UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE ENGENHARIA MECÂNICA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA DISSERTAÇÃO DE MESTRADO Metodologia para Projeto Inverso de Aerofólios em Grades de Turbomáquinas Via Otimização por Busca Aleatória Controlada Autor: Carlos Alberto Amaral Moino Orientador: Prof. Dr. Nelson Manzanares Filho Co-Orientador: Prof. Dr. Waldir de Oliveira Itajubá, julho de 2006

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE ENGENHARIA MECÂNICA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
DISSERTAÇÃO DE MESTRADO
Metodologia para Projeto Inverso de Aerofólios em Grades de Turbomáquinas Via Otimização por Busca Aleatória Controlada
Autor: Carlos Alberto Amaral Moino
Orientador: Prof. Dr. Nelson Manzanares Filho Co-Orientador: Prof. Dr. Waldir de Oliveira
Itajubá, julho de 2006
UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE ENGENHARIA MECÂNICA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
DISSERTAÇÃO DE MESTRADO
Metodologia para Projeto Inverso de Aerofólios em Grades de Turbomáquinas
Via Otimização por Busca Aleatória Controlada
Autor: Carlos Alberto Amaral Moino Orientador: Prof. Dr. Nelson Manzanares Filho Co-Orientador: Prof. Dr. Waldir de Oliveira Curso: Mestrado em Engenharia Mecânica Área de Concentração: Dinâmica de Fluidos e Máquinas de Fluxo Dissertação submetida ao Programa de Pós-Graduação em Engenharia Mecânica como
parte dos requisitos para obtenção do Título de Mestre em Engenharia Mecânica.
Itajubá, julho de 2006 MG. – Brasil
UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE ENGENHARIA MECÂNICA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
DISSERTAÇÃO DE MESTRADO
Metodologia para Projeto Inverso de Aerofólios em Grades de Turbomáquinas
Via Otimização por Busca Aleatória Controlada
Autor: Carlos Alberto Amaral Moino Orientador: Prof. Dr. Nelson Manzanares Filho Co-Orientador: Prof. Dr. Waldir de Oliveira Composição da Banca Examinadora: Prof. Dr. Ramiro Gustavo Ramirez Camacho - ITA Prof. Dr. Denis Rinaldi Petrucci - IEM/UNIFEI Prof. Dr. Genésio José Menon - IEM/UNIFEI Prof. Dr. Waldir de Oliveira - IEM/UNIFEI Prof. Dr. Nelson Manzanares Filho, Presidente - IEM/UNIFEI
Dedicatória
Dedico este trabalho a minha querida e bela esposa Cibele e a minha adorável filha
Carolina, que são incansáveis apoiadoras e pacientes nos momentos difíceis de minhas
jornadas.
Aos meus pais José e Jadyr, que me mostraram a importância do estudo e não
mediram esforços para que eu pudesse me tornar engenheiro.
Agradecimentos
Ao meu orientador, Prof. Dr. Nelson Manzanares Filho, pela competência em
transmitir seu notório saber. Mais que um orientador, um amigo mostrando sempre a luz do
conhecimento com ética e profissionalismo.
Ao grande amigo Prof. Manoel da Silva Valente, que nos encaminhou no início desta
jornada e sempre esteve me apoiando.
Aos grandes amigos Marques e Aldo Ramos, pelo exemplo.
Aos caros companheiros Amaral, Santoro, João José, Chinen, Júlio, Renato, Galli,
Canton, Tibério, Rosário e demais companheiros de turma.
Ao Prof. Waldir de Oliveira e aos professores Ariosto Bretanha Jorge, Celso Volpe,
Eli Silva, Genésio José Menon, José Juliano de Lima Júnior, Marcelo José Pirani, Osvaldo
José Venturini, Ricardo Dias Martins de Carvalho, Rogério José da Silva e Sebastião Varela,
que refletiram a UNIFEI, mostrando seu brilho pelo trabalho sério e competente.
Ao Instituto de Engenharia Mecânica da UNIFEI por seus dedicados Professores e
Funcionários, pela oportunidade de crescimento profissional que me concedeu.
Nas pessoas dos diretores Antonio de Salles Penteado e Áureo Emanuel Pasqualeto
Figueiredo, agradeço a todos da “Família Ceciliana” pelo grande incentivo.
Ao amigo e grande “chefe” Fernando Luiz Windlin, pelo grande apoio na carreira de
engenheiro. Suas ações éticas e competentes me nortearam em 18 anos de vida acadêmica e
profissional.

De tudo ficam três coisas:
a certeza de que está sempre começando,
a certeza de que era preciso continuar e
a certeza de que seria interrompido antes de terminar.
Fazer da interrupção um caminho novo.
Fazer da queda um passo de dança,
do medo uma escada e da procura... um encontro.”
Fernando Sabino
Resumo
MOINO, C. A. Amaral (2006), Metodologia para o Projeto Inverso de Aerofólios em
Grades de Turbomáquinas via Otimização por Busca Aleatória Controlada, Itajubá,
78p. Dissertação (Mestrado em Dinâmica de Fluidos e Máquinas de Fluxo) - Instituto
de Engenharia Mecânica, Universidade Federal de Itajubá.
Nesta dissertação, é apresentado o desenvolvimento de uma metodologia de projeto
inverso de aerofólios de grades lineares de turbomáquinas axiais, utilizando algoritmos de
otimização baseados em busca aleatória controlada (algoritmos CRS).
A geometria do aerofólio é parametrizada com curvas polinomiais de Bezier. O cálculo
do escoamento é feito através de um método de painéis baseado em distribuições constantes
de vórtices e na condição de contorno de Dirichlet (velocidade nula no interior do aerofólio).
Uma nova versão dos algoritmos CRS é apresentada, utilizando reflexões baseadas na
variabilidade da função objetivo (CRS-VBR). Essa versão procura utilizar informações sobre
a variação da função objetivo em torno do melhor ponto da população atual, de modo a
balancear automaticamente as buscas globais e locais, aumentando a eficiência geral da busca.
Três casos de teste de projeto inverso de aerofólios em grade linear são apresentados
para avaliar a eficácia da metodologia. O algoritmo CRS-VBR proposto mostra-se superior a
outras versões do CRS da literatura, tanto sob o aspecto de precisão quanto de taxa de
convergência.
Palavras-chave
Grades Lineares, Aerofólios, Projeto Inverso, Otimização, Busca Aleatória Controlada

Abstract
MOINO, C. A. Amaral (2006), Methodology for Inverse Airfoil Design of Turbomachines
Cascades Using Optimization by Controlled Random Search,, Itajubá, 78p, MSc
Dissertation - Instituto de Engenharia Mecânica, Universidade Federal de Itajubá.
This dissertation presents the development of a methodology for inverse airfoil design
of axial turbomachine cascades by applying optimization algorithms based on Controlled
Random Search (CRS algorithms).
The airfoil geometry is parameterized with Bezier polynomial curves. The flow
calculation is made by means of a panel method with constant vortex distributions and by
applying the Dirichlet boundary condition (null velocities inside the airfoil).
A new version of the CRS algorithm is presented by using Variability Based Reflections
(CRS-VBR). This version aims to use information about the objective function variation
around the best point of the current population, in order to automatically balance local and
global searches, improving in this way the general search efficiency.
Three test cases of inverse airfoil cascade design are presented for evaluating the
methodology effectiveness. The proposed CRS-VBR algorithm has outperformed other
referred CRS algorithms, both in terms of precision and convergence rate.
Keywords
Linear Cascades, Airfoils, Inverse Design, Optimization, Controlled Random Search
i
Sumário
SUMÁRIO_________________________________________________________________i
LISTA DE FIGURAS_______________________________________________________iv
LISTA DE TABELAS ______________________________________________________vi
SIMBOLOGIA ___________________________________________________________ vii
LETRAS LATINAS _______________________________________________________ vii
LETRAS GREGAS _______________________________________________________viii
SUPERESCRITOS_________________________________________________________ix
SUBSCRITOS_____________________________________________________________ x
ABREVIATURAS _________________________________________________________ x
SIGLAS __________________________________________________________________xi
CAPÍTULO 1 _____________________________________________________________ 1
INTRODUÇÃO GERAL ____________________________________________________ 1
1.1 Introdução ----------------------------------------------------------------------------------------- 1
1.2 Contexto e Revisão Bibliográfica -------------------------------------------------------------- 2
1.2.1 Métodos de Análise do Escoamento Potencial ao Redor de Aerofólios de Pás de
Máquinas de Fluxo ------------------------------------------------------------------------------- 4
1.2.2 Métodos de Otimização para Aerofólios de Turbomáquinas ------------------------- 7
1.3 Motivação do Presente Trabalho --------------------------------------------------------------10
1.4 Objetivos do Presente Trabalho -------------------------------------------------------------- 11
1.5 Delineamento do Presente Trabalho ----------------------------------------------------------11
CAPÍTULO 2 ____________________________________________________________ 13
ANÁLISE DO ESCOAMENTO POTENCIAL EM GRADES LINEARES – MÉTODO
DOS PAINÉS ____________________________________________________________ 13
2.1 Introdução ----------------------------------------------------------------------------------------13
2.2 Definição das Grades Lineares de Máquinas de Fluxo Axiais-----------------------------14
2.3 Fundamentos Teóricos para Cálculo do Escoamento Potencial em Grades Lineares --16
ii
2.4 Solução Numérica – Método dos Painéis-----------------------------------------------------20
2.5 Modificações na Matriz de Influência --------------------------------------------------------27
2.5.1 Modificação na Diagonal da Matriz de Influência B’kj -------------------------------27
2.5.2 Modificação na Posição dos Pontos de Controle e nos Elementos Não-Diagonais
da Matriz de Influência B’kj ---------------------------------------------------------------------28
2.6 Efeitos Viscosos – Ajuste de Gostelow-------------------------------------------------------29
2.6.1 Circulação Efetiva -------------------------------------------------------------------------31
CAPÍTULO 3 ____________________________________________________________ 34
PARAMETRIZAÇÃO GEOMÉTRICA DE AEROFÓLIOS _____________________ 34
3.1 Introdução ----------------------------------------------------------------------------------------34
3.2 Parametrização para Geração dos Perfis------------------------------------------------------35
3.3 Procedimento para Geração de Perfis Viáveis -----------------------------------------------38
CAPÍTULO 4 ____________________________________________________________ 43
ALGORITMO DE OTIMIZAÇÃO __________________________________________ 43
4.1 Introdução ----------------------------------------------------------------------------------------43
4.2 Algoritmos de Busca Aleatória Controlada --------------------------------------------------44
4.2.1 O CRS Básico ------------------------------------------------------------------------------45
4.2.2 Algumas Versões do CRS ----------------------------------------------------------------45
4.2.3 Um Algorítmo Usando Relfexão Baseada em Variabilidade: CRS-VBR
(Manzanares Filho et al.,2005)------------------------------------------------------------------47
4.3 Comentários sobre a Implementação e Utilização do Código Computacional ----------50
4.3.1 Dados de Entrada --------------------------------------------------------------------------50
4.3.2 Geração da População Inicial ------------------------------------------------------------51
4.3.3 Definição e Cálculo da Função Objetivo -----------------------------------------------52
4.3.4 Critério de Parada -------------------------------------------------------------------------52
CAPÍTULO 5 ____________________________________________________________ 53
APRESENTAÇÃO DOS CASOS ESTUDADOS _______________________________ 53
5.1 Introdução ----------------------------------------------------------------------------------------53
5.2 Informações Gerais -----------------------------------------------------------------------------54
5.3 1º Caso – Perfil Alvo Descrito Exatamente pela Parametrização -------------------------57
5.4 2º Caso – Exemplo da Literatura --------------------------------------------------------------62
5.5 3º Caso – Dados Experimentais para a Distribuição de Pressões do Perfil Alvo -------66
iii
CAPÍTULO 6 ____________________________________________________________ 71
CONCLUSÕES E SUGESTÕES ____________________________________________ 71
6.1 Conclusões --------------------------------------------------------------------------------------- 71
6.3 Sugestões para Trabalhos Futuros------------------------------------------------------------- 73
APÊNDICE A ____________________________________________________________ 74
REFERÊNCIAS BIBLIOGRÁFICAS ________________________________________ 75
iv
Lista de Figuras
Figura 1.1 – Linha metodológica adotada nesta dissertação -------------------------------------- 12
Figura 2.1 – Esquema de uma bomba ou ventilador axial -----------------------------------------14
Figura 2.2 – Sistema de uma máquina axial desenvolvida em grade Linear --------------------15
Figura 2.3 – Parâmetros da grade de perfis aerodinâmicos idênticos ----------------------------16
Figura 2.4 – Sentido positivo de ds -------------------------------------------------------------------18
Figura 2.5 – Definição do ângulo α ---------------------------------------------------------------18
Figura 2.6 – Relação entre as velocidades a montante e jusante e a circulação -----------------19
Figura 2.7 – Polígono de “n” lados acompanhando o contorno do perfil-------------------------21
Figura 2.8 – Detalhe do ponto de controle do painel j ----------------------------------------------22
Figura 2.9 – Condição de Kutta -----------------------------------------------------------------------25
Figura 2.10 - Detalhe do ângulo de curvatura do perfil correspondente ao painel k -----------27
Figura 2.11 –Detalhe do deslocamento do ponto de controle zck --------------------------------28
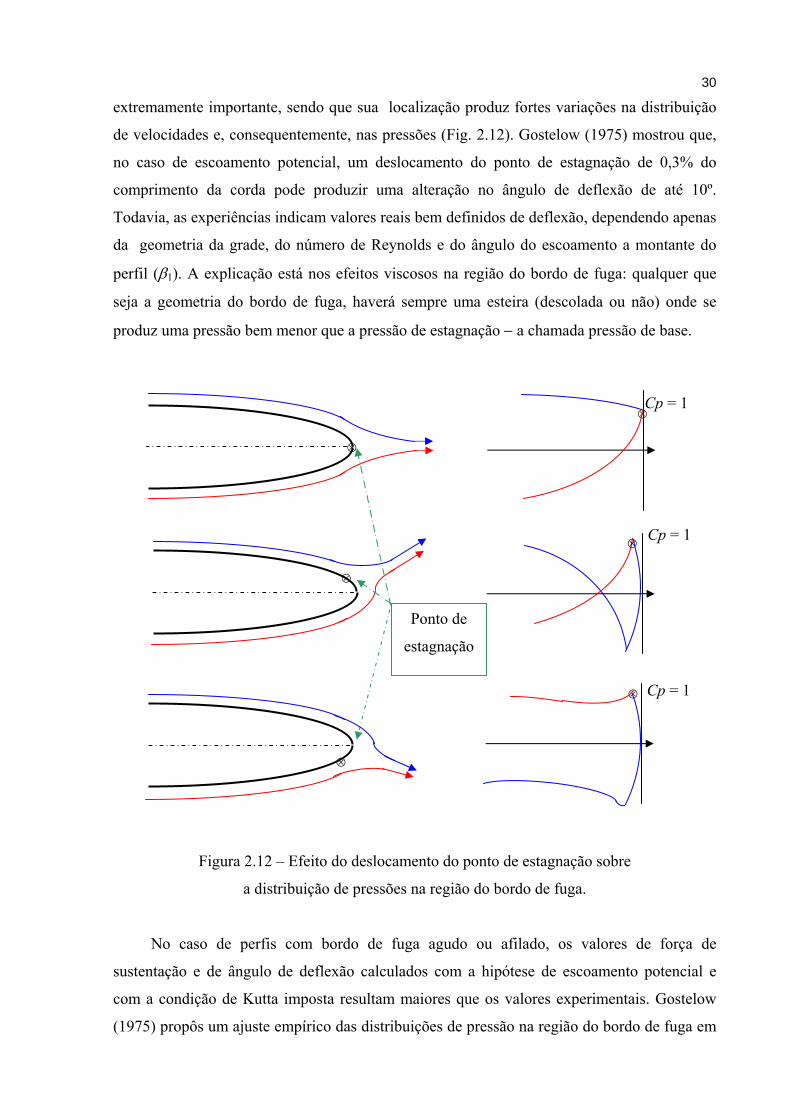
Figura 2.12 – Efeito do deslocamento do ponto de estagnação sobre a distribuição de
pressões na região do bordo de fuga ------------------------------------------------------------------30
Figura 2.13 – Circulação efetiva ---------------------------------------------------------------------- 31
Figura 2.14 – Ajuste de Gostelow ---------------------------------------------------------------------32
Figura 3.1 – Curvas Bezier para o arqueamento do perfil -----------------------------------------36
Figura 3.2 – Curvas Bezier para a espessura do perfil ---------------------------------------------36
Figura 3.3 – Curvas de espessura (t representa a semi- espessura) -------------------------------38
Figura 3.4 – Curva de espessura soperposta à curva de arqueamento---------------------------- 38
Figura 3.5 – Perfis inviáveis (a) em função de arqueamento excessivo (b) em função do
cruzamento da linha de espessura ---------------------------------------------------------------------38
Figura 3.6 – Definição dos intervalos para a viabilização dos perfis -----------------------------39
Figura 4.1 – Parábola para obtenção da coordenada do novo ponto tentativo ----------------- 46
Figura 4.2 – (a) Perfil alvo (b) Pior perfil gerado na inicial (c) Melhor perfil gerado na
população inicial ---------------------------------------------------------------------------------------- 51
Figura 5.1 – Caso 1 – Perfil alvo, pior e melhor aerofólios da população inicial ---------------59
Figura 5.2 – Caso 1 – Evolução do processo de convergência dos algoritmos CRS ---------- 59
Figura 5.3 – Caso 1 – Comparação entre aerofólios resultantes e o perfil alvo -----------------60
Figura 5.4 – Caso 1 - Distribuições de pressões para aerofólios resultantes e o perfil alvo----61
Figura 5.5 – Caso 2 – Perfil de referência, pior e melhor aerofólios da população inicial ---- 63
v
Figura 5.6 – Caso 2 - Evolução do processo de convergência dos algoritmos CRS ------------63
Figura 5.7 – Caso 2 – Comparação entre os aerofólios resultantes -------------------------------64
Figura 5.8 – Caso 2 – Distribuições de pressões para aerofólios resultantes e o perfil alvo -- 65
Figura 5.9 – Caso 3 – Perfil NACA 1510 , pior e melhor aerofólios da população inicial
(a) escoamento puramente potencial (b) escoamento com ajuste de Gostelow ---------------- 67
Figura 5.10 – Caso 3 – Evolução do processo de convergência dos algoritmos CRS
(a) escoamento puramente potencial (b) escoamento com ajuste de Gostelow -----------------68
Figura 5.11 – Caso 3 – Comparação entre os aerofólios resultantes e o perfil NACA–1510
(a) escoamento puramente potencial (b) escoamento com ajuste de Gostelow -----------------69
Figura 5.12 – Caso 3– Distribuições de pressões aerofólios resultantes e experimental ------ 70
vi
Lista de Tabelas
Tabela 2.1 – Avaliação da Aferição do Fator de Deslocamento dos Pontos de Controle
para Perfis Joukowsky Isolados ---------------------------------------------------------------------- 28
Tabela 3.1 – Coordenadas dos Pontos de Controle - Curvas de Bezier para Arqueamento ---36
Tabela 3.2 – Coordenadas dos Pontos de Controle - Curvas de Bezier para Espessura -------37
Tabela 3.3 – Definição da Nova Parametrização (∆i) em Função da Antiga (bj) ---------------40
Tabela 3.4 – Recuperação recursiva da Parametrização Antiga (bj) em função da Nova
Parametrização (∆i) -------------------------------------------------------------------------------------41
Tabela 5.1 – Valores bj para Geração do Perfil Alvo do 1º Caso ---------------------------------58
Tabela 5.2 – Comparação das Normas Geométricas dos Melhores Aerofólios -----------------58
vii
Simbologia
Letras Latinas
A Matriz com a população de perfis a serem verificados na otimização
Akj Matriz de contribuição no método dos painéis
bk Vetor com componentes cinemáticos
bi Pontos das curvas de Bezier – Variáveis de projeto
Bk Matriz de influência
Cs Coeficiente de sustentação aerodinâmica
Ca Coeficiente de arrasto aerodinâmico
Cp Coeficiente de pressão
CpG Coeficiente de pressão com ajuste de Gostelow
CM Coeficiente de momento
e Base dos logaritmos neperianos de valor 2,71828
f (p) Valor da função objetivo no ponto tentativo no processo de otimização
fg Valor médio entre os pontos definidos para reflexão
f Fator de deslocamento do ponto de controle no método dos painéis
f l Menor valor da função objetivo no processo de otimização
f h Maior valor da função objetivo no processo de otimização
g Centróide
gi Valor ponderado das coordenadas do centróide
i Unidade imaginária i = −( )1 1 2 .
h Pior ponto da população inicial
ℑ Parte imaginária da Equação de Fredholm
l Corda do perfil
l melhor ponto da população inicial →n Vetor normal à superfície do rotor
n Número de variáveis de projeto (17 valores de intervalos de projeto ( )n∆ )
viii
N Número de indivíduos na população
Np Número de painéis
pi Ponto tentativo
p Pressão
P População inicial
pTS Pressão no bordo de fuga pelo lado de sucção
pTP Pressão no bordo de fuga pelo lado de pressão
P(u) Pontos para definição dos painéis pelas curvas de Bezier
Q Vazão volumétrica.
r1 coordenada do ponto de menor valor da função objetivo
r2 coordenada do 1º ponto para geração da parábola que define o ponto tentativo
r3 coordenada do 2º ponto para geração da parábola que define o ponto tentativo
ℜ Parte real da equação integral de Fredholm
s Coordenada natural do perfil
t Espaçamento entre os perfis na grade
sw distribuição de velocidades
W Velocidade do escoamento
W1 Velocidade a montante da grade
W2 Velocidade a jusante da grade
w Velocidade relativa.
x , y Coordenadas cartesianas retangulares no plano z da grade linear.
z Ponto no plano complexo da grade linear, yixz += .
Z n Pontos que definem o polígono formado no método dos painéis
Z c Pontos de controle definidos no meio de cada um dos painéis
Letras Gregas
α Valor que define a variabilidade local para o processo de otimização com reflexão
α Ângulo tomado entre o sentido positivo da tangente ao perfil e o eixo x
β Distribuição de probabilidade
ix
−β Ângulo de montagem
1β Ângulo do escoamento na aproximação da grade
2β Ângulo do escoamento na saída da grade
β∆ Ângulo de deflexão
ULi,∆ Intervalos de projeto para viabilização dos perfis
s∆ Comprimento do painel
*x∆ Deslocamento do bordo de fuga para o ajuste de Gostelow
cε Erro circulatório
γ Densidade de vórtices.
Γ Circulação
Γef Circulação efetiva
Mδ Ângulo de montagem da pá.
III eλλ Núcleos das Equações de Fredholm
ζ Ponto de cálculo e posição genérica das singularidades distribuídas.
℘ Contorno do perfil
π 3,14159265...
ρ Massa específica.
φ Potencial de velocidades.
∇ Operador Nabla
Superescritos
L Limite inferior
U Limite superior
x
Subscritos
∞ Referente à distância longe da grade, ou ao número infinito de pás.
c Referente ao ponto de controle.
G Cálculo realizado com ajuste de Gostelow
i Referente às abscissas e ordenadas dos intervalos de projeto
j Referente ao ponto de controle genérico.
k Referente à grade elementar genérica, ou painel correspondente.
MÍN Referente à mínimo.
MÁX Referente à máximo.
Abreviaturas
CRS Busca aleatória controlada
CRSI Busca aleatória controlada original
CRS6-BV Busca aleatória controlada com busca local
CRS6_VBR Busca aleatória controlada com reflexão
DE Evolução Diferencial
FCNR Sub-rotina para cálculo da função objetivo
GA Algoritmo Genético
GRADLIN Programa para cálculo do escoamento pelo método dos painéis
INIT_POP Sub-rotina para geração da população inicial
ISSED_U Semente para a geração da população inicial
ISSED_B Semente para a distribuição Beta
MLOCMAX Número máximo de buscas locais por rodada
RAND_PAR Sub-rotina para viabilização dos aerofólios
xi
TOL_G Critério de parada
TRIAL_GLOBAL Sub-rotina para busca global
TRIAL_LOCAL Sub-rotina para busca local
OPT_L Variável para definir a busca local
OPT_VBR Variável para definir a reflexão
RAND_PAR Sub-rotina para geração aleatória
Siglas
IEM Instituto de Engenharia Mecânica
NACA National Advisory Commitee for Aeronautics
1
Capítulo 1
INTRODUÇÃO GERAL
1.1 – INTRODUÇÃO
O desenvolvimento das máquinas de fluxo ⎯ bombas, ventiladores, compressores e
turbinas ⎯ recebeu um grande impulso a partir dos avanços da aerodinâmica no século XX.
O projeto adequado de aerofólios para os perfis de pás de rotores e estatores tornou-se cada
vez mais um fator crucial para a melhoria da eficiência energética dessas máquinas.
Aliados a estes avanços encontram-se o crescente aumento da capacidade de cálculo dos
computadores digitais e o desenvolvimento de novas técnicas computacionais que têm
tornado possível a produção de turbomáquinas conducentes a resultados cada vez mais
próximos das especificações de projeto, reduzindo custos de experimentação em modelos e
protótipos e viabilizando projetos industriais.
Atualmente, verifica-se uma forte tendência no emprego de técnicas computacionais de
otimização e métodos inversos em projetos aerodinâmicos. Trata-se aparentemente de uma
tendência irreversível, que tem alterado drasticamente os procedimentos tradicionais de
projeto aerodinâmico, baseados unicamente em cálculos seqüenciais e na experiência
2 acumulada dos projetistas. Seguindo essa tendência, o escopo do presente trabalho refere-se
ao desenvolvimento de uma metodologia de projeto inverso de aerofólios em grades de
turbomáquinas utilizando um algoritmo de otimização especial, baseado em busca aleatória
controlada. Nos itens subseqüentes, procura-se tornar mais claro o significado dessa
metodologia.
1.2 – CONTEXTO E REVISÃO BIBLIOGRÁFICA
No estudo do escoamento ao redor das pás de turbomáquinas destacam-se dois tipos
clássicos de problemas. No primeiro, denominado problema direto, são feitas análises das
características do escoamento, partindo-se de uma configuração geométrica dada, ou seja,
conhecida a geometria dos perfis, os parâmetros dimensionais da grade e os ângulos do
escoamento a montante e a jusante, efetua-se o cálculo do escoamento. No problema direto é
comum a utilização de famílias padronizadas de perfis que nem sempre são as melhores
soluções para o problema de projeto.
No segundo tipo de problema, denominado problema inverso, o objetivo é a
determinação de uma geometria adequada para atender a uma distribuição de pressões ou de
velocidades fornecida inicialmente. Com a solução do problema inverso elimina-se a
necessidade de utilização de famílias padronizadas de aerofólios no projeto das pás;
entretanto, a especificação da distribuição de pressões ou de velocidades depende fortemente
de um prévio conhecimento em aerodinâmica e teoria da camada limite; além disso, nem
sempre é possível determinar formatos aerodinâmicos viáveis partindo daquela distribuição.
Um formato aerodinâmico viável de um aerofólio, por exemplo, não deve apresentar
contornos abertos ou com cruzamentos.
Atualmente, os métodos de otimização apresentam-se como ferramentas versáteis e
bastante difundidas para projetos de aerodinâmica. Estas ferramentas não estão vinculadas a
um único tipo de problema ou método para o cálculo do escoamento e sua aplicação não exige
necessariamente uma dada distribuição de pressões ou de velocidades para obter um perfil.
Podem ser aplicados na determinação de parâmetros geométricos ou aerodinâmicos que
minimizem certas grandezas globais de interesse do projetista, tais como perdas e arrasto.
Os métodos de otimização também podem ser utilizados na obtenção de uma solução
aproximada do problema inverso, mesmo em situações em que não exista uma solução viável
3 exata. Com o emprego de parametrizações geométricas adequadas e a aplicação de certas
restrições, torna-se possível obter uma geometria final viável que produza uma distribuição de
pressões que melhor se aproxime da distribuição especificada.
Algumas comparações podem ser feitas entre os métodos inversos clássicos ⎯ que não
usam técnicas de otimização diretamente ⎯ e os métodos de otimização ⎯ mesmo quando
aplicados ao problema inverso. Os métodos inversos clássicos são relativamente rápidos,
podendo inclusive dispensar iterações, com um esforço computacional comparável a uma
única análise; por outro lado, os processos de otimização normalmente requerem diversas
análises para um único problema. Os métodos de otimização em geral são capazes de
determinar pelo menos uma solução viável aproximada e podem exercer um maior controle
das variáveis de projeto, reduzindo o risco de que a solução não seja aplicável; os métodos
inversos clássicos podem gerar uma geometria inviável para as condições de busca. Os
métodos de otimização comportam, com relativa facilidade, o tratamento de restrições
geométricas e do escoamento, enquanto que os métodos inversos clássicos apresentam
dificuldades no tratamento de restrições.
A título ilustrativo, apresenta-se a seguir a classificação dos métodos inversos para
projeto de aerofólios proposta por Yiu (1994):
• Métodos com correção iterativa da geometria e utilização de equações não-lineares.
• Métodos de cálculo no plano transformado - transformação conforme.
• Métodos especiais, incluindo o método dos painéis para o cálculo do escoamento
potencial e incompressível.
• Métodos de modificação iterativa - métodos de otimização
Diversos métodos híbridos podem ser concebidos pela combinação de dois ou mais dos
métodos listados acima. Por exemplo, Petrucci (2003) apresenta um método inverso híbrido
para o projeto de aerofólios combinando os métodos de transformação conforme e de painéis.
Deve-se observar que a classificação de Yiu (1994) não pretende ser exaustiva. Em
geral, não convém superestimar a importância de qualquer classificação desse tipo. Mas é
importante ressaltar que a metodologia a ser apresentada ao longo do presente trabalho
deveria ser incluída no último item da lista de Yiu, pois se baseia no emprego de técnicas de
otimização. Como será visto, a metodologia proposta utiliza um método de painéis para
determinar a distribuição de pressões em torno dos aerofólios; todavia, qualquer outro tipo de
método de cálculo do escoamento poderia ser empregado em seu lugar e, portanto, não
conviria classificar a metodologia proposta neste trabalho como híbrida. De qualquer forma,
como o método de cálculo de escoamento e o método de otimização escolhidos são
4 ingredientes importantes da metodologia e são independentes entre si, decidiu-se por
apresentar o seu contexto e a revisão bibliográfica pertinente em duas partes distintas,
enfocando cada método em separado.
1.2.1 – Métodos de Análise do Escoamento Potencial ao Redor de Aerofólios de Pás de Máquinas de Fluxo
O desenvolvimento de turbomáquinas apresenta fases importantes e seqüenciais,
podendo-se empregar técnicas unidimensionais, bidimensionais ou tridimensionais,
dependendo da fase em que se encontra o desenvolvimento do projeto.
