CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT PARTIE I. 6 GENERALITES SUR L’AMORTISSEMENT 1. Introduction Les vibrations dans un système mécanique [106, 130, 164] résultent d’un transfert alternatif entre énergies cinétique et potentielle qui, sans dissipation, perdure Figure(1-a). En présence de dissipation, et c’est le cas de tout système réel, les amplitudes du mouvement convergent jusqu’à l’équilibre dynamique dans le cas d’un système forcé, jusqu’à l’équilibre statique dans le cas d’un système libre. Un amortissement visqueux crée une force proportionnelle et opposée à la vitesse alors qu’un frottement sec crée une force constante mais change de signe à chaque demi-cycle et donc s’oppose à la vitesse [73, 137]. Position d’équilibre Position de mouvement Temps a- Poutre non amortie Enveloppe W e (t) Temps Amortisseur visco b- Poutre avec amortissement visco Temps Amortisseur en friction c- Poutre avec amortissement sec Fig.1. Poutre en mouvement libre [ 137]. Dans le cas d’une réponse impulsion le mouvement alternatif s’inscrit dans une courbe enveloppe exponentielle décroissante, Figure (1-b), en présence d’amortissement visqueux, linéaire décroissante, Figure (1.-c) en présence d’amortissement sec. Ainsi le mouvement d’un

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 6
GENERALITES SUR L’AMORTISSEMENT
1. Introduction
Les vibrations dans un système mécanique [106, 130, 164] résultent d’un transfert
alternatif entre énergies cinétique et potentielle qui, sans dissipation, perdure Figure(1-a). En
présence de dissipation, et c’est le cas de tout système réel, les amplitudes du mouvement
convergent jusqu’à l’équilibre dynamique dans le cas d’un système forcé, jusqu’à l’équilibre
statique dans le cas d’un système libre.
Un amortissement visqueux crée une force proportionnelle et opposée à la vitesse alors
qu’un frottement sec crée une force constante mais change de signe à chaque demi-cycle et
donc s’oppose à la vitesse [73, 137].
Position d’équilibre
Position de mouvementTemps
a- Poutre non amortie
Enveloppe We(t)
TempsAmortisseur visco
b- Poutre avec amortissement visco
Temps
Amortisseur en friction
c- Poutre avec amortissement sec
Fig.1. Poutre en mouvement libre [ 137].
Dans le cas d’une réponse impulsion le mouvement alternatif s’inscrit dans une courbe
enveloppe exponentielle décroissante, Figure (1-b), en présence d’amortissement visqueux,
linéaire décroissante, Figure (1.-c) en présence d’amortissement sec. Ainsi le mouvement d’un

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 7
système avec amortissement visqueux pur prend théoriquement un temps infini pour mourir
complètement. Mais dans la pratique un système réel cumule différents types d’amortissement
qui ne dépendent pas exclusivement de la vitesse et qui contribuent donc à l’étouffement
complet du mouvement [98, 99, 109, 135]. Pour les systèmes à plusieurs degrés de liberté
l’amortissement étouffe avec le temps les modes de fréquences les plus élevées. Ainsi au bout
d’un certain temps le mouvement ne comportera que le mode fondamental permettant la
mesure de l’amortissement par décrément logarithmique dans le cas d’amortissement visqueux
et d’hystérésis pouvant être décrit par un module d’Young complexe.
En régime harmonique, un système à un degré de liberté se comporte en raideur en deçà
de sa fréquence propre, en inertie au delà. En l'absence d’amortissement aucun équilibre
dynamique ne peut être atteint à la résonance [23, 84, 67]. Dans la pratique et donc en présence
d’amortissement, l’amplitude de l’équilibre dynamique dépend de l’importance des forces
d’amortissement. La mesure de l’amortissement s’opère alors par la mesure de bande. Là aussi
la mesure d'amortissement sera unique pour certains types d'amortissement, tels que visqueux
ou d’hystérésis, mais dépendra de l'amplitude pour d'autres types d'amortissement, tels que le
frottement sec, et doit donc être employée avec une certaine attention.
2. Amortissement externe à la structure
L’amortissement externe est apporté par le fluide environnant [26], le contact avec une
autre structure ou un système mécanique
2.1 Rayonnement acoustique
Un milieu fluide environnant (air, l'eau, huile, ou d'autres gaz ou liquides) modifie la
réponse vibratoire d'une structure [21, 73].
2.1.1 Piston dans un tube
L'effet d'amortissement du milieu fluide dépend de plusieurs facteurs, dont la densité 'ρ
du milieu, la vitesse de propagation des ondes dans le milieu, et les caractéristiques de masse et
de rigidité de la structure elle-même [26, 133, 137]. Un système très simple, une masse
soutenue par des ressorts de raideur k agissant comme un degré de liberté ( )tw couplé sur
chaque extrémité à un milieu acoustique permet d’illustrer les principes mis en œuvre.
L'équation du mouvement de la masse m est
( ) aFtFkwdt
wdm −=+
2
2
, (1)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 8
où aF est la force due au milieu acoustique. Elle est déterminée en résolvant l'équation du
mouvement du milieu acoustique, la masse oscillant avec la vitesse ( )tw� . L'équation du
mouvement à satisfaire est l'équation d'ondes unidimensionnelle:
01
2
2
22
2
=−dt
d
adx
d ψψ. (2)
Dans cette équation a est la célérité de l’onde dans le milieu et ψ le potentiel vitesse dans
le milieu liquide, qui est lié à l'incrément de pression p et à la vitesse acoustique V par les
relations suivantes:
dt
dp
ψρ'−= , et dx
dV
ψ= . (3)
Si le déplacement de la masse m est ( ) tiWetw ω= , alors nous pouvons supposer que ( )tx,ψ est
de la forme ( ) tiex ωΨ , de sorte que la force Fa devient
( ) waRppRF LRa �'2 22 ρππ =−= , (4)
par conséquent l'équation (1) prend la forme :
( )tFkwdt
dwaR
dt
wdm =++ '2 2
2
2
ρπ , (5)
si maintenant ( ) tiFetF ω= , alors:
( ) 21
1
ωη mikF
W
e −+= , (6)
où
k
aRe
ωρπη '2 2
= , (7)
est le facteur de perte efficace du système à un seul degré de liberté. Il est proportionnel à ω : et
à la densité du milieu 'ρ : ainsi ce type d'amortissement est plus efficace aux fréquences
élevées et dans un milieu type liquide (eau, huile) plutôt que type gaz (air).
