Honeywell COMMERCIAL FLIGHT SYSTEMSGROUP BUSINESS ANDCOMMUTER AVIATION SYSTEMSDIVISION GLENDALE, ARIZONA SPZ-500C Integrated Flight Control System Cessna Citation WV Maintenance Manual 22-14-00 PRINTED IN U.S.A. Al 5-1146-47 REVISED 25 MAY 1990 15 MARCI-I 1989

Cessna Citation II y V
Nov 01, 2014
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

HoneywellCOMMERCIALFLIGHTSYSTEMSGROUPBUSINESSANDCOMMUTERAVIATIONSYSTEMSDIVISIONGLENDALE,ARIZONA
SPZ-500C Integrated FlightControl System
Cessna Citation WV
MaintenanceManual
22-14-00
PRINTED IN U.S.A. Al 5-1146-47REVISED 25 MAY 1990
15 MARCI-I 1989

PROPRIETARYNOTICE
ThisreviseddocumentandtheinformationdisclosedhereinareproprietarydataofHoneywellInc.Neitherthisdocumentnortheinformationcontainedhereinshallbeused,reproduced,ordisclosedtootherswithoutthewrittenauthorizationofHoneywellInc.,excepttotheextentrequiredforinstallationormaintenanceofrecipient’sequipment.
NOTICE-FREEDOMOF INFORMATIONACT(5USC552)ANDDISCLOSUREOFCONFIDENTIALINFORMATIONGENERALLY(18USC1905)
Thisreviseddocumentisbeingfurnishedinconfidenceby HoneywellInc.Theinformationdisclosedhereinfallswithinexemption(b)(4)of5USC552andtheprohibitionsof18USC1905.
S14
IMPORTANT NOTICE
The avionicsbusinessunitsformerlyowned by UNISYS Corp.andidentifiedwiththeSperryname or logohave been acquiredbyHoneywellInc.Publications,products,and componentsmarkedoridentifiedhereinwiththeSperryname orlogoarepublications,products,and componentsofHoneywellInc.AllreferencestotheSperryname orlogoshouldbe takenasreferringtoHoneywellInc.
Copyright 1990 Honeywell Inc.All Rights Reserved

Honeywell M!&?’’””CITATIONn/V
RECORDOF REVISIONS
Retainthisrecordin frontof manual.On receiptofrevision,insertrevisedpagesin themanual,andenterrevisionnumber,dateinsertedand initial.
Revision Revision Insertion Revision Revision InsertionNumber Date Date By Number Date Date By
May25/90 Jun25/90 &
22-14-00Recordof Revisions
Mar 15/89Use or disclosure of !nformatlon on this page IS subject to the re.stncttons on the hlle paje of th!s document “‘

Honeywell MKR’ANC’CITATION n/V
SUBJECT PAGE
Title
RecordofRevisions
ListofEffectivePages
;34
;789 Added10 BlankAdded
Contents1
:456 Blank
ListofIllustrations
1
:4567 Added8 BlankAdded
LISTOF EFFECTIVEPAGES
Original....O....Mar15/89Revision....l....May25/90
REVNO.
1
0
1111111111
111111
11011111
SUBJECT ~
Listof Tables1234 Blank
Introduction1
:456 Blank
SystemDescription
:3456 Blank78 Blank910 Blank1112 Blank1314 Blank14.1Added14.2BlankAdded1516 Blank171819
ThismanualwasreleasedfordistributionJune25/90.
REVNO.
1111
111000
11111
:00000001111110
22-14-00Listof EffectivePages(Page1)
May 25/90Use or disclosure of mformatlon on this page IS sublecl 10 the restr!cttons on the title pag ! of Ihm document

SUBJECT PAGE
SystemDescription(cent)
;!!2223242526
ComponentDescription
101102103104Blank105106Blank107108109110Blank111112Blank113114115116117118119120121122Blank123124Blank125126Blank127128Blank129130131132Blank133134135136Blank137
Honeywell
REVNO.
o100011
:000000000000
:000000000000000000000
MAINTENANCEMANUALCITATION1l/V
SUBJECT ~
138139140141142Blank143144145146Blank147148149150151152153154155156157158159160161162Blank163164165166167168169170171172173174Blank175176177178179180181182183184185186187
REVNO.
o001
:0000000
;o000010111110
i
:100111111100101110
22-14-00Listof EffectivePages(Page2)
May 25/90Use or chsclosure of mformatlon on thm page IS sublect to the re.stnctlons on the Mle page of thm document

SUBJECT ~
ComponentDescription(cent)
188189190191192193194195196Blank197198198.1198.2198.3198.4Blank198.5198.6198.7198.8198.9198.10Blank198.11198.12Blank198.13198.14198.15198.16198.17198.18198.19198.20Blank198.21198.22198.23198.24Blank198.25198.26Blank198.27198.28198.29198.30198.31198.32Blank198.33Blank198.34198.35198.36Blank
Honeywell
REVNO.
:0000000000000
:0000000000
:0
:000
:00000000
:
MAINTENANCEMANUALCITATION1l/V
SUBJECT ~
198.37198.38198.39198.40198.41198.42198.43198.44198.45198.46198.47198.48198.49198.50198.51198.52198.53198.54198.55198.56198.57198.58198.59198.60198.61198.62198.63198.64198.65198.66198.67198.68198.69198.70
B1ank
Blank
61ank
B1ank
Blank
B1ank
Blank
BIank
Blank198.70.1Added198.70.2Added198.70.3Added198.70.4Added198.70.5Added198.70.6Blank
,4dded198.70.7Added198.70.8Blank
Added198.71198.72198.73198.74198.75198.76
REVNO.
o00000000011000001000000000
:0
:0011111
11
1000000
22-14-00Listof EffectivePages(Page3)
May25/90Use or disclosure o! Intormallon on Ih!s page IS sub!ect to the restrictions cn the tllle pa(]e of this document

Honeywell
SUBJECT ~
ComponentDescription(cent)
198.77198.78198.79198.80198.81198.82Blank198.83198.84Blank198.85198.86198.87198.88Blank198.89198.90198.91198.92198.93198.94198.95198.96198.97198.98Blank198.99198.100198.101198.102198.103198.104198.105198.106198.107198.108198.109198.110198.111198.112198.113198.114198.115198.116198.117198.118198.119198.120198.121198.122198.123
REVNO.
o
:00000000000
:000011000000
:00000000010100000
MAINTENANCEMANUALCITATION1l/V
SUBJECT ~ REVNO.
198.124 0198.125 0198.126 0198.127 0198.128 0198.129Added 1198.130Added 1198.131Added 1198.132BlankAdded1198.133Added 1198.134Added 1198.135Added 1198.136BlankAdded1198.137Added 1198.138Added 1198.139Added 1198.140Added 1198.141Added 1198.142BlankAdded1
SystemOperation
201 0202 0203 0204 0205 1206 0207 0208 0209 0210 0211 1212 1213 0214 0215 0216 0217 0218 0219 0220Blank o221 1222Blank 1223 0224 0225 0226Blank o227 0228Blank o
22-14-00Listof EffectivePages(Page4)
May 25/90Use or dmclosure 01 tnformatlon on Ihm pag8ISsubpct to fhe restrlcttons on the tltJe page of th)s document

Honeywell WNS’ANcECITATION n/V
SUBJECT PAGE
SystemOperation(cent)
229230Blank231232Blank233234Blank235236Blank237238Blank239240Blank241242Blank243244Blank245246Blank247248Blank249250Blank251252Blank253254Blank255256Blank257258Blank259260261262263264265266267268269270271272Blank273274Blank
REVNO.
o000000000111100111100000000111100100001001111
SUBJECT ~
274.1Added274.2BlankAdded275276Blank277278Blank279280Blank281282Blank282.1Added282.2BlankAdded283284Blank285286Blank287288288.1Added288.2BlankAdded289290Blank291292293294295296297298Blank298.1298.2Blank298.3298.4Blank298.5298.6Blank298.7298.8Blank298.9298.10Blank298.11298.12Blank
GroundCheck301302Blank303304Blank
REVNO.
1
:0000011111
:011111100100100111111110011
0000
22-14-00Listof EffectivePacies(Paqe5)
May 25/90Use or disclosure of mformahon on this page IS subject to the resfnchons on the title pa ~e of Ih(s document

SUBJECT PAGE
FaultIsolation401402Blank403404 Blank
Interconnects501502Blank503504
Honeywell Ml!i’K/’ANcECITATION n/V
504.1Added504.2BlankAdded505506507508509510511512513514515516517518519520521522523524525526527528529530531532533534535536537538539540541
REVNO.
o000
1
:111000000000
:
:00100011111
:
io01111111
SUBJECT ~ REVNO.
542543544545546547548549550551552553554555556557558559560561562563564565566567568569570571572573574575576577578579580580.1Added580.2BlankAdded581582583584585586587588589
00
:1000011000010010100001100010100111111
ko010111
22-14-00Listof EffectivePages(Page6)
May 25/90Use or disclosure of mformtlon on thm page IS subject to the restrictions on the title page of this document

SUBJECT ~
Interconnects(cent)
590591592593594595596597598598.1598.2598.3598.4598.5598.6598.7598.8598.9598.10598.11598.12598.13598.14598.15598.16598.17598.18598.19598.20598.21598.22598.23598.24598.25598.26598.27598.28598.29598.30598.31598.32598.33598.34598.35598.36598.37598.38598.39
HoneywellREVNO.
1001001111
;111011
:000011110
;o0101111001001111
MANUALCITATION n/V
SUBJECT ~
598.40598.41598.42598.43598.44598.45598.46598.47598.48598.49598.50598.51598.52598.53598.54598.55598.56598.57598.58598.59598.60598.61598.62598.63598.64598.64.1Added598.64.2Added598.65598.66598.67598.68598.69598.70598.71598.72598.73598.74598.75598.76598.77598.78598.79598.80598.81598.82598.83598.84598.85598.86598.87
REVNO.
o1111110000000000000101111100100010000110101011100
22-14-00Listof EffectivePages(Page7)
May25/90Use or disclosure of informalton on Ihls page IS subject to the restrictions on the title pa, je of thw document

SUBJECT PAGE
Interconnects(cent)
598.88598.89598.90598.91598.92598.93598.94598.95598.96598.97598.98598.99598.100598.101598.102598.103598.104598.105598.106598.107598.108598.109598.110598.111598.112598.113598.114598.115598.116598.117598.118598.119598.120598.121598.122598.123598.124598.125598.126598.127598.128598.129598.130598.131598.132598.133598.134598.135
Honeywell
REVNO.
o00111
;1
:0011000101001000000000000000001100000
MAINTENANCEMANUALCITATION n/V
SUBJECT PAGE
598.136598.137598.138598.139598.140598.141598.142598.142.1Added598.142.2Added598.143598.144598.145598.146598.147598.148598.149598.150598.151598.152598.153598.154598.155598.156598.157598.158598.159598.160598.161598.162598.163598.164598.165598.166598.167598.168598.169598.170598.171598.172598.173Added598.174Added598.175Added598.176Added598.177Added598.178Added598.179Added598.180Added598.181Added598.182Added598.183Added
REVNO.
o0100111
:0010001001001001111101111001111111111111
22-14-00Listof EffectivePages(Page8)
May 25/90Use or disclosure of Intormatlon on thm page IS subject to the restncttons on the title page of thm document

SUBJECT ~
Honeywell l!iri~!’”c’CITATION n/V
REVNO.
Interconnects(cent)
598.184Added 1598.185Added 1598.186Added 1598.187Added 1598.188Added 1598.189Added 1598.190Added 1598.191Added 1598.192Added 1598.193Added 1598.194Added 1598.195Added 1598.196Added 1598.197Added 1598.198Added 1598.199Added598.200BlankAdded ;
SystemSchematics
601 0602Blank o
Removal/ReinstallationandAdjustment
701702703704705706707708709710711712Blank
Shipping/Handling/Storage
801 0802Blank o
SUBJECT PAGE REVNO.
22-14-00Listof EffectivePages(Page9/10)
Max 25/90Use or disclosure of mlormatlon on this page IS sub]ec! 10 the reslncttons on the htle page of Ihm docume t

Honeywell WR’AN’ECITATION n/V
Section
1
9
2
Parama~h
TABLEOF CONTENTS
Subject
SystemDescri~tion
1. General2. SystemDescription
1!.B.
c.D.
E.F.G.H.I.J.
AttitudeandHeadingReferenceSystemADZ-241AirDataSystemor OptionalADZ-81OAir DataSystemAA-300RadioAltimeterSystemEDZ-605ElectronicFlightInstrumentSystem(EFIS)FlightControlSystemPRIMUS@650WeatherRadarSystemMDZ-605MultifunctionDisplaySystem(Optional)FMZ-800FlightManagementSystem(Optional)SRZ-850IntegratedRadioSystem(Optional)LSZ-850LightningSensorSystem(Optional)
Coml)onentDescritItion
1. General2. AttitudeandHeadingReferenceSystem
andRateGyro
A. VG-14AVerticalGyroB. C-14DDirectionalGyroc. CS-412DualRemoteCompensatorD. FX-220FluxValveE. RG-204RateGyro
3. ADZ-241andOptionalADZ-81OAir DataSys’~em
A. AZ-241Air DataComputerB. BA-141BarometricAltitudeIndicatorc. VN-212VNAVComputer/ControllerD. AZ-81ODigitalAirDataComputerE. VN-800VNAVControl/Display
4. OptionalAA-300RadioAltimeterSystem
A. RT-300RadioAltimeterReceiver/TransmitterB. AT-223RadioAltimeterAntenna
5. ElectromechanicalFlightInstruments
A. RD-450HorizontalSituationIndicator
Paqe
1
118
;:
2020
212222232426
101
101102
102108114116118
120
120130134138144
148
148151
152
152- Copilot’s 22-14-00
Contents(Page1)May25/90
Use or disclosure of reformation on Ihls page IS subject to the restrictions on Ihe title page of this document

Section
2
Honeywell WWI!AN’ECITATION n/V
TABLEOF CONTENTS(cent)
Paraqra~h Sub.iect
Comr)onentDescription(cent)
6. EDZ-605ElectronicFlightInstrumentSystemandOptionalMQZ-605MultifunctionDisplaySystem
A.B.
c.
D.E.F.
!:I.J.K.L.
ED-600ElectronicDisplayED-600Usedas an ElectronicAttitudeDirectorIndicator(EADI)ED-600Usedas an ElectronicHorizontalSituationIndicator(EHSI)CompositeDisplayEFISSelfTestED-600Usedas a MultifunctionDisplay(MFD)ED-600FunctionalOperationDC-811DisplayControllerRI-106SInstrumentRemoteControllerSG-605SymbolGeneratorMC-800MFDControllerMG-605MFD SymbolGenerator
7. FlightControlSystem
A. SP-200AutopilotComputerB. FZ-500FlightDirectorComputerc. MS-205ModeSelectorD. PC-500AutopilotControllerE. AG-222AccelerometerF. RZ-220RollRateMonitor- CitationV OnlyG. SM-200ServoDriveandSB-201Bracket
8. PRIMUS@650WeatherRadarSystem
A. WU-650AntennaandReceiver/TransmitterUnitB. WI-650WeatherRadarIndicator
&
156
156157
168
185186187193198
198.6198.8198.14198.22
198.28
198.28198.30198.42198.46198.52198.54198.58
198.62
198.62198.66
C. OptionalWC-650WeatherRadarController 198.70.2
9. OptionalFMZ-800FlightManagementSystem(FMS) 198.72
A. NZ-61OB. CD-800c. DL-800D. OZ-800E. AT-801
NavigationComputer 198.72ControlDisplayUnit 198.76DataLoader 198.86ReceiverProcessorUnit 198.90H-FieldBrickAntenna 198.93
22-14-00Contents(Page2)
May25/90Use or dmclosure of mformatlon on th!s page IS subject to the reslnct}ons on the mle page of this ,~ocument

Honeywell ti%i’!!f~ANcECITATION n/V
Section
2
TABLEOF CONTENTS(cent)
Paraqra~h Sub.iect
Com~onentDescription(cent)
10. OptionalSRZ-850IntegratedRadioSystem
A. RNZ-850IntegratedNavigationUnitB. RCZ-850IntegratedCommunicationUnitC. ML-850MicrowaveLandingSystem(MLS)
ReceiverD. RM-850RadioManagementUnit(RMU)E. AV-850AAudioControlUnitF. CD-850ClearanceDeliveryControl/
DisplayUnitG. D1-851DMEIndicatorH. AT-860ADFAntennaI. AT-851MLSAntenna
11. OptionalLSZ-850LightningSensorSystem
A. LP-850LightningB. LU-850LightningC. AT-850AntennaD. AT-855Antenna
SvstemODeration
1. General
SensorProcessorSensorController
SystemPerformance/OperatingLimits:: FlightDirectorFunctionalDescription
A. GeneralB. ControlFunctionsc. FlightDirectorModeFlowDescription
4. AutopilotComputerFunctionalDescription
A. Autopilot/YawDamperEngageB. RollAxisC. PitchAxisD. YawAxis
5. C-14DCompassSystemFunctionalDescription
6. EDZ-605EFISandOptionalMDZ-605MFD System
A. AttitudePortInterconnectsB. HeadingPortInterconnectsc. ShortRangeNavigation(SRN)Port
~
198,94
198.94198.100198.104
198.108198.114198.118
198.122198.126198.128
198.130
198.130198.134198.138198.140
201
201202207
207207210
259
259260264268
288
291
291291293
Interconnects 22-14-00Contents(Page3)
May25/90UseordisclosureofInlormatlonon this page IS subject to the restrictions on the Utle pa]e of thwi document

Section
3
Honeywell WMYANCECITATION n/V
TABLEOF CONTENTS(cent)
Paraqrar)h Sub.iect
SYstemOt)eration(cent)
D. LongRangeNavigation(LRN)PortInterconnects
E. RadioAltimeterPortInterconnectsF. WeatherRadarPortInterconnectsG. Rateof TurnPortInterconnectsH. MicrowaveLandingSystem(MLS)Port
InterconnectsMiscellaneousProgrammingFunctions
;: FlightDirectorSignalsK. EFISBackupMode
GroundCheck
General:: EquipmentandMaterials3. Procedure
FaultIsolation
1. General2. Procedure
Interconnects
SystemSchematics
Removal/ReinstallationandAd.iustment
1. General2. EquipmentandMaterials3. ProcedureforAll IndicatorsandElectronic
Displays4. ProcedureforSelectorsandControllers
A. MS-205ModeSelector,PC-500AutopilotController,RI-106SInstrumentRemoteController,DC-811DisplayController,MC-800MFDController,AV-850AAudioControlUnit,CD-800ControlDisplayUnit,andWC-650WeatherRadarController
B. VN-212VNAVComputer/Controller,VN-800VNAVControl/Display,and LU-850LightningSensorController
294
294295295295
296296297
301
301301301
401
401401
501
601
701
701701701
702
702
702
22-14-00Contents(Page4)
May25/90Use or chsclosure of Information on thm page IS subject to the restrictions on the Idle page of this document

Section
8
Honeywell WR’AN’ECITATION n/V
TABLEOF CONTENTS(cent)
Paraqrar)h Sub.iect
Removal/ReinstallationandAd.iustment(cent)
5. ProcedureforSensorsandGyros
A. AG-222AccelerometerandRG-204RateGyroB. VG-14AVerticalGyroandC-14DDirectional
Gyroc. FX-220FluxValveD. CS-412DualRemoteCompensator
6. ProcedureforSP-200Autopilot,FZ-500FlightDirector,NZ-61ONavigation.andAZ-241/AZ-810AirDataComputers,SG-605/MG-605SymbolGenerators,OZ-800ReceiverProcessorUnit,RNZ-850NAVUnit,RCZ-850COMUnit,ML-850MLSReceiver,anclLP-850LightningSensorProcessor
7. ProcedureforSM-200ServoDriveandSB-201DrumandBracketAssembly
A. ServoDriveAssemblyB. DrumandBracket
8. ProcedureforRT-300Transmitter
9. ProcedureforRZ-220
10. ProcedureforWU-650TransmitterUnit
11. ProcedureforWI-65012. ProcedureforRM-85013. ProcedureforCD-850
As;embly
RadioAltimeterRece?ver
RollRateMonitor
AntennaandReceiver;
WeatherRadarIndicatorRadioManagementUnit(RMU)ClearanceDeliveryCDU
702
702703
703705
706
707
707707
709
709
710
710711711
22-14-00Contents(Paqe5/6)
‘May25/90Useordisclosureof mforma!lon on Ihm page IS subject to the restnct!ons on the title pag! of thw document

Honeywell K!M?ANCECITATION n/V
Ei9.w
1
12
4
5
6
7
2-1
2-2
2-3
2-4
2-5
2-6
2-7
2-8
2-9
2-1o
3-1
3-2
3-3
3-4
3-5
LISTOF ILLUSTRATIONS
W
SystemFlowDiagram
OptionalMultifunctionDisplay(MFD)SystemFlowDiagram
OptionalFMZ-800FlightManagementSystem(FMS]FlowDiagram
OptionalRNZ-850IntegratedRadioSystem
OptionalLSZ-850LightningSensorSystem
ComponentLocations
LightningSymbols
VG-14AVerticalGyro
VG-14AVerticalGyroBlockDiagram
C-14DDirectionalGyro
C-14DDirectionalGyroBlockDiagram
CS-412DualRemoteCompensator
CS-412DualRemoteCompensatorBlockDiagram
FX-220FluxValve
FX-220FluxValveSchematic
RG-204RateGyro
RG-204RateGyroBlockDiagram
AZ-241AirDataComputer
AZ-241AirDataComputerBlockDiagram
BA-141BarometricAltitudeIndicator
BA-141BarometricAltitudeIndicatorBlockDiagram
VN-212VNAVComputer/Controller
en
&
5
9
11
13
14.1
15
26
102
103
108
111
114
115
116
117
118
119
120
123
130
133
134
iu”14-ooListof Illustrations(Page1)
May25/90Use or disclosure of mformwon on this page IS subject to the restr!ctlons on the title page of thm document

Mu!E
3-6
3-7
3-8
3-9
3-1o
4-1
4-2
4-3
5-1
5-2
6-1
6-2
6-3
6-4
6-5
6-6
6-7
6-8
6-9
6-10
6-11
6-12
6-13
Honeywell MVJEFANCECITATION n/V
LISTOF ILLUSTRATIONS(cent)
m
VN-212VNAVComputer/ControllerBlockDiagram
AZ-81ODigitalAirDataComputer
AZ-81ODigitalAirDataComputerBlockDiagram
VN-800VNAVControl/Display
VN-800VNAVControl/DisplayBlockDiagram
RT-300RadioAltimeterReceiver/Transmitter
RT-300RadioAltimeterReceiver/TransmitterBlockDiagram
AT-223RadioAltimeterAntenna
RD-450HorizontalSituationIndicator
RD-450HorizontalSituationIndicatorBlockDiagram
ED-600EADIDisplaysandAnnunciators
ED-600EADICautionandFailureAnnunciations(Amber/
ED-600EADICautionandFailureAnnunciations(Red)
ED-600InternalSystemFailure(Red)
ED-600EHSIDisplaysandAnnunciators
ED-600EHSICautionandFailureAnnunciations(Amber!
ED-600EHSICautionandFailureAnnunciations(Red)
ED-600EHSIPartialCompassDisplays
LRNMapModewithMultipleWaypoints
SRN (VOR)MAPMode
CompositeDisplaySymbolDefinition
MFDMapMode
MFD PlanMode
Paqe
135
138
140
144
147
148
150
151
152
155
161
165
166
167
173
176
177
179
182
184
185
190
192
22-14-00Listof Illustrations(Paqe2)
May ?5/90Use or disclosure of Intormatton on Ihls page IS subject to the restncttons on the Mle page of this d[ cument

Honeywell M!M!!ANCECITATION V
6-14
6-15
6-16
6-17
6-18
6-19
6-20
6-21
6-22
6-23
6-24
7-1
7-2
7-3
7-4
7-5
7-6
7-7
7-8
7-9
7-1o
7-11
LISTOF ILLUSTRATIONS(cent)
&
ED-600ElectronicDisplayBlockDiagram
DC-811DisplayController
DC-811DisplayControllerBlockDiagram
RI-106SInstrumentRemoteController
RI-106SInstrumentRemoteControllerSchematic
SG-605SymbolGenerator
SG-605SymbolGeneratorBlockDiagram
MC-800MFDController
MC-800MFDControllerBlockDiagram
MG-605MFDSymbolGenerator
MG-605MFDSymbolGeneratorBlockDiagram
SP-200AutopilotComputer
FZ-500FlightDirectorComputer
FZ-500FlightDirectorComputerBlockDiagram
MS-205ModeSelector
MS-205ModeSelectorSchematic
PC-500AutopilotController
PC-500AutopilotControllerBlockDiagram
AG-222Accelerometer
AG-222AccelerometerBlockDiagram
RZ-220RollRateMonitor
RZ-220RollRateMonitorBlockDiagram
PacJg
195
198
198.3
198.6
198.7
198.8
198.11
198.14
198.19
198.22
198.25
198.28
198.30
198.33
198.42
198.43
198.46
198.49
198.52
198.53
198.54
198.55
22-14-00Listof Illustrations(Page3)
Mar 15/89Useordisclosure01InformalIonon this page IS subject 10 the restrictions on the Mle pag, ot this document

Honeywell MMR’AN’ECITATION n/V
7-12
7-13
8-1
8-2
8-3
8-4
I8-58-6
9-1
9-2
9-3
9-4
9-5
9-6
9-7
9-8
9-9
1o-1
10-2
10-3
10-4
10-5
10-6
LISTOF ILLUSTRATIONS(cent)
W
SM-200ServoDriveandSB-201Bracket
SM-200ServoDriveBlockDiagram
WU-650AntennaandReceiver/TransmitterUnit
WU-650AntennaandReceiver/TransmitterUnitBlockDiagram
WI-650WeatherRadarIndicator
WI-650WeatherRadarIndicatorBlockDiagram
WC-650WeatherRadarController
WC-650WeatherRadarControllerBlockDiagram
NZ-61ONavigationComputer
NZ-61ONavigationComputerBlockDiagram
CD-800ControlDisplayUnit
CD-800ControlDisplayUnitBlockDiagram
DL-800DataLoader
DL-800DataLoaderBlockDiagram
OZ-800ReceiverProcessorUnit
OZ-800ReceiverProcessorUnitBlockDiagram
AT-801H-FieldBrickAntenna
RNZ-850IntegratedNavigationUnit
RNZ-850IntegratedNavigationUnitBlockDiagram
RCZ-850IntegratedCommunicationUnit
RCZ-850IntegratedCommunicationUnitBlockDiagram
ML-850MLSReceiver
ML-850MLSReceiverBlockDiagram
Paqe
198.58
198.61
198.62
198.65
198.66
198.69
198.70.2
198.70.7
198.72
198.75
198.76
198.83
198.86
198.89
198.90
198.92
198.93
198.94
198.99
198.100
198.103
1980104
198.107
22-14-00Listof Illustrations(Page4)
May 25/90Lh3 or disclosure of mtormatlon on this pageE subtecl to the restrtcttons on the tttle pageOfthisdt,Curnerll

Honeywell WWANC’CITATION n/V
LISTOF ILLUSTRATIONS(cent)
m m
10-7
10-8
10-9
1o-1o
10-11
10-12
10-13
10-14
10-15
10-16
10-17
11-1
11-2
11-3
11-4
11-5
11-6
201
202
203
204
205
206
RM-850RadioManagementUnit
RM-850RadioManagementUnitBlockDiagram
AV-850AAudioControlUnit
AV-850AAudioControlUnitBlockDiagram
CD-850ClearanceDeliveryControl/DisplayUnit
CD-850ClearanceDeliveryControl/DisplayUnitBlockDiagram
DI-851DME Indicator
DI-851DME IndicatorBlockDiagram
AT-860ADFAntenna
AT-860ADFAntennaBlockDiagram
AT-851MLSAntenna
LP-850LightningSensorProcessor
LP-850LightningSensorProcessorBlockDiagram
LU-850LightningSensorController
LU-850LightningSensorControllerSchematic
AT-850Antenna
AT-855Antenna
FlightDirectorModeLogic
FD OFF Logic
EHSI
EFIS
EFIS
EFIS
HeadingandCourseSelectInterface
Rollor PitchAttitudeandCommandInterface
ED-600EADIInterconnects
ED-600EHSIInterconnects
Pag_e
198.108
198.112
198.114
198.117
198.118
198.121
198.122
198.124
198.126
198.127
198.128
198.130
198.133
198.134
198.137
198.138
198.140
221
227
229
231
233
235
22-14-00Listof Illustrations(Page5)
May25/90Use or disclosure of mformahon on Ihm page IS subject to the restnct!ons on the utle page >f fhts documenl

Honeywell WE’’””CITATION 11~
Euu!E
207
208
209
210
211
212
213
214
215
216
I217
217.1
218
I219219.1
220
221
222
223
Heading
VOR and
LISTOF ILLUSTRATIONS(cent)
M
SelectandGo AroundModeFlowDiagram
VORApproachModeFlowDiagram
Localizer,LocalizerApproach,andBackCourseModeFlowDiagram
InstrumentLandingSystem(ILS)Diagram
Altitude,VerticalSpeed,and IndicatedAirspeedHoldModeFlowDiagram
GlideslopeApproachandGo AroundModeFlowDiagram
AltitudePreselectModeFlowDiagram
VerticalNavigationModeFlowDiagram
VNAVSampleProblem
FailureWarningFlagsandBarBiasLogicDiagram
Autopilot/YawDamperEngageInterlockDiagramforCitationV
Autopilot/YawDamperEngageInterlockDiagramforCitationV
AutopilotComputerSignalFlowDiagram
TorqueSwitchingSignalFlowDiagramforCitationV
TorqueSwitchingSignalFlowDiagramforCitationII
Pilot’sC-14DCompassSystemSignalFlowDiagram
SG-605andOptionalMG-605AttitudePortInterconnects
SG-605andOptionalMG-605HeadingPortInterconnects
SG-605andOptionalMG-605ShortRangeNavigation(SRN)PortInterconnects
~
237
239
241
243
245
247
249
251
253
255
271
274.1
275
287
288
289
298.1
298.3
298.5
22-14-00Listof Illustrations(Page6)
May25/90Use Or disclosure of mformatlon on Ih!s page IS subject 10 the restrictions on the [Itle pageOf!hls document

Ei9!u
224
225
226
Honeywell WR’AN’ECITATION n/V
LISTOF ILLUSTRATIONS(cent)
Name
SG-605andOptionalMG-605LongRangeNavigation(LRN)PortInterconnects
SG-605andOptionalMG-605RadioAltitude,Rateof Turn,WeatherRadar,andMicrowaveLandingSystem(MLS)PortInterconnects
PaQe
298.7
298.9
FlightDirectorValidandNavigationSignals 298.11
22-14-00Listof Illustrations(Page7/8)
May25/90Useordisclosureofmformatlon on thts pageIS subject to the reslr!cllons on the tttle pacj ! of thm documenl

Honeywell WE’’AN’ECITATION n/V
Table
1
2
,3
2-1
2-2
2-3
2-4
2-5
3-1
3-2
3-3
3-4
3-5
4-1
4-2
5-1
6-1
6-2
6-3
6-4
LISTOF TABLES
Name
SystemComponents
OptionalSystemComponents
EquipmentRequiredbutnotSuppliedby Honeywe”’1
VG-14AVerticalGyroLeadingParticulars
C-14DDirectionalGyroLeadingParticulars
CS-412DualRemoteCompensatorLeadingParticulars
FX-220FluxValveLeadingParticulars
RG-204RateGyroLeadingParticulars
AZ-241AirDataComputerLeadingParticulars
BA-141BarometricAltitudeIndicatorLeadingParticulars
VN-212VNAVComputer/ControllerLeadingPartic~llars
AZ-81ODigitalAirDataComputerLeadingParticulars
VN-800VNAVControl/DisplayLeadingParticular;
RT-300RadioAltimeterReceiver/TransmitterLeadingParticulars
AT-223RadioAltimeterAntennaLeadingParticulars
RD-450HorizontalSituationIndicatorLeadingParticulars
ED-600ElectronicDisplayLeadingParticulars
DC-811DisplayControllerLeadingParticulars
RI-106SInstrumentRemoteControllerLeadingParticulars
SG-601SymbolGeneratorLeadingParticulars
~
1
3
17
102
109
114
116
118
121
130
134
139
144
148
151
153
156
198
198.6
198.8
22-14-00Listof Tables(Page1)
May25/90Use or disclosure 0! Information on this page IS subject 10 the reslrlctlons on the Iltle pag( of Ihm document

Honeywell !NLE?AN’ECITATION n/V
Table
6-5
6-6
7-1
7-2
7-3
7-4
7-5
7-6
7-7
7-8
8-1
8-2
8-3
I8-4
8-5
9-1
9-2
9-3
9-4
9-5
1o-1
10-2
MC-800
MG-605
SP-200
FZ-500
MS-205
PC-500
AG-222
RZ-200
SM-200
LISTOF TABLES(cent)
W
MFDControllerLeadingParticulars
MFDSymbolGeneratorLeadingParticulars
AutopilotComputerLeadingParticulars
FlightDirectorComputerLeadingParticulars
ModeSelectorLeadingParticulars
AutopilotControllerLeadingParticulars
AccelerometerLeadingParticulars
RollRateMonitorLeadingParticulars
ServoDriveandSB-201BracketLeadingParticulars
SM-200ServoDriveDashNo.Differences
WU-650AntennaandReceiver/TransmitterLeadingParticulars
WI-650WeatherRadarIndicatorLeadingParticulars
IndicatorControlFunctions
WC-650WeatherRadarControllerLeadingParticulars
WC-650ControlFunctions
NZ-61ONavigationComputerLeadingParticulars
CD-800ControlDisplayUnitLeadingParticulars
DL-800DataLoaderLeadingParticulars
OZ-800ReceiverProcessorUnitLeadingParticulars
AT-801H-FieldBrickAntennaLeadingParticulars
RNZ-850IntegratedNavigationUnitLeadingParticulars
RCZ-850IntegratedCommunicationUnitLeadingParticulars
~
198.14
198.23
198.29
198.31
198.42
198.46
198.52
198.54
198.59
198.59
198.63
198.66
198.67
198.70.2
198.70.3
198.73
198.77
198.86
198.91
198.93
198.94
198.100
22-14-00Listof Tables(Page2)
May25/90Use or ckclosure of mformatlon on thm page !s subject to the restrrct!ons on the tttle page of Ihm d )cument

Honeywell W!MR’ANCECITATION n/V
Table
10-3
10-4
10-5
10-6
10-7
10-8
10-9
1o-1o
11-1
11-2
11-3
11-4
11-5
201
301
401
501
LISTOF TABLES(cent)
W
ML-850MLSReceiverLeadingParticulars
ML-850MLSReceiverARINC429Outputs
RM-850RadioManagementUnitLeadingParticulars
AV-850AAudioControlUnitLeadingParticulars
CD-850ClearanceDeliveryControl/DisplayUnitLeadingParticulars
DI-851DME IndicatorLeadingParticulars
AT-860ADFAntennaLeadingParticulars
AT-851MLSAntennaLeadingParticulars
LP-850LightningSensorProcessorLeadingParticulars
LU-850LightningSensorControllerLeadingParticulars
LU-850SwitchFunctions
AT-850AntennaLeadingParticulars
AT-855AntennaLeadingParticulars
SystemPerformance/OperatingLimits
GroundCheckProcedure
FaultIsolation
InterconnectInformation
~
198.104
198.106
198.108
198.114
198.118
198.122
198.126
198.128
198.131
198.134
198.135
198.138
198.140
202
303
403
503
22-14-00Listof Tables(Page3/4)
May 25/90Use or disclosure of Information on this page IS subject to the reslrlcllons on the ttlle pagr of thm document

Honeywell WW’’ANCECITATION n/V
INTRODUCTION
ThismanualprovidesgeneralsystemmaintenanceinstructionsandtheoryofoperationfortheSPZ-500CIntegratedFlightControlSystem(System),forthe
I CessnaCitationII or V aircraft.
Thismanualprovidesblockdiagraminformationandinterconnectcliagramstopermitgeneralunderstandingof Systeminterface.
CommonSystemmaintenanceproceduresarenotpresentedin thismanual.Thebestestablishedshopandflightlinepracticesshouldbe used.
Informationon shipping,storage,andhandlingof allsystemcomponentsiscontainedinmanual,HoneywellPub.No.09-1100-01.
Abbreviationsusedin thismanualaredefinedas follows:
Abbreviation Equivalent
ACCELADCADFADIA/DAGCAILALTANNANTAOSSAP,A/PAPP,APRAPSAPSBKARMASASCBATTBAROB/ABCBCDBRGCAPCBCDSCDUCE
AccelerometerAirDataComputerAutomaticDirectionFinderAttitudeDirectorIndicatorAnalogto DigitalAutomaticGainControlAileronAltitudeAnnunciatorAntennaAfterOverStationSensorAutopilotApproachAltitudePreselectAPS BracketArmedAirspeedAvionicsStandardCommunicationBusAttitudeBarometricBankAngleBackCourseBinary-Coded-DecimalBearingCaptureCircuitBreakerDifferentialResolverControlDisplayUnitCourseError
22-14-00Introduction(Paqe1)
May25/90Use or disclosure of InformalIon on this page IS subject to the restrictions on the title page of this documenf

Honeywell MWFAN’ECITATION n/V
Abbreviation
CKTCLKCMDCMPTRCOMCOMP,COMPTRCONTCORRCosCPLCRSCsCTD/ADEGDEMODDETDEV, DEVNDGDHDIFFDISPLDMEDNDRCDUPEADIEHSIEFISEL,ELEVEMIENGEOE OFFEX LOCEXTFD,F/DFDCFLTFMSFR,FRMGA,G/AGND
I GPGS,G/SHDGHORIZHSIIASIDENT
Equivalent
CircuitClockCommandComputerCommon,CommunicationCompensation,Compass,or ComparatorControllerCorrectionCosineCoupleCourseElectricalResolverControlTransformerDigitalto AnalogDegreeDemodulatorDetector,DetentDeviationDirectionalGyroDecisionHeightDifferentialDisplacementDistanceMeasuringEquipmentDownDualRemoteCompensatorDuplicateElectronicAltitudeDirectorIndicatorElectronicHorizontalSituationIndicatorElectronicF1ElevatorElectromagnetEngageEasy-OnEasy-OffExpandedLoca
ght InstrumentSystem
c Interference
izerExtend,ExternalFlightDirectorFlightDirectorComputerF1ightFlightManagementSystemFromGo-AroundGroundGlidepathGlideslopeHeadingHorizontalHorizontalSituationIndicatorIndicatedAirspeedIdentification
22-14-00Introduction(Page2)
May 25/90Use or disclosure of Information on this page IS sub~ect to the restrictions on the tttle page of thm do ;umenl

Abbreviation Equivalent
IFIFCSILSINC-DECINDINSINTLKINTGLINVIVVKN,KTSLLATLBSL/CLHLOCLRNLSSLTGMFDMMMOMMONNAVNCNCDNMNONOCNORMOBSo/cOM0ssPATTPewsPECOPITCHSYNCPRIPROGP/sPwPWRRRA,R/A,RADALTRAMRCVRRBBRCPL
IntermediateFrequencyIntegratedFlightControlSystemInstrumentLandingSystemIncrease-DecreaseIndicatorInertialNavigationSystemInterlockIntegralInverterInstantaneousVerticalVelocityKnotsLeftLateralLateralBeamSensorInductive/CapacitiveLeftHandLocalizerLongRangeNavigationLightningSensorSystemLightingMultifunctionDisplayMiddleMarkerMomentaryMonitorNavigationalNo Connectionor NormallyClosedNo ComputedDataNauticalMileNormallyOpenNAVon CourseNormalOmniBearingSelectorOn CourseOuterMarkerOverStationSensorPitchAttitudePitchControlWheelSteeringPitchErectionCut-OffPitchSynchronizationPrimaryProgrammerPitotSwitchPitchWheelor PulseWidthPowerRightRadioAltimeterRandomAccessMemoryReceiverRollBarBiasRollCouple
22-14-00Intrclduction(Page3)
May25/90Use or disclosure of mformat!on on thts page IS subject to lhe restr,cl(ons cn the title page of th!s documenl

Honeywell i!i};k~ANcECITATION V
Abbreviation
RCVRRCWSRECOREFRETRREV
!!IRN,RNAVRNAPPRSBRT,R/TRUDSBYSECSELSIGSINSPDSRSRNSSECSTAELSTCSTPSYNCTASTCSTKTPTSOTTLVAVALVANGVAPPVBSVGVORVORTACVRVRT,VERT
[?,W/LXMTRYD,Y/D
Equivalent
ReceiverRollControlWheelSteeringRollErectionCut-OffReferenceRetractReverseCourse(Sameas BackCourse)RightHandRadioMagneticIndicatorAreaNAVRNAVApproachRadioSystemBusReceiver/Transmitter,Rateof TurnRudderStandbySecondarySelectSignalSineSpeedSoftRideShortRangeNavigationStaticSourceErrorCorrectionStationElevationSensitivityTimeControlSteepSynchronizationTrueAir SpeedTouchControlSteeringTurnKnobTestPointTechnicalStandardOrderTunedto LocalizerVoltAmpereValidVerticalAngleVORApproachVerticalBeamSensorVerticalGyroVHFOmniRangeColocatedVOR andTacanStationsVoltsRegulatedVerticalVerticalSpeedWingsLevelTransmitterYawDamper
22-14-00Introduction(Page4)
Mar 15/89Use or disclosure of mformatlon on thm page IS subject to the restrictions on the trtle page of this dd:umenl

Honeywell Wi’JkI!’ANcECITATION V
L...2E----COMPLIANCE REQUIRED
Honeywellhasan AirworthinessAnalysisprocedureperformedforall itsairborneproductsto ensurethatequipmentdesignedby Honeywellwillnotcreateahazardousin-flightcondition.As a resultof theAnalysis,certaininstallationshavebeendesignatedINSTALLATIONCRITICAL,and 100percentcompliancewiththoseinstallationsis required.
INSTALLATIONCRITICALis definedas:
Specificmethodsof installationarerequiredto ensurethateitherthefailureof theassemblyor partisextremelyimprobableor thatitsfailurecouldnotcreatea hazardouscondition.
22-14-00Introduction(Page5/6)
Mar 15/89Use or disclosure of mformatlon on thts page IS subJecl to Ihe restrlcttons on the Mle page of this document

SECTION1SYSTEMDESCRIPTION
1. General
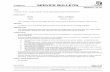
ThisSPZ-500CIntegratedFlightControlSystem(Figure1) providesflightdirector,automaticpilot,flightinstrumentation(includinggyroreferencesandflightinstruments),an airdatasystem(includingairdatadisplays,altitudealerting,altitudepreselect,andaltitudereporting}anda weatherradarsystem.
I
Optionalsubsystemsprovidemultifunctiondisplay(Figure2),flightmanagement(Figure3),radiocommunicationandnavigation(Figure4),andlightningdisplay(Figure5).
Table1 liststhecomponentsandpartnumbersthatcomposea standardSystem
IandTable2 listsoptionalsubsystemcomponents.Figure6 showstheapproximatecomponentlocationsfora typicalinstallation.Table3 listsequipmentrequiredbutnot suppliedby Honeywell.
I
Honeywell A/CRefSystemComponent PartNo. Des
VG-14AVerticalGyro
ED-600ElectronicDisplay(EHSI)
RD-450HorizontalSituationIndicator
ED-600ElectronicDisplay(EADI)andInclinometerKit
FX-220FluxValve*
CS-412DualRemoteCompensator
C-14DDirectionalGyro*
FZ-500FlightDirectorComputer
MS-205ModeSelector
AZ-241Air DataComputer
SP-200AutopilotComputer
7000622-901 1
7003430-901 2
7002493-903 C2
7003430-901 37005400-901
2594484 4
2593379-1 5
4020577-3 6
4018369-905 7
4020570-905 8
4013241-931 9
4008519-941(CitationII)10-952(CitationV)
* Denotesdualcomponents.
SystemComponentsTable1
22-14-00Page1
May25/90use or disclosure ‘d Informailon on Ihls page IS sub)ect to the reslrlcllons on [he title paq ! 01 this document

Honeywell M!KYANCECITATION Ii/v
I
Honeywel1 A/CRefSystemComponent PartNo. Des
PC-500
SM-200
S6-201
SM-200
SB-201
SM-200
S6-201
RG-204
VN-212
AG-222
6A-141
AutopilotController
ServoDrive(Aileron)
ServoBracket(Aileron)
ServoDrive(Elevator)
ServoBracket(Elevator)
ServoDrive(Rudder)
ServoBracket(Rudder)
RateGyro
VNAVComputer/Controller
Accelerometer
BaroAltitudeIndicator
RI-106SInstrumentRemoteController
1 RZ-220RollRateMonitor(CitationV only)
IWU-650AntennaandReceiver/TransmitterUnit
WI-650WeatherRadarIndicator
SG-605SymbolGenerator
DC-811DisplayController
4018639-909 11
4006719-906 12
4005842 12A
4006719-904(CitationII)13-914(CitationV)
4005842 13A
4006719-906 14
4005842 14A
7007453-903 15
4020571-904 16
7000992 17
4016341-905 18
4026206-973 23
4015901-920 57
7008470-902,-912 59
7007700-301 63
7011672-606 65
7012977-753 115
SystemComponentsTable1 (cent)
22-14-00Paae2
May 2~/90Use or disclosure of mformatlon on this page IS sublecl to the reslnct!ons on the Mle page of Ihls locument

Honeywell WMR’ANC’CITATION n/V
Honeywel1 A/CRefSystemComponent Qty PartNo. Des
AA-300RadioAltimeterSystemCom~onents
RT-300RadioAltimeterReceiver/TransmitterAT-223RadioAltimeterAntenna(Receive)AT-223RadioAltimeterAntenna(Transmit)
FMZ-800FliqhtManagementSystemComt)onents
CD-800ControlDisplayUnitNZ-61ONavigationComputer ;DL-800DataLoader(CarryOn) 1OZ-800ReceiverProcessorUnit 1AT-801H-FieldBrickAntenna 1
MDZ-605MultifunctionDistIlaY(MFD)Com~onents
MG-605MFDSymbolGenerator 1MC-800MFDControllerED-600ElectronicDisplay(MFD) I
SRZ-850IntegratedRadioSystemComponents
ML-850MLSReceiver 2AT-851MLSAntenna 4RCZ-850IntegratedCommunication 2UnitRM-850RadioManagementUnit 2AT-860ADFAntenna 2AV-850AAudioControlUnit 2DI-851DME Indicator
I
2RNZ-850IntegratedNavigationUnit 2CD-850ClearanceDelivery 1Control/DisplayUnit
ADZ-81ODiqitalAirDataSystemCom~onents
~ AZ-81ODigitalAirDataComputer 1VN-800VNAVControl/Display 1
7001840-91540105044010504
7004403-9017004402-6547004607-9037004608-9017011103
7011673-6067007062-9337003430-901
7510600-9017510638-9017510700-901
7012100-9437510300-9017511001-9017513006-9017510100-9117513000-911
7000700-9487000472-901
120121123141142
125126127
116118143
144158160163164165
916
OptionalSystemComponentsTable2
22-14-00Page3
May”25/90Use or disclosure of mformwon on thts page IS subjecl to the restncl!ons on the tttle pag! of thm document

Honeywell WU’NANCECITATION n/V
Honeywel1 A/CRefSystemComponent Qty PartNo. Des
LSZ-850LiqhtninaSensorSvstemComponents
LP-850LightningSensorProcessor 1 7011822-903 145LU-850LightningSensorController 1 7011865-903 146AT-850LightningAntenna(Teardrop) 1 4057697-901 147
ORAT-855LightningAntenna(Brick) 1 7014062-901 147
PRIMUS@650WeatherRadarComponents
WC-650WeatherRadarController 1 7008471-605 61
NOTE: TheWC-650replacestheWI-650andLU-850.WithouttheWI-650,weatherinformationwouldbe displayedon theEHSIandMFDdisplays.
OptionalSystemComponentsTable2 (cent)
22-14-00Page4
May25/90Use or dmclosure of mtormatlon on thm page IS sub)ect 10 the restrictions on the title page of this document

Honeywell MAINTENANCEMANUALCITATION n/V
WI-SW WEATHER RADAFE INDICATOR8A-141 BAROALTITUDE INO
VN.212 V-NAVCOMPUTER/CONTROLLER
ml
~ VISUAL ALERT“a~~g’e, -
,, 0)..“’ ,,~
DC-S11 DISPLAY CONTROLLERRI-1OSS INSTRUMENTREMOTE CONTROLLER
-~1 1
SELECTEDCOURSE ANDHEADING ED-500 EADI
WU-SSO ANTENNAAND RECEIVER/TRANSMITTER
L
/ ====. -. \
7
L1
.
‘Iii]ED-600 EHSI
.—,“ “! ..!
y ~<j “$7/5, ‘;.’, .
0 !’!... ... . . . . <.@. .:-!“c,, ....-~,,: q,,,, ,,,,.O’.’.,-
CQ2 400,,,
trffi kROMRD-450 HSI(SH2)
AZ241AIR DATA COMPUTER AG-222
ACCELEROMETER-=’==-/ ,/>
.<. e~‘“..,>9/~P. ,;-’
KALTITUDE SYNCHRO OATA
~“/;~ AIRSPEED SIGNAL
.
-
7/
,..--’ ALTITUOE ANO AIRSPEEO SIGNALS
n7!.Ir—————CRS ERROR
.9 mAUTOPI LOT COMPUTER
-..
*
d’ 4
~11P“T’’E’’’’cJR+ * -
~ ++”’’.’”
MODE LOGIC .:., .
0,
4 )
, ,...,,..:, %.
w..+ .
. , . .. .. ..., ,>:, %... Fz-m
FLIGHT
d 7
SWl%%NG
~lt
DIRECTORCOMPUTER
*
ASCB TOOPTIONAL MG-S05(FIG. 2) OR NZ-S1O (FIG. 3)
~rrAIR OATA ERROR SIGNALS
1
TO/FROM SIGNAL TO VN-212
NAV ~AND SG-S05
RAOIOS RAOIO OEVIATION SIGNALS
TO VH-212AND SG-S05
OME OME OISTANCE
RECEIVER
RAOIO AL TITuOE SIGNALS
RT300 RAOIO ALTIMETERREcEIvER/TRANSMITTER w
@. I ‘b]I
,:
ATTITuOE SIGNALS
7
1. .
/.HEAOING SIGNALS
/’”MODE MODE AUTOPILOT
‘. ANN SELECTAUTOPILOT PITCH ANO ROLL
d l“.
Q
LOGIC LOGIC TCAS AND LOGIC COMMANOS.= .;., ,
~i.% * .AP DISENGAGE
,=. . ,r,& -:GO AROUND
(7!!P
-.,...,.-;’-.“ ,
-.. ..’
‘J.
)T’ mPC-5G0 AUTOPILOT CONTROLLER
+&k+&RECEIVE ANT TRANSMIT ANT ““’:GyRO d-”-k
rEEz5xl“..*. “.-,mr . . . .,---- I c1r
w=FLUX VALVE
s-al 2
m.?-... “.””. . ...”. ““
Qlal IITHROTTLES CONIROI
WHEEL
RZ.220 ROLL RATE MONITOR(CIT V ONLY)
DUAIREMOTECOMPENSATOR
C.140DIRECTIONAL GVRO
SystemF1ow DiagramFigure1 (Sheet1 of 2)
22-14-00Page5/6May-25/90lfseor dmclosure Of information on this pageis subject to the reslricllons on the title pageof this document.

Honeywell lNKR’ANcECITATION V
RD-450 HSI
NAVIGATION DATA FROMOPTIONAL RNZ-850 ~NAV UNIT
HEADING OUTPUT~ TO SG-605
SYMBOL GI=NERATOR(SH1)
CS-412DUAL REMOTECOMPENSATOR
m
C-14DDIRECTIONALGYRO
e
I0.s TO SI’-2OO. .
0 AP COMPUTER(SH1:I
COPILOT’SSIDEFX-220FLUX VALVE AD-18742 ?’
SystemFlowDiagramFigure1 (Sheet2)
22-14-00Paae7/8Mar-15/89Use or disclosure of Information on this page K subjeci to the restrictions on the Mle pacje of thts document

DATAFROMDC-811
PILOT’SSENSORS
Honeywell W’W’ANCECITATION V
ED-600MFD
f +
“(~’DTw MAGOlomfi
HD6 FMS1I 2s NE
,jcAEt ~
~Rc IN6S
o y, @J’ o
150310
142.DN 3W 24.2, I’!ANZYU112C6.S, W.] L 20 HIM
GENERATOR
m
WX FROMWU-650FIG.1
ASCBTOSG-605(FIG.1)ANDNZ-61O(FIG.3)
BACKUPFOREFIS
AD-18743MC-800MFD CONTROLLER
OptionalMultifunctionDisplay(MFD)SystemF1ow Diagram
Figure222-14-00
Page9/10Ma~ 15/89
Use or disclosure of information on this page IS subject to the restntiions on the title pal e of this document.

429LS
429LS AT-801ANTENNA
RECEIVERPROCESSORUNIT
TOOPTIONAL
NO.l&2 ‘=RNZ-850
NZ-81OCOMPUTER I i
IIW-422 I
CD-800CONTROLDISPLAYUNIT
I I
I
i L–.RS-422----
~DL-SOODATA
]LOADER
I●
●.6
AZ-81ODIGITAL*COMPUTER
*NOTPART3FFMZ-800COMPONENTS
AD-18744
OptionalFMZ-800FlightManagementSystem(FMS)FlowDiagram
Figure3 22-14-00Page11/12Mar 15/89
Use or disclosure of information on this page IS subject to the restrictions on the title pa~~ of this document.

Honeywell WUY’NCECITATION V
Ki
I
)
FrM-sm RADIOMANAGEMENT
LrNrT W 2
ql-
,
mm m0m ~4- FMa
m m TUNS4Gm m
ncmnoonn
RM-e50 RADs)MANAGEMENT UNIT
D
- (,
m ~-RS422
FMsTUNING
(0/ .. W- , , “.\o ii w 44
I NO. 1 DIGITAL AUDIO BUS 1
T I Ill Alum 42s~ k--o ‘Q-AII I NO 2 DffilTAL AIJDkY BUS, 1
ordsooMElNDrCATORII I
8 I—--- ——-
1 1- 1[!RAOUl SYSTEM BUS
1 I
Iml, y;::
UEAIW4CE-== OELIVEFY
od~ ~L m.—
vFrcz.sYl
INTEGRATEDCOMMUNICATION
UNIT NO 1i
II I IRSA22BuSES
rceNAV DATATO RD-4S0 HSI
rL%sa
RNZ.BW INTEGRATED
w. “/Rcz4.so F .--%’- ““;%’NAVIGATION UNIT ND. 2
L=IleIML-SE41MIS
RECEIVERNo. 1
-f%”’~,~,“----I&GLIDE SLOPE
ANTENNA
T
T!7 T?... 0.........Cl!flGLIDE SLOPE
ANTENNA
a A,,MLS ANTENNASMI-SANTENNAS
tiDME ANTENNA
TRANSPONOEHANTENNA
TRANSPONDERANTENNA
OME ANTENNA
?’11.VofvLocANrEr4NA
\
h.
VorwmcANTENNA
A
\
MARKER SEACONANTENN4\
i
\MARKER SEACON
ANTENNA oCOMM
.00 ANTENNA o-.00 ANTENNA
h-:==&+AT-&30 AOF ANTENNA
AD1622$R1
OptionalRNZ-850IntegratedRadioSystemFigure4 22-14-00
Page13/14Mar 15/89
Use or dwlosure of Intormatlon on this page is subject to the restrictions on the Mle page of thm document.

Honeywell WI’LWANCECITATION n/V
AT-850 LIGHTNING ANTENNA
429 LS DATA
DG VALIDAND 3-WIRESYNCHRO DATAFROM C-1 4DDIRECTIONALGYRO
I MODE
~ TO SG-605 ANDMG-605 SYMBOLGENERATORS
429 LS DATAFROM AZ-81 O
~ DIGITAL AIRDATA COMPUTER
LP-850 LIGHTNINGSENSOR PROCESSOR
IDISCRETES
.
[clo
ST9Y ‘x C,, T!3T 0
a‘“ Q
o 0LU-850 LIGHTNINGSENSOR CONTROLLER
OptionalLSZ-850LightningSensorSystemFlowDiaqram
Figure5 -
AD-21740
22-14-00Page14.1/14.2
May25/90Use or dwclosure of Information on Ih!s page IS subject to the restrtctlons on the tttle pai e of this document

Honeywell MME’*NCECITATION n/V
m
I.-, ...
/.- 4C ‘=-----R-T-T-5A
ITEMNO. NOMENCLATURE
1 LEFT SIDE NOSE COMPARTMENT COMPONENTS:. SP-200AUTOPILOT COMPUTER. AZ-241 OR AZ-810 AIR DATA COMPUTER. C-14D DIRECTIONAL GYRO NO. 1● VG-14A VERTICAL GYRO. AG-222 ACCELEROMETER
(UNDER VG-14A)● RG-204 RATE GYRO. RNZ-850 INTEGRATED NAVIGATION UNIT NO. 1. RCZ-860 INTEGRATED COMMUNICATION
UNIT NO 1.
2 RIGHT SIDE NOSE COMPARTMENT COMPONENTS:. FZ-500 FLIGHT DIRECTOR COMPUTER. SG-605 SYMBOL GENERATOR. RZ-220 ROLL RATE MONITOR. C-14D DIRECTIONAL GYRO NO. 2. RNZ-850 INTEGRATED NAVIGATION UNIT NO. 2. RCZ-850 INTEGRATED COMMUNICATION
UNIT NO. 2
3 WU-650 ANTENNA AND RCVFUXMTR UNIT
ITEMNO.
4
5
6
7
8
9
1011
12
13
14
15
18
17
NOMENCLATURE
Y \ \\
ITEMNO. NOMENCLATURE
ML-850 MLS RECEIVERS
CS-412DUALREMOTECOMPENSATORAT-223RADIOALTIMETERANTENNA(TRANSMITTER)AT-223RADIOALTIMETERANTENNA(RECEIVER)RT-300RADIOALTIMETERRCVR/XMTRAT-660ADFANTENNASOZ-800RECEIVERPROCESSORUNITNZ-61ONAVIGATIONCOMPUTERSM-200SERVODRIVE(ELEVATOR)SM-200SERVODRIVE(RUDDER)SM.200SERVODRIVE(AILERON)SB-201SERVODRUMANDHOUSINGASSYFX-220FLUXVALVESAT-801H-FIELDBRICKANTENNA
ComponentLocationsFigure6
22-14-00Paqe15/16
19
18 INSTRUMENTPANELANDPEDESTALMOUNTEDCOMPONENTS:......
.
.
.
.
.
.
.
.
.
.
ED-600EHSIED-600EADIED-600MFDMS-205MODESELECTORPC-500AUTOPILOTCONTROLLERVN-212VNAVCOMPUTER/CONTROLLERORVN-801CONTROUDISPLAY6A-141BAROALTITUDEINDICATORR1-106SINSTRUMENTREMOTECONTROLLERDC-811DISPLAYCONTROLLERWI-650WEATHERRADARINDICATORRD-450HSICD-800CONTROLDISPLAYUNITMC-800MFDCONTROLLERRM-850RADIOMANAGEMENTUNITSAV-850AAUDIOCONTROLUNITSDI-851DMEINDICATORSCD-850CLEARANCEDELlVERYCONTROIJDISPLAYUNIT
19 MG-605MFDSYMBOLGENERATORAD 18745-R 1
M;y25/90Use Or disclosure of InformalIon on this page is subpct to the restnchons on the tttle page of Ihm document.

Honeywell W!’WAN’ECITATION n/V
Functionand Quantity RecommendedDesignation Required Description Source
FastErectSwitchS1
AneroidSwitch*
DirectionalGyroFree/SlaveSwitchS3
DirectionalGyroManualSyncSwitchS4
Pilot’sAP DisengageSwitchS5
TorqueWarningLight
FlapTransitionSwitch
Copilot’sAP DisengageSwitchS6
TouchControlSteeringSwitch,S7,S8
Go-AroundRelayK4
TrimRelaysKl,K2,K3
TCS/TrimRelayK5
l/VG
1
l/DG
l/DG
1
1
1
1
2
1
3
1
SPSTMOM.PushbuttonRatedat 1/2ampInductive
GornPressSW No. ConsolidatedGBC300-55 AirborneSystems
SPSTToggleRatedat 1/2amp Inductive
SPDTMOM.ToaalewithCenterOFF 1~~amprating
NC andNo Rated@ 283 ampsInductive
TradeNo.734165 mA@28V
DPDT
v
MicroSwitch
NC Rated@ 28 V 3 ampsInductive
MOM.N.O.SPSTSwitch ControlsCo.ofRatedat 1/2ampat AmericaSeries28 V dc B9000
NC Rated@ 28 V 3 ampsInductive
DPDTRelaysRated@ 28 V3 ampsInductive
SPDTRelayRated@ 28 V1 amp
* Theaneroidswitchis locatednearthecopilot’srightrudderpedal.
EquipmentRequiredbutnotSuppliedby Honeywell
Table3
22-14-00?aqe17
May25/90Use or disclosure of Information on Ihm page IS sublect to the restrlcflons on the title pa!js of this document

Honeywell U’R’AN’ECITATION n/V
2. SvstemDescription
TheSPZ-500CIFCSconsistsof thefollowingsubsystemswhicharedescribedinI Paragraphs2.AthroughJ.
. Attitude/HeadingReferenceSystem
. ADZ-241AirDataSystemor OptionalADZ-81ODigitalAirDataSystem
. AA-300RadioAltimeterSystem
. EDZ-605ElectronicFlightInstrumentSystem(EFIS)
. FlightControlSystem
. PRIMUS@650WeatherRadarSystem
● MDZ-605MultifunctionDisplaySystem(Optional)
● FMZ-800FlightManagementSystem(Optional)
. SRZ-850IntegratedRadioSystem(Optional)
i ● LSZ-850LightningSensorSystem(Optional)
TheSystemprovidesthree-axisaircraftattitudestabilizationandpathcontrol.Theautomaticpathmodecommandsaregeneratedby theFi!-500FlightDirectorComputerwhichintegratesthe attitudeandheadingreference,airdata,andEFISintoa completeaircraftcontrolsystemthatprovidesthestabilizationandcontrolneededto ensureoptimumperformancethroughouttheaircraftflightregime.
TheSystemdisplaysheading,course,radiobearing,pitchandrollattitude,barometricaltitude,radioaltitude,coursedeviation,glideslopedeviation,to-fromandDME indications.Lightedannunciatorsdenoteselectedflightmodeandaltitudealert. Pitchandrollsteeringcommandsdevelopedby theFlightDirectorComputerinconjunctionwiththeModeSelectoraredisplayedby steeringpointersto enablethepilotto reachand/ormaintainthedesiredflightpathor attitude.
An AvionicsStandardCommunicationsBus (ASCB)is usedto interfacebetweentheSG-605SymbolGeneratorandtheoptional’MG-605MFDSymbolGeneratorortheoptionalNZ-61ONavigationComDuter.Otherdatais transmitt[?don thefollowing
● DC-811bus)
● SG-605buses)
● MC-800bus)
● MG-605bus)
privatelineb~ses: “
DisplayControllerto SG-605SymbolGenerator(privatelineserial
SymbolGeneratorto ED-600EFISdisplays(privatelineparallel
MFDControllerto MG-605MFD Symbo-
MFDSymbolGeneratorto ED-600MFD
Generator(private!ineserial
display(privatelineparallel
22-14-00Page18
May25/90Use or disclosure ot Information on this page IS sub)ect to the reslr[ct}ons on the tdle page of this Iocument

Honeywell [WR’”c’CITATION V
2. A. Attitudeand
TheAttitudecomponents:
HeadingReferenceSystem
andHeadingReferenceSystemis comprisedof thefollowing
. VG-14AVerticalGyro
. C-14DDirectionalGyro
. FX-220FluxValve
. CS-412DualRemoteCompensator
TheVG-14AVerticalGyroprovidesa pitchandrollattitudesignalto theFZ-500FlightDirectorComputerandtheSP-200AutopilotComputerforusein controllingtheverticalandlateralmodesof operation.TheVG-14Aalsoprovidesa 50-millivolt/degreesignalto theMU-650AntennaandReceiver/Transmitterforuse in antennastabilization.Thethree-wirepitchor rollattitudesignalis alsoroutedto theSG-605SymbolGeneratorto providepitchandrollsphereindicationson theED-600EAD1.
TheC-14DDirectionalGyroprovidesthree-wireheadingdatato theSP-200AutopilotComputerforuse inyaw axiscontrolandto t?eSG-605SymbolGeneratorforpositioningtheheadingdialon the ED-60’3EHSI. TherearedualC-14DDirectionalGyrosin thesystem.Undernormaloperationthepilot’sC-14DdrivestheED-600EHSIandthecopilot’slL-14DdrivestheRD-450HSI. Theheadinginputto the SG-605SymbolGeleratorandautopilotcanbe switchedbetweenthepilot’sor copilot’sC-14DwiththeremoteHDGREV switch.
The FX-220FluxValvedetectsthemagnitudeanddirecti~nof theearth’smagneticfieldforuse in aligningtheC-14Dto magneticnorth. TheCS-412DualRemoteCompensatorprovidessinglecycleN-S,E-Wcompensationforthefluxvalve.
B. ADZ-241AirDataSystemor OptionalADZ-81OAirDataSystem
TheADZ-241AirDataSystemis comprisedof thefollowingcomponents:
. AZ-241Air DataComputer
● BA-141BaroAltitudeIndicator
● VN-212VNAVComputer/Controller
TheAZ-241AirDataComputerprocessespitotandstaticpressureinputsandprovidesairspeed,altitude,andholdoutputsto thsflightcontrolsystemandbaroaltitudeto theBA-141.Also,altitudeencodingoutputsareprovidedfortransponderuse.
The VN-212VNAVComputer/Controllerprovidesselectionanddisplayforaltitudealerting,altitudepreselect,andverticalnavigation.
22-14-00Pagei9
Mar 15/89Use or dmclosure of mtormatlon on thm page K subject to the restrlchons on the title pa{ e of this documenl

TheoptionalADZ-81OAirDataSystemis comprisedof the fol””owingcomponents:
. AZ-81ODigitalAir DataComputer(DADC)
. 6A-141BaroAltitudeIndicator
. VN-800VNAVControl/Display
TheAZ-81OAir DataSystemis requiredif theFMZ-800FlightmanagementSystemis installed.TheAZ-81ODADCprovidesthe samefunctionsasdescribedfortheAZ-241butalsoprovidesARINC429datafo!useby theNZ-61ONavigationComputer.
WhenusingtheAZ-81ODADC,theVN-212needsto be replacedby theVN-800VNAVControl/Display.TheVN-800providesthesamefunctionsasdiscussedfortheVN-212. Thedifferenceis thatthecomputationsforthesefunctionsof theVN-800areperformedby theAZ-81ODADC.
2. c. AA-300RadioAltimeterSystem
TheAA-300RadioAltimeterSystemis comprisedof thefollowingcomponents:
● RT-300RadioAltimeterReceiverTransmitter
. AT-223Antenna
The radioaltimetersystemprovidesan absolutealtitudedisFlayforO to2500feetdecisionheightselection,failureannunciation,and internalself-test.
D. EDZ-605ElectronicFlightInstrumentSystem(EFIS)
The EFISis comprisedof thefollowingcomponents:
. ED-600ElectronicDisplay(EADIandEHSI)
. SG-605SymbolGenerator
. DC-811DisplayController
. RI-106SInstrumentRemoteController(IRC)
The EFISdisplayspitchandrollattitude,heading,courseorientation,flightpathcommands,weatherpresentations,andmodeand sourceannunciations.
The SG-605SymbolGeneratoris theheartof thesystemand processesallthedatafordisplayon theED-600EADIor EHSI. TheSG-605alsoprovidesswitchingforback-updatafromtheoptionalMG-605YFDSymbolGeneratorduringthereversionarymode.
The RI-106SIRCprovidesheadingandcourseselectinformationthroughtheSG-605to theFZ-500FlightDirectorComputer.
22=-14-00Page20
Mar 15/89Use or disclosure of mformatlon on this page K subject to the restrtctlons on the title page of thts jocument

Honeywell WE!!’””CITATION n/V
TheDC-811DisplayControllerprovidesthemeansforcontrollingthedisplayformatsandthe intensityof eachED-600display.TheDC-811alsocontainsthebearingselectknobs.
In thecaseof an ED-600displayfailure,a compositeattitude/headingdisplayformatcanbe displayedon theremainingdisplay.
The switchingof navigationsensordatato be displayedis providedelectronically.Allcomparisonmonitoringof criticaldisplayinformationis donewithintheEFIS.
2. E. FlightControlSystem
The FlightControlSystemiscomprisedof thefollowingcomponents:
● FZ-500
● SP-200
● MS-205
● PC-500
● AG-222
s SM-200
● RZ-220
FlightDirectorComputer
AutopilotComputer
ModeSelector
AutopilotController
Accelerometer
ServoDrive(Aileron,Elevator,Rudder)
RollRateMonitor(CitationV only)
The FZ-500FlightDirectorprocessescourseandheadingselect,attitude,airdata,DMEandradionavigationdatato providerolljpitchsteeringcommandsfordisplayon theED-600EADIand roll,airdata,andglideslopecommandsto theSP-200Autopilotforautomaticcontrolof theaircraftsurfacesviatheSM-200ServoDrives. Flightdirectormodeselectionisprovidedby theMS-205ModeSelectorandAP andYDengagement,turnknob,andpitchwheelinputsareprovidedby thePC-500AutopilotController.
TheRZ-220RollRateMonitoris usedto preventtheoccurrenceof anexcessiverollhardoverif an autopilotmalfunctionresultsin asaturatedservoamplifierduringrolloperation.If theRZ-220detectsrollanglesgreaterthan40 degreesandrollratesin excessof 20degrees/see,itwillcausetheautopilotto disengage.
22-14-00Page21
Mayj5/90useor dmclosure of mformatlon on thm page IS subject to the restnct!ons on the Iltle pat,,e of Ihm document

2. F. PRIMUS@650WeatherRadarSystem
The PRIMUS@650 DigitalWeatherRadarSystemconsistsof the followingcomponents:
. WU-650AntennaandRCVR/XMTRUnit
. WI-650WeatherRadarIndicator
The PRIMUS@650 is an X-Bandradardesignedforweatherdetectionandanalysis.The Indicatordisplaysstormintensitylevelsin b:-ightcolorscontrastedagainsta deepblackbackground.Areasof heaviestrainfallappearinmagenta,nextheaviestappearin red,rainfallof mediumintensityappearsyellow,andareasof weakestrainfallappearin green.Afterproperevaluation,thepilotcancharthiscoursearoun~ithesestormareas. Theradarcanalsobe usedforgroundmapping. IntheGMAPmode,prominentlandmarksaredisplayedwhichenablesthepilottoidentifycoastline,hillyor mountainousregions,cities,or even largestructures.In groundmappingmode,videolevelsof increasingreflectivityaredisplayedas cyan,yellow,andmagenta.Whe~lthePRIMUS@650 is operatedin conjunctionwiththeEFIS,radarvideoisprovidedfordisplayon theEHSI.
G. MDZ-605MultifunctionDisplaySystem(Optiona”
TheMDZ-605MultifunctionDisplaySystemconscomponents:
. MG-605MFD SymbolGenerator
. MC-800MFD Controller
s ED-600ElectronicDisplay(MFD)
)
stsof thefollt)wing
TheMultifunctionDisplaySystem(MFD)presentsdatato the f“ightcrewthatwillenhancetheoperationof theaircraft.Thisdatairlcludesnormalandemergencychecklists,navigationmaps,andweatherradar. Inaddition,theMFD providesbackupcapabilityfortheEFISSG-b05SymbolGeneratorandEFISdisplaytubefailures.
TheMG-605SymbolGeneratoris thefocalpointof informationflowin theMDZ-605System.Thesymbolgeneratorperformstheconversion:necessaryto interfacethismicroprocessor-basedsystemto thesensorsintheaircraft.Thisinformationis thenprocessedusingcomputerTechniquesto filter,scale,storeandreconvertthe informationto the videoanddeflectionsignalsrequiredto controltheelectronbeamon theED-600ElectronicDisplay.
TheMC-800MFD Controllerprovidesa meansforpilotselectiotof displaymodesandformats.
22-14-00Paqe22
Mar j5/89Use or dmclosure of mformatlon on thm page IS subject to the reslncllons on the Mle page of Ihls :’ocument

Honeywell M!’WANC’CITATION V
2. H. FMZ-800FlightManagementSystem(Optional)
TheFMZ-800FlightManagementSystem(FMS)consistsof thefollowingcomponents:
● CD-800
● NZ-61O
● DL-800
. OZ-800
● AT-801
ControlDisplayUnit
NavigationComputer
DataLoader
ReceiverProcessorUnit
H-FieldBrickAntenna
TheFMSprovideslateralandverticalnavigationguidancefordisplayandcouplingto the IFCS. TheCD-800ControlDisplayUnit(CDU)providestheprimarymeansforpilotinterfacewiththe systemanddisplaystheselectedflightplandata.
TheNZ-61ONavigationComputercaninterfacewiththreelongrangesensors,oneviaan ARINC429busandtwoovertheASCBbus. EachNavigationComputercanalsoconnectto dualDME Receiversanda singleVORReceiver.The interfaceto theMFDand EFISis overtheAvionicsStandardCommunicationsBus (ASCB).The interfaceto theAZ-81ODADCandOZ-800RPU is overanARINC429bus. Thelinkto theCDU is overan RS-422private-lineinterface.Withlinksto theon-boardnavigationsensors,theNavigationComputerdevelopsan FMSpositionbasedon ablendor mixof thesensors.TheFMSdoesnotdirectlydisplaynavigationmapson theCDU;however,theFMS is the sourceof mapdataforothercockpitdisplayssuchas EFISor MFD. Displayof mapdataisachievedby theutilizationof the internaldatabaseandASCB1/0. Alargeportionof thenavigationdatabaseis subjectto updatingon a 28-dayinterval.TheDL-800DataLoaderisusedforthispurpose.
Thenavigationpartof the FMSmaybe consideredan areanavigationsystemor RNAV. Itsfundamentalpurposeis to providenavigationinformationrelativeto a selectedgeographicallylocatedpoint.Navigationmanagementwillallowthepilotto definea routefromtheaircraftpresentpositionto anypointin theworld. The systemwilloutputadvisoryinformationandsteeringsignalsto al”lowthepilotorIFCSto steertheaircraftalongthedesiredroute. Routesaredefinedfromthe aircraftpresentpositionto a destinationwaypointviaa directgreatcirclerouteor viaa seriesof greatcircleleg:,connectedbyintermediatewaypoints.
22-14-00Page23
Mar 15/89Use ordisclosure Of mformatlon on thm page IS sublect to the restncllons on the title p Ige of this document

Honeywell W!’URANCECITATION V
2. I. SRZ-850IntegratedRadioSystem(Optional)
TheSRZ-850IntegratedRadioSystemconsistsof thefollowingcomponents:
. RNZ-850IntegratedNavigationUnit
. RCZ-850IntegratedCommunicationUnit
. ML-850MLSReceiver
. RM-850RadioManagementUnit
● AV-850AAudioControlUnit
● CD-850ClearanceDeliveryControl/DisplayUnit
. DI-851DME Indicator
● AT-860ADFAntenna
. AT-851MLSAntennas(2per system)
Theradiosystemprovidescommunicationandnavigationinformationto theflightcrew. It is a dualsystemconfiguration,withsystemNo. 1 beingthepilot’ssideandsystemNo.2 beingthecopilot’sside.
TheRNZ-850IntegratedNavigationUnitprovidesVHFNAVandPDF receiverandDME transceiverfunctions.TheRCZ-850IntegratedCommunicationUnitprovidesVHFCOMtransceiverandMODES transponderfunction!..Microphoneselection,radioheadsetandspeakeraudioselectionandvolumecontrolareprovidedby theAV-850AAudioControlUnit.
Thebasicradiocontrolfunctionsare:
. VHFCOMmodeandchannel
● VHFNAVmodeandchannel
. ADFmodeandchannel
. Transponderreplycodeandmode
● MLS azimuth,elevation,andchannel
. AudioPanel
. DME (IndependentChannelingintheSplitMode)
Frequencyandmodecontrolof theradioscanbe inputby theoperatorfromeithertheRadioManagementUnit,viatheFMS,or by theClearanceDeliveryCDU.
22-14-00Page24
Mar 15/89Use or disclosure of mformatlon on thm page E subject to the restnctrons on the Iftle page of Wls document

Honeywell MNRANCECITATION n/V
Withtheexceptionof theaudiosignalsandemergencytuningcommands,alldataforthesecontrolfunctionsaretransmittedviaa RadioSystemBus (RSB).Audioswitchingcontrolis inputby meansof controAudioPanelitself.The audiosignalsaretransmittedfromtheunitsto theaudiopanelviaa dedicateddigitalaudiobus.
Withtheexceptionof a DME Indicator,allthenavigationdatadisDlavedon theEFIS. A seDarateDME indicatoris ~rovidedwh
s on theremote
sch
displa~sthedistance,groundspeed,time-to-station;and stationidentifier.
Basicto theoverallsystemdesignareclustermodulesin theCOMandNAVremoteunits. Theclustermoduleis an interfacingelementwhichcollectsdatafromtheRSB,distributesthisdatato therespectivefunctionalmodules(ADF,DME,etc.)viaRCB,andalsocollectsdataviaRCBfromthefunctionalmodulesto be broadcaston theRSB.
TheRM-850RMUbroadcastsmessagesaddressedto radiofunctionalmodulesandreceivesdatafromtheradiosviatheRSB. ThreemajorfunctionsoftheRMUareto outputtuning(channelor frequency)controldata,outputoperationalmodecontroldatafortheradios,anddisplaythetunedactivechannelor frequencyandoperationalmode.
The RSBis a highspeed(667kHz)multi-userbusthatallowsallradiosandcontrolheadsto broadcastdataon thebusforthe aurposeof tuningradiosto thedesiredchannelor frequencyforaircraftcommunicationandnavigation.Threebusesareusedforredundancyin theeventthatoneormorebusesbecomeinoperativeforanyreason.
Physically,RSBconsistsof threeseparatemulti-userserialhalf-duplex,digitalcommunicationsbuses. Eachbusis electricallyisolatedfromtheothers,andallbusesareelectricallyisolated(transformercoupled)fromthecircuitryinsidetheunitsinstalledon thebus. Eachbus isterminatedat eachendwithan appropriateterminationnetworkasshowninSection6, Table501,Figure4-9.
The busisconnectedin a mannerthatoneprimarybusservesallof theradios.Twosecondarybuses,oneforeachside,servetheradioson thatsideonly. By connectingthebusesas shown,onlythreecontrolbusconnectionsthroughthepressurebulkheadareusuallyrequired.
TheRSBhasno buscontrollerscommandingusersto transmitdata. Usercomponentsknowwhentheyshouldtransmitby havingsynchronizedthemselvesto broadcastson thebusandarecontinuallydesynchronizingtheirclocksto validbroadcastson thebus. A validbroadcastisdefinedas a transmissionthathasthecorrecttransmitaddressandhasoccurredin a timeslotdefinedforthataddress.
Lossof theprimarybusonlyeliminatesthecross-sidecontrolfeature.InthateventtheRMUSor controlheadscanno longertunetheiroffsideradios.However,no radiofunctionsarelost. Theradioson bothsidesarestillfullyfunctionalviatheirsecondarybuses.
22-14-00Paqe25
May25/90Use or dwclosure of mtormatlon on this page IS subject to the restrictions on the Mle paq g of this document

Honeywell MVJEJANC’CITATION n/V
2. J. LSZ-850LightningSensorSystem(Optional)
The LSZ-850LightningSensorSystemconsistsof thefollowingcomponents:
. LP-850LightningSensorProcessor
. AT-850/855Antenna
. LU-850LightningSensorController
. WC-650WeatherRadarControllercontainingLSSswitch(usedinplaceof LU-850)
The LightningSensorSystemdetectslightningactivityin theregionaroundtheaircraftwithin100NM anddeterminestherangeandbearingofeachlightningdischarge.A symbolplandisplayisgeneratedwithspecialsymbols,as shownin Figure7, andthesesymbolsareIdisplayedinconjunctionwithweatherradardisplayson theEHSIor MFD.
The LU-850or WC-650Controllercontainstheswitchusedfor theselectionof themodesof operation.
9WHITE
LEVEL 1
BWHITE $WHITE
LEVEL 2 LEVEL 3
LightningSymbolsFigure7
bMAGENTA
ALERT
AD 13983R4
22-14-00Page26
May25/90Use or disclosure of mformatlon on thts page w sub)ect to the restncttons on the title page of Ihls !ocumenl

Honeywell W’E’ANcECITATION n/V
SECTION2COMPONENTDESCRIPTION
1. General
Thissectionprovidesan illustration,leadingparticulars,a briefdescription,anda blockdiagramor schematicof eachcomponentusedintheSystem. The informationisonlyforthespecificcomponentslistedinSection1, Table1. Whena componentpictureutilizescallouts,thedescriptionforeachcalloutis presentedwithupperleft-handcalloutdescribedfirstandproceedingclockwiseunlessit is a minoritemgroupedwitha majorcallout.
Thecomponentsareseparatedintothefollowinggroupsor subsystems:
Subsvstem Paraqra~h
AttitudeandHeadingReferenceSystem 2
ADZ-241andOptionalADZ-81OAirDataSystem 3
OptionalAA-300RadioAltimeterSystem 4
ElectromechanicalFlightInstruments 5
EDZ-605ElectronicFlightInstrumentSystemandOptionalMDZ-605MultifunctionDisplaySystem 6
FlightControlSystem 7
PRIMUS@650WeatherRadarSystem 8
OptionalFMZ-800FlightManagementSystem 9
OptionalSRZ-850IntegratedRadioSystem 10
OptionalLSZ-850LightningSensorSystem 11
NOTE: Referto thecontentssectionin thefrontof thismanualforalistingof eachcomponentcontainedin eachsubsystem.
22-14-00Paae101May”25/90useor disclosure Of information on this page IS sub}ecf to the restrictions on the title pa~e of this document.

Honeywell URVJEPANCECITATION V
2. AttitudeandHeadinqReferenceSystemandRateGvro
A. VG-14AVerticalGyro(SeeFigures2-1 and2-2,andTable2-l.)
The Gyroprovidesthree-wiresynchrooutputsthatareelectricalanalogsof theaircraftDitchandrollattitudes.Pitchqimbalfreedomis t80degreesandroll’gimbalfreedomis unlimited. -
VG-14AVerticalGyroFigure2-1
Dimensions:
Length......................................... 9.38in.(238.3mm)Width.......................................... 6.75in. (171.5mm)Height......................................... 6.19in. (157.2mm)
Weight(maximum)....................................... 7.3lb (3.3kg)
PowerRequirements:
Primary.................... 115V, 400Hz,80 VA startand40 VA run
MatingConnector:
lJ1 ................................................. MS3126F22-55SY
Mounting.................................................... HardMount
VG-14AVerticalGyroLeadingParticulars
Table2-122-14-00
Page102Mar 15/89
Use or dkclosure of information on this page is sub)ect to the restrictions on the title page of thi: document.

Honeywell WR’AN’ECITATION V
1J21 ) F 5V, 400 Hz OUTPUT
26 V. 400 HZ OUTPUTI ) E
1 J2
c++-
,115 V,400HZINPUT POWER
<l,& 26VAC I
F+28VDC
1> D1
III
I
I
I
+28VDC OUTPU1
- +20VDCUNREGULATED
J*+10VDC
POWERSUPPLY +15VDC PRECISION
REFERENCE
J-~ POWERSUPPLY
–15Voc* B+(+13VOC)
——_r—— ‘-’-’”’”;
MONITORFLAGINTLK
AUTOPILOT INTLK
+10 Voc
POWER GN13 J
EXTERNALPECO INTLK
R
r-rL+28vDc!1-
1I
II
CHASSISGND+28VocI I *
GYROMOTOR
WHEELSPEED
MONITORr
115 V,400 Hz
I * I
I
+?+MEXTERNALFASTERECT
I
EXTERNALPECO PITCHTOFKNJER
CONTROLFIELDAMPLIFIES
>?
B5 PITCHTORQUER
W/kPITCHERECTLEVELSWITCH DIFF ~ !@
S1 * AMPL *
L hKi
+28VDC
I
I
IIIT 26 VA’ I( I
4)w
,
ROLLTORCIUEFICONTROL FIELO
ROLL ERECTLEVELQIIVITCH
OIFF+ AMPL
1
NOTES:
1.ALLRELAYSARESHOWNINDE-ENERGIZEDPOSITION.
2. UNDERLINEDLETTERDESIGNATESA LOWERCASELETTER
3.PINS1J2.A,G K M AND~ARE TESTPOINTS#_, _,ANDARENOTNORMALLYCONNECTEOWHENTHEGYROISINSTALLEOINTHEAIRCRAFT.TESTPOlNTSlJ2-~ANDQ,NOTSHOWN,AREALSONOTCONNECTEDINTHEAIRCRAFT.
4. EXTERNALGRADIENTADJUSTMENT
5.PlNSlJ2.sAND ~AND,lJ2-AAAND BBARENORMALLYJUMPEREDTOGETHERTOOBTAINTHE200mVAC/DEGOUTPUTGRADIENT.
EXTERNALRECOINTLK
RECOCONTROLlNORMALLyJUMPEREOTO1J2-J)
AOl19@R2oA
VG-14AVerticalGyroBlockDiagramFigure2-2 (Sheet1 of 2) 22-14-00
Paae103/104“Mar15/89
Use or disclosure Of reformation on Ihm page !s subject 10 the restrictions on the tttle page of Ihls documenl.

Honeywell Mi’E’ANcECITATION V
RECOOISABLE
i% ~tilNALR ECO
1J2A <,
1A
I
tROLL
I+ ERECTION
CUTOFF1J2
I
DETECTOR 1)
I
~ <u
T t
26 VAC
26 VAC
+15VIX-vv%-J
ROLLSYNCHRO
9
7
10
JT2B 13
3I
I
‘(N0TE4)(H)
T (c)%&&
(c) >
(H)
(x)I :
* i-
PITCHSYNCHRO
s
*
1
72 I(c) \1“
I
Ilx) .1
1 (Y)I >
A (z)II T >
VG-14AVerticalGyroBlockDiagramFigure2-2 (Sheet2)
22-14-00Page105/106
RECOCONTROLJ (NORMALLyJuMPEREO
TO 1J2-H)
ccBBAA
EE
llo
ROLLFDOUTPUT(200mVAC/DEG)(SEENOTE5)
ROLLRADAROUTPUT(50mVAC/DEG)
ROLLSYNCHROSTATOROUTPUT@OOmVAC/DEG)
PITCHFDOUTPU1(200mVAC/DEG)(SEENOTE5)
PITCHRADAROUTPUT(50mVAC/DEG)
PITCHSYNCI-IROSTATOROUTPUT(200mVAC/DEG)
ADl19@
‘Mar15/89Use or dmclosureOf reformationon this page is sublect to the restrictionson the I!tle page of this document.

Honeyell H!HRANCECITATION V
Thispageis intentionallyleftblank.
22-14-00Paqe107Mar-15/89UseordisclosureOf mformatlon on thK page is sub!ect to the restrictions on the title pag ? of this document.

Honeywell M!Ml!’”c’CITATION V
2. B. C-14DDirectionalGyro(SeeFigures2-3and2-4,andTable2-?.)
TheC-14DDirectionalGyroprovidesthree-wiresynchroheadinginformationto theED-600EHSI,copilot’sRD-450HSI,andtheAutopilot.In addition,a remotelymountedAUTO/MANswitchcontrolscompassslavedor nonslavedmodesof operation.A remotelymountedslewswitch(LH/RH)is usedto aligngyroheadingin caseof lossof theslavingamplifier.
A powersupply/staticinverter,whichoperatesofftheaircraft28 voltsdc power,is housedin thebaseof thegyro. The staticinverterprovidesoutputsof 115volts,400Hz and26 volts,400Hz.
(==I
C-14DDirectionalGyroFigure2-3
22--14-00Page108Mar-15/89Use or disclosure Of information on this page is subject to the restrictions on the tttle page of this document.

Honeywell UNJEPANCECITATION V
Dimensions
Length
(maximum) :
......................................... 9.03in. (229.4mm)Width.......................................... 6.25in. (158.8mm)Height......................................... 7.22in. (183.4mm)Height(shockmountsextended)................. 7.50in. (190.5mm)
Weight(approximate)................................. 6.7lb (3.04kg)
PowerRequirements:
primary ............................................... 28f3VdcStarting................................................... $~~~Running......................................................
GimbalFreedom:
Vertical(Azimuth)........................................ 360degHorizontal(PitchandRoll) ................................ ~85 degSlavedaccuracy............................................. *2 degGyrofreedrift(exclusiveof earthrate)............... *24deg/hrSlavingrate(normal)........................... 2.5to 5.0deg/minSlewrate(automaticfastor manual).................... 30 deg/min
MatingConnector.......................................... MS3126F20-41S
Mounting.................................................... HardMount
C-14DDirectionalGyroLeadingParticularsTable2-2
22-14-00Page109/110
Mar 15/89Useordisclosure Of information on thts page is sub~ect to the restrictions on the Mle pagl! of lhls document.

Honeywell WW’ANcECITATION V
~
—— —— —— —— ——- —— —— —C-14DGYROSYNCOMPASS
——1 ~2——— ——— ——— ——— ——— ——— ——— ——
GYROAND SYNCHRONIZER
I11
-i{
+ u(+)I ANN
AMPLANNUNCIATOR
r-——— —-—— ———— —--— ———— —--- ; +V(-)I 1 I
--tr SLAVING—— ——— —_—
1Lb”
—— -- -— -- —Ill
I
I
I ~ 11I I
I I u--tDEMOD I
!11
I
CIRCUITI
1 I
:~
n~:&R ‘~+24v”MANUALSYNCSW (+)
# -~ -rPOWERADEQUACYI
WHEELSPEED
MONITOR
IIll
yIIII
iI IL —— —— —— —— —
POWER
HGYRO
SUPPLYAND CIRCUITRECTIFIER (Bl AND B5)CIRCUIT (L1 THRU L4)
q--
Il.
–1 II
I
e
{}+ H 26V,400Hz (FROMBASE)
I CXNO.1
II
I +’II
t{}
~ jK(Z)-. 62 ● L (X) HEADINGOUTPUTNO.1
II II , +“(y)
~ p+-i-j-{3:}2’v‘--~*{~E]HEADINGOUTPUTNO.Z
1 I1>,
S 26 VAC FLUX VALVE EXCITATION
*s16 I
I I11 I
-—; IK2
I
l!
=1 Ill——— ——. — . —–—–—–i- I I
POWERWARNING(VALID)
AUTOPILOTINTERLOCK
i
I I —— —— —— —— —— .— ————— —— —— —— —POWERSUPPLY/STATICINVERTER (BASE)Ir -IiI 7~, I III
+26VDC c FILTER 400 Hz 1 STAGE PUSH-PULL AU~OMATIC POWER
‘1T
AND PUSH-PULL ~ PUSH-PULL CLASSB LEVEL TRANSFORMERVOLTAGE CONTROL 1m ~
LIC OSC CLASSB POWER AND26 VDC GND B LIMITER AMPL AMPL AND ZENER 1 1
REFERENCEOUTPUT A
l— I t II
,II
I ~
LL
J——— ——— ——— ——— —-—— ——— ——— ————— —— ..— ——— —— ——— — J
C-14DDirectionalGyroBlockDiawamFigure~-4
I 1i
1W 5V,400HZ LIGHTING
22-14-00
115V, 400 Hz
26V, 400 Hz (TO CX1,CX2ANDSYSTEM)ACPOWERRETURN
FREO/PHASELOCK
25755-R4
Page111/112Mar 15/89
UseordisclosureofInformationon this page is subject to the restrictions on the Idle page of Ihm document.

Honeywell !NJRANCECITATION V
Thispageis intentionallyleftblank.
22-14-00Page113Mar 15/89
Useordisclosureofln~orma~iononthfspage1ssubjecttotherestrictionsonthetitlepag~?ofthisdocument.

Honeywell M!iKR’ANcECITATION V
2. c. CS-412DualRemoteCompensator(SeeFigures2-5and2-6,andTable2-3.)
The DualRemoteCompensatorcompensatesthefluxvalveby insertingsmalldc voltagesto canceltheerrorscausedby magneticdisturbarlces.
CS-412DualRemoteCompensatorFigure2-5
Dimensions(maximum):
Length......................................... 5.62in. [142.7mm)Width........................................... 2.56in. (65.0mm)Height.......................................... 2.99in. (75.9mm)
Weight(maximum)....................................... l.Olb (0.45kg)
Powerrequirements................................. 26V, 400Hz, 2.5VA
MatingConnectors:
J1 .................................................. MS3126F14-19SXJ2 .................................................. MS3126F14-19SY
CS-412DualRemoteCompensatorLeadingParticularsTable2-3
22-14-00Page114Mar-15/89Use or disclosure of information on this page is subject to the restrictions on the title page of this document

Honeywell ~#!jJErANcECITATION V
SCREWDRIVERADJUSTMENTS
r —— —— -1 ~m
26 V, 400 Hz
INPUT POWER
I+6.6VDC
[?’
J1 (H)D
I
REGULATED
DC PDWER
~ l(c)) t
SUPPLY IE
IT -6.8 VDC>
II
I I
ICURRENT
LIMITING
RESISTORS
FLUX VALVEJ
III
I I
.— —
NO. 1J1 I
r!!iiE~~~’
F.
A.
DC
B< ; A BLOCKING
CAPACITORSc
I
L —— —— —— —— —— —.,.
NOTE, THE DUAL REMOTE COMPENSATOR CONTAINS TWO IDENTICAL COMIPENSATIONCIRCUITS. CIRCUITRY AND CONNECTIONS SHOWN ARE FORTHENUMBER ONESYSTEM THROUGH CONNECTORJ1. CIRCUITRY FOR THENUWBERTWO SYSTEMISIDENTICALTO SYSTEM NUMBER ONE, EXCEPT CONNECTIONS AREMADETHROUGH CONNECTOR J2.
I
1.*1 J1 K
TO
FLUX VALVE
:~CT
J
25756. R4
CS-412DualRemoteCompensatorBlockDiagramFigure2-6
22-14-00Page115Mar-15/89Useordisclosureofinformationonthispageksubjecttotherestrictionsonthetitlepa$l~ofthisdocument.

Honeywell KIURANCECITATION V
2. D. FX-220Flux Valve (See Figures 2-7 and 2-8, and Table 2-4.)
The fluxvalvedetectsthemagnitudeanddirectionof theearth’smagneticfieldandconvertsitto electricalinformationwhichis used toalign the directional gyro to magnetic north.
w.
FX-220FluxValveFigure2-7
Dimensions(maximum):
Bowldiameter ................................. 3.58in. (90.93mm)Mountingflangediameter....................... 4.80in. (121.9 mm)Height .......................................... 2.88 in. (73.15 mm)
Weight(maximum)....................................... 1.5lb (0.68 kg)
Power requirements ........................ 26.0f O.05V, 400Hz, 1.lVAsingle-phase
.
Mounting ........................... Nonmagnetic machine screws, 6-40 by3/8 in.roundhead,PartNo.319011
FX-220FluxValveLeadingParticularsTable2-4
22-14-00Paae116Mar”15/89UseordisclosureOfinformationonthispage is subject to the restrictions on the title page of this document.

Honeywell U2TJEFANCECITATION V
:]=i::$.F SHIELD
B
c.1800 ~Z
SIGNALOUTPUT
371s
FX-220Flux ValveSchematicFigure 2-8
%2-14-00Page 117Mar 15/89
Useordisclosureof reformation on this page IS subpct to the restrictions on the Iltle page of this document.

Honeywell lWR’ANcECITATION V
2. E. RG-204RateGyro(SeeFigures2-9and2-10,and
The RateGyror)rovidesa rate-of-turnsiqnalto
Table2-5.)
theEADIproportionaltotherateo; angulardisplacementabouta~ axisperpendicular”tothemountingsurface.
RG-204RateGyroFigure2-9
Dimensions(maximum):
Length ......................................... 3.32in. (84.3mm)Width .......................................... 2.04 in. (51.8 mm)Height .......................................... 1.82 in. (46.2 mm)
Weight................................................. 1.0lb (0.45kg)
MotorPowerRequirements
Excitation(400Hz) ........................................ 26 V acPower (running) ............................................. 6.5 VARunuptime(maximum)......................................... 90 secPhase........................................................ Single
Sense,polarity (input axis down, cw rate)(rate viewed from top) ......................... Positive
Mating Connector .......................................... TedMfgB1700
Mounting .................................................... Hard Mount
RG-204RateGyroLeadingParticularsTable2-5
22-14-00Page118Mar-15/89
Use or dwclosure Of information on this page K subject to the restrictions on the title page of this c!ocument.

26 VAC400H2
Honeywell Mfiw;kp’”c’CITATION V
———— —— .——.‘—–—K
4([H) ,
(c)2
3
=
*mvAc.44si Hx
*FwR SUPPLY OEMoo AMPL
= GYROe WHEEL SEEO
-IToR
4
51}GYRo oc‘% ~{L] VOLTAGE
40*0.4 VOCAT60SGSEC
~}
(L)-D GVRIFLFL:Hl+ 4.S*O.SVW
——— ——— ——— ——— —— P ~sz
RG-204RateGyroBlockDiagramFigure2-10
22-14-00Page 119Mar-15/89Useordisclosureofinfofrnatlononthis page is subject to the restrictions on the title page of thm document.

Honeywell MfiWJfPANcECITATION V
3. ADZ-241andODtionalADZ-81OAirDataSystem
A. AZ-241Air DataComputer(SeeFigures3-1 and3-2,andTable3-l.)
TheAir DataComputer(ADC)receivesinputsof staticpressureandpitotpressurewhichit utilizesto produceelectricaloutputsignalsfor airdata displays, altitude transponder, flight director, and the automaticflight control system.
AZ-241AirDataComputerFigure3-1
22-14-00Page120Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title page of this drcument.

Honeywell uirJErANcECITATION V
Dimensions(maximum):
Length......................................... 15.19Width............................................ 3.59Height.......................................... 7.63
n. (385.8mm)in. (91.3mm)n. (193.7mm)
Weight(maximum)...................................... 10.O lb (4.54kg)
PowerRequirements................................. 115V, 400Hz,40 VA
MatingConnector:
J1 ............................................... DPXBMA-67-33S-O068
Pneumatic Connectors:
Pitot (straight) ........................ MS24393-4 and Nut MS24400-4Static (straight) ....................... MS24393-6 and NutMS24400-6Pitot(90”)............................. MS24394-4andNutMS24400-4Static(90”)............................ MS24394-6andNutMS24400-6
Mounting............................ Tray,BarryPartNo.404A-38-S-DPXB
AZ-241AirDataComputerLeadingParticulars
Table3-1
22-14-00Page121/122
Mar 15/89Use or disclosure of information on this page IS subject to the restrictions on the Mle page ~f this document.

Honeywell M!E!’AN’ECITATION V
DC llME IEST
SMno [/c~----------:,~oc, ,,
+15-15vDC~( -E3 -,5
1 I —.- ,., .1 !,
I
I
, ~––––––– ——— ——— GNEJ+)A++15+0>
-Is+f>
+15 REF-p M>
~1
Ii
1 lAi A5 SENSORI ~___–––– J p:::s:N___
$==—-—A.1.
—ML.—— — ——— ——— .—— ———— ———— -
L.-’-;-534::”LII<A111-
-101.EF 9 +
8~.,:< ,. , ,,. -*5A” “z””
uI A7 AIRSPEED sENSOR +1
I––-. _.–––_____-l
fi6-sGTc FREsGnrsTNGr––– –––––––––––– –-– -,
:~ +’GNO c
+15
-15
6MD SEN
+15REF
r-FH+ ‘ ‘I HP ;
I, >LJ>
I I—A3-14 H=> V&l10
I 1A~l? All VAI lb H -:. VAL, L,
I
II
I~=
D< 101IME
‘+MONI 10R
ALTITuDE3 uONI1OR
“f~
$67
“i---b
6
I
1—
Wi==l’J! I I I‘c +,K)-
1
I I
I II I
1 II
J 1A BARO CORRECTION 1’v+
60( , <H; (I
II
I L——————l II
w< ,!SSEC
—
3I
; ~h ‘+y” ‘“10’’”0’‘“
=b+’ ... w--p” ‘;>16463 LC All
- ,>-q:+5 ,,’
-B I;4 I !
Clllih, mkNG 1
SSEC INPU1BA RO (W)
8An0 LOW
OARO DISABLE
——
1 .-’46
54
~
1-+51 +
I
I ,I
I 1’
L__—_—— —————— —————— ___A>-3
Al 15
44-.4:
rp,o~5——— ———1
1 J1.
I●2,—@4--+2wK’IIAZ-241AirDataComputerBlockDiagram
Figure3-2 (Sheet1 of 3)
L — — ——— —.
E4021354-1-E
22-14-00Paae123/124“Mar15/89
Use or disclosure of information On thts page is subject to the reslricllons on the title page of this document,

Honeywell Wi!!frANcECITATIONV
-i --L..———.— — —..—
1. ..— —— —————— —— —___ ______ -———,
S“PPLV I.—— — ———— —.. 1
* Efk+Q+”F’.15 “LX RCF’
● 20 —r-! ‘“+‘“RCGULA1OR-zo~+20 Vc~-23Pu+3 Pm-33PR
-A..,6
AZ.53
{
(M) 3
115 US(
(L) ●
{
(M) 1
16 V~t
(L) ?.
01 Oottccllrlcns
.—— ——————--———— —-——— —————=& , SWCURWIZCR
+s5 41 + +!s “0,
I
ICNO SEN
’15 ‘+6+- -@$ vDC !: Gwn L.’w>- J
I
1I
I
I
I
I
IIII
PILOTI+DL O
COP4L01MOLD
IL
I
I
I
I
I
III
HOLO OUT PuT (1
IioLo OUTPUT (
ALT CN6AGE
AL1 RATE ENCA
A/s CNG
●?.-55
A?. 44
SL[W fMCJ
5LCW COMIP.OL
140L D REF
1;L————————.—— ——————————————————J It
1’L__———— —-———————————————J J I
As.aa
55-
I — A5-Z
A4.4?I
AZ.33
A8-A
A6 KI——— —.— ——. - J
46. V
.— .—. . — h3.14
E4021264-2-E
AZ-241AirDataComputerBlockDiagramFigure3-2 (Sheet2)
22-14-00Page125/126‘Mar15/89UseordisclosureOf Information on this page is subject to the restrtctlon$ on the title page 01 this document.

Honeywell FA!ME!ANCECITATION V
A6 h
W.A
————————- _—_——.————..— —___ ___ _=Oc lC TIME A*
I
I
26
~ II
~+ 8SAMPLC ●“Lw.
+46* s , .?I
I $!,,
ION rtml 10 <owls
,1-
—
I
I
I
—— ———— .—— .J
3=I
——— J
-1!JIA
) 56 OIGITIZCR TEST
L!———————————
r -i 3— 7L:1U—OE—DCIIIZER — — — ———— — — — — — — ———— —-— ———— —
------d+I
so 5,0UI SVNC
LATCH ~ 32 5~oo svM~I
I
J NDl
AZ-241AirDataComputerBlockDiagramFigure3-2 (Sheet3)
22-14-00Pacle127/128
I I
OIG471ZEROIJr Ptlr
E4021354-3-E
‘Mar15/89UseordisclosureofIntormatlononthispage is subject 10 the restrictions on the title page of Ihls document.

Honeywell !fA!W’”c’CITATION V
Thispageis intentionallyleftblank.
22-14-00Page129Mar 15/89
UseordisclosureofInformationon~hkpageIS subjecttotherestrictionsonthetttlepage of fhls document

Honeywell WVR!ANC’CITATION V
3. B. BA-141BarometricAltitudeIndicator(SeeFigures3-3and3-4,andTable3-2.)
POINT
In’% -
ALTITUDEALEFT
,,, a ‘NNuNc’ATOR
><Q“’i,,
eq::ARNNG
/. : COUNTER
BARO
‘ETKNOBk@i!r~r
BARO COUNTERS31710
BA-141BarometricAltitudeIndicatorFigure3-3
Dimensions (maximum):
Length (from rearWidth ............
of bezel)...................... 6.65in. (168.9mm)................................. 3.28in. (83.3mm)
Height............................................ 3.28in. (83.3mmj
Weight(maximum)........................................ 2.8lb (1.27kg)
PowerRequirements:
Primary ........................................... 26V, 400Hz, 4VAAlt Alert .................................................... 28 V dcLighting ................................................ 5Vacordc
Mating Connector:
J1 .................................................... MS3126F20-41SW
Mounting .................................. Clamp, MSP Inc,PartNo.64409
BA-141BarometricAltitudeIndicatorLeadinqParticulars
T;ble 3-222-14-00
Page130Mar-15/89Useordisclosureofinformationonthispageissubject10therestrictionsonthetitlepageofthisd(,cument.

Honeywell
TheBarometricAltitudeIndicatordisplayof barometricallycorrectprovidesthefollowingdisplays:
3. B. (1)
(2)
(3)
(4)
(5)
AltitudeAlertAnnunciator-
MAINTENANCEMANUALCITATIONV
providesa servoedcounterdrum/pointerpressurealtitude.The Indicator
The liqht illuminates to ctrovide avisualindicationwhentheaircraft-iswithin1000feetof thepreselectedaltitude,andextinguisheswhen the aircraft is within250 feet of the preselected altitude. After capture, the light willilluminate if theaircraftdepartsmorethan250feetfromtheselectedaltitudeandwillextinguishif theaircraftdepartsgreaterthan1000feetfromthepreselectedaltitude.
FailureWarningFlag- Thefailurewarningflagcomesintoviewwhentheerrorbetweenthe altitudedisplayedandthealtitudesignalreceivedis toogreat,theADCgoesinvalid,or theBarometricAltitudeIndicatorlosesprimarypower.
AltitudeCounter- The four-drumcounterdisplaysaltitudefromO to50,000feet. A negative(NEG) altitude shutter obscures the 10,000and 1000 digits of the counter to annunciate altitudes belowsea1evel. The “O”positionon theten-thousandsdrumis blackandwhitecrosshatchto alertthepilotto altitudesof lessthan10,000feet.
BAROSetKnobandBAROCounters- Thebarometriccounters,setbymeansof theBAROknob,displaybarometricpressurein inchesofmercuryandmillibars.SettingtheBAROknobprovidesBAROcorrection,tothe airdatacomputer.
Pointer- Thepointerdisplaysaltitudesbetween1000-footlevelsona scalewithmajorindicesevery100feetandminorindicesevery20feet.
22-14-00Paqe131/132“Mar1’5/89
Use or disclosure of reformation on this page IS subject 10 the restrictions on the title page of thts document.

Honeywell H!K!!’”c’CITATION V
CCM7SE AL1FROM mc ‘r
IBARO CORRECTED)
‘2.6 Voc +0.2 rnvoc/Fr
+lSVOC ~FRDM ADC
FINE AL1
{
SIN U
FROM ADC[SARO
CosvCORRECTED)
cm w ipya IC LIMITERAND
DEMOD 1-/j!*I I ==I I
I II I
I
CHASSISGNo G
hi
““ND ‘h [=
c1WAS
MONITOR
LIGHTINGSYSTEMmwER
-10 Voc
GNO
30 Voc
GNO FROMALT ALERTCONT
28 VDC I IOATA VALIO &
I1
FROM AIJC I II L--.------—-———- ------- ——— ---- ----
5VOCISV6C A t&&.t-ki--q:’
‘“~DTm-%%---g ! @jp;:&o =
B
@
1
POINTER
I
.3241 I2 L-----
-—---——-—- . J
I
~~ K%A%:%4UY
.,,
BA-141BarometricAltitudeIndicatorBlockDiaaramFigure ~-4
22-14-00Page-133Mar 15/89
Use or disclosure of reformation on this page is subject to the restrtctlons on the title page of thts document.

Honeywell tiill~~p’”c’CITATION V
3. c. VN-212VNAVComputer/Controller(SeeFigures3-5 and3-6,andTable3-3.)
{ >
@mifE;LT:FR
\o)(1,
vANGDEG
01 M
\o o,25744-RI
VN-212VNAVComputer/ControllerFigure3-5
Dimensions (maximum):
Length.......................................... 10.53in.(267.5mm)Width............................................ 3.37in. (85.6mm)Height........................................... 1.65in. (41.9mm)
Weight(maximum)....................................... 2.51b (1.14kg)
PowerRequirements:
Primary........................................ 115V, 400Hz, 16VALighting......................................... 5Vacordc,2VA
MatingConnector:
J1 ................................................. JT06RE16-35S(SR)
Mounting................................. Clamp,MSP Inc,PartNo.64321
VN-212VNAVComputer/ControllerLeadingParticulars
Table3-3
TheVNAVComputer/Controller(VNCC)providesdatainsertionsanddisplaysforaltitudealerting,altitudepreselect,andVNAVmode.
Altitudeis selectedby placingtheselectorswitchto ALTandslewingtothedesiredvalue,andtheALT SEL button selected on the ModeSelectorwillinitiatealtitudepreselect.To utilizetheVNAVcomputationcapability of the VNCC,thepilotmustsetthe stationelevation,to-fromdistance,andgo to the VANG position after selecting the desiredaltitude.
22-14-00Page134Mar15/89
Use or dwclosure Of Information on this page is subject to the restrictions on the Mle page of this d >cument.

Honeywell WXRAN’ECITATIONV
lJ11> 23, 22 ALT AND VERT ERROR VALID
18 ALT ALERT HORN ANO LIGHT
ALT ERROR <1000 FT GND (KALT)
TO/FROM NULL GND
I
I
I 17,TO/FROM
lJ1
TO/FROM 30 I
~
I
II
RANGE VALIO 331
I1)20
POWERREADY●
POWERSUPPLYCARD
Al
ONE-SHOT●
I 1 24
ICLK 1, 2, 4, 5● 1
3.OIGIT DEC DRIVE
RANGE VALID●
OATA BUS DO-07
-’l
DISPLAYCARD
A4
DIGITALCARD
A2 DASH AND DEC POINT DRIVE●
I
ALT AND VERT ERROR VALIO●
✍✍❉
STAEL
VANG●
POT VOLTAGES●
CLK4
STAELm*
-i
TO BIASVNAV MODE GND
RNAV MODE GND
AIR DATA VALID
COARSE ALT REF
29
32
36
14
34
37
40,
m--i
FROM BIASANALOG
CAROA3AID COMP
4TO BIAS
o
FROM BIASaDC
SLEW RATE*RANGE
DC COARSE ALT
FINE ALT(SIN AND COS)
AIR DATA AC REF
41\l
36 I4 -25 .27 ALT ANO VERT ERROR
25S66
VN-212VNAVComputer/Control1erBlockDiagramFigure3-6
22-14-00Paqe135/136‘Mar15/89
USL! or dwclosure of lnfOrmallOn on this page IS subject to the restrictions on the Ittle page ot this document.

Honeywell W!URANCECITATION V
Thispageis intentionallyleftblank.
22-14-00Page137Mar-15/89UseordisclosureofInformationonthispage IS sublecf to the reslnchons on the title page of this document.

Honeywell WNR’”c’CITATION V
3. D. AZ-81ODigitalAir DataComputer(SeeFigures3-7 and3-8,andTable3-4.)
NOTE - TheAZ-81Ois a replacementfortheAZ-241ADC when using the‘“ FMZ-800FMS.
AD 3037
AZ-81ODigitalAirDataComputerFigure3-7
22-14-00Page138Mar 15/89Useordisclosureof mformatlon on this page IS subject to the restrictions on the title page of thw d>cument.

Honeywell ~iw!FrANcECITATION V
Dimensions(maximum):
Length......................................... 15.76in. (400.3mm)Width............................................ 3.59in.(91.2mm)Height......................................... 7.62in. (193.5 mm)
Weight(maximum)....................................... 10.01b(4.6 kg)
PowerRequirements.................................. 28Vdc, l.lAMax26 V ac Ref, 60 mA
MatingConnector:
J1 ....................................... DPX2MA-A106P-A1O6P-33B-OOO1
MatingPneumaticConnectors:
Pitot(straight)........................................ 40007-1B24*Static(straight)....................................... 40007-1A26*Pitot(90°elbow) ...................................... 40007-1B24E*Static (90” elbow) ..................................... 40007-1A26E*
*AllpartnumbersareAmericanSafetyFlightSystems.
Mounting........................ Tray,BarryPartNo.404A-38-S-l/DPX2-O
AZ-81ODigitalAirDataComputerLeadingParticulars
Table3-4
The AZ-81ODigitalAir DataComputer(DADC)is a microprocessor baseddigital computer which accepts both digital and analog inputs, performsdigital computations, and supplies both digital and analog outputs. Itreceivespitot-staticpressuresandtotalairtemperatureinputsforcomputingthestandardairdatafunctions.The airdataequationsaresolveddirectlyusinga 16/32-bitarithmeticmicroprocessorunderthecontrolof an 8-bitgeneralpurposemicroprocessor.TheDADCprovidesoutputsfordrivingtheBaroAltitudeIndicator,transponder,flightrecorder,flightdirector,andautopilot,as well as other elements ofthe flight control system. It also provides the computation fortheVN-800VNAVControl/Display.
22-14-00Paqe139Mar-15/89
Use or disclosure of Information on this page IS sub)ect to the restncttons on the title page! of this document

Honeywell M!MY’”c’CITATION V
DIGITALRANGE
I
9< I10
1
711
12 t
STATIC
kP&;Eo~E k FREOTUOENCY
SENSOR TEMPSERIAL
DIGITALCONVERTER
PAR~~LEL
CHARA~R~;ZAT IONCONVERTER
+(AR!NC 419)
[DIGITAL BUS
.—BuS (TO SH2)
/\
CHARACTERIZATIONPROM
PTPITOT
~SENSOR
‘TPRESSURE Pr
SENSORTEMP —
SENsOR TEMP INTERFACE
‘JIBVNAV
{<!
10HI
SLEWCONTROL IW< ‘o
{1AN::
51<1 “DIGIT
TO/FROM52< ‘0
CohvERT]
‘=4%=3EH
E=POWER
SIGNAL 5GROUND ~
SUPPLY
7
%OUND s
CHASSIS 9GROUND ,0
—
L
1BARO DISASLE 38
SSEC DISABLE 39
mSELF TEST 52 ,
T,4T/SAT SEL 71
ALERTER SEL 93P]LOT/COPILOT SEL lm
@
ALT 55
PILOT ALT RATE 56HOLDENG AJS 57
MACH 58
PILOT SLEW ENG 59JIBmALT 55
COPILOT ALT RATE %HOLDENG .4,,s 57
MACH 58
COPILOT SLEW ENG 59
J3A
Ma101>D2
AIRCRAFT 103INTERLOCKKEYING 1~
105
106
ASC.B DUAUSGL 99JIB
{a
94TEST INTERLOCK[DIAGNOSTIC MODEI 95
RANGE FORMAT 2.+
RANGE CORRECTION 65
RANGE VALl D S6a
DISCRETEINPUT
CON D~NINING
MULTIPLEXING
4CENTRAL
PROCESSINGUNIT(80851
t
H READ,wRITEMEMORY
(RAM) Ii 1
.5ESIVNAV ARM 92
VNAV CAPTURE 92
WAYPOINT SELECT 90
[
100
DISPLAY ’01SELECT 702
99
E
COMTORQUE LOGIC IN 1 5
TOROUE LOGIC IN 2 6
TOROUELOGICTEST 7
. ANALOG OUT (FROM SH2)
MONITOR [FROM SH2)
*c-7?d3
AZ-81ODiaitalAirDataComputer‘BlockDiagram -
Figure3-8 (Sheet1 of 2) 22-14-00
Use or disclosure of information
Page140Mar15/89
onthispageIS sublecttotherestrictionson the title page of thm :Iocurnent

Honeywell W/W’””CITATION Ilfl
JIA(H) ,1
(c) I
I;)
A LL4TA12
(H)24
(cl I;)
A CLK25
JIB
B
m
81
82VNAV
DISPLAY S2OUTPUT
REGISTER 04
85
S6
87IVNAVDISPLAYDATA
JIB
IAS SEL 91 ,
I
JIA
{ 932 “1
23 VACI AIEFE%ACE
INPUTLO
GENERATION33 7-j=fiiii
(H)
:;)
= OUTPUT(c)
ARINCz, NO 1
42s(H)
‘>)
70 o“,p(J~(c) I >,, NO 2
solJIA
FINE28
m RESOLVER
~}
cos , ~, FMRESOLVER
OUTPUT COM ALTITUDE NO 128
MO?41TOllClnCUITFiV
““c’ODE”w’7’FMooEI I I I I
DIGITAL BuSBUS (FROM Slit)— 1
1nlGtT41
H
TOANALOG
CO?4VERTEH
SAMPLE +tCkDCL3)4TRCl
JIA
-_..+ *4] 1
)COARSE DCALTITUDE NC 1a15
16
17
I18
19
m
21
ALTITUOE*EPOR’71NQREGISTER
TFIANSPONOEROUTPOT v
~----=i ‘oNT”’CIRCLIITRV OIGITAL SINTO AC FINE 1.
sOUTPUT RESOLVER
ms P89 FM
CONVERTER, REBCLVER
— CIJTPIJT COAJ, ~ ALTITUDE NO 2
ii
22
2sCOM
13
JIB
~1:1
1
TOFlOUE~ TOROUE LOGIC
Ij,OUTPUTS
LOGIC
4 TORQUE LOGIC VALIEI
r IREFJIA
~
)41IAS I ,,
MACH 1 ,5
VA40 : )484 1
A4ACHICOM 1 4)
4 AIRSPEEOWTPUTS REF
JIB
l)4?
-IAS
41MACH ! >
‘ 45
COM I >AdJIA
) 7U
}
PILOTOUTPUTS
1COPILOTOUTFllTS
---’@a
JIA
E34
}
JIB ALTITLIOE VALIDS
S4JIA49
VALIOrXITPUT
}
J1O AIRSPEED VALIOS
REGISTER 40
37 VERT PATH VALID
SAMPLWHOLO
CIRCUITS
IAS NO 3 1+ —JMONITOR
MULTIPLEXER
t3=i!’”TsO’::TspJg,,,g,~N,ToR
‘1ACIRCUITRY
HI
+51
LO
~
PILOT
5d HOLO OUTPUT
+ )61 PILOT HOLO FIEFHOLO
-OUTWTS HI J)S
1 53LO 1
~i}
COPILOT
54 I’(OLO OUTIWT
I )61 COPILOT HOLO I?EF
I,>78PRESELECT ALT VALIO
B“ “JIS
3s TO/FROM NULL
MISCOUTWT
75 ALT ALERT LIGHT
REGISTER 7s ALT ALERT HORN
e ,.74 PRESELECT ALT lSM FT
77 PRESELECT ALT CRANK
Ss WAYPOINT 1 ANN
I I i )09 WAYPOINT 2 ANN
JIA
PRESSURE
I
)78 PRESS ALT NO 1ALTITUOE JBOUTPUTS >79 PREss ALT NO 2
ANALOG OUT ~(TO SHII
MONITOR(TO SH1)
I AD 2! 7.2
AZ-81ODigitalAirDataComputerBlockDiaqram
Figure3-8 (sheet2) 22-14-00Paae141/142“May25/90
Useordisclosureofinformnllononthispage is subpct to the restrictions on the title page of this document.

Honeywell WJE!ANC’CITATION V
Thispageis intentionallyleftblank.
22-14-00Page143Mar 15/89
Use or disclosure of Information on thm page K subject to the restrictions on the title page of this document.

Honeywell MW!YANCECITATION V
3. E. VN-800VNAVControl/Display(SeeFigures3-9and3-10,andTab”le3-5.)
VN-800VNAVControl/DisplayFigure3-9
Dimensions (maximum):
Length........................................ 8.316 in. (211.23mm)Width.......................................... 3.275in. (83.19mm)Height......................................... 1.537in. (3$1.04mm)
Weight(maximum)........................................ 1.3lb (0.6kg)
PowerRequirements:
Primary ............................................... 28V dC, 5 WLighting........................................... 28Vdc, 3.OVA
MatingConnector:
J1 ...................................................... MS24308/2-4
Mounting................................. Clamp,MSP Inc,Part No 64321
VN-800VNAVControl/DisplayLeadingParticulars
Table3-5
The VNAVControl/Displayprovidesdisplaysfor altitude alerting,altitude preselect, and vertical navigation (VNAV) mode. Thecomputations foreachof thesemodesareperformedin theAZ-810AirDataComputer.
22-14-00Pa~e144Mar”15/89
Use or disclosure Of information on this page is subject to the restrictions on the title page of this dc cument,

Honeywell WRAN’ECITATION V
Altitudeis selectedby placingtheselectorswitchto AI.TSELandslewing to the desired value, and the ALT SELbuttonselectedon the ModeSelector willinitiatealtitudepreselect.To utilizetheVNAVcomputationcapabilityof theunit,thepilotmustsetthestationelevation,to-fromdistance,andgo to theVANGposition after selectingthe desired waypoint altitude.
TheWPT switchprovidesa meansforselectingthewaypointto bet)roarammedor disDlaYed.The PROFILE switch uroyidesa meansfor;tr;nging togeascent with no
Thedisplaywi”two seconds or
he;tietwoselectedwaypoints’fora multi-legdescentorlevel off between waypoints.
1 indicate dashes if poweris interruptedformore thanif the air data computer is not valid.
22-14-00Page145/146
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title page of this document.

Honeywell tiir~kp’”c’CITATION V
“v”c~’w , ,*—’’+%-
DISPLAYDATA
II +r
{
DDO
‘ %!!
1
BCD D’l 19
DATA DD2 14
DD3 18
(
DD4VNAV
DIGIT 11 DISPLAYSELECTORS DD5 12 ELECTRONICS
STROBE DD6 6
DISPLAYCONTROL{0 = DASHES
= DATA) ‘D’-hti
II
I III
II
II
I I
IIII
II
● p’% DIMMINGp’y} CONTROLINPUT
STA w~EL ALT ALT
@
TO SEL
FROM
VANG
9 +j+ LAMP TEST(GND = TESTI
DATASELECT
SELE’T’0MMON~21’+DISPIAY SWITCH
‘ J4i@i2+’+’’’”k”-’JAT,o”{:~d:WPT
AO.5S R3
VN-800VNAVControl/DisplayBlockDiaaramFigure3~10
22-14-00Paqe147Mar-15/89Useordisclosureofinformationonthispagem subjecttotherestrictionscmthetitlepageotthisdocument.

Honeywell MWR”c’CITATION V
4. Or)tionalAA-300RadioAltimeterSystem
RT-300RadioAltimeterReceiver/Transmitter(SeeFigures4-1Table
RT-300RadioAltimeterReceiver/TransmitterFigure4-1
4-2,
Dimensions (maximum):
Length ......................................... 11.07 in. (Z~l.Zmm)Width ........................................... 4.56 in. (115.8 mm)Height .......................................... 4.09 in. (104.0 mm)
Weight (maximum) ....................................... 4.51b(~.05 kg)
PowerRequirements..
Transmittercharacter
Type............
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 V dc,
sties(nominal):
............................ ShortPulseModu”
0.7A
ationRF”freauenc.y................................................ 4.3GHzPeakpower....................................................... 5W
Receiver characteristics (nominal):
Type................................................ SuperheterodyneIF frequency................................................. 60 MHz
RT-300RadioAltimeterReceiver/TransmitterLeadingParticulars
Table4-1
22-14-00Pac.le148Mar-15/89
Use or disclosure of information on this Page IS subject to the restrictions on the title page of this d~lcument.