Inicialmente, as análises unidimensionais do escoamento geram parâmetros
fluidodinâmicos e geométricos. Ficam definidos nesta fase, por exemplo, o tipo de máquina, o
número de estágios, dimensões principais, o número de pás, os triângulos de velocidades, os
balanços de massa, energia e quantidade de movimento.
Em uma segunda etapa, bidimensional, o estudo do escoamento em grades lineares
determina as características geométricas de pás e aletas e define os parâmetros geométricos de
grade como, por exemplo, os ângulos de montagem e os espaçamentos. Nessa etapa, os
métodos de análise de escoamento potencial concorrem com os métodos viscosos, baseados
na solução das equações de Navier-Stokes. Os métodos potenciais, obviamente, são menos
completos que os métodos viscosos, mas são muito mais fáceis de se implementar e
apresentam custo computacional bem menor. Em situações de projeto, os métodos potenciais
podem ainda ser corrigidos de maneira semi-empírica ou mediante o acoplamento dos efeitos
de camada limite e esteira, de modo a se tornarem mais realistas, sem perda substancial de sua
eficiência numérica. Dessa forma, os métodos potenciais constituem, ainda hoje, ferramentas
extremamente úteis no projeto aerodinâmico via otimização.
Dentre os métodos para análise do escoamento bidimensional, potencial, de fluido
incompressível, em regime permanente, destacam-se duas abordagens clássicas já bastante
desenvolvidas: o método da transformação conforme e o método das singularidades.
Embora não seja alvo do presente trabalho, o método da transformação conforme está
apoiado em antigas teorias de variáveis complexas e pode ser utilizado nos problemas de
projeto. Através desse método, um problema de escoamento em torno de uma geometria
complicada (no plano físico) e de difícil solução direta é relacionado matematicamente a uma
geometria mais simples (no plano transformado), para qual a solução possa ser calculada mais
5 facilmente. Ou seja, o cálculo do escoamento é feito no plano transformado com uma
geometria mais simples e mapeado de volta para a geometria desejada no plano físico.
O método das singularidades utiliza uma distribuição discreta ou contínua de fontes
(aparecimento de vazão), sumidouros (desaparecimento de vazão) e vórtices (aparecimento de
circulação) para a simulação das velocidades induzidas pela presença de um corpo. Esta
distribuição, que pode ser implantada na superfície ou no interior do corpo em estudo, deve
satisfazer certas condições de contorno e de continuidade.
Utilizado no presente trabalho, o método das singularidades foi desenvolvido
inicialmente por Birnbaum (1923) e Glauert (1924), para perfis de pequena espessura e
curvatura, tendo ainda bordo de fuga afilado. Esses trabalhos iniciais baseiam-se em uma
única distribuição contínua de vórtices para representar o campo de velocidades induzidas, na
forma de integrais. Este procedimento mostrou-se mais versátil que os métodos de
transformação conforme, e foi estendido a diversas outras situações. Por exemplo, no projeto
inverso de pás de rotores máquinas de fluxo centrífugas citam-se os trabalhos pioneiros de
Staufer (1936) e de Betz e Flügge-Lotz (1938). Um tratamento mais geral de grades de
máquinas de fluxo com perfis de formato arbitrário, utilizando distribuições de vórtices no
contorno, foi apresentado por Isay (1954). Todavia, pouca atenção foi dada à obtenção de
soluções, provavelmente devido às restrições computacionais da época.
Com o advento e disseminação dos computadores digitais, esquemas numéricos
passaram a ser usados de modo a ampliar a aplicabilidade do método de singularidades a
corpos de formato arbitrário. Uma das implementações numéricas mais utilizadas hoje em dia
é o método dos painéis, desenvolvido principalmente nas décadas de 1960 e 1970. O trabalho
de Hess e Smith (1967) apresenta uma revisão sobre o desenvolvimento inicial e diversas
aplicações do método dos painéis a corpos bi e tridimensionais, incluindo grades lineares de
máquinas de fluxo (Giesing, 1964). No método dos painéis, a superfície do corpo é
discretizada em elementos, ou painéis, sobre os quais são colocadas distribuições de
singularidades de intensidade a se determinar, porém de forma conhecida (constante, linear,
parabólica, etc.). O cálculo destas intensidades é feito impondo uma condição de contorno em
certos pontos de controle e resolvendo-se um sistema de equações algébricas lineares
resultante. A partir dessas intensidades, calculam-se diretamente o campo de velocidades e o
campo de pressões, usando o teorema de Bernoulli.
A formulação usada por Hess e Smith baseia-se em distribuições de fontes e na
condição de contorno de Neumann (impenetrabilidade). No caso de aerofólios com
sustentação, uma distribuição de vórtices uniforme em todo o contorno é introduzida, com
6 intensidade determinada pela condição de Kutta. Por outro lado, é possível utilizar apenas
distribuições de vórtices e a condição de Dirichlet (velocidade nula no interior do perfil), do
modo introduzido por Martensen (1971) para perfis isolados ou em grades de turbomáquinas.
Com esta formulação, a velocidade no contorno externo do perfil iguala-se à intensidade de
vórtices. Assim como no caso da formulação de Hess-Smith, a formulação de Martensen
conduz a uma equação integral de Fredholm de segunda espécie. Martensen (1971) apresenta
um método de solução numérica para essa equação, diferente do método de painéis.
Mavriplis (1971) utilizou a formulação de Martensen (1971) e desenvolveu um método
de painéis simples e eficaz para perfis isolados ou segmentados, objetivando o
desenvolvimento de aerofólios de alta sustentação.
Amorim (1987) estendeu o método de painéis à formulação clássica de Martensen,
visando o caso de grades lineares de máquinas de fluxo. Foram utilizados painéis retos e
distribuições de vórtices constantes. Correções de curvatura foram introduzidas para aumentar
a precisão do método. Posteriormente, Manzanares Filho (1994) propôs aprimoramentos
adicionais, introduzindo correções baseadas no deslocamento dos pontos de controle. Efeitos
viscosos também foram introduzidos através de uma técnica de ajuste proposta por Gostelow
(1975), aferida sistematicamente através de dados experimentais disponíveis para grades de
perfis da série NACA 65 (Emery et al., 1958).
Petrucci (1998) aplicou o método de Hess-Smith (modificado) ao problema inverso de
projeto de perfis isolados e em grades de turbomáquinas. Foram utilizadas distribuições
constantes de fontes como no método original. Por ou lado, ao invés de uma distribuição
uniforme de vórtices no contorno, foi empregada uma distribuição senoidal com valor nulo no
bordo de fuga e máximo na região do bordo de ataque, segundo idéia de Plotkin (1990) e
Girardi e Bizarro (1995). Foi proposto um controle iterativo da geometria do aerofólio,
através de alterações sucessivas das inclinações dos painéis, partindo do bordo de fuga,
contornando o perfil e retornando ao bordo de fuga. Essas alterações dependem de cálculos
das velocidades normais induzidas por distribuições fictícias de vórtices, dadas pela diferença
entre as velocidades tangenciais requeridas e as calculadas em cada iteração. Verificou-se
posteriormente que esse procedimento seria melhor adaptado ao uso exclusivo de
distribuições de vórtices com a condição de Neumann. Isso foi feito por Petrucci (2003),
utilizando distribuições lineares de vórtices e um tratamento especial da condição de Kutta
para o caso de bordos de fuga afilados. Com esse procedimento, foi possível obter resultados
qualitativamente melhores em relação ao método de Hess-Smith. Melhorias adicionais
7 significativas puderam ainda ser obtidas aplicando-se uma metodologia híbrida, em que o
método de painéis é combinado com o método de transformação conforme, com o aerofólio
(plano físico) sendo mapeado em um quase-círculo (plano transformado). Petrucci (2003)
verificou que é mais preciso e eficiente aplicar o método inverso ao quase-círculo do que
aplicá-lo diretamente ao aerofólio pretendido no plano físico. Desse modo, a geometria do
aerofólio pode ser obtida com um número menor de iterações e com maior suavidade ao longo
de todo o contorno, principalmente na região do bordo de ataque.
Petrucci (2003) sugere ainda a continuidade dos trabalhos em problemas inversos por
uma linha diferente, utilizando métodos de otimização e parametrizações geométricas que
possam garantir certos requisitos geométricos a priori. Seguindo essa linha, não é preciso
utilizar um método de painéis de alta ordem, pois o controle geométrico é feito pela própria
parametrização. No presente trabalho, por exemplo, busca-se atacar o problema inverso
utilizando o método de painéis desenvolvido por Amorim (1987) e Manzanares Filho (1994).
1.2.2 – Métodos de Otimização para Aerofólios de Turbomáquinas
Desde a década de 70, os métodos de otimização ganharam destaque nas mais diversas
áreas da ciência e da tecnologia. No âmbito da aerodinâmica, o uso de métodos de otimização
tem se dado em duas grandes vertentes: (i) com o objetivo de se minimizar uma variável
aerodinâmica importante tal como o arrasto; (ii) com o objetivo de se resolver o problema
inverso. No primeiro caso, em geral, uma distribuição de pressões não é fornecida e o
procedimento é conhecido como método de otimização aerodinâmica, propriamente dito. No
segundo caso, o método de otimização é utilizado para se minimizar uma medida da diferença
entre a distribuição de pressões calculada iterativamente e a distribuição de pressões requerida
para o perfil alvo. O interesse deste trabalho encontra-se neste último caso.
Uma vasta gama de métodos de otimização tem sido aplicada nas últimas décadas aos
problemas aerodinâmicos. Os trabalhos de Hicks et al. (1974) e Vanderplaats (1979) podem
ser considerados pioneiros na aplicação de métodos de otimização ao projeto de formas
aerodinâmicas. Os métodos utilizados nesses trabalhos são métodos de busca local, baseados
no cálculo dos gradientes da função objetivo e das restrições que, portanto, devem ser
diferenciáveis. Esses métodos costumam convergir para um ponto de ótimo local na
vizinhança do ponto de partida do processo de busca. Portanto, por questões de eficácia, é
fundamental que o ponto inicial esteja em uma região promissora do espaço de soluções, e
8 isso depende fortemente do conhecimento do projetista. A vantagem principal de tais métodos
está na sua rápida convergência para um ótimo local, o que pode representar um atrativo
maior para a aplicação de códigos computacionais complexos como aqueles baseados em
soluções numéricas das equações de Navier-Stokes.
Em casos onde não há confiabilidade no ponto inicial de busca, é possível ainda aplicar
os métodos locais diversas vezes, partindo de diferentes pontos. Todavia, esse procedimento
costuma ser ineficiente, se não vier acompanhado de um algoritmo de busca adequado. Surge
assim a necessidade de métodos de otimização mais robustos, que não exijam a especificação
de um único ponto de partida e possam escapar de mínimos locais.
Os métodos de otimização populacionais atendem a essa necessidade e estão hoje
bastante difundidos. Tais métodos baseiam-se na especificação de uma “população inicial” de
pontos no espaço de solução a ser aprimorada iterativamente por algum algoritmo especial.
Destacam-se aqui os Algoritmos Genéticos (GA), os algoritmos de Evolução Diferencial (DE)
e os algoritmos de Busca Aleatória Controlada (CRS), utilizados no presente trabalho (Ali e
Törn, 2004).
Os Algoritmos Genéticos (GA) talvez sejam os algoritmos populacionais mais aplicados
atualmente nas diversas áreas da engenharia. A estrutura dos Algoritmos Genéticos (GA) é
descrita em Goldberg (1989), Davis (1991) e Holst e Pullian (2003). Exemplos de aplicação
dos GA a problemas inversos em aerodinâmica podem ser encontrados no trabalho de
Obayashi e Tsukahara (1996). Em um teste de maximização do coeficiente de sustentação de
um aerofólio, Obayashi e Tsukahara (1997) verificaram a superioridade de um GA sobre um
algoritmo de busca local e outro algoritmo baseado no conceito de recozimento simulado
(simulated annealing).
Os GA baseiam-se na simulação dos mecanismos de seleção natural e de genética,
encontrados na reprodução e evolução dos seres vivos. Neste processo, características
denominadas genótipos (variáveis de projeto) produzem fenótipos (projetos) cujas
modificações são definidas por parâmetros biológicos de aptidão (por exemplo, menor valor
da função objetivo, em problemas de minimização). Partindo de uma população inicial, em
cada geração os principais mecanismos (passos do algoritmo) são: escolha dos pais (por
critérios de aptidão e aleatoriedade), recombinação de genótipos (cruzamentos que transferem
características genéticas dos pais para os filhos), mutação (alterações não-genéticas de
membros da população) e seleção de fenótipos (os mais aptos escolhidos dentre filhos gerados
e membros que sofreram mutações irão substituir os pais para formar uma nova população).
9 Em princípio, os processos de reprodução (recombinação e mutação) e seleção devem
produzir um aprimoramento evolutivo a cada geração (diminuição da função objetivo em
problemas de minimização). A cada passo, apenas uma parcela da população é trocada para
formar a nova população. Os GA costumam demandar um número elevado de chamadas da
função objetivo e nem sempre são suficientemente robustos.
O algoritmo de Evolução Diferencial (DE) foi proposto por Storn e Price (1997) como
opção robusta para a otimização de funções contínuas. Os DE trabalham com uma população
intermediária (mutante) obtida por um processo de mutação dos membros da população atual.
Cada membro i da população mutante é obtido por soma ponderada das diferenças de dois
membros j, k da população atual a um terceiro membro l, com j, k, l ≠ i. Em seguida, é
efetuado o processo de cruzamento entre os membros da população atual e da população
mutante, gerando uma população tentativa. Cada membro da população tentativa é avaliado e
comparado com o membro correspondente da população atual para saber qual deles
pertencerá à próxima geração (nova população). Note-se que, em cada geração, os algoritmos
DE realizam um número de avaliações da função objetivo igual ao número de membros da
população, podendo renovar toda ela para produzir a nova geração. Portanto, embora mais
robustos, os algoritmos DE costumam ter um custo computacional mais elevado que os
algoritmos GA.
Rogalsky et al. (1999) aplicaram o algoritmo DE ao projeto inverso de aerofólios de
grades de turbomáquinas axiais. A distribuição de pressões requerida é baseada nas propostas
de Liebeck (1973), para obtenção de perfis de alta sustentação. Além dos parâmetros
geométricos do perfil, o ângulo de montagem e o espaçamento na grade foram também
considerados variáveis de projeto. Os autores reportam números de chamadas da função
objetivo da ordem de 50.000 a 100.000 para se obter soluções suficientemente precisas,
reforçando a expectativa do alto custo computacional dos algoritmos DE.
Antes mesmo do desenvolvimento dos algoritmos evolutivos GA ou DE, outros
algoritmos, de busca aleatória simples, foram utilizados para determinação de pontos ótimos
de funções em que o cálculo de derivadas era impossível, proibitivo ou muito difícil. Price
(1977) faz uma analise crítica de alguns desses algoritmos, no contexto de otimização global,
e propõe um novo algoritmo de busca aleatória, denominado por ele mesmo de Busca
Aleatória Controlada (CRS). Trata-se também de um algoritmo populacional, em que uma
população inicial é gerada aleatoriamente e contraída iterativamente em direção a um único
ponto (que se espera ser um ponto de ótimo global). A cada iteração, um único ponto tentativo
10 é construído heuristicamente, avaliado e comparado com o pior membro da população atual.
Se for superior, o ponto tentativo é aceito e substitui o pior membro da população atual,
formando uma nova população melhorada. Esse processo de busca é repetido até que certo
critério de parada seja atingido. Note-se que o algoritmo CRS promove a substituição de um
único ponto da população atual a cada “geração”, diferentemente dos algoritmos GA e DE.
Contrariamente ao GA e igualmente ao DE, a aceitação de pontos tentativos no CRS não é
compulsória. Aliás, os algoritmos CRS, GA e DE podem ser vistos dentro de um contexto
evolutivo padrão, analisando os seus processos de seleção, reprodução (cruzamento e
mutação) e aceitação (Ali e Törn, 2004). No CRS, a reprodução se dá apenas por mutação.
Uma descrição mais detalhada do algoritmo CRS básico e de diversas de suas versões é
dada no Capítulo 4 desta dissertação.
1.3 – MOTIVAÇÃO DO PRESENTE TRABALHO
Basicamente, são duas as motivações principais para o presente trabalho.
Primeiramente, pretende-se atender à sugestão de Petrucci (2003), no sentido de se estudar a
aplicação de métodos de otimização ao projeto de pás de turbomáquinas, métodos esses que
possam ser aplicados com quaisquer modelos de escoamento e com funções objetivo e
restrições as mais gerais possíveis. A proposta desta dissertação é dar um passo preliminar
nesse sentido, considerando apenas o projeto inverso, ainda com o emprego de um modelo
potencial para cálculo do escoamento, deixando para trabalhos futuros os casos mais gerais de
otimização e os modelos de escoamento mais complexos (por exemplo, aqueles baseados na
solução numérica das equações de Navier-Stokes).
Por outro lado, como segunda motivação, verifica-se que é escassa a literatura técnica
acerca do uso dos algoritmos de busca aleatória controlada (CRS) em projeto aerodinâmico.
Trata-se, porém, de um algoritmo robusto, de fácil implementação e bastante geral no âmbito
das funções contínuas. Além disso, o CRS já se mostrou eficaz na solução de problemas reais
de otimização bastante complexos (Ali et al., 1997b). Surge, portanto, o interesse em avaliá-lo
em situações de projeto aerodinâmico.
11
1.4 – OBJETIVOS DO PRESENTE TRABALHO
Basicamente, são três os objetivos do presente trabalho:
1) Apresentar o desenvolvimento de uma metodologia de projeto inverso de aerofólios
de grades de turbomáquinas utilizando técnicas de otimização. A geometria do aerofólio é
parametrizada com arcos de Bezier conforme sugestão de Venkataraman (1995) e adaptações
de Rogalsky et al. (1999). Utilizam-se algoritmos de otimização por busca aleatória
controlada (CRS). O cálculo do escoamento é feito através de um método de painéis baseado
na formulação de Martensen (1971), conforme descrito por Amorim (1987) e Manzanares
Filho (1994).
2) Apresentar e testar uma nova versão do CRS (Manzanares Filho et al., 2005),
utilizando o conceito de reflexão baseada na variabilidade da função objetivo (CRS-VBR).
Essa versão procura utilizar informações sobre a variação da função objetivo em torno do
melhor ponto da população atual, de modo a balancear automaticamente as buscas globais e
locais, aumentando a eficiência geral da busca.
3) Avaliar a eficácia da metodologia em três casos de teste, comparando o algoritmo
CRS-VBR proposto com duas outras versões do CRS da literatura.
O presente trabalho não tem por objetivo comparar o algoritmo CRS com outros
algoritmos de otimização, como os GA e os DE em problemas aerodinâmicos. Essa
comparação é sugerida como trabalho futuro.
1.5 – DELINEAMENTO DO PRESENTE TRABALHO
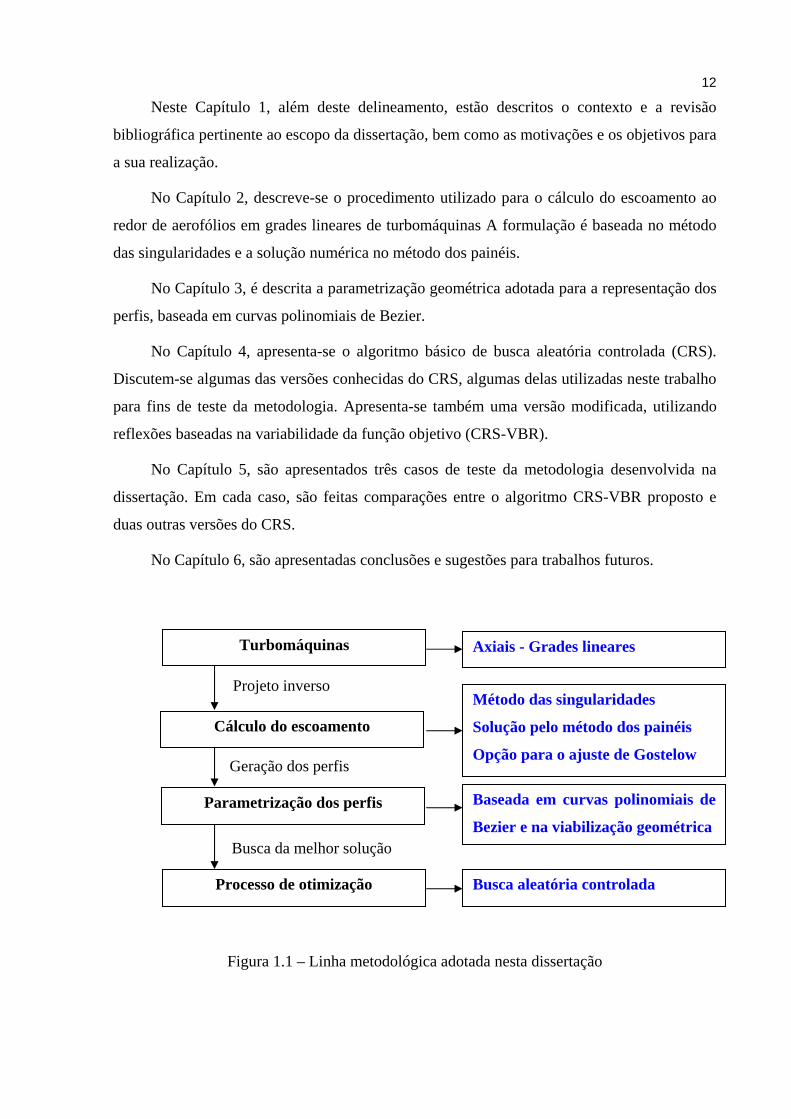
O delineamento desta dissertação segue a estrutura metodológica ilustrada na Fig. 1.1.
Opções diferentes poderiam ser feitas dentro de cada quadro indicado na Fig. 1.1. Todavia,
conforme já salientado no item anterior, o presente trabalho utiliza as seguintes opções:
problema: projeto inverso de grades lineares de turbomáquinas axiais; cálculo do
escoamento com base no método dos painéis; parametrização dos perfis baseada em curvas
polinomiais de Bezier; processo de otimização utilizando busca aleatória controlada.
12 Neste Capítulo 1, além deste delineamento, estão descritos o contexto e a revisão
bibliográfica pertinente ao escopo da dissertação, bem como as motivações e os objetivos para
a sua realização.
No Capítulo 2, descreve-se o procedimento utilizado para o cálculo do escoamento ao
redor de aerofólios em grades lineares de turbomáquinas A formulação é baseada no método
das singularidades e a solução numérica no método dos painéis.
No Capítulo 3, é descrita a parametrização geométrica adotada para a representação dos
perfis, baseada em curvas polinomiais de Bezier.
No Capítulo 4, apresenta-se o algoritmo básico de busca aleatória controlada (CRS).
Discutem-se algumas das versões conhecidas do CRS, algumas delas utilizadas neste trabalho
para fins de teste da metodologia. Apresenta-se também uma versão modificada, utilizando
reflexões baseadas na variabilidade da função objetivo (CRS-VBR).
No Capítulo 5, são apresentados três casos de teste da metodologia desenvolvida na
dissertação. Em cada caso, são feitas comparações entre o algoritmo CRS-VBR proposto e
duas outras versões do CRS.
No Capítulo 6, são apresentadas conclusões e sugestões para trabalhos futuros.
Figura 1.1 – Linha metodológica adotada nesta dissertação
Turbomáquinas
Cálculo do escoamento
Parametrização dos perfis
Axiais - Grades lineares
Método das singularidades
Solução pelo método dos painéis
Opção para o ajuste de Gostelow
Baseada em curvas polinomiais de
Bezier e na viabilização geométrica
Processo de otimização Busca aleatória controlada
Busca da melhor solução
Geração dos perfis
Projeto inverso
13
Capítulo 2
ANÁLISE DE ESCOAMENTO POTENCIAL EM GRADES LINEARES – MÉTODO DOS PAINÉIS
2.1 – INTRODUÇÃO
O método adotado para análise do escoamento assume um papel importante em
qualquer processo de otimização de formas aerodinâmicas. Para certa geometria definida
iterativamente pelo otimizador, os resultados de uma análise são usados no cálculo da função
objetivo e das restrições. O custo computacional de cada análise do escoamento é fator
decisivo para a viabilização do processo de otimização, pois a rotina de cálculo pode ser
chamada milhares de vezes.
Tendo em vista o desenvolvimento de um método inverso relativamente rápido para o
projeto de perfis aerodinâmicos em grade linear, optou-se nesse trabalho pela utilização de
uma rotina pré-existente para cálculo de escoamento potencial (GRADLIN), que pode ser
executada em frações de segundo em um micro-computador pessoal moderno.
O presente capítulo aborda a metodologia utilizada na implementação da rotina
GRADLIN, para o cálculo do escoamento potencial em grades lineares de máquinas de fluxo
axiais, e está baseado nos trabalho desenvolvidos por Amorim (1987) e Manzanares Filho
(1994). O capítulo foi introduzido nesta dissertação para conveniência do leitor que, caso o
julgue dispensável, poderá seguir diretamente ao Capítulo 3.
14
2.2 – DEFINIÇÃO DAS GRADES LINEARES DE MÁQUINAS DE FLUXO AXIAIS
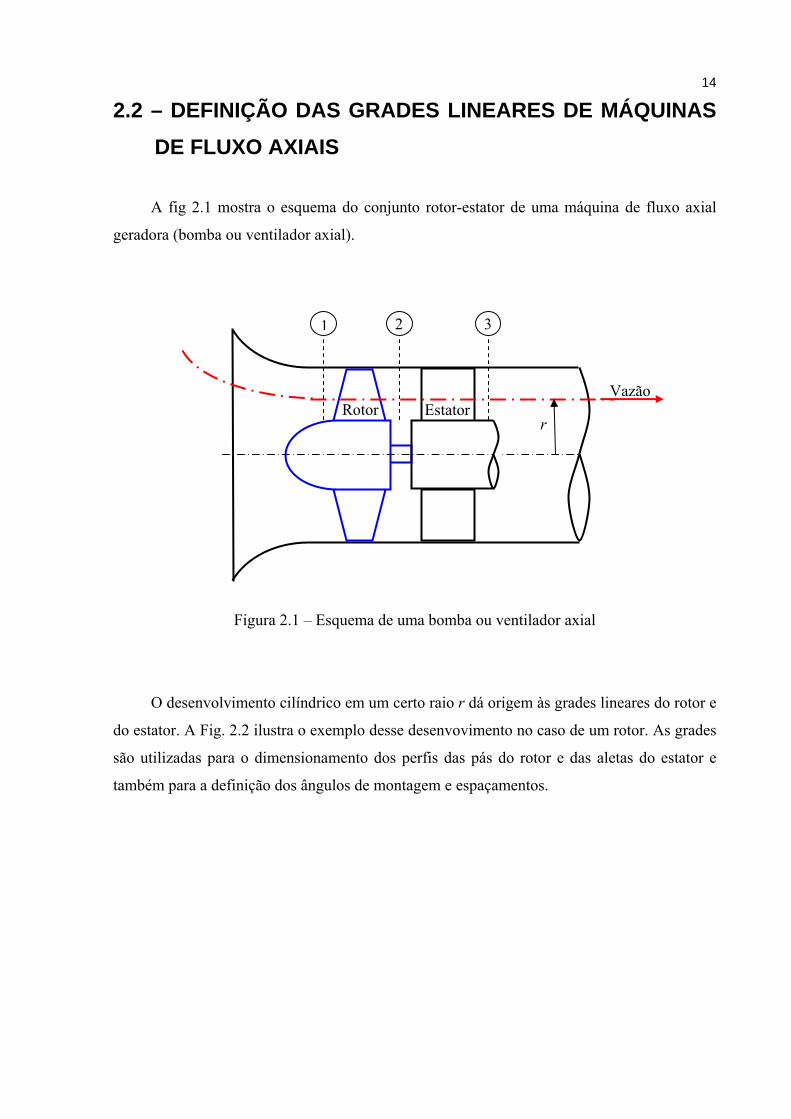
A fig 2.1 mostra o esquema do conjunto rotor-estator de uma máquina de fluxo axial
geradora (bomba ou ventilador axial).
Figura 2.1 – Esquema de uma bomba ou ventilador axial
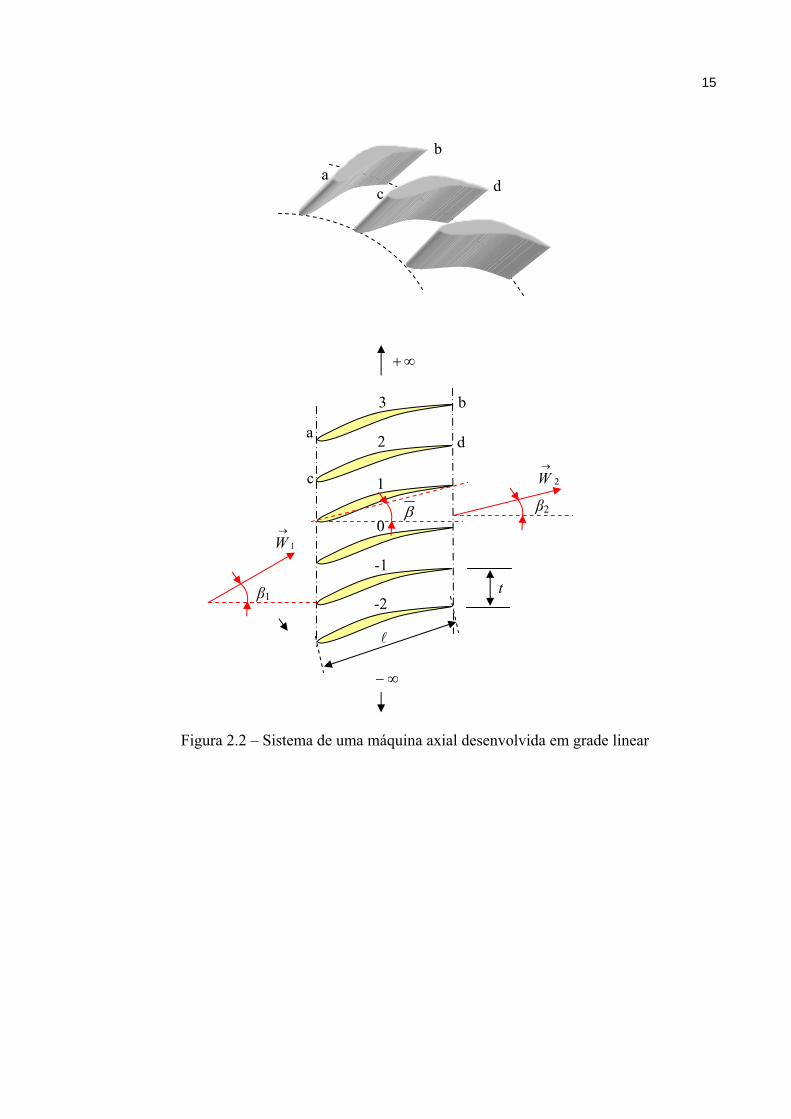
O desenvolvimento cilíndrico em um certo raio r dá origem às grades lineares do rotor e
do estator. A Fig. 2.2 ilustra o exemplo desse desenvovimento no caso de um rotor. As grades
são utilizadas para o dimensionamento dos perfis das pás do rotor e das aletas do estator e
também para a definição dos ângulos de montagem e espaçamentos.
