., -' •• SLOCUM GLIDER: Design and 1991 Field Trials Prepared by: Paul Simonetti Webb Research Corp. under subcontract from Woods Hole Oceanographic Institution Office of Naval Technology Contract No. N00014-90C-0098 September 1992

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

.,
-' ••
SLOCUM GLIDER:Design and 1991 Field Trials
Prepared by:Paul Simonetti
Webb Research Corp.under subcontract from
Woods Hole Oceanographic InstitutionOffice of Naval TechnologyContract No. N00014-90C-0098
September 1992

.;
\
ABSTRACT
A prototype SLOCUM glider was fabricated and tested in open-loop,shallow water field trials in January 1991. Straight-ahead and turningdives were accomplished using a fixed-weight release to produce thebuoyancy changes that drive the sinking and ascent modes. Averagehorizontal glide speeds of .13 m/sec and turn radii of 21-70 m wereobtained, in good agreement with computer simulated predictions. Aseparate pool test showed that gliding at very shallow (5°_7°) angleswith the horizontal could be initiated, although such a mode isinherently unstable.
An advanced, autopilot-controlled glider was designed andsuccessfully tested at Seneca Lake, NY in November 1991. It employed ahydraulic pump to inflate an external bladder as the means of changingbuoyancy for ascent/descent. Average horizontal glide speed of .20m/sec and turn radii of 7-13 m as well as course-correction performancein excess of expected future ocean deployment needs were obtained.
Specifications for a 5-year endurance, .28 m/sec horizontal speedocean glider, with an ocean thermocline-driven buoyancy change engineare pre~ented.
-i-

?
/
I.
II.
III.
IV.
V.
VI.
TABLE OF CONTENTS
Abstract ..
Introduction
Data Presentation and Discussion
Ocean Test Unit Planning
Summary and Conclusions.
Acknowledgments.
References
PAGE
i
1
4
13
14
15
16

/
LIST OF FIGURES.j
Figure 1 SLOCUM Glider Dive Profile
Figure 2 Prototype Glider Outline Drawing
Figure 3 Wakulla Springs, FL, Site Plan
Figure 4 Lake Test Glider Outline Summary
Figure 5 Heading Autopilot Block Diagram
Figure 6 Seneca Lake Operations Area Chart
All
vs. Pitch Angle (Small Wings)
vs. Pitch Angle (Medium Wings)
vs. Pitch Angle (Large Wings)
Heading Rate vs. Bank Angle (Ascent,
Figure 7 Glide Speed
Figure 8 Glide Speed
Figure 9 Glide Speed
Figure 10 Steady-State
Wings)
Figure 11 Steady~State Heading Rate vs. Bank Angle (Descent, All.. - ---- --- -- .
Wings) .
Figure 12 Steady-State Heading Rate vs. Bank Angle (Medium Wings)
Figure 13 Turn Radius vs. Bank Angle (Medium Wings)
Figure 14 Pitch Angle vs. Time (Small Wings)
Figure 15 Pitch Angle vs. Time (Medium Wings)
Figure 16 Heading Angle vs. Time (Medium Wings)
Figure 17 Wing Angle vs. Time (Medium Wings)
Figure 18 Glide Speed vs. Pitch Angle (Lake Test Model)
Figure 19 Steady-State Heading Rate vs. Bank Angle (Lake Test
Model)
Figure 20 Turn Radius vs. Wing Bank Angle (Lake Test Model)
Figure 21 Pitch Angle vs. Time (Lake Test Model)
Figure 22 Heading Angle vs. Time (Lake Test Hodel)
Figure 23 Autopilot Dive 7 (Gain - 5.7xlO-3sec.l)
Figure 24 Autopilot Dive 7 - Wing Angle vs. Time
Figure 25 Autopilot Dive 9 (Gain - 2.9xlO-3sec.l)
Figure 26 Autopilot Dive 10 (Gain - 4.0xlO.3sec.l)

-l
I. INTRODUCTION
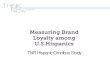
This report presents the design features, computer-simulated andactual field trial gliding and autopilot performance of the first twomodels in the ongoing evolution of the SLOCUM glider vehicle. Thevehicle mission is to gather oceanographic data while performingautonomous, gliding dives to 1800 m depth at typical glide path anglesof 45° with the horizontal, and a sink rate of .33 m/sec (Figure 1).The ascent/descent portions of the dives are driven by the vehicle'sability to slightly (typ IIOO g) change its net buoyancy at theinflection points of the dive. The energy to power these buoyancychanges will eventually be provided at zero on-board energy cost by aheat engine that exploits the ocean's thermal gradient between the warmsurface and cold deep layers of the ocean. The first two unitsdescribed in this report employed mechanical, energy consuming means ofbuoyancy change.
The glider is a faired cylinder with fixed vertical and horizontalwings at the aft end. These provide gliding lift as well as stabilityand steering moments. The cylindrical fuselage also provides somelift. The vehicle pitch angle is changed by longitudinal movement ofan internal weight. The vehicle roll angle is changed by rotationabout the vehicle centerline of the same radially aSYIDIDetric, internal,moveable. weight ..-.This causes the fixed wings.to rotate and produce anet lateral yawing moment due-to their verticaljhorizontal aSYIDIDetry;as a result, the vehicle changes its heading. Once per day, thevehicle will assume a vertical, antenna-up position at the surface and-eventually engage in two-way satellite communication. This maneuver isaccomplished by activating approximately 0.7 liter of additionalsurface buoyancy in the vehicle nose and by movement of the vehicle'scenter of gravity aft-ward and on-centerline. Power to activate thesurface buoyancy will be provided at no on-board energy cost by asecond heat engine. This engine will operate on a differentthermodynamic cycle than the drive buoyancy engine. The long-termdeployment target is 5 years.
A basic description of the design features and field trialenvironment of the first two glider models follows.
1. Prototype Glider (Figure 2)
Physical Description
MassLength
39.8 kg1.9 m (fuselage); 2.8 m (overall including antenna, wings)
-1-