Honeywell MAWJIPANCECITATION V
OperationalAltitude............................................. O-2500ft
DataOutputs/Accuracy:
PrecisionOutput....................... DC analogvoltag~(O - 2500ft)Gradient:-4.0mV dc/ft
O alt = O voltAccuracy: o - 100ft,*3 ft
100- 500ft,i3%500- 2500ft,t4%
Auxiliary Output .............. DC analogvoltage(O - 50tlft)Gradient:PerARINCcharacteristic552,
ALT= (0.02h+ 0.4)Vdc foraltitudesbelow480ft &(10+ 101.nh + 20)Vdc
foralt480ft
Accuracy: o - 100ft,100- 500ft,500- 2500ft
500t,udesabove
AltitudeTrips................ 100mA currentsinkprovidedat andbelow trip points indicated below:
Tri~Point Accuracy
50 ft t4ft250ft ~loft500ft *2Oft1200ft ~60ft
MatingConnectors:J1 ................................................... MS3126F16-26SJ2 - TRANSMIT....................................... GRFF4007-0002
(GRFFConnectors, GRFF Division, Solitron Devices, Inc)J3 - RECEIVE........................................ GFIFF4007-0002
Mounting.................................................... HardMount
RT-300RadioAltimeterReceiver/TransmitterLeadingParticularsTable4-1 (cent)
The RadioAltimeterReceiver/Transmitterprovidesa dc outputvoltagewhichis proportionalto theaircraftabsolutealtitudeaboveterrain.In addition,it providesradioaltitudetrippoints,an indicatorwarningflagoutput,andan auxiliaryradioaltitudeoutput.
The precision output is usedto drivethe EADIRADALTdisplay.Theauxiliaryoutputsuppliesabsolutealtitudeinformationto theflightdirectorsystem.
22-14-00Page149Mar-15/89
Use or disclosure of information on this page E subject to the restrictions on the title page of this documenl.

Honeywell WiURANcECITATION V
J2
YTO TRANSMITANTENNA
J3
Y TO RECEIVEANTENNA
r-o dP/7!
--—.J--—
(-
TRANSMITTERI To ‘ULSE VIDEOMODULATOR
RECEIVER
AGC VOLTAGESPROCESSOR
STC VOLTAGE
TRACKJ1 VALID J1
II
1>W AL-F OUTPUT [EH)
SELF TEST T I 1]X AUK OUTPUT
IY FLAG WARNING
II F TRACK INVALID
I1] N OUTPUT COMMONITEST INHIBIT NO. 1 D OUTPUT
I ASSEMBLY=
I
Ii U 1200 FTTRIP
TEST INHIBIT NO. 2 Bi I
1 V 250 FTTRIP
I I > R 50 FTTRIP
OUTPUT TEST EI I L 500= TRIP
I I > P ALT TRIP COMMON
I 28 VDC FILTERED I
I + +30 VDC I+28 VDC +15 VDCINPUT PWR E
Z +15 VDC OUTPUT
‘1 POWER ~ +5 VDC 1>
I SUPPLY I–15 VDC
PWR GND Q [ a -15 VDC OUTPUT
‘ -“’’’v”:::’RT-300RadioAltimeter Receiver/Transmi tter
BlockDiacwamFigure4:2
22-14-00Paqe150Mar”15/89LJseordisclosureofinformationonthispageEsublecttotherestnctlorlsonthetitlepageofthisrocument,

Honeywell ~firl~r’”c’CITATION V
4. B. AT-223RadioAltimeterAntenna(SeeFigure4-3 andTable4-2.)
OneAT-223anotheris
antenna is usedto receive information from theRT-300andusedto transmitinformationto the RT-300.
AD-18382
AT-223RadioAltimeterAntennaFigure4-3
Dimensions (maximum):
Width .......................................... 6.05ir. (153.7 mm)Height ......................................... 2.89 in. (73.4 mm)
Weight(maximum)....................................... 0.81b (0.36kg)
Power Requirements .......................... 10 Wpeakmax, lW average
Mating Connector:
J1 ...................................................... TNC - male
Mounting......................... Flushmountedto aircraftskin,usingNo. 10 panheadscrewsandgasket,
PartNo.4010193-3
AT-223RadioAltimeterAntennaLeadingParticulars
Table4-2
22-14-00Page151Mar-15/89UseordisclosureofIntormatlononthispageIS subjecttolherestrictionsonthetitlepage]~thisdocument.

Honeywell WUR!AN’ECITATION V
5. ElectromechanicalFliqhtInstruments
A. RD-450HorizontalSituationIndicator- Copilot’s(SeeFigures5-1and5-2,andTable5-l.)
FORE HEADINGHEADING HEADING LUBBER WARNINGDIAL BUG LINE FIAG
COURSESELECTPOINTER
COURSEDEVIATIONBAR
NAVIGATIONWARNINGFLAG
AIRCRAITSYMBOL
COMPASSSYNCANNUNCIATOR
COURSE RECIPROCAL A17 HEADINGSELECT COURSE LUBBER SELECTKNOB POINTER LINE KNOB
RD-450HorizontalSituationIndicatorFigure5-1
VERTICALWARNINGFLAG
VERTICALDEVIATIONPOINTEF
TO-FROMPOINTEF?
AD-396(I
22=14-00Page 152Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this document.

Honeywell W!JRANCECITATIONV
Dimensions (maximum):
Length .......................................... 7.00 in. (177.8 mm)Width........................................... 4.07in.(103.4mm)Height.......................................... 4.07irl.(103.4mm)
Weight(maximum)....................................... 3.81b (1.72kg)
PowerRequirements:
Primary ...................................... 26 V, 400Iiz,1.4VALighting....................................... 5 V ac ordc, 1.2VA
MatingConnectors:
J1 ................................................... MS3126F22-55SJ1 ................................................... MS3126F18-32S
Mounting................................ Clamp,MSP Inc,PartNo.64391
RD-450HorizontalSituationIndicatorLeadingParticulars
Table5-1
The RD-450SeriesHSIcombinesnumerousdisplaysto prov-dea map-likedisplayof theaircraftposition.The indicatordisplaysaircraftdisplacementrelativeto VORradials,localizer,andglic~eslopebeam.The indicatorprovidesthefollowingdisplays:
5. A. (1)
(2)
(3)
(4)
HeadingDialand ForeandAftLubberLine- Gyrostabilizedmagneticcompassinformationisdisplayedon theheadingdia~,whichrotateswiththeaircraftthroughout360degrees.Theazimuthringisgraduatedin 5-degreeincrements.Fixedheadingmarksareat theforeandaftlubberlinepositionsandat 45-degreebearings.
HeadingBugandHeadingSelectKnob- Thenotchedorangeheadingbugis positionedon therotatingheadingdialby theheadingknobtoselectanddisplaypreselectedcompassheading.The bugrotateswiththeheadingdialso thedifferencebetweenthebugandtheforelubberlineindexis theamountof headingerrorappliedto theflightdirectorcomputer.
HeadingWarningFlag- TheHDGflagis in viewwhentheheadingsignalfromthedirectionalgyrobecomesinvalid,primarypowertothe Indicatoris lost,or theerrorbetweentheheadingdisplayedandtheheadingsignalreceivedexceedsa specificthreshold.
VerticalWarningFlag- TheVERTflagis in viewwhuntheglideslopevalidsignalis lost.
22-14-00Page153Mar-15/89
Use or disclosure of reformation on this page is subject to the restrictions on the Mle page of fhls document.

Honeywell IN!JRAN’ECITATIONV
5. A. (5)
(6)
(7)
(8)
(9)
(lo)
(11)
(12)
VerticalDeviationPointer- TheverticaldeviationpointerdisplaysGS deviation.Forglideslopeoperation,thepointeris in viewonlywhentheNAVis tunedto a localizerfrequency.The aircraft isbelow glidepath if the pointer is displaced upward, and each dotrepresents 75 microamps of glideslope displacement.
TO-FROMPointer- Thepointerconsistsof twoflags,180degreesapart. One alwayspointsthedirectionto thestationalongtheselectedVORradial.
ReciprocalCoursePointer- Thepointerindicates180degreesfromthecourseselectpointerindication.
CourseSelectKnobandCourseSelectPointer- Theyellowcoursepointeris positionedon therotatingheadingdialby the courseknobto selecta magneticbearingthatcoincideswiththedesiredVORradialor localizercourse.Liketheheadingbug,thecoursepointeralsorotateswiththerotatingheadingdialto provideacontinuousreadoutof courseerrorto theflightdirectorcomputer.
CompassSyncAnnunciator- Theannunciatorconsistsof the symbol.or + (dotor cross)displayedin a window.Whenthecompasssystemis in the slavedmodeandsynchronized,thedisplaywillslowlyoscillatebetweenthe ● and+, indicatingthattherotatingheadingdialis synchronizedwiththegyrostabilizedmagneticheading.
AircraftSymbol- A fixedminiatureaircraftsymbolcorrespondstothelongitudinalaxisof theaircraftandlubberlinemarkings.Thesymbolshowsaircraftpositionandheadingwithrespectto therotatingheadingdial. It alsoshowstheaircraftpositioninrelationto a radiocourse.
NavigationWarningFlag- TheNAV flagis in viewwhenthenavigationvalidsignalis lost.
CourseDeviationBar - thebarrepresentsthecenterlineof theselectedVORor localizercourse.Theaircraftsymbolshowspictoriallyactualaircraftpositionin relationto thisselectedcourse. InVORoperation,symbolrepresents5-degreeIn ILSoperation, each dotcenterline (75 microamps).
eachdoton eithersideof the aircraftdeviationfromcenterline(75microamps).representsl-1/4-degreedeviationfrom
22-14-00Page154Mar 15/89Use or disclosure of information on this page IS subject to the restrictions on the title page of th!s document.

Honeywell UN!FAN’ECITATIONV
-J+? x W’J2%%J2
I MofwroR
I*1
MEWING VALID INPUT
HOG INPUT
Y
I !
f?
L- .-—----- -- A------ +–---T
e I
I
I
I
I
vER? HI LSVELvEWl LO LEVEL
vEWl FuGTuNE?O LOC GND
uv
w
A,RESOLVERCOURSE
NAV !+1LSVEL
NM LO LEVEL
NAV FMG
Pm
s I tII
I
II
It SYNCHROCOURSEERR~I
//DC GNO
vERT WV [-)
vERl OW (-1
-2s Voc
o
c
o
a
_A+lt-?”I
iA
II
r-
1
.WJ2
SYNC l+ LEVEL J
oOlx
SYNC LO LEVEL H
SYNC ANN G - Ml
{NJ’ ‘v \ @
W LIGHTING M LIGHTINGAc OR Gc
LIGHT BLOCKASSV HS401P4G
I
B-+----y4-
11sYNcMmOHEAOINGERROR
1 IJWSR,*DI “
I I
L ----- -- +
I 4--- ~> s
I E “S2 *
~___--_J nz 34 c1
RI S2
alo~
-J%(V11>
‘+-------------
COMP4!41SONMONITOSSYNCI+RO
I
-L—-—-— —— -—---- -1
RD-450HorizontalSituationIndicatorB1ock DiagramFigure5-2
22-14-00Paqe155Mar”15/89Useordisclosureof information on this page is subjecf to the restrictions on the tttle page of this document.

Honeywell W!iVR’”c’CITATIONV
6. EDZ-605ElectronicFliqhtInstrumentSvstemandODtionalMDZ-605MultifunctionDis~lavSvstem
A. ED-600ElectronicDisplay
The ED-600 is a standard 4.6 x 5 inch display that uses a high resolutionCRTto displayADIandHSI information. A single EDZ-605systemiscomprisedof twoED-600ElectronicDisplaysthatareidenticalandinterchangeable,exceptwhenused as an ADI an inclinometeris attachedto the bezel. LeadingParticularsof theED-600arelistedinTable6-1.Paragraph6.B.describesthedisplayfeaturesof theED-600whenusedasanADI and paragraph 6.C. described HSI features.Paragraph6.D.describesthecompositedisplayforthe EDZ-605EFIS,Paragraph6.E.describesMFD features,andParagraph6.F.describesthefunctionaloperationof the ED-600.
Dimensions (maximum):
Length ........................................ 10.50 in. (266.70mm)Width......................................... 5.070in. (127.78 mm)Height........................................ 4.695in. (119.25mm)
Weight(maximum)....................................... 9.1 lb (4.14 kg)
Power Requirements:
Primary .......................................... 28 V dc, 65 WmaxLighting.................................... 5 V ac or dc, 1.2Wmax
28 V dc, 1.2W max
MatingConnector:
J1 ................................................... MS27473E20B35Swith strain relief
MS27506-B20-2
Mounting............................ Clamp,HoneywellPartNo. 7000066-5or MSP PartNo.64483-103
ED-600ElectronicDisplayLeadingParticulars
Table6-1
22-14-00Page156Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this di cument.

Honeywell uilJJfrANcECITATION V
6. B. ED-600Used As an Electronic Attitude Director Indicator (EADI)
TheEADIcombinesthefamiliartruesphere-typeattitudedisplaywithlateralandverticalcomputedsteeringsignalsto providethepilotcommandsrequiredto interceptandmaintaina desiredflightpath. TheEADIprovidesthefollowingdisplayinformation:
●
●
●
b
●
●
●
b
●
9
VerticalNavigation,Glideslope,or ElevationDeviationExpandedLocalizeror AzimuthDeviationRadioAltitude- RisingRunway- DigitalDecisionHeightAir DataCommandFD ModeAnnunciatorsMarkerBeaconAnnunciationRateof TurnSpeedCommandAttitudeSource
Thefollowingdiscussionis separatedintothreeparts. Paragraph6.B.(1)describestheEADIdisplaysandannunciatorswithreferencetoFigure6-1;paragraph6.B.(2)describestheambercautionandfailureannunciationswithreferenceto Figure6-2;andparagraph6.B.(3)describestheredfailureannunciationswithreferenceto Figure6-3or6-4.
(1) ED-600EADIDisplaysandAnnunciators(SeeFigure6-1.)
(a) AttitudeSphere- The sphere moves with respect to symbolicaircraft reference to display actual pitch and roll attitude.Pitch attitude marks are in 5-degreeincrements.
(b) AttitudeSourceAnnunciator- Theselectedattitudesource isnot annunciated if it is the normal source for that indicator.As other attitude sources are selected, they are annunciated inwhiteat thetop leftside of the EADI. When the pilot andcopilot sourcesarethesame,theannunciationis amber.However,when the Citation V has onlyoneattitudesource,there willnot be anyattitudesourceannunciations.
(c) RollAttitudePointerandScale- The pointerdisplaysactualrollattitudewhenalignedwiththefixedinde,~referencemarksat O, 10,20,30,45,and60 degreeson the rollscale.
22-14-00Paqe157Mar-15/89
Use or disclosure of reformation On this page IS subject to the restrictions on the title page of Ihls document,

Honeywell WM?ANcECITATIONn/V
6. B. (1) (d) FlightDirectorModeAnnunciators- Flightdirectorverticalandlateralmodes are annunciated along thetopof theEADI.Armedverticalandlateralmodes are annunciated inwhitetotheleftof thecapturedverticalandlateralmodeannunciators. Captured modeannunciatorsaredisplayedingreen and are located to the left of top center for lateralmodes and in the upper right corner forverticalmodes. As themodestransitionas specifiedbelow,a whiteboxis drawnaroundthecaptureor holdmodeannunciatorfor5 seconds.
LateralTransitions VerticalTransitions
NAVARM to NAVCAP VNAVARM to VNAVCAP
LOCARM to LOCCAP VNAVCAPto ALTVNAVCAPto IAS
BC ARM to BC CAP ASELARM to ASELCAP
VAPPARMto VAPPCAP ASELCAPto ALT
AZ ARM to AZ CAP ASELARM to ALTGS ARMto GS CAPGPARM to GP CAP
(e) Glideslope,VerticalNavigation(VNAV),or GlidepathDeviationPointer- Theglideslopepointerandscalearein viewwhentunedto an ILSfrequencyto displayaircraftdeviationfromglideslopebeamcenter.Aircraftis belowglidepathif pointeris displacedupward.Eachglideslopedot represents0.35degree(75-microamp)displacementfromthe beamcent~?rline.IftheVNAVmodeis selected,thepointerindicatestheVNAVcomputedpathcenterto whichtheaircraftisto be flown. IfMLS is selected,thepointerwouldindicatedeviationfromtheselectedglidepathangle.
The letterG, or V is annunciatedinsidethepointertoindicatethetypeof informationbeingdisplayed.Ifthe scaleindicationbecomessaturated,thescalepointerwillgo outofviewbuttheletterG or V willremainin viewat themaximumdeflectionpositionof thescale.As the signalcomesout ofsaturation,thepointerwillpickup the letterandcarryitinsidethepointeras itmovesaboutthe scale.
(f) AircraftSymbol- Thesymbolservesas a stationaryrepresentationof theaircraft.Aircraftpitchandrollattitudesaredisplayedby therelationshipbetweenthefixedminiatureaircraftandthemovablesphere.Theminiatureaircraftis flownto alignthecommandcueto theaircraftsymbolinorderto satisfythecommandsof theselectedflightdirectormode.
22-14-00Paae158May”25/90
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of this dc :umen!.

Honeywell HWJEFANCECITATION V
6. B. (1) (g) MarkerBeacon- Markerbeaconinformationis displayedon thesideof the EADIbelowtheglideslopescale. Themarkersareof thespecifiedcolorof blueforouter,amberformiddleandwhiteforinnermarker.A whiteboxidentifiesthelocationofthemarkerbeaconannunciationaftertuningto a localizer.
(h) AutopilotEngageAnnunciator- A greenAP ENG is annunciatedwhenevertheautopilotis engaged.
(i)
(j)
RadioAltitudeDisplay- Thefour-digitdisplayindicatestheaircraft’sradioaltitudefrom-20to 2500feet. Theresolutionabove200feetof altitudeis 10 feet;below200feet,theresolutionis 5 feet. Thedisplayis blankedforaltitudesgreaterthan2000or 2500feet,dependingon theoutputcapabilitiesof theradioaltimeter.Whentheradioaltitudedatais invalid,thedisplayindicatesa dashin eachof thedigits.
RisingRunway- Foraddedbackupduringthecriticalapproachphaseof flight,absolutereferenceabovetheterrainisdisplayedbelow200feetby therisingrunway. The risingrunwayappearsat 200feetandmovestowardtheminiatureaircraftsymbolas theaircraftdescendstowardtherunway,contactingthebottomof thesymbolicaircraftat touchdown.If theradioaltitudeis invalid,therisingrunwayis outofview.
(k) Inclinometer- The inclinometergivesthepilota conventionaldisplayon aircraftslipor skid,andis usedas an aidtocoordinatedmaneuvers.A meansforlevelingthe inclinometeris provided.Levelinclinometerin accordancewithprocedurein Section8.
(1) ExpandedLocalizeror AzimuthPointer- Expandedlocalizerisdisplayedby thelocalizerpointerwhenevera validlocalizersignalis available.Rawlocalizerdisplacementdatafromthenavigationreceiveris amplifiedapproximately7-1/2timestopermitthelocalizerpointerto be usedas a sensitivereferenceindicatorof theaircraft’spositionwithrespecttothecenterof thelocalizer.It isnormallyusedforassessmentonly. Duringfinalapproach,thepointerservesasan indicatorof theCategoryIIwindow.Whentunedto otherthanan ILSfrequency,theexpandedlocalizerdisplayisreplacedby therate-of-turndisplay.WhenMLS is selected,theexpandedlocalizerpointerdisplaysdeviationfromtheselectedazimuthangle.
22-14-00Paqe159Mar”15/89Use or disclosure of Information on thm page is sub)ecf to the restrictions on the title pagf of this document.

Honeywell WWPCECITATIONn/V
6. B. (1) (m) Rate-Of-TurnDisplay - When tuned to other than an ILSfrequency, the rate-of-turn is displayed by a pointer and scaleat the same location as the expanded localizer. The rate-of-turn of the aircraft is indicated by the position of thepointer against scale indices. Themarksat theextremeleftandrightsidesof thescalerepresenta standardrateof turn(2-minuteor 3-degreeper second turn rate).
(n) DecisionHeightDisplay- Decisionheightisdisplayedby athreedigitdisplay.The setrangeis from10 to 990feetin10 footincrements.The DH displaymay be removedb.ysettingfullcounterclockwiserotationof thesetknob. Whenat orbelowdecisionheight,an amberDH willappearinsidethewhiteboxadjacentto radioaltitude.
(o) AirDataCommandDisplay- Whenselectinga flightdirectorairdatacommandfunction(verticalspeedor indicatedairspeed)andwiththeautopilotengaged,thecommandreferencewillappearin thelowerleftcorner.The autopilotpitchwheelmaybe usedto changetheairdatacommandreference.Forotherverticalmodes,theairdatacommanddisplaywillbe removed.
(P) Fast/SlowPointer- Thepointerindicatesrelativeapproachairspeedprovidedby the angleof attacksystem.ThepointerdeflectstowardF whentheaircraftis flyingat morethanprogrammedspeed. Theoppositeis truewhenthepointerdeflectstowardS.
(q) PitchandRollCommandCue - Thecuedisplayscomputedsteeringcommandsto captureandmaintaina desiredflightpath. Alwaysflythe symbolicminiatureaircraftto theflightdirectorcue.Thecue is biasedout-of-viewif an invalidconditionoccursintheflightdirectorpitchor rollchannel.
(r) AirspeedDisplay-IndicatedAirspeed(IAS)isdisplayedon arollingdigitreadoutbetween80 and600 knotswithI knotresolution.
22-14-00Page160May-25/90
Use or disclosure of Information on this page is subject to the restrictions on the title page of this do :ument.

Honeywell WUR!ANCECITATION11~
I LATERAL I
ROLL FLIGHT DIRECTORATTITUDE ROLL MODE ANNUNCIATORS
ATTITUDE POINTER SCALE (NOTE 3)
SPHERE \ \ \ /
?T!!ii+\ 1=PITCHAND ROLL HD ‘s mCOMMAND CUE(NOTE2)
AOA20— 20
—F
—lo o0
FASTISLOW _— o
> -
: !POINTER a“
o — olo— 10 0q
—AIRDATA 20
7
I
““’D$G~y\
H AP ENG
14 RA
+ /
DECISION EXPANDED INCLINOMETER RISING RADIOHEIGHT LOCALIZER RUNWAY ALTITUDEDISPLAY OR AZIMUTH DISPLAY
2.
3.
4
VNAV,GLIDESLOPE,
— OR GLIDEPATHDEVIATIONPOINTER
.AIRCRAFTSYMBOL
,MARKERBEACON
AUTOPILOTENGAGEANNUNCIATOR
POINTER(NOTE1)
NOTES:1.WHEN NOT TUNED TO AN ILSFREQUENCY,THE RATEOF
TURN POINTER AND SCALE IS PRESENT INPLACEOF THEEXPANDED LOCALIZERPOINTER.WHEN MLS ISSELECTED,THE EXPANDED LOCALIZERPOINTERDISPLAYSAZIMUTHDEVIATION.THECUE CAN BECHANGED TO CROSS POINTERSBYAPPLYINGA GROUND TO 115J1-7.A WHITEBOX ISDRAWN AROUND THE MODE ANNUNCIATORFOR5SECONDS WHEN AN AUTOMATICMODE TRANSITIONOCCURS.(INTHIS CASE ASEL ARM TO ALT.)
THE AIRSPEED DISPLAY IS ONLY AVAILABLE WHENUSINGTHEAZ-81ODADC.ITISCURRENTLY A NON-APPROVED OPTION.
+
LATERAL ARM(WHITE)
t .--u-.-. VAPPBC AZvOR LNAV
ED-600EADIDisplays andAnnunciatorsFigure6-1
22-14-00Page161/162
AIRSPEED=DISPLAY(NOTE4)
E[31 450 KTS J
LE!!UI-%KP-IVAPP LNAV VNAVVOR AZ ASEL VERTICALLOC HDG GS CAPTUREBC GP (GREEN)
GP VNAV
—F
1 lo— 10
+$(=-e[
lo— 10s —
nDECISIONHEIGHT(AMBER)
-KE4DEVIATION
● V FOR VNAVDEVIATION
● G FOR GPDEVIATION
I MARKER BEACON !
‘PsI1
AD-18383-R2
‘May25/90Use or disclosure of information on this page is subpxl 10 the restrictions on the title page of thts document.

Honeywell HiWJfPANcECfTATIONn/V
6. B. (2) ED-600EADIAmberCautionandFailureAnnunciations. .(See‘- - ‘-
(a)
(b)
(c)
(d)
(e)
(f)
(9)
(h),
(i)
(j)
(k)
Figure6-Z).
FlightDirectorFailure- An amber FD FAIL warning is displayedat the top left of the EADI in the event of a flight directorfailure. Also, the flight director cue and all FD modeannunciatorsareremoved.Duringself-test,if the FD modeannunciatortestis valid,the word TEST is annunciated inmagentaat thesamelocationas FD FAIL.
Excessive Deviation - Excessive glideslope/glidepath orlocalizer/azimuth deviation is indicated by changing therespective deviation scales and pointers to amber.
AutomaticFlightControlSystemSourceflightcontrolsystemswitchdiscretesreceivedduringEFISsourceswitching,willbedisplayed.
Advisory- If automaticarenotproperlyan amber “AFCS?”warning
FlightManagementSystemMessage(FMSMSG)- An amberwarningmessageto alertthepilotthatan FMSmessageis displayedontheCD-800ControlDisplayUnit.
TouchControlSteering- TouchControlSteeringmodeisindicatedby an amberTCSENG.
RadioAltitudeFailure- Intheeventof a failureof theradioaltimeter,amberdasheswillreplacethenumericalvaluesandtherisingrunwaywillbe removedfromthedisplay,if present.
DecisionHeightWarning- Whentheradioaltitudeiswithin100feetof thedecisionheight,a whiteboxwillappearto theleftof theradioaltitudedisplay.Whenat thedecisionheight,an amberDH willappearinsidethewhitebox.
DecisionHeightFailure- In theeventof an openDHpotentiometer,or duringself-test,amberdasheswillreplacethenumericalvaluesof thedecisionheightdisplay.
AirDatafailure,specific
AirspeedComputer
CommandFailure- In theeventof an airdatacomputeramberdasheswillreplacethenumericalvalueof theairdatacommanddisplayed.
DisplayFailure- In theeventof an AZ-81OAir Datafailure,thedisplayis replacedwithamberdashes.
SG BackupAnnunciator- An amberMG is displayedat thetopleftof theEADIspherewhentheSG backupmodeis selectedandtheMG-605MFDSymbolGeneratoris beingusedin placeof afailedSG-605SymbolGenerator.
22-14-00Page163May 25/90
Use or disclosure of mformatlon on this page IS subject 10 the restrictions on the title page of this document.

Honeywell W!RFcECITATIONn/V
6. B. (3) ED-600EADIRedFailureAnnunciations(SeeFigures6-3 and6-4.)
(a) AttitudeFailure- In theeventof a failureof theattitudedisplay,thepitchscaleandrollpointerwill be removed, thesphere will be painted blue, and a redATT FAILwillbedisplayedin the middle of the sphere upper half.
(b) G1ideslope, VNAV or G1idepath, Expanded Localizer or Azimuth,Fast/Slow Command and Rate-of-Turn failures - In theeventof afailureof anyof thesesystems,thepointeris removedandared “X”isdrawnthroughthescale. TheletterG or V remainsat thezerodeviationpositionto identifythe invalidinformation.
(c) InternalFailure- In theeventof an internalfailurewithinthedisplaysystemitself,thedisplaywillbe blank Afailureof the symbolgeneratorinput/outputprocessorwillbeindicatedby a red “X”centeredon thedisplay,withannunciation“SGFAIL.”
22-14-00Pacie164May-25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of this document.

SGBACKUPANNUNCIATOR(WITHMFDONLY)
\
AIRSPEEDDISPLAY FAILURE-(AMBER DASHES)
AIR DATACOMMANDFAILURE(AMBER DASHES)-
~,~,s,oN/HEIGHTFAILURE(AMBER DASHES)
Honeywell !RWPAN’ECITATIONV
FD FAIL(AMBER)
/
\
fi~ ;
FD FAIL
20 — 20AOA ~ —
FG10 —lo o
0 —
“&4’ (5---
T
, /zi\ ,0
slo— 10
—
CMD 20 — 20/i---KTS H FMs MsG-–-DH ---RA
1’
~“~>
D
DE&SION
%RADIOALTITUDEFAILURE(AMBER DASHES)
HEIGHTWARNING(AMBER) AD-18384-RI
ED-600EADICautionandFailureAnnunciations(Amber)
Figure6-2 - “22-14-00
Paqe165Mar-15/89
Use or dwciosure of information on this page IS subject to the restncttons on the tifle page of this document.

FAST/SLOW ,FAILURE(RED)
Honeywell UNMIFPANCECtTATIONn/V
AOA
o
\NOTE: RATE OF TURN
FAILURE IS SIMILAR.
EXPANDED LOCALIZEROR AZIMUTH FAILURE(RED) (NOTE)
ED-600EADICautionandFailureAnnunciations(Red]
Figure6-3 ‘ ‘
,ATTFAILANNUNCIATOR(RED)
/ffi;;&YLFllEpATHFAILURE (RED)
AD-11436-RI
22.14-00Page166May25/90Use or disclosure of information on this page is subject to the restrictions on the title page of thw document.

Honeywell WitW’”c’CITATIONV
AO-5276
ED-600Internal System Failure (Red)Figure 6-4 22-14-00
Page-167Mar 15/89
Use or dwclosure of information on this page !s sub)ect to the restrictions on the title pag? of thts document.

Honeywell M!URAN’ECITATIONn/V
6. C. ED-600UsedAs An ElectronicHorizontalSituationIndicator(EHSI)
The EHSI combines numerous displays to provide a map-like display of theaircraft position. The Indicatordisplaysaircraftdisplacementrelativeto VORradials,localizer,andglideslopebeam. At powerup,theEHSIpresentsa fullcompassdisplay.By pressingtheDC-811FULL~ARCor MAPbutton,thefullcompassdisplayis changedto a partialcompassformat.Also,ifweatherradarreturnsaredesired,pressingtheWX buttonon theDC-811changesthefullcompassdisplayto a partialcompassdisplayingweatherradarreturns.The EHSI,providesthefollowingfullandpartialcompassdisplayinformation:
FullCom~assDisplays
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
HeadingCourseSelectCourseor AzimuthDeviationDistanceGroundspeedTo/FromDesiredTrackBearing1 and2HeadingSelectVertical,Glideslope,or GlidepathDeviationTime-To-GoElapsedTimeHeadingandNAVSourceAnnunciatorsCompassSyncVariableGainAnnunciatorWeatherRadarModeandTiltAngleAnnunciatorFMSApproachMessage
partialComc)assDisplaysonly
. WeatherRadar
. WindVector
. NavigationMap (Rangeannunciationandwaypoints)
. MultipleWaypoints
Thefollowingdiscussionis separatedintofourparts. Paragraph6.C.(1)describestheEHSIdisplaysandannunciatorswithreferencetc Figure6-5;paragraph6.C.(2)describestheambercautionandfailureannunciationswithreferenceto Figure6-6;paragraph6.C.(3)describestheredfailureannunciationswithreferenceto Figure6-7;paragraph6.C.(4)describesthedisplayfeaturesof thepartialcompassdisplaywithreferenceto Figure6-8;paragraph6.C.(5)describesthelongrangenavigationmapmodewithreferenceto Figure6-9,andparagraph6.C.(6)describestheshortrangenavigationmapmodewithreferenceto Figure6-10.
22-14-00Page168May-25/90
Use or disclosure of information on this page is subject 10 the restrictions on the title page of this document.

Honeywell !R!JRANCECITATIONV
6. C. (1) ED-600EHSIDisplaysandAnnunciators(SeeFigure6-5.)
(a) CourseSelect/DesiredTrackDisplay- A digitalreadoutindegreesof the course indicated by thecourseselectpointer.If longrangenavigationis selected,desiredtrack(DTRK)isdisplayed.
(b) Drift Angle Bug (INSonly) - Thedriftanglebugwithrespectto the lubberlinerepresentsdriftangleleftor rightof thedesiredtrack. Thedriftanglebugwithrespectto thecompasscardrepresentsaircraftactualtrack. The bugisdisplayedasa green triangle which moves around the outsicle of the compasscard (either partial or full).
(c) FMSApproachMessage- A blueAPP indicatesthatthe FMSis intheapproachmode.
(d) HeadingSourceAnnunciator- Thecurrentheadingsourceisdisplayedinwhitewhenthepilotandcopilotsourcesarenotthesame. If theheadingsourcesarethesame,theannunciationis in amber.
(e) HeadingSelectBugandHeadingSelectDisplay- Thenotchedblueheadingselectbug is positionedon the rotatingheadingdialby a remoteheadingknobto selectanddisplaypreselectedcompassheading.Thebugrotateswiththeheadingdial,thereforethedifferencebetweenthebugandtheforelubberlineindexis theamountof headingerrorappliedto theflightdirectorcomputer.A digitalheadingselectdisplayisprovidedforconveniencein settingthe headingbug.
(f) NavigationSourceAnnunciators- Annunciationof thenavigationsourceis displayedin theupperrighthandcorner. Longrangenavigationsources(INS,VLF,RNAV,FMS)aredisplayedin blueto distinguishthemfromshortrangesourcesannunciatedinwhite.
(g) DistanceDisplay- Thedistancedisplayindicatesthenauticalmilesto theselectedDME stationor waypoint.Dependingonequipment,thedistancewillbe displayedin a.O-399.9or a O-3999nauticalmileformat.DMEHOLDis indicatedby an amber“H”adjacentto thedistancereadout.
22-14-00Paqe 169Mar-15/89
Use or disclosure of reformation on this page IS sub)ect to the restrictions on the Iltle pag,? of this document.

Honeywell MW!AN’ECITATIONn/V
6. C. (1) (h) HeadingDialandForeandAftLubberLines- Gyrostabilizedmagneticcompassinformationisdisplayedon theheadingdial,whichrotateswiththeaircraftthroughout360degrees.Theazimuthringisgraduatedin 5-degreeincrements.Fixedheadingmarksareat theforeandaftlubberlinepositionsandat 45-degreebearings.
(i) VerticalNavigation,Glideslope,or GlidepathDeviationPointer- TheverticalnavigationdisplayandannunciatorcomeintoviewwhentheVNAVmodeon theflightdirectoris selected.The deviationpointerthenindicatestheVNAV’Scomputedpathcenterto whichtheaircraftis to be flown.
TheglideslopedisplayandannunciatorcomeintoviewwhenaVHFNAV sourceis selectedon theEHSIandthatNAV sourceistunedto a localizerfrequency.Thedeviationpointerthenindicatestheglideslopebeamcenterto whichtheaircraftisto be flown.
TheglidepathdisplayandannunciatorcomeintoviewwhenMLSis selected.Thedeviationpointerthenindicatesdeviationfromtheselectedglidepathangle.
The letterG or V is annunciatedinsidethepointerto indicatethetypeof informationbeingdisplayed.If thescaleindicationbecomes saturated, the scale pointer will go out ofview but the letter G or V will remain in view at the maximumdeflection position of the scale. As the signal comes out ofsaturation, the pointer will pick up theletterandcarryitinsidethepointeras it movesaboutthescale.
(j) Groundspeed,Time-To-Go,or ElapsedTimeDisplay- PressingtheGSPD/TTGbuttonon theDC-811DisplayControllerallowsgroundspeedor time-to-goto be alternatelydisplayed.Groundspeeddisplayedis thevaluecalculatedby thelongrangenavigationsystem(LRN)if an LRNis installedand itsoutputis valid. IftheLRNis invalid,theEFIScomputesgroundspeedusingDMEdistance.
PressingtheET buttonon theDC-811changesthedisplaytoelapsedtime. Whenin theelapsedtime(ET)mode,theETdisplaycanreadminutesandsecondsor hoursandminutes.Thehour/minutemodewillbe distinguishablefromtheminute/secondsmodeby an H on theleftof thedigitaldisplay.
(k) BearingPointersandSourceAnnunciators- Thebearingpointersindicaterelativebearingto theselectednavaid.Twobearingpointersareavailableandcanbe tunedto navaidsor selectedoff fromtheDC-811DisplayController.Thebearingsourceannunciationsaresymbolandcolorcodedwiththebearingpointers.Whenthebearingpointernavigationsourceisinvalidor a localizerfrequencyis chosen,therespective
22-14-00Page170May-25/90
Use or disclosure of Information on thts page IS sub)eci to the restrictions on the title page of this document,

Honeywell W!O?AN’ECITATIONV
6. C. (1) (1)
(m)
(n)
(o)
(P)
(q)
bearing pointer is removed. Theannunciator:Symbols<z andOareremovedfromthedisplay,in additionto thepointersbeingremoved,ifthebearingpointersareselectedoff.
ReciprocalCoursePointer- Thepointerindicates180degreesfromthecourseselectpointer.
AircraftSymbol- A fixedminiatureaircraftsymbolcorrespondsto thelongitudinalaxisof theaircraftandlubberlinemarkings.The symbolshowsaircraftpositionandheadingwithrespectto therotatingheadingdial. It alsoshowstheaircraftpositioninrelationto a radiocourse.
Courseor AzimuthDeviationBar - Thecoursebarrepresentsthecenterlineof theselectedVORor localizercourse.Theaircraftsymbolshowspictoriallyactualaircraftpositioninrelationto thisselectedcourse. InVORoperation,eachdoton eithersideof theaircrafts~mbolrepresents5-deareedeviationfromcenterline(75mi:roamps)’.eachdotrepresentsl-1/4-degreedeviationmicroamps).WhenMLS is selected,thebarfromthe selectedazimuthangle.
Whenthebackcourse(BC)modeis selected
In ILSope~ation,fromcenterline(75indicatesdeviation
on the flightdirector,or whentunedto a localizerfrequencyandtheselectedcourseismorethan90°fromaircraftheading,thecoursedeviationis automaticallyreversedto provideproperdeviationsensingwithrespectto thecoursecenterline.Thecoursedeviationbaralwaysindicatesthelocationof thecoursecenterlinerelativeto thenoseof the aircraft.
WeatherRadarModeandTiltAnnunciator- The annunciatorindicatesthemodeof operationof theweatherradar. Theannunciationisdeterminedby themodeandfeatureselectedontheWX controller.BelowtheWX modeannunciator,theangletheweatherradarantennais positionedis displayedinpositivedegreesforup tiltandnegativedegreesfordowntilt.
NAVTo-FromAnnunciator- An arrowheadin thecenterof theEHSIindicateswhethertheselectedcourseis TO or FROMthestationor waypoint.TheTO-FROMannunciatoris not in viewduringlocalizeroperation.
CourseSelectPointer- Theyellowcoursepointeris positionedon therotatingheadingdialby a remotecourseknobto selecta magneticbearingthatcoincideswiththedesiredVORradialor localizercourse.Thecoursepointerrotates with therotating heading dial to provide a continuous readout of courseerror to the flight director computer.
22-14-00Page171Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title pa~e of this document

6. C. (1) (r)
Honeywell UiMfPANcECITATIONV
Whenlongrangenavigationis selected,thecoursepointernowbecomesa desiredtrackpointer.The position of the desiredtrack pointer is controlled by the long range NAV system. Adigital display of desired track (DTRK) is displayed in theupper left hand corner.
CompassSyncAnnunciator- Thecompasssyncannunciatorindicatesthestateof the compasssystemin the slaved mode.Thebarrepresentscommandsto thedirectionalgyroto slewtothe indicateddirection(+ forincreasedheadingandc fordecreasedheading).The syncannunciatoris removedduringcompassMANUALmodeand INSoperation.
22-=14-00Paqe172Mar-15/89
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of thm document.

Honeywell WW!ANCECITATIONn/V
DRIFT;;:LE FMS
APPROACH
\
MESSAGECOURSE/DESIREDTRACK DISPLAY I
(HONEYWELFM~ f)NIY)
HEADING FORE HEADING
\\ .. ..\. L %:o~lAToR,:wERjHc;.:;,::::N
-,. , ,---
AND TILT ANNUNCIATOR- [ A
COURSE OR I M i“”’ “<T
BEARINGPOINTERSOURCEANNUNCIATOR
~,/
T“- /. ~. 0’; . I
~ DISTANCEDISPLAY
‘HEADING DIAL
VERTICALNAVIGATION
\g&.;;.:TH
DEVIATIONPOINTER
\ VORGANNUNCIATOR
HEAD{NG AIRCR’AFT AF? RECI>RCCAL BEA~lNG..—.SELECT- SYMBOL LUBBER COURSE POINTERSDISPLAY LINE POINTER
\ GROUND SPEEDDISPLAY (NOTE 1)
QCRSOR
DTRK E=HEADING SOURCE
ANNUNCIATOR
DG1 MAGIDG2 MAG2
BTARGETALERTARMED
TGT (GREEN)
NOTE 2>
5BEARINGSOURCESADF1ADF2VOR1VOR2FMS
mEl
VERTICALDEVIATION
ANNUNCIATOR
vG
1=ELAPSED
TIME, TIME-TO-GO, OR
GROUNDSPEED
DISPLAY
ET
E59.59ETH959TTG399 MINGSPD
L-X!Es-NOTES:1.TIME-TO-GOAND ELAPSEDTIMEISALSO DISPLAYEDATTHISLOCATION
2. TX APPEARS WHENEVER THE WEATHER RADAR ISTRANSMITTINGAND WXISNOT SELECTED FOR DISPLAY.
AD-18418-R2
ED-600EHSIDiSD1a.ysandAnnunciatorsF~gu~e6-5 22-14-00
Page1737174May25/90
Use or dwclosure of Information on this page IS sublect to the restncttons on the title page of this document.

Honeywell WJYANC’CITATIONn/V
6. C. (2) ED-600EHSIAmberCautionandFailureAnnunciations(SeeFigure6-6.)
(a) WaypointAlertAnnunciator- An amber WPT annunciation from alongrangeNAV system is displayed to indicate waypoint passagefor the longrangenavigationsystemdisplayedon theEHSI.
(b) SameHeadingor NavigationSource- Ifthepilotand copilothave selected the same heading or navigation source, theapplicable sourceis annunciatedin amber. Otherwise theannunciation is in white. ForSRNsources,if the pilot andcopilot have both cross switched to the other’s source, theannunciator would be amber even though they would be fromdifferent sources.
(c) DMEHoldAnnunciator- WhenDME is in theholdposition,anamber“H”is displayedto theleftof thenumericalDMEreadout.
(d) WeatherRadar(WX)Failure- An amberWX indicatesa failurewithintheweatherradarsystem.
(e) WeatherTargetAlertor VariableGain- Weatherradartar-getalerts are annunciated on the EHSI above the bearing sourceannunciation.GreenTGT indicatesan armedconditionwhileamberTGT indicatesan alertcondition.An amberVAR indicatestheradaris operatingin thevariablegainmode.
(f) DisplayFailures- Whenanyof thefollowingsystemsfail,thedigitaldisplayis replacedby amberdashes:
. Groundspeed(GSPD)
. Time-To-Go(TTG)
. ElapsedTime(ET)
. DistanceMeasuringEquipment(DME)
. HeadingSelect(HDG)
. CourseSelect(CRS)
. DesiredTrack(DTRK)
(3) ED-600EHSIRed FailureAnnunciations(SeeFigure6-7.)
(a) HeadingFailure- A failureof theheadingsystemvalidresultsin theremovalof bearingannunciators,bearingpointers,To-Fromarrowselectcoursepointer,coursedeviationpointer,andcoursescale. Thedigitalselectcourseanddigitalheadingselectreadoutsaredashed,a red“HDGFAIL”isdisplayedat thetopof theheadingdial,andthe headingsourceannunciatorindicatesHDG.
22-14-00PaQe175May-25/90
Use or disclosure of information on this page is subject to the restrictions on the title pag,] of this document.

Honeywell WEJANC’CITATIONn/V
WAYPOINT ALERT SAME HEADINGANNUNCIATOR OR NAV SOURCE(AMBER) (AMBER) (NOTE 3)
COURSE SELECT\ \ AFAILURE(AMBER DASHES) \
(NOTE2)
‘mI TGT VAR I
WEATHER RADAR-FAILURE (AMBER)
HEADING SELECT—FAILURE(AMBER DASHES)
‘r/-\–\
Ih“’ CRS MAGlfl WPT IL$l——- T A “.----M
m’.‘h
“o.RJ*’’’(X.Xt:
“/0—-—-
-aloonl=-
‘as+
“/@‘/ &
VOR2 /’/,$HDG
\A-O
!\:?o
c? @ \’\‘ftl,,\\\\\‘ GSPD
I --- KTS
““’~
zDME DISPLAYFAILURE(AMBER DASHES)(NOTE 4)
\ DME HOLDANNUNCIATOR(AMBER)
>GRouND SpEED
FAILURE(AMBERDASHES)(NOTE1)
NOTES:1.TTG AND ETFAILURESARE SIMILAR.2.DTRK FAILUREISSIMILAR.3.IFBOTH THE PILOTAND THE COPILOTSELECTTHE CROSS-SIDENAV SOURCE,THE NAVANNUNCIATORSARE AMBER.
4.AN AMBER N/AISDISPLAYEDWHEN SELECTEDLRNDISTANCE AD-18419432ISNOT AVAILABLE.
ED-600EHSICautionandFai1ureAnnunciations (Amber)Figure 6-6
22--14-00Pa~e176May”25/90Useor disclosure of mformatlon on this page is subject to the restrictions on the title page of this document.

Honeywell W!K?’”c’CITATIONn/V
HEADING COURSE DEVIATIONFAILURE FAILURE (RED)(RED) (NOTE 2)
(NOTE2)
o
/ I I
CRS
‘,J
Wb
HDG1 HOGFL
ILS1-—- IOONM+10 II
\\’ N\ \\:..<
~ /<
.\ Q/
‘[
o.% 6’; -
~s o om=G
“/ ~“/@ ~=,>
0/ .\ o
““/,/,p\\\’” GSPDF4MDbll m
1<
II ___ 100 KTSDASHES(NOTE2)
\
/
NOTES:1.VNAV AND GLIDEPATHDEVIATIONFAILUREISSIMILAR,2.INTHE EVENTOF A HEADINGFAILURE,THE COURSE SCALEAND RED X WILLNOT BE DISPLAYEDAND THE CRS AND HDGREADOUTS WILLINDICATEAMBER DASHES.
-GLIDE SLOPEDEVIATIONFAILURE (RED)(NOTE1)
AD-18420-R2
ED-600EHSI Display Failure Annunciations (Red]Figure 6-7 22-14-00
Page17714ay-25/90
Use or disclosure of information on this page w subject to the restrictions on the tttle pagt of this document.

Honeywell tiirJfrANcECITATION11~
16. C. (3)
(4)
(b) CourseDeviation,GlideslopeDeviation,VerticalDeviation,AzimuthDeviation,or GlidepathDeviationFailure- A failureof anyof thesesystemsresultsin theremovalof thedeviationpointer,anda red“X”drawnthroughthescale.
(c) InternalFailure- Intheeventof an internalfailurewithinthedisplaysystemitself,thedisplaywillbe blank. Afailureof thesymbolgeneratorinput/outputprocessorwillbeindicatedby a red “X”centeredon thedisplay,withannunciation“SGFAIL.” (SeeFigure6-4.)
PartialCompassFormatandWeatherRadarDisplay(SeeFigure6-8.)
The partialcompassmodedisplaysa 90 degreearcof the compasscard. Pressing the FULL/ARC button once on the DC-811 DisplayController causes the heading dial to change to the partial compassformat.. Pressing the WX button on the Weather Radar Indicatorallows weather radar returns to be displayed on the partial compass.The followingfeaturesareavailableduringpartialcompassoperation:
(a)
(b)
(c)
Target Alert (TGT)and Variable Gain (VAR) Annunciator - Thetarget alert annunciator warns of level 3 targets. A green TGTindicatesan armedcondition,whilean amberTGT indicatesaweatheralertcondition.VAR indicatestheradaris operatinginthevariablegainmode.
WeatherRadarReturns- Weatherinformationfromthe radarcanbe displayedin partialcompassmodeby pressingtheWX buttonon theWeatherRadarIndicator.The colorsusedare:
Return ~ ~
Level1 Green CyanLevel2 Yellow MagentaLevel3 Red B1ueRTC B1ue N/A
RangeRings- Rangeringsaredisplayedto aidin theuseofradarreturnsandpositionof navaids.Theouterrangeringisthecompasscardboundaryandrepresentstheselectrangeontheradar. Therangeannunciationon the innerringrepresentsone-halftherangesettingof theweatherradar. If theradaris turnedoff,thenby defaultthe outerrangeringis 100NM.
22-14-00Paqe178May-25/90Use or disclosure of Information on this page is subject to the restrictions on the title page of this flocument.

P-650WX MODE
ANNUNCIATIONS
● WAIT (GREEN)● STBY (GREEN)● TEST (GREEN)● WX (GREEN)● RCT (GREEN)● GCR (AMBER)● CR/R (AMBER)● GMAP (GREEN). FAIL (AMBER)● CYC (GREEN)● TX (AMBER)
Honeywell Kl!lL5PNcECITATIONIt/v
TGT OR VAR ANNUNCIATOR 1
\
WX TILT ANGLE—
NAVAID=
WINDVECTOR -DISPLAY
● TGT: TARGET AI+13T
–GREEN-SELECTED–AMBER-LVL 3 TGT DETECTED
● VAR: VARIABLE GAIN (AMBER) Jf
./
\
3
/
.
/RANGE ANNUNCIATION(INNER RANGE IS 1/2 THERANGE SETTING OF THEWEATHER RADAR)
/
WEATHERRADARRETURN
RANGE7 RINGS
AD-18421-R2
ED-600EHSIPartialCompassDisplaysFigure6-8
22-14-00Pacie179May”25/90
Use or disclosure of information on thm page w subject to the restrictions on the title paq? of this document.

Honeywell M!WAN’ECITATIONV
6. C. (4) (d) WindVectorDisplay- Windvectorinformationisdisplayedleftof bottomcenter.Thewindis shownin Figure 6-9 withvelocity and direction or can be broken into head/tailcomponent and crosswind component as shown in Figure 6-8.Figure 6-8 shows a 25 knot tailwind and a 15 knot left cross-wind component. In bothcases,the arrow shows the directionand the number indicates velocity of the wind. The type ofdisplay is determined during installation. The windvectorsareavailablefromlongrangeNAV systems suchas VI..FandINS.
(e) Navaid- Navaidpositioncanbe selectedduringMAPmode. Thesourceof thenavaidpositionmarkersis selectedandannunciatedin conjunctionwiththe associatedbear~ngsourceandis colorcoded.
(f) WX AntennaTiltAngle- Theangletheweatherradarantennaispositionedisdisplayedin positivedegreesforup tiltandnegativedegreesfordowntilt.
(g) WX ModeAnnunciator- Thisannunciatorindicatesthemodeofoperationof the radar.
(5) LongRangeNavigationMapMode(SeeFigure6-9.)
The EFIShasthecapabilityof displayingmultiplewaypotntsfromalongrangenavigation(LRN) system. Thesewaypointsmustbe presentin a distance/bearing format. The systemwillnotacceptmultiplewaypointsin a latitude-longitude format.
With an LRN programmed for multiple waypoints in distance/bearingformat, and WX radar range set to a range allowing displayofmultiplewaypoints,selectingtheMAPmodeon theDC-811withtheLRN selectedwillpermitthemultiplewaypointsto be di$playedonthe EHSI.
The EHSIcandisplayup to sixLRNwaypointsandtwoVORstationnavaidsymbolsat the sametime. ThisassumesallwaypointsandVORstationsarewithinthe selectedWX rangeandallarewithinthelimitsof the headingdisplayof theEHSIin theMAPmode.
Upon
(a)
(b)
selectionof theMAPmode, the following will occur:
The course select pointer and HSI-type coursedeviationbardisplayswill be removed.
Both bearing pointers will be removed.
22-14-00Page180Mar-15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this document.

Honeywell M&wJ.rANcECITATION V
6. C. (5) (c) A digitalcourse deviation display will be present on thebottom of the EHSI display. This willshowthe positionof theaircraftwithrespectto thedesiredtrack.
(d) The multiple waypoints wil1 appear on the EHSI.
● Eachwaypointwill be identified by a number 01 through 99or when the LRN communicates by the GAMA standard busforalphanumericsthewaypointwillbe identified by name.
. The waypoint to which the aircraft is flying is magenta incolor. All other waypoints are white.
● A white track lineconnectswaypointto waypoint.
● If the EFISis receiving valid VORstation and DME distance,the navaids forthetwoVOR stations will be available fordisplay on the EHSI,no matterwhere the bearing selectorswitches are set. The blue navaid will be VOR 1 (NAV 1),and the greennavaidwill be VOR 2 (NAV 2)
(e) For convenience, the actual heading indicated by the headingdial is numerically displayed at the top of the EHSI.
(f) Thedesiredtrackannunciatoranda digitalreadoutof thedesiredtrackfrompastwaypointto thenextwaypointareshownintheupperleftcornerof the EHSI.
(g) ATo-From indication is displayed to the right of the desiredtrack digital readout. It will indicate TO when the aircraftis flying to the waypoint.
(h) Thefollowingdisplaysfunctionas previouslydescribed:
●
●
●
●
●
●
●
●
●
HeadingSourceAnnunciatorNavigationSourceAnnunciatorDistanceDisplayRangeRingsAircraftSymbolGroundspeedHeadingSelectDisplayandHeadingSelectBugHeadingDialWeatherRadarandTiltAnnunciator
22-14-00Paae181Mar-15/89
Use or dsclosure of Information on this page IS subject to the restrictions on the title pay? of thrs document.

VOR STATIONBLUE FOR VOR 1GREEN FOR VOR 2
\
NAVAIDSOURCEANNUNCIATOR /
Honeywell tifrlr’”c’CITATIONn/V
WIND VECTOR /DISPLAY
“-~9\TGT MANZYWx-3°A A KDVT
VOR I
\
50A&
HDG ‘l& GSPD022 25? O.OL 360 KTS
/@ @ /
\ MULTIPLE LRNWAY POINTS
AC-18422-RI
LRN Map ModewithMultipleIdaypointsFigure6-9
22-14-00Paqe182May-25/90Use or dwclosure of mformatlon on this page IS subject to the restrictions on the title page of this r:ocument.

Honeywell Uil!!fPANcECITATIONV
6. C. (6) Short Range Navigation MAP Mode(SeeFigure6-10).
Uponwill
(a)
(b)
(c)
(d)
(e)
selectionof theMAPmodeandthe SRN VORmode,the followingoccur:
ThecourseselectpointerandHSI-typecoursedeviationbardisplayswillbe removed.
Bothbearingpointswillbe removed.
A digitalcoursedeviationdisplaywill be present on thebottom of the EHSI display. This will show the position of theaircraft in nauticalmilesto theleftor therightof thepresenttrack.
FormapswithVOR stationsin viewon the EFI$map a selectedcourse line is drawn through the displayed navigation source.Thesolidlinerepresentstheinboundselectedcourseto thestation.Thedashedlinerepresentstheselectedoutboundradialfromthe station.If available,a navsourceidentifiermay be displayedadjacentto thenavaidsymbol.Cross-sidenavaididentifiersarenotavailable.
FormapswithVOR stationsoutof rangeof theEFISmap,eithera solidmagentaline or dashed magenta line will appear ifwithinthe90°arc. A solidmagentalinewithan arrowindicatesthe inboundcoursenecessaryto flyto the station.A dashedmagentalineindicatestheoutboundradial.
22-14-00Page183Mar-15/89
Use or disclosure of reformation on this page is subject to the restrictions on the Mle page of thts document.

INBOUNDSELECTEDCOURSETOVOR STATIOP
Honeywell WURANC’CITATIONn/V
3
1
VOR1 ‘A
1;.5
VOR2HDG * GSPD022 14.7R 100 KTS
SRN (VOR)Map ModeFigure6-10
. OUTBOUNDRADIAL FROMVOR STATION
AD-18423-RI
22-14-00Pacie184May-25/90
Use or dwclosure of mformatlon on this page IS subject to the restrictions on the title page of this cocument.

Honeywell UNWANCECITATIONn/V
6. D. CompositeDisplay(SeeFigure6-11.)
In the event of a display unit failure, the EADI/EHSI DIMcontrol on theDC-811 Display Controller is turned to the OFF position to display acomposite attitude and NAV format on the remaining good display head.Figure 6-11 defines the location and form of the compos~te displayelements. As in normal EADI and EHSI presentations, all elements are notdisplayed at the same time. The presence or absence of each displayelement is determined by flight phase, NAV radio tuning, selected flightdirector mode,absolutealtitude,etc. The failure,caution, and warningannunciations function is much the same as for the normal display mode.
To!FRofvf ROLL ATTITUDE ROLL NAVIGATION SOURCE DISTANCE
COURSE/DESIREDTRACK DISPLAY
HEADING~DISPLAY
HEADING SELECTDISPLAY
COURSE FORE LUBBER COURSEOR COURSEOR HEADINGTPPESELECT LINE AZIMUTH AZIMUTHPOINTER
DISPLAYDEVIATION BAR DEVIATION
NOTE: DISPLAY
WHEN VSOR IAS MODESARE SELECTED, AIR DATACOMMAND INFORMATIONREPLACES THE HDGSOURCE ANN. AD-I S424- RI
CompositeDisplaySymbolDefinitionFigure6-11
22-14-00Paqe185May-25/90
Use or disclosure of information on this page E subject to the restrictions on the title pacy! of this document.

Honeywell I&MY’”c’CITATIONn/V
6. E. EFISSelfTest
The EFISsystem is continuously testing itself and therefore a manuallyinitiated selftestis notrequiredas partof theaircraftpreflighttest. The manually initiated self test is provided forthefollowingreasons:
. The EFISmanuallyinitiatedtestsymbologyprovidesa convenientmethodforthepilotto familiarizehimselfwiththeformatusedforvariousfailuremodes.
. The radioaltimetersystemcanbe commandedintotestmodeusingtheEFIStestswitch.
The EFIScanbe manuallyselftestedusingtheDC-811DisplayControllerTestswitch.Thefollowingtestroutineisdisplayed:
~: Testof the EFISis onlyfunctionalon theground.Thd radio
1altimetertestis functionalat alltimesexceptduringGS CAPorGP CAPmodes.
● Courseselect,headingselect,DH set,distanceandGSPD/TTGdigitaldisplaysarereplacedby amberdashes.
● ATT
● All
● All
andHDGdisplaysareflagged.
pointer/scalesareflaggedwitha redX.
headingrelatedbugs/pointersareremoved.
. Commandbarsarebiasedfromview.
. Radioaltimeterdigitalreadoutdisplaysradioaltimeterselftest-value. Slewsto 100feetfor Honeywell radio altimeter.
● Comparator monitor annunciates ATT, HDGand ILS(ifILSsourcesareselectedon bothsides)or MLS (IfMLS sources are selected on bothsides).
● Test(inmagentacolor)or Fail(inamber)is annunciatedin theFDLATcapturelocation.
. FD modeannunciationsareremoved.
22-14-00Paqe186May-25/90
Use or disclosure of Information on this page is subject to the restrictions on the title page of this ~ocument,

Honeywell ti2fJE~ANcECITATIONV
6. F. ED-600Used as a Multifunction Display (MFD)
(1) GeneralMDZ-605MFDSystemInformation
TheMDZ-605MultifunctionDisplaySystemhasthreemajorsub-functions.Oneof themostsignificantis itsabilityto backup EFISsymbolgeneratoror the EHSIdisplay.ShouldtheSG fail,thepilotcan selecttheMFDsymbolgeneratorto takeoveroperationof the failedEFISdisplayswithallfunctionsandoperationsunchanged.The EFIS DC-811 controller willcontinueto operatethedisplayformatsas before.TheMFDdisplaycanalsobe usedas abackupintheeventof an EHSIdisplayfailure.
TheMFD systemgreatlyexpandson thenavigationmappingcapabilitiesof theEFIS. This is primarily dueto thefactthattheMFDdisplayareacanbe usedexclusivelyformapformatswithouttheneedfortheessentialheadingandnavdatathi~tthe EHSIalsohasto contain.Someof theadditionalinformationthatcanbeaddedto thetraditionalmapdisplayof waypointlocationsincludeswaypointandVOR identifiers,aircraftpresentpositionin LAT/LONcoordinates,andthe “TO”waypointtimeto go or ETA,as wellasestimatedfuelremainingat the “TO”waypoint.Thisadditionaldatais suppliedby theoptionalFlightManagementSystemfordisplayontheMFD. TheMFDsystemalsohasa north-upplanfunctioninadditionto theusualheading-upmapdisplay.Bothformatsmakeuseof a designatorcontrolledby theMC-800controllerjoystick.Thepositionof thedesignatorcanbe automaticallytri~nsmittedto theFMSto be usedindefininga newwaypoint.
(2) MFDWeatherRadarMode
Theweatherradardisplayis identicalto theweatherradardisplayon the EHSIpartialcompassdisplayas shown in Figure6-8.
ColorweatherradarinformationfromthePRIMUSQ650Receiver-Transmitteris presentedin theformof an overlayby rastertechniqueson thestrokewrittendisplay.A whiteouterrangeringis provided.An innerrangeringis alsoprovidedwithitsassociatedlabelalsostrokewritteninwhitecharacterson therightside of the display. Weather intensity leve”ls aredifferentiated by the standard convention of red,yellow,green,andblueareas.
Thebluefieldisgeneratedby therain-echoattenuationcompensationcircuitryto warnthepilotthattheweatherlevelsinthisareacannotbe calibratedandarethereforeof unknownprecipitationdensity.Groundmappingmay alsobe displayedon thestandardconventionof magenta,yellow,andcyanareas. The radarmodeis annunciatedon theleftsideof thedispla:y.
22-14-00Paqe187Mar”15/89
Use or disclosure of information on this page is subject 10 the restrictions on the title page of thm document

Honeywell tiiWJfPANcECITATIONV
A targetalertannunciatoris providedabovethe mode annunciator towarn of level 3 targets 7.5 degrees on either side of the aircraftflight path. A green TGT annunciates this feature, changing to anamber TGT whenactive.Whenthegainis notcalibrated,an amberVAR annunciatorwillbe displayedinthetargetalertarea.
A weatherradarfailurewillremovetherasterweatherdisDlavandforcethemodeannunciatorto displayWX in amber
A magentaTX isdisplayedwhereWX is annunciatedradaris transmittingandweatherisnot selected
6. F. (3) MFDMap Mode(SeeFigure6-12.)
charac?,e;s.”
whentheweatherforMFD display.
Two formats of NAVmappingareselectableusingthe alternateactionMAP/PLANbuttonon theMC-800MFDController.TheMAP fc~rmatexpandsthetotallyindependentEHSImap by increasingthemaximumrangebeyondthenormalradarranges,andutilizesallthedataavailablefromselectablenavigationsources.TheMAP formatisalwaysorientedto theaircraftheadingwiththeaircraftpositionat lowercenterandthemaproutemovingtowardthe aircraft.Whencoupledto a compatibleLNAVor FMS, the NAV route with up to 6waypoints can be displayed to the range limit of 1200 miles, or thenext route segment can be displayed. When weather returns areselected, the maximum selectable range is slaved to the radar WI-650setting. With a compatible NAV source,suchas the Honeywell FMSwithstoreddatabase,otherpertinentnavigationdatabeyondroutemappingsuchas VORstationlocations,fuelremaining,andtime-to-goto thenextwaypoint,canbe selectedanddisplayed.Amovabledesignatorcanaidin relocatingthenextwaypoint.Whenthedesignatorismovedfrom“home”positionthe Lat-Londisplayreflectsthedesignatorpositionwhichthencan be automaticallyloadedas thenextwaypointintocompatibleLNAVor FMS sources.Themapmodedisplaysshownon Figure6-12aredescribedbelow.
‘(a) HeadingDisplay- TheHDGdisplayindicatesthe a~of theaircraft.It isthe sameheadinginformaton theEHSI.
(b) SelectedNAV Source - The selected longrangenavis displayed.
tual headingor]displayed
gationsource
(c) Distanceto “TO”Waypoint- The distance to the designatedwaypoint is displayed in nauticalmiles.
(d) AirportAnnunciator- The airportsare identifiedas a functionof theAPTbuttonon theMC-800.
22-14-00Page188Mar 15/89
UseordisclosureofInformationonthispageksubjecttotherestrictionsonthetitlepageofthisr~ocumenl.

Honeywell WNFANC’CITATIONV
6. F. (3) (e) RangeRings- Rangeringsaredisplayedto aid in the use ofradar returns and position of navaids. IfWX modeis selected,the outer range ring is the compass card boundary andrepresents the select range on the radar. Th[?rangeannunciation on the inner ring represents one half the rangesetting of the weather radar. The INC/DECswitchon theMC-800increasesor decreasestherangeif WX mode is notselected.
(f) DesignatorAnnunciations- Displaysthecourseanddistancetothedesignatorfrompresent position.
(9) WaypointandWaypointData- The number of available waypointsis dependent upon the LRN which is providing the data, whiletheselectedrangedeterminesthenumberof displayedwaypoints.Thewaypointto whichthe aircraftis flyingismagentain color. All otherwaypointsarewhite. TheDATbuttonon theMC-800willaddthefollowinginformationto thedisplayif it isavailablefromthelongrangeNAV system.
. Waypointidentification(eithernumberor rlame)
. Distanceto “TO”waypointin nauticalmile:
. ETAin GMTat the “TO”waypoint,if available,or TTG
(h) AircraftSymbol- The aircraftsymbolprovide!a visualcueasto theaircraftpositionin relationto thedesiredtrack.
(i) CrosstrackDeviation- Indicatesthedeviatiorlin nauticalmiles to the right (R) or left (L) of the desired track.
(j) DisplacementLine- Indicatesthepositionof thedesignatorrelativeto thenoseof the aircraft.
(k) Designator- Thepowerup homepositionof thedesignatoristheaircraftpresentposition.Thedesignator’slatitudeandlongitudeis continuouslydisplayedin the lower left corner ofthe presentation. Manipulation of the designator is controlledby the Joystick and the SKP,RCL,and ENT buttons on theMC-800. The designator’s latitude and longitude can betransmitted to the selected LRN as a map reference point.
(1) WX AntennaTiltAngle- The angletheweatherradarantennaispositionedis displayedin positivedegreesfclrup tiltandnegativedegreesfordowntilt.
(m) WeatherRadarMode- Displaysthestatusof theweatherradarsystem.Weatheris addedto thedisplayandMX is annunciatedby pressingtheWX buttonon theMC-800.
22-14-00Paae189Mar”15/89
Use or disclosure of mformalion on this page is subpct to the restrictions on the tttle pag ? of thts document.

Honeywell !!fi~~f~””c’CITATION V
6. F. (3) (n) TargetAlert/VariableGain- A targetalertannunciatorisprovidedto warnof level3 targets7.5degrees on either sideof theaircraftflightpath. A greenTGT annunciates thisfeature, changing to an amber TGTwhen active. Whenthegainis notcalibrated,an amberVARannunciatorwillbe displayedin thetargetalertarea.
(o) VOR/DMESymbols- Thesesymbolsareaddeduponactuationof theVOR buttonon theMC-800. TheyrepresenttheVOR stationswhicharebeingusedby the LRN.
(P) DesiredTrack(DTRK)Line- Thewaypointsareconnectedby awhitetrackline. Thedesiredtrackannunciatoranda digitalreadoutof thedesiredtrackfrompastwaypointto thenextwaypointareshownin the upperleftcornerof the[display.
HEADING SELECTEDNAVDISPLAY
\
SOURCE
/
DESIREDTRACKANNUNCIATION
WAYPOINT
DTRKLINE— “VOR/DME m
DESIGNATORANNUNCIATION
GAIN 1 /ff2”-
TARGETALERT/VARIABLE
ANNUNClATOR~><~AN150-WX MODE
/.
rDEs,GNAToRpi’R:qy~ii :j!!syWXANTENNA/TILT ANGLE
F:%%?oRe -+
“TO’’WAYPOINTIDENTIFICATION
TTGINMIN
DISPLAC~MENT CRO&STRACK AIRCkAFTLINE DEVIATION SYMBOL
AD-1 8386
MFDMapModeFigure6-12
22-14-00Paqe190
NS
Mar”15/89Use or disclosure of information on this page is subject to the restrictions on the title page of Ihts locument.

Honeywell M!JR’”c’CITATION V
6. F. (4) MFD Plan
A unique
(5)
Mode (See Figure 6-13.)
NAV PLAN format features a “truenorth-up”orientationinwhich“theaircraftis positionedwithrespect to the NAV route andprogresses along the route, while the maximum range is depicted by acircle around the outer perimeter. Thenorth-uporientationenhancestheflightplanningfunctionandfurtherclarifiestheaircraftrelationshipto theprogrammedroute. Inthisdisplaythedesignatoris “homed”to the “TO”waypointandbothappearin thecenterof thedisplay.The aircraft symbol is still plotted atpresent position (if present position is on the display) and isoriented with respect to heading. If the designator is movedfromthe “TO”waypoint,thedesignatorsymbolwillremainin thecenterof thedisplaywhilethedesignatorcourse/distanceannunciationinthelowerrightcornerwillbe fromthewaypoint.Thedesignatorremainsin thecenterduringSKP and joystick operations. Weatheris not available in the PLAN mode so range is controlled solely fromthe MC-800. Other operations are the same as forMAPmode.
MFDChecklistDisplay
TheMFD SymbolGeneratoris capableof storinganddisplaying200,400,or 800pagesof text. Thesepagesarestoredin controlledinternalPROMwithcontentas definedby theaircraftoperator.Pagecompositionis 12 lineswitha maximumof 24 charactersperline. All textis strokewrittenforsunlightreadability.
TheNORMbuttonon theMC-800providesentryintothenormalchecklistdisplayfunction.Thenormalchecklistsarearrangedintheorderof standardflightoperations.Buttonactuationscausepresentationof thenormalchecklistindexpagethatcontainsthelowestorderincompleteandunskippedchecklistwiththeactiveselectionat thatchecklist.
TheSKP,RCL,PAG,andENTbuttonsandthejoystickon theMC-800providecontrolof thisfunctionandaredescribedin paragraph6.K.(5).
TheEMERbuttonon theMC-800providesentryintotheemergencychecklistdisplayfunction.Actuationof EMERresultsinthepresentationof thefirstpageof theemergencychecklistindexwiththeactiveselectionat thefirstchecklist.The SKP,RCL,PAG,andENT buttons and the joystick shall provide control of this functionand are described in paragraph6.K.(5). ThesecontrolsperformasdescribedforNORMwiththeexceptionof the action taken uponcompletion of the checklist. All checklist items are removed fromthe page and “EMERGENCY PROCEDURE COMPLETE” is written belowtheamberchecklisttitle. Thiswillbe clearedwhenthe indexisselected.
22-14-00Paae191Mar”15/89
Use or disclosure of information on this page IS subpct to the restrictions on the title paoe of this document.

Honeywell M!RI!ANC’CITATION V
SELECTED NAVSOURCE
I
“NORTH-UP”IDENTIFIER
DTRKLINE
WAYPOINT
LAT/LON
AIRCRAflSYMBOL
MFD PIan ModeFigure 6-13
DISTANCE TO“TO- WAYPOINT
TUNED VOR/’DME
DISPUCEMENTLINE
DESIGNATOR
DESIGNATORANNUNCIATIONSCOURSE FROMWAYPOINT
DISTANCE FROMWAYPOINT
“TO WAYPOINTIDENTIFICATION
TTGIN MIN
AD-10312-R1
22-14-00Paue192Mar-15/89
Use or disclosure of information on thts page is subject 10 the restrictions on the Mle page of this document.

Honeywell WRANcECITATION V
6. F. (6) EFISBackupModes
Selection of EFIS backup by the MFD is accomplished by the rotaryMODE selector switch on the MC-800 MFD Controller. Normal MFDfunctions are available in the MFD position, and F.FISbackupmodesare obtained by selecting the HSI or SG positions.
. HSI- Selectionof thispositionwillresultin an HSIdisplayontheMFD. Compositionof theHSIwillbe determinedby theEFISDC-811DisplayController.
● SG- Selection of this position willresultin replacement of theEFIS symbolgeneratorby theMFD symbolgeneratorfortheEFISdisplays.In thiscasetheMFD CRT will be blanked. Compositionof the EFIS displays will be determined by the EFIS DC-811Display Controller.
G. ED-600FunctionalOperation(SeeFigure6-14.)
(1) Deflection System
The ED-600displayunitiscapableof operatingineitherrasterscanor strokewritingmodes. In thestrokewriting modethedeflectionamplifiersoperateas currentoutputpowerstages.Thedeflectionyokecurrentsaresampledandfedbackto the inputofthepowerstagesto providedeflectionamplificationfor each modeof operation. The deflection amplifier output stages,in boththeverticalandhorizontalaxes,areconstructedusingcomplementarypowerFETsforhighpowergain,hencereducedcomponentcount.Circuitryis containedwithinthedeflectionsystem to provideforthe “pincushion”linearitycorrectionrequiredby theCRTphysicalgeometry.
In orderto providethehighestpossibledatathroughoutfromthesymbolgeneratorto thedisplay,a “handshake”systemis used to
tellthesymbolgeneratorwhenthe displaydeflectionamplifiersarethroughslewingandreadyto write. Thisstrokereadysignalisgeneratedby a windowcomparatorwhichmonitorsthe input/outputstatusof thedeflectionamplifiers.All of thedisplayunitdeflectionsignalsarefedthrough a multiplexer. This allows thedisplay to be driven from two different symbol generators asrequired in thereversionarymode.
22-14-00Paqe193Mar-15/89
Use or disclosure of information on this page IS subject 10 the restncttons on the title pa:.e of lhls document

Honeywell M!UEANCECITATION V
6. G. (2) VideoandDimmingSystem
The videosystemprovidesthe individualdrivesignalsto eachofthethree(red,blueandgreen) electron guns in the CRT. Amplitudeof thegundrivesareadjustedto providetherequiredcolorselectionmenu. Four bits of colorselectiondataareusedprovidingfora possible8 colors on both raster and strokeoperation (for a total of 16).
The overallintensityof thedisplayoutputis controlledin thevideosystemby a signalfromthe auto-dimmingsystem. In theauto-dimmingsystem,thepilotselectedintensity(fromthedimmingcontrolon theDC-811controller)ismodulatedby a controlsignalgeneratedfromtwostrategicallylocatedambientlightsensors.
(3) SystemMonitor
A system monitor is incorporated in the ED-600 to provide CRTphosphorprotectionanda systeminvalidsignalto thesymbolgeneratorwheneverthefollowingconditionsaredetected:
s Lossof deflection in eitheraxes. AbnormalpowersupplyoutputsQ ImproperCRT filament
The circuitryalsoprovidesa 5-secondtimedelaybetweenapplicationof CRTfilamentcurrentandhighvoltagepowerturn-on.Thisallowsthe systemto stabilizequicklyandalsoprotectstheCRTcathodesfromtheeffectsof excessiveinitialanodecurrent.
6. G. (4) PowerSupply
All powerrequiredby the ED-600displayunitis providedfrom theaircraft 28 voltsdc busvia a power supply subsystem located withinthe display unit. This power supply subsystem consists of a highefficiency switching regulator and a solid state high voltage powersupply.
The highvoltagepowersupplyis a ferro-resonantswitchingconverterandhighvoltagemultiplierassembly.Thissupplyfeatureswellregulatedhighvoltage(14kV) to preventintensityandsizevariationsin thepicturedueto loadvariationscausedbychangesin picturecontent.The high voltage portions of the powersupplyareencapsulatedas wellas theanodeandfocusleadassembly.Thisis requiredfor unpressurized environments.
Whenan ED-600displayunitis to be usedas an EADI,aninclinometeris attachedto the frontof thedisplay.Provisionshavebeenmadeto lightthe inclinometerfromthe standa)pdaircraft5 voltslightingbus.
22-14-00Page194Mar15/89
Use or disclosure Of mformatlon on this page E subject to the restrictions on the title page of this iocument.

Honeywell WJ?ANCECITATIONV
28VDCAIRCRAFT
(:+-# I%JE% ;!INTERNAL HIGH VOLTAGE
POWER ~ POWER POWER SUPPLY
I m 1 1
d
IL T
I
l—— -1I! HENABLE G1
DIMCONTROL 1
WX DIMCONTROL 1
II
RIGHTSENSOROUT q
IAUTO
DIM1 SYSTEM
LEFTSENSOROUT~
VIDEOINTERFACE
STROKEREADY
XDEFLECTION
((PRI)(SEC)
((PRI)(SEC)
((PRI)
(SEC)
Y DEFLECTION[(PRI)
RASTER/STROKE
FLYBACK
L(SEC)
((PRI)(SEC)
((PRI)(SEC)
{
(PRI)cOLOR (SEC)
REVSELECT
RIGHT PHOTO SENSOR 1-
x
LEFT PHOTO SENSOR
VIDEO R,B,GSYSTEM
III -
STROKE READY
I I I
T G1’
G2
6.3V
I E RASTER/S”TROKEI f1 FLYBACKI
I
1 D-
ED-600ElectronicDisplayBlockDiaqramFigure6-14
/77
AD-5272-RI
22-14-00Page195)196
Mar 15/89Useordisclosureofinlormetionon this page IS subjecf to the reslrtctlons on the title page of Ihm document.

Honeywell WME!!ANC’CITATION V
Thispageintentionallyleftblank.
22-14-00Page-197
Mar 15/89Useor disclosure Of mformatlon on this page is subjecf 10 the restndons on the Mle pag ? of tlvs document.

Honeywell WUWANCECITATION V
6. H. DC-811DisplayController(SeeFigures6-15and6-16,andTable6-2.)
AD-18425
DC-811Display ControllerFigure 6-15
Dimensions (maximum):
Lenath ........................................ 6.87 in. (174.50 mm)Wi(He
Weight
~h ......................................... 5.75in. i146.05mm~. #ght
(max
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.25in. (57.15mm)
mum) ...................................... 1.8 lb (0.82kg)
Power Requirements:
primary ............................................ 28Vdc,Lighting ..............................................sVdc.
Mating Connector:
J1
Mount
5 W max5 W max
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . MS27473E20-B35SC
ng ............................................Unt ScrewFasteners
DC-811 Display Controller Leading ParticularsTable 6-2
22-14-00Page198
Mar 15/89UseordisclosureOflnlorrna~lononthispage is subject to the restrictions on the title page of thts document.

Honeywell INKY’””CITATION V
The DC-811DisplayControllerprovidesthemeansby whichthepilotcancontrolthe EADIand EHSIdisplayformatting.Alsoincludedon theDC-811 arethe bearingselectknobsanddisplaydimmingcontrols.Thefollowing paragraphs describe the controller functions.
6. H. (1) FULL/ARCButton- The FULL/ARCbuttonisusedto c:langetheEHSIdisplayfromfullcompassto partialcompassformat. In the fullcompass mode,360degreesof headingaredisplayed.In thepartialcompassmode,90 degreesof heading are displayed. Successivetogglingof the FULL/ARCbuttonchangesthedisplayback-and-forthfromthefullcompassto thepartialcompassdisplay.
(2) MAP Button- By pressingthe button,theful1 compass display may bechanged to the partial compass format allowing one waypoint foreachbearingpointerandVOR/DMEgroundstationpositionsto bedisplayed.The informationwillonlybe displayedifwithintherangeselected.If inWX mode,activationof the buttonwillselecttheMAP formatwithweatherradarinformation.
(3) Weather(WX)Button- TheWX button is usedto callup weatherradarreturnson thepartialcompassMAPdisplayof the EHSI. Ifthe EHSIis in thefullcompassMAPmodeinitially,pressingtheWX buttonchangesthedisplayto thepartialcompassMAPmodeanddisplaysweatherradarreturnsfromtheweatherradaror a weathertestpattern.If presently in MAP mode,activationof theWX buttonwillsuperimposeweatherradarinformationovertheMAP information.Asecond push of the WX button will remove the weather information.
(4) Groundspeed/Time-To-Go (GSPD/TTG) Button - By pressing the GSPD/TTGbutton, groundspeed or time-to-go willalternatelybe displayedinthelowerrightcornerof the EHSI.
(5) ElapsedTime(ET)Button- By pressingtheET button,elapsedtimeisdisplayed.Pressingthe ET buttonthefirsttimewillresetthedisplayedtimeto zero. Thetogglingsequenceof ‘:he“ET”buttonisreset,start,stop.
(6) Navigation(NAV)Button- By pressingtheNAVbutton,VOR/LOCinformationis selectedfordisplayon theEHSI.
(7) FlightManagementSystem(FMS)Button- By pressingthe FMSbutton,flightmanagementsystem(FMS)informationis selectedfordisplayon the EHSI.
22-14-00Paqe198.1M~r 15/89
Use or disclosure of Information on this page IS subject to the restrictions on the title pag? of this document.

Honeywell WWANC’CITATIONV
6. H. (8) BearingSource Select Knobs - The EHSI has the capabilit~ ofdisplaying two independent bearing pointers. The selectable bearingsources for each pointer are as follows:
BRG O BRG <>
NAV 1 NAV 2ADF 1 ADF 2FMS1
(9) DimControls- Thedimmingsystememployedby the EFISis semi-automatic.Two inputscontributeto theoveralldisplaybrightnessof eachED-600ElectronicDisplay:
● Ambientlightsensedby thephotosensorson eachED-6C0. Settingof thedimmingcontrols
TheDIMpot setthenominalintensityforeachdisplay.Thephotosensorslocatedon eachED-600causethe lightoutp~tof eachdisplayto be modulatedaboutthenominalintensityas a functionofthelightincidenton eachdisplay.
(a) ADI DIMControl- The ADI DIM control dims the rastEr andstroke writing on the EADI. Turning the control to the OFFposition causes the EADI to go blank and the composite modetobe displayed on the EHSI.
(b) HSIDIMControl- The HSIDIMcontrol dims the raster andstroke writing on the EHSI. Turning the control to the OFFposition causes the EHSI to go blank and the composite mode tobe displayed on the EADI.
(c) WX DIMControl- TheWX DIMcontroldimsonlytherasteron theEHSIwhich contains weather radar information. Turning thecontrol to the OFFpositionremoves the weather radar display.If in thecompositemode on the EHSI, the WX DIM control isused to dim the attitude sphere intensity.
(10) DecisionHeight(DH)Knob- Rotationof the innerDH knob allows thedecision height displayed on the EADI to be adjusted between 10 and990 feet in 10-footincrements.By rotatingtheDH knob completelycounterclockwise, the decision height display may be remcved fromtheEADIdisplay.
(11) TEST(TST)Button - TheTST buttonallowsfortestingth~radioaltimeterand EFISwhen on the ground or the radio altimeter onlywhenin the air, if not in the GS capture mode. Refer tc paragraph6.E. for test procedure.
22-14-00Page198.2Mar 15/89
Use or disclosure of mformatlon on this page E subject to the restrictions on the title page of this [ocument.

Honeywell MWJRANC’CITATIONV
Y————— —,__, ———— ———— .—. — ——-— —--- ——— — ———— ——— 1Ii
IIIII
;I1I1IIII
;++89
10e
11
12 Q13
$
25
15
16
17
285
18
2s
195
30
20
32
!
23
67
I
I246
59+1
HFUNCTION
1 I I
‘=G===&}’’”NG‘*4Cc@6
T@7
UNCTION
@-j-l-:)’OEH”
SERIAL DATA TO EFIS S’ HI 34
~;}
TO EFIS SYMBOL
L GENERATOR35
SERIAL DATA TO MFD SG
:/ ):}
TO MFD SYMBOLGENERATOR
1
$H!
2 M,
3 Dm
4 SRI
ISI MODE v
!AP
=
‘ATA #1 D
NE
5- LRN 0
IIATA #2 u
N:S MLS c
t. J E.-O
4
●
●
●
1
2
3
4-
●
7*
8°
9°
10*
11°
12*
13
14-
15
16*
179
18*
19*
209..*
L
“%ED TIME
5---- -+ SIGNAL GROUND I I SIGNAL GROUND
* I.3tJr3-- -1
‘HsET-:)’i’TOR—
wx DIM # Cw
451
(t4Sl RASTER)
!~l
TO EHSI
52(+)
))
42 PITcH WHEEL(-)1
?ti:l~u-
1a=!32
23
24
25
26
27,R
,...~=
i4I ~GNO=AP ENGAGE (26V)
ADC SLEW ENGAGE
ADC SLEW
VS HOLD A400E GND
IAS HOLD MODE GND
.jI- jlcc J
I --ADI ON GND
1J 1 ADI OFF ~ 32-
I33
v HSI ON ‘ND (GND = ON! -
{i
ILRN B(L)
LRN A(L) 37-
EXTADF (L)
‘TRAPP’NG :’--J 3’
*
I r% vOR (L)
\ \ I43
j49LRN B(R)
42 1;79
LRN A(R)’41
78AOF(R) I >77
POSITION 3
I74
r
POSITION 4
I>75
POSITION 5
l}76
MACH HOLDMODE
I‘NO
ExTSTRAPPING
I Q ?- OFF
L———————— ——————— ——— ——— ——— ———— —.—— ——— ——— ——— — 2
DC-811DisplayControllerBlockDiagramFigure6-16
22-14-00Page198.3/198.4
Mar 15/89UseordisclosureofInlormebonon this page IS subject to the restrictionsOnthe title page01Ihmdocument.

Honeywell !NNJRANC’CITATION V
Thispageis intentionallyleftblank.
22-14-00Paqe 198.5M;r 15/89
UseordisclosureofInformationon this page IS sub~ecf to Ihe restrictions on the title pag ? of this document.

Honeywell MNNJFANC’CITATION V
6. I. RI-106SInstrumentRemoteController(SeeFigures6-17and6-18,andTable6-3.)
The InstrumentRemoteControllerinterfaceswiththe symbolgeneratortoprovideheadingandcourse selection. Activation of the PULL SYNC switchcauses synchronization of the heading bugto present heading (lubberline). The PULLDIR switchallowsautomaticselectionof a TO directiondesired VORcoursehavingzerodeviation.
HEADING
a0;PULL(BJO SYNC
RI-106SInstrumentRemoteControllerFigure6-17
Dimensions(maximum):
Length .......................................... 2.75 in. (69.9mm)Width.......................................... 5.75in. (146.1mm)Height........................................ 1.50in. (38.1mm)
Weight(maximum)...................................... 0.8 lb (0.36kg)
PowerRequirements:
SynchroExcitation.............................. 26V, 40f)l-iz,2.4vABlue-White Lighting .............................. 5 V acordc, 3.3 VA
MatingConnector:
J1 .................................................... MS3126F14-19S
Mounting............................................UnitScrewF~~steners
RI-106SInstrumentRemoteControllerLeadingParticulars
Table6-3
22-14-00Page198.6Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this I ~ocument,

Honeywell WRANCECITATION V
COURSE26 VAC400 HZ
SIG.GND.
HEADING26 VAC400HZ
5VLIGHTING
CHASSISGND.
J1-e 1 ~ED/WHT
[::
I YEL
“ 1
+ JI-D
IH BLU COURSE
IJ1-E SELECTED
BLK/WHT BLK 1 OUTPUT‘I-C \> J1-F
I II I i
JI-A< I+ i
[
J
JI
I RED IWHT II
-J <YEL
1 ‘1~~Ji-L
IH BLU HEADING
+ JI-M ::$K:TEDI
-K <BLK/ WHT BLK
~> J1-N
I I
I
}
;~J1-U SPARES
-+ J1-~AD-15099
RI-106SInstrumentRemoteControl1er SchematicFigure6-18 22-14-00
Page 198.7Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title pag~? of this document ‘

Honeywell W%”’””CITATION V
6. J. SG-605Symbol Generator (See Figures 6-19 and 6-20, and Table 6-4.)
011s41-)71
SG-605SymbolGeneratorFigure6-19
Dimensions (maximum):
Length ........................................ 16.45 in. (417.83 mm)Width .......................................... 4.91 in. (1;?4.71mm)Height........................................ 7.62in. (193.55mm)
Weight(maximum)...................................... 16.Olb (7.24kg)
PowerRequirements.................................... 28 V dc,70 W max
MatingConnector:
J1 ........................................ DPX2MA-A106--A1O6P-33B-OO63J2 ........................................ DPX2MA-A106P-A1O6P-33B-OO64
Mounting....................... TrayModelMT-800,PartNo. 7003272-901,BoxmountTray,PartNo.8314,or
BarryTray,PartNo.93995-1
SG-605SymbolGeneratorLeadingParticulars
Table6-4 22.14-00Page198.8Mar 15/89
Use or disclosure ot information on this page is subject to the restrictions on the title pageof this document.

Honeywell M!MRANCECITATION V
The symbol generator is the heart of the EDZ-605 System. It receivesheading, attitude, and short and longrangenavigationsensorandweatherradarinputs.Italsoreceivesmodelogic inputs from the flightdirector. All inputs are processed and transmitted to the ED-600Electronic Displays as a function of the selections made on the DC-811Display Controller and RI-106S Instrument Remote Controller. In caseoffailureof thesymbolgenerator,backupis providedby theMFDSymbolGenerator.
22-14-00Page198.9/198.10
Mar 15/89Useordisclosureof Information on this page is subject to the restrictions on the title pa[~e of this document.

Honeywell Hi}JfPANcECITATIONV
OISCRETES4 1
NSPLAYJ=l rNO.1VECTORGENERATOR
m
IISPLAYNTERFACE:Pu
H r==l-- :110
EAOI
I
TO
EHSI!m=
L—————
NO.2VECTORGENERATOR
m
m w-
1
L
GAOIO/A CONVERTOF!
ANODEFLECTION
DRIvER-r
-1Hmmm
(A7)
r+==-t-+=-t
HSI D!ACONVERTOR
ANDDEFLECTION
ORWER
1-12EEElEEt
(As)
%sG-lJLmcl
(Al)
[As)
mI (As)
DC VARIABLEA
—+28vOC INPuT
BKl -v
%
TIMINGGENERATOR
HORIZONGENERATOR
U!?_.1
m mDC TO OCCONVERTOR
t
1===1
++
AclocVARSIGNALS
RELAYSWITCH
m Lmm
(Ml
AC/DC* VAROUTPUTSm
nSYNCHROSAMPLE AND
HOLO
TO FZ-WOFLIGHTDIRECTORCOMPUTERmm
m _ oIsC@ETESIVALIOS-u&_J-
Plo (As)
I (M)
Plo (A2]
1
(MIOC VAR
FROMSIGNALS
MG40S/SOSoISCRSTES/VALIOS
SG-605SymbolGeneratorBlockDiawamFigure 6~20 22-14-00
Page198.11/198.12Mar 15/89
UseordisclosureOf Infomahon on thm page IS subject to the restrictions on the title page of Ihls document.

Honeywell WiKW’”c’CITATION V
Thispageis intentionallyleftblank.
22-14-00Page198.13Mar 15/89
Use or dwclosure of inforrnattononhs pageISsubjectto the restrictions on the t}tle pa~e of this document

Honeywell M!JFAN’ECITATION V
6. K. MC-800MFD Controller(SeeFigures6-21and6-22,andTable6-6.)
AD-1 8426
MC-800MFDControllerFigure6-21
Dimensions (maximum):
LengthWidth .:::Height ...
Weight (maximum,
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.59in. (167.39 mm)
................................... 5.75in.(146.05mm)
.................................... 2.25in.(57.15mm)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.8lb (0.82kg)
Power Requirements:
Primary .......................................... 28Vdc, 5WmaxLighting ......................................... 28 V dc, 5 W max
MatingConnector:
J1 ................................................. MS27473E14-35S
Mounting ......................................... UnitScrewFasteners
MC-800MFDControllerLeadingParticulars
Table6-5
TheMC-800MFDControllerprovidesthemeansby whichthepilotcancontroltheMFDdisplaymodes and format. The followingparagraphsdescribethecontrollerfunctions.
22=14-00Page 198.14Mar 15/89
Use or disclosure of mformatlon on this page IS sub~ecf to fhe restrictions on the title page of this 5ocument.

Honeywell hi!ilIE~ANcECITATION V
6. K. (1) MAP/PLANButton - TheMAP/PLANbuttonalternatelyselectstheheading up MAPdisplayor theNorthup PLANmodefor display.
(2) Weather(WX)Button- The WX button is used to call up weatherradarreturnson theMFDmap display. When weather is displayed, the maprange is controlled by the WI-650 Weather Radar Indicator Rangeswitch.
(3) Normal(NORM) Button - The NORM button provides entry into the MFD’snormal checklist display function. Thenormalchecklistis arrangedin theorderof standardflightoperations.Buttonactuationscausepresentationof thenormalchecklistindexpagethatcontainsthelowestorderincompleteandunskippedchecklistwiththeactiveselectionat thatchecklist.The SKP,RCL,PAG,and ENT buttons andthe joystick provide control of this function.
(4) Emergency(EMER)Button- The EMERbuttonprovidesentryintotheMFD’semergencychecklistdisplayfunction.Actuationof EMERresultsin thepresentationof thefirstpageof thehighestprioritycallupwiththeactiveselectionat thefirstitemon thepage.
The SKP, RCL, PAG,andENTbuttonsandthejoystickprovidecontrolof thisfunction.
(5) Skip(SKP),Recall (RCL), Page (PAG),and Enter (EtiT)Buttons andJoystick - These buttons (PAGforchecklistonly) andthejoystickare usedto controlthechecklistandoperationof thedesignatoronthemap. Paragraph(5)(a)describesthechecklistcontrolandparagraph(5)(b)describesthedesignatorcontrol.
(a) ChecklistControl
. SKP - actuationskipstheactiveselectionto thenextitem.If the item skipped is the last item, the active selectionis the lowest order skipped item.
. RCL- actuationresultsinpresentationof the pagecontainingthelowestorderskippeditemwiththeactiveselectionat thatitem.
● PAG- actuation advances the page count. The activeselectionisthelowestorderincompleteitemon thatpage.if thereareno incompleteitemson the page,theactiveselectionisthefirstitemon thepage.
22-14-00Page 198.15Mar 15/89
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title pag: of this document

Honeywell WllR!’”c’CITATION V
. ENT- operation is dependent upon display if:
On an indexpage- actuationresultsin displayc]fthechecklistcorrespondingto the activeindexlineselection.Thechecklistis presentedat thepagecontainingthe lowestorderincompleteitemwiththe activeselection:Itthatitem. Ifthechecklisthadpreviouslybeencompleted,thesystemforcesall itemsinthe checklistto incompleteandpresentthefirstpageof thechecklistwiththeactiveselectionat the first item.
On a checklist page - actuation forces the active selectionto complete and advance the active selection to the nextincomplete item. If ENT is actuated with the activeselection at the last item in a checklist, the operationdepends upon the completion status of the checklist.
Ifthechecklistis notcomplete(oneor moreitemsskipped)the system presents the page containing the lowest orderincomplete item with the active selection at that item.
If thechecklistis complete(allitemscomplete)the systempresentsthe indexpagecontainingthe nexthigh~’rorderchecklistwiththeactiveselectionat thatchecl.list.
. Joystick- Thejoystickprovidesadditionalpagingandcursorcontrol.Eachactuationresultsin the actiondescribed:
- UP moves the active selection to the lower orcler item
- DOWNmovestheactiveselectionto thenexthigherorderitem(thisis identicalto SKP)
- LEFTresultsin presentationof the previouspage
- RIGHTresultsin presentationof the nextpag~’(thisisidenticalto PAG)
6. K. (5) (b) DesignatorControl
● SKP - actuatorskipsthedesignator’shomepositionto thenextdisplayedwaypoint.Whenactuatedwiththedesignatorat thelastdisplayedwaypoint,thedesignatorshallreturnto present position.
. RCL - whenthedesignatoris not at itshomeposition.actuation of RCL recalls the designator to the homeposition.Actuationwiththedesignatorat itshomepositionrecallsthedesignatorto presentposition(alreadythere).
f not
22-14-00Page198.16Mar 15/89
Use or disclosure of mformatlon on this page E subject to the restrictions on the title page of this rlocument.

Honeywell WMI!AN’ECITATION V
. ENT - when the designator is offset, actuation of ENT causesthe LAT/LON of the designator to be transmitted to theselected LRN as a requested waypoint.
. Joystick - the joystick provides four direction control ofthe designator: up, down,left,andright. The courseanddistanceto thedesignatorfromitshomepositionisdisplayedin the lowerrightcornerof thedisplay.
6. K. (6) VHFOmniRange(VOR)Button- The VOR button is us~~dto addVOR/DMEsymbolsto themapandplandisplays.
(7) Data(DAT)Button- The DATbuttonis usedto add ‘longrangenavigationinformationto themapandplandisplay:;.
. Firstactuationwilladdthe followinqdatato thelowerricihtcornerof thedisplay:
- Waypointidentification
- EstimatedTimeof Arrival(ETAat the “TO”waypointif known;the “TO”waypoint.
in GreenwichMeanTime(GMT)otherwise,Time-To-Go(TTG)to
. Secondactuation- If no destination information is known, thisstep shall be to data OFF. However,ifdestinationidentification,ETA,or TTG is known,thisstepshallreplacethe“TO”waypointdataas describedabovewith the destination data.If some destination data is known but the waypoint identificationis not, the mnemonic “DEST” shall be used in placeof thewaypointidentification.
(8) Airport(APT)Button- TheAPT buttonis usedto addairportdesignatorsto themap andplandisplays.
(9) Increase(INC)/Decrease(DEC)Range (RNG)Switch- Thisswitchincreasesor decreasestheselectedrange(5,10,25,50,100,200,300,600and 1200NM) if the weather radar (WX) mode is notselected. When WX is selected, the range is controlled by theWI-650 Weather Radar Indicator Range Switch.
22-14-00Paqe198.17Mar 15/89
Use or disclosure of information on this page is sub!ecf to the restrictions on the title page of this document.

Honeywell WJNANC’CITATION V
6. K. (10) ModeSelector- Thisis a threepositionrotary switch usedtoselectthe following MFD modesof operation:
● MFD - normal MFD operation● SG - pilot SG-605 backup● HSI - HSI backup
(11) DimControl- ThisknobcontrolsoverallMFDCRTdimmingin additionto the ED-600automaticphotoelectricdimming.
22-14-00Paqe198.18Mar 15/89
Use or disclosure of mformat!on on this page E subject to the restrictions on the tnle page of this ::ocumenl.

Honeywell ~#If{ANcE
r—— —— —— —— —— —. .
A4 1JI
I ~1 I I i FRAME ASSEMBLY i2
* DSI DS2 DS3 DS4 DS5 DS6 Ds7 DS8 DS9DSIOi+–
“-p J J p p p p J p I4 I ~ I5 < A A A A A
7 < I
+28vDC POWER I
?
5G7
323334
8910II1213l-l1516171819202122232425262728304
3536
KEYING{~+28v POWER REF
O-28VDC LIGtlTINGO-5VAC LIGHTING
LIGHTING POW ERCOMWX HWx wWX L
~L---uElEEBE= LMAP PLAN I
]’
I51
I
I
I
II
I
II
DISPLAY DIM (L)DISPLAY DIM (L)
SIGNAL GN3
I I II III L-J+A36L
—
[
o
234567
r
o
2
L ——— —— —— —— .— —— J
DISCRETE IN
DIM— ———
A4R16
-I.-L-1 1
J
1 2.3(I ()
-———41}.5 A4S16
-
A
——_—A4S14
{DISCRETEOUT ~
[
567
[
A(H)
SERIAL OUTA(L)B (H)B (L)
DISPLAY DIM I (H)DISPLAY DIM 2 (H)
El_~_
-I II
MODE
E’i‘‘C13C15A4AZ
A29 ylA20
A12A8 ml?<
+}8 - ‘EY’NG
JOYSTICK
RANGE lNC/DEC
AD-18427
CHASSIS GND
LEFT SG BACKUPRIGHT SG BACKUP I
I
-2 t—— —- —-—
3 t A4S15I I I
MC-800MFDControllerBlockDiagramFigure6-22 22-14-00
Page198.19/198.20Mar 15/89
Useordisclosureof mformallon on Ihm page is sublect to the restrictions on the tttle page of thw document.

Honeywell M!illE!ANcECITATION V
This page is intentionally left blank.
22-14-00Page 198.21Mar 15/89
Use or disclosure of mformatlon on this page is subject to the restr!ctlons on the title paqe of thts document.

Honeywell M!U2AN’ECITATION V
6. L. MG-605MFD SymbolGenerator(SeeFigures6-23and6-24,andTable6-7.)
OPTIONAL CHECK LK3T MODULEY
AD- 10317-R1
MG-605 MFD SymbolGeneratorFigure6-23
22-14-00Paqe198.22Mar 15/89Useor disclosureof mformatton on this page IS subject to the restrictions on the title page of Ihm Jocumenl.

Honeywell KNEPANCECITATION V
Dimensions (maximum):
Length ............................................ 16.65 in. (422.91 mm)Width............................................. 7.53in. (191.26mm)Height............................................ 7.62in. (193.55mm)
Weight (maximum) ..................................... 25.0 lb (11.34kg)
Power Requirements ................................... 28Vdc, 120Wmax
Mating Connectors:
J1 andJ3 ................................... DPX2MA-A106P-A1O6P-33B-OO99J2 ......................................... DPX2MA-A106P-A1O6P-33B-OOO1
Mounting............................................ TrayModelMT-61O,PartNo. 7007246-901
MG-605MFD Symbol GeneratorLeading Particulars
Table 6-6
TheMG-605MFD SymbolGeneratoris theheartof theMDZ-605MFD system.The symbolgeneratorinputportsareparalleledwiththeSG-605SymbolGeneratorinputports. All inputsareprocessedandtransmittedto theED-600MFDdisplayas a functionof theMC-800MFD Controllerwhenin theMFDmode. Whenin theSG backupmode,thedisplayfunctionsarecontrolledby theDC-811DisplayController.Whenin SG backupmode,theMG-605processesandoutputsthesamesignalsto theautopilotandflightdirectoras theSG-605SymbolGeneratordidbeforeit failed.However,theMG-605signalsareswitchedthroughthefailedSG. If theMFDchecklistisprovided,a checklistmoduleprogrammedto eachcustomer’soperatingrequirementsis installedin thefrontof theMFDSymbolGenerator.
NOTICE
If theMG-605MFD SymbolGeneratoris sentin forrepairor exchange,thechecklistmodulehasto be removedandretainedfor installationin thereplacementMG-605.
22-14-00Paqe198.23/198.24
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title pa~,e of thw document.

DISCRETES
1 I)ISPLAYZPu
m r-NO.1VECTORGENERATON
m~
DISPLAYINTERFACE
VoCPU
D!cl+==-+
IIEiEzil-
7 ——..—NO. 2 VECTORGENERATOR
INPUTMUXI L!El
m
EEl L ADID,A cONVERTER
Ar4cJ * -DEFLECTION
DRIVER
m
tiSl VIDEODRIVER
I4 I
HSI (I’ACONVERTER
* ANODEFLECTION
DRIVER ElDUTPUTMUX
DEFLECTIONSWITCHING
DECODING
DISCRETEANDVALIDS
(All)
EElm m
-/
m mm 4“ ‘12Ezl
EEilRzEl(xl) I
(A9)
Esil-(A8
IICONTROL
LOGIC 1 J
I
(A3)
A_
w- rRASTERGENERATOH
~
—
POWERSUPPLY +28VDC INPUT+28VOC COMMON
I I —2
I
E!Ed--’(A7)
ARINC
m
m
m
m
m
mPIO(A4)
L
IOCVARIABLE IARINC
m
m
> m
mPIO(A4)
~ TO SG-W5/S05SYMBOL GENERATORm
Grl
nSYNCHROSAMPLE AND
HOLDr
CKORIVER
Em I (A4) I
EEl tFROMINPUT
MUXA2
(A12) AD15781
MG-605MFDSymbolGeneratorBlockDiagram
Figure6-24 22-14-00Page198.25/198.26
Mar 15/89UseordisclosureotInlormallononthis page IS subjecl 10 the restrictionson the Mle page of this document.

Honeywell tii~;k~’”c’CITATION V
This page is intentionally left blank.
22-14-00Page 198.27Mar 15/89
UseordisclosureofinformationonIhlspageissubjecttotheres~ncllonsOntheIltlepa~~ofthmdocument.

Honeywell W!W’”c’CITATION V
7. FlicihtControlSystem
A. SP-200AutopilotComputer(SeeFigure218 (Section3), Figure7-1,andTable7-l.)
The Autopilot Computer processes information about the aircraft actualattitude versus a desired attitude as a function of selected flight modeto produce pitch, roll, and yaw control outputs. In addition to themodes selectable on the Autopilot Controller, the Autopilot will producepitch and roll outputs for any flight director mode except go-around.The computer also has torque switching, on the pitch and roll outputs, asa function of altitude.
I
SP-200 Autopilot ComputerFigure 7-1
22-14-00Paqe198.28
Mar 15/89Use or disclosureofinformationonthispageISsubjecttothe restncttons on the title page of this document.

Honeywell WiWANcECITATION V
Dimensions (maximum):
Length ............................................ 12.65Width .............................................. 2.79Height ............................................. 7.62
n. (321.3mm)in. (70.9 mm)n. (193.5 mm)
Weight(maximum)....................................... 7.0 lb (3.18 kg)
Power Requirements ................. 115V, 400 tlz,40 VA; 28Vdc, 100W
MatingConnector:
J1 ............................. CannonPart
Mounting ................................ Tray,
No. DPX2MA-67S67S-33B-OO01
Honeywell P?rt No. 4011646
SP-200AutopilotComputerLeading Particulars
Table 7-1
22-14-00Page 198.29
Mar 15/89Useordisclosureofinformationon thm page is sublect to the restrictions on the title pag? of this document.

Honeywell F&WRANcECITATION V
7. B. FZ-500FlightDirectorComputer(SeeFigures7-2 and7-3,andTable7-2.)
The Flight Director processesinformationaboutactualaircraftattitudeversusdesiredaircraftattitudeas a functionof selectedflightmodetoproducepitchandrollsteeringcommandoutputsto the EADI. It alsoprovides flight director pitch and roll mode steering information to theautopilot computer whennotinthego-aroundmode.
@
FZ-500Flight Director ComputerFigure 7-2
22-14-00Page 198.30Mar 15/89
UseordisclosureofInformationonthispageksub)ecltotherestnc~lonsonthetitlepageofthis[~ocument.

Honeywell WWEFANCECITATION V
Dimensions (maximum):
Length(excludinghandle)......................... 12.65in. (321.3mm)Width.............................................. 2.79in. (70.9mm)Height............................................. 7.62in. (193.5mm)
Weight(approximate)..................................... 71b(3.18 kg)
Power Requirements .................. 115 V, 400 I-tz,14 VA; 28 V dc, 15W
Mating Connector:
J1 ......................... CannonPartNo.DPX2MA-106~-106P-33B-0068
Mounting................................ Tray,HoneywellPartNo.4011646
FZ-500FlightDirectorComputerLeadingParticulars
Table7-2
22-14-00Paqe198-31/198.32
Mar 15/89Use or disclosure of reformation on this page is subject to the restrictions on the title pa~.e of thm document.

Honeywell W!URANCECITATIONV
JIAassr-+”flINS nwAv .:70 -- A
I I
{
-H4”<’ 4
t ❑ms .+4,<,
I
I
I
I
I
I
II
I
I
IISNVOR
IVA?M
I
I
I
I
I
-v-&w1 Fiimii + IizniF
II
SC
--h{.-k<NAv REX ●
m ~
vowsAM OEv
--/--- .
21
I ‘, ~LAT GAIN PROC ●=
I I
II !* I
1 1
INS ONAVCAP9,1N
Mmoo
I
--/0-.●
eC000LAT+=061N
1’D
{
-p -k=<I
OEMOO#im .svP+ n<~vw — --o+ii--
+++
PCOUT● tAOG
a
“C’”{*:= {“- t - ,xFH,,m
*
nOLL WAS
ROLL ms“~o OENEllATOR
-kI
AMOATA
[:
Y I ---M
NOTES
mM?uTEn1 ALL SWITCHES ARE~ INTHEOPEN?OSITSON.
AL TITUOE LABELEO CONDITIONS REPRESENT SWITCtS IN CL@EO WSITIm,FUNCTION
~ ~.2 RESISTOR SVMUELS INOICATE SIGNAL GAIW
GENERATORROLL AXIS
FZ-500F1ightDirectorComputerBlockDiagram
Figure7-3 (Sheet1 of 4) 22-14-00Page198.33/198.34
Mar 15/89Use or dkcbSure of informa~km on this page is subpcf 10 the restrictionson the title page of this document,

Honeywell UNlkPANcECITATIONV
A
c--l
“-u
*
INvOR ● (WC ● 0SS + AOSS4
●VAPR + LOS
vAPn ● I.oc
t t
CROSSWINO WASHOUT
E
1-+m
RNVORJ P
TASLE 1
F
LIMIT ~lTION
t W JIAbl AMO = JUN?SSSED
* Iv WOWC+OSS+MIMl ONo AWLIEDTO JIA-SS MOVIOESilFFoa ALLmsEXCEPTLNAV
II>*SroSATz:1 1 I
JIA
~“%-mLL ““’’’”*&p.y.LLL,.,,,n
ROLL M lE LIMITl.wsscSW-• Noc6.S%SC LOC + VAM + LNAV~wssc OTNSR Nooss
U--psp=’II
II
l!
1,
1E4 KNOTsms
M oTAS VALlO
vROLL AXIS
FZ-500FlightDirectorComputerBlockDiaaram
~d%#EFlbOp’’c”Ax’s ‘*3A”””1 I
~ TAS INTERNAL TO PITCH AXIS EM 4)
Figure7-3 (~heet2) 22-14-00Page198.35/198.36
Mar 15/89USe or dwclosure of lnfOrmatlOn on this pegeissubj@10 the restnctmnsOnthe Mle pageof Ihls documersl.

Honeywell INW’”c’CITATIONV
All 4LCR1Ct)nlnotlcn&L1 Pnfst LtcTtnnom
ALT f14nOnVWAV
AIM OATA CWTnMOLO fII~n (
-P:7--+--- T
II — ‘“’555L=l-p.+ VS9 [Xl GND -
\*31I
1’7--AI TOEXT ONOo~ ( )
I% d
II
1/A
IIVSOEXT GNDO~=
)( ~
.1 ,, I
{tic’ > ‘–
VCnTKALERRon
MACH
vNAV*,,
AIR MTA
FIICM SELtCTSms
-% 4--6sI
1
1+1--ElII
=%+-l—
I I
I
PITCH AXIS
II—
1 >II
4~o LIMITER *vNOC EO I ,,q * SOv
VNAv OAsmmo
l;”h-3
1/h
VNAv m
SYNCWO1O
1
II1/
( ~-I II I
Vixii ) II
II
II
v-I’w I “w
GSOC EO
FZ-500F1ight Director ComputerBlock Diagram
Figure 7-3 (Sheet 3)
-@l
22-14-00Page198.37/198.38
Mar 15/89Useordlscfosureofinformationonthis page IS subject fo fhe restrictionson the title page of Ihls document

Honeywell &!Af~f{ANcE
J
Me
R&:,,”,. F1-@+-N . I( —GIS GSEOFF
OEv,AT,oN/~17~” “
..->-.-... /~.. . . . .
II
II *c
*
PITCH SVP4C
PITCH RATELIM, ,
c1TAS GAIN
PROGRAMMER
iA
““~------+IIPITCH BIASOUT OF VIEW
I
PITCHATTITUDEVSRTICALGvRO
FIAO,O d+”{
~ ! RAVAL● 3S0 GND
ALTIMETER
+Ia
GLIOE SLOPE
RAVA1O 350 GNO + MMGAIN PROGRAMMER
TAS INTFROM ROLL
1
AXIS (SN 21
Iv: ,- ~“”
G10 VR
T1[ 41
MM
0=’0
PITCH AXIS
FZ-500FlightDirectorComputerBlockDiagram
Figure7-3 (Sheet4)
II
IIII
I1
N-1
?rTcN Nao
GS GAIN PROG
22-14-00Page198.39/198.40
)-
A?R CAP
1=—
Mar 15/89Use or disclosure of Informetlon on this page IS subject 10 the restrictions on the title page of this document

Honeywell !%W?ANCECITATION V
This page is intentionally left blank.
22-14-00Page 198.41Mar 15/89
Use or dmclosure of mformaijon on this page is sub!eci to the restnc!~ons on the title pag ? of this document.

Honeywell MMWANC’CITATION V
7. c. MS-205 ModeSelector (See Figures 7-4 and 7-5, and Table 7-3.)
The Mode Selector provides pushbutton lateral and vertical modeselection,andmodeannunciationforthe IntegratedFlightControlsystem.The FD OFF switch, whenpressed,appliesa groundto theFDCcausingtheremovalof FD commandson the EADI. The DIMcontrolprovidesdimmingfor the ModeSelectorannunciators.
o FDOFF HDG oNAV8APR BC o...... .. - ... .........
~McAp.KJ7 ,1..., -:.”b’.:.”.:. .m
, -..
Qx ‘i- ‘-”-””- ‘ ‘“ ‘“““...........
‘ )
c)~
DIM ALT ALTSEL VN4V VS IAS——-,—..- .. ........ -.-_- ;.-—..:- --..:..:==-...
::.’:!-.~?:.“~“.’.l.:.-...,
‘=:-:‘--”=--:’”“; ~-----~‘: (b
MS-205ModeSelectorFigure7-4
Dimensions(maximum):
Length(frombackof mountingplate) ......... 4.50Width................................11:1......... 5.17Height............................................. 2.01
Weight(maximum)......................................... 3
PowerRequirements
Primary ..............................................Lighting...............................................
MatingConnector:
J1 .....................................................
n. (114.3mm)n. (131.4mm)in. (51.1mm)
O lb (1.4kg)
28 V dc,20 W5Vacordc
MS3126F20-41S
Mounting.......................................................... Screws
Use or dwclosure of
MS-205ModeSelectorLeadinaParticulars
T~ble7-322-14-00
Page198.~2Mar 15/89
on this page IS subject to the restrictions on the title page of this cl,]cument.

Honeywell !MUYAN’ECITATIONV
+15VDC
POWER LJNO
O-28 V MODE ANIWN
MOOE SELECT GNO
HOG SELECT
---- ---- ---- -1
I
I
NAV SELEC 1
APR SELECT
B C SELECT
AL1 SEL SELECT
VNAV SEL
ALT SELECT
VS SELEC1
IAS SfLECT
DIM CONTROLExCITATION
OIM CObTROL S&NAL
o-w PANEL LIGNTING
LIGHTING GND
CHASSIS G~
-1
I
I ~Nc––––––– &-,tb
I c1 s‘1 I) NOL
I l--- —---I f==+II
NCr------
<1cl Sll
1 NOiL3
!l—— ——— —--
II
IIIIII
II
I1 ———
IIIII
II
I
II
II
II
II
I
,,
II
I
I
I
I
I
I
I
I
I
IIIII
I
4
I
I
I
I
I
I
I
“’”U====+J8 !
II
I I 1
I I I
.1 CRZ 1,I
NJ CR5 I ,.,9 I
16:CR8 I l)
.15 I
14!CR?
:131’1,.
WI cR13125
1“
T 9
24!CR12 I 23
T >.- CR15 .,. 1
20; CR14 ;27 I
1’.
22;CRll I ,.
*2 I I
32! CFA16 !3 1
34 I CR17!33
l=’
T 9
I I-——— ——-— -———- —— -- —— -- NOTES
UNLESSOTHERWISESPECIFIED:1 ALLCAPACITANCEVALUESAREINMICROFARAOS.
rP~~L–,~&c~T~M~~ 2. ALLRESISTANCEVALUESAREINOHMS.
‘1 iT06;
OLK I I
67 1 I
oL— ;’7 I I
I II
-.h El
MS-205ModeSelectorFigure7-5
I~o:l_______j
Schematic
F D SELECT OFF
HOG GNO
NAv CAIJ LND
NAV ARM GND
APR CAP GNQ
APII ARM GNO
BC CAP GNO
B C ARM GNO
ALT SEL CAP GNl)
ALT SEL ARM (,NO
VNAV CAP GNO
VNAV ARM GNO
ALT 6N0
VS GNO
lA5 GND
AD18429
22-14-00Page198.43/198.44
Mar 15/89Use or disclosure of mformatlon on this page IS subject to the restncttons on the ttle page of thm document.

Honepe[[ WURANCECITATION V
This page is intentionally left blank.
22-14-00Page 198.45Mar 15/89
Use or disclosure of information on this page is sub)ecf to the restrictions on the title paqe of thw document.

Honeywell !t%M@ANcECITATIONV
7. D. PC-500AutopilotController(SeeFigures7-6 and7-7,andTable7-4.)
Qn ESCEND
P
+
E
T~
cH
M
CLIMBQ+
L -1
AO-2368-R1
PC-500AutopilotControllerFigure7-6
Dimensions (maximum):
Length............................................ 4.81in. (122.2 mm)Width ............................................. 5.75 in. (146.1 mm)Height ............................................. 2.63 in. ~66.7 mm)
Weight(maximum)..................,..................... 2.0lb (0.91 kg)
PowerRequirements:
Pushbuttons................................................. 28 V dcLighting............................................... 5Vacordc
MatingConnector:
J1 .................................● ................... MS3126F18-32S
Mounting........................................... UnitScrewFasteners
PC-500AutopilotControllerLeadingParticulars
Table7-4
22-14-00Page198.46Mar 15/89Useor dsclosure of Information on this page is subject to the restrictions on the title page of this document.

Honeywell M?JE!ANCECITATIONn/V
The autopiyaw damperknob
7. D. (1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
andP
ot controllerprovidesthemeansof engagingtheautopilotandas wellas manuallycontrollingthe autopilotthroughtheTURNTCHwheel. Thefollowingparagraphsdescribeeachcontrol.
AP ENGAGESwitch- The ENGAGEswitchis usedto engagetheautopilot.Engagingthe autopilotautomaticallyengagestheyawdamper. Theautopilotmay be engagedwiththeairplanein anyreasonableattitude.The autopilotwillautomaticallycoupleto anymodesselectedon themodeselector,uponengagement.
YD ENGAGESwitch- Whentheautopilotis notengaged,theyawdampermay be utilizedby theYD engagemode.
BANKLIMITSwitch- Whenin theHDGmode,thisswitchis usedtodecreasetheflightdirectorrollcommandbanklimitto 12 degrees.
SOFTRIDESwitch- TheSOFTRIDEON switchreducesautopilotgainswhile still maintaining stability in rough air. Thismode may beused with any flight director modeselected.
ElevatorTRIMIndicator- TheelevatorTRIMindicatorshowsout-of-trimconditionby displayingUP or DNwhena susta$nedsignalisbeingappliedto theelevatorservo.
TESTEACHFLTButton- The TEST EACH FLT button provides a test forthe torque limit monitors. Also, on the Citation V theaccelerometer and roll rate monitors are tested. After engaging theautopilot, pressing the TEST button will cause the autopilot todisengage by simulating a failure in the monitors. THIS TEST SHOULDBE PERFORMEDPRIORTO EACHFLIGHT.
PITCHWheel - Rotation of the PITCH wheel results in a change ofpitch attitude proportional to the rotation of the wheel and in thedirectionof wheelmovement.Movementof thewheel,withtheautopilotengaged,willcanceltheALTholdmode.
TURNKnob- Rotationof theTURNknoboutof detentresultsin arollcommand.Therollangleis proportionalto andin thedirectionof theTURNknobrotation.TheTURNknobmustbe indetent(centerposition)beforetheautopilotcanbe engaged.Rotationof theTURNknobcancelsanylateralmodeselected.
22-14-00Paqe198,47/198.48
Miy 25/90Use or disclosure of reformation on this page K subject to the restnct!ons on the title pag,, of thm document.

Ho
ne
ywe
lltii!!!~
~~’”c
’CITATIONV
z.
T.-
—--—
----
------
-——
—— --—
---—
——
——
———
-——T
———2
—t-—
L
.E Gx.i!
----.
I
tI
.I
T
---
PC-500AutopilotController
BlockDiagram
Figure7-7
22-14-00Page198.49/198.
50
Mar15/89
Useordisclosure
ofInlormallon
on
thm
pag
eis
sub
jecttoth
erestrictio
nso
nth
etitle
pag
eo
fIh
tsd
ocu
men
t.

This page is intentionally left blank.
22-14-00Page 198.51
Mar 15/89Useordisclosure Of Informationon this page IS sublect to the restrictions on the title page of this document.

Honeywell Ml!!f?’”c’CITATION V
7. E. AG-222Accelerometer(SeeFigure7-8and7-9,andTable7-5.)
The Accelerometer is a closed loop, forcebalanceddevicewitha linearoutputproportionalto aircraftverticalacceleration.It hasself-containedelectronicsand incorporatesself-testcapabilities.
m 440
AG-222AccelerometerFigure7-8
ilimensions (maximum):
Length ............................................. 2.25 in.(57.2mm)Width .............................................. 1.03 in.(26.2mm)Height.............................................. 2.39in, (60.7mm)
Weight(maximum)........................................ 5.0oz (127gm)
PowerRequirements:
Excitation............................., (+)and (-)15 V dc, 1.0W
MatingConnector:
J1 ................................................ BendixJT06RE8-35S
Mounting..................................................... HardMount
AG-222AccelerometerLeadingParticularsTable7-5
22-14-00Page198.52Mar 15/89
Use or disclosure Of Information on this page is subject to the restnct!ons on the title page of thts document.

Honeywell MNHANCECITATION V
II SEISMIC
\
I MASS
PICKOFF AMPL
I
II
L.
T\-—————A—— ——
-- —-—
“1//TORQUE// MOTOR
.—
6K RLOAD
L
1
6
2
3
5
4—J
+13V
TESl-
SIGNALOUT
SIGANDPWRGND
-13V
SPARE
31729-R2
AG-222 Accelerometer Block DiagramFigure 7-9
22-14-00Page198.53Mar 15/89
Use or dmclosure of Information on this page m sub)ect to the restrictions on the tllle pace of Ihm document.

17. F.
Honeywell WE!ANCECITATIONn/V
RZ-220RollRateMonitor- CitationV Only(SeeFigures7-10and7-11,Table7-6.)
Therollratemonitorreceives3-wiresynchrorollattitudefromtheVG-14AVerticalGyro. Itmonitorsthisrollattitudesignalforabsoluterollanglesof greaterthan40°0 androllratesin excessof 20°0/see.Whenevertheseparametersareexceeded,a relayintherollratemonitordeenergizes,whichcausestheautopilotto disengage.
RZ-220RollRateMonitorFigure7-10
Dimensions(maximum):
Length.● ...● ...,...● ...● ...● .............,......● 5.62in.(142.75mm)Width..● ...● ..................................... 3.93in.(99.82mm)Height.● ...........● .............................. 2.65in.(67.31mm)
Weight(maximum).● ...● ................................. 1.2lb (0.54kg)
PowerRequirements........................... 115V ac,400Hz,2 VA max
MatingConnector.............● ............................. MS3126F14-19S
Mounting.............● .................................... SolidMounting
RZ-220RollRateMonitorLeadincjParticulars
T~ble7-6 22-14-00Page198.54flay25/90
Useordisclosureof information on this page is subject to the restrictions on the t!tle page of this document.

Honeywell WW!’”c’CITATIONV
+J: >_____ -15 VDC
c
U >— SIGNAL GND
TEST ,. ~’;”
ROLLATTITUDEZ, N>50K11
1
If
+ v >— Tp,v 1/
)( )
WJ”4) , -K>
X+E>( b
TDEMOD
I
AND ~
t- q
L>
LVC20%EC 225 mS
~ %M>+ THRESHOLD TIME
DETECTOR DELAY
LVC IN>
28VRELAY ENERGIZED
K 1 ENGAGE A/P115 mS30° TIME
THRESHOLD
TEST DETECTORDELAY
Y
OR GATE FUNCTIONSAS ‘AND’ GATE DURINGTEST
! 405° 155 mSVOLTAGE TIME
z~G> *
TCosd DETECTOR DELAY
l--hI~ )
+15 VDC INPUTFOR SELF TEST - B >
M ATEST (339SEC ROLL RATE)
+
+C>—+15VDC
*
P-JLINE
vOLTAGE LVC
COMPEN.SATION
fr
P ~ CHASSIS GND
-jR>— TP,
~ S >— TPz
1=+ vDCPOWERSUPPLY
- vDC
=-J---l*
RZ-220RollRateMonitorBlockDiaqramFigure7~11
AIRCRAFTAIPINTERLOCKS
TO
AD 182S1
22-14-00Page198.55/198.56
Mar 15/89Use or disclosure of information on this page is sublect to the restrictions on the title page of this document.

Hone~el[ WUHANCECITATION V
Thispageis intentionallyleft blank.
22-14-00Page 198.57
Mar 15/89Useordisclosureofinformationon thw page IS subject 10 the restrictions on fhe title page of this document.

