Cálculo Diferencial em IR n (Cálculo diferencial em campos escalares) José António Caldeira Duarte DMAT 16 Maio 2001

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Cálculo Diferencial em IRn
(Cálculo diferencial em campos escalares)
José António Caldeira Duarte
DMAT
16 Maio 2001

Conteúdo
1 Cálculo Diferencial em Campos Escalares 2
1.1 Derivadas Parciais de 1a Ordem . . . . . . . . . . . . . . . . . 21.2 Derivadas Parcias de Ordem Superior à Primeira . . . . . . . 61.3 Diferenciabilidade de Campos Escalares . . . . . . . . . . . . . 71.4 Derivada Dirigida . . . . . . . . . . . . . . . . . . . . . . . . . 161.5 O vector Gradiente . . . . . . . . . . . . . . . . . . . . . . . . 19
1 16/Maio/2001
1 Cálculo Diferencial em Campos Escalares
O conceito fundamental desta secção é o de derivada de um campo escalar.
1.1 Derivadas Parciais de 1a Ordem
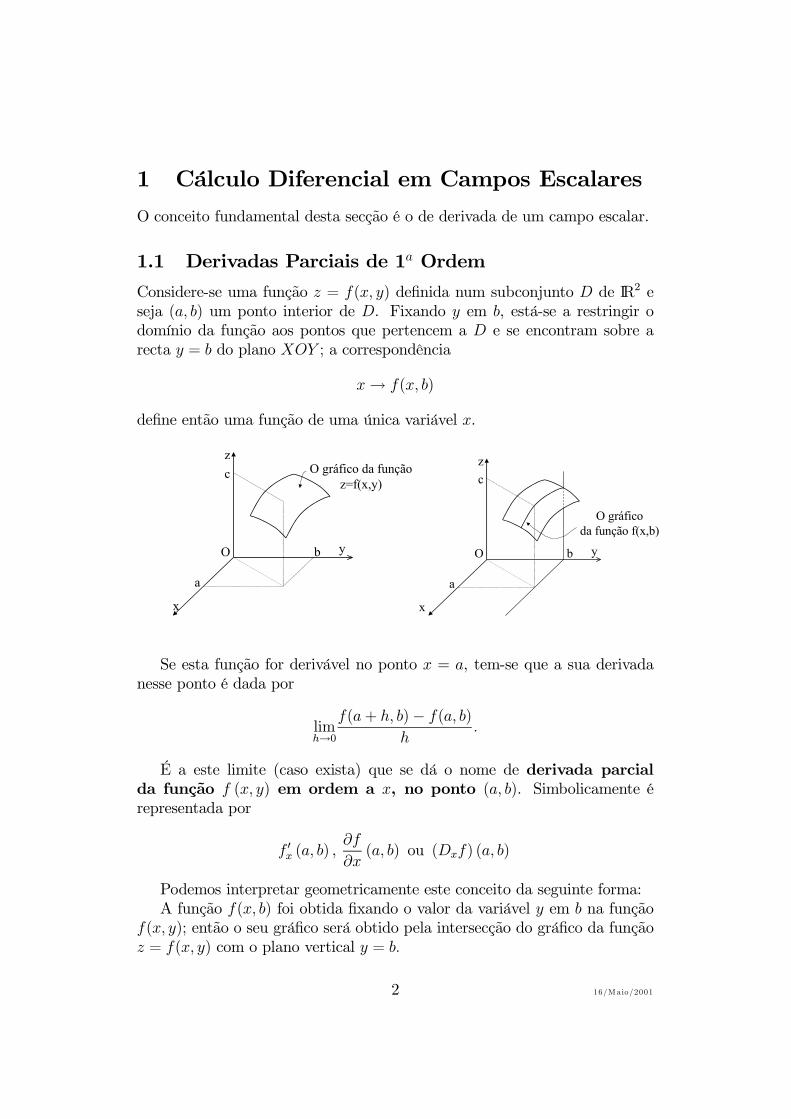
Considere-se uma função z = f(x, y) definida num subconjunto D de IR2 eseja (a, b) um ponto interior de D. Fixando y em b, está-se a restringir odomínio da função aos pontos que pertencem a D e se encontram sobre arecta y = b do plano XOY ; a correspondência
x→ f(x, b)
define então uma função de uma única variável x.
a
O b
x
y
c
zO gráfico da função
z=f(x,y)
a
O b
x
y
c
z
O gráfico
da função f(x,b)
Se esta função for derivável no ponto x = a, tem-se que a sua derivadanesse ponto é dada por
limh→0
f(a+ h, b)− f(a, b)h
.
É a este limite (caso exista) que se dá o nome de derivada parcialda função f (x, y) em ordem a x, no ponto (a, b). Simbolicamente érepresentada por
f ′x (a, b) ,∂f
∂x(a, b) ou (Dxf) (a, b)
Podemos interpretar geometricamente este conceito da seguinte forma:A função f(x, b) foi obtida fixando o valor da variável y em b na função
f(x, y); então o seu gráfico será obtido pela intersecção do gráfico da funçãoz = f(x, y) com o plano vertical y = b.
2 16/Maio/2001

