Bounded Delay Scheduling with Packet Dependencies Michael Markovitch and Gabriel Scalosub Department of Communication Systems Engineering Ben-Gurion University of the Negev Beer-Sheva 84105, Israel Email: [email protected], [email protected] Abstract—A common situation occurring when dealing with multimedia traffic is having large data frames fragmented into smaller IP packets, and having these packets sent independently through the network. For real-time multimedia traffic, dropping even few packets of a frame may render the entire frame useless. Such traffic is usually modeled as having inter-packet dependencies. We study the problem of scheduling traffic with such dependencies, where each packet has a deadline by which it should arrive at its destination. Such deadlines are common for real-time multimedia applications, and are derived from stringent delay constraints posed by the application. The figure of merit in such environments is maximizing the system’s goodput, namely, the number of frames successfully delivered. We study online algorithms for the problem of maximizing goodput of delay-bounded traffic with inter-packet dependencies, and use competitive analysis to evaluate their performance. We present competitive algorithms for the problem, as well as matching lower bounds that are tight up to a constant factor. We further present the results of a simulation study which further validates our algorithmic approach and shows that insights arising from our analysis are indeed manifested in practice. I. I NTRODUCTION A recent report studying the growth of real-time entertain- ment traffic in the Internet predicts that by 2018 approximately 66% of Internet traffic in North America will consist of real-time entertainment traffic, and most predominantly, video streaming [1]. Such traffic, especially as video definition increases, is characterized by having large application-level data frames being fragmented into smaller IP packets which are sent independently throughout the network. For stored- video one can rely on mechanisms built into various layers of the protocol stack (e.g., TCP) that ensure reliable data transfer. However, for real-time multimedia applications such as live IPTV and video conferencing, these mechanisms are not applicable due to the strict delay restrictions posed by the application (such traffic is therefore usually transmitted over UDP). These restrictions essentially imply that retransmission of lost packets is in most cases pointless, since retransmitted packets would arrive too late to be successfully decoded and used at the receiving end. Furthermore, the inability to decode an original dataframe once too many of its constituent packets have been dropped, essentially means that the resources used by the network to deliver those packets that did arrive success- fully, have been wasted in vain. Since network elements make their decisions on a packet-level basis, and are unaware of such dependencies occurring between packets corresponding to the same frame, such utilization inefficiencies can be quite common, as also demonstrated in experimental studies [2]. Some of the most common methods employed to deal with the hazardous effect of packet loss in such scenarios focus on trading bandwidth for packet loss; The sender encodes the data frames while adding significant redundancy to the outgoing packet stream, an approach commonly known as forward error correction (FEC). This allows the user to circumvent the effect of packet loss, at the cost of increasing the rate at which traffic is transmitted. This makes it possible (in some cases) to decode the data frame even if some of its constituent packets are dropped. However, increasing the bandwidth may be prohibitively costly in various scenarios, such as wireless access networks, network transcoders, and CDN headends. In such environments it is not recommended, nor even possible in many cases, to employ such solutions. In this work we study mechanisms and algorithms that are to be implemented within the network, targeted at optimizing the usage of network resources (namely, buffer space and link bandwidth), when dealing with such delay-sensitive traffic. Previous models presenting solutions for packet dependencies focused on managing a bounded-buffer FIFO queue, and mainly addressed the questions of handling buffer overflows (see more details in Section I-C). We consider a significantly different model where each arriving packet has a deadline (which may or may not be induced by a deadline imposed on the data frame to which it corresponds). We assume no bound on the available buffer space, but are required to maximize the system’s goodput, namely, the number of frames for which all of their packets are delivered by their deadline. 1 This model better captures the nature of real-time video streaming, where a data frame must be successfully decoded in real-time, based on some permissible deadline by which packets should arrive, that still renders the stream usable. We consider traffic as being burst-bounded, i.e., there is an upper bound on the number of packets arriving in a time- slot. This assumption does not restrict the applicability of our algorithms, since it is common for traffic (and especially traffic with stringent Quality-of-Service requirements) to be regulated 1 It should be noted that the objective of maximizing goodput (on the frame- level) is in most cases significantly different than the common concept of maximizing throughput (on the packet-level). arXiv:1402.6973v1 [cs.NI] 27 Feb 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Bounded Delay Scheduling with PacketDependencies
Michael Markovitch and Gabriel ScalosubDepartment of Communication Systems Engineering
Ben-Gurion University of the NegevBeer-Sheva 84105, Israel
Email: [email protected], [email protected]
Abstract—A common situation occurring when dealing withmultimedia traffic is having large data frames fragmented intosmaller IP packets, and having these packets sent independentlythrough the network. For real-time multimedia traffic, droppingeven few packets of a frame may render the entire frameuseless. Such traffic is usually modeled as having inter-packetdependencies. We study the problem of scheduling traffic withsuch dependencies, where each packet has a deadline by whichit should arrive at its destination. Such deadlines are common forreal-time multimedia applications, and are derived from stringentdelay constraints posed by the application. The figure of merit insuch environments is maximizing the system’s goodput, namely,the number of frames successfully delivered.
We study online algorithms for the problem of maximizinggoodput of delay-bounded traffic with inter-packet dependencies,and use competitive analysis to evaluate their performance.We present competitive algorithms for the problem, as well asmatching lower bounds that are tight up to a constant factor. Wefurther present the results of a simulation study which furthervalidates our algorithmic approach and shows that insightsarising from our analysis are indeed manifested in practice.
I. INTRODUCTION
A recent report studying the growth of real-time entertain-ment traffic in the Internet predicts that by 2018 approximately66% of Internet traffic in North America will consist ofreal-time entertainment traffic, and most predominantly, videostreaming [1]. Such traffic, especially as video definitionincreases, is characterized by having large application-leveldata frames being fragmented into smaller IP packets whichare sent independently throughout the network. For stored-video one can rely on mechanisms built into various layersof the protocol stack (e.g., TCP) that ensure reliable datatransfer. However, for real-time multimedia applications suchas live IPTV and video conferencing, these mechanisms arenot applicable due to the strict delay restrictions posed by theapplication (such traffic is therefore usually transmitted overUDP). These restrictions essentially imply that retransmissionof lost packets is in most cases pointless, since retransmittedpackets would arrive too late to be successfully decoded andused at the receiving end. Furthermore, the inability to decodean original dataframe once too many of its constituent packetshave been dropped, essentially means that the resources usedby the network to deliver those packets that did arrive success-fully, have been wasted in vain. Since network elements maketheir decisions on a packet-level basis, and are unaware of
such dependencies occurring between packets correspondingto the same frame, such utilization inefficiencies can be quitecommon, as also demonstrated in experimental studies [2].
Some of the most common methods employed to deal withthe hazardous effect of packet loss in such scenarios focus ontrading bandwidth for packet loss; The sender encodes the dataframes while adding significant redundancy to the outgoingpacket stream, an approach commonly known as forward errorcorrection (FEC). This allows the user to circumvent the effectof packet loss, at the cost of increasing the rate at whichtraffic is transmitted. This makes it possible (in some cases)to decode the data frame even if some of its constituentpackets are dropped. However, increasing the bandwidth maybe prohibitively costly in various scenarios, such as wirelessaccess networks, network transcoders, and CDN headends. Insuch environments it is not recommended, nor even possiblein many cases, to employ such solutions.
In this work we study mechanisms and algorithms that areto be implemented within the network, targeted at optimizingthe usage of network resources (namely, buffer space and linkbandwidth), when dealing with such delay-sensitive traffic.Previous models presenting solutions for packet dependenciesfocused on managing a bounded-buffer FIFO queue, andmainly addressed the questions of handling buffer overflows(see more details in Section I-C). We consider a significantlydifferent model where each arriving packet has a deadline(which may or may not be induced by a deadline imposed onthe data frame to which it corresponds). We assume no boundon the available buffer space, but are required to maximize thesystem’s goodput, namely, the number of frames for which allof their packets are delivered by their deadline.1 This modelbetter captures the nature of real-time video streaming, wherea data frame must be successfully decoded in real-time, basedon some permissible deadline by which packets should arrive,that still renders the stream usable.
