Identificação de Sistemas Dinâmicos — Prof. Samir Martins Capítulo 3 - Métodos Determinísticos Prof. Samir Martins UFSJ-CEFET/MG Programa de Pós Graduação em Engenharia Elétrica - PPGEL São João del-Rei, 5 de setembro de 2018 1 / 61

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Capítulo 3 - Métodos Determinísticos
Prof. Samir Martins
UFSJ-CEFET/MGPrograma de Pós Graduação em Engenharia Elétrica - PPGEL
São João del-Rei, 5 de setembro de 2018
1 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Introdução
I Métodos determinísticos→ não dão tratamento especial aoruído presente nos dados, ainda que se aceite que os mesmosestejam contaminados;
I Métodos pouco imunes a ruídos;
I Requerem elevada relação sinal/ruído;
I Métodos estocásticos→ tratam o ruído presente nos dados(Capítulo 5);
2 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Introdução
I Métodos determinísticos→ não dão tratamento especial aoruído presente nos dados, ainda que se aceite que os mesmosestejam contaminados;
I Métodos pouco imunes a ruídos;
I Requerem elevada relação sinal/ruído;
I Métodos estocásticos→ tratam o ruído presente nos dados(Capítulo 5);
2 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Introdução
I Métodos determinísticos→ não dão tratamento especial aoruído presente nos dados, ainda que se aceite que os mesmosestejam contaminados;
I Métodos pouco imunes a ruídos;
I Requerem elevada relação sinal/ruído;
I Métodos estocásticos→ tratam o ruído presente nos dados(Capítulo 5);
2 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Introdução
I Métodos determinísticos→ não dão tratamento especial aoruído presente nos dados, ainda que se aceite que os mesmosestejam contaminados;
I Métodos pouco imunes a ruídos;
I Requerem elevada relação sinal/ruído;
I Métodos estocásticos→ tratam o ruído presente nos dados(Capítulo 5);
2 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Alguns Casos Simples
I Um sistema de primeira ordem pode ser representado por:
H(s) =K
τs + 1, (1)
K e τ podem ser estimados por:
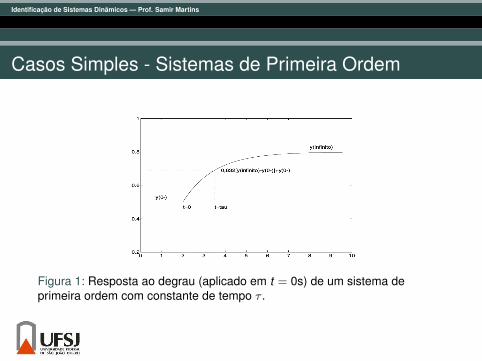
K =(y(∞)− y(0−)
A, (2)
y(τ) = 0,632(y(∞)− y(0−)) + y(0−), (3)
sendo A a amplitude do degrau aplicado.
3 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Alguns Casos Simples
I Um sistema de primeira ordem pode ser representado por:
H(s) =K
τs + 1, (1)
K e τ podem ser estimados por:
K =(y(∞)− y(0−)
A, (2)
y(τ) = 0,632(y(∞)− y(0−)) + y(0−), (3)
sendo A a amplitude do degrau aplicado.
3 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Casos Simples - Sistemas de Primeira Ordem
Figura 1: Resposta ao degrau (aplicado em t = 0s) de um sistema deprimeira ordem com constante de tempo τ .
4 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Sistemas de Segunda Ordem Pouco Amortecidos
I Seja um possível modelo a ser identificado:
H(s) =Y (s)
U(s)=
Kω2n
s2 + 2ζωns + ω2n
(4)
I Para sistemas pouco amortecidos, o número de ciclos visíveispode ser aproximado por:
0.6ζ
(5)
I Exatidão do método depende da qualidade da aproximação√1− ζ2 ≈ 1→ ωn = ω (estimada diretamente do gráfico).
I K obtido como para sistemas de primeira ordem.
5 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Sistemas de Segunda Ordem Pouco Amortecidos
I Seja um possível modelo a ser identificado:
H(s) =Y (s)
U(s)=
Kω2n
s2 + 2ζωns + ω2n
(4)
I Para sistemas pouco amortecidos, o número de ciclos visíveispode ser aproximado por:
0.6ζ
(5)
I Exatidão do método depende da qualidade da aproximação√1− ζ2 ≈ 1→ ωn = ω (estimada diretamente do gráfico).
I K obtido como para sistemas de primeira ordem.
5 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Sistemas de Segunda Ordem Pouco Amortecidos
I Seja um possível modelo a ser identificado:
H(s) =Y (s)
U(s)=
Kω2n
s2 + 2ζωns + ω2n
(4)
I Para sistemas pouco amortecidos, o número de ciclos visíveispode ser aproximado por:
0.6ζ
(5)
I Exatidão do método depende da qualidade da aproximação√1− ζ2 ≈ 1→ ωn = ω (estimada diretamente do gráfico).
I K obtido como para sistemas de primeira ordem.
5 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Sistemas de Segunda Ordem Pouco Amortecidos
I Seja um possível modelo a ser identificado:
H(s) =Y (s)
U(s)=
Kω2n
s2 + 2ζωns + ω2n
(4)
I Para sistemas pouco amortecidos, o número de ciclos visíveispode ser aproximado por:
0.6ζ
(5)
I Exatidão do método depende da qualidade da aproximação√1− ζ2 ≈ 1→ ωn = ω (estimada diretamente do gráfico).
I K obtido como para sistemas de primeira ordem.