A derivada parcial de f em ordem a x no ponto (a, b), sendo a derivadada função real de variável real z = f(x, b), representará o declive da rectatangente ao seu gráfico no ponto (a, b, c).
a
O b
x
y
c
z
A recta tangente
ao gráfico da função
f(x,b) no ponto (a,b,c).
O gráfico
da função f(x,b)
De forma análoga define-se a derivada parcial de f (x, y) em ordem a yno ponto (a, b). Fixando x em a, a transformação
y → f(a, y)
define uma função de uma só variável y;
a
O b
x
y
c
z
O gráfico
da função f(a,y)
se esta função for derivável no ponto y = b, a sua derivada nesse ponto édada por
limk→0
f(a, b+ k)− f(a, b)k
que representa a derivada parcial de f (x, y) em ordem a y no ponto
(a, b).
3 16/Maio/2001
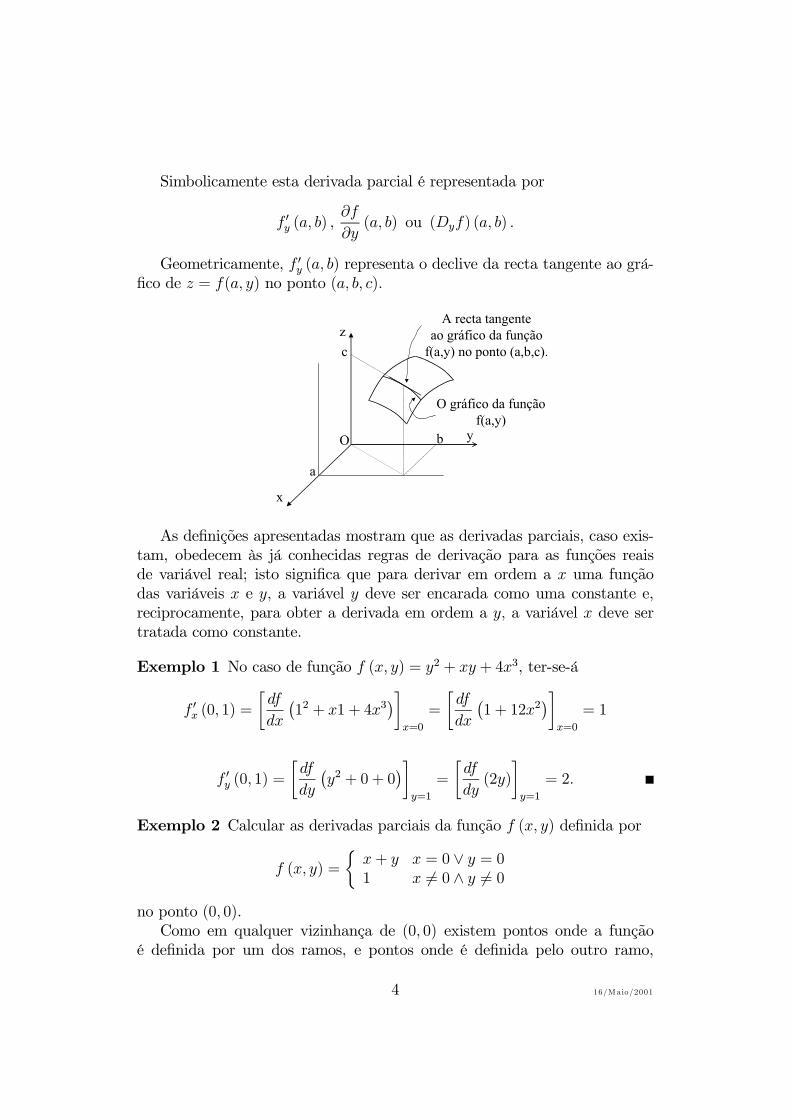
Simbolicamente esta derivada parcial é representada por
f ′y (a, b) ,∂f
∂y(a, b) ou (Dyf) (a, b) .
Geometricamente, f ′y (a, b) representa o declive da recta tangente ao grá-fico de z = f(a, y) no ponto (a, b, c).
a
O b
x
y
c
z
O gráfico da função
f(a,y)
A recta tangente
ao gráfico da função
f(a,y) no ponto (a,b,c).
As definições apresentadas mostram que as derivadas parciais, caso exis-tam, obedecem às já conhecidas regras de derivação para as funções reaisde variável real; isto significa que para derivar em ordem a x uma funçãodas variáveis x e y, a variável y deve ser encarada como uma constante e,reciprocamente, para obter a derivada em ordem a y, a variável x deve sertratada como constante.
Exemplo 1 No caso de função f (x, y) = y2 + xy + 4x3, ter-se-á
f ′x (0, 1) =[df
dx
(12 + x1 + 4x3
)]x=0
=
[df
dx
(1 + 12x2
)]x=0
= 1
f ′y (0, 1) =[df
dy
(y2 + 0 + 0
)]y=1
=
[df
dy(2y)
]y=1
= 2.
Exemplo 2 Calcular as derivadas parciais da função f (x, y) definida por
f (x, y) =
{x+ y x = 0 ∨ y = 01 x �= 0 ∧ y �= 0
no ponto (0, 0).Como em qualquer vizinhança de (0, 0) existem pontos onde a função
é definida por um dos ramos, e pontos onde é definida pelo outro ramo,
4 16/Maio/2001

(qualquer vizinhança de (0, 0) contém pontos que se encontram sobre os eixosonde a função é definida pela expressão x + y, e pontos que não pertencemaos eixos, onde a função assume o valor 1),
������������������������������������������������������������������������������������������������������������������������
as derivadas parciais terão que ser calculadas utilizando a definição.Tem-se então,
f ′x (0, 0) = limh→0
f(h, 0)− f(0, 0)h
= limh→0
h− 0h
= 1
f ′y (0, 0) = limk→0
f(0, k)− f(0, 0)k
= limk→0
k − 0k
= 1.
Repare-se que no exemplo anterior ambas as derivadas parciais de fexistem na origem, mas a função não é continua neste ponto; de factolim
(x,y)→(0,0)f(x, y) não existe.
Contrariamente ao que se verifica para as função reais de variável real,em que a existência de derivada finita num ponto implica que a função sejacontinua. nesse ponto, em campos escalares a existência de derivadas parciaisfinitas não implica continuidade.A definição de derivada parcial generaliza-se com facilidade a campos
escalares de IRn em IR.
Definição 1 Seja f : D ⊆ IRn → IR e (a1, a2, . . . , an) ∈ intD. Chama-se derivada parcial de f em ordem à variável xi, 1 ≤ i ≤ n, no ponto(a1, a2, . . . , an), e representa-se por
∂f
∂xi(a1, a2, . . . , an), ao limite
limh→0
f(a1, a2, . . . , ai + h, . . . , an)− f(a1, a2, . . . , ai, . . . , an)h
.
5 16/Maio/2001

1.2 Derivadas Parcias de Ordem Superior à Primeira
Considere-se agora uma função f : D ⊆ IR2 → IR que admite derivada parcialem ordem a x, num conjunto de pontos E ⊆ D. A cada ponto de E podemospois associar um número real - a derivada parcial de f em ordem a x nesseponto. Obtém-se assim uma nova função de E em IR, que se chama a funçãoderivada parcial de f em ordem a x, e que se representa por ∂f
∂xou f ′x.
De uma forma análoga se poderia definir a função derivada parcialem ordem a y, ∂f
∂you f ′y.
Exemplo 3 A função f (x, y) = x3y2 − 3xy admite como funções derivadasparciais
f ′x = 3x2y2 − 3y
f ′y = 2x3y − 3x
Como novas funções f ′x e f′y podem admitir por sua vez, derivadas parciais.
Assim, a derivada parcial de f ′x em ordem a x, num ponto (a, b) ∈ D′ será
limh→0
f ′x(a+ h, b)− f ′x(a, b)h
e representa-se por f ′′x2(a, b) ou ∂2f
∂x2(a, b).
A derivada parcial de f ′x em ordem a y, no ponto (a, b) será calculada por
limk→0
f ′x(a, b+ k)− f ′x(a, b)k
que se representa por f ′′xy (a, b) ou∂2f
∂y∂x(a, b).
As derivadas parciais da função f ′y, em ordem a x e em ordem a y, sãorespectivamente,
∂2f
∂x∂y(a, b) = f ′yx (a, b) e
∂2f
∂y2(a, b) = f ′′y2 (a, b)
Note que ∂2f
∂y∂x(a, b) e ∂2f
∂x∂y(a, b) são abreviaturas das notações
∂2f
∂y∂x(a, b) =
∂
∂y
(∂f
∂x(a, b)
),
∂2f
∂x∂y(a, b) =
∂
∂x
(∂f
∂y(a, b)
).
Às derivadas f ′′x2, f ′′xy, f
′′y2e f ′′yx chamam-se as derivadas parciais de 2
a
ordem da função f .
6 16/Maio/2001