We consider traffic as being burst-bounded, i.e., there is anupper bound on the number of packets arriving in a time-slot. This assumption does not restrict the applicability of ouralgorithms, since it is common for traffic (and especially trafficwith stringent Quality-of-Service requirements) to be regulated
1It should be noted that the objective of maximizing goodput (on the frame-level) is in most cases significantly different than the common concept ofmaximizing throughput (on the packet-level).
arX
iv:1
402.
6973
v1 [
cs.N
I] 2
7 Fe
b 20
14
-
2
by some token-bucket envelope [3].We present several algorithms for the problem and use
competitive analysis to show how close they are from anoptimal solution. This approach makes our results globallyapplicable, and independent of the specific process generatingthe traffic. We further provide some lower bounds on theperformance of any deterministic algorithm for the problem.Finally, we perform an extensive simulation study whichfurther validates our results.
A. System ModelWe consider a time-slotted system where traffic consists of a
sequence of unit-size packets, p1, p2, . . ., such that packets arelogically partitioned into frames. Each frame f corresponds tok of the packets, pf1 , . . . , p
fk ∈ {p1, p2, . . .}, where we refer
to packet pf` as the `-packet of frame f . For every packet pwe denote its arrival time by a(p), and we assume that thearrival of packets corresponding to frame f satisfies a(pf` ) ≤a(pf`+1) for all ` = 1, . . . , k − 1. We make no assumptionon the relation between arrival times of packets correspondingto different frames. Each packet p is also characterized by adeadline, denoted e(p), by which it should be scheduled fordelivery, or else the packet expires. We assume e(p) ≥ a(p)for every packet p, and define the slack of packet p to ber(p) = e(p)− a(p). For every time t and packet p for whicht ∈ [a(p), e(p)], if p has not yet been delivered by t, we sayp is pending at t. we further define its residual slack at t tobe rt(p) = e(p)− t.2
We refer to an arrival sequence as being d-uniform if forevery packet p in the sequence we have r(p) = d. Weassume that k ≤ d, which implies that any arriving frame canpotentially be successfully delivered (e.g., if all other framesare ignored). We further let b denote the maximum burst size,i.e., for every time t, the number of packets arriving at t is atmost b.
The packets arrive at a queue residing at the tail of alink with unit capacity. The queue is assumed to be emptybefore the first packet arrival. In each time-slot t we havethree substeps: (i) the arrival substep, where the new packetswhose arrival time is t arrive and are stored in the queue,(ii) the scheduling/delivery substep, where at most one packetfrom the queue is scheduled for delivery, and (iii) the cleanupsubstep, where every packet p currently in the queue whichcan not be scheduled by its deadline is discarded from thequeue, either because rt(p) = 0, or because it belongs to aframe which has multiple pending packets at time t and it isnot feasible to schedule at least one of them by its deadline.Such packets are also said to expire at time t.
For every frame f and every time t, if f is not yetsuccessful, but all of its packets that have arrived by t areeither pending or have been delivered, then f is said to bealive at t. Otherwise it is said to have expired. A frame issaid to be successful if each of its packets is delivered (by itsdeadline).
2Note that this is a tad different from the model used in [4] since we allowa packet to be scheduled also at time e(p) = a(p) + r(p).
The Bounded-Delay Goodput problem (BDG) is defined asthe problem of maximizing the number of successful frames.When traffic is d-uniform, we refer to the problem as the d-uniform BDG problem (d-UBDG).
The main focus of our work is designing online algorithmsfor solving the BDG problem. An algorithm is said to beonline if at any point in time t the algorithm knows only ofarrivals that have occurred up to t, and has no informationabout future arrivals. We employ competitive analysis [5], [6]to bound the performance of the algorithms. We say an onlinealgorithm ALG is c-competitive (for c ≥ 1) if for every finitearrival sequence it produces a solution who’s goodput is atleast a 1/c fraction from the optimal goodput possible. c is thensaid to be an upper bound on the competitive ratio of ALG.As is customary in studies of competitive algorithms, we willsometimes assume the algorithms works against an adversary,which generates the input as well as an optimal solution forthis input. This view is especially useful when showing lowerbounds. For completeness, we also address the offline problemwhere the entire arrival sequence is given in advance. In suchoffline settings the goal is to study the approximation ratioguaranteed by an algorithm, where an offline algorithm is ansaid to be an α-approximation algorithm if for every finitearrival sequence the goodput of the solution it produces isalways at least a fraction 1/α of the optimal goodput possible.
B. Our Contribution
In this paper we provide the initial study of schedulingdelay-bounded traffic in the presence of packet dependencies.We initially provide some initial observations on the offlineversion of the problem, and then turn to conduct a thoroughstudy of the problem with d-uniform traffic, i.e., where allpackets have uniform delay d, burst sizes are bounded by b,and each frame consists of k packets.
In the offline settings, we show that hardness results derivedfor the bounded-size FIFO queue model are applicable toour problem as well, which implies that it is NP-hard toapproximate the problem to within a factor of o(k/ ln k), andthat a (k + 1)-approximation exists.
In the Online settings we provide a lower bound of Ω(bk−1)on the competitive ratio of any deterministic online algorithmfor the problem, as well as several other refined lower boundsfor specific values of the system’s parameters. We also designonline deterministic algorithms with competitive ratio thatasymptotically matches our lower bounds. This means thatour algorithms are optimal up to a (small) constant factor.
We complement our analytical study with a simulationstudy which studied both our proposed algorithms, as well asadditional heuristics for the problem, and also explores variousalgorithmic considerations in implementing our solutions. Oursimulation results show that our proposed solutions are close tooptimal, and also provide strong evidence that the performanceexhibited by our algorithms in simulation closely follow theexpected performance implied by our analysis.
Due to space constraints, some of the proofs are omitted,and can be found in [7].
-
3
C. Previous Work
The effect of packet-level decisions on the the successfuldelivery of large data-frames has been studied extensively inthe past decades. Most of these works considered FIFO queueswith bounded buffers and focused on discard decisions madeupon overflows [8], as well as more specific aspects relating tovideo streams [9], [10]. This research thrust was accompaniedby theoretical work trying to understand the performanceof buffer management algorithms and scheduling paradigms,where the underlying architecture of the systems employedFIFO queues with bounded buffers. The main focus of theseworks was the design of competitive algorithms in an attemptto optimize some figure of merit, usually derived from Quality-of-Service objectives (see [11] for a survey). However, most ofthe works within this domain assumed the underlying packetsare independent of each other, and disregarded any possiblestructure governing the generation of traffic, and the effect thealgorithms’ decisions may have on such frame-induced traffic.
Recently, a new model dealing with packet dependencieswas suggested in [12]. They assumed arriving packets arepartitioned into frames, and considered the problem of maxi-mizing the system’s goodput. The main focus of this work wasbuffer management of a single FIFO queue equipped with abuffer of size d, and the algorithmic questions was how tohandle buffer overflows, and they presented both competitivealgorithms as well as lower bounds for this problem. In whatfollows we refer to this problem as the d-bounded FIFOproblem (d-BFIFO). Following this work, a series of worksstudied algorithms for various variants of the problem [13],[14], [15], [16]. Our model differs significantly from this bodyof work since in our model we assume no bounds on theavailable buffer size (as is more common in queueing theorymodels), nor do we assume the scheduler conforms with aFIFO discipline. More generally, we focus our attention on thetask of deciding which packet to schedule, where each arrivingpacket has a deadline by which it should be delivered, asopposed to the question of how one should deal with overflowsupon packet arrival when buffering resources are scarce.