5 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
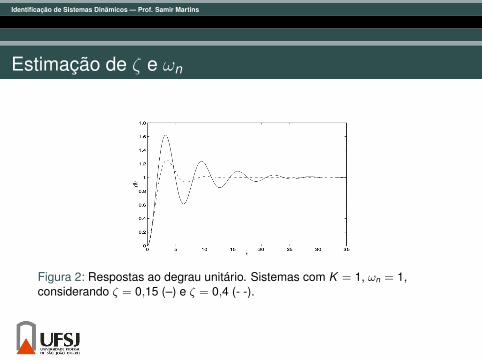
Estimação de ζ e ωn
Figura 2: Respostas ao degrau unitário. Sistemas com K = 1, ωn = 1,considerando ζ = 0,15 (–) e ζ = 0,4 (- -).
6 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação de ζ e ωn
I Para a resposta menos amortecida:
ζ ≈ 0,64,5
= 0,13. (6)
I Temos aproximadamente quatro ciclos nos primeiros 25segundos→ "período médio":
T =254
ωn =2πT≈ 1,0. (7)
7 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação de ζ e ωn
I Para a resposta menos amortecida:
ζ ≈ 0,64,5
= 0,13. (6)
I Temos aproximadamente quatro ciclos nos primeiros 25segundos→ "período médio":
T =254
ωn =2πT≈ 1,0. (7)
7 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação de ζ e ωn
I Para a resposta mais amortecida:
ζ ≈ 0,6 (8)
I Apenas um ciclo é visível;
I Valor estimado 50% maior que o valor verdadeiro.
8 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação de ζ e ωn
I Para a resposta mais amortecida:
ζ ≈ 0,6 (8)
I Apenas um ciclo é visível;
I Valor estimado 50% maior que o valor verdadeiro.
8 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação de ζ e ωn
I Para a resposta mais amortecida:
ζ ≈ 0,6 (8)
I Apenas um ciclo é visível;
I Valor estimado 50% maior que o valor verdadeiro.
8 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Pressupõe que o sistema possa ser aproximadosatisfatoriamente por:
H(s) =e−τd s
(τ1s + 1)(τ2s + 1)(9)
ou ainda:
H(s) =e−τd sω2
n
s2 + 2ζωns + ω2n
(10)
9 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Objetivo do método: determinação de parâmetros τd , τ1 e τ2 ouτd , ωn e ζ;
I Utiliza, para tal, a resposta do sistema ao degrau;
I Ganho posteriormente ajustado.
10 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Objetivo do método: determinação de parâmetros τd , τ1 e τ2 ouτd , ωn e ζ;
I Utiliza, para tal, a resposta do sistema ao degrau;
I Ganho posteriormente ajustado.
10 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Objetivo do método: determinação de parâmetros τd , τ1 e τ2 ouτd , ωn e ζ;
I Utiliza, para tal, a resposta do sistema ao degrau;
I Ganho posteriormente ajustado.
10 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O método de Sundaresan
Figura 3: Resposta ao degrau típica de um sistema sobreamortecido comtempo morto.
11 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Para este método, tem-se:
m1 =
∫ ∞0
(1− y(t))dt . (11)
I H(s) e m1 estão relacionados por:
m1 = −dH(s)
ds|s=0 = τdτ1 + τ2. (12)
I A resposta ao degrau é dada por:
y(t) =
[1− τ1
τ1 − τ2e−
t−τdτ1 +
τ2
τ1 − τ2e−
t−τdτ2
]u(t − τd ), (13)
12 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Para este método, tem-se:
m1 =
∫ ∞0
(1− y(t))dt . (11)
I H(s) e m1 estão relacionados por:
m1 = −dH(s)
ds|s=0 = τdτ1 + τ2. (12)
I A resposta ao degrau é dada por:
y(t) =
[1− τ1
τ1 − τ2e−
t−τdτ1 +
τ2
τ1 − τ2e−
t−τdτ2
]u(t − τd ), (13)
12 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Para este método, tem-se:
m1 =
∫ ∞0
(1− y(t))dt . (11)
I H(s) e m1 estão relacionados por:
m1 = −dH(s)
ds|s=0 = τdτ1 + τ2. (12)
I A resposta ao degrau é dada por:
y(t) =
[1− τ1
τ1 − τ2e−
t−τdτ1 +
τ2
τ1 − τ2e−
t−τdτ2
]u(t − τd ), (13)
12 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de SundaresanI Igualando a segunda derivada da resposta ao degrau a zero
(ponto de inflexão):
ti = τd + αln η, (14)
I sendo η = τ1/τ2 e α = τ1τ2/(τ1 − τ2).I A inclinação da reta tangente ao ponto de inflexão pode ser
obtida por:
Mi =η1/(1−η)
α(η − 1). (15)
I tm pode ser expresso por:
tm = τd + α
[ln η +
η2 − 1η
]. (16)
13 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de SundaresanI Igualando a segunda derivada da resposta ao degrau a zero
(ponto de inflexão):
ti = τd + αln η, (14)
I sendo η = τ1/τ2 e α = τ1τ2/(τ1 − τ2).I A inclinação da reta tangente ao ponto de inflexão pode ser
obtida por:
Mi =η1/(1−η)
α(η − 1). (15)
I tm pode ser expresso por:
tm = τd + α
[ln η +
η2 − 1η
]. (16)
13 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de SundaresanI Igualando a segunda derivada da resposta ao degrau a zero
(ponto de inflexão):
ti = τd + αln η, (14)
I sendo η = τ1/τ2 e α = τ1τ2/(τ1 − τ2).I A inclinação da reta tangente ao ponto de inflexão pode ser
obtida por:
Mi =η1/(1−η)
α(η − 1). (15)
I tm pode ser expresso por:
tm = τd + α
[ln η +
η2 − 1η
]. (16)
13 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Combinando as equações anteriormente apresentadas,chega-se a:
Mi (tm −m1) =η1/(1−η)
η − 1ln η, (17)
I a qual pode ser escrita como:
λ = χe−χ, (18)
I sendo λ = (tm −m1)Mi e ainda
χ =ln ηη − 1
. (19)
14 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Combinando as equações anteriormente apresentadas,chega-se a:
Mi (tm −m1) =η1/(1−η)
η − 1ln η, (17)
I a qual pode ser escrita como:
λ = χe−χ, (18)
I sendo λ = (tm −m1)Mi e ainda
χ =ln ηη − 1
. (19)
14 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
I Combinando as equações anteriormente apresentadas,chega-se a:
Mi (tm −m1) =η1/(1−η)
η − 1ln η, (17)
I a qual pode ser escrita como:
λ = χe−χ, (18)
I sendo λ = (tm −m1)Mi e ainda
χ =ln ηη − 1
. (19)
14 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan
Figura 4: Relação entre η e λ.
