Bounding the Cost of Stability in Games with Restricted Interaction Reshef Meir, Yair Zick, Edith Elkind and Jeffrey S. Rosenschein COMSOC 2012 (to appear)

Bounding the Cost of Stability in Games with Restricted Interaction Reshef Meir, Yair Zick, Edith Elkind and Jeffrey S. Rosenschein COMSOC 2012 (to appear)
Dec 30, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Bounding the Cost of Stability in Games with Restricted Interaction
Reshef Meir, Yair Zick, Edith Elkind and Jeffrey S. Rosenschein
COMSOC 2012 (to appear)

Cooperative TU Games
Agents divide into coalitions; generate profit. 1
6
4
5
3
2Coalition members can freely divide profits.
How should profits
be divided?
$5
$3
$2
TU Games - NotationsAgents: N = {1,…,n}Coalition: S µ NCharacteristic function: v: 2N → RA TU game is simple, if every
coalition either wins or loses, i.e.
v: 2N → {0,1} A TU game is monotone, if the value
of a coalition can only increase by adding more agents to it.

Payoffs
Agents may freely distribute profits.An outcome is a coalition structure CS
and a vector x = (x1,…,xn) such that
Σi2S xi= v(S) for all S in CS
Individual rationality: each agent gets at least what she can make on her own: xi ≥ v({i})
The CoreThe core is the set of all stable
outcomes: for all S µ N we have x(S) ¸ v(S)
May be empty in many games.Example: the 3-majority game.
Three players; any set of size two or more has a value of 1; singletons have a value of 0.
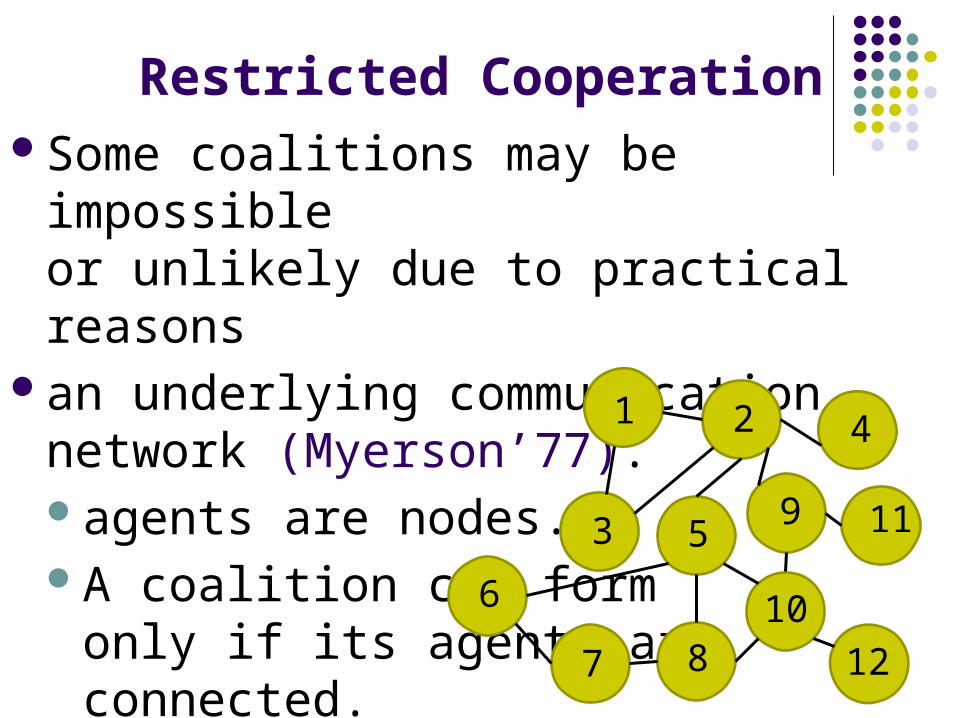
Some coalitions may be impossible or unlikely due to practical reasons
an underlying communication network (Myerson’77).agents are nodes.A coalition can form
only if its agents are connected.
