CSE152, Spr 05 Intro Computer Vision Introduction to Computer Vision CSE 152 Lecture 5 CSE152, Spr 05 Intro Computer Vision Announcements • Assignment 1 has been posted. • See links on web page for reading • Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating images. Try xv for linux. CSE152, Spr 05 Intro Computer Vision Camera parameters • Issue – camera may not be at the origin, looking down the z-axis • extrinsic parameters (Rigid Transformation) – one unit in camera coordinates may not be the same as one unit in world coordinates • intrinsic parameters - focal length, principal point, aspect ratio, angle between axes, etc. U V W = Transformation representing intrinsic parameters 1 0 0 0 0 1 0 0 0 0 1 0 Transformation representing extrinsic parameters X Y Z T 3 x 3 4 x 4 CSE152, Spr 05 Intro Computer Vision , estimate intrinsic and extrinsic camera parameters • See Text book for how to do it. Camera Calibration CSE152, Spr 05 Intro Computer Vision Limits for pinhole cameras CSE152, Spr 05 Intro Computer Vision Thin Lens: Image of Point O F P P’ Z’ f Z f z z 1 1 ' 1 = −

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
CSE152, Spr 05 Intro Computer Vision
Introduction to Computer VisionCSE 152Lecture 5
CSE152, Spr 05 Intro Computer Vision
Announcements• Assignment 1 has been posted.• See links on web page for reading• Irfanview: http://www.irfanview.com/ is a
good windows utility for manipulating images. Try xv for linux.
CSE152, Spr 05 Intro Computer Vision
Camera parameters• Issue
– camera may not be at the origin, looking down the z-axis
• extrinsic parameters (Rigid Transformation)– one unit in camera coordinates may not be the
same as one unit in world coordinates• intrinsic parameters - focal length, principal point,
aspect ratio, angle between axes, etc.
UVW
=
Transformationrepresenting intrinsic parameters
1 0 0 00 1 0 00 0 1 0
Transformationrepresentingextrinsic parameters
XYZT
3 x 3 4 x 4CSE152, Spr 05 Intro Computer Vision
, estimate intrinsic and extrinsic camera parameters
• See Text book for how to do it.
Camera Calibration
CSE152, Spr 05 Intro Computer Vision
Limits for pinhole cameras
CSE152, Spr 05 Intro Computer Vision
Thin Lens: Image of Point
OF
P
P’ Z’
f
Z
fzz11
'1
=−
2
CSE152, Spr 05 Intro Computer Vision
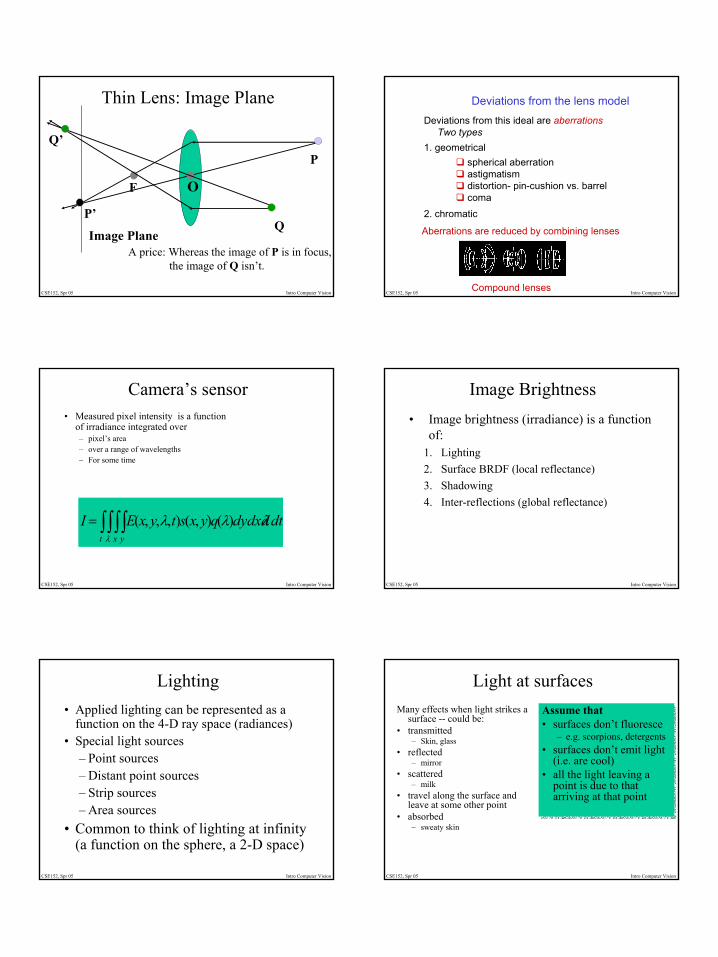
Thin Lens: Image Plane
OF
P
P’
Image Plane
Q’
Q
A price: Whereas the image of P is in focus,the image of Q isn’t.
CSE152, Spr 05 Intro Computer Vision
Deviations from the lens modelDeviations from this ideal are aberrations
Two types1. geometrical
2. chromatic