Another vast body of related work focuses on issues ofscheduling, and scheduling in packet networks in particular,in scenarios where packets have deadlines. Earliest-Deadline-First schedulilng was studied in various contexts, includingOS process scheduling [17], and more generally in the ORcommunity [18]. Our framework is most closely related to [4]which considers a packet stream where each packet has adeadline as well as a weight, and the goal is to maximizingthe weight of packets delivered by their deadline. They alsoconsider relations between this model and the bounded-bufferFIFO queue model, and present competitive algorithms inboth settings. These results are related to our discussionof the offline settings in Section II. Additional works pro-vided improved competitive online algorithms for this problem(e.g. [19], [20]). However, none of these works considered thesettings of packet-dependencies, which is the main focus ofour work.
II. THE OFFLINE SETTINGSIn order to study the d-UBDG problem in the offline
settings, it is instructive to consider the d-BFIFO problemstudied in [12]. We recall that in this problem traffic arrivesat a FIFO queue with buffer capacity d, and the goal is tomaximize the number of frames for which all of their packetsare successfully delivered (and not dropped due to bufferoverflows).
In what follows we first prove that these two problems areequivalent in the offline settings (proof omitted).
Lemma 1. For any arrival sequence σ, a set of frames Fconstitutes a feasible solution to the d-UBDG problem if andonly if it is a solution to the d-BFIFO problem.
Proof: Assume a d-BFIFO algorithm A, and a d-UBDGalgorithm B, and note the set of packets in the queue of A attime t as - PAF (t), and the set of packets in the buffer of Bat time t as - PBU (t).
At the time of arrival, every packet that a A can choose toenqueue can be held in the buffer of B (since there are nocapacity constraints). Every packet that A enqueues can notstay in the queue more than d time slots, since after d timeslots the packet must have been either sent or discarded (pre-empted) - the packet can not be in the queue longer thanthe slack time d. Therefore any algorithm B which neverschedules a packet before it is scheduled by A can maintainthat PAF (t) ∈ PBU (t).
As at any time t an B can hold all the packets which A canhold, any schedule which is feasible for A algorithm, is alsofeasible for B (including the optimal schedule).
For the reverse direction, assume that B creates the scheduleSB . At any time t, of all the packets in the buffer at that time,no more than d packets can be part of the schedule SB - ifthere were more than d packets than not all of them couldhave been sent, rendering the schedule infeasible.
Therefore at any time t, all the buffered packets of theschedule SB can fit a FIFO queue of size d. Since a packet cannot stay in a FIFO queue and in the unbounded buffer morethan d time slots, there must exist an offline FIFO scheduleSA, for which all the packets in SB are in SA.
Note that in particular, Lemma 1 implies that a set of framesF is optimal for d-UBDG if and only if it is optimal for d-BFIFO. By using the results of [12] for the d-BFIFO problemwe obtain the following corollaries:
Corollary 2. It is NP-hard to approximate the BDG problemto within a factor of o( kln k ) for k ≥ 3, even for 0-uniforminstances.
Proof: Since any o( kln k ) approximation would imply anapproximation of the same factor for the 1-BFIFO problem,the result follows from [12, Corollary 2].
Corollary 3. There is a deterministic (k + 1)-approximationalgorithm for the d-UBDG problem.
Proof: One can apply the algorithm G-OFF specifiedin [12]. The result follows from [12, Theorem 3].
-
4
III. THE ONLINE SETTINGS
The offline settings studied in section II, and the relationbetween the d-UBDG problem and the d-BFIFO problem,give rise to the question of whether one should expect a similarrelation to be manifested in the online settings. In this sectionwe answer this question in the negative.
A first fundamental difference is due to the fact that inthe d-UBDG problem the scheduler is not forced to follow aFIFO discipline. This means that the inherent delay of packetsstored in the back of the queue which occurs in a FIFO buffer(unless packets are discarded upfront) can be circumventedby the scheduler in the d-UBDG problem, allowing it to takepriorities into account. Another significant difference betweenthe two problems is that while in the d-BFIFO problem discarddecisions in case of buffer overflow must be made immediatelyupon overflow, in the d-UBDG problem such decisions can besomewhat delayed. Intuitively, the online algorithm in the d-UBDG problem has more time to study the arrivals in the nearfuture, before making a scheduling decision, and thus enableit to make somewhat better decisions, albeit myopic. We notethat this view is also used in [20], [19] in the concepts ofprovisional schedules and suppressed packets (we give moredetails of these features in subsection IV-B).
A. Lower Bounds
In this section we provide several lower bounds for variousranges of our systems parameters. The main theorem is thefollowing:
Theorem 4. Any algorithm for the d-UBDG problem withburst size b ≥ 2d has competitive ratio Ω(bk−1).
Proof: Assume an arrival sequence with b > 1, for trafficwith slack d comprised of three stages:
Stage 1 - at times 0, 1, 2, ..., (n − 1), b ’1’ packets arrive.During this stage, out of nb ’1’ packets any online algorithmcan only schedule up to n+ d ’1’ packets, and the adversarycan schedule at least n (and at most n + d) other packets -there are at most d time slots for which the online algorithmcan schedule all arriving packets. We choose n so that n+ dis a multiple of b in order to simplify the analysis.
Stage 2 - at times n, n + 1, ..., n + (n + d)/b − 1, b ’2’packets of frames whose ’1’ packets were scheduled by theonline algorithm arrive. If we had not chosen n + d to be amultiple of b, then there would also have been one more burstof size n+ d− b(n+ d)/bc.
Stage 3 - Stage 3 - at times n+ (n+ d)/b, n+ (n+ d)/b+1, ..., n+(n+d)/b+n(d−1)−d−1, one ’2’ packet of frameswhose ’1’ packet were not scheduled by the online algorithmarrive (including the adversary’s packets).
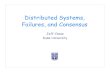
This sequence is illustrated in Figure 1.For k > 2 stages 2 and 3 can be repeated with a slight
modification to stage 2 - packets of frames which werescheduled by the online algorithm at the previous round arrivefirst (the burst contains frames whose packets were scheduledby the online algorithm in at least one stage).
By the end of stage 1, both the online and optimal algo-rithms would have sent n+d ’1’ packets. Stage 2 is designedto hit the goodput of the online algorithm as much as possible- only the online algorithm schedules packets. Stage 3 isintended to maximize the goodput of the optimal algorithm.
The goodput of the optimal schedule for this input is at leastn (and at most n+ d). For k=2, the best possible goodput foran online unbounded buffer algorithm can not be better thand+ n+db - the algorithm can schedule up to d packets of thelast burst of stage 2, and for all earlier bursts of stage 2 nomore than one packet each. Since the at the end of the previousstage the number of frames whose ’1’ packets were scheduledby the algorithm is n+ d, there are n+db bursts in total.
If stages 2 and 3 are repeated, than the goodput of theoptimal schedule for this input remains at least n.
In general, after stages 2 and 3 are performed j times, thegoodput (GP ) of any online algorithm can not exceed GPj =d+
GPj−1b .
By induction: for j = 1 we have from the definition ofstage 1 that GPj−1 = n+ d and that GPj = d+
GPj−1b . For
the induction stage consider j + 1: during stage 2 there areGPjb consecutive bursts (since packets scheduled during the
previous round arrive first), and therefore the online algorithmcan not schedule more than GPjb + d packet, hence GPj+1 =d+
GPjb .
The best possible goodput of an online algorithm with kpackets in a frame is then:
n+ d
bk−1+
k∑i=2
d
bi−2
Therefore, since we control n and can make it as large as wedesire (nb is analogous to the number of streams), the lowerbound for the competitive ratio of an online algorithm with amaximum burst size of b is:
|ALG||OPT | ≤
n+ d
n · bk−1 +k∑
i=2
d
n · bi−2 −−−−→n→∞1
bk−1
Our lower bound can be adapted to token-bucket regulatedtraffic, with maximum burst size b and average rate r. Suchrestrictions on the traffic are quite common in SLAs. Of specialinterest is the case where the average rate is r = 1, whichessentially means the link is not oversubscribed. Even for suchhighly regulated traffic, we have the following lower bound:
Theorem 5. For token-bucket regulated traffic with parame-ters (b, r = 1), any algorithm for the d-UBDG problem whereb ≥ 2d has competitive ratio Ω(
(bd
)k−1).
