Brakes ©Dr Moudar Zgoul, 2010-2011

Brakes ©Dr Moudar Zgoul, 2010-2011. A brake decelerates a system by transferring power from it. Brakes take a number of forms: A system may drive.
Dec 18, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Brakes
©Dr Moudar Zgoul, 2010-2011



• A brake decelerates a system by transferring power from it.
• Brakes take a number of forms:• A system may drive a pump or electric generator, so the
pump or generator acts as a brake on the system. • Most common brakes employ friction to transform the
braked system's mechanical energy irreversibly into heat which is then transferred to the surrounding environment.

• The friction mechanism is convenient since it allows force and torque to be developed between surfaces which slide over one another due to their different speeds.
• One of the sliding surfaces is usually metal, the other a special friction material - the lining - which is sacrificial.
• Wear (ie. material loss) of the lining must be catered for, and the lining usually needs to be renewed periodically.

Types of Brakes
• A hydraulically activated disc brake comprises two opposing pistons each faced with a pad of lining material.
• When the hydraulic pressure is increased the pads are forced against the rotating metal friction disc, exerting a normal force at each contact.
• The two normal forces cancel one another axially but cause additive tangential friction forces which oppose the disc's motion and decelerate it.

Types of Brakes
• A band brake consists of a flexible band faced with friction material bearing on the periphery of a drum which may rotate in either direction.
• The actuation force P is applied to the band's extremities through an actuation linkage such as the cranked lever illustrated.

Types of Brakes
• Tension build-up in the band is identical to that in a stationary flat belt.
• The band cross-section shows lining material riveted to the band. Allowance for lining wear is provided - when the rivets start to rub on the drum they are drilled out prior to new linings being riveted to the band.

Types of Brakes
• External rigid shoe brakes - rigid because the shoes with attached linings are rigidly connected to the pivoted posts; external because they lie outside the rotating drum.

Types of Brakes
• An actuation linkage distributes the actuation force to the posts thereby causing them both to rotate towards the drum - the linings thus contract around the drum and develop a friction braking torque. The RH brake features improved hinge locations and integral posts/shoes.

Types of Brakes
• The two hydraulically actuated rigid shoe brakes here are located internal to the drum.
• The LH brake incorporates a rotating cam which causes the shoes to expand and the linings to bear on the surrounding drum.
• The RH brake features two leading shoes, enabled by an individual (and more expensive) hydraulic cylinder and piston for each shoe. The terms leading and trailing will be explained later.

Brake design
Brake design investigations generally proceed along the following lines : • The braked system is first examined to find out the required
brake capacity, that is the torque and average power developed over the braking period.
• The brake is then either selected from a commercially available range or designed from scratch.
• Analysis of the actuating mechanism is necessary to disclose the actuation requirements, brake sensitivity, bearing loads and the like.

Brake shoe analysis
Various shoe configurations are illustrated. Each consists of a body whose motion is braked together with a shoe which can swing freely about a fixed hinge H. A lining is attached to the shoe and contacts the braked body. The actuation force P applied to the shoe gives rise to a normal pressure and corresponding braking friction distributed over the area A of contact between lining and braked body.