spherical aberrationastigmatismdistortion- pin-cushion vs. barrelcoma
Aberrations are reduced by combining lenses
Compound lenses
CSE152, Spr 05 Intro Computer Vision
Camera’s sensor• Measured pixel intensity is a function
of irradiance integrated over – pixel’s area– over a range of wavelengths– For some time
∫∫∫∫ =t x y
dtdydxdqyxstyxEIλ
λλλ )(),(),,,(
CSE152, Spr 05 Intro Computer Vision
Image Brightness• Image brightness (irradiance) is a function
of:1. Lighting2. Surface BRDF (local reflectance)3. Shadowing4. Inter-reflections (global reflectance)
CSE152, Spr 05 Intro Computer Vision
Lighting• Applied lighting can be represented as a
function on the 4-D ray space (radiances)• Special light sources
– Point sources– Distant point sources– Strip sources– Area sources
• Common to think of lighting at infinity (a function on the sphere, a 2-D space)
CSE152, Spr 05 Intro Computer Vision
Light at surfacesMany effects when light strikes a
surface -- could be:• transmitted
– Skin, glass• reflected
– mirror• scattered
– milk• travel along the surface and
leave at some other point• absorbed
– sweaty skin
Assume that• surfaces don’t fluoresce
– e.g. scorpions, detergents • surfaces don’t emit light
(i.e. are cool)• all the light leaving a
point is due to that arriving at that point
Assume that• surfaces don’t fluoresce
– e.g. scorpions, detergents • surfaces don’t emit light
(i.e. are cool)• all the light leaving a
point is due to that arriving at that point
3
CSE152, Spr 05 Intro Computer Vision
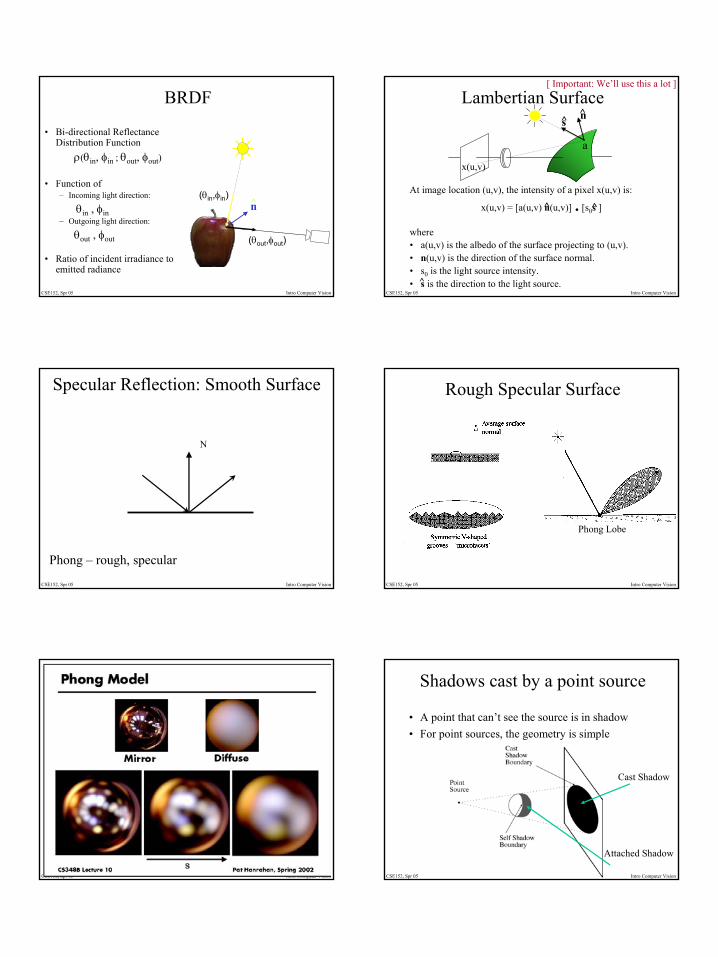
BRDF
• Bi-directional Reflectance Distribution Function
ρ(θin, φin ; θout, φout)
• Function of– Incoming light direction:
θin , φin– Outgoing light direction:
θout , φout
• Ratio of incident irradiance to emitted radiance
n(θin,φin)
(θout,φout)
CSE152, Spr 05 Intro Computer Vision
Lambertian Surface
At image location (u,v), the intensity of a pixel x(u,v) is:
x(u,v) = [a(u,v) n(u,v)] [s0s ]
where• a(u,v) is the albedo of the surface projecting to (u,v).• n(u,v) is the direction of the surface normal.• s0 is the light source intensity.• s is the direction to the light source.
^ ^.
ns
a
x(u,v)
^
[ Important: We’ll use this a lot ]
CSE152, Spr 05 Intro Computer Vision
Specular Reflection: Smooth Surface
N
Phong – rough, specular
CSE152, Spr 05 Intro Computer Vision
Rough Specular Surface
Phong Lobe
CSE152, Spr 05 Intro Computer Vision CSE152, Spr 05 Intro Computer Vision
Shadows cast by a point source
• A point that can’t see the source is in shadow• For point sources, the geometry is simple
Cast Shadow
Attached Shadow

