Bridge System with Precast Concrete Double-T Girder and External Unbonded Post-tensioning by Yang Eileen Li A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of Civil Engineering University of Toronto © Copyright by Yang Eileen Li (2010)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Bridge System with Precast Concrete Double-T Girder and External Unbonded Post-tensioning
by
Yang Eileen Li
A thesis submitted in conformity with the requirements for the degree of Master of Applied Science
Graduate Department of Civil Engineering University of Toronto
© Copyright by Yang Eileen Li (2010)

Bridge System with Precast Concrete Double-T Girder and External Unbonded Post-tensioning
Yang Eileen Li Master of Applied Science Graduate Department of Civil Engineering University of Toronto 2010
Abstract
This thesis compares the consumption of primary superstructure material in a
conventional single span CPCI system with those of double-T alternatives. The CPCI
system is currently the preferred bridge type for short and medium spans in Canada, despite
its relatively inefficient use of materials due to imperfect live load sharing among multiple
parallel girders. The double-T alternatives utilize slender double-T cross-sections, fully
precast segments, and post-tensioning in both longitudinal and transverse direction.
The economy of the CPCI and double-T systems is compared within the framework of
four sample designs. The results indicate that the double-T systems are in general more
efficient than the CPCI system and have the potential to achieve better economy.
ii

Acknowledgements
This project is partially funded by the National Science and Engineering Research
Council of Canada.
I would like to thank Professor Gauvreau without whom this work would not have been
possible. Professor Gauvreau has given me invaluable guidance and encouragement not only
during the course of this thesis, but throughout my years at the University of Toronto.
I would also like to thank Hatch Mott MacDonald for their financial contribution to this
project. The technical and personal support from Philip Murray and Biljana Rajlic of the
bridge group is deeply appreciated.
Thanks to my research colleagues for offering their help and insight to this thesis: Davis
Doan, Negar Elhamikhorasani, Kris Mermigas, Sandy Poon and Jason Salonga.
Finally, I would like to thank my parents for their patience and care throughout my
graduate studies.
iii

iv
Table of Contents Abstract ii
Acknowledgement iii
Table of Contents iv
List of Figures viii
List of Tables xi
List of Symbols xiii
Chapter 1: Introduction 1
1.1. Motivation 1
1.2. The Double-T Concept 4
1.2.1. Cross-Section 4
1.2.2. Prestressing Concept 5
1.2.3. Construction 6
1.3. Geometrical Requirements for Sample Designs 7
1.4. Objective and Scope 7
Chapter 2: Double-T Base Concept 9
2.1. Brief Description of Design 9
2.2. Material Properties 12
2.3. Design Criteria 13
2.3.1. Serviceability Limit States 14
2.3.2. Ultimate Limit States 15
2.4. Loads, Load Combinations and Post-tensioning Parameters 15
2.4.1. Dead Load and Superimposed Dead Load 15

v
2.4.2. Live Load 16
2.4.3. Post-tensioning Parameters 17
2.4.4. Load Factors and Load Combinations 18
2.5. Transverse System Design 21
2.5.1. Load Effects 21
2.5.2. Design Approach 21
2.5.3. Final Design 23
2.6. Torsion and Live Load Distribution 24
2.6.1. Analytical Approach 24
2.6.1.1. Torsion 24
2.6.1.2. Parametric Study on Torsion 27
2.6.1.3. Live Load Distribution based on Analytical Approach 29
2.6.2. Grillage Model Analysis 31
2.7. Longitudinal Flexure 34
2.7.1. Unbonded Tendons 34
2.7.2. Prestress Losses 35
2.7.3. Flexural Response under SLS 40
2.7.4. Flexural Response under ULS 42
2.7.5. Shear 46
2.8. Local Forces 47
2.8.1. Anchorage Zone 47
2.8.2. Deviation 49
2.9. Construction 50
2.9.1. Precast Segment Design 50
2.9.2. Precast Concrete Forming 52
2.9.3. Girder Erection 52
2.10. Final Remarks 53
Chapter 3: Double-T Alternative Concept I 54
3.1. Fibre-Reinforced Polymer (FRP) Reinforcing Systems 55
3.2. Brief Description of Design 56
3.3. Material Properties 58
3.4. Design Criteria 59
3.4.1. Serviceability Limit States 59
3.4.2. Fatigue Limit States 59

vi
3.4.3. Ultimate Limit States 60
3.5. Load Combinations and Associated Prestress Parameters 62
3.6. Longitudinal Flexure 63
3.6.1. Prestress Losses 63
3.6.2. Serviceability Limit States 64
3.6.3. Ultimate Limit States 65
3.6.4. Fatigue Limit States 68
3.7. Shear Design 68
3.8. Final Remarks 69
Chapter 4: Double-T Alternative Concept II 70
4.1. Brief Description of Design 71
4.2. Material Properties 72
4.3. Design Criteria 73
4.3.1. Serviceability Limit States 73
4.3.2. Fatigue Limit States 73
4.3.3. Ultimate Limit States 73
4.4. Longitudinal Flexure 74
4.4.1. Serviceability Limit States 74
4.4.2. Ultimate Limit States 75
4.4.3. Fatigue Limit States 78
4.5. Final Remarks 78
Chapter 5: Slab-on-Girder Bridge System with CPCI Girders 79
5.1. Introduction 79
5.2. Brief Description of Design 80
5.3. Material Properties 81
5.4. Live Load Distribution 82
5.4.1. AASHTO Standard 83
5.4.2. AASHTO LRFD Specifications 84
5.4.3. Canadian Highway Bridge Design Code 85
5.5. Deck Slab Design 88
5.5.1. Arching Action 88
5.5.2. Empirical Design Method from CHBDC 89
5.6. Construction 90

vii
5.6.1. CPCI Girder Fabrication 90
5.6.2. Erection 91
Chapter 6: Evaluation of the Double-T and CPCI systems 92
6.1. Comparison of Double-T Concepts 92
6.2. Comparison of Double-T Systems with CPCI Slab-on-Girder System 96
6.2.1. Live Load Distribution 96
6.2.2. Design Load 97
6.2.3. Deck Slab Design 98
6.3. Material Consumption 99
6.3.1. Concrete 99
6.3.2. Prestressing Steel 100
6.3.3. Reinforcing Steel 101
6.3.4. CFRP Reinforcing System 101
6.4. Cost Comparison 102
6.4.1. Cost Comparison of Double-T Systems 102
6.4.2. Cost Comparison between Double-T and CPCI Systems 103
Chapter 7: Conclusion 107
References 109
Appendices 113
Appendix A: Double-T Concepts Sample Calculations and Design Drawings 113
A.1. Sample Calculations 114
A.2. Design Drawings 128
Appendix B: CPCI Slab-on-Girder System Sample Calculations and Design Drawings 138
B.1. Sample Calculations 139
B.2. Design Drawings 150
Appendix C: Grillage Model Input File from SAP 152

viii
List of Figures 1.1. CPCI slab-on-girder system (CPCI, 2009) 2
1.2. Cross-section of CPCI girders (adapted from Pre-Con, 2004) 2
1.3. Idealized model of load distribution in a slab-on-girder system 3
1.4. Web thickness of a double-T girder 5
1.5. Double-T girder cross-section 5
1.6. Matching casting of box girder segments (adapted from Interactive Design Systems, 2009) 6
1.7. Roadway cross-section 7
2.1. Sample design of double-T base concept 10
2.2. Longitudinal prestressing design of double-T concept 11
2.3. Transverse prestressing design of double-T concept 12
2.4. Material stress-strain relationships 13
2.5. Schematic diagram of stress in unbonded tendon as a function of member curvature 14
2.6. Dead load and superimposed dead load for sample design 15
2.7. CL-W and CL-625-ONT live load models (adapted from CSA, 2006a) 16
2.8. Design lane layout 16
2.9. Transverse tendon profile 22
2.10. Integrated process of transverse flexural design 22
2.11. Flexural demand and capacity of transverse system as a function of web spacing 23
2.12. Transverse tendon layout in a typical segment 24
2.13. Decomposition of applied eccentric load (adapted from Menn, 1990) 25
2.14. Shear flow paths in closed and open cross-sections 25
2.15. Double-T cross-section dimension – notations (adapted from Menn, 1990) 26
2.16. Differential web bending due to warping torsion (adapted from Menn, 1990) 27
2.17. Torsion distribution with varying web thickness and span length 28
2.18. Load cases for evaluating live load distribution 30
2.19. Maximum moment per web as a function of k 31
2.20. Grillage model of double-T system 32
2.21. Position of truck wheel load for Load Case 2 and 3 32

ix
2.22. Example of equivalent load used in applying wheel load 32
2.23. Member forces and deformation from grillage model 33
2.24. Compatibility relationship for bonded and unbonded tendons under ultimate limit states 34
2.25. Parameters in determining creep coefficient φ (Menn, 1990) 38
2.26. Summary of prestress losses in sample design 39
2.27. Concrete stress under SLS 41
2.28. Concrete stress sensitivity to level of prestress 41
2.29. Iterative procedure for calculating post-tensioning force in unbonded tendons under ULS 43
2.30. Concrete stress under load combination ULS 1A and 1B 44
2.31. Moment and girder deformation under load combination ULS 1D 44
2.32. Moment diagram under load combination ULS 1C 45
2.33. Negative flexural capacity of girder under load combination ULS 1C 45
2.34. Shear design for the base concept 47
2.35. Equilibrium of anchorage zone 48
2.36. Anchorage location of external tendons 48
2.37. Anchorage zone truss model 49
2.38. Deviation truss model 50
2.39. Segment layout 50
2.40. Segment geometry 51
2.41. Schematic illustration of formwork for an interior segment 52
2.42. Erection girder with overhanging platform 53
3.1. Comparison of cross-sections of double-T base concept and alternative concept I 54
3.2. A beam strengthened with CFRP flexure plates and L-shaped shear plates (Sika, 2009) 55
3.3. Design of alternative concept I 57
3.4. Typical CFRP and mild-steel stress-strain relationship (adapted from Teng, 2002) 59
3.5. FRP related failure modes of members reinforced with externally bonded FRP system
(adapted from ACI, 2008 and Teng, 2002)
61
3.6. Prestress losses for alternative concept I 64
3.7. Concrete stress under SLS 64
3.8. Moment diagrams under ULS load combinations 65
3.9. Concrete stress under negative-flexure-critical ULS load combinations 66
3.10. System behaviour under ULS 1D 67
3.11. Schematic diagrams of moments under load combination ULS 1D and FLS 1 68
3.12. Shear design for alternative concept 69

x
4.1. Comparison of cross-section between double-T base concept and alternative concept II 70
4.2. Design of alternative concept II 72
4.3. Concrete stress under SLS 74
4.4. External load and internal forces under load combinations SLS 1B and SLS 1D 75
4.5. Moment diagrams under ULS load combinations 76
4.6. Concrete stress under negative-flexure-critical ULS load combinations 76
4.7. System behaviour under ULS 1D 77
5.1. Standardized I sections (adapted from Pre-Con, 2004 and FHWA, 2009) 80
5.2. Sample design of the Slab-on-CPCI-girder system 81
5.3. Pre-tension strand layout (adapted from MTO, 2002) 81
5.4. Load distribution in an idealized beam-on-girder system
(adapted from Hassanain, 1998)
83
5.5. Fm for internal girders in a slab-on-girder bridge system under ULS and SLS (CSA, 2006b) 86
5.6. Arching action in deck slab (adapted from Batchelor, 1987) 89
5.7. Punching shear failure mode (adapted from Batchelor, 1987) 89
5.8. Typical deck slab design based on CHBDC’s empirical method – cross-section view 90
5.9. CPCI girder fabrication (photos by P. Gauvreau) 91
5.10. Typical construction sequence for the superstructure of a slab-on-girder bridge
(adapted from WSDOT, 2008)
91
xi
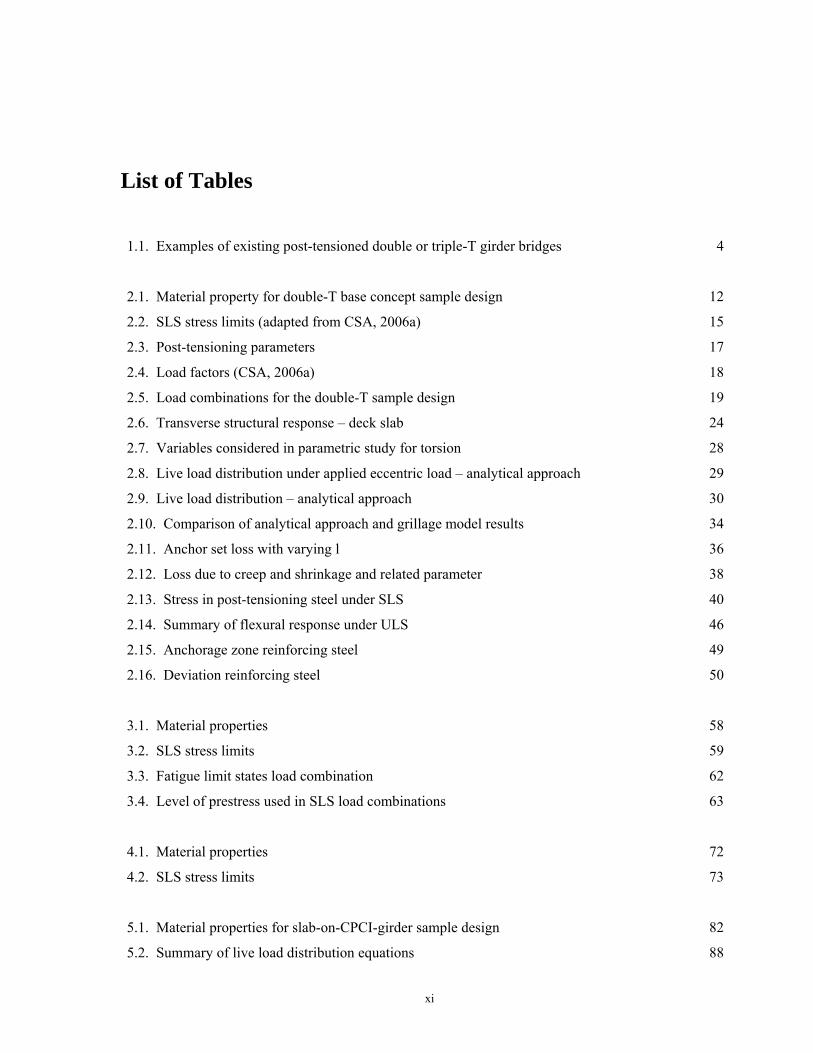
List of Tables 1.1. Examples of existing post-tensioned double or triple-T girder bridges 4
2.1. Material property for double-T base concept sample design 12
2.2. SLS stress limits (adapted from CSA, 2006a) 15
2.3. Post-tensioning parameters 17
2.4. Load factors (CSA, 2006a) 18
2.5. Load combinations for the double-T sample design 19
2.6. Transverse structural response – deck slab 24
2.7. Variables considered in parametric study for torsion 28
2.8. Live load distribution under applied eccentric load – analytical approach 29
2.9. Live load distribution – analytical approach 30
2.10. Comparison of analytical approach and grillage model results 34
2.11. Anchor set loss with varying l 36
2.12. Loss due to creep and shrinkage and related parameter 38
2.13. Stress in post-tensioning steel under SLS 40
2.14. Summary of flexural response under ULS 46
2.15. Anchorage zone reinforcing steel 49
2.16. Deviation reinforcing steel 50
3.1. Material properties 58
3.2. SLS stress limits 59
3.3. Fatigue limit states load combination 62
3.4. Level of prestress used in SLS load combinations 63
4.1. Material properties 72
4.2. SLS stress limits 73
5.1. Material properties for slab-on-CPCI-girder sample design 82
5.2. Summary of live load distribution equations 88

xii
6.1. Comparison of double-T systems 95
6.2. Live load distribution comparison 96
6.3. Maximum moment intensity due to DL, SDL, and LL 98
6.4. Concrete consumption 99
6.5. Prestressing steel consumption 100
6.6. Reinforcing steel consumption 101
6.7. CFRP reinforcing system (Data provided by Sika, Canada) 101
6.8. Unit cost of structural reinforcing systems 102
6.9. Cost comparison of double-T systems 102
6.10. Qualitative cost comparison of the double-T and CPCI systems 104
6.11. Cost of precast concrete and cast-in-place deck slab 105
6.12. Cost comparison between the CPCI system and double-T alternative concept II 106

xiii
List of Symbols A Area of concrete cross-section
As Area of reinforcing steel
Astrand Area of each prestresing strand
ANC Prestress loss due to anchor set
b Deck slab width (Figure 2.9)
b0 Width between centrelines of the two webs in a double-T cross-section (Figure 2.9)
bw Average web thickness (Figure 2.9)
Cf Factor for lane width correction factor, which is used in calculating live load distribution
based on CHBDC
D D value in AASHTO equation for calcuating live load distribution among girders
DF Distribution factor characterizing transverse live load distribution in a bridge system
e(x) Distance from centroid of the gross uncracked concrete section to the centroid of
prestressing steel
Ec Modulus of Elasticity of concrete
Ef Modulus of Elasticity of FRP
Ep Modulus of Elasticity of prestressing steel
Es Modulus of Elasticity of reinforcing steel
f'c Specified compressive strength of concrete
fo Jacking stress of post-tensioning tendon
fpy Yield strength of prestressing steel
fpu Specified tensile strength of prestressing steel
fy Yield strength of reinforcing steel
F Width dimension that characterizes the load distribution for a bridge
Fm
FR Prestress loss due to friction
G Shear modulus
k Ratio between St. Venant and warping torsion, assumed to be constant along along the
span
K Torsional constant

xiv
Kg Girder longitudinal stiffness in the AASHTO LRFD equation for calculating live load
distribution
lp Total length of the post-tensioning tendon between anchors
lp0 Tendon length when force in tendon equals effective prestress
L Span length
Mg Maximum longitudinal moment per web or per girder due to live load, including effects of
live load amplification factor
Mg,avg Average moment per web or per girder due to live load if live load is shared equally among
girders or webs
Mg,tot Total moment of the cross-section if the maximum longitudinal moment per girder (web),
Mg, is applied to every girder (web)
Mp Primary moment due to prestress; equals pretressing force times tendon eccentricity
MQ Moment due to external load
MT Maximum moment per design lane
Mtot Sum of moment due to external load and primary moment due to prestressing
n Number of design lanes according to CHBDC
N Number of girders or number of webs
P Prestressing force
P1 Post-tensioning force from tendons installed in stage 1 of the post-tensioning operation.
P1i Tendon stress equals initial jacking stress.
P1∞ Tendon stress equals effective prestress after all losses.
P1ULS Tendon stress at ULS
P2 Post-tensioning force from tendons installed in stage 2 of the post-tensioning operation.
P2i Tendon stress equals initial jacking stress.
P2∞ Tendon stress equals effective prestress after all losses.
P2ULS Tendon stress at ULS
Ptot Total prestressing force
Pmin Minimum prestressing force required for equilibrium under ULS
Py Tendon yield force
P∞ Effective prestressing force after all losses
Qf External load
RL Multi-lane reduction factor
S Section modulus of concrete cross-section; girder spacing in a slab-on-girder system
ts Deck slab thickness (Figure 2.9)
T(x) Total torsion due to applied load

xv
TSV(x) St. Venant torsion
TW(x) Warping torsion
wv Vertical girder deflection due to longitudinal flexure
W Axle load of truck load model
We Width of a design lane
α(x) Tendon angle change from jacking end to location x
αD Load factor for dead load
ΔlPD Tendon elongation due to deformation
ΔlPF Tendon elongation due to tendon force
Δset Change in length of post-tensioning tendon due to anchorage slip
Δεp Change in strain in prestressing steel due to deformation
εcp Concrete strain at the level of prestressing steel
εcs(t) Concrete shrinkage strain
εct Concrete tensile stress
εfd FRP debonding strain
εfu FRP ultimate strain
θSV(x) Twist angle due to St. Venant torsion
θW(x) Twist angle due to warping torsion
μ Friction coefficient; aging coefficient of concrete; factor for lane width correction factor,
which is used in calculating live load distribution based on CHBDC
ρ Reinforcement ratio
σc0(x) Concrete stress at the level of prestressing steel due to initial load
σc,bot Concrete stress in section's bottom fibre
σc,top Concrete stress in section's top fibre
φ Curvature
φ(t) Creep coefficient of concrete

Chapter 1 Introduction
This thesis compares the consumption of primary superstructure material (concrete,
prestressing steel and other reinforcements) in a conventional single span slab-on-girder system
with those of double-T alternatives. The slab-on-girder system addressed in this thesis consists
of a series of parallel CPCI (Canadian Precast Prestressed Concrete Institute) girders, which are
standardized I sections used in Canada, with a cast-in-place deck slab. A sample design of the
CPCI girder bridge will be developed with standard methods used in the industry. The double-T
concepts involve the use of slender cross-section, fully precast concrete, and external unbonded
post-tensioning. Three double-T concepts will be developed and validated in this thesis with
sample designs. The three concepts are:
1. Base concept: a double-T system with pure external unbonded post-tensioning;
2. Alternative concept I: a double-T system with a blend of external unbonded post-tensioning
and external carbon-fibre-reinforced polymer (CFRP) laminate reinforcements;
3. Alternative concept II: a double-T system with a blend of external unbonded post-
tensioning and internal bonded unstressed tendons.
This thesis will compare the material consumption and cost of the slab-on-CPCI-girder system
with the double-T systems based on their design examples.
1.1. Motivation
Long span bridges with their grand appearance often attract most of the public attention.
Records for the longest spans in the world are constantly being challenged or broken as a
reflection of people’s fascination with long spans and the extensive technological interest that
follows it. In the bridge industry, however, the largest section comprises short and medium
spans, ranging approximately from 20 m to 45 m. These may be single span bridges, or parts of
a longer multi-span structure. Given the large market share of this type of project, it follows
that short-to-medium spans are of great economical importance to the society and deserve as
1

2
much if not more attention than long spans (Kulka and Lin, 1984). For instance, any reduction
in material consumption of short-to-medium span structures will be magnified by the large
number of their applications and result in substantial overall economical improvement.
In most parts of Canada, the preferred structural system for spans of up to about 45 m is
the CPCI slab-on-girder system, which consists of multiple parallel precast, pre-tensioned
concrete CPCI girders with a cast-in-place concrete deck slab (Figure 1.1). CPCI girders,
shown in Figure 1.2, are precast I sections commonly used in Canada. The CPCI slab-on-girder
system has become very much standardized, making its design and construction relatively
straightforward. Consequently, when facing this type of project, owners and designers are often
reluctant to consider alternatives that may be more efficient and economical.
Figure 1.1. CPCI slab-on-girder system Figure 1.2. Cross-section of CPCI girders (CPCI, 2009) (adapted from Pre-Con, 2004)
Although the cost of the CPCI system is often considered to be acceptable by owners,
this system actually makes relatively inefficient use of materials. One primary source of
inefficiency in this type of bridge comes from the imperfect sharing of live load among multiple
parallel girders due to transverse flexibility of the deck slab. An idealized example with stick
models is illustrated in Figure 1.3. As shown in the figure, if the deck slab is infinitely stiff, it
rotates under applied eccentric load and engages multiple girders in resisting the load. On the
other hand, if the deck slab is infinitely flexible, it bends under the applied load and only
engages the girder directly below or adjacent to the load. The CPCI slab-on-girder system is in
between the two extreme cases but close to the case with the flexible deck slab. This inefficient
load distribution requires every girder in the system to be designed for relatively high loading,
which, in combination with the relatively large number of girders in a CPCI system, results in an
unnecessarily high design load for the overall structure. The inefficient live load distribution in
the CPCI slab-on-girder system is qualitatively discussed in Chapter 5.

3
Figure 1.3. Idealized model of load distribution in a slab-on-girder system
Another source of inefficiency associated with live load distribution comes from the
actual method of calculating it. Much research has been done in modeling live load distribution
in a slab-on-girder system using grillage, semi-continuum or finite element methods (CSA
2006b.). The results from these analyses are used to formulate design equations in standards
and codes. However, these equations are often simplified from the real situation to include only
a limited number of variables. They usually determine the maximum amount of load distributed
to a girder under the most unfavourable conditions. The design equations for live load
distribution from AASHTO Standards, AASHO LRFD Specifications and CHBDC, will be
examined in Chapter 5.
In addition to the structural inefficiencies associated with live load distribution, the
construction of a CPCI girder bridge can also be problematic due to its cast-in-place deck slab.
The casting of the deck slab is an inconvenient and time-consuming process which involves
installing formwork, placing the deck slab reinforcements, casting and curing concrete, and
removing formwork if necessary. The non-prestressed deck slab is also a source of durability
problems due to slab’s tendency to crack. Once crack forms, salts and other chemical agents
penetrate the concrete and induce corrosion in the reinforcing steel.
Recognizing the large demand in short and medium span bridges and the inefficiency of
current solution – the CPCI slab-on-girder system, this thesis aims to develop a new structural
system based on a double-T cross-section. The new double-T concept will be developed with
the specific intent of maximizing the efficient use of concrete and prestressing steel, as well as
simplifying the construction process. The material consumption will then be compared to the
CPCI system to provide a qualitative measure of the greater efficiency of the double-T system.

4
1.2. The Double-T Concept
1.2.1. Cross-Section
Recognizing the inherent inefficiency of live load distribution in a slab-on-girder system,
the new concept is based on a two-web double-T cross-section. Double-T girders, which are not
common in North America, have seen most of their use in Europe. Post-tensioned double or
triple-T girder bridges, as shown in Table 1.1, have traditionally incorporated thick webs to
accommodate internal post-tensioning tendons. The combination of cover requirements and
clearance requirements for construction (i.e. distance between tendon ducts to allow proper
placement and vibration of concrete) generally results in a minimum web thickness of
approximately 440 mm (Figure 1.4 (a)).
Table 1.1. Examples of existing post-tensioned double or triple-T girder bridges
Bridge Cross-section Web thickness Notes (Reference)
le viaduc d'Orbe, Switzerland
1050 mm (Departement des Travaux Publics du Canton de Vaud, 1989)
Weinlandbrucke Andelfingen 500 mm
Cross-section is variable along span. The triple-T section shown is for the region close to mid-span. For regions close to support, bottom slabs are added, creating a twin-box girder. (Stussi, 1958)
Isarbrucke Munchen 700 mm (Leonhardt, 1979)
Rheinbrucke Emmerich Vorlandbrucken
1150 mm (Leonhardt, 1979)
The new double-T concept is developed with the specific intention to minimize the
amount of concrete in the system. Hence the relatively thick webs in the traditional double-T
girder need to be modified. In the new concept, web thickness is reduced by removing the
internal tendons, and replacing them with external unbonded tendons (Figure 2.7(b)). By doing
so, the web thickness can be reduced to at least 300 mm and possibly lower because web
thickness is no longer governed by detailing requirements, but rather by stress.

5
(a) (b)
Figure 1.4. Web thickness of a double-T girder: (a) with internal tendons (adapted from Menn, 1990); (b) with external tendons
The double-T cross-section that will be used in this thesis is illustrated in Figure 1.5. It
consists of a 225 mm thick top slab and two slender webs. The webs have an average thickness
of 300 mm, and are tapered to facilitate the forming process. The thickness of 300 mm is
consistent with the standard practice of box girder cross-sections with similar span and girder
depth (ASBI, 2008). The deck width is governed by the roadway cross-section, which is
presented in the section of Geometrical Requirements for Sample Designs (Section 1.3). The
overall depth of the cross-section is chosen to be 2 m based on the span length (36.6m, see
Section 1.3) and typical span-to-depth ratios, which range from 17:1 to 22:1 for constant-depth
girders (Menn, 1990). The web spacing is chosen to be 7.9 m based on an optimization process
of the girder’s transverse flexural behaviour. Details of the analysis can be found in Section 2.5.
Figure 1.5. Double-T girder cross-section
1.2.2. Prestressing Concept
The double-T concept involves post-tensioning in both the longitudinal and transverse
directions. Longitudinally, the system is post-tensioned with external unbonded tendons.
Transversely, the deck slab is post-tensioned with internal flat-duct tendons. Transverse post-

6
tensioning serves primarily two purposes: 1) providing transverse bending capacity to the deck
slab; 2) controlling crack in the deck slab thus enhancing the system’s durability. Details of
longitudinal and transverse post-tensioning design will be presented in subsequent chapters.
1.2.3. Construction
The new double-T concept employs precast segmental construction technology which
allows bridge to be built rapidly with minimal impact to traffic. Segments will be fabricated of-
site with the method of match-casting, which produces custom-fitted joints by casting a new
segment against a dry mating segment (Figure 1.6). Segments produced by such method can be
erected on site speedily without the need of cast-in-place concrete or grout (Gauvreau, 2006).
New segment
Core form
Match-cast
Completed
mate segment
segment
Figure 1.6. Match casting of box girder segments (adapted from Interactive Design Systems, 2009)
The precast segmental method is most often used for large projects. This is because the
initial cost of the segmental method, which is associated with manufacturing the forming
equipment, is usually high and hard to be justified if a large number of segments is not needed.
The most expensive part of the forming equipment is the core form (shown in Figure 1.6). It
can slide in and out during the match-casting of box girder segments, thus allowing the entire
rebar cage to be prefabricated. The decoupling of rebar fabrication and the actual casting
process can simplify the casting procedures and improve both casting speed and quality. The
forming of double-T girder segments, however, does not require such a core form due to the
absence of a bottom slab. The rebar cages can be prefabricated and used during casting with
formwork simply made of plywood which is relatively low in cost. Without the high initial cost
of forming equipment, the segmental construction method becomes a feasible and economical
choice for short-to-medium span double-T systems.

7
1.3. Geometrical Requirements for Sample Designs
The CPCI slab-on-girder system and the three double-T concepts will be evaluated based
on their sample designs. To form a consistent basis of comparison, all four sample designs will
be developed under the same geometrical requirements. These requirements are representative
of the general highway bridge design conditions in Ontario. First, the bridge needs to cross a
distance of 36.6 m with one simply-supported span. Second, the roadway cross-section needs to
accommodate three traffic lanes, each 3.6 m wide, and two shoulder lanes, each 1.2 m wide
(Figure 1.7). The travelled and the total deck width are 13.2 m and 13.8 m, respectively. The
road deck wearing surface is assumed to be 90 mm in thickness.
Figure 1.7. Roadway cross-section
1.4. Objective and Scope
The objective of this thesis is to compare the consumption of primary superstructure
materials (concrete, prestressing steel, and additional reinforcements) in a conventional single
span CPCI system with those of double-T alternative systems. A total of four systems are
investigated in this thesis:
1. Double-T base concept: a double-T system with pure external unbonded post-tensioning;
2. Double-T alternative concept I: a double-T system with a blend of external unbonded post-
tensioning and external carbon-fibre-reinforced polymer (CFRP) laminate reinforcements;
3. Double-T alternative concept II: a double-T system with a blend of external unbonded post-
tensioning and internal bonded unstressed tendons
4. CPCI slab-on-girder system
A sample design is produced for each of the four systems above under the general highway
bridge design conditions in Ontario.
Chapters 2 to 4 describe and discuss the three double-T concepts within the framework
of three sample designs. Chapter 2 presents a comprehensive review on the design of the
double-T base concept, including the system’s transverse flexure, torsion, live load distribution,

8
longitudinal flexure and shear, anchorage and deviation regions, as well as construction.
Chapters 3 and 4 present the design of double-T alternative concept I and II. These two
alternative concepts are modified versions of the base concept and share a number of same traits
with the base concept, such as transverse flexure, torsion, live load distribution and local designs.
As a result, Chapters 3 and 4 only focus on the differences between the alternative concepts and
the base concept, which is primarily longitudinal flexure.
Chapter 5 is dedicated to the CPCI slab-on-girder system. A sample design is presented.
Two important aspects in this type of system, live load distribution and deck slab design, are
also discussed.
Chapter 6 compares the four systems based on the sample designs developed. First, the
three double-T concepts are evaluated on their differences in flexural behaviour. Next, the
CPCI slab-on-girder system is compared with the double-T systems in terms of structural
efficiency, such as live load distribution. Finally, a comparison is made on the material
economy between the CPCI slab-on-girder system and the double-T systems.
The final chapter concludes the thesis by summarizing the important findings from the
development of the double-T systems, and the comparison between the systems’ material
economy.

