This is the author’s version of a work that was submitted/accepted for pub- lication in the following source: Clothier, Reece A., Palmer, Jennifer L., Walker, Rodney A., & Fulton, Neale L. (2010) Definition of airworthiness categories for civil Unmanned Aircraft Systems (UAS). In Proceedings of The 27th International Congress of the Aeronautical Sciences, Acropolis Conference Centre, Nice. (In Press) This file was downloaded from: c Copyright 2010 Please consult the authors. Notice: Changes introduced as a result of publishing processes such as copy-editing and formatting may not be reflected in this document. For a definitive version of this work, please refer to the published source:

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

This is the author’s version of a work that was submitted/accepted for pub-lication in the following source:
Clothier, Reece A., Palmer, Jennifer L., Walker, Rodney A., & Fulton, NealeL. (2010) Definition of airworthiness categories for civil Unmanned AircraftSystems (UAS). In Proceedings of The 27th International Congress of theAeronautical Sciences, Acropolis Conference Centre, Nice. (In Press)
This file was downloaded from: http://eprints.qut.edu.au/32789/
c© Copyright 2010 Please consult the authors.
Notice: Changes introduced as a result of publishing processes such ascopy-editing and formatting may not be reflected in this document. For adefinitive version of this work, please refer to the published source:

Defini&on Of Airworthiness Categories For Civil Unmanned Aircra; Systems
Reece A. Clothier,* Jennifer L. Palmer,† Rodney A. Walker,* Neale L. Fulton‡
*Australian Research Centre for Aerospace Automa5on
†Defence Science and Technology Organisa5on ‡Commonwealth Scien5fic and Industrial Research Organisa5on

• Development of an airworthiness framework for civil unmanned aircraD – Introduc5on to the problem and a proposed method for systema5cally structuring the regula5ons
• Defini5on of UAS type-‐cer5fica5on categories – An ‘objec5ve’ risk-‐based approach – Results
Overview of Presenta&on
Copyright © 2010 R. Clothier www.arcaa.aero

Development of an airworthiness framework for civil UAS
Risk-‐based approach towards the development of “Part 21” equivalent regula?ons for UAS
Copyright © 2010 R. Clothier www.arcaa.aero

• ICAO Chicago Conven5on 1944
• Inten5on is to provide assurance that an aircraD is designed, manufactured, maintained, and operated to an acceptable standard by approved people so as not present an unacceptable level of risk to passengers, other aircraD, or to the people and property over-‐flown
• A suitable framework for regula5ons governing the airworthiness of civil UAS has yet to be defined
• Exis5ng regula5ons and standards may not be directly applicable to all types of UAS and there opera5ons
Introduc&on -‐ Airworthiness
Copyright © 2010 R. Clothier www.arcaa.aero

• As described by McGeer and Vagners [2]:
…with a manned aircraD you have to build to the same standard no maFer what is underneath you, but among unmanned aircraD, acceptable safety for flights exclusively over oceans can be achieved with rather more rickety machines than would be fit to fly over a city.
Challenges
Copyright © 2010 R. Clothier www.arcaa.aero

• Unique aspects
• Diversity
Challenges -‐ Diversity
Copyright © 2010 R. Clothier www.arcaa.aero
Image: Ref.[1] Database of UAS compiled and maintained by Defence Science and Technology Organisa&on (DSTO) personnel. Database includes military UAS
• Before we can go down the path of determining suitable
standards and requirements for UAS, a suitable basis for applying them needs to be established – E.g., exis5ng FAR/JAR Part 23 are applicable but not to ALL UAS
opera5ons
• We need an equivalent (in regulatory func5on) to the FAR/JAR Part 21 – Specifies the type categories of conven5onally-‐piloted avia5on
and the applicable cer5fica5on categories for each type
• How do we systema5cally and jus5fiably describe the diversity of UAS and their opera5ons for the purposes of airworthiness
• This can be answered through another ques5on:
– The purpose of avia5on safety regula5ons is to ...?
Challenges
Copyright © 2010 R. Clothier www.arcaa.aero