Exemplo 4 No exemplo anterior,
f ′′x2 = 6xy2
f ′′xy = 6x2y − 3
f ′′yx = 6x2y − 3
f ′′y2 = 2x3
A partir das derivadas de 2aordem podem ser definidas as derivadas de3a ordem e assim sucessivamente.As derivadas f ′′xy e f
′′yx costumam ser designadas por derivadas mistas e em
certas condições dá-se a igualdade entre elas, como acontece no exemplo an-terior. O teorema que apresentamos a seguir, sem demonstração, estabelecealgumas condições em que se dá essa igualdade.
Teorema 1 (Schwarz) Se existirem f ′x, f′y e f
′′xy numa vizinhança de (a, b)
e se f ′′xy for contínua nesse ponto, então também existe f ′′yx (a, b) e
f ′′xy (a, b) = f′′yx (a, b) .
Dem. Omitida.
1.3 Diferenciabilidade de Campos Escalares
Da mesma forma que a diferenciabilidade de uma função real de variávelreal, num certo ponto a do seu domínio, está associada à existência de umarecta tangente ao gráfico da função no ponto (a, f (a)), a diferenciabilidadede um campo escalar de IR2 em IR, num ponto (a, b) do seu domínio, estáassociada à existência do plano tangente ao gráfico desse campo escalar no
7 16/Maio/2001
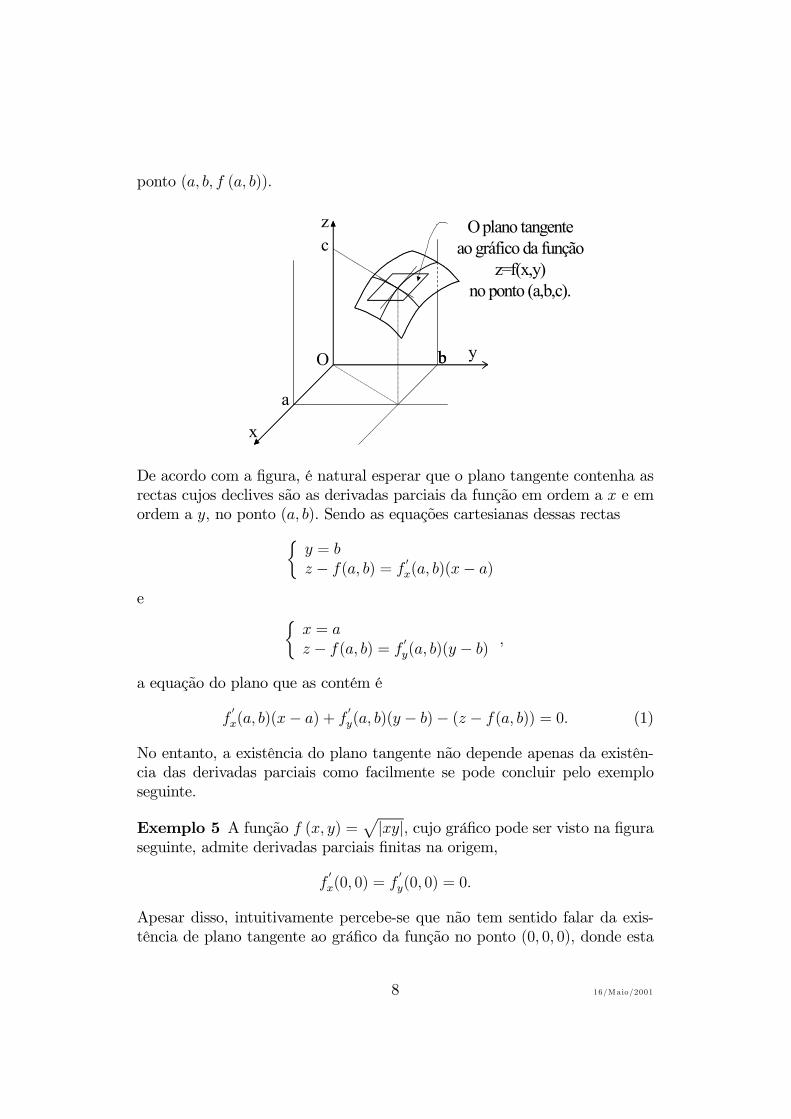
ponto (a, b, f (a, b)).
b
a
O b
x
y
c
z O plano tangente
ao gráfico da função
z=f(x,y)
no ponto (a,b,c).
De acordo com a figura, é natural esperar que o plano tangente contenha asrectas cujos declives são as derivadas parciais da função em ordem a x e emordem a y, no ponto (a, b). Sendo as equações cartesianas dessas rectas{
y = bz − f(a, b) = f ′x(a, b)(x− a)
e {x = az − f(a, b) = f ′y(a, b)(y − b) ,
a equação do plano que as contém é
f′
x(a, b)(x− a) + f′
y(a, b)(y − b)− (z − f(a, b)) = 0. (1)
No entanto, a existência do plano tangente não depende apenas da existên-cia das derivadas parciais como facilmente se pode concluir pelo exemploseguinte.
Exemplo 5 A função f (x, y) =√|xy|, cujo gráfico pode ser visto na figura
seguinte, admite derivadas parciais finitas na origem,
f′
x(0, 0) = f′
y(0, 0) = 0.
Apesar disso, intuitivamente percebe-se que não tem sentido falar da exis-tência de plano tangente ao gráfico da função no ponto (0, 0, 0), donde esta
8 16/Maio/2001
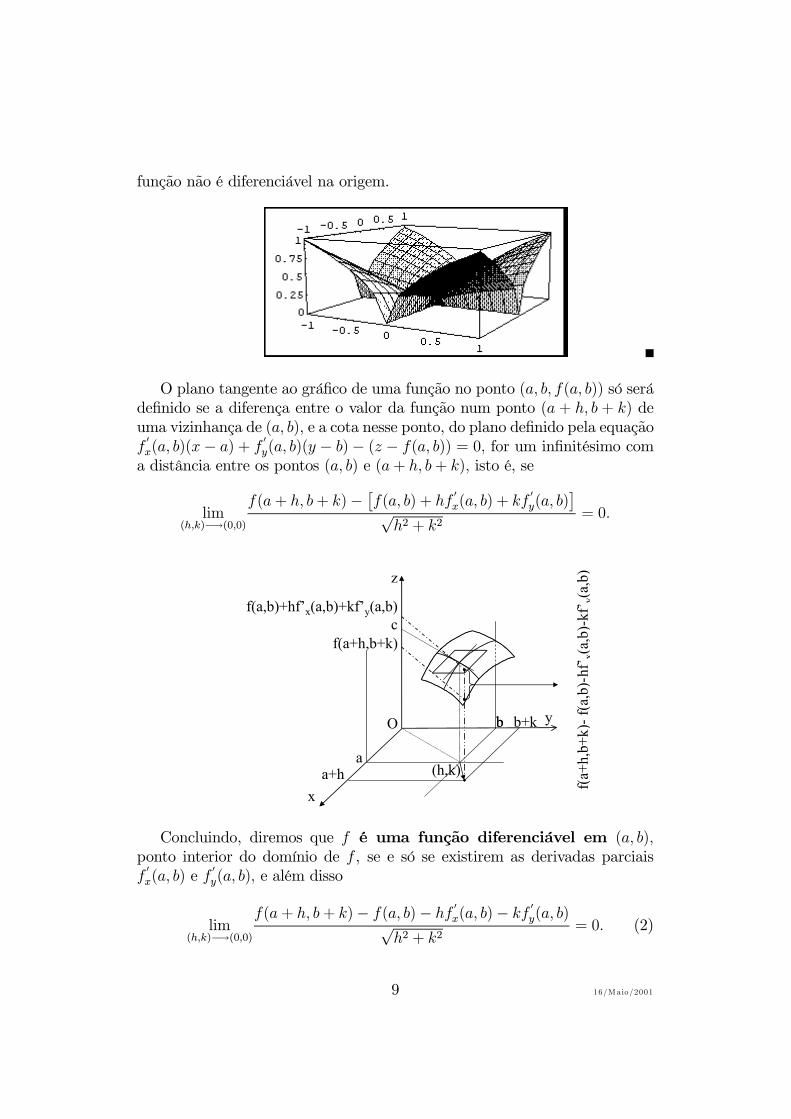
função não é diferenciável na origem.
O plano tangente ao gráfico de uma função no ponto (a, b, f(a, b)) só serádefinido se a diferença entre o valor da função num ponto (a + h, b + k) deuma vizinhança de (a, b), e a cota nesse ponto, do plano definido pela equaçãof′
x(a, b)(x− a) + f ′y(a, b)(y − b)− (z − f(a, b)) = 0, for um infinitésimo coma distância entre os pontos (a, b) e (a+ h, b+ k), isto é, se
lim(h,k)−→(0,0)
f(a+ h, b+ k)− [f(a, b) + hf ′x(a, b) + kf ′y(a, b)]√h2 + k2
= 0.
b
c
z
a
O b
x
yb+k
a+h
f(a+h,b+k)
f(a,b)+hf’x(a,b)+kf’y(a,b)
f(a+
h,b
+k
)- f
(a,b
)-hf’x(a
,b)-
kf’y(a
,b)
(h,k)
Concluindo, diremos que f é uma função diferenciável em (a, b),ponto interior do domínio de f , se e só se existirem as derivadas parciaisf′
x(a, b) e f′
y(a, b), e além disso
lim(h,k)−→(0,0)
f(a+ h, b+ k)− f(a, b)− hf ′x(a, b)− kf ′y(a, b)√h2 + k2
= 0. (2)
9 16/Maio/2001