4
CSE152, Spr 05 Intro Computer VisionFigure from “Mutual Illumination,” by D.A. Forsyth and A.P. Zisserman, Proc. CVPR, 1989, copyright 1989 IEEE
At the top, geometry of a gutter with triangular cross-section; below, predicted radiositysolutions, scaled to lie on top of each other, for different albedos of the geometry. When albedo is close to zero, shading follows a local model; when it is close to one, there are substantial reflexes.
Inter-reflections
CSE152, Spr 05 Intro Computer Vision
Color Cameras
Eye: Three types of Cones
Cameras:1. Prism (with 3 sensors)2. Filter mosaic3. Filter wheel
… and X3
CSE152, Spr 05 Intro Computer Vision
Prism color cameraSeparate light in 3 beams using dichroic prismRequires 3 sensors & precise alignmentGood color separation
CSE152, Spr 05 Intro Computer Vision
Filter mosaic Coat filter directly on sensor
Demosaicing (obtain full colour & full resolution image)
CSE152, Spr 05 Intro Computer Vision
Filter wheelRotate multiple filters in front of lensAllows more than 3 color bands
Only suitable for static scenes
CSE152, Spr 05 Intro Computer Vision
new color CMOS sensorFoveon’s X3
better image qualitysmarter pixels

5
CSE152, Spr 05 Intro Computer Vision
The appearance of colors
• Color appearance is strongly affected by (at least):– Spectrum of lighting striking the retina– other nearby colors (space)– adaptation to previous views (time)– “state of mind”
CSE152, Spr 05 Intro Computer Vision
From Foundations of Vision, Brian Wandell, 1995, via B. Freeman slides
CSE152, Spr 05 Intro Computer Vision CSE152, Spr 05 Intro Computer Vision
CSE152, Spr 05 Intro Computer Vision CSE152, Spr 05 Intro Computer Vision