Proof: This proof is very similar to the proof of Theo-rem 4, and therefore we only give the differences.
The arrival sequence is modified so in stage 1 the intervalbetween consecutive bursts is of length 2d (in order to buildup for the next burst), and in stage 2 the interval betweenconsecutive bursts is of length b. Stage 3 remains unchanged.
-
5
0 (n − 1) n n + n+db − 1 n + n+db n + n+db + 1 t
b
b·p
1
b·p
1
b
b·X
2
b·X
2
Y2 Y2
Y - AdversaryX - Algorithm
Fig. 1: Input for lower bound - The input is comprised of threestages. During the first stage the algorithm schedules n + d’1’ packets and the adversary schedules n + d different ’1’packets. During the second stage the algorithm’s ’2’ packetsdesignated X2j arrive as densely as possible. During stage 3the adversary’s ’2’ packets designated Y 2j arrive in a patternthat allows the adversary not to drop a single packet
The goodput after repeating stages 2 and 3 j times can notexceed GPj = d+
d·GPj−1b , since out of every burst in stage
2 the online algorithm can schedule up to d packets.The best possible goodput for an online algorithm with k
packets in a frame is then:
ndk
bk−1+
k∑i=2
di−1
bi−2
Therefore, the lower bound for the competitive ratio of anonline algorithm with a maximum burst size of b is:
|ALG||OPT | ≤
ndk
nd · bk−1 +k∑
i=2
di−1
nd · bi−2 −−−−→n→∞ (d
b)k−1
B. The Proactive Greedy Algorithm
In this section we present a simple greedy algorithm,PROACTIVEGREEDY (PG), that essentially ignores the dead-lines in making scheduling decisions, and proactively dropspackets from the queue. Although one wouldn’t expect suchan algorithm to perform well in practice, its simplicity allowsfor a simple analysis which serves as the basis for the designand analysis of the refined greedy algorithm for the d-UBDGproblem presented in subsequent sections.
For every time t and frame f that has pending packetsat t, let It(f) denote the index of the first pending packetof f . Recall that by our assumption on the order of packetswithin a frame, this is the minimal index of a pending packetcorresponding to f . We consider at every time t all pendingframes as ordered in decreasing order (It(f). For every packetf we let w(f) denote the number of packets correspond-ing to f that were delivered by PROACTIVEGREEDY, i.e.w(f) = |{p ∈ f | p is delivered by PG}|. In what follows weslightly abuse notation and refer to a frame as alive as long asnone of its packets has expired nor was dropped. AlgorithmPROACTIVEGREEDY is described in Algorithm 1.
Algorithm 1 PROACTIVEGREEDY: at the scheduling substepof time t
1: drop all pending packets of frames that are not alive2: Qt ← all alive frames with pending packets at t3: f ← arg maxf ′∈Qt It(f ′) . Ties broken arbitrarily4: drop all pending packets of frames in Qt \ {f}5: deliver the first pending packet of f
The following lemma shows no packet ever expires inPROACTIVEGREEDY.
Lemma 6. No packet ever expires in PROACTIVEGREEDY.
Proof: Consider some packet p ∈ f for some frame f ,and assume p is not delivered. It follows that there exists someminimal time slot t where f ceases to be alive. Consider timea(p). If t < a(p), then p is dropped upon arrival in line 1.If f is alive at a(p) then Qa(p) 6= ∅. Let f ′ be the frameidentified in line 3. if f 6= f ′, then p is dropped in line 4, attime a(p) and therefore does not expire. Otherwise, we havef = f ′. Note that at the end of every scheduling substep thequeue can only hold packets corresponding to the single frameidentified in line 3 (if it is not empty). It follows that p is inthe queue until time t, and since d ≥ k, if it weren’t dropped itcould have been delivered successfully after all the precedingpackets of f residing in the queue with it at time a(p), andwouldn’t expire. Since p is not delivered, it follows that pmust be dropped at some time t ≤ a(p)+d due to some otherframe f ′ identified in line 4.
The following corollary follows directly from Lemma 6.
Corollary 7. Every frame in the arrival sequence is eithersuccessfully delivered by PROACTIVEGREEDY, or has one ofits packets proactively dropped.
Let FPG be the set of frames successfully delivered by PG,and let O denote the set of frames successfully delivered bysome optimal solution.
Lemma 8. If f /∈ FPG, then there exists a time t = tf suchthat f is alive at t, packet pIt(f) ∈ f is dropped in time t, anda packet p′ ∈ f ′ is delivered at time t, for some frame f ′.
Proof: The proof follows directly from Lemma 6, and thedetails in its proof applied to packet pIt(f) at the maximumtime t for which f is alive at the beginning of time slot t.
We describe a mapping φ of frames in the arrival sequenceto frames in FPG:
1) if f ∈ FPG then f is mapped to itself.2) if f /∈ FPG, then let pf be the first packet of f dropped
by PG in line 4, and denote by tf the time slot where pfis dropped. Let p′ = p ∈ f ′ be the packet scheduled intime slot tf in line 5. We map f to f ′ directly, and re-map any frames that were previously mapped to f ontof ′ indirectly. We say that these frames are re-mapped tof ′ via packet p′. We also refer to tf as the drop timeof f and to the set of frames mapped to f via p (eitherdirectly or indirectly) as M(p).
-
6
The following lemma shows that frames are remapped ontoframes that are (strictly) closer to completion.
Lemma 9. If f /∈ FPG is mapped to f ′ then w(f ′) > w(f).Proof: Let t be the drop time of f and let f ′ be the
frame to which f is directly mapped. By the choice of f ′ inline 3 it follows that It(f ′) ≥ It(f). It follows that w(f) =It(f)− 1, and since a packet of f ′ is delivered in time t wehave w(f ′) ≥ It(f ′). Combining these inequalities we obtain
w(f ′) ≥ It(f ′) ≥ It(f) > It(f)− 1 = w(f),as required.
The following corollary bounds the length of a re-mappingsequence.
Corollary 10. A frame can be (re-)mapped at most k times,and all frames are eventually mapped to frames in FPG.
Proof: By definition every f ∈ FPG is mapped to itself.For every frame f /∈ FPG, consider the number of times `ffor which f is mapped directly or indirectly to some otherframe. Denote by f` the `-th packet to which f is mapped.We prove by induction on ` that in the `-th such (re-)mapping,where f is mapped to f`, we have w(f) < w(f)+ ` ≤ w(f`).This will imply that after at most k remappings f is mappedto a frame f ′ for which w(f ′) = k, i.e., f ′ ∈ FPG. Forthe base case where ` = 1, this means f is directly mappedto f1. By Lemma 9 we have w(f) < w(f1), and thereforew(f) + 1 ≤ w(f1). For the induction step, consider the `-thremapping for ` > 1. By the definition of the mapping, fwas mapped (directly or indirectly) to f`−1 in the (` − 1)-th remapping, and we are guaranteed to have w(f) + (` −1) ≤ w(f`−1). By Lemma 9 we have w(f`−1) < w(f`), andtherefore w(f`−1)+1 ≤ w(f`). By combining the inequalitieswe obtain
w(f) + ` = w(f) + (`− 1) + 1 ≤ w(f`−1) + 1 ≤ w(f`),thus completing the proof.
The following corollary is an immediate consequence ofLemma 8 and Corollary 10.
Corollary 11. The mapping φ is well defined.
Lemma 12. For every frame f , the number of frames directlymapped to f via packet p ∈ f is at most b.
Proof: As there can be at most b packets arriving at t,and all carrying over from t− 1 correspond to a single frame,the number of frames mapped via p(t) ∈ f is at most b.