15 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área m1:
I determinar a inclinação da reta tangente ao ponto de inflexão dey(t). Este valor é Mi :
I determinar tm:
I determinar λ a partir de λ = (tm −m1)Mi :
16 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área m1:
I determinar a inclinação da reta tangente ao ponto de inflexão dey(t). Este valor é Mi :
I determinar tm:
I determinar λ a partir de λ = (tm −m1)Mi :
16 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área m1:
I determinar a inclinação da reta tangente ao ponto de inflexão dey(t). Este valor é Mi :
I determinar tm:
I determinar λ a partir de λ = (tm −m1)Mi :
16 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área m1:
I determinar a inclinação da reta tangente ao ponto de inflexão dey(t). Este valor é Mi :
I determinar tm:
I determinar λ a partir de λ = (tm −m1)Mi :
16 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área m1:
I determinar a inclinação da reta tangente ao ponto de inflexão dey(t). Este valor é Mi :
I determinar tm:
I determinar λ a partir de λ = (tm −m1)Mi :
16 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar η a partir da última Figura apresentada:
I determinar τ1, τ2 e τd por
τ1 =η
η1−η
Mi(20)
τ2 =η
11−η
Mi(21)
τd = m1 − τ1 − τ2. (22)
17 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar η a partir da última Figura apresentada:
I determinar τ1, τ2 e τd por
τ1 =η
η1−η
Mi(20)
τ2 =η
11−η
Mi(21)
τd = m1 − τ1 − τ2. (22)
17 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
Figura 5: Resposta ao degrau típica de um sistema subamortecido comtempo morto.
18 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
I A resposta ao degrau é dada por:
y(t) = u(t − τd )
{1− ζωnet−τd
[ζ√
1− ζ2sen
(ωn(t − τd )
√1− ζ2
)+
+cos(ωn(t − τd )
√1− ζ2
)]}(23)
I Seguindo procedimentos análogos aos apresentados, obtém-se:
19 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
λ = (tm −m1)M1 =cos−1ζ√
1− ζ2e− ζcos−1(ζ)√
1−ζ2 , (24)
ωn =cos−1ζ√
1− ζ2
1tm −m1
, (25)
τd = m1 −2ζωn. (26)
20 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
λ = (tm −m1)M1 =cos−1ζ√
1− ζ2e− ζcos−1(ζ)√
1−ζ2 , (24)
ωn =cos−1ζ√
1− ζ2
1tm −m1
, (25)
τd = m1 −2ζωn. (26)
20 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
λ = (tm −m1)M1 =cos−1ζ√
1− ζ2e− ζcos−1(ζ)√
1−ζ2 , (24)
ωn =cos−1ζ√
1− ζ2
1tm −m1
, (25)
τd = m1 −2ζωn. (26)
20 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Caso Subamortecido
I ζ Pode ser obtido a partir de λ por:
Figura 6: Relação entre ζ e λ
21 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área sombreada na resposta ao degrau, a áreaacima do valor de y(∞) deve ser subtraída. Este valor é m1:
I determinar a inclinação da tangente no ponto de inflexão dey(t). Este valor é Mi :
I determinar tm, que é a interseção da tangente com o valor emregime permanente de y(t):
I determinar λ
22 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área sombreada na resposta ao degrau, a áreaacima do valor de y(∞) deve ser subtraída. Este valor é m1:
I determinar a inclinação da tangente no ponto de inflexão dey(t). Este valor é Mi :
I determinar tm, que é a interseção da tangente com o valor emregime permanente de y(t):
I determinar λ
22 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área sombreada na resposta ao degrau, a áreaacima do valor de y(∞) deve ser subtraída. Este valor é m1:
I determinar a inclinação da tangente no ponto de inflexão dey(t). Este valor é Mi :
I determinar tm, que é a interseção da tangente com o valor emregime permanente de y(t):
I determinar λ
22 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área sombreada na resposta ao degrau, a áreaacima do valor de y(∞) deve ser subtraída. Este valor é m1:
I determinar a inclinação da tangente no ponto de inflexão dey(t). Este valor é Mi :
I determinar tm, que é a interseção da tangente com o valor emregime permanente de y(t):
I determinar λ
22 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar o ganho em regime permanente:
I determinar a área sombreada na resposta ao degrau, a áreaacima do valor de y(∞) deve ser subtraída. Este valor é m1:
I determinar a inclinação da tangente no ponto de inflexão dey(t). Este valor é Mi :
I determinar tm, que é a interseção da tangente com o valor emregime permanente de y(t):
I determinar λ
22 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar ζ graficamente:
I determinar ωn e τd .
23 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Resumo
I determinar ζ graficamente:
I determinar ωn e τd .