6
CSE152, Spr 05 Intro Computer Vision CSE152, Spr 05 Intro Computer Vision
Color Afterimage: South African Flag
opponent colors Blue -> yellowRed -> green
CSE152, Spr 05 Intro Computer Vision CSE152, Spr 05 Intro Computer Vision
Light Spectrum
CSE152, Spr 05 Intro Computer Vision
Talking about colors1. Spectrum –
• A positive function over interval 400nm-700nm
• “Infinite” number of values needed.2. Names
• red, harvest gold, cyan, aquamarine, auburn, chestnut
• A large, discrete set of color names3. R,G,B values
• Just 3 numbersCSE152, Spr 05 Intro Computer Vision
Color ReflectanceMeasured color spectrum is
a function of the spectrum of the illumination and reflectance
From Foundations of Vision, Brian Wandell, 1995, via B. Freeman slides
7
CSE152, Spr 05 Intro Computer Vision
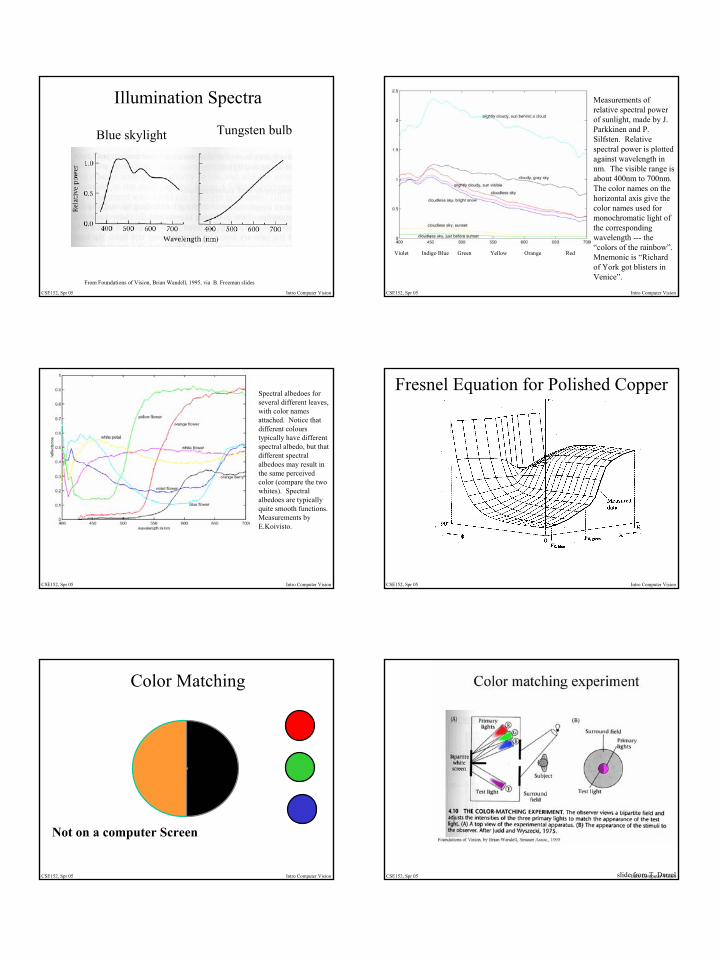
Illumination Spectra
Blue skylight Tungsten bulb
From Foundations of Vision, Brian Wandell, 1995, via B. Freeman slides
CSE152, Spr 05 Intro Computer Vision
Measurements of relative spectral power of sunlight, made by J. Parkkinen and P. Silfsten. Relative spectral power is plotted against wavelength in nm. The visible range is about 400nm to 700nm. The color names on the horizontal axis give the color names used for monochromatic light of the corresponding wavelength --- the “colors of the rainbow”. Mnemonic is “Richard of York got blisters in Venice”.
Violet Indigo Blue Green Yellow Orange Red
CSE152, Spr 05 Intro Computer Vision
Spectral albedoes for several different leaves, with color names attached. Notice that different colourstypically have different spectral albedo, but that different spectral albedoes may result in the same perceived color (compare the two whites). Spectral albedoes are typically quite smooth functions. Measurements by E.Koivisto.
CSE152, Spr 05 Intro Computer Vision
Fresnel Equation for Polished Copper
CSE152, Spr 05 Intro Computer Vision
Color Matching
Not on a computer Screen
CSE152, Spr 05 Intro Computer Visionslide from T. Darrel

8
CSE152, Spr 05 Intro Computer Visionslide from T. Darrel CSE152, Spr 05 Intro Computer Visionslide from T. Darrel
CSE152, Spr 05 Intro Computer Visionslide from T. Darrel CSE152, Spr 05 Intro Computer Visionslide from T. Darrel
CSE152, Spr 05 Intro Computer Visionslide from T. Darrel CSE152, Spr 05 Intro Computer Visionslide from T. Darrel

9
CSE152, Spr 05 Intro Computer Visionslide from T. Darrel CSE152, Spr 05 Intro Computer Visionslide from T. Darrel
CSE152, Spr 05 Intro Computer Vision
The principle of trichromacy• Experimental facts:
– Three primaries will work for most people if we allow subtractive matching
• Exceptional people can match with two or only one primary.
• This could be caused by a variety of deficiencies.
– Most people make the same matches.• There are some anomalous trichromats, who use
three primaries but make different combinations to match.
CSE152, Spr 05 Intro Computer Vision
Color receptors
“Red” cone “Green” cone “Blue” cone
Response of k’th cone = λλλρ dEk
)()(∫
CSE152, Spr 05 Intro Computer Vision
Color Matching Functions
CSE152, Spr 05 Intro Computer Vision
Color spaces
• Linear color spaces describe colors as linear combinations of primaries
• Choice of primaries=choice of color matching functions=choice of color space
• Color matching functions, hence color descriptions, are all within linear transformations
• RGB: primaries are monochromatic, energies are 645.2nm, 526.3nm, 444.4nm. Color matching functions have negative parts -> some colors can be matched only subtractively.
• CIE XYZ: Color matching functions are positive everywhere, but primaries are imaginary. Usually draw x, y, where x=X/(X+Y+Z)
y=Y/(X+Y+Z)

10
CSE152, Spr 05 Intro Computer Vision
RGB Color Cube• Block of colours for (r, g,
b) in the range (0-1).• Convenient to have an
upper bound on coefficient of each primary.
• In practice:– primaries given by monitor
phosphors– (phosphors are the materials
on the face of the monitor screen that glow when struck by electrons)
CSE152, Spr 05 Intro Computer Vision
YIQ Model
• Used by NTSC TV standard• Separates Hue & Saturation (I,Q) from
Luminance (Y)
−−−=
BGR
QIY
311.0532.0212.0321.0275.0596.0
114.0587.0299.0
Related Documents