Chapter 2 Double-T Base Concept
– Double-T System with Pure External Unbonded Post-Tensioning
This chapter describes the design of the double-T base concept, which is a double-T
system with pure external unbonded post-tensioning. The concept is presented within the
framework of a sample design, which is briefly described in Section 2.1. While most of details
regarding design procedures and analyses are presented in the later sections, it is helpful to
outline some of the main aspects the design and set up the framework at the beginning of the
chapter for a more clear understanding of the later discussions. Following the description of the
design, Section 2.2 and 2.3 outline the material properties and the design criteria. Section 2.4
describes the loadings and the associated factors and load combinations. Sections 2.5 to 2.6
examine the system’s transverse behaviour, torsion, and live load distribution, while Section 2.7
investigates the structural system’s global longitudinal response, such as longitudinal flexure
and shear. Local effects in the anchorage and deviation zone are analyzed in Section 2.8, while
Section 2.9 is dedicated to construction related subjects.
2.1. Brief Description of Design
The plan, elevation and cross-section of the base concept are shown in Figure 2.1. The
concrete cross-section and its features were already explained in Chapter 1 (Section 1.2.1).
Concrete details at the ends of the span are designed to accommodate expansion joints and post-
tensioning anchorages (Section 2.8). Two deviation diaphragms are provided along the span to
accommodate the deviation of the external unbonded tendons. For a complete set of drawings,
the reader can refer to Appendix A.
9

10
Figure 2.1. Sample design of double-T base concept

11
The longitudinal prestressing of the sample design, shown in Figure 2.2, has a total of 78
strands per web, grouped into 3 external unbonded tendons. The tendons are arranged in a
harped profile with a horizontal segment between deviations. Between deviations where
flexural demand is high, the tendon eccentricity (vertical distance between the centroid of
tendons and the centroidal axis of the concrete cross-section) is kept at its maximum. Close to
girders ends, the tendon eccentricity is kept as small as possible to minimize cantilever moment
in the girder overhand created by prestressing.
Typical anchorage system fora multistrand post-tensioning tendon(adapted from DSI, 2009)
Figure 2.2. Longitudinal prestressing design of double-T concept
Transversely, the system’s deck slab is post-tensioned with internal bonded tendons.
The transverse tendons, each containing 4 strands, are spaced at 933 mm. This spacing
translates to 3 tendons per precast segment, which is 2.8 m long for the sample design. The
profile of the tendon, shown in Figure 2.3, is arranged to provide maximum negative flexural
capacity at web-slab conjunction and maximum positive flexural capacity at the transverse mid-
span of the deck. Details on transverse flexural design can be found in Section 2.5.

12
Figure 2.3. Transverse prestressing design of double-T concept
2.2. Material Properties
The material properties assumed for the sample design are summarized in Table 2.1.
The design chooses to utilize concrete with a compressive strength of 70 MPa because
preliminary design indicates that 70 MPa is approximately the minimum strength required for
satisfactory structural response under SLS and ULS. Although the current standard practice in
Ontario is to use 50 MPa concrete, concrete with a compressive strength of 70 MPa or above has
become commercially available and has seen increased application in North America as a result
of the recent advancement in concrete technology (Choi et al, 2008).
Table 2.1. Material property for double-T base concept sample design
Material Strength Modulus of Elasticity
Concrete Specified compressive strength: 1.5( ' 6900)( / 2300)c c cE f γ= + f'c = 70 MPa Ec = 36 300 MPa Cracking strength: 0.4 ' 3.35MPacr cf f= = Reinforcement Yield strength: Es = 200 000 MPa fy = 400 MPa Prestressing steel Specified tensile strength: Ep = 200 000 MPa Size 15 fpu = 1860 MPa (Astrand = 140 mm2) Yield strength: fpy = 0.90fpu = 1674 MPa

13
The material stress-strain relationships assumed in the design are illustrated in Figure 2.4.
Concrete is assumed to behave linear-elastically up to 60% of f’c. Reinforcing steel and
prestressing steel’s stress-strain diagrams are approximated as bi-linear. The yield stress of
prestressing steel is assumed to be at approximately 90% fpu.
Figure 2.4. Material stress-strain relationships
2.3. Design Criteria
The Canadian Highway Bridge Design Code (CSA, 2006a) is used as the primary design
standard in this thesis. CHBDC is a limit-states code, under which bridge components need to
satisfy the requirements at three limit states – serviceability limit states (SLS), fatigue limit
states (FLS), and the ultimate limit states (ULS) (CSA, 2006a). The design of the double-T base
concept in this chapter focuses on the structural response under SLS and ULS. Fatigue is
associated with repeated stress cycles leading to crack or fracture in metals. According to
CHBDC, FLS needs to be checked for reinforcing bars and prestressing tendons in a concrete
structure. For the structural system under study, the primary longitudinal and transverse
reinforcements are post-tensioned prestressing steel, of which the stress range under SLS is very
small because concrete remains uncracked (Figure 2.5). Under FLS loading, the stress range
becomes more negligible as FLS imposes only one lane of live load. As a result, FLS is likely
not a governing limit state for the double-T base concept under study and thus not focused on in
the design. For double-T alternative concepts I and II which use a blend of post-tensioned and
non-post-tensioned reinforcements, FLS will be examined explicitly in Chapters 3 and 4.

14
Figure 2.5. Schematic diagram of stress in unbonded tendon as a function of member curvature
2.3.1. Serviceability Limit States
The serviceability limit states concern the “life, appearance and use” of the structure
(CSA, 2006b). They define a set of criteria that the structure shall satisfy under service load
conditions. The SLS criteria considered in this thesis primarily consist of a set of stress limit on
concrete and structural reinforcements. The stress limits imposed on the design are adapted
from CHBDC clause 8.7.1 and 8.8.4.6 and are summarized in Table 2.2. Longitudinally,
because the double-T girder has no bonded reinforcements across segmental joints, tensile stress
is prohibited in concrete. Transversely, due to the presence of bonded reinforcements in the
deck slab, concrete is allowed to develop a tensile stress up to fcr. CHBDC requires the
maximum compressive stress in concrete to be limited under 0.6 fc’ at transfer and during
construction. As an extension to this criterion, the design of the double-T system imposes that
the stress limit of 0.6 fc’ should be satisfied not only under the construction stages, but also
throughout the structure’s service life. The purpose of the stress limit is to keep concrete
approximately within the linear elastic regime under SLS. For conventional bridge systems, the
concrete compressive stress under SLS is usually well below 0.6 fc’ as long as the tensile
requirements under SLS and ULS are met. However, as the double-T concept intends to
minimize the amount of concrete in the system, the structure will likely be challenged more and
concrete may approach the limit of 0.6 fc’. It is then necessary to impose such an additional
criterion to the design of the double-T girder bridge.

15
Table 2.2. SLS stress limits (adapted from CSA, 2006a)
Concrete (CHBDC clause 8.8.4.6) Tendon (CHBDC clause 8.7.1)
Tension At jacking ≤ 0.80 fpu Longitudinal ≤ 0 MPa Transverse ≤ fcr, 3.35 MPa
CHBDC requirements
Compression at transfer and during construction
≤ 0.6 f’c
Additional requirements
Compression at all other stages
≤ 0.6 f’c
2.3.2. Ultimate Limit States
The ultimate limit states are related to the structural safety of the bridge (CSA, 2006b).
Under ultimate limit states, the structure’s factored resistance should be greater than or equal to
the factored load effect. The ultimate capacity of the double-T system can be controlled by
concrete crushing or yielding of longitudinal unbonded post-tensioning steel.
2.4. Loads, Load Combinations and Post-tensioning Parameters
2.4.1. Dead Load and Superimposed Dead Load
Dead load includes weights of the bridge’s structural load-carrying components, such as
girder and deck slab. Superimposed dead load consists of weights of the non-structural
components, such as barrier and wearing surface. The values of dead load and superimposed
dead load for the sample design are summarized in Figure 2.6.
Figure 2.6. Dead load and superimposed dead load for sample design

16
2.4.2 Live Load
CHBDC clause 3.8.3 specifies two live load models – the CL-W Truck and CL-W Lane
Load model, both shown in Figure 2.7. The CL-W Truck consists of 5 axles, spaced at given
distances. The CL-W Lane Load is a combination of 80% of the CL-W Truck Load and a 9
kN/m uniformly distributed load. In the sample design, the CL-625-ONT model is used.
Figure 2.7. CL-W and CL-625-ONT live load models (adapted from CSA, 2006a)
In analysis, the CL-W live load is applied to each design lane of the bridge. Design
lanes are defined by the bridge’s deck width and can be different from the actual travelled lanes
(CSA, 2006b). For the sample design which has a travelled deck width of 13.2 m, there should
be three design lanes according to CHBDC (Figure 2.8). When more than one design lane is
loaded, the total load should be reduced by the multi-lane reduction factor listed in Figure 2.8.
Figure 2.8. Design lane layout

17
The vibration and impact from the travelling vehicles may magnify the live load effect
on the structure. To account for this, CHBDC specifies a dynamic load allowance, which is
expressed as a percentage of the CL-W Truck and added to the static live load (CSA, 2006a). In
an analysis where all axles of the CL-W Truck are considered, the dynamic load allowance is
taken as 0.25, which means that the total live load effect should be increased by 25%. The
dynamic load allowance is only applicable to the CL-W Truck load.
2.4.3. Post-tensioning Parameters
The sample design utilizes two orthogonal systems of prestressing. While the bridge
girder is post-tensioned longitudinally with external unbonded tendons, the deck slab is
transversely post-tensioned with internal bonded tendons. Parameters related to the two systems
of post-tensioning are summarized in Table 2.3. For the transverse tendons, the jacking stress is
assumed to be at the upper limit specified by CHBDC, which is 80% fpu. The loss of prestress is
estimated to be a lump sum of 20% fpu, which is an average along the length of the tendon. Thus
the prestress in transverse post-tensioning after all losses is 60% fpu. The maximum stress in the
transverse post-tensioning tendon is assumed to be 90% fpu. Compared to the transverse system,
the longitudinal post-tensioning system with external unbonded tendons requires a more detailed
evaluation on prestress losses under SLS and the level of stress under ULS. Details on these
two subjects are presented later in Section 2.7.3 and 2.7.4 with other topics related to
longitudinal flexure.
Table 2.3. Post-tensioning parameters
Longitudinal system Transverse System
Tendon type External unbonded Internal bonded
Stress at Jacking 80% fpu 80% fpu
SLS
67% fpu after all losses 74% fpu at 28 days (Section 2.8.2)
60% fpu (with estimated lump-sum losses)
ULS
81% fpu (Section 2.8.4)
90% fpu
The longitudinal post-tensioning of the double-T system involves a two-stage operation
to reduce the overall negative flexural demand on the bridge girder during the stressing of
tendons. During this operation, tendons are separated into two groups and stressed in two
separate stages. Four out of the six tendons are stressed first following the erection of
segments. These tendons are designated as Stage I tendons. Afterwards, prior to the stressing

18
of the remaining two tendons, barriers and wearing surface are placed. This allows both dead
load and super-imposed dead load to be engaged during the second stage of prestressing. As a
result of the increase in gravity load, the net negative flexure in the system is reduced. Finally,
the remaining two tendons are stressed. The basic sequence of construction is summarized in
the following:
1. Erect all girder segments.
2. Stress stage I post-tensioning tendons.
3. Place deck slab wearing surface and barriers.
4. Stress stage II post-tensioning tendons.
The time elapsed between stage I and stage II post-tensioning is assumed to be 28 days.
2.4.4. Load Factors and Load Combinations
CHBDC specifies two SLS and nine ULS load combinations. The ones that are
applicable to the current design are as follows:
SLS Combination 1: 1.00 D + 0.90 L
ULS Combination 1: αD D + 1.70 L
where D represents dead load and superimposed dead load while L represents live load. The
range of αD is summarized in Table 2.4.
Table 2.4. Load factors (CSA, 2006a, clause 3.5.1)
Max. Min.
Dead Load (Precast) 1.10 0.95 Superimposed Dead Load - Barrier (Cast-in-place) 1.20 0.90 Superimposed Dead Load - Wearing Surface 1.50 0.65
For the longitudinal system which involves a staged construction sequence, it is
necessary to expand the load combinations specified by CHBDC to account for loadings during
each stage of the construction as well as the final service stage. The preliminary design for the
double-T system indicates that there are four critical load cases for each of the load
combinations specified by CHBDC. They are schematically illustrated in Table 2.5. The load
factors associated with each load combination are selected to maximize the overall load effect in
each load case.

Table 2.5. Load combinations for the double-T sample design
Load Factor - α Case Combination Schematic DL SDL - B SDL - WS LL P
SLS 1A DL + P1j
1 0 0 0 1
1B DL + SDL + P128 days
1 1 1 0 1
1C DL + SDL + P128days + P2j
1 1 1 0 1
1D DL + SDL + P1∞ + P2∞ + LL
1 1 1 0.9 1
ULS 1A DL + P1j 0.95 0 0 0 1.2* 1B DL + SDL + P1ULS Refer to above 1.1 1.2 1.5 0 1 1C DL + SDL + P128 days + P2j SLS cases 0.95 0.9 0.65 0 1.2*
1D DL + SDL + P1ULS + P2ULS + LL
1.1 1.2 1.5 1.7 1
*The load factor 1.2 is applied to one of tendons only. Notation: DL Dead load P1 Force in stage 1 post-tensioning tendons P2 SDL Super-imposed dead load P1i when tendon stress equals initial jacking stress P2i SDL - B Barrier load P1∞ when tendon stress equals effective prestress after all losses. P2∞ SDL - WS Wearing surface load P1ULS at ULS P2ULS
Force in stage 2 post-tensioning tendons
LL Live load 19

20
Load Combination 1A
This load case takes place immediately following the installation and stressing of stage
one post-tensioning tendons. The stress in the prestressing tendons is taken as the jacking stress.
The post-tensioning force from stage I stressing overcomes the effect of dead load and causes
overall negative moment on the girder.
Load Combination 1B
This load case takes place after the addition of wearing surface and barriers. During
actual construction, false work or erection girder may be left in place or removed at this stage.
This analysis assumes that supporting devices have been removed, thus making the structure
self-supportive. By this time, the stage I tendons have likely lost some of the stresses initially
jacked in. The degree of long-term loss depends on the time elapsed since the stage one
stressing operation, which is assumed to be 28 days in this analysis. This period is estimated
based on the time required to complete work on wearing surface and barriers. This load case is
critical in positive flexure.
Load Combination 1C
This load case occurs immediately after the stressing of stage II post-tensioning tendons.
The stress in the stage II tendons is therefore taken as the jacking stress. The stress in stage I
tendons is again assumed to be the prestress after losses at 28 days. This load case is critical in
negative flexure.
Load Combination 1D
This load case takes place during the structure’s service life, when dead load,
superimposed dead load and live load are all acting on the bridge. For SLS analysis, the tendon
stress is taken as the effective prestress after all losses, while for ULS analysis, the tendon stress
is calculated based on girder’s ULS deformation (see Section 2.7.4).

21
2.5. Transverse System Design
2.5.1. Load Effects
The design process requires an evaluation of the transverse structural response under the
previously discussed loads. Under uniform loads, such as weight of deck slab, barrier and
wearing surface, the deck slab can be treated as a one-way slab with transverse moment constant
along the longitudinal span. The situation under live load is more complicated because the
transverse moment due to concentrated wheel loads varies longitudinally, making it is no longer
appropriate to consider just an arbitrary slice of the girder for the analysis (Gauvreau, 2006).
To evaluate the effect of concentrated live load, elastic influence surfaces are used.
They are diagrams analogous to influence lines, used to calculate load effect at a specific
location on an elastic plate due to applied gravity loads under a given plate geometry and
support condition (Menn, 1990). The design of the double-T girder uses two specific influence
surfaces published by Pucher (1977) – one for the transverse mid-span moment in the deck slab
between the two web supports, the other for the cantilever moment in the deck slab overhang.
2.5.2. Design Approach
For the double-T girder, the transverse span and cantilever of the deck slab are much
longer compared to those of a multi-girder system. As a result, transverse flexure becomes
critical in deck slab design. Web spacing directly affects the transverse flexural demand in the
system. For a box girder, the web-slab junction is often chosen as the quarter points from the
edges of the deck slab so that there is no transverse bending in webs under dead load (Gauvreau,
2006). This is however unnecessary for a double-T girder as the absence of a bottom slab
makes the webs free to rotate. The web spacing instead is chosen to balance the demand and
capacity at the two critical locations – the transverse mid-span of the deck slab and the fixed end
of the deck slab cantilever. A change in web spacing produces opposite effects on the flexural
demands at these two locations. For example, a wider spacing decreases the negative moment at
the end of deck cantilever but increases the positive moment at transverse mid-span. The web
spacing, however, cannot be chosen based solely on the equalization of maximum positive and
negative flexural demand because the positive and negative flexural capacity at the two
locations are different and depends on the transverse post-tensioning design.

22
The deck slab is post-tensioned transversely with flat-duct tendons each containing four
0.6” diameter strands. Recognizing the pattern of the transverse bending moment, the tendon
profile is made parabolic with the highest elevation at the web-slab conjunction and the lowest
elevation at mid-span (Figure 2.9). The sizing of the post-tensioning tendons is based on
flexural demand in the deck slab. For a segmental bridge, another important constraint is that
segments with the same length should have the same number of tendons except for special
segments such as end and deviation segments. For the double-T sample design, a typical
segment is 2.8 m long. Detailed segment layout is shown in Section 2.9.1.
Figure 2.9. Transverse tendon profile
It is recognized from the above discussion that the transverse flexural design of the
double-T system, including the sizing of the post-tensioning tendons and the optimization of
web spacing, is an integrated process. As illustrated in Figure 2.10, while web spacing affects
flexural demand and capacity, it is also determined based on optimization of the ratio between
these two quantities.
Figure 2.10. Integrated process of transverse flexural design As a starting point of the design process, transverse flexural demand from external load
is plotted as a function of web spacing for the two critical locations in Figure 2.11. Web spacing
is chosen to range from 6.5 m to 8.5 m, which is equivalent to 47% to 62% of total deck width.
Demand on the system shifts toward positive flexure as web spacing increases, and vice versa.
Next, moment capacities at the two critical locations are calculated for SLS and ULS
based on the design criteria given in Section 2.2. For SLS, the moment capacity is defined here

23
as a value under which concrete remains uncracked. Concrete stress under SLS can be
calculated as follows:
, or 3.35 MPaQ Pcr
M MP fA S S
σ = − + − ≤ [2-1]
where MQ is moment due to external load and MP is primary moment due to prestress. By
rearranging the above equation, an expression for SLS moment capacity can be obtained:
max,SLS cr PPM f S MA
⎛ ⎞= + × +⎜ ⎟⎝ ⎠
[2-2]
Mmax, SLS is calculated and plotted in Figure 2.11 for cases of having 2, 3 and 4 tendons in each
segment respectively. The moment capacities under ULS are also calculated and shown in
Figure 2.11.
(a) SLS (b) ULS
Figure 2.11. Flexural demand and capacity of transverse system as a function of web spacing
2.5.3. Final Design
Based on the information shown in Figure 2.11, the final transverse design is set to a
web spacing of 7.9 m and a post-tensioning design of 3 tendons (12 strands) per typical segment.
The actual number of strands required for adequate SLS and ULS behaviour is approximately 10.
However, because a whole number of tendons is used, the total number strands per segment is
increased from 10 to 12. The transverse tendon layout in a typical segment is shown in Figure
2.12. To confirm the adequacy of the design, the transverse structural responses under SLS and
-400.0
-300.0
-200.0
-100.0
0.0
100.0
200.0
6 6.5 7 7.5 8 8.5 9
Web spacing [m]
M[k
N-m
/m]
Positive moment at transverse mid-spanNegative moment at fixed end of deck slab cantilever
3
Maximum moment allowableto ensure σbot≤fcr attransverse mid-span
4 tendons per seg
2
2 tendons per seg34
Maximum moment allowableto ensure σtop≤fcr at fixed
end of cantilever-400.0
-300.0
-200.0
-100.0
0.0
100.0
200.0
6 6.5 7 7.5 8 8.5 9
Web spacing [m]
M[k
N-m
/m]
Positive moment at transverse mid-spanNegative moment at fixed end of deck slab cantilever
Positive moment capacityat transverse mid-span
4 tendons per seg32
2 tendons per seg
3
4Negative momentcapacity at fixed endof cantilever

24
ULS are calculated and summarized in Table 2.6. The SLS stresses are within the limit of 0.6f’c
≤ σ ≤ fcr, or -42 MPa ≤ σ ≤ 3.35 MPa. The ULS capacities at the two critical locations are
greater than the respective demands.
Figure 2.12. Transverse tendon layout in a typical segment Table 2.6. Transverse structural response – deck slab
SLS ULS σtop σbot Demand Capacity Demand MPa MPa kN-m/m kN-m/m Capacity
Mid-span between webs -7.702 1.729 119 146 0.81 Cantilever fixed end 1.336 -4.920 -215 -284 0.76
2.6. Torsion and Live Load Distribution
In this section, torsion and live load distribution are evaluated using two approaches.
The first one is an analytical approach based on Menn’s (1990) method of calculating torsion in
a double-T system (Section 2.6.1). This is a simplified method that does not account for the
stiffness of diaphragms in the structure. The second approach is a grillage model analysis
(Section 2.6.2). This method accounts for the presence of diaphragms.
2.6.1. Analytical Approach
2.6.1.1. Torsion
Torsion due to eccentric live load needs to be considered in the design process. An
applied eccentric load can be decomposed into a symmetrical and an antisymmetrical
component as shown in Figure 2.13 (Menn, 1990). The symmetrical component induces
bending and shear in the webs while the antisymmetrical component, which is equivalent to an
externally applied torque, causes torsional moment in the structure (Menn, 1990).

25
Figure 2.13. Decomposition of applied eccentric load (adapted from Menn, 1990)
Torsional moment can be resisted by means of closed shear flow or differential web
bending. The former phenomenon is called St. Venant torsion while the latter is usually referred
to as warping torsion. St. Venant torsion is the dominant action for closed sections such as box
girders, because their cross-section geometry provides an efficient closed shear flow path as
shown in Figure 2.14. Open sections, such as a double-T girder, are not as effective in
facilitating closed shear flows, thus need to resist torsion by a combination of St. Venant and
warping action, with the latter being dominant. This relationship can be expressed as:
( ) ( ) ( )= +SV WT x T x T x [2-3]
where TSV(x) and TW(x) denotes St. Venant torsion and warping torsion respectively.
Figure 2.14. Shear flow paths in closed and open cross-sections
The ratio between St. Venant torsion and warping torsion varies along the span and
depends on the cross-section dimensions and span length. Menn (1990) has proposed a
simplified method to approximate the ratio by assuming that its value is constant along the span,
which is expressed as:
( )( )
SV
W
T x kT x
= [2-4]
where k is the constant ratio between St. Venant and warping torsion. Menn (1990) suggests
that, for a conventional double-T girder, the value of k can be approximated as 1/2 for spans
longer than 50m and 1/3 for spans less than 50m.

26
The method to calculate TSV/TW is based on the understanding that compatibility requires
the twist due to St. Venant and warping torsion to be equal at any given point of the span:
( ) ( )SV Wx xθ θ= [2-5]
The twist angle due to warping can be determined from the following equation:
0
2 ( )( )W vw xxb
θ = [2-6]
where wv is the vertical web deflection due to flexure and b0 is the horizontal distance between
the centrelines of two webs (Figure 2.15). The angle due to St. Venant torsion can be derived
from first principals:
1( ) ( )SV SVx T x dx CGK
θ = +∫ [2-7]
where G is the shear modulus, K is the torsional constant, and C is a constant determined from
boundary conditions. K is a geometric property that depends on the cross-section dimensions.
For a double-T girder,
3 30
1 ( ) 2( )3⎡ ⎤≈ +⎣ ⎦s wK t b b h [2-8]
where ts, b and bw are cross-section dimensions shown in Figure 2.15.
Figure 2.15. Double-T cross-section dimension – notations (adapted from Menn, 1990)
Based on the above method, the TSV/TW ratio for the sample design is calculated to be
0.305, indicating that approximately 77% of total torsion is resisted by warping and only 23% is
by St. Venant action. A sample calculation can be found in Appendix A. The result agrees with
the previous discussion on that warping is the dominant action for resisting torsion in an open
cross-section. However, the actual amount of warping torsion is likely smaller than the value
predicted above since this procedure neglects the presence of concrete diaphragms, which

27
provide rigidity in refraining the differential web bending associated with warping action. This
effect will be investigated in the grillage model analysis in Section 2.6.2.
Warping torsion, as illustrated in Figure 2.16, is the phenomenon of differential bending
between two webs. The applied torque due to warping torsion causes the two webs to deflect in
opposite directions and induces additional longitudinal bending in the webs (Menn, 1990). If
the total factored load results in positive flexural demand on the girder, the warping torsion
shown in Figure 2.16 will cause increased bending in Web1 and reduced bending in Web2.
Therefore, the warping component of torsion can be dealt as additional flexural demand in
design.
Figure 2.16. Differential web bending due to warping torsion (adapted from Menn, 1990)
2.6.1.2. Parametric Study on Torsion
A parametric study is carried out to evaluate the effect of change in span length and web
thickness on the distribution of torsion. It is based on Menn’s method of calculating torsion. In
addition to the cross-section of the sample design, three other cross-sections with varying web
thicknesses are proposed to form the basis of the study. As shown in Table 2.7, their
dimensions are identical to those of the sample design cross-section, except for their web
thicknesses which range from 0.4 m to 0.6 m. Three span lengths are investigated – 30 m, 36.6
m, and 45 m. The proposed variation in span and cross-section produces 12 combinations to be
investigated and compared in the study.
The TW/TTOT and TSV/TTOT ratios for the 12 combinations are evaluated and summarized
graphically in Figure 2.17. It is shown that, as the web thickness increases, the percentage of
total torsion attributed to warping is reduced. For the span of 36.6 m, by increasing the web
thickness from 0.3 m to 0.6 m, the amount of warping torsion can be reduced by 9 percentage
points. Wider webs result in less warping torsion and more St. Venant torsion because they
provide a larger area for closed shear flow. This relationship is also confirmed by equation 2-8,

28
which suggests that the torsional stiffness K of a cross-section is a function of the web thickness
cubed. As a result, as the web thickness increases, the value of K increases, and so does the
amount of torsion attributed to St. Venant action. Another trend observed from Figure 2.17 is
that, as span increases, the amount of warping torsion decreases. For example, for a web
thickness of 0.3 m, the percentage of torsion attributed to warping is reduced from 83% to 68%.
Table 2.7. Variables considered in parametric study for torsion Average web thickness [m] Cross-section Span [m]
0.3025 - cross-section of sample design
30 m, 36.6 m, 45 m
0.4
30 m, 36.6 m, 45 m
0.5
30 m, 36.6 m, 45 m
0.6 30 m, 36.6 m, 45 m
In summary, this study indicates that increase in web thickness and span length
produces less warping torsion. As discussed earlier, warping torsion creates differential web
bending and imposes additional flexural demand on one of the two webs in a double-T girder.
This can be seen as a form of unequal load distribution. Since increase in web thickness and
span reduces warping torsion, it would also result in a more equalized load distribution between
the girder webs given that other factors remain constant.
83% 82% 80% 76% 77% 76% 72% 68% 68% 67% 63% 58%
17% 18% 20% 24% 23% 24% 28% 32% 32% 33% 37% 42%
0%
20%
40%
60%
80%
100%
tw= 0.3
03m
0.4m
0.5m
0.6m
tw= 0.3
03m
0.4m
0.5m
0.6m
tw= 0.3
03m
0.4m
0.5m
0.6m
Tsv/Ttot
Tw/Ttot
Span = 30m Span = 36.6m Span = 45m
Tsv - St. Venant torsionTw - warping torsionTtot - total torsion
Figure 2.17. Torsion distribution with varying web thickness and span length

29
2.6.1.3. Live Load Distribution based on Analytical Approach
In a double-T system, the two webs always collectively carry 100% of all live load
applied to the system. If the load is concentric, for a bridge with a straight and unskewed
alignment, it distributes equally between two webs. However, if the applied load is eccentric,
the load becomes unevenly shared. As described in Section 2.6.1.1, an applied eccentric load
can be decomposed into a symmetrical and an antisymmetrical component. The equivalent load
and resisting forces for the two components are summarized in Table 2.8. While the
symmetrical component produces a pair of equal forces in the webs, the antisymmtrical
component is resisted by a force couple, of which the magnitude is proportional to the amount
of warping torsion. The overall force in each web, which is the sum of resisting force from the
symmetrical and the antisymmetrical cases, is different in magnitude. This uneven distribution
of load can be seen as a result of warping torsion.
Table 2.8. Live load distribution under applied eccentric load – analytical approach
Live load distribution for the sample design is examined based on three load cases,
which are shown in Figure 2.18. These three load cases are associated with live load models
with discreet wheel loads, such as the CL-W Truck Load model or the point load component of
the CL-W Lane Load model. Load case 1 is a concentrically loaded with three lanes of traffic;
loads are symmetric about the centreline of the cross-section. Load case 2 and 3 are eccentric
load cases, where loads are positioned in each lane to maximize the load eccentricity and torsion

30
created in the section. Load case 2 bears 2 lanes of traffic whereas Load case 3 bears 3 lanes of
traffic.
Note: W represents CL-W truck axle load.
Figure 2.18. Load cases for evaluating live load distribution
Live load distribution in the sample design is evaluated under the three load cases using
the approach illustrated in Table 2.8, and the results are summarized in Table 2.9. The
calculation procedure (included in Appendix A) assumes that 77% of total torsion is resisted by
warping as calculated in Section 2.6.1.1. Based on this assumption, the concentric load case
Load Case 1 results in an equal sharing of live load, while Load Case 3 results in a 58%-42%
distribution. Among the three cases, Load Case 2 produces the most uneven distribution of live
load, with 80% of total live load being taken by the web on the severe loading side. In addition
to the relative percentage distribution of live load, it is also important to note the absolute
amount of live load carried per web. As shown in Table 2.9, the highest moment per web at
mid-span is 7520 kN-m produced by Load Case 2.
Table 2.9. Live load distribution – analytical approach
Live load distribution: moment at mid-span
Percentage distribution of total live load
Web 1 Web 2 Web 1 Web 2 [kN-m] [kN-m] Load Case 1 6300 6300 50% 50% Load Case 2 7520 1930 80% 20% Load Case 3 7280 5320 58% 42%
Note: (1) W represents CL-W truck axle load; (2) Calculation already accounts for multi-lane reduction factor and dynamic load allowance where applicable.
As shown in Table 2.8, warping torsion is an important quantity that affects the result of
live load distribution. Figure 2.19, which is generated based on the analytical method described
above, illustrates the relationship between the maximum moment per web and the amount of
warping torsion. In general, larger warping torsion produces a higher maximum moment per

31
web thus a more uneven distribution of live load. For Load Case 1, the concentrically applied
load does not induce any torsion in the system, thus warping torsion does not play a role in load
distribution. For both Load Case 2 and 3, the maximum moment per web is reduced as the ratio
of Tw/Ttot decreases. The rate of reduction for Load Case 2 is higher because its loading
arrangement creates higher total torsion in the system. Figure 2.19 indicates that Load Case 3
governs for lower values of lower levels of warping torsion, while Load Case 2 governs for
higher levels of warping torsion.
6000
6500
7000
7500
8000
0.40 0.50 0.60 0.70 0.80 0.90
Tw/Ttot
Max
imum
M p
er w
eb [k
N-m
] Load Case 1Load Case 2Load Case 3
Figure 2.19. Maximum moment per web as a function of k
The calculation of live load distribution in this section is based on the warping torsion
analysis in Section 2.6.1. However, the analysis in Section 2.6.1 is likely a conservative
evaluation that overestimates the amount of warping torsion because it neglects the presence of
transverse diaphragms in the double-T system. Therefore, the live load distribution calculated
in this section using the analytical approach likely overestimates the maximum live load
moment per web.
2.6.2. Grillage Model Analysis
A grillage model is developed to evaluate live load distribution in the double-T system.
It is a more refined approach than the previous analytical method because it accounts for the
stiffness of the transverse diaphragms and the two way action of the deck slab. As shown in
Figure 2.20, the model consists of a number of longitudinal and transverse beam elements that
represent the longitudinal and transverse strips of the structure. The flexural, shear and torsional
stiffness of each beam are based on the properties of their corresponding strip. The model is
simply-supported at the ends of the two webs. The detailed text input file of the grillage model
in included in Appendix C.

32
Figure 2.20. Grillage model of double-T system
The two eccentric load cases from the previous section (Load Case 2 and Load Case 3)
are considered in the grillage model analysis. Transversely, the CL-W trucks are placed to
maximize the load eccentricity; longitudinally, the loads are positioned to produce the maximum
bending moment at mid-span. The footprints of the truck wheel loads on the bridge deck slab
are illustrated in Figure 2.21. As shown in Figure 2.22, the wheel loads are applied as an
equivalent pair of gravity load and torsional moment on the centroid of the longitudinal strip
they act on.
Load Case 2 Load Case 3
Figure 2.21. Position of truck wheel load for Load Cases 2 and 3
Figure 2.22. Example of equivalent load used in applying wheel load
Figure 2.23 summarizes the results from the grillage model analysis. Member forces
including moment and torsion in webs and transverse diaphragms are plotted in the diagram. A
comparison of the results from the analytical approach and the grillage model is shown in Table

33
2.10. According to the grillage model, Load Case 3 produces the maximum moment per web at
mid-span, which is 6730 kN-m as indicated on the diagram. This value is approximately 15%
less than the maximum live load moment predicted by the analytical method in the previous
section. The fact that Load Case 3 governs over Load Case 2 indicates that the grillage model
predicts less warping torsion in the system than the analytical method. This is as expected
because the grillage model accounts for the stiffness of diaphragms which restrain differential
web bending. The moment and torsion present in the diaphragms as shown in the figure are also
evidence that they are helping reduce the warping torsion in the system. In conclusion, the live
load distribution calculated using the grillage model is used in the design of double-T system
because it is a more refined method that accounts for the stiffness of the diaphragms in the
system.
Load Case 2 Load Case 3
Moment [kN-m]
3046
6404
Web1
ED ED ED EDDD DD DD DD
Web26733
5733 150Scale
2800
Torsion [kN-m]
Scale 150
100
Web1
Web2
Deformed shape
Figure 2.23. Member forces and deformation from grillage model

34
Table 2.10. Comparison of analytical approach and grillage model results [Unit: kN-m]
Analytical approach Grillage model Web 1 Web 2 Web 1 Web 2
Load Case 1 6300 6300 - - Load Case 2 7520 1930 6400 3050 Load Case 3 7280 5320 6730 5730
2.7. Longitudinal Flexure
2.7.1. Unbonded Tendons
Unbonded tendons are commonly used today in bridge and building construction. One
type of application for unbonded tendons is external post-tensioning, where tendons are placed
outside of concrete and enclosed in plastic ducts injected with grout. The underlying principle
of unbonded tendons has a fundamental difference with internal bonded tendons (Menn, 1990).
For bonded tendons, the change in strain in prestressing steel due to deformation (Δεp) equals
the concrete strain at tendon level (εcp) for any given plane section (Figure 2.24). This
compatibility relationship however cannot be applied to unbonded tendons. Due to the lack of
bonding, the tendon strain is not directly related to concrete strain at any one plane. Instead, the
strain depends on the global deformation of the girder and can be determined by integrating the
concrete strain at the level of tendon over the span of the structure (Menn, 1990). The
prestressing steel strain for unbonded tendons can be assumed constant along the span.
Figure 2.24. Compatibility relationship for bonded and unbonded tendons under ultimate limit states Under SLS, as concrete remains uncracked, the girder deformation and the change of
strain in prestressing steel is negligible (Menn, 1990). Thus, the stress in the unbonded tendons
can be taken as the effective prestress (Menn, 1990), which is the tendon stress after all losses.

