Certifying the robustness of model predictive controllers W. P. Heath and B. Lennox Control Systems Centre The University of Manchester

Certifying the robustness of model predictive controllers W. P. Heath and B. Lennox Control Systems Centre The University of Manchester.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Certifying the robustness of
model predictive controllers
W. P. Heath and B. LennoxControl Systems CentreThe University of Manchester

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

Two success stories for control engineering
• Model predictive control- industry led- wide interest in academia
• Robust linear control- developed in academia- industrial applications e.g. automotive, aerospace…

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

Generic web forming process
Paper making, plastic film extrusion, steel rolling etc.

Plastic film extrusion
Process variable: - thickness
Manipulated variables: - bolts at slice lip - machine speed

Profile response
Slice actuators(paper)
Modeled deflection(paper)
Observed stepresponse(plastic film)
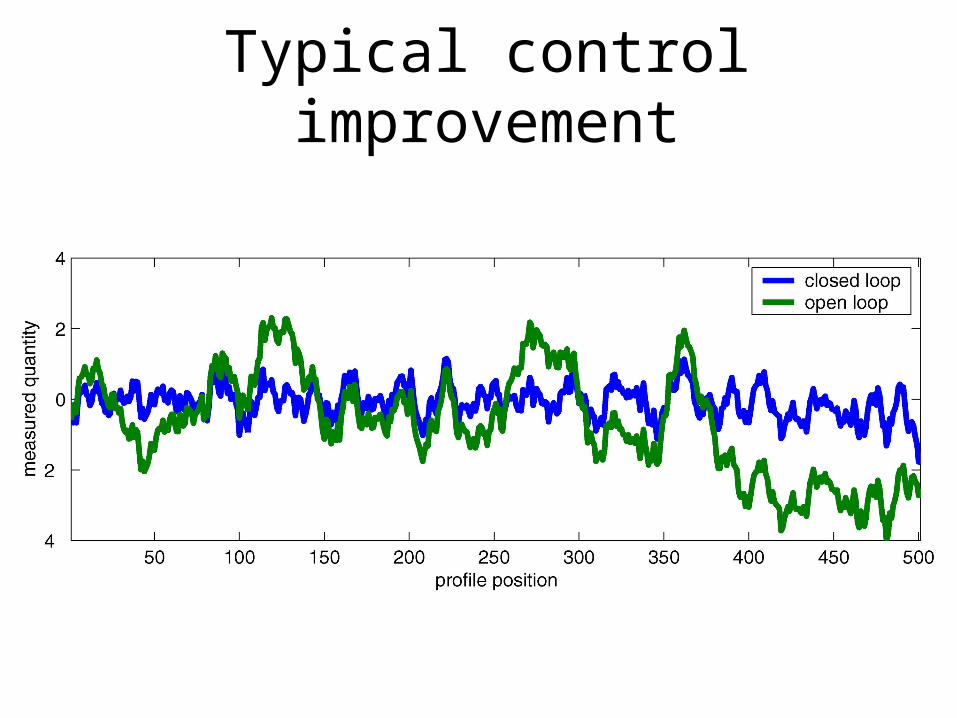
Typical control improvement
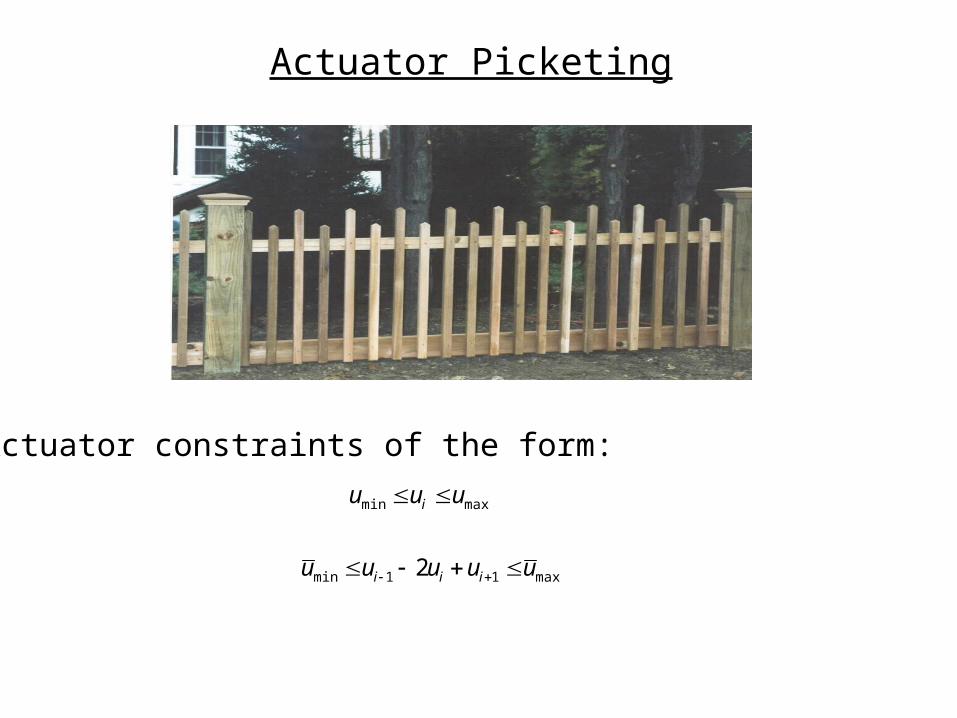
Actuator Picketing
Actuator constraints of the form:
max11min
maxmin
2 uuuuu
uuu
iii
i