Brake shoe analysis
• An element dA of the lining is shown with the braked body moving past at velocity v.
• Since sliding must occur the force resultant on dA comprises the elemental component dN = p.dA orthogonal to dA together with the elemental friction component dFf = μp.dA coplanar with dA and in the sense of v.
Brake shoe analysis
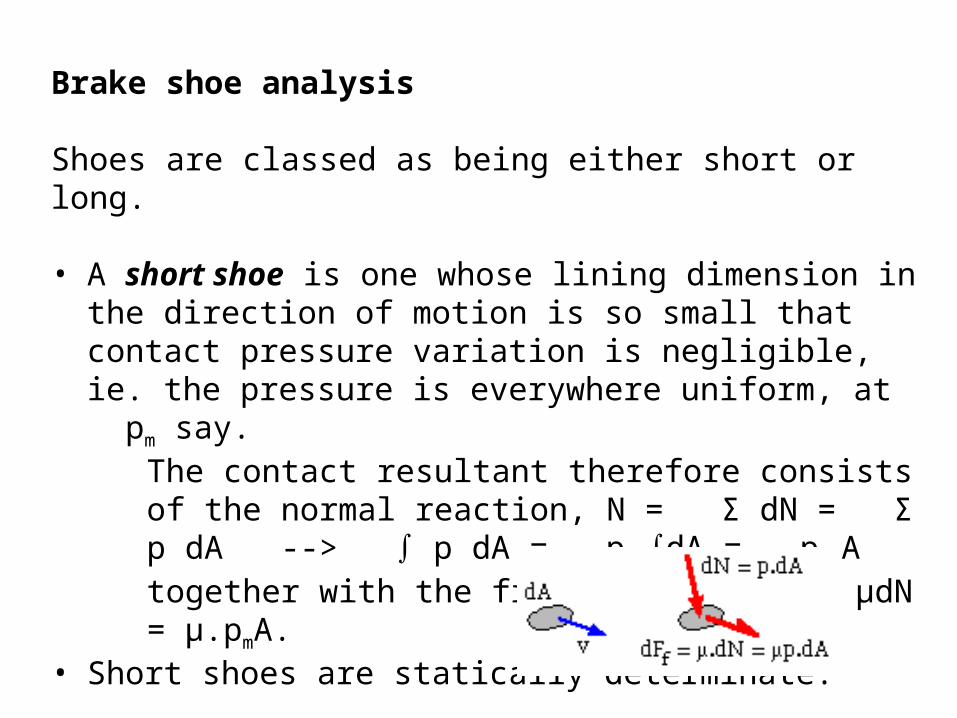
Shoes are classed as being either short or long.
• A short shoe is one whose lining dimension in the direction of motion is so small that contact pressure variation is negligible, ie. the pressure is everywhere uniform, at pm say.
The contact resultant therefore consists of the normal reaction, N = Σ dN = Σ p dA --> ∫ p dA = pm ∫dA = pm A together with the friction force Σ μdN = μ.pmA.
• Short shoes are statically determinate.

Brake shoe analysis
Shoes are classed as being either short or long.
In a long shoe the variation of contact pressure in the direction of motion is not negligible and integrals of the form ( ∫ pdA ) cannot be evaluated unless the p-variation is known.
A long shoe is thus statically indeterminate.
Long shoes are more complex than short.

Brake shoe analysis
The pivot G of a hinged shoe introduces a second degree of freedom permitting the lining to adopt a position which tends to spread wear more uniformly over the lining and hence to increase lining life.

Brake shoe analysis
The pivot G of a hinged shoe introduces a second degree of freedom permitting the lining to adopt a position which tends to spread wear more uniformly over the lining and hence to increase lining life.

Brake shoe analysis
A shoe behaves very differently depending upon whether it trails or leads. If the braked body drags the lining away from the hinge then the lining trails behind the hinge and the shoe as a whole is said 'to trail.'
The shoes in the upper row all lead for the motion senses drawn.
The shoes in the lower row all trail.
Short translational shoe analysis
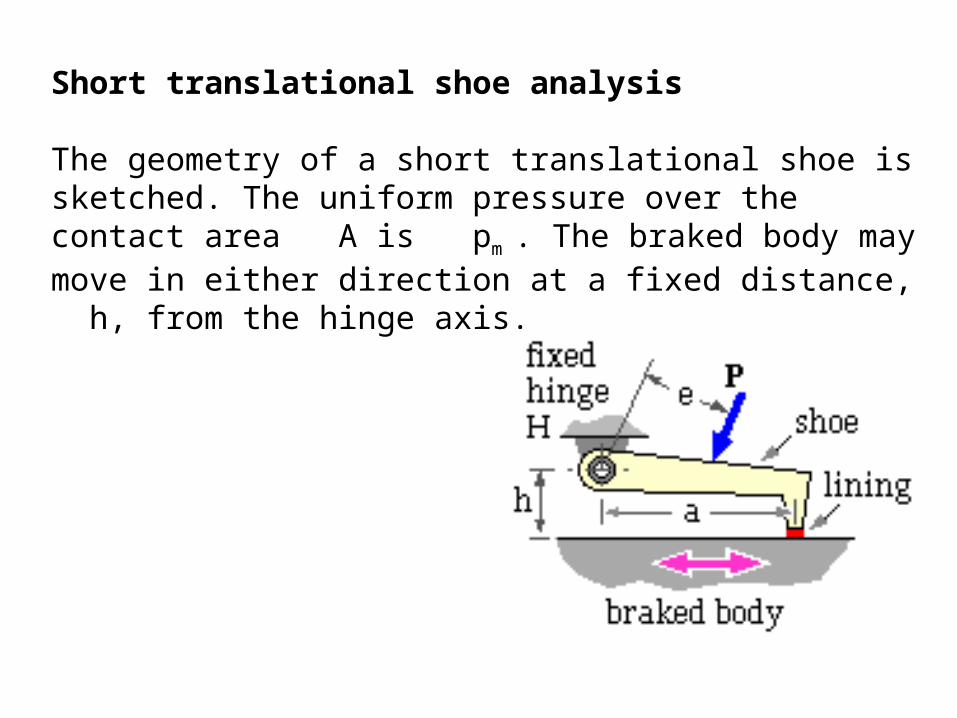
The geometry of a short translational shoe is sketched. The uniform pressure over the contact area A is pm . The braked body may move in either direction at a fixed distance, h, from the hinge axis.