Exemplo 6 Para provar que a função f (x, y) = x2y2 é diferenciável em(0, 0) comecemos por calcular f ′x (0, 0) e f
′y (0, 0):
f ′x (x, y) = 2xy2 e f ′y (x, y) = 2yx
2 ⇒ f ′x (0, 0) = 0 e f′y (0, 0) = 0.
Vamos agora demonstrar que
lim(h,k)→(0,0)
f (0 + h, 0 + k)− f (0, 0)− hf ′x (0, 0)− kf ′y (0, 0)√h2 + k2
= 0.
Para isso vamos utilizar a definição de limite; neste caso,
lim(h,k)→(0,0)
f (0 + h, 0 + k)− f (0, 0)− hf ′x (0, 0)− kf ′y (0, 0)√h2 + k2
= 0⇔
lim(h,k)→(0,0)
h2k2√h2 + k2
= 0⇔
∀δ > 0,∃ε > 0 :√h2 + k2 < ε⇒
∣∣∣∣ h2k2√h2 + k2
∣∣∣∣ < δ.Ora, ∣∣∣∣ h2k2√
h2 + k2
∣∣∣∣ = h2k2√h2 + k2
≤ (h2 + k2)2
√h2 + k2
=(h2 + k2
) 23 ;
Então, fazendo ε = δ3
2 fica provado que, quando√h2 + k2 < ε,∣∣∣∣ h2k2√
h2 + k2
∣∣∣∣ ≤ (h2 + k2) 23 < ε 23 = (δ 32)2
3
= δ.
Repare-se agora que da relação 2 podemos concluir que
lim(h,k)−→(0,0)
f(a+ h, b+ k)− f(a, b)− hf ′x(a, b)− kf′
y(a, b) = 0,
ou, equivalentemente,
f(a+ h, b+ k) = f(a, b) + hf′
x(a, b) + kf′
y(a, b) +R (h, k) , com (3)
lim(h,k)−→(0,0)
R (h, k) = 0.
A igualdade 3 pode ainda ser expressa na forma
f(a+ h, b+ k) = f(a, b) +[f′
x(a, b) f′
y(a, b)] [ h
k
]+R (h, k) ;
10 16/Maio/2001

fazendo
α = (a, b) , v = he1 + ke2
e designando por Dfα a aplicação linear de IR2 em IR representada matri-cialmente por
[f′
x(a, b) f′
y(a, b)]tem-se
f (α+ v) = f (α) +Dfα (v)+R (v) ,
o que sugere a definição seguinte.
Definição 2 Seja f : D ⊆ IR2 → IR e α =(a, b) ∈ intD. f é diferenciávelem α se e só se existir uma bola aberta centrada em α e de raio r, Br(α) ⊆D,e uma aplicação linear Dfα de IR
2 → IR, tais que:
f (α+ v) = f (α) +Dfα (v) +R (v) , (4)
com lim‖v‖→0
R (v)
‖v‖ = 0,
para qualquer vector v ∈IR2 que satisfaça a condição ‖v‖ < r.
A aplicação linearDfα referida na definição anterior diz-se o diferencial,derivada ou derivada total de f em α e representa-se habitualmente porf′
(α).O teorema que enunciamos a seguir mostra que esta definição é equiva-
lente à apresentada inicialmente.
Proposição 2 Seja f : D ⊆ IR2 → IR e α =(a, b) ∈ intD. Se f é diferen-ciável em α, então a aplicação linear Dfα é representada matricialmente por[f′
x(a, b) f′
y(a, b)].
Dem. Seja Dfα =[s1 s2
], α = (a, b) , v = he1 + ke2. A relação 4
pode então ser escrita na forma
f(a+ h, b+ k) = f(a, b) + s1h+ s2k +R (h, k) . (5)
Fazendo h = 0 na relação anterior, tem-se
f(a, b+ k) = f(a, b) + s2k +R (0, k)⇒f(a, b+ k)− f(a, b)
k= s2 +
R(0, k)
k.
11 16/Maio/2001

