Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-1 Chapter 1 Kinematics: The Description of Motion ! Is it possible to safely catch a flying bullet with your hand? ! What is the safe following distance between you and the car in front of you? ! Can you be moving and not moving at the same time? Make sure you know how to: 1. Define what a point-like object is. (Intro) 2. Use significant digits in calculations (Intro) While flying their aircraft, World War I pilots were known to catch bullets fired from enemy soldiers on the ground. Magicians who tried this trick were often seriously injured, or worse. The bullets traveled about 120 miles per hour (mph). How were the pilots able to catch bullets with their bare hands, but the magicians could not? By the time you finish working through this chapter, you’ll know the answer. Scientists often ask questions about things that most people accept as being “just the way it is.” In the northern hemisphere, we have more hours of daylight during the summer than in the winter. In the southern hemisphere, it’s just the opposite. Most people simply accept this fact. However, scientists want explanations for even the simplest mysteries surrounding us. We will begin our study of physics with a phenomenon that surrounds us from the moment we are born—motion. For example, each dawn, we see the Sun in the east, and at dusk it is in the west. For more than 1000 years, scientists believed that the Sun circled Earth every 24 hours. However now they are convinced that we live in a heliocentric (Sun-centered) solar system in which Earth and all planets move in orbits around the Sun. What made scientists change their understanding of Earth’s position and motion in the Solar system? The start of understanding everyday phenomena such as this is a careful observation and description of the phenomena. In this chapter, we learn to describe motion. 1.1 What is motion? Understanding motion quantitatively challenged the minds of scientists for thousands of years, so let’s start by first defining what motion is. Consider the following experiments that investigate how the description of motion depends on the observer. ALG 1.1.1- 1.1.5

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-1
Chapter 1 Kinematics: The Description of Motion
! Is it possible to safely catch a flying bullet with your hand?
! What is the safe following distance between you and the car in front of you?
! Can you be moving and not moving at the same time?
Make sure you know how to:
1. Define what a point-like object is. (Intro)
2. Use significant digits in calculations (Intro)
While flying their aircraft, World War I pilots were known to catch bullets fired from
enemy soldiers on the ground. Magicians who tried this trick were often seriously injured, or
worse. The bullets traveled about 120 miles per hour (mph). How were the pilots able to catch
bullets with their bare hands, but the magicians could not? By the time you finish working
through this chapter, you’ll know the answer.
Scientists often ask questions about things that most people accept as being “just the way
it is.” In the northern hemisphere, we have more hours of daylight during the summer than in the
winter. In the southern hemisphere, it’s just the opposite. Most people simply accept this fact.
However, scientists want explanations for even the simplest mysteries surrounding us.
We will begin our study of physics with a phenomenon that surrounds us from the
moment we are born—motion. For example, each dawn, we see the Sun in the east, and at dusk it
is in the west. For more than 1000 years, scientists believed that the Sun circled Earth every 24
hours. However now they are convinced that we live in a heliocentric (Sun-centered) solar system
in which Earth and all planets move in orbits around the Sun. What made scientists change their
understanding of Earth’s position and motion in the Solar system? The start of understanding
everyday phenomena such as this is a careful observation and description of the phenomena. In
this chapter, we learn to describe motion.
1.1 What is motion?
Understanding motion quantitatively challenged the minds of scientists for thousands
of years, so let’s start by first defining what motion is. Consider the following experiments
that investigate how the description of motion depends on the observer.
ALG
1.1.1-
1.1.5

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-2
Observational Experiment Table 1.1 Describing motion through the observer.
Observational experiments Analysis
Jan focuses on a ball in her
hands as she walks across the
room. Tim, sitting at a desk,
also focuses on the ball.
Jan reaches the other side of
the room continually
focusing on the ball; her head
did not turn. Tim’s head has
turned in order to follow the
ball.
The two observers (Jan and Tim) see the ball
differently. With respect to Jan, the ball’s
position does not change. With respect to
Tim, it does change.
Ted on train A observes
Sue on train B. He does
not turn his head to keep
his eyes on Sue. Joan
standing on the station
platform turns her head to
follow Sue.
Ted sees Sue as stationary whereas Joan sees
her as moving.
Pattern Different observers can describe the same process differently, including whether or not motion is occurring.
The pattern that we discovered by doing these observational experiments was that
different observers describe the same process differently. One person sees the ball moving while
another does not. They are both correct from their perspectives. In order to describe the motion of
something, we need to identify the observer.
Definition of motion Motion is a change in an object’s position relative to a given
observer during a certain change in time. Without identifying the observer, it is impossible
to say whether motion occurred. Physicists say motion is relative, meaning that motion
depends on the point of view of the observer.
Testing your ideas
Are you moving as you read this book? According to our definition of motion, we should
be able to find an observer who says you are moving. Consider a friend walking past you while
you sit reading. Your friend first saw you several feet in front of her, then she saw you next to
her, and finally she saw you several feet behind her. Though you were sitting in a chair, you
definitely were moving with respect to your friend!

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-3
We just performed an experiment to test the idea that motion is relative. To test an idea in
science means to use the idea to predict the outcome of a new experiment. If the outcome matches
the prediction, the idea has not been disproved (we would need an infinite number of testing
experiments to prove that the idea is correct in absolutely all cases, a finite number of
experiments cannot do it). If the idea does not match the prediction, then the idea has been
disproved and you need to revise it (if possible).
Now let’s return to you sitting in a chair reading this book. You obviously are not moving
with respect to the chair or with respect to the floor, but you are moving with respect to the Sun
or with respect to a bird flying outside. What makes the idea of relative motion confusing at first
is that people intuitively use the Earth as the object of reference. If an object does not move with
respect to the Earth, many people would say that the object is not moving. That is why it took
scientists thousands of years to understand the reason for days and nights on Earth. An observer
on Earth sees the Sun moving in an arc across the sky (Figure 1.1a). An observer on a spaceship
sees Earth rotating on its axis so that different parts of its surface are facing the Sun at different
times (Figure 1.1b).
Think back to the World War I pilots who could catch bullets with their bare hands. The
speed of airplanes at that time was about 120 mph. If the plane and the bullet were both traveling
relative to Earth at about 120 mph in the same direction, then the bullet was approximately at rest
with respect to the pilot; the pilot could catch the bullet without injuring himself. Does that seem
counterintuitive? The bullet was moving fast from the point of view of the soldier who fired it
from the ground. At the same time, the bullet was almost at rest from the point of view of the
pilot.
Figure 1.1 (a)(b) Two observers see different reasons for the appearance of the Sun relative to Earth
Review question 1.1
Are you moving while sitting on a train that is leaving a station?

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-4
1.2 Point-like objects and linear motion
In the Introduction Chapter, we learned about some tools that physicists use to study the
physical world. One tool is models—simplified assumptions about objects, interactions, and
processes when analyzing complicated situations.
Model of a point-like object
One way that physicists model objects is to represent them as point-like objects. We use
the point-like object model to represent a real object when the size and internal structure of the
real object are not relevant for understanding the situation, and/or when all parts of the object
move together without changing its structure. When you represent an object as a point, you
basically think of it as a dot, a small point-like entity of zero volume. Later, we will construct
more sophisticated models of objects (for example, rigid bodies, elastic bodies, ideal gases, and
incompressible fluids) as we build more physics ideas and analyze more complicated situations.
Models of processes
Since we are investigating the phenomenon of motion, we will need a different category
of model—a model of processes. Motion is one of many processes you will study in this book.
Examples of other processes include changes in an object’s color, the transition from a solid
object to liquid, and the drying of a liquid. Just as we made a simplifying assumption about an
object (representing a real object as a point-like object), we can also make simplifying
assumptions about a process. What is the simplest way an object can move?
Imagine that you haven’t ridden a bike in a while. You would probably start by riding in
a straight line to get comfortable. This kind of motion is called linear motion. Eventually you get
comfortable enough that you try changing direction. This kind of motion is called curvilinear
motion. Since linear motion is easier to describe, let’s start with that.
Linear motion A process model of motion using the simplified assumption that an
object, considered as a point-like object, moves along a straight line.
Let’s say we want to construct a model for a car’s motion along a straight stretch of
highway. Since the car is small compared to the length of the highway, we can model it as a
point-like object (a model of an object). Since the highway is long and straight, we can model the
motion as linear motion (a model of a process).
If you think there is more going on, such as the effect the air has on the car, or the effect
that the road surface has on its tires, we agree! The road and the air definitely have important
effects on the motion of the car. They interact with the car. We will start constructing models of
interactions in Chapter 2. For now, we are interested only in the motion of the car and not why the
motion of the car is what it is.
Reference frames
At the beginning of the chapter, we constructed an explanation for how World War I
pilots were able to catch bullets. Specifying the observer before describing the motion is

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-5
extremely important. To describe motion quantitatively, physicists use a reference frame. A
reference frame includes an observer, a coordinate system, a scale for measuring distances, and a
clock to measure time. If the object of reference is large (for example, Earth) and cannot be
considered a point, it is important to specify where on the object of reference the origin of the
coordinate system is placed.
Reference frame A reference frame includes three essential components:
(a) An object of reference with a specific point of reference on it.
(b) A coordinate system, which includes coordinate axes, for example, x, y, z, and an origin
located at the point of reference. The coordinate system also includes a unit of measurement for
specifying distances along the axes.
(c) A clock, which includes an origin in time called 0t " and a unit of measurement for
specifying times and time intervals.
Note that the coordinate axes are mutually perpendicular to each other. Each axis has a positive
direction, which runs one way along the axis, and a negative direction, which runs in the opposite
direction. The coordinates of the origin are ( , , ) (0,0,0)x y z " .
For the example of the World War I pilot catching the bullet, we could choose the object
of reference to be the pilot and the point of reference to be the palm of his hand. The coordinate
system could have the positive x-axis pointing in the direction of the front the plane, the positive
y-axis pointing to the pilot’s left, and the positive z-axis pointing straight up. The origin in time
could be the moment the bullet is beside the pilot. In this reference frame, the pilot is at rest, the
bullet is approximately at rest, and the bullet is located at his side.
Review Question 1.2
Describe the point-like object model of a real object. Explain when we can use this model to
describe the motion of a real object.
1.3 A conceptual description of motion
How can we describe linear motion more precisely? We could start by using equations to
represent motion, but let’s first devise a visual representation that does not use mathematical
equations. Later we will construct a mathematical description.
Motion diagrams
We start our investigation with observational experiments involving a bowling ball
rolling on a smooth linoleum floor.
ALG
1.1.6-
1.1.8

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-6
Observational Experiment Table 1.2 Using dots to represent motion.
Observational experiment Analysis
(1) You gently push the bowling ball once and
let it roll on a smooth linoleum floor. Place
beanbags each second beside the bowling ball.
The beanbags are evenly spaced.
The diagram below represents with dots the locations of
the bags each second for the slow moving bowling ball.
(2) Experiment (1) is repeated except you
push the ball harder before you let it roll. The
beanbags are farther apart but are still evenly
spaced.
In this diagram the dots are still evenly spaced but now
the distance between them is bigger.
(3) You push the bowling ball and let it roll on
a carpeted floor instead of a linoleum floor.
The distance between the beanbags decreases
as the ball rolls.
In this dot diagram there is a decreasing distance between
the dots.
(4) You roll the ball on the linoleum floor and
gently and continually push on it with a board.
The beanbag separation spreads farther apart
as the pushed ball rolls.
The dots on the diagram spread farther apart.
Pattern
! The spacing of the dots allows us to visualize motion.
! When the object travels without speeding up or slowing down, the dots are evenly spaced.
! When it slows down, the dots get closer together.
! When it moves faster and faster, the dots separate farther.
In the experiments above, the beanbags were an approximate record of where the ball
was located as time passed (Fig. 1.2a). The diagrams with dots allowed us to visualize the motion
of the ball. We can represent motion in even more detail by adding arrows to each dot that
indicate which way the object is moving and how fast it is moving as it passes a particular
position. Such a diagram for the first experiment in Observational Experiment Table 1.2 is shown
in Fig. 1.2b. The dots in the diagram indicate the approximate position of the moving object at
equal time intervals (for example, each consecutive second). The arrows represent the direction of
motion and how fast the object is moving. They are called velocity arrows. The longer the arrow,
the faster is the motion. The tiny arrow above the letter v indicates that this characteristic of
motion has a direction as well as a magnitude—called a vector quantity. For the motion in Fig.
1.2b, the dots are evenly spaced, and the velocity arrows all have the same length and point in the

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-7
same direction. This means that the ball was moving equally fast in the same direction at each
point. Similar diagrams with velocity arrows for the other three experiments in Table 1.2 are
shown in Fig. 1.2c-e.
Figure 1.2 (a)Person dropping bags as ball rolls (b)(c) Motion diagrams for steady motion (d)(e) and
changing motion
Velocity change arrows
The ball in Experiment 4 described by the motion diagram in Fig. 1.2e was moving
increasingly fast while being pushed. The velocity arrows were getting increasingly longer. We
can represent this change in the velocity arrows by a velocity change arrow v#!
. The# here means
a change in whatever quantity follows the# , a change in v!
in this case. To illustrate how to
determine qualitatively the velocity change between any two adjacent points in the diagram, we
redraw the diagram shown in Fig. 1.2e again in Fig. 1.3a. For illustration purposes only, the v!
arrows for each position are now numbered consecutively. How for example do we determine
qualitatively the velocity change arrow as the ball moves from position 2 to position 3 in Fig.
1.3a? Place the second arrow 3v!
directly above the first arrow 2v!
as shown in Fig. 1.3b. The

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-8
object was moving faster at position 3 than at position 2. Arrow 2v!
can be turned into 3v!
by
placing the tail of a velocity change arrow v#!
at the head of 2v!
so that the head of v#!
makes
the combination of 2 23v v$ #! !
the same length as 3v!
. This is called graphical vector addition:
2 23 3v v v$ # "! ! !
, as shown in Fig. 1.3c. Note that if we move 2v!
to the other side of the equation,
then:
23 3 2v v v# " %! ! !
Thus, 23v#!
is the difference of the third velocity arrow and the second velocity arrow—the
change in velocity between position 2 and position 3. (Appendix 1 has a detailed description of
vectors.)
Figure 1.3 Determining velocity change arrows
Making a complete motion diagram
We now place in our diagrams the v#!
arrows above and between the dots where the
change occurred (see Fig. 1.4a). These new diagrams are called motion diagrams. A v#!
arrow
points in the same direction as the v!
arrows when the object is speeding up; the v#!
arrow
points opposite the v!
arrows when the object is slowing down. In most of our problems, the v!
arrows change by the same amount during each consecutive time interval. Then, the v#!
arrows
for each time interval are the same lengths. In such cases only one v#!
arrow is needed for the
entire motion diagram (see Fig. 1.4b).
Figure 1.4 A motion diagram that includes v#!
arrows