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

A. G. Wills and W. P. Heath. Application of barrier function model predictive control to an edible oil refining process. Journal of Process Control, 15(2):183-200, March 2005.

Separator operation

Quality/yield trade-offopen loop

Quality/yield trade-offclosed loop
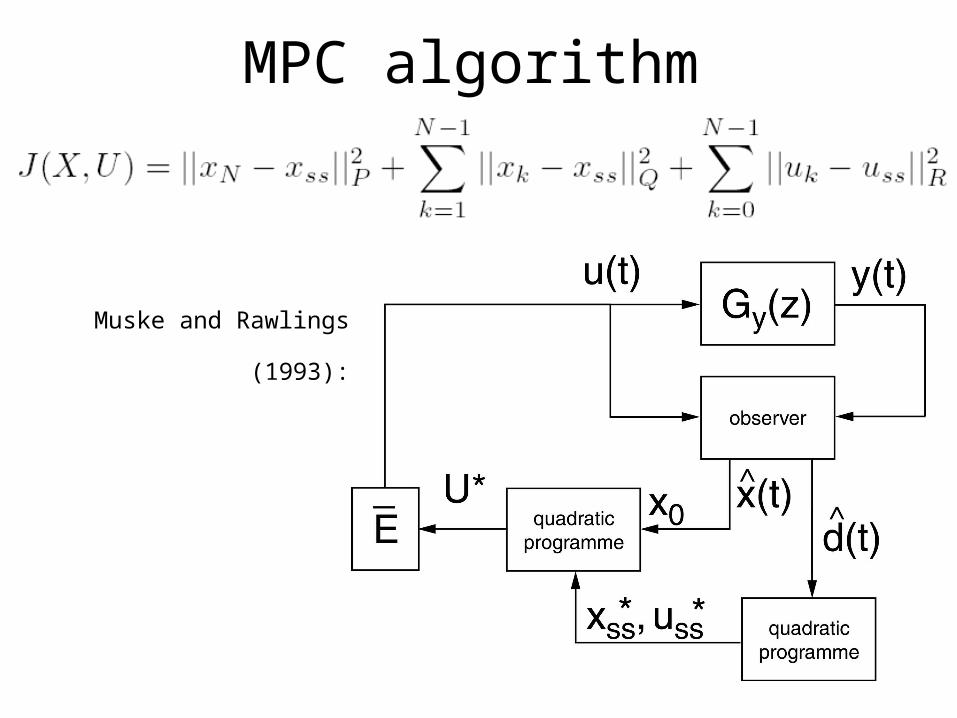
MPC algorithm
Muske and Rawlings (1993):