1 3 2
Rotor Estator Vazão
r
15
Figura 2.2 – Sistema de uma máquina axial desenvolvida em grade linear
a b
c d
b 3
t β1
β2
a
c
d
0
1
2
-1
-2
∞−
2
→
W
1
→
W
l
∞+
β
16
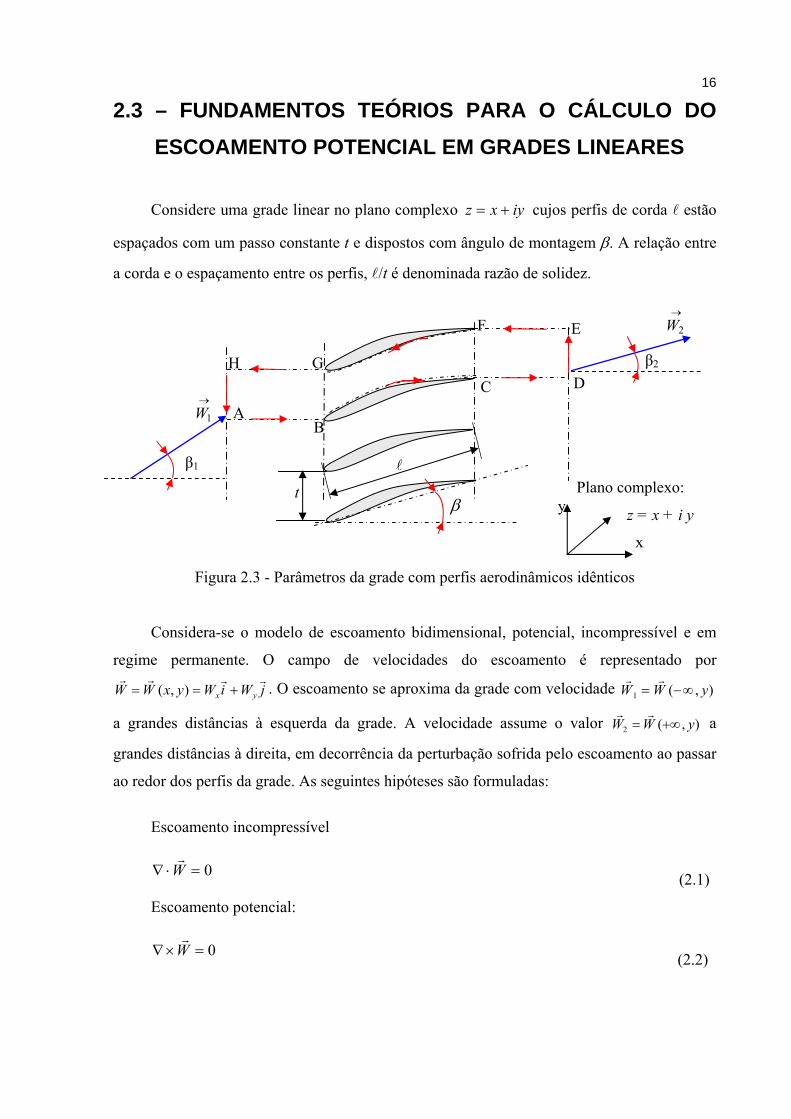
2.3 – FUNDAMENTOS TEÓRIOS PARA O CÁLCULO DO ESCOAMENTO POTENCIAL EM GRADES LINEARES
Considere uma grade linear no plano complexo iyxz += cujos perfis de corda l estão
espaçados com um passo constante t e dispostos com ângulo de montagem β. A relação entre
a corda e o espaçamento entre os perfis, l/t é denominada razão de solidez.
Figura 2.3 - Parâmetros da grade com perfis aerodinâmicos idênticos
Considera-se o modelo de escoamento bidimensional, potencial, incompressível e em
regime permanente. O campo de velocidades do escoamento é representado por
jWiWyxWW yx
rrrr+== ),( . O escoamento se aproxima da grade com velocidade ),(1 yWW ∞−=
rr
a grandes distâncias à esquerda da grade. A velocidade assume o valor ),(2 yWW +∞=rr
a
grandes distâncias à direita, em decorrência da perturbação sofrida pelo escoamento ao passar
ao redor dos perfis da grade. As seguintes hipóteses são formuladas:
Escoamento incompressível
0=⋅∇ Wr
(2.1)
Escoamento potencial:
0=×∇ Wr
(2.2)
t
A B
C D
β1
H G
F E
Plano complexo:
z = x + i y
x
y β
l
→
1W
→
2W
β2
17
O campo de velocidades, portanto, é obtido da função potencial de velocidades φ :
φ∇=Wr
(2.3)
Com estas hipóteses estabelecidas, têm-se a seguinte formulação para o domínio
exterior e para as condições de contorno:
- No domínio exterior: vale a equação de Laplace para o potencial de velocidades φ :
02 =∇ φ (2.4)
- No contorno dos perfis: considerando a condição de impermeabilidade dos perfis, a
velocidade normal na superfície do perfil será nula.
0=⋅ nW rr
(2.5)
- A montante da grade: considera-se a velocidade 1Wr
de aproximação do escoamento,
suficientemente distante para que ainda não tenha sofrido perturbação pela presença da grade:
1lim WWx
rr=
−∞→ (2.6)
- A jusante da grade: considera-se a velocidade 2Wr
de afastamento do escoamento,
suficientemente distante para que não sofra mais perturbação pela presença da grade:
2lim WWx
rr=
+∞→ (2.7)
Tomando o contorno ℘ de um perfil de referência, a distribuição de velocidades )(ζsw
no contorno, compatível com as condições (2.4) a (2.7), deve satisfazer a seguinte equação
integral de Fredholm de segunda espécie, correspondente a um campo de velocidades nulo no
interior (W∞ é a velocidade complexa conjugada não-perturbada):
´´)(´),(21)(
2)( dsweWw
sIis ζζζλ
πζ α ∫℘
−∞ +ℜ= (2.8)
A condição de impermeabilidade no contorno do perfil fica expressa pela seguinte equação
integral de Fredholm de primeira espécie:
´)´(´),(21)(0 dsweW sII
i ζζζλπ
α ∫℘−
∞ +ℑ= (2.9)
18
Nas Eqs. (2.8) e (2.9), ζ representa o ponto de cálculo e ´ζ um ponto de integração. O
sentido positivo da coordenada natural s do contorno é definido de modo a deixar o interior do
perfil sempre à direita (Fig. 2.4). Partindo-se do bordo de fuga pelo intradorso, após um
percurso completo do contorno atinge-se novamente o bordo de fuga pelo extradorso.
Figura 2.4 – Sentido positivo de ds
O ângulo α é tomado entre a reta tangente ao perfil e o eixo positivo x (Fig. 2.5).
Figura 2.5 – Definição do ângulo α
Ainda em relação às Eqs. (2.8) e (2.9), foi utilizada notação complexa para as
velocidades: W = Wx + iWy, de modo que W∞ representa a velocidade média (vetorial) das
velocidades 1W e 2W :
221 WWW +
=∞ (2.10)
onde:
yx WiWW 111 += (2.11)
yx WiWW 222 += (2.12)
Verifica-se, pela equação da continuidade para as máquinas axiais, que xx WW 21 = .
Os operadores ℜ e ℑ selecionam, respectivamente, as partes real e imaginária do
operando, enquanto que os núcleos λI e λII das equações (2.8) e (2.9) são dados por:
ds
ζ ds
α x

19
)( αλλ iΙ eℑ−= (2.13)
)( αλλ iII eℜ= (2.14)
onde
⎥⎦⎤
⎢⎣⎡ −== ´)(coth)´,,( ζζπζζλλ
tt (2.15)
A circulação Γp em torno de um perfil é definida por
∫℘=Γ dswsp (2.16)
relacionando-se com as componentes y da velocidade a montante e a jusante da grade da
seguinte forma (Teorema de Stokes):
tWW yyp )( 21 −=Γ (2.17)
Com as Eqs. (2.10), (2.17) e xx WW 21 = , resultam expressões para as velocidades
complexas a montante e a jusante da grade em termos da circulação e do passo:
tiWW p
21
Γ+= ∞ (2.18)
tiWW p
22
Γ−= ∞ (2.19)
Na Fig. 2.6 estão representadas graficamente as equações (2.17) a (2.19). Para perfis
isolados, o espaçamento t tende a infinito e não há deflexão do escoamento, produzindo-se
assim ∞== WWW 21 .
Figura 2.6 – Relação entre as velocidades a montante e jusante e a circulação
1Wr
∞Wr
2Wr
tp 2/Γ
tp 2/Γ
2β ∞β 1β
20
A circulação é um parâmetro livre na formulação apresentada acima. Uma das maneiras
clássicas de definir implicitamente um valor fisicamente aceitável para a circulação consiste
em impor a condição de Kutta, exigindo que o escoamento não contorne o bordo de fuga dos
perfis. Os procedimentos numéricos concernentes a imposição de uma circulação ou da
condição de Kutta são descritos no item subseqüente.
Para uma dada geometria de grade e uma velocidade complexa especificada, a jusante, a
montante ou média (W1 ou W2 ou W∞), a distribuição de velocidades no contorno do perfil
ws(ζ) = ws(s), calculada pelo lado exterior, é uma função incógnita nas equações integrais de
Fredholm (2.8) e (2.9). Ela corresponde à densidade linear γ(s) de uma distribuição de
vórtices colocada ao longo das coordenadas s do contorno do perfil, perturbando o campo de
velocidade uniforme W∞, sendo dada por:
∫=Γ=Γ
=s
s dsswsswdsds
0´´)()(),()(γ (2.20)
O programa computacional desenvolvido para o cálculo do escoamento baseia-se na
equação de Fredholm de segunda espécie (2.8). Ao contrário do núcleo λII na Eq. (2.9), o
núcleo λI na Eq. (2.8) é limitado para ζ → ζ ´. Além disso, a presença da incógnita ws = γ
fora da integral favorece os algoritmos de solução do sistema de equações algébricas lineares
resultantes da discretização da equação integral. A utilização da Eq. (2.8) em vez da Eq. (2.9)
foi sugerida por Martensen (1971) e adotada por Amorim (1987) e Manzanares Filho (1994)
no desenvolvimento da rotina GRADLIN, que segue a sistemática do método dos painéis.
2.4 – SOLUÇÃO NUMÉRICA - MÉTODO DOS PAINÉIS
O método dos painéis é bastante difundido no meio científico e industrial quando se
trata de obter uma solução numérica para o escoamento potencial em torno de perfis
aerodinâmicos isolados ou dispostos em grades lineares de turbomáquinas.
Conforme já discutido, o campo básico de velocidades W∞ (uniforme) sofre a
perturbação dos perfis da grade, cujo efeito pode se representado por uma distribuição de
vórtices sobre o contorno destes perfis, cuja densidade γ tem o mesmo valor da velocidade
externa no contorno dos perfis. O método dos painéis consiste em discretizar o contorno dos
perfis em segmentos (painéis) de geometria simples (p. ex., retos) e discretizar também a
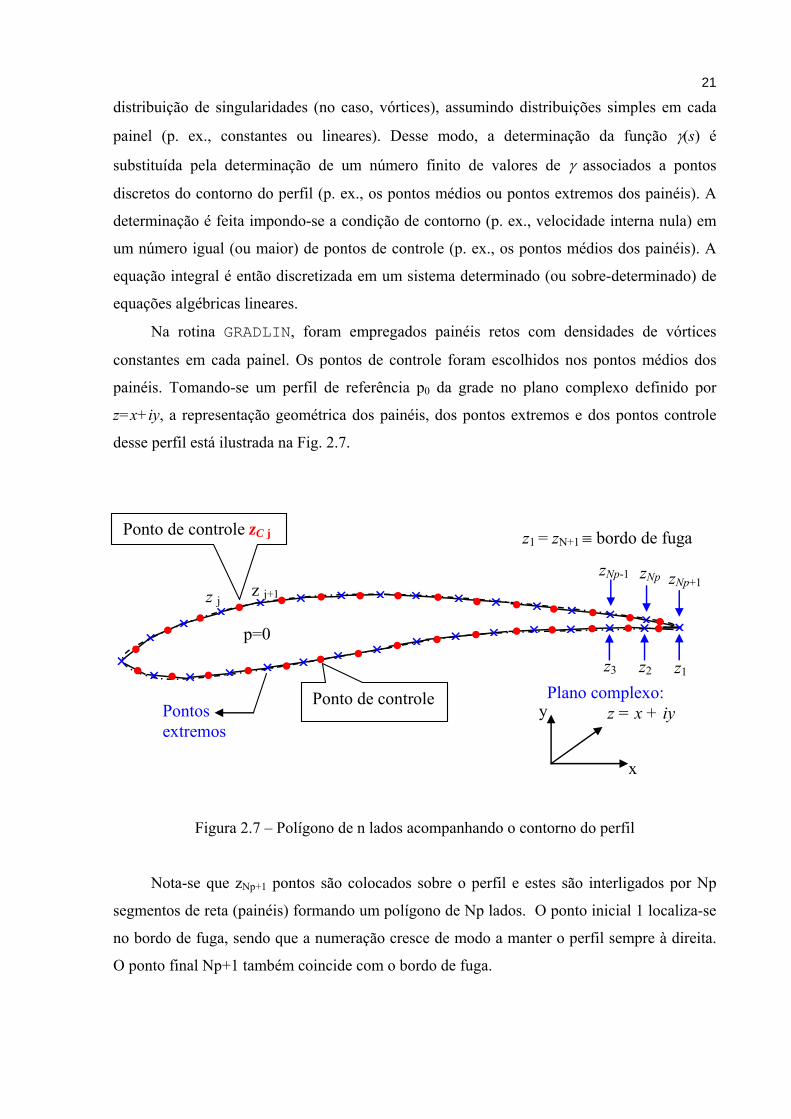
21
distribuição de singularidades (no caso, vórtices), assumindo distribuições simples em cada
painel (p. ex., constantes ou lineares). Desse modo, a determinação da função γ(s) é
substituída pela determinação de um número finito de valores de γ associados a pontos
discretos do contorno do perfil (p. ex., os pontos médios ou pontos extremos dos painéis). A
determinação é feita impondo-se a condição de contorno (p. ex., velocidade interna nula) em
um número igual (ou maior) de pontos de controle (p. ex., os pontos médios dos painéis). A
equação integral é então discretizada em um sistema determinado (ou sobre-determinado) de
equações algébricas lineares.
Na rotina GRADLIN, foram empregados painéis retos com densidades de vórtices
constantes em cada painel. Os pontos de controle foram escolhidos nos pontos médios dos
painéis. Tomando-se um perfil de referência p0 da grade no plano complexo definido por
z=x+iy, a representação geométrica dos painéis, dos pontos extremos e dos pontos controle
desse perfil está ilustrada na Fig. 2.7.
Figura 2.7 – Polígono de n lados acompanhando o contorno do perfil
Nota-se que zNp+1 pontos são colocados sobre o perfil e estes são interligados por Np
segmentos de reta (painéis) formando um polígono de Np lados. O ponto inicial 1 localiza-se
no bordo de fuga, sendo que a numeração cresce de modo a manter o perfil sempre à direita.
O ponto final Np+1 também coincide com o bordo de fuga.
Plano complexo: z = x + iy
x
y Ponto de controle
Pontos extremos
z1 = zN+1 ≡ bordo de fuga Ponto de controle zC j
z1 z2 z3
p=0
z j z j+1
zNp-1 zNp zNp+1
●●● ● ●
● ●
●
● ●
● ● ●
●
● ●
● ●
●
● ●●
● ●
● ● ● ● ●●×
×
×× × ×
× × × × × × ×
× × × × × × ×× ××
×× ×
× ×××

22
Para cada painel genérico j, com pontos extremos representados por z j e zj+1, define-se
um ponto de controle zCj correspondente ao ponto médio do painel (Fig. 2.8).
Figura 2.8 - Detalhe do ponto de controle no painel j
Cada painel j recebe uma distribuição de vórtices de densidade uniforme γj. Manzanares
Filho (1994) utiliza uma fórmula semelhante à apresentada por Giesing (1964), para o cálculo
da velocidade induzida no ponto zC k pelo painel j, do perfil de referência, juntamente com
todos os painéis j correspondentes aos demais perfis da grade linear:
jkjkCjI AzW γ=)( (2.21)
onde kjA é o conjugado de kjA dado por
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎦⎤
⎢⎣⎡ −
⎥⎦⎤
⎢⎣⎡ −
=
+
−
)(senh
)(senhln
21jkC
jkCi
kj
zzt
zzteiA
j
π
π
π
α
(2.22)
Para a condição em que k = j, a Eq. (2.22) reduz-se a
ki
kk eA α−±=21
(2.23)
sendo o sinal positivo para o lado externo do contorno do perfil e o sinal negativo para o lado
interno.
O ponto de controle do painel genérico zC k terá uma velocidade complexa induzida no
contorno externo igual ao resultado da superposição das contribuições de todos os painéis
sobre este ponto, dada por:
j
Np
jjk
Np
jkCjIkCI AzWzW γ∑∑
====
11)()( (2.24)
A velocidade complexa no ponto zCk será dada pela superposição da velocidade
calculada em (2.24) com o campo básico de velocidades W∞:
α j z j
z j+1
21++
= jjjC
zzz
×
×
●

23
)()( kCIkC zWWzW += ∞ (2.25)
Impondo-se a condição de velocidade tangencial nula no contorno interior do perfil
( 0=−sw ), resulta a Eq. (2.26), onde ακ é o ângulo representado pela figura 2.8 (trocando j por
k):
[ ] 0)()( =ℜ= −−kC
ikCs zWezw kα
(2.26)
As equações (2.24) a (2.26) produzem um sistema de equações algébricas nn × onde
serão determinadas as densidades de vórtices jγ .
nkbBn
jkjkj ...,,2,1,
1==∑
=
γ (2.27)
onde Bkj representa os elementos da matriz de influência e dependem apenas da discretização
geométrica do perfil. As componentes bk do vetor 2º membro dependem apenas da geometria
e do campo básico de velocidades W∞. Suas expressões são
( )jki
jk AeB kα−ℜ= (2.28)
( )∞−ℜ−= Web ki
kα
(2.29)
Conhecidos os valores do campo básico, torna-se possível a determinação de bk e
conseqüentemente as densidades de vórtice jγ .
A circulação sobre o perfil pode ser calculada de modo aproximado:
∑=
∆=ΓNp
jjjp s
1γ (2.30)
onde o comprimento do painel j é dado por
jjj zzs −=∆ +1 (2.31)
Conforme já discutido, a circulação é um parâmetro livre no escoamento potencial em
torno de perfis. Considerando, em princípio, um dado valor arbitrário de circulação, a inclusão
da Eq. (2.30) na Eq. (2.27) gera um sistema sobre-determinado, com Np+1 equações e N
incógnitas. Visando facilitar a solução desse sistema, é introduzido um erro circulatório
constante, εc , na velocidade tangencial interna, afetando o vetor 2º membro da Eq. (2.27):
( ) ci
ckk Webb k εε α +ℜ−=+= ∞−'
(2.32)

24
O erro circulatório εc passa a ser considerado uma nova incógnita, juntamente com γj, j =1,...,
Np. Desse modo, o sistema formado pelas Eqs. (2.27) e (2.30) fica determinado.
Outra alteração efetuada é a substituição da velocidade ∞W pela velocidade 1W (Eqs.
2.18 e 2.30), deixando o sistema de equações definido por:
NpkbBNp
jkjkj ...,,2,1
1
''' ==∑=
γ ; (2.33)
onde a nova matriz
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ ∆−ℜ= −
ts
iAeB jkj
ikj k
2' α
(2.34)
continua dependente apenas de fatores geométricos enquanto que o vetor
( ) ci
k Web k εα +ℜ−= −1
''
(2.35)
continua contendo os componentes cinemáticos do escoamento básico, agora com a
velocidade de aproximação da grade W1.
Uma combinação linear de 3 soluções básicas é utilizada, sendo a densidade γj
determinada pela combinação linear dessas soluções:
Γ++= jcjjj WW γεγβγβγ 90
110
11 sencos (2.36)
onde cada parcela do 2º membro corresponde a uma das soluções básicas assim definidas:
- primeira parcela ─ solução 0jγ correspondente a um escoamento paralelo ao eixo x
com 1β = 0, 11 =W e 0=cε
- segunda parcela ─ solução 90jγ correspondente a um escoamento perpendicular ao
eixo x com 1β = 90º, 11 =W e 0=cε
- terceira parcela ─ solução Γjγ correspondente a um escoamento puramente circulatório
com 01 =W e 1=cε
Para o caso de um perfil aerodinâmico com bordo de fuga bem definido e afilado, é
importante garantir que o escoamento resultante não contorne o bordo de fuga definido pelos
pontos z1 e zNp+1 conforme a figura 2.9. Esta imposição é conhecida como condição de Kutta.

25
Figura 2.9 – Condição de Kutta
Assim, considerando a Eq. (2.36) na condição de Kutta, γn = − γ1, obtém-se o seguinte erro
circulatório:
( ) ( )[ ]
ΓΓ ++++
−=n
nnc
Wγγ
βγγβγγε
1
19090
1100
11 sencos (2.37)
Calculadas as três soluções básicas e o erro circulatório pela Eq. (2.37), torna-se
possível o cálculo das grandezas aerodinâmicas locais (nos pontos de controle) e globais
(integradas). As densidades de vórtice γj são calculadas pela equação (2.36), enquanto que a
circulação é calculada pela Eq. (2.30). As pressões estáticas são relacionadas com as pressões
dinâmicas pela equação de Bernoulli:
22
211
2 wpwp jsj +=+ρρ (2.38)
Define-se ainda o coeficiente adimensional de pressão Cpj, por:
2
1
12W
ppC j
jpρ
−= (2.39)
As Eqs. (2.38) e (2.39) vão produzir a equação (2.40) com a velocidade sjw substituída por jγ
2
1
1 ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
WC j
jp
γ (2.40)
A força aerodinâmica complexa que atua sobre um perfil da grade (por unidade de
largura perpendicular ao plano z), definida por, yx iFFF += pode ser calculada do seguinte
modo:
∫℘−= dzpiF (2.41)
●●
×
×
×Z1 + Zn+1 γn = - γ1
Z2
Zn ZCn
ZC1
γn
γ1

26
que na forma adimensional será representada e calculada aproximadamente por
( )∑∫=
+℘−−≅−==
n
jjjpjp zzCidzCi
lWFF
1
**1
*2
1
* 2ρ (2.42)
sendo ainda z* = z/l (coodenadas adimensionalizadas pela corda).
Para o escoamento potencial, a força deve resultar perpendicular à direção do
escoamento básico médio W∞, definida assim com uma força de sustentação. A força de
arrasto (paralela a W∞) deverá ser nula. Os coeficientes de sustentação, CS, e de arrasto, CA,
são definidos e calculados da seguinte maneira:
( )∞−ℑ== β
ρiS
S eFW
FC *
2
1
2l ( )∞−ℜ== β
ρiA
A eFW
FC *
2
1
2l (2.43a,b)
Considerando-se o teorema de Kutta-Joukowsky, a força de sustenção pode ser
calculada por:
PS WF Γ= ∞ρ (2.44)
os coeficientes de arrasto e de sustentação podem ser calculados de modo alternativo:
l2
1
2W
WC p
Sρ
∞Γ= 0=AC (2.45a,b)
Numericamente, o valor residual de arrasto calculado em (2.43b) pode ser interpretado
como uma medida de erro global do método de cálculo. Outra medida de erro é dada pela
diferença entre os valores de CS calculados em (2.43a) e (2.45a).
O coeficiente de momento anti-horário das forças aerodinâmicas será dado por:
[ ])()(2 *1
*1
*****2
1
jn
j jcjpppM zzzCdzzCdzzCWMC ∑∫∫ = +℘℘
−ℜ≅ℜ===lρ (2.46)
O ângulo de deflexão da grade será dado por:
21 βββ −=∆ (2.47)
Ainda, podemos relacionar as velocidades a montante W1 e a jusante W2 com a
circulação Γp retomando a Eq. (2.19):
ti
WW pΓ−= 12 (2.48)
27
Observa-se assim que, para o espaçamento da grade tendendo a infinito (estudo de perfis
isolados), não haverá deflexão do escoamento e a velocidade a montante W1 será igual a W2.
2.5 – MODIFICAÇÕES NA MATRIZ DE INFLUÊNCIA
A matriz de influência kjB ' em (2.33) exerce efeito primordial nos resultados obtidos
com o método de painéis descrito nas seções anteriores. Em função da discretização de 1ª
ordem, com painéis retos e densidades uniformes de vórtices sobre os painéis, a forma
original dessa matriz conduz a imprecisões significativas nos resultados de cálculo. Esses
resultados podem ser melhorados com certas modificações introduzidas na matriz de
influência, conforme descrito por Amorim (1987) e Manzanares Filho (1994), com base nos
estudos de Lewis (1991) e Mavriplis (1971).
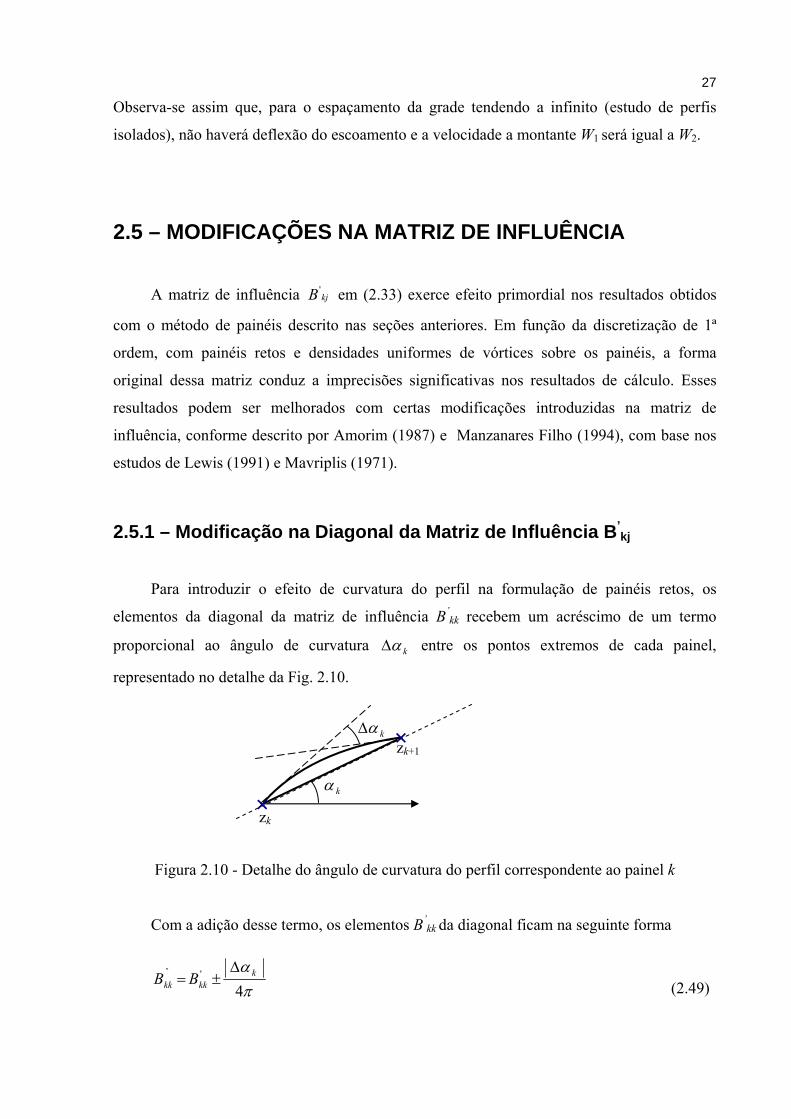
2.5.1 – Modificação na Diagonal da Matriz de Influência B’kj
Para introduzir o efeito de curvatura do perfil na formulação de painéis retos, os
elementos da diagonal da matriz de influência B’kk recebem um acréscimo de um termo
proporcional ao ângulo de curvatura kα∆ entre os pontos extremos de cada painel,
representado no detalhe da Fig. 2.10.
Figura 2.10 - Detalhe do ângulo de curvatura do perfil correspondente ao painel k
Com a adição desse termo, os elementos B’kk da diagonal ficam na seguinte forma
πα
4'" kkkkk BB
∆±= (2.49)
zk+1
kα
kα∆
zk ×
×
28
O sinal negativo deve ser utilizado para os trechos côncavos e o sinal positivo para os
trechos convexos. O embasamento teórico para esta modificação pode ser encontrado, por
exemplo, no trabalho de Amorim (1987).