1 2
3
4
5
6
7 8
9
10
11
12
Restricted Cooperation
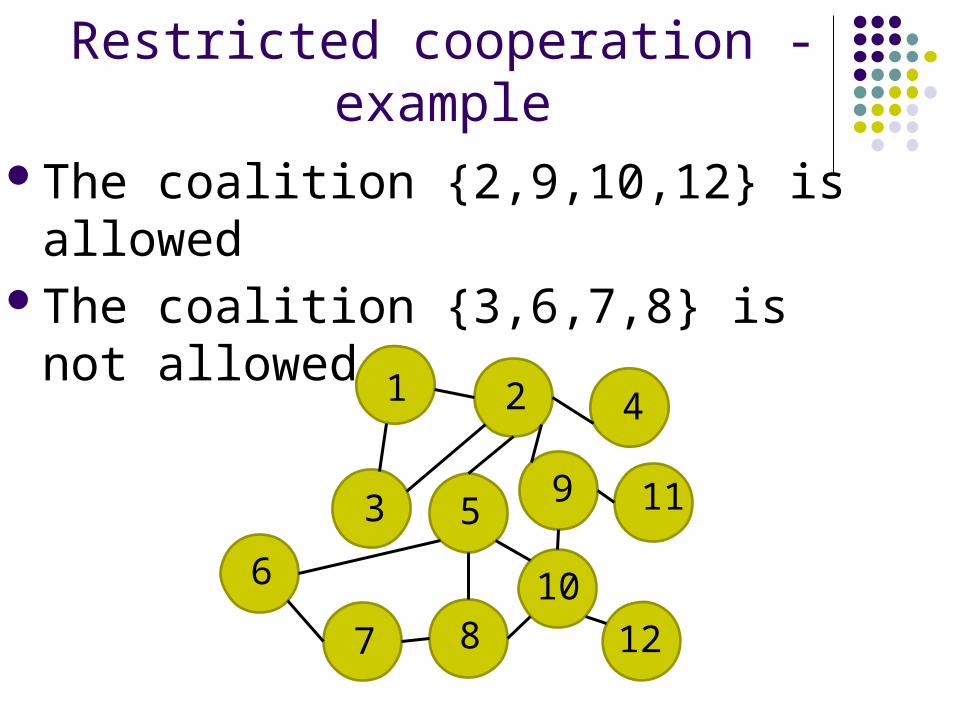
Restricted cooperation - example
The coalition {2,9,10,12} is allowedThe coalition {3,6,7,8} is not allowed
1 2
3
4
5
6
7 8
9
10
11
12
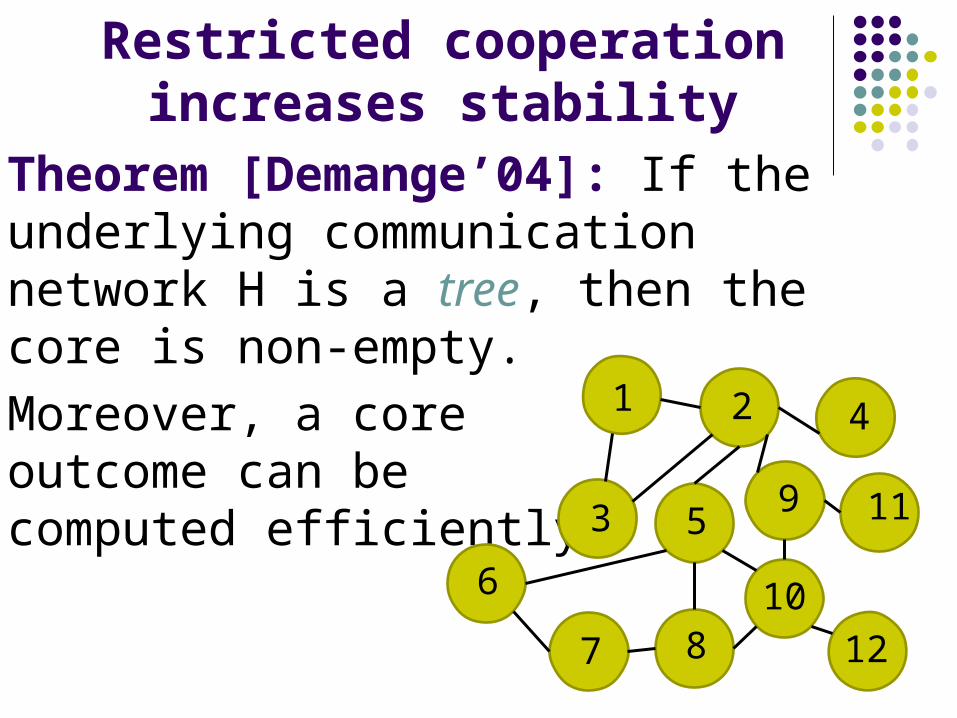
Restricted cooperation increases stability
Theorem [Demange’04]: If the underlying communication network H is a tree, then the core is non-empty.