PressureDiameterMaterialCollapseLength:
Hull:0.165 m:606l-T6 aluminumDepth : 2600 m1.52 m
.7
WingsConfiguration: Rectangular Box-TailArea: 0.023 m2 (Vertical) 1.0 aspect ratio (AR)(each) 0.047 m2 (Horizontal, small size) 2.0 AR
0.071 m2 (Horizontal, medium size) 3.0 AR0.094 m2 (Horizontal, large size) 4.0 AR
Material: Fiberglass covered syntactic foamThickness:lO.2 mm (max.)
Vehicle Characteristics
commanded,Buoyancy Change: I39 g net about neutral; pressureelectromagnet-released drop weight on vehicle nose.Radial CG offset from centerline: 2.4 mmSink rate @ 400Pitch angle: 0.10Vehicle controller
m/sec (medium wings)and Data Logger: Onset Computer Corp.;
Tattletale Model II- vehicle heading .'vehicle pitch angle =~ --"-
- vehicle roll angle- pitch actuator position- roll actuator position- battery voltage- ambient pressure- time
Heading sensor: Watson Industries, custom 3 axis fluxgate compasswith pitch and roll outputs.Pressure sensor: Transmetrics Model P2lLC (0-50 psig)Depth Telemetry/Emergency Release Sonar: Benthos Model 865, 10 kHz(x-mit), 12 kHz (receive)Antenna: 0.66 m long x 10.2 mm dia whip (non-functional)Battery capacity: 18 alkaline D cells, 2 parallel banks @l3.5VjbankCurrent drain: 5 ma (quiescent); 500 rna (peak)
- Dive Variables Stored:
Field Trial Description
A series of twenty nine (29) dives was run at Wakulla Springs,Florida, in January 1991 with the prototype glider. The tests exercisedthe gliding and turning dynamics of the vehicle for the three differentsized steering wings over the range of vehicle roll angles. Thespecific geometry of the test site (Figure 3) required the dives be runnear glide angles of 400 with the horizontal and that turn-arounddepths be less than 60 feet. The site was chosen for its exceptional
-2-

water clarity and its reasonable depth in an unobstructed, relativelyconfined area. This allowed direct observation of the vehicle at alltimes through a glass-bottom boat to visually verifiy gliding, as wellto track and to retrieve it easily.
The typical deployment sequence began with programming the gliderwith dive parameters at the surface through a serial communicatorport. The communicator would then be disconnected, the nosedrop-weight attached, the vehicle pointed in the proper direction andlet go in an approximately horizontal attitude. The unit would quicklypitch down to its proper dive angle, dive to its weight-drop depth,drop the weight and then pitch up for its ascent glide and subsequentre-surfacing. The glass-bottom boat would then come alongside thesurfaced vehicle for reattachment of the communicator cable. Dive datawould be offloaded and new parameters downloaded for the next divewhile the vehicle was towed back to the original launch point. Theentire launch, retrieval and reprogramming sequence could be done in 20minutes.
Following the Wakulla Spring tests, a brief test was conducted atthe 20 X 20 X 20 ft. pool at Benthos Inc., North Falmouth, MA, todetermine the minimum angle at which the vehicle would continue toglide and not stall. This was done by pushing the vehicle to thebottom of the pool in the buoyant, ascent condition (without the noseweight). The ascent pitch angle with the horizontal was decreaseduntil the vehicle was observed to ascend straight up (stalled) and nolonger glide.
2. Lake Test Glider (Figure 4)
Physical Description
(Same as prototype unit except as follows.)
Mass: 40.3 kgLength: 2.0 m (fuselage); 3.2 m (overall including antenna, wings)
Wings
Configuration: Straight cruciform, swept platformArea: 0.036 m2 (Vertical), 660 sweepback, 3.9 AR(each) 0.067 m2 (Horizontal), 430 sweepback, 1.6 ARThickness: 15.9 rom (max.)
Vehicle Characteristics
Buoyancy Change: t50 g net about neutral; pressure commandedhydraulic pump driven oil inflation of external bladder in tailcone fairingRadial CG offset from centerline: 3.8 rom
-3-

Sink rate @ 40° pitch angle: 0.17 m/secPressure sensor: Transmetrics Model P21LC (0-500 psig)Autopilot: See Figure 5 for block diagram
Field Trial Description
A series of 15 ascent glides were performed at a test pool atRaytheon Co., Submarine Signal Division, Portsmouth, RI, on November 5,1991. The section of the pool used for the tests was 20 ft. wide X 20ft. deep X 40 ft. long. The glider was pushed to the bottom in thebuoyant condition (external oil bladder inflated) at one end of thepool with a collared pole. It was positioned to point down the 40 ft.length of the pool and disengaged from the pole. The vehicle wouldpitch up to its intended angle and glide down the pool whileascending. Its open-loop gliding and turning characteristics wereexercised over several pitch angles and the full range of vehicle rollangles, right and left.
A series of 14 autopilot trial dives were performed out of WatkinsGlen, NY, on Seneca Lake during November 10-14, 1991. The vehicle wasdeployed from a 29 ft., large cockpit cruiser in the general locationshown on the chart in Figure 6. The vehicle was programmed for thecurrent dive on deck, deployed, retrieved and brought back onboard fordata downloading and programming for the next dive.
'Th~ tests' purpose was to determine the ability of the autopilot tocome to and hold a programmed heading over a range of initial.off-course errors (right and left) for various values of autopilotgain. A typical dive would have the vehicle released from the surfaceat some initial deviation from its programmed heading, with thesteering wings level and the pitch approximately horizontal. Thevehicle would pitch and glide down while the autopilot rolled thevehicle appropriately to correct the heading error, and then hold thedesired course until reaching the depth that activates the buoyancypump. At this point, the autopilot is turned off and the vehicle isbrought to a horizontal attitude to minimize sinking during the time(approx. 10 min.) that the pump brings the vehicle to its net ascentbuoyancy. The vehicle is then pitched up and the autopilot turned onfor ascent.
The glider successfully performed several controlled ascent/descentcycles before a pump problem precluded controlled ascents on the lasttwo days of testing. The depth of controlled dives ranged between 100and 300 feet.
II. DATA PRESENTATION AND DISCUSSION
This section presents the predicted and measured performanceresults of each glider model and its field trials. The presentationfor each glider model is immediately followed by a discussion of theresults and their effect on the design of the ~~xt model.
-4-