2.5.2 – Modificação na Posição dos Pontos de Controle e nos Elementos Não-Diagonais da Matriz de Influência B’
KJ
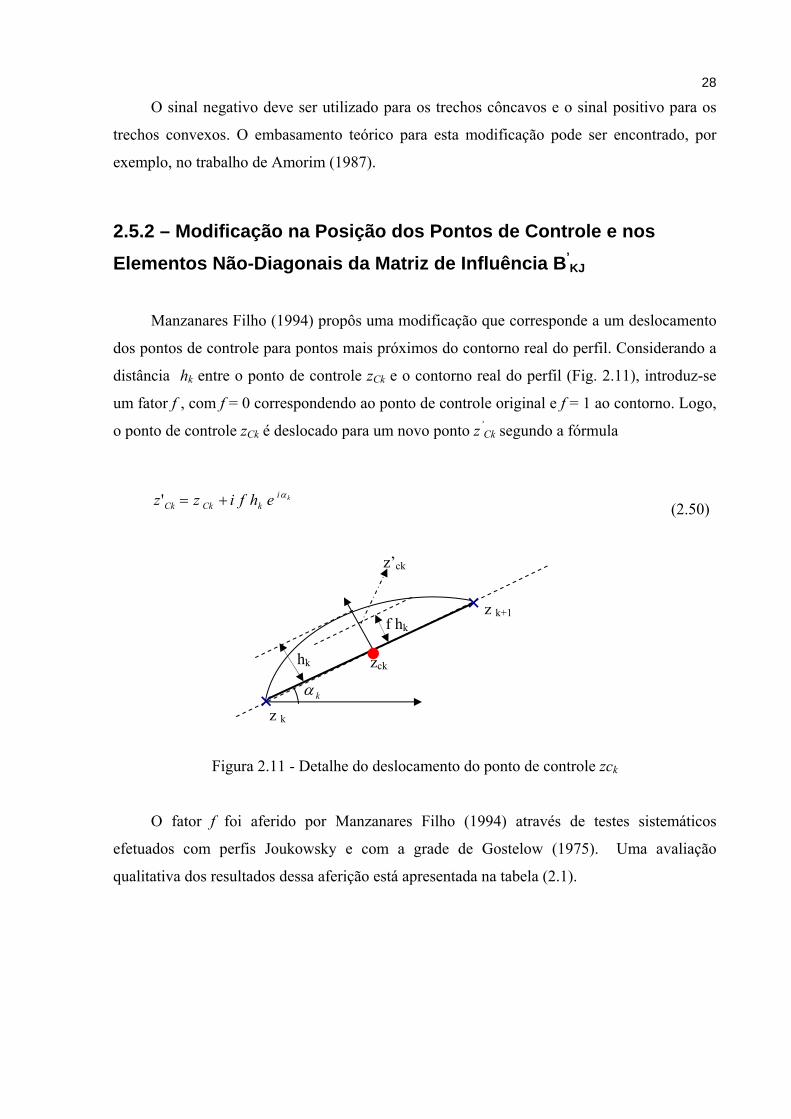
Manzanares Filho (1994) propôs uma modificação que corresponde a um deslocamento
dos pontos de controle para pontos mais próximos do contorno real do perfil. Considerando a
distância hk entre o ponto de controle zCk e o contorno real do perfil (Fig. 2.11), introduz-se
um fator f , com f = 0 correspondendo ao ponto de controle original e f = 1 ao contorno. Logo,
o ponto de controle zCk é deslocado para um novo ponto z’Ck segundo a fórmula
ki
kCkCk ehfizz α+=' (2.50)
Figura 2.11 - Detalhe do deslocamento do ponto de controle zck
O fator f foi aferido por Manzanares Filho (1994) através de testes sistemáticos
efetuados com perfis Joukowsky e com a grade de Gostelow (1975). Uma avaliação
qualitativa dos resultados dessa aferição está apresentada na tabela (2.1).
z k
z k+1
kα
zck hk
f hk
z’ck
●
×
×
29
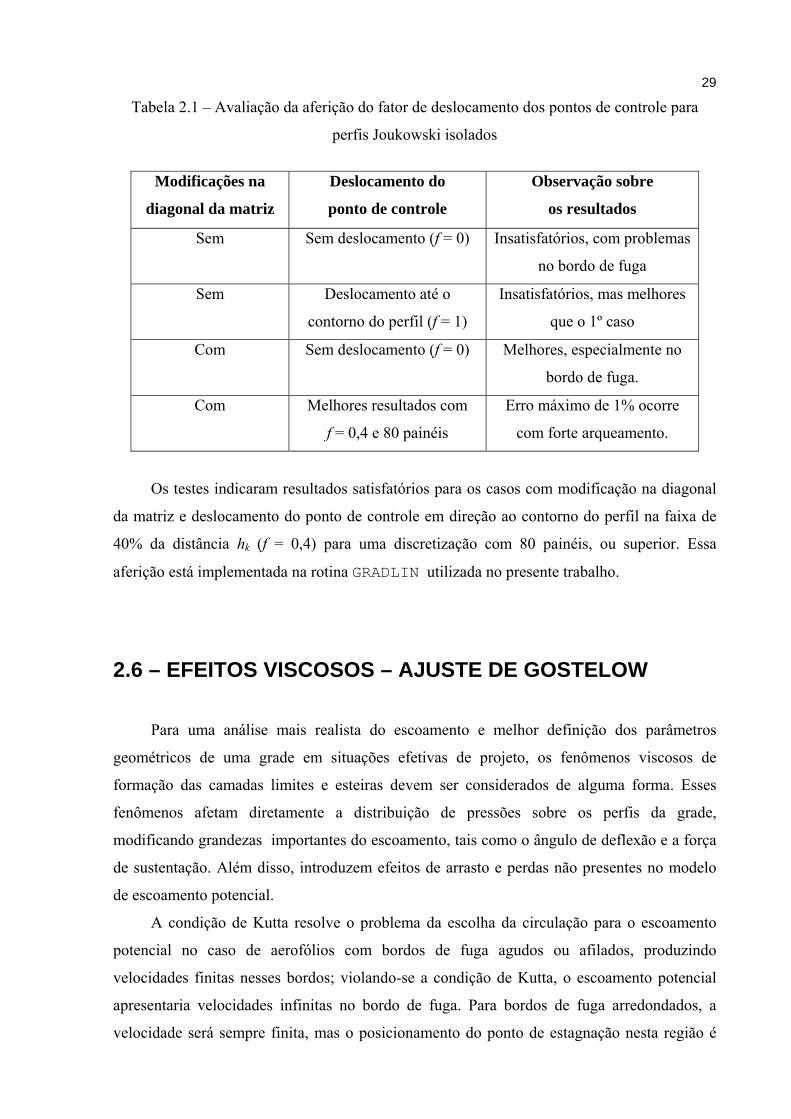
Tabela 2.1 – Avaliação da aferição do fator de deslocamento dos pontos de controle para
perfis Joukowski isolados
Modificações na
diagonal da matriz
Deslocamento do
ponto de controle
Observação sobre
os resultados
Sem Sem deslocamento (f = 0) Insatisfatórios, com problemas
no bordo de fuga
Sem Deslocamento até o
contorno do perfil (f = 1)
Insatisfatórios, mas melhores
que o 1º caso
Com Sem deslocamento (f = 0) Melhores, especialmente no
bordo de fuga.
Com Melhores resultados com
f = 0,4 e 80 painéis
Erro máximo de 1% ocorre
com forte arqueamento.
Os testes indicaram resultados satisfatórios para os casos com modificação na diagonal
da matriz e deslocamento do ponto de controle em direção ao contorno do perfil na faixa de
40% da distância hk (f = 0,4) para uma discretização com 80 painéis, ou superior. Essa
aferição está implementada na rotina GRADLIN utilizada no presente trabalho.
2.6 – EFEITOS VISCOSOS – AJUSTE DE GOSTELOW
Para uma análise mais realista do escoamento e melhor definição dos parâmetros
geométricos de uma grade em situações efetivas de projeto, os fenômenos viscosos de
formação das camadas limites e esteiras devem ser considerados de alguma forma. Esses
fenômenos afetam diretamente a distribuição de pressões sobre os perfis da grade,
modificando grandezas importantes do escoamento, tais como o ângulo de deflexão e a força
de sustentação. Além disso, introduzem efeitos de arrasto e perdas não presentes no modelo
de escoamento potencial.
A condição de Kutta resolve o problema da escolha da circulação para o escoamento
potencial no caso de aerofólios com bordos de fuga agudos ou afilados, produzindo
velocidades finitas nesses bordos; violando-se a condição de Kutta, o escoamento potencial
apresentaria velocidades infinitas no bordo de fuga. Para bordos de fuga arredondados, a
velocidade será sempre finita, mas o posicionamento do ponto de estagnação nesta região é
30
extremamente importante, sendo que sua localização produz fortes variações na distribuição
de velocidades e, consequentemente, nas pressões (Fig. 2.12). Gostelow (1975) mostrou que,
no caso de escoamento potencial, um deslocamento do ponto de estagnação de 0,3% do
comprimento da corda pode produzir uma alteração no ângulo de deflexão de até 10º.
Todavia, as experiências indicam valores reais bem definidos de deflexão, dependendo apenas
da geometria da grade, do número de Reynolds e do ângulo do escoamento a montante do
perfil (β1). A explicação está nos efeitos viscosos na região do bordo de fuga: qualquer que
seja a geometria do bordo de fuga, haverá sempre uma esteira (descolada ou não) onde se
produz uma pressão bem menor que a pressão de estagnação − a chamada pressão de base.
Figura 2.12 – Efeito do deslocamento do ponto de estagnação sobre
a distribuição de pressões na região do bordo de fuga.
No caso de perfis com bordo de fuga agudo ou afilado, os valores de força de
sustentação e de ângulo de deflexão calculados com a hipótese de escoamento potencial e
com a condição de Kutta imposta resultam maiores que os valores experimentais. Gostelow
(1975) propôs um ajuste empírico das distribuições de pressão na região do bordo de fuga em
⊗
⊗
⊗
⊗
Cp = 1
Cp = 1
Cp = 1
⊗
Ponto de
estagnação
⊗
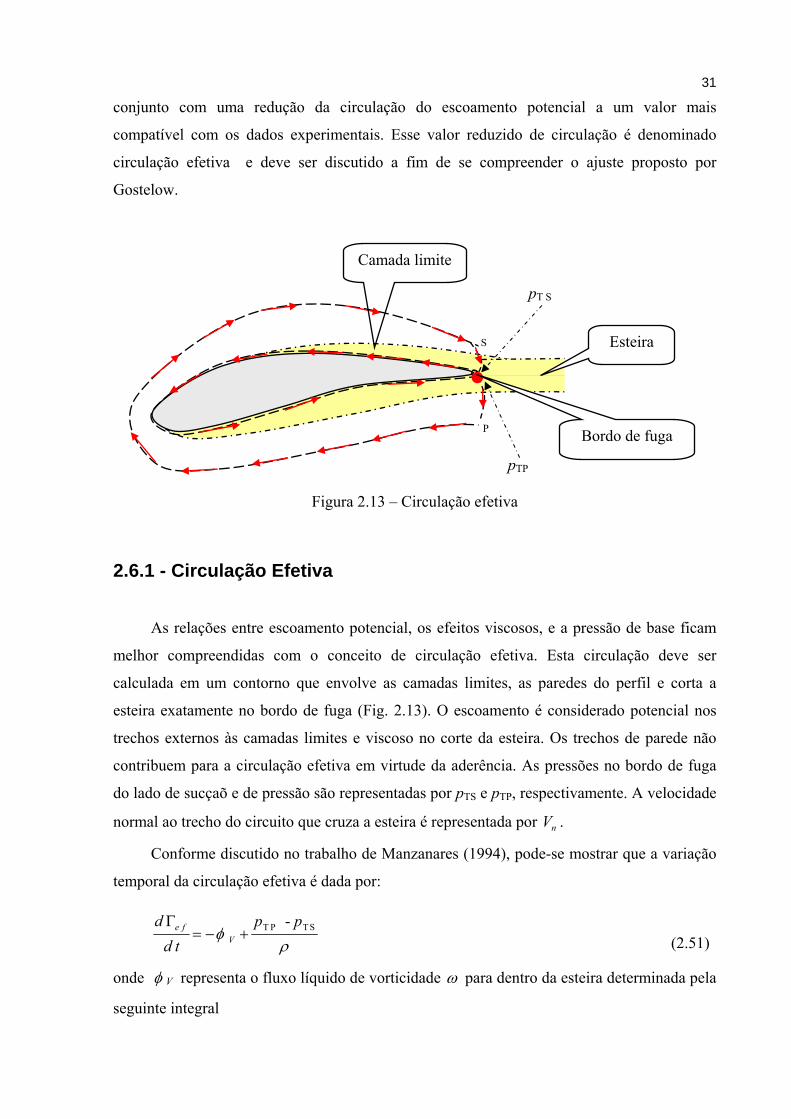
31
conjunto com uma redução da circulação do escoamento potencial a um valor mais
compatível com os dados experimentais. Esse valor reduzido de circulação é denominado
circulação efetiva e deve ser discutido a fim de se compreender o ajuste proposto por
Gostelow.
Figura 2.13 – Circulação efetiva
2.6.1 - Circulação Efetiva
As relações entre escoamento potencial, os efeitos viscosos, e a pressão de base ficam
melhor compreendidas com o conceito de circulação efetiva. Esta circulação deve ser
calculada em um contorno que envolve as camadas limites, as paredes do perfil e corta a
esteira exatamente no bordo de fuga (Fig. 2.13). O escoamento é considerado potencial nos
trechos externos às camadas limites e viscoso no corte da esteira. Os trechos de parede não
contribuem para a circulação efetiva em virtude da aderência. As pressões no bordo de fuga
do lado de sucçaõ e de pressão são representadas por pTS e pTP, respectivamente. A velocidade
normal ao trecho do circuito que cruza a esteira é representada por nV .
Conforme discutido no trabalho de Manzanares (1994), pode-se mostrar que a variação
temporal da circulação efetiva é dada por:
ρφ STPT - pp
tdd
Vfe +−=
Γ (2.51)
onde φ V representa o fluxo líquido de vorticidade ω para dentro da esteira determinada pela
seguinte integral
o
Camada limite
Esteira
pT S
pTP
S
P
●
Bordo de fuga
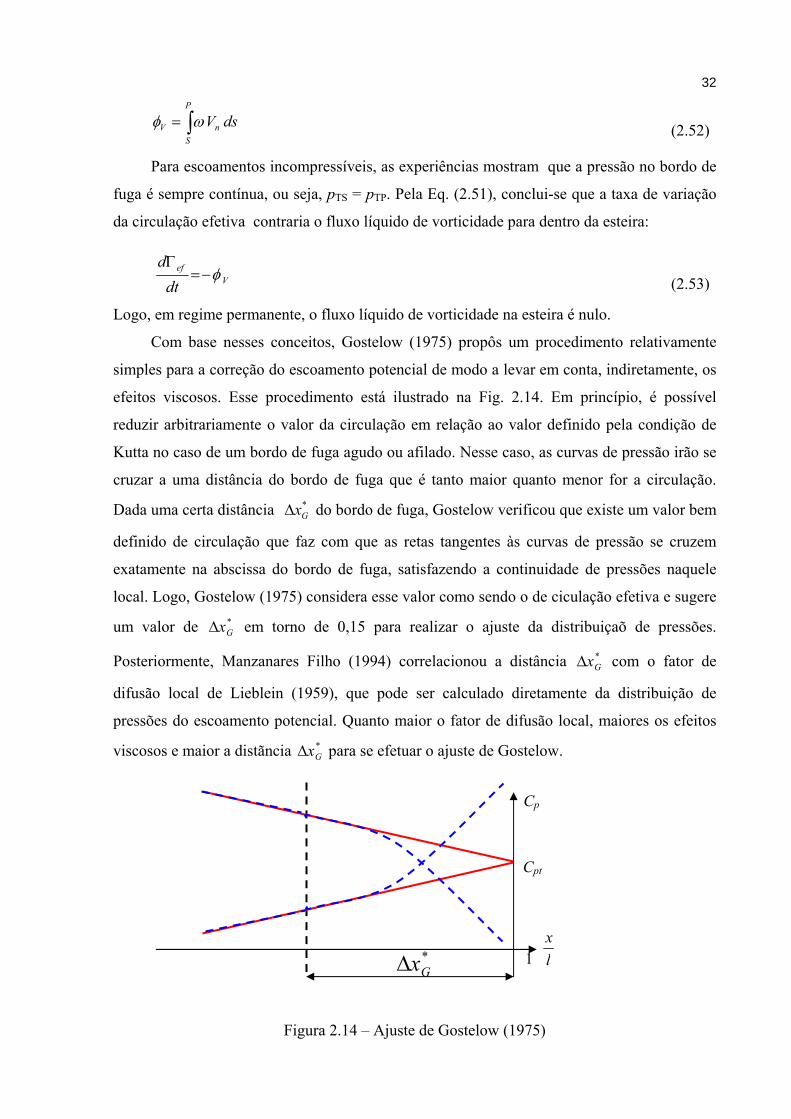
32
∫=P
SnV dsVωφ (2.52)
Para escoamentos incompressíveis, as experiências mostram que a pressão no bordo de
fuga é sempre contínua, ou seja, pTS = pTP. Pela Eq. (2.51), conclui-se que a taxa de variação
da circulação efetiva contraria o fluxo líquido de vorticidade para dentro da esteira:
Vef
dtd
φ−=Γ
(2.53)
Logo, em regime permanente, o fluxo líquido de vorticidade na esteira é nulo.
Com base nesses conceitos, Gostelow (1975) propôs um procedimento relativamente
simples para a correção do escoamento potencial de modo a levar em conta, indiretamente, os
efeitos viscosos. Esse procedimento está ilustrado na Fig. 2.14. Em princípio, é possível
reduzir arbitrariamente o valor da circulação em relação ao valor definido pela condição de
Kutta no caso de um bordo de fuga agudo ou afilado. Nesse caso, as curvas de pressão irão se
cruzar a uma distância do bordo de fuga que é tanto maior quanto menor for a circulação.
Dada uma certa distância *Gx∆ do bordo de fuga, Gostelow verificou que existe um valor bem
definido de circulação que faz com que as retas tangentes às curvas de pressão se cruzem
exatamente na abscissa do bordo de fuga, satisfazendo a continuidade de pressões naquele
local. Logo, Gostelow (1975) considera esse valor como sendo o de ciculação efetiva e sugere
um valor de *Gx∆ em torno de 0,15 para realizar o ajuste da distribuiçaõ de pressões.
Posteriormente, Manzanares Filho (1994) correlacionou a distância *Gx∆ com o fator de
difusão local de Lieblein (1959), que pode ser calculado diretamente da distribuição de
pressões do escoamento potencial. Quanto maior o fator de difusão local, maiores os efeitos
viscosos e maior a distãncia *Gx∆ para se efetuar o ajuste de Gostelow.
Figura 2.14 – Ajuste de Gostelow (1975)
lx *
Gx∆
Cp
Cpt
1
33
Na rotina GRADLIN, utilizada no presente trabalho, a distribuição de pressões do
escoamento potencial com a condição de Kutta é primeiramente calculada, resultando tembém
o fator de difusão local e o valor correspondente de *Gx∆ . As soluções básicas do escoamento
são combinadas novamente, agora sem a condição de Kutta original, mas de modo a produzir
a extrapolação de pressões desejada a partir da distância *Gx∆ . Em seguida, a parte potencial
da distribuição de pressões de comprimento *Gx∆ é eliminada (linhas tracejadas na Fig. 2.14) e
substituida pelos segmentos de reta extrapolados (linhas cheias). A distribuição de pressões
resultante é utilizada então para o cálculo das forças aerodinâmicas e do ângulo de deflexão
corrigidos.
O ajuste de Gostelow mostrou-se bastante efetivo no tratamento de grades de perfis com
bordo de fuga afilado, particularmente os perfis da série NACA 65.
34
Capítulo 3
PARAMETRIZAÇÃO GEOMÉTRICA DE AEROFÓLIOS
3.1 – INTRODUÇÃO
O objetivo principal desta dissertação consiste no desenvolvimento de uma metodologia
para projeto inverso de aerofólios em grades de turbomáquinas axiais, utilizando algoritmos
de otimização. A escolha de uma adequada parametrização geométrica de aerofólios é de
suma importância para a aplicação desses algoritmos. Uma parametrização é considerada
adequada quando o número de parâmetros introduzidos é suficiente para gerar um espaço de
soluções representativo do universo em questão, sem, contudo, ser excessivo, de modo a
manter um custo computacional aceitável para o processo de otimização.
Neste capítulo, descreve-se uma parametrização que foi considerada adequada para os
propósitos do presente trabalho e, portanto, adotada no desenvolvimento da metodologia. Essa
parametrização baseia-se no uso de polinômios de Bernstein (curvas Bezier), e foi proposta
inicialmente por Venkataraman (1995) e posteriormente adaptada por Rogalsky et al. (1999).
O presente trabalho introduz ainda um tratamento especial dos parâmetros a fim de se obter
aerofólios viáveis durante todo o processo de otimização.
35
3.2 – PARAMETRIZAÇÃO PARA A GERAÇÃO DOS PERFIS
A parametrização de aerofólios empregada neste trabalho está baseada no emprego de
polinômios desenvolvidos pelo matemático russo Sergei N. Bernstein, em 1912. Os
polinômios de Bernstein ganharam notoriedade na década 70, quando o engenheiro francês
Pierre Bezier utilizou-os para produzir curvas concordantes e suaves em programas de
desenho por computador, resolvendo problemas na indústria automobilística. Assim, as curvas
geradas pelos polinômios de Bernstein passaram ser chamadas de curvas Bezier ou curvas de
Bernstein-Bezier.
Uma curva Bezier paramétrica de grau n no plano é determinada de maneira única pelos
n+1 vértices de um polígono, chamados de pontos de controle Pi, através do seguinte
polinômio de Bernstein P(u):
∑=
−−−
=n
i
inii uu
ininu
0)1(
!)(!!)( PP (3.1)
onde u é um parâmetro real no intervalo [0, 1], tal que os pontos extremos são dados por P(0)
= P0 e P(1) = Pn. Note-se que P representa aqui um vetor no plano (x, y).
As curvas Bezier possuem muitas propriedades interessantes para um projeto
aerodinâmico. Os pontos extremos de uma curva Bezier são fixados automaticamente nos dois
vértices extremos. Em um ponto extremo, a curva é tangente ao vetor que une aquele ponto
extremo e o ponto de controle mais próximo, facilitando a união suave de duas curvas de
Bezier. A curva sempre permanece dentro da figura convexa definida pelos vértices do
polígono. Finalmente, a curva tem continuidade de ordem n em todos os pontos e jamais
oscila fortemente para longe dos seus pontos de controle definidores.
Uma curva de Bezier cúbica é definida por um polinômio de Bernstein de grau n = 3 na
Eq. (3.1), usando quatro pontos de controle P0, P1, P2 e P3, com P(0) = P0 e P(1) = P3:
33
22
21
30 )1(3)1(3)1()( uuuuuuu PPPPP +−+−+−= (3.2)
Note-se que, enquanto os pontos extremos P0 e P3 situam-se sobre a curva de Bézier, o mesmo
não ocorre, em geral, com os pontos intermediários P1, P2 .
Venkataraman (1995) introduziu a idéia de se usar quatro curvas de Bezier cúbicas para
definir um aerofólio, duas para o intradorso e duas para o extradorso. Rogalsky et al. (1999)
preferiram utilizar duas curvas cúbicas de Bezier para representar a distribuição de semi-
espessura (curvas dianteira e traseira, conectadas na abscissa de espessura máxima, Fig. 3.1) e
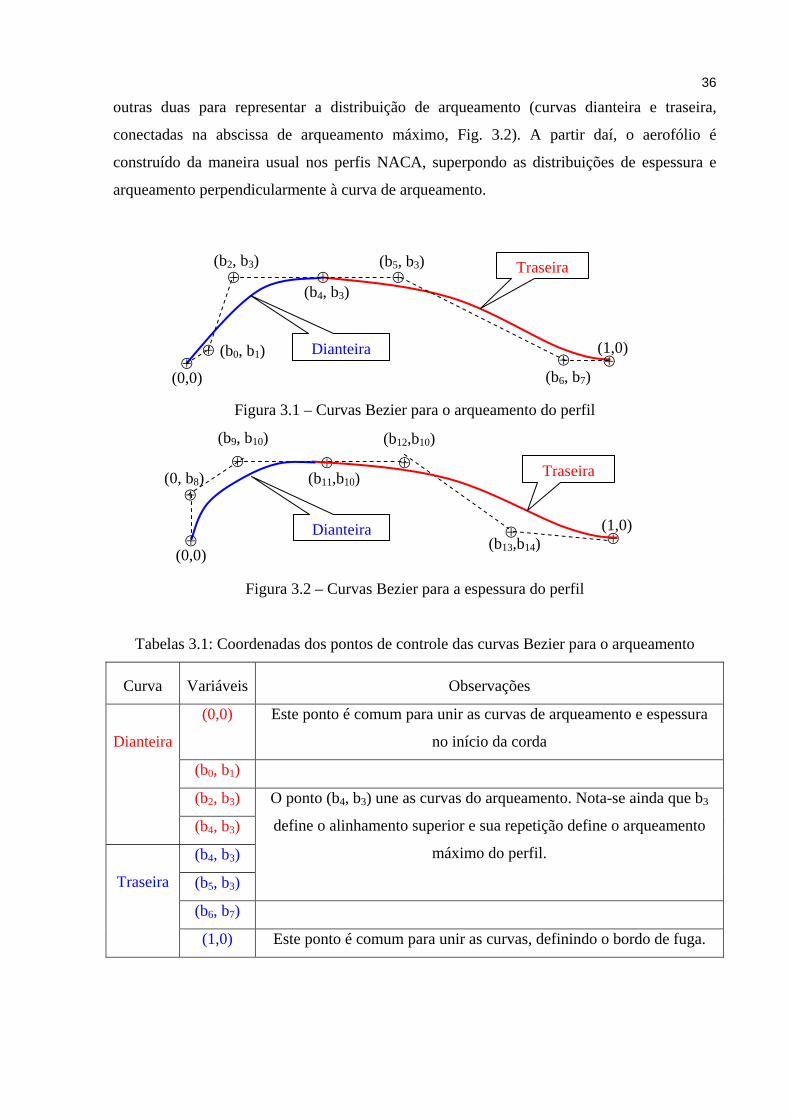
36
outras duas para representar a distribuição de arqueamento (curvas dianteira e traseira,
conectadas na abscissa de arqueamento máximo, Fig. 3.2). A partir daí, o aerofólio é
construído da maneira usual nos perfis NACA, superpondo as distribuições de espessura e
arqueamento perpendicularmente à curva de arqueamento.
Figura 3.1 – Curvas Bezier para o arqueamento do perfil
Figura 3.2 – Curvas Bezier para a espessura do perfil
Tabelas 3.1: Coordenadas dos pontos de controle das curvas Bezier para o arqueamento
Curva
Variáveis
Observações
(0,0) Este ponto é comum para unir as curvas de arqueamento e espessura
no início da corda
(b0, b1)
(b2, b3)
Dianteira
(b4, b3)
(b4, b3)
(b5, b3)
O ponto (b4, b3) une as curvas do arqueamento. Nota-se ainda que b3
define o alinhamento superior e sua repetição define o arqueamento
máximo do perfil.
(b6, b7)
Traseira
(1,0) Este ponto é comum para unir as curvas, definindo o bordo de fuga.
(0,0)
⊕ ⊕
⊕ ⊕ ⊕
⊕ ⊕ (b0, b1)
(b2, b3)
(b4, b3)
(b5, b3)
(b6, b7)
(1,0)
(0,0)
⊕
⊕
⊕ ⊕ ⊕
⊕ ⊕
(0, b8)
(b9, b10)
(b11,b10)
(b12,b10)
(b13,b14) (1,0)
Dianteira
Dianteira
Traseira
Traseira
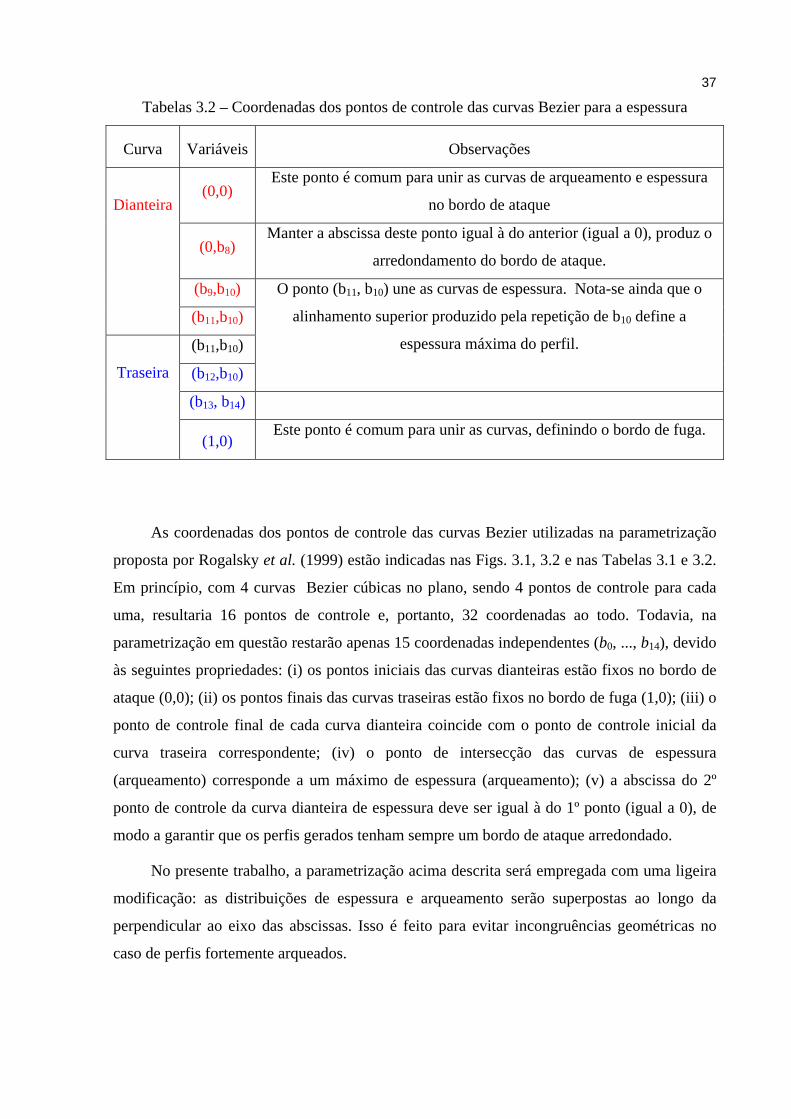
37
Tabelas 3.2 – Coordenadas dos pontos de controle das curvas Bezier para a espessura
Curva
Variáveis
Observações
(0,0) Este ponto é comum para unir as curvas de arqueamento e espessura
no bordo de ataque
(0,b8) Manter a abscissa deste ponto igual à do anterior (igual a 0), produz o
arredondamento do bordo de ataque.
(b9,b10)
Dianteira
(b11,b10)
(b11,b10)
(b12,b10)
O ponto (b11, b10) une as curvas de espessura. Nota-se ainda que o
alinhamento superior produzido pela repetição de b10 define a
espessura máxima do perfil.
(b13, b14)
Traseira
(1,0) Este ponto é comum para unir as curvas, definindo o bordo de fuga.
As coordenadas dos pontos de controle das curvas Bezier utilizadas na parametrização
proposta por Rogalsky et al. (1999) estão indicadas nas Figs. 3.1, 3.2 e nas Tabelas 3.1 e 3.2.
Em princípio, com 4 curvas Bezier cúbicas no plano, sendo 4 pontos de controle para cada
uma, resultaria 16 pontos de controle e, portanto, 32 coordenadas ao todo. Todavia, na
parametrização em questão restarão apenas 15 coordenadas independentes (b0, ..., b14), devido
às seguintes propriedades: (i) os pontos iniciais das curvas dianteiras estão fixos no bordo de
ataque (0,0); (ii) os pontos finais das curvas traseiras estão fixos no bordo de fuga (1,0); (iii) o
ponto de controle final de cada curva dianteira coincide com o ponto de controle inicial da
curva traseira correspondente; (iv) o ponto de intersecção das curvas de espessura
(arqueamento) corresponde a um máximo de espessura (arqueamento); (v) a abscissa do 2º
ponto de controle da curva dianteira de espessura deve ser igual à do 1º ponto (igual a 0), de
modo a garantir que os perfis gerados tenham sempre um bordo de ataque arredondado.
