ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ МИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ В.Г.Зубков, В.А.Ляховский, А.И.Мартыненко, В.Б.Миносцев КУРС ВЫСШЕЙ МАТЕМАТИКИ под редакцией В.Б.Миносцева УЧЕБНОЕ ПОСОБИЕ Часть 2 8-е издание Рекомендовано Министерством образования Российской федерации в качестве учебного пособия для студентов высших учебных заведений Москва 2007

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙУНИВЕРСИТЕТ
В.Г.Зубков, В.А.Ляховский,А.И.Мартыненко, В.Б.Миносцев
КУРС ВЫСШЕЙ МАТЕМАТИКИпод редакцией В.Б.Миносцева
УЧЕБНОЕ ПОСОБИЕ
Часть 28-е издание
Рекомендовано Министерством образованияРоссийской федерации в качестве учебного пособия
для студентов высших учебных заведений
Москва 2007

УДК 517К93
Курс высшей математики: Учебное пособие для ВТУЗов. Часть.2. /В.Г.Зубков, В.А.Ляховский, А.И.Мартыненко, В.Б.Миносцев; Под ред.засл. раб. ВШ РФ д.ф.-м.н., проф. В.Б.Миносцева -М.:МГИУ, 2007, 8-eизд., — 527 с. Ил. 161, библиогр. спис. 26 наим.
ISBN 5-276-00446-3 (Ч.2)ISBN 5-276-00444-7
Рецензент: У.Г.Пирумов, чл.-корр. РАН, проф, засл. деятель науки РФ.Учебное пособие предназначено для студентов высших учебных заве-
дений и соответствует государственному образовательному стандарту.Пособие включает в себя лекции и практические занятия.Вторая часть пособия содержит 34 лекции и 34 практических заня-
тия по следующим разделам: дифференциальное исчисление функцийнескольких переменных, интегральное исчисление функций одной пере-менной, кратные интегралы, криволинейные интегралы и теория поля,дифференциальные уравнения, элементы теории функций комплекснойпеременной.
Подписано в печать 08.09.2003 Сдано в производство 09.09.2003Формат бумаги 60x90/16 Бумага множ.Усл.печ.л. 30,5 Уч.-изд.л. 34,5 Тем. план 2003 г., N1-30/03Тираж 1000 Заказ N681
ISBN 5-276-00446-3 (Ч.2) c© Зубков В.Г., Мартыненко А.И.ISBN 5-276-00444-7 Миносцев В.Б., 2000, 2002, 2005, 2007
c© Ляховский В.А., 2000c© МГИУ, 2000, 2002, 2005, 2007

35 Лекция – Основные понятия 3
VII ГЛАВА
Дифференциальное исчислениефункций
нескольких переменных
35. лекция – основные понятия функциинескольких переменных
Системы координат в пространстве. Понятие области. Функциядвух переменных: способы задания, геометрическое представление.Функции более двух независимых переменных. Поверхности и ли-нии в пространстве. Цилиндрические и конические поверхности. По-верхности вращения.
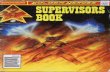
35.1. Системы координат в пространстве. Как отмечалось в лек-ции 2, положение точки M в пространстве можно определить в декарто-вой системе координат тремя числами – ее координатами по трем взаимноперпендикулярным осям Ox (ось абсцисс), Oy (ось ординат), Oz (ось ап-пликат) т.е. проекциями точки M на соответствующие оси (рис. 1).
4 35 Лекция – Основные понятия
z
y
z
y
M
x
x
Рис. 1. Декартова система координат
Определение 35.1. Поверхность, для которой одна из координатявляется постоянной, называется координатной поверхностью.
Определение 35.2. Линия, для которой все координаты, кроме од-ной, являются постоянными, называется координатной линией.
Для декартовой системы координат координатными поверхностямиявляются плоскости, параллельные координатным плоскостям. Действи-тельно, в соответствии с определением (35.1) их уравнения имеют вид:x = x0, y = y0 или z = z0, а в соответствии с изложенным в лекции 33это есть уравнения плоскостей, параллельных плоскостям Oyz, Oxz, Oxyсоответственно.
Координатными линиями для декартовой системы координат являют-ся прямые, параллельные координатным осям, получающиеся как пере-сечение координатных плоскостей.
Вообще можно заметить, что координатные линии являются пересе-чением координатных поверхностей.
Наряду с декартовыми координатами часто применяются цилиндри-ческие координаты. В этих координатах положение точки M в простран-стве определяется заданием полярных координат r и ϕ ее проекции M ′
на плоскость Oxy и аппликаты z точки M (рис. 2). Эти три числа r, ϕ иz называются цилиндрическими координатами точки M . Они связаны сее декартовыми координатами x, y, z следующими соотношениями:
(35.1) x = r cosϕ, y = r sinϕ, z = z.
Для цилиндрических координат координатными поверхностями явля-ются плоскости, перпендикулярные координатной оси Oz (z = z0), полу-плоскости, ограниченные осью Oz (ϕ = ϕ0) и цилиндрические поверхно-сти, осью которых является ось Oz (r = r0). Последний факт объясняет

35 Лекция – Основные понятия 5
z
y
M
x M
z
rϕ
Рис. 2. Цилиндрическая система координат
название системы координат. Координатными линиями будут линии пе-ресечения этих поверхностей.
Кроме декартовых и цилиндрических координат в пространстве так-же применяются сферические координаты. В этих координатах положе-ние точки M в пространстве определяется длиной ρ радиуса-вектора этойточки (полярный радиус), ее долготой ϕ и широтой θ (рис. 3).
Долготой ϕ точки M называется полярный угол ϕ ее проекции M ′ наплоскость Oxy; широтой θ (0 6 θ 6 π) называется угол радиуса-вектораточки M с положительным направлением оси Oz.
z
y
M
x M
z
ϕ
θ
r
ρ
Рис. 3. Сферическая система координат
Сферические координаты связаны с декартовыми следующими соот-ношениями:
(35.2) x = ρ cosϕ sin θ, y = ρ sinϕ sin θ, z = ρ cos θ.

6 35 Лекция – Основные понятия
Для сферических координат координатными поверхностями являютсясферы с центром в начале координат (ρ = ρ0), полуплоскости, ограничен-ные осью Oz (ϕ = ϕ0) и конусы с вершиной в начале координат и осьюOz в качестве оси симметрии (θ = θ0). Координатными линиями будутлинии пересечения этих поверхностей. Название системы координат объ-ясняется наличием сфер среди координатных поверхностей.
35.2. Понятие области. Введем некоторые определения, которыепонадобятся в дальнейшем.
Определение 35.3. Областью (открытой областью) называется мно-жество точек плоскости, обладающее следующими двумя свойствами:
(1) каждая точка области принадлежит ей вместе с некоторойокрестностью этой точки (свойство открытости);
(2) всякие две точки области можно соединить непрерывной лини-ей, целиком лежащей в этой области (свойство связности).
Часть плоскости, лежащей внутри замкнутого контура L (см. рис. 4),является областью, так как: 1) для любой точки P , лежащей внутри L,существует окрестность, также лежащая внутри L; 2) две любые точки Pи Q, лежащие внутри L, можно соединить непрерывной линией, лежащейвнутри L.
Точка P0 называется граничной точкой области G, если любая окрест-ность этой точки содержит как точки области G, так и точки, ей не при-надлежащие.
Множество всех граничных точек области называется ее границей.На рис. 4 любая точка P0 контура L, очевидно, является граничной.
L
p
pQ
0
Рис. 4. Область
Определение 35.4. Если к открытой области присоединить ее гра-ницу, то полученное множество точек называется замкнутой обла-стью.
35 Лекция – Основные понятия 7
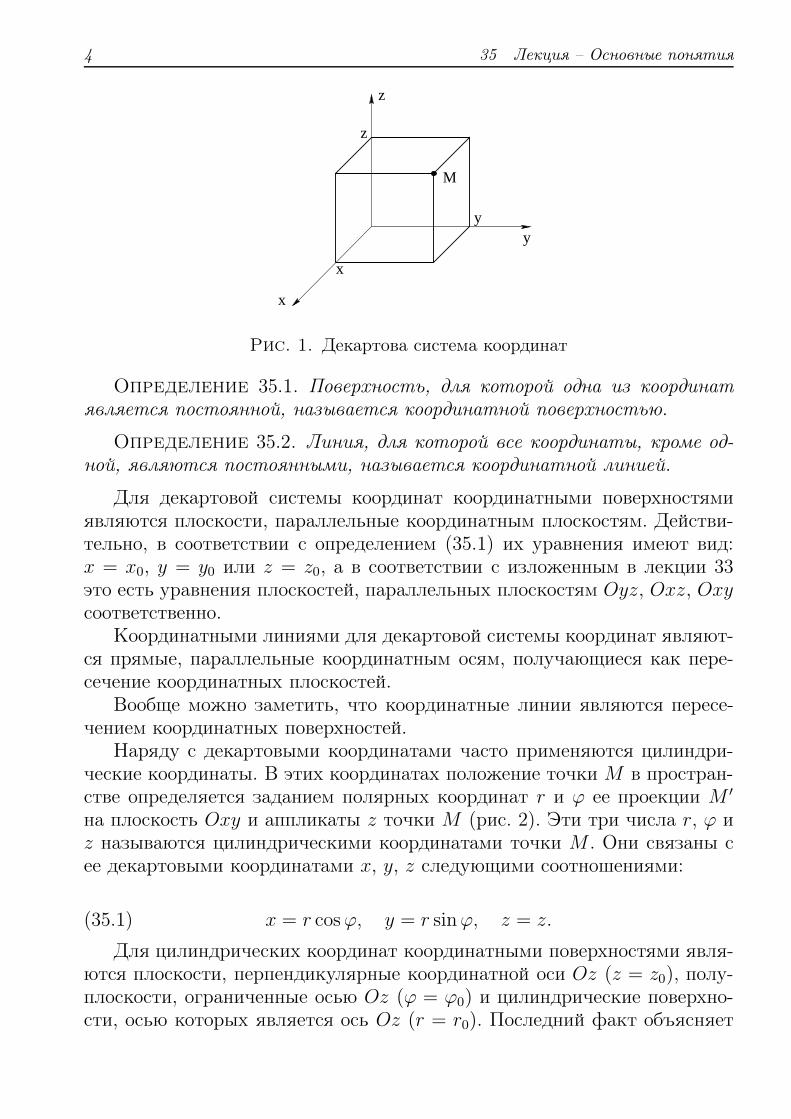
Определение 35.5. Если для данной области можно подобрать круг,полностью ее покрывающий, т.е. такой, внутри которого лежат всеточки области, то такая область называется ограниченной.
Если же круга, полностью покрывающего область, подобрать нельзя,то область называется неограниченной.
Определение 35.6. Область G (открытая или замкнутая) назы-вается односвязной, если для любого замкнутого контура, лежащего вэтой области, ограниченная им часть плоскости целиком принадлежитобласти G.
Например, область, заключенная между окружностями x2 + y2 = 2и x2 + y2 = 4 не является односвязной, так как, например, окружностьx2 + y2 = 3, лежащая в этой области, содержит внутри себя точки, непринадлежащие области (скажем, начало координат).
Замечание 35.1. Все введенные в этом пункте понятия переносят-ся на пространство трех и большего числа измерений.
35.3. Основные понятия функций двух переменных. Опреде-ление функции одной переменной было дано в лекции 3 части 1 Курса. Поаналогии с этим определением введем понятие функции двух переменных.
Определение 35.7. Функцией двух переменных называется прави-ло, которое каждой паре действительных чисел (x; y) ∈ D ставит всоответствие единственное число z ∈ E.
Переменные x и y называются независимыми переменными или аргу-ментами, переменная z – зависимой переменной или функцией, множествоD называется областью определения D(f), множество E называется об-ластью изменения или множеством значений функции E(f).
Обозначать функцию двух переменных будем аналогично тому, какэто делали для функции одной переменной: z = f(x; y), z = z(x; y). Зна-чение функции для фиксированного значения аргументов x0, y0, будемобозначать z0 = f(x0; y0), z0 = z(x0; y0) или: z0 = z|x=x0
y=y0. Так как каж-
дой паре чисел (x; y) соответствует единственная точка P (x; y) плоскостиOxy в декартовых координатах и наоборот, то функцию двух переменныхможно рассматривать как функцию точки P (x; y) и писать: z = f(P ) илиz = z(P ). Областью определения функции в этом случае будет некотороемножество D точек плоскости Oxy.
Пример 35.1. Периметр параллелограмма со сторонами x и y опре-деляется по формуле z = 2x + 2y и является функцией двух перемен-ных. Областью определения D этой функции является множество всех
8 35 Лекция – Основные понятия
пар неотрицательных чисел (x; y), т.е. первый квадрант плоскости Oxy.Множеством значений E этой функции является множество всех неотри-цательных чисел.
Основными способами задания функции двух переменных являютсяаналитический и табличный.
При аналитическом способе функция задается посредством формул.При этом она может быть задана в декартовой, цилиндрической или сфе-рической системе координат в явном и неявном виде.
Если в уравнении, определяющем функцию, значение функции z вы-ражено в явном виде (изолировано в левой части уравнения), то говорят,что функция задана в явном виде: z = f(x; y).
Пример 35.2. Функция z = 1x−y задана в явном виде.
Область определения данной функции есть множество точек плоско-сти Oxy, для которых y 6= x, область изменения есть (−∞; +∞).
Если в уравнении, определяющем функцию, значение функции z неизолированно, то говорят, что функция задана в неявном виде уравнениемвида: F (x; y; z) = 0.
При этом остается требование, чтобы каждой паре чисел (x; y) из об-ласти определения соответствовало единственное значение z.
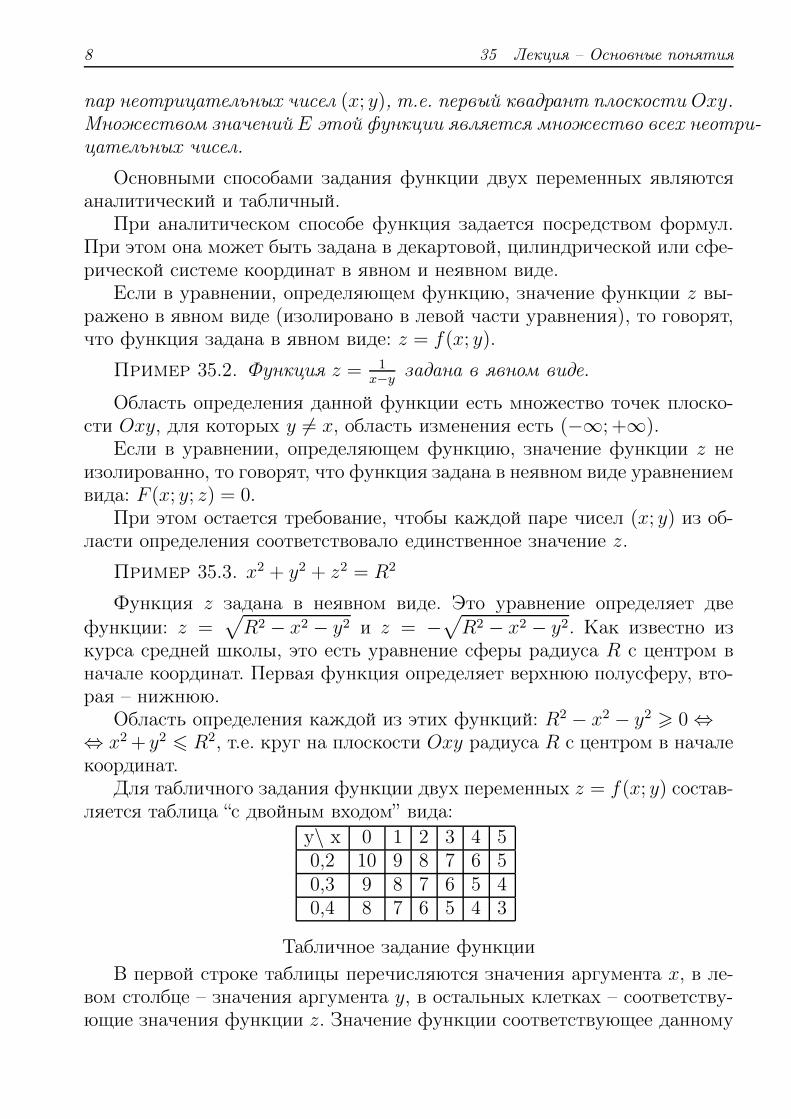
Пример 35.3. x2 + y2 + z2 = R2
Функция z задана в неявном виде. Это уравнение определяет двефункции: z =
√
R2 − x2 − y2 и z = −√
R2 − x2 − y2. Как известно изкурса средней школы, это есть уравнение сферы радиуса R с центром вначале координат. Первая функция определяет верхнюю полусферу, вто-рая – нижнюю.
Область определения каждой из этих функций: R2 − x2 − y2 > 0 ⇔⇔ x2 + y2 6 R2, т.е. круг на плоскости Oxy радиуса R с центром в началекоординат.
Для табличного задания функции двух переменных z = f(x; y) состав-ляется таблица “с двойным входом” вида:
y\ x 0 1 2 3 4 50,2 10 9 8 7 6 50,3 9 8 7 6 5 40,4 8 7 6 5 4 3
Табличное задание функцииВ первой строке таблицы перечисляются значения аргумента x, в ле-
вом столбце – значения аргумента y, в остальных клетках – соответству-ющие значения функции z. Значение функции соответствующее данному
35 Лекция – Основные понятия 9
значению аргумента x (например x = 2) и y (например y = 0, 3) располо-жено на пересечении соответствующего столбца и строки: z| x=2
y=0,3= 7.
Графиком функции двух переменных является множество точек про-странства, удовлетворяющих уравнению функции. Для функции двух пе-ременных это будет в общем случае некоторая поверхность (см. при-мер 35.3). Следует отметить, что поскольку эта поверхность изображаетсяв проекции на плоскость (лист бумаги), изображение графиков функциидвух переменных вызывает определенные трудности. Однако в настоящеевремя в связи с широким распространением персональных компьютеров сбольшим набором графических пакетов прикладных программ эти труд-ности отступают на второй план по сравнению с наглядностью графиче-ского метода представления функции.
35.4. Функции более двух независимых переменных. На прак-тике встречаются функции трех и более независимых переменных. Так,например, объем V прямоугольного параллелепипеда зависит от трех ар-гументов – длины x, ширины y и высоты z : V = xyz.
Определение 35.8. Функцией трех переменных называется прави-ло, которое каждой тройке действительных чисел (x; y; z) ∈ D ставитв соответствие единственное число u ∈ E.
Переменные x, y, z называют независимыми переменными или аргу-ментами, переменную u – зависимой переменной или функцией, множе-ство D называют областью определения функции D(f), множество E –областью изменения или множеством значений функции E(f).
Обозначаются функции трех переменных так же, как и функции двухпеременных: u = f(x; y; z), u = u(x; y; z), ω = ω(x; y; z). Функцию трехпеременных можно рассматривать как функцию точки P (x; y; z) в про-странстве Oxyz: u = f(P ). Область определения в такой интерпретациибудет множеством точек в этом пространстве.
Способами задания функции трех переменных являются также ана-литический и табличный. Следует, однако отметить, что пользоваться та-блицей с тремя входами менее удобно.
Аналогично можно ввести понятие функции четырех переменных, пя-ти, вообще – n переменных. Область определения функции n перемен-ных является множествоD системы действительных чисел (x1; x2; . . . ; xn).Функцию n переменных u = f(x1; x2; . . . ; xn) также часто рассматриваюткак функцию точки P (x1; x2; . . . ; xn) n-мерного пространства и пишут:u = f(P ).
Заметим, что функцию трех или более переменных изобразить с по-мощью графика в пространстве невозможно.
10 35 Лекция – Основные понятия
35.5. Поверхности и линии в пространстве. Как отмечалось вначале лекции, поверхность в 3-х мерном пространстве описывается урав-нением вида F (x; y; z) = 0 или z = f(x; y).
Пересечение двух поверхностей задает линию в пространстве; такимобразом, линия в пространстве определяется системой двух уравненийвида
F1(x; y; z) = 0F2(x; y; z) = 0
или
z = f1(x; y)z = f2(x; y)
.
Изучать характер изменения поверхности можно методом параллель-ных сечений, который заключается в следующем. Рассматривают линииполучающиеся в сечении поверхности семейством параллельных плоско-стей и на основании изменения этих сечений судят о характере изменения(рельефе) поверхности. Чаще всего это будут плоскости параллельныекоординатным плоскостям. Например для представления о рельефе зем-ной поверхности на географических картах изображают линии одинако-вой высоты (изогипсы или горизонтали), получающиеся в сечении земнойповерхности семейством параллельных плоскостей.
Определение 35.9. Линиями уровня функции z = f(x; y) называют-ся линии, образующиеся в пересечении графика этой функции (поверхно-сти) с плоскостями, параллельными координатной плоскости Oxy, т.е.
линии вида:
z = f(x; y)z = C
, где C – произвольная константа. Другими
словами, линии уровня задаются уравнениями вида
(35.3) f(x; y) = C
Если функция задана в неявном виде F (x; y; z) = 0, то уравнениялиний уровня будут иметь вид:
(35.4) F (x; y;C) = 0
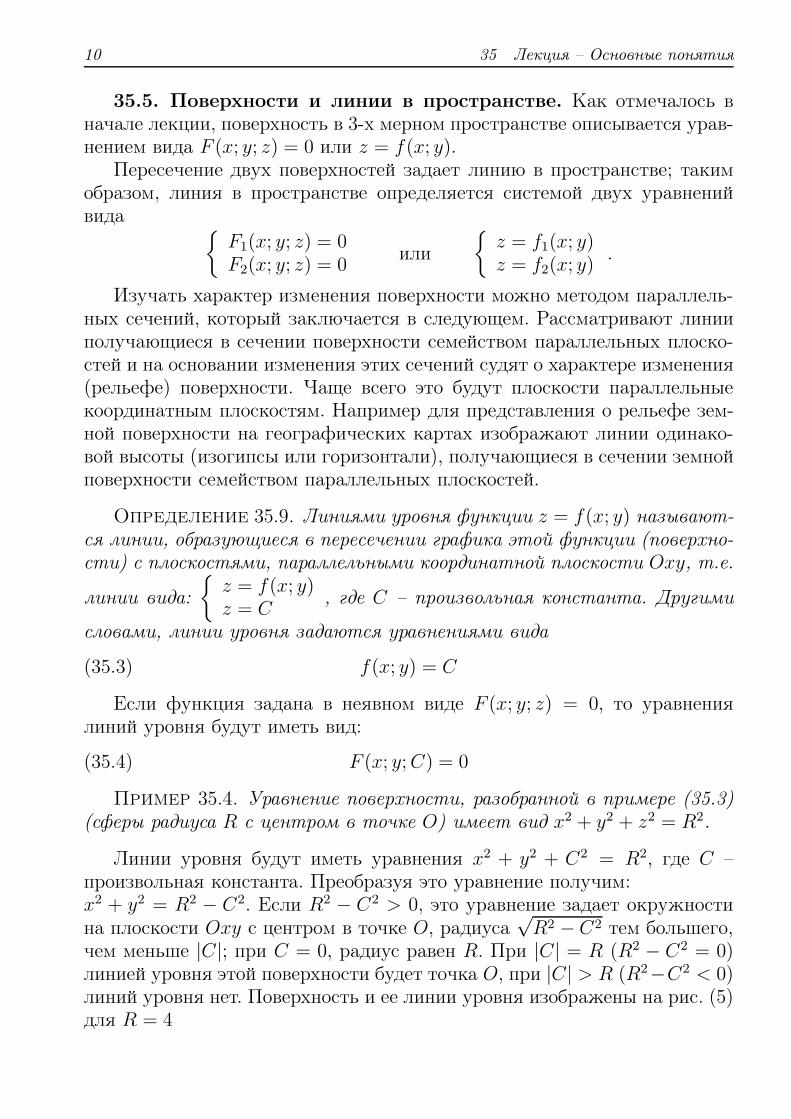
Пример 35.4. Уравнение поверхности, разобранной в примере (35.3)(сферы радиуса R с центром в точке O) имеет вид x2 + y2 + z2 = R2.
Линии уровня будут иметь уравнения x2 + y2 + C2 = R2, где C –произвольная константа. Преобразуя это уравнение получим:x2 + y2 = R2 − C2. Если R2 − C2 > 0, это уравнение задает окружностина плоскости Oxy с центром в точке O, радиуса
√R2 − C2 тем большего,
чем меньше |C|; при C = 0, радиус равен R. При |C| = R (R2 − C2 = 0)линией уровня этой поверхности будет точка O, при |C| > R (R2−C2 < 0)линий уровня нет. Поверхность и ее линии уровня изображены на рис. (5)для R = 4
35 Лекция – Основные понятия 11
7- 7 1212-15- 15
15|c|=2
y
x
z
-c
-4 4
|c|=0
0 |c|=4
|c|=3
|c|=1
x
y
c
Рис. 5. Линии уровня сферы
Для функции трех переменных аналогичным понятием будут поверх-ности уровня.
Определение 35.10. Поверхностями уровня функции u = f(x; y; z)называются поверхности вида
(35.5) f(x; y; z) = C,
где C – произвольная константа
Это будет однопараметрическое семейство поверхностей в 3-х мерномпространстве Oxyz.
35.5.1. Цилиндрические поверхности.
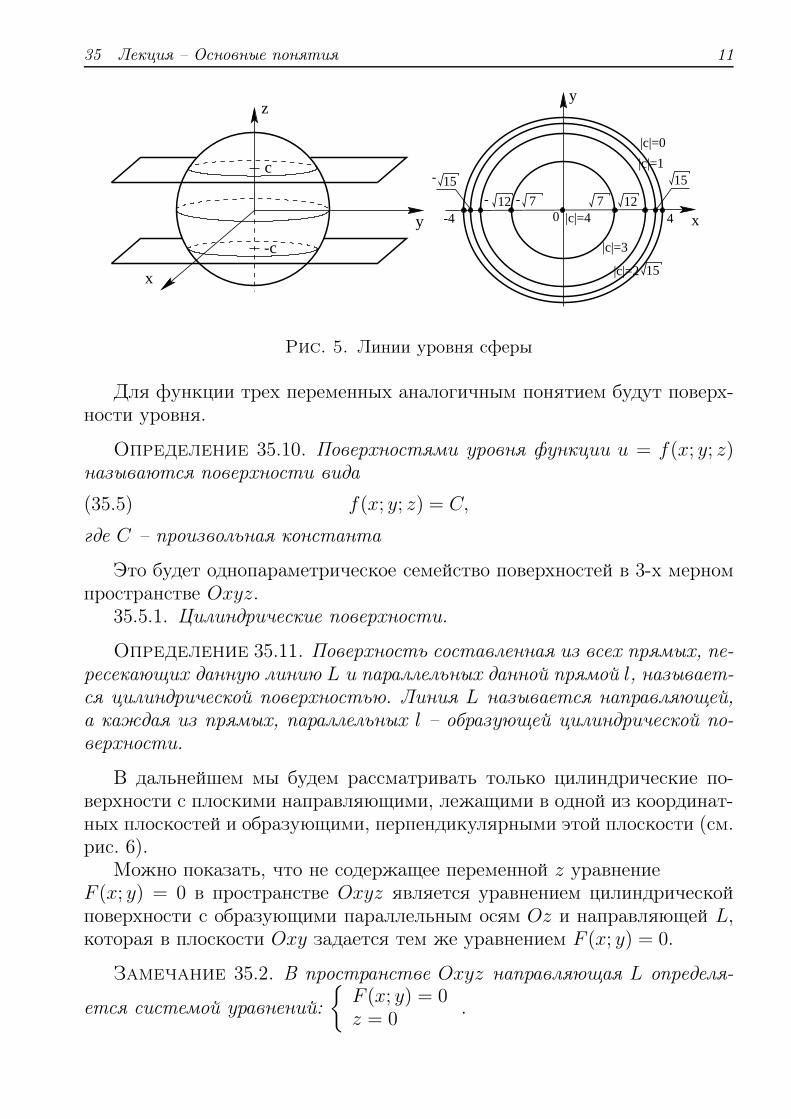
Определение 35.11. Поверхность составленная из всех прямых, пе-ресекающих данную линию L и параллельных данной прямой l, называет-ся цилиндрической поверхностью. Линия L называется направляющей,а каждая из прямых, параллельных l – образующей цилиндрической по-верхности.
В дальнейшем мы будем рассматривать только цилиндрические по-верхности с плоскими направляющими, лежащими в одной из координат-ных плоскостей и образующими, перпендикулярными этой плоскости (см.рис. 6).
Можно показать, что не содержащее переменной z уравнениеF (x; y) = 0 в пространстве Oxyz является уравнением цилиндрическойповерхности с образующими параллельным осям Oz и направляющей L,которая в плоскости Oxy задается тем же уравнением F (x; y) = 0.
Замечание 35.2. В пространстве Oxyz направляющая L определя-
ется системой уравнений:
F (x; y) = 0z = 0
.
12 35 Лекция – Основные понятия
x
z
y0
L
l
Рис. 6. Цилиндрическая поверхность
Аналогично можно показать, что уравнение F (x; z) = 0, не содержа-щее y, и уравнение F (y; z) = 0, не содержащее x, определяют в простран-стве Oxyz цилиндрические поверхности с образующими, параллельнымисоответственно осям Oy и Ox.
Рассмотрим примеры цилиндрических поверхностей.
Определение 35.12.Поверхность определяемая уравнением
(35.6)x2
a2+y2
b2= 1,
является цилиндрической и называется эллиптическим цилиндром (рис.7).
Ее образующие параллельны оси Oz, а направляющей является эллипсс полуосями a и b, лежащий в плоскости Oxy. В частности, если a = b,то направляющей является окружность, а поверхность является прямымкруговым цилиндром. Его уравнение x2 + y2 = a2.
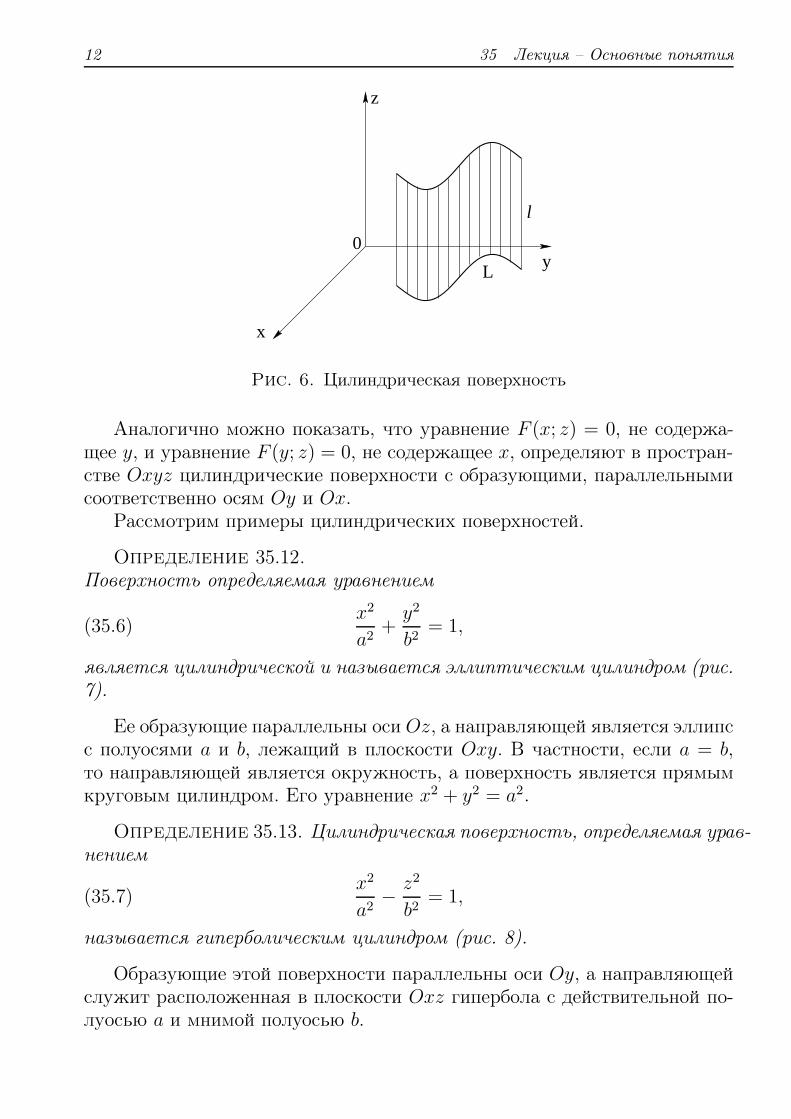
Определение 35.13. Цилиндрическая поверхность, определяемая урав-нением
(35.7)x2
a2− z2
b2= 1,
называется гиперболическим цилиндром (рис. 8).
Образующие этой поверхности параллельны оси Oy, а направляющейслужит расположенная в плоскости Oxz гипербола с действительной по-луoсью a и мнимой полуосью b.

35 Лекция – Основные понятия 13
z
y
x
Рис. 7. Эллиптический цилиндр
Определение 35.14. Цилиндрическая поверхность, определяемая урав-нением
(35.8) y2 = 2pz,
называется параболическим цилиндром (рис. 9).
Ее направляющей является парабола, лежащая в плоскости Oyz, аобразующие параллельны оси Ox.
Замечание 35.3. Как известно, прямая в пространстве может бытьзадана уравнениями различных пар плоскостей, пересекающихся по этойпрямой. Подобно этому кривая в пространстве может быть задана спомощью уравнений различных поверхностей, пересекающихся по этойкривой. Например, окружность C, получающаяся в сечении плоскостьюz = 3 сферы x2 + y2 + z2 = 25 может быть задана системой уравнений
(35.9)
z = 3x2 + y2 + z2 = 25
С другой стороны эта окружность может быть получена как линияпересечения плоскости z = 3 и прямого кругового цилиндра x2 + y2 = 16,т.е. может быть задана системой уравнений
(35.10)
z = 3x2 + y2 = 16

14 35 Лекция – Основные понятия
z
yx
0
Рис. 8. Гиперболический цилиндр
z
yx
0
Рис. 9. Параболический цилиндр
равносильной системе (35.9)
В дальнейшем, исследуя форму той или иной поверхности с помощьюсечений, параллельных координатным плоскостям, мы не раз будем поль-зоваться цилиндрическими поверхностями, проектирующими эти сеченияна координатные плоскости. Это позволит так же, как в рассмотренномпримере, судить о размерах и форме указанных сечений, а тем самым ио форме исследуемых поверхностей.
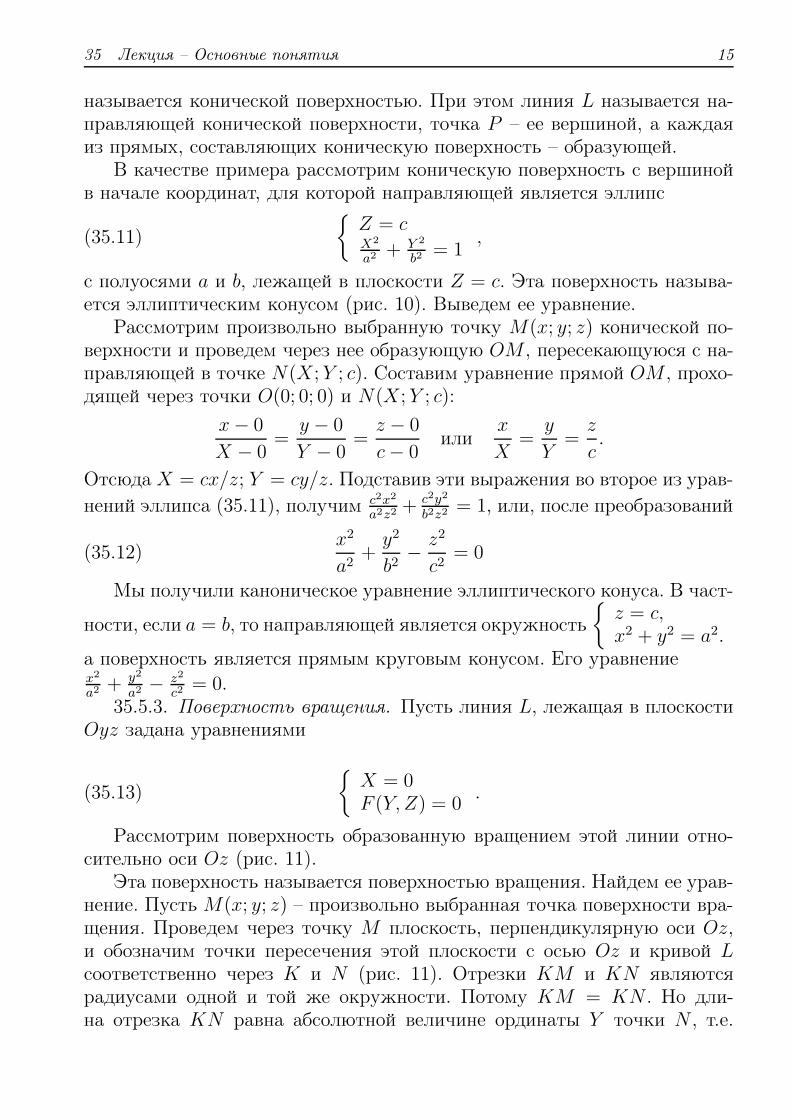
35.5.2. Конические поверхности. Поверхность, составленная из всехпрямых, пересекающих линию L и проходящих через данную точку P ,
35 Лекция – Основные понятия 15
называется конической поверхностью. При этом линия L называется на-правляющей конической поверхности, точка P – ее вершиной, а каждаяиз прямых, составляющих коническую поверхность – образующей.
В качестве примера рассмотрим коническую поверхность с вершинойв начале координат, для которой направляющей является эллипс
(35.11)
Z = cX2
a2+ Y 2
b2= 1
,
с полуосями a и b, лежащей в плоскости Z = c. Эта поверхность называ-ется эллиптическим конусом (рис. 10). Выведем ее уравнение.
Рассмотрим произвольно выбранную точку M(x; y; z) конической по-верхности и проведем через нее образующую OM , пересекающуюся с на-правляющей в точке N(X; Y ; c). Составим уравнение прямой OM , прохо-дящей через точки O(0; 0; 0) и N(X; Y ; c):
x− 0
X − 0=
y − 0
Y − 0=z − 0
c− 0или
x
X=
y
Y=z
c.
Отсюда X = cx/z; Y = cy/z. Подставив эти выражения во второе из урав-нений эллипса (35.11), получим c2x2
a2z2+ c2y2
b2z2= 1, или, после преобразований
(35.12)x2
a2+y2
b2− z2
c2= 0
Мы получили каноническое уравнение эллиптического конуса. В част-
ности, если a = b, то направляющей является окружность
z = c,x2 + y2 = a2.
а поверхность является прямым круговым конусом. Его уравнениеx2
a2+ y2
a2− z2
c2= 0.
35.5.3. Поверхность вращения. Пусть линия L, лежащая в плоскостиOyz задана уравнениями
(35.13)
X = 0F (Y, Z) = 0
.
Рассмотрим поверхность образованную вращением этой линии отно-сительно оси Oz (рис. 11).
Эта поверхность называется поверхностью вращения. Найдем ее урав-нение. Пусть M(x; y; z) – произвольно выбранная точка поверхности вра-щения. Проведем через точку M плоскость, перпендикулярную оси Oz,и обозначим точки пересечения этой плоскости с осью Oz и кривой Lсоответственно через K и N (рис. 11). Отрезки KM и KN являютсярадиусами одной и той же окружности. Потому KM = KN . Но дли-на отрезка KN равна абсолютной величине ординаты Y точки N , т.е.

16 35 Лекция – Основные понятия
z
x
0y
Рис. 10. Коническая поверхность
z
L
x
y
M(x;y;z)
N(0;y;z)
x0 y
p
k
Рис. 11. Поверхность вращения
KN = |Y |, а KM = OP =√
x2 + y2. Следовательно, |Y | =√
x2 + y2,или Y = ±
√
x2 + y2. Кроме того, аппликата Z точки N , очевидно, равнааппликате z точки M .
Так как точка N лежит на линии L, заданной уравнениями (35.13), токоординаты Y и Z точки N удовлетворяют второму из этих уравнений.Подставляя в него вместо Y и Z соответственно равные им величины±√
x2 + y2 и z, получим уравнение

35 Практическое занятие – Основные понятия 17
(35.14) F (±√
x2 + y2, z) = 0,
которому удовлетворяют координаты любой точки M(x; y; z) поверхностивращения. Можно показать, что координаты точек, не лежащих на этойповерхности, уравнению (35.14) не удовлетворяют. Таким образом, урав-нение (35.14) является уравнением поверхности вращения относительнооси Oz линии L, определяемой уравнениями (35.13). Уравнение (35.14)получается из второго уравнения системы (35.13) заменой в нем коорди-нат Y и Z координатами x, y и z по формулам
(35.15)
Y = ±√
x2 + y2
Z = z.
Замечание 35.4. Мы считали, что кривая L задана в плоскости Oyzи вращается относительно Oz. Однако кривая L может быть заданаи в другой координатной плоскости и может вращаться относительнодругой координатной оси. Формулы, подобные формулам (35.13), (35.14)и (35.15), читатель легко составит сам.
35. практическое занятие —основные понятия функции
нескольких переменных
Пример 35.1. Найти и изобразить на плоскости область определе-ния функции двух переменных z = xy
2x−3y+10.
Р е ш е н и е: Поскольку знаменатель не должен обращаться в нуль,область определения данной функции будет:D(f) = (x; y)|2x− 3y + 10 6= 0.
Это будет множество всех точек плоскости Oxy за исключением точек,лежащих на прямой 2x− 3y + 10 = 0 (см. рис. 12)
x
y
-5
10/3
0
Рис. 12. Решение примера (35.1)

18 35 Практическое занятие – Основные понятия
Ответ: D(f) = (x; y)|2x− 3y + 10 6= 0.Пример 35.2. Найдите область определения функции трех перемен-
ных u =√
2x− y + 3z − 1
Р е ш е н и е: Поскольку выражение под корнем квадратным долж-но быть неотрицательным, область определения данной функции будет:D(f) = (x; y; z)|2x− y + 3z − 1 > 0.
Это будет множество всех точек полупространства, отделенного плос-костью 2x− y + 3z − 1 = 0, включая саму плоскость.
Ответ: D(f) = (x; y; z)|2x− y + 3z − 1 > 0.Пример 35.3. Найдите и изобразите на плоскости линии уровня функ-
ции двух переменных z = x2
4+ y2
Р е ш е н и е: Уравнение линий уровня имеет вид x2
4+ y2 = c, где c –
произвольная константа. Очевидно, что данному уравнению будет соот-ветствовать линия только при c > 0. При c = 0 это будет начало координат– точка O(0; 0). При c > 0 – эллипс с полуосями 2
√c и
√c
x2 4 6
123
0c=1
c=9c=4
y
Рис. 13. Решение примера (35.3)
Пример 35.4. Определите вид поверхности, задаваемой уравнениемy2 − 2y + x2 + 4x+ 4 = 0
Р е ш е н и е: Выделив полный квадрат по y и по x, получим уравнениеповерхности в виде: (x+ 2)2 + (y − 1)2 = 1. Это круговой цилиндр с осьюпараллельной оси Oz, проходящей через точку P (−2; 1; 0), радиусом 1.
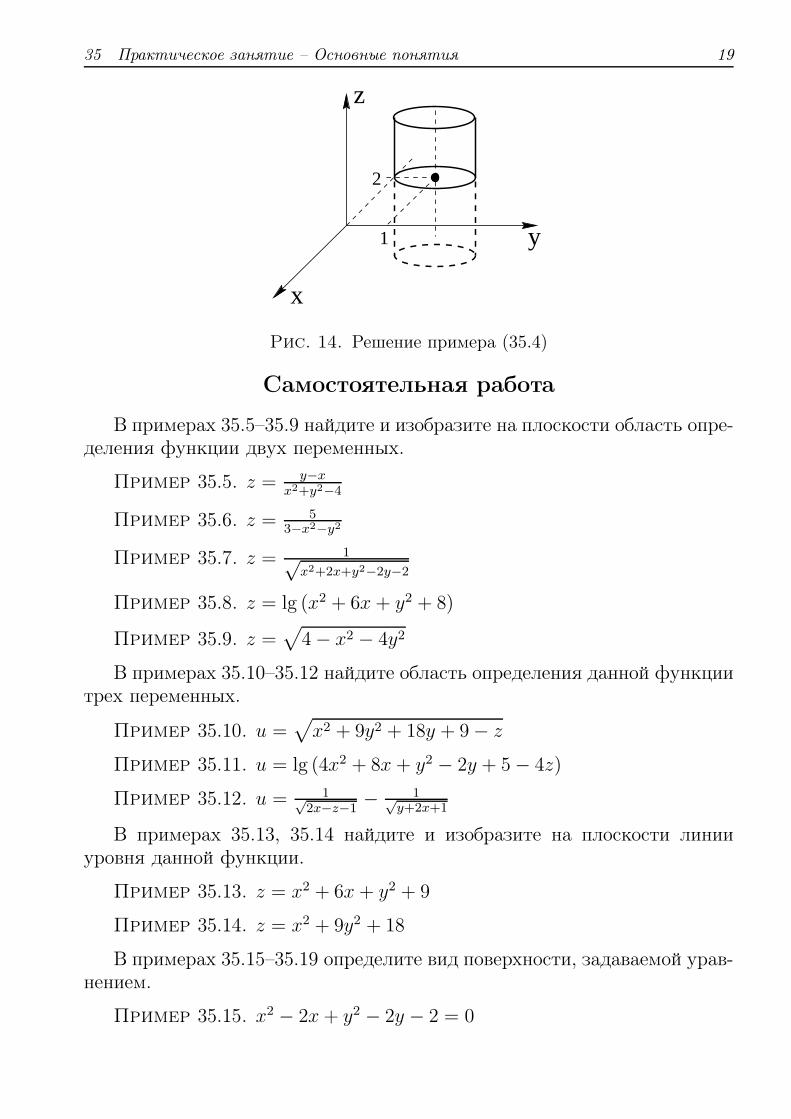
35 Практическое занятие – Основные понятия 19
y
x
z
2
1
Рис. 14. Решение примера (35.4)
Самостоятельная работа
В примерах 35.5–35.9 найдите и изобразите на плоскости область опре-деления функции двух переменных.
Пример 35.5. z = y−xx2+y2−4
Пример 35.6. z = 53−x2−y2
Пример 35.7. z = 1√x2+2x+y2−2y−2
Пример 35.8. z = lg (x2 + 6x + y2 + 8)
Пример 35.9. z =√
4 − x2 − 4y2
В примерах 35.10–35.12 найдите область определения данной функциитрех переменных.
Пример 35.10. u =√
x2 + 9y2 + 18y + 9 − z
Пример 35.11. u = lg (4x2 + 8x + y2 − 2y + 5 − 4z)
Пример 35.12. u = 1√2x−z−1
− 1√y+2x+1
В примерах 35.13, 35.14 найдите и изобразите на плоскости линииуровня данной функции.
Пример 35.13. z = x2 + 6x + y2 + 9
Пример 35.14. z = x2 + 9y2 + 18
В примерах 35.15–35.19 определите вид поверхности, задаваемой урав-нением.
Пример 35.15. x2 − 2x + y2 − 2y − 2 = 0

20 36 Лекция – Поверхности второго порядка
Пример 35.16. 4x2 + y2 − 4 = 0
Пример 35.17. x− y2 − 2y − 2 = 0
Пример 35.18. x2 − y + 1 = 0
Пример 35.19. x2 + 4z2 − y2 = 0
36. лекция – поверхности второго порядка
Построение поверхностей методом параллельных сечений. Поверх-ности 2-го порядка: эллиптические, гиперболические, параболиче-ские. Линейчатые поверхности.
36.1. Поверхности второго порядка. В части 1 данного Курса мыизучили кривые второго порядка. Аналогично этому, общее уравнениеповерхности второго порядка имеет вид:
(36.1) a11x2 + a22y
2 + a33z2 + 2a12xy + 2a13xz+
+2a23yz + 2a14x+ 2a24y + 2a34z + a44 = 0
Рассмотренные в лекции уравнения поверхности являются частнымслучаем общего уравнения (36.1).
Форму поверхностей рассматриваемых в этой лекции, будем изучатьметодом параллельных сечений.
36.1.1. Эллипсоид.
Определение 36.1. Поверхность определяемая уравнением
(36.2)x2
a2+y2
b2+z2
c2= 1,
называется трехосным эллипсоидом. Числа a, b и c называются полуося-ми эллипсоида, а уравнение (36.2) каноническим уравнением эллипсоида.
Так как в уравнении (36.2) текущие координаты входят в четных сте-пенях, то эллипсоид симметричен относительно координатных плоско-стей. Чтобы установить форму эллипсоида, будем пересекать его плос-костями, параллельными координатным плоскостям. Покажем, что еслипересечь эллипсоид плоскостью z = h (|h| < c), то в сечении получитсяэллипс L. В самом деле, исключая из уравнений
z = hx2
a2+ y2
b2+ z2
c2= 1
.
36 Лекция – Поверхности второго порядка 21
аппликату z, получим уравнение цилиндрической поверхности, проекти-рующее сечение L на плоскость Oxy: x2
a2+ y2
b2= 1 − h2
c2, или
x2
(
a√
1 − h2
c2
)2 +y2
(
b
√
1 − h2
c22) = 1.
Из этого уравнения видно, что кривая L есть эллипс с полуосями
(36.3) a = a
√
1 − h2
c2, b = b
√
1 − h2
c2
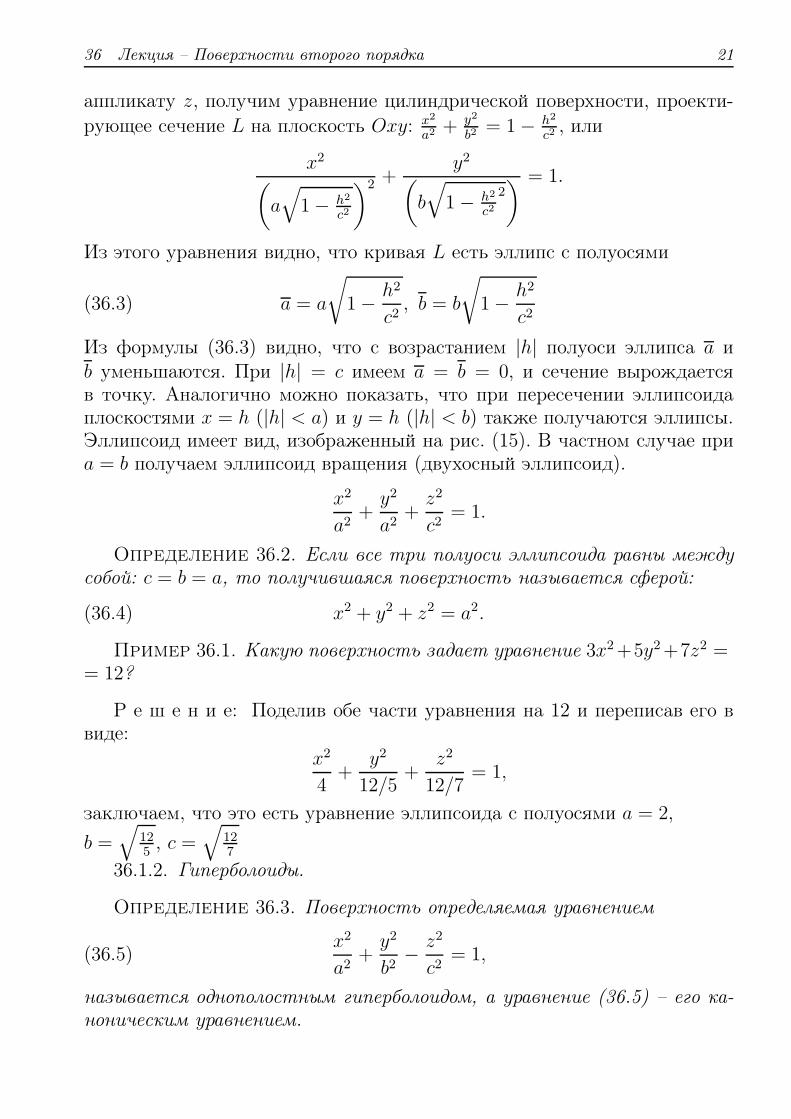
Из формулы (36.3) видно, что с возрастанием |h| полуоси эллипса a иb уменьшаются. При |h| = c имеем a = b = 0, и сечение вырождаетсяв точку. Аналогично можно показать, что при пересечении эллипсоидаплоскостями x = h (|h| < a) и y = h (|h| < b) также получаются эллипсы.Эллипсоид имеет вид, изображенный на рис. (15). В частном случае приa = b получаем эллипсоид вращения (двухосный эллипсоид).
x2
a2+y2
a2+z2
c2= 1.
Определение 36.2. Если все три полуоси эллипсоида равны междусобой: c = b = a, то получившаяся поверхность называется сферой:
(36.4) x2 + y2 + z2 = a2.
Пример 36.1. Какую поверхность задает уравнение 3x2 +5y2 +7z2 == 12?
Р е ш е н и е: Поделив обе части уравнения на 12 и переписав его ввиде:
x2
4+
y2
12/5+
z2
12/7= 1,
заключаем, что это есть уравнение эллипсоида с полуосями a = 2,
b =√
125, c =
√127
36.1.2. Гиперболоиды.
Определение 36.3. Поверхность определяемая уравнением
(36.5)x2
a2+y2
b2− z2
c2= 1,
называется однополостным гиперболоидом, а уравнение (36.5) – его ка-ноническим уравнением.
22 36 Лекция – Поверхности второго порядка
b
c
x
z
y0
a
Рис. 15. Эллипсоид
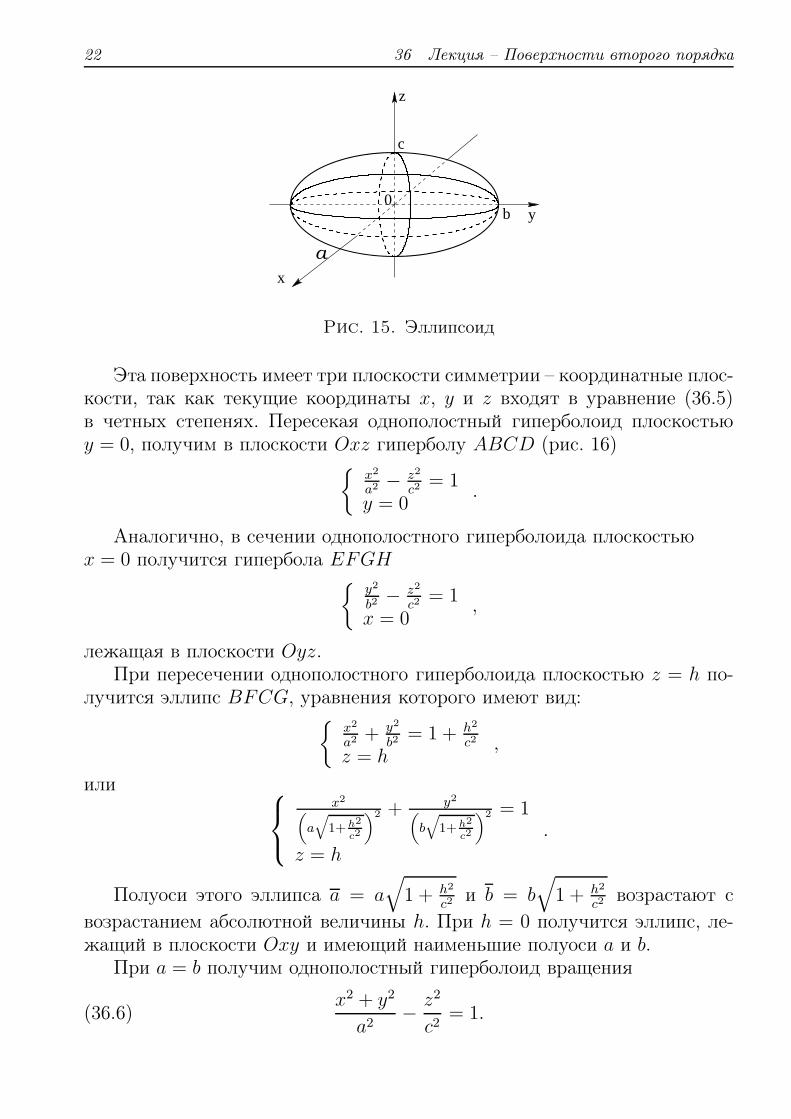
Эта поверхность имеет три плоскости симметрии – координатные плос-кости, так как текущие координаты x, y и z входят в уравнение (36.5)в четных степенях. Пересекая однополостный гиперболоид плоскостьюy = 0, получим в плоскости Oxz гиперболу ABCD (рис. 16)
x2
a2− z2
c2= 1
y = 0.
Аналогично, в сечении однополостного гиперболоида плоскостьюx = 0 получится гипербола EFGH
y2
b2− z2
c2= 1
x = 0,
лежащая в плоскости Oyz.При пересечении однополостного гиперболоида плоскостью z = h по-
лучится эллипс BFCG, уравнения которого имеют вид:
x2
a2+ y2
b2= 1 + h2
c2
z = h,
или
x2„
aq
1+h2
c2
«2 + y2„
bq
1+h2
c2
«2 = 1
z = h.
Полуоси этого эллипса a = a√
1 + h2
c2и b = b
√
1 + h2
c2возрастают с
возрастанием абсолютной величины h. При h = 0 получится эллипс, ле-жащий в плоскости Oxy и имеющий наименьшие полуоси a и b.
При a = b получим однополостный гиперболоид вращения
(36.6)x2 + y2
a2− z2
c2= 1.

36 Лекция – Поверхности второго порядка 23
x
y
A
EH
D
F G
Cz
Bh
0
Рис. 16. Однополостный гиперболоид
При пересечении его плоскостями z = h получаются окружности
z2 + y2 = a2(
1 + h2
c2
)
z = h.
В п. (35.5.2) и (35.5.3) рассматривались цилиндрические и кониче-ские поверхности, каждая из которых составлена из прямых. Оказыва-ется, однополостный гиперболоид можно также рассматривать как по-верхность, составленную из прямых линий. Рассмотрим прямую, опреде-ляемую уравнениями
(36.7)
xa
+ zc
= k(1 + y
b
)
xa− z
c= 1
k
(1 − y
b
) ,
в которых a, b и c – полуоси однополостного гиперболоида, a k – про-извольно выбранное число (k 6= 0).
Перемножая почленно эти уравнения, получим
x2
a2− z2
c2= 1 − y2
b2, или
x2
a2+y2
b2− z2
c2= 1,
т.е. уравнение однополостного гиперболоида.Таким образом, уравнение однополостного гиперболоида является
следствием системы уравнений (36.7). Поэтому координаты любой точ-ки M(x; y; z), удовлетворяющие системе (36.7), удовлетворяют также и
24 36 Лекция – Поверхности второго порядка
уравнению (36.5) однополостного гиперболоида. Иными словами, все точ-ки прямой (36.7) принадлежат гиперболоиду (36.5). Меняя значения k, мыполучим целое семейство прямых, лежащих на поверхности (36.5). Анало-гично можно показать, что однополостному гиперболоиду принадлежатвсе прямые семейства
(36.8)
xa
+ zc
= l(1 − y
b
),
xa− z
c= 1
l
(1 + y
b
).
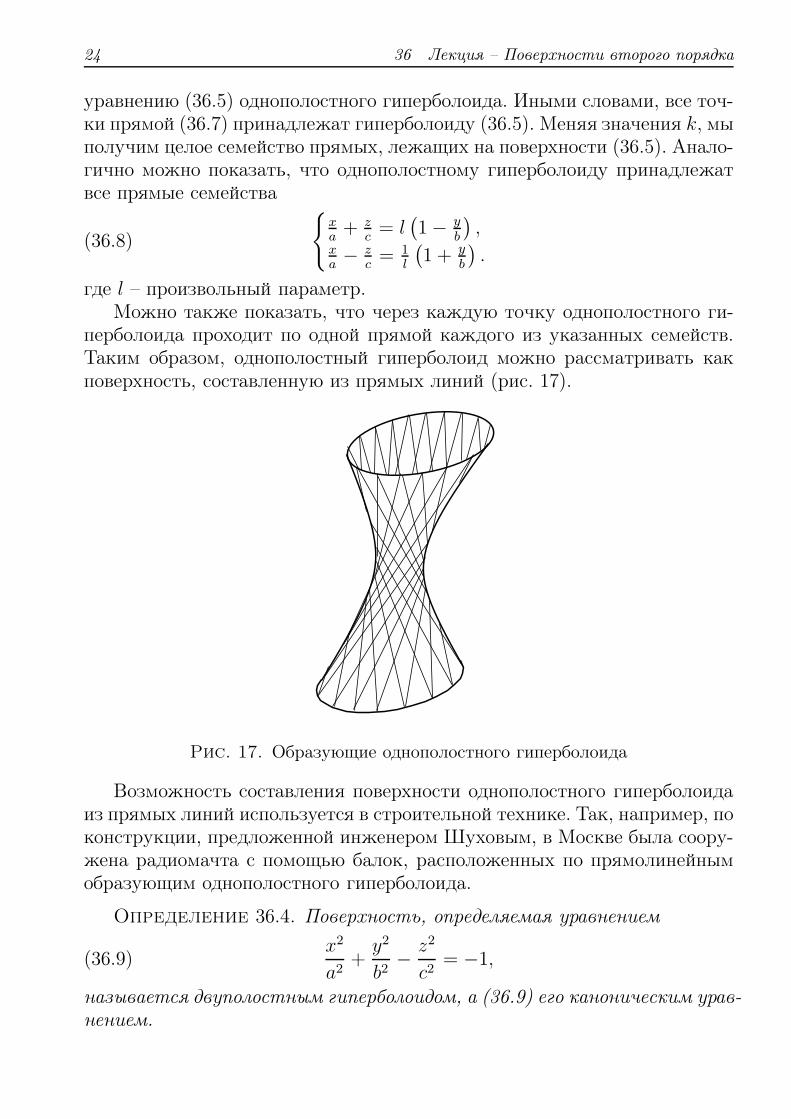
где l – произвольный параметр.Можно также показать, что через каждую точку однополостного ги-
перболоида проходит по одной прямой каждого из указанных семейств.Таким образом, однополостный гиперболоид можно рассматривать какповерхность, составленную из прямых линий (рис. 17).
Рис. 17. Образующие однополостного гиперболоида
Возможность составления поверхности однополостного гиперболоидаиз прямых линий используется в строительной технике. Так, например, поконструкции, предложенной инженером Шуховым, в Москве была соору-жена радиомачта с помощью балок, расположенных по прямолинейнымобразующим однополостного гиперболоида.
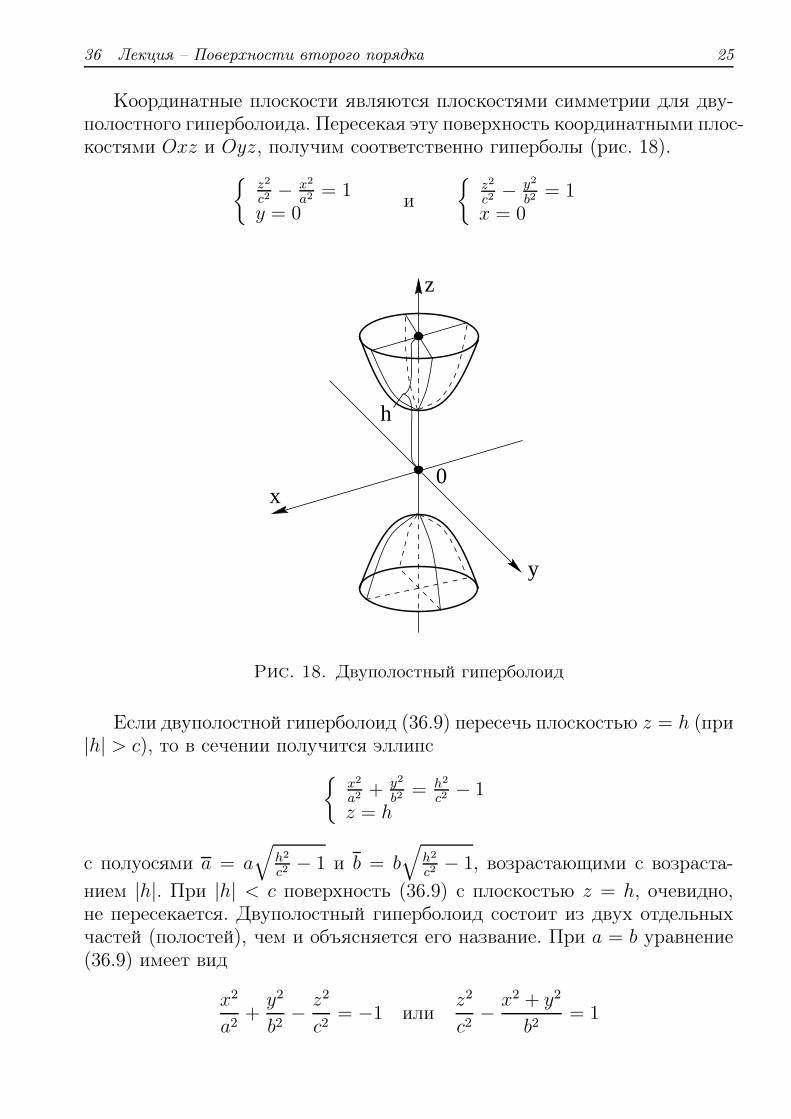
Определение 36.4. Поверхность, определяемая уравнением
(36.9)x2
a2+y2
b2− z2
c2= −1,
называется двуполостным гиперболоидом, а (36.9) его каноническим урав-нением.
36 Лекция – Поверхности второго порядка 25
Координатные плоскости являются плоскостями симметрии для дву-полостного гиперболоида. Пересекая эту поверхность координатными плос-костями Oxz и Oyz, получим соответственно гиперболы (рис. 18).
z2
c2− x2
a2= 1
y = 0и
z2
c2− y2
b2= 1
x = 0
z
0
h
x
y
Рис. 18. Двуполостный гиперболоид
Если двуполостной гиперболоид (36.9) пересечь плоскостью z = h (при|h| > c), то в сечении получится эллипс
x2
a2+ y2
b2= h2
c2− 1
z = h
с полуосями a = a√
h2
c2− 1 и b = b
√h2
c2− 1, возрастающими с возраста-
нием |h|. При |h| < c поверхность (36.9) с плоскостью z = h, очевидно,не пересекается. Двуполостный гиперболоид состоит из двух отдельныхчастей (полостей), чем и объясняется его название. При a = b уравнение(36.9) имеет вид
x2
a2+y2
b2− z2
c2= −1 или
z2
c2− x2 + y2
b2= 1
26 36 Лекция – Поверхности второго порядка
и является уравнением двуполостного гиперболоида вращения. В сечениипоследнего плоскостью z = h (|h| > c) получится окружность
x2 + y2 = b2(h2
c2− 1)
z = h
радиуса R = b√
h2
c2− 1.
Пример 36.2. Какую поверхность задает уравнение4x2 − 2y2 + 3z2 = 5?
Р е ш е н и е: Поделив обе части уравнения на 5 и переписав его ввиде
x2
5/4+
z2
5/3− y2
5/2= 1,
заключаем, что это уравнение однополостного гиперболоида, расположен-ного “вдоль” оси Oy
Пример 36.3. Какую поверхность задает уравнение 9x2−y2−z2 = 5?
Р е ш е н и е: Поделив обе части уравнения на -5 и переписав его ввиде
y2
5+z2
5− x2
5/9= −1,
заключаем, что это уравнение двуполостного гиперболоида вращения,расположенного “вдоль” оси Ox.
36.1.3. Параболоиды.
Определение 36.5. Эллиптическим параболоидом называется по-верхность, определяемая уравнением
(36.10) z =x2
a2+y2
b2,
а (36.10) – его каноническим уравнением.
При пересечении эллиптического параболоида координатными плос-костями Oxz и Oyz получатся соответственно параболы
z = x2
a2
y = 0и
z = y2
b2
x = 0
а при пересечении плоскостью z = h (h > 0) – эллипс
x2
a2h+ y2
b2h= 1
z = h

36 Лекция – Поверхности второго порядка 27
с полуосями a√h и b
√h (рис. 19). В случае a2 = b2 получим параболоид
вращения a2z = x2 + y2.Поскольку x и y входят в уравнение (36.10) в четных степенях, эллип-
тический параболоид имеет две плоскости симметрии: Oxz и Oyz.
0
h
x y
z
Рис. 19. Параболоид вращения
Определение 36.6. Гиперболическим параболоидом называется по-верхность, определяемая уравнением
(36.11) z =x2
a2− y2
b2,
a (36.11) его каноническим уравнением.
Пересекая эту поверхность плоскостью Oxz, получим параболу
(36.12)
a2z = x2
y = 0.
При пересечении гиперболического параболоида плоскостью x = hполучится парабола
z = h2
a2− y2
b2
x = hи
b2(
z − h2
2a2
)
= −y2
x = h.
При различных значениях h получится целое семейство парабол, ле-жащих в плоскостях, параллельных плоскости Oyz и имеющих одинако-вый параметр b2.
Гиперболический параболоид можно рассматривать как поверхность,описываемую движением любой из этих парабол при условии, что плос-кость движущейся параболы остается параллельной плоскости Oyz, ось
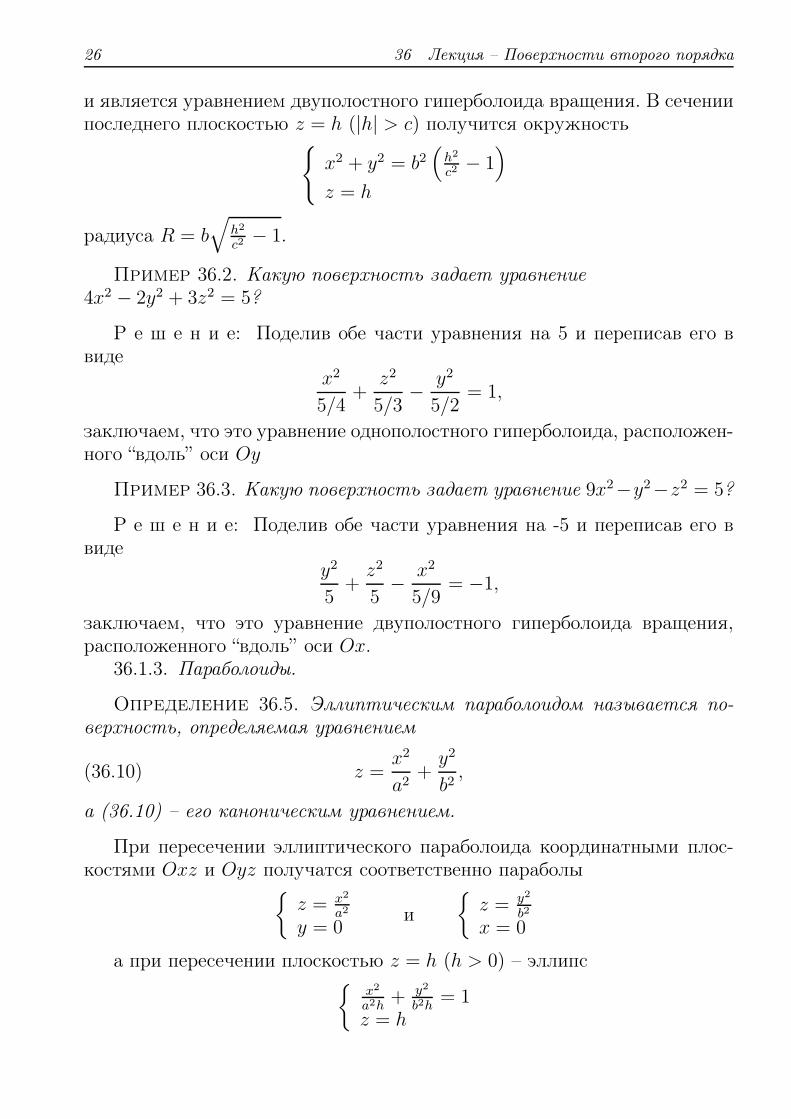
28 36 Лекция – Поверхности второго порядка
симметрии параболы остается в плоскости Oxz, а вершина движется попараболе (36.12). Пересекая гиперболический параболоид плоскостью z =h, получим (при h 6= 0) гиперболу
h = x2
a2− y2
b2
z = hили
x2
a2h− y2
b2h= 1
z = h.
0
z
x
y
Рис. 20. Гиперболический параболоид
На рис. (20) показано расположение этой гиперболы для двух случаев:h > 0 (верхний край) и h < 0 (нижний край). При h = 0, т.е. при пересе-чении гиперболического параболоида координатной плоскостью Oxy, по-лучится линия, уравнение которой в плоскости Oxy имеет вид x2
a2− y2
b2= 0.
Последнее уравнение равносильно системе двух уравнений
xa
+ yb
= 0xa− y
b= 0
.
Это означает, что гиперболический параболоид пересекается с плоско-стью Oxy по двум прямым
xa
+ yb
= 0z = 0
xa− y
b= 0
z = 0,
лежащим в плоскости Oxy и проходящим через начало координат. Кромеэтих двух прямых, существуют и другие прямые, полностью лежащие нагиперболическом параболоиде. Более того, как и в случае однополостно-го гиперболоида, можно показать, что через каждую точку гиперболиче-ского параболоида проходит по одной прямой каждого из двух семействпрямых
xa
+ yb
= kzxa− y
b= 1
k
и
xa
+ yb
= 1l
xa− y
b= lz
,
где k и l – произвольные параметры.Таким образом, гиперболический параболоид можно рассматривать
как поверхность составленную из прямых линий (рис. 21).
36 Практическое занятие – Поверхности второго порядка 29
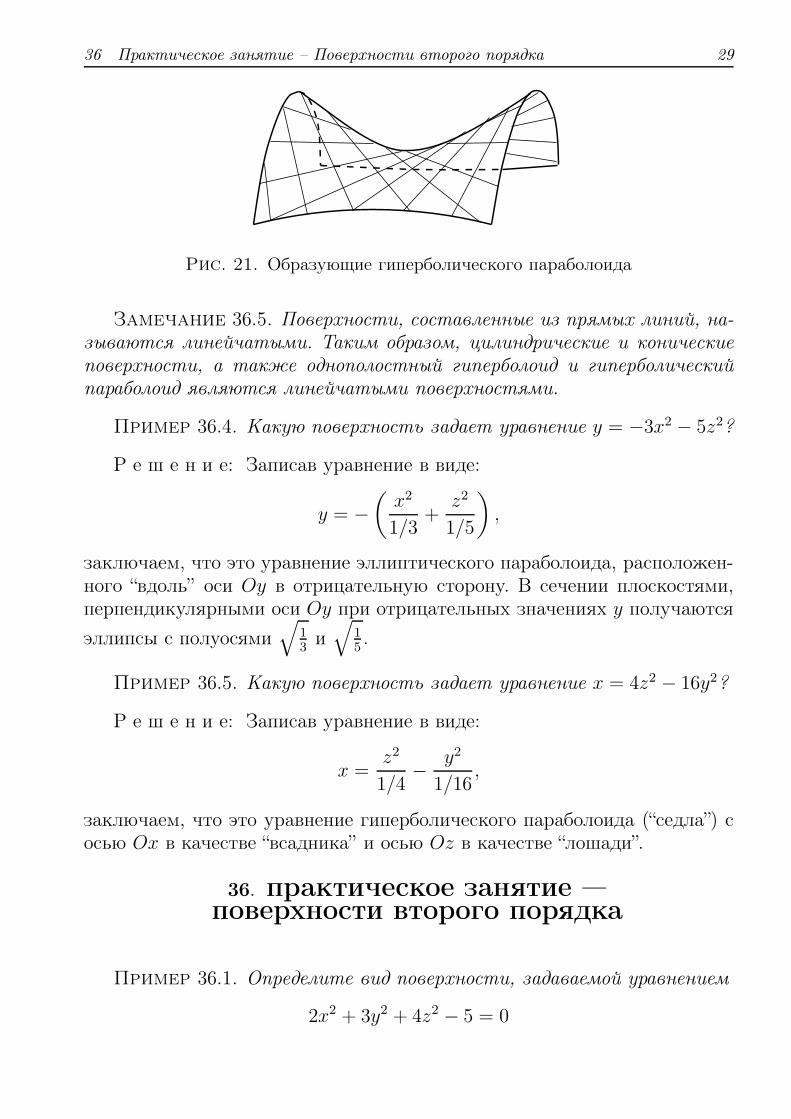
Рис. 21. Образующие гиперболического параболоида
Замечание 36.5. Поверхности, составленные из прямых линий, на-зываются линейчатыми. Таким образом, цилиндрические и коническиеповерхности, а также однополостный гиперболоид и гиперболическийпараболоид являются линейчатыми поверхностями.
Пример 36.4. Какую поверхность задает уравнение y = −3x2 − 5z2?
Р е ш е н и е: Записав уравнение в виде:
y = −(x2
1/3+
z2
1/5
)
,
заключаем, что это уравнение эллиптического параболоида, расположен-ного “вдоль” оси Oy в отрицательную сторону. В сечении плоскостями,перпендикулярными оси Oy при отрицательных значениях y получаются
эллипсы с полуосями√
13
и√
15.
Пример 36.5. Какую поверхность задает уравнение x = 4z2 − 16y2?
Р е ш е н и е: Записав уравнение в виде:
x =z2
1/4− y2
1/16,
заключаем, что это уравнение гиперболического параболоида (“седла”) сосью Ox в качестве “всадника” и осью Oz в качестве “лошади”.
36. практическое занятие —поверхности второго порядка
Пример 36.1. Определите вид поверхности, задаваемой уравнением
2x2 + 3y2 + 4z2 − 5 = 0
30 36 Практическое занятие – Поверхности второго порядка
Р е ш е н и е: Перенеся свободный член в правую часть уравнения иподелив обе его части на 5, получим:
2x2
5+
3y2
5+
4z2
5= 1 ⇔ x2
5/2+
y2
5/3+
z2
5/4= 1
Это каноническое уравнение эллипсоида с полуосями a =√
52, b =
√53,
c =√
54.
Ответ: эллипсоид.
Пример 36.2. Определите вид поверхности, задаваемой уравнением
3x2 − 4y2 + 5z2 − 6 = 0
Р е ш е н и е: Перенеся свободный член в правую часть уравнения иподелив обе его части на 6, получим:
3x2
6− 2y2
3+
5z2
6= 1 ⇔ x2
6/3− y2
3/2+
z2
6/5= 1
Это каноническое уравнение однополостного гиперболоида, расположен-
ного вдоль оси Oy, с полуосями√
63
и√
65
эллипса в плоскости y = 0.Ответ: Однополостный гиперболоид вдоль Oy
Пример 36.3. Определите вид поверхности, задаваемой уравнением
4y2 + 4z2 − 5x2 − 7 = 0
Р е ш е н и е: Перенеся свободный член в правую часть уравнения иподелив обе его части на 7, получим:
4y2
7+
4z2
7− 5x2
7= 1 ⇔ y2
7/4+
z2
7/4− x2
7/5= 1
Это каноническое уравнение однополостного гиперболоида вращения, рас-
положенного вдоль оси Ox, с радиусом√
74
окружности в плоскости Ox.Ответ: Однополостный гиперболоид вращения вдоль Ox
Пример 36.4. Определите вид поверхности, задаваемой уравнением
4y2 + 5z2 = 6x2 − 2
Р е ш е н и е: Перенеся 6x2 в левую часть уравнения и деля обе егочасти на 2, получаем:
2y2 +5z2
2− 3x2 = −1 ⇔ y2
1/2+
z2
2/5− x2
1/3= −1
36 Практическое занятие – Поверхности второго порядка 31
Это уравнение двуполостного гиперболоида, расположенного вдоль осиOx.Ответ: Двуполостный гиперболоид вдоль оси Ox.
Пример 36.5. Определите вид поверхности, задаваемой уравнением
3x2 + 3z2 = 4y2 − 4
Р е ш е н и е: Перенеся 4y2 в левую часть уравнения и деля обе егочасти на 4, получаем:
3x2
4+
3z2
4− y2 = −1 ⇔ x2
4/3+
z2
4/3− y2 = −1
Это уравнение двуполостного гиперболоида вращения, расположенноговдоль оси Oy.Ответ: Двуполостный гиперболоид вдоль оси Oy.
Пример 36.6. Определите вид поверхности, задаваемой уравнением
3z2 + 2y2 − 5x = 0
Р е ш е н и е: Перенеся 5x в другую часть уравнения и поделив обеего части на 5, получим:
x =2y2
5+
3z2
5⇔ x =
y2
5/2+
z2
5/3
Это уравнение эллиптического параболоида, расположенного вдоль осиOxОтвет: Эллиптический параболоид вдоль оси Ox.
Пример 36.7. Определите вид поверхности, задаваемой уравнением
4y2 − 3z2 − 3x = 0
Р е ш е н и е: Перенеся 3x в другую часть уравнения и поделив обеего части на 3, получим:
x =4y2
3− 5z2
3⇔ x =
y2
3/4− z2
3/5
Это каноническое уравнение гиперболического параболоида, расположен-ного вдоль оси OyОтвет: Гиперболический параболоид вдоль оси Oy.
32 37 Лекция – Преобразование декартовых координат
Самостоятельная работа
В следующих примерах определите вид поверхности, задаваемой урав-нением
Пример 36.8. 6 − x2 − 2y2 − 3z2 = 0
Пример 36.9. 2z2 + 5 = 3y2 + 4x2
Пример 36.10. 6x2 + 3z2 + 4 = 5y2
Пример 36.11. 3y − 4x2 − 5z2 = 0
Пример 36.12. 3x2 + 3y2 − 5z = 0
Пример 36.13. 2y + 3z2 − 5x2 = 0
37. лекция —преобразование декартовых координат
в пространстве
Параллельный перенос осей. Поворот oсей. Приведение поверхности2-го порядка к каноническому виду.
Аналогично тому, как это было сделано в лекции 2 части 1 настоя-щего курса, выведем формулы связывающие координаты точки в дан-ной декартовой (прямоугольной) системе координат с ее координатамив другой такой же, отличающейся расположением начала и направлени-ем осей. Сначала рассмотрим более простой случай, когда оси координатсонаправленны.
37.1. Параллельный перенос осей декартовой системы коор-динат. Будем предполагать, что обе системы прямоугольные, причем од-ноименные оси этих систем параллельны, одинаково направлены и накаждой из них выбрана одна и таже масштабная единица (см. рис. 22).Условимся называть координаты точки в системе Oxy старыми, а в си-стеме O1XY , полученной параллельным переносом осей старой системы– новыми.
Пусть начало новой системы координат O1 имеет в старой системекоординаты x0, y0, z0: O1(x0; y0; z0).
Также как для декартовой системы двух координат (см. лекцию 2 ча-сти 1 Курса), можно показать, что при параллельном переносе осей впространстве получаются следующие формулы преобразования коорди-нат:

37 Лекция – Преобразование декартовых координат 33
x
O
O
zZ
X
Yy
1
Рис. 22. Параллельный перенос декартовой системы координат
(37.1) x = X + x0; y = Y + y0; z = Z + z0,
или, что тоже самое
(37.2) X = x− x0; Y = y − y0; Z = z − z0.
37.2. Поворот осей декартовой системы координат. Пусть в простран-стве заданы две прямоугольные системы координат, имеющие общее начало O:система Oxyz (старая) и система OXY Z (новая), которая получена поворотомстарой системы. Найдем формулы, выражающие старые координаты x, y, zпроизвольной точки M пространства через ее новые координаты X, Y , Z.
x
O
z
y
X
Z
Y
Рис. 23. Поворот осей декартовой системы координат

34 37 Лекция – Преобразование декартовых координат
Задавать положение новых осей относительно старых будем с помощью на-правляющих косинусов. Так, например, положение оси OX зададим тремя на-правляющими косинусами, обозначив их следующим образом:
cos ∠XOx = α11, cos ∠XOy = α21, cos ∠XOz = α31.
Заметим, что так же как для направляющих косинусов вектора, справедливосоотношение:
(37.3) α211 + α2
21 + α231 = 1
Обозначив аналогичным образом направляющие косинусы всех осей, сведемрезультаты в таблицу:
X Y Zx α11 α12 α13
y α21 α22 α23
z α31 α32 α33
Направляющие косинусы новых осей по отношению к старым
Можно доказать (сделайте это самостоятельно), что старые координаты вы-ражаются через новые по формулам:
(37.4)
x = α11X + α12Y + α13Zy = α21X + α22Y + α23Zz = α31X + α32Y + α33Z
Если обозначить матрицу направляющих косинусов L, вектор–столбец ста-рых координат X, а новых X ′:
(37.5) L =
α11 α12 α13
α21 α22 α23
α31 α32 α33
, X =
xyz
, X ′ =
XYZ
,
то формулы (37.4) в матричной форме запишутся в виде:
(37.6) X = L ·X ′
Матрица L обладает свойствами:
- сумма квадратов элементов строки или столбца равна 1;- сумма произведений соответственных элементов двух строк или столб-
цов равна нулю;- транспонированная матрица LT совпадает с обратной L−1: LT =
= L−1.
Такая матрица, как отмечалось в лекции 36 части 1 Курса, называется орто-гональной. Формулы (37.4) соответствуют формулам (36.2) лекции 36, а преоб-разование координат в матричной форме (37.6) такое же как для случая двухкоординат.