Como limk→0
R(0,k)k
= 0, conclui-se que
limk→0
f(a, b+ k)− f(a, b)k
= s2 ⇒s2 = f
′
y(a, b).
Fazendo agora k = 0 na relação 5, tem-se
f(a+ h, b) = f(a, b) + s1h+R (h, 0)⇒f(a+ h, b)− f(a, b)
h= s1 +
R(h, 0)
h.
Como também limh→0
R(h,0)h
= 0, conclui-se que
limk→0
f(a+ h, b)− f(a, b)h
= s1 ⇒s1 = f
′
x(a, b).
A equação 4, válida para ‖v‖ < r, é chamada a fórmula de Taylor de1aordem para f (α+ v) e fornece uma aproximação linear, Dfα (v) , paraa diferença f (α+ v)− f (α) . Desprezando R (v) podemos escrever
f (α+ v)− f (α) ≈ Dfα (v) .
O erro que se comete ao fazer esta aproximação é portanto igual a R (v) ,que é um termo de ordem inferior a ‖v‖ quando ‖v‖ → 0.Era isto, aliás, o que já acontecia com as funções reais de variável real.
Relembrando um pouco este assunto, dizer que uma função real de variávelreal, f , pode ser aproximada linearmente em x = a, será poder escrevê-la nafórmula de Taylor com resto de primeira ordem:
f (a+ h) = f (a) + f ′ (a)h+R1 (x) , com lim|h|→0
R1 (h)
h= 0
Repare-se que na vizinhança de a, a aproximação linear de f (x) é a função
f(x) = f (a) + f ′ (a) (x− a) = f ′ (a)x+ [f (a)− f ′ (a) a]
que representa a equação de uma recta com declive f ′ (a) e ordenada naorigem [f (a)− f ′ (a) a].
12 16/Maio/2001

Exemplo 7 A função f (x) = ex, numa vizinhança do ponto 0, tem comoaproximação linear a função y = x+ 1. Como df = f ′ (x0) dx então
�f ≈ f ′ (x0)� x.
Assim,
ex − e0 ≈ e0 (x− 0) ,
resultando
ex ≈ x+ 1.
0
0.5
1
1.5
2
2.5
-1 -0.5 0.5 1x
Exemplo 8 A função do exemplo 6, f(x, y) = x2y2, tem como aproximaçãolinear numa vizinhança do ponto (0, 0), o plano tangente de equação z = 0.
Isto significa que numa vizinhança de (0, 0), x2y2 ≈ 0.
Vamos agora apresentar a generalização dos resultados anteriores, a cam-pos escalares definidos em IRn.
13 16/Maio/2001

Definição 3 Seja f : D ⊆ IRn → IR e α =(α1, . . . ,αn) ∈ intD. f édiferenciável em α se e só se existir uma bola aberta centrada em α e deraio r, Br(α), e uma aplicação linear Dfα de IR
n → IR, tais que:
f (α+ v) = f (α) +Dfα (v) +R (v) , (6)
com lim‖v‖→0
R (v)
‖v‖ = 0,
para qualquer vector v ∈IRn que satisfaça a condição ‖v‖ < r.
Proposição 3 Seja f : D ⊆ IRn → IR e α =(α1, . . . ,αn) ∈ intD. Se f édiferenciável em α, então a aplicação linear Dfα é representada matricial-mente por [
f′
x1(α) . . . f
′
xn(α)
].
Dem. Exercício.
Vimos anteriormente que a existência das derivadas parciais não garantea diferenciabilidade de um campo escalar; mas o mesmo não se passa com aderivada total.
Proposição 4 Seja: f : D ⊆ IRn → IR e α ∈ intD. Se f é diferenciável emα então f é contínua neste ponto.Dem. Pretende-se mostrar que lim
x→αf (x) = f (α) , ou de outro modo,
que limv→0
f (α+ v) = f (α)Como f é diferenciável em α, tem-se
f (α+ v) = f (α) +Dfα (v) +R (v) ,
com lim‖v‖→0
R (v)
‖v‖ = 0.
Fazendo v→ 0, na expressão anterior, resulta
limv→0
f (α+ v) = limv→0
f (α) + limv→0
Dfα (v) + limv→0
R (v) =
= f (α) .
pois por hipótese limv→0
R (v) = 0 e qualquer aplicação linear é uma função
contínua.
14 16/Maio/2001