I
.1
Predicted and actual measured performance results are graphicallypresented in the following manner:
Gliding Performance: A plot of vehicle speed along the glide pathvs. glide angle was deemed the best indicator of gliding performance .It not only shows the effects of drag for different models or differentfeatures of the same model (such as different size wings), but servesas an indicator of the "robustness" of the vehicle's gliding ability.The vehicle will probably be operating at a pitch angle that maximizesits horizontal speed, typically 40-50 •. However, the vehicle should becapable of effective gliding over a wider range of pitch angles thatmay be encountered over time. These could be corrected by appropriatelongitudinal adjustment of the moveable weight but at an energy costand decreased vehicle scientific life. An example of this is thecoupled change in pitch angle when the vehicle is rolled to perform asteering action. Glide path speed was inferred from an internallylogged record of depth vs. time, pitch angle as well as analyticalknowledge of angle of attack vs. pitch angle.
Turning Performance: A plot of steady state turning rate vs. wingbank angle is used as the primary indicator of turning performance. Itnot only gives the autopilot designer critical information aboutvehicle steering characteristics but also serves to point out thelikely magnitudes of the inevitable aSYmmetries between right turn/leftturn and ascent/descent modes that must be eventual~y dealt withthrough design or compensation. ."-
Plots of steady state turning radius as function of wing ~ank angleare also presented. Since the actual turning rates are relativelysmall, turning radius is given as a performance indicator that iseasily visualized and understood physically.
Autooilot Performance: Autopilot performance is presented as the rawdata of heading angle vs. time in the controlled mode for a range oftested off-course errors and feedback gain settings. Some selectedpredicted simulations are also given.
Other Data: Some selected examples of specific cases of unreduced rawdata output are shown to illustrate specific features important in thediscussion of results.
Computer Simulated Predictions: All examples of predicted vehicleperformance either utilize inputs from or are direct outputs of aunique, computer-simulated model of the vehicle. It is a 6 DOF,non-linear model, with accommodation for a wide range of vehiclemaneuver and disturbance inputs. It is mechanized on the TUTSIM-6Block Diagram Simulation Language for use on a personal computer (Ref.2).
-5-

1. PROTOTYPE GLIDER
A. Data Presentation
a Gliding Performance: Actual glidepath speed as afunction of pitch angle is given in Figures 7, 8, and 9 for allthree wing sizes used in the prototype model. The predictedspeed curve is given for the medium wings. The pool test stallresults are also included in these plots as the zero speedlimits.
b. Turning Performance: Plots of actual steady state turnrate as a function of wing bank angle are shown in Figures 10and 11. A comparison with predicted values is given in Figure12 for the medium wings. Actual turning radii for the mediumwing size is presented in Figure 13.
c. Other Data: Representative raw data plots of pitchangle vs. time for the small and medium size wings are given inFigures 14 and 15. These serve to illustrate the presence andmagnitude of observed vehicle pitch oscillations in the steadygliding mode after the initial down/up transient. A plot ofheading angle as a function of time, for the dive shown inFigure 15 with.the wings at -23° deflection, is shown in Figure16. This clearly shows the presence of heading oscillations atthe same time as the pitch oscillations of Figure 15. A plotof wing angle vs. time is shown in Figure 17. This shows rolloscillations coupled with those in pitch.
B. Discussion of Results
a. Gliding Performance: Figure 8 shows good agreement ofactual with predicted glide speed in the pitch angle rangewhere an analytical gliding solution is provided by thecomputer model. The few points for the medium wings at lowerpitch angles, including the stall angle of 8°, appear to lieroughly along a line projected back from the predicted solutionline. This effect is more clearly seen in Figure 7 for thesmall wings where more dives were made at the smaller pitchangles. It should also be noticed that the. small wings showedan approximately 20% speed increase over the medium wings atpitch angles greater than 35° due to decrease in direct andinduced drag. Figure 9 for the large wing set shows glidespeed performance essentially similar to that of the mediumwings.
Two major conclusions may be drawn from the glidingperformance curves. First, glide speed is reasonablypredictable using the computer model. Second, some semblanceof gliding, although at large angles of attack, seems to be
-6-
I

able to be initiated right down to stall pitch angles of 5°-10°with the horizontal. Although operation of the vehicle at lowpitch angles is not intended, degradation or changes in eitherthe vehicle's hydrodynamic, control or drive characteristicsover long missions could sometimes find it operating at lowerthan intended pitch angles. Also, the vehicle must be capableof transiently operating from near horizontal to its optimalpitch angle (approx. 45°) upon initial sinking at each diveinitiation from its nose-up, surface orientation, and also uponturn-around at depth.
On first inspection, it seems that the small wings would bethe preferred set due to the greater glide speed obtained withthem. However, other considerations explained below, such asturning performance and stability, led to the adoption of thearea of the medium size set for the subsequent lake model.
b. Turning Performance: Steady state turn rate for all threewing sizes in Figures 10 and 11 show somewhat aSYmmetric andinconsistent results for the small and large wing sets withrespect to both ascent/descent and right/left wing bank angles.
The plots for the medium wings show little aSYmmetry oroffset. This can be seen more clearly in Figure 12 where themedium_w~ng_results are plotted along with predicted turn ratesfrom the computer-simulation. These show very good agreementbetween actual and simulated results at the higher wing bankangles whereas the simulation generally underestimates actualperformance at wing angles less than 15°.
Figure 13 shows actual turn radius as a function of wingbank angle for the medium wings. The original target of a50-100 m turn radius is well met at bank angles even as smallas 5°, with a 25° bank producing a very tight 21 m radius.This has very positive implications for using minimum energy inlong term deployments, since the actuation motors that causethe vehicle (and hence the rigidly attached wings) to roll willnot have to be moved very far to achieve acceptable turning.
c. Other Data: Figure 14 shows vehicle pitch oscillations ofISo during descent and I9° during ascent after the abruptturnaround transient following the drop of the nose weight.Figure 15 shows a similar plot for a dive with the medium wingset where reduced pitch oscillations of Il.7° and ISo areobserved for descent and ascent respectively. This reflectsthe increased added mass of the medium wings, an effect thatwas exploited further in the lake test glider.
-7-