Honeywell lWiiE!ANcECITATION V
7. G. SM-200ServoDriveandSB-201Bracket.(SeeFigures7-12and7-13,andTables7-7 and7-8.)
TheServoDrivetranslateselectricalinputsintoa clutchedrotationalmechanicaloutput.Thisassembly,witha splineoutputon theclutch,mateswiththedrumandbracketassembly.Tachometerrateand Synchro
position signals arefedbackto theautopilotcomputerservoamplifier.Thedrumandbracketunitis boltedto theaircraftstructureandconnectedin parallelto theaircraftprimarycontrolriggingthrough.-cables.
m 221s
SM-200 ServoDrive and SB-201 BracketFigure7-12
22-14-00Page198.58Mar 15/89Use or dmclosure of mtormatlon on this page is sub@ct to the restrictions on the title page of this document

Honeywell IWLWANCECITATION V
Dimensions (maximum):
Length ........................................... 8.825 in. (224.3mm)Width............................................ 5.065in.(128.8mm)Height ............................................ 3.97 in. (100.8 mm)
Weight(maximum)....................................... 56 lb (2.55kg)
PowerRequirements:
Clutch.................................................. ..... 28 V dcMotor Stall ............................................. 28 V dc, 56 WSynchro ............................................ 26 ~~,400 Hz, 1 VA
Stall Torque ........................................... Upto1601b-in.
Mating Connector:
J1 ................................................... P-K)6E-14-19S(SR)
Mounting .................................................. .. Hard Mount
SM-200ServoDriveandSB-201BracketLeadingParticulars
Table7-7
Power Synchro Clutch ClutchDashNo. GearRatio GearRatio Hi Pin Hi Pin
-906 38.9:1 151.1:1 F J-914 18.6:1 151.1:1 G H
SM-200ServoDriveDashNo.Differences
Table7-8
22-14-00Page198.59/198.60
Mar 15/89Use or disclosure of mformatlon on this page IS subJect to the restrictions on the title pa$e of this document.

Honeywell INKY’””CITATION V
r ——— ——— ——— ..—, SERVO ORIVE ASSEMBLY POWER LOOP 1.
II
F*CLUTCHEXCITATION
I
(CONTROLLED BYAUTO PILOT IENGAGE ANO/OR
TOUCH CONTROL
STEERINGI
SHIELD GNO
CLUTCH
VOLTAGE
x
d
I
[G<;-ORN ~
, CR1-VOLTAGE
2 I
11 IBLK BLK
‘~
I
{J ;::
+BLKTACH RATE L
FEEOBACK OUTPUT II
(POLARITY SHOWN
FOR CCW OUTPUTII I
TOORUMANO _WHTi IN
BRACKETI WI
MOTOR INPUT FROMSERVOAMPL
(POLARITY SHOWNFOR CCW OUTPUT TOORUMANDBRACKET)
‘4--I
I
J-J-
.
.I
l--
I
I TO
~+. -.AIRCRAFT
[0CONTROL
CABLES
~~ IPOWER
GEAR
TRAIN
I I
<> I
II I5
I
CHASSISGND C
% +
r.—— ——— ——— -t—
5ERv0DRlvE A55EM13Ly FEE06AcKL00P
I I SYNCHROSYNCHROTERMINALS
GEAR TRAIN
p IX BLU B@
[;!
BLUE
SERVO(SYNCHRO 61) Y WHT/VIO 9 BLKPOSITION FEEDBACK ROUTPUT
! H=q
Cx
2 YEL 10 YELLowE:1
{::
‘1 H WHT/RED 11 REo,wHTD
26 V400 Hz c WHT/BLK ‘2 BLK/WHT
E. H
I 1- ——— ——— ._ —.—
SPARES
““ fJ-
1NOTES
‘+
1
iJ-
SPARES 0
.V +J--
2$
3
$
INDICATES MECHANICALSIGNAL FLOW
INDICATES ELECTRICALINPUTS
IN OICATES ELECTRICALOUTPUTS
SM-200ServoDriveBlockDiagramFigure7-13
AD.202
22-14-00Page198.61Mar 15/89Useordisclosureofinformationonthispage!ssub}ecttothe restrictions on the title pag ! of this document.

Honeywell WJE”ANCECITATION V
8. PRIMUS@ 650 Weather Radar System
A. WU-650 Antenna and Receiver/Transmitter Unit (See Figures 8-1 and 8-2,and Table 8-l.)
TheWU-650Antenna and Receiver/Transmitter Unit generates andreceivesX-bandradiofrequencyenergy forthepurposesof weatherdet~ctionandgroundmapping.The9345i30MHztransmittedsignalsaresentdirectlyto theantennafromtransmittercircuitrymountedon therearof theantenna.Echo signals received by the antenna are applied directly to thereceiver which is also mounted directly to the antenna. The IF,video,and processing system processes these signals by encoding them into oneof four levels depending on their intensity, scan converts th~m, andoutputs the scan converted data to the various display systems.
84-88-14
WU-650Antenna and Receiver/Transmitter UnitFigure 8-1
22-14-00Pacle198.62~ar 15/89
Use or disclosure of information on this page IS subject to the restrictions on the title page of th!s jocument.

Honeywell tii~;?’””CITATION V
Dimensions (maximum):
Base Diameter ................................. 10.00 in. (254.0mm)Height(Antennaflat).......................... 9.00in.(228.6mm)Height(Antennafullac) ...................... 13.20in. (335.3mm)
Weight............................................... 13.cllb(5.90kg)
Prime Power ......................... +22 to +32 V dc, 90 watts, maximum
Antenna
Size....................................... 12-inch flat plate radiatorStabilization ............................... Line-of-sight., t30 degreesTilt ....................................................... t15 degreesScan .................................. Fu1l - 120 degrees (t60 degrees)
Sector - 60 degrees (t30 degrees)
Transmitter
Frequency................................................. 9345t30MHzpower ....................................... 1.3kW, nominal, magnetronPulse Widths ................... 1.2, 1.5, 2.4, 4.8, 9, 18, and 27 usec,
determined by selected rangePRF ......................................... 120, 240, 360, and480 Hz,
determined by selected range
Receiver
Noise Figure ........................................... 8.5dB, typicalIF Frequency.................................................... 35 MHzIF Bandwidth.......................................... 0.[1MHz,nominalVideoBandwidth................. CommensuratewithselectedpulsewidthSTC ............................................... Presen”tin allmodesMDS ................................. 112.4 dBm nominal, on 300 NM range
DisplayedRanqes
WXGMAP .......................... 5, 10, 25, 50, 100, 200, and 300, NMfull scale with fiveconcentricrangerings(cyanforWX,greenfor GMAP)
Flight Plan ............. 5, 10, 25, 50, 100, 200, 300, 500, and 1000 NMfull scale with fiveconcentricrangerings
MatingConnector......................................... MS3126F20-41S
WU-650AntennaandReceiver/TransmitterLeadingParticulars
Table8-1
22-14-00Page198-63/198-64
Mar 15/89Use or disclosure of information on this page IS sub!ect to the restrictions on the tttle pa<:eof this document.

MOOULATOR
1
t
IF PREAMPL IF AMPL DETECTEH AMPL
w
L.O.
+,I
=hwGNETRON
-L-EJ--
t
‘T..s’g;’rON/OFF .—l I II$)‘z
MOTORORIVE
1
AzMOTOR
I1
VIDEO
PROCESSOR
8
ELMOTORORIVE
1
ELMOTOR
—
r OIGITIZEO VIOEO
EllNO/MFO
LT EFISPICTURE
BUS
RT EFIS
-IXLPR’MAR4
—
3’”~— LT EFI’
-–i=’’”~—
‘clCONTROLBus
AD.6s7A.a3
WU-650AntennaandReceiver/TransmitterUnit Block DiagramFigure 8-2
22-14-00Page 198.65
Mar 15/89UseordisclosureOfinformation on this page is subject to the restrictions on the title pag~ of this document.

Honeywell !WWANC’CITATION V
8. B. WI-650WeatherRadarIndicator(SeeFigures8-3 and8-4,and“rabies8-2and8-3.)
..-. —. .-. -=.-...-=.-.==,Il(mcwt’wll
f=, A-ria.m--- ..--—.. -. , ,. ..——
. ..
#b...
-. .
#.--~
. ..._l(.I-.~
II
,---7 . ._
, .&-. .
. . ..
x.
t—— .. . .
.L.
‘F, .i.1 ,m.. Ii
.
—,. . J ,- ,. -,:~---..,- --- =!! ;
AW122QS-R3
WI-650WeatherRadarIndicatorFigure8-3
Dimensions (maximum):
Length (from rear of bezel) .................... 11.49 in. (2!]l.85mm)Width.......................................... 6.27in. (159.13mm)Height.......................................... 4.83in. (122.68mm)
Weight(maximum)....................................... 12.Olb (5.45kg)
PowerRequirements:
Primary............................... +27.5V dc,36 watts.,maximumLighting............................ 28Vdc, at O.20A, nominal,or
5 V ac/dc,0.75A. nominal
MatingConnectors:
J101 ................................................. MS3126F22-21SJ102 ................................................. MS3126F14-19S
Mounting........................... Tray,HoneywellPartNo. 701.1359-901
WI-650WeatherRadarIndicatorLeadingParticulars
Table8-2
22-=14-00Page198.66Mar 15/89
Use or disclosure of Intormatlon on this page is subject to the restrictions on the tllle page of this document.

Honeywell WKPANcECITATION V
The indicator provides all control functions fortheweatherradarsystemanddisplaysscanconverteddata,processedby theWU-650on a 5-inchdiagonalcolorCRT. Colors provided are red, green,blue.yellow,cyan,magenta,white,andblack. Thefunctionof eachcontrolon the indicatoris listedinTable8-3.
BRT
TILT
GAIN
Mode
OFF
SBY
ON
FP
TST
TGT
Single-turndisplaybrightnesscontrolthatadjustsbrightnessof display.CW rotationincreasesdisplaybrightnessandCCWrotationdecreasesbrightness.
Single-turnrotarycontrolwhichvarie:iantennatiltbetween15degreesup and 15 degreesdown. The rangebetween +5 degrees and -5 degrees is expanded for easeof setability. When pulled, stabilization inputs aredisabled and pitch and roll are assumed to be zero.
Single-turn rotary control which varie:; the RTA receivergain. Control is active when pulled, andwhen pushed,receiver gain is preset and calibrated Selection ofRCToverrides the variable gain setting causing receivergainto be fixedandcalibrated.CW positionproducespresetgain.
Five-positionrotarycontrolwhichselectsprimaryradarmodes.
Removespowerfromsystem.
Standby.Placessystemin nonoperationalmode.
Placessystemintheoperationalmode:jelectedby WX orGMPpushbuttons.
Flight Plan. Permits the singular display ofnavigational data provided through the UDI port.
Activates the system self-test mode.
Momentary alternate-action pushbutton which enablestheTargetAlertfunction.RTAbecomesoperationalif FP modeis selectedandTargetAler:enabled.
Indicator Control FunctionsTable 8-3
22-14-00Page198.67Mar 15/89
Use or disclosure Of mtormatlon on thts page IS subject to the restrictions on the title pa[:e of this document,

Honeywell MI!!!NANC’CITATION V
RTC
GMP
Wx
RANGE
AZ
SCT
Momentary alternate-action pushbutton which enables therain echo attenuation compensation technique function.
Momentary pushbutton which selects the ground mappingdisplay mode.
Momentary pushbutton which selects the weather displaymode.
Two-pushbuttonrangeselectionsystemwhichpermitsrangeselectionfrom5 to 300 NM full scale ‘n the ONMode or 5 to 1000 NM full scale in the Flighl. Plan Mode.The “uparrow”pushbuttonselectsincreasingrangeswhile the “downarrow”pushbuttonselectsdecreasingranges.Thelastrangeis rememberedwhen switchingbetween ON and FP.
Upon reaching maximum or minimum range, further pressingof the pushbutton causes the range to rollover tominimum or maximum range, respectively. If f’SBY iswired to a weight-on-wheels switch, the unit will be inForced Standby on the ground unless both RANGEpushbuttons are pressed simultaneously.
Momentary alternate-action pushbutton which permitsdisplaying and removing azimuth marks from the display.
Alternate-action pushbutton which selects either fullazimuth scan angle (120 degrees)or sectorazimuthscanangle(60degrees).
IndicatorControlFunctionsTable8-3 (cent)
22-14-00Paqe198.68Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the Iltle page of this I Iocument.

Honeywell WK5!’”c’CITATIONV
REF
VERTREF
HORIZ TIMING VERTGENERATOR SWEEP
VIDEORED
\
JDISELECT P
UDICIRCUITS
STBY +
2FORCED STBY /
/ 1
CONTROLBUS
ENCODER/DECODER
*
II ALPHA- 1 ~vlDEO 1
NUMERIC l)ECODER/GENERATOR PRIORTIZER
FRONTON/OFF+ PANEL
CONTROLS
WI-650WeatherRadarIndicatorBlockDiagramFigure8-4 22-14-00
HORIZSWEEP
3LANK vCOLORVIDEOAMPI.
NTC
P:&RSUPPLY
AO-6873-R2
Page198.69/198,70Mar 15/89
Useordisclosure01informationonthispageIS subjectto the restrlcltonsonthe Mle page of thtsdocument.

Honeywell l!fi~u%NANcECITATIONn/V
This page intentionally left blank.
22-14-00Page198.70.1
May25/90Use or disclosure of Information on this page K subject to the restrictions on the title paq? of this document.

Honeywell WWmcECITATIONn/V
8. C. OptionalWC-650WeatherRadarController(SeeFigures8-5and8-6,andTables8-4 and8-5.)
AD-15s72
WC-650WeatherRadarControl1erFigure8-5
Dimensions (maximum):
Length (from rear of bezel) ...................... 7.0 in.(277.8mm)Width ........................................... 5.75 in. (146.1mm)Height ........................................... 1.87 in. (47.5 mm)
Weight ................................................. 12.0 lb (5.45kg)
PowerRequirements:
Primary......................... +22to +32V dc, 5.8watts,maximumLighting.......................... 28 V dc at 6.0watts,nominal,or
5 V ac/dcat 4.6watts,nominal
MatingConnectors:...................................... MS27473E14B-18SwithstrainreliefMS27506-B14-2
Mounting........................................... UnitScrewFasteners
WC-650WeatherRadarControllerLeadingParticulars
Table8-4
22-14-00Page198.70~2
May 25/90Use or disclosure of information on this page is subject to the restrictions on the title page of this jocument.

Honeywell Wllk”ANcECITATIONn/V
TheWC-650Controllersetsthemodes,range,andantennatiltusedtodisplayradarinformationon theEHSI. The controller also contains theLightningthe LSS.
The funct8-5.
SensorSystem(LSS)switchwhich
on of eachcontrolon theWC-650
is used
Control”
to con-trolthemodesof
er is listedin Table
Control Function
TILT
LSS
OFF
SBY
LX
CLR/TST -
SLV
Single-turnrotarycontrolwhichvarie:;antennatiltbetween15degrees up and15degreesdown. Therangebetween+5 degreesand -5degreesisexpandedforeaseof setability.
Four-positionrotaryswitchwhichselectstheLightningSensorSystemmodes.
AllpowerremovedfromLightningSensorSystem.
Displayof datafromthe LightningSensorSystemisinhibited,but it is accumulatingdata.
LightningSensorSystemif fullyoperationalanddisplayingon the Indicator.
Accumulateddatais clearedfrommemoryof theLightningSensorSystem.After3 seconds,thetestmodeisinitiatedin theLightningSensorSystem.
An annunciatorcenteredon theloweredgeof thepanel.Thisannunciatoris usedin a dualcontrollerinstallationandlightswheneverthiscontrolleris intheOFFmodeandtheoppositesidecontrolleris in anymodeexceptOFF.
WC-650ControlFunctionsTable8-5
22-14-00Paqe198.70.3
May 25/90UseordisclosureofInformationon this page is subject to the restrictions on the title pay 1 of this document.

Honeywell WURANCECITATIONn/V
Control Function
RADAR
OFF
STBY
Wx
GMAP
FP
TEST
GAIN
Range
RCT
STAB
Six position rotary switchmodes.
Removespower from system.
Standby. Places system in
which selects primary radar
nonoperational mode.
Selectsthe
Selectsthe
Selectsthemode.
Selectsthe
Sinqleturn
weatherdisplaymode.
groundmapmode.
system flight plan (navigation) display
system self test mode.
rotary control which varies the RTA receivergai~. Receiver g~in is calibrated in the PRESETposition. CCW provides minimum receiver gain.Selection of REACT overrides the gain contro~ setting,causing the receiver gain to be fixed and ca~ibrated.
A two-pushbutton range selection system which permitsrange selection from 50 to 300 NM full scale in the ONmode or 5 to 1000 NM full scale in the Flight Plan mode.The “uparrow”selectsincreasingrangeswhile the “downarrow”selectsdecreasingranges.
REACT- Momentaryalternatingactionpushbuttonwhichenablesthebluebackgroundfieldto indicaterangesatwhichthereceivercalibrationhasbeenexceeded.Compensationis activeat alltimesunlessthe REACTCompensationOverridepinon theRTAconnectorisgrounded,inwhichcasethecompensationis enabledcoincidentallywiththebluefielddisplay.The REACToffconditionis annunciatedabovetheswitch.
Momentaryalternateactionpushbuttonwhichpermitsdisablingstabilizationinputs.Whendisabled,the“OFF”conditionis annunciatedabovethe switch, andpitch and rollinputsareassumedto be zero,
WC-650ControlFunctionsTable8-5 (cent)
22-14-00Page198.70.4
Ma{25/90Use or disclosureofinformationonthispageissubjecttothe restrictions on the title page of lhts docume t.

Honeywell MM?’””CITATIONn/V
Control Function
TGT - Momentaryalternatingactionpushbuttonwhichselectstargetalertfunction.
SECT - Sector.Momentary alternating action pushbutton switchwhich selects either full azimuth scan (120 degrees) orsector scan (60 degrees).
WC-650Control FunctionsTable 8-5 (cent)
22-14-00Page198.70.5/198.70.6
May 25/90Useordisclosureoflflformatlononthispage ts subject to the restrictions on the title paq? of this document.

Honeywell tiil!il~r’”c’CITATION Ilfl
OEI
SECTTGT
‘z~ ‘g”: ‘-TM-
96 KHZ
t BINPROGRAM CTRCOUNTERS A3U6
A3U9ANDA3U1O -t-
+4A3U3 --06.144MHZ
OscA3U7,A3Y1
STAB 1 ,3 BUFFERRCT > / A3U13 TBO - TB6
iii TGAINWIPER — A2U1A
OPAMP
~“ P
~A?N TBO- T’SA3U20
CONrROL LABEL 192 KHZ
PROM PROMA3U15 A3U12
v
UART LINEINTERNAL BUS
A3U6— DRIVER
A3U2
SclTO RTA
ADCTILT
A3U19“LTW’PER+* Q
OE1
DECODER OE2
MUX OE310FB 0E4A3U21 OE5
0E6 l==%R
OE3
JlSBY
a ~
PROM IMAP (MODE) TBO-TBQFP A2U7 1
‘STU A rB2 - TB6
OE3~BUFFERA3U22
UP 7ON
A3U26OCTAL PROM
(RNG)A3U26 A3U29
FP +
a+cwf~:Rt-+5v
I PULSE k +15VDCRNG
b 4
POWER SUPPLY
LEGl
- “T L JPANEL LAMP NOTE:
CIRUIT REFERENCE DESIGNATIONS ARE AS FOLLOWS:Al = LC)W VOLTAGE powER SUPPLY CCA
JQ . LOGIC 1 CCA
~ . LOGIC 2 CCA
WC-650WeatherRadarControl1erBlockDiagramFigure8-6
22-14-00Page198.70.7/198.70.8
Ma{25/90Use or disclosure of InformalIon on Ihm pege ts subject to the reslrlcllons on the tttle page of this docume 1,

Honeywell KAWJ$PANCECITATION V
Thispageintentionallyleftblank.
22-14-00Page198.71Mar 15/89
Use or disclosure of Information on this page IS subject to the restrlcttons on the title pag ? of thm document.

Honeywell MWJEP’NCECITATION V
9. Or)tionalFMZ-800FliqhtManagementSystem(FMS)
A. NZ-61ONavigationComputer(SeeFigures9-1and9-2,andTabl~?9-l.)
AD-11941
NZ-61ONavigationComputerFigure9-1
22-14-00Paqe 198.72
har 15/89Use or disclosure of Information on thm page is subject to the restrictions on the title page of this cocument.

Honeywell KI!!!EPANCECITATION V
Dimensions (maximum):
Length .......................................... 17.03 ir. (432.6mm)Width............................................ 4.91ir.(124.7mm)Height........................................... 7.62ir.(193.5mm)
Weight (approximate) ................................... 14.8 lb (6.71 kg)
PowerRequirements ...................................... 28 V dc, 65 W
Mating Connector:
J1 ........................... Cannon Part No. DPX2-67S-I06P-33B-O089
Mounting ..................................... Tray, Part No. 7003272-903
NZ-61ONavigationComputerLeadingParticulars
Table9-1
The NZ-61ONavigationComputerprovidesbothlateralandverticalnavigationguidance.The navigationcomputerhasa l12kbyteinternalnavigationdatabasethatis usedforstorageof waypoints,navaids,routes,airports,andotherNAVdataforeasyaccessby thepilot. The navigatior~ computer caninterface with three long term sensors via ARINC 429 busesandtheASCB.Eachnavigationcomputercanalsoconnectto dualDME receiversanda singleVOR receiver. The interfaceto theSG-605(EFIS),andMG-605(MFD),is overtheASCBandthelinkto the CDU is over an RS-422 ‘private-line’ interface.With links to the on-board navigation sensors, the navigatic~n computerdevelops an FMSposition based on a blend or mixof the sensors.The FMSdoesnotdirectlydisplaynavigationmapson the CDU; howev~r,theFMS is thesource of map data forothercockpitdisplayssuch as EFIS. Display of mapdata is achieved by the utilization of the internal data base and ASCB1/0.Thenavigationdatabaseis subjectto updatingon a 28 day interval.TheDL-800 data loader is used for this purpose.
The navigation functions of the system include accurate computations ofaircraft position and groundspeed. Navaid selection and tuning of the VORand DME receivers can also be accomplished through the FMS. Aircraftposition is computed using data received from the radios (VORand/or DMEand/or Omega). The navigation computer calculates groundspPed using radioinputs.
22-14-00Page198.73
Mar 15/89UseordisclosureofInformationonthispageE subjecttothe restrictions on the title pag 1 of thm document.

Honeywell WKFANCECITATION V
Thenavigationcomputerselectsfrequenciesfor tuning the VORanca directedscanDMEor twosinglechannelDME’s. However, the NAV radios car be tunedby either the navigation computer supplied frequencies or a frequencytransmitted by the VHF NAVcontrol head. When in autotune,theVCIR/DMEislisteningto thenavigationcomputerfor selection of the VORfrequencyandas manyas threeDMEfrequencies.In themanualposition,theVOF./DMEislisteningto theVHF NAV control head which can select a VORand/cr DMEstation for display on the EHSI.
The aircraft position is computed as a function of logicswitchescallednavigationupdatemodes. The fourpositionupdatemodesareradic/inertial,radioonly, inertial onlyanddeadreckoning.Thenavigationmod~hierarchyis a functionof sensoranddataavailability.
Theradio/inertialpositionis computedby usingradioposition.Theradiopositionis thencombinedwiththecalculatedinertialvelocityfcrcomputingradio/inertialr)osition.If validrho/thetaor omeqadatais beirq receivedon the ground,~ radiopositionwillbe computed.-
Theradioonlymodeis activewhenthereisno validinertia”radiodatais beingreceived.
TheDeadReckoningmodeisactivatedwhenthefollowingcond
● There is a valid mag heading input.
. A radio position cannot be computed.
dataandvalid
tionsaretrue:
. A valid true airspeed is available from the air data computer.
A dead reckoning position is calculated from the last known aircraft positionusing the track and distance traveled along that track. Heading, ADC trueairspeed, and the last known wind areusedto estimateaircraftgroundspeedandtrack. Thedeadreckoningpositionupdatemodeis annunciatedon theCDU . The annunciator is automatically cleared whenthe positionupdatemodetransitionsoutof deadreckoning.
22-14-00Page198.74Mar 15/89
Use or chclosure of Information on this page is subject to the restrictions on the title page of thts I ‘ocument.

GMTCLOCK
CouINTERFACE
DATALOADER
DATA ❑ASEE2 PROM
PROGRAMEPROM
RAM
Honeywell WNR’”c’CITATION V
1 I
ARINC
429— XMIT
RS422
RCVRS
RS422XMIT
DISCRETES P
OISCRETES
NZ-61ONavigationComputerBlockDiagramFigure9-2
22-14-00Page 198.75
Mar 15/89UseordisclosureofInformationonthispageissubject10therestrictionsonthetttlepa$e ofthisdocument.

Honeywell MINJEPANCECITATION V
9. B. CD-800ControlDisplayUnit(SeeFigures9-3 and9-4,andTab”e9-2.)
PHOTO PHOTOSENSOR ANNUNCIATORS SENSOR
/ / I
CRTDISPLAY~
LEFTLINESELECT\KEYS
SCRATCHPA~
MODE KEYS —
ALPHA-NUMERICKEYS
-1El 34a o 4.ONM
KSLC 09IfZ~ ,,(4ARM ALTN {HEl
4560
ARRIVALD ~
11II
/— —.m
).
,,,, ,Jpq
RIGHTLINE
~SELECTKEYS
FUNCTION‘KEYS
MODE KEYS
=-BRIGHTNESSCONTROL
AD-11942-RI
CD-800 Control Display UnitFigure 9-3
22-14-00Paqe 198.76Mar 15/89
Use or disclosure of reformation on this page IS subject to the restrictions on the title page of Ihls cocumenl.

Honeywell WIMP’””CITATION V
Dimensions (maximum):
Length .......................................... 7.50in. (190.5 mm)Width ............................................ 5.75 in. (146.1mm)Height........................................... 6.75in. (171.5mm)
Weight............................................... 9.4 lb (4.27 kg)
PowerRequirements:
Primary ............................................. 28 Vdc, 40 WLighting ..................................................... 5Vac
MatingConnector:
J1 ................................................... PS3126F22-55SX
Mounting .......................................... Unit Screw Fasteners
CD-800ControlDisplayUnitLeadingParticulars
Table9-2
TheCD-800ControlDisplayUnit(CDU) is the pilot interface with theFMS. TheCRTdisplays relative flight information to the pilot. Thepilotenters alphanumeric data into the system via the full alphanumerickeyboard. This data appears inthescratchpadto be lineselectedto theappropriatepositionon theCRTdisplay. The CDUfunction controls aredescribed in thefollowingparagraphs:
9. B. (1) CRTDisplay - A monochrome CRT is usedto displaydataon theCDU.The displays consist of 9 lines, each line containing 24 characters.The first line is a title line and the ninth line is the scratchpad.The intermediate lines and scratchpad are available fordatadisplayandentry.
(2) PhotoSensorsandBrightnessControl- CRTbrightnesscontrolisprovidedin orderto maintainreadabilityunderdim lightas wellasdirectsunlight.This is accomplished in two ways:
22-14-00Paqe198.77
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the tttle parje of thts document.

Honeywell WMR’AN’ECITATION V
9. B. (2) (a) Manuallyby thebrightnessknob- The brightnessknobisprovidedto manuallyvarythe intensityof the CRT display fora given ambient light level.
(b) Automatically by the photo sensors - The photosensors sensethe ambient light and adjust the CRT brightness automaticallyto maintain the relative brightness set by the brigiltness knob.
(3) Annunciators - Thesixannunciatorslocatedat thetopo-ftheCDUkeyboardpaneloperateindependentlyfromtheCRT and keyboard.Lighting of the annunciators is initiated by the Navigation Computervia the RS422 serial data link. The twocolorsusedforannunciations are white and amber. White indicates an advisory typeannunciation, and amber indicates an alerting type annunciation.The followingparagraphsdescribeeachannunciator:
(a) Display(DSPLY)Annunciator- TheDSPLYannunciatoris anadvisorytype(white)thatlightswhentheCDU isdisplayingapagethatis notrelativeto theverticalflightpath. The DSPLYthe followingconditions:
. Whendisplayinga flightplan
current aircraft l;~teralOFannunciatorwilllightunder
page other than Page 1.
. Whendisplayinga storedflightplanpage.
● Whendisplayingthe ‘CHANGEACTIVELEG’ message.
. When defining the ‘Intercept’ waypoint on the ac”:ive leg.
(b) Dead Reckoning (DR)Annunciator - The DR annunciator is analerting type (amber) that lights whenthe FMSis ni~vigatingviatheDR modewhichis definedto be the lossof radioupdatingandthelossof allpositionsensors.TheDRannunciatorwilllightunderthe followingconditions:
. When the FMShas beenoperatingin theDR modeforlongerthan3 minutes.
. WhentheAPRCHannunciatoris illuminatedandpositionupdatingfromallsourcesis lostformore than 30 secondsand the radio is not procedure tuned.
. When the APRCH annunciator is illuminated and positionupdating from all sources is lost formore than 5 secondsandtheradiois proceduretuned.
22-14-00Paqe198.78Mar 15/89
Useordisclosureofreformationonthispage IS subject to the restrictions on the title page of this document.

Honeywell MFJEPANCECITATION V
9. B. (3) (c)
(d)
(e)
(f)
I)egraded (DGRAD) Annunciator - The DGRAD annunciator is anadvisory type (white) that lights whentheFMShasenteredadegradednavigationmode. Thedefinitionof degradediswhenthe FMScannot guarantee the required accurac:f forthepresentsegmentof flight.TheDGRADannunciatorwilllightunderthefollowingconditions:
. Whentheaircraftiswithintheterminalarea,50.8NM,andtherequiredaccuracycannotbe guaranteedwiththeavailablepositionsensors.
● Whenthe aircraftiswithintheapproacharea,10 NM,andtherequiredaccuracycannotbe guaranteedwiththeavailablepositionsensors.
IftheDEGRADannunciatoris on whentheDR annunciatoristurnedon,theDEGRADannunciatorwillbe turnedoff.
Message(MSG)Annunciator- TheMSG annunciatoris an advisorytype(white)thatlightswhentheFMSis disp”!ayinga messagein thescratchpadto theflightcrew. Theannunciatorshallextinguishafterthemessage(s)havebeencleared from thescratchpad.
OFFSET Annunciator - TheOFFSETannunciatoris an advisorytype(white)thatlightswhen a laterally offset path has beenentered into the FMSusing the progress page. Theannunciatorturnsoff whentheoffsethas been removed. If there is anoffset when the APRCH annunciator is lighted, the offset willbe removed and the annunciator turned off.
Approach(APRCH)Annunciator- TheAPRCHannunciatoris anadvisorytype(white)thatlightswhenin approachmode. TheNAVComputeroutputsensitivityof lateraldeviationto theEHSIwillbe rampedto a highersensitivitywhentheannunciatoris lighted.The APRCH annunciato~’ willlightunderthefollowingconditions:
. Ifthedestinationelevationis specified,distancetodestinationis lessthan15 NM,altitudeis lessthan2500feetabovethedestinationelevation,and:he speedislessthan200 knots.
c If the destination elevation is not specified, distance todestination is less than 15 NM, and speed is less than 200knots.
. IftheAPRCHannunciatoris illuminatedandtheaircraftfliesoutof theaboveconditions,theAPRCHannunciatorwillbe extinguishedandthesensitivityrt~mpedto normal.
. When the pilot selects APP on the modeselector.
22-14-00Page198,79Mar 15/89
Use or disclosure of reformation on this page IS subject to the restrictions on the title pag? of this document.

Honeywell WNFANcECITATION V
9. B. (4) LineSelectKeys- Therearefourlineselectkeyson eachsideoftheCRT display. Forreference,thekeysaredefinedonethroughfourfromtopto bottomon eithersideof theCRT. A leftandrightis alsoassignedto definethe sideof theCRTon whichthekeyislocated.Forexample,lineselectkey ‘IL’is thetopleftlineselectkey.
In thecaseof an indexdisplay,thelineselectkeyscanbe usedtoselectsub-modeswithinthemajormodes. In displays otoer thanindex, the lineselectkeys4L and4R arePrimarilyused fordirectaccessto othermodesin~he FMS. Datacanbe cop~edto thescratchpadthroughtheuseof a lineselectkey,andonesdatahasbeenenteredintothescratchpad,eithervialineselec:manualkeyboardentry,itmay be selectedto anyof thelineselectfieldson a givenpage. Thiscanbe accomp”by depressingthe keyadjacentto thelineinwhichyouscratchpaddatato be inserted.
ion orallowableished simp”ywishthe
(5) FunctionKeys- Therearefourfunctionkeys,andthefunctionofeachisdescribedin thefollowingparagraphs:
(a) Previous(PREV)andNEXTPageKeys- Thenumberof pagesin aparticularmodeor menudisplayare shownintheupperrighthandcornerof thedisplay.The formatis ‘AA/BB.’‘AA’sicinifies the number of the current page that is displayed.‘BE’signifies the total number of pag;s that are available forpilotviewing/modification.Pagechangesshallbe donebyselectingthe PREVandNEXTkeys. Whenin thePLANmode,thesekeyswillincrementor decrementthemapcenterwaypoint.
(b) Clear(CLR)Key - TheCLR keyperformsthefollowingfunctions:
. Whena messageis presentin the scratchpad,pre:isingtheCLR keyshalldeletethatmessage.
. Whenan alpha-numericentryresidesin thescratchpad,onecharactershallbe clearedfromthescratchpad(fromrightto left)foreachtimethebuttonis pressed.
. Whenan alpha-numericentryresidesin thescratchpadandtheCLR keyis helddown,thefirstcharacteris clearedwithin100msec. After400msechaveelapsed,characterswillbe clearedat 100msecintervalsforas longas thekeyis helddown.
(c) Delete(DEL)Key - Whenthereis no messagein the $cratchpadandtheDELkeyis pressed,a “*DELETE*”willappearin thescratchpad.Thismaynowbe lineselectedto deletewaypointsandotheritemsdisplayedon theCDU. Whenthereis a messagedisplayed,thedeleteoperationwillbe inhibited.
22.14-00Paae198.80
Ear 15/89Use or disclosure of mformatlon on this page is subject 10 the restrictions on the title page of thw c,ocument.

Honeywell YA!YRANCECITATION V
9. B. (6) Mode Keys - There are fivemode keys, and the funczion of each isdescribed in the following paragraphs:
(a) Performance (PERF) ModeKey- Pressingthe PERFmode key shallenable the pilot to access the performance page(s). Thepilotmay selector entertheapplicableinformationthroughtheuseof thelineselectkeys.
(b) Navigation (NAV) Mode Key - Pressing the NAVr~odekeyshallenablethepilotto accesstheNAV indexpage The pilot mayselect any of the sub-modesby pressingthelineselectkey.
(c) FlightPlan(FPL)ModeKey- Pressingthe FPLmodekeyshalldisplaythefirstpageof theflightplan. 1= thereis noflightplancurrentlyentered,thepilotmaymanuallyenteraflightplan, selecta storedflightplan,or createa storedflightplan.
(d) Progress(PROG)ModeKey- Pressingthe PROGmodekeyshalldisplaythefirstpageof theprogresspages. The purposeofthismode is to show the current status of the flight. Thisfirst progress page shall display the ‘to’ waypoint, thedestination, the navaids that are currently tuned for radioupdating, and the update status of each navigation computer.
(e) DirectTo/Intercept(DIR)ModeKey- PressingtheDIRmodekeyshalldisplaythe activeflightplanwiththeDIRECTandINTERCEPTprompts.
(7) AlphanumericKeys- TheControlDisplayUnitprovidesa fullalphanumerickeyboardto enablepilotinputsto thescratchpadofthe CDU. A keyis providedforeachletterof thealphabetaswellas eachnumber,decimal,minussignandslash.
(8) Scratchpad- The scratchpadprovidesa workingareaforthepilottoenterdataand/orverifythedatabeforelineselectingit to thedesiredposition.The scratchpadalsoprovidesadvisoryandalertingmessagesto be displayedto thepilot. Datashallberetainedin thescratchpadthroughoutallmodeandpagechanges.
22-14-00Page198.81/198.82
Mar 15/89Use or disclosure of information on thts page E subject to the restrictions on the title pa~ ? of this document.

NAVCOMPUTER
PERFORMANCE
COMPUTER
5VLIGHTING J< ‘: + KEYBOAROLIGHTINGCOMMON 0< I - LIGHTING
CLEAR
. .I I
{ El‘ (H)
MOATABUS OUT
N(c)
RS422
{
(H) OUTDATATERMINAL pREAOYBUSOUT ~ (c)
OATABUSIN(
TO SEND BUS IN
{
CLK BUS IN(
(H)
[c)
~ , (H)
:a
RS422(c) INPUT
(H)
(c)
I
~ I(H)
OATA BUS IN( d
K
(c)
(
(H)●
CLEAR TO SENO BUS INRS422
f(c) INPUT
(
9(H)
CLK BUS INh
(c)
{
Y
=1-(H)
MTA BUS OUTz
(c)
RS422
{
(H) OUT
WTA TERMINAL aREAOY BUS OUT ~ (c)
I
I
+’I )
L 1
I 1
R f’~OTO SENSOR OUT
L PHOTO SENSOR OUT
I 1
G1 FOCUS
VIDEORAM A
&
*
-VIDEO
CRT VIDEO AMPLIFIER
CONTROLLER CONTROLLER
HEATER
VIDEORAM B
I 1x
SYNC1
DDEFLECTIONAMPLIFIERS Y
CDU VALID
I v 1
BRIGHTIDIMDISCRETE VANNUNCIATOR- * KEYBOARD
‘1
_]
ORIVERS ANNUNCIATORS
I
INPUT KEYSOARO
BUFFER OECOOE A
TEST ENABLE EEi
9
I
{:!
B(H)
*
28 VDC POWERc
(L) LVPS
LAMPTEST S<
{:;
(H)F -
2bV ANN POWER (L) ANNUNCIATORH - POWER/
.1 OIM CONTROL
ANN INTENSITY CONTROL‘~
CHASSISGND G
%
CD-800ControlDisplay610ck DiagramFigure 9-4
AOI 1970
Unit
22-14-00Page198.83/198.84
Mar 15/89UseordisclosureofInlormallonon Ihm page IS sublect 10 the restrlcttons on the Mle page of this document.

Honeywell tii~if~’”c’CITATION V
This page intentionally left blank.
22-14-00Page 198.85
Mar 15/89UseordisclosureofinformationonthispageIS subjectto the restrictions on the title pag ? of this document.

Honeywell M!!WANCECITATION V
9. c. DL-800DataLoader(SeeFigures9-5 and9-6,andTable9-3.)
AD-1 2269R1
DL-800DataLoaderFigure9-5
Dimensions(maximum):
Length ......................................... 7.87 in.Width.......................................... 13.75in.Height......................................... 14.49in.
Weight (maximum) ....................................... 14.1
PowerRequirements:
Primary .......................................... 28 VLighting.......................................... 5V
(199.90(349.25(368.05
lb (6.4
dc.dc
5W5W
mm)mm)mm)
kg)
maxmax
MatingConnector:
J1 .................................................... MS3126f’16-26$
DL-800 DataLoaderLeadingParticulars
Table9-3
22-14-00Page198.86Mar 15/89
Use or disclosure of mformatlon on this page is sub]ect to the restrictions on the tnle page of thw locument.

Honeywell W!Wi!ANcECITATION V
TheDL-800DataLoaderis used-totransfernavigationrelateddatato theNZ-61ONAV computer. TheDL-800hasthecapacityto transferin excessof320kbytesstoredon a 3-1/2inchmini-diskette.It hasan RS-422interfacewiththe NAV computer.
9. c. (1) Navigation Data Base Loading - TheDL-800DataLoaderprovidestransferof dataderivedfromtheJeppesendataba~efroma 3-1/2inchfloppydiskto theNZ-61ONAV Computer local IIEPROMmemory.This data includes navaids, waypoints, airports, airport runways,airport procedures, and jet routes organized in regionalpartitionsof theentireJeppesendatasource. Thedatabaseis updatedevery28 days. Thedatatransferrateis 312kbaud. Thetotaltimerequiredto loada fulldatabaseis approximately3 minutes.
(2) F1ightPlanLoading- TheDL-800DataLoaderalsohasthecapabilityof interfacingwitha groundbasedLockheedJet Plancomputerorequivalent.It is capableof transferringan optimizedflightplanfromthegroundbasedcomputerto thenavigationcomputerviaa3-1/2 inch floppy disk. Foreachflightplan,th~~followingdatawillbe stored:lateralwaypoints,origin,destin(ition,windsandtemperaturesat eachwaypoint.
22-14-00Page198.87/198.88
Mar 15/89Use or disclosure Of mformatlon on this page IS subject to the restrictions on the title pag? of this document.

Honeywell MWPANC’CITATION V
{:~
DATA 3US IN GJ1 (Cl
● CENTRAL PROCESSING UNIT (CPU)FROM NAV
COMPUTER H(H) –Zao CPU
—8K B~ES RAM
{[i
CLKBUSIN J(c) —32 K BYTES EPROM
FROM NAV —RS422 INTERFACE
COMPUTER K(H)
—RS232 TEST INTERFACE
I
I
I
I r 7
(c) J1 S
‘c}
DATA BUS OUT(H)
TTO NAV COMPUTER
{ =3(L)
28VCICPOWER B(H) ●
c
LOADER
{
(R)INSTALLED DDISCRETEFROM E (L)rJAvCOMPUTER
POWER SUPPLY CARD
–-5 VDC
—z12 VDC ~
—DISCRETES FOR CPU
J
EEl-El- 4S11%S
DL-800DataLoaderBlockDiagramFigure9-6
22-14-00Page198.89
Mar 15/89Useordisclosure01ln~ormallonon this page IS subject to the restrictions on the htle paqe of this document.

Honeywell MNRAN’ECITATION V
9. D. OZ-800ReceiverProcessorUnit(SeeFigures9-7and9-8,andTable9-4.)
AD-1.5616
OZ-800ReceiverProcessorUnitFigure9-7
22-14-00Page198.90Mar 15/89UseordisclosureofintormatlononthispageISsubjecttotheresIrictlonsOnthetitlepageofthis~ocument.

Honeywell WWF’””CITATION V
Dimensions(maximum):
Length ......................................... 14.58n. (370.33 mm)Width ........................................... 2.25 in. (57.15mm)Height ......................................... 7.60 :n. (193.04 mm)
Weight (maximum) ....................................... 65 lb (2.95kg)
PowerRequirements.................................... 28 V dc,40 W max
Frequency ............................................. 10.2 to 13.6 kHz
Mating Connector ..................... Cannon Part No. DPX13MA-57-335-0001
Mounting ................................................. ........ Tray
OZ-800ReceiverProcessorUnitLeadingParticulars
Table9-4
TheOZ-800ReceiverProcessorUnit(RPU)receivesandprocessesdatafromthegroundbasedOMEGA/VLFstationsto providelatitude,longitude,N-Svelocity,E-Wvelocity,andstationinformationto theflightmanagementsystem.The antennareceivestheOMEGA/VLFsignalsandconvertsthemforprocessing by the RPU. All signals from or to the RPU are transmitted overan ARINC 429 data bus. The RPUalsosuppliestheantennawitht12voltsdcpower.
22-14-00Page198.91Mar 15/89
Use or disclosure of information on this page IS subject to Ihe restrictions on the title pag ? of thw document.

[ 7MASTER OSC
t 1 I
OMEGAIVLF ANALOG flIVLFANTENNA *
INPUT RCVRDIGITAL
1LRCVR
SELECT~ ‘RocEssoR-––w––
GNDfOPENDISCRETE
DISCRETE
INPUTS INTERFACE
HDG,TAS SYNCHROINPUTS ~ INTERFACE
DIGITALINPUTIOUTPUT
44
13PUDC
28 VDCPOWER *VOLTAGES REQUIRED
/SUPPLY ~ =12VDC
TO ACUAO-1 5927
OZ-800ReceiverProcessorUnitBlockDiagramFigure 9-8 22-14-00
Page198.92Mar 15/89
Use or disclosureofInformationonthispageissubjecttotherestrictionsontheotlepageofthisd)cument.

Honeywell
9. E. AT-801H-FieldBrickAntenna(See
MAINTENANCEMANUALCITATIONV
Figure9-9andTable!1-5.)
The AT-801 Antenna receives the OMEGA/VLFsignalsandconvertsthemforprocessingby theOZ-800RPU. Theantennaalsoincorporatesbuilt-intestcircuitryto monitoritsownoperation.
AT-801H-FieldBrickAntennaFigure9-9
Dimensions(maximum):
Length......................................... 6.50in.(165.10mm)Width.......................................... 5.65in.(143.51mm)Height.......................................... 1.75in.(44.45mm)
Weight ............................................... 2.2lb (1.00kg)
MatingConnector...................................... M8:3723-86R-14-15N
Mounting .................................................... Hardmountusingsixnonmagnetic
hexheadscrews,10-32x 1.00
AT-801H-FieldBrick AntennaLeading Particulars
Table 9-5
22-14-00Page198.93
Mar 15/89Use or disclosure of information on thm pageissublect to the restrictions on the tttle pa$e of this document.

Honeywell MNRANC’CITATION V
10. Optional 5RZ-850 Integrated Radio System
A. RNZ-850IntegratedNavigationUnit(SeeFigures10-1and 10-2, and Tablelo-l.)
AD-I 3743-R1
RNZ-850IntegratedNavigationUnitFigure10-1
Dimensions (maximum):
Length ....................................... 14.01in. (355.9mm)Width ......................................... 8.90in. (226.1 mm)Height ........................................ 3.36 in. (85.3 mm)
Weight .............................................. 13.6 lb (6.16kg)
Power Requirements .......................... 28Vdc, 69VA (nominal),26 V, 400 Hz, 18.3VA (maximum)
Mounting ................................... Tray,PartNo. 7510124-9OX(includes mating connectors)
RNZ-850IntegratedNavigationUnitLeadingParticulars
Table10-1
22-14-00Page 198.94
Mar 15/89UseordisclosureOfIntormatlononthispage is subject to the restrictions on the title page of Ihts ::ocument.

Honeywell tiiWJEPANcECITATION V
The RNZ-850IntegratedNavigationUnitis a completeself-containednavigationsystem. ItcontainstheNV-850VHF NAV Receiver module, theDF-850 Automatic Direction Finder (ADF) module and a stix-channelscanning DM-850 Distance Measurement Equipment (DME) module. Alsowithinthenavigationunitis a clustermodulewhichcontainsthecircuitrynecessaryto handleallof thedigitaloutputsof thenavigationunitmodulesandplacethemon thedigitalaudioandradiosystem buses. Another function of the cluster module ;s an MLSInterface.Theclustermodulehascircuitryanddriversto feedtheinformationcomingfromthe RSB to the ML-850 MLS Receiver in the samemanner as it feeds information to one of the internal modules.ThismakestheexternalMLS,in effect,a moduleof the NAV unit; however, itis housed separately so it may be used forindependentapplicationswherea fullNAV unit is not needed.
Eachoneof themoduleshas itsownindividualtemperature sensor,andanymodulecancallforcoolingairby notifyingthec-lustermodule,whichcontrolsthecoolingfanlocatedon themountingrackat therearof theunit. When the temperature within the unit has droppedadequately to satisfy the conditions, the cluster module willdeactivatethe fan. The fanoperationismonitoredfullyby theclustermoduleandis testedeachtimepoweris appliedto theunitas we-nas beingverifiedthatit is runningduringthenecessaryoperatingperiods.
10. A. (1) NV-850VHFNAV Receiver
TheNAVreceivercontainstheVOR/Localizer,GlideSlope,andMarkerBeaconReceivers.
TheVORportionof theNAVreceiveris usedto in+:ercepta VORradialintheradiofrequencyrangeof 108.00to 117.95MHz onchannelsspaced50 kHzapart. The VOR receiver provides radiodeviation, To-From, bearing, and flag outputs to zhe EFIS SymbolGenerator for display on the EHSI and to the FZ-500 Flight DirectorComputer forautomaticcaptureandtrackingof the selectedVORradial.
TheNAVreceiveralsocontainsthe ILScomponentswhicharethelocalizer,glideslope,andmarkerbeaconreceivers.
Thelocalizerreceiveris usedforprocessingrawlocalizerdataforuse in liningup theaircrafton thecenterlineof therunway.Thelocalizerfrequencyrangeis 108.10to 111.95MHzon channelsspaced50 kHzapart. The localizerdeviationoutputisdisplayedon the EADIandEHSIandis appliedto the FZ-500FlightDirectorComputerforuse in automaticcaptureandtrackingof thelocalizerbeam.
22-14-00Page198.95
Mar 15/89UseordisclosureofInformationon this page IS subject to the restrictions on the title paq$ of this document.

Honeywell H!JR’”c’CITATION V
The glide slope receiver is used for processing glide slope datafor use in guiding the aircraft down to the runway in a lineardescent. The glide slope frequency range is 329.15 to 335.00 MHzon channels spaced 150 kHz apart. The glide slope deviation outputis displayed on the EADI and EHSI and is applied to the FZ-500Flight Director Computer for use in automatic capture and trackingof the glide slope beam. The 75 MHz marker beacon receiver detectsthe three tones of the marker beacons and provides audio and lampdrive outputs to annunciate on the EADI the outer marker (blue),middle marker (amber), and inner marker (white).
The navigation receiver has extensive built-in test circuitry.This BITE operation includes a self-test signal generator andmodulator built into the unit. When energized by flight crew orpower-up command, the injected signal is identical to a VOR/ILSsignal and starts the testing at the earliest possible stages ofthe various receivers, just after the antenna. BITE commands anextensive check of the various circuitry within the NAV receiverand will cause the various outputs to move in a very specified andregular sequence, allowing the pilot to confirm that the entirenavigation receiver is operating properly. Additionally, there areother maintenance monitor and signal monitors associated with theNAV module which continuously check for proper operation and validsignals within the unit. These circuits continuously watch overthe operation of the unit and, should any operating parameter moveoutside of its nominal range, this condition will be stored innonvolatile memory for subsequent maintenance readout.
The NV-850 also has its own self-contained power supply which isfed from a dedicated pin on the main connector of the unit allowingfor independent application of aircraft supply voltages to the NAVreceiver.
10. A. (2) DM-850 DME
The DM-850 Distance Measuring Module is a six-channel scanning DMEthat simultaneously tracks four selected DME channels for distance,ground speed, and time to station as well as tracking twoadditional channels for the IDENT functions. This gives the systemthe capability of tracking four channels and having the decodedidentifier readily available from two additional channels. Theunit dedicates two of its four channels to a Flight ManagementSystem when installed. Thus with an FMS, the flight crew has tworemaining channels to control and display IDENT, distance, time tostation, and ground speed. The IDENT only channels will havedecoded IDENT ready, so when the crew selects the preset VORchannel, the instant search capability of its DME will allow thefunctionality of 4 full-time channels for the crew.
22-14-00Paqe198.96Mar 15/89
Use or disclosure of InformalIon on this page IS subject to the restrictions on the title page of this t:ocument.

Honeywell W%P’”c’CITATIONn/V
The ranging capability of the DME is up to 300miles,groundspeedcapabilityup to 1000knots,andtime-to-stationcapabilityup to999minutes.ThesesignalsaresentfromtheDME in severalformats,oneof whichis thenormalradiosystem+ormatappearingon thedigitalbusviatheclustermodule,anothe]-is an RS-422format.Alsoprovidedis an ARINC-568standardoutputof sixwireson whichdata,syncandclockareprovidedto outputthedistance.In additionto thedigitaloutputs,a 40 millivoltspernauticalmileanalogoutputandaudiocapableof drivingtwo600-ohmaudioloadswiththe IDENTsignalis alsoprovided.Selftestingisaccomplishedviaa builtin signalgeneratorwhichis pulsedtoprovidea completeendto enddistanceverificationcheckof theDMEunit.
10. A. (3) DF-850AutomaticDirectionFinder
TheDF-850ADF receiverandcompanionAT-860ADF mtenna comprisetheAutomaticDirectionFinderSystem.Usedtogether,thesetwounitsprovidetheADFfunctioncapabilitycontainedintheintegratedNAVunit. TheDF-850functionsoverthefrequencyrangeof 100kHzto 1799.5kHzin additionto operatingon emergencyrangeof 2181to 2183kHz. Allof thesefrequencyrangesareavailablewith0.5kHzincrements.
TheDF-850ADFdrivesconventionalanalogsynchrosandRMIsandhasstrapoptionsavailableto selectDC SIN/COSor AC synchrodrives.In additionto itscapabilityof drivingvariouspointers,theADFhasdigitaloutputswhicharesentto theRSBviatheclustermodule. TheADF alsohasan RS-422serialdataoutput.
As wellas sendingitsanaloginformationto theclustermoduleforapplicationto thedigitalaudiosystem,theADFalsohasan outputto drivestandardaudiointerfaces.
ForselftesttheADF hasa builtin oscillatorcircuitrylocatedin theantennawhich,whenenergized,couplesdirectlyintotheantennacircuitryandprovidesa completetestof theentireADFsystem.
22-14-00Page198.97/198.98
May25/90UseordisclosureofInformationonthispageISsubjecttotherestrlcflonsonthetitlepagsofth!sdocument.

Honeyell lIKNJEPANcECITATION V
RADIOSYSTEM~Bus
DIGITALAUDIO ~BUS
CLUSTERMODULE—
:B
.
IiTERFAcE
—
DIGITALAUDIO
NTERFACE
KPOWERSUPPLY
—128 VDC VORILOC
INPUT POWER28 vDC DMEINPUT POWER28 VDC ADF zINPUT POWER
28 VDC M’SINPUT POWER-
DME MODULE
- RCOINTERFACE RFANC
.___>
ARINC568
SIGNAL RS422POWER PROCESSINGSUPPLY
ANALOG
ADF MODULE
RCBRFAND
~ k
ANALOG- INTERFACE
SIGNALPOWER ProcessingSUPPLY
RS-422
—}~ AUX AUDIO
INPUT
—1
+’ ~~:~,‘R;,-~ANALoGOPTIONALSEPARATE MLS UNIT
4
SIGNAL
~&a vy:rAR’Nc 42’
IAO-142S9.R3
RNZ-850IntegratedNavigationUnitBlock DiagramFiqure 10-2
22-14-00Page 198.99Mar 15/89
Use or disclosure of mlormatlon on this page IS sub]ect to the restrictions on the title pagf of thts document.

10. B. RCZ-850Integrated CommunicationTable 10-2.)
MAINTENANCEMANUALCITATIONV
Unit (See Figures 10-3 and ,.0-4,and
AD-13744-R1
RCZ-850IntegratedCommunicationUnitFigure 10-3
Dimensions (maximum):
Length ........................................ 14.1 in. (353.6mm)Width ......................................... 6.86in. (174.4mm)Height ......................................
Weight ..........................................
PowerRequirements ............ 28 V dc, 36.5 VA28 V dc, 227VA ~
. 3.32in. ‘(84.3mm)
. . . 11.5lb (5.22kg)
(nominal receive mode)nominaltransmitmode)
Mounting................................... Tray,PartNo.75108I4-9OX(includesmatingconnector)
RCZ-850IntegratedCommunicationUnitLeadingParticulars
Table 10-2
22-14-00Paqe198.100
‘Mar 15/89UseordisclosureofInlormatlononthispageIS subjecttotherestrictionsontheIItlepageofthis:ocument.

Honeywell !W!K!ANCECITATION V
The RCZ-850IntegratedCommunicationUnitcontainstheTR-850VHFCommunicationTransceivermoduleandtheXS-850ModeS Transpondermodule. Also within the RCZ-850 is a cluster module that providestheinterfacebetweentheTR-850andXS-850andotherunitsof theintegratedradiosystem.Coolingis providedthesameas theRNZ-805IntegratedNavigationUnit.
10. B. (1) TR-850VHFCommunicationTransceiver
The TR-850 VHF COM Transceiver module provides air-to-ground andair-to-air voice and data communications in theradiofrequencyrangeof 118.00to 136.975MHz (or from 118.00 to 151.975 MHz inextendedfrequencyrange)on channelsspaced25 k’dzapartandutilizesamplitudemodulation.
Thesynthesizerportionof theCOM is similarin functionto otherfrequencysynthesizersin thatchannelsareselectedviatheRSBandclustermodule.The synthesizergeneratesthe internalRFsignalsnecessaryforchannelingof theCOMunit. Oneof theoptionalfeaturesof theCOM is thatwhenit receivesa channelchange,itwillputouta toneindicatingthatthe frequencyhaschangedintheCOMreceiverif thefunctionhasbeenselectedbythestrapoptions.
The audio circuitry of the COM provides a noise squelchandacarrierlevelsquelch,allowingit to operatein lconjunctionwithmulti-carriernetworks.Also, it has outputs forSELCAL,theselectivecallingsysteminwhichan individualaircraftmay beaddressedviatonesacrossa COMchannel.The audio circuitry hasan output of 100 milliwatts into a 600 ohmloadwhich is theconventional standard. It also has an isolated sidetoneoutputsothatthereceiverandtransmitteraudiooutputsmay be routed, asappropriate, to existing analog type audio systems. Thetransmitter sidetoneis derivedby actuallydetectingtheCOMtransmitter output. This provides a full checkof themodulatorandtransmitterportionsof theCOM.
TheCOMtransmitteralsohasa timeoutfeaturewhichcausestheunitto automaticallyreturnto thereceivemodeaftertwominutesof continuoustransmitting.Thisfeatureis intendedto protecttheuserandothersusingthesamefrequencyfromdisruptionofcommunicationscausedby blockingthefrequency.
Built into the COM is a self-test oscillator which,whenenergized,willcausea signalto appearin thereceiverandwillverifyitsoperation.
Otherfeaturesof theCOM includethestandardRadioSystemnonvolatilemaintenancelogand internalmonitoringto verifycircuitryperformanceandto recordanydeviationfromnominaloperationforlaterrecallby maintenancepersonnel.
22-14-00Paqe198.101
‘Mar 15/89UseordisclosureofInlormatlononthispagek subjecttotherestrictionsonthetitlepa$~ofthisdocument.

Honeywell MI!MNANC’CITATION V
The COM transmitter poweroutputis a nominal20 watts,aguaranteedminimumof 16watts,andis applicableacrosstheentirefrequencyrangeof 118.000to 151.975MHz. The receiversensitivityof theCOM is a nominal2.5 (hard)microvolt.
10. B. (2) XS-850ModeS Transponder
TheXS-850ModeS transpondermoduleworks with the Air TrafficControl Radar Beacon System (ATCRBS) to provide enhancedsurveillance and communication capability required for airtrafficcontrolautomation.TheModeS Transpondermoduleuses1030MHztoreceiveinterrogationsand 1090MHzto transmitreplies.It isfullyfunctionalwithATCRBSModesA andC andcapableof providingBasicModeS operation.ModeS allowsdigitaladdressingofindividualaircraftandthecommunicationof messagesbackandforthbetweentheairandthegroundand is a fundamentalportionof the FAAproposedTCAScollisionavoidancesystem.
Whenthetranspondersensesa changein the replycodecommandedbythecontrolhead,itwillholdthecurrentreplycodeuntilthenewcodehasremainedconstantforapproximately3 seconds.Thenitwillbeginto usethenewlyselectedreplycode. This is doneinan effortto avoidtransmittingfalsealarmsandfalseemergencysignalswhentheemergencycodesareinadvertentlyused during theprocess of tuning.
As with all the other radio units, the transponder has its ownbuilt-in self-test circuitry and its own maintenance log andmaintenance monitoring circuitry. The self-testcircuitryiscomposedof oscillatorsandpulsegeneratingcircuitrywhichwillinjectsimulatedinterrogationsintothetransponderreceivercircuitryverycloseto theantennasystemandwillcompletelycheckthetranspondercode,processing,andallof theRF circuitryby actuallysimulatinga knownsignalcomingfromtheground.
22-14-00Paae198.102‘Mar15/89
Use or disclosure of information on this page IS subject to the restrictions on the title page of Ihm cocument.

RAOK3
SYSTEMBUS
Honeywell !WMFANCECITATION V
DIGITAL
+
DIGITAL.AUDIO AUOIOBus INTERFACE
POWERSUPPLY
COMMOOULE..—
1
I I
IJ
MODES MODULE
@ RC8INTERFACE RFANO
SIGNAL L ALTIMETERPOWER FROCESS:tdGSUPPLY
}
~ EXT DIGITAL.—~ INTERFACES
.
,NPUTPOWER=28 VOCCOM
RCZ-850IntegratedCommunicationUnitBlockDiagramFigure10-4
AO-14270-R3
22-14-00Page 198.103
‘Mar 15/89Useordisclosureo!mformatlononlhlspages subject10therestrrctfonsonthetitlepagfofthfsdocument.

Honeywell I!AMNANC’CITATION V
10. c. ML-850MicrowaveLandingSystem(MLS)Receiver(SeeFigures10-5and10-6,andTable10-3.)
AD-l3745-Rz
ML-850 MLS ReceiverFigure10-5
Dimensions (maximum):
Length ......................................... 14.01 in. (355.9mm)Width ........................................... 3.08in. (78.2mm)Height .......................................... 3.36in. (85.3mm)
Weight ................................................. 4.6lb (2.09kg)
Power Requirements ............................. 28 V dc, 15.5 ‘JAnominal
Mounting ..................................... Tray,PartNo.7510664-901(includesmating(connector)
ML-850MLS ReceiverLeading Particulars
Table 10-3
22-14-00Page198.104
Mar 15/89UseordisclosureofinformationonthispageIS sub!ecttotherestrictionsOnthetitlepageofthisIocument.

Honeywell M!J?ANC’CITATION V
TheML-850MLSReceiverdecodes and processes data fronl an MLSgroundstationandprovidesan accurateindicationin bothazimuth(equivalentto localizer)andelevation(equivalentto glideslope)of thedeviationfromthedesiredflightpath. Thedeviationdatais displayedon theEADIandEHSIand isoutputto the FZ-500FlightDirectorComputerforuse intheapproachmodeof operation.
TheML-850operatesin thefrequencyrangeof 5031.0tc 5090.7MHz on200 channels spaced 3000 kHzapart. Selectionof thedesiredazimuthandelevationangleandtuningis accomplishedwiththeRM-850RMU. Inits operation, the ML-850 is fully integrated with the RNZ-850Integrated Navigation Unit and may be though of as simply another modulefor the RNZ-850.
TheML-850providesARINC429digitaloutputs(Table10-4)thatconformto thedatastandardsof ARINCcharacteristic727forNILSreceivers.Also provided is a digital DC MorseCodeoutputfor usc with a digitalaudio system.
22-14-00Paqe 198.105
“Mar 15/89Useordisclosureofinformationonthispage!ssubjecttotherestrictionsonthetitlepag!ofthisdocument.

Honeywell MWJWANCECITATION V
Labelm
017033035036105130131132133134135136137140141142143151152153154155156157160161162163164165173174175176177256257270376377
Data Description
Runway HeadingILS/MLS FrequencyMLS/DME FrequencyMLS Channel NumberRunway HeadinqMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSMLSGenMLS
A~xiliary-DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary DataAuxiliary Data
Word1AWord 2AWord 3AWord 4AWord lBWord2BWord3BWord4BWordlCWord2CWord3CWord4C
Azimuth DeviationGlidepath DeviationSelected Azimuth AngleMaxSelectableGlidepathAngleSelectedGlidepathAngleBasic Data Word 1Basic Data Word 2Basic Data Word 3Basic Data Word 4Basic Data Word 5Basic Data Word6AbsoluteGlidepathAngleAbsoluteAzimuthAngleLocalizerDeviationGlideSlopeDeviationSelectedBackAzimuthAngleBackAzimuthAbsoluteAngleBackAzimuthDeviationGroundStationIdentification1GroundStationIdentification2DiscretesAV Equipment IdentificationSpecific Equipment Identification
ML-850MLS ReceiverARINC 429 Outputs
Table 10-4
22-14-00F’aqe 198.106
‘Mar 15/89Useordisclosureof!nformatlononthispageissubject10therestrlCIIOnsonlhetitlepageofthisoocument.

Honeywell M!!L?ANCECITATION V
MLS ANTENNAS
k“ CA..———— -.—— 1
,p + DPSK
4 +
I ,
ANTENNA
SWITCH
I
d TCXO - SYNTHESIZER
IRC8
II
BITETO
NAV UNIT
L ——— ——— . ——— ——
+5 +.28 +15 -15
+
r———— — ———. —— ——— ——
I
ANALOG/POWEll ANALOG
SUPPLY CARD DEVIATIONS
I
ANO
POWER
SUPPLY
FIAGS
I
ARINC 42S
1-OUTPUT
L ——— ——— ——— ——— ——— ——— --—— d.28 VDCINPUT
POWER AO-14?5?~2
ML-850MLS Receiver Block DiagramFigure 10-6
22-14-00Paqe 198:107
‘Mar 15/89USe or disclosureofln~ormatlononthispageissubjecttotherestrictionsonIhe~lflepaq?ofthisdocumenl.

Honeywell W?WAN’ECITATION V
10. D. RM-850RadioManagementUnit(RMU)(SeeFigures10-7and 10-&,andTable10-5.)
CURSOR\
TRANSFERKEY(LEFT~SIDE)
JLINE SELECTKEYS(LEHSIDE)
FUNCTION_KEYS
/ @\
.Honeywell
\~
WIT1(
-~ [’;:.20 ;0.25
‘iE3 131.27 109.35MEMORY-3 MEMORY-1
EATC ADF1
e
1471 162.510N+ALT ANT
IFdm>
Els
RM-850RadioManagementUnitFigure10-7
TRANSFEF/KEY (R[GHT
SIDE)
t
LINE SELECTKEYS (RIGI+TSIDE)
TUNING- KNOBS
AD-18084
Dimensions (maximum):
Length ........................................ 11.10 in. (281.9mm)Width .......................................... 4.06 in. (103.1 mm)Height ........................................ 5.06in. (128.5mm)
Weight ................................................ 7.2 lb (3.27kg)
PowerRequirements .............................. 28 V dc, 33 VA nominal
Mating Connector ......................................... Ms3176F20-41S
Mounting .......................... Clamp, Honeywell Part No. 7[100066-11MSP PartNo.64557
RM-850RadioManagementUnitLeadingParticulars
Table10-5
22-14-00Page198~108
Mar 15/89Useordisclosureofinformationonthispagek subjecttotherestrictionsOntheIlilepageofthis(:ocument.

Honeywell WMR’”c’CITATION V
The RadioManagementUnit(RMU)isthecentralcontrolunitfortheentireradiosystem.Itprovidescompletecapabilityforcontrollingtheoperatingmode, frequencies, and codes within all ‘:heunits of theRadio System. Additionally, the RMU has the capability to switch itsoperation from its primary radio system to the cross-side system. TheRMU is a colorCRTbasedcontrollerfeaturingtheprovenconceptofselectinga functionby pushinga lineselectkeyadjacentto theparameterthatisto be changed.Any selectableparameter,suchas aVOR frequency,maybe changedby pressingthecorrespondinglinekeynextto thedisplayedparameterandthenrotatingthecontrollertuningknob.
Foreaseof operation,theRMUscreenis dividedintofivededicatedwindows. Eachwindowgroupsthedataassociatedwitha particularfunctionof theradiosystem.The five windows (COM,NAV,Transponder,ADF, and MLS)eachprovideforcompletecontrolof frequencyand/oroperatingmode of the associated function. The RMU also has otherdisplay modes,calledpages,whichperformadditional-Featuresandfunctionsforthecontrolof theradiosystem.
The RMUis alsotheinputto theradiosystemforexternalFMStuninginthatdigitalsignalsfromthe FMScomeintothe RMUwheretheyactinmuchthesamemanneras if thefronttuningknobwas beingoperated.ThisallowstheFMSto enterintothesystemin an organizedmanner,andwillappearto thesystemas iftheflight crew is tuning the receiver.
As a safetyfeature of the RMU, should any of the components of theradio system fail to respond to commands from the RMU, the frequenciesor operating commands associated with that particular Cunction will beremoved from the RMU and replaced with dashes. This willalertthecrewto thefactthattheradiosystemoperationis notnormal.
AlsoavailableintheRMUis a maintenancemodeof operation,whennotin flight.Duringthismode,variouspagesareutilizedto allowmaintenancepersonnelaccessto themaintenancelogdazaandoperatingconditionsof theradiosystem. Inthe aircraftmaintenancemode,parametersmay onlybe examinedandmay notbe modifiedin anyway bythe crew.
The followingparagraphsdescribeeachcontrolon theRMU:
10. D. (1) PhotoSensor- Thephotosensorsensesthe ambientlightandcausestheCRT brightnessto be automaticallyadjustedto compensateforvaryinglevelsof lightas theaircraftmaneuversin the sunlight.
(2) TransferKeys- Thetransferkeywhenpushed,flip-flopsthe activefrequency(TopLine)andthepresetfrequency(BottomLine)of theCOMor NAVwindow.
22-14-00Paqe198.109‘Mar15/89
Use or dmclosure of Information on this page is subject to the restrictions on the title paqe of thw document.

Honeywell WMF’”c’CITATION V
10. D. (3) Line Select Keys- Thefirstpushof the lineselectkeymovestheyellow cursor to surround the data field associated with thatparticular line select key. This then electronically connects thatdata field to the tuning knobs so that frequency or modemay bechanged.Forsomefunctions,additionalpushesof the ~ineselectkeywilltogglemodesor recallstoredfrequencies.The lineselect key, if held forcertainfunctions,allowsADF andATCmemories to be recalled, and to enter and exit direct tune modefortheCOMandNAV.
(4) Tuning Knobs - The tuning knobs are used to modify the data fieldenclosedby thecursor. Thismay be frequencyor modedependinguponthedatafield.
(5) FunctionKeys
(a)
(b)
(c)
(d)
(e)
Squelch (SQ) Key - Pressing the SQ key causes the COM radio toopen its squelch and allowanynoiseor signalpresentin theradioto be heardin the audiosystem. The squelch key isstrictly a toggle. Pressing the key toggles SQ. ‘rhelettersSQ are annunciated along the top line of theCOMwindowwhenthesquelchis opened.
Dimming(DIM)Key - PressingtheDIM keyconnectstheRMUbrightnesscontrolto thetuningknoballowingthedisplaytobe adjustedto matchoverallcockpitbrightness.
Cross-Side(1/2)Key - PressingthiskeytransferstheentireRMUoperationanddisplayto thecross-sidesystem Thelegend color changes from white to magenta whenone systemisbeingcontrolledby theRMUassociatedwiththecross-sidesystem.
Store(STO)Key - PressingtheSTO keycausesa temporary(TEMP)COM/NAVpreselectfrequencyto be storedinmemoryandassigneda numberedlocation,providedthecursorhasfirstbeenplacedaroundthatfrequency.TheADFandATC each haveone memory location. Pressing the STO key causes the currentADF or ATCchannelto be storedin memory,providedthecursorhasfirstbeenplacedaroundthatfrequency.
Identification(ID)Key - Pressingthe ID keyplacesthetransponderin the identificationresponsemode. The IDsquawk terminates after 18 seconds.
22-14-00page198~110
Mar 15/89UseordisclosureofinformationonthispageIS sub!ecttotherestrictionsonthetitlepageofthisdocument

Honeywell WW’”c’CITATION V
10. D. (5) (f)
(9)
(h)
Page(PGE)Key - Pressingthe PGE key once willchange the RMUdisplay to the COM preset frequency memory page. Pressing ita secondtimewillmovethedisplayto theNAVpresetfrequenciespage. KeyingPGE a third time calls up thediscrete RADIOON-OFFpage,which is the last page of the RMUprogram. A fourth push of the PGEkeywill return the displayto the Main Page. All of thesebackpagesassigna “Return”functionto thelowerleftlineselectkey. Pressingthiskeywillbringbackthe “Front”page.
Test (TST) Key - Pressing the TST keycausesthecomponentassociatedwiththeyellowcursor’spresentpositiontoactivateitsinternalself-testcircuitsfora completeend-to-end test of the function. Hold the TST keydownforthedurationof thetest,about2 secondsforCOMtransceiver,5to 7 secondsforDME,ATC, ADF, and about 20 seconds forNAV(VOR/ILS).Releasing the TST key at any time immediatelyreturns the function to normal operation.
DME Key - TheDME keydeslavestheDME fromthe active VORfrequency, and allows tuning of a different DMEchannelwithout changing active VOR. Successivepressesof theDMEkeyenabledisplayandselectionof theDMEchannels in VHFandTACANformats.
(6) Cursor- Theyel1ow cursorenclosesthedatafieldselectedby theline select key. Theyellowcursorrevertsto theCOMwindow20secondsafterthelasttuningoperationon theRMU.
22-14-00Page 198.111
Mar 15/89Use or disclosure of tnformatlon on thts page is subject to the restrictions on the title pag,, of thts document.

Honeywell M;WJEPANCECITATION V
01.SPLAY
RADIO
~ ~ ‘- “
USE OISPLAY DISPLAYSYSTEM~ INTERFACE CONTROL ORIVERSBUS ~-a
n 1Rs-422
FlvlsRS-422
INTERFACEINPUT
+
FRONTCONTROL
PROCESSOR -BEZEL
CONTROLS
ATC IDENT J
COM FREO XFR +
COM MEM SELVOR MKR SENS~
S1OE SEL BIT~
TEST ENABLE %
wEIGHT-ON-WHEELS~WOW POLARITY~
SOFTWARECONFIGURATION
STRAPS (= \
,
28 VDCLOW HIGH
INPUTVOLTAGE - VOLTAGE
POWERPOWER POWERSUPPLY SUPPLY
{
ELECTRO- ELECTRO-DIMMING : U: LUMINESCENT LUMINESCENTINPUTS POWER ANO BACK
28 VDC 4 DIMMING LIGHTING
L
OISCRETEINPUTS
PDDISCRETE ~ POWER OFF
OUTPUTS CONTROLS
AO-1426W+2
RM-850RadioManagementUnitBlockDiagramFigure10-8
22=14-00Page198.112
Mar 15/89UseordisclosureofInformationonthispageIssubject10therestrictionsonIhetitlepageofthis(:ocument.

Honeywell MKJE?ANCECITATION V
Thispageintentionallyleftblank.
22-14-00Page 198.113
Mar 15/89Useordisclosureoflnforrna~lononthispageIS subjecltotherestrictionsonthetitlepa~eofthisdocument.

Honeywell W!URANCECITATION V
10. E. AV-850AAudioControlUnit(SeeFigures10-9and 10-10,and““able10-6.)
I J k II
AV-850AAudioControlUnitFigure10-9
Dimensions (maximum):
Length ......................................... 7.10in. (~.80.3mm)Width .......................................... 5.75in. (:,46.1mm)Height ........................................ 3.00in. (76.2mm)
Weight ............................................... 3.75lb (1.70kg)
Power Requirements .............................. 28Vdc, 28 VA nominal
MatingConnector:
J1 ................................................. MS27473E20-A41SJ2 ................................................ MS27473E20-A41SB
Mounting .............................. UnitDzusFastenersperMS-25213
AV-850AAudioControlUnitLeadingParticulars
Table10-6
22-14-00Page 198.114
Mar 15/89Use or dwclosure of mformatlon on this page IS subject to the restrictions on the title page of this ,tocumenl.

Honeywell WiKRANcECITATIONV
10. E.
TheAV-850AAudioControlUnit(AudioPanel)is usuall;yinstalledin adualsystemconfiguration,withsystemNo. 1 beingthepilot’sor leftside,andsystemNo.2 beingthecopilot’sor rightside. Communicationandnavigationinformationfortheflightcrewis receivedfromtheremoteunitsas digitizedaudioviatwo highspeeddigitalaudiobuses.The two high speeddigitalbusesconsistof Bus1 forthepilot’sdigitalaudioand Bus 2 for the copilot’s digital audio. Bus 1 input isderived from the COM1, NAV 1 andADF 1 radiofunctions,as applicableto systemoperation,andBus2 inputfor COM 2, NAV 2 and ADF 2 radiofunctions. Each Audio Panel then selects the appropriate channels fromthis digital audio busandreconstitutesheadphoneandspeakersignals.This allows the system to provide the capability to individually selectthe radio function the crew member desires to hear.
Having the audio digitized offers the advantage that when recovering theanalog information from the digital, each volumecontrolmay beindependentlysetby eachcrewmember. For instance, ‘thepilot maywishto haveCOM 1 veryloudandCOM2 very soft in his headset while thecopilot desires the VORto be loud,COM 1 to be softandCOM 2 to bemoderate.This is easily set at the audio panels simplyby adjustingthe volumes to their own-
Thefollowingparagraphsfunctions:
(1)
(2)
(3)
(4)
Micro~honeSwitches
desire.
describetheAudioPanelswitchandcontrol
- TheseswitcheswhenPressed automaticallyselectthe desired microphone and at the same time enable the ~udioassociated with that microphone, regardless of the setting of theCOM audio on/off controls that are located under the switch.
CABIN Switch - When the CABIN switch is pressed, a cabin speakeramplifier is enabled. Allotheraudios,exceptwarningaudios,aremutedduringcabinaddressoperation.
Emergency(EMER)Switch- Whenthe EMERswitchis pressed,themicrophoneis connecteddirectlyto a predeterminedVHFCOMtransceiver,andthetransceiversreceivedaudioisconnecteddirectly to”the aircrasimultaneously route ais selected, headphonevolumecontrol.All e“position.Thismodea“
AudioSourceControl-
t’sheadphone. Thesystemmay be wiredtosingleNAV audio to headphones. When EMERvolume is controlled by the master headphoneectroniccircuitryis eliminatedin the EMERsodisablesallotheraudiopanelmodes.
Eachcontrol(COM,NAV, ADF,DME,MLS)combinesthefunctionof switchandvolumecontrol.The controlenergizes a particular channel’s audio whenunlatched(outposition)andde-energizestheaudiowhenlatched(inposition).Rotationof thiscontrolwilladjusttheaudiolevelfromminimumat thefullyCCWpositionto maximumat thefullyCW position.
22-14-00Page 198.115
Mar 15/89Useordisclosureofinformation on this page is subject to the restrictions on the title pa$e of thw document.

Honeywell WWMCECITATIONn/V
10. E. (5) ID/VoiceSwitch- The ID/Voiceswitchis operatedby settingarotaryswitchand is used to filter the VORandADFaudiosignals.In the IDmode(CCWposition),theVOR orADF audio is filtered insucha way as to enhancetheMorseCodeidentification.IntheVOICEmode(CWposition),theaudiois filteredto reducetheMorseCodesignalforreceivedADF andVOR/ILSaudio. IntheBOTH(centerposition),theVORandADF signalsarenotsubjectedto anyfilteringin theaudiofrequencyband.
(6) SpeakerandHeadphoneControls- Thesecontrolsareusedto adjustthe speakerandheadphoneamplifier’svolume.Theyworkin serieswiththe individualaudiosourcecontrols.
(7) Marker(MKR)BeaconVolumeControl- Themarkervolumecontrolis alatchedswitchusedto controlthemarkeraudiovolume. Itdiffersfromtheothervolumecontrolsin thatitmaynotbe turneddownbelowa levelwhichis adjustedby a potentiometerinsidetheaudiopanel. Thispreventsthemarkeraudiofrombeingturneddowntoolowto be heard,causingthemarkersignalto be missed.
(8) MarkerBeaconMUTEControl- Themarkersensitivityiscontrolledby rotatingthecontrol.Pressingthecontrolactivatesthemarkermutefunctionthatis usedto temporarilysilencetheMarkerBeaconaudio(non-latching).Whenthemarkeraudioismuted,itwillremainmutedas longas theaudiolevelis abovea thresholdsetting.Whentheaudioleveldropsbelowthethreshold,a time-out sequencebeginsthatcontinuesto mutethemarkeraudioforafixedperiodof time. Afterthetime-outthemarkeraudioisunmuted.
(9) Interphone(INPH)Control- The interphonevolumecontroladjuststhe headsetaudiolevelwhenthe interphonefunctionis used. Theinterphoneaudiois notavailableoverthecockpitspeaker.Theinterphonefunctiontiestogetherthecross-sideaudiopanelandanyexternallylocatedmaintenanceaudiojacks. The interphonefunctionmaybe either“hotmic”or “push-to-talk.”
22-14-00Page 198.116‘May25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of this :~ocument.

PILOTSDIGITAL
1
Bus
AUDIORECEIVER
Honeywell INILYANCECITATION V
COCKPIT AUOIOSIGNALS
-1
WARNINGSAND
INTERCOM
DECODEAND DIGITAL
~ VOLUME = TO
CONTROL ANALOG
PROCESSOR
A
A
I
L
28 VDCINPUT
1
POWSR
POWER SUPPLY
COPILOTSDIGITAL 1 BUS “
AUDIORECEIVER
FRONTPANEL
SWITCHES
*
CONTROL+
PROCESSOR
‘!7FRONTPANEL
VOLUMECONTROL
I
DECODEANO DIGITAL
w vOLUME . TOCONTROL ANALOG
PROCESSOR
)+
—
L ——/
TO- RADIOS
AV-850AAudioControlUnitBlockDiagramFigure10-10
22-14-00Page 198.117
‘Mar 15/89UseordisclosureofinformationonthispageE subjecttotherestrictionsonthetlllepa(~?ofthisdocument.

Honeywell WJiW’”c’CITATIONn/V
10. F. CD-850ClearanceDeliveryControl/DisplayUnit(SeeFigures10-11and10-12,andTable10-7.)
SYSTEM INSTALLATION REMOTE TUNE TUNING NAVAUDIOONANNUNCIATOR \ ANNUNCIATOR CURSOR ANNUNCIATOR
RADIO TUNINGANNUNCIATORS
TRANSFER KEY
NORM/EMERGENCYMODE SWITCH
AD-21741
CD-850ClearanceDeliveryControl/DisplayUnitFigure10-11
Dimensions(maximum):
Length(frombackof bezel) .................... 5.90in. (1.49.9mm)Width ........................................... 2.38in. \60.3mm)Height .......................................... 2.62in. (66.7mm)
Weight ................................................ 1.25lb. (567g)
Power Requirements ............................... 28 V dc, 4 VA maximum
DisplayType ......................... DichroicLCD,whitecharactersonblackbackground
MatingConnector........................................ MS3126F20-41SW
Mounting ........................................... UnitLockingPanels
CD-850ClearanceDeliveryControl/DisplayUnitLeadingParticulars
Table10-7
22-14-00Paqe198.118‘May25/90
Use or dwclosure of Information on this page is subject to the restncttons on the title page of this document.

Honeywell MW!ANC’CITATION V
TheCD-850ClearanceDeliveryCDU provides an alternat~ or emergencybackuD capability for tuninq the remote mounted VHF Communicationstrans~eiver and/~r VHFRadio System Bus (RSB)wishesto override the
TheCD-850can be usedwith low powerdrain.back-upthirdcontrol.selectedby eitherthe
Navi~ationReceiverinthe eventthattheprimarytuningis notavailable,or if thepilot/operatorbustuningforanyreason.
beforeenginestartforinitialcommunicationsIt canactas a stand-alonecontrolunitor aTheCD-850hasseveraloperatir~gmodeswhicharemodeknobor by installationstrai)pinqon the
rear conne;tor. The modes selected by installation st~appin~are:
. ClearanceDeliverymode,whichisthenormaloperatingmode.
. COMonlymode,whichmakestheunitdedicatedto COfVltuningonly.
. NAV only mode,whichmakestheunitdedicatedto NA’u’tuningonly.
Thenormalandemergencymodesaresubmodesthatares~lectedby themodeknobandareusedif theunitis strappedforclearancedelivery.
Thefollowingparagraphsdescribeeachfunctionor control:
10. F. (1) SystemInstallationAnnunciator- Eitherthe 1, 2, or 3 annunciatoris ON to indicateto whichsystemtheCD-850is ccmnected.
(2) RemoteTuneAnnunciator- Thisannunciatoris activeonlywhentheCD-850is strappedforNAVonlyor COMonlytuning. RMT isannunciatedwhentheradioistunedfromsomesourceotherthantheCD-850.
(3) TuningCursor- Thetuningcursorannunciatoriswhichis controlledby thetransferkey. It indfrequencycanbe changedby thetuningknobs.
(4) NAVAUDIOOn Annunciator- Thisannunciatorindifaudiohasbeenselectedon.
z lightedtrianglecateswhich
ateswhenNAV
(5) Emergency(EMRG)ModeAnnunciator- ThisannunciatorindicateswhentheCD-850hasbeenplacedin theemergencyback-LpmodewhichlocksoutallotherCOMandNAVtuningsourcesfor the sidetowhichit is connected.TheCOMandNAVarenowtl:nedexclusivelyby theCD-850.Thisannunciatoris notrelatedtr the emergencyfrequencyof 121.5.
(6) Squelch(SQ)Annunciator- Thisannunciatorindicttesthatthesquelchis opened.
(7) Transmit(TX)Annunciator- ThisannunciatorindicateswhentheCOMtransmitterisON.
(8) NAVAUDIOOn/OffSwitch- Thisalternateactionpl.shbuttonis usedto toggleNAVaudioON or OFF.
22-14-00Page198.119
Mar 15/89Use or disclosure of information on this page 6 subject to the restrictions on the Mle pacj: of this document,

Honeywell W!JR’”c’CITATION V
10. F. (9) Squelchusedto
(10) Tuning
(SQ)On/OffSwitch- ThisalternateactionpushbuttonistoggletheCOM squelchON or OFF.
Knobs - Thetuningknobsareusedto change the frequencyindicated by the tuning cursor.
(11) Normal/EmergencyMode Switch - This rotary switch knob providesalternate selection of the Normal and Emergency modes when theCD-850 is strapped for operation as a clearance delivery head.This switch is non-operating in the COM only or NAV on~y modes.
(12) TransferKey - Intheclearancedeliverymode,thetransferkeyalternatelyselectseithertheCOMfrequency(top)or I;heNAVfrequency(bottom)to be connectedto thetuningknobs
IntheNAVonlyor COMonlyconfiguration,thetransferkeytogglestheactive(top)frequencywiththepreset(bottom)frequency.In addition,holdingthe transferkey down for twoseconds will remove the preset frequency and place the CD-850 inthedirecttuningmode. To returnto theactive/presettuningmode,holddownthetransferkeyfortwo seconds.
(13) RadioTuningAnnunciators- Thesefourannunciatorsareannunciatedindividuallyto identifythe frequencyat thetopandbottomlines.
22-14-00‘age198.120
Mar 15/89Use or disclosure of information on this page E subject to the restrictions on the Mle page of thts 5ocument.

Honeyweil WMYANCECITATION V
AUX PORT
COM AUXPORT
stllFfREGiSTE8
AND DRIVER
{“ j
DATAAUX PORT 1
CLOCK _;, ‘E’: z’=
NAV AUX Sw!=rPORT LOAD REGISTER PROCESSOR
AND DRIVER ?
PRIMARYRS8 s RSBRECEIVER
*
‘i ~::c =af+=
1 I
~u L_. I
SQUAT Sw
1 1,0 P
DISCRETE
CD.COM.NAV SEL STRAPS (2)
C“”CoN’”“RAp~ I‘AvcONF’GsTRAps‘“~
EL!ECTRO-
H
ELECTRO-LUMINESCENT LUMINESCENT?POWER AND BACK
0i<4MlNG LIGHTING
{DIMMING S VAC/DCINPUTS 28 VOC —
CD-850ClearanceDeliveryControl/DisplayUnitBlockDiagramFigure10-12
22-14-00Page198.121“Mar15/89
Use or disclosure of mformatlon on tlm page IS subject to the restrictions on the Mte paq ? of this document.

Honeywell !!AWJEPANCECITATION V
10. G. DI-851DME Indicator(SeeFigures10-13and10-14,andTable10-8.)
RMUFREOSELECT PILOl%/COPILOT’.S MLSTUNEANNUNCIATOR (1/2)ANNUNClATOR ANNUNCIATOR
DME DISTANCE—
L~>F1’EE:21ATOR
DME CtiANNEL PAR~M~ERSELECT SELECT
DI-851DME IndicatorFigure10-13
AD-15823-RI
Dimensions (maximum):
Length(fromback of bezel) .................... 6.27in. (159.3mm)Width .......................................... 3.26in. (82.8mm)Height ......................................... 1.54 in. (39.2mm)
Weight ................................................. 1.05111(476g)
PowerRequirements............................. 28 V dc, 2.8VA nominal
Mating Connector .................... Honeywell Kit Part No. 75(10436-901
Mounting ........................... Clamp,Honeywel1 PartNo. 7001995-1MSP64419)
DI-851DME IndicatorLeadingParticulars
Table10-8
22-14-00F’age198.122
Mar 15/89Use or dwclosureofinformationon this page is sub)ecf to the restrictions on the title page of this :Iocument.

Honeywell WIJN””c’CITATION V
TheDME IndicatorcandisplayfourdifferentDMEdista?ces andassociated ground speed,time-to-stationor Identas selectedby thepilot. TheDMEhasmultiplescanningchannels,four(2 fromeachside)of whichareaccessibleto thepilot. TheDMEindicatorwillshowthedistancesassociatedwitheachoneof thesechannels.
The DMEdigitaldisplayis separatedintotwowindowsof liquidcrystaldisplays.The window on the left continuously displays distance innauticalmiles,andthewindowon therightdisplayseitherstationidentifier,groundspeedin knots,or time-to-goin minutes.
The
10. G. (1)
(2)
(3)
(4)
(5)
(6)
followingparagraphsdescribeeachfunctionor control:
RMUFrequencySelectAnnunciator- The annunciationNAV isdisplayedwhentheDME is associatedwiththeactiveNAVchannelselectedon theRMU. Ifthepresetchannelis selected,theannunciationis PRE.
Pilot’s/Copilot’s(1/2)Annunciator- The 1 or 2 isannunciateddependingon whetherthepilot’sside(1)or the copilot’s side(2)channelis selectedas determinedby thechannel(CH)selectbutton.
MLSTuneAnnunciator- MLSis displayedwhena DME receiverisbeingtunedby themicrowavelandingsystemrecei~er.
ParameterDisplayandSelect- TheDMEstationidentifier,thecomputedgroundspeedof theaircraftin knots,o- time-to-go(timeto reachthegroundstation)inminutesisdisplayedas a functionof theparameterselect(SEL) button. The KTS/MINannunciatoridentifieswhichparameteris beingdisplayed.EachtimetheSELbutton is pressed, the display changes as follows:
SELButton Parameter Annunciator
PowerUp Identifier 61ank1stPush GroundSpeed KTS2ndPush Time-To-Go MIN3rdPush Identifier B1ank
DMEChannelSelect- TheCH buttonselectswhichIIMEchanneltodisplay.At powerup,thesamechannelis displayedthatwas beingdisplayedat power down. IfMLS is not selected, the buttontoggles between NAV 1, NAV2, PRE1, andPRE2.
DMEHoldAnnunciator- HLDis annunciatedif the DME frequency issplit from the VOR.
22-14-00Page198.123
Mar 15/89Use or disclosure Of information on this page IS subject to the restrictions on the title page of this document

Honeywell iNU?ANcECITATION V
DATA
CLOCK DISPLAY
ENABLE _
PRIMARYRSB lNPUT~ RSE +
SELECT +RSB
RECEIVER- PROCESSOR
SECONDARY~ SWITCHRS8 INPUT
[ DATA
tCLOCK
ENABLE
ONIOFF FROM NAV EPOWER
28 VDC INPUT POWER~SUPPLY
— ‘;: H
ww=g%:c~
AO-1.%Z&Rl
DI-851DME IndicatorBlockDiagramFigure10-14
22-14-00Page198.124
Mar 15/89Useordisclosureof information on thts page IS subject to the restrictions on the Mle page of thm t~ocumenl.

Honeywell MI!WANCECITATION V
This page intentionally left blank.
22-14-00Paae198.125“Mar15/89
Use or disclosure of Information on this page IS subject to the restrictions on the title pag ? of this document.

Honeywell IWR!ANCECITATION V
10.H. AT-860 ADF Antenna (See Figures 10-15 and 10-16,
~+
AO-14 150
AT-860ADFAntennaFigure10-15
Dimensions (maximum):
Length ......................................... 18.3 in. (~14.8Width .......................................... 8.33 in. (211.6Height ......................................... 1.51 in. [38.3
Weight ................................................ 3.7lb (1.68
mm)mm)mm)
kg)
Power Requirements .......................... +15 Vdcfrom AllFReceiver
Mating Connector ................................... Cannon KPT08P12-10S
Mounting .................................. Hard mount using fourNo. 10steelsocketheadscrews
AT-860 ADF AntennaLeadingParticulars
Table10-9
22-14-00Page198.126
Mar 15/89Useordisclosureofinformationon!hlspageissubjecttotherestrictionsonthei!tlepageofth!s~ocument

Honeywell INJR’”c’CITATION V
The AT-860 ADF Antenna performs the functions of reception,amplification, and combination of RF signalsso as to yieldlowfrequencyreceptionanddirectionalinformation.Normal reception of AMsignals is performed by the E-field element, or vertically polarizedantenna; while bearing information is provided by H-field antennas inthe formof a pairof loopantennasmountedat rightanglesto eachother. By carefullycombiningtheamplifiedsignals,bearing
information is obtained in the form of phase modulation on the received
RF whichis demodulatedandprocessedin thereceiver.
The antennaalsocontainsa selftestcircuitwhichradiatesa 120kHzsignalintothesenseandloopantennas.ThischeckstheoperationofboththeAT-860ADFAntennaandtheDF-850ADFReceive’Module. Properoperationis indicatedby a 1 kHztoneanda bearingindicationof 135degrees.
Cx >: .LOOP Cos CosANTENNA
BAIANCEDLOOPAMPL MODUUTOR
SINLOOP
SIN 50OHMAMPL OUTPUT
790DEGPHASE
EQUALIZER
120 KHZSELF TEST < TESTHAL OSC
AO-14S22-RZ
AT-860ADFAntennaBlockDiagramFigure10-16
22-14-00Page 198.127‘Mar15/89
Use or disclosure of reformation on Ihw page is subjecf to the restrtcttons on the title pag~ of this document.

Honeywell M?;?’”c’CITATION V
10. I. AT-851MLSAntenna(SeeFigure10-17,andTable10-10.)
AD-1 5804
AT-851MLSAntennaFigure10-17
Dimensions (maximum):
Length .................. 2.50in. [,62.5mm)Width .::::::::::::::::::::::::.................. 1.50in. (38.1mm)Height ......................................... 0.75 in. (19.05mm)
Weight ................................................ 1.20z (34.029)
PowerRequirements........................................... ~.KWpeak
Impedance...................................................... 50 ohms
MatingConnector.............................. TNCMale,GRFF4100-0001
Mounting ................................... Hardmountusingf[lur10-32uncflatheadscrews
AT-851MLSAntennaLeading Particulars
Table 10-10
TheAT-851MLSAntennais a verticallypolarizedC-bandantennaoperatingin the5.0to 5.1GHzfrequencyrangewitha maximumVWSRof2:1. The antenna is omnidirectional in azimuthandcosinusoidalinelevation.
22-14-00Page198.128
Mar 15/89Use or disclosure Of information on this page is subject to the restrictions on the title page of thts jocument.

Honeywell UMRANCECXTATIONn/V
Thispageintentionallyleftblank.
22-14-00Page198.129
May 25/90Use or disclosure of mformatlon on thw page K subject to the restrictions on fhe ttle pagt of this document.

Honeywell W!JYANCECITATION n/V
11. O~tionalLSZ-850LiqhtninqSensorSystem
A. LP-850LightningSensorProcessor(SeeFigures11-1.)
11-1and 11-2,andTable
LP-850LightningSensorProcessorFigure11-1
22.14-00Paqe 198,130
“May25/90Use or disclosure of Information on this page is subjecf to the restrictions on the title page of this jocument.

Honeywell KKPANCECITATION Ii/v
Dimensions(maximum):
Length ..........................................Width
14.75in.(375mm)2.42in.(61.5mm)...........................................
Height ........................................... 7.62in.(194mm)
6.75lb (2.76kg)Weight ...............................................
Power .................................................... 28Vdc, lA
MatingConnector................................... DPX2MA-67S-33B-OO01
Mounting ................................................. MountingTray
LP-850LightningSensorProcessorLeadingParticulars
Table11-1
The Processorreceivessignalswhicharenaturallygeneratedbylightningactivity,anddeterminestheirrangefromthisenergydistribution.At thesametime,bearingiscomputedby meansof Antennacrossedloopsin a mannersimilarto anADF.
Theoutputdatais convertedto an ARINC429low-speedarchitecturefordisplayon the EHSIor MFD. However,labelassignmentsdo notconformto ARINC429. Thedatastreamcontainsrange,bearing,andseveritydataforup to 50 cells. The429datacontainsalldataavailablefora360degreeareawitha radiusof 125NM aroundtheaircraft,and it isthetaskof thedisplaydeviceto determinewhichcellsfallwithinitsdisplayarea.
Modeselectionis providedby theLU-850LightningSensorControllerorWC-650WeatherRadarController.
22-14-00Page198.131/198.132
May25/90Use or disclosure of mformatlon on this page IS subjecf to the restrictions on the Mle paq? of this document.

Honeywell M!KrANcECITATION n/V
28 VDC +POWERSUPPLY
*
I
HN, HP, E-FIELDANALOG
FROM ANTb TO DIGITAL
CONVERTER
oDATAPROCESSOR
INPUTS I lNPUTi I
fl~vDcToANTENNA
INTERNALPf3WER
LIGHTNINGFLAGVALID
RA13AR INDAND DATA NAVOLITPUTS
‘AS’TASREFIp~:J~oRI
-=’==2
LP-850LightningSensorProcessorBlockDiaciramFigureii-2
ARINC429OUTPUTSTO EFISAND MFD
AD-18249-R1
22-14-00Paqe198.133‘May25/90
Use or disclosure of information on this page IS subject to the restrictions on the title pag ? of this document.

Honeywell tiMErANcECITATION n/V
11. B. LU-850LightningSensorController(SeeFigures11-3and11-4andTables11-2and11-3.)
‘o LXSTBY
8
CLRITST
OFF @
Lo
LU-850LightningSensorFigure11-3
AD-20866
Controller
Dimensions(maximum):
Length ......................................... 2.59in.(65.89mm)Width .......................................... 3.38in.(85.85mm)Height ......................................... 1.66in.(42.16mm)
Weight ................................................ 0.5lb {0.23kg)
LightningPower ................... 5 V ac/dcor 28 V dc,3.5VA maximum
MatingConnector......................● ● ................ MS3126F14-19SW
Mounting ................................● ....................... Screws
LU-850LightningSensorControllerLeadingParticulars
Table11-2
22-14-00Page198.134
May25/90Use or disclosure Of mformatlon on this page IS subject to the restrictions on the title page of this document,

Honeywell WMWANCECITATION n/V
The LU-850LightningSensorControlleris usedto selectthemodesofoperationof thelightningsensorsystem.The switchfunctionsarelistedinTable11-3.
OFF All powerremoved.
STBY Displayis inhibitedbuttheprocessorisaccumulatingdata.
LX Systemis fullyoperational.Allaccumulatedlightningdatais displayed.
CLR/TST Accumulateddatais clearedfrommemory.After3 secondsthetestmodeis initiated.
LU-850SwitchFunctionsTable11-3
22-14-00Paqe198.135/198.136.,
May25/90Use or disclosure of Information on this page IS sub)ecl to the restrictions on the title pagf of Ihts document.

Honeywell W!FANCECITATION n/V
J1
~
~ ElA
#2c
~ E3B
m’1~ C S2-B
#00/00
f ,I
?
IIII
02
IC S2-A
1-0
I 00;,..
.
H
J
K
L
+28V UGHTING
LIGHTING COMMON
+ 5V LIGHTING
PWR ON COMMAND
STBY
Lx
CLR/TST
SWITCH COMMON
AD-20867
LU-850LightningSensorControllerSchematic
Figure11-4 22-14-00Page198.137‘May25/90
Use or dmclosure of mformat!on on thw page IS subject to the restrictions on the title pag,] of this document.

Honeywell WUWANCECITATION n/V
11. C. AT-850Antenna(SeeFigure11-5,andTable11-4.)
AT-850AntennaFigure11-5
Dimensions(maximum):
Length ....................................... 11.58in. (294.13mm)Width ......................................... 6.06in. (153.92mm)Height ......................................... 1.25in. (31.75mm)
Weight ................................................ 2.5lb (1.13kg)
Power ............................................. *12V dc fromLp-850
MatingConnector.......................................... KJ6F12A35-SN
Mounting ..................... HardMountUsingThreeNo. 10 ScrewsWithMaximumWasherDiameterof 0.455in.
AT-850AntennaLeadingParticulars
Table11-4
22-14-00Page198.138
May25/90Use or disclosure of reformation on this page is sub)ect to the restrictions on the title page of this jocument.

Honeywell Wi’’r’””CITATION n/V
TheAT-850Antennacontainscrossedloop H-field antennae and an E-field
antenna similar to an ADF antenna.
Preamplifierstagesarealsobuiltintotheantennain orderto enhancethesystem’simmunityto noiseoriginatingin aircraftwiring.
TheH-fieldloopantennaearedesignatedHn andHw andareorientatedinsucha mannerthatHn willbe mostsensitiveto signalsoriginatingaheador behindtheaircraft,andtheHw antennawillbe mostsensitiveto signalsoriginatingabeamtheaircraft.
The E-fieldantennais constructedsuchas to be mostsensitivetoverticalE-fields.
tIZV dc powerforthepreamplifiersisprovidedto theantennafromtheProcessor.
The antennaalsocontainsa testwinding.Duringtestmodethiswindingis drivenwitha simulatedlightningsignalandcoupleswiththeE- andH-elementsof theantenna.Thus,thetestmodeis ableto provideanevaluationof theperformanceof theantenna,itspreamplifiers,andcablingto theLP-850LightningSensorProcessor.
TheAT-850Antennaisdesignatedformountingexternalto theaircraftand isnotto be paintedafterinstallation.Also,the antennaisencapsulatedandis notrepairable.
22-14-00Page198.139“May25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the [Itle pag, ? of this document

Honeywell
11. D. AT-855Antenna(SeeFigure11-6,
MAINTENANCEMANUALCITATIONn/V
andTable11-5.)
AT-855AntennaFigure11-6
Dimensions(maximum):
Length ........................................ 6.75in.Width ........................................ 6.060in.Height ......................................... 1.67in
Weight ...........................................● .... 2.5“
Power ........................................
MatingConnector.............................
Mounting...................... Hard Mount lJs”Maximum Wi
(171.45mm)(152.40mm)(42.42mm)
b (1.13kg)
fromLP-850
. . . . . . . . . . . . KJ6F12A35-SN
ng ThreeNo.8 ScrewsWithsherDiameterof 0.350in.
AT-855AntennaLeadingParticulars
Table11-5
22=14-00Page198.140
May 25/90Use or disclosure of mformat!on on this page is subject to the restrictions on the title page of this I iocument.

Honeywell WKPAN’ECITATION Ii/v
TheAT-855AntennacontainscrossedloopH-fieldantennaeandan E-fieldantennasimilarto an ADFantenna.
Preamplifierstagesarealsobuiltintotheantennain orderto enhancethesystem’simmunityto noiseoriginatingin aircraftwiring.
TheH-fieldloopantennaearedesignatedHn andHw andareorientatedinsucha mannerthatHn willbe mostsensitiveto signal$originatingaheador behindtheaircraft,andtheHw antennawillbe mostsensitiveto signalsoriginatingabeamthe aircraft.
The E-fieldantennais constructedsuchas to be mostsensitivetoverticalE-fields.
~12V dc powerforthepreamplifiersis providedto theantennafromtheProcessor.
Theantennaalsocontainsa testwinding.Duringtestmodethiswindingis drivenwitha simulatedlightningsignalandcoupleswiththeE- andH-elementsof theantenna.Thus,thetestmodeis ableto provideanevaluationof theperformanceof theantenna,itspreamplifiers,andcablingto the LP-850LightningSensorProcessor.
TheAT-855Antennais designatedforradomemountingandis notto bepaintedafterinstallation.Also,theantennais encapsulatedandisnotrepairable.
22-14-00Paue198,141/198.142.
May25/90Use or disclosureof Information on this page IS subject to the restrictions on the title page of this document.

Honeywell #il!iEPANcECITATION V
SECTION3SYSTEMOPERATION
1. General
This section describes the operation of the System by separating it intothree subsystems: Flight Director Functional Description, paragraph 3;Autopilot Functional Description, paragraph 4; and Compass System FunctionalDescription, paragraph 5. Paragraph 6 describes the port connections and theprogramming pin functions of the EDZ-605 EFIS and the optional MDZ-605 MFDSystem. A table listing the system limits is contained in paragraph2.
22-14-00Page201Mar 15/89
Use or disclosure of information on this page m subject to the restncttons on the tttle page of this document.

Honeywell MMRANCECITATION V
2. SvstemPerformance/O~eratinqLimits
The systemperformance/operatinglimitsfortheSystemarepresentedinTable201. All limitslistedhavea toleranceof f10percent.
Mode Controlor Sensor Parameter Value
Y/D Y/DEngage
A/P A/P Engage
BasicA/P Tcs
TurnKnob
PitchWheel
HeadingHold
Heading HeadingSELKnobSelect
VORor CourseKnob,VORAPR NAVReceiver,and
DMEReceiver
EngageLimit
EngageLimit
RollControlLimit
PitchControlLimit
RollAngleLimit
RollRateLimit
PitchAngle
PitchRateLimit
RollAngleLimit
RollRateLimit
RollAngleLimit
RollRateLimit
VORCapture:
Up to 45 degLeftor RightBank
Roll:Up to f45degPitch: up to f30degYaw: up to t45deg
Up to t45degRoll
Up to f20degPitch
5.5degjsec
*15deg Pitch
Variable
f35.5 deg.
&5.5 deg/sec
?27.5deg,t12degwithPC-500BankLimitSwitch
3 deg~sec
UD to ~ 90 deqBeamInterceptAngle ‘(HDGSEL)
SystemPerformance/OperatingLimitsTable201
22-14-00Page202Mar 15/89
Use or disclosure of reformation on this page is subject to the restrictions on the title page of this document.

Honeywell U!MFANcECITATION V
Mode Control or Sensor Parameter Value
VORor CapturePointVORAPR(cent)
CourseKnob, RollAngleLimitNAVReceiver,andDMEReceiver RollRateLimitVORAPR
RollRateLimitVOR
VORCapture:CourseCut LimitDuringCapture
VOROn Course:RollAngleLimit
RollRateLimit
CrosswindCorrection
VORGainProgramming
OverStation:CourseChange
RollAngleLimit
RollRateLimitVAPR
RollRateLimitVOR
APR or BC CourseKnobandNAV LOCCapture:Receiver BeamInterceptAngle
(HDGSEL)
Functionof Beam,BeamRate,andcourseError,andDMEdistanceMinTripPointf30mV dc MaxTripPointt175mV dc
t27.5deg
5.5deg/sec
3.0deg/sec
t45degCourseErrorin VORf30degCourseErrorinVORAPR
1 deg/secin VOR5.5deg/secinVORAPI<
Up to i45degCourseErrorinVofl~30deg in VORAPR
Functionof DMEDistanceandTAS
Up to ~90deg
fl~: deg
5.!5deg/sec
3.0deg/sec
Up to t90deg
SystemPerformance/OperatingLimitsTable201 (cent)
22-14-00Page203Mar 15/89
Use or disclosure Of Information on this page is subject to the restrictions on the t!tle page of this document,

Honeywell M!MRANCECITATION V
Mode Controlor Sensor Parameter Value
APRor BC CapturePoint(cent)
CourseKnoband RollAngleLimitNAVReceiver
RollRateLimit
CourseCutLimitDuringCapture
LOCGainProgramming
APR GS Receiverand GlideslopeCapture:AirDataComputer CapturePoint
PitchCommandLimit
GlideslopeDamping
PitchRateLimit:
GS GainProgrammingFirstStage(RadioAltimeterValid)
Functiorof Beam,BeamRate,andCourseErrorMinTripPoint~60mv dcMaxTripPoint~]75mv dc
~12deg
5.5deg~sec
t30deg Course
Functionof timeandTAS;Startsat1200ft radioaltitude
LOCDeviationgainreduction= 1 to0.5
~30mv dc at 150knots;beamrateandTAS programmed
tlodeg
VerticalAccelerationfromAccelerometer
~TAS (kn)deg/sec(MaxRate= 2deg/see)
Functionof Timeand TAS; Starts at
1200 ft radio
altitude
GainReduction= 1 to 0.33
SystemPerformance/OperatingLimitsTable201 (cent)
22-14-00Page204Mar-15/89
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of th!s d]cument.

Honeywell WK?AN’ECITATIONn/V
Mode Controlor Sensor Parameter Value
APR (cent) FirstStage(RadioAltimeterInvalid)
SecondStage(RadioAltimeterValid)
SecondStage(RadioAltimeterInvalid)
I GA ControlSwitcheson FixedFlightDirectorThrottle(DisengagePitch-UpCommand;WingsA/P) Levelin Roll
PitchSync TCS Switchon Wheel PitchAttitudeCommandDepressed
ALT Hold ADC ALTHoldEngageRange
ALTHoldEngageError
PitchLimit
PitchRateLimit
VS Hold ADC VERTSpeedEngageRange
VERTSpeedHoldEngageError
PitchLimit
PitchRateLimit
StartsatGl~deslopeCapture
Functionof RadioAltitude;Startsat 250ft radioaltitudeGainReduction= 0.33to Zero
Functionof MiddleMarker
GainReduction= 0.33to 0.13
10°CitationV7.5°CitationII
~2~deg Maximum
o to 50,000 ft
~25ft
~2~deg
~TAS (kn)deg/sec(MaxRate= 2deg/see)
O t.of4000ft/min
~313ft/min
~2~deg
y)cJTAS (kn)deg/sec(MaxRate= 2deg/see)
SystemPerformance/OperatingLimitsTable201 (cent)
22-14-00Paqe205May-25/90
Use or disclosure of information on this page IS subject to the restrictions on the title page ]f this document,

Honeywell WE!’’”c’CITATION V
Mode Control or Sensor Parameter Value
IASHold ADC IASEngageRange
IASHoldEngageError
PitchLimit
PitchRateLimit
ALT ADC and VNAV Preselect Capture RangePreselect Computer/Control ler
VNAV
Maximum VerticalSpeed forCapture
CaptureManeuver:MaximumGravitationalForce
PitchLimit
PitchRateLimit
AirDataComputer, AltitudeRangePathDME,VNAV AngleRangeComputer/ControllerElevationRange
BiasRange
PitchLimit
PitchRateLimit
80 to 45Ilkn
~TAS (kn)deg/sec
(MaxRate= 2deg/see)
o to 50,000 ft
~TM (kn)CWsec
(MaxRate= 2deg/see)
o to 50,000 ftt6 dego to 10,000ftt99,9milesfromVOR/TACorwaypoint
w kn deg/secTAS(MaxRate= 2deg/see)
SystemPerformance/OperatingLimitsTable201 (cent)
22-14-00Page206Mar 15/89
Use or disclosure of mformatlon on this page is sub!ecf to the restrictions on the title page of this d “)cument.

Honeywell U!KR’”c’CITATION V
3. Fliqht Director Functional Description
A. General
Paragraph 3.B. discusses conditions and functions that are referred to inthediscussionsof eachmodeof operationin paragraph3.C. Paragraph3.C.discussesthesignalflowthroughtheflightdirectorcomputerforeachflightpathmode. Figures203through214aresimplifieddiagramsthatshowtheunitsignalpathand interconnectwiringfortheapplicableselectedmode. Theyareusedin conjunctionwithFigures201and202whicharesimplifieddiagramsof themodeselectionlogicandtheFD OFFlogic,respectively.Figure215is a simplifieddiagramforthewarningflagsandbarbiaslogic.
B. ControlFunctions
(1) LateralBeamSensors(LBS)
Whenflyingto intercepttheVORor LOCbeamin theheadingselectmode,theLBSis controlledby thefollowingsignal;.Themagnitudeandpolarityof theairspeedprogrammedcourseerropsignaliscomparedwiththeDMEgainprogrammedbeamdeviationsignal. IntheLOCmode,thecourseerroris comparedwiththe beamdeviationsignalandrateof crossingthebeamto determinethe LBStrippoint.
WhentheLBStrips,theflightdirectorcommandsa turntowardthedesiredVORradialor runwayat the optimumpointfora smoothcaptureof thebeam. Ifthe interceptangleto thebeamcenterisveryshallow,the LBS wouldnottripuntilthe aircraftwas almoston beamcenter. Forthisreason,an overrideon the LBS occurs whenthe beam deviation reaches a specified minimum. TheminimumbeamsensortrippointforVORor VORAPRmodeis *3OmV, In theLOCmode,theminimumtripLBStrippointis t175
(2) NAVOn Course(NOC)
TheNOC isdefinedas:degreesandbankangletrips. IntheVORAPR
pointis t60mV. In allmodes,themaximummV.
LBStripped,courseerrorlessthan22.5lessthan6 degreesor 2 minutesafterLBSmode,thecourseerror,bankangle,andless
than75 mV beamdeviationmustexistsimultaneouslyfo~5 secondsforNOCto latchup. InVOR,LOC,BC,andAPRmodes,thecourseerrorandbankangleconditionsmustexistsimultaneouslyfor0.5secondforNOCto latchup. Whenin theNOC submode,themaximumbankanglecommandedis 12t 2 degrees.NOC startsthecrosswindwashoutfunctionintheflightdirectorcomputer.
Whenin theRNAVmode(7J1A-47grounded),NOCcanbe resetbyapplyingtheRNAVstaginggroundat 7J1A-26.Thisenablesthesystemto makelegchangesusingthe 27.5degreebankangle.
22-14-00Page207Mar 15/89
Use or disclosure of Information on thw page IS subject to the restrictions on the title page of thw document

Honeywell WNRANC’CITATION V
3. B. (3) OverStationSensor(0SS)
The0SS sensesthebeamratenoisein thezoneof confusionovertheVOR station. After the NOC submode is established, the 0SS submode
is armed. In theVORmode,if the beamdeviationratereachesapredeterminedlevel(8mV of deviationpersecondwithd~viationgreaterthan75 mV),the0SStrips. 0SSremovestheradiobeamdeviationfromtheflightdirectorrollcommandoutput. In theVORmode,the beamdeviationis removeduntilthebeamdeviationhasdecreasedbelowthetrippointfor20 seconds.In theVCIRAPl&mode,if theDME is validandlessthan1.5nauticalmilesand if 0SS,thebeamdeviationratemustreach4 mV/secwitha deviationgreaterthan30 mV forthe0SSto trip. Thedeviationis removecluntilthebeamdeviationhasdecreasedbelowthetrippointfor4 ~econds.IftheDME is notvalid,0SS is the sameas theVORmode.
(4) AfterOverStationSensor(AOSS)
AOSSis theperiodbetweenthelossof 0SSandtheoccurrenceofNOC.
(5) VerticalBeamSensor(VBS)
Theverticalbeamsensoris armedwhentheradiois tuneclto a LOCfrequency,the LOCreceiveris valid,andthe LBS has tripped. TheVBStripsas a functionof verticalspeed,TAS,andglideslopedeviation.Whentheverticalrateis zeroandTAS is 15(Iknots,theVBSwilltripat 30 mV of glideslopedeviation.Thiswillresetthepreviouslyselectedpitchmodeandchangeaircraftattitudetosmoothlycapturetheglideslopebeam.
Inthebackcourse(BC)mode,theVBS is lockedoutwhenBC isselected.
Whencapturingfromabovethebeam,theaircraftmustbe descendingat a ratethatwillcreatea suitableinterceptangle.
(6) LocalizerGainProgramming(LOCII)
ForfrontcourseILSapproaches,thissubmodeis armedaftertheLBShastrippedandNOC is engaged.Witha validradioaltimeter,LOCII engageswhentheradioaltitudeis lessthan1200feet. Ifthealtimeteris notvalid,LOC II engagesat approachcapture.Ifthealtimeterisnotvalidandan approachmodehasnot beenselected,LOCII startsas a functionof NOC andTTL.
Forbackcourseapproaches,thissubmodeis armedafterI.BShastrippedandNOChasbeenestablished.Witha validradioaltimeter,operationis as describedforfrontcourseapproach.If theradioaltimeteris notvalid,LOC II startswhenNOChasbeenestablished.
22-14-00Page208Mar 15/89
Use or disclosure Of information on this page IS subject to the restrictions on the title page of th!s document

3. B. (7)
(8)
(9)
(lo)
(11)
Honeywell
G1ideslopeOn Course(GSOC)
MAINTENANCEMANUALCITATION V
and (GSOC+15)
Glideslopeon courseis establishedwhentheVBSha;tripped,glideslopeis validandLBShastripped.At GSOC,a signalisappliedto transitiontheaircraftfromtheexistingflightpathtotheflightpathnecessaryto flytheglideslopebeam. After15seconds-(GSOC+15),thissignalis removedand’theg’lideslopedeviationgainis increased.
GlideslopeGainProgramming
(a)
(b)
True
FirstStageGainProgramming
FirststagegainprogrammingstartsaftertheVBStrips,LOC II is engaged.
Second-StageGainProgramming
AfterVBStrips,thesecondstageof gainproqramminqis
when
armed.Whentheradioaltimeteris val;d,th=second-stageis engagedwhentheradioaltitudeis lessthan250feet. Iftheradioaltimeteris notvalid,thesecondstageis engagedwhenthemiddlemarkersignalis received.
Airspeed(TAS)FunctionGenerator
An approximationof TAS iscalculatedas a functionof altitudeandindicatedairspeed.Thisfunctionis usedto programheadingselecterror,courseselecterror,airdatacommands,verticalbeamsensor,pitchratelimit,and ILSgainprogrammers.If theairdatacomputeris notvalid,theTAS programmer reverts tr~ a fixedairspeed.
Distance Measuring Equipment (DME) Gain Programmer
This function optimizes VORor VORAPR operationby changingthegainof theradiosignalas a functionof DMEdistar]ceto theVORTAC station.TheDMEprogrammerrevertsto a fixedgainlevelandremainsthereif theDMEis invalid,DME is placedin theDMEHOLDconfiguration,or the RNAVmodeis selected.
EADISingleCue
Whena commandsignalis appliedto thecue input,thecuewillmoveCW or CCW (roll)or up or down(pitch).Thisprovidestherequiredcommandto allowthepilotto maneuvertheaircraftin theproperdirectionto reachthedesiredflightpath.
22-14-00Paqe209Mar-15/89
Use or dwclosure of Information on this page IS subpcf to the restrictions on the title page of this document,

Honeywell IWFANCECITATION V
If the informationrequiredto flythedesiredflightpathbecomesinvalid,thecue is biasedfromview.
A rollmodemustbe selectedbeforethe singlecuewillbe in-view.If onlya rollmodeis selected,pitchcommandwillbe pitchattitudehold.
c. FlightDirectorModeFlowDescription
(1) HeadingSelectMode(SeeFigure207.)
The headingselectmodeis selectedby pressingtheHDGbuttononthemodeselector.TheHDGbuttonilluminateswhenthemodeisengagedandHDG is annunciatedon theEADI. Headingselectwilloverrideandresetotherpreviouslyselectedlateralmodes. Theheadingerrorsignalrepresentsthedifferencebetweenthefixedheadingindexandtheselectedpositionof theheadingbugon theEHSI.
The errorsignalfromtheSG-605SymbolGeneratoris appliedto theflightdirectorcomputer,demodulated,programmedto increasegainas a functionof increasingTASandappliedto thebankanglelimiter.Thenormalbankanglelimitis 27.5degrees.PressingtheBANKLIMITswitchon thePC-500AutopilotControllerappliesagroundto 7J1A-93to changethebankanglelimitto 12 degrees,whenin theHDGmode.
The headingselecterrorsignalis limitedto a 3-degree-per-secondrollrateandsentas rollcommandto the autopilotcomputer.Thissignalis alsosummedwitha demodulatedrollsignalfromtheverticalgyro. The resultantcommandfromthissummationis appliedto theSG-605to positiontherollcueof theEADI. Thisis thesignalusedby thepilotto flyto thedesiredheading.Ifthesignalsourcesof thecommandsignalbecomeinvalid,rollbarbiasis appliedto biastherollcommandcueoutof view.
(2) Go-AroundMode(GA)(SeeFigure207.)
Thismodeis selectedby pressinga throttle-mountedGO-AROUNDswitch.Thiscancelsanypreviouslyselectedpitchor rollmode.Thego-aroundlogicswitchopensremovingallrollcommandsignalsfromtheEADIcue. Theverticalgyrosignalremainsto drivetherollcommandinputto theSG-605SymbolGeneratorforpositioningthe EADIrollcommandcue. Itwillprovidea wings-levelcommandtothe EADIrollcommandcue. Aftergo-aroundhasbeenselected,anyrollmodecanbe selected.Thisselectionwillcancelthewings-levelsubmodeof go-aroundbutstillleavethe fixedclimbattitude.Go-aroundcanbe cancelledby selectinganotherpitchmode,pressingTCS,or engagingtheautopilot.
22-14-00Paqe210Mar”15/89
Use or disclosure of reformation on this page IS subject to the restrictions on the title page of thts document,

Honewel[ ~f#&NANcECITATION n/V
3. c. (3) VORMode(SeeFigure208.)
The VORmodeis selectedby pressingtheNAVbuttonon theflightdirectormodeselectorwiththeRNZ-850NAVUnittunedto a VORfrequency.Whenoutsidethelateralbeamsensor(LBS)trippoint,theHDGmodeisautomaticallyselected.The HDGmodeis usedtointerceptthedesiredVORradial.At thistime,HDGandNAVARMmodesare illuminatedon themodeselectorandHDG (green)andVOR(white)areannunciatedon theEADI. Whenreachingthe LBStrippoint,thesystemautomaticallyswitchesto theVORcapturemode.TheHDGandNAVARM annunciatorsareturnedoffandtheNAVCAPmodeis illuminatedon themodeselector.On the EADI,!-lDGturnsoffandVOR (green)is annunciated.Theflightdirectorcomputernowprovidesa commandto interceptandtrackthedesiredVORradial.
ThedesiredVORradialis seton thecourseselectpointeron theEHSI. ThecourseerrorsignalfromtheSG-605SymbolGeneratorrepresentsthedifferencebetweenthefixedheadingindexandtheselectedpositionof thecourseselectpointeron theEHSI. Thissignalis demodulated,programmedto increasegainas a functionofincreasingTAS,andsummedwiththeradiodeviationsignal.Radiodeviation,fromtheRNZ-850NAVUnit,is gainprogrammedas afunctionof DMEdistancefromtheVORstation.Theresultantof thesummingof courseerrorandradiodeviationsignalsis appliedtothecoursecutlimiter.Thissignalwillbe limitedto a levelthatwillresultin a maximumcoursecutangleof 45 degreesto thedesiredVORradialaftertheLBStrips. At thistime,thebankanglelimitis 27.5degreesandtherollratelimitis 3 degreespersecond.Signalflowfromtheratelimiteris as describedin theHDGmode.
At NOC,bankanglelimitis reducedto 12degrees,rollratelimitis 1 degreepersecond,additionalfilteringis providedto minimizetrackingbeamnoiseandcourseerroriswashedoutto eliminateanysteady-statecourseerrorin thepresenceof crosswind,therebypreventingbeamstandoff.
WhenpassingovertheVORstation,the0SScircuitremovestheradiodeviationsignalfromtheflightdirectorcommandoutputuntilthedeviationsignalis no longererratic.Whileoverthestation,coursechangesaremadeby selectinga newcourseon theEHSI. IftheNAVdataisnotvalidpriorto thecapturepoint,theLBSwillnot tripandthesystemremainsin theHDGmode. Aftercapture,iftheNAVdata,compassdata,or verticalgyrogoesinvalid,therollcommandcuewillbiasfromview. Theflightdirectorcomputerwillremainin theNAVmode. A momentarylossof NAVUnitvalidwillcauseNAVCAPto turnoffon themodeselectorandVOR (green)toturnoffon theEADI. WhentheNAVvalidsignalis restored,NAVCAP andVOR (green)areagainannunciated.Withthelossof NAVCAP,lateralmodelogicis removedandtheautopilotrevertstoautomaticwingsleveling.WhenNAVCAP is restored,theautopilotwillagainflytherollcommand.
22-14-00Paqe211May”25/90
Use or disclosure of reformation on this page is subject to the restrictions on the title page of this document

Honeywell M!W’”c’CITATION n/V
3. c.
B
I
(4) VOR ApproachMode(SeeFigure208.)
TheVORapproachmodeis selectedby pressingtheAPR buttonon theflightdirectormodeselectorwiththeRNZ-850NAVUnittunedto aVOR frequency.OutsidetheLBStrippoint,HDGandNAV ARM are
illuminated on themodeselectorandHDG (green)andVApp(white)areannunciatedon theEADI. At capture,-HDGandNAVCAP illuminateson themodeselector.VAPP(green)is annunciatedon the EADI. ThepreviouslydescribedfortheVORmode. Gainsapproach,crosswindwashoutismuchfasterincoursecut limitis reducedto 30 degrees.
(5) LocalizerMode(SeeFigures209and210.)
andNAVARM turnoffHDGturnsoffandmodeoperatesasareoptimizedforthismode,andthe
The localizermodeis selectedby pressingtheNAVbuttonon theflightdirectormodeselector.TheRNZ-850NAVUnitis tunedto alocalizerfrequencyandtheEHSIcourseselectis setto thepublishedfrontcourseforthe ILS. Operationoutsidethe LBStrippointbeforebeamcaptureis as describedfortheVORmode exceptLOC (white)is annunciatedon the EADI. At theLBStrippoint,NAVCAP is illuminatedon themodeselectorandtheHDGandN.4VARMannunciatorsareoff. On the EADI,HDGturnsoffandLOC (green)isannunciated.
The courseerrorsignalisgainprogrammedas a functionofcalculatedtrueairspeedandsummedwithradiodeviationfromthelateralgainprograminer.Theresultantsummedcourseerrorandradiodeviationsignalis coursecutlimitedto 30 degreesandr[ratelimited.The crosswindcorrectedcourseerrorandradiodeviationsignal,beforesummationwithrollattitude,is routedthe autopilotcomputer.
At NOC,bankanglelimitis reducedto 12 degrees,rollratelimremainsat 5.5degreespersecond,andadditionalfilteringis
11
to
t
providedto minim;zetrackingbeamnoise. Courseerroriswashedout at a muchfasterratethantheVORmodeto quicklyeliminateanysteady-statecourseerrorin thepresenceof crosswind,thuspreventingbeamstandoff.Signaloutputsfromtheratelimiterfunctionas describedabove.
Gainprogrammingis controlledby the LOCII submode.WhenLOC IIis established,gainis reducedfrom100to 50 percentas a functionof timeandairspeed.Also,at LOC II,laggedrollis summedwiththe signalsto improvelateralcontroldamping.
22=14-00Page212May25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of thm d ~cument.