37 Лекция – Преобразование декартовых координат 35
Поскольку обратная матрица совпадает с транспонированной: L−1 == LT , обратное к (37.6) преобразование в матричной форме имеет вид:
X ′ = L−1X = LTX,
а в координатах:
(37.7)X = α11x+ α21y + α31zY = α12x+ α22y + α23zZ = α13x+ α23y + α33z
.
Определение 37.1. Декартова (прямоугольная) система координат впространстве Oxyz называется правой, если смешанное произведение единич-ных векторов по осям координат равно +1:
(ijk) = +1
Если (ijk) = −1, система координат называется левой.
На практике, если направление оси Oz совпадает с движением правого бу-равчика, у которого ручка вращается по кратчайшему пути от оси Ox к осиOy, то система правая. Если же направление оси Oz противоположно, системалевая (рис. 24).
y
z
z
y
x
x
Рис. 24. Правая и левая системы координат в пространстве
Замечание 37.6. Если считать оси системы координат в пространстве“жестко соединенными”, то вращением невозможно совместить правую и ле-вую системы координат с общим началом.
Замечание 37.7. Определитель матрицы L преобразования координат ра-вен +1, если при преобразовании ориентация системы не меняется (правая пе-реходит в правую или левая в левую). В противном случае (правая переходитв левую или левая в правую) определитель матрицы L равен -1.
Замечание 37.8. на плоскости также различают правую и левую систе-мы координат (см. рис. 25). Система является правой, если ось Ox совмеща-ется с осью Oy кратчайшим путем вращением против часовой стрелки.
Если считать оси системы координат на плоскости “жестко соединенными”,
то вращением без вывода из плоскости невозможно совместить правую и левую
системы координат с общим началом.
36 37 Лекция – Преобразование декартовых координат
O x
y y
x O
Рис. 25. Правая и левая системы координат на плоскости
37.3. Приведение уравнения поверхности 2-го порядка к ка-ноническому виду. Если в общем уравнении (36.1) поверхности 2-гопорядка отсутствуют члены xy, xz и yz (т.е. a12 = a13 = a14 = 0), то при-вести уравнение к каноническому виду можно выделив полный квадрат.Покажем это на примерах.
Пример 37.1. Какую поверхность задает уравнение:3x2 + 2y2 + z2 − 6x+ 4y − 4z + 5 = 0?
Р е ш е н и е: Сгруппировав члены с одинаковыми переменными ивыделив полный квадрат, получаем:
3x2 + 2y2 + z2 − 6x + 4y − 4z + 5 = 0 ⇔
⇔ 3(x2 − 2x + 1) + 2(y2 + 2y + 1) + (z2 − 4z + 4) = 4 ⇔
⇔ 3(x− 1)2 + 2(y+ 1)2 + (z− 2)2 = 4 ⇔ (x− 1)2
4/3+
(y + 1)2
4/2+
(z − 2)2
4= 1.
Сделаем замену переменных:
X = x− 1, Y = y + 1, Z = z − 2.
В новых координатах уравнение примет вид:
X2
4/3+Y 2
2+Z2
4= 1.
Это каноническое уравнение эллипсоида с полуосями
a =2√3, b =
√2, c = 2.
Поскольку новые координаты X, Y , Z выражаются через старые ко-ординаты x, y, z по формулам: X = x − x0, Y = y − y0, Z = z − z0, наосновании изложенного в п. (37.1), заключаем, что новая система коорди-нат получается из старой параллельным переносом начала координат вточку P0(x0; y0; z0). Поскольку в новых координатах поверхность являетсяэллипсоидом с центром в начале координат и осями координат в качестве
37 Лекция – Преобразование декартовых координат 37
осей симметрии, то в старых координатах поверхность является эллипсо-идом с центром в точке P0(1;−1; 2) и осями симметрии параллельнымиосям координат.
Пример 37.2. Какую поверхность задает уравнение
4x2 + y2 − 3z2 + 16x + 2y + 6z + 6 = 0?
Р е ш е н и е:Сгруппировав члены с одинаковыми переменными и выделив полный
квадрат, получаем:
4x2 + y2 − 3z2 + 16x + 2y + 6z + 6 = 0 ⇔⇔ 4(x2 + 4x + 4) + (y2 + 2y + 1) − 3(z2 − 2z + 1) = 8 ⇔
⇔ (x+ 2)2
2+
(y + 1)2
8− (z − 1)2
8/3= 1
Сделаем замену переменных:
X = x+ 2, Y = y + 1, Z = z − 1
В новых координатах уравнение имеет вид:
X2
2+Y 2
8− Z2
8/3= 1.
Это каноническое уравнение однополостного гиперболоида, располо-женного “вдоль” оси OZ. В сечениях перпендикулярных оси OZ получа-ются эллипсы. Поскольку новая система координат получается из старойпараллельным переносом начала в точку P0(−2;−1; 1), осью гиперболои-да является прямая, параллельная оси Oz и проходящая через эту точку.
Если в общем уравнении (36.1) поверхности 2-го порядка не все коэффици-енты a12, a13 и a23 равны нулю, то для приведения уравнения поверхности кканоническому виду необходимо найти собственные числа и собственные век-торы матрицы квадратичной формы (36.1) как это изложено в лекции 32 т.1данного Курса.
Направляющие косинусы осей новой системы координат, в которой уравне-ние поверхности станет каноническим, находятся из трех систем уравнений:
(37.8)
(a11 − λi)α1i + a12α2i + a13α3i = 0a12α1i + (a22 − λi)α2i + a23α3i = 0a13α1i + a23α2i + (a33 − λi)α3i = 0
,
дополненных условием нормировки (37.3):
α21i + α2
2i + α23i = 1,

38 37 Лекция – Преобразование декартовых координат
где три действительные собственные значения λ1, λ2, λ3 находятся из характе-ристического уравнения (37.9):
(37.9)
∣∣∣∣∣∣
a11 − λ a12 a13
a12 a22 − λ a23
a13 a23 a33 − λ
∣∣∣∣∣∣
= 0.
Замечание 37.9. Направляющие косинусы каждой из трех новых осей об-разуют собственный вектор матрицы квадратичной формы
(37.10)
a11 a12 a13
a12 a22 a23
a13 a23 a33
,
соответствующий собственному значению λi (i=1,2,3). Если все корниуравнения (37.9) отличны от нуля, системы (37.8) определяют направляю-щие косинусы осей новой системы координат (X,Y,Z), в которой уравнениеповерхности будет каноническим. Если два корня уравнения (37.9) равны ну-лю, поверхность является параболическим цилиндром или парой параллель-ных плоскостей. В этом случае систему (37.8) следует дополнить уравнениемa14α11 + a24α21 + a34α31 = 0 и полученная система определит направляющиекосинусы образующих цилиндра
Замечание 37.10. Можно показать, что если матрица A квадратичнойформы не вырождена (detA 6= 0), то каноническое уравнение поверхности вто-рого порядка после приведения к каноническому виду имеет вид:
λ1X2 + λ2Y
2 + λ3Z2 +
detD
detA= 0,
где: λ1, λ2, λ3 – собственные значения матрицы квадратичной формы.
A =
a11 a12 a13
a12 a22 a23
a13 a23 a33
,
detA – ее определитель.
D =
a11 a12 a13 a14
a12 a22 a23 a24
a13 a23 a33 a34
a14 a24 a34 a44
,
матрица уравнения поверхности, detD – ее определитель, называемый дис-криминантом уравнения поверхности.
Пример 37.3. Определить, какую поверхность задает уравнение
6x2 − 2y2 + 6z2 + 4zx+ 8x− 4y − 8z + 1 = 0
и найти направляющие косинусы осей новой системы координат, в которойуравнение поверхности станет каноническим.
37 Лекция – Преобразование декартовых координат 39
Р е ш е н и е: Составим матрицу (37.10) квадратичной формы:
6 0 20 −2 02 0 6
и характеристическое уравнение (37.9):∣∣∣∣∣∣
6 − λ 0 20 −2 − λ 02 0 6 − λ
∣∣∣∣∣∣
= 0 ⇔
⇔ −(6 − λ)(2 + λ)(6 − λ) + 4(2 + λ) = 0 ⇔ (2 + λ)(4 − (6 − λ)2
)= 0 ⇔
⇔ (2 + λ)(4 − 36 + 12λ− λ2) = 0 ⇔ (λ+ 2)(λ− 8)(λ− 4) = 0 ⇔⇔ λ1 = −2. λ2 = 8, λ3 = 4.
Найдем направляющие косинусы из систем (37.8), дополненных условием нор-мировки (37.3).
(6 − 4)α11 + 2α31 = 0(−2 − 4)α21 = 02α11 + (6 − 4)α31 = 0α2
11 + α221 + α2
31 = 1
⇒
α11 = − 1√2
α21 = 0α31 = 1√
2
(6 − 8)α12 + 2α32 = 0(−2 − 8)α22 = 02α12 + (6 − 8)α32 = 0α2
12 + α222 + α2
32 = 1
⇒
α12 = 1√2
α22 = 0α32 = 1√
2
(6 + 2)α13 + 2α33 = 00 = 02α13 + (6 + 2)α33 = 0α2
13 + α223 + α2
33 = 1
⇒
α13 = 0α23 = 1α33 = 0
Получим матрицу L линейного преобразования координат (поворот осей):
L =
− 1√2
1√2
0
0 0 11√2
1√2
0
Делая это преобразование X = LX ′, т.е.
x = − 1√2X ′ + 1√
2Y ′
y = Z ′
z = 1√2X ′ + 1√
2Y ′
,
получаем уравнение:
4(X ′ −√
2)2 + 8Y′2 − 2(Z ′ + 1)2 − 5 = 0.
40 37 Практическое занятие – Преобразование координат
Делая еще одно преобразование (параллельный перенос)
X = X ′ −√
2Y = Y ′
Z = Z ′ + 1,
получаем каноническое уравнение однополостного гиперболоида
4X2 + 8Y 2 − 2Z2 − 5 = 0 ⇔ X2
5/4+Y 2
5/8− Z2
5/2= 1.
37. практическое занятие —преобразование декартовых координат
Пример 37.1. Определите вид поверхности задаваемой уравнением2x2 + 3y2 − 4x + 6y − 6z − 7 = 0.
Р е ш е н и е: Сгруппировав члены с одинаковыми переменными ивыделив полный квадрат, получаем:
2x2 − 4x + 3y2 + 6y − 6z − 7 = 0 ⇔⇔ 2(x2 − 2x+ 1) + 3(y2 + 2y + 1) − 6z − 12 = 0 ⇔
⇔ z + 2 =(x− 1)2
3+
(y + 1)2
2Сделаем замену переменных:
X = x− 1, Y = y + 1, Z = z + 2
В новых координатах уравнение имеет вид:
Z =X2
3+Y 2
2
Это каноническое уравнение эллиптического параболоида.
Пример 37.2. Определить вид поверхности задаваемой уравнением
2x2 + 5y2 + 2z2 − 2xy − 4zx+ 2yz + 2x− 10y − 2z − 1 = 0,
найти направляющие косинусы осей новой системы координат и каноническоеуравнение поверхности.
Р е ш е н и е: Составим матрицу (37.10) квадратичной формы:
A =
2 −1 −2−1 5 1−2 1 2

37 Практическое занятие – Преобразование координат 41
и характеристическое уравнение (37.9):∣∣∣∣∣∣
2 − λ −1 −2−1 5 − λ 1−2 1 2 − λ
∣∣∣∣∣∣
= 0
выполним элементарные преобразования для упрощения определителя: приба-вим к первому столбцу последний и к первой строке последнюю:
∣∣∣∣∣∣
−λ −1 −20 5 − λ 1−λ 1 2 − λ
∣∣∣∣∣∣
= 0 ⇔
∣∣∣∣∣∣
−2λ 0 λ0 5 − λ 1−λ 1 2 − λ
∣∣∣∣∣∣
⇔
−λ(λ2 − 9λ+ 18) = 0 ⇔ λ(λ− 3)(λ− 6) = 0
λ1 = 6, λ2 = 3, λ3 = 0
Составим системы (37.8)
(2 − 3)α11 − 1α21 − 2α31 = 0−1α11 + (5 − 3)α21 + 1α31 = 0−2α11 + 1α21 + (2 − 3)α31 = 0α2
11 + α221 + α2
31 = 1
⇒
α11 = − 1√6
α21 = 2√6
α31 = 1√6
(2 − 6)α12 − 1α22 − 2α32 = 0−1α12 + (5 − 6)α22 + 1α32 = 0−2α12 + 1α22 + (2 − 6)α32 = 0α2
12 + α222 + α2
32 = 1
⇒
α12 = − 1√3
α22 = − 1√3
α32 = 1√3
2α13 − 1α23 − 2α33 = 0−1α13 + 5α23 + 1α33 = 0−2α13 + 1α23 + 2α33 = 0α2
13 + α223 + α2
33 = 1
⇒
α13 = 1√2
α23 = 0α33 = 1√
2
Решая эти системы, с учетом нормирующего условия (37.3) находим направля-ющие косинусы и матрицу линейного преобразования L (поворота):
L =
− 1√6
− 1√3
1√2
2√6
− 1√3
01√6
1√3
1√2
Делая преобразование координат (поворот осей) X = LX ′, т.е.
x = − 1√6X ′ − 1√
3Y ′ + 1√
2Z ′
y = 2√6X ′ − 1√
3Y ′
z = 1√6X ′ + 1√
3Y ′ + 1√
2Z ′
,
и затем – параллельный перенос, получаем каноническое уравнение эллиптиче-ского цилиндра:
2X2 + Y 2 − 2 = 0 ⇔ X2 +Y 2
2= 1.
42 37 Практическое занятие – Преобразование координат
Пример 37.3. Определить вид поверхности, задаваемой уравнением
x2 − 2y2 + z2 + 4xy − 8zx− 4yz − 14x − 4y + 14z + 16 = 0,
найти направляющие косинусы осей новой системы координат и каноническоеуравнение поверхности.
Р е ш е н и е: Матрица (37.10) квадратичной формы имеет следующий вид:
A =
1 2 −42 −2 −2−4 −2 1
Решая характеристическое уравнение∣∣∣∣∣∣
1 − λ 2 −42 −2 − λ −2−4 −2 1 − λ
∣∣∣∣∣∣
= 0,
находим собственные значения:
λ1 = −3, λ2 = 6, λ3 = −3
Решая системы (37.8) с учетом нормирующего условия (37.3) находим направ-ляющие косинусы и матрицу линейного преобразования L:
L =
− 1√5
−23
43√
52√5
−13
23√
5
0 23
√5
3
Делая преобразование L:
x = −X′√5− 2
3Y′ + 4
3√
5Z ′
y = 2√5X ′ + 2
3Y′ + 2
3√
5Z ′
z = 23Y
′ +√
53 Z
′,
получаем в координатах X ′, Y ′, Z ′ уравнение поверхности, не содержащее, чле-нов со смешанным произведением X ′Y ′, X ′Z ′, Y ′Z ′. Выделяя дальше полныйквадрат, получаем каноническое уравнение конуса:
X2 − 2Y 2 + Z2 = 0 ⇔ X2 − Y 2
1/2+ Z2 = 0
Заметим, что здесь detA = 54,detD = 0
Самостоятельная работа
В следующих примерах определите вид поверхности и найдите ее ка-ноническое уравнение.
Пример 37.4. x2 + 2x+ 2z2 − 4z + 4y2 + 2 = 0
Пример 37.5. x2 − 2x+ y2 + 2y + z2 − 1 = 0

38 Лекция – Частные производные 43
Пример 37.6. x2 + 4z2 − 2y2 − 4 = 0.
Пример 37.7. 3y2 − 6y − x2 + 3z2 = 0.
Пример 37.8. 3y2 − 6z2 − 2x2 − 6 = 0.
Пример 37.9. z2 + 2z − 3x2 + 6x− 3y2 − 5 = 0.
Пример 37.10. 3x2 + 2z2 − 6y = 0.
Пример 37.11. y2 + 2y + z2 − 2z − 4x + 2 = 0.
Пример 37.12. x2 + 9y2 + 18y + 9z + 9 = 0.
Пример 37.13. 3x2 − 2z2 − 6y = 0.
Пример 37.14. x2 + y2 + 5z2 − 6xy+ 2zx− 2yz − 4x+ 8y− 12z+ 14 = 0
Пример 37.15. 4x2 + 5y2 + 6z2 − 4xy + 4yz + 4x + 6y + 4z − 27 = 0.
Пример 37.16. x2 + 2y2 + 3z2 + 2x− 4y − 12z + 9 = 0
38. лекция —предел, непрерывность и частные производные
функции двух переменных
Предел функции двух переменных. Точка и линии разрыва. Функ-ции непрерывные в ограниченной замкнутой области. Частные про-изводные 1-го порядка. Частные производные высших порядков.
38.1. Предел функции двух переменных. При рассмотрении пре-дела функции одной переменной (часть 1 Курса) было введено понятиеδ-окрестности точки x0 – интервал с центром в точке x0 вида (x0−δ; x0+δ).Введем аналогичное понятие для функции двух переменных.
Определение 38.1. δ-окрестностью точки P0(x0; y0) называетсявнутренняя часть круга с центром в этой точке радиуса δ:
δ(P0) =
P (x; y)|√
(x− x0)2 + (y − y0)2 < δ
.
Любая точка P этой δ-окрестности находится от точки P0 на расстоя-нии меньшем δ.

44 38 Лекция – Частные производные
Определение 38.2. Число b называется пределом функции двух пе-ременных или двойным пределом функции z = f(x; y) при P → P0, еслидля любого числа ε найдется такая δ-окрестность точки P0(x0; y0), чтодля любой точки P (x; y) этой окрестности, за исключением, быть мо-жет, точки P0, будет выполнено неравенство: |f(x; y) − b| < ε.
При этом записывают:
limx→x0y→y0
f(x; y) = b или limP→P0
f(P ) = b.
Символическая запись определения 38.2 limP→P0
f(P ) = b:
∃(ε > 0) ∀(δ(P0))∃(P ∈ δ(P0), м.б.кр. P = P0) ⇒ |f(P ) − b| < ε
Для двойного предела справедливы все свойства предела, перечислен-ные в части 1 Курса для функции одного переменного: предел суммы, раз-ности, произведения равен соответственно сумме, разности, произведениюпределов, если каждый из них существует; предел частного равен частно-му пределов, если каждый из них существует и предел знаменателя не ра-вен нулю; постоянный множитель можно выносить за знак предела и т.д.Из определений (38.1) и (38.2) следует, что lim
x→x0y→y0
f(x; y) = b⇔ limδ→0
f(x; y) =
= b, где δ =√
(x− x0)2 + (y − y0)2 – расстояние между точками P и P0.Поэтому для вычисления пределов функции двух переменных мы будемпользоваться равносильным определением (38.3)
Определение 38.3. Число b называется пределом функции двух пе-ременных или двойным пределом функции z = f(x; y) при P → P0, еслифункция определена в некоторой окрестности точки P0 за исключением,быть может, точки P0 и lim
δ→0f(x; y) = b, где δ =
√
(x− x0)2 + (y − y0)2
Пример 38.1. Найти limx→0y→0
x2+y2√x2+y2+4−2
.
Р е ш е н и е: В данном примере x0 = 0, y0 = 0, P0(0; 0) ⇒⇒ δ =
√
x2 + y2. Таким образом:
limx→0y→0
x2 + y2
√
x2 + y2 + 4 − 2= lim
δ→0
δ2
√δ2 + 4 − 2
=
= limδ→0
δ2(√
δ2 + 4 + 2)
δ2 + 4 − 4= lim
δ→0
(√δ2 + 4 + 2
)
= 4.
В данном примере функция x2+y2√x2+y2+4−2
не определена в точке P0(0; 0), но
имеет предел при P → P0.

38 Лекция – Частные производные 45
Заметим, что двойной предел limx→x0y→y0
f(x; y) при одновременном стремле-
нии обоих аргументов не обязательно совпадает с повторными пределами
limx→x0
(
limy→y0
f(x; y)
)
и limy→y0
(
limx→x0
f(x; y)
)
,
которые не являются новыми понятиями, а вычисляются последовательнокак обычные пределы функции одной переменной.
Однако существует теорема, которая позволяет заменять двойной пре-дел функции двух переменных повторным пределом при достаточно ши-роких предположениях.
Теорема 38.1. Если существует limx→x0y→y0
f(x; y) и при ∀y ∈ δ окрест-
ности y0, y 6= y0, ∃ limx→x0
f(x; y), а при ∀x ∈ δ окрестности x0, x 6= x0,
∃ limy→y0
f(x; y), то ∃ limy→y0
limx→x0
f(x; y),
∃ limx→x0
limy→y0
f(x; y) и limy→y0
limx→x0
f(x; y) = limx→x0
limy→y0
f(x; y) = limx→x0y→y0
f(x; y).
Пример 38.2. В условиях примера (38.1) вычислить повторные пре-делы.
Р е ш е н и е:
limy→0
limx→0
x2 + y2
√
x2 + y2 + 4 − 2= lim
y→0
y2
√
y2 + 4 − 2=
= limy→0
y2(√
y2 + 4 + 2)
y2 + 4 − 4= lim
y→0
(√
y2 + 4 + 2)
= 4.
Проверьте самостоятельно, что limx→0
limy→0
x2+y2√x2+y2+4−2
= 4.
В первой части нашего курса (п.6.5) для функций одной переменнойy = f(x) были введены односторонние пределы lim
x→x0−0и lim
x→x0+0и отме-
чалось, что для существования limx→x0
f(x) они должны быть равны. Для
функции 2x переменных limx→0y→0
f(x; y) существует, если он не зависит от спо-
соба стремления точки P (x; y) к точке P0(x0; y0).
Пример 38.3. Найти limx→0y→0
x2−y2x2+y2
.
Р е ш е н и е: Пусть y = λx, т.е. подход к началу координат соверша-ется вдоль прямых y = λx, тогда lim
x→0y→0
x2−y2x2+y2
= limx→0
x2−λ2x2
x2+λ2x2 = 1−λ2
1+λ2 зависит от
λ и, следовательно, не существует.

46 38 Лекция – Частные производные
Установите справедливость выполнения условий теоремы 38.1.
Определение 38.4. Функция f(x; y) называется бесконечно малойпри P → P0, если ее двойной предел равен нулю.
Можно доказать равносильность следующих трех утверждений:limP→P0
f(P ) = b ⇔ limP→P0
(f(P ) − b) = 0 ⇔ f(P ) − b является бесконечно
малой при P → P0.Определение предела естественным образом распространяется на слу-
чай функции 3-х и более переменных.
38.2. Непрерывность функции нескольких переменных.
Определение 38.5. Функция n переменных u = f(P ) называетсянепрерывной в точке P0, если функция определена в этой точке и в неко-торой ее окрестности и lim
P→P0
f(P ) = f(P0).
Определение 38.6. Точка P0, в которой функция u = f(P ) непре-рывна, называется точкой непрерывности этой функции.
Заметим, что определение точки разрыва более сложное, чем простопротивоположное к данному утверждение и будет сформулировано позже.
Свойства непрерывных функций сформулируем в виде теоремы, ко-торую примем без доказательства, т.к. оно аналогично доказательствусоответствующей теоремы о непрерывных функциях одной переменнойиз тома 1 Курса.
Теорема 38.2. Если функция n переменных f1(P ) и f2(P ) непрерывныв точке P0, то в этой же точке непрерывны и их сумма f1(P ) + f2(P ),разность f1(P )−f2(P ), произведение f1(P ) ·f2(P ) и частное f1(P )/f2(P ),если f2(P0) 6= 0.
На основании этой теоремы легко устанавливается непрерывность мно-гочлена от двух переменных при любом их значении и непрерывность ра-циональной функции во всех точках плоскости, в которых знаменательне равен нулю.
Определение 38.7. Точка P0 называется точкой разрыва функцииf(P ), если она принадлежит области определения этой функции или еегранице и не является точкой непрерывности.
Пример 38.4. Найти точки разрыва функции z = 1x−y+1
.
Р е ш е н и е: Функция определена и непрерывна всюду, кроме точек скоординатами, удовлетворяющими уравнению: x−y+1 = 0. Это уравнение
38 Лекция – Частные производные 47
прямой y = x + 1, являющейся границей области определения функции.Каждая точка этой прямой есть точка разрыва.
Ответ: точки разрыва образуют прямую y = x+ 1.
38.3. Функции непрерывные в ограниченной замкнутой об-ласти. В томе 1 Курса были рассмотрены свойства функции одной пе-ременной, непрерывной на отрезке. Аналогичными свойствами обладаютфункции нескольких переменных, непрерывные в ограниченной замкну-той области.
Определение 38.8. Функция z = f(P ) называется непрерывной вограниченной замкнутой области D, если она непрерывна в каждой точ-ке этой области. При этом для непрерывности f(P ) в граничной точкеP0 траекторию движения точки P при стремлении P → P0 выбираемвнутри D.
Теорема 38.3. Если функция z = f(P ) непрерывна в ограниченнойзамкнутой области D, то она в этой области:
(1) ограничена: ∃ N > 0 : |f(P )| 6 N для ∀P ∈ D;(2) достигает своего наименьшего m и наибольшего M значений:
∃ P1 ∈ D : f(P1) = m и ∃ P2 ∈ D : f(P2) = M ;(3) любое значение между m и M принимает хотя бы в одной точке
области: для ∀ c ∈ [m;M ] ∃ P0 : f(P0) = c.
Пример 38.5. Функция z =√
1 − x2 − y2 определена и непрерывнав ограниченной замкнутой области D = (x; y)|x2 + y2 6 1 – круге сцентром в точке O(0; 0) и радиуса 1.
Она ограничена: |√
1 − x2 − y2| 6 1 при x2 + y2 6 1.Наименьшее значение m = 0 достигается в точках окружности x2 +
+ y2 = 1 – на границе области, наибольшее значение M = 1 достигается вначале координат – внутренней точке области.
Функция принимает любое значение 0 6 c 6 1 в точках окружностиc =
√
1 − x2 − y2 ⇔ x2+y2 = 1−c2. Графиком функции является верхняяполусфера, изображенная на рис. 26
38.4. Частные производные 1-го порядка. Рассмотрим функциюдвух переменных z = f(x; y). Зафиксируем значение одного из аргумен-тов, например y, положив y = y0. Тогда функция f(x; y0) есть функцияодной переменной x. Пусть она имеет производную в точке x0:
(38.1) lim∆x→0
f(x0 + ∆x; y0) − f(x0; y0)
∆x.

48 38 Лекция – Частные производные
11
-1
1
z
x
y
Рис. 26. График функции z =√
1 − x2 − y2
Эта производная называется частной производной (или частной про-изводной первого порядка) функции z = f(x; y) по x в точке P0(x0; y0) иобозначается символом f ′
x(x0; y0).Разность f(x0 + ∆x; y0) − f(x0; y0) называется частным приращением
по x функции z = f(x; y) в точке P0(x0; y0) и обозначается символом ∆xz:
(38.2) ∆xz = f(x0 + ∆x; y0) − f(x0; y0).
Учитывая эти обозначения, можно записать
(38.3) f ′x(x0; y0) = lim
∆x→0
∆xz
∆x.
Аналогично определяются и обозначаются частное приращение функ-ции z = f(x; y) по y и частная производная по y в точке P0(x0; y0):
∆yz = f(x0; y0 + ∆y) − f(x0; y0),
f ′y(x0; y0) = lim
∆y→0
∆yz
∆y.
Таким образом, частная производная функции двух переменных поодному из ее аргументов равна пределу отношения частного приращенияфункции к вызвавшему его приращению аргумента, когда приращениеаргумента стремится к нулю.
Значение частной производной зависит от точки P (x; y), в которойона вычисляется. Поэтому частная производная функции двух перемен-ных z = f(x; y), вообще говоря, есть функция точки P (x; y), т.е. такжеявляется функцией двух переменных x и y.
Частные производные, рассматриваемые как функции двух перемен-ных, обозначаются следующим образом:
f ′x(x; y), f
′y(x; y) или z′x, z
′y или
∂z
∂x,∂z
∂y.
38 Лекция – Частные производные 49
Частные приращения и частные производные функции n переменныхпри n > 2 определяются и обозначаются аналогично. Например, дляфункции трех переменных u = f(x; y; z) частное приращение по x, в точ-ке P0(x0; y0; z0) получится, если x получит приращение ∆x, а остальныеаргументы останутся неизменными:
∆xu = f(x0 + ∆x; y0; z0) − f(x0; y0; z0).
Частная производная функции u = f(x; y; z) по аргументу x в точкеP0(x0; y0; z0) равна
u′x(x0; y0; z0) = lim∆x→0
∆xu
∆x.
Таким образом, частная производная функции нескольких перемен-ных определяется как производная функции одной из этих переменных.Вследствие этого все правила и формулы дифференцирования, выведен-ные для производных функции одной переменной, сохраняются для част-ных производных функции нескольких переменных. Следует лишь по-мнить, что во всех этих правилах и формулах при нахождении частнойпроизводной по какому-либо аргументу все остальные аргументы счита-ются постоянными.
Пример 38.6. Найти частные производные первого порядка функцииz =
√
x2 − y2 в точке P0(5; 3)
Р е ш е н и е:
∂z
∂x=
2x
2√
x2 − y2=
x√
x2 + y2;
∂z
∂x|P0 =
5√52 − 32
=5
4;
∂z
∂y=
−2y
2√
x2 − y2= − y
√
x2 − y2;
∂z
∂y|P0 = −3
4.
Ответ: ∂z∂x|P0 = 5
4; ∂z
∂y|P0 = −3
4
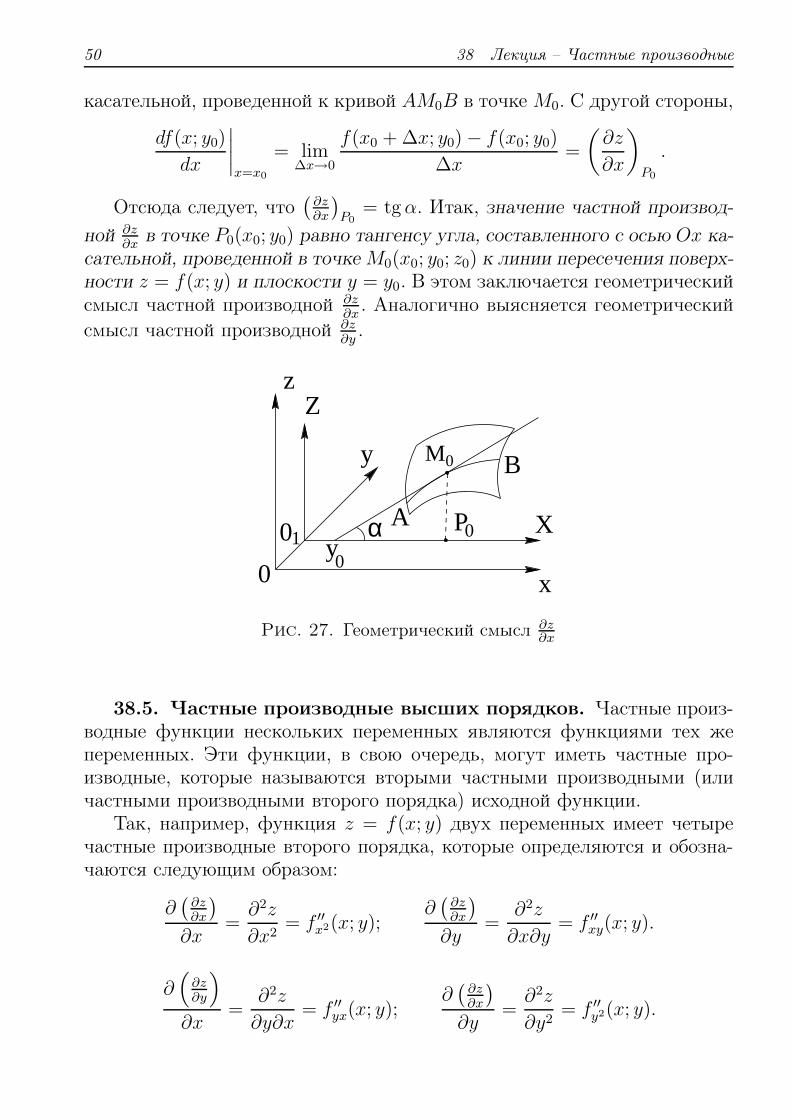
Выясним геометрический смысл частной производной ∂z∂x
функции двухпеременных z = f(x; y). Как известно, графиком функции z = f(x; y) яв-ляется некоторая поверхность. Рассмотрим точку P0(x0; y0) в плоскостиOxy и соответствующую точку M0(x0; y0; z0) на поверхности (рис. 27). Рас-смотрим плоскую кривую AM0B, которая получится при сечении поверх-ности плоскостью y = y0. Эту кривую можно рассматривать как графикфункции одной переменной z = f(x; y0) в плоскости y = y0. Но тогда,согласно геометрическому смыслу производной функции одной перемен-ной, df(x;y0)
dx= tgα, где α – угол с осью O1X, или, что то же, с осью Ox
50 38 Лекция – Частные производные
касательной, проведенной к кривой AM0B в точке M0. С другой стороны,
df(x; y0)
dx
∣∣∣∣x=x0
= lim∆x→0
f(x0 + ∆x; y0) − f(x0; y0)
∆x=
(∂z
∂x
)
P0
.
Отсюда следует, что(∂z∂x
)
P0= tgα. Итак, значение частной производ-
ной ∂z∂x
в точке P0(x0; y0) равно тангенсу угла, составленного с осью Ox ка-сательной, проведенной в точке M0(x0; y0; z0) к линии пересечения поверх-ности z = f(x; y) и плоскости y = y0. В этом заключается геометрическийсмысл частной производной ∂z
∂x. Аналогично выясняется геометрический
смысл частной производной ∂z∂y
.
0M
10 P0
zZ
y
x
X
B
Aα
0y0
Рис. 27. Геометрический смысл ∂z∂x
38.5. Частные производные высших порядков. Частные произ-водные функции нескольких переменных являются функциями тех жепеременных. Эти функции, в свою очередь, могут иметь частные про-изводные, которые называются вторыми частными производными (иличастными производными второго порядка) исходной функции.
Так, например, функция z = f(x; y) двух переменных имеет четыречастные производные второго порядка, которые определяются и обозна-чаются следующим образом:
∂(∂z∂x
)
∂x=∂2z
∂x2= f ′′
x2(x; y);∂(∂z∂x
)
∂y=
∂2z
∂x∂y= f ′′
xy(x; y).
∂(∂z∂y
)
∂x=
∂2z
∂y∂x= f ′′
yx(x; y);∂(∂z∂x
)
∂y=∂2z
∂y2= f ′′
y2(x; y).

38 Лекция – Частные производные 51
Функция u = f(x; y; z), трех переменных имеет девять частных произ-водных второго порядка:
∂(∂u∂x
)
∂x=∂2u
∂x2= f ′′
x2(x; y; z);∂(∂u∂x
)
∂y=
∂2u
∂x∂y= f ′′
xy(x; y; z);
∂(∂u∂x
)
∂z=
∂2u
∂x∂z= f ′′
xz(x; y; z) и т.д.
Аналогично определяются и обозначаются частные производные тре-тьего и более высокого порядка функции нескольких переменных: частнойпроизводной n-го порядка функции нескольких переменных называетсячастная производная первого порядка от частной производной (n− 1)-гопорядка той же функции.
Например, частная производная третьего порядка ∂3z∂x∂y2
функцииz = f(x; y) есть частная производная первого порядка по y от частнойпроизводной второго порядка ∂2z
∂x∂y:
∂3z
∂x∂y2=∂(
∂2z∂x∂y
)
∂y.
Частная производная второго или более высокого порядка, взятая понескольким различным переменным, называется смешанной частной про-изводной.
Например, частные производные
∂2z
∂x∂y,∂2z
∂y∂x,
∂3z
∂x∂y2
являются смешанными частными производными функции двух перемен-ных z = f(x; y).
Пример 38.7. Найти смешанные частные производные второго по-рядка функции z = x2y3.
Р е ш е н и е: Находим частные производные первого порядка
∂z
∂x= 2xy3,
∂z
∂y= 3x2y2.
Затем находим смешанные частные производные второго порядка
∂2z
∂x∂y=∂(∂z∂x
)
∂y=(2xy3
)′y
= 6xy2,
∂2z
∂y∂x=∂(∂z∂y
)
∂x=(3x2y2
)′x
= 6xy2.
52 38 Практическое занятие – Частные производные
Мы видим, что смешанные частные производные данной функции ∂2z∂x∂y
и ∂2z∂y∂x
, отличающиеся между собой лишь порядком дифференцирования,т.е. последовательностью, в которой производится дифференцирование поразличным переменным, оказались тождественно равными. Этот резуль-тат не случаен. Относительно смешанных частных производных имеетместо следующая теорема, которую мы принимаем без доказательства.
Теорема 38.4. Две смешанные частные производные одного порядкаодной и той же функции, отличающиеся лишь порядком дифференциро-вания, равны между собой при условии их непрерывности.
В частности, для функции двух переменных z = f(x; y) имеем:
∂2z
∂x∂y=
∂2z
∂y∂x.
38. практическое занятие —частные производные
Поскольку основная задача данного практического занятия – приоб-ретение навыков нахождения частных производных функции несколькихпеременных, мы не всегда будем упрощать полученный результат.
Пример 38.1. Найдите все частные производные первого порядка функ-ции z =
√
x2 − 3y2
Р е ш е н и е: При нахождении ∂z∂x
будем считать y постоянным.Пользуясь обычными правилами нахождения производных получаем:
∂z
∂x=
2x
2√
x2 − 3y2;
∂z
∂y=
−6y
2√
x2 − 3y2
Пример 38.2. Найдите частные производные первого порядка функ-ции z = 4√
5−xy
Р е ш е н и е: При нахождении ∂z∂x
считаем y постоянным
∂z
∂x=(
4(5 − xy)−12
)′
x= 4
(
−1
2
)
(5 − xy)−32 (−y) =
=2y
(5 − xy)√
5 − xy.
Aналогично находим ∂z∂y
, считая x постоянным.
∂z
∂y=
2x
(5 − xy)√
5 − xy

38 Практическое занятие – Частные производные 53
Пример 38.3. Найдите частные производные первого порядка функ-ции z = yx.
Р е ш е н и е: При нахождении ∂z∂x
считаем y постоянным и находимпроизводную показательной функции:
∂z
∂x= yx ln y
При нахождении ∂z∂y
считаем x постоянным и находим производную пока-зательной функции:
∂z
∂y= xyx−1
Пример 38.4. Найдите частные производные первого порядка функ-ции z = log2 (3 3
√x+ 2y2).
Р е ш е н и е: При фиксированном y находим ∂z∂x
:
∂z
∂x=
3 · 1
33√x2
(3 3√x+ 2y2) ln 2
=1
(
3x + 2y2 3√x2)
ln 2.
Аналогично находим ∂z∂y
при фиксированном x:
∂z
∂y=
4y
(3 3√x+ 2y2) ln 2
.
Пример 38.5. Найдите частные производные первого порядка функ-ции x = 2cos t
s .
Р е ш е н и е: При фиксированном s находим ∂x∂t
:
∂x
∂t= 2cos t
s ln 2
(
− sint
s
)
· 1
s= −2cos t
s ln 2 sint
s· 1
s
Аналогично, при фиксированном t находим ∂x∂s
:
∂x
∂s= 2cos t
s ln 2
(
− sint
s
)(
− t
s2
)
= 2cos ts ln 2 sin
t
s· ts2
Самостоятельная работа
Для закрепления навыков дифференцирования в следующих приме-рах найдите все частные производные первого порядка:

54 39 Лекция – Полный дифференциал
Пример 38.6. z = 2x2 − 3y2 − 2xy + 3x− 5y + 1.
Пример 38.7. z = 2y−3x2x−5y
Пример 38.8. z = x√y−x
Пример 38.9. z = 3√x− y
Пример 38.10. z = 3y−x
Пример 38.11. z = 2xy
Пример 38.12. z = sin(
x2√y
)
Пример 38.13. z = tg( √
y
3 3√x
)
Пример 38.14. z = arcsin(3y − 2x)
Пример 38.15. z = arctg(3x− 2
√y).
Пример 38.16. u = (y)xz
Пример 38.17. u = zxy
Пример 38.18. u = (yz)x
Пример 38.19. y = ln(cos u− sin v)
В примерах 38.20,38.21 найдите все частные производные второго по-рядка, предварительно найдя и упростив производные первого порядка.
Пример 38.20. z =√
x2 + y2
Пример 38.21. z = log3(x− y2)
39. лекция —полный дифференциал функции
нескольких переменных
Полное приращение функции. Полный дифференциал. Приближен-ные вычисления с помощью полного дифференциала. Дифференци-рование сложных и неявных функций.
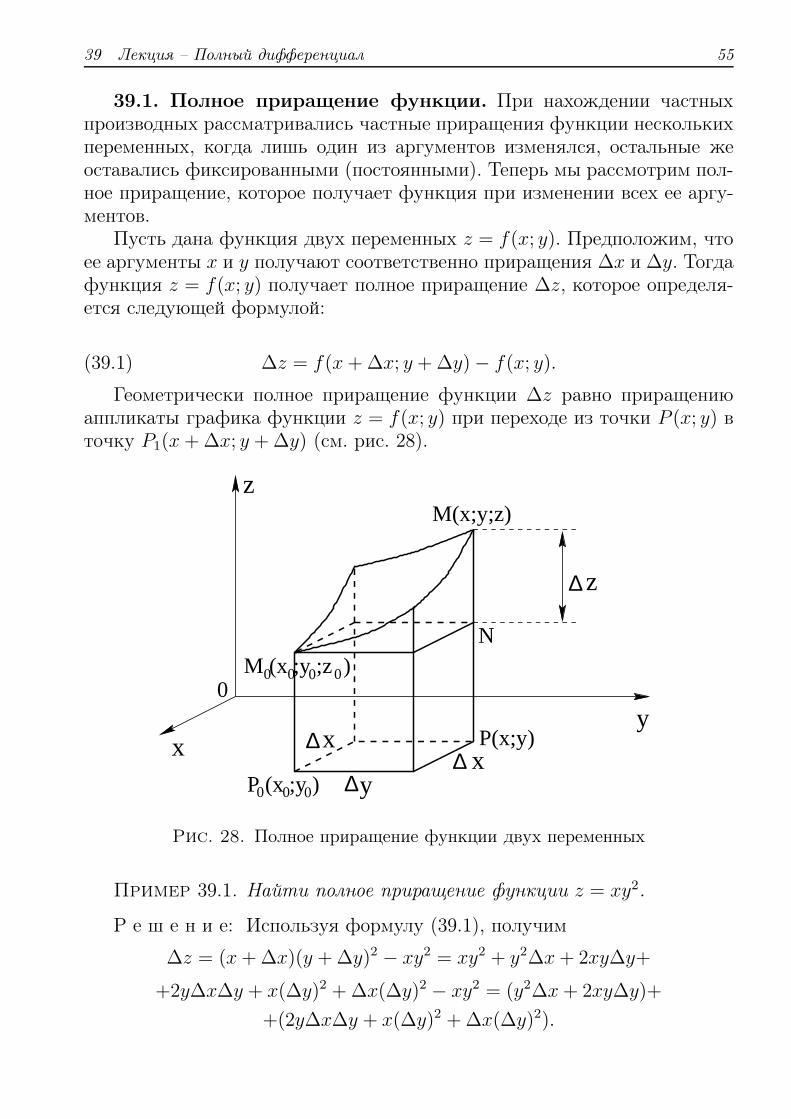
39 Лекция – Полный дифференциал 55
39.1. Полное приращение функции. При нахождении частныхпроизводных рассматривались частные приращения функции несколькихпеременных, когда лишь один из аргументов изменялся, остальные жеоставались фиксированными (постоянными). Теперь мы рассмотрим пол-ное приращение, которое получает функция при изменении всех ее аргу-ментов.
Пусть дана функция двух переменных z = f(x; y). Предположим, чтоее аргументы x и y получают соответственно приращения ∆x и ∆y. Тогдафункция z = f(x; y) получает полное приращение ∆z, которое определя-ется следующей формулой:
(39.1) ∆z = f(x+ ∆x; y + ∆y) − f(x; y).
Геометрически полное приращение функции ∆z равно приращениюаппликаты графика функции z = f(x; y) при переходе из точки P (x; y) вточку P1(x + ∆x; y + ∆y) (см. рис. 28).
P (x ;y )0 00
M (x ;y ;z )00 0 0
y
z
0
∆ z
∆∆
∆x
x
y
N
M(x;y;z)
P(x;y)x
Рис. 28. Полное приращение функции двух переменных
Пример 39.1. Найти полное приращение функции z = xy2.
Р е ш е н и е: Используя формулу (39.1), получим
∆z = (x+ ∆x)(y + ∆y)2 − xy2 = xy2 + y2∆x+ 2xy∆y+
+2y∆x∆y + x(∆y)2 + ∆x(∆y)2 − xy2 = (y2∆x+ 2xy∆y)+
+(2y∆x∆y + x(∆y)2 + ∆x(∆y)2).

56 39 Лекция – Полный дифференциал
Мы видим, что полное приращение ∆z данной функции можно пред-ставить в виде суммы двух слагаемых: первого слагаемого y2∆x+2xy∆y,линейного относительно приращений аргументов ∆x и ∆y, и второго сла-гаемого 2y∆x∆y+x(∆y)2 +∆x(∆y)2, нелинейного относительно ∆x и ∆y.Оба этих слагаемых, очевидно, стремятся к нулю при ∆x → 0, ∆y → 0,однако второе слагаемое при этом стремится к нулю быстрее, чем первое.
39.2. Полный дифференциал функции. Напомним, что в части1 для функции одной переменной y = f(x) было введено понятие диффе-ренциала dy как главной части приращения функции, линейной относи-тельно приращения аргумента. Дифференциал независимой переменнойdx равнялся ее приращению: dx = ∆x, дифференциал функции dy свя-зан с производной формулой: dy = f ′(x)dx. Аналогичным образом можноввести понятие частного дифференциала по x функции двух переменныхz = f(x; y), если считать значение y фиксированным: dxz = f ′
x(x; y)dx ичастного дифференциала по y (считая xфиксированным): dyz = f ′
y(x; y)dy.
Определение 39.1. Полным дифференциалом функции двух перемен-ных z = f(x; y) называется сумма ее частных дифференциалов по x и поy:
(39.2) dz = f ′x(x; y)dx+ f ′
y(x; y)dy.
Полный дифференциал является главной частью приращения функ-ции ∆z = f(x+∆x; y+∆y)−f(x; y), линейной относительно приращенийаргументов ∆x = dx и ∆y = dy. Другими словами, приращение функции∆z представляется в виде суммы дифференциала dz и и бесконечно ма-лой ω(∆x; ∆y) более высокого порядка, чем расстояние ρ =
√
∆x2 + ∆y2
между точками P (x; y) и P1(x+ ∆x; y + ∆y):
(39.3) ∆z = dz + ω(∆x; ∆y), где limρ→0
ω(∆x; ∆y)
ρ= 0.
Определение 39.2. Если у функции в точке P (x; y) существуетдифференциал, то она называется дифференцируемой в этой точке.
Как следует из определения (39.1), если функция z = f(x; y) в точкеP (x; y) дифференцируема, то она имеет в этой точке частные производныеf ′x(x; y) и f ′
y(x; y).Можно показать, что обратное утверждение, вообще говоря, невер-
но, т.е. из существования частных производных не следует существова-ние полного дифференциала. Однако, если предположить, что частныепроизводные не только существуют, но и непрерывны, то функция будетдифференцируемой. Иными словами, имеет место следующая теорема,доказательства которой мы не приводим.

39 Лекция – Полный дифференциал 57
Теорема 39.1. Если частные производные ∂z∂x
и ∂z∂y
функции z = f(x; y)
непрерывны в некоторой окрестности точки P (x; y), то эта функция вточке P (x; y) дифференцируема и справедлива формула (39.2)
Все сказанное легко распространяется на функции трех и большегочисла переменных. Так, например, для дифференцируемой функции трехпеременных u = f(x; y; z) полное приращение ∆u выражается формулой
(39.4) ∆u =∂u
∂x∆x+
∂u
∂y∆y +
∂u
∂z∆z + ω(∆x; ∆y; ∆z)
при условии limρ→0
ωρ
= 0(
ρ =√
∆x2 + ∆y2 + ∆z2)
, а ее полный диффе-ренциал имеет вид
(39.5) du =∂u
∂xdx+
∂u
∂ydy +
∂u
∂zdz.
Пример 39.2. Найти полный дифференциал функции z = xy2 в про-извольной точке.
Р е ш е н и е: Полный дифференциал dz = ∂z∂xdx + ∂z
∂ydy существует
при условии непрерывности частных производных ∂z∂x
и ∂z∂y
. Находим
∂z
∂x= (xy2)′x = y2,
∂z
∂y= (xy2)′y = 2xy.
Мы видим, что найденные частные производные являются непрерывнымифункциями во всей плоскости Oxy. Поэтому дифференциал этой функциивсюду существует, причем dz = y2dx + 2xydy. Сравните это выражение слинейной частью приращения функции в п. (39.1)
39.3. Геометрический смысл полного дифференциала функ-ции двух переменных. Пусть функция z = f(x; y) имеет в точке P0(x0; y0)дифференциал dz = f ′
x(x0; y0)∆x+ f ′y(x0; y0)∆y, или dz = f ′
x(x0; y0)(x−− x0) + f ′
y(x0; y0)(y − y0). В следующей лекции будет показано, что урав-нение касательной плоскости (M0M1KM2 на рис. 29) имеет вид: z− z0 == f ′
x(x0; y0)(x−x0)+f′y(x0; y0)(y−y0), где z – аппликата точки K касатель-
ной плоскости. Поскольку правые части этих уравнений совпадают, будутсовпадать и их левые части. Таким образом, дифференциал функции двухпеременных равен приращению аппликаты касательной плоскости (KNна рис. 29). В этом заключается геометрический смысл дифференциала.
Заметим, что в соответствии с определением дифференциала прира-щение аппликаты касательной плоскости KN есть главная часть прира-щения функции MN (см. рис. 29).
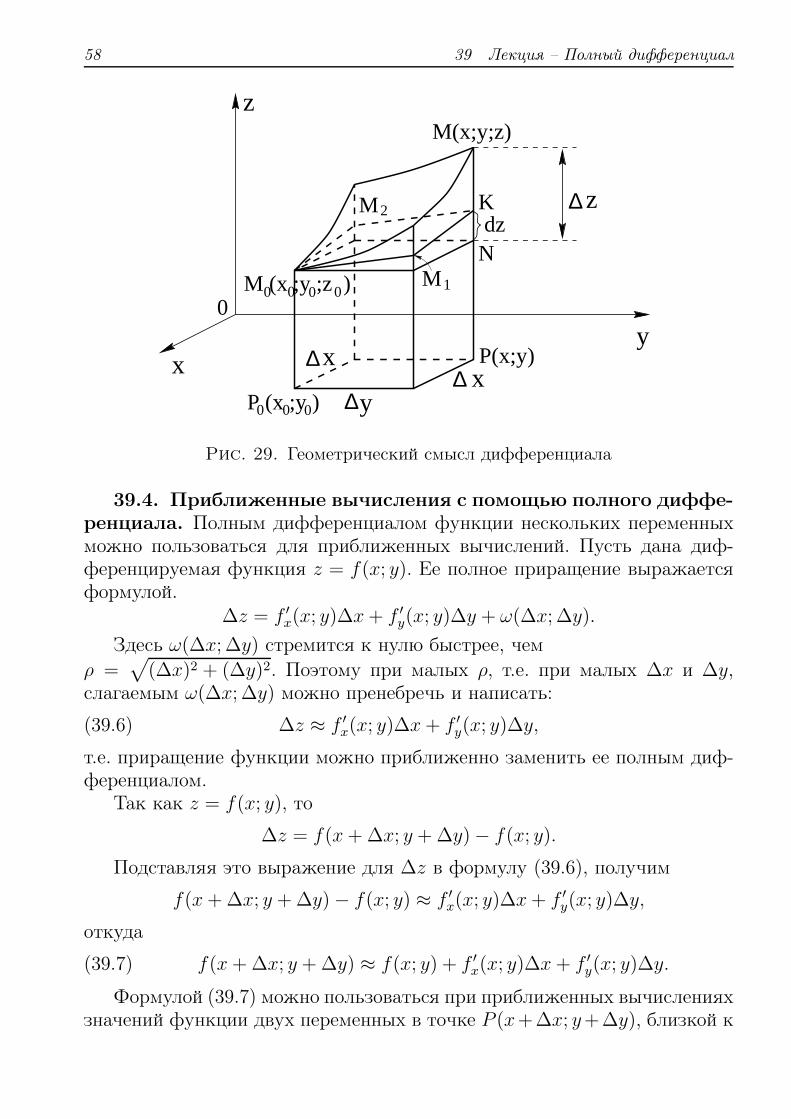
58 39 Лекция – Полный дифференциал
P (x ;y )0 00
M (x ;y ;z )00 0 0M 1
M 2
y
z
0
∆ z
∆∆
∆x
x
y
K
N
M(x;y;z)
P(x;y)
dz
x
Рис. 29. Геометрический смысл дифференциала
39.4. Приближенные вычисления с помощью полного диффе-ренциала. Полным дифференциалом функции нескольких переменныхможно пользоваться для приближенных вычислений. Пусть дана диф-ференцируемая функция z = f(x; y). Ее полное приращение выражаетсяформулой.
∆z = f ′x(x; y)∆x+ f ′
y(x; y)∆y + ω(∆x; ∆y).
Здесь ω(∆x; ∆y) стремится к нулю быстрее, чемρ =
√
(∆x)2 + (∆y)2. Поэтому при малых ρ, т.е. при малых ∆x и ∆y,слагаемым ω(∆x; ∆y) можно пренебречь и написать:
(39.6) ∆z ≈ f ′x(x; y)∆x+ f ′
y(x; y)∆y,
т.е. приращение функции можно приближенно заменить ее полным диф-ференциалом.
Так как z = f(x; y), то
∆z = f(x+ ∆x; y + ∆y) − f(x; y).
Подставляя это выражение для ∆z в формулу (39.6), получим
f(x+ ∆x; y + ∆y) − f(x; y) ≈ f ′x(x; y)∆x+ f ′
y(x; y)∆y,
откуда
(39.7) f(x+ ∆x; y + ∆y) ≈ f(x; y) + f ′x(x; y)∆x+ f ′
y(x; y)∆y.
Формулой (39.7) можно пользоваться при приближенных вычисленияхзначений функции двух переменных в точке P (x+∆x; y+∆y), близкой к

39 Лекция – Полный дифференциал 59
точке P (x; y), если известны значения функции и ее частных производныхв самой точке P (x; y).
Аналогичные формулы можно вывести для функции n переменныхпри n > 2. Например, n = 3 получим
(39.8) f(x+ ∆x; y + ∆y; ∆z + ∆z) ≈
≈ f(x; y; z) + f ′x(x; y; z)∆x+ f ′
y(x; y; z)∆y + f ′z(x; y; z)∆z.
Пример 39.3. Вычислить приближенно с помощью полного диффе-ренциала 1√
2.952+4.012
Р е ш е н и е: Рассмотрим функцию z = 1√x2+y2
. Применяя формулу
(39.7) к этой функции получим:
1√
(x+ ∆x)2 + (y + ∆y)2≈ 1√
x2 + y2+ z′x∆x+ z′y∆y
Найдем частные производные:
z′x = − x
(x2 + y2)3/2; z′y = − y
(x2 + y2)3/2.
Положим теперь x = 3, ∆x = −0.05, y = 4, ∆y = 0.01. Получим:
1√2.952 + 4.012
≈ 1
5+
3
5√
50.05 − 4
5√
50.01 ≈ 0.21
Заметим, что если вычислить это значение с большей точностью с помо-щью калькулятора, получится 1√
2.952+4.012 ≈ 0.201. Этот пример иллюстри-рует определение дифференциала как главной части приращения функ-ции.
39.5. Дифференциалы более высоких порядков. Если z = f(x; y) –функция независимых переменных x и y, имеет непрерывные частные произ-водные второго порядка, то можно найти дифференциал от полного дифферен-циала, называемый дифференциалом второго порядка: d(dz) = d2z.
Поскольку dx и dy не зависят от переменных x и y, в соответствии с фор-мулой (39.2), находим:
d2z = d(dz) = d
(∂z
∂xdx+
∂z
∂ydy
)
=∂
∂x
(∂z
∂xdx+
∂z
∂ydy
)
dx+
+∂
∂y
(∂z
∂xdx+
∂z
∂ydy
)
dy =
=∂2z
∂x2dx2 +
∂2z
∂x∂ydxdy +
∂2z
∂y∂xdxdy +
∂2z
∂y2dy2
60 39 Лекция – Полный дифференциал
Пользуясь теоремой (38.4) и приводя подобные члены, получаем:
(39.9) d2z =∂2z
∂x2dx2 + 2
∂2z
∂x∂ydxdy +
∂2z
∂y2dy2
Аналогично можно найти дифференциал третьего порядка функции двухнезависимых переменных (сделайте это самостоятельно):
d3z =∂3z
∂x3dx3 + 3
∂3z
∂x2∂ydx2dy + 3
∂3z
∂x∂y2dxdy2 +
∂3z
∂y3dy3.
Легко догадаться, что общая формула для дифференциала n-го порядкафункции двух независимых переменных имеет вид, похожий на бином Ньютона:
(39.10) dnz =
n∑
i=0
Cin∂nz
∂xi∂yn−idxidyn−i.
39.6. Дифференцирование сложных функций. Пусть дана функ-ция двух переменных z = f(x; y), причем аргументы этой функции явля-ются функциями одной независимой переменной t : x = x(t), y = y(t).Тогда z есть сложная функция одной независимой переменной t. Поста-вим задачу найти производную этой сложной функции dz
dt, зная частные
производные ∂z∂x
и ∂z∂y
и производные dxdt
и dydt
. При решении этой задачи бу-дем предполагать, что функции x = x(t) и y = y(t) имеют производные вточке t, а функция двух переменных z = f(x; y) в соответствующей точке(x; y) дифференцируема.
Пусть независимая переменная t получает приращение ∆t; тогда пере-менные x и y получают соответственно приращения ∆x и ∆y, а функция z– приращение ∆z. Так как функция z по предположению дифференциру-ема, то ее полное приращение ∆z может быть представлено в следующемвиде:
(39.11) ∆z =∂z
∂x∆x+
∂z
∂y∆y + ω(∆x; ∆y),
причем limρ→0
ωρ
= 0, где ρ =√
∆x2 + ∆y2. Разделив обе части равенства
(39.11) на ∆t и переходя к пределу при ∆t→ 0, получим
(39.12) lim∆t→0
∆z
∆t=∂z
∂xlim
∆t→0
∆x
∆t+∂z
∂ylim
∆t→0
∆y
∆t+ lim
∆t→0
ω
∆t.
Если каждый из пределов, стоящих в правой части этого равенства,существует, то существует и предел, стоящий в левой части этого равен-ства, т.е. производная dz
dt. Но lim
∆t→0
∆x∆t
= dxdt
и lim∆t→0
∆y∆t
= dydt
существуют попредположению.

39 Лекция – Полный дифференциал 61
Найдем
lim∆t→0
ω
∆t= lim
∆t→0
(ω
ρ· ρ
∆t
)
= lim∆t→0
ω
ρ· lim
∆t→0
ρ
∆t
Рассмотрим сначала
lim∆t→0
ρ
∆t= lim
∆t→0
√
∆x2 + ∆y2
∆t=
= lim∆t→0
√(
∆x
∆t
)2
+
(∆y
∆t
)2
=
√(dx
dt
)2
+
(dy
dt
)2
.
Этот предел существует, так как существуют производные dxdt
и dydt
.Прежде чем доказать, что lim
∆t→0
ωρ
= 0, отметим, что при ∆t → 0 также и
ρ→ 0. Но тогда lim∆t→0
ωρ
= limρ→0
ωρ
= 0 и, следовательно,
lim∆t→0
ω
∆t= 0 ·
√(dx
dt
)2
+
(dy
dt
)2
= 0.
Учитывая это, формулу (39.12) можно записать в следующем виде:
(39.13)dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt.
Пример 39.4. Найти производную dzdt
, если z = yx, x = cos t, y = t3.
Р е ш е н и е: Используя формулу (39.13), получим
dz
dt= (yx)′ · dx
dt+ (yx)′y
dy
dt= −yx ln y sin t+ 3t2xyx−1 =
= −t3 cos t ln t3 sin t+ 3t2 cos t · t3(cos t−1) = t3 cos t−1(3 cos t− 3 ln t sin t) =
= t(sin t)t2−1(t cos t+ 2 sin t · ln sin t).
Рассмотрим теперь функцию z = f(x; y) при условии, что y = y(x).Здесь переменная z есть функция одной переменной x : z = f(x; y(x)).Этот случай сводится к предыдущему, причем роль переменной t играетx. По формуле (39.13) имеем
dz
dx=∂z
∂x
dx
dx+∂z
∂y
dy
dx.
Но dxdx
= 1, и поэтому
(39.14)dz
dx=∂z
∂x+∂z
∂y
dy
dx.
62 39 Лекция – Полный дифференциал
В правой и левой частях этой формулы имеются производные z поx. Одна из них ∂z
∂x– частная производная функции двух переменных
z = f(x; y), которая находится так, как если бы y не зависел от x. Вотличие от нее производная dz
dx, стоящая в левой части формулы (39.14),
есть производная сложной функции одной переменной z = f(x; y(x)). Этупроизводную мы будем называть полной производной.
Предположим теперь, что z = f(x; y), причем x = x(u; v) и y = y(u; v).Тогда z есть сложная функция двух независимых переменных u и v. Най-дем частные производные ∂z
∂uи ∂z
∂vэтой сложной функции.
Частные производные ∂z∂u
, ∂x∂u
и ∂y∂u
находится так, как если бы z, x и yбыли функциями одной переменной u. Но тогда можно воспользоватьсяформулой (39.13), заменив в ней производные dz
dt, dxdt
и dydt
соответствую-щими частными производными ∂z
∂u, ∂x∂u
и ∂y∂u
:
(39.15)∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u.
Аналогично можно получить выражение для ∂z∂v
:
(39.16)∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v.
Полученные результаты легко обобщаются на случай сложной функ-ции любого конечного числа аргументов.
В частности, для функции трех переменных u = F (x; y; z), где x = x(t),y = y(t), z = z(t), имеем
(39.17)du
dt=∂u
∂x
dx
dt+∂u
∂y
dy
dt+∂u
∂z
dz
dt.
39.7. Дифференцирование неявных функций. Пусть дано урав-нение
(39.18) 3y − x3 − 1 = 0
В нем каждому действительному значению x соответствует такое един-ственное значение y, что если эти значения x и y подставить в уравнение(39.18), то оно превратится в тождество. Например, значению x = 0 со-ответствует значение y = 0, так как при подстановке этих значений x и yв уравнение (39.18) мы получим тождество 30 − 03 − 1 = 0. Аналогично,значению x = 1 соответствует значение y = log3 2 и т.д. Иными словами, с

39 Лекция – Полный дифференциал 63
помощью уравнения (39.18) задана функция, областью определения кото-рой является числовая ось при x > −1, а множество значений – множествовсех действительных чисел. Эта функция называется неявной.
Пусть в общем случае дано уравнение
(39.19) F (x; y) = 0,
где F (x; y) – функция двух переменных.
Определение 39.3. Если каждому значению x, принадлежащемунекоторому множеству M (x ∈M), соответствует единственное зна-чение y, которое совместно с x удовлетворяет уравнению (39.19), тоговорят, что уравнение определяет на множестве M неявную функциюy = ϕ(x).
Таким образом, для неявной функции y = ϕ(x), определенной уравне-нием (39.19), имеет место тождество
F (x;ϕ(x)) = 0,
справедливое для всех x из области определения M этой неявной функ-ции.
В отличие от неявной функции функция y = f(x), заданная уравне-нием, разрешенным относительно y, называется явной.
Вернемся к рассмотренному примеру. Уравнение (39.18) можно разре-шить относительно y:
(39.20) y = log3(x3 + 1)
Эта функция – явная. Разумеется, это та же самая функция, котораяранее была задана неявно уравнением (39.18). Она тождественно удовле-творяет уравнению (39.18). В самом деле, подставив в соотношение (39.18)вместо y его выражение из формулы (39.20), получим
3log3(x3+1) − x3 − 1 = x3 + 1 − x3 − 1 = 0.
В некоторых случаях каждому значению x ∈M соответствует несколь-ко значений y, удовлетворяющих совместно с данным x уравнению (39.19).Тогда это уравнение определяет не одну, а несколько неявных функций.Так, например, уравнение x2+y2−1 = 0 определяет две неявные функции,которые можно записать в явном виде, разрешив уравнение x2+y2−1 = 0относительно y:
y =√
1 − x2, y = −√
1 − x2.