Figure 16 shows typically observed heading oscillationsduring both the ascent and descent portions of the dive shownin Figure 15. Although an average steady turn rate was alwaysobserved, efforts were made to suppress the oscillations ofthis probably unstable mode in the lake test model. The causeof the oscillations is suspected to be hysteretic wing stallingdue to separation of the flow at the leading edges of thewings. The triggering mechanism for this appears to be pitchoscillations occurring at the same time as those observed forheading (see Figures 15, 16). This is further confirmed byFigure 17, which shows wing bank angle as a function of timefor the same dive. This shows coupled wing angle oscillationsof up to 40 about the _230 (left) set bank angle, occurring atthe same times (approx. 40, 80, 200 and 240 sec) as the pitchoscillations. A goal for the lake test unit was to decreaseinduced disturbances on the vehicle and reduce the wings'sensitivity to low speed separation.
d. Design Improvements: The following design improvementswere made in the lake test model glider in light of the resultsdescribed above for the prototype.
1. Increasing Glide Speed
Increases in glide speed were anticipated i~ the lake testglider by increasing the net drive to 50 g and by reducingdrag. The latter is accomplished by careful attention toforward and aft fairing design and to wing drag reductionthrough wing configuration and attachment improvements.
2. Decreasing Pitch Oscillations
Pitch oscillations can be reduced by decreasing thepitching moment of the vehicle. However, it was desired toaccomplish this without changing the lift and hence theturning force available for steering. This was done in thelake test unit by changing from a box wing configurationto an equivalent lift cruciform with the four wings bolteddirectly to the thermal engine housing (see Figure 4).With both main lifting wings now directly exposed tocross-flow, instead of shielding one another as in the boxwing configuration, their effective added mass, and henceresistance to pitch accelerations, was increased by 76%with little change in lift.
-8-

-'I
3. Increasing Turn Rate
Although the turning rates and radii obtained in theprototype unit with the medium wing set were well withindesired target of 100 m, it was desirable to improve on thelake test model by providing a greater safety margin overthe vehicle's deployed life and to possibly minimize theenergy required for turning maneuvers. To accomplish thiswithout increasing the size of the lifting wings, it wasnecessary to increase the asymmetry ratio of the horizontalto vertical wings. A further requirement was to avoidsignificantly decreasing the effective lateral stability ofthe vertical wings.
These improvements were accomplished by placing thecruciform wingset of the lake test glider on the outside ofthe thermal engine housing. This places an identicalportion of each wing's area near the root chord attachmentpoint in the trailing wake of the aft conical fairingduring normal forward motion; thereby decreasing eachwing's effective area by the same amount. However, sincethere is a difference in area between the horizontal andvertical wings, the decrease in effective area increasesthe aSYmmetry ratio without changing actual wing areas.The vertical wings are still fully exposed to, and canresist large angle of attack lateral crossflows, hencepreserving the good lateral stability of the originalboxwing. The lake test model has an effective aSYmmetryratio increase of 90% over the prototype, while essentiallypreserving the stability characteristics of the medium sizebox wing.
4. Increasing Wing Low Speed Stall Resistance
The prototype box wings were designed with a conventionalsection of a rounded leading edge tapering to a sharptrailing edge. Research into the sparsely studied area ofwing performance at the low operating Reynolds numbers ofthe wing (typ. 25,000) revealed that flow separation canoccur from a rounded leading edge at an angle of attack.Review with our hydrodynamic consultant (H. Jex, STI Corp.,Hawthorne, CA), one of the few experts in low Reynoldsnumber wing performance, led to the adoption of a wingsection with a sharp, tapered leading edge.
5. Improving Vehicle Configuration
The physical configuration of the prototype glider waschanged in two significant ways to make it more compatiblewith long-term ocean deployment.
-9-

-J
a. The platform of the wings was changed from rectangularto swept to promote weed/trash shedding.
b. The antenna mount was shifted to the nose for internalpackaging purposes and to keep the wings below the airinterface when the vehicle is in the vertical,satellite transmission mode at the surface. Theobjective was to minimize both stress on the wings fromwave action and any tendency for the wings to collectand trap weeds while at the surface, or during theinitial phases of sinking at dive initiation.
2. LAKE TEST GLIDER
A. Data Presentation
a. Gliding Performance: Predicted and actual glidepath speedas a function of pitch angle is shown in Figure 18 for both theRaytheon tank tests and the Seneca lake trials, each run at I50g net drive.
b. Turning Performance: A plot of predicted and actual steadystate turn rate as a function of wing bank angle is given inFigure 19. Actual turning radii are presented in~igure 20.
--c. Other Data: Raw data plots of pitch angle and heading ai- afunction of time are shown in Figures 21 and 22 respectively.These figures illustrate the complete absence of pitch andheading oscillations in the lake test glider.
d. Autopilot Performance: Several plots of heading angle as afunction of time under autopilot control are given in Figures23, 25 and 26 for various values of initial heading error andautopilot gain. Comparison with predicted performance is alsopresented for dives 7 and 9 in Figures 23 and 25. Dive 7 wasperformed at a value of autopilot gain considered to be nearoptimal from the pre-test computer simulations. Figure 24 is atime history of the wing bank angle for dive 7.
B. Discussion of Results
a. Gliding Performance: Figure 18 shows the actual lake modelglide speeds in good agreement with predicted values, with anominal 52% increase over that of the prototype at 40° pitchangle. This is considerably greater than the 13% increaseexpected from a straight scale-up by the square root of theratio of their net drive forces (50 g, 39 g respectively).This implies that the goal of considerable drag reduction hasbeen met and that a reduction of 44% in the effective dragcoefficient has been achieved.
-10-

Figure 18 also shows maintenance of a reasonable glide speed in theregion below 350 pitch angle where analytical predictions are notobtained. Data points there project back from the predictableregion in a reasonably smooth fashion. This would seem to indicatethat operation at low pitch angles remains stable and maintains thegoal of gliding "robustness" to off-design operating points or tonear-optimal points for which energy expenditure to continuouslycorrect may not be justified.
b. Turning Performance: Figure 19 shows an average of steadystate turn rates for the lake test glider over several runs atthe same wing bank angles. The rates are generally 300-400%higher than comparable ones for the prototype with the mediumwings. This indicates that the vehicle speed increase and theincrease in the horizontal/vertical wing asymmetry ratio hasbeen effective in significantly increasing turning performance.Predicted values generally understate actual ones at lower wingangles, as was the case with the prototype model. This, again,is a positive implication for potential energy minimizationgoals, and can be fairly easily adjusted for in the predictivecomputer models.
Figure 20 shows that the turn radii for the lake test modelwere reduced significantly (70-80%) from the medium wing sizeprototype for the same .wing bank angles .. In addition,.thecurve is .much flatter fro~ low to high bank angles, reflectingthe relatively high turn rates observed at low bank angles (seeFigure 19) in the lake test model.
c. Other Data: Figure 21 shows a time plot of pitch angle forthe descent phase of one of the autopilot dives at SenecaLake. The descent pitch angle of _490 (nose down) is solidlymaintained, with no evidence of the large scale 25-50 sec pitchoscillations seen in the prototype. The high frequency .50noise seen in the record is 1 count jitter in the A/D converterof the vehicle data logger. This was also seen in theprototype trials (Figures 14, 15).
Figure 22 is a time plot of heading angle for one of theascents made in the Raytheon test tank. A test tank run waschosen for illustration since the wing angle is fixed (here 340right bank) and steady-state turning is quickly reached asopposed to the lake autopilot runs where the wing setting isconstantly changing. The plot is seen to be smooth with noevidence of the heading reversals seen in the prototype. Theflat, slightly jagged portion in the first 15 seconds of therun is during the pitch-up of the vehicle from its initialhorizontal position on the tank bottom, prior to thecommencement of any forward gliding motion. The withdrawal ofthe bottom holding device at the beginning of this initialrighting almost always induced some small heading perturbationduring the static pitch-up.
-11-