23 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
I Identificação de Malha de controle de combustíveis;
I Sistema de controle que injeta até quatro combustíveis nafornalha de uma caldeira industrial.
I Devido à falta de medições e dados de fabricação, não se podeobter modelos pela física do processo;
24 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
I Identificação de Malha de controle de combustíveis;
I Sistema de controle que injeta até quatro combustíveis nafornalha de uma caldeira industrial.
I Devido à falta de medições e dados de fabricação, não se podeobter modelos pela física do processo;
24 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
I Identificação de Malha de controle de combustíveis;
I Sistema de controle que injeta até quatro combustíveis nafornalha de uma caldeira industrial.
I Devido à falta de medições e dados de fabricação, não se podeobter modelos pela física do processo;
24 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
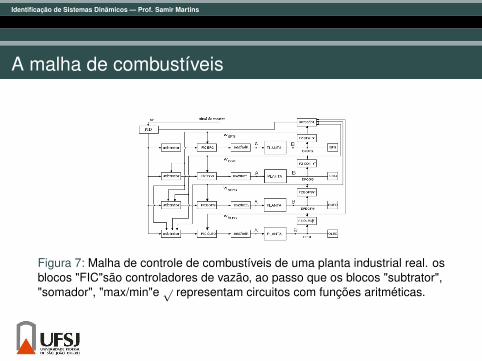
A malha de combustíveis
Figura 7: Malha de controle de combustíveis de uma planta industrial real. osblocos "FIC"são controladores de vazão, ao passo que os blocos "subtrator","somador", "max/min"e √ representam circuitos com funções aritméticas.
25 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
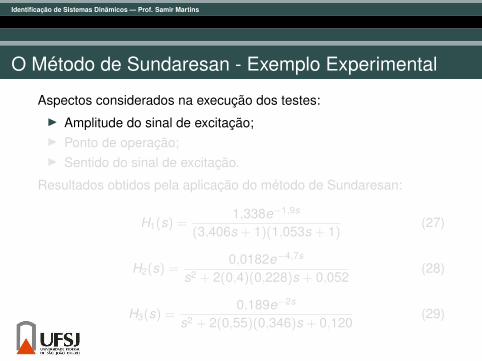
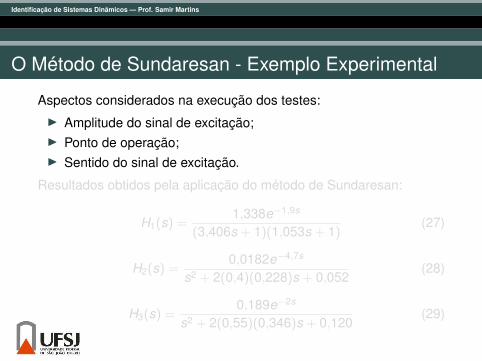
Aspectos considerados na execução dos testes:
I Amplitude do sinal de excitação;I Ponto de operação;I Sentido do sinal de excitação.
Resultados obtidos pela aplicação do método de Sundaresan:
H1(s) =1,338e−1,9s
(3,406s + 1)(1,053s + 1)(27)
H2(s) =0,0182e−4,7s
s2 + 2(0,4)(0,228)s + 0,052(28)
H3(s) =0,189e−2s
s2 + 2(0,55)(0,346)s + 0,120(29)
26 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
Aspectos considerados na execução dos testes:
I Amplitude do sinal de excitação;I Ponto de operação;I Sentido do sinal de excitação.
Resultados obtidos pela aplicação do método de Sundaresan:
H1(s) =1,338e−1,9s
(3,406s + 1)(1,053s + 1)(27)
H2(s) =0,0182e−4,7s
s2 + 2(0,4)(0,228)s + 0,052(28)
H3(s) =0,189e−2s
s2 + 2(0,55)(0,346)s + 0,120(29)
26 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
Aspectos considerados na execução dos testes:
I Amplitude do sinal de excitação;I Ponto de operação;I Sentido do sinal de excitação.
Resultados obtidos pela aplicação do método de Sundaresan:
H1(s) =1,338e−1,9s
(3,406s + 1)(1,053s + 1)(27)
H2(s) =0,0182e−4,7s
s2 + 2(0,4)(0,228)s + 0,052(28)
H3(s) =0,189e−2s
s2 + 2(0,55)(0,346)s + 0,120(29)
26 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
O Método de Sundaresan - Exemplo Experimental
Aspectos considerados na execução dos testes:
I Amplitude do sinal de excitação;I Ponto de operação;I Sentido do sinal de excitação.
Resultados obtidos pela aplicação do método de Sundaresan:
H1(s) =1,338e−1,9s
(3,406s + 1)(1,053s + 1)(27)
H2(s) =0,0182e−4,7s
s2 + 2(0,4)(0,228)s + 0,052(28)
H3(s) =0,189e−2s
s2 + 2(0,55)(0,346)s + 0,120(29)
26 / 61
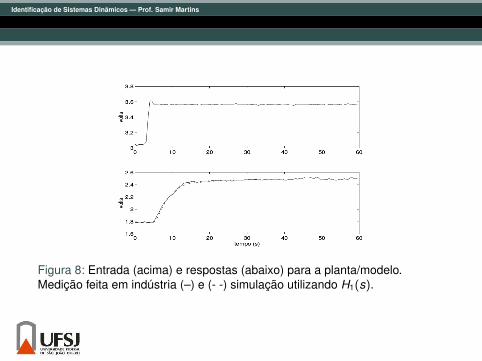
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Figura 8: Entrada (acima) e respostas (abaixo) para a planta/modelo.Medição feita em indústria (–) e (- -) simulação utilizando H1(s).