Short translational shoe analysis
Free bodies of the shoe are shown for the two possible directions - evidently the shoe in the left configuration trails while that in the right leads. The three contacts which each free body makes with its surrounds are• the actuation force P.• the braked body characterised by the normal reaction, N = pmA,
together with the friction force μN in the sense of the braked body's motion.
• the hinge support reaction RH.

Short translational shoe analysis
It is the reaction to the illustrated friction force μN which brakes the translating body. The normal reaction and friction force are correlated with a given actuation via the equation for moment equilibrium about the hinge (thus eliminating the as yet irrelevant hinge reaction)
Short translational shoe analysis
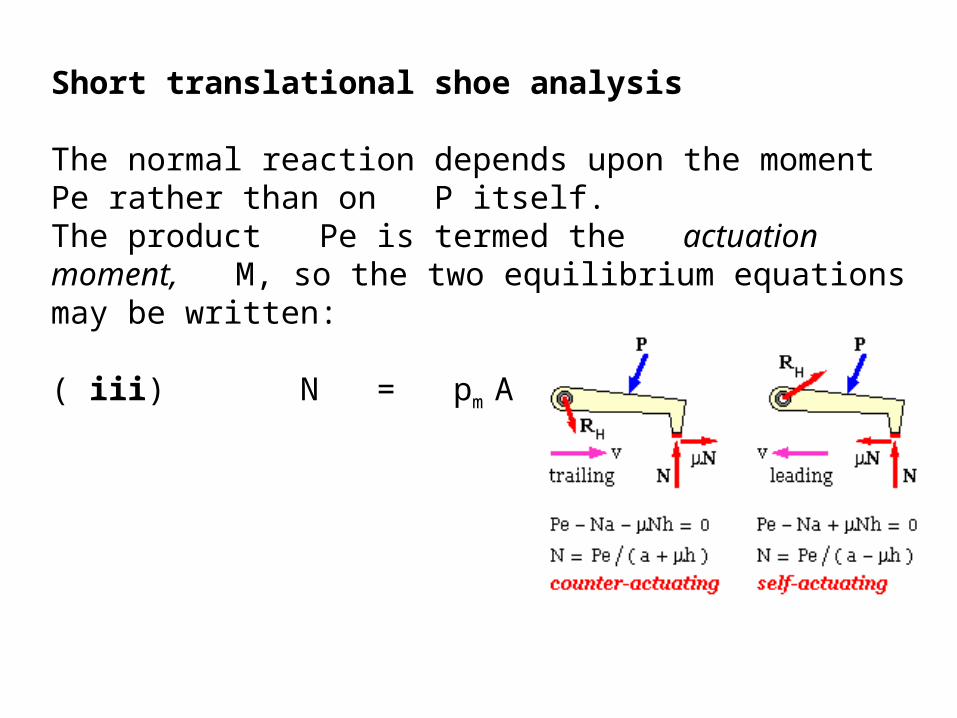
The normal reaction depends upon the moment Pe rather than on P itself. The product Pe is termed the actuation moment, M, so the two equilibrium equations may be written:
( iii) N = pm A = M / ( a ± μh )
- the sign depending upon whether the shoe trails or leads

Short translational shoe analysis
All terms on the RHS of this equation are geometric - apart from the actuation and the (presumably constant) friction coefficient - so the normal reaction and the frictional braking force are directly proportional to the actuation.
The difference between the two behaviours is as follows:• In the LH sketch the moment of the friction force opposes the
actuation moment; friction tends to throw the shoe off the braked body, to reduce the actuation - the shoe is said to be counter- actuating.

Short translational shoe analysis
All terms on the RHS of this equation are geometric - apart from the actuation and the (presumably constant) friction coefficient - so the normal reaction and the frictional braking force are directly proportional to the actuation.
The difference between the two behaviours is as follows:• In the RH sketch the moment of the friction force assists the
actuating moment; friction tends to drag the shoe onto the braked body, to augment the actuation - the shoe is said to be self- actuating.