d. Autopilot Performance: Figure 23 shows the glider, underautopilot control, correcting an initial heading error of 42°in 80 seconds, and holding course within z2.5° thereafter.This compares very well with the predicted values over most ofthe plot. The actual performance showed slight hunting aboutthe control heading, whereas the simulation at the same gain,predicted a smooth, overdamped asymptote to the controlheading. This is explained by the fact that the vehicle datalogger, which also served as the overall controller, was notcapable of floating point arithmetic. It was therefore notcapable of producing a corrective signal once the feedbackvariables dropped below certain minimums, typically near thecontrol point. At these times the algorithm would stopcorrective action at the last wing setting until a large enough(typically overshot) error was detected, or it would put thewings to the horizontal position if corrective action was notcalled for after a certain wait period. This artifact producedflat spots in the wing deflection curve, at or near thehorizontal wing position, when the vehicle was near the controlpoint. This action is evident from Figure 24, the wing angletime history for this run. This effect will not be present atall in the ocean model with its higher level controller and inno real way detracts from the success of the controlalgorithm's performance. In fact, the z2.5° overshoots seemremarkably small given the---crudenature of the corrective-action near the control point and are not important relative tolong-term ocean deployment where control action decisiondeadbands will be large (typ. z300).
Figure 25 shows the results of autopilot dive 9 which was acontrolled run at an autopilot gain of half that of dive 7(Figure 23). It shows excellent agreement with predictedvalues over most of the corrective action range but with fastermovement of the actual vehicle toward the set heading in thelater stage of control. This is entirely explained by theresults shown in Figure 19, where the actual turn rates of thevehicle at wing angles less than 10° are seen to be greaterthan five times those predicted. The wing angle during dive 9(Figure 25) is less than 8° for time greater than 60 seconds,_so faster than predicted performance is not surprising.
Figure 26 is for a dive with an autopilot gain intermediatebetween those of the two previously discussed runs, which werethe high and low points respectively of the tested gain range.It shows performance very similar to that of dive 7 (Figure 23)with respect to the corrective maneuver and subsequent coursekeeping, and is presented without further discussion.
e. Design Improvements: The following design improvements areintended for the first ocean demonstration model in light ofthe results described above for the lake test model.
-12-

1. Increased Glide Speed
The glide speed of the lake test glider was increased overthat of the prototype largely through drag reduction, withsome contribution from increased drive force. Significantfurther drag reductions are not likely, so a glide speedincrease for the ocean glider will come from increaseddrive. The drive force for the ocean test model will beincreased to IIOO g with an expected glide path speed of.44 m/sec (.28 m/sec horizontal). This is more in linewith speeds originally deemed necessary in order for theSLOCUM vehicle to perform meaningful station-keeping in theocean.
2. Buoyancy Compensation
The SLOCUM vehicle's sawtooth depth profile and.fixedbuoyancy change imply that its forward progress over thebottom is maximized by maintaining the dive angle thatresults in maximum horizontal velocity and by maintainingthe constant drive force over the course of the dive. Thelatter can only happen if the vehicle's totalcompressibility and thermal expansion match those of theocean. Without compensation, the vehicle with 100 g.negative buoyancy at the surface would become lighter as itdived and reached equilibrium at about 1000 m. The oceantest glider will employ passive buoyancy compensators toclosely match the vehicle's density variation to that ofthe ocean over its entire 1800 m operating range.
3. Revise Autopilot Simulation
The autopilot simulation program for the ocean glider willbe revised to reflect the observed increased vehicleturning performance relative to that predicted at the lowerwing bank angles. This will enable the autopilot gain tobe optimized in a way that minimizes energy use by thevehicle roll actuator.
III. OCEAN TEST GLIDER PLANNING
The successful results of the described glider trials and separatelab and field trials of a thermal buoyancy change device have led tothe following specifications for an ocean glider unit.
-13-

Specifications
Physical Configuration and Size: Same as Lake Test GliderCollapse Depth: 3000 mHull Material: 7075-T6 aluminumEnergy Consumption: 1 Wh/dayEndurance: 5 yearsBuoyancy Change: IlOO g about neutralAdditional Surface Buoyancy:700 gNominal .Glide Speeds: 0.33 m/sec (vertical)
0.28 m/sec (horizontal)Design Turn-Around Depth: 1800 mNominal Operating Temperature Difference: 15°C (surface-1800 m)Autopilot Sample Interval:60-l20 sec (est.)Satellite Communication: ARGOSData.Sensors: Temperature, depth (demonstration unit);
CTD,current meter, other sensors (follow-on scienceunits)
Navigation: Dead-reckoning autopilot; pre-programmed headings(demonstration unit); custom GPS navigation module(target)
It is expected that the first ocean demonstration glider wouldessentially be the same physical size as the lake test unit but withactive drive and surface buoyancy thermal engines. The autopilot wouldsimply steer a pre-programmed triangular or rectangular course. Depthand temperature data would be measured on one or more descents per day.and transmitted via ARGOS daily. The position of the unit at thesurface as well as science and engineering data would be received fromthe ARGOS transmission.
A successful field trial of the ocean glider would lead to thefabrication and testing of two more with full science and navigationpackages. Gliders like this, with various sensor configurations, couldthen become available for use by the scientific community.
IV. SUMMARY AND CONCLUSIONS
Two design iterations toward the utlimate goal of a SLOCUM glidercapable of long-endurance profiling missions to the interior of theocean as part of a large-scale ocean observational system (Ref. 1) havebeen completed. The significant accomplishments and conclusions of thework are the following:
1) A basic glider configuration which is dynamically stable,minimizes drag and anticipates future system packaging andmission needs has been evolved and tested.
-14-