Honeywell M!R’”c’CITATION V
3. C. (6) LocalizerApproachMode(SeeFigures209and210.)
The localizerapproachmodeis usedto makea fullILSapproach.The approachmodeis selectedandthe localizerandglideslopemodesarearmedby pressingtheAPR buttonon themodeselectorwith theRNZ-850NAVUnittunedto an ILSfrequency.Whenoutsidethelateralbeamsensortrippoint,theheadingmodeis automaticallyselected;the rollcueon theEADIreceivesa headingselectcommandas describedinthe headingselectmode;and,HDG mode illuminates
along with the NAVARM andAPRARMannunciatorson themodeselector.HDG (green),LOC (white),andGS (white)areannunciatedon the EADI. Whenreachingthelateralbeamsensortrippoint,thesystemautomaticallyswitchesto theAPRmode,HDGandNAVARMannunciatorsextinguish,andNAVCAP illuminateson themodeselector.HDGextinguishesandLOC(green)andGS (white)areannunciatedon the EADI.
The courseerrorandradiodeviationsignalsareprocessedthesameas previouslydescribedforthelocalizermode.
(7) BackCourseMode(SeeFigure209.)
Thismodeis selectedby pressingtheBC buttonon theflightdirectormodeselectorwiththeRNZ-850NAVUnittunedto alocalizerfrequency.Outsidethe LBS trip point, the heading select
modeis engagedwithbackcoursearmed. The HOGandBC ARMannunciatorsareilluminatedon themodeselectorandHDGandBC(white)areannunciatedon theEADI. The EHSIcourseselectis setto thepublishedfrontcourseforthe ILS. Selectionof backcoursereversesthecourseerrorandradiodeviationsignalsforproperbackcourseapproachresponse.At beamcapture,HDGandBC ARM turnoff andBC CAP illuminateson themodeselector.On theEADI,HDGturnsoffandBC (green)is annunciated.
Backcourseoperatesthesameas thelocalizermodepreviouslydescribed.The radiodeviationsignalis attenuatedto compensateforthecloseproximityto thelocalizerantenna.Glideslopecaptureis lockedoutwhentheBC modeis selected.
(8) PitchHoldSubmode(SeeFigure211.)
Thissubmodeis engagedby selectinganyrollmodeon theflightdirectormodeselector,withoutselectinganypitchmode. Noannunciatorsareilluminatedto announcethissubmode.
22-14-00Page213Mar 15/89
Use or disclosure of information on this page IS subject to the restrictions on the Mle page of thm document.

Honeywell WJ!F’”c’CITATION V
The verticalgyroinputsignalis synchronizedbeforeanymodeisengaged.When onlya lateralmodeis selected,thesynchronizerretainsthepitchattitudeto providethepitchholdfunction.Theoutputsignalis appliedto thepitchlimiterandis thensummedwiththeverticalgyrosignal.At engagement,thesesignalscanceleachotherso thecuegoesto thenullpositionon the EADI. If theaircraftchangesattitude,an errorsignalis appliedto theEADItocommanda returnto theoriginalattitude.
Whena pitchmodeis selected,thesynchronizationcircuitoperatesas a pitchattitudewashout.Thiseliminatesstandofffromdesiredpositiondue to long-termattitudechanges.
3. c. (9) AltitudeHoldMode(SeeFigure211.)
Thismodeis selectedby pressingtheALTbuttonon the flightdirectormodeselector.SelectingALTwillresetanypreviouslyselectedpitchmodes. ALT is illuminated on the modeselectorandALT (green)is annunciatedon theEADI. Onceengaged,themodewillbe resetif theairdatacomputeris notvalid. ThepitchcuewillbiasfromviewiftheVG is notvalid.
WhenALT is selected,a logicgroundis suppliedfromtheflightdirectorcomputerto theairdatacomputerto engagethemode.Afterengagement,anydeparturefromtheengagedaltituderesultsinan errorsignalfromtheairdatacomputer.Thiserrorsignalisprogrammedto decreasethegainor ratelimitas a functionof TAS.Thissignal,outof theratelimiter,is sentto theautopilotcomputer.It is alsosummedwiththewashedoutverticalgyrosignal,displacementlimited,summedwiththeverticalgyrosignal,amplified,andsentto theSG-605to drivethepitchcueof theEADI.
An absoluterollsignalis appliedto theversinecircuitstoprovideaccelerationcompensationin turns. Thisversinesignalcancelstheradialaccelerationoutputof thenormalaccelerometer.The resultantsignalis summedwiththealtituderatedampingsignalfromtheairdatacomputer.Thissignal(IVV)is scaledforproperresponseon a givenaircraftandsummedwiththealtitudeerrorsignal.
WhenTouchControlSteering(TCS)is activated,theversineanddampeningsignalsareremoved,ratelimiteris shortedout,verticalgyrowashoutis synchronizedto theexistingattitude,andthealtitudeholdmodein theairdatacomputerdesynchronizesto thenew altitude.AnyerrorsignalexistingwhenTCS is pressediswashedout in about5 seconds.WhentheTCSbuttonis released,thesystemoperatesas previouslydescribed.
If theADC becomesinvalid,theTASgainprogrammerrevertsto afixedairspeed.If theBAROsettingon thebarometricaltitudeindicatoris changed,a commandisgeneratedto flytheaircraftbackto theoriginalaltitudereference.
22-14-00Paqe214Mar-15/89
Use or disclosure of Information on this page is subject to the restrictions on the title page of this document.

Honeywell M!JR’”c’CITATION V
3. C. (10) VerticalSpeed Hold Mode(SeeFigure211.)
Thismodeis selectedby pressingtheVS buttonon theflightdirectormodeselector.This action will reset any previouslyselected pitch mode. VS is illuminated on the mode selector and VS
(green)is annunciatedon theEADI. Onceengaged,themodewillberesetif theairdatacomputerisnotvalid. The pitchcue willbias from viewif theverticalgyroisnotvalid.
WhenVS is selected,a logic ground is supplied from the flight
director computer to the air data computer to engagethemode. Iftheaircraftdepartsfromtheengagedverticalspeed,an errorsignalis sentto theflightdirectorcomputer.Thissignalfollowsthepathdescribedforthealtitudeholdsignalwithoneexception.In theVS mode,thealtituderatedampingsignalsarenot used.
Anytimethepilotdesiresto modifyhisexistingverticalspeed,pressingtheTCSbuttonwilloperatein the samemanneras theAltHoldmode. Whentheautopilotisengaged,the pilotcancommandanewVS by movingthepitchwheelon theautopilotcontroller;theEADIairdatacommanddisplaywillchangeas a functionof pitchwheelmovement.
(11) IndicatedAirspeedHoldMode (See Figure 211. )
Thismodeis selectedby pressingthe IASbuttonon the flightdirectormodeselector.Thisresetsanypreviouslyselectedpitchmode. IAS is illuminatedon themode selector and IAS (green)isannunciatedon theEADI. Onceengaged,themodewillresetiftheairdatacomputeris notvalid. Thepitchcuewillbiasfromviewif theverticalgyrois notvalid.
WhenIASis selected,a logicgroundis suppliedfromthe flightdirectorcomputerto theairdatacomputerto engagethemode. Iftheaircraftdepartsfromtheengagedairspeed,an errorsignalisappliedto theflightdirectorcomputer.ThissignalbypassestheTASgainprogrammerandis appliedto thepitchratelimiter.From
this point, the signal path is thesameas previous-lydescribedintheALTmode. The airspeedcommandedvalueon the EADIairdatacommanddisplaycanbe changedby thepilotby movingthe pitchwheelon theautopilotcontrollerwhentheautopilotis engaged.
(12) G1ideslopeApproachMode(SeeFigure212.)
Thismode is selected by pressing the APRbuttonon theflightdirectormodeselectorwiththeRNZ-850NAVUnittunedto alocalizerfrequency.Glideslopecaptureis inhibiteduntilthelocalizerhasbeencaptured.WhenAPR is selected,localizercapture,andtheVBShasnotbeentripped,APRARM andanypreviouslyselectedpitchmodeis illuminatedon themodeselector.ThepreviouslyselectedpitchmodeandLOC (green)andGS (white)areannunciatedon theEADI. Afterthelocalizerhas been captured,
22-14-00Pacre215
Mar”15/89Useordisclosureofinformation on this page IS subject 10 the restrictions on the title page of thw document,

Honeywell WW!!AN’ECITATION V
thesystemautomaticallycapturestheglideslopebeamwhen the VBStrips. At thattime,APRARM andpreviouslyselectedpitchmodes
areresetandAPRCAP illuminateson themode selector. On the
EADI, any previously selected pitch modesareresetand LOC(green)andGS (green) are annunciated. If the glideslope data is not valid
prior to capture, the vertical beam sensorwill not trip and the
system will remain in thepitchmode. Aftercapture,if theglideslopedataor verticalgyrobecomesinvalid,thepitchcommandcuewillbiasoutof view. A momentarylossof glideslopevalidwillturnofftheAPR CAP annunciator on themodeselectclr.Whenthevalidsignalreturns,APR CAP is again annunciated.
Theglideslopedeviationsignalis appliedto the GS gairprogrammer.Theoutputof theGS gainprogrammerismaximum(100percentgain)at beamcapture.GlideslopecaptureisdeterminedbysummingtheGS deviationsignalwithTAS and IVV siqnals._ TAS andIVVareappliedfor15 secondsthroughswitchGSOC+15EOFF. Whenthesumof thesesignalsequalszerotheVBS trips. Duringthis15-secondduration,theTASand IVVsignalsprogramthe(S deviationcommandingtheaircraftto transitionfromlevelfliqhtto flyingtheglideslopebeam. After15 seconds,theGSOC+15EOFFswitchopensandbothGSOC+15EO switchescloseto increasethegainof theGS deviationsignalfromthecaptureto thecontrolphaseandto adda dampingsignalto improveglideslopetracking.Thiscombinedsignalis thenprogrammedto decreasetheratelimitas a functionof increasingTAS. Fromtheratelimiter,a displacementandintegralsignalissuppliedto theautopilotcomputer.Theotheroutputfromtheratelimiteris summedwithwashedoutverticalgyroto eliminateanytendenciesforbeamstandoffdue to steady-stateattitudechanges,displacementlimited,summedwithvertical gyro,
amplified, and applied to theSG-605to drivethe pitchcueof theEAD1. Thisprovidesa commandto smoothlytracktheglideslopebeam.
At LOCII,theglideslopedeviationsignalis first-stagegainprogrammedas a functionof timeandTAS,andstartsat the1200-footradioaltimeter(RA)trippointwiththeRA valid. Thegainisreducedfrom1 to 0.33. If theRA is invalid,glideslopegainprogrammingis initiatedafterglideslopecaptureandNOC.
The secondstageof glideslopegainprogrammingbeginsat analtitudeof 250feetwhentheradioaltimeteris valid. Theglideslopesignalis programmedto a gainof zeroat zeroradioaltitude. Thisis a linearreductionfromgainof 0.33at 250feetof radioaltitude.If theradioaltimeteris invalid,thesecond-stagegainprogrammingis triggeredby themiddleImarkersignal. In thiscase,thegainreducesfrom0.33to 0.13andremainsat the0.13level. The rateof gainreductionforbothstagesis controlledby timeandtrueairspeedin additionto theradioaltimeteror middlemarkerinputsignals.
22-14-00Paqe216Mar-15/89
Use or disclosure of mformatlon on this page IS sub)ect to the restrlchons on the title page of this ducument.

Honeywell WWANC’CITATION V
3. C. (13) Go-Around Mode (See Figure 212.)
Whenthego-aroundmodeis initiatedby pressingtheGA buttononthethrottlehandle,theGA logicswitcheschangestate. This opensthesignalpathfromthepitchratelimiter,disablesthepitchattitudewashoutcircuitandinsertsa voltagerepresentinga fixedpitchup command.Thissignal,appliedto theSG-605to drivethepitchcueon the EADI,commandsthepilotto pullthenoseof theaircraftup to thefixedgo-aroundangle.
(14) AltitudePreselectMode (SeeFigure213.)
Thedesiredaltitudeis selectedon theVNAVComputer/Controller.Thismodeis selectedby pressingtheALT SELbuttonon theflightdirectormodeselector.Anotherpitchmode,VS, IAS,or PITCHHOLDis selectedto flythe aircrafttowardtheselectedaltitude.Whenoutsidethe altitudebracketpoint,ALTSELARM andtheengagedpitchmodesareilluminatedon themodeselector.TheengagedpitchmodeandASEL (white)areannunciatedon theEADI.
Whenreachingthebracketaltitude,thesystemautomaticallyswitchesto ALT SELCAP andthepreviouspitchmodeis cancelled.At thistime,ALT SEL CAP is illuminated on themodeselectorandASEL (green) is annunciated on theEADI. As the aircraftreachestheselectedaltitude,ALTSELCAP is cancelledandALT is engaged.TheALT SELCAPon themodeselectorandASELannunciatoron theEADIareturnedoff;thenALT is illuminatedon the mode selectorand ALT (green) is annunciated on theEADI. If the air data
computer is not valid, the altitude preselect modecannotbeselected.The commandcuewillbiasoutof viewif theverticalgyrois notvalid.
Theerrorsignal,representingthedifferencebetweenselectedandactualaltitude,is appliedto theflightdirectorcomputerfromtheVNAV. The bracketdetectoris armedby a groundfromtheVNAV.Whenthebracketdetectortrips,theerrorsignalis appliedto theTAS programmer and the gain is decreased as a function of increasing
TAS. Theerrorsignalis summedwiththe altituderatedampingsignalsbeforebeinggainprogrammed.Theprogrammeroutputisratelimitedas a functionof TASandappliedas an outputto theautopilotcomputer.It is alsosummedwithwashedoutpitchattitudeanddisplacementlimited.Thenit is summedwiththeverticalgyrosignal,amplified,andappliedto the SG-605to drivethepitchcueon theEADI. Thisprovidesthecommandto capturetheselectedaltitude.
AfterALTSEL CAPandbeforegoingintoALT hold,anychangeofpreselectedaltitudewillresultinALTSELmoderevertingbacktoARM.
22-14-00Page217
Mar 15/89UseordisclosureotInformationon this page is subject to the restr!ctlons on the t!tle page of this document,

Honeywell UWUYANCECITATION V
3. C. (15) VerticalNavigationMode(VNAV)(SeeFigure214.)
To utilizetheVNAVcapabilityof theVNAVComputer/Controller(VNCC),the pilot must set selected altitude, station elevation, and
TO-FROMoffsetfromthestation.
The altitude is selected by placing the selector switch t~ ALT and
slewing the display to the desired altitude. TheSTAELswitchpositionis selectedandthe stationelevationis seton thedisplayby rotatingthesetknob. Resolutionis 100feet. TheTCIor FRposition is selected and the distance ahead of, or beyond the VOR
(along track offset) is set. Resolution is 0.1 nautical mile. Theverticalangle(VANG)positionis selectedandthecomputedverticalpathangleto thedesireddestinationis displayed.The pilotmayobservethe continuouslycomputedflightpathangle(anglecomputemode)untilthedesiredangleis displayedandthenpress the VNAVbutton on the flight director modeselector.Thiswillfreezetheangleandcapturetheverticalpath,or thesetknobmay be usedtopreseta desiredverticalangle(fixedanglemode). ThenpressingtheVNAVbuttonwill arm the system to capture the selected vertical
path angle. Should the VNAV button not be pressed before theselected angle is reached, theVNCCwillrevertto theanglecomputemode,continuouslydisplayingthecomputedangleto thedesireddestination.
Whena verticalpathhas been selected by pressing the VNAV button
on the modeselector,theverticaldeviationwithrespectto theselectedverticalpathis displayedon the EADI and EHSI. Pressingthe VNAV button willcausethe aircraftto capturetheverticalpathimmediatelyif in theanglecomputemode. Thiswillcancelanypreviouslyselectedpitchmode. VNAVCAP is illuminatedon themodeselectorandVNAV(green)is annunciatedon the EADI. IftheVNAVbutton on the modeselectoris pressedbeforethepresetangleisreachedin thefixedanglemode,theVNAVARM andpreviouslyengagedpitchmodeare illuminatedon themodeselector.Thepreviouslyselectedpitch modeandVNAV(white)is annunciatedon theEADI.Whentheselectedangleis reached,VNAVCAP illuminates on the modeselector,VNAVARM andthepreviouslyselectedpitchmodeturnoff.On the EADI,VNAV(green)turnson andthepreviouslyselectedpitchmodeis turnedoff.
Whenthe aircrafthasreachedtheselectedaltitude,ALT is
illuminatedandVNAVCAP is turned off on the mode selector. ALT isannunciated and VNAV is turned offon theEADI.
22-14-00Page218Mar 15/89
Use or dmclosure of mformatlon on this page is subject to the restrictions on the title page of this document.

Honeywell WUWANCECITATION V
As the aircraft passes the selected point or the desired altitude,
the vertical path problem will be cancelled. This replacesthevaluesin STAEL, TO, FR,andVANG with dashes. This prevents use of
erroneous VORTAC data for a subsequent problem. Furthermore, should
the computed angle reach a preset maximum, the provision forvertical path navigation will be cancelled in the samemanner.Thisautomaticcancellationwillbe precededby flashingof theVANGdisplayforthelastdegreeof computerverticalpathangle.
The signalrepresentingVANG/verticalerroris suppliedto theflightdirectorcomputerfromtheVNAVComputer/Controller.Intheanglecomputesubmode,theflightdirectorsynchronizesto theconstantlychangingangle.WhenVNAVis selectedandimmediatelycaptured,the synchronizerbecomesan angleholdci~cuit.Anydeviationfromtheengagedangleprovidesan errorsignalintotheTASprogrammer.
Inthefixedanglemode,theselectedangleis storedin thesynch/holdcircuitin theflightdirectorcomputer.Whentheaircraftreachesthepointwheretheactualandselectedanglesareequal,thesystemcapturesandfliesthepreviouslyselectedVANG.Anydeparturefromthisangleprovidesan errorsignalintothe TASprogrammer.
Theerrorsignalis gainprogrammedandpitchrate‘limitedas afunctionofTAS. It isthensentto theautopilotcomputer.Insidethe flight director computer, it is summed with a washed outvertical gyro signal, displacement limited, summed with the verticalgyro, amplified, and applied to the SG-605 to drive the pitch cue onthe EADI.
A sampleproblemis diagramedin Figure215. At the instantshown,the aircraft is 1000 feet above and 13.0 range miles from a VORstationwhichhasan elevationof 1500feet. The pilotdesirestogo to 10,000feetat a point10milespasttheVOR station.Iftheproblemvariables(STAEL,ALT,TO-FRM)hadalreadybeenput intothe
VN-212andthepilothadpressedtheVNAVbuttonon themodeselectorat the instantshown, the aircraft would climbto thedesiredpointat a 3-degreeangle.
22-14-00Page219/220‘Mar15/89
Use or disclosure of mformatlon on thw page IS subject to the restrictions on the title page of thts documenl.

.—— — —AS405MODEiELECTOR 1
i=EDGELIGHTPANEL
7J1
BA
r
————MS-205MODESELECTOR
7J1 Z-500FLIGHTDIRECTOROMPUTER
SJl
‘a
b!
7(
7
7
7
7
7
7
7
d
E
.
2
1
5
3
4
6
,7
8
ia
:7
<
5 VOLTLIGHTING -
c TO 65J1B.39
zT065J1B-46
rJ
IIII
II
l=10l?II 2Ig1-
I$!Ig:;
I~r~
1%
Im
I
I
I
I
I
IIIIIIIIIII
I
I
I
I
IIII
I
I
II
I
I
I
I
I
I
I
I
TEST INPUT GND- TO LAMP
{
OUTPUT LNA~DRIVERS DURING MACF
TEST—+13 vDC
TEST
ANN ~
SWITCH
+13 vDC
3r
65J1B-43125J1A-67
-L&w kllJ1.12
NAV ARM
&
NAv CAP
5
APR CAP
3
AR&
I
65J1B-55+ 125J1A-76
-dARh
NAV LOGIC
(SEE SH2FOR DETAILS)
I b
I CAI 65J1B.56- 125J1 A-77
~ 65JIB-59125J1A.60
ARh
e
vOR APR LOGICfSEESH2
FOR DETAILS)
CAI
—
~ =JIS-SO125J1A-LI1
r65J1 B-49125J1 A-Ti
APR ARh4
I
II
IIIIIIIIiIIIIIIIIIIIIIIIIIIIIII
I
I
AR1
-GAPR LOGIC
(SEE SH2FOR DETAILS)
CA
>
r
65J1B-50125JIA.7?
+26vDC
ti
65J2B79DME’GROUN[RANGE
BC ARM BC CAP
Q
ALT SEL
CAP
r
65J 1B-57125J1A-7E(NOTE 3)
ARI
G
SC LOGIC(SEE SH3
FOR DETAILS)
CA
c--I
ALT
&--LEEPALT SEL
ARM
&r
65J 1B-41125J1A-65
AR
-dALT SEL LCGIC
(SEE SH3FOR DETAILS)
CP
Ic--~ ALT
SEL
●
r65J1B-42125J 1A-66
Vs
m65J1 B-46m
*IAS65J1 B-47
r125J1A.70
115J1.4E -1-L=+‘/NWARM
&
VNAVCAP
mr
65J1B-51125J1A.74
4-c-1
J VNAV
r65J1B-52125J1A-75
-’$1-DIM
CB
L26 VDC nBUS — e 65J1 A-83
- 65J1 B-4o125Jl A-6-4
REMOTE
fi=&4 -mzl-L———. * ——— ——.NOTE
1 ALL LOGIC BLOCKS PROVIDE A GROUND OUTPUT TO LIGHTMODE ANNUNCIATORS ON MS.205
3 A LOGIC LOW IS APPLIED TO THE REIAY WHEN FMS ISSELECTED WHICH DISABLES THE FD APR MODE
2 THE LOGIC GROUND OUTPUT TO THE SYMBOL GENERATOR IS
uSED TO ANNUNCIATE THE MODE ON THE EADI.

Honeywell W!!kl!ANcECITATION V
~————————— —.—————. ——— ——— ——— ———, HDG LOGIC 1i
IIII
NAv ARM TF ST
VORAPR ARM
BC ARMs HOG ON
o -
I-%
LGMP HOG ON ANN
MOM 15 VDCOR vER
b TGND TO 7J1A-71
FROM 7J1 A.55E
GAR
~?
NAV CAPCLR
vOR APR CAP
EC CAP PWR UP+ FO~
1-——— ——— ——— ——— ——— ——— ——-. ——.— ——, -i
r—————— ——_ ———— ———— ———-t- ———— —~
iNAVLOGIC
I
I
1
I
I
III
MOM 15 VDCFROM 7J 1A-56
I
‘PRARM+=-IS4-
‘oR!9-&%2JNAV VALIO 4
NAV SEL NAV ARM 1 ANN
~ TRIP GND TO 7J1A-73
LBS TRIP
NAV ARM NAV CAP 1 ANN
NAV VALIDGND TO 7J1 A-74
I y7
+%K$IA.6~TO ANN vOR/LOC
1-\,r
——— ——— ——— ——— ——— ——— —— -,. ——— ——-
r ——— ——— ——— ——— ——— ——— —— -,.——— .——,1.VOR APR LOGIC
I
I
I
III
NAV VALIO
MOM 15 VOC s o VOR ApR SEL VAPR ARM ANN
FROM 7J1A-89 ~ TRIP
mT
GND TO 7J IA-67
BC
GA L8S TRIP
HDGvOR APR ARM
NAVNAV VALIO
GND TO 7J1 ‘.S8
II
I
IL-
1
——— ——— ——— ——— ——— ——— ———. ——— —— J
.—— — ———— ———— ———— ———— ——-—— ———-: APR LOGIC
MOM 15 VDC.Dn,, .!. . . . — ns-
1
.“V,., ,4 ,Q.,.,
T“ x~L
ALT PRECAP5
GA R
ALTVes
VsCLR
APR ARM APR CAP ANN I
IASGNO TO 7J1B-iO
PwR UP + FD VALIDGSVALID
NAV .+ I
“v
Use or disclosure of information
F1 ight Director ModeLoqic
Figure 201 (Sheet2)-
22-14-00on this page IS
Page 223Mar 15/89
subject to the reslrlctlons on the Mle page of thts document.

Honeywell RW!FA”CECITATION V
—.—— ———— ———— ———— ———— ——.. — ——
P’””c 7
INAV VALID _ I
s BC SEL BC ARM ANNMOM 15 vDC o
I=5 TRIP GND TO 7J1A-68
IFROM J?A-57
5 LATERALR
I
TTL ILBS TRIP SENSOR
HDG CLR
1
BC ARM — INAV
PWR UPVOR APR
NAV VALID —+FDm
III
L———— ———— ———— ———— ———— ——.. — —— J
———— ———— ———— ———— ———— ———— ——
P“’’””c 1
TEST IALT PRE CAP —
IAP ENG . VS<10 FPS —
ALT ERROR<25 FT —s ALT ON ALT ON ANN I
I
oMOM 15 vDC
* GND TO 7J1 B-75- T
IFROM 7JI B-56
I GA5
R
CL13 II
Vs
GS CAP PWR~ADC VALID I
I +FD VALID
IL ———— ———— ———— ——. — ———— ——. — —— -1
f’A’TSEL LOGIC———— ———— ———— ———— ———— ———— ——. 1
1 I I II
I
s ALT SEL ARMo
MOM 15 VDC* ALT SEL ARM ANN
GND TO 7JI B-71 iFROM 7J1 B-60 - T
I
5R
ALT
I
CLR
GA
PWR UP+ADC VALID
I +Fom
I1- ———— ———— ———— ———— ———— —..—— ——, J
nALT ERRORDETECTOR
+
i
———— ———— ———— ———— —,——- .—— .-— —-
F’””c 1TEST 1
I
III
I
is VS ON
oMOM 15 vDC
,- VS ON ANNGND TO 7J1B-76 i
c TFROM 7J1 B-56
GS CAP
I
IALT PRE CAP ONE
ALT SHOT
GA I
IASPWR fiADC VALID+ FD VALID
I
L ——— ——— ——— ——— ——— ——— ——.— _, JAD-k3.585@ R?
F1ightDirectorModeLogic
Figure 201 (Sheet 3)
22-14-00Page224Mar-15/89UseordisclosureofInformationonthis page IS sublectto the restrictions on the title page of thi.? document.

Honeywell M!MRANCECITATION V
r —.—— ———— ———— —.—. ———— ———— ——IASLOGIC
ITE:’T
7
Is
oIAS ON
‘::;;EB-77 ~
IMOM 15 VDC s TFROM 7J1 B.57
I
5GA
ALT
I
ONE I
I SHOT
I VsI
ALT PRE CAP
I
GS CAPPWR &ADC VALID+ FD VALID I
h——.———— ———————— ———.———— ——— J
F———— ————— ————— ————— ——.——— ——-
I
I
I
I
I
I
s VNAV VALID VNAV ARM ANN
MOM 15 vDCFROM 7J1 B-61
GND TO 7J1B-73
5
Vs
ALT VNAV CAP ANN
GA PWR&ADC= GND TO 7J1 B.74
IAS + FD VALID
GS CAP
I
IIII
1
I1- ———— ———— ———— ———— ———— ..,— —— ——, A
1- ———— ———— ——— ———— ———— —--—— ———
I
GALOGIC 7
I
TI;ST
“%
I
I
so .
GA L7<MP GA GND IMOM GND
Da vER TO 7J1 6.66
FROM 7J1 B-54
I
IE
,- R
ANY vERT MODE
I
CLR IAP ENG
TCS
I
PWR UP+FO~ I
LI
———— ———— ———— ———— ———— -.,——— __, d
AD-18685@ RI
F1ightDirectorModeLogicFigure201 (Sheet4)
22-14-00Page225/226
Mar 15/89Use or disclosure Of mformatlon on this page IS sub~ect to the restrictions on the title page of thw document

+13VDC FROM 7J1A2
+28 vDC FROM 7J1A 9
8J 1
E
c
-——— ——— .—— ——— ——— ——— ——MS-205MODESELECTOR
7i I
9.1 VOLTLIMITER I
Tr--——. 1
I
II
- SET
I
-
- – ‘w
SJ1
LAMP FD OFF GNDFLIP FLOP
(RIVER N TO 7J1A.5S
RESET
OFF
311, I
I I I
] @FF..— — J
L
I——— ——— ——. .—— ——— ——— —— -1 ..,=,
FD OFF LogicFigure202
22-14-00Page 227/228‘Mar1“5/89Use or disclosure of information on this page !s subject to the restrtctlons on the title ptge of thts document.

Honeyell WRPANCECITATION V
FILOTS c-14D DG—— ——
––k -r
——— ——— .— ——— ——— — —— 165J1A SG.605 SyMBOL GENERATOR
I
III
I
!
IL
28VDCDGVALIDOUTPUT
1’
e i I
I I
wuI
55J2B
80DIRECTOR COMPUTER
r—————l H +2’””2A—
21
22
23
w
49
5C
4:
4(
:
ANALOGTO
DIGITALCONVERTER
65J2A 125J1B-3 82 BACKUPHEADING
FROMOPTIONAL105
——— — —— -r
FII
{+1
II
JIA
1
36
200 mVAC/DEGHEADINGERRORTO FZ-500FLIGHTDIRECTORCOMPUTER
37
65J2B
Y
——. ———rR1.106S 1IINSTRUMENT REMOTE
CONTROLLER
H
23J1(x)
p@ :::;
liEADIN(’I
IKNolj
rI
F26VAC
I
+I l-l
SLBACKUP km2J’ ED-6irEHT 1
IJK
D
E
FBc
rI
II
(NoTE~ — — -J 7J1A
It I I
I —CRSKNOB
@ $4(xl
o
{Y)f31
(Z1 3 DIGITALCOURSE
ERRORTO
PROCESSORANALOG
CONVERTER
=-L 200 mVAC/DEGCOURSEERRORTO FZ-500FLIGHTDIRECTORCOMPUTER
—
II1- —.— ——— J
I 04
h=C2J1 65J21
.D3~(x) z
(Y)[ 2:
(z) pu
Ir SGBACKUP
HDGNO 2(NOTE1)
.—— — ——— --—— ——— —-NOTES: .—— — —
1. THEHEADINGINPUTUSEDISA FUNCTIONOFAN EXTERNALHDGREVSWITCH
2. SEEFIGURE206FORTHEINTERCONNECTSNECESSARYFORDISPLAYINGHEADINGANDCOURSEINFORMATIONONTHEEHSI.ALL INPUTSTOTHESG-605AREALSOROUTEDTOTHEOPTIONALMG-605FORUSEINTHESGBACKUPMODE.
3 AD.18687
EFISHeadingandCourseSelect Interface
Figure 203 22-14-00Page229/230
Mar 15/89Useordisclosure01mlormallonon thm page IS sub)ect10 the restrictionson the title page of Ihw document.

Honeywell M!WPAN’ECITATIONV
IY’LWERTICAL GYRO
.— ——— ———lJ1 7J1A
I!
-.Y , 14
-t }
ROLLATT
I
TO FZ-500
P1l; G - 1
T 15
I 5
. v w1- ——— — ——— — -1
ROLLATTNO.2(NOCONN)
{:
W’w,-.{!n-:ROLLCOMMANDFROMFZ-500
[ VG-14A VERTICAL GYRO L
IIIIII
l--l+ 7.IIB
m.&1
‘cc 27
~:: }
PITCHATTTO FZ-500
AA 28
PITCHVG PITCH ATT
SYNCHROx (200 mVAC/DEG)
x ●
26 VACY ●
z r ●
L—v— -P=
—————— (-9
PITCHCOMMANDFROMFZ-500FLIGHTDIRECTORCOMPUTER {-
+
PITCHATTNO.2(NOCONN)
b
JIB
30 ●
31 ●
EFISRollor PitchAttitudeandCommandInterface
65J2A
8
9
0
‘5
‘6
15
16
17
7:
74
1
8
19
?0
——— —— —— ——5G-605;YMBOLGENERATOR
J
+ROLL
ATrlTUDE
+ PROCESSOR
+
+
aal--
Gsl=
i
PITCHATTITUDE
15 PROCESSOR
16
17
P--
F
IIIIIIIIII65J1A
w
——3J1 ED-GM EADI 1
NOTE1I
—— -J
III NOTES:
I1.
I 2.
I
II
I——— ——— —
SEEFIGURE205FORTHEINTERCONNECTSNECESSARYFORDISPLAYINGAITITUDEANDCOMMANDCUEINFORMATIONONTHEEADI.ALLINPUTSTOTHE SG-605AREROUTEDTOTHEOPTIONALMG-605FORUSEINTHESGBACKUPMODE.
AD-1S6S8
Figure204 22-14-00Page231/232
Mar 15/89Use or disclosureof mformattonon this page IS subject 10 the restrictionson the Mle page of this document.

Honeywell WMRANCECITATIONV
+f~ti
.—— ——— ——— ——— ———~J , EO-SGOSAOI(PILOT) REv INOTE 1)
3
3J 1
REV
( )
T
38
()
66-~ COLOR 3 ●
REv(
— 125J1A.53
39 67 —125J1A.54
-REV R
___ ———
d b50I 1
T (j :)
~ COLO130 ●
1-72
51 (
—125JIA41
R$V L JT3 —125J1A 48
.—— ——-
(+k++++++p----——’~ x —(j ~) d~ FLYBACK ●
(
—1291A 57
-r
——— —
I_——.——. J—125J1A-58 MFD SYMBOL GENERATOR 1
125J1B,
H‘l”’ l-’ k , , , , , , ,
VALID A nk~m AV A ,.-I..L,
II I
—
.
T9
)x DEFLECTION
10. 11
12 )Y DEFLECTION
: %2==+=REV<J::y:REv
LOGIC29 NC
Pm
+~b
VALID SEC 20 — NC
STROKE READY sECB(=
16
~)
NC17
——— ——— ——— ——— ———
I
I
I
I1
i125JlAJ II
L———
.—— — ——— ——— ——— —.—;G-e05 SYMBOLGENERATOR(PILOTI 1
b
v ———‘R1 ADI STROKE READY
65J2BMC- MFD
126J1controller
‘R1 ADI VALID INPLJTSG PWR DN 10
35 LEFT SGBACKUP
L
lDl Y DEFL OUTPUT
I
———
NOTES.ADI X DEFL OUTPUT
I 1 THESE ARE TRISTATE DEVICESNORMAL OPERATION THE DEVICE
IIS OFF REVERSIONARY OPERATIONTHE RECEIVER (R) IS ON ONLY ORTHE TRANSMITTER (T) IS ON ONLY
—J
—1
II
I—J
ADI FLYBACK
i2 THE MFD SYMBOL GENERATOR
AND MC-SOO ARE OPTIONAL
ADI RASTER/STROKEI
ADI VIDEO
IADI COLOR O IADI COLOR 1
I
ADI COLOR 2 IADI COLOR 3
I
——— ——— ——— ——— ——— — J
● [:ACHLINECONSISTSOFATWISTEDSHIELDED PAIR
AD 18689
EFISED-600EADIInterconnectsFigure205
22-14-00Paae233/234“Mar15/89
Use or disclosureof informationon this pege is subjecf to the restrictionson the Mle page of Ihls document.

—
II -L––. –––––. –––––-J
b65J 1A
(=
50
51
46
(:
64—
65
(:
61—
62
—(~
43
44
—(~
47
48
(=
28
29
(:
31
32
(~
34
35
(=
37
38
(=Q
40
41
I.—— — ——— ——— ——— ———SG-S05SYMBOLGENERATOR(PILOT) 1
k
- ——— — 1
PRI HSI STROKE REAOY65J2S
MC-BOO MFD12&Jl CO~ROLLER
IPfil HSI VALlD INPUT
SG PWR ON 1035 LEFT SG
BACKUP It4Sl Y DEFL OUTPUT L
IHSI X DEFL OUTPUT
I
- ——— —
NOTES
HSI FLYBACK
HSI RASTEFVSTROKE
HSI VIDEO
III
HSI COLOR O IHSI COLOR 1 IHSI COLOR 2
I
HSI COLOFi 3I
——— ——— ——— ——— ——— — -1
EFISED-600EHSIInterconnectsFigure206
22-14-00
1 THESE ARE TRISTATE DEVICESNORMAL OPERATION THE DEVICEIS OFF REVERSIONARY OPERATIONTHE RECEIVER (R) IS ON ONLY ORTHE TRANSMITTER (T) IS ON ONLY.
2 THE MFD SYMBOL GENERATORANO MC-800 ARE OPTIONAL.
● EACH LINE CONSISTS OF A TwISTED SHIELDED PAIR AD 186W
Page235/236Mar 15/89
Useordisclosure01intormellononIhlspageksubject10therestrictionsonIheIlllepageofthisdocument,

Honeywell M!WANCECITATIONV
2D0mVACIDEG
{-
HEADING ERROR +FROM SG-SOSFIG. 203
——. ——— — —-[ M.241 AIRDATACOMPUTER Isll
A/C =!=+AIRSPEEDAS (11.1 IIWDCIK
PITOT , SENSCIR
1- .—— —— —.
1===”’=- –,– ~ ,VGRE)LL ATT(200,11v AC L3EGI
Iu
I
I ROLL
I
SYNCHRO
26vAC
I
I
7JIA
I
4
5
1
1
L ——— . —— 4
——— ——— ——— ——— ——— ——— ———r~.500 FLIGHTDIRECTORCOMPUTER
I I
HeadingSelectandGo-AroundModeFlowDiaqram
~‘ ‘ “’MoD~+’E3-iEF
L150 KNOTBIAS
1 II
———- ——- —-- ——--- - J
I
~o————--13 VDC HOIL BAR LEIA$
-1
●
\
L
I
-1.—— —— .—— —. —.— .—— — —.
Figure207 22-14-00
llJ1
-a
GND FROMN PC-500
FOR 12 DEGBANK LIMIT
1 LOW BANK LIMITADJ r12 DEG
KLJIA
-a
ROLL CUD18 TO A? CMPTR
FIG, 210
NOTE:ALL LABELEO SWITCHESARE SNOWN IN TNE OPENPOSITION. LABELEDCONDITION CLOSESSWITCH.
1ROLL SARGAIN SENSITIVITYAOJUST
:)
ROLL CM12TO SG405FIG. 2D4
AD-15691-RI
Page237/238Mar 15/89
useordisclosureofin~orm&sllonon this page is subject to the restrlctlon$on the Mle page of thm document.

Honeywell MW?ANCECITATION n/V
-.—— .—— — ——— — ——. —.— — ——. —.— ——— — ——1I =-= FLIGHTDIREcToRcOMP”TER
JIA
7J1A
1I
= TAS G41N iPROGF!AMMEm
11
1?
300 mVACIOEG
(
COURSE ERROR -pll~m=as *
iw%bs”COURSE
CUT LIMITER(NOTE 41 7
BANK RATELIMIT LIMITINOTE (NOTE
2)
—
\
lWIA
-a
ROLL CMD,IJ TO AP
CLEPTRFIG. 218
m!EO KNOT
BIASvOR ● NOCEO
+VIVR
~-2’Al==cwPwE* SJt——— —
l-l I
*Ar-43A/C?1101
WCSTATIC
I
1I
---- —— -- -—-
-’7FIXED
DISTANCE
II
D -----------
1-——— ——— — Y
r——— ———
SG-S05SYMBOLGENERATOR 6sJ2B
r—.—— ——
PILOT’SRNZ-SSONAVUNIT
Mti
1S4J1
(
40 mVMl + lo2 x
❑ A 44J2n
I
OUTPUT _ ,0, 1
US-422
(
57GME DATA :
)
42 + ME
I
44 43- INPUT
24 VDC GUE VALIO 4S u
I
DUETUNED TO NAV GNO S4 51
I
RS-422NAV DATA
(
+ss
)
a + RADIO (VOR)
(TUNED TO VOR) – 56 41 - OEVN lNPLTl
L(
RADIO (VOR) + m 2
DEVN OUTPUT - 97 21
——— ———I
NOTES
1.
2,
3.
4,
ALL LABELEO SWITCHESAFIE SHOWN IN THE OPENmslTmP4, LA6ELE0CONOITION CLOSESSWITCH.
BANK ANGLE LIMITS.
NORMAL =227.S0NOC+OSS+A05S-i120
RATE LIMITS:
FINVOR ●NCC s 1.0 DEG/SECLOC + VAPR .5.5 DE GISECOTHER MODES = 3,0 OEGISEC~~0 FOR Rp+VOR ONLY
JP40LL BARGAIN SENSITIVITYAOJUSTk ——— ——. A
I w~.14AvEFITICALGYR0
——— ———lJ1 VG ROLL ATT
C7DDmVAC/OEG)
I
g w 1
~ 1
I ROLLlLu IA
~SYNCHRO
~
~=)
ROLL ATT
IVAC Q To SO.605
~ FIG. 204
I
\
:1ROLL CMOTO SG.SOSFffi. 204
+;,As0----13 vDC I
-1——— ——— ——— ——— —— ——. ——— —.— —— ——— — —— AD 13492 R2
VORandVOR Approacht40de F1ow Diagram
Figure208 22”14“00Page239/240‘May25/90
Use or disclosure of information on Ihls page is subject to the restrictions on the title page of thm document.

Honeywell WIJErANcECITATIONIlfl
—— ——— ——-— .—— —.— ——— — ——— ——— ——— ——— ——— ——1
~-tiFLIGHT,lRECTORCOMPUTER
Of MOO OUTPUTIS 0PPC2S11[ PHASEFOR BC
* T
1A
11
31
83
u
52
2
2(
1
1
3
2CCImVAC DEGCOURSE ERRORFROM SG 605FIG 203
I I A
— QBANKRLIMIT LI(NOTE (N
2)10J1A
-0
ROLL CMD18 TO A? CMPTR
FIG, 218
I164 KNOTsllAs
+?
t
I
p-241 AII?DATACOMP”TER——— ——— —
1- 9J 1
\
TIME CONSTANTLCC=15 SEC
*
I
.. —- -—-— -—
[
APR CAP] -’b
10 NOC
r+ y
TTL
5–--–- J
NOTES
1-——— ——— — J--’ 1
2
3
4
ALL LABELED SWITCHESARE SHOWN IN THE OPENPOSITION LABE LEDCONDITION CLOSESSWITCH
BANK ANGLE LIMlrSNORMAL = + 215(NOC+DSS+AOSSI =*12”
RATE LIMITSRNvOR .NOC 10 DEGISECLGC+VAPR = 65 DE G/SECOTHER MODES -30 DEGISEC
~45° F0R RFJVDR ONLV
——— ——— .~T.30G RADIOALTIMETER
I12COFTGN0
I 2SWC RA VALID
LOC II
r———— . . ——— .——
PILOT’SRNZ-B50NAVUNtT lWJ1~w2B SG-6G5SYMBOLGENERATOR
OA
I
{~)
66JS0
R6-422NAV DATA
(*) m 40 (*) LOC DEVF4
I $=’LOC DEVN “) W
(TUNEO TO LOC) (-) 5* 41 (-) INPUT OUTPUT (-) EIT
1- ———— —— ———— ——
3ROLL SARGAIN SENSITIVITYADJuST
~G-14A VERTICALGYRO ~ ,mmVAC DE.,
——— — ——VG ROLL ATT ——
-dig
Pa: J I%
L IT 1
10.I14
I9 :\R{
ROLL sSYNCHRO AP Cl. .
—ROLL CMOTO SG4GSFIG 2W—IA
+–13votROLL OAR BIAS
ROLL AmTo sowsFIG. 2M r
AD 1SS93R2
——— .—-—— —— ——— —— ——— —— ——— ——— ——— ——— —— ,——L- ——— ——— A
Localizer,LocalizerApproach,andBackCourseModeF1ow Diaaram
Figure209” 22-1 4“00Page241/242‘May25/90
Use or disclosureof informationon this page is subject 10 the restrictionson the title page of this document.

Honeywell M?R!ANCECITATION V
IQ)‘ )CATEGORY I I CAT II :
2600’ RVR (RUNWAY VISUAL RANGE) AT 200’.14M ICATEGORY IllA(700’ RVR)
40
ILOCALIZER CATEGORY II GATE I I
t 35 JIA ,—.
LOCALIZER TRANSMITTERTHE LOCALIZER TRANSMITTER. OPERATING ON ONE OF THE 40 ILSCHANNELS WITHIN THE FREQUENCY RANGE OF 108.1 MHz TO 111.95MHz, RADIATES ABOUT 100 WATTS, IS HORIZONTALLY POLARIZED,AND HAS MODULATION FREQUENCIES OF 90 AND 150 Hz. CODEIDENTIFICATION (1020 Hz} ANO VOICE COMMUNICATION AREPROVIDED ON THE SAME CHANNEL.
Xk~ARKER / l+3&’-i*.. ----- ------ .“,... ..—
DECISION ALTITUDES
GLIDE SLOPETRANSMITTER
/THE GLIDE SLOPE TRANSMITTER, OPERATING ON ONE OF THE 40 ILSCHANNELS WITHIN THE FREQUENCY RANGE OF 329.15 MHz TO
/GLIDE SLOPE
\
Q
.. .
IMIDDLE MARKER
w“ ,--
LIGHT COLOR - PURPLE LIGHT CCIDENTIFICATION - TWO DASHEStSECONDCONTINUOUS IDENTIFICATION - ALTERNATE
MODULATION -400 HZ MUUULAIIUN - 1.SUU MZ
OLOR - AMBERDOTS AND OASHES
——— ——. — .— (95 DOTiDASH COMBINATIONS PER MINUTE)—m—m—m— ● —* —*— O —
CAT I I CATEGORY II I CATEGORY ill A(700’ RVR), 6(150’ RVR), C(O’ RVR).—. —
MIDDLEMARKER ~ ~’ooo””~%%<z
InstrumentLandingSystem(ILS)DiagramFigure210
22-14-00
335.0 MHz. RADIATES ABOUT 5 WATTS, IS HORIZONTALLY POLARIZED,AND HAS MODULATION FREQUENCIES OF 80 AND 150 Hz. THE GLIDEPATH IS ESTABLISHED NOMINALLY AT AN ANGLE OF 2.5 TO 3.0DEGREES, DEPENDING ON LOCAL TERRAIN.
m MPASS LOCATOR TRANSMITT*COMPASSLOCATOR TRANSMITTERS ARE OFTEN SITUATED AT THEMIDDLE AND OUTER MARKER SITES. THE TRANSMITTERS HAVE APOWEROF LESSTHAN 25 WATTS, A RANGE OF AT LEAST 15 MILES,AND OPERATE BETWEEN 200 AND 415 kHz. THE 1020 HZ IDENTIFICATIONCODE IS KEYED WITH THE FIRST TWO LETTERS OF THE ILSIDENTIFICATION ON THE OUTER LOCATOR AND THE LAST TWOLETTERS ON THE MIDDLE LOCATOR. AT SOME LOCATORS,SIMULTANEOUS VOICE TRANSMISSIONS FROM THE CONTROL TOWERARE PROVIDED.
RATE OF DESCENT CHARTIf eat per minute)
ANGLESPEED
(KNOTS) 2112’3 23140 P
80 400 440 475
110 485 535 565
130 575 630 690
150 665 730 795
160 707 778 849AD-923
Page243/244Mar 15/89
Use or dmclosureof informationon thm page is subject to the restrictionson the ttle pege of this document,

Honeywell WR’’AN’ECITATION n/V
r
—.— .AGZ22 NORMAL
L17J1
ACCELEROMETER—— ——— ——— — ——— ——— —————— —— ——
%?.s00 FLIGHT DIRECTOR COMPUTER15VDCw vc nOLL An WNAL‘JIA+ (~ ‘) F- FKL 20s USED TO~lA.1 (w v) CDUPENSATE FW THE
ROLL COUPONE51 GF +721EACCELE~EtERSIGNALr!+1 5 Vcc AT ml
-15 Vsc- FROM
7J1 A-5 (CiT IO1Ml A.7 (CIT VI
+ NV TO FIG ’212lVV
AcCELDAMPONO
ALT&T~
WV DAA6PINGGAIN ADJUS7
3
5
L———— J 10J1A
123 Alfl L2A7A CMD
TO AP CUPTR
aFIG 218
-sA-PIICM SYNC
——— —r~~ll DISPLAYCONT kt IIJI
II
30N(07nONLY)OAAGFOSACCEL OAUPING =
36 Voc
IAP ENG
L
i
III u
L. —— —-J6SJ1BI SO-SOS SYMBOL
IGENERATOR w NooEONDIAS UOGE OIAD
IIS MODE Gt20
AS MGDEGND-J=4s
47
6SJZAII ((4
AIS DATA Cm(-1 a7s
so GNO FSON _1LL21A-31
ACCEL CGMPGNO
L— ——— .
I!$J1
33
3s
Ss
37
PITCH BAR GAINSENSITIVITY AGJuST
IF=== 7PITCHRATELIMIT
i AIFIDATA S&W -ml--+--(
t
PITCHCUDTO S0+06FIG. 304
I SLEW CDFATFlOL
I
I
AL1 RATE S9 1640 mVOC/lK FTWIN
NGLO ERRORALT 10 ntVGC/FTVS 1 VDC/lK FT/MINtAS3S nWGC/KN {
t
“I---41
< MOLD ● SYNC GNO
IS NOLD ● SYNC GND
AS HOLD ● SYNC GND 9TAS
G41NPRoGRAMMERI
al160KNDTBIAS
lGTE:ALL LABELED SWITCHESARE SNOWN IN TNE OPENPCFSMON LABELEDCGNDMGN CLOSESSWITCH.
.——————- —---- ——————--— —-4
r&4AVERTICAL
—— —— -
IGYRO
I prT
<J
Ss
cc
An
VG PITCH1 (200mVAC10EG1
b--l)v311AVG PITCH
1s ATT INPUTTO AP
16 CA6PTRFffi. 216
==)PITCHATT TOSG.605Fffi 204 [
- –13 VDC~.
P*% H% VS + APSS
/0P,lCH SAR SIAS
AD !s6s4R,
L —.— — .— —— —— .— — —— —— —— . . —— —— —— ——
Altitude,VerticalSpeed,andIndicatedAirspeedHoldModeFlowDiagram
Figure21122-1 4“00
Page245/246‘May25/90
Use or disclosure Of Information on Ihm page is subject to the restrlchons on the Itlle page of Ihm document.

Honeywell UKR!AN’ECITATION n/V
.—— ——. ——— ——. —— ——. — ——— ——— -- ~500FLIGHT DIRECT0RC0MPUTER
7J 1A
32 SEC \
WASHOUTAND
FILTER ACCE LDAMPGND
IvvFROM
++13 VDCFIG. 211
1GS DAMPINGGAIN ADJUST
lGJIA
a
2D GSOISPLACEMENT ToAp
)
CMPTII22 GS INTEGRAL FIG. 218
KG-222 NORMALACCELEROMETE~y——— ——
ITOROUE MOTOR
2
(+1.6 vGC AT ICI
/2
TO lwIA-44 (AP DISENG
I PD ?{ -
\IF ACCEL ●1.@E+ <ZERO 0)
h.. -/ 3
SEISMICGNG FOR
I MASSACCEL OAMPI!4G ~
=
~b ~ -15 VW ?Row
7.IIA-5 (CIT II)
——. —. lWiA-7 (CIT V)
IPITCH BAFI GAINSENSITIVITY AOJUS1
+
GA
-(CA
GSOC+lS EOPITCH CMOTO S0-505FIG. 204
b
)GSOC+15 EOFF
.
L ————J L.rzr
———RT.SRADIO ALTIMETER
ToTRANSMITANT
13SVGC RA VALlO Y *
INDICATOR OUTPUT w — (NOTE 2)E
10
-1‘FTE : -:
AUXILIARY*
RECEIVE OUTPUT *
ANT
LALTTRIP COMMON P 65J2A
——— — =——— —
fiZ-241 AIRDATACOMPUTER~
NOTES:
TAS GAIN
FIG. 211PROGRAMMER~ ‘J=’’’ATORI
1. ALL LABELEO SWITCHES ARESHOWN IN THE OPEN POSITIONLABELEO CONOITICLNCLOSES
2.
3.
5WITCH.
THE GRADIENT AT20J1.W IS .4.0 mVOCIFT.OALT ❑ O VGC.THE GRADIENT AT 20J1-X IS:ALT. 4s0 n. o.ozh. 0.4 vocALT.4SOIS=10+10Ln H+2DVDC
500
CITATION II= 7.5 OEG WITH A WOKRESISTOR. CITATION V =10 OEG WITHA 225S RESISTOR.
NCPITOT
IALT (0,75V DC
~ATIc J
L—————
4
.—— ———————+=x~.——FGxvERTIt2AL GyRo
— lJ1VG PITCH ATT
IIZOOmvAC/OEGl
*
I 10J1A
I TO AP CMPTR
PITCH
I
sYNcliRo x
3s VACg
v
=)
PITCH ATT 5B2 y TO SO-W5
I*)
zg
FIG, 204
d L
PITCH HOLO~-11 VDC
/0
PITCH 6AII BIAS AD 12695 R2
——— — .—. — ——. —.— ——— ——— ——. — ——.1- ——— — 2
G1ideslopeApproachandGo-AroundModeF1ow Diaqram
Figure21~ 22-14-00Paae247/248“May25/90
Use or disclosure of InformalIon on this page IS subject to the restrictions on the title page of this document.

Honeywell MAINTENANCEMANUALCITATIONV
1
#
4
4
5
5
.—— — —— ——. — .— —.— —— —.— — ——— ——. !
3
4
1
(
1
1
11
$
!2
!4
m
il
6
2
2-500FLIGHTDIRECTORCOMPUTER
FILTER
VG ROLL A71 SIGNALFROM FIG. 20S USEO TOCOS4PENSATE FOR THE
(200 mVAC DEGI
ROLL COMPONENT OF*
THE ACCELEROMETERACCE1DAMPGNIZSIGNAL
NORMALAcCELEFSOMETEFI I+ 5 VDC Al IGIINPUT FROM 17J1-2
0
(sEE FIG. 212)GND FOR rACCEL DAMpfiNG 7
r ———.—
kSG-6G5SYMBOLGENERATOR 16U2B
IAPS VALID ~1 .OUTPUT
I
6EJ1h
APB VALIO ~INPUT
L,....__ —__
— TO MOOE LOGIC CKTS
——— —-~N-212 VNAV
ICOMPUTER/CONTROLLER
10I1A
II23 AIR QATA CUDTO AP CMPTRFIG. 218
25
d~PITCHSYNC
IPRESELECTROF4 GND
UEARIZEOESELECTROR GNO
I
1PITCH SAR GAINSENSITIVITY AOJUSTu--
u 11- ——— —TAS
GAINPROGRAMMER
I
-
1PITCH CMOTO SG-605FIG. 204
r——— —-
AZ.241AIRDATACOMPUTER
(ml
I26 VAC
(c I
+2&lI
{
‘SIN
IFINE ALT CDS
RET
I (+2.6v M +0.2 mVDC/Fl
COARSEALT 16 VOC flEf
RE1
E64
ALT RATE NO. 1 OR 2
65(500 mVC4Xl K FT/MIN)
AS (11,1 mvoC/KNl64 ALT (O.75V oc
+0.2 mV CC/FT)63
123S VOC ADC VALIO
q150 OJGr
WAS
.L-C’ II
4
4 .——. —- ___ —- --—.————— -— —-4 IL ——— —-
r——— ———
VG-14AVERTICALGYRO 1J1
IEscc
I AA
II PITCH
SYNC14R0 x
kc ,2 ~-p “
~y
Iz ~
#
NOTE:ALL LABELEO SWITCHESARE SHOWN IN TtfEOPEN POSITION. LABELEDCONOITION CLOSES SWITCH.
7VG PITCH ATT
- (200 mVACILZEGlT I
Ml10J1A
,5 VG PITCHAT7 INPUT
16 TO AP CMP1FIG. 218
‘)
PITCH AllTO sG-605
+FIG. 204
[
PITCH HOLO VS + APSB—-13 VDC
PITCti EIAR BIAS AD 186%L—————— 2
——— —— —— —— —. ——— ——— . ——— ——— ——.
AltitudePreselectModeFlowDiagramFigure213
22-14-00Page249/250
Mar 15/89Use or dmclosureOf Informationon this page is subjad to the restrictionson the tttle page of Ihls document.

‘%==”%%=+’”‘“’’’””’=O”O==-------------------[TO MOOE LOGIC CKTS
10 VNOC CKTS
I
I
I 1+1To .m
m
11
)
TO/FROM
IINPUT FROM
W FROM 31 12 SG.S05
I[
DUE 40 mVDC/Ml + “102
)
NE INPUT
- 2s 101 FROM SG-645~JIB lWIA
33 ~ 23 AIFI DATACMO TO APCSEPTR
24 36 FIG. 218
L
11 PITCH BAR GAIN
13SEN.SITIVITV ADJUS1
30 ->
PITCHCUD;o#cc$15
31 -+
>.
—
) r PITCHSYNC
t
LSYNCM-ELDI+TA2
GAINIVV FRON
_ CIRCUITRVPROGRAMMER
SHOWN ONFIG. 213 i
WASNOUTI 4
II
JL ——— .—
I4 1
TIME CONSTANT:IIIIII
((w2s VAC (c)
f :- -; ~
VNDC .40 SEC XV CAP ●APSB
\
TA2 PITCH
GAIN RATEPROGRAMMER LIMIT
TAS
150 KNOTGAIN
SIAS?ROGRAMtiER
9’”
TA6FUNCTION
GENERATOR IIII
-— —— -- -———- ;
{
SwFINE ALT C06
RET 4 PITCHLIMITER
M
m+’2.6 voc +0.2 mVOC/FT
COARSEALT
(
1S VOC REF
RET
g
l=ALT RATE NO. 2~6G0 A02/lK FT/MIN)
65
AS (11.1 mVGC/lCNlM
ALT 075V DC+0.2 mV GcIFTI
6336 VGC AOC VALID
12
II
II
II
I
I
I
I
I
Xz!lAIRSPEED
PITOT SENSOR
STATIC
STATICPRESSURE
SENSOR
L— ——— —
ALL LABELED SWITCHESARE SNOWN IN TNE OPENPOSITION. LABELEOCONDITION CLOSESSWITCH.
r——— — ——
VG-14A VERTICALGYRO lJI
IIII PITCH
SVNCFiRO x
1% s, v’$ “_
~
y
I
z g
VG PITCH ATT
w
@DO mVAC/OEG)
lWIA
VG PITCH15 An ,NpUT,6TO AP CMPT
FIG. 218
\tl-’wr-
l-:l’S L~’–—PITCH HOLD
J———————————————————————————:}
PITCH ATTTO sG.S05FIG. 204 [
AD 18697L
L ——— ——— d
VerticalNavigationModeFlowDiagramFigure214
22-14-00Page251/252
Mar 15/89Use or disclosureof informationon this page is subject to the restrictionson the title page of thm document.

Honeywell W!!!FPANC’CITATION V
1,000 FT
DME = 13.0MILES
.1
-10,000 FT
T7,500 FT
-2,500 FT -
VOR STATION, 1,500 FTABOVE SEA LEVEL
r——T
.—— —— ——— —.— — ——— ——— —I
1,500 FT (STAEL)I
i SEALEVEL
VNAV Sample ProblemFigure 215
30567
22-14-00Page 253/254
Mar 15/89Use or disclosureof informationon this page is subject to the restrictionson the Mle pag{ of Ihm document.

Honeywell MNWAN’ECITATION V
lx-2TAlRiA R::l%s
J ; ‘: “-DE
~*212vNAvcoMpuTER/controller——— .—— ——
1COMPUTER 9J1
I
lSJ1 131SPLAYH
2BVDCADC VALID 12 36 H
m
I
I
H -—
I26VAC 30 PDwER
SUPPL v3s I
1-
MONI1OR
=—— I
NOTES:
1. (H~DENOTESHIGH FORAVALID LOGIC CONDITION;ANY INVALID LOW WILLCAUSE THE ROLL OFI PITCHBAR TO BIAS OUT OF VIEWOR THE APPLICABLE FLAGTO COME IN VIEW.I
,*
c NC
I e28 Voc
I P(3WEROG VALIO
PGWER AOEOUACVISUPPLV WMEELSPEEO
J
MC)NITOR !.
GYRO IMOTOR
I
115 VAC 05
nI
2. LOW LC3G4CCLOSES PiTCHOllROLL SAR BIAS SWITCH ASSHOWN ON FtGLSRES207 THRU214 ALLOWING FIXED BIASVOLTAGE TO SE APPLIED TOADI TO BIAS CUE OUT OF
-———— ——. —— A
—.— —~-1,1 BAROALTIT”DEINDICATOR
——— —1m
I I taJ1ll_’- H
●
H
I3. WITH ROLL MOGE SELECTED
IExCEPT NAV CAP, BC CAP,ANO VOR APR CAP.
Wsw .
1- ——. ——— ——. J I~405 SYMBOLGENERATOR
———— ———— .—
24VDCHOGVALN3INPUT)J6531A
S4
L———— ————. A
——— ——— —_— —_FZ-5LXlFDCOMPUTER I
II
IIIIIII
SS.12S 7J1A
24 VOC NAV VALIO
711—
1
—
NAV CAP
44
m
87
-1VALlO (H)[NoTE 31
I
LAT OEVN VAUD OUTPUT
FROM FD OFF
4
5sW1.N IFIG 202}
I
I
I HOG VALID OUTPUT
I+
2S VOC HOG VALID23
OC VG VAUO19
i
2S VGC GS VALIDI VERT DEVN VALID OUTPUT
L ———— ———— —- INOT[ 21
I VALID IHI WITHPITCH OR ROLL
I
MOOE SE LECTEOEXCEPT APR CAP
[ VG-14AVERTtCALGYRO 1
I
I
III
GYROMOTOR
VALIO115 VAC i
IJI+28 VOC -
WHEEL H HI{SPEED
—
MONITOR FF — NC
)
POWER
SUPPLYH I GG
MONITOR
+28 V13C
POWERSUPPLY AND 0EMI FILTER 28 VC3C OUTPUT 28 VDC
VG VALID
I AD 18698@
FailureWarningFlagsandBarBiasLogicDiagramFigure216 (Sheet1 of 2) 22-14-00
Page255/256‘Mar15/89
Useordisclosure01informationonthispage is subject to the restrictionson the title page of thm document,

Honeywell WKY’”c’CITATION n/V
——— —hU&::NZ4350 yJ;
I6!
\
I
RS422
(
+ 89 *NAVDATA – 59
I
.
RS422
(
+ 57
I
-9DME DATA – 44 +
/
L ——— —
r——— —
PILOT’S ML-850MLS RECEIVER 116J1
I (ARINC 429 + 33
I*
MLS DATA _ 2 *
L ——— —
r——— —
VN-212 VNAV
I
CMPTRICONT 16J1 61
;~:~c ‘NAV 22
I
*
28VDC APS 23VALID
*
2
L ——— —
r!!ED+
!?5;’+
!zi;+
r!!?+ANGLE OFAITACKSYSTEM
““”c+
J2E
40
41
42
43
68
69
1A
76
96
7a
83
84
85
75
.—— — —
1SG-605 SYMBOL2ENERATOR
+
-)
VOR/LOC ANDGS VALID
+
-)DME VALID
+-) GLIDEPATHAN[~AZIMUTH VALID
VNAV VALID
APS VALID
RADIO ALTITUDEVALID
FLIGHT DIRECTORVALID
HEADING VALID
ATTITUDE VALID
(OA VALID
FailureWarningFlagsandBarBiasLogicDiagram
Figure216 (Sheet2)
Use or disclosure of information on this page is subject to the restrictions on the title pag?
IIIIIIIIIII
b65J1A
TOED-600EADI ANDEHSI TOFLAGFAILURE
I
IIIIIIII
IIII AD-18698@FII
J
22=14=00Page257/258
ofthlS~oCu~~#25/90

Honeywell W!ijFANcECITATION n/V
~ 4. AutopilotComputerFunctionalDescription(SeeFigures217,217.1,218,and219.)
A. Autopilot/YawDamperEngage(SeeFigure217or 217.1.)
The autopilotis engagedby pressingtheAP ENGAGEbuttonon thePC-500AP Controller.Engagingtheautopilotautomaticallyengagestheyawdamper. WiththemomentaryAP ENGAGEswitchbuttonpressed,28 voltsdcfromdisconnectswitchesS5 andS6 areroutedthroughthefollowingto1OJ1B-3Oto turntransistorQ1 on.
. AP Controllerturnknobswitchto llJ1-L● AP ControllerAP ENGAGEswitchto lJ1-P. VG Validswitchto lJ1-R. Rollratemonitortestboardto 57J1-H(CitationV only). RollratemonitorrelayK1 energizedcontactto 57J1-K(CitationV
only)● Rollratemonitortestboardto 1OJ1B-3O(CitationV only)● lJ1-Rto 1OJ1B-3O(CitationII only)
WithQ1 on, 28 voltsfrom1OJ1A-5areroutedthroughtheENGseriesswitchanda diodeto 1OJ1B-33.These28 voltsdc areroutedthroughtheVG validswitchpathto 1OJ1B-3Oto latchQ1 on aftertheAP ENGAGEbuttonis released.WithTCSnotselected,the28 voltsdc from1OJ1A-5arealsoroutedthroughthe ENG and TCS seriesswitchesto 1OJ1A-3toengagethe aileronandelevatorclutchesandareroutedto llJ1-ctolighttheAP ENGAGEbutton,whichindicatesthattheautopilotisengaged.
TheYawDamperis alsoengagedwhentheAP ENGAGEbuttonis pressed.The28 voltsat 1OJ1B-3OthatturnQ1 on areroutedthrough;idiodeto turnQ2 on. WithQ2 on,28 voltsat 1OJ1B-13areroutedthroughtheENGseriesswitchto 1OJ1B-12to engagetherudderservoclutch.Thisvoltageis alsoroutedthrougha diodeto latchQ2 on andto llJ1-RtolighttheYD ENGAGEbuttonwhichindicatesthattheyaw damperisengaged.
TheYawDampercanalsobe engaged,withouttheautopilotbeingengaged,by pressingtheYD ENGAGEbuttonon thePC-500AutopilotController.TransistorQ2 is thenturnedon by 28 voltsappliedto 1OJ1B-35,Theyawdamperengagecircuitrythenoperatesthesameas previouslydiscussed.
The autopilotwilldisengageif any of the following conditions exist:
. Pressingthepilot’sor copilot’sAP disconnect switch● Pressing the go-around switch. Pressing the pilot’s or copilot’s TCS switch. Using manual electric trim. Lossof theVG or DG valid. InternalAP Computerpowersupplyfailure. Highservotorquecurrent. AP Test. Verticalaccelerationgreaterthan1.6gor lessthanO.Og(CitationV
only)● Rollgreaterthan40 degrees(CitationV only). Rollgreaterthan30 de reesandrollrategreaterthan20 degreesper
second(CitationV only7 22=14-00Page259May 25/90
Use or disclosure of information on thm page is subject to the restrictions on the t!tle page of this document.

1
4. B.
Honeywell
The Yaw damper will disengage for
MAINTENANCEMANUALCITATION1l/V
the following conditions:
. Pressingthepilot’sor copilot’sAP disconnectswitch
. Pressingthego-aroundswitch
. Lossof DG valid
Roll Axis (See Figure 218, sheets 1 and 2.)
The roll axis of the autopilot receives signals from the following
components:
Attitudevalidandrollattitudesignalfromthe verticalgyro.
Headingvalidandheadingerrorsignalfromthedirectionalgyro
Rollcommandsfromtheflightdirectorcomputer.
Rollturnknobcommandsfromtheautopilotcontroller.
(1) Synchronization.Synchronizationin therollaxisis achievedwhenthenet signalto therollservosumiszero. Priorto autopilotengagement,allautopilotcommandinputsare zerobecausetheautopilotisnotyetcoupledto anymodeand theROLLCPL,HDG HOLD,andTK ● AP ENGswitchesareopen. At thistime,the inputto therollsynchronizerthroughtherollratelimiterwillalsobe zerobecauseswitchAP ENG ● TCSSEL ● ROLL HOLD is open. Rollattitudefromthe verticalgyroisdemodulatedandappliedto thesummingamplifier.Ifthesumof thesetwosignalsis notzero,qn errorsignalappearsandisamplified,andappliedto theAP ENG+ TCSSELswitch. Duringsynchronizationpriorto autopilotengagement,theswitchis closed,applyingtheerrorsicmalto therollsynchronizerintegrator.Beforeengagement,theROLLHOLDswitchis closedandtheerrorsignaldrivestheintegrator.The integratorisdrivenuntilitsoutputisequalto therollattitudeinput. Whentheyareequalthe errorto theintegratoris zeroandtherollaxisissynchronized.Synchronizingprovidestransient-freeengagementoftheautopilot.Duringsynchronization,the errorsignalis alsoappliedto therolldisplacementpathbutthe aileronservois notengaged.Therefore,no synchronizationtransientswillappearonthecontrols.
Priorto engagementof theautopilot,theservodriveclutchis notengagedto thecentralsurface;thus,the servoloopfollowsup ontheinputcommandsynchronizingto zeromotorrotation.#tengagement,theservois at a nullpositioncorrespondingto theinputcommand.
(2) Heading-Hold.If theautopilotis engagedwithno lateralmodeselectedandwitha bankangleof lessthan6 degreesandtheTURNknobin thedetentposition,theheading-holdmodeis engagedandtheHDG HOLDswitchisclosed,allowingthe outputof theheading
22-14-00Paqe260May-25/90
Use or dwclosure Of information on this page IS sub!ect to the restrictions on the title page of this dc :ument.

Honeywell WWANCECITATION V
synchronizer to be coupled into the roll rate limiter. Prior to
engagement or whenothermodesareengaged,thissignaloutputiszero. If the aircraft departs from the synchronized heading, an
error signal is applied to therollratelimitcircluit.
Therollratelimiterderivestherateof thecommanderrorsignal.Theratesignalis clippedby a diodelimiterandthen applied tothe integrator. Iftheratesignalrisesto a leve”lthatwouldcommandmorethan5.5degreespersecond,thediodescliptheerrorsignalintothe integrator,thuslimitingthe integratoroutputto5.5degreespersecond.Whentheratesignaldecreases to a level
that commands less than a 5.5 degrees per secondro’11rate,thissignaldrivesthe integratorat thatrateandthediodelimitershaveno effecton theerrorsignal.Errorcommandsignalsfromtheratelimitercircuitareappliedto therollsynchronizer.Becausetheautopilotis intheheading-holdmode,thecommandsignalpassesthroughtheROLLHOLDswitchto the integratorinthe rollsynchronizer.Whentheauto~ilotis engagedandTC:Sisnotselected,theA/P ENG ● TCS”SELswitchis closed, adding a resistor
to the feedback path around the integrator. This converts theintegrator into a lag circuit.
Thecommandsignalfromthelagcircuitis appliedto a bankanglelimiter.Thiscircuitlimitsthesignaloutputfortheheadingholdmode. The limiteris removedfromthecircuitwhentheautopilotisdisengagedor whentheTCS buttonis pressedto allowsynchronization.Intheheading-holdmode,theA/P ENG ● TCS SEL
switch is closed, placing the limiter in therollcommandcircuit.
Thelimitedcommandis amplifiedandappliedto the rolldisplacementpath. Thefeedbackpathto therolls.qnchronizerisnowopenedbecausetheA/P ENG+ TCSSELswitchis openintheheadingholdmode. Thedisplacementcommandis invertedandpassedthroughtheQ-switchingandsoft-ride,gain-changingcircuitsto besummedwithrollrate.
Rollrateprovidesa short-termdampingsignal.The resultingerrorsignalis amplifiedby therollservosumamplifierandappliedtotheservoamplifier.The resultantoutputsignald-ivestheaileronservomotor.
Theservoamplifieroutputis limitedby theelectronictorquelimiter.Intheeventof a failureof thetorquelimiter,themonitorcircuitwoulddisengagethe autopilotwhenservotorqueexceededa predeterminedlevel. The clutchis engagedso theservomotorwilldrivetheaileron.As themotordrives,a ratedampingsignalfromtheservotachometeris fedbackas a dampingsignaltostabilizetheservoloop. A positionsignalis alsofedbacktoopposethecommandsignal.Deflectingthe aileronwillbanktheairplanetowardtheheadingthatexistedwhentheaJtopilotwasengaged.As theairplanebankanglechanges,theo~tputof the
22-14-00Page261Mar 15/89
Use or disclosure of information on this page IS subject to the restrictions on the title page of this document.

Honeywell WY’””CITATION V
4. B. (3)
vertical gyro reflects the change. The inputfromthegy~oopposestheerrorsignal,thusreducingtheresultingerrorto theservodrive. As theairplanebankstowardthedesiredheading,theerrorfromthe headingsynchronizerwill be reduced. As this e-rordecreasesthecommandsignalsthroughoutthe axis will begin to rolltheairplanetowardwings-level.The final result will be a null at
the servo output with the airplaneflyingwings-levelon theheadingthatexistedat thetimeof autopilotengagement.
TouchControlSteering(TCS). WhentheTCS switchon thecontrolwheel is pressed, the error signal into the roll synchronizer is
reduced to zero because the inputswitchesto therollratelimiterareallopened,removingallcommandinputsto thesesummingpoints.Theaileronservodriveclutchisdisengaged,allowingthepilottoplacethe airplanein thedesiredrollattitude.As the attitudechanges,theoutputto therollservosumwillchange.Thisoutputrepresentsthedifferencebetweenairplaneattitudeandtlesignallevelat theoutputof therollsynchronizer.Theoutputto theservosum is fedbackintotherollsynchronizerkeepingtheservosuminputat a null.
The amplifiederrorsicmalis fedbackto therollsynchronizerthroughtheclosedA/P ENG+ TCSSEL switch.At thistirwtheA/PENG. TCS SELswitchopens,removingtheresistorfromthaoutputoftheintegrator.Withtheresistor’seffectremoved,thesynchronizeractsas an integrator,notas a lagcircuit.Theerrorsignalis appliedthroughthe ROLLHOLDswitchto drivet~eintegrator.The integratordrivesuntilitsoutputis eqJal to the
rollattitudesignal.At thistimetheerrorsignalswillbe zero,andthe systemis synchronizedto theexistingairplanebankangle.
WhentheTCS switchis released,thefeedbackpathfortheamplifiederrorsignalis openedby theA/P ENG+ TCSSEL switch. ReleasingtheTCS switchalsoclosestheA/P ENG ● TCSSEL switch,convertingthe integratorintoa lagcircuit.If no lateral modes are selected
in theflightdirectorcomputerandthebankangleis lessthan6degreeswhenTCS is released,theautopilotwillreturnto headinghold. When thebankangleis greaterthan6 degreesat TCSrelease,theROLLHOLDswitchopensandtheairplanemaintainstheselectedbankangle. Anydeviationfromthisbankanglewillgeneratean errorsignalto drivetheaileronservoto returntheairplaneto thedesiredbankangle. Thisbankangleis maintaineduntila new attitudeis selectedwithTCS. If theautopilotwascoupledto the flightdirectorwhen TCS was used,uponreleaseoftheTCS switch,theautopilotwillcoupleto theengagedflightdirectormode.
22-14-00Paqe 262Mar”15/89
Use or dwclosure of information on this page IS subject to the restrictions on the title page of this d~cument.

Honeywell tifivl”’”c’CITATION n/V
4. B. (4) TURNprev.
HOLD
Knob. WhentheTURNknobis rotatedoutof detent,anyously coupled roll modeis uncoupled.TheROLLCPL and IDG ~switches areopen,removingallinputsignals,TheTK ● AP ENG
switchclosesto applytheTURN-knobcommandsignalfromtheautopilotcontroller.-Thecommandsignalis ratelimitedto 5.5degreespersecondandpassedthroughtheROLLHOLDswitch(seelastparagraphof TCS explanation)to drivetherollsynchronizer.Thecommandsignalis limitedto *3Odegreesby knobexcitation,thensummedwiththeverticalgyroattitudesignal.Fromthispoint,theerrorsignalis appliedto thedisplacementpathto drivetheaileronservo.
ReturningtheTURNknobto detentwillreturntheairplaneto awings-levelconditionandengagetheheading-holdmode. Othermodescanbe selectedandwillbe coupledaftertheTURNknobis returnedto thedetentposition.
(5) LateralModes(HeadingSelect,NAVSelect,BackCourse,VORAPR).Whenthepilotselectsa lateralmodeon themodeselector,theROLLCPLmodeis engagedif theautopilotisengaged.Thedesiredrollcommandsarecomputedandprocessedby theflightdirectorcomputerandareappliedto theautopilotcomputerat 1OJ1A-18.
ThecommandsignalispassedthroughtheROLLCPLswitch.AllotherinputsareblockedbecausetheHDGHOLD,andTK . AP ENGswitchesareopened. Fromthispoint,therollcommandpathfollowsthesamepathas theheading-holdsignalto drivetheaileronservo.Theerrorsignalwillflytheairplaneto theselectedflightpathandrolloutto a wings-levelconditionon theselectedflightpath.
(6) LiftCompensation.Duringa turn,an airplanelosesliftandtendsto losealtitude.To compensateforthiscondition,theautopilotrollaxisappliestherollattitudesignalfromtheverticalgyrotoan absoluterollcircuit.Thiscircuitwillprovidea nose-upcommandto thepitchaxiswhentheairplaneis bankedleftor right.Theamplitudeof thiscommandshouldbe equalto thelossof liftdueto theturnso thatverylittle,if any,altitudeislostduringtheturn. Theabsoluterollcircuitoutputis alsoappliedto therolllogiccircuitsto generatea bankangleof lessthan6-degreeslogicin additionto theliftcompensationin thepitchaxis.
(7) TorqueSwitching.(SeeFigure219or 219.1.) The rollandpitchtorquelimitersandtorquemonitorsareswitchedas a functionofbarometricaltitudefromtheairdatacomputer.Thenominaltorqueswitchpointin theautopilotcomputeris 13,400i 1,100feetofbarometricpressurealtitude.Abovethisaltitude,thepitchandrolltorquelimitersandmonitorsareswitchedto a lowtorqueregime.
22-14-00Paqe263May-25/90
Use or disclosure of Information on this page IS subJecf to the restrictions on the title page of th(s document.

Honeywell MM!’’””CITATION V
An aneroidprovidesan independentsecondsourceof altitudeinformationformonitoringtheairdatatorqueswitching.If thetorque has notbeenswitchedto lowtorqueabove16,000t 1,000feet,as determinedby theaneroid,a TORQUEWARN light willannunciatethecondition.TheTORQUEWARNfunctionis testedby theTESTEA FLTbuttonon theautopilotcontroller.
At an air data barometric altitude of about 19,000 feet, ‘themonitor
circuitry cross checkstheaneroidlogic. If the aneroid has not
switched from ground to +15 volts dc before this altitude, the
TORQUE WARN light will annunciate this condition.
Lossof the air data valid will cause the system to reverl: to the
low torque regime.
4. c. PitchAxis(SeeFigure218,sheets3 and4.)
The pitch axis of the autopilot receives signals from the following
components:
Airdatainformationfromtheflightdirectorcomputer.
Airspeedandaltitudeinformationfromthe airdatacomputerfor
Q-switching.
Pitchwheelcommandsfromtheautopilotcontroller.
Attitudevalidandpitchattitudeinformationfromthe vertical gyro.
Glideslopedeviation signal from the flight director computer.
(1) Synchronization. Synchronization in the pitch axisis achievedwhenthenetsignalto thepitchservosum iszero. Priorto autopilotengagement,theglideslope,airdata,andPITCHwheelsignalsareblockedby the open GS CPL,ADCCPL,andPW switches.
Pitchattitudefromtheverticalgyroisdemodulatedand issummedwiththeoutputof thepitchintegrator.Duringsynchronization,theoutputof the integratorfollowspitchattitudecausingtheoutputof thepitchdisplacementamplifierto be zero. Iftheairplaneattitudechanges,the sumof theintegratorand ~erticalgyrosignalsis an errorsignal. The error signal is applied to the
pitch displacement path and through the closedAP ENG+ TCSswitchandtheclosedPITCHHOLDswitchto drivethe integrator.Theintegratoris drivenuntilitsoutputisequalto the verticalgyrosignalandthenetpitchdisplacementsignalis zero.
Prior to engagement of the autopilot, the servo drive clutch is not
engaged to the central surface; thus, the servo loop followsup onthe input command synchronizing to zero motor rotation. Atengagement, the servo is at a null position corresponding to the
input command.
22-14-00Paqe264Mar-15/89
Use or dmclosure of information on this page ts subject to the restrictions on the title page of this document,

Honeywell W’URANCECITATIONV
4. c. (2) PitchHold. Aftertheautopilotis engaged,ifno verticalmodeisengagedon theflightdirectorandthePITCHwheelis notrotated,theautopilotis in thepitch-holdmodeand the pitch integrator
holds the pitch attitude reference signal. Theoutputof theintegratormaintainsthe airplanepitchattitudethatexistedat thetimeof engagement.Any changein pitchattitudehillproduceanerrorsignal,andtheservodrivemotorisdrivenin thedirectionto returntheairplanepitchattitudeto thatwhichexistedat thetimeof engagement.The servodrivedeflectstheelevatorcontroltabbecausetheservodriveis coupledby theservoclutchafterautopilotengagement.The errorsignalsdrivetheservoandelevatorto returntheairplaneto thedesiredattitude.Whenthisattitudeis achieved,theelevatorwillbe at theneutralpositionandthe servosumoutputwill be at a null.
(3) RateDamping.Dampingof theaircraftcentralresponse is provided
by pitch rate. Pitch rate is derived from pitch attitude in thepitchratetaker. This signal is applied as a damping signal forpitch attitude control.
(4)
(5)
LiftCompensation.AbsoluterollsignalfromtherollaxisisshapedbeforepassingthroughtheQ-switchingandsoft-ridecircuitry.Theliftcompensationfunctiongeneratorcircuitryproducesa liftcompensationsignalwhosemagnitudeis proportionalto sec~-l,where$ is the airplanebankangle. Thissignalpitchestheaircraftup whenmakinga bankturnto compensateforthe lossof liftin a turn. Thismaintainstheaircraftneara constantaltitudein a turn. If the autopilot is in the airspeed hold mode,theliftcompensationsignalis removedcompletelyto preventtheliftcompensationandairspeedholdcommandsignalsfromopposingeachotherandcausingairspeedholdmodecontrolproblems.
TouchControlSteering(TCS). WhentheTCS switchon thecontrolwheel is pressed, the autopilot disengaged synchronization paths are
established. A feedback path is provided from the pitchdisplacementinverterintothe pitch integrator through A/P ENG+TCSandPITCHHOLDswitches.The servoclutchisdisengagedandthepilotfliestheairplaneto a desiredpitchattitude.The autopilotwillsynchronizethepitchintegratorto thenewairplanepitchattitudeandthenetservosumoutputwillbe at a null.
WhentheTCSswitchis released,thefeedbackpatharoundthepitchintegratorisopenedandthe integratorretainsthepitchattitudesignalexistingat thetimetheswitchis released.If the airplane
deviates from the synchronized pitch attitude, an error signal
appears at the integrator output and is usedto positionthe servomotorto drivetheairplanebackto thesynchronizedpitchattitude.
22-14-00Page265Mar-15/89
Use or disclosure of information on thm page is subject to the restrictions on the title page of this document.

Honeywell MI!MPANC’CITATIONV
4. c. (6) PITCHWheel. WhenthePITCHwheel is rotated and IASandVS modes
are not selected, the PM switch closes, allowing the output of thePITCHwheeltachometerto be applied.The PW switch remains closedas long as thePITCHwheel is being rotated. It opens when the
PITCHwheel movement stops. Rotating the PITCH wheel will close the
PITCH HOLD switch (applying the PITCH wheel signal to the pitch
integrator). If the GS is coupled, the PITCH wheel operation will
be inhibited. The rate of PITCH wheel rotation (tachometer output)
is integrated by the pitch integrator producing an attitudedisplacement command since integrated rate is displacement. If the
output of the integrator is changed, by the PITCH wheel, this upsets
the balance of the integrator and vertical gyro inputs. Ihe error
signal is routed through the displacement path to the servoamplifier, the servo drive moves the elevator and changes the
airplane attitude. The airplane attitude will be changed until the
vertical gyro signal is equal to the pitch integrator output. At
this time the airplane will be at the new commanded attitude.
(7) Air Data Modes(Altitude, Airspeed, or Vertical SpeedHold!). WhentheALT,IASor VS mode is selected in the flight director computer
with the autopilot engaged, a ground is supplied from the flight
director computer to pin 1OJ1B-38, -40, or:~l. These ground
signals control the switches labeled ALT ● PW, IASor VS. TheALT,IASor VS error signal corresponding to the mode selected isprovided from the flight director~omputer to the air director
computer input through the ALT ● PW, IASor VS and ADC CPL switches
into the pitch integrator and the pitch command amplifier, Thecombination of the pitch command and integral signals are summedwith the vertical gyro signal.
If the summation of the error and gyro signals is not zero, theerror signal will be used to drive the servo drive motor and change
the elevator control tab position in the direction to get the
airplane back on the selected air data reference. As the airplane
changes pitch attitude to obtain the desired air data reference, the
vertical gyro signal changes and the air data error signa”l
decreases. The net signal will continue to drive the servo to
change airplane attitude until the air data error signal ~rom theflight director computer is zero and the net signal is zero. The
airplane is then at the desired attitude.
The servo amplifier output is limited by the electronic torque
limiter. In the event of a failure of the torque limiter, the
monitor circuit would disengage the autopilot when servo torque
exceededa predeterminedlevel. The clutch is engaged so the servo
motor willdrivetheelevatorcontroltab. As themotordrives,arate damping signal from the servo tachometer is fed back as a
damping signal to stabilize the servo loop. A position signal is
also fed back to oppose the command signal.
If in the IASor VS modes, rotation of the PITCHwheel changes theIASor VS reference.If in the ALT holdmode, rotation of the PITCHwheel cancels the mode.
22-14-00Paae266Mar-15/89
Use or disclosure of information on this page is subJect to the restrictions on the t[tle page Of this d jcument.

Honeywell KWUHANC’CITATION V
4. c. (8)
(9)
Glideslope.Glideslopeinformationis appliedthroughtheGS CPLswitches. Prior to glideslope capture, the GS CPL switches are
open, blocking the glideslope signals from the flight directorcomputer. At that time the autopilot will be flyj~]g the pitch holdor airdatamode. IftheALT,IAS,or VS mode is selected, the ADCCPL switches are closed, supplying error signals. When the glide
slope beam is captured, the air data mode is disengaged, the ADC CPLswitchesareopened,andtheGS CPLswitchesareclosed,andtheglideslopecommandsignalsareapplied.
Theglideslopedisplacementsignalis invertedandlimitedto i6degreesandtheglideslopeintegralsignalis appliedthroughthePITCHHOLDswitchto the integrator.A limiteron theoutputof theintegratorlimitsthissignalto +20degreesup ancl-5degreesdownwhilein theglideslopemode. Theglideslopedisplacementandintegralsignalsarecombinedandthensummedwiththeverticalgyrosignal.
Ifthesumof theglideslopecommandsandtheverticalgyrois notzero,an errorsignalis appliedto theservomotor,followingthesamepathas describedfortheairdatamode. The servowilldrivetheelevatorcontroltabuntiltheairplaneis in thecenterof theglideslopebeam.
AutopilotandManualPitchTrimSystem.Themanualelectricandautopilotpitchtrimsystemsbothutilizethe sametrimservo. Theaircraftinterfaceprovidestheswitchingcontrolto determinewhichoperationalmodeis beingutilized.Themanualelectrictrimis theprimaryor masteroperationalmode. Theautopilottrimis utilizedif theautopilotis engagedandthemanualelectrictrimswitchisnotbeingoperated.Eitherof theoperationalmodesdrivestheelevatortrimsurfaceto reducetheloadon theelevator.
(a) ManualElectricTrimSystem. Themanualelectrictrimisoperatedby meansof a switchon eitherthepilot’sor thecopilot’scontrolwheel. In orderto activatethetrimservo,theswitchmustbe activated.Operationof themanualelectrictrimswitchwillcausethepitchandrollaxisof theautopilotto disengageby interruptingtheautopilotengagevoltage.Thetrimservoclutchis routedthroughrelaycontacts,in theinterface,whichare interruptedby pressingtheAP disconnectbutton.Thisfeatureis providedto allowdecouplingof thetrimservodrivein caseof a trimrunaway.
(b) AutopilotTrimSystem.Theautopilottrimsystemcontrolstheaircraftinstalledelectrictrimservomotor. Thetrimrateisa functionof sustainedelevatorservoforcesabovea giventhreshold.
22-14-00Paae267Mar”15/89
Use or dmclosure of information on this page IS subject to the restrictions on the title page of this document,

Honeywell WiW””c’CITATION n/V
I4. c. (lo)
1
1 (11)
Trimis requiredwhentheelevatorservois requiredto holdasustainedtorqueholdingthesurfaceoffset. Movingthetrimtabremovesthisoffset.Theelevatorservoamplifieroutputvoltageis fedto thetrimup-downsensors.Servomotorcurrentis fedto thetrimthresholdsensor.Whentheairplanerequirestrimwhilethe autopilotis engaged,eitherthedown-trimsensoror theup-trimsensor,dependingon directionof trimrequired,sensesthedirectionfromthe amplifieroutputandproducesa commandsignalforup or downl-rim.Theholdingforce(motortorque)at whichtrimoccursisdetectedby thetrimthresholdsensor.Thissensordetectsmotorcurrent,whichis proportionalto torque.The servotorquemustbe presentfor1 second(up)or 2.5seconds(down)beforethe startof trimming. Thisis establishedby theTimeDelaycircuit.Thedetectingandthresholdsignalsare“AND”anddrivetherelaywhichallowsthepulseoutputto drivethetrimmotor. Thepulsewidthmodulatorsuppliesa pulsetrain,thepulsedurationbeinga functionof airspeed,whichcontrolsthespeedof thetrimtab. Thetrimservodrivemotorw~lldriveto changetrimtabpositionuntilthetrimsensordoesnotsensea trim requirementandtheholdingforceis r[?movedfromthe servo.
FlapCompensation.Deploymentor detractingof the flaps(CitationII)or advancingor retardingthethrottles(CitationV)requiresaddedtrimresponseto limitairplane“ballooning”atdeployment.Whenthethrottlesareadvancedor retarded,a flap-upor flap-downsignalenterstheautopilotcomputerat 1OJ1B-46andstartsthe flapsinmotiontimer. Theoutputof thetimeris theflap/throttlecompensationsignal.Thissignalis appliedto theupanddowntrimsensor,thusbypassingthenormaltrimdelayin onedirection.
TorqueSwitching.(SeeFigure219or 219.1.) The pitchaxistorqueswitchingoperatesthesameas therollaxistorqueswitchingdiscussedin paragraph4.B.(7).
22+ 4-00Page268May25/90
Use or disclosure of Information on this page is subject to the restrictions on the title page of this document.

Honeywell
4. D. YawAxis(SeeFigure218,sheets
MAINTENANCEMANUALCITATION V
5 and 6.)
Theyaw axisof theautopilotreceivesheadinginformationfromthedirectionalgyro.
(1) YawAxisSynchronization.Theyaw axisof theautopilotissynchronizedpriorto engagement.Beforetheyawdampermodeisengaged,allheadingratesignalsareblockedby theYD ENGAGEswitch,whichgroundstheoutputof theheadingratewashoutamplifier.Theservoamplifierandservodrivemakeup theservopositionservoloop. A signalat theyawservosumis amplifiedbythe servoamplifieranddrivesthetorquemotorto commanda surfaceposition.Thepositionfeedbacksynchrofeedsbacka 400-Hzsignalthatisdemodulatedandopposestheerrorsignal.Whenthe surfaceis at the position commanded, the input to the servo amplifier willbe at a null. A rate damping signal is fedbackas a dampingsignalto stabilizetheservoloop.
Priorto engagementof theautopilot,theservodrive clutch is notengaged to the central surface; thus, the servoloopfollowsUp on
the inputcommandsynchronizingto zeromotorrotation.Atengagement,theservois at a nullpositioncorrespondingto theinputcommand.The servoamplifierincludesa torquelimiterandmonitor.Thetorquelimiterlimitsthemaximumcurrentsuppliedtothemotor,andthus,limitsthemaximumtorqueoutputof themotor,sincemotortorqueis proportionalto motorcurrent.Themonitordisengagestheautopilotandyaw damperifthetorquelimiterfails,preventinga failurewhichwouldresultinno torquelimiting.
Duringthe synchronizationmodeanduntiltheheading-holdmodeisengaged,theheadingsynchronizeris inthefollow-uporsynchronizationmode. Thisheadingsynchronizeris an electronicunit,not a mechanicaldevice. In orderto achieveelectronicheadingsynchronizationandelectronicyawratecircuitoperation,a3-wire-to-2-wireconvertercircuitis employedin theyaw axisoftheautopilot.Three-wireinformationfromthedirectionalgyroisappliedto SW1andSW2andto the logicswitchingcircuitsthatactuallyperformthe3-wire-to-2-wireconversionby openingandclosingelectronicswitches.
ThedirectionalgyroX andY informationis appliedto SW1andSW2.One of theseswitcheswillalwaysbe closed,andat timesbothareclosed.The switchesareclosedwhentheirwaveformvoltageis zeroandopenwhenthewaveformis at 5 volts. The signalfromSW1andSW2 isdemodulatedandthenappliedto thelinevoltagecompensationcircuit.Anyerrorsignalsinducedby voltagechangeson the115-voltsac linewillbe eliminatedat thispoint. A signalrepresentingdynamicairplaneheadingis summedwitha signalfromthe integratorof theheadingsynchronizer.Ifthesesignalsarenotequal,theresultanterrorsignalis invertedandappliedto theintegratorthroughtheHDGHOLDswitch.The integratorwillbedrivenuntilitsoutputis equalto theairplaneheading.
22-14-00Paqe269Mar”15/89
Use or disclosure of information on this page IS subject to the restrtctlons on the title page of this document.

Honeywell WJRAN’ECITATION V
4. D. (2) HeadingHold. If the autopilot is engaged and the airplane is
flying wings-level with no other modesselected,theheading-holdmodeis engaged.TheHDGHOLDswitch into the heading synchronizeropens. If theairplanechangesheading,an errorsignalisdeveloped.It is invertedandappliedthroughtheNORMor INVswitchto providea headingerrorsignalto the rollaxiscircuitsto returntheairplaneto thedesiredheading.Whentheheading-holdmodeis engaged,a logicinputto the3-wire-to-2-wireconverterlocksup theconverterto maintainexistinglogicoutputs.Thislockup is necessaryto preservetheheading-holdreferenceinformation.
(3) YawDamperOperation.Thedynamicheadinginformationfromthe linevoltagecompensationamplifieris appliedto theheadingratetakercircuitandpassedthroughtheNORMor INVswitches.The ratesignalis amplifiedandthenappliedto thecrossoverholdcircuit.SwitchRT1 is closedat alltimesexceptwhenthe slopeof thedynamicheadingchangesfrompositiveto negativeor negativetopositive.At thesetimes,theratesignalwouldbe causedby theswitchingcircuitsandnotairplaneinputs.Thistransientsignalis blockedfromenteringtheheadingratewashoutcircuit.by openingswitchRT1fora 100-millisecondperiodduringthe switchingtransition.Duringthisperiod,thecapacitorin thecrossoverholdcircuitmaintainsthelastexistingsignalrateof thedynamicheadingsignal.
The crossoverholdcircuitoutputis appliedto theheadingratewashoutcircuit.Thisoutputsignalrepresentsthechangesof~amic headingrate. Whentheyawdampermodeis engaged,the~ENGswitchwillbe open,removingthegroundfromtheheadingratewashoutcircuitoutput.Thissignalwillbe appliedto theyawservosumto drivetherudderservo. The servoamplifieroutputislimitedby theelectronictorquelimiter.In theeventof a failureof thetorquelimiter,themonitorcircuitwoulddisengagetheautopilotwhenservotorqueexceededa predeterminedlevel. Theservodriveclutchis engagedso thattherudderis drivento dampoutthe changingdynamicheadingratesignals.If theairplanerollrateexceeds7 degreespersecondor if theairplanebankangleexceeds45 degrees,theheadingratesignalis removedby groundingtheoutputof theheadingratewashoutcircuit.Whentheserateandbankanglesignalsarereducedbelow7 degreesper secondandthebankangleis lessthan45 degrees,theswitchopens,removingthegroundandrestoringthecommandsignal.
The headingratesignalfromtheheadingratewashoutcircuitisgainswitchedby theMID-Qswitchto maintainuniformairplaneresponseacrosstheairspeedrangeof theairplane.
22-14-00Paqe270Mar-15/89
Use Or disclosure of information on this page IS sub@ to the restrictions on the title page of this d( cument.

Honeywell ti~v~~’”c’CITATION n/V
COPILOTS TCS SW
T
QTURN —KNOB TK DETENT
20 VDCTO lDJIB.15AND 65J1A.95
! :%%?:ER 4
L-LPILOTSTCS SW
T7J1A-38
2
C_
TI00(N(
57J,t
.5:’4JT~”Ni I
7ENG TCS 10J1A
ISERIES * SERIES +3+
SWITCH SWITCH
1 II
APfTRIM CBPILOT’S AP TRIM 28 VDC To
28vDc_nDISCONNECT SW ELEc ‘RIM swCOPILOTS APDISCONNECT SW
$’0 d’S6
TO 10J1B.3S5 THROTTLE MOUNTED
+28V AP POWER 4-
Th
GO-AROUND SW
K4
1%
--P_77T07J1B54
INTERNAL GND DISENGAGES APFOR THE FOLLOWINGINVALID CONDITIONS:
. POWER SUPPLY ( 15 AND 5 VDC) 1 I
. HIGH TOROUE CURRENT
. AP TEST (FAULT ALL MONITORS)
. ACCELERATION> 1.@+<O @
10J1A T
t“
01
28V AP ENG ● TCS
JI
&10J1I3
PILOTSI
13ENG
IAP 28 VDC TRIMSERIES
SYSTEMVD ENGAGE
II
SWITCH
%
IIAP DISC
WITH TRIM
RELAY K7 . ~:n~;~ ~ <35llJ1 I
I
II
NOTE :
SEE SHEET 2 FOR DETAILSOF ROLL RATE MONITORTEST BOARD
AUTOPILOT
OFF” LIGHT14-327
LAMPS)L10J1A
“-?:.4537 . . . . . !OJIA Q 28 VDCA C FAILCKT BKFi
vALID I
L
IOJIB
36
&
28 VDCHDG2 %
::MPTR ~ 4
GNO FROM ~> 14
w “AUTOPILOTOFF” HORN
AD 18699@ R2
Autopi1et/YawDamperEngageInterlockDiagramforCitationV
Figure217(Sheet1 of 2) 22-14-00Page271/272‘Ma~25/90
Use or disclosure of information on Ihm pege is sublect to the restrictionson the title page of Ihts docume 1,

Honeywell WUFANCECITATION 11~
28 VDC AP PWR —
rPC.= AT —-
llJICONTROLLER
I
Y
c+15 VDC
‘FROM 1OJIA-1
I
I d
L ———
ROLLRATEMONITORTESTBOARD
14
2
I5
I
l-, II I
JJl -%-l’-7 $-l Itil
‘1L A A I 1 I
* K1
10J1E
-———— ———4 28 VDCAP ENG
———~P-~ APCOMPUTER728 VDC AP ENGSELECT
I1I
AP ENG
INTLK II
r——— ——— —
RZ-220ROLLRATEMONITOR 1FROMllJ1-P
II.
11
TH
I
I
I
I
K
I
I
JIII
I I
I I
I I
I I
I I
I I
NOTE.
RZ-220 ROLL RATEMONITOR RELAY K1IS SHOWN IN THENORMAL ENERGIZEDPOSITION THE CONDITIONSTO THE OR GATE CAUSETHE RELAY TO DE-ENERGIZEAND THE AUTOPILOT TODISENGAGE.
I
I
II
I#I
I
I
–J
AD lW19@)
Autopilot/YawDamperEngageInterlockDiagramforCitationV
Figure217(Sheet2) 22-1 4“00Page273/274
May25/90Use or disclosureOf InformalIon on thm page is subpct to the restrictionson the title pege of this document.

Honeywell WW!ANCECITATION n/V
COPILOT S TCS SW
T
PILOT’S AP TRIM 28 VOC TOAP/TRIM CB
,8vDc_n~DISCONNECTS ELEc TRIMsw
1
l-l(
TO 10J1B.355
+28V AP POWER
u I IPILOTSTCS SW
T
II
I7JIA 38
I ;
II
1.11 I I
r
P<—4-S 1.)1
VG vAL~ R~~”~
I
~IIJl<33-
COPILOTS APDISCONNECT SW
-
I
%
S6
THROTTLE MOUNTEDGO-AROUND SW
K4T
S3
3TO 7J1B-54
~ To P’LOT”STRIM SYSTEM
J\E10J1A
IENG TCS 10.I1A
SERIES + SERIES +3+SWITCH SWITCH
+ * I
~
+ )
10J1B
“~ 6W1A’4
p,D~~::Mm~:l~ 1‘ SWITCH
<I
r
Figure217.1
I I I
28v AP ENG . TCS
AUTOPILOTOFF” LIGHT[4-327LAMPSI
VALID
Autopilot/YawDamperEngageInterlockDiagramforCitationII
22”14“00Paae274.1/274.2
II L 10JIB
I36 ~
%EJ28 VDCHDG2 Q
=AUTOPILOT
OFF HORN
AD21745
Ma~25/90Use or disclosure of Information on Ihm page IS subject to Ihe restrictions on the Mle page of this docume t.

Honeywell IN!E!ANCECITATIONV
HDG ERRDRFllLLM YAWAXIS [SW 5)
7
liDG HOLD
o
lwIA
:rv%:s’li%m’w+“ T’”ROLL CPL
r—–1, ! 1
‘“=
A/P CONTROLLER
+ ‘~:% <+-,
I
&
C* 1 <?+15.OCRIGHTROLL
I
I
‘ 26+
1’
; ‘~< , TK ●A:ENG
A >__L< , <~.l,v.c
1’ :*27-
I @l
I
TURN 11=
LK N08
-1
II
——— II
ROLL AXiS
L>. 4L-JSYNCHRONIZER
AP ENG . TCSSEL
_ o~—6P ENG+ ROLL HOLO+ TCS S*L
rA? ENG ● TCS SEl
‘i’
9,~o
BANK ANGLELIMITER
OISPLA
VGROI.LATT “<1
{
,
LINE
FIG. 207+10<1
VOLTAGECOMPENSATION
AMPLIFIER ABSOLLITEROLL
‘c
TO PITCH AXISISH 31
&OC ROLL TONOTE: ALL SWITCHES ARE SHOWN IN OPEN POSITION.
YAw AXIS (SH 51LABELEO CONDITION CLOSES SWITCH.
AD 187LM@
AutopilotComputerSignalFlowDiaqram
Figure218 (Sh~et1 of 6) 22-14-00Page275/276
Mar 15/89Use or disclosureof informationon thm page is subject to Ihe restrictionson the title page of this document.

Honeywell MWRAN’ECITATIONV
——— .——~LERON SERVO DRtiVE AND BRACKET
110JlB 12J1 I
I
\< - J-
IIIII
OISPL
SERVO AMPLIFIER
A
‘ :&
IIROLLOISJ’LACEMENT
FILTER &
ROLL SERVO SUM
‘ 2’.-.’5
11
TOROUE IILIMITER \
II= =
HI TOROUE_.—● AP TEST
II
IIRATE
BRATE ‘ “*
ROLL AXIS
jg~y;;,, -449 d-+J- AP TEST+15 V OC
AutopilotComputerSignalFlowDiagram
Figure218 (Sheet2)
AT7-TOROLI E
MONITOR
H~UE●AP TEST
+28v ‘P ENG
TO ENGAGI. LOGIC TCS SEL
-1+57J-+=
1021A
“----1+3-
1
!@SVNCHROGEARRATIO
I1I
=2M
TOROUEMOTOR I
I
I
.-
1 I1 I
CLUTCH
m 1)
-.
POWER IGEARTRAIN
I
I
II
u
ORUM
II
LINKAGL
-{--~-eAIL 1 N(1N
II
II
* L .—— ———
~ TO PITCH AXIS ISH41TO YAW AXIS ISH61
NOTE ALL SWITCHES ARE SHOWN IN OPEN POSITION.LABELEO CONDITION CLOSES SWITCH.
AO.1S700 2 RI
22-14-00Page277/278
Mar 15/89Use or disclosureof informationon this paga IS subject to the restrictionson the Mle page 01 Ihls document

Honeywell lNUFANcECITATIONV
r————.APCONTROLLER7
llJI
DESCENDa—
‘>”+
: !#.*--/) ;I CLIME
L ‘1PITCH WHEEL -
——— ——
———— —~pLAYCONTROLLIEFI 1 I
-t-$gpi=SLEWCMD
v
!2+
AoMOOE ●
I
lWIB
[
~ 38 yALT HOLD GND
L~M +40+ ’”s’’O’O ’”” 1
TO SWITCHLOGIC FALT . P=
I As
I /lWIA ( o
{
%“
Vs
AIR OATA INPUTFROM FDC
%$%’’” +25
)
l!
(
~~
ALT . =
1,ADC CPi
GLIDESLOPEFROM FGCFtG. 212
IIIII I
IIIIII
L/-A+Vs
I IINTEGRAL ~22 < ; w
“3
+G, CPL
IIIIIIIi ADC CPL
II
DISPLACEMENT +20<f *LA
I
VG
{
J@<!PITCH ATT
LINE vOLTAGE
FIG.,,, ~,,<1COMPENSATION —
t AMPLIFIER
+’8+ ‘S Pw
I
L JL=———— ——
PITCH AXIS
AutopilotComputerSignalFlowDiagram
Figure218(Sheet3) 22-14-00
1-
T~O.4;EF+AT10N
ABSDLUTE ROL 1
1
LIFT COMP
FROM RDLL AXIS FUNCTION
(SH 1) GENERATOR
~o*
= =
I
AP ENG+TCS
) PITCHINTEGRATOR
“m
k6°LIMITER
PITCH COMMANOAMPLIFIER
I
+ PITCH
T
DISPLACEMENT
MID O
1 ISR= =
I 1(VA
RATE TAKER
NOTE. ALL SWITCHES ARE SHOWN IN OPEN POSITION
LASELEO CGNOITION CLOSES SWITCH.
=
AD 187023 R!
Page279/280Mar 15/89
Use or disclosureof informationon this page is subject to the restrictionson the Mle page of this document.

Honeywell WUFANcECITATION n/V
10.MA
“5’”’-’ ~
AP TEST+15 VDCFROM ROLLAXIS ISH2)
+TOENGAGELOG1cI
H~uE ●AP TEST
“voc+i>THROTTLE THROTTLE● 4s% P42 -% N2
LOW Q 7U% OUTV CVCLEMm o 4S% OUTV CVCLE
Miu c1
J
THROTiLES 100% DUTV CVCLE
LEd-EEF’” - ‘---rCESSNATRIM SERVO —1
I
ORIVE
AIRCRAFT GEARTRIM I
RELAY*
RELAVS
DRIVERI
(SEETABLE S01, QH]}.-C’”.,
IFIG. 4-11)
CLUTCH
TORCEUETFIIM TIME OELAV I
~ UP 1 SEC
+&“
IT14RESliOL0 * I
LIMITER5s
SENSOR ON 2.S SEC
I
ELEVATORCURRENTSENSING
z) ~ Em ~TRIM
~GOWN
SENSOR
H~uE 4● AP TEST
t
RATElWIB
~“h-
L SERVO AMPLIFIERg--bt-
-++53+
c
~554-
SERVO SUM IIIIII
11.11
~ ‘> TO APCONTtlOLLER
)4x* ‘R’ML”HT’
r —— —— ——,Ul ELEVATOR SERVO ORIVE AND BRACKET 1
PITCH AXIS (FOR CtTATtONV ONLY)
I
!III
I
+ L ——— ..— J
AutopilotComputerSignalFlowDiagram
Figure218 (Sheet4) 22-1 4=00Page281/282
May25/90Use or dwclosureof Informellonon thm page is subject to the restrictionson the Mle page of this document.
+g-eELEVATOR
LINKAGE TRIM TAB
LINKAGE
E-0
ELEVATORCONTROLTAB
AD 18700@) R2

Honeywell U!MYANCECITATION 11~
FLAP RELAYACTIVATED BYSWITCtE ONFLAP HANDLE
lWIBFLAP COMP
~“’>
FLAP UP
TIMER 26 SEC
I FLAPS ON9=
LOW Q 50% DUTY CYCLEMID 0 36% OUTV CYCLE
FLAPS IN MOTION 100% OLJTVCYCLE
MIO O
*,.,-+::-
AF TEST+ 16 VDCFROM ROL!.Axis {w’z)
‘DENGAGELoGc ~
NI TOROUE
-“”Y’d3 &&Q
TRIM TIME DELAYe Tt4RESNOLD ~ PULL IN 3 SEC
SENSOR OROPOUT O SEC
.LEVATOR
r——— ——
CESSNATRIM SERVO 7
, ORIVE 1GEAR
~]}..c,,,.; -6t-ELEVATORTRIM TASCLUTCH
——
ILINKAGE
EEl- IL .—
:URRENTENSING
1
:) {UP
UP TRIM
SENSOR
‘<
ONTRIM
I
DOWNSENSOR
fHI-E. AP TEST T II
_!9
Eef-—————.
RATE lWIS ,W, ELEVATOR SERVO DRIVE AND SRACKET 1~’”
L
@“
I
ERVO AMPLIFIER
–~53c
—–4” ‘SERVO SUM
II
II
II
D OEMOOPOSITION
-:’
~ ~“>1
r-r’ LINKAGE
~-e
ELEVATORCONTROLTAB
+
10J1A-——
+2 TIVAPENG. TCSSEL+ 3 , ‘ ,~:—J I ~
‘“”’-k ______ J=
PITCH AXIS (FOR CITATIONII ONLY) AD 18702 ~
AutopilotComputerSignalF1ow Diaaram
Figure218(Sfieet4.1) 22=14“00Page282.1/282.2
Ma~25/90Use or disclosure of mformallon on Ihm page is subject 10 Ihe restrictionson the Inle page of this docume 1.

r- ——PILOT’SC14-D~~1
I
E
Xb
I +
IJ I
A$
I o ‘;%--L
z z+HEADINGSVNCHRO NO. 2
—— -1
IWIB
~’+’’”Ac
I
INv --”-y>+[~wo–--~=”cROSS OVER HOLO CIRCUIT HOG RATE WASHOUT3P” 1/ r
ii
>
---1
.I1 ,..
~- )1VOENG
+SR
ROLL RATE > 70/SEC(cm v
+
1
ONLV)
B/A >450+= =
HDG RATE DISAISLE
HEAOING RATE TAKER
-0=”2NORM 1’MO a
SW2
I
t—NOTE, ALL SWITCHES ARE SHOWN IN OPEN POSITION
‘“w
NORMLASELED CONDITION CLOSES SWITCH
HOG ERROR
“+.~Q “ < - ‘OROLLAx’s’w”
4C’’!FREICONVERTER
‘l-HOG HOLO
.—~op,~oT’sc,4.Dq’1,
I
I
G
, ~>+
I “ 0+o VI
I , !O~z ‘~
LHEAOINGSVNCHRO NO. 2
‘-A 2’vOce”’ORYAW AXIS
HOG HOLO —-1 t- ‘“
=%0+r~I
III
I
HEADINO SYNCHRONIZER
—
—
II
AD lu700@ R!
AutopilotComputerSignalFlowDiaqram
Figure218 (sheet5) 22-14-00Page283/284
May25/90Use or dwclosureof mlormallonon this page IS subject to the restrictionson the title page of this document.

Honeywell MNWI!ANC’CITATION V
DEMOCI
i ) v< I ‘
RUDDERWASHOUT
VD ENG II 1; ISERVO AMPLIFIER
HEALSING RATE
~ ]:@;@.~:J~-z-j-
FILTER AND 1 TOROUE POWER \ ORUM
VAW SERVO SUM, , , MOTOR :
GEARI
TRAIN .
II
I
IQSVNCHROGEARRATIO
i
II I III
II I
I
II
I1II I ;m III ITA~”
‘3 ~~
IRATE ! ‘“xi ‘GEN I
AP TEST+15 VOC TOROUE I-&-i
I
— IFROM ROLL MONITOR Y
AXIS [’HZ)
I Ii I I
l.-TO ENGAGE LOGIC +’E’VV”’N’+’’*!J I i
.,GNO I ‘1’ I
YAW AXIS
AutopilotComputerSignalFlowDiaaram
Figure218 (~heet6) 22-14-00Page285/286
LINKAGE
-19-RUOOER
AO.187Cll@
‘Mar15/89Use or dlsctosureotinformationon this page is subject to tha restrictionson the title page of thm document.

Honeywell W?’””CITATION n/V
10J1A+15 VDCAPTEST INPUT ___l_<49< *
APTESTI
FROM57J1-L+75V De
FIG. 217I I
I
r ———ANEROID SWITCH1
I II I
I_———
AIR DATA COMPUTER9J1
1;‘ ALTSIGNAL
I2.5 VDC+O.2 mVDC/FT
+y>--<zl <~*
#
Ii
10J1B
28 VDC VALID ~ 1: >—<44 (—-
L ——— -1NOTE: THE ANEROID SWITCH WILL SWITCH
BETWEEN 15,000 AND 17,000 FEET.THE OUTPUT WILL BE +15 V DCFOR >17,000 FEET AND GND FOR<15,000 FEET.
TORQUESWITCHING
LOGIC
TORQUEWARNANNUNCIATOR
10J1B
+“%al- 28V DC
HI TORQUE I I●in=rzsf
AD-1 8701
TorqueSwitchingSignalFlowDiagramforCitationV
‘Figure21922-1 4=00
Paae287May”25/90
Use or disclosure of Information on thm page is subject to the restrictions on the title page of thm document,
+15VDCGND

Honeywell W%i’’’”c’CITATION n/V
APCOGOG —1llJ1 10J1A
‘r
I
TESTEA FLT I iw’e+”v”
I
z Ill
.7
+’ ><<49 ‘AP TEST
-1
+15V DC
1-1 I
——— II
r ——— 1I TOR(21JE
ANEROIO SWITCH I
IWARN
I ANNUNCIATOR
~ “5V::O>*.<!-v
?:0-..I
il—-’—-d : I ELEVATOR
I TORQUETOROUE
r ——— LIMITER/AIR OATA COMPUTER I I
SWITCHINGLOGIC
MONITOR
ALT SIGNALjy>--<21 <1
HI TORQUE
I
2.5 VOC + 0.2 mVDC/FT - ● AP TEST
I10J1B
AILERONTOROUE
I 2SVOCVALID ~12 >—<44< -LIMITER/MONITOR
1- -J
HI TORQUE
——— .Xn%sT
NOTE: THE ANEROID SWITCH WILL SWITCHBETWEEN 15,000 AND 17,000 FEET.THE OUTPUT WILL BE +15 V DCFOR >17,000 FEET AND GND FOR<15.000 FEET.
TorqueSwitchingSignalFlowDiagramforCitationII
Figure219.1
AO.7S7 R2
22=14-00Paqe288May-25/90
Use or disclosure of information on this page IS subject to the restrictions on the tttle page of thm dc cument.

Honeywell WURAN’ECITATION n/V
5. C-14DComDassSystemFunctionalDescription(Fiaure220)
Basicpowerforthesystemis the28 voltsdc inputat 6J1-Cof theC-14DDirectionalGyro. Thisprovidesinternalpowerforthegyroanda 26 voltsac poweroutputforthefluxvalveandCS-412.
Thefluxvalvesensesthehorizontalcomponentof theearth’smagneticfield.Usingthe 26 voltsac referencesignal,it providesan outputsignalthatrepresentsaircraftheadingin theearth’smagneticfield. Thissignalwillprovidea commandto keeptherotorof thegyroalignedto magneticnorthintheslavedmode.
TheCS-412DualRemoteCompensatorcompensatesthefluxvalveforsingle-cycle(hard-ironeffects)by biasingthefluxvalvecoilswitha lowleveldcvoltage.Theprocedureforadjustingthislevelof compensationisdiscussedin Section8. Two independentcompasssystemscanbe compensatedby theCS-412.
Intheslavedmodeof operation,thedirectionalgyrois slavedto a positionrelativeto themagneticheadingreferenceas suppliedby thefluxvalveandtheCS-412.
Slavingof thedirectionalgyrois accomplishedby supplyingcurrentflowthroughprecessioncoilsaffectingthesensitiveaxisof thegyro. TheMANUALSYNCHRONIZATIONswitchis usedto engagefastslavingof thedirectionalgyro. Whenfastslavingis engaged,theslavingrateisincreasedfromapproximately3.5degreesperminuteto approximately40degreesperminute. Onceengaged,fastslavingcontinuesuntilthecompasscardof the EHSIor HSI indicateswithin4 degreesof actualheading,atwhichtimethenormalslavingrateis assumed.
In thefreeor manualmodeof operation,magneticinformationfromthefluxvalveandCS-412is disabledin thegyroandno slavingis performed.Thedirectionalgyroprovidescompassinformationas a product0$ thepositionoftheaircraftwithreferenceto thepositionof theunslavedgyro. As noslavingis performed,thedisplayedheadinginformationis subjectto erroras theresultof freegyrodrift.
Duringoperationof thedirectionalgyro,anyof thefollowingconditionswillcausea lossof theheadingvalidsignalsuppliedto theSG-605SymbolGenerator:
(a) Lowvoltageto thedirectionalgyropowersupply
(b) Improperwheelspeedof thespinmotor
(c) Fastsync(manualsynchronization)
22-14-00Paqe288.1/288.2
May’25/90Use or disclosure of information on this page is subject to the restrictions on fhe title page of fhls document

Honeywell WWANCECITATION n/V
C-14D DIRECTIONAL GYRO,
tip=
WWE R *24 voc6UWLY ANDRECTIFIER
CIRCUIT -24 VW
26 VAC
5 VAC
NC ~
w—
D
E
F
A
B
c
———— ——— ———CS-412DUALREMOTECOMP
SCREWDRIVERAGJZJSTMENTS
—I I
mNS EW
+S.8 VDC
[H)
REGULATEDOCPCP~$ R
48VOC
SG-60SSYMBOLGENERATOR I
+1 I1 I I
21
Er
21
12
23
●
-1HOG SYNCFOR GZSPLAYON EHSI
1I 1
II
I
vm MzINPUT CURRENT
FROM FLUXLIMITING
RESISTORSVALVE
\
:1
I
02
;1BLDCXIND
CAPACITORS
s>
NOTE 1
/ r
600 M, INPUTFROM CS412
?---- --- ---- --t /+I CXNG.1
FLUX VALVE
---- ---- -
oEMOO. AMPL CIRCUIT
A
II
-
IIIIII
LI I
II
I
B
17 ~X:TO
C.14D
HOG’70A#CMPTR
J-’
&“DCANOPDWERAMPL
NOTES: AUTO/MANSWITCHFLUX VALVE SNIELOEO WIRE GROUNOEO
ONLY AT C-14D PFNf.1.
z.
3
4
Cx No. 2
466J2s
IDG 1 VALIO3SVOCHD0 ~
UPUTVALIO OUTPUT
.—— — ——
TNEC%412 COF4TNNS TWO IDENTICALCGMPENSA7SON CIRCUITS. CONNECTIONS “’A”ED”ooEc’@’o’~SNOWR ARE TNE NUMSER ONE SYSTEMTHROUGH EM. TNE CIRCUITS FOR TNENUMSEH TWO SYSTEM ARE COF6NECTE0TNROUGH SJ3.
TNE HEAOIF40 INPUT TO 7NE AP COMPUTERIS RELAY SWZTCNEO SETWEEN TNE PILOTSANO COPILOT% C-140 AS SNGWN ONFIG, 218, SNEET 5.
LEFT HAND
6
7NE MZJtdTOR 0S60 FROM TNE AP COMPUTER MANUAL SVNC 6W WIPER ●
2S RELAY SWZ7CFSED SETWEEN TNE PFLOTS Q ZFIGHT HANO
AND CD. PZLOT’S G140 AS SNDWN ON FIG. 217OR 217.1.
CHASSIS GNO
x
W) POWER
ITADEOLSACV I
651WHEEL
J 141SPEED
MONITOR
NC
EG
Cll(s1 i
(L1 T
NC lW1 E
aMONITOR GND
~ 28 To Apc~p.T~
1- uorA-7oRGr40FRDUAP CMPTRlDJ1 A-SO (FX7 22)OR lDJIA.S3 (Cr7 v)(NOTE 4)
~ ‘%E”t- w7J1A
z4EAON4G VALIOINPUT TO FD CNPTR
23
kid-iaAD 18702R1
——— ——— —.-— ——— ——— ———
Pilot’sC-14DCompassSystemSignalF1ow Diagram
Figure22022-1 4“00
Paae289/290‘May25/90
Use or disclosure Of Information On this page E subject 10 the restrictions on the Mle page of thm document.

Honeywell MPJKYANC’CITATION V
TheSG-605receivesthree-wirecompassinformationfromtheC-14Dandusesitto movethe EHSIheadingdialto theproperlocation.
Synchronizationbetweenthefluxvalveandtheactualheadingof the aircraftis indicatedby thecompasssynchronizationannunciatorof the EHSI. Whenthe+ is in viewon theannunciator,theheadingdialis rotatingin thecounterclockwisedirection(actualheadinggreaterthanindicated).Whenthe
is in view,theheadingdialis rotatingin theclockwisedirection~actualheadinglessthanindicated).Whensynchronized,the annunciatorslowlyoscillatesbetweenthe+ andthe..
6. EDZ-605EFISandOptionalMDZ-605MFDSystem
A. AttitudePortInterconnects(SeeFigure221.)
Theconfigurationshownin Figure221consistsof oneVG-14AVerticalGyro. It provides3-wirepitchandrollattitudeto theSG-605forusein drivingthe EADIattitudesphere.If theattitudevalidappliedto65J1A-85is lost,a redATT FAILis annunciatedon the EADI. Pin65J1B-92isgroundedto preventAFCS?frombeingdisplayedon the EADI.Sincethereis onlyoneattitudesource,theATT sourceandtoggleprogrammingpinsarenotapplicable.The attitudesignalsarealsoconnectedto theoptionalMG-605forusewhentheMG-605is backingup afailedSG-605SymbolGenerator.
B. HeadingPortInterconnects
TheconfigurationshowninGyrosources.Twoheading65J1B-24and-25open.
(SeeFigure222.)
Figure222consistsof twoC-14DDirectionalsourcesareindicatedby leavingprogrampins
Thedefinitionof theheadinginputisdeterminedby programpin65J1B-22(HDGport1) and65J1B-28(HDGport2). Whenpins-22or -28areopen,theheadingsourceis considereda compassandwhenthepinsaregrounded,theheadingsourceis a magneticor trueNorthreferencedsystem. Programpin65J1B-23or 29 controlsthefree/slaveormagnetic/truefunctionof theheadinginput.
Programpins65J1B-26and-27aregroundedor opento controlthetogglingsequenceof theexternalHDGREVswitch.Withpins-26and -27openthetogglingsequenceis as specifiedin Table201.
22-14-00Paqe291Mar”15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this document.