Moreover, a core outcome can be computed efficiently.
1 2
3
4
5
6
7 8
9
10
11
12
Using Subsidies to Stabilize the game
Originally, we divided OPT(G) between the agents.
We increase the value of OPT(G), creating a “superimputation”.
Division of the incremented value
α∙OPT(G)

The Cost Of Stability (CoS)
Observation: With a big enough payment, any game can be stabilizedα ≤ nThe Cost of Stability (CoS) is
the minimal subsidy α that stabilizes the game.
i.e. allows a non-empty core in G(α)
(Bachrach et al., SAGT’09)
Back to our example3-majority game (core is empty)By distributing a total payoff of 1½ (rather
than 1), the core of G(1½) is non-empty.x = (½, ½, ½) is a stable superimputation.
CoS(G) ≤ 1½ This bound is tight! No lower subsidy will
stabilize the game. CoS(G) = 1½

CoS with restricted cooperation
Recall that by [Demange’04] : if H is a tree, then the core is non-empty (i.e. CoS = 1).
What is the connection between graph complexity and the cost of stability?
Theorem [Meir et al., IJCAI’11]: If H contains a single cycle, then CoS(G|H) ≤ 2, and this is tight
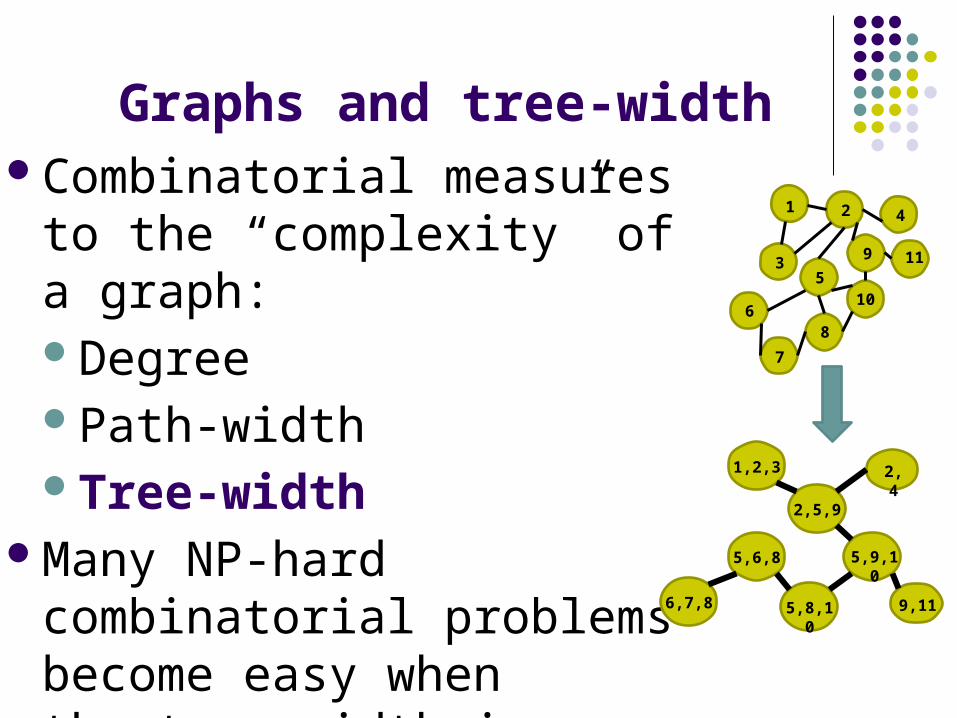
Graphs and tree-widthCombinatorial measures to the
“complexity” of a graph:DegreePath-widthTree-width
Many NP-hard combinatorial problems become easy when the tree-width is bounded.