By Lemma 12 it follows that the overall number of framesdirectly mapped to any single frame f is at most kb. Com-bining this with Corollary 10 implies a (k · b)-ary depth-ktree structure for the mapping (direct or indirect) onto anysingle frame f ∈ FPG, which shows that PROACTIVEGREEDYdelivers at least a fraction of 1
(k·b)k of the total arrivingtraffic. This clearly serves as a bound on the competitive ratio.However, a significantly better bound can be obtained by acloser examination of direct mappings.
Lemma 13. For every frame f , the overall number of framesmapped to f at time t via packets p` ∈ f is at mostb · (1 + b)`−1.
Proof: First we observe that if a a frame f ′ is directlymapped to a frame f at time t, then It(f ′) ≤ It(f). Inparticular, if the minimal-indexed packet of f ′ dropped at timet is the j-th packet of f ′, then j ≤ It(f). Also notice that(1 + b)`−1 =
∑`−1i=0
(`−1i
)bi.
We now turn to prove the claim by induction on `. For thebase case of ` = 1, assume f ′ is mapped to f via p` at timet. If f ′ is mapped to f directly, by the above observation wehave that the minimal-indexed packet of f ′ dropped at t is atmost ` = 1, and therefore it must be the first packet of f ′.Since all these packets must have arrived at time t, it followsthat none of these frames have any frames mapped to them.By Lemma 12 it follows that the overall number of framesdirectly mapped to f via p is at most b. Note that this impliesthat for the base case there can be no frames indirectly mappedto f . It follows that the overall number of frames mapped to fvia p1 is at most |M(p1)| = b = b · (1 + b)0, thus completingthe base case. For the induction step consider p`+1 ∈ f for` + 1, and let f ′′ be a frame mapped to f via p`+1. Assumef ′′ is mapped to f directly. By the above observation we havethat the minimal-indexed packet of f ′′ dropped at t is at most` + 1. Again, the overall number of frames directly mappedto f via p`+1 is at most b. It follows that the maximum indexof a packet p′′ ∈ f ′′ for which there were frames mapped tof ′′ via p′′ is at most `. Hence for ` + 1, the overall numberof frames mapped to f at time t via pf`+1 is at most:
|M(p`+1)| = b(
1 +∑̀i=1
|M(p′′i )|)
(1)
≤ b
(`0
)· b0 +
∑̀i=1
i−1∑j=0
b ·(i− 1j
)· bj (2)
= b
(`0
)· b0 + b
∑̀i=1
bi−1`−i∑j=0
(i− 1 + ji− 1
) (3)= b
((`
0
)· b0 + b
∑̀i=1
(`
i
)bi−1
)(4)
= b∑̀i=0
(`
i
)bi.
Equality (1) follows from the direct mappings via p`+1and inequality (2) follows from the induction hypothesis.Equality (3) follows from reversing the order of summationon j, and noticing that only the topmost `− (i−1) sums overj contribute to the coefficient of bi−1. Finally, equality (4) isa simple diagonal binomial identity.
Since f ′′ itself is mapped to f in addition to all the frameswhich were mapped to f ′′.
Recall O denotes the set of frames in an optimal solution.The following corollary provides a bound on the number of
-
7
frames in O\FPG that are mapped by our mapping procedure.Corollary 14. For every frame f , the overall number of framesin O \ FPG mapped to f at time t via packets p` ∈ f is atmost min {d, b} · (1 + b)`−1.
Proof: Assume a frame f which has a packet p ∈ fdelivered by PROACTIVEGREEDY at time t. The number offrames in O \ FPG which can be directly mapped to f viap ∈ f is at most min {d, b}, since the optimal solution cannotdeliver more than d of the pending packets at any time t.
If d ≥ b, then since the maximal number of packets whichcan arrive at time t is b, the result of Lemma 13 applies inthis case too, and b = min {d, b}.
If d < b, if frames f ′ ∈ O \ FPG were to be mapped toanother frame f ′′ ∈ O \FPG via p
′′
` then at most d−1 frameswith weight w(f ′`−1) or d frames with weight w(f
′`−2) can
be directly mapped via p′′
` . Therefore, the highest number offrames f ′ ∈ O \ FPG mapped to a single frame f ∈ FPGis achieved when frames f ′ ∈ O \ FPG can not be mappedto frames f ′′ ∈ O \ FPG (otherwise the resulting tree likestructure contains less mapped frames) - the maximal numberof frames f ′ ∈ O \FPG mapped to a single frame f ∈ FPG isachieved when PROACTIVEGREEDY never schedules a packetof a frame f ′ ∈ O \ FPG. Hence by counting the maximalnumber of frames mapped to f ∈ FPG via packets withweight w ≥ 1 according to Lemma 13 (b (1 + b)`−2 mappedframes), and mapping at most d frames f ′ ∈ O \ FPG viaevery scheduled packet with ` = 1 (for every frame mappedto f including itself), the result for the maximal number offrames f ′ ∈ O \ FPG mapped to a single frame f ∈ FPG is(b (1 + b)
`−2+ 1)d ≤ d (1 + b)`−1.
Theorem 15. Algorithm PROACTIVEGREEDY isO(min {d, b} bk−1)-competitive.
Proof: By Corollary 14 the overall number of frames inO \ FPG mapped to any f ∈ FPG is
k∑`=1
∣∣∣M(pf` )∣∣∣ ≤ min {d, b} k∑`=1
(1 + b)`−1
= min {d, b} bk−1(1 +O(kb
))
= O(min {d, b} bk−1),
which completes the proof.From this analysis of the PROACTIVEGREEDY algorithm
we learn that choosing a preference based on how close is aframe to completion guarantees not only that a frame will becompleted (Corollary 10), but also that the algorithm will becompetitive. Also, even though this algorithm is very simple(conceptually), the competitiveness is close to the lower boundwe proved for the general case (within a factor of d from thelower bound). This competitive ratio does not depend if thetraffic is burst bound (r = b the general case) or token bucketshaped (r < b), since an arrival sequence achieving this bound
can be created regardless of the value of r (due to step 2 ofthe algorithm).
C. The Greedy Algorithm
With the proactive greedy algorithm, we saw that choosinga preference based on how close is a frame to completionresults in an upper bound which is close to the lower bound forthe general case (r = b). However, the PROACTIVEGREEDYalgorithm is not a natural algorithm to suggest since framesare being dropped unnecessarily, resulting both in inefficiencyand in implementation complexity.
We suggest a more intuitive algorithm, the GREEDY algo-rithm - Algorithm 2. The only difference between the twoalgorithms is that the GREEDY algorithm does not drop framesunnecessarily - a frame expires only if it is not feasible toschedule one of it’s packets by the packet’s deadline.
Algorithm 2 GREEDY: at the scheduling substep of time t1: drop all pending packets of frames that are not alive2: Qt ← all alive frames with pending packets at t3: f ← arg max {It(f ′) | f ′ ∈ Qt}4: deliver the first pending packet of f
We say a packet pf` is eligible if at a time t it is in thebuffer of GREEDY and it’s index is ` = It(f) - it is the firstpending packet of the live frame f at time t. The followinglemma relates the number of packets of index at least ` thatwere dropped by GREEDY, to the number of packets of indexat least ` that were delivered by t.
Lemma 16. For any time t during which a previously eligiblepacket p` ∈ f is dropped, assume n`t is the total number ofpackets with index at least ` which were eligible and droppedby time t. It follows that at least dn`t/be packets with index ofat least ` were delivered by GREEDYby time t.
Proof: At most b+ 1 packets can become eligible at thestart of any time t - a burst of at most b packets, and onepacket p′′′i ∈ f ′′′ which was in buffer at time t − 1 if packetp′′′i−1 ∈ f ′′′ was scheduled at time t-1.
When a packet p` ∈ f is eligible, only a packet whichbelongs to a frame of at least the same weight can bescheduled. We note two possible cases:
1) For the case that b + 1 packets belonging to frameswith weight w(f ′) ≥ w(f) become eligible at time t(including p`), then one of them will be scheduled sinceall eligible packets carrying over from time t−1 p′′ ∈ f ′′belong to frames with w(f ′′) < w(f ′′′) - at least onepacket out of b+ 1 will be scheduled at time t.