Honeywell M!JRANCECITATION V
HDGSourceHDGREV Using
SwitchPosition HDGREVSwitch
InitialPower Pilot’sDG1stPress Copilot’sDG2ndPress Sameas initialpower
HDGREVSwitchTogglingSequenceTable201
Headingphasingforthepilot’sport2 is identifiedby the openorgroundconditionon 65J1B-30.Whenthispin is open,thedemodacreferenceexcitationto headingport2 sourceis fromthepilot’sac bus.A groundon pin65J1B-30wouldidentifythattheheadingport2 sourceisbeingexcitedby thecopilot’sac bus.
Headinginformationis appliedto the specificSG-605headingports. Thetogglesequenceof theHDGREVswitchdetermineswhichattitudeportissupplyingtheheadingindicationson the EHSI. Theheadingsourceisannunciatedon theEHSIinwhiteif thepilotandcopilotare usingdifferentsourcesandin amberif the samesourceis used. Iftheheadingvalidappliedto theSG-605is lost,a redHDGFAILisannunciatedon theEHSI.
Thecopilot’sC-14DDirectionalGyronormallydrivestheheadingdialontheRD-450HSI. WhenHDGREV is selected,a 3-wireoutputfromtheRD-450HSIthatis appliedto HDGport2 of theSG-605is usedto drivetheheadingdialon the EHSI.
Thepilot’sC-14Dheadingsignalsarealsoconnectedto the optionalMG-605forusewhentheMG-605is backingup a failedSG-605SymbolGenerator.
22-14-00Paqe292Mar-15/89
Use or disclosure of information on this page is subject to the restrictions on the title page of this dr~cument.

Honeywell W!!FANC’CITATION n/V
6. C. Short Range Navigation (SRN) Port Interconnects (See Figure 223.)
Theconfigurationshownin Figure223consistsof analogADF anddiqitalDMEandNAV sourcesforthepilot’ssideandanalogADF-andNAVsou~cesandARINC568DMEsourceforthecopilot’sside. Programpin65J1B-32openand65J1B-33isgroundedwhichindicatesthattheSRN1 sourceisdigitalRS-422. Programpins65J1B-9and-68arebothopenwhichindicatesthattheSRN2 sourcesareanalogandARINC568. Programpin65J1B-36identifieswhetherthetogglingsequenceof theNAV (VOR/LOC)buttonon theDC-811includesMLS. Thetogglingsequenceis as follows
Pin65J1B-36 SwitchSeauence
Open VOR/LOCto CS VOR/LOCthenrepeatGround VOR/LOCto MLSto CS VOR/LOCto CS MLSthenrepeat
s
Programpin65J1B-10isgroundedwhichindicatesthe systemis usingdualADFreceivers.Also,pin65J1A-103isgroundedto allocatecrosssideSRNandADF sensors.
Thepilot’sADF inputappliedto 65J2A-55through58 canbe in the3-wireX, Y, andZ or 4-wiresine/cosineconfiguration.When3-wireinformationis applied,65J1A-1OOis open;if 4-wireis applied,pin100isgrounded.TheADF validis appliedto 65J1A-82.
Crosssidecopilot’sADF bearingis appliedto 65J2A-34through37 inthe4-wiresine/cosineconfigurationas indicatedby 65J1B-81grounded.
Thebearinginputto 65J2A-51through-54canbe in the3-wireor 4-wireconfiguration.Leavingpin65J1A-99openidentifies3-wire,andgroundingpin99 identifiesa 4-wiresine/cosineinput. Thebearinginputis availablein caseor cardreference.Applyinga groundto pin65J1B-31assumestheVORbearingsignalis casereferenced(i.e.,aircraftheadinghasalreadybeensubtractedfromtheVOROMNIbearing,thusmakingit a relativebearing).Leavingpin31 openassumestheVORbearingsignalto be cardreferenced(i.e.,aircraftheadinghasnotbeensubtractedfromtheVOROMNIbearing,thusmakingit an OMNIor absolutebearing).
A groundis appliedto 65J1B-34whentheDME is tunedto thesamefrequencyas theselectedNAV. At allothertimesthisinputshouldbeleftopen.
Thepilot’ssideusesRS-422NAVandDMEdataandthecopilot’ssideusesARINC568DMEandanalogNAVdeviationdata. Selectionbetweenthepilot’sor copilot’ssensorsis by theNAVbuttonon theDC-811DisplayController.
Allsensoroutputsarealsoconnectedto theoptionalMG-605forusewhentheMG-605is backingup a failedSG-605SymbolGenerator.
22-1 4=00Paqe293May-25/90
Use or disclosure Of Information on this page is subject to the restrictions on the title page of this document.

Honeywell WIY””c’CITATION V
6. D. LongRangeNavigation(LRN)PortInterconnects(SeeFigure224.)
Theconfigurationshownin Figure224consistsof oneARINC429 LRNsource. Programpins65J1B-66and -67identifythetypeof inputappliedto LRNport1. Withpin -66openand-67grounded,a highspeedARINC429 inputis indicated.Programpins65J1B-62through-65controltheLRNport1 sourcenameas displayedon theEHSI. TheconditionsshowninFigure224indicateFMS.
Programpins65J1B-13and -14determinethegroundspeeddatasourcewhenan LRN is notselectedfordisplay.Withpin -13groundedand -14open,theVOR/DMEwouldbe thesourceused.
Programpins65JlB/C65JlB-70and-71identifythetogglingsequenceof theDc-811LRNpushbutton.Withbothpinsopen,therewouldbe no togglingsequencesinceonlyoneLRNsourceis used.
Thegroundingof programmingpin65J1B-6disablestheautomatictransitionfromtheselectedLRNto theSRN.
The LRNoutputis alsoconnectedto theoptionalMG-605forusewhentheMG-605is backingup a failedSG-605SymbolGenerator.
E. RadioAltimeterPortInterconnects(SeeFigure225.)
TheSG-605symbolGeneratorhastwo radioaltimeterports. If a singleradioaltimeteris installed,as shownin Figure225,it is connectedtotheprimaryport. Thedisplayedradioaltitudeinformationcomesfromtheprimaryinput. The secondaryinputis onlyusedforradioaltitudecomparisonmonitoring.
Programpin65J1B-85is open,whichindicatesa singleradioaltimeterisinstalled.
Thesymbolgeneratorcanacceptseveraltypesof radioaltimetersignals.Theformatis programmedusingprogrampins65J1B-4(IDO)and65J1B-5(ID1)as shownin Table202.
RadioALTProg.Pins RadioAltimeter
JIB-4(IDO) JIB-5(ID1) Type
Open Open HoneywellAA-300Ground Open CollinsALT-50Open Ground ARINC552Ground Ground CollinsALT-55
RadioAltimeterIdentificationTable202
22-14-00Paqe294Mar-15/89
Use or disclosure of information on this page is subjecf to the restrictions on the title page of this dccument.

Honeywell MI!XYANC’CITATION V
TheTESTOUTpin65J2B-76is an open/grounddiscreteoutputthatgoestogroundwhenthe EFIStestmodeis initiated.Thegroundoutputisconnectedto the primaryradioaltimeterso thatradioaltitudetestisautomaticallyselectedwheninthe EFIStestmode.
TheDH OUT pin 65J2B-75 is an open/ground discrete output that goesactive (ground) whenever radio altitude is less than the decision heightvalue displayed on the EADI. Allradioaltitudesignalsarealsoconnectedto theoptionalMG-605forusein theSG backupmode.
6. F. WeatherRadarPortInterconnects(SeeFigure225.)
Theweatherradarinformationto theSG-605SymbolGeneratoristransmittedon twoseparatedigitaldatabuses. One highspeedbus (MXVIDEO)is usedto transmitthepartiallyscanconvertedweatherradarvideo. A secondlowspeedbus (WXCONTROLDATA)is usedto transmittheradarstatusandcontrolinformation.
Pins65J1B-96and97 areonlyusedwitha P-800weatherradarsystem.OthersystemssendthisinformationovertheWX controlbus.
Theweatherradarsignalsarealsoroutedto theoptionalMG-605forusein theSG backupmode.
G. Rateof TurnPortInterconnects(SeeFigure225.)
Therateof turnsignalis providedby a rategyroandtherateof turnis displayedwhenexpandedlocalizeris notdisplayedon theEADI. Ifpin65J1A-104is grounded,therateof turndisplayis disabled.Therateof turnsignalsarealsoroutedto theoptionalMG-605foruseintheSG backupmode.
H. MicrowaveLandingSystem(MLS) PortInterconnects(SeeFigure225.)
LowspeedARINC429MLSdataisprovidedby theML-850MLS receiver.Programpin65J1B-11identifiesthenumberof MLSreceiversinstalledintheaircraft.The pinisopenforsingleinstallationsandgroundedfordualinstallations.
Programpin65J1B-36whengroundedidentifiesthatthetogglingsequenceof theNAV (VOR/LOC)buttonon theDC-811includesMLS. Thetogglingsequenceis VOR/LOCto MLSto CS VOR/LOCto CS MLSthenrepeat.
TheNAVSELECTEDpin65J2B-82is a 28 V de/Opendiscreteoutputwhichgoesto 28 V wheneitherMLS isthe selectednavigationsource. It isusedto activatea relaywhichswitchestheDMEreceivertuninginputfromtheSRNcontrolheadto theMLScontrolhead,allowingtheMLStotunetheDME.
TheMLSsignalis alsoroutedto theoptionalMG-605foruse in theSGbackupmode.
22-14-00Paqe295Mar-15/89
Use or disclosure of mformatlon on this page is subject to the restrictions on the t[tle page of thts document.

Honeywell WE”’””CITATION n/V
6. I. Miscellaneous Programming Functions
Thefollowingdefinesthemiscellaneousprogrampinsas shownin Figures221through224.
(1) SG Left/Right(65J1A-97)
Thispinidentifieswhichsideof thecockpittheserves. If thepilotsitson theleftside,thison thepilot’sSG.
(2) SC-DC/DC-811(65J1A-98)
symbolqeneratorp~n would be open
Thispinidentifieswhetherthe systemis usingan SC-800andDC-800 controlleror a DC-811DisplayController.ThispinwouldbegroundedwhenusingtheDC-811.
(3) ASCBDual/Single(65J1A-101)
Thispinidentifiesthenumberof systemAvionicsStandardCommunicationBuses. Thispin is openas a singleASCBsystemisnotdefined.
(4) EFISDual/Single(65J1A-102)
ThispinprogramstheSG-605SymbolGeneratorforoperationin adualor singleinstallation.Thispin is groundedfora singlesystem.
(5) Citation11/V(65J1B-82)
The standardgenericSG-605SymbolGeneratorwas PartNo.7011672-605. Whengrounded,thispin identifiestheCitation11/VSG-605configurationthatis PartNo. 7011672-606.
FlightDirectorSignals(SeeFigure226.)
The FZ-500FlightDirectorComputerinputsareroutedfromtheSG-605.If theSG-605SymbolGeneratorfails,it canbe replacedby identicalbackupsignalsfromtheMG-605MFD SymbolGenerator.TheseMG-605signalsarerelayswitchedthroughthefailedSG-605.
Figure226doesnotshowthe inputpinsto theSG-605or MG-605.Theapplicablesignalinputis shownin Figures221through224. Forexample,theglideslopedeviationsignalis inputtedat 65J2A-67and-68and125J3A-43and -44on Figure223. Theglideslopedeviationisoutputat 65J2B-99to theFZ-500pin7J1B-16in Figure223. DuringtheSGbackupmode,theglideslopedeviationsignaloutputtedat 125J2B-11wouldbe switchedthroughthefailedSG-605to the FZ-500pin7J1B-16.
22-14-00Pacle296May-25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of this dccument.

Honeywell WMEANC’CITATION V
6. K. EFISBackupMode
Selectionof EFISbackupby theMFD is accomplishedby therotaryMODselector switch on the MC-800 MFD Controller. Normal MFD functions areavailable in theMFD position,andEFISbackupmodes are. obtained by
selecting the HSI or SG positions.
● HSI- Selectionof thispositionwill result in an HSIdisplayon theMFD. Compositionof theHSIwillbe determinedby ttleEFISDC-811DisplayController.
. SG - Selectionof thispositionwillresultin replacementof theSG-605SymbolGeneratorby theMG-605MFDSymbolGeneratorfortheEFISdisplays.InthiscasetheMFDCRTwill be blarlked. Composition
of the EFIS displays willbe determinedby theDC-811DisplayController.
22-14-00Page297/298
Mar15/89Use or disclosure of information on this page is subject to the restrictions on the title pag( of this document.

Honeywell l&EtANcECITATION n/V
65J
4
5
9
A
5
6
7
18
19
?0
B
1
12
151617
181920
.—— — —VG-14A VERTICAL GYRO
ATT VALID +28v
(x)
(Y)
}
ROLL ATT
(z)
(x)
(Y)
}
PITCH ATT
(z)
‘7II
II
●
DISPLAY DATATO PILOT’S EADI
a
ATT1WRAPAROUNDlJ1
+65J1B
[3
1516
NC17
((x)PITCH ATT 1 (Y)
(z]
(
(x]ROLL ATT 1 W’
(z
IDO
)
ATTSOURCE ATTPORT1ID1
IDO
)ATTTOGGLE
ID1
CITATION110/1.
—
LF118
82 =JI .—— — —— J
(+))DC.811DATA(-)
SGLEFT/RIGHTSC-DCIDC-811
ASCBDUAUSINGLE AIT PORT 2
EFISDUAL/SINGLE
r ———MG-LM= 1
SYMBOL GENERATORI
125J2B
+
125J3Ar
(x(Y
(z
(x(Y
(z
ITTVALID,
IPITCH ATT 2
ROLL ATT 2
[x)1 I(Y) PITCHATT
(z) I
(x)
}
ROLLATTI
(Y)(z) I
r .——MG=5 =DSYMBOL GENERATOR
~=d
125J3A
I (+ 23
DC-811 DATA _ 24
I)
—-JATT2 VALI[
IL —. ——— —— --
———— —— -J1- ———— —
NOTE:INTERFACEBETWEENTHESG-605ANDMG-605IS BYTHEASCB.
AD.18703.R1
SG-605andOptionalMG-605AttitudePortInterconnects
Figure221 22”14-00Page298.1/298.2
May25/90Useordisclosureofinformationon this page is subject to the restrictionson the htle page of this document.

Honeywell W!M5ANCECITATION n/V
r ——————————~65JSG-B05 SYMBOLGENERATOR
,—— — ——PILOT’SC-14DDG 128 V13C HDG VALID I
)(+)“DG(–)SYNC I
I
I(x)1
HDG(Y) SYNCI-IRO I(z) NO 1
I
6J
i
Euv
L
M
K
IDISPLAY DATA TOPILOTS EtiSl
Q“DGISYNC’‘~‘I-J
‘ 65J65Jl B
$
24
25
lB 2A
7
1=
21
>2
:!3
23 (NOTE 2)
22 NC
/
HC!GIDO HDti PORT 1
ID1 SOURCE
100 HOG {
. .,Xj
HDG 1 (Y)
(z)
—NC
I ID1 ~ TOGGLE
CITATION WVHOG 1 FREE/SLAVEOR MAG/lRUE
~C-Sll DISPLAYCONTROLLER——— ——.
HOG 1 DEF
I(-
DC/SG BUS +
I
I HOG REV
I
I (-DC/MG BUS +
L ——— —..
OAG-SQ5MFDSYMBOLGENERATOR IHDG1 VALID IHOG 2 VALID
I
(+)
(-))DC-811 DATA 125J2B
<
34
5s
I 65J
1A
92
B
!s
‘8
10
HDG 2 VALID
J=15
$
HDG REV
36
37 )
r———— —
MG-S05 MFD
I
SYMBOLGENERATOR
l-l=J
125J3A
(
+ 23DC-811 DATA _ 24
L)
—————
3-NC 97
es
=
NC 101
102
=
I
[
(+)HOG2SYNC
(-)
(x)
HDG 2 (Y)
(z)
126J3A
a
7
8
9
13
S’ LEFT/RIGHT
x)
}
IY) HOG1
z) I
+
-)HDG1 SYNC I
-——— —— J
SC-DCIDC-S1l
r22
23
(NOTE 2)
NC
=
HDGPORT 2
ASCB DUAL/SINGLEHOG 2 FREE/SLAVE
EFIS DUAL/SINGLE
I OR MAG/TRUE
HOG 2 DEF
HDG 2 PHASE (PR1/SEC)
1- ——— ——— ——— —!
——— ———COPILOT’SC-14DDG 1[ COPILOT’SRD-450HSI I C2J2
28 VDC HDG VALID
)
I+ HDG— SYNC
I
I u=HDGVALID(IN) Y
IHDG SYNC
(
+G— H~
I
HDGvALID(OUT) X
II
I
I
I }
(x) l+fJG
(Y) SYNCHRO
(z) NO 1
I1 HDGOUTPUT~l :=
-—— ——— dy
NOTES.
I l.(x) s
L ——— —. -P 1. INTERFACE BETWEEN THE SG-605AND MG-6051SBYTHEASCB
2 THIS PIN TELLS THE SG.605WHETHER THE COMPASS ISINTHE FREE (OPEN) OR SLAVED (GNO) MODE. CONNECT TOSEPARATE POLE OF THE WAG (FREE/SIAVE) SWITCH
AD 1870&R1
SG-605andOptionalMG-605HeadingPortInterconnects
Figure22222-1 4“00Paae298.3/298.4
May”25/90useordwclosure01Inlormntlononthispage IS subject to the restrictionson the title page of this document,

Honeywell W!JFANCEr——— ———
1
CITATION 11~OC.S1l OISPLAY CONTROLLER lISJ1
A
125J.—— —.k~5 SYMBOL 1;ENERATOR
.—— — ———.MG.SOS UFO SYMBOLGENERATOR
1A
1!
t
<
5
5
5
6
6
6
6
6
6
c
E
6
I
IIII
I
I
IIIIIII
I
III
IIIIII
I
I
I
III
I
I
I
I
I
I
E
t
f
u
?,
&
o
2
e5
2
1:
5c1
1:
>
&
7
8
,7
18
3!
02
X
)2
cl
73
!3$
7;
7.
81
3A
76
77
18
79
37
36
39
40
86
87
22
e9
w
91
33
34
35
36
41
42
43
44
48
4:
54
5
b DISP18YDATATOPILO1S EAOIANDFHSII GCSG Bus
+ :~{- l=)1 NC 4
) SCSGBuS
G LEFTRIGHTCDCDC 811 I
II
I
I
I
I
I
I
i
I
I
I
I
I
I
I
I
I
I
IIIIIIIIIIIIj
i K’ql .~“c’MG’”s(~: )
1-—————.2 RS 422
NAV DATA
SCBDUALSINGLEFIS OUALSINGLEIIATION11VRN TO SRN TRANSITIONON OFFROSSSIDE SENSORDISABLE
Of SINGLEDUAL~iA&RmEr– – ,2SJ3A
I
I~ld“’’o’”{: :
:}Rs 422DME DATARN 2 BRG CARO CASE
)
N SRN 1), SOURCE
1-——— ——— -r RN TCGGLE
}M SF4N2)1 SOURCE
/;%;fATA]SRN11s 4Z2DME DATA
OF I VALl0
SIN ~
X SIN
1
V COM ADF 1
z cos BRG
COM
ARINC 1 VALID
l–
[
———
:} 1OATA
:)SYNC g% JME
:}C’K
DME 2 ~D
x SIN
1Y COM SRN z
z cos sRG
CON
:)
INNERMARKER
cm)ADF 1 BRGCos
;P COM
(DF I BRG 34 WIRE SEL
,DF 2 BRG 34 WIRE SEL~O&&O=RNZ41S0
——— —
1
C164J1
1 NAV UNIT A B
-1—————gI I
18V DME VALID
:)OATA
:)
ARINC 1SYNC SRN2 OME
:}CLX
I DME DIST VALID +28V I 48
IIIIII
I
I
I
I
-’s’”’”(: :5
~ED’s’’’~{: :
-E’’s’c’K{~ :;TL#4ED 10 NAV GNO 3
H----)ME HOLD,GNDI IN;RN 2 WIG 34 WIRE SE1
i
1 SIN 1
{
SIN
EXl GND
Cos
‘,COM )SRN 2 BRG! Cos
;PfcOM
:)INNER MAF4KER
SRN 2 TTL GNO
SRN 2 vORLW VALID
~)SRN 2 CRS DEV (LGCI
11
37
12
F ‘ :
—--+
+
———
{
—Nc—
—
SRN 2 GS VALID
~}SRN 2 GS OEV9MIDDLE MARKERlhUJEn MARKER x
MIOOLE MARKEI+ a
WTER MARKER 74
:}OUTER MARKER
SRN TOGGLE
CAA RULES
IDO
)SRN SOURCE
101IIIIIII
I
TTL GNLI
2W VORILDC VALID
CRsDEv’Lm’{~28V GIS VALID 7
S14N2 TTL GND
3RN 2 VOR LGC VALID
:)SRN 2 CfIS DEV (LOCI 4=
+,-——: =+--- -
T
-
75
79 :+ - -
SC GCOC 811
SRN WIG 34
ADF BRG34
ADF SINGLE IDUAL
LRN ‘0 SW TRANSITIG+4 ONIOFF
SRN 2 G S VALlD
:}SRN 2 G S OEV
x SIN
1YCOM ADF 2
z cos BRG
COM
ADF 2 VALID
-(qX SIN
1
Y ‘GM ADF 2
z cos BRG
‘GM
((x) 6
ADF 213RG
(Y) 3
(z) 4
ADF VALtO
-—— ——— — J.—— —— ——.I
NOTE
INTERFACE BETWEEN THE SG 6D5AND MG 6D5 IS 8Y THE ASCB
AOIB7C511,
SG-605andOptionalMG-605ShortRangeNavigation(SRN)
PortInterconnectsFigure223 22-1 4“00
Page298.5/298.6May25/90UseordisclosureofInlormallonon this page IS subject to the reslncttons on the title page of this document,

Honeywell W’UR’”c’CITATION H/V
r——— ——— .
DC-611 DISPLAYCONTROLLER——— ——. — ——SG-605 SYMBOLGENERATOR
I
PDISPLAYDATATO PILOTSEHSI
I
I
I
I
I
I ( (+)DC/SG BUS
(-)
(+)(-) )DC-811 DATA
I SG LEFT/RIGHT
SC.DC/DC-811
ASCB DUAUSINGLE
EFIS DUAUSINGLE
I
I 2-98
=
NC 101
Irx
=
J=)36
37
125J3A
)
23
242
DC/MG BUS(
(+]
(-)
L———————Ir———————
MG-605 MFD SYMBOL GENERATOR IIIII
IIIIIIIIIIIIIIIII
II
I
II (DC-811 (+
DATA (-
I J
125J1A
E
83 Nc
84
=
91 NC
92
93
94 =
65JI B
1
13
=
NC — 14
NC(=
70
71
NC — 62
— 63
164
= L 65
NC — 66
167
=
1
6
=
L82
. &
I
I
LRN 1
{
IDOPORTIDENT ID I
IDO
1
GSPDSOURCE
ID1II
III
(IDO
LRN 1 ID1SOURCEIDENT ID2
ID3
)IDO LRN
IDI TOGGLE
[Dl
I
LRN1SOURCE
ID2 IDENT125J2A
1-
66 NCFMS SINGLE/DUAL ID3J
}
IDo LRN1
PORTID1 IDENT
.
(IDO
GSPDSOURCE
ID1
68
P
=
69 NC
I
I89
t-=
sc-Dc/Dc-811 LRN TO SRN TRANSITION ON/OFF
I
II
I
LRN TO SRN TRANSITIONON/OFF CITATION n/V
125J3A
IARINC O
(
(+’
DATA (-:
L
81
r——— ———
I
—
LRN NO. 1
I
7
ARINC 429
(
(+) +
LRN DATA (-)
I
65J2B
4 (+) )ARINC O
[-)DATALRN 1
1- ——— ——— J ——— ——. — — JAD. 187C&R1
SG-605andOptionalMG-605Long Range Navigation (LRN)
Port InterconnectsFigure224
22=14-00Page298.7/298.8
May25/90Use or disclosure of reformation on this page is subpct to the restrictions on the title pag,) of this document,

——. . 1
I%-300 RADIOALTIMETER ~ml
I
-
(-4 mVDC/FT)
I
I 28 VDC RA VALID ~A
TEST T
*
NC —
.—— — ——;G-605SYMBOLGENERATOR1
——— —MG-605 MFD 1
125J6SJ
A
7
8
s
x
N
s{
7(
7
10
Ic
B
5
B
8
n
f
c
SYMBOLGENERATONB
5
4
5
3
3(
x
,,
3’
,
I
)
7
3
-}
Ik
PRIMARYRAD ALT I
‘WiiAc/AITvAllL I
I
I
I
I
I
I
I
IIIIII
I
I
I
IIIIII
q
Nc
}
‘) PRIMARY
L)ALT RAD
RAG AL.T SINGLEID!JAL
PRI RAD ALT VALIDlAD ALT SINGLE/DUAL I—
I P d [EST OUTI
RA TEST OUT
L ——— — -1 )H OUT 1RA TEST IN
}
mRAD ALT TYPE
)1
k
-}
RATE OF TURN
I
I‘c-l
r——. — —
RG-Z04RATEGYRO
}
)0RAD ALT TYPE
31
DH IN
15J1
1=
4
5 +
7
IRATE OF TURN
{
+
I0.667 vDC/DEG/SEC _
NC -1
I 45 i 0.5 VDC VALID +
-}RATE OF TURNzNC
NC
{
iOT VALID
P
DISPLAY
30T ON/OFFDATA TOPILOT’S
t
-}
EADI ANDSECONDARY EHSIRAD ALT
1- ——— —.
r————-WU-650ANTENNAANDRCVRIXMTRUNtT
ROT VALID
59J1
7
+
-}WX VIDEODATA
I
I
I{-+
IVIDEO DATA
I{-
+CONTROL DATA
I Eq=q9
h
m
n
USED FORP 800 ONLY
{
NC
i
ROT ON/OFF
+
-}
WX VIDEODATA
+
}
WX CONTROL_ DATA
WX VALID
II +)WX CONTROL
DATA—L ————- wx TARGET ALERT INAV SELECTED
IMLS SINGLE/DUAL
Ir————ML-850 MLS 1 LRECEIVER 116J1 =
I ARINC 429
(~}
+ 33
I
~
MLS DATA _ z Y~
I
L= (
1- ——— — J
WX DUAIJSINGLE
MLS SINGLE/DUAL
+
-}
ARINC 8DATA+)ARINC 8 I
DATA—
ISRN TOGGLE
I-Jr NAV SELECTED
I.————
AO 18707 RI
———— .— J
II I
SG-605andOptionalMG-605RadioAltitude,Rateof Turn,WeatherRadar,andMicrowaveLandingSystem(MLS)PortInterconnects
Fiqure225 22-14-00Page298.9/298.10
Mar 15/89Useordisclosure01Informationonthispage is subjeci 10 the restrictionson the title page of lhm document.

Honeywell MWEP*NCECITATION ii/V
,,, &2M FDC———
7
— —— ——1
25J1B c’ DISCRETE (NOTE) I 65.1?43 4 1
7
M
K
L9
,24
3
&
8!
64
8i628:9(9
9;
9:
9,
9!
%
.
HOG VALID*
II
I
I
I
{
I
I
I
I
I
I
I-—— — J
II
I
II
1
I
I
I
I
I
I
I
SGBACKUP
LAT STRG VALID
NAV SEL VALID
iKti=–TO EFIS SELECT RELAY(SEE TABLE 501, FIG All]
X 16LAT DEv VALlD
VERT DEV VALID--
l=vERT DEV VALIII
87 +~f.w,,., ,n
66 - 34
26V TK ~89 e 49
28v AP ENGAGEDso * 46
APS VALID91 *
LNAv APP92 * 40
LIME VALiLI
3 INPUTS
ARE
RELAY
SWITCHED
28V TK ~
26V AP ENGAGED
APS VALID
LNAV APP
SAME
SH&JNABOVE
TTL GNO
TTN GND
MIDDLE MARKER (5W
PW MOVED GND- r L“L
.—— — A
r ——, VN-212 165J2P
f-
i5J
1
2
w
9
w
37
19
73
02
01
i1:
I&
)7
m
00
39
u
10
—
?E
9
1(
1
1:
TO/FROM
a
(+) ,,
IIIII (-) ,2 r
———FZ-SOOFDC 1
11B
(+)
LAT DEV
(-)
-7II
-
7
I
SG ‘BACKUP
I TO FROM
((-)
I
I
I
I
1I
I
IIIIIIII
I
A
LAT DEV h- (+) ,MIIIIII
‘-) 62u[
(+ I
LRN LAT DEV
(-
[
(+
VOR LOC DEV
(-
[
(+
GS DEV
[-
[
(+
DME
(-
h VORILOC DEV i- (+) 96
J
II,1II (-) 97u
3GS DEV 4 .-.
.
1(+)
VOR LOC 23EV
(-)
1
6 (+)
GS DEv
7 (-)
INPUTSARE
RELAYSWITCHED
SAMEAS
SHOWNABOVE
-b
-m
+
-—
I NOTE
THE INTERNAL SG SIGNAL IS APPLIED TO THE SG 605
I
AND MG605 AS SHOWN ON FIGuRES 221 THRU 224WHEN THE SG FAILS. THE SIGNAL FROM THE ffiLW5
I
IS RELAY SWITCHED THROUGH THE SG 605
41(+)DME i40 MVIMI
(-)I
———
—
—
SHIELDGND
.——ALI !LIWU H!L————.
F1ightDirectorValidandNavigationSignals
Figure22622=14-00
Page298.11/298.12Ma#25/90Use or dmclosure01 mlormattonon this page is subject to the restr!chons on the htle page of thm docume 1.

Honeywell i!i~;k~’”c’CITATION V
SECTION4GROUNDCHECK
1. General
Thissectionprovidesa simplifiedprocedure(Table301)forcheckingtheSystemforcorrectinstallationandproperoperationof allcomponentsinthesystem.
NOTICE
ProceduresinTable301arebasedonHoneywellEngineeringBulletinTBA.
Shouldanyfailuresari”sewhileperformingthefollowinggroundcheck, refer
to FAULT ISOLATION as required.
2. EquipmentandMaterials
Equipment and materials are listed in Table 301.
3. Procedure
Instructionsforperformingthetestarelistedin Table301,
22-14-00Page301/302
Mar 15/89he or disclosure of information on this page IS subject to the restrictions on the title page of this document.

Honeywell Wi!!RANcECITATION V
Table301To Be Supplied.
GroundCheckProcedureTable301
22-14-00Pac7e303/304“Marl’5/89
Use or disclosure of information on this page IS subjecf to the restrictions on the title pag ? of this document.

Honeywell Mi!i%!ANcECITATION V
SECTION5FAULTISOLATION
1. General
Thissectionprovides faulty component isolation (Table 401’1 as an aid introubleshootingtheSystemshouldanyfailureoccurduring&ROUNUCHECK.
2. Procedure
Table401is to be used to isolate a faulty component of the system. Ifthesystemfailsanyustepof thesimplifiedgroundcheck, Table 401 indicates
themode flow or modelogicdiagramin Section3 thatis associatedwiththeapplicableGROUNDCHECKstepandthesediagramsidentifythecomponentsinvolvedforthatstep. Also,interconnectdiagrams,Section6, canbe usedas aidsin isolatingthefaultycomponent.
A suspectedfaultycomponentcanbe furtherverifiedby usingtheSperrySystemsTroubleshooter/Interface,if available,andperformingtheapplicableComponentProcedureon allunitsexceptEFIS,weatherradar,andradiocomponents.
22-14-00Page401/402
Mar 15/89UseordisclosureofreformationonthispageIS subjecttotherestrictionsonthetitlepageofth!sdocument.

Honeywell WiVRANcECITATION V
Table401To Be Supplied.
FaultIsolationTable401
22-14-00Page403/404‘Mar15/89
Use or disclosure Of information On lhls page IS subpt to !he reslrlcttons on the title page of thw document.

Honeywell lWJWANcECITATION n/V
SECTION6INTERCONNECTS
Thissectionprovidesinterconnectinformation(Table501)fortheSPZ-500CSystemas an aidin troubleshootingtheSystemshouldanyfailureoccurduringGROUNDCHECK.
NOTICE
ProceduresinTable501arebasedonHoneywellEngineeringBulletinEB7013894,RevisionD.
22-14-00Page501/502
May25/90Use or disclosure of reformation on thw page IS sub!ect to the restnctrons on the title page of Ih}s document.

1
2
3
Honeywell
Introduction
Thistablecontainssystemcomponent
MAINTENANCEMANUALCITATION V
interconnect information and lighting,
power,interlock,and-switchingschematics.
List of Tables Incorporated in thisTable:
Table &
4-1 WeatherRadarCable 508
4-2 MultiplexDataBus 508
List of Figures Incorporated in thisTable:
FigureNo.
4-1
4-2
4-3
4-4
4-5
4-6
4-7
4-8
4-9
4-1o
4-11
4-12
4-13
4-14
4-15
4-16
4-17
Pilot’s/Copilot’s28 V dc Bus
Edge Lighting
AC PowerRequirements
AOA/SpeedCommand
RadioAltimeterInterface
Air DatacommandBlockDiagram
WeightOn WheelsSwitch
AltitudeAlertHorn
PRIMUS@11 RadioSystemBusArchitecture
AudioSystemBus
Engage/Trim Interlock
Heading Switching
Autopilot Engage Select and VG Valid Switching
Aneroid Switch Wiring
Flap Transition Switch Thrust Compensation
TorqueWarnAnnunciator
VNAVDisable
InterconnectTable
Paqe
598.46
598.48
598.49
598.52
598.53
598.54
598.55
598.56
598.57
598.58
598.59
598,60
598.61
598.62
598.62
598.62
598.63
Information501
22-14-00Page503Mar 15/89
U.Se or disclosure Of lnfOrmatlOn on thm page is subject to the restrictions on the title page of thw document.

Honeywell M!M?ANC’CITATIONn/V
FigureNo.
AppendixA
A-1 28 V dc BUS
A-2 EdgeLighting
A-3 AC PowerRequirements
A-4 ReversionarySelectDiscreteSwitching3-TubeEFIS
A-5 AOA/SpeedCommand
A-6 RadioAltimeterInterface
A-7 AirDataCommandBlockDiagram
A-8 WeightOn WheelsSwitch
A-9 ASCBBusConfiguration
A-10 VNAVDisable
AppendixB
B-1 Deleted
B-2 Deleted
B-3 28 V dc Power
B-4 FMSAuto-TuneSwitches
B-5 ASCBConfiguration
B-6 NZ-61OFlightTestInterface
AppendixC
c-1 28 V dc PowerRequirements
c-2 26 V ac PowerRequirements
c-3 EdgeLighting
c-4 AuralAlerters
c-5 MiscellaneousSwitches
C-6 AirDataCommandBlockDiagram
c-7 VNAVDisable
598.132
598.133
598.134
598.135
598.136
598.137
598.138
598.139
598.140
598.141
--- -
598.155
598.156
598.157
598.158
598.168
598.168
598.168
598.169
598.170
598.171
598.172
InterconnectInformationTable501 (cent)
22-14-00Paqe504May-25/90
Use or disclosure of Information on this page is subject to the restrictions on the title page of thks document.

Honeywell iWJRANcECITATION Ilfl
FigureNo.
AppendixD
D-1 Deleted
D-2 Deleted
D-3 WeightOn Wheels
D-4 DC PWRRequirements
D-5 PanelLighting
AppendixE (CitationIIOnly)
E-1 DC PowerRequirements
E-2 AC PowerRequirements
E-3 EdgeLighting
E-4 AirDataCommandBlockDiagram
E-5 Engage/TrimInterlock
E-6 HeadingSwitching
E-7 AutopilotEngageSelectandVG ValidSwitching
E-8 AneroidSwitchWiring
E-9 FlapTransitionSwitch
E-10 TorqueWarnAnnunciator
InterconnectInformationTable501 (cent)
--- -
598.186
598.186
598.186
598.194
598.194
598.194
598.195
598.196
598.197
598.198
598.199
598.199
598.199
22-14-00Page504.1/504.2
May 25/90Use or disclosure of Information on this page IS subject to the restrictions on the title pagt of thm document.

Honeywell M!JYANCECITATION V
4.0 ELECTRICALINTERCONNECTINFORMATION
Thissectioncontainsthecomponentwiringfortheelectronicflightinstrumentsystemanditsinterconnectionto variousotheraircraftsystems.
4.1 GeneralRequirements
~: EFIS/MFDusesAC powerfortheDC-811SynchroExcitation,theSG-605/805andMG-605/805DemodReferences.AllotherEFIS/MFDpowerrequirementsare28 V DC. Panelandpedestalmountedunitscanbeorderedinconfigurationsfor5 V or 28 V lighting.
4.1.1 AC Power- Theaircraftac powersupplymustbe singlephase,115t 5volts,400t 20 Hz sinewavewitha maximumtotalharmonicdistortionof5 percent.Underallloadconditions,amplitudemodulationof thepowersupplyshallnotexceed2 percentat anyfrequency.(Percentmodulationisdefinedas one-halfof thepeak-to-peakmodulationenvelopedividedby thecarrieramplitudeandmultipliedby one hundred.)Withinitsloadrating,thepowersupply’soutputimpedanceshallbe lessthan.3ohmforsinusoidalloadvariationsat allfrequenciesbelow10 Hz.
4.1.2 DC Power- Theaircraftdc powersupplymustbe 28 voltst 10 percent.
~: Forfurtherinformationaboutaircraftpower supplies, ‘refer toRadio Technical Commission forAeronauticsspecificationDO-160A.
4.1.3 Interconnect
4.1.3.1Wiring
The interconnect cabling shall be routed to minimize coupling withhigh voltage and high current circuits suchas the+28voltsdc powerfromthesymbolgenerators.
4.1.3.2InterconnectFormat
Eachconnectionis typicallyshown as indicated in FigureI-1. Wireterminationsprefacedby theletter“C”indicatethecopilot’ssideinthedualinstallation.
InterconnectInformationTable 501 (cent) 22-14-00
Page 505Mar 15/89
Useordisclosureof Informationon this page s subpct to the restrictions on the title pagf of this document.

Honeywell M!U?ANCECITATION V
Function Connector Pin Connects TT
------------- -----]imContrO1<~~l:~~----~~~~~~<~ld
lnit Connectordesignation Wire Gage
~: Intheaboveexampletheshieldcanbe groundedat eitherend (butnot at both ends).
InterconnectFormatFigureI-1
1.1.3.3Grounds
GOODGROUNDSAREA KEYFACTORINA GOODINSTALLATION.Eachgroundshouldbe runas a separatewire and terminated at one central point.The followingspecialrequirementsshallbe met:
A. Chassisgroundsshallbe terminatedto theframeof theaircraftfromthematingconnectorwiththeminimumwirelength.Ifchassisgroundsextendbeyond18 inches,theyshouldbemadeusinga shieldedwire.
B. ALLSHIELDEDWIRESshallhavetheshieldstiedat oneendonlytothenearestaircraftframepoint. Shieldgroundreferencesareshown only on critical functions. All other shields should begrounded at the Transmit endof theshield. (Neverat bothends).DO NOTconnectDigitalshieldsandanalogshieldstogether.
C. Twistedwiresshallhaveat leasttwofullturnsperfoot.
D. Alldc powergroundsshallbe tiedtogether,allac power groundsshall be tied together, all signal grounds shall be tied together,all discrete returns shall be tied together and all lightinggrounds shall be tied together. DC power,AC power,signaldiscreteandlightinggroundgroupsarethentiedtogetherat asinglepointandconnectedto theairframe.Insuregroundblockconnectionto theairframehascapabilityto maintaingroundreferenceundermaximumcurrentconditions.Thediagrambelowillustratesthisgroundingmethod.
InterconnectInformationTable 501 (cent) 22-14-00
Page-506Mar 15/89useordisclosureofinformationonthispageissubject to the restrictions on the title page of thts dJcument.

Honeywell MKRANCECITATION V
Itis veryimportant that this grounding technique be adhered to.Do not tie the various ground wires to multiple aircraft frame-and depend on the aircraft structure itself to provide alow impedance path for the individual grounds. ONLY chassisgrounds and shield grounds are grounded at multj~points in theaircraft.
E. If ground blocks are not adjacent to the unit and ground wires areseveral feet long, it may be necessary to splice larger gauge wireto the ground wire outputs to reduce voltage drop in these longgroundwires. Voltagedropson allgroundwiresfromLRU’Stoaircraftframeshallbe lessthan1.0volts.
F. Pin1OJ1A-4oftheautopilotandpins 12,13,and:.4J1-Cof theservosmustbeterminatedat onecommonpointwhichisalsotiedto aircraftground.The wire used to connect 10JIA-4to thecommon point must be of sufficient gauge to maintain less than 1/4ohm resistance in this path.
r——
I
I
CENTRALAIRCRAFT
IGNDBLOCKS
IL ——
— ——— ——. —— —— .— —
DISCRETERETURN
DC PWR AC PWR
I :
SIGNAL .IGHTING
GNDS GNDS GNDS GNDS GNDS
— — — -,.
‘1
I
I
I
–-l
TOVARIOUSAIRCRAFT LOCATIONSAD-3647
Interconnect InformationTable 501 (cent) 22-14-00
Page507Mar 15/89
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title pacje of this document

Honeywell YAWJRANCECITATION V
4.1.3.4SpecialCabling
A. TheED-600/800Color,Video,FlybackRaster/Stroke,andStrokeReadysignalsconsistof8 twistedshieldedpairs. The maximumlength of these cables is 40 feet.
B. TheED-600/800secondaryColor,Video,Raster/StrokeandFlybacksignalsconsistsof 7 twistedshieldedpairs. Themaximumlengthof thesecablesis40 feet.
c. Theweatherradarcableto theSG-605/805andMG-605/805shallmeettheelectricalcharacteristicsof Table4-1.
Table4-1
* ElectricalProperties,WireAWG24,StrandedTwistedPair,Shielded
Impedance(PerMIL-C-915) 70 ~ 7 ohmsMutualCapacitance(PerMIL-C-915) 30 PF/FtMaxAttenuationat 1 MHz 1.408/100FtMax
* Equivalentto RaychemCorp. Twoconductors,MultiplexDataBus.DrawingNo. 10595,Rev.C, dated4-10-78whichis availablefromSperryperTable4-2.
Table4-2
CABLEMI * UNCUTLENGTH
M1585294 40 FeetM1585294-1 80 FeetM1585294-2 120FeetM1595294-3 160FeetM1595294-4 200 Feet
Interconnect Information
Table 501 (cent) 22-14-00Page 508
Mar 15/89Useordisclosureofinformationonthjspagew subjecttotherestrictionsonthetitlepageofthisdocument.

Honeywell WMRANC’CITATION V
[.2 Interconnect Requirements
1.2.1 Polarities - Installing the systemin accordancewiththe interconnectinformationthephasingbetweentheautopilotsensors and aircraftcontrols willbe as follows:
o Rollright CW drumrotationviewedfromdrumend
● Pitchup CW drumrotationviewedfromdrumenci
o Yawright CW drumrotationviewedfromdrumend
If it is impossibleto maintaintheaboverelationships,servodrivedrumrotationdirectioncanbe changedby interchangingtheconnectionsto pin “A”withpin“B”andpin “L” withpin“N”on theappropriateservo. Ifthe trim servo polarity must be changed the connections topin ‘B” and pin “C” are reversed.
,.2.2 Engage Interlock - Theautopilotcomputeriselectricallykeyedtopreventthewrongcomputerfrombeinginstalledandoperatedinanaircraft.
,.2.3ServoDriveElectricalKeying- The engage clutch of the servo drive iselectrically keyedas a functionofpowergearratioto preventthewrongservofrombeinginstalled.
.2.4 PitchWheelGain- A resistorinstalledintheaircraftwiringbetween1OJ1B-28andllJ1-Uprovidedfor controlling the gain of the pitch wheel- thedegreeof pitchwheelchangeperdegreeof pitchattitudechange.
ResistorValve ~
o 10 Degrees Pitch/60e Wheel51K, 5%, 1/2 WattlOOK,5%,1/2Watt :200K,5%,1/2Watt 2470K,5%,1/2Watt 1
Interconnect InformationTable 501 (cent) 22-14-00
Paqe 509Mar”15/89
UseordisclosureofInformationonthispageIS subJecttotherestrictionsonthetitlepa~{)ofthisdocument.

Honeywell W!J.LANCECITATION V
4.2.5 Go-AroundPitchCommandAdjustment- Externaladjustmentof thego-aroundpitchangleis providedby a resistorin theaircraftwiringbetweenpins7J1A-2and7J1B-32of theflightdirector.Theresistorvaluesareas follows:
PitchAncile ~ PitchAnqle ~
4.05M 8 331K:: 1.82M 9 272K3 1.22M 10 225K4 862K 11 186K ‘
649K 12 154K: 508K 13 127K7 407K 14 103K
4.2.6 AutopilotOffAnnunciator- Thecircuitshownin Figure4-11canbe usedto annunciateinadvertentautopilotdisengage.If theautopilotdisengagesforanyreasonotherthanusingthedisengageswitches,the“autopilotoff” light will illuminate. Pressing the disengage buttonwill reset the annunciator. Everytimetheautopilotdisengagesthehornwill give a 1 sec warning.
4.2.7 TrimWarningThreshold- Theoutof trimwarningthresholdwillbe setby resistorsin theautopilotcontroller.
4.2.8 FlightDirectorPointerGain- Theflightdirectorpointergainisestablishedin theaircraftwiringforthevariousindicatorstobeused.
4.2.9 DMETuneto NAV - IftheDME/NAVfrequencyselectorallowstheDMEto betunedto a frequencyotherthanthefrequencyof theflightdirectNAVinput,a logicgndis requiredon 7J1A-50of theflightdirectorwhentheDMEis tunedto thesamestationas theNAV input.ThisinsuresthattheDMEdistanceinputto theflightdirectorrepresentsthedistanceto theVORstationtunedon theNAV selector.
4.2.10RNAV/RNAVApproachModeGrounds- When in theRNAVAPPROACHmode,bothRNAVandRNAVapproach(7J1A-47,48)groundsareto be applied.TTLgroundis notto be appliedin RNAVmodes.
InterconnectInformationTable 501 (cent) 22-14-00
Page 510Mar 15/89
Useordisclosureofinformationon thw page IS subject to the restrictions on the title page of thm document,

Honeywell I!NKYANCECITATION V
).2.11 Aircraft Relays
Ifthe requirement existsforaircraftrelaysto be drivenin parallelwiththeannunciatorlightsinthe FD/AP ModeSelector,diodeisolationis required.Suppressiondiodes should be installed across the relay
coil and a diodemustbe installedin serieswiththemodeselectorasshownbelow. Failureto installthediodesmayresultin unselectedmodeslightingas a functionof dimmingtheannunciatorlighting.
—— —
.IRECTOR~~El8-28VDCFPOMFLIGHT
7J1A-9
L —— — -1~ REM~~TEANN”NCIAT~R 1
——— —
———
1
OIODES IFDCOMPUTER REQUIRED 5VDCOR28VDC
I
IINAIRCRAFT
‘*’ ‘ ‘ <
s
‘ DIMMING
I1SUPPLYi
I
I I 1- ——— — JI $1L .—— J AD-1429 @
———‘FD/APMODE SELECTOR=
R$;:R0MLQ5L’>7J1A-9
L -J+221VDC
———
:L
——— —
DIODEI
7———1
REQUIREDFDCOMPUTER
lRCRAFT I
I‘+!7’ ‘: <
I RELAY
II
I I 1-————JIL
v——— J AD-1429 ~
AircraftRelayDiodeIsolation
InterconnectInformationTable501 (cent)
22-14-00Page 511Mar 15/89
Use or disclosure of reformation on this page is subject to the restrictions on the title page of this document.

Honeywell WVFAN’ECITATION V
5.0 AVIONICSSTANDARDCOMMUNICATIONSBUS (ASCB)
TheASCBistheprimarycommunicationpathbetweensymbolgeneratorsandthsSperryFMSsystem.Physically,itconsistsof twomulti-pointserialsynchronousdigitalcommunicationsnetworks,eachelectricallyisolatedfrcmtheother,andeachcapableof maintainingfullinter-systemcommunicationin the event of a failure on the other. TheASCBcomplieswithRTCADocumentDO-160Awhichrequiresthatthefollowinginstallationrequirementsbe met:
A. Therearetwo independentASCB’Sdenoted“A”and“B”,eachconsistingof twowirepairsdenoted“Data”and“Clock”.
B. TheASCBtransmissionlinesshallbe Raychem2524E0114withathermoradjacketor Fillotex63247.
c. EachASCBtransmission line pair shall have a characteristic impedanceof 125 ohmst 5 ohms. Thecharacteristiccapacitanceshallbe 12 t 2picofarads/foot.
r). EachASCBtransmissionlinepairshallbe terminatedat itstwoendswith“non-inductive”127ohmresistorst 1%,1/4watt,metalfilm. Aminimumcablelengthof 23 inchesisrequiredbetweentheterminationresistorsandtheneareststub.
E. TheASCBtransmissionlines shall have a maximum length betwaenterminators of 150 feet.
F. Stublengthsat eachuser pickoff shall not exceed 10 inches.Buttspliceswithsolderringsshallbe utilizedforallstubinterconnections.
G. Theshieldconnectionsat eachstubshallbe accomplishedwitha buttsplice.Themaximumallowabledistancebetweenshieldconnectionsshallbe 0.3 inch.
H. Allshieldsshallbe tiedat onepointto theaircraftframeat therearof theLRUwhichis approximatelyin thecenterof thebus. A6-inch(maximum)lengthof 22gaugeinsulatedwireshallbe used.
1. Wirerunsoutsideshieldsshallbe no longer than 2 inches and shallbe configured as twisted pairs wherever possible.
5.1 Rad50SystemBus (RSB)andDiqitalAudioBus
Referto Section5.0for RSBandDigitalAudioBusinstallationrequirements.
InterconnectInformationTable501 (cent)
22--14-00Page512Mar 15/89
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of thm document,

Honeywell lWLWANcECITATION V
Function
TEST POINTPOWER GND115 VAC, 400 HZ INPUT27 VDC OUTPUT26 VAC, 400 HZ OUTPUT(55 VA MAX)5V, 400 HZ OUTPUTEXTERNAL PECO CONTROL GNDRECO CONTROLRECO CONTROLPECO CONTROLCHASSIS GNDPECO CONTROL
[
NCw
ATTITUDE VALID
SPARES
EXTERNAL FAST ERECT CMD
SPARES
TEST POINTTEST POINT
SPARES
PILOT’S VERTICAL GYROVG-14A
Connector Pin
lJ1-A ------NCP,
{-B (22)----r-,-’-.
-c (22)----’~- --D (24)---------
-E ------NC
.------- ----
.------ -----
.------- ----
-F ------NC------NC
=fi(24)-----------------J (24)----------------1-K ------NC-L (22)----------------M ------NC h
------NC~! (24)-----1+-----------
I
;1 J-R (24)----<$--------------s-T-u
7
ORI’!
-V (24)-------- o---------w HI
NOTE : CONNECTIONS SHOWN FORVG-14ACONNECTORPOINTINGFORWARD.
Connects To
AG GNDFIG. 4-3(SHT.1)lJ1-HH
JUMPER
1OJ1B-33,11J1-P
FIG. 4-13
DC GND
Interconnect InformationTable 501 (cent)
22-14-00Paqe 513Mar”15/89Useordisclosureof information on this page IS subject to the restrictions on the title pag: of this document.

Honeywell MMRANCECITATION n/V
PILOT’SVERTICALGYRO(cent)VG-14A
Function ConnectorPin ConnectsTo
RECOGNDOUTPUT>6°OUTPUT lJ1-k------NCPECOGNDOUTPUT -m ------NCEXTERNALRECOCONTROL -n ------NC
[
x f)--P (24)---- ------------65J2A-18,57J1-EROLLATTITUDE -q (24)---- ------------65J2A-19,57J1-F
; ~!-r (24)---- -------------65J2A-20,57J1-Gc -S (24)-------n- ------ 7J1A-15,1OJ1A-10
ROLLTO F/D C -t (24)----1 ItIH -U (24)--------w-------- 7J1A-14,1OJ1A-9
ROLLTO RADAR H[
:; \;:]--fl+------------;;:;-[50MV/DEG c -- - - - - - - - - - -- - -
[
x
1
-X (24)---R-------------65J2A-15PITCHAllITUDE Y -y (24)---tt-:::::::::::::;j;~-;;
z -Z (24)---~-C
t
-AA(24)--------- ------ 7J1B-;8,1OJ1A-16PITCHTO F/D C -BB(24)---In
H 11-CC(24)------U-- ----- 7J1B-27,1OJ1A-15
PITCHTO RADAR C
1
t-DD(24)Q- -------------59J1-L
50MV/DEG H -EE (24)~- ------------- 59J1-K-GG (24)------------------ 7JlA-19, 65J1A-85
ATTITUDE VALID [C -FFNO lJ1-HH(24)------------------lJ1-D
InterconnectInformationTable501 (cent)
22-14-00Page514May25/90UseordisclosureofInformatlofionthispage!ssubject10therestrictionsonthetitlepageofthisdocument

PILOT’SELECTRONICHSIED-600
Function ConnectorPin ConnectsTo
PRIX DEFL(IN) +<-
t2J1-1 (24)------------------ 65J1A-61-2 (24)--------------~-~<’--65J1A-62
-- 65J1A-63SECX DEFL(OUT +
Y--3 ------NC-4 ------NC
28 V DC PWR +
1
‘~ (22)--------------------pILOT28VDC
28 VDCPWR + -6 (22)--------------------‘OWER’F1G”4-1
STROKEREADY(PRI){: A ; :::--fi----------------:::------ --------------
STROKEREADY(PRI)SHIELDGND -36------1’ IPRIY DEFL(IN) +
-(--9 (24)--------------?--C--65J1A-64-10(24)--------------~-i~--65J1A-65
Y-- 65J1A-66SECY DEFL(OUT) +
{-11------NC-12------NC
POWERRETURN - -13(22)--------------------DC PWRGNDPOWERRETURN -14(22)--------------------DC PWRGNDVALIDOUTPUT(PRI)(GND=VALID)-15(24)--------------------65J1A-46STROKEREADY(SEC) +
<--16------NC-17------NC
SECXDEFL (IN) +-(-
-18------NC-19------NC
VALIDOUTPUT(SEC)(GND=VALID)-20------NCREVSELECT(PRI) -21------NCSIGNALGND -22(22)--------------------SIGNALGNDCHASSISGND -23(22)--------------------CHASSISGNDSECY DEFL(IN) +
{--24------NC-25------NC
INCLINOMETERLIGHTING +{-
-26------NC-27------NC
SPARE 231-28------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 515
Mar 15/89Use or disclosure of information on this page IS subject to the restrtctlons on the title pa~e of Ihfs document.

Honeywell WXE!ANCECITATION n/V
PILOT’SELE~:R:lf~CHSI (cent)
Function ConnectorPin Connects To
REV SELECT (SEC) 2J1-29 ------NC
DIM CONTROL
{-
+ -30 (24)------------ n- ---- 115J1-40U*-31 (24)------------ - ---- 115J1-41
SPARE -32 ------NC
{
-33 (24) -------------------- 115J1-50
RASTER DIM CONTROL I -34 (24)-------------------- 115J1-51-35 (24) -------------------- 115J1-52
STROKE READY (PRI) SHIkLD GND -36(20)--------------------SHIELDGNDFOR2J1-7,2J1-8
SPARE
A
-37------NCCOLOR3 (PRI) +
{-1 1
-38 (24)-------- -------T?- 65J1A-40-39 (24)----------------L-- 65J1A-41
t- 65J1A-42TEMP ANNUN GNDOUTPUT -40(24)--------------------ANNUNCIATORSPARE
A-41------NC
COLOR2 (PRI) +<-
1I
-42(24)---------------r~r-65J1A-37-43(24)---------------1-- 65J1A-38
9 -- 65J1A-39STROKEREADY(SEC)SHIELDGND -44------NC
SPAREA
-45------NCCOLOR1 (PRI) +
{-1 -46(24)--------+
%.-------- 65J1A-34-47(24)----------------:<.-65J1A-35
-- 65J1A-36RESERVED -48------NCRESERVED
A-49------NC
COLORO (PRI) +{-
1 4-50(24)---------------r~t-65J1A-31-51(24)---------~------~-65J1A-32
-- 65J1A-33SPARE -52------NCSECX DEFLSHIELDGND 2J1-53------NC “
A 1 SEE PARA.4.1.3.4.A
InterconnectInformationTable501 (cent)
22-14-00Page516May25/90Useordisclosureofmformatlononthispageksubjecttotherestrictionsonthetitlepageofthistiocument.

Honeywell W!KPAN’ECITATION V
PILOT’S ELE~]R{’&CHSI (cent)
Function ConnectorPin
VIDEO(PRI)<-+ A 1 42J1-54(24)------------------
-55(24)------S--------V-----
SECY DEFLSHIELDGND -56------NC
SPARERASTER/STROKE(PRI) + 1-@l
FLYBACK(PRI)<: A
LEFTPHOTOSENSOROUT +
RIGHTPHOTOSENSOROUT +
ACOLOR3 (SEC) + - 2
.{-
-57------NC
{-58(24)---------------fl---59(24)---------------$’--
1-60(24)---------------=-61(z4)---------------~1--
L --
-62------NC-63------NC-64------NC-65------NC-66------NC
-67------NC
COLOR2 (SEC) +
{-
A2 -68------NC
-69------NC
COLOR1 (SEC) +
{-
A2 -70------NC
-71------NC
COLORO (SEC) +
{A2 -72------NC
-73------NC
VIDEO(SEC)
{
+ A2 -74------NC
2J1-75------NC
A2 SEEPARA4.1.3.4.B
ConnectsTo
65J1A-2865J1A-2965J1A-30
65J1A-4765J1A-4865J1A-4965J1A-4365J1A-4465J1A-45
interconnect Information
Table 501 (cent)22-14-00
Page 517Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title pay; of this document.

Honeywell MUR’NCECITATION V
Function
RASTE1l/STROKE
FLYBACK (SEC)
P:
(SEC) +
{.
ELECTRONICED-600
ConnectorPin
2J1-76------NC
-77------NC
A2 -78------NC
2J1-79 ------NC
(cent)
Connec;sTo——
Use or disclosure of mformatlon
Interconnect InformationTable 501 (cent)
22-14-00Page 518
Mar 15/89onthispageIS subjecttotherestrictionsonthetitlepageofthisl:ocument.

Honeywell WW!!ANC’CITATION V
PILOT’SELECTRONICADIED-600
Function ConnectorPin ConnectsTo
PRIX DEFL(IN) +<- I
3J1-1 (24)---------------r~r- 65J1A-55-2 (24)----------------+-- 65J1A-56
SHIELD -- 65J1A-57SECX DEFL(OUT)+
{--3 ------NC-4 ------NC
28 V DC PWR + ‘5 (22)--------------------pILOT28V
28 V DC PWR -6 (22)-------------------} DC PWR,FIG.4-1+
STROKEREADY(PRI) +
{-
-7 (24)--i~l-
A i
--------------65J1A-231-8 (24)-~-J---------------65J1A-24
STROKEREADY(PRI)SHIELDGND -36------TPRIY DEFL(IN) +
{--9 (24)-------------4---=--65J1A-58-10 (24)-------------~--!--~-65J1A-59
SHIELD -- 65J1A-60SECY DEFL(OUT)+
<--11------NC-12------NC
POWERRETURN -13(22)--------------------DC PWRGNDPOWERRETURN -14(22)--------------------DC PWRGNDVALIDOUTPUT(PRI)(GND=VALID)-15(24)--------------------65J1A-19STROKEREADY(SEC) +
<--16------NC-17------NC
SECX DEFL(IN) +.<-
-18------NC-19------NC
VALIDOUTPUT(SEC)(GND=VALID)-20 ------NCREVSELECT(PRI) -21------NCSIGNALGND -22 (22)-------------------- SIGNAL GNC)CHASSIS GND -23(22)--------------------CHASSISGNDSECY DEFL(IN) i-
{--24------NC
3J1-25------NC
41 SEEPARA4.1.3.4.A.
Interconnect InformationTable 501 (cent) 22-14-00
Page 519Mar 15/89
Use or disclosure of mformatlon on this page IS sublect to the restrictions on the tllle page of this document.

Honeywell WURANCECITATION n/V
PILOT’SELEj~~O#~CADI (cent)
Function ConnectorPin
INCLINOMETERLIGHTING +
{.
3J1-26 (22) --------------------
-27 (22) --------------------SPARE -28 ------NCREV SELECT (SEC) -29 ------NCDIM CONTROL
<+ n$-30 (24)------ - - ---------
b-31 (24) ------ -L-----------
SPARE -32 ------NC
{
-33 ------NCRASTER DIM CONTROL ; -34 ------NC
-35 ------NCSTROKE READY (PRI) SHI;LD GND -36 (24)--------------------
SPARECOLOR3 (PRI) +
<
TEMP ANNUNGNDOUTPUT
A1
SPARECOLOR2 (PRI) +
<-A 1
READY(SEC)SHIELDGND
SPARECOLOR1 (PRI) <+
RESERVEDRESERVEDCOLORO (PRI) ~+
SPAREL-
-37------NC
1-38 (24)--I?-----------T~[--39 (24)--w-----------’&-
L --
-40 (24)--------------------
-41------NC
1-42 (24)--1%-----------tar--43 (24)--@------------lfL-
---44------NC
-45------NC
/-46 (24)--r?----------i~r---47 (24)--~J-------.---lw--
L ---
-48------NC
A-49------NC
1 -50(24)--~1-1----------pT--51 (24)--~J-.----------LyL-
3J1-52------NC --
ConnectsTo
EDGELIGHTINGFIG.4-2DC GNtI
115J1-38115J1-39
SHIELCIGNDFOR3J1-7,3J1-8
65J1A-1365J1A-1465J1A-15ANNUNCIATOR
65J1A-1065J1A-1165J1A-12
65J1A-765J1A-865J1A-9
65J1A-465J1A-565J1A-6
InterconnectInformationTable501 (cent)
22-14-00Page520May 25/90
Use or disclosure of mformatlon on thm page IS subject to the restrictions on the title page of this (Jocument.

PILOT’S ELE:;R#:C MI (cOnt)
ConnectorPin ConnectsTOFunction
EC X DEFLSHIELDGND 331-53
IDEO(PRI)i-+ A 1 -54
-55
EC Y DEFLSHEILDGND -56
PARE -57
{- ~ ~::!ASTER/STROKE(PRI) +
‘LYBACK(PRI) +<
A 1-60
. -61
-EFTPHOTOSENSOROUT +{-
------NC
(24)-----i--------------65J1A-1
(24)----- __---.-!.l--65JIA-2--- 65J1A-3
------NC
------NC(24)-----
1-------------65J1A-20
(24)----- ___---iql-- 65JM-21--- 65J1A-22
(24)-----I------------65J1A-16(24)----- ___---~:[-- 65J1A-17
--- 65J1A-18-62------NC-63------NC
COLOR3 (SEC) +
<-
COLOR2 (SEC) +
{
COLOR1 (SEC) +
{-
COLORO (SEC) +
{.
VIDEO(SEC) +
{
RIGHTPHOTO SENSOROUT‘+-c
-64------NC-65------NC
A -66------NC
A2 -67------NC
A-68------NC
2-69------NC
A-70------NC
2-71------NC
A-72------NC
2-73------NC
?3-74------NC
2J1-75------NC
b2 SEEPARA4.1.3.4.B.
interconnect informationTable 501 (cent) 22-14-00
Page 521Mar 15/89
Use or dwclosure of information on this page IS subject to the restrictionson the title pagw of this document.

Honeywell KNJIPANCECITATION V
PILOT’S ELECTRONIC ADI (cent)ED-600
Function ConnectorPin
RASTER/STROKE(SEC){: x:; ::::
FLYBACK(SEC) +
{.
A 2 -78------NC
3J1-79------NC
Connects To
Interconnect InformationTable 501 (cent) 22-14-00
Page 522Mar 15/89
Use or dwclosure of reformation on this page IS subject to the restrictions on the title page of this jocu”rnent. “

PILOT’S FLUX VALVEFX-220
Function ConnectorPin , ConnectsTo
{
z i4JI-A(24)---O--------------5J1-AFVSTATOR x -B (24)--J-!-!-------------5JI-B
Y -C (24)--JJ-?--------.----5J~-c26V,400HZ
{-------------------AC GNU
; :: !::l---;----------[----- hll-sSHIELDGND -F (24)---- ----- 5J1-il
PILOT’SDUALREMOTECOMPENSATORCS-412
FROMFLUXVALVE
26V,400HZ
PWRGNDSHIELll GNllSPARE
FLUX VALVE OUTPUT
CI-IASSIS GND
SPARES
{
z 5J1-A(24)---=-?-------------x
i-B (24)--~-~--------------
Y -C (24)--J-!--------------
1
-D (24)-----------------T -----
-E (24)--------------------~ (24)-----La
{
x I-H (24)---,~i-’-------------Y -J (24)-------------------z -K (24)--&~-------------
-L (24)--------
(
-M A
::
{-R-s
4J1-A4J1-B4J1-C6J1-S4JI-EAC GND
6J1-R6J1-N6JI-P
[
-T-u-v
~: SHIELDSON THISSHEETARENOTTIEDTOAIRCRAFTGROUND.SHIELDSMUSTBE INSULATEDFF!OMAIRCRAFTSTRUCTURE.
Interconnect InformationTable 501 (cent) 22-14-00
Page 523Mar 15/89
Use or disclosure of Inforfnatlon on thk page IS subject to the restrictions on the tttte page of this document

Honeywell M!MY’”c’CITATION Ilfl
Function
AC POWERGND28 VDCGND+28VDC INPUT
FREESLAVESW
+B TO FREESLAVESWHDGNO.1 ROTOR26V400HZ
HDGNO.1 STATOR
FLUXVALVE
26 VACFLUXVALVEEX115VACOUT
ANNUNCIATOR5 VACOUTPUT
HOGNO.2 ROTOR
HDGNO.2 STATOR
INTERLOCKNO. 1
FLUXVALVESHIELDCHASSISGND
INTERLOCKNO. 2
26 VACOUTPUT H42 VA MAX
SYNCSWITCH(w
FREQUENCY/PHASELOCK+
SPARE
PILOT’SDIRECTIONALGYROC-14D
ConnectorPin ConnectsTo
6J1-A(22)-------------------B (22)-------------------c (22)-------i-----------D~; (24)-----------
AUTO1
-G (24)--------------J-H (22)T~t
\-------------.
-J (22)&~-----X-
1
-------K (24)--------~a- -------L (24)--------ha--------M (24)--------’-’------
1
-N (24)-----------------P (24)------------+----R (24)------------J-1---S (24)-----T~+&-~+&----
AC GNDDC GNDFIG.4-1 (SHT1)
FREESLAVESWITCHFIG.4-3 (SHT3)AC GND65J2A-2365J2A-2165J2A-225J1-J5J1-K5J1-H4J1-E
-T-- i L---- 5J1-D
(-+ -U (24)-----’------------65J2A-28
1-V (24)-----------------65J2A-29-w
(
H
1
I-X (22)-r3-j------------;;::Bi7,C6J1-X,
c -y (22)-’”1--1------------AC GND
(
z -Z (24)----------------x -a (24)-----{_ij-;___
)FIG.4-12
Y -b (24)------&d-------fNC -c I
(NO -d (24)-----;------------FIG.4-1 (SHT 1)c -e (24)------------------65J1A-84
-f--–-J-g (22)------>
(c -h (24)------------------1OJ1B-28,C6J1-hNC -i
~NO ~~ (24)------------------FIG.4-12------NC
-m(24)----------------n (24)------------L:!Y;; ::Nc-p (24)---------------4-q RH
(
-r
6J1::
InterconnectInformationTable501(cent)
22-14-00Page524May 25/90
Use or disclosure of information on this page IS sub)ect to the restrictions on the Mle page of this socument

PILOT’SFLIGHTDIRECTORCOMPUTERFZ-500
Function
sIGNALGND+V oUTPUTVNAVW/OTp
-voUTPUTsPARESPARE+28VANN.POWEROUTPUT+28VANN. POWER OUTPUTDC ANN GNDDC ANN GND
sPARE
sPARE
ROLLATT
+28 NAV VALID
Fll LAT f+
Dc \-+28VG VALIDNAV/LOCRADIODEV(+RIGHT)TUNEDTO LOCGND+28HDGVALIDREVAPPGNDNOCGAINCHANGERNAV STAGING GND+28 V INS/R-NAV MOOE
ROLL AP COMMAND
ROLLFD COMMANDBIASOUTOF VIEW
OMEDIST40MV/MI
1 +V DMEVALID
IHDG ERROR.3V/DEGHDGERROR.2V/DEG
(H
c
(-+
(-+
(-
+
Connector PinConnectsTO
7J1A-I(22)--------------------SIGGND-2 (22)---------------~ ;:;6:32-3 ------NC t
-i ------NC-5 (22)__----!!!!------ 7J1B-29,7J1A-31-6-7-8 (22)--r?-
1
--------------18J1-f
-9 (22)--t-l---------------8J1-C
-10 (22)-~J---------------+
-11 (22)j DC GND,
-----------------.-
-12-13-14
-15-16-17-18-19-20-21-22-23-24-25-26-27-28
t
(24)-~~[
-------------------
[::]-ij----------l--::---------------
$(24)------------C>---(24)------------LQL----(24)--A-
I
--------------
(24)-~-r--------------[;j]-~”
---------------.-----------
~::t;;;;---------------
(24)-------------------(24)--------.-----.----(24)-------.--------.--(24)----~●-t------------t
lJI-u,1OJ1A-9lJ1-tlJ1-s,1OJ1A-1065J2B-8665J2B-1OO65J2B-9lJ1-GG,65J1A-8565J2B-9765J2B-9865J2B-9365J2B-80
7J1A-65sIGGND65J2B-841OJ1A-18
{-29 (24)------------~L---- ~~~~~~~~-30 (24)------------- ----31 (24)--------------------7J1A-5,7JIB-29
-32 (24)--------
i~ ------- ;:;;~#2’
-33(24)------------------~~jfB~:O1’
-34(24)-------------------iiiJ2B-88,FIG.4-17
-35 (24)
!
------------------ 7J1A-37
7J1A-36(24)--------------T;-65J2B-105
InterconnectInformationTable501 (cent) 22-14-00
Page 525May-25/90
Use or disclosure of mformatlonon WIIS page IS subject to the reslncttons
on the title pag, ! of this documenl

1
H
Function
IDG& CRSCOM
.28V TCSSELiPARE;RSERROR.3V/DEG:RSERROR.2V/DEGFZS V ALTVALIDAIRSPEEDINPUTALTITUDEINPUT
PILOT’SFLIGHT DI};C::} COMPUTER (cont)
SPARE+28V AP ENGAGE
R-NAVMODEGND INPUTR-NAVAPPMODEGND INPUT+28V TK DETENTDMETUNEDTO NAV GND
TASOUTPUT+28V TASVALIDINPUTSPARESBYSEL INPUT
HDGSEL INPUTNAVSEL INPUTBC SEL INPU
FDOFF SEL INPUTROLLPTRGAIN(C)
[HI
1ROLLPTRGAINSELECT LOCOMM
SPARESPARENAVCAP ● ~ GNDNAVCAP ● TTL GND
BC CAP GND
BC ARM GNDSBYGNDPITCHMODEGNDHDGMODEGND
LNAVMODEGNDNAVARM GND#lNAV CAP GND#l
~:~ (24)------------NCi---------l--‘lG”4-1’
-40(24)------]-U+-41 (24]-------------- 65J2B-103
-42(24)___----------:: 9J1-12-43(24)---<3 -------------9JI-64,1OJ1A-39
-44(24)-------CT----------9J1-63-45------Nc-46(24)-------------------::;2B;:$
.
-47 (24)--------------------SIGGND
-48(24)-------------------65J2B-92
-49 (24)-------------------65J2B-89-50(24)-------------------65J2B-94,
F“IG.4-17
“ -51------Nc-52(24)-------------------9J1-12
-55(24)-------------------M;-;~;;~::~-------------------
-------------------8Jl~i
-58 (24)-------------------8JI-N
-59------NC;:;(24)--.---------------
1 JUMPER
~::(24)------------------J
-64-65(24)-------------------7J1A-25-66------NC-67(24)-------------------~~~-~;~~~~~-~~-68(24)--------------------69------NC-70 ------Nc-71 (24)-------------------8J1-r,65J1B-43,
llJ1-d
-72(24)------------------- 65JlB-39
-73 (24)-------------------8J1-n
7J1A-74(24)-------------------8J1-pi
InterconnectInformationTable501 (cent) 22-14-00
Page526May25/90
useordisclosure of mformat!on on this page is sub]ect to the restrictions on the I!tle page of this dljcument.

Honeywell WJRANCECITATION n/V
PILOT’SFLIGHTDIRECTORCOMPUTER(cent)FZ-500
Function ConnectorPin ConnectsTo
+28V BC OUTPUT 7J1A-75------NCVORAPP GND -76------NCLATERALMODELOGIC -77(24)-------------------1oJ1B-37LOC IITESTPT -78------NC0SSTESTPT -79 ------NCNOC TEST PT -80 ------NCAOSS TEST PT -81 ------NCROLL TP C -82 ------NCROLL TP D -83------NCSPARE -84NAV ARM GND#2 -85(24)-------------------65J1B-55NAV CAP GND#2 -86(24)-------------------65J1B-56VORAPP ARMGND -87(24)-------------------&jJIB-59VORAPP CAP GND -88(24)-------------------65J1B-60VORAPP SEL INPUT -89 (24)------------------- FIG. 4-17ROLL DEVTP E -90 ------NCSPARE -91ROLL TP A -92------NC17 DEG BANK LIMIT -93 (24)------------------- llJ1-NEX ROLL LIMIT JUMPER 1 -94 (24)------------------EX ROLL LIMIT JUMPER 2 -95 (24)------------------1SPARE -9628V DISPLAY IN VIEW -97------NCG/SDISPTP -98------NCNAV CAP “ NOC DELAY TP -99 ------NC
-1oo
-101SPARES -102
-103LATSTRGVAL -104------NCRATELIMITDISABLEGND -105(24)------------------TJIA-11
SPARE 7J1A-106
InterconnectInformationTable501 (cent)
22-14-00Paae527Ma~”25/90
Use or dwclosure Of Information on thm page IS subject to the restrictions on the title page of this docum nt

Honeywell MF;:FANCECITATION n/V
PILOT”sFLIWT D\~cT# coMf’WH?(Cent)
Function
115VAC 400HZ (H(c
+28V INPUTNO. 1F28V INPUTNO.2k26VACOUTPUT(20VA MAX)‘ITCHHOLDBUTTON~28V GS VALIDI TO TERNN~ AV VALID:HASSISGND
{
HI‘ITCHPTR LOWIAINSSEL COMMERTICAL PATH ERROR
+ UP)LIDESLOPEDEVIATION+ UP)
IMIIOALT
!T ENGTO TERNIRMALACCEL
: PRESELECTERROR#1iRT ENG TO TERN
.TERR<1OOOFTNAV MODEGND:PRSELERR#l
‘ITCHATTITUDE
IIASOUTOF VIEW
‘DPITCHCOMMANDIO-AROUNDBIAS
DC COMMANDO AP
GND
28VRADIOALTVALIDOLDERRORROM ADC
2TE 1: CITATION VONLY.
I++++{Hc[--t
(-+
(+
ConnectorPin ConnectsTO
7J1B-I(22)--c2--2 (22)-J-J-t
--------------FIG4-3,(SHT1)
-3 (22)-:~-‘-------------ACGND
-4 (22)-----7--------------FIG4-1, (SHT1)
-5 ------NC------NC
‘~ (24)-8
---------.----------65J2&87
-11-12-13-14-15-16-17-18-19-20
-9 (24)--------------------16JI-22,65JIA-76-lo (22)-----*
(24)------------------1
(24)-----------------
I
J(24)--Z-~--------------(24)-!C;-------------
$(24)-------C>---------(24)------{;-?-------(24)
l-:t------------------
(24)---------------- -----:--NC \J
16J1-28,65J2B-3816JI-27,65J2B-3965J2B-9965J2B-7320J1-X20J1-N,65J2A-70
-21 (24)-------------------17J1-2,10J1A-44.
-22 (24)---------------____-23------NC-24 [24)--------------------25 (24)--------------------26 (22j-------------------
!
-27 (24)--:;--------------
-28 (24)-+-------~:::::-29 (24)-------------------
(NOTE1) ‘16JI-25
16J1-2016J1-29SIGGNDlJ1-CC,1OJ1A-15lJ1-BBlJ1-AA,1OJ1A-167J1A-5,7J1A-31
-30 (24)-~~--31 (24)-+-;-!
-------------fjCjJ2A-73-------------65J2A-74
-32 (24)-------------- 7J~A-~, 8J1-E
225K-33 (24)-34 (24)
‘------------------~OJ~A-23
‘------------------1OJ1A-25-35 (24)--;<---------------zOJ~-~, 65JIA-78
I[- 7JlB::;[;;;:~;;:=:::::::::::::;;:;; 65J2A80>
InterconnectInformation -Table501 (cent)
22-14-00I%ge528May25/90
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of this cjocument.

Honeywell tifiWJErANcECITATION n/V
PILOT’S FLIGHT DIRECTOR COMPUTER (cent)FZ-500
Function Connector Pin Connects To
+28V ALT PRESELECT VALID 7J1B-38 (24)------------------- 65J2B-91TO/FROM NULL DISCRETE ~~; (24)------------------- 16J1-24IVV OUTPUT ------NCMODE SELECT RETURN -41(22)------------------8J1-FGS DISPCMDTOAP -42(24)--~i
#--------------1OJ1A-2O
GS INTCMDTO AP -43 (24)--U- -------------- 10JIA-22
VERT SPEED #1 .5V/lKFT/MIN -44 (24)----------C’ ------- 9J1-65VERT SPEED #2 .5V/lKFT/MIN -45 ------NC1200 FT RA GND -46(24)-------------------20J1-U+28VFDCVALID -47(24)-------------------65J1A-83LOW LEVEL FDCVALIDDISCRETE -48------NCPITCHWHEELMOVEDISCRETE -49(24)-------------------1OJ1A-33,
65J2B-96DAY-NITE28V=DIM -50(24)-------------------FIG4-1DC PRESELECTERROR#2 -51(24)-------------------SIG.GND.250FT RA GND -52(24)-------------------20J1-VAPPSELECTINPUT -53(24)-------------------FIG.4-17GA SELECTINPUT -54(24)-------------------FIG4-11O-28VLIGHTINGCONTROLINPUT -55(24)-------------------8J1-LALTHOLDSEL INPUT -56(24)-------------------8J1-aIASHOLDSEL INPUT -57(24)-------------------8J1-WVS HOLDSEL INPUT -58(24)-------------------8J1-YMACHHOLDSEL INPUT -59------NCALT SEL INPUT -60(24)-------------------8J1-cV-NAVSEL INPUT -61(24)-------------------8J1-RGNDFORACCELCOMP -62 (24) ------------------- 1OJ1A-31, NOTE2
V/SMODEGNDTOAP -63(24)-------------------1OJ1B-41ALTMODEGNDTOAP -64(24)-------------------10JtB-38IAS+ MACHGNDTO AP -65(24)-------------------1OJ1B-4OALTSWITCHGND -66------NCK GND -67GA GND -68 (24)-------------------65J1B-40APPARM GND -69(24)-------------------8J1-g,65J18-49APPCAP GND -70 (24) ------------------- 8J1-h,65J1B-50,
1OJ1B-21ALTSELARMGND -71(24)-------------------8J1-d,65J1B-41ALTSELCAPGND -72(24)-------------------8J1-e,65J1B-42VNAVARM GND -73(24)-------------------8J1-S,65J1B-51VNAVCAPTGND 7J1B-74 (24)------------------- 8J1-T, 65J1B-52
NOTE 2: CITATION V ONLY. IT IS NOTCONNECTEDFORCITATIONII.
InterconnectInformationTable501(cent)
22-14-00Paqe529Ma~-25/90
Use or disclosure of Information on th!s page IS subject to the restncttons on the title page of this docum nt.

Honeywell W!!M!ANCECITATION V
PILOT’S FLIGHT DIRECTOR COMPUTER (cent)FZ-500
Function Connector Pin Connec?s To——
ALT HOLD GND 7J1B-75 (24)------------------- 8J1-b, 65J1B-45V/S HOLD GND -76 (24)------------------- 8J1-Z, 65J1B-46,
115J1-4?
IAS HOLD GND -77 (24)------------------- ;;3;;,4;5J1B-47,
14ACHHOLD GND -78 (24)------------------- 65Jl&e~
SPARE. -79
MIDDLE MARKER INPUT -80 (24)------------------- 65J2B-95ALT HOLD ● SYNC TO ADC -81 (24)------------------- 9J1-31V/S HOLD ● SYNC TO ADC -82 (24)------------------- 9J1-34MACH HOLD ● ~TO ADC -83 ------NCIAS HOLD ● SYNC TO ADC -84 (24)------------------- 9J1-35
{
4 -85 ------NCALT HOLD 2 -86 (24)--------------
-87 (24)--------------; -88 (24)-------------- 1
{
4 -89 ------NCG/S 2 -90 (24)--------------DAMPING -91 (24)--------------
: -92 (24)-------------- 1RNAV IAS/MACH -93 ------NCASC GND INPUT -94 ------NCVERT STRG VAL -95 ------NCLNAV SEL INPUT -96 ------NCG/S OC +10TEST POINT -97 ------NCVNAV COMMAND TEST POINT -98 ------NCSPARE -99m -1oo ------NCEXT GND FOR ACCEL DAMPING -101(24)------------------ SIG GNDGND FOR ALTALERTER -102 ------NC-10 REF TEST POINT -103 ------NCVERT STRG TO TERN -104 ------NC
NORMAL ACCEL TEST POINT -105 ------NC
VERT CHANGE “7J1B-106 ------NC
Interconnect InformationTable501 (cent)
22-14-00Page 530
Mar-15/89Use or disclosure of mformatlon on this page Ls subject to the restrictions on the trtle page of this document.

Honeywell tiilllr’”c’CITATION 11/’V
(
PILOT’SFD MODE SELECTORMS-205
Function Connector Pin ConnectsTo
O-5LIGHTINGCONTROL 8J1-A(22)------------------~i;V4E;GELIGHTING
LIGHTINGGND -B (22)------------------AC GN;28 VDC MODE ANN POWER -C (22)------------------7J1A-9CHASSISGND -D (22)------
h+V POWERFROMFDC -E (22)------------------7LilA-2,7J1B-32MODESELRETURN -F (22)------------------7J1B-41
-GSPARE -HNAVSWITCHINGGND -JDIM
[HI -K (24)------------------FIG.4-1
CONTROL WIPER -L (24)------------------7J1B-55DC POWERGND -M (22)------------------DC GNDFD OFFSELECT -N (24)------------------7J1A-58NAV1REMOTEGND -P ------NCVNAVSELECT -R (24)------------------7J1B-61VNAVARM GND -S (24)------------------7J1B-73,65J1B-51VNAVCAP GND -T (24)------------------7J1B-74,65J1B-52NAV2REMOTEGND -u ------NCSPARE -v ------NCIASSEL -W (24)------------------7J1B-57IAS GND -X (24)------------------7J1B-77,65J1B-47,
115J1-48VS SEL -Y (24)------------------7J1B-58VS GND -Z (24)------------------7J1B-76,65J1B-46,
115J1-47ALTHOLDSELECT -a (24)------------------7J1B-56ALTHOLDGND -b (24)------------------ 7J1B-75, 65J1B-45ALT SELECT -C (24) ------------------ 7J1B-60ALT SELARM GND -d (24)------------------7J1B-71,65J1B-41ALT SELCAPGND -e (24)------------------7J1B-72,65J1B-42APP SEL -f (24)------------------FIG.4-17APPARM GND -g (24)------------------ 7J1B-69, 65J1B-49
APP CAPGND -h (24)----------------- 7J1B-7O,1OJ1B-2I
[----- 65J1B-50BC SEL -i (24) ------------------ 7J1A-57BC ARM GND -j (24)------------------ 7J1A-68, 65J1B-57BC CAPGND 8J1-k(24)------------------7J1A-67,65J1B-58
InterconnectInformationTable501 (cent) 22-14-00
Page531May 25/90
Use or disclosure of reformation on this page is subpct to the restrictions on the tdle paqe of thw document.

Honeywell Y&!&!!ANcECITATION V
Function
NAVSELNAVARMGNDNAVCAPGNDHOGSELHDGGND
SPARESPARE
PILOT’SFDMODESELECTORMS-205
ConnectorPin ConnectsTo
8J1-m(24)------------------7J1A-56-n (24)------------------7J1A-73-p (24)------------------7J1A-74-q (24)------------------7J1A-55-r (24)------------------7J1A-71,65J1B-43,
llJ1-d------NC
8J1::------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 532Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the tttle page of this document

Honeywell MI!!!RANCECITATIONV
AIRDATACOMPUTER(PILOT’S/COPILOT’S)AZ-241
Function ConnectorPin ConnectsTo
26 VAC400Hz OUTPUT H<
9J1-1 (22)------------------ 16J1-3~,18Jl-E26 VAC400Hz OUTPUT C -2 (22)------------------16J1-X),18J1-F115VAC400 tiZ INPUT H
{-3 (22)------------------FIG.4-3 (SH1)
115VAC400HZ INPUT C -4 (22)------------------AC P14RGND
{
SIGNAL -5 (24)------------------18JI-TCOARSEALTNO.1 +15V REF -6 (24)------------------18J1-R
RETURN -7 (24)------------------18J1-P
{
SIN -8 (24)------------------18J1-uFINEALTNO.1 Cos -9 (22)------------------18J1-V
RETURN -lo(22)-----------------18J1-WCHASSISGND -11------+28V ADCVALID -12(24)-*-------------16J1-36,7J1A-42
18J1-a,7J1A-52ALTALERTHORN1OJ1B-44
SPARE -13SPARE -14SIGNAL GND
“[
-15 (22)-----------------SIGNALGND-16---------143J1-85,C143JI-85
;: -17---------I43J1-1OO,CI43J1-1OOcl -18---------143J1-1,C143JI-1C2 -19---------143J1-26,C143J1-26
ALTITUDE Al -20---------143J1-98,C143J1-98ENCODING A2 -21---------143J1-99,C143J1-99
A4 -22---------143J1-97,C143J1-97-23---------143J1-86,C143J1-86
l? -24---------143J1-84,C143J1-84SPARE -25SPARE -26ALTENCODINGD4 -27---------143J1-13,C143J1-13IILTENCODINGCOMMON -28---------143J1-69,C143J1-69PREASSIGNED -29------NCPREASSIGNED -30------NC
{
ALTHOLDENGGND
I
-31(24)----------------7J1B-81HOLDOUTPUTS
{H -32(24)-r~-------------7J1B-36
-33(24)-vs--------------7Jlg-37,65J2A-80Vo.1 VERTSPEEDHOLDENiGND -34 (24)-----------------7J1B-82
AIRSPEEDHOLDENGGND -35(24)-----------------7J~B-84PREASSIGNED -36------NCSLEWENGAGE 9J1-37(24)-----------------115J1-57,F1G.4-6
InterconnectInformationTable 501 (cent)
22-14-00Page-533
Mar 15/89Use or disclosure of mformahon on this page IS subject 10 the restnctrons on the Mle pa~e of this document

Honeywell W!URANCECITATION V
AIR DATACOMPUTER(~;L~]~S/COPILOT’S)(cent)
Function ConnectorPin ConnectsTo
{SLEWCONTROL 9J1-38(24)-----------------FIG.4-6,115J1-58
NO.1 HOLDREFOUTPUT -39(24)-----------------FIG.4-6,65J2A-79fALT HOLDENGGND -40------NC
HOLDOUTPUT ~ -41------NC-42------NC
NO. 2
VERTSPEEDHOLDENG -43------NCAIRSPEEDHOLDENG -44------NCPREASSIGNED -45------NCSLEWENGAGE -46------NCSLEWCONTROLINPUT -47------NC.HOLDREF -48------NC
{
SINFINEALT CosNO.2 COMMON
{
SIGNALCOARSE +15 V REFALT NO. 2 GND
SPARE
TESTPOINTS
{
EXCITATIONBARO POT WIPER
LOW
4-49(24)--1~,-----50(24)---------51(24)-+-J----52(24)----------53(24)----------54(24)---------
-- -- -- - -------- --- - -i- - - -
“-l------II-------L-Ll---
-55
{
------NC-% ------NC-58------NC
{-59(24)----------Q-’-----60(24)---------!-(------61(24)---------L=I-?----
16J1-4016J1-4116J1-4216J1-37,1OJ1A-2116J1-1416J1-15
18J1-Z18J1-Y18J1-X
BAROCORRECTIONDISABLE -62------NCDCALTITUDE -63(24)-----------------7J1A-44AUTOPILOTAIRSPEED -64(24)-----------------7J1A-43
1OJ1A-39ALTRATEOUTPUT -65(24)-----------------7JIB-44ALTRATEREF+ -66------NCALTRATEREF - 9J1-67------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 534
Mar-15/89Use or disclosure of reformation on this page !s sub)ect to the restrlcttons on the title page of this document

Honeywell W!JR’”c’CITATION n/V
AUTOPILOTCOMPUTERSP-200
Function ConnectorPin ConnectsTo
+15VDC 10JIA:~(24)------------------;;;;-!,FIG4-14,+5 VDC ------NC
+28V A/P ENG . TCSSEL -3 (20)------------------llJ1-C,12J1-F,13J1-G.FIG.4-11
SERVOPWRGND -4 (18)------------------i2J1-C;13J1-C14J1-C,SERVOPWRGND
+28VDC FROMA/PDISENGSW -5 (20)------------------FIG.4-11SPARE -6-15VDC -7 (24)------------------llJ1-A,17J1-5CHASSISGND -8 --------
*,
ROLLH!
-9 (24)-------2--------ROLLC ;;:(24)------~L4--------ROLLHOLDANN GND ------NCPITCHCOUPLEANNGND -12------NCAP OFF LIGHTGND -13(24)-----------------AP OFFHORNGND -14(24)------X--------PITCHH -15(24)------P+
!-------
PITCHC -16(24)------!&--------ROLLCOUPLEANN GND -17------NCROLLA/P PATHCOMMAND -18(24)-----------------(ROLLLEFT= -)
V/LRADIODEVIATION -19--:---NCG/SDISPLACEMENTCMD
!
-20(24)~-6– ---------ADCALT INPUT -21(24)----- .-------.G/S INTCMD -22(24)1-&-----------:~~R:ATACOMMAND(+)
I
-23(24)---------,=------24 ,1
AIRDATACOMMAND(-) -25(24)--------@---TURNKNOBCOMMANDW
}
-26(24)-------------~~j-(+ROLLLEFT)
TURNKNOBCOMMANDCT -27(24)-----:-------U-
PITCHWHEEL+ CLIMB I-28(24)=’~&!-----PITCHWHEEL+ DIVE -29(24)JOL--.-----------~ Q OUTPUTGAINCONTROL -30------NCAPE 1OJ1A-31(24)-----------------
lJ1-u,7J1A-14lJ1-s,7J1A-15
FIG.4-11FIG.4-11lJI-CC,7J1B-27lJI-AA,7J1B-28
7JIA-28
7JIB-429JI-52,16J1-377J1B-437J1B-33
7J1B-34llJ1-B
llJ1-D
FIG.4-6
7JIB-62
InterconnectInformationTable501 (cent) 22-14-00
Page535May 25/90
Use or disclosure of mformatlon on thm page IS subject to the restrictions on the Otle page of this document

Honeywell ~fi~J~~ANcECITATION n/V
AUTOPILOTj~[l~ER (cent)
Function ConnectorPin ConnectsTo
ANEROIDSWITCHINPUTPITCHWHEELLOGICINHIBITSPAREVOROSS OUTPUT(+5V 0SS)ROLLSPARE#8SPARESPAREAIRSPEEDINPUT
[COURSEERROR ~
PITCHCOUPLESEL GND
NORMAL ACCELERATION
ROLLINTEGRALDISABLE
{
xHEADING Y
A/PTEST (t15V)
AUTOPILOTVALIDINTLK
+28V PULSETRIMUPINTERLOCKSPARE+28V PULSETRIMDOIIIN
HDG ERROR
YAW RATE
PITCH DISPLACEMENT
PITCH RATELIFTCOMPROLLDISPLACEMENTROLLRATEROLLINTROLLCOORDINATION
1OJ1A-32(24)-----------------FIG.4-14-33 (24)-----------------7J1B-49,65J2B-96-34-35------NC-36------NC-37-38-39 (24)-----------------7J1A-43,9J1-64-40------NC-41------NC-42------NC-43------NC-44(24)-----------------17J1-2,
7J1B-21-45------NC
i-46(24)---------------
~}-47(24)-----!-J-------- FIG.4-12-48(24)-----!Cj---------49(24)-----------------57J1-L,FIG.4-13
[
-50------NC-51(24)-----------------1OJ1B-36-52------NC-53(24)-----------------FIG.4-12-54------NC-55 (22)-----------------FIG.4-11-56------NC-57-58(22)-----------------FIG.4-11-59------NC-60------NC-61------NC-62------NC-63------NC-64------NC-65------NC-66------NC
1OJ1A-67------NC
T-A-..----_-L T—I?-..--L, –.-
lnvercunnec~ lnTormaLlon
Table501 (cent)22-14-00
Paqe536May-25/90
Use or disclosure Of Information on th!s page IS subject to the restrictions on the tttle page of this oocument

Honeywell ~fivJk~ANcECITATION n/V
AUTOPILOTCOMPUTER(cent)SP-200
Function ConnectorPin
SIGNALGND 10JIB:~(20)-----------------SPARE+28V INPUTPOWER -3 (18)-----------------115 VAC, 400HZ (H) -4 (22)----------
{
-----
AC POWER GND -5 (22)-------=------1,
SPARE -6 ;:26 VACOUTPUT -7 (22)-------U-------DC POWERGND -8 (20)-----------------SPARE -9SPARE -lo+28 VDCA/P ENG -11 (22)----------------+28VDC Y/D ENG -12 (22)----------------+28VDC FROMDISENGAGE -13 (22)----------------SW (Y/D)
28 VDC PULSETRIMDRIVE -14 (22)----------------+28VDCTK OUTOF DETENT -15 (24)----------------TTL GND -16------NCHDGHOLDANN ● GND -17------NCTORQUEWARNING -18 (24)----------------28 VDCTCS SELECT -19 (24)----------------APPARM GND -20------NCAPP CAPGND -21 (24)----------------
AIL SYNCHROEXCC -22 (22)----------------HDGGND -23------NCV/LGND -24------NCREVCRSGND -25------NCSBYGND -26---T--NCSOFTRIDEMODEGND -27(24)----------------ENG INTLKTODG VALIDRELAY -28 (24)----------------
AIL SYNCHROEXC H -29(22)----------------+28V A/P ENGSELECTSYNCHRO -30(24)----------------RUDDERSYNCHROEXC C -31(24)----------------RUDDERSYNCHROEXC H -32 (24)----------------+28V A/P ENG INTERLOCK -33(24)----------------
FLAPINPUTNO.2 -34------NC+28VDC Y/D ENGSELECT 1OJ1B-35(24)----------------
ConnectsTo
SIGNALGND
FIG.4-1 (SH1)FIG.4-3 (SH1)AC POWERGND,13JI-E
13J1-D,6J1-X,C6J1-XDC POWERGND
65J1A-94,FIG.4-614J1-FFIG.4-11
FIG. 4-11FIG.4-11
FIG.4-16FIG.4-11,65J1A-90
7J1B-70,65J1B-50,8J1-h12J1-E
llJ1-Z6J1-h,C6J1-h,FIG.4-1212J1-DFIG.4-1314J1-E14J1-DlJ1-P,llJ1-P,FIG.4-13
llJ1-R
InterconnectInformationTable501(cent)
22-14-00Paae537Ma~”25/90
Use or disclosure of mformatlon on th!s page IS sub!ect to the restrictions on the ttle pag ? of this docum nt.

Honeywell tiil!l!~l!’”c’CITATION n/V
AUTOPILOT~f~l\TER(cent)
Function ConnectorPin ConnectsTo
ENGINTERLOCK 1OJ1B-36(24)-----------------1OJ1A-51LATERALMODELOGIC -37 (24)-----------------7J1A-77ALTHOLDMODEGND -38 (24)-----------------7J1B-64+28V ALTVALIDOUTPUT -39------NCIASHOLDMODEGND -40(24)-----------------7J1B-65V/SMODEGND -41 (24)-----------------7J1B-63ALTHO~= SYNCGND -42------NCIAS ● SYNCGND -43------NCADCVALID -44(24)-----------------9J1-12v/s ● SYNCGND -45------NCGEAR+ FLAPSDOWN -46 (24)-----------------FIG.4-15RESERVEDSPARE -47HEADINGRATEDISABLE -48(24)----------------FIG.4-12ELEVTACH(+)
I-49(24)-5--------------13J1-.N
ELEVTACH(-) -50(24)-’=~-fi------------13J1-tELEVSERVOPOSITION(X)
1-51 (24)----------------13J1-P
ELEVSERVOPOSITION(Y) -52(24)---& -- ------ 13J1-RELEVSERVOAMPLOUTPUT(+)
1
-53 (20)-------1~1------- 13J1-A,llJ1-WACCELEROMETERTEST -54(24)-------::------- ~::~A;:4,17J1-2,
ELEVSERVOAMPLOUTPUT(-) -55(20)-------’=1--- --- 13Jl~B,llJ1-XAILERONTACI-I(+)
1-56 (24)---------------- 12J1-L
AILERONTACH(-) -57 (24)---------J=!-- 12J1-NAILERONSERVOAMPLOUTPUT(+) -58 (20)--------------=-
~1
12J1-BAILERONSERVOPOSITION(X) -59(24)--=---------~-’-12J1-PAILERONSERVOAMPLOUTPUT(-) -60(20)-!-~--------~1- 12J1-AAILERONSERVOPOSITION(Y) -61(24)-1=’------------ 12J1-RRUDDERSERVOAMPL(+) o-62(20)------ -- -- --- 14J1-ARUDDERSERVOPOSITION(X)
j#-63(24)fi-- ---------- 14J1-P
RUDDERSERVOAMPL (-) u-64 (20)----- - -- -- --- 14J1-B
RUDDER SERVO POSITION - (Y) -65 (24)~-------------- 14J1-R
RUDDER TACH (+) 0+-66 (24)---------- -- -- 14J1-L
RUDDER TACH(-) 1OJ1B-67(24)----------W -- 14J1-N
InterconnectInformationTable 501 (cent) 22-14-00
Page538Ma~25/90
Use or dmclosure of Information on this page IS sub)ect to the restrictions on the title page of this ~ocum nt,

Honeywell WME!AN’ECITATION n/V
AUTOPILOTCONTROLLERPC-500
Function ConnectorPin ConnectsTo
llJ1-A(24)-----------------
I
-B (24).fi.-------------c (24)-,-;-------------
1OJ1A-7,17J1-51OJ1A-261OJ1A-1,17J1-1
TURNKNOB CWTURNKNOB WTURNKNOB CCW
4-D (24)--& -------------E (22)-------------------F (22)-------------------G (22)-------------------H (24)------------------
1OJ1A-27FIG4-I (SH1)FIG4-11IIJ1-L,FIG.4-11FIG.4-11
TURNKNOB CT28VANNPOWER(NIGHT)TURNKNOBOUT
{
cOF DETENTSWITCH NO
NC
O-28VEDGELIGHTINGLIGHTINGGNDA/P ENGINPUT+28VYD ENG
LOWBANKLIMITA/PENGSELECT
-J ------NC-K ------NC-L (22)------------------llJ1-G,FIG.4-11-M (22)------------------F1G4-11-N (24)------------------7J1A-93-P (24)------------------::~-P~~:JIB-33,
-R (24)------------------10JiB-35-s-T
YD ENGSELECTSPARESPARE
+]-U (24)------------R-- FIG.4-6
------------ -- -
[-+ :! [:;}--~-$-----:Y-----
1OJ1B-53,13J1-A--- - ------------ 1OJ1B-55,13J1-B
PITCH WHEEL +PITCH WHEEL [ELEV SERVO AMPL-ELEV SERVO AMPL
A/PTEST+15VDCSOFTRIDEMODEGNDPOWERGND
-Y (24)------------------FIG.4-13-Z (24)------------------1OJ1B-27-a (20)------------------DC POWERGND-bSPARE
+28V DC A/P ENG ● TCSSEL -C (24)---;--------------1OJ1A-3,12J1-F,13J1-G7J1A-71,8J1-r,HDGMODEGND -d (24)------------------65J1B-43
SPARELAMPTESTGND
-e-f (24)------------------7J1A-54,
16J1-16,LAMPTESTSWITCHFIG.4-2FIG.4-1 (SH1)
-g (22)-------------------h (22)------------------
llJ1-j(22)------
h
O-5VLIGHTING28VANNPOWER(DAY)CHASSISGND
InterconnectInformationTable501 (cent) 22-14-00
Page539May 25/90
Use or disclosure of InformalIon on this page IS subject to the restnct!ons on the title pag~ of thts document.

Honeywell UAYJIPANCECITATION n/V
Function
MOTOR INPUT{
+(CCW DRUM ROTATION) -SERVO POWER GND
POSITION SYNCHROEXC26 VAC,400 HZ { :
CLUTCH EXCITATION
TACH SHIELDTACHOMETER OUTPUT
{+
(CCM DRUM ROTATION) -
{
xPOSITION SYNCHROOUTPUT Y
z
SPARES
* Refer to Para 4.1.3.3.F.
AILERONSERVOSM-~00
ConnectorPin
$12Jl:~~~:j---------------
u----------------c (20)------------------
-D (24)-------------------E (24)------------------
[
-F (22)-------------------G ------NC-H ------NC
1-J-K-L-N-P
3
(22)------------7-----
------NL
Connects To
1OJ1B-6O1OJ1B-58SERVOPWRGND, 1OJIA-4*1OJ1B-291OJ1B-221OJIA-3, llJ1-~
IOJIB-561OJ1B-571OJ1B-591OJ1B-61
InterconnectInformationTable501 (cent)
22-14-00Page540May 25/90
Use or disclosure of Information on thw page IS subject to the restrictions on the title page of this oocument.

Honeywell W!!WANCECITATION n/V
ELEVATORSERVOSM-200
Function ConnectorPin
MOTORINPUT[+
t13J1-A(20)--;-------------
(CCWDRUMROTATION)- -B (20)_~ -------------SERVOPOWERGND -c (20)------------------
POSITION SYNCHROEXC H[
-D (24)------------------26 VAC,400HZ c -E (24)------------------
-F (22)------------------CLUTCHEXCITATION -G (22)------------------
-H (22)-------------------J ------NC
TACHSHIELD -K (24)----TACHOMETEROUTPUT
[ t-L (24)----R ----------~
(CCWDRUMROTATION)~ -N (24)----o -----------
{
x $-P (24)----~-----------POSITION SYNCHROOUTPUT Y -R (24)---~~-----------
z -s ------NC
[
-MSPARES -T
-u13J1-V
* Referto Para4.1.3.3.F.
A1 CITATIONII ONLY.
A2 CITATION V ONLY.
Connects To
1OJ1B-53,llJ1-W1OJ1B-55, llJ1-XSERVOPWRGND, 1OJ1A-4*DC POWER GND1OJ1B-71OJ1B-5
2
1OJ1A-3, llJ1-c1OJ1A-3, llJ1-cDC PWRGND
1OJ1B-5O10JIB-49
lc1Jlf3-51lCJIB-52
InterconnectInformationTable501 (cent) 22-14-00
Page541May 25/90
Use or dwclosure of Information on th!s page IS subject to the restrictions on lhe title pagE of this document

Honeywell MNE!ANCECITATION V
RUDDER SERVOSM-200
Function Connector Pin1
MOTOR INPUT{
+#
14J1-A (20)-71- -------------(CCW DRUM ROTATION) - -B (20)-& -------------SERVO POWER GND -c (20)------------------
POSITION SYNCHRO EXC ii<
-D (24)------------------26 VAC, 400 HZ c -E (24)------------------
-F (22)-------------------G ------NC
CLUTCH EXCITATION -H ------NC-J (22)------------------
Connects To——
1OJ1B-621OJ1B-64SERVO PWRGND, 1OJIA-4*1OJ18-321OJ1B-311OJ1B-I2
DC PWR GND
TACH SHIELD.. -K (24)---------XTACHOMETER OUTPUT
<+’ -L (24) 1---------j-+- ----- 1OJ1B-66
(CCW DRUM ROTATION) - -N (24)___-+~-;_- 10JIB-67
{
x -1-P (24)--------7= ----- 1OJ1B-63POSITION SYNCHRO OUTPUT Y -R (24)--------J~------- IOJIB-65
z -s ------NC “
{
-MSPARES -T
-u14J1-V
* Referto Para4.1.3.3.F.
Interconnect InformationTable 501 (cent)
22-14-00Page 542
Mar-15/89Use or disclosure of u’tformatton on this page is subject to the restrictions on the title page of this document.

Function
YAWRATEGYRORG-204
ConnectorPin ConnectsTo
26 VAC,400HZ 15J11~{~~]l~l~[~jjll~~~l~l~FIG.4-3 (SHT3)POWERGND AC GNDCHASSISGND -3 (22)---,-------,RATEOF TURN
{
+
1
-4 (24)--j~i--------- 65J2A-77(RTTURN)
-5 (24)--~1-------------65J2A-78RATEOF TURNVALID -
{-6 (24)------------------DCGND
(4.5V) + 15J1-7(24)----C+------------65J1B-3
Interconnect InformationTable 501 (cent) 22-14-00
Page 543Mar 15/89
Use or dmclosure of intormatlon on this page w subject to the restrtctlons on the title pag ? of this document.

Honeywell tiAWJEPANcECITATION n/V
V-NAVDISPLAY/CONTROLLER(PILOT’S)VN-212
Function ConnectorPin ConnectsTo
115V 400Hz[H 16J1-1(24)------------------FIG.4-3 (SH1)c -2 (24)------------------ACGND
[O-5V LIGHTINGPOWER : -3 (22)------------------FIG.4-2
-4 (22)------------------ACGNDSPARE -5ALTERRORAC -6 ------NC
SPARES{:;-9
+28V DC INPUT -10(22)-----------------FIG4-1 (SH1)CHASSISGND -11(22)-------
*SIGNALGND -12 (22)-----------------SIGGNDSPARE -13------NCCOARSEALT
[+15 V REF
1-14(24)-----~T---------9J1-53
RETURN -15(24)-----~---------9J1-54SHIELDEDWITH16J1-37
LAMPTESTGND -16 (24) ----------------- 7J1A-54, llJ1-f,LoAD5mA@15v LAMP TEST SWITCHALT ALERT HORN GND -17(24)-----------------TO ALERTHORN(-)120m’ MAXALTALERTLAMPGND -18 (24)-----------------18J1-g120mA MAXSPARE -19ALT<1000FT -20(24)-----------------7J1B-24V-NAVMODEARM -21------NCVERTICALDEVIATIONVALID -22(24)-----------------65J1A-76,7J1B-9ALTITUDEPRESELECTVALID -23(24)-----------------65J1A-96TO/FROMNULL -24 (24)-----------------7J1B-39ALTERROR -25 (24)-----------------7J1B-22ALTERROR -26------NC
[+
J-27 (24)----~1----------7J1B-15,65J2B-39VERTICALDEVIATION _-28 (24)---------------7J1B-14,65J2B-38
VNAVMODEGND -29(24)-----------------7JIB-25TO/FROM
[+ TO
1-30(24)---F?-----------65J2B-11
MINLOAD5,000OHMS + FROM -31(24)---v-----------65J2B-12RANGE FROM R-NAV GND -32 ------NC+V RANGE VALID MIN 16J1-33(24)-----------------FIG.4-17LOAD 5,000 OHMS
InterconnectInformationTable501 (cent)
22-14-00Page544Ma~-25/90
Use or disclosure of mformatlon on this page s sub!eci to the restrictions on the title page of this :~ocum nt.

Honeywell klNWYANcECITATION V
Function
V-NAV DISPLAY/CONTROLLER (PILOT’S) (con~)VN-212
RANGE 40 MV/MI
{
+
MIN LOAD 10,000 OHMS -
ADC VALID +28V
COARSE ALT SIG
{
HADC REF 26 V AC
c
{
SINFINE ALT INPUT Cos
RET
Connector Pin I Connects To
J16J1-34 (24)--7~} ----------- 7J1A-32,65J2B-102l;i
-35 (24)--*------------ 7:1A-33,65J2B-101
-36 (24)-----------------9dl-12SHIELDEDITI-I16J1-14
Y-37(24)----------------9;1-52,1OJ1A-21-38(24)-----------------9(1-1,18J1-E
-39(24)--
]1
----------- - 9;1-2,18J1-F-40 (24)-----------ffiy- 9J1-49-41(24)-------------~- 9J1-50
16J1-42(24)----------w-- 9J1-51
L JUMPER AT CONNECTORNOTE 1
NOTE: 1. Jumper is provided so that when VNCC is removed.The demods in the ADC have a reference.
Interconnect InformationTable 501 (cent)
22-14-00Page-5~5
Mar 15/89Use or dwclosure of reformation on this page IS subject to the restrictions on the title pa~g,? of this document.

Honeywell #NNIFANcECITATION n/V
Function
PILOT’SNORMALACCELEROMETERAG-222
ConnectorPin ~ects To
+15VDC POWER 17J1-1(24)------------------IOJIA-1,llJ1-COUTPUT1.5V/G -2 (24)--
1--------------7J1B-21,1OJ1A-44
SIGNAL GND-VDC POWER
L-m-_ SIGNALGND
20K,l/2W-3 (24)------------------SIGNALGND-5 (24)------------------llJ1-A,1OJ1A-7
TEST 17J1-6(24)------------------1OJ1B-54
InterconnectInformationTable501 (cent)
22-14-00Page 546Ma~-25/90
Use or dmclosure of mformatlon on thw page IS subject to the restrtcttons on the title page of Ihls ~ocum nt.
,10J1B-54

Honeywell KNM!!AN’ECITATION V
BAROMETRICALTITUDEINDICATOR(PILOT’S)BA-141
Function ConnectorPin
{
HO-5VAC INSTLIGHTS
cSPARESPARE
{
H26 V AC 400HZ
cCHASSIS
SPARES
18J1-A(24)------------------
-B (24)-------------------c-D-E (24)------------------
-F (24)-------------------G (22)--------
/%
(-H-J
[NSIGNALGNDTOADC
1
:P (22)--,=-------------ACT COARSE +15REF -R (24)--r+-------------SPARE -sALT COARSE SIGNAL -T {z4)-JUi-?------------
{
SIN
i
-U (24)-------=--------FINEALT Cos -V (24)------J-!--------
COM -W (24)-------’=’--------BARO
{
LOW
I
-X (24)-----------9-- ---CORRECTION WIPER -Y (24)----------J-4- ---
EXCITATION -Z (24) ----------~uJ- ---
+28V DC ALTVALID
{
-a (24)-------------------b
SPARES::-e
ALT ALERT
{
-f (24)------------------
LIGHT 18J1-g(24)------------------
Connects To
AC LIGHTINGCONTROLFIG4-2AC PWRGND
9J1-1,16J1-38
9J1-2,16J1-39
9J1-79J1-6 “
9J1-5
9J1-89J1-99J1-109J1-619JI-609J1-59
9JI-12
7JIA-8
16J1-18
Interconnect InformationTable 501 (cent)
22-14-00Page 547
Mar 15/89UseordisclosureofInformationonthispage IS subject to the restrictions on the title pag: of this document.

Honeywell MIURANCECITATION V
PILOT’SRADIOALTIMETERRECEIVER/TRANSMITTERRT-300
Function ConnectorPin ConnectsTo
{
20J1-ASPARES -B
-cTESTINHIBIT -DOUTPUTCIRCUITTEST “ -E (22)------------------DC GNDTRACKINVALIDGND -F
[
-GSPARES
:!L-K
400 OR 500 FTTRIP (TRIP PT #4) -Lf15 VDC COM -M ------NCOUTPUT COM I-N (24)------------J~F --
1ALTTRIPCOM
I
-P (24)-----------------50 FTTRIP (TRIPPT #3) ------NCSPARE :; ------NCTEST -T (24)-----------------
1200FTTRIP (TRIPPT#l)
+
-U (24)-----------------250FTTRIP (TRIPPT #2) -V (24)----------------ALT OUT -W (24) ------------4GL---
AUX OUTPUT -X (24)------------------
7J1B-19,65J2A-70DC GND
65J2B-76
7J1B-467J1B-5265J2A-69
7J1B-18
FLAGWARN -Y (24)------------------7J1B-35,
+15VDC65J1A-78
-z ------NC-15VDC -a ------NCPWRGND -b (24)------------------DCGND+28VDC 20J1-c(24)------------------FIG4-1 {sHTI)
Interconnect InformationTable 501 (cent)
22-14-00
I
Page 548Mar 15/89
UseordisclosureofinformationonthispageISsubjecttotherestrictionsonthetitlepageofthisjocument

PILOT’SR;~O]&ONTROLLER
Function ConnectorPin ConnectsTO——
sIGNALGND 23J1-A(22)-------------------SIGNALGND
CRS26 VAC<
H i-B (22)--------- --~[--- [;GFW#-;ND
cl?S 26 V AC c -c (22)--------- --u----
{
x -D
RS SELECT Y -E
z -F
(24)----------~-=- 65J2A-4~Ill
T~24)-------.-.--fl-~--65J2A-46
(24)------------%1--65J2A-47
;RSPULLDCT\DGPULLSYNC
~DG26 V AC<H
IDG26 V AC c
{
x
HDGSELECT Y
{-+5 V LIGHTING “+
CHASSISGND
SPARES
-G,(24)------------------1I5J1-10-H (24)------------------115JI-12
~-J (22)--------- ------- ]:Gp:~3GND-K (22)---------1-&’----
1-L (24)-----------‘-in;-65J2A-48
-M (24)-----------‘:-;-- 65J2A-49
-N (24)------------~~-- 65J2A-50
-P (22)------------------F]G.4-2-R (22)------------------AC GND
-s (22)------------------cHASSISGND
Interconnect InformationTable 501 (cent) 22-14-00
Paae 549
Mar”15/89
Use or disclosure of mtormation on this page IS subject to the restrictions on the title paqe of thw document

Honeywell WMRANCECITATION V
Function
115VAC,400HZ PWRSELFTEST
+15VDCPWRGND
/x
ROLLATTITUDE Y
{
wRELAYCONTACT1
!:
[
NC
RELAYCONTACT2 NOw
CHASSISGND
TESTPOINT1TESTPOINT2-15VDCSIGNAL GNDTEST POINT 3
ROLLRATEMONITORRZ-220
ConnectorPin ConnectsTo1
I57J1-A(22)----------------- FIG.4-3 (SH1)-B (22)------------------- FIG.4-13,
57J1-N-c‘---::!!-------~--f---Ac p~~ GN~-D (22)-E (24)--------------------lJ1-P.65J2A-18-F (24)--------------------lJ1-q-,
65J2~-19-G (24)-------------------- lJ1-r, 65J2A-20
-H (22)--------------------FIG. 4-13,1J1-R-J (22)-------------------- FIG.4-13-K (22)--------------------FIG.4-13,
1OJ1B-3O-L (22)--------------------FIG.4-13,
1OJ1A-49-M -----NC-N (22)--------------------FIG.4-13,
57J1-B-P (22)-------
A
-R -----NC-s -----NC -
-----NC1
57J1-V-----NC
Interconnect InformationTable 501 (cent)
22-14-00Paue 550Mar”15/89Useordisclosureofinformationonthis page IS subfect to the restncttons on the title page of thts ~.locument.

Honeywell WMFANC’CITATION n/V
PILOT’S WEATHERRADARR/T/AWU-650
Function ConnectorPin ConnectsTo
28 VDC PRIMARYPOWER 59J1-A(20)--------------------28VDCPOWER,FIG4-1
28 VDC PRIMARYPOWER -B (20)--------------------28VDC POWER,FIG4-1
DC PWRGND -X (20)--------------------DC PWRGNDDC PWRGND -W (20)--------------------DC PWRGNDALTERNATECONTROLBUS (HI) -a ------NCALTERNATECONTROLBUS (LO) -b ------NC
PRIMARYCONTROLBUS(HI)#
-C (24)-----------------O-63J1-FPRIMARY CONTROL BUS (LO) -d (24) ---------------- J -1
CONTROL BUSSHIELD -p (24)-------a Y-: :;:;::
REMOTEON -U (24)--------------------63J1-E
GNDFOR429STABTRANSMITONKEYSPAREEA ROM ERASESPAREGNDFORINVERTEDMT
REACT COMPENSATION OVERRIDEGNDFOR200mv/DEGSHIELDGNDSIN PITCH(HI)OR429SIN PITCH(LO)OR429
-T -----NC-c -----NC-v -----NC
-----NC1 -----NC-Y -----NC
-----NC1; [24)‘-------------------GND
:: iiii:~:-------------q -
1-K (24) ----------------t-l - lJ1-EE
-L (24) ----------------v - lJ1-1)11
SINROLL(HI) h
i-M (24)----------------id- lJ1-v
SINROLL(LO) -N (24)------------------ lJ1-w+-- s~IELDGND
STBLN400HZ REF IN 10V -H ------NCSTBLN400HZ REF IN 26V -z ------NCSTBLN400HZ REF IN 115V
k-D (24)-----------------OFIG4-3 (SH1)
STBLN400HZ REF INCOM -G (24)----------------!-~-- ~~I~~~GND
LEFTEFISCONTROLBUS (P) -m (24)-T~$---------------65J2B-32,1
LEFTEFISCONTROLBUS (N) k59J1-n(24)-+-L---------------65J2&33
ii
InterconnectInformationTable501 (cent)
22-14-00Pacie551May-25/90
Use or disclosure of !nformatlon on this page IS subject to the restrictions on the title pagt, of this document,

Honeywell ~iwJfrANcECITATION n/V
Function
PILOT’S WEATHER RADAR R/T/A (cent)WU-650
CENTER CONTROL BUS (P)CENTER CONTROL BUS (N)RIGHT EFIS CONTROL BUS (P)RIGHT EFIS CONTROL BUS (N)
PICTURE BUS SHIELD GNDLEFT EFIS PICTURE BUS (P)
LEFT EFIS PICTURE BUS (N)
CENTER PICTURE BUS (P)
CENTER PICTURE BUS (N)RIGHT EFIS PICTURE BUS (P)RIGHT EFIS PICTURE BUS (N)
Connector Pin Connects To—,
59J1-t -----NC-r -----NC
-----NC:; -----)JC
-q @~)---T I-9(2+--1-1------------- 65J2E’-30Jlt-h (24)-------------------65J2E-31
<I
-i (24)--------t-r-----~o--63J1-M-j ~::~:~~-----LCh-------- 63J1-L-k
59J1-s-----NC
InterconnectInformationTable501 (cent)
22-14-00Page552May-25/90useor disclosure of !nformat!on on thts page is sub!ect to the restrictions on fhe title page of th!s Iocument.

Honeywell W!UN’”c’CITATION V
Function
+28 VDC
+28 VDC RTNLIGHT GND+28 V LIGHTS+5 V LIGHTSMASTER FAULTCTRL BUS HICTRL BUS LOSHIELD GNDREMOTE ONPICTURE BUS HIPICTURE i3USLOPICTURE BUS SHIELDFSB1FSB2SPARESPARECHASSIS GNDRESERVEDRESERVEDSPARE
PILOT’S WEATHER RADAR INDICATORWI-650
ConnectorPin
63J1-N (20)---------------------A (20)---------------------D (22)---------------------c -----NC-s (22)---------------------J ------NC-F (24)---1C~
$------------
-G (24)------------------------- - J
:: (24)----------1 ---------
[-M (24)-------R- ----------L (24)------* - ----------w -----------?-H (24)---------------------K ------NC-u-v-B (20)__--_---P &-R
63J1-X
ConnectsTo
FIG. 4-1 (SH 1)DC PWR GNDLIGHT GND
FIG. 4-2
59J1-c59J1-d
59J1-U59J1-i59J1-j
FIG. 4-7
Interconnect Information
Table 501 (cent)22-14-00
Pa~e 553Mar”15/89UseordisclosureofIntormatlonon this page is subject to the restrictions on the title page of Ihls document,

Honeywell IM!E!!ANCECITATION V
PILOT’S WEATHER RADAR INDICATOR (cent)
WI-650
Function Connector Pin ConnectsTo
HORIZ REF HI 63J2-L ------NCHORIZ REF LO -A ------NCVERT REF HI -M ------NCVERT REF LO -K ------NCDC RTN -G ------NCSTBY -N ------NCBLUE VIDEO INPUT HI -T ------NCBLUE VIDEO INPUT LO -D ------NCGREEN VIDEO INPUT HI ------NCGREEN VIDEO INPUT LO x ------NCRED VIDEO INPUT HI ------NCRED VIDEO INPUT LO :: ------NCSHIELD COMMONRANGE CODE OUTPUT RO :: :-----NCRANGE CODE OUTPUT RI -P ------NCRANGE CODE OUTPUT R2 -B ------NC
RANGE CODE OUTPUT R3 -v ------NCVIDEO SEL (P) -H ------NCVIDEO SEL(N) 63J2-R------NC
InterconnectInformationTable 501 (cent)
22-14-00Page 554
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title page of lhls document.

Honeywell MUFF*””CITATION V
PILOT’S SYMBOL GENERATORSG-605/805
Function Connector Pin Connects To
ADI VIDEO (+) 65J1A-1I
(24)q~-- ~~~~~-jl=~~ ;:;-;;ADI VIDEO (-) ~$ (24)-1-1--ADI VIDEO SHIELD GND (24)-~Z 1ADI COLOR O (+) ~~ (24)---4-;----------- 3J1-50ADI COLOR O (-) (24) ----------------- 3J1-51ADI COLOR O SHIELD GND ~; (24)--Y ‘ADI COLOR 1 (+)
7(Z4)-Zt- ----------- 3J1-46
ADI COLOR 1 (-) ~~ (24)--1-1------------- 3J1-47ADI COLOR 1 SHIELD GND (24)--Y ~ADI COLOR 2 (+) -lo (24)-T~l-i----------- 3J1-42
ADI COLOR 2 (-) -11 (24)-A-’------------- 3J1-43ADI COLOR 2 SHIELD GND -12 (24)--Y ‘ADI COLOR 3 (+) -13 (24)--=;----------- 3J1-38ADI COLOR 3 (-) -14 (24)-J-1------------- 3J1-39ADI COLOR 3 SHIELD GND -15 (24)--YADI FLYBACK (+)
t-16 (24)-7=- ----------- 3J1-60
ADI FLYBACK (-) -17 (24)-A-[- ----------- 3J1-61
ADI FLYBACK SHIELD GND ;;; ::;]--fADI VALID
i
----- ----------- 3J1-15ADI R/S (+) ~~~ @~\-JC~- ----------- 3J1-58ADI R/S (-) --- ------------- 3J1-59ADI R/S SHIELD GND -22 (24)--YADI SR (+)
/
-23 (24)----------- -+;- 3J1-7
ADI SR (-) I i- 3J1-8-24 (24)---------------~-- 3J1-3fj
ADI CS SR (+) -25 ------NCADI CSSR (-) -26 ------NC
ADI CS VALID -27 ------NC
HSI VIDEO (+) -28 (24)--a--1
----------- 2J1-54HSI VIDEO (-) -29 (24)-J-1------------- 2J1-55HSI VIDEO SHIELD GND -30 (24)--VHSI COLOR O (+)
t-31 (24)--= ----------- 2J1-50
HSI COLOR O (-) -32 (24)-~-l------------- 2J1-51HSI COLOR O SHIELD GND -33 (24)--YHSI COLOR 1 (+) -34 (24)--~
+----------- 2J1-46
HSI COLOR 1 (-) -35 (24)-J-!------------- 2J1-47HSI COLOR 1 SHIELD GND -36 (24)--~#HSI COLOR 2 (+) 65J1A-37 (24)-l~T------------- 2JI-42
Interconnect InformationTable 501 (cent) 22-14-00
Page 555Mar 15/89
Useordisclosureofinformationon thm page IS sub!ecf to the restncttons on the Mle paq! of thts documenf.