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-9
The following Reasoning Skill box (Constructing a Motion Diagram) summarizes the
procedure for constructing a motion diagram. Notice that in the experiment represented with this
diagram, the object is slowing down.
Reasoning Skill: Constructing a Motion Diagram
Tip! When drawing a motion diagram always specify the observer with respect to whom a
particular motion occurs.
Below is a conceptual exercise—a practice example that involves the skill that you have
just learned. When working on a conceptual exercise, first read it several times. Next, visualize
the situation and draw a sketch of what is happening. Then, construct a physics representation (in
this case, a motion diagram) for the process.
Conceptual Exercise 1.1 Driving in the city A car at a traffic light initially at rest speeds up
when the light turns green. The car reaches the speed limit in 4 seconds, continues at the speed
limit for 3 seconds, then slows down and stops in 2 seconds while approaching the next stoplight.
Finally, the car is at rest for 1 second until the light turns green. Meanwhile, a cyclist approaching
the first green light keeps moving without slowing down or speeding up. She reaches the second
stoplight just as it turns green. Draw a motion diagram for the car, and another for the bicycle as
seen by the observer on the ground. If you place one diagram below the other, it will be easier to
compare them.
Sketch and Translate Visualize the motion for the car and the bicycle as seen by the observer on
the ground. The car trip has four distinct parts:
(1) starting at rest and moving faster and faster for 4 seconds;
(2) moving at a constant rate for 3 seconds;
(3) slowing down to a stop for 2 seconds; and
(4) sitting at rest for 1 second.
""!"v "
!"v "
!"v
"#!"v
3. Draw a velocity change "#!"v arrow to indicate how the
""!"v arrows are changing between adjacent positions.
2. Point velocity "!"v arrows in the direction of motion
and draw their relative lengths to indicate
approximately how fast the object is moving.
1. Draw dots to represent the position of
the object at equal time intervals.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-10
The bicycle moves at a constant rate with respect to the ground for the entire time and is at the
same initial location and same final location as the car—only moving when at these locations.
Simplify and Diagram We model the car and the bicycle as point-like objects (dots). In each
motion diagram, there will be 11 dots, one for each second of time (including one for time zero).
The last two dots for the car will be on top of each other since the car was at rest from time = 9 s
to time = 10 s. The dots for the bicycle are evenly spaced. The motion diagrams are shown in Fig.
1.5.
Figure 1.5 Car and bicycle trips between stop lights
Try It Yourself: Two bowling balls are rolling along a linoleum floor. One of them is moving
twice as fast as the other. At time zero, they are next to each other on the floor. Construct motion
diagrams for each ball’s motion during a time of four seconds, as seen by an observer on the
ground. Indicate on the diagrams the locations at which the balls were next to each other at the
same time. Indicate possible mistakes that a student can make answering the question above.
Answer: See Fig. 1.6. They are side-by-side only at time zero—the first dot for each ball. It looks
like they are side-by-side when at the 2-m position, but the slow ball is at the 2-m position at 2 s
and the faster ball is there at 1 s. Similar reasoning applies for the 4-m positions - they are not
side-by-side when at the 4-m position as they reach that point at different times.
Figure 1.6 Two bowling ball motion diagrams
Review Question 1.3
What information about a moving object can we extract from a motion diagram?

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-11
1.4 Quantities for describing motion
So far we learned how to represent motion qualitatively using a motion diagram.
However, to analyze situations more precisely, for example, to determine how far a car will travel
after the brakes are applied to avoid a person crossing a street, we need to investigate how to
describe motion quantitatively. As we learned in the Introduction Chapter, physicists describe
processes using physical quantities. In this section, we will construct some of the quantities we
need to describe linear motion. In most situations, we are interested in the positions of objects at
specific times; thus, the quantities we use in the remainder of this section involve time and
position.
Time and time interval
The names of many physical quantities have been borrowed from everyday language,
where they often have imprecise meanings. In physics, the name given to a physical quantity has
a very specific meaning, and it’s important to define these quantities carefully to avoid confusion
with the everyday terms.
Time is an example of such a quantity. People use the word ‘time’ to talk about different
things. One meaning is the reading on a clock when some event happened. Another is how long a
process takes. The latter use of the word ‘time’ is the difference in time between the start of the
process and the end of the process (it involves two times). To make the distinction clear,
physicists use two different words—time (a clock reading) and time interval (a difference in clock
readings).
Time and time interval Time (clock reading) t is the reading on a clock or some other time
measuring instrument. Time interval ( 2 1–t t ) or t# is the difference of two times. In the SI
system (metric units), the unit of time and of time interval is the second. Time and time interval
are both scalar quantities. They can be measured in other units such as minutes, hours, days, and
years.
Position, displacement, distance, and path length
Along with a precise definition for time and time interval, we need to precisely define what we
mean by position. There are four quantities related to this idea: position, displacement, distance,
and path length.
Position, displacement, distance, and path length The position of an object is its
location with respect to a particular coordinate system (usually indicated by x or y). The
displacement of an object, usually indicated by d!
, is an arrow (a vector) from an object’s initial
position to its final position. The magnitude (length) of the displacement vector is called distance.
The path length is how far the object moved as it traveled from its initial position to its final
position. Imagine laying a string along the path the object took. The length of string is the path
length.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-12
Figure 1.7a shows a car’s initial position i
x at initial time i
t . It moves toward the origin
of the coordinate system at 0x " , stops, and then moves in the positive x direction to its final
position f
x . Notice that the initial position and the origin of a coordinate system are not
necessarily the same points! The path length is the distance from i
x to 0 plus the distance from 0
to f
x (Fig. 1.7b). The displacement for the whole trip is a vector that points from the starting
position at i
x to the final position at f
x (Fig. 1.7c). The distance for the trip is the magnitude of
the displacement (always a positive value); note that it does not equal the path length.
Tip! The subscripts 1, 2, 3, or i (initial) and f (final) for times and the corresponding positions
sometimes communicate a sequence of different and distinguishable stages in a process involving
the motion of an object. For us the process starts at the beginning of observations of motion and
stops at the end; however, the actual motion occurs before we start observing it and continues
after we stop.
Figure 1.7 Position, path length, displacement and distance for short car trip.
Scalar component of displacement for motion along one axis
One or more of these four quantities (position, displacement, distance, and path length)
can be used to describe linear motion quantitatively. To do so, we need to specify a reference
frame. For linear motion the simplest description is when one coordinate axis points either
parallel or anti-parallel (opposite in direction) to the object’s direction of motion. In this case, we
need only one coordinate axis to describe the object’s changing position. Imagine that at time i
t
(initial) a car is at position & 'ix t and that at time
ft (final) the car is at & 'f
x t (Fig. 1. 8). The

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-13
notation ( )x t indicates that the car’s position x is a function of the quantity time t – here time is
an independent variable and position is a dependent variable. The car’s position can change as
time progresses.
Figure 1.8 Using function x(t) to identify position
We will use the notation ( )x t when dealing with the functional relationship. However,
when we need to note a specific value of position x at a specific clock reading 1t , instead of
writing 1( )x t we will write 1x . The same applies to i
x , f
x , etc. The displacement vector points
from the initial position i
x to the final position f
x .
The quantity that we determine through the operation f i
x x% is called the x scalar
component of the displacement vector and is abbreviated x
d (usually we will drop the term
‘scalar’ and just call this the x-component of the displacement). Figure 1.9a shows that the initial
position of person A is A 3.0 mi
x " $ and the final position is A 5.0 mf
x " $ ; thus the x-
component of person A’s displacement is A A A– ( 5.0 m) ( 3.0 m) = +2.0 m
x f id x x" " $ % $ ;
the displacement is positive since the object moved in the positive x-direction. In Fig. 1.9b, person
B moved in the negative direction from initial position of +5.0 m to the final position of +3.0 m;
thus the x-component of displacement of person B is
B, B B – ( 3.0 m) – (+5.0 m) = – 2.0 mx f i
d x x" " $ and is negative. To learn more about the
vectors and their components, see Appendix 1.
Figure 1.9 Component of displacement (a) positive and (b) negative

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-14
Distance is always positive, as it equals the absolute value of the displacement 2 2x x% .
In the example above, the displacements for A and B are different but the distances are both
+2.0 m (always positive).
If we choose a different reference frame for the same trip, the values for f
x and i
x may
be different as would be the displacement and the distance. Suppose for example that we choose a
reference frame whose object of reference is person C, and person C is walking next to person A.
We choose the positive x-axis in this new reference frame as pointing in the same direction as A’s
motion relative to the sidewalk. In person C’s reference frame, person A is not moving. The
initial and final positions of person A are the same. Thus the displacement for person A and the
distance traveled relative to person C’s reference frame are both zero.
Tip! The quantities used to describe motion have no meaning unless the reference frame is
specified.
Using the position-related quantities to describe a two-dimensional trip
To understand better how vector quantities work, let’s use the quantities position,
displacement, distance, and path length to describe a trip from St. Louis to Indianapolis to
Louisville. (Fig.1.10a) We use Earth as the object of reference and place the origin of the
coordinate system at Indianapolis. The positive x-axis points towards St. Louis, and the positive
y-axis points toward Louisville. Notice that the orientations of the axes are different from the
traditional orientation used in mathematics. In physics we often choose axes by convenience and
not necessarily by tradition. As long as the x and y-axes are perpendicular to each other, and we
move in a counterclockwise direction from the x-axis to the y-axis, we have a Cartesian
coordinate system. Because the three cities form a right triangle (approximately), we could line
up the coordinate system with the three cities as shown. We use the scale of the map to determine
quantitatively the positions of the three cities.
Although all three cities have considerable size, these sizes are relatively small compared to
the distances between them. Using the map’s scale, we can estimate the distance between St.
Louis and Indianapolis is between 230 and 250 miles, depending on which parts of the cities we
travel between. Since the map does not allow us to be very precise in determining this distance,
we need to specify not just the distance but also the uncertainty in that distance. In this case, we
choose the uncertainty to be ±10 mi ; thus we record the St. Louis and Indianapolis distance as
240 10 mi( . Using this same idea, we measure the distance between Indianapolis to Louisville
as 110 10 mi( .
Since the origin of the coordinate system is at Indianapolis, the position coordinates of
Indianapolis are I 0 mix " , I 0 miy " ; the position coordinates of St. Louis are S 240 mix " $ ,
S 0 miy " ; and the position of Louisville is L 0 mix " , L 110 miy " $ .

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-15
The displacement vectors for the two parts of the trip are shown in Fig. 1.10b. The
displacement vector from St. Louis to Indianapolis ( S Id )
!) represents the first part of the trip. The
displacement vector from Indianapolis to Louisville ( I Ld )
!) represents the second part of the trip.
The magnitude of each displacement vector is the distance for each part of the trip. The x and y
components of the displacement vector for the first part of the trip S Id )
! are:
I, I S 0 – (240 mi) = 240 miS x
d x x) " % " %
S I, 0 0 0 miy
d ) " % " .
The magnitude of the first displacement vector is 240 mi. The x and y components of the
displacement vector for the second part of the trip I Ld )
!are:
I L, 0 0 0 mix
d ) " % "
I L, L I (110 mi) – 0 = +110 mi.y
d y y) " % " .
The magnitude of the second displacement vector is 110 mi. The total path length for the trip is
240 mi 110 mi 350 mi$ " .
Figure 1.10c shows the displacement vector for the whole trip. Thus, according to the rules
of vector addition (see appendix), it is the vector sum of the displacement vectors S Id )
! and
I Ld )
!. We can find the length of the total displacement vector using the Pythagorean theorem,
and the lengths of the two perpendicular displacement vectors:
2 2
L S (240mi) (110mi) 260 mi.d ) " $ "
Using a calculator, you would get 264.00757 miles. However, because we designated an
uncertainty of ±10 miles, there is no reason to write more than two significant digits. In fact, the
roads are not straight, so the uncertainty is possibly greater than this. Notice that the length of the
total displacement vector is less than the path length traveled. If you returned back to St. Louis
from Louisville along Route 64, the total path length for the whole trip would be about
240 mi 110 mi + 260 mi 610 mi$ " , while the total displacement would be zero (you’re back
where you started).

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-16
Figure 1.10 A two dimensional trip
Review Question 1.4
Which of the following (quantities initial position, final position, distance, displacement, and path
length) have values that depend on the choice of coordinate system?
1.5 Representing motion with
data tables and graphs
So far, we have learned how to
represent motion with motion diagrams,
and developed precise definitions for
position, time, and other related concepts.
In this section, we learn to represent
constant linear motion with data tables
and graphs.
Imagine walking across the front
Table 1.3 Time-position data for linear motion.
Clock reading (time) Position
t0 = 0.0 s 0x = 1.00 m
t1 = 1.0 s 1x = 2.42 m
t2 = 2.0 s 2x = 4.13 m
t3 = 3.0 s 3x = 5.52 m
t4 = 4.0 s 4x = 7.26 m
t5 = 5.0 s 5x = 8.41 m
t6 = 6.0 s 6x = 10.00 m
ALG 2.1.1;
2.1.2

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-17
of your classroom. In order to record your position as a function of clock reading, you drop a
beanbag on the floor each second (Fig. 1.11a). We choose the floor as the object of reference. The
origin of the coordinate system is 1.00 m from the first beanbag and the position axis points in the
direction you are walking. Each bag’s positions and the clock reading that it was dropped are
shown in Table 1.3. It is difficult to drop the bags exactly each second and the bags have to fall a
certain distance from your hand to the floor. The position data recorded in Table 1.3 includes an
uncertainty of ±0.01 m. The uncertainty in the time data is more complicated as it involves
human reaction time; however, we will designate an uncertainty of about ±0.1 s.
Do you see a pattern in the table’s data? One way to determine if there is a pattern is to
plot the data on a graph. For simplicity, we will not represent uncertainty in the data points (Fig.
1.11b).
Time (or clock reading) t is the independent variable; so the horizontal axis of the graph
will be the t axis. Position x is the dependent variable; so the vertical axis will be the x-axis. As
we noted earlier in the chapter, in physics we designate axes by convenience rather than tradition.
Most of the time, they are not called x and y.
A row in the data table turns into two points, one on each axis. Each point on the
horizontal axis represents a clock reading. Each point on the vertical axis represents the position
of a beanbag. Lines drawn through these points and perpendicular to the axes intersect at a single
location—a dot on the graph that simultaneously represents a time and the corresponding position
of the object. This dot is not a location in real space but rather a representation of the position of
the beanbag at a specific clock reading.
Is there a trend in the locations of the dots on the graph? We see that the position
increases as the time increases, which is what we expect for this person’s motion. We can draw a
smooth best-fit curve that passes as close as possible to the data points (Fig. 1.11c). It looks like a
straight line in this particular case – the position is linearly dependent on time. The graph we just
made is called a position-versus-time kinematics graph. The word kinematics refers to motion.
Kinematics graphs contain more precise information about an object’s motion than motion
diagrams.
Figure 1.11 Constructing a kinematics Position vs. Time graph