No presente trabalho, a parametrização acima descrita será empregada com uma ligeira
modificação: as distribuições de espessura e arqueamento serão superpostas ao longo da
perpendicular ao eixo das abscissas. Isso é feito para evitar incongruências geométricas no
caso de perfis fortemente arqueados.
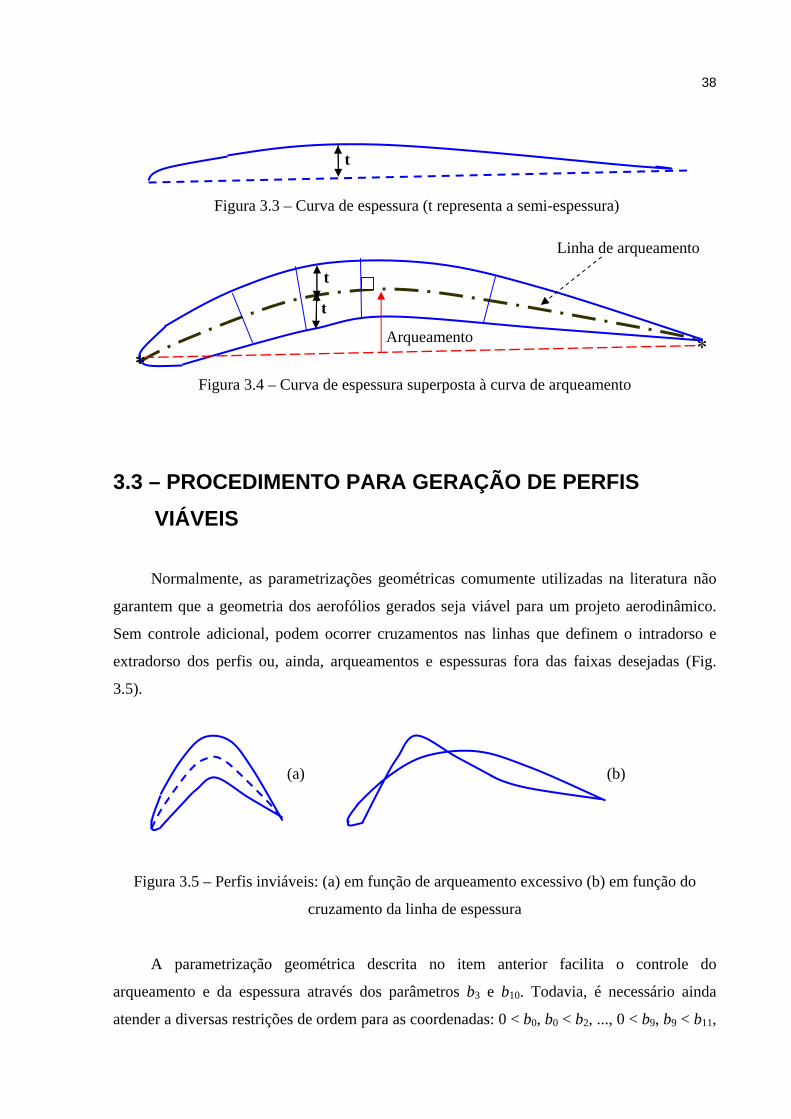
38
Figura 3.3 – Curva de espessura (t representa a semi-espessura)
Figura 3.4 – Curva de espessura superposta à curva de arqueamento
3.3 – PROCEDIMENTO PARA GERAÇÃO DE PERFIS VIÁVEIS
Normalmente, as parametrizações geométricas comumente utilizadas na literatura não
garantem que a geometria dos aerofólios gerados seja viável para um projeto aerodinâmico.
Sem controle adicional, podem ocorrer cruzamentos nas linhas que definem o intradorso e
extradorso dos perfis ou, ainda, arqueamentos e espessuras fora das faixas desejadas (Fig.
3.5).
Figura 3.5 – Perfis inviáveis: (a) em função de arqueamento excessivo (b) em função do
cruzamento da linha de espessura
A parametrização geométrica descrita no item anterior facilita o controle do
arqueamento e da espessura através dos parâmetros b3 e b10. Todavia, é necessário ainda
atender a diversas restrições de ordem para as coordenadas: 0 < b0, b0 < b2, ..., 0 < b9, b9 < b11,
t
t
Arqueamento
t
∗ ∗
Linha de arqueamento
(a) (b)
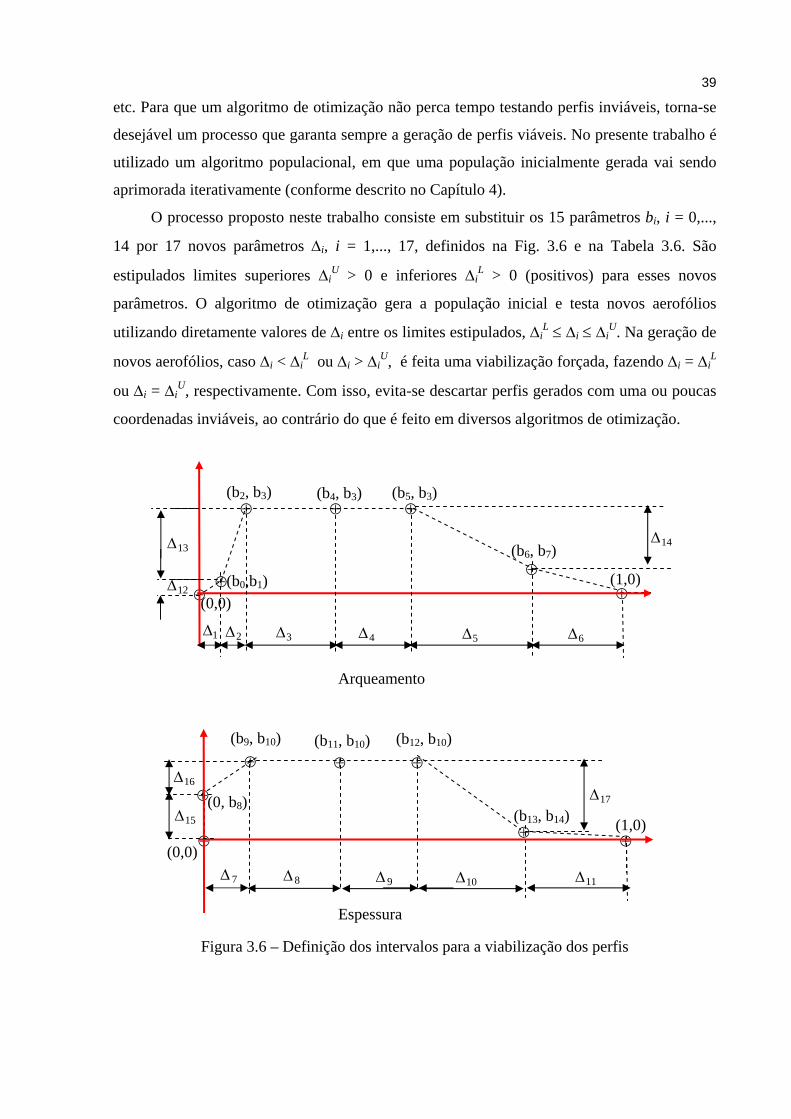
39
etc. Para que um algoritmo de otimização não perca tempo testando perfis inviáveis, torna-se
desejável um processo que garanta sempre a geração de perfis viáveis. No presente trabalho é
utilizado um algoritmo populacional, em que uma população inicialmente gerada vai sendo
aprimorada iterativamente (conforme descrito no Capítulo 4).
O processo proposto neste trabalho consiste em substituir os 15 parâmetros bi, i = 0,...,
14 por 17 novos parâmetros ∆i, i = 1,..., 17, definidos na Fig. 3.6 e na Tabela 3.6. São
estipulados limites superiores ∆iU > 0 e inferiores ∆i
L > 0 (positivos) para esses novos
parâmetros. O algoritmo de otimização gera a população inicial e testa novos aerofólios
utilizando diretamente valores de ∆i entre os limites estipulados, ∆iL ≤ ∆i ≤ ∆i
U. Na geração de
novos aerofólios, caso ∆i < ∆iL ou ∆i > ∆i
U, é feita uma viabilização forçada, fazendo ∆i = ∆iL
ou ∆i = ∆iU, respectivamente. Com isso, evita-se descartar perfis gerados com uma ou poucas
coordenadas inviáveis, ao contrário do que é feito em diversos algoritmos de otimização.
Figura 3.6 – Definição dos intervalos para a viabilização dos perfis
Arqueamento
⊕ ⊕
⊕ ⊕ ⊕
⊕ ⊕
(b0,b1)
(b2, b3) (b4, b3) (b5, b3)
(b6, b7)
(1,0)
1∆ 2∆ 3∆ 4∆ 5∆ 6∆
(0,0) 12∆
13∆ 14∆
(0,0)
⊕
⊕
⊕ ⊕ ⊕
⊕ ⊕
(0, b8)
(b9, b10) (b11, b10) (b12, b10)
(b13, b14) (1,0)
Espessura
7∆ 8∆ 9∆ 11∆10∆
15∆
16∆17∆
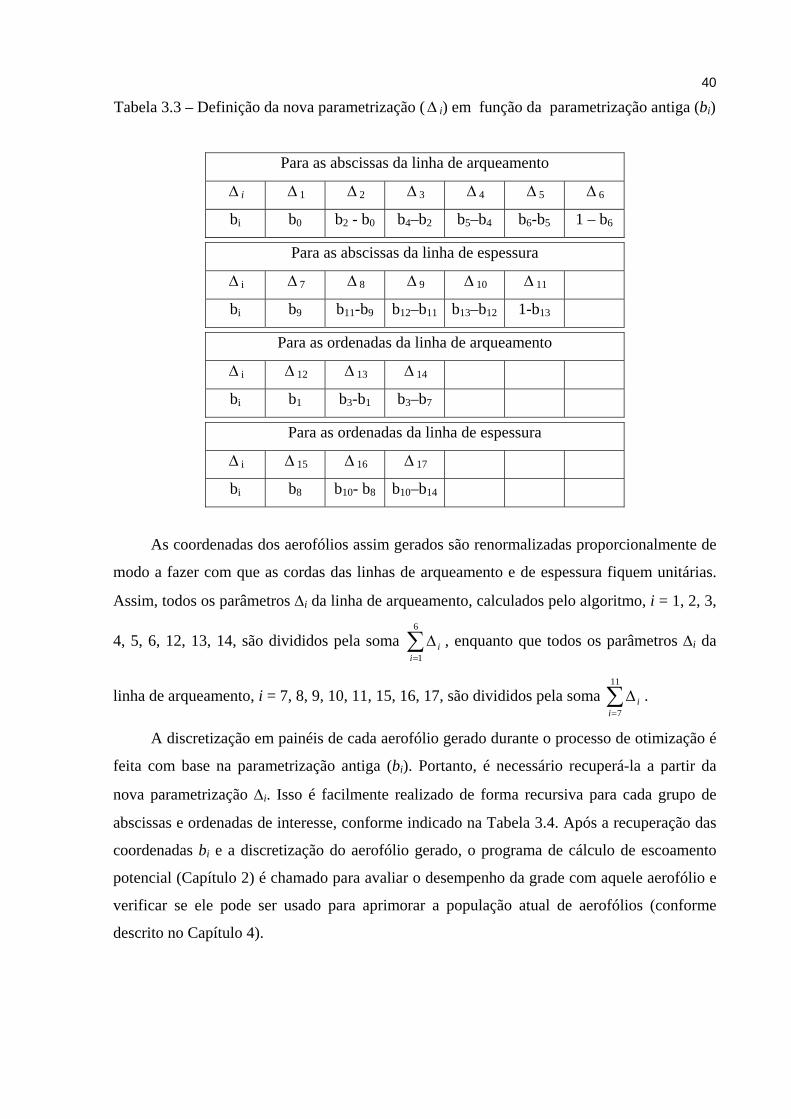
40
Tabela 3.3 – Definição da nova parametrização (∆ i) em função da parametrização antiga (bi)
Para as abscissas da linha de arqueamento
∆ i ∆ 1 ∆ 2 ∆ 3 ∆ 4 ∆ 5 ∆ 6
bi b0 b2 - b0 b4–b2 b5–b4 b6-b5 1 – b6
Para as abscissas da linha de espessura
∆ i ∆ 7 ∆ 8 ∆ 9 ∆ 10 ∆ 11
bi b9 b11-b9 b12–b11 b13–b12 1-b13
Para as ordenadas da linha de arqueamento
∆ i ∆ 12 ∆ 13 ∆ 14
bi b1 b3-b1 b3–b7
Para as ordenadas da linha de espessura
∆ i ∆ 15 ∆ 16 ∆ 17
bi b8 b10- b8 b10–b14
As coordenadas dos aerofólios assim gerados são renormalizadas proporcionalmente de
modo a fazer com que as cordas das linhas de arqueamento e de espessura fiquem unitárias.
Assim, todos os parâmetros ∆i da linha de arqueamento, calculados pelo algoritmo, i = 1, 2, 3,
4, 5, 6, 12, 13, 14, são divididos pela soma ∑=
∆6
1ii , enquanto que todos os parâmetros ∆i da
linha de arqueamento, i = 7, 8, 9, 10, 11, 15, 16, 17, são divididos pela soma ∑=
∆11
7ii .
A discretização em painéis de cada aerofólio gerado durante o processo de otimização é
feita com base na parametrização antiga (bi). Portanto, é necessário recuperá-la a partir da
nova parametrização ∆i. Isso é facilmente realizado de forma recursiva para cada grupo de
abscissas e ordenadas de interesse, conforme indicado na Tabela 3.4. Após a recuperação das
coordenadas bi e a discretização do aerofólio gerado, o programa de cálculo de escoamento
potencial (Capítulo 2) é chamado para avaliar o desempenho da grade com aquele aerofólio e
verificar se ele pode ser usado para aprimorar a população atual de aerofólios (conforme
descrito no Capítulo 4).
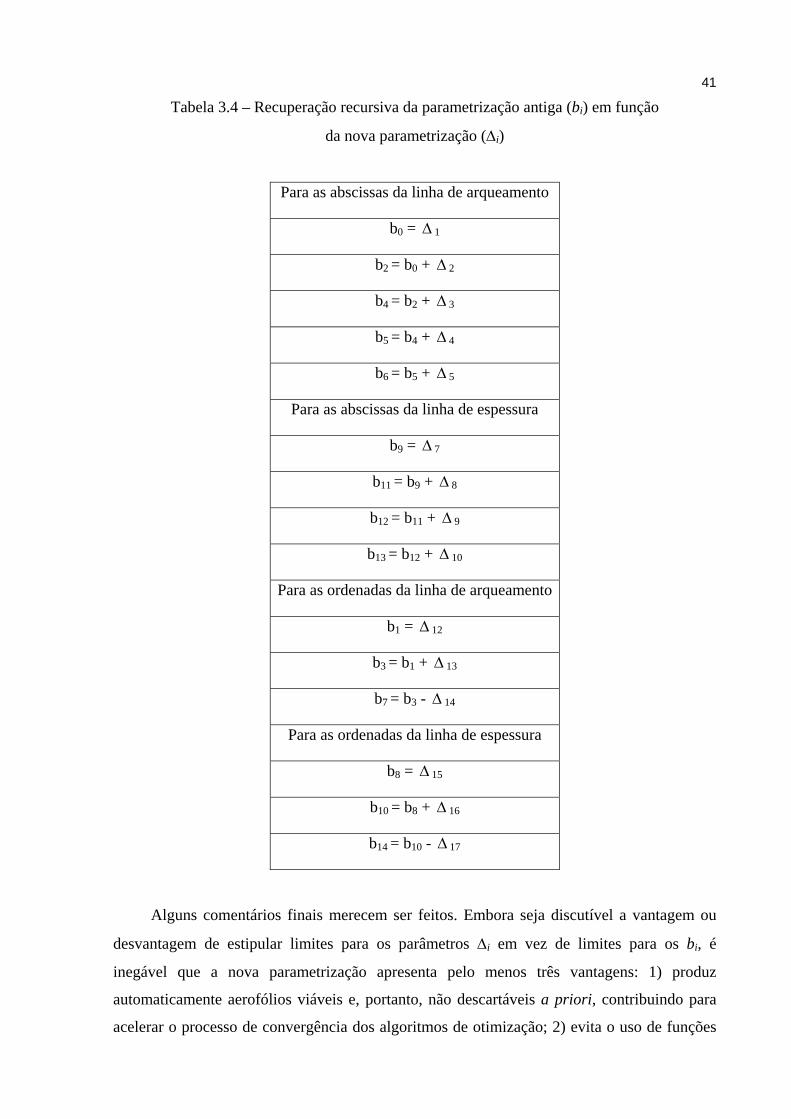
41
Tabela 3.4 – Recuperação recursiva da parametrização antiga (bi) em função
da nova parametrização (∆i)
Para as abscissas da linha de arqueamento
b0 = ∆ 1
b2 = b0 + ∆ 2
b4 = b2 + ∆ 3
b5 = b4 + ∆ 4
b6 = b5 + ∆ 5
Para as abscissas da linha de espessura
b9 = ∆ 7
b11 = b9 + ∆ 8
b12 = b11 + ∆ 9
b13 = b12 + ∆ 10
Para as ordenadas da linha de arqueamento
b1 = ∆ 12
b3 = b1 + ∆ 13
b7 = b3 - ∆ 14
Para as ordenadas da linha de espessura
b8 = ∆ 15
b10 = b8 + ∆ 16
b14 = b10 - ∆ 17
Alguns comentários finais merecem ser feitos. Embora seja discutível a vantagem ou
desvantagem de estipular limites para os parâmetros ∆i em vez de limites para os bi, é
inegável que a nova parametrização apresenta pelo menos três vantagens: 1) produz
automaticamente aerofólios viáveis e, portanto, não descartáveis a priori, contribuindo para
acelerar o processo de convergência dos algoritmos de otimização; 2) evita o uso de funções

42
de penalidade na função objetivo para atender às restrições de ordem das abscissas dos pontos
de controle das curvas Bezier; 3) evita o cálculo do escoamento em torno de aerofólios
inviáveis, com efeitos numéricos eventualmente descontroláveis.
43
Capítulo 4
ALGORITMO DE OTIMIZAÇÃO
4.1 – INTRODUÇÃO
Neste capítulo, discute-se o algoritmo de otimização utilizado para o projeto inverso de
aerofólios em grades de turbomáquinas. É importante salientar que se trata de uma abordagem
bastante diferente daquela desenvolvida anteriormente na UNIFEI, que se baseava no próprio
método dos painéis, tratava todos os pontos nodais como variáveis de projeto e não utilizava
algoritmos de otimização explícitos (Petrucci, 2003). A vantagem da abordagem apresentada
neste trabalho é que ela independe do método de cálculo do escoamento e do tipo de
parametrização empregados, e até mesmo do algoritmo de otimização. Contudo, neste
trabalho emprega-se o método dos painéis descrito no Capítulo 2, a técnica de parametrização
descrita no Capítulo 3 e um algoritmo de otimização baseado em técnicas populacionais
evolucionárias.
Mesmo com técnicas populacionais de otimização mais consagradas em aerodinâmica,
como os Algoritmos Genéticos (GA) ou de Evolução Diferencial (DE), optou-se neste
trabalho pelo algoritmo de Busca Aleatória Controlada (CRS), proposto inicialmente por
44
Price (1977) e desenvolvido em novas versões por Ali et.al. (1997a). Tal escolha justifica-se
por se tratar de um algoritmo de fácil implementação e com bom potencial de aplicabilidade,
além de poder atingir um desempenho comparável ao dos GA´s e DE´s. Outro fator
considerado é a aparente escassez de trabalhos de aplicação dos algoritmos CRS em
problemas inversos e de otimização de aerofólios ou pás de turbomáquinas. Assim, o presente
trabalho busca contribuir no sentido de avaliar as potencialidades dessa opção adicional.
Busca também contribuir com a apresentação de uma nova versão do CRS, mais eficiente
para o problema de projeto inverso de aerofólios (Manzanares Filho et al., 2005).
4.2 – ALGORITMOS DE BUSCA ALEATÓRIA CONTROLADA
Os algoritmos de busca aleatória controlada são algoritmos de otimização adequados
para a pesquisa de minimizadores globais de uma função real contínua, denominada função
objetivo, f: ℜn → ℜ, não necessariamente diferenciável, definida em uma hiper-caixa
S = {x ∈ ℜn: Ujj
Lj xxx ≤≤ , j = 1, ..., n}, onde L
jx e Ujx representam, respectivamente, limites
inferiores e superiores para as n coordenadas de x. Um ponto x* é dito um otimizador global
de f se f(x*) ≤ f(x), ∀x ∈ S. Além das restrições laterais usadas na definição de S, outros tipos
de restrição poderiam, em princípio, ser impostos por meio de esquemas de penalidade sobre
a função objetivo ou qualquer outra técnica de tratamento de restrições (Oyama et al., 2005).
Os algoritmos CRS foram propostos como um aperfeiçoamento de métodos simples de
busca aleatória em que apenas o ponto de menor valor da função objetivo fica retido em cada
iteração (Price, 1977). Assim como os GA´s e DE´s, um CRS é um algoritmo populacional
evolucionário que parte de um conjunto inicial P de N pontos distribuídos aleatoriamente
sobre S e, a partir daí, efetua um processo de contração iterativa em direção a um ponto de
mínimo global por meio de procedimentos puramente heurísticos (Ali et al., 1997a, e Ali e
Törn, 2004). Além disso, o tamanho N da população é mantido durante todo processo de
otimização. Diferentemente dos demais algoritmos evolucionários mencionados, um CRS
substitui um único ponto da população (seu ponto atual de pior valor da função objetivo, h)
por um ponto melhor, p, em cada iteração (i.e., um ponto tentativo p tal que f(p) < f(h)).
Assim, sua implementação é mais direta
45
4.2.1 – O Algoritmo CRS Básico
O algoritmo CRS básico para minimização pode ser descrito brevemente do seguinte
modo (adaptado de Ali et al., 1997a e Ali e Törn, 2004):
1. Gerar aleatoriamente uma população inicial P de N pontos em S: P = {x1, ..., xN}.
Calcular os valores da função nesses pontos de um modo indexado. Determinar o pior
ponto, h, e o melhor ponto, l, i.e., aqueles pontos em P com o maior e o menor valor
da função, fh e fl, respectivamente. Se um critério de parada já for atendido, parar (por
exemplo, parar se fh − fl < , onde é uma tolerância especificada). Se não, continuar.
2. Gerar um ponto tentativo p para substituir o pior ponto, h.
3. Se p for inviável (p ∉ S), ir ao passo 2 (ou, tornar p viável e continuar).
4. Avaliar fp = f(p). Se p for insatisfatório (fp ≥ fh), ir ao passo 2.
5. Atualizar o conjunto P substituindo o pior ponto atual pelo ponto tentativo: (P ← P ∪
{p} / {h}). Encontrar h e fh na nova população P. Se fp < fl, estabelecer p, fp como os
novos l, fl, respectivamente.
6. Se um critério de parada for atendido, parar; se não, ir ao passo 2.
As duas principais diferenças dentre as versões disponíveis do CRS estão relacionadas
(i) ao modo de geração do ponto tentativo (passo 2) e (ii) ao acesso opcional a uma fase de
busca local sempre que o melhor ponto for o mais novo na população (quando fp < fl no passo
5). Deve-se observar que todas as versões admitem que N >> n (por exemplo, Ali et al.
(1997a) sugerem empregar N = 10(n + 1) ).
4.2.2 – Algumas Versões do CRS
O CRS proposto por Price (1977) foi aparentemente o primeiro a aparecer no formato
acima. Ele não inclui uma fase local no passo 5. A geração do ponto tentativo no passo 2 é
efetuada do seguinte modo: Escolher aleatoriamente n + 1 pontos distintos da população atual
P: r1, ..., rn+1 (formando um simplex em ℜn). Determinar o centróide g dos n primeiros pontos
r1, ..., rn. Em seguida, determinar o ponto tentativo p pela reflexão do ponto remanescente
rn+1 em relação ao centróide g, segundo o procedimento de Nelder e Mead (1965):
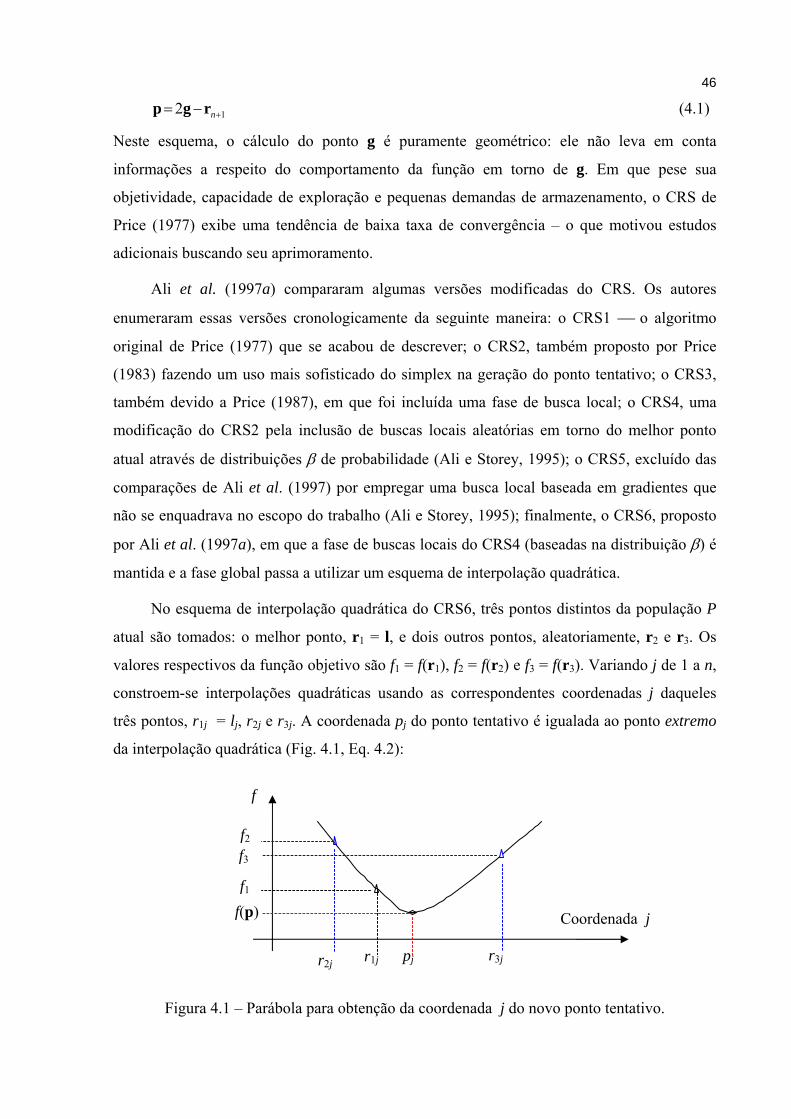
46
12 +−= nrgp (4.1)
Neste esquema, o cálculo do ponto g é puramente geométrico: ele não leva em conta
informações a respeito do comportamento da função em torno de g. Em que pese sua
objetividade, capacidade de exploração e pequenas demandas de armazenamento, o CRS de
Price (1977) exibe uma tendência de baixa taxa de convergência – o que motivou estudos
adicionais buscando seu aprimoramento.
Ali et al. (1997a) compararam algumas versões modificadas do CRS. Os autores
enumeraram essas versões cronologicamente da seguinte maneira: o CRS1 ⎯ o algoritmo
original de Price (1977) que se acabou de descrever; o CRS2, também proposto por Price
(1983) fazendo um uso mais sofisticado do simplex na geração do ponto tentativo; o CRS3,
também devido a Price (1987), em que foi incluída uma fase de busca local; o CRS4, uma
modificação do CRS2 pela inclusão de buscas locais aleatórias em torno do melhor ponto
atual através de distribuições β de probabilidade (Ali e Storey, 1995); o CRS5, excluído das
comparações de Ali et al. (1997) por empregar uma busca local baseada em gradientes que
não se enquadrava no escopo do trabalho (Ali e Storey, 1995); finalmente, o CRS6, proposto
por Ali et al. (1997a), em que a fase de buscas locais do CRS4 (baseadas na distribuição β) é
mantida e a fase global passa a utilizar um esquema de interpolação quadrática.
No esquema de interpolação quadrática do CRS6, três pontos distintos da população P
atual são tomados: o melhor ponto, r1 = l, e dois outros pontos, aleatoriamente, r2 e r3. Os
valores respectivos da função objetivo são f1 = f(r1), f2 = f(r2) e f3 = f(r3). Variando j de 1 a n,
constroem-se interpolações quadráticas usando as correspondentes coordenadas j daqueles
três pontos, r1j = lj, r2j e r3j. A coordenada pj do ponto tentativo é igualada ao ponto extremo
da interpolação quadrática (Fig. 4.1, Eq. 4.2):
Figura 4.1 – Parábola para obtenção da coordenada j do novo ponto tentativo.
r2j r3j pj
Coordenada j
r1j
f2
f3
f1
f(p)
f
47
321213132
32
22
122
12
312
32
2
)()()()()()(
21
frrfrrfrrfrrfrrfrr
pjjjjjj
jjjjjjj −+−+−
−+−+−= , (j = 1, ..., n) (4.2)
A idéia heurística subjacente a esse esquema consiste em considerar como promissora
qualquer região em torno do melhor ponto e promover uma busca global por melhores pontos
em tais regiões por meio de interpolações parabólicas ao longo de cada coordenada.
Ali et al. (1997a) compararam o CRS6 com outras versões do CRS em 13 problemas-
teste consagrados em otimização global. Em todos os testes, o desempenho do CRS6
mostrou-se superior. Verificou-se que o esquema de interpolação quadrática foi mais
importante para a melhoria do desempenho que as buscas locais baseadas na distribuição β de
probabilidade ⎯ embora essas também tenham exercido um efeito benéfico.
4.2.3 – Um Algoritmo CRS Usando Reflexão Baseada em
Variabilidade: CRS-VBR (Manzanares Filho et al., 2005)
A facilidade de implementação e bom desempenho do CRS6 trazem uma expectativa a
respeito de sua eficácia na solução de problemas de projeto de formas aerodinâmicas. Alguns
testes preliminares foram realizados nesse sentido, concluindo-se que o CRS6 poderia, de
fato, ser aplicado nesses problemas; entretanto, alguns inconvenientes também puderam ser
verificados: para um número relativamente grande de parâmetros geométricos, como no caso
da parametrização descrita no Capítulo 3 (n =17), há tendência de redução da taxa de
convergência do CRS6 em direção a um mínimo global; as buscas locais baseadas na
distribuição β de probabilidade nem sempre são benéficas e até podem dificultar a
convergência; existem alguns parâmetros empíricos nessas buscas locais que são de difícil
calibração ⎯ o que representa uma perda de objetividade e generalidade. Assim, torna-se
desejável dispor de uma versão aprimorada do CRS capaz de eliminar ou, pelo menos,
amenizar esses inconvenientes.