Honeywell WNRANCECITATION V
Function
HSI COLOR 2 (-)HSI COLOR 2 SHIELD GNDHSI COLOR 3 (+)HSI COLOR 3 (-)HSI COLOR 3 SHIELD GNDHSI FLYBACK (+)HSI FLYBACK (-)HSI FLYBACK SHIELD GNDHSI VALIDHSI R/S (+)HSI R/S (-)HSI R/S SHIELD GNDHSI SR (+)HSI SR (-)
HSI CS SR (+)HSI CS SR (-)HSI CS VALID
ADI X DEF OUT (+)ADI X DEF OUT (-)ADI X DEF SHIELD GNDADI Y DEF OUT (+)ADI Y DEFOUT (-)ADI Y DEF SHIELD GNDHSI X DEF OUT (+)HSI X DEF OUT (-)HSI X DEF SHIELD GNDHSI Y DEF OUT (+)HSI Y DEF OUT (-)HSI Y DEF SHIELD GNDDC811 DATA (+)DC811 DATA (-)
RESERVED
PILOT’S SYMBOL GENERATOR (cent)
SG-605/805
Connector Pin 1
65J1A-38-39-40-41-42-43-44-45-46-47-48-49-50-51
(24)-@-----------(24)--(24)--C*
4-----------
(24)-~1- -----------(24)--Y[;:;-~~fI
-------------- -------------
(24)--’(24j----
t
-----------(24)-i? .-----------(24).-Y---------(24)--
$(24)----------- ++..(24)----------- --=-
L_-
-52 ------NC-53 ------NC-54 ------NC
I-55 (24)-+ ------------56 (24)-- -+ ------------57 (24)---Y
I-58 (24)--1; ---------59 (24)-- ------------60 (24)=J-61 (24)--T= ------------62 (24)----ii____-63 (24)---Y-64 (24)---=
!----------
-65 (24)--J-1-------------66 (24)---Y
I-67 (24)------ ------ _-r-68 (24)-------------~1--
L --
65J1A-69 ------NC
Connects To——
2J1-4:!
2J1-382J1-39
2J1-602J1-61
2J1-IL2J1-582J1-51!
2J1-72J1-82J1-3fi
3J1-13J1-2
3J1-93J1-lC
2J1-12J1-2
2J1-92J1-lC
115J1-34115J1-35SHIELD GND
Interconnect InformationTable 501 (cent)
22-14-00Page 556
Mar 15/89UseordisclosureofinformationonthispageIS subject to the restrictions on the title page of this document.

Honeywell WWI!A”CECITATION n/V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function ConnectorPin ConnectsTo
RESERVED 65J1A-70------NCRESERVED -71 ------NCRESERVED -72 ------NCVALIDIN 1 SRNDMEVLD -73 (24)-----------------C164J1A-46VALIDIN 2 SRNVRTDV VLD -74 (24)-----------------:~5:~~A-74,
VALIDIN3 SPDDEVVLD -75 (24)-----------------FIG4-4VALIDIN4 VNAVDEVVLD -76 (24)-----------------16J1-22,7J1B-9
VALIDIN 5 SRN LATDV VLD -77 (24)-----------------UM:J;B-91,
VALIDIN 6 RADALT 1 VLD -78 (24)------------:----20J1-Y,FIG.4-57J1B-35
VALIDIN 7 RADALT 2 VLD -79 ------NCVALIDIN8 LRN1LATDV VLD -80 (24)-----------------C164J1B-99(ADF2VALIDWHENDIN6= GND)VALID IN 9 LRN1VRTDV VLD -81 ------NCVALIDIN1OADFVLD -82 (24)-----------------164J1B-99
VALIDIN1lFDC VLD -83 (24) ----------------- 7J1B-47
VALID IN12 HDG 1 VLD -84 (24) ----------------- 6J1-eVALID IN13 ATT 1 VLD -85 (24) ----------------- lJ1-GG,7J1A-19
VALID IN14 CS/SG VLD -86 ------NCVALID IN15 ARINC O VLD -87 - -----NCVALID IN16 LRN 1 28 V WPTALERT -88 ------NCVALIDIN17ROTVLD -89 ------NCVALIDIN18TCS 65J1A-90(24)-----------------1OJ1B-19
~: ALLVALIDSARE+28V DC.
InterconnectInformationTable501 (cent)
22-14-00Page 557May25/90
Use or dmclosure of mformatlon on this page IS subject to the restrlcttons on the tttle pag ? of this document.

Honeywell !H!WY’”c’CITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin
VALID IN19 SPARE 65J1A-91 ------NCVALID IN20 HDG 2 VLD -92 (24)-----------------
VALID IN21 ATT2 VLD -93 ------NCVALID IN22 AP ENGAGED IN -94 (24)-----------------
VALID IN23 TK DETENT IN -95 (24)-----------------
VALID IN24 APS VLD IN -96 (24)-----------------
DIN O SYMGEN L/R IDO -97 ------NCDIN 1 DC811 -98 (24)-----------------DIN 2 Si7BRG3/4 -99 (24)-----------------DIN 3 ADFIBRG 3/4 -100 (24)-----------------DIN 4 ASCB D/S -101 ------NCDIN 5 EFIS D/S -102 (24)-----------------DIN 6 CROSSIDE SENSOR DISABLE-103 (24)-----------------DIN 7 ROT ON/OFF -104 ------NCDIN GND -105 (24)-----------------ATT PULSE OUT 65J1A-106 ------NC
NOTE : ALL VALIDS ARE +28 V DC.
Connects To.—
C2J2-X
1OJ1B-11
llJ1-H,IOJIB-15FIG. 4-11
16J1-;?3
65J1A-10565J1A-10565J1A-105
65J1A-10565J1A-105
PROG GND
Interconnect InformationTable 501 (cent)
22-=14-00Page558
Mar 15/89Use or disclosure of information on this page IS sub!ect to the restrictions on the title page of thm jocument

Honeywell W!UF’NCECITATION V
PILOT’S SYMBOL GENERATOR (cent)
SG-605/805
Function Connector Pin Connects To
DIN 8 CPMN ON/OFF 65J1B-1 (24)----------------- 65J1A-105DIN 9 WIND PO/XY -2 ------NCDIN 10 +5V ROT VAL -3 (24)----------------- 15J1-7DIN 11 R ALT IDO -4 ------NCDIN 12 R ALT ID1 -5 ------NCDIN 13 TRANSITION ON/OFF ~; (24)----------------- 65J1A-105DIN 14 LRN1 PHASE (P/S) ------NCDIN 15 ADI ON HSI (OFF/ON) -8 ------NCDIN 16 SRN2 ID1 ------NCDIN 17 ADF 1/2 ~?O (24)----------------- 65,J1A-105DIN 18 MLS 1/2 -11 ------NC
DIN 19 wow -12 (24)----------------- FIG 4-7DIN 20 GSPD IDO -13 (24)----------------- 65J1A-105DIN 21 GSPD IDI -14 ------NCDIN 22 ATT # IDO -15 ------NCDIN 23 ATT# ID1 -16 ------NCDIN 24 AT TGL IDO -17 ------NCDIN 25 AT TGL ID1 -18 ------NCDIN 26 ATT2 P/S -19 ------NCDIN 27 RESERVED -20 ------NCDIN 28 FLIP -21 ------NCDIN 29 HDG1 DEF -22 ------NCDIN , 30 HDG1 F/S-M/T -23 (24)----------------- TO :/S SWITCHDIN 31 HDG # IDO -24 ------NCDIN 32 HOG # ID1 -25 ------NCDIN 33 HD TGL IDO -26 ------NCDIN 34 HD TGL ID1 -27 ------NCDIN 35 HDG2 DEF -28 ------NCDIN 36 HDG2 F/S-M/T -29 (24)----------------- TO F/S SWITCHDIN 37 HDG2 P/s -30 ------NCDIN 38 S BRG CD/CS 65J1B-31 ------NC
Interconnect Information
Table 501 (cent) 22-14-00Page 559
Mar-15/89Use or disclosure of information on this page is subject to the restrictions on the title pag: of this document,

Honeywell U2M?*NCECITATION n/V
PILOT’S SYMBOLGENERATOR(cent)
Function
DrhlDINDINDIN
DINDINDINDINDINDINDINDIN
DINDINDIN
DIN
DINDINDIN
DINDINDINDINDINDINDINDINDIN
DINDIN
A 1
39404142
4344454647484950
515253
54
555657
5859606162636465666768
.
SRNSRC IDOSRNSRC 101DMETTNTTL
SRNTGL A 1HSI MODERESERVEDLNAVMODEGNDGA MODEGNDASELARMMODEGNDASELCAPMODEGNDtJDGSELMODEGND
RESERVEDALT HOLDMODEGNDV/SHOLDMODEGND
IASHOLDMODEGND
MACHHOLDMODEGNDGS ARMMODEGNDGS CAPMODEGND
VNAVARMMODEGNDVNAVCAPMODEGNDLRN1SRCNORM/ALTLRN1BRGCARD/CASENAVARMMODEGNDNAV CAPMODEGNDBC ARMMODEGNDBC CAPMODEGNDVORAPRARMMODEGNDVORAPRCAPMODEGND
SG-605/805
ConnectorPin ConnectsTo
65J1B-32------NC~:: y;-----------------
- . - - - - -- - - - - - - -- -
-35(24)-----------------
-36------NC-37------NC-38------NC-39(24)------------------40(24)------------------41(24)------------------42(24)------------------43(24)-----------------
-44 ------NC-45 (24)------------------46 (24)-----------------
-47(24)-----------------
-48(24)------------------49(24)------------------50(24)-----------------
-51 (24)------------------52 (24)------------------53 ------NC-54 ------NC-55 (24)------------------56 (24)------------------57 (24)------------------58 (24)------------------59 (24)------------------60 (24)-----------------
65J1A-105C164JIA-3C164ilB-64,C2J1-:{.
7J1A-7’27J1B-M37J1B-?l, 8J1-d7JIB-72, 8J1-e;;;:-;1, 8J1-r,
7JIB-75, 8J1-b7J1B-76, 8JI-Z,l15t11-477J1B-77, 8J1-X,115J1-487J1B-787JIB-69, 8J1-g7JlB-70,8Jl-h,ICIJIB-217J1B-73, 8J1-S7JlB-74, 8J1-T
7J1A-857J1A-857JlA-6f3, 8J1-J7JIA-67> 8J1-K7J1A-877J1A-83
LRN1BG/DA 65J1B-61~--~--NC
tiroundthispinif MLS is installed.
InterconnectInformationTable501(cent) 22-14-00
Page560May25/90
Use or disclosure Of information on thts page IS sublect to the restrictions on the ttle page of this c ocument.

Honeyell ##~{(ANcE
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
DINDINDINDINDINDINDINDINDIN)IN)IN)IN)IN)IN
6970717273747576777879808182
LRN1 IDOLRN1 ID1LRN1 ID2LRN1 ID3LRN1 SRC IDOLRN1 SRC ID1SRN2 IDOLRN1 DT/OALRN TGL IDOLRN TGL IDlLRN1 MG/TULRN2 IDOLRN2 ID1LRN2 ID2
65J1B-62-63-64-65-66-67-68-69-70-71-72-73-74
65J1B-75
------NC(24)--------------------65J1A-105
(24)----------------- 65J1A-105(24)------------------ 65J1A-105------NC@:~::~-------------- 65JlA-~05------NC------tic------NC------NC------NC------NC------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page 561Mar 15/89
Use or disclosure of information on this page IS subject to the restrictions onthe title pagf of tfis document.

Honeywell WWANCECITATION ii/V
PILOT’S SYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
DIN 83 LRN2 ID3 65J1B-76 ------NCDIN 84 LRN2SRC IDO -77------NCDIN 85 LRN2SRC ID1 -78------NCDIN 86 AIRDATACMDDISABLE -79------NCDIN 87 SPARE -80------NCDIN 88 LRN1BRG3/4 -81(24)-----------------65J1A-105(ADF2BRG3/4WHENDIN6= GND)DIN 89 CITATION11/V -82(24)-----------------65J1A-105DIN 90 IRS1AN/DIG -83------NCDIN 91 IRS2AN/DIG -84------NCDIN 92 RADALT S/D -85------NCDIN 93 A/S,AOA,SPD IDO -86(24)-----------------65J1A-105DIN 94 A/S,AOA,SPDID1 -87(24)-----------------65J1A-105DIN 95 CS IN -88------NCDIN 96 COUPLE1/2 -89------NCDIN 97 STBYSELMODEGND -90------NCDIN 98 SPARE -91------NCDIN 99 ATT#1 WRAP -92 (24)----------------- 65JlA-105DIN 100ATT#2 WRAP -93------NCDIN 101ATT#3 WRAP -94------NCDIN 102ATT #4 WRAP -95------NCDIN 103RESERVED -96------NCDIN 104RESERVED -97------NCDIN 105FMSSINGLE/DUAL -98------NCDIN 106 A/S,AOA,SPDID2 -99------NCDIN 107CAARULES -1oo------NCDIN 108SPARE -101------NCDIN 109SYMGEN L/RIDI -102------NCRESERVEDDC IN (+) -103------NCRESERVEDDC IN (-) -104------NCRESERVEDDC OUT (+) -105------NCRESERVEDDC OUT (-) 65J1B-106------NC
InterconnectInformationTable501 (cent) 22-14-00
Page562May-25/90
Use or disclosure of information on this page IS sub!ecl to the restrictions on the title page of this :]ocument

Honeywell WM!ANcECITATION V
Function
+28 V DC POWER
+28 V DC POWERHDG VALID IN28 V DC RETURN28 V DC RETURNCHASSIS GNDCHASSIS GNDSIGNAL GNDSIGNALGNDDISCRETEGNDTO/FRDC IN (+)TO/FRDC IN (-)
ONSIDEACREF (+)
ONSIDEAC REF (-)
#l PITCHX#1 PITCHY
#l PITCHZ
#1 ROLLX
#1 ROLLY
#l ROLLZ
#l HDGX
#l HDGY
#1 HDG Z
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
ConnectorPin ConnectsTo
}
65J2A-1(22)------------------PILOT28VDCPOWER,
-2 (22)------------------FIGURE4-1-3 ------NC-4 (22)------------------DC PWRGND-5 (22)------------------DC PWRGND-6 (24)------------------CHASSISGND-7 (24)------------------CHASSISGND-8 (24)------------------SIGNALGND-9 (24)------------------SIGNALGND-10(24)------------------CIISCRETEGND
-11------NC-12------NC
t
-13(24)------:-]---------26VAC,1, FIG4-3 (SH3)
+Ii
-14(24)------L---------ACGNDt-L-
!
----- SHIELDGND-15 (24)------------ -T=(- lJl_x-16 (24)------------ ----- lJ1-y
tii-17(24)---------------W-lJ1-z
!1-- SHIELDGND
-18(24)----------------- lJ1-p,57J1.E
1’-19(24)-------------~~-- lJ1-q,57J1-Ft:
-20(24)--------------L-- lJ1-~, 57J1-G?
IL-- SHIELDGND
-21(24)-------------[~-- 6J1-L
IL-22(24)---------------- 6J1-M
+ i65J2A-23(24)--------------IV--6J1-K
1 -- SHIELDGND
Interconnect InformationTable 501 (cent)
22-14-00Paae563
Mar”15/89UseordisclosureofinformationonthispageK subjecttotherestrictionsonthetitlepagtofthisdocument.

Honeywell WWFANcECITATIONV
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function Connector Pin
SYS ASCBA DATA (+) 65J2A-24 ------NC
SYSASCBA DATA (-) -25 ------NC
SYS ASCBACLK (+) -26 ------NC
SYSASCBACLK (-) -27 ------NC
#1 HDGSYNC+ I-28(24)-------------1~~-
#1 HDGSYNC- b-29(24)--------------1-1-Y
L --
MFD G/S DEV DC IN (-) -30------NC
#1 LRN DSRTRK X -31 ------NC
#1 LRN DSRTRK Y -32 ------NC
??1 LRN DSRTRKZ -33 ------NC
#l LRN BRGX/SIN
I
-34(24)-----------fi----(ADF2X/SINWITHDIN6 = GND)#1 LRNBRGY/COM -35(24)-----------1-1---(ADF2Y/COMNWITHDIN6 = GND)#1 LRNBRGZ/COS I-36(24)------------ - --(ADF2Z/COSWITHDIN6 = GND) ,r#1 LRNBRGCOM
+-37(24)---------------
(ADF2COMWITHDIN6 = GND) -----
#l LRNTO/FROM(+) -38------NC#l LRNTO/FROM(-) -39------NC#1 LRNLATDEV (+) -40------NC#1 LRNLATDEV (-) -41------NCDH H -42(24)------------------
DHW 65J2A-43(24)------------------
ConnectsTo
6J1-U
6J1-V
SHIELDGND
C164J1A-61
C164J1A-33
C164J1A-47
C164J1A-33SHIELD GND
l15J1-53
115J1-54
Interconnect Information
Table 501 (cent)
22-14-00Paae 564
Mar”15/89Use or disclosure of mformatton on this page is sub]ecf to the restrictions on the !Itle page of this jocument.

Honeywell MllR”c’CITATIONV
Function
DH L
CRS SEL X/TACH +
.CRSSELY/TACH-
CRS SEL Z
SHIELDGNDHDGSELXTACH +
HDGSELY TACH-
HDGSELZ
SHIELDGNDVORBRGX/SINVORBRGY/COMVORBRGZ/COSVORBRGSP/COM
#1 ADF BRGX/SIN
#l ADF BRGY/COM
#l ADF BRGZ/COS
#1 ADF BRGSP/COM
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
ConnectorPin JonnectsTo
65J2A-44(24)------------------115J1-55
!-45 (24)-1?-------------23J1-D
-46 (24)-------------------23J1-Elit
-47 (24)--4--------------23J1-F
Y(24)--
i-48 (24)-l~i-------------~3J1.L
-49 (24)-j-;--------------23J1-MI]*
-50 (24)--III--------------23J1-N
J
I
-51 (24)~~------l~r-------C164J1B-11-52 (24)-----------------C164J1B-37
1[-53 (24)--------I:.I- ----- C164J1B-12-54 (24)-------b------- C164J1B-37
t-- -----
TSHIELD GND
-55 (24)-------=------- 164J1A-61
iit
-56 (24)-------1-[--------164J1A-33
-57 (24)-------~-!--------164J1A-47~lt
65J2A-58(24)-------- --------164J1A-33Y ------ --- SHIELDGND
Interconnect Information
Table 501 (cent) 22-14-00Page-565
Mar 15/89Use or disclosure of reformation on this page IS subject to the restrictions on the title pag? of this document.