64 39 Лекция – Полный дифференциал
Не следует, однако, думать, что всякую неявную функцию можнопредставить в виде явной элементарной функции. Например, уравнение
3y − 3y + x3 − 1 = 0
задает неявную функцию y, так как существуют пары значений x и y,удовлетворяющие данному уравнению (например, x = 0, y = 0; x = 1,y = 1 и т.д.). Но это уравнение нельзя разрешить так, чтобы y выражалсячерез элементарные функции аргумента x.
Не всякое уравнение вида F (x; y) = 0 задает неявную функцию. На-пример, уравнению x2+y2+1 = 0 не удовлетворяют никакие действитель-ные значения x и y, и, следовательно, оно не определяет никакой неявнойфункции.
Каким же условиям должна удовлетворять функция F (x; y), чтобыуравнение F (x; y) = 0 определяло единственную неявную функцию y?Ответ на этот вопрос дает следующая теорема существования неявнойфункции.
Теорема 39.2. Если функция F (x; y) и ее частные производные F ′x(x; y)
и F ′y(x; y) определены и непрерывны в некоторой окрестности точки
P0(x0; y0) и при этом F (x0; y0) = 0, а F ′y(x0; y0) 6= 0, то уравнение F (x; y)
определяет в некоторой окрестности точки P0(x0; y0) единственную неяв-ную функцию y = y(x), непрерывную и дифференцируемую в некотороминтервале, содержащем точку x0, причем y(x0) = y0.
Эту теорему мы оставляем без доказательства.Перейдем теперь к вопросу о дифференцировании неявной функции.
Пусть левая часть уравнения (39.19) удовлетворяет указанным в теоремеусловиям. Тогда это уравнение определяет неявную функциюy = y(x), для которой в окрестности точки P0(x0; y0) имеет место тож-дество F (x; y(x)) ≡ 0 относительно x.
Так как производная функции, тождественно равной нулю, также рав-на нулю, то полная производная dF
dx= 0, но в силу соотношения (39.14)
имеемdF
dx=∂F
∂x+∂F
∂y
dy
dx
и поэтому ∂F∂x
+ ∂F∂y
dydx
= 0, откуда
(39.21)dy
dx= −
∂F∂x∂F∂y
.
По этой формуле находится производная неявной функции одной пе-ременной.

39 Лекция – Полный дифференциал 65
Пример 39.5. Найти первую и вторую производные неявной функцииy, заданной уравнением x3−3x+y2−xy−1 = 0, и вычислить их значениев точке P (1; 1).
Р е ш е н и е: Введем обозначение F (x; y) = x2 − 2x+3y2 −xy− 1 = 0.тогда ∂F
∂x= 3x2 − 3 − y; ∂F
∂y= 2y − x. Следовательно по формуле (39.21)
dy
dx= −
∂F∂x∂F∂y
= −3x2 − 3 − y
2y − x=
3x2 − 3 − y
x− 2y.
Продифференцировав это выражение по x, получим:
y′′ =(6x− y′)(x− 2y) − (1 − 2y′)(3x2 − 3 − y)
(x− 2y)2
Подставив найденное ранее выражение для y′ и несколько упростив по-лучаем:
y′′ =(3x2 − 12xy + 3 + y)(x− 2y) − (x− 6x2 + 6)(3x2 − 3 − y)
(x− 2y)3
В частности, в точке P (1; 1)
dy
dx
∣∣∣x=1
y=1= 1, y′′|x=1
y=1= −6
Не выражая y в явном виде через x мы установили, что в данной точкекасательная к графику образует с осью Ox угол 45o (tgϕ = 1).
39.8. Инвариантность формы полного дифференциала. Как извест-но, для дифференциала функции одной переменной y = f(x) имеет местоинвариантность его формы. Это значит, что выражение для дифференциалаdy = f ′(x)dx остается верным независимо от того, является ли x независимойпеременной или функцией некоторой переменной: x = ϕ(t).
Для функции нескольких переменных u = f(x; y; z; . . . ; t) справедливо ана-логичное утверждение: полный дифференциал функции n переменныхu = f(x; y; z; . . . ; t) сохраняет свою форму
du =∂u
∂xdx+
∂u
∂ydy +
∂u
∂zdz + · · · + ∂u
∂tdt
независимо от того, являются ли x, y, z, . . . , t независимыми переменными илифункциями других переменных.
Мы ограничимся доказательством этого утверждения только для случаяфункции двух переменных z = f(x; y). Как известно, если x и y являютсянезависимыми переменными, полный дифференциал имеет следующий вид:
dz =∂z
∂xdx+
∂z
∂ydy.
66 39 Практическое занятие – Полный дифференциал
Покажем, что эта форма дифференциала сохраняется, когда x и y стано-вятся функциями новых переменных: x = x(u; v), y = y(u; v). Тогда z являетсясложной функцией u и v. Дифференциал этой сложной функции выражаетсяформулой
dz =∂z
∂udu+
∂z
∂vdv.
Но по формулам (39.16) и (39.17)
∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u,
∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v.
Следовательно,
dz =
(∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u
)
du+
(∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v
)
dv =
=∂z
∂x
∂x
∂udu+
∂z
∂x
∂x
∂vdv +
∂z
∂y
∂y
∂udu+
∂z
∂y
∂y
∂vdv =
=∂z
∂x
(∂x
∂udu+
∂x
∂vdv
)
+∂z
∂y
(∂y
∂udu+
∂y
∂vdv
)
=∂z
∂xdx+
∂z
∂ydy,
так как∂x
∂udu+
∂x
∂vdv = dx, a
∂y
∂udu+
∂y
∂vdv = dy.
Следовательно, полный дифференциал dz не изменяет своей формы, т.е.dz = ∂z
∂xdx+ ∂z∂ydy и тогда, когда x и y явлются функциями новых переменных.
Заметим, что дифференциалы более высоких порядков такими свойствами
не обладают.
39. практическое занятие —полный дифференциал
Пример 39.1. Для функции z = xy2 найдите полное приращение ∆z иполный дифференциал dz в точке M(2, 00; 1, 00) для ∆x = 0.20, ∆y = 0.10и сравните их.
Р е ш е н и е: Найдем ∆z = f(x+ ∆x; y + ∆y) − f(x; y) = (x + ∆x) ·· (y + ∆y)2 − xy2. Поскольку x = 2, y = 1, получаем для точки M :∆z = 2.20 · 1.102 − 2.00 · 1.002 ≈ 0, 66.
Найдем dz = ∂z∂xdx+ ∂z
∂ydy = y2∆x+ 2xy∆y
Здесь dx = ∆x, dy = ∆y, т.к. x и y – независимые переменные.Для точки M получаем:
dz = 1.002 · 0.20 + 2 · 2.00 · 1.00 · 0.10 = 0.60
Заметим, что разница между ∆z и dz равна 0.06, т.е. значительно мень-ше величины ρ =
√
∆x2 + ∆y2 ≈ 0.22Ответ: ∆z ≈ 0.66; dz = 0.60.

39 Практическое занятие – Полный дифференциал 67
Пример 39.2. Найдите полный дифференциал dz функции z = x3y2
Р е ш е н и е:
dz =∂z
∂xdx+
∂z
∂ydy = 3x2y2dx+ 2x3ydy
Ответ: dz = 3x2y2dx+ 2x3ydy
Пример 39.3. Вычислите приближенно 1.012 · 0.983
Р е ш е н и е: Аналогично тому, как было сделано в примере (39.1),найдем полный дифференциал dz для функции z = x2y3 при x = 1, y = 1,∆x = 1.01 − 1 = 0.01, ∆y = 0.98 − 1 = −0.02. В этом случае искомоезначение 1.012 · 0.983 равно f(x+ ∆x; y + ∆y).
dz =∂z
∂xdx+
∂z
∂ydy = 2xy3∆x+ 3x2y2∆y =
= 2 · 1 · 13 · 0.01 + 3 · 12 · 12(−0.02) = −0.04
Воспользовавшись приближенным равенством: ∆z ≈ dz, получим:
f(x+ ∆x; y + ∆y) − f(x; y) ≈ dz ⇒ f(x+ ∆x; y + ∆y) ≈ f(x; y) + dz
Учитывая, что f(x; y) = 12 · 13 = 1, окончательно получаем:
1.012 · 0.983 ≈ 1 − 0.04 = 0.96
Заметим, что в ответе указывается столько цифр после запятой, сколь-ко их дано в исходных данных.
Ответ: 1.012 · 0.983 ≈ 1 − 0.04 = 0.96
Пример 39.4. Найдите полный дифференциал 2-го порядка функции
z = x2 − 3xy − 2y2
Р е ш е н и е: Дифференциал 1-го порядка находим как в примере (39.2).
dz =∂z
∂xdx+
∂z
∂ydy = (2x− 3y)dx− (3x− 4y)dy
Находя дифференциал от dz и помня, что dx и dy не зависят от x и y, получаем:
d2z = d(dz) = d((2x− 3y)dx− (3x− 4y)dy) =
= (2dx− 3dy)dx− (3dx− 4dy)dy = 2dx2 − 3dxdy − 3dxdy − 4dy2 =
= 2dx2 − 6dxdy − 4dy2
Для нахождения d2z можно также воспользоваться формулой (39.11):
d2z =∂2z
∂x2dx2 + 2
∂2z
∂x∂ydxdy +
∂2z
∂y2=
= 2dx2 + 2(−3)dxdy − 4dy2 = 2dx2 − 6dxdy − 4dy2

68 39 Практическое занятие – Полный дифференциал
Пример 39.5. Найдите dzdt
, если z =√
3x− 5y, где x = sin t, y =√t.
Р е ш е н и е: В соответствии с формулой производной сложной функ-ции имеем:
dx
dt= cos t,
dy
dt=
1
2√t,
∂z
∂x=
3
2√
3x− 5y,
∂z
∂y=
−5
2√
3x− 5y,
dz
dt=
3
2√
3x− 5ycos t+
−5
2√
3x− 5y
1
2√t
После подстановки выражений для x = sin t и y =√t, вынесения
общего множителя за скобки, получаем:
dz
dt=
3 cos t− 52√t
2√
3 sin t− 5√t
Пример 39.6. Найдите ∂z∂x
, dzdx
, если z = 2xy , где y = sinx.
Р е ш е н и е: ∂z∂x
находим как в предыдущем практическом занятии,dzdx
находим по формуле производной сложной функции .
∂z
∂x= 2
xy ln 2 · 1
y
dz
dx= 2
xy ln 2
1
y+ 2
xy ln 2
(
− x
y2
)
cosx =
2x
sin x ln 21
sin x+ 2
xsin x ln 2
(
− x
sin2 x
)
cos x =2
xsin x
ln 2
sinx(1 − x ctg x)
Пример 39.7. Найдите производную dydx
функции заданной неявно урав-нением: y = xy.
Р е ш е н и е: Запишем уравнение y = xy в неявном виде F (x, y) =
= xy − y = 0. На основании (39.21) имеем dydx
= − yxy−1
xy lnx−1
Продифференцировав это выражение еще раз, имея в виду, что y естьфункция от x, можем найти y′′.
Самостоятельная работа
В примерах 39.8,39.9 найдите полное приращение ∆z и полный диф-ференциал dz для данной функции в точке M(x; y) для заданных ∆x и∆y.
Пример 39.8. z = x2y; M(1; 2); ∆x = 0.05; ∆y = 0, 10.

39 Практическое занятие – Полный дифференциал 69
Пример 39.9. z = x2y2; M(1; 1); ∆x = 0.01; ∆y = 0, 02.
В примерах 39.10–39.13 найдите полный дифференциал dz данной функ-ции.
Пример 39.10. z = x2+y2
x2−y2 .
Пример 39.11. z = xyx.
Пример 39.12. z = ln tg xy.
Пример 39.13. u = xyz.
В примерах 39.14–39.16 найдите полные дифференциалы 1-го и 2-гопорядков данной функции.
Пример 39.14. z = exy.
Пример 39.15. z = xey + yex.
Пример 39.16. z = ey sinx.
В примерах 39.17–39.19 вычислите приближенно данное значение безиспользования калькулятора. При переводе градусов в радианы и привсех вычислениях брать три значащие цифры, в ответе последний знакокруглить.
Пример 39.17. 0.993 · 1.022.
Пример 39.18.√
3.98 + 2.95.
Пример 39.19. sin 31o cos 61.
В следующих примерах не упрощайте полученный результат.
Пример 39.20. Найдите dzdt
, если z = yx, где y = arcsin t, x = ln t.
Пример 39.21. Найдите dzdx
, если z =√s− t, где t = tg x, s = 3
√x.
Пример 39.22. Найдите dudt
, если u = xyz, где x =
√t+ 2, y = et,
z = cos t.
Пример 39.23. Найдите ∂z∂x
и dzdx
, если z = yx, где y = arctg x.
Пример 39.24. Найдите dzdx
, если z = sin(u · v), где u =√x, v = tg x.
Пример 39.25. Найдите производную dydx
функции, заданной неявноуравнением: y = x + log3 y.
Пример 39.26. Найдите 1-ю и 2-ю производные функции y = y(x),заданной неявно уравнением: xey + yex = 0.
70 40 Лекция – Производная по направлению
40. лекция —производная по направлению и градиент
Скалярное поле. Производная по направлению. Градиент. Касатель-ная плоскость и нормаль к поверхности.
40.1. Производная по направлению.
Определение 40.1. Если каждой точке P некоторой области Dтрехмерного пространства соответствует число u, определяемое функ-цией u = f(P ) = f(x; y; z), то говорят, что в области D задано трех-мерное скалярное поле. Если поле определяется функцией двух перемен-ных z = f(x; y), то оно называется двумерным или плоским скалярнымполем.
Пусть в области D задана дифференцируемая функция u = F (x; y; z).Рассмотрим точку P (x; y; z) этого скалярного поля и луч l, выходящий източки P в направлении единичного вектора l = cosαi+cosβj+cos γk, гдеα, β и γ – углы вектора l с осями координат (рис 30).
Пусть P1(x + ∆x; y + ∆y; z + ∆z) ∈ D – какая нибудь другая точкаэтого луча. Разность значений функции u скалярного поля в точках P1 иP назовем приращением этой функции в направлении l и обозначим через∆lu. Тогда
∆lu = F (x+ ∆x; y + ∆y; z + ∆z) − F (x; y; z).
Обозначим через ∆l расстояние между точками P и P1: ∆l = PP1.
Определение 40.2. Производной функции u = F (x; y; z) в точке Pпо направлению l называется предел lim
∆l→0
∆lu∆l
.
Производная функции u по направлению l обозначается символом ∂u∂l
.Таким образом,
(40.1)∂u
∂l= lim
∆l→0
∆lu
∆l.
Заметим, что если производная функции u в точке P (x; y; z) по дан-ному направлению l положительна, то функция u в этом направлениивозрастает; если же ∂u
∂l< 0, то функция u в этом направлении убывает.
Можно сказать, что производная по направлению ∂u∂l
дает скоростьизменения функции u в этом направлении.

40 Лекция – Производная по направлению 71
Выведем формулу для вычисления производной по направлению. Преж-де всего заметим, что приращения ∆x, ∆y и ∆z координат точки P свя-заны с длиной отрезка P1P = ∆l и направляющими косинусами вектораl следующими соотношениями (см. рис. 30):
(40.2) ∆x = ∆l cosα; ∆y = ∆l cos β; ∆z = ∆l cos γ.
Так как функция u по условию дифференцируема, то, как было по-казано в лекции 39 (39.4), ее приращение ∆u в точке P (x; y; z) можнопредставить в виде
(40.3) ∆u = F ′x(x; y; z)∆x+ F ′
y(x; y; z)∆y + F ′z(x; y; z)∆z + ω,
причем ω стремится к нулю быстрее, чем ρ =√
∆x2 + ∆y2 + ∆z2, т.е.limρ→0
ωρ
= 0.
y0
x
z
∆∆
∆zx
y
p1
pβ
γ
α
l
Рис. 30. Связь между ∆l и ∆x, ∆y, ∆z
Если рассматривать приращение функции вдоль луча в направлениивектора l, то ∆u = ∆lu, ρ = ∆l, а ∆x, ∆y и ∆z выражаются по формулам(40.2). Тогда равенство (40.3) примет следующий вид:
∆lu = F ′x(x; y; z)∆l cosα+ F ′
y(x; y; z)∆l cosβ + F ′z(x; y; z)∆l cos γ + ω.
Разделив обе части этого равенства на ∆l и переходя к пределу при∆l → 0, получим
∂u
∂l= lim
∆l→0
∆lu
∆l= lim
∆l→0(F ′
x(x; y; z) cosα+
+F ′y(x; y; z) cosβ + F ′
z(x; y; z) cos γ)
+ lim∆l→0
ω
∆l.
72 40 Лекция – Производная по направлению
Но F ′x(x; y; z), F
′y(x; y; z), F
′z(x; y; z) и направляющие косинусы не зави-
сят от ∆l, и так как lim∆l→0
ω∆l
= limρ→0
ωρ
= 0, то
(40.4)∂u
∂l= F ′
x(x; y; z) cosα+ F ′y(x; y; z) cosβ + F ′
z(x; y; z) cos γ.
Из формулы (40.4) следует, что если вектор l совпадает с одним изортов i, j или k, то производная u по направлению l совпадает с соответ-ствующей частной производной этой функции. Так, например, если l=i,то cosα = 1, cosβ = 0, cos γ = 0 и, следовательно, ∂u
∂l= F ′
x(x; y; z).
Замечание 40.11. Все сказанное в этом разделе остается справед-ливым для функции двух переменных z = f(x; y). В этом случае произ-водная по направлению задается формулой (40.5) и равна скорости из-менения функции z = f(x; y) в направлении вектора l.
(40.5)∂z
∂l= f ′
x(x; y) cosα+ f ′y(x; y) cosβ
Пример 40.1. Найти производную функции z =√
x2 − y2 в точкеP0(5; 3) в направлении вектора l = 3i+ 4j
Р е ш е н и е:
cosα =3
|l| =3√
32 + 42=
3
5; cosβ =
4
|l| =4
5,
частные производные в точке P0 были найдены в примере (38.6). В соот-ветствии с формулой (40.5) получаем:
∂z
∂l
∣∣∣∣P0
=5
4
3
5− 3
4
4
5=
3
4− 3
5=
3
20
Полученный результат свидетельствует о том, что в точке P0 функцияz =
√
x2 − y2 возрастает в данном направлении(∂z∂l|P0 > 0
)
Ответ: ∂z∂l|P0 = 3
20
40.2. Градиент скалярного поля. Определение скалярного полябыло дано в начале этой лекции.
Определение 40.3. Градиентом в точке P (x; y; z) скалярного поля,заданного дифференцируемой функцией u = F (x; y; z) или просто гради-ентом функции называется вектор, равный
F ′x(x; y; z)i + F ′
y(x; y; z)j + F ′z(x; y; z)k.
40 Лекция – Производная по направлению 73
Градиент функции u = F (x; y; z) мы будем обозначать одним из сим-волов gradF (x; y; z), gradF (P ), grad u. Следовательно, по определению
(40.6) gradF (x; y; z) = F ′x(x; y; z)i+ F ′
y(x; y; z)j + F ′z(x; y; z)k,
или кратко
(40.7) grad u =∂u
∂xi+
∂u
∂yj +
∂u
∂zk.
Таким образом, каждой точке P (x; y; z) скалярного поля, заданного диф-ференцируемой функцией u = F (x; y; z), соответствует не только значениеэтой функции, но и вполне определенный вектор gradF (P ).
Пример 40.2. Найти градиент функции u = x2 + y2 − z2 в точкеP0(1; 1; 1)
Р е ш е н и е: Найдем значение частных производных в точке P0:
∂u
∂x= 2x;
∂u
∂x
∣∣∣∣P0
= 2;∂u
∂y= 2y;
∂u
∂y
∣∣∣∣P0
= 2;
∂u
∂z= −2z;
∂u
∂z
∣∣∣∣P0
= −2.
В соответствии с формулой (40.7) получаем:
grad u = 2i+ 2j − 2k
Ответ: grad u = 2i + 2j − 2k
Теорема 40.1. Проекция вектора grad u на единичный вектор l == i cosα + j cos β + k cos γ равна производной функции u по направлениюl:
(40.8) прl grad u =∂u
∂l.
Доказательство: Пусть u = F (x; y; z). Из векторной алгебры известно,что проекция какого-либо вектора на единичный вектор равна скалярно-му произведению этих векторов. Но
grad u = F ′x(x; y; z)i + F ′
y(x; y; z)j + F ′z(x; y; z)k.
Поэтомупрl grad u = gradu · l =
F ′x(x; y; z) cosα + F ′
y(x; y; z) cosβ + F ′z(x; y; z) cosγ =
∂u
∂l,
что и требовалось доказать.Учитывая, что производная по направлению ∂u
∂lвыражает скорость
изменения скалярного поля u = F (x; y; z) в этом направлении, можно
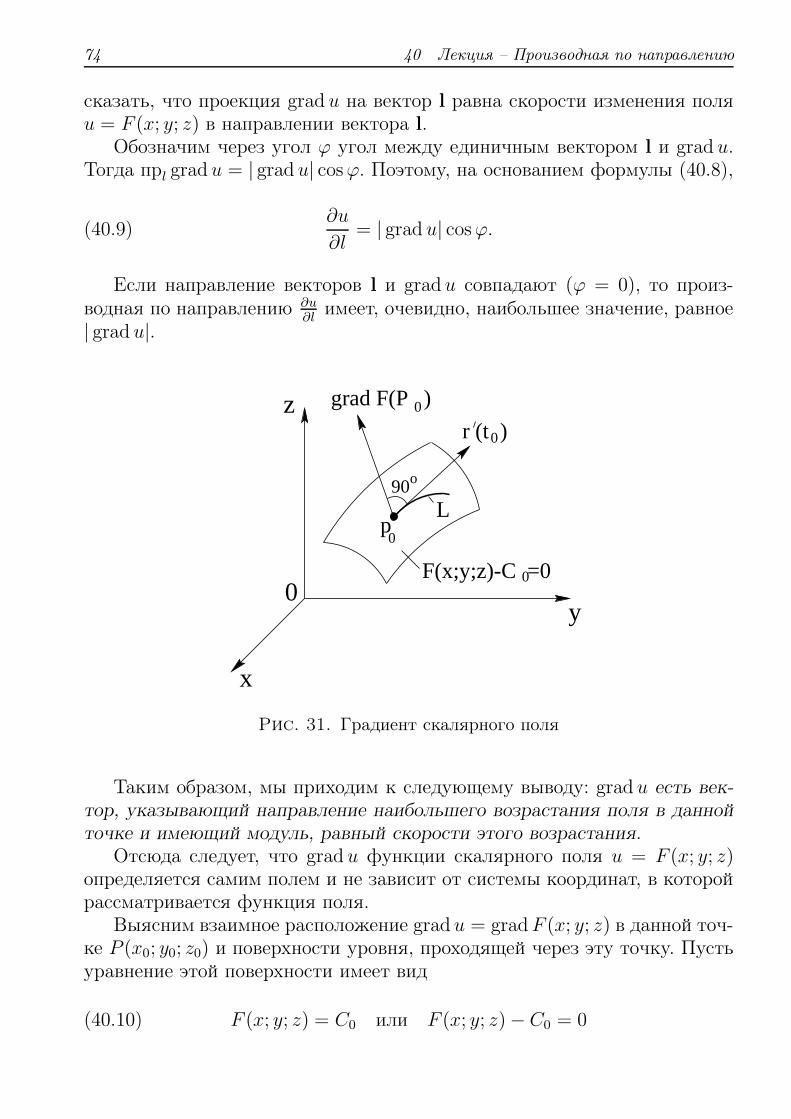
74 40 Лекция – Производная по направлению
сказать, что проекция grad u на вектор l равна скорости изменения поляu = F (x; y; z) в направлении вектора l.
Обозначим через угол ϕ угол между единичным вектором l и grad u.Тогда прl grad u = | grad u| cosϕ. Поэтому, на основанием формулы (40.8),
(40.9)∂u
∂l= | grad u| cosϕ.
Если направление векторов l и grad u совпадают (ϕ = 0), то произ-водная по направлению ∂u
∂lимеет, очевидно, наибольшее значение, равное
| grad u|.
0
L
F(x;y;z)-C =00
p0
0
90o
r (t )0
z
y
x
grad F(P )
Рис. 31. Градиент скалярного поля
Таким образом, мы приходим к следующему выводу: grad u есть век-тор, указывающий направление наибольшего возрастания поля в даннойточке и имеющий модуль, равный скорости этого возрастания.
Отсюда следует, что grad u функции скалярного поля u = F (x; y; z)определяется самим полем и не зависит от системы координат, в которойрассматривается функция поля.
Выясним взаимное расположение grad u = gradF (x; y; z) в данной точ-ке P (x0; y0; z0) и поверхности уровня, проходящей через эту точку. Пустьуравнение этой поверхности имеет вид
(40.10) F (x; y; z) = C0 или F (x; y; z) − C0 = 0

40 Лекция – Производная по направлению 75
Рассмотрим кривую L, лежащую на поверхности (40.10) и проходящуючерез точку P0 (рис. 31). Предположим, что эта кривая задана уравнени-ями
x = x(t),y = y(t),z = z(t),
где x(t), y(t) и z(t) – дифференцируемые функции t, причем x0 = x(t0),y0 = y(t0), z0 = z(t0). Если обозначить r = (x; y; z), то уравнения кривойможно записать в векторной форме: r = r(t). Можно доказать, что векторсоставленный из производных (x′(t0); y
′(t0); z′(t0)) = r′(t0) направлен по
касательной к кривой L в точке r(t0).Действительно, по определению производной:
r′(t0) = lim∆t→0
r(t0 + ∆t) − r(t0)
∆t
Вектор r(t0 + ∆t) − r(t0) направлен по секущей к кривой L, проходя-щей через точку P0(r(t0)) и другую точку этой кривой r(t0 + ∆t); векторr(t0+∆t)−r(t0)
∆tему коллинеарен. Когда ∆t → 0, секущая превращается в
касательную.Каждая точка кривой L имеет координаты x(t), y(t) и z(t), которые
должны удовлетворять уравнению (40.10) поверхности уровня, посколькукривая L полностью лежит на этой поверхности. Таким образом, должновыполняться тождество
F (x(t); y(t); z(t))− C0 = 0.
Продифференцируем обе части этого тождества по t; учитывая, что (C0)′t =
= 0, получим∂F
∂xx′(t) +
∂F
∂yy′(t) +
∂F
∂zz′(t) = 0.
В частности, при t = t0 имеем
F ′x(x0; y0; z0)x
′(t0) + F ′y(x0; y0; z0)y
′(t0) + F ′z(x0; y0; z0)z
′(t0) = 0.
Левая часть этого равенства является скалярным произведением
grad u(P0) = F ′x(x0; y0; z0)i+ F ′
y(x0; y0; z0)j + F ′z(x0; y0; z0)k
и вектораr′(t0) = x′(t0)i + y′(t0)j + z′(t0)k,
направленного по касательной к кривой L. Таким образом,
(40.11) grad u(P0) · r′(t0) = 0.

76 40 Лекция – Производная по направлению
Предположим, что grad u(P0) 6= 0. Тогда из равенства (40.11) вытекает,что grad u(P0) перпендикулярен к вектору r′(t0), направленному по каса-тельной к кривой L в точке P0.
Так как эта кривая была выбрана произвольно, то мы приходим к сле-дующему выводу. Если скалярное поле задано дифференцируемой функ-цией u = F (x; y; z), то все касательные, проведенные в точке P0 к линиям,лежащим на поверхности уровня и проходящим через точку P0, распо-ложены в одной плоскости, перпендикулярной вектору gradF (P0), приусловии, что этот вектор не равен нулю.
В случае плоского скалярного поля, заданного дифференцируемойфункцией двух переменных z = f(x; y), градиент определяется форму-лой
(40.12) grad f(x; y) = f ′x(x; y)i+ f ′
y(x; y)j.
Его связь с производной по направлению ∂z∂l
выражается равенством
прl grad z =∂z
∂lили
∂z
∂l= | grad z| cosϕ,
где ϕ – угол между единичным вектором направления l и grad z. Можнопоказать, что если поле задано дифференцируемой функцией z = f(x; y),то вектор grad f(x0; y0) перпендикулярен к касательной, проведенной клинии уровня в точке P0(x0; y0).
40.3. Касательная плоскость и нормаль к поверхности. Пустьповерхность задана уравнением
(40.13) F (x; y; z) = 0,
где F (x; y; z) – дифференцируемая функция. Если в точкеP0(x0; y0; z0) градиент отличен от нуля, то в соответствии с изложеннымвыше все касательные, проведенные в точке P0 к линиям, лежащим на по-верхности и проходящим через точку P0, расположены в одной плоскости,перпендикулярной gradF (P0)
Эта плоскость называется касательной к поверхностиF (x; y; z) = 0 в точке P0 (см. рис. 32).
Для нахождения уравнения этой плоскости, используем уравнение плос-кости, проходящей через данную точку P0 (лекция 30):
A(x− x0) +B(y − y0) + C(z − z0) = 0
В качестве нормального вектора N(A;B;C) возьмем вектор градиента,перпендикулярный касательной плоскости. Уравнение касательной плос-кости примет вид:
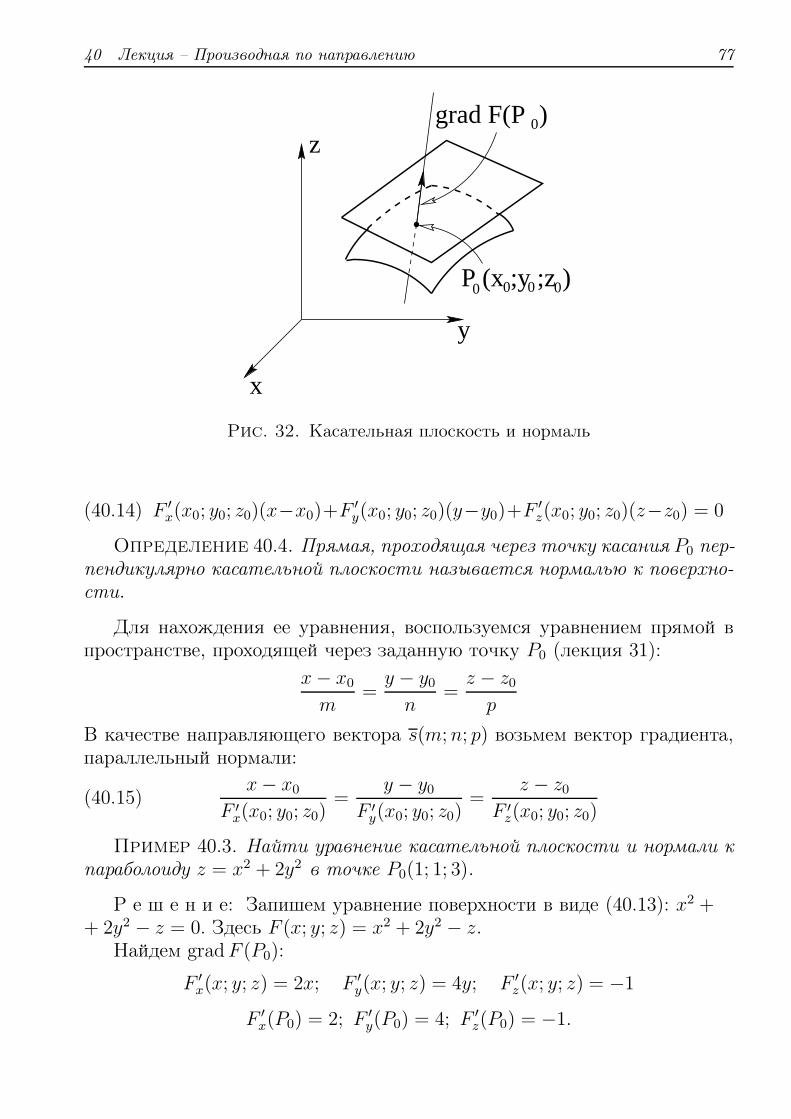
40 Лекция – Производная по направлению 77
P (x ;y ;z )0 0 0 0
z
x
y
0grad F(P )
Рис. 32. Касательная плоскость и нормаль
(40.14) F ′x(x0; y0; z0)(x−x0)+F
′y(x0; y0; z0)(y−y0)+F
′z(x0; y0; z0)(z−z0) = 0
Определение 40.4. Прямая, проходящая через точку касания P0 пер-пендикулярно касательной плоскости называется нормалью к поверхно-сти.
Для нахождения ее уравнения, воспользуемся уравнением прямой впространстве, проходящей через заданную точку P0 (лекция 31):
x− x0
m=y − y0
n=z − z0p
В качестве направляющего вектора s(m;n; p) возьмем вектор градиента,параллельный нормали:
(40.15)x− x0
F ′x(x0; y0; z0)
=y − y0
F ′y(x0; y0; z0)
=z − z0
F ′z(x0; y0; z0)
Пример 40.3. Найти уравнение касательной плоскости и нормали кпараболоиду z = x2 + 2y2 в точке P0(1; 1; 3).
Р е ш е н и е: Запишем уравнение поверхности в виде (40.13): x2 ++ 2y2 − z = 0. Здесь F (x; y; z) = x2 + 2y2 − z.
Найдем gradF (P0):
F ′x(x; y; z) = 2x; F ′
y(x; y; z) = 4y; F ′z(x; y; z) = −1
F ′x(P0) = 2; F ′
y(P0) = 4; F ′z(P0) = −1.

78 40 Лекция – Производная по направлению
В соответствии с (40.14) уравнение касательной плоскости имеет вид:
2(x− 1) + 4(y − 1) − 1(z − 3) = 0, или: 2x + 4y − z − 3 = 0.
В соответствии с (40.15) уравнение нормали имеет вид:x− 1
2=y − 1
4=z − 1
−1
Ответ: 2x + 4y − z − 3 = 0, x−12
= y−14
= z−1−1
Рассмотрим теперь часто встречающийся на практике случай, когдаповерхность задана уравнением z = f(x; y), как в примере (40.3). Этотслучай сводится к предыдущему, как это сделано в предыдущем примере.
Запишем уравнение поверхности в виде
(40.16) −f(x; y) + z = 0.
Здесь F (x; y; z) = −f(x; y) + z. Найдем gradF (P0):
F ′x(x0; y0; z0) = −f ′
x(x0; y0); F ′y(x0; y0; z0) = −f ′
y(x0; y0);
F ′z(x0; y0; z0) = 1.
В соответствии с (40.14) уравнение касательной плоскости имеет вид:
−f ′x(x0; y0)(x− x0) − f ′
y(x0; y0)(y − y0) + (z − z0) = 0, или :
(40.17) z − z0 = f ′x(x0; y0)(x− x0) + f ′
y(x0; y0)(y − y0)
В соответствии с (40.15) уравнение нормали имеет вид:
(40.18)x− x0
−f ′x(x0; y0)
=y − y0
−f ′y(x0; y0)
=z − z0
1
Направляющие косинусы нормали в точке P0 находятся как было из-ложено в т. 1 Курса. Формулы для направляющих косинусов нормали призадании поверхности уравнением F (x; y; z) = 0 получаются следующие:
(40.19) cosα =F ′x(P0)
| gradF (P0)|; cosβ =
F ′y(P0)
| gradF (P0)|; cos γ =
F ′z(P0)
| gradF (P0)|,
где | gradF (P0)| =√
(F ′x(P0))2 + (F ′
y(P0))2 + (F ′z(P0))2. Если поверхность
задана уравнением z = f(x; y), формулы, очевидно будут следующими:
(40.20) cosα =−f ′
x(x0; y0)
| gradF (P0)|; cosβ =
−f ′y(x0; y0)
| gradF (P0)|; cos γ =
1
| gradF (P0)|,
где | gradF (P0)| =√
(f ′x(x0; y0))2 + (f ′
y(x0; y0))2 + 1

40 Практическое занятие – Градиент 79
40. практическое занятие —производная по направлению и градиент
Пример 40.1. Найдите производную функции z = x2 + 2y2 в точкеM(1; 1) в направлении, составляющем с осью Ox угол 60o.
Р е ш е н и е: Найдем направляющие косинусы: cosα = cos 60o = 12,
cos β = cos(90o − 60o) = cos 30o =√
32
.Заметим, что cos β можно также найти из условия cos2 α + cos2 β = 1.
Найдем значения частных производных в точке M :
∂z
∂x|M = 2x|x=1 = 2;
∂z
∂y|M = 4y|y=1 = 4.
Найдем производную по направлению:
∂z
∂l|M =
∂z
∂x|M cosα+
∂z
∂y|M cosβ = 2
1
2+ 4
√3
2= 1 + 2
√3 ≈ 4, 46
Поскольку производная по направлению равна тангенсу угла наклона ка-сательной в данной точке в данном направлении с плоскостью XOY ,заключаем, что в точке M(1; 1) в заданном направлении функция z == x2 + 2y2 возрастает и довольно “круто” – угол касательной с плоско-стью XOY составляет около 77o.
Пример 40.2. Найдите производную функции z = 2x2 + y2 в точ-ке M(1; 1) в направлении, идущем от этой точки к началу координатO(0; 0).
Р е ш е н и е: Найдем направляющие косинусы, для чего предвари-тельно найдем координаты вектора MO, задающего направление. В соот-ветствии с изложенным в Части 1 Курса, координаты вектора получаютсявычитанием координат начала вектора из координат его конца:MO = (0 − 1; 0 − 1) = (−1;−1)
Направляющие косинусы вектора равны координатам единичного век-тора, сонаправленого с данным:
lMN =MO
|MO|
Найдем |MO| =√
(−1)2 + (−1)2 =√
2
lMN =
(
− 1√2;− 1√
2
)
⇒ cosα = − 1√2; cos β = − 1√
2.

80 40 Практическое занятие – Градиент
Аналогично тому, как это делалось в предыдущем примере, найдем про-изводную по направлению:
∂z
∂x|M = 4x|x=1 = 4;
∂z
∂y|M = 2y|y=1 = 2 ⇒
⇒ ∂z
∂l|M = 4
(
− 1√2
)
+ 2
(
− 1√2
)
= − 6√2≈ −4.3
Заметим, что функция в данном направлении в точке M убывает (про-изводная отрицательная). Самостоятельно с помощью калькулятора най-дите угол касательной с плоскостью XOY .
Пример 40.3. Найдите градиент функции z = x2+2y2 в точке M(1; 1)и производную этой функции в данной точке в направлении градиента.
Р е ш е н и е: Используя найденные в примере (40.1) значения частныхпроизводных, найдем grad z:
grad z|M =
(∂z
∂x|M ;
∂z
∂y|M)
= (2; 4).
В соответствии с изложенным в лекции 40 производная функции в дан-ной точке принимает наибольшее значение в направлении градиента и
равна его модулю; т.е.
√(∂z∂x
)2+(∂z∂y
)2
. Таким образом, в данном при-
мере производная функции в точке M в направлении градиента равна√22 + 42 =
√20 ≈ 4.47, что немного больше результата примера (40.1)
Пример 40.4. Найдите уравнение касательной плоскости и нормалик конусу
x2
16+y2
9− z2
8= 0
в точке P0(4; 3; 4).
Р е ш е н и е: Здесь поверхность задана уравнением вида F (x; y; z) = 0,где: F (x; y; z) = x2
16+ y2
9− z2
8.
F ′x(x; y; z) =
x
8; F ′
y(x; y; z) =2y
9; F ′
z(x; y; z) = −z4
F ′x(P0) =
1
2; F ′
y(P0) =2
3; F ′
z(P0) = −1
В соответствии с (39.16) уравнение касательной плоскости имеет вид:
1
2(x− 4) +
2
3(y − 3) − (z − 4) = 0 или 3x + 4y − 6z = 0.

40 Практическое занятие – Градиент 81
В соответствии с (39.17) уравнение нормали имеет вид:x− 4
1/2=y − 3
2/3=z − 4
−1
Ответ: 3x + 4y − 6z = 0; x−41/2
= y−32/3
= z−4−1
.
Самостоятельная работа
В примерах 40.4–40.8 найдите производную данной функции в даннойточке в направлении, составляющем с осью Ox угол α.
Пример 40.5. z = 2x2 + xy + 3y2; M(2;−2); α = −45o
Пример 40.6. z = x2 − y2; M(−1; 1); α = 120o
Пример 40.7. z = xy; M(2; 1); cosα = 1
3; 0 < β < π/2
Пример 40.8. z =√
x2 − y2; M(5; 3); cosα = cos β < 0
В примерах 40.9–40.11 найдите производную данной функции в точкеM в направлении, идущем от этой точки к точке N .
Пример 40.9. z = 1xy
; M(1; 1); N(−1; 1)
Пример 40.10. z =√x− y; M(1; 0); N(0; 1)
Пример 40.11. u = xy + yz + zx; M(2; 1; 3); N(5; 5; 15).
В примерах 40.12–40.15 найдите градиент данной функции в даннойточке и производную этой функции в данной точке в направлении гради-ента (т.е. наибольшую скорость изменения функции в данной точке).
Пример 40.12. z = 2x3 + 3y3 − 2xy; M(2; 1).
Пример 40.13. z = 2√
y2 − x2; M(3; 5).
Пример 40.14. u = 2xyz; M(3; 2; 1).
Пример 40.15. u = 4x2 + y2 + z2; M(1; 1; 1).
Пример 40.16. Найти уравнение касательной плоскости и нормали
к гиперболическому параболоиду z = x2
2− y2
3в точке P0(2; 3;−1).
82 41 Лекция – Экстремум функции
41. лекция —экстремум функции нескольких переменных
Формула Тейлора функции 2-х переменных. Решение систем нели-нейных уравнений методом Ньютона. Локальный экстремум функ-ции нескольких переменных. Наибольшее и наименьшее значения.Условный экстремум. Метод множителей Лагранжа. Численные ме-тоды поиска экстремума.
41.1. Формула Тейлора для функции двух переменных. В ча-сти 1 данного курса была выведена формула Тейлора для функции однойпеременной (п. 19.2):
(41.1) f(x) = f(x0) +f ′(x0)
1!(x− x0) +
f ′′(x0)
2!(x− x0)
2 + · · ·+
+fn−1(x0)
(n− 1)!(x− x0)
n−1 +O((x− x0)n),
где O(ρn) есть бесконечно малая порядка n при ρ → 0, в данном случаеρ = x− x0.
Аналогичную формулу, дающую представление функции в виде мно-гочлена от приращений ее аргументов, можно доказать для функции двух(и более) аргументов. Вот как выглядят первые три ее члена:
(41.2) f(x; y) = f(x0; y0) +1
1!
(f ′x(x0; y0)∆x + f ′
y(x0; y0)∆y)+
+1
2!
(f ′′xx(x0; y0)∆x
2 + 2f ′′xy(x0; y0)∆x∆y + f ′′
yy(x0; y0)∆y2)
+O(ρ3),
где ρ =√
∆x2 + ∆y2, ∆x = x− x0, ∆y = y − y0.Если заметить, что в скобках в правой части стоят дифференциалы
равных порядков, формулу можно записать короче:
(41.3) f(x; y) = f(x0; y0) +df(x0; y0)
1!+d2f(x0; y0)
2!+ · · ·+
+dn−1f(x0; y0)
(n− 1)!+O(ρn)
Заметим, что формула (39.3) есть формула Тейлора приn = 2.

41 Лекция – Экстремум функции 83
O(ρn) называется остаточным членом формулы Тейлора. Для функ-ции m переменных формула Тейлора, выписанная до членов первого по-рядка будет иметь вид:
(41.4) f(x1; x2; . . . ; xm) = f(x01; x
02; . . . ; x
0m) +
(f ′x1
(x01; x
02; . . . ; x
0m)∆x1+
+f ′x2
(x01; x
02; . . . ; x
0m)∆x2 + · · · + f ′
xm(x0
1; x02; . . . ; x
0m)∆xm
)+O(ρ2),
где: ∆xi = xi − x0i , i = 1, 2, . . . , m, ρ =
√m∑
i=1
∆x2i
41.2. Решение систем нелинейных уравнений методом Нью-тона. Пусть дана система m нелинейных уравнений с m неизвестными,гдеfi(x1; . . . ; xm) – некоторые функции:
(41.5)
f1(x1; x2; . . . ; xm) = 0f2(x1; x2; . . . ; xm) = 0. . . . . . . . .fm(x1; x2; . . . ; xm) = 0
Определение 41.1. Решением системы (41.5) называется точкаm-мерного пространства P0(a1; a2; . . . ; am), координаты которой удовле-творяют этой системе.
Введем матрицы-столбцы неизвестныхX(координаты точкиm-мерногопространства), функций F и нулевой столбец.
(41.6) X =
x1...xm
, F (X) =
f1(x1; . . . ; xm)...
fm(x1; . . . ; xm)
, O =
0...0
Тогда система (41.5) может быть записана в матричном виде:
(41.7) F (X) = O
Для приближенного решения системы (41.5) в методе Ньютона пред-лагается процедура последовательного уточнения значений решения си-стемы.
Пусть известно приближенное решение Xn системы (41.7) и его отли-чие ε от истинного решения:
(41.8) Xn =
xn1...xnm
, ε =
∆x1...
∆xm
,
где: ∆xi = xi − xni или xi = xni + ∆xi.

84 41 Лекция – Экстремум функции
В матричных обозначениях (41.8) записывается следующим образом:
ε = X −Xn или X = Xn + ε.
Подставляя (41.8) в (41.5), получаем систему:
f1(xn1 + ∆x1, . . . , x
nm + ∆xm) = 0
. . .fm(xn1 + ∆x1, . . . , x
nm + ∆xm) = 0
Заменим каждую из функций в левых частях этих уравнений по фор-муле Тейлора с точностью до линейных членов, которая записываетсяподобно формуле (41.2):
fi(xn1 + ∆x1, . . . , x
nm + ∆xm) = fi(x
n1 , . . . , x
nm)+
+m∑
j=1
f ′i,xj
(xn1 , . . . , xnm)∆xj + α2ρ
2,
где f ′i,xj
(xn1 , . . . , xnm) =
∂fi(xn1 ,...,x
nm)
∂xj
Пренебрегая остаточным членом, получим систему (41.9) линейныхуравнений для определения неизвестных “поправок” ∆xnj , (j = 1, 2, . . . , m)к “n-му приближению” xn1 , . . . , x
nm, которые будут отличаться от ∆xj.
(41.9)
f1(xn1 , . . . , x
nm) + f ′
1,x1(xn1 , . . . , x
nm)∆xn1+, . . . ,+
+f ′1,xm
(xn1 , . . . , xnm)∆xnm = 0
. . .fm(xn1 , . . . , x
nm) + f ′
m,x1(xn1 , . . . , x
nm)∆xn1+, . . . ,+
+f ′m,xm
(xn1 , . . . , xnm)∆xnm = 0
Находя из этой системы значения поправок ∆xnj (j = 1, . . . , m), находим“n+ 1-е приближение” по формулам (41.10)
(41.10) xn+11 = xn1 + ∆xn1 , . . . , x
n+1m = xnm = +∆xnm.
Конечно, подставляя найденные значения xnj (j = 1, . . . , m) в систему(41.5), мы не получим (в общем случае) тождество, т.к. при вычислениипоправок ∆xnj мы пренебрегаем остаточным членом в формуле Тейлора.Вычисляя, на основании значений xn+1
j новые поправки из системы (41.9),найдем следующее, n + 2-е приближение. Процесс обычно продолжаетсядо тех пор, пока поправки к решению не оказываются по абсолютной вели-чине меньше наперед заданной точности вычислений δ, которую обычноберут одинаковой для всех неизвестных: |∆xnj | < δ для всех j = 1, . . . , m.

41 Лекция – Экстремум функции 85
Метод Ньютона, как правило, сходится если начальное приближениедостаточно близко к истинному решению. На практике начальное прибли-жение для системы двух и трех уравнений выбирают из геометрическихсоображений. Решение системы (41.9) и реализация метода Ньютона внастоящее время осуществляется с помощью ЭВМ.
В матричном виде, с использованием обозначений (41.6), система (41.9)и ее решение записывается более удобно:
(41.11) F (Xn) +W (Xn) · εn = 0,
где W (Xn) – так называемая матрица Якоби, или якобиан, составлена изпроизводных функций fi(x1, . . . , xm) в точке(xn1 , . . . , x
nm):
(41.12) W (X) =
∂f1∂x1
. . . ∂f1∂xm
. . . . . . . . .∂fm
∂x1. . . ∂fm
∂xm
Решая матричное уравнение (41.11), получаем матрицу-столбец попра-вок:
(41.13) εn = −W−1(Xn)F (Xn),
где W−1(Xn) – матрица, обратная к матрице Якоби, вычисленной для Xn.Очередное n+ 1-е приближение вычисляется по формуле:
(41.14) Xn+1 = Xn + εn
Замечание 41.12. Для системы двух и трех уравнений аргументыx1, x2, x3 обозначают, как правило, традиционным способом: x, y, z.
Пример 41.1. Решить систему уравненийx2 + 4y2 − 1 = 0y − x3 = 0
с точностью δ = 0, 01
Р е ш е н и е: В данном случае система двух уравнений с двумянеизвестными: x1 = x, x2 = y, f1(x1; x2) = x2 + 4y2 − 1, f2(x1; x2) = y − x3,
F (X) =
(x2 + 4y2 − 1
y − x3
)
;∂f1∂x1
= ∂f1∂x
= 2x, ∂f1∂x2
= ∂f1∂y
= 8y,∂f2∂x1
= ∂f2∂x
= −3x2, ∂f2∂x2
= ∂f2∂y
= 1.
Таким образом, матрица Якоби получилась равной:
W (X) =
(2x 8y
−3x2 1
)

86 41 Лекция – Экстремум функции
На практике далее вычисления производятся с помощью программына ЭВМ, исходными данными для работы которой являются правые частиуравнений F (X), матрица Якоби W (X), начальное приближение x0, y0 иточность вычислений δ.
Для нахождения начального приближения воспользуемся геометриче-ской интерпретацией уравнений системы примера 41.1. Уравнение x2 +
+4y2−1 = 0 определяет эллипс x2
1+ y2
(0,5)2= 1 с полуосями a = 1 и b = 0, 5.
Уравнение y−x3 = 0 определяет кубическую параболу y = x3. Нарисовавобе кривые в одних осях найдем нулевое приближение из графика (см.рис. 33)
y
x
0,5
1
-0.5
-1
Рис. 33. Решение примера 41.1
Ограничимся нахождением решения системы с положительными ко-ординатами, выбрав в качестве начального приближения x0 = 0, 50;y0 = 0, 25
Для начальной иллюстрации метода Ньютона покажем процесс чис-ленного решения примера 41.1. В вычислениях будем брать на один знакбольше требуемой точности, т.е. 3 знака после запятой.
Найдем матрицу обратную к матрице Якоби как было изложено вчасти 1 настоящего Курса:
W−1(X) =
(1
2x+24x2y− 4yx+12x2y
3x2
2x+24x2yx
x+12x2y
)
Система (41.13) для определения поправок ε = −W−1(X)F (X) приоб-ретает вид:
(41.15)
∆x = −(x2+4y2−12x+24x2y
− 4y(y−x3)x+12x2y
)
∆y = −(
3x2(x2+4y2−1)2x+24x2y
+ x(y−x3)x+12x2y
)
Подставляя сюда начальное приближение x0 = 0, 50, y0 = 0, 25 полу-чаем значения поправок ∆x0 = 0, 30; ∆y0 = 0, 10.

41 Лекция – Экстремум функции 87
Вычисляя далее очередное приближение получаем x1 = x0+∆x0 = 0, 8,y1 = y0 + ∆y0 = 0, 35.
Поскольку условие окончания процесса|∆x0| < 0, 01|∆y0| < 0, 01
не выполнено, продолжаем вычисления.
Подставляя в систему (41.15) значения x1, y1, получаем ∆x1 = −0, 084;∆y1 = 0, 0014; x2 = x1 + ∆x1 = 0, 716; y2 = y1 + ∆y1 = 0, 3514.
Поскольку условие окончания процесса:|∆x1| < 0, 01|∆y1| < 0, 01
, не выполнено, вычисления продолжаем.
Результаты вычислений сведены в таблицу:i xi yi ∆xi ∆yi0 0,50 0,25 0,30 0,101 0,80 0,35 -0,084 0,00442 0,716 0,3514 -0,0088 -0,0093 0,707 0,3505
Условия окончания процесса выполняются для i = 2: |∆x2| < 0, 1;|∆y2| < 0, 01.
Ответ: x3 = 0, 71; y3 = 0, 35 с точностью до 0, 01.
41.3. Локальный экстремум функции нескольких перемен-ных.
Определение 41.2. Мы говорим, что функция z = f(x; y) имеетлокальный максимум в точке M0(x0; y0) ∈ D(f) (т.е. при x = x0 иy = y0), если
f(x0; y0) > f(x; y)
для всех точек (x; y), достаточно близких к точке (x0; y0) (из δ окрест-ности этой точки) и отличных от нее.
Определение 41.3. Совершенно аналогично говорят, что функцияz = f(x; y) имеет локальный минимум в точкеM0(x0; y0) ∈ D(f), если
f(x0; y0) < f(x; y)
для всех точек (x; y), достаточно близких к точке (x0; y0) и отличныхот нее.
Локальный максимум и минимум функции называют локальными экс-тремумами функции, т.е. говорят, что функция имеет локальный экстре-мум в данной точке, если эта функция имеет локальный максимум илиминимум в данной точке.
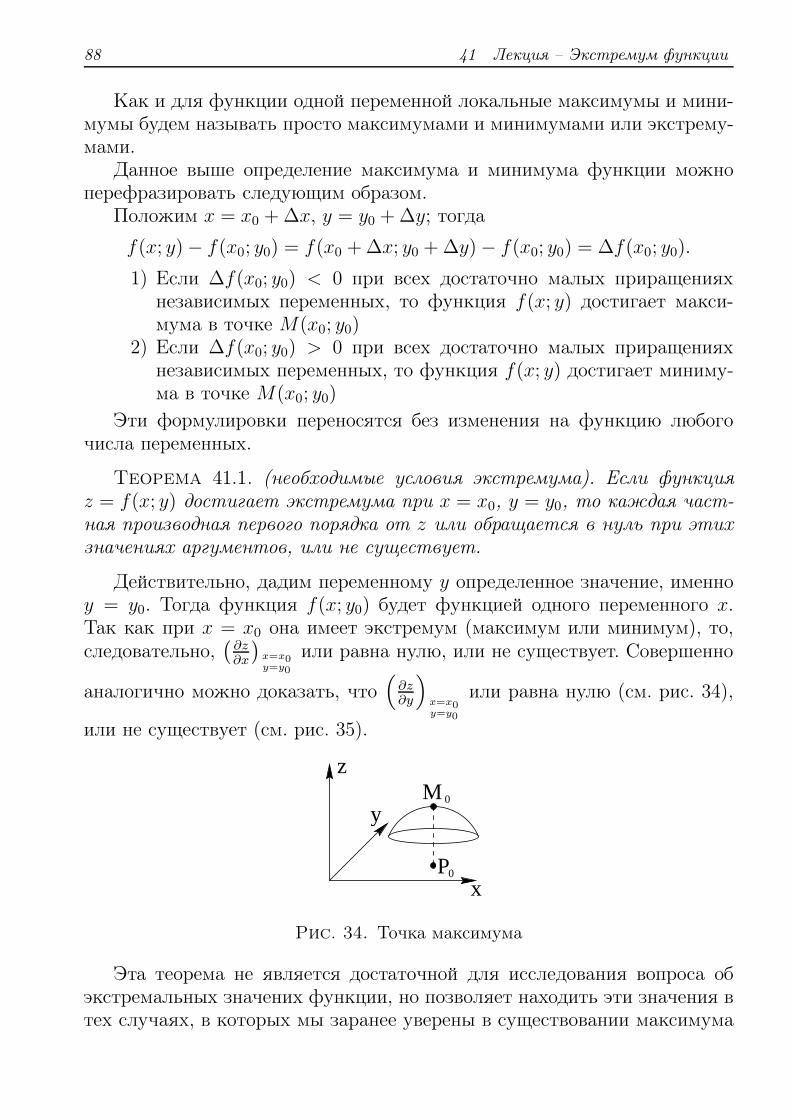
88 41 Лекция – Экстремум функции
Как и для функции одной переменной локальные максимумы и мини-мумы будем называть просто максимумами и минимумами или экстрему-мами.
Данное выше определение максимума и минимума функции можноперефразировать следующим образом.
Положим x = x0 + ∆x, y = y0 + ∆y; тогда
f(x; y) − f(x0; y0) = f(x0 + ∆x; y0 + ∆y) − f(x0; y0) = ∆f(x0; y0).
1) Если ∆f(x0; y0) < 0 при всех достаточно малых приращенияхнезависимых переменных, то функция f(x; y) достигает макси-мума в точке M(x0; y0)
2) Если ∆f(x0; y0) > 0 при всех достаточно малых приращенияхнезависимых переменных, то функция f(x; y) достигает миниму-ма в точке M(x0; y0)
Эти формулировки переносятся без изменения на функцию любогочисла переменных.
Теорема 41.1. (необходимые условия экстремума). Если функцияz = f(x; y) достигает экстремума при x = x0, y = y0, то каждая част-ная производная первого порядка от z или обращается в нуль при этихзначениях аргументов, или не существует.
Действительно, дадим переменному y определенное значение, именноy = y0. Тогда функция f(x; y0) будет функцией одного переменного x.Так как при x = x0 она имеет экстремум (максимум или минимум), то,следовательно,
(∂z∂x
)
x=x0y=y0
или равна нулю, или не существует. Совершенно
аналогично можно доказать, что(∂z∂y
)
x=x0y=y0
или равна нулю (см. рис. 34),
или не существует (см. рис. 35).
x
zM
P0
y0
Рис. 34. Точка максимума
Эта теорема не является достаточной для исследования вопроса обэкстремальных значених функции, но позволяет находить эти значения втех случаях, в которых мы заранее уверены в существовании максимума
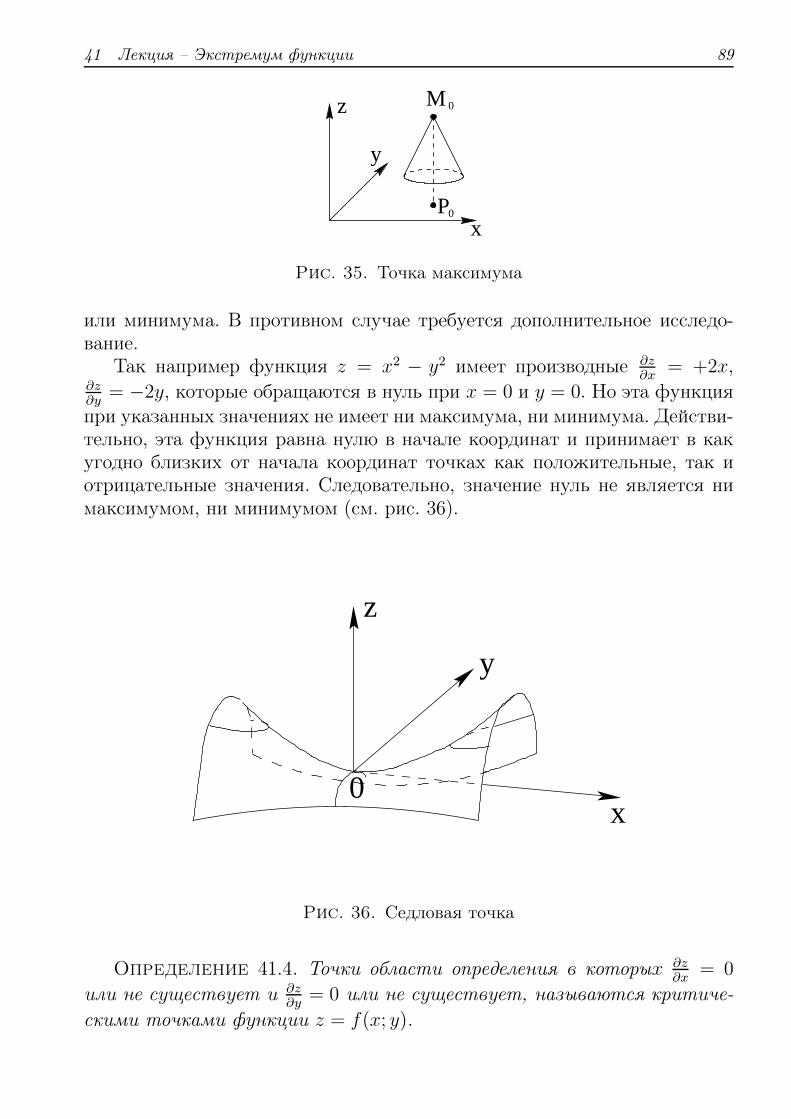
41 Лекция – Экстремум функции 89
x
z
P0
y
M 0
Рис. 35. Точка максимума
или минимума. В противном случае требуется дополнительное исследо-вание.
Так например функция z = x2 − y2 имеет производные ∂z∂x
= +2x,∂z∂y
= −2y, которые обращаются в нуль при x = 0 и y = 0. Но эта функцияпри указанных значениях не имеет ни максимума, ни минимума. Действи-тельно, эта функция равна нулю в начале координат и принимает в какугодно близких от начала координат точках как положительные, так иотрицательные значения. Следовательно, значение нуль не является нимаксимумом, ни минимумом (см. рис. 36).
x
y
z
0
Рис. 36. Седловая точка
Определение 41.4. Точки области определения в которых ∂z∂x
= 0
или не существует и ∂z∂y
= 0 или не существует, называются критиче-
скими точками функции z = f(x; y).
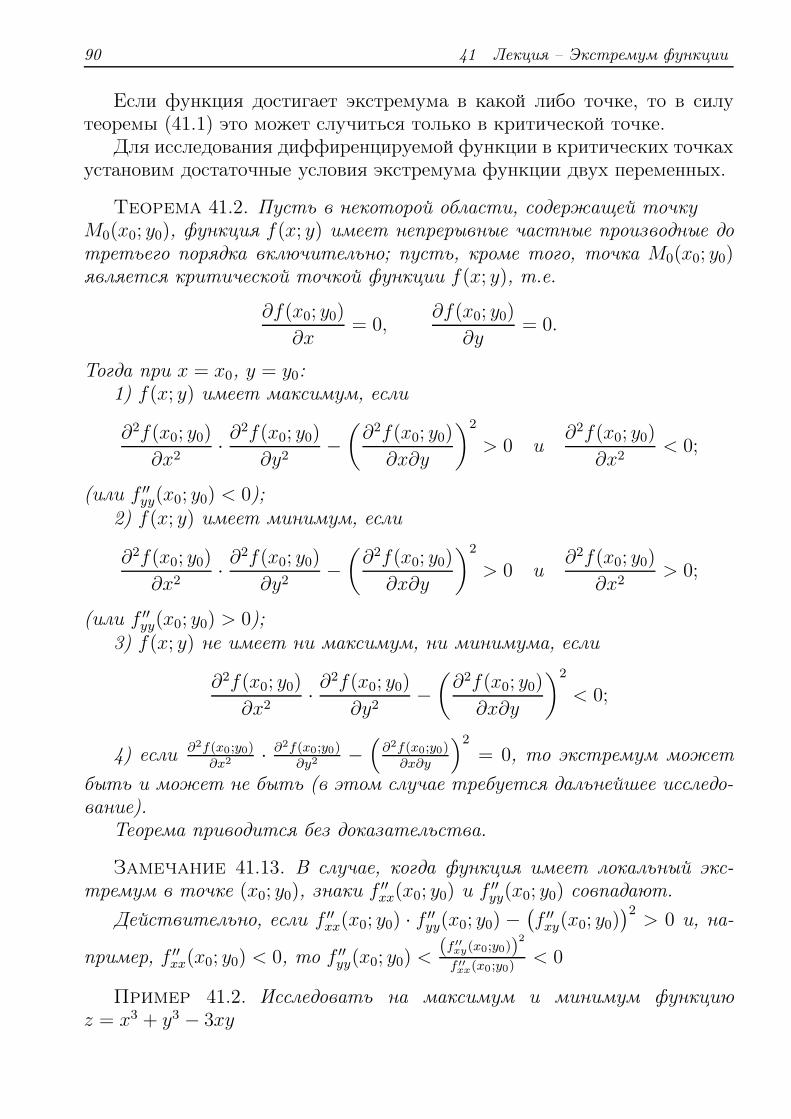
90 41 Лекция – Экстремум функции
Если функция достигает экстремума в какой либо точке, то в силутеоремы (41.1) это может случиться только в критической точке.
Для исследования диффиренцируемой функции в критических точкахустановим достаточные условия экстремума функции двух переменных.
Теорема 41.2. Пусть в некоторой области, содержащей точкуM0(x0; y0), функция f(x; y) имеет непрерывные частные производные дотретьего порядка включительно; пусть, кроме того, точка M0(x0; y0)является критической точкой функции f(x; y), т.е.
∂f(x0; y0)
∂x= 0,
∂f(x0; y0)
∂y= 0.
Тогда при x = x0, y = y0:1) f(x; y) имеет максимум, если
∂2f(x0; y0)
∂x2· ∂
2f(x0; y0)
∂y2−(∂2f(x0; y0)
∂x∂y
)2
> 0 и∂2f(x0; y0)
∂x2< 0;
(или f ′′yy(x0; y0) < 0);
2) f(x; y) имеет минимум, если
∂2f(x0; y0)
∂x2· ∂
2f(x0; y0)
∂y2−(∂2f(x0; y0)
∂x∂y
)2
> 0 и∂2f(x0; y0)
∂x2> 0;
(или f ′′yy(x0; y0) > 0);
3) f(x; y) не имеет ни максимум, ни минимума, если
∂2f(x0; y0)
∂x2· ∂
2f(x0; y0)
∂y2−(∂2f(x0; y0)
∂x∂y
)2
< 0;
4) если ∂2f(x0;y0)∂x2 · ∂2f(x0;y0)
∂y2−(∂2f(x0;y0)∂x∂y
)2
= 0, то экстремум может
быть и может не быть (в этом случае требуется дальнейшее исследо-вание).
Теорема приводится без доказательства.
Замечание 41.13. В случае, когда функция имеет локальный экс-тремум в точке (x0; y0), знаки f ′′
xx(x0; y0) и f ′′yy(x0; y0) совпадают.
Действительно, если f ′′xx(x0; y0) · f ′′
yy(x0; y0) −(f ′′xy(x0; y0)
)2> 0 и, на-
пример, f ′′xx(x0; y0) < 0, то f ′′
yy(x0; y0) <(f ′′xy(x0;y0))
2
f ′′xx(x0;y0)< 0
Пример 41.2. Исследовать на максимум и минимум функциюz = x3 + y3 − 3xy

41 Лекция – Экстремум функции 91
Р е ш е н и е:1) Найдем критические точки пользуясь необходимыми условиями экс-
тремума:∂z∂x
= 3x2 − 3y = 0,∂z∂y
= 3y2 − 3x = 0.
Отсюда получаем две критические точки:
x1 = 1, y1 = 1 и x2 = 0, y2 = 0.
2) Найдем производные второго порядка:
∂2z
∂x2= 6x,
∂2z
∂x∂y= −3,
∂2z
∂y2= 6y.
3) Исследуем характер первой критической точки M(1; 1):
A =
(∂2z
∂x2
)
x=1y=1
= 6, B =
(∂2z
∂x∂y
)
x=1y=1
= −3, C =
(∂2z
∂y2
)
x=1y=1
= 6,
AC −B2 = 36 − 9 = 27 > 0; A > 0(и C > 0).
Следовательно, в точке (1; 1) данная функция имеет минимум, именно:
zmin = −1.
4) Исследуем характер второй критической точки M2(0; 0):
A = 0, B = −3, C = 0;
AC − B2 = −9 < 0.
Следовательно, во второй критической точке функция не имеет ни мак-симума, ни минимума (минимакс).
41.4. Наибольшее и наименьшее значение функции в замкну-той области. В некоторых задачах необходимо найти максимум или ми-нимум функции от нескольких переменных, не являющихся независимы-ми, но связанными друг с другом некоторыми дополнительными услови-ями: уравнениями или неравенствами.
Определение 41.5. Наибольшее значение функции z = f(x; y) намножестве M называется глобальным максимумом этой функции намножестве M .
Аналогично вводится понятие глобального минимума на множествеM как наименьшего значения. Наибольшее и наименьшее значения на-зываются глобальными экстремумами.
Пусть функция z = f(x; y) непрерывна в ограниченной замкнутой об-ласти G и дифференцируема внутри этой области.
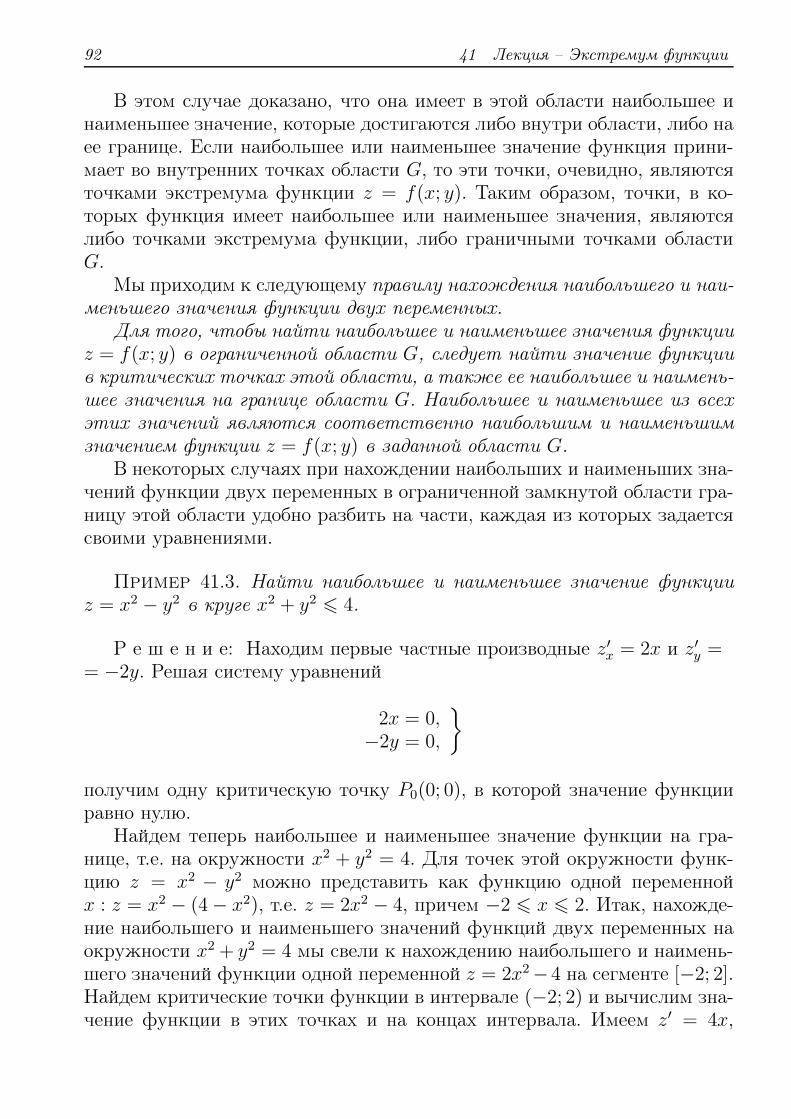
92 41 Лекция – Экстремум функции
В этом случае доказано, что она имеет в этой области наибольшее инаименьшее значение, которые достигаются либо внутри области, либо наее границе. Если наибольшее или наименьшее значение функция прини-мает во внутренних точках области G, то эти точки, очевидно, являютсяточками экстремума функции z = f(x; y). Таким образом, точки, в ко-торых функция имеет наибольшее или наименьшее значения, являютсялибо точками экстремума функции, либо граничными точками областиG.
Мы приходим к следующему правилу нахождения наибольшего и наи-меньшего значения функции двух переменных.
Для того, чтобы найти наибольшее и наименьшее значения функцииz = f(x; y) в ограниченной области G, следует найти значение функциив критических точках этой области, а также ее наибольшее и наимень-шее значения на границе области G. Наибольшее и наименьшее из всехэтих значений являются соответственно наибольшим и наименьшимзначением функции z = f(x; y) в заданной области G.
В некоторых случаях при нахождении наибольших и наименьших зна-чений функции двух переменных в ограниченной замкнутой области гра-ницу этой области удобно разбить на части, каждая из которых задаетсясвоими уравнениями.
Пример 41.3. Найти наибольшее и наименьшее значение функцииz = x2 − y2 в круге x2 + y2 6 4.
Р е ш е н и е: Находим первые частные производные z′x = 2x и z′y == −2y. Решая систему уравнений
2x = 0,−2y = 0,
получим одну критическую точку P0(0; 0), в которой значение функцииравно нулю.
Найдем теперь наибольшее и наименьшее значение функции на гра-нице, т.е. на окружности x2 + y2 = 4. Для точек этой окружности функ-цию z = x2 − y2 можно представить как функцию одной переменнойx : z = x2 − (4 − x2), т.е. z = 2x2 − 4, причем −2 6 x 6 2. Итак, нахожде-ние наибольшего и наименьшего значений функций двух переменных наокружности x2 + y2 = 4 мы свели к нахождению наибольшего и наимень-шего значений функции одной переменной z = 2x2−4 на сегменте [−2; 2].Найдем критические точки функции в интервале (−2; 2) и вычислим зна-чение функции в этих точках и на концах интервала. Имеем z′ = 4x,
41 Лекция – Экстремум функции 93
4x = 0, откуда получаем критическую точку x = 0; z|x=0 = −4. Далее на-ходим z|x=−2 = 4, z|x=2 = 4. Таким образом, функция имеет наибольшеезначение, равное 4, и наименьшее значение, равное -4.
Итак, наибольшее значение функции z = x2 − y2 в круге x2 + y2 6 4принимает в точках M1(−2; 0) и M2(2; 0) окружности x2 + y2 = 4 и наи-меньшее – в точках M3(0; 2) и M4(0;−2) той же окружности.
Заметим, что наибольшее и наименьшее значение функции на окруж-ности x2 + y2 = 4 можно найти иначе.
Представим уравнение окружности в параметрическом виде:
x = 2 cos t, y = 2 sin t, (0 6 t 6 2π).
Тогда z = x2 − y2 = 4 cos2 t − 4 sin2 t = 4 cos 2t. Найдем наибольшее инаименьшее значение этой функции на сегменте 0 6 t 6 2π. Для этогопродифференцировав функцию z = 4 cos 2t, получим z′ = −8 sin 2t. Со-ставив уравнение −8 sin 2t = 0, находим три критические точки t1 = π/2,t2 = π, t3 = 3π/2, лежащие внутри указанного сегмента. Вычислив зна-чения функции 4 cos 2t в этих точках, а также на концах сегмента t = 0и t = 2π, заметим, что получаются лишь два различных между собойзначения функции: z1 = −4 (наименьшее значение) и z2 = 4 (наибольшеезначение).
41.5. Условный экстремум.
Пример 41.4. Из куска жести площадью 2a требуется сделать за-крытую коробку в виде прямоугольного параллелепипеда, имеющего наи-больший объем.
Р е ш е н и е: Обозначив длину ребер параллелепипеда x, y и z,сведем задачу к нахождению максимума функции V = xyz при условии:2xy+2xz+2yz = 2a, x > 0, y > 0, z > 0. Решение этой задачи приводитсяниже.
Такие задачи называются задачами на условный экстремум.Сначала рассмотрим задачу нахождения условного экстремума функ-
ции двух переменных, связанных одним условием.Требуется найти максимумы и минимумы функции
(41.16) u = f(x; y)
при условии, что x и y связаны уравнением
(41.17) ϕ(x; y) = 0
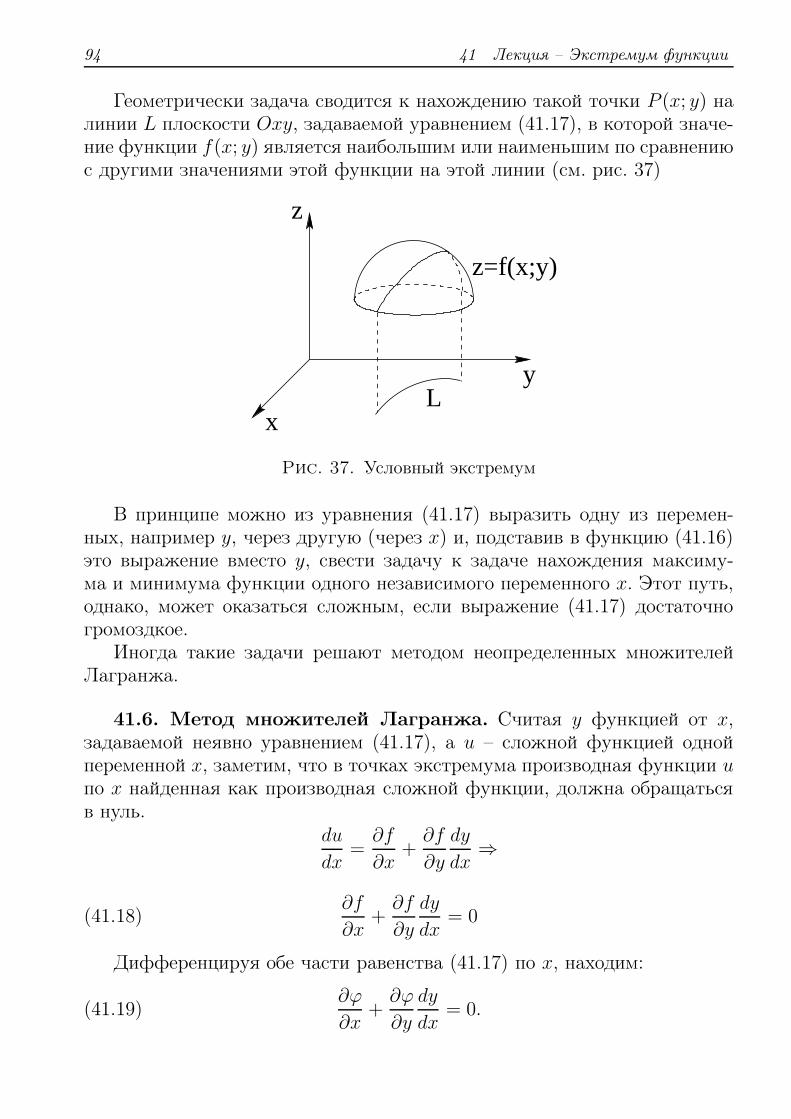
94 41 Лекция – Экстремум функции
Геометрически задача сводится к нахождению такой точки P (x; y) налинии L плоскости Oxy, задаваемой уравнением (41.17), в которой значе-ние функции f(x; y) является наибольшим или наименьшим по сравнениюс другими значениями этой функции на этой линии (см. рис. 37)
L
z=f(x;y)
y
x
z
Рис. 37. Условный экстремум
В принципе можно из уравнения (41.17) выразить одну из перемен-ных, например y, через другую (через x) и, подставив в функцию (41.16)это выражение вместо y, свести задачу к задаче нахождения максиму-ма и минимума функции одного независимого переменного x. Этот путь,однако, может оказаться сложным, если выражение (41.17) достаточногромоздкое.
Иногда такие задачи решают методом неопределенных множителейЛагранжа.
41.6. Метод множителей Лагранжа. Считая y функцией от x,задаваемой неявно уравнением (41.17), а u – сложной функцией однойпеременной x, заметим, что в точках экстремума производная функции uпо x найденная как производная сложной функции, должна обращатьсяв нуль.
du
dx=∂f
∂x+∂f
∂y
dy
dx⇒
(41.18)∂f
∂x+∂f
∂y
dy
dx= 0
Дифференцируя обе части равенства (41.17) по x, находим:
(41.19)∂ϕ
∂x+∂ϕ
∂y
dy
dx= 0.