Após algumas análises críticas, foi possível identificar quatro aspectos do CRS6
merecedores de atenção:
(i) primeiramente, não é possível asseverar que o extremo da interpolação quadrática
(Fig.4.1) corresponda sempre a um mínimo; situações de máximo podem ocorrer com relativa
48
freqüência; (ii) as regiões de busca cobertas pelas interpolações quadráticas em torno do
melhor ponto não possuem necessariamente a mesma potencialidade de fornecer pontos
melhores ⎯ pode-se argumentar que regiões com fortes variações da função são mais
promissoras que regiões com variações suaves; isso é especialmente importante quando a
interpolação não produz um mínimo; (iii) podem ocorrer situações em que a interpolação
torna-se mal-condicionada; (iv) finalmente, seria desejável eliminar as duvidosas buscas
locais baseadas na distribuição β de probabilidade e a corresponde calibração de parâmetros
empíricos.
Tendo em mente tais considerações, outra versão do CRS foi desenvolvida (Manzanares
et al., 2005). Essa versão ⎯ denominada CRS-VBR⎯ faz uso seletivo das interpolações
quadráticas do CRS6, leva em conta a variabilidade da função em torno do melhor ponto da
população atual e elimina as buscas locais baseadas na distribuição β de probabilidade. As
particularidades do CRS-VBR referem-se apenas à geração do ponto tentativo, i.e, ao passo 2
do CRS básico (item 4.2.1). Um valor médio da função, fg, e uma medida de variabilidade
local, α, são calculados da seguinte maneira:
( )3221 fff g += , (4.3)
lh
lg
ffff
−−
=α (4.4)
onde fh representa o valor da função do pior ponto da população atual.
O algoritmo proposto para determinar cada coordenada pi do ponto tentativo pode ser
descrito da seguinte maneira:
1. Fazer um teste de mal-condicionamento da interpolação quadrática entre r1i, r2i e r3i.
Se ela for considerada mal-condicionada, então avaliar o valor de pi aleatoriamente
no intervalo viável correspondente, Uii
Li xxx ≤≤ .
2. Se não, se a coordenada do melhor ponto estiver entre as coordenadas dos outros
dois pontos, — i.e., se (r2i − r1i) (r3i − r1i) < 0 —, então calcular pi como o mínimo
da interpolação quadrática entre r1i, r2i e r3i, assim como é feito no CRS6 (Eq. 4.2).
3. Se não, calcular uma coordenada centroidal ponderada gi do seguinte modo:
49
( ) ( )( ) ( )1312
313212
ffffrffrff
g iii −+−
−+−= (4.5)
e, em seguida, calcular a coordenada pi do ponto tentativo por meio de uma
reflexão baseada em variabilidade da coordenada centroidal gi em relação à
coordenada r1i do melhor ponto:
( ) ( ) iii grp αα −−−= 12 1 (4.6)
Observações
• A interpolação pode ser considerada mal-condicionada quando o determinante
associado ao coeficiente do termo quadrático, (r2i − r3i) f1 + (r3i − r1i) f2 + ( r1i − r2i) f3,
ficar abaixo de um pequeno valor prescrito, δC. Opcionalmente, buscando maior
generalidade, é possível usar o número de condição da matriz de interpolação, que é
independente de escala, diferentemente do determinante. Neste trabalho, optou-se por
usar δC = 10-30, adequado para dupla precisão. Além do tamanho N da população, δC
torna-se o único parâmetro empírico adicional do algoritmo proposto.
• A avaliação aleatória de pi quando a interpolação é considerada mal-condicionada
incrementa a abrangência da busca e ajuda a evitar uma contração prematura da
população em direção a um mínimo local. Mesmo uma pane eventual do processo
numérico pode ser evitada desse modo.
• Ao satisfazer a condição de aceite de uma coordenada do ponto tentativo do CRS6,
garante-se com certeza que essa coordenada corresponde ao mínimo da interpolação e,
também, que ela permanece no intervalo viável.
• O cálculo da coordenada centroidal gi (Eq. 4.5) coloca maior peso sobre a coordenada
cujo valor da função é maior, a fim de enfatizar a variabilidade local em torno da
coordenada do melhor ponto atual.
• A avaliação da coordenada do ponto tentativo (Eq. 4.6) utilizando a medida de
variabilidade local α (Eqs. 4.4 e 4.3) representa um procedimento heurístico para
balancear automaticamente buscas globais e locais. Para variabilidade baixa (α → 0), a
coordenada centroidal é refletida para longe da coordenada do melhor ponto atual, pois
o intervalo de interpolação correspondente não parece promissor nesse caso. Isso ajuda
o algoritmo a escapar de pontos de mínimo local e torna a busca “mais global”, quando
50
necessário. Para alta variabilidade (α → 1), a coordenada centroidal é refletida para
perto da coordenada do melhor ponto atual, pois agora é de se esperar melhores valores
da função por ali. Isso ajuda o algoritmo a acelerar a busca de um mínimo local, quando
necessário.
4.3 – COMENTÁRIOS SOBRE A IMPLEMENTAÇÃO E UTILIZAÇÃO DO CÓDIGO COMPUTACIONAL
Os algoritmos CRS-VBR e CRS6 foram implementados em linguagem Fortran para
utilizar a rotina GRADLIN descrita no Capítulo 2 como solucionador (“solver”), integrando
assim a metodologia de projeto inverso de aerofólios proposta neste trabalho. Alguns aspectos
da implementação merecem comentário: (1) dados de entrada; (2) geração da população
inicial; (3) definição e cálculo da função objetivo; (4) critérios de parada.
4.3.1 – Dados de Entrada
Para utilizar o código computacional, devem-se fornecer os seguintes dados: (i) limites
inferiores e superiores para as variáveis de projeto (∆iL e ∆i
U , i = 1, ..., n=17); (ii) tamanho da
população de aerofólios N; (iii) semente do gerador de números aleatórios; (iv) número
máximo de chamada da função objetivo; (v) tolerância para o critério de parada, ε ; (vi) opção
para usar CRS-VBR ou CRS6; (vii) no caso de se usar CRS6, opção para realizar ou não
buscas locais baseadas em distribuições β ; (viii) dados de grade linear: ângulo de montagem
β , razão de solidez l/t e ângulo do escoamento na entrada α1; (ix) número de painéis a ser
usado na discretização dos aerofólios.
Na versão atual do código, os dados referentes aos itens (i), (ii) e (ix) acima estão pré-
fixados no próprio código; os demais dados são fornecidos através da rotina INPUT_PAR.
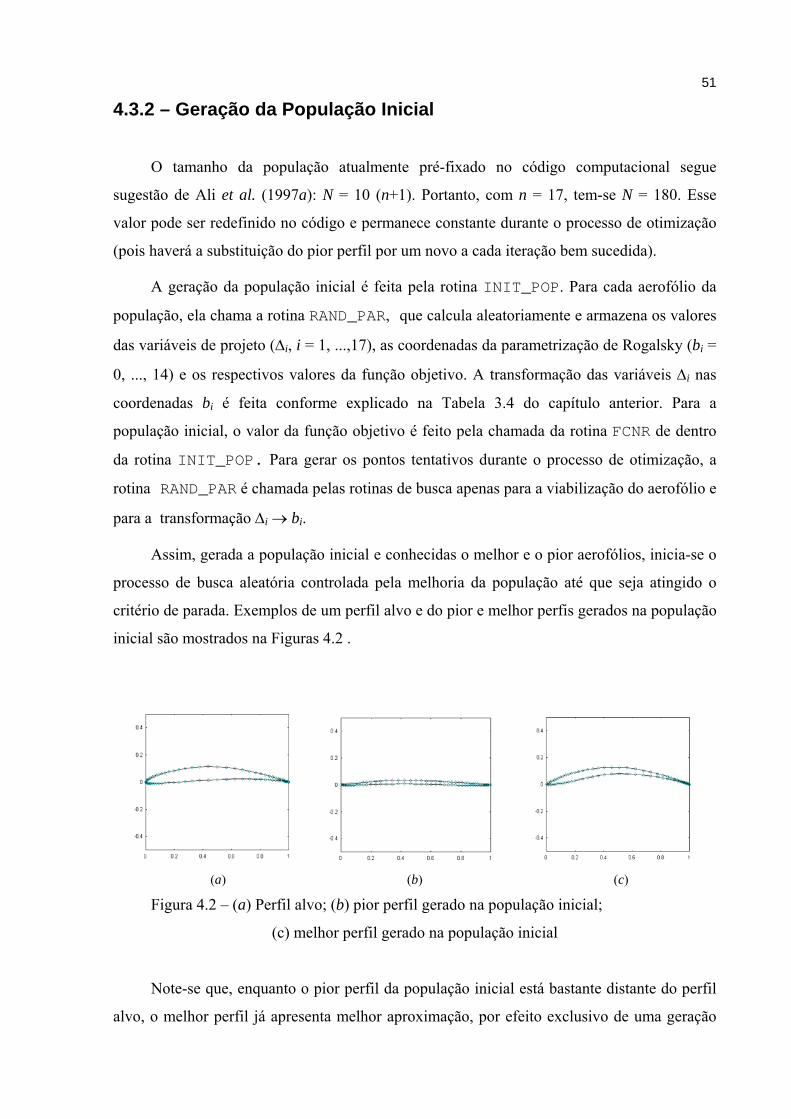
51
4.3.2 – Geração da População Inicial
O tamanho da população atualmente pré-fixado no código computacional segue
sugestão de Ali et al. (1997a): N = 10 (n+1). Portanto, com n = 17, tem-se N = 180. Esse
valor pode ser redefinido no código e permanece constante durante o processo de otimização
(pois haverá a substituição do pior perfil por um novo a cada iteração bem sucedida).
A geração da população inicial é feita pela rotina INIT_POP. Para cada aerofólio da
população, ela chama a rotina RAND_PAR, que calcula aleatoriamente e armazena os valores
das variáveis de projeto (∆i, i = 1, ...,17), as coordenadas da parametrização de Rogalsky (bi =
0, ..., 14) e os respectivos valores da função objetivo. A transformação das variáveis ∆i nas
coordenadas bi é feita conforme explicado na Tabela 3.4 do capítulo anterior. Para a
população inicial, o valor da função objetivo é feito pela chamada da rotina FCNR de dentro
da rotina INIT_POP. Para gerar os pontos tentativos durante o processo de otimização, a
rotina RAND_PAR é chamada pelas rotinas de busca apenas para a viabilização do aerofólio e
para a transformação ∆i → bi.
Assim, gerada a população inicial e conhecidas o melhor e o pior aerofólios, inicia-se o
processo de busca aleatória controlada pela melhoria da população até que seja atingido o
critério de parada. Exemplos de um perfil alvo e do pior e melhor perfis gerados na população
inicial são mostrados na Figuras 4.2 .
(a) (b) (c)
Figura 4.2 – (a) Perfil alvo; (b) pior perfil gerado na população inicial;
(c) melhor perfil gerado na população inicial
Note-se que, enquanto o pior perfil da população inicial está bastante distante do perfil
alvo, o melhor perfil já apresenta melhor aproximação, por efeito exclusivo de uma geração
52
aleatória. O processo de busca aleatória controlada deverá fazer todos os 180 perfis da
população convergir para o perfil alvo.
4.3.3 – Definição e Cálculo da Função Objetivo
A função objetivo para o problema de projeto inverso é definida por uma norma,
baseada na diferença entre a distribuição de velocidades ou pressões, calculada em cada
iteração e aquela requerida para o aerofólio alvo (fixada). É possível introduzir ponderações
adequadas a cada problema específico. No Capítulo 5, serão apresentados três casos de
projeto inverso, cada qual com uma definição diferente dessa norma em virtude das
características peculiares de cada caso.
O cálculo da função objetivo é feito pela chamada da rotina FCNR com os parâmetros
da parametrização direta bi (Rogalsky et al., 1999) fornecidos. Essa rotina é chamada pela
rotina INIT_POP na fase de geração da população inicial. Na geração do ponto tentativo, a
rotina FCNR é chamada pelas rotinas de busca global e/ou local, TRIAL_GLOBAL e
TRIAL_LOCAL, respectivamente.
Ao ser chamada, a rotina FCNR chama primeiramente a rotina GEOM, que realiza a
discretização do aerofólio, usando os parâmetros bi correspondentes. Em seguida, é chamada
a rotina GRADLIN para calcular as distribuições de velocidades e pressões sobre o aerofólio.
Finalmente, essas distribuições são comparadas com a distribuição alvo através do cálculo da
função objetivo desejada.
4.3.4 – Critérios de Parada
O processo iterativo é interrompido quando um de dois critérios for primeiramente
atendido: (i) o número de chamadas da função objetivo ultrapassar um número máximo
especificado ou (ii) a diferença entre os valores da função objetivo do pior e do melhor
aerofólio da população corrente ficar abaixo da tolerância pré-estabelecida: fh− fl < ε.
Um fluxograma do programa apresenta-se no Apêndice A
53
Capítulo 5
APRESENTAÇÃO DOS CASOS ESTUDADOS
5.1 – INTRODUÇÃO
Com o intuito de avaliar a aplicabilidade dos algoritmos de Busca Aleatória Controlada
(CRS) no projeto inverso de grades de turbomáquinas, são apresentados neste capítulo três
casos de estudo. No primeiro caso, tem-se por objetivo testar a capacidade dos algoritmos
CRS de recuperar um perfil aerodinâmico cuja geometria é representada com exatidão pela
parametrização geométrica descrita no Capítulo 3. No segundo caso, busca-se reproduzir uma
situação de projeto inverso tratada na literatura através de outro algoritmo de otimização
(Rogalsky et al., 1999). No terceiro caso, testa-se a capacidade dos algoritmos CRS de
recuperar um perfil de uma grade real, partindo de dados experimentais da distribuição de
pressões no contorno. Nesse último caso, é feita uma comparação entre os perfis obtidos
através de cálculos com escoamento puramente potencial e com o ajuste de Gostelow
(conforme descrito no Capítulo 2).
Em todos os casos, três diferentes algoritmos CRS são comparados: (i) uma versão do
algoritmo CRS6 de Ali et al. (1997a), sem busca local baseada em distribuição β de
probabilidades, aqui denominado CRSI; (ii) o próprio algoritmo CRS6, que inclui a busca
local, aqui denominado CRS6-BV; (iii) o algoritmo CRS baseado em reflexão, proposto no
trabalho de Manzanares Filho et al. (2005), denominado CRS-VBR .
54
5.2 – INFORMAÇÕES GERAIS
Antes de apresentar os resultados dos casos de teste, é conveniente abordar alguns
aspectos e registrar o uso de alguns parâmetros, comuns a todos os casos. Aspectos e/ou
parâmetros particulares de cada caso serão abordados oportunamente.
• Geradores de números aleatórios
Dois geradores de números aleatórios são utilizados no presente trabalho. Um deles
utiliza uma distribuição uniforme de probabilidades, e é utilizado na geração da população
inicial e nas buscas globais de pontos tentativos. Para esse gerador, a definição da semente e a
geração propriamente dita são executadas, respectivamente, através das rotinas SRAND e
RAND da biblioteca PORTLIB, que acompanha o compilador Compaq Visual Fortran. O
outro gerador de números aleatórios utiliza uma distribuição β de probabilidades e é utilizado
apenas no processo de busca local exigido pelo algoritmo CRS6-BV. Para esse gerador, a
definição das sementes e a geração propriamente dita são executadas, respectivamente,
através das rotinas SETALL e GENBET da biblioteca RANLIB (Brown et al., 1994).
Os resultados obtidos com algoritmos de natureza aleatória, como os CRS, dependem
das sementes dos geradores de números aleatórios utilizados. A rigor, ao se aplicar rotinas
computacionais baseadas nesses algoritmos, torna-se necessário efetuar repetidos testes com
diferentes sementes e analisar estatisticamente os resultados. No presente trabalho, por
questões de tempo e facilidade, decidiu-se apresentar resultados de um único teste em cada
caso, utilizando as mesmas sementes em todos os casos. Assim, para cada caso e cada versão
do CRS, o código computacional é executado uma única vez, sendo a rotina SRAND chamada
com a semente igual a 123456 e a rotina SETALL chamada com as sementes iguais a 1.
Esses valores são arbitrários, mas foram considerados adequados para os casos a serem
apresentados no próximo item.
• Tamanho da população de aerofólios
Conforme descrito no item 4.3.2, a população é constituída de 180 aerofólios, sendo de
início gerada aleatoriamente.
55
• Número de painéis
O número e a distribuição de painéis no contorno do aerofólio exercem influência
significativa na qualidade dos cálculos efetuados pela rotina GRADLIN. É importante que o
número de painéis seja suficiente para descrever os detalhes geométricos do perfil alvo (i.e, o
perfil que deve melhor atender à distribuição de pressões ou velocidades requerida no projeto
inverso). Por outro lado, como a rotina GRADLIN deve ser chamada milhares de vezes
durante o processo de busca, é importante utilizar um número de painéis que não seja
excessivo, tendo em vista o custo computacional. Nos casos a serem apresentados, resultados
satisfatórios foram obtidos com uma distribuição que concentra mais painéis nas regiões dos
bordos de ataque e de fuga do perfil. O tamanho dos painéis aumenta em progressão
geométrica desde aos bordos até as regiões correspondentes ao máximo arqueamento do
perfil. Para os casos apresentados, considerou-se satisfatório utilizar 88 painéis (44 no
intradorso e 44 no extradorso) com um fator de progressão igual a 1,10.
• Intervalos das variáveis de projeto
As variáveis de projeto correspondem aos intervalos ∆i , i = 1,..., 17, entre as abscissas e
ordenadas da parametrização baseada nas quatro curvas de Bezier (duas para a linha de
arqueamento e duas para a linha de espessura), conforme discutido no Capítulo 3. Lembre-se
que as 15 coordenadas bi dos pontos de controle daquelas curvas são recuperadas
recursivamente a partir dos 17 intervalos ∆i (Tabela 3.4). Para a aplicação dos algoritmos
CRS, é necessário especificar os limites inferiores e superiores dessas variáveis de projeto,
∆iL e ∆i
U, respectivamente. A seguir, estão listados os valores desses limites, utilizados em
todos os casos de teste:
∆1 L = 0,005; ∆1
U = 0,400;
∆2 L = 0,025; ∆2
U = 0,500;
∆3 L = 0,050; ∆3
U = 0,700;
∆4 L = 0,050; ∆4
U = 0,700;
∆5 L = 0,025; ∆5
U = 0,600;
∆6 L = 0,005; ∆6
U = 0,500;
56
∆7 L = 0,005; ∆7
U = 0,400;
∆8 L = 0,005; ∆8
U = 0,500;
∆9 L = 0,005; ∆9
U = 0,700;
∆10L = 0,005; ∆10
U = 0,600;
∆11L = 0,005; ∆11
U = 0,500;
∆12L = 0,001; ∆12
U = 0,150;
∆13L = 0,001; ∆13
U = 0,100;
∆14L = 0,001; ∆14
U = 0,250;
∆15L = 0,001; ∆15
U = 0,050;
∆16L = 0,001; ∆16
U = 0,050;
∆17L = 0,001; ∆17
U = 0,050.
É importante observar que, para a busca dos intervalos ∆i das abscissas (i = 1 até 11), os
valores absolutos dos limites não são relevantes, uma vez que aqueles intervalos serão
normalizados durante o processo de busca. O que importa nesse caso é a distribuição relativa
dos limites. Já os valores individuais dos intervalos das ordenadas (i = 12 até 17) são
relevantes, pois estão relacionados aos valores máximos de arqueamento e espessura. Os
limites apresentados acima podem ser considerados satisfatórios para o projeto de uma vasta
gama de perfis aerodinâmicos com, no máximo, 25% de arqueamento ⎯ (∆12U +∆13
U = 0,25 )
⎯ e 20% de espessura ⎯ 2(∆15U +∆16
U ) = 0,20.
• Avaliação da função objetivo e chamada da rotina GRADLIN
A função objetivo a ser minimizada pelos algoritmos CRS será definida como uma
norma (medida) da diferença entre a distribuição de velocidades ou pressões requerida para o
perfil alvo e aquela calculada iterativamente durante o processo de minimização. Cada
avaliação da função objetivo, portanto, necessita de uma chamada prévia da rotina GRADLIN
para cálculo do escoamento na grade em questão. Desse modo, o número de avaliações da
função objetivo é igual ao número de chamadas da rotina GRADLIN. Note-se que o número
57
mínimo de chamadas é 180, que é o tamanho da população, obrigatoriamente avaliada por
completo no início do processo de busca.
Para cada caso a ser apresentado, será empregada uma definição diferente da função
objetivo, conforme ficará claro mais adiante.
• Critério de parada
O número máximo de chamada da função objetivo igual a 20.000 foi fixado como
critério de parada em todos os casos estudados. Do ponto de vista de aplicações reais de
projeto, é possível obter resultados satisfatórios com um número de chamadas bem inferior a
20.000 (tipicamente, de 1.000 a 5.000). Todavia, para se comparar o comportamento da
convergência dos diversos algoritmos CRS, julgou-se conveniente fixar esse número
relativamente alto nos testes.
O código computacional admite ainda outro critério de parada, já mencionado no item
4.3.4. Consiste em interromper o processo de busca quando a diferença entre os valores da
função objetivo do pior (f H) e do melhor aerofólio (f L) da população corrente ficar abaixo de
uma tolerância pré-estabelecida:
ε<− LH ff (5.1)
Nos casos a serem apresentados, esta tolerância foi fixada em 10–15, valor que jamais
pôde ser atingido com um número de chamadas da função objetivo inferior a 20.000. Desse
modo, o processo de busca sempre se prolongou o suficiente para se efetuar a comparação
entre os algoritmos CRS do ponto de vista de convergência.
5.3 – 1º CASO: PERFIL ALVO DESCRITO EXATAMENTE PELA PARAMETRIZAÇÃO
O objetivo do primeiro caso é testar a capacidade dos algoritmos CRS de recuperar um
perfil aerodinâmico cuja geometria é representada com exatidão pela parametrização
geométrica descrita no Capítulo 3. Em geral, quando se fornece uma distribuição arbitrária de
pressões ou velocidades, o perfil alvo é obviamente desconhecido e a geometria determinada
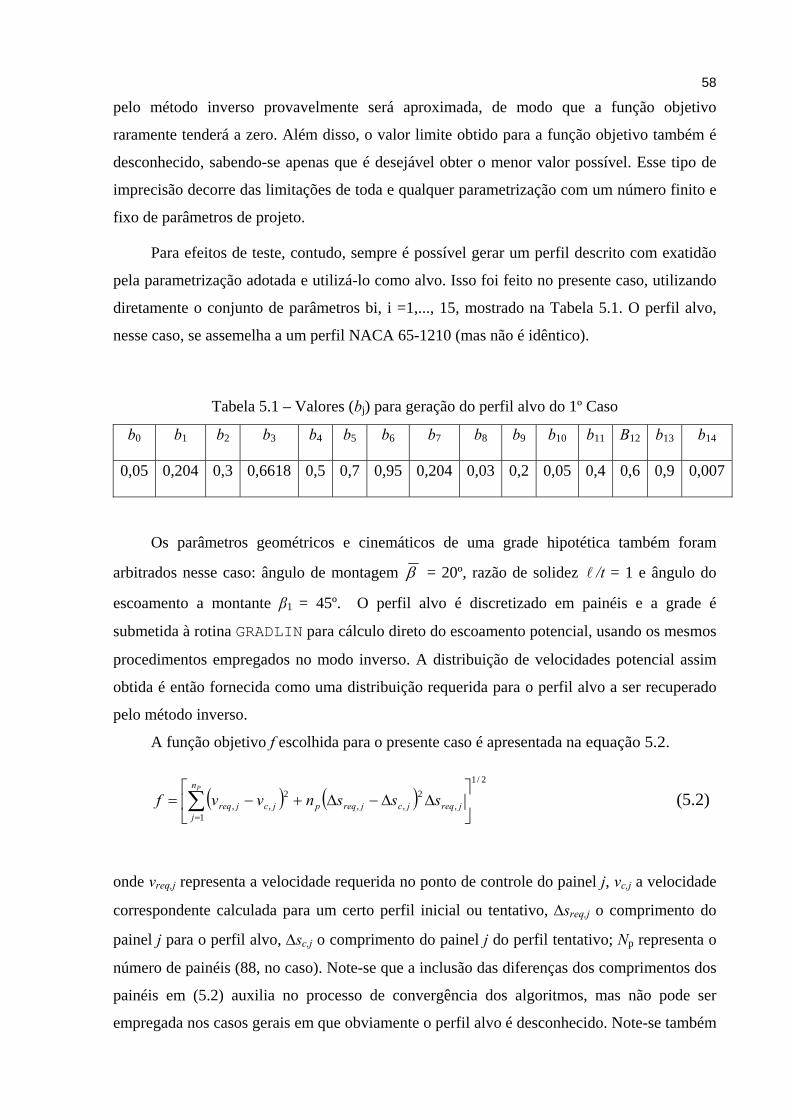
58
pelo método inverso provavelmente será aproximada, de modo que a função objetivo
raramente tenderá a zero. Além disso, o valor limite obtido para a função objetivo também é
desconhecido, sabendo-se apenas que é desejável obter o menor valor possível. Esse tipo de
imprecisão decorre das limitações de toda e qualquer parametrização com um número finito e
fixo de parâmetros de projeto.
Para efeitos de teste, contudo, sempre é possível gerar um perfil descrito com exatidão
pela parametrização adotada e utilizá-lo como alvo. Isso foi feito no presente caso, utilizando
diretamente o conjunto de parâmetros bi, i =1,..., 15, mostrado na Tabela 5.1. O perfil alvo,
nesse caso, se assemelha a um perfil NACA 65-1210 (mas não é idêntico).
Tabela 5.1 – Valores (bj) para geração do perfil alvo do 1º Caso
b0 b1 b2 b3 b4 b5 b6 b7 b8 b9 b10 b11 B12 b13 b14
0,05 0,204 0,3 0,6618 0,5 0,7 0,95 0,204 0,03 0,2 0,05 0,4 0,6 0,9 0,007
Os parâmetros geométricos e cinemáticos de uma grade hipotética também foram
arbitrados nesse caso: ângulo de montagem β = 20º, razão de solidez l /t = 1 e ângulo do
escoamento a montante β1 = 45º. O perfil alvo é discretizado em painéis e a grade é
submetida à rotina GRADLIN para cálculo direto do escoamento potencial, usando os mesmos
procedimentos empregados no modo inverso. A distribuição de velocidades potencial assim
obtida é então fornecida como uma distribuição requerida para o perfil alvo a ser recuperado
pelo método inverso.
A função objetivo f escolhida para o presente caso é apresentada na equação 5.2.
( ) ( )2/1
1,
2,,
2,, ⎥
⎦
⎤⎢⎣
⎡∆∆−∆+−= ∑
=
Pn
jjreqjcjreqpjcjreq sssnvvf (5.2)
onde vreq,j representa a velocidade requerida no ponto de controle do painel j, vc,j a velocidade
correspondente calculada para um certo perfil inicial ou tentativo, ∆sreq,j o comprimento do
painel j para o perfil alvo, ∆sc,j o comprimento do painel j do perfil tentativo; Np representa o
número de painéis (88, no caso). Note-se que a inclusão das diferenças dos comprimentos dos
painéis em (5.2) auxilia no processo de convergência dos algoritmos, mas não pode ser
empregada nos casos gerais em que obviamente o perfil alvo é desconhecido. Note-se também
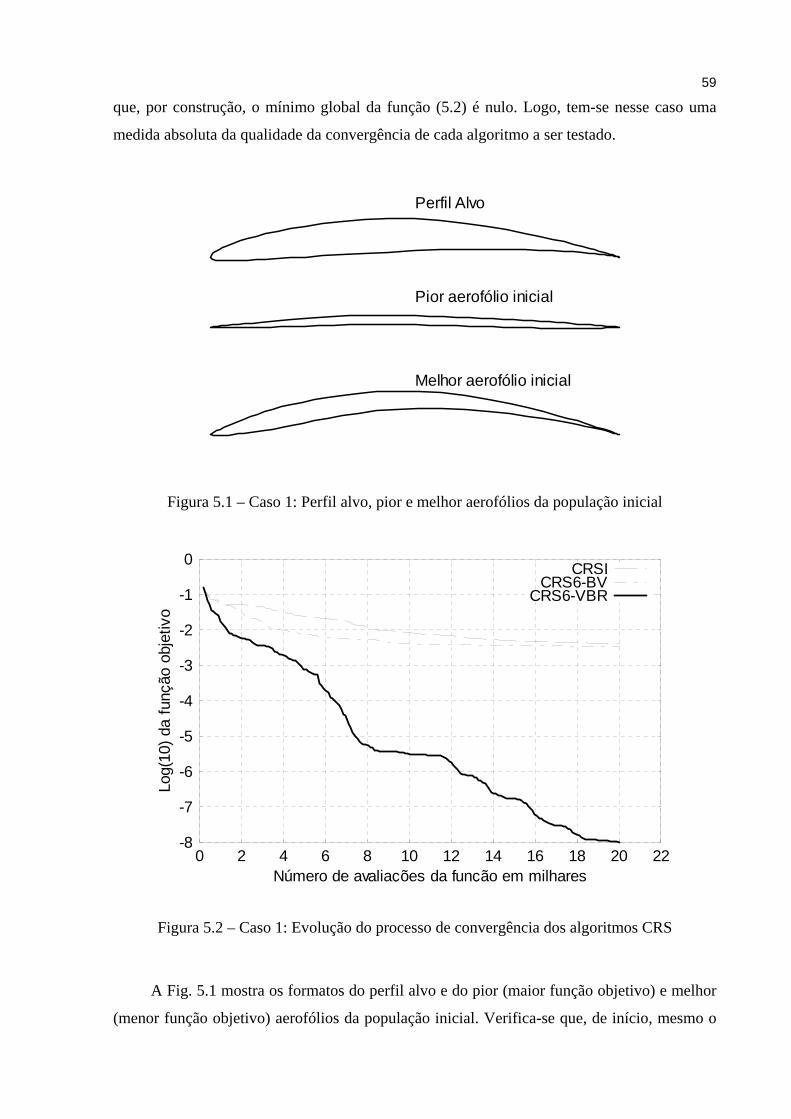
59
que, por construção, o mínimo global da função (5.2) é nulo. Logo, tem-se nesse caso uma
medida absoluta da qualidade da convergência de cada algoritmo a ser testado.