35
The stress in unbonded tendons under ULS can also be conservatively estimated as the
effective prestress (Menn, 1990). Although this approximation can be sufficient for some of the
preliminary design calculations, it is desirable to determine the actual tendon stress under ULS,
so that better material economy can be achieved. A procedure to calculate unbonded tendon
stress under ULS is described in Section 2.7.4.
For both the SLS and ULS analysis, a reliable value of the effective prestress after all
losses is needed. A procedure for calculating this for girders with unbonded tendons is given in
Section 2.7.2.
2.7.2. Prestress Losses
The effective prestress in tendons under service load is always less than the jacking force
due to prestress losses (Menn, 1990). The prestress losses considered for the sample design
include: (a) friction loss, (b) anchor set loss, (c) loss due to concrete creep and shrinkage, and (d)
relaxation of prestressing steel after transfer. While (a) and (b) are losses at transfer, (c) and (d)
are time-dependent losses taking place over long-term. The losses for the sample design are
calculated with the following procedures and the results are summarized graphically in Figure
2.26.
(a) Friction Loss
Friction loss is due to the friction force between tendon and duct incurred during
stressing of tendons. It is related to the change of tendon alignment in both the vertical and
horizontal plane. The friction loss FR at a distance x away from the jacking end can be
calculated using the following formula (Menn, 1990): ( )(1 )x
oFR f e μα−= − [2-9]
where fo is the jacking stress, α(x) is the angle change between the jacking end and location x,
and μ is the friction coefficient, which varies for different types of post-tensioning systems. For
external unbonded tendons, AASHTO (1998) suggests that μ can be taken as 0.25. Unlike
internal bonded tendons with continuous angle change in their alignment, external unbonded
tendons only incur angle changes at a couple of discreet locations along the span. As a result,
friction loss in external unbonded tendons tends to be lower in comparison with internal bonded
tendons. For the sample design, the total friction loss is calculated to be 14 MPa based on a
value of 0.25 for μ.

36
(b) Anchor Set Loss
Anchor set loss refers to the anchorage slip due to seating of wedges during the
anchoring process. The tensile stress in the tendons decreases as the tendon shortens due to slip.
The anchor set loss ANC can be calculated as follows:
setpANC E
lΔ⎛ ⎞= ⎜ ⎟
⎝ ⎠ [2-10]
where Δset is the change in tendon length due to anchorage slip, which can be assumed to be 7
mm based on specifications of conventional post-tensioning systems. The parameter l is the
tendon length over which anchor set has an effect, and is dependent on friction in the post-
tensioning system. A tendon with lower friction has a longer l and vice versa. Because friction
in the unbonded system occurs primarily at deviation, the possible termination for l would be at
the deviations or the opposite end of the beam. The three possible cases for l are evaluated and
shown in Table 2.11. With an l of 12 m under case 1, the anchor set loss is calculated to be 112
MPa. This means that the total stress differential at the first deviation becomes 126 MPa
(FR+ANC), which equals 9 times of the friction loss. This likely cannot be sustained by the
deviation in the form of friction, thus the anchor set loss propagates beyond the first deviation.
A similar case can be made for Case 2. Consequently, it is assumed that the influence of anchor
set extends to the entire span. With an l of 38 m, the anchor set loss is calculated to be 37 MPa.
Table 2.11. Anchor set loss with varying l
Anchor set loss
Case 1 112 MPa Case 2 54 MPa Case 3 37 MPa
(c) Loss due to Concrete Creep and Shrinkage
Both creep and shrinkage are time-dependent phenomenons that cause plastic shortening
in concrete. As tendons shorten with concrete, they lose some of the prestressing force initially
jacked in. Trost (1967) has developed the following expression for the change of concrete strain
due to creep and shrinkage:
( )0 1c cc CS
c cE Eσ σε φ μφ εΔ
Δ = + + + [2-11]

37
where σc0 is the initial concrete stress at the level of prestressing steel due to dead load and
prestressing force; φ and μ are the creep coefficient and the aging coefficient respectively; and
εcs(t) is the concrete shrinkage strain. Based on the compatibility relationship of Δεp = εcp
(Figure 2.21), Menn (1990) has derived from equation 2-11 the following formula to calculate
the loss of prestress due to creep and shrinkage for bonded tendons:
( ) [ ]( )
0
1 1c c cs c cn A E A
P tn
ρ σ φ ερ μφ
+Δ =
+ + [2-12]
where n = Ep / Ec and ρ = Ap / Ac. This formula, however, cannot be applied to unbonded
tendons, because the derivation assumes that Δεp = εcp, which does not hold true for unbonded
tendons.
From the same expression by Trost [2-11], Gauvreau (1993) has derived a formula to
calculate creep and shrinkage loss based on the compatibility relationship for unbonded tendons,
which requires that the total change in length in prestressing steel equals the total concrete
deformation at the level of unbonded tendons. This relationship, which assumes that the strain in
prestressing steel is constant along the length of tendon, can be expressed as follows:
( )1p cp
p
x dxl
ε εΔ = ∫ [2-13]
where Δεp is the change in strain in prestressing steel; εcp is the concrete strain at elevation of
tendon; and lp is tendon length. The integration of εcp is over the projected length of tendon.
The formula for creep and shrinkage loss developed by Gauvreau (1993) for unbonded tendons
is as follows:
( )
[ ] ( )
0
2
1
1 1 1
c c cs c cp
c
p c
n A x dx E Al
PAn e x dx
l I
ρ φ σ ε
ρ μφ
⎡ ⎤+⎢ ⎥
⎢ ⎥⎣ ⎦Δ =⎡ ⎤
+ + +⎢ ⎥⎢ ⎥⎣ ⎦
∫
∫ [2-14]
where e(x) is the distance from centroid of the gross uncracked concrete section to the centroid
of unbonded prestressing steel.

38
(a) (b) (c) (a) Nominal creep coefficient versus relative humidity for water-to-cement ratio (W/C) of 0.4 and 0.5 (b) Correction factor k versus time of loading (days / years after casting) (c) Time-varying function f(t-τ) versus time (days / years after casting) for two typical values of hef, where hef = 2Ac/U. Ac is the cross-sectional area and U denotes the exposed perimeter.
Figure 2.25. Parameters in determining creep coefficient φ (Menn, 1990)
The value of μ in equation 2-14 can normally be taken as 0.8 (Menn, 1990). Both the
shrinkage strain and the creep coefficient are time-dependent variables. While εcs can be
determined from charts in Menn (1990), creep coefficient φ can be calculated using the
following equation (Menn, 1990):
( ) ( )( , ) nt k f tφ τ φ τ τ= − [2-15]
where φn is the nominal creep coefficient; k(τ) is a correction factor for the age of concrete at
time of loading; and f(t-τ) is the function accounting for the time-varying property of creep. All
three parameters can be determined graphically from diagrams in Figure 2.25.
Based on the above information, long-term prestress loss due to creep and shrinkage for
the sample design is evaluated for a projected service life of 50 years. Also included in the
calculation is the loss in stage 1 tendons at the time of stage 2 post-tensioning, which was
assumed to be 28 days after the stage 1 operation. The creep and shrinkage losses calculated are
summarized in Table 2.12.
Table 2.12. Loss due to creep and shrinkage and related parameters
Time Shrinkage strain, εcs (Menn, 1990)
Creep coefficient, φ (Menn, 1990)
Loss due to creep and shrinkage
All tendons 50 years -0.298 mm/m 2.00 136 MPa
Stage 1 tendons 28 days -0.105 mm/m 0.50 25 MPa

39
(d) Relaxation of Prestressing Steel after Transfer
The loss of prestress due to relaxation is a function of the prestressing steel property as
well as the ratio between the initial stress (σp0) and the ultimate stress (fpu) of the prestressing
steel (Menn, 1990). This relationship is expressed by the following equation in CHBDC (CSA,
2006b):
REL = C [ A – B (CR + SH) ] [2-16]
where A and B are variables related to the property of prestressing steel, and C is a variable
depending on the ratio of σp0 / fpu . According to CHBDC, A and B can be taken as 42 and 0.053
respectively for Grade 1860 low-relaxation strand, while C can be taken as 1.00 if σp0 / fpu
equals 0.75. From equation 2-16, it is calculated that the long-term prestress loss due to
relaxation for the sample design approximately 35 MPa.
Relaxation develops faster in comparison with creep and shrinkage. Approximately 50%
of the final relaxation loss can be reached at 28 days (Menn, 1990). The relaxation loss at 56
days is conservatively taken as 100% of its final value since the stress in stage 1 tendons at 56
days will be used as a lower bound in later analysis. In summary, the relaxation loss of stage 1
tendons at 28 days and 56 days are assumed to be 17 MPa and 35 MPa, respectively.
Note: * Stress at 28 and 56 days are calculated for stage 1 post-tensioning tendons. t = time elapsed since loading
Figure 2.26. Summary of prestress losses in sample design

40
2.7.3. Flexural Response under SLS
The structural response under SLS needs to be evaluated for the load combinations
presented in Section 2.4.4. The magnitude and load factors for dead, superimposed dead and
live load were given in Section 2.4.1 and 2.4.2. The prestressing force used in each load
combination is based on the loss calculation from section 2.7.2. As shown in Figure 2.26,
prestress losses vary along the span. This variation, however, only changes the total
prestressing force in each case by approximately 1%. Due to the relatively small effect of the
variations, the stress in the prestressing steel is assumed to be constant along the span for the
SLS analysis. The prestress values used in the SLS calculation are summarized in Table 2.13.
For load case 1A which represents the loading condition during stage I post-tensioning, the
stress in stage I tendons (fP1) is assumed to be the jacking stress, 0.80 fpu. For load case 2, which
describes the loading just prior to stage II post-tensioning, fP1 is taken as the prestress after 28
days, which is 0.74 fpu, because stage II post-tensioning is assumed to commence 28 days after
stage I. Load case 1C takes place shortly after load case 1B during stage II post-tensioning
operation. Under this load case, fP1 is assumed to still be at 0.74 fpu, while fP2 is taken as the
jacking stress, 0.80 fpu. Finally, load case 1D accounts for the load combination during the
bridge’s service life. fP1 and fP2 are taken as the prestress after all losses for a period of 50 years.
Table 2.13. Stress in post-tensioning steel under SLS
Case Combination fP1 fP2 SLS 1A DL + P1 80% fpu 0 1B DL + SDL + P1 74% fpu 0 1C DL + SDL + P1 + P2 74% fpu 80% fpu 1D DL + SDL + P1 + P2 + LL 67% fpu 67% fpu
The concrete stresses at the girder’s top and bottom fibre are calculated for the four load
combinations and shown in Figure 2.27. Stresses are not shown for girder ends, because it is not
appropriate to use methods based on the principle of plane sections to evaluate these disturbed
regions with not only changing geometry but also large concentrated forces from the post-
tensioning anchorages. Based on St. Venant principle, the length of the disturbed region is
approximated as the depth of the girder, which is 2 m (Schlaich, 1987). The end region will be
analyzed explicitly with strut-and-tie models in Section 2.8.

41
Concrete top fibre stress
-8.000-4.0000.000
[MPa
].Concrete bottom fibre stress
-50.000-40.000-30.000-20.000-10.000
0.000
[MPa
].
SLS 1A SLS 1B SLS 1C SLS 1D Compressive stress limit
-0.060 MPa
-1.777 MPa
-0.068 MPa tensile stress limit
tensile stress limit
compressive stress limit
Figure 2.27. Concrete stress under SLS
-12-10
-8-6-4-20246
0.6 0.65 0.7 0.75 0.8
Level of prestress (fraction of fpu)
Conc
rete
stres
s[M
Pa]
SLS 1B
SLS 1D
-12-10
-8-6-4-20246
0.6 0.65 0.7 0.75 0.8
Level of prestress (fraction of fpu)
Conc
rete
stres
s[M
Pa]
SLS 1Ctensile stress limittensile stress limit
(a) Tensile stress in concrete bottom fibre (b) Tensile stress in concrete top fibre
Figure 2.28. Concrete stress sensitivity to level of prestress
The stress diagram in Figure 2.27 confirms that the concrete stress lies within the range
of 0 MPa to 0.6 f’c (-42 MPa) under all load combinations, thus satisfies the SLS design criteria.
The tensile stress limit is the governing criterion for all critical locations, which include the mid-
span for positive flexure (SLS 1D), as well as deviation and girder end for negative flexure (SLS
1C). The maximum compressive stress in the concrete shown in Figure 2.27 is approximately
36 MPa. This value is 86% of the compressive stress limit of 42 MPa, indicating that the
system is making rather efficient use of concrete.
The analysis found that the concrete stresses are somewhat sensitive to the level of
prestress, which is dependent on prestress losses. As shown in Figure 2.28, concrete stress in
the bottom fibre would exceed the tensile stress limit if the level of prestress under SLS 1B and

42
1D goes below approximately 0.65 fpu; concrete stress in the top fibre would exceed the tensile
stress limit if the level of prestress goes above 0.75 fpu. Prestress losses for the sample design
was evaluated with a reasonable level of accuracy but might still differ from the real stress due
to lack of control over construction details at the design stage and the inherent variability
associated with long term losses. Uncertainty associated with prestress losses comes from both
short and long-term losses. Short-term losses due to anchor set and friction are dependent on
the selection of hardware system and somewhat on how the construction is carried out on site.
As a result, a designer can only estimate these losses during the design phase based on
recommendations from various standards and manufactures’ specifications. Uncertainty in
long-term losses mainly comes from: 1) At the design stage, it is somewhat difficult to predict
accurately the time between stage I and stage II post-tensioning; 2) Even with an accurate
prediction of the time between two stages of post-tensioning operation, there is some inherent
uncertainty with the level of long-term losses incurred during that period. Because the concrete
stresses are relatively close to the stress limit, some control over this sensitivity to level of
prestress is desirable in the system. Also shown in Figure 2.27 is that concrete stresses in both
top and bottom fibre are close to the tensile stress limit, indicating that the design is critical in
both positive- and negative-flexure. This observation suggests that the system has relatively low
tolerance in terms of post-tensioning design – an increase in post-tensioning would increase
negative flexure and push concrete’s top fibre beyond its stress limit under SLS 1A and 1C,
while an decrease in post-tensioning would increase positive flexure and overstress the
concrete’s bottom fibre under SLS 1D and possibly SLS 1B. This relatively low tolerance of
post-tensioning design does not affect the developed sample design very much, but it may limit
the double-T base concept’s applicability to a wider range of geometrical conditions that create
different loading conditions.
2.7.4. Flexural Response under ULS
The adequacy of the structure’s flexural capacity needs to be verified under ULS. The
load combinations and associated load factors were provided in Section 2.4. The stress in
unbonded tendons under ULS can be assumed to be the effective prestress after all losses. This
is however always a conservative assumption (Menn, 1990). The actual tendon stress is greater
than the effective prestress due to tendon elongation under ULS.
The stress in unbonded tendons under ULS depends on the loading condition, and can be
determined based on equilibrium and global deformation. In this thesis, the tendon stress is

43
evaluated by a method that equilibrates tendon elongation due to tendon force (ΔlPF) with
tendon elongation due to deformation (ΔlPD). For an assumed tendon force Pi, ΔlPF can be
calculated from the following equation:
( )0
iPF P
P P
P Pl l
A E∞−
Δ = [2-17]
where P∞ is the effective prestress after all losses and lp0 is the tendon length when the force in
tendon is P∞. For a structural member with external load Qf and tendon force Pi, ΔlPF can be
calculated as follows:
( )PD cPl x dxεΔ = ∫ [2-18]
where εcp is the concrete strain at level of prestressing tendon due to Qf and Pi. The calculation
procedure is an iterative process in which the value of Pi is assumed and adjusted until the
tendon elongation calculated from equation 2-17 and 2-18 are equal. The final solution from the
iteration is a tendon force that is compatible with the member deformation under external load
Qf. It is also useful to determine the minimum prestressing force Pmin required for equilibrating
external loads. The value of Pmin and the tendon yield force Py serve as the lower and upper
bound of the actual tendon force. The iterative procedure is schematically illustrated in Figure
2.29.
Figure 2.29. Iterative procedure for calculating post-tensioning force in unbonded tendons under ULS
Preliminary calculations indicate that concrete remains within the uncracked and linear
elastic range under load combination ULS 1A and 1B (Figure 2.30). Thus it is clear that
structural capacity is greater than demand under these two load cases. The remaining load cases
to be checked are ULS 1C and 1D.

44
-45.000
-30.000
-15.000
0.0005.000
[MPa
] .
ULS 1A - Top fibre ULS 1B - Top fibreULS 1A - Bottom fibre ULS 1B - Bottom fibre
cracking stress
0.6 f’c
Figure 2.30. Concrete stress under load combination ULS 1A and 1B
0100002000030000
Moment[kN-m]
MQ - Moment dueto external loadMcr - crackingmomentM capacity
-2.00-1.000.00[mm/m]
0.00
10.00
20.00
Curvature[rad/km]
0.004.008.00
12.00[mm/m]
,c topε
cpε
28500
30600
cracked Figure 2.31. Moment and girder deformation under load combination ULS 1D
Under load combination ULS 1D, stress in unbonded tendons will be higher than under
SLS due to girder deformation under applied load. The actual stress can be determined using
the procedure outlined earlier in this section. Figure 2.31 illustrates the moment diagram and
related concrete deformations under ULS 1D. Based this information, it is calculated that the
tendons elongate approximately 54 mm under ULS 1D and achieve a final stress of 1500 MPa,
equivalent to 81% of fpu. It is somewhat difficult to define the moment capacity for a system
with unbonded tendons because demand and the unbonded tendon force (thus capacity) are

45
interrelated. The moment capacity diagram shown in Figure 2.31 is calculated by magnifying
the total load on the girder until the unbonded tendon stress reaches the yield stress. Thus the
curve can be interpreted approximately as the upper limit for demand. It is shown in Figure
2.31 that the upper limit is approximately 7% higher than the actual demand on the girder.
Load combination ULS 1C accounts for the loading condition during stage II post-
tensioning. As shown in Figure 2.32, the negative moment due to prestressing force under this
load case is larger than the positive moment from to external load, resulting in overall negative
bending in the girder. Thus, unlike ULS 1D where tendons need to gain additional stress to
maintain equilibrium with external applied load, the tendon stress under ULS 1C remains
unchanged at 0.74 fpu for stage I tendons and 0.80 fpu for stage II tendons. An estimation of
concrete stress under ULS 1C using elastic method indicates that the maximum tensile stress
and compressive stress in the concrete are 1.5 MPa and -48 MPa, respectively. This suggests
that concrete remains uncracked but goes slightly beyond the linear elastic range under ULS 1C.
The negative flexural capacity of the girder is thus checked for this load combination. With the
known prestressing force P, the negative flexural capacity of the girder is calculated with P
treated as external load. The capacity of -17350 kN-m, as shown in Figure 2.33, is greater than
the total demand from MQ and MP (-11460 kN-m) shown in Figure 2.32.
-20000
0
20000
40000
Moment[kN-m]
MQ - Moment dueto external loadMQ + MP
M capacity (P asload)
-11460
-17220
Figure 2.32. Moment diagram under load combination ULS 1C
Note: Prestressing force is treated as load instead of internal resistance.
Figure 2.33. Negative flexural capacity of girder under load combination ULS 1C

46
In summary, the design of the double-T system is adequate under ULS. The demand and
capacity under all four ULS load combinations are summarized in Table 2.14.
Table 2.14. Summary of flexural response under ULS
Load combination
Max demand Capacity Max demand
Capacity Note
ULS 1A - - - 1B - - -
Not evaluated as concrete remains uncracked and linear elastic (see Figure 2.30)
1C -11460 kN-m
-17220 kN-m 67%
1D 28500 kN-m
30600 kN-m 93%
2.7.5. Shear
Shear is designed under ULS 1D as preliminary calculation indicates that it produces the
largest shear demand. The design follows the general method proscribed by CHBDC clause 8.9.
Detailed calculation is included in Appendix A. The factored shear under ULS 1D is plotted in
Figure 2.34 along with the shear resistance contribution from post-tensioning and concrete. The
shear reinforcement design is included at the bottom of the diagram. It should be noted that this
design is for the global system only. The final stirrup layout will be modified to account for the
local forces in post-tensioning anchorage zone and the deviation region. Somewhat contrary to
conventional wisdom, the segment of the girder between deviations requires more shear
reinforcement than the regions closer support. This is partly due to the fact that the deflected
tendons provide significant shear resistance while the flatly aligned tendons between deviations
provide none.

47
Figure 2.34. Shear design for the base concept 2.8. Local Forces
2.8.1. Anchorage Zone
The anchorage zone for external unbonded tendons is a critical region where large
concentrated force needs to be transferred from the tendon anchorages the concrete section. The
region over which the load transfer occurs can be called the disturbed region (Schlaich, 1987).
Within the disturbed region, a reasonable model for the flow of forces needs to be established.
This is accomplished by the use of truss model, which approximates the flow of forces with a
system of compression struts and tension ties (Schlaich, 1987).
The load and reaction forces acting on the anchorage zone are illustrated in Figure 2.35.
They are calculated based on load combination ULS 1C which has the highest post-tensioning
force. The length of the disturbed region is approximated as half of the deck width to
accommodate the horizontal speading of the prestressing force. Dead load of the girder is
applied at centerline of the webs. The sectional forces right next to the disturbed region are
calculated based on sectional bahaviour of the girder and the global loading under ULS 1C.
They are represented in Figure 2.35 by a pair of compression forces in the top slab and the webs,
and are applied at the end of the disturbed region opposite to the tendon forces.
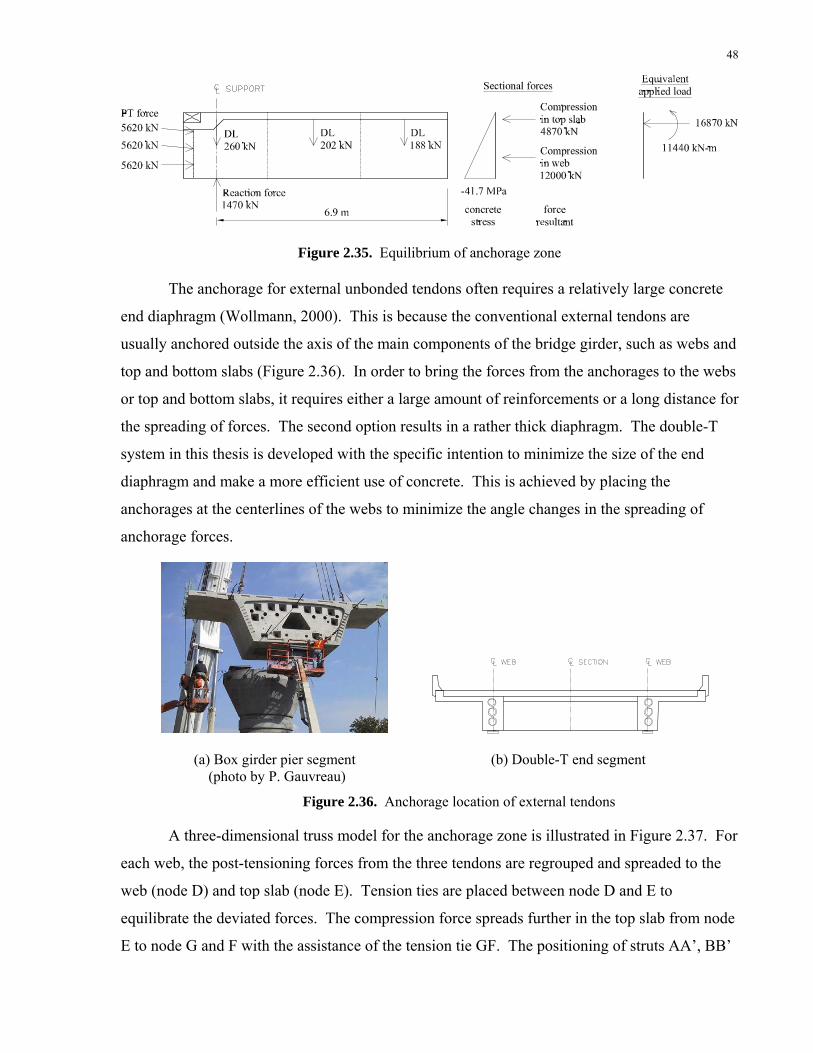
48
Figure 2.35. Equilibrium of anchorage zone
The anchorage for external unbonded tendons often requires a relatively large concrete
end diaphragm (Wollmann, 2000). This is because the conventional external tendons are
usually anchored outside the axis of the main components of the bridge girder, such as webs and
top and bottom slabs (Figure 2.36). In order to bring the forces from the anchorages to the webs
or top and bottom slabs, it requires either a large amount of reinforcements or a long distance for
the spreading of forces. The second option results in a rather thick diaphragm. The double-T
system in this thesis is developed with the specific intention to minimize the size of the end
diaphragm and make a more efficient use of concrete. This is achieved by placing the
anchorages at the centerlines of the webs to minimize the angle changes in the spreading of
anchorage forces.
(a) Box girder pier segment (b) Double-T end segment (photo by P. Gauvreau)
Figure 2.36. Anchorage location of external tendons
A three-dimensional truss model for the anchorage zone is illustrated in Figure 2.37. For
each web, the post-tensioning forces from the three tendons are regrouped and spreaded to the
web (node D) and top slab (node E). Tension ties are placed between node D and E to
equilibrate the deviated forces. The compression force spreads further in the top slab from node
E to node G and F with the assistance of the tension tie GF. The positioning of struts AA’, BB’

49
and CC’ in one plane allows the use of a relative thin diaphragm. The forces in struts and ties
are calculated from the loads described in Figure 2.35 and are based on equilibrium at each joint.
Concrete stresses in the compression struts are found to be non-critical. The quantity of
reinforcements required in the region, which is based on the forces in the tension ties, is
summarized in Table 2.15.
5001780
1290
12000
3000
50103000
2420
2420
Top view
Side view
Isometric view
Figure 2.37. Anchorage zone truss model [Unit: kN]
Table 2.15. Anchorage zone reinforcing steel
Force Reinforcement
Tie DE 1290 kN 20M@120mm, for a 1.5m wide band centred at tie AB Tie GF 1780 kN Two additional 4-0.6" tendons in the top slab
As shown in the above discussion, by placing the external tendon anchorages at the
centerlines of webs, the amount of forces required for spreading the anchorage forces is reduced
and so is the required dimension of the end diaphragm. One implication of this anchorage
placement is that the angle of which the tendons extrude from the concrete webs is relatively flat
(shown in top view of Figure 2.37). To resolve this issue, the webs are widened for a certain
distance from the end of the girder. More details on the widened webs are shown in Section
2.9.1.
2.8.2. Deviation
Similar as tendon anchorages, deviations also create large concentrated forces in the
structure. The flow of forces is again analyzed by the use of truss model, which is illustrated in

50
Figure 2.38. The forces are calculated under ULS 1C which has the highest post-tensioning
force among all load cases. The reinforcing steel required based on this truss model is
summarized in Table 2.16.
Figure 2.38. Deviation truss model
Table 2.16. Deviation reinforcing steel
Force Reinforcement
Horizontal tie 470 kN 20M@170mm, for a 1.5m band centred at deviation Vertical tie 900 kN One additional 4-0.6" tendon in the top slab at deviation
2.9. Construction
2.9.1. Precast Segment Design
The double-T bridge concept will be constructed using precast segmental method. The
segment layout for the design example is shown in Figure 2.39. For transportation reasons, the
length of every segment is limited under 3 m.
Figure 2.39. Segment layout There are four types of segments in the sample design:
1. Interior segment (IS) (Figure 2.40 a)
These are regular segments with no special modifications.
2. Modified interior segment (MIS) (Figure 2.40 b)
These segments are positioned next to the end segments. Their geometry is the same as
interior segments except that their webs are slightly widened to accommodate post-tensioning
tendons extruding from concrete.

51
3. Deviation segment (DS) (Figure 2.40 c)
The deviation segment requires a full or partial concrete diaphragm to support the tendon
deviators and to accommodate the flow of forces from the tendon deviation. For box-girder
bridges, partial diaphragms with an access opening are usually used to facilitate future bridge
inspection. The double-T girder bridge however does not necessarily require such an opening in
the diaphragm because all its concrete surfaces are readily accessible for inspection from
exterior. The diaphragm dimensions are adapted from ASBI standard drawings (2008).
4. End segment (ES) (Figure 2.40 d)
The relatively complicated geometry of the end segment is to accommodate the
following:
a. Anchors of the longitudinal post-tensioning tendons;
b. Flow of forces from tendon anchorages to concrete sections, as described in Section
2.8.1;
c. Recess for expansion joint;
d. Contact surface for bearing plate.
Detailed segment drawings with complete dimensioning can be found in Appendix A.
The actual dimensions are based on ASBI standard drawings (2008) and the anchorage zone
truss model analysis.
Side view Cross-section view Isometric view
Figure 2.40. Segment geometry
(a) Interior segment (IS)
(b) Modified interior segment (MIS)
(c) Deviation segment (DS)
(d) End segment (ES)

52
2.9.2. Precast Concrete Forming
Segments will be precasted with match-cast technology, which produces perfectly-fitted
joints by casting a new segment against a dry mate segment. Segments produced by such
method can be erected on site speedily without the need of cast-in-place concrete or grout. As
discussed in Chapter 1, segmental construction of box girder bridges usually involves the use of
a core form, of which cost is rather high and can only be justified for long bridges. For the
double-T system, the absence of a bottom slab frees the construction from the need of a core
form and subsequently creates flexibility in the choices of forming method. The double-T
segments can be casted with relative inexpensive plywood formwork as shown in Figure 2.41.
The cost can be further reduced by employing a system of formwork modules, which are created
based on the common geometrical elements shared by each type of segment. These modules
can be used in various combinations to form the different types of segment in the system.
Figure 2.41. Schematic illustration of formwork for an interior segment
2.9.3. Girder Erection
The construction sequence for the superstructure of a single-span double-T bridge is as
follows:
1. Erect precast girders;
2. Stress stage I post-tensioning tendons;
3. Place wearing surface and barriers;
4. Stress stage II post-tensioning tendons.
The girder segments can be erected on either false work or erection girders. The first
option is more economical if access from below the bridge is relatively non-restrictive.
Otherwise, the second method is a more suitable option. Both types of erection systems need to
provide a platform below the girder for personnel to stand on during the grouting of external
post-tensioning tendons. A platform can be added onto false work with relative ease. Erection
girders, on the other hand, needs to be specifically designed to be able to accommodate such a
Wooden form Platform

53
platform. A sample design of an under-slung erection girder with overhanging platform is
shown in Figure 2.42.
Figure 2.42. Erection girder with overhanging platform
2.10. Final Remarks
A double-T system with pure external unbonded post-tensioning is developed in this
chapter. The concrete section with two slender webs not only reduces the overall concrete and
dead load of the structure, but also improves the live load distribution in comparison with
conventional slab-on-girder system with multiple girders. A detailed comparison of the two
types of systems will be presented later in Chapter 6. The double-T system will be constructed
with precast segmental method, which allows the bridge to be built rapidly with relatively low
impact on site. The simplicity of the double-T section allows for easy forming and flexibility in
construction.
The sample design of the double-T base concept is governed by longitudinal flexure
under SLS. It is found in the SLS analysis that the structure is somewhat sensitive to the
assumptions related to loss of prestress and the amount of the post-tensioning in the system.
This finding does not affect the developed sample design very much, but it may limit the
double-T base concept’s applicability to a wider range of geometrical requirements that create
different loading conditions. To resolve this limitation, two alternative double-T concepts with
a blend of prestressed and non-prestressed primary reinforcements will be examined in the
following two chapters. They are modifications of the base concept with reduced amounts of
post-tensioning and supplementary non-prestressed reinforcements.