41 Лекция – Экстремум функции 95
Это равенство выполняется для всех x и y, удовлетворяющих уравне-нию (41.17).
Умножив обе части равенства (41.19) на неопределенный пока коэф-фициент λ и сложив их с соответствующими частями равенства (41.18),получаем равенство:
(41.20)
(∂f
∂x+ λ
∂ϕ
∂x
)
+
(∂f
∂y+ λ
∂ϕ
∂y
)dy
dx= 0,
выполняющееся в точках экстремума.Подберем λ так, чтобы в этих точках вторая скобка в (41.20) обрати-
лась в нуль:∂f
∂y+ λ
∂ϕ
∂y= 0.
Тогда при этих значениях x и y следует равенство нулю первой скобкив (41.20):
∂f
∂x+ λ
∂ϕ
∂x= 0.
Таким образом, в точках экстремума выполняются три условия:
(41.21)
∂f∂x
+ λ∂ϕ∂x
= 0,∂f∂y
+ λ∂ϕ∂y
= 0,
ϕ(x; y) = 0.
Т.е. система (41.21) является необходимым условием условного экстре-мума. Заметим, что левые части уравнений (41.20) являются частнымипроизводными функции Лагранжа
(41.22) F (x; y; λ) = f(x; y) + λϕ(x; y)
трех переменных x, y и λ.Таким образом, для нахождения условного экстремума функции (41.16)
при условии (41.17) методом множителей Лагранжа, нужно составить до-полнительную функцию (41.22), приравняв нулю ее частные производ-ные по x, y и λ и из полученной системы (41.21) определить значение xи y (вспомогательный множитель λ не нужен). Заметим, что посколькууравнения (41.21) являются необходимым условием, требуется дополни-тельное исследование характера критической точки. Иногда при решенииконкретных задач удается установить характер критической точки из фи-зического смысла задачи.
Рассмотренный метод распространяется на случай любого числа пе-ременных.

96 41 Лекция – Экстремум функции
Если требуется найти экстремумы функции n переменныхu = f(x1; . . . ; xn) при условии:
(41.23)
ϕ1(x1; . . . ; xn) = 0. . .ϕm(x1; . . . ; xn) = 0, где m < n
нужно составить функцию Лагранжа:
F (x1; . . . ; xn; λ1; . . . ; λm) =
= f(x1; . . . ; xn) + λ1ϕ1(x1; . . . ; xn) + · · · + λmϕm(x1; . . . ; xn).
Приравняв нулю ее частные производные по всем n+m переменным,получим систему:
(41.24)
∂f∂x1
+ λ1∂ϕ1
∂x1+ · · · + λm
∂ϕm
∂x1= 0
. . .∂f∂xn
+ λ1∂ϕ1
∂xn+ · · · + λm
∂ϕm
∂xn= 0
ϕ1 = 0. . .ϕm = 0
Определив из системы (41.24) значения x1, . . . , xn (вспомогательныемножители λ1, . . . , λm не нужны), выделим экстремумы из найденныхкритических точек (с помощью вспомогательных соображений).
Пример 41.5. Решим пример (41.16) методом множителей Лагран-жа.
Р е ш е н и е: Составим вспомогательную функцию
F (x; y; λ) = xyz + λ(2xy + 2xz + 2yz − 2a).
Найдем ее частные производные и приравняем их нулю:
yz + λ(y + z) = 0,
xz + λ(x+ z) = 0,
xy + λ(x+ y) = 0,
xy + xz + yz − a = 0.
Для решения этой системы умножим первое уравнение на x, второена y, третье на z и сложим их; с учетом последнего уравнения, получаем:
41 Лекция – Экстремум функции 97
λ = −3xyz2a
. Подставив это выражение в первые три уравнения, получаем:
yz(1 − 3x
2a(y + z)
)= 0,
xz(1 − 3y
2a(x+ z)
)= 0,
xy(1 − 3z
2a(x+ y)
)= 0,
xy + xz + yz − a = 0.
Т.к. x, y, z по смыслу задачи отличны от нуля, из первых трех урав-нений имеем:
1 − 3x2a
(y + z) = 0,
1 − 3y2a
(x+ z) = 0,
1 − 3z2a
(x+ y) = 0,
xy + xz + yz − a = 0.
Из первых двух уравнений находим x = y, из второго и третьего y = z,из последнего:
x = y = z =
√a
3.
Из геометрических соображений следует, что полученная критическаяточка дает максимум, т.к. минимум объема будет при x = 0 или y = 0или z = 0.
Ответ: Объем коробки наибольший, когда коробка имеет форму кубас ребром равным
√a3.
41.7. Понятие о численных методах поиска экстремума. В связи стем, что аналитические методы зачастую приводят к громоздким вычислениям,в связи с развитием вычислительной техники большое распространение полу-чили численные методы поиска экстремума.
Ряд таких методов, получивших название градиентных, основаны на свой-стве градиента указывать направление наибольшего возрастания функции вданной точке.
В соответствии с градиентным методом для нахождения максимума функ-ции z = f(x; y) тем или иным методом определяется начальное приближение– точка P0(x0; y0). Далее вычисляется вектор grad f(P0) и определяется точканаибольшего значения функции в этом направлении – точка P1(x1; y1). Вычис-ляется вектор grad f(P1) указывающий направление следующего шага; вычис-ляется точка наибольшего значения функции в направлении grad f(P1) – точкаP2(x2; y2) и т.д. до достижения “вершины” – точки локального максимума. Напрактике процесс прекращают когда абсолютная величина | grad f(Pn)| стано-вится достаточно малой.
Иногда градиентные методы называют “методами наискорейшего спуска” –применяя их для нахождения точки минимума.
98 41 Практическое занятие – Экстремум функции
Кроме градиентных методов широкое распространение получили также чис-
ленные методы поиска экстремума, основанные на приближении (линейном или
более высокого порядка) значения функции в данной точке
41. практическое занятие —экстремум функции нескольких переменных
Пример 41.1. Найдите экстремумы функции z = x2+xy+y2−6x−3y
Р е ш е н и е: Найдем частные производные первого порядка и найдемстационарные точки из необходимого условия экстремума, решив системууравнений:
∂z
∂x= 2x + y − 6;
∂z
∂y= x+ 2y − 3
∂z∂x
= 0∂z∂y
= 0⇔
2x+ y − 6 = 0x+ 2y − 3 = 0
⇔x = 3y = 0
Найдем далее частные производные второго порядка и вычислим значе-ние дискриминанта ∆ = z′′xx · z′′yy − (z′′xy)
2 в стационарных точках.
z′′xx = 2; z′′yy = 2; z′′xy = 1 ⇒ ∆ = 2 · 2 − 1 = 3 > 0
В соответствии с достаточным условием экстремума найденная стацио-нарная точка M(3; 0) является точкой экстремума. Поскольку z′′xx > 0,это минимум.
Ответ: Точка M(3; 0) является точкой минимума.
Пример 41.2. Исследуйте на экстремум функцию z = y3 + 3x2y −− 12x− 15y
Р е ш е н и е: Найдем стационарные точки:
z′x = 6xy − 12; z′y = 3y2 + 3x2 − 15z′x = 0z′y = 0
⇔
6xy − 12 = 03y2 + 3x2 − 15 = 0
⇔x2 + y2 = 5xy = 2
⇔
⇔x2 + 2xy + y2 = 9x2 − 2xy + y2 = 1
⇔
(x+ y)2 = 9(x− y)2 = 1
⇔x+ y = ±3x− y = ±1
Решая 4 системы, получаем 4 стационарные точки:
M1(1; 2); M2(2; 1); M3(−1;−2); M4(−2;−1)
Определим знак дискриминанта ∆ = z′′xxz′′yy − (z′′xy)
2 в каждой из этихточек
z′′xx = 6y; z′′yy = 6y; z′′xy = 6x⇒∆ = 6y6y − (6x)2 = 36(y2 − x2)
41 Практическое занятие – Экстремум функции 99
∆|M1 = 36(4 − 1) > 0; ∆|M2 = 36(1 − 4) < 0∆|M3 = 36(4 − 1) > 0; ∆|M4 = 36(1 − 4) < 0Следовательно в точках M1 и M3 есть экстремум, а в точках M2 и M4
его нет.Определите знак частной производной z′′xx в точках M1 и M3.
z′′xx|M1 = 6 · 2 > 0; z′′xx|M3 = 6 · (−2) < 0
Следовательно в точке M1 функция имеет минимум, а в точке M3 – мак-симум.
Пример 41.3. Исследуйте на экстремум функцию z = 2x2 + (y − 1)2
Р е ш е н и е: Найдем частные производные первого порядка и опре-делим стационарные точки из необходимого условия экстремума, решивсистему уравнений:
∂z
∂x= 4x;
∂z
∂y= 2(y − 1)
∂z∂x
= 0∂z∂y
= 0⇔
4x = 02(y − 1) = 0
⇔x = 0y = 1
Найдем частные производные второго порядка и вычислим значениедискриминанта ∆ = z′′xxz
′′yy − (z′′xy)
2 в стационарных точках:
z′′xx = 4, z′′yy = 2, z′′xy = 0 ⇒ ∆ = 4 · 2 − 0 = 8 > 0
На основании достаточного условия экстремума заключаем, что най-денная стационарная точкаM(0; 1) является точкой экстремума. Посколь-ку ∆z′′xx > 0, это точка минимума.Ответ: Точка M(0; 1) — точка минимума.
Пример 41.4. Найдите условные экстремумы функцииz =
√
1 − x2 − y2 при условии x+ y − 1 = 0.
Р е ш е н и е: Графиком функции z =√
1 − x2 − y2 является верхняяполусфера (см. рис. 38), линия L : x+ y− 1 = 0 есть прямая на плоскостиOxy.
Из геометрических соображений ясно, что для точек этой линии наи-большее значение функции достигается в точке P (1
2; 1
2), лежащей посере-
дине между точками A(1; 0) и B(0; 1), а наименьшее значение – в точкахA и B.
Заметим, что условный максимум – точка M не совпадает с глобаль-ным максимумом – точкой N .

100 41 Практическое занятие – Экстремум функции
z= 1-x -y 2 2
y
x
z
M
AB
Px+y-1=0
N
Рис. 38. Решение примера (41.4)
Из уравнения связи x + y − 1 = 0 получаем y = 1 − x. Отсюдаz =
√
1 − x2 − (1 − x)2 ⇔ z =√
2x− 2x2. Область изменения x найдем изусловия 2x− x2 > 0 ⇔ x ∈ [0; 1]
Находя производную z′x = 2−4x2√
2x−2x2 , определяем критическую точку
z′x = 0 ⇔ x0 = 12
принадлежащую отрезку, вычисляем значение функции вэтой критической точке и на концах отрезка: z
(12
)= 1√
2; z(0) = 0; z(1) = 0
и находим как раз те локальные экстремумы, которые были определеныиз геометрических соображений:
x0 =1
2⇒ y0 = 1 − x0 =
1
2⇒ z
(1
2
)
=1√2;
x1 = 0 ⇒ y0 = 1 − x0 = 1 ⇒ z(0) = 0;x2 = 1 ⇒ y0 = 1 − x0 = 0 ⇒ z(1) = 0.
Пример 41.5. Найдите экстремумы функций z = 6 − 3x − 4y приусловии, что x2 + y2 = 1
Р е ш е н и е: Составим функцию Лагранжа:
F (x; y; λ) = 6 − 3x− 4y + λ(x2 + y2 − 1)
Необходимые условия экстремума дают систему:
F ′x = 0,F ′y = 0,Fλ = 0.
⇔
−3 + 2λx = 0,−4 + 2λy = 0,x2 + y2 − 1 = 0.
⇔
x = 32λ,
y = 2λ,
x2 + y2 − 1 = 0.⇔
⇔
x = 32λ,
y = 2λ,
(32λ
)2+(
2λ
)2 − 1 = 0.
⇔
x = 32λ,
y = 2λ,
25−4λ2
4λ2 = 0.⇔
x = 32λ,
y = 2λ,
λ = ±52.

41 Практическое занятие – Экстремум функции 101
⇔
x1 = 35,
y1 = 45,
λ1 = 52.
или
x2 = −35,
y2 = −45,
λ2 = −52.
Для определения наличия экстремума и его характера, определимзнак d2F = F ′′
xxdx2+2F ′′
xydxdy+F ′′yydy
2 при данных значениях переменных.F ′′xx = 2λ; F ′′
yy = 2λ; F ′′xy = 0 ⇒ d2F = 2λdx2 + 2λdy2.
Если λ1 = 52, x1 = 3
5, y1 = 4
5, то d2F = 5(dx2 +dy2) > 0 и следовательно,
в этой точке минимум.Если λ2 = −5
2, x2 = −3
5, y2 = −4
5, то d2F = −5(dx2 + dy2) < 0 и
следовательно, в этой точке максимум.zmin = 6 − 3
(35
)− 4
(45
)= 1
zmax = 6 − 3(−3
5
)− 4
(−4
5
)= 11
Заметим, что геометрически данная задача сводится к нахождению са-мой “высокой” (zmax) и самой “низкой” (zmin) точек пересечения плоскостиz = 6 − 3x− 4y с цилиндром x2 + y2 = 1
Ответ: точка максимума Mmax
(−3
5;−4
5
), точка минимумаMmin
(35; 4
5
).
Пример 41.6. Найдите наибольшее и наименьшее значение функцииz = x2 − xy + y2 − 4y − x в области x > 0, y > 0, 3x+ 2y − 12 6 0.
Р е ш е н и е: Найдем стационарные точки данной функцииz′x = 0,z′y = 0.
⇔
2x− y − 1 = 0,−x+ 2y − 4 = 0.
⇔x = 2,y = 3.
⇔
Проверим принадлежность этой точки M(2; 3) данной области: 2 > 0;3 > 0; 3 · 2 + 2 · 3 − 12 = 0
Найдем значение функции в этой точке z|M = 22−2·3+32−4·3−2 = −7.Исследуем функцию на границах области. При x = 0 имеем zI = y2 − 4yпри 2y − 12 6 0, y > 0. Найдем наименьшее и наибольшее значения этойфункции одного аргумента на отрезке [0; 6].
Найдем критические точки, принадлежащие отрезку (zI)′y = 2y − 4,
(zI)′y = 0 ⇔ 2y − 4 = 0 ⇔ y = 2. Найдем значение функции в этой точке
zI |y=2 = 22 − 4 · 2 = −4 Найдем значение функции на концах отрезка:zI |y=0 = 0, zI |y=6 = 62 − 4 · 6 = 12. Заключаем, что наибольшее значениепри x = 0 функция достигает при y = 6 : (zIнаиб) = 12, наименьшее – приy = 2 : (zIнаим) = −4.
Аналогично найдем наименьшее и наибольшее значения функции приy = 0. Самостоятельно убедитесь, что наибольшее значение при y = 0функция достигает при x = 4 : (zIIнаиб) = 12, наименьшее – при x = 1
2:
(zIIнаиб) = −14.

102 41 Практическое занятие – Экстремум функции
Для исследования функции на третьей границе: 3x+2y−12 = 0, выра-зим из этого уравнения y = 6− 3x
2и подставим в правую часть уравнения
функции. Получим zIII = 19x2
4− 19x + 12. Из условия
x > 0,y > 0.
⇔
⇔x > 0,6 − 3x
2> 0.
⇔x > 0,x 6 0.
заключаем, что на третьей границе x меня-
ется в пределах от 0 до 4. Самостоятельно найдите наименьшее и наиболь-шее значения функции zIII на [0; 4]. Убедитесь, что наименьшее значениефункция достигает при x = 2, y = 3 : zIIIнаим = −7, наибольшее – приx = 0, y = 6 : zIIIнаиб = 12 (Впрочем, эти значения уже были). Выбираяиз всех найденных значений функции самое большое и самое маленькое,окончательно заключаем, что наибольшее значение zнаиб = 12 в даннойобласти функция принимает в точках M1(0; 6) и M2(4; 0), а наименьшееzнаим = −7 – в точке M3(2; 3).
Ответ: zнаиб = 12, zнаим = −7
Самостоятельная работа
В примерах 41.7–41.9 исследуйте данные функции на экстремум.
Пример 41.7. z = x2 + xy + y2 − x− 2y
Пример 41.8. z = x4 + y4 − 2x2 + 4xy − 2y2
Пример 41.9. z = y2 − 2x2 − 2y + 1
В примерах 41.10–41.11 определите условные экстремумы приведен-ных функций.
Пример 41.10. z = 2x+ y при x2 + y2 = 5
Пример 41.11. z = x2 + y2 при 2x + 3y = 6
В примерах 41.12–41.13 найдите наибольшее и наименьшее значенияфункции в данной области.
Пример 41.12. z = xy + x+ y в области 1 6 x 6 2, 2 6 y 6 3.
Пример 41.13. z = xy в области x2 + y2 6 1
Пример 41.14. Из всех точек кривой, являющейся линией пересече-ния параболоида z = x2 + y2 и плоскости z = 2x + y найти точку M ,наиболее удаленную от начала координат.
42 Лекция – Функции комплексной переменной 103
42. лекция – понятия о функцияхкомплексной переменной
Функция комплексной переменной. Основные элементарные функ-ции. Производная. Условие Коши-Римана. Аналитическая функция.Ряды Тейлора и Лорана. Изолированные особые точки и их клас-сификация.
42.1. Функция комплексной переменной. В лекции 33 настоя-щего курса были введены комплексные числа. Определим теперь понятиефункции комплексной переменной.
Определение 42.1. Функцией w = f(z) комплексной переменной z,заданной на области M называется правило, которое каждому значе-нию z ∈ M ставит в соответствие одно или множество комплексныхзначений w. В первом случае функция w = f(z) называется однозначной,во втором многозначной. Множество M называется областью опреде-ления функции, а совокупность N всех значений w, принимаемых функ-цией ее областью изменения или множеством значений.
Если значение z откладывать на одной комплексной плоскости, а w —на другой, то функцию w = f(z) можно геометрически представить какнекоторое отображение множества плоскости z на множество N плоско-сти w.
Определение 42.2. Если функция w = f(z) однозначна на M и двумравным значениям z соответствуют разные значения w, то такое отоб-ражение называется взаимно однозначным или однолистным.
Ясно, что у такой функции существует обратная z = f−1(w), отоб-ражающая множество N плоскости w на множество M плоскости z иявляющаяся также взаимно однозначной.
42.2. Основные элементарные функции. Степеннаяфункция (при n ∈ N) wn. Эта функция однозначна. Если в плоскостях zи w ввести полярные координаты (перейти к тригонометрической формекомплексного числа): z = r(cosϕ+ i sinϕ), w = ρ(cos θ+ i sin θ), то уравне-ние функции запишется в виде системы уравнений двух действительныхфункций:
ρ = rn
θ = nϕ

104 42 Лекция – Функции комплексной переменной
Из этой системы видно, что функция w = zn осуществляет отображение,заключающееся в повороте вектора z на угол (n− 1)argz и в растяженииего в |z|n раз.
Это отображение однолистно в секторах вида k · 2πn< ϕ < (k + 1)2π
n,
где k = 0, 1, . . . , n − 1, каждый из которых переходит в плоскость w (сисключенной положительной полуосью).
Функция w = n√z n–значная (см. лекцию 33). Можно показать, что
в любой области M , не содержащей начала координат z 6= 0, можно вы-делить n однозначных функций, каждая из которых принимает одно иззначений n
√z. Эти n функций называются ветвями многозначной функ-
ции w = n√z.
Показательная функция w = ez
Напомним, что если z = x + iy, то ez = ex(cos y + i sin y) Отсюда приx = 0, y = ϕ получаем формулу Эйлера (33.23)
eiϕ = cosϕ+ i sinϕ.
Отметим, что показательная функция комплексной переменной ока-зывается периодической с мнимым периодом 2πi. Действительно, по фор-муле Эйлера e2πki = cos 2πk + i sin 2πk, (k ∈ Z) следовательно
ez+2πki = ez · e2πki = ez · 1 = ez.
Для комплексного числа z можно определить логарифм ln z, как чис-ло w, такое, что ew = z. Определенная таким образом логарифмическаяфункция w = ln z определена не только для отрицательных действитель-ных чисел, но и для комплексных z 6= 0.
Каждое комплексное число z имеет бесчисленное множество логариф-мов, мнимые части которых определяются с точностью до слагаемого,кратного 2π:
ln z = ln r + i(ϕ+ 2πk), k ∈ Z
Для действительных положительных чисел (ϕ = 0, r 6= 0) значениеln z при k = 0 совпадает с известной ранее логарифмической функцией.Поэтому будем обозначать ln z значение функции ln z при фиксированномk (одну ветвь функции ln z). Очевидно, что функция ln z будет однознач-ной при z 6= 0.
С помощью логарифмической функции можно определить общую сте-пенную функцию w = za, где a = α + iβ, соотношением za = ea ln z
Пример 42.1. Найти ln(−1)
Р е ш е н и е: Представим (-1) в тригонометрической форме:−1 = 1(cos π + i sinπ), т.к. для z = −1, |z| = r = 1, ϕ = π. В соответствии

42 Лекция – Функции комплексной переменной 105
с определением ln z, получаем:
ln(−1) = ln 1 + i(π + 2πk) = i(π + 2πk), k ∈ Z
Получили бесконечно много мнимых значений ln(−1)Тригонометрические функции sin z, cos zОпределим sin z = eiz−e−iz
2i; cos z = eiz+e−iz
2Так определенные тригонометрические функции комплексного пере-
менного позволяют обобщить формулу Эйлера на случай комплексногоаргумента: eiz = cos z + i sin z.
Кроме того, эти функции (см. лекцию 33) периодичны с периодом 2π,sin(−z) = − sin(z), cos(−z) = cos(z), sin2 z+cos2 z = 1, sin 2z = 2 sin z cos z,cos 2z = cos2 z−sin2 z и т.д. Можно показать, что sin z и cos z в комплекснойобласти неограничены.
Пример 42.2. Найти cos i
Р е ш е н и е: В соответствии с определением
cos i =ei
2+ e−i
2
2=e−1 + e1
2≈ 1, 54
Получим значение большее 1.
42.3. Производная.
Определение 42.3. Если функция w = f(z), где z = x+ iy, w == u(x; y) + iv(x; y), определена и однозначна в некоторой окрестноститочки z0 = x0 + iy0, то предел lim
z→z0f(z) определяется через введенные
ранее пределы функции двух переменных:
limz→z0
f(z) = limx→x0y→y0
u(x; y) + i limx→x0y→y0
v(x; y)
Таким образом основные свойства предела сохраняются для функциикомплексного переменного.
Определение 42.4. Функция w = f(z) называется непрерывной вточке z0 ели она определена и однозначна в этой точке, некоторой ееокрестности и lim
z→z0f(z) = f(z0). Функция f(z) называется непрерывной
в области D, если она непрерывна в каждой ее точке.
Для непрерывных функций комплексной переменной остаются спра-ведливыми известные ранее свойства.
Определение 42.5. Производной f ′(z) функции f(z) называется пре-дел:
f ′(z) = lim∆z→0
f(z + ∆z) − f(z)
∆z

106 42 Лекция – Функции комплексной переменной
Если этот предел существует, то функция f(z) называется дифферен-цируемой в точке z.
Известные свойства дифференцируемых функций так же как и обыч-ные правила дифференцирования сохраняются для функций комплексно-го переменного z, если она задана как w = f(z).
Пример 42.3. Найти производную функции: f(z) = z2 −√z + 3ez −
− 5 ln z + sin z + cos z + tg z
Р е ш е н и е:
f ′(z) = 2z − 1
2√z
+ 3ez − 5
z+ cos z − sin z +
1
cos2 z
Если же w задана своей действительной u = u(x; y) и мнимой частьюv = v(x; y), то для дифференцируемости функции w = u+iv должна бытьвыполнена теорема.
Теорема 42.1. (Условия Коши–Римана). Если функцияf(z) = u(x; y) + iv(x; y) определена в некоторой окрестности точки z ив этой точке функции u(x; y) и v(x; y) дифференцируемы, то для диф-ференцируемости функции f(z) в точке z необходимо и достаточно вы-полнение условий.
(42.1)
∂u∂x
= ∂v∂y,
∂u∂y
= − ∂v∂x
При этом:
(42.2) f ′(z) =∂u
∂x+ i
∂v
∂x=∂v
∂y− i
∂u
∂y=∂u
∂x− i
∂u
∂y=∂v
∂y+ i
∂u
∂x
Примем эту теорему без доказательства.
Пример 42.4. Проверить дифференцируемость f(z) = z
Р е ш е н и е: Комплексно сопряженным для числа z = x + iy назы-вается (см. лекцию 33) число z = z − iy. Поэтому в данном примере
u(x; y) = x, v(x; y) = −y → ∂u
∂x= 1;
∂v
∂y= −1 ⇒ ∂u
∂x6= ∂v
∂y,
условие Коши–Римана не выполняется ⇒ функция f(z) = z не диффе-ренцируема.
Определение 42.6. Функция f(z) однозначная и дифференцируемаяв каждой точке области D, называется аналитической (регулярной, мо-нотонной) в этой области.
42 Лекция – Функции комплексной переменной 107
Возникает вопрос: всякая ли функция двух переменных может бытьдействительной (или мнимой) частью аналитической функции и можно липо данной действительной (или мнимой) части найти мнимую (действи-тельную) часть и, следовательно, всю аналитическую функцию. Диффе-
ренцируя первое из условий (42.1) по x, а второе по y, получаем:∂2u
∂x2=
=∂2v
∂x∂y;∂2u
∂y2= − ∂2v
∂x∂y.
Складывая обе части этих уравнений, получаем уравнение:
(42.3)∂2u
∂x2+∂2u
∂y2= 0
Аналогично для v(x; y) получаем уравнение:
(42.4)∂2v
∂x2+∂2v
∂y2= 0
Уравнения (42.3), (42.4) называются уравнениями Лапласа, а функ-ции, удовлетворяющие этим уравнениям называются гармоническими. Та-ким образом, действительная и мнимая части аналитической функциидолжны быть гармоническими функциями.
С методами решения уравнений в частных производных, в том числе— уравнения Лапласа, мы познакомимся в III части настоящего курса.
Пример 42.5. Могут ли быть функции ϕ(x; y) = x3y2 и ψ(x; y) == x3−3xy2 действительной или мнимой частями аналитической функ-ции.
Р е ш е н и е: Для того, чтобы ϕ(x; y) или ψ(x; y) были бы действитель-ной или мнимой частями аналитической функции должны быть выпол-
нены условия (42.3) или (42.4). В нашем случае∂ϕ
∂x= 3x2y2,
∂2ϕ
∂x2= 6xy2,
∂ϕ
∂y= 2x3y,
∂2ϕ
∂y2= 2x3 и
∂2ϕ
∂x2+∂2ϕ
∂y2= 6xy2 + 2x3 6= 0. Следователь-
но, ϕ(x; y) = x3y2 не является гармонической функцией и не может бытьдействительной или мнимой частью аналитической функции.
∂ψ
∂x= 3x2 − 3y2;
∂2ψ
∂x2= 6x;
∂ψ
∂y= −6xy;
∂2ψ
∂y2= −6x и
∂2ψ
∂x2+∂2ψ
∂y2=
= 6x− 6x = 0, таким образом ψ(x; y) = x3 − 3xy2 является гармоническойфункцией и существует аналитическая функция, у которой ψ(x; y) == x3 − 3xy2 может быть действительной или мнимой частью.
С методикой определения аналитической функции по ее действитель-ной или мнимой частям мы встретимся в лекции 46 (п. 46.6)
108 42 Лекция – Функции комплексной переменной
42.4. Ряды Тейлора и Лорана. Аналитические функции, а такжеи некоторые другие функции комплексной переменной удобно представ-лять в виде суммы степенных рядов.
Теорема 42.2. (Коши) Функция f(z), аналитическая в открытомкруге с центром в точке a, представима в нем своим рядом Тейлора:
(42.5) f(z) = f(a) +f ′(a)
1!(z − a) +
f ′′(a)
2!(z − a)2 + . . .
Известные разложения элементарных функций сохраняются в ком-плексной области:
(42.6) ez = 1 + z +z2
2!+z3
3!+ . . .
(42.7) sin z = z − z3
3!+z5
5!− . . .
(42.8) cos z = 1 − z2
2!+z4
4!− . . .
(перечисленные ряды сходятся для любого z)
(42.9) ln(1 + z) = z − z2
2+z3
3− . . .
(42.10) (1 + z)a = 1 + az +a(a− 1)
2z2 +
a(a− 1)(a− 2)
3z3 + . . .
(последние ряды сходятся в круге |z| < 1)Возникает вопрос, будет ли сумма произвольного степенного ряда
∞∑
n=0
Cn(z − a)n аналитической функцией.
Вейштрасс1 и Абель2 доказали это утверждение (теорема 42.4).Приведем сначало утверждение, определяющее вид области, в которой
степенной ряд сходится.
1Карл Вейштрасс (1815–1897) — немецкий математик2Нильс Абель (1802–1829) — норвежский математик
42 Лекция – Функции комплексной переменной 109
Теорема 42.3. Областью сходимости степенного ряда∞∑
n=0
Cn(z−a)n является открытый круг с центром в точке a : z||z − a| < R,
где радиус сходимости R определяется по формуле:
(42.11) R =1
limn→∞
∣∣∣Cn+1
Cn
∣∣∣
Внутри этого круга ряд сходится, вне — расходится, сходимость награнице требует отдельного исследования
Доказательство этого утверждения не приводится.
Пример 42.6. Найти область сходимости степенного ряда∞∑
n=0
(z−i)n√n
2n .
Р е ш е н и е: В соответствии с теоремой (42.3) областью сходимостиявляется круг |z− i| < R с центром в точке i. Найдем радиус сходимостипо формуле (42.11):
R =1
limn→∞
∣∣∣
√n+1·2n
2n+1·√n
∣∣∣
= 2
Теорема 42.4. Сумма любого степенного ряда∞∑
n=0
Cn(z − a)n в круге
его сходимости является аналитической функцией
Отсюда следует, что внутри круга сходимости сумма этого ряда естьнепрерывная функция и его можно почленно дифференцировать.
Для изучения функций, аналитических в кольцевых областях видаr < |z − a| < R, где 0 ≤ r ≤ ∞, 0 ≤ R ≤ ∞, рассмотрим разложение поположительным и отрицательным степеням (z − a):
(42.12) f(z) =∞∑
n=−∞Cn(z − a)n,
являющиеся обобщением тейлоровского разложения.
Определение 42.7. Правая часть разложения (42.12) называетсярядом Лорана3 для функции f(z), его часть
(42.13)−1∑
n=−∞Cn(z − a)n = C−1(z − a)−1 + C−2(z − a)−2 + . . .
3Пьер Лоран (1813–1854) французский математик
110 42 Лекция – Функции комплексной переменной
называется главной частью ряда Лорана, а∞∑
n=0
Cn(z−a)n = C0+C1(z−− a) + C2(z − a)2 + . . . — правильной частью.
Теорема 42.5. Функция f(z) аналитична в кольцеz|r < |z − a| < R тогда и только тогда, когда она может быть пред-ставлена в нем своим рядом Лорана (42.12).
Лорановское разложение позволяет изучать поведение функций, ана-литических везде, за исключением некоторых, так называемых, особыхточек.
Определение 42.8. Точка a называется изолированной особой точ-кой функции f(z), если существует выколотая окрестность этой точкиz|0 < |z − a| < R, в которой f(z) аналитична.
Различают три типа изолированных особых точек:a называется устранимой особой точкой если существует конечный
предел limz→a
f(z).
a называется полюсом, если |f(z)| неограниченно возрастает приz → a (т.е. f(z) является бесконечно большой при z → a)
a называется существенно особой точкой, если limz→a
f(z) не существу-ет.
Тип особой точки функции f(z) может быть установлен по виду рядаЛорана в окрестности этой точки и наоборот.
Теорема 42.6. Для того, чтобы a была устранимой особой точкойфункции f(z) необходимо и достаточно, чтобы ее ряд Лорана в окрест-ности этой точки не содержал главной части, т.е. имел вид:
f(z) =∞∑
n=0
Cn(z − a)n.
Для того, чтобы a была полюсом функции f(z) необходимо и доста-точно, чтобы ее ряд Лорана в окрестности этой точки содержал конеч-
ное число членов в главной части, т.е. имел вид: f(z) =+∞∑
n=−kCn(z − a)n.
Для того, чтобы a была существенно особой точкой функции f(z)необходимо и достаточно, чтобы ее ряд Лорана в окрестности этойточки содержал бесконечно много членов, т.е. имел вид:
f(z) =∞∑
n=−∞Cn(z − a)n.
Замечание 42.14. Если a — полюс функции f(z), то число k членовглавной части ее ряда Лорана называется порядком полюса. Это число
42 Лекция – Функции комплексной переменной 111
называют также порядком нуля функции1
f(z), т.к. при z = a обраща-
ется в нуль сама функция1
f(z)и n− 1 ее производная.
Определение 42.9. Функция f(z) называется целой (голоморфной),если она аналитична при всех z (т.е. не имеет конечных особых точек).
Очевидно, что целая функция представляется рядом Тейлора, сходя-щимся во всей плоскости. Целыми функциями являются многочлены, по-казательная функция, sin z, cos z и др.
Пример 42.7. Определить тип особой точки z = 0 для функцииf(z) = sin z
z
Р е ш е н и е: Пользуясь разложением (42.7), представим даннуюфункцию в виде ряда Лорана по степеням z:
sin z
z= 1 − z2
3!+z4
5!− . . .
В соответствии с теоремой (42.6) z = 0 является устранимой особойточкой этой функции.
Пример 42.8. Определить тип особой точки z = 0 для функцииf(z) = cos z
z.
Р е ш е н и е: Пользуясь разложением (42.8), представим даннуюфункцию в виде ряда Лорана по степеням z:
cos z
z=
1
z− z
2!+z3
4!− . . .
В соответствии с теоремой (42.6) z = 0 является полюсом 1-го порядкаэтой функции. Заметим, что z = 0 является нулем первого порядка для
функции1
f(z)=
z
cos z. Действительно, при z = 0 обращается в нуль сама
функцияz
cos z, а ее производная
( z
cos z
)′=
cos z + z sin z
cos2 z
уже не равна нулю при z = 0
Пример 42.9. Определить тип особой точки z = 0 для функцииf(x) = e1/z.

112 42 Практическое занятие – Контрольная работа
Р е ш е н и е: По (42.6) имеем:
e1z = 1 +
1
z+
1
2!z2+
1
3!z3+ . . .
Главная часть разложения содержит бесконечное число членов, следо-вательно, точка z = 0 для функции f(z) = e1/z является существенноособой.
42. практическое занятие – контрольнаяработа по материалам лекций 35–41
Примерный типовой вариант контрольной работы
Пример 42.1. Найдите область определения функции z = arcsin(4x2++ y2)
Пример 42.2. Определите вид поверхности, задаваемой уравнением4x2 − 36y − 3z2 = 0
Пример 42.3. Найдите все частные производные второго порядка
функции z =x√x− x +
√y
y
Пример 42.4. Найдите∂z
∂xиdz
dx, если z = xy, y = ctg x
Пример 42.5. Найдите y′ и y′′ функции, заданной неявно уравнениемln y + x = ln x
Пример 42.6. Найдите производную функции z =√x+ 2y в точке
M(4; 2) в направлении к точке N(5; 3), найдите grad z(M)
Пример 42.7. Исследуйте на экстремум функцию z = x2 + xy+ y2
2+
+x−2y и найдите ее наименьшее m и наибольшее M значения в замкну-той области x ≤ 0, y ≥ 0, y ≤ 10 + x. Найдите уравнение касательнойплоскости в точке M0(1; 1; 3/2) к поверхности, являющейся графиком кэтой функции.
Решение примеров типового варианта
Пример 42.1.
Р е ш е н и е: |4x2 + y2| ≤ 1 ⇒ −1 ≤ 4x2 + y2 ≤ 1 ⇒
⇒
4x2 + y2 ≥ −1, при любых x и y,4x2 + y2 ≤ 1, внутри эллипса с полуосямиa = 1
2; b = 1
(рис. 39)
42 Практическое занятие – Контрольная работа 113
y
1
-1
-1/2
1/2x
Рис. 39. К примеру 42.1
Пример 42.2.
Р е ш е н и е:
4x2 − 36y − 3z2 = 0 ⇔ y =x2
9− z2
12⇒
гиперболический параболоид вдоль оси Ox
Пример 42.3.
Р е ш е н и е:
z =x√x− x+
√y
y⇔ z =
x3/2 − x
y+ y−1/2 ⇒
⇒ ∂z
∂x=
32x1/2 − 1
y=
3√x− 2
2y;∂z
∂y= −x
3/2 − x
y2− 1
2y−
32
∂2z
∂x2=
34x1/2 − 1
y=
3
4√xy
;∂2z
∂y2=
2(x3/2 − x)
y3+
3
4y−5/2
∂2z
∂x∂y= −
32x1/2 − 1
y2=
2 − 3√x
2y2
Пример 42.4.
Р е ш е н и е:
z = xy; y = ctg x⇒ ∂z
∂x= y · xy−1;
∂z
∂y= xy ln x⇒
⇒ dz
dx=∂z
∂x+∂z
∂y
dy
dx= y · xy−1 + xy ln x
(
− 1
sin2 x
)
=
= ctg x · xctg x−1 − xctg · ln ctg x
sin2 x
114 42 Практическое занятие – Контрольная работа
Пример 42.5.
Р е ш е н и е:
ln y + x = lnx⇔ y′
y+ 1 =
1
x⇒ y′ =
y
x− y = y
(1
x− 1
)
y′′ =
(
y
(1
x− 1
))′
x
= y′(
1
x− 1
)
− y1
x2=
= y
(1
x− 1
)2
− y
x2= y
(
1 − 2
x
)
Пример 42.6.
Р е ш е н и е: z =√x+ 2y; M(4; 2); N(5; 3) ⇒
MN = (1; 1) ⇒ |MN | =√
2 ⇒ cosα =1√2; cosβ =
1√2⇒
⇒ ∂z
∂l
∣∣∣∣M
=∂z
∂x
∣∣∣∣M
cosα+∂z
∂y
∣∣∣∣M
cos β =
=
(1
2√x+ 2y
1√2
+2
2√x+ 2y
1√2
)
x = 4y = 2
=
=1
2√
8
1√2
+1√8
1√2
=3
8,
grad z(M) =∂z
∂x
∣∣∣∣M
~i+∂z
∂y
∣∣∣∣M
~j =1
2√
8~i+
1√8~j.
Пример 42.7.
Р е ш е н и е: z = x2 + xy + y2
2+ x− 2y ⇒
∂z
∂x= 2x+ y + 1;
∂z
∂y= x+ y − 2;
∂2z
∂x2= 2;
∂2z
∂y2= 1;
∂2z
∂x∂y= 1 ⇒
∂z∂x
= 0∂z∂y
= 0⇔
2x + y + 1 = 0x + y − 2 = 0
⇔x = −3y = 5
∆ =∂2z
∂x2
∂2z
∂y2−(∂2z
∂x∂y
)2
= 2 − 1 > 0;∂2z
∂x2= 2 > 0 ⇒ min
xmin = −3; ymin = 5; zmin = −6, 5
Рассмотрим заданную область x ≤ 10 + x, x ≤ 0, y ≥ 0, включающуютреугольник ABC и ограничивающие его прямые x = 0, y = 0 и y = x+10.
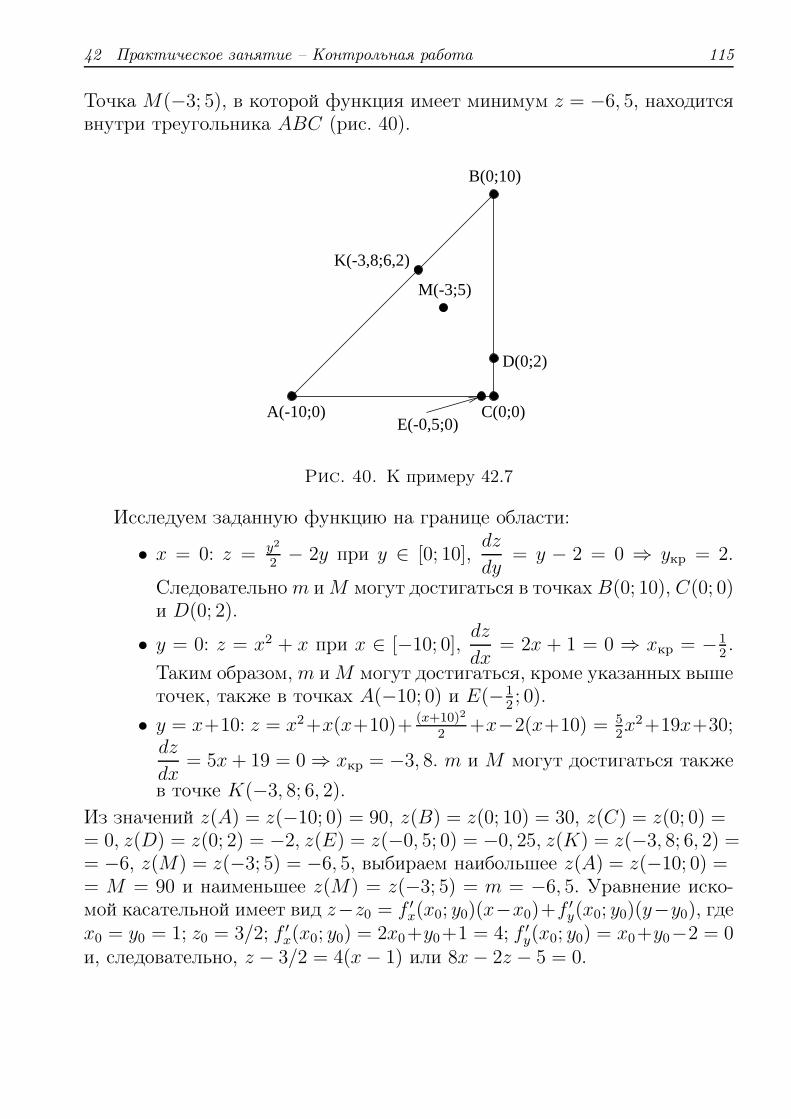
42 Практическое занятие – Контрольная работа 115
Точка M(−3; 5), в которой функция имеет минимум z = −6, 5, находитсявнутри треугольника ABC (рис. 40).
A(-10;0)E(-0,5;0)
C(0;0)
B(0;10)
D(0;2)
M(-3;5)
K(-3,8;6,2)
Рис. 40. К примеру 42.7
Исследуем заданную функцию на границе области:
• x = 0: z = y2
2− 2y при y ∈ [0; 10],
dz
dy= y − 2 = 0 ⇒ yкр = 2.
Следовательно m иM могут достигаться в точках B(0; 10), C(0; 0)и D(0; 2).
• y = 0: z = x2 + x при x ∈ [−10; 0],dz
dx= 2x + 1 = 0 ⇒ xкр = −1
2.
Таким образом, m иM могут достигаться, кроме указанных вышеточек, также в точках A(−10; 0) и E(−1
2; 0).
• y = x+10: z = x2+x(x+10)+ (x+10)2
2+x−2(x+10) = 5
2x2+19x+30;
dz
dx= 5x+ 19 = 0 ⇒ xкр = −3, 8. m и M могут достигаться также
в точке K(−3, 8; 6, 2).Из значений z(A) = z(−10; 0) = 90, z(B) = z(0; 10) = 30, z(C) = z(0; 0) == 0, z(D) = z(0; 2) = −2, z(E) = z(−0, 5; 0) = −0, 25, z(K) = z(−3, 8; 6, 2) == −6, z(M) = z(−3; 5) = −6, 5, выбираем наибольшее z(A) = z(−10; 0) == M = 90 и наименьшее z(M) = z(−3; 5) = m = −6, 5. Уравнение иско-мой касательной имеет вид z−z0 = f ′
x(x0; y0)(x−x0)+f′y(x0; y0)(y−y0), где
x0 = y0 = 1; z0 = 3/2; f ′x(x0; y0) = 2x0+y0+1 = 4; f ′
y(x0; y0) = x0+y0−2 = 0и, следовательно, z − 3/2 = 4(x− 1) или 8x− 2z − 5 = 0.

116 42 Практическое занятие – Контрольная работа
Самостоятельная работа
Пример 42.8. Найдите область определения функции z = ln(x2−y2−− 4).
Пример 42.9. Определите вид поверхности, задаваемой уравнением:4x− 2y2 − z2 = 0.
Пример 42.10. Найдите все частные производные второго порядкафункции z = arcsin x
y.
Пример 42.11. Найдитеdz
dx, Если z = 1
u−v , u = sinx, v =√x.
Пример 42.12. Найдитеdy
dxиd2y
dx2функции, заданной неявно уравне-
нием 2y = x + ln x
Пример 42.13. Найдите наибольшую скорость изменения функцииz =
√
x2 + y2 в точке M(3; 4)
Пример 42.14. Исследуйте на экстремум функцию z = x2+y2+y−2xи найдите m и M в замкнутой области 0 ≤ x ≤ 2, 0 ≤ y ≤ 3. Найди-те уравнение нормали в точке M0(1; 0;−1) к поверхности, являющейсяграфиком этой функции.
43 Лекция – Первообразная и неопределенный интеграл 117
VIII ГЛАВА
Интегральное исчислениефункций одной переменной
43. лекция —первообразная и неопределенный интеграл
Первообразная. Неопределенный интеграл, его свойства. Внесениефункций под знак дифференциала. Таблица основных интегралов.Основные методы интегрирования — замены переменной, разложе-ния, по частям.
43.1. Первообразная функции. В предыдущем семестре мы изу-чали дифференциальное исчисление, основная задача которого заключа-ется в нахождении производной заданной функции.
Рассмотрим теперь обратную задачу: для данной функции f(x) найтитакую функцию F (x), производная которой равнялась бы данной функ-ции f(x), т.е.
(43.1) F ′(x) = f(x).
Допустима и следующая формулировка этой задачи: для данной функ-ции f(x) найти такую функцию F (x), дифференциал которой равнялся

118 43 Лекция – Первообразная и неопределенный интеграл
бы f(x)dx, т.е.
(43.2) dF (x) = F ′(x)dx = f(x) dx.
Определение 43.1. Функция F (x), производная которой равна f(x)называется первообразной функции f(x).
Так, например, первообразной функции f(x) = cos 2x является функ-ция F (x) = 1
2sin 2x, так как
(1
2sin 2x
)′= cos 2x или d
(1
2sin 2x
)
= cos 2x dx.
Отыскание по данной функции ее первообразной составляет основнуюзадачу интегрального исчисления. При этом возникает вопрос: для вся-кой ли функции существует первообразная? Отвечает на него следующаятеорема, принимаемая без доказательства.
Теорема 43.1. Любая непрерывная на отрезке функция имеет наэтом отрезке первообразную.
Поэтому в дальнейшем (если это специально не оговорено) функции,для которых ищутся первообразные мы будем рассматривать на тех про-межутках, где они непрерывны.
Теперь возникает следующий естественный вопрос: если первообраз-ная существует, то одна или несколько? На этот вопрос отвечает следую-щая теорема.
Теорема 43.2. Если функция f(x) на отрезке [a; b] имеет первооб-разную F (x), то на этом отрезке она имеет бесчисленное множествопервообразных вида F (x) + C, где C – произвольная константа.
Доказательство. Очевидно, что если F (x) – первообразная для f(x),то F (x)+C — тоже (F ′(x) = f(x) ⇒ (F (x)+C)′ = f(x)). Допустим, что наотрезке [a; b] функция f(x) имеет различные первообразные F (x) и Φ(x).Tогда из равенства (43.1) следует:
Φ′(x) = f(x),
F ′(x) = f(x).
Вычитая из одного равенства другое и учитывая, что разность произ-водных двух функций равна производной разности этих функций, полу-чим:
(43.3) (Φ(x) − F (x))′ = 0.

43 Лекция – Первообразная и неопределенный интеграл 119
С помощью теоремы Лагранжа легко можно доказать, что если нанекотором отрезке производная функции равна нулю, то она на этом от-резке постоянна. Поэтому из формулы (43.3) следует, что
Φ(x) − F (x) = C или
(43.4) Φ(x) = F (x) + C.
В формуле (43.4) C – произвольное число. Ясно, что выражениеF (x) +C охватывает совокупность всех первообразных данной функции.Следовательно, все первообразные функции cos 2x имеют вид 1
2sin 2x+C,
а все первообразные функции x2 имеют вид x3
3+ C.
43.2. Неопределенный интеграл. Введем теперь одно важное по-нятие.
Определение 43.2. Если функция F (x) одна из первообразных функ-ции f(x), то выражение F (x) + C, где C – постоянная, называетсянеопределенным интегралом, иными словами неопределенным интегра-лом называется однопараметрическое семейство первообразных даннойфункции.
Неопределенный интеграл обозначается∫f(x) dx. Таким образом:
(43.5)∫
f(x) dx = F (x) + C.
Здесь:∫
− знак неопределенного интеграла,
f(x) − подынтегральная функция,
f(x) dx − подынтегральное выражение.
Рассмотренные ранее примеры, мы можем записать так:∫
cos 2x dx =1
2sin 2x+ C,
∫
x2 dx =x3
3+ C.
Действие отыскания неопределенного интеграла (или что то же самое,бесчисленного множества первообразных) называется интегрированием.Заметим, что вместо слов “найти интеграл” иногда используется выраже-ние “взять интеграл”.

120 43 Лекция – Первообразная и неопределенный интеграл
Необходимо отметить, что из факта существования первообразной неследует, что у элементарной функции f(x) первообразная F (x) также яв-ляется элементарной функцией.
Сушествующая в силу теоремы 43.1 первобразная не всегда можетбыть выражена с помощью конечного числа алгебраических действий исуперпозиций, проведенных над элементарными функциями. К таким ин-тегралам относятся, например,
∫sinx
xdx − интегральный синус,
∫
e−x2
dx − интеграл вероятностей.
Интегралы такого типа называются на математическом жаргоне “небе-рущимися”, а соответствующие первообразные находятся приближенно спомощью различных приемов.
Для сравнения вспомним, что у элементарной функции производная( в отличие от первообразной ) всегда является элементарной функцией.
43.3. Свойства неопределенного интеграла.1. Постоянный множитель можно вынести за знак интеграла:
(43.6)∫
kf(x) dx = k
∫
f(x) dx.
2. Неопределенный интеграл от алгебраической суммы двух функцийравен сумме неопределенных интегралов от этих функций:
(43.7)∫
(f(x) ± φ(x)) dx =
∫
f(x) dx±∫
φ(x) dx.
Справедливость формул (43.6) и (43.7) может быть доказана их диф-ференцированием. Свойство 2 легко обобщается на случай любого (боль-шего двух) конечного числа слагаемых.
3. Производная неопределенного интеграла равна подынтегральнойфункции:
(43.8)
(∫
f(x) dx
)′= f(x).
4. Дифференциал неопределенного интеграла равен подынтегрально-му выражению:
(43.9) d
(∫
f(x) dx
)
= f(x) dx.
Справедливость последних двух свойств вытекает из определения неопре-деленного интеграла.

43 Лекция – Первообразная и неопределенный интеграл 121
5. Неопределенный интеграл от дифференциала некоторой функцииравен этой функции плюс C:
(43.10)∫
dF (x) = F (x) + C.
Это свойство доказывается подстановкой в левую часть (43.5) f(x) dx == dF (x) (см. формулу (43.2)).
Замечание 43.15. Обратите внимание на формулы (43.9) и (43.10):знаки d и
∫следуя друг за другом как бы уничтожают друг друга. Но
ведь дифференцирование и интегрирование – два взаимно обратных дей-ствия.
Замечание 43.16. Из формулы (43.10) следует, что если, например,
∫
x dx =x2
2+ C, то
∫
sin x cosxdx =
∫
sinx d(sinx) =sin2 x
2+ C,
∫
(ex − tg x)
(
ex − 1
cos2 x
)
dx =∫
(ex − tg x) d(ex − tg x) =(ex − tg x)2
2+ C,
∫arcsinx dx√
1 − x2=
∫
arcsin x d(arcsinx) =arcsin 2x
2+ C, и
∫lnx
xdx =
∫
ln x d(lnx) =ln2 x
2+ C.
Это вытекает из известного свойства инвариантности формы первогодифференциала функции:
Формула
dy = y′ dx
сохраняет вид как для случая, когда x является независимой переменной,так и для случая, когда x зависит еще от какой-то другой переменной.

122 43 Лекция – Первообразная и неопределенный интеграл
При нахождении второго, третьего, четвертого и пятого интеграловмы воспользовались тем, что
cosx dx = d(sinx),(
ex − 1
cos2 x
)
dx = d(ex − tg x),
dx√1 − x2
= d arcsinx,
dx
x= d lnx.
Такое преобразование подынтегрального выражения называется под-ведением (внесением) функций под знак дифференциала. Это преобра-зование – самый универсальный прием практического интегрирования.Можно даже утверждать (с небольшой долей преувеличения), что инте-грал не найти, если ничего нельзя внести под знак дифференциала. С опе-рацией внесения функции под знак дифференциала студенты уже былиознакомлены в первой части пособия. Напомним, что далеко не каждуюфункцию можно внести под знак дифференциала. В частности, приве-денные выше выражения sinx
xdx и e−x
2dx не являются дифференциалами
элементарных функций, или условно говоря, функции sinxx
и e−x2
не “вно-сятся” под знак дифференциала.
43.4. Таблица основных интегралов. Как и всякая обратная за-дача, отыскание первообразной (неопределенного интеграла) сложнее, чемпроизводной (дифференциала).
Если для отыскания производной существует четкий алгоритм, то дляотыскания первообразных элементарных функций такого алгоритма несуществует. Так, например, не существует правил нахождения интегралаот произведения двух функций, даже если известны интегралы от сомно-жителей.
Методы интегрирования функций сводятся к указанию ряда приемов,выполнение которых приводит к цели в некоторых частных случаях.
Для облегчения интегрирования составляется таблица так называе-мых основных интегралов:
1.
∫
xn dx =
∫
d
(xn+1
n+ 1
)
=xn+1
n+ 1+ C, (n 6= −1), при n = 0 ⇒
∫
dx =
= x + C,
2.
∫dx
x=
∫
d(ln(x)) = ln |x| + C,
3.
∫
sinx dx =
∫
d(− cosx) = − cosx + C,
43 Лекция – Первообразная и неопределенный интеграл 123
4.
∫
cosx dx =
∫
d(sinx) = sinx+ C,
5.
∫dx
cos2 x=
∫
d(tg x) = tg x + C,
6.
∫dx
sin2 x=
∫
d(− ctg x) = ctg x+ C,
7.
∫dx
a2 + x2=
∫
d
(1
aarctg
x
a
)
=1
aarctg
x
a+C,
∫dx
1 + x2= arctg x+C,
8.
∫dx√a2 − x2
=
∫
d arcsinx
a= arcsin
x
a+ C,
∫dx√
1 − x2= arcsinx+ C,
9.
∫
ax dx =
∫
dax
ln a=
ax
ln a+ C,
∫
ex dx = ex + C,
10.
∫dx√x2 ± a2
= ln |x +√x2 ± a2| + C,
11.
∫dx
x2 − a2=
1
2aln
∣∣∣∣
x− a
x+ a
∣∣∣∣+ C,
∫dx
a2 − x2=
1
2aln
∣∣∣∣
a+ x
a− x
∣∣∣∣+ C,
Первые девять формул этой таблицы являются следствием таблицыпроизводных (или дифференциалов). Формулы 10 и 11 будут рассмот-рены в следующих пунктах этой лекции. Иногда в таблицу включаюти некоторые другие часто встречающиеся интегралы. Мы ограничимсянаименьшим числом основных интегралов, которые включаются во всеучебные пособия по интегральному исчислению
Замечание 43.17. Все формулы интегрирования сохраняют вид, ес-ли в обе части формулы вместо x подставить любую дифференцируемуюфункцию x.
Процесс интегрирования (нахождения интеграла или первообразной)сводится к выполнению тождественных преобразований до тех пор, поканельзя будет применить одну или несколько формул из таблицы интегра-лов.
Рассмотрим теперь некоторые приемы, позволяющие сводить задан-ные интегралы к табличным.
43.5. Интегрирование методом замены переменной. Имеет ме-сто формула
(43.11)∫
f(x)dx =
∫
f(φ(t))φ′(t)dt,

124 43 Лекция – Первообразная и неопределенный интеграл
в справедливости которой можно убедиться, найдя дифференциалы обеихее частей:
d
∫
f(x)dx = f(x)dx,
d
∫
f(φ(t))φ′(t)dt = f(φ(t))d(φ(t)) = |x = φ(t)| = f(x)dx.
Допустим, что интеграл в правой части формулы (43.11) найден. Тогдаразрешим выражение x = φ(t) относительно t : t = ψ(x) и подставим егов Φ(t) :
∫
f(x)dx =
∫
f(φ(t) · φ′(t))dt = Φ(t) + C = Φ(ψ(x)) + C.
Замечание 43.18. Для запоминания формулы (43.11) заметим, чтоправая ее часть получается, если в интеграле
∫f(x)dx заменить x на
φ(t) и dx на φ′(t)dt.
Пример 43.1. Найти интеграл I =∫x2ex
3dx.
Р е ш е н и е: При нахождении такого типа интегралов надо обращатьвнимание на функции x3 и x2. Степень аргумента x во второй на единицуменьше, как и у производной степенной функции. Поэтому, если восполь-зоваться подстановкой x3 = t, то после дифференцирования последнегоравенства получим 3x2dx = dt. Следовательно, множитель x2 “войдет” вdt.
Оформим нахождение интеграла с помощью подстановки следующимобразом:
I =∣∣x3 = t ⇒ 3x2dx = dt
∣∣ =
1
3
∫
et dt =1
3et + C =
1
3ex
3
+ C.
Пример 43.2. Найти интеграл I =∫
sin kx dx.
Р е ш е н и е: Обозначим kx = t =⇒ dx = dtk. Поэтому:
I =1
k
∫
sin tdt = −1
kcos t+ C = −1
kcos kx+ C.
Пример 43.3. Найти интеграл I =∫
dx√x2±a2 .

43 Лекция – Первообразная и неопределенный интеграл 125
Применим подстановку
t = x+√x2 ± a2 ⇒
⇒ dt =
(
1 +x√
x2 ± a2
)
=
√x2 ± a2 + x√x2 ± a2
dx ⇒
⇒ dx√x2 ± a2
=dt
x+√x2 ± a2
⇒ dx√x2 ± a2
=dt
t.
Поэтому:
I =
∫dt
t= ln |t| + C = ln |x+
√x2 ± a2| + C.
Мы получили формулу N10 из нашей таблицы интегралов.
43.6. Интегрирование методом разложения. Этот метод осно-ван на разложении подынтегральной функции на сумму нескольких функ-ций и применении свойств 1 и 2 неопределенного интеграла.
Пример 43.4. Найти I =∫
(x− 3)2dx;
Р е ш е н и е:
I =
∫
(x2 − 6x + 9)dx =
∫
x2dx− 6
∫
xdx+ 9
∫
dx =
= (x3
3+ C1) − (6
x2
2+ C2) + (9x + C3) =
x3
3− 3x2 + 9x + C.
Ясно, что сумма трех произвольных постоянных C1 − C2 + C3 произ-вольная постоянная, которую можно обозначить просто C. Поэтому принахождении интеграла от суммы нескольких слагаемых следует писатьтолько одно произвольное слагаемое.
Пример 43.5. Найти I =∫
x2−3√xdx.
Р е ш е н и е:
I =
∫
(x32 − 3x−
12 )dx =
x32+1
32
+ 1− 3
x−12+1
−12
+ 1+ C =
2
5x2√x− 6
√x+ C.
Пример 43.6. Найти I =∫
dxsin2 x cos2 x
;
Р е ш е н и е:
I =
∫sin2 x+ cos2 x
sin2 x cos2 xdx =
∫dx
cos2 x+
∫dx
sin2 x= tg x− ctg x+ C.

126 43 Лекция – Первообразная и неопределенный интеграл
Этот интеграл можно найти еще и так:
I = 4
∫dx
sin2 2x= 2
∫d(2x)
sin2 2x= −2 ctg 2x+ C.
Пример 43.7. Найти интеграл: I =∫
tg5 x dx.
Р е ш е н и е:
I =
∫
tg 3x tg 2xdx =
∫
tg 3x
(1
cos2 x− 1
)
dx =
∫
tg 3xdx
cos2 x−
−∫
tg 3xdx =
∫
tg 3d tg x−∫
tg 3xdx =tg 4x
4−∫
tg 3xdx.
В исходном интеграле степень n = 5, в последнем n = 3. Применяемтот же прием.
I =tg4 x
4−∫
tg x
(1
cos2 x− 1
)
dx =
=tg4 x
4−∫
tg xd tg x +
∫
tg xdx =tg4 x
4− tg2 x
2− ln | cosx| + C.
Интегралы, в которых подынтегральная функция есть произведениесинусов и косинусов разных аргументов также могут быть разложены наслагаемые с помощью тригонометрических формул:
sinnx cosmx =1
2(sin(n−m)x+ sin(n+m)x) ,(43.12)
sinnx sinmx =1
2(cos(n−m)x− cos(n+m)x) ,
cosnx cosmx =1
2(cos(n−m)x+ cos(n+m)x) .
Пример 43.8. Найти интеграл: I =∫
sin 2x cos 3x dx.
Р е ш е н и е:
I =
∫1
2(− sinx+ sin 5x)dx =
1
2cos x− 1
10cos 5x+ C.
Пример 43.9. Найти I =∫
dxx2−a2 .
Р е ш е н и е: Можно показать, что
1
x2 − a2=
1
2a
(1
x− a− 1
x + a
)
.

43 Лекция – Первообразная и неопределенный интеграл 127
Для доказательства достаточно в правой части привести к общемузнаменателю. Поэтому:
I =1
2a
(∫d(x− a)
x− a−∫d(x+ a)
x + a
)
=
=1
2a(ln |x− a| − ln |x + a|) =
1
2aln
∣∣∣∣
x− a
x+ a
∣∣∣∣+ C.
Это – табличный интеграл N11.
43.7. Интегрирование по частям. Очевидно: d(uv) = udv + vdu;проинтегрировав обе части этого равенства, получим:
(43.13)∫
udv = uv −∫
vdu.
Формула (43.13) называется формулой интегрирования по частям. Онаприменяется, когда:
I) подынтегральная функция есть произведение степенной на показа-тельную или тригонометрическую функции
∫
Pn(x)eαx dx или
∫
Pn(x) sinαx dx или∫
Pn(x) cosαx dx.
В этих случаях подынтегральное выражение разбивается на множи-тели и преобразуется так:
∫
Pn(x)eαx dx =⇒
u = Pn(x), du = P ′n(x)dx, dv = eαx = d
(eαx
α
)
,
v =eαx
α,
∫
Pn(x) sinαx dx =⇒
u = Pn(x), du = P ′n(x)dx, dv = sinαx dx = d
(
−cosαx
α
)
,
v = −cosαx
α,
∫
Pn(x) cosαx dx =⇒
u = Pn(x), du = P ′n(x)dx, dv = cosαx dx = d
(sinαx
α
)
,
v =sinαx
α.

128 43 Лекция – Первообразная и неопределенный интеграл
II) подынтегральная функция есть произведение степенной на лога-рифмическую или обратную тригонометрическую функции
∫
Pn(x) lnx dx или∫
Pn(x) arcsinαx dx или∫
Pn(x) arctgαx dx.
В этих случаях подынтегральное выражение разбивается на множи-тели и преобразуется так:
∫
Pn(x) lnx dx =⇒
u = lnx, du =dx
x, dv = Pn(x)dx, v =
∫
Pn(x) dx,∫
Pn(x) arcsinαx dx =⇒
u = arcsinαx, du =αdx
√
1 − (αx)2, dv = Pn(x)dx, v =
∫
Pn(x) dx,
∫
Pn(x) arctgαx dx =⇒
u = arctgαx, du =αdx
1 + (αx)2, dv = Pn(x)dx, v =
∫
Pn(x) dx.
III) в некоторых других случаях;
Пример 43.10. Найти интеграл I =∫x2 ln x dx.
Р е ш е н и е:
I =
∣∣∣∣
u = lnx du = dxx
dv = x2dx = dx3
3v = x3
3
∣∣∣∣=
=x3
3lnx− 1
3
∫
x2dx =x3
3lnx− x3
9+ C.
Пример 43.11. Найти интеграл I =∫x arctg x dx.
Р е ш е н и е:
I =
∣∣∣∣
u = arctg x du = dxx2+1
dv = xdx = dx2
2v = x2
2
∣∣∣∣=x2
2arctg x− 1
2
∫x2dx
x2 + 1=
=x2
2arctg x− 1
2
∫x2 + 1 − 1
x2 + 1dx =
x2
2arctg x−
− 1
2
∫
dx+1
2
∫dx
x2 + 1=x2
2arctg x− 1
2x+
1
2arctg x+ C.

43 Лекция – Первообразная и неопределенный интеграл 129
Пример 43.12. Найти интеграл I =∫x2 sinx dx.
Формулу интегрирования по частям применим дважды.Р е ш е н и е:
I =
∣∣∣∣
u = x2 du = 2xdxdv = sinxdx = d(− cosx) v = − cos x
∣∣∣∣= −x2 cos x+
+ 2
∫
x cosxdx =
∣∣∣∣
u = x du = dxdv = cos xdx = d(sinx) v = sinx
∣∣∣∣=
= −x2 cos x+ 2x sinx+ 2 cos x+ C.
Пример 43.13. Найти интеграл I =∫xe3x dx.
Р е ш е н и е:
I =
∣∣∣∣
u = x du = dxdv = e3xdx v = 1
3e3x
∣∣∣∣=
1
3xe3x − 1
3
∫
e3xdx =
=1
3xe3x − 1
9e3x + C.
И, наконец, рассмотрим примеры на вышеупомянутый пункт Ш. Вследующих двух упражнениях применение формулы интегрирования почастям дважды приводит к уравнению относительно искомого интеграла,из которого последний и находится.
Пример 43.14. I =∫eax cosnx dx.
Р е ш е н и е:
I =
∣∣∣∣
u = eax du = aeax dxdv = cosnx dx v = 1
nsinnx
∣∣∣∣=
=1
neax sinnx− a
n
∫
eax sinnx dx =
=
∣∣∣∣
u = eax du = aeax dxdv = sinnx dx v = − 1
ncosnx
∣∣∣∣=
1
neax sinnx−
− a
n
(
−1
neax cosnx+
a
n
∫
eax cosnx dx
)
=
=1
neax sinnx +
a
n2eax cosnx− a2
n2I.
Получили уравнение, содержащее искомый интеграл I. Решая это урав-нение, находим:
I =
∫
eax cosnx dx =eax(a cosnx + n sinnx)
a2 + n2+ C.

130 43 Практическое занятие – Неопределенный интеграл
Величина C прибавляется потому, что равенство содержит интегралыс точностью до произвольной константы.
Пример 43.15. Найти интеграл I =∫ √
x2 − a2 dx.
Р е ш е н и е:
I =
∣∣∣∣
u =√x2 − a2 du = xdx√
x2−a2dv = dx v = x
∣∣∣∣= x
√x2 − a2 −
∫x2dx√x2 − a2
=
= x√x2 − a2 −
∫x2 − a2 + a2
√x2 − a2
dx = x√x2 − a2 − I − a2
∫dx√x2 − a2
.
Итак, мы получили равенство:
I = x√x2 − a2 − I − a2
∫dx√x2 − a2
,
откуда
I =1
2x√x2 − a2 − a
2arcsin
x
a+ C.
43. практическое занятие —неопределенный интеграл
Вспомните определение 43.1 первообразной. Исходя из него с помощьюобращения формул дифференцирования найдем первообразные функцийи проверим результат дифференцированием.
Пример 43.1. f(x) = 1cos2 2x
.
Р е ш е н и е: F (x) = 12tg 2x + C.
Проверка: f(x) = F ′(x) = (12tg 2x)′ = 1
2· 2 1
cos2 2x= 1
cos2 2x.
Пример 43.2. f(x) = x4.
Р е ш е н и е: F (x) = x5
5+ C.
Проверка: f(x) = F ′(x) = (x5
5+ C)′ = 1
5· 5x4 + 0 = x4.
Пример 43.3. f(x) = 2x.
Р е ш е н и е: F (x) = 2 ln | − x| + C.Проверка: f(x) = F ′(x) = (2 ln | − x| + C)′ = 2(− 1
x)(−1) + 0 = 2
x.
Вспомним теперь определение 43.2 неопределенного интеграла, табли-цу основных интегралов.
При нахождении неопределенных интегралов на этом занятии мы бу-дем пользоваться только одним, но универсальным приемом – внесениемфункций под знак дифференциала.

43 Практическое занятие – Неопределенный интеграл 131
Ради краткости слово “неопределенный” часто будем опускать.Найти интегралы с использованием формулы N1 таблицы интегралов:
Пример 43.4. I =∫
sin3 x cosx dx.
Р е ш е н и е:Учитывая, что d(sinx) = cos xdx, найдем
I =
∫
sin3 xd sinx =sin4 x
4+ C.
Пример 43.5. I =∫ √
arctg x1+x2 dx.
Р е ш е н и е: Учитывая, что d(arctg x) = dx1+x2 , найдем
I =
∫
(arctg x)1/2 d arctg x =(arctg x)1/2+1
1/2 + 1=
2
3(arctg x)3/2 + C.
Найти интегралы с использованием формулы N2 таблицы интегралов:
Пример 43.6. I1 =∫
tg x dx, I2 =∈ ctg x dx.
Р е ш е н и е:
I1 =
∫sinx dx
cosx= −
∫d cosx
cos x= − ln | cosx| + C.
I2 =
∫cosx dx
sinx=
∫d sinx
sinx= ln | sinx| + C.
Пример 43.7. I =∫
dxx lnx
.
Р е ш е н и е:
I =
∫dx
x lnx=
∫dx/x
lnx=
∫d ln |x|lnx
= ln | ln |x|| + C.
Найти интегралы с использованием формул N3 и N4 таблицы инте-гралов:
Пример 43.8. I =∫
sin 5x dx.
Р е ш е н и е: Число 5 нельзя вынести за знак синуса, но зато число 5можно внести под знак дифференциала, умножив одновременно интегрална 1
5:
I =1
5
∫
sin 5x d5x = −1
5cos 5x + C.
Пример 43.9. I =∫ex cos ex dx.

132 43 Практическое занятие – Неопределенный интеграл
Р е ш е н и е: Так как d(ex) = ex dx, то:
I =
∫
cos ex dex = sin ex + C.
Найдите следующие интегралы с использованием других формул та-блицы интегралов с помощью, приема неоднократно использованного вы-ше – внесение функций под знак дифференциала
Пример 43.10. I =∫
dxx2 cos2 1
x
.
Р е ш е н и е:
I = −∫
d 1x
cos2 1x
= tg1
x+ C.
Пример 43.11. I =∫
dxsin2(3x−5)
.
Р е ш е н и е:
I =1
3
∫d(3x− 5)
sin2(3x− 5)= −1
3ctg(3x− 5) + C.
Пример 43.12. I =∫
x3 dx5−x8 .
Р е ш е н и е:
I =1
4
∫dx4
(√
5)2 − (x4)2=
1
8√
5ln
∣∣∣∣∣
√5 + x4
√5 − x4
∣∣∣∣∣+ C.
Пример 43.13. I =∫x3x
2dx.
Р е ш е н и е:
I =1
2
∫
3x2
dx2 =3x
2
2 ln 3+ C.
Решим теперь несколько примеров с использованием метода разложе-ния, который заключаеся в представлении подынтегральной функции ввиде суммы нескольких слагаемых и использовании свойств интеграла:
∫
(f(x) ± ϕ(x)) dx =
∫
f(x) dx±∫
ϕ(x) dx,∫
kf(x) dx = k
∫
f(x) dx.
Пример 43.14. I =∫
x4−10x2+5x2 dx.