2.1.2 Amortissement acoustique d’une plaque
Le problème de prévoir l'effet d'un milieu acoustique sur la réponse d'une plaque est plus
compliqué que le cas précédent. Un élément de la plaque vibrant au point A, Figure 2, met en
mouvement le milieu acoustique et produit des ondes qui, en se propageant, créent des
pressions au point B.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 9
θ0
θr0
r’
r
o
ds
X
γ A
B
Fig.2. Amortissement acoustique
En champ libre, la pression est donnée par la formule de Rayleigh [137, 161]:
( ) ( )∫ −−−=S
arti dSer
rwip '
',
2' ωθ
πωρ �
, (8)
où S est la surface totale de la plaque, ( ) tierw ωθ,� la vitesse du plat au point B, et r' est la
distance de B à A donnée par ( )0022
0 cos2' θθ −−+= rrrrr . L’équation générale du
mouvement d'une plaque avec un milieu acoustique s’écrit en employant l'équation (1):
( ) ( )θθρ ω ,,2
24 rperF
dt
wdHbwD ti −=+∇ , (9)
où D est la constante de rigidité des plaques, H l’épaisseur, b la largeur, ρ la masse volumique
de la plaque. C'est une équation intégrale-différentielle qui peut être résolue, par exemple, par
analyse modale.
2.2 Piston de compresseur
Le fluide dans lequel une structure est immergée peut fournir d'autres mécanismes
d'amortissement comme la fuite de gaz [137]. Un piston comprimant alternativement un
volume de gaz fermé hermétiquement crée un incrément de pression tipeω∆ proportionnel au
mouvement du piston ( ) tieyxW ω, et aucune dissipation ne se produit. Si une petite fuite
survient, l'incrément de pression se modifie : ( )εω +∆ tipe , où ε est un angle de phase résultant de
la perte. L’écoulement de la fuite peut avoir un régime laminaire ou turbulent, selon
l’amplitude W, le volume du gaz 0V , la taille de la fuite, et le type de mode dans lequel le
panneau répond.
CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 10
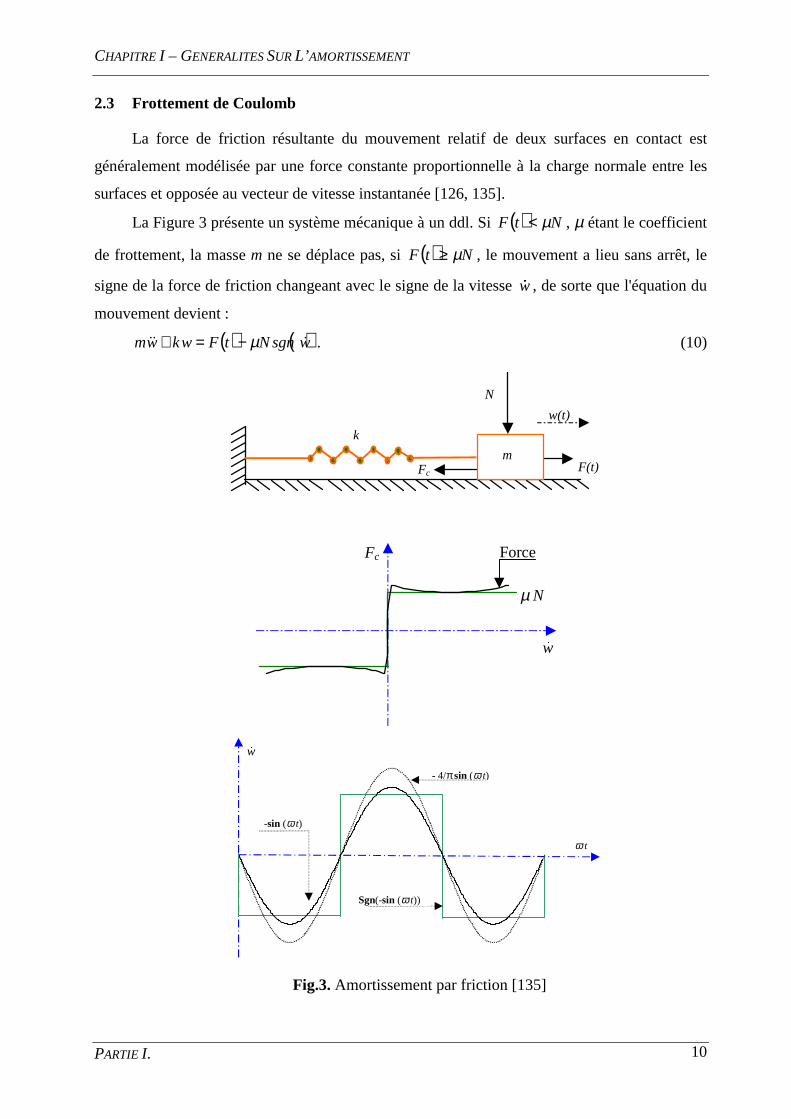
2.3 Frottement de Coulomb
La force de friction résultante du mouvement relatif de deux surfaces en contact est
généralement modélisée par une force constante proportionnelle à la charge normale entre les
surfaces et opposée au vecteur de vitesse instantanée [126, 135].