27 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Figura 9: Entrada (acima) e respostas (abaixo) para a planta/modelo.Medição feita em indústria (–) e (- -) simulação utilizando H2(s).
28 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Figura 10: Entrada (acima) e respostas (abaixo) para a planta/modelo.Medição feita em indústria (–) e (- -) simulação utilizando H3(s).
29 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
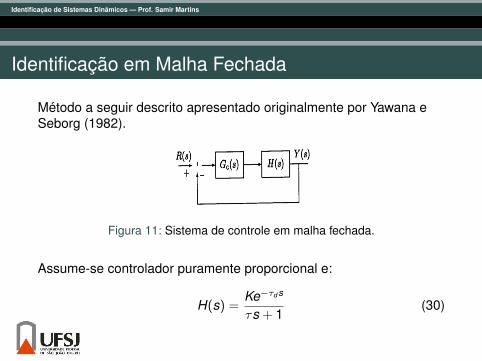
Método a seguir descrito apresentado originalmente por Yawana eSeborg (1982).
Figura 11: Sistema de controle em malha fechada.
Assume-se controlador puramente proporcional e:
H(s) =Ke−τd s
τs + 1(30)
30 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
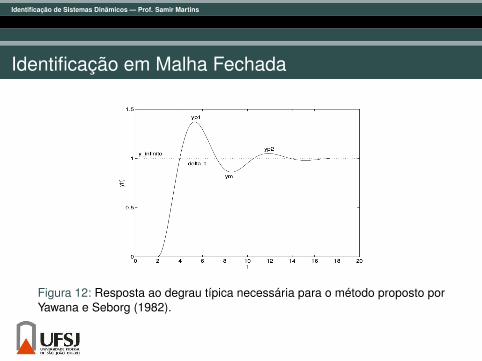
Figura 12: Resposta ao degrau típica necessária para o método proposto porYawana e Seborg (1982).
31 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
I A função de transferência em malha fechada é dada por:
Y (s)
R(s)=
Kf e−τd s
τs + [Kf e−τd s + 1](31)
I Utilizando a seguinte aproximação de Padé:
e−τd s =1− 0,5τds1 + 0,5τds
(32)
I chega-se a:
32 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
I A função de transferência em malha fechada é dada por:
Y (s)
R(s)=
Kf e−τd s
τs + [Kf e−τd s + 1](31)
I Utilizando a seguinte aproximação de Padé:
e−τd s =1− 0,5τds1 + 0,5τds
(32)
I chega-se a:
32 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
Y (s)
R(s)=
K (1− 0,5τds)
τ2s2 + 2ζτs + 1(33)
sendo Kc o ganho do controlador, Kf = KcK e
K =Kf
Kf + 1(34)
τ =
[τdτ
2(Kf + 1)
]0,5
(35)
ζ =τ + 0,5τd (1− Kf )√
2τdτ(Kf + 1)(36)
33 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
Y (s)
R(s)=
K (1− 0,5τds)
τ2s2 + 2ζτs + 1(33)
sendo Kc o ganho do controlador, Kf = KcK e
K =Kf
Kf + 1(34)
τ =
[τdτ
2(Kf + 1)
]0,5
(35)
ζ =τ + 0,5τd (1− Kf )√
2τdτ(Kf + 1)(36)
33 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
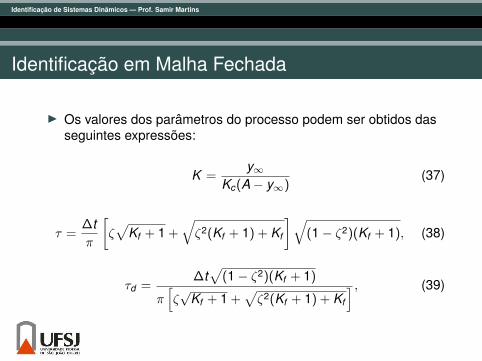
I Os valores dos parâmetros do processo podem ser obtidos dasseguintes expressões:
K =y∞
Kc(A− y∞)(37)
τ =∆tπ
[ζ√
Kf + 1 +√ζ2(Kf + 1) + Kf
]√(1− ζ2)(Kf + 1), (38)
τd =∆t√
(1− ζ2)(Kf + 1)
π[ζ√
Kf + 1 +√ζ2(Kf + 1) + Kf
] , (39)
34 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
I Sendo que ζ pode ser avaliado de duas formas diferentes:
ζ =−ln
[y∞−ymyp1−y∞
]√π2 +
(ln[
y∞−ymyp1−y∞
])2(40)
ζ =−ln
[yp2−yinftyyp1−y∞
]√
4π2 +(
ln[
yp2−yinftyyp1−y∞
]) (41)
35 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada
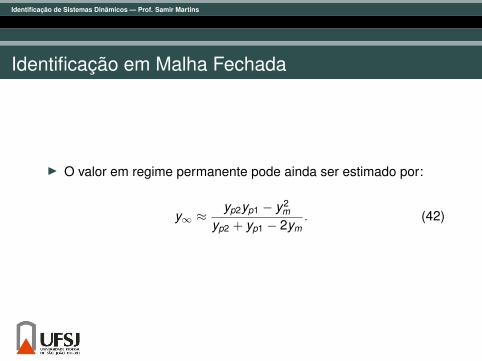
I O valor em regime permanente pode ainda ser estimado por:
y∞ ≈yp2yp1 − y2
m
yp2 + yp1 − 2ym. (42)
36 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada - Processo Real
I Objetivo→ obter modelos em malha aberta a partir de dadosreais coletados de uma planta industrial operando em malhafechada;
I Malha de corrente de um separador magnético.
I A partir dos dados medidos, obteve-se: yp1 = 33, yp2 = 28,ym = 16, ∆t = 7, y∞ = 22,8, com Kc = 2.