Risk-‐Based Approach
Copyright © 2010 R. Clothier www.arcaa.aero

Type Categories
Copyright © 2010 R. Clothier www.arcaa.aero
Defined by the degree of harm a UAS could cause to an area over-‐flown. Note: the type categories are defined independent of the par5cular area over-‐flown (orthogonal to the axis describing the opera5onal environment)

Opera&onal Environments
Copyright © 2010 R. Clothier www.arcaa.aero
Defined by the poten5al for harm given a UAS crashing in the area (characterised by the suscep5bility of an area to a crashing UAS: popula5on density, degree of sheltering, hazardous industry etc). Note: the categories of opera5onal environment are defined independent of the par5cular type of UAS over-‐flying (orthogonal to the type category axis)

Opera&onal Scenarios
Copyright © 2010 R. Clothier www.arcaa.aero
Each cell of the matrix defines a unique opera5onal scenario (the combina5on of a UAS type and par5cular opera5ng environment).
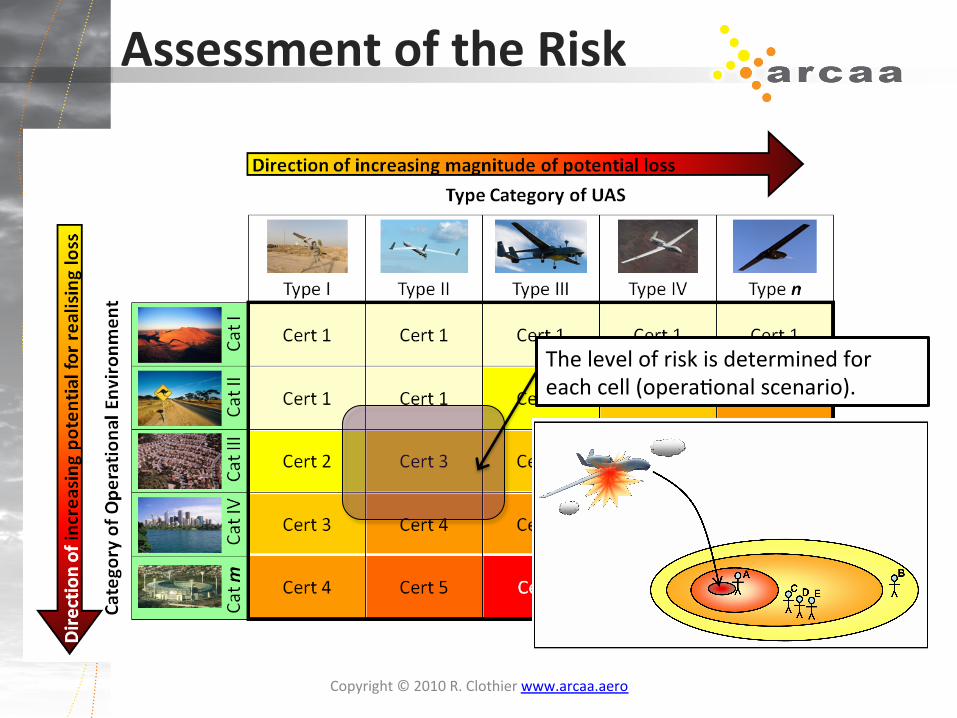
Assessment of the Risk
Copyright © 2010 R. Clothier www.arcaa.aero
The level of risk is determined for each cell (opera5onal scenario).

Assignment to Airworthiness Categories
Copyright © 2010 R. Clothier www.arcaa.aero
Cells of a similar colour represent a similar level of risk and hence are subject to the same airworthiness requirements.
The spectrum of risk is then ‘mapped’ to a finite and con5guous number of cer5fica5on categories (r). Illustra5vely, this is the process of assigning a finite number of colours to the cells.