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-18
Relating a motion diagram and position-versus-time graph
To understand how graphs and motion diagrams are related, let’s consider the motion
represented by the data in Table 1.3 and in Fig. 1.11c. A modified motion diagram for the data in
Table 1.3 is shown in Fig. 1.12 (the dot times are shown and the v#!
arrows have been removed
for simplicity). The corresponding position-versus-time graph is also shown in Fig. 1.12. Each
position dot on the motion diagram corresponds to a point on the position axis for a particular
clock reading. The graph line combines the information about the position of an object and the
clock reading when this position occurred. Note for example, the 4.0 st " dot on the motion
diagram at position 7.26 mx " is at 7.26 m on the position axis. The corresponding dot on the
graph is at the intersection of the vertical line passing through 4.0 s, and the horizontal line
passing though 7.26 m.
Tip! The quantity that appears on the vertical
axis of the graph can represent the position of
an object whose actual position is changing
along a horizontal axis, along a vertical axis, or
along an inclined axis. The line shown on a
kinematics graph is not a picture of the actual
path that the object takes as it moves.
Figure 1.12
The role of a reference frame
Always keep in mind that representations of motion (motion diagrams, tables, kinematics
graphs, equations, etc.) depend on the reference frame chosen. Let’s look at the representations
of the motion of a cyclist using two different reference frames.
Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-19
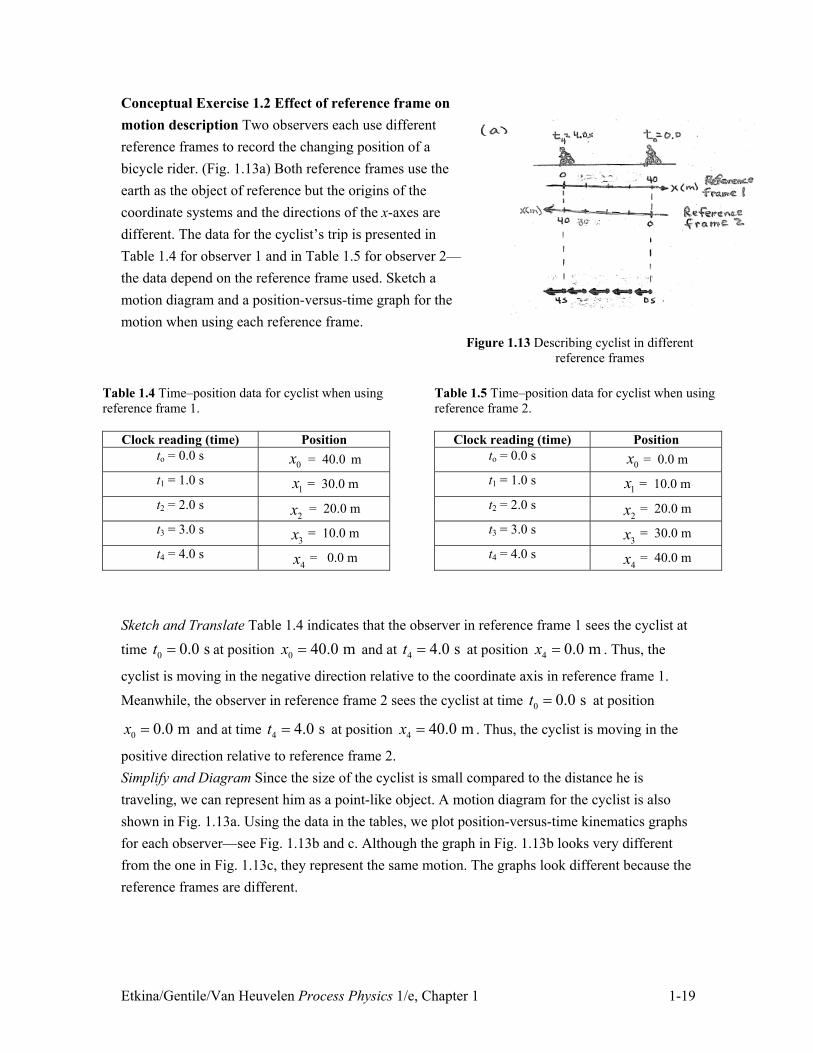
Conceptual Exercise 1.2 Effect of reference frame on
motion description Two observers each use different
reference frames to record the changing position of a
bicycle rider. (Fig. 1.13a) Both reference frames use the
earth as the object of reference but the origins of the
coordinate systems and the directions of the x-axes are
different. The data for the cyclist’s trip is presented in
Table 1.4 for observer 1 and in Table 1.5 for observer 2—
the data depend on the reference frame used. Sketch a
motion diagram and a position-versus-time graph for the
motion when using each reference frame.
Figure 1.13 Describing cyclist in different
reference frames
Sketch and Translate Table 1.4 indicates that the observer in reference frame 1 sees the cyclist at
time 0 0.0 st " at position 0 40.0 mx " and at 4 4.0 st " at position 4 0.0 mx " . Thus, the
cyclist is moving in the negative direction relative to the coordinate axis in reference frame 1.
Meanwhile, the observer in reference frame 2 sees the cyclist at time 0 0.0 st " at position
0 0.0 mx " and at time 4 4.0 st " at position 4 40.0 mx " . Thus, the cyclist is moving in the
positive direction relative to reference frame 2.
Simplify and Diagram Since the size of the cyclist is small compared to the distance he is
traveling, we can represent him as a point-like object. A motion diagram for the cyclist is also
shown in Fig. 1.13a. Using the data in the tables, we plot position-versus-time kinematics graphs
for each observer—see Fig. 1.13b and c. Although the graph in Fig. 1.13b looks very different
from the one in Fig. 1.13c, they represent the same motion. The graphs look different because the
reference frames are different.
Table 1.4 Time–position data for cyclist when using
reference frame 1.
Clock reading (time) Position
to = 0.0 s 0x = 40.0 m
t1 = 1.0 s 1x = 30.0 m
t2 = 2.0 s 2x = 20.0 m
t3 = 3.0 s 3x = 10.0 m
t4 = 4.0 s 4x = 0.0 m
Table 1.5 Time–position data for cyclist when using
reference frame 2.
Clock reading (time) Position
to = 0.0 s 0x = 0.0 m
t1 = 1.0 s 1x = 10.0 m
t2 = 2.0 s 2x = 20.0 m
t3 = 3.0 s 3x = 30.0 m
t4 = 4.0 s 4x = 40.0 m

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-20
Figure 1.13
Notice that in reference frame 1, the cyclist is initially at 0 40 mx " and is moving left
toward the origin—toward smaller values of x, shown as a downward-sloped line in Fig. 1.13b.
However in reference frame 2, the positive direction of the axis points left and its origin and the
cyclist’s initial position 0 0x " are at the same place. Using this axis, the cyclist is moving to the
left, away from the origin and toward larger values of x. Both graphical descriptions are correct
relative to the reference frames used.
Try It Yourself: A third observer recorded the following values for the time and position of the
same cyclist. Describe the reference frame of this observer.
Answer: The point of reference could be another cyclist moving in the opposite positive direction
from the direction in which the first cyclist is traveling and each covering the same distance
relative to the ground during the same time interval (the point of reference cyclist moves 40 m to
the right relative to the ground while the cyclist being analyzed moves 40 m to the left relative to
the ground).
Review Question 1.5
A position-versus-time graph representing a moving object is shown
in Fig. 1.14. What are the positions of the object at clock readings 2.0
s and 5.0 s?
Figure 1.14
Clock reading (time) Position
to = 0.0 s 0x = 0.0 m
t1 = 1.0 s 1x = -20.0 m
t2 = 2.0 s 2x = -40.0 m
t3 = 3.0 s 3x = -60.0 m
t4 = 4.0 s 4x = -80.0 m

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-21
1.6 Constant velocity motion
In the last section, we used a table of data to construct a graphical representation of motion. Here
we will connect graphs to mathematical representations. Let’s investigate the motion of two
motorized toy cars starting next to each other at the same time and racing toward a finish line. We
collect data marking the locations of the cars every second and analyze the data by constructing a
graph of the positions of the cars as a function of time.
When the cars are released, car B moves faster than car A and reaches the finish line first
(Fig. 1.15). The data that we collect is shown in
Observational Experiment Table 1.6. The reference
frame has Earth as the object of reference. The origin
of the coordinate system (the point of reference) is
1.0 m to the left of the initial position of the cars.
The positive x-direction points in the direction of the
cars’ motions. Now let’s use the provided data to find
some pattern. It is common in science to analyze data
collected by others with the goal of finding a pattern,
explaining, etc. Figure 1.15
Observational Experiment Table 1.6 Graphing the motion of cars
Observational experiment Analysis
Data for car A Data for car B
To analyze the data with the goal of
finding a pattern, we use a graphical
analysis.
0 0.0 st "
1 1.0 st "
2 2.0 st "
3 3.0 st "
4 4.0 st "
5 5.0 st "
0 1.0 mx "
1 1.4 mx "
1 1.9 mx "
3 2.5 mx "
4 2.9 mx "
5 3.5 mx "
0 0.0 st "
1 1.0 st "
2 2.0 st "
3 3.0 st "
4 4.0 st "
5 5.0 st "
0 1.0 mx "
1 1.9 mx "
2 3.0 mx "
3 3.9 mx "
4 5.0 mx "
5 6.0 mx "
Pattern
It looks like a straight line is the simplest reasonable choice for the best-fit curve in both cases (the data
points do not have to be exactly on the line). The slope of the line representing the motion of car B is
greater than the slope of the line representing the motion of car A. What is the physical meaning of this
slope?
When we write a functional relationship in mathematics, usually x is our independent
variable and y is the dependent variable; a function ( ) ( )y x f x" is an operation that one needs to

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-22
do to x as an input, to have y as the output. For a straight line, the function y(x) is ( )y x kx b" $ ,
where k is the slope and b is the y intercept—the value of the y when 0x " .
In the case of the cars, the independent variable is time t and the dependent variable is
position x. The equation of a straight line becomes & 'x t kt b" $ , where b is the x-intercept of
the line, and k is the slope of the line. The x-intercept is the x -position when 0t " , also called
the initial position of the car 0x . Both cars started at the same location: A0 B0 1.0 mx x" " .
To find the slope k of a straight line, we can choose any two points on the line and divide
the change in the vertical quantity ( x# in this case) by the change in the horizontal quantity ( t#
in this case): 2 1
2 1
–
–
x x xk
t t t
#" "
#. For example, for car A the slope of the line is
A
3.5 m – 1.0 m0.5 m s
5.0 s – 0.0 sk " " $ . The slope of the line for car B is
B
6.0 m – 1.0 m1.0 m s
5.0 s – 0.0 sk " " $ . Now we have all the information we need to write
mathematical equations that describe the motion of each of the two cars:
Car A: & ' & 'A 0.5 m s 1.0 mx t" $ $
Car B: & ' & 'B 1.0 m s 1.0 mx t" $ $
What is the meaning of the slopes of the lines for the motion of the two cars? Notice that
the units of the slope are meters per second. The slope indicates how the object’s position
changes with respect to time. That sounds like speed. We have learned that some of the terms
used in physics are borrowed from everyday speech, but that they have very specific meanings in
physics. In everyday speech we know that speed is usually measured in miles per hour, which
sounds similar to meters per second. However, the slope of the line contains more information
than just how fast the car is going. It also tells us the direction of motion relative to the coordinate
axis.
Consider the motions represented graphically in Fig. 1.16a. The slope of the position-
versus-time graph representing motion of car C is +20 m/s, but the slope of car D’s position-
versus-time graph is –20 m/s. What is the significance of the minus sign? Car C is moving in the
positive direction but car D is moving in the negative direction (in Fig. 1.16a this motion is
represented by the increasing position for car C with time and decreasing position for car D—also
shown in the motion diagrams in Fig. 1.16b). The magnitudes of the slopes of their position-
versus-time graphs are the same but the signs are different. Thus, the slope contains information
about how fast the car is traveling (which is what we call speed) and in what direction it is
traveling. A combination of this information is called velocity, and is what the slope of a position-
versus-time kinematics graph represents. You are already familiar with the term “velocity arrow”
used on motion diagrams. Now you have a formal definition for this quantity.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-23
Figure 1.16 Sign of slope indicates direction of motion
Velocity and speed for constant velocity linear motion For constant velocity linear motion,
the component of velocity x
v along the axis of motion can be found as the slope of the
position-versus-time graph or the ratio of the component of the displacement of an object
2 1x x% during any time interval 2 1t t% :
2 1
2 1
x
x x xv
t t t
% #" "
% # (1.1)
Examples of units of velocity are: m/s, mi/h, and km/h. Speed is the magnitude of the
velocity and is always a positive number.
Tip! In Eq (1.1) you can use any change in position divided by the time interval during which that
change occurred and obtain the same number—as long as the position-versus-time graph is a
straight line, or the object is moving at constant velocity. Later in the chapter, you will learn how
to modify this equation to find the velocity of an object if the velocity is not constant.
Note that velocity is a vector quantity. If we write the definition in a vector form for the
motion at constant velocity, it is d
vt
"#
!!
. Here we divide a vector by a scalar. According to the
operations with vectors (see more in appendix), the resultant vector has the same direction as the
displacement vector – thus the direction for the velocity vector shows the direction of motion
(same as the direction of the displacement vector) and the magnitude shows the speed. But as it is
difficult to operate mathematically with vectors, we will work with components.
Also note that the velocity and speed of an object depend on the observer. Think of a stop
sign on the road. A bus driver approaching the stop sign will say that the velocity and the speed of
the stop sign are non-zero relative to the driver while a person standing at the stop sign would say
its velocity and speed are zero.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-24
Equation of motion for constant velocity motion
We can rearrange Eq. (1.1) into a form that allows us to determine the position of an
object at time 2t knowing only its position at time 1t and the x-component of its velocity:
& '2 1 2 1xx x v t t" $ % . If we apply this equation for time zero ( 0 0t " ) when the initial position is
0x , then the position x at any later position time t can be written as follows.
Position equation for constant velocity linear motion
0 xx x v t" $ (1.2)
where x is the function ( )x t , position 0x is the position of the object at time 0 0t " with
respect to a particular reference frame, and the (constant) x -component of the velocity of
the object x
v is the slope of the position-versus-time kinematics graph.
Below you see a new type of task—a quantitative exercise. The purpose of quantitative
exercises is to help you apply the mathematical representations you have just learned to analyze a
different physical situation. They have different steps than conceptual exercises. These steps
focus on constructing mathematical representations of the situation, answering the mathematical
question being asked, and evaluating the result.
Quantitative Exercise 1.3 A cyclist In Conceptual Exercise 1.2, you constructed graphs (Figs.
1.13b-c) for the motion of a cyclist using two different reference frames. Now construct
mathematical representations (equations) for the cyclist’s motion for each of the two graphs. Do
the equations indicate the same position for the cyclist at time 6.0 st " ?
Represent Mathematically The cyclist moves at constant velocity; thus the general mathematical
description of her motion is 0 xx x v t" $ , where
2 1
2 1
x
x xv
t t
%"
%.
Solve and Evaluate Using reference frame 1 and the graph in Fig. 1.13b, we see that the biker’s
initial position is 0 40 mx " $ . The velocity along the x-axis (the slope of the graph line) is
0 m - 40 m10 m s
4 s - 0 sx
v " " %
The minus sign in front of the cyclist’s speed indicates that the velocity points in the negative x-
direction (toward the left) relative to that axis. The motion of the bike with respect to reference
frame 1 is described by the equation:
& '0 40 m 10 m sx
x x v t t" $ " $ %
Using reference frame 2 and the graph in Fig. 1.13c, we see that the cyclist’s initial
position is 0 0 mx " . The x-component of the velocity along the axis of motion is