Honeywell !WJJFANCECITATION V
Function
INNERMKR (+)MARKERCOMMON
MIDDLEMKR (+)
MFDLATSTEER
~LI~J~MKR(+)
SRNCRSDEV (+)SRNCRSDEV (-)
SRNGS DEV(-)
SRNGS DEV(+)
RADALT (+)RADALT (-)
SPEEDCMD(+)SPEEDCMD(-)
PITCHCMII(+)
PITCHCMD (-)
ROLLCMD(+)
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
ConnectorPin ConnectsTo
65J2A-59(24)-----------------C164J1A-73-60 (24)-------*
-61 (24)-----------------C164J1A-60
-62 ------NC
-63-64-65-66
-67
-68
-69-70
-71-72
-73
~~~~~~~~-------------C164J1B-74
I(24)------~~r-------C164J1B-78,C2J2-E(24)------t-~------- :;::J;B-75,
Y - -------SHIE~DGND
!(24)------j~r-------C2J2-C,65J2A-66,
i IjC164J1B-75
(24)--------------- C164J1B-79,C2J2-DY
1-------- SHIELDGND
(24)---------------(24)-----------~-~fL-) FIG.4-5
-- SHIELDGND
{)(24) ----------- -----(24) ----------- -;-[- FIG= 4-4
i
<-- SHIELD GND
(24) ----------- -i?-- 7J1B-30
~ ‘ ‘ 7J1B-31-74 (24)-------------i-~-
( L SHIELDGND65J2A-75(24)-----------~-r~T-7JIA-29
Interconnect Information
Table 501 (cent)
22=-14-00Page 566
Mar 15/89Use or disclosure of Information on thm page IS subject 10 the restrictions on the title page of this document.

Honeywell WMR!’”c’CITATION n/V
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function Connector Pin Connects ToI
ROLL CMD (-) 65J2A-76(24)-------------*-4-L- 7J1A-30
Y--SHIELDGNDRATE OF TURN (+)
t-77 (24) ------------ ---- 15J1-4
RATE OF TURN (-) -78 (24)------------ t-!d-- 15J1-5
T -- SHIELD GNDAIR DATA CMD (+)
!-79 (24)------------ ----- 9J1-39
~1
AIR DATA CMD (-) -80 (24)------------*-!-l--9J1-33,7J1B-37.5VL-- SHIELD GND
STEER IN (+) -81 ------NCSTEER IN (-) -82 ------NCMFD LRNSELVALIN(P-ID2) -83 ------NC
MFD LAT STEER VALIN -84 ------NC
MFDNAV SELVALIN(P-IDO) -85 ------NC
MFD V/LDEVVALIN -86 ------NC
MFDGS DEVVALIN -87 ------NC
MFDDMEVALIN -88 ------NC
MFDTK DETENTVALIN -89 (22)------------------FIG ~-11 .
MFDAP ENGAGEDVALIN J-90 (22)------------------(SHT1)
MFDAPS VALIN -91 ------NC
MFD LNAV APP DOUT -92 ------NC
MFDTTLDIN 65J2A-93------NC
InterconnectInformationTable501 (cent)
22-14-00Paqe 567May”25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title pa~; e of this document.

Honeywell M!WANCECITATION Ilfl
PILOT’S SYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
MFDDME TTN DIN 65J2A-94 ------NC
MFDMIDMARKDIN (5V) -95 ------NC
MFD PW MOVEDIN -96 (24)------------------ DCGND
MFDV/LDEVDC IN (-) -97 ------NC
MFDV/LDEVDC IN (+) -98 ------NC
MFDGS DEVDC IN (+) -99 ------NC
MFD LRNLAT IN -1oo ------NC
MFDDME IN (-) -101 ------NC
MFDDME IN (+) -102 ------NC
MFDCRS ERR (+) IN -103 ------NC
MFDCRS ERR (-) IN -104 ------NC
MFDHDG ERR (+) IN -105 ------NC
MFDHDG ERR (-) IN 65J2A-106 ------NC
InterconnectInformationTable501 (cent) 22-14-00
Page-568May 25/90
Use or disclosure of Information on thm page m subject to the restrictions on the title page of this :!ocument,

Honeywell W!W!ANCECITATIONV
Function
DIN 112 SPL SEL ODIN 113 SPL SEL 1DIN 114 SPL SEL 2DIN 115 SPL SEL 3DIN 116 SPL IN ODIN 117 SPL IN 1DIN 118 SPL IN 2DIN 119 SPL IN 3FD LP.TDC OUT (-)SG PWR ONFD TO/FR DC OUT (+)FD TO/FR DC OUT [-)SHIELD GiWlCROSS SIIIEAC REF (+)
CROSS SIDE AC REF (-)
#2 PITCHX#2 PITCHY#2 PITCHZ .#2 ROLLX#2 ROLLY#2 ROLLZ#2 HDG X#2 HDG Y#2 HDG ZSYS ASCB B DATA (+)SYS ASCB B DATA (-)
SYS ASCB B CLK (+)SYS ASCB B CLK (-)
PILOT’S SYMBOL GENERATOR (cent)
SG-605/805
ConnectorPin ConnectsTo
65J2B-1 -----NC-2 -----NC-3 -----NC-4 -----NC-5 -----NC-6 -----NC-7 -----NC-8 -----NC TS WITH 65J2B-10[I
+-9 (24)-Tc ---n--------- 7,11A-18
~;; ?;;T~!:73&----- I,6J1-30-12 (24)---+--J------------ 16J1-31
---
1
-13 (24)------------- --~ 26 V AC,I \ FIG. 4-3 (SH 2)Ii
-14 (24)---------------+-t
AC PWR GND-- SHIELD GND
-15 ------NC-16 ------NC
-17 ------NC-18 ------NC-19 ------NC-20 ------NC
-21 (24)------------------ C2J1-S-22 (24)------------------ t2J1-t-23 (24)------------------ C2J1-U-24 ------NC-25 ------NC
-26 ------NC65J2B-27 ------NC
Interconnect Information
Table 501 (cent)22-14-00
Page 569Mar 15/89
Use or disclosure of information on thm page IS subject to the restrictions on the htle pag; of this document.

Honeywell WWANC’CITATIONV
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
#2 HDGSYNC(+) 65J2B-28(24)-------------------C6J1-1#2 HDGSYNC(-) -29(24)------------------ C6J1-VWX VIDEODATA(P)
!
-30 (24)-------------;?- 59J1-9
14XVIDEODATA(N) 1 1- 59J1-h-31 (24)----------------
!
Y -- SHIELDGNDWX CONTROLDATA(P) -32 (24)-------------T~r- 59J1-Iri
iL- 59J~-~WX CONTROLDATA(N) -33 (24)--------------+-
Y -- SHIELClGNDIASSET (+) -34 ------NCIASSET (-) -35 ------NCRA #2 (+) -36 ------NCRA#2 (-) -37 ------NCVNAVDEV (+) -38 (24)------------’‘-t~i- 16J1-28>7J1B-14
i -!-~- 16JI-27,7J1B-15VNAVDEV (-) -39 (24)------------
I
Y--SHIELDGNDPROLINENAV (+) -40 (24)------------ ---- 164Jl13-89PROLINE NAV (-) -41 (24)--------------!-$-164J1A-59
-- SHIELDGNDPROLINEDME (+) ,-42 (24)------------:q~--164J1A-57PROLINEDME(-) -43 (24)------------JO%--164J1A-44SHIELD -- SHIELDGNDARINCO DATA(+)
1}
-44”(24)-------------~,-- 429HS DATAARINCO DATA(-) 65J2B-45(24)------------- -J--FROMLRN1
~-- SHIELDGND
Interconnect InformationTable 501 (cent) 22-14-00
Page 570Mar 15/89
Use or dsclosure of Information on this page is subject to the restrictions on the title page of this jocument.

Honeywell M!MEI!ANCECITATIONV
Function
ARINC O SYNC (+)ARINC O SYNC (-)SHIELD GNDARINC O CLK (+)ARINC O CLK (-)SHIELDGNDARINC 1 DATA (+)ARINC 1 DATA (-)SHIELD GNDARINC1 SYNC (+)ARINC1 SYNC (-)SHIELD GNDARINC1 CLOCK (+)ARINC1 CLOCK (-)SHIELD GNDARINC2 DATA (+)ARINC2 DATA (-)SHIELD GNDARINC3 DATA (+)ARINC3 DATA (-)SHIELD GNDARINC4 DATA (+)ARINC4 DATA (-)SHIELD GNDARINC5 DATA (+)ARINC5 DATA (-)SHIELD GNDARINC6 DATA (+)ARINC6 DATA (-)SHIELD GND
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Connector Pin Connects To
65J2B-46 ------NC-47 L-----NC
-48 ------NC-49 ------tic
-50 (24)------------------ C164J1A-5-51 (24)------------------ C164J1A-15
-52(24)------------------C164J1A-26-53(24)------------------C164J1A-45
-54 (24)------------------ C164J1A-19-55 (24)------------------ C164J1A-17
-56 ------NC-57 ------NC
-58 ------NC-59 ------NC
-60 ------NC-61 ------NC
-62 ------NC-63 ------NC
-64 ------NC65J2B-65 ------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 571
Mar-15/89Use or dmclosure Of Information on this page IS subject to the restrictions on the title pag~, of this document.

Honeywell MI!!?*NCECITATION n/V
PILOT’S SYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
ARINC7DATA(+) 65J2B-66------NCARINC7DATA(-) -67------NC
ARINC8DATA(+)t
-68(24)------------F--- 116J1-33ARINC8DATA(-) -69(24)------------- --- 116J1-2SHIELDGND Y ----- 116J1-35ARINC9DATA(+) -70------NCARINC9DATA(-) -71------NCSHIELDGNDOVERTEMPWARN -72(24)------------------AIRCRAFT
TS WITH65J -99 ANNUNCIATORFD GS DEVDC OUT (-) $-73(20)---------L----- 7J1B-17
DOUT 1 MST CMPWRN
/
-74------NCDOUT 2 DH
A
-75 ------NC
DOUT 3 RAD/FDTEST 1 -76 (24)------------------ 20J1-’r
DOUT 4 HDG CMP MON -77------NCDOUT 5 ATT CMP MON -78------NCDOUT 6 DME/GROUNDRANGE -79 (24) ------------------ FIG.4-17VALOUT3 FD HDG VLDOUT -80(24)------------------7J1A-23VALOUT 1 SG -81------NCVALOUT 2 NAVSEL (P-ID1) -82(24)------------------FIG.4-18FD LRNSELVALOUT(P-ID2) -83(24)------------------FIG.4-18FD LATSTRGVALOUT -84(24)------------------7J1A-27NAVSEL (P-IDO) -85(24)------------------FIG.4-18FD LATDEVVALOUT -86(24)------------------7J1A-:16FD VERTDEVVALOUT -87(24)------------------7J1B-7FD DME VALOUT -88(24)------------------7JlA-34,FIG.4-17FDTK DETENTVALOUT -89(24)------------------7J1A-49FDAP ENGAGEDVALOUT -90(24)------------------7J1A-46,FIG.4-6FDAPS VALOUT -91(24)------------------7J1B-38FD LNAVAPPDOUT
}A
-92(24)------------------7J1A-48FDTTL DOUT 1 -93(24)------------------7J1A-22FD DME TTN DOUT -94 (24) ------------------ 7J1A-50, FIG.4-17FD MID MARK (5V) -95 (24) ------------------ 7J1B-f30FD PW MOVE -96 (24)------------
#
----- 7J1B-49,1OJ1A-33FDV/L DEVOUT (-) -97 (24)----------FDV/L DEVOUT (+)
fi ----- 7JlA-~o65J2B-98(24)----------~----- 7J1A-21
A1 CAUTION!100ma MAX LOAD.
InterconnectInformationTable501 (cent)
22-14-00Page572May 25/90
Use or dwclosure of information on thw page IS subject to the restrictions on the title page of thm document,

Honeywell INR’’”c’CITATION V
Function
FD G/S DEV OUT
FD LRN LAT DC OUT
FD DME DC OUT (-)
FD DME DC OUT (+)
FD CRS ERROR (+) OUTFD CRS ERROR (-) OUTSHIELDFD HDG ERROR (+) OUTFD HDG ERROR (-) OUTSHIELD
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Connector Pin Connects To
TS-WITH 65J2B-7365J2B-99 (24)----I-+---*------- i’JIB-16
TS WITH,65J2B-9-100 (24)---+:+---W-------- 7J1A-17
t
-101(24)-----------!--:& 7J1A-33,16J1-35
*II
?
-102 (24)-------------- -- “7J1A-32,16JI-34-- SHIELD GND
!-103 (24)----------- ----- 7J1A-41-104 (24)----------- --kq-- ?JIA-37. .
I‘L-- SHIELD GND
-105 (24)----------- ---- 7J1A-36
65J2B-106 (24)-------------4- -- 7J1A-374 -- ~;HIELD GND
Interconnect Information
Table 501 (cent) 22-14-00Page 573
Mar 15/89Use or disclosure Of Information on this page is subject to the restrictions on the title pag” ! of this document,

Function
SIGNALGNDLIGHTING28V (H)LIGHTING5V (H)
LIGHTINGCOM+28V DC POWER
FIG4-1DC POWERGNDsc/cPPB~;~P~~DTIMEPB
;OURSE SYNCPBUC REVSWiEADINGSYNCpB;PAREPB/ESERVED-!DGREV PB!TTREV PB
RESERVEDNAV REV PBFLIPPBRESERVEDSPARESPAREWX PB
TESTcs REV SW
SPARE
SPARERESERVED
HDGSillHDG SW2
ATT SWlATTSW2SPAREDC/SGBUS (H)DC/SGBUS (L)SHIELDGND--DC/MGBUS (H)DC/MGBUS (L)SHIELDGND
PILOT’SEFISREMOTECONTROLLERDC-811
connector Pin Connects TO—,,
115J1-1 (22)--------------------SIGNALGND-2 ------NC-3 (22)--------------------PILOT5 V
LIGHTING,FIG4-2
-4 (22)--------------------LIGHTINGCOM-5 (22)--------------------;:;::28VDC
,
-6 (22)--------------------‘c ‘wilGND-7 ------NC-8 ------NC-9 ------NC-10 (24)--------------------23J1-[~-11------NC-12 (24)--------------------23J1-li
-13 ------NC-14 ------NC-15 ------NC-i6------NC-17------NC-18------NC-19------NC-20------NC-21------NC-22------NC-23------NC-24------NC-25------NC-26------NC-27------NC-28------NC-29 (24)---------------------30------NC-31------NC-32------NC-33------
$1#-34 (24)--Y(-1--------------
-35(24)--N --------------
FIG.4-12
65J1A-6765J1A-68
-36-----NC115J1-37-----NC
InterconnectInformationTable501 (cent) 22-14-00
Paae574May-25/90
Use or disclosure of reformation on this pageis subject to the restrictions on the title page of this document.

Honeywell U%!JFPANCECITATION V
PILOT’SEFISREMOTECONTROLLER(cent)DC-811
Function ConnectorPin ConnectsTo
ADIDIM (H) t115Jlj;~~~~]------------r?-----3J1-30ADIDIM (L) ------.---
1
---- 3J1-31HSIDIM (H) -40(24)-------G-~~~~---- 2J1-30HSIDIM (L) -41(24)-------~d----l--~u-2J1-3~AP PITCHWHEELINPUT+ -42(24)--------------AP PITCHWHEELINPUT- {‘T-l_-~FIG.4-6-43(24)--------------- - -~
I
Y -- SHIELDGNDAP PITCHWHEELOUTPUT+ -44(24)-----fi-AP PITCHWHEELOUTPUT- -45(24)-----
‘---------->FIG.4-6
Y-------------
SHIELDGND---+28 VDCAP ENGAGEINPUT -46(24)--------------------FIG.4-6VS HOLDMODEGND -47(24)--------------------FIG.4-6IAS HOLII MODE GND -48(24)--------------------FIG.4-6MACHHOLDMODEGND -49------NCWX DIM (H) -50(24)--------------------2J1-33WX DIM (W) -51(24)--------------------2J1-34WX DIM (L) -52(24)--------------------2J1-35DH SET (H) -53(24)--------------------65J2A-42DH SET (W) -54(24)--------------------65J2A-43
DH SET (L) -55(24)--------------------65J2A-44
FDMODECOMMON -56(24)--------------------SIGNALGNDADCSLEWENGAGE -57(24)--------------------FIG4-6,9J1-37ADCSLEW + -58(24)--------------------FIG4-6,9J1-38ADION GND -59-----NCSPARE -60-----NCSPARE -61-----NCSPARE -62-----NCHSION GND -63-----NCSPARE -64-----NCSPARE -65-----NCSPARE -66-----NCWX ON GND -67-----NCPOSITION3 -68(24)--------------------115J1-71POSITION4 -69(24)--------------------115J1-72POSITION5 -70-----NCADF (L) -71(24)--------------------115J1-68LRNA (L) CIRCLEPTR -72(24)--------------------115J1-69LRNB (L) 115J1-73-----NC
Interconnect Information
Table 501 (cent)22-14-00
Page575Mar 15/89
Use or disclosure of mformatlon on this page is subject to the restrictions on the title paqe of this document.

Honeywell W!W’”c’CITATION V
PILOT’S
Function
POSITION 3’POSITION 4POSITION 5ADF (R)LRN A -(“R)LRN B (R) ~
DIAMOND PTR
EFIS REMOTE CONTROLLER (cent)DC-811
Connector Pin Connects To——
115J1-74-75-76-77-78
115J1-79
(24)-------------------- 115J1-77(24)-------------------- 115J1-78-----NC(24)-------------------- 115J1-74(24)-------------------- 115J1-75-----NC
Interconnect InformationTable 501 (cent)
22-14-00Page 576
Mar-15/89Use or dwclosure of mformatlon on this page IS subject to the restrictions on the title page of this locument.

Honeywell !NJEPAN’ECITATION n/V
INSTALLATIONBULLETINFOR REMOTE RADIOS
PILOT’S MLS UNIT MLZ-850
Function ConnectorPin ConnectsTo
EL DEVIATIONLO 116J1-1-------NC
429LO
1
-2 (24)----------t~r------ 65J2B-69
[I33---------v
------35--------
AZ DEVIATIONRTN -3-------NC
+28VDCRET -4 (22)--------------------DC GND
+28 VDC INPUT -5 (22)-------------------- pILOT!j 2SVDC
FIG.4-1BACKAZ SELECTED -6-------NCMLS OFF -7-------NCANALOGVIDEO -8-------NCMORSEAUDIOHI -9-------NC
AZ DEVIATIONLO -lo------NC
EL DEVIATIONHI -11------NC
EL LOWLEVELFLAG -12------NCSPARE -13------NCEL HIGHLEVELFLAG -14------NCBACKAZ AVAILABLE -15------NCFRONTPREAMPPRESENT -16 (24)-------------------lMJI-36
(IFFRONTPRE)EL CHANNELCHANGE -17------NCDPSKDATA -18------NCSPARE -19------NCAZ DEVIATIONHI -20------NC
MORSEAUDIOLO -21------NC
EL DEVIATION RETURN -22------NCAZ LOW LEVEL FLAG -23 ------NCAZ HIGH LEVEL FLAG -24 ------NCAZ CHANNEL CHANGE 116J1-25------NC
InterconnectInformationTable501 (cent)
22-14-00Paqe577
May-25]90Use or disclosure of mformatlon on this page IS sub!ect to the restncttons on the Mte pag ? of !hls document.

Honeyell IKWJEPANCECITATION 11/’V
Function
IDOREARPREAMPPRESENT
SPAREBOARDTESTSYNC4SPARESYNC3429HIGH
SPARESHIELDGROUND
STRAPGROUND
RCBSHIELDGNDMSA 1MLSRCBRX (-)
MLSRCBTX (-)
TESTBUTTONINPUTMLS RCBTX (+)
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SMLSUNITMLZ-850(cent)
ConnectorPin
116J1-26------NC-27(24)-------------------
-28------NC-29------NC-30------NC-31------NC-32------NC
t-33(24)---------~-------
II2-------_~-l-*--:---
Y-34------NC
1-35(24)-----------
-36(24)-------------------
-37(24)--------------------38(24)----fi-------------‘39--------‘i
i------------
67-J- ------------37--f
41-40 -------i-, ------------42-<~ ------------
-41------NC
!-42-----------------C-----
40---------J-1-----%37----------
Conn6ctsTo
116J1-36(IFREARPRESET)
65J2$-68
116J1-16,116J1-27GNDSEENOTE1164J1,4-34164J1A-21
164J1A-38164J1A-25
164J1A-25164J1A-38
MSA 7 -43------NC
MORSE IDENT (H)!
116J1-44 (24)------------? ---- 164J1B-3260----------$ ---- 164J1[I-13
InterconnectInformationTable501 (cent) 22-14-00
Page578May 25/90
Use or disclosure of mformatlon on this page is sub!ecf 10 the restrictions on the htle page of this document.

Honeywell M!KRANCECITATION n/V
INSTALLATIONBULLETINFOR REMOTE RADIOS
PILOT’S MLSUNITMLZ-850(cent)
Function ConnectorPin ConnectsTo
SPARE 116J1-45------NCSYNC2 (EL) -46------NCSPARE -47------NCSPARE -48------NCMSA3 -49(24)-------------------MSA 2
t
-50 (24)------------------- NOTE 1MSA PARITY -51(24)-------------------SPARE -52------NCSPARE -53------NCSPARE -54------NCSYNC1 -55------NCAGC VOLTAGE -56------NcCHANGEINHIBITNOT -57------NCMSA4 -58(24)-------------------SEENOTE1MSA6 -59(24)------------------SEENOTE1CHASSISGND
)-60 (24)-------O----------164J1B-13
44----4-!---------164J1B-32MSA 5 -61 (24)-------J ----------- SEE NOTE 1SPARE -62------NCSPARE -63 ------NCMSA O -64 (24) ------------------- SEE NOTE 1ID1 -65------NCTESTOUTPUT -66------NCMLS RCB RX (+)
!116J1-67---------------~[ ------ 164J1A-21
39---------Y
------ 164J1A-34
37--------
FORE ANTENNA 116J2-1----2142U4/U ------------ - FORE ANTFORE ANTENNA SHAD --------------------------- - FORE ANTAFT ANT 116J3-1----2142U4/U ----------- -- AFT ANTAFT ANT SHAD---------------------------- AFTANT
NOTE1: SEE PAGE580.
InterconnectInformationTable501 (cent) 22-14-00
Paqe579Ma~-25/90
Use or disclosure of mformatlon on this page IS subject 10 the restrictions on fhe title Pa;e Of this docume t.

Honeywell W!WFANCECITATION 11~
NOTE1:
Maximum Selectable Angle
MSA7
MSA6
MSA5
MSA4
MSA3
MSA2
MSA1
MSAO
Parity
Pin #
45
59
61
58
49
50
38
64
51
OpenCircuit
o
0
0
0
0
0
0
0
Jumperedto 116J1-36
1 = 12.8(Deg)
1 = 6.4
1 = 3.2
1 = 1.6
1 = 0.8
1 = 0.4$
1 = 0.2
1 =0.1
The ParityPin (51)shouldbe jumpered (or not jumpered) to Pin 116J1-62to giveoddparity.
InterconnectInformationTable501 (cent)
22-14-00Paae580May”25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of this document,

Honeywell ~ir~~ANcECITATION n/V
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SCOMUNITRCZ-850
Function Connector Pin Connects To
ENCALTCIN 143J11:~;:]--------------------9J1-18,C143J1-1+28VDCFAN --------------------FANREDSPARE -3-------NC+28VDCCOM -4 (22)--------------------+28 VDC COM -5 (22) -------------------- PILOT 28 VDC+28 VDC COM
}
-6 (22) -------------------- FIG.4-1+28VDCTDR RET -7 (22)--------------------DC GND
+28VDCTDR -8 (22)--------------------PILOT28 VDC+28VDCTDR 1-9 (22)--------------------FIG.4-1
RSBPRIMARY(+)}]
-lo--------------
Y
------- FIG.4-9RSB PRIMARY (-) -11------------ --------
BOBBIN----
SELCAL/ACARSRET -12-------NC
ENCALTD4N -13(24)-------------------9J1-27,C143J1-13
ACH POWER+28VDC -14-------NCRCBSPARE1 RX - -15-------NC+5 VDC -16(24)-------------------STRAPP3 RED+28VDCCOMRET -17(20)-------------------DC GND+28VDCCOMRET -18(20)-------------------DC GND+28VDCCOMRET -19(20)-------------------DC GND+28VDCTDR RET -20(20)-------------------DCGND
VHF1PTT -21(24)-------------------160J1-F,C160J1-B,C160J1-F,
SELCAL/ACARS -22-------NC 160J1-BSPARE -23-------NC
SIMULCOMRET -24-------NC
COMMACHDATA(-)y$
-25(24);;---------- ---- 165J1-J-------- -- .--- 165J1-H
BOBBIN--------ENC ALT C2N 143J1-26 (24) ------------------- 9J1-19,
C143J1-26
InterconnectInformationTable501 (cent)
22-14-00Page580.1/580.2
May 25/90Use or dwclosure of !nformatlon on this page is subject to the restrictions on the title pagf of thw document

Honeywell &MF.ANcECITATION n/V
INSTALLATIONBULLETINFOR REMOTE RADIOS
PILOT’S COMUNITRCZ-850(cent)
Function
ENCALT D2NRCB SPARE 1 RX +
EMER PHONE LO
RECPH AUO HIEMERPHONEHISPARE
COMM ACH OATA +
AUX AUD 4 LOSIMULCOMSPARE3HF COMXMITAUX AUD 2 HItlFCOMSQUELCHGNO (AUDIOSHIELDS)COMMACH +28 VDC RET
AUDIO BUS SHIELD(GND)
+5 VDCRET (GND)GNDGND
GND
SPARESPARE2AUX AUD 2 LO
AUXAUD 1 LO (INPUT)
AUX AUD 3 LO
AUX AUD 3 HIRCBSPARE2 RX -+28 VDC FAN RET
TDR-DLP TD +
DIGAUDIOBUS 1 (+)
Connector Pin Connects To
143J1-27-------NC-28-------NC
I
-29(24)-------------;---- 160J1-m,-30-------NC C160J1-m-31 (24)------------!~---- 160J1-G,-32-------NC
YC160J1-G
BOBBIN-----
-33 (24)------ii--:T?i1---- 165J1-H
Y---- 165J1-J
BOBBIN~-----34-------NC-35-------NC-36-------NC-37 (24)-------------------“FIG.4-19-38-------NC-39-------NC-40 (24)-------------------BOBBIN-41-------NC-42------------------------AUDIOBUS SHLD
-43 (24)-------------------STRAPP4 BLK-44 (22)-------------------BOBBIN-45(22)------BOBBIN-46(22]------BOBBIN
-47-------NC-48-------NC-49
1-50----------------1~r---- HF1
66-------------- - ----Y]BOBBIN----
-51-------NC.
-52-------NC-53-------NC-54(24)-------------------FANBLU-55-------NC
143J1-56 n
!----------------- ----IT FIG.4-IO
70
d
---------- ---42----------
Interconnect InformationTable 501 (cent) 22-14-00
Page581May25/90
Use or disclosure of mformatlon on thm page IS subject to the restncttons on the title pag! of this document.

Honeywell !MIM!!ANC’CITATIONV
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SCOMUNITRCZ-850(cent)
Function Connector Pin Connects To
SIDETONEPHONEAUDIOHI 143J1-57-------NCGND -58(24)-------------------BOBBIN
SPARE -59-------NCGND -60(24)-------------------BOBBIN
RSBSECONDARY(-) -61v}----;~----------t-t- -- FIG.4-9
J--------- - - --
BOBBIN-----+
AUXAUD 4 HI -62-------NCSPARE -63-------NC
SPARE -64-------NCSPARE -65-------NC
AUXAUD.1HI -66(24)----------+:f------HF150 (24)---+-------
?GND 1-67(24)------------------BOBBIN
RCBSPARE2 RX + -68-------NC
ENCALT COMMON -69 (24)------------------- 9J1-213,,
C143J1-69
DIG AUDIO BUS1 (-)!)
-70---------------l~T-l--- FIG.4-1056 --------v-----42----------J
ATCOFF/ON -71-------NC
GND (SQUAT SklITCH RET) -72 -------NC
SPARE
RSBSECONDARY(+)
-73-------NC
-74 t----;i---------~~F-f--->FIG.4-9
Y-------- - -----
BOBBIN-----
SPARE -75-------NCSPARE -76-------NCSPARE 143J1-77-------NC
Interconnect Information
Table 501 (cent)22-14-00
Paqe 582Mar”15/89
UseordisclosureofinformationonthispageISsubjecttotheTestnctionsonthetitlepageofIhlslocument

Honeywell M!JFPANCECITATIONV
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SCONUNITRCZ-850(cent)
Function Connector Pin Connects To
SPARE 143J1-78------NCSPARE -79------NC
MUT SUPRET -80(24);;-i;;j-----------A
4-/---- 164J1A-42
C164J1A-42C143J1-94
RCBSPARE1 TX + -81------NCRCB SPARE 2 TX + -82 ------NC
SQUAT SW IN -83(24)-------------------FIG.4-7ENCALTC4N -84(24)-------------------9J1-24
C143J1-84ENCALTB2N -85(24)-------------------9J1-16,
C143J1-85ENC ALT BIN -86(24)-------------------9J1-23,
C143J1-86TDR-DLPTD- -87------NCCLOCK -88 (24)-----;------------- STRAPP6 BLUSIDEAO -89(24)-------------------STRAP P1 GRNDLP-TDR TD(+) -90------NC~~~I~lENABLE -91(24)-----------------J--143J1-105
i
-92--------------------- 160J1-RIi C160J1-RII
106---------!-1+ :::::i~;u ---
ON/OFFVHFCOMREMOTE -93-------NC
MUTSUP IN -94(24)-----t--)-----------C164J1A-42
1
164J1A-42C143J1-94
80-----
RCBSPARE1 TX - -95-------NCRCB SPARE 2 TX - -96-------NC
ENCALTA4N 143J1-97(24)-------------------9J1-22,C143J1-97
Interconnect InformationTable 501 (cent) 22-14-00
Page 583Mar 15/89
Use or disclosure of tnformatlon on this page is subjecl to the restrictions on the title pag? of this document,

Honeywell MIM!!’”c’CITATION V
INSTALLATIONBULLETINFOR REMOTE RADIOS
PILOT’S COM UNIT RCZ-850 (cent)
Function Connector Pin Connects To
ENC ALTAIN 143J1-98(24)-------------------9J1-2C,C143J1-98
ENCALTA2N -99(24)-------------------9J1-21,C143J1-99
ENCALT B4N -100(24)------------------9J1-17,C143J1-1OO
SERIALDATA -101(24)------------------STRAPP7WHTPARLOADNOT -102(24)------------------STRAPP20RNSIDEAl -103(24)------------------STRAPP8YELDLP-TDRTD (-) -104-------NCRETURN -105(24)------------------143J1-91
MICLO
,!
-106(24)---------------- 160J1-E,II 160J1-H11 C160JI-E,lJ C160JI-H
92 --------v----
TRANSPONDERANTENNA 143J2-1-------RB-214/U-:---------XPONDERANTTRANSPONDERANTENNA JSHAD--------------------------XPONDE.RANT
(SEENOTE)
CC)MANTENNA 143J3-l-------RG-58/U~-’--------COMANTrSHAD---------------------------COMANT
(SEE NOTE)
~: MAX COAX LENGTH 30 FT.
Interconnect Information
Table 501 (cent) 22--14-00Page-584
Mar 15/89Use or disclosure of mformatlon on this page IS sub)ect to the restrictions on the title page of this document.

Honeywell MINJfPANcECITATION n/V
INSTALLATION BULLETIN FOR REMOTE llADIOS
PILOT’S RMU RM-850
Function Connector Pin Connects To
+28 VDC LIGHTING 144JI-A-------NC
+28VDC LIGHTINGRET -------NC+28 VDC :: (20)-------------------- PILOT’S 28V
FIG. 4-1+28 VOC RETURN -D (20)-------------------- DCGND
FMCSBUS (+) (RS 422)
I
-E (24) -----fl ------------ 121 J1A-40FMCS BUS (-) (RS 422) -F (24) -----U ------------ 121 J1A-41
5 VDC LIGHT -G (22)--------------------FIG.4-25 VDCLIGHTRET -H (22)--------------------LIGHTGND
5 VAC LIGHT -J -------NC5 VAC LIGHT RET -K-------NC
CHASSIS GND -L (24)--------------------CHASSISGND
RSB SECONflARY (+) -M ------------pi
‘1
--------- FIG.4-9RSBSECONDARY(-) -N -----..----- -- ----.----.
t Y-------
W.o.w. -P (24)--------------------A/CWOW SWITCHM.O.M.POLARITY -R (24)--------------------WOW = GNO
ATC IDEI’JT -S (24)-------------------- C144J1-S
GND SWITCH
MBU INHIBIT -T-------NC
CHASSISGND -U (24)--------------------CHASSISGND
RSB PRIMARY (+)n
:: -----------’-’-
‘}
------ ------ ---- ----- .- FIG.4-9RSBPRIMARY(-)
b---------
t-------
SPAREDIG IN -------NCON/OFF PAGE DELETE ~? (24)-------------------- 144J1-DSPARE DIG IN -Z-------NCSPARE 144J1-a-------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page585May-25/90UseorUwclosure of mformatlon on this page E subject to the restrtctlons on the title pag( of this document.

Honeywell MKMRANCECITATION V
INSTALLATIONBULLETINFORP.EMOTERADIOS
PILOT’SRMURM-85C(cent)
Function Connector Pin Connects To
SIDE SELECT BO 144J11~ ~j$------------------- 144J1-USIDE SELECT B1 -------------------- 144JI-USIDE SELECT EV PARITY -d (24)--------------------144J1-U
TESTENABLE ~;:-e-------l:COMMFREQXFER -f-------ii:
COMMMEMSELECTO -9-------E:MKRSENSELEFTSIDE -h-------tin
MKRSENSERIGHTSIDE -i-------tic
COMMPOWEROFF -j-------N~ATCPOWEROFF -k-------N:VORPOWEROFF -m-------~~DMEPOWEROFF -n-------zADFPOWEROFF ,-P---.---;;MLSPOWEROFF -q-------N:
SPAREDIGOUT -r-------NCSPAREDIGOUT -s-------NC
,RSBSHLDGND 144J1-t-------------------------RSBSHLDFIG.4-9
Interconnect Information
Table 501 (cent) 22=-14-00Page 586Mar15/89
Useordisclosureof mformatlon on thw page IS sub)ect to the restrictions on the t!tle page of this document

Honeywell MKMYANCECITATION Ilfl
Function
AOF MODSHLD
ADF COSMOD
ADFANTTEST
ADF OUTERSHLD
ADF INNERSHLD
ADF RF INPUT
ADF +15VDC
ADF SINMOD
ADF+15VDCGND
ADF LOOPEN
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SADFANTENNAAT-860
Connector Pin Connects To
158J1-A-------NC
-’----------~-t--- 164J’A-’1-c---------
t t----------- --- 164J1A-77
-D-------NC I-E-----
AdI-F---{<:,?RCR505Z-Z------- 164J2-1
--
{-G------------------------ 164J1B-1
i-H------------------------ 164J1A-104
-J-------------------------164J1B-27
158J1-K-------------------------164J1A-101
NOTE: ADFANTENNATRIAXIALCABLESHALLBE TROMPETERPN TRC-50-2OREQUIVALENTTRIAXIALCABLE.
ALL WIRESSHALLBE STANDARD#22AWG PERMIL-W-B1044ORMIL-W-22759/16EXCEPTAS NOTED.
InterconnectInformationTable501 (cent) 22-14-00
Paqe587May-25/90
Use or disclosure of information on thw page IS sub~ect to the restrictions on the title pagi! of this document.

Function
HANDMIC PTTEMERGENCYCOMPTT
IHF2 PTT
VHF2MIC HI
VHF 1 MIC LO
VHF 1 PTT
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SAUDIOPANELAV-850
Connector Pin connects TO
160J1-A(24)-------------------- PILO’TSMIC
-B (24)---------------------160J1-FC160J1-BC160J1-F143J.I-21
-C (24)--------------------C143,11-21C160J1-C
1
-D (24)---------F;-‘----- j;~;j~-:2
w --.---l~--------
I
--0B
-E (24)---------~-l--
!
------ 143JI-106,
II160J1-Hc160J1-E,1{ C160J1-H
R-------!~--------
-F (24)--------------------143J1-21,160J1-BC160J1-F,C160J1-B
EMERCOM PHONEHIn
!
-G (24)-----------q-r-‘--- ~~~~~~3~II
m_------~-~---~~~ SHIELDGND
EMERCOMMIC LO -H (24)-------
[
p- ---------l&)J1-EII C160J1-HII 143J1-106
C160J1-EP-----;----------
HANDMIC LO -J (24)--------------‘--- ~:~~~sJ~~~EB;~DHANDMIC HI 61160J1-K(24)------------------
11
InterconnectInformationTable501 (cent) 22-14-00
Page588May 25/90
use or disclosure of mformatlon on this pageIS sub!ect to the restrictions on the Iltle Page of thl~ ~oCumenl

Hone~eiI !%fii!ANcECITATION Ilfl
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S AUDIO PANEL AV-850 (cent)
Connector Pin Connects TOFunction
iBIN/COCKPIT SPKR LO 160J1-L (24)-------------------- LtiCKPT/CAB SPKR LO
?8 VDC RTN -M (20)--------------------DCGND
-N (24)---.---------------— --0B4LDGND
-P (24)-------~[
1
160J1-R‘4ERCOM MIC HI
--------C160J1-P
([ C160J1-R
II 143J1-92H ?----------------
HF 1 MICHI-
{F2 MICLO -s
{F2 MICHI -T
+28 VDC -u
t28 VDC -v
VHF 2 MIC LO -w
HF 2 PTT -x
II L C160J1-R,[1 C160J1-P
E-----t~----------
f(24).------.7----------C160J1-S,HF2
(24)-------J.;~::-G---- c160J1-T,HF2
(20)--------------------PILOTS 28 VDC
(20) 1-------------------- FIG. 4-1
A----0
I(24)-----.-~j---B-----c143J1-106
C160J1-WII
D-----: -- -------
(24)--------------------c160J1-x’‘F*
COCKPITSPKR HI 160JI-Y(24)-;----Q------------)LH CKPT SPKR
---- ------------
JInterconnectInformation
Table501 (cent) 22-14-00Page589May 25/90
Useordl?.closureofInformationonthispage!ssublecttotherestnc~lonson(he!ltlepag~ofthisdOCUKIent.

Function
F 1 MICLO
F 1 MICHI
F 1 PTT
IGAUDIOBUS2 (+)
IIGAUDIOBUS1 (+)
;ABIN SPKRHI
Y4ERNAVPHONEHI
)lMMINGRTN
I
,qASK/BOOM PTTMASK/BOOM HI
INTERPHONELO
PHONELO
INSTALLATION BULLETIN FORREMOTERADIOS
PILOT’S AUDIO PANEL AV-850 (cent)
Connector PinConnects TO—.
h----
0
I160J1-2(24)-------l-r--------- C160J1-Z,HF1
-a (24)-------’~’-------‘-- c160’]1-a’‘F1
-b (24)--------------------C160J1-b,HF1
-c !]~------ ---- FIG. 4-10-----; ::---l ] _
--------- --- --
1---- @
-di]
------ ---------;-----1 ~
FIG. 4-10----- ----- ----
‘J
9}
-e (24)-L--:----- - ‘------ ~~R------ ------ --
t
-f (24)_-=~--_-~~---- ----- C160J1-fc164J1B-36
,1m-----1“-------- ---
~-------- SHIELD GND_.. —
-g (24)--------------------flS~~,~~Gp~N-h (24)--------------------To~EADSET
91-i (24)-i1----------------
-------- -------JACK~---:@@J--JC160:1 j
-j (24)-------1---i
,-
kj
-------- ------ C160J1-S
-k------~-----,(--------- TO LFPHONEJACK
C164J1B-51
6
----@
DIG AUDIO BUS 2 (-) 160J1-n----_------t]
----------- FIG.4-10c---.-JJ---_------
It-----To-----------
EMERNAV/COMPHONELO -m (24)--------------------~~~~~~z~
JInterconnect Information
Table 501 (cent) 22-14-00Page590
May 25/90
Use or disclosure of mformatlon on this pageIS subject to the restrictions on the title page of this 40Cement.

Honeywell W!UY’”c’CITATION V
Function
DIGAUDIO BUS 1 (-)
INSTALLATIONBULLETINFORREMOTE RADIOS
PILOT’SAUDIOPANELAV-850(cent)
Connector Pin Connects To
1}160J1-p -----i----’p --------- --
$
FIG.4-10----- -----------
----Q
+5 VAC/DC DIMMINGS -q (22)---------------------FIG.4-2+28 VDCDIMMINGS -r-------
1
INTERPHONE HI -S (24) t------,c+.-i--------C160J1-:
j ~~--;--------C160J1-J----+-
PHONE HI
1
160J1-t-----------f~-w---------TO LHPHONE JACK
k ----j--[- --------
t ---@
Interconnect InformationTable 501 (cent) 22-14-00
Page 591
Mar 15/89Use or disclosure of Information on thw page IS subject to the restrictions on the tttle pagt ! of this documenf.

Honeywell INK!!’””CITATIONV
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S AUDIO PANEL AV-850 (cent)
Furtction Connector Pin Connects To
WARNING 5 AUDIO 160J2-A -------NCWARNING 1 LO -B-------NCSPAREGND -------NCSHLDGND $-------NCRESERVED -E-------NCSPARE -------NCWARNINGAUDIO2 LO ::-------NCCABINDISABLE -H-------NCWARNINGAUDIO3 LO -J-------NCRESERVED -K-------NCMARKERSENS -L-------NCSTEROMUTE -M-------NCSPARE -N -------NCSERVICE PHONE LO
t}-P (24); ---------F~-- ----- TO SEI?VICE
------- -- ‘ti-- ----- PHONE JACKRESERVED -R-------NCRESERVED -S-------NCRESERVED -T-------NCRESERVED -U-------NCVOICERECORDERHI
“1 }-V (24)----------f~------TO VOICE
------------------- RECORCIERWARNING 1 AUDIO -W-----!-NCWARNING2 AUDIO -X-------NCRESERVED -Y-------NCWARNINGAUDIO4 LO . -Z-------NCWARNINGAUDIO5 LO
.-a-------
MASKINTERCOMENABLE -b (24)--------------------TO PILOT’SHEADSETOXYGENMASKSWITCH
MKRDISABLE -C (24)--------------------C160J2-CSPARE -d-------NCSERVICEMICLO t
1-e (24)----------i~t------ TO SERVICE
---------
1
~h - ----- MICSERVICEPHONEHI -f (24);---------T=------
J- }
TO SERVICE---------b- - ----- PHONEJACK
RESERVED -9-------NCRESERVED -h-------NCRESERVED -i-------NCRESERVED -j-------NCSERVICEMIC PTT -k (24)-------------------- SERVICE PTT
-1-------NOT USED IN CONNECTORWARNING 3 AUDIO -------NCRESERVED 160J2~;-------NC
Interconnect InformationTable 501 (cent)
22=14-00Page 592
Mar 15/89UseordmclosureofInformationon this page is subject to the restrictions on the title page of thm ~ocument.

Honeywell MR!!YANC’CITATION n/V
INSTALLATION BULLETIN FORREMOTERADIOS
PILOT’SAUDIOPANELAV-850(cent)
Function Connector Pin Connects To
INTERPHONE PTT 160J2-p------------------------- INTERPHONE pTT
SERVICE MIC HIi
-q (24)--f’~ -------------- TO SERVICEe--~ 1------------- MIC
VOICE RECORDERLO ‘r (24)--+’Tt-------------TO VOICE
v--1-- 1-------------RECORDER
RESERVED -s-------NC
WARNING4 AUDIO 160J2-t-------NC
InterconnectInformationTable501 (cent) 22-14-00
Page593May 25/90
Use or disclosure of mformatlon on thw page IS sub!ect to the restrtct!ons on the tttle pag{ ! of thts document.

“~
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S DME INDICATOR DI-850
Function Connector Pin Connects To
RESERVED 163J1-1-------NC
RSB PRIMARY (-) -2 ~>‘----~~---------ir?--‘-FIG. 4-9
--------Y- -----
10 ---------
RIB SEGONDARY (+)t?
-3 ----------------n~~- --- FIG. 4-9
14 -------- - - --Y10 ---------
RESERVED -------NC
RESERVED ~;-------NC
+28 VDC P14R -6 (22)-------------------- :’~oT&28vDc.-
5 V AC/DC LIGHTING INPUT -7 (24)-------------------- ;l: D;M~~NGs.-
SPARE -8-------NCSPARE -9-------NC
CHASSIS GND -lo (22)------------------- RSB s~LD
SPARE -11------NC
IICGROUND -12 (22)-------------------Dc Gf’J!)
LIGHTINGCOMMON -13 (24)------------------- LIGHT~NG GND
RSB sECoNDARy (-) -14 ----;----------f; 1}--- --- FIG. 4-9
-’r--------- -----
10 --------- ,
RSB PRIMARY (+) -15 ----.-- --------\>
s- --- FIG. ~L92 ‘l__---------
Y10 ---------
-16------KCSPARES -17------NC
163J1-18------NC
Interconnect InformationTable 501 (COnt)
I
22-14-00Page 594
Mar 15/89Useordisclosureof mformatlon on th!s page IS subject to the restrictions on the title page of thw jocument

Honeywell WJW’”c’CITATIONV
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S DME INDICATOR DI-850 (cent)
Function Connector Pin Connects To
SPARE 163J1-19------NC
28 VDC LIGHTING INPUT -20------NCPOWER ON/OFF INPUT -21------NC
-22------NCSPARES -23------NC
-24------NC28 VDC RTN 163J1-25 (22)------------------- DC GND
.
Interconnect Information
Table 501 (cent)22-14-00
Page 595Mar 15/89
Use or disclosure of Information on this page IS sub!ecl to the restrictions on the title pat; e of this document,

Honeywell WXYAN’ECITATION n/V
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SNAVUNITRNZ-850
Function Connector Pin Connects To
CLUSPARE 164J1A-1-------NCDMEHOLDNOT -2--- ----NCDME HOLD -3 -------NCDME SPARE -4 -------NCDME 6 W 568 + DATA -5 -------NCDME SPARE -6-- -----NCADF SHLD -7 (24)-------------------- ADF Stll-1)CLUSPARE -8-------NCCLUSPARE -9-------NCADF26 VAC400HZ RTN -10------NCADF26 VAC400HZ RTN
.9-11------NC
ADFSYNCHROY OUT -12------NC
CLUSPARE -13------NC
V/ION/OFF -14------NC
DME6 - 568- DATA -15------NC
DMERS 422SD - (2) -16(24)--------~T
‘}
-------A54------- -------TO LRN#1A28-----Y
DME6 W 568 - CLK -17------NCDMEACT 1 AUD OUT -18------NCDME6 W 568+ CLK -19------NC
CLUMLS RCBSHLD -20---------------CLUMLS RCBTX1 AJ164J1A-21---------------- ------ 116J1-67
A34------40L------ l16J1-39~SEENOTE5 FORSHLDINFO
11 IFTHEML-850MLSRECEIVERIS NOT INSTALLED,THEMLSRCBRX ANDTX PORTSMUSTBE JUMPEREDTOGETHERAT THE NAVUNITMATINGCONNECTORAS SHOWNBELOW:
JUMPER1: 164JIA-25TO 164J1A-21JUMPER2: 164JIA-38TO 164J1A-34
InterconnectInformationTable501 (cent) 22-14-00
Pacie596May-25/90
Use or dwclosure of mformatlon on thw page is subject to the restncttons on the title page of this document.

Honeywell WKY’”c’CITATION n/V
Function
ADF SYNCHROX OUT
AOF26 VAC400 HZ
CLUCHANGEINHIBITCLU MLS RCBRX1
DME6 W 568+ SYNCCLUSPAREDMEGND
DMESPAREOME SPARE
CLUSPAREDMESPARE
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SNAVUNITRNZ-850(cent)
ADFSYNCHROZ OUT (GND)
ConnectorPin ConnectsTo
164J1A-22-------NC
-23-------NC
-24-------NC
t-25----------------?-- --~h A
116J1-42 ~A38--------P------ 116J1-40
YA20---------SEENOTE8 FORSHLDINFO
-26------NC-27-------NC-28------------------------DMESHLD
SEENOTE2 FORSHLD INFO
-29-------NC-30-------NC-31-------NC-32-------NC
!164J1A-33(24)------+~--------- 65J2A-58,
II 65J2A-56,
ILRMI
A47------,--------A61---J--L---------A7-----Y
Interconnect InformationTable501(cent) 22-14-00
Page597May 25/90
Use or disclosure of information orI thw page IS sub]ecf to the restrtctlons on the tttte pagf, of ttws document.

Honeywell Hl!W!ANcECITATION n/V
Function
CLU MLS RCB TX2
CLU SPARECLU SPARE
CLU SPARE
CLU MLS RCB RX2
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S NAV UNIT RNZ-850 (cent)
ADF AUDIO OUT SHLD
DME ON/OFF
CLU AUX 1 AUD HI
DME MUT SUP
DME SPARE
DME RS 422 SD - (1)
DME 6 W 568 - SYNCDME FLAG
ADF DC COS OUT
CLU.SPARECLU SPARE
Connector Pin Connects To—,—I
164J1A-34m
t-------------- --q- -- -- ;;;::.<3;~
A21---------’------- -YA2&--------
SEE NOTE 5 FOR SHLD INFO-35-------NC-36-------NC-37-------NC
+-38--------------?- ----jt 116J1-40 ~
A25------=-’-- ---- 116J1-.42A20------- YSEE NOTE 5 FOR SHLD INFO
-39-------NC
-40-------NC
-41-------NC
-42 (24)--------<-+------- C164J?A-42
I
C143J;.-9,4143J1-94
A28------SEE NOTE 2 FOR SHLD INFO
-43-------NC
-44 (24) +----------~r ----- 65J2B-43ItI[1 1A57--------P ------- 65J2B-42
A28------- 1-45 -------NC-46 -------NC
-47 (24) ‘L
+‘----ii~i:::+- -
65J2A-57,RMI
A33 -----+-l-- -
-48-------YNC A7-------
164J1A-49-------NC
Interconnect InformationTable 501 (cent)
22-14-00Page598
May 25/90Use or dmclosure of mformatton on this page is subject to the restrictions on the title page of lhts [iocument.

Honeywell W!EIANcECITATION n/V
Function
ADFAUDIOHI OUT
CLU SPARE
ADF AUDIO LO OUTCLU SPARE
DME RS 422 SD + (2)
CLUAUX 1 AUD RTN
DME SPARE
DMERS422 SD+ (1)
CLUACH DATA (-)
V/IRS422 SERD lB
V/IMKIRLAMPM
ADFDC SIN/fiOUT
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SNAV UNIT RNZ-850 (cent)
CLUSPARECLUSPARECLUSPARECLUSPARE
ADFHF KEY
Connector Pin Connects To
164J1A-50-------NC-51-------NC-52-------NC-53-------NC
t-54(24)------------------
A16-----+1--------
1TO LRN#1
A28-------55------NC-56------NC
i
-57(24)-------?~--------- 65J2B-42It
A44----l-f
---------65J2B-43
A28----~-58------NC
i-59(24)------”~---------- 65J2B-41
B89-------~~-----------65J2B-40YB50--------
-60 ------NC
i
-61(24)--------1~1------- 65J2A-55,RMIA47-----
‘-1-------A33-------Y--------
--------62----~~NC-63------NC-64------NC-65------NC
164J1A-66(24)-------------------FIG,4-19
InterconnectInformationTable501 (cent)
22-14-00Pacae598.1M~y25/90
Use or disclosure of Information on this page IS sub)ec! to the restrictions on the title pag~: of this document

Honeywell MI!IL?ANC’CITATION n/V
INSTALLATION BULLETIN FORREMOTERADIOS
PILOT’SNAVUNITRNZ-850(cent)
Function
CLU AUX 2 AUO HI
CLU AUX 2 AUD RTNCLUACHNAV CLOCK+CLU ACHDATA+DME40 MV/MICLUACHNAVCLOCK-V/IMARKERLAMPI
V/IGS SUPERFLAG
CLUSPARECLUSPARE
ADFANTTEST
CLUSPAREADFMODSHLD
V/IGNDPS INCLUACHGNDCLUSPARE
DME28 VDCRET
[/1RS 422SERD 2B
V/I+28VDCDME+28VDCADF+28VDC
RSBSECONDARY(+)
CLUSPARECLUSPARE
Connector Pin Conn~cts To-
164J1A-67 ------NC-68 ------NC-69 ------NC-70 ------NC-71 ------NC-72 ------NC-73 ------NC
-74 ------NC
-75 ------NC-76 ------NC
-77 ----------------------- 158J1-CSEENOTE3 FORSHLDINFO
-78------NC-79------NC
-80------NC-81------NC-82------NC
-83(22)------------------
}A95--J-------------‘c ‘ND
‘}
-84(24)-------I?--------B102----
Y-------TO LRN#l
B50-----
-85(22)-------------------PILOT’S
}-86(22)-------------------28VDC BUS-87(20)-------------------FIG.4-1
6
‘}
-88---------------r------ FIG.4-9A102-----j-
f------
B85-------
-89-------NC164J1A-90-------NC
InterconnectInformationTable501 (cent) 22-14-00
Page598.2May25/90
Use or disclosure of information on this page IS subject to the restrictions on the t!tle page of th!s cocument.

Honeywell M!JRANC’CITATIONV
Function
ADF COS MOD
CLU SPARECLU SPARE
ADF 28 VDC RET
DME 28 VDC RET
CLU SHLD GND
DME ACT 2 AUD OUT
V/I +28 VDCDME +28 VDCADF +28 VDC
ADF LOOP EN
RSB SECONDARY (-)
CLU GND
ADF SIN MOD
ADF MOD SHLD
CLU SPARE
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S NAV UNIT RNZ-850 (cent)
Connector Pin Connects To
t164J1A-91--------------=---- --- 158J1-B
A104---------------- --- 158J1-HYA105----------
SEE NOTE 3 FOR SHLD INFO
-92-------NC-93-------NC
-94 (22)------------------- DC GND
-95 (22)------------------- DC GND
-96 (24)---------A
IB13 (24)1-T- ------ 116J1-35B32 (24)JOA-------- 116J1-44
-97-------NC
-98 (22)------------------- PILOT’S
}-99 (22)------------------- 28 VDC BUS-100(20)------------------ FIG. 4-1
-lOJ----------------------Y 158J1-KSEE NOTE 3 FOR SHLD INFO
m h-102 ---------------- ----- FIG. 4-9A88 ----+&------f3/35-_--y----_--
-~03 (22)-.-------.--------7- DC GND
-104!
-----------------+->- - 158J1-iiA91------------------- 158J1-B
Y-105------------------SEE NOTE 3 FOR SHLD INFO
164J1A-106-------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.3Mar 15/89
Use or disclosure of mformatlon on lhts page IS sub)ecf to the restrictions on the title pag! of thts document,

Honeywell M!JEPANcECITATION n/V
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S NAV UNIT RNZ-850 (cent)
Function Connector Pin Connects To——
ADF +15 VDC 164J1B-1-------------------------- 158J1-GSEE NOTE 3 FOR SHLD INFO
CLU FAN HI -2 (24)-------------------- FAN Rt:DCLU SPARE -3-------NCCLU SPARE -------NCCLU SPARE STAT I (DIG AUD) &----NCCLU SPARE STATRTN (DIG AUD) -6-------NCV/I SYNC COMP IN X -7-------NCCLU ACH +28 VDC -8-------NCV/I OBS D,G -9-------NCV/I OBS F -10------NCV/I OBI OSIN -11 (24)
t}
-------i%-- -----
V/I OBIO COS -12(24)ii;----+l-------- RMI
, -Y-.---
B50=:-- ‘--SEE NOTE 4 FOR SHLD DATA
CLU MLS MORSE ID RTN -13 (24)fit
i------------d- - -- 116J1-60B32---------J-T---- 116J1--44
9A96----------
CLU SPARE -14-------NCCLU SPARE -15-------NCCLU SPARE -16-------NCCLU SPARE -17-------NCCLU SPARE -18-------NCCLU SPARE -19-------NC
V/I 26 VAC 400 HZ H REF -20 (22)------------------- 26 VAC 400 HZPWR, FIG. 4-3
V/I RNAV VIDEO OUT -21-------NCV/I RNAV VIDEO GND -22-------NC
V/I 400 HZ 26 VAC RET -23 (22)------------------- AC GND
V/I VOR/LOC AUDIO CT -24-------NC
ADF GND 164J1B-25 (22)------------------- DC GND
InterconnectInformationTable501(cent)
22-14-00Page598.4May 25/90
Use or disclosure of !nformatton on this page IS subject to the restr!cttons on the title page of this :;ocument.

Honeywell WIJRANCECITATION n/V
INSTALLATION BULLETIN FOR REMOTE RADIOS
PILOT’S NAV UNIT RNZ-850 (cent)
Function Connector Pin Connects To
CLU +5 VDC RTN 164J1B-26 (22) ------------------ STRAP P4 BLK
ADF +15 VDC GND -27 ----------------------- 158J1-JSEE NOTE 3 FOR SHLD INFO
CLU SPARE -28 ------NC
DIG AUDIO BUS 1 (-) -290
i---------------y+- ---
B42?]
--------- ----- FIG. 4-10I
B67 --------
CLUSPARESTATIN (DIG AUD) -30 ------NC
ICLU AUD AUX SQUELCH -31 ------NC1
CLU MLS MORSE ID -32 (24)o
t-.---------a-b- --- 116J1-44B13 (24)---J-1 ----- 116J1-60
YA96 (24)----
V/I SYNC COMP IN Y -33 ------NC
V/I OBS B -34 ------NCV/I OBS C -35 ------NC
V/I VOR/LOC AUDIO HI -36 ------NC
I V/I OBI.O GND -37 (24)------------------- RMI
IV/I PWR GND -38 (22)------------------- DC GND
V/I +28 VDC -39 (22)------------------- 28 VDC POWERFIG. 4-1
CLU CLUS +5V -40 (24)------------------- STRAP P3 RED
CLU SPARE
DIG AUDIO BUS 1 (+)
-41 ------NC f
164J1B-42n
t----------------++ --
B29 ---------1-J \Y----j
FIG. 4-10B67 ---------
Interconnect InformationTable 501 (cent)
22-14-00Paqe598.5M;y 25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title pag,, of thts document.

Honeywell MliRANcECITATIONn/V
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SNAV UNIT RNZ-850 (cent)
Function Connector Pin Conn[?cts To
CLUSPARE 164J1B-43------NC
CLU FANRTN -44(24)-------------------FAN BLU
CLUAUDAUX XMT -45------NCCLUSPARE -46------NC
V/ISYNCCOMPINZ -47------NCV/IOBSA -48------NCV/IOBS E -49------NC
V/IPWRGND -50(22)-------------------DC GND
V/IVOR/LOCAUDIOLO -51------NC
V/I28 VDC -52 (22)-------------------28VC1CPOWERFIG.4-1
CLUSPARE -53------NCCLUSPARE -54------NCCLUSPARE -55------NCCROSSSIDEMLSSEL -56------NC
CLUSIDESPARE -57(24)-------------------STRAPP1 GRN
CLUSTRAPSD DATA -58(24)-------------------STRAp P7WHT
CLUSTRAPCLK -59(24)-------------------STRilPP6 BLIJ
V/I GS FLAG -60 ------NC
V/ISYNCOUTZ -61------NC
V/ISYNCCOMPVALID -62------NCV/IMKRAUDIOCT -63------NC
V/ICC ILSMODE -64(24)-------------------RMI
V/ITO/FROM+ -65------NCV/IMKRAUDIOHI 164J1B-66------NC
InterconnectInformationTable501 (cent) 22-14-00
Page598.6May 25/90
Use or dwclosure of Information on this page IS sub)ect to the restrictions on the title page of this : ocument.

Honeywell WJHANC’CITATIONV
INSTALLATIONBULLETINFORREMOTERADIOSPILOT’SNAVUNITRNZ-850(cent)
Function Connector Pin Connects To
DIGAUDIOBUSSHLD 164J1B-67----------------1
i}B29-------------- FIG.4-10J~B42-------Z-- --
ADF26 VAC400HZ -68-------NC
CLUSPARE -69-------NCCLUSPARE -70-------NC
ADF SYNTH LOCKADFRS 422TXDBV/IMKRLAMPOV/lDEVCOMV/I ILSMODEANUCLUSPAREV/lVOR/LOCDEV+V/IGS DEV+
-72------NC-73------NC-74------NC-75------NC-76------NC-77------NC-78------NC-79------NC
CLUSIDESELECT -80(24)-------------------STRAP P8YEL
RSBPRIMARY(-) . -81 11~]n--.----------------- -
B71--------------Y
-FIG.4-9B95--------- J
CLU SPARE -82-------NCCLUSPARE -83-------NC
CLUSTRAPWD LOAD -84------------------------STRAP P20RN
RSBSHLD 164J1B-85--------------------j
A102 *-:::::::::1:2--~F*G”4-9.
Interconnect InformationTable 501 (cent)
22-14-00Paqe 598.7
M~r 15/89Use or disclosure of Information on this page IS subpct to the restrictions on the Mle pa~s of this document,

Honeywell WMYANCECITATION n/V
Function
CLUSPARE
ADFON/OFF
CLUACH NAVCONTROL-
V/IRS 422SERD 1A
INSTALLATIONBULLETINFOR REMOTE RADIOS
CLU ACH NAVCONTROL+
V/I VOR SUPERFLAG
V/IVOR/LOCFLAGV/IMKRAUDIOLOCCLUSPARE
RSBSHLD
ON SIDEMLSSELCLUSPARE
CLUGND
ADF LOCK
ADF RS 422 TXD AV/ISPAREV/IRS 422SERD 2A
V/ISYNCOUTYV/ISYNCOUTXCLUSPAREV/ITO/FROM& FLAGCOM
PILOT’S NAVUNITRNZ-850
Connector Pin
164J1B-86 ------NC
-87 ------NC
-88 ------NC
cent)
Connects To
t-89(24)--------1~-------- 65J213-40
A59---------- ------- 65J2B-41Y
B50----------1-90------NC .3
-91 (24)-------------------RMI
-92------NC-93------NC-94------NC
-95-------------------B71---------1-1-~t}
FIG.4-9B81--------------
-96(24)---------------FIG.4-18-97------NC
-98(22)-------------------DC GND
-99(24)-------------------RMI,65J1A-82
-1oo------NC-101------NC
‘}
-102(24)--------1~1-------A84------------ TO LPN#1B50--_-y
-103------NC-104------NC-105------NC
164J1B-106------NC I
InterconnectInformationTable501(cent) 22-14-00
Page598.8May 25/90
Use or disclosure of reformation on this page IS subject to the restrlct!ons on the t!tle page of th!s jocument.

Honeywell WiW!’”c’CITATION n/V
Function
ADFRF INPUTADF INNERSHLDADFOUTERStlLD
V/lANTV/lANT
V/IGS ANTV/IGS ANT
V/IMKRANTV/lMKRANT
DMEANTDMEANT
INSTALLATIONBULLETINFORREMOTERADIOS
PILOT’SNAVUNITRNZ-850(cent)
Connector Pin
164J2-1-Tf+TRC-50-2-----@)--164J2-2_&
r
.—El
SEENOTE3 FORSHLDINFO
164J3-1?
------RG-58/U----- ------SHAD----------------------------
164J4-1?
------RG-58/U----- -------SHAD----------------------------
164J5-I?
------RG-58/U----- ------SHAD----------------------------
164J6-1------RG-214/U----9
------SHAD----------------------------
Connects To
158J1-F158J1-E
OLITERStiLDOPENAT NAV END
VOR/LOCANTVOR/LOCANT
GS ANTGS ANT
MKRANTMKRANT
DMEANTDMEANT
NOTE1: SHIELDSOF PAIRSA47-A61,ANDTRIPLEA12-A22-A33ARE TIEDTOGETHER.
NOTE2: SHIELDSOF A42 AND PAIRS A16-A54, A44-A57, ANDGROUNDA28ARETIEDTOGETHER.
NOTE 3: ADF ANTENNA TRIAXIAL CABLE SHALL BE TRUMPETER PN TRC-50-2OREQUIVALENTTRIAXIALCABLE.
ALLWIRESSHALLBE STANDARD#22AWG PER MIL-W-B1044 OR
MIL-W-22759/16 EXCEPT AS NOTED.
THEOUTERSHIELDJUMPERTO GENAT THEANTENNASIDESHALLBE 20AWGANO ITSLENGTHSHALLNOTEXCEED10 INCHES.
NOTE4: SHIELOSOFTRIPLESB1l-B12-B37,B9-B1O-B49ANO B34-B35-B48(IFUSED)ARETO BE TIEOTOGETHER.
NOTE5: SHIELOSOF PAIRSA21-A34ANDA25-A38ARE TIED TOGETHER.
Interconnect InformationTable 501 (cent)
22-14-00Page 598.9May25/90
Use or dwclosure Of Information on !!IIs page IS sub!ecf to the restrwtlons on the title pagr of thm document.

)\S52NN
\I
CLEARANC::~;~VERY UNIT
connector Pin Connects TOFunction
N/OFF OUTPIJT165JI-A
UD1OINPUT HIGHQUATSWITCHSENSV AC/DCLIGHTINGINPUT8V DC POWERINPUTIAVAUXSHIFT/LOADINPUTIIAVAUXSHIFT/LOAO
- BUS+I INPUTBUS-
:OMAUXOUTPUTBUS+;PARE;OMAUXOUTPUTBUS-
tAVAUXBUSSHIFT/LOADSHLDGND
ilIDEBANDSELECTINPUTNAVAUXOUTPUTBUS +NAV AUXOUTPUTBUS -
NAVAUX CLOCKINPUTBUS -
SPAREPRIMARYRSBBUS -
NAV AUDIO INPUT LOWROTORMODFILTERINPUT0/300DEG.ELECTINPUTVSMA7.9V/11.8VWX INPUTPOSTFAILANNUNOUTPUTtijcOM/NAVSELECT+SQUATSWITCHINPUTLIGHTINGCOMMON28 V DC LIGHTINGINPUTAUDIOOUTPUTHIGHAUDIOOUTPUTLOWNAVAUXOUTPUTBUSSHLDGND
SYNCHRO/RSBCOMPASSNAVAUXCLOCKINPUT
INPUTBUS +
-B-c-D-E-F-G
-H-1-J
-K
-L-M
------NC------NC(24)-.------------------(24)--------------------(22)-----X------------
#(24)-----r,------------(24)--------------------K (24)--Y
i
~::~::~~-~------------
(~q)---.!-!-------------P (24)--Y
165J1-gFIG.4-2c164J1B-8c164J18-90c164J1B-88
143JI-33
143JI-25
(24)-------I
tf \;:]---r-l--‘-------:;::::::::d-- -------------
---:--NC -
t(24)-----f~-‘---------:;:]:;;:::
-N (24)-------------------
-~ (24)--Y
t-P (24)-----,C[-‘---------:;~:;;::;
-f (24)-----------------~ (24)--Y
-Q ------NC
-R (24)
}
--------------------F*G.4-9-g (24)-----------------
-s ------NC-T ------NC
-U (24)--------------------sEENOTE1-V (24)--------------------SEENOTE1-w ------NC-x ------NC-Y (24)--------------------FIG.4-7-Z (24)--------------------LIGHTINGGND-g :--;--NC-tJ------NC-c ------NC-~ (24)-------L
$-M (24)---1-1--‘-------:;:::;~:;:-N (24)---w-----------
-g ------NC
t-~ (24)-----C--‘---------C164J1A-69-p (24) 1:-----------------c164J1A-72
165J1-~(24)--J
Interconnect InformationTable 501 (cent) 22-14-00
Paae598.10‘fray25/90
Intormatlon on this page IS subiect to the restrictions onthe title page of this document.
Use or disclosure Ot .

Honeywell M!WRANC’CITATION V
CLEARANCE DELIVERY UNIT (cent)CD-850
Function Connector=Pin Connects To
PRIMARYRSB BUS +
NAV AUDIO INPUT HIGHRMI REL/MAG BEARING INPUTPOWER GROUNDAUDIO SHLDGNDSPARECD/COM/NAV SELECTSIDE SELECTSPARECOM AUX BUSSHLDGND
JUMPERGROUNDNAVAUXBUSCLOCKSHLDGND
NAVAUDIOSHLDGNDAUDIOINPUTLOWSPARESPARESPARESPARESPARESPARE
)165J1-g(24)--------------------:~lG Q-g-R (z4)-----------------0
-h ------NC-~ (24)--------------------SEENOTE1-J.(22)--------------------DCGND-~ ------NC-~ ------NC-lJ------NC-rJ------NC-g ------NC-Q (24)-------A
t-H (24)----;1----------143J1-33-J (24)----U----------143J1-25
-g (24)--------------------165J1-C-L (24)-------I
t-P (24)----------------C164J1A-72-~ (24)---~aJ----------C164J1A-69
-~ ------NC-~ ------NC-lJ------NC-~‘------NC-y ------NC-~ ------NC
------NC165Jl~~------NC
NOTE1: CLEARANCEDELIVERYSTRAPOPTIONS
fIJl
i
T
u
e
v
L
A
DESCRIPTION
RMIREL/MAGBEARINGINPUT
ROTORMODFILTERINPUT
0/300DEG.ELECTOFFSETINPUT
SYNCHRO/RSBCOMPASSINPUT
VSMA7.9V/11.8VMAXINPUT
WIDEBANDSELECTINPUT
ON/OFFOUTPUT
FUNCTION
OPEN = MAGNETICGND = RELATIVEGND = FILTER ONOPEN= FILTEROFFOPEN = 300 DEGOFFSETGND = O DEG OFFSETGND = RSBOPEN= SYNCHROOPEN = 11.8VGND = 7.9VGND = NARROWBANDOPEN = WIDE BANDGND = OFFOPEN = ON
Interconnect Information
Table 501 (cent)22-14-00
Page 598.11Mar 15/89
Use or disclosure of Information on this page IS subJecf to the restncttons on the title pag$ of this document.

Honeywell %WEANCECITATION V
Function
COPILOT’SHORIZONTALSITUATIONINDICATORRD-450
HEADING ERROR NO. 1 HROTOR { cCHASSISGND
DC GND
SPARES
26V, 400 HZ POWER
(5V LIGHTINGPOWER :
SPARES
HDG ERROR NO. 1 XSTATOR
(Y
. 2v/DEG z
SPARES
TUNEDTO LOCGND+28 V DC
SPARES
{
(ROTOR H
CRSERROR(:
NO.1 .2V/DEGSTATOR Y
Connector Pin Connects To
C2J1-A------NC-B ------NC-C (24)-------
A-D -------------------------DCGND
:;
:[-J-K-L (22)---------------------FIG.4-3 (SH2)-M (22)---------------------FIG.4-2-N (24j---------------------ACGND
:;
:; ------NC-u ------NC-v ------NC
:!-Y-z
---------------------C164J1B-64“l;(24)”------NC
-c-d
:;------NC
:: ------NC-i ------NC.
------NCC2Jl~~------NC
Interconnect Information
Table 501 (cent) 22-14-00Page 598.12Mar 15/89
Use or disclosure of information on this page is subject to the restrlcl(ons on the tnle page of this :iocument.

Honeywell !!Wk!ANcECITATIONV
Function
SPARES
(STATOR iz
COPILOT’SHORIZONTALSITUATIONINDICATOR(cent)RD-450
COMPARATOR/HDGTRANSMITTER Cos ;
SINHc
CRSRESOLVER
SPARE
ConnectorPin
{
C2J1-m-n
-P-q-r-S (24)----------------------t (24) ----------------------U (24)---------------------
-v ------NC------NC I~; (24)------------T~r-----
-y (24)------------ - -----Y ------
-Z (24)----------------------AA(24)---------------------66(24)---------------------CC(24)---------------------DD(24)---------------------EE(24)---------------------FF(24)---------------------GG------NC
C2J1-HH
ConnectsTo
65J2B-2165J2B-2265J2B-23
FIG.4-3 (SH2)AC PWRGNDSHIELDGNDC164J1B-9C164J1B-49C164J1B-10C164J1B-9C164J1B-48C164J1B-34C164J1B-35
Interconnect Information
Table 501 (cent)
22-14-00Page 598.73
Mar 15/89Use or disclosure of Information on this page IS subject to the restncflons on the tile pag ! of this document

Honeywell lRYiR_ANcECITATION V
COPILOT’S HORIZONTAL:HL}{TION INDICATOR (cent)
Function ConnectorPin
TO-FROMPOINTER{+
iC2J2-A(24)--------------------
(DEFLTO) 250LOAD - -B (24)--------$) --------GLIDESLOPEDEV
[
-C (24)----f-;-------------
II
(DEFLUP) lK LOAD i- -D (24)----~-j-------------
COURSEDEV(+
*-E (24)---------f~---------
(DEFLRIGHT)lKLOAD - -F (24)---------1-L--------
{
+ -G (24)---------------------SYNCANN lK -H (24)---------------------
10K -J ------NC
{
-K-L
SPARES:!
F(HIGHLEVEL+28V
( 1
-P (24)--------~~i---------NAV FLAG LOWLEVEL+ ------NC
COMMON - ~! (24)-------\> ----------; [SPARE -T
{
HIGH +
1
-U (24)-------;;-------------GLIDESLOPEFLAG LOW + -v ------NC
COMMON -W (24)-------l;____HDGDISPLAYVALID+28V -X (24)---------~f----------HOGVALID+28V -Y (24)---------------------
{
x -Z (24)---------------------HOGINPUT Y -a (24)---------------------
z -b (24)---------------------
SPARES{::-e
POWERGND - -f (22)---------------------
{
-9SPARES -h
C2J2-i
Connects To
C164J1B-65C164J1B-106C164J1B-75,65J2A-66,65J2A-67C164JIB-79,65J2A-68C164JIB-78C164J1B-75C6J1-UC6J1-V
C164JIB-91
C164J1B-106
C164J1A-74
CI64J1B-10665J1A-92C6J1-eC6J1-LC6J1-MC6J1-K
AC GNII
Interconnect Information
Table 501 (cant)
22-14-00Page598.14
Mar 15/89Use Or dk5C10SUre Of lnfOrmallOn on thts page !s subject to the restrictions on the title page of Ihls document.

Honeywell MNFANCECITATION V
COPILOT’S FLUX VALVEFX-220
Function Connector Pin Connects ToI
{
z 1C4J1-A (24)---~i- ------------- C5J1-AFV STATOR x ;: [;:]--j-l- ------------- C5J1-B
------ ------------- C5J1-C26V, 400 HZ
(:
7
-D (24)--- ---------------- AC GNDH -E (24)--- --------- ----- C6J1-S
SHIELD GND -F (24)--- T ----- C5J1-D
COPILOT’S DUAL REMOTE COMPENSATORCS-412
FROM FLUX VALVE
26V, 400 HZ
PWR GNDSHIELD GNDSPARE
FLUX VALVE OUTPUT
CHASSIS GND
SPARES
{
z “1C5J1-A (24)------ -------------x -B (24)--J-!- -------------Y -C (24)--~-~- -------------
-D (24)-------------------
1L----
-E (24)--- -----------------F (24)----G-H
-J-K-L
{
-M
-N-P-R
-s-T
-u
-v
. .
1(24)--=- -------------(24)--:-!- -------------(24)--IY- -------------(24)--------7
m
C4J1-AC4J1-BC4J1-CC6J1-SC4J1-EAC GND
C6J1-RC6J1-NC6J1-P
NOTE : SHIELDS ON THIS SHEET ARE NOT TIED TO AIRCRAFT GROUND. SHIELDS MUSTBE INSULATED FROM AIRCRAFT STRUCTURE.
Interconnect Information
Table 501 (cent) 22-14-00Page 598.15
Mar 15/89Use or disclosure of mformatlon on this page IS sub!ecl to the restrlcttons on the title pag ? of this document.

Honeywell MIKtfiiANcECITATION n/V
COPILOT’S DIRECTIONAL GYROC-14D
Function Connector Pin Connec:s To,—
AC POWER GNiI c6J1-A (22)------------------ AC GND28 VDC GND -B (22)------------------ DC GND+28 VDC INPUT -C (22)------------------ FIG. 4-L (SHT2)
-D9MA
FREE SLAVE SW -E (24)---- o-------F AUTO 1 FREE SLAVE
+B TO FREE SLAVE SW -G (24)---A-
1
------ -- SWITCHHDG NO. 1 ROTOR
{H -H (22)--t-~- ----------- FIG. 4-:1 (SHT 2)
26V 400HZ c -J (22)--Q----- ------- AC GND
{
z -K (24)------ ,>-
I
------- c2J2-EHDG NO. 1 STATOR -L (24)------+-T- ------- C2J2-Z
; -M (24)------a- - ---- --
1
C2J2-4
{
-N (24)-------~---r~- -- C5J1-JFLUx vALvE : -P (24)------------F-r -- C5J1-K
x -R (24)------------LO- -- C5J1-H
26 VAC FLUX VALVE EXY
-S (24)------------ ---- C4J1-E115 VAC OUT
{-
---- C5J1-D+ ~~ (24)------------------ 65J2B-28,C2J2-G
ANNUNCIATOR -V (24)------------------ 65J2B-29,C2J2-H5 VAC OUTPUT -w
<H -X (22)-T9r
HDG NO. 2 ROTOR t------------
clCLJIB-7,&ll-X,12J1-D
-Y (22)---------- ------- AC GND
{
z -Z (24)
1}
---Y---CL- ---7---HDG NO. 2 STATOR x -a (24)------~-!- ------- FIG. 4-;2
-b (24)------J-1- -------
{
;C vINTERLOCK NO. 1 NO ~~ (24)------------------ FIG. 4-: (SHT 2)
c -e (24)------------------ c2J2-yFLUX VALVE SHIELDCHASSIS GND :: (22)------%
c -h (24)------------------ 1OJ1B-28, 6J1-hINTERLOCK NO. 2 NC “
NO =; (24)------------------ FIG. 4-1226 VAC OUTPUT H -k ------NC42 VA MAX LH
-m (24) ---------------+ MANUAL $YNCSYNC SWITCH
<
i -n (24)-------------o SWITCH :3-p (24)--------------*4
FREQUENCY/PHASE LOCK+ -q ------NC RH
{
-r
SPARE6J1::
InterconnectInformationTable 501 (cent)
22-14-00Page 598.16May 25/90
Use or dwclosure of mformatlon on thw page is subject to the restrictions on the title page of lhm Iocument,

Honeywell W!RANCECITATION n/V
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’SMLS UNIT MLZ-850
Function Connector Pin Connects To
EL DEVIATIONLO C116J1-1-------NC
429LO -2-------NC
AZ DEVIATIONRTN -3-------NC
+28VDCRET -4 (22)--------------------DC GND
+28VDC INPUT -5 (22)--------------------COPILOTS28 VDCFIG. 4-1
BACKAZ SELECTED -6-------NCMLSOFF -7-------NCANALOGVIDEO -8-------NCMORSEAUDIOHI -9-------NC
AZ DEVIATIONLO -lo------NC
EL DEVIATIONHI -11------NC
EL LOWLEVELFLAG -12------NCSPARE -13------NCEL HIGHLEVELFLAG -14------NCBACKAZ AVAILABLE -15------NCFRONTPREAMPPRESENT -16(24)-------------------C116J1-36
(IFFRONTPRE)EL CHANNELCHANGE -17------NCDPSKDATA -18------NCSPARE -19------NCAZ DEVIATIONHI -20------NC
MORSEAUDIOLO -21------NC
EL DEVIATIONRETURN -22------NCAZ LOWLEVELFLAG -23------NCAZ HIGHLEVELFLAG -24------NCAZ CHANNELCHANGE C116J1-25------NC
Interconnect InformationTable501(cent)
22-14-00Paqe598.17May25/90
Use or dmclosure of reformation on this page IS sub;ecf to the restrictions on the title pag ? of this document,

INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’SMLSUNITMLZ-850(cent)
Function
IDOREARPREAMPPRESENT
SPAREBOARDTESTSYNC4SPARESYNC3429HIGH
SPARESHIELDGROUND
STRAP GROUND
RCB SHIELD GNDMSA 1MLS RCB RX (-)
MLS RCBTX (-)
TESTBUTTONINPUTMLS RCBTX (+)
MSA7MORSEIDENT(H)
Connector Pin Connects To
C116J1-26------NC-27 (24)------------------- C116’]1-36 (lF
REAR PRESET)
-28------NC-29------NC-30------NC-31------NC-32------NC-33------NC
.>-34------NC-35
-36 (24)------------------- j~~;’~~~~:~,.
-37 (24)------------------- GND;:; (24)---------6--------- ~;;4:o:~3;
--------------I-l-t-------
67------ -
T
------- C164J1A-2137---”---
h-40--------------(;
!-------c164JlA-38
42-------v-------c164J1A-25
-41------NC
1-42----------------$~‘--- C164~lA-25
40----------’-37----------
~ ---- C164J1A-38
-43------NC
i116J1-44(24)-----------~T---- C164J1B-32
60----------U----- C164J1B-13
InterconnectInformationTable501 (cent) 22-14-00
Page 598.18May 25/90
Useor dtSCIOSUfe of mformatton on thm page IS sub!ect 10 the restrlcilons onthe ttle page of thm :ocument.

Honeywell W!MYANCECITATION n/V
Function
SPARESYNC2 (EL)SPARE
SPARE
MSA 3MSA 2MSA PARITY
SPARESPARE
SPARE
SYNC 1
AGC VOLTAGE
CHANGE INHIBIT NOTMSA 4
MSA 6CHASSIS GND
MSA 5SPARESPAREMSA O
ID1TESTOUTPUTMLS RCBRX (+)
INSTALLATIONBULLETINFOR REMOTE RADIOS
COPILOT’S MLSUNITMLZ-850(cent)
ConnectorPin ConnectsTo
C116J1-45,-----NC-46------NC-47------NC-48------NC-49(24)-------------------
1-50(24)-------------------NOTE1-51(24)-------------------J-52------NC-53------NC-54------NC-55------NC-56------NC-57------NC-58(24)-------------------SEE NOTE 1-59 (24)------------------- SEE NOTE 1-60 (24)-ii::_:--:---fl
t--- C164J1B-13
---- - C164J1B-32-61 (24)-----=---~-~~- SEE NOTE 1-62------NC
-63------NC
-64 (24)------------------- SEE NOTE 1
-65------NC
-66-- ----NC
1C116J1-67---------------$’T ----- C164J1A-21
39--------- ----- C164J1A-34
37-------- Y
FOREANTENNA C116J2-1----RG-214/U-------------FOREANTFOREANTENNA SHAD---------------------------- FOREANT
AFTANT C116J3-1----RG-214/U-------------AFTANTAFTANT SHAD---------------------------- AFTANT
NOTE1: SEEPAGE580,
InterconnectInformationTable501(cent) 22-14-00
Paqe598.19Ray25/90
Use or disclosure of information on thm page IS subject to the restrictions on the title pag~: of this document

Honeywell W!W!!ANCECITATION V
Function
ENC ALT CIN+28VDCFANSPARE+28VDCCOM+28VDCCOM+28VDCCOMi-28VDCTDRRET
+28VDCTDR+28VDCTDR
RSBPRIMARY(+)RSBPRIMARY(-)
SELCAL/ACARSRET
ENCALTD4N
ACHPOWER+28VDC
RCBSPARE1 RX -
+5 VDC+28VDCCOMRET+28VDCCOMRET+28VDCCOMRET+28VDCTDRRET
VHF1PTT
SELCAL/ACARSSPARE
SIMULCOMRET
COMMACHDATA(-)
ENCALTC2N
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SCOMUNITRCZ-850
Connector Pin Connects To
C143J1-1(24)--------------------9JI-1!3,143J1-1-2 (24)--------------------FANRSD-3 -------NC-4 (22)-------------------
}
COPILOT-5 (22)-------------------- 28VOC-6 (22)------------------- FIG.4-1-7 (22)--------------------DCGN!3
-8 (22)-------------------)
COPILOT28 VDC-9 (22)--------------------FIG.4-1
-12-------NC
-13(24)-------------------9J1-27,143J1-13
-14------NC
-15------NC.
-16(24)-------------------sTRApp3RED-17(20)-------------------DCGND-18(20)-------------------DCGND-19(20)-------------------DCGND-20(20)-------------------DCGND
-21(24)-------------------160J1-cC160J1-C
-22-------NC-23-------NC
-24-------NC
-25-------NC
C143J1-26(24)-------------------9J1-19,143J1-26
Interconnect Information
Table 501 (cent)22--14-00
Page 598.20Mar 15/89
Use or disclosure of Information on this page IS subject to the restrictions on the title page of this document.

Hone~ell M!IRANCECITATIONn/V
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’S COM UNIT RCZ-850 (cent)
Function Connector Pin Connects To
ENCALTD2N C143J1-27-------NCRCBSPARE1 RX + -28-------NC
EMERPHONELO -29-------NCRECPHAtJDHI -30-------NCEMERPHONEHI -31-------NCSPARE -32-------NCACHDATA+ -33------NCAUXAUD4 LO -34-------NCSIMULCOM -35-------NCSPARE3 -36-------NCHF COMXMIT -37(24)-------------------FIG. 4-19AUXAUD 2 HI -38-------NCliFCOMSQUELCH -39-------NCGND (AUDIOSHIELDS) -40 (24)-------------------BOBBIN
ACH+28VDC RET -41------NC
AUDIOBUSSHIELD(GND) -42-----------------------AUDIOBUSSHLD
+5 VDCRET (GND) -43 (24)-------------------STRAPP4BLKGND -44 (22)------BOBBINGND 4; ~~:]------BOBBINGND ------BOBBIN
SPARE -47-------NCSPARE -48-------NCAUXAUC)2 LO -49AUXAUD 1 LO
h-50---------------fJ------ HF2
66-------------!J------$“BOBBIN-------
AUXAUD3 LO -51-------NCAUXAUD3 HI -52-------NCRCBSPARE2 RX - -53-------NC+28VDCFANRET C143J1-54(24)-------------------FANBLU
InterconnectInformationTable501 (cent) 22-14-00
Page598.21May25/90
Use or disclosure of Information on this page IS subject to the restrictions on the title pagt of thm document.

Honeywell ti%!~f~’”c’CITATION V
Function
TDR-DLP TD +
DIGAUDIOBUS2 (+)
INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’SCOMUNITRCZ-850(cent)
SIDETONEPHONEAUDIOHIGND
SPAREGND
RSBSECONDARY(-)
AUXAUD4 HISPARE
SPARESPARE
AUXAUD 1 HI
GND
RCBSPARE2 RX +
ENCALTCOMMON
DIGAUDIOBUS2 (-)
ATCOFF/ON
GND (SQUATSWITCHRET)
SPARE
Connector Pin Connects To
C143J1-55-------NC
-56t)
----------------fj---- FIG 4-10II .
---------------:!----------~
-57-------NC-58(24)-------------------BOBBIN
-59-------NC-60(24)-------------------BOBBIN
-61 ::t)---------------------- FIG.4-9
74 ---------------BOBBIN-----Y
-62-------NC-63-------NC-64-------NC-65-------NC
t}-66(24);;--;j----f------ HF2
----T?---‘-
-67(24)------------1------BOBBIN
-68-------NC
-69(24)-------------------9J1-28,143J1-69
b-70---------------------- FIG.4-10--------c-l-----
::---------(2
-71-------NC
-72-------NC
C143J1-73-------NC
Interconnect Information
Table 501 (cent) 22-J4-00Paqe 598.22
Mar 15/89UseordisclosureotInformationonth!spageissubjecttotherestrictionsonthetitlepageofthisSocument

Honeywell WE!’””CITATIONV
Function
RSBSECONDARY(+)
SPARESPARE 1SPARESPARESPARE
MUT SUPRET
RCBSPARE1 TX +RCBSPARE2 TX +
SQUATSW INENCALTC4NENCALT B2NENCALT BINTDR-DLPTD -CLOCKSIDEAODLP-TDRTD +SQUITENABLEMICHI
ON/OFFVHFCOMREMOTE
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SCOMUNITRCZ-850(cent)
MUTSUP IN
ConnectorPin
tC143J1-74----------------(~----
61 ----e----------YBOBBIN------
-75-------NC-76-------NC-77-------NC-78-------NC-79-------NC
-80(24)i~-i;;i------7~
------c-J---
-81-------NC-82-------NC
-83(24)--------------------84(24)--------------------85(24)--------------------86(24)--------------------87-------NC-88(24)--------------------89(24)--------------------90-------NC-91(24)------------------
f-92(24)------------~-\i---
{ ii106(24)----1-,----
-93-------NC
C143J1-94(24)--------------{>---
80------------4
ConnectsTo
FIG.4-9
164J1A-42C164J1A-42143J1-94
FIG.4-79J1-24,143J1-849J1-16,143J1-859J1-23,143J1-86
STRAPP6 BLUSTRAPP1 GRN
C143J1-105160J1-DC160J1-D
C164J1A-42164J1A-42143J1-94
Interconnect Information
Table 501 (cent)22-14-00
Page 598.23Mar 15/89
Use or dwclosure of InformalIon on this page IS subject to the restrlcflons on the Mle pag: of this document.

Function
RCBSPARE1 TX -RCBSPARE2 TX -
ENCALTA4NENCALTAINENCALTA2NENCALT B4N
SE21ALDATAPARLOADNOTSIDEAIDLP-TDRTD(-)RETURN
MICLO
INSTALLATIONBULLETINFOR REMOTE RADIOS
COPILOT’SCOMUNITRCZ-850(cent)
ConnectorPin
C143J1-95-------NC-96-------NC
-97(24)-------------------98(24)-------------------99(24)-------------------100(24)-----------------
-101(24)------------------102(24)------------------103(24)------------------104-------NC-105(24)-----------------
[
-106(24)----------f~i---
II92--------(7----
Connects To
9J1-22,143J1-979J1-20,143J1-989J1-21,143J1-999JI-17T143JI-100
STRAPP7 WHTSTRAPP2 ORNSTRAPP8 YEL
C143J1-91
160J1-14C160J1-W
TRANSPONDERANTENNA C143J2-1-------RB-214/U---------XPONDERANTTRANSPONDERANTENNA SHAD--------------------1’-----XPONDERANT
(SEENOTE)
COMANTENNA- C143J3-1-------RG-58/U--------- COMAN1SHAD------------------------- COMANT
(SEENOTE)
~: MAX COAXLENGTH30 FT.
Interconnect Information
Table 501 (cent) 22-14-00Page 598.24
Mar 15/89Use or dmcloswe Of mfofmatlon on tfw page is subject to the restrictions on the title page of thm uocu ment.

Honeywell W!J?AN’ECITATION 11~
7
INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’SRMURM-850
Function
+28VDC LIGHTING
+28 VDCLIGHTINGRET+28 VDC
+28VDCRETURN
FMCSBUS (+)(RS422)FMCSBUS (-)(RS422)5 VDC LIGHT5 VDC LIGHTRET
5 VACLIGHT5 VACLIGHTRET
CHASSISGND
RSBSECONDARY(+)RSBSECONDARY(-)
W.O.!4.W.O.W.POLARITY
ATC IDENT
MBU INHIBIT
CHASSISGND
RSBPRIMARY(+)RSB PRIMARY(-)
SPAREDIG INON/OFFPAGEDELETESPAREDIG INSPARE
ConnectorPin ConnectsTo
C144J1-A------NC
-B ------NC-C (20)--------------------;~~IL~T;S28V
-D (20)--------------------DC~ND-
-E ------NC-F ------NC-G (22)--------------------FIG.4-2-H (22)--------------------LIGHTGND
------NCI ------NC
-L (24)--------------------CHASSISGND
~:=:)FIG.~-g-M ------------1~1--fl------------
t Y-------
-P ------------------------A/CWOW SWITCH-R ------------------------W.O.W.=GND
-S (24)--------------------144J1-SGNDSWITCH
-T-------NC
-U (24)--------------------CHASSISGND
1-v -----------q~-----------w ------------ -
~FIG. 4-9
Y--------
t-------
-X-------NC-Y (24)--------------------144J1-D-z-------NC
C144J1-a-------NC
InterconnectInformationTable501 (cent) 22-14-00
Page 598.25flay25/90
Use or dwc(osure of reformation on thw page IS sub)ect to the restrictions on the title pag!, of Ihts document.

Honeywell WIWANCECITATIONV
Function
SIDE SELECT BOSIDE SELECT B1SIDE SELECT EV PARITY
INSTALLATIONBULLETINFOR REMOTE RADIOS
COPILOT’SRMURM-850(cent)
TEST ENABLECOMM FREQXFER
COMM MEM SELECT OMKR SENSE LEFT SIDE
MKRSENSERIGHTSIDE
COMM POWER OFFATC POWER OFFVOR POWER OFFDME POWER OFFADF POWER OFFMLS POWER OFF
SPARE DIGOUTSPAREDIGOUT
RSB SHLD GND
Connector Pin Connects To—-
C144J1-b-------NC-C (24)--------------------C144J]-U-d-------NC
-------NC%------NC
-9-------NC-h-------NC
-i-------NC
-j -------NC-k-------NC-m-------
-------!;~;-------NC-q-------NC
-r------- NC-s-------NC
C144J1-t-------------------------RSBSHLDFIG.4-9
Interconnect Information
Table 501 (cent)
22-14-00Page 598.26
Mar 15/89Use or disclosure of Information on this page IS subject to the restrictions on Ihe title page of this I: ocument.

Hone~el[ HIRANCECITATIONn/V
Function
ADFMODSHLD
ADF COSMOD
ADF ANT TEST
AOFOUTERSHLD
ADF INNERSHLD
ADF RF INPUT
ADF+15 VDC
ADF SIN MOD
ADF+15VDC GNC’I
ADF LOOPEN
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SADFANTENNAAT-860
Connector Pin Connects TtI
C158J1-A-------NC
-B---------- --------- 4-- C164J1A-91
-c------------------------- C164J1A-77
-D-------NC
-E----
--TRC-50-2-----’--- C164J2-1
-G------------------------- C164JlB-1
-H--------------------+AY--d
C164J1A-104
-J-------------------------C164JIB-27
C158J1-K------------------------- C164J1A-101
NOTE: ADFANTENNATRIAXIALCABLESHALLBE TROMPETERPN TRC-50-2OREQUIVALENTTRIAXIALCABLE.
ALLWIRESSHALLBE STANDARD#22AWGPERMIL-W-B1044ORMIL-W-22759/16EXCEPTAS NOTED.
InterconnectInformationTable501 (cent) 22-14-00
Page598.27May25/90
Use or disclosure of information on this page is sub!ect to the restrtcttons on the title pag~, of this document,

Honeywell WJFANCECITATIONn/V
INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’S AUDIO PANEL AV-850
Function ConnectorPin ~ects To
HANDMIC PTT C160J1-A(24)--------------------COPILOTSMIC
EMERGENCYCOM PTT -B (24)--------------------160J1-F160J1-BC160J1-F143J1-21
VHF2 PTT -C (24)--------------------C143J1-21160J1-C
VHF2 MICHI
I
-D (24)---------T?--------
wII----------------
1--a
VHF 1 MIC LO -E (24)----------l-~
!
------
~;
R___-~ ------
VHF 1 PTT -F (24)--------------------
nEMERCOMPHONEHI -G (24)--------~-,-
!
--------
IIm
v----------------
----------
C143J1-92160J1-D
143J1-106,160J1-H160J1-E,C160J1-H
143J1-21160J1-F160J1-B,C160!J1-B
143J:1-31160J:i-G
SHIELDGND
EMERCOMMIC LO
\
n ----------160J:.-E-H (24)------r,
II160J:-H143J;-106
II C160J1-EP----0- ----------
HANDMIC LO -J (24)------------------- PILOTS MIKE ANDHANDMICHI &C160J1-K(24)------------ ------ PHONEJAcK Box ,,
Interconnect InformationTable 501 (cent)
22-14-00Page598.28May 25/90
Use or disclosure of Information on this page IS subject to the restrictions on the t!tle page of this jocument.

Honeywell WJttp’”c’CITATION n/V
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’S AUDIO PANEL AV-850 (cent)
Function Connector Pin Connects To
CABIN/COCKPIT SPKR LO C160J1-L (24)-------------------- RH cKPT/cAB
SPKR LO
+28 VDC RTN -M (20)-------------------- DC GND
SHLD GND o-N (24)-----------------------B
EMERCOMMICHI
I
-P (24)-------:;---------- 160J1-R160J1-P
!/ C160J1-R
-----~-~--- 143J1-92H -------
VHF 1 MIC HI I
I
o-R (24)-------C-;==------- 143J1-92,
II 160J1-P[1 160J1-R,
----~j C160J1-PE -- --------
<J
HF 2 MICLO
1
-S (24)-------F;---------- 160J1-s,HF2
HF 2 MICHI -T (24)------&- -------- 160J1-T,HF2
+28 vDc -U (20)--------------------COPILOTS28 t/De+28 VDC -V (20)-------------------- FIG.4-1
VHF 2 MIC LO
1
-W (24)------1’+- -------- C143J1-106----j~ 160J1-WD ~-.- --------
l-’-----0B
HF 2 PTT -X (24)-------------------- 160J1-x,HFZ
COCKPIT SPKR HI C160J1-Y(24)---- -------------? >
RH CKPT SPKRL-- ---------------
InterconnectInformationTable501 (cent)
22-14-00Page598.29May 25/90
Use or disclosure of information on this page IS subject to the restrictions on the title pag!, of this document.

INSTALLATION BULLETIN FORREMOTERADIOS
Function
HF 1 MIC LO
HF 1 MICHI
HF 1 PTT
DIGAUD1OBUS2 (+)
DIGAUDIOBUS1 (+)
CABINSPKRHI
EMERNAVPHONEHI
DIMMINGRTNMASK/BOOMPTTMASK/BOOMHI
INTERPHONELO
PHONELO
EMERNAV/COMPHONE
COPILOT’SAUDIOPANELAV-850(cent)
Connector Pin Connects To.—
[
04- ‘- BC160J1-2(24)-------l-r---------160J1-Z,HF1
-a (24)-------~~L--.------ 160J1-a,HF1
-b (24)------------------- -- 160J1-b,HF1
-c .;:::::~~::::,::::] FIG.4-10
---- B-d
:!O1-----;-----t-l-
------ --- FIG. 4-10----------------
-e (24)-----------e ------]CABSPKRL-------- -&-------J
i
-f (24)-------R-----------~~~~j~~36
mII
9-----------------
------------ SHIELDGND-g (24)--------------------- TO DIMMINGRTN
-h (24)-------------------- ~&[~~~ETpTT
9}
-i (24) -i-----------------
------ ----- -----
-------A --@
JACK
-j (24)
1}
--------- 160J1-j1-1----------------- 160J1-S
-k------y-----~---------TORHPHONEJACK
-----JUL---------
LO C160J1-m(24)-!------------------~60J1-m143J1-29
Interconnect InformationTable 501 (cent)
C164J1B-51
------
22-14-00Paae 598.30..4
May 25/90Use or disclosure of mformatlon on Ihm page IS subfect
to the resfrlctlons on fhe t!tle page of this dOCUment.

Honeywell INR’”c’CITATION V
Function
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’S AUDIO PANEL AV-850 (cent)
ConnectorPin Connects To
DIG AUDIO BUS 2 (-) C160J1-n$
}
-------- --i~----------- FIG. 4-10c-- ---------------
$
~---aDIG AUDIO BUS 1 (-) -P -------- -r~r----------- FIG. 4-10
d-- ---------------
Y---Q }
+5 VAC/DCDIMMINGS -q (22)--------------------FIG. 4-2+28 VDC DIMMINGS -r ------NC
INTERPHONE HIt
-S (24)------1=,----- ----- 160J1-sj----------- ----- 160J1-j
PHONE HI C160Jl-t----------
1}1;----- ------
TO RHPHONE JACK
kti----------- ------
LB-----0
Interconnect Information
Table 501 (cent)
22-14-00Paqe 598.31
fiar 15/89Use or disclosure of mformatlon on this page IS subject to the restrtctlons on the title pag: of this document.

INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’SAUDIOPANEL AV-850 (cent)
Function Connector Pin Connects To
WARSING5 AUDIO C160J2-A-------NCWA&;;lNG1 LO -B-------NCSPL<EGND -c-------NCSHL2GND -D-------NCRESSRVED -------NCSPP;?E ~~-------NCWA2X;NGAUDIO2 LO -G-------NCCAE;NDISABLEWA?.:iINGAUDIO3 LO
-H-------NC
-J -------NCRES;$UIED -K-------NCMA~;:~R SE~S -------NCSTERO MUTE ~i-------NCSPA2: -N-------NCSERVICE PHONE LO
t]-P (24)-;------:1--- ------ TO SERVICE
~i---------- ------ PHONE JACKRES;RVED -R-------NCRES=RVED -S-------NC~E~~~VED -T-------NCR~~~~VED
Voic: RECORDER HI-u-------NC
1]-V (24)--------i~---- ------ TO VOICE
------ ---- ------ RECORDER-W------~NC
GWARNING 1 AUDIOWAF:i2NG 2 AUDIO -------NCRESERVED ~i------NCWAR!:INGAUDIO 4 LO -Z-------NCWA%;INGAUDIO5 LO -a-------MASKINTERCOMENABLE -b (24)--------------------TO COPILOT’S
HEADSET OXYGENMASK SWITCH
MKE DI’jABLE -C (24)-------------------- 160J2-cSPL:: -d-------NCSE$,:.”,;CEMICLo
1)-e (24)--------,~1---------TO SERVICE
q------ ---------v MIC
SEE’;’[CEPHONE HIt
-f (24)-;------,=/--------- TO SERVICE-------~7--- ------ PHONE JACK
RE5:;?\tED-9-------NC
RES::VED -h-------NCRES:;VED -i-------NCRES;;;VED -j-------NCSEE’i’ICEMICPTT -k-------NC
-1 -------NOTUSEDINCONNECTORWAF~jNG3 AUDIO -------NCREZ~~VED C160J2~~-------NC—..
Interconnect InformationTable 501 (cent) 22-=14-00
Page 598.32
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title page of thts document

Honeywell !U!MYANCECITATION n/V
INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’SAUDIOPANELAY-850(cent)
Function ConnectorPin ConnectsTo
/INTERPHONEPTT C160J2-p-------------------------INTERPHONEPTT
SERVICEMIC HI
‘1
-q (24)-------O----------”TO SERVICEe---.-~l---------- MIC
VOICERECORDERLO
‘}
-r (24)-------C---------- TO VOICEv LJ-_----- ---- ----- RECORDER
RESERVED -s-------NC
WARNING4 AUDIO C160J2-t-------NC
InterconnectInformationTable501 (cent)
22-14-00Page598.33May 25/90
Use or dmclosure Of Information on this page IS subject to the restrictions on the t~tle pagt of thw document

Honeywell W%”’””CITATION V
Function
RESERVED
RSB PRIMARY (-)
RSB SECONDARY (+)
RESERVEDRESERVED
+28 VDC PWR
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’S DME INDICATOR DI-850
5 V AC/DC LIGHTING INPUT
SPARESPARE
CHASSIS GND
SPARE
DC GROUND
LIGHTING COMMON
RSB SECONDARY (-)
RSB PRIMARY (+)
SPARES
Connector Pin Connects To——
C163J1-1-------NC
t>-2 ----------------f-~ --- FIG. 4-9
15 ----------- ----10 --------bJ,
-3 i----------------;-;y---~ FIG. 4-914 ----------- ---
Y10 ---------
-------NC::-------NC
-6 (22)-------------------- COPILOT’S28 VDCFIG. 4-1
-7 (24)-------------------- FIG. 4-2
-8 -------NC-9-------NC
-10 (22)------------------- &j SHLD
-11------NC
-12 (22)------------------- DC GND
-13 (24)---------------7--- LIGHTING GND
b-14 ------------------- --3 ---------J%l- --- ‘*G” 4-910 --------- ,
t)-15---------------------- FIG. 4-9
2 II------------- ---Y10 ---------
-16------NC-17------NC
C163J1-18------NC
-.
Interconnect InformationTable 501 (cent)
22-14-00Page 598.34Mar 15/89
Use or disclosure Of information on thts page E subject to the restrictions on the title page of thm locument.

Honeywell W!WSANCECITATIONV
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’S DME INDICATOR DI-850 (cent)
Function Connector Pin Connects To
SPARE C163J1-19------NC28 VDC LIGHTING INPUT -20------NCPOWER ON/OFF INPUT -21 ------NC
-22 ------NC
SPARES -23------NC-24------NC
28 VDC RTN C163J1-25 (22)------------------- DC GND
Interconnect Information
Table 501 (cent) 22-14-00Page 598.35
Mar 15/89Use or disclosure of mformatlon on this page IS sub)ect to the restrictions on the title paq ? of this document.

HoneyelI MMRIANCECITATION n/V
INSTALLATION BULLETIN FORREMOTERADIOS
COPILOT’S NAV UNITRNZ-850
Function Connector Pin Connects To
CLU SPARE C164J1A-1 -------NC
DME HOLD NOT -2-------NCOME HOLD -3 (24) -------------------- 65J1B-34
DME SPARE -4 -------NC
DME 6 W 568 + DATA -5 (24)-------------------- 65J2B-50
DME SPARE -6 -------NC
ADF SHLD -7 (24)--------------------ADF SI+LOCLU SPARE -8- ------NC
CLUSPARE -9-------NCADF 26 VAC400HZ RTN -10------NCADF 26 VAC 400 HZ RTN -11------NC
ADF SYNCHRO Y OUT -12 -----NC
CLUSPARE -13-----NCV/I ON/OFF -14-----NCDME6 - 568 - DATA -15(24)-------------------65J2B-51DME RS 422SO - (2) -16-----NCDME6 W 568- CLK
n
I
-17 (24)---------~(- ------ 65J2B-55DME ACT 1 AUD OUT -18 -----NC
OPIE 6 W 568 + CLK -19 (24)--------1-!- ------ 65J2B-54A28d’
CLU MLS RCB SHLR -20----------_----
CLU MLS RCB TX1 A-I
C164J1A-21-------------- - ----- C116JI-67A34--------!! A----- C116J1-39 1SEE NOTE 5 FOR SHLD INFO
h IF THE ML-850 MLS RECEIVER IS NOT INSTALLED, THE MLS RCB RX AND TX PORTSMUST BE JUMPERED TOGETHER AT THE NAV UNIT MATING CONNECTOR AS SHOWN BELOW:
JUMPER 1: C164JIA-25 TO C164JIA-21
JUMPER 2: C164J1A-38 TO C164J1A-34
.
Interconnect InformationTable 501 (cent) 22-14-00
Page598.36May 25/90
Use or disclosure of Information on thm page IS sub!ect to the restrictions on the title page of this dacument.

Honeywell !!f#lEPANcECITATION n/V
Function
ADF SYNCHRO X OUT
ADF 26 VAC400HZ
CLUCHANGEINHIBITCLU MLS RCB RX1
DME6 W 568+ SYNCCLUSPAREDMEGNDSHLD
DMESPAREDMESPARECLUSPAREDMESPARE
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SNAVUNITRNZ-850(cent)
ADFSYNCHROZ OUT (GND)
CLUMLS RCBTX2
Connector Pin Connects To
C164J1A-22 ------NC
-23------NC
-24------NC
t-25--------------------- C116J1-42
A38--------J+J-- A-- C116J1-401A20---------SEENOTE5 FOR SHLD INFO
-26 (24)------------------2 65J2B-52-27 ------NC-28------------------------ DME SHLD
SEENOTE2 FORSHLD INFO
-29 ------NC-30 ------NC-31 ------NC-32 ------NC
‘1-33(24)--------Y-------- RMI,65J2A-35,65J2A-37,
A47----+-1--------A61------
Y---------
A7------C164JlA-34---------------------- C116J1-39 ~
J;-~-- C116J1 67 ~A21-------- -A20---------SEE NOTE5 FORSHLDINFO
InterconnectInformationTable501 (cent)
22-14-00Paqe598.37May 25/90Useordisclosureof Information on thm page IS subject to the restrichons on the title pagi! of this document

Honeywell UAYJEPANCECITATION ii/V
Function
CLUSPARECLUSPARECLUSPARECLUMLS RCBRX2
ADFAUDIOOUTSHLDDMEON/OFFCLUAUX 1 AUD HIDMEMUTSUP
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SNAVUNITRNZ-850(cent)
DMESPAREDMERS 422SD - (1)DME6 W 568 - SYNCDME FLAGADFDC COSOUT
CLUSPARECLUSPAREADFAUDIOHI OUTCLUSPAREADFAUDIOLO OUTCLUSPAREDMERS 422SD + (2)CLUAUX 1 AUD RTNDME SPAREDMERS 422 SD+ (1)CLU ACH DATA (-)
V/IRS 422SERD lBV/IMKIRLAMPM
Connector Pin Connects To
C164J1A-35------NC-36------NC-37------NC-38 ~
$--------------- --- ---
1+Cl16J1-40~
A25----------- --- C116J1-42A20-------SEE NOTE 5 FOR SHLD INFO
-39------NC-40------NC-41------NC-42(24)-------------- --- 164J14-42
T
143J1-94C143J1-94
A28 (24)------SEE NOTE 2 FOR SHLD INFO
-43------NC-44------NC-45(24)-------------------65J2B-53-46(24)-------------------65J1A-73
i
-47(24)---------~j------ RMI,55J2A-36A61---------------A33---------------A7-------Y
-48------NC-49------NC-50------NC-51------NC-52------NC-53------NC-54------NC-55------NC-56------NC-57------NC
t-58(24)--------1’------- 165J1-N
?A70-------------- 165J1-M@ ------
-59------NCC164J1A-60(24)-------------------65J2A-61
InterconnectInformationTable 501 (cent)
22-14-00I’age598.38May 25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of this d ]cument.

Honeywell WKYANCECITATION n/V
Function
ADF DC SIN/SINOUT
CLUSPARECLUSPARECLUSPARECLUSPARE
ADFHF KEYCLUAUX 2 AUDHICLUAUX 2 AUD RTNCLUACH NAVCLOCK+
CLUACH DATA (+)
DME40 MV/MICLUACH NAVCLOCK-
V/IMARKERLAMPIV/IGS SUPERFLAGCLUSPARECLUSPAREADFANT TEST
CLUSPAREADFMODSHLD
V/IGND PS INCLUACH GNDCLUSPAREDME28 VDCRET
V/IRS 422SERD 2BV/I+28 VDCDME+28VDCADF+28VDC
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SNAVUNITRNZ-850(cent)
ConnectorPin ConnectsTo
n
1-
C164J1A-61(24)--------~f--------RMI,65J2A-34A47------ -------A33---- J-[ --------A7------Y
-62 ------NC-63 ------NC-64 ------NC-65 ------NC
-66-67-68-69
-70
------ ------ ------ -----
------NC------NC(24)------~1 r~
------------------------
‘&---Y
!(24)-------O----------
A58---!-i----------e---~
-71-----:NC
t-72(24)-------G----------
---J-!---------‘g_’i
-73(24)--------------------74(24)--------------------75------NC-76------NC-77------------------------
SEENOTE3 FORSHLDINFO-78-------NC-79-------NC
FIG.4-19
165J1-f165J1-P
165J1-M165J1-N
165J1-P
65J2A-5965JIA-74,C2J2-U
C158J1-C
-80------NC
*-81(24)-------------------A-82------NC-83(22)---------
1 }---------DC GND
A95----------------84------NC-85(22)-------------------COpILOT’S
}-86(22)-------------------28 VDCBUS
C164J1A-87(20)-------------------FIG.4-1
InterconnectInformationTable501 (cent)
22-14-00Page598.39May25/90
Use or disclosure of mformatlon on thw page IS subject to the restrictions on the title pag! of this document.

Honeywell WMI!ANcECITATION V
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’S NAV UNIT RNZ-850 (cent)
Function Connector Pin Connects To
13
——
RSB SECONDARY (+) C164J1A-88 --------------=-- --- FIG. 4-9A102---------- ----B85-------
CLU SPARE -89 ------NCCLUSPARE -90------NCADFCOSMOD
t-91 -------------=--- ---- C158J1-B
A104--------------- ---- C158J1-HYA105----------
SEE NOTE 3 FOR SHLD INFO
CLU SPARE -92 ------NCCLU SPARE -93 ------NCADF 28 VDC RET -94 (22)------------------- DC GNDDME 28 VDC RET -95 (22)------------------- DC GND
CLU SHLD GND -96 (24)---------1
t~~~ [~~~i-i--- ---- C116J1-35
------ ---- C116J1-44L)
DME ACT 2 AUD OUT -97-------NC
V/I +28 VDC -98 (22)------------------
}
COPILOT’SDME +28 VDC -99 (22)------------------- 28 VDC BUSADF +28 VDC -100 (20)----------------- FIG. 4-1
ADF LOOP EN -~ol----------------------- C158J1-KSEE NOTE 3 FOR SHLD INFO
RSB SECONDARY (-)t
-102----------------=---
}
FIG. 4-9A88 -------LJ- ---
xB85 ------- ----
CLU GND -103 (22)---------------;-- DC GND
ADF SIN MOD4
-104------------------=- -- C158J1-HA91--------------~-1 -- C158J1-B
ADF MOD SHLD Y-105------------------SEE NOTE 3 FOR SHLD INFO
CLU SPARE C164J1A-106-------NC
Interconnect Information
Table 501 (cent)22-14-00
Paqe 598.40Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the Mle page of thw document,

Function
DF
LULULULULU
+15 VDC
FANHISPARESPARESPARE STATSPARE STAT
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SNAVUNITRNZ-850(cent)
Connector Pin
c164J1B-1------------------------SEENOTE 3 FOR SHLD INFO
-2 (24)----.-----.---------
-3 ------NC-4 ------NC
I (DIGAUD) -5 ------NCRTN (DIG AUD) -6 ------NC
-7 ------NC
-8 (22) ..------- -------- ----
-9 (24) ------- ------- ------
-10 (24) ------ ------ ------- -
‘/1SYNCCOMPINX:LUACH+28VDC!/1OBSD,G!/IOBs F
//1OBI O SIN1/1OBI O COS
:LUMLS MORSEID RTN
CLUCLUCLUCLUCLUCLU
v/I
V/IV/I
V/I
V/IADF
SPARESPARESPARESPARESPARESPARE
26 VAC400HZ H REF
RNAV VIDEOOUTRNAV VIDEOGND
400 HZ 26 VACRET
VOR/LOC AUDIO CTGND
ConnectsTO
C158J1-G
FAN RED
165J1-Eg$;~-:bC2Jl-CC
B50-----~q-13(24)~;;---------‘- - - ;;;:;;:~
v---------- -- -
A96----------
-14 ------NC-15------NC-16------NC-17------NC-18------NC-19------NC
-20(2z)-------------------;:RVAC#04H$* .-
-21------NC-22------NC
-23(22)-------------------AC GND
-24------NCc164J1B-25(22)-------------------DC GND
InterconnectInformationTable501(cent) 22-14-00.—
Page 598.41May25/90
UseordisclosureotInformationonthispageIS sub!ecttotherestr]ciionsonthe~ltlepageofthisdocument

Honeywell W!!RANCECITATION n/V
INSTALLATION BULLETIN FOR REMOTE RADIOS
COPILOT’SNAVUNITRNZ-850(cent)
Function Connector Pin ConnpctsTo—-
CLU+5 VDC RTN C164J1B-26 (22)------------------- STRAPP4 BLKADF+15VDCGND -27------------------------C158,J1-J
SEENOTE3 FORSHLDINFOCLUSPARE -28------NC
DIGAUDIOBUS2 (-)
‘}
-29------------------ --B42__+l_ -- FIG.4-10B67--------
CLUSPARESTATIN (DIGAUD) -30------NCCLUAUDAUX SQUELCH -31------NC
CLUMLSMORSEIDt
-32(24)-----------i~---“~C116J1-44B13--------- -- -- C116J1-60
YA96---------
V/ISYNCCOMPIN Y -33------NCV/IOBS B -34(24)-------------------C2J1-EEV/IOBSC -35(24)-------------------C2J1-FFV/IVOR/LOCAUDIOHI
t
-36(24)-------~i--------- 160J!.-f,C160J1-f
B51---t-t--------- 160J1.-m,
YC160J1-m
B50----V/IOBIOGND -37(24)-------------------RMI,65J2A-52,
65J2A-54V/I PWRGND -38(22)-------------------DC GNDV/I+28VDC -39(22)-------------------COPILOT28 VDC
POWER, FIG.4-1
CLUCLUS+5V -40(24)-------------------STRAPP3 REDCLUSPARE -41------NCDIGAUDIOBUS2 (+) -42
i}----------------------
17- -B29---------- FIG.4-10‘3’B67---------
CLU SPARE -43 ------NC
CLU FAN RTN -44 (24)------------------- FAN 13LU
CLUAUD AUX XMT -45------NCCLUSPARE -46------NCV/ISYNCCOMPINZ -47-------NCV/IOBSA -48(24)-------------------C2J1-DDV/IOBS E C164J1B-49(24)-------------------C2J1-AA
Interconnect InformationTable 501 (cent)
22-14-00Page598.42hay25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of this jocument.

Honeywell WjJRANcECITATION n/V
INSTALLATIONBULLETINFOR REMOTE RADIOS
COPILOT’SNAVUNITRNZ-850(cent)
Function Connector Pin Connects To
V/IPWRGNDV/IVOR/LOCAUDIOLO
V/I28 VDC
CLUSPARECLUSPARECLUSPAREON SIDEMLSSELCLUSIDESPARECLUSTRAPSD DATACLUSTRAPCLKV/IGS FLAGV/ISYNCOUTZV/ISYNCCOMPVALIDV/IMKRAUDIOCTV/ICC ILSMODE
V/ITO/FROM+V/IMKRAUDIOHIDIGAUDIOBUS SHLD
ADF26 VAC400HZ
C164J1B-50(22)-------------------DC GND
1
-51(24)---.---O--------- 160J1-m,11 C160J1-m
‘36---T-T---- ‘---- ;;;:;~f;YB50----
-52(22)-------------------COPILOT28 VDCPOWER, FIG.4-1
-53------NC-54------NC-55------NC-56------NC-57(24)-------------------STRAPP1 GRN-58(24)-------------------STRAPP7WHT-59(24)-------------------STRAP P6 BLU
-60 ------NC-61 ------NC-62 ------NC
-63 ------NC-64 (24)------------------- RMI, C2J1-a,
65J1B-35
-65 (24)------------------- C2J2-A
-66 ------NC
-67 -------- ------ --A
t~B29 --------- -- --:FIG.4-10
IJB42 --------L-- -- ~.’
-68 ------NC
CLUSPARE -69------NCCLUSPARE -70------NCRSBPRIMARY(+) -71 9------------------ --
B81 I r$-------------
1FIG.4-9
B95---------~
ADF SYNTH LOCK -72 ------NC
ADF RS 422 TXD B -73------NCV/IMKRLAMPO -74(24)-------------------65J2A-63V/IDEVCOM C164J1B-75(24)-------------------C2J2-F,C2J2-C
65J2A-67,65J2A-66
InterconnectInformationTable501 (cent)
22-14-00Page 598.43May25/90
Use or disclosure of mformat!on on this page IS subject to the restrictions on the title pag!, of this document.

Honeywell h&r~fANcECITATION n/V
INSTALLATIONBULLETINFOR REMOTE RADIOS
COPILOT’SNAVUNITRNZ-850(cent)
Function ConnectorPin ConnectsTo
V/IILSMODELOGIC C164J1B-76------NCCLUSPARE -77------NCV/IVOR/LOCDEV+ -78(24)-------------------C2J2-E,65J2A-65V/IGS DEV+ -79(24)-------------------C2J2-D,65J2A-68CLUSIDESELECT -80~~~~11j111111c1=j5--=-STRAPP8 YELRSBPRIMARY(-) -81
B71}
--------1-i~:-~FIG q-~Y“B95---------
CLUSPARECLUSPARECLUSTRAPWD LOADRSBSHLD
CLUSPAREADFON/OFF
CLU ACHNAVCONTROL-V/IRS 422SERD 1ACLUACH NAV CONTROL +
V/IVORSUPERFLAGV/IVOR/LOCFLAGV/IMKRAUDIOLOCCLUSPARERSBSHLD
CROSSSIDEMLS SEL
CLU SPARE
CLU GNDADF LOCK
ADF RS 422 TXDAV/ISPAREV/IRS 422SERD 2AV/ISYNCOUTYV/ISYNCOUTXCLUSPAREV/ITO/FROM& FLAGCOM
-82------NC-83------NC-84-----------------------STRAPP2 ORN-85-------------------
At}
A88 ---------------FIG.4-9A102---------JGl-
-86------NC-87------NC
!
-88(24)----------~--- --- 165JI-G-89------NC II
-90 (24)----------JY4----- 165J],-FA81--------
-91 (24)-------------------RMI,65J1A-77,-92------NC C2J2-P-93------NC-94------NC-95------------------
Be1 A
B81 t}---------]:T-- FIG.4-9--------------96------NC-97------NC-98(22)-------------------DC GND-99(24)-------------------RMI,65J1A-80-1oo-----NC-101-----NC-102-----NC-103-----NC-104-----NC’105-----NC
C164J1B-106(24)------------------C2J2-S
InterconnectInformationTable501 (cent)
22-14-00Page598.44flay25/90
Use or disclosure Of mformatlon on thrs page IS sublect to the restrictions on the Mle page of this cocumenl.

Honeywell !MFANCECITATIONn/V
INSTALLATIONBULLETINFORREMOTERADIOS
COPILOT’SNAV UNIT RNZ-850 (cent)
Function Connector Pin Connects To
ADF RF INPUT2=-
C164J2-l-
1
-TRC-50-2--------- C158J1-FAOF INNERSHLD C164J2- --- C158J1-EADFOUTERSHLD El
OUTERSHLDOPENAT NAV END
SEE NOTE3 FORSHLD INFO
V/IANT C164J3-1------RG-58/U------~+-----VOR/LOCANTV/IANT SHAD----------------------I------ VOR/LOCANT
V/IGS ANT C164J4-1------RG-58/U------\~----- fXANT
V/IGS ANT rSHAD---------------------------- GSANT
V/IMKRANT C164J5-1------RG-58/U------fl----- MKRANTV/IMKRANT YSHAD---------------------------- MKRANT
DMEANT C164J6-l------RG-214/U-----fiJ----- DMEANTDMEANT 1SHAD--------------------------- DMEANT
NOTE1: SHIELDSOF PAIRSA47-A61,ANDTRIPLEA12-A22-A33ARE TIEOTOGETHER.
NOTE 2: StiIELDS OF A42 AND PAIRSA16-A54,A44-A57,AND GROUNDA28ARE TIEDTOGETHER.
NOTE 3: ADF ANTENt4ATRIAXIAL CABLE SHALL BE TROMPETER PN TRC-50-2 OR
EQUIVALENT TRIAXIAL CABLE.
ALL WIRES SHALL BE STANDARD#22AWG PERMIL-W-B10440?MIL-U-22759/16EXCEPTAS NOTED.
THEOUTERSHIELDJUMPERTO GNDAT THEANTENNASIDESHALLBE 20AWGAND ITSLENGTHSHALLNOT EXCEED10 INCHES.
NOTE 4: SHIELDS OF TRIPLES B1l-B12-B37, B9-BIO-B49 AND B34-B35-B48 (IF USED)
ARE TO BE TIEDTOGETHER.
NOTE5: SHIELDSOF PAIRSA21-A34ANDA25-A38ARETIEDTOGETHER.
Interconnect InformationTable501 (cent) 22-14-00
Page598.45May25/90
Use or dmclosure of mformatlon on this page 1s subject to the restncttons on the tnle pag,: of thts document.

Honeywell MRE!AN’ECITATION Ilfl
%4010 ALT
n~ 2A 2w7-C RAOIO ALT ,20WI
I t-- ‘“2’”8’
+ ‘3A’ \6J.lo ‘JNAV ,5W)
&Q?s— AF’OFFW*.WING
iL APOFCHORN
.,
J=.:;:;5= ;; ) ‘“6”’’’0”)
28 VDC OUSQ
63J1-N wl*$O[~
I ,,
Pilot’s28 V dc BUSFigure4-1 (Sheet1 of 2)
C,2W
!E4w,,.
,59WI-n
34W,
,4W)
m !6m7m
.
InterconnectInformationTable501 (cent)
22-14-00Pa~e 598.46fray25/90Useordisclosureof Information on this page IS subject to the restrictions on the title page of thm document.

Honeywell !R!J?ANcECITATIONV
DIRECT GYRO 2
~*~u C-’’’K’’’’;”HDG VALID INTLK (lW)
I DME 2
L“RMU 2
5 C144J1-C RM-850 (34W)
LoMLS 2
2 C116J1-5 ML-850 (l’W)
AD-17190
Copilot’s 28 V dc 6USFigure 4-1 (Sheet 2)
Interconnect Information
Table 501 (cent) 22-14-00Page 598.47Mar 15/89
UseordisclosureOfinformationonthispageIS subject10therestr!ctlonsontheI;tlepag!ofthisdocument.

Honeywell MI!!RANCECITATIONV
PILOT’S SIDEi65J1-D CD-850
163J1-7 DI-850
5 VDCCNMMING
115J1-3 DC-811 (5VW
23J1-P RI-106S (1.2 VA)
63J1 -S WI-650
3J1 -26 ED-800 (1 .2W)
18J1 -A BARO ALT (2.5 VA)
8J1 -A FD MODE SEL (6.6 VA)
1 lJ1 -g AP CONTROLLER (3 VA)
) 16J1 -3 VNAV (2.5 VA
4B 160J1 -q AV-850
144J1 -G RM-850
COPILOT’S SIDE
0-5 VDCDIMMING
w C163J1-7 DI-850
4) C2J1-M RD-450
4r C144J1-G RM-850
Cl 60J1 -q AV-850
AD-16209-R2
EdgeLightingFigure4-2
Interconnect Information
Table 501 (cent)
22-14-00Page 598.48Mar 15/89
Use or dwclosure of mformat!on on this page IS sub)ect to the restrictions on the t!tle page of this jocument.

Honeywell WURANCECITATIONV
RADAR REF
Q 59J1-D WU-650STABILIZATION REF
%~ “::: z:” ‘A)(32 VA)
VG 1
115VAC Q400 Hz - v “’J1-C VG-14A
MAX PWR
80 VA START40 VA RUN
FD 1
Q‘~JIB-l FDC (1 1.5 VA)
%~~~~~%(;~~A,
AD-16412-R2
AC PowerRequirementsFigure4-3 (Sheet1 of 3)
Interconnect InformationTable 501 (cent)
22-14-00Paae 598.49
fiar 15/89Use or dmclosure of mformatlon on this page IS subject to the restncttons on the title pagt of this document.

Honeywell Mii!!!fy’”c’CITATIONV
}
C- I 4D
SG-6051805~65J2&13
C6JlFLUX VALVE
Cl 4D2.4 VA i INCLUDES
26 VAC >
NAV 2
26 VACQ
C164J16-20 (.1 ‘vA)
AO-16211-R3
Copilot’s AC PowerRequirementsFigure4-3 (Sheet2)
InterconnectInformationTable501 (cent) 22-14-00
Page 598.50Mar 15/89
Use or disclosure of information on thw page IS sub]ect to the restrictions on the I[tle page of this <Iocument.

Honeyell !ljttf~j{’”c’
EFIS 1 I 5J1-D DUAL REMOTE COMP
26 VAC‘~ “’-” ‘“D “ ‘A)
h 65J2A-13 SG-605f605 (1 VA)
23J1 -B RI-106 SEL CFCSEXCITATION (1.2 VA)
23J1-J RI-108SSEL lIDG EXCITATION (1.2 VA)
1 15J1-1 RATE GYRO8 VA START6,5 VA RUN
NAV 1
Q26 VA’ 164J1 6-20 (.1 VA)
AD-1 621 O-R2
Pilot’sAC PowerRequirementsFigure4-3 (Sheet3)
InterconnectInformationTable501 (cent) 22-14-00
Page598.51Mar 15/89
Use or disclosure Of Information on this page IS sublect to the restrictions on the title pag? of this document.

Honeywell WNJi”ANcECITATIONV
PILOT’S SIDE
{.
+ 65J2A-71 SPD DEV (H) ‘
AOA ERROR
65J2A-72 SPD DEV (L)
I
PILOT”SDISPLAY
AOA VALID 65J1 A-75 SPD DEV VLD. I
AD-16212
AOA/Speed CommandFigure 4-4
Interconnect Information
Table 501 (cent)
22=14-00Page 598,52
Mar 15/89Use or disclosure of mformatlon on this page IS subject to the restrictions on the ttle page of this jocument.

PILOT’S RT 20J1
+28 VDC PWR C>~ +28 VDCI
I>
I n + I
III1 I ,[:=C
65J1APILOT’S SG
POWER GND 78 RA VALID IN
jg
65J2BTRIP COMMON 76 ~ RA TEST OUT
65J2ATEST SWITCH - T +
+:+ - }
RAD ALT
PRIMARY OUTPUT (H) , wINPUT
COMMON OUTPUT (C) N> w
AUX OUTPUT (H)
E~~ ,’ ‘1
‘~
7J1B
r
PILOT’S FD
OUTPUT TEST E 18 ~ +
1
RAD ALT
RA VALID Y 19+ - INPUT
TRIP POINT #1 u 35 + RA VALID IN
TRIP POINT #2 v~ 46 ~ TRIP POINT #1
t I~sz+
+
TRIP POINT #2
I
AD-I 698
Radio Altimeter InterfaceFigure 4-5
Interconnect Information
Table 501 (cent)
22-14-00Page 598.53Mar 15/89
Use or disclosure of mtormahon on thts page IS sublect to the restrictions on the title pag ? of this document.

Honeywell W!J5!!ANC’CITATION V
—
~,my=—m—— — - I GENERATOR 6N1A
1- 7J7A 6sJ2B 94
AP ENG 46——-. — —
L65.J2A
,(l,J,~ AUTOPILOT COMPUTER 190———- —
v L11 +2EW AP ENG I
r———— —
PILOT OC-S1l d
Y115.J1
———7W7A I
lIJ1 llW1
1
44r
20 HI
t1I
1 :L }
Iu 42 PITCH WHEE .
INPuTI
t 45 29 Lo Iv— 43L (A ——-. — — 4
!t (GNU]
I I “<’”———— —
J–––––< I65.JIB PILaS SYMBOL GENERATOR -A
-t-l4’1 ‘sMODEGNO 1“~
P-L47 IAS MOOE GNO
———— —
37
32
39
L--r—————
~1 PILOT MS-206 1x IA6 MOOE GNO
i
-w
~ VS MOOE GNOI
———— — A*D.,62,4..W
Air Data Command Block DiagramFigure 4-6
Interconnect Information
Table 501 (cent)
22-14-00Paqe 598.54
Mar 15/89Use or disclosure of information on this page IS subject to the restrictions on the title page of thts d ~cument.

Honeywell !WWANC’CITATION V
T a 63JI-H WI-650
65JIB12 SG-605/805
wow 143J1-83 RCZ-850
C143J1-83 RCZ-850
165J1-Y CD-850
144J1-P RM-850
C144JI-P RM-850
AD-16215-R2
WeightOn “,~iselsSwitchFig:::,:4-7
Interconnect Information
Table 501 (cent)
22-14-00Page 598.55Mar 15/89
UseordisclosureofinformationonthispageE subjecttotherestrictionsonthetitlepaq~!ofthisclocument.

Honeywell M!UR!ANCECITATION V
.
9J1-12 +
16J1-17
AD-17191-RI
Altitude Alert HornFigure 4-8
Use or disclosure of inf ormatlon
Interconnect Information
Table 501 (cent) 22-14-00Page 598,56Mar 15/89
on this page is subject to the restrictions on the title page of this jocument.

Honeywell ~i~ik!’”c’CITATIONV
Primus II Radio System BusArchitectureFigure4-9
Interconnect InformationTable 501 (cent)
22-14-00Page 598.57Mar 15/89
Use or disclosure of Information on this page IS sub]ecf to the festnctlons on the title pa{je of Ihm document.

Honeywell WNRANC’CITATION V
t --PILOT AUDIO PANEL --
: 7
COPILOT AUDIO PANEL
AUDIO
{
+ 160J1-Q .T In C160J1-~ + -
BUS 1 II
v }AUDIO
– 16W1-P
+1 “+. ‘
C160J1-p - BUS 1—.
16W1-N ‘—--
4—— J b C160JI-N--
AAUDIO
{
160Jl~ .BUS 2 II Ii
c160J1-~
‘}
AUDIO160J1-~
<J
— J—
- C160J1-Q , BUS 2
--< --
PILOT COMM COPILOT COMM
{
:’1 C143J1-56 yAUDIOBUS 1 II II
4}4)
\
‘ 1
> AUDIO
II II BUS 2– 143J1-70 ,
yC143J1-70
/
—-143J1-42 J l-- C14Wl_42
——
PILOT NAV COPILOT NAV
{
In C164J1B-42 ‘AUDIOBUS 1 II
b ~ ●T’ ‘1
/, AUDIO
IIJ
BUS 2Cl 64J1 B-29
164JI B-67 4 I f——
L C164J1B-67—-
127
oleu13
Audio System BusFigure 4-10
Interconnect Information
Table 501 (cent)22-14-00
Page 598.58Mar 15/89
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of thm rmcument.

Honeywell lHMRANcECITATION V
ALITOPILOT/TRIM PILOT’S APITRIM
+33
- ~.10.E1A.3A/? ENG-~ 4
e
+33 VPWR AUTWILOT
,fn
OFFc
lWIALIG14T
&No 327
+29 v UP TRW .—< 55 LAMPS
lWIAo
f17~F ~13 G
AP OFF
iWARNING
3W1B
!
1, HORN
‘“~EmR ~“ <I
~ #lM :
‘n
I*
LyAI
/
lLUIA &’$G &*4~ 2+)
+22 v ON TRIM -<58 <K3
NOTE
1. ALL REmvs snow IN LiNENEPEGIZEDPOSITION
) Z 5, 3S. K4 MUS7 CARRV EMGAGE CIRCUIT
v
CURRENTS AS S140WN TO MAINTAIN AuTO.PILOT sAFs7w, 71.IE COMPONENTS M“=BE RATEO TO SWITCH 3S WC e 3 bMP3INOWTIVE MINIMUM. ALSO K7. UJ
Engage/Trim InterlockFigure 4-11
Interconnect Information
Table 501 (cent)
22-14-00Page 598.59
Mar 15/89Use or disclosure of information on this page is subject to the restrictions on the title pag? of thm document.

NN
1
6J1
<
10JIB
ENG INTLK —< 28‘%~a’’_~’&~-~L~;
C6JI C6J I
PILOTS C-14Dh<+)
i
DIR GYRO NO. 1I
r -3I I I———
1 RMI iVALID I
I6J 1
I I
III
HDG 2 STATOR X ~ 10J1A I
I4
46 HEADING XI I
I
IHDG 2 STATOR Y B
I
I + I 47 HEADING Y
I II HDG 2 STATOR Z z
2
L
I
———!
48 HEADING Z
iI I
COPILOT’S C-14D I IDIR GYRO NO. 2
r ——— 1 -=}RMI 2=
I II
C6J 1I I
HOG 2 STATOR X ~ 10J1B
I
I
I
d
-
~ P: . . . . . ..-[- 1
48 HDG RATE DISABLE
I IHOG 2 STATOR Y B 1
I -
I
I —.— JI
I
PILOT’S HDG REV
HDG 2 STATOR Z z
L ———=
J
——.115J1 plLo~S Dc T.,)”,,,,,.
L.—.— ‘ 29;:SGP,:’.’
W_i
——. J=Al) 11928.ill

Honeywell &i!}I~~ANcE
JUNCTION BOX I ROLLRATEMONITOR
57J1
r+
B
Ill
+15 VDC, llJ1-YAP TEST
I J J I I I
-G->’:llJ1
.Z
(AP CONT)P+ +28 VDC
ENG SELVALID
10J1B
33+ %:%.LATCH
YE
THE ROLL RATE MONITOR RELAYSARE ENERGIZED DURING THE NORMALOPERATION WHEN VG IS VALID.
nAUTOPILOT
+-q- ‘c
fiJ+-1
i
10J1 B
4’~<~
+28 VDCAP ENGSEL
Autopilot Engage Select and W Valid SwitchingFigure 4-13
AO-18152
Interconnect Information
Table 501 (cent) 22-14-00Page 598.61Mar 15/89
Use or disclosure of mformatlon on this page IS sub!ect to the restrictions on the tnle pag? of this document.

Honeywell M!!URANCECITATION Ilfl
TRIP BE-
E ‘E :s:;::’’O’”-’FEET ALT
AneroidSwitchWiringFigure4-14
++28’”’
AD-783-R3
LEFfTHROITLE>65% N2
RIGHT ‘ &THROTfLE>85% N2
AO-SS9S
ThrustCompensationFigure4-15
WARN
AD-785
TorqueWarnAnnunciatorFigure4-16
InterconnectInformationTable 501 (cent)
22-14-00Page598.62May 25/90
Use or disclosure of tnformatlon on this page IS subject to the restrictions on the title page of this : ocument.

—.
Honeywell WE!ANCECITATION n/V
‘Pp‘EL’8J’-f~
~7Jl B-53, 7JIA-89I
h.Cd I
I
DME
DME
NC II
I
-! IVALID, 65J2B-88 I
I
16J 1-33
I J
I
NC I
+28 VDC
alTN, 65J2B-94 (lx+ 28V
%5J2B-79
GROUNDRANGE
AD-1 7502-R2
VNAV Disable
Figure 4-17
InterconnectInformationTable501 (cent) 22-14-00
Page598.63May25/90
Useordisclosureofinformationonthispageissubjecttotherestnct!onsonthetilepagtoffhlsdocument.

Honeywell W!KW’”c’CITATION n/V
I II I II IIIIII
I I II I LRN B_NCI LRN AI 1°
—NC
1B-96
“J2B-8~ ‘5J2B-8~ 65J2B-8~ AD-20073
EFIS Display Select I)iscrete Outputs
Figure 4-18
InterconnectInformationTable 501 (cent)
22-14-00Page 598.64May25/90
Use or disclosure of information on this page is subject to the restrictions on the title page of this rocument.

Honeywell tiiWIEPANcECITATION n/V
r —1HF~ST~NO. 1
I I r+28 V FROM HF 1
y+
I I
[T- L r(
GROUND AT CCM 1
I—.——
143J1 COM UNIT NO. 1 7
la I --- I
I I 37 HF COTJ XMIT
I
I I I
I I——— A
I I - —1164J1A NAV~ll%. 1
I 1
~ J7°=
u vI
HF #1 PIT66 ADF H[’ KEY
I
——— J L I— ——- J
-—1C164J1A NAVyNiT~. 2
‘HF%?ST~ N= 7
I
z
P“’ K =
I
66 ADF HF KEYHF #2 P7T
I II
I IL I- ——. J
I II f)+ II II I I t-
La ——.#26 V FROM
--
HF 2
A GROUND AT COU 2
4
—1Cl 43J1 CO=NI=O. 2
I\
37 HF COF4 XMIT
I
W I———JAD-20074
HF KeyConfigurationFigure 4-19.
InterconnectInformationTable501 (cent) 22-14-00
Paqe 598.64.1May25/90UseordisclosureofInformationon this page IS subject to the restrictions on the tttle pag! of this document.

Honeywell MMRANCECITATION n/V
APPENDIX A
SINGLE EDZ-605/805 WITtlMDZ-605/805 INSTALLATION
.. .- -.
InterconnectInformationTable 501 (cent)
22-14-00Page598.64.2
May25/90Useordisclosureofreformation on thk page IS subject to the restrictions on the title page of this jocument.

Honeywell #$&{ANcE
APPENDIX A
ThisappendixdefinestheEFISinterconnectsfor an installation
whichhasa multifunctiondisplaysystem.
Interconnect Information
Table 501 (cent) 22-14-00Page 598.65
Mar 15/89Use or disclosure of In!orrnaoon on this page is subject to the restrictions on the Mle pag ? of this document.

Honeywell !&N~f~ANc’CITATION V
PILOT’S ELECTRONIC HSIED-6oo/t300
Function Connector Pin ~~ects To)
PRIX DEFL(Ill)+-(-
2Jl:; [;j]-------------j--:r-65J1A-61-------------------
‘i--65J1A-6265J1A-63
SECX DEFL (OUT)+{-
------NC:: ------NC
28 V DC PWR + -5 (22)--------------------PILOT28VDC28 V DC PWR + >-6 (22)--------------------POMER,FIG.A-1
STROKEREADY(PRI) +
t
-7 (24}--,c7---------------65JIA-50,
{- A -~ (24)-;-;---------------65J,A-5,125JlB-59
r’125JlB-6b
STROKEREADY(PRI)SHIELDGND -36------PRIY DEFL(IN) +
<- !-9 (24)---------------FT- 65J1A-64-10(24)------------------- 65JIA-65
‘-t--65JI~-65SECY DEFL(OUT) +
{--11------NC-12------NC
POWERRETURN -13(22)--------------------DC PIIJRGNDPOWERRETURN -14(22)--------------------DC PWRGNDVALIDOUTPUT(PRI)(GND=VALID)-15(24)--------------------65JL4-46STROKEREADY(SEC} +
{--16------NC-17------NC
SEC X DEFL(IN) +{-
i-18(24)------------------ 125JIB-13-19(24)--------------~-& 125JlB-14
I
VALIDOUTPUT(SEC)(GND=VALID)-20------NCREVSELECT(PRI)
1
-21(24)--------------------FIG.A-4SIGNALGND -22(22)------------------- SIGNALGNIICHASSISGND -23 (22)--------------F ----- CHASSISGNDSEC Y llEFL (IN) +
-(--24(24)--------------?-----125JlB-15-25(24)--------------~-~--’-125JIB-16
~- SHIELDGNDINCLINOMETERLIGHTING +
<--26------NC-27------NC
SPARE 2J1-28------NC
Interconnect Information
Table 501 (cent) 22-14-00Page 598.66
Mar 15/89Use or disclosure of Information on this page k sub!ect to the restrictions on the Mle page of this document

Honeywell t&!Mfl!ANcECITATION n/V
PILOT’S ELECTRONIC HSI (cent)ED-6oo/8oo
Function Connector Pin Connects To
REV SELECT (SEC) 2J1-29 ------NCDIM CONTROL
{-+ -30 (24)----------
$n. ----
-31 (24)---------SPARE -32 ------NC
W- ‘---
H -33 (24)--------------------RASTER DIMCONTROL W -34 (24)--------------------
L -35 (24)--------------------STROKEREADY(PRI)SHIELDGND -36 (20)--------------------
SPARE
A
-37 ------NCCOLOR3 (PRI) +
{-1
I-38 (24)------------- --=---39 (24)------------- --&-
lD--
TEMPANNUN GND OUTPUT -40 (24)--------------------SPARE
A
-41------NCCOLOR 2 (PRI) +
(.
1I
-42 (24)-----D.-o-co- .j~--
-43 (24)------------- - ~--b--
STROKEREADY(SEC)SHIELDGND -44------NC
SPARECOLOR 1 (PRI) +
(-
SPARESPARECOLORO (PRI) +
(-
SPARESECX DEFLSHIELDGND
A1
A1
A1 SEEPARA.4.1.3.4.A
115J1-40215JI-41
115J1-50l15J1-51115J1-52SHIELDGND FOR2J1-7,2JI-8
65J1A-4065JIA-4165JIA-42ANNUNCIATOR
65J1A-3765JIA-3865J1A-39
-45------NC
$-46 (24)---------------=- 65J1A-34-47 (24)-------------+-- 65J1A-35
-- 65JIA-36-48------NC-49------NC
I-50 (24)---------------~j- 65J1A-31-51(24)---------------r=-- 65J1A-32
‘L 65J1A-33-52------NC
2J1-53------NC
InterconnectInformationTable 501 (cent) 22-14-00
Paqe598.67fray25/90
Use or dlscfosure of Information on this page IS subject to the restrictions on the t!tle pagf of th~s document

Honeywell PAM!’”c’CITATION V
PILOT’S ELECTRONIC HSI (cent)ED-6oo/8oo
Function ConnectorPin
VIDEO(PRI){-+ A 1 t
2J11~~~;~]---------------~T------------- -------
Y --SECY DEFLSHIELD6ND -56 ------NC
SPARERASTER/STROKE (PRI) + 1{-A
FLYBACK (PRI) <A
LEFTPHOTOSENSOR OUT +{-
RIGHTPHOTO SENSOR OUT +<
ACOLOR3 (SEC) + - 2
{-
-57------NC
i-58(24)---------------r~r--59(24)----------------y--
1-60(24)----------------~~~-61(24)---------------~y’--
-.-62------NC-63------NC-64------NC-65------NC
1-66(24)---------------:r-
~-67(24)--------------JVi--
ConnectsTo
65J1A-2865J1A-2965J1P:-30
65J1A-4765J1A-4865J1A-4965J1A-4365J1A-4465J1A-45
125JIB-53
125JIB-54
COLOR2 (SEC) +
{
A2
~’
-68(24)---------------.~l--125JIB-51
-69(24)---------------’Y’--125JIB-52
COLOR1 (SEC) +
{A2
t
A-70(24)---------------r:--125JIB-49
-71(24)---------------$- :25JIB-50
COLORO (SEC) +
{-A 2
1-
J-72(24)---------------r;--125J1B-47
-73(24)---------------’vi--125JIB-48
VIDEO (SEC) +
{-
A 2
I
1-74 (24)----------- -------- 125J1B-45
2J1-75 (24)----------- ----’--’--125J1B-46Y
A~-- SHIELDGND
2 SEE PARA4.1.3.4.B
Interconnect Information
Table 501 (cent)
22-14-00Page 598.68
Mar 15/89Use or disclosure of information on this page IS sub!ect to the restrictions on the Iltle page of this :,ocument.

PILOT’SELECTRONICHSI (cent)ED-6oo/8oo
Function Connector Pin Connects To
RASTER/STROKE (SEC) +
{- 1
2J1-76 (24)------------ ---~~;- 125J1B-55
-77 (24)------------ ---!=!- 125J1B-56
FLYBACK(SEC) +
{-A2 I
-78(24)---------------fj--125J1B-57
2J1-79(24}------------~---~-i--125J1B-58
1 -- SHIELDGNO
Interconnect Information
Table 501 (cent) 22-14-00Page 598.69
Mar 15/89Use or dwclosure of Information on this page IS sub!ect to the restrlcfrons on the title page of thm document.

Honeywell !!;FJ.?’NCECITATION V
PILOT’S ELECTRONIC ADIED-6oo/8oo
Function Connector Pin Conn~cts To—-
PRIXDEFL (IN) +<- i
3J1-1 (24)------------------- 65JIA-55-2 (24)---------------~:]--65J1A-56
SHIELD --- 65J1A-57SEC XDEFL (OUT)+
{-------NC
:: ------NC
28 V DC P14R + -S (22)--------------------PILOT’28 V DC28 V DC PMR + )-6 (22)--------------------POWER,FIG.A-1
STROKEREADY(PRI)
STROKEREADY(PRI)PRIY DEFL(IN)~+
L-S1-lIELf)
SEC Y DEFL (OUT)+<-
SHIELDGND -36-9-lo
-11-12
I(24)-------~~j---------
(24)---~#---~#-------
!(24)---------------~r-(24)------------------
L-.
------NC---:’-NC
65J1A-23,125J1A-5965J1A-24,125J1A-60
65J1A-5865J1A-5965J1A-60
POWERRETURN -13(22)--------------------DC PMl? GNDPOWER RETURN -14 (22)-------------------- DC PMRGNDVALIDOUTPUT(PRI)(GND=VALID)d: (24)--------------------65J1A-19STROKEREADY(SEC) +
{-------NC
-17------NC
SEC X DEFL (IN) +{- I
-18(24)------------------ 125Jl13-9-19(24)---------------’vi--125J1B-10
VALIDOUTPUT(SEC)(GND=VALID)-20------NCREVSELECT(PRI)
/
-21(24)------------------- FIG.A-4SIGNALGN!I -22(22)------------------- SIGNALGNDCHASSISGND -23 (22)------------------- CHASSISGNDSECY DEFL(IN) +
<- 1-24 (24)------------------- 125Jl&ll
3J1-25(24)---------------L=’--125J1B-12I-- SHIELDGND
!L1 SEEPARA4.1.3.4.A.
Interconnect Information
Table 501 (cont.) 22-14-00Page 598.70
Mar 15/89UseordmclosureofInformationonthispageIS sub:ecttotherestrictionsonthetitlepageofthisd,jcument.

Honeywell tiiV&?’ANcECITATION n/V
PILOT’S ELECTRONIC ADI (cent)ED-6oo/8oo
Function Connector Pin Connects To
INCLINOMETERLIGHTING +[
3JI-26(22)--------------------;f:E;I:HTING.-
[- ~$~ (22)--------------------DC GNDSPARE ------NCREVSELECT(SEC) -29------NCDIMCONTROL
(-+ n
t-30(24)---------- - ------ 115JI-38-31(24)---------W------” 115J1-39
SPARE -32------NC
{
H -33 (24)-------------------RASTERIJIMCONTROL W -34 (24)-------------------3
-35------NCSTROKEREADY(PRI)SHI:LDGND -36 (24)--------------------SHIELDGNDFOR
3J1-7,3J1-8
SPARE
A
-37------NCCOLOR3 (PRI) +
(-1 -38(24)------------
!-.q.- 65J1A-13
-39 (24)--------------11-- 65JlA-14t 65J1A-15
TEMPANNUNGIWIOUTPUT -40 (24)--------------------ANNUNCIATOR
SPARECOLOR2 (PRI) +
(- A 1
STROKE READY (SEC) SHIELD GNDSPARECOLOR 1 (PRI) +
(- A 1
SPARESPARECOLORO (PRI) +
(- A 1
SPARE
-41------NC
1-42(24)-------------------43 (24)---------------’‘--
Y .--44------NC-45------NC
I-46 (24)--------------~~:---47(24)-------------- - --
Y ----48------NC-49------NC
i
..
-50(24)-------------~---51 (24)------------------
3J1-52------NC --
65J1A-1065J1A-1165J1A-12
65J1A-765J1A-865JlA-9
65JIA-465J1A-565J1A-6
.
Interconnect InformationTable 501 (cent) 22-14-00
Page598.71May25/90
Useordisclosure 01 Information on this page IS sub!ecf to the restrictions on the fltle pagt of thm document.

Honeywell W!W.R””c’CITATION V
PILOT’SELECTRONICADI (cent)ED-6oo/8oo
Function Connector Pin
SECX DEFLSHIELDGND 3J1-53------NC
VIDEO(PRI) +
{-‘A 1
i-54 (24)----------- ---------55 (24)----------- ----&~-
&--
SECY DEFLSHEILDGND -56 ------NC
A ~---
FLYBACK(PRI) +<-
1 -60(24)--------------------61(24)---------------&~-
---
LEFTPHOTOSENSOROUT +{
-62------NC-63------NC
RIGHTPHOTOSENSOROUT ;{
-64------NC-65------NC
COLOR3 (SEC) + -
‘ {- A 1
-66(24)--------------l=r--2
-67(24)--------------&!--
COLOR2 (SEC) +
{- 1
L
A
-68(24)--------------;-;--2
-69(24)--------------!:!--
COLOR1 (SEC) +
{- A 1-70(24)---------------);--
2-71(24)-----------Y---:=!--
COLORO (SEC) +
{A
i
A-72(24)---------------:-1--2
-73(24)---------------’ut--
VIDEO(SEC) +
{4 I
A-74(24)---------------;-;-2
J1-75(24)---------------’----
T---42 SEE PARA4.1.3.4.B.
ConnectsTo
65J1A-165J1A-265J1A-3
65J1A-2065J1A-2165J1A-2265J1A-1665J1A-1765J1A-18
125J1A-53
125J1A-54
125J1A-51
125J1A-52
125J1A-49
125J1A-50
125J1A-47.
125JIA-48
125J1A-45
125J1A-46
SHIELIIGND
Interconnect InformationTable 501 (cent)
22-14-00Page 598,72Mar 15/89Useordisclosureofreformationonthmpagem subjecttotherestrictionsonthetitlepageofthisdlcument

Honeywell ~ifJkPANcECITATION V
PILOT’S ELECTRONICADI (cent)ED-6oo/8oo
Function Connector Pin Connects To
RASTER/STROKE (SEC)
1{: x:; :;:::::::::::: :;::::: ::::;
AFLYBACK (SEC) + 2
{ I L-78(24)---------------j-r-125J1A-57
3J1-79(24)---------------!~--125J1A-58Y
L -- SHIELD GND
Interconnect InformationTable 501 (cent)
22-14-00Page 598.73Mar 15/89
Useordisclosureof Information on this page IS subject to the restrictions on the tttle pagt of !h!s document.

Honeywell WNEPANC’CITATION V
PILOT’S SYMBOL GENERATORSG-605/805
Function ConnectorPin ConnectsToI
ADIVIDEO(+)ADIVIDEO (-)ADI VIDEO SHIELD GNDADICOLORO (+)ADICOLORO (-)ADICOLORO SHIELDGNDADICOLOR1-(+)ADICOLOR1 (-)ADI COLOR1 SHIELDGNDADICOLOR2 (+)ADICOLOR2 (-)ADICOLOR2 SHIELDGNDADICOLOR3 (+)ADI COLOR 3 (-)ADICOLOR3 SHIELDGNDADIFLYBACK(+)ADIFLYBACK(-)ADIFLYBACKSHIELDGNDADIVALIDADIR/S (+)ADIR/S (-)ADIR/SSHIELDGNDADISR (+)
ADISR (-)
ADICS SR (+)ADICS SR (-)
ADHSHSHSHSHSHSHSI-ISHSHS
65J1A-1-2-3-4-5-6-7-8-9-lo-11-12-13-14-15-16-17-18-19-20-21-22-23
-24
-25-26
I(24)--O;------------(24)-J--------------(24)--Y
}(24)-l=j------------(24)--Y-------------(24)-- L
.--------(24)-1-1--1----------(24)--Y *(24’,-, ~.-.!(zfl)-----------------(24)--Y
{(24)--.=------------(24)--’.-;--------.---(Zbj.-l’
!(24)--,~1------------(24)----------------(24)--Y(24)-----------------
I(24)-:7-- ----------(24)----------------(24)--Z
I
(24)------------r~r-
(24)------------~:--T
L --
------NC------NC
3J1-543J1-55
3J1-503J1-51
3J1-463J1-47
3J1-423J1-43
3J1-383J1-39
3J1-603J1-61
3J1-153J1-583J1-59
3J1-7,125J1A-593J1-8,125J1A-603J1-36
CS VALID -27 ------NCVIDEO(+) :;; [;:]-fl-------------;;;-::VIDEO(-) ---------------- -.VIDEOSHIELDGND -30 (24)--Y iCOLORO (+)
[-31 (24)--’=7-------------2J1-WI
COLORO (-) -32 (24)----------------2J1-51COLORO SHIELDGND -33 (24)--Y ~COLOR1 (+)
J-34 (24)--=--------------2J1-~16
COLOR1 (-) -35 (24)-~-L-COLOR1 SHIELDGND
-----------2J1-47-36 (24)--Y ~
COLOR2 (+) 65J1A-37(24)-j~j-?-----------2J1-42
Interconnect InformationTable 501 (cent)
22-14-00Page 598.74
Mar 15/89Use or disclosure of information on this page IS subject to the restrictions on the tttle page of th!s document

Honeywell WJRANCECITATION V
Function
HSICOLOR2 (-)HSICOLOR2 SHIELDGNDHSICOLOR3 (+)HSICOLOR3 (-)HSICOLOR3 SHIELDGNDHSIFLYBACK(+)HSIFLYBACK(-)HSIFLYBACKSHIELDGNDHSIVALIDHSIR/S(+)HSIR/S(-)HSIR/SSHIELDGNDHSISR {+)
HSISR (-)
HSICSSR (+)HSICSSR (-)
HSICSVALIDADIXDEFOUT (+)ADIXDEFOUT (-)ADIXDEF SHIELDGNDADIY DEFOUT (+)ADIY DEF OUT (-)ADI Y DEF SHIELD GNDHSIX DEFOUT (+)HSIX DEFOUT (-)HSIX DEFSHIELDGNDHSIY DEFOUT (+)HSIYDEFOUT (-)HSI Y DEF SHIELD GNDDC811DATA(+)DC811DATA(-)
RESERVED
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
ConnectorPin11~
65J1A-38(24)-----------------39 (24)--Y
!-40 (24)--=--------------41 (24)-----------------42 (24)--Y
1-43 (24)-l=_i-------------44 (24)-----------------45 (24)--Y-46 (24)-----------------
i-47 (24)--=--------------48 (24)-J-L-------------49 (24)--Y
1
-50 (24)------------T’=’r-
-51 (24)------------~-l-
f-.-52 ------NC-53 ------NC
-54-55-56-57-58-59-60-61-62-63-64-65-66-67-68---
65J1A-69
------NC
t(24)--7~r-----(24)----------(24).--’Z’,(24)-----------(24)--J--------(24)---Y(24)--1~7------
------ ----f;:]---y~(24)---9--,----(24)--J-J-y----(24)---Y I
{
(24)--l~T-----(24)----------SHIELDGND
------NC
------------
-------- -- - -
------------
------------
------- --- - -
ConnectsTo
2J1-43
2J1-382J1-39
2J1-602J1-61
2J1-152J1-582J1-59
2J1-7,125J1B-59’2JP8,125J1B-602J1-36
3J1-13J1-2
3J1-93J1-10
2J1-I2J1-2
2J1-92J1-10
115J1-34115J1-35
Interconnect Information
Table 501 (cent)
22-14-00Page 598.75Mar 15/89UseordisclosureofInformationonthmpageissubjecttotherestrictionsonthetitlepagtofthtsdocument.

Honeywell M!!E?ANC’CITATION n/V
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
RESERVED 65J1A-70------NCRESERVED -71------NCRESERVED -72------NCVALIDIN 1 SRNDMEVLD -73(24)-----------------C164J1A-46,
125J2B-23VALIDIhl2 SRNVRTDV VLD -74(24)-----------------C164J1A-74,
125J2B-24VALIDIN 3 SPODEVVLD -75(24)-----------------FIGA-5VALIDIN 4 VNAVDEVVLD -76(24)-----------------16J1-22,7J1B-9
125J2B-26VALIDIN 5 SRN LATOV VLD -77 (24)----------------- C164J1B-91,
‘ 125J2B-27
VALID IN 6 RAC) ALT 1 VLD -78 (24)----------------- FIG A-6,20J1-Y7J1B-35
VALID IN 7 RADALT 2 VLD -79------NCVALIDIN8 LRN1 LAT OV VLD -80 (24)----------------- C164JIB-99(ADF 2 VALID WHENDIN6 = GND)VALIDIN9 LRN1VRTDV VLD -81 ------NCVALID IN1OADF VLD -82(24)-----------------164J1B-99,
125J2B-32
VALIDIN1lFDCVLD -83(24)-----------------7J1B-47,125J26-33
VALIDIN12HDG 1 VLO -84(24)-----------------6J1-e,125J2B-34VALIDIN13ATT 1 VLD -85(24)-----------------lJI-GG,7J1A-19
125J2B-35VALIDIN14CS/SGVLD -86(24)-----------------125J1B-18VALIDIN15ARINCO VLII -87------NCVALIDIN16LRN 1 28 V WPTALERT -88------NCVALIDIN17ROT VLD -89 ------NCVALID IN18 TCS 65J1A-90 (24) ----------------- 1OJ1B-19,
125J2B-40
~: ALL VALIDS ARE +28 V DC.
Interconnect InformationTable 501 (cent) 22-14-00
Page598.76May25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the tllle page of this d>cument

Honeywell M!E!ANCECITATION n/V
4
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
VALIDIN19SPARE 65J1A-91------ NCVALIDIN20HDG 2 VLD -92 (24)----------------- C2J2-X,
125J2B-58
VALID IN21 ATT 2 VLD -93 ------ NCVALID IN22 AP ENGAGEDIN -94(24)-----------------;:;J~Bi:4,
VALID IN23 TK DETENT IN -95 (24)-----------------llJ1-H,1OJ1B-15125J2B-45
VALIDIN24APS VLI)IN -96 (24)-----------------16J1-23,125J2B-46
DIN O SYMGEN L/R IDO -97 ------ NC
DIN 1 DC811 -98(24)-----------------65J1A-105DIN2 SRBRG3/4 -99 (24)-----------------65J1A-105DIN3 ADFBRG 3/4 -100 (24) ---------------- 65J1A-105DIN4 ASCB D/S -101------ NCDIN 5 EFISD/S -102(24)----------------65J1A-105DIN6 CROSSIDESENSORDISABLE-103(24)----------------65J1A-105DIN 7 ROT ON/OFF -104------ NCDIN GND -105(24)-----------------PROGGNDATT PULSEOUT 65J1A-106”(24)-----------------125J1A-40
NOTE: ALL VALIDS ARE +28 V DC.
.
InterconnectInformationTable501 (cent) 22-14-00
Page598.77May25/90
Use or disclosure of Information on this page IS subject to the restrictions on the title pag[ of this document.

Honeywell WMRANCECITATIONV
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
DIN 8 CPMNON/OFF 65JlB1~ &--~;----------- 65J1A-105DIN 9 WINDPO/XYDIN 10 +5VROTVAL -3 (24)-----------------15J1-7,
125J2A-33DIN 11 RALT IDO ------NCDIN 12 RALT ID1 :: ------NCDIN 13 TRANSITIONON/OFF ~~ (24)-----------------65J1A-105DIN 14 LRN1PHASE(P/S) ------NCDIN 15 ADIONHSI (OFF/ON) ------NCDIN 16 SRN2ID1 :: ------NCDIN 17 ADF 1/2 -10 (24)-----------------65J1A-105DIN 18 MLS 1/2 -11 (24)-----------------65J1A-105DIN 19 wow -12 (24)-----------------FIGA-8DIN 20 GSPDIDO -13 (24)-----------------65J1A-105DIN 21 GSPDID1 -14 ------NCDIN 22 ATT # IDO -15 ------NCDIN 23 ATT# ID1 -16 ------NCDIN 24 ATTGL IDO -17 ------NCDIN 25 ATTGL ID1 -18 ------NCDIN 26 ATT2P/S -19 ------NCDIN 27 RESERVED -20 ------NCDIN 28 FLIP -21 ------NCDIN 29 HDG1DEF -22 ------NCDIN 30 HDG1F/S-M/T -23 (24)-----------------TOF/SSWITCHDIN 31 HDG# IDO -24 ------NCDIN 32 HDG# ID1 -25 ------NCDIN 33 HDTGL IDO -26 ------NCDIN 34 HDTGL ID1 -27 ------NCDIN 35 HDG2DEF -28 ------NCDIN 36 HDG2F/S-M/T -29 (24)-----------------TOF/SSWITCHDIN 37 HDG2P/S -30 ------NCDIN 38 S BRGCD/CS 65J1B-31------NC
Interconnect Information
Table 501 (cent)22-14-00
Page 598.78flar 15/89
Use or disclosure of Information on thm page is sub)ect to the restrictions on the t!tle page of thm d )cument.

Honeywell %I!uYPANCECITATION n/V
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Function ConnectorPin ConnectsTo
DIN 39 SRNSRC IDO 65J1B-32------NCDIN 40 SRN SRC 101 -33 (24)-----------------65J1A-105DIN 41 DMETTN -34 (24)-----------------C164J1A-3,
125J2A-50DIN 42 TTL ~:~ (24)-----------------C164J1B-64DIN 43 SRN TGL ~ ------NC
DIN 44 HSI MODE -37 ------NCDIN 45 RESERVED -38 ------NCDIN 46 LNAV MODE GND -39 (24)----------------- 7J1A-72,
125J1A-63
DIN 47 GA MODEGND -40 (24)----------------- 7J1B-68,125J1A-64
DIN 48 ASEL ARM MODE GND -41 (24) ----------------- 7J1B-71, 8J1-~
125J1A-65
DIN 49 ASEL CAP MODE GND .42 (24)-----------------7J1B-72,8J1-g125J1A-66
DIN 50 HDG SEL MODE GND -43 (24)----------------- 7J1A-71, 8J1-~125J1A-67,llJ1-~
DIN 51 RESERVED -44 ------NCDIN 52 ALTHOLDMODEGND -45 (24) ----------------- 7J1B-75, 8J1-Q
125J1A-68
DIN 53 V/SHOLDMODEGND -46 (24)-----------------7J1B-76,8J1-Z,125J1A-69,115J1-47
DIN 54 IASHOLD MODE GND -47 (24)-----------------7J1B-77,8J1-X,125J1A-70,115JI-48
DIN 55 MACH HOLD MODE GND -48 (24)-----------------7J1B-78,125J1A-71
DIN 56 GS ARM MODE GND -49 (24)-----------------7J1B-69,8J1-g125J1A-72
DIN 57 GS CAP MODE GND -50 (24)-----------------7J1B-70,8J1-h125J1A-73,1OJ1B-21
DIN 58 VNAVARMMODEGND -51 (24)-----------------7J1B-73,8J1-S125J1A-74
DIN 59 VNAV CAP MODE GND -52 (24)-----------------7J1B-74,8J1-T125J1A-75
DIN 60 LRN1SRCNORM/ALT65J1B-53------NC
A1’ GROUNDTHISPIN IFMLS IS INSTALLED.
InterconnectInformationTable501 (cent) 22-14-00
Page598.79May 25/90
Use or disclosure Of Information on thm page IS subject to the restnct!ons on the title pagt of thm documenf,

Honeywell W!W’”c’CITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
DIN 61 LRN1BRGCARD/ 65J1B-54------NCCASE
DIN 62 NAVARM MODEGND -55 (24)----------------- 7J1A-85,125J1A-76
DIN 63 NAV CAP MODE GND -56 (24)-----------------7J1A-$36,125J1A-77
DIN 64 BCARM MODEGND -57 (24)-----------------7J1A-68,8J1-~125J1A-78
DIN 65 BC CAP MODE GND -58 (24)-----------------7JIA-67, 8J1-14
125J1A-79DIN 66 VORAPR ARM MODE GND -59 (24) ----------------- 7J1A-137,
125J1A-80DIN 67 VORAPR CAP MODE GND -60 (24)----------------- 7J1A-$38,
125J1A-81DIN 68 LRN1BG/DA - -61 ------NCDIN 69 LRN1IDO -62 ------NCDIN 70 LRN1ID1 -63 (24)-----------------65J1A-105DIN. 71 LRN1ID2 -64 (24)-----------------65J1A-105DIN 72 LRN1 1D3 -65 (24)----------------- 65J1A-105DIN 73 LRN1 SRC IDO -66 ------NCDIN 74 LRN1 SRC ID1 -67 (24)----------------- 65J1A-105 “DIN 75 SRN2IDO -68 ------NCDIN 76 LRN1DT/DA -69 ------NCDIN 77 LRNTGL IDO -70 ------NCDIN 78 LRN TGL ID1 -71 ------NCDIN 79 LRN1MG/TU -72 ------NCDIN 80 LRN2IDO -73 ------NCDIN 81 LRN2ID1 -74 ------NCDIN 82 LRN2ID2 65J1B-75------NC
Interconnect Information
Table 501 (cent)
22-14-00Paqe 598,80
Mar 15/89Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of thm d~cument

Honeywell WE!ANCECITATION n/V
PILOT’S SYMBOL GENERATOR (cor)t)SG-605/805
Function Connector Pin Connects To
DIN 83 LRN2ID3 65J1B-76------NCDIN 84 LRN2SRC IDO -77 ------NCDIN 85 LRN2SRC ID1 -78 ------NC
DIN 86 AIR DATACMDDISABLE -79 ------NCDIN 87 SPARE -80 ------NCDIN 88 LRN1BRG3/4 -81 (24)-----------------65J1A-105(ADF2 BRG 3/4 WHEN DIN6 = GND)DIN 89 CITATION11/V -82 (24)-----------------65J1A-105DIN 90 IRS1AN/DIG ------NCDIN 91 IRS2AN/DIG :R ------NCDIN 92 RADALT S/D -85 ------NCDIN 93 A/S,AOA,SPD IDO -86 (24)-----------------65J1A-105DIN 94 A/S,AOA,SPD ID1 -87 (24)-----------------65J1A-105DIN 95 CS IN -88 ------NCDIN 96 COUPLE1/2 -89 ------NCDIN 97 STBY SELMODEGND -90 ------NCDIN 98 SPARE -91 ------NCDIN 99 ATT #1 WRAP -92 (24)-----------------65J1A-105DIN 100ATT #2 WRAP -93 ------NCDIN 101ATT #3 WRAP -94 ------NCDIN 102ATT #4 WRAP -95 ------NCDIN 103RESERVED -96 ------NCDIN 104RESERVED -97 ------NCDIN 105FMSSINGLE/DUAL -98 ------NCDIN 106A/S,AOA,SPD ID2 -99 ------NCDIN 107CAARULES -1oo------NCDIN 108SPARE -101------NCDIN 109SYMGENL/RID1 -102------NCRESERVEDDC IN (+) -103------NCRESERVEDDC IN (-) -104------NCRESERVEDDC OUT (+) -105------NCRESERVEDDC OUT (-) 65J1B-106------NC
InterconnectInformationTable501 (cent)
22-14-00Page598.81May 25/90Useordisclosureofreformationonthispagem subjecttotherestrictionsonthetitlepag~ofth(sdocument

Honeywell MNR’ANCECITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function ConnectorPin ConnectsTo
}’65J2A-1 (22)------------------;;~;;28 V DC
-2 (22)------------------FIGURtA-1-3 (24)------------------125JIB-82
+28VOLT POWER
+28VOLTPOWERHDGVALIDIN
28 VOLTRETURN28 VOLTRETURNCHASSISGND --CHASSISGNDSIGNALGNDSIGNALGNDDISCRETE GNDTO/FRDC IN (+)
-4-5-6-7-8-9
(22)------------------(22)------------------(24)------------------(24)------------------(24)------------------(24)------------------
DC PWRGNDDC PhlRGNDCHASSISGNDCHASSISGNDSIGNALGNDSIGNALGNDDISCRETEGND125JIB-97,
-io-11
(24)-----------------
7(24)----,:-----------Ilk
(24)----U-----------TO/FRDC IN (-) -12 125JI.B-98,
ONSIDEACREF (+) -13 PILOT26VAC,FIGA-3SHIELD GNDAC GNDSHIELDGNDlJ1-x,125J3A-1lJ1-y,125J3A-2lJI-z.,125J3A-3SHIELDGNDlJ1-p,57Jl-E125J3A-4lJ1-CI,57J1-F
ONSIDEACREF (-)
#1 PITCHX
#1 PITCHY
#l PITCHZ
-14
-15
-16
-17
t
-----
(24)-----------~--~j-
!(24)-------------+
~ II(24)-----------------
I 1’---
f(24)-------------~~r-#1 ROLLX
#1 ROLLY
#1 ROLLZ
-18
-19
-201(24)-------------~-;-
(24)---------~----+~-125J~A-5lJ1-r,57Jl-G125J3A-6
I
7(24)---------‘----+SHIELDGND6J1-L,#1 HDGX
#1 HDGY
#l HDGZ
-21
-22
65J2A-23
125J3A-76JI-M,125J2,A-86J1-K,125J3A-9SHIELDGND
1(24)-------------:-:-
(24)---------j----l~--
1L--
Interconnect Information
Table 501 (cent)
22-14-00Page 598.82
Mar 15/89Use or disclosure of !nforrnaflon on this page !s subject to the restrictions on the title page of this c ocumenl

Honeywell WUWANCECITATION n/V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin
SYSASCBA DATA(+) 65J2A-24 n----------------------SYSASCBA DATA(-) -25 II----------------------
VL-_
SYSASCBA CLK (+) n-26 -----------------_--.--
SYSASCBA CLK (-) -27 ----------------------;--
#1 HDGSYNC+t
-28 (24)--------------~1-
#1 HOG SYNC - -29 (24)--------------!!*-Y
MFDG/SDEV DC IN (-) -30 (24)------------------TS WITH 65J2A-99
#1 LRNDSRTRKX -31 ------NC#l LRNDSRTRKY -32 ------NC#1 LRNDSRTRKZ -33 ------NC#2 ADF BRGX/SIN
t-34 (24)---------;------
#2 ADF BRGY/COM ljt
-35 (24)---------1,------
#2 ADF BRGZ/COS -36 (24)---------+;&-
#2 ADF BRGCOMIii
-37 (24)----------J------
#1 LRNTO/FROM(+) -38 ------NC#1 LRNTO/FROM(-) -39 ------NC#1 LRNLATDEV (+) -40 ------NC#1 LRNLATDEV (-) -41 ------NCDH H -42 (24)------------------DH W 65J2A-43(24)------------------
ConnectsTo
FIG.A-9
FIG.A-9
6J1-U,125J3A-136J1-V,125J3A-14SHIELDGND125J2B-12,
C164J1A-61,125J3A-48C164J1A-33,125J3A-49C164J1A-47,125J3A-50C164J1A-33,125J3A-51
125J1B-33115J1-54,125J3A-25
InterconnectInformationTable501 (cent)
22-14-00.—Page598.83May25/90
Use or disclosure Of !nformatlon on this page IS subject to the restrictions on the title pagf of this document

Honeywell WWANcECITATION n/V
Function
DH L
CRSSELX/TACH+
CRSSELY/TACH -
CRSSELZ
SHIELD GNDHDG SEL X TACH +
HDGSELY TACH-
HDGSELZ
SHIELDGND
VOR BRGX/SIN
VOR BRGY/COM
VOR BRGZ/COS
VOR BRGSP/COM
#l ADF BRGX/SIN
#l ADFBRGY/COM
#1 ADF BRGZ/COS
#1 ADF BRGSP/COM
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Connector Pin
65J2A-44(24)------------------
-45 (24)------------------/1
-46 (24)-i-,-{-------------
-47 (24)-j!-
?
L ------------
(24)--n-48 (24)-1-i
+------------
t-49 (24)-;-I-------------
-50 (24)--1-!$-------------
Y
f-q-51 (24)~~~-------rl----
,?ii -----52 (24)----------1
+LI ----’53 (24)----------lj,
-54 (24)----------LJ*----
K
+
-------55 (24)--------:--------
?-56 (24)-------:+-------
-57 (24)-------~-:-f------
‘‘ *------65J2A-58(24)-------i-l-
Y-----
ConnectsTo..-
115J1-55,125J3A--2623JI-0,125J3A-2723J1-E..125J3A-28,23J1-F,125J3A-29,
23J1-L.125J3A-30,23J1-M,125J3A-31,23J1-N,125J3A-32,
C164J1E!-11,125J3A-33C164J1EI-37,125J3A-34C164J1E!-12,125J3A-35,C164J1E-37,125J3A-36SHIELD GND164J1A-61,125J3A-37164J1A-33,125J3A-38164J1A-47,125J3A-39125J3A-40,164J1A-33SHIELDGND
InterconnectInformationTable501 (cent) 22-14-00
Page598.84May25/90
Use or disclosure of mformatlon on this page is subject to the restrictions on the title page of this I: ocument,

Honeywell WIIEPANCECITATIONn/V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
INNERMKR(+) 65J2A-59 (24)------------------C164J1A-73,125J2B-75
MARKERCOMMON -60 (24)-------,
MIDDLEMKR(+) -61 (24)-----=---------325J2B-77,C164J1A-60
TS with65J2A-1OO
MFDLATSTEER f-j$-62 (24)------ -- -------1.25J1B-99
OUTER MKR (+)
SPARESRNCRSDEV (+)
SRNCRSDEV (-)
SRNGS DEV (-)
SRNGS DEV (+)
RADALT (+)RADALT (-)
SPEEDCMD (+)SPEEDCMD (-)
PITCHCMD (+)
PITCHCMD (-)
ROLLCMD (+)
-63 (24)------------------125J2B-79,C164J1B-74
-64 ------NC-65 (24)------------------C164J1B-78,
125J3A-41-66 (24)------------------C164J1B-75,
125J3A-42-67 (24)------------------C164J1B-75,
C2J2-C125J3A-43,65J2A-66
-68 (24)------------------C164J1B-79,. .
u)]125J3A-44,C2J2-D
-69 (24)------------- -- FIG A-6-70 (24)------------- --- “
-- SHIELDGND
t]’71 (24)----------- ----- FIG A-5
+-72 (24)----------- -- -L- “
t
-- SHIELD GND-73 (24)-------------m- 7J1B-30,
II 125J3A-58-74 (24)------------- -- ;7J1B-31,
T125J3A-59
t
-- SHIELDGND65J2A-75(24)-------------0-- 7J1A-29,
11 :125J3A-60
Interconnect InformationTable 501 (cent)
22-14-00Page598.85May25/90
Use or disclosure Of mformatlon on this page IS subject to the restrictions on the ftle pagti of thm document,

Honeywell W!WANcECITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
ROLL CMD (-) k65J2A-76 (24)------------ --!-!-
Y
7J1A-30,125J3A-61
1
-- SHIELD GNDRATE OF TURN (+) -77 (24)----------- --r~r- 15J1-4,
125J3A-62RATE OF TURN (-) -78 (24)----------- --!-~- 15J1-5,
Y125J3A-63
I
-- SHIELD GNDAIR DATA CMD (+) -79 (24)-------------~r- 9J1-39,
125J3A-64AIRDATACMD (-) -80 (24)-----------------
Y
9J1-33,7J1B-37125J3A-65
-- SHIELDGNDSTEER IN (+) -81 ------NCSTEER IN (-) -82 ------NCMFD LRN SEL VALIN (P-ID2) -83 (24)------------------ 125J1B-83MFD LAT STEER VALIN -84 (24)------------------ 125J1B-84MFD NAV SEL VALIN (IDO) -85 (24)------------------ 125J1B-85
MFD V/L DEV VALIN -86 (24) ------------------ 125J1!3-86
MFD GS DEV VALIN -87 (24------------------- 125J1B-87
MFD DME VALIN -88 (24)------------------ 125J1B-88
MFD TK DETENT VALIN -89 (24) ------------------ 125 J1B-89
MFD AP ENGAGED VALIN -90 (24)------------------ 125J1B-90
MFD ADS VALIN -91 (24)------------------ 125JiB-91
MFD LNAVAPPDIN -92 (24)------------------125J1B-92
MFD TTL DIN 65J2A-93 (24)------------------ 125J1B-93
Interconnect Information
Table 501 (cent)
22-14-00Page 598.86
Mar 15/89Use or disclosure of mformatlon on this page is sub)ect to the restncttons on the title page of Ih!s cocument.

Honeywell MI!W’NCECITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
MFD DME TTN DIN 65J2A-94(24)------------------125J1B-94
MFDMID MARKDIN (5V) -95 (24)------------------125J1B-95
MFD PW MOVE DIN -96 (24)------------------125J1B-96
MFD V/L DEV DC IN (-) -97 (24)------------------125J2B-10
MFDV/LDEVDC IN (+) -98 (24)------------------125J2B-9TSWITH 65J2A-30
MFDGS DEVDC IN (+) -99 (24)------------------125J2B-11TSWITH 65J2A-62
MFDLRNLATIN -100(24)------------------125J1B-1OO
MFDDME IN (-) -101(24)------------------125J1B-101
MFD DME IN (+) -102(24)------------------125J1B-102
MFDCRSERR(+)IN
I
-103(24)-------------y~i- 125J1B-103
MFDCRSERR(-)IN -104(24)-------------L=L- 125J1B-104
1
1-- SHIELDGNDMFDHDGERR(+)IN -105(24)--------------F;- I25J1B-105
MFIIHDGERR(-)IN 65J2A-106(24)-------------i:!--125J1B-106
L-- SHIELDGND
Interconnect Information
Table 501 (cent) 22-14-00Page 598.87
Mar 15/89Use or drs.closure of information on this page IS sub)ect to the res!rlct!ons on the Mle pag I: of this document

Honeywell MW!ANC’CITATION V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To—.!—
DIN 112 SPL SEL O 65J2B-1 -----NCDIN 113 SPL SEL 1 -2 -----NCDIN 114 SPL SEL 2 -----NCDIN 115 SPL SEL 3 :: -----NCDIN 116 SPL IN O -----NCDIN 117 SPL IN 1 :: -----NCDIN 118 SPL IN 2 -----NCDIN 119 SPL IN3 :; -----NlT’jWITH65J2B-1OOFD LATDC OUT (-) %-9 (24)-5- -------------- 7J1A-18SG PWRDN -10 (24)~----------------- FIGA-4FD TO/FR DC OUT (+) -11 (24)---5-------------- 16J1-30FD TO/FR DCOUT (-) -12 (24)--~Y!------------- 16J1-31
SHIELD GND ---CROSS SIDE AC REF (+)
/
-13 (24)------------ -r~i- COP1LOT26VAC,
II FIG. A-3
CROSS SIDE AC REF (-) -14 (24)------------ -~-L- AC PWR GND~-- SHIEL[jGND
:2 PITCH X -15 ------NC#2 PITCH Y -16 ------NC#2 PITCHZ -17 ------NC#2 ROLLX -18 ------NC#2 ROLLY -19 ------NC#2 ROLLZ -20 ------NC#2 HDG X -21 (24)------------------ C2J1-S#2 HDG Y -22 (24)------------------ C2J1-1:#2 HDG Z -23 (24)--------------X-- C2J1-11SYS ASCB B DATA (+) -24 ------- --------------SYS ASCB B DATA (-) -25 ‘ 1 >FIG. A-9----------------------
Y---SYS ASCB B CLK (+) -26
______------------l~--) FIGc /~-9
SYS ASCB B CLK (-) 65J2B-27 ------------------------
Interconnect Information
Table 501 (cent)
22-14-00Page 598.88
Mar 15/89Use or disclosure of mformatlon on this page IS subject to the restrictions on the trtle page of thts ::ocument.

Honeywell W!URAN’ECITATION V
Function
#2 HDGSYNC(+)#2 HDGSYNC(-)WX VIDEODATA(P)
WX VIDEODATA(N)
WX CONTROLDATA(P)
WX CONTROLDATA(N)
IASSET (+)MS SET (-)RA #2 (+)RA #2 (-)VNAVDEV (+)
VNAVDEV (-)
PROLINENAV(+)
PROLINENAV (-)
PROLINEDME (+)
PROLINE DME (-)
SHIELDARINCO DATA(+)
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
ConnectorPin
65J2Bj;~[;:]------------------------------------
t
-30 (24}-------------;~r-
-31 (24)-------------~-L-‘f
f
1.-32 (24)-----------L--T=;:
-33 (24)----------JLI------
TL--
-34 ------NC-35 ------NC-36 ------NC-37 ------NC
Y-38 (24)-------------rfr-
i-39 (24)-------------!-~-
7L--
Y-40 (24)-------------r~j-
tll-41 (24)-----------------
T
t
&---42 (24)-------------;j-
~1,-43 (24)----------- --Y--
t
165J2B-44 (24)----------- --l=;:
ConnectsTo
C6J1-UC6J1-V125J3A-6859J1-g125J3A-6959J1-hSHIELDGND125J3A-7059J1-m125J3A-7159J1-nSHIELDGND
16J1-28,7J1B-14125J3A-7416J1-27,7J1B-15125J3A-75SHIELDGND164J1B-89,125J3A-76164J1A-59,125J3A-77SHIELDGND164J1A-57,125J3A-78164J1A-44,125J3A-79SHIELDGND429 HS DATAFROM LRN 1
Interconnect Information
Table 501 (cent)
22-14-00Page 598.89Mar 15/89
Use or disclosure of information on this page is subject to the restrictions on the title pagf of this document.

Honeywell UNJRAN’ECITATION V
Function
ARINCO DATA(-)SHIELDGNDARINC O SYNC (+)ARINC O SYNC (-)SHIELD GNDARINCO CLK (+)ARINC O CLK (-)SHIELD GNDARINC1 DATA(+)
ARINC 1 DATA (-)SHIELD GNDARINCISYNC(+)
ARINC1SYNC(-)SHIELDGNDARINC1CLOCK (+)
ARINC1 CLOCK(-)SHIELDGNDARINC2DATA(+)
ARINC2DATA(-)
ARINC3 DATA (+)ARINC3 DATA (-)SHIELD GNDARINC4DATA(+)ARINC4DATA(-)SHIELDGNDARINC5DATA(+)ARINC5DATA(-)SHIELDGNDARINC6DATA(+)ARINC6DATA(-)SHIELDGND
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Connector Pin Connects To
i65J2B-45 (24)----------- -~~!-- 429 tlSDATAFROM I-RN1
-46 ------NC-47 ------NC
-48 ------NC-49 ------NC
t-50
-51
-52
-53
-54
-55
-56
-57
1(24)----?;-----------
(24)----$’----.------
(24)~~~-~ri----------
(24)----~y’------------
+(24)~~~-~r----------
(24)----~1----------------
------NC
------NC
-58 ------NC-59 ------NC
-60 ------NC-61 ------NC
-62 ------NC-63 ------NC
-64 ------NC65J2B-65 ------NC
C164J1A-5,125J3A-86C164J1A-15,125J3A-87C164J1A-26,125J3A-88C164J1A-45,125J3A-89C164J1A-19,125J3A-90C164J1A-17,125J3A-91
Interconnect Information
Table 501 (cent)
22-14-00‘age 598.90Mar 15/89Use or disclosure of Information on thm page IS sub~ect to the restrictions on the trtle page of ttus ldocument.

Honeywell MWJEPANCECITATION n/V
PILOT’S SYMBOL GENERATOR (cent)SG-605/805
Function Connector Pin Connects To
ARINC7 DATA (+) 65J2B-66 ------NCARINC7 DATA (-) -67 ------NCSHIELD GNDARINC8DATA(+)
t-68 (24)----------~r--- 116J1-33,125J3A-102
ARINC8DATA(-) -69 (24)----------!----- 116J1-2,125J3A1-103SHIELDGND ~----- l16J~-35
ARINC9DATA(+) -70 ------NCARINC9DATA(-) -71 ------NCSHIELDGNDOVERTEMPWARN -72 (24)-----------------AIRCRAFT
TS WITH65JB-99 ANNUNCIATORFD GS DEVDC OUT (-) -73 (20)-- ------&---’ 7J1B-17
DOUT 1 MST CMP WRN
1
-74 ------NCDOUT 2 DH -----------------125J1A-23DOUT 3 RAD/FDTESTDOUT
~ ~j~ f$j]-----------------125JIA-25,FIG.A-64 HDGCMPMON -77 ------NC
DOUT 5 ATT CMPMON -78 ------NCDOUT 6 DME/GROUNDRANGE -79 (24)-----------------125J1A-31VALOUT3 FD HDGVLDOUT -80 (24)-----------------7J1A-23VALOUT 1 SG -81 (24)-----------------125J1A-17VAL OUT 2 NAV SEL (P-ID1) -82 (24)----------------- 125J1A-19FD LRNSELVALOUT(P-ID2) -83 (24)-----------------FIG.A-nFD LATSTRGVALOUT -84 (24)-----------------7J1A-27NAVSEL (P-IDO) -85 (24)-----------------FIG.A-IIFD LATDEVVALOUT -86 (24)-----------------7J1A-16FD VERTDEVVALOUT -87 (24)-----------------7J1B-7FD DMEVALOUT -88 (24)-----------------7J1A-34,FIG.A-1oFD TK DETENTVALOUT -89 (24)-----------------7J1A-49FD AP ENGAGEDVALOUT -90 (24)-----------------7J1A-46FD APSVALOUT -91 (24)-----------------7J1B-38FD LNAVAPPDOUT
}A
-92 (24)-----------------7J1A-48FD TTLDOUT 1 -93 (24)-----------------7J1A-22FD DME TTNDOUT _94 (24)-----------------7J1A-5O,FIG.A-1OFD MIDMARK(5V) -95 (24)-----------------7J1B-80FD PW MOVE -96 (24)-----------------7J1B-49,
1OJ1A-33FD V/L DEV OUT (-)
t-97 (24)------------~1-- 7J1A-20
FD V/L DEV OUT (+) 65J2B-98(24)-----------Jd--- 7J1A-21
A1 CAUTION! 100mA maximumload
InterconnectInformationTable501 (cent)
22-14-00Page 598.91May25/90
Use or disclosure of mformatlon on thm page IS subject to the restrictions on the title pag[ of this document.

Honeywell WJFAN’ECITATION n/V
Function
FD G/SOEVOUT
FD LRNLATDC OUT
FD DMEDC OUT (-)
FD DMEDC OUT (+)
FD CRS ERROR(+)OUTFD CRS ERROR(-)OUTSHIELDFD HDG ERROR (+) OUTFD HDG ERROR (-) OUT
SHIELD
PILOT’SSYMBOLGENERATOR(cent)SG-605/805
Connector Pin
TSWITH 65J2B-7365J2B-99 (24)-----+:q&--------
TS WI~H65J2B-9-100 (24)----+;:---------
1-101 (24)---------- --r~---
~li
-102(24)-------------+-------
I-103(24)-------------~--.~-104(24)------------LqL--
1,L ---
-105(24)-----------------65J2B-106(24)------------Lyi---
---
ConnectsTo
7J1B-16
7J1A-17
7J1A-33,16J1-35
7J1A-32,16J1-34SHIELDGND
7J1A-417J1A-37SHIELDGND7J1A-367J1A-37SHIELDGND
InterconnectInformationTable501 (cent) 22-14-00
Page598.92May25/90UseordisclosureOfIn!ormat!ononthispageIS subject10therestrictionsonthetitlepageof~hlsC:~cument

Honeywell WKE!ANCECITATION n/V
Function
SIGNAL GNDLIGHTING 28V (H)LIGHTING 5V (H)
LIGHTING COM+28 VDC POWER
DC POWER GNDSC/CP PBELAPSED TIME PBREV PBCOURSE SYNC PBADC REV SWHEADING SYNC PBSPARE PBRESERVEDHDG REV PBATT REV PBRESERVED
NAV REV PB
FLIP PBRESERVEDSPARESPAREWX PBTESTCS REV SWSPARESPARERESERVEDHDG SW1HDG SW2ATT SW1ATT SW2SPAREDC/SG BUS (H)DC/SG BUS (L)SHIELD GNDDC/MG BUS (H)DC/MG BUS (L)SHIELD GND
PILOT’S EFIS REMOTE CONTROLLERDC-811
Connector Pin
115J1-1 (22)---------------------2 ------NC-3 (22)--------------------
-4 (22)---------------------5 (22)--------------------
-6 (22)---------------------7 ------NC-8 ------NC-9 ------NC-10 (24)---------------------11 ------NC-12 (24)---------------------13 ------NC-14 ------NC-15 ------NC-16 ------NC-17 ------NC-18 ------NC-19 ------NC-20 ------NC-21 ------NC-22 ------NC-23 ------NC-24 ------NC-25 ------NC-26 ------NC-27 ------NC-28 ------NC-29 (z4)---------------------30 ------NC-31 ------NC-32 ------NC-33 ------
1-34 (24)-~- ----------------35 (24)-IUI- ---------------
----
t-36 (24)-<- ---------------
115J1-37 (24)-!!1----------------
Connects To
SIGNAL GND
PILOT 5 VLIGHTING,FIG.A-2LIGHTINGCOMPILOT 28 V DCPWR, FIG. A-1DC PWR GND
23J1-G
23J1-H
FIG. A-12
65J1A-6765J1A-68
125J3A-23125J3A-24
InterconnectInformationTable501 (cent)
22-14-00Page598,93May 25/90
Use or disclosure of mformatlon on this page IS subject to the restr!ctlons on the title pagf of th{s document.

Honeywell tiNllrANcECITATION n/V
PILOT’SEFISREMOTE CONTROLLER (cent)DC-811
Function Connector Pin
ADIDIM (H)ADIDIM (L)HSIDIM (H)HSIDIM (L)AP PITCHWHEELINPUT+AP PITCHWHEELINPUT-
AP PITCHWHEELOUTPUT+AP PITCH WHEEL OUTPUT -
+28VDCAP ENGAGEINPUTVS HOLDMODEGNDIASHOLDMODEGNDMACHHOLDMODEGNDWX DIM (H)WX DIM (W)WX DIM (L)
DH SET (H)
i115J1-38(24)--------------fl--
-39(24)--------------j~--
i-40 (24)--fl---------------41 (24)--J~-------------
1-42(24)--------------------43(24)----------------’1
Y_-
I’44(24)----TGj--------------45(24)-----
Y------------
SHIELDGND---46(24)---------------------47 (24)---------------------48(24)---------------------49------NC-50(24)---------------------51(24)---------------------52(24)---------------------53(24)--------------------
DH SET (W) -54(24)--------------------
DH SET (L) -55 (24)--------------------
FD MODE COMMON
ADCSLEWENGAGEADCSLEW +ADION GNDSPARESPARESPAREHSION GNDSPARESPARESPAREWX ON GNDPOSITION3POSITION4POSITION5ADF (L)LRNA (L) CIRCLEPTRLRN B (L)
-56(24)---------------------57(24)---------------------58(24)---------------------59-----NC-60-----NC-61-----NC-62-----NC-63-----NC-64-----NC-65-----NC-66-----NC-67-----NC-68(24)---------------------69(24)---------------------70-----NC-71(24)---------------------72(24)--------------------
115J1-73-----NC
Connects To
3J1-303J1-312J1-302J1-31
FIG.4-7
SHIELDGNDFIG.A-7FIG.A-7
FIG.A-7FIG.A-7FIG.A-7
2J1-332J1-3112J1-35125J1A-33
65J2A-43,125J3A-2565J2A-44,125J3A-26.SIGNALGNDFIGA-7,9J1-37FIGA-7,9J1-38
115J1.71115J1-72
115J1-68115J1.69
InterconnectInformationTable501 (cent)
22-14-00Page598.94Ray 25/90useordisclosure Of Information on thm page is subject to the restrictions on the ttle page of this cocument

Honeywell lWJRANcECITATION V
PILOT’S EFIS REMOTE CONTROLLER (cent)DC-811
Function Connector Pin Connects To
POSITION 3 115J1-74 (24)-------------------- 115J1-77POSITION 4 -75 (24)-------------------- 115J1-78POSITION 5 -76 -----NCADF (R) -77 (24)-------------------- 115J1-74LRNA (R) DIAMOND PTR -78 (24)-------------------- 115J1-75LRNB (R) 115J1-79 -----NC
Interconnect Information
Table 501 (cent)22-14-00
Page 598.95Mar 15/89
Use or disclosure of information on this page IS subject to the restrictions on the title pag!, of thw document.

Honeywell WWANCECITATION ii/V
MG-605/805(SYMBOLGENERATOR)
Function
P- SEC ADI X DEFL INP- SECADIX DEFLINSHIELDP- SECADIY DEFLINP- SECADIY DEFLINSHIELDP- SECHSIX DEFLINP- SECHSIX DEFLINSHIELDP- SECHSIY DEFLINP- SECHSIY DEFLINSHIELDC- SECADIX DEFLINC- SECADI X DEFLINSHIELDC- SECADIY DEFLINC- SECADIY DEFLINSHIELDC- SECHSIX DEFLINC- SECHS]X DEFLINSHIELDC- SECHSIY DEFLINC- SECHSIY DEFLINSHIELDP SG VALIN(SGVALOUTC SG VALIN(SGVALOUTNAVSELVALIN(P-ID1)NAVSELVALIN(C-ID1)- MASTCOMPDINDOUT1MASTCOMPDINDOUTIDH DINDOUT2DH DINDOUT2
(+)(-)
(+)(-)
(+)(-)
(+)(-)
(+)(-)
(+)(-)
(+)(-)
(+)(-)
1)1}
RAD/FDTESTDINDOUT3RAO/FDTESTDINDOUT3HOG’HOGATTATTDMEDME
COMPOIN DOUT4COMPDINDOUT4COMPDIN DOUT5COMPDINDOUT5GNDRANGEDINDOUT6GNDRANGEOIN00UT6
,
Connector Pin Connects To
125J1A-1 ------NC-2 ------NC
-3 ------NC-4 ------NC
------NC:: ------NC
-7 ------NC-8 ------NC
-9 ------NC-10 ------NC
-11 ------NC-12 ------NC
-13 ------NC-14 ------NC
-15 ------NC-16 ------NC
-17 (24)------------------ 65J2B-81-18 ------NC-19 (24)------------------ 65J2B-82-20 ~--~--NC’21 ------NC-22 ------NC-23 (24)------------------65J2B-75-24 ------NC-25-26-27-28-29-30-31
125J1A-32
(24)------------------65J2EI;’6,FIG.A-6------NC------NC------NC------NC------NC(24)------------------65J2B-79------NC
Interconnect InformationTable501 (cent) 22-14-00
Page 598.96May 25/90
Use or dmclosure of mformatlon on this page IS sub!ect to the restrtctlons on the tttle page of this d.)cument.

Honeywell W!JRANCECITATION n/V
MG-605/805(SYMBOLGENERATOR)(cent)
Function Connector Pin Connects To
P- DH SET IN (H) 125J1A1;;(24)------------------115JI-53C- DH SET IN (H) ------NC
P REV SEL IN (+) -35 (24)------------------FIGA-4
P REVSEL IN (-) -36 ------NC
C REVSEL IN (+) -37 ------NCCREVSEL IN (-) -38 ------NC
RESERVED -39 ------NCATT IN -40 (24)------------------65J1A-106
: ATT IN -41 ------NCFD 1 PWR IN -42 (24)------------------PILOTFD
28 VFD 2 PWR IN -43 ------NC
FD RESETGND
1
-44 (24)-----------------SIGNALGNDP/C-SECADI VIDEO (+) -45 (24)----i~i----------3J1-74
P/C-SECADI VIDEO (-) -46 (24)----!-1-----------3J1-75
P/C-SECADI COLOR O (+)x
I
-47 (24)----j-j ---------- 3J1-72
P/C- SEC ADI COLOR O (-) -48 (24)----[-1- ----------
1
3J1-73
P/C- SEC ADI COLOR 1 (+)
1
-49 (24)----i-~ ---------- 3J1-70
P/C- SEC ADI COLOR 1 (-) -50 (24)----L-]- ---------- 3J1-71
P/C- SECADI COLOR 2 (+)I
1
-51 (24) ----i-r ---------- 3J1-68
P/C- SEC ADI COLOR 2 (-) -52 (24)----1--1- ----------
1+
3J1-69
P/C- SECADI COLOR3 (+) 125J1A-53 (24) ----1 -( ---------- 3J1-66
InterconnectInformationTable501(cent)
22-14-00Paqe 598.97May25/90
Use or dwclosure of information on this page is sub!ect to the restrictions on the Mle page of this document.

Honeywell M!WPANCECITATION V
Function
MG-605/805 (SYMBOL GENERATOR) (cent)
P/C- SEC ADI COLOR 3 (-)
P/C- SEC ADI RAS/STRK (+)
P/C- SEC ADI RAS/STRK (-)
p/c- SECADI FLYBACK (+)
Plc-SECADIFLYBACK(-)SHIELDGND
P- PRI ADI STRK RDY (+)
P- PRI ADI STRK RDY (-)
SHIELDC- PRI ADI STRK RDY (+)
C- PRI ADI STRK RDY (-)
FD 1 LNAV MODE GND
FD 1 GA MODE GND
FD 1 ASEL ARM MODE GND
FD 1 ASEL CAP MODE GND
FD 1 I-IDS SEL MODE GND
FD 1 ALT HOLD MODE GND
FD 1 VS HOLD MODE GND
FD 1 IAS HOLD MODE GND
Connector Pin Connects To
i
—.—
125J1A-54 (24)---~q~--,--------- 3J1-67
‘f-55 (24)---1-1-- --------- 3J1-76
Iii-56 (24)-------- --------- 3J1-77
‘f-57 (24)-------- --------- 3J1-78
il*-58 (24)---V--- --------- 3J1-79
------- J
I-59 (24)-------- -----;~r- 3J1-765J1A-23
-60 (24)-------- -----!;--) %:;:-24L-- 3J1-36
-61 ------NC-62 ------NC
-63
-64
-65
-66
-67
-68
-69
125J1A-70
(24)-----------------
(24)------------------
(24)------------------
(24)------------------
(24)------------------
(24)------------------
(24)------------------
(24)------------------
65J1B-397J1A-7265J1B-40 “7J1B-6865J1B-41, 8J1-d_7J1B-7165J1B-42, 8J1-~7J1B-7265J1B-43, 8J1-r7J1A--71, llJ1-~65J1EI-45,8J1-~7J1B-7565J1B-467J1B-76,8J1-Z,115J1-4765J1B-477J1B-77,8J1-X,115J1-48
Interconnect Information
Table 501 (cent)
22-14-00Page 598.98
Mar 15/89Use or disclosure of Information on this page IS sub)ect to the restrictions on the title page of thw LIocument.

Honeywell WURANC’CITATION V
MG-605/805(SYMBOLGENERATOR)(cent)
Function
FD 1 MACHHOLDMODEGNDFD 1 GS ARMMODEGND
ConnectorPin ConnectsTo
65J1B-48,7J1B-7[65J1B-49,8J1-g7J1B-6965JlB-50,8Jl-h7J1B-70,
125J1A-71(24)-------------------72 (24)------------------
FD 1 GS CAPMODEGND -73 (24)------------------
1OJ1B-2165J1B-51,8J1-SFD 1 VNAVARMMODEGND -74 (24)------------------7J1B-7365J1B-52,8J1-T7J1B-7465J1B-557J1A-85,65J1B-567J1A-86,65J1B-57,8J1-~7J1A-68
(24)------------------FD 1 VNAVCAP MODE GND -75
FD 1 NAV ARM MODE GND -76 (24)------------------
FD 1 NAV CAP MODE GND -77 (24)------------------
FD 1 BC ARMMODEGND -78 (24)------------------
FD 1 BC CAP MODE GND -79 (24)------------------65J1B-58,8J1-~“7J1A-67
FD 1 VORAPR ARMMODEGND -80 (24)------------------65J1B-597J1A-8765J1B-607J1A-88
FD 1 VORAPR CAPMODEGND -81 (24)------------------
MDIN81 SRNBRGCD/CSMDIN82 LRN1PORTIDOMDIN83 LRN1PORTID1MDIN84 LRN2PORTIDOMDIN85 LRN2PORTID1MDIN86 LRN3PORTIDOMDIN87 LRN3PORTID1MDIN88 LRN4PORTIDOMDIN89 LRN4PORTID1MDIN90 LRN1 IDOMDIN 91 LRN1 ID1MDIN 92 LRN1 ID2MDIN 93 LRN1ID3MDIN94 LRN2IDOMDIN 95 LRN2 ID1MDIN96 LRN2ID2MDIN97 LRN2ID3MDIN98 LRN3IDO
-82-83-84-85-86-87-88-89-90-91-92-93-94-95-96-97-98
125J1A-99
------NC------NC@~+ii--------------
------NC------NC------NC------NC------NC------NC(24)------------------(24)------------------(24)------------------------NC------NC------NC------NC------NC
125J2A-105
125J2A-105125J2A-105125J2A-105
Interconnect Information
Table 501 (cent)
22-14-00Page 598.99Mar 15/89
Use or dwclosure of Information on this page IS subject to the restncttons on the Mle pagt of thm document

Honeywell W!KWANC’CITATION V
MG-605/805(SYMBOLGENERATOR)(cent)
Function Connector Pin Connects To
MDIN 98 LRl13 ID1 125J1A-1OO ------NCMDIN100LRN3102 -101------NCMDIN101LRN3ID3 -102------NCMDIN102LRN4IDO -103------NC(SRN2 IDOWHENMDIN64 = GND)MDIN103LRN4ID1 -104------NC(SRN2 ID1WHENMDIN64 =GND)MDIN104LRN4102 -105------NC(RESERVEDWHENMDIN64 = GND)MDIN 105 LRN4 ID3 125J1A-106 ------NC(RESERVED WHEN MDIN 64 = GND)
Interconnect Information
Table 501 (cent)22-14-00
Page598.100Mar 15/89
Use or disclosure of mformatlon on this page IS subject to the restncttons on the title page of fhm r!ocument.

Honeywell W!WANCECITATION Ilfl
-.
MG-605/805 (SYMBOL GENERATOR) (cent)
Function Connector Pin Connects To
C- SEC ADI X DEFL OUT (+) 125J1B-1 ------NCC- SEC ADI X DEFL OUT (-) -2 ------NC
C- SEC ADI Y DEFL OUT (+) -3 ------NC
C- SEC ADI Y DEFL OUT (-) -4 ------NC
C- SEC HSI X DEFL OUT (+) -5 ------NCC- SEC HSI X DEFL OUT (-) -6 ------NC
C- SEC HSI Y DEFL OUT (+) -7 ------NCC- SEC HSI Y DEFL OUT (-) -8 ------NCSHIELD GND
P- SEC ADI X DEFL OUT (+)i
-9 (24)-------C- ----- 3J1-18P- SEC ADI X DEFL OUT (-) -10 (24)------~-~- ----- 3J1-19
P- SEC ADI Y DEFL OUT (+) x
1-11 (24)---------- ----- 3J1-24
P- SEC ADI Y DEFL OUT (-) -12 (24)------~-~- ----- 3JI-25
P- SEC HSI X DEFL OUT (+)x
t-13 (24)---------- ----- 2J1-18
P- SEC HSI X DEFL OUT (-) -14 (24)------J-I- ----- 2J1-19
P- SEC HSI Y DEFL OUT (+) -15- (24)f~
---------- ----- 2J1-24P- SEC HSI Y DEFL OUT (-) -16 (24)------$!- ----- 2J1-25SHIELD GND -------
P SG VALOUT (SG VALOUT1) -17 ------NCC SG VALOUT (SG VALOUT1) -18 (24)---------------- 65J1A-86NAV SEL VALOUT (P-ID1) -19 (24)---------------- FIG. A-nNAV SEL VALOUT (C-ID1) -20 ------NC
P MAST COMP DOUT1
}
A
-21 ------NCC MAST COMP DOUT1
1-22 ------NC
P DH DOUT2 -23 ------NCC DH DOUT2 -24 ------NCP RAD/FD TEST DOUT3 125J1B-25 -------------------- FIG. A-6
11 CAUTION: 100ma MAX LOAD.
InterconnectInformationTable501 (cent)
22-14-00Page 598.101
‘May 25/90Use or disclosure of reformation on this page IS sub!ect to the restncttons on the title pag? of th!s document.

Honeywell RMWAN’ECITATION n/V
Function
C RAD/FD TEST DOUT3P HDG COMP DOUT4
C HDG COMP DOUT4PATT COMPDOUT5C ATT COMPDOUT5P DME/GNDRANGEDOUT6C DME/GNDRANGEDOUT6P DH SETOUT (+)C DH SETOUT (+)PREV SELOUT PRI
MG-605/805(SYMBOLGENERATOR)(cent)
C REVSELOUTSECC REVSELOUT PRIP REVSELOUT SECRESERVED
ATTOUT; ATTOUTC AP ENGOUTC TKODOUTSPAREP/C-SECHSIVIDEO (+)P/C-SECHSIVIDEO (-)SHIELDP/C-SECHSICOLORO (+)
ConnectorPin ConnectsTo
1 CAUTION: 100ma MAXLOAD.
125J1B-26-27
A
-281 -29
-30-31-32-33-34-35
-36-37-38-39-40-41-42-43-44-45-46
125J1B-47
------NC------NC------NC------NC------NC(24)----------------FIG.A-10------NC~~~~~;~~------------65J2A-42
(24)----------------FIG.A-4
------NC------NC------NC------NC------NC------NC------NC------NC------NC
!(24)----O----------2J1-74(24)----’~-,--------2J1-75
+(24)----I?---------2J1-72
Interconnect InformationTable 501 (cent)
22-14-00Page598.102
May25/90Use or disclosure of reformation on this page IS sub!ecl to the restnct!ons on the title page of thrs d )cument

Honeywell PA!iW?ANcECITATION V
MG-605/805(SYMBOL GENERATOR) (cent)
Function Connector Pin ConnectsTo
P/C-SECHSICOLORO (-) i125J1B-48(24)-----------L~-- 2J1-73
P/C-SECHSICOLOR1 (+)
~
x-49 (24)-----------;-:- 2J1-70
P/C-SECHSICOLOR1 (-) -50 (24)-----------~-’--2J1-71
P/C-SECHSICOLOR2 (+)
i
x’51 (24)---------”--T-;-2J1-68
P/C-SECHSICOLOR2 (-) -52 (24)-----------!-l--2J1-69
P/C-SECHSICOLOR3 (+)
I
L-53 (24)---------’--7-r-2J1-66
P/C-SECHSICOLOR3 (-) -54 (24)-----------LC’--2J1-67
P/C-SECHSIRAS/STRK(+)
J
A-55 (24)---------‘-j-;- 2J1-76
P/C-SECHSIRAS/STRK(-) -56 (24)-----------!=’--2J1-77
P/C-SECWI FLYBACK (+)
J
A-57 (24)-----------r-r- 2JI-78
P/C-SECHSIFLYBACK (-) -58 (24)-----------!:-- 2J1-79
P- PRIHSISTRKRDY (+)f
‘1-59 (24)--------- --~-j- 2J1-7,
65J1A-50P- PRI HSISTRKRDY (-) -60 (24)---------~--L-~-2J1-8,
T65J1A-51
-- 2J1-36C- PRIHSISTRKRDY (+) -61 ------NCC- PRIHSISTRKRDY (-) -62 ------NCFD 2 LNAVMODEGND -63 ------NCFD 2 GAMODE GND 125JIB-64 ------NC
Interconnect Information
Table 501 (cent)22-14-00
Page598.103Mar 15/89
Useordisclosureofinformationonthispage is subject to the restrictions on the title pag? of this document,

Honeywell KNK!AN’ECITATION V
Function
FD 2 ASEL ARM MODE GND
FD 2 ASEL CAP MODE GND
FD 2 HDG SEL MODE GND
FD 2 ALT HOLD MODE GND
FD 2 VS MODE GND
FD 2 IASMODE GND
FD 2 MACH MODE GND
FD 2 GS ARM MODE GND
FD 2 GS CAP MODE GND
FD 2 VNAV ARM MODE GND
MG-605/805 (SYMBOL GENERATOR) (cent)
FD 2 VNAV CAP MODE GND
FD 2 NAV ARM MODE GND
FD 2 NAV CAP MODE GND
FD 2 BC ARM MODE GND
FD 2 BC CAP MODE GND
FD 2 VOR APR ARM MODE GND
FD 2 VOR APR CAP MODE GND
HDG VALOUT
LRN SEL VALOUT (ID2)
LAT STRG VALOUT
Connector Pin Connects To—-
125J1B-65 ------NC
-66 ------NC
-67 ------NC
-68 ------NC
-69 ------NC
-70 ------NC
-71 ------NC
-72 ------NC
-73 ------NC
-74 ------NC
-75 ------NC
-76 ------NC
-77 ------NC
-78 ------NC
-79 ------NC
-80 ------NC
-81 ------NC
-82 (24)---------------- 65J2A-3
-83 (24)---------------- 65J2A-93
125J1B-84 (24)---------------- 65J2A-84
Interconnect InformationTable 501 (cent)
22-14-00Page 598.104
Mar 15/89Use or disclosure of Information on thm page IS subject to the restrictions on the title page of this d.)cument

Honeywell !iNIL!’NcECITATION V
MG-605/805(SYMBOLGENERATOR) (cent)
Function ConnectorPin
NAVSELVALOUT(100) 125J1B-85(24)----------------V/LDEVVALOUT -86 (24)----------------
ConnectsTo
65J2A-8565J2A-86
GS DEVVALOUT -87 (24)----------------65J2A-87
DMEVALOUT -88 (24)----------------65J2A-88
P TK DETENT VALOUT -89 (24) ----------------
PAP ENG’D VALOUT -90 (24)----------------
APSVALOUT -91 (24)----------------
65J2A-8965J2A-9065J2A-91
LNAV APP DOUT> -92 (24)---------------- 65J2A-92
TTLDOUT
1
A 1 -93 (24)----------------
DMETTNDOUT -94 (24)----------------
65J2A-93
65J2A-94
MIDMARKDOUT(5V) -95 (24)----------------65J2A-95
PW MOVE DOUT
TO/FR DC OUT (+)
TO/FRDC OUT (-)
LRNLATDCOUT STRG(-)
LRNLATDCOUTSTRG (+)
DMEDC OUT (-)
DMEDC OUT (+)
-96 (24)-------r--------65J2A-96
t-97 (24)--~F ----------- 65J2A-11
-98 (24)--I---!---------65J2A-12
1-99 (24)---------------- 65J2A-62
bIt-100(24)-- ------------
I-101 (24)=-m--- --------
I
65J2A-1OO
65J2A-101
-102(24)--$-----------65J2A-102
SHIELDGND--Y
125J1B-103(24)--;:------------CRSERR (+)OUT 65J2A-103
CAUTION:100MA MAX LOAD
Interconnect InformationTable 501 (cent) 22-14-00
Page598.105Mar 15/89
Use or disclosure of information on Ws page s sub)ect to the restrictions on the tttle pagt of thts document,

MG-605/805(SYMBOLGENERATOR)(cent)
Function Connector Pin Connects To
J
.—
CRS ERR (-) OUT 125J1B-104 (24)------1-1- ----- 65J2A-104‘1’
-lDGERR (+) OUT
\
-105 (24)------l~~- ----- 65J2A-105
Ii~DG ERR (-) OUT 125J1B-106 (24)---------- ----- 65J2A..106
SHLD GND--1’
Interconnect InformationTable501 (cent) 22-14-00
Page 598.106May 25/90
Use or disclosure of Information on this page k subject to the restrictions on Ihe title page of this d<~cument

Honeywell WJRANC’CITATION V
MG-605/805 (SYMBOL GENERATOR) (cent]
Function Connector Pin Connects To
+28V DC POWER+28 V DC POWERSPARE28 VOLT RETURN28 VOLT RETURNSPARECHASSIS GND
CHASSIS GNDSIGNALGNDSIGNALGNDDISCRETERETURNGNDDISCRETERETURNGNDASCB SHIELD GNDASCB SHIELD GNDP AC REF (+)
PAC REF(-)
SYSASCBA DATA(+)SYSASCBA DATA(-)
SYSASCBACLK (+)SYSASCBACLK (-)
L LRN XMIT(+) .L LRN XMIT (-)MDIN 1 SPLSELOMDIN2 SPLSEL1MDIN3 SPLSEL 2MDIN4 SPLSEL3MDIN5 SPLIN OMDIN6 SPLIN 1MDIN 7 SPLIN 2MDIN8 SPLIN 3MDIN9 COMPMONON/OFFMDIN 10 C 4.5 V ROT VALID
125J2A-1-2-3-4-5
$-8-9-lo-11-12-13-14-15
-16
-17-18
-19-20
-21-22-23-24-25-26-27-28-29-30-31-32
(DO)----------------*PILOT28VPWR@~~:ii-------------~FIG.A-1
(20)----------------DC PWRGND(20)----------------DC PWRGND-----NC(22)----------------CHASSISGND(22)----------------CHASSISGND(22)----------------SIGNALGND(22)----------------SIGNALGND(22)----------------DISCRETEGND(22)----------------DISCRETEGND------NC------NC
1
(22)----------]---- PILOT26VAC1-1PWR,FIG.A-3
(22)---------u----AC GND
1J----- SHIELDGND
-----------,:,--}FIG A-g----r-~-
------- ------- --
!
Y_ “--- - - - -- - -- -__-~~-?,F~G. A-9-----------------GL-J
4L --
------NC------NC------NC------NC------NC------NC------NC------NC------NC------NC~~~!;;~;------------125J2A-105
MDIN11 P+4.5V ROTVALID 125J2A-33(24)----------------15J1-7,65J1B-3
Interconnect Information
Table 501 (cent)
22-14-00Page 598.107
Mar 15/89Use or disclosure of mformat!on on this page IS sublect to the restrictions on the title pag ~ of thm document.

Honeywell ?MW!ANC’CITATION n/V
t4G-605/805(SYMBOLGENERATOR)(cent)
Function ConnectorPin ConnectsTo
MDIN12 WEIGHTON MHEELS 125J2A-34(24)----------------~~~C~F~SWITCH.-
t4DIN13 FLIP -35 ------NCMDIN14 HSIMODE -36 ------NCMDIN15 IRS1AN/DIG -37 ------NCMDIN16 HDGIFREE/SLAVE-MAG/TRU -38 (24)----------------TO F/SSWITCHMDIN17 PILOTLRNA -39 ------NCMDIN18 COPILOTLRNA -40 ------NCMDIN19 SPARE -41 ------NCMDIN20 tiDG2FREESLAVE-MAG/TRU -42 (24)----------------TO F/SSWITCH14DIN21 SPARE -43 ------NCMDIN22 CITATIONV -44 (24)----------------125J2A-lo5MDIN23 SPARE -45 ------NCMDIN24 HDG1 DEF -46 ------NCMDIN25 HDG3 DEF -47 ------NCMDIN26 SRNTGL -48 ------NCMDIN27 CAARULES -49 ------NCMDIN 28 PILOT’S DME~’ -50 - - - . -- - - - - - - . - - -- - .- C164JlA-3,
65J1B-34
MDIN 29 CO-PILOT’S DME ~ -51 ------NC
MDIN30 PILOT’STTL -52 --------------------C164JI,B-64,65JIB-35
MDIN31 CO-PILOT’STTL -53 ------NCMDIN32 IRS2AN/DIG -54 ------NCMDIN33 LRN1 MAG/TRU -55 ------NCMDIN34 SPARE -56 ------NCMDIN35 SPARE 125J2A-57------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.108May 25/90
Use or dwclosure of Information on th!s page IS sub)ecl to the restrictions on the title page of this Cjcument

Honeywell WJW’”c’CITATION V
MG-605/805(SYMBOLGENERATOR)(cent)
Function ConnectorPin ConnectsTo
MDIN36 LRNTGL IDO 125J2A-58------NCMDIN37 AIRDATACMDDISABLE -59 ------NCMDIN 38 LRN3 MAG/TRU -60 ------NCMDIN39 SPARE -61 ------NCMDIN40 SPARE -62 ------NCMDIN41 ROTON/OFF -63 ------NCMDIN42 WX DUAL/SINGLE -64 (24)----------------125J2A-105MDIN43 WX TGL -65 ------NCMDIN44 FMS S/D -66 ------NCMDIN 45 VORTGL -67 ------NCMDIN 46 MFD GSPDSRCIDO -68 (24)----------------125J2A-105MDIN47 MFDGSPDSRCID1 -69 ------NCMDIN48ATT 1 WRAP -70 (24)----------------125J2A-105MDIN49ATT2 WRAP -71 ------NCMDIN 50ATT3 WRAP -72 ------NCMDIN51 ATT4 WRAP -73 ------NCMDIN52 liDGTGL IDO -74 ------NCMDIN53 HDGTGL ID1 -75 ------NCMDIN54 LRN 1 DTRK/TKE+DA -76 ------NCMDIN 55 LRN 3 DTRK/TKE+DA -77 ------NCMDIN 56 ATTTGL IDO -78 ------NCMDIN57ATTTGL ID1 -79 ------NCMDIN58 RESERVED -80 ------NCMDIN59 RESERVED -81 ------NCMDIN60 SRNSRCIDO -82 ------NCMDIN 61 SRN SRC ID1 -83 (24)---------------- 125J2A-105MDIN 62 P STBY SEL -84 ------NCMDIN 63 C STBYSEL -85 ------NCMDIN64 EFIS5 TUBE/3TUBE -86 (24)----------------125J2A-105MDIN65 RADALT S/D -87 ------NCMDIN66 COUPLE1/2 -88 ------NCMDIN67 SCDC/DC-811 -89 (24)----------------125J2A-105MDIN68 SRNBRG3/4 -90 (24)----------------125J2A-105MDIN69ADFBRG3/4 -91 (24)----------------125J2A-105t4DIN70 MLSS/C 125J2A-92(24)----------------125J2A-105
Interconnect Information
Table 501 (cent)22-14-00
Page 598.109Mar 15/89UseordisclosureOf mformailon on this page IS sub)ect to the restrictions on the Mle page of this document.

Honeywell WRANcECITATION V
MG-605/805 (SYMBOLGENERATOR)(cent)
Function ConnectorPin ConnectsTo
MDIN71 ADFS/D 125J2A14~(24)----------------125J24-105MDIN72 RADALT IDO ------NCMDIN73 RADALT ID1 -95 ------NC
MDIN 74AOA, A/S,F/S IDO -96 (24)----------------125J2A-105MDIN75AOA, A/S,F/S ID1 -97 (24)----------------125J2A-105MDIN76 AOA,A/S,F/S ID2 -98 ------NCMDIN77 WINDP8/XY -99 ------NCMDIN 78 TRANSITIONON/OFF -100(24)----------------125J2A-105MDIN79 LRN1 BRGCD/CS -101------NCMDIN80 LRN3BRG CD/CS -102 ------NC
L SG BACKUP -103 ------NC
R SG BACKUP -104 ------NC
MDIN GND -105(24)----------------PROGGNDMDIN GND 125J2A-106(24)----------------PROGGND
Interconnect Information
Table 501 (cent)22-14-00
Pdqe 598.110‘Mar 15/89
Use or disclosure of reformation on this page IS subject to the restrictions on the title page of this c~}cument.

Honeywell tifi!iifi!!ANcECITATION ii/V
MG-605/805 (SYMBOL GENERATOR) (cent)
Function Connector Pin Connects To
+28 VOLT DC POWER 125J2B-1 (20)---------------- :& IL~T128V,
+28 VOLT DC POWER }:$ (20)---------------- CIRiUI+ BREAKERSPARE28 VOLT DC RETURN -4 (20)---------------- DC PWRGND28 VOLT DC RETURN ~~ (20)---------------- DC PWRGNDSPARERESERVEDDC OUT (+) -----NCRESERVEDDC OUT (-) :: -----NC
V/LOEVOC OUT (+) t-9 (24)-----i~l------- 65J2A-98
V/LDEV DC OUT (-)+
i-10 (24)-----’--- ----- 65J2A-97SHIELDGND - - -- - -- - - -
GS DEV DC OUT (+) -11 (24)-----~7--!--:-- 65J2A-99
GS DEV DC OUT (-)1[+-12 (22)------ --------65J2A-30
SHIELDGND Y. --- -- - -- -
ASCBSHIELDGND -13 -----NCASCBSHIELDGND -14 -----NC ‘
CAC REF (+) !-15 (22)-----, ---T~----- ~:[IL~T326VAC,
CAC REF (-)+ it
-16, (22)--------- ---- AC GND-Y--A--SHIELDGNDSYSASCBB DATA (+) -17SYSASCBB DATA(-)
----------------t-;--18 ----------------y- ) FIG.A-9
--SYSASCB BCLI((+) -19 --------.-------SYSASCBB CLK (-) -20
T~;----------------- - -
Y-) FIG.A-9
R LRNXMIT (+) -21 ------NCR LRNXMIT(-) -22 ------NCLVALIN1ARINC1 -23 [24)----------------65J1A-73,
C164J1A-46L VALIN2GS DEV -24 (24)----------------65J1A-74,
C164J1A-74L VALIN3SPD DEV -25 (24)---------------- FIG. A-5L VALIN4 VNAV DEV -26 (24) ---------------- y~:~A;j6, 7J1B-9
L VALIN5 VOR/LOC OEV 125J2B-27(24)----------------65Jl~-77,C164J1B-91
InterconnectInformationTable501 (cent) 22-14-00
Page598.111May 25/90
UseordisclosureofInformationon Ihm page E sub!ect to the restrictions on the tile page of thm document

Honeywell WNRANC’CITATIONV
MG-605/805 (SYMBOL GENERATOR) (cent)
Function Connector Pin
L VALIN6RADALT 125J2B-28(24)----------------L VALIN7SPARE -29 ------NCVALIN8LRN1LATDEV -30 ------NC(ADF2VLDWHENMDIN 64 = GND)VALIN9LRN1 VERT DEV -31 ------NCL VALIN1OADF -32 (24)----------------
L VALIN1lFD1 -33
VALIN 12 HDG 1 -34
VALIN13ATT 1 -35
L VALIN14 SPARE -36L VALIN15ARINC O -37L VALIN 16 LRN1 28 V WPT ALERT -38L VALIN17 ROT -39L VALIN18TCS -40
L VALIN19SPARE -41VALIN20 RESERVED -42VALIN21 SPARE -43L VALIN22AP ENG’D -44
L VALIN23TK DETENT -45
L VALIN24APS -46
RVALIN1ARINC1 -47RVALIN 2 GS DEV -48RVALIN3 SPDDEV -49R VALIN4 VNAVDEV -50R VALIN5VORLOC -51RVALIN 6 RADALT 125J2B-52
(24)----------------
(24)----------------
(24)----------------
------NC------NC------NC------NC(24)----------------
------NC------NC------NC(24)----------------
(24)”----------------
(24)----------------
------NC------NC------NC------NC------NC------NC
ConnectsTo
FIG.A-6
164J1B-99,65J1A-82
65J1A-83,7J1B-476J1-e,65J1A-84lJ1-GG,7J1A-1965J1A-85
1OJ1B-19,65J1A-90
65J1A-94,1OJ1B-11llJ1-H,65J1A-951OJ1B-1565J1A-96,16J1-23
Interconnect InformationTable 501 (cent)
22-14-00Paqe 598.112
‘Mar 15/89Use or dwclosure Of mformatlon on thw page IS subject to the restrictions on the Mle page of thm d >cument.

Honeywell MI!IJ?ANCECITATION V
Function
R VALIN7 SPAREVALIN8 LRN 3 LAT DEVVALIN 9 LRN 3 VERT DEVR VALIN1O ADFR VALIN1l FD2VALIN 12 HDG 3
VALIN 13 ATT 3
MG-605/805 (SYMBOL GENERATOR) (cent)
R VALIN14 SPARER VALIN15 ARINC OR VALIN16 LRN3 28 V UPT ALERTR VALIN17 ROTR VALIN 18 TCSR VALIN19 SPAREVALIN 20 RESERVEDVALIN21 SPARER VALIN22 AP ENG’DR VALIN23 TK DETENT
R VAL1N24 APSSPAREOVER TEMPSPARESPAREINNER MARKER (+)
INNER MARKER (-)SHIELD
MIDDLE MARKER (+)
Connector Pin Connects To
125J2B-53-----NC-54 -----NC-55 -----NC-56 (24)----------------C164J1B-99-57 -----NC-58 (24)----------------C2J2-X
65J1A-92-59 -----NC
-60-61-62-63-64-65-66-67-68-69-70-71-72-73-74-75
-76
125J2B-77
-----NC-----NC-----NC-----NC-----NC-----NC-----NC-----NC-----NC-----NC-----NC-----NC~::~:~;-------~----- AIRCRAFT ANN
-----NC(24)---------------- ;;~;~l&73,
(24)---->
(24)---------------- 65J2A-61,C164J1A-60
Interconnect Information
Table 501 (cent)
22-14-00Page 598.113
Mar 15/89Use or disclosure of Information on this page is subject to the restrictions on the title pag( of this documenl.

Honeywell lWJRANcECITATION V
Function
MIDDLE MARKER (-)
OUTER MARKER (+)OUTER MARKER (-)
MFMF
M:MF
M?MF
M?MF
3X llEFL OUT (+)J X DEFL OUT (-)~IELD GNDIY DEFL OUT (+)3 Y DEFL OUT (-)-IIELDGND) VIDEO (+)1 VIDEO (-)iIELD CIN13; pm} : ~+;
MFD RAS/STRK (+)
MFD RAS/STRK (-)
MFDSTRK RDY (+)MFD STRK RDY (-)
MC/MGDATA (+)MC/MGLATfi(-)
SPARESPARE
MG-605/805(SYMBOLGENERATOR)(cent)
Connector Pin Connects To
125J2B-78
-79-80
-81-82-83-84-85-86-87-88
(24)------L
(24)-----------------(24)-------L
1(24)--- ---;=’l------(24)--- ------------(24)----.----Y(24)---{---ID;------(24)---------------(24)------Y
{(24)------i~;-------(24)------+--------
- - . -; - --i.
(24)---~j--~j-------(24)--- ---.%--------
65J2A-63,C164JIB-74
127J1-1127J1-2
127J1-9127J1-10
127J1-54127J1.=55
127J1-50127J1-51
A-91 (24)---~l--l-i------- 127J1-46-92 (24)------->-------- 127J1-47
‘k$-93 (24)--- ~:l:i------- 127J1-42-94 (24)--- ~------- 127J~-43
yA-95 (24)--- ------------ ~27J1-38-96 (24)---j=!j=!------- 127J1.39
yA-97 (24)--- ------------ 127J1-58-98 (z+--~--+------- 127J1-59
I-101 (24)---------- --=-- 127J1-7-102(24)-----------~$- 127J1-8
I
‘-- 127J1-36-103(24)-------------- 126J1-24-104(24)-----------~+’--126JI-25
‘-- SHIELDGND-105-----NC
I25J2B-106-----NC
Interconnect Information
Table 501 (cent)
22-14-00Page 598,114
Mar 15/89Use or disclosure of Information on this page IS subject to Ihe resmct!ons on the Mle page of this c ocumenl.

Honeywell !MNRANCECITATION V
Function
#1 PITCHX
#1 PITCH Y
#1 PITCHZ
#1 ROLLX
#1 ROLLY
#1 ROLLZ
HDG 1
HDG 1
HDG 1
RESERVEDRESERVEDRESERVEDHDG1SYNC
HDG1SYNC
RESERVEDRESERVEDP- RADALT
P- RADALT
(x)
(Y)
(z)
MG-605/805(cent)
Connector Pin Connects To
1:
125J3A-1 (24)---------- --~;- lJ1-z,65J2A-15
-2 (24)-----------~-;--lJ1-y,65J2A-16
-3 (24)-----------:-- lJ1-~,65J2A-17
-4
-5
-6
-7
-8
-9
-lo-11-12
(+) -13
(-) -14
-15-16
(+) -17
(-) 125J3A-18
1&--
(24)------------~r-
(24)-----------~-;--
(24)-----------L-’--
t
Yk--(24)-----------~{--
!,(24)-----------~--;--
(24)-----------$--
!---------NC------NC------NC
11(24)-----------~;-
(24)-----------$
>-. .
------NC
SHIELDGNDlJ1-p,57Jl-E65J2A-18lJ1-q,57Jl-F65J2AL19lJ1-r,57Jl-G65J2A-20SHIELDGND6J1-L.65J2A~216J1-M,65J2A-226J1-K,65J2A-23SHIELDGND
6J1-U,65J2A-286J1-V,65J2A-29SHIELDGND
------NC~ ~(24)-----------: ~.~FIG.
i(24)-----------~ -~A-6
[.. SHIELD GND
Interconnect InformationTable 501 (cent)
22-14-00Page 598~li5
Mar 15/89Use or disclosure of Information on this page IS subject to the restrmflons on the title pagfi of this document.

Honeywell W!!URANCECITATION V
MG-605/805 (cent)
Function Connector Pin Connects To.—
RESERVED 125J3A-19 ------NCRESERVED -20 ------NCRESERVED -21 ------NCRESERVED -22 ------NCP- DC81O DAT (+)
$-23 (24)--------- ---- 115J1-36
P- DC81O DAT (-) -24 (24)--------- -~-’-- 115J1-37~-- SHIEL~ GND
P-DH SET (W) IN -25 (24)---------------- 115J1-54,65J2A-43
P- OH SET (L) -26 (24)---------------- 115J1-55,
1
65J2A-44P- CRS SEL X/TACH (+) -27 (24)--Y~-- -------- 23J1-D,
65J2A-45P- CRS SEL Y/TACH (-) -28 (24)------ -------- 23J1-E,
65J2A-46P- CRS SEL Z -29 (24)----------------
1’
23J1-1:,65J2A-47
SHIELD GNII ------P- HDG SEL X/TACH (+)
[
-30 (24)--7=7-- -------- 23J1-:.,
65J2A-48P- HDG SEL Y/TACH (-) -31 (24)--;-;-- -------- 23J1-M,
65J2A-49P- HDG SEL Z 125J3A-32 (24)--J-J-- -------- 23J1-N,
1’65J2A-50
SHIELD GND ---...-
Interconnect Information
Table 501 (cent)
22-14-00Page 598.116
Mar 15/89Use or disclosure of mformahon on this page IS sub!ect to the restrictions on the title page of this ,Iocument.

Honeywell UNRANCECITATIONV
MG-605/805 (cent)
Function Connector Pin
#1 VORBRG X/SIN 125J3A-33(24)----------Q--J
#l VOR BRGY/COM ‘4 ~-34 (24)----------jT--
#1 VOR BRG Z/COS‘!
-35 (24)----------l j---
#l VORBRGCOM -36 (24-----------G-!
1
1----#l ADFBRGX/SIN -37 ~24)--q- ---------
#l ADF BRG Y/COM -38 (24)-- -,- ---------
#l ADF BRG Z/COS1
-39 (24) --1-------------
$1ADFBRGCOM -40 (24)--J~l-----------
1------ ----#l SRNCRSDEV (+)
-T-41 (24)-------- ------1[
#l SRNCRSDEV (-) -42 (24)-------4-i------
v
I
-------#l SRNGS DEV (-) -43 (24)---fi----------
#l SRNGSDEV (+)
‘11J II
-44 (24)---t-t----------
#1 LRNDSRTRKX -45#1 LRNDSRTRK Y -46#1 LRNDSRTRKZ -47#l LRNBRGX/SIN -48(ADF2X/SINWHENMDIN64 = GND)#1 LRN BRGY/COM -49(ADF2Y/COMWHENMDIN64 = GND)#1 LRN BRG Z/COS -50
(ADF2 Z/COS WHEN MDIN64 = GND)#1 LRNBRGCOM 125J3A-51(ADF2COMWHENMDIN64 = GND)
I
I’-----------------NC------NC------NC
I
I(24)----fi--------
(24)----;-!--------
(24)----l-r--------
(24)----1-]---------vL - - ------ --
ConnectsTo
C164J1B-11,65J2A-51C164J1B-37,65J2A-52C164J1B-12,65J2A-53C164J1B-37,65J2A-54SHIELDGND65J2A-55,164J1A-6165J2A-56,164J1A-3365J2A-57,164J1A-4765J2A-58,164J1A-33SHIELDGNDC164J1B-78,65J2A-65
C164J1B-75,65J2A-66SHIELD GNDC164J1B-75,C2J2-C,65J2A-67,65J2A-66C164J1B-79,C2J2-D,65J2A-68SHIELDGND
C164J1A-61
C164J1A-33
C164J1A-47
C164J1A-33SHIELDGND
Interconnect InformationTable 501 (cent)
22-14-00Page 598.117
‘Mar 15/89Useordisclosureof Information on this page is subject to the restncttons on the t!tle pagt of this document.

Honeywell MI!UPAN’ECITATION V
-.
MG-605/805 (cent)
Function Connector Pin Connects To
#l LRN TO/FROM (+) 125J3A-52 ------NC#l LRN TO/FROM (-) -53 ------NC#1 LRN LATDEV (+) -54 ------NC$1 :~: ::;DEV (-) -55 ------NC
(+) -56 (24)-----------_i~~- FIG. A-E
P- SPD DEV (-) -57 (24)------------!-~-
Y
FIG. A-E
-- SHIELD GNDP PITCH CMD (+) -58 (24)------------~-i- 65J2A-73,
7J1B-30P PITCH CMD (-) -59 (24)---------------- 65J2A-7~,
T7J1B-31
-- SHIELD GNDP ROLL CMD (+) -60 (24)------------=- 65J2A-75, 7J1A-29P ROLL CMD (-) -61 (24)---------------- 65J2A-76, 7J1A-30
%- SHIELD GNDP ROT (+) -62 (24)------------~r- 15J1-4,
65J2A-77P ROT (-) -63 (24)----------------
T
15J1-5,65J2A-78
-- SHIELD GN!Ip- AIR DATA CMD (+) -64” (24)------------~r- 65J2A-79,
9J1-39p- AIR DATA CMD (-) -65 (24)---------------- 65J2A-80, 7JIB-37
T9J1-33
-- SHIELD GNDP- AC STEER IN (+) -66 ------NCP- AC STEER IN (-) 125J3A-67 ------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 598.118
Mar 15/89Use or disclosure of information on thts page IS sub)ect to the restrictions on the Ittle page of this :]ocument

Honeywell WMRANcECITATION V
.
MG-605/805(cent)
Function ConnectorPin ConnectsToI
PWX VIDEODATA(P)
/
125J3A-68(24)------------~i- 5!~J1-g,65J2B-30
PWX VIDEODATA(N) -69 (24)-----------L-!-
1
59J1-h,65J2B-31
i-- SHIELDGND
P WX CONTROLDATA(P) -70 (24)----------l-j-r-59J1-m,
i65J2B-32
P WX CONTROLDATA(N) -71 (24)-----------!!]--59J1-n,65J2B-33
P IAS SET (+)’ -72 ------NCP IASSET (-) -73 ------NC
P- VNAV DEV (+)
1
-74 (24) ---------- -j~~- 65J2B-38,
ii7J1B-14,
16J1-28P- VNAVDEV (-) -75 (24)-----------l-~-
r
65J2B-39,7JlB-15,
1
16J1-27-- SHIELDGND
P PROLINENAV (+) -76 (24)-----------i~i- 164J1B-89,6$iJ2B-40
P PROLINENAV(-) -77 (24)-----------!-!- 164J1A-59,
I
Y65J2B-41
-- SHIELDGNDP PROLINEDME (+) -78 (24)-----------~-r- 164J1A-57,
65J2B-42P PROLINEDME (-) -79 (24)-----------L-L-
T
164J1A-44,65J2B-43
I
-- SHIELDGNDPARINC O DATA(+) -80 (24)-----------fi-- 429 HSDATA
P ARINCO DATA(-) -81 (24)-----------1----FF!OMLRN1~.- SHIELDGND
PARINC O SYNC(+) -82 ------NCPARINC O SYNC(-) 125J3A-83------NC
Interconnect Information
Table 501 (cent)
22-14-00Page 598.119
Mar 15/89Use or disclosure Of lnfOrmatlOn on this page is sublect to the restrictions on the title page of this document.

Honeywell M!JRANCECITATION V
Function
P ARINCO CLK (+)P ARINC O CLK (-)
P ARINC 1 DATA (+)
P ARINC 1 DATA (-)
P ARINC1 SYNC(+)
P ARINC1 SYNC(-)
PARINC 1 CLOCK (+)
PARINC 1 CLOCK (-)
PARINC2 DATA (+)
P ARINC2 DATA (-)
PARINC3 DATA (+)P ARINC3 DATA (-)
PARINC5 DATA (+)PARINC5 DATA (-)
PARINC6 DATA (+)PARINC6 DATA (-)
PARINC7 DATA (+)PARINC7 DATA (-)
PARINC8 DATA (+)P ARINC8 DATA (-)
PARINC9 DATA (+)PARINC9 DATA (-)
SPARE
MG-605/805 (cent)
Connector Pin
125J3A-84------NC-85 ------NC
I-86 (24)---------l~f-----l]
-87 (24)---------1-1------
Y
Jlt-89 (24)---------,-T ------
Y
?
------90 (24)---------1+ -----
jlt-91 (24)---------,-j------
r--------92 ------NC
-93 ------NC
-94 ------NC-95 ------NC
-96 ------NC-97 ------NC
ConnectsTo
C164J:1A-5,65J2B-50C164JIA-15,65J2B-=51SHIELIIGNDC164JI.A-26,65J2B-52C164JIA-45>65J2B-53SHIELDGNDC164JIA-19,65J2B-54C164J1A-17,65J2B-55SHIELDGND
-98 ------NC-99 ------NC
-1oo------NC-101------NC
1-102 (24)----------R- ---- 116J1-33-103(24)----------- ---- 116J1-2
Y ------- SHIELDGND
-104------NC-105------NC
125J3A-106------NC
Interconnect Information
Table 501 (cent)22-14-00
Page 598.120Mar 15/89
UseordisclosureofinformationonthispageIS subjecttotherestrictionsonthetttlepageofthis:ocumenl

Honeywell iWiik~ANcECITATION V
Function
#3 PITCH X
#3 PITCH Y
#3 PITCH Z
#3 ROLL X
#3 ROLL Y
#3 ROLL Z
HDG2 X
HDG2 Y
HDG2 Z
RESERVEDRESERVEDRESERVEDtiDG2 SYNC (+)
HDG2 SYNC (-)
RESERVEDRESERVEDC- RADALT (+)
C- RADALT (-)
MG-605/805(cent)
ConnectorPin ConnectsTo
125J3B-1 ------NC
-2 ------NC
-3 ------NC
-4 ------NC
-5 ------NC
-6 ------NC
1-7 (24)-------1~~----- C2J1-S
-8 (24)-------:-~----- C2J1-tI’*
-9 (24)------- ------ C2J1-UY -------SHIELDGND
-lo ------NC-11 ------NC-12 ------NC
I
-13 (24)-------~~r----- C6J1-UII
-14 (24)-------- ------ C6J1-VY -------SHIELDGND
-15 ------NC-16 ------NC-17 ------NC
125J3B-18------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.121
Mar 15/89Useordisclosureof mformatlon on this page IS sublect to the restrictions on the Mle pag,~of this document.

Honeywell M!iK~ANcECITATION V
Function
RESERVEDRESERVED
RESERVEDRESERVED
C- DC811DAT (+)C- DC811DAT (-)
C- DH SET (W) INC-DHSET (L) IN
C- CRS SEL X TACH (+)
C- CRS SEL YTACH (-)
C- CRS SEL ZSHIELD GND
C- HDG SEL X TACH (+)
C- HDG SEL Y TACH (-)
C- HDG SEL ZSHIELD GND
MG-605/805 (cent)
Connector Pin Connects To.—
125J3B-19 ------NC-20 ------NC
-21 ------NC-22 ------NC
-23 ------NC-24 ------NC
-25 ------NC-26 ------NC
1-27 (24)---~r---------23J2-9
!-28 (24)--~r;--- ------- 23J2-E
-29 (24)---&--i------- 23J2-Z-------
-30 (24)--T=;--
t
------- 23J2-L
-31 (24)--;-;--- ------- 23J2-hl
125J3B-32(24)--~Y~---t-------23J2-N-------
Interconnect Information
Table 501 (cent)
22-14-00Page 598.122
Mar 15/89Use or disclosure of mformatlon on Ihts page IS subject to the restrictions on the htle page of this d >cument.

Honeywell W!WANCECITATION V
MG-605/805 (cent)
Function Connector Pin Connects To
#2 VOR BRG X/SIN 125J3B-33 ------NC#2 VOR BRG Y/COM -34 ------NC
#2 VOR BRG Z/COS -35 ------NC:2 VOR BRG COM -36 ------NC
#2 ADF BRG X/SIN -37 ------NC
#2 ADF BRG YICOM -38 ------NC
#2 ADF BRG Z/COS -39 ------NC
#2 ADF BRG COM -40 ------NC
#2 SRN CRSDEV (+) -41 ------NC#2 SRN CRS DEV (-) -42 ------NC#2 SRN GLIDE SLOPE DEV (+) -43 ------NC#2 SRN GLIDE SLOPE DEV (-) -44 ------NC#3 LRN DSR TRK X -45 ------NC#3 LRN DSR TRK Y#3 LRN DSR TRK Z
-46 ------NC-47 ------NC
#3 LRN BRG X/SIN -48 ------NC#3 LRN BRG YjCOM -49 ------NC#3 LRN BRG Z/COS -50 ------NC#3 LRN BRG COM 125J3B-51 ------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 598;123
Mar 15/89Use or disclosure of Information on thm page IS subject to the restrictions on the title pag? of this document.

Honeywell W!M!ANCECITATION V
MG-605/805 (cent)
Function Connector Pin Connects To——
#3 LRNTO/FROM(+) 125J3B-52------NC+3 LRNT()/FRoM(-) -53 ------NC:3 LRNLATDEV(+) -54 ------NC#3 LRNLATDEV (-) -55 ------NCC- SPD DEV (+) -56 ------NC
G= SPDDEV (-) -57 ------NC
C PITCH CMD (+) -58 ------NC
C P~TcH cMD (-) -59 ------NC
C ROLL CMD (+) -60 ------NC
C ROLLCMD (-) -61 ------NC
c ROT (+) -62 ------NC
C ROT (-) -63 ------NC
C- AIR DATA CMEI (+) -64 ------NC
c- AIR DATAcMD (-) -65 ------NC
C- AC STEER IN (+) -66 ------NCC- AC STEER IN (-) 125J3B-67 ------NC
— —-
Interconnect InformationTable 501 (cent)
22-14-00Page598.124
Mar 15/89Use or disclosure Of Information on Ihts page IS sub)ecf to the restrictions on the tdle page of this r.ocument

Honeywell MWJF!ANC’CITATION V
Function
CWX VIDEODATA (P)
CWX VIDEO DATA (N)
C WX CONTROLDATA(P)
C WX CONTROLDATA(N)
C IASSET (+)C IASSET (-)C- VNAVDEV (+)
C- VNAVDEV (-)
C PROLINENAV (+)
C PROLINENAV (-)
C PROLINEDME (+)
C PROLINEDME(-)
MG-605/805 (cent)
Connector Pin Connects To
125J3B-68------NC
-69 ------NC
-70 ------NC
-71 ------NC
-72 ------NC-73 ------NC-74 ------NC
-75 ------NC
-76 ------NC
-77 ------NC
-78 ------NC
125J3B-79------NC
Interconnect Information
Table 501 (cent)22-14-00
Page 598.125Mar 15/89
Use or disclosure of mformatlon on this page IS subject to the restrictions on the t[tle pay ? of thm document

Honeywell MMRAN’ECITATION V
MG-605/805 (con~)
Function Connector Pin Connects To
C ARIllC O DATA (+) 125J3B-80 ------NCC ARINC O DATA (-) -81 ------NC
C ARINC O SYNC (+) -82 ------NCCARINCO SYNC (-) -83 ------NC
C ARINCO CLK (+) -84 ------NCCARINCO CLK (-) -85 ------NC
C ARINC 1 DATA (+) -86 ------NCC ARINC 1 DATA (-) -87 ------NC
C ARINC 1 SYNC (+) -88 ------NCCARINC 1 SYNC (-) -89 ------NC
C ARINC 1 CLOCK (+) -90 ------NCC ARINC 1 CLOCK (-) -91 ------NC
C ARINC2 DATA (+) -92 ------NCC ARINC2 DATA (-) -93 ------NC
C ARINC3 DATA (+) -94 ------NCC ARINC3 DATA (-) -95 ------NC
C ARINC5 DATA (+) -96 ------NCC ARINC5 DATA (-) -97 ------NC
C ARINC6 DATA (+) -98 ------NCC ARINC6 DATA (-) -99 ------NC
C ARINC7 DATA (+) -100 ------NCC ARINC7 DATA (-) -101 ------NC
C ARINC8 DATA (+) -102 ------NCC ARINC8 DATA (-) -103 ------NC
C ARINC9 DATA (+) -104 ------NCCARINC9 DATA (-) -105 ------NC
SPARE 125J3B-106 ------NC
I
Interconnect InformationTable 501 (cent)
22-14-00.—Page 598.126
Mar 15/89Use or disclosure of information on this page is sub)ecl to the restrictions on the Mle page of this uocurnent

Honeywell H%i!i?’””CITATION V
Function
+28V DC PWR
DC PWR GROUNDSIGNAL GROUNDCHASSIS GROUNDO-28 V DC LIGHTING POWER(H)O-5V AC/DCLIGHTINGPWR (H)
LIGHTING POWER COMMONREMOTE PAGE BUTTON INPUTREMOTE RECAL BUTTONINPUTREMOTESKIPBUllONINPUTREMOTEENTERBUTTONINPUTREMOTENORMALCHECKLISTREMOTEEMERGENCYCHECKLISTDI 1 DISCRETEINDI 1 DISCRETEINREMOTESWITCHCOMMONRESERVEDRESERVEDRESERVEDRESERVEDRESERVEDRESERVEDRESERVEDMC-MGDATABUS (H)
PILOT’SMC-800
ConnectorPin
126J1-1 (22)------------------
-2 (22)-------------------3 (22)-------------------4 (22)-------------------5 ------NC-6 (22)------------------
-7 (22)-------------------8 ------NC-9 ------NC-lo------NC-11------NC-12------NC-13------NC-14------NC-15------NC-16------NC-17------NC-18------NC-19------NC-20------NC-21------NC-22------NC-23------NC ‘
126J1-24(24)-----,+----------
ConnectsTo
PILOT28VDCPWR,FIG.A-1DC POWER GNDSIGNALGNDCHASSISGND
PILOT5V *LIGHTINGLIGHTINGGND
125J2B-103
Interconnect Information
Table 501 (cent)22-14-00
Page 598:127Mar 15/89
Use or disclosure of ln~ormatlon on this page IS subject to the restr!ctlons on the tile pag~ of this document.

Honeywell B!iW’”c’CITATION V
PILOT’SMC-800(cent)
Function ConnectorPin ConnectsTo
M~;M4L~AMDBUS (L) 11~126J1-25(24)-----------------125J2B-104-26~::~::ii~
RESERVEDRESERVED -27------NCMFDDISPLAYDIM (H) -28(24)------------------127J1-30MFDDISPLAYDIM (L) -29(24)------------------127J1-31RESERVED -30------NCRESERVED -31------NCWX DIMH -32------NCWX DIMW -33------NCWX DIML -34------NCLEFTSG BACKUP -35(24)------------------;:~~;Ai;5,
FIG.~-4’RIGHTSG BACKUP -36------NCSPARE 126J1-37------NC
Interconnect Information
Table 501 (cent)
22-14-00Page 598.128
Mar 15/89Use or disclosure Of mformatton on this page IS sub~ect to the restnctjons on the t!tle page of this c~cument.

Honeywell WNE~ANcECITATION n/V
ED-600 (MFD)
Function Connector Pin
PRI X DEFL (IN) +
[
127J11~ ~:~~11:1111:1111:1:11~-$PRI X DEFL (IN) -
Y .-
SEC X DEFL (OUT) +
[
--”--NC
SEC X DEFL (OUT)- :: -----NC28 V DC PWR + -5 (22)--------------------
28 V DC PWRSTROKEREADY(PRI; +
[STROKEREADY(PRI) -
PRIY DEFL(IN) +[-
SECY DEFL(OUT)+[
POWERRETURN -POWERRETURNVALIDOUTPUT(PRI)STROKEREADY(SEC)STROKEREADY(SEC)SECX DEFL(IN) +
[SECX DEFL(IN) -VALIDOUTPUT(SEC)REVSELECT(PRI)
[-
+
SIGNALGND - -CHASSISGNDSECY DEFL(IN) +
[SECY DEFL(IN) -INCLINOMETERLIGHTING +
(INCLINOMETERLIGHTING -SPARE
- -- - - -- - - - -- - -
:? l;f]::5;~--------------8 (24)-~y----------------36------ I
$-9 (24)----------------=--10(24)----------------Q-
L-.
-11 -----NC-12-----NC-13 (22)--------------------:!: (22)--------------------
-----NC-16-----NC-17-----NC-18-----NC-19-----NC-20-----NC-21-----NC-22(22)---------------------23~::~:~-------------------24-25-----NC-26-----NC-27-----NC-28-----NC
REVSELECT (SEC) -29 -----NCDIMCONTROL
[+ -30(24)------------------
DIMCONTROL - il-31~::~:i;------~G-ii---G!SPARE -32RASTERDIMCONTROL Ii
{
-33.-.--------wvv---RASTERDIMCONTROL W -34-----------------------1RASTERDIM CONTROLSTROKEREADY(PRI)SHLbGND127J1% ~iij:~------------------
ConnectsTo
125J2B-81125J2B-82125J2B-83
PILOT 28V,FIG.A-1
125J2B-101125J2B-102
125J2B-84125J2B-85125J2B-86
DC PWRGNDDC PWRGND
SIGNALGNDCHASSISGND
126J1-28126J1-29
SHIELD GNDFOR127JI-7,127J1-8
Interconnect InformationTable 501 (cent)
22-14-00Page 598.129
May25/90Use or disclosure of information on This page E subject to the restrtctlons on the title page of thm document.

Honeywell tiiWJEPANcECITATION 11/’V
ED-600 (MFD) (cent)
Function Connector Pin Connects To
SPARE 127J1-37-----NCCOLOR3 (PRI) +
[ t-38 (24)-----------------10125J23-95
COLOR3 (PRI) - -39 (24)------------------Y
125J23-96-- SHIEL9GND
TEMPANNUNGNDOUTPUT -40-----NCSPARE -41-----NCCOLOR2 (PRI) +
[J
-42(24)----------------1~1-125J23-93COLOR 2 (PRI) - -43 (24)------------------ 125J2!3-94
-- SHIELD GNDSTROKEREADY(SEC)SHLDGND -44-----NCSPARE -45-----NCCOLOR 1 (PRI) +
[ ?-46 (24)------------------ - 125J2B-91
COLOR1 (PRI) - -47(24)----------------!-1125J213-92$?-- SHIELI)GND
SPARE -48-----NCSPARE -49-----NCCOLORO (PRI) +
[ !-50 (24)-----------------f, - 125J2B-89
COLORO (PRI) - -51(24)------------------- 125J2E)-909 -- SHIELDGND
SPARE -52-----NCSECX DEFLSHIELDGND -53-----NCVIDEO(PRI)
[+
J
-54(24)----------------17-125J2B-87VIDEO(PRI) - -55 (24)------------------ - 125J2B-88
-- SHIELD GNDSECY DEFLSHEILDGND -56-----NCSPARE -57-----NCRASTER/STROKE(PRI) -
[$
-58 (24)-----------------O- 125J2B-97RASTER/STROKE (PRI) + -59 (24)----------------!- 125J2[I-98
FLYBACK (PRI)
FLYBACK (PRI) r A :::l::;:::::::::::::::::i:i!;:c-- SHIELDGND
LEFTPHOTOSENSOROUT -
[
-62-----NCLEFTPHOTOSENSOROUT + -63-----NCRIGHTPHOTOSENSOROUT + -64-----NCRIGHTPHOTOSENSOROUT - -65-----NCCOLOR3 (SEC) +
[
-66-----NCCOLOR3 (SEC) -67-----NCCOLOR2 (SEC) ; -68-----NCCOLOR2 (SEC) -69-----NCCOLOR1 (SEC) ; -70-----NCCOLOR1 (SEC) - 127J1-71-----NC
InterconnectInformationTable501 (cent) 22-14-00
Page 598.130May 25/90
Use or dw.closure of mformahon on NW page is sub!ect to the reslnctlons on the lltle page of this dJcument

Honeywell WWR’”c’CITATION V
ED-600 (MFD) (cent)
Function Connector Pin Connects To
COLOR O (SEC) +<
127J1-72 -----NCCOLOR O (SEC) - -73 -----NCVIDEO (SEC)
{+ -74 -----NC
VIDEO (SEC) -75 -----NCRASTER/STROKE (SE;) +
<-76 -----NC
RASTER/STROKE (SEC) - -77 -----NCFLYBACK (SEC) +
{-78 -----NC
FLYBACK (SEC) - 127J1-79 -----NC
Interconnect Information
Table 501 (cent)
22-14-00Page 598-131
Mar 15/89Use or disclosure of mformallon on this page IS sub!ecf to the restnchons on the title pag, of this document

Honeywell !!NJRANC’CITATION V
..
EADI
28 VDC BUSA
‘~:: } ‘“-””’’’””(”w)
EHSI
)
‘~:: }’D-’’”’’”’(”w)
EFIS
{ B
‘~~:::} “’’’’’”’(’”w)
( ) 1A 115J1-5 DC-81 1 (’w)
MFD SYM ‘EN
4) 7.5A-. 125J2A-1
) 125J2A-2
{
4
)
D
I
MG-605/805 (115W)
125J2B-1
125J2B-2
126J1-1 Mc-800 (5W)
MFD DISPLAY
‘~ :::} ED-’c’0’800(’5w)
AD-16219
28 V dc BUSFigureA-1
Interconnect InformationTable 501 (cent)
22-14-00F’aqe 598.132
‘Mar 15/89Use or disclosure of information on this page IS sub\ect to the restrictions on the title page of thm Iocument

Honeywell WMRANC’CITATION V
5 VDC A
DIMMINGT 115J1-3 DC-811 (5W)
b 3J1-26 ED-800 (1 .2W)
AD-16220
Edge LightingFigure A-2
Interconnect Information
Table 501 (cent)
22-14-00Page 598.133
Mar 15/89Use or disclosure of Intormatlon on thm page IS subject to the restrictions on the title pagf of this document.

Honeywell W!K!””c’CITATION V
PILOT’S SIDE EFIS
COPILOT’S SIDE HSI 2
AD-1 6221 -RI
AC Power RequirementsFigure A-3
Interconnect Information
Table 501 (cent)22-14-00
Page 598.134Mar 15/89
Use or dkclosure of mformatton on thts page is sub)ect to the restrictions on the lltle page of Ihw cocument.

Honeywell !WVHANCECITATION V
r.,—————- 3J 1
I PRl 21
L ——— ——
r Y 1-——-. —————— — MG-6051805I-M 2J 1 125J1B
I
7PRI 21
1-
1———— — - I
I II I
r ——— —— — I ISG-6051805 65J2B 125J1A
I SG PWR ,0I
DN
L. I——— —— —
I1- ——. —— -J
LEFT SGBACKUP
r——— —— —
MC-800 126J1
I 35
1-AD-16222
——— —— -
Reversionary Select Discrete Switching3 Tube EFISFigure A-4
Interconnect Information
Table 501 (cent)
22-14-00Paqe 598.135
‘Mar 15/89Use or disclosure of mlormatlon on Ih(s page IS sub!eti to the restrictions on the title pagl of this document.

Honeywell M?K?’”c’CITATION V
PILOTS SIDE
AOA ERROR
{
}+ ~:;:::;, ‘PDDEV (H)
}]- ~ :E’, ‘p” “V(L)
PILOT’SDISPLAY
AOA VALID 65J1A-75
}
SPD DEV VLD125J2B-25 J
AD-16223
AOA/Speed CommandFigure A-5
Interconnect Information
Table 501 (cent)
22-14-00Page 598,136
‘Mar 15/89Useordlsclosufeoftntormatton on !hls page IS subject to the restrictions on the title page of thts jocument

Honeywell M!JEANCECITATIONV
RKVDC---b=’=S5..2A I
PRIMARY CIUTPUT(HI
Pi ‘;’ 1’ ‘ t, ‘~
w
II ==OUTPUT
COMMON (C)N
7J1B
AUX OUTPUT (H) x 18
E
~lLOT’S FD
uOUTPUT TEST E 1
RAD ALT
IQ - lNPuT
II~ f, RA VALID IN
,. .,. 11 RA VALID Y> , ,
1:
., izw==?
Ill ~< 25-P RA TEST IN 1
I NC~215
d
C RA TEST OUT125J2B
NC~5:! C RA “ALID IN I
NC+l”’ a}H CoPILOT’SRA13 ALT
NC+ 18 L INPLJT
AD-16224
Radio Altimeter InterfaceFigure A-6
Interconnect Information
Table 501 (cent)22-14-00
Paqe 598.137‘Mar 15/89
Use or disclosure of mformatlon on thw page IS subject to the restrictions on the Iltle pag ! of thts document

Honeywell WJEFCECITATIONn/V
—.—. —,=lB%0 SYU80L GENERATOR
T
II
1
rlmym-m— — — -SG SACKUP
I7J1A
I
AP ENG 46
L—————JSGBACKUP
——-— — -——— -1
paimpri~l- – –
mJm ~mLm COMPUTER
●2SV AP ENG ICONTROLLER
I
llJ1 115.0 44
I
PITCH WHEELINPUT
I
I I
———— — A
AmOPILOT+ ENGAGE -28V
.,~=.y,r – – 1
II I l-” 1.1 .
I-IdL-————a
———— —E6JIB PILOT’SSYMBOLGENERATOR W3A
46 VSMODE GND so
47 IAE MOOE GND 79
———— — d I
‘w
1
33 L Ax
39 H CM”
JIII
1——-— —
,J,e PILOT FZ-EOO 7J1B I
t b 76 VS MODE GND 3s= HOLD I(b77IASMODE GND 37 ~ ERROR
L I-———— .—————A——.——~,%LOTMB-ZDS1t I!2sw.M===.=== 1
x IASMOOE GNDI
1h z VS MODE GNOI I
——-— — A l~!AI
70 MS MOOE GN:
Ea VS MOOE GNC I
———— - JG1-
AirDataCommandB1ockDiagramFigureA-7
InterconnectInformationTable501 (cent)
22-14-00Paqe 598.138‘May25/90Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of this {! ~cument

Honeywell M!UN’”c’CITATION V
~~::1,wow 125J2A-34
Weight On WheelsSwitchFigure A-8
WI-650
SG-605/805
MG-605f805
AD-16226-RI‘
Interconnect Information
Table 501 (cent)
Use or disclosure of information on this page w subject 10 the restrictions
22-14-00Page 598.139
Mar 15/89on the t!tle page of this document.

Honeywell M!KWANCECITATION V
r———
PILOl%SSYMBOLGENERATOR
II “AIuIIIIII
127 fl 1270 127 fl 127 fl
—— ————65J2A 125J2A MFDSYMBOL
{ ‘
H 24
“ }
GENERATOR
‘{
17 1+DATA
c 25DATA
18 c
{ }}
.,A,H 26
CLOCK19 H
c 27CLOCK
20 c
I 65J2E 125J2B
I
{ 7“
H 24 17 H
I
{
DATA
“ }
DATA
c 25 18 c,“6
I{ -
‘ }}
“’B’H 26
CLOCK
19 H
c 27CLOCK
L
4 ~ 20 c
——. —— ——.. —
*
127 (l 127’0 127 n 127 f)
ASCB Bus ConfigurationFigure A-9
—1
III
I1IIIIIII
—J
AD-16227
Interconnect Information
Table 501 (cent)22-14-00
Page 598.140Mar 15/89
Use or disclosure of information on this page IS subject to the restncttons on the title page of thm <ocument.

Honeywell M!MFANcECITATIONn/V
APP SEL,8J1-f
~’l!—7J1 B-53,7J1A-59
-f,
INC
DME
DME
NC I
I
I
-f
I
I
VALID,65J2B-88 I 16J1-33
GROUNDRANGE
AD-20072
VNAV DisableFigure A-10
InterconnectInformationTable501 (cent)
22-14-00Page 598.141‘May25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title pagd, of thts document.

Honeywell W!NFANcECITATION ii/V
III I I II I II II
I I I IIII
I I LRN B _ NcI LRN A _NcI 1°
“J2B-8~12w’B-’~ ‘5J2B-8~ AD-21X175
EFIS Display Select Discrete OutputsFigure A-n
Interconnect InformationTable 501 (cent)
22-14-00Page598.142
May 25/90Use or dwclosure of Information on thts page IS subject to the restrictions on the title page of !h!s ~ocument.

smw
-llnA. A.
6JI
<
10J1B
ENG INTLK ‘< 28 ;w~:”:_Q-FE-LrlC6J !
PILOl”S C-14D IDIR GYRO NO. 1
=}
DG2 II I
r —.. 1 RMI IvALID I
I I I
I6J 1 I
I
HDG 2 STATOR X ~ I 10J1A II
I 48 HEADING X II HOG 2 STATOR Y ~ I
I 4 I 47 HEAOING Y
I I
IHDG 2 STATOR Z z
I
4I I
L d
48 HEADING Z
——.
~? I
COPILOT% C-14DDIR GYRO NO. 2
r ——— 1 ~}RMI 2
1&l r
I H’=’G2sTAToRxI ~ H
111I I
! ‘DG2sTAT0Ry.I+=m ___l
10.JIB
40 HOG RATE DISABLE
PILOTS HOG REV
IIF I ———— -
I I

Honeywell WJFANCECITATIONn/V
APPENDIX B
FMZ-800 FLIGHT MANAGEMENT SYSTEM INSTALLATION
Use or disclosure of Information
Interconnect InformationTable 501 (cent)
onthispagek sub!ecttotherestrictions
22-14-00Page598.142.2
May25/90onthe!Jtlepageofthis[ocumenl.

Honeywell !NNJNANCECITATION V
APPENDIX B
FMZ-800 Flight Management System Interconnect
B1. SCOPE
This Appendix defines the installationrequirements for the HoneywellFMZ-800 Flight ManagementSystem.Thisinterconnectinformationisstand-alone.TheFMZ-800interfaceswiththeEDZ-605/805systemviatheASCBdatabus.
B2. ELECTRICALINSTALLATION
TheelectricalinstallationrequirementsfortheFMZ-800FlightFlanagementSystemaredefinedin paragraph 4 in themainbodyof thisTable.
Thefollowingprogrammingpinschangesarerequiredon the EFISSG andtheMFD SG. Theseprogrammi-ngpinsallowtheSG andMG to communicatewiththeFMZ-800viatheASCB.
Proq Pin Function
62 LRNA InterfaceIDo Identifiesthe63 LRNA InterfaceID1 FMSInterface64 LRNA InterfaceID2
IDo ID1 ID2——
Open Gnd Grid LeftSystemASCB
Interconnect Information
Table 501 (cent)22-14-00
Page 598:143Mar 15/89
Use or disclosure of mformatlon on this page is subject 10 the restrictions on the title pagt of th!s document.

I Function
ISPARE+28VDC POWERpOWERRETURNLIGHTINGCOMMONSPARE
I28VANN POMER HCHASSISGfiD28VANN POWER C5V LIGHTING
I28VLIGHTINGSPARENAVDATABUSOUT
( :
I (NAVCTRLBUSoUT :
INAVDATABUSIN ( :
INAVCTRLBU!jIN
( :NAVCLKBUSIN
( :
I (PERF DATA BUS OUT :
I (PERFCTRLBUSOUT ;
IPERF DATA BUS IN :(
i
PERF CTRL BUSIN(.[
pERFCLKBUS IN(
CDUVALID:
ISPARES
IR PHOTOSENSOROUTL PHOTOSENSOROUTPAREIM CONTROLo(JTPARE
PILOT’SCONTROLDISPLAYUNIT
CD”800
Connector PinConnects TO
(22)-------------.------(24) FIG.B-3---------------.----(22) cHASSISGND--..-----------------(22) DC GND--------------------
TO PILOT’S5V
------NC DIMMINGCONTROL
I(24)----f2’--------------(24)---!G!----(24) .=i--------..-~ ----,
------- --
(24j-------Ju!y----lj::1{24)----O--------.-----~24)---io!------------:24) n.$----------- ---------
py -ci”--------2tij---.-7 ------- ------z4j---LYLY-----.-----N&-----NC .-----NC-----NC
121JIA-5512131A-56121JlB-7121J1B-8121JIA-65121J1A-66121J1B-32121JIB-33121JIB-35121J1B-36
------NC:: ------NC
------NC3 ------NC-9 ------NC-h ------NC-~ (24)--------------------
{12IJ1B-1oo
1-m ------NC
------NC~;
------NC12031$
Interconnect Information
Table 501 (cent)
22-14-00Fage598.144
Mar 15/89Use or disclosure of H’rformafton on this page w subject to the restrictions on the Mle page of this I ocument.

Honeywell MUR’”c’CITATION V
Function
.AMP TEST
;PARESlRIGHT/DIMDISCRETE\NNINTENSITYCONTROL
~PARES
‘ESTENABLE!ESERVED;PARES
PILOT’SCONTROLDISFFL~T’~NIT(cent)
ConnectorPin ConnectsTo
120J1-s(24)--------------------TO AIRCRAFTLAMPTEST(GNDFORTEST)
-t-u-V (24)--------------------FIG.B-3-w (22)--------------------TO PILOT’SDAY/
NIGHTSWITCH
~;
:L-BB-cc-DD-EE ------NC-FF-GG
120J1-HH
Interconnect InformationTable 501 (cent)
22-14-00Page 598.145
‘Mar 15/89Use or disclosure of Information on this page is subject to the restrictions on the title pag( of thm document,

Honeywell WiKPANcECITATIONn/V
PILOT’SNAVIGATIONCOMPUTER
NZ-61O
Function Connector Pin ConnectsTo
\IRCRAFTBATTERY28 V DC 121J1A-1-------NCJNITOVERHEAT -2
(-28 V DC POWER ~ -3 (20)-------------------- FIG.B-3
-4 (20)--------------------DCGND;HASSISGND -5 (22)--------------------CHASSISGND;IGNALGND -6 (22)--------------------SIGGNDIATTERYRETURN -7
t
-------NCiSCBDATA“A”
(H -8 ---------
)--------------
------!ulFIG.B-5
c -9 --------------!ESERVED -lo!ESERVED -11iSCBCLOCK“A”
{H -12 n
J )------- ------ ------- --
c -13 II FIG.B-5--- - - - - - - - -- -- ------ --
!ESERVED -14;PARE -15ILS DATA BUS
(H -16------NC
ARINC429) c -17------NClMEDATABUS
{H -18------NC
ARINC429) -19------NClMEDATABUS
{i
i-20(24)-----C-----------164J1A-54
PROLINEII) c -21(24)-----1UL----------164J1A-165V STBYMONITOR -22,TSDATABUS
{H -23
(ARINC429) C -245V MONITOR -25TS DATABUS
(H
I-26 (24)-----j~T----------141J1-14
(ARINC429) C -27 (24)-----U---------- 141J1:15
(IATA LOADER DATA BUS IN H
t
-28 (24)------------O----- 123J1-Tc
t
-29 (24)----------~1 ---- 123J1-S‘OR/LOCDATABUS
{H -30 (24)------f- ---------- 164J1B-102
(PROLINE II) c -31 (24)-----1UL----------164J1A-S4‘OR/LOC DATA BUS
(H -32------NC
(ARINC429) c -33------NC5V MONITOR -34CARS DATA BUS IN
(H -35------NC
(ARINC429) C 121J1A-36------NC
InterconnectInformationTable501 (cent)
22-14-00
I
I
Page 598:146May25/90UseordlsdosureofinformationonthispageIS subjecttotherestrictionsOnihetjtlepageofthisl~~cument.

Honeywell M!UR’”c’CITATION V
PILOT’SNAVIGATIONN;OW;TER (cent)
Function Connector Pin ConnectsTo
I-15VMONITOR i21JlA-37
i-38(24)---T--------------FRoM#l
1
}-39(24)--& ------------FUELFLowsENsoR-40(24)----------=------- 144JI-E-41(24)---------JU!------ 144J1-F-42------NC
FUEL FLOW IN #1{Hc
GENERAL BUSOUT#3(PROLINEII)
DATA LOADER COMMONVOR/LOCDATABUS IN(ARINC429) (“c
GENERALBUSOUT#2{H
(ARINC429) cLTS#1 BUSSPEEDHI/LOLTS#2 BUSSPEEDHI/LOLTS#3 BUSSPEEDHI/LOGENERALBUSOUT#1
[H
(ARINC429)
DATALOADERDATA
SPARECDUDATABUSIN
SPAREPERFDATABUSIN
FUELFLOWIN#2
q
{BUSOUT ~
(Hc
{Hc
{Hc
PERFDATABUSOUT{Hc
TESTCLKHICDUDATABUSOUT
(Hc
IESTCLK LO
-43------NC-44------NC-45------NC-46------NC-47(24)-------------------SIGGND-48------NC-49------NC
1
-50(24)-----i=i----------141J1-27
-51”(24)-----!U! ---------- 141J1-28
t-52(24)------f-----------123J1-H-53(24)-----LGL----------IZ3J1-G-54
t-55(24)------=-----------120J1-M-56(24)-----!G’-,----------120J1-N-57-58------NC-59------NC
1-60(24)-----G-----------FROM#2
}-61(24)-----!O~----------FUELFLowsENsoR-62------NC-63------NC ,-64
i-65(24)------O-----------l~oJ1-s-66(24)-----1-J---------- -l;~OJ1-T
121J1A-67
Interconnect InformationTable 501 (cent)
22-14-00Paqe 598.147
‘Mar 15/89Use or disclosure of mformatlon on this page IS subject to the restrictions on the [Itle pag[ of thm document

Honeywell !%$J?ANC’CITATIONV
Function
RESERVED 1RESERVEDSPARERESERVEDRESERVEDSPARECDUCTRLBUSIN
{Hc
TAGSYNC OUT
PILOT’SNAVIGATIONN$OW;TER (cent)
FLIGHTTESTPORTC
{
RCV(RS-232) RET
XMTFLIGHT TEST PORT A
{
RCV(RS-232) RET
XMTCDUSYNCFLIGHTTESTPORTB
{
RCV(RS-232) RET
XMTDATALOADERCLKOUT
{H
CROSSDMEDATABUS{i
(ARINC429) cCROSSDMEDATABUS
(PROLINEII)ASCBDATA“B”
{Hc
RESERVED
{ASCBCLOCK “B” ;
RESERVED
{CDUCTRLBUSOUT ;
TAGSYNC INCDUCLK BUSOUT ~
{MAG/TRUSEL OUTONSIDEAUTOTUNECONTROLREMOTETUNINGCONTROL 1
ConnectorPin
21J1B-1 ------NC-2 ------NC
:: ------NC-5 ------NC ,-6
i‘7 (24)---~mI--------------8 (24)----U--------------9 ------NC
1
-10(24)--1~j------------’11(24)--l-z--------------12(24)---= II------------’13(24)--------Tab--------14(24)------------------~~~(24)--------LL!------
-,;;::l::~::l
’17(24)--Ter-18(24)--i-i
-20(24)-..---.---G---------21(24)--------1.1--------22------NC-23------NC
t-24(24)--1~j--------------25(24)----------
1}
--------26------------------------27------------!-!--------28-29-30-31-32-33-34-35-36-37-38
21J1B-39
n“1 >.-----.-----------------.-!=! ------
[
t(24)--~=i-------------~::~::iy--------------
i(24)--------jet -------~::~+ii-__G- -------
}
(24)-------------------(24)-------------------
Connects To
120J1-P120JI”R
FIG.B-6
FIG.B-6
123JI-K123JI-J
C164J1A-54C164J1A-16FIG.B-$
FIG.B-5
120J1-U120J1-V
120J1-W120JI-X
TO AUTOTUNECIRCUIT
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.148Mar 15/89
Use or disclosure of mformatlon on this page m sub~ecf to the restncttons on the title page of th!s d ]Cument.

Honeywell MIWPANCECITATION V
.,
PILOT’SNAVIGATIONN:O~fiTER(cent)
Function Connector Pin Connects To
LATERAL WAYPOINT ALERT 121J1B-40 ------NCVERTICAL WAYPOINT ALERT -41 ------NCDEAD RECKONING -42 ------NC
DFFSET ALERT -43 ------NC
APPROACH SENSITIVITY -44 ------NC
INDEPENDENT OP -45 ------NC
CDU MESSAGE -46 ------NCDEGRADED ACCURACY -47------NCCDUSYNC -48------NCNAVCOMPUTERVALID -49------NCSPARE -50SPARE -51ADCVMO -52VERTICALTRACKAURALALERT -53 ------NCOFFSIDEAUTOTUNINGCONTROL -54
{FUEL FLOW IN #3 H -55 (24)------------------- SIGGND
c -56(24)-------------------SIGGNDLTS#3 DATA BUS H
{-57------NC
(ARINC429) c -58------NCLTS #1 CONFIGURATION
(101 -59------NCID2 -60(24)-------------------SIGGND
LTS #2 CONFIGURATION(ID1 -61------NC102 -62------NC
{
101 -63------NCLTS #3 CONFIGURATIONS
ID2 -64------NC5DICENTER -65------NCCROSSFILLENABLE -66------NCVERSIONB ASCB -67
{
ID1 -68------NCFUELFLOWID ID2 -69------NC
1113 -70(24)-------------------SIGGNDOPERATIONALMODEIDO -71(24)-------------------SIGGNDJEIGHTON WHEELS -72(24)-------------------IO WOW SWITCH
(GND FORWOW)PERFCOMPUTERINSTALLED -73------NC
{
IDO -74------NCLTS #I TYPE ID1 -75(24)-------------------SIGGND
ID2 -76 ------NC
{
IDO -77------NCLTS#2 TYPE ID1 -78------NC
102 121J1B-79------NC
Interconnect InformationTable 501 (cent)
22-14-00Page 598.149
‘Mar 15/89Use or chsclosure of Information on this page is sub}ect to the restrictions on the title pag$: of this document.

FunctionConnector Pin
121J1B-80sIG GND
REsERVED
[l-l
-al(24)----------::::::::::;:J;N1;
FUELFLOWIN #4-82(24)--------::---------
DATALOADERCONNECTEDiL}
-..
-83 (24)--------
[
IDO)
-84(24)-------::::::::::::~~;LE
RADIOTYPECODEID1 -85 (24)-------
1D2~:!!:?!;:~;-------”-------
MAINTENANCETESTSEL -88------NC
ILS/MLssEL
\
-89------NCIDO -90------NCID1LTs#3 l~pE -91------NCID2 -92------NC
OPERATIONALMODE ID1INITIATEDTRANSMIT
-93------NC
INITIATEDRECEIVE
-94-.----NC
[
-95 (24)--------:::::::::::1TABLEB-2
RADIOTYPECODE
m3ID4 % ~:~~=---
ASCBDUAL/SINGLE
sIGGNI}-98 (24)-------------------
SDI#~ -99------NC ---- 120J1-~
SD1 #2~~~~ (24)--------------
CDUVALID------NC
MAG/TRUESELECTENGLISH/METRICID
-102 ---- sIGGNE’
OVERSPEEDPROTECTION
~;:~(24)--------------
W-422 OFFSIDEVORCONNECTED
----- SIGGNC’
CROSSVOR/DMEMANUALTUNE
-1o5(24)-----------------FIG.B-4
VOR/DMEMANUALTUNE121J1B-106(24)-------------
HOCIeWell !:~~~~cE 4
PILOT’s
NAVIGATIONCOMPUTER~cont~NZ-61Oconne(:ts To
I
4
I Interconnect InformationTable 501 ~cont)
2279;?$0 May 2iv90
~e~trlctlOnSon the thle Pa9e of ‘his o ‘umen~
~5e O, disclosure of mformatlonon this page w sub(ect to the

Honeywell W’W’NCECITATION V
Function
SPARE
(+28 V DC POWER ~
{LOADER INSTALLED ~
SPARE
{
cDATA BUS IN
H
{
cCLK BUS IN
i-i
SPARES
{
cDATA BUS OUT
H
SPARES
CHASSIS GNDSPARE
PILOT’SDATA LOADER
DL-800
Connector Pin
123J1-A-B (22)---------------------c ~f:~:ii-----------------
:; (24)------7--------------F
!-G (24)---l~; -------------
-H (24)--&1- -------------
I-J (24)---1~1 -------------
-K (24)--& -------------
-L-M-N-P
ConnectsTo
DC GNDFIG. B-3
121J1B-83
121J1A-53,
121J1A-52,
121J1B-21,
121J1B-20,
-R
!-S (24)---I=; ------------- 121J1A-29,
I I*-T (24)---U- ------------- 121J1A-28,
-u
‘[
-v-w-x-Y-z
1-a-b (22)---------123JI-c h
Interconnect Information
Table501 (cent)22-14-00
Page598,151Mar 15/89
Use or disclosure of mformatlon on this page IS sublect to the restrictions on the title pag! of this document,

Honeywell W!!JEPAN’ECITATION V
Function
BITE LODATA FROM CDULO
(LOOPA HI
LO
DATA FROM CDU HI
{LOOP B ‘1
LO
PWR SHIELDPWR COM TO ACUBITE HI
SPARESPARELOOP A SHIELDPRIMARY DATA ~A
OUTPUT (ONSIDE) [B
LOOP B SHIELDSPARE+12 VDCTO ACU-12 VDC TO ACUBITE SHIELD
SPARERESERVEDSECONDARY DATA
{A
OUTPUT (OFFSIDE)SECONDARY DATA
(:
INPUT (OFFSIDE) BPRIMARY DATA
(A
INPUT (ONSIDE) B
(DESTINATION BIT ~
OUTER SHIELDDATA TO CDU
(LOHI
SPAREFSK DATA (+)E FIELD ANT
PILOT’SOMEGA SENSOR
OZ-800
Connector Pin
t
141J1-1 (24)----------~j ------------NC
t:: (24)---=-- ----- -------4 (24)---!V1------- ------
-------- ------------NC
$ 1~j (24)---O-- ----- -------7 (24)--~U1-- ----- ------
--------- -------8 (24)---A
I-9 (20)-------------------10 (24)-~-J---JY1-------
----------11------NC-12------NC-13(24)-----------------
1
-14(24)--------~~i------
-15(24)--------i~~------
-16-17-18-19-20
-21-22-23-24-25-26-27-28-29-30
11W::-i-- -----------
Vm]--r-r- ----------------- --- --------
(24)--------- --------
------NC------NC------NC------lie------NC------NC 1t(24)------------ ------(24)---------!-L ------
z(24)---------- --------------NC
-31 (24)--------------------32 ------NC-33 ------NC-34 ------NC-35 ------NC
141J1-36 ------NC
Connects To—. —
142J1-3
142J1-9142J1-10141J1-13
142J1-12142J1-13141J1-16
142J1-6142J1-I141J1-20
LOOP A SHIELD121J1A-26
121J1A-27
LOOP B SHIELD
142J1-7142J1-5BITE SHIELD
121J1A-50121J1A-51141J1-53
OUTER SHIELD
Interconnect Information
Table 501 (cent) 22-14-00Page 598,152
Mar 15/89Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of Ihls tiocument.

Hone~e[l ::Fg:ANCECITATION n/V
PILOT’SOMEGA SENSOR (cent)
OZ-800
Function Connector Pin Connects To
SPARE 141J1-37 ------NC
SPARE -38 ------NC
4DG VALID -39 ------NC
SECONDARY (OFFSIDE) ON/OFF -40(24)-------------------141J1-53
iDGREF[
_41------NC;? -42------NC
~SKDATA(-) -43------NCSHIELDCOMMON
-G-44 (24)------------------- A
{
Y -45 ------NCiDGSYNCHROINPUT Z -46------NC
x -47------NC?ANGE/HYPERBOLIC -48------NC~RIMARY(ONSIDE)ON/OFF -49(24)-------------------141J1-53rOP/BOTTOMANT MT -50------NCILEO -51(24)-------------------TOWOW SWITCHILEO(REVERSELOGIC) -52------NC?RoGRAMcoMMoN -53(24)-------------------141J1-40,DC GND
[141J1-49,141J1-29
ICCOMMON
[
-54(20)-------------------DC GND-55 (20)-------------------
28 vDc IN1
-56 (20)------------------- FIG.B-3141J1-57(20)-------------------
InterconnectInformationTable501 (cent) 22-14-00
Page598,153May25/90
Use or disclosure of Information on thm page IS subject to the restncttons on the t!tle page of this document.

Honeywell !!N!E?ANC’CITATION V
Function
IITEHI;PAREIITE-LOIITESHIELD12 VDC‘WRCOMMON.12VDC‘WRSHIELD
{HI
.00PA LO
[
SHIELDHI
.00PB
t ~lIELDLJTERSHIELD
PILOT’SOMEGA ANTENNA
AT-801
Connector Pin I
142Jl:;(24)------------NC
-3 (24)-------4 (24)-------5 (20)-------6 (20)-------7 (20)-------8 (24j-------9 (24)-------10(24)------11(24)------12(24)------13(24)------14(24)-----
‘l-------------K -------H-Y
IH------------!?-+&-------- ------Y ~j‘i----.-------Il.------------’Y’~;n
t------------
II------ ------;’f’i)142J1-15(24j--------------i
Connect-
141J1-10
141J1-1
141J1-19141J1-9141J1-18
141J1-3141J1-4
141J1-6141J1-7
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.154Mar 15/89
Use or disclosure of Information on this page IS subject to the restrictions on the Mle page of this d ~cumenl

Honeywell ~iWfEfANcECITATION V
PILOT’S SIDE J
AD-17194
28 VDCPowerFigureB-3
Interconnect Information
Table 501 (cent)
22-14-00Paae 598.155
“Mar 15/89Use or disclosure of Information on this page IS subject to the restrictions on the title pag~, of this document

Honeywell WWF~ANcECITATION n/V
PILOT’S AUTO/MANUAL SWITCH
AUTO
I ~ 121J1B-106
*
MANUAL
AD-1 71 95-RI
FMSAuto-Tune SwitchesFigure B-4
Interconnect InformationTable501 (cent)
22-14-00Paqe598.156‘Play25/90
Use or disclosure of reformation on this page IS subject to the restncttons on the tnle page of this d ]cument,

Honeywell H!K?””c’CITATION V
TO SYSTEM ASCB
PILOT’S FMS ~~121J1A
{
DATA
“A”
{
H 12
CLOCKc 13 4)
“—- ‘\ F ‘--- ‘Y r --- ‘b< --- ,><. -—. ,) L ,--- ,/ L ,--- .J
- +121J1B
( ;;
H 26 i }
{
DATAc 27 4)
“B”
{ .;;
H 29 41
CLOCK
c 30 t)
~ ‘“ ‘~&
““
TO SYSTEM ASCBAD-17196
ASCBConfigurationFigure B-5
Interconnect Information
Table 501 (cent)
22-14-00Page598.157
Mar 15/89Useordisclosureofinformationon this page IS subjecf to the restrictions on the title pagf of Ih!s documenl.

Honeywell M!KWANCECITATION V
~
PILOl% NZ-610
RCV
PORT C RET
XMT
{
RCV
PORT A RET
XMT
i
{
RCV
PORT B RET
XMT
—.—
1121J1B /\
10 1 III
11 ,II I
12\/
I II f--l,I fx13
~1
J1-2 IRET!! DBMA-25S
14 ‘1-7 (TRW)I II II I
15\/ L/
J1-3
I I
I f\17 1“
II18 t
II I19 I
LSWITCH..— — ———— J
AD-17197
NZ-61O Flight Test InterfaceFigure B-6
Interconnect Information
Table 501 (cent)
22-14-00Paqe 598.158
‘Mar 15/89Use or disclosure Of information on this page IS subject 10 the restrictions on the title page of this :!ocument.

Honeywell WMFANCECITATION n/V
TableB-2RadioTypeCode
PinJIB-84,85,86, 95,96
RadioTv~e Pin Number84 85 86 95 96
HoneywellPrimusII (Normal) 11000
HoneywellPrimusII (Offside) 11001
CollinsProlineII (Normal) o 0000
CollinsProlineII (Offside) 00001
0 = Ground
1 = Open
InterconnectInformationTable501 (cent) 22-14-00
Page 598.159‘May 25/90
Use or disclosure of Information on this page IS subject to the restrictions on the We pag! of this document.

Honeywell WJFANCECITATION Ii/l/
APPENDIXC
DADCAZ-81OAND VN-800Interconnect
Use or dwclosure of
InterconnectInformationTable501 (cent)
22-14-00Page598.160
May25/90on this page IS subject to the restrictions on the htle page of th!s d(,cument.

Honeywell ~f~Jf~ANcECITATIONn/V
Function
28 V DC HI28 V DC HI28 V DC RETURN28 V DC RETURNSIGNALGROUNDSIGNALGROUNDDC GROUNDDC GROUNDCHASSISGROUNDCHASSIS GROUNDASCB DATA “A”
[
H
cALTITUDE REPORTING COMMON
ALTITUDE REPORTING B2
!LTITUDE REPORTING B4
ALTITUDEREPORTINGCl4LTITUDEREPORTINGC24LTITUDEREPORTINGAl4LTITUDEREPORTINGA2NLTITUDEREPORTINGA4ILTITUDEREPORTINGB1lLTITUDEREPORTINGC4lLTITUDEREPORTINGD4\SCBCLOCK “A”
[
H
c
IARO-CORRECTED\LTITUDE NO. 1
PILOT’SDIGITALAIR DATA COMPUTER
AZ-81O
Connector Pin $onnects To
9J1A:;:;:j-------------------
I
FIG.C-1--------------------3 (20)--------------------4 (Do)-------------------DC GND-5 (20) -------------------” SIG GM)
:; ALI- DESIRED-8 ----- ---- ----- ---- ---- - PROGRAM PINS-9 (22)------------------- CHASSIS GND-10 (22)------------------ CHASSIS GNII-11--------NC-12--------NC-13 (24)------------------ 14:jJ1-69,C143Jl-6g-14 (24)------------------ 143J1-85,C143J1-85-15 (24)------------------ 143J1-1oo,C143J1-1OO
-16 (24)------------------ 143,J1-1,C143J1-1-17 (24)------------------ 143,11-26,c143J1-26-18 (24)------------------ 14~J1-9~,c143Jl-9fj-19(24)------------------143J1-99,c143J1-99-20(24)------------------143J1-97,C143J1-97-21 (24)------------------143,11-86,c.14~JI-86-22 (24)------------------143J1-84,c143Jl-Fj4-23 (24)------------------143,]1-13,C]43J1-13-24--------NC-25--------NC
1FINESINE -26(24)--6
I
------------18J1UFINECOS -27(24)--q-t------------18J1-VFINECOMMON -28 (24)--v ------------18J1-WCOARSE DC -29 (24)---1~
1
----- ----- -- 18J1-TCOARSE REF(+15) -30 (24)---I-F ------------18J1R
,COARSE COMMON -31 (24)--4~ ------------18J1-P
?6V AC 400Hz PWR[
H1
-32(24)---fi------------FIG.c-2C 9J1A-33(24)---U------------AC GND
InterconnectInformationTable501 (cent)
22-14-00Page598.161‘May25/90Use or disclosure of mformatton on this page IS sub!ect to the re$tnctlons on the t!tle page Of this document.

Honeywell iH!MR!ANcECITATIONn/V
PILOT’SDIGITAL AIR D~A8~~MPUTER (cent)
Function Connector Pin ConnectsTo
ALTITUDE VALID #1 9J1A-34 (24)------------------ ;&l-:,;OJIB-44
BARO POTEXCITATION(-10V)
i
-35 (24)----fi-----------18Ji-Z-BARO POT WIPER -36 (24)----J-1----------- 18J1-YBARO POTCOMMON li-37 (24)----U-----------18J1-XBARODISABLE -38SSECDISABLE -39
[
SIGNAL -40 (24)------------------7J1B-44COM -41--------NC
ALTITUDERATE#1 +REF(+12) -42--------NC-REF(-12) -43--------NC
INDICATEDAIRSPEED#1 -44--------NCMACHNUMBER#1 -45--------NCMAXIMUMOPERATINGSPEED(VMO) -46--------NCMACH/AIRSPEEDREF (+12) -47--------NCMACH/AIRSPEEDCOMMON -48--------NCAIRSPEEDVALID#l -49--------NCBAROCORRECTEDCOARSEREF(+15V)-50--------NChLT#2 [COARSEDC -51 (24)------------------1OJ1A-21AIRDATASELFTEST -52 (24)------------------FIG.C-5PILOTHOLDOUTPUT- HI -53 (24)------------------7J1B-36PILOTHOLDOUTPUT- LO -54 (24)------------------7J1B-37,65J2A-80,(SIGGND) 12533A-65
PILOTALTITUDEHOLDENGAGE -55 (24)------------------7J1B-81PILOTALTITUDERATEHOLII -56 (24)------------------7J1B-82ENGAGE
PILOTAIRSPEEDHOLDENGAGE -57 (24)------------------7J1B-84PILOTMACHHOLDENGAGE -58--------NCPILOTSLEWENGAGE -59 (24)------------------115J1-57,FIG.C-6PILOTSLEWCONTROLINPUT -60 (24)------------------FIG.C-6<,115J1-58PILOT HOLD REFERENCE -61 (24)------------------ FIG.C-6,65J2A-79,
{
125J3A-64-62
SPARES -63-64
DVERSPEEDWARNINGGND -65 (24)------------------FIG.C-4-66
{
SIGNAL -67--------NCTAS#1 DC REF (+20) -68--------NC
GND -69--------NCTAT/SATDC SIGNAL -70--------NCTAT/SATSELECT 9J1A-71--------NC
Interconnect InformationTable 501 (cent) 22-14-00
Paqe 598:162‘May25/90
Use or disclosure of reformation on thm page IS subject to the restrictions on, the Mle page of thm iocument

Honeywell ~iv~p’”c’CITATION n/V
PILOT’SDIGITALAIRDATACOMPUTER(cent)
AZ-81O
Function Connector Pin $onnects To
TEMPERATUREPROBE- HI 9J1A-72(24)-----~ri----.----
}
500OHMTEMPERATURE PROBE - LOW -73 (24)------- --------- TEMPERATURE P~OBETEMPERATURE PROBE - RET -74 (24)-----YSPARE -75INDICATEDAIRSPEED#3ALT SWITCH
-76(24)------------------1oJ1A-39,7JIA-43-77--------NC
PRESSUREALTITUDEOUT #1 -78 (24)------------------ 7JIA-44
-79
-80
-81
-82
-83-84
[
-85BARO- FINESINE -86--------NCCORRECTED SPARE -87ALTITUDE#2 FINECOMMON -88--------NC
FINE COS -89--- -----NCSPARE -90ALT #2 COARSE COMMON -91--------NC
-92ALERTER SELECT -93--- -----NC
AIRSPEED SWITCH #1 -94AIRSPEED SWITCH #2 -95
-96-97-98
)UAL/SINGLE ASCB -99-- ------NCLEFT/RIGHT PROG
[
-1ooIDO -101(24)-----------------
-102(24)-----------------~IRCRAFT :;;
1
-103(24)-----------------TABLEID ID3 -104(24)-----------------C-1
ID4 -105(24)-----------------ID5 9J1A-106(24)-----------------
InterconnectInformationTable501 (cent)
22-14-00Paqe598.163‘May25/90UseordisclosureOf mformatlon on this page IS subject to the restrictions on the title page of this document.

Honeywell WJ?’NCECITATION V
Function
TORQUE LOGICOUTPUT 1TORQUE LOGICOUTPUT 2TORQUE LOGICOUTPUT 3TORQUELOGICVALIDIORQUE LOGIC INPUT 1TORQUE LOGIC INPUT 2TORQUE LOGIC TEST
i
IIGITAL RANGEDATA ~
IIGITALRANGECLK ~~t?
IIGITALRANGE SYNC -HI
PILOT’SDIGITALAIRD~~A8~~MPUTER(cent)
ConnectorPin ConnectsTo
9J1B-1
::-4-5-6-7
::-lo-11-12
{
\SCB“B” BUS DATA H -13-------NCc -14-------NC
\scB“B”WJS cLOCK
{“:
;PARES
10mV/ARINC561*PROGPIN)IGITALRANGESYNCLO
{\RiNC429OUTPUT#1 H
c
;PARES
LLTITUDEVALID#2
-15-------NC-16-------NC-17-i8-19-20
. -21-22-23-24-25-26 -------NC-27 -------NC-28-29-30-31-32-33
9J1B-34 (24)------------------ 7J1A-42
Interconnect Information
Table 501 (cent)
22-14-00.-Page 598.164
Mar 15/89Use or disclosure of Information on thm page is subject to the restrictions on the title page of thts I iocument.

Honeywell WW!””c’CtTATIONn/V
PILOT’SDIGITAL AIR DATA COMPUTER (cent)
AZ-81O
Function Connector Pin Connects To
VERTICAL PATH ERROR - HI 9J1B-35(24)------------------7JIB-15,65J2B-39,125J3A-75
VERTICALPATHERROR- COM -36(24)------------------7J1B-14,65J2B-38,125J3A-74
VERTICALPATHERRORVALID -37(24)------------------~;;:Ai76,125J2B-26
IASHOLDSELECT(OUTPUT) -38(24)------------------7JlB~57TO/FROMNULLDISCRETE -39(24)------------------7JIB-39
{
SIGNAL -40ALTITUDERATE COMMON -41OUTPUT#2 +REF(+12) -42
-REF(-12) -43IASOUTPUT#2 -44MACHNUMBEROUTPUT#2 -45SPARE -46AUXMACH/AIRSPEEOREF (+12)#2 -47MACH/AIRSPEEDCOMMON #2 -48
AIRSPEED VALID OUTPUT #Z -49 (24)------------------ 7JIA-52
ASEL SEL INPUT -5o(24)------------------~JJ-~
[H -51(24)------------------65J2B-11
i$~!f$~HOLDOUTPUTL-HI-52(24)------------------65J2B-12-53
COPILOTHOLOOUTPUT- LO -54COPILOTALTITUDEHOLDENGAGE -55COPILOTALTITUDERATEHOLDENG -56COPILOTAIRSPEEDHOLDENGAGE -57COPILOTMACHHOLDENGAGE -58COPILOTSLEWENGAGE -59COPILOTSLEWCONTROLINPUT -60COPILOTHOLDENGAGEREFERENCE -61ASELSEL OUTPUT -62 (24) ------------------ 7JIB-60
DC RANGE[
H -63(24)------------------7JIA-32,65J2B-102L -64(24)------------------7J1A-33,65J2B-101
SLANT/GROUND’RANGEINPUT -65 (24)------------------125J1B-31RANGEVALID ;;?(24)------------------FIG.C-7
{
SIGNALTAS #2 AC REF (11.8 VAC) -68
COM 9J1B-69
Interconnect InformationTable501(cent) 22-14-00
Page598.165May 25/90
Use or disclosure of mformatlon on lhts page IS sub!ecf to the restnctrons on the title page of th!s document.

PILOT’S
DIGITALAIRD~~8~~MpUTER(cont)
Function
lINC429OUTPUT#2 [Hc
ConnectorPin Connects TO
?ESELECTALTITUDEERR6RSIGRESELECTALTITUDEERRORCOMRESELECTALTITUDEERRORDISC59WZjlCHEDALTITUDEALERTLIGHTWITCHEDALTITUDEALERTHORN
!9J1B-70(24)-Tin--------------~~~:$;~~~3~;~~-71(24)-~--------------.72(24)------------------7J1B-51 A
RESELECTALTITUDECRANKLOGICRESELECTALTITUDEVALIDRESSUREALTOUT#2
(DDONO.1
IISPLAYDATA
IJAYPOINT 1 NO.1~AYPOINT 2 NO.IJAYPOINT SELNO.1IASHOLDMODESELVNAVARMVNAV CAPTURETEST INTERLOCK
TEST INTERLOCK
VNAV MODE SELECTVNAV MODE F/B
DISPLAY SELECT
VNAV[H
ISLEWCONTROL C
IDD1 No.1
\
DD2 NO. 1DD3 NO. 1DD4.NO.1DD5 NO.1DD6NO.1DD7NO.1
INPUT
-73-74(24)------------------7J1B-24-75(24)-------------------76(24)------------------~~~RTC~~RN,
.
-77(24)------------------~~;~~g;6-78(24)-------------------79 ‘-80(24)-------------------81(24)-------------------82(24)-----------.-------83(24)-------------------84(24)-------------------85(24)-------------------86(24)-------------------87(24)-------------------i38(24)-------------------89(24)-------------------90(24)-------------------91(24)-------------------92(24)-------------------93(24)-------------------94---------NC-95---------NC-96(24)-------------------97(24)-------------------98
~~~O~oN~.~ -99,24)-------------------100(24)-----------------
DOS1NO:l qol (24)-----------------
DDS2NO.1 -102(24)----------------
1-~03(24)-Q -------------
[24)-~ -------------
ISPARESWITCHEDALTITUDEALERT 9J1B-106-------NC
1
LIGHT
-104-105
16J1-1516J1-1916J1-1416J1-1816J1-1116J1-1216J1-616J1-3716JI-1016J1-516J1-238J1-W7JIB-737J1B-74
8J1-R7J1B-61
7J1B-22MUSTBE GROUNDED,WHENAZ-81ODADCIS INSTALLED. A&
Interconnect InformationTable 501 (cent) 22-14-00
paae598.166
16J1-2116J1-3616J1-3316J1-3416J1-1616.31-17
“May 25/90
Use or disclosure of mformatlonon thm page IS subject to the restnct!ons on
the title page of th!s d]cument.

