Chandra Chekuri, Nitish Korula and Martin Pal Proceedings of the nineteenth annual ACM-SIAM symposium on Discrete algorithms (SODA 08) Improved Algorithms for Orienteering and Related Problems Presented By: Asish Ghoshal

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Chandra Chekuri, Nitish Korula and Martin Pal
Proceedings of the nineteenth annual ACM-SIAM symposium on Discrete algorithms (SODA 08)
Improved Algorithms for Orienteering and Related Problems
Presented By: Asish Ghoshal
The Problem
• Given a graph G(V,E) (directed or undirected), two nodes s,t ϵ V and a non-negative budget B, find an s-t walk of total length at most B so as to maximize the number of distinct nodes visited by the walk.
• A node may be visited multiple times by the walk but is only counted once in the objective function.
• Motivated from real world problems in vehicle routing, robot motion planning.
Quick Facts
• Is NP-hard
• Is APX-hard (cannot be approximated within 1481/1480)
• Introduced in 1987 by Bruce L. Golden, Larry Levy, and Rakesh Vohra

Introduction
• Orienteering belongs to the class of prize collecting TSP.
• Given a set of cities with some “prize” associated with each city and given a set of pair wise distances, a salesman needs to pick a subset of cities so as to minimize distance and maximize total reward.
• Bi-criteria optimization problem.

Introduction
• General approach:
• Fix one criteria and optimize the other– K-TSP, k-Stroll
Fix: No of nodes (total reward)
Optimize: distance
– OrienteeringFix: Total distance (budget)
Optimize: Reward (no of nodes covered)

The Story So far
• First non-trivial approximation: 2 + Ɛ (Arkin, Mitchell and Narasimhan) for points on Euclidean plane.
• 4 (Blum et al) for points on arbitrary metric spaces.
• 3 (Bansal et al)
• PTAS (K. Chen and Har-peled) for fixed dimensional Euclidean space.

Results
• Undirected graphs:– Ratio of (2+δ) and running time of nO(1/ δ^2)
• Directed Graphs:• Ratio O(log2 OPT)
Approach
• The basic approach:
Approximation of k-stroll -> approximation of minimum excess -> approximation for Orienteering.

The MIN_EXCESS Problem
• The excess of a path P is defined as the difference between the length of the path L and the shortest distance D between its end points. i.e excess(P) = L – D
• Given a weighted graph with rewards, end points s and t, and a reward quota k, find a minimum excess path from s to t collecting reward at least k.

MIN_EXCESS (Contd)
• If x is the excess of an optimal path, an α-approximation for the minimum-excess problem has length at most:
d(t) + αx ≤ α(d(t) + x)
and hence gives an α approximation for the minimum length problem.
Note: d(t) is the shortest distance between the end points of the path.

K-stroll to Orienteering via min-excess
1. In undirected graphs a β-approximation to the k-stroll problem implies a (3 β/2 – ½)-approximation to the minimum excess problem (Blum 2003)
2. In directed graphs a β-approximation to the k-stroll problem implies a (2β - 1)-approximation to the minimum excess problem.
3. A γ-approximation to the min-excess problem implies a | γ| approximation for orienteering. (Bansal 2004)

• 2 and 3 can be extended to show that an (α,β)-approximation to the k-stroll algorithm for directed graphs gives (α|2β -1|)-approximation for directed orienteering.
• Using 1 and 3 and a (1 + δ,2)-approximation for the k-stroll problem gives a ((1+ δ)*|2.5|) = (3 + δ)-approximation for orienteering.
• But we are interested in (2 + δ) approximation.
K-stroll to Orienteering via min-excess

(2 + δ) approach
• Begin with k-stroll
• Given a metric graph G, with 2 specified vertices s, t and a target k, find an s-t path of minimum length that visits at least k vertices.
• Let L be the length of such an optimal path and D be the shortest path distance from s to t.
(2 + δ) approach (Contd)
• Objective: For any fixed path that visits at least (1-O(δ))k vertices and has total length at most max1.5D,2L-D
• (Chaudhuri et al 2003) give a polynomial algorithm to find a tree T that spans k vertices containing both s and t, of length at most (1+ Ɛ)L for any Ɛ > 0
• Guesses O(1/Ɛ) vertices s,w1..wm,t such that an optimal path P visits the vertices in the given order and length and distance between any wi-wi+1 is < ƐL.
• Assume all edges in T are < ƐL.