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-25
40 m 0 m10m s
4 s 0 sx
v%
" " $%
The positive sign in front of the cyclist’s velocity indicates that it points in the positive x -
direction (toward the left). The motion of the bike relative to reference frame 2 is described by the
equation:
& '0 0 m 10 m sx
x x v t t" $ " $
Let’s see what these two equations say about the position of the cyclist at time 1 6 t s" .
With respect to reference frame 1:
& '& '1 40 m 10 m s 6 s 20 mx " $ % " %
With respect to reference frame 2:
& '& '1 0 m 10 m s 6 s 60 mx " $ $ " $
How can the position of the cyclist be both 20 m% and 60 m$ ? Remember that the
description of motion of an object depends on the reference frame. If you put a dot on coordinate
axis 1 at the 20 m% position and a dot on coordinate axis 2 at to +60 m position, you find that
the dots are in fact at the same location, even though that location is indicated by a different
number in each reference frame (Fig. 1.17). Both descriptions of the motion are correct and
consistent; but each one is meaningful only with respect to the reference frame that was used.
Figure 1.17 Position of cyclist at t = 6 s in two different reference frames
Try it yourself: Use the data for the motion of the cyclist as seen by the third observer in the Try It
Yourself part of Example 1.2 to write the equation of motion. Why is the magnitude of the
cyclist’s velocity different compared to 10 m/s in the example above?
Answer: (0 m) ( 20 m/s)x t" $ % . The observer is moving with respect to the earth at the same
speed in the direction opposite to the cyclist.
Let’s try an example that is a little more complex. We will use the same steps to solve the
rest of the examples.
Example 1.4 You chase sister Your young sister is running at 2.0 m/s toward a mud puddle that
is 6.0 m in front of her. You are 10.0-m behind her running at 5.0 m/s to catch her before she
enters the mud. Will she need a bath?
Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-26
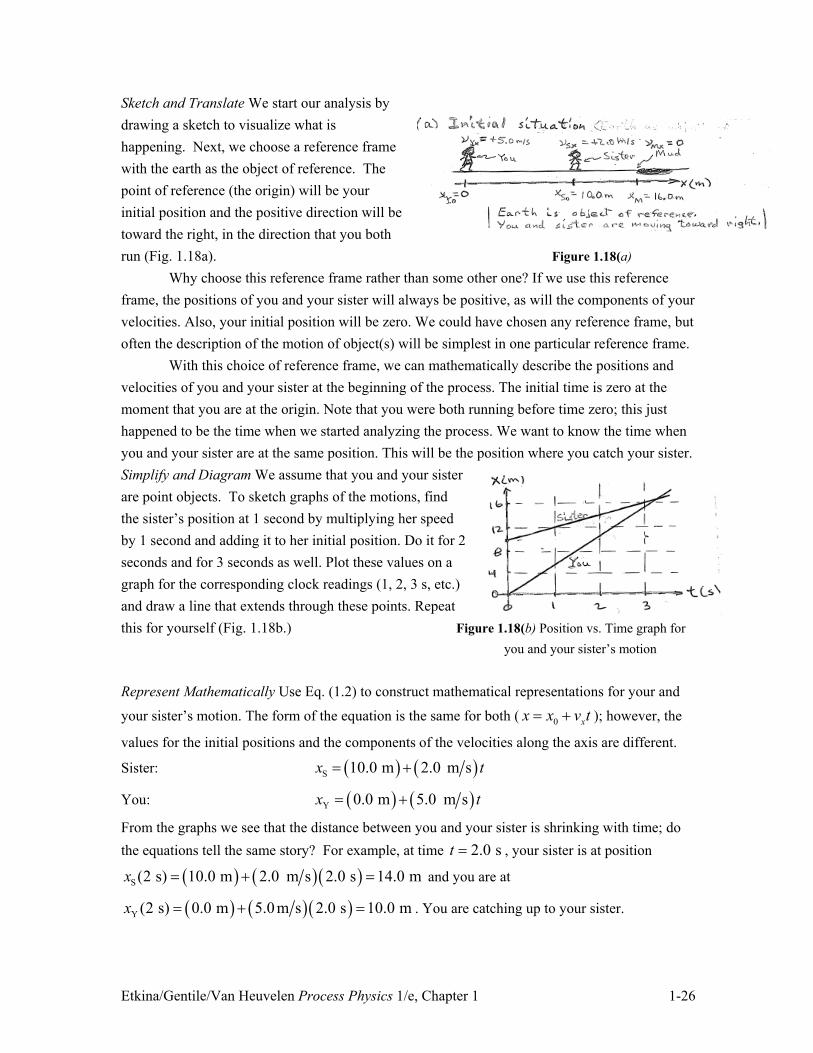
Sketch and Translate We start our analysis by
drawing a sketch to visualize what is
happening. Next, we choose a reference frame
with the earth as the object of reference. The
point of reference (the origin) will be your
initial position and the positive direction will be
toward the right, in the direction that you both
run (Fig. 1.18a). Figure 1.18(a)
Why choose this reference frame rather than some other one? If we use this reference
frame, the positions of you and your sister will always be positive, as will the components of your
velocities. Also, your initial position will be zero. We could have chosen any reference frame, but
often the description of the motion of object(s) will be simplest in one particular reference frame.
With this choice of reference frame, we can mathematically describe the positions and
velocities of you and your sister at the beginning of the process. The initial time is zero at the
moment that you are at the origin. Note that you were both running before time zero; this just
happened to be the time when we started analyzing the process. We want to know the time when
you and your sister are at the same position. This will be the position where you catch your sister.
Simplify and Diagram We assume that you and your sister
are point objects. To sketch graphs of the motions, find
the sister’s position at 1 second by multiplying her speed
by 1 second and adding it to her initial position. Do it for 2
seconds and for 3 seconds as well. Plot these values on a
graph for the corresponding clock readings (1, 2, 3 s, etc.)
and draw a line that extends through these points. Repeat
this for yourself (Fig. 1.18b.) Figure 1.18(b) Position vs. Time graph for
you and your sister’s motion
Represent Mathematically Use Eq. (1.2) to construct mathematical representations for your and
your sister’s motion. The form of the equation is the same for both ( 0 xx x v t" $ ); however, the
values for the initial positions and the components of the velocities along the axis are different.
Sister: & ' & 'S 10.0 m 2.0 m sx t" $
You: & ' & 'Y 0.0 m 5.0 m sx t" $
From the graphs we see that the distance between you and your sister is shrinking with time; do
the equations tell the same story? For example, at time 2.0 st " , your sister is at position
& ' & '& 'S (2 s) 10.0 m 2.0 m s 2.0 s 14.0 mx " $ " and you are at
& ' & '& 'Y (2 s) 0.0 m 5.0 m s 2.0 s 10.0 mx " $ " . You are catching up to your sister.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-27
Solve and Evaluate The time t at which the two of you are at the same position can be found by
setting S Y( ) ( )x t x t" :
& ' & ' & ' & '10.0 m 2.0 m s 0.0 m 5.0 m st t$ " $
Rearrange the above to determine the time t when you are both at the same position:
& ' & ' & ' & '2.0 m s 5.0 m s 0.0 m 10.0 mt t% " %
& ' & '3.0 m s 10.0 mt% " %
3.33333333 st "
The 3.33333333 s number produced by our calculator has many more significant digits
than the givens. Should we round it to have the same number of significant digits as the givens?
The rule of thumb is that if it is the final result, you need to round this number to 3.3, as the
answer cannot be more precise than the given information. However, if the number is instead a
result of an intermediate calculation, do not round it; use it as is to calculate the next value, and
then round the final result.
Sister: & ' & 'S ( ) 10.0 m 2.0 m s (3.33333333 s) 16.7 mx t " $ "
You: & ' & 'Y ( ) 0.0 m 5.0 m s (3.33333333 s) 16.7 mx t " $ "
Note that if you used the rounded number 3.3 s, you would get 16.5 m for your sister and 16.6 m
for you. These would be slightly less than the result calculated above. However, for our purposes
it does not matter, as the goal of this example was to decide if you could catch your sister before
she reaches the puddle. Since you caught her at a position of about 16.7 m, with the uncertainty of
about 0.1 m, this position is greater than 16.0 m distance to the puddle. Therefore your sister
reaches the puddle before you. This answer seems consistent with the graphical representation of
their motion shown in Fig. 1.18b.
Try It Yourself: Describe the problem situation using a reference frame with the sister (not the
earth) as the object and point of reference, and the positive direction pointing toward the puddle.
Answer: With respect to this reference frame, the sister is at position 0 and at rest; you are
initially at –10.0 m and moving toward your sister with velocity 3.0 m s$ ; and the mud puddle
is initially at +6.0 m and moving toward your sister with velocity 2.0 m s% (Fig. 1.18c).
Figure 1.18(c)

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-28
Unit Conversions
Suppose that in the last example, you were told the distance to the puddle in meters, and
the speeds of the mother and daughter in miles per hour. To analyze the situation, you would first
need to convert the speeds into meters per second. When physical quantities are substituted into
equations to determine other quantities, the units of the quantities must be consistent—for
example, all SI metric units. How is a quantity expressed in one set of units converted into
another set? Suppose your speed is reported as 11 mph. To find your speed in m/s, use the
conversions on the inside of the front cover of this book to convert miles into m (meters) and
hours into s (seconds):
1609 m11 miles
11 miles 1 mile 4.9 m/s3600 s1 hour
1 hour 1 hour
" "
What we have actually done is multiplied the numerator and denominator by the equivalent of the
number 1 (since 1609 m = 1 mile, then 1609 m/1 mile = 1; and since 3600 s = 1 hour, then 3600
s/1 hour = 1). Notice that in these fractions, the unit that we are converting from (miles or hours)
appears in the denominator, and the unit we are converting to (m or s) appears in the numerator.
Graphing velocity
So far, we constructed only a single type of kinematics graph (the position-versus-time
graph). We could also construct a graph of an object’s velocity as a function of time. What would
this graph look like for you and your sister in the last example (using the earth as the object of
reference)? You are moving at a constant velocity whose x component is 5 m/sx
v " $ , and your
sister at +2.0 m/s. Put clock readings on the horizontal axis
and the x-component of your and your sister’s velocities on
the vertical axis; then plot points for these velocities at each
time (see Fig. 1.19a). The best-fit curve for each person is a
horizontal line, which makes sense since the velocity is not
changing. For you the equation of the best-fit line is
& 'Y 5.0 m sx
v t " $ and for your sister & 'S 2.0 m sx
v t " $ ,
where ( )x
v t represents the x component of velocity as a
function of time. Figure 1.19(a) V vs t graph lines
with Earth as object of reference
Do you think these graph lines will be different if instead we choose your sister as the
object of reference? Her velocity with respect to herself is zero; so the best-fit curve will again be
a horizontal line, but it will be at a value of 0.0 m s instead of +2.0 m/s. With her as the object
of reference, your velocity is +3.0 m/s (see Fig. 1.19b) and the mud velocity is –2.0 m/s. The
ALG
2.1.3

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-29
minus sign indicates that from your sister’s point of view, the
mud is moving in the negative direction toward her at speed
2.0 m/s.
Figure 1.19(b) V vs t graph lines
with sister as object of reference
Tip! Notice that a horizontal line on a position-vs-time graph means that the object is at rest (the
position is constant with time). The same horizontal line on the velocity-vs-time graph means that
the object is moving at constant velocity (it does not change with time).
Finding displacement from a velocity graph
We just learned to construct a new type of kinematics graph, a velocity-versus-time
graph. Can we get anything more out of such graphs besides being able to represent velocity
graphically? Earlier you learned that for constant velocity linear motion, the position of an object
changes with time according to 0 xx x v t" $ . This equation connects an object’s position x at
time t to its initial position x0 at time zero and its velocity vx. Rearranging this equation a bit we
get 0 xx x v t% " . The left side is the displacement of the object from time zero to time t . Now
look at the right side; vx is the vertical height of the velocity-versus-time graph line and t is the
horizontal width from time zero to time t (see Fig. 1.20). This means we can interpret the right
side as the shaded area between the velocity-
versus-time graph line and the time axis. In the
previous equation, this area (the right side of the
equation) equals the displacement of the object
from time zero to time t on the left side of the
equation. Here the displacement is a positive
number as we chose an example with positive
velocity. If we wish to extend our reasoning to all
cases, we need to take the direction into account.
Figure 1.20 Using x vs. t to find displacement
Displacement is the area between a velocity-versus-time graph line and the time axis For
motion with constant velocity, the displacement 2 1x x% of an object during a time interval from
t1 to t2 is the area between a velocity-versus-time graph line and the time axis between those two
clock readings. The displacement is positive for areas above the time axis and negative for areas
below the time axis.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-30
Quantitative Exercise 1.5 Displacement of you and your sister Use the velocity vs. time
graphs shown in Fig. 1.19a for you and your sister (see Example 1.4) to find your
displacements with respect to the earth for the time interval from 0 to 3.0 s. The velocity
components relative to earth are +2.0 m/s for your sister and +5.0 m/s for you.
Represent Mathematically For constant velocity motion, the object’s displacement 0x x% is the
area of a rectangle whose vertical side equals the object’s velocity x
v and the horizontal side
equals the time interval 0 0t t t% " % during which the motion occurred (Fig. 1.20).
Solve and Evaluate The displacement of your sister heading toward the mud puddle during the
3.0-s time interval is the area of a rectangle whose vertical side is the velocity and whose
horizontal side is the time interval:
S 0 S( ) ( 2.0 m/s)(3.0 s) 6.0 md x x" % " $ " $ .
Your displacement during that same 3.0-s time interval is the product of your constant velocity
and the time interval:
Y 0 Y( ) ( 5.0 m/s)(3.0 s) 15.0 md x x" % " $ " $ .
Try It Yourself: Determine the magnitudes of the displacements of you and your sister from time
zero to time 2.0 s and your positions at that time. Your initial position is zero and your sister’s
is10 m.
Answer: The sister’s values are S 4.0 md " and S 14.0 mx " ; and your values are Y 10.0 md "
and Y 10.0 mx " . She is 4.0 m ahead of you at that time.
The first person to use this graphical method to find displacement was Nicolas Oresme at
the University of Paris early in the fourteenth century (1320-1382). He was a chaplain to King
Charles V. Historians of science are interested in his work in kinematics but also because before
Copernicus he proposed a Sun centered model for the universe (as opposed to an Earth centered
model).
Review Question 1.6
The position-versus-time graph for a moving object is a straight line with a slope equal to –15.0
m/s. Explain what this means about the motion of this object.
1.7 Motion at constant acceleration
In the previous section, we learned to describe linear motion at constant velocity. In that kind of
motion, the speed and the direction of travel do not change; therefore it is a very restrictive kind
of motion. Since the goal of this chapter is to construct models of motion, we should try to make
ALG
2.1.4