Chapter 3 Double-T Alternative Concept I
– Double-T System with External Unbonded Post-Tensioning and External
Carbon-Fibre-Reinforced Polymer (CFRP) Reinforcing System
This chapter describes the design of an alternative double-T system that is a modification
of the base concept in Chapter 2. This concept is developed to address the sensitivity to
prestress losses and amount of post-tensioning encountered in the base concept. Unlike the base
concept which has post-tensioning as its sole primary longitudinal reinforcements, alternative
concept I incorporates a blend of prestressed and non-prestressed reinforcements. The
prestressed reinforcement is external unbonded post-tensioning, and the non-prestressed
reinforcement is carbon-fibre-reinforced polymer (CFRP).
Base concept Alternative concept I
Figure 3.1. Comparison of cross-sections of double-T base concept and alternative concept I
A number of design aspects of alternative concept I are same as those for the base
concept, thus are not repeated in this chapter. These subjects include:
Dead load and live load (Section 2.4.1 and 2.4.2)
SLS and ULS load combinations (Section 2.4.4)
Transverse system design (Section 2.5)
Torsion and live load distribution (Section 2.6)
Construction (Section 2.9)
In addition to the items listed above, evaluation of local forces (Section 2.9) is also excluded
from this chapter because variation in this aspect of the design is minor and easily adaptable
between the two concepts.
54

55
This chapter focuses on the longitudinal behaviour of the new system and its differences
from the base concept. Section 3.1 provides some background information on fibre-reinforced
polymer (FRP), which is a family of material that includes CFRP. Section 3.2 gives a brief
description of the design. Section 3.3 and 3.4 describe the material properties and design
criteria respectively. Section 3.5 describes the load combinations and the associated
prestressing parameters. Section 3.6 and 3.7 are dedicated to the systems’ longitudinal flexure
and shear. Finally, section 3.8 discusses some of the advantages and disadvantages of
alternative concept I.
3.1. Fibre-Reinforced Polymer (FRP) Reinforcing Systems
FRP is a type of composite material that is in most cases made of fibres set in a matrix of
polymeric resin. The most common types of fibres include aramid, carbon and glass. Typical
forms of FRP reinforcing system are internal reinforcements such as rods, tendons and grids,
and external systems such as plates and wraps. The double-T alternative concept I employs the
CFRP flexure strengthening system with external plates as shown in Figure 3.2.
Figure 3.2. A beam strengthened with CFRP flexure plates and L-shaped shear plates (Sika, 2009)
Originally developed for marine and aerospace applications in the early 1940’s, FRP
composites started to be studied as a construction material a few decades ago since the 1950’s
(ACI, 2007). It began being investigated in Europe as an externally bonded reinforcement to
concrete structure for flexural strengthening (ACI, 2007). In the 1980’s, research interests also
arose in the use of FRP reinforcing bars in reinforced concrete for the enhancement of durability
(ACI, 2007). The FRP system has seen increased application in civil infrastructure in the recent
decades (ACI, 2007). As reported by American Composite Manufacturers Association (ACMA,
2005), civil applications such as transportation and infrastructure consumes approximately 52%

56
of all FRP material shipped in U.S. in 2004. The use of externally applied FRP in structural
strengthening and retrofitting is a field that gained major development (ACI, 2007). Today,
thousands of projects worldwide have utilized external FRP strengthening systems (ACI, 2008).
FRP has a number of characteristics that make it desirable as a construction material.
First, it is less prone to corrosion in comparison with steel. Its superior durability means less
repair and associated cost during the service life of the structure. Among different types of
fibres, carbon fibre is most resistant to environmental factors such as moisture and alkaline
attack (ACI, 2007). Second, FRP has a higher tensile strength than mild steel. A typical CFRP
strengthening system usually has a tensile strength between 1000 and 3000 MPa (ACI, 2007).
Finally, FRP systems are light weight, making them easy to apply in construction thus saving
labour cost (ACI, 2007).
There are in general two types of externally applied FRP strengthening systems
commercially available (Teng, 2002). The first one is the wet layup system, which comes in as
dry fibre sheets and needs to be set in the resin and cured on-site. The second type is the
procured system, which is manufactured off-site into different shapes, such as plates or shells,
and ready to be used once on-site (ACI, 2007). While the wet layup system has more flexibility
in bonding and shaping on-site, the procured system facilitate better quality control (Teng,
2002). The double-T alternative concept I is proposed to employ procured CFRP plate
reinforcements.
3.2. Brief Description of Design
This section briefly describes the design of the alternative double-T system with external
unbonded post-tensioning and external CFRP system. More detailed design drawings can be
found in Appendix A. The analysis that describes the design process or supports the design
outcome is presented in the later sections of this chapter.
The cross-section of the structure, as shown in Figure 3.3, consists of a concrete double-
T section, external unbonded post-tensioning tendons, and CFRP laminates externally attached
to the bottom and side faces of the concrete webs. The concrete section is identical to that of the
base concept. The post-tensioning layout is also similar to that of the base concept, except that
the number of strands per web is reduced to from 78 to 72. The strands are grouped into three
tendons, each containing 24 strands. The concept again employs a staged post-tensioning

57
operation. Two out of three tendons are stressed during stage I while the remaining one tendon
is stressed during stage II operation. The unidirectional CFRP laminates are applied to the
concrete surface with the direction of the fibres aligned along the longitudinal axis of the bridge.
The number of strands and the size of the CFRP laminates are determined based on SLS and
ULS analysis that is presented in Section 3.6.
Longitudinal section view
Cross-section views
Figure 3.3. Design of alternative concept I
Longitudinally, the post-tensioning layout is unchanged compared to the base concept.
The length of the CFRP laminate depends on the span of the cracked region under ULS. ACI
(2008) recommends that, to prevent FRP delamination near laminate ends, a minimum
development length should be provided beyond the girder’s cracked region. The development
length lfd can be calculated as follows for a simply supported beam (ACI, 2008):
'
f fdf
c
nE tl
f= [3-1]
where f’c is the compressive strength of concrete; Ef is the elastic modulus of FRP; n is the
number of plies of FRP laminates; and tf is the laminate thickness in mm. Based on the material
properties provided later in Table 3.1, lfd is calculated to be 154 mm. To be conservative, the

58
CFRP strips are extended 200 mm beyond the cracked region. More details on the calculation
of cracked region can be found in Section 3.6.3.
3.3. Material Properties
The material properties assumed for the design in this Chapter are summarized in Table
3.1. The properties of concrete, mild steel and prestressing steel are same as those used in the
base concept. The CFRP properties are based on the Sika CarboDur composite system (Sika,
2009).
Table 3.1. Material properties
Material Strength Modulus of Elasticity
Concrete Specified compressive strength: Ec = 36 300 MPa f'c = 70 MPa Cracking strength: fcr = 3.35 MPa
Reinforcement Yield strength: Es = 200 000 MPa fy = 400 MPa Prestressing steel Specified tensile strength: Ep = 200 000 MPa Size 15 (Astrand = 140 mm2) fpu = 1860 MPa Yield strength: fpy = 0.90 fpu = 1674 MPa
CFRP Tensile strength: Ef = 165 000 MPa Sika CarboDur composite system ffu = 2800 MPa Type S plate (thickness = 1.4mm) (breaking strain εfu = 0.017)
The behaviour of CFRP composites is very different from steel. Like other types of FRP
materials, CFRP does not yield in tension; instead, the composite exhibits a linear stress-strain
relationship up to its brittle failure. The behaviour of CFRP in tension is contrasted to mild steel
in Figure 3.4. As shown by the stress-strain curves, the CFRP has a much higher ultimate
strength, but does not have the ductility that mild steel has. Consequently, the design of CFRP
reinforced structures needs to ensure that the brittle failure of CFRP does not occur.

59
Figure 3.4. Typical CFRP and mild-steel stress-strain relationship (adapted from Teng, 2002)
3.4. Design Criteria
3.4.1. Serviceability Limit States
As described in Chapter 2, the serviceability limit states consist of a number of stress
limits that the structure shall satisfy. The limits for alternative concept I with CFRP are based
on CHBDC requirements and are summarized in Table 3.2. One major difference between the
base concept and alternative I is that the alternative concept allows a tensile stress up to fcr in
concrete’s bottom fibre due to the presence of continuous bonded reinforcements (i.e. CFRP
laminates).
Table 3.2. SLS stress limits
Concrete (CHBDC clause 8.8.4.6) Tendon (clause 8.7.1)
Tension (top) Tension (bottom)
≤ 0 ≤ fcr, 3.35 MPa
At jacking
≤ 0.80 fpuCHBDC requirements
Compression at transfer and during construction
≤ 0.6 f’c
Additional requirements
Compression at all other stages
≤ 0.6 f’c
3.4.2. Fatigue Limit States
The fatigue limit states impose numerical limits on the stress variations in the structural
components under FLS loading. This is applicable to structural reinforcements, which include
prestressing steel and CFRP in this case. In Chapter 2, it was already argued that the stress
variation in the prestressing steel under FLS is very small thus not susceptible to fatigue. The

60
FLS evaluation in the chapter thus focuses on the behaviour of CFRP. Because CHBDC does
not provide a specific allowable stress range for CFRP, the evaluation adopts the
recommendation from ACI (2008), which suggests that the sustained plus cyclic stress in the
CFRP should be limited to 0.55 ffu.
3.4.3. Ultimate Limit States
Under ultimate limit states, the structure’s factored resistance should be greater than or
equal to the factored load effect.
The structure’s factored resistance is governed by the controlling failure mode. In a
conventional reinforced concrete structure, a flexural member often fails by crushing of concrete
or yielding of reinforcements followed by concrete crushing (ACI, 2008). For a FRP reinforced
structure, the design needs to consider additional failure modes involving the failure of FRP,
such as (ACI, 2008):
Rupture of FRP laminate;
Delamination of concrete cover;
Debonding of FRP from concrete.
The rupture of FRP is assumed to occur when the strain in the FRP exceeds the ultimate
breaking strain (εfu) specified by the manufacturer. For the FRP system employed in this
chapter, the breaking strain is 0.017 as given in Table 3.1.
Delamination of concrete cover refers to a failure mode by which the FRP laminate
separates from the concrete substrate near the end of the laminate, as shown in Figure 3.5a (ACI,
2008). Some believes that this failure mode is caused by the concentrated stress resulted from
the sudden termination of the FRP laminate (Teng, 2002). Once crack forms, it propagates to
steel reinforcements, which acts as a “bond breaker” and leads the crack to progress horizontally
(ACI, 2008; Teng, 2002). Subsequently, the concrete cover pulls away. This failure mode can
in most parts be avoided by proper detailing of the FRP termination, such as using an anchorage
or providing enough development length (ACI, 2008). The recommended development length
for the sample design was already discussed in the brief design description in Section 3.2.
FRP debonding refers to a failure mode that occurs away from FRP termination. Under
this failure mode, debonding is initiated by intermediate flexural and shear cracks and advances
toward the end of the FRP laminate. The debonding may occur in either the adhesive layer or

61
the concrete substrate. Because the adhesive epoxy currently available in the market has very
high strength, the concrete substrate is almost always the weak link through which debonding
progresses (Teng, 2002). This failure mode can be controlled by limiting the strain in FRP
below the level at which debonding may occur. CHBDC (CSA, 2006a) suggests that the
debonding strain εfd can be conservatively taken as 0.006. Another standard from CSA, Design
and Construction of Building Components with Fibre-Reinforced Polyers (S806-02) (CSA,
2002), recommends εfd to be taken as 0.007. ACI (2008) suggests the following equation to
estimate the debonding strain εfd:
'
0.41 0.9cfd fu
f f
fnE t
ε ε= ≤ [3-2]
where f’c is the compressive strength of concrete; Ef is the elastic modulus of FRP; n is the
number of plies of FRP laminates; and tf is the laminate thickness in mm. Based on this
equation and the material properties provided in Table 3.1, εfd is calculated to be 7.14x10-3 for
one ply of laminate. This value is consistent with the recommendation from CSA-S806 and
further confirms that the 0.006 suggested by CHBDC is a conservative limit. In this chapter, εfd
is assumed to be 0.006 as suggested by CHBDC.
(a) Flexural member with externally bonded FRP on sofit
(b) FRP delamination (c) FRP debonding
Figure 3.5. FRP related failure modes of members reinforced with externally bonded FRP system (adapted from ACI, 2008 and Teng, 2002)

62
As indicated in the above discussion, FRP rupture cannot occur if the strain in FRP is
kept below the debonding strain εfd, which is only about 35% of the breaking strain. The
delamination of concrete cover can also be mitigated by means of installing anchorages or
providing enough development length. Therefore, FRP debonding is governing among the three
failure modes associated with FRP.
3.5. Load Combinations and Associated Prestress Parameters
The eight load combinations (four for SLS and four for ULS) and corresponding load
factors used Chapter 2 will also be applied to the design of the alternative concept in this
Chapter. Their descriptions can be found in Section 2.4.4 and Table 2.5, and are not repeated
here. The only additional load combination in this chapter is FLS 1 for the fatigue limit states.
The load factors associated with FLS 1 is summarized in Table 3.3. One important difference
between FLS 1 and the SLS and ULS load cases is that live load under FLS consists of one CL-
W truck only, placed at the centre of one travelled lane. This change reduces the overall live
load demand on the girder.
Table 3.3. Fatigue limit states load combination
Load Factor - α Case Combination DL SDL - B SDL - WS LL P
FLS 1 DL + SDL + P1∞ + P2∞ + LL* 1 1 1 1 1
Note: Live load consists of one truck only, placed at the centre of one travelled lane (CSA, 2006a)
An important parameter that is associated with the load combinations is the stress in
prestressing tendons. In Chapter 2, the prestress level was calculated for each load combination
based on the stage of construction each combination corresponds to and the associated loading.
However, there is some uncertainty associated with the prestress losses, coming from both short
and long-term losses. Short-term losses due to anchor set and friction are dependent on the
selection of hardware system and somewhat on how the construction is carried out on site. As a
result, a designer can only estimate these losses during the design phase based on
recommendations from various standards and manufactures’ specifications. Uncertainty in
long-term losses mainly comes from: 1) At the design stage, it is somewhat difficult to predict
accurately the time between stage I and stage II post-tensioning; 2) Even with an accurate
prediction of the time between two stages of post-tensioning operation, there is some inherent

63
uncertainty with the level of long-term losses incurred during that period. It was found in
Chapter 2 that the concrete stress under SLS is somewhat sensitive to the stress in the tendons.
Thus it is desirable to lower or eliminate the effect of this prestress-related uncertainty on the
overall design.
To make the alternative system in this chapter more robust to the variation in prestress
losses, the stress in the tendons in each SLS load combination is assumed to be at its upper or
lower bound, whichever produces the most severe load effect. The upper and lower bounds are
taken as the jacking stress and the stress after all losses, respectively. As shown in Table 3.4,
for load combinations critical in negative flexure, such as 1A and 1C, the stress in the tendons is
assumed to be at its upper bound, which produces the maximum negative moment; for load
combinations critical in positive flexure, such as 1B and 1D, the stress is assumed to be at its
lower bound, which produces the minimum negative moment. Like the base concept, the
jacking stress is again set to 80% fpu. The value of prestress after all losses is calculated in
Section 3.6.1.
Table 3.4. Level of prestress used in SLS load combinations
Load Load Base concept (Chapter 2)
Alt. concept (Chapter 3)
case combination fP1 fP2 fP1 fP2
SLS 1A DL + P1 80% fpu 1 0 80% fpu 1 0 1B DL + SDL + P1 74% fpu 2 0 67% fpu 3 0 1C DL + SDL + P1 + P2 74% fpu 2 80% fpu 1 80% fpu
1 80% fpu 1 1D DL + SDL + P1 + P2 + LL 67% fpu 3 67% fpu 3 67% fpu
3 67% fpu 3
Note: 1 jacking stress 2 prestress after losses for a period of 28 days (time assume to be elapsed between stage one and stage two post-tensioning)
3 prestress after all losses for a period of 50 years
3.6. Longitudinal Flexure
3.6.1. Prestress Losses
Prestress losses for alternative concept I are calculated using the methods presented in
Section 2.8.2. The values of losses, summarized graphically in Figure 3.6, are very similar to
those of the base concept. This is within expectation because the change in prestressing design
between the base concept and alternative concept I is small.

64
Note: t = time elapsed since loading
Figure 3.6. Prestress losses for alternative concept I
3.6.2. Serviceability Limit States
The SLS design criteria primarily consists of a set of limits on the stress in concrete (see
Section 3.4.1). For alternative concept I, the concrete stresses are calculated for each load
combination based on the given loading and level of prestress. The concrete stresses are plotted
in Figure 3.7. It is shown that the critical load cases for negative and positive flexure are SLS
1A and SLS 1B, respectively, both of which take place during construction.
Concrete top fibre stress
-8.000-4.0000.000
[MPa
].
Concrete bottom fibre stress
-50.000-40.000-30.000-20.000-10.000
0.000
[MPa
].
SLS 1A SLS 1B SLS 1C SLS 1D
tensile stress limit, 0 MPa
tensile stress limit, fcr
-0.651
2.90
compressive stress limit,0.6 f ’c
Figure 3.7. Concrete stress under SLS

65
Because the above concrete stresses are calculated using the upper and lower bound
values for the tendon stress, they are less sensitive to the variations in PT losses compared to the
base concept. For example, the tensile stress of 2.90 MPa at the concrete bottom fibre under
SLS 1B is calculated by assuming that stage I tendons have incurred all short and long term
losses just prior to the stressing of stage II tendons. In reality, stage I tendons by then has only
lost a portion of all the long term losses. Thus the concrete stress is likely lower than the
calculated 2.90 MPa and further below the tensile stress limit fcr.
3.6.3. Ultimate Limit States
The structural response under ultimate limit states are evaluated under the four load
combinations described earlier. Figure 3.8 plots the total moment under the four load
combinations, which is the sum of moments due to prestressing and applied gravity loads.
These load cases can be grouped into two categories: negative-flexure-critical cases such as
ULS 1A and 1C and positive-flexure-critical cases such as ULS 1B and 1D.
-12000-8000-4000
040008000
12000
ULS 1AULS 1B
ULS 1CULS 1D
Mtot(MQ+MP)
[kN-m]
Negative-flexure-critical load combinations:Positive-flexure-critical load combinations:
Figure 3.8. Moment diagrams under ULS load combinations
For the negative-flexure-critical cases, the prestressing forces dominate over gravity
loads, resulting in overall negative flexure in the system. The concrete stresses under ULS 1A
and 1C are calculated and shown in Figure 3.9. Although the concrete top fibre stress goes
slightly into tension, it still remains below the cracking stress fcr under both ULS 1A and 1C. At
the same time, the concrete bottom fibre stress is kept below 0.6 f’c. These two observations
suggest that concrete is still linear elastic under ULS 1A and 1C, hence confirm that the
structural capacity is adequate under these two load combinations.

66
Concrete top fibre stress
-4.000-2.0000.0002.0004.000
[MPa
].
Concrete bottom fibre stress
-50.000-40.000-30.000-20.000-10.000
0.000
[MPa
].
ULS 1A ULS 1C
fcr
0.6 f’c
Figure 3.9. Concrete stress under negative-flexure-critical ULS load combinations
For positive-flexure-critical load combinations, the moments due to gravity loads are
higher than the moments provided by prestressing. Under these load cases, the external
unbonded tendons elongate and develop additional stress due to girder deformation. At the
same time, CFRP also contributes to the system’s overall capacity. The flexural response of the
girder is evaluated and summarized in Figure 3.10. The analysis is only shown for ULS 1D
because it is a more severe load case than the other positive-flexure-critical case ULS 1B.
The first diagram in Figure 3.10 illustrates the flexural demand and capacity of the
bridge girder. The analysis finds that CFRP debonding is the governing failure criteria. The
corresponding moment capacity is calculated by limiting the maximum strain in CFRP to 6
mm/m. A second idealized moment capacity is calculated based on the assumption that CFRP
debonding does not occur. In this case, the yielding of prestressing steel becomes the governing
criteria. The second idealized moment capacity is obtained by increasing the applied load on the
structure until the post-tensioning tendons yield. As shown in Figure 3.10, the capacity without
CFRP debonding is approximately 28% higher than the one with debonding.
Because plane sections remain planes, the εbot plot in Figure 3.10 represents not only the
concrete bottom fibre strain, but also the strain in the CFRP laminates attached to the bottom
face of the double-T web. The bottom laminates are the furthest away from the section’s neutral
axis thus experience the highest level of strain. It is shown that εbot at mid-span is 5.91 mm/m,
which is below the CFRP debonding limit of 6 mm/m.

67
The stress in the external unbonded tendons is calculated using the method presented in
Section 2.8.4. By integrating the strain at the level of tendons εcp along the span, it is found that
the prestressing steel gains an additional 283 MPa and reach 1500 MPa, equivalent of 0.81 fpu,
under ULS 1D. This value is about the same as the base concept, despite the alternative concept
has a reduced number of strands. This is because the level of strain in the alternative concept is
greatly limited by the CFRP debonding criteria.
The εtop plot in Figure 3.10 represents the strain in concrete’s top fibre. The maximum
value of εtop is 0.686 mm/m at mid-span, which is only about 20% of concrete crushing strain,
indicating that concrete has not failed.
The flexural response of alternative concept I has a number of differences from the
double-T base concept. A comprehensive comparison is presented in Section 6.1.
0.002.004.006.00
[MPa]
0.00
1000.00[MPa]
0100002000030000
Moment[kN-m]
MQ - Moment due toexternal loadMcr - cracking moment
M capacity
M capacity
(without debonding limit)
(with debonding limit)
-0.80-0.400.00
[mm/m]
0.00
2.00
4.00
Curvature[rad/km]
0.002.004.006.00
[mm/m]
cracked
topε
σ
botε
cpε
35300 kN-m
27500 kN-m
3.30 rad/km
-0.686 mm/m
4.99 mm/m
5.91 mm/m
879 MPa
CFRP
Figure 3.10. System behaviour under ULS 1D

68
3.6.4. Fatigue Limit States
Under FLS, the stress in CFRP laminates due to sustained and cyclic load needs to be
limited under 55% of the CFRP’s ultimate strength ffu. Given that ffu is 2800 MPa, the FLS
stress limit on CFRP equals 1540 MPa. In the ULS analysis from the previous section, it was
found that the maximum stress in CFRP is 879 MPa under ULS 1D. As shown in the schematic
comparison of ULS 1D and FLS 1 loading (Figure 3.13), flexural demand under ULS is much
higher than under FLS. This is due to: 1) The load factors under ULS 1D are higher than FLS 1;
2) Live load under ULS requires multiple design lanes to be loaded while live load under FLS
consists of only one truck placed in one traffic lane. Because load is lower under FLS 1, the
stress in CFRP under FLS 1 is expected to be less than 879 MPa, which is the CFRP stress
under ULS 1D. This assures that the CFRP stress under FLS is lower than 0.55 ffu, or 1540 MPa.
Figure 3.11. Schematic diagrams of moments under load combination ULS 1D and FLS 1
3.7. Shear Design
The shear resistance of the alternative concept comes from stirrups, deviated prestressing
tendons and concrete. CFRP laminates does not contribute to shear resistance because the fibres
are aligned along the longitudinal axis of the bridge. Same as the base concept, the shear design
of the alternative concept follows the method prescribed by CHBDC clause 8.9. The final
design is shown in Figure 3.12.

69
Figure 3.12. Shear design for alternative concept I
3.8. Final Remarks
The alternative double-T concept presented in this Chapter is a modification of the base
concept presented in Chapter 2. The changes include reduced amount of post-tensioning and
addition of external CFRP reinforcements. The advantage of the alternative system is that post-
tensioning design is not as restricted as it is in the base concept. This is because: 1) The
decrease in post-tensioning reduces the negative moment imposed on the structure during
construction thus making the structure less critical in negative flexure; 2) The addition of
continuous CFRP reinforcements expands the allowable window for concrete stress from 0.6 f’c
– 0 to 0.6 f’c – fcr under SLS. The disadvantage of the system is primarily on its behaviour
under ULS. Due to concern over CFRP debonding, the strain level in the bridge girder is
greatly limited under ULS. Because the external unbonded tendons rely on the girder’s overall
deformation to gain additional stress under ULS, the limit on strain level restricts the
prestressing force and lowers the system’s structural capacity. If debonding strain were higher
and closer to the CFRP breaking strain, the prestressing tendons would achieve a higher stress
under ULS and less CFRP would be required. In this case, both prestressing steel and CFRP
would be better utilized. However, to increase the debonding strain, the system needs to be
investigated for possible improvements on CFRP bonding.

Chapter 4 Double-T Alternative Concept II
– Double-T System with External Unbonded Post-Tensioning and Internal
Bonded Unstressed Tendons
This chapter describes the design of an alternative double-T system that is a modification
of the base concept in Chapter 2. This concept is developed to resolve two issues with the
previous two concepts: 1) the base concept’s sensitivity to prestress losses and amount of post-
tensioning; 2) alternative concept I’s limitation with CFRP debonding. Similar as alternative
concept I, alternative concept II incorporates a blend of prestressed and non-prestressed
reinforcements. The prestressed reinforcements are external unbonded post-tensioning tendons
while the non-prestressed reinforcements are internal unstressed tendons.
Figure 4.1. Comparison of cross-section between double-T base concept and alternative concept II
Alternative concept II’s prestressing design remains unchanged in comparison with
alternative concept I. Both systems have 72 prestressing stands per web grouped into 3 external
unbonded tendons. As a result, several aspects of design related to prestressing are same
between the two systems and are not repeated in this chapter. Those aspects include:
Load combinations and related prestress parameters (Section 3.5)
Prestress losses (Section 3.6.1)
Shear design (Section 3.7)
The shear resistance of the double-T system comes from concrete, deviated post-tensioning
tendons and stirrups. Because the shear resistance contributed from concrete and post-
70

71
tensioning are very similar between alternative concept I and II, the stirrup design does not need
to be modified.
In addition to the above topics, a number of design subjects that were already covered in
Chapter 2 will not be repeated in this chapter either. These subjects include:
Dead load and live load (Section 2.4.1 and 2.4.2)
Transverse system design (Section 2.5)
Torsion and live load distribution (Section 2.6)
Local forces (Section 2.8)
Construction (2.9)
This chapter focuses on the longitudinal behaviour of the new system and its differences
from the base concept and alternative concept I. Section 4.1 gives a brief description of the
design. Section 4.2 and 4.3 discusses the material properties and design criteria respectively.
Section 4.4 is dedicated to the systems’ longitudinal flexure. Finally, section 4.5 addresses
some of the advantages and disadvantages of alternative concept II.
4.1. Brief Description of Design
This section briefly describes the design of alternative concept II. More detailed design
drawings can be found in Appendix A. The analysis that describes the design process or
supports the design outcome is presented in the later sections of this chapter.
The cross-section of the structure, as shown in Figure 4.2, consists of a concrete double-
T section, external unbonded post-tensioning tendons, and internal bonded unstressed tendons.
The concrete section is identical to that of the previous two concepts. The post-tensioning
layout is same as alternative concept I as both have 72 strands per web grouped into three
tendons. The concept again employs a staged post-tensioning operation. Two out of three
tendons are stressed during stage I while the remaining one tendon is stressed during stage II
operation. Each web has one internal bonded tendon which contains 5 prestressing strands. The
tendons are placed at the web centreline 95 mm above the bottom face of the web.
Longitudinally, the post-tensioning tendon layout is unchanged compared to the base
concept. The unstressed tendon is laid horizontally between the two ends of the girder. The
unstressed tendon does not require any anchorage because it has no post-tensioning force that
causes large concentrated force at the ends of the tendon.

72
Longitudinal section view
Cross-section views
Figure 4.2. Design of alternative concept II
4.2. Material Properties
Alternative concept II employs the same materials as the base concept. The material
properties are summarized in Table 4.1. Both prestressed and unstressed tendons consist of size
15 prestressing strands.
Table 4.1. Material properties
Material Strength Modulus of Elasticity
Concrete Specified compressive strength: Ec = 36 300 MPa f'c = 70 MPa Cracking strength: fcr = 3.35 MPa
Reinforcement Yield strength: Es = 200 000 MPa fy = 400 MPa Prestressing steel Specified tensile strength: Ep = 200 000 MPa Size 15 (Astrand = 140 mm2) fpu = 1860 MPa Yield strength: fpy = 0.90 fpu = 1674 MPa

73
4.3. Design Criteria
4.3.1. Serviceability Limit States
The serviceability limit states consist of a set of stress limits for concrete and
prestressing steel, which is summarized in Table 4.2. The stress limits on concrete and post-
tensioning tendons are same as those for alternative concept I. The tensile stress limit on
concrete is at fcr because the system has continuous bonded tendons along the span. For the
prestressing steel in the unstressed tendons, the stress under SLS is limited to 240 MPa. This
criterion, which is adapted from CHBDC requirements, is a mean of controlling the overall
deformation and size of cracks in concrete under SLS.
Table 4.2. SLS stress limits
Concrete (CHBDC clause 8.8.4.6)
Prestressing steel (CHBDC clause 8.7.1)
Post-tensioned tendons Tension (top) Tension (bottom)
≤ 0 MPa ≤ fcr, 3.35 MPa
At jacking ≤ 0.80 fpu CHBDC requirements
Compression at transfer and during construction
≤ 0.6 f’c
Unstressed tendons Additional requirements
Compression at all other stages
≤ 0.6 f’c Tension ≤ 240 MPa
4.3.2. Fatigue Limit States
According to CHBDC, the stress variation in tendons should be limited under 125 MPa
under FLS. In Chapter 2, it was already argued that the stress variation in the post-tensioned
tendon is very small thus not susceptible to fatigue. The prestressing steel in the unstressed
tendon on the other hand will need to be checked against the stress limit under FLS.
4.3.3. Ultimate Limit States
Under ultimate limit states, the structure’s factored resistance should be greater than or
equal to the factored load effect. The factored resistance, as discussed in Chapter 2, will be
controlled by the failure mode of either concrete crushing or the yielding of external unbonded
post-tensioning tendons.

74
4.4. Longitudinal Flexure
4.4.1. Serviceability Limit States
Under SLS, the concrete stress depends on the loading and the prestress level under each
load combination. Because alternative concept I and II share the same loading and prestress
design, their concrete stresses under SLS also work out to be the same. The concrete stresses,
shown in Figure 4.3, are calculated based on the prestressing stress’s upper and lower bounds as
discussed in Chapter 3. For a more detailed discussion on level of prestressing and concrete
stresses under SLS, the reader can refer to Section 3.5 and Section 3.6.2.
Concrete top fibre stress
-8.000-4.0000.000
[MPa
].
Concrete bottom fibre stress
-50.000-40.000-30.000-20.000-10.000
0.000
[MPa
].
SLS 1A SLS 1B SLS 1C SLS 1D
tensile stress limit, 0 MPa
tensile stress limit, fcr
-0.651
2.90
compressive stress limit,0.6 f ’c
Figure 4.3. Concrete stress under SLS
The other SLS design criterion involves limiting the tensile stress in the internal
unstressed tendons under 240 MPa. This is a mean of controlling the overall girder deformation
and the size of cracks and segmental joint opening. This criterion only needs to be checked for
positive-flexure-critical load under which the unstressed tendon may be in tension. The external
loads and state of stress in the concrete section under SLS 1B and 1D are illustrated in Figure
4.4. It should be noted that SLS 1B in Figure 4.4 is evaluated based on a prestress level that is
closer to its true value than the lower bound value used in calculating the curves in Figure 4.3.
The prestress level used in SLS 1B for stage I tendons is the prestress after 28 days, which is
74% fpu. As shown in Figure 4.4, although both systems are critical in positive flexure, only
SLS 1D results in tension in the unstressed tendon. Under SLS 1D, the tensile stress in the
concrete is not likely to cause significant cracking since it is under the value of fcr predicted by

75
CHBDC. However, at a segmental joint where there is no bond between the adjacent two
concrete surfaces, the system needs to rely on the continuous reinforcements to carry the tensile
stress across. Based on the forces produced by the triangular blocks of tensile stresses, it is
determined that 5 strands are required to satisfy the stress limit of 240 MPa. The resulting stress
in the strands under SLS 1D is 234 MPa.
Load combination SLS 1B
Load combination SLS 1D
Figure 4.4. External load and internal forces under load combinations SLS 1B and SLS 1D
4.4.2. Ultimate Limit States
The structural response under ultimate limit states are evaluated under load combinations
ULS 1A, 1B, 1C and 1D, which were described in Section 2.4.4 and Table 2.5. Figure 4.5 plots
the total moment under the four combinations, which is the sum of moments due to prestressing
and applied gravity loads. These load cases can be grouped into two categories: negative-
flexure-critical combinations such as ULS 1A and 1C and positive-flexure-critical combinations
such as ULS 1B and 1D.