La Figure 3 présente un système mécanique à un ddl. Si ( ) NtF µ< , µ étant le coefficient
de frottement, la masse m ne se déplace pas, si ( ) NtF µ≥ , le mouvement a lieu sans arrêt, le
signe de la force de friction changeant avec le signe de la vitesse w� , de sorte que l'équation du
mouvement devient :
( ) ( )wsgnNtFwkwm ��� µ−=+ . (10)
Fc
k
N
w(t)
F(t) m
Force
µ N
w�
Fc
-sin (ω t)
Sgn(-sin (ω t))
ω t
- 4/π sin (ω t)
w�
Fig.3. Amortissement par friction [135]

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 11
Si la force est harmonique ( )tFF ωcos0= , la solution se recherche sous la forme :
( ) ( ) ( )( )( ) ( )t
k
F
k
NtCtCtw ω
ωωµωω cos
1sincos
20
00201 −
+±+= , (11)
où mk=20ω , et 21, CC sont les constantes de l'intégration.
3. Amortissement intrinsèque à la structure
L’amortissement dans les matériaux, considéré à l’origine comme un processus
clairement homogène, est en réalité un processus très complexe, qui obéit à nombre de
différents mécanismes. En fait, d'une façon générale, la dissipation de l'énergie mécanique dans
le matériau a lieu par un processus irréversible : transfert d'un état d’équilibre
thermodynamique de la structure interne à un autre état d'équilibre correspondant à de
nouvelles conditions imposées. Ce processus de transfert est accompli par une réorganisation
interne de structure [135, 167]. L'effet final de la dissipation représente, donc, une somme
d'effets provoqués par divers mécanismes de la reconstruction de la micro- et macro- structure.
Les mécanismes de la reconstruction interne incluent l'hystérésis magnétique (magnéto-
élasticité, magnéto-mécanique, magnétostriction, courant de Foucault), conductivité thermique
(thermoélasticité, thermique, diffusion thermique et écoulement thermique) et reconstruction
atomique.
Le dernier groupe inclut des effets liés à la diffusion, aux dislocations, à la relaxation
d'effort aux blocs de frontières de grain en matériaux polycristallins, aux processus de phase
dans les solutions pleines, etc. Pendant la déformation, tous les mécanismes d'amortissement
sont impliqués à un certain degré. Cependant, la contribution de chaque processus au
comportement d'amortissement général est différente parce que, dans des conditions externes
données et une gamme prescrite d'amplitude d'effort, chaque processus est relié à certaines
fréquences et températures ambiantes, dans lesquelles il est le plus prononcé. Les mécanismes
séparés responsables de la réorganisation interne de structure peuvent représenter des processus
réversibles ou irréversibles et peuvent être étroitement reliés à la température, à l'amplitude ou
à la fréquence de la déformation. De tels effets sont souvent fortement non-linéaires, ainsi
l'analyse détaillée de la réponse avec de tels mécanismes d'amortissement est habituellement
très difficile [11, 49, 75, 109].
Les processus typiques incluent :
- Relaxation amortissante qui dépend de la fréquence et de la température, mais pas de
l'amplitude de déformation. Le processus est réversible pour de petites valeurs d'amplitude :

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 12
anélasticité des matériaux. Le processus est irréversible pour de plus grandes amplitudes :
viscoplasticité [47],
- Amortissement résonnant qui dépend de la fréquence de résonance du mécanisme
particulier [99],,
- Amortissement structural qui dépend de l'amplitude de la déformation mais pas de sa
vitesse [135, 137],
- Facteurs amortissants qui dépendent de l’amplitude et la vitesse de la déformation [86,
90, 108],
- Facteurs visqueux non linéaires qui dépendent principalement de la température
[90, 179].
L'énergie par volume unitaire dissipée par cycle est très petite pour la plupart des
matériaux structuraux conventionnels, légèrement plus élevée pour certains alliages.
Les matériaux composites en général comme par exemple le boron-aluminium ou les
composés carbone-époxydes ont un très faible amortissement et un comportement fortement
non linéaire, [99]. Pour ce qui est des matériaux viscoélastiques l’amortissement viscoélastique
est exhibé fortement par les matériaux polymères et vitreux, et ce mécanisme de
l'amortissement interne a beaucoup d'application industrielle. L'amortissement résulte de la
relaxation et du rétablissement du réseau de polymère après qu'il ait été déformé, et une
dépendance forte existe entre les effets de fréquence et les effets de la température en raison du
rapport direct entre la température matériau et le mouvement moléculaire [34].
4. Propriétés et modélisation des caractéristiques dynamiques des matériaux
Les caractéristiques dynamiques des matériaux qui traduisent les propriétés de rigidité et
d'amortissement des matériaux, sont respectivement le module d’Young E et le facteur de perte
η [34, 35, 99,137, 179]. Ils changent en particulier avec la température, la fréquence de la
sollicitation et dans un degré moindre avec d’autres facteurs tels le vieillissement, le vide, le
rayonnement, l'huile,…
4.1 Effets de la température
La température est habituellement considérée comme le facteur environnemental le plus
important affectant sur les propriétés d'amortissement des matériaux [135, 137]. Cet effet est
illustré sur la Figure 4 où on peut observer quatre régions distinctes.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 13
- Région vitreuse. Avec la température, le module d’Young E évolue lentement et le
facteur de perte η fortement.
- Région transitoire. Le module dans cette région diminue rapidement avec
l'augmentation de la température, alors que le facteur de perte prend sa valeur maximum.
- Région caoutchouteuse. Le module et le facteur de perte prennent de faibles valeurs et
changent peu avec la température.
- Région d’écoulement. Le matériau continue à se ramollir avec la température, et
l’amortissement s’élève fortement.
Régionvitreuse
Régiontransitoire
Régioncaoutchouc
Régiond'écoulement
E
η
Température
fréquenceconstante
Fig.4. Effet de la température [137]
4.2 Effets de la fréquence
En utilisant la représentation complexe du module, ( )ωE et ( )ωη peuvent être
représentées analytiquement de différentes manières. Voici celle suggérée par [99, 137].