Short translational shoe analysis
Mathematically, the negative sign in the denominator of ( iii) causes a significantly larger contact resultant for a given actuation than does the positive sign.
Once the normal and friction forces have been found via ( iii) for a given actuation, the hinge reaction, RH, may be ascertained easily from force equilibrium of the shoe free body.
All forces are then known, allowing safe design to be carried out

Short rotational shoe analysis
The drum of radius r is centred at O which forms the origin of a Cartesian system whose x-axis passes through the shoe hinge H distant a from O.
The y-axis is directed generally towards the short lining - whether this system is right- handed or not is irrelevant.
The lining is located at angle θm from the x-axis.

Short rotational shoe analysis
The shoe free body is shown at ( b) with the actuation moment M = Pe and the effect of the braked body (drum) contact on the lining expressed by the normal reaction N and the friction force μN in the sense of braked body motion - just like the short translational shoe.
For rotational equilibrium about the hinge to eliminate the as yet unwanted hinge reaction

Short rotational shoe analysis
( v) N = pm A = M / ( a.sin θm - μ ( r - a.cos θm ) )

Short rotational shoe analysis
( v) N = pm A = M / ( a.sin θm - μ ( r - a.cos θm ) )
Equation ( v) applies only to an external trailing shoe.
Rather than derive other relations for internal and/or leading shoes, we shall employ a "double delta" notation and re-derive a general form of ( v) which will describe all possible configurations simply by inserting appropriate ±1 values for the deltas.

Short rotational shoe analysis
( v) N = pm A = M / ( a.sin θm - μ ( r - a.cos θm ) )
When short shoe results are extended to long shoes it will be seen that the normal and friction components vary in both magnitude and direction around the lining contact. It is much easier to handle these if they are moved to the shaft centre, O.
It will be recalled from basic Statics that a force may be moved transverse to its line of action without altering the equilibrium of a body on which it acts provided a corresponding moment is introduced equal to the force multiplied by the transverse distance moved.

Short rotational shoe analysis
( v) N = pm A = M / ( a.sin θm - μ ( r - a.cos θm ) )
The double delta notation utilises upper case Δ to designate shoe positionif a shoe is external then Δ = +1; if the shoe is internal then Δ = -1.
lower case δ to designate shoe sense if a shoe is trailing then δ = +1; if the shoe is leading then δ = -1.

Short rotational shoe analysis
The forces and torques of sketch ( b) which enter into the hinge moment equation are repeated with the Δ-δ terminology in sketch ( c), though this is not a complete free body of the shoe.
It should be noted that : if the shoe leads rather than trails then the friction force on the shoe μN will act in the SE direction, ie. negatively in the NW sense sketched since δ = -1 for the leading shoe;

Short rotational shoe analysis
if the shoe is internal to the drum rather than external, then the normal reaction N will act radially inwards on the lining while, to rotate the shoe clockwise against the surrounding drum, the actuation M must be clockwise ie. negative in the senses sketched since Δ = -1 for the internal shoe.
Short rotational shoe analysis
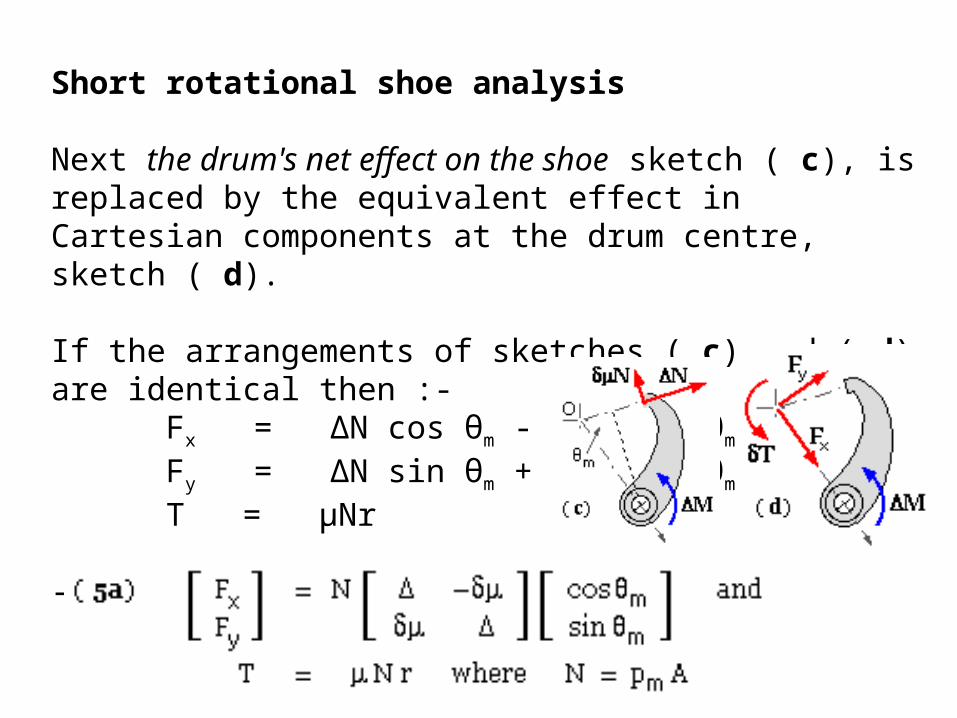
Next the drum's net effect on the shoe sketch ( c), is replaced by the equivalent effect in Cartesian components at the drum centre, sketch ( d).
If the arrangements of sketches ( c) and ( d) are identical then :- Fx = ΔN cos θm - δμN sin θm ; Fy = ΔN sin θm + δμN cos θm ; T = μNr
- or briefly :-