43 Практическое занятие – Неопределенный интеграл 133
Р е ш е н и е:
I =
∫ (
x2 − 10 +5
x2
)
dx =
∫
x2 dx− 10
∫
dx+ 5
∫
x−2 dx =
=x3
3− 10x− 5
x+ C.
Пример 43.15. I =∫ (√
2x+√
2x
)
dx.
Р е ш е н и е:
I =√
2
∫
x12 dx+
√2
∫
x−12 dx =
√2
(2
3x√x+ 2
√x
)
+ C.
Пример 43.16. I =∫
cos 2x cos 5x dx.
Р е ш е н и е:
I =1
2
∫
(cos 7x + cos 3x) dx =1
14
∫
cos 7xd(7x)+
+1
6
∫
cos 3x d(3x) =1
14sin 7x+
1
6sin 3x+ C.
Но этого достаточно только для нахождения простейших интегралов.Сейчас мы рассмотрим более сложные методы.Найти интегралы с помощью замены переменной.
Пример 43.17. I =∫
9x2 3√x3 + 10 dx.
Р е ш е н и е: I =
∣∣∣∣
x3 + 10 = t3x2 dx = dt
∣∣∣∣
= 3∫t
13 dt = 3 t
13+1
13+1
+ C =
= 94t 3√t+ C = 9
4(x3 + 10)3
√x3 + 10 + C.
Пример 43.18. I =∫
4xdx5√8−x2
.
Р е ш е н и е: I =
∣∣∣∣
8 − x2 = t−2x dx = dt
∣∣∣∣
= −2∫t−
15 dt = −2 t
− 15+1
− 15+1
+ C =
= −52t
45 + C = −5
2(8 − x2)
45 + C.
Пример 43.19. I =∫
2 cosxdx4+sinx
.
Р е ш е н и е: I =
∣∣∣∣
4 + sinx = tcosx dx = dt
∣∣∣∣
= 2∫
dtt
= 2 ln |t| + C = 2 ln(4 +
+ sinx) + C.
Замечание 43.19. 4 + sinx > 0, поэтому знак абсолютной величиныопущен.

134 43 Практическое занятие – Неопределенный интеграл
Пример 43.20. I =∫ √
arcsinx1−x2 dx.
Р е ш е н и е: I =
∣∣∣∣
arcsinx = tdx√1−x2 = dt
∣∣∣∣
=∫ √
t dt = 23t√t + C =
= 23arcsin x
√arcsin x+ C.
Этот интеграл можно найти и с помощью подведения функции√
1 − x2
под знак дифференциала:
I =
∫ √arcsin x
dx√1 − x2
=
∫ √arcsinx d(arcsinx) =
=2
3arcsinx
√arcsinx+ C.
Найти интегралы с помощью подведения функций под знак диффе-ренциала.
Пример 43.21. I =∫ex(ex + 2)2 dx.
Р е ш е н и е: I =∫
(ex + 2)2 d(ex + 2) = (ex+2)3
3+ C.
Пример 43.22. I =∫
ex+sinxex−cosx
dx.
Р е ш е н и е: I =∫ d(ex−cosx)
ex−cosx= ln |ex − cosx| + C.
Пример 43.23. I =∫
x+5√x2+3
dx.
Р е ш е н и е: I = x dx√x2+3
+5∫
dx√x2+3
= 12
∫ d(x2+3)√x2+3
+∫
dx√(x2+3)
=√x2 + 3+
+ ln |x +√x2 + 3| + C.
Пример 43.24. I =∫
x4 dx1+x10 .
Р е ш е н и е: I = 15
∫dx5
1+(x5)2= 1
5arctg x5 + C.
Найти интегралы с помощью интегрирования по частям.
Пример 43.25. I =∫xeax dx.
Р е ш е н и е: I =
∣∣∣∣
u = x du = dxdv = eax dx v = 1
aeax
∣∣∣∣
= xeax
a− 1
a
∫eax dx =
= xeax
a− eax
a2+ C.
Пример 43.26. I =∫xn lnx dx (n 6= −1).
Р е ш е н и е: I =
∣∣∣∣
u = ln x du = dxx
dv = xn dx v = xn+1
n+1
∣∣∣∣
= xn+1
n+1lnx +
∫xn−1 dx =
= xn+1
n+1
(lnx− 1
n+1
)+ C.

43 Практическое занятие – Неопределенный интеграл 135
Если же показатель степени n = −1, то интеграл находится так:
I =
∫
lnxdx
x=
∫
lnx d(lnx) =1
2ln2 x+ C.
Пример 43.27. I =∫eax sinnx dx.
Р е ш е н и е:
I =
∣∣∣∣
u = eax, du = aeax dxdv = sinnx dx, v = − 1
ncosnx
∣∣∣∣= −1
neax cosnx+
+a
n
∫
eax cosnx dx =
∣∣∣∣
u = eax du = aeax dxdv = cosnx dx v = 1
nsinnx
∣∣∣∣=
= −1
neax cosnx +
a
n
(1
neax sinnx− a
n
∫
eax sinnx dx
)
= −
− 1
neax cosnx +
a
n2− a2
n2I.⇒
⇒ I =
∫
eax sinnx dx =eax(a sinnx− n cosnx)
a2 + n2+ C.
Напомним, что в лекции мы нашли таким же способом похожий инте-грал
∫eax cosnx dx.
Самостоятельная работа
Найдите первообразные функций и проверьте результат дифференци-рованием.
Пример 43.28. f(x) = 6x2.
Пример 43.29. f(x) = tg 5x.
Найдите неопределенные интегралы.
Пример 43.30. I =∫
x dx√2−x4 .
Пример 43.31. I =∫
sin2 x dxcos 2x
.
Пример 43.32. I =∫
cosx dx3√sinx
.
Пример 43.33. I =∫
(1 − 7x)5x dx.
Пример 43.34. I =∫etg x dx
cos2 x.
Пример 43.35. I =∫√
arcsin 3x1−x2 dx.

136 43 Практическое занятие – Неопределенный интеграл
Пример 43.36. I =∫ex
2+2x(x + 1) dx.
Пример 43.37. I =∫
x dx√x2−6
.
Пример 43.38. I =∫e√x dx√
x.
Пример 43.39. I =∫
5√
9 − exex dx.
Пример 43.40. I =∫
(√x− 1)2 dx.
Пример 43.41. I =∫ (x−1)3
xdx.
Пример 43.42. I =∫
(sin 5x cosx) dx.
Найти интегралы с помощью замены переменной.
Пример 43.43. I =∫x√
2x2 + 7 dx.
Пример 43.44. I =∫ (2x+5) dx
x2+5x−13.
Пример 43.45. I =∫
sin 3x dx√5+cos 3x
.
Пример 43.46. I =∫
3√
tg 2x dxcos2 2x
.
Найти интегралы с помощью подведения функций под знак диффе-ренциала.
Пример 43.47. I =∫
2+ln xx
.
Пример 43.48. I =∫
sin 2x dx7+cos2 x
.
Пример 43.49. I =∫
x+x3
x4+5dx.
Найти интегралы с помощью интегрирования по частям.
Пример 43.50. I =∫x sin 2x dx.
Пример 43.51. I =∫
arctg x dx.
Пример 43.52. I =∫e2t cos 3t dt.
44 Лекция – Интегрирование рациональных дробей 137
44. лекция —интегрирование рациональных дробей
Интегрирование простейших элементарных дробей. Примеры инте-грирования рациональных функций.
44.1. Интегрирование простейших рациональных дробей. Влекции 34 мы ввели понятие так называемых простейших дробей сле-дующих четырех типов.
I.A
x− a,
П.A
(x− a)n(n = 2, 3, ...),
Ш.Mx +N
x2 + px+ q(D = p2 − 4q < 0),
IV.Mx+N
(x2 + px+ q)2(D = p2 − 4q < 0, n = 2, 3...).
Рассмотрим как находятся интегралы от этих дробей.Интегралы от простейших дробей первого и второго типов являются
табличными интегралами, входящими туда под номерами 1 и 2.
I.
∫Adx
x− a= A
∫d(x− a)
x− a= A ln |x− a| + C.
П.∫
Adx
(x− a)n= A
∫
(x− a)−nd(x− a) = A(x− a)−n+1
−n+ 1+ C =
=A
(1 − n)(x− a)n−1+ C.
Интеграл от дроби третьего типа относятся к интегралам, содержа-щим квадратный трехчлен ax2 + bx+ c, при нахождении которых исполь-зуется подстановка
(44.1)1
2(ax2 + bx+ c)′ = ax +
b
2= t

138 44 Лекция – Интегрирование рациональных дробей
Ш.
∫Mx+N
x2 + px+ qdx =
∣∣∣∣
12(x2 + pq + q)′ = t dx = dtx+ p
2= t x = t− p
2
∣∣∣∣=
=
∫M(t− p
2) +N
(t− p2)2 + p(t− p
2) + q
dt =
∫Mt+ (N − Mp
2)
t2 + (q − P 2
4)dt.
Если ввести обозначение:
q − p2
4= a2 > 0,
то∫
Mx+N
x2 + px+ qdx = M
∫tdt
t2 + a2+
(
N − Mp
2
)∫dt
t2 + a2=
=M
2ln(t2 + a2) +
(
N − Mp
2
)1
2aarctg
t
a+ C.
Заменяя t и a их выражениями, получим:
(44.2)∫
Mx+N
x2 + px+ qdx =
M
2ln(x2 +px+q)+
N − Mp2
√
q − P 2
4
arctgx+ p
4√
q − p2
4
+C.
Для вычисления интеграла от дроби третьего типа можно поступитьтак:
а) В числителе дроби, стоящей под интегралом, записываем производ-ную знаменателя, т.е. 2x+p. Тождественными преобразованиями из 2x+pполучаем заданный числитель Mx+N. Для этого 2x+p умножаем на N/2и к полученному происведению прибавляем N −Mp/2. Очевидно, что
(2x + p)M
2+N − Mp
2= Mx+N.
б) Преобразованная дробь
Mx+N
x2 + px+ qпринимает вид
(2x + p)M2
+N − Mpc
x2 + px+ qи представляется как сумма двух дробей:
M
2
2x + p
x2 + px+ q+
N − Mp2
x2 + px+ q.
Числитель первой дроби равен производной знаменателя, поэтому ин-теграл от нее равен натуральному логарифму модуля знаменателя.

44 Лекция – Интегрирование рациональных дробей 139
Для интегрирования второй дроби в знаменателе выделяем полныйквадрат:
x2 + px+ 1 =(
x+p
2
)2
+ q − p2
4.
Интеграл от второй дроби приводится к табличному ґ11, если4q − p2 < 0, и к табличному ґ7, если 4q − p2 > 0.
Замечание 44.20. Если в знаменателе дроби вместо трехчлена x2++ px+ q находится трехчлен ax2 + bx+ c, то для сведения этого случаяк предыдущему необходимо коэффициент a вынести за скобку.
Пример 44.1. Найти интеграл: I =∫
x+1x2+4x+8
dx.
Р е ш е н и е: Половину производной квадратного трехчлена обозна-чим через t, т.е. t = x+ 2, тогда x = t− 2 и dx = dt. Следовательно,
I =
∫x+ 1
x2 + 4x+ 8dx =
∫t− 2 + 1
(t− 2)2 + 4(t− 2) + 8dt =
∫t− 1
t2 + 4=
=
∫tdt
t2 + 4−∫
dt
t2 + 4=
1
2ln(t2 + 4) − 1
2arctg
t
2+ C =
=1
2ln(x2 + 4x+ 8) − 1
2arctg
x+ 2
2+ C.
Этот же интеграл найдем рассмотренным на с 138 способом.Производная знаменателя равна 2x + 4. Умножаем и делим дробь на
2. Константу в числителе, равную 2 записываем, как 4-2:x+ 1
x2 + 4x+ 8=
1
2
2x+ 4 − 2
x2 + 4x+ 8
Почленным деления числителя на знаменатель разбиваем дробь на дведроби и в знаменателе второй дроби выделяем полный квадрат:
1
2
2x + 4 − 2
x2 + 4x + 8=
1
2
2x + 4
x2 + 4x + 8− 1
(x+ 2)2 + 4.
Тогда интеграл равен:
I =1
2
∫d(x2 + 4x + 8)
x2 + 4x+ 8−∫
d(x+ 2)
(x+ 2)2 + 22=
=1
2ln(x2 + 4x + 8) − 1
2ln arctg
x+ 2
2+ C.
IV. Применив к интегралу от простейшей дроби IV типа ту же под-становку, что и к интегралу от дроби Ш типа, получим:
(44.3)∫
Mx +N
(x2 + px+ q)ndx = M
∫tdt
(t2 + a2)n+
(
N − Mp
2
)∫dt
(t2 + a2)n.

140 44 Лекция – Интегрирование рациональных дробей
Первый интеграл в (44.3) легко вычисляется:∫
tdt
(t2 + a2)n=
1
2
∫
(t2 + a2)−nd(t2 + a2) =1
2(1 − n)(t2 + a2)n−1+ C.
Для вычисления второго интеграла In =∫
dt(t2+a2)n запишем его в виде:
In =
∫dt
(t2 + a2)n=
1
a2
∫(t2 + a2) − t2
(t2 + a2)ndt =
=1
a2
(∫dt
(t2 + a2)n−1−∫
t2dt
(t2 + a2)n
)
.
Замечая, что∫
dt(t2+a2)n−1 = In−1, получим:
(44.4) In =1
a2
(
In−1 −∫
t2dt
(t2 + a2)n
)
.
К интегралу∫
t2dt(t2+a2)n применим интегрирование по частям, полагая:
∣∣∣∣
u = t du = dtdv = tdt
(t2+a2)n v = 12(1−n)(t2+a2)n−1
∣∣∣∣:
∫t2dt
(t2 + a2)n=
t
2(1 − n)(t2 + a2)n−1− 1
2(1 − n)In−1.
Подставляя данный интеграл в формулу (44.4), после приведения по-добных членов, получим:
(44.5) In =1
a2
(2n− 3
2n− 2In−1 +
t
2(n− 1)(t2 + a2)n−1
)
.
Это – рекуррентная формула или – формула приведения. Она позволя-ет свести интеграл от дроби IV типа с показателем степени n к интегралуот дроби IV типа с показателем степени n− 1.
Формулу (44.5) надо применять n − 1 раз, пока показатель степени взнаменателе не станет равным единице.
Пример 44.2. Найти интеграл: I3 =∫
dt(t2+1)3
.
Р е ш е н и е: Здесь a = 1, n = 3. Применяя формулу (44.5), получим:
I3 =1
12
(2 · 3 − 3
2 · 3 − 2I2 +
t
2(3 − 1)(t2 + 1)2
)
=3
4I2 +
t
4(t2 + 1)2.
По той же формуле:
I2 =
∫dt
(t2 + 1)2=
2 · 2 − 3
2 · 2 − 2I1 +
t
2(2 − 1)(t2 + 1)=
1
2I1 +
t
2(t2 + 1).

44 Лекция – Интегрирование рациональных дробей 141
Так как
I1 =
∫dt
t2 + 1= arctg t+ C,
то
I2 =1
2arctg t +
t
2(t2 + 1)+ C
и
I3 =3
4
(1
2arctg t+
t
2(t2 + 1)
)
+t
4(t2 + 1)2+ C =
=t
4(t2 + 1)2+
3t
8(t2 + 1)+
3
8arctg t+ C.
Рассмотрим теперь∫R(x)dx, где R(x) — рациональная дробь. Как
мы видели в лекции 36 любая дробь может быть представлена в видецелой части (многочлена) и суммы простейщих дробей. А следовательно∫R(x)dx всегда может быть сведен к интегралам от многочлена и суммы
простейших дробей.
Пример 44.3. Найти интеграл
I =
∫2x2 + 5x− 8
(x− 1)3(x+ 2)2dx.
Р е ш е н и е: Дробь под интегралом правильная. Представим ее ввиде:
2x2 + 5x− 8
(x− 1)3(x+ 2)2=
A
(x− 1)3+
B
(x− 1)2+
C
x− 1+D
D
(x+ 2)2+
E
x+ 2.
Приведем в правой части к общему знаменателю и приравняем чис-лители:
2x2 + 5x− 8 = A(x+ 2)2 +B(x− 1)(x + 2)2 + C(x− 1)2(x + 2)2+
+D(x− 1)3 + E(x− 1)3(x+ 2).
Коэффициенты A, B, C, D, E найдем пользуясь и методом произ-вольных значений, и методом неопределенных коэффициентов:
x = 1 ⇒ −1 = 9A ⇒ A = −19,
x = −2 ⇒ −10 = −27D ⇒ D = 1027,
x = 2 ⇒ 10 = 16A + 16C +D + 4E ⇒ 4B + 4C + E = 7727,
x4 ⇒ C +E = 0,
св. чл. ⇒ −8 = 4A− 4B + 4C −D − 2E ⇒ 2B − 2C + E = 9727.

142 44 Лекция – Интегрирование рациональных дробей
При нахождении последних трех уравнений, мы использовали найден-ные ранее значения A и D.
Для определения B, C, E имеем систему уравнений
C +E = 0,
2B − 2C + E = 9727,
4B + 4C + E = 7727,
решая которую, найдем:
B =29
27, C = −13
27, E =
13
27.
Таким образом,∫
2x2 + 5x− 8
(x− 1)3(x+ 2)2dx =
∫
(−1/9
(x− 1)3+
29/27
(x− 1)2+
−13/27
x− 1+
+10/27
(x+ 2)2+
13/27
x+ 2)dx =
1
18
1
(x− 1)2
29
27
1
x− 1−
− 13
27ln |x− 1| − 10
27
1
x + 2+
13
27ln |x+ 2| + C =
= − 26x2 + 5x− 34
18(x− 1)2(x+ 2)+
13
27ln
∣∣∣∣
x+ 2
x− 1
∣∣∣∣+ C.
Пример 44.4. Найти интеграл
I =
∫x4 + 5x3 − 6x+ 5
x3 + 2x2 − 1dx.
Р е ш е н и е: Неправильную дробь, стоящую под интегралом пред-ставим в виде суммы целой части и правильной дроби:
x4 + 5x3 − 6x + 5
x3 + 2x2 − 1= x+ 3 +
−6x2 − 5x+ 8
x3 + 2x2 − 1.
Далее разложим знаменатель x3 + 2x2 − 1 на множители. Этот мно-гочлен имеет очевидный корень x = −1. Поэтому он делится на двучленx+ 1 без остатка. Выполнив это деление, найдем:
x3 + 2x2 − 1 = (x+ 1)(x2 + x− 1).
Квадратный трехчлен x2 +x− 1 имеет действительные корни и такжеможет быть разложен на множители. Но не будем это делать, так каккорни иррациональные.

44 Лекция – Интегрирование рациональных дробей 143
Представим правильную дробь в виде суммы дробей:
−6x2 − 5x + 8
(x+ 1)(x2 + x− 1)=
A
x+ 1+
Bx+ C
x2 + x− 1.
Приведем в правой части к общему знаменателю и приравняем чис-лители:
−6x2 − 5x + 8 = A(x2 + x− 1) + (Bx + C)(x+ 1) =
= (A+B)x2 + (A+ B + C)x−A+ C.
Коэффициенты A, B, C найдем пользуясь и методом произвольныхзначений, и методом неопределенных коэффициентов:
x = −1 =⇒ 7 = −A =⇒ A = −7,
x2 ⇒ −6 = A+ B =⇒ B = 1,
свободные члены ⇒ 8 = −A+ C =⇒ C = 1.
Следовательно,
−6x2 − 5x + 8
(x+ 1)(x2 + x− 1)=
−7
x+ 1+
x+ 1
x2 + x− 1.
Проведем теперь над второй дробью в правой части тождественныепреобразования:
x + 1
x2 + x− 1=
1
2· 2x+ 1 + 1
x2 + x− 1=
1
2
2x+ 1
x2 + x− 1+
1
2
1
(x+ 12)2 − 5
4
.
Теперь окончательно получаем:
I =
∫ (
x + 3 − 7
x+ 1+
1
2· 2x + 1
x2 + x− 1+
1
2
1
(x+ 12)2 − 5
4
)
dx =
=
∫
x dx− 3
∫
dx+1
2
∫d(x2 + x− 1)
x2 + x− 1+
1
2
∫d(x+ 1
2)
(x + 12)2 − 5
4
=
=x2
2+ 3x− 7 ln |x + 1| + 1
2ln |x2 + x− 1| + 1
2ln
∣∣∣∣∣
x + 12−
√5
2
x + 12
+√
52
∣∣∣∣∣+ C.
Пример 44.5. Вычислить интеграл
I =
∫x4 + 5x3 − 7x2 + 5
x3 − x2 + 5x− 5dx.
144 44 Практическое занятие – Интегрирование дробей
Р е ш е н и е: Дробь, стоящая под интегралом, – неправильная. Раз-делив числитель на знаменатель, найдем:
x4 + 5x3 − 7x2 + 5
x3 − x2 + 5x− 5= x + 6 − 6x2 + 25x− 35
x3 − x2 + 5x− 5.
Разложим знаменатель на множители:
x3 − x2 + 5x− 5 = x2(x− 1) + 5(x− 1) = (x− 1)(x2 + 5).
Разложим правильную дробь на простейшие:
6x2 + 25x − 35
x3 − x2 + 5x− 5=
A
x− 1+Bx+ C
x2 + 5.
Приведем в правой части к общему знаменателю и приравняем чис-лители:
6x2 + 25x− 35 = A(x2 + 5) + (Bx + C)(x− 1).
Коэффициенты A, B, C найдем пользуясь и методом произвольных зна-чений, и методом неопределенных коэффициентов:
x = 1 ⇒ −4 = 6A =⇒ A = −23,
x2 ⇒ 6 = A+ B =⇒ B = 6 − A = 6 + 23
= 203,
св. чл. ⇒ −35 = 5A− C =⇒ C = 953.
Таким образом,
6x2 + 25x− 35
x3 − x2 + 5x− 5= −2
3· 1
x− 1+
20x/3 + 95/3
x2 + 5.
Окончательно получаем:
I =
∫ (
x+ 6 +
(
−2
3· 1
x− 1+
20x/3 + 95/3
x2 + 5
))
=
=x2
2+ 6x− 2
3ln |x− 1| + 20
3
∫x dx
x2 + 5+
95
3
∫dx
x2 + 5=
=x2
2+ 6x +
1
3ln
(x2 + 5)10
(x− 1)2+
95
3√
5arctg
x√5
+ C.
44. практическое занятие —интегрирование рациональных дробей
Это практическое занятие вначале мы посвятим интегрированию эле-ментарных дробей, а затем примерам интегрирования рациональных функ-ций, разложение которых на дроби мы получим на практическом занятии.
Проинтегрировать элементарные дроби.
Пример 44.1. Найти интеграл от дроби 1 типа I =∫
dxx−5
.

44 Практическое занятие – Интегрирование дробей 145
Р е ш е н и е: I =∫ d(x−5)
x−5= ln |x− 5| + C.
Пример 44.2. Найти интеграл от дроби 2 типа I =∫
dx(x+2)4
.
Р е ш е н и е:
I =
∫
(x+ 2)−4 d(x+ 2) =(x+ 2)−4+1
−4 + 1+ C = − 1
3(x + 2)3+ C.
Пример 44.3. Найти интеграл от дроби 3 типаI =
∫x+3
x2+4x+29dx.
Р е ш е н и е:
I = |12(x2 + 4x+ 29)′ = x+ 2 = t, dx = dt| =
∫t+ 1
t2 + 25dt =
=
∫t dt
t2 + 25+
∫dt
t2 + 25=
1
2ln(t2 + 25) +
1
5arctg
t
5+ C =
=1
2ln(x2 + 4x+ 29) +
1
5arctg
x+ 2
5+ C.
Пример 44.4. Найти интеграл от дроби 4 типа I4 =∫
dx(x2+1)4
.
Р е ш е н и е: Последовательно применяем рекуррентную формулу(44.5):
In =
∫dx
(x2 + a2)n=
1
a2
(2n− 3
2n− 2In−1 +
x
2(n− 1)(x2 + a2)n−1
)
:
I4 =5
6I3 +
x
6(x2 + 1)3;
I3 =3
4I2 +
x
4(x2 + 1)2;
I2 =1
2I1 +
x
2(x2 + 1).
Но ведь I1 =∫
dxx2+1
= arctg x + C.

146 44 Практическое занятие – Интегрирование дробей
Далее увеличиваем индекс:
I2 =2
3arctg x+
1
2(x2 + 1);
I3 =3
4
(2
3arctg x+
1
2(x2 + 1)
)
+1
4(x2 + 1)2=
=1
2arctg x+
3
8(x2 + 1)+
1
4(x2 + 1)2;
I4 =5
4
(1
2arctg x+
3
8(x2 + 1)+
1
4(x2 + 1)2
)
+1
6(x2 + 1)3=
=5
8arctg x+
15
32(x2 + 1)+
5
16(x2 + 1)2+
1
6(x2 + 1)3+ C.
Пример 44.5. Найти I =∫
x4−3x3−5x2+30x−22x3−x2−8x+12
dx.
Р е ш е н и е: Под интегралом стоит неправильная рациональнаядробь. Разделив числитель на знаменатель, получим
x4 − 3x3 − 5x2 + 30x− 22
x3 − x2 − 8x + 12= x− 2 +
x2 + 2x + 2
x3 − x2 − 8x+ 12.
Поэтому
I =
∫ (
x− 2 +x2 + 2x+ 2
x3 − x2 − 8x+ 12
)
dx =
=x2
2− 2x +
∫x2 + 2x + 2
x3 − x2 − 8x + 12dx.
Учитывая, что x3−x2−8x+12 = (x−2)2(x+3) разложим правильнуюрациональную дробь на простейшие дроби
x2 + 2x + 2
x3 − x2 − 8x + 12=
x2 + 2x+ 2
(x− 2)2(x+ 3)=
A
x− 2+
B
(x− 2)2+
C
x+ 3.
Приведем к общему знаменателю в правой части тождества и прирав-няем числители
x2 + 2x + 2 = A(x− 2)(x + 3) +B(x+ 3) + C(x− 2)2.
Коэффициенты A, B и C найдем пользуясь и методом произвольныхзначений, и методом неопределенных коэффициентов:
x = 2 ⇒ 10 = 5B ⇒ B = 2,
x = −3 ⇒ 5 = 25C ⇒ C = 15,
x2 ⇒ 1 = A + C ⇒ A = 45.

44 Практическое занятие – Интегрирование дробей 147
Поэтому
I =x2
2− 2x +
4
5ln |x− 2| − 2
x− 2+
1
5ln |x + 3| + C.
Пример 44.6. Найти I =∫
x2−5x+9(x−1)2(x2+2x+2)
dx.
Р е ш е н и е: Это интеграл от правильной дроби.Раскладываем ее на простейшие:
x2 − 5x + 9
(x− 1)2(x2 + 2x + 2)=
A
x− 1+
+B
(x− 1)2+
Cx+D
x2 + 2x + 2.
Далее
x2 − 5x + 9 = A(x− 1)(x2 + 2x + 2) + B(x2 + 2x+ 2)+
+ (Cx+D)(x− 1)2, или x2 − 5x + 9 = (A + C)x3+
+ (A +B − 2C +D)x2 + (2B + C − 2D)x + (−2A+ 2B +D).
Приравниваем коэффициенты при одинаковых степенях x в обеих ча-стях равенства:
x3 ⇒ A+ C = 0,x2 ⇒ A+B − 2C +D = 1,x ⇒ 2B + C − 2D = −5,Св.чл. : ⇒ −2A+ 2B +D = 9.
Решив систему, найдем
A = −7
5, B = 1, C =
7
5, D =
21
5.
Следовательно,
I =
∫x2 − 5x+ 9
(x− 1)2(x2 + 2x + 2)dx =
= −7
5
∫dx
x− 1+
∫dx
(x− 1)2+
7
5
∫x + 3
x2 + 2x+ 2dx.
Последний интеграл берется с помощью подстановки
1
2(x2 + 2x + 2)′ = t ⇒ t = x+ 1, x = t− 1; dx = dt.

148 44 Практическое занятие – Интегрирование дробей
Тогда∫
x+ 3
x2 + 2x + 2dx =
∫t+ 2
t2 + 1dt =
∫t dt
t2 + 1+ 2
∫dt
t2 + 1=
=1
2ln(t2 + 1) + 2 arctg t+ C =
1
2ln(x2 + 2x + 2)+
+ 2 arctg(x+ 1) + C.
Таким образом:
I = −7
5ln |x− 1| − 1
x− 1+
7
10(x2 + 2x + 2) +
14
5arctg(x+ 1) + C.
Пример 44.7. I =∫
2x+2(x−1)(x2+1)2
dx.
Р е ш е н и е:2x + 2
(x− 1)(x2 + 1)2=
A
x− 1+Bx + C
x2 + 1+
Dx + E
(x2 + 1)2.
Приведя к общему знаменателю и приравняв числители, получим
2x + 2 = A(x2 + 1)2 + (Bx+ C)(x− 1)(x2 + 1) + (Dx +E)(x− 1)
или
2x + 2 = (A+ B)x4 + (C −B)x3 + (2A +D + B + C)x2+
+ (E −D + C − B)x+ (A− C − E).
Приравнивая друг другу соответствующие коэффициенты левой и пра-вой частей, приходим к системе
A+ B = 0,C − B = 0,2A +D +B + C = 0,E −D + C −B = 2A− C − E = 2.
Ее решение: A = 1, B = −1, C = −1, D = −2, E = 0.Таким образом:
I =
∫ (1
x− 1− 2x
(x2 + 1)2− x+ 1
x2 + 1
)
dx =
=
∫dx
x− 1−∫
d(x2 + 1)
(x2 + 1)2− 1
2
∫d(x2 + 1)
x2 + 1−∫
dx
x2 + 1=
= ln |x− 1| + 1
x2 + 1− 1
2ln(x2 + 1) − arctg x + C.

45 Лекция – Интегрирование тригонометрических функций 149
Самостоятельная работа
Проинтегрировать элементарные дроби.
Пример 44.8. Найти интеграл от дроби 1 типа I =∫
dxx+3
.
Пример 44.9. Найти интеграл от дроби 2 типа I =∫
dx(x−2)5
.
Пример 44.10. Найти интеграл от дроби 3 типаI =
∫2x+5
x2+2x+5dx.
Пример 44.11. Найти интеграл от дроби 4 типаI =
∫x+1
x2+4x+5dx.
Найти интегралы от рациональных дробей.
Пример 44.12. I =∫
dxx3−2x2+x
.
Пример 44.13. I =∫
x dx(x−1)(x+1)2
.
Пример 44.14. I =∫
dx(x3−1)2
.
Пример 44.15. I =∫
x dx(5x2+2x+4)2
.
45. лекция —интегрирование тригонометрических функций
Универсальная тригонометрическая подстановка. Некоторые част-ные приемы нахождения интегралов, содержащих тригонометриче-ские функции.
Рассмотрим некоторые приемы, полезные при нахождении интегра-лов:
(45.1)∫
R(sinx, cosx) dx, где R(sin x, cosx) − рациональная функция.
Например, если x2y3 – рациональная функция относительно x и y, тоsin2 x cos3 y – рациональная функция относительно sinx и cos y, a(√
2)2( 5√
5)3 – рациональная функция относительно√
2 и 5√
5.

150 45 Лекция – Интегрирование тригонометрических функций
45.1. Универсальная тригонометрическая подстановка. Из три-гонометрии известно, что все тригонометрические функции аргумента xрационально выражаются через тангенс половинного аргумента:
sinx =2 tg x
2
1 + tg2 x2
,
cosx =1 − tg2 x
2
1 + tg2 x2
.
Поэтому с помощью формул:
tgx
2= t,(45.2)
sinx =2t
1 + t2,
cosx =1 − t2
1 + t2,
dx =2dt
1 + t2.
интеграл (45.1) сводится к интегралу
∫
R
(2t
1 + t2;1 − t2
1 + t2
)2dt
1 + t2=
∫
R1(t)dt,
где R1(t) — рациональная функция t, а, как показано в предыдущей лек-ции такой интеграл, в принципе, берется в элементарных функциях.
Пример 45.1. Найти интегралы:∫
dxsin x
и∫
dxcosx
.
Р е ш е н и е:∫
dx
sinx=
∫1 + t2
2t· 2
1 + t2dt = ln |t|+C = ln | tg x
2|+C,
аналогично∫
dx
cos x=
∫dx
sin(π2
+ x) = ln
∣∣∣tg(π
2+x
2
)∣∣∣+ C.
Пример 45.2. Найти интеграл I =∫
dx2 sinx−cosx+3
Р е ш е н и е: По формулам (45.2):
I =
∫ 2dtt2+1
4tt2+1
− 1−t21+t2
+ 3=
∫dt
2t2 + 2t + 1.

45 Лекция – Интегрирование тригонометрических функций 151
Сделаем еще одну подстановку:
1
2(2t2 + 2t+ 1)′ = 2t + 1 = z =⇒ t =
z − 1
2, dt =
dz
2.
I =1
2
∫dz
2(z−12
)2 + 2(z−12
) + 1=
∫dz
z2 + 1= arctg z + C.
Возвращаясь от z к t, а затем от t к x, получим:
I = arctg(2t+ 1) + C = arctg(2 tgx
2+ 1) + C.
Применение универсальной тригонометрической подстановки частоприводит к сложным выкладкам. Поэтому на практике она применяет-ся к интегралам, для которых не существует более простых подстановок,например, к интегралам вида
∫dx
a sin x+ b cos x+ c.
При нахождении интегралов, содержащих тригонометрические функ-ции в другой форме, применяются другие приемы.
45.2. Нахождение интегралов вида∫
sinn x cosm xdx.45.2.1. Хотя бы один из показателей степени – целое нечетное поло-
жительное число 2k+1 (k > 0, k ∈ Z), другой показатель – равен любомучислу (даже не целому).
Если m = 2k + 1, делается подстановка sinx = t, если n = 2k + 1, то –cos x = t. Если и m, и n – нечетные числа, делается любая из указанныхподстановок.
Если же при нахождении интегралов пользуются не подстановкой, аподведением под знак дифференциала, то надо руководствоваться прави-лом: та функция, показатель степени которой 2k + 1 вносится под знакдифференциала.
Пример 45.3. Найти интеграл I =∫
sin2 x cos3 x dx.
Р е ш е н и е:а) с помощью подстановки:
I = | sinx = t, cosxdx = dt| =
∫
(1 − t2)t2dt =
∫
(t2 − t4)dt =
t3
3− t5
5+ C =
sin3 x
3− sin5 x
5+ C.
б) с помощью подведения функции под знак дифференциала:

152 45 Лекция – Интегрирование тригонометрических функций
I =
∫
sin2 x(1 − sin2 x) cosxdx =
∫
sin2 x(1 − sin2 x)d sinx =
=
∫
(sin2 x− sin4 x)d sinx =sin3 x
3− sin5 x
5+ C.
Пример 45.4. Найти интеграл I =∫
cos5 x3√sinx
.
Р е ш е н и е: Внесем cosx под знак дифференциала:
cosxdx = d(sinx),
и представим:
cos 4x = (1 − sin2 x)2.
Тогда:
I =
∫1 − 2 sin 2x+ sin 4x
sin 1/3d(sinx) =
=
∫
(sinx)−1/3 d(sinx) − 2
∫
(sinx)5/3 d(sinx)+
+
∫
(sinx)11/3 d(sinx) =3
2(sinx)2/3 − 3
4(sinx)8/3 +
+3
14(sin x)14/3 + C.
45.2.2. Оба показателя степени – четные положительные числа (одиниз них может равняться 0). В этом случае пользуются тригонометриче-скими формулами:
sin2 x =1 − cos 2x
2,(45.3)
cos2 x =1 + cos 2x
2,
sinx cosx =sin 2x
2.
После их применения интегралы сводятся к случаю 45.2.1 или вновьк 45.2.2.
Пример 45.5. Найти интеграл I =∫
sin4 x cos2 x dx

45 Лекция – Интегрирование тригонометрических функций 153
Р е ш е н и е:
I =
∫
sin2 x(sinx cosx)2dx =
∫1 − cos 2x
2· sin2 2x
4dx =
=1
8
∫
sin2 2xdx− 1
8
∫
sin2 2x cos 2xdx.
Первый интеграл относится к пункту 45.2.2, второй к пункту 45.2.1.Поэтому
I =1
8
∫1 − cos 4x
2dx− 1
16
∫
sin2 2xd(sin 2x) =
=1
16x− 1
64sin 4x− 1
48sin3 2x + C.
Оба показателя отрицательные числа одинаковой четности.В этом случае, числитель и знаменатель надо разделить на cosk x,
(sink x), где k = |m+n|2
∈ N , и ввести дифференциал тангенса (котангенса).Требование того, чтобы m и n были целыми числами и оба отрицатель-ными не является обязательным.
Пример 45.6. Найти интеграл: I =∫
dxcos3 x sinx
.
Р е ш е н и е:
I =
∫ dxcos2 x
sin x cosx=
∫tg2 x + 1
tg xd tg x =
=
∫
tg x d tgx =tg2 x
2+ ln | tg x| + C.
Пример 45.7. I =∫
dxsin3 x cos5 x
.
Р е ш е н и е: Очевидно, что
dx
cos2 x= d tg x, а
1
sin3 x cos3 x=
1(
tg x√1+tg2 x
· 1√1+tg2 x
)3 =
(1 + tg2 x
tg x
)3
.
Поэтому:

154 45 Лекция – Интегрирование тригонометрических функций
I =
∫ (1 + tg2 x
tg x
)3
d tg x =
=1
3
∫1 + 3 tg2 x+ 3 tg 4x+ tg 6x
tg3 xd tg x =
=1
3
∫ (
tg −3x +3
3 tg x+ 3 tg x + tg 3x
)
dx =
=1
2ctg 2x+ 3 ln | tg x| + 3
2tg 2x+
1
4tg 4x+ C.
45.2.3. Укажем еще случаи, позволяющие избежать применения уни-версальной тригонометрической подстановки.
Если R(sin x, cosx) меняет знак при замене sinx на − sinx, полезнаподстановка cos x = t.
Если R(sin x, cosx) меняет знак при замене cos x на − cosx, полезнаподстановка sin x = t.
Если R(sin x, cosx) не меняется при одновременной замене sinx на− sinx, и cosx на − cos x,, то применяется подстановка tg x = t.
Пример 45.8. Найти интеграл: I =∫
dxa2 cos2 x+b2 sin2 x
.
Р е ш е н и е: Так как синус и косинус находятся в четных степенях,то подынтегральная функция не изменится при изменениях знака у этихфункций.
Делаем подстановку:
tgx = t =⇒ x = arctg t =⇒ dx =dt
1 + t2.
Если
tg x = t, то sinx =t√
1 + t2, cos x =
1√1 + t2
,
sin2 x =t2
1 + t2, cos2 x =
1
1 + t2.
Поэтому:
I =
∫ dt1+t2
a2
1+t2+ b2t2
1+t2
=
∫dt
a2 + b2t2=
1
b
∫bdt
a2 + (bt)2=
=1
abarctg
bt
a+ C =
1
abarctg
(b
atg x
)
+ C.

45 Лекция – Интегрирование тригонометрических функций 155
Пример 45.9. Найти интеграл: I =∫
dxsin 3x cos2 x
.
Р е ш е н и е: При замене sinx на − sinx подынтегральная функцияменяет знак, поэтому применяем подстановку
cosx = t =⇒ sinx =√
1 − t2 =⇒ x = arccos t =⇒ dx = − dt
1 − t2.
Интеграл примет вид:
I = −∫
dt√1 − t2
√
(1 − t2)3t2= −
∫dt
(1 − t2)2t2.
Это – интеграл от рациональной дроби. Раскладывая дробь
1
(1 − t2)2t2
на простейшие, после тождественных преобразований, окончательно по-лучим
I =1
cosx− cosx
2 sin2 x+
3
2ln∣∣∣tg
x
2
∣∣∣+ C.
45.3. Нахождение интегралов вида∫
tg nxdx. Можно рекомен-довать два способа:
а) С использованием формулы:
(45.4) tg 2x =1
cos2 x− 1
и понижением показателя степени n на две единицы.б) С помощью подстановки: tg x = t, откуда x = arctg t и dx = dt
1+t2.
Пример 45.10. Найти интеграл: I =∫
tg4 2xdx
Р е ш е н и е: Обозначим: tg 2x = t, тогда x = 12arctg t и dx = 1
2dt
1+t2.
Поэтому:
I =1
2
∫t4dt
t2 + 1=
1
2
∫ (
t2 − 1 +1
t2 + 1
)
dt =
=t3
6− t
2+
1
2arctg t+ C =
tg3 2x
6− tg 2x
2+
1
2arctg tg 2x+ C =
=tg3 2x
6− tg 2x
2+ x+ C.
Аналогично находятся интегралы вида∫
ctg nxdx.

156 45 Лекция – Интегрирование тригонометрических функций
45.4. Нахождение интегралов вида∫R(tg x) dx. В этом случае
с помощью подстановки tg x = t, получаем интеграл от рациональнойфункции аргумента t.
Пример 45.11. Вычислить интеграл I =∫
tg x+3tg x−1
dx.
Р е ш е н и е: Введя новую переменную
t = tg x =⇒ x = arctg t =⇒ dx =dt
1 + t2,
получаем интеграл от правильной рациональной дроби:
I =
∫t+ 3
(t− 1)(t2 + 1)dt.
Разлагаем дробь на сумму элементарных дробей:t+ 3
(t− 1)(t2 + 1)=
A
t− 1+Bt+ C
t2 + 1.
Приводим в правой части тождества к общему знаменателю и прирав-ниваем числители:
t+ 3 = A(t2 + 1) + (Bt+ C)(t− 1).
Подставив в последнее соотношение t = 1, найдем, A = 2. Прирав-няв коэффициенты при t2, а затем свободные члены, найдем B = −2 иC = −1.
Следовательно,
I =
∫ (2
t− 1− 2t + 1
t2 + 1
)
=
= 2
∫dt
t− 1−∫d(t2 + 1)
t2 + 1−∫
dt
t2 + 1=
= 2 ln |t− 1| − ln(t2 + 1) − arctg t+ C.
Сделав обратную подстановку, и учитывая, что
tg 2t+ 1 =1
cos2 tи arctg tg t = t,
получимI = 2 ln | tg x− 1| + ln | cosx| − x + C.

45 Практическое занятие – Тригонометрические функции 157
45. практическое занятие —интегрирование тригонометрических функций
На этом занятии мы поупражняемся в нахождении интегралов от три-гонометрических функций. Некоторые интегралы такого типа мы нахо-дили ранее, при знакомстве с методом разложения.
Пример 45.1. Найти интеграл I =∫
cos 3x cos 9x dx.
Р е ш е н и е: Воспользуемся формулой, преобразования произведениякосинусов в сумму:
I =1
2
∫
(cos(−6x) + cos 12x) dx =1
2
∫
(cos 6x + cos 12x) dx =
1
12sin 6x +
1
24sin 12x + C.
Пример 45.2. Найти интеграл I =∫
sin 2x cos 5x sin 9x dx.
Р е ш е н и е:
I =1
2
∫
(− sin 3x + sin 7x) sin 9x dx =
= −1
2
∫
sin 3x sin 9x dx+1
2
∫
sin 7x sin 9x dx =
= −1
4
∫
(cos 6x− cos 12x) dx+1
4
∫
(cos 2x− cos 16x) dx =
=1
4
(sin 12x
12− sin 6x
6+
sin 2x
2− sin 16x
16
)
+ C.
Рассмотрим три вида интегралов∫
sinn x cosm x dx.a) Хотя бы один из показателей – нечетное положительное число, дру-
гой – любое число.
Пример 45.3. Найти интеграл I =∫
sin2 x cos7 x dx.
Р е ш е н и е:
I =
∫
sin2 x cos6 x cosx dx =
∫
sin2 x(1 − sin2 x)3 d sinx =
=
∫
(sin2 x− 3 sin4 x+ 3 sin6 x− sin8 x) dx =
=sin3 x
3− 3 sin5 x
5+
3 sin7 x
7− sin9 x
9+ C.

158 45 Практическое занятие – Тригонометрические функции
Пример 45.4. Найти интеграл I =∫
sin5 x√cosx
dx.
Р е ш е н и е: Воспользуемся заменой переменной: cosx = t, − sinx dx =dt. Тогда
I = −∫
(1 − t2)2
√t
dt =
∫(−t−1/2 + 2t3/2 − t7/2
)dx =
= −2√t+
4
5t2√t− 2
9t4√t+ C =
=√
cosx(−2 +4
5cos2 x− 2
9cos4 x) + C.
б) Оба показателя четные положительные числа (один из них, в част-ности, может равняться нулю).
Пример 45.5. Найти интеграл I =∫
cos4 x dx.
Р е ш е н и е: Так как
cos4 x = (cos2 x)2 =
(1 + cos 2x
2
)2
, то
I =1
4
∫
(1 + cos 2x)2 dx =1
4
∫
(1 + 2 cos 2x+ cos2 2x) dx.
Опять применив формулу понижения степени: cos2 2x = 1+cos 4x2
, полу-чим
I =1
4
∫ (
1 + 2 cos 2x +1 + cos 4x
2
)
dx =
=1
4
∫
(3
2+ 2 cos 2x+
1
2cos 4x) dx =
=1
4(3
2x+ sin 2x+
1
8sin 8x) + C.
Пример 45.6. Найти интеграл I =∫
cos2 3x sin4 3x dx.

45 Практическое занятие – Тригонометрические функции 159
Р е ш е н и е:
I =
∫
(cos 3x sin 3x)2 sin2 3x dx =
=
∫sin2 6x
4
1 − cos 6x
2dx =
1
8
∫
(sin2 6x− sin2 6x cos 6x) dx =
=1
8
∫ (1 − cos 12x
2− sin2 6x cos 6x
)
dx =
=1
8
(x
2− sin 12x
24− sin3 6x
18
)
+ C.
в) Показатели степени – отрицательные числа одинаковой четности(m+ n = 2k, k ∈ N).
Требование того, чтобы m и n были целыми числами и оба отрица-тельными не является обязательным.
Пример 45.7. Найти интеграл I =∫
3
√cos2 xsin8 x
dx.
Р е ш е н и е: В этом примере показатель синуса m = −83, а показатель
степени косинуса n = 23, а потому m + n = −8
3+ 2
3= −2.
Применим подстановку ctg x = t, тогда
− dx
sin2 x= dt и 3
√
cos2 x
sin2 x= ctg
23 x.
Поэтому
I = −∫
t23 dt = −3
5t
53 + C = −3
5ctg x 3
√
ctg 2x + C.
В следующих двух примерах применим, рассмотренные в лекции, дваприема нахождения интегралов от n-ой степени tg x или ctg x.
Пример 45.8. Найти интеграл I =∫
tg4 x dx.
Р е ш е н и е:
I =
∣∣∣∣tg x = t, x = arctg t, dx =
dt
t2 + 1
∣∣∣∣=
=
∫t4 dt
t2 + 1=
∫ (
t2 − 1 +1
t2 + 1
)
dt =
=t3
3− t+ arctg t+ C =
tg3 x
3− tg x+
+ arctg(tg x) + C =tg3 x
3− tg x+ x + C.

160 45 Практическое занятие – Тригонометрические функции
Пример 45.9. Найти интеграл I =∫
ctg 5x dx.
Р е ш е н и е: Воспользуемся формулами
ctg 2x =1
sin2 x− 1 и
dx
sin2 x= − d ctg x :
I =
∫
ctg 3x ctg 2x dx =
∫
ctg 3x
(1
sin2 x− 1
)
dx =
= −∫
ctg 3x d ctgx−∫
ctg 3x dx = −ctg 4x
4−
−∫
ctg x
(1
sin2 x− 1
)
dx = −ctg 4x
4+
∫
ctg x d ctgx+
+
∫
ctg x dx = −ctg 4x
4+
ctg 2x
2+ ln | sinx| + C.
И, наконец, решим два примера на универсальную тригонометриче-скую подстановку.
Пример 45.10. Найти интеграл I =∫
dxsin3 x
.
Р е ш е н и е:
I =
∣∣∣∣tgx
2= t, sinx =
2t
1 + t2, dx =
dt
1 + t2
∣∣∣∣=
=1
4
∫(1 + t2)2
t3dt =
1
4
∫ (1
t3+
2
t+ t
)
dt =
=1
4
(
− 1
2t2+ 2 ln |t| + t2
2
)
+ C =
− 1
8ctg2 x
2+
1
2ln | tg x
2| + 1
8tg2 x
2+ C.
При нахождении, например, интеграла∫
dxcos5 x
, целесообразнее сначалазаменить cos5 x на sin5
(π2
+ x), а затем применить универсальную подста-
новку.
Пример 45.11. Найти интеграл I =∫
5+6 sinxsinx(4+3 cosx)
dx.
Р е ш е н и е:Опять применим универсальную подстановку tg x
2= t, тогда

45 Практическое занятие – Тригонометрические функции 161
I =
∫5 + 12t
1+t2
2t1+t2
(
4 + 3(1−t2)1+t2
)2 dt
1 + t2=
∫5t2 + 12t + 5
t(7 + t2)dt.
Разложим дробь на простейшие
5t2 + 12t + 5
t(7 + t2)=A
t+Bt+ C
7 + t2.
Отсюда
5t2 + 12t + 5 = A(7 + t2) + t(Bt+ C);
A =5
7, B =
30
7, C = 12.
Поэтому
I =
∫ (5
7t+
307t+ 12
7 + t2
)
dt =
=5
7ln |t| + 15
7ln(7 + t2) +
12√7
arctgt√7
+ C =
=5
7
(
ln | tg x2| + 3 ln(7 + tg2 x
2))
+
+12√
7arctg(
1√7
tgx
2) + C.
Самостоятельная работа
Пример 45.12. Найти интеграл I =∫
sin 6x cos 2x dx.
Пример 45.13. Найти интеграл I =∫
cos 2x cos 3x dx.
Пример 45.14. Найти интеграл I =∫
sin5 x cos2 x dx.
Пример 45.15. Найти интеграл I =∫
cos5 x3√
sin2 x dx.
Пример 45.16. Найти интеграл I =∫
sin4 x dx.
Пример 45.17. Найти интеграл I =∫
sin4 x cos6 x dx.
Пример 45.18. Найти интеграл I =∫
dxsin4 x cos6 x
.
Пример 45.19. Найти интеграл I =∫√
sinxcos9 x
dx.
162 46 Лекция – Интегрирование иррациональных функций
Пример 45.20. Найти интеграл I =∫
ctg5 x dx.
Пример 45.21. Найти интеграл I =∫
tg8 x dx.
Пример 45.22. Найти интеграл I =∫
dxsin5 x
.
46. лекция —интегрирование иррациональных функций
Нахождение интегралов от иррациональных выражений. Рациона-лизация функций с помощью тригонометрических подстановок. За-ключительные замечании об интегрировании. Опрделение аналити-ческой функции по действительной или мнимой части.
Рассмотрим некоторые частные приемы, позволяющие иррациональ-ные функции свести к рациональным.
46.1. Интегралы вида∫R(x; n
√ax + b) dx. Интегралы вида
∫R(x; n
√ax + b)dx, где R(x; n
√ax+ b) – рациональное выражение относи-
тельно x и n√ax + b и n - целое положительное число не меньшее двух,
могут быть сведены к интегралам от рациональных функций с помощьюзамены переменной:
(46.1) ax+ b = tn, тогда x =tn − b
a, dx =
ntn−1
adt,
n√ax + b = t.
Следовательно,∫
R(x;n√ax + b)dx =
∫
R
(tn − b
a; t
)ntn−1
adt.
Интеграл в правой части последнего равенства может быть найденприемами, изложенными ранее.
Пример 46.1. Найти интеграл: I =∫ √
x+1x−
√x+1
dx;
Р е ш е н и е: Положим:
x+ 1 = t2, тогда x = t2 − 1 и dx = 2tdt.
Поэтому:
I =
∫t · 2tdtt2 − t− 1
= 2
∫t2dt
t2 − t− 1= 2
∫ (
1 +t+ 1
t2 − t+ 1
)
dt.
46 Лекция – Интегрирование иррациональных функций 163
Интеграл∫
t+1t2−t−1
можем найти разложением дроби на сумму элемен-тарных дробей. Однако, проще сделать подстановку
1
2(t2 − t− 1)′ = z, откуда t = z +
1
2и dt = dz.
Дальнейший ход решения следующий:
I = 2t + 2
∫z + 3
2
z2 − 54
dz = 2t +
∫d(z2 − 5
4)
z2 − 54
+ 3
∫dz
z2 − 54
=
= t+ ln
∣∣∣∣z2 − 5
4
∣∣∣∣+
3√5
ln
∣∣∣∣∣
z −√
52
z +√
52
∣∣∣∣∣+ C = t+ ln |t2 − t− 1|+
3√5
ln
∣∣∣∣∣
t− 12−
√5
2
t− 12
+√
52
∣∣∣∣∣+ C =
=√x+ 1 + ln |x−
√x+ 1| + 3√
5ln
∣∣∣∣∣
2√x+ 1 − 1 −
√5
2√x+ 1 − 1 +
√5
∣∣∣∣∣+ C.
46.2. Интегралы вида∫R(x; n
√ax+bcx+d
)dx. Эти интегралы приводят-
ся к интегралам от рациональной функции подстановкой:
(46.2)ax + b
cx + d= tn.
Пример 46.2. Вычислить интеграл: I =∫x√
x−1x+2
dx;
Р е ш е н и е: Пусть
x− 1
x + 2= t2, тогда
√
x− 1
x + 2= t, x =
1 + t2
1 − t2и dx =
4t
(1 − t2)2dt.
Поэтому
I =
∫1 − t2
1 + t2t
4t
(1 − t2)2dt = −4
∫t2dt
(t− 1)(t+ 1)(t2 + 1).
Раскладываем подынтегральную функцию на элементарные дроби:
t2
(t− 1)(t + 1)(t2 + 1)=
A
t− 1+
B
t+ 1+Mt+N
t2 + 1⇒
⇒ t2 = A(t+ 1)(t2 + 1) + B(t− 1)(t2 + 1) + (Mt+N)(t2 − 1).

164 46 Лекция – Интегрирование иррациональных функций
Находим коэффициенты этого разложения, пользуюсь и методом неопре-деленных коэффициентов, и методом произвольных значений.
t = 1 : =⇒ 4A = 1 =⇒ A = 14,
t = −1 : =⇒ −4B = 1 =⇒ B = −14,
t3 : =⇒ A+B +M = 0 =⇒ M = 0,
свободные члены: =⇒ A− B −N = 0 =⇒ N = 12.
Поэтому:
I = −4
∫ ( 14
t− 1−
14
t+ 1+
12
t2 + 1
)
dt =
= − ln |t− 1| + ln |t+ 1| + 1
2arctg t+ C.
Вернувшись к исходной переменной, получим:
I = ln
(√
x− 1
x+ 2+ 1
)
− ln
∣∣∣∣∣
√
x− 1
x + 2− 1
∣∣∣∣∣− 1
2arctg
√
x− 1
x + 2+ C.
Если в подынтегральное выражение входят корни из одного и того жевыражения разных степеней, т.е. для интегралов вида
∫
R
(
x,m
√
ax + b
cx+ d,
n
√
ax + b
cx + d, · · · k
√
ax + b
cx+ d
)
dx
применяется подстановка, рационализирующая подынтегральную функ-цию:
(46.3)ax+ b
cx+ d= tp,
где p - наименьшее общее кратное показателей корней m, n, · · · , k.Пример 46.3. Найти интеграл
∫dx
3√x+ 1 − 4
√x+ 1
.
Р е ш е н и е:Так как выражение x+1 входит в корни 3 и 4 степеней, а наименьшим
общим кратным этих чисел является 12, то положим:
x+ 1 = t12 =⇒ x = t12 − 1, dx = 12t11dt, 3√x+ 1 = t4, 4
√x + 1 = t3.
Тогда интеграл примет вид:
12
∫t11 dt
t4 − t3= 12
∫t8 dt
t− 1.

46 Лекция – Интегрирование иррациональных функций 165
Это – интеграл от рациональной дроби. Так как дробь неправильная,разделим числитель на знаменатель, находим:
12
∫t8 dt
t− 1=
= 12
∫ (
t7 + t6 + t5 + t4 + t3 + t2 + t+ 1 +1
t− 1
)
dt =
= 12
(t8
8+t7
7+t6
6+t5
5+t4
4+t3
3+t2
2+ t+ ln |t− 1|
)
+ C.
Сделав обратную подстановку t = 12√x+ 1 окончательно получим:
I = 12(3√
(x+ 1)2
8+
12√
(x+ 1)7
7+
√x+ 1
6+
12√
(x+ 1)5
5+
+3√x+ 1
4+
4√x+ 1
3+
6√x + 1
2+ 12
√x+ 1 + ln | 12
√x+ 1 − 1|) + C.
46.3. Интегралы вида∫R(x;
√Ax2 + Bx+ C)dx. После подстанов-
ки12(Ax2+Bx+C)′ = t такие интегралы сводятся к интегралам, содержащим
корни вида:
(46.4)√a2 − t2,
√t2 − a2,
√a2 + t2.
Если интеграл не является табличным, то интегралы, содержащие кор-ни вида (46.4), рационализируются подстановками:
√a2 − t2 =⇒ t = a sin z или t = a cos z,
√t2 − a2 =⇒ t =
a
sin zили t =
a
cos z,
√a2 + t2 =⇒ t = a tg z или t = a ctg z.
Пример 46.4. Вычислить интеграл: I =∫ √
x2+2x−3(x+1)3
dx;
Р е ш е н и е: После подстановки:1
2(x2 + 2x− 3)′ = t или x+ 1 = t, x = t− 1, dx = dt
интеграл запишется в виде:
I =
∫ √
(t− 1)2 + 2(t− 1) − 3
t3dt =
∫ √t2 − 4
t3dt.
Далее положим
t =2
cos z, тогда
√t2 − 4 = 2 tg z, dt =
2 sin z
cos2 zdz.
166 46 Лекция – Интегрирование иррациональных функций
Таким образом:
I =
∫ √t2 − 4
t3dt =
∫2 tg z
( 2cos z
)3
2 sin z
cos2 zdz =
1
2
∫
sin2 zdz =
=1
4
∫
(1 − cos 2z)dz =1
4
(
z − sin 2z
2
)
+ C =1
4(z − sin z cos z) + C.
Так как
t =2
cos z, то cos z =
2
t, z = arccos
2
t,
sin z =√
1 − cos2 z =
√t2 − 4
t.
Поэтому
I =1
4
(
arccos2
t− 2
√t2 − 4
t2
)
+ C =
=1
4
(
arccos2
x+ 1− 2
√x2 + 2x− 3
(x− 1)2
)
+ C.
Отметим, что интегралы с корнями вида (46.4) иногда можно взятьпо частям (см. пример 43.15).
Пример 46.5. Вычислить интеграл: I =∫
dx(√
5+2x+x2)3;
Р е ш е н и е:
I =
∫dx
√
(5 + 2x + x2)3=
∣∣∣∣
12(x2 + 2x+ 5)′ = t dx = dtx+ 2 = t x = t− 2
∣∣∣∣=
=
∫dt
√
(t2 + 4)3=
∣∣∣∣
t = 2 tg z dt = dzcos2 z√
t2 + 4 = 2cos z
∣∣∣∣=
1
4
∫
cos zdz =
=1
4sin z + C =
1
4sin arctg
t
2+ C =
1
4
z2
√z2
4+ 1
+ C =
=x+ 1
4√
5 + 2x+ x2+ C.
46.4. Интегралы вида∫
dxx√ax2+bx+c
. К таким интегралам можно бы-ло бы применить методику п. 46.3, но однако целесообразнее оказываетсяподстановка
(46.5) x =1
t, dx = −dt
t2.

46 Лекция – Интегрирование иррациональных функций 167
Пример 46.6. Найти интеграл: I =∫
dxx√
5x2−2x+1;
Р е ш е н и е: Применив подстановку (46.5)получим:
I =−dtt2
1t
√5t2− 2
t+ 1
= −∫
dt√t2 − 2t+ 5
= −∫
d(t− 1)√
(t− 1)2 + 4=
= − ln |t− 1 +√t2 + 2t + 5| + C = − ln
∣∣∣∣∣
1
x− 1 +
√
1
x2+
2
x+ 5
∣∣∣∣∣+ C.
46.5. Интегралы от дифференциальных биномов. Так называ-ются интегралы вида:
(46.6)∫
xm(a+ bxn)p dx,
где m,n и p – любые рациональные числа.Доказано, что только в трех случаях этот интеграл может быть выра-
жен через элементарные функции.1)p – натуральное число. В этом случае двухчлен a + bxn возводится
в степень p и после умножения на xm почленно интегрируется.2)m+1
n– целое число В этом случае применяется подстановка a+bxn =
= ts, где s – знаменатель дроби p.3)m+1
n+p – целое число В этом случае применяется подстановка ax−n+
+ b = ts, где s – знаменатель дроби p.
Пример 46.7. Найти интеграл∫
3√
1 + 4√x√
xdx.
Р е ш е н и е: Перепишем интеграл в виде:
I =
∫
x−1/2(1 + x1/4
)1/3dx.
Здесь
m = −1
2, n =
1
4, p =
1
3=⇒ m+ 1
n= 2 − целое число.
Делаем подстановку:
1 + x1/4 = t3 =⇒ t =3√
1 + x1/4 =⇒x1/4 = t3 − 1 =⇒ x = (t3 − 1)4 =⇒ x−1/2 =
((t3 − 1)4
)−1/2=
=1
(t3 − 1)2=⇒ dx = 4(t3 − 1)33t2dt = 12(t3 − 1)3t2dt

168 46 Лекция – Интегрирование иррациональных функций
Поэтому
I =
∫t · 12(t3 − 1)3t2dt
(t3 − 1)2= 12
∫
t3(t3 − 1)dt =
= 12
∫
(t6 − t3)dt = 12t4(t3
7− 1
4
)
+ C.
Для возвращения к исходной переменной, воспользовавшись равен-ством
t =3
√
1 + 4√x,
получим
I = 12(1 + 4√x)
3
√
1 + 4√x
(1 + 4
√x
7− 1
4
)
+ C.
46.6. Определение аналитической функции по ее действитель-ной или мнимой части. В лекции 42 было установлено, что для того,чтобы функция двух переменных была бы действительной или мнимойчастью аналитической функции, она должна быть гармонической, т.е.удовлетворять уравнению Лапласа (42.3), (42.4).
Пусть функция u = u(x; y) удовлетворяет этим условиям и являетсядействительной частью аналитической функции u = Ref(z), где f(z) == u(x; y) + iv(x; y). Требуется найти мнимую часть этой функции v == v(x; y) = Imf(z), следовательно, и функцию f(z).
Из 1ого условия Коши-Римана (42.1)∂v
∂y=∂u
∂x⇒ v =
∫ ∂u
∂xdy + ϕ(x),
где ϕ(x) произвольная функция x.2ое условие Коши-Римана дает нам соответствие
∂v
∂x=
(∫ ∂u
∂xdx
)′
x
+ ϕ′(x) = −∂u∂y
, из которого находится ϕ′(x), а затем
ϕ(x) = −∫((∫ ∂u
∂xdx
)′
x
+∂u
∂y
)
dx+ C.
Подставляя полученное выражение ϕ(x) в v(x) найдем, что
v = Imf(z) =∫ ∂u
∂xdx+ ϕ(x).
Аналогично может быть рассмотрена задача об определении аналити-ческой функции при задании ее мнимой части.
Пример 46.8. По функции u(x; y) = x3 − 3xy2, являющейся действи-тельной частью аналитической функции f(z) найти ее мнимую частьи функцию f(z) при условии, что f(0) = 0.

46 Лекция – Интегрирование иррациональных функций 169
Р е ш е н и е: В примере 42.5 было показано, что функция u(x; y) = x3−− 3xy2 является гармонической, поэтому она может быть действительной
частью аналитической функции u(x; y) = x3 − 3xy2 = Ref(z) ⇒ ∂v
∂y=
=∂u
∂x= 3x2 − 3y2 ⇒ v(x; y) = 3
∫(x2 − y2)dy + ϕ(x) = 3x2y − y3 + ϕ(x),
∂v
∂x= 6xy + ϕ′(x) = −∂u
∂y= 6xy ⇒ ϕ′(x) = 0 ⇒ ϕ(x) = C.
Итак v(x; y) = Imf(z) = 3x2y − y3 + C, а f(z) = x3 − 3xy2 + i(3x2y −− y3 +C). Константу C находим из начального условия f(0) = 0, так какz = x + iy = 0 ⇒ x = y = 0 и f(0) = 0 + iC = 0 ⇒ C = 0. Окончательноимеем f(z) = x3 − 3xy2 + i(3x2y − y3).
46.7. Заключительные замечания об интегрировании. Инте-грирование – операция не только сложнее, в общем случае, чем диффе-ренцирование, но в отличие от нее не имеет четкого алгоритма.
Вся трудность интегрального исчисления заключается в невозмож-ности сразу сказать, выражается ли первообразная через элементарныефункции или нет
Какими бы простыми не казались на первый взгляд интегралы, на-пример,
∫
ex2
dx,
∫sinx
xdx,
∫ √x cosx dx
выразить их через элементарные функции невозможно.Для нахождения ряда интегралов существуют различные способы.
Пример 46.9. Найти интеграл I =
∫
sinx cosx dx.
Р е ш е н и е: Найдем этот интеграл тремя способами, внеся под знакдифференциала сначала sinx, затем cosx, и, наконец число 2.
I =
∫
sin xd(sinx) =1
2sin2 x+ C,
I = −∫
cos xd(cosx) = −1
2cos2 x+ C,
I =1
2
∫
sin 2xdx =1
4
∫
sin 2xd(2x) = −1
4cos 2x + C.
Замечание 46.21. Может показаться, что решение последнего при-мера противоречит теореме 43.2. Но из тригонометрических формул
170 46 Практическое занятие – Иррациональности
следует, что функции
1
2sin2 x, −1
2cos2 x и − 1
4cos 2x
отличаются друг от друга на постоянные величины.
Мы ознакомились только с небольшим числом приемов интегрирова-ния функций. Тем не менее, они позволяют интегрировать довольно ши-рокие классы элементарных функций.
Но и к нахождению таких интегралов необходимо подходить творче-ски. Так для нахождения, например, интеграла
∫ −6x2 − 5x + 8
x3 + 2x2 − 1dx
из примера 44.4 требуется произвести большой объем вычислений.Интеграл же
∫3x2 + 4x
x3 + 2x2 − 1dx = ln |x3 + 2x2 − 1| + C
на первый взгляд такой же трудоемкий берется значительно проще, таккак числитель подынтегральной функции равен производной знаменате-ля. Внеся числитель под знак дифференциала, применяем формулу 2 та-блицы интегралов (п.43.4).
В нашей таблице интегралов 11 формул. А в таблицах интегралов,сумм, рядов и произведений (авторы И.С.Рыжик и И.М.Градштейн, На-ука, 1971) около пяти тысяч интегралов.
На практике достаточно сложные интегралы не вычисляют, а ищут вболее или менее подробной таблице интегралов, или в соответствующейпрограмме на компьютере.
46. практическое занятие —интегрирование иррациональностей
Пример 46.1. Найти интеграл I =∫ 3√x−2
3√
(x−2)2−√x−2
dx.
Р е ш е н и е:
I = |x− 2 = t6, dx = 6t5 dt| =
∫t2
t4 − t36t5 dt =
= 6
∫t4
t− 1dt = 6
∫ (
t3 + t2 + t + 1 +1
t− 1
)
dt =

46 Практическое занятие – Иррациональности 171
= 6
(t4
4+t3
3+t2
2+ t+ ln |t− 1|
)
+ C =
= 6
(3√
(x− 2)2
4+
√x− 2
3+
3√x− 2
2+
+ 6√x− 2 + ln | 6
√x− 2 − 1|
)+ C.
Замечание 46.22. Если в последнем интеграле поменять местамичислитель и знаменатель, то кроме аналогичного, можно рекомендо-вать более простой способ вычисления интеграла. Достаточно почленноразделить числитель на знаменатель:
I =
∫3√
(x− 2)2 −√x− 2
3√x− 2
dx =
∫((x− 2)1/3−
−(x− 2)1/6)d(x− 2) =
3
4(x− 2)4/3 − 6
7(x− 2)7/6 + C.
Такой же прием для рационализации подынтегральной функции при-меняется, если последняя содержит дробь ax+b
cx+dв разных степенях.
Пример 46.2. Найти интеграл I =∫ √
5−3x4+7x
dx.
Р е ш е н и е: Подстановка 5−3x4+7x
= t2 приводит к интегрированиюрациональной функции. Из указанной подстановки определим x и dx:
5 − 3x = t2(4 + 7x) ⇒ x =5 − 4t2
7t2 + 3⇒
⇒ dx =−8t(7t2 + 3) − 14t(5 − 4t2)
(7t2 + 3)2dt =
−94t
(7t2 + 3)2dt.
Поэтому
I =
∫
t−94t
(7t2 + 3)2dt = −94
∫t2 dt
(7t2 + 3)2=
= −94 ·(
1
7
)2 ∫ t2 + 37− 3
7
(t2 + 37)2
dt =
= −94 · 1
49
(∫dt
t2 + 37
− 3
7
∫dt
(t2 + 37)2
)
.

172 46 Практическое занятие – Иррациональности
Первый интеграл табличный, второй – от дроби 4-ого типа:
I =
∫dt
(t2 + 37)2
=7
3
(1
2
∫dt
t2 + 37
+t
2(t2 + 37)
)
.
Взяв этот, а значит и предыдущий, после возвращения к исходнойпеременной, получим окончательно
I =
√
(5 − 3x)(4 + 7x)
7− 47
√21
147arctg
(√
7
3
√
5 − 3x
4 + 7x
)
+ C.
Пример 46.3. Найти интеграл I =∫
dx3√
(x−1)2(x+2).
Р е ш е н и е: Этот интеграл можно свести к рассматриваемому типу,например:
3√
(x− 1)2(x + 2) =√
(x−12)(x+2)2
(x+ 2)3 = (x+ 2) 3
√(x−1x+2
)2.
Поэтому
I =
∫dx
(x+ 2) 3
√(x−1x+2
)2=
∣∣∣∣
x− 1
x+ 2= t3,
x =2t3 + 1
1 − t3, dx =
9t2 dt
(1 − t3)2
∣∣∣∣= 3
∫dt
1 − t3.
Так как
1
1 − t3=
1
(1 − t)(t2 + t+ 1)=
A
1 − t+
Bt + C
t2 + t+ 1,
где A = B =1
3, C =
2
3, то
I = − ln |1 − t| + 1
2ln(t2 + t+ 1) +
√3 arctg
2t + 1√3
+ C.
Вернувшись к исходной переменной, окончательно получим
I = −1
2ln
(3√x+ 2 − 3
√x− 1
3
)3
+√
3 arctg2 3√x− 1 + 3
√x+ 2√
3 3√x+ 2
+ C.
В следующих примерах мы не рационализируем подынтегральные функ-ции, a сводим интегралы к табличным.
Пример 46.4. Найти интеграл I =∫
dx√2x2+3x+7
.

46 Практическое занятие – Иррациональности 173
Р е ш е н и е:
I =
(1
2(2x2 + 3x+ 7)′ = t, 2x +
3
2= t, x =
t− 32
2, dx =
1
2dt
)
=
=1√2
∫dt
√
t2 + 4716
=1√2
ln
∣∣∣∣∣t+
√
t2 +47
16
∣∣∣∣∣+ C =
=1√2
ln∣∣∣4x+ 3 + 2
√4x2 + 6x + 14
∣∣∣+ C.
Пример 46.5. Найти интеграл I =∫
3x−7√5x2+8x+1
dx.
Р е ш е н и е:
I =
∣∣∣∣
1
2(5x2 + 8x+ 1)′ = t, 5x + 4 = t, x =
t− 4
5, dx = dt
∣∣∣∣=
=
∫ 35(t− 4) − 7
√
5(t−45
)2+ 8
5(t− 4) + 1
dt =
=3
2√
5
∫d(t2 − 11)√t2 − 11
− 7√
5
∫dt√
t2 − 11=
=3√5
√t2 − 11 − 7
√5 ln |t +
√t2 − 11| + C =
=3
5
√5x2 + 8x + 1 − 47
5√
5ln |10x + 8 + 2
√
5(5x2 + 8x+ 1)| + C.
Интегралы∫
dx(x+d)
√ax2+bx+c
сводятся к рассмотренным выше подста-
новкой x+ d = 1t.
Пример 46.6. Найти интеграл I =∫
dxx√x2+3
.
Р е ш е н и е:
I =
∣∣∣∣x =
1
t, dx = − dt
t2
∣∣∣∣=
∫ − dt/t2√3t2 + 1/t2
=
= −∫
dt√3t2 + 1
= − 1√3
∫d(√
3t)√
(√
3t)2 + 1=
= − 1√3
ln |√
3t+√
3t2 + 1| + C = − 1√3
ln
∣∣∣∣∣
√3
x+
√x2 + 3
x
∣∣∣∣∣+ C.