Risk Matrix Approach
Copyright © 2010 R. Clothier www.arcaa.aero
A single type category of UAS can be cer5fied in a range of airworthiness categories

• Framework does not prescribe whether a safety target or prescrip5ve code of requirements should be used – E.g., small UAS may be more effec5vely regulated through use of a safety target approach, larger UAS by prescrip5ve requirements
• Mi5ga5on strategies can be consistently managed: – Controls which reduce poten5al harm, likelihood, or both harm and likelihood are characterised as movements within the matrix
• Cer5fica5on is determined by the combina5on of the system and its intended opera5onal environment – Not just the MTOW of the aircraD
Discussion on Approach
Copyright © 2010 R. Clothier www.arcaa.aero
• Jus5fiable
– Cer5fica5on categories are defined based on risk • Flexible
– A given UAS can be cer5fied in a number of possible categories
– Chosen category can be determined by: available technology, business case etc.
• Traceable – To the requirement for an equivalent level of safety to conven5onally-‐piloted avia5on
Advantages
Copyright © 2010 R. Clothier www.arcaa.aero

• Necessitates more resolu5on in, and the clarifica5on of, the defini5on of over-‐flown areas – Need for new ‘maps’ classifying areas overflown
• Can create high concentra5ons of UAS ac5vity – E.g., high density corridors of UAS ac5vity in built up areas
• Must be quan5ta5ve to avoid subjec5ve interpreta5on – E.g., what is a densely populated area vs sparsely populated?
• More informa5on in Ref. [1]
Disadvantages
Copyright © 2010 R. Clothier www.arcaa.aero

Defini&on of UAS Type Categories
An objec?ve risk-‐based approach for categorising UAS
Copyright © 2010 R. Clothier www.arcaa.aero
Type I Type II Type III Type IV Type n
Direc&on of increasing magnitude of poten&al loss
• In accordance with the proposed framework:
– A category describing a group of UAS which present a similar level of harm to areas over-‐flown
• I.e., have the poten5al to cause about the same amount of damage
• Must cover the complete range of possible types of UAS
Type Categories
Copyright © 2010 R. Clothier www.arcaa.aero

• Use tradi5onal categories defined for CPA
– Do not cover the complete spectrum of UAS – Sufficient resolu5on in exis5ng categories – Use MTOW, propulsion systems and number of seats onboard only
• Proposed approach is to two 5ered
1. Use threshold levels of harm 2. The use a mathema5cal algorithm to
objec5vely “learn” discrete groupings of UAS based on the measures of the poten5al harm
Approaches
Copyright © 2010 R. Clothier www.arcaa.aero

• Requires:
– A database of UAS – Models describing the measures of harm for each UAS in the database
– Threshold levels of harm – A suitable clustering/par55oning algorithm which uses the risk measures to divide the database into ‘similar’ groups
• Advantages: – Subjec5vi5es can be iden5fied, characterised and in some cases removed
– Can consider complex risk measures – Output is a par55oning based on measures of risk
Proposed Approach
Copyright © 2010 R. Clothier www.arcaa.aero

• Compiled and maintained by the Air Vehicles Division, Defence Science & Technology Organisa5on (DSTO), Australian Department of Defence
• Data on over 1,000 civil and military UAS • This paper uses data on over 500 fixed wing aircraD – excludes aerial targets
Database
Copyright © 2010 R. Clothier www.arcaa.aero

Database
Copyright © 2010 R. Clothier www.arcaa.aero

• Maximum Takeoff Weight is not sufficient to characterise the diversity of UAS and the risk they pose to people and property on the ground – E.g., light-‐weight slow mover vs light-‐weight fast mover
• Given an impact in a populated region – is a par?cular UAS capable of inflic?ng harm to different types of people on the ground?
– Injury to people standing in the open – Injury to people sheltered within light structures – Injury to people sheltered within heavy structures
• Simple energy model is used (maximum kine5c energy)
Measures – Individual Risk
Copyright © 2010 R. Clothier www.arcaa.aero