2) Drag reduction has been accomplished to the extent that thetarget horizontal speed of .5 knot can be obtained by simplyincreasing the net gravitational drive force to 100 g.
3) The greatly simplifying concept of utilizing an internal weightshift to accomplish pitch attitude and turning maneuvers hasbeen very successful. Turn radii ten times less than the 100 moriginally estimated as acceptable have been obtained withreasonably sized, rigidly-attached wings.
4) Performance-robbing and potentially unstable pitch and headingoscillations observed in the first prototype glider have beencompletely eliminated by a new wing configuration and sectiondesign. The new configuration also has the benefits of greatlyreduced drag and enhanced weed/trash shedding properties due toits swept platform.
5) A unique, computer-simulated model of the SLOCUM glider has beendeveloped and mechanized on a PC. It has proven accurate inmost aspects of predicted performance with all significantdiscrepancies being on the side of performance underprediction.
6) An extremely simple heading autopilot seems capable ofcontrolling vehicle heading to about ten times the accuracy thatwill likely be needed in eventual long-term ocean deploym~nts.This same algorithm has been successfully employed in computersimulations of ocean mission situations with autopilot updateintervals up to 60 times longer than those employed in the laketests.
In conclusion, the originally most risk-prone aspect of the SLOCUMconcept: an autonomous, near-neutrally buoyant glider, has been provenlargely successful. Subsystem designs such as effective realization ofthe thermocline-driven buoyancy change engine and low-power 2-waysatellite communication are now the controlling factors in long-termsystem success.
V. ACKNOWLEDGMENTS
Funds were provided to Webb Research Corporation under subcontractto the Woods Hole Oceanographic Institution through ONT Contract No.NOOOI4-90-C-0098. Guidance and encouragement provided by WHOI principalinvestigators Dr. Philip Richardson and the late Dr. Henry Stommel aregratefully acknowledged. Special recognition also goes to Douglas Webband Dr. Joshua Hoyt of Webb Research Corp. for the original SLOCUMglider and weight-shift mechanism designs, and to Henry Jex of SystemsTechnology, Inc. for the computer simulation model.
-15-

<l
VI. REFERENCES
1. Henry Stomme1, The SLOCUM Mission, Oceanography, April 1989, 22-25.
2. Henry R. Jex and Keith J. Owens, 1991. The SLOSIM Simulation ProgramGuide. Systems Technology, Inc., Yorking Paper No. 2398-7.
-16-
----"

"".,-, "
1JJSLOCUM OPERATIONS PROFILE
«!- ... 3,6 kM -
1800 M
40-500
F/G,Uf?~ /
Avernge Horizontn'l' Speed Approx. 28 CM/ sec, -An AUV of 5 yeo.rs o.nd 40/000 kM outonoMYTwo woy so.tellite COMMUniCo.tions o.nd positions frOM' GPSDuring dive vehicle is under o.utopilot control while toking observQ tions

4 3 2 1
A
,
c
o
APPYD
, ,j~(Yf,1I(!- /1'J:p~'It('~iCoQnfl,,':" ','f,l: ',.~olf~t=-'it~OI~b "
DESCIIlrTIOH
REVlI!O"IO£ICfttPTIOH
DATE ITlfLl)R~fJ"'QT;/p~,,~rJ,~t"'"";'. ." ",:."f~..f 'j P , , I.
":'O(JM!~.''''\~,,~",i)w~.",f . "' ••• .,.~'I~.-e..... . ..
ITtM I rART OR DWQ. NO, '
UNLUI OTHERWISE aPECWIIDDtMItCIIOHI ARE IN IHCHU
TOI.UANCU: =FRACe_DECIMALS, MICROlH
,)0(e~W .xXXe I V
SCAlE SltEEf Of
",4& MI'''' 4 3 .,..... 2 1
'. ,

A
LDOWN 0RIVER
13IRD'S EYE VIEW
TYPICAL DIVEPROFILE
\
SECTION A-A
FIGURE 3
SCHEMATIC OF TEST SITE
WAKULLA SPRING, FL
~
DIVE PLATFORM
LODGE
7//
1-

-t;;>(nO ~(vli..1()O
-LINn CI,.30(79 .1-53.1- 5>1f17.... . -"-.
h .3(jO'9/;j
-.._- - -r

& '. ,'," ,.-(V~ ~
,....,0'-.J
V\
~
\U..JdJ
'tq: ~
C(~
~
..:t ~
"-::> t~ ~
.~
""
.~ ~Q
'-.!J (j
J<:t: ~{ ¥...QlQ ~ It '"
,.... \.1J ~ ~
a
~c UJI, ..j
\!5 LL ~ :.-{~c:Q
-..!5\f) t-o
- .,
V'..J
UJ '}~. -..J
Q...
d2()
q \---
ff~.~
.':)
q ~-::>
~-J
~
~'<
'V.....•••
- -=t" -:I: -<:)
\f) ~e:::t
...,... •• ,n II\U
:::t ~C:;<J::::t:
Q.. • •, . ~
"<\1J \lJ
-~ ~~
~ )L<:(:'
~'::) ~
\- '-!rq G:..J'-J~\V~(:):<
~

..: ".';"-':t -\...:.;.:,.,~'.
-.
t.....::~i
. .;.,
,1~~~C~.~::;~~~:S~~
~If{
256
RMA8T0(WGMF)llDlllfUOaoA
619
540
::;
.:~>-..:~.
.c::.\ ... :~.' ...
;.' .'
:I 10 promo'e IOte navigation, Th"•• 10 lubmll c:amICliDNI, Odd/llenl,
Irl. OlrllClOl, CllartIng and Geoc1e1lCOcean S"r"fce, NOAA. Rnt:~vll'"
'- : ...~.::,"J.:Lo~itud. Plotting Interpolator
;'£J~/:'.....~
ION REPORTSllaZardous subsl8nces 10 the National8802 (101/freel. or 10 \he neareal U.S..-.one co~municallon Is In'ipossible
'1EFLECTORS':w _bee~ pi~C~don many!!gallon,. 'lldlvlC!ual. ra~ar. on lI1ese. aids.' has bl!enL
.1 ~~'582
~ ';. 230
..: ',~ \.'.t> •• ". . '.\ q )F'u'u'"" PI
5a7 228

FIG.7 (SMALL WINGS)GLIDE SPEED VS PITCH ANGLE
0.30-I~~~~~~~~~~~~~~~~~~~~-D~~~~~:IA~u~ I
0.25 -t-----.-.--.-- ..--- --.- -- -----.- - ---- -..---.- ..- ----.
o 0o..__ ._._ .._ _. .__ _ .0_._ _
o
,-.....o
'Q)
,0.20.__ E"-J -
. 8 0.15 -Iwa....Ul
~ 0.10--.JC)
oo
o 0 0
Q o
0.05 -1- ..-.. ....---.------. ......----- ..--- ....
0.00o
,0 I I I j I I I I
5 10 15' 20 25 30 35 40 45 50PITCH ANGLE (deg)