174 46 Практическое занятие – Иррациональности
Пример 46.7. Найти интеграл I =∫
dxx2
√7−x2 .
Р е ш е н и е:
I =
∣∣∣∣x =
1
t, dx = − dt
t2
∣∣∣∣=
∫ − dt/t2√7t2 − 1/t3
= −∫
t dt√7t2 − 1
=
=1
14
∫d(7t2 − 1)√
7t2 − 1= − 1
142√
7t2 − 1 + C = −1
7
√
7
x2− 1 + C.
В заключение данного занятия найдем интеграл с помощью тригоно-метрической подстановки.
Пример 46.8. Найти интеграл I =∫
dx(x2+9)
√x2+9
.
Р е ш е н и е: Положим x = 3 tg t, тогда
dx =3dt
cos2 tи x2 + 9 = 9(tg2 t+ 1) =
9
cos2 t.
Поэтому
I =
∫3 dt/ cos2 t
27/ cos3 t=
1
9
∫
cos t dt =1
9sin t+ C.
Найдем sin t через x:
x = 3 tg t ⇒ tg t =x
3⇒ sin t = tg t · cos t =
=tg t
√
1 + tg2 t=
x/3√
1 + (x/3)2=
x√9 + x2
.
Поэтому окончательно
I =x
9√
9 + x2+ C.
Самостоятельная работа
Пример 46.9. Найти интеграл I =∫ 6
√x dx
x( 3√x+ 4
√x).
Пример 46.10. Найти интеграл I =∫ √
3−4x9−5x
dx.
Пример 46.11. Найти интеграл I =∫
dx3√
(x+1)2(x−2)4.
Пример 46.12. Найти интеграл I =∫
dx√11+5x+6x2 .
47 Лекция – Определенный интеграл 175
Пример 46.13. Найти интеграл I =∫
2x+5√7+8x−11x2 dx.
Пример 46.14. Найти интеграл I =∫
dxx√
2x2−1.
Пример 46.15. Найти интеграл I =∫
dxx2
√15+3x2 .
Пример 46.16. Найти интеграл I =∫
dx(x2−5)
√x2−5
.
Пример 46.17. Найти интеграл I =∫ √
x(3 + 4x3)dx.
47. лекция – определенный интеграл
Определенный интеграл. Свойства, теорема существования. Про-изводная по переменной верхней границе. Формула Ньютона-Лейбница. Замена переменной и интегрирование по частям в опре-деленном интеграле. Физический и геометрический смысл опреде-ленного интеграла.
47.1. Определенный интеграл. Пусть на отрезке [a; b] дана непре-рывная функция y = f(x).
Проделаем следующие действия:1. Отрезок [a; b] разделим на n частей произвольным образом. Каж-
дый такой отрезок назовем частичным. Если обозначить точки деленияотрезка
xo = a < x1 < x2 < . . . < xn = b,
то длина частичного отрезка
∆xi = xi − xi−1.
2. На каждом частичном отрезке выберем произвольную точку ξi, т.е.ξi ∈ [xi−1; xi].
3. Вычислим значение функции f(x) в этой произвольно выбраннойточке f(ξi), умножим полученное значение на длину соответствующегочастичного отрезка f(ξi)∆xi и составим сумму всех таких произведений,которую обозначим
(47.1)n∑
i=1
f(ξi)∆xi.
Эта сумма называется интегральной суммой для функции f(x) на от-резке [a; b]. Очевидно для функции f(x) на отрезке [a; b] можно составитьбесчисленное множество интегральных сумм.
176 47 Лекция – Определенный интеграл
4. Найдем предел интегральной суммы (47.1) при условии, что числочастичных отрезков неограниченно возрастает и каждый из них стягива-ется в точку.
Обозначим через λ длину наибольшего из частичных отрезков.
Определение 47.1. Предел интегральной суммы (47.1)
limλ→0
(n→∞)
n∑
i=1
f(ξi)∆xi
при условии, что λ → 0 (и, следовательно, при n → ∞), если он суще-ствует и не зависит ни от способа деления отрезка [a; b], ни от спосо-ба выбора внутренних точек ξi, называется определенным интегралом
функции f(x) на отрезке [a; b] и обозначается символомb∫
a
f(x) dx.
Таким образом,
(47.2) limλ→0
(n→∞)
n∑
i=1
f(ξi)∆xi =
b∫
a
f(x) dx.
Функция f(x) в этом случае называется интегрируемой на отрезке[a; b].
Возникает естественный вопрос: при каких условиях существует пре-дел (47.1). Отвечает на него следущая теорема, которую мы принимаембез доказательства.
Теорема 47.1. (Существования определенного интеграла.) Если функ-ция f(x) непрерывна на отрезке [a; b], то существует определенный ин-
тегралb∫
a
f(x) dx, т.е. существует предел (47.1), не зависящий ни от
способа разбиения отрезка, ни от способа выбора внутренних точек.
В символеb∫
a
f(x) dx:
a, b – нижний и верхний пределы (границы) интегрирования,f(x) – подынтегральная функция,f(x) dx – подынтегральное выражение.Отрезок [a; b] называется отрезком (областью) интегрирования.Отметим, что каждое слагаемое f(ξi)∆xi есть величина бесконечно
малая. Так как их число неограниченно возрастает можем сказать, чтоопределенный интеграл есть предел бесконечно большого числа бесконечномалых слагаемых.

47 Лекция – Определенный интеграл 177
47.2. Свойства определенного интеграла. Рассмотрим исходя изопределения интеграла (47.1) его простейшие свойства.
1. Постоянный множитель можно вынести за знак определенного ин-теграла, т.е. если k – число, то
b∫
a
kf(x) dx = k
b∫
a
f(x) dx.
Действительно,
b∫
a
kf(x) dx = limλ→0
n∑
i=1
kf(ξi)∆xi =
= limλ→0
(
kn∑
i=1
f(ξi)∆xi
)
= k limλ→0
n∑
i=1
f(ξi)∆xi = k
b∫
a
f(x) dx.
При доказательстве этого свойства мы воспользовались тем, что по-стоянный множитель можно выносить как за знак суммы, так и за знакпредела.
2. Определенный интеграл от суммы двух функций равен сумме опре-деленных интегралов от слагаемых.
b∫
a
(f(x) ± ϕ(x)) dx.
Доказательство анологично предыдущему.Это свойство легко обобщается на случай не двух, а любого конечного
числа слагаемых.3. Если в определенном интеграле поменять местами пределы инте-
грирования, то он изменит знак, т.е.
(47.3)
b∫
a
f(x) dx = −a∫
b
f(x) dx.
Справедливость этого свойства вытекает из того очевидного факта,что если точки деления брать одни и те же, то в интегральных суммах,соответствующих интегралам в обеих частях равенства (47.3) ∆xi будутравны по величине и противоположны по знаку.

178 47 Лекция – Определенный интеграл
Возьмем интеграл, у которого пределы одинаковы и поменяем их ме-стами:
a∫
a
f(x) dx = −a∫
a
f(x) dx.
Числа, отличающиеся знаком равны, если они равны нулю. Поэтому
a∫
a
f(x) dx = 0.
4. Если отрезок интегрирования [a; b] точкой c разбить на две части[a; c] и [c; b], то
(47.4)
b∫
a
f(x) dx =
c∫
a
f(x) dx+
b∫
c
f(x) dx.
Предположим сначала, что c ∈ (a; b).Предел интегральной суммы не зависит от способа разбиения отрезка
[a; b] на частичные отрезки.Это позволяет при составлении каждой интегральной суммы вклю-
чать точку c в число точек разбиения. Пусть c = xm. Тогда интегральнаясумма может быть разбита на две:
n∑
i=1
f(ξi)∆xi =
m∑
i=1
f(ξi)∆xi +
n∑
i=m+1
f(ξi)∆xi.
Переходя в этом равенстве к пределу при λ → 0 (n → ∞), получимформулу (47.4).
Положим теперь, что c /∈ (a; b), например c > b. Но тогда мы можемсчитать, что точка b делит внутренним образом отрезок [a; c] на отрезки[a; b] и [b; c].
Тогда
c∫
a
f(x) dx =
b∫
a
f(x) dx+
c∫
b
f(x) dx, откуда
b∫
a
f(x) dx =
c∫
a
f(x) dx−c∫
b
f(x) dx.

47 Лекция – Определенный интеграл 179
Но на основании формулы (47.3)
c∫
b
f(x) dx = −b∫
c
f(x) dx.
Поэтому и при “внешнем” делении отрезка [a; b] получим формулу(47.4).
Это свойство легко распространить на случай и большего числа точекделения отрезка [a; b].
5. Если на отрезке [a; b]
(47.5) f(x) > 0,
тоb∫
a
f(x) dx > 0.
Действительно, так как f(ξi) > 0 и ∆xi > 0 для любых i, то инте-
гральная суммаn∑
i=1
f(ξi)∆xi > 0.
Поэтому и предел интегральной суммы при λ→ 0, т.е.b∫
a
f(x) dx также
неотрицателен.Если же при условии (47.5) непрерывная функция f(x) > 0 хотя бы в
одной точке отрезка [a; b], то
b∫
a
f(x) dx > 0.
Действительно, пусть непрерывная функция f(x) > 0 везде на [a; b],но в какой-то точке d ∈ (a; b) f(x) > 0. Но в силу непрерывности онаположительна на каком-то отрезке [α; β], содержащем d.
Разобъем отрезок [a; b] двумя точками α и β (α < d < β) на триотрезка. Тогда
b∫
a
f(x) dx =
α∫
a
f(x) dx+
β∫
α
f(x) dx+
b∫
β
f(x) dx.
Очевидно в правой части последнего равенства первый и третий ин-тегралы неотрицательны, а второй положителен.
Имеет место аналогичное свойство для случая, когда на отрезке [a; b]f(x)6 0.

180 47 Лекция – Определенный интеграл
6. Если на отрезке [a; b] две функции f(x) и ϕ(x) удоволетворяют нера-венству f(x) > ϕ(x), то
b∫
a
f(x) dx >
b∫
a
ϕ(x) dx.
Иными словами, неравенство можно почленно интегрировать.В самом деле, разность f(x) − ϕ(x) > 0, поэтому согласно свойству 5
b∫
a
(f(x) − ϕ(x)) dx > 0.
Откудаb∫
a
f(x) dx−b∫
a
ϕ(x) dx > 0 и
b∫
a
f(x) dx >
b∫
a
ϕ(x) dx.
7. Если f(x) – непрерывная на отрезке [a; b] функция, то на отрезке[a; b] существует хотя бы одна такая точка ξ, что
b∫
a
f(x) dx = f(ξ)(b− a).
Обозначим черезm иM соответственно наименьшее и наибольшее зна-чения функции f(x) на отрезке [a; b], т.е. для любого x ∈ [a; b] справедливонеравенство
m 6 f(x) 6 M.
Применяя свойство 6, получим
m
b∫
a
dx 6
b∫
a
f(x) dx 6 M
b∫
a
dx.
Ноb∫
a
dx = b− a, т.к. для f(x) = 1
n∑
i=1
f(ξi)∆xi =n∑
i=1
1 · ∆xi = b− a.

47 Лекция – Определенный интеграл 181
Поэтому
m 6
b∫
a
f(x) dx
b− a6 M.
Введя обозначение
bR
af(x) dx
b−a = µ, получим m 6 µ 6 M .Число µ лежит между m и M . Так как непрерывная на отрезке [a; b]
функция f(x) принимает все промежуточные значения между наимень-шим m и наибольшим M значениями, то найдется такое число ξ ∈ [a; b],для которого f(ξ) = µ, откуда
b∫
a
f(x) dx
b− a= f(ξ) и
b∫
a
f(x) dx = f(ξ)(b− a).
Итак, определенный интеграл от непрерывной функции равен значе-нию подынтегральной функции в некоторой внутренней точке, умножен-ному на длину отрезка интегрирования. Это значение называется средниминтегральным значением функции на отрезке [a; b].
Вычисление определенного интеграла как предела интегральной сум-мы имеет только теоретическое значение, почти никогда на деле не при-менямое.
Получить правило вычисления определенного интеграла, имеющее прак-тическую ценность, мы сможем очень скоро после ознакомления с двумятеоремами.
47.3. Производная интеграла по переменной верхней грани-це. Пусть f(x) – непрерывная на отрезке [a; b] функция. Рассмотрим ин-теграл
b∫
a
f(x) dx.
Закрепим нижнюю границу a и будем изменять верхнюю границу, то-гда интеграл будет функцией своей верхней границы. Чтобы подчеркнуть,что верхняя граница переменная, обозначим ее через x вместо b.
Переменную интегрирования, чтобы не смешивать ее с верхней гра-ницей обозначим через t. Таким образом интеграл с переменной верхней

182 47 Лекция – Определенный интеграл
границей является функцией x:
(47.6) I(x) =
x∫
a
f(t) dt.
Для этой функции имеет место следущая теорема.
Теорема 47.2. Производная интеграла по переменной верхней грани-це равна подынтегральной функции, в которой переменная интегрирова-ния заменена верхней границей, т.е.
(47.7)
x∫
a
f(t) dt
′
= f(x).
Доказательство. Найдем производную функции (47.6), исходя из опре-деления (см. часть 1, стр. 175, п. 13.2).
Дадим x приращение ∆x, тогда:
I(x + ∆x) =
x+∆x∫
a
f(t) dt.
Следовательно, приращение функции I(x) равно:
(47.8) ∆I =
x+∆x∫
a
f(t) dt−x∫
a
f(t) dt.
Разделим отрезок [a; x+∆x] точкой x на два отрезка [a; x] и [x; x+∆x].Поэтому на основании свойства 4 определенного интеграла:
(47.9)
x+∆x∫
a
f(t) dt =
x∫
a
f(t) dt+
x+∆x∫
x
f(t) dt.
Тогда на основание формулы (47.9) соотношение (47.8) примет вид
(47.10) ∆I =
x+∆x∫
x
f(t) dt.
Применим к интегралу в правой части (47.10) теорему о среднем зна-чении, тогда
∆I = f(ξ)∆x, где ξ ∈ [x; x+ ∆x].
47 Лекция – Определенный интеграл 183
Разделим обе части последнего равенства на ∆x:
(47.11)∆I
∆x= f(ξ), ξ ∈ [x; x+ ∆x].
Перейдя в равенстве (47.11) к пределу при ∆x→ 0, получим искомуюформулу (47.7).
Доказанная теорема является одной из основных теорем математиче-ского анализа. Ее смысл в том, что интеграл с переменной верхней гра-ницей есть одна из первообразных подынтегральной функции.
47.4. Формула Ньютона-Лейбница. В предыдущем пункте мы уста-новили, что функция
I(x) =
x∫
a
f(t) dt
является первообразной для непрерывной подынтегральной функциии f(x).Известно, что все первообразные функции отличаются друг от друга
постоянным слагаемым. Поэтому, если F (x) – другая первообразная дляf(x), то I(x) = F (x) + C или
(47.12)
x∫
a
f(t) dt = F (x) + C.
Подставим в эту формулу x = a и учитывая, чтоa∫
a
f(t) dt = 0, получим
F (a) + C = 0 или C = −F (a).
Подставив это значение C в (47.12) и положив x = b, найдем
(47.13)
b∫
a
f(t) dt = F (b) − F (a).
Эта формула Ньютона–Лейбница. Из нее следует, чтоОпределенный интеграл – это приращение первообразной функции f(x)
на отрезке [a; b].Вследствие этой формулы, определенный интеграл и вычисляется как
приращение первообразной, а не как предел интегральной суммы.
184 47 Лекция – Определенный интеграл
Пример 47.1. Вычислить интеграл
I =
π/2∫
0
sin x dx.
Р е ш е н и е: I = − cos x|π/20 = − cos(π2
)+ cos 0 = 1.
47.5. Замена переменной в определенном интеграле. Предпо-ложим, что нужно вычислить определенный интеграл
b∫
a
f(x) dx, где
f(x) – непрерывная на отрезке [a; b] функция. Перейдем от переменной xк переменной t, положив:
(47.14) x = ϕ(t).
Пусть:
ϕ(α) = a,
ϕ(β) = b.
Предположим, кроме того, что1. Функция ϕ(t) и ее производная ϕ′(t) непрерывны на отрезке [α; β];2. При изменении t от α до β значения функции ϕ(t) не выходят за
пределы отрезка a 6 x 6 b.При выполнении этих условий имеет место следующая формула заме-
ны переменной в определенном интеграле:
(47.15)
b∫
a
f(x) dx =
β∫
α
f(ϕ(t))ϕ′(t) dt
В самом деле, пусть F (x) – первообразная для функции f(x), т.е.F ′(x) = f(x). Тогда по формуле Ньютона-Лейбница:
(47.16)
b∫
a
f(x) dx = F (b) − F (a).
Если в первообразной F (x) положить x = ϕ(t), то функция F (ϕ(t)) бу-дет первообразной для подынтегральной функции преобразованного ин-теграла
f(ϕ(t))ϕ′(t).

47 Лекция – Определенный интеграл 185
В самом деле, применяя правило дифференцирования сложной функ-ции, получим:
(ϕ′(t))t = (F (x))′t = F ′x · x′t = f(x) · ϕ′(t) = f(ϕ(t))ϕ′(t).
Поэтому по формуле Ньютона-Лейбница
(47.17)
β∫
α
f(ϕ(t))ϕ′(t) dt = F (ϕ(β)) − F (ϕ(α)) = F (b) − F (a)
Равенство правых частей формул (47.16) и (47.17) и доказывает спра-ведливость формулы (47.15).
Рассмотрим два примера.
Пример 47.2. Вычислить интеграл I =1∫
0
dx√x2+4x+20
.
Р е ш е н и е: I =1∫
0
dx√x2+4x+20
=
=
∣∣∣∣
12(x2 + 4x + 20)′ = t, x+ 2 = t,α = a+ 2 = 2, β = b+ 2 = 3
∣∣∣∣=
=3∫
2
dt√t2+16
= ln∣∣t+
√t2 + 16
∣∣ |32 = ln 8 − ln(2 +
√20) = ln 8
2+√
20.
Пример 47.3. Вычислить интеграл I =a∫
0
√a2 − x2 dx.
Р е ш е н и е: I =
∣∣∣∣
x = a sin t, x = 0 ⇒ t = 0dx = a cos t dt, x = a ⇒ t = π/2
∣∣∣∣=
=π/2∫
0
√
a2 − a2 sin2 ta cos t dt = a2π/2∫
0
cos2 t dt = a2
2
π/2∫
0
(1 + cos 2t) dt =
a2
2
(t+ sin 2t
2
)|π/20 = πa2
4.
47.6. Интегрирование по частям в определенном интеграле.Пусть u(x) и v(x) – функции, непрерывные вместе со своими производ-ными на отрезке [a; b].
Очевидно:
d(uv) = v du+ u dv.
Интегрируя это соотношение в пределах от a до b, получим
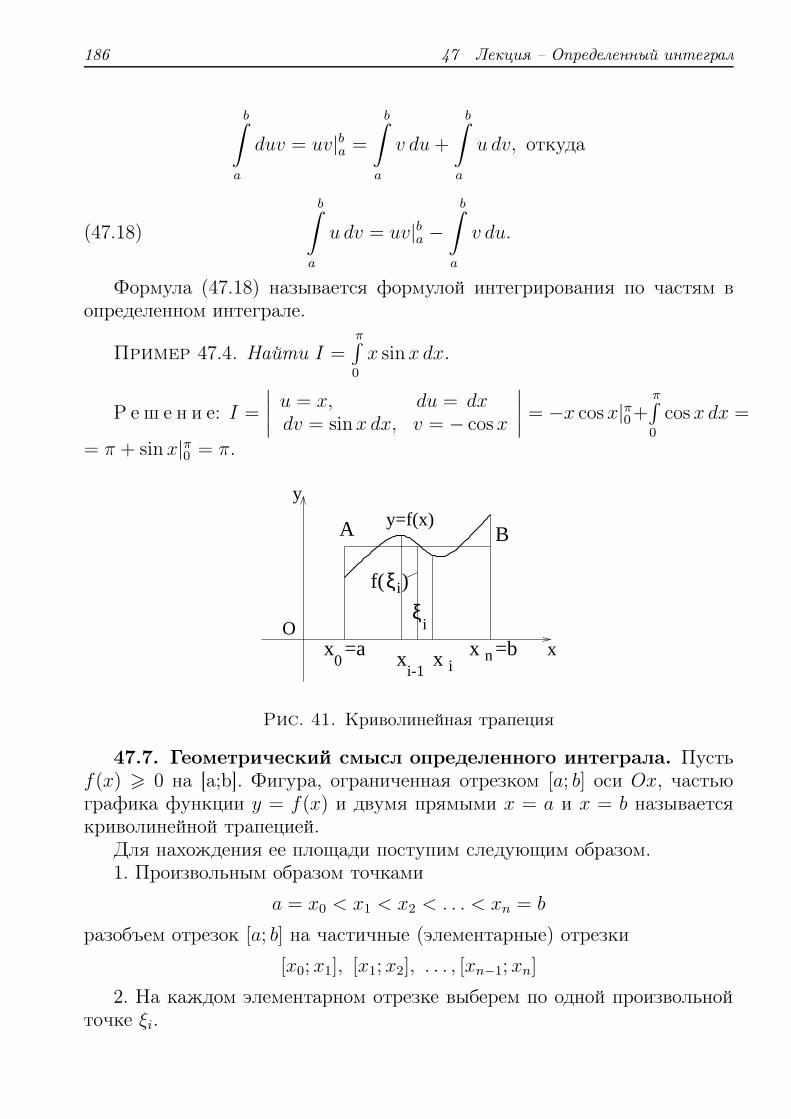
186 47 Лекция – Определенный интеграл
b∫
a
duv = uv|ba =
b∫
a
v du+
b∫
a
u dv, откуда
(47.18)
b∫
a
u dv = uv|ba −b∫
a
v du.
Формула (47.18) называется формулой интегрирования по частям вопределенном интеграле.
Пример 47.4. Найти I =π∫
0
x sinx dx.
Р е ш е н и е: I =
∣∣∣∣
u = x, du = dxdv = sinx dx, v = − cosx
∣∣∣∣= −x cosx|π0+
π∫
0
cosx dx =
= π + sin x|π0 = π.
Ox
yy=f(x)
x0=a x =bn
f( ξ i)
xi-1
A B
ξi
x i
Рис. 41. Криволинейная трапеция
47.7. Геометрический смысл определенного интеграла. Пустьf(x) > 0 на [a;b]. Фигура, ограниченная отрезком [a; b] оси Ox, частьюграфика функции y = f(x) и двумя прямыми x = a и x = b называетсякриволинейной трапецией.
Для нахождения ее площади поступим следующим образом.1. Произвольным образом точками
a = x0 < x1 < x2 < . . . < xn = b
разобъем отрезок [a; b] на частичные (элементарные) отрезки
[x0; x1], [x1; x2], . . . , [xn−1; xn]
2. На каждом элементарном отрезке выберем по одной произвольнойточке ξi.
47 Лекция – Определенный интеграл 187
3. С небольшой погрешностью можем принять, что на протяжениикаждого элементарного отрезка функция f(x) постоянна и равна ее зна-чению f(ξi) в произвольно выбранной точке. Фактически мы заменяемплощадь элементарной криволинейной трапеции с основанием [xi; xi−1]на площадь прямоугольника с тем же основанием и высотой f(ξi) (рис.41).
Тогда:
S ≈ f(ξ1)∆x1 + f(ξ2)∆x2 + . . .+ f(ξn)∆xn =
n∑
i=1
f(ξi)∆xi.
4. За точное значение площади примем предел этой интегральной сум-мы при λ→ 0 (n→ ∞).
S = limλ→0
n∑
i=1
f(ξi)∆xi, т.е.
(47.19) S =
b∫
a
f(x) dx.
Последнее равенство выражает геометрический смысл определенного
интеграла: интегралb∫
a
f(x) dx равен площади криволинейной трапеции,
ограниченной графиком функции y = f(x) > 0, осью Ox и вертикальнымипрямыми x = a и x = b.
47.8. Физический смысл определенного интеграла. Пусть ма-териальная точка совершает прямолинейное движение, причем ее ско-рость является функцией времени: V = V (t). Найдем путь, пройденныйточкой за промежуток времени t = α до t = β.
Поскольку движение не является равномерным мы не можем вычис-лить путь по формуле
(47.20) S = V · t.Поэтому для подсчета пути поступим следующим образом.1. Разобъем отрезок [α; β] оси Ot произвольным образом на частичные
отрезки точками t0 = α < t1 < t2 < . . . < tn = β с длинами ∆ti = ti − ti−1.2. На каждом частичном отрезке выберем по одной произвольной точ-
ке τi.3. Если эти отрезки достаточно малы, то без большой погрешности
движение на каждом отрезке можно считать равномерным со скоростью,
188 47 Практическое занятие – Определенный интеграл
равной значению функции V (t) в произвольно выбранной точке. Тогда:
(47.21) S ≈ V (τ1)∆t1 + V (τ2)∆t2 + . . .+ V (τn)∆tn =n∑
i=1
V (τi)∆ti.
4. За точное значение пройденного пути примем предел интегральнойсуммы (47.21) при условии, что число частичных отрезков неограниченновозрастает и каждый из них стягивается в точку:
S = limn→∞
n∑
i=1
V (τi)∆ti, т.е.
(47.22) S =
β∫
α
V (t) dt.
Последнее равенство выражает физический смысл определенного ин-теграла: пройденный путь равен определенному интегралу от скоростипо времени.
47. практическое занятие —определенный интеграл
Вспомним определение интеграла как предела интегральных сумм иприменим его при решении оследующих двух задач.
Пример 47.1. Составить формулу для вычисления интегральных суммдля функции f(x), непрерывной на отрезке [a; b], разделяя этот отрезокна n равных элементарных отрезков и взяв в качестве внутренней точ-ки ξi правый конец каждого отрезка.
Р е ш е н и е: Обозначим длину каждого частичного отрезка через h:
h =b− a
n.
Координаты точек деления:
xo = a, x1 = a+ h, x2 = f + 2h . . . , xi = a+ ih.
Значения функции f(x) в правых концах частичных отрезков:
f(a+ h), f(a+ 2h), . . . , f(a+ nh).
Умножая каждое из этих значений на длину частичного отрезка h исоставив сумму таких произведений, получим интегральную сумму
Sn = f(a+ h) · h+ f(a+ 2h) · h+ . . .+ f(a+ nh) · h =

47 Практическое занятие – Определенный интеграл 189
= h
n∑
i=1
f(a+ ih).
Пример 47.2. Вычислить интегралb∫
a
x dx (a < b, ), как предел ин-
тегральной суммы.
Р е ш е н и е:Предпримем такое разбиение отрезка интегрирования [a; b] на части,
чтобы абциссы точек деления образовали геометрическую прогрессию(иными словами – длины отрезков образовывали геометрическую про-грессию).
Если знаменатель прогрессии обозначить q (q > 1), то абциссы точекделения будут такими:
xo = a, x1 = aq, x2 = aq2, . . . , xn = aqn = b.
Заметим на будущее, что qn = ba.
Длины частичных отрезков равны
∆x1 = x1 − xo = a(q − 1), ∆x2 = x2 − x1 = aq(q − 1), . . .
∆xi = xi − xi−1 = aqi−1(q − 1).
Значения функции f(x) = x в левом конце каждого отрезка равны
a, aq, aq2, . . . , aqn−1.
Умножим эти значения на соответствующие длины отрезков и соста-вим суммы таких произведений:
Sn = a2(q − 1) + (aq)2(q − 1) + . . .+ (aqn−1)2(q − 1) =
= a2(q − 1)n−1∑
i=0
q2i.
Сумма геометрической прогрессии
S =q2n − 1
q2 − 1=
( ba)2 − 1
q2 − 1и q → 1 при n→ ∞.
Поэтомуb∫
a
x dx = a2 limq→1
n→∞
(q − 1)b2
a2− 1
q2 − 1= a2
(b2
a2− 1
)
limq→1
q − 1
q2 − 1=b2 − a2
2.
Видно, что составление интегральных сумм и нахождение их пределов– дело очень сложное.

190 47 Практическое занятие – Определенный интеграл
К счастью существует и второе определение определенного интеграла– как приращение первообразной для функции f(x) на отрезке [a; b]. Спомощью такого определения решение последнего примера уместится водной строке:
b∫
a
x dx =x2
2
∣∣∣∣
b
a
=b2 − a2
2.
Найдем еще несколько интегралов с помощью формулыНьютона-Лейбница.
Пример 47.3. Найти I =1∫
0
(x− 2)3 dx.
Р е ш е н и е: I = (x−2)4
4
∣∣∣
1
0= 1
4− 4 = −3, 75.
Пример 47.4. Найти I =
√3∫
1
dxx2+1
.
Р е ш е н и е: I = arctg x|√
31 = arctg
√3 − arctg 1 = π
3− π
4= π
12.
Пример 47.5. Найти I =1∫
0
dxx2−4
.
Р е ш е н и е: I = 14ln∣∣x−2x+2
∣∣∣∣1
0= 1
4
(ln 1
3− ln 1
)= 1
4ln 1
3= −1
4ln 3.
Напомним, что при замене переменной x = ϕ(t) в определенном инте-
гралеb∫
a
f(x) dx после нахождения первообразной не следует возвращаться
к переменной x, если найденызначения t = α и t = β соответствующиезначениям x = a и x = b.
Пример 47.6. Вычислить интеграл I =9∫
1
√xdx
x+2√x.
Р е ш е н и е: Сделаем подстановку x = t2, откуда dx = 2t dt. Найдемпределы изменения t:
1 = t2 ⇒ t = 1, 9 = t2 ⇒ t = 3.
Следовательно,
I =
3∫
1
2t2 dt
t2 + 2t= 2
3∫
1
t dt
t+ 2= 2
3∫
1
t+ 2 − 2
t + 2dt =

47 Практическое занятие – Определенный интеграл 191
= 2
3∫
1
(
1 − 2
t+ 2
)
dt = 2 (t− 2 ln |t+ 2|) |31 = 4
(
1 − ln5
3
)
.
Пример 47.7. Вычислить интеграл I =10∫
3
dx(x−4)
√x+6
.
Р е ш е н и е: Сделав подстановку x + 6 = t2, dx = 2t dt, найдемпределы изменения t:
при x = 3 t = 3,
при x = 10 t = 4.
Поэтому
I =
4∫
3
2t dt
(t2 − 10) t= 2
1
2√
10ln
∣∣∣∣∣
t−√
10
t+√
10
∣∣∣∣∣
∣∣∣∣∣
4
3
=
=1√10
(
ln
∣∣∣∣∣
4 −√
10
4 +√
10
∣∣∣∣∣− ln
∣∣∣∣∣
3 −√
10
3 +√
10
∣∣∣∣∣
)
=
=1√10
ln
∣∣∣∣∣
(4 −
√10) (
3 +√
10)
(4 +
√10) (
3 −√
10)
∣∣∣∣∣=
1√10
ln7 + 2
√10
3.
Пример 47.8. Вычислить интеграл I =2a∫
0
√2ax− x2 dx.
Р е ш е н и е: Сделаем первую подстановку: 12(2ax− x2)
′= t или
a− x = t, откуда x = a− t, dx = − dt, 2ax− x2 = a2 − t2, x = 0 ⇒ t = a,x = 2a ⇒ t = −a.
Следовательно, I =
a∫
−a
√a2 − t2 dt.
Сделаем вторую подстановку: t = a sin z, dt = a cos z dz,√a2 − t2 =
= a cos z, t = −a ⇒ z = −π2, t = a ⇒ z = π
2. Поэтому
I = a2
π/2∫
−π/2
cos2 z dz = a2
π/2∫
0
(1 + cos 2z) dz =
= a2
(
z +sin 2z
2
)∣∣∣∣
π/2
0
=πa2
2.

192 47 Практическое занятие – Определенный интеграл
Замечание 47.23. При нахождении пределов изменения z мы выбра-ли отрезок [−π
2; π
2], так как он удовлетворяет условиям 1,2 на с. 184
Замечание 47.24. При вычислении интеграла от четной функциив пределах, симетричных относительно нуля мы воспользовались соот-ношением
I =
π/2∫
−π/2
cos2 z dz = 2
π/2∫
0
cos2 z dz.
В заключение этого практического занятия найдем интегралы с помо-щью формулы интегрирования по частям.
Пример 47.9. Вычислить интеграл I =1∫
0
xex dx.
Р е ш е н и е:
I =
∣∣∣∣
u = x; du = dxdv = ex dx; v = ex
∣∣∣∣= xex|10 −
1∫
0
ex dx = e− ex|10 = 1.
Пример 47.10. Вычислить интеграл I =1∫
0
x arctg x dx.
Р е ш е н и е:
I =
∣∣∣∣
u = arctg x; du = dxx2+1
dv = x dx; v = x2
2
∣∣∣∣=
=x2
2arctg x
∣∣∣∣
1
0
− 1
2
1∫
0
x2 dx
x2 + 1=π
8− 1
2
1∫
0
(
1 − 1
x2 + 1
)
dx =
=π
8− 1
2(x− arctg x)|10 =
π
8− 1
2
(
1 − π
4
)
=π
4− 1
2.
Самостоятельная работа
Пример 47.11. Составить формулу для вычисления интегральныхсумм для функции f(x), непрерывной на отрезке [a; b], разделяя этот от-резок на n равных элементарных отрезков и взяв в качестве внутреннейточки ξi левый конец каждого отрезка.
47 Практическое занятие – Определенный интеграл 193
Пример 47.12. Составить формулу для вычисления интегральныхсумм для функции y = ex на отрезке [a; b] разделяя его на n равных от-резков и взяв в качестве внутренней точки ξi правый конец каждогоотрезка.
Пример 47.13. Вычислитьb∫
a
x dx, составив интегральную сумму для
функции f(x) = x. Отрезок [a; b] разделить на n частей произвольнымобразом. В качестве внутренней точки ξi взять середину каждого ча-стичного отрезка.
Найти интегралы по формуле Ньютона-Лейбница.
Пример 47.14. I =1/2∫
0
dx√1−x2 .
Пример 47.15. I =3∫
2
ex dx.
Пример 47.16. I =1∫
0
dx√x2+4
.
Пример 47.17. Вычислить интеграл I =4∫
1
√x dx
1+√x.
Пример 47.18. Вычислить интеграл I =1/4∫
0
dx(4x+1)
√x.
Пример 47.19. Вычислить интеграл I =a∫
0
√a2 − x2 dx.
Пример 47.20. Вычислить интеграл I =1∫
0
√1−x1+x
dx. Указание. Сде-
лать подстановку x = cos t.
Пример 47.21. Вычислить интеграл I =1∫
0
arcsinx dx.
Пример 47.22. Вычислить интеграл I =π∫
0
x cosx dx.
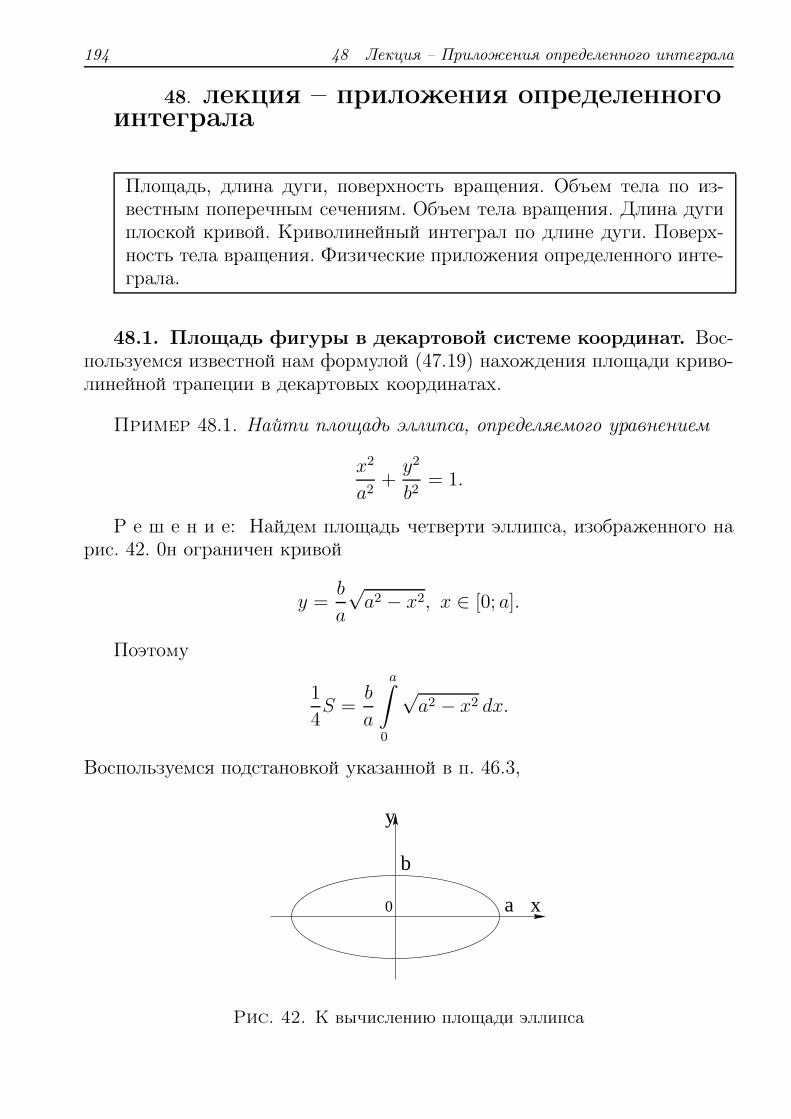
194 48 Лекция – Приложения определенного интеграла
48. лекция – приложения определенногоинтеграла
Площадь, длина дуги, поверхность вращения. Объем тела по из-вестным поперечным сечениям. Объем тела вращения. Длина дугиплоской кривой. Криволинейный интеграл по длине дуги. Поверх-ность тела вращения. Физические приложения определенного инте-грала.
48.1. Площадь фигуры в декартовой системе координат. Вос-пользуемся известной нам формулой (47.19) нахождения площади криво-линейной трапеции в декартовых координатах.
Пример 48.1. Найти площадь эллипса, определяемого уравнением
x2
a2+y2
b2= 1.
Р е ш е н и е: Найдем площадь четверти эллипса, изображенного нарис. 42. 0н ограничен кривой
y =b
a
√a2 − x2, x ∈ [0; a].
Поэтому
1
4S =
b
a
a∫
0
√a2 − x2 dx.
Воспользуемся подстановкой указанной в п. 46.3,
x
b
a
y
0
Рис. 42. К вычислению площади эллипса
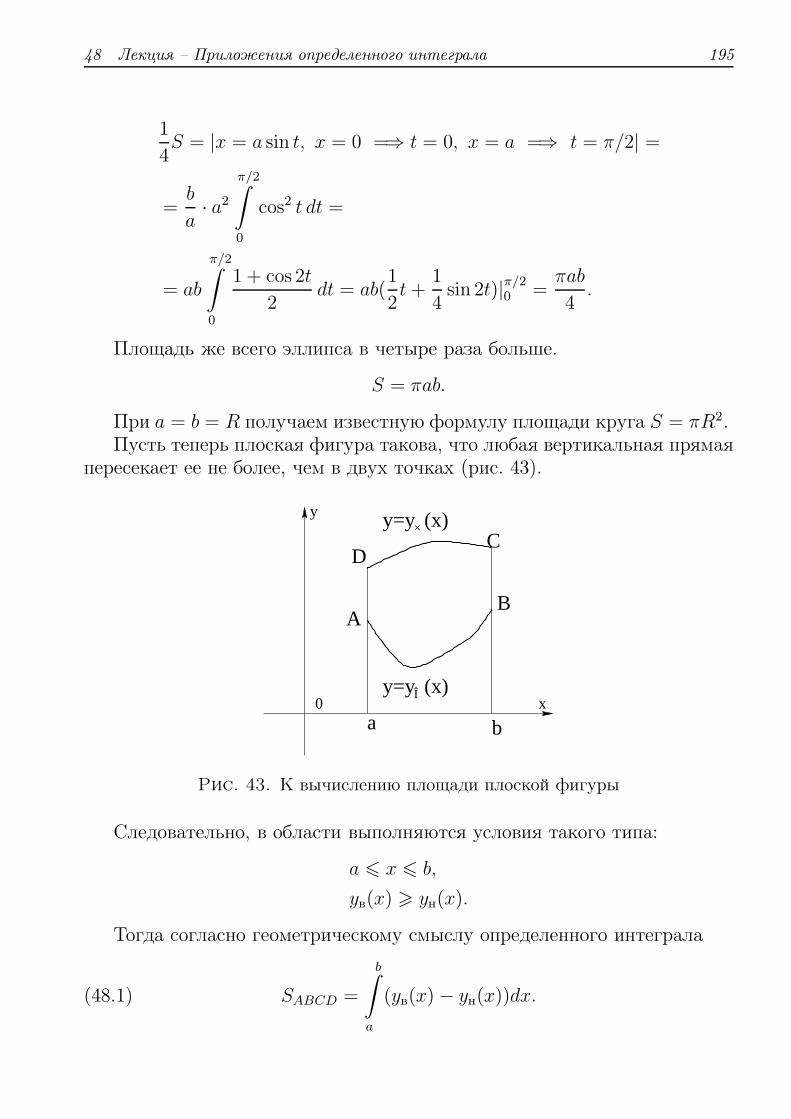
48 Лекция – Приложения определенного интеграла 195
1
4S = |x = a sin t, x = 0 =⇒ t = 0, x = a =⇒ t = π/2| =
=b
a· a2
π/2∫
0
cos2 t dt =
= ab
π/2∫
0
1 + cos 2t
2dt = ab(
1
2t+
1
4sin 2t)|π/20 =
πab
4.
Площадь же всего эллипса в четыре раза больше.
S = πab.
При a = b = R получаем известную формулу площади круга S = πR2.Пусть теперь плоская фигура такова, что любая вертикальная прямая
пересекает ее не более, чем в двух точках (рис. 43).
y=y
y=y (x)
(x)
Î
×
AB
CD
bax
y
0
Рис. 43. К вычислению площади плоской фигуры
Следовательно, в области выполняются условия такого типа:
a 6 x 6 b,
yв(x) > yн(x).
Тогда согласно геометрическому смыслу определенного интеграла
(48.1) SABCD =
b∫
a
(yв(x) − yн(x))dx.

196 48 Лекция – Приложения определенного интеграла
Эта формула справедлива для любого расположения кривых (в верх-ней или в нижней полуплоскостях), лишь бы выполнялось условие
yв(x) > yн(x) для x ∈ [a; b].
Если же кривая задана в параметрическом виде:x = x(t),y = y(t), то
(48.2) S =
t2∫
t1
y(t)x′(t) dt.
Эта формула получается из формулы (47.19) формальной подстанов-кой y = f(x) = y(t), dx = x′(t) dt. Значения параметра t1 соответствуютнижней границе a, t2 – верхней границе b.
Пример 48.2. Найти площадь фигуры, ограниченной одной аркой цик-лоиды
x = a(t− sin t),y = a(1 − cos t)
осью абсцисс.
Р е ш е н и е: Границам первой арки циклоиды соответствуют значе-ния t1 = 0 и t2 = 2π (рис. 44).
xt=0 t=
a
a
y
2π
Рис. 44. К решению примера 48.2.
Поэтому
S =
2π∫
0
a(1 − cos t)(a(t− sin t))′ dt = a2
2π∫
0
(1 − cos t)2 dt =
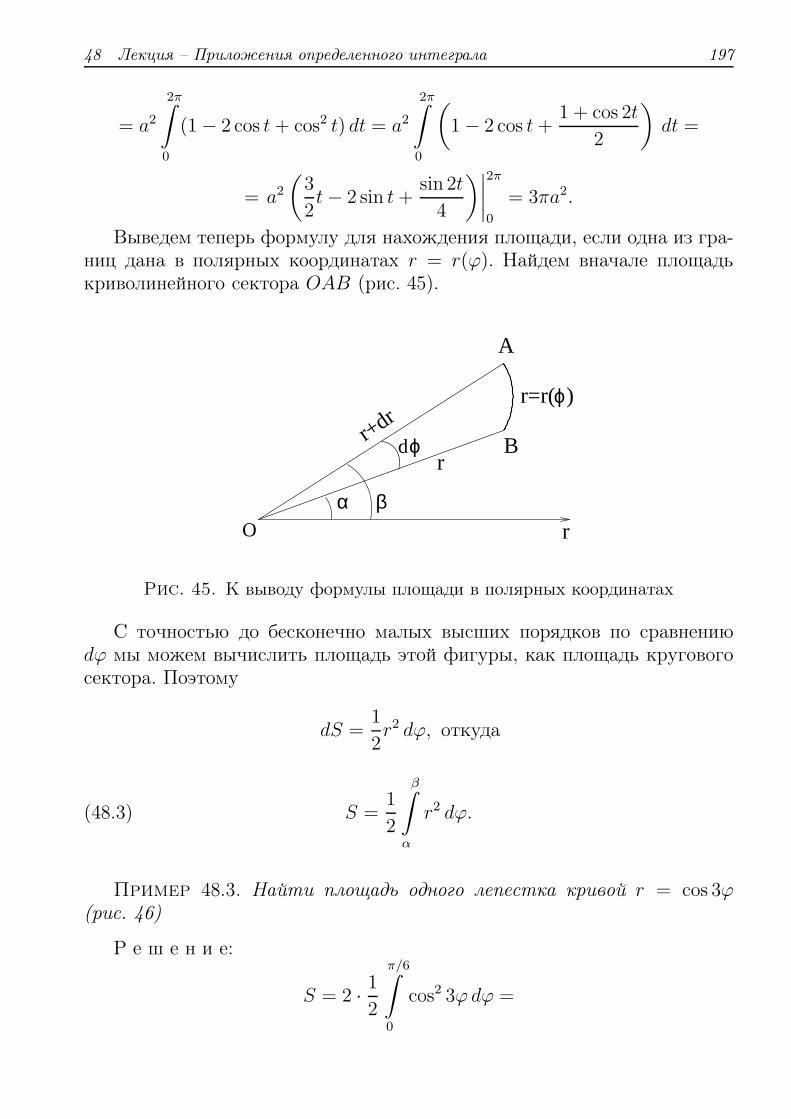
48 Лекция – Приложения определенного интеграла 197
= a2
2π∫
0
(1 − 2 cos t+ cos2 t) dt = a2
2π∫
0
(
1 − 2 cos t+1 + cos 2t
2
)
dt =
= a2
(3
2t− 2 sin t+
sin 2t
4
)∣∣∣∣
2π
0
= 3πa2.
Выведем теперь формулу для нахождения площади, если одна из гра-ниц дана в полярных координатах r = r(ϕ). Найдем вначале площадькриволинейного сектора OAB (рис. 45).
r=r( )
A
Br+drϕ
Oα β
ϕd
r
r
Рис. 45. К выводу формулы площади в полярных координатах
С точностью до бесконечно малых высших порядков по сравнениюdϕ мы можем вычислить площадь этой фигуры, как площадь круговогосектора. Поэтому
dS =1
2r2 dϕ, откуда
(48.3) S =1
2
β∫
α
r2 dϕ.
Пример 48.3. Найти площадь одного лепестка кривой r = cos 3ϕ(рис. 46)
Р е ш е н и е:
S = 2 · 1
2
π/6∫
0
cos2 3ϕdϕ =

198 48 Лекция – Приложения определенного интеграла
π/6
r
Рис. 46. К решению примера 48.3
=1
2
π/6∫
0
(1 + cos 6ϕ) dϕ =1
2(1 +
sin 6ϕ
6)
∣∣∣∣
π/6
0
=π
12.
48.2. Объем тела по известным поперечным сечениям. Пустьмы хотим определить объем V некоторого тела. Предположим, что намизвестны площади сечений этого тела плоскостями, перпендикулярнымиоси Ox. Назовем эти сечения поперечными. Очевидно, что они являютсяфункциями переменной x : S = S(x). Обозначим через a и b абсциссысамой левой и самой правой точек тела.
Разобъем отрезок [a, b] на n частей точками
a = x0 < x1 < x2 < · < xn−1 < xn = b.
Проведем через чти точки плоскости, перпендикулярные оси Ox. Этиплоскости рассекут тело на n слоев. Обозначим объем слоя, заключенногомежду двумя плоскостями, проведенными через точки xi−1 и xi через ∆vi.Тогда
V = ∆v1 + ∆v2 + · + ∆vn =n∑
i=1
∆vi.
Рассмотрим один из слоев, заключенный между плоскостями, прове-денными через точки xi−1 и xi. Его объем приближенно равен объемупрямого цилиндра, высота которого равна [x1 − xi−1, а основание совпа-дает с поперечным сечением в какой-то точке ξi ∈ [xi−1, xi].

48 Лекция – Приложения определенного интеграла 199
Объем такого цилиндра равен произведению площади основания навысоту: s(ξi)∆xi.
Поэтому объем тела приближенно будет равен:
(48.4) V ≈n∑
i=1
s(ξi)∆xi.
За точное значение объема примем предел интегральной суммы (48.4)при условии, что длина шага разбиения отрезка стремится к нулю:
(48.5) V = limλ→0
n∑
i=1
s(ξi)∆xi.
Окончательно получаем:
(48.6) V =
b∫
a
s(x) dx.
Пример 48.4. Найти объем эллипсоида x2
a2+ y2
b2+ z2
c2= 1.
Р е ш е н и е: Найдем площадь сечения эллипсоида плоскостью, пер-пендикулярной оси Ox. Ее уравнение x = d (d ∈ [−a; a]). Подставив вуравнение эллипсоида x = d, найдем, что в сечении получится эллипс
y2
b2
a2(a2 − d2)
+z2
c2
a2(a2 − d2)
= 1
с полуосями a1 = ba
√a2 − d2 и b1 = c
a
√a2 − d2.
Его площадь (см. пример 48.2)
S = πa1b1 =bc
a2(a2 − d2).
А теперь положим d = x (−a 6 x 6 a). Тогда площадь поперечногосечения эллипсоида станет функцией:
S(x) =bc
a2(a2 − x2).
И объем эллипсоида найдем по формуле (48.6):
V =
a∫
−a
S(x) dx = 2
a∫
0
bc
a2(a2x2) dx =
= 2bc
a2
(
a2x− x3
3
)∣∣∣∣
a
0
=4
3πabc.
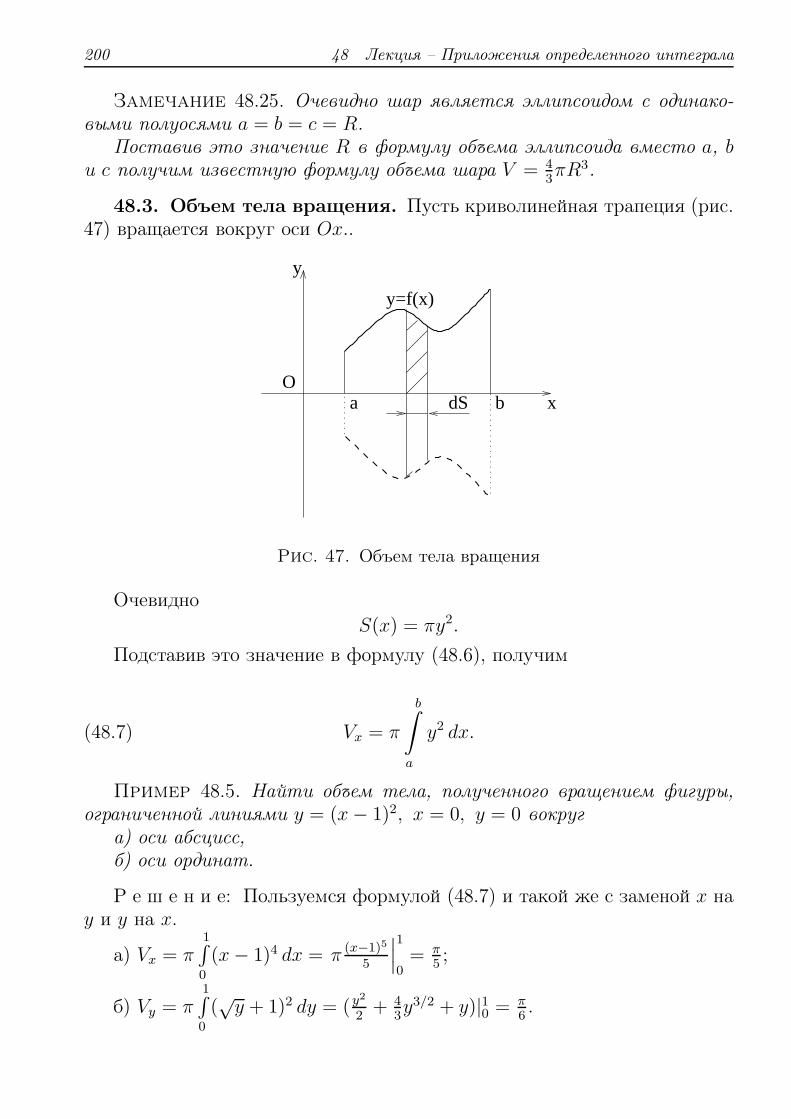
200 48 Лекция – Приложения определенного интеграла
Замечание 48.25. Очевидно шар является эллипсоидом с одинако-выми полуосями a = b = c = R.
Поставив это значение R в формулу объема эллипсоида вместо a, bи c получим известную формулу объема шара V = 4
3πR3.
48.3. Объем тела вращения. Пусть криволинейная трапеция (рис.47) вращается вокруг оси Ox..
y
Oba x
y=f(x)
dS
Рис. 47. Объем тела вращения
ОчевидноS(x) = πy2.
Подставив это значение в формулу (48.6), получим
(48.7) Vx = π
b∫
a
y2 dx.
Пример 48.5. Найти объем тела, полученного вращением фигуры,ограниченной линиями y = (x− 1)2, x = 0, y = 0 вокруг
а) оси абсцисс,б) оси ординат.
Р е ш е н и е: Пользуемся формулой (48.7) и такой же с заменой x наy и y на x.
а) Vx = π1∫
0
(x− 1)4 dx = π (x−1)5
5
∣∣∣
1
0= π
5;
б) Vy = π1∫
0
(√y + 1)2 dy = (y
2
2+ 4
3y3/2 + y)|10 = π
6.
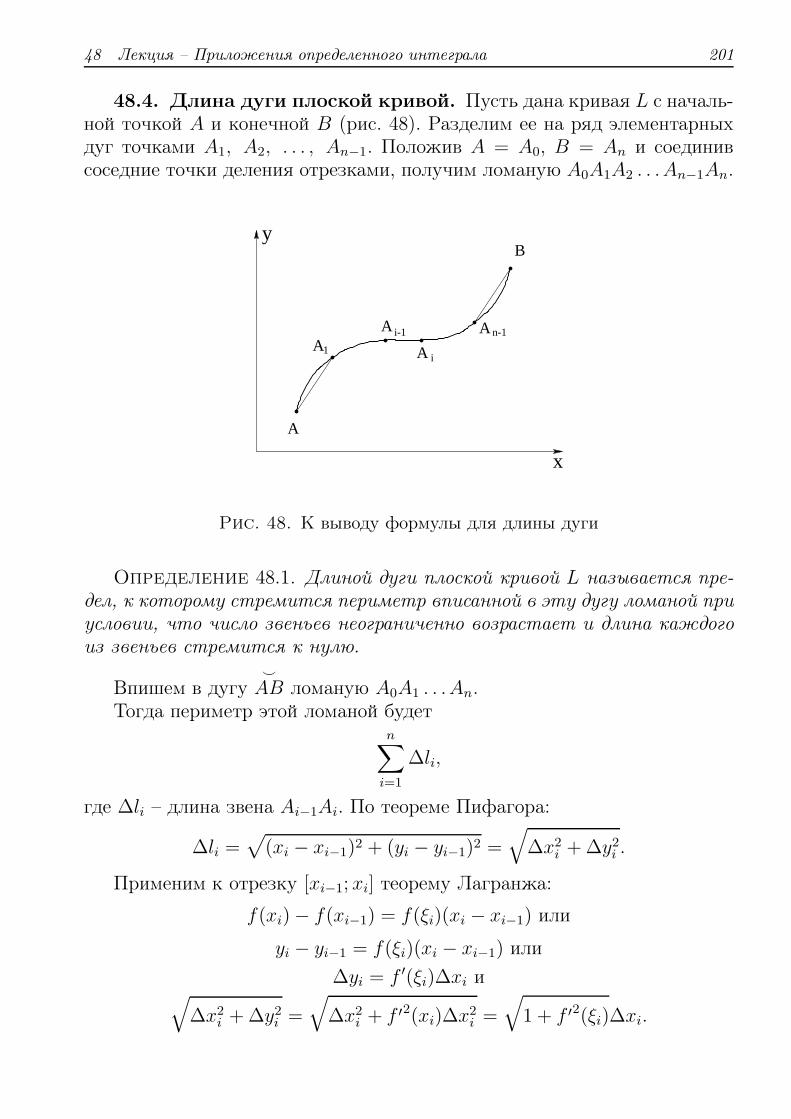
48 Лекция – Приложения определенного интеграла 201
48.4. Длина дуги плоской кривой. Пусть дана кривая L с началь-ной точкой A и конечной B (рис. 48). Разделим ее на ряд элементарныхдуг точками A1, A2, . . . , An−1. Положив A = A0, B = An и соединивсоседние точки деления отрезками, получим ломаную A0A1A2 . . .An−1An.
A
B
1
n-1
AA
y
x
A
A i
i-1
Рис. 48. К выводу формулы для длины дуги
Определение 48.1. Длиной дуги плоской кривой L называется пре-дел, к которому стремится периметр вписанной в эту дугу ломаной приусловии, что число звеньев неограниченно возрастает и длина каждогоиз звеньев стремится к нулю.
Впишем в дугу
AB ломаную A0A1 . . .An.Тогда периметр этой ломаной будет
n∑
i=1
∆li,
где ∆li – длина звена Ai−1Ai. По теореме Пифагора:
∆li =√
(xi − xi−1)2 + (yi − yi−1)2 =√
∆x2i + ∆y2
i .
Применим к отрезку [xi−1; xi] теорему Лагранжа:
f(xi) − f(xi−1) = f(ξi)(xi − xi−1) или
yi − yi−1 = f(ξi)(xi − xi−1) или
∆yi = f ′(ξi)∆xi и√
∆x2i + ∆y2
i =
√
∆x2i + f ′2(xi)∆x2
i =
√
1 + f ′2(ξi)∆xi.

202 48 Лекция – Приложения определенного интеграла
В последнем равенстве ξi принадлежит отрезку [xi−1; xi], но где точноона лежит неизвестно.
Вспомним, что в определении интеграла как предела интегральныхсумм присутствуют произвольно выбранные точки ξi. Так вот, в качестве“произвольных"точек выберем точки ξi, о существовании которых гово-рится теореме в Лагранжа.
Тогда периметр ломаной
(48.8)n∑
i=1
∆li =n∑
i=1
√
1 + f ′2(ξi)∆xi.
Но (48.8) есть интегральная сумма для функции 1 + f ′2(x) на отрезке[a; b]. Поэтому
(48.9) l = limn→∞
√
1 + f ′2(ξi)∆xi =
b∫
a
√
1 + y′2 dx.
Выражение
(48.10) dl =√
dx2 + dy2 =
√
1 + y′2dx.
называется дифференциалом дуги в декартовых координатах.
Если плоская дуга задана в параметрическом видеx=x(t),y=y(t)
, то
dl =
√
x′2 dt+ y′2 dt =
√
x′2 + y′2 dt
и длина дуги в параметрическом виде может быть найдена по формуле
l =
t2∫
t1
√
x′2(t) + y′2(t) dt.
Если же в формуле (48.10) перейти к полярным координатам по фор-мулам
x = r cosϕ,
y = r sinϕ,
то надо найти
dx = (r cosϕ)′ϕ dϕ = (r′ cosϕ− r sinϕ) dϕ,
dy = (r sinϕ)′ϕ dϕ = (r′ sinϕ+ r cosϕ) dϕ.
Подставив найденные дифференциалы в формулу (48.10), получим
dl =√
r2 + r′2 dϕ, откуда

48 Лекция – Приложения определенного интеграла 203
длина дуги в полярных координатах равна
(48.11) l =
β∫
α
√
r2 + r′2 dϕ.
Пример 48.6. Вычислить длину дуги кривой y = lnx от точки сабсциссой 1 до точки с абсциссой
√3.
Р е ш е н и е:
L =
√3∫
1
√1 + x2
xdx.
Применив подстановку
x = tg t =⇒ dx =dt
1 + t2,
получим
L =
π/3∫
π/4
dt
sin t cos2 t=
π/3∫
π/4
sin2 t+ cos2 t
sin t cos2 tdt =
(1
cos t+ ln
∣∣∣∣tgt
2
∣∣∣∣
)
|π/3π/4 =
= 2 −√
2 − 1
2ln 3 ln tg
π
8= 0, 92.
Пример 48.7. Найти длину одной арки циклоиды (см. пример 48.2).
Р е ш е н и е:
l = a
2π∫
0
√
(t− sin t)′2 + (1 − cos t)′2 dt =
= a
2π∫
0
√
(1 − cos t)2 + sin2 t dt =
= a
2π∫
0
√
2(1 − cos t) dt = a
2π∫
0
√
4 sin2 t
2dt = 2a
2π∫
0
sint
2dt =
= −4a cost
2
∣∣∣∣
2pi
0
= −4a(−1 − 1) = 8a.
204 48 Лекция – Приложения определенного интеграла
48.5. Криволинейный интеграл по длине дуги. Пусть кривая L (рис48) находится в скалярном поле, определяемом функцией u = f(x; y). По анало-гии с пунктом 48.4 для кривой L, определяемом уравнениемy = y(x) введем интегральную сумму
(48.12)n∑
i=1
f(ξi; y(ξi))∆li =
n∑
i=1
f(ξi; y(ξi))
√
1 + y′2(ξi)∆xi
Определение 48.2. Предел интегральной суммы (48.12) при условии, чтовсе ∆li → 0, и, следовательно, n→ ∞, называется криволинейным интеграломпо длине дуги в скалярном поле u = f(x; y), или криволинейным интегралом1-го рода, и обозначается
(48.13)
∫
L
f(x; y(x))dl =
∫
AB
f(x; y(x))dl = limn→∞
(max∆li→0)
n∑
i=1
f(ξi; y(ξi))∆li,
где дифференциал дуги dl =√
1 + y′2(x)dx.
Если кривая L задана в параметрическом виде x = x(t), y = y(t) или вполярных координатах x = r cosϕ, y = r sinϕ, то криволинейный интегралпо длине дуги будет вычисляться в соответсвие с выражением дифференциаладуги (см. п. 48.4) по формулам:
(48.14)
∫
AB
f(x; y)dl =
tB∫
tA
f(x(t), y(t))
√
x′2(t) + y′2(t)dt или
(48.15)
∫
AB
f(x; y)dl =
ϕB∫
ϕA
f(r cosϕ; r sinϕ)
√
r2(ϕ) + r′2(ϕ)dϕ,
где tA, tB, ϕA, ϕB - значение параметра t или полярного угла ϕ в точках A иB.
Пример 48.8. Вычислить криволинейный интеграл по дуге окружностиx = R cos t, y = R sin t от точки A(0;R) до точки B(R; 0) от функции f(x; y) =x · y
Р е ш е н и е: По формуле (48.14)
∫
AB
f(x; y)dl =
tB∫
tA
xy
√
x′2(t) + y′2(t)dt.

48 Лекция – Приложения определенного интеграла 205
Из условия 0 = R cos t определяем tB = π2 , из условия R = R cos t находим
tA = 0. Поскольку x′t = −R sin t, y′t = R cos t получаем:
∫
AB
f(x; y)dl =
π2∫
0
R cos t ·R sin t√
R2 sin2 t+R2 cos2 tdt =
= R3
π2∫
0
sin t cos tdt = R3 sin2 t
2
∣∣∣∣
π2
0
=R2
2.
Следует обратить внимание на то, что точки A и B выбирались таким об-разом, чтобы выполнялось условие tA < tB.
Установим физический смысл криволинейного интеграла по длине дуги.Пусть вдоль кривой AB распределена масса с линейной плотностью γ = f(x; y).Напомним, что линейной плотностью массы f(x; y) в точке P (x; y) называетсяпредел отношения массы участка дуги AB, содержащего точку P к его длине,когда длина стремится к нулю (т.е. участок стягивается в точку P). Тогдаприближенное значение массы ∆mi участка Ai−1Ai (см. рис. 48) будет рав-но ∆mi ≈ f(xi; yi)∆li. Суммируя, найдем приближенное значение массы всей
дуги AB m ≈n∑
i=1f(xi; yi)∆li. Точное значение массы получится предельным
переходом и, в соответствии с определением 48.2, будет равно криволинейномуинтегралу:
(48.16) m =
∫
AB
f(x; y)dl
Если f(x; y) = 1 формула 48.16 переходит в формулу 48.9 для вычислениядуги AB.
Пример 48.9. Найти массу проволоки, имеющей форму параболыy = x2 на участке x ∈ [0;
√2], если плотность определяется формулой γ = 3x.
Р е ш е н и е: По формуле 48.16, учитывая, что y′ = 2x, получаем:
m =
√2∫
0
3x√
1 + 4x2dx =3
8
√2∫
0
√
1 + 4x2d(1 + 4x2) =
=3
8· 2
3
(1 + 4x2
) 32
∣∣∣
√2
0=
1
4(93/2 − 1) = 6, 5.
Позже мы рассмотрим криволинейные интегралы 2ого рода, которые имеют
более широкие приложения.
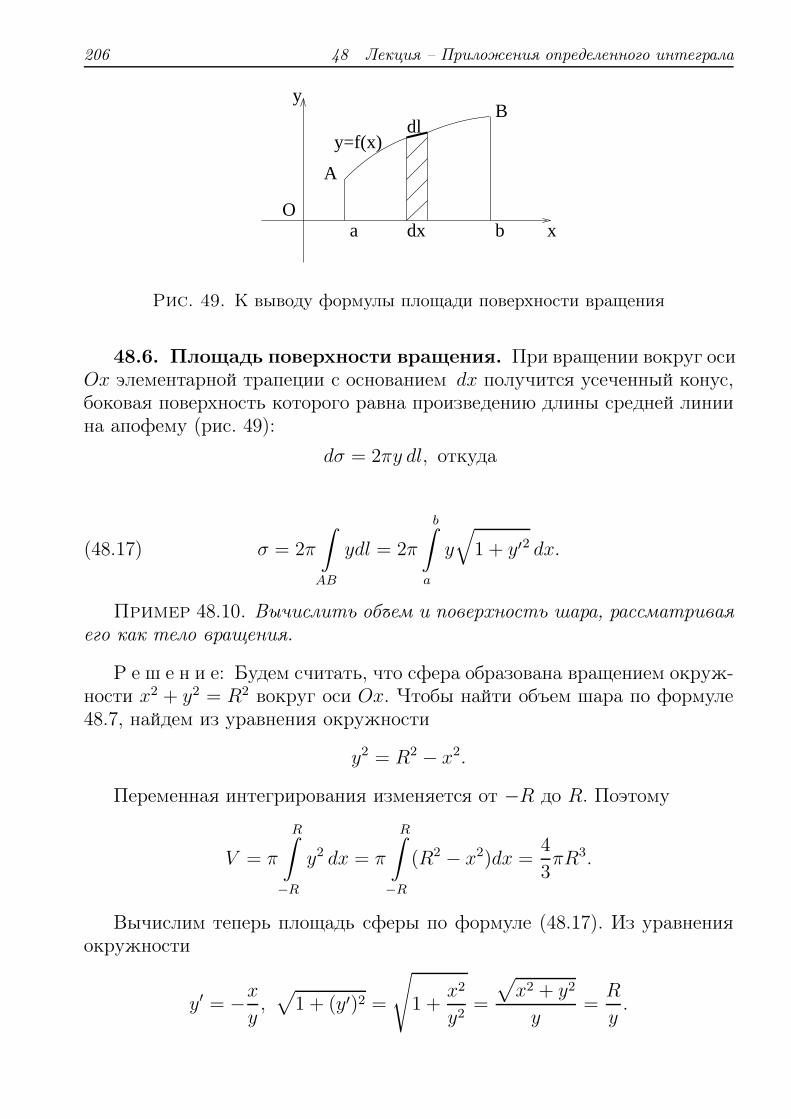
206 48 Лекция – Приложения определенного интеграла
y
Oba x
A
B
dx
y=f(x)dl
Рис. 49. К выводу формулы площади поверхности вращения
48.6. Площадь поверхности вращения. При вращении вокруг осиOx элементарной трапеции с основанием dx получится усеченный конус,боковая поверхность которого равна произведению длины средней линиина апофему (рис. 49):
dσ = 2πy dl, откуда
(48.17) σ = 2π
∫
AB
ydl = 2π
b∫
a
y
√
1 + y′2 dx.
Пример 48.10. Вычислить объем и поверхность шара, рассматриваяего как тело вращения.
Р е ш е н и е: Будем считать, что сфера образована вращением окруж-ности x2 + y2 = R2 вокруг оси Ox. Чтобы найти объем шара по формуле48.7, найдем из уравнения окружности
y2 = R2 − x2.
Переменная интегрирования изменяется от −R до R. Поэтому
V = π
R∫
−R
y2 dx = π
R∫
−R
(R2 − x2)dx =4
3πR3.
Вычислим теперь площадь сферы по формуле (48.17). Из уравненияокружности
y′ = −xy,√
1 + (y′)2 =
√
1 +x2
y2=
√
x2 + y2
y=R
y.
48 Лекция – Приложения определенного интеграла 207
Подставляя это значение корня в (48.17), найдем
σ = 2π
R∫
−R
y√
1 + y′(2)dx = 2π
R∫
−R
yR
ydx =
= 2πRx|R−R = 4πR2.
48.7. Приложение определенного интеграла к решению фи-зических задач. Рассмотрим два примера приложения определенногоинтеграла к решению физических задач.
Пример 48.11. Сила тока I является заданной непрерывной функци-ей времени t: I = I(t). Определить количество электричества Q, про-текшего через поперечное сечение проводника за время T от моментаначала эксперимента.
Р е ш е н и е: 1. Разделим отрезок времени [0; T ] точкамиt0 = 0, t1, t2, . . . , tn = T на n элементарных отрезков
[t0; t1], [t1; t2], . . . , [tn−1; tn].
Обозначим ∆ti = ti − ti−1.2. На каждом отрезке выберем по одной произвольной точке τi.3. Будем считать, что за время ∆ti сила тока не изменяется и равна
значению функции I(t) в произвольно выбранной внутренней точке τi, т.е.I(τi).
Так ка для постоянного тока количество электричества, протекшеечерез поперечное сечение проводника равно произведению силы тока навремя, то на каждом элементарном отрезке
∆Qi ≈ I(τi)∆τi,
а на всем проводнике
Q ≈n∑
i=1
I(τi)∆τi.
4. За точное значение Q примем предел этой интегральной суммы приусловии, что число элементарных отрезков неограниченно возрастает икаждый из них стягивается в точку:
Q = limn→∞λ→0
n∑
i=1
I(τi)∆τi.
В последней формуле λ – длина наибольшего частичного отрезка.
208 48 Практическое занятие – Приложения интеграла
На основании формулы (47.1) окончательно получаем
Q =
T∫
0
I(t) dt.
Пример 48.12. Тяжелая цепь длиною L =100м поднимается, нави-ваясь на ворот. Определить работу силы веса при подъеме цепи, еслипогонный метр весит 50кг. Размерами ворота пренебречь.
Р е ш е н и е: Пусть к некоторому моменту времени на ворот навер-нулся отрезок цепи длиной x. Тогда свешивается часть цепи длиной L−x.Весит эта часть (L− x)50.
Элементарная работа силы веса на перемещении dx будет равна
dA = −(L− x)50 dx.
Полную работу найдем по формуле:
A =
L∫
0
−(L− x)50 dx = 50(L − x)2
2|L0 =
= −25L2 = −25 · 1002 = −250000.
Замечание 48.26. Знак минус поставлен потому, что сила веса на-правлена противоположно перемещению.
Пример 48.13. Скорость движения материальной точки выража-ется формулой V = t2. Какой путь пройдет эта точка за первые 2 сдвижения.
Р е ш е н и е:
S =
2∫
0
t2 dt =t3
8|20 = 1.
48. практическое занятие —приложения определенного интеграла
Пример 48.1. Найти площадь, ограниченную графиками функцийy = 2
√x и y = 2x (см. рис. 50).

48 Практическое занятие – Приложения интеграла 209
x1
m
A2
BO
y
C
y=2xxy=2
Рис. 50. К решению примера 48.1
Р е ш е н и е: Найдем площадь двумя способами.а) Как разность площадей криволинейных трапеций с основаниями на
оси Ox−OmAB и OAB:
S =
b∫
a
(yв − yн)dx =
1∫
0
2√x dx−
1∫
0
2x dx =4
3x3/2
∣∣∣∣
1
0
− x2|10 =1
3.
б) Как разность площадей криволинейных трапеций с основаниямина оси Oy − OAC и OmAC. В этом случае вместо ординат из уравненийверхней и нижней границ области использутся абсциссы из уравненийправой и левой границ области.
S =
2∫
0
(xп − xл)dy =
2∫
0
y
2dy −
2∫
0
y2
4dy =
y2
4
∣∣∣∣
2
0
− y3
12
∣∣∣∣
2
0
=1
3.
Пример 48.2. Найти площадь, ограничeнную эллипсом (рис. 51)x = a cos t,y = b sin t.
Р е ш е н и е: Воспользуемся формулой (48.2) для вычисления пло-щади, ограниченной кривой, заданой в параметрическом виде:
S =
t2∫
t1
y(t)x′(t) dt.

210 48 Практическое занятие – Приложения интеграла
Найдем всю площадь, как учетверенную площадь четверти эллипса.Так как y = b sin t, dx = d(a cos t) = −a sin t dt и t ∈ [π
2; 0], то
S = −4ab
0∫
π/2
sin2 t dt = −2ab
0∫
π/2
(1 − cos 2t) dt =
= −2ab(t− 1
2sin 2t)
∣∣∣∣
0
π/2
= πab.
Напомним, что ранее ( см. упр. 48.1) мы нашли площадь того же эл-липса в декартовых координатах.
y
xt=0O
b
-b
-a a
2/πt=
Рис. 51. К решению примера 48.2
Пример 48.3. Найти площадь одного лепестка четырехлепестковойрозы r = a sin 2ϕ (рис. 52).
Р е ш е н и е: Один лепесток ограничен кривой r = a sin 2ϕ и двумялучами α = 0 и β = π
2. Поэтому
S =1
2
β∫
α
ρ2 d =a2
2
π/2∫
0
sin2 2ϕdϕ =
=a2
4
π/2∫
0
(1 − cos 4ϕ) dϕ =a2
4(ϕ− 1
4sin 4ϕ)
∣∣∣∣
π/2
0
=πa2
8.

48 Практическое занятие – Приложения интеграла 211
r
Рис. 52. К решению примера 48.3
Пример 48.4. Найти объем тела вращения фигуры, ограниченной ли-ниями y = 2
√x и y = 2x вокруг осей Ox и Oy.
Р е ш е н и е: Этот объем равен разности двух объемов (см. рисунок 50)V1 и V2. V1 – объем тела вращения трапеции OmAB, а V2 – треугольникаOAB вокруг оси Ox.
Следовательно,
Vx = V1 − V2 = π
1∫
0
4x dx− π
1∫
0
4x2 dx = π
(
2x2∣∣1
0− 4
x3
3
∣∣∣∣
1
0
)
=2
3π.
Объем тела вращения вокруг оси Oy найдем по формуле аналогичной(48.7) с заменой x на y и y на x:
Vy = π
b∫
a
x2 dy.
В нашем случае
Vy = π
2∫
0
y2
4dy − π
2∫
0
y4
16dy = π
(
y3
12
∣∣∣∣
2
0
− y5
80
∣∣∣∣
2
0
)
=4π
15.
Пример 48.5. Вычислить поверхность сферы, радиуса R, рассматри-вая ee как тело вращения.

212 48 Практическое занятие – Приложения интеграла
Р е ш е н и е: Будем считать, что сфера образована вращением окруж-ности x2 + y2 = R2 вокруг оси Ox. Найдем из этого соотношения
y =√R2 − x2, y′ = −x
y,
√
1 + y′2 =
√
1 +x2
y2=
√
x2 + y2
y=R
y.
Подставляя эти значения в формулу
S = 2π
b∫
a
y
√
1 + y′2 dx,
найдем
S = 2π
R∫
−R
yR
ydx = 2πRx|R−R = 4πR2.
Пример 48.6. Найти длину дуги кривой y = lnx (x ∈ [1;√
3]).
Р е ш е н и е: Длина дуги в декартовых координатах находится поформуле (48.9). В нашем случае
l =
√3∫
1
√1 + x2
xdx =
∣∣∣∣
x = tg t x = 1 ⇒ t = π4
dx = dtcos2 t
x =√
3 ⇒ t = π3
∣∣∣∣=
=
π/3∫
π/4
dt
sin t cos2 t=
π/3∫
π/4
sin2 t + cos2 t
sin t cos2 tdt =
=
π/3∫
π/4
sin t dt
cos2 t+
π/3∫
π/4
dt
sin2 t=
(1
cos t+ ln
∣∣∣∣tgt
2
∣∣∣∣
)∣∣∣∣
π/3
π/4
=
= 2 −√
2 − 1
2ln 3 − ln tg
π
8= 2 −
√2 − 1
2
(
ln 3 + ln1 − cos π
4
1 + cos π4
)
=
= 2 −√
2 − 1
2ln
3(√
2 − 1)√2 + 1
≈ 0, 91.