Short rotational shoe analysis
pmis the uniform pressure over the short lining whose contact area is A.
The reaction to the torque T is the braking effect exerted by the shoe on the drum.
Taking moments about the hinge for the free body ( d) - [ ( c) serves equally well ] - ( vi) ΔM = a Fy - δT = N [ a ( δμ cosθm + Δ sinθm ) - δμ r ]
- and solving for N
( 6a) N = M / [ a sin θm - δΔ μ ( r - a cos θm ) ]
Short rotational shoe analysis
A generalisation of ( v) applicable to all layouts = M / [ μr ( m - δΔ n ) ]
- in which m ≡ 1/μ a/r sin θm and n ≡ 1 - a/r cos θm
are constant dimensionless characteristics of the shoe.
Summarising the analysis steps for a short shoe of known geometry and friction coefficient : • Evaluate the shoe constants, m & n from ( 6a); • for a given actuation M ascertain the corresponding normal
reaction N from ( 6a) with δ, Δ appropriate to the shoe's configuration;
• determine contact resultants including braking torque from ( 5a), then other forces if desired from force equilibrium.
Short rotational shoe analysis
( 6a) N = M / [ a sin θm - δΔ μ ( r - a cos θm ) ]
A generalisation of ( v) applicable to all layouts = M / [ μr ( m - δΔ n ) ]
m ≡ 1/μ a/r sin θm and n ≡ 1 - a/r cos θm
Shoe figures of merit
The performance of a single shoe or a complete brake is described by either of two dimensionless figures of merit:The mechanical advantage (or "brake factor"), η
( vii) η = output/input = braking effect/corresponding actuation necessary
The sensitivity, S, reflects the proportional variation of braking torque with fixed actuation as the friction coefficient varies, thus
( viii) S = μ/T . [ ∂T/∂μ ]M = μ/η . dη/dμ
For a single shoe, use of ( 5a), ( 6a) leads to ( 8) η = T/M = 1/( m - δΔ n ) and S = m η
Shoe figures of merit

Shoe figures of merit
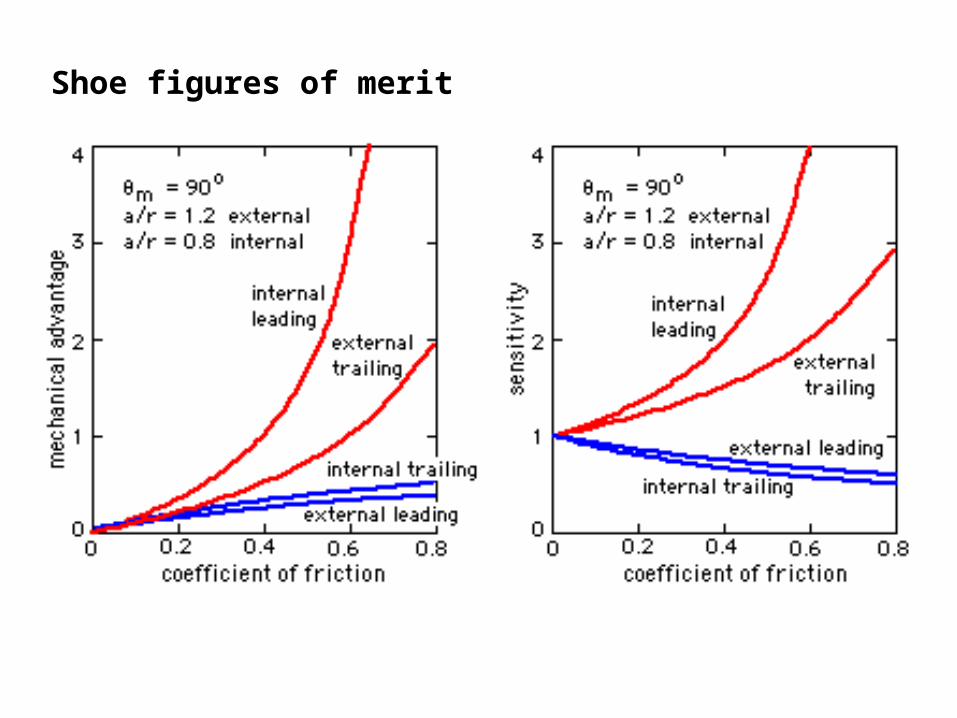
δΔ = -1
External leading and internal trailing shoes of the given proportions are counter- actuating. Both mechanical advantage and sensitivity are low and the shoes are inherently stable