Thresholds – Individual Risk
Copyright © 2010 R. Clothier www.arcaa.aero
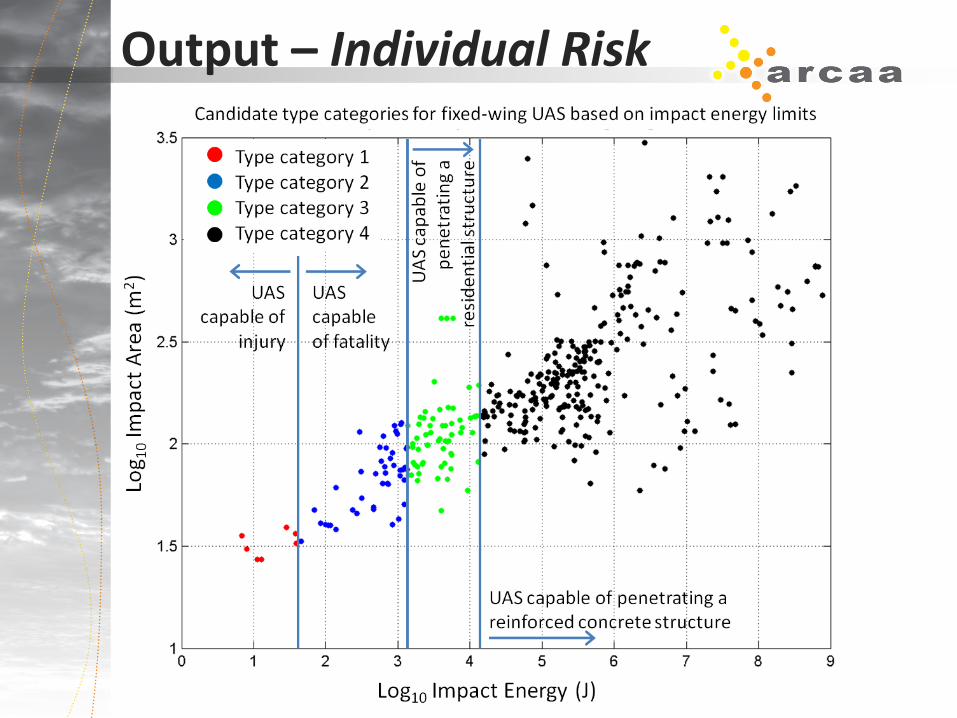
Output – Individual Risk
Copyright © 2010 R. Clothier www.arcaa.aero

X-‐45C
RQ-‐11A/B Raven
FQM-‐151A Pointer
Brumby, Mk3
Black Widow Wasp II
RQ-‐14A Dragon Eye KillerBee 2
Aerosonde Mk 4
ScanEagle, A-‐15
RQ-‐7A, Shadow 200
RQ-‐2A/B Pioneer
I-‐View 250
Shadow 600
Sky Lark IV
Helios
MQ-‐5C e-‐Hunter
M/RQ-‐1B Predator
Heron 1
MQ-12A Sky Warrior
RQ-‐3A DarkStar
Taranis
RQ-‐4B Global Hawk
RQ-‐37A
MQ-‐9B Reaper
Centurion
CL-‐89_Midge
Scarab
Sky-‐X Eagle Eye
Mobius 4

X-‐45C
RQ-‐11A/B Raven
FQM-‐151A Pointer
Brumby, Mk3
Black Widow Wasp II
RQ-‐14A Dragon Eye KillerBee 2
Aerosonde Mk 4
ScanEagle, A-‐15
RQ-‐7A, Shadow 200
RQ-‐2A/B Pioneer
I-‐View 250
Shadow 600
Sky Lark IV
Helios
MQ-‐5C e-‐Hunter
M/RQ-‐1B Predator
Heron 1
MQ-12A Sky Warrior
RQ-‐3A DarkStar
Taranis
RQ-‐4B Global Hawk
RQ-‐37A
MQ-‐9B Reaper
Centurion
CL-‐89_Midge
Scarab
Sky-‐X Eagle Eye
Mobius 4
Insufficient resolu&on in the fourth category. Problem -‐ How to further objec<vely discriminate between these UAS?