Before
Flow
Pressure1
Pressure2
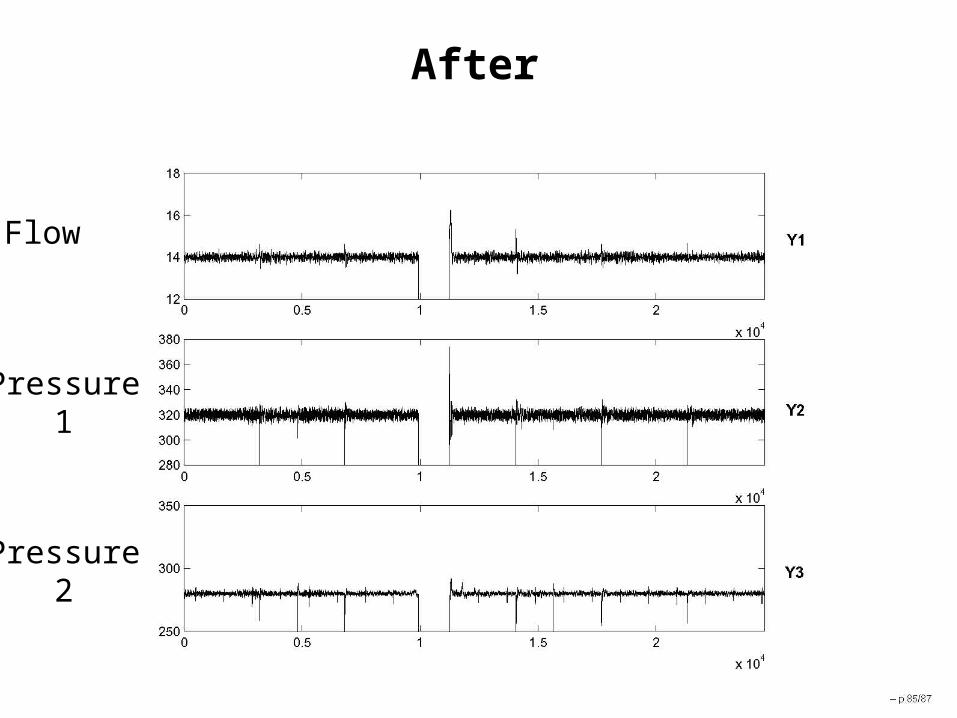
After
Pressure1
Pressure2
Flow

Results
• 76% reduction in separator 1 variation (sd)
• 78% reduction in separator 2 variation (sd)
• 10% increase in input flow variation (sd)

Start-up:manual to automatic operation
• Final set-up has both manual and automatic valves
• Best solution would be to have clutched handwheels with position sensors
• Implemented solution brings in one loop at a time via MPC’s constraint handling

Start-up
Manipulatedvariables
Processvariables

Self-cleaning
• Periodically separator bowl opens to atmospheric pressure:
• Circa 40% volume lost during self-clean• During operation inputs frozen and
setpoints track measured variables• Fast recovery exploits
– observer– MPC constraint handling

Self-cleaning
Manipulatedvariables
Processvariables

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

A. G. Wills et al. Model Predictive Control Applied to Constraint Handling in Active Noise and Vibration Control. IEEE Transactions on Control Systems Technology, 2007.
5KHz sampling
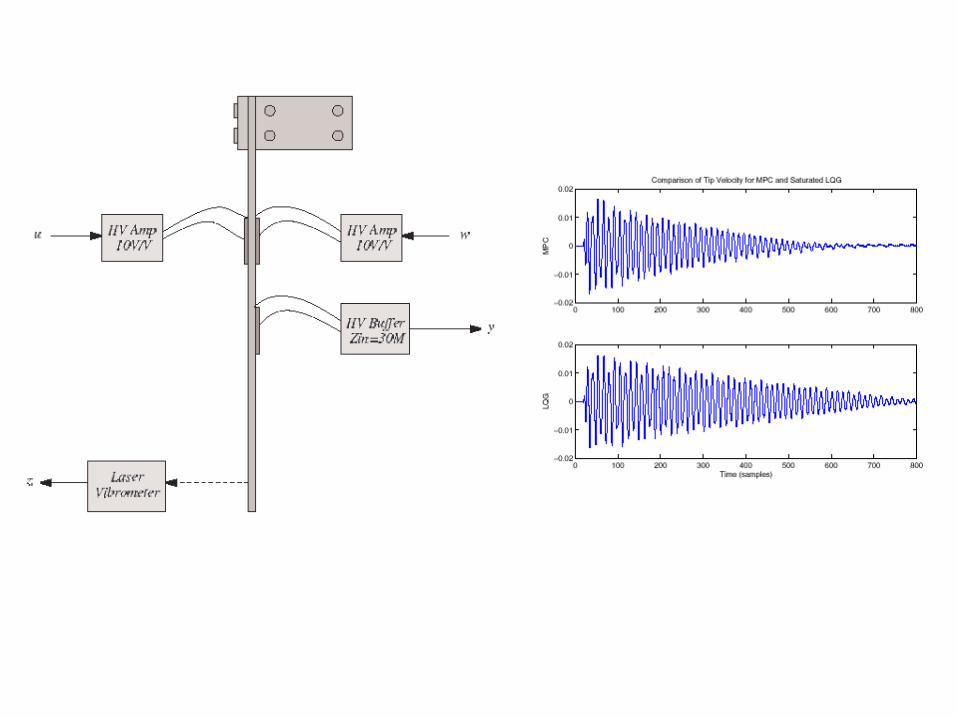