2) For the case that up to b packets belonging to frameswith weight w(f ′) ≥ w(f) become eligible at time t(including p`), then one packet pi≥` will be scheduled.The packet scheduled at time t can be one of the up tob packets that became eligible, or it can be a packet thatarrived at an earlier time (and is still eligible) - at leastone packet out of b + 1 (in case the scheduled packet
-
8
was already eligible at t − 1) packets will be scheduledat time t.
Note that if at time t − 1 there were eligible packets withw(f ′) ≥ w(f), all of them were already accounted for at timeof first eligibility - either during a previous case 2, or duringa previous case 1.
The combination of the two cases guarantees that at anytime t, if the number of packets with index of at least ` whichwere eligible and subsequently dropped by GREEDY by timet is n, than at least dnb e packets with an index of at least `were scheduled by time t.
In order to find the upper bound of the competitive ratio, weuse the same approach used to analyze PROACTIVEGREEDY.Let FG be the set of frames successfully delivered by GREEDYand let O denote the set of frames successfully delivered bysome optimal solution. We define mapping ψ of frames in thearrival sequence to packets in FG.
1) if f ∈ FG then f is mapped to itself.2) if f ∈ O \ FG, then let pf` be the first packet of f
dropped by G in line 1, and denote by tf the time slotwhere pf` was dropped. Let p
′i≥` = p(t ≤ tf ) ∈ f ′ be
a packet scheduled in time slot t ≤ tf in line 5. Wemap f to f ′ directly, and re-map any frames that werepreviously mapped to f onto f ′ indirectly, if it is theearliest scheduled packet with the lowest index i ≥ `which has less than 2 packets already directly mappedto it. We say that these frames are re-mapped to f ′ viapacket p′ = p(t ≤ tf ). We also refer to the group of allframes mapped to f via p as M(p).
3) if f /∈ FG ∪ O, then let pf` be the first packet of fdropped by G in line 1, and denote by tf the time slotwhere pf` was dropped. Let p
′i≥` = p(t ≤ tf ) ∈ f ′ be
a packet scheduled in time slot t ≤ tf in line 5. Wemap f to f ′ directly, and re-map any frames that werepreviously mapped to f onto f ′ indirectly, if it is theearliest scheduled packet with the lowest index i ≥ `which has less than b packets already directly mappedto it. We say that these frames are re-mapped to f ′ viapacket p′ = p(t ≤ tf ). We also refer to the group of allframes mapped to f via p as M(p).
The following lemma shows that the mapping is welldefined, and that at most 2 packets of O are directly mappedto any single frame f .
Lemma 17. At any time t when there is no eligible packetwith index j ≥ `, at least 1 packet with index i ≥ ` have beenscheduled by GREEDY for every 2 packets with indices j ≥ `which were eligible and subsequently dropped by GREEDY.
Proof: Note that during every time slot that packet p` ∈f ∈ O is eligible for GREEDY, if it is not scheduled it meansthere exist some packet p′i≥` ∈ f ′ which is scheduled instead.Also note that the schedule of the adversary must be feasible.
Consider the first time a packet with index ` becomeseligible te: either all the packets with index i ≥ ` whichbecame eligible at te (at least one of them with index i = `)
arrived at te, or one of the packets with an index i = ` whichbecame eligible was already in the buffer and became eligiblebecause the `− 1 packet of the same stream was scheduled attime slot te − 1.
We define tb as the first time after te where there are noeligible packets with an index i ≥ ` in the buffer, by definitiontb > te. We say call the interval [te, tb] an `-ary busy period.
During an `-ary busy period, at most tb − te + 1 of theadversary’s packets with index i ≥ ` can become eligible forGREEDY:• at time te up to d+1 of the adversary’s packets with indexi ≥ ` can become eligible for GREEDYdue to feasibilityof O, as at most d such eligible packets can arrive at timete and one packet was already in the buffer can becomeeligible.
• during the interval [te, tb] at most tb−te of the adversary’spackets with index i ≥ ` could arrive and become eligiblefor GREEDY, due to the combination of the feasibility ofO and of the fact that at time tb there are no eligiblepackets with index i ≥ ` in the buffer.
During the `-ary busy period [te, tb], tb − te packets withindex i ≥ ` are scheduled by GREEDY.
Therefore during the `-ary busy period [te, tb], GREEDYschedules tb − te packets with index i ≥ `, and drops at mosttb − te + 1 of the adversary’s packets with index i ≥ ` whichbecame eligible during the interval.
We extend the definition of te to be the first time slot apacket with index ` becomes eligible after some time t < teduring which there were no eligible packets with index i ≥ ` inthe buffer (this definition applies also for te = 0 as at previoustimes the buffer was empty). Then an `-ary busy period canbe followed by another `-ary busy period after a it ends (therecan be no overlap between the busy periods). Busy periods ofdifferent indices can and do overlap one another.
As all packets of index ` become eligible during an `-arybusy period the result follows, since during a single busyperiod tb − te packets with index i ≥ ` are scheduled byGREEDY, and at most tb−te+1 of eligible adversary’s packetswith index i ≥ ` are dropped by GREEDY.
Lemma 16 and Lemma 17 ensure that mapping ψ is welldefined. The definition of ψ together with Corollary 10 yields:
Corollary 18. A frame can be (re-)mapped at most k times,and all frames are eventually mapped to frames in FPG.
By the definition of ψ, no more than b frames can be directlymapped to a frame f ′ via packet p′ ∈ f ′. Furthermore, iff /∈ FG is mapped to f ′ then w(f ′) > w(f). It followsthat the proof of Lemma 13 also holds for GREEDY(sinceall requirements are met):
Corollary 19. For every frame f , the overall number offrames mapped to f at time t via packets p` ∈ f is at mostb · (1 + b)`−1.
Therefore by applying Corollary 19 and the fact that accord-ing to ψ the number of frames in O \ FPG directly mapped
-
9
to any f via p ∈ f is at most 2, using similar arguments asthe ones used in Corollary 14 and Theorem 15 we obtain thefollowing theorem.
Theorem 20. Algorithm GREEDY is O(bk−1)-competitive.
Proof: Applying the arguments from Corollary 14 on theresults of Corollary 19 Lemma 17, yields that the overallnumber of frames in O\FPG mapped to f at time t via packetsp` ∈ f is at most 2 · (1 + b)`−1 (since min {2, b} ≤ 2). Thenas in Theorem 15 the overall number of frames in O \ FPGmapped to any f ∈ FPG is
k∑`=1
∣∣∣M(pf` )∣∣∣ ≤ 2 k∑`=1
(1 + b)`−1
= 2bk−1(1 +O(k
b))
= O(bk−1)
We note that by our lower bounds algorithm GREEDYoptimal up to a constant factor. Furthermore it should be notedthat this improved bound, as well as expected performancein practice, comes at a cost of significantly more compleximplementation. Specifically, while PROACTIVEGREEDY canpotentially be implemented using a FIFO buffer, GREEDY doesnot deliver packets in FIFO order. In other aspects GREEDY isnot significantly more complex than the PROACTIVEGREEDYe.g., by trading garbage collection with killing live frames.
IV. FURTHER ALGORITHMIC CONSIDERATIONS
A. Tie-breaking
The results from the analysis of the two algorithms, showus that an algorithm should prefer frames which are closerto completion (since this characteristic guarantees competi-tiveness), and that live frames should be kept in the bufferas long as possible (as shown by the difference between thealgorithms). But the analysis brings up the question how tobest tie-break between frames which are the same distancefrom completion (the number of sent packets is the same forboth frames).
A natural choice for a tie-breaker is the residual slack rt(pf )of the smallest-index packet pf ∈ Qt ∩ f for each frame fthat has the maximal It(f) value. The purpose of such a tiebreaker is of course to improve performance by keeping asmany frames alive as possible.
A less obvious choice for a tie-breaker is the number ofpending packets corresponding to frame f , denoted nt(f). Theintuition underlying this choice is that preferring frames withlower nt(f) can more rapidly “clear” the effect of f on otherframes with pending packets.