37 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada - Processo Real
I Objetivo→ obter modelos em malha aberta a partir de dadosreais coletados de uma planta industrial operando em malhafechada;
I Malha de corrente de um separador magnético.
I A partir dos dados medidos, obteve-se: yp1 = 33, yp2 = 28,ym = 16, ∆t = 7, y∞ = 22,8, com Kc = 2.
37 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada - Processo Real
I Objetivo→ obter modelos em malha aberta a partir de dadosreais coletados de uma planta industrial operando em malhafechada;
I Malha de corrente de um separador magnético.
I A partir dos dados medidos, obteve-se: yp1 = 33, yp2 = 28,ym = 16, ∆t = 7, y∞ = 22,8, com Kc = 2.
37 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada - Processo Real
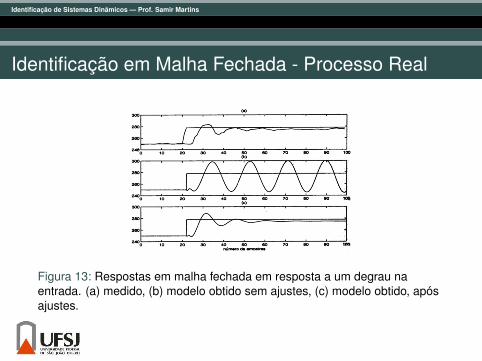
I O modelo em malha aberta obtido foi:
H1(s) =2,1923e−5,2853s
12,3681s + 1. (43)
I Ajustes realizados: aumento de K em 70% e aumento de ζpor 2,4:
H2(s) =3,7269e−3,4108s
23,2170s + 1(44)
38 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação em Malha Fechada - Processo Real
Figura 13: Respostas em malha fechada em resposta a um degrau naentrada. (a) medido, (b) modelo obtido sem ajustes, (c) modelo obtido, apósajustes.
39 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação Usando Convolução
I Seja o somatório de convolução:
y(k) =∞∑j=0
h(j)u(k − j). (45)
Tomando-se as medições u(k) e y(k), pode-se escrever:
y(0) = h(0)u(0) + h(1)u(−1) + h(2)u(−2) + · · · (46)y(1) = h(0)u(1) + h(1)u(0) + h(2)u(−1) + · · · (47)y(2) = h(0)u(2) + h(1)u(1) + h(2)u(0) + · · · (48)
......
...
40 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação Usando Convolução
I Que também pode ser expresso em forma matricial:
y(0)y(1)y(2)
...
=
u(0) u(−1) u(−2) · · ·u(1) u(0) u(−1) · · ·u(2) u(1) u(0) · · ·
......
...
h(0)h(1)h(2)
...
, (49)
y = Uh (50)
I Se u(k) = 0 ∀k 6= 0, pode-se escrever:
y = u(0)I h, (51)h = y/u(0). (52)
41 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação Usando Convolução
I Se o sinal de saída estiver contaminado com ruído de medição(y(k) = y i (k) + e(k)):
h =yi + eu(0)
h =yi
u(0)+
eu(0)
(53)
I A segunda parcela da equação acima somente é eliminada se: i)u(0)→∞ ou; ii) e(k) = 0,∀ k .
42 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
I Seja a função de transferência:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(54)
I H(z) simulada para uma entrada pseudo-aleatória;
I Resposta ao impulso obtida como anteriormente apresentado;
I Duas abordagens apresentadas: i) sem ruído e; ii) com ruído debaixíssima variância (σ2
e = 1× 10−5).
I h obtida de maneira determinística (h = U−1y);
43 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
I Seja a função de transferência:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(54)
I H(z) simulada para uma entrada pseudo-aleatória;
I Resposta ao impulso obtida como anteriormente apresentado;
I Duas abordagens apresentadas: i) sem ruído e; ii) com ruído debaixíssima variância (σ2
e = 1× 10−5).
I h obtida de maneira determinística (h = U−1y);
43 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
I Seja a função de transferência:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(54)
I H(z) simulada para uma entrada pseudo-aleatória;
I Resposta ao impulso obtida como anteriormente apresentado;
I Duas abordagens apresentadas: i) sem ruído e; ii) com ruído debaixíssima variância (σ2
e = 1× 10−5).
I h obtida de maneira determinística (h = U−1y);
43 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
I Seja a função de transferência:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(54)
I H(z) simulada para uma entrada pseudo-aleatória;
I Resposta ao impulso obtida como anteriormente apresentado;
I Duas abordagens apresentadas: i) sem ruído e; ii) com ruído debaixíssima variância (σ2
e = 1× 10−5).
I h obtida de maneira determinística (h = U−1y);
43 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
I Seja a função de transferência:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(54)
I H(z) simulada para uma entrada pseudo-aleatória;
I Resposta ao impulso obtida como anteriormente apresentado;
I Duas abordagens apresentadas: i) sem ruído e; ii) com ruído debaixíssima variância (σ2
e = 1× 10−5).
I h obtida de maneira determinística (h = U−1y);
43 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
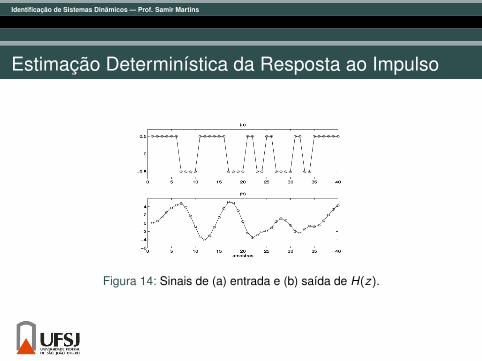
Figura 14: Sinais de (a) entrada e (b) saída de H(z).