Shoe figures of merit
δΔ = +1
External trailing and internal leading shoes of the given proportions are self- actuating.
Both mechanical advantage and sensitivity can become high - giving rise to instability, to vibration and squeal, to judder if the assembly is flexible, or even more dangerous, to grabbing of the brake. Physically this is due to friction not merely assisting actuation but swamping it.

Shoe figures of merit
Self- actuation occurs if m and n in ( 6a) & ( 8) are approximately equal due to design, or to the shoe becoming out of adjustment because of hinge wear, or if the coefficient of friction increases after the ingress of dirt, drum scoring, or other environmental changes.
While significant self- actuation may be advantageous for an emergency brake, generally it should be avoided.

Long rotational shoe analysis
The lining of constant width w normal to the sketch plane extends between θ1 and θ2.

Long rotational shoe analysis
Assuming the lining to behave elastically, the compressive stress and the contact pressure p also vary in this manner.
A sinusoidal pressure variation is thus a reasonable postulate for practical linings which are not wholly elastic, thus:
( 9) p = pmax sinθ ; θ1 ≤ θ ≤ θ2 pm = ∫1
2 p dθ / ( θ2 - θ1 ) = pmax Is / ( θ2 - θ1 )
in which pmax is the pressure at θ = π/2 .
For a certain actuation there is a corresponding pmax and hence a corresponding pressure distribution via ( 9) - just like the lining deflection in the animation.

Long rotational shoe analysis
pm is the average pressure over the whole lining, and the integral Is together with other relevant integrals are defined as
( 10) Is = ∫12 sinθ dθ = cosθ1 - cosθ2
Iss = ∫12 sin2θ dθ = ( 2θ2 - 2θ1 - sin2θ2 + sin2θ1 )/4
Isc = ∫12 sinθ cosθ d&theta = ( cos2θ1 - cos2θ2 )/4
Ic = ∫12 cosθ dθ = sinθ2 - sinθ1
Icc = ∫12 cos2θ dθ = ( 2θ2 - 2θ1 + sin2θ2 - sin2θ1 )/4

Long rotational shoe analysis
- A long shoe is analysed by dividing it up conceptually into infinitessimal elements - each of whose contact with the braked body is identical to that of the short shoe
- Then summing (integrating) the equilibrating effect of all the elements.
- Thus the element of lining dθ at θ in the sketch below is analogous to the short lining of sketch ( c).
- The element's contribution to the contact resultant at the shaft centre O is dFx = Δ.dN cosθ - δ.μ.dN sinθ ;
dFy = Δ.dN sinθ + δ.μ.dN cosθ ; dT = μ.dN r

Long rotational shoe analysis
The pressure p is essentially uniform over the short element, so the normal reaction on the element is
dN = p dA = pmax sinθ.wr dθ using ( 9).
The x-component of the resultant contact force, sketch ( d), is therefore Fx = pmaxwr ∫1
2 ( Δ cosθ - δ.μ.sinθ ) sinθ dθ = pmaxwr [ ΔIsc - δμIss ] using (10)

Long rotational shoe analysis
Proceeding in like manner for the y-component and for the torque leads to:

Long rotational shoe analysis
the actuating moment from sketch ( d) is:
ΔM = a Fy - δT = No [ a ( δμ Isc + Δ Iss ) - δμ r Is ]
- and solving for No
( 6b) No = M / [ μr Is ( m - δΔ n ) ]
in which m ≡ 1/μ a/r Iss/Is and n ≡ 1 - a/r I
sc/Is
are constant dimensionless characteristics of the shoe.

