CAN bus 神神神神 神神 神神

CAN bus. Controller Area Network (CAN) is a broadcast, differential serial bus standard, originally developed in the 1980s by Robert Bosch GmbH, for connecting.
Dec 11, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

CAN bus
神戸大学 金子 敬宏

Controller Area Network (CAN) is a broadcast, differential serial bus standard, originally developed in the 1980s by Robert Bosch GmbH, for connecting electronic control units (ECUs).
CAN was specifically designed to be robust in electromagnetically noisy environments and can utilize a differential balanced line like RS-485.
It can be even more robust against noise if twisted pair wire is used. Although initially created for automotive purposes (as a vehicle bus), nowadays it is used in many embedded control applications (e.g., industrial) that may be subject to noise.
Bit rates up to 1 Mbit/s are possible at network lengths below 40 m. Decreasing the bit rate allows longer network distances (e.g. 125 kbit/s at 500 m).
The CAN data link layer protocol is standardized in ISO 11898-1 (2003).
This standard describes mainly the data link layer — composed of the Logical Link Control (LLC) sublayer and the Media Access Control (MAC) sublayer — and some aspects of the physical layer of the OSI Reference Model.
All the other protocol layers are left to the network designer's choice.
CAN: Controller Area Network

伝送方式:半二重シリアル通信
1つの伝送路を用いて送信と受信を切り替えながら行う通信方法
Network Topology:バス型-マルチマスタ
バスがあいているときは、バスに接続されるすべてのユニットがメッセージの送信を始めることができる
アクセス制御方式: CSMA/NBA
早く通信を始めた局が通信を続ける優先権を持つ
同時に2つの通信を始めるユニットが2つあった場合、通信フレームの始め の11ビットのパターンをお互いに見合って優先権得たユニットが通信を続ける
CSMA/CDの場合は同時の時一時中断
最大通信速度:1Mbps()



ECU
device
I/O
device ECU
I/O
device
device
CAN
NI PCI-CAN/2Operationg System
Windows 2000/NT/XP/Me/98
LabVIEW Real-Time
Recommended Software
LabVEIW
Lab Windows/CVI
Other Compatible Software
C/C++
Visual Basic 6
Application Software (included)
Bus monitor utility
Driver Software (included)
NI-CAN

ESD CAN-CBX-AI814
・ CANopen module with In-Rail-Bus
・ 8 A/D-converter inputs
・ resolution 14 bit
・ input voltage range
・ CANopen

Monitoring system for the HCAL prototype
• LED monitoring system- System concept- Choice of LED- Test of fiber bundle- LED driver studies
• Temperature monitoring • Slow control
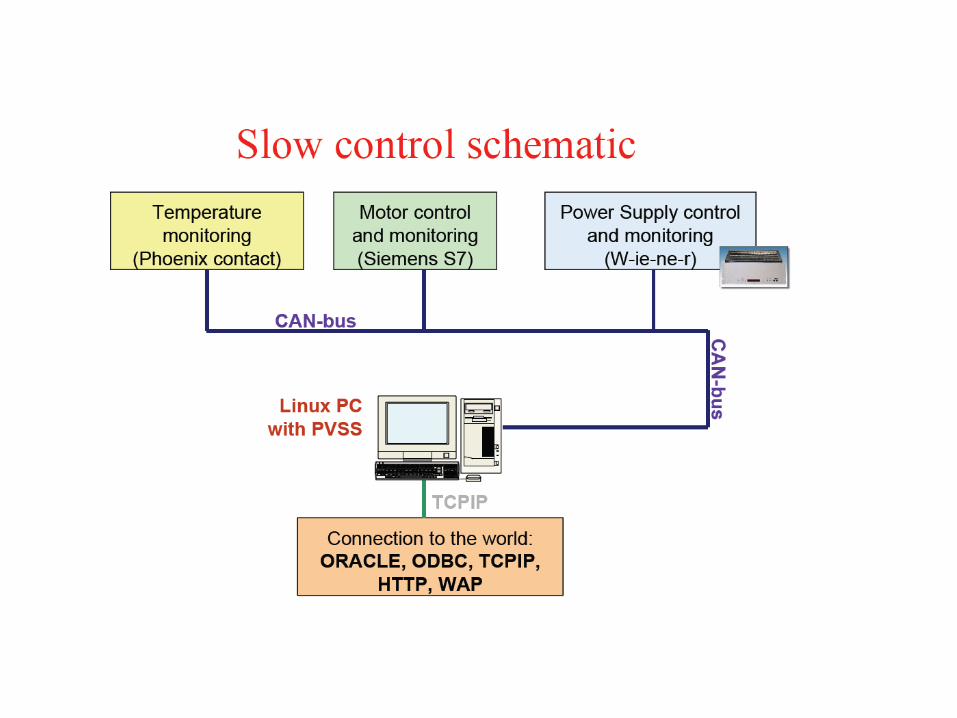
Slow ControlTo intervene on detector parameters frontend processors (mostly VME) and interfaces can be addressed via a dedicated slow control bus connected to the monitoring workstation.
As bus systems two options are considered at present:
CANbus is a standard slow control bus which is widely used in the VME sector. It also offers accessibility to crates and power supplies allowing additional monitoring and maintenance possibilities.
Ethernet as slow control bus is an inexpensive alternative. Most VME CPUs are equipped with standard ethernet interfaces. The protocol is more flexible and allows a higher bandwidth then CANbus. To avoid problems this net should be separated from the CERN wide network
The slow control processors perform e.g. voltage and temperature checks, set voltages and thresholds.



Plan
Gain monitoring systemにおける PCへの接続
Related Documents