44 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação Determinística da Resposta ao Impulso
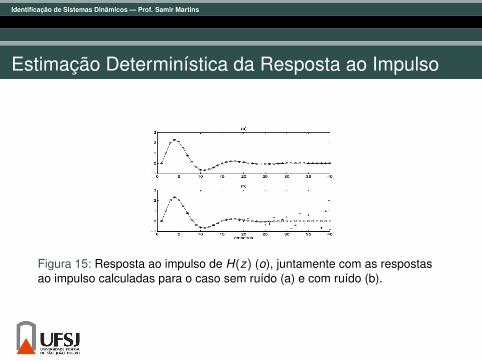
Figura 15: Resposta ao impulso de H(z) (o), juntamente com as respostasao impulso calculadas para o caso sem ruído (a) e com ruído (b).
45 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Resposta em regime permanente de um sistema linear excitadopor uma senóide, também será uma senóide de mesmafrequência.
I Amplitude e fase da resposta dependem do sistema, e podemser alteradas
I Amplitude→ multiplicada por |H(jω)|
I Fase→ atrasada de φ radianos, sendo H(jω) = |H(jω)|ejφ.
46 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Resposta em regime permanente de um sistema linear excitadopor uma senóide, também será uma senóide de mesmafrequência.
I Amplitude e fase da resposta dependem do sistema, e podemser alteradas
I Amplitude→ multiplicada por |H(jω)|
I Fase→ atrasada de φ radianos, sendo H(jω) = |H(jω)|ejφ.
46 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Resposta em regime permanente de um sistema linear excitadopor uma senóide, também será uma senóide de mesmafrequência.
I Amplitude e fase da resposta dependem do sistema, e podemser alteradas
I Amplitude→ multiplicada por |H(jω)|
I Fase→ atrasada de φ radianos, sendo H(jω) = |H(jω)|ejφ.
46 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Resposta em regime permanente de um sistema linear excitadopor uma senóide, também será uma senóide de mesmafrequência.
I Amplitude e fase da resposta dependem do sistema, e podemser alteradas
I Amplitude→ multiplicada por |H(jω)|
I Fase→ atrasada de φ radianos, sendo H(jω) = |H(jω)|ejφ.
46 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Procedimento possível para estimar H(jω)→ excitar o sistemacom senoides de diferentes frequências.
I A partir daí, obtém-se o ganho e fase.
I Problema→ nem sempre se pode aplicar sinais senoidais aoprocesso a ser identificado
I Problema→ teste de longa duração.
47 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Procedimento possível para estimar H(jω)→ excitar o sistemacom senoides de diferentes frequências.
I A partir daí, obtém-se o ganho e fase.
I Problema→ nem sempre se pode aplicar sinais senoidais aoprocesso a ser identificado
I Problema→ teste de longa duração.
47 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Procedimento possível para estimar H(jω)→ excitar o sistemacom senoides de diferentes frequências.
I A partir daí, obtém-se o ganho e fase.
I Problema→ nem sempre se pode aplicar sinais senoidais aoprocesso a ser identificado
I Problema→ teste de longa duração.
47 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Procedimento possível para estimar H(jω)→ excitar o sistemacom senoides de diferentes frequências.
I A partir daí, obtém-se o ganho e fase.
I Problema→ nem sempre se pode aplicar sinais senoidais aoprocesso a ser identificado
I Problema→ teste de longa duração.
47 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Aplicando-se a transformada de Fourier à integral deconvolução:
H(jω) =Y (jω)
U(jω). (55)
I Sinais "abertos"(resposta a um degrau - sistema estável deprimeira ordem)→ não são absolutamente integráveis(condições de Dirichlet);
I Diferenciação destes sinais: forma alternativa para se obtersinais "fechados", não alterando a resposta em frequência:
48 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Aplicando-se a transformada de Fourier à integral deconvolução:
H(jω) =Y (jω)
U(jω). (55)
I Sinais "abertos"(resposta a um degrau - sistema estável deprimeira ordem)→ não são absolutamente integráveis(condições de Dirichlet);
I Diferenciação destes sinais: forma alternativa para se obtersinais "fechados", não alterando a resposta em frequência:
48 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I Aplicando-se a transformada de Fourier à integral deconvolução:
H(jω) =Y (jω)
U(jω). (55)
I Sinais "abertos"(resposta a um degrau - sistema estável deprimeira ordem)→ não são absolutamente integráveis(condições de Dirichlet);
I Diferenciação destes sinais: forma alternativa para se obtersinais "fechados", não alterando a resposta em frequência:
48 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
H(jω) =F{y(t)}F{u(t)}
=jωY (jω)
jωU(jω). (56)
I Para sinais de tempo discreto:
y∗(k) = y(k − 1)− y(k) (57)u∗(k) = u(k − 1)− u(k) (58)
49 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
H(jω) =F{y(t)}F{u(t)}
=jωY (jω)
jωU(jω). (56)
I Para sinais de tempo discreto:
y∗(k) = y(k − 1)− y(k) (57)u∗(k) = u(k − 1)− u(k) (58)
49 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificação no Domínio da Frequência
I E a estimativa da resposta em frequência é:
H(ejω) =Y ∗(ejω)
U∗(ejω), (59)
I sendo que o argumento ejω indica a transformada de Fourier desinais discretos.
I A transformada Discreta de Fourier para um sinal y(k), com Namostras, é definida como:
Y (ejω) =1√N
N∑k=1
y(k)e−jωk , ω =2πkN
, k = 1, . . . ,N. (60)
50 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Identificaçao no Domínio da Frequência
I Se y(t) é composto de uma parcela ideal (sem ruído - y i (t)) e deruído de medição e(t), tem-se:
H(jω) =Y i (jω)
U(jω)+
E(jω)
U(jω). (61)
I Para que e(t) não afete a estimativa da resposta emfrequência→ e(t) = 0,∀ t .