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-31
models that are more widely applicable. The goal of this section is to construct a model of linear
motion at changing velocity.
Instantaneous velocity
In the last section, the function vx (t) was a
horizontal line on the velocity-versus-time graph because
the velocity was constant. How would the graph look if the
velocity were changing? One example of such a graph is
shown in Fig. 1.21. The velocity of the object is positive all
the time; however its magnitude changes with time. A point
on the curve indicates the velocity of the object shown on
the vertical axis at a particular time (clock reading) shown
on the horizontal axis. Figure 1.21
The velocity of an object at a particular time is called the instantaneous velocity of the
object. Figure 1.21 shows velocity-versus-time graph for the motion when the instantaneous
velocity of the object is continually changing and is different just before and just after a particular
clock reading. A car’s speedometer measures a car’s instantaneous speed (the magnitude of its
velocity) relative to the road surface. But, the speedometer does not indicate the direction of the
car’s motion; so it does not measure the car’s instantaneous velocity. However, some cars are
equipped with a compass. The compass reading together with the speedometer reading does
provide enough information to specify the car’s instantaneous velocity—its speed and direction.
When an object’s velocity is changing, we cannot use Eq. (1.1) to determine its
instantaneous velocity, as the ratio 2 1
2 1
x
x x xv
t t t
% #" "
% #
is not the same for different time intervals
the way it was when the object was moving at constant velocity. However, we can still use the
same equation to determine a new quantity called the average velocity, which is the ratio of the
change in position and the time interval during which this change occurred. For motion at
constant velocity, the instantaneous and average velocity equal each other; for the motion at
changing velocity they are not.
When an object moves with changing velocity, its velocity can change quickly or slowly.
To characterize the rate at which the velocity of an object is changing, we need a new physical
quantity.
Acceleration
We’ll analyze motion with changing velocity in a way that is similar to how we
analyzed constant velocity motion. We start by looking for the simplest type of linear motion with
changing velocity. This occurs when the velocity of the object increases or decreases at a
constant rate, that is, by the same amount during the same time interval. Imagine that a cyclist is
speeding up so that his velocity is increasing at a constant rate with respect to an observer on the
ground. Graphically, this process is represented as the velocity-versus-time graph shown in Fig.
1.22a. The velocity-versus-time graph is a straight line that is not horizontal. Now imagine that a
ALG
2.1.5

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-32
car next to the cyclist is also speeding up, but at a greater rate than the biker. Its velocity-versus-
time graph is shown in Fig. 1.22b. The larger slope indicates that the car’s velocity increases at a
faster rate. This physical quantity that characterizes the change in velocity during a particular
time interval, equal to the slope of the velocity-versus-time graph, is called acceleration a!
.
Similar to velocity, the acceleration of an object moving in a straight line is defined as:
2 1
2 1
–
–
x x x
x
v v va
t t t
#" "
#
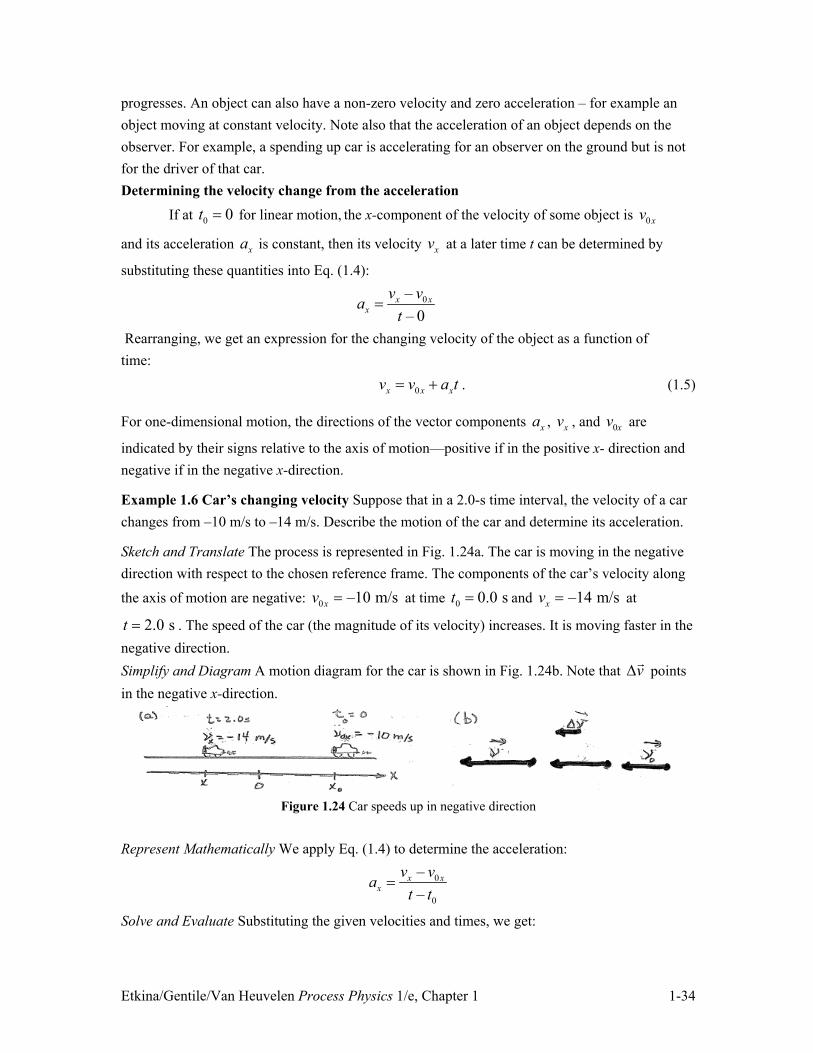
The acceleration can be either positive or negative. In the examples above, if the cyclist
or the car had been slowing down, their velocity-versus-time graph would instead have a negative
slope, which corresponds to a decreasing speed and a negative acceleration, as 2xv is smaller than
1xv (Fig. 1.22c). However, an object can have a negative acceleration and speed up! This happens
when the object is moving in the negative direction, has a negative component of velocity, but its
speed in the negative direction is increasing in magnitude (see Fig. 1.22d).
Figure 1.22
Because velocity is a vector quantity and the acceleration shows how quickly the velocity
changes as time progresses, acceleration is also a vector quantity. We can define acceleration in a
more general way. The average acceleration of an object during a time interval is:
2 1
2 1
–
–
v v va
t t t
#" "
#
! ! !!
You can see that to determine the acceleration, we need to determine the velocity change
vector v#!
. Remember that the capital delta # means “final value minus initial value”, or in this
case, the velocity of the object at a later time 2t minus the velocity of the object at an earlier time
1t ( 2 1v v v# " %! ! !
). This equation involves the subtraction of vectors. However, it is possible to

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-33
think about the same equation as addition by moving the 1v!
and v#!
to the same side of the
equation ( 1 2v v v$ # "! ! !
). Note that v#!
is the vector that we add to 1v!
to get 2v!
(Fig. 1.23). We
did this when making motion diagrams in Section 1.3. The acceleration vector /a v t" # #! !
is in
the same direction as the velocity change vector v#!
, as the time interval t# is a scalar quantity.
Figure 1.23 The change in velocity
Acceleration An object’s average acceleration during a time interval t# is the change in its
velocity v#!
divided by that time interval:
2 1
2 1
–
–
v v va
t t t
#" "
#
! ! !!
(1.3)
If t# is very small, then the acceleration given by this equation is the instantaneous
acceleration of the object. For one-dimensional motion, the component of the acceleration
along a particular axis (for example, for the x axis) is:
2 1
2 1
–
–
x x x
x
v v va
t t t
#" "
# . (1.4)
The unit of acceleration is (m/s)/s = m/s2.
Note that if an object has an acceleration of 2+6 m/s , it means that its velocity changes by
+6 m/s in 1 s, or by +12 m/s in 2 s [2(+12 m/s)/(2 s) = + 6 m/s ].
Tip! If it is difficult for you to think about velocity and acceleration in abstract terms, try
calculating the acceleration for simple integer velocities, as done above.
Note that is possible for an object to have a zero velocity and a non-zero acceleration –
for example when an object starts moving from rest – zero initial velocity and speeds up as it time
Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-34
progresses. An object can also have a non-zero velocity and zero acceleration – for example an
object moving at constant velocity. Note also that the acceleration of an object depends on the
observer. For example, a spending up car is accelerating for an observer on the ground but is not
for the driver of that car.
Determining the velocity change from the acceleration
If at 0 0t " for linear motion, the x-component of the velocity of some object is 0xv
and its acceleration x
a is constant, then its velocity x
v at a later time t can be determined by
substituting these quantities into Eq. (1.4):
0–
– 0
x x
x
v va
t"
Rearranging, we get an expression for the changing velocity of the object as a function of
time:
0x x xv v a t" $ . (1.5)
For one-dimensional motion, the directions of the vector components x
a , x
v , and 0xv are
indicated by their signs relative to the axis of motion—positive if in the positive x- direction and
negative if in the negative x-direction.
Example 1.6 Car’s changing velocity Suppose that in a 2.0-s time interval, the velocity of a car
changes from –10 m/s to –14 m/s. Describe the motion of the car and determine its acceleration.
Sketch and Translate The process is represented in Fig. 1.24a. The car is moving in the negative
direction with respect to the chosen reference frame. The components of the car’s velocity along
the axis of motion are negative: 0 –10 m/sx
v " at time 0 0.0 st " and –14 m/sx
v " at
2.0 st " . The speed of the car (the magnitude of its velocity) increases. It is moving faster in the
negative direction.
Simplify and Diagram A motion diagram for the car is shown in Fig. 1.24b. Note that v#!
points
in the negative x-direction.
Figure 1.24 Car speeds up in negative direction
Represent Mathematically We apply Eq. (1.4) to determine the acceleration:
0
0
–
–
x x
x
v va
t t"
Solve and Evaluate Substituting the given velocities and times, we get:
Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-35
& ' & ' 2
x
14m s 10m s2.0m s
2.0 s – 0.0 sa
% % %" " %
The car’s x-component of velocity at time zero was –10 m/s. It’s velocity was changing by –2 m/s
each second. So 1 second later, its velocity was:
1s 0 = + = (–10 m/s) + (–2 m/s) = –12 m/sx x x
v v v# .
During the second 1-second time interval, the velocity changed by another –2 m/s and was now
(–12 m/s) + (–2 m/s) = (–14 m/s) . In this example, the car was speeding up by 2 m/s each
second in the negative direction.
Try It Yourself: What is the car’s acceleration if its velocity changes from +14 m/s to +10 m/s
in 2.0 seconds?
Answer: 2(–2.0 m/s)/s –2.0 m/s
xa " " . The car’s velocity in the positive x-direction is
decreasing 2.0 m/s each second.
Tip! When an object is speeding up, the acceleration is in the same direction as the velocity, and
the velocity and acceleration have the same sign. When an object slows down, the acceleration is
in the opposite direction relative to the velocity; they have opposite signs. For example, when an
object is moving in the negative direction and slowing down, its acceleration is in the positive
direction and has a positive sign.
Displacement of an object moving at constant acceleration
For motion at constant velocity, we know that the area between the velocity-versus-
time graph line and the time axis between two clock readings equals the magnitude of the
object’s displacement during that time interval. Now we have a different situation—the
velocity is changing. Is the magnitude of an object’s displacement during a time interval still the
area under its velocity-versus-time graph line between those two times?
Consider the displacement of the object during the small shaded time interval shown in
Fig. 1.25a. The velocity is almost constant during that time interval. Note that x
xv
t
#"#
or
• ( ) = x
xv t t x
t
## " # #
#. Thus, the small displacement x# during that small time interval t# is
the small shaded area x
v t#! under that curve (the height times the width of the small rectangle).
We can repeat the same procedure for many successive small time intervals (Fig. 1.25b), building
up the area under the curve as a sum of areas of small rectangles of different heights. This is what
integration is, an important operation in calculus. The total area, shown in Fig. 1.25c, is the total
displacement of the object during the time interval between the initial time 0t and the final time
ALG
2.1.6

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-36
t . In general, the area will give you the displacement. A negative area (below the time axis)
corresponds to a negative displacement
Displacement from a v-vs-t graph The displacement 2 1x x% of an object during a time
interval 2 1t t% is the area between the velocity-versus-time curve and the time axis between
those two clock readings. The displacement is negative for areas below the time axis and
positive for areas above.
Figure 1.25
Equation of motion—position as a function of time
We can use the above idea to find an equation for the position x of an object at different
times t . Consider the displacement of an object whose velocity-versus-time graph line is shown
in Fig. 1.26a. Its displacement 0–x x during the time interval from 0 0t " to some arbitrary time
t is the shaded area under the trapezoid during that time interval.
ALG
2.1.7,
2.1.8

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-37
Figure 1.26
We can find the area between this curve and the time axis by breaking the area into a
triangle on top and a rectangular below (Fig. 1.26b). The area of a triangle is 1
base height2* * .
The base of the triangle is 0t % and the height is x 0xv v% . So, the area of the triangle is
& '& ' & '& ' 2
triangle x 0
1 1 10
2 2 2x x x
A t v v t a t a t" % % " " ,
where we substituted x 0x xv v a t% " from Eq. (1.5) into the above. Note that vx is the value of the
x- component of the velocity at time t .
The area of the rectangle equals its width times its height:
& 'rectangle 0 0x
A v t" %
The total area under the curve (the displacement 0x x% of the object) is
2
0 rectangle triangle 0
2
0 0
1
2
1
2
x x
x x
x x A A v t a t
x x v t a t
% " $ " $
+ " $ $
(Note that the symbol + means that this equation follows from the previous equation.) Does the
above result make sense? Consider a limiting case, for example when the object is traveling at a
constant velocity (when 0x
a " ). In this case the equation should reduce to the result from our
investigation of linear motion with constant velocity ( 0 0xx x v t" $ ). It does. We can also check
the units of each term in this equation for consistency (when terms in an equation are added or
subtracted, each of those terms must have the same units). Each term has units of meters, so the
units also check.
Position of an object during linear motion with constant acceleration For any initial
position 0x at clock reading 0 0t " , we can determine the position x of an object at any later
time t , provided we also know the initial velocity 0xv of the object and its constant
acceleration x
a :
2
0 0
1
2x x
x x v t a t" $ $ (1.6)