A afirmação recíproca não é verdadeira! Existem funções contínuas quenão são diferenciáveis como o exemplo 5 mostra!Nem sempre é fácil verificar se uma função é diferenciável recorrendo à
definição. Tem interesse, por isso, conhecer condições suficientes que garan-tam a diferenciabilidade de uma função.
Proposição 5 Seja f um campo escalar definido num subconjunto D deIRn e α ∈ intD; se todas as derivadas parciais de f são continuas numavizinhança de α então f é diferenciável nesse ponto.Dem. Omite-se a demonstração deste resultado.
Exemplo 9 A função f (x, y) = x2 + 2xy + y2 é diferenciável em qualquerponto de IR2, pois
f ′x = 2x+ 2y e f′y = 2x+ 2y
são funções contínuas em qualquer ponto de IR2.
Interessa agora apresentar a definição de um conceito que será frequente-mente utilizado daqui em diante.
Definição 4 Quando uma função admite derivadas parciais continuas atéà ordem p em todos os pontos de um conjunto S, diz-se de classe Cp emS e representa-se por f ∈ Cp (S). Se uma função tiver derivadas parciaiscontínuas, de qualquer ordem em todos os pontos de um conjunto S, diz-sede classe C∞, nesse conjunto. Uma função diz-se de classe C0 no conjuntoS se for contínua em S.
Em face desta definição podemos pois afirmar que uma função de classeC1 numa vizinhança de um ponto (a, b) é diferenciável nesse ponto.
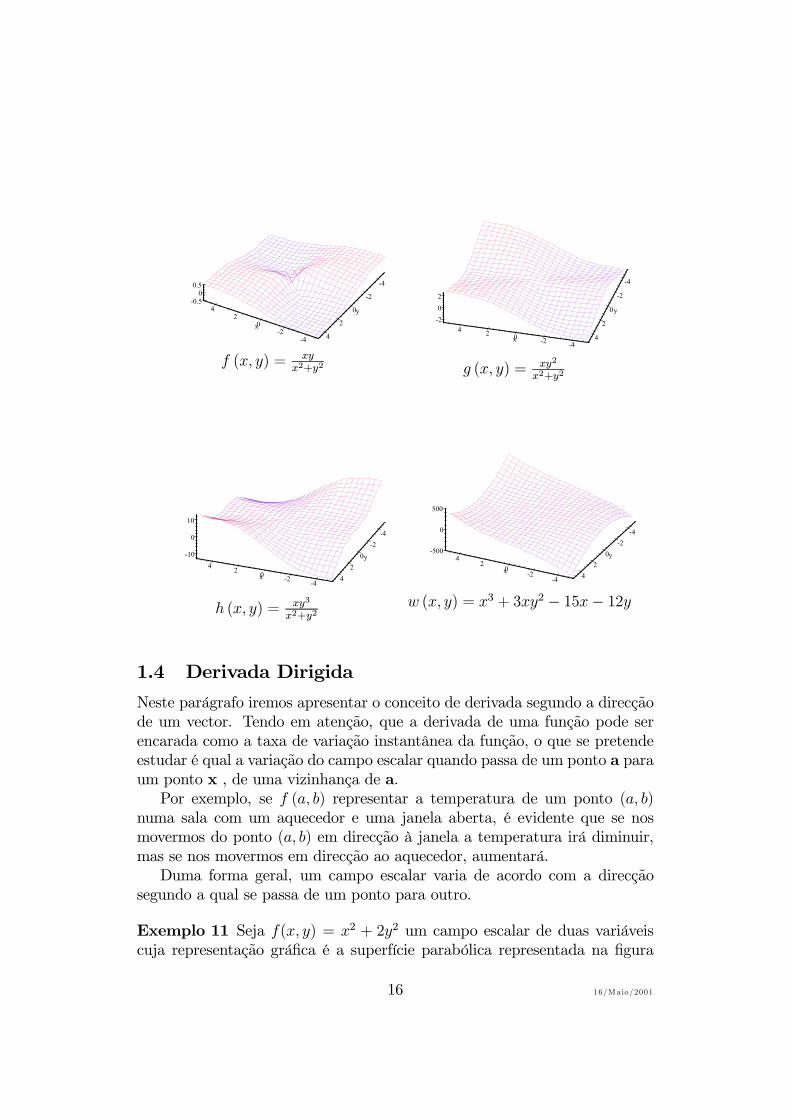
Exemplo 10 Nas figuras seguintes representam-se campos escalares comdiferentes comportamentos na vizinhança da origem: f (x, y) = xy
x2+y2(des-
contínuo), g (x, y) = xy2
x2+y2(prolongável por contínuidade mas com prolonga-
mento não diferenciável), h (x, y) = xy3
x2+y2(com prolongamento por con-
tinuidade diferenciável). O campo escalar, w (x, y) = x3+3xy2− 15x− 12y,constitui um exemplo de uma aplicação C∞ (“suave”).
15 16/Maio/2001
-4-2
02
4
x
-4
-2
0
2
4
y
-0.5
00.5
f (x, y) = xy
x2+y2
-4-2
02
4
x
-4
-2
0
2
4
y
-2
0
2
g (x, y) = xy2
x2+y2
-4-2
02
4
x
-4
-2
0
2
4
y-10
0
10
h (x, y) = xy3
x2+y2
-4-2
02
4
x
-4
-2
0
2
4
y-500
0
500
w (x, y) = x3 + 3xy2 − 15x− 12y
1.4 Derivada Dirigida
Neste parágrafo iremos apresentar o conceito de derivada segundo a direcçãode um vector. Tendo em atenção, que a derivada de uma função pode serencarada como a taxa de variação instantânea da função, o que se pretendeestudar é qual a variação do campo escalar quando passa de um ponto a paraum ponto x , de uma vizinhança de a.Por exemplo, se f (a, b) representar a temperatura de um ponto (a, b)
numa sala com um aquecedor e uma janela aberta, é evidente que se nosmovermos do ponto (a, b) em direcção à janela a temperatura irá diminuir,mas se nos movermos em direcção ao aquecedor, aumentará.Duma forma geral, um campo escalar varia de acordo com a direcção
segundo a qual se passa de um ponto para outro.
Exemplo 11 Seja f(x, y) = x2 + 2y2 um campo escalar de duas variáveiscuja representação gráfica é a superfície parabólica representada na figura
16 16/Maio/2001
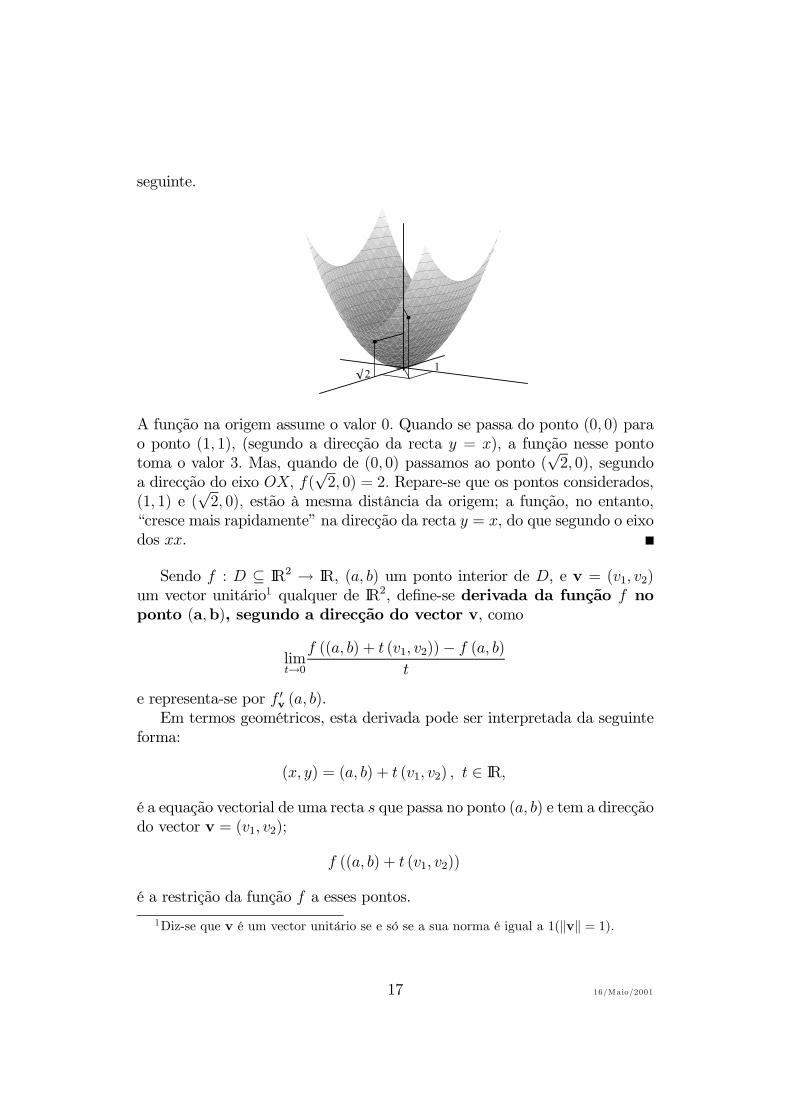
seguinte.
1◊2
A função na origem assume o valor 0. Quando se passa do ponto (0, 0) parao ponto (1, 1), (segundo a direcção da recta y = x), a função nesse pontotoma o valor 3. Mas, quando de (0, 0) passamos ao ponto (
√2, 0), segundo
a direcção do eixo OX, f(√2, 0) = 2. Repare-se que os pontos considerados,
(1, 1) e (√2, 0), estão à mesma distância da origem; a função, no entanto,
“cresce mais rapidamente” na direcção da recta y = x, do que segundo o eixodos xx.
Sendo f : D ⊆ IR2 → IR, (a, b) um ponto interior de D, e v = (v1, v2)um vector unitário1 qualquer de IR2, define-se derivada da função f noponto (a,b), segundo a direcção do vector v, como
limt→0f ((a, b) + t (v1, v2))− f (a, b)
t
e representa-se por f ′v(a, b).
Em termos geométricos, esta derivada pode ser interpretada da seguinteforma:
(x, y) = (a, b) + t (v1, v2) , t ∈ IR,
é a equação vectorial de uma recta s que passa no ponto (a, b) e tem a direcçãodo vector v = (v1, v2);
f ((a, b) + t (v1, v2))
é a restrição da função f a esses pontos.
1Diz-se que v é um vector unitário se e só se a sua norma é igual a 1(‖v‖ = 1).
17 16/Maio/2001
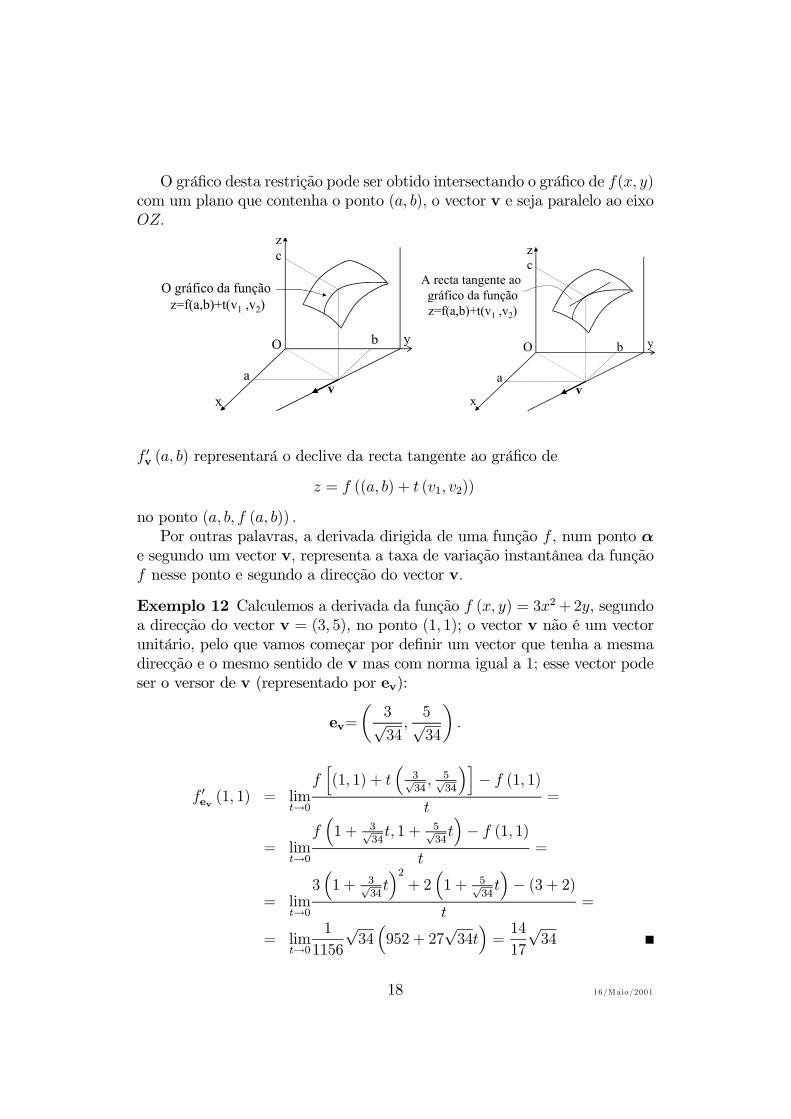
O gráfico desta restrição pode ser obtido intersectando o gráfico de f(x, y)com um plano que contenha o ponto (a, b), o vector v e seja paralelo ao eixoOZ.
a
O b
x
y
c
z
v
O gráfico da função
z=f(a,b)+t(v1 ,v2)
a
O b
x
y
c
z
v
A recta tangente ao
gráfico da função
z=f(a,b)+t(v1 ,v2)
f ′v(a, b) representará o declive da recta tangente ao gráfico de
z = f ((a, b) + t (v1, v2))
no ponto (a, b, f (a, b)) .Por outras palavras, a derivada dirigida de uma função f , num ponto α
e segundo um vector v, representa a taxa de variação instantânea da funçãof nesse ponto e segundo a direcção do vector v.
Exemplo 12 Calculemos a derivada da função f (x, y) = 3x2+2y, segundoa direcção do vector v = (3, 5), no ponto (1, 1); o vector v não é um vectorunitário, pelo que vamos começar por definir um vector que tenha a mesmadirecção e o mesmo sentido de v mas com norma igual a 1; esse vector podeser o versor de v (representado por ev):
ev=
(3√34,5√34
).
f ′ev(1, 1) = lim
t→0
f[(1, 1) + t
(3√34, 5√
34
)]− f (1, 1)
t=
= limt→0
f(1 + 3√
34t, 1 + 5√
34t)− f (1, 1)
t=
= limt→0
3(1 + 3√
34t)2+ 2
(1 + 5√
34t)− (3 + 2)
t=
= limt→0
1
1156
√34(952 + 27
√34t)=14
17
√34
18 16/Maio/2001