• Illustra5ve energy model chosen is very conserva5ve (in-‐
frangible), second order model is needed: – Momentum and energy dissipa5on
• Secondary effects are not considered
– Explosions, collapsing buildings, fragmenta5on etc
• Only a limited number of categories (4) can be iden5fied – Large “fourth” category (5 orders of magnitude) which are ‘lethal’ to ‘everything’
• KE on its own is not sufficient to comprehensively
characterise the risk – Does not consider the ‘group’ risk –the poten5al to injure more than one individual
Limita&ons
Copyright © 2010 R. Clothier www.arcaa.aero

• Group risk discriminates between UAS based on the poten5al for harm to mul5ple people
• Simple lethal area and uniform distribu5on of energy model is used
• Problem -‐ How to ‘objec5vely’ sub-‐divide large fourth category of UAS based on group risk? – Clustering algoritm
Measures – Group Risk
Copyright © 2010 R. Clothier www.arcaa.aero

• K-‐means clustering algorithm ayempts to form K clusters by minimising a distance metric
• Must specify K
Clustering Algorithm
Copyright © 2010 R. Clothier www.arcaa.aero
Raw data to be grouped Two clusters Three clusters

Results – Clustering
Copyright © 2010 R. Clothier www.arcaa.aero

X-‐45C
RQ-‐11A/B Raven
FQM-‐151A Pointer
Brumby, Mk3
Black Widow Wasp II
RQ-‐14A Dragon Eye KillerBee 2
Aerosonde Mk 4
ScanEagle, A-‐15
RQ-‐7A, Shadow 200
RQ-‐2A/B Pioneer
I-‐View 250
Shadow 600
Sky Lark IV
Helios
MQ-‐5C e-‐Hunter
M/RQ-‐1B Predator
Heron 1
MQ-12A Sky Warrior
RQ-‐3A DarkStar
Taranis
RQ-‐4B Global Hawk
RQ-‐37A
MQ-‐9B Reaper
Centurion
CL-‐89_Midge
Scarab
Sky-‐X Eagle Eye
Mobius 4