48 Практическое занятие – Приложения интеграла 213
Пример 48.7. Найти длину окружности радиуса R, заданной пара-метрическими уравнениями
x = R cos t,y = R sin t,
Р е ш е н и е: l =t2∫
t1
√
x′2 + y′2 dt =
=2π∫
0
√
(R cos t)′2 + (R sin t)′2 dt = R2π∫
0
dt = 2πR.
Пример 48.8. Найти длину кривой r = 1 − sinϕ.
Р е ш е н и е: Длина дуги в полярных координатах находится поформуле (48.11).
Находим: r′ = − cosϕ,√
r2 + r′2 =√
(1 − sinϕ)2 + cos2 ϕ =√
2(1 − sinϕ) =
=
√
2(
1 + cos(π
2+ ϕ
))
=
√
4 cos2(π
4+ϕ
2
)
= 2 cos(π
4+ϕ
2
)
.
Следовательно,
l = 2
π/2∫
−π/2
2 cos(π
4+ϕ
2
)
dϕ = 8 sin(π
4+ϕ
2
)∣∣∣
π/2
−π/2= 8.
В заключение этого занятия решим задачу на физическое приложениеопределенного интеграла.
Пример 48.9. К телу прикреплена пружина, другой конец которойзакреплен неподвижно в точке O.
Упругая сила, с которой действует пружина на тело, подчиняетсязакону Гука, согласно которому F = −kx, где k – коэффициент пропор-циональности, а x – удлинение пружины. Найти работу упругой силыпри прямолинейном перемещении по линии действия силыот x = a доx = b.
Р е ш е н и е: Элементарная работа dA силы упругости при переме-щении dx равна
dA = −kx dx.

214 48 Практическое занятие – Приложения интеграла
Следовательно, вся работа при перемещении от a до b определится поформуле:
A =
b∫
a
F (x) dx =
b∫
a
−kx dx = −kx2
2=k
2(a2 − b2).
Самостоятельная работа
Пример 48.10. Найти площадь, ограниченную линиями y = 0,y = (x+ 2)2 и y = 4 − x.
Пример 48.11. Найти площадь, ограниченную астроидой
x = R cos3 t
4,
y = R sin3 t4.
Пример 48.12. Найти площадь, ограниченную кардиоидой r = a(1 ++ cosϕ).
Пример 48.13. Найти объем, ограниченный поверхностями x = 0,y = 0, z = 0, x + y + z = 1. Указание. Найти площадь сечения фигу-ры плоскостью x = const и воспользоваться формулой объема тела поизвестным поперечным сечениям.
Пример 48.14. Найти объем, тела ограниченного поверхностью вра-щения параболы y2 = x вокруг оси Ox и плоскостью x = C.
Пример 48.15. Найти объем прямого кругового конуса, рассматриваяего как тело, полученное от вращения отрезка y = x (y ∈ [0; 1]) вокругоси Oy.
Пример 48.16. Найти боковую поверхность прямого кругового кону-са, рассматривая его как тело, полученное вращением отрезка y = 2x(x ∈ [0; 1]) вокруг оси Ox.
Пример 48.17. Найти длину дуги параболы y = ax2 (a > 0) от вер-шины до произвольной точки с абсциссой x.
Пример 48.18. Найти длину астроиды
x = R cos3 t
4,
y = R sin3 t4.
Пример 48.19. Найти длину дуги спирали Архимеда r = aϕ от на-чала координат до точки (r;ϕ).
Пример 48.20. Вычислить путь, пройденый свободно падающим впустоте телом за tс, если известно, что скорость падения определяет-ся формулой V = gt, (V0 = 0).
49 Лекция – Несобственные интегралы 215
49. лекция – несобственные интегралы
Интегралы с бесконечными пределами. Интегралы от разрывныхфункций. Признаки сходимости несобственных интегралов. Инте-гральный признак сходимости знакоположительных рядов.
Определение интеграла (47.1) основано на следущих условиях:– областью интегрирования является отрезок [a; b];– подынтегральная функция f(x) непрерывна на этом отрезке.Если хотя бы одно из этих условий не выполняется, то обычное опре-
деление интеграла становится неприемлемым.Обобщим, поэтому, понятие определенного интеграла на случаи, когда
эти условия не выполняются.
49.1. Интегралы с бесконечными пределами. Пусть в интеграле
верхний предел бесконечный:+∞∫
a
f(x) dx.
Поступим следущим образом:1. Заменим бесконечный предел на конечный, например, b.
2. Вычислимb∫
a
f(x) dx. Очевидно он будет функцией переменной b.
3. Найдем предел этого интеграла при условии, что b→ +∞.Этот предел называют несобственным интегралом с бесконечным пре-
делом и обозначают+∞∫
a
f(x) dx.
Таким образом
(49.1)
+∞∫
a
f(x) dx = limb→+∞
b∫
a
f(x) dx.
Если предел существует, то несобственный интеграл называется сходя-щимся (существует), в противном случае – расходящимся (не существует).
Пример 49.1. Исследовать на сходимость интеграл I =+∞∫
1
dxxα .
Р е ш е н и е: Заменим бесконечный предел на конечный:
I =
+∞∫
1
dx
xα= lim
b→+∞
b∫
1
x−α dx.
Находим интеграл, а затем его предел.
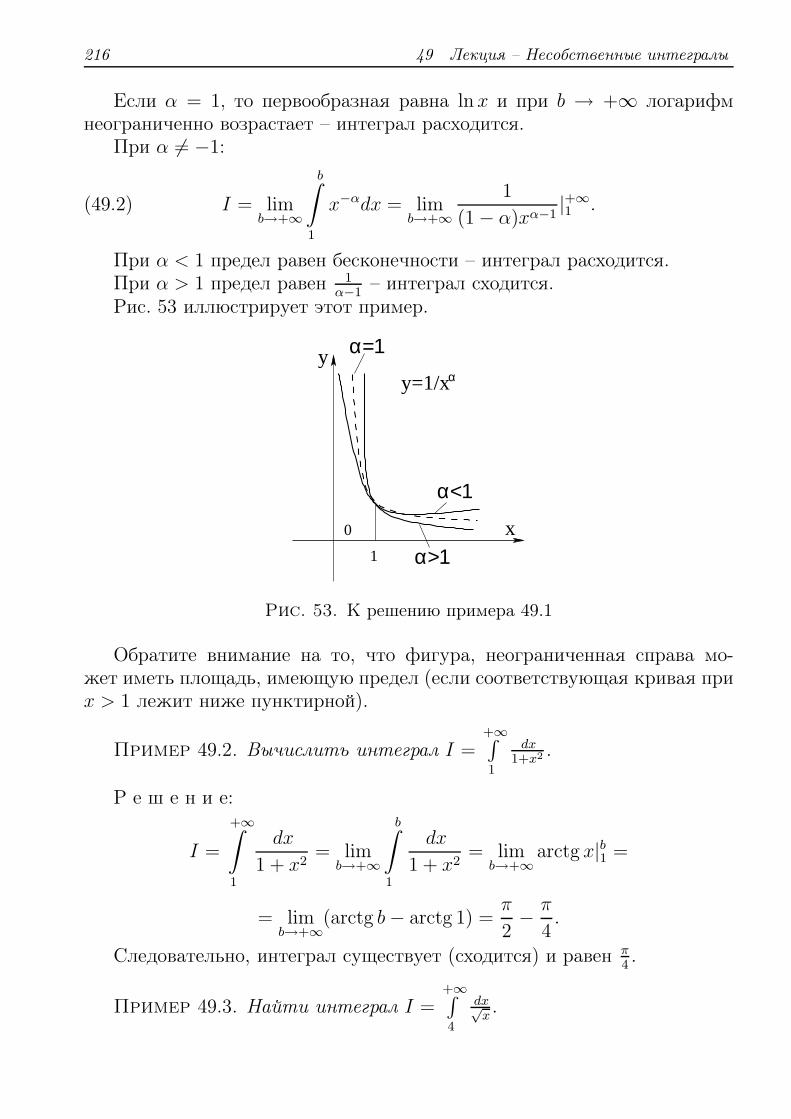
216 49 Лекция – Несобственные интегралы
Если α = 1, то первообразная равна ln x и при b → +∞ логарифмнеограниченно возрастает – интеграл расходится.
При α 6= −1:
(49.2) I = limb→+∞
b∫
1
x−αdx = limb→+∞
1
(1 − α)xα−1|+∞1 .
При α < 1 предел равен бесконечности – интеграл расходится.При α > 1 предел равен 1
α−1– интеграл сходится.
Рис. 53 иллюстрирует этот пример.
1
x
y
0
α=1
y=1/xα
α<1
α>1
Рис. 53. К решению примера 49.1
Обратите внимание на то, что фигура, неограниченная справа мо-жет иметь площадь, имеющую предел (если соответствующая кривая приx > 1 лежит ниже пунктирной).
Пример 49.2. Вычислить интеграл I =+∞∫
1
dx1+x2 .
Р е ш е н и е:
I =
+∞∫
1
dx
1 + x2= lim
b→+∞
b∫
1
dx
1 + x2= lim
b→+∞arctg x|b1 =
= limb→+∞
(arctg b− arctg 1) =π
2− π
4.
Следовательно, интеграл существует (сходится) и равен π4.
Пример 49.3. Найти интеграл I =+∞∫
4
dx√x.

49 Лекция – Несобственные интегралы 217
Р е ш е н и е:
I =
+∞∫
4
dx√x
= limb→+∞
b∫
4
dx√x
= 2 limb→+∞
√x|b4 = 2 lim
b→+∞(√b− 2) = +∞.
Таким образом, интеграл не существует (расходится).Аналогично определяется интеграл с бесконечным нижним пределом:
(49.3)
b∫
−∞
f(x) dx = lima→−∞
∫ b
a
f(x) dx.
Интеграл, у которого оба предела бесконечны определяется формулой
(49.4)
+∞∫
−∞
f(x) dx =
c∫
−∞
f(x) dx+
+∞∫
c
f(x) dx,
где с – любая фиксированная точка.Интеграл в левой части (49.4) существует (сходится), если существуют
оба интеграла в его правой части.
Пример 49.4. Исследовать на сходимость интеграл I =+∞∫
−∞
arctg x dx1+x2 .
Р е ш е н и е:
I =
0∫
−∞
arctg x dx
1 + x2+
+∞∫
0
arctg x dx
1 + x2.
Вычислим первый интеграл:0∫
−∞
arctg x dx
1 + x2= lim
a→−∞
0∫
a
arctg x dx
1 + x2=
1
2lim
a→−∞arctg 2x|0a =
= −1
2lim
a→−∞arctg 2a = −π
2
8.
Вычислим второй интеграл:+∞∫
0
arctg x dx
1 + x2= lim
b→+∞
b∫
0
arctg x dx
1 + x2=
1
2limb→+∞
2arctg x|b0 =
=1
2limb→+∞
2arctg b =
π2
8.

218 49 Лекция – Несобственные интегралы
Поэтому
I = −π2
8+π2
8= 0.
Следовательно, интеграл существует (сходится) и равен 0.
Замечание 49.27. Иногда замена переменной может превратитьнесобственный интеграл в определенный.
Пример 49.5. Вычислить интеграл+∞∫
−∞
dx
1 + x2.
Р е ш е н и е: Введем новую переменную и найдем соответствующиепределы интегрирования.
t = arctg x =⇒ dt =dx
1 + x2, x = −∞ =⇒
⇒ t = −π/2, x = ∞ =⇒ t = π/2.
Тогда:+∞∫
−∞
dx
1 + x2=
π/2∫
−π/2
dt = t|π/2−π/2 = π.
Замечание 49.28. При решении примеров, связанных с несобствен-ными интегралами допускается следующая формальная запись:
+∞∫
a
f(x) dx = F (x)∣∣+∞a = F (+∞) − F (a) ,
где понимается, что F (+∞) = limx→+∞
F (x).
49.2. Интегралы от разрывных функций. Пусть функция f(x)непрерывна на промежутке [a, b) и в точке b имеет разрыв. Что же в таком
случае понимать под выражениемb∫
a
f(x) dx?
Поступим следущим образом1. Заменим верхний предел b точкой b − ε (ε > 0). По определению
функция f(x) непрерывна на отрезке [a; b− ε].
2. Вычислим определенный интегралb−ε∫
a
f(x) dx.
3. Найдем предел этого определенного интеграла при ε→ 0.

49 Лекция – Несобственные интегралы 219
Этот предел называют несобственным интегралом от разрывной функ-ции. Если предел существует, то говорят, что интеграл сходится (суще-ствует). В противном случае интеграл расходится (не существует).
(49.5)
b∫
a
f(x)dx = limε→0
b−ε∫
a
f(x)dx
Пример 49.6. Вычислить интеграл I =1∫
0
dxx−1
.
Р е ш е н и е: Подынтегральная функция 1x−1
имеет разрыв в точкеx = 1 – правой границе области интегрирования. Поэтому
I =
1∫
0
dx
x− 1= lim
ε→0
1−ε∫
0
dx
x− 1= lim
ε→0ln |x− 1||1−ε0 = lim
ε→0ln ε = −∞.
Следовательно, интеграл расходится (не существует).Если же подынтегральная функция f(x) непрерывна на (a; b], то ин-
тегралb∫
a
f(x) dx определяется так:
(49.6)
b∫
a
f(x) dx = limε→0
b∫
a+ε
f(x) dx
Если же точка разрыва x = c лежит внутри отрезка [a; b], то
(49.7)
b∫
a
f(x) dx =
c∫
a
f(x) dx+
b∫
c
f(x) dx.
Интеграл в левой части равенства называется сходящимся, если суще-ствуют оба интеграла в правой части.
Пример 49.7. Исследовать на сходимость интеграл1∫
−1
dxx2 .
Р е ш е н и е: Подынтегральная функция разрывная в точке x = 0.
Поэтому рассмотрим отдельно интегралы0∫
−1
dxx2 и
1∫
0
dxx2 . Легко убедится,
220 49 Лекция – Несобственные интегралы
что оба интеграла не существуют. Так1∫
0
dx
x2= lim
ε→0
1∫
ε
dx
x2= − lim
ε→0
1
x|1ε = − lim
ε→0
(
1 − 1
ε
)
= +∞.
Следовательно, по определению не существует интеграл1∫
−1
dxx2 .
Замечание 49.29. Если действовать формально, применяя форму-лу Ньютона-Лейбница, то получили бы заведомо неверный результат1∫
−1
dxx2 = − 1
x|1−1 = −2.
Эта ошибка вызвана неправильным применением формулы Ньютона-Лейбница.
Замечание 49.30. Все виды несобственных интегралов можно опре-делить как пределы определенных интегралов (а не пределы интеграль-ных сумм).
49.3. Признаки сходимости несобственных интегралов. Ино-гда нет необходимости вычислять несобственный интеграл, а достаточнолишь знать сходится ли он или нет.
В таких случаях бывает полезно сравнить данный несобственный ин-теграл с другим, сходимость или расходимость которого заранее известна.Приведем без вывода теоремы, устанавливающие признаки сходимостиили расходимости, основанные на сравнении несобственных интегралов.
Теорема 49.1. Пусть на промежутке [a; +∞) функции f(x) и ϕ(x)непрерывны и удовлетворяют условиям
0 6 ϕ(x) 6 f(x).
Тогда
а) если интеграл+∞∫
a
f(x) dx сходится, то сходится и интеграл
+∞∫
a
ϕ(x) dx.
б) если интеграл+∞∫
a
ϕ(x) dx расходится, то расходится и интеграл
+∞∫
a
f(x) dx;
Пример 49.8. Исследовать на сходимость интеграл: I =+∞∫
1
dxx3+1
.

49 Лекция – Несобственные интегралы 221
Р е ш е н и е: Ранее (см. пример 49.2) было найдено, что интеграл+∞∫
1
dxx2+1
сходится. Так как на [1; +∞) 1x3+1
6 1x2+1
, то интеграл+∞∫
1
dxx3+1
также сходится.
Теорема 49.2. Пусть функции f(x) и ϕ(x) на промежутке [a; b)непрерывны и удовлетворяют условиям
0 6 ϕ(x) 6 f(x), а
в точке x = b имеют разрыв.Тогда
а) если интегралb∫
a
f(x) dx сходится, то сходится и интеграл
b∫
a
ϕ(x) dx.
б) если расходится интегралb∫
0
ϕ(x) dx, то расходится и интеграл
b∫
a
f(x) dx.
Пример 49.9. Исследовать на сходимость интеграл: I =1∫
0
dx3√1−x5
.
Р е ш е н и е: Подынтегральная функция непрерывна на [0; 1) и имеетбесконечный разрыв в точке x = 1. Сравним ее с функцией 1
3√1−x такженепрерывной на [0; 1) и имеющей бесконечный разрыв в точке x = 1.
Для всех 0 6 1 имеет место неравенство x5 6 x и 1 − x5 > 1 − x.Но тогда 3
√1 − x5 > 3
√1 − x и 1
3√1−x56 1
3√1−x .
Таким образом, подынтегральная функция 13√1−x5
в промежутке [0; 1)
меньше функции 13√1−x .
Вычислим интеграл I =1∫
0
dx3√1−x :
I = limε→0
1−ε∫
0
dx3√
1 − x= −3
2limε→0
(ε2/3 − 1
)=
3
2.
Так как он сходится, то сходится и исходный интеграл.

222 49 Практическое занятие – Несобственные интегралы
49.4. Интегральный признак сходимости знакоположительныхрядов. В 11 лекции первой части были рассмотрены признаки сходи-мости знакоположительных рядов – сравнения, Даламбера, Коши (ради-кальный).
Познакомимся еще с одним – интегральным признаком Коши.
Теорема 49.3. Пусть члены знакоположительного ряда
(49.8) u1 + u2+, · · · ,+un + · · · ,являются значениями при
x = 1, 2, · · · n, · · ·некоторой функции f(x), положительной, непрерывной, убывающей напромежутке [1; +∞), так что
u1 = f(1), u2 = f(2), · · · , un = f(n), · · · .Рассмотрим несобственный интеграл
(49.9) I =
+∞∫
1
f(x)dx.
Тогда на основании интегрального признака Коши, принимаемого на-ми без доказательства:
1.Если сходится интеграл (49.9), то сходится ряд (49.8).2.Если расходится интеграл (49.9), то расходится ряд (49.8).
Пример 49.10. Исследовать на сходимость обобщенный гармониче-ский ряд
(49.10)1
1α+
1
2α+
1
3α+ · · · 1
nα+ · · · ,
Р е ш е н и е: Согласно (49.2) интеграл I =
+∞∫
1
dx
xα.
Сходится при α > 1 и расходится при α 6 1.Следовательно, и ряд (49.10) сходится при α > 1 и расходится при
α 6 1.
49. практическое занятие —несобственные интегралы
При решении примеров этого занятия необходимо вспомнить опреде-ления несобственных интегралов, а также признаки их сходимости (рас-ходимости).
49 Практическое занятие – Несобственные интегралы 223
Пример 49.1. Вычислить интеграл
I =
+∞∫
0
e−αx dx.
Р е ш е н и е:
I =
+∞∫
0
e−αx dx = limb→+∞
b∫
0
e−αx dx =
= − 1
αlimb→+∞
(e−bx − 1
)=
1α, если α > 0,
+∞, если p < 0.
При α > 0 limb→+∞
e−αb = limb→+∞
1ebα = 0, так как ebα −→ +∞ при b→ +∞.
Ясно, что при α = 0 несобственный интеграл расходится.Поэтому заключаем, что исходный интеграл сходится при α > 0 и
равен в этом случае 1α. При α 6 0 интеграл расходится и суммы не имеет.
Пример 49.2. Вычислить интеграл
I =
+∞∫
0
cos x dx.
Р е ш е н и е: Решение оформим с учетом замечания 49.28:
I = sinx∣∣+∞0 = sin(+∞) − sin 0.
Но sinx при x → +∞ не стремится ни к какому пределу, совершаяколебания от –1 до 1. Следовательно, интеграл расходится.
Пример 49.3. Вычислить интеграл
I =
1∫
−∞
dx
1 + x2.
Р е ш е н и е:
I = arctg x∣∣1−∞ = arctg 1 − arctg(−∞) = π/4 + π/2 = 3π/4.
Мы воспользовались тем, что limx→+∞
arctg x = π/2.
Следовательно, интеграл сходится и равен 3π/4.

224 49 Практическое занятие – Несобственные интегралы
Пример 49.4. Вычислить интеграл
I =
+∞∫
−∞
arctg2 x dx
1 + x2.
Р е ш е н и е: У данного несобственного интеграла оба предела бес-конечны. Разобъем его на два, например. точкой 0:
I = I1 + I2 =
0∫
−∞
arctg2 x dx
1 + x2+
+∞∫
0
arctg2 x dx
1 + x2.
Вычислим их:
I1 =
0∫
−∞
arctg 2x d(arctg x) =
=1
3arctg 3x
∣∣0−∞ =
1
3(0 − (−π/2)3) = π3/24,
I2 =
+∞∫
0
arctg 2x d(arctg x) =
=1
3arctg 3x
∣∣−∞0 =
1
3((π/2)3 − 0) = π3/24.
Так как оба интеграла сходятся, то исходный интеграл сходится и ра-вен:
I = I1 + I2 = π3/24 + π3/24 = π3/12.
Напомним, что иногда достаточно не вычисляя интеграла только вы-яснить сходится он или нет. В таких случаях необходимо пользоватьсяпризнаками сходимости интегралов.
Пример 49.5. Исследовать на сходимость интеграл
I =
+∞∫
0
dx
1 + x3.
Р е ш е н и е:На промежутке [1; +∞) подынтегральная функция данного интеграла
не больше, чем у сходящегося интеграла примера 49.3:1
1 + x36
1
1 + x2.

49 Практическое занятие – Несобственные интегралы 225
Поэтому данный интеграл сходится (заметим, что сумма его не най-дена, но в данном примере она нас не интересует).
Пример 49.6. Исследовать на сходимость интеграл
I =
+∞∫
0
e−x2
dx.
Р е ш е н и е:Используем для доказательства сходимости интеграла признак срав-
нения.Проделаем элементарные преобразования:
(x− 1)2 > 0 =⇒ x2 − 2x + 1 > 0 =⇒ −x2 6 −2x + 1.
Так как функция ex монотонная, то
e−x2
6 e−2x+1 или e−x2
6 e · e−2x.
Из примера 49.1 следует, что интеграл
I =
+∞∫
0
e−2x dx
сходится. Поэтому сходится и исходный интеграл.Он называется интегралом вероятностей, Для него составлены подроб-
ные таблицы.
Пример 49.7. Исследовать на сходимость интеграл
I =
+∞∫
1
arctg x dx
x.
Р е ш е н и е:Рассмотрим несобственный интеграл:
I1 =
+∞∫
1
dx
x.
Покажем, что он расходится:
I1 =
+∞∫
1
dx
x= lnx
∣∣+∞1 = ln(+∞) = +∞.

226 49 Практическое занятие – Несобственные интегралы
Так как начиная с некоторого числа a arctg xx
> 1x, то на основании
признака сравнения исходный интеграл расходится.Решим физическую задачу, приводящую к несобственному интегралу.
Пример 49.8. В начале координат О находится масса m, котораяпритягивает по закону Ньютона с силой, модуль которой F = m
x2 , ма-териальную точку M единичной массы, находящуюся на оси Ox на рас-стоянии x от начала координат.
Вычислить работу A, которую произведет эта сила при перемеще-нии точки M в бесконечность из положения x = a.
Р е ш е н и е:Так как сила притяжения направлена к началу координат, т.е. против
движения, то работа будет отрицательной.На основании закона Ньютона:
A =
+∞∫
a
−mdxx2
=m
x
∣∣+∞a = −m
a.
Перейдем теперь к интегралам от разрывных функций.
Пример 49.9. Вычислить интеграл
I =
1∫
0
dx√x.
Р е ш е н и е: Очевидно, при x → 0 подынтегральная функция 1√x
неограниченно возрастает. Ясно, что она непрерывна на отрезке [ǫ; 1].По определению несобственного интеграла от разрывных функций име-
ем:
I = limǫ→0
1∫
ǫ
dx√x
= 2 limǫ→0
√x∣∣1ǫ = 2(1 − lim
ǫ→0
√ǫ) = 2.
Следовательно, интеграл сходится и равен двум.
Пример 49.10. Вычислить интеграл
I =
2∫
0
dx
x− 1.
Р е ш е н и е:
49 Практическое занятие – Несобственные интегралы 227
Особая точка лежит внутри отрезка интегрирования. Поэтому разо-бъем интеграл на два:
I = I1 + I2 =
1∫
0
dx
x− 1+
2∫
1
dx
x− 1.
У первого интеграла особой точкой является верхняя граница инте-грирования, у второго – нижняя.
Исследуем на сходимость I1 :
I1 = limǫ→0
1−ǫ∫
0
dx
x− 1= lim
ǫ→0ln |x− 1|
∣∣1−ǫ0 = lim
ǫ→0ln ǫ = −∞.
Так как I1 расходится, то независимо от того, сходится или расходитсяI2, исходный интеграл расходится.
Пример 49.11. Исследовать на сходимость ряд∞∑
n=1
1n√n
с помощью
интегрального признака сходимости рядов.
Р е ш е н и е: Согласно п.49.4 имеем Un = f(n) = 1n√n
и, следовательно,
соответствующий несобственный интеграл I =∞∫
1
dxx√x
=∞∫
1
dxx3/2 сходится,
т.к. α = 3/2, а в этом случае согласно (49.2) интеграл∞∫
1
dxx2 сходится, а,
следовательно, на основании интегрального признака Коши сходится и
ряд∞∑
n=1
1n√n
Самостоятельная работа
Вычислить интегралы или показать их расходимость.
Пример 49.12.+∞∫
0
sin xdx.
Пример 49.13.+∞∫
0
dxa2+b2x2 .
Пример 49.14.+∞∫
0
xdxc2+x2 .
Пример 49.15.2∫
0
dx√2−x .
Пример 49.16.2∫
1
dxx lnx
.
Пример 49.17.27∫
−8
dx3√x.
Пример 49.18.1∫
0
arcsinxdx√1−x2 .
Пример 49.19.+∞∫
−∞
dxx2+2x+2
.

228 50 Лекция – Приближенное вычисление интегралов
Исследовать сходимость интегралов.
Пример 49.20.+∞∫
1
x3+1x4 dx.
Пример 49.21.+∞∫
0
√xe−x dx.
Пример 49.22.1∫
0
x2 dx3√
(1−x2)5.
Пример 49.23.1∫
0
dxe√
x−1.
Исследовать на сходимость ряды.
Пример 49.24. 12 ln 2
+ 13 ln 3
+ 14 ln 4
+ · · · ,+ 1n lnn
+ · · · ,
50. лекция —приближенное вычислениеопределенных интегралов
Методы прямоугольников, трапеций и Симпсона. Оценка ошибок.Вычисление интегралов с помощью рядов.
50.1. Постановка задачи. Пусть требуется найти определенный ин-
тегралb∫
a
f(x) dx. Если функция f(x) непрерывна на отрезке [a; b] и может
быть найдена ее первообразная F (x), то по формуле Ньютона-Лейбница(47.13)
b∫
a
f(x) dx = F (b) − F (a).
Если же первообразная не может быть найдена или функция f(x) за-дана графически или таблично, то для вычисления интеграла прибегаютк приближенным формулам, точность которых может быть сколь угоднобольшой.
Чаще всего формулы приближеного интегрирования вытекают из гео-метрического смысла определенного интеграла как площади криволиней-ной трапеции. Следовательно, задача о приближенном вычислении инте-грала заменяется другой, равносильной ей – задачей о нахождении пло-щади криволинейной трапеции.
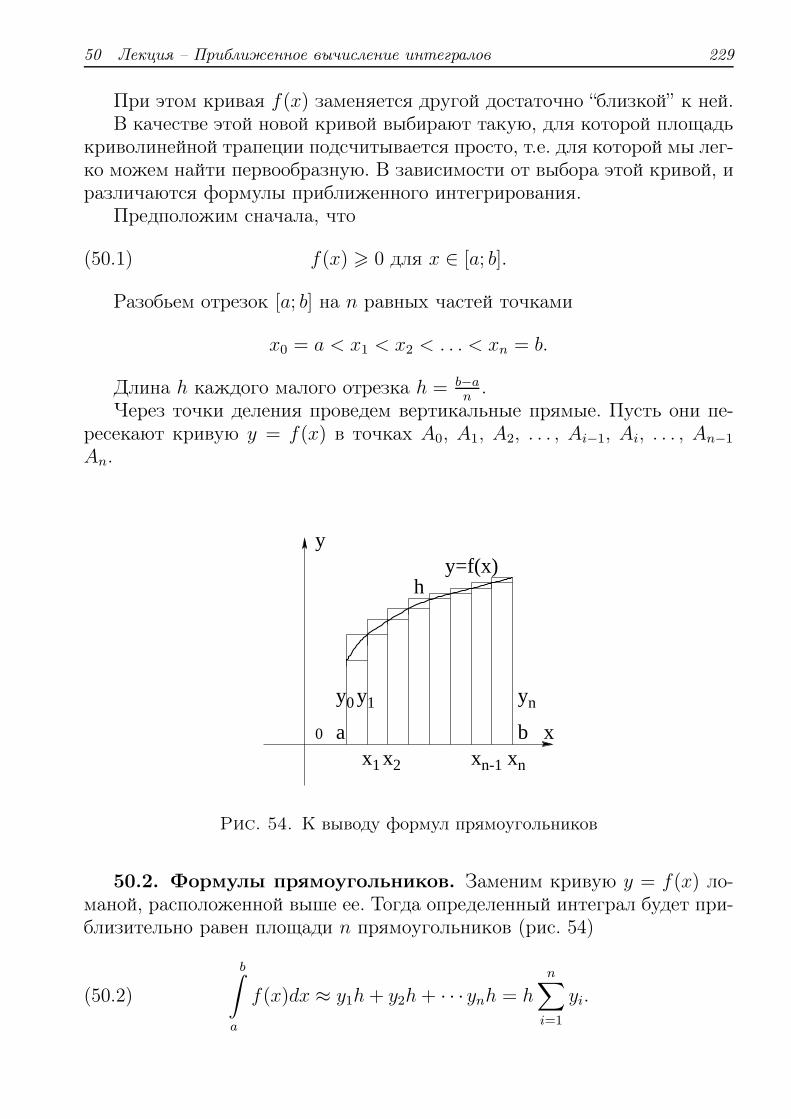
50 Лекция – Приближенное вычисление интегралов 229
При этом кривая f(x) заменяется другой достаточно “близкой” к ней.В качестве этой новой кривой выбирают такую, для которой площадь
криволинейной трапеции подсчитывается просто, т.е. для которой мы лег-ко можем найти первообразную. В зависимости от выбора этой кривой, иразличаются формулы приближенного интегрирования.
Предположим сначала, что
(50.1) f(x) > 0 для x ∈ [a; b].
Разобьем отрезок [a; b] на n равных частей точками
x0 = a < x1 < x2 < . . . < xn = b.
Длина h каждого малого отрезка h = b−an
.Через точки деления проведем вертикальные прямые. Пусть они пе-
ресекают кривую y = f(x) в точках A0, A1, A2, . . . , Ai−1, Ai, . . . , An−1
An.
x
y
h
0
y=f(x)
x x1 2
baxnn-1x
y0y1 yn
Рис. 54. К выводу формул прямоугольников
50.2. Формулы прямоугольников. Заменим кривую y = f(x) ло-маной, расположенной выше ее. Тогда определенный интеграл будет при-близительно равен площади n прямоугольникoв (рис. 54)
(50.2)
b∫
a
f(x)dx ≈ y1h+ y2h+ · · · ynh = hn∑
i=1
yi.

230 50 Лекция – Приближенное вычисление интегралов
Если же кривую y = f(x) заменить ломаной, расположенной ниже ее,то получится формула
(50.3)
b∫
a
f(x)dx ≈ y0h+ y1h+ · · · yn−1h = hn−1∑
i=0
yi.
Формулы 50.2 и 50.3 называются формулами прямоугольников.
50.3. Формула трапеций. Соединив каждые две соседние точки де-ления отрезками прямых, заменим кривую y = f(x) вписанной в нееломаной. Площадь элементарной криволинейной трапеции с основани-ем [xi−1; xi] заменим площадью трапеции, ограниченной сверху прямойAi−1Ai (рис. 55).
∆Si =yi−1 + yi
2· ∆xi.
x xx
y=f(x)
i-1 i
A
A i
i-1
Рис. 55. К выводу формулы трапеций
Тогда площадь криволинейной трапеции, ограниченной ломанойA0A1A2 · · ·An будет приблизительно равна площади криволинейной тра-пеции, ограниченной кривой f(x), т.е. интегралуb∫
a
f(x) dx.
По свойству аддитивности площадь фигуры, ограниченной ломанойравна сумме площадей прямолинейных трапеций, ограниченных сверхузвеньями этой ломаной.
Площадь каждой такой трапеции легко подсчитать. Надо только по-нять, что в отличие от привычного расположения трапеции (основаниягоризонтальны) эти трапеции расположены так, что их основания верти-кальны.
Длины этих оснований – ординаты смежных точек деления. Высотакаждой малой трапеции равна h.
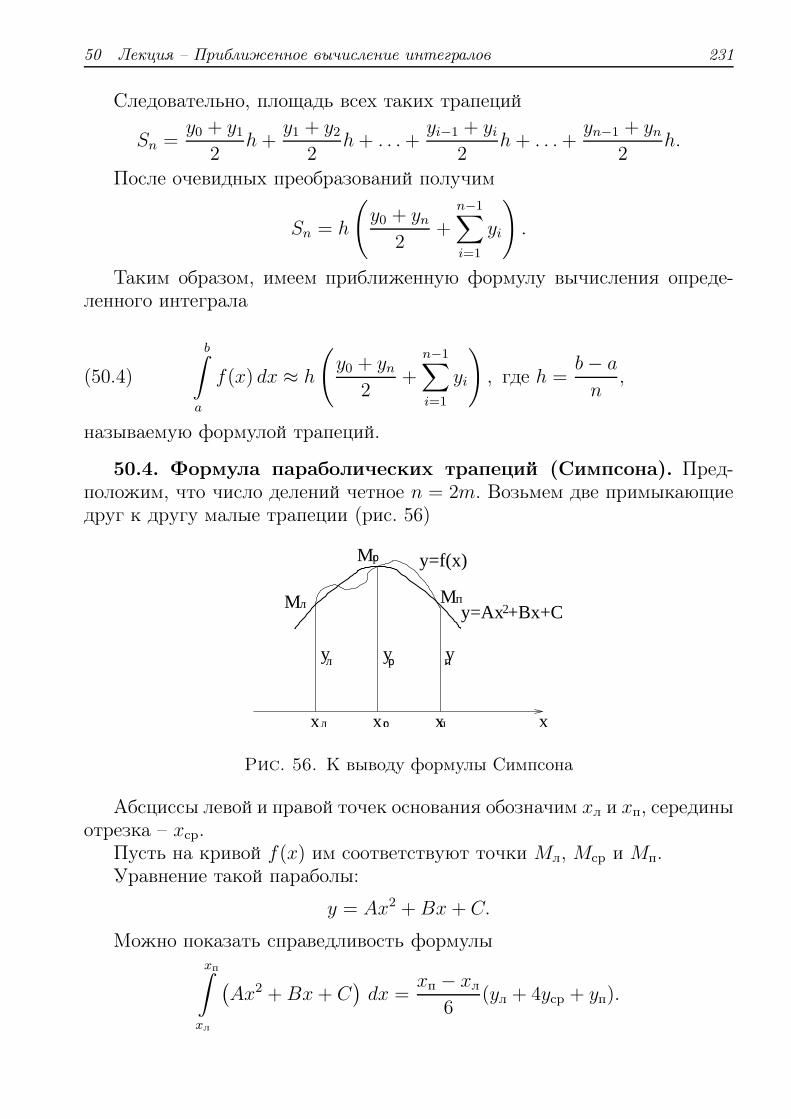
50 Лекция – Приближенное вычисление интегралов 231
Следовательно, площадь всех таких трапеций
Sn =y0 + y1
2h+
y1 + y2
2h+ . . .+
yi−1 + yi2
h+ . . .+yn−1 + yn
2h.
После очевидных преобразований получим
Sn = h
(
y0 + yn2
+
n−1∑
i=1
yi
)
.
Таким образом, имеем приближенную формулу вычисления опреде-ленного интеграла
(50.4)
b∫
a
f(x) dx ≈ h
(
y0 + yn2
+
n−1∑
i=1
yi
)
, где h =b− a
n,
называемую формулой трапеций.
50.4. Формула параболических трапеций (Симпсона). Пред-положим, что число делений четное n = 2m. Возьмем две примыкающиедруг к другу малые трапеции (рис. 56)
x
y y y
x x x
M
M y=f(x)
M2
л п
л
ср
п
л п
y=Ax +Bx+C
ср
ср
Рис. 56. К выводу формулы Симпсона
Абсциссы левой и правой точек основания обозначим xл и xп, серединыотрезка – xср.
Пусть на кривой f(x) им соответствуют точки Mл, Mср и Mп.Уравнение такой параболы:
y = Ax2 +Bx + C.
Можно показать справедливость формулыxп∫
xл
(Ax2 +Bx+ C
)dx =
xп − xл
6(yл + 4yср + yп).

232 50 Лекция – Приближенное вычисление интегралов
Для того, чтобы убедится в справедливости формулы достаточно вы-числить ее левую и правую части.
Поэтому
Sn = (y0 + 4y1 + y2)b− a
6m+ (y1 + 4y2 + y3)
b− a
6m+ . . .+
+(ym−2 + 4y2m−1 + y2m)b− a
6m=
=b− a
6m
(
(y0 + y2m) + 2m−1∑
i=1
y2i + 4m∑
i=1
y2i−1
)
.
Следовательно,
(50.5)
b∫
a
f(x) dx ≈ h
3
(
y0 + y2m + 2m−1∑
i=1
y2i + 4m∑
i=1
y2i−1
)
, гдеh =b− a
2m.
Эта формула называется формулой параболических трапеций.
Замечание 50.31. По определению (47.2)
b∫
a
f(x) dx = limλ→0
(n→∞)
n∑
i=1
f(ξi)∆xi.
Заменяя предел приближенным равенством, получим
b∫
a
f(x) dx ≈n∑
i=1
f(ξi)∆xi ≈ hn∑
i=1
f(ξi),(50.6)
где h = ∆xi =b− a
n.
Все формулы численного интегрирования, рассмотренные выше, вы-текают из (50.6) и отличаются друг от друга только выбором точекξi.
Можно показать справедливость формул прямоугольников, трапецийи Симпсона и в случае, если условие 50.1 не выполняются.
50.5. Оценка ошибок. Рассмотрим одну элементарную криволиней-ную трапецию (рис. 57). Ошибка при замене ее площади площадью пря-моугольника равна
δh =
h∫
0
|y − y0|dx.

50 Лекция – Приближенное вычисление интегралов 233
y=f(x)
x
y
0 h
y0
Рис. 57. К выводу погрешности формул прямоугольников
По формуле Лагранжа приращение функции на отрезке равно длинеэтого отрезка, умноженной на значение производной функции в некоторойточке:
y = y0 + y′(ξ)x.
Поэтому
δh =
h∫
0
|y′(ξ|xdx 6M1h
2
2,
где M1 – наибольшее значение производной функции y = f(x) на отрезке[a; b].
Так как всего отрезков деления
(50.7) n =b− a
h,
то оценка абсолютной погрешности увеличится в n раз:
δ 6 δh · n 6M1nh
2
2,
а с учетом формулы (50.7):
(50.8) δ 6b− a
2M1h.
Аналогично можно вывести оценки ошибок для методов трапеций иСимпсона:
(50.9) δтр 6b− a
12M2h
2,

234 50 Лекция – Приближенное вычисление интегралов
(50.10) δсим 6b− a
180M4h
4.
В этих формулах Mk = max |f (k)(x)| на отрезке [a; b].Для оценки погрешностей вычислений по формулам трапеций и Симп-
сона существуют еще и формулы, которые мы приводим без доказательств:
(50.11)
∣∣∣∣∣∣
b∫
a
f(x) dx− I2n
∣∣∣∣∣∣
6|I2n − In|
15.
При вычисление интегралов с помощью этих формул обычно поступа-ют так:
– вычисляют интеграл при числе точек деления n и 2n– сравнивают результаты вычислений и оставляют все первые совпа-
дающие знаки.
Пример 50.1. Вычислить интеграл I =1∫
0
3x2dx с помощью формул
прямоугольников (50.2; 50.3), трапеций (50.4) и Симпсона (50.5) с шагомh = 1
n= 0, 1. Оценить ошибки вычислений.
Р е ш е н и е: Очевидно, что точное значение заданного интеграла
может быть легко получено I =1∫
0
3x2dx = x3|10 = 1. С использованием
формулы прямоугольников, соответственно, по (50.2) I = 0, 3(0, 01+0, 04++ 0, 09 + 0, 16 + 0, 25 + 0, 36 + 0, 49 + 0, 64 + 0, 81 + 1) = 1, 155, по (50.3)I = 0, 3(0+0, 01+0, 04+0, 09+0, 16+0, 25+0, 36+0, 49+0, 64+0, 81) = 0, 855,по формуле трапеций (50.4) I = 0, 3(0+1
2+0, 01+0, 04+0, 09+0, 16+0, 25+
+0, 36+0, 49+0, 64+0, 81+1) = 1, 005 и, наконец, использование формулыСимпсона (50.5) дает точный результат I = 0, 1(0 + 1 + 2(0, 04 + 0, 16 ++ 0, 36 + 0, 64) + 4(0, 01 + 0, 09 + 0, 025 + 0, 049 + 0, 081)) = 1
Вычислим значения производных от подынтегральной функцииf(x) = 3x2, f ′(x) = 6x, f ′′(x) = 6, f ′′′(x) = f IV (x) = 0. Следователь-но, на отрезке [0, 1] имеем M1 = 6, M2 = 6, M4 = 0 и производная поформулам (50.8)–(50.10) оценка ошибки вычислений с использованием,соответственно, формул прямоугольников, трапеций и Симпсона оказы-вается:
по (50.8) δ 6b− a
2M1h =
1
2· 6 · 0, 1 = 0, 3;
по (50.9) δ 6b− a
12M2h
2 =1
12· 6 · 0, 01 = 0, 005;

50 Лекция – Приближенное вычисление интегралов 235
по (50.10) δ 6b− a
180M4h
4 = 0.
Как видно реальная ошибка формул прямоугольников (50.2) 0, 155 << 0, 3 и (50.3) 0, 145 < 0, 3. Полученная по формуле трапеций реальнаяошибка совпадает с оценкой, а по формуле Симпсона реальная и оценоч-ная ошибки равны нулю. Это вызвано тем, что для нашей подынтеграль-ной функции вторая производная постоянна, а четвертая равна нулю.
Замечание 50.32. Из формулы оценки ошибки (50.10) формулы Cимп-сона (50.5) следует, что если подынтегральная функция является мно-гочленом степени не ниже 3ей, то формула Симпсона дает точный ре-зультат при любом четном количестве шагов.
Пример 50.2. На сколько частей надо разделить отрезок интегриро-вания [0;1], чтобы вычислить по формулам численного интегрирования
интеграл I =1∫
0
cos x dx с точностью δ ≤ 0, 0001?
Р е ш е н и е: Длина отрезка интегрирования b-a=1 учитывая, чтонаибольшее значение всех производных:
M1 = M2 = M4 = 1,
для того, чтобы реальная ошибка не превышала 10−4
1)Формул прямоугольников (50.8).
h 6 0, 0002 =⇒ n >1
0, 0002= 5000.
2)Формулы трапеций (50.9).
h 6√
0, 0012 =⇒ n >1√
0, 0012≈ 29.
3)Формулы Симпсона (50.10).
h 6 4√
0, 0180 =⇒ n >1
4√
0, 0180≈ 2.
50.6. Вычисление интегралов с помощью рядов. Этот методприближенного нахождения определенных интегралов основан на разло-жении подынтегральной функции в ряд Тейлора с последующим интегри-рованием каждого слагаемого этого ряда. При нахождении определенногоинтеграла сумма ряда заменяется его частичной суммой с последующейоценкой ошибки.

236 50 Лекция – Приближенное вычисление интегралов
b∫
a
∞∑
n=0
f (n)(a)
n!(x− a)ndx =
∞∑
n=0
f (n)(a)
n!
(x− a)n+1
n+ 1|ba =
=∞∑
n=0
f (n)(a)
(n+ 1)!(b− a)n+1.
Пример 50.3. Вычислить интеграл Φ(x) =x∫
0
e−x2dx с точностью
δ = 0, 005.
Р е ш е н и е: Это – известный ”интеграл вероятностей”. Разложимподынтегральную функцию в ряд Маклорена:
x∫
0
e−x2
dx =
x∫
0
(1 − x2 +x4
2!− x6
3!+x8
4!+ . . .+ (−1)n
x2n
n!+ . . .)dx
Интеграл от каждого слагаемого легко находится. Поэтому при x = 1получим:
1∫
0
e−x2
dx =
1∫
0
(
1 − x2 +x4
2− x6
6+x8
24+ · · ·
)
dx =
= x|10 −x3
3
∣∣∣∣∣
10 +
x5
10
∣∣∣∣10 −
x7
42
∣∣∣∣
1
0
+x9
216
∣∣∣∣∣
1
0
− · · · . = 1 − 1
3+
1
10− 1
42+
1
216− . . .
Полученный ряд знакочередующийся.Для него очень проста оценка ошибки – надо взять столько членов
ряда, чтобы первый отброшенный по абсолютной величине не превышалпогрешности. Так как 1
216< 0, 005, то с точностью до 0, 005
I = 1 − 1
3+
1
10− 1
42=
78
105.
50 Практическое занятие – Контрольная работа 237
50. практическое занятие – контрольнаяработа по материалам лекций 43–49
Типовой вариант
Пример 50.1.∫
3x2 + 1
x3 + x+ 8dx
Пример 50.2.∫
arcsin x√x+ 1
dx
Пример 50.3.∫
xdx√3x2 − 11x + 2
Пример 50.4.∫
x3 + 5
x3 − x2 + 4x− 4dx
Пример 50.5.∫
tg5 xdx
Пример 50.6. Вычислить определенный интеграл4∫
1
√x
√√x+ 1
dx
Пример 50.7. Исследовать на сходимость ряд∞∑
n=2
lnn
n(1 + ln4 n)
Пример 50.8. Найти площадь фигуры, ограниченной линиямиx = −2, y = −x, y = 1
x2
Пример 50.9. Найти работу, затрачиваемую на выкачивание водыиз полностью заполненного полусферического котлована радиуса R = 10м. Откачка проводится с поверхности воды.

238 50 Практическое занятие – Контрольная работа
Решение примеров типового вариантаконтрольной работы
Пример 50.1.
Р е ш е н и е: Этот пример на внесение подынтегральной функциипод знак дифференциала:
∫(3x2 + 1)dx
x3 + x+ 8=
∫d(x3 + x+ 8)
x3 + x+ 8=
=
∫
d ln |x3 + x+ 8| = ln |x3 + x+ 8| + C
Пример 50.2.
Р е ш е н и е: Для решения данного примера используем формулуинтегрирования по частям (43.13):
∫arcsin x√x+ 1
dx =
∣∣∣∣∣
u = arcsinx, du = 1√1−x2dx
dv = dx√x+1
= d(2√x+ 1) → v = 2
√x + 1
∣∣∣∣∣=
= 2√x + 1 arcsin x− 2
∫ √x+ 1√1 − x2
dx = 2√x+ 1 arcsinx−
−2
∫dx√1 − x
= 2√x+ 1 arcsinx+ 4
√1 − x+ C
Пример 50.3.
Р е ш е н и е: В данном примере подынтегральная функция содержитквадратный трехчлен и в соответствии с п.39.1 и 46.3 используем подста-новку t = 1
2(3x2−11x+2)′ = 3x− 11
2, положив затем z = t
3= x− 11
6, откуда
x = z + 116, dx = dz. Далее, выделив полный квадрат в квадратном трех-
члене 3x2 −11x+2 = 3(x2 − 113x+ 2
3) = 3
((x− 11
6)2 + 2
3− 121
36
)= 3
(z2 − 97
36
)
и заменив x на z + 116, а dx на dz, получим
∫xdx√
3x2 − 11x + 2=
1√3
∫zdz
√
z2 − 97/36+
11
6√
3
∫dz
√
z2 − 97/36=
=1√3
√
z2 − 97/36 +11
6√
3ln |z +
√
z2 − 97/36| + C =
=1√3
(√
x2 − 11
3x+
2
3+
11
6ln |x− 11
6+
√
x2 − 11
3x +
2
3+
2
3|)
+ C

50 Практическое занятие – Контрольная работа 239
Пример 50.4.
Р е ш е н и е: Подынтегральное выражение в нашем случае являетсянеправильной рациональной дробью. Разделив числитель на знаменательи разложив знаменатель на множители x3 − x2 + 4x− 4 = x2(x− 1) ++ 4(x− 1) = (x− 1)(x2 + 4) согласно методике, изложенной в лекции 34 и44 получаем:
∫x3 + 5
x3 − x2 + 4x− 4dx =
∫ (
1 +x2 − 4x+ 9
(x− 1)(x2 + 4)
)
dx =
=
∣∣∣∣
x2 − 4x+ 9
(x− 1)(x2 + 4)=
A
x− 1+Bx + C
x2 + 4=
=A(x2 + 4) + (x− 1)(Bx + C)
(x− 1)(x2 + 4)→
→ A(x2 + 4) + (x− 1)(Bx + C) = x2 − 4x + 9,
положив в данном тождестве x = 1, получим 5A = 6 → A = 6/5. Приx = 0 имеем: 4A − C = 9 → C = 4A − 9 = −21/5. И, наконец, приравнявкоэффициенты при x2 получаем A+B = 1 → B = 1 − A = −1
5.
Таким образом искомый интеграл∫
x3 + 5
x3 − x2 + 4x− 4dx =
∫ (
1 +6
5(x− 1)− 1
5
x+ 21
x2 + 4
)
dx =
= x+6
5ln |x− 1| − 1
10ln(x2 + 4) − 21
10arctg
x
2+ C.
Пример 50.5.
Р е ш е н и е: В данном примере подынтегральная функция являетсярациональной функцией tg x и в соответствии с п. 45.3 сделав заменуtg x = z, x = arctg z, dx = dz
1+z2, получим
∫
tg5 xdx =
∫z5
z2 + 1dz =
∫ (
z3 − z +z
z2 + 1
)
dz =z4
4− z2
2+
+1
2ln(z2 + 1) + C =
tg4 x
4− tg2 x
2+
1
2ln(tg2 x+ 1) + C =
=tg4 x
4− tg2 x
2− ln | cosx| + C,
в последнем преобразовании учтено, что ln(tg2 x+1) = ln 1cos2 x
= −2 ln | cosx|.

240 50 Практическое занятие – Контрольная работа
Пример 50.6.
Р е ш е н и е: В заданном примере подынтегральная функция являетсядифференциальным биномом
xm(a+ bxn)p = x1/2(x1/2 + 1)−12 → m =
1
2; n =
1
2; p = −1
2, a = b = 1.
В соответствии со вторым случаем п. 46.5 имеем m+1n
=12+1
1/2= 3 и реко-
мендуемая замена в данном примере√x + 1 = z2 →
√x = z2 − 1,
dx
2√x
= 2zdz,√xdx = 4xzdz = 4z(z2 − 1)2dz.
Исключив из подынтегрального выражения x и заменив пределы инте-грирования, получим
4∫
1
√x
√√x+ 1
dx = 4
√3∫
√2
(z4 − 2z2 + 1
)dz = 4
(z5
5− 2
3z3 + z
)∣∣∣∣
√3
√2
=
= 4√
3
(9
5− 2 + 1
)
− 4√
2
(4
5− 4
3+ 1
)
=16√
3
5− 28
√2
15=
=4
5
(
4√
3 − 7√
2
3
)
≈ 2, 903
Пример 50.7.
Р е ш е н и е: В соответствии с интегральным признаком Коши (п.49.4) рассмотрим несобственный интеграл
∞∫
2
lnx
x(1 + ln4 x)dx =
∞∫
2
lnx
1 + ln4 xd lnx =
1
2
∞∫
2
d ln2 x
1 + ln4 x=
=1
2arctg ln2 x
∣∣∣∣
∞
2
=1
2
(π
2− arctg ln2 2
)
.
Итак интеграл сходится и, следовательно, ряд∞∑
n=2
lnn
n(1 + ln4 n)также схо-
дится.

50 Практическое занятие – Контрольная работа 241
Пример 50.8.
Р е ш е н и е: Изобразим заданный криволинейный треугольникABC на рис. 58. По формуле (48.1), определив предварительно коорди-нату xB = −1, найдем искомую площадь
2y=
1/x
A
C
B
-1 0-2 x
y
y=-x
Рис. 58. К примеру 50.8
SABC =
−1∫
−2
(
−x− 1
x2
)
dx =
(
−x2
2+
1
x
)∣∣∣∣
−1
−2
= −1
2− 1 +
4
2+
1
2= 1.
Пример 50.9.
Р е ш е н и е: Изобразим диаметральное сечение котлавана на рис.59. Элементарная работа по поднятию слоя воды размером ∆x на высоту
R0-R
Rx
y
x∆x+ x
Рис. 59. К примеру 50.9
x равна
∆A = gx∆m = gxρ∆V ≈ γxπy2∆x =
∣∣∣∣
x2 + y2 = R2
y2 = R2 − x2
∣∣∣∣=
= πγx(R2 − x2)∆x.

242 50 Практическое занятие – Контрольная работа
Таким образом искомая работа
A =
R∫
0
πγ(R2x− x3)dx = πγ
(
R2x2
2− x4
4
)∣∣∣∣
R
0
=
= πγ
(R4
2− R4
4
)
=πγR4
4=π
4107 кгм ≈ 7854000 кгм.
При расчете, удельный вес воды взят γ = 1 т.м3 = 103 кг
м3 .В качестве домашнего задания студентам рекомендуется решить какой
либо из других вариантов контрольной работы.

51 Лекция – Двойной интеграл 243
IX ГЛАВА
Кратные и криволинейныеинтегралы. Элементы теории
векторного поля
51. лекция – двойной интеграл
Определение, геометрическая интерпретация и свойства двойногоинтеграла. Переход от двойного интеграла к двукратному интегра-лу в декартовой системе координат. Вычисление двойных интегра-лов в декартовых координатах.
51.1. Понятие двойного интеграла. В лекции 47 мы ввели поня-тие определенного интеграла, как предела интегральной суммы, образо-ванной для функции одной переменной y = f(x) на отрезке [a; b]. Про-ведем теперь аналогичные рассуждения для функции двух переменныхz = f(x, y), заданной и непрерывной в замкнутой области S (см. лекцию35), ограниченной линией C (рис. 60). Площадь области S обозначим тойже буквой.
Разобьем область S произвольным образом на n частей (малых пло-щадок), названия которых, а также их площади обозначим ∆Si, таким
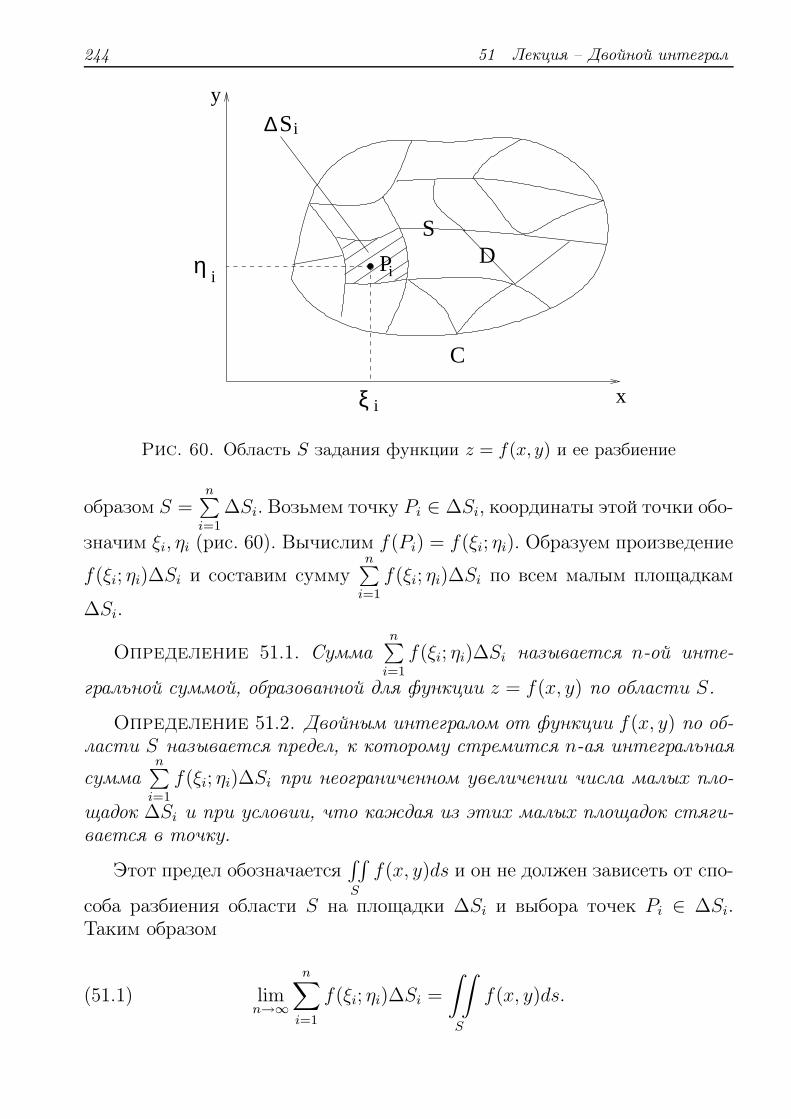
244 51 Лекция – Двойной интеграл
y
x
P
SD
C
η i
ξ i
Si∆
i
Рис. 60. Область S задания функции z = f(x, y) и ее разбиение
образом S =n∑
i=1
∆Si. Возьмем точку Pi ∈ ∆Si, координаты этой точки обо-
значим ξi, ηi (рис. 60). Вычислим f(Pi) = f(ξi; ηi). Образуем произведение
f(ξi; ηi)∆Si и составим суммуn∑
i=1
f(ξi; ηi)∆Si по всем малым площадкам
∆Si.
Определение 51.1. Суммаn∑
i=1
f(ξi; ηi)∆Si называется n-ой инте-
гральной суммой, образованной для функции z = f(x, y) по области S.
Определение 51.2. Двойным интегралом от функции f(x, y) по об-ласти S называется предел, к которому стремится n-ая интегральная
суммаn∑
i=1
f(ξi; ηi)∆Si при неограниченном увеличении числа малых пло-
щадок ∆Si и при условии, что каждая из этих малых площадок стяги-вается в точку.
Этот предел обозначается∫∫
S
f(x, y)ds и он не должен зависеть от спо-
соба разбиения области S на площадки ∆Si и выбора точек Pi ∈ ∆Si.Таким образом
(51.1) limn→∞
n∑
i=1
f(ξi; ηi)∆Si =
∫∫
S
f(x, y)ds.
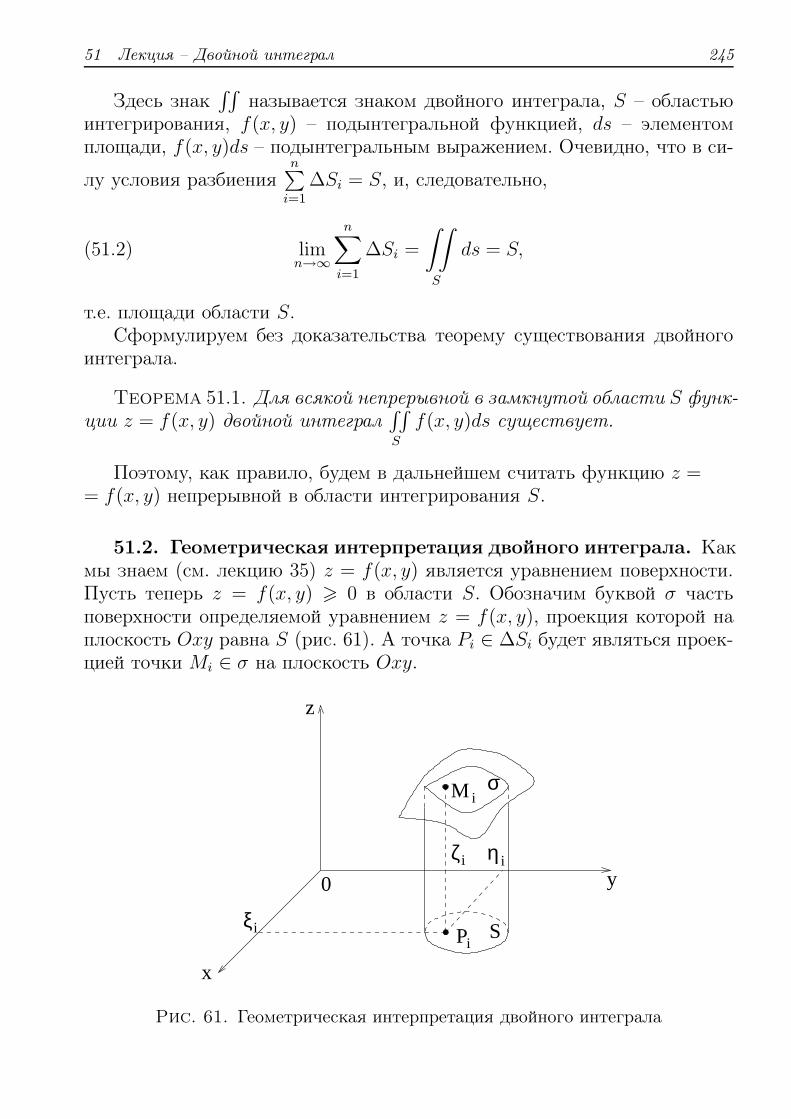
51 Лекция – Двойной интеграл 245
Здесь знак∫∫
называется знаком двойного интеграла, S – областьюинтегрирования, f(x, y) – подынтегральной функцией, ds – элементомплощади, f(x, y)ds – подынтегральным выражением. Очевидно, что в си-
лу условия разбиенияn∑
i=1
∆Si = S, и, следовательно,
(51.2) limn→∞
n∑
i=1
∆Si =
∫∫
S
ds = S,
т.е. площади области S.Сформулируем без доказательства теорему существования двойного
интеграла.
Теорема 51.1. Для всякой непрерывной в замкнутой области S функ-ции z = f(x, y) двойной интеграл
∫∫
S
f(x, y)ds существует.
Поэтому, как правило, будем в дальнейшем считать функцию z == f(x, y) непрерывной в области интегрирования S.
51.2. Геометрическая интерпретация двойного интеграла. Какмы знаем (см. лекцию 35) z = f(x, y) является уравнением поверхности.Пусть теперь z = f(x, y) > 0 в области S. Обозначим буквой σ частьповерхности определяемой уравнением z = f(x, y), проекция которой наплоскость Oxy равна S (рис. 61). А точка Pi ∈ ∆Si будет являться проек-цией точки Mi ∈ σ на плоскость Oxy.
0
z
y
x
M i
ξ
η
i
i
σ
SPi
ζ i
Рис. 61. Геометрическая интерпретация двойного интеграла

246 51 Лекция – Двойной интеграл
Так как ζi = f(ξi; ηi) = PiMi, то произведение f(ξi; ηi)∆Si = ζi∆Si естьобъем малого цилиндра с основанием ∆Si и высотой PiMi = ζi. Инте-
гральная суммаn∑
n=1
f(ξi; ηi)∆Si =n∑
n=1
ζi∆Si будет равна объему некоторого
“ступенчатого” тела Vn, состоящего из этих цилиндриков.В соответствие с формулой 51.1 имеем
limn→∞
n∑
i=1
f(ξi; ηi)∆Si =
∫∫
S
f(x, y)ds = limn→∞
Vn = V,
где V , очевидно, является объемом цилиндрического тела (рис. 61) с обра-зующей, параллельной оси Oz, нижним основанием S и верхним основани-ем σ. В этом и заключается геометрический смысл (или интерпретация)двойного интеграла при f(x, y) > 0 в S.
51.3. Свойства двойного интеграла. Понятие двойного интегра-ла, как мы видим, вводится аналогично понятию определенного интегра-ла, следовательно, двойной интеграл обладает теми же свойствами, что иопределенный. Приведем их без доказательства.
• Постоянный множитель можно выносить за знак двойного инте-грала:
∫∫
S
kf(x, y)ds = k
∫∫
S
f(x, y)ds.
• Двойной интеграл от суммы функций равен сумме двойных ин-тегралов от этих функций:∫∫
S
(f(x, y) + ϕ(x, y))ds =
∫∫
S
f(x, y)ds+
∫∫
S
ϕ(x, y)ds.
• Если в области интегрирования f(x, y) > 0, то и∫∫
S
f(x, y)ds > 0.
• Если в области интегрирования m и M являются соответственнонаименьшим и наибольшим значениями функции f(x, y), т.е.
m 6 f(x, y) 6 M, то mS 6
∫∫
S
f(x, y)ds 6 MS.
Это свойство дает нам оценку двойного интеграла.

51 Лекция – Двойной интеграл 247
• Если область интегрирования S =m∑
j=1
Sj , то
∫∫
S
f(x, y)ds =m∑
j=1
∫∫
Si
f(x, y)ds.
• Теорема о среднем. Если функция f(x, y) непрерывна в замкнутойобласти S, то в области S существует, по крайней мере, одна точкаP (ξ; η), в которой значение функции f(ξ, η) = 1
S
∫∫
S
f(x, y)ds. Это
значение называется средним интегральным значением функцииf(x; y; z) в области S.
51.4. Переход от двойного интеграла к двукратному (повтор-ному) в декартовой системе координат. Под двукратным интегри-рованием понимается последовательное вычисление двух определенныхинтегралов. Вывод формул перехода от двойного интеграла к двукратно-му мы проведем для подынтегральной функции f(x, y) > 0, хотя получен-ный результат справедлив и в общем случае. Предположение о том, чтоf(x, y) > 0 в S позволяет использовать геометрическую интерпретациюдвойного интеграла.
Пусть область интегрирования S ограничена снизу кривой y = yн(x),сверху – y = yв(x), а слева и справа соответственно прямыми x = a и x = b(рис. 62). Так, что любая прямая x = const, параллельная оси Oy, приусловии, что a < x < b, имеет одну точку входа в область на пересеченииее с нижней границей области y = yн(x), и одну точку выхода из областина пересечении ее с верхней границей y = yв(x). Соответственно на рис62 эти точки обозначены значками “o” и “x”.
A B
CDE
K
a b
S
x
y x=consty=y
B(x)
y=yH(x)
Рис. 62. Область, правильная в направлении оси Oy
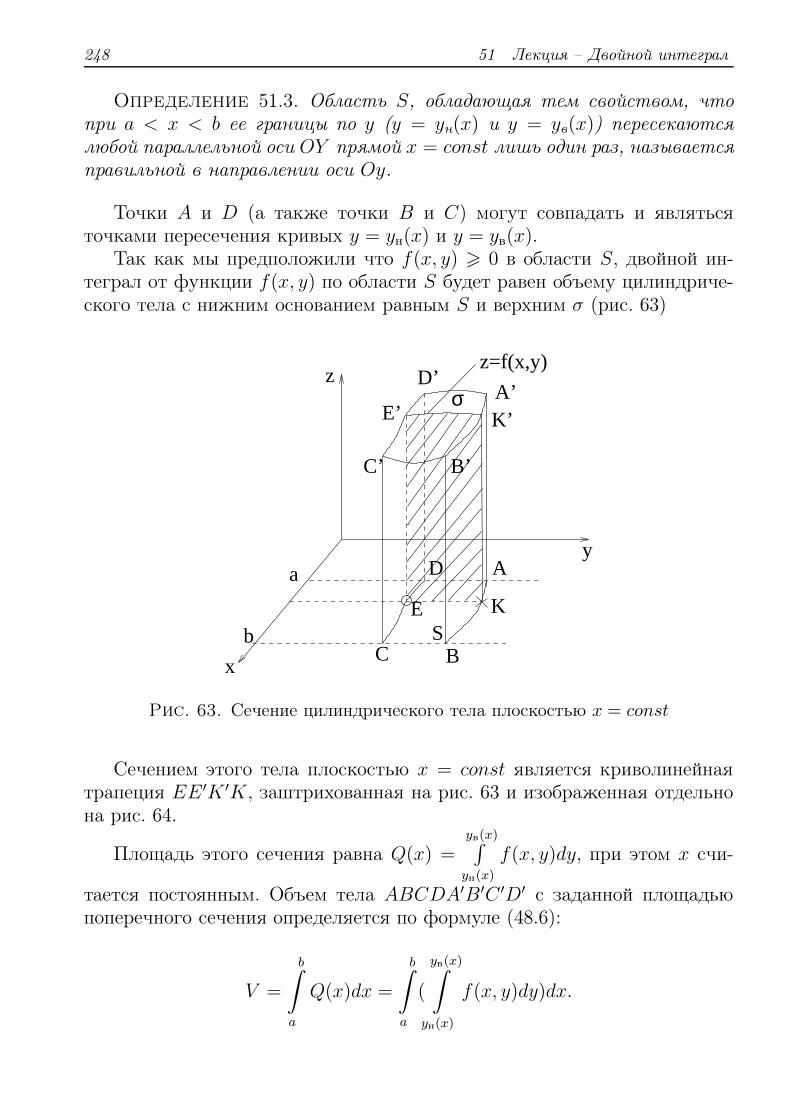
248 51 Лекция – Двойной интеграл
Определение 51.3. Область S, обладающая тем свойством, чтопри a < x < b ее границы по y (y = yн(x) и y = yв(x)) пересекаютсялюбой параллельной оси OY прямой x = const лишь один раз, называетсяправильной в направлении оси Oy.
Точки A и D (а также точки B и C) могут совпадать и являтьсяточками пересечения кривых y = yн(x) и y = yв(x).
Так как мы предположили что f(x, y) > 0 в области S, двойной ин-теграл от функции f(x, y) по области S будет равен объему цилиндриче-ского тела с нижним основанием равным S и верхним σ (рис. 63)
BC
AD
SK
b
a
x
z
y
B’C’
D’A’
E
E’ K’σ
z=f(x,y)
Рис. 63. Сечение цилиндрического тела плоскостью x = const
Сечением этого тела плоскостью x = const является криволинейнаятрапеция EE ′K ′K, заштрихованная на рис. 63 и изображенная отдельнона рис. 64.
Площадь этого сечения равна Q(x) =yв(x)∫
yн(x)
f(x, y)dy, при этом x счи-
тается постоянным. Объем тела ABCDA′B′C ′D′ с заданной площадьюпоперечного сечения определяется по формуле (48.6):
V =
b∫
a
Q(x)dx =
b∫
a
(
yв(x)∫
yн(x)
f(x, y)dy)dx.

51 Лекция – Двойной интеграл 249
0 y
z
Q(x)
z=f(x,y)
E K
E’K’
y=yB(x)
y=yH(x)
Рис. 64. Плоскость x = const
Принято последний интеграл писать в виде:
V =
b∫
a
dx
yв(x)∫
yн(x)
f(x, y)dy.
С другой стороны мы знаем, что при f(x, y) > 0 :
V =
∫∫
S
f(x, y)ds.
Сравнивая два последних выражения для V , получаем формулу пере-хода от двойного интеграла к двукратному с последовательным инте-грированием сначала по y, затем по x.
(51.3)∫∫
S
f(x, y)ds =
b∫
a
dx
yв(x)∫
yн(x)
f(x, y)dy
Внешние пределы в двукратном интеграле всегда постоянны, а вну-тренние постоянны лишь тогда, когда границы области являются коорди-натными линиями x = const и y = const, т.е. сама область S представляетсобой прямоугольник (рис. 65).
В этом случае формула (51.3) упрощается и
(51.4)∫∫
S
f(x, y)ds =
b∫
a
dx
d∫
c
f(x, y)dy.