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-38
Since 2
t appears in Eq. (1.6), the position-versus-time graph for this motion will be a
parabola (Fig. 1.27a). Unlike the position-versus-time graph for constant velocity motion where
xconst
t
#"
#, the position-versus-time graph line for accelerated motion is not a straight line; it
does not have a constant slope. At different times, the change in position x# has a different value
for the same time interval t# (Fig. 1.27b). The line tangent to the position-versus-time graph line
at a particular time has a slope x
t
##
that equals the velocity x
v of the object at that time. The
slopes of the tangent lines at different times for the graph line in Fig. 1.27b differ—greater when
the position changes more during the same time interval. An object’s velocity at a particular time
can also be determined using Eq. (1.5) 0x x xv v a t" $ , which describes an object’s velocity as a
function of time for constant acceleration motion.
Figure 1.27 Velocity is the slope of x vs. t graph
Example 1.7 Acceleration during a car collision A car traveling at 45 mi/h collides head-on
with a concrete pillar. During the collision, the front of the car compresses 1.0 m. The driver, if
belted securely in the car, also travels about 1.0 m while stopping during the collision. Determine
the acceleration of the driver during the collision.
Figure 1.28(a)

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-39
Sketch and Translate The sketch in Fig. 1.28a represents the initial and final situations during the
collision. The car crumples 1.0 m. This crumpling distance is the distance that the driver travels
during the collision. Since the driver comes to a stop over such a short distance, we expect his
acceleration to have a large value.
Simplify and Diagram As the shape of the car changes, we cannot model it as a point like object.
But we can think of a driver as a point-like object that moves 1.0 m during the collision. Another
simplification involves the acceleration. We don’t know the details of the stopping motion so
assume that the acceleration is constant equal to the average acceleration. The motion diagram in
Fig. 1.28b represents the person’s motion while stopping, assuming constant acceleration.
Figure 1.28(b)
Represent Mathematically The challenge in representing this situation mathematically is that
there are two unknowns: the magnitude of acceleration x
a of the driver (which is what we are
looking for) and the time t at which he comes to rest. However, both Eqs. (1.5) and (1.6)
describe linear motion with constant acceleration and have x
a and t in them. Since we have two
equations and two unknowns, we can handle this challenge by solving Eq. (1.5) for the time t
( 0x x
x
v vt
a
%" ) , and substitute it into rearranged Eq. (1.6):
2
0 0
1
2x x
x x v t a t" $ $
The result is:
2
0 00 0 2
( )( )
2
x x x x x
x
x x
v v a v vx x v
a a
% %% " $ ,
where x and x
v are the position and velocity of the driver at the later time t . Using algebra we
can simplify the above equation:
& ' & ' & '& ' & ' & '& '
& '
2
0 0 0 0
2 2 2
0 0 0 0 0
2 2
0 0
2 2
0
0
2 2
2 2 2 2
2
2
x x x x x x
x x x x x x x x
x x x
x x
x
a x x v v v v v
a x x v v v v v v v
a x x v v
v va
x x
+ % " % $ %
+ % " % $ % $
+ % " %
%+ "
%
Solve and Evaluate Now we can use the above equation to solve for the acceleration. We also
need to convert the initial speed of the car in mi/h to m/s:
ALG
2.1.10

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-40
& '
& '
& '
22
2 220
0
mi 1 h 1609 m0 45
h 3600 s 1 mi200 m s
2 2 1.0 m 0
x x
x
v va
x x
, -% * *. /% 0 1" " " %% %
.
This is a huge acceleration; but the human body can withstand acceleration such as this.
Try It Yourself: Using the expression & '
2 2
0
02
x x
x
v va
x x
%"
%, decide how the acceleration would change
if: (a) the stopping distance 0( )x x% doubled, and (b) the initial speed v0x doubled. Note that the
final velocity is 0x
v " .
Answer: (a) ax would be half as great; (b) ax would be four times greater.
In the Represent Mathematically step above, we developed a new equation for the
acceleration by combining Eqs. (1.5) and (1.6). This useful equation is rewritten and described
briefly below.
Alternate equation for linear motion with constant acceleration:
& ' 2 2
0 02 –x x x
a x x v v% " (1.7)
The above equation can be used to determine one of the following quantities if the others are
known: the acceleration ( xa ), the displacement 0( )x x% of an object, its initial velocity
( 0xv ), and its final velocity ( xv ) when at position x . This equation is useful for situations in
which you do not know the time interval during which the changes in position and in velocity
occurred.
Review Question 1.7
(a) Give an example in which an object with negative acceleration and is speeding up. (b) Give an
example in which an object with positive acceleration is slowing down.
1.8 Skills for Analyzing Situations Involving Motion
In this section we will practice translating between these different types of concrete and abstract
ways of representing motion (called representations). We start with linear motion with constant
velocity since that’s the simplest kind of motion we have encountered.
Motion at constant velocity
To help understand physical processes involving motion, we will represent processes in
multiple ways: the words in the problem statement, a sketch, one or more diagrams, possibly a
graph, and a mathematical description. The sketches and diagrams help give meaning to the
mathematical descriptions for such processes.
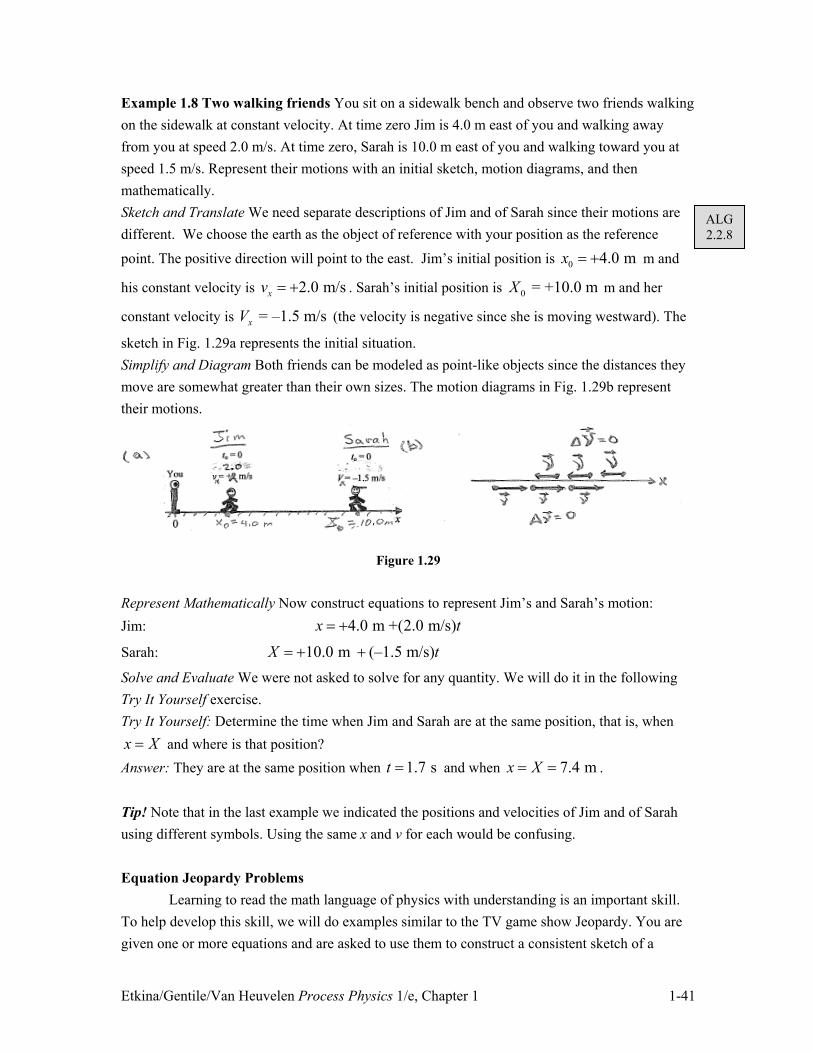
Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-41
Example 1.8 Two walking friends You sit on a sidewalk bench and observe two friends walking
on the sidewalk at constant velocity. At time zero Jim is 4.0 m east of you and walking away
from you at speed 2.0 m/s. At time zero, Sarah is 10.0 m east of you and walking toward you at
speed 1.5 m/s. Represent their motions with an initial sketch, motion diagrams, and then
mathematically.
Sketch and Translate We need separate descriptions of Jim and of Sarah since their motions are
different. We choose the earth as the object of reference with your position as the reference
point. The positive direction will point to the east. Jim’s initial position is 0 4.0 mx " $ m and
his constant velocity is 2.0 m/sx
v " $ . Sarah’s initial position is 0 = +10.0 mX m and her
constant velocity is = –1.5 m/sx
V (the velocity is negative since she is moving westward). The
sketch in Fig. 1.29a represents the initial situation.
Simplify and Diagram Both friends can be modeled as point-like objects since the distances they
move are somewhat greater than their own sizes. The motion diagrams in Fig. 1.29b represent
their motions.
Figure 1.29
Represent Mathematically Now construct equations to represent Jim’s and Sarah’s motion:
Jim: 4.0 m +(2.0 m/s)x t" $
Sarah: 10.0 m (–1.5 m/s)X t" $ $
Solve and Evaluate We were not asked to solve for any quantity. We will do it in the following
Try It Yourself exercise.
Try It Yourself: Determine the time when Jim and Sarah are at the same position, that is, when
x X" and where is that position?
Answer: They are at the same position when 1.7 st " and when 7.4 mx X" " .
Tip! Note that in the last example we indicated the positions and velocities of Jim and of Sarah
using different symbols. Using the same x and v for each would be confusing.
Equation Jeopardy Problems
Learning to read the math language of physics with understanding is an important skill.
To help develop this skill, we will do examples similar to the TV game show Jeopardy. You are
given one or more equations and are asked to use them to construct a consistent sketch of a
ALG
2.2.8

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-42
process. You then convert the sketch into a diagram of a process that is consistent with the
equations and sketch. Finally, you can invent a word problem that the equations might have been
used to solve. Note that there are often many possible consistent word problems for a particular
mathematical description. Here is our first example of an Equation Jeopardy Problem.
Conceptual Exercise 1.9 Equation Jeopardy The following equation describes an object’s
motion:
& ' & '5.0 m 3.0 m sx t" $ %
Construct a sketch, a motion diagram, kinematics graphs, and a verbal description of a situation
that is consistent with this equation. There are many possible situations that the equation
describes equally well.
Sketch and Translate This equation looks like a specific example of our general equation for the
linear motion of an object with constant velocity: 0 0xx x v t" $ . The minus sign in front of the
3.0 m/s indicates that the object is moving in the negative x-direction. At time zero, the object is
located at position 0 5.0 mx " $ with respect to some chosen object of reference. Let’s imagine
that this chosen object of reference is a running person (the observer) and the equation represents
the motion of a person sitting on a bench (object of interest) as seen by the runner. (You can
probably think of easier possible processes described by the equation.) A labeled sketch of this
possible situation is shown in Fig. 1.30a. The positive axis points from the observer (the runner)
towards the bench and the person sitting on it is 5.0 m in front of the runner and coming closer to
the runner as time elapses.
Figure 1.30(a)
Simplify and Diagram We are modeling the object of interest as a point-like object. A motion
diagram for the situation is shown in Fig. 1.30b. The equal spacing of the dots and the equal
lengths of velocity arrows both indicate that the object of interest is moving with constant
velocity with respect to the observer.
Figure 1.30(b)

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-43
Motion at constant non-zero acceleration
Position-versus-time and velocity-versus-time kinematics graphs of the process are
shown in Fig. 1.30c and d. The position-versus-time graph has a constant –3.0 m/s slope and a
+5.0 m intercept with the vertical (position) axis. The velocity-versus-time graph has a constant
value (–3.0 m/s) and a zero slope (the velocity is not changing). The following verbal description
describes this particular process: A jogger sees a bench in the park 5.0 meters in front of her. The
bench is approaching at a speed of 3.0 m/s. The direction pointing from the jogger to the bench is
positive.
Figure 1.30(c)(d)
Try It Yourself: Suppose we switch the observer and object of reference roles in the last example.
Now the person on the bench is the object of reference and observes the runner. We choose to
describe the process by the same equation as in the example:
& ' & '5.0 m 3.0 m sx t" $ %
Construct an initial sketch and a motion diagram that are consistent with the equation and with
the new observer and new object of reference.
Answer: Figure 1.31a is an initial sketch for this process and Fig. 1.31b is a consistent motion
diagram. The kinematics graphs for this process are the same as in the example.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-44
Figure 1.31
We’ve just learned how to analyze linear motion with constant velocity (zero
acceleration). Let’s apply what we’ve learned to analyze linear motion with constant (non-zero)
acceleration.
Example 1.10 Equation Jeopardy Problem A process is represented mathematically by the
following equation:
& ' & ' & '2 260 m 10 m s 1.0 m s ,x t t" % $ $
Use the equation to construct an initial sketch, a motion diagram, and words to describe a process
that is consistent with this equation.
Sketch and Translate The above equation appears to be an application of Eq. (1.6), which we
constructed to describe linear motion with constant acceleration, if we assume that 21.0 m/s in
front of 2
t is the result of dividing 22.0 m/s by 2:
2
0 0
1
2x x
x x v t a t" $ $ .
& ' & ' & '2 2160 m 10 m s 2.0 m s
2x t t" % $ $
It looks like the initial position of the object is 0 = –60 mx , its initial velocity is 0 = +10 m/sx
v ,
and its acceleration is 2 = +2.0 m/s
xa . Let’s imagine that this equation describes the motion of a
car passing a van in which you, the observer, are riding in the van on a straight highway. The car
is 60 m behind you and moving 10 m/s faster than your van. The car speeds up at a rate of
22.0 m/s with respect to the van. The object of reference is you in the van; the positive direction
is the direction in which the car and van are moving. A sketch of the initial situation with the
known information is shown in Fig. 1.32a.
ALG
2.2.2-
2.2.7;
2.2.9

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-45
Figure 1.32(a)
Simplify and Diagram The car can be considered as a point-like object—much smaller than the
dimensions of the path it travels. The car’s velocity and acceleration are both positive. Thus, the
car’s speed in the positive x-direction is increasing as at moves toward the van (toward the
origin). A motion diagram for the car’s motion as seen from the van is shown in Fig. 1.32b. The
successive dots in the diagram are spaced increasingly farther apart as the velocity increases; the
velocity arrows are drawn increasingly longer. The velocity arrow (and the acceleration) point in
the positive x-direction, that is, in same direction as the velocity arrows.
Figure 1.32(b)
Represent Mathematically We were given the mathematical representation of the situation at the
start of the Equation Jeopardy Problem.
Solve and Evaluate To evaluate what we have done, we can check the consistency of the different
representations. For example, we can check if the initial position and velocity are consistent in the
equation, the sketch, and the motion diagram. In this case, they are.
Try It Yourself: Describe a different scenario for the same mathematical representation.
Answer: This could be a mathematical representation of the motion of a cyclist moving on a
straight path as seen by a person standing on a sidewalk 60 m in front of the cyclist. The positive
direction is in the direction the cyclist is traveling. When the person starts observing the cyclist,
he is moving at an initial velocity of 0 = +10 m/sx
v and speeding up with acceleration
2 = +2.0 m/sx
a .
Problem solving procedure: kinematics problems
The problem-solving procedure in this text uses a multiple representation strategy that
was found to be extremely useful in helping solve physics problems. The same strategy will be
adapted to the different physics subject areas in the book. Most of the chapters will include one