Le module d’Young E s’établit comme suit :
( ) ( )Φ−+= 1EEE��
ω (12)
où E�
et E�
sont les valeurs minimum et maximum du module du matériau pour ce qui
concerne la fréquence ω et Φ est une fonction de la fréquence satisfaisant les conditions
suivantes 0lim,1lim0
→→ ΦΦ∞→→ ωω
, qui peut être par exemple :
( )nωβ+=Φ
1
1, (13)
où β et n sont des constantes dépendantes du matériau. De même, pour le facteur de perte :

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 14
( )ω
ωπωηd
dE
E
=
2. (14)
Ainsi les deux expressions pour le facteur de module et de perte du matériel peuvent
s’écrire en fonction de la fréquence sous la forme :
( )( )
−+=
+ nEEE
ωβω
1
11
��, (15)
( ) ( )( ) ( )( )21
2 nE
nEn
ωβω
ωβπωη+
=
�
. (16)
Pour utiliser la forme complexe ( )"'* iEEE += il faut que ( )ωE ′′ devienne :
( ) ( ) ( ) ( )
( )2
12
==′′
+ n
nEnEE
ωβ
ωβπωηωω�
. (17)
( )ωE ′′ atteint sa valeur maximum, quand ( ) 1=nβω , et on trouve que la valeur maximum du
module de perte:
En
E�
8max
π=′′ . (18)
Ainsi le nombre n peut facilement être déterminé à partir des valeurs maximums des
modules de stockage et de perte.
4.3 Effets de fréquence-température
Il est difficile de pouvoir dissocier les effets de la température des effets de la fréquence
puisque la température du matériau s’élève sitôt qu’il est soumis à une sollicitation alternative
[75, 90, 98, 135]. Une des techniques les plus utiles pour présenter les données expérimentales
sont le principe d'équivalence de fréquence-température (fréquence réduite) pour matériaux
viscoélastique à comportement linéaire. Dans ces approches ( )ETT ρρ00 et η sont tracés en
fonction de la fréquence réduite Tαω , où ω est la fréquence réelle, Tα est une fonction de la
température absolue T, et T0 est une température absolue de référence. L'expression analytique
pour la variation des propriétés d'amortissement avec la fréquence peut être prolongée pour
inclure les effets de la température si le facteur de glissement ( )Tα est connu comme fonction
de la température, de sorte que les équations (15) et (16) soient réécrites sous la forme
( ) ( )
+
−+=n
T
EETEβωα
ω1
11,
��, (19)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 15
( )( )( ) 2
12
=
+ nT
E
nT
En
ωαβ
ωαβπωη�
, (20)
où Tα est déterminé en fonction de la température. Il peut avoir plusieurs formes [99], dont
notamment :
∞−−−=
TT
TTCT
01logα , (21)
où Cl, 0T , et ∞T , sont des constantes matérielles à déterminer expérimentalement.
Fig.5. Effet de la fréquence réduit [99] Fig.6. Facteur de glissement [99]
Pour un matériau typique comme le caoutchouc le module d’Young augmente toujours
avec la fréquence, Figure 5. Le facteur de perte augmente avec la fréquence dans la région
caoutchouteuse, prend sa valeur maximum dans la région de transition, et diminue dans la
région vitreuse, [90, 99, 120]. La Figure 6 représente l’évolution du facteur de glissement en
fonction de la température.
4.4 Effets généraux
Une représentation plus générale des caractéristiques des matériaux est [99, 137] :
( ) ( ) ( )( ) ( )εωλλεωλ ,,
6,,,
21
2211 TECC
FCFCTE
++= , (22)
( ) ( ) ( )( ) ( ) ( )εωη
λλλεωλη ,,,,,2211
221 TFCFC
FCCT
++= , (23)
où E(λ,ω,T,ε) et η(λ,ω,T,ε) sont fonction de la déflexion statique λ, de la fréquence ω, de la
température T, et de la déformation ε. Les constantes C1, et C2 sont déterminées à partir de
106104102110-2102
103
104
105
0.1
1
10
Mod
ule
d’él
astic
ité
E
Fact
eur d
e pe
rte
η
Fréquence réduite fαT
T-2
T-1
T0
T1
T2 E
η
T2T1T0T-1T -2
10-2
10-1
1
102
Fa
cte
ur
de
glis
se
me
nt
α T
La tem pératu re
10

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 16
mesures statiques, tandis que E(ω,T,ε) et η(ω,T,ε) sont déterminés à partir des mesures
dynamiques.
5. Modélisation de l’amortissement
La rhéologie est à la base de la modélisation des phénomènes d'amortissement : c’est la
science de la déformation et de l’écoulement de la matière. La première direction dans laquelle
la rhéologie s'est développée, appelée théorie microscopique, est basée sur les modèles discrets
de la physique moderne et emploie les résultats concernant la structure interne de la matière
pour décrire des processus exécutés à l'intérieur du milieu en termes d'interactions atomiques et
moléculaires. La deuxième direction, habituellement celle de la technologie, s'appelle
l'approche macroscopique et comprend des théories basées sur des aspects phénoménologiques
de la physique. L'approche macroscopique de la rhéologie fonctionne en terme d'équations
d'état basées sur les lois de la thermodynamique des processus irréversibles, qui peuvent être
écrites sous la forme très générale [99, 135, 137] :
( ) ( )( ) 0,.,.,,, 21 =TtDDf εσ , (24)
où f, représente un vecteur fonction des variables, σ le tenseur de contrainte, ε le tenseur de
déformation, t le temps, T la température, D1 et D2 les opérateurs différentiels, intégraux ou
combinés, (généralement non-linéaires), d'autres variables les propriétés physico-chimiques du
milieu et des conditions environnementales externes.
Les équations d'état sont généralement des modèles du comportement matériau et, selon
l'effet de l'excitation externe (forces externes, champ de température, champ magnétiques,
réactions chimiques, rayonnement, etc.), décrivent les matériaux avec un certain degré
d'approximation. D'une façon générale, au niveau actuel, des données expérimentales sont
employées pour établir un modèle mécanique pour chaque matériau.
5.1 Modèle linéaire standard
Le modèle linéaire standard [135, 137] relie contrainte σ et déformation ε:
+=+
dt
dE
dt
d εβεσασ , (25)
Les étapes suivantes illustrent divers aspects du comportement rhéologique.