0.25 -+-.-..-- -..--- -- ..------.-- - -0- -.------- -
0.30
",.-....-0Q)
, 0.20-E••.......•.8 0.15w _(LVl
~ 0.10--.J~
0.05
0.00o
FIG.8 (MEDIUM WINGS)GLIDE SPEED VS PITCH ANGLE
o
oo
oo
B
o
5 10 15 20 25 30 35 40 45 50-PITCHANGLE (deg)
oActual
Predicted

-,
FIG.9 (LARGE WINGS)GLIDE SPEED VS PITCH ANGLE
0.25 I 0 II A~ual i
...._----_ .._-- 0 O....-- __ _-.._.--.--- 0 0o.2 0 -1--- __ £[) E3 0
o
..--..()Q)(f]
""-EO.1 5 ~---... . -'-/ ----_ •._--- o
owW0-Ul 0.10 I ----------------------.1Wo--l()
0.05 ~.-- ..-..--.-.-.- ..-...-- ..-.--------.--------
0.00o
P I I I I I I I I
5 10 15 20. 25 30 35 40 45 50PITCH ANGLE (deg)

o 10.00oo.,....x0' 5.00(I)(J]
"-=- 0 00w ..-<{-, Ck:
- '-' -5.00.zCl<{w:r: -10.00w.-<{.-(/]-15.00>-o<{
w 0~ -20.0 -25
FIG.10 (ASCENT, ALL WINGS)S. S. HEADING RATE VS BANK ANGLE
- 20 -1 5 -1 0 -5 0 5 10 15WING BANK ANGLE (deg. -LEFT +RIGHT)
20 25
-e-Small-e-Medium-A--
Large

FIG. 1 1 (DESCENT, ALL WINGS)S. S. HEADING RATE VS BANK ANGLE
o 10.00oo ~
Small--e-Medium-A-Large
0.00
-5.00
T"""
'o..JWI-<i~~zo<iwIwI-<i~ -10.00
T"""
X".......()Q)C1l
"
>-o<iw~ -15.00
- 25 - 20 -1 5 -1 0 -5 0 5 10 15 20 25WING BANK ANGLE (deg, -LEFT +RIGHT)

FIG.1 2 (MEDIUM WINGS)S. S. HEADING RATE VS BANK ANGLE
oAscent
Predicted
+Descent
25 30
+o
-_ ------._ -..-_ +._._._._ _---_ .._------- _._.-4.00
6.00
8.00aaa,....x,,-.,..(.')OJCI1
""
,....'W' 2.00l-
._ .<i ...
. ~.- 0.00. Cl ..z~ -2.00w:r: -4.00wI-<iI- -6.00(J)
ro -8.00<iwti -10.00
-30 -25 -20 -15 -10 -5 0 5 10 15 20WING BANK ANGLE. (deg. -LEFT +RIGHT)

l
FIG.1 3 (MEDIUM WINGS)TURN RADIUS VS WING BANK ANGLE
.....•........_----_.--_ ..__ .._--_.-_._-------_ __ _--_.- _._---_ .._.._ --
80
70 -'-.-.------...-
(f) 40 -'...-.----.-----:Jo '
<i __n:: 30 -'._.- _. ._z .n:: _~ 20..1.-. ----
--...6 0 -1.__•.._. __ ._ ..__. ..1...__ .__ •••__ •__ .._..•_ •••.••__ •__ •.._.-.-.-_ ..- ••.- ••--- ••-_._ .•.•..•..••.•.... _-- ..•..••..•••--- ..•.•....•.••.• -
(/]L-.G)-E 50 .J. ._.. .._~ . ._.._. __ .._.- -
"--../
1 0 -1-... .-'---:----------.------- ._--
oo 5 10 15' 20
WING BANK ANGLE (deg)25 30

FIG. 1 4 (SMALL WINGS)PITCH ANGLE VS TIME
._-----_._----_...._-----------1------ ..._------------
---_._._----_._-----_ ••......_._-_ ..._._-_ ..._._----_.- .....---._ ...._------_._-_ ....__.-
40 ...1_ .. ._.__... . _ ---
50
3 0 ...1__ ••••••• ••_ ••• _._ ••_._ •• ._._._ ••__ ._ ••__ ._ •••••---1..-.....--_.-.-.-- ...-.-
-20-30
w 10---l~Z« .0:I:U.....-10a...
--...g> 20
"U'-J
-40 o 20 40 60 80 100 120 140 160 180 200TIME (sec)

FIG.1 5 (MEDIUM WINGS)PITCH ANGLE VS TIME
l
50
40 ....---.--.--------
30 -1--. -------.-
--. 20rnOJ
~ 10_.. W
-lC) 0Z<{
:r: ~10ul-n. -20-30-40-50 o 50 100 150
TIME (sec)
------_ ..-._--_ _._---
200 250

FIG. 1 6 (MEDIUM WINGS)HEADING ANGLE VS TIME
. 360
350 -1__ •••• ••••_ - .•-. .~--- •••••- ••..-.- •••-.-- ••- •••---.---.-.- ••.-
(j) 340 ---- ---- - ..------- ---------..-Q)-0'-J~ 330C)z<{
C) 320zo<{w 310I
300
290o 50 100 150
TIME (sec).200 250

.1
-19-20
.-..-210>Q)
~-22w-.J(!) -23.z .<{
~ -24z.<{
en -25(!)z3: -26
-27
- l
FIG.1 7 (MEDIUM WINGS)WING BANK ANGLE VS TIME
-- ••- .- ••-- ••-------- ••-----_. ._.11••__ • I SET ANGLE I
-----_._._------------------------_ .._-----
-28 o 50 100 150TIME (sec)
. 200 250

I
FIG.18 (LAKE TEST MODEL)GLIDE SPEED VS PITCH ANGLE
o oActual
8 I I Predicted
o
oo
. ~~.--------_ ..-o ..._-.
o 0
o
-----------_ .._----_._-------------_._--_ ..._-------_._--
----_ ...._-----_._--------_._-----_ .._-_.-. ---_ ..
.._._._ .__.. _. __ - - --- - ---.--.,...-13-
0.35
0.30
""'"~ 0.25(I]
"E"-/0.200ww~ 0~15w0<3 0.1 0
0.05
0.00 . . .o 5 10 15 20 25 30 35 40 45 50PITCH ANGLE (deg)