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-46
problem-solving procedure that can be applied to typical problems in that chapter. The complete
strategy for a particular chapter will be presented with an example at the side. The problem-
solving steps for kinematics (motion) problems is presented in the next example on the left side
and illustrated for that problem on the right side.
Example 1.11 Car arriving at a red light A car’s
motion is represented by the velocity-versus-time
graph in Fig. 1.33. What time interval is needed for
the car to stop and how far did it travel while
stopping?
Figure 1.33 A car’s v vs. t graph when stopping
Sketch and Translate:
! Sketch the situation described in the problem.
! Include an object of reference, a coordinate
system and indicate the origin and the positive
direction.
! Label the sketch with relevant information.
From the graph, we see that the car’s velocity at time
zero is 0
14 m/sx
v " $ . The object of reference is the
ground. The plus sign means it is moving in the
positive x-direction. From the graph, we see that the
car’s velocity in the positive x-direction decreases by
2.0 m/s for each second; thus the slope of the graph
xv
t
#
#is (–2.0 m/s)/s . A labeled initial situation
sketch is shown below. The car’s initial position is
unknown—we’ll choose to place it at position 0
0x "
at 0
0t " .
Simplify and diagram:
! Decide how you will model the moving object
(for example, as a point-like object)
! Can you model the motion as constant velocity or
constant acceleration?
! Draw motion diagrams and kinematics graphs if
needed.
We will model the car as a point-like object moving
along a straight line. A motion diagram for the car is
shown below. The velocity arrows get increasingly
smaller since the acceleration arrow points opposite
the velocity arrows.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-47
Represent Mathematically:
! Use the sketch(s), motion diagram(s), and
kinematics graph(s) to help construct a
mathematical representation (equations) of the
process. Be sure to consider the sign of each
quantity.
Rearrange Eq. (1.6) to determine the time at which
the velocity decreases to zero:
– 0x x
x
v v
at "
The position of the car at that time can then be
determined using the position equation of motion:
2 21(–2.0 m/s ) .
20 (14 m/s) tx t" $ $
Solve and Evaluate:
! Solve the equations to find the answer to the
question you are investigating.
! Evaluate the results to see if they are reasonable.
To do this, check the units, decide if the
calculated quantities have reasonable values
(sign, magnitude), and check limiting cases.
Substituting the known information in the first
equation above:
2
(0 m/s) – (14 m/s)7.0 s
–2.0 m/st ""
The car stops after a time interval 0( 7.0 s)t t% " .
The car’s position when it stops is:
2 21(–2.0 m/s ) 49 m.
20 (14 m/s)(7.0 s) (7.0 s)x "" $ $
The units are correct, and the magnitudes are
reasonable.
Try It Yourself: A cyclist is moving in the negative x-direction at a speed of 6.0 m/s (the positive
direction points to the right). The cyclist sees a red light and stops in 3.0 seconds. What is the
cyclist’s acceleration?
Answer: 23.0 m/s
xa " $ . Why is the acceleration positive even though the cyclist’s speed
decreased? Hint: Draw a motion diagram and think about the direction of the velocity change
arrow and the acceleration arrow relative to the chosen positive direction.
Using the quadratic equation
In Example 1.7 we used a mathematical strategy in which two independent mathematical
expressions were used to solve for a situation involving two unknown quantities. In the next
problem we use another important mathematical strategy—the quadratic equation—to solve the
problem.
Example 1.12 Stopping for a cross walk You are driving at a moderate speed of 8.0 m/s (18
mph). Suddenly, you become distracted and fail to notice a crosswalk until you are 3.0 m from
the crosswalk (you are supposed to stop at or before the crosswalk). You hit the brakes and slow
down at a rate of 8.0 m/s each second. What is time interval needed for the car to reach the
crosswalk, and how fast is the car moving at that instant?
Sketch and Translate From the text of the problem we see that the motion is described with
respect to the ground. Let’s choose a coordinate axis that points toward the right, opposite your

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-48
direction of motion with the origin at the edge of the crosswalk, as shown in Fig. 1.34a. With this
choice, the following information about the car’s motion relative to that coordinate axis is known:
initial position 0 3.0 mx " $ , initial velocity 0 8.0 m/sx
v " % , and acceleration 28.0 m/s
xa " $ .
We wish to know the time t when the car reaches the crosswalk, and its speed x
v at that time.
Figure 1.34(a)
Simplify and Diagram A motion diagram for the car is shown in Fig. 1.34b. Note that the velocity
arrows pointing in the negative direction are getting shorter as the car moves toward the left.
Recall that earlier in the chapter, we saw that the velocity change arrow and the acceleration
arrow point opposite the direction of the velocity when an object’s speed is decreasing. This
means the acceleration points in the positive direction and is positive.
Figure 1.34(b)
Represent Mathematically We are now ready to construct a mathematical description of the
motion. Since this is linear motion with constant acceleration, we can apply Eqs. (1.6) and (1.5)
to this problem:
2
0 0
1
2x x
x x v t a t" $ $
0x x xv v a t" $
These equations applied to the situation with this car become:
& ' & '2 213.0 m 8.0 m s 8.0 m s
2x t t" $ % $
& ' & '28.0 m s 8.0 m sx
v t" % $
To determine when the car passes the 0x " position, we set 0x " in the first equation above:
& ' & '2 210 3.0 m 8.0 m s 8.0 m s
2t t" $ % $
Solve and Evaluate To determine the time when the position is zero, we need to solve the last
equation for the unknown time t. Notice that it is not a linear equation, but a quadratic equation.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-49
One way to solve a quadratic equation is to simplify it so that it has the form 2 0At Bt C$ $ " .
Recall from algebra that such an equation has two solutions:
2 4
2
B B ACt
A$
% $ %" and
2 4
2
B B ACt
A%
% % %" .
The quadratic equation for the car in the problem (leaving out the units) is:
24.0 – 8.0 3.0 0.t t $ "
With = 4.0, = –8.0, and = 3.0A B C , the first solution is:
22 (–8.0) (–8.0) 4 • 4.0 •3.041.5 s.
2 2 • 4.0
B B ACt
A$
% $ %% $ %" " " $
The second solution is:
22 (–8.0) (–8.0) 4 • 4.0 •3,040.5 s.
2 2 • 4.0
B B ACt
A%
% % %% % %" " " $
Which answer should we use? The velocity of the car with the second solution is:
& ' & '28.0 m s 8.0 m s (0.5 s) –4.0 m/s.x
v " % $ "
The car is moving in the same direction as it was initially moving, but now slower; that makes
sense. The velocity of the car at 1.5 s, the second solution, is:
& ' & '28.0 m s 8.0 m s (1.5 s) 4.0 m/s.x
v " % $ " $
The car must have stopped, and because of the continuing positive acceleration, it is now moving
in the opposite direction. This is not a reasonable solution in terms of real life and will be rejected
even though it is an appropriate math solution.
Try It Yourself: At what time and location in this example did the car stop, and where was it when
its velocity was zero?
Answer: Use the velocity equation to determine the time when the velocity was zero:
20 –8.0 m/s + (8.0 m/s )t" .
The velocity will be zero when 1.0 st " . The car is now at:
& ' & '2 213.0 m 8.0 m s (1.0 s) 8.0 m s (1.0 s) –1.0 m.
2x " $ % $ "
Evidently the car continued to slow down in the negative direction until 1.0 st " and when 1.0
m beyond the start of the crosswalk. Because of the positive acceleration, the car unrealistically
moved backward in the positive direction reaching the cross walk stop sign again at 1.5 s.
Review Question 1.8 A car’s motion with respect to the ground is described by the following
function:
& ' & ' & '2 248 m 12 m s 2.0 m sx t t" % $ $ %

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-50
Determine the car’s position and velocity at time zero. Also, determine its acceleration. At what
times (if any) does the car’s velocity become zero?
1.9 Free Fall
We learned about two simple models of motion – linear motion with constant velocity and linear
motion with constant acceleration. Do these models represent commonly occurring motions? For
example, if we drive a car in a straight line on a highway at roughly constant velocity, there
would still be slight variations in the car’s speed and direction of motion. Yet, the constant
velocity motion model applies nicely. What about constant acceleration motion? That is much
harder. Can you drive your car in such a way that the rate at which your velocity increases is
constant? It’s not easy.
There is another common situation that can be modeled reasonably as constant
acceleration motion. Let’s start with the following observational experiment. Tear out a sheet of
paper from your notebook and hold the paper in one hand. Hold a textbook in the other hand and
then drop both side by side. The book lands first. Next, crumple the paper into a tight ball. Now
drop the book and the crumpled paper side-by-side. This time they land at about the same time.
Does the motion depend on how heavy the objects are or on their shapes?
Aristotle believed that heavier objects fall faster than lighter objects. This is consistent
with our first observation with the book and paper, and people believed his explanation for almost
2000 years. But, the second observation with the book and crumpled paper is inconsistent with
this explanation.
In the 1600s, long after Aristotle, Galileo Galilei observed
swinging chandeliers in a church and noticed that the time interval
needed to complete each swing did not depend on how heavy the
chandeliers were. Instead, he noticed that it depended on the length of
the ropes that supported the chandeliers. This pattern made him think
of falling objects, as he suspected that the reason that suspended
chandeliers swung as they did was the same as the reason for the
objects to fall when they were not suspended. That led him to
construct the following hypothesis: the heaviness of objects does not
affect the way they fall. Galileo said that the reason some objects seem to fall differently from
others is because of the effect the air has on them. Put another way, Galileo’s hypothesis says that
in the absence of air, all objects, regardless of mass or shape, would fall in exactly the same way.
There is a legend that Galileo, then a mathematics professor at the University of Pisa,
tested his hypothesis by dropping from the Pisa Tower (Fig. 1.35) two stones of about the same
size but made of different materials—one was much heavier than the other. He recorded the time
that it took them to fall by listening for the thud when they hit the ground. Although he could hear

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-51
the heavier stone hit the ground slightly sooner than the light one, the difference in the times that
the two stones fell was tiny compared to how heavy they were.
If Galileo could get rid of air completely, he would observe that less massive and more
massive objects fall exactly the same way. Today scientists can use vacuum pumps to remove
nearly all of the air from a container. When most of the air is pumped out, all objects reach the
bottom at the same time—for example, a feather and a rock.
At this point, we do not know why this is happening (we will learn why in Chapter 2).
For the moment this is just a pattern that we have observed about the motion of falling objects:
when air is not present, all objects fall in exactly the same way. Galileo’s idea that the heaviness
of an object was not important in describing their falling motion is supported by the results of the
testing experiment we just described.
What type of motion should we use to model the motion of these falling objects? We
know from experience that a breakable object is more likely to break when it falls from a table
then from a low shelf. Is it because it is moving faster when falling from the table? If this is the
case, then objects do speed up when falling. But do they speed up at constant acceleration or does
the acceleration change during the fall? Galileo decided that constant acceleration was the
simplest possible motion and he did not see any reason why the motion of falling objects should
be more complicated. This idea was difficult to test. Galileo did not have a video camera or a
watch with a second hand. He measured time with his heartbeat. Objects fell too quickly for his
crude measuring instruments. How could he slow down falling objects so he could collect data to
support or reject his hypothesis?
Galileo decided to reduce the speed of falling objects by rolling balls on a tilted track,
and recording the time interval it takes them to cover a certain distance. His original hypothesis
was that the speed of a falling object should increase in a simple linear fashion as a function of
time – increasing by the same amount every second or in other words, that the objects would fall
with constant acceleration. He extended this hypothesis to the rolling balls – when they travel
down the ramp, their speed increases in linear proportion to time. This hypothesis makes a
specific prediction about the distance the balls should travel as a function of time. If the ball starts
at zero velocity and velocity increases in linear proportion to time x x
v a t" , the distance traveled
will be proportional to time squared 21
2x
x a t" (Eq. (1.5). Thus, if the ball travels a distance of 1
unit during the first second of its motion, its displacement after the first 2 seconds should be 4
units, after the first 3 seconds should be 9 units, etc. These distances are easy to measure! The
outcome of the experiment that Galileo performed was consistent with this prediction and thus
supported his hypothesis (Fig. 1.36). This result convinced Galileo that his hypothesis that in the
absence of air, all objects fall with constant acceleration was correct. He also thought that the
acceleration of freely falling objects would be larger than the acceleration of the balls rolling
down the incline.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-52
Figure 1.36 Distance ball travels while rolling down incline
Let’s test Galileo’s actual hypothesis using a real falling
object. Imagine that we videotape a metal ball that is dropped beside
a ruler (Fig. 1.37). If the hypothesis is correct, the speed of the ball
should increase linearly with time. After recording the fall, we step
through the video frame-by-frame and record the ball’s position
every 0.100 s (Table 1.7). We use the earth as our object of reference
and place the origin of our coordinate axis at the initial location of
the ball. The positive direction points down.
To determine the average velocity during each time interval,
we calculate the displacement of the ball between consecutive times
and then divide by the time interval (see Table 1.7). For example, the
average speed between 0.100 s and 0.200 s is
(0.196 m – 0.049 m)/(0.200 s – 0.100 s) = 1.47 m/s . These
Figure 1.37 Falling ball calculated velocities in the last row are associated with the clock
readings *t at the middle of each time interval (the third row). Finally, we use these velocities and
*t times to construct a velocity-versus-time graph (Fig. 1.38). Notice that the best-fit curve for
this data is a straight line, indicating that the motion of the metal ball can be modeled accurately as
motion with constant acceleration. The slope of the line equals 9.8 m/s2.
Figure 1.38 Velocity-vs-time for falling ball

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-53
Table 1.7 Position and time data for a falling block.
t (s) 0.000 0.100 0.200 0.300 0.400 0.500
y (m) 0.000 0.049 0.196 0.441 0.784 1.225
We can represent the motion of a falling ball mathematically using the equations of
motion for constant acceleration [Eqs. (1.5) and (1.6)] with 2= 9.8 m/s
ya g" :
2
0 0= (9.8 m/s ) y y y y
v v a t v t$ " $ (1.8)
2 2
0 0
1(9.8 m/s )
2y
y y v t t" $ $ . (1.9)
where 0 0 and y
y v are the position and instantaneous velocity of the object at the clock reading
0 0t " . These equations apply if the positive y direction is down. If using an upward pointing y-
axis, a minus sign is placed in front of the 9.8 m/s2. The magnitude of the object’s acceleration
while falling without air resistance is given a special symbol 29.8 m/sg " .
If we videotape a small object thrown upwards and then use the data to construct a velocity-
versus-time graph, we find that its acceleration is still the same at all clock readings. Using an
upward pointing axis, its acceleration is 2–9.8 m/s on the way up;
2–9.8 m/s on the way down;
and even 2–9.8 m/s at the instant when the object is momentarily at rest at the highest point of its
motion. At all times during the object’s flight, its velocity is changing at a rate of –9.8 m/s each
second. A motion diagram and the graphs representing the position-versus-time, velocity-versus-
time and acceleration-versus-time are shown in Fig. 1.39. The positive direction is up. Notice that
when the position-versus-time graph is at its maximum (object is at maximum height), the velocity
is instantaneously zero (the slope of the position-versus-time graph is zero). The acceleration is
never zero, even at the moment when the velocity of the object is zero.
t* (s) 0.050 0.150 0.250 0.350 0.450
vav (m/s) 0.49 1.47 2.45 3.43 4.41