Long rotational shoe analysis
Twin shoe brakes analysis
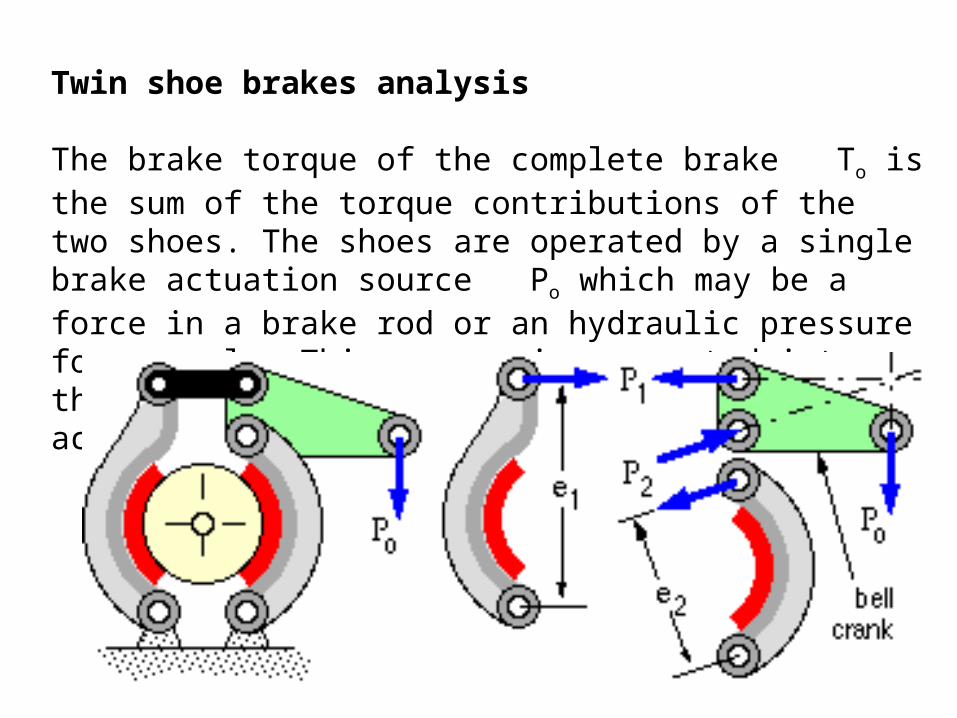
The brake torque of the complete brake To is the sum of the torque contributions of the two shoes. The shoes are operated by a single brake actuation source Po which may be a force in a brake rod or an hydraulic pressure for example. This source is converted into the individual shoe actuations by some actuating linkage

Twin shoe brakes analysis
Since the two shoes usually behave differently - one leading while the other trails - the actuating linkage is arranged to have different transformation ratios between the source and the shoes so that the linings' peak pressures and lives are not too different.
Expressing this mathematically ( 12) M1 = λ1 Po ; M2 = λ2 Po