76
-12000-8000-4000
040008000
12000
ULS 1AULS 1B
ULS 1CULS 1D
Mtot(MQ+MP)
[kN-m]
Negative-flexure-critical load combinations:Positive-flexure-critical load combinations:
Figure 4.5. Moment diagrams under ULS load combinations
Under the negative-flexure-critical load cases 1A and 1C, the system behaves in the
same manner as alternative concept I. As shown in Figure 4.6, concrete stresses remain
approximately within the linear elastic region between 0.6 f’c and fcr. This indicates that the
structural capacity is adequate for the loading under combination ULS 1A and 1C.
Concrete top fibre stress
-4.000-2.0000.0002.0004.000
[MPa
].
Concrete bottom fibre stress
-50.000-40.000-30.000-20.000-10.000
0.000
[MPa
].
ULS 1A ULS 1C
fcr
0.6 f ’c
Figure 4.6. Concrete stress under negative-flexure-critical ULS load combinations
For positive-flexure-critical load combinations, the moments due to gravity loads are
higher than the moments provided by prestressing. Under these load cases, the external
unbonded tendons elongate and develop additional stress due to girder deformation. At the
same time, the internal bonded unstressed tendons also contribute to the system’s overall
capacity. The flexural response of the girder is evaluated and summarized in Figure 4.7. The
analysis is only shown for ULS 1D because loading under ULS 1D is more severe than ULS 1B.

77
0.00500.00
1000.001500.00
[MPa]
0100002000030000
Moment[kN-m]
MQ - Moment dueto external loadMcr - crackingmomentM capacity
-1.00-0.500.00
[mm/m]
0.00
2.50
5.00
Curvature[rad/km]
0.002.004.006.00
[mm/m]
topε
σ
cpε
30000 kN-m
27500 kN-m
4.31 rad/km
-0.90 mm/m
6.52 mm/m
1460 MPa
S
Cracked
Figure 4.7. System behaviour under ULS 1D
The above moment diagram shows that the moment capacity of the section is 30000 kN-
m, which is approximately 9% above the maximum demand at mid-span. This capacity is
calculated using the same method as in Chapter 2 for the base concept, where the applied load
on the bridge girder is magnified until the stress in the external unbonded tendons reaches 90%
fpu.
The compressive strain in concrete’s top fibre, represented by εtop, has a maximum of -
0.90 mm/m. This is approximately 30% of the concrete crushing strain, indicating that the
concrete is not close to failure.
The stress in the external unbonded tendons is calculated using the method presented in
Section 2.8.4. By integrating the strain at the level of tendons εcp along the span, it is found that
the prestressing steel gains an additional 286 MPa and reach 1530 MPa, equivalent of 0.82 fpu,
under ULS 1D.

78
The flexural response of alternative concept I has a number of differences from the
double-T base concept and alternative concept I. A comprehensive comparison is presented in
Section 6.1.
4.4.3. Fatigue Limit States
It was shown in Section 4.4.1 that the concrete girder remains uncracked under SLS.
Thus under FLS with less loading, the concrete would also remain uncracked. As a result, the
unstressed prestressing strands would experience negligible tensile stress under FLS, thus is not
critical in fatigue.
4.5. Final Remarks
The alternative double-T concept presented in this Chapter is a modification of the base
concept presented in Chapter 2. The changes include reduced amount of post-tensioning and the
addition of unstressed internal tendons. Due to these modifications, alternative concept II’s
post-tensioning design is not as restricted as the base concept. The reduction in post-tensioning
decreases the negative moment imposed on the structure during construction thus making the
structure less critical in negative flexure. The addition of internal unstressed tendon, which is
continuous along the span, expands the allowable window for concrete stress from 0.6 f’c – 0 to
0.6 f’c – fcr under SLS, thus giving the designer more flexibility. When compared to alternative
concept I, alternative concept II is no longer limited by the CFRP debonding strain under ULS.
This allows the system to achieve larger deformation and develop higher stress in the unbonded
tendons under ULS. This is indicative of a more efficient utilization of the unbonded tendons.

Chapter 5 Slab-on-Girder Bridge System with CPCI Girders
This chapter describes some important aspects in the design of a conventional slab-on-
girder bridge system with CPCI girders. CPCI girders are standardized I sections commonly
used in Canada. A sample design is developed using a standard design spreadsheet provided by
Hatch Mott MacDonald Mississauga office. The spreadsheet calculation is included in
Appendix B and not discussed in detail in this chapter. Section 5.1 gives a brief introduction to
the CPCI slab-on-girder type of bridge system. Section 5.2 briefly describes the key features of
the sample design, while Section 5.3 gives a summary of the materials used. Section 5.4 and 5.5
examine live load distribution and deck slab design, which are two important aspects in the
design of slab-on-girder bridges. Finally, Section 5.6 is dedicated to construction related
subjects.
5.1. Introduction
Prestressed concrete I-girder bridges were introduced in the 1950s (Kulka and Lin, 1984).
This type of structural system includes a series of precast and prestressed concrete I-girders with
a cast-in-place concrete top slab. One of the first prominent bridges of this type is the Walnut
Lane Memorial Bridge built in Philadelphia, Pennsylvania in 1950 (Dunker and Rabbat, 1992).
Since then, this type of slab-on-girder bridge gained wide popularity in North America and
became the most used bridge system for short-to-medium span bridges (Kulka and Lin, 1984).
A survey done by Dunker and Rabbat in 1992 indicates that they comprise about 40% of all
prestressed concrete bridges constructed in the United States during the period from 1950 to
1989. Precast pre-tensioned I-girders have traditionally been used for spans up to approximately
50 m (Kulka and Lin, 1984). Nowadays, the range of span can be extended to 75 m by using I-
girders that are spliced together with longitudinal post-tensioning (Lounis et al, 1997).
I-girders are highly standardised in today’s bridge industry (FHWA, 2009). A number
of standard I sections have been developed, such as the Florida Bulb-Tee, AASHTO-PCI Bulb-
79

80
Tee and the CPCI standard I sections (Figure 5.1). The first two types of girders are most often
used in the US, while CPCI girders are commonly used in Canada.
Figure 5.1. Standardized I sections (adapted from Pre-Con, 2004 and FHWA, 2009) Despite the wide application of the slab-on-girder system, this type of bridge has its
inherent shortcomings. The first major shortcoming is its inefficient sharing of live load
between girders. Due to the deck slab’s flexibility, the effect of an applied load on the deck slab
can only propagate to a limited number of girders close to the location of the load. The second
shortcoming of the system comes from the inconvenience and cost associated with the cast-in-
place deck slab. Both subjects will be discussed in more detail in later sections.
5.2. Brief Description of Design
A slab-on-CPCI-girder system is developed based on the geometrical requirements
presented in Chapter 1. The design is produced with the aid of a standard design spreadsheet
provided by Hatch Mott MacDonald, Missisauga. Sample pages of the spreadsheet as well as a
more complete set of drawings are included in Appendix B for reference.
As shown in Figure 5.2, the cross-section of the bridge consists of a cast-in-place deck
slab 225 mm in thickness and six prestressed precast CPCI 1900 girders spaced at 2350 mm.
The depth of the girder is 1900 mm and the total depth of the structure is 2175 mm. The
concrete girders are pre-tensioned with internal prestressing strands. The strands are installed in
standardized locations within the girder. For the sample design, each girder is equipped with 50
S13 strands, among which 32 are straight and 18 are deflected. The strand layout is shown in
Figure 5.3.

81
Figure 5.2. Sample design of the Slab-on-CPCI-girder system
Figure 5.3. Pre-tension strand layout (adapted from MTO, 2002)
5.3. Material Properties
The properties of the materials used in the sample design are summarized in Table 5.1.
There are two major differences between the materials used in the CPCI system and the double-

82
T systems. First, the CPCI system uses a more conventional 50 MPa concrete while the double-
T systems use 70 MPa concrete. Second, because the current pretensioning industry usually
prefers size 13 prestressing strands, the CPCI system does not employ the size 15 strands that
were used in the double-T systems.
Table 5.1. Material properties for slab-on-CPCI-girder sample design
Material Strength Modulus of Elasticity
Concrete Specified compressive strength: 1.5( ' 6900)( / 2300)c c cE f γ= + f'c = 50 MPa Ec = 31 900 MPa Cracking strength: 0.4 ' 2.83MPacr cf f= = Reinforcement Yield strength: Es = 200 000 MPa fy = 400 MPa Prestressing steel Specified tensile strength: Ep = 200 000 MPa Size 13
(Astrand = 99 mm2) fpu = 1860 MPa
Yield strength: fpy = 0.90fpu = 1674 MPa
5.4. Live Load Distribution
When vehicular live load is applied on the deck slab, its influence on each girder is
different. It is important for designers to know how load is distributed among girders, as it is a
governing factor in determining the design load for each girder.
The simplified example in Figure 5.4 (Hassanain, 1998) and the following discussion
describe two extreme cases of live load distribution. The example has a slab-on-girder system
that is idealized as three simply-supported girders connected by a transverse beam at mid-span.
A load P is applied at mid-span of the transverse beam, thus directly on the central girder. On
one extreme, if the transverse beam has no stiffness, the three girders become virtually
disconnected, and all load will be taken by the central girder. In this case, Girder 2 carries the
entire P while Girder 1 and 3 carries no load. On the other extreme, if the transverse beam is
infinitely stiff, all three girders will deflect and share the load equally, and the load distributed to
each girder is P/3. The second case illustrates a more efficient load distribution among girders.

83
Figure 5.4. Load distribution in an idealized beam-on-girder system (adapted from Hassanain, 1998)
In a more realistic case where girders are connected by a deck slab, live load distribution
becomes much more complicated. It depends on many factors, such as span length, the
transverse position of live load, the dimension and location of the diaphragms, and the
transverse and longitudinal bending stiffness of the girder-and-slab composite (CSA, 2006b).
Much research has been done in modeling live load distribution in a slab-on-girder
system using grillage, semi-continuum or finite element methods (CSA, 2006b). The results
from these analysis are used to formulate design equations in standards and codes. These
equations are often simplified from the real situation to include only a limited number of
variables. They are usually used to determine the maximum amount of load distributed to a
girder under the most unfavourable conditions. This load level then becomes the design load for
each girder in the system. The following sections describe some of the load distribution
equations used in North America. The equations are also summarized in Table 5.2.
5.4.1. AASHTO Standard
The AASHTO Standard equations have been used in the United States since the 1930s
(Yousif, 2007). They were only recently replaced by the new AASHTO LRFD specification,
which was first published in 1998.
In the AASHTO Standard, a distribution factor (DF) is defined and applied to one line of
wheel load. The equation for DF takes a simple form of S/D, where S is the girder spacing and
D is a constant that depends on the type of bridge and the number lanes loaded (AASHTO,
1996). For concrete slab on girder bridges, D is 2.13 if only one lane is loaded, and 1.68 if two
or more lanes are loaded.
The S/D formula is relatively easy to apply. However, it disregards the effect of span
length, deck slab, and girder stiffness (Yousif, 2007). It was found to produce overly

84
conservative results in some cases and unconservative results in others (Cai, 2005). Also, this
formula is developed only for bridges with typical geometry, thus not applicable to more
complicated bridges (Yousif, 2007). All these shortcomings of the S/D formula led to the
development of the new load distribution formula, which was introduced in AASHTO LRFD
Bridge Design Specifications in 1998.
5.4.2. AASHTO LRFD Specifications
The AASHTO LRFD Specifications provide a more refined method to calculate live
load distribution than the previous S/D equation. In addition to girder spacing, this formula also
takes into consideration the bridge span, slab thickness, and the longitudinal stiffness of the
cross-section (Yousif, 2007).
The distribution factor, which is also applied to one line of wheel load, is defined as
follows (AASHTO 1998):
0.10.4 0.3
30.064300
g
s
KS SDFL Lt
⎛ ⎞⎛ ⎞ ⎛ ⎞= + ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
if one lane is loaded [5-1]
0.10.6 0.2
30.0752900
g
s
KS SDFL Lt
⎛ ⎞⎛ ⎞ ⎛ ⎞= + ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
if two or more lanes are loaded [5-2]
where S is girder spacing, L is span length, ts is deck slab thickness and Kg is the longitudinal
stiffness. Kg mainly depends on the girder type, and can be calculated as follows (Yousif, 2007):
( )2g g g gK n I A e= + [5-3]
where n is the ratio between the girder and deck’s Elastic Modulus; Ig and Ag are the moment of
inertia and the cross-sectional area of the girder; and eg is the eccentricity between the girder and
slab’s center of gravity.
The AASHTO LRFD method is more elaborate and is shown to produce more accurate
results than the previous S/D formula (Suksawang, 2007). However it complicates the design
procedure significantly because the new equations require the knowledge of the girder cross-
sectional properties, which are generally unknown prior to the determination of design load. As
a result, the design becomes an iterative process. Research has been done in recent years trying
to simplify the new AASHTO LRFD formulations while not compromising its accuracy (Cai,
2005, Suksawang, 2007, and Yousif, 2007).

85
5.4.3. Canadian Highway Bridge Design Code
The Canadian Highway Bridge Design Code prescribes simplified methods for the
analysis of live load distribution. These methods are based on analysis results from modeling
many structures with the grillage, semi-continuum, and finite element methods (CSA 2006b).
To be analyzed using the simplified methods, the bridge must satisfy certain conditions (CSA
2006a). For a straight slab-on-girder bridge, the conditions include:
a. The deck width is constant;
b. The support conditions can be represented by line support;
c. There should be at least three longitudinal girders with approximately equal flexural
rigidity and spacing;
d. The deck slab overhang should be less than 1.80 m and 60% of the average girder
spacing.
CHBDC prescribes several methods to analyze live load distribution. Each method is
applicable to a specific type of load effect under specific limit states, such as SLS, FLS or ULS.
The following discussion focuses on the method for evaluating the distribution of longitudinal
bending moments in slab-on-girder bridges under ULS and SLS.
The method presented in CHBDC centres at the concept of an amplification factor (Fm),
which is defined as:
,
gm
g avg
MF
M= [5-4]
where Mg,avg is the average moment per girder due to live load if live load were shared equally
among girders, and Mg is the maximum longitudinal moment per girder accounting for unequal
live load distribution (CSA, 2006a). Mg,avg can be calculated from the following equation:
,T L
g avgnM RM
N= [5-5]
where n is the number of design lanes, RL is the multi-lane loading reduction factor, N is the
number of girders, and MT is the maximum moment per design lane due to the two-line axel
load (CSA 2006a).

86
It is shown in equation 5-4 that Fm is a measure of how much the extreme load
distribution deviates from the average distribution. Lower values of Fm indicate less deviation,
thus greater ability of the bridge to transfer load across its width (CSA, 2006b). Figure 5.5
shows an Fm versus span graph developed for slab-on-girder bridges with a lane width of 3.33 m.
The graph indicates that bridges with longer spans and narrower decks have a lower value of Fm,
which is a sign of more even live load distribution.
Figure 5.5. Fm for internal girders in a slab-on-girder bridge system under ULS and SLS (CSA, 2006b)
In design, Fm for slab-on-girder type of bridge can be calculated using the following
formula:
1.051
100
mf
SNFC
Fμ
= ≥⎡ ⎤+⎢ ⎥
⎣ ⎦
[5-6]
where S is the girder spacing. There are two key expressions in the above equation for Fm:
F
F is a “width dimension that characterizes the load distribution for a bridge” (CSA,
2006a). It depends on many factors, including bridge type, highway class, span length,
number of design lanes, and girder position. The concept of F is related to the constant D in
AASHTO Standard’s S/D formulation by the following expression (CSA 2006b):
2 LF nR D= [5-7]
The multiplier of 2 accounts for the fact that the AASHTO formulas are based on one line of
wheel load while CHBDC formulas are associated with the full truck load. The factor n and
RL adjusts the constant to account for the multi-lane loading effect. The values of F are
tabulated in CHBDC.

87
1100
fCμ⎡ ⎤+⎢ ⎥
⎣ ⎦
This expression represents the “lane width correction factor” (CSA, 2006a). Cf is a
“percentage correction factor”, which can be obtained from tables in CHBDC (CSA, 2006a).
The factor μ can be calculated as follows:
3.3 1.00.6
eWμ −= ≤ [5-8]
where We is the design lane width.
Live load distribution in the CPCI sample design is analyzed based on CHBDC’s
simplified method. From the CHBDC tables, the live load amplification factor Fm is calculated
to be 1.501. Thus, from equation 5-4 and 5-5,
, ,1.501g m g avg g avgM F M M= = ×
0.601T Lg m T
nM RM F MN
= = ×
Live load analysis for the 36.6 m span indicates that the CL truck load model produces the
governing live load effect. Hence, the dynamic load allowance needs to be applied to the above
relationships. After factoring in a dynamic load allowance of 1.25, the above two equations
become:
, ,1.25 1.501 1.876g g avg g avgM M M= × × = ×
1.25 0.601 0.751g T TM M M= × × = ×
The first relationship indicates that the maximum longitudinal moment per girder due to unequal
live load sharing is approximately 1.9 times of the average moment per girder if load were
shared equally. The second equation, which is rearranged from the first relationship, suggests
that the live load demand for each girder is approximately 75% of the maximum moment per
design lane (MT). Based on the above calculation, the total live load demand on the six-girder
system is 4.5 MT – 50% higher than the actual maximum live load possible for a structure with
three design lanes.

88
Table 5.2. Summary of live load distribution equations
Standard Equation Application
AASHTO Standards
(AASHTO, 1996)
DF = S/D where D = 2.13 for one lane D = 1.68 for two or more lanes
Mg = DF x MT where MT is the moment due to one line of wheel load
AASHTO LRFD
(AASHTO, 1998)
For one lane: 0.10.4 0.3
30.06
4300g
s
KS SDF
L Lt= +
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
For two or more lanes: 0.10.6 0.2
30.075
2900g
s
KS SDF
L Lt= +
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Mg = DF x MT where MT is the moment due to one line of wheel load
CHBDC (CSA, 2006a)
,
1.051
100
g
mfg avg
M SNF
CMF
μ= ≥
+
=⎡ ⎤⎢ ⎥⎣ ⎦
equivalent LmDF F
nRN
=
Mg = DF x MT where MT is the moment from one lane (a full truck load).
5.5. Deck Slab Design
5.5.1. Arching Action
Prior to 1970s, bridge deck slabs were primarily designed for pure bending in North
America (Batchelor, 1987). This approach was shown to be overly conservative, as deck slabs
designed with this method had much higher strength than what was required by safety
(Batchelor, 1987). Researchers found that the traditional design method neglected an important
element in predicting the deck slab response – the compressive in-plane forces, which induce
arching action in laterally restrained slabs after cracks are developed (Figure 5.6) (Batchelor,
1987). Arching action can greatly enhance the deck slab strength, and is the dominant action for
deck slabs in resisting concentrated wheel loads (Batchelor, 1987). Due to arching action, deck
slabs tend to fail in punching shear instead of flexure. In 1960, Kinnunen and Nylander
proposed a model to describe the punching shear failure mode (Figure 5.7). This model
assumes the critical portion of slab bounded by the shear cracks is loaded by a conical shell at

89
the base perimeter of the loaded area (Batchelor, 1987). A failure of the system will occur if the
conical shell becomes over stressed (Batchelor, 1987).
Figure 5.6. Arching action in deck slab Figure 5.7. Punching shear failure mode (adapted from Batchelor, 1987) (adapted from Batchelor, 1987)
The Kinnunen and Nylander model provided a good foundation for predicting the slab
failure load under arching action. However, many parameters are involved in the actual analysis.
Some parameters, such as the influence of boundary forces, are not easily quantifiable (Hewitt
and Batchelor, 1975). In Ontario, extensive theoretical, laboratory and field studies were carried
out to establish an empirical method for the design of deck slabs that accounts for the effect of
arching action (Batchelor, 1987). This method was first introduced in OHBDC in 1979 and
later refined in the following editions of the code. The new method substantially reduces the
amount of reinforcements in the deck slab in comparison with the former flexural design method
(Batchelor, 1987).
For the design of the double-T deck slab, arching action is not considered. The design is
developed based on transverse flexure of the deck slab.
5.5.2. Empirical Design Method from CHBDC
The deck slab design of the CPCI system adopts the empirical method from CHBDC.
According to CHBDC, slabs designed using to this method need not to be analyzed except for a
few special locations.
The minimum deck slab thickness required by CHBDC is 225 mm if 15M bars are used
as deck slab reinforcements. This thickness accommodates a 90 mm top cover, a 50 mm sofit
cover, and a 55 mm clear distance between top and bottom transverse reinforcements (CSA,
2006b). A typical deck slab cross-section and its reinforcement layout are shown in Figure 5.8.

90
Figure 5.8. Typical deck slab design based on CHBDC’s empirical method – cross-section view For a full-depth cast-in-space deck slab, there should be a total of four layers of
reinforcing bars arranged in two orthogonal planes – one plane near the top of the slab and the
other near the bottom. The reinforcement ratio ρ for each layer should be at least 0.003, unless
the deck slab can be proved to behave satisfactorily with less reinforcements. In the latter case,
ρ can be reduced to 0.002. The ratio ρ is defined as:
sAbd
ρ = [5-9]
where b is an arbitrary width, As is the area of reinforcement within the given width b, and d is
the effective depth of concrete. In practice, it is customary to design deck slabs of slab-on-
girder bridges with 15M bars spaced at 300 mm. This translate to a reinforcement ratio slightly
higher than 0.003.
5.6. Construction
5.6.1. CPCI Girder Fabrication
The fabrication of CPCI girders involves first placing and stressing the pretensioning
strands, then laying the reinforcing bars, and finally casting concrete. This process requires
specialized formwork and equipments. The formwork is usually made of steel to maximize its
durability for extended use. Bulkheads as shown in Figure 5.9 are used at ends of the precast
segment to anchor the pre-tensioning strands. Also shown in the figure is a precasting bed made
of steel beams. It serves the purpose of both supporting the cast segment and holding down the
pre-tensioning strands’ deviations. During the casting process, steel side forms are used to form
the side geometry of the CPCI girders. The specialized forms and equipments require high
capital investment. As a result, only a very limited number of suppliers of CPCI girders are
available in Ontario.

91
Figure 5.9. CPCI girder fabrication (photos by P. Gauvreau)
5.6.2. Erection
The superstructure of a single-span CPCI slab-on-girder girder bridge is typically
constructed in the following sequence (Figure 5.10):
1. Erect precast girders;
2. Cast end diaphragms;
3. Place deck slab reinforcements;
4. Cast deck slab once the concrete compressive strength in the diaphragms has reached
the specified value.
The erection of girder is usually done by a crane. The overall construction is relatively standard.
However the speed of construction is often redistricted by the time required to place deck slab
reinforcements and cure the cast-in-place concrete.
Figure 5.10. Typical construction sequence for the superstructure of a slab-on-girder bridge (adapted from WSDOT, 2008)
Bulkhead
Precasting bed
Reinforcing bars
Pretensioning strands

Chapter 6 Evaluation of the Double-T and CPCI Systems
This chapter evaluates the structural efficiency and the material consumption and cost of
the double-T and the CPCI slab-on-girder systems based on the sample designs developed in
Chapter 2 to 5. Section 6.1 examines three alternative double-T systems. Section 6.2 compares
the double-T and the CPCI systems in terms of live load distribution, amount of design load
incurred in the system, and the approaches for deck slab design. Section 6.3 compares the
systems’ material consumption, including the use of concrete, prestressing steel and additional
reinforcements. Finally, Section 6.4 provides a preliminary cost comparison for the systems
developed in this thesis.
6.1. Comparison of Double-T Concepts
The three double-T concepts were developed based on the same concrete cross-section
and transverse design. Differences of the systems lie in the design of their primary longitudinal
reinforcements. While the base concept is reinforced with pure post-tensioning, alternative
concept I and II have a blend of prestressed and non-prestressed primary reinforcements.
The double-T base concept is longitudinally reinforced with pure external unbonded
post-tensioning. The sample design of the double-T base concept is governed by longitudinal
flexure under SLS. It is found in the SLS analysis that the structure is somewhat sensitive to the
level of prestressing losses and the amount of post-tensioning in the system. While the sample
design developed in Chapter 2 is a feasible system responding to the specific geometrical
requirements described in Chapter 1, the double-T base concept’s applicability to different
geometrical conditions may be limited due to the limitation associated with post-tensioning
design.
To improve the double-T system’s adaptability to different geometrical conditions,
alternative concept I is developed with a blend of prestressed and non-prestressed primary
reinforcements. The pretressed reinforcements are again external unbonded post-tensioning
92

93
tendons, while the non-prestressed reinforcements are external CFRP laminates. This
alternative design has two major advantages. First, due to the addition of continuous CFRP
laminate, the concrete stress limit under SLS is increased up to fcr in the bottom fibre, giving the
designer more flexibility. Second, because the system’s positive flexural capacity is
complemented by CFPR, the amount of external post-tensioning can now be reduced, thus
creating less negative flexural demand on the system. For alternative concept I, the concrete
stresses under SLS become less critical and less sensitive to level of prestressing in comparison
with the base concept. The disadvantage of alternative concept I relates to its behaviour under
ULS, where the girder’s overall deformation is restricted by the debonding strain of CFRP
laminate. This restriction lowers the additional stress that can be developed in the unbonded
tendons under ULS and increases the amount of CFRP needed.
A second alternative double-T system is created by replacing the CFRP in alternative
concept I with unstressed internal bonded tendon, which is continuous along the span. The
number of strands provided in the unstressed tendon is governed by a criterion that requires the
stress in the strand to be less than 240 MPa under SLS. This requirement is a mean of
controlling the size of crack and segmental joint opening under SLS. Like alternative concept I,
concrete stresses under SLS is less critical and less sensitive to level of prestressing in
comparison with the base concept. The unbonded tendons under ULS develop slightly higher
stresses than the previous two concepts due to the increase in girder deformation.
Both alternative concept I and II are developed with SLS design criteria that limit the
tensile stress in concrete under fcr. It is possible to increase their SLS concrete tensile stress
limit beyond fcr. However, a thorough examination of cracking needs to be carried out.
Table 6.1 summarizes some of the SLS and ULS characteristics of the double-T systems.
The major difference among the systems under SLS is that the base concept does not allow any
tensile stress in concrete while alternative concept I and II allow up to fcr in concrete’s bottom
fibre where continuous reinforcements are present. Under ULS, although the final stress in the
external unbonded tendons is close among the three concepts, the strain distribution is quite
different. For the base concept, the strain peaks at mid-span at a value of 12.3 mm/m. For the
alternative concepts, the strain diagram displays a more parabolic distribution with a lower
maximum. This indicates that the addition of internal bonded reinforcements help better
distribute strain in the system. The governing design criteria and ULS capacity of the three
systems are also shown in the table. The base concept is governed by concrete tensile stress

94
limit under SLS and display some reserve in ULS capacity. Alternative concept I is governed
by ULS criteria of CFRP debonding. The ULS capacity is calculated based on a CFRP
debonding strain of 6 mm/m, which is a conservative limit suggested by CHBDC (2006b). If
bonding can be improved and made more reliable, the ULS capacity can improve significantly.
Alternative concept II is governed by the SLS stress limit for the internal continuous
prestressing steel. The system’s ULS demand is approximately 92% of its capacity.
Overall, alternative concept II appears to be the most versatile system among the three
concepts. Unlike the base concept which is somewhat constrained by the large amount of post-
tensioning force in the system, alternative concept II can be adapted to other design conditions
by adjusting the amount of post-tensioning based on SLS design criteria and complementing the
ULS capacity with internal unstressed prestressing strands. While there is a certain range of
geometrical conditions that alternative concept II is most suitable for, this system appears to
have a reasonable range of applicability. Alternative concept I with CFRP reinforcements also
has the potential for wider range of application if bonding between CFRP and the double-T
girder can be improved.

Table 6.1. Comparison of double-T systems
Base concept Alternative concept I Alternative concept II
External post-tensioning only External PT + CFRP External PT + unstressed internal tendon
Amt. of external post-tensioning 156 strands 144 strands 144 strands
Amt. of additional reinforcement - CFRP laminate with size of
21m (L)×3.44m (W)×1.2mm (T) 10 prestressing strands
SLS concrete tensile stress limit 0 MPa 0 MPa (top fibre)
fcr (bottom fibre) 0 MPa (top fibre) fcr (bottom fibre)
Max. concrete tensile stress under SLS -0.06 MPa (top fibre)
-1.78 MPa (bottom fibre) -0.65 MPa (top fibre)
+2.9 MPa (bottom fibre) -0.65 MPa (top fibre)
+2.9 MPa (bottom fibre)
εcp under ULS
σp under ULS 81% fpu 81% fpu 82% fpu
Demand / Capacity under ULS 93% 100% (with debonding limit)
78% (without debonding limit) 92%
Governing design criteria Concrete stress under SLS CFRP debonding strain under ULS Stress in unstressed prestressing
steel under SLS
95

96
6.2. Comparison of Double-T Systems with CPCI Slab-on-Girder System
This section compares the structural efficiency of the double-T and CPCI systems in
terms of live load distribution, level of design loads, and deck slab design. It should be noted
that the analysis and design under these three subjects are the same for the three double-T
sample designs. Therefore, the following comparison will not make a distinction among the
three double-T concepts, and will instead address them collectively as the “double-T system”.
6.2.1. Live Load Distribution
Live load distribution, as discussed earlier, is an important factor that has significant
influence on the amount of design load per girder. Efficient live load distribution can reduce the
total demand on the overall system. In this section, live load distribution of the double-T and
the CPCI systems are evaluated based on the comparison of the following ratios:
(1) Mg / Mg,avg: Mg is the maximum longitudinal moment per web or per girder due to live load,
including effects of live load amplification factor. Mg,avg is the average moment per web or per
girder due to live load if live load is shared equally among girders or webs. The ratio of
Mg/Mg,avg evaluates how much the case of uneven live load distribution deviates from the case of
even distribution. It is a measure of the bridge’s ability to transfer loads transversely across the
cross-section (CSA, 2006b).
(2) Mg,tot / MT: Mg,tot is the total moment of the cross-section if the maximum longitudinal
moment per girder (or per web), Mg, is applied to every girder (or web). MT is the maximum
moment per design lane. This ratio represents how many lanes of loading the system actually
needs to be designed for when uneven live load distribution is accounted for.
Table 6.2 summarizes the values of the above two ratios for the double-T and the CPCI
system. For the double-T system, live load distribution was evaluated in Chapter 2 using
analytical and modeling approaches. Live load distribution for the CPCI system was evaluated
in Chapter 5 based on CHBDC provisions.
Table 6.2. Live load distribution comparison
Double-T CPCI (1) Mg / Mg,avg 1.43 1.88 (3) Mg,tot / MT 3.22 4.51

97
The ratios in Table 6.2 suggest that the double-T system is overall more efficient in live
load distribution. The comparison of the first ratio Mg/Mg,avg indicates that the maximum live
load per girder for the CPCI system deviates more from the ideal case of equal distribution. The
second ratio Mg,tot / MT clearly shows that the total live load demand on the full cross-section is
lower for the double-T system. The difference between the two systems is approximately 30%.
The inefficiency of live load distribution in the CPCI system comes from two levels. The first
level is the basic inefficiency associated with structural system itself. Due to flexibility of the
deck slab, live load only propagates to a few girders close to its point of application. This
uneven distribution is magnified by the relatively large number of girders in the system. The
second level of inefficiency is associated with the method of calculation. As discussed in
Chapter 5, live load distribution in a slab-on-girder system with multiple girders is a relatively
complex problem that involves many parameters. The provisions in codes and standards are
usually simplified representation of the real situation and include only a limited number of
variables. These provisions are usually used to determine the maximum amount of load
distributed to a girder under the most unfavourable conditions.
As the above comparison indicates, the double-T system exhibits more efficient live load
distribution. This has significant impact on the total live load demand on the structure. This
subject is examined in the following section.
6.2.2. Design Load
The structural efficiency of the double-T and the CPCI system can also be evaluated
from the perspective of design loads. Although the sample designs are developed under the
same geometrical conditions and live load model, the amount of dead and live load incurred in
each structure are different. The difference in dead load is due to the structures’ different cross-
sections, while the difference in live load results from the variation in live load distribution.
The maximum moment intensities for the double-T and the CPCI systems are
summarized in Table 6.3. To present a more clear comparison, the moment intensity ratios of
the two systems are computed for each load category as well as for the overall structure. The
values from Table 6.3 clearly indicate that the double-T system incurs less design load. While
the amount of super-imposed dead load is the same for both systems, the dead load moment
intensity in the double-T is only 69% of that in the CPCI system. This is largely due to the
small number of webs in the double-T cross-section as well as the web’s slender dimension.