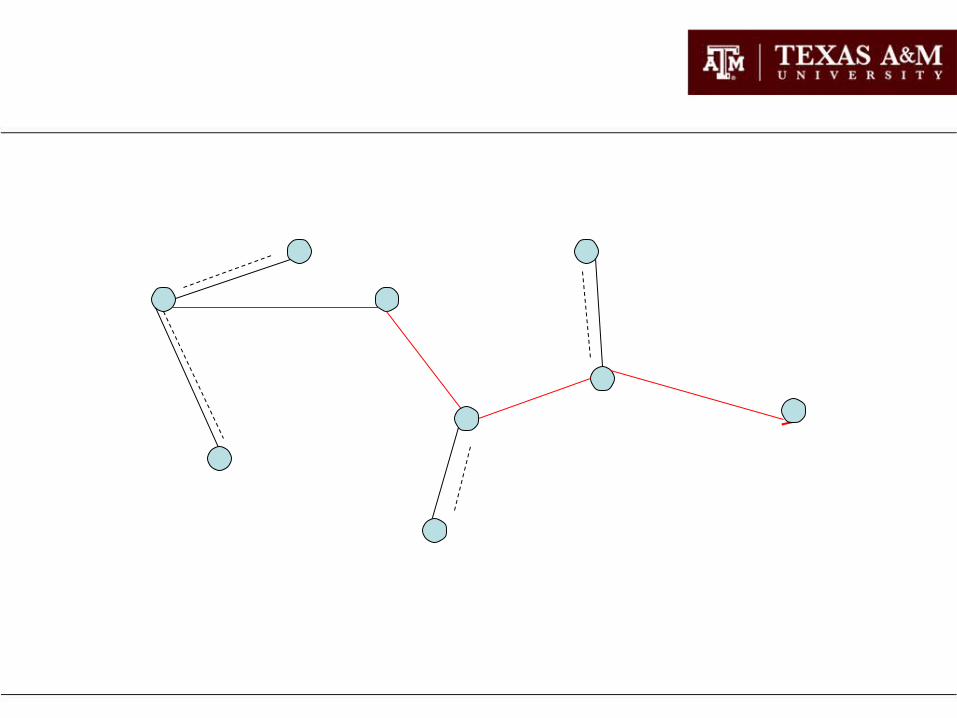
• Let PTs,t be the path in T from s to t.
• L is the shortest s-t path visiting k vertices.
• Since length(T)<= (1+Ɛ)L
We can double all edges of T not on PTs,t to
obtain a path PT from s to t that visits k vertices.
Length of PT is 2length(T)-length(PTs,t) <=
2length(T) - D

Easy Doubling conditions
• If length(T) <= 5D/4 then PT has length at most 3D/2).
• Length(PTs,t) >= D+2ƐL then
length(PT) <= 2(1+Ɛ)L – (D + 2ƐL) = 2L - D

• If the easy doubling conditions are not met it means D <= 4/5(length(T)) and length(PT
s,t) >= (1/5 - 2Ɛ)L
• Modify the tree T to T’ in the following way:
• Greedily decompose the edge set of T\PTs,t into
Ω(1/δ) disjoint connected components, each with length in [δL,3δL)
• Merge connected components to get T’• Tree T’ contains a vertex of degree 1 or 2 that
corresponds to a component containing at most 32δk vertices.
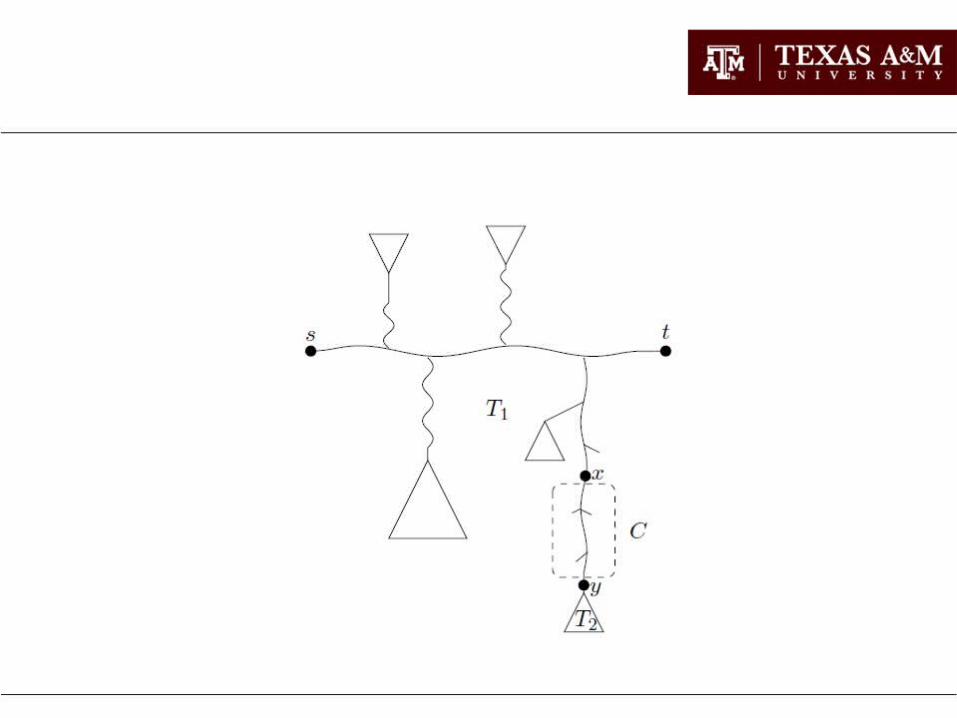

• Remove C• C can either be a leaf or a node with degree 2
and contain at most 32δk vertices.• So we get a tree T’’ of length (1-32δ)k vertices.• If C is not a leaf we get two Trees.• Find the shortest distance between trees.• In either case double edges and we get a tree of
length at most 2L-D and we are done.

Conclusion
• Using results from Orienteering improved results can be obtained for TSP with deadlines and TSP with time windows.

References
• N. Bansal, A. Blum, S. Chawla and A. Meyerson. Approximation Algorithms for Deadline TSP and Vehicle Routing with time windows. Proc. Of ACM STOC 166-174. 2004
• A.Blum, S.Chawla, D. Karger, T.Lane, A. Meyerson and M. Minkoff. Approximation algorithms for Orienteering and disounted reward TSP, SIAM J. On Computing, 37(2):653-670,2007.
• K. Chaudhuri, B.Godfrey, S.Rao and K.Talwar. Paths, trees and minimum latency tours. Proc. of IEEE FOCS, 36-45,2003.
Related Documents