Soit le cas d’une contrainte constante σ0 appliquée au temps t = 0 à une éprouvette. Alors
0=dtdσ . Si de plus ε = 0 à t = 0, l’équation (25) donne :
( )βσε te
E−−= 10 . (26)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 17
Puis si une première déformation ε0 est appliquée soudainement à t = 0, alors 0=dtdε .
Si de plus σ = 0 à t = 0, l'équation (25) donne
( )αεσ teE −−= 10 , (27)
où α est la constante de relaxation de contrainte.
Quand les contrainte et déformation sont harmoniques, tie ωσσ 0= et tie ωεε 0= ,
l'équation (25) donne
( ) 00 "' εσ iEE += , (28)
où
++=
22
2
1
1'
αωαβω
EE et ( )
+−=
221"
αωαβω
EE , (29)
Les relations (29) donnent une variation de E' et de E" avec la fréquence beaucoup plus
forte que ce qui est usuellement observé.
5.2 Modèle standard généralisé
Les limitations de la forme simple du modèle standard peuvent être repoussées [99, 135,
137] en présentant les dérivées additionnelles de σ et de ε dans l'équation (24) pour donner :
+=+ ∑∑
==
n
ii
i
i
n
ii
i
i dt
dE
dt
d
11
εβεσασ . (30)
Pour la réponse harmonique, de la forme tieωσσ 0= et tieωεε 0= , ceci donne maintenant
( ) 00 "' εσ iEE += , (31)
où E' et E" sont maintenant des fonctions en ω beaucoup plus compliquées. Les constantes αi et
βi sont calées à partir de la mesure de E' et E" en fonction de la fréquence. Le nombre
substantiel de valeurs βi et αi nécessaires pénalisent ce modèle. Cependant ce n’est pas
particulièrement difficile à traiter, puisque les expressions pour E' et E" deviennent maintenant
(avec α0 = 1, β0 = 1) :
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
++=
αωαωαωαωβωαωβωαω
GGFF
GGFFEE' , (32)
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
++=′′
αωαωαωαωβωαωβωαω
GGFF
FGGFEE , (33)
où

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 18
( ) ( ) ,10
22∑
=
−=nf
k
kk
kF ωλλω , (34)
( ) ( ) ,10
1212∑
=
++−=
ng
k
kk
kG ωλλω , (35)
avec
( )( ) ( )( )314
1
2
1,11
4
1
2
1 +−−=−−+= nn
nn ngnf . (36)
5.3 Modèle à dérivées généralisées
Afin de réduire le nombre de termes exigés par le modèle standard généralisé, les
dérivées utilisées jusqu'ici peuvent être remplacées, par les dérivées partielles [156, 169] :
( ) ( )( ) ( ) ( )( )
+=+ ∑∑
==
n
ii
n
ii tDtEtDt ii
11
εβεσασ νµ , (37)
où iDµ et iDν opérateurs dérivées généralisées sont définis par :
( )[ ] ( )( )
( )∫ −−Γ=
t
i
dt
x
dt
dtxD
i
i
01
1 τττ
λ λλ , (38)
avec 10 << iλ et + est la fonction Gamma. Il faut noter que comme avec le modèle standard
généralisé cette définition permet d'obtenir des solutions dans le domaine du temps au moyen
de la transformée de Laplace ce qui est d’un grand intérêt quand ( ) tiet ωσσ 0= , ( ) tiet ωεε 0= .
L’équation (37) se réduit à :
( ) ( )
+=
+ ∑∑
==
n
kk
n
kk
kk iEi1
01
0 11 νµ ωβεωασ , (39)
Cette équation s’exprime sous la forme complexe :
( ) 00*
0 "' εεσ iEEE +== , (40)
avec
( )
( )
+
+=
∑
∑
=
=n
nk
n
kk
k
k
i
i
E
E
1
1
1
1Re
'
µ
ν
ωα
ωβ, (41)
( )
( )
+
+=
′′
∑
∑
=
=n
nk
n
kk
k
k
i
i
E
E
1
1
1
1Im
µ
ν
ωα
ωβ(42)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 19
5.4 Module complexe
Les constantes élastiques peuvent être remplacées en régime dynamique par des quantités
complexes avec partie imaginaire identique si le coefficient de Poisson varie faiblement avec la
fréquence [116].
Le module complexe représente une méthode commode pour décrire simplement le
comportement viscoélastique :
( ) ( ) ( )( ) 00*
0 "' εωωεωσ iEEE +== . (43)
Si l'on ne s'intéresse qu'aux régimes sinusoïdaux, il est démontré [34, 35, 179] que le
module d'Young du matériau viscoélastique s'écrit :
( )ηiEEiEE +=′′+′= 1* . (44)
Ces deux facteurs dépendent notamment à la fois de la fréquence ω, et de la température
T, selon des lois qui peuvent être connues expérimentalement mais qui n'ont pas de
formulations analytiques.
5.5 Boucles d'Hystérésis
Dans le cas de variations harmoniques de σ et ε, la relation unidirectionnelle (43) devient
[75] :
dt
dEE
εω
εσ ′′+′= , (45)
qui pour ( ) ( )tt a ωεε sin= , peut se mettre sous la forme :
22 εεεσ −′′±′= aEE . (46)
En terme de force-déflexion, la relation (46) devient :
22 δδδ −′′±′= akkF , (47)
avec
kk ′′′, parties réelle et imaginaire de la raideur complexe
δ,F force et déflexion en fonction du temps
aδ amplitude de déflexion
Dans l’espace ( )εσ , , ou ( )δ,F les relations (46) et (47) présentent une boucle
d’hystérésis Figure 7. Il s’agit d’une ellipse à partir de laquelle on peut trouver [90, 186]:
y
y
a
y
a
y
a
b
E
EbE
aE =
′′′
==′′=′ ηεε
,, , (48)
ou bien :

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 20
y
y
a
y
a
y
a
b
k
kbk
ak =
′′′
==′′=′ ηδδ
,, . (49)
Fig.7. Boucle d’hystérésis - ellipse Fig. 8. Boucle d’hystérésis – non linéaire
L’ellipse d’hystéresis, Figure 7, est caractéristique d’un comportement linéaire, dans
l’hypothèse où σ et ε sont des fonctions harmoniques. Dans le cas du comportement élastique à
frottement sec, les équations (46) et (47) ne sont plus valables; la boucle n’est plus purement
elliptique, Figure 8. A partir de sa forme on peut donc statuer sur le type de comportement du
matériau.