• MPC beats LQG with antiwindup at 5kHz
• Implemented on standard DSP
• On-line active set algorithm
• 12 step horizon
• Linear state space formulation with terminal weight and observer
• Boxed input constraints only

Common to all three examples:
• Low level control application
• Multivariable interactions
• Input constraints only

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

Mayne et al., Automatica 2000
“While the problem has been studied and is now well understood, the outcome of the research is conceptual controllers that work well in principle but are too complex to employ.”

Magni and ScattoliniNMPC 2005
“Despite the large number of results available, it is believed that significant process [has] still to be done towards the development of algorithms guaranteeing satisfactory performances with an acceptable computational effort”

Why is it hard?
• Satisfying constraints renders the controller inherently nonlinear.
• State constraints introduce:feasibility issuesloss of sparseness and symmetry
• Remark: standard stability approaches impose state constraints
• Approaches such as min-max make matters even worse

What can we advise practitioners?
• Rewrite your code
• Extend your horizonsRemark: length of horizon and terminal weight depend on both current state and projected steady state position
• Detune your controllerRemark: no theory!

ZafiriouComputers chem. Engng. 1990
“One should study the problem in its nonlinear nature, obtain conditions that guarantee nominal and robust stability and performance and tune the parameters of the original optimization problems to satisfy them.”

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

Gain margin

Phase margin

Gain margin

How do we generalise ideas to multivariable?
Rosenbrock
Manchester/Cambridge School
H∞ theory, μ synthesis etc.

Sensitivity analysis

Plant model

Closed loop system
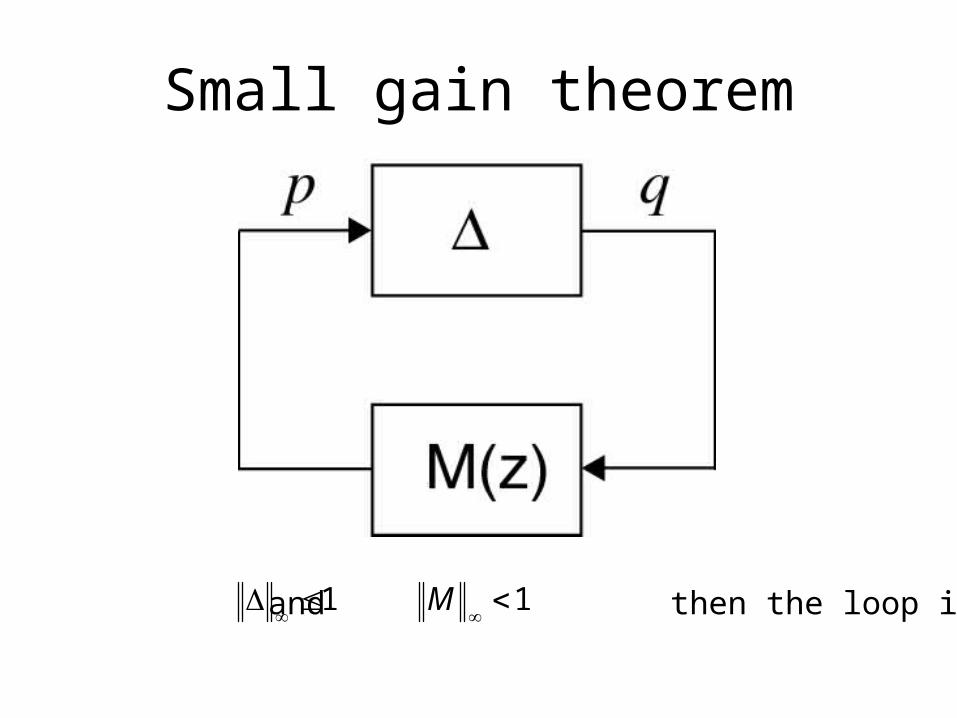
Small gain theorem
1If and then the loop is stable 1
M
Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