98
The live load moment intensity is also lower for the double-T design example due to the
system’s more efficient live load distribution. As shown in section 6.2.1, the live load demand
for the double-T system is approximately 30% lower than the conventional CPCI slab-on-girder
alternative. The total design moment in the double-T example is 26% lower than the CPCI
system. Based on this comparison, the double-T concept is more efficient in terms of level of
design load.
Table 6.3. Maximum moment intensity due to DL, SDL, and LL
Absolute moment intensity [kN-m] Moment intensity
ratio Double-T CPCI Mdouble-T / MCPCI DL Slab 12740 12740 1.00 Fillet (Haunch) 2360 1680 1.41 Web (Girder) 4350 13870 0.31 Subtotal 19450 28300 0.69
SDL 7630 7630 1.00
LL 13550 18920 0.72 Total 40600 54800 0.74
6.2.3 Deck Slab Design
The double-T and CPCI systems employ two different approaches for the design of deck
slab. The approach used for the CPCI system is based on the empirical method prescribed by
CHBDC, which produces relatively economical deck slab designs for slab-on-girder bridges
(Batchelor, 1987). However, because the method was developed mostly based on experimental
data for multiple-girder systems with non-prestressed deck slabs, it cannot be effectively applied
to the double-T system. The deck slab for the double-T system, on the other hand, is designed
based on flexure. This approach likely produces conservative design due to the neglection of
arching action. It was shown in research that the true capacity of laterally restrained deck slabs
is often much higher than the deck slab’s flexural capacity due to strong arching action present
under applied load (Batchelor, 1987). The deck slab of the double-T system, which has
significant lateral restraining force from transverse post-tensioning, is likely to develop
additional capacity from arching action.
Durability of conventional reinforced concrete deck slabs is often of concern due to the
slab’s tendency to crack under service load. Cracking in deck slab can cause water leakage,

99
which is a vector in reinforcement corrosion. In comparison, the deck slab of the double-T
system has superior durability. By pre-compressing the concrete, transverse post-tensioning
reduces the likelihood for cracks to develop, thus enhances the deck slab’s intrinsic durability.
6.3. Material Consumption
6.3.1. Concrete
Concrete consumption in the double-T and the CPCI system is summarized in Table 6.4.
The table includes data on concrete volume used in the full system as well as in each structural
component. Structural components are categorized into “primary section”, such as the double-T
girder in the double-T system and the slab-girder composite in the CPCI system, and
“diaphragms”.
Table 6.4. Concrete consumption
Concrete volume [m3] % of total volume Double-T* CPCI Double-T* CPCI
Primary section Deck slab 114 114 50% 39% Fillet (Haunch) 21 15 9% 5% Web (Girder) 39 124 17% 43%
Subtotal 174 252 77% 88%
Diaphragms End diaphragm 36 36 16% 13% Deviation diaphragm 15 0 7% 0%
Subtotal 52 36 23% 13%
Grand total 225 288 100% 100%
* Because the three double-T sample designs share the same concrete section, they are collectively represented here as “Double-T”.
As shown in the above table, the total concrete consumption of the double-T system is
approximately 22% less than the CPCI system. The material economy of the double-T system
can be attributed to its efficient cross-section which consists of only two slender webs. The
amount of concrete consumed by the double-T webs is only 1/3 of the amount consumed by the
CPCI girders. The concrete consumption in end diaphragms has no major discrepancy between
the two systems. The deviation diaphragm, which is only required in the double-T concept,
consumes approximately 7% of total concrete used in the double-T system.

100
Another important trend shown in Table 6.4 is that deck slabs tend to be the most major
source of concrete consumption in bridge systems. For the sample design of the conventional
CPCI slab-on-girder bridge, deck slab takes up 39% of total superstructure concrete. For the
more slender double-T girder bridge, the deck slab’s share increases to 50% of the system’s total
concrete consumption. This observation suggests that deck slab design is an important subject
that has significant impact on the structure’s overall material economy. For instance, if the deck
slab thickness can be reduced by 25 mm, the total concrete consumption in the double-T sample
design can be reduced by close to 6%. The deck slab for the double-T system is designed based
on flexure. As discussed earlier in this chapter, this method tends to be conservative as deck
slabs usually exhibit greater capacity than their flexural strength due to arching action.
However, empirical method prescribed by CHBDC is not fully applicable to the double-T
system because the method is mostly based on research data of multiple-girder systems. To
further improve the material economy of the double-T system and other bridge systems, deck
slab design is a subject that deserves further investigation.
6.3.2. Prestressing Steel
Prestressing steel consumption is summarized in Table 6.5. All three double-T systems
use less prestressing steel in longitudinal post-tensioning than the CPCI system. However, the
double-T systems require additional prestressing steel in the transverse post-tensioning of deck
slabs. As a result, the total volume of prestressing steel consumed by the double-T systems
becomes close to or higher than the CPCI system. Despite the cost, transverse post-tensioning
brings additional value to the system by improving the deck slab’s durability and enhancing the
structure’s overall quality.
Table 6.5. Prestressing steel consumption [unit: t]
Double-T
base conceptDouble-T
alternative I Double-T
alternative II CPCI Longitudinal post-tensioning 6.3 5.9 5.9 8.6 Transverse post-tensioning 2.7 2.7 2.7 - Unstressed prestressing steel - - 0.7 -
Total 9.0 8.5 9.3 8.6

101
6.3.3. Reinforcing Steel
The reinforcing steel consumption is summarized in Table 6.6. It is observed that
overall the double-T systems require less reinforcing steel than the CPCI system. The double-T
systems consume significantly less stirrups because it has greater shear resistance contribution
from the draped post-tensioning tendons. While all tendons in the double-T girder are draped,
only 36% of all prestressing strands in the CPCI system are deflected. The quantity of
reinforcing steel in the deck slab is less for the double-T system because the transverse
reinforcing steels are replaced by transverse post-tensioning tendons. The amount of
longitudinal girder reinforcement is also less in the double-T system because of the minimized
number of webs.
Table 6.6. Reinforcing steel consumption
Double-T
base conceptDouble-T
alternative I Double-T
alternative II CPCI Deck Slab 2.6 2.6 2.6 5.2 Stirrups 2.1 2.3 2.3 6.1 Longitudinal Girder / Web Reinforcement 1.4 1.4 1.4 3.4
Total 6.1 6.3 6.3 14.8
6.3.4. CFRP Reinforcing System
The double-T alternative concept II involves the use external CFRP reinforcing system,
which primary consists of CFRP laminates and epoxy adhesive. CFRP laminate strips have a
specified thickness and are available in specific widths. Some of the commercially available
sizes of laminate and their epoxy requirement are summarized in Table 6.7. The size of
laminate and amount of epoxy required by the double-T system is also given in the table.
Table 6.7. CFRP reinforcing system (Data provided by Sika, Canada)
Amount req’d by
double-T alternative IIThickness Width Epoxy Laminate Epoxy
Sika CarbonDur laminate [mm] [mm] [kg/m of strip] [m] [kg]
S812 1.2 80 0.48 42 13 S1012 1.2 100 0.60 588 282 S1212 1.2 120 0.72 84 60
Total - 355

102
6.4. Cost Comparison
6.4.1. Cost Comparison of Double-T Systems
The cost of the three double-T systems will be compared in this section. The cost of
precast concrete, including fabrication, delivery and erection, is the same for the three systems.
The cost of structural reinforcements, such as post-tensioning, CFRP, and unstressed
prestressing steel, are compared based on the material unit costs listed in Table 6.8, which are
acquired from design offices and suppliers. The unit cost of post-tensioning already accounts
for the cost of anchorage systems and the labour required for stressing the tendons.
Table 6.8. Unit cost of structural reinforcing systems
Unit cost Post-tensioning Longitudinal [$/t] 8,500 Transverse [$/t] 11,500 CFRP system CFRP laminate [avg $/m] 58 Epoxy [$/kg] 14 Unstressed strand [$/t] 2,500
The cost estimate for the three systems based on the above material unit cost is
summarized in Table 6.9. The cost of precast concrete is assumed to be a constant value of C
for the three systems. The comparison indicates that double-T alternative II is the most
economical system. The cost of alternative concept I is relatively high due to the high cost of
CFRP reinforcing system.
Table 6.9. Cost comparison of double-T systems [Unit: $]
Double-T base
concept Double-T
alternative I Double-T
alternative II
Precast concrete C C C Post-tensioning Longitudinal 53,918 49,770 49,770 Transverse 30,970 30,970 30,970 CFRP system CFRP 43,680 Epoxy 5,093 Unstressed strand 1,826
Total C + 84,900 C + 129,500 C + 81,800

103
6.4.2. Cost Comparison between Double-T and CPCI Systems
In this section, the cost of the CPCI slab-on-girder system is compared with double-T
system. The cost of the CPCI system primarily consists of precast concrete and cast-in-place
deck slab. For the double-T system, the cost primarily consists of precast concrete and
structural reinforcing systems.
The cost of precast concrete is the most uncertain item in this cost comparison. It is not
only affected by the cost of material and labour, but also the availability of suppliers in the
market. The cost associated with the fabrication, delivery and erection of the precast concrete is
summarized in Table 6.10 and discussed in the following paragraphs:
Precast concrete fabrication:
The fabrication cost depends on the actual material cost as well as the ease of fabrication
and the availability of suppliers. In terms of materials, the double-T system requires only
concrete and reinforcing bars while the CPCI system requires additional prestressing strands for
pre-tensioning. However, the cost of concrete in the double-T system is likely higher because it
utilizes a higher strength concrete. In terms of forming, the double-T system can be casted
relatively easily with wood formworks. Because the relative ease of forming and low cost of the
forms, supplier availability is likely not a problem, and the contractor may be able to form the
segments themselves. On the other hand, the CPCI girders need specialized formworks and
equipments that require high capital investment. This results in a very limited number of
suppliers available. In Ontario where there are only several CPCI girder suppliers, the price of
CPCI girders can increase due to the combination of low supply and high demand. Based on the
above comparison, it is expected that the precast concrete fabrication cost would be similar
between the double-T and the CPCI system.
Precast concrete delivery:
The CPCI girders usually come in lengths of about 30, 35 or 40 m. The long segments
require special trucks, permits and specified routes. On the other hand, the smaller double-T
segments can be transported without special consideration. Hence, it is expected that the
delivery cost is lower for the double-T system.
Erection:
The erection of CPCI girders requires a crane while the double-T system requires a crane
and an erection girder. The crane needed by the double-T system can be smaller than the CPCI

104
system because a single double-T segment weighs about 325 kN while one 37 m long CPCI
girder weighs about 505 kN. Overall, it is expected that the erection cost for double-T system is
higher. However, with an increased application of the double-T system, the average cost of
erection would decrease due to the repeated use of the erection girder. In long term, the erection
cost of the double-T system would be expected to approach that of the CPCI system.
Table 6.10. Qualitative cost comparison of the double-T and CPCI systems
Item CPCI + Cast-in-place deck slab Double-T Comment
Fabricate precast concrete
Requires relatively high initial capital investment for precasting forms and equipments
Limited number of suppliers in Ontario; price can increase due to high demand and low supply
Requires relatively low capital investment since no precasting bed is required and formwork can be made from wood
More suppliers available due to ease of forming
Expect to be similar for two systems
Includes pretressing strands No strands 50 MPa concrete 70 MPa concrete
Precast concrete delivery
Girders in lengths of 30, 35 or 40 m; requires special trucks, permits and specified routes
Segments can be transported without special considerations
Expect to be cheaper for double-T
Erection Requires crane
Requires crane and erection girder
Size of crane can be smaller than CPCI system due to the lighter segments
Expect overall cost to be higher for double-T
Deck slab Includes concrete, rebar and
labour
Not required
Post-tensiong
Not required Requires longitudinal and transverse post-tensioning
Additional reinf.
Not required CFRP required by alternative I Unstressed strands required by alternative II
The above discussion and Table 6.10 provide a reasonably founded qualitative
comparison between the cost of the CPCI and the double-T system. However, the difference in
cost identified in the comparison is somewhat difficult to be quantified. The following
numerical comparison between the two systems is made by varying two parameters with the

105
most uncertainty (i.e. precast concrete delivery and erection cost). The costs of precast concrete
and cast-in-place deck slab, summarized in Table 6.11, are taken from recent bridges in Ontario.
Table 6.11. Cost of precast concrete and cast-in-place deck slab
CPCI Double-T Precast concrete
Fabrication $ 1190 /m3 of concrete Assume to be same as CPCI
Delivery $ 333 /m3 of concrete
Expected to be lower than CPCI; Cost is computed with levels of delivery cost at 50%, 75% and 100% of CPCI delivery cost.
Erection $ 316 /m3 of concrete
Expected to be higher than CPCI; Cost is computed with levels of erection cost at 100%, 150% and 200% of CPCI erection cost.
Cast-in-place deck slab Concrete $ 1170 /m3 Not required Reinforcing bars $ 2500 /t Not required
The numerical comparison is made between the CPCI sample design and double-T
alternative concept II sample design. Table 6.12 (a) compares the cost of the system by varying
the cost of double-T girder delivery from 50% to 100% of the CPCI girder delivery cost. The
other parameter, erection cost, is kept constant and assumed to be equal between the double-T
and CPCI system for this comparison. Table 6.12 (a) shows that the overall cost of the double-T
system is not very sensitive to the cost of precast concrete delivery. The costs of the two
systems are about equal when the delivery cost of the double-T segment is about 80% of the
CPCI girder.
Table 6.12 (b) compares the cost of systems by varying the cost of double-T girder
erection from 100% to 200% of the CPCI girder erection cost. The cost of the double-T
segment delivery is assumed to be 75% of the CPCI girder delivery cost. It is shown that the
overall cost of the double-T system is slightly lower than the CPCI system when the erection
costs of the two systems are equal. As the cost of erection for the double-T system increases up
to twice of the CPCI erection cost, the total cost the double-T system becomes approximately
12% higher than the cost of the CPCI system.
Overall, the cost comparison shows that there is not a significant discrepancy between
the economies of the two systems, especially in the long term when the erection cost of the
double-T system becomes lower. With a similar cost as the CPCI system, the double-T system
offers the following advantages over its counterpart: 1) The elimination of cast-in-place deck

106
slab simplifies and accelerates the construction process; and 2) The transverse post-tensioning
enhances the deck slab durability thus reduces the need for frequent deck slab replacements and
lowers the structure’s life cycle cost.
Table 6.12. Cost comparison between the CPCI system and double-T alternative concept II
(a) Comparison with varying delivery cost
Rd = Unit delivery cost ($/m3 concrete) of double-T system / unit deliver cost of CPCI system
Rd = 50% Rd =75% Rd=100% CPCI Double-T CPCI Double-T CPCI Double-T
Fabricate precast concrete 46,729 205,790 146,729 205,790 146,729 205,790 Precast delivery 41,198 28,977 41,198 43,336 41,198 57,781 Erection 39,095 54,831 39,095 54,831 39,095 54,831
Cast-in-place deck slab Concrete 150,627 - 150,627 - 150,627 - Reinforcing bar 13,250 - 13,250 - 13,250 -
Post-tensioning 84,888 84,888 84,888 Unstressed strands - 1,015 1,015 1,015
Total 390,898 371,353 390,898 385,712 390,898 400,157
(b) Comparison with varying erection cost
Re = Unit erection cost ($/m3 concrete) of double-T system / unit erection cost of CPCI system
Re = 1.00 Re = 1.50 Re = 2.00 CPCI Double-T CPCI Double-T CPCI Double-T
Fabricate precast concrete 146,729 205,790 146,729 205,790 146,729 205,790 Precast delivery 41,198 43,336 41,198 43,336 41,198 43,336 Erection 39,095 54,831 39,095 82,247 39,095 109,662
Cast-in-place deck slab Concrete 150,627 - 150,627 - 150,627 Reinforcing bar 13,250 - 13,250 - 13,250
Post-tensioning 84,888 84,888 84,888 Unstressed strands - 1,015 1,015 1,015
Total 390,898 385,712 390,898 413,127 390,898 440,543

Chapter 7 Conclusion
This thesis develops three alternative double-T bridge concepts and compares their
primary superstructure material consumption with that of a conventional single span CPCI
system. The results indicate that the double-T systems are in general more efficient than the
CPCI system and have the potential to achieve better material economy.
Three double-T concepts are developed with varying design of primary longitudinal
reinforcements. All three concepts employ a slender concrete cross-section with two thin webs,
post-tensioning in two orthogonal directions, and precast segmental construction method. The
double-T base concept developed in Chapter 2 is reinforced with pure external unbonded post-
tensioning. While a feasible sample design is created based on the given geometrical
requirements, the concept is found to have a somewhat low tolerance in terms of post-tensioning
design due to the high jacking force imposed to the system during construction. To resolve this
limitation and extend the double-T concept’s applicability to a wider range of geometrical
conditions, two alternative double-T concepts with blends of prestressed and non-prestressed
primary reinforcements are developed in Chapter 3 and 4. They are modifications of the base
concept with reduced amounts of post-tensioning and supplementary non-prestressed
reinforcements. These modifications in the system create more flexibility in the design because:
1) The decrease in post-tensioning reduces the negative moment imposed on the structure during
construction thus making the structure less critical in negative flexure; 2) The addition of the
non-prestressed continuous reinforcements expands the allowable window for concrete stress
from 0.6 f’c – 0 to 0.6 f’c – fcr under SLS. The alternative concept I with CFRP reinforcing
system is limited by the CFRP debonding strain under ULS. The alternative concept II does not
have such a limitation. As a result, it achieves slightly larger deformation and develops higher
stress in the unbonded tendons under ULS, which are indicative of a more efficient utilization of
the unbonded tendons.
107

108
Comparisons of the double-T and CPCI systems are presented in Chapter 6. The
structural efficiency comparison indicates that the double-T section with two slender webs not
only reduces the overall concrete and dead load of the structure, but also improves live load
distribution in comparison with conventional CPCI system. The use of transverse post-
tensioning in the double-T deck slab enhances the system’s durability. The costs of the double-
T and the CPCI systems are compared both qualitatively and quantitatively. It is found that
there is not a significant discrepancy between the economies of the two systems, especially in
the long term when the erection cost of the double-T system becomes lower. With a similar cost
as the CPCI system, the double-T system offers advantages over its counterpart, such as
simplified construction process and enhanced deck slab durability.

References
American Association of State Highway and Transportation Officials (AASHTO). (1996).
Standard specifications for highway bridges. Washington, D.C.
American Association of State Highway and Transportation Officials (AASHTO). (1998).
LRFD bridge design specifications. (SI units 2nd ed.). Washington, D.C.
American Composites Manufacturers Association (ACMA). (2005). Composites Industry
Statistics. <http://www.acmanet.org/professionals /2005-Composites-Industry-
Statistics.pdf > (Nov. 20, 2009)
American Concrete Institute (ACI) – Committee 440. (2007). Report on Fiber-Reinforced
Polymer (FRP) Reinforcement for Concrete Structures, ACI 440R-07. Farmington Hills,
MI, USA.
American Concrete Institute (ACI) – Committee 440. (2008). Design and Construction of
Externally Bonded FRP Systems, ACI 440.2R-08. Farmington Hills, MI, USA.
American Segmental Bridge Institute (2008). Segmental Box Girder Standards.
<http://www.asbi-assoc.org/resources/AASHTO_Standards.cfm> (June 1, 2008)
Batchelor, B. deV. (1987). Membrane Enhancement in Top Slabs of Concrete Bridges. Chapter
6 of Concrete Bridge Engineering: Performance and Advances. Elsevier Applied
Science Publishers Ltd., Barking, Essex, England.
Cai, C. S. (2005). Discussion on AASHTO LRFD load distribution factors for slab-on-girder
bridges. Practice Periodical on Structural Design and Construction, 10(3), 171-176.
Canadian Precast/Prestressed Concrete Instittute (2009). Prestressed Girder Bridges.
<http://www.cpci.ca/?sc=bs&pn=prestressedgirderbridges> (August 1, 2009)
109

110
Canadian Standards Association (2002). S806-02: Design and Construction of Building
Components with Fibre-Reinforced Polyers. CSA, Mississauga, Ontario.
Canadian Standards Association (2006a). CAN/CSA-S6-06: Canadian Highway Bridge Design
Code. CSA, Mississauga, Ontario.
Canadian Standards Association (2006b). S6.1-06: Commentary on CAN/CSA-S6-06, Canadian
Highway Bridge Design Code. CSA, Mississauga, Ontario.
Choi, W., Rizkalla, S., Zia, P., & Mirmiran, A. (2008). Behavior and design of high-strength
prestressed concrete girders. PCI Journal, 53(5), 54-69.
Departement des Travaux Publics du Canton de Vaud. (1989). Catalogue of le viaduc d’Orbe for
Routes nationales suisses N9.
Dywidag-Systems International Canada Ltd. (2006). DYWIDAG Multistrand Stay Cable
Systems. <http://www.dsicanada.ca/en/downloads/brochures-canada.html> (April 1,
2008).
Dunker, K. F. (1992). Performance of Prestressed Concrete Highway Bridges in the United
States – The First 40 Years. PCI Journal, 37(3), 48-64.
Federal Highway Administration (FHWA). (2009). Optimized Sections for High-Strength
Concrete Bridge Girders--Effect of Deck Concrete Strength.
<http://www.tfhrc.gov/structur/pubs/05058/01.htm> (Oct. 10, 2009)
Gauvreau, P. (2006). Bridges. Chapter 12 (pp. 195-240) of Post-Tensioning Manual. 6th ed.
Phoenix: Post-Tensioning Institute.
Hassanain. M. A. (1998). Optimal design of precast I-girder bridges made with high-
performance concrete. Unpublished Doctor of Philosophy, Department of Civil
Engineering, Calgary, Alberta.
Hewitt, B. E., & Batchelor, B. d. (1975). Punching shear strength of restrained slabs. ASCE J
Struct Div, 101(9), 1837-1853.

111
Interactive Design Systems. (2009). <http://www.ids-
soft.com/solutions/products/geometrey.html Match cast diagram> (Nov. 11, 2009)
Kulka, F., & Lin, T. Y. (1982). Comparative studies of medium span box girder bridges with
other precast systems. International Conference on Short and Medium Span Bridges,
Proceedings, 1 81-94.
Leonhardt, Fritz. (1979). Vorlesungen uber Massivbau. Berlin: Springer-Verlag.
Lounis, Z., Mirza, M. S., & Cohn, M. Z. (1997). Segmental and conventional precast prestressed
concrete I-bridge girders. Journal of Bridge Engineering, 2(3), 73-82.
Menn, C. (1990). In Gauvreau P. (Ed.), Prestressed concrete bridges. Boston: Birkhäuser
Verlag.
MTO. (2002). Prestressed Girders and Bearings (CPCI 1900). Standard Drawing June 2002.
Pre-Con. (2004). Prestressed “I” Girders. Product Manual.
Pucher, A. (1977). Einflussfelder elastischer platten: Influence surfaces of elastic plates (5.,
durchgesehene Aufl. -- ed.). New York: Springer-Verlag.
Roberts-Wollmann, C. L., Kreger, M. E., Rogowsky, D. M., & Breen, J. E. (2005). Stresses in
external tendons at ultimate. ACI Structural Journal, 102(2), 206-213.
Schlaich, J., Shäfer, K., and Jennewein, M. (1987). Towards a Consistent Design of Structural
Concrete. PCI Journal. 32, 3: 74-150.
Sika. (2009). Engineering with external carbon reinforcement. <http://www.sika.ca/con-bro-
carbon-reinforcement-heinz.pdf> (Nov. 3, 2009)
Sika. (2009). Sika CarboDur product data sheet. <http://www.sika.ca/con-tds-sikacarbodur-
ca.pdf> (Nov. 3, 2009)
Stussi, B., (1958). Grundsatzliches zum Projekt, zur Ausfuhrung und zur Berechnung. In
Offentlichen Bauten des Kantons, Weinlandbrucke Andelfingen (32-47).

112
Suksawang, N., & Nassif, H. H. (2007). Development of live load distribution factor equation
for girder bridges. Transportation Research Record, no.2028, (2028), 9-18.
Teng, J. (2002). FRP Strengthened RC Structures. New York: Wiley.
Trost, H. (1967). Auswirkungen des Superpositionsprinzips auf Kriech- und
Relaxationsprobleme bei Beton und Spannbeton. Parts 1, 2. Beton- und Stahlbetonbau.
Washington State Department of Transportation. (2008). Single Span P.S Girder Construction
Sequence. Bridge Standard Drawings.
<http://www.wsdot.wa.gov/eesc/bridge/drawings/index.cfm?fuseaction=drawings§i
on_nbr=6&type_id=16> (August 1, 2009)
Yousif, Z., & Hindi, R. (2007). AASHTO-LRFD live load distribution for beam-and-slab
bridges: Limitations and applicability. Journal of Bridge Engineering, 12(6), 765-773.

Appendix A:
Double-T Concepts Sample Calculations and Design Drawings
113

114
page 1 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
General Double-T base concept sample design
Design Criteria
- Canadian Highway Bridge Design Code 2006 (CAN/CSA-S6-06) - refer to specific references listed
General Bridge Information
- Span length: 36.60 m
- Deck width (full slab), Wc: 13.80 m- Deck width minor barrier 13.20 m- Web spacing, bo: 7.90 m- Exterior fillet width: 2.00 m- Interior fillet width: 1.85 m- Web thickness, top, tw,top: 0.310 m- Web thickness, bot, tw,bot: 0.285 m
- Total depth of girder, h: 2.00 m- Slab thickness, ts: 0.225 m- Fillet thickness, tf: 0.150 m- Height of web, hw: 1.625 m
- No. of design lanes: 3 (ref. Table 3.8.2)
- Barrier wall area: 0.73 m2 Total of 2 barrier walls
- Total asphalt + w/p thickness: 90 mm

115
page 2 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Section Property Double-T base concept sample design
Section Properties - Full section
Atot = 4.741 m2Ytop = 0.353 m Ybot = 1.647 m
I = 1.065 m4Stop = 3.019 m3 Sbot = 0.647 m3
Section Property - Half sectionAtot = 2.370 m2Ytop = 0.353 m Ybot = 1.647 m
I = 0.533 m4Stop = 1.509 m3 Sbot = 0.323 m3

116
page 3 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Material Property Double-T base concept sample design
Material Specifications
Post-tensioning tendon and duct Use DSI 27-0.6" strand ducts
Strand diameter = 13.35 mm2
Strand area = 140 mm2
No. of strands per duct = 27
f pu = 1860 MPa Assume fpy = 0.9 fpu = 1674 MPaEp = 200000 MPa (cl. 8.4.3.3)
Concrete Ec= (3000 (fC')0.5 + 6900) (gC / 2300)1.5 (cl. 8.4.1.7)b1 = 0.97 - 0.0025 fC' > 0.67 (cl. 8.8.3.g)
f'c (Girder) = 70 MPa ===> Ec= 36263 MPa b1 = 0.795 fCR = 3.35
Reinforcing Steelfy = 400 MPa
Es = 200000 MPa (cl. 8.4.2.1.4)

117
page 4 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Torsion 1 Double-T Concrete Bridge Design
Torsion in Double-T Girders(Ref. Menn, Sec. 5.1.3) - Torsional moments in open sections (i.e. double-t girder) are resisted by a combnation of St. Venant torsion (Tsv) and warping torsion (Tw).
Calculate k
ho = 1.8632609 mbo = 7.90 m
h = 2.00 mb = 13.80 m
bw = 0.2975 mts = 0.2734783 m
as: distance from middle surface of top slab to centroidal axisas = 0.216102 m I (half) = 0.53254 m4
an: distance from middle surface of top slab to neutral axis.an = 0.208767 m In bar (half) = 0.59369 m4
K: torsional constant (equivalent of I in bending)K = 0.126793 G = 0.4 E
Compatibility at mid-spanspan = 36.60 m
sv = 9.15 k*Qw*bo/(G*K) = 1425.25 k*(Qw/E) [m-2]
wv: delfection at mid-spanwv = Qw*l^3/(48*E*I n bar) = 1720.47 Qw/E [m-1]
w = 2*wv(x)/bo = 435.561 Qw/E [m-2]
Set w = sv
k = 0.305603Qw = 0.76593 Q and Qsv = 0.23407 Q
)()()( xTxTxT wsv kxTxT
w
sv
)()( k
w
sv

118
page 5 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Torsion 2 Double-T Concrete Bridge Design
Torsion due to Eccentric Load
Load Case 1: Concentric load, 4 lanes loaded
Wtot = 3W *0.8*1.25 = 3 WTtot= = 0
Twarp = Ttot / (1+k) = 0
Load Case 2: Eccentric load, 2 lanes loaded
Wtot = 2W *0.9*1.25 = 2.25 WTtot= (W/2)*(6.3+4.5+1.6-0.2)*0.9*1.25 = 6.8625 W
Twarp = Ttot / (1+k) = 5.2561923 W5.26 W / bo = 0.6653 W
web 1 = 1.7903 WLoad Case 3: Eccentric load, 3 lanes loaded
Wtot = 3W *0.8*1.25 = 3 WTtot= (W/2)*(6.3+4.5+1.6-0.2-2.8-4.6)*0.8*1.25 = 2.4 W
Twarp = Ttot / (1+k) = 1.8382312 W1.84 W / bo = 0.2327 W
web 1 = 1.7327 W

119
page 6 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Demand Double-T base concept sample design
LONGITUIDNAL SYSTEM
Dead LoadGirder 116.15 kN/m Longitudinal
Super-imposed Dead LoadBarrier 17.52 kN/m LongitudinalWearing surface 27.92 kN/m Longitudinal
Live LoadCHBDC CL-625-ONT truck load or lane load
Load FactorsULS max ULS min SLS
DL 1.10 0.95 1.00SDL - Barrier 1.20 0.90 1.00SDL - Wearing surface 1.50 0.65 1.00LL 1.70 - 0.90 cl.3.5.1 & Table 3.5.1(b)
Other FactorsMulti-lane reduction, RL: 0.8 for 3 lanes
0.9 for 2 lanes cl. 3.8.4.2 & Table 3.5DLA : 1.25 cl. 3.8.4.5 Applied to truck load, NOT to lane load.
Consideration for Eccentric Live Load- When girder is loaded eccentrically, torsion will be created.- Torsion will be carried by the means of 1) Warping torsion, and 2) St. Venant torsion. 1) Warping torsion causes differential bending in webs 2) St. Venant torsion will be carried by closed shear flow within each individual cross-section element- Warping torsion will be dealt as additional flextural demand; St. Venant torsion will be dealt later as additional shear stress.- 3 load cases will be considered, the most severe will be used as demand. Load case 1: 3 lanes loaded concentrically. Load case 2: 2 lanes loaded eccentrically. Load case 3: 3 lanes loaded eccentrically. - Note: RL = 0.8 for 3 lanes and = 0.9 for 2 lanes, this significantly affects the result of Load Case 2 and Load Case 3.
- Let W be the load of 1 truck (a pair of axle); Q1 be the reaction in the web on the severe side.
Load Case 1Load Case 2Load Case 3 MaxQ1 [*W] 1.5 1.525 1.612 1.612 Note: Values account for RL and DLA.
max. MLL (one web, unfac) 6301 6404 6773 6773 Live load distribution taken fromSAP grillage model analyiss results
Q1 [*W] - axle load portion 0.96 0.98 1.03Q1 [kN/m] - unif portion 10.8 12.890 12.475
max. MLL (one web, unfac) 5841 6257 6424 6424
.:. Max. LL unfactored moment = 6773 kN-m Truck Load, Load Case 3 governs.
LaneLoad
TruckLoad

120
page 7 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Load Combinations Double-T base concept sample design
Section Property - Full sectionAtot = 4.741 m2Ytop = 0.353 m Ybot = 1.647 m
I = 1.065 m4Stop = 3.019 m3 Sbot = 0.647 m3
Section Property - Half sectionAtot = 2.370 m2Ytop = 0.353 m Ybot = 1.647 m
I = 0.533 m4Stop = 1.509 m3 Sbot = 0.323 m3
Moments (ONE web)
DL SDL-Barrier SDL-WS LLMid-span 9724 1467 2337 6773Deviation 8286 1250 1992 6042 Deviation = 11.3 m from support
Anchorage 5950 898 1430 4361 6.9m from support
**Note: LL moment accounts for warping torsion.
Size of PT (ONE web)str./ duct no. duct Tot. str
Stage 1 27 2.00 54.00Stage 2 24 1.00 24.00
Total 78.00
Allowable stresses for SLSten fct = 0 Mpacomp f'c = 0.60 f'c = 42.00 Mpa
PT LayoutAt mid-span and deviation At anchorag 6.90 m from support
e = -1.367 m e = -1.116 m.:. dp = -1.720 m .:. dp = -1.469 m
At supporte = -0.722 m
.:. dp = -1.075 m
Unfactored

121
page 8 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Load Combinations Double-T base concept sample design
Load Combinations (2 stage prestressing)
Notation:
P1 Post-tensioning force from tendons installed in stage 2 of the post-tensioning operation.
P1 i Tendon stress equals initial jacking stress.
P1 Tendon stress equals effective prestress after all losses.P1 ULS Tendon stress at ULS
Above notations also applies to forces associated with stage 2 post-tensioning, P2, P2i, P2 , P2ULS.
Case Combination DL SDL - B SDL - WS L one PT remain PT P1 P2
SLS 1 DL + P1i 1 0 0 0 1 1 0.80 0 2 DL + SDL + P1 1 1 1 0 1 1 0.74 0 3 DL + SDL + P1i + P2i 1 1 1 0 1 1 0.74 0.80 4 DL + SDL + P1 + P2 + LL 1 1 1 0.9 1 1 0.67 0.67ULS 1 DL + P1i 0.95 0 0 0 1.2 1 0.8 0 2 DL + SDL + P1ULS 1.1 1.2 1.5 0 1 1 0.740 0
3 DL + SDL + P1i + P2i 0.95 0.9 0.65 0 1.2 1 0.8 0.8
4 DL + SDL + P1ULS + P2ULS + LL 1.1 1.2 1.5 1.7 1 1 0.824 0.824
Stresses (ONE web)**Note: The stresses for ULS Load Combinations in the following charts only serve as general indication of the load condition severity. Detailed ULS check will be done in other spread sheets.
At mid-span
Case Combination P1 P2 Ptot MP MQ Mtot top bot
kN kN kN kN-m kN-m kN-m Mpa Mpa
SLS 1 DL + P1i 11249 0 11249 -15380 9724 -5655 -0.999 -22.237 2 DL + SDL + P1 10406 0 10406 -14226 13529 -697 -3.928 -6.547 3 DL + SDL + P1i + P2i 10406 5000 15405 -21061 13529 -7533 -1.508 -29.798 4 DL + SDL + P1 + P2 + LL 9421 4187 13609 -18605 19624 1019 -6.416 -2.588ULS 1 DL + P1i 12374 0 12374 -16918 9238 -7679 -0.132 -28.972 2 DL + SDL + P1ULS 10406 0 10406 -14226 15963 1737 -5.541 0.983 3 DL + SDL + P1i + P2i 11249 6000 17249 -23582 12078 -11504 0.346 -42.860 4 DL + SDL + P1ULS + P2ULS + LL 11584 5148 16732 -22876 27477 4601 -10.107 7.173
At deviation
Case Combination P1 P2 Ptot MP MQ Mtot top bot
kN kN kN kN-m kN-m kN-m Mpa Mpa
SLS 1 DL + P1i 11249 0 11249 -15380 8286 -7093 -0.046 -26.686 2 DL + SDL + P1 10406 0 10406 -14226 11528 -2698 -2.602 -12.736 3 DL + SDL + P1i + P2i 10406 5000 15405 -21061 11528 -9534 -0.182 -35.987 4 DL + SDL + P1 + P2 + LL 9421 4187 13609 -18605 16965 -1640 -4.654 -10.813ULS 1 DL + P1i 12374 0 12374 -16918 7872 -9046 0.773 -33.199 2 DL + SDL + P1ULS 10406 0 10406 -14226 13602 -624 -3.976 -6.320 3 DL + SDL + P1i + P2i 11249 6000 17249 -23582 10291 -13291 1.529 -48.385 4 DL + SDL + P1ULS + P2ULS + LL 11584 5148 16732 -22876 23873 997 -7.720 -3.974
fraction of Pu
No
No
LF -