One should note that neither choice affects the asymptoticcompetitiveness of GREEDY, which is tight up to a constantfactor. However, this choice is expected to influence theperformance of the algorithms in practice. In section V wefurther address these design dilemmas.
B. Scheduling
For both of the greedy algorithms presented in Sec-tions III-B and III-C, the first packet of the preferred framewas sent, where the difference between the algorithms boileddown to the the way other pending packets were treated.In particular, the residual slack of the packets is essentiallyignored by these greedy approaches (although it can be takeninto account in tie-breaking, as discussed above).
One common approach to incorporate residual slack into thescheduler is considering provisional schedules, which essen-tially try pick the packet to be delivered using a local offlinealgorithm, which takes into account all currently availableinformation. Such an approach can be viewed as aiming tomaximize the benefit to be accrued from the present packets,assuming no future arrivals. Such an approach lays at the coreof the solutions proposed by [4], [20], [19] which each used analgorithm for computing an optimal offline local solution. Inour case, as shown in Corollary 2, computing such an optimalprovisional schedule is hard, but, as shown in Corollary 3,there exists a (k+1)-approximation algorithm for the problem.
We adapt this algorithm into a procedure for computing aprovisional schedule, which would allow a smaller I-indexedframe to have one of its packets scheduled, only if non of theframes with a higher I-index would become infeasible in thefollowing time slot. Our proposed heuristic, OPPORTUNISTIC,is described in Algorithm 3. OPPORTUNISTIC builds a provi-sional schedule Ft as follows:
1) Sort pending frames3 in decreasing lexicographical orderof (It(f), d − rt(f)). I.e., preference is given to frameswith higher I-index values. In case of ties, preference isgiven to frames for which their smallest-index packet hasthe minimal residual slack.
2) Initialize the provisional schedule Ft = ∅.3) For each frame f in this order, test whether for all s =
0, . . . , d, the pending packets of f can be added to Ftsuch that the overall number of packets in the provisionalschedule with remaining slack at most s, does not exceeds. If f can be added, update Ft = Ft ∪ {f}.
Figure 2 gives an illustration of construction of a provisionalschedule at some time t. The first two frames have room forall their packets in the provisional schedule, and all of theirpackets can be accommodated for delivery by their deadlines(note that the first frame tested will always be a part ofthe provisional schedule, since otherwise it would not bealive). The packet of the third frame causes an “overflow”for s = 5, and therefore its frame cannot be accommodatedin the provisional schedule. We note that in this example, thepacket picked for delivery would be P 21 ∈ f2, which mightnot correspond to the highest I-index pending frame (e.g., ifIt(f2) < It(f1)).
V. SIMULATIONS
In the previous sections we provided an analysis of thegreedy online algorithm, and of discussed additional guidelines
3A frame is pending if it has pending packets.
-
10
1 2 3 4 5 S
P 12 P13
1 2 3 4 5 S
P 12
P 13
P 21 P22
1 2 3 4 5 S
P 12
P 13
P 21
P 22
P 31
”overflow”at S = 4
Fig. 2: Schematics of building a provisional schedule.
Algorithm 3 OPPORTUNISTIC: at the scheduling substep oftime t
1: Build the provisional schedule Ft2: transmit the packet with minimum residual slack in Ft
for effective algorithm design. We also presented algorithmOPPORTUNISTIC. In this section we provide a simulationstudy in which we test the performance of the algorithms, theeffectiveness the guidelines, and the impact the parameters kand d on the performance.
A. Traffic Generation and Setup
We recall that the problem of managing traffic with packetdependencies captured by our model is most prevalent inreal-time video streams. We therefore perform a simulationstudy that aims to capture many of the characteristics of suchstreams.
We will generate traffic which will be an interleaving ofstreams, where each stream is targeted at a different receiver,and all streams require service from a single queue at the tailof a link.
In our simulation study, we focus on traffic with thefollowing characteristics.
• We assume each stream has a random start time wherepackets are generated. This corresponds to scenarios suchas VOD streams, where each receiver may choose whichvideo to view and when to view it, and these choices areindependent.
• We assume the average bandwidth demand of all streamsis identical, which represents streams with comparablevideo quality.
• Frames of a single stream are non-overlapping, and areproduced by the source in evenly spaced intervals. E.g.,if we consider video streams consisting of 30FPS, eachinterval is 33ms.
• The source transmits the packets of each frame in a burst,and we assume each frame consists of the same number ofpackets. Such a scenario occurs, e.g., in MPEG encodingmaking use of I-frames alone. We assume all packet havethe same size, namely, the network’s MTU.
• We assume a random delay variation between the arrivalof consecutive packets corresponding to the same stream.Such delay variation is produced, e.g., due to queueing
delay in previous nodes along the streams path. Specif-ically, we assume a uniform delay variation of up to 5time slots.
• We assume each packet contains the frame number, andthe index number of the packet within the frame. Suchinformation can be encoded, e.g., in the RTP header.
For the setup we chose to simulate, the packet sizes areset such that every time slot one packet can be scheduled,and the aggregate bandwidth of all the streams is equal to theservice bandwidth. We note that even in such cases, wheretraffic arrival rate does not exceed the link capacity, no onlinealgorithm can obtain the optimal goodput.
We simulate 2 minutes worth of traffic for 50 streams, wherefor all the streams the frame rate is 30FPS (for a total of 3600frames per stream). Since we fix the service rate as 1, in thesimulation the interval between consecutive frames arrival ina stream is ∆F = k · 50 time slots, where k is the number ofpackets per frame. As k grows the “real” duration of a singletime slot decreases, as the service rate effectively increases.
B. Simulated Algorithms
We performed the simulation study for four schedulingalgorithms, where in all algorithms in case of ties in thepriorities, these are broken according to the a random (butfixed) priority on the streams:• The offline O(k + 1)-approximation algorithm of [12].
By Corollary 3 this algorithm has the same performanceguarantee in our model as well. This algorithm serves asa benchmark for evaluating the performance of the onlinealgorithms.
• Algorithm GREEDY, described and analysed in subsec-tion III-C. This algorithm represents our baseline forstudying the the performance of online algorithms for theproblem.
• Algorithm GREEDYSLACK, which implements GREEDYwith ties broken according to minimum residual slack.
• Algorithm OPPORTUNISTIC, presented insubsection IV-B. This is the most complex algorithm weevaluate, as in addition to the enhanced tie-breaking, italso attempts to exploit opportunities to schedule lowerranked packets according to the provisional schedule.
C. Results
The simulation results confirm our hypothesis that imple-mentation of the proposed algorithm design guideline doesindeed impact the performance of online algorithms. We depictthe performance of each online algorithm by its goodput ratio,measured by the ratio between the goodput of the onlinealgorithm and that of the offline algorithm.
Figure 3 presents the performance of the online algorithmsas a function of the slack each packet has, for k = 6. Itcan be seen that as the slack increases the tie-breaking rulein GREEDYSLACK shows significant improved performance incomparison with the vanilla greedy algorithm. The figure alsoshows that the OPPORTUNISTIC exhibits a significantly betterperformance than GREEDYSLACK (although this improvement
-
11
is paid for by significant additional complexity). We note thatresults for greater values of 12 exhibit the same trends. Alsoof note is that the GREEDYSLACK and OPPORTUNISTIC manageto trace the performance of the offline algorithm (and actuallycomplete all the frames of all the streams) for traffic withsufficiently large slack.