Perfil Alvo
Pior aerofólio inicial
Melhor aerofólio inicial
Figura 5.1 – Caso 1: Perfil alvo, pior e melhor aerofólios da população inicial
-8
-7
-6
-5
-4
-3
-2
-1
0
0 2 4 6 8 10 12 14 16 18 20 22
Log(
10) d
a fu
nção
obj
etiv
o
Número de avaliações da função em milhares
CRSICRS6-BV
CRS6-VBR
Figura 5.2 – Caso 1: Evolução do processo de convergência dos algoritmos CRS
A Fig. 5.1 mostra os formatos do perfil alvo e do pior (maior função objetivo) e melhor
(menor função objetivo) aerofólios da população inicial. Verifica-se que, de início, mesmo o
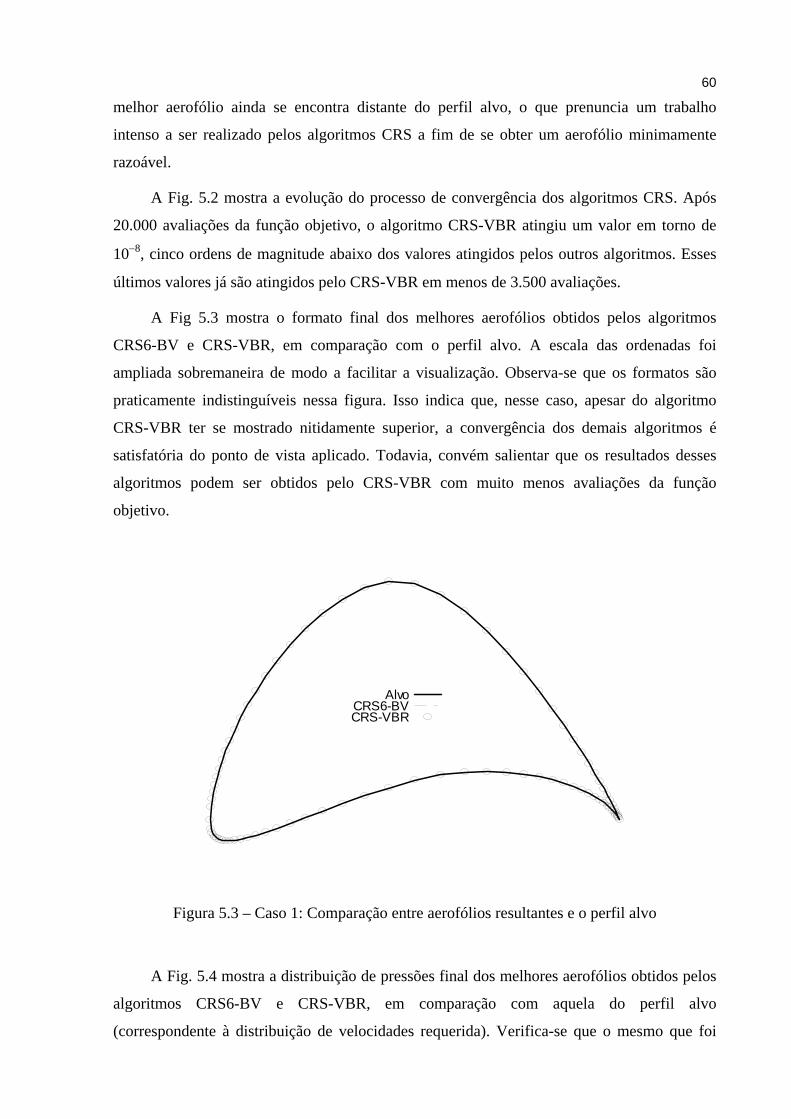
60
melhor aerofólio ainda se encontra distante do perfil alvo, o que prenuncia um trabalho
intenso a ser realizado pelos algoritmos CRS a fim de se obter um aerofólio minimamente
razoável.
A Fig. 5.2 mostra a evolução do processo de convergência dos algoritmos CRS. Após
20.000 avaliações da função objetivo, o algoritmo CRS-VBR atingiu um valor em torno de
10−8, cinco ordens de magnitude abaixo dos valores atingidos pelos outros algoritmos. Esses
últimos valores já são atingidos pelo CRS-VBR em menos de 3.500 avaliações.
A Fig 5.3 mostra o formato final dos melhores aerofólios obtidos pelos algoritmos
CRS6-BV e CRS-VBR, em comparação com o perfil alvo. A escala das ordenadas foi
ampliada sobremaneira de modo a facilitar a visualização. Observa-se que os formatos são
praticamente indistinguíveis nessa figura. Isso indica que, nesse caso, apesar do algoritmo
CRS-VBR ter se mostrado nitidamente superior, a convergência dos demais algoritmos é
satisfatória do ponto de vista aplicado. Todavia, convém salientar que os resultados desses
algoritmos podem ser obtidos pelo CRS-VBR com muito menos avaliações da função
objetivo.
AlvoCRS6-BVCRS-VBR
Figura 5.3 – Caso 1: Comparação entre aerofólios resultantes e o perfil alvo
A Fig. 5.4 mostra a distribuição de pressões final dos melhores aerofólios obtidos pelos
algoritmos CRS6-BV e CRS-VBR, em comparação com aquela do perfil alvo
(correspondente à distribuição de velocidades requerida). Verifica-se que o mesmo que foi
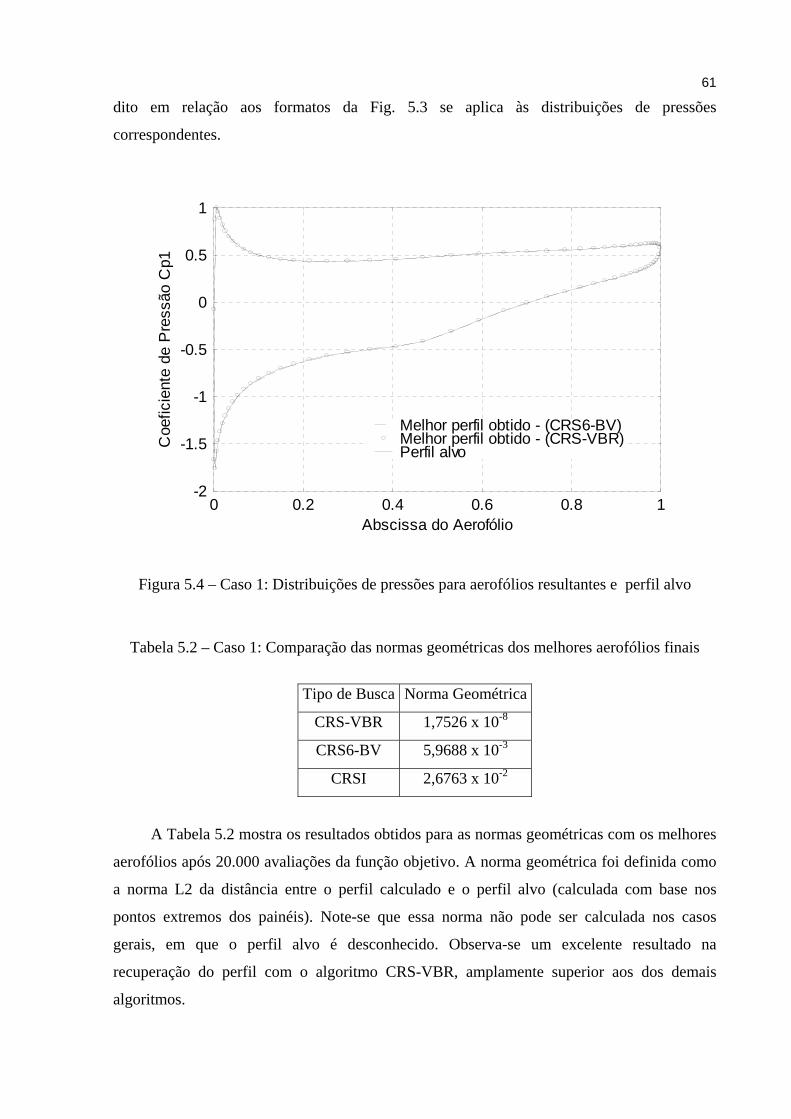
61
dito em relação aos formatos da Fig. 5.3 se aplica às distribuições de pressões
correspondentes.
-2
-1.5
-1
-0.5
0
0.5
1
0 0.2 0.4 0.6 0.8 1
Coe
ficie
nte
de P
ress
ão C
p1
Abscissa do Aerofólio
Melhor perfil obtido - (CRS6-BV)Melhor perfil obtido - (CRS-VBR)Perfil alvo
Figura 5.4 – Caso 1: Distribuições de pressões para aerofólios resultantes e perfil alvo
Tabela 5.2 – Caso 1: Comparação das normas geométricas dos melhores aerofólios finais
Tipo de Busca Norma Geométrica
CRS-VBR 1,7526 x 10-8
CRS6-BV 5,9688 x 10-3
CRSI 2,6763 x 10-2
A Tabela 5.2 mostra os resultados obtidos para as normas geométricas com os melhores
aerofólios após 20.000 avaliações da função objetivo. A norma geométrica foi definida como
a norma L2 da distância entre o perfil calculado e o perfil alvo (calculada com base nos
pontos extremos dos painéis). Note-se que essa norma não pode ser calculada nos casos
gerais, em que o perfil alvo é desconhecido. Observa-se um excelente resultado na
recuperação do perfil com o algoritmo CRS-VBR, amplamente superior aos dos demais
algoritmos.
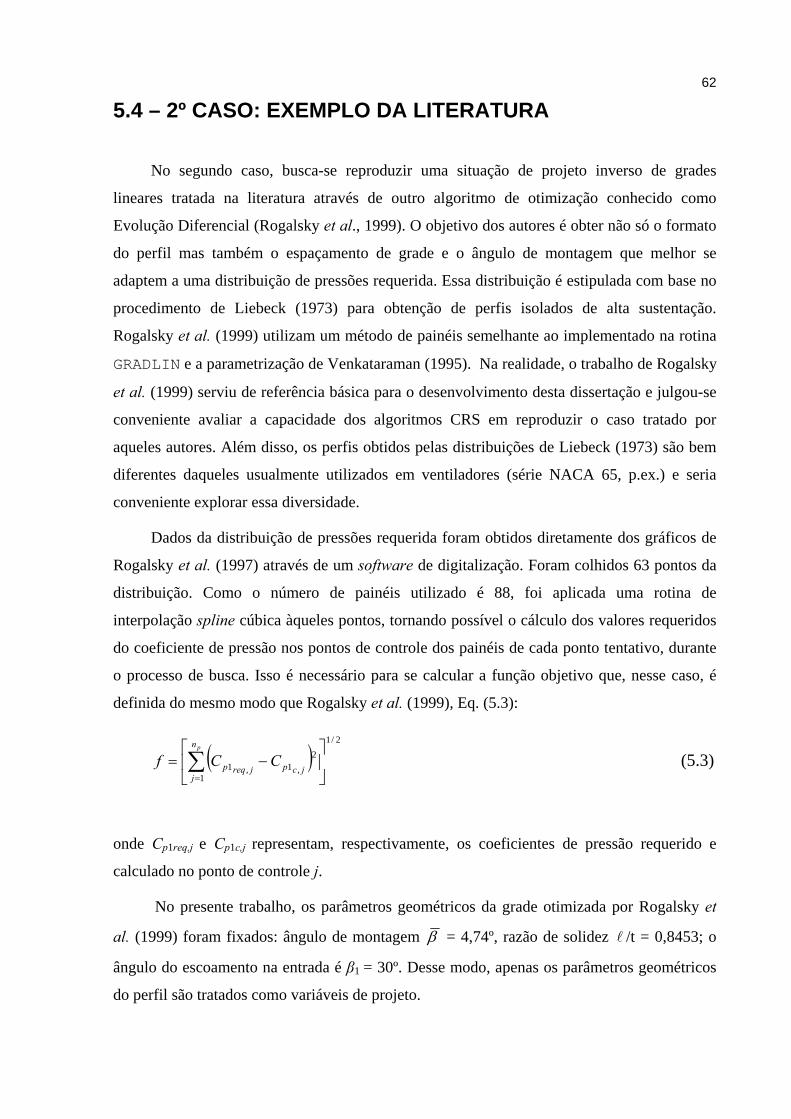
62
5.4 – 2º CASO: EXEMPLO DA LITERATURA
No segundo caso, busca-se reproduzir uma situação de projeto inverso de grades
lineares tratada na literatura através de outro algoritmo de otimização conhecido como
Evolução Diferencial (Rogalsky et al., 1999). O objetivo dos autores é obter não só o formato
do perfil mas também o espaçamento de grade e o ângulo de montagem que melhor se
adaptem a uma distribuição de pressões requerida. Essa distribuição é estipulada com base no
procedimento de Liebeck (1973) para obtenção de perfis isolados de alta sustentação.
Rogalsky et al. (1999) utilizam um método de painéis semelhante ao implementado na rotina
GRADLIN e a parametrização de Venkataraman (1995). Na realidade, o trabalho de Rogalsky
et al. (1999) serviu de referência básica para o desenvolvimento desta dissertação e julgou-se
conveniente avaliar a capacidade dos algoritmos CRS em reproduzir o caso tratado por
aqueles autores. Além disso, os perfis obtidos pelas distribuições de Liebeck (1973) são bem
diferentes daqueles usualmente utilizados em ventiladores (série NACA 65, p.ex.) e seria
conveniente explorar essa diversidade.
Dados da distribuição de pressões requerida foram obtidos diretamente dos gráficos de
Rogalsky et al. (1997) através de um software de digitalização. Foram colhidos 63 pontos da
distribuição. Como o número de painéis utilizado é 88, foi aplicada uma rotina de
interpolação spline cúbica àqueles pontos, tornando possível o cálculo dos valores requeridos
do coeficiente de pressão nos pontos de controle dos painéis de cada ponto tentativo, durante
o processo de busca. Isso é necessário para se calcular a função objetivo que, nesse caso, é
definida do mesmo modo que Rogalsky et al. (1999), Eq. (5.3):
( )2/1
1
2,1,1 ⎥
⎦
⎤⎢⎣
⎡−= ∑
=
pn
jjcpjreqp CCf (5.3)
onde Cp1req,j e Cp1c,j representam, respectivamente, os coeficientes de pressão requerido e
calculado no ponto de controle j.
No presente trabalho, os parâmetros geométricos da grade otimizada por Rogalsky et
al. (1999) foram fixados: ângulo de montagem β = 4,74º, razão de solidez l /t = 0,8453; o
ângulo do escoamento na entrada é β1 = 30º. Desse modo, apenas os parâmetros geométricos
do perfil são tratados como variáveis de projeto.
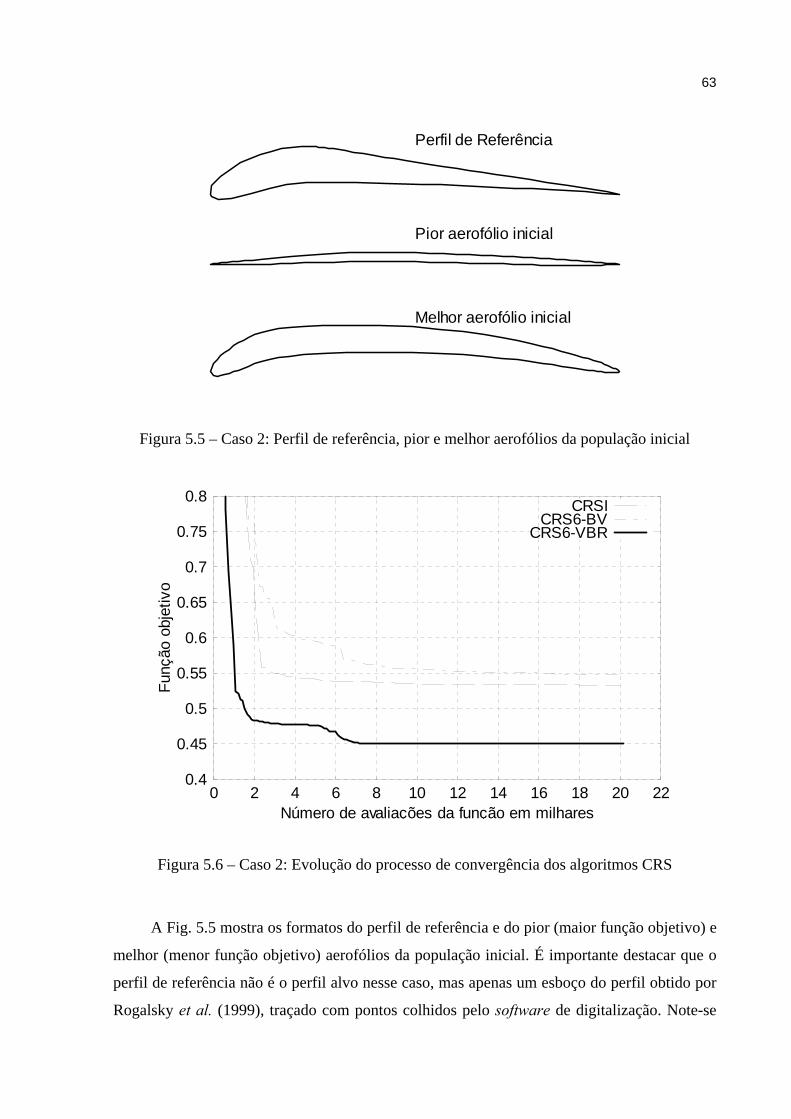
63
Perfil de Referência
Pior aerofólio inicial
Melhor aerofólio inicial
Figura 5.5 – Caso 2: Perfil de referência, pior e melhor aerofólios da população inicial
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0 2 4 6 8 10 12 14 16 18 20 22
Funç
ão o
bjet
ivo
Número de avaliações da função em milhares
CRSICRS6-BV
CRS6-VBR
Figura 5.6 – Caso 2: Evolução do processo de convergência dos algoritmos CRS
A Fig. 5.5 mostra os formatos do perfil de referência e do pior (maior função objetivo) e
melhor (menor função objetivo) aerofólios da população inicial. É importante destacar que o
perfil de referência não é o perfil alvo nesse caso, mas apenas um esboço do perfil obtido por
Rogalsky et al. (1999), traçado com pontos colhidos pelo software de digitalização. Note-se
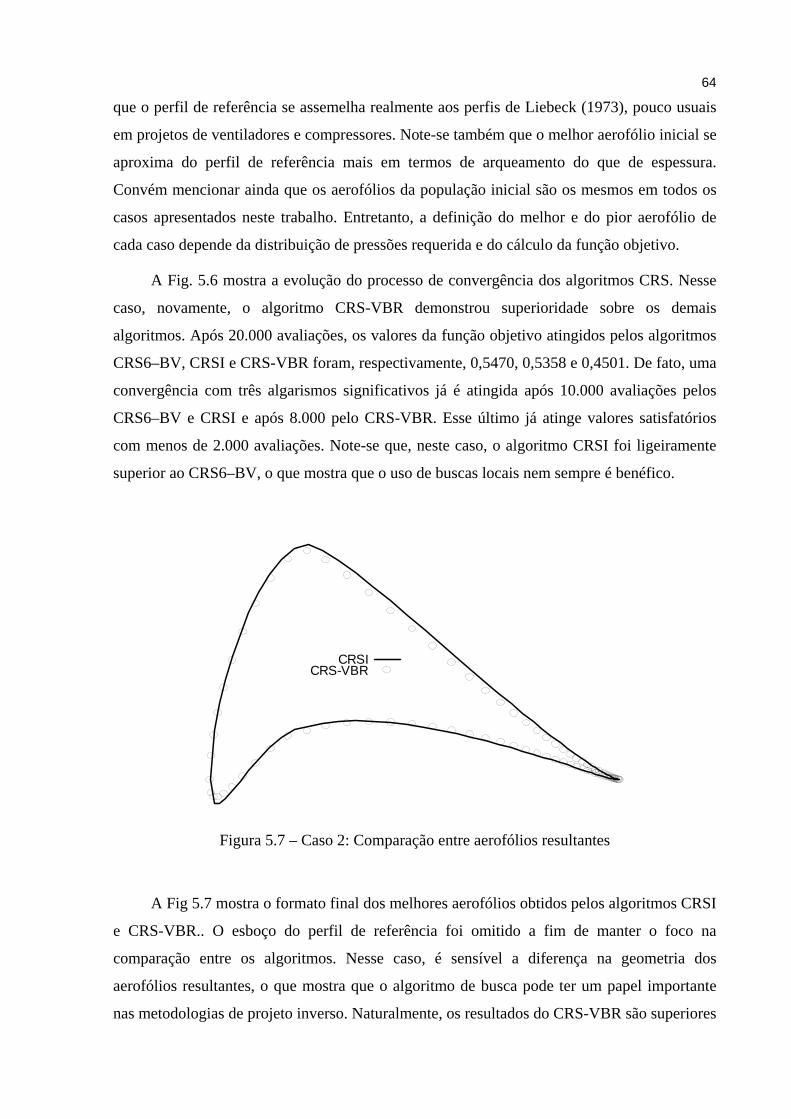
64
que o perfil de referência se assemelha realmente aos perfis de Liebeck (1973), pouco usuais
em projetos de ventiladores e compressores. Note-se também que o melhor aerofólio inicial se
aproxima do perfil de referência mais em termos de arqueamento do que de espessura.
Convém mencionar ainda que os aerofólios da população inicial são os mesmos em todos os
casos apresentados neste trabalho. Entretanto, a definição do melhor e do pior aerofólio de
cada caso depende da distribuição de pressões requerida e do cálculo da função objetivo.
A Fig. 5.6 mostra a evolução do processo de convergência dos algoritmos CRS. Nesse
caso, novamente, o algoritmo CRS-VBR demonstrou superioridade sobre os demais
algoritmos. Após 20.000 avaliações, os valores da função objetivo atingidos pelos algoritmos
CRS6–BV, CRSI e CRS-VBR foram, respectivamente, 0,5470, 0,5358 e 0,4501. De fato, uma
convergência com três algarismos significativos já é atingida após 10.000 avaliações pelos
CRS6–BV e CRSI e após 8.000 pelo CRS-VBR. Esse último já atinge valores satisfatórios
com menos de 2.000 avaliações. Note-se que, neste caso, o algoritmo CRSI foi ligeiramente
superior ao CRS6–BV, o que mostra que o uso de buscas locais nem sempre é benéfico.
CRSICRS-VBR
Figura 5.7 – Caso 2: Comparação entre aerofólios resultantes
A Fig 5.7 mostra o formato final dos melhores aerofólios obtidos pelos algoritmos CRSI
e CRS-VBR.. O esboço do perfil de referência foi omitido a fim de manter o foco na
comparação entre os algoritmos. Nesse caso, é sensível a diferença na geometria dos
aerofólios resultantes, o que mostra que o algoritmo de busca pode ter um papel importante
nas metodologias de projeto inverso. Naturalmente, os resultados do CRS-VBR são superiores
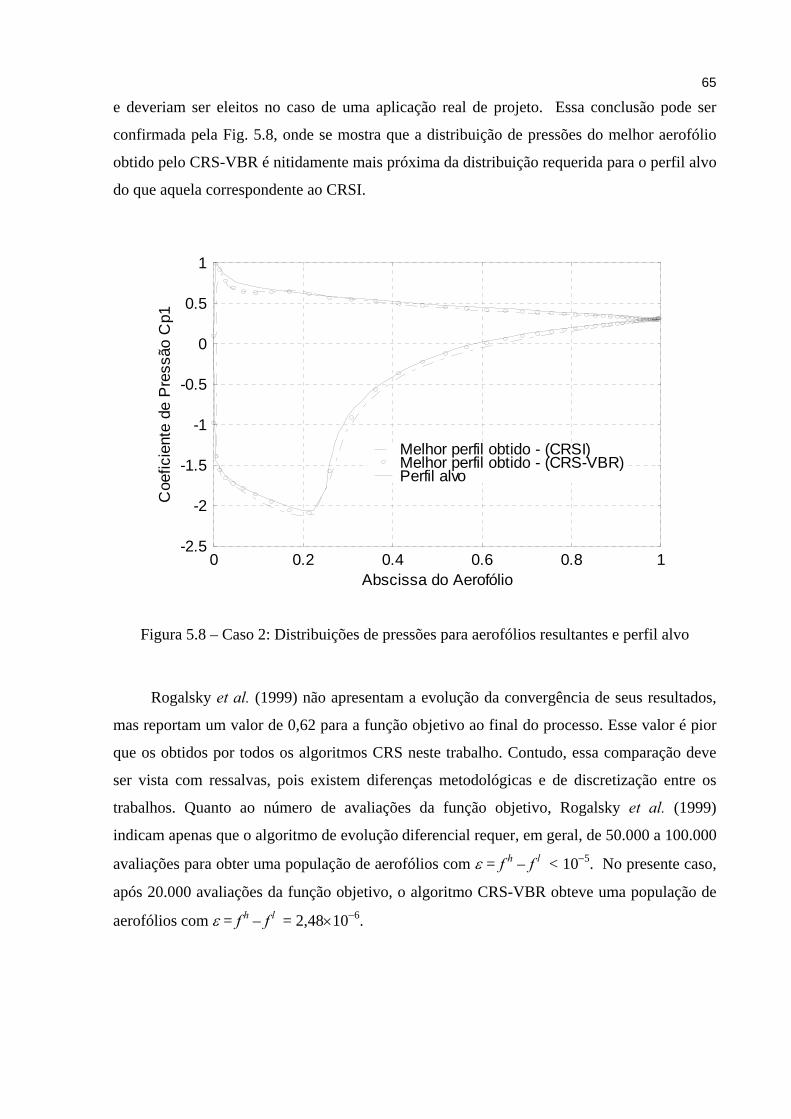
65
e deveriam ser eleitos no caso de uma aplicação real de projeto. Essa conclusão pode ser
confirmada pela Fig. 5.8, onde se mostra que a distribuição de pressões do melhor aerofólio
obtido pelo CRS-VBR é nitidamente mais próxima da distribuição requerida para o perfil alvo
do que aquela correspondente ao CRSI.
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
0 0.2 0.4 0.6 0.8 1
Coe
ficie
nte
de P
ress
ão C
p1
Abscissa do Aerofólio
Melhor perfil obtido - (CRSI)Melhor perfil obtido - (CRS-VBR)Perfil alvo
Figura 5.8 – Caso 2: Distribuições de pressões para aerofólios resultantes e perfil alvo
Rogalsky et al. (1999) não apresentam a evolução da convergência de seus resultados,
mas reportam um valor de 0,62 para a função objetivo ao final do processo. Esse valor é pior
que os obtidos por todos os algoritmos CRS neste trabalho. Contudo, essa comparação deve
ser vista com ressalvas, pois existem diferenças metodológicas e de discretização entre os
trabalhos. Quanto ao número de avaliações da função objetivo, Rogalsky et al. (1999)
indicam apenas que o algoritmo de evolução diferencial requer, em geral, de 50.000 a 100.000
avaliações para obter uma população de aerofólios com ε = f h – f
l < 10−5. No presente caso,
após 20.000 avaliações da função objetivo, o algoritmo CRS-VBR obteve uma população de
aerofólios com ε = f h – f
l = 2,48×10−6.
66
5.5 – 3º CASO: DADOS EXPERIMENTAIS PARA A DISTRIBUIÇÃO DE PRESSÕES DO PERFIL ALVO
No terceiro caso, testa-se a capacidade dos algoritmos CRS de recuperar um perfil de
uma grade real, partindo de dados experimentais da distribuição de pressões no contorno. É
feita também uma comparação entre os perfis obtidos através de cálculos com escoamento
puramente potencial e com o ajuste de Gostelow (conforme descrito no Capítulo 2).
A grade em questão é constituída de perfis NACA 65-1510, com ângulo de montagem
β = 43,5º, razão de solidez l /t = 1 e ângulo do escoamento na entrada β1 = 60º (ângulo de
ataque α1 = β1 − β = 16,5º). Dados experimentais para essa grade foram obtidos por Emery
et al. (1958) ⎯ pág. 40, Fig. 57(e). Foram colhidos 30 pontos experimentais dessa figura
usando um software de digitalização. Assim como no 2º caso, foi aplicada uma interpolação
spline cúbica a esses pontos a fim de se calcular a função objetivo com valores do coeficiente
de pressão nos pontos de controle dos painéis.
Neste 3º caso, utiliza-se uma função objetivo semelhante à do 2º caso (Eq. 5.3),
efetuando-se, porém, ponderações locais com os comprimentos dos painéis calculados para o
perfil tentativo, ∆sc,j, j = 1,..., Np:
( )2/1
,1
2,1,1 ⎥
⎦
⎤⎢⎣
⎡∆−= ∑
=jc
N
jjcpjreqp sCCf
p (5.4)
As ponderações locais produziram melhoras significativas no processo de convergência,
mostrando que a definição da função objetivo é muito importante. Em geral, a definição dada
em (5.4) é recomendável em todos os casos.
Observação: antes de se iniciar o processo de busca, especifica-se qual o conjunto de valores
calculados dos coeficientes de pressão Cp1c,j devem ser usados na Eq. (5.4) durante todo o
processo: (a) escoamento puramente potencial ou (b) escoamento com o ajuste de Gostelow
para efeitos viscosos. As duas opções foram testadas neste caso.
A Fig. 5.9 mostra os formatos do perfil NACA 65-1510 e do pior (maior função
objetivo) e melhor (menor função objetivo) aerofólios da população inicial. Observa-se que o
melhor perfil na situação puramente potencial é diferente daquele na situação com o ajuste de
Gostelow: este último já tende a ser mais arqueado que o primeiro de modo a compensar a
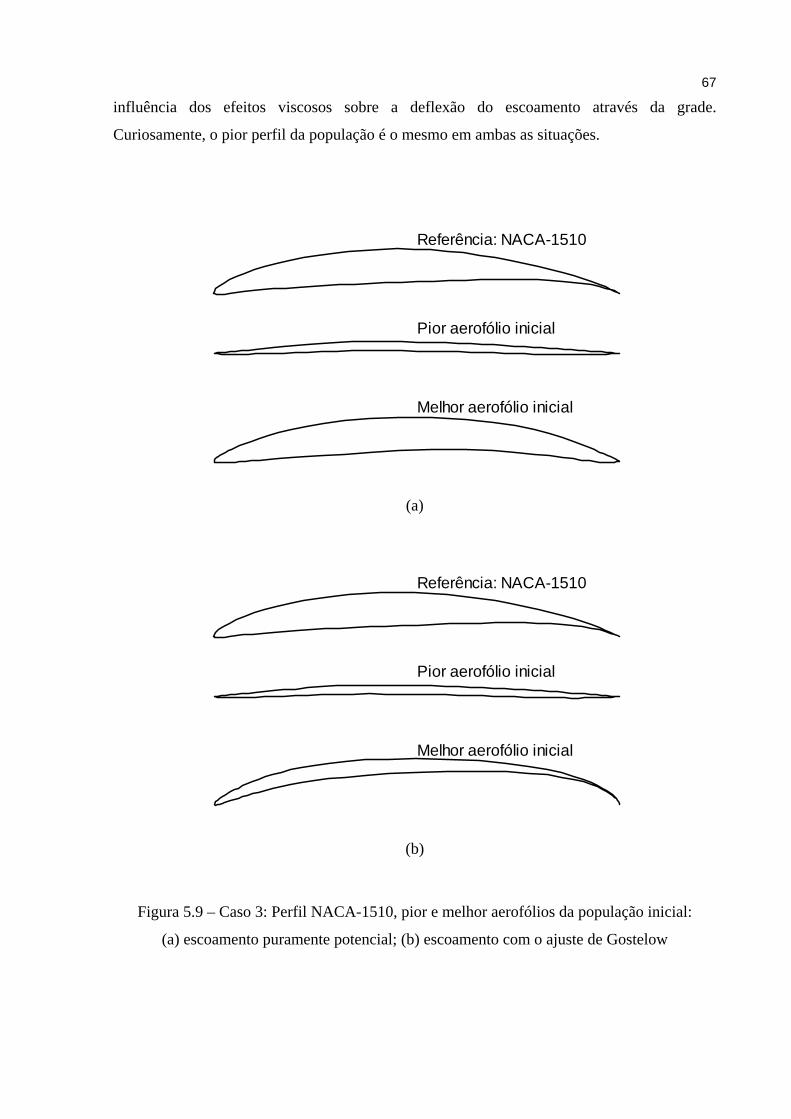
67
influência dos efeitos viscosos sobre a deflexão do escoamento através da grade.