1 2
3
4
5
6
7
8
9
10
11
1,2,3 2,4
2,5,9
5,9,10
5,8,10
5,6,8
6,7,8 9,11

Conjectured Connections
Conjecture [MRM’11]: Let d be the maximal degree in H, then
CoS(G|H) ≤ d
Conjecture: Let k be the tree-width of H, then CoS(G|H) ≤ k
There are games on a 3-dimensional grid (d = 6) with unbounded CoS
This is “almost” true.

Our Main Result
Theorem: For any G with an interaction graph H
CoS(G|H) ≤ tw(H) + 1and this bound is tight.
Also, a stable payoff vector can be found efficiently in the case of simple,
monotone games.
Step 1 – Simple Games
1,2,3 2,4
2,5,9
5,9,10
5,8,10
5,6,8
6,7,8
9,11
{5,6,8,10}
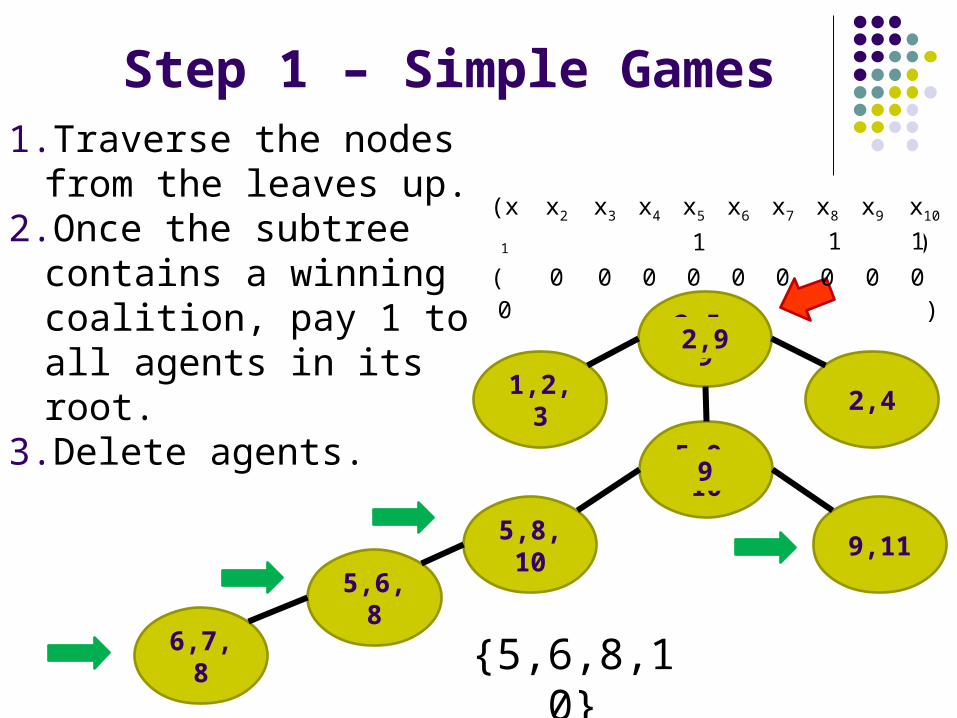
1.Traverse the nodes from the leaves up.
2.Once the subtree contains a winning coalition, pay 1 to all agents in its root.
3.Delete agents.
(x1 x2 x3 x4 x5 x6 x7 x8 x9 x10)
( 0 0 0 0 0 0 0 0 0 0 )1 1 1
9
2,9

Stability: every winning coalition intersects a node in the tree decomposition that was paid by the algorithm; thus gets at least 1.
Lemma: For any simple G with an interaction graph H, the algorithm produces a stable imputation x such that
x(N) ≤ (tw(H) + 1)OPT(G|H)

Bounded payoff: let St be the set of agents that were removed at time t. St contains a winning coalition Wt
We can partition the agents into a coalition structure CS = {{Wt}t2T*, L}.
T* is the set of all times where sets were pruned by the algorithm.