On peut alors caractériser le comportement par une approche qualitative basée sur les
notions effectives de raideur dynamique ke et coefficient de perte ηe [71, 75] :
minmax
minmax
δδ −−= FF
ke , ( )
minmax
0minmax
FF
FFe −
−= =δη . (50)
La Figure 9 présente des boucles faiblement et fortement non linéaires [135, 137].
Nombre d'analyses non-linéaires de la réponse amortie des structures ont été effectuées en
utilisant les représentations analytiques d'une telle boucle d'hystérésis, chaque moitié de la
boucle ayant une forme fonctionnelle différente. Une représentation possible est :
( )( )
−±= − nnn
nE 0
10 2 εεενεσ # . (51)
où le signe (-) représente le chargement du cycle et le signe (+) le déchargement. Une forme
alternative, légèrement plus simple, est
( ) ( )
−±=
n
E2
00 1
εεεεηεεσ , (52)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 21
avec ( ) βεαε
+=
1
EE
Fig.9. Boucle d’hystérésis non linéaire
L'identification des paramètres de ces équations n'est pas une tâche simple, car cela exige
nombre de mesures effectuées pour diverses amplitudes de sollicitation à diverses fréquences et
températures.
5.6 Dissipation d'énergie
La dissipation d'énergie pendant un cycle de déformation du volume unitaire d’une
éprouvette est donnée par :
∫= εσ dD , (53)
d’après (45) avec ( )tωεε sin0= l’équation (53) devient
20'επηED = , (54)
Comme l'énergie maximum stockée U = 2' 20εE , elle est une mesure importante des
capacités d’amortissement du matériau, UD πη 2= .
5.7 Fonction de dissipation de Rayleigh
Lorsque la modélisation utilise une approche globale il est classique de prendre en
compte l’amortissement visqueux dans les équations de Lagrange par le biais de la fonction de
dissipation de Rayleigh R, [144].
nrq
R
q
V
q
T
q
T
dt
d
rrrr
,,2,1, ���
=∂∂−
∂∂−=
∂∂−
∂∂
,s (55)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 22
où T, V, sont respectivement les énergies cinétique et potentielle et qr les coordonnées
généralisée.
La valeur numérique de la fonction R à l'instant t représente la moitié de l’énergie
dissipée par unité de temps.
5.7.1 Exemple 1 : forces de dissipation
Soit un système mécanique défini par :
( ) ( )222222
2
1,
2
1yqxpVyxT +=+= �� , (56)
et
( )22 22
1yByxHxAR ���� ++= , (57)
où, p, q, A, H, B sont des constantes. En appliquant les équations (55) les équations qui
régissent le mouvement sont alors :
=+++
=+++0
02
2
xHyqyBy
yHxpxAx
����
����(58)
Ainsi la fonction de dissipation R génère des forces d’amortissement.
5.7.2 Exemple 2 : forces gyroscopiques
Soit un système holonôme (l’énergie cinétique est une forme quadratique de la vitesse,
les équations des liaisons ne contiennent pas les vitesse, et) qui a n coordonnées généralisées
q1, q2, …, qn et qui est défini par :
∑∑= =
=n
r
n
ssrrs qqmT
1 12
1�� , (59)
∑∑= =
=n
r
n
ssrrs qqkV
1 12
1, (60)
∑∑= =
=n
r
n
ssrnrs qqqqfR
1 11 ),,( ��� , (61)
où m , k sont des matrices symétriques et constantes et f est une matrice symétrique dépendant
de q1, q2, …, qn.. L’application des équations de Lagrange (55) donne l’équation:
0),,(2 1 =++ rnrsrrsrrs qqqfqkqm ���� . (62)
Cet exemple montre donc comment des forces gyroscopiques peuvent être introduites par
la fonction de dissipation.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 23
5.8 Synthèse
La dissipation d’énergie est décrite efficacement par le facteur d’amortissement η
d'amortisseur pour le modèle rhéologique linéaire standard. Ce coefficient peut être considéré
comme une constante ou une fonction des paramètres du mouvement permanent, tels que
l'amplitude et la fréquence [135]
• constante== vηη : amortissement visqueux. Dans ce cas-ci la force d'amortissement
dépend linéairement de la vitesse et si le mouvement est périodique, l'amortissement
dépend seulement de la fréquence du processus
• constante, == hh ηωηη : amortissement hystérétique. Si le mouvement est
monoharmonique, l'effet d'amortissement ne dépend pas de la fréquence.
• ( )ωηη = : l’amortissement est fonction de la fréquence du mouvement
monoharmonique. La forme de la fonction peut être déterminée expérimentalement.
• ( )max,εωηη = : l’amortissement est fonction de la fréquence et de l'amplitude du
processus monoharmonique, la forme de la fonction est obtenue à partir de l'expérience ou
du calcul.
6. Réponse de systèmes amortis en régime harmonique
Il s’agit ici de résoudre et de comparer les réponses harmonique et transitoire d’un
système mécanique le plus simple possible, prenant en compte un amortissement structural ou
visqueux. Dans un système avec amortissement visqueux l'énergie absorbée par le cycle dépend
linéairement de la fréquence de l'oscillation, tandis que pour un système amortissement
structural (ou avec hystérétique) elle est indépendante de la fréquence [75, 137].