122
page 9 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Short-term Prestress Losses Double-T base concept sample design
PT LayoutUse 78 strands Ap = 10920 mm2
CHBDC Table 8.5 (3) Min top cover = 120 mmCHBDC Table 8.5 (7) Min side cover = 80 mm
CHBDC CL 8.14.2.2.2 Min clear dist = 40 mmMin clear hor dist = 75 mm for precast segmental
Elevation Support Deviation Mid-span Deviation Supportx: Dist from left support [m] 0 11.30 18.3 25.3 36.60
Distance from cl PT to top of section [m] 1.075 1.72 1.720 1.72 1.075e: Dist btw cl tendon and cl section [m] 0.722 1.367 0.722
Mp = P e [kN-m]
PT total length = 37.635 mPT angle of inclination = 0.0546 rad.
Plan Support Deviation Mid-span Deviation Supportx: Dist from left support [m] 0 11.3 18.3 25.3 36.6
Distance from cl PT to cl web [m] 0.321 0.467 0.467 0.467 0.321
PT total length = 37.602 mPT angle of inclination = 0.0124 rad.
PT ForceAssume during jacking, fsj = 0.80 fpu = 1488 MpaStress at transfer - anchor = 1451 Mpa = 0.78 fpu
Stress at transfer - mid-span = 1426 MPa = 0.77 fpu
Loss of stage 1 prestress at 28 days = 50 Mpa = 0.03 fpuPrestress at 28 days at mid-span = 1376 MPa = 0.740 fpu
Assume eff. stress after all losses P = 0.67 fpu = 1246 MPa Adjust until assumed matches calculated.Calculated total losses at mid-span = 181 Mpa
Calculated final PT stress P = fsj - all losses = 1245 Mpa = 0.67 fpu
PT lossesFriction loss
Total angle change per deviation, = 0.067 rad.lower bound
Friction coefficients (AASHTO) K = 0 = 0.25
f (x) = fo { 1 - exp [ -Kx - (x) ] } = 24.7 Mpa
Anchor set lossAssume, set = 7 mm
Assume PT is anchored from one end.:. set = set / PT length = 0.0001860 mm/mm
ANC = set * Ep = 37.2 Mpa

123
page 10 of 14
University of ToronCOMPUTATIONS made by EL date 12/14/09
chc'k by date
Long-term Prestress Losses Double-T base concept sample design
PT LayoutCaculation of creep and shrinkage loss requires c0, the conrete stress due to initial load.
Stage 2 PT (Load combination 3) Stage 1 PT (Load combination 1).:. P = 15405 kN .:. P = 11249 kN
Support Deviation Mid-span Deviation Supportx: Dist from left support [m] 0 11.3 18.3 25.3 36.6
Distance from cl PT to top of section [m] 1.075 1.720 1.720 1.720 1.075e: Dist btw cl tendon and cl section [m] -0.722 -1.367 -1.367 -1.367 -0.722
LC1 Mp = P e [kN-m] -8124 -15380 -15380 -15380 -8124LC3 Mp = P e [kN-m] -11125 -21061 -21061 -21061 -11125
PT losses (cont'd)Creep and Shrikage
*Assume deformation is symmetric about mid-span.*Following properties are for ONE web.
= 2 = 0.8cs(t) = -0.000196Ep = 200000 Mpa Ec = 36263 Mpa n = Ep / Ec = 5.52Ap = 10920 mm2 Ac = 2.370 m2 = Ap / Ac = 0.004607Ic = 0.5325 m4
Lp = 37.64 m
Location L interval MDL+SDL e e2 (x) dx MP Mtot c,0 c,0 (x) dx[m] [m] [kN-m] [m] [m3] [kN-m] [kN-m] [MPa] [Mpa*m]0 1.830 0 -0.722 0.954 -10986 -10986 -21.397 -39.2
3.66 3.660 4750 -0.931 3.173 -14164 -9414 -22.958 -84.07.32 3.660 8614 -1.140 4.756 -17342 -8728 -25.183 -92.210.98 3.660 11252 -1.349 6.659 -20520 -9268 -29.975 -109.714.64 3.660 12945 -1.367 6.841 -20185 -7240 -25.085 -91.818.3 1.830 13529 -1.367 3.420 -20185 -6656 -23.587 -43.2
18.3 25.805 -460.0
.:. c0 (x)dx = -460.0 Mpa*m e2 (x)dx = 25.805 m3.:. P(t) = -1900 / 1.268 = -1499 kN
.:. f = P/Ap = 137.2 Mpa
RelaxationREL = [fst/fpu - 0.55] * [0.34 - (CR+SH)/(1.25fpu)] * (fpu/3) = 43.6 MPa >= 0.002fpu = 3.72 Mpa
CHDBC Clause 8.7.4.3.4
dxxeIlA
tn
AEtdxxl
tAntP
cp
c
cccscp
c
2
0
111
1
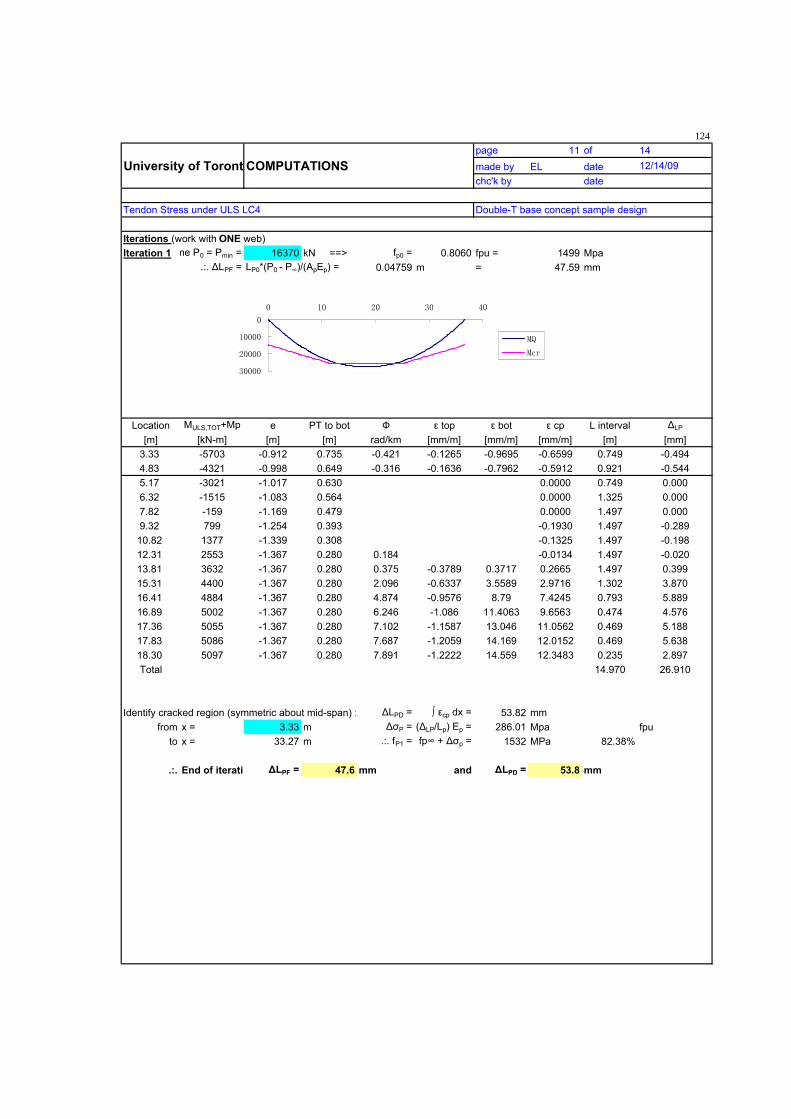
124page 11 of 14
University of Toront COMPUTATIONS made by EL date 12/14/09chc'k by date
Tendon Stress under ULS LC4 Double-T base concept sample design
Iterations (work with ONE web)Iteration 1 me P0 = Pmin = 16370 kN ==> fp0 = 0.8060 fpu = 1499 Mpa
.:. LPF = LP0*(P0 - P )/(ApEp) = 0.04759 m = 47.59 mm
Location MULS,TOT+Mp e PT to bot top bot cp L interval LP
[m] [kN-m] [m] [m] rad/km [mm/m] [mm/m] [mm/m] [m] [mm]3.33 -5703 -0.912 0.735 -0.421 -0.1265 -0.9695 -0.6599 0.749 -0.4944.83 -4321 -0.998 0.649 -0.316 -0.1636 -0.7962 -0.5912 0.921 -0.5445.17 -3021 -1.017 0.630 0.0000 0.749 0.0006.32 -1515 -1.083 0.564 0.0000 1.325 0.0007.82 -159 -1.169 0.479 0.0000 1.497 0.0009.32 799 -1.254 0.393 -0.1930 1.497 -0.28910.82 1377 -1.339 0.308 -0.1325 1.497 -0.19812.31 2553 -1.367 0.280 0.184 -0.0134 1.497 -0.02013.81 3632 -1.367 0.280 0.375 -0.3789 0.3717 0.2665 1.497 0.39915.31 4400 -1.367 0.280 2.096 -0.6337 3.5589 2.9716 1.302 3.87016.41 4884 -1.367 0.280 4.874 -0.9576 8.79 7.4245 0.793 5.88916.89 5002 -1.367 0.280 6.246 -1.086 11.4063 9.6563 0.474 4.57617.36 5055 -1.367 0.280 7.102 -1.1587 13.046 11.0562 0.469 5.18817.83 5086 -1.367 0.280 7.687 -1.2059 14.169 12.0152 0.469 5.63818.30 5097 -1.367 0.280 7.891 -1.2222 14.559 12.3483 0.235 2.897Total 14.970 26.910
Identify cracked region (symmetric about mid-span) : LPD = cp dx = 53.82 mmfrom x = 3.33 m P = ( LP/Lp) Ep = 286.01 Mpa fpu
to x = 33.27 m .:. fP1 = fp + p = 1532 MPa 82.38%
.:. End of iterati LPF = 47.6 mm and LPD = 53.8 mm

125
page 12 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09
chc'k by date
Shear Double-T base concept sample design
ULS LC1 LC2 LC3 LC4Max Vp (ONE web) [kN] 655 568 941 913
max Vf-Vp (ONE web) = 2163 kNmax Vf-Vp (TWO web) = 4326 kN
dv = 0.72 h = 1440 mm sze = 300 mmApfp = 13609 kN
EpAp = 2184000 kNAssume EsAs = 0
Deviationdv 0.1L 0.2L 0.3L 0.4L
Vf kN 2896 2552 2070 1469 1070Mf/dv kN 2612 7196 12418 16823 18455
Mf/dv +Vf -Apfp kN -8100 -3861 880 4684 5917x 0 0 0 0 0
degree 29 29 30 37 380 0 0 0 0
Vc kN 1045 1045 803 401 345Vp kN 913 913 913 0 0
Vs = Vf-Vc-Vp kN 938 593 354 1069 725Av/s mm2/mm 1.003 0.634 0.401 1.526 1.111
s mm 398 630 997 262 359 min req 600mm
Shear forces (ONE web) - ULS LC1
VfVp
0 36.6
Shear forces (ONE web) - ULS LC2
Vf
Vp
0 36.6
Shear forces (ONE web) - ULS LC3
Vf
Vp
0 36.6
Shear forces (ONE web) - ULS LC43076
1518
Vf
913Vp
0 36.6

126page 13 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09chc'k by date
Shear Double-T base concept sample design
Shear Design according to CHBDC cl.8.9
At dv from supportmax Vf (ONE web) = 2896 kN At 1.6m from support (spread of anchor force)
Mf/dv = 2612 kN Use 2 legs of 20M at 180mm over 1.5m band.Mf/dv +Vf -Apfp = -8100 kN (per web)
x = 0 = 29 degrees = 0.40
Vc = 1045 kNVp = 913 kN
Vs = Vf-Vp-Vc = 938 kNAv/s required = 1.003 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 3772 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 398 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 598 mm 600 mm
At 0.1L from supportmax Vf (ONE web) = 2552 kN
Mf/dv = 7196 kNMf/dv +Vf -Apfp = -3861 kN
x = 0 = 29 degrees = 0.40
Vc = 1045 kNVp = 913 kN
Vs = Vf-Vp-Vc = 593 kNAv/s required = 0.634 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 3772 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 630 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 946 mm 600 mm
At 0.2L from supportmax Vf (ONE web) = 2070 kN
Mf/dv = 12418 kNMf/dv +Vf -Apfp = 880 kN
x = 0.000202 = 30.41059 degrees = 0.31
Vc = 803 kNVp = 913 kN
Vs = Vf-Vp-Vc = 354 kNAv/s required = 0.401 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 3772 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 997 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 1496 mm 600 mm

127page 14 of 14
University of Toronto COMPUTATIONS made by EL date 12/14/09chc'k by date
Shear 0
At 0.3L (11.26m) from support (just left of deviation)max Vf (ONE web) = 1518 kN Note: At Dev, there is an additional vertical force of 900kN (per web).
Mf/dv = 16579 kN .:. For the left half of a 1.5m band centred at dev,Mf/dv +Vf -Apfp = 4488 kN Vs >= Vf-Vc-Vp = 1093 kN (1 webs)
x = 0.001027 Vs = ( s fy Av dv cot ) / s = 36.19199 degrees .:. Av / s >= 1.54 mm2/mm = 0.16 s<= 388 mm 20M
Vc = 411 kNVp = 913 kN
Vs = Vf-Vp-Vc = 193 kNAv/s required = 0.273 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 3772 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 1467 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 2201 mm 600 mm
At 0.3L (11.61m) from support (just right of deviation)max Vf (ONE web) = 1469 kN Note: At Dev, there is an additional vertical force of 900kN (per web).
Mf/dv = 16823 kN .:. For the right half of a 1.5m band centred at dev,Mf/dv +Vf -Apfp = 4684 kN Vs >= Vf-Vc-Vp = 2869 kN (1 webs)
x = 0.001072 Vs = ( s fy Av dv cot ) / s = 36.50567 degrees .:. Av / s >= 4.10 mm2/mm = 0.15 s<= 146 mm 20M
Vc = 401 kNVp = 0 kN
Vs = Vf-Vp-Vc = 1069 kNAv/s required = 1.526 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 2859 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 262 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 393 mm 600 mm
At 0.4L from supportmax Vf (ONE web) = 1070 kN
Mf/dv = 18455 kNMf/dv +Vf -Apfp = 5917 kN
x = 0.001355 = 38.48173 degrees = 0.13
Vc = 345 kNVp = 0 kN
Vs = Vf-Vp-Vc = 725 kNAv/s required = 1.111 mm2/mm
Vf <= 0.125 cf'cbwdv+Vp = 2859 kNMinimum spacing from code
If use 15M bars, Av = 400 mm2 .:. s <= 359 mm 600 mmIf use 20M bars, Av = 600 mm2 .:. s <= 539 mm 600 mm











Appendix B:
CPCI Slab-on-Girder System Sample Calculations and Design
Drawings
138

139
page 1 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Design Criteria
- Canadian Highway Bridge Design Code 2006 (CAN/CSA-S6-06) - refer to specific references listed
General Bridge Information
- Span No. 1 of 1 spans.
- Span length: 36600 mm Bridge Skew (rad.) = 0.00000- Adjacent span length 0 mm---> adjustments for continuity, L +: 36600 mm (Appendix A5.1) L -: 0 mm (Appendix A5.1)
- Deck width (travelled), Wc: 13.20 m
- No. of design lanes: 3 (ref. Table 3.8.2)
- Barrier wall area: 0.73 m2 2 barrier walls
- Total deck width: 13.80 m
- Deck thickness: 225 mm- Haunch thickness: 75 mm- Sidewalk width ; thickness: 0 mm 0 mm
- Total asphalt + w/p thickness: 90 mm- Spacing of girders: 2.35 m- Total no. of girders: 6- Top flange width 910 mm- Half deck span, BINT: 720 mm INTERIOR GIRDER- Half deck span, BEXT: 570 mm EXTERIOR GIRDER- Bearing Width = 300 mm- Deck overhang = 1.025 m < 0.5S
Effective Flange Width (cl. 5-8.2)
For Positive Moment Region
Interior (L+)/B ratio = 50.83 ===> Be = 720 mm .:. complete slab width is effectiveExterior (L+)/B ratio = 64.21 ===> Be = 570 mm .:. complete slab width is effective
For Negative Moment Region
Interior (L-)/B ratio = 0.00 ===> Be = 0 mmExterior (L-)/B ratio = 0.00 ===> Be = 0 mm

140
page 2 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Section Properties (uncracked)
Naked Girder: CPCI 1900
flange width, top = 910 mm hf (equiv.) = 150 mmA = 563375 mm2 bweb = 160 mmh = 1900 mm bflange top = 910 mm
y top = 960.1 mm bflange bott.= 660 mm
y bott. = 939.9 mmS top = 285522418 mm3
S bott. = 291672976 mm3
I = 2.74E+11 mm4
Composite Girder: * consider n = E(slab)/E(gird)
1. Interior Girder at Positive Moment Region = | yc - y |
Area (mm2) y (mm) Ay (x103) d (mm) Ad^2 (x106) Io (x106)Slab x n 512967 2012.5 1032346 561.4 161681.2 2164.1Girder 563375 939.9 529516 511.2 147214.8 274136.7
Total 1076342 2952.4 1561862 308896.0 276300.8yc = Ay / A = 1451.1 mm
.:. I comp. = 585196.8 x106 mm4
y top slab = 673.9 mm ; S top slab = 8.95E+08 mm^3y top girder = 448.9 mm ; S top gird. = 1.30E+09 mm^3
y bott. girder = 1451.1 mm ; S bott. gird. = 4.03E+08 mm^3
2. Interior Girder at Negative Moment Region = | yc - y |
Area (mm2) y (mm) Ay (x103) d (mm) Ad^2 (x106) Io (x106)Slab x n 198638 2012.5 399760 561.4 62608.5 838.0Girder 563375 939.9 529516 511.2 147214.8 274136.7
Total 762013 2952.4 929276 209823.3 274974.7yc = Ay / A = 1219.5 mm
.:. I comp. = 484798.0 x106 mm4
y top slab = 905.5 mm ; S top slab = 5.52E+08 mm^3y top girder = 680.5 mm ; S top gird. = 7.12E+08 mm^3
y bott. girder = 1219.5 mm ; S bott. gird. = 3.98E+08 mm^3

141
page 3 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
DEAD LOADS - per girder
To use the Simplified Method of load distribution (beam analogy method) the following conditions must be met: (Cl. 5.6.1.1)
a) constant width.
b) supports are equivalent to line support.
c) skew parameter = 0.0000 < 1 / 18 = 0.055556
d) curved bridges built with shored construction must meet requirements of Appendix A5.1(b)(ii)
e) N/A
f) deck cantilever does not exceed 60% of mean girder spacing nor 1.80 m.
1. Supported by Naked Girder (simple support):
- Girder self-wt. = 13.80 kN/m per girder
- Slab + haunch = 14.33 kN/m per girder
dist. (m) percentage of span:
1.736 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Moment and shear coeff. V 16.6 18.3 14.6 11.0 7.3 3.7 0.0 3.7 7.3 11.0 14.6 18.3based on 1 kN/m udl s. s M 30 0.0 60.3 107.2 140.7 160.7 167.4 160.7 140.7 107.2 60.3 0.0
Girder V 229 253 202 152 101 51 0 51 101 152 202 253
M 418 0 832 1479 1941 2219 2311 2219 1941 1479 832 0
Slab + haunch V 237 262 210 157 105 52 0 52 105 157 210 262M 434 0 864 1535 2015 2303 2399 2303 2015 1535 864 0
2. Supported by Composite Girder:
- asphalt = 4.65 kN/m per girder
- barriers = 2.92 kN/m per girder
dist. from abut (m) percentage of span:
1.736 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Moment and shear coeff. V 17 18.3 14.6 11.0 7.3 3.7 0.0 3.7 7.3 11.0 14.6 18.3based on 1 kN/m udl con M 30 0.0 60.3 107.2 140.7 160.7 167.4 160.7 140.7 107.2 60.3 0.0
Asphalt V 77 85 68 51 34 17 0 17 34 51 68 85
M 141 0 280 499 654 748 779 748 654 499 280 0
Barriers V 48 53 43 32 21 11 0 11 21 32 43 53M 88 0 176 313 411 469 489 469 411 313 176 0
Caculated from SAP
dist. from abut (m) percentage of span:
1.736 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Moment and shear coeff. V 17 17.2 12.7 8.2 3.7 0.8 5.3 9.8 14.3 18.8 23.7 27.8
based on 1 kN/m udl con M 30 0.0 64.4 114.5 141.4 148.1 134.5 100.6 46.5 -27.9 -122.5 -237.3
Asphalt V 77 80 59 38 17 4 25 45 66 87 110 129
M 141 0 300 533 658 689 626 468 216 -130 -570 -1104
Barriers V 48 50 37 24 11 2 15 29 42 55 69 81
M 88 0 188 334 413 432 393 294 136 -81 -358 -693

142
page 4 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Amplification Factors for Live Load
To use the Simplified Method for live load distribution as given in Cl. 5.7.1, the following requirements must be met: (Cl. 5.7.1.1)a) constant width.b) supports are equivalent to line support.c) skew parameter = 0.0000 < 1 / 18 = 0.05556 as per Appendix A5.1(b)(I)d) curved bridges built with shored construction must meet requirements of Appendix A5.1(b)(ii).e) N/Af) at least 3 longit. girders are of equal flexural rigidity and equally spaced, or with variations not more than 10% from the mean.g) deck cantilever does not exceed 60% of mean girder spacing nor 1.80 m.h) assumed points of inflection as per Appendix A5.1(a) apply.I) for multispine bridges, each spine has only two webs S NLongitudinal bending moments for ULS & SLS (cl. 5.7.1.2.1) Mg = Fm n MT RL / N & Fm = F (1+ Cf/100) > 1.05
MT = maximum moment per design lane at the point of interest ---- see table belown = 3 = number of design lanes as per 3.8.2
RL = 0.8 = modification factor for multi-lane loading as per 3.8.4.2 & 14.8.4.2N = 6 = number of girders within bridge deck width B
We = 4.400 = Wc / # design lanes= 1.000 = (We - 3.3)/0.6 < 1.0
S = 2.35 = centre to centre spacing of girders
F and Cf are obtained from Table 5.3 as follows (Type C - Slab-on-girder bridges):
Pos. Mom. region:L = 36.6 m Negative Mom. region: L = 0 mF tab EXT = 8.59071 m
Ftab INT= 9.02623 mCf= 9.31694 %
governing: F = 8.59071 m.:. Fm = 1.50142
==> Mg= 0.601 MT
Longitudinal shear for ULS & SLS(cl. 5.7.1.4.1) Vg = FV n VT RL / N & F V = S N / F
F = 8.2 (Table 5.7).:. FV = 1.7195 ==> Vg= 0.6878 VT
LIVE LOADS - per girderInput the results from a moving load analysis with CHBDC ONT truck (no DLA) and max. values from pattern loadingof 9 kN/m udl for lane load. The Amplification Factors from above & DLA are used to compute the Truck Load and Lane Load.
dist. (m) percentage of span:1.736 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
M & V coeff. based V 459 486 428 371 313 256 198 256 313 371 428 486on CHBDC truck (n M 743 0 1568 2831 3690 4128 4201 4128 3690 2831 1568 0
M 743 0 1568 2831 3690 4128 4201 4128 3690 2831 1568 0
M & V based on V 149 165 132 99 66 33 0 33 66 99 132 1659 kN/m pattern load M 272 0 543 964 1266 1447 1507 1447 1266 964 543 0
M 272 0 543 964 1266 1447 1507 1447 1266 964 543 0
Truck Load / Girde V 394 418 368 319 269 220 171 220 269 319 368 418(incl. DLA) M 558 0 1177 2125 2770 3099 3154 3099 2770 2125 1177 0
M 558 0 1177 2125 2770 3099 3154 3099 2770 2125 1177 0
Lane Load / Girde V 355 381 326 272 218 163 109 163 218 272 326 381M 596 0 1236 2221 2901 3266 3348 3266 2901 2221 1236 0
M 596 0 1236 2221 2901 3266 3348 3266 2901 2221 1236 0

143
page 5 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Strand Arrangement
At hold-downs: At left end: At right end:
# strands yb (mm) (#)*yb No. strands yb (mm) (#)*yb # strands yb (mm) (#)*yb10 60 600 8 60 480 8 60 4802 85.4 170.8 8 110 880 8 110 880
10 110.8 1108 8 160 1280 8 160 12802 136.2 272.4 6 210 1260 6 210 1260
10 161.6 1616 2 260 520 2 260 5202 187 374 0 1838 0 0 1838 08 212.4 1699.2 0 1787.2 0 0 1787.2 02 237.8 475.6 0 1736.4 0 0 1736.4 04 263.2 1052.8 0 1685.6 0 0 1685.6 00 288.6 0 0 1634.8 0 0 1634.8 00 314 0 0 1584 0 0 1584 00 339.4 0 0 1533.2 0 0 1533.2 00 364.8 0 0 1482.4 0 0 1482.4 00 390.2 0 0 1431.6 0 0 1431.6 00 415.6 0 0 1380.8 0 0 1380.8 00 441 0 0 1330 0 0 1330 00 466.4 0 2 1279.2 2558.4 2 1279.2 2558.40 491.8 0 2 1228.4 2456.8 2 1228.4 2456.80 517.2 0 2 1177.6 2355.2 2 1177.6 2355.20 542.6 0 2 1126.8 2253.6 2 1126.8 2253.60 568 0 2 1076 2152 2 1076 21520 593.4 0 2 1025.2 2050.4 2 1025.2 2050.40 618.8 0 2 974.4 1948.8 2 974.4 1948.80 644.2 0 2 923.6 1847.2 2 923.6 1847.20 669.6 0 2 872.8 1745.6 2 872.8 1745.6
Total Total Total50 7368.8 50 23788 50 23788
.:. ybp = 147.4 mm .:. ybp = 475.8 mm .:. ybp = 475.8 mm
MIDSPAN LEFT RIGHT (c/l PIER)32 straight 32 straight 32 straight18 deflected 18 deflected 18 deflected
50 total 50 total 50 total

144
page 6 of 19
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Material Specifications
Prestressing Strand (CSA G279-Mlow relax., size designation 13, Grade 1860
Nominal diameter = 12.7 mm2
Nominal area = 98.7 mm2
Breaking strength = 183.7 kN
f pu = 1861 MPaEp = 200000 MPa (cl. 8.4.3.3)
Concrete Ec= (3000 (fC')0.5 + 6900) ( C / 2300)1.5 (cl. 8.4.1.7)
1 = 0.97 - 0.0025 fC' > 0.67 (cl. 8.8.3.f)
f'c (Girder) = 50 MPa ===> Ec= 31859 MPa 1 = 0.845 fCR = 2.83f'ci = 50 MPa ===> Ec= 31859 MPa 1 = 0.845 fCR = 2.83
f'c (Slab) = 50 MPa ===> Ec= 30908 MPa 1 = 0.845 fCR = 2.83n = Edeck/Egirder = 0.970
Reinforcing Steelfy = 400 MPa
Es = 200000 MPa (cl. 8.4.2.1.4)

145
page 7 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
FULL PRESTRESSING DESIGN
Stresses in Prestressing Strand: (ref. Table 8.2)
Stress (Mpa x A ps (mm^2) = Force (kN)f pu = 1861.0 x 98.7 183.7
f sj = 0.78 f pu = 1451.6 x 98.7 = 143.3
f st max.=0.74 f pu = 1377.1 x 98.7 = 135.9f st min.=0.45 f pu = 837.5 x 98.7 = 82.7
Assume /\ fs1 = 166.9 (Revise until "assumed" = calculated) Calculated = 132.7 Mpathen, f st = f sj - /\ fs1= 1284.7 x 98.7 = 126.8 < f st max .:. O.K.!
Assume /\fs=/\fs1+/\fs2= 410.3 (Revise until "assumed" = calculated) Calculated = 316.2 Mpathen, f se = f sj - /\ fs = 1041.3 x 98.7 = 102.8 > f st min. .:. O.K.!
Girder Design - try: 50 strands ====> *** From strand arrangement on previous page ***50 @ L.END and 50 @ R. END after debonding considered
i) between hold down points yp = 147.4 mme = 792.5 mm
ii) at girder ends: LEFT END: yp = 475.8 mm RIGHT END: yp = 475.8e = 464.1 mm e = 464.1
Check hold down(HD) forces for each deflected strand group (max. 6 strands/group
HD point 1 - distance from girder end = 13000 mm- y @ gird. end for group 1= 1860 mm- y @ gird. hold down for group 1 247.5 mm- # strands at hold down point = 4
.:. Hold-down force 71.1 kN ==> Within Recommended limit of 80 kN .:. O.K.!
HD point 2 - distance from girder end = 12500 mm- y @ gird. end for group 2= 1660 mm- y @ gird. hold down for group 2 197.5 mm- # strands at hold down point = 4
.:. Hold-down force 67.1 kN ==> Within Recommended limit of 80 kN .:. O.K.!
HD point 3 - distance from girder end = 12000 mm- y @ gird. end for group 3= 1410 mm- y @ gird. hold down for group 3 147.5 mm- # strands at hold down point = 4
.:. Hold-down force 60.3 kN ==> Within Recommended limit of 80 kN .:. O.K.!
HD point 4 - distance from girder end = 11500 mm- y @ gird. end for group 4= 1110 mm- y @ gird. hold down for group 4 85 mm- # strands at hold down point = 6
.:. Hold-down force 76.6 kN ==> Within Recommended limit of 80 kN .:. O.K.!

146
page 8 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
CHECK ASSUMED LOSSES
1. Relaxation, REL1: (cl. 8.7.4.2.4)
Transfer assumed at t = 0.75 days (as per Comm. 8.7.4.2.4 for 24 hour production)
REL1 = log(24t)/45 * [fsj/fpy - 0.55] * fsj (Mpa) ; fpy = 0.9 fpu
= 12.8 MPa ; fsj = 0.78 fpu
For elastic shortening & creep calculations:
f cir = conc. stress @ c.g. prestress due to prestress at transfer + self-wt of member @ loc. of max. moment= [(Fst / Ag) + (Fst * e2) / I - (Md * e) / I]
e = e between hold downs = 0.793 mMd = M girder at midspan = 2311.2 kN-m
.:. f cir = 19.10 Mpa
f cds = conc. stress @ c.g. prestress due to all loads except dead load at transfer @ loc. of max. moment ("+" tensile)=Msl*e / Ig + Msdl*(yb - yp) / Icomp.
.:. f cds = 9.76 Mpa
2. Elastic Shortening, ES: (cl. 8.7.4.2.5)
ES = (Ep / E ci) * f cir= 119.9 MPa
.:. Total Losses At Transfer = fs1 = REL1 + ES = 132.7 Mpa
Stress in strand at transfer,fst = fsj - fs1
= 1319 Mpa < 0.74fPU OK (cl. C8.7.4.2.4)
Force per strand at transfer,Fst = 130 kN per strand
Total prestressing force at transfer,Fst = 6509 kN

147
page 9 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
Confirm that As/Aps < 1.0. If not, a more detailed analysis is needed to calculate losses after transfer.3. Creep, CR: Mean relative humidity (H) = 70 % (Figure A3.1.3) (cl. 8.7.4.3.2)
Kcr = 2.0 for pretensioned design
CR = [ 1.37 - 0.77 * (0.01 * RH)2 ] * Kcr * (Ep/Ec) * (fcir - fcds) Where Ep = 200000 MPa= 116.4 MPa Ec = 31859 MPa
fcir = 19.1 MPafcds = 9.8 MPa
4. Shrinkage, SH: (cl. 8.7.4.3.3)
SH = 117.0 - 1.05 (RH) for pretensioned design= 43.5 MPa
5. Relaxation, REL2: (cl. 8.7.4.3.4)
REL2 = [(fst / fpu -0.55) * (0.34 - (CR + SH) / (1.25 * fpu)) * fpu / 3] > 0.002 * fpu= 23.6 MPa > 0.002*fpu OK
.:. fs2 = CR + SH + REL2 Total losses after transfer 183.5 MPa
.:. Total Losses at service loads = /\ fs = /\ fs1 + /\ fs2 316.2 Mpa
Stress in strand after all losses:fse = fsj - fs
1135 MPa > 0.45fpu OK
Force in strand after all losses:Fse = 1135(98.7)
112 kN
Total prestressing force after all losses:Fpe = 50(112)
5603 kN Approx. 22% final losses.