Function
5 VDC TEST POINT
.28 VOC)IMMING CONTROL
;PAREJAYPOINT 2
)ISPLAY DATA - DD6t12VDC TEST POINT
HI
ICGND~15VDC TESTPOINTdAYPOINT 1IISPLAY DATA - DD4IISPLAY DATA - DD5SPARE91SPLAY DATA - DD2DI$PLAY DATA - DDOSLEW CONTROL HISLEW CONTROL LODISPLAY DATA - DD3DISPLAY DATA - DD1LAMP TESTDISPLAY SELECT COMSPAREWAYPOINT/PROFILESELECT
SPARES
DIMMINGCONTROLLO
CHASSIS GND
ISPARES
PILOT’SVNAVCONTROL/DISPLAY
VN-800
connector Pin
16J1-1-------NC-2 (22)--------------------3 (24)-------------------
-27(24)-----------4-5 (24)--------------------6 (24)--------------------7-------NC-8 (22)--------------------9-------NC-10(24)-------------------11 (24)--------------------12(24)-------------------13-14(24)-------------------15(24)-------------------16(24)-------------------17(24)-------------------18(24)-------------------19(24)-------------------20(24)-------------------21(24)------------------
~;onnects To
FIG.C-150F;FIG.C-3
9JIB-899JIB-86
DC PWR GND
9JIB-889J1B-849J1B-85
9J1B-829J1B-809JIB-1039J:1B-1049JIB-839J1B-81FIG.C-59J1B-99
-22-23(24)------------------9J1B-90
J-24-25~ 26127 (24):i-iiij:--------% 50KFIG. c-3
---------
-28(22)------------------cHAssls‘ND
I-29-30
I5 VACLODISPLAYSELECT- DS1DISPLAYSELECT- DS25 VACHI
DISPLAYSELECT- DSO
J
-36(24)------------------;;::::;ODISPLAYDATA- DD7 16J1-37(24)------------------
\ 31:32 (22)---~0r
j
-----------
-33(24)-----------------
-34(24)------------------35(22)---J~-----------
AC PWRGND9J16-1019J18-102O-5VACLIGHTINGCONTROL
InterconnectInformationTable501 (cent) 22-14-00
Page598.167May 25/90
useOrdisclosure of mformallon on this page IS subjeti to the reStrlCtlOnson the Mle page of this document.

Honeywell iirJfFANcECITATION n/V
DADC
28 VDC PowerRequirementsFigureC-1
26 VAC PowerRequirementsFigure C-2
O-5 VDCDIMMING 16J1-3 VN-80C)(2.5W)
AD-1 7198-171
EdgeLightingFigureC-3
InterconnectInformationTable501 (cent)
22-14-00Page598.168‘May25/90
Use or disclosure of reformation on this page IS subject to the restrictions on the title page of thm ~ocument.

Honeywell M!WPANCECITATION V
ALTITUDE ALERT HORN
PILOTS +28VDC +
9JIB-76
OVERSPEED HORN
Use or dmclosure of
Interconnect InformationTable 501 (cent) 22-14-00
Page598.169Mar 15/89
Information on this page IS subject to the restncttons on the title pag~ of this document.

Honeywell PM!JRANCECITATION V
AIRCRAFT LAMP TEST SWITCH
+–07~ 16J1-20 VN-800
TEST
DADC TEST
c io 9J1A-52 AZ-810
TEST
AD-17200
Miscellaneous SwitchesFigure C-5
Use or disclosure of mformatlon
Interconnect InformationTable 501 (cent)
on this page IS subject to the restrictions
22-14-00Page 598.170
Mar 15/89on the Otle page of this jocument.

Honepe[[ &iJ..PANcECITATION n/V
‘A=P~T 1cl-—---” “--JU.tm
1%PITCHwHEEL
-— —.
V-ol,25J, B MF~VM~OL~N~T~ 1
r-——. 90 t~
PILOT SYMBOL I---- -------
&l 125J2B SG 9ACKuPI
I GENERAIUR
~ILTn-500———— T I
I
SG SIGNAL 94 ,4 L~7J1A 65J28
AP ENG 46 65J2A ;
L—.. ——
SG BACKUP $2
‘X
.—— — —
———— . IOJ I IS AUTOPILOTCOMPUTER 1.— —-— —q L————I P,LOTOC-811 1%’1
-–––– l_..q ,1, .2YAPEN.
llJ1 175J1 44 28 H\
u 42
I
I : . }
PITCH wHEELINPUT
t45 29 .0
I
v — ‘u
d L
lDJIA ———I
fl~AUTOPILOT
.46 - ENGAGE -28v ———
~JIA PILOT AZ-S1O
ALIC SLEW-
58 60
SLEW ENGAGE [GNDI
GND457 59
L ———— —
!!:~~--L.—.——-
65JIS PILOTS SYMBOLGENERATOR 65J~A
46 vs MOOE GNO 80 54 31ADcCMD
47 IAS MODE GNO 79 61 i
———— —
———— —
7J , ~ PILOT FZ-SOO 7J1B
76 VS MODE GND 36 = $40L0
77 IAS MOOE GND 37~ ,:RROR
———— — ——
L-$—————
PILOT MS-205 1x IAS MOOE GNU I
R z VS MODE GNDI
———— - A w“———
,2W3A MFD SYMBOL GEI
m
65
II x 4S MOOE GND
I s MOOE GNO
——.
AirDataCommandBlockDiagramwithMFDFigureC-6 (Sheet1 of 2)
YERA
l—
II
iI—A
—1IIIIIIIII,
—1TOR
I
I
I
I
,— Jm.mw
InterconnectInformationTable501 (cent) 22-14-00
Page 598.171May25/90
Use or disclosure of Information on this page IS subject to the restrictions on the title page of this document.

Honeywell Uil!jJfPANcECITATIONn/V
1(
Air DataCommandBlockI)iagramWithoutMFDFigureC-6 (Sheet2)
InterconnectInformationTable501 (cent)
22-14-00Page598.172‘Play25/90
Use or disclosure of mformatlon on this page IS subject to the restr!ctlons on the title page of this : ocument

Honeywell WUEP””c’CITATIONn/V
APP SEL, 8J1-f
NC ~;7J1B-53,7J1A-89
I
I
DME
{
65J2B-88VALID 7J1A-34 ‘~9JIB-66
II I
I I
{
IDME 65J2B-94 + 28V
ITTN 7J1A-50 Id
III
GROUND{
65J2B-79RANGE
~ + 28Vh
AD-1 7927-RI
VNAV Disable
Figure C-7
Interconnect InformationTable 501 (cent)
22-14-00Paqe 598.173‘May25/90
Use or disclosure of Information on this page IS subject to the restncttons on the title pag$? of this document.

Honeywell K2YEPANCECITATION n/V
TableC-1DADCAircraftIDs
CIT IICorm.Pin Ident ~ ~
9J1A-101 IDO 1 09J1A-102 ID1 o 09J1A-103 ID2 o 19J1A-104 ID3 o 19J1A-105 ID4 1 09J1A-106 ID5 o 0
0 = Jumper to 9J1A-8 (DC Ground)1 = No connection
1 1 00 1 10 I (!1 00 : 00 0 0
Interconnect InformationTable 501 (cent)
22-14-00Page 598.174“May25/90use or disclosure of information on this page IS subject to the restrictions on the Mle page of this \ocument.

Honeywell fl&VJErANcECITATION n/V
APPENDIXD
LSZ-850LIGHTNINGDETECTIONSYSTEMINSTALLATION
Interconnect InformationTable501 (cent)
22-14-00Page598.175
May25/90Useordisclosureof Information on this page IS subject to the restnct!ons on the t!tle page of this document.

Honeywell K!M?ANCECITATION n/V
LIGHTNING PROCESSOR
LP-850
Function Connector Pin Connects To
HREF IN (+)HREF IN (-)
145J1A-1------NC-2 ------NC
{
-3-4-5
SPARES
VREF IN (+)VREF IN (-)
-6 ------NC-7 ------NC
RED VIDOUT (+)RED VIDOUT (-)
-8 ------NC-9 ------NC
GRN VIDOUT (+)GRN VIDOUT (-)GRN VID OUT (S)
-lo------NC-11------NC-12 ------NC
BLU VIDOUT (S)BLU VIO OUT (+)BLU VIDOUT (-)
-13 ------NC-14 ------NC-15 ------NC
VID SEL OUT (+)VIDSELOUT (-)
-16 ------NC-17 ------NC
JC RTN -18------NC
dX STBY -19------NC
RNGIDO(+)?NGID1(+)RNG ID2 (+)?NG ID3 (+)
-20 ------NC-21 ------NC-22 ------NC-23 ------NC
+S OUT (+) -24 ------NC
;REF OUT (+)iREF OUT (-)iREF OUT (S)
-25 ------NC-26 ------NC-27 ------NC
IREF OUT (+)IR-EFOUT (-)
-28 --.---NC
145J1A-29 ------NC
Interconnect InformationTable 501 (cent) 22-14-00
Page598.176‘May 25/90
Use or disclosure of Information on thm page IS subject to the restrictions on the title page of this d >cument.

Honeywell MMF’”c’CITATION n/V
Function
RED VID IN (+)REDVID IN (-)
DC RTN
GRN VID IN (+)GRN VID IN (-)
BLU VID IN (+)BLU VID IN (-)
VID SEL IN (+)IID SEL IN (-)
SEL CL
;EL NAV
{SOUT (-)
IS OUT (+)
rST MODE 1rST MODE 2[ST MODE RTN
IS OUT (-)
;SCOM GND:s1:s2:s3:s4:s5;S6:s7:S8:s9:s10:s11:s12
LIGHTNING PROCESSOR
LP-850 (cent)
Connector Pin Connects To
145J1A-30------NC-31------NC
-32------NC
-33------NC-34------NC
-35------NC-36------NC
-37------NC-38------NC
-39------NC
-40 ------NC
-41 ------NC
-42 __----Nc
-43------NC-44------NC-45------NC
-46------NC
-47------NC-48------NC-49------NC-50------NC-51------NC-52------NC-53------NC-54------NC-55 (24)------------------14SJ1A-64-56 ------NC-57------NC-58------NC
145J1A-59------NC
InterconnectInformationTable 501 (cent)
22-14-00Page 598.177
‘May 25/90Use or dwclosure of mformatlon on this page is subject to the restrictions on the t!tle page of this document.

Honeywell M!MW’”c’CITATION n/V
Function
CS13CS14CS15CS16CS COMGND
RS 232 INRS 232OUTRS 232 COM
LIGHTNINGPROCESSOR
LP-850(cent)
Connector Pin Connects To
145J1A-60------NC-61------NC-62------NC-63------NC-64 (24)------------------145JIA-L5
-65 ------NC-66 ------NC-67 ------NC
Interconnect InformationTable 501 (cent) 22-14-00
Paae598.178‘May25/90
Use or disclosure of information on this page is subject to the restrictions on the t!tle page of this ~\ocument

Honeywell MMENANCECITATION n/V
LIGHTNING PROCESSOR
LP-850
Function Connector Pin ~onnects To
DG VALID 145J1B-1 (22)------------------- 6J1-h
wow -2 (24)------------------- FIG. D-3
28 V DC -3 (20)------------------- FIG. D-4PWR GND -4 (20)-------------------DC GNOCHASSIS GND -5 (20)-------------------CHASSISGND
HN (+)I
-6 (24)----~---~- ----- 147J1-11HN (-) -7 (24)----+!----!--’----14m-12
OUTERSHIELDT
.*-8 -------41II
TASREF (LO)
HW (+)
HW (-)HW (S)
-12V DC
E (+)E (-)E (S)
HN (S)
+12V DC12 V DC RTN
SHIELD
TST LOOP (S)
TST LOOP(+)TST LOOP (-)
-9 ------NCII., I
-13 (24)----!-~--------1~~-147J1-15
{ ‘- -,!-14(24)----~-1----~---- 147J1-3-15(24)----~1----1-
Y ‘--- 147J1-4-16 (24)----:j----:
-17--------:j-.d
}-18 (24)----l~--------l---14i’Jl-8
4-19(24)----~j---------- 14i’Jl-9-20(24)----To--------
!I-21 (24)----T-l---4~-22 (24)----~----r- ----- 147J1-5
-23 (24)----d---~- ----- 147J1-6
XMIT INHB -24 ------NC
INHB RTN -25------NC
429DATAIN 1 (H) -26----”-NC429DATA IN I (L) 145JIB-27------NC
Interconnect InformationTable501 (cent) 22-14-00
Page598.179May25/90
Wseor disclosure of Information on thm page IS sub)ect to the restrictions on the title page of this document.

Honeywell WK?’”c’CITATIONn/V
Function
429 DATA IN 2 (H),429DATAIN 2 (L)I
LIGHTNINGPROCESSOR
LP-850(cent)
ConnectorPin ConnectsTo
145J1B-28(24)------------ --- 9J1B-26l?~-29(.24)---------------- 9J1B-279 ---- SHIELDGND
LX VALIDFLGLX VALIDRTN
TAS (+)
TAS (-)TAS REF (HI)
IAS (+)IAS (-)IASREF (HI)
AP AS (+)APAS (-)
ADC HP (+)ADC HP (-)
SHIELD
429DATAOUT4 (H)429DATAOUT4 (L)SHIELD
IASREF (LO)
429DATAOUT 1 (H):;;EfiTAOUT 1 (L)
429DATAOUT 2 (H)429DATAOUT2 (L)SHIELD
429DATAOUT3 (H)429 DATAOUT3 (L)
-30 ------NC-31------NC
-32------NC-33------NC-34------NC
-35------NC-36------NC-37------NC
-38------NC-39------NC
-40------NC-41------NC
-42-------------
-43------NC-44------NC-45
-46------NC
!
/
-47(24)--P;------------65J2B-62-48 (24)---------------65J2B-6?-49(24)--Y
-50------NC-51------NC-52
I-53(24)--------To------- 125J3A-96
145J1B-54(24)--------~- ------ 125J3A-97
Interconnect InformationTable501 (cent)
22-14-00Page598.180
May 25/90Use or disclosure of mformatlon on this page IS sub!ect to the restrictions on the title page of th!s jocument.

Honeywell liKNRANcECITATION n/V
Function
4DG (Y)iDG (Z)-IDG(X)
$YNCtiRO(H)jYNCHRO(L)
SPARE
:P RTN
iDGOFF
.X-CT
-x-s
-x
>wRoN
SPARE
LIGHTNINGPROCESSOR
LP-850(cent)
ConnectorPin
$145J1B-55(24)-----------1-----56(24)-----------7;----57(24)----------------
-----
1-58(24)----------+ ----59(24)----------------
v-----
-60
-61(24)------------------
-62------NC
-63(24)------------------
-64 (24)------------------
-65(24)------------------
-66(24)------------------
145J1B-67
Connects To
6J1-b6J1-Z6J1-aSHIELDGND
6J1-X6J1-YSHIELDGND
146J1-L
146J1-K
146J1-H
146J1-J
146J1-E
Interconnect InformationTable 501 (cent) 22-14-00
Page 598.181May 25/90
Use or dmclosure of Information on thm page IS subject to the restrictions on the ttle page of thm document.

Function
!8 V LIGHTING
i V LIGHTING
.IGHTING COMMON
;PARE
>WRON
ARE
ARE
,-s
LIGHTNINGSENSOR CONTROLLER
LU-850
Connector Pinconnects To——
146J1-A ------NC
-B (24)-------------------FIG”‘-5
-C (24)-------------------‘lGHTINGGND
-0
-E (24)-------------------145J1B-65
-F
-G
-H (24)------------------- 145J1B-64
-J (24)-------------------145J1B-65
;-CT
J RTN
IARE
IG OFF
PARES
-K (24)------------------- 145J1B-63
-L (24)------------------- 145J1B-61
-M
-N ------NC
[
-P-R-s-T-u
146J1-V
Hone~ell MYJRA*CECITATION1l/V
I
-1Interconnect Information
Table 501 (cent) 22-14-00Paue598,182
“Mav 25/90Use or disclosure of Information on thm page IS subJect to
the restrtcttons on the Mle page of thts I: xumefit. “

Honeywell MII!IRANC’CfTATIONn/V
Function
HW (+)
SPARE
E (+)E (-)
TSTLOOP(+)TSTLOOP(-)
CHASSISGND
+12V DC12 V RTN
SPARE
iN (+)
+N (-)
SPARE
iw (-)
-12VDC
;PARES
LIGHTNING ANTENNA
AT-850/855
ConnectorPin
147J1-1(24)-----fi----
7
-----
-2:1
II
1-3 (24)----q-P------~l----4 (24)----7-1-------- ---
‘l------a-------
-5 (24)-------6 (24)--------------~ --
-----7 ------NCI I
[1.
N~::;U]-----rL--r - ----------+-r - ---- -
-lo 1!Ii 1$
~1-11 (24)----TT---- - - ----12 (24)----rT---- - - ---
Ii ‘ -----13
1!-Jf----;- -----
’14 ‘24)- I [ . ------15(24)----Lj--~-~.------
yY --------
[
-16-17-18
f-19-20
I -21147J1-22
L ---- ----- ---
.!~onnectsTo
145J1B-10
145J1B-14145J1B-15145J1B-16145J1B-22145J1B-23145J1B-21
145J1B-18145J1B-19
145JiB-6145J1B-7145J1B-17
145J1B-11145J1B-12145J1B-13145J1B-20145J1B-8
Interconnect InformationTable 501 (cent)
22-14-00Page 598.183
May25/90Useordisclosureof !nformatlon on this page IS subject to the restrictions on the title pagt~ of thm document,

Function
ERIALCONTROL(HI)ERIALCONTROL(Lo)
PARE
8V DC INPUT8 V DC GNDHASSISGND8 V LIGHTINGV LIGHTINGIGHTINGCOMMONaNNUNCIATORDIMMINGiPARE:ONTROLBUS SHIELDiPARE
‘SB1~EMOTE ON
‘SBZ)FFINIFFOUT
. .
WEATHERRADARCONTROLLER
MC-650
Connector Pin Connects TO1
61J1-A-B
-c
-D-E-F-G-H-J-K-L-M-N-P-R-s-T
61J1-U
(24)-------------$
+9- - 59J1-s(24)-------------+-L-- 59J1-d
‘JI
I(22)--------------------28 V DC POWER
(22)J
------------------ DC POWERGND
~::n::~-----------,----CHASSIS‘ND
(24)--------------!---- ~l[H;;N:O~;[(24)-----.---------.--(24) 4-------------- ---- DAY/NIGtlTLOGIC
I
(24) 1--.-----------
[;:;------------------- wow sWITCH
------------------- 59J1-U
:--:--NC------NC------NC
J
InterconnectInformationTable501 (cent) 22-14-00
page 598.184May25/90
Use or disclosure of mtormatlon on this page IS subject to the restrictions on the title page of this 0 Jcument

Honeywell Mll!!PANcECITATION n/V
WEATHERRADARCONTROLLER
WC-650
Function Connector Pin Jonnects To
CP RTN 61J2-M------NC
PWRON -E (24)-------------------145J1B-66
LX-S -H (24)-------------------145J1B-64
LX -J (24)-------------------145JIB-65
LX-CT -K (24) ------------------- 14!5J1B-63
CP RTN 61J2-L(24)-----------------Z-145J1B-61
InterconnectInformationTable501 (cent)
22-14-00Page 598.185
May25/90Use or disclosure of Information on this page IS sub!ecf to the restrictions on the title page of this document.

Honeywell tifl!ll~r’”c’CITATION n/V
H: 145J1B-2
AD-20079 @
Weight On WheelsFigure D-3
PILOT’S Q
28 V DC 145J1 B-3 (28 W)
oAD-20079 2
DC PWl? Requirements
Figure D-4
5 V DC DIMMING 146J1-B(35 VA)
AD-20079@
Panel LightingFigure D-5
Interconnect InformationTable 501 (cent) 22-14-00
Page598.186May 25/90UseordisclosureOfmfofmatlononthispage!ssubjecttotherestrictionsonIhetitlepageofthisdt)cument,

APPENDIX E
CITATION 11 INSTALLATIONWIRING
Table 501 (cent) 22-14-00Page598.187
May 25/90Use or disclosure of mformal!on on this page IS sub!ect to the restrictions on the title page of this document.

Honeywell WWAN’ECITATIONn/V
APPENDIX E
CITATION II INSTALLATIONWIRING
ThisappendixdefinestheCitationII installation wiring. TheCitationIIAvionicsinstallationis identicalto theCitationV installation(referto themainbody), except the following:
● The RollRateMonitor(57J1),RZ-220,isnotusedin theCitation11avionicsinstallation.
c The SP-200(-941)autopilotis used in the Citation II installation.The
interconnect information for SP-200 (-941) is provided in thisappendix.
InterconnectInformationTable501 (cent) 22-14-00
Paqe598.188‘May25/90
Use or disclosure of information on this page IS subject to the restr!ctlons on the Ilfle page of this d ]cument

Honeywell HYEPANC’CITATION 11~
AUTOPILOTCOMPUTERSP-200
Function Connector Pin Connects To
+15 VDC 1OJ1A-1 (24)------------------+5 VDC -2 ------NC
+28 V A/P ENG ● TCS SEL -3 (20)------------------
SERVO PWR GND -4 (18)------------------
+28 VDC FROM A/P DIS ENGSW -5 (20)------------------SPARE -6-15VDC -7 (24)------------------CHASSIS GND -8 --------
d .9
ROLLHROLLCROLLHOLDANNGNDPITCHCOUPLEANNGNDAP OFF LIGHTGNDAP OFFHORNGNDPITCHHPITCHCROLLCOUPLEANNGNDROLLA/P PATHCOMMAND(ROLLLEFT= -)
V/LRADIODEVIATIONG/SDISPLACEMENTCMDADCALT INPUTG/S INTCMDAIRDATACOMMAND(+)SPAREAIRDATACOMMAND(-)TURNKNOBCOMMANDW(+ROLLLEFT)
TURNKNOBCOMMANDCT
t-9 (24)---------~--------10(24)-------~--------11------NC-12------NC-13(24)------------------14(24)--------
i
---------15(24)------13---------16 (24)------V---------17------NC-18(24)-----------------
-19------NC
1
.20(24)--,7-------------21(24)--1-[------------------------22(24)--G
[
-23 (24)---------,?------24-25(24)---------L!------26(24)---------------
-27(24)---------------
llJI-C, FIG.E-8,FIG.E-9
llJ1-C, 12J1-F,13J1-F, FIG. E-512!J1-C, 13J1-C14J1-C, SERVOPWRGNDFIG.E-5
llJ1-A
lJ1-u,7J1A-14lJI-s,7J1A-15
FIG.E-5FIG.E-5lJI-CC,7J1B-27lJi-AA,7J1B-28
7J:.A-28
7J;.B-429J1-52,16J1-377JIB-437JIB-33
7J1B-34llJ1-B
11.11-D*51K-
PITCHWHEEL+ CLIMB
J
-28(24)~1-------- FIL.E-4PITCHWHEEL+ DIVE -29(24)~- -------------1m Q OUTPUTGAINCONTROL -30------NCAPE 1OJ1A-31------NC
Interconnect InformationTable 501 (cent)
22-14-00Page598:189
May25/90UseordisclosureofIntormatlononthispage IS subject 10 the restrictions on the title pagf of this document.

Honeywell WMR!ANCECITATION n/V
. .
AUTOPILOT COMPUTER (cent)SP-200
Function Connector Pin ConnertsTo.-
ANEROIDSWITCHINPUT 10JIA1;;[;U]-----------------FIG. E-8PITCH WHEEL LOGICINHIBIT -----------------7J1B-49,65J2B-96SPARE -34VOR 0SS OUTPUT (+5 V 0SS) -35 ------NC
ROLL SPARE #8 -36 ------NC
SPARE -37
SPARE -38
AIRSPEED INPUT -39 (24)----------------- 7J1A-43, 9J1-64-40 -- ----NC
[COURSE ERROR :
-41 -- ----NC
-42 - -----NC
PITCH COUPLE SEL GND -43 ------NC
SPARE -44
ROLL INTEGRAL DISABLE -45 ------NC
{
x
1}
-46 (24)---n-----------HEADING Y -47(24)---j~-----------FIG.E-6
-48 (24)---J~----------A/PTEST (;15V) -49 (24)-----------------llJ1-Y
[
-50 (24)-----------------FIG.E-6-51 (24)-----------------1OJ1B-36
AUTOPILOTVALIDINTLK -52------NC-53------NC-54------NC
+28V PULSETRIMUP -55 (22) ----------------- FIG.E-5INTERLOCK -56------NCSPARE -57+28V PULSE TRIM DOWN -58 (22)----------------- FIG. E-5HDG ERROR -59------NCYAWRATE -60------NCPITCHDISPLACEMENT -61------NCPITCHRATE -62------NCLIFTCOMP -63 ------NCROLL DISPLACEMENT -64 ------NCROLL RATE -65 ------NCROLL IN1 -66 - -----NCROLL COORDINATION 1OJ1A-67 ------NC
InterconnectInformationTable501 (cent) 22-14-00
Page 598.190May 25/90
Use or disclosure of reformation on this page IS subject to the restrictions on the title page of this d}cument

Honeywell KMFANCECITATION Ii/V
AUTOPILOT$N4JJ\TER(cent)
Function Connector Pin
SIGNAL GND 1OJ1B-1 (20)-----------------SPARE-2+28V INPUTPOWER -3 (18)-----------------115VAC, 400HZ (H) -4 (22)---=-----------AC POWERGND -5 (22)---rl--+-.-------
SPARE26 VACOUTPUTDC POWERGNDSPARESPARE+28VDCA/P ENG
+28 VDC Y/DENG+28VDC FROMDISENGAGESW (Y/D)
28 VDC PULSETRIMDRIVE+28VDCTK OUTOF DETENTTTLGNDHDGHOLDANN “ GNDTORQUEWARNING28 VDC TCS SELECT
APP ARM GNDAPPCAPGND
II-6
1-7 (22)---:-- ----------8 (20)------------------9-lo-11 (22) -----------------12 (22) -----------------13 (22)----------------
-14 (22)-----------------15 (24)-----------------16------NC-17------NC-18 (24)-----------------19 (24)-----------------20------NC-21 (24)----------------
AIL SYNCHROEXCC -22 (22)----------------HDGGND -23------NCV/lGND -24------NCREVCRS GND -25------NCSBYGND -26------NCSOFTRIDEMODEGND -27 (24)----------------ENGINTLKTODG VALIDRELAY -28 (24)----------------
AILSYNCHROEXC H -29 (22)----------------+28V A/P ENGSELECTSYNCHRO -30 (24)----------------RUDDERSYNCHROEXC C -31 (24)----------------RUDDERSYNCHRO EXC H -32 (24)----------------+28 V A/P ENGINTERLOCK -33 (24)----------------
FLAPINPUTNO.2 -34------NC+28VDC Y/DENGSELECT 1OJ1B-35(24)----------------
ConnectsTo
SIGNALGND
FIG.E-1FIG.E-2AC POWERGND,13J1-E
13J1-D,6J1-X,C6J1-XDC POWERGND
65J1A-94,FIG.E-414J1-FFIG. E-5
FIG. E-5FIG. E-5
FIG.E-10FIG.E-5,65J1A-90
7JIB-70,65J1B-50,8J1-h12J1-E
llJ1-Z6J1-h,C6J1-h,FIG.E-612J1-DFIG.E-714J1-E14J1-DlJI-P,llJ1-P,FIG.E-7
llJ1-R
InterconnectInformationTable 501 (cent)
22-14-00Page 598.191
May25/90Use or disclosure of information on thts page IS subject to the restrictions on the Mle pag,, of thw document.

Honeywell R!IUE”ANCEGITATIONn/V
AUTOPILOTCOMPUTER(cent)SP-200
Function Connector Pin Connects To
ENG INTERLOCK 10JIB::; [;:] ----------------- 1OJ1A-51LATERALMODELOGIC -----------------7J1A-77ALTHOLDMODEGND -38(24)-----------------7J1B-64+28V ALT VALIDOUTPUT -39------NCIASHOLDMODEGND -40 (24)----------------- 7J1B-65
V/S MODE GND -41(24)-----------------7J1B-63ALTHOW SYNCGND -42------NCIAS ● SYNCGND -43------NCADC VALID 4: (24) ----------------- 9J1-12v/s ● SYNCGND ------NC
GEAR + FLAPS DOWN -46 (24)----------------- FIG.E-9RESERVEDSPARE -47HEADINGRATEDISABLE -48(24)-h--------------FIG.E-6ELEV TACH (+) ’49 (24)-Fi
1------------- 13J1-N
ELEV TACH (-) -50 (24)-L~ -fi-
#
--------- 13J1-LELEV SERVO POSITION(H) -51(24)-----FT---------13J1-PELEVSERVOPOSITION(C) -52(24)-----I-OF ------- 13J1-RELEVSERVOAMPLOUTPUT(+)
1
-53(20)-------,-,------- 13J1-A,llJ1-WSPARE -54ELEV SERVO AMPL OUTPUT (-) -55 (20)-------l& ------- 13J1-B, llJ1-XAILERON TACH (+)
t-56 (24)---------I? ---- 12J1-L
AILERON TACH (-) -57 (24)---------1Y - -- 12J1-NAILERON SERVO AMPL OUTPUT (+) -58 (20)------------- -- 12J1-BAILERON SERVO POSITION (X)
ji-59 (24)-? -~~-~~~~~ -- 12J1-P
AILERON SERVO AMPL OUTPUT (-) -60 (20)-[~ -- 12J1-AAILERON SERVO POSITION (Y) ~:; [;:]-J --------: --- 12J1-RRUDDERSERVOAMPL (+) -----------------14J1-ARUDDERSERVOPOSITION(H) -63(24)-----------------14J1-PRUDDERSERVOAMPL(-) -64(20)-----------------14J1-BRUDDERSERVOPOSITION(C) -65(24)-----------------14J1-RRUDDERTACH(+) -66(24)-----------------14J1-LRUDDERTACH(-) 1OJ1B-67(24)-----------------14J1-N
Interconnect InformationTable501(cent) 22=14-00
Paae598.192“May25/90
Use or disclosure of Information on this page is subJect to the restrictions on the Iltle page of this document.

Honeywell MWW!ANCECITATION n/V
Function
TURN KNOB CWTURNKNOB WTURNKNOB CCW
TURNKNOB CT
28V ANN POWER (NIGH:)TURNKNOBOUT
{OF DETENTSWITCH NO
NC
O-28V EDGE LIGHTINGLIGHTING GNDA/P ENG INPUT +28VYD ENG
LOWBANKLIMITA/PENGSELECT
YD ENGSELECTSPARESPARE
PITCHWHEEL +PITCHWHEEL [ELEVSERVOAMPL- +
[ELEVSERVOAMPL -
A/PTEST+15VDCSOFTRIDEMODEGNDPOWERGNDSPARE+28V DC A/PENG ● TCS SEL
HDGMODEGND
SPARE
LAMPTESTGND
O-5VLIGHTING28VANN POWER(DAY)CHASSISGND
AUTOPILOTCONTROLLERPC-500
Connector Pin Connects To
llJ1-A (24)------------------ lCIJIA-7
+
-B (24)---=- ----------- lCIJIA-26-C (24)--;-;-------------10J1A-1
1L ~-----------1oJ1A-27-D (24)---=--E (22)------------------FIGE-1-F ~22j------------------FIG E-5-G (22)------------------ llJ1-L, FIG. E-5-H (24j------------------ FIG.E-5
-J ------NC-K ------NC-L (22)------------------lIJ1-G, FIG.E-5-M (22)------------------FIGE-5-N (24)------------------7J1A-93-P (24)------------------lJ1-P, IOJIB-33,
FIG. E-7-R (24) ------------------ 1OJ1B-35-s-T
i]-U (24)----------O----- FIG E-4-V (24)----------U----- “-w (24)--~i-
t------------1OJ1B-53,13J1-A
-x (24)-:u--------------1OJ1B-55,13J1-B
-Y (24)------------------1OJ1A-49-Z (24)------------------1OJ1B-27-a (20)------------------DC POWERGND-b-C (24)------------------1OJ1A-3,12J1-F,
13J1-F-d (24)------------------::;:i7;i8J1-r,
-e
-f (24)------------------7J1A-54,16J1-16,LAMPTESTSWITCH
-g (22)------------------FIG.E-3-h (22)------------------FIG.E-1
llJ1-j(22)-----3
InterconnectInformationTable501(cent)
22-14-00Page598:193
May25/90useordisclosure Of lnfOrmatlOn on this page is subject to the restrictionson the Mle pag~ of this document.

Honeywell tijWJ5iANcECITATION n/V
PILOT’S 28 V DC
115 V AC
AP
~Bus— . — —IOJIB-3 AP (1OOW)
NIGHTr— lflJ1-E~
OC Power RequirementsFigure E-1
AP
—! >6
t- llJ1-h !
t ‘;WDAY J
‘AP DISCONNECT
400 HZ— 1A
I 1
AC Power “RequirementsFigure E-2
AD-20227
AP (17 VA)
PILOT’S 5V DC DIMMINGI
llJ1-gAP CONT (3 VA)
AD-20229
Edge LightingFigure E-3
.
Use or disclosure of information
Interconnect InformationTable 501 (cent)
22-14-00Page 598.194
May 25/90on Ihm page IS sub!ect to the restrictions on the t!tle page of th)s ltocument.

Honeywell WRANCECITATIONn/V
::::iNMT&....%01 lz-3aD
I
L
1= &_Jq 44 23 wH IPITCH WHEEL I
n“)llll 1 ~4sl I AZI LOI I
——— —— A
1-17’
1111 :%111 Ilr’”m .I
171111 -Cl “
“-yQw%J&iiP’=’v -. ==2=;DC SLEW
y ~:s
a
SLEW ENGAGE ~GND)
1
- 37I
II L-- ——-A II IP ———- —
S5J1B ‘1- SYMBOL G3NERATOR &J~ i4- 4sVS MOOE GND m
4 I47 lAS MODE GND 7s
. ———— — I—-—-—7J1E I1W 7s VS MODE GND 36 I
( 77 1- MOOE GNO alI
. ———.— — ———. — A
. ——-— —~, Ptwl ms-2Qs 1
1I
W&4 MFr=M70LzN~~T~ 1
x IAS MOOE GNO 1
- z VS MOOE GNOI I
———— — a l~lAI
70 IAS MODE GND1
———— — Jm.!-
Air DataCommandBlock DiagramFigure E-4
Interconnect InformationTable 501 (cent)
22-14-00Paqe 598,195‘May 25/90Useordisclosureofmformatlonon th!s page IS subject to the restrictions on the title pag( of this document.

Honeywell WEPANC’CITATIONn/V
Engage/Trim InterlockFigure E-5
Interconnect InformationTable 501 (cent)
22-14-00Page598.196‘May 25/90
Use or disclosure of mformatlon on this page IS subject to the restrictions on the title page of thm d )cument

H
ar+m22
0-o-sm=
(DUlnat+
>.
NN
6J }
<
10J1B
ENG INTLK .—< 28“%*a’’-z~~~~L~~~~
C6J i C6JI
PILOllS C-14Dh<+)
I
DIR GYRO NO. 1I
, i I I.10❑; ““’v” ‘
II I I
—...- ..-.
r--–%v
I .f3G2sTATof4x tL4LlI.
I ‘DG2sTAT0Ry I B ~
II ‘DG2sTAT0RzH--L ——— -J
COPlLO13 C-14D
T::3i’RM’2 -1II - d
–)
II -lI ‘DG2sTAT0RyIBPm4
IHEAOING X
I
IHEADING Y
I
I
I+7’HEADING Z
i= 1n I I
10J1B
I
+
46 tlDG RATE OISABLE
I II
~ - ——— JI
J( F
JUNCTION
+-l+
Box
IPILOT’S HDG REV
~
L1
II
AD 17928.R2

Honeywell MiW&NANcECITATIONn/V
. .
(AP CONT) llJ1
+28 V DCL—> PENG SEL
710J1B lJ1+28 V DCENG INTLK-> 33; ~ p <_/o—;:>—:&:’~ ;?
LATCH VG VALID
AD-20Z30-R1
Autopilot Engage Select and VG Valid SwitchingFigure E-7
Interconnect InformationTable 501 (cent)
22-14-00Page 598.198
May 25/90UseordisclosureofmformatlononthispageIS subjecttotherestrictionsonthetitlepageofIhls:ocumenl

Honeywell WK!ANC’CITATIONn/V
FEET ALT AD-783-R3
Aneroid Switch WiringFigure E-8
-+::<1FLAPS DN
+15VOC-> 1AD.-?~
Flap Transition SwitchFigure E-9
WARN
AD-785
Torque Warn Annunciator
Figure E-10
Interconnect InformationTable 501 (cent)
22-14-00Page 598.199/598~2~0
May 25/90Use or disclosure of Information on this page IS sub!ect to the restnct!ons on the t!tle pagr of this document,

Honeywell !#i~!f~ANc’CITATION V
-.
SECTION 7
SYSTEM SCHEMATICS
Information normally contained in overall system schematics has been incorporated
in the mode flow diagrams (Section 3) and the interconnects (Section 6);
therefore, this section has been omitted.
22-14-00Page 601/602
Mar 15/89Use or disclosure of mformatlon on thw Page IS sub!ect to the restncttons on the Mle pag~> of th~s document.

Honeywell WM?ANcECITATION V
SECTION 8REMOVAL/REINSTALLATIONAND ADJUSTMENT
1. General
2
3
This section provides instructions for removing and reinstalling, and
adjusting each unit of the Integrated Flight Control System that has been
previously installed in the system. Should any INSTALLATION CRITICAL cases
arise with the reinstallation of any unit, be sure to comply 100 percent with
the instructions.
CAUTION: TO PREVENT COMPONENT DAMAGE, TURN AIRCRAFT POWER OFF WHEN REMOVING
OR INSTALLING COMPONENTS.
~: No adjustment is required unless states otherwise.
After reinstallation of any unit, check unit operation in accordance with
applicable GROUND CHECK procedure.
Equipment and Materials
No special equipment or materials other than those commonly used in shop are
required for reinstalling and adjusting the System.
Procedure for All Indicators and Electronic Dis~lavs (Exce~t WI-650 Weather
Radar Indicator
A. Remove Indicators or Displays.
(1) Loosen screws on panel at each corner of unit.
NOTE : If new shelf-type clamp is used,only the top two screws need
to be loosened.
(2) S1 ide unit out of panel and disconnect cable connector(s).
B. Reinstall Indicators or Displays.
(1) Mate unit connector(s) with cable connector(s) and slide unit into
panel .
(2) Tighten screws on panel at each corner of unit.
c. ADI Inclinometer Level Adjustment
(1) Loosen two screws on cover.
(2) Adjust inclinometer or lever
level and tighten screws.on right side until inclinometer is
22-14-00Page 701
Mar 15/89Use or disclosure of Information on this page IS sublecf to the restrictions on the ttle page of this document

Honeywell lNi&WANcECITATIONn/V
4. Procedure for Selectors and Controllers
A. MS-205Mode Selector, PC-500 Autopilot Controller, RI-106S Instrument
I
Remote Controller, DC-811 Display Controller, MC-800 MFD Controller,AV-850A Audio Control Unit, CD-800 Control Display Unit, and WC-650Weather Radar Controller
(1) Remove unit.
(a) Loosen unit screw fasteners.
(b) Slide unit out of panel and disconnect cable connector.
(2) Reinstall unit.
(a) ~:::lunit connector with cable connector and slide unit into.
(b) Tighten unit screw fasteners.
I B. VN-212 VNAV Computer/Controller,VN-800 VNAV Control/Display, and LU-850Lightning Sensor Controller
(1) Remove unit.
(a) Loosen screws on panel at each corner of unit.
(b) Slide unit out of panel and disconnect cable connector.
(2) Reinstall Unit.
(a) ~;;glunit connector with cable connector and slide unit into.
(b) Tighten screws on panel at each corner of unit.
5. Procedure for Sensors and Gyros
A. AG-222 Accelerometer and RG-204 Rate Gyro
NOTE: Before removing accelerometer, note direction of arrow to ensureunit is reinstalled properly.
(1) Remove Accelerometer or Rate Gyro.
(a) Disconnect cable connector from unit.
(b) Remove hardware securing unit to airframe.
22-14-00Page702
May 25/90Use or disclosure of mformatlon on this page IS sub!ect to the restrctlons on the title page of this d]cument

Honeywell !iNK?’””CITATION V
5. A. (2) Reinstal1 Accelerometer or Rate Gyro.
(a) Secure unit to airframe with applicable hardware. Ensure thatarrow on accelerometer is pointed in proper direction.
(b) Mate unit connector with cable connector.
B. VG-14A Vertical Gyro and C-14D Directional Gyro.
CAUTION: A GYRO MAY BE DAMAGED BY MOVING IT AFTER ELECTRICAL POWER ISREMOVED BUT BEFORE THE GYRO ROTOR STOPS. THE GYRO ROTOR WON’TCOME TO A STOP FOR APPROXIMATELY 15 MINUTES AFTER ELECTRICALPOWER IS REMOVED. WHEN REMOVING OR INSTALLING A GYRO FROM ORTO ITS MOUNT, DO SO GENTLY WITH NO QUICK MOTION. THE GYROSHOULD NOT BE TWISTED IN ITS ISOLATOR SHOCK MOUNTS. ANYEXCESSIVE TWISTING WILL CAUSE THE GYRO TO REMAIN OFFSET FROMITS NEUTRAL POSITIONFORA SHORTPERIODOF TIME.
(1) Remove Gyro.
(a) Disconnect cable connector from gyro.
(b) Remove hardware securing gyro to airframe.
(2) Reinstall Gyro.
(a) Secure gyro to airframe with applicable hardware.
(b) Mate gyro connector with cable connector.
(c) For VG-14A Gyros Only, any adjustment necessary to the ROLL andPITCH gradients will be determined by performing the applicableGROUND CHECK procedure.
c. FX-220 Flux Valve
~: Whenever a flux valve is removed and replaced, a compass swingmust be performed to maintain desired heading accuracy.
(1) Remove flux valve.
(a) Gain access to flux valve by removing wing access panel.
(b) Remove cover from flux valve and disconnect six wires from fluxvalve terminals.
(c) Remove three screws securing flux valve to mounting bracket.
22-14-00Paqe 703
Mar-15/89Use or disclosure of mformatlon on thw page is sub~ecl to the restrictions on the title pag ? of fhm document.

Honeywell WVF’”c’CITATION V
5. c. (2) Reinstall flux valve. “
(a) Install flux valve in mounting bracket and secure with three6-40X3/8-inch, round head, nonmagnetic machine screws,Honeywell Part No. 319011.
NOTE: Do not use magnetic type screws to mount the flux valve.
(b) Connect applicable wires to flux valve terminals and instal 1
cover on flux valve.
(c) Perform compass swing calibration procedures.
(3) Compass Swing Calibration
(a) Energize the Compass System and allow several minutes for thegyro to reach operating speed and for the system to slave tothe magnetic heading.
~: The aircraft should be in its normal flight position with theelectrical system and radio equipment operating.
(b) Position the aircraft on a compass rose and turn it to each ofthe four cardinal headings.
(c) Allowing sufficient time for the heading indicator to settlerecord the differences in readings between the headingindicator and the compass rose at each cardinal heading as p’or minus, depending on whether the dial readings are greaterless than the compass rose readings.
usor
NOTE : Instead of the compass rose, a magnetic sighting compass may
be used. To take a reading, the compass is located at a
considerable distance fore and aft of the aircraft and is
moved back and forth from the line of sight coinciding withthe plane. When a sight is taken facing aft, 180 degreesmust be added or subtracted from the sighting compassreading. When facing fore, the compass reads directly.
(d) Add the errors algebraically and divide by four. The result is
the index error.
(e) Loosen the screws holding the flux valve flange to its mountingsurface and rotate the flange of the unit to cancel out theindex error. If the error is positive, the flange should berotated in the counterclockwise direction (giving a minusreading on the flange) as observed from above the unit.
22-14-00Paqe 704
Mar”15/89Use or disclosure of reformation on this page is subject to the restrictions on the title page of this cocumenl.

Honeywell W!URANCECITATION V
5. c. (3) (f)
(9)
(h)
(i)
If the error is negati~e, rotate the flange in the clockwise
direction (giving a plus reading on the flange). The amount of
rotation should equal the index error.
Tighten the mounting screws and recheck the readings at the
four cardinal headings. Recalculate the index error to make
sure it is zero.
If the index error is not zero, readjust the flux valve flangeuntil this error is cancelled.
Any remaining errors in excess of fl degree which are caused byextraneous magnetic fields should be counteracted byreadjusting the compensator. Refer to paragraph 5.D.(3).
D. CS-412 Dual Remote Compensator
(1) Remove Compensator.
(a) Disconnect cable connector(s) from unit.
(b) Remove hardware securing unit to airframe.
(2) Reinstall Compensator.
(a) Secure unit to airframe with applicable hardware.
(b) Mate unit connector(s) with cable connectors.
(c) Perform compensator adjustment procedures.
(3) Compensator Adjustments.
NOTE : Before making the following adjustments to the dual remotecompensator, perform flux valve index error adjustment.
(a) Remove the compensator cover and adjust the compensationpotentiometers to their center position.
(b) Using a compass rose, place the aircraft on a north heading andallow compass dial to settle.
(c) Compensate for any difference between actual heading and
compass dial indication by loosening locking nut and adjusting
N-S (North-South) potentiometer on compensator. Tighten
locking nut.
(d) Place the aircraft on an east heading and allow compass dial to
settle.
22-14-00Paqe 705
Mar-15/89Use or disclosure of Information on this page IS subject to the restrictions on the title pagf of fhm document.

Honeywell Will!’””CITATION n/V
5.
6.
I
D. (3) (e)
(f)
(9)
(h)
(i)
(j)
Compensate for any difference between actual heading andcomDass dial indication b.vlooseninq lockinq nut and adiiustinqE-W’(East-West) potentiom~ternut.
Place the aircraft on a southsettle.
on coiiipensato;. Tighten lockin~
heading and allow compass dial to
Compensate for half of any difference between actual headingand compass dial indication by loosening locking nut andadjusting N-S potentiometer on compensator. Tighten lockingnut.
Place the aircraft on a west heading and allow compass dial tosettle.
Compensate for half of any difference between actual headingand compass dial indication by loosening locking nut andadjusting E-W potentiometer on compensator. Tighten lockingnut.
The compensator should now be fully adjusted for propercompensation. As a check, swing the aircraft on 30-degreeincrements and note readings on compass dial. All readingsshould be within 1 degree of the actual heading. If errors aregreater than 1 degree, repeat index error adjustment and aboveadjustments for greater accuracy.
NOTE: MC-1 or MC-2 Magnetic Compass Calibrator Set can be usedfor index error and compensator adjustment in lieu ofthe above procedure.
Procedure for SP-200 AutoDilot. FZ-500 Fliaht Director, NZ-61O Navigation andAZ-241/AZ-810 Air Data ComDuters, SG-605/MG-605 Symbol Generators, OZ-800Receiver Processor unit. RNZ-850 NAV Unit, RCZ-850 COM Unit, ML-850 MLSReceiver, and LP-850 Liqhtninq Sensor Processor
A. Remove unit.
(1) For air data computers, disconnect pitot and static lines.
(2) Loosen mounting tray holddown assembly knob.
(3) Slowly pull forward on unit handle to separate unit and trayconnectors and slide unit out of tray.
B. Reinstall unit.
(1) Slide unit into mounting tray.
(2) Carefully apply firm pressure until unit connector is mated withconnector receptacle on mounting tray.
22-1 4=00Page 706
May 25/90Use or disclosure of Information on this page IS subject to the restrictions on the title page of this (Iocument.

Honeywell W!JRANCECITATION V
CAUTION: DO NOT FORCE FIT.-” IF MATING IS DIFFICULT,REMOVE THE UNIT AND CHECK FOR CONNECTOR PINSTHAT MAY BE BENT OR OUT OF ALIGNMENT. ALSOCHECK THE ALIGNMENT OF THE RECEPTACLE IN THEMOUNTING TRAY.
6. B. (3) Insert mounting tray holddown assembly knob into hookon front ofunit, and tighten holddown knob.
(4) For air data computers, connect pitot and static l-nes and performpitot/static leak check.
7. Procedure for SM-200 Servo Drive and SB-201 Drum and Bracket Assembly
A. Servo Drive Assembly
(1) Remove Servo Drive Assembly.
(a) Disconnect cable connector from servo drive.
(b) Cut safety wire securing four screws on rear of servo drive,and remove screws.
(c) Slide servo drive out of drum and bracket assembly.
(2) Reinstall Servo Drive Assembly.
(a)
(b)
B. Drum and
Slide servo drive into rear of drum and bracket assembly andsecure with four screws, Honeywell Part No. 4011086. Safetywire all four screws.
Mate servo drive connector with cable connector.
Bracket Assembly
(1) Remove Drum and Bracket Assembly.
(a) Remove servo drive in accordance with paragraph 7.A. (1).
(b) Release bridle cable tension.
22-14-00Paqe 707
Mar”15/89Useordisclosureof mformatlon on this page IS subject to the restrictions on the Mle page of this document.

7. B. (1) (c) Cut safety wire on fou~ screws securing retaining plate, andremove screws and retaining plate.
(d) Remove four cable keepers, Honeywell Part No. 2518330.
(e) Cut safety wire and remove two screws securing swagged cableterminals to drum.
(f) Unwrap bridle cables from drum.
(g) :;~;;:m~our bolts securing drum and bracket assembly to
.
(2) Reinstal 1 Drum and Bracket Assembly.
(a) Mount drum and bracket assembly rigidly to airframe with fourl/4-inch diameter bolts of sufficient length, and four suitablelock washers and nuts.
(b) Wrap bridge cables around servo bracket drum. Secure swagged
cable terminals to servo bracket drum with two, 0.138-32-NC-2A
stainless steel drilled screws, Honeywell Part No. 2554911-1.Safety wire screws through adjacent holes in drum with Low MuMonel wire, 0.020 inch diameter and 4 inches long.
m
TO ENSURE CABLE TERMINAL CAPTURE, USE ONLY SCREW, HONEYWELL PART NO.2554911-1. STANDARD FILLISTER HEAD SCREWS MAY NOT PROPERLY RETAINTHE CABLE TERMINAL.
(c) Adjust control system and bridle cables to proper tension.Cable tension will vary with aircraft. Refer to TypeCertificate, Supplementary Type Certificate, or aircraft manualas applicable to determine proper cable tensions.
(d) Install two of four cable keepers, Honeywell Part No. 2518330,on the servo bracket at points of cable tangency to drum. Theother two cable keepers shall be located at 90 degrees from thefirst two.
(e) Install retaining plate, Honeywell Part No. 2518332, on theslotted end of the cable keepers using four, 5/16-inch long,
No. 8-32, drilled fillister head screws. Safety wire thesefour screws with Low Mu Monel wire, 0.032-inch in diameter and4 inches long.
22-14-00Page 708
Mar 15/89Use or disclosure of information on thm page is subject to the restrictions on the t!tle page of thm r!ocument.

Honeywell WWANCECITATIONV
INSTALLATION CRITICAL
TO ENSURE THAT THE CABLE CANNOT JAM BETWEEN THE DRUMAND KEEPERS, THE DISTANCE BETWEEN THE KEEPERS AND DRUMSHALL BE MEASURED AFTER THE KEEPERS AND RETAINING PLATEARE INSTALLED. THE DISTANCE BETWEEN THE DRUM ANDKEEPERS SHALL NOT EXCEED 0.040-INCH AND NOT BE LESSTHAN 0.005 INCH. THE 3/32-INCH CABLE DIAMETER SHALL BEVERIFIED. THESE ARE CRITICAL INSTALLATIONREQUIREMENTS.
(f) Reinstall servo drive in accordance with paragraph 7.A. (2).
8. Procedure for RT-300 Radio Altimeter Receiver Transmitter
A. Remove Radio Altimeter Receiver Transmitter.
(1) Disconnect cable and antenna connectors.
(2) Remove mounting hardware on front of unit and loosen mountinghardware on back and remove unit.
B. Reinstall Radio Altimeter Receiver Transmitter.
(1) Slide unit into mounting location and secure with applicablehardware.
(2) Mate unit connectors with applicable antenna and cable connectors.
c. Radio Altimeter Display Zero Ground Adjustment.
~: On the radio Altimeter Receiver Transmitter, the zero adjustpotentiometer is accessible through hole above connector on frontof unit.
Apply power and adjust potentiometer for zero foot display
indication on the ED-600 EADI.
9. Procedure for RZ-220 Roll Rate Monitor
A. Remove Monitor.
(1) Disconnect cable connector from unit.
(2) Remove hardware securing unit to airframe.
B. Reinstall Monitor.
(1) Secure unit to airframe with applicable hardware.
(2) Mate unit connector with cable connector.
22-14-00Page 709
Mar 15/89Use or disclosure of mformahon on this page IS sub~ect to the restrictions on the title pagr of thts document

Honeywell WIRANCECITATION V
10. Procedure for WU-650 Antenna and Re~eiver/Transmitter Unit
A. Remove Antenna and Receiver/Transmitter Unit.
(1) Disconnect cable connector from unit.
(2) Remove hardware securing unit to airframe.
B. Reinstall Antenna and Receiver/Transmitter Unit.
(1) Secure unit to airframe with applicable hardware.
(2) Mate unit connector with cable connector.
(3) Perform test and adjustment in accordance with procedures inPRIMUS@ 650 System Description and Installation Manual, Pub. No.A09-3941-01.
11. Procedure for WI-650 Weather Radar Indicator
A. Remove Indicator.
(1) Using a 7/64 allen wrench, turn two screws (access holes are nearlower edge of Indicator front panel) counterclockwise to disengagetwo locking pawls holding Indicator to mounting tray.
(2) Slide Indicator out of instrument panel, andconnector P101 and connector P102, if used.
B. Reinstall Indicator.
(1) Turrt two screws (access holes are near lower
disconnect aircraft
edqe of Indicator. .front panel) counterclockwise so that locking p~wls will travelrearmost.
(2) Connect Indicator to aircraft mating connector P101. If used,connect mating connector P102.
(3) Slide Indicator, connector-end first, into tray, and engage twospring-loaded guide pins at rear.
(4) Turn locking-pawl screws clockwise until pawls engage tray (throughrectangular cutouts).
CAUTION: USE ONLY HAND PRESSURE TO SEAT INDICATOR INTO PANEL. DO NOTUSE THE LOCKING-PAWL SCREWS TO “SCREWJACK” THE INDICATOR INTOPLACE.
(5) Push Indicator into panel with one hand until springs in guide pinsare depressed, hold in place and tighten locking-pawl screws.
22-14-00Page 710
Mar 15/89Use or disclosure of Information on thts page IS sublect to the restrictions on the title page of thw tiocument.

Honeywell WMPANC’CITATION V
12. Procedure for RM-850 Radio Management Unit (RMU)
A. Remove RMU.
(1) Loosen screws on panel at each top corner of unit.
(2) Slide unit out of panel and disconnect aircraft cable connector.
B. Reinstall RMU.
(1) Mate unit connector with aircraft cable connector and slide unitinto panel.
(2) Tighten screws on panel at each top corner of unit.
13. Procedure for CD-850 Clearance Deliverv CDU
A. Remove Clearance Delivery CDU.
(1) Using a3/32 Allen Wrench, loosen unit mounting clamps.
(2) Slide unit out of panel and disconnect aircraft cable connector.
B. Reinstall Clearance Delivery CDU.
(1) Mate unit connector with aircraft cable connector and slide unitinto panel.
(2) Using a3/32 Allen Wrench, tighten unit mounting clamps.
22-14-00Paqe 711/712
‘Mar 15/89Use or dsclosure of reformation on this page IS subject to the restncttons on the Mle pag$ of this document.

Honeywell M!’K!’NCECITATIONV
SECTION 9SHIPPING, HANDLING. AND STORAGE
Refer to manual, Honeywell Pub. No. 09-1100-01, for detailed procedures for
preparing all system components for storage or shipment.
22-14-00Page 801/802
Mar 15/89Use or disclosure of information on this page IS subject to the restrictions on the title page of this document

Page 321
Note 1, Honeywell, 09/11/97 09:48:35 AM +15VDC
Note 2, Honeywell, 09/11/97 09:49:05 AM GND
Page 387
Note 3, Honeywell, 09/11/97 09:42:40 AM ,
Note 4, Honeywell, 09/11/97 09:43:45 AM 10J1B-54
Related Documents