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-54
Figure 1.39 Representing vertical motion of object thrown upward
Tip: It might be tempting to think that at the instant an object is not moving, its acceleration must
be zero. This is only true for an object that is at rest and remains at rest. In the case of an object
thrown upward, if its acceleration at the top of the flight is zero, it would never descend (it would
remain at test at the very top of the flight).
Another tip! Physicists say that an object is in a state of free fall even when it is thrown upward,
as its acceleration is the same on the way up as on the way down. The acceleration points down in
the vertical y direction. When the y -axis points down, the y-component of the acceleration
29.8 m/sy
g " ; when the y -axis points up 29.8 m/s
yg " % .
Galileo
Galileo Galilee was a founder of the contemporary practice of science—science that is
based on making careful observations, finding patterns, proposing hypotheses/explanations for
these patterns, and testing these explanations by predicting the outcomes of new experiments. He
was the first scientist to write his papers in his native language rather than in Latin. He was the
first to point a telescope at the Moon and see the craters there. He was the first to observer the
moons of Jupiter—four satellites that are now called the Galilean moons of Jupiter. Jupiter has
many more moons than just four, but only the largest were visible to Galileo with his telescope.
He got in trouble for his study of sunspots. At the time it was believed the Sun was not supposed
to have any spots at all. He not only saw sunspots, but he saw that they moved across the face of
the Sun. His hypothesis was that the Sun rotated, which turned out to be correct (read more about
sunspots in Chapter 17). His discoveries were evidence that Earth was just one planet out of

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-55
many, and that it wasn’t located at the center of the Universe (which was the accepted belief at
the time).
Example 1.13 Research rocket test flight The European REXUS 3 research rocket is used to test
electronic parts, which will be used on future spaceflights. In April 2006, the engine fired during
takeoff for 25.0 seconds, giving the rocket an average acceleration of about 60 m/s2. After the
rocket’s engine shut off, the rocket continued upward into the atmosphere at decreasing speed (like
an upward thrown ball slowing down after it leaves the thrower’s hand). Determine (a) the
REXUS 3’s height above Earth’s surface at the end of the 25.0 s fuel burn, (b) its speed at that
time, and (c) the height of REXUS 3 above Earth’s surface when it reached its highest altitude.
Sketch and Translate We choose the earth as the object of reference. The point of reference is the
initial position of the rocket. The positive direction is upward. We need to analyze the rocket’s
motion in two parts because there are two different values for acceleration. During the first part of
the rocket’s motion, the engine is firing and the rocket has a constant acceleration of 260 m/s$ .
During the second part of the rocket’s motion, the engine is off and its acceleration is 2–9.8 m/s .
For (a) and (b), we need to find the rocket’s height 1y and speed 1yv at the end of part I of the
motion. For (c), we need to find the highest point of the rocket, or
2y at the end of part II. After this, the rocket’s velocity becomes
negative, and it begins falling back toward Earth. The process is
pictured in Fig. 1.40a.
Simplify and Diagram We make several assumptions: 1) the
rocket is a point-like object, 2) the acceleration of the rocket
during part I is constant at 2+60 m/s , and 3) the acceleration
during part II is constant at 2–9.8 m/s . Assumptions 2) and 3)
are questionable. The rocket will be traveling at increasing speed
and very rapidly; air resistance is likely to have a changing effect
on the rocket motion, making its acceleration vary. But, if we do
not make these assumptions, we will not be able to apply our
model of constant acceleration motion. Figure 1.40b shows a
motion diagram for both parts of the rocket’s motion. Notice the
acceleration vectors. Figure 1.40 Rocket flight
Represent Mathematically The standard kinematics equations for constant accelerated motion will
be adapted for each part of the motion:
0y y yv v a t" $ (1.5)
2
0 0
1
2y y
y y v t a t" $ $ (1.6)
Solve and Evaluate We start by applying the above for the fuel burn.

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-56
Part I (the rocket burn): The rocket’s initial position is 0 0y " , its initial speed 0 0y
v " , the
acceleration during fuel burn 2
I 60 m/sy
a " $ , and the time at the end of the burn 25 st " . The
speed of the rocket at the end of the burn is determined using Eq. (1.5):
& '& '2 3
1 0 I 1 0 60 m s 25.0 s 1500 m s 1.5 10 m sy y y
v v a t" $ " $ " " * .
We’ve switched to scientific notation here because when we wrote 1500 m s , it was not possible
to indicate how many significant digits there were. Are there two, three, or four? There are two,
because the acceleration has just two significant figures. Use Eq. (1.6) to determine the position
of the rocket at the end of the fuel burn):
& '& '22 2 4
1 0 0 I
1 10 0 60 m s 25.0 s 2.0 10 m
2 2y y
y y v t a t" $ $ " $ $ " *
Part II (after the rocket burn): The end of part I is the beginning of part II, so the position and
velocity of the rocket at the end of part I is the position and velocity of the rocket at the beginning
of part II. At the end of part II, the rocket is at its highest point and has zero velocity for a brief
instant (it had a positive velocity a moment earlier, and will have a negative velocity a moment
later.) This means that 2 0y
v " . We use Eq. (1.7) to find the height of the rocket at the end of part
II:
& '
& '& ' & '
2 2
2 1 II 2 1
22 32 2
2 1 4
2 1 2II
5
2
2
0 1.5 10 m s2.0 10 m
2 2 9.8 m s
1.3 10 m = 130 km = 81 mi.
y y y
y y
y
v v a y y
v vy y
a
y
" $ %
% *%+ " $ " $ *
%
+ " *
Assuming our assumptions are reasonable, the model for the rocket’s motion tells us that
it will attain a maximum altitude of 81 miles. However, the assumptions must be somewhat
wrong because the rocket actually reached only 20 miles in height. This is due primarily to the
acceleration not being constant, leading to a breakdown in our simplified equations of motion.
Try It Yourself: Determine the time interval for part II of the flight (from the time the fuel stopped
burning until the rocket reached its highest point).
Answer: 150 s .
Review Question 1.9
How do you decide if you should use a positive or negative sign for the acceleration of an object
moving in a vertical direction?

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-57
1.10 Putting it all together
In this section, we use the models developed thus far to analyze a situation that
happens on the road every day—tailgating, or when one car follows too closely behind
another. The National Highway Traffic Safety Administration of the US has reported that
rear-end collisions account for 23 percent of all motor vehicle crashes, resulting in
approximately 2000 deaths and 950,000 injuries.
Drivers count on their ability to apply the brakes in time if the car in front of them suddenly
slows. However, this is not always possible. Factors affecting the possibility of a collision due to
tailgating include:
! Car decelerations (‘deceleration’ is a term used to describe acceleration that is opposite
the direction of motion).
! Driver reaction time (the time interval it takes for a driver to respond by applying the
brakes from the time he or she sees the need to slow down).
! The cruising speeds of the cars before they start applying their brakes.
! The distance between the lead and tailgating car.
Let’s look at motion of two vehicles in what appears to be a safe driving situation.
Example 1.14 An accident involving tailgating A sports car follows about two car lengths (10.0
m) behind a van. At the beginning of the process, both vehicles are traveling at a conservative 25
m/s speed (56 mph). The driver of the van suddenly slams on the brakes decelerating at 9.0 m/s2
to avoid an accident. The car’s driver’s reaction time is 0.80 s and the car’s maximum
deceleration is 29.2 m/s . Will the car be able to stop before hitting the van?
Sketch and Translate Figure 1.41a represents this situation for each vehicle. We’ll use capital
symbols to indicate quantities referring to the van and lower case symbols for quantities referring
to the car. We use the coordinate system shown in Fig. 1.41a with the origin of the coordinates at
the initial position of the sports car’s front bumper. The positive direction is in the direction of
motion.
The process starts when the van starts braking (constant negative acceleration). It moves
at constant acceleration throughout the problem situation. The motion of the car is broken into
two parts: 1) the motion before the driver applies the brakes (constant velocity), and 2) its motion
after driver starts braking (constant negative acceleration).
Simplify and Diagram We model each vehicle as a point-like object, but since we are trying to
determine if they collide, we need to be more specific about their locations. The position of the
car will be the position of its front bumper. The position of the van will be the position of its rear
bumper. We look at the motion of each vehicle separately. If the car’s final position is greater
than the van’s final position, then a collision has occurred at some point during their motion.
Assume that the vehicles have constant acceleration so that we can apply our model of motion
ALG
2.2.10-
2.2.18

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-58
with constant acceleration. A velocity-versus-time graph line for each vehicle is shown in Fig.
1.41b.
Figure 1.41 Sports car tailgates a van
Represent Mathematically: We use the constant acceleration mathematical principles constructed
in this chapter.
The Van
Equation (1.7) can be used to determine the distance the van travels while stopping:
& ' 2 2
0 0
2 2
00
2 –
2
x x x
x x
x
A X X V V
V VX X
A
% "
%+ " $
The Car Part 1
Since the car is initially traveling at constant velocity, we use Eq. (1.2). The subscript ‘0’
indicates the moment the driver sees the van start slowing down. The subscript ‘1’ indicates the
moment the car driver starts braking. The subscript ‘2’ indicates the moment the car stops
moving.
1 0 0 1xx x v t" $
The Car Part 2
After applying the brake, the car has an acceleration of –9.2 m/s2. We represent this part of the
motion using Eq. (1.7):

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-59
& ' 2 2
2 1 2 1
2 2
2 12 1
2 2
2 12 0 0 1
2 –
2
( )2
x x x
x x
x
x x
x
x
a x x v v
v vx x
a
v vx x v t
a
% "
%+ " $
%+ " $ $
The last step came from inserting the result from part 1 for x1.
Solve and Evaluate The van’s initial velocity 0 = +25 m/sV , its final velocity final = 0V , and its
acceleration 2 = –9.0 m/sA . Its initial position is two car lengths in front of the front of the car,
so 0 2 5.0 m 10 mX " * " . The final position of the van is:
& '
& '
222 2
00 2
0 25 m s10 m 45 m.
2 2 9.0 m s
x x
x
V VX X
A
%%" $ " $ "
%
The car’s initial position 0 0x " , its initial velocity is 0 25 m/sx
v " , its final velocity
2 0x
v " , and its acceleration when braking is 2–9.2 m/s
xa " . The car’s final position is:
& '
& ' & '& '222 2
2 12 0 0 1 2
0 25 m s ( ) [0 m 25 m s 0.8 s ] 54 m.
2 2 9.2 m s
x x
x
x
v vx x v t
a
%%" $ $ " $ $ "
%
The car would stop about 9.0 m beyond where the van would stop. There will be a collision
between the two vehicles. Another way to solve this problem is to switch to a reference frame
associated with the van. In this reference frame the van is at rest and car approaches it. If it
reaches the van while moving, the collision occurs.
This analysis illustrates the reason why tailgating is such a big problem. The car traveled
at a 25-m/s constant velocity during the relatively short 0.80 s reaction time. During the same
0.80 s, the van’s velocity decreased by 2(0.80 s)(–9.0 m/s ) = 7.2 m/s from 25 m/s to about 18
m/s. So, the van was moving somewhat slower than the car when the car finally started to brake.
Since they were both decelerating at about the same rate, the tailgating vehicle’s velocity was
always greater than that of the vehicle in front (see Fig. 1.41b)—until they hit.
Try It Yourself: Two cars, one behind the other, are traveling at 30 m/s (13 mph). The front car
hits the brakes and has a 10-m/s2 deceleration—the same as that of the back car. The driver of the
second car has a 1.0 s reaction time. The front car’s speed has decreased to 20 m/s during that 1.0
s. The back car traveling at 30 m/s starts braking. How far behind the front car should the back
car be so it does not hit the front car?
Answer: The back car should be at least 25 m behind the front car.
If a drivers’ reaction time were 0.1 s instead of 0.8 s, then tailgating might not be such a
problem, but such short reaction times are extremely rare. Many tailgating accidents occur when
we are not alert, either while eating, talking on a cell phone, or looking at the GPS unit. As a

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-60
result, reaction times can be as high as two seconds. Here’s a rule of thumb for determining a safe
following distance. Choose a marker on the side of the road ahead of you, such as a tree or a road
sign. Two seconds should pass between when the car in front of you passes that marker and when
your car does. This will give you a large enough following distance so that if the car in front does
slam on the brakes, you will be able to avoid a collision.
Review Question 1.10
Why is “following too closely” not a very good explanation for why a tailgating accident occurs?

Etkina/Gentile/Van Heuvelen Process Physics 1/e, Chapter 1 1-61
Summary
Word Description Picture or Diagrammatic
Description
Mathematical Description
A reference frame consists of an object of
reference, a point of reference on that
object, a coordinate system whose origin is
at the point of reference, and a clock.
A pictorial description of motion includes
a sketch of the situation, a coordinate axis,
and the values of known physical
quantities that describe that process.
! Time or clock reading t (a scalar) is the
reading on a clock or on a stopwatch or on
some other time measuring instrument.
! Time interval t# (a scalar) is the
difference of two times.
Time: t
Time interval:
2 1t t t# " %
! Position x (a scalar) is the location of
an object relative to the chosen origin.
! Displacement d!
is a vector drawn from
the initial position of an object to its final
position. The x component of the
displacement x
d is the change in position
of the object along the x -axis.
! Distance d (a scalar) is the magnitude
of the displacement and is always positive.
0 x
x x d" $ or
0 0 x
d x x" % 2 if d!
points
in the positive direction of x
axis.
0 0 x
d x x" % 3 if d!
points
in the negative direction.
0d x x" %
! Velocity v!
(a vector) is the displacement
of an object during a time interval divided
by that time interval. The velocity is
instantaneous if the time interval is very
small and average if the time interval is
longer.
! Speed v (a scalar) is the magnitude of
the velocity.
For linear constant velocity
motion d
v
t
"#
!
2 1
2 1
x
x xxv
t t t
%#" "# %
(1.1)
xv
t
#"#
! Acceleration a!
(a vector) is the change
in an object’s velocity v#!
during a time
interval t divided by the time interval.
The acceleration is instantaneous if the
time interval is very small and average if
the time interval is longer.
va
t
#"#
!!
0
0
–
–
x x x
x
v v v
a
t t t
"#
"# (1.4)
Motion with constant velocity or constant
acceleration can be represented with a
sketch, a motion diagram, with kinematics
graphs, and mathematically.
0x x x
v v a t" $ (1.5)
2
0 0
1
2x x
x x v t a t" $ $(1.6)
2 2
0
0
2
x x
x
v vx x
a
%% "
(1.7)
Related Documents