148
page 10 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
STRESSES AT SLS AT CRITICAL LOCATIONS(effect of "K", differential shrinkage, to be considered separately)
1. At c/l girder: Total prestressing force after all losses,Fpe = 5603 kN (previous)
Item f top (Mpa) f bott. (Mpa) f slab (Mpa)- girder d.l. = 8.09 -7.92 --- Tension is - ve- slab+haunch d.l. = 8.40 -8.23 --- Compression is + ve- asphalt s.d.l. = 0.60 -1.93 0.87- barrier s.d.l. = 0.38 -1.21 0.55[f d.l. + f s.d.l.] = 17.47 -19.29 1.42
- 0.90 * live load = 2.31 -7.47 3.37[f d.l. + f s.d.l. + 0.9*f l.l.] = 19.78 -26.77 4.78
Fpe/Ag = 9.95 9.95 ---(Fpe x e)/S = -15.55 15.22 ---[f prestress] = -5.61 25.17 ---
[f d.l. + f s.d.l. + 0.9*f l.l. +f pr.] = 14.17 -1.60 4.78
Check Allowable Stresses: < < <fc' fcr = fc slab
50.00 -2.83 50.00 (cl. 8.8.4.6 & 8.12.4)O.K. O.K.! O.K.
2. At girder end 0.0 (Abutment):
Item f top (Mpa) f bott. (Mpa) f slab (Mpa)- girder d.l. = 0.00 0.00 ---- slab+haunch d.l. = 0.00 0.00 ---- asphalt s.d.l. = 0.00 0.00 0.00- barrier s.d.l. = 0.00 0.00 0.00[f d.l. + f s.d.l.] = 0.00 0.00 0.00
- 0.90 * live load = 0.00 0.00 0.00[f d.l. + f s.d.l. + 0.9*f l.l.] = 0.00 0.00 0.00
Fpe/Ag = 9.95 9.95 ---(Fpe x e)/S = -9.11 8.92 ---[f prestress] = 0.84 18.86 ---
[f d.l. + f s.d.l. + 0.75*f l.l. +f pr.] = 0.84 18.86 0.00
Check Allowable Stresses: < < <fc' fc' fc slab
50.00 50.00 50.00 (cl. 8.8.4.6 & 8.12.4)O.K. O.K. O.K.

149
page 11 of 11
COMPUTATIONS made by EL date 12/15/09
chc'k by date
Prestressed Concrete Girder Design - Structure: CPCI 1900 CPCI System Sample Design
3. At girder end 1.0: (RIGHT END - Pier)
Itemf top
(Mpa)f bott.(Mpa)
f slab(Mpa)
- girder d.l. = 0.00 0.00 ---- slab+haunch d.l. = 0.00 0.00 ---- asphalt s.d.l. = 0.00 0.00 0.00- barrier s.d.l. = 0.00 0.00 0.00[f d.l. + f s.d.l.] = 0.00 0.00 0.00
- 0.90 * live load = 0.00 0.00 0.00[f d.l. + f s.d.l. + 0.9*f l.l.] = 0.00 0.00 0.00
Fpe/Ag = 9.95 9.95 ---(Fpe x e)/S = -9.11 8.92 ---[f prestress] = 0.84 18.86 ---
[f d.l. + f s.d.l. + 0.75*f l.l. +f pr.] = 0.84 18.86 0.00
Check Allowable Stresses: < < <fc' fc' fc slab
50.00 50.00 50.00 (cl. 8.8.4.6 & 8.12.4)O.K. O.K. O.K.
CHECK STRESSES AT SLS AT TRANSFER
Concrete Strength at Transfer = 50 Mpa
1. At hold-down points - I.e. at 1/3 span: M girder @ hold-dow 2032.9 kN-m (1/3 L along span)
Itemf top
(Mpa)f bott.(Mpa)
f girder = 7.12 -6.97
Fst/Ag = 11.55 11.55(Fst x e)/S = -18.07 17.68[f total] = 0.61 22.27
Check Allowable Stresses: < <0.6fci 0.6fci30.00 30.00 (cl. 8.8.4.6)O.K. O.K.
2. At ends: @ L. END (Abutment) @ R. END (Pier)
Itemf top
(Mpa)f bott.(Mpa)
f top(Mpa)
f bott.(Mpa)
Fst/Ag = 11.55 11.55 11.55 11.55(Fst x e)/S = -10.58 10.36 -10.58 10.36[f total] = 0.97 21.91 0.97 21.91
Check Allowable Stresses: < < < <0.6fci 0.6fci 0.6fci 0.6fci30.00 30.00 30.00 30.00O.K. O.K. O.K. O.K.



Appendix C:
Grillage Model Input File from SAP
152

SAP2000 v10.0.1 12/13/09 20:26:48
153
Table: Analysis Case Definitions
Case Type InitialCond ModalCase RunCase Text Text Text Text Yes/No
DEAD LinStatic Zero No MODAL LinModal Zero No
LC2 LinStatic Zero Yes LC3 LinStatic Zero Yes
Table: Case - Static 1 - Load Assignments
Case LoadType LoadName LoadSFText Text Text Unitless
DEAD Load case DEAD 1.000000LC2 Load case LC2-gravity 1.125000LC2 Load case LC2-torsion 1.125000LC3 Load case LC3-gravity 1.000000LC3 Load case LC3-torsion 1.000000
Table: Coordinate Systems
Name Type X Y Z AboutZ AboutY AboutXText Text m m m Degrees Degrees Degrees
GLOBAL Cartesian 0.00000 0.00000 0.00000 0.000 0.000 0.000 Table: Frame Loads - Point, Part 1 of 2
Frame LoadCase CoordSys Type Dir DistType RelDistText Text Text Text Text Text Unitless
2 LC3-gravity GLOBAL Force Gravity RelDist 0.22792 LC3-gravity GLOBAL Force Gravity RelDist 0.32622 LC3-gravity GLOBAL Force Gravity RelDist 0.35902 LC3-gravity GLOBAL Force Gravity RelDist 0.53932 LC3-gravity GLOBAL Force Gravity RelDist 0.71972 LC3-torsion GLOBAL Moment X RelDist 0.71972 LC3-torsion GLOBAL Moment X RelDist 0.22792 LC3-torsion GLOBAL Moment X RelDist 0.32622 LC3-torsion GLOBAL Moment X RelDist 0.35902 LC3-torsion GLOBAL Moment X RelDist 0.53935 LC2-gravity GLOBAL Force Gravity RelDist 0.22795 LC2-gravity GLOBAL Force Gravity RelDist 0.32625 LC2-gravity GLOBAL Force Gravity RelDist 0.35905 LC2-gravity GLOBAL Force Gravity RelDist 0.53935 LC3-gravity GLOBAL Force Gravity RelDist 0.22795 LC3-gravity GLOBAL Force Gravity RelDist 0.32625 LC3-gravity GLOBAL Force Gravity RelDist 0.35905 LC3-gravity GLOBAL Force Gravity RelDist 0.53935 LC3-gravity GLOBAL Force Gravity RelDist 0.71975 LC2-gravity GLOBAL Force Gravity RelDist 0.71975 LC2-torsion GLOBAL Moment X RelDist 0.71975 LC3-torsion GLOBAL Moment X RelDist 0.71975 LC2-torsion GLOBAL Moment X RelDist 0.22795 LC2-torsion GLOBAL Moment X RelDist 0.32625 LC2-torsion GLOBAL Moment X RelDist 0.35905 LC2-torsion GLOBAL Moment X RelDist 0.53935 LC3-torsion GLOBAL Moment X RelDist 0.22795 LC3-torsion GLOBAL Moment X RelDist 0.32625 LC3-torsion GLOBAL Moment X RelDist 0.35905 LC3-torsion GLOBAL Moment X RelDist 0.53931 LC2-gravity GLOBAL Force Gravity RelDist 0.22791 LC2-gravity GLOBAL Force Gravity RelDist 0.3262

SAP2000 v10.0.1 12/13/09 20:26:48
154
Frame LoadCase CoordSys Type Dir DistType RelDistText Text Text Text Text Text Unitless
1 LC2-gravity GLOBAL Force Gravity RelDist 0.35901 LC2-gravity GLOBAL Force Gravity RelDist 0.53931 LC3-gravity GLOBAL Force Gravity RelDist 0.22791 LC3-gravity GLOBAL Force Gravity RelDist 0.32621 LC3-gravity GLOBAL Force Gravity RelDist 0.35901 LC3-gravity GLOBAL Force Gravity RelDist 0.53931 LC3-gravity GLOBAL Force Gravity RelDist 0.71971 LC2-gravity GLOBAL Force Gravity RelDist 0.71971 LC2-torsion GLOBAL Moment X RelDist 0.71971 LC3-torsion GLOBAL Moment X RelDist 0.71971 LC3-torsion GLOBAL Moment X RelDist 0.22791 LC3-torsion GLOBAL Moment X RelDist 0.32621 LC3-torsion GLOBAL Moment X RelDist 0.35901 LC3-torsion GLOBAL Moment X RelDist 0.53931 LC2-torsion GLOBAL Moment X RelDist 0.22791 LC2-torsion GLOBAL Moment X RelDist 0.32621 LC2-torsion GLOBAL Moment X RelDist 0.35901 LC2-torsion GLOBAL Moment X RelDist 0.53934 LC2-gravity GLOBAL Force Gravity RelDist 0.22794 LC2-gravity GLOBAL Force Gravity RelDist 0.32624 LC2-gravity GLOBAL Force Gravity RelDist 0.35904 LC2-gravity GLOBAL Force Gravity RelDist 0.53934 LC3-gravity GLOBAL Force Gravity RelDist 0.22794 LC3-gravity GLOBAL Force Gravity RelDist 0.32624 LC3-gravity GLOBAL Force Gravity RelDist 0.35904 LC3-gravity GLOBAL Force Gravity RelDist 0.53934 LC3-gravity GLOBAL Force Gravity RelDist 0.71974 LC2-gravity GLOBAL Force Gravity RelDist 0.71974 LC2-torsion GLOBAL Moment X RelDist 0.71974 LC3-torsion GLOBAL Moment X RelDist 0.71974 LC2-torsion GLOBAL Moment X RelDist 0.22794 LC2-torsion GLOBAL Moment X RelDist 0.32624 LC2-torsion GLOBAL Moment X RelDist 0.35904 LC2-torsion GLOBAL Moment X RelDist 0.53934 LC3-torsion GLOBAL Moment X RelDist 0.22794 LC3-torsion GLOBAL Moment X RelDist 0.32624 LC3-torsion GLOBAL Moment X RelDist 0.35904 LC3-torsion GLOBAL Moment X RelDist 0.53939 LC3-gravity GLOBAL Force Gravity RelDist 0.22799 LC3-gravity GLOBAL Force Gravity RelDist 0.32629 LC3-gravity GLOBAL Force Gravity RelDist 0.35909 LC3-gravity GLOBAL Force Gravity RelDist 0.53939 LC3-gravity GLOBAL Force Gravity RelDist 0.71979 LC3-torsion GLOBAL Moment X RelDist 0.71979 LC3-torsion GLOBAL Moment X RelDist 0.22799 LC3-torsion GLOBAL Moment X RelDist 0.32629 LC3-torsion GLOBAL Moment X RelDist 0.35909 LC3-torsion GLOBAL Moment X RelDist 0.53936 LC2-gravity GLOBAL Force Gravity RelDist 0.22796 LC2-gravity GLOBAL Force Gravity RelDist 0.32626 LC2-gravity GLOBAL Force Gravity RelDist 0.35906 LC2-gravity GLOBAL Force Gravity RelDist 0.53936 LC3-gravity GLOBAL Force Gravity RelDist 0.22796 LC3-gravity GLOBAL Force Gravity RelDist 0.32626 LC3-gravity GLOBAL Force Gravity RelDist 0.35906 LC3-gravity GLOBAL Force Gravity RelDist 0.53936 LC3-gravity GLOBAL Force Gravity RelDist 0.71976 LC2-gravity GLOBAL Force Gravity RelDist 0.71976 LC2-torsion GLOBAL Moment X RelDist 0.71976 LC3-torsion GLOBAL Moment X RelDist 0.71976 LC3-torsion GLOBAL Moment X RelDist 0.22796 LC3-torsion GLOBAL Moment X RelDist 0.3262

SAP2000 v10.0.1 12/13/09 20:26:48
155
Frame LoadCase CoordSys Type Dir DistType RelDistText Text Text Text Text Text Unitless
6 LC3-torsion GLOBAL Moment X RelDist 0.35906 LC3-torsion GLOBAL Moment X RelDist 0.53936 LC2-torsion GLOBAL Moment X RelDist 0.22796 LC2-torsion GLOBAL Moment X RelDist 0.32626 LC2-torsion GLOBAL Moment X RelDist 0.35906 LC2-torsion GLOBAL Moment X RelDist 0.5393
Table: Frame Loads - Point, Part 2 of 2
Frame LoadCase AbsDist Force MomentText Text m KN KN-m
2 LC3-gravity 8.34000 25.0002 LC3-gravity 11.94000 70.0002 LC3-gravity 13.14000 70.0002 LC3-gravity 19.74000 87.5002 LC3-gravity 26.34000 60.0002 LC3-torsion 26.34000 39.00002 LC3-torsion 8.34000 16.25002 LC3-torsion 11.94000 45.50002 LC3-torsion 13.14000 45.50002 LC3-torsion 19.74000 56.87505 LC2-gravity 8.34000 25.0005 LC2-gravity 11.94000 70.0005 LC2-gravity 13.14000 70.0005 LC2-gravity 19.74000 87.5005 LC3-gravity 8.34000 25.0005 LC3-gravity 11.94000 70.0005 LC3-gravity 13.14000 70.0005 LC3-gravity 19.74000 87.5005 LC3-gravity 26.34000 60.0005 LC2-gravity 26.34000 60.0005 LC2-torsion 26.34000 -33.00005 LC3-torsion 26.34000 -33.00005 LC2-torsion 8.34000 -13.75005 LC2-torsion 11.94000 -38.50005 LC2-torsion 13.14000 -38.50005 LC2-torsion 19.74000 -48.12505 LC3-torsion 8.34000 -13.75005 LC3-torsion 11.94000 -38.50005 LC3-torsion 13.14000 -38.50005 LC3-torsion 19.74000 -48.12501 LC2-gravity 8.34000 25.0001 LC2-gravity 11.94000 70.0001 LC2-gravity 13.14000 70.0001 LC2-gravity 19.74000 87.5001 LC3-gravity 8.34000 25.0001 LC3-gravity 11.94000 70.0001 LC3-gravity 13.14000 70.0001 LC3-gravity 19.74000 87.5001 LC3-gravity 26.34000 60.0001 LC2-gravity 26.34000 60.0001 LC2-torsion 26.34000 22.50001 LC3-torsion 26.34000 22.50001 LC3-torsion 8.34000 9.37501 LC3-torsion 11.94000 26.25001 LC3-torsion 13.14000 26.25001 LC3-torsion 19.74000 32.81251 LC2-torsion 8.34000 9.37501 LC2-torsion 11.94000 26.25001 LC2-torsion 13.14000 26.25001 LC2-torsion 19.74000 32.8125

SAP2000 v10.0.1 12/13/09 20:26:48
156
Frame LoadCase AbsDist Force MomentText Text m KN KN-m
4 LC2-gravity 8.34000 25.0004 LC2-gravity 11.94000 70.0004 LC2-gravity 13.14000 70.0004 LC2-gravity 19.74000 87.5004 LC3-gravity 8.34000 25.0004 LC3-gravity 11.94000 70.0004 LC3-gravity 13.14000 70.0004 LC3-gravity 19.74000 87.5004 LC3-gravity 26.34000 60.0004 LC2-gravity 26.34000 60.0004 LC2-torsion 26.34000 12.00004 LC3-torsion 26.34000 12.00004 LC2-torsion 8.34000 5.00004 LC2-torsion 11.94000 14.00004 LC2-torsion 13.14000 14.00004 LC2-torsion 19.74000 17.50004 LC3-torsion 8.34000 5.00004 LC3-torsion 11.94000 14.00004 LC3-torsion 13.14000 14.00004 LC3-torsion 19.74000 17.50009 LC3-gravity 8.34000 25.0009 LC3-gravity 11.94000 70.0009 LC3-gravity 13.14000 70.0009 LC3-gravity 19.74000 87.5009 LC3-gravity 26.34000 60.0009 LC3-torsion 26.34000 49.50009 LC3-torsion 8.34000 20.62509 LC3-torsion 11.94000 57.75009 LC3-torsion 13.14000 57.75009 LC3-torsion 19.74000 72.18756 LC2-gravity 8.34000 25.0006 LC2-gravity 11.94000 70.0006 LC2-gravity 13.14000 70.0006 LC2-gravity 19.74000 87.5006 LC3-gravity 8.34000 25.0006 LC3-gravity 11.94000 70.0006 LC3-gravity 13.14000 70.0006 LC3-gravity 19.74000 87.5006 LC3-gravity 26.34000 60.0006 LC2-gravity 26.34000 60.0006 LC2-torsion 26.34000 -22.87506 LC3-torsion 26.34000 -22.87506 LC3-torsion 8.34000 -9.53136 LC3-torsion 11.94000 -26.68756 LC3-torsion 13.14000 -26.68756 LC3-torsion 19.74000 -33.35946 LC2-torsion 8.34000 -9.53136 LC2-torsion 11.94000 -26.68756 LC2-torsion 13.14000 -26.68756 LC2-torsion 19.74000 -33.3594
Table: Frame Section Assignments
Frame SectionType AutoSelect AnalSect DesignSect MatProp Text Text Text Text Text Text
1 Rectangular N.A. NLONGR N.A. Default 2 Tee N.A. NLONGT NLONGT Default 3 Tee N.A. NTRANSE NTRANSE Default 4 Rectangular N.A. NLONGR N.A. Default 5 Tee N.A. NLONGT NLONGT Default 6 Rectangular N.A. NLONGR N.A. Default

SAP2000 v10.0.1 12/13/09 20:26:48
157
Frame SectionType AutoSelect AnalSect DesignSect MatProp Text Text Text Text Text Text
7 Rectangular N.A. NLONGR N.A. Default 8 Tee N.A. NTRANSE NTRANSE Default 9 Rectangular N.A. NLONGR N.A. Default
10 Tee N.A. NTRANSE NTRANSE Default 11 Tee N.A. NTRANSE NTRANSE Default 12 Tee N.A. NTRANSE NTRANSE Default 13 Tee N.A. NTRANSE NTRANSE Default 14 Tee N.A. NTRANSE NTRANSE Default 15 Tee N.A. NTRANSE NTRANSE Default 16 Rectangular N.A. NTRANSR N.A. Default 17 Rectangular N.A. NTRANSR N.A. Default 18 Rectangular N.A. NTRANSR N.A. Default 19 Rectangular N.A. NTRANSR N.A. Default 20 Rectangular N.A. NTRANSR N.A. Default 21 Rectangular N.A. NTRANSR N.A. Default 22 Rectangular N.A. NTRANSR N.A. Default 23 Rectangular N.A. NTRANSR N.A. Default 24 Rectangular N.A. NTRANSR N.A. Default 25 Rectangular N.A. NTRANSR N.A. Default 26 Rectangular N.A. NTRANSR N.A. Default 27 Rectangular N.A. NTRANSR N.A. Default 28 Rectangular N.A. NTRANSR N.A. Default 29 Rectangular N.A. NTRANSR N.A. Default 30 Rectangular N.A. NTRANSR N.A. Default 31 Rectangular N.A. NTRANSR N.A. Default 32 Rectangular N.A. NTRANSR N.A. Default 33 Rectangular N.A. NTRANSR N.A. Default 34 Rectangular N.A. NTRANSR N.A. Default 35 Rectangular N.A. NTRANSR N.A. Default 36 Rectangular N.A. NTRANSR N.A. Default 37 Rectangular N.A. NTRANSR N.A. Default 38 Rectangular N.A. NTRANSR N.A. Default 39 Rectangular N.A. NTRANSR N.A. Default 40 Rectangular N.A. NTRANSR N.A. Default 41 Rectangular N.A. NTRANSR N.A. Default 42 Rectangular N.A. NTRANSR N.A. Default 43 Rectangular N.A. NTRANSR N.A. Default 44 Rectangular N.A. NTRANSR N.A. Default 45 Rectangular N.A. NTRANSR N.A. Default 46 Rectangular N.A. NTRANSR N.A. Default 47 Rectangular N.A. NTRANSR N.A. Default 48 Rectangular N.A. NTRANSR N.A. Default 49 Rectangular N.A. NTRANSR N.A. Default 50 Rectangular N.A. NTRANSR N.A. Default 51 Rectangular N.A. NTRANSR N.A. Default 52 Rectangular N.A. NTRANSR N.A. Default 53 Rectangular N.A. NTRANSR N.A. Default 54 Rectangular N.A. NTRANSR N.A. Default 55 Rectangular N.A. NTRANSR N.A. Default 56 Rectangular N.A. NTRANSR N.A. Default 57 Rectangular N.A. NTRANSR N.A. Default 58 Rectangular N.A. NTRANSR N.A. Default 59 Rectangular N.A. NTRANSR N.A. Default 60 Rectangular N.A. NTRANSR N.A. Default 61 Rectangular N.A. NTRANSR N.A. Default 62 Rectangular N.A. NTRANSR N.A. Default 63 Rectangular N.A. NTRANSR N.A. Default 64 Rectangular N.A. NTRANSR N.A. Default 65 Rectangular N.A. NTRANSR N.A. Default 66 Rectangular N.A. NTRANSR N.A. Default 67 Rectangular N.A. NTRANSR N.A. Default 68 Rectangular N.A. NTRANSR N.A. Default

SAP2000 v10.0.1 12/13/09 20:26:48
158
Frame SectionType AutoSelect AnalSect DesignSect MatProp Text Text Text Text Text Text 69 Rectangular N.A. NTRANSR N.A. Default 70 Rectangular N.A. NTRANSR N.A. Default 71 Rectangular N.A. NTRANSR N.A. Default 72 Rectangular N.A. NTRANSR N.A. Default 73 Rectangular N.A. NTRANSR N.A. Default 74 Rectangular N.A. NTRANSR N.A. Default 75 Rectangular N.A. NTRANSR N.A. Default 76 Rectangular N.A. NTRANSR N.A. Default 77 Rectangular N.A. NTRANSR N.A. Default 78 Rectangular N.A. NTRANSR N.A. Default 79 Rectangular N.A. NTRANSR N.A. Default 80 Rectangular N.A. NTRANSR N.A. Default 81 Rectangular N.A. NTRANSR N.A. Default 82 Rectangular N.A. NTRANSR N.A. Default 83 Rectangular N.A. NTRANSR N.A. Default 84 I/Wide Flange N.A. NTRANSD N.A. Default 85 I/Wide Flange N.A. NTRANSD N.A. Default 86 I/Wide Flange N.A. NTRANSD N.A. Default 87 I/Wide Flange N.A. NTRANSD N.A. Default 88 I/Wide Flange N.A. NTRANSD N.A. Default 89 I/Wide Flange N.A. NTRANSD N.A. Default 90 Rectangular N.A. NTRANSR N.A. Default 91 Rectangular N.A. NTRANSR N.A. Default 92 Rectangular N.A. NTRANSR N.A. Default 93 Rectangular N.A. NTRANSR N.A. Default 94 Rectangular N.A. NTRANSR N.A. Default 95 Rectangular N.A. NTRANSR N.A. Default 96 Rectangular N.A. NTRANSR N.A. Default 97 Rectangular N.A. NTRANSR N.A. Default 98 Rectangular N.A. NTRANSR N.A. Default 99 Rectangular N.A. NTRANSR N.A. Default
100 Rectangular N.A. NTRANSR N.A. Default 101 Rectangular N.A. NTRANSR N.A. Default 102 Rectangular N.A. NTRANSR N.A. Default 103 Rectangular N.A. NTRANSR N.A. Default 104 Rectangular N.A. NTRANSR N.A. Default 105 Rectangular N.A. NTRANSR N.A. Default 106 Rectangular N.A. NTRANSR N.A. Default 107 Rectangular N.A. NTRANSR N.A. Default 108 Rectangular N.A. NTRANSR N.A. Default 109 Rectangular N.A. NTRANSR N.A. Default 110 Rectangular N.A. NTRANSR N.A. Default 111 Rectangular N.A. NTRANSR N.A. Default 112 Rectangular N.A. NTRANSR N.A. Default 113 Rectangular N.A. NTRANSR N.A. Default 114 Rectangular N.A. NTRANSR N.A. Default 115 Rectangular N.A. NTRANSR N.A. Default 116 Rectangular N.A. NTRANSR N.A. Default 117 Rectangular N.A. NTRANSR N.A. Default 118 Rectangular N.A. NTRANSR N.A. Default 119 Rectangular N.A. NTRANSR N.A. Default 120 Rectangular N.A. NTRANSR N.A. Default 121 Rectangular N.A. NTRANSR N.A. Default 122 Rectangular N.A. NTRANSR N.A. Default 123 Rectangular N.A. NTRANSR N.A. Default 124 I/Wide Flange N.A. NTRANSD N.A. Default 125 I/Wide Flange N.A. NTRANSD N.A. Default 126 I/Wide Flange N.A. NTRANSD N.A. Default 127 I/Wide Flange N.A. NTRANSD N.A. Default 128 I/Wide Flange N.A. NTRANSD N.A. Default 129 I/Wide Flange N.A. NTRANSD N.A. Default 130 Rectangular N.A. NTRANSR N.A. Default

SAP2000 v10.0.1 12/13/09 20:26:48
159
Frame SectionType AutoSelect AnalSect DesignSect MatProp Text Text Text Text Text Text 131 Rectangular N.A. NTRANSR N.A. Default 132 Rectangular N.A. NTRANSR N.A. Default 133 Rectangular N.A. NTRANSR N.A. Default 134 Rectangular N.A. NTRANSR N.A. Default 135 Rectangular N.A. NTRANSR N.A. Default 136 Rectangular N.A. NTRANSR N.A. Default 137 Rectangular N.A. NTRANSR N.A. Default 138 Rectangular N.A. NTRANSR N.A. Default 139 Rectangular N.A. NTRANSR N.A. Default 140 Rectangular N.A. NTRANSR N.A. Default 141 Rectangular N.A. NTRANSR N.A. Default 142 Rectangular N.A. NTRANSR N.A. Default 143 Rectangular N.A. NTRANSR N.A. Default 144 Rectangular N.A. NTRANSR N.A. Default 145 Rectangular N.A. NTRANSR N.A. Default 146 Rectangular N.A. NTRANSR N.A. Default 147 Rectangular N.A. NTRANSR N.A. Default 148 Rectangular N.A. NTRANSR N.A. Default 149 Rectangular N.A. NTRANSR N.A. Default 150 Rectangular N.A. NTRANSR N.A. Default 151 Rectangular N.A. NTRANSR N.A. Default 152 Rectangular N.A. NTRANSR N.A. Default 153 Rectangular N.A. NTRANSR N.A. Default 154 Tee N.A. NTRANSE NTRANSE Default 155 Tee N.A. NTRANSE NTRANSE Default 156 Tee N.A. NTRANSE NTRANSE Default 157 Tee N.A. NTRANSE NTRANSE Default
Table: Frame Section Properties 01 - General, Part 1 of 6
SectionName Material Shape t3 t2 tf twText Text Text m m m m
NLONGR OTHER Rectangular 0.225000 1.975000 NLONGT CONC Tee 2.000000 1.975000 0.343500 0.297500
NTRANSD CONC I/Wide Flange 2.000000 1.525000 0.273000 0.300000NTRANSE CONC Tee 2.000000 1.525000 0.273000 0.600000NTRANSR OTHER Rectangular 0.273000 1.525000
Table: Frame Section Properties 01 - General, Part 2 of 6
SectionName t2b tfb Area TorsConst I33 I22 AS2Text m m m2 m4 m4 m4 m2
NLONGR 0.444375 0.006961 0.001875 0.144445 0.370313NLONGT 1.171221 0.039284 0.404811 0.224154 0.595000
NTRANSD 1.100000 0.504000 1.337625 0.051874 0.685439 0.139338 0.600000NTRANSE 1.452525 0.128758 0.557124 0.111771 1.200000NTRANSR 0.416325 0.009176 0.002586 0.080685 0.346938
Table: Frame Section Properties 01 - General, Part 3 of 6
SectionName AS3 S33 S22 Z33 Z22 R33 R22Text m2 m3 m3 m3 m3 m m
NLONGR 0.370313 0.016664 0.146273 0.024996 0.219410 0.064952 0.570133NLONGT 0.565344 0.287613 0.226992 0.520326 0.371619 0.587905 0.437476
NTRANSD 0.808938 0.678933 0.182739 0.886428 0.338701 0.715842 0.322751NTRANSE 0.346938 0.484405 0.146584 0.791485 0.314154 0.619319 0.277397NTRANSR 0.346938 0.018943 0.105816 0.028414 0.158724 0.078808 0.440230

SAP2000 v10.0.1 12/13/09 20:26:48
160
Table: Frame Section Properties 01 - General, Part 4 of 6
SectionName ConcCol ConcBeam Color TotalWt TotalMass FromFile AModText Yes/No Yes/No Text KN KN-s2/m Yes/No Unitless
NLONGR No No Blue 1916.045 195.22 No 1.000000NLONGT No Yes Blue 2020.146 206.00 No 1.000000
NTRANSD No No Magenta 746.203 76.09 No 1.000000NTRANSE No Yes White 810.301 82.63 No 1.000000NTRANSR No No Blue 2438.467 248.45 No 1.000000
Table: Grid Lines, Part 1 of 2
CoordSys AxisDir GridID XRYZCoord LineType LineColor Visible BubbleLocText Text Text m Text Text Yes/No Text
GLOBAL X x1 0.00000 Primary Gray8Dark Yes End GLOBAL X x2 1.52500 Primary Gray8Dark Yes End GLOBAL X x3 3.05000 Primary Gray8Dark Yes End GLOBAL X x4 4.57500 Primary Gray8Dark Yes End GLOBAL X x5 6.10000 Primary Gray8Dark Yes End GLOBAL X x6 7.62500 Primary Gray8Dark Yes End GLOBAL X x7 9.15000 Primary Gray8Dark Yes End GLOBAL X x8 10.67500 Primary Gray8Dark Yes End GLOBAL X x9 12.20000 Primary Gray8Dark Yes End GLOBAL X x10 13.72500 Primary Gray8Dark Yes End GLOBAL X x11 15.25000 Primary Gray8Dark Yes End GLOBAL X x12 16.77500 Primary Gray8Dark Yes End GLOBAL X x13 18.30000 Primary Gray8Dark Yes End GLOBAL X x14 19.82500 Primary Gray8Dark Yes End GLOBAL X x15 21.35000 Primary Gray8Dark Yes End GLOBAL X x16 22.87500 Primary Gray8Dark Yes End GLOBAL X x17 24.40000 Primary Gray8Dark Yes End GLOBAL X x18 25.92500 Primary Gray8Dark Yes End GLOBAL X x19 27.45000 Primary Gray8Dark Yes End GLOBAL X x20 28.97500 Primary Gray8Dark Yes End GLOBAL X x21 30.50000 Primary Gray8Dark Yes End GLOBAL X x22 32.02500 Primary Gray8Dark Yes End GLOBAL X x23 33.55000 Primary Gray8Dark Yes End GLOBAL X x24 35.07500 Primary Gray8Dark Yes End GLOBAL X x25 36.60000 Primary Gray8Dark Yes End GLOBAL Y y1 -1.96875 Primary Gray8Dark Yes End GLOBAL Y y2 0.00000 Primary Gray8Dark Yes End GLOBAL Y y3 1.97500 Primary Gray8Dark Yes End GLOBAL Y y4 3.95000 Primary Gray8Dark Yes End GLOBAL Y y5 5.92500 Primary Gray8Dark Yes End GLOBAL Y y6 7.90000 Primary Gray8Dark Yes End GLOBAL Y y7 9.86875 Primary Gray8Dark Yes End GLOBAL Z z1 0.00000 Primary Gray8Dark Yes End
Table: Load Case Definitions
LoadCase DesignType SelfWtMult AutoLoad Text Text Unitless Text
LC2-gravity LIVE 0.000000 LC2-torsion LIVE 0.000000 LC3-gravity LIVE 0.000000 LC3-torsion LIVE 0.000000

SAP2000 v10.0.1 12/13/09 20:26:48
161
Table: Program Control, Part 1 of 2
ProgramName
Version ProgLevel LicenseOS LicenseSC LicenseBR LicenseHT CurrUnits
Text Text Text Yes/No Yes/No Yes/No Yes/No Text SAP2000 10.0.1 Advanced Yes Yes Yes No KN, m, C
Related Documents











