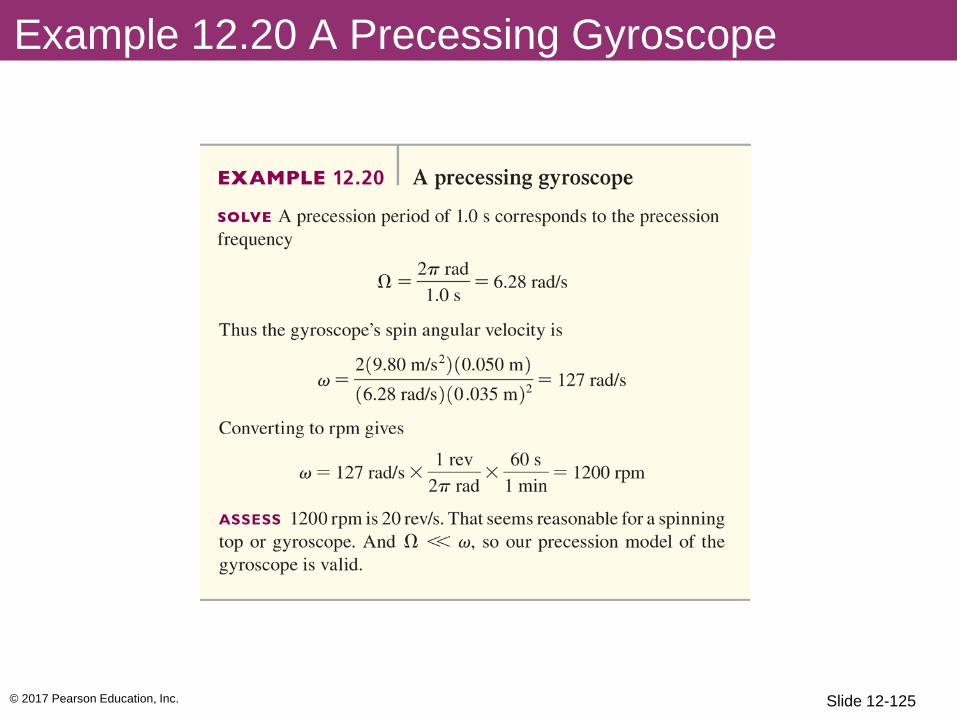
Example 12.20 A Precessing Gyroscope
Slide 12-123
© 2017 Pearson Education, Inc.
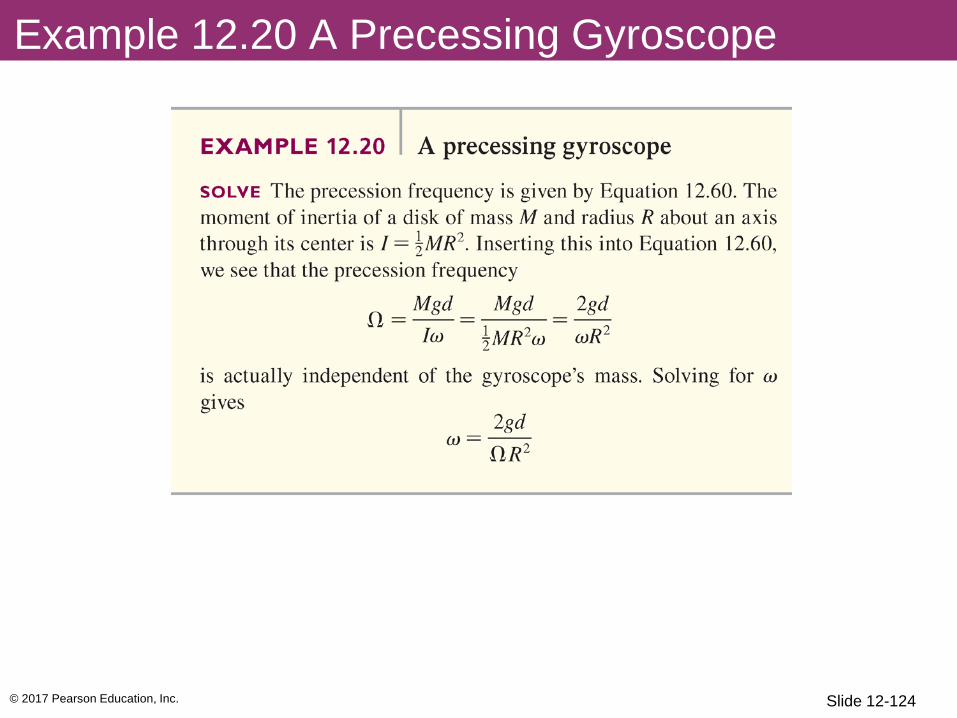
Example 12.20 A Precessing Gyroscope
Slide 12-124
© 2017 Pearson Education, Inc.
Example 12.20 A Precessing Gyroscope
Slide 12-125
© 2017 Pearson Education, Inc.
Chapter 12 Summary Slides
Slide 12-126
© 2017 Pearson Education, Inc.
General Principles
Slide 12-127
© 2017 Pearson Education, Inc.
General Principles
Slide 12-128
© 2017 Pearson Education, Inc.
Important Concepts
Slide 12-129
© 2017 Pearson Education, Inc.
Important Concepts
Slide 12-130
© 2017 Pearson Education, Inc.
Important Concepts
Slide 12-131
© 2017 Pearson Education, Inc.
Important Concepts
Slide 12-132
© 2017 Pearson Education, Inc.
Applications
Slide 12-133
© 2017 Pearson Education, Inc.
Applications
Slide 12-134
© 2017 Pearson Education, Inc.
Applications
Slide 12-135
Related Documents