The value of CS is at most |T*|.
x(N) ≤ (tw(H) + 1) |T*| ≤ (tw(H) + 1)OPT(G|H)
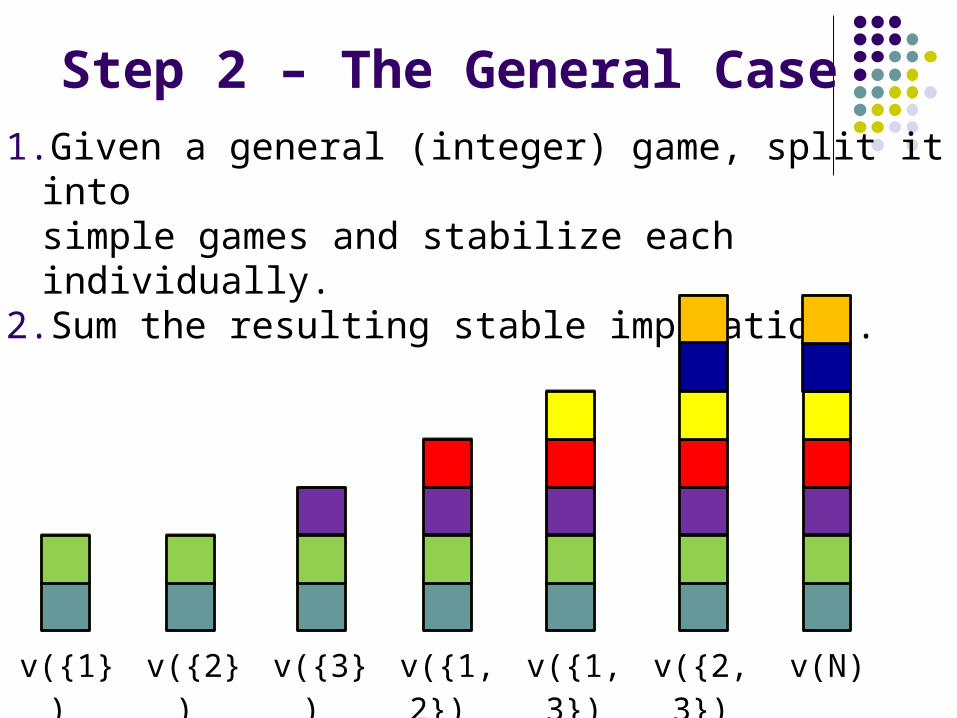
Step 2 – The General Case1.Given a general (integer) game, split it into
simple games and stabilize each individually.2.Sum the resulting stable imputations.
v({1}) v({2}) v({3}) v({1,2})
v({1,3})
v({2,3})
v(N)
Tightness
a1 a2
a4a3
c1 c2
c4c3
z1
z3
z2
b1 b2
b4b3
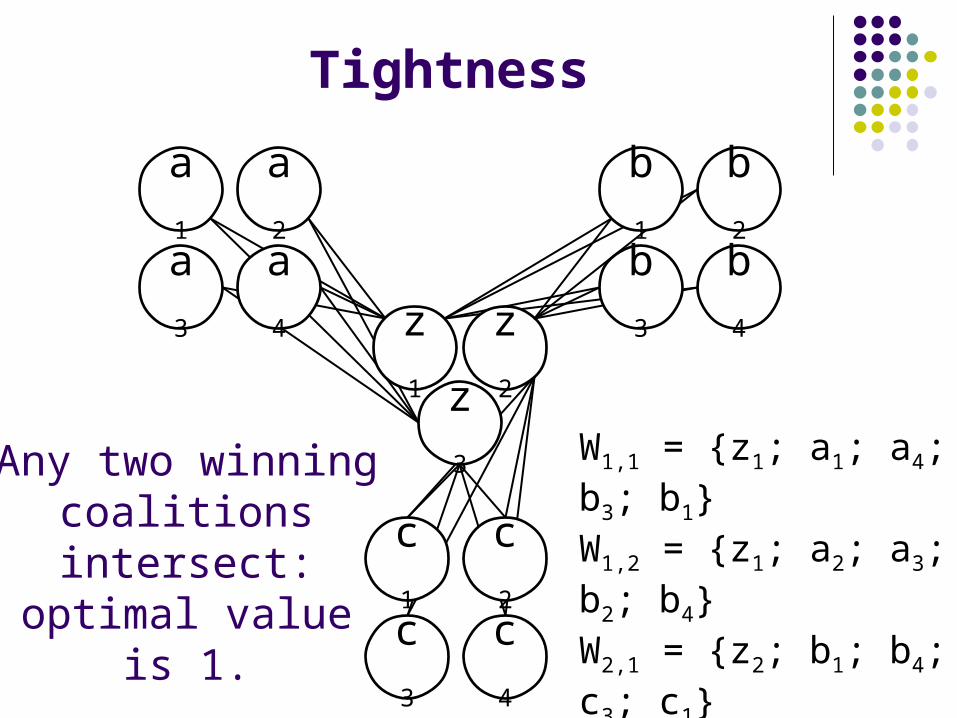
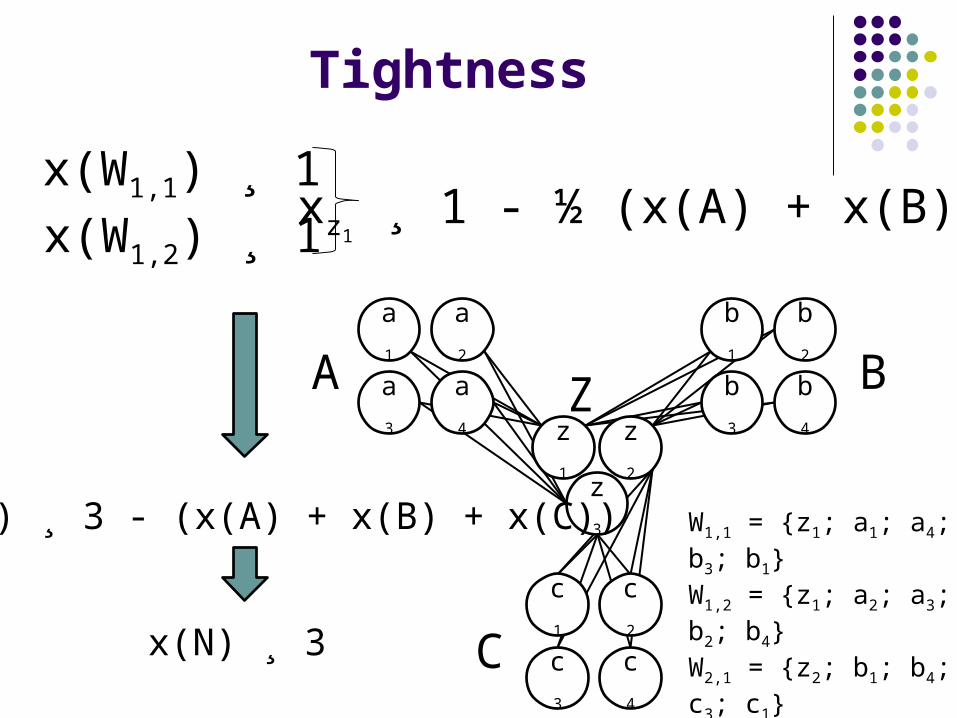
W1,1 = {z1; a1; a4; b3; b1} W1,2 = {z1; a2; a3; b2; b4}W2,1 = {z2; b1; b4; c3; c1} W2,2 = {z2; b2; b3; c2; c4}W3,1 = {z3; c1; c4; a3; a1} W3,2 = {z3; c2; c3; a2; a4}
Any two winning coalitions intersect: optimal value is 1.
Tightness
a1 a2
a4a3
c1 c2
c4c3
z1
z3
z2
b1 b2
b4b3
W1,1 = {z1; a1; a4; b3; b1} W1,2 = {z1; a2; a3; b2; b4}W2,1 = {z2; b1; b4; c3; c1} W2,2 = {z2; b2; b3; c2; c4}W3,1 = {z3; c1; c4; a3; a1} W3,2 = {z3; c2; c3; a2; a4}
x(W1,1) ¸ 1
x(W1,2) ¸ 1xz1
¸ 1 - ½ (x(A) + x(B))
A B
C
Z
x(Z) ¸ 3 - (x(A) + x(B) + x(C))
x(N) ¸ 3

Discussion/Future Work
A slightly better (tight) bound holds for the pathwidth of the interaction graph: we can drop the +1.
Bounded tree-width does not facilitate computations (e.g. Greco et al.’11)
Other graphical models of cooperative games? Non-cooperative games?
Other measures of graph complexity?
Thank you!Questions?
Related Documents