A definição apresentada generaliza-se facilmente para uma função definidanum subconjunto de IRn.
Definição 5 Seja f : D ⊆ IRn → IR, α ∈ intD e v um vector qualquerde IRn; Chama-se derivada de f no ponto α, segundo o vector v, erepresenta-se por f ′
v(α), ao seguinte limite quando este existe:
limt→0f (α+ tv)− f (α)
t
Chama-se derivada de f no ponto α segundo a direcção do vector v a derivadasegundo o versor ev de v.
As derivadas parciais de um campo escalar constituem casos particularesde derivadas direccionais; de facto, fazendo v = ei, i = 1, . . . , n, na definição5 obtemos
f ′ei(α) =
∂f
∂xi(α) .
1.5 O vector Gradiente
Neste parágrafo iremos admitir que a função f : D ⊆ IRn → IR é diferenciávelem α ∈ intD. Nestas condições define-se vector gradiente da função fno ponto α e representa-se por
�f (α) ou gradf (α) .ao vector cujas componentes são as derivadas parciais de f no ponto α,(
∂f
∂x1(α) , . . . ,
∂f
∂xn(α)
).
Repare-se que, sendo (e1, . . . , en) a base canónica de IRn,
�f (α) = ∂f
∂x1(α) e1 + · · ·+ ∂f
∂xn(α) en.
Exemplo 13 Calculemos o gradiente da função f (x, y) = 3x2+2y, no ponto(1, 1);
f ′x (x, y) = 6x⇒ f ′x (1, 1) = 6 e f′y (x, y) = 2⇒ f ′y (1, 1) = 2.
Assim
gradf (1, 1) = �f (1, 1) = (6, 2) = 6e1 + 2e2.
19 16/Maio/2001