6.1 Amortissement visqueux.
Le système à 1ddl w(t), se compose d'une masse m fixée à un ressort k, et un amortisseur
visqueux avec une force d'excitation ( )tF ωcos0 appliquée à la masse. Le mouvement est décrit
par l’équation :
( ) ( ) ( ) ( )tFtkwtwCtwm ωcos0=++ ��� . (63)
Deux solutions se superposent :
1- Une oscillation transitoire de fréquence naturelle et dont l'amplitude dépend des
conditions initiales et s’éteint avec le temps
( )tCtCew ddta
c ωω cossin 21 += − . (64)
2- Une oscillation permanente de fréquence ω de la force d'excitation et de phase ε

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 24
( )( )εω
ωω−
+−= t
Cmk
Fwp cos
2222. (65)
Et la solution totale :
( )( )
( )εωωω
ωω −+−
++= − tCmk
FtCtCew dd
at coscossin2222
21 , (66)
où
m
Ca
2= ,
2
2
−=
m
C
m
kdω ,
−= 2arctan
ωωεmk
C. (67)
A mesure que la fréquence augmente, le terme d'inertie wm 2ω− augmente jusqu’à la
valeur égale à la force de rigidité kw. C'est l'état connu sous le nom de résonance. L'amplitude
de la vibration est limitée seulement par l'amortissement. Aux fréquences d’excitation bien au-
dessus de la résonance le terme d'inertie domine complètement, et l'amplitude de réponse
devient très petite et a lieu en opposition de phase avec l'excitation ( $180≈ε ). Aux fréquences
d’excitation bien en deçà, la force de raideur domine et la réponse de la masse est en phase
avec l'excitation ( 0≈ε ) : l'amplitude du déplacement permanent dynamique est
approximativement égale au déplacement statique qui serait provoqué par une force constante
F. Trois fréquences principales peuvent être distinguées pour le cas visqueux:
1. La fréquence naturelle mkn =ω .
2. La fréquence normale amortie ( )22mCmkd −=ω .
3. La fréquence de résonance d’amplitude pour laquelle 0Fwp est un maximum. Pour
trouver cette dernière fréquence, de l'équation (65) on trouve
−=
km
C
m
kr 2
12
ω .
6.2 Amortissement hystérétique.
L’amortissement visqueux utilisé a été choisi principalement pour la convenance
mathématique. L'amortissement structural (ou hystérétique), basé sur le concept d'un module
complexe, peut souvent être efficacement utilisé dans le calcul. Supposons que le coefficient
d’amortissement visqueux dans l'équation (63) soit ωηkC = . En utilisant la notation
complexe, wiw ω=� , l'équation (63) devient :
tieFwkwm ω0
* =+�� , (68)
avec ( )ηikk += 1* , la raideur complexe de la suspension qui contient raideur et amortissement.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 25
Système avecAmortissement visqueux
Système avecAmortissement hystérétique
Equation différentielle ( )tFkwwCwm ωcos=++ ��� ( ) ( )tiFeRewikwm ωη =++ 1��
Solution permanente( )
( ) 2222
0 cos
ωω
εω
Cmk
tFwp
+−
−=( )
( ) 2222
0 cos
ηω
εω
kmk
tFwp
+−
−=
Energie dissipée par cycle
∫= FdwDS
2pWCD ωπ= 2
pWkD ηπ=
Fréquence de résonance
−=
km
C
m
kr 2
12
ωm
kr =ω
Déplacement statique à 0=ωk
F0
( )20
1 η+k
F
Amplitude de Résonance ( )Ckmf ,, ( )η,kf
Tableau 1 Comparaison entre l’amortissement visqueux ou hystérétique [137]
ω r = ω r (α)
ω
F
W
k
1
O
m
F
ck
ω
F
W
O
m
F
k∗ = k(1+i η)
mkr =ω
Fig.10. Réponse dynamique des systèmes visqueux et hystérétique

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 26
6.3 Effets des amortissements visqueux et hystérétique
La Figure 10 et le tableau 1 synthétisent et comparent les résultats principaux liés à un
système avec amortissement visqueux ou hystérétique soumis à un régime harmonique
permanent.
6.4 Système réel
Dans les systèmes réels se combinent différents types d’amortissements (visqueux,
hystérétique, …) aussi il est particulièrement difficile de modéliser avec grande précision la
réponse de systèmes mécaniques industriels [109].
7. Mesure de l’amortissement
L’amortissement se mesure au travers de la réponse du système amorti.
7.1 Régime forcé
7.1.1 Mesure par la largeur de bande
La Figure 11 présente la réponse du système à amortissement visqueux à 1ddl autour de
la fréquence de résonance [106]. En substituant la fréquence de l'amplitude maximum, dans la
solution particulière de la réponse forcée, l'équation (65), l'amplitude à la résonance devient :
W
n
Wres
Wres
A B
ω 1 ω 2ωres ω
Fig.11. Réponse du système à amortissement visqueux autour de la résonance
( )
−=
2
0
12
1
ααk
FW
resp , (69)
où mk
C
2=α .

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 27
Pour trouver les fréquences des points A et B où l'amplitude est n1 fois ( )respW , la
réponse de l'équation (65) est égale (n1 ) fois de la réponse de l'équation (69) :
( ) ( ) 2
0
222
0
1221 αααξξ −=
+− n
kFkF, (70)
avec 0ωωξ = . Pour 14
2
<<km
C, les deux solutions 2,1, =iiω sont données par l'équation:
11 2 −±= ni αξ , (71)
d’où :
−−
=nn ωωωα 12
2 12
1, (72)
pour 2=n
nωωα
2∆= , (73)
où le terme ( ) cCCkmC /2/ ==α , est le facteur d’amortissement visqueux, et cC est
l'amortissement critique du système. Des calculs semblables peuvent être effectués pour le
système avec amortissement hystérétique. Dans ce cas-ci l'amplitude à la résonance est
( )ηk
FW
resp0= , (74)
où mkres =ω . Les fréquences aux points A et B de la Figure 11, où la réponse est n1 fois
( )respW , sont indiquées par
( )11 22,1 −±= n
m
k ηω . (75)
Par conséquent pour 2=n :
ηηω
ω −−+=∆11
res
. (76)
Et pour 1<<η
resωωη ∆≈ . (77)
Les équations (73) et (77) montrent que
αη 2≈ . (78)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 28
7.1.2 Mesure par l’amplitude à la résonance
Le facteur de surtension ou de qualité Q est défini comme le rapport de l'amplitude de la
réponse à la résonance au déplacement si la force est appliquée statiquement [106] :
( )kF
WQ resp
0
= . (79)
A partir des équations (69) et (79), on peut dire que dans le cas de l'amortissement visqueux
212
1
αα −=Q . (80)
Pour 1<<α cela se réduit à la relation familière :
Q2
1=α . (81)
De même pour l'amortissement hystérétique, l'équation (74) et (79) donne :
Q
1=η . (82)