FIG.19 (LAKE TEST MODEL)S. S. HEADING RATE VS BANK ANGLE
oActual
Predicted
25 30 35
o.t:L....__.. .
or-W 10.00 -1 ._.... .••-----
I-<i~
~ 0.00o<iw~ -10.00I-<iI-
CIl -20.00ro<iwI-CIl -30.00
-35-30-25-20-15-10 -5 0 5 10 15 20WING BANK ANGLE (deg, -LEFT +RIGHT)
a 30.00aaor-Xo 20.0 0 -l _ _..__ _- ..-_._.-._ _._- _-t-_ .._-_._._-._--El - __.J •••••••••-.--Q)Ul,I I 0

FIG.20 (LAKE TEST MODEL)TURN RADIUS VS WING BANK ANGLE
15
._--------_._._--------------------------_ ..._----_ .._.----_ ...._---
--_._--------_._._-----------_._----_ ..•__ ._--_._.--------
3 _.
12-'---'
U1:Jo~ 6zCk:::JI-
--...C/]LQ)-Q)E 9'--/
o. 0 5 10 15 20 25 30WING BANK ANGLE (deg)
35 40

.~
FIG.21 (LAKE TEST MODEL)PITCH ANGLE VS TIME
-10
-1 5 -1-'-.-.- - .._-.- - .._-._ __ ._.-..-..---- - ..-.- - --.- ..- -.- - -._ - -.-
- 20 -1.-_ .., - .1-25 ~---=-===---.-_..- __.._.--_..-.----.------. __ .. ----- -_•..- --- - _._-----. __ _---- __ .
w-'Cl -30z<{.
:1:--35uJ-a.. -40
-45
-50 o 50 100 150 200TIME (sec)
250 300

FIG.22 LAKE TEST MODELHEADING ANGLE VS TIME
60504030TIME (sec)
20
-----_ _-----------------_.-
10
._-----_ ...._--_ ......•_----_.
•• __ •••••••••••••• _ •• __ ••••••••••••••• __ •• _ •• _ •• u ••• ••••••••••••••• •__ • •••••••••••••••• _ ••••••••••••••••••••••••••••••••••••••••••••• ----- •••••••••• --
...__ ...•..•..•......_--_ ....•.•........_--_ _----- _-_._----_ __ -.............•......_--~ _••......
.......--_ •.....•..._----_ _-_ .........•...__._--..........•..__ ._-_.._--_ _-_ ...................•..._-_ ...••......,.._-_ .......•.••...-
._--_.__._----_.110
105
100. 0
150
145
140,,--.....~ 135'"0'-"w 130--1C)z 125<i
~ 120oj 115:r:

FIG.23 AUTOPILOT DIVE 7GAIN[(1/ sec)x1 000]= 5.7
._-_._------_._---_ ...._----_ ...._---_ ...••.._._--_ ...----
185
180
175--..u~ 170crno 165E~ 160'"tJ
"-"C) 155z.0<t: 150wI
145
===--::'~~;;::~=.=~':::--=-~:~::~:::--=--.::=:l-".._-_._ ..__.._----,-~:-;..,!!~:.._--" __ __ _-_ _.. ------ _ _--_ __ _-
._-_._ _- /-_ .._-~----_.._ _--_ __ ._.__ .__ ._----_ .._---- _._.__ __ .
I._--;-~_._--_....__ ..._ .._----! __---------.._---____----_-I-------.,.,•II•••7-••••I.-"- •••.•I---A_
I•••
ACTUAL
PREDICTED
SET HDG.
140 ¥-------- ..- --_._._ .._ ...._..... ---- -_._--_ ...._.- ---------- .......•..••••_--- _-
135o 20 40 60 80 100 120 140 160 180
TIME (sec)

~l
FIG.24 AUTOPILOT DIVE 7WING ANGLE VS TIME
10
----_ _----_ _---------_ .....•_-----_ _._--_ _----30
5 -.-.- ---- -- -.- --- - __ ..-.._- ..- - _.._ _.- --.~- -•..--
w -1 0 -t.--~-----------1~~ -15~z -20~
-25 _.-
,.....,.0> -5 .-<.--..•......---.--.- ..---.-.------.-- ..........--.--.--- -- ..- _.--.- - -.--_ - -..--Q)
"U
'-../
I .
-35 o 20 40 60 80 100 120 140 160 180TIME (sec)

(:loS) 3~1109~ OV~ Ol~ OO~ 08 09 Ov Ol a 08~
all
. ,.....Q.
aOl~3
SOl ~:::JCD-a~l~
.- .._ .•._- ..--_._--_ .._.__ ..
...__ .....•.....__ _ _---_.__ .__ _._--_ .._. -_.---- ..---.- ..---- -- ..-.--.. S 8 ~
..._.__ .__ __ _--
a31Jla3~d
lVn1JV
._-- .....-.•........---...-...•....-•..•- .•.....-- ••_-_ .•••••1i- --_ ..._ .•_-_._-
"'-'" ..--.."-.•.."____.__ n_._ _ '~.~ .-.-------•...
",",- ,.....--------. _ .......•_-_ ...•.........._.._ ................•.•_._.__.---_.__ ._-_ ...•....._.__ .~~
'~aH 135 "" .•....•.,-_ _ ......•......•.._-_.__ _ -_ __ ._---_ __ ._.-.._ _ __ __ .."\:- _ __ ..•."......"..--_ ...•......_-_ _._ .._ -_ _._--_ __ _-_ _ --_ __ ._-_ .........•....,,--_ ..
6'Z =[000 ~X(~8S/ ~)JNI't~6 31\10 lOlldOlnV £ Z.8IJ

""1
i
';.
."-1 '..
190
180
....--...~ 170
Q)c0>oE 160.0>Q)1)'-/ 150Clzo<i 140wI
130
FIG.26 AUTOPILOT DIVE 10GAIN[(1/see)x1 000]= 4.0
-------------_._----_._----- - _._--_ ---_ _ -•.-
ACTUAL
SET HOG.
120o . 50 100 150 200
TIME (sec)250 300 350
Related Documents





![Retail brands & brand storytelling [research]](https://static.cupdf.com/doc/110x72/55d0fd8cbb61eb2f258b4647/retail-brands-brand-storytelling-research.jpg)