0 20 40 60 80 100 120 140 160 180Slack
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Goo
dput
ratio
Goodput of online algorithms - k=12
GREEDY
GREEDYSLACK
OPPORTUNISTIC
Fig. 3: Comparison of the goodput of online algorithms
In Figure 4 we presents the goodput ratio of OPPOR-TUNISTIC and GREEDYSLACK as a function of d/k. The firstlesson learnt from this data is that the performance of theopportunistic algorithm is superior to that of the enhancedgreedy algorithm, in particular for small d/k values where thedifference becomes more pronounced (these results are alsohinted by Figure 3, but are not as pronounced). Furthermore,the performance of both algorithms depends exponentially onthe ratio between d and k (shown by the log scale), as eventhough both graphs present results of many simulations withdifferent inputs having different parameters, the plots show alinear trend up to the point where they match the goodput ofoffline algorithm. This exponential dependency can be viewedas comparable to that of the analytic lower bound presentedin subsection III-A, where d/k takes the role of 1/k.
Another important result is that the streams are not treatedfairly. When there is no random delay variation for the inputsequence, the algorithms synchronize with the input so eitherall frames of a stream are completed, or none of them are com-pleted. Raising the limits of the random delay variation im-proves the fairness, although some degree of synchronizationremains. When there exists a random delay variation highervalues of k result in improved fairness. The impact of thedelay variation can be seen in Figure 5, which shows that forGREEDYSLACK maximal delay variation of 1 time slot (for anaverage of 0.5 time slots) results in complete synchronization- a stream either has all of it’s frames completed or it has noframe completed. Raising the maximal delay variation evenby a small amount reduces the synchronization significantly.
400 800 1200 1600 2000 2400 2800 3200 3600Completed frames per stream
0.0
0.2
0.4
0.6
0.8
1.0
Cum
mul
ativ
epe
rcen
tage
ofst
ream
s
Cummulative goodput per stream , k=6, d=10
jit=1jit=3jit=5jit=7
Fig. 5: Cumulative completed frames per stream forGREEDYSLACK as a function of maximal delay variation (jitter)between packets of a stream.
VI. CONCLUSIONS AND FUTURE WORK
In this paper we address the problem of maximizing thegoodput of delay sensitive traffic with inter-packet depen-dencies. We provide lower bounds on the competitivenessof online algorithms for the general case that the traffic isburst bounded, and present competitive scheduling algorithmsfor the problem. Through the analysis we show that thereexists an algorithmic guideline that ensures competitiveness- preference for frames that are closer to completion. Ourproposed solutions ensure the optimal performance possible,up to a small constant factor.
Our analysis further provides insights into improving theperformance of online algorithms for the problem. Theseinsights are further verified by a simulation study whichshows that our improved algorithms which are inspired byour analytic results, are very close to the performance of thecurrently best known offline algorithm for the problem. Morespecifically, the performance of our algorithms approach theperformance of our benchmark algorithm with an exponentialcorrelation to the increase in delay-slack.
Our work serves as an initial study of scheduling delay-bounded traffic with inter-packet dependencies. Our workraises new questions about the performance of algorithms forthis problem:
1) Our simulation results indicate that the ratio d/k bearssome influence on the algorithm performance. Sheddinglight on this effect is an interesting open question.
2) Are there other algorithmic guidelines which can fur-ther improve the performance of online algorithms, andspecifically how well can randomized algorithms per-form?
-
12
100 101
log d/k
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Goo
dput
ratio
Goodput of OPPORTUNISTIC
k=6k=12k=18k=24k=30
(a) OPPORTUNISTIC
100 101
log d/k
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Goo
dput
ratio
Goodput of GREEDYSLACK
k=6k=12k=18k=24k=30
(b) GREEDYSLACK
100 101
log d/k
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Goo
dput
ratio
Goodput of GREEDY
k=6k=12k=18k=24k=30
(c) GREEDY
Fig. 4: Goodput of the online algorithms as a function of d/k on a logarithmic scale
REFERENCES
[1] Sandvine, “Global Internet phenomena report – 1H 2013,” http://www.sandvine.com/, July 2013.
[2] J. M. Boyce and R. D. Gaglianello, “Packet loss effects on MPEGvideo sent over the public internet,” in Proceedings of the 6th ACMInternational Conference on Multimedia, 1998, pp. 181–190.
[3] J. F. Kurose and K. W. Ross, Computer Networking: A Top-DownApproach. Addison-Wesley, 2011.
[4] A. Kesselman, Z. Lotker, Y. Mansour, B. Patt-Shamir, B. Schieber, andM. Sviridenko, “Buffer overflow management in QoS switches,” SIAMJournal on Computing, vol. 33, no. 3, pp. 563–583, 2004.
[5] D. D. Sleator and R. E. Tarjan, “Amortized efficiency of list update andpaging rules,” Communications of the ACM, vol. 28, no. 2, pp. 202–208,1985.
[6] A. Borodin and R. El-Yaniv, Online Computation and CompetitiveAnalysis. Cambridge University Press, 1998.
[7] M. Markovitch and G. Scalosub, “Bounded delay schedulingwith packet dependencies,” December 2013. [Online]. Available:http://www.bgu.ac.il/∼sgabriel/MS-2013.pdf
[8] S. Ramanathan, P. V. Rangan, H. M. Vin, and S. S. Kumar, “Enforcingapplication-level QoS by frame-induced packet discarding in videocommunications,” Computer Communications, vol. 18, no. 10, pp. 742–754, 1995.
[9] A. Awad, M. W. McKinnon, and R. Sivakumar, “Goodput estimation foran access node buffer carrying correlated video traffic,” in Proceedingsof the 7th IEEE Symposium on Computers and Communications (ISCC),2002, pp. 120–125.
[10] E. Gürses, G. B. Akar, and N. Akar, “A simple and effective mechanismfor stored video streaming with TCP transport and server-side adaptiveframe discard,” Computer Networks, vol. 48, no. 4, pp. 489–501, 2005.
[11] M. H. Goldwasser, “A survey of buffer management policies for packetswitches,” ACM SIGACT News, vol. 41, no. 1, pp. 100–128, 2010.
[12] A. Kesselman, B. Patt-Shamir, and G. Scalosub, “Competitive buffermanagement with packet dependencies,” Theoretical Computer Science,vol. 489–490, pp. 75–87, 2013.
[13] Y. Emek, M. M. Halldórsson, Y. Mansour, B. Patt-Shamir, J. Radhakrish-nan, and D. Rawitz, “Online set packing,” SIAM Journal on Computing,vol. 41, no. 4, pp. 728–746, 2012.
[14] Y. Mansour, B. Patt-Shamir, and D. Rawitz, “Competitive router schedul-ing with structured data,” in Proceedings of the 9th Workshop onApproximation and Online Algorithms (WAOA), 2011.
[15] ——, “Overflow management with multipart packets,” Computer Net-works, vol. 56, no. 15, pp. 3456–3467, 2012.
[16] G. Scalosub, P. Marbach, and J. Liebeherr, “Buffer management for ag-gregated streaming data with packet dependencies,” IEEE Transacationson Parallel and Distributed Systems, vol. 24, no. 3, pp. 439–449, 2013.
[17] A. Silberschatz, P. B. Galvin, and G. Gagne, Operating System Concepts.John Wiley & Sons, 2012.
[18] M. L. Pinedo, Scheduling: Theory, Algorithms, and Systems. Springer,2012.
[19] M. Englert and M. Westermann, “Considering suppressed packets im-proves buffer management in quality of service switches,” SIAM Journalon Computing, vol. 41, no. 5, pp. 1166–1192, 2012.
[20] L. Jez, F. Li, J. Sethuraman, and C. Stein, “Online scheduling of packetswith agreeable deadlines,” ACM Transactions on Algorithms, vol. 9,no. 1, 2012.
http://www.sandvine.com/http://www.sandvine.com/http://www.bgu.ac.il/~sgabriel/MS-2013.pdf
I IntroductionI-A System ModelI-B Our ContributionI-C Previous Work
II The Offline SettingsIII The Online SettingsIII-A Lower BoundsIII-B The Proactive Greedy AlgorithmIII-C The Greedy Algorithm
IV Further Algorithmic ConsiderationsIV-A Tie-breakingIV-B Scheduling
V SimulationsV-A Traffic Generation and SetupV-B Simulated AlgorithmsV-C Results
VI Conclusions and Future WorkReferences
Related Documents