51 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoSimulado
I Considere que:
H(z) =Y (z)
U(z)=
z + 0,5z2 − 1,5z + 0,7
(62)
foi excitada por um sinal pseudo-aleatório.
I O número complexo H(ejωi ) = α + jβ foi obtido dividindo-seY (ejωi ) por U(ejωi ):
|H(ejωi )| =√α2 + β2 (63)
fase[H(ejωi )
]= tan−1
[β
α
]. (64)
52 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoSimulado
Figura 16: (a) ganho e (b) fase das respostas em frequência do sistemaoriginal (traço contínuo) e estimada a partir de y(k) e u(k) (tracejado).Procedimento sensível a problemas numéricos, especialmente em elevadasfrequências.
53 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
I Dados coletados da planta piloto de bombeamento de água;
I A variação do sinal de saída é relativamente pequenacomparada à faixa total de operação (menos de 0,1V, em umfundo de escala de 5V);
I O teste dinamico não começa com a planta "desligada";
I O tempo de amostragem utilizado foi de Ts = 1,044s.
54 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
I Dados coletados da planta piloto de bombeamento de água;
I A variação do sinal de saída é relativamente pequenacomparada à faixa total de operação (menos de 0,1V, em umfundo de escala de 5V);
I O teste dinamico não começa com a planta "desligada";
I O tempo de amostragem utilizado foi de Ts = 1,044s.
54 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
I Dados coletados da planta piloto de bombeamento de água;
I A variação do sinal de saída é relativamente pequenacomparada à faixa total de operação (menos de 0,1V, em umfundo de escala de 5V);
I O teste dinamico não começa com a planta "desligada";
I O tempo de amostragem utilizado foi de Ts = 1,044s.
54 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
I Dados coletados da planta piloto de bombeamento de água;
I A variação do sinal de saída é relativamente pequenacomparada à faixa total de operação (menos de 0,1V, em umfundo de escala de 5V);
I O teste dinamico não começa com a planta "desligada";
I O tempo de amostragem utilizado foi de Ts = 1,044s.
54 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
Figura 17: (a) pulso de entrada, u(k), e (b) resposta de vazão da planta,y(k).
55 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
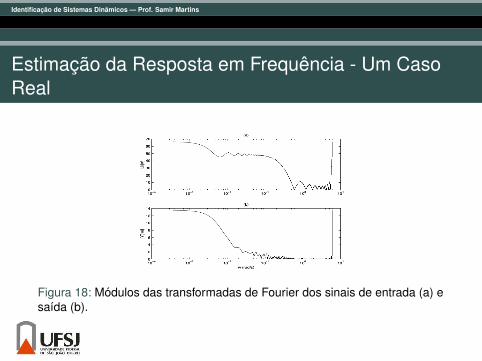
Figura 18: Módulos das transformadas de Fourier dos sinais de entrada (a) esaída (b).
56 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Estimação da Resposta em Frequência - Um CasoReal
Foram utilizados apenas os dados correspondentes até a frequênciade ω = 0,015rad/s.
Figura 19: Resposta em frequência estimada. Representação gráfica deH(ejω). (a) ganho e (b) fase.
57 / 61
Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Comentários Finais
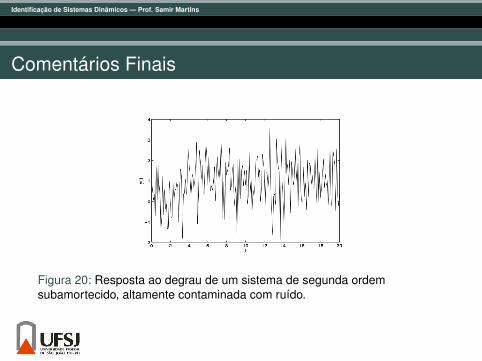
Figura 20: Resposta ao degrau de um sistema de segunda ordemsubamortecido, altamente contaminada com ruído.
58 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Comentários Finais
I A partir da Figura anterior, torna-se impossível aplicar métodosdeterminísticos para obtenção de modelos.
I Considerando o exemplo do ajuste de reta, com ruído,tomando-se dois pontos, chega-se a:
[θ1θ2
]=
[2,872× 10−1
−1,091× 10−3
], (65)
sendo y = θ1 + θ2x .
59 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Comentários Finais
I A partir da Figura anterior, torna-se impossível aplicar métodosdeterminísticos para obtenção de modelos.
I Considerando o exemplo do ajuste de reta, com ruído,tomando-se dois pontos, chega-se a:
[θ1θ2
]=
[2,872× 10−1
−1,091× 10−3
], (65)
sendo y = θ1 + θ2x .
59 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Comentários Finais
I A partir da Figura anterior, torna-se impossível aplicar métodosdeterminísticos para obtenção de modelos.
I Considerando o exemplo do ajuste de reta, com ruído,tomando-se dois pontos, chega-se a:
[θ1θ2
]=
[2,872× 10−1
−1,091× 10−3
], (65)
sendo y = θ1 + θ2x .
59 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Comentários Finais
Figura 21: Dados medidos com ruído estão marcados com cruzes, e o traçoé a reta estimada - y = 2,872× 10−1 − 1,091× 10−3x
60 / 61

Identificação de Sistemas Dinâmicos — Prof. Samir Martins
Agradecimentos
MUITO OBRIGADO!
Prof. Samir MartinsDEPEL/UFSJ
61 / 61
Related Documents