Beech_King_Air_B200
RV-‐7
MC-‐10 Cri Cri
Super_Zodiac_CH601_HDS
Grob G102 As5r CS-‐Glider
Cessna 172
Grumman G73 Mallard
Bombardier Q400-‐Dash8
Embraer ERJ-‐145ER
Beech Beechjet 400A
Honda HA-‐420 HondaJet
Boeing C17A
Boeing 737-‐700
FA-‐18E_Hornet
Sparrow
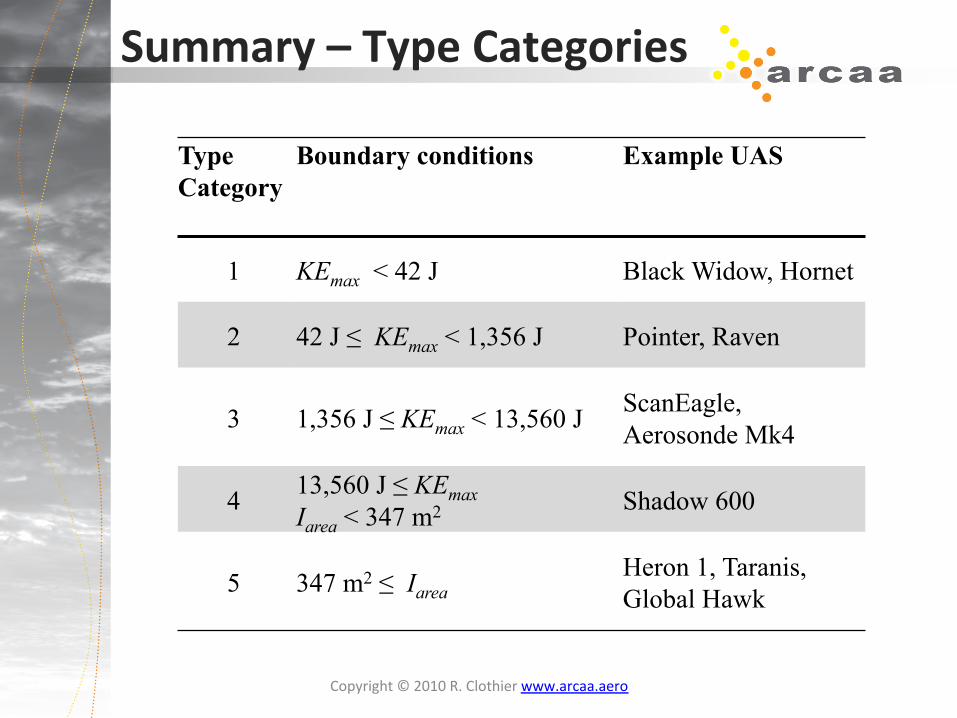
Summary – Type Categories
Copyright © 2010 R. Clothier www.arcaa.aero
Type Category
Boundary conditions Example UAS
1 KEmax < 42 J Black Widow, Hornet 2 42 J ≤ KEmax < 1,356 J Pointer, Raven
3 1,356 J ≤ KEmax < 13,560 J ScanEagle, Aerosonde Mk4
4 13,560 J ≤ KEmax Iarea < 347 m2 Shadow 600
5 347 m2 ≤ Iarea Heron 1, Taranis, Global Hawk

• Type categories are defined by: – Threshold levels of harm to individuals – Applica5on of a clustering algorithm using measures of the harm to groups of people
• Approach iden5fied five type categories of UAS – Limita5ons in the models used – Results would only provide the basis for discussion
• Commercial, poli5cal, technological, social and other influencing factors
Discussion – Type Categories
Copyright © 2010 R. Clothier www.arcaa.aero

• Paper covered: – Defini5on of airworthiness regulatory structure – Defini5on of UAS type categories
• Approach – Risk based – Traceable to the equivalent level of safety objec5ve
– Systema5c – Flexible
Summary
Copyright © 2010 R. Clothier www.arcaa.aero

• Specifying the opera5onal areas • Quan5fying the equivalent level of safety objec5ve and mapping to cer5fica5on categories
• Regulatory impact analysis • Extension to airspace integra5on regula5ons
Future Work
Copyright © 2010 R. Clothier www.arcaa.aero

[1] Clothier, R.A., Palmer, J.L., Walker, R.A., Fulton, N.L. (2010) “Defini?on of an Airworthiness Cer?fica?on Framework for Civil Unmanned AircraD Systems” submiyed to Safety Science.
[2] T. McGeer and J. Vagners. Wide-‐scale use of long-‐range miniature Aerosondes over the world's oceans. Insitu Group, Bingen, WA, USA, 1999
References/Reading
Copyright © 2010 R. Clothier www.arcaa.aero

Related Documents






![c Copyright 2011 [please consult the authors] Notice ... · IEHR has been referred to as the Personally-Controlled Electronic Health Record (PCEHR) by the Australian Government (Morris](https://static.cupdf.com/doc/110x72/5ed835630fa3e705ec0e0983/c-copyright-2011-please-consult-the-authors-notice-iehr-has-been-referred.jpg)

![c Copyright 2015 [please consult the authors] Notice ...eprints.qut.edu.au/84932/3/Final_Draft_SpatialPaper1.pdfii On the QUT campus, numerous technical laboratory facilities are maintained](https://static.cupdf.com/doc/110x72/5b3438e97f8b9a6b548be642/c-copyright-2015-please-consult-the-authors-notice-on-the-qut-campus-numerous.jpg)