IQC theory:

IQC notation:

IQC theory:

Example: small gain theorem

Example: multivariable circle criterion

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

We only consider
• Open-loop stable plant
• Linear plant model
• Input constraints
• Robust stability

Multi-parametric quadratic programming

Sector bound

MPC stability We can use IQC theory to test stability of many
MPC structures. For example:

Equivalent loop
• represents static nonlinearity (quadratic program)

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

MPC robust stabilityFor MPC we can combine
– the quadratic programming nonlinearity – the model uncertainty
into a single block satisfying a single IQC.
• represents uncertainty• represents static nonlinearity (quadratic program)

Example

Example in standard form

Example:
• 10 step horizon• 2x2 plant• IQC made up from four separate blocks (two
nonlinearities and 2 uncertainties)• Weight on states is 1/k

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges

Cross-directional control with unit prediction horizon
R. M. Morales and W. P. HeathNumerical design of robust cross-directional control with saturating actuators.Control Systems 06, Finland.

Robustness analysis

Corresponding range in the modes.

Tuning parameter at each mode
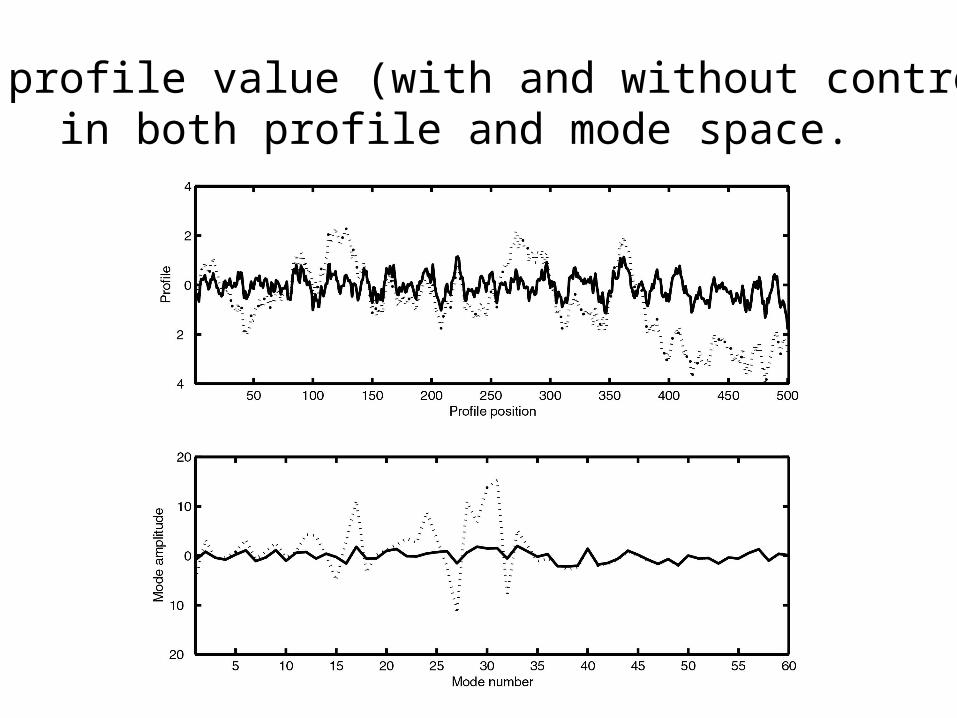
Final profile value (with and without control) in both profile and mode space.

Corresponding actuator position, and second moment of actuators.

Overview
• Motivating examples: cross-directional controledible oil refiningactive vibration control
• Robustness of MPC (i)• Robust linear control• IQC framework• Geometry of quadratic programs• Robustness of MPC (ii)• Cross-directional control example• Challenges
Challenges
• From analysis to control design
• Robust performance
• Output (and state) constraints
• Open loop unstable plant (e.g. integrating plants)
Thank you!
W. P. Heath and B. LennoxControl Systems CentreThe University of Manchester
Related Documents