Vejamos agora algumas propriedades do vector gradiente.
Proposição 6 Se f : D ⊆ IRn → IR, for diferenciável em α, então:
f ′v(α) = �f (α) |v .
Dem. Sendo f : D ⊂ IRn → IR diferenciável em α, tem-se
f (α+ tv) = f (α) +Dfα (tv) +R (tv)
com
limt→0R (tv)
‖tv‖ = 0.
Ora
f ′v(α) = lim
t→0f (α+ tv)− f (α)
t=
= limt→0
[Dfα (v) +
R (tv)
t
]=
= Dfα (v) =
= �f (α) |v.
Em resumo, a derivada segundo um vector de uma função diferenciável podeser obtida pelo produto interno entre o vector gradiente e o vector em questão.
Proposição 7 Nas condições da proposição anterior,
f ′v(α) = �f (α) |v = ‖�f (α)‖ ‖v‖ cos θ, (7)
em que θ é o ângulo entre os vectores �f (α) e v.Dem. Resulta imediatamente da caracterização de produto interno através
da noção de norma e ângulo entre dois vectores.
Proposição 8 A taxa de variação máxima de um campo escalar verifica-sena direcção e do vector gradiente (se �f (α) �= 0) e o valor absoluto destataxa de variação é igual à norma do vector gradiente, isto é,
|f ′e(α)| = ‖�f (α)‖ .
20 16/Maio/2001

Dem. Seja v um vector de norma 1; a igualdade 7 toma então a forma
f ′v(α) = �f (α) |v = ‖�f (α)‖ cos θ.
Assim, a derivada segundo a direcção de v, f ′v(α), é maxima quando
o vector v tiver a direcção e do vector �f (α) , pois nestas circunstânciascos θ = 1. Mas a derivada segundo a direcção de e, f ′
e(α), traduz precisa-
mente a taxa de variação do campo escalar nesta direcção. Por outro lado,nesta direcção, |f ′
e(α)| = ‖�f (α)‖ .
Exemplo 14 Qual a direcção de maior crescimento da função f (x, y) =x2 − y2, no ponto (0, 1)?A direcção procurada é a direcção do vector gradiente de f em (0, 1),
�f (0, 1) = (0,−2) .
yx
z
x2 -y2 =0
x2 -y2 =1
1
-1
-1 1
x2-y2=-4
x2 -y2=-1
2
2
x2 -y2 =4
A curva de nível que passa
no ponto (0,1).
O vector gradiente
“f(0,1).
Esta resposta é perfeitamente consistente com os gráficos apresentadosanteriormente; de facto, se as linhas de nível representam o lugar geométricodos pontos onde a função assume um valor constante, e o gradiente apontana direcção de maior crescimento, sendo f uma função “razoavelmente bemcomportada”, é natural esperar que o gradiente da função num determinadoponto, e a curva de nível que passa nesse ponto sejam perpendiculares.
O teorema que apresentamos a seguir para n = 3, e cuja demonstraçãoserá deixada como exercício, traduz esta importante propriedade do vectorgradiente.
Proposição 9 Seja f : D ⊆ IR3 → IR uma função diferenciável em (a, b, c) ∈intD; então �f (a, b, c) é perpendicular à superfície de nível da função f quepassa nesse ponto.Dem. Exercício.
21 16/Maio/2001

Exemplo 15 Determinemos a equação do plano tangente à superfície esféri-ca x2 + y2 + z2 = 3 no ponto (1, 1, 1).É de fácil verificação que o ponto referido pertence à superfície indicada.
Por outro lado, designando por f a função definida por
f(x, y, z) = x2 + y2 + z2,
sabemos que o vector gradiente de f no ponto (1, 1, 1) ,
∇f(1, 1, 1) = (2, 2, 2)
é normal à referida superfície no ponto em questão Assim a equação do planotangente será:
(x− 1) 2 + (y − 1) 2 + (z − 1) 2 = 0.
As equações normais da recta normal à superfície no ponto (1, 1, 1) serão:
x− 12
=y − 12
=z − 12
Generalizando este exemplo, suponha-se, agora, que uma dada superfícieé caracterizada pela equação F (x, y, z) = C e que P = (a, b, c) é um pontoda referida superfície. Nestas circunstâncias sabemos que v =gradF (a, b, c)será um vector normal à superfície em P . Assim a equação do plano tangentee as equações da recta normal à superfície serão, respectivamente:
1. Equação do Plano Tangente à superfície F (x, y, z) = C em P =(a, b, c) :
(x− a) ∂F∂x(a, b, c) + (y − b) ∂F
∂y(a, b, c) + (z − c) ∂F
∂z(a, b, c) = 0
2. Equações da Recta Normal à superfície F (x, y, z) = C em P = (a, b, c):
x− a∂F∂x(a, b, c)
=y − b
∂F∂y(a, b, c)
=z − c
∂F∂z(a, b, c)
.
Exemplo 16 Consideremos agora o campo escalar z = f (x, y). Deter-minemos a equação do plano tangente ao gráfico de f no ponto (a, b, f (a, b))bem como as equação cartesianas da recta perpendicular ao seu gráfico nesseponto.
22 16/Maio/2001

Nesta situação, os pontos do gráfico da função f são caracterizados pelacondição f (x, y)− z = 0. Fazendo F (x, y, z) = f(x, y)− z, tem-se
∂F∂x(a, b, f (a, b)) = ∂f
∂x(a, b) ,
∂F∂y(a, b, f (a, b)) = ∂f
∂y(a, b) ,
e∂F∂z(a, b, f (a, b)) = −1.
1. Equação do plano tangente à superfície z = f (x, y) em (a, b, f (a, b)) :
z = (x− a) ∂f∂x(a, b) + (y − b) ∂f
∂y(a, b) + f (a, b) .
2. Equações da recta normal à superfície z = f (x, y) em (a, b, f (a, b)) :
x− a∂f
∂x(a, b)
=y − b∂f
∂y(a, b)
=z − f (a, b)
−1
Referências
[1] Apostol, T. M., Calculus, Reverté, 1977;
[2] Azenha, Acilina e Jerónimo, M. A., Cálculo Diferencial Integral em IR eIRn, McGraw-Hill, 1995;
[3] Lima, Elon Lages, Curso de Análise (Vol 1 e 2), IMPA, Projecto Euclides,1995;
[4] Piskounov, N., Calcul Différentiel et Intégral, MIR, 1976;
[5] Taylor, A. E., Advanced Calculus, Xerox College Publishing, Mas-sachusetts, 1972;
[6] Wade, W. R., An Introduction to Analysis, Prentice Hall, 1995;
23 16/Maio/2001
Related Documents