Twin shoe brakes analysis
( 12) M1 = λ1 Po ; M2 = λ2 Po
where λ1 and λ2 are geometric actuation constants which reflect the actuation linkage's mechanical advantages. The dimensions of λ will be [length3] if Po is an hydraulic pressure, or [length] if Po is a force.
thus for the linkage sketched above, λ1 = P1 e1 /Po and λ2 = P2 e2 /Po both depend upon the geometry of the bell crank.
Twin shoe brakes analysis
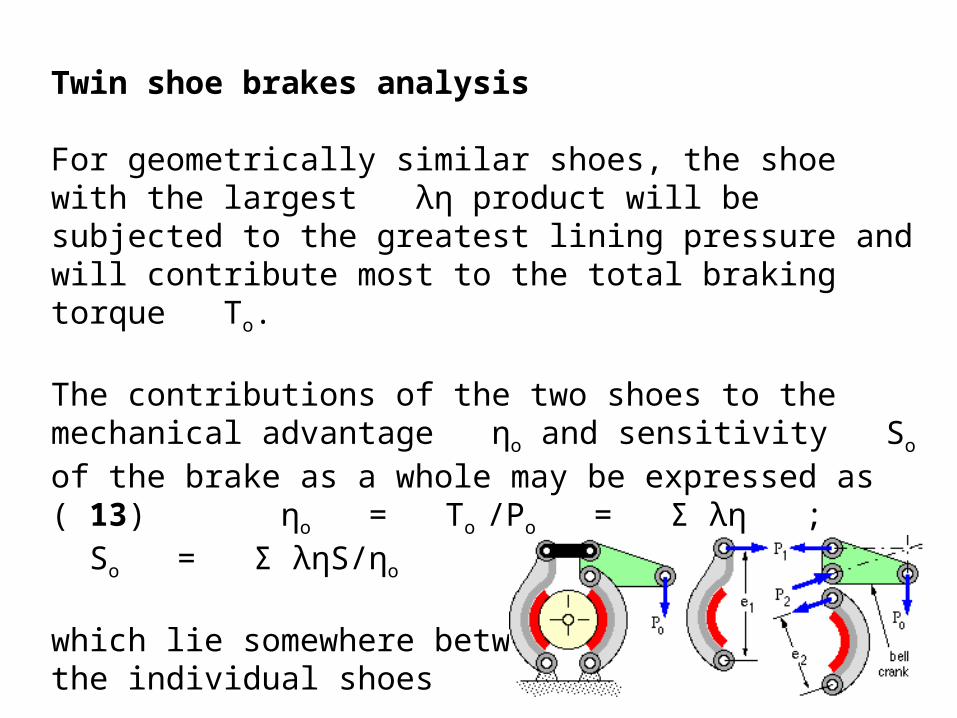
For geometrically similar shoes, the shoe with the largest λη product will be subjected to the greatest lining pressure and will contribute most to the total braking torque To.
The contributions of the two shoes to the mechanical advantage ηo and sensitivity So of the brake as a whole may be expressed as ( 13) ηo = To /Po = Σ λη ; So = Σ ληS/ηo
which lie somewhere between the values for the individual shoes
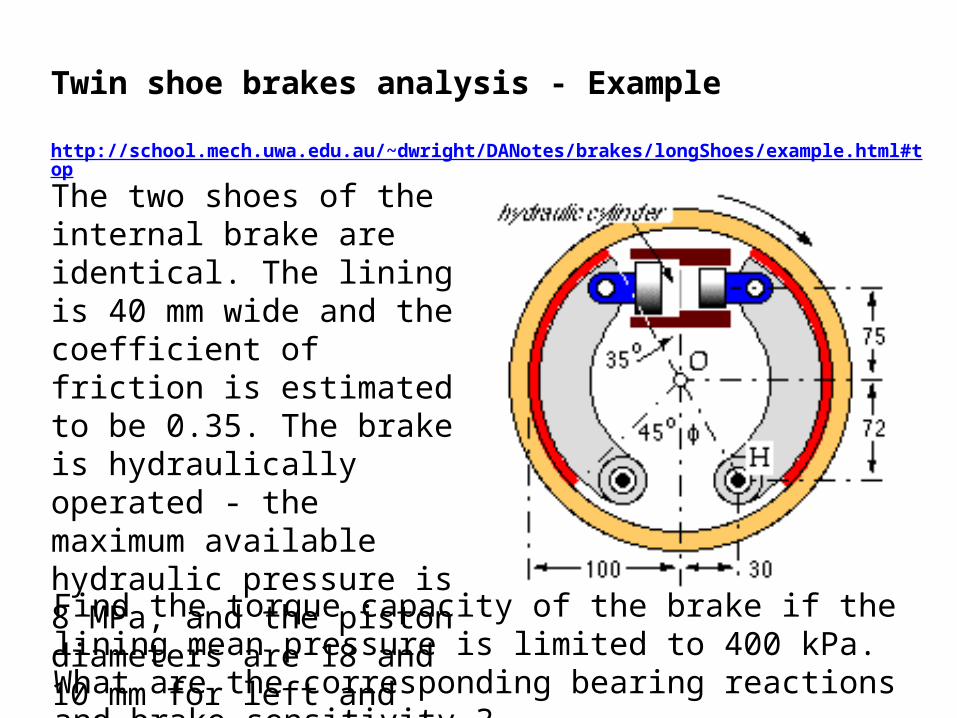
Twin shoe brakes analysis - Example
http://school.mech.uwa.edu.au/~dwright/DANotes/brakes/longShoes/example.html#top
The two shoes of the internal brake are identical. The lining is 40 mm wide and the coefficient of friction is estimated to be 0.35. The brake is hydraulically operated - the maximum available hydraulic pressure is 8 MPa, and the piston diameters are 18 and 10 mm for left and right shoes respectively.
Find the torque capacity of the brake if the lining mean pressure is limited to 400 kPa. What are the corresponding bearing reactions and brake sensitivity ?
Brakes Presentations
Group C, E: Types of brakes and barking systemsGroup D: Brakes for heavy machinery and aircrafts
Related Documents