Curiosamente, o pior perfil da população é o mesmo em ambas as situações.
Referência: NACA-1510
Pior aerofólio inicial
Melhor aerofólio inicial
(a)
Referência: NACA-1510
Pior aerofólio inicial
Melhor aerofólio inicial
(b)
Figura 5.9 – Caso 3: Perfil NACA-1510, pior e melhor aerofólios da população inicial:
(a) escoamento puramente potencial; (b) escoamento com o ajuste de Gostelow
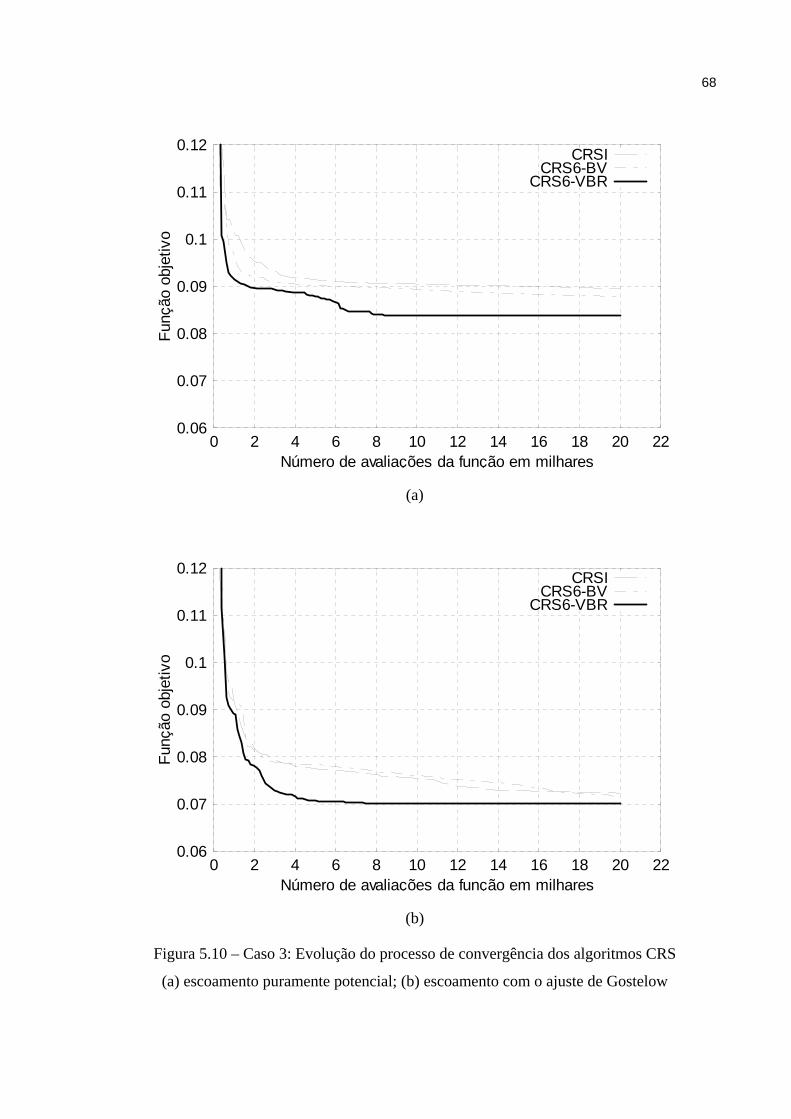
68
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0 2 4 6 8 10 12 14 16 18 20 22
Funç
ão o
bjet
ivo
Número de avaliações da função em milhares
CRSICRS6-BV
CRS6-VBR
(a)
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0 2 4 6 8 10 12 14 16 18 20 22
Funç
ão o
bjet
ivo
Número de avaliações da função em milhares
CRSICRS6-BV
CRS6-VBR
(b)
Figura 5.10 – Caso 3: Evolução do processo de convergência dos algoritmos CRS
(a) escoamento puramente potencial; (b) escoamento com o ajuste de Gostelow
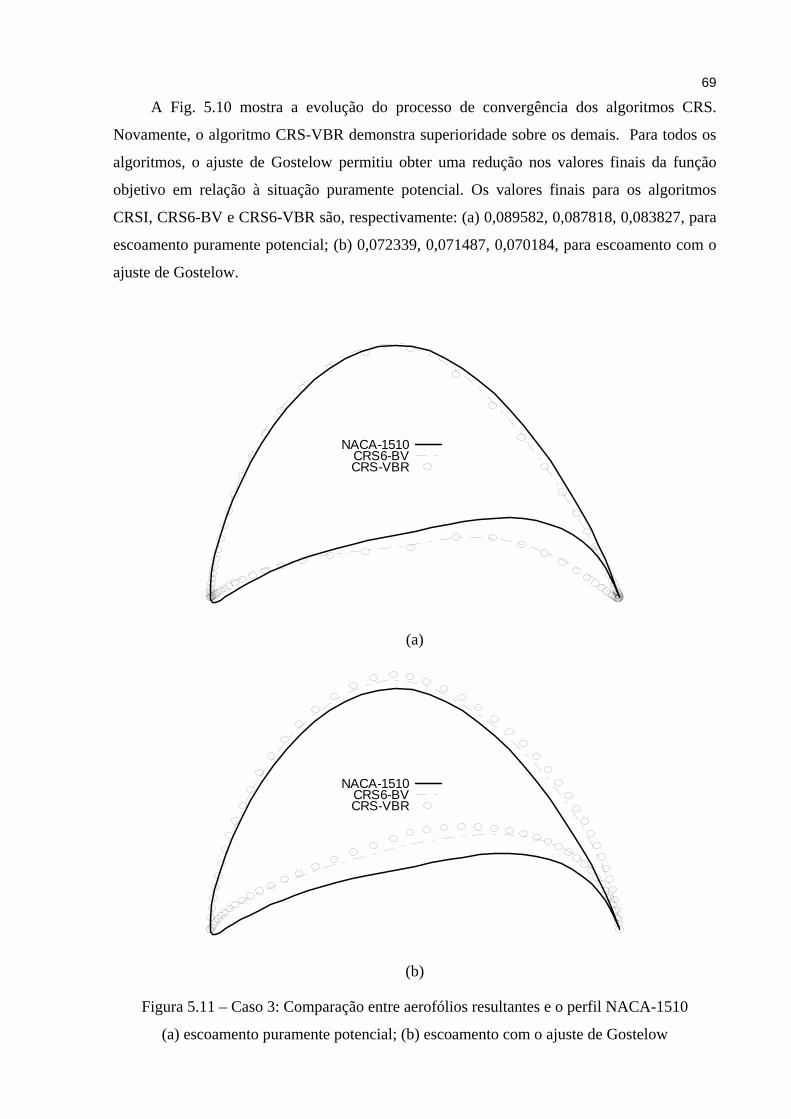
69
A Fig. 5.10 mostra a evolução do processo de convergência dos algoritmos CRS.
Novamente, o algoritmo CRS-VBR demonstra superioridade sobre os demais. Para todos os
algoritmos, o ajuste de Gostelow permitiu obter uma redução nos valores finais da função
objetivo em relação à situação puramente potencial. Os valores finais para os algoritmos
CRSI, CRS6-BV e CRS6-VBR são, respectivamente: (a) 0,089582, 0,087818, 0,083827, para
escoamento puramente potencial; (b) 0,072339, 0,071487, 0,070184, para escoamento com o
ajuste de Gostelow.
NACA-1510CRS6-BVCRS-VBR
(a)
NACA-1510CRS6-BVCRS-VBR
(b)
Figura 5.11 – Caso 3: Comparação entre aerofólios resultantes e o perfil NACA-1510
(a) escoamento puramente potencial; (b) escoamento com o ajuste de Gostelow
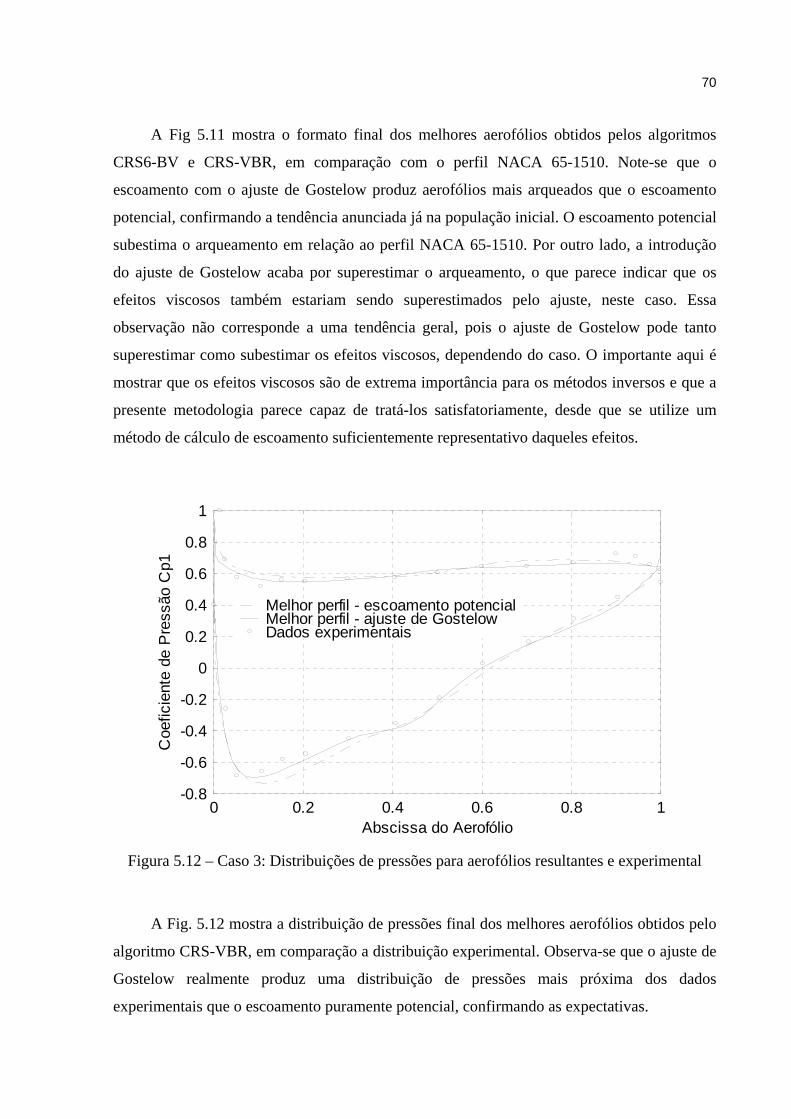
70
A Fig 5.11 mostra o formato final dos melhores aerofólios obtidos pelos algoritmos
CRS6-BV e CRS-VBR, em comparação com o perfil NACA 65-1510. Note-se que o
escoamento com o ajuste de Gostelow produz aerofólios mais arqueados que o escoamento
potencial, confirmando a tendência anunciada já na população inicial. O escoamento potencial
subestima o arqueamento em relação ao perfil NACA 65-1510. Por outro lado, a introdução
do ajuste de Gostelow acaba por superestimar o arqueamento, o que parece indicar que os
efeitos viscosos também estariam sendo superestimados pelo ajuste, neste caso. Essa
observação não corresponde a uma tendência geral, pois o ajuste de Gostelow pode tanto
superestimar como subestimar os efeitos viscosos, dependendo do caso. O importante aqui é
mostrar que os efeitos viscosos são de extrema importância para os métodos inversos e que a
presente metodologia parece capaz de tratá-los satisfatoriamente, desde que se utilize um
método de cálculo de escoamento suficientemente representativo daqueles efeitos.
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Coe
ficie
nte
de P
ress
ão C
p1
Abscissa do Aerofólio
Melhor perfil - escoamento potencialMelhor perfil - ajuste de GostelowDados experimentais
Figura 5.12 – Caso 3: Distribuições de pressões para aerofólios resultantes e experimental
A Fig. 5.12 mostra a distribuição de pressões final dos melhores aerofólios obtidos pelo
algoritmo CRS-VBR, em comparação a distribuição experimental. Observa-se que o ajuste de
Gostelow realmente produz uma distribuição de pressões mais próxima dos dados
experimentais que o escoamento puramente potencial, confirmando as expectativas.
71
Capítulo 6
CONCLUSÕES E SUGESTÕES
Neste capítulo final, são apresentadas conclusões e sugestões para trabalhos futuros
relacionados aos assuntos abordados nesta dissertação.
6.1 – CONCLUSÕES
No presente trabalho foi descrita uma metodologia para projeto inverso de aerofólios em
grades de turbomáquinas, utilizando algoritmos de otimização global baseados em busca
aleatória controlada (algoritmos CRS). A motivação principal no uso desses algoritmos está
na sua relativa facilidade de implementação e no uso direto dos valores da função apenas, sem
necessidade de se calcularem derivadas. Além disso, os algoritmos CRS têm sido pouco
explorados na solução de problemas inversos, em comparação com outros algoritmos
populacionais.
Uma nova versão do CRS foi apresentada neste trabalho (CRS-VBR). Essa versão é
baseada em uma busca por coordenadas e introduz uma reflexão baseada na variabilidade da
função objetivo em torno do melhor ponto em cada iteração. Trata-se de uma modificação de
72
outros algoritmos CRS disponíveis na literatura (Ali et al., 1997a), e foi feita com o intuito de
balancear automaticamente as buscas locais e globais ao longo do processo de otimização.
A aplicação do CRS-VBR em problemas de projeto inverso de aerofólios em alguns
casos de teste produziu resultados promissores em comparação com outras versões do CRS.
Apesar disso, o número necessário de iterações para uma boa convergência pode ser
considerado alto em relação aos algoritmos de busca local. Além disso, não foram feitas ainda
comparações com outros algoritmos distintos dos CRS.
A parametrização geométrica utilizada nesse trabalho coincide, a rigor, com aquela
proposta por Venkataraman (1995) e modificada por Rogalsky et al. (1999), baseada em arcos
Bezier para a descrição das linhas de arqueamento e espessura. Todavia, ao invés de se
utilizar diretamente as coordenadas paramétricas dos pontos de controle, optou-se por utilizar
os intervalos entre essas coordenadas como variáveis de projeto. Com isso, tornou-se
desnecessário a aplicação de restrições para garantir a consistência geométrica da
parametrização, garantindo-se ainda a geração de perfis viáveis durante todo o processo de
otimização. Por outro lado, fica em aberto a questão sobre a real superioridade desse
procedimento em relação ao procedimento original.
Outro aspecto importante verificado nos testes é a importância que a definição da
função objetivo tem para o processo de convergência dos algoritmos de busca. Verificou-se
que a introdução de ponderações locais com medidas de comprimento dos painéis produz
melhorias no processo de convergência ⎯ embora esse aspecto não tenha sido analisado em
profundidade nesta dissertação.
O uso de um modelo de escoamento potencial (rotina GRADLIN), com opção do ajuste
de Gostelow para os efeitos viscosos, foi feito por questões de rapidez computacional. Os
algoritmos CRS exigem milhares de chamadas da rotina de cálculo do escoamento e o modelo
potencial leva frações de segundo para um cálculo completo. Assim, uma busca completa com
20.000 chamadas da rotina GRADLIN leva em torno de apenas 10 minutos em um
computador Pentium III de 1 GHz (usando o compilador Compaq Visual Fortran 6.x, em
plataforma Windows). No 3º caso de teste apresentado no Capítulo 5, verificou-se que a
metodologia é adequada para o tratamento dos efeitos viscosos pelo ajuste de Gostelow e,
provavelmente, deverá se adaptar bem a outras rotinas de cálculo mais complexas e
representativas daqueles efeitos. Todavia, essas rotinas costumam apresentar custos
computacionais bem mais elevados, podendo levar minutos ou horas para executar um único
73
cálculo completo de escoamento. Desse modo, torna-se necessário introduzir mecanismos de
aceleração dos algoritmos CRS de modo a torná-los viáveis em aplicações mais complexas de
projeto inverso.
6.2 – SUGESTÕES PARA TRABALHOS FUTUROS
Apresentam-se como sugestões para trabalhos futuros os seguintes tópicos:
1) Realizar estudos estatísticos sobre o comportamento dos algoritmos CRS em geral e
aplicados a problemas de projeto inverso de aerofólios em particular.
2) Comparar os algoritmos CRS com outros algoritmos de busca direta, como os
algoritmos genéticos e evolutivos.
3) Realizar estudos comparativos sistemáticos sobre técnicas de parametrização
geométrica de aerofólios e sobre definições de funções objetivo adequadas ao projeto
inverso de aerofólios.
4) Aplicar metodologias de projeto inverso com rotinas de cálculo de escoamentos
viscosos baseados em técnicas de interação viscosa-não viscosa ou no emprego das
equações de Navier-Stokes completas.
5) Estudar mecanismos de aceleração dos algoritmos CRS e de outros algoritmos, visando
reduzir o número de avaliações da função objetivo, principalmente tendo em vista
aplicações mais complexas com aquelas sugeridas no item 4.
6) Implementar sub-programas para realizar a paralelização e distribuição de cálculos,
visando acelerar os códigos de otimização.
75
REFERÊNCIAS BIBLIOGRÁFICAS
ALI, M. M., STOREY, C. (1995), “Modified Controlled Random Search Algorithms”,
International Journal of Computer Mathematics, Vol. 54, pp.229-235.
ALI, M. M., TÖRN, A., VIITANEN, S. (1997a), “A Numerical Comparison of Some
Modified Controlled Random Search Algorithms”, Journal of Global Optimization, Vol.
11, pp.1703-1725.
ALI, M. M., STOREY, C., TÖRN, A. (1997b), “Application of Stochastic Global
Optimization Algorithms to Practical Problems”, Journal of Optimization Theory and
Applications, Vol. 92, No 2, pp.1703-1725.
ALI, M. M., TÖRN, A. (2004), “Population Set-Based Optimization Algorithms: Some
Modifications and Numerical Studiess”, Computer and Operations Research, Vol.31,
pp.1703-1725.
AMORIM, J. C. C. (1987), “Cálculo do Escoamento Potencial em Perfis Aerodinâmicos
Isolados e em Grades de Turbomáquinas”, Dissertação de Mestrado, Universidade
Federal de Itajubá, Itajubá, MG.
BETZ, A., FLÜGGE-LOTZ, I. (1938), “Berechnung der Schaulfeln von Kreiselraedern”
(Cálculo das Pás de Rotores Radiais), Ingenieur-Archiv, vol. 9, pp. 486-501.
BIRNBAUM, W. (1923), “Die Berechnung der Strömung durch Schaufelgitter”, Sulzer
Tech. Rundschau, 1-25.
76
BROWN, B. W., LOVATO J., RUSSELL K. (1994), “Library of Fortran Routines for
Random Number Generation”, http://www.netlib.org/random/ranlib.f.tar.gz , endereço
acessado em 29/06/2006.
DAVIS, L. (1991), “Handbook of Genetic Algorithms”, Van Nostrand Reinhold, New York
EMERY, J. C., HERRIG, L. J., ERWIN, J. R., FELIX, A. R. (1958), “Systematic Two-
Dimensional Cascade Tests of NACA 65-Series Compressor Blades at Low Speeds”;
NACA Report 1368, Langley Aeronautical Laboratory.
GIESING, J.P. (1964), “Extension of the Douglas Newman Program to Problems of Lifting,
Infinite Cascade”, Douglas Aircraft Co., Inc., Report nº LB-31653.
GIRARDI, R. M., BIZARRO, A. F. (1995), “Modification of the Hess-Smith Method for
Calculating Cascades and Airfoils with Cusped Trailing Edge”, Proceedings of the 13th
Brazilian Congress and 2nd Iberian American Congress of Mechanical Engineering,
(XIII COBEM), Belo Horizonte, MG.
GLAUERT, H. (1924), “A theory of Thin Aerofoils”, Aeronautical Research Council Report
and Memorandum, 910.
GOLDBERG, D.E. (1989), “Genetic Algorithms in Search, Optimization and Machine
Learning” Addison-Wesley Longman Publishing Co., Inc. Boston, MA, USA.
GOSTELOW, J.P. (1975), “Trailing Edge Flows Over Turbomachine Blades and the Kutta-
Joukowsky Condition”, ASME Paper nº 75-GT-94.
HESS, J. L., SMITH, A.M.O. (1967), “Calculation of Potential Flow about Arbitrary
Bodies”, Progress in Aeronautics Sciences, Vol 8, pp 1-138.
HICKS, M. R., MURMAN, M. E., VANDERPLAATS, G. N. (1974), “An assessment of
airfoil design by numerical optimization”, NASA TM–3092.
HOLST L. T.; PULLIAN, T. H. (2003), “Evaluation of Genetic Algorithm Concepts Using
Model Problems – Part I: Single-Objective Optimization”, NASA TM-212812, pp 1-36.
77
ISAY, W. H. (1954), “Beitrag zur Potentialströmung durch radiale Schaufelgitter”
(Contribuição para o Escoamento Potencial em Grades Radiais), Ingenieur-Archiv, Vol.
32, pp. 203-210.
LEWIS, R. I. (1991), “Vortex Element Methods for Fluid Dynamic Analysis of Engineering
Systems”, Cambridge Press, Cambridge.
LIEBECK, R.H. (1973), “A Class of Airfoils Designed for High Lift in Incompressible
Flow”, Journal of Aircraft, Vol. 10, No 10, pp. 610-617.
LIEBLEIN, S, (1959), “Loss and Stall Analysis of Compressor Cascades”, ASME Journal of
Basic Engineering, Vol. 81, pp. 387-400.
MANZANARES FILHO, N. (1994), “Análise do Escoamento em Máquinas de Fluxo
Axiais”, Tese de Doutorado, Instituto Tecnológico de Aeronáutica, São José dos
Campos, SP.
MANZANARES FILHO, N., MOINO, C. A. A., JORGE, A. B. (2005), “An Improved
Controlled Random Search Algorithm for Inverse Airfoil Cascade Design”, Proceedings
of the 6th World Congresses of Structural and Multidisciplinary Optimization, Paper No
4451, Rio de Janeiro, Brazil.
MARTENSEN, E. (1971), “The Calculation of the Pressure Distribution on a Cascade of
Thick Airfoils by Means of Fredholm Integral Equations of the Second Kind”, NASA
TT F-702.
MAVRIPLIS, F. (1971), “Aerodynamic Research on High Lift Systems”, Canadian
Aeronautics and Space Journal, Vol. 17, pp. 175-183.
NELDER, J. A., MEAD, R. (1965), “A Simplex Method for Function Minimization”,
Computer Journal, Vol. 7, pp. 308-313.
OBAYASHI S., TSUKAHARA, T. (1996), “Genetic Optimization of Target Pressure
Distributions for Inverse Design Methods”, AIAA Journal, Vol. 34, No 5, pp. 881-886.
78
OBAYASHI,S., TSUKAHARA,T. (1997), “Comparison of Optimization Algorithms for
Aerodynamics Shape Design”, AIAA Journal, Vol. 35, No 8, pp. 1413-1415.
OYAMA, A., FUJII, K., SHIMOYAMA, K., LIOU, M-S. (2005), “Pareto-Optimality-
Based Constraint-Handling Technique and Its Application to Compressor Design”, 17th
AIAA CFD Conference, paper AIAA 2005-4983.
PETRUCCI, D. R. (1998), “Problema Inverso do Escoamento em Torno de Perfis
Aerodinâmicos Isolados e em Grades de Turbomáquinas”, Dissertação de Mestrado,
Universidade Federal de Itajubá, Itajubá, MG.
PETRUCCI, D. R. (2003), “Métodos Inversos para o Projeto Aerodinâmico de Grades de
Turbomáquinas Axiais”, Tese de Doutorado, Universidade Federal de Itajubá, Itajubá,
MG.
PLOTKIN, A. (1990), “Comment to ‘Improved Thin-Airfoil Theory’ ”, Journal of Aircraft,
Vo. 27, No 5, pp.478-479. (referindo-se a uma comunicação pessoal de J. L. Hess, 1989)
PRICE, W. L. (1977), “Global Optimization by Controlled Random Search”, Computer
Journal, Vol. 20, No 4, pp. 367-370.
PRICE, W. L. (1983), “Global Optimization by Controlled Random Search”, Journal of
Optimization Theory and Applications Vol. 40, No 3, pp. 333-348.
PRICE, W. L. (1987), “Global optimization algorithms for a CAD workstation”, Journal of
Optimization Theory and Applications, Vol. 55, No 1, pp. 133–146.
ROGALSKY, T., DERKSEN, R. e KOCABIYIC, S. (1999), “An Aerodynamics Design
Technique for Optimizing Fan Blade Spacing”, Proceedings of the 7th Annual
Conference of the Computational Fluid Dynamics Society of Canada, Halifax, pp. 2-29
– 2-34.
STAUFER, F. (1936), “Verfahren zur Bestimung der Schaufel-Form um Laufender
Kreisfoermiger Schufelgitter”(Método de Determinação da Forma das Pás de Grades
Radiais Móveis), Wasserkraft und Wasserwirtschaft, Vol. 31, p. 212.
79
STORN, R., PRICE, K. (1997), “Differential Evolution – A Simple and Efficient Heuristic
for Global Optimization over Continuous Spaces”, Journal of Global Optimization, Vol.
11, pp. 341–359,
VANDERPLAATS, G. N. (1979), “Efficient Algorithm for Numerical Airfoil Optimization”,
Journal of Aircraft, Vol. 16, No 12, pp. 842-847.
VENKATARAMAN, P. (1995), “A New Procedure for Airfoil Definition”, 13th Applied
Aerodynamic Conference, AIAA, Paper 95–1875-CP, San Diego, USA.
YIU, K. F. C. (1994), “Computational Methods for Aerodynamic Shape Design”,
Mathematical and Computer Modelling, Vol. 20, No. 12, pp. 3-29.
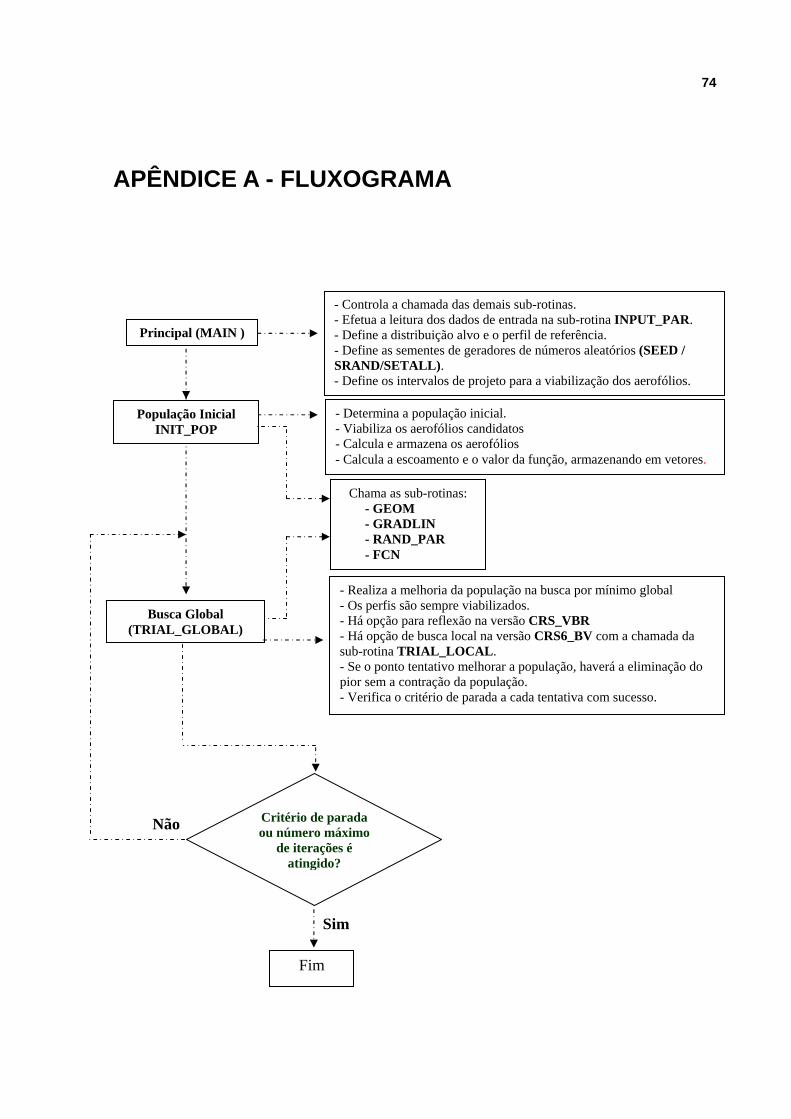
74
APÊNDICE A - FLUXOGRAMA
Principal (MAIN )
- Controla a chamada das demais sub-rotinas. - Efetua a leitura dos dados de entrada na sub-rotina INPUT_PAR. - Define a distribuição alvo e o perfil de referência. - Define as sementes de geradores de números aleatórios (SEED / SRAND/SETALL). - Define os intervalos de projeto para a viabilização dos aerofólios.
- Determina a população inicial. - Viabiliza os aerofólios candidatos - Calcula e armazena os aerofólios - Calcula a escoamento e o valor da função, armazenando em vetores.
Chama as sub-rotinas: - GEOM - GRADLIN - RAND_PAR - FCN
- Realiza a melhoria da população na busca por mínimo global - Os perfis são sempre viabilizados. - Há opção para reflexão na versão CRS_VBR - Há opção de busca local na versão CRS6_BV com a chamada da sub-rotina TRIAL_LOCAL. - Se o ponto tentativo melhorar a população, haverá a eliminação do pior sem a contração da população. - Verifica o critério de parada a cada tentativa com sucesso.
Critério de parada ou número máximo
de iterações é atingido?
Sim
Não
População Inicial INIT_POP
Busca Global (TRIAL_GLOBAL)
Fim
Related Documents