7.2 Régime libre
7.2.1 Amortissement visqueux.
L'équation du mouvement du système à un degré de liberté avec amortissement visqueux,
soumis à une force impulsion ( )tF δ à 0=t , est écrite sous la forme homogène [106, 137] :
0=++ kwwCwm ��� . (83)
La solution de cette équation dans le cas 12 <kmC est :
( ) ( )φωαωα +−= − teAtw t0
21cos0 , (84)
où kmC 2=α , mk=0ω . Le terme ( )φωα +− t021cos est égal à unité quand
( ) 20 12 αφπω −−= nt , n = 0, 1, 2, … Ainsi le rapport des amplitudes maximales pour n1 et
n2 est:
( )( )
−
−−
=2
21
2
1 1 α
παnn
n
n ew
w. (85)
En particulier, pour 112 += nn
( )21ln
2
1
απαδ−
=
=
n
n
w
w, (86)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 29
22 πδδα+
= , (87)
où δ est connu comme le décrément logarithmique.
7.2.2 Amortissement élastoplastique
La figure (3) montre un système avec un frottement de type Coulomb, l’équation du
mouvement libre de la masse s’écrit avec comme déplacement initial w0:
( ) 0sgn =++ kwwNwm ��� µ , (88)
avec mgN = , cette équation est non linéaire du type « linéaire par morceaux » [106, 135].
Nous cherchons une solution particulière de l'équation (88), satisfaisant les conditions initiales
( ) ( ) 00,00 0 =>= www � . (89)
Considérons deux demi-périodes du mouvement :
nt ωπ≤≤0 et nn t ωπωπ 2≤≤ , (90)
où mkn =ω représente la fréquence propre du système. Puisque 00 >w , la première demie-
période du mouvement s'effectue vers la gauche. Dans ce cas, la force de frottement est dirigée
vers la droite et l'équation du mouvement a la forme :
0=+− kwNwm µ�� , (91)
et compte tenu des conditions initiales (89), l’équation (91) admet pour solution particulière :
( ) ( )k
Nt
k
Nwtw n
µωµ +
−= cos0 . (92)
Cette phase du mouvement prend fin lorsque nt ωπ= . On trouve à cet instant :
( ) ( ) 0,20 =+−= nn wk
Nww ωπµωπ � . (93)
Pour la seconde demie-période le mouvement s'effectue vers la droite et la force de frottement
change de signe. On a donc :
0=++ kwNwm µ�� , (94)
et la solution particulière de cette équation avec les conditions initiales (93) s'écrit :
( ) ( )k
Nt
k
Nwtw n
µωµ −
−= cos30 . (95)
Ce procédé de découpage en phases successives de mouvement, pendant lesquelles la
vitesse garde un signe constant peut être poursuivi. Ainsi après chaque demie-période nωπ
l'amplitude du mouvement W(t) diminue de kNµ2 . Pour la n-ième demie-période (dans ce
cas la période est constante), on a :

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 30
( ) ( ) ( ) ( )k
Nt
k
Nnwtw n
n
µωµ 10 1cos12 +−+
−−= . (96)
w
4µN / k
Wn
Wn+2
µN / k
4π /ωn
w0
0t
tf
Fig. 12. Vibrations libres du système avec friction de Coulomb
Les vibrations continuent jusqu’à l'instant ftt = pour lequel :
( )k
Ntw f
µ= , (97)
quand ftt > le mouvement s’arrête. on a montré ici, que pour un système non linéaire il est
parfois possible de trouver assez facilement une solution particulière.
Pour calculer le facteur de friction, il y a deux méthodes :
a) Evaluation de la dissipation d’énergie par le décrément logarithmique
=
+2
lnn
n
W
Wδ , (98)
où 2, +nn WW respectivement sont les amplitudes maximales au bout de la n-ième et (n+2) iéme
demie-période, ( ) ( )( )TnwWnTwW nn 2, 2 +== + . Dans le cas considéré :
( )
+−
−=kNnw
kNnw
µµδ22
2ln
0
0 , (99)
dans le cas δ est une petite quantité, on peut trouver le facteur de frottement donc :
δµN
kw
40≈ . (100)
b) Evaluation de la dissipation d’énergie par la méthode de boucle d’hystérésis

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I. 31
w0w0 – 2(n + 1) (µN / k)
- w0 + 2n (µN / k)
2 µN
w
kw ± µN
Fig. 13. Boucle d’hystéresis. Friction de Coulomb
La Figure 13 représente les forces appliquées au système en fonction du déplacement, S
représente l’aire interne dans la boucle qui est proportionnelle à la quantité de l’énergie dissipée
pendant une période du mouvement (le travail effectué et dissipé) :
( )
+−= 124 0 n
k
NwNS
µµ , (101)
le coefficient de la dissipation ψ relative s’écrit :
U
S=ψ , (102)
où U désigne l’énergie des vibrations d’un cycle en négligeant la dissipation. Elle est égale à
l’énergie potentielle maximale :
202
1wkU = , (103)
on a donc :
( )
+−= 1218
00
nwk
N
wk
N µµψ , (104)
si on accepte que le facteur ψ égale δ2 (où δ est petit), on a :
δψµN
wk
N
wk
48
1 00 =≈ . (105)
Les relations (100) et (105) montrent que les deux méthodes sont équivalentes.
Related Documents