250 51 Лекция – Двойной интеграл
0 a b
d
c
S
y
x
Рис. 65. Область интегрирования – прямоугольник
Определение 51.4. Произведение дифференциалов декартовых коор-динат dxdy = ds называется элементом площади в декартовых коорди-натах.
Если мы сможем найти первообразную для функции f(x, y) приx = const, т.е. такую функцию F (x, y), для которой ∂F (x,y)
∂y= f(x, y), прове-
дем интегрирование по y во внутреннем интеграле (x при этом считаетсяпостоянным).
(51.5)
b∫
a
dx
yв(x)(x)∫
yн(x)
f(x, y)dy =
b∫
a
F (x, y)|yвyнdx =
=
b∫
a
(F (x, yв(x)) − F (x, yн(x)))dx.
И, следовательно, мы сведем наш двойной интеграл к определенно-му интегралу по переменной x, методы решения которых рассмотрены вседьмой главе.
Если нижняя, или верхняя границы области S состоят из участков,определяемых различными уравнениями, то S необходимо разбить пря-мыми параллельными оси Oy на отдельные составные части Si, в которыхнижняя и верхняя границы определяются каждая одним уравнением. Так,например, поскольку для изображенной на рис. 66 области S ее нижняяграница при a 6 x 6 c определяется одним уравнением y = yн1(x), при

51 Лекция – Двойной интеграл 251
c 6 x 6 b другим уравнением y = yн2(x), а верхняя граница соответствен-но при a 6 x 6 d – y = yв1(x) и при d 6 x 6 b – y = yв2(x), нам необходимо
0
S S S1
2 3
y
xa c d b
y=y y=y
y=yy=y
B B
H
H
(x)
(x)(x)
1
1 2(x)
2
Рис. 66. Разбиение области интегрирования на части
разбить область S на три S1, S2, S3.В результате
∫∫
S
f(x, y)ds =
∫∫
S1
f(x, y)ds+
∫∫
S2
f(x, y)ds+
∫∫
S3
f(x, y)ds =
=
c∫
a
dx
yв1(x)∫
yн1(x)
f(x, y)dy +
d∫
c
dx
yв1(x)∫
yн2(x)
f(x, y)dy +
b∫
d
dx
yв2(x)∫
yн2(x)
f(x, y)dy.
Пример 51.1. Вычислить двойной интеграл∫∫
S
(x+y)ds, где S – тре-
угольник с вершинами O(0; 0), A(1; 1), B(1; 0).
Р е ш е н и е: Границами области интегрирования являются прямыеy = 0, x = 1, y = x. Проведем любую прямую x = const, 0 < x < 1.Она пересекает нижнюю границу области интегрирования в точке “o”, вкоторой y = yн(x) = 0, и верхнюю границу области в точке “x”, в кото-рой y = yв(x) = x. Слева и справа область S ограничена значениями x,равными 0 и 1 (рис. 67).
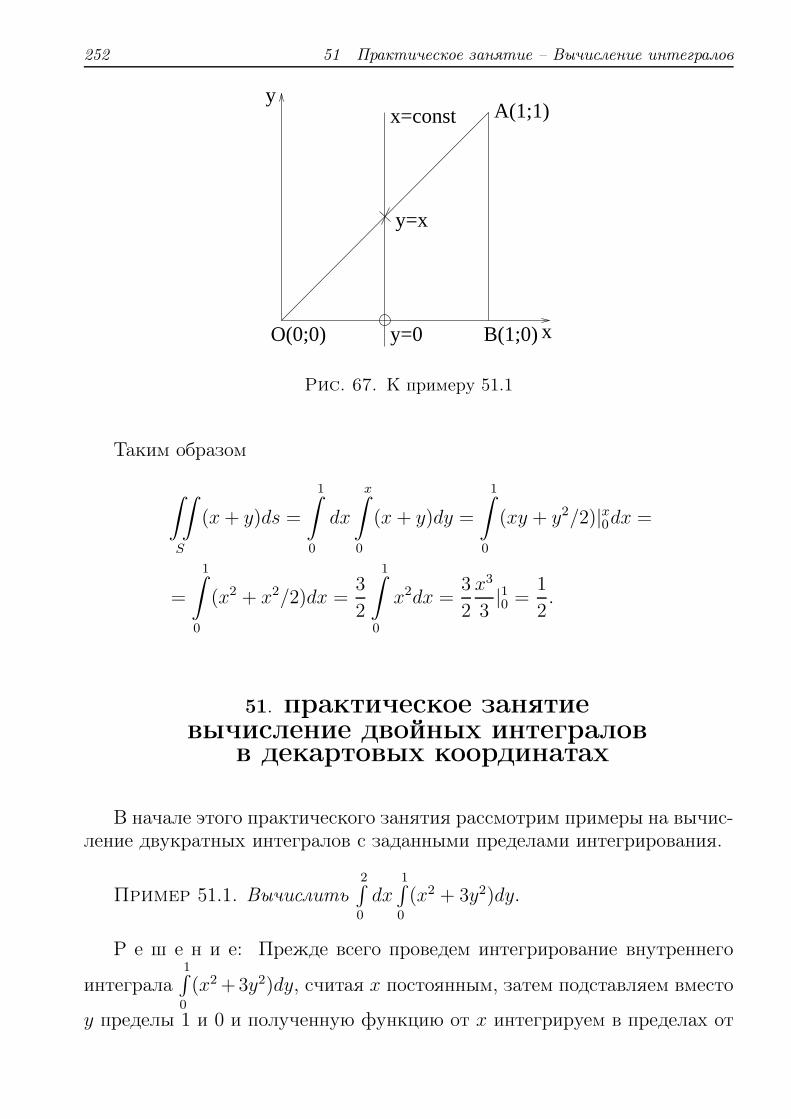
252 51 Практическое занятие – Вычисление интегралов
O(0;0) B(1;0)
A(1;1)
y=0
y=x
x=consty
x
Рис. 67. К примеру 51.1
Таким образом
∫∫
S
(x+ y)ds =
1∫
0
dx
x∫
0
(x + y)dy =
1∫
0
(xy + y2/2)|x0dx =
=
1∫
0
(x2 + x2/2)dx =3
2
1∫
0
x2dx =3
2
x3
3|10 =
1
2.
51. практическое занятиевычисление двойных интегралов
в декартовых координатах
В начале этого практического занятия рассмотрим примеры на вычис-ление двукратных интегралов с заданными пределами интегрирования.
Пример 51.1. Вычислить2∫
0
dx1∫
0
(x2 + 3y2)dy.
Р е ш е н и е: Прежде всего проведем интегрирование внутреннего
интеграла1∫
0
(x2 +3y2)dy, считая x постоянным, затем подставляем вместо
y пределы 1 и 0 и полученную функцию от x интегрируем в пределах от

51 Практическое занятие – Вычисление интегралов 253
0 до 2.2∫
0
dx
1∫
0
(x2 + 3y2)dy =
2∫
0
(x2y + y3)|10dx =
2∫
0
(x2 + 1)dx = (x3
3+ x)|20 =
8
3+ 2 =
14
3.
Пример 51.2. Вычислить2∫
1
dxx∫
1/x
x2dyy2.
Р е ш е н и е: Прежде всего отметим, что поскольку внутреннийинтеграл берется при x = const, x2 может быть вынесен из под знакавнутреннего интеграла, а затем проводятся действия подобные тем, какиепроводились в примере 51.1.
2∫
1
x2dx
x∫
1/x
dy
y2=
2∫
1
x2(−1
y)|x1/xdx =
2∫
1
x2(x− 1
x)dx =
=
2∫
1
(x3 − x)dx =
(x4
4− x2
2
)∣∣21 = 4 − 2 − 1
4+
1
2=
9
4.
Рассмотрим теперь примеры 51.3, 51.4, в которых надо найти и по-строить области интегрирования S по заданным пределам двукратногоинтеграла.
Пример 51.3.3∫
1
dxx+9∫
x2
f(x, y)dy.
Р е ш е н и е: Внутренний интегралx+9∫
x2
f(x, y)dy берется вдоль прямой
x = const от точки “o” пересечения ее с параболой y = x2, ограничиваю-щей область интегрирования S снизу, до точки пересечения “x” с прямойy = x + 9, ограничивающей область S сверху. Границы области интегри-рования S по x определяются прямыми x = 1 и x = 3. Следовательно,область интегрирования ограничена линиями: y = x2, y = x + 9, x = 1 иx = 3. Построим их и изобразим область интегрирования S на рис. 68.
Точки пересечения координатных линий x = 1 и x = 3 с прямой y == x+9 равны A(1;10) и B(3;12). Соответственно с параболой y = x2 D(1;1)и C(3;9).

254 51 Практическое занятие – Вычисление интегралов
y
x1 3
1
10
y=x+9
D
CA
B
0
x=1
x=3
x=co
nst
y=x 2
Рис. 68. К примеру 51.3
y
x
x=-4
x=3
y= 25-x
y=- 25-x 2
2
x=co
nst
Рис. 69. К примеру 51.4
Пример 51.4.3∫
−4
dx
√25−x2∫
−√
25−x2
f(x; y)dy.
51 Практическое занятие – Вычисление интегралов 255
Р е ш е н и е: Внутренний интеграл
√25−x2∫
−√
25−x2
f(x; y)dy берется вдоль
прямой x = const в пределах от точки “o” пересечения ее с частью окруж-ности y = −
√25 − x2 → x2 + y2 = 25, расположенной ниже оси x и огра-
ничивающей область интегрирования S снизу, до точки пересечения “x” счастью этой окружности y =
√25 − x2 → x2 + y2 = 25, ограничивающей
область S сверху. Границы области интегрирования S по x определяютсяпрямыми x = −4 и x = 3. Следовательно область интегрирования огра-ничена окружностью x2 + y2 = 25 и прямыми x = −4 и x = 3. Построимих и изобразим область интегрирования S на рис. 69
Точки пересечения окружности x2+y2 = 25 с прямыми x = −4 и x = 3имеют координаты A(-4;3), B(3;4), C(3;-4) и D(-4;-3).
Самостоятельная работа
Пример 51.5. Вычислить4∫
2
dyy∫
0
y3
x2+y2dx и построить область инте-
грирования.
Пример 51.6. Вычислить4∫
3
dx2∫
1
dy(x+y)2
и построить область инте-
грирования.
Пример 51.7. Вычислить2∫
1
dx2x∫
x
(2x− y)dy и построить область ин-
тегрирования.
В примерах (51.8) и (51.9) написать уравнения кривых, ограничиваю-щих область интегрирования и изобразить эти области.
Пример 51.8.2∫
0
dx
√4x∫
√2x−x2
f(x, y)dy.
Пример 51.9.1∫
0
dy
√3−y2∫
y/2
f(x, y)dx.

256 52 Лекция – Двойной интеграл
52. лекция – двойной интеграл
Вычисление двойных интегралов в декартовых координатах (про-должение). Изменение порядка интегрирования. Другое обоснова-ние формул перехода от двойного интеграла к двукратному в де-картовых координатах.
52.1. Вычисление двойных интегралов в декартовых коорди-натах (продолжение). Продолжим рассмотрение примеров вычисле-ния двойных интегралов в декартовых координатах, начатое в преды-дущей лекции.
Пример 52.1. Вычислить двойной интеграл∫∫
S
(x+y)ds, где S – тре-
угольник с вершинами O(0; 0), A(1; 1), B(0; 2).
O(0;0)
x=const
y=x
y=2-x
A(1;1)
y B(0;2)
x
Рис. 70. К примеру 52.1
Р е ш е н и е: Границами области интегрирования являются прямыеx = 0, y = x, y = 2 − x (рис. 70).
Повторяя рассуждения, проведенные при решении примера 51.1 из
предыдущей лекции, получаем∫∫
S
(x+ y)ds =1∫
0
dx2−x∫
x
(x+ y)dy =1∫
0
(xy +
+ y2/2)|2−xx dx =1∫
0
(x(2−x)+ (2−x)22
−x2 − x2
2)dx =
1∫
0
(2x−x2 +2− 2x+ x2
2−
− x2 − x2
2)dx = 2
1∫
0
(1 − x2)dx = 2(x− x3
3)|10 = 2(1 − 1
3) = 4
3.

52 Лекция – Двойной интеграл 257
Пример 52.2. Вычислить двойной интеграл∫∫
S
(x+y)ds, где S – тре-
угольник с вершинами O(0; 0), A(1; 1), B(2; 0).
O(0;0)
x=const
y=x
A(1;1)
yx=const
y=2-x
B(2;0)C(1;0) x
Рис. 71. К примеру 52.2
Р е ш е н и е: Границами области интегрирования являются прямыеx = 0, y = x, y = 2 − x (рис. 71).
Отличие этого примера от предыдущих заключается в том, что грани-ца области интегрирования сверху ограничена двумя различными кривы-ми, а, следовательно, область интегрирования необходимо разбить прямойпараллельной оси OY на два треугольника OAC и ACB. На основаниисвойств двойного интеграла
∫∫
S
(x + y)ds =∫∫
OAC
(x+ y)ds+∫∫
ACB
(x + y)ds.
Расставляя пределы интегрирования в интегралах по треугольникамOAC и ACB в соответствие с рис. 71 и, проведя затем интегрирование,
получим∫∫
S
(x+y)ds =1∫
0
dxx∫
0
(x+y)dy+2∫
1
dx2−x∫
0
(x+y)dy =1∫
0
(xy+ y2
2)|x0dx+
+2∫
1
(xy + y2
2)|2−x0 dx =
1∫
0
(x2 + x2
2)dx+
2∫
1
(x(2 − x) + (2−x)22
)dx = 32
1∫
0
x2dx+
+2∫
1
(2 − x2
2)dx = 3
2x3
3|10 + (2x− x3
6)|21 = 1
2+ 4 − 4
3− 2 + 1
6= 4
3.
52.2. Изменение порядка интегрирования. Пусть теперь областьS ограничена слева кривой x = xл(y), справа – x = xпр(y), снизу прямойy = c, сверху – y = d (рис. 72).
Любая прямая y = const, параллельная оси Ox, при условии c < x < d,имеет одну точку входа в область на пересечении ее с левой границей об-ласти x = xл(y) и одну точку выхода из области, на пересечении ее с

258 52 Лекция – Двойной интеграл
y=const
d
c
A B
CD
x=x (y)npx=x (y)
y
x
Рис. 72. Область, правильная в направлении оси Ox
правой границей x = xпр(y). Соответственно на рис. 72 эти точки обозна-чены значками “o” и “x”.
Определение 52.1. Область S, обладающая тем свойством, чтопри c < y < d ее границы по x (x = xл(y) и x = xпр(y)) пересекаютсялюбой параллельной оси OX прямой y = const лишь один раз, называетсяправильной в направлении оси Ox.
Точки A и B (а также D и C) могут совпадать и являться точкамипересечения кривых x = xл(y) и x = xпр(y).
Для выбранного первоначального направления интегрирования по xможно получить формулу аналогичную формуле (51.3), полученной намив предыдущей лекции для первоначального направления интегрированияпо y:
(52.1)∫∫
S
f(x, y)ds =
d∫
c
dy
xпр(y)∫
xл(y)
f(x, y)dx.
Для области, являющейся прямоугольником (рис. 65) имеем:
(52.2)∫∫
S
f(x, y)ds =
d∫
c
dy
b∫
a
f(x, y)dx.
Очевидно, что если все пределы постоянны, порядок интегрирования(формулы (51.4),(52.2)) не имеет значения. Если к тому же f(x, y) == ϕ(x)ψ(y), то двойной интеграл равен произведению двух определенных

52 Лекция – Двойной интеграл 259
интегралов:
(52.3)∫∫
S
f(x, y)dxdy =
b∫
a
ϕ(x)dx
d∫
c
ψ(y)dy.
Если мы найдем первообразную для f(x, y) при y = const, т.е. такуюфункцию Φ(x, y), для которой ∂Φ(x,y)
∂x= f(x, y), то сможем провести инте-
грирование по x во внутреннем интеграле двойного интеграла (52.1).
(52.4)
d∫
c
dy
xпр(y)∫
xл(y)
f(x, y)dx =
d∫
c
Φ(x, y)|xпр(y)
xл(y) dy =
=
d∫
c
(Φ(xпр(y), y) − Φ(xпр(y), y))dy.
И, следовательно, сведем наш двойной интеграл вновь к определенно-му интегралу, только переменной теперь является y.
Пример 52.3. Изменить порядок интегрирования в двойном инте-грале из примера 51.1.
Р е ш е н и е: Проведем любую прямую y = const, 0 < y < 1. Онапересекает левую границу области интегрирования в точке “o”, в которойx = xл(y) = y, и правую границу области в точке “x”, в которой x == xпр(y) = 1. Снизу и сверху область S ограничена значениями y, равны-ми 0 и 1 (рис. 73).
O(0;0) B(1;0)
A(1;1)y
x
y=const
x=y
Рис. 73. К примеру 52.3

260 52 Лекция – Двойной интеграл
Следовательно,
∫∫
S
(x + y)ds =
1∫
0
dy
y∫
0
(x+ y)dx =
1∫
0
(x2
2+ yx)|y0dy =
=
1∫
0
(y2
2+ y2)dy =
3
2
1∫
0
y2dy =3
2
y3
3|10 =
1
2.
Пример 52.4. Изменить порядок интегрирования в двойном инте-грале из примера 52.1.
Р е ш е н и е: Проведем любую прямую y = const 0 < y < 1. В точкевхода ее в область интегрирования “o” x = xл(y) = 0, однако, посколькусправа при o < y < 1 границей области интегрирования является прямаяx = xпр(y) = 2 − y, а при 1 < y < 2 – x = xпр(y) = 2y, область S следуетразбить на два треугольника OAC и CAB (рис. 74).
O(0;0)
A(1;1)
y B(0;2)
C(0;1)
x=y
x=2-yy=const
y=const
x
Рис. 74. К примеру 52.4
Таким образом∫∫
S
(x+ y)ds =∫∫
OAC
(x + y)ds+∫∫
CAB
(x+ y)ds.
Расставляя пределы интегрирования в интегралах по треугольникамOAC и CAB в соответствие с рис. 74, и, проведя затем интегрирование,получим:
∫∫
S
(x + y)ds =
1∫
0
dy
y∫
0
(x+ y)dx +
2∫
1
dy
2−y∫
0
(x + y)dx =4
3.

52 Лекция – Двойной интеграл 261
Пример 52.5. Изменить порядок интегрирования в двойном инте-грале из примера 52.2 (рис. 75).
Р е ш е н и е: Рассуждая подобным образом, как и в предыдущих
примерах, получаем∫∫
S
(x + y)ds =1∫
0
dy2−y∫
y
(x+ y)dx = 43.
O(0;0)
A(1;1)
y
B(2;0)C(1;0) x
y=const
x=2-yx=y
Рис. 75. К примеру 52.5
Из приведенных примеров (51.1 – 52.5) видно, что выбор порядка ин-тегрирования имеет существенное значение при вычислении двойного ин-теграла, так как изменив порядок интегрирования мы можем быть выну-ждены вместо одного двукратного интеграла вычислять два, а может иболее интегралов.
52.3. Другое обоснование формул перехода от двойного инте-грала к двукратному в декартовых координатах. Вначале предпо-ложим, что непрерывная функция f(x, y) задана в области S, являющейсяпрямоугольником, для которого a 6 x 6 b, c 6 y 6 d (рис. 76). Наи-более естественно в данном случае разбить S координатными прямымиx = const и y = const, соответственно параллельным координатным осям.
Пусть отрезок [a; b] разбит на k частей, а [c; d] на m. Тогда b−a =k∑
l=1
∆xl,
c− d =m∑
j=1
∆yj, где ∆xl = xl − xl−1, ∆yj = yj − yj−1.
При введении понятия двойного интеграла в предыдущей лекции мыразбили область интегрирования на n площадок. Очевидно, что в рас-сматриваемом теперь случае S = (b−a)(c−d), n = km, а ∆Si = ∆xl ·∆yj.Вычислим теперь значение f(x, y) в точке (ξl; ηj), принадлежащей зачер-ненному на рис. 76 прямоугольнику и образуем произведение f(ξl; ηj)∆xl∆yj.

262 52 Лекция – Двойной интеграл
y =d
y
xx =a x =b
m
0
yj-1
jy
x xl-1 l k0
y =c
Рис. 76. Разбиение прямоугольной области координатными ли-ниями в декартовых координатах
Просуммировав эти произведения по j, т.е. по вертикали (заштрихо-ванный столбец на рис 76), получим m−ю интегральную сумму
m∑
j=1
f(ξl; ηl)∆xl∆yj,
где суммирование проведено по переменной y при постоянном x. Просум-мировав теперь полученные для каждого вертикального столбца суммыпо l и перейдя к пределу при ∆xl → 0 и ∆yj → 0, получим
lim∆xl→0∆yj→0
k∑
l=1
(m∑
j=1
f(ξl; ηj)∆xl∆yj
)
=
lim∆xl→0∆yj→0
k∑
l=1
(m∑
j=1
f(ξl; ηj)∆yj
)
∆xl =
=b∫
a
(d∫
c
f(x, y)dy
)
dx =b∫
a
dxd∫
c
f(x, y)dy =∫∫
S
f(x, y)ds.
Рассмотрим теперь более общий пример области ABCD, правильнойв направлении оси oy (рис. 62 и рис. 77).
Отличия разбиения этой области координатными линиями x = constи y = const от разбиения прямоугольной области и процесса суммирова-ния имеют место лишь вблизи границы y = yн(x) и y = yв(x). Однакопри стремлении ∆xl и ∆yj к нулю эти отличия исчезают и вертикальнаяполоска стягивается в линию x = const (бесконечно тонкую полоску) сточкой входа в область “o” и выхода “x” из нее и суммирование по y про-водится от y = yн(x) до y = yв(x). Просуммировав затем полученные длякаждой такой бесконечно тонкой полоски суммы по l и, устремив ∆xl к

52 Практическое занятие – Вычисление интегралов 263
y
xx =b
yj-1
jy
x xl-1 l k0x =a
CD
A B
0
y=y (x)B
y=y (x)H
Рис. 77. Разбиение правильной в направлении оси Oy областикоординатными линиями в декартовой системе координат
нулю, получим формулу (51.3). Аналогично можно обосновать и формулу(52.1) для области, правильной в направлении оси Ox (рис. 72).
52. практическое занятиевычисление двойных интегралов
в декартовых координатах.изменение порядка интегрирования
На этом практическом занятии мы продолжим рассматривать приме-ры на вычисление двойных интегралов в декартовых координатах. Преж-де всего изменим порядок интегрирования в рассматриваемых на преды-дущем занятии примерах 51.3 и 51.4.
Пример 52.1. Изменить порядок интегрирования в интеграле3∫
1
dx
x+9∫
x2
f(x, y)dy.
Р е ш е н и е: Область интегрирования найдена в примере 51.3 и изоб-ражена на рис. 68 и 78. Поскольку отдельные участки границы областиинтегрирования как слева, так и справа заданы различными аналитиче-скими выражениями при первоначальном интегрировании в направленииоси x мы вынуждены разбить область интегрирования на три части пря-мыми y = 9 и y = 10 (отрезки этих прямых EC и AK изображены на рис.78 пунктирными линиями). Таким образом S=DEC+EAKC+ABK и
∫∫
S
f(x, y)ds =
∫∫
DEC
f(x, y)ds+
∫∫
EAKC
f(x, y)ds+
∫∫
ABK
f(x, y)ds.
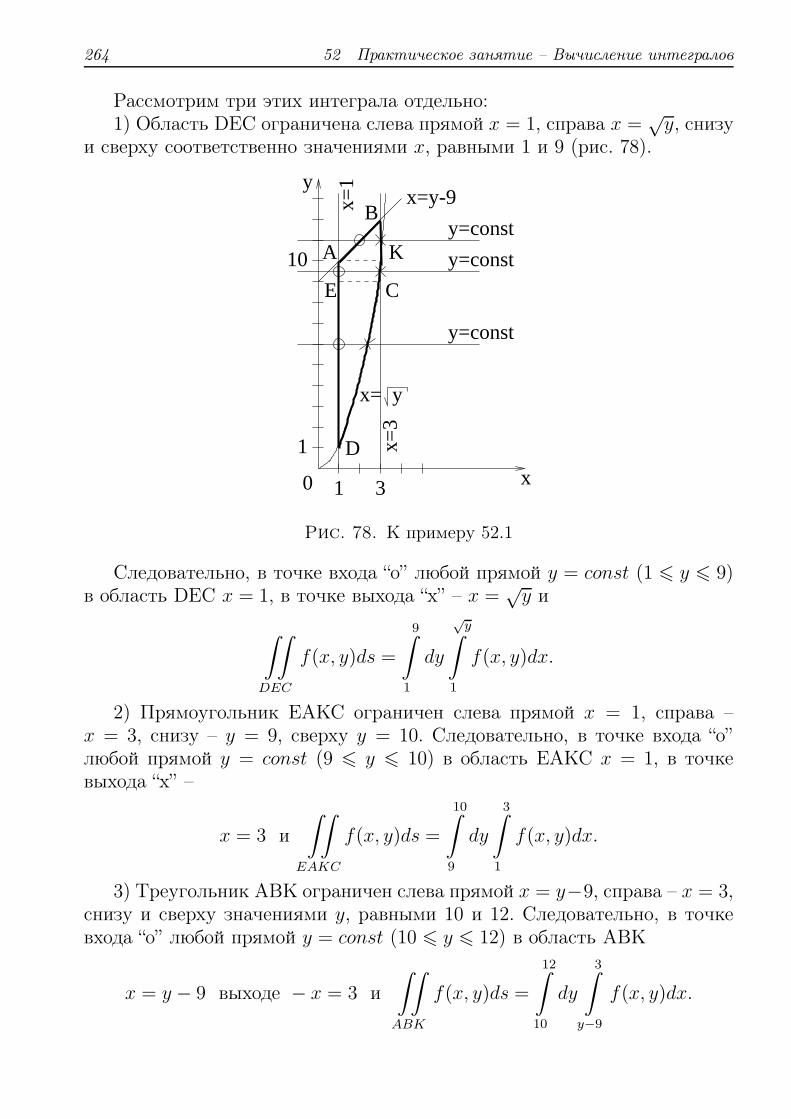
264 52 Практическое занятие – Вычисление интегралов
Рассмотрим три этих интеграла отдельно:1) Область DEC ограничена слева прямой x = 1, справа x =
√y, снизу
и сверху соответственно значениями x, равными 1 и 9 (рис. 78).
y
x1 3
1
10
D
B
0
x=3
x=y-9
E C
KA
x=1
y=const
y=const
y=const
x= y
Рис. 78. К примеру 52.1
Следовательно, в точке входа “o” любой прямой y = const (1 6 y 6 9)в область DEC x = 1, в точке выхода “x” – x =
√y и
∫∫
DEC
f(x, y)ds =
9∫
1
dy
√y∫
1
f(x, y)dx.
2) Прямоугольник EAKC ограничен слева прямой x = 1, справа –x = 3, снизу – y = 9, сверху y = 10. Следовательно, в точке входа “o”любой прямой y = const (9 6 y 6 10) в область EAKC x = 1, в точкевыхода “x” –
x = 3 и∫∫
EAKC
f(x, y)ds =
10∫
9
dy
3∫
1
f(x, y)dx.
3) Треугольник ABK ограничен слева прямой x = y−9, справа – x = 3,снизу и сверху значениями y, равными 10 и 12. Следовательно, в точкевхода “o” любой прямой y = const (10 6 y 6 12) в область ABK
x = y − 9 выходе − x = 3 и∫∫
ABK
f(x, y)ds =
12∫
10
dy
3∫
y−9
f(x, y)dx.

52 Практическое занятие – Вычисление интегралов 265
Таким образом, окончательный ответ будет:3∫
1
dx
x+9∫
x2
f(x, y)dy =
=
9∫
1
dy
√y∫
1
f(x, y)dx+
10∫
9
dy
3∫
1
f(x, y)dx+
12∫
10
dy
3∫
y−9
f(x, y)dx.
Пример 52.2. Изменить порядок интегрирования в интеграле
3∫
−4
dx
√25−x2∫
−√
25−x2
f(x; y)dy.
Р е ш е н и е: Область интегрирования найдена в примере 51.4 иизображена на рис. 69 и 79.
2x= 25-y2x=- 25-y
2x=- 25-y 2x= 25-y
y
x
x=-4
x=3
y=const
y=const
y=const
y=consty=const
y=const
AE
T
DN
Q
CM
KB
Рис. 79. К примеру 52.2
Поскольку отдельные участки границы области интегрирования S какслева, так и справа заданы различными аналитическими выражениямипри первоначальном интегрировании в направлении оси x мы вынужде-ны, как и в предыдущем примере разбить область S на несколько частей,в данном случае на 5. Это делается линиями y = −4, y = −3, y = 3,y = 4 (отрезки этих прямых NC, DM, AK и EB приведены на рис. 79пунктирными линиями).

266 52 Практическое занятие – Вычисление интегралов
Таким образом S=NQC+DNCM+ADMK+EAKB+ETB и∫∫
S
f(x, y)ds =
∫∫
NQC
f(x, y)ds+
+
∫∫
DNCM
f(x, y)ds+
∫∫
ADMK
f(x, y)ds+
∫∫
EAKB
f(x, y)ds+
∫∫
ETB
f(x, y)ds.
Рассмотрим эти пять интегралов отдельно:1) Область NQC является сегментом окружности x2 + y2 = 5, отсекае-
мым прямой y = −4. Любая прямая y = const (−5 6 y 6 −4) входит в этуобласть в точке “o”, в которой x = −
√
25 − y2 и выходит из нее в точке“x”, в которой x =
√
25 − y2. Следовательно,
∫∫
NQC
f(x, y)ds =
−4∫
−5
dy
√25−y2∫
−√
25−y2
f(x, y)dx.
2) Область DNCM ограничена слева дугой окружности x = −√
25 − y2,справа прямой x = 3, снизу и сверху соответственно значениями y, рав-ными -4 и -3. Следовательно, в точке входа “o” любой прямой y = const(−4 6 y 6 −3) в область DNCM x = −
√
25 − y2, в точке выхода “x” –
x = 3 и∫∫
DNCM
f(x, y)ds =
−3∫
−4
dy
3∫
−√
25−y2
f(x, y)dx.
3) Прямоугольник ADMK ограничен слева прямой x = −4, справа –x = 3, снизу – y = −3, сверху – y = 3. Следовательно, в точке входа “o”любой прямой y = const (−3 6 y 6 3) в область ADMK x = −4, в точкевыхода “x” –
x = 3 и∫∫
ADMK
f(x, y)ds =
3∫
−3
dy
3∫
−4
f(x, y)dx.
4) Область EAKB симметрична относительно оси x области DNCM и,следовательно,
∫∫
EAKB
f(x, y)ds =
4∫
3
dy
3∫
−√
25−y2
f(x, y)dx.

52 Практическое занятие – Вычисление интегралов 267
5) Сегмент ETB симметричен относительно x сегменту NQC. Анало-гично:
∫∫
ETB
f(x, y)ds =
5∫
4
dy
√25−y2∫
−√
25−y2
f(x, y)dx.
Таким образом суммируя рассмотренные результаты, получим
3∫
−4
dx
√25−x2∫
−√
25−x2
f(x; y)dy =
−4∫
−5
dy
√25−y2∫
−√
25−y2
f(x, y)dx +
+
−3∫
−4
dy
3∫
−√
25−y2
f(x, y)dx +
3∫
−3
dy
3∫
−4
f(x, y)dx +
+
4∫
3
dy
3∫
−√
25−y2
f(x, y)dx +
5∫
4
dy
√25−y2∫
−√
25−y2
f(x, y)dx.
Самостоятельная работа
В примерах 52.3 и 52.4 написать уравнения кривых, ограничивающихобласть интегрирования, изобразить эти области и изменить порядок ин-тегрирования.
Пример 52.3.2∫
0
dx
√4x∫
√2x−x2
f(x, y)dy.
Пример 52.4.1∫
0
dy
√3−y2∫
y/2
f(x, y)dx.

268 53 Лекция – Криволинейные координаты
53. лекциядвойной интеграл
в криволинейных координатах
Вычисление двойного интеграла в полярных координатах. Заменапеременных в двойном интеграле в общем случае. Якобиан преоб-разования.
53.1. Вычисление двойного интеграла в полярных координа-тах. В лекциях, посвященных вычислению определенного интеграла, мывидели, что замена переменных часто помогает легче и быстрее провестиэти вычисления. То же самое имеет место и при вычислении двойногоинтеграла. Рассмотрим прежде всего наиболее часто встречающиеся напрактике полярные координаты r и ϕ. Они были введены нами в лекции2.
Как мы видели в начале данной лекции наиболее простой областью,для которой в декартовой системе координат пределы внешнего и вну-треннего интеграла постоянны, является прямоугольник – фигура, гра-ницами которой служат координатные прямые x = const, y = const.
В полярной системе координат координатными линиями являются лу-чи ϕ = const и окружности r = const. Возьмем вначале область S, гра-ницами которой служат координатные линии DC, AB и AD, BC, длякоторых соответственно ϕ = α, ϕ = β и r = r0, r = R (рис. 80).
Пусть нам необходимо вычислить интеграл от функции f(x, y) по этойобласти S. Разобьем S на n малых площадок ∆Si с помощью координат-ных лучей ϕ = ϕl и окружностей r = ri. При этом пусть ∆ϕl = ϕl − ϕl−1,
∆rj = rj − rj−1, тогда β − α =k∑
l=1
∆ϕl, а R− r0 =m∑
j=1
∆rj.
Рассмотрим элементарную площадку ∆Si, которая зачернена на рис.80. Ее площадь равна разности площадей двух секторов ∆Si = 1
2r2j∆ϕl −
−12r2j−1∆ϕl =
r2j−r2j−1
2∆ϕl =
rj+rj−1
2(rj − rj−1)∆ϕl =
rj+rj−1
2∆rj∆ϕl. По опре-
делению 51.2∫∫
S
f(x, y)ds = limn→∞
n∑
i=1
f(ξi, ηi)∆Si =
= limn→∞
n∑
i=1
f(ξi, ηi)rj+rj−1
2∆rj∆ϕl. В этом определении оговаривалось, что
при n → ∞ каждая элементарная площадка ∆Si должна стягиватьсяв точку, а, следовательно, ∆rj → 0, ∆ϕl → 0 и rj−1 → rj. А тогда∫∫
S
f(x, y)ds =∫∫
S
f(x, y)rdrdϕ и, учитывая, что x = r cosϕ, а y = r sinϕ,

53 Лекция – Криволинейные координаты 269
r=R
∆ϕ l
ϕl
rjrj-1
j∆ry
0 x
B
C
β
αDϕl-1
Ar=r0
Рис. 80. К выводу представления двойного интеграла в поляр-ных координатах
получаем выражение для двойного интеграла по области S в полярныхкоординатах:
(53.1)∫∫
S
f(x, y)ds =
∫∫
S
f(r cosϕ, r sinϕ)rdrdϕ.
Определение 53.1. Выражение rdrdϕ называется элементом пло-щади в полярных координатах.
Как мы видим элемент площади в полярных координатах уже не яв-ляется произведением дифференциалов независимых переменных r и ϕ.
Перейдем теперь к преобразованию двойного интеграла в двукратный(повторный) в полярных координатах. Рассмотрим вновь рис. 80. Произ-ведем сначала суммирование в направлении r (заштрихованная областьна рис. 80), а затем по ϕ:
limn→∞
n∑
i=1
f(ξi, ηi)rj+rj−1
2∆rj∆ϕl =
= lim∆rj→0
∆ϕl→0
k∑
l=1
(m∑
j=1
f(ξi, ηi)rj+rj−1
2∆rj)∆ϕl.
Переходя к пределу при k → ∞ и m → ∞ и учитывая все сказанноепри выводе формулы (53.1) получим:
(53.2)∫∫
S
f(r cosϕ, r sinϕ)rdrdϕ =
β∫
α
dϕ
R∫
r0
f(r cosϕ, r sinϕ)rdr.

270 53 Лекция – Криволинейные координаты
Рассмотрим теперь более общий пример области ABCD, правильнойв направлении переменной r, но границы которой по r не являются коор-динатными линиями.
Определение 53.2. Область S называется правильной в направ-лении переменной r (луча ϕ = const), если любой луч ϕ = const приα < ϕ < β, пересекает каждую из ее границ r = rδ(ϕ) и r = rg(ϕ) одинраз (81).
S
A
B
C
D
r=r ( )
y
x0
ϕ=const
r=r ( )δ ϕ
g ϕ
Рис. 81. Область, правильная в направлении луча ϕ = const
Точку входа луча ϕ = const в область (пересечение с границейr = rδ(ϕ)) обозначим так же, как и в декартовой системе координат знач-ком “o”, точку выхода (пересечение с границей r = rg(ϕ)) – “x”. Индексы“δ” и “g” соответствуют расположенным ближе и дальше по отношению кначалу координат границам области.
Проведя рассуждения аналогичные тем, что были сделаны в пункте52.1 для декартовой системы координат, получим
(53.3)∫∫
S
f(r cosϕ, r sinϕ)rdrdϕ =
β∫
α
dϕ
rg(ϕ)∫
rδ(ϕ)
f(r cosϕ, r sinϕ)rdr.
Очевидно, что в том случае, когда границы по переменной r не являют-ся координатными линиями r = const, пределы во внутреннем интеграле(53.3) зависят от ϕ, а не являются постоянными, как в формуле (53.2).
Совершенно аналогично, рассматривая область S, правильную в на-правлении переменной ϕ (рис. 82), имеем

53 Лекция – Криволинейные координаты 271
(53.4)∫∫
S
f(r cosϕ, r sinϕ)rdrdϕ =
rl∫
r0
rdr
ϕ2(r)∫
ϕ1(r)
f(r cosϕ, r sinϕ)dϕ.
Определение 53.3. Область S называется правильной в направле-нии переменной ϕ, если любая окружность r = const, при r0 < r < Rпересекает каждую из ее границ ϕ = ϕ1(r) и ϕ = ϕ2(r) в одной точке.
ϕ=ϕ1(r)
ϕ=ϕ2(r)
y
x0
A
B
C
D
Sr=r
r=R
r=const0
Рис. 82. Область S, правильная в направлении переменной ϕ
Также как и ранее точку входа в область S обозначим “o”, выхода –“x”. Точка входа в область определяется, как точка пересечения окруж-ности r = const с границей ϕ = ϕ1(r), точка выхода – с ϕ = ϕ2(r), вточке входа, очевидно, значение ϕ меньше, чем в точке выхода. В фор-муле (53.4) r вынесено за знак внутреннего интеграла, так как он беретсяпри постоянном r. Отметим, что только в случае, если границы по ϕ будуткоординатными линиями (рис. 82), внутренние пределы в формуле (53.4)будут постоянными и
(53.5)∫∫
S
f(r cosϕ, r sinϕ)rdrdϕ =
R∫
r0
rdr
β∫
α
f(r cosϕ, r sinϕ)dϕ.
Конечно, как и в декартовой системе координат выбор направленияпервоначального интегрирования имеет существенное значение для вы-числения двойного интеграла в полярных координатах.
Пример 53.1. Вычислить двойной интеграл∫∫
S
√
4 − x2 − y2ds по об-
ласти, являющейся кругом радиуса R = 2 (рис. 83).

272 53 Лекция – Криволинейные координаты
y
x0ϕ
r=R=2
=constϕ
Рис. 83. К примеру 53.1
Р е ш е н и е: Так как в полярных координатах
x = r cosϕ, y = r sinϕ, x2 + y2 = r2, ds = rdrdϕ,
имеем ∫∫
S
√
4 − x2 − y2ds =
∫∫
S
√4 − r2rdrdϕ.
Область интегрирования ограничена следующим значением r и ϕ: r == 0, r = 2, ϕ = 0, ϕ = 2π. Следовательно, по формуле (53.2):
∫∫
S
√4 − r2rdrdϕ =
2π∫
0
dϕ
2∫
0
√4 − r2rdr.
Так как внутренний интеграл и его пределы не зависят от ϕ значениедвойного интеграла будет равно произведению определенных интегралов
2π∫
0
dϕ = ϕ|2π0 = 2π и
2∫
0
√4 − r2rdr = −
(√
(4 − r2)3
3
)
|20 =8
3.
Следовательно, окончательный ответ∫∫
S
√
4 − x2 − y2ds =16π
3.
Вычислить этот интеграл в декартовых координатах было бы значи-тельно сложнее.
Пример 53.2. Переходя к полярным координатам вычислить∫∫
S
yds
по области S, ограниченной окружностью x2 + y2 = 2x и осью Ox.

53 Лекция – Криволинейные координаты 273
Р е ш е н и е: Уравнение x2+y2 = 2x является уравнением окружностис центром в точке (1;0) радиусом, равным 1. Действительно x2+y2 = 2x →x2 − 2x + y2 = 0 → x2 − 2x + 1 + y2 = 1 → (x − 1)2 + y2 = 1. Изобразимобласть интегрирования на рис. 84.
1 2
S
r=constϕ=const
r=2cos
ϕ =arccosr2
y
x0
ϕ
Рис. 84. К примеру 53.2
Подставив x = r cosϕ и y = r sinϕ в уравнение x2 + y2 = 2x полу-чим r2 = 2r cosϕ, откуда r = 2 cosϕ. Это уравнение является уравнениемнашей окружности в полярных координатах. Выберем направление пер-воначального интегрирования по r вдоль луча ϕ = const (рис. 84). В точкевхода “o” в область r = 0, выхода r = 2 cosϕ, ϕ изменяется в пределах от0 до π/2. Таким образом по формуле (53.4):
∫∫
S
yds =
∫∫
S
(r sinϕ)rdrdϕ =
π/2∫
0
sinϕdϕ
2 cosϕ∫
0
r2dr =
=
π/2∫
0
r3
3sinϕ|2 cosϕ
0 dϕ =1
3
π/2∫
0
8 cos3 ϕ · sinϕdϕ =
= −8
3
cos4 ϕ
4|π/20 = −2
3(cos4 π
2− cos4 0) = −2
3(0 − 1) =
2
3.
Если мы выберем направление первоначального интегрирования по ϕвдоль окружности r = const от точки входа ее “o” в область S, в которой

274 53 Лекция – Криволинейные координаты
ϕ = 0, до точки выхода “x”, в которой ϕ = arccos r2, получим:
∫∫
S
yds =
∫∫
S
r2 sinϕdsdϕ =
2∫
0
r2dr
arccos r2∫
0
sinϕdϕ =
=
2∫
0
r2(− cosϕ)|arccos r2
0 dr =
2∫
0
r2(− cos arccosr
2+ cos 0)dr =
=
2∫
0
r2(
1 − r
2
)
dr =
(r3
3− r4
8
)
|20 =8
3− 2 =
2
3.
53.2. Замена переменных в двойном интеграле в общем слу-чае криволинейных координат. Предположим, что при вычислениидвойного интеграла
∫∫
S
f(x, y)ds мы вводим новые переменные u и v та-
кие, что
(53.6) x = x(u, v), y = y(u, v)
являются функциями, имеющими непрерывные частные производныепо u и v в области S. Пусть также каждому значению x и y в области Sсоответствуют единственные значения u и v, определяемые дифференци-руемыми функциями
(53.7) u = u(x, y), v = v(x, y).
Определение 53.4. Числа u и v, определяемые по (53.7) для каждойточки с декартовыми координатами x и y, принадлежащей области ин-тегрирования S, называются криволинейными координатами этой точ-ки.
Подобно тому, как мы это делали в декартовой и полярной системах коор-динат, разобьем область S координатными линиями u = const иv = const на элементарные площадки ∆Si (рис. 85).
Вычислим площадь ∆Si, или в соответствие с обозначениями, приведенны-ми на рис. 85, площадь криволинейного четырехугольника с вершинами в точ-ках P1, P2, P3 и P4, являющимися точками пересечения координатных линийсо значениями криволинейных координат, равными u, v, u+ ∆u, v+ ∆v. Коор-динаты этих вершин P1(x1, y1), P2(x2, y2), P3(x3, y3) и P4(x4, y4) определяютсяпо (53.6):

53 Лекция – Криволинейные координаты 275
∆Si
v+ v
u+ u
y
P1 P2P3
x0
P4
v
u
Рис. 85. Разбиение области интегрирования S криволинейнымикоординатными линиями u = const v = const
(53.8)
x1 = x(u, v), y1 = y(u, v),x2 = x(u+ ∆u, v), y2 = y(u+ ∆u, v),x3 = x(u+ ∆u, v + ∆v), y3 = y(u+ ∆u, v + ∆v),x4 = x(u, v + ∆v), y4 = y(u, v + ∆v).
Представим теперь значения координат в точках P2, P3 и P4 через соответ-ствующие значения координат в точке P1 с помощью формулы Тейлора дляфункции двух переменных (лекция 41), при этом будем учитывать лишь при-ращения ∆u и ∆v первого порядка малости.
(53.9)
x1 = x(u, v),y1 = y(u, v),
x2 = x(u, v) + ∂x∂u∆u = x1 + ∂x
∂u∆u,
y2 = y(u, v) + ∂y∂u∆u = y1 + ∂y
∂u∆u,
x3 = x(u, v) + ∂x∂u∆u+ ∂x
∂v∆v = x1 + ∂x∂u∆u+ ∂x
∂v∆v,
y3 = y(u, v) + ∂y∂u∆u+ ∂y
∂v∆v = y1 + ∂y∂u∆u+ ∂y
∂v∆v,
x4 = x(u, v) + ∂x∂v∆v = x1 + ∂x
∂v∆v,
y4 = y(u, v) + ∂y∂v∆v = y1 + ∂y
∂v∆v.
При этом ограничении криволинейный четырехугольникP1P2P3P4 превращается в параллелограмм, площадь которого (см. лекцию 29)
равна абсолютной величине векторного произведения ~P1P2 и ~P1P4. Учитывая
(53.9) находим ~P1P2 = (x2 − x1; y2 − y1; 0) =(∂x∂u∆u; ∂y∂u∆u; 0
)
и ~P1P4 = (x4 −
x1; y4 − y1; 0) =(∂x∂v∆v;
∂y∂v∆v; 0
)
.

276 53 Лекция – Криволинейные координаты
По формуле (32.4): ~P1P2 × ~P1P4 =
∣∣∣∣∣∣
~i ~j ~k∂x∂u∆u ∂y
∂u∆u 0∂x∂v∆v
∂y∂v∆v 0
∣∣∣∣∣∣
=
=
∣∣∣∣
∂x∂u
∂y∂u
∂x∂v
∂y∂v
∣∣∣∣∆u∆v~k и ∆Si = | ~P1P2 × ~P1P4| =
∣∣∣∣
∂x∂u
∂x∂v
∂y∂u
∂y∂v
∣∣∣∣i
∆u∆v = |J |i∆u∆v, в
определителе для удобства строки и столбцы поменяли местами, от этого егоабсолютная величина не меняется.
Подставляя полученное значение ∆Si в (51.1), заменив декартовые коорди-наты x и y на u и v по (53.6), и учитывая, что предел интеграл суммы не зависитот разбиения S на элементарные площадки, получаем:
(53.10)
∫∫
S
f(x, y)ds =
∫∫
S
f(x(u, v), y(u, v))|J |dudv.
Определение 53.5. Формула (53.10) называется формулой преобра-зования координат в двойном интеграле, входящий в нее определитель
(53.11) J =
∣∣∣∣
∂x∂u
∂x∂v
∂y∂u
∂y∂v
∣∣∣∣
называется определителем Якоби, или якобианом, а произведение|J |dudv – элементом площади в криволинейных координатах u и v.
Для рассмотренных нами в предыдущем пункте полярных координатx = r cosϕ, y = r sinϕ и, следовательно, якобиан будет равен
J =
∣∣∣∣
cosϕ −r sinϕsinϕ r cosϕ
∣∣∣∣= r cos2 ϕ+r sin2 ϕ = r, а элемент площади – rdrdϕ,
как и было ранее в определении 53.1.Приведем один пример на преобразование координат.
Пример 53.3. Вычислить∫∫
S
(y − x)ds, где S – параллелограмм, огра-
ниченный прямыми y = x+ 1, y = x+ 4, y = −2x + 9 и y = −2x + 5.
Р е ш е н и е: Изобразим заданную область S на рис. 86.Очевидно, что для вычисления интеграла по данной области в декар-
товых координатах мы должны будем разбить ее на три части прямымипараллельными оси x (или оси y), которые и изображены на рис. 86 пунк-тирными линиями и, следовательно,∫∫
S
(x− y)dxdy =
∫∫
SDCK
(x− y)dxdy +
∫∫
SKCEA
(x− y)dxdy +
∫∫
SAEB
(x− y)dxdy.
Это, очевидно, потребует значительного количества труда и времени.
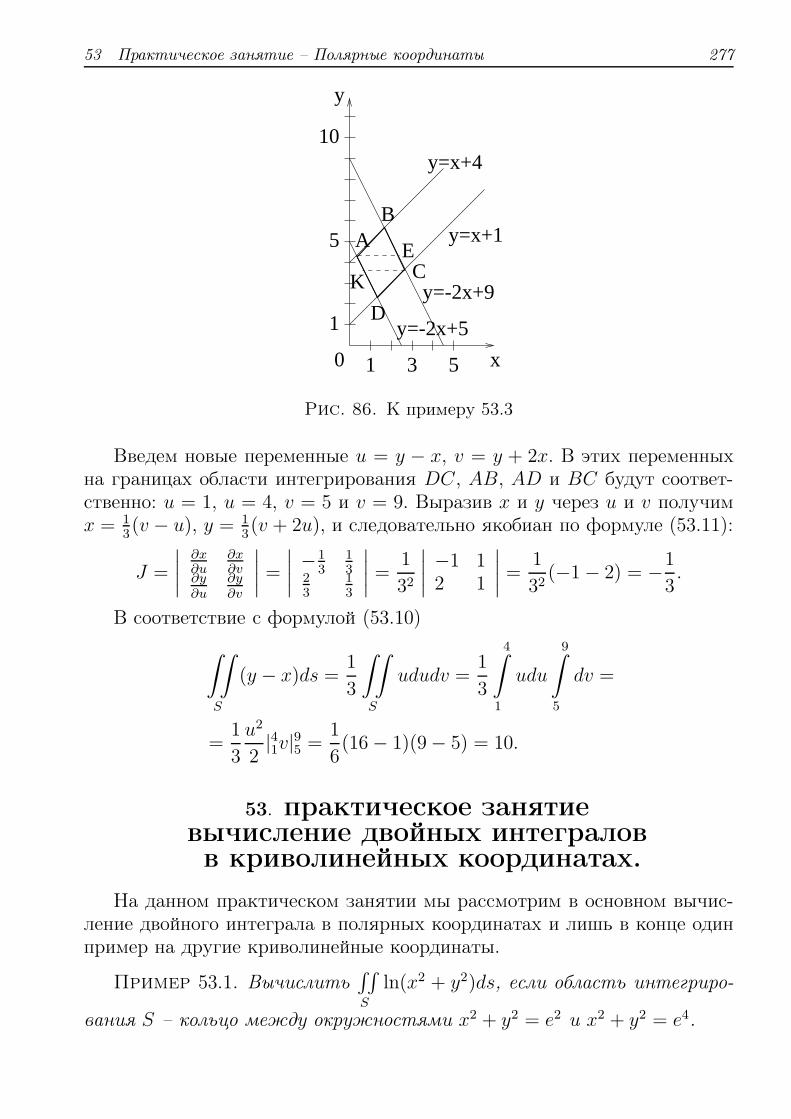
53 Практическое занятие – Полярные координаты 277
1 3
1
10
0 5
5
x
y
y=x+4
y=x+1A
CE
K
B
Dy=-2x+9
y=-2x+5
Рис. 86. К примеру 53.3
Введем новые переменные u = y − x, v = y + 2x. В этих переменныхна границах области интегрирования DC, AB, AD и BC будут соответ-ственно: u = 1, u = 4, v = 5 и v = 9. Выразив x и y через u и v получимx = 1
3(v − u), y = 1
3(v + 2u), и следовательно якобиан по формуле (53.11):
J =
∣∣∣∣
∂x∂u
∂x∂v
∂y∂u
∂y∂v
∣∣∣∣=
∣∣∣∣
−13
13
23
13
∣∣∣∣=
1
32
∣∣∣∣
−1 12 1
∣∣∣∣=
1
32(−1 − 2) = −1
3.
В соответствие с формулой (53.10)
∫∫
S
(y − x)ds =1
3
∫∫
S
ududv =1
3
4∫
1
udu
9∫
5
dv =
=1
3
u2
2|41v|95 =
1
6(16 − 1)(9 − 5) = 10.
53. практическое занятиевычисление двойных интеграловв криволинейных координатах.
На данном практическом занятии мы рассмотрим в основном вычис-ление двойного интеграла в полярных координатах и лишь в конце одинпример на другие криволинейные координаты.
Пример 53.1. Вычислить∫∫
S
ln(x2 + y2)ds, если область интегриро-
вания S – кольцо между окружностями x2 + y2 = e2 и x2 + y2 = e4.

278 53 Практическое занятие – Полярные координаты
Р е ш е н и е: В полярных координатах область S ограничена коор-динатными линиями r = r0 = e, r = R = e2, ϕ = α = 0, ϕ = β = 2π и, сле-довательно по формуле (53.2), используя затем формулу интегрирования
по частям получим∫∫
S
ln(x2 + y2)ds =2π∫
0
dϕe2∫
e
r ln r2dr = 2ϕ|2π0e2∫
e
r ln rdr =
= 4πe2∫
e
r ln rdr = 4π( r2
2ln r|e2e −
e2∫
e
r2
21rdr) = 2π(r2 ln r − r2
2)|e2e = 2π(e4 ln e2 −
− e4
4− e2 ln e+ e2
2) = πe2(3e2 − 1).
Пример 53.2. Вычислить∫∫
S
r sinϕdrdϕ, S : r 6 a, ϕ > π2, ϕ 6 π.
Р е ш е н и е: Здесь мы также можем воспользоваться формулой (53.2)положив r0 = 0, R = a, α = π
2, β = π.
∫∫
S
r sinϕdrdϕ =π∫
π/2
sinϕdϕa∫
0
rdr = (− cosϕ)|ππ/2 r2
2|a0 = (− cosπ+cos π/2)×
× (a2/2 − 0) = a2/2.
Пример 53.3. Вычислить интеграл из примера 53.2, если S: r > 1,r 6 2 + cosϕ, 0 6 ϕ 6 π.
Р е ш е н и е: Изобразим область S на рис. 87.
y
x-1 1 3
1
2 =const
r=const
r=2+cos
=arccos(r-2)ϕ
ϕ
ϕ
Рис. 87. К примеру 53.3
Луч ϕ = const входит в область S в точке “o”, в которой r = 1, ивыходит из области в точке “x”, в которой r определяется уравнениемr = 2 + cosϕ, по ϕ область ограничена значениями ϕ = 0 и ϕ = π
2.
∫∫
S
sinϕdrdϕ =π∫
0
sinϕdϕ2+cosϕ∫
1
rdr =π∫
0
r2
2|2+cosϕ1 sinϕdϕ =
= 12
π∫
0
((2 + cosϕ)2 − 1) sinϕdϕ = −12
π∫
0
(3 + 4 cosϕ+ cos2 ϕ)d cosϕ =

53 Практическое занятие – Полярные координаты 279
= −12(3 cosϕ+2 cos2 ϕ+ cos3 ϕ
3)|π0 = −1
2(3 cosπ+2 cos2 π+ 1
3cos3 π−3 cos 0−
− 2 cos2 0 − 13cos3 0) = 1
2(6 + 2/3) = 10
3.
Если изменить порядок интегрирования, то внутренний интеграл надовзять вдоль окружности r = const от точки входа “o” в область S, в кото-рой ϕ = 0 до точки выхода “x” из области S, в которой ϕ определяется изуравнения r = 2 + cosϕ → ϕ = arccos(r − 2), а по r пределы изменяютсяот 1 до 3.∫∫
S
r sinϕdrdϕ =3∫
1
rdrarccos(r−2)∫
0
sinϕdϕ = −3∫
1
r cosϕ|arccos(r−2)0 dr = −
3∫
1
r(r−
− 2 − 1)dr =3∫
1
(3r − r2)dr =(
3r2
2− r3
3
)
|31 = 103.
Пример 53.4. Рассмотрим предыдущий пример для области S: r > 1,r 6 2 + cosϕ, 0 6 ϕ 6 π
2(рис. 88).
y
x1 3
1
2
r=const
r=const
2
ϕ =arccos(r-2)
Рис. 88. К примеру 53.4
Р е ш е н и е: При выборе первоначального направления вдоль лучаϕ = const изменится один верхний предел с π на π/2, а остальное все будеттакже, как в предыдущем примере. Следовательно
∫∫
S
r sinϕ dr dϕ =
= −12
(
3 cosϕ+ 2 cos2 ϕ+ cos3 ϕ3
)
|π/20 = −12(3 cos π
2+ 2 cos2 π
2− 1
3cos3 π
2−
− 3 cos 0 − 2 cos2 0 − 13cos3 0) = 8
3.
При выборе же первоначального направления интегрирования вдольлинии r = const оказывается необходимым область S разбивать на две(рис. 88), для первой из которых 1 6 r 6 2, для второй 2 6 r 6 3, в первойϕ меняется от 0 до π
2, во второй от 0 до ϕ = arccos(r−2).
∫∫
S
r sinϕdrdϕ =
=2∫
1
rdrπ/2∫
0
sinϕdϕ+3∫
2
rdrarccos(r−2)∫
0
sinϕdϕ = r2
2|21(− cosϕ)|π/20 +
(3r2
2− r3
3
)
|32 =
= 2 − 12
+ 272− 9 − 6 + 8
3= 8
3.
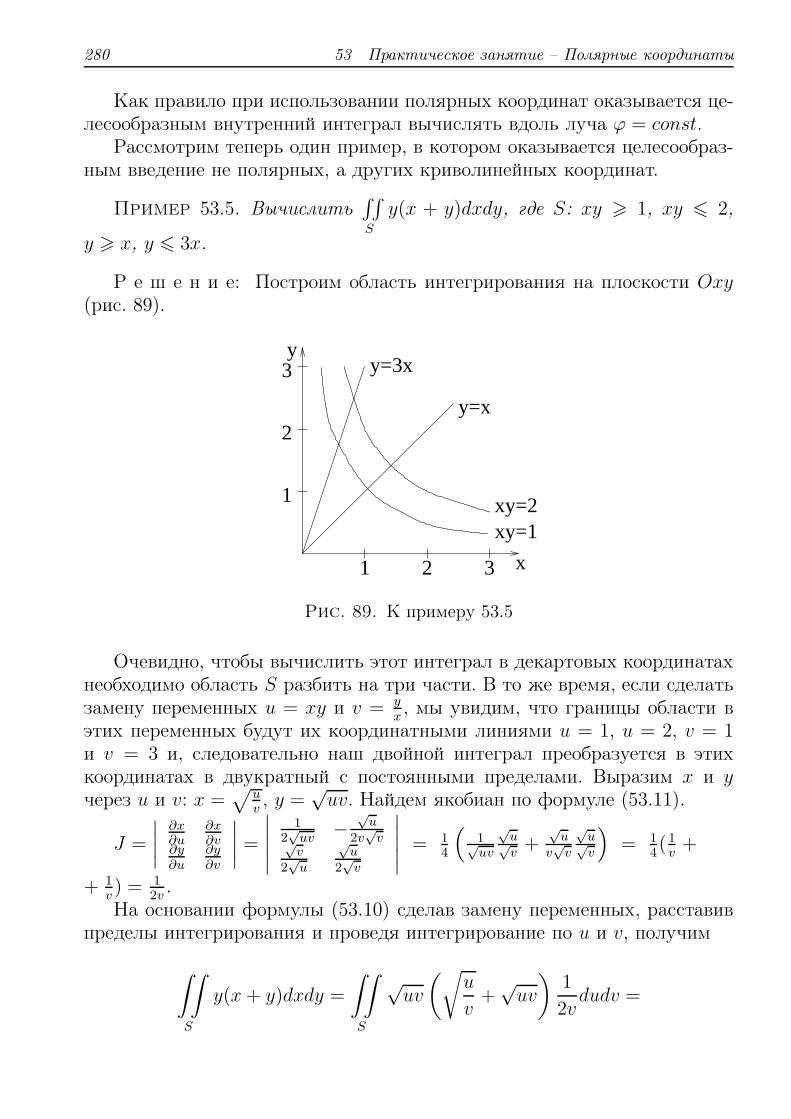
280 53 Практическое занятие – Полярные координаты
Как правило при использовании полярных координат оказывается це-лесообразным внутренний интеграл вычислять вдоль луча ϕ = const.
Рассмотрим теперь один пример, в котором оказывается целесообраз-ным введение не полярных, а других криволинейных координат.
Пример 53.5. Вычислить∫∫
S
y(x + y)dxdy, где S: xy > 1, xy 6 2,
y > x, y 6 3x.
Р е ш е н и е: Построим область интегрирования на плоскости Oxy(рис. 89).
x1 2 3
y
2
1
3 y=3x
y=x
xy=2xy=1
Рис. 89. К примеру 53.5
Очевидно, чтобы вычислить этот интеграл в декартовых координатахнеобходимо область S разбить на три части. В то же время, если сделатьзамену переменных u = xy и v = y
x, мы увидим, что границы области в
этих переменных будут их координатными линиями u = 1, u = 2, v = 1и v = 3 и, следовательно наш двойной интеграл преобразуется в этихкоординатах в двукратный с постоянными пределами. Выразим x и yчерез u и v: x =
√uv, y =
√uv. Найдем якобиан по формуле (53.11).
J =
∣∣∣∣
∂x∂u
∂x∂v
∂y∂u
∂y∂v
∣∣∣∣=
∣∣∣∣∣
12√uv
−√u
2v√v√
v2√u
√u
2√v
∣∣∣∣∣
= 14
(1√uv
√u√v
+√u
v√v
√u√v
)
= 14(1v
+
+ 1v) = 1
2v.
На основании формулы (53.10) сделав замену переменных, расставивпределы интегрирования и проведя интегрирование по u и v, получим
∫∫
S
y(x + y)dxdy =
∫∫
S
√uv
(√u
v+√uv
)1
2vdudv =

53 Практическое занятие – Полярные координаты 281
=1
2
2∫
1
du
3∫
1
(u
v+ u)
dv =1
2
2∫
1
u(ln v + v)|31du =
=1
2(ln 3 + 2)
u2
2|21 =
3
4(ln 3 + 2).
Самостоятельная работаВ примерах 53.6, 53.7 перейти к полярным координатам и расставить
пределы интегрирования.
Пример 53.6.1∫
0
dx1∫
0
f(x, y)dy.
Пример 53.7.∫∫
S
f(x, y)dxdy, S : y > x, y > −x, y 6 1.
Пример 53.8. Вычислить∫∫
S
r2drdϕ, если S ограничена первым за-
витком спирали r = aϕ и осью Ox.
Пример 53.9. Преобразовать к полярным координатам и вычислить∫∫
S
e−x2−y2dxdy, S : x2 + y2 6 a2.
Пример 53.10. Вычислить∫∫
S
(x + y)3(x− y)2 ds, если область
S – квадрат, ограниченный прямыми x + y = 1, x − y = 1, x + y = 3,x− y = −1. Ввести новые переменные: u = x+ y; v = x− y.

282 54 Лекция – Приложения двойных интегралов
54. лекцияприложения двойных интегралов
Объем тел. Площадь поверхности. Масса, статические моменты, ко-ординаты центра тяжести и моменты инерции пластин.
54.1. Объем тел. Пусть рассматривается тело, объем которого ра-вен V , ограниченное замкнутой поверхностью σ, состоящей из трех ча-стей: сбоку – цилиндрической поверхности F (x, y) = 0, снизу – поверхно-сти σн, сверху – σв, являющимися графиками функций двух переменныхz = zн(x, y) и z = zв(x, y). Пусть эти функции z = zн(x, y) и z = zв(x, y)непрерывны в области S, которая определяется как проекция рассматри-ваемого тела на плоскость Oxy (рис. 90).
x
y
z z=z (x,y)
z=z (x,y)
S
V
y=const, x=const
B
H
C
γB
Hγ
Рис. 90. К вычислению объема V
Границей области S будет проекция линий пересечения γн и γв поверх-ностей zн и zв с цилиндрической поверхностью F (x, y).
В частном случае линии пересечения поверхностей σн и σв с цилин-дрической поверхностью F (x, y) = 0 могут совпадать. Тогда γн = γв = γи поверхность σ состоит только из двух частей σн и σв, пересекающихсяпо линии γ. Изображенная на рис. 90 прямая x = const, y = const в этомпункте не будет использована, а потребуется нам в следующей лекции.
Предположим вначале, что zн(x, y) > 0 и zв(x, y) > 0 в S. Тогда всоответствие с геометрическим смыслом двойного интеграла (см. лек-цию 51)
∫∫
S
zв(x, y)ds и∫∫
S
zн(x, y)ds равны объемам цилиндрических тел

54 Лекция – Приложения двойных интегралов 283
с образующей параллельной оси oz, направляющей C, нижним основани-ем S, ограниченным сверху соответственно поверхностями z = zв(x, y) иz = zн(x, y). Разность этих объемов и будет равна V .
(54.1) V =
∫∫
S
zв(x, y)ds−∫∫
S
zн(x, y)ds =
∫∫
S
(zв(x, y) − zн(x, y))ds
Полученная формула справедлива при любом расположении σн и σв
относительно плоскости XOY , только всегда для заданных x и y коорди-ната zв > zн.
Вычисление объемов тел более сложной формы сводится к вычисле-нию алгебраической суммы нескольких тел рассмотренного нами типа.
Пример 54.1. Вычислить объем тела, ограниченного поверхностями:y = x2, y = 1, x+ y + z = 4 и 2x + y + z = 3.
Р е ш е н и е: Данное тело (рис. 91а) ограничено сбоку частью ци-линдрической поверхностью y = x2 (AECKD), частью плоскости y = 1(ACD), сверху – частью плоскости zв = 4− x− y (DKC), снизу – частьюплоскости zн = 3 − 2x − y (AEC). Его проекцией на плоскость XOY яв-ляется область S (AOB), ограниченная прямой y = 1 и параболой y = x2.
y
x
B A
O
b)
y=const
x= yx=- y
z
yA
B
CE D
a)
x
O
K
Рис. 91. К решению примера 54.1
Объем рассматриваемого тела находим по формуле (54.1)
V =
∫∫
S
(4 − x− y − (3 − 2x− y))ds =
∫∫
S
(1 + x)ds.
Данный двойной интеграл первоначально будем интегрировать вдольлинии y = const от точки “o” входа ее в область S, в которой x = −√
y, до

284 54 Лекция – Приложения двойных интегралов
точки выхода “x”, в которой x =√y (рис. 91b), а затем по y, в пределах
от 0 до 1, следовательно,
V =
1∫
0
dy
√y∫
−√y
(1 + x)dx =
1∫
0
√ydy = 2
2
3y3/2|10 =
4
3.
Пример 54.2. Вычислить объем тела, ограниченного поверхностямиz = 4 − x2 − y2 и z = 1 + 1
2(x2 + y2).
Р е ш е н и е: Рассматриваемое тело ограничено сверху параболоидомвращения zв = 4 − x2 − y2 и снизу также параболоидом вращенияzн = 1+ 1
2(x2+y2), которые пересекаются в плоскости z = 2 по окружности
x2 + y2 = 2 (рис. 92).
4
0
x
z
y
y
x
r= 2
=const
a) b)
ϕ
Рис. 92. К решению примера 54.2
Таким образом, по формуле (54.1) находим объем рассматриваемоготела
V =∫∫
S
(4 − x2 − y2 − (1 + 1
2(x2 + y2))
)ds =
∫∫
S
(3 − 32(x2 + y2))ds =
= 32
∫∫
S
(2−x2−y2)ds, где S является кругом x2+y2 = 2 с радиусом, равным√
2 ( заштрихованная область на рис. 92a и изображенная в плоскостиXOY на рис. 92b). Естественно, что вычисление полученного двойногоинтеграла целесообразно проводить в полярной системе координат по rот r = o до r =
√2 и по ϕ от 0 до 2π (см. формулу 53.2). Напомним, что
в полярных координатах x2 + y2 = r2, а ds = rdrdϕ (см. лекцию 53). Итак
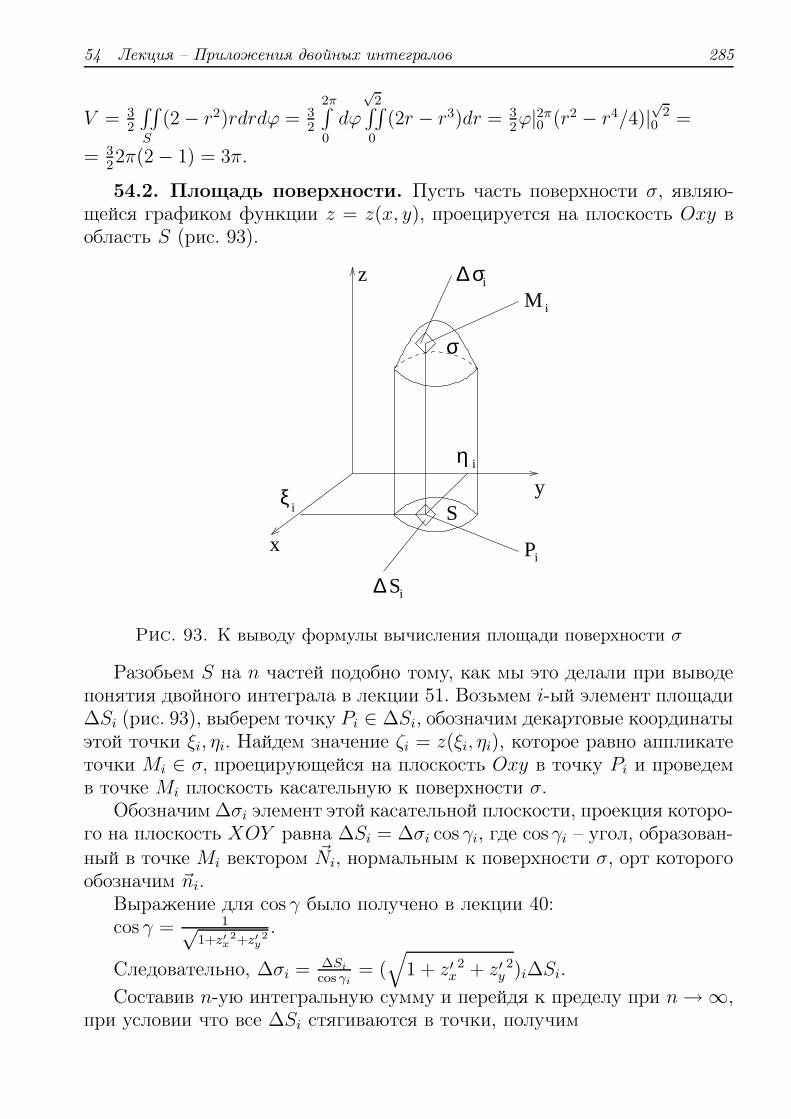
54 Лекция – Приложения двойных интегралов 285
V = 32
∫∫
S
(2 − r2)rdrdϕ = 32
2π∫
0
dϕ
√2∫∫
0
(2r − r3)dr = 32ϕ|2π0 (r2 − r4/4)|
√2
0 =
= 322π(2 − 1) = 3π.
54.2. Площадь поверхности. Пусть часть поверхности σ, являю-щейся графиком функции z = z(x, y), проецируется на плоскость Oxy вобласть S (рис. 93).
z
x
y
σ
P
η
ξS
M
i
i
i
i
∆
∆
S
σi
i
Рис. 93. К выводу формулы вычисления площади поверхности σ
Разобьем S на n частей подобно тому, как мы это делали при выводепонятия двойного интеграла в лекции 51. Возьмем i-ый элемент площади∆Si (рис. 93), выберем точку Pi ∈ ∆Si, обозначим декартовые координатыэтой точки ξi, ηi. Найдем значение ζi = z(ξi, ηi), которое равно аппликатеточки Mi ∈ σ, проецирующейся на плоскость Oxy в точку Pi и проведемв точке Mi плоскость касательную к поверхности σ.
Обозначим ∆σi элемент этой касательной плоскости, проекция которо-го на плоскость XOY равна ∆Si = ∆σi cos γi, где cos γi – угол, образован-ный в точке Mi вектором ~Ni, нормальным к поверхности σ, орт которогообозначим ~ni.
Выражение для cos γ было получено в лекции 40:cos γ = 1√
1+z′x2+z′y
2.
Следовательно, ∆σi = ∆Si
cos γi= (√
1 + z′x2 + z′y
2)i∆Si.
Составив n-ую интегральную сумму и перейдя к пределу при n→ ∞,при условии что все ∆Si стягиваются в точки, получим

286 54 Лекция – Приложения двойных интегралов
(54.2) σ = limn→∞
n∑
i=1
(√
1 + z′x2 + z′y
2)i∆Si =
∫∫
S
√
1 + z′x2 + z′y
2ds
Если поверхность σ будет задана неявным выражениемF (x, y, z) = 0, то согласно формуле 54.2:
(54.3) σ =
∫∫
S
√
F ′x2 + F ′
y2 + F ′
z2
F ′z2 ds =
∫∫
S
1
|F ′z|√
F ′x2 + F ′
y2 + F ′
z2ds.
Пример 54.3. Найти площадь части цилиндра x2 + z2 = a2, вырезан-ной из него цилиндром x2 + y2 = a2.
Р е ш е н и е: Цилиндр x2 + z2 = a2 имеет своей осью ось OY , ацилиндр x2 + y2 = a2 – ось OZ. На рис. 94a заштрихована расположеннаяв 1-м октанте часть поверхности, вырезанной цилиндром x2 + y2 = a2 изцилиндра x2 + z2 = a2.
z
y
x
aa
a
a)y
x
x=const
y= a -x2 2
b)
Рис. 94. К примеру 54.3
Ее площадь составляет 18
часть искомой площади. Учитывая, что
z =√a2 − x2 и z′x = − x√
a2−x2 , а z′y = 0 и, следовательно,√
1 + z′x2 + z′y
2 =
=√
1 + x2
a2−x2 = a√a2−x2 , по формуле (54.2) находим искомую площадь
σ = 8a∫∫
S
ds√a2−x2 = 8a
a∫
0
dx√a2−x2
√a2−x2∫
0
dy = 8aa∫
0
y√a2−x2 |
√a2−x2
0 dx = 8aa∫
0
dx =
= 8a2.
54 Лекция – Приложения двойных интегралов 287
Хотя область интегрирования здесь является 14
частью круга, интегри-ровать оказывается целесообразнее в декартовых координатах согласносхеме, изображенной на рис. 94b.
54.3. Масса, статические моменты, координаты центра тяже-сти и моменты инерции пластин. Пусть S является тонкой матери-альной пластинкой с поверхностной плотностью γ = γ(x, y). Разобьем Sна n частей ∆Si, как мы это делали в п. 51.1 при введении понятия двой-ного интеграла. Пусть точка Pi с координатами ξi, ηi принадлежит ∆Si(рис. 60). Вычислим плотность в этой точке γ(ξi, ηi) и будем считать еепостоянной для всего элемента площади ∆Si. Тогда масса этого элементапластинки будет ∆mi = γ(ξi, ηi)∆Si.
Составим n-ую интегральную сумму и устремив ее к пределу в соот-ветствие с формулой (51.1) найдем, что масса материальной пластинкиS с поверхностной плотностью γ = γ(x, y) равна
(54.4) M = limn→∞
n∑
i=1
γ(ξi, ηi)∆Si =
∫∫
S
γ(x, y)ds.
Очевидно, что если плотность γ постоянна для всей пластинки
(54.5) M = γ
∫∫
S
ds = γS.
Перейдем теперь к нахождению статических моментов, координат цен-тра тяжести и моментов инерции материальной пластинки S. Их нахо-ждение в случае произвольной материальной пластинки S проводится поаналогии с выводом формулы (54.4) для массы пластинки S.
(54.6) Mx = limn→∞
n∑
i=1
ηiγ(ξi, ηi)∆Si =
∫∫
S
γ(x, y)yds,
(54.7) My = limn→∞
n∑
i=1
ξiγ(ξi, ηi)∆Si =
∫∫
S
γ(x, y)xds,
(54.8) xц =My
M=
∫∫
S
γ(x, y)xds
∫∫
S
γ(x, y)ds,

288 54 Лекция – Приложения двойных интегралов
(54.9) yц =Mx
M=
∫∫
S
γ(x, y)yds
∫∫
S
γ(x, y)ds,
(54.10) Ix = limn→∞
n∑
i=1
η2i γ(ξi, ηi)∆Si =
∫∫
S
γ(x, y)y2ds,
(54.11) Iy = limn→∞
n∑
i=1
ξ2i γ(ξi, ηi)∆Si =
∫∫
S
γ(x, y)x2ds.
Введем также понятие полярного момента инерции материальной точ-ки, определенного как произведение массы материальной точки на квад-рат ее расстояния до начала координат.
(54.12) I0 = limn→∞
n∑
i=1
(η2i + ξ2
i )γ(ξi, ηi)∆Si =
∫∫
S
r2γ(x, y)ds = Ix + Iy.
В случае постоянной поверхностной плотности γ = const приведенныеформулы преобразуются в следующие:
(54.13) Mx = γ
∫∫
S
yds,
(54.14) My = γ
∫∫
S
xds,
(54.15) xц =
∫∫
S
xds
∫∫
S
ds=
1
S
∫∫
S
xds,
(54.16) yц =
∫∫
S
yds
∫∫
S
ds=
1
S
∫∫
S
yds,
(54.17) Ix = γ
∫∫
S
y2ds,

54 Лекция – Приложения двойных интегралов 289
(54.18) Iy = γ
∫∫
S
x2ds,
(54.19) I0 = γ
∫∫
S
r2ds = Ix + Iy.
Пример 54.4. Найти массу круглой пластинки, если ее плотностьпропорциональна расстоянию точки от центра и равна δ на краю пла-стинки.
Р е ш е н и е: Очевидно, что, исходя из условия задачи, плотностьпластинки γ = r
Rδ.
Массу пластинки определим по формуле (54.4) M =∫∫
S
rRδds. Этот
интеграл, очевидно, целесообразно вычислять в полярных координатах rменяющейся от 0 до R, и ϕ, меняющейся от 0 до 2π. Напомним, что вполярных координатах элемент площади ds = rdrdϕ. Следовательно,
M =δ
R
R∫
0
dϕ
R∫
0
r2dr =δ
Rϕ|2π0
r3
3|R0 =
2πδR2
3.
Пример 54.5. Найти координаты центра тяжести полукруга ради-уса R. Плотность пластинки постоянна.
Р е ш е н и е: В силу симметрии, очевидно, что xц = 0. S = 12πR2.
По формуле (54.16) yц = 1S
∫∫
S
yds = 2πR2
∫∫
S
yds. Для вычисления данно-
го интеграла по области S разумно воспользоваться полярной системойкоординат (рис. 95), в которой y = r sinϕ, ds = rdrdϕ.
y
x
r=R
=constϕ
Рис. 95. К примеру 54.5

290 54 Практическое занятие – Двойные интегралы
Таким образом
yц = 2πR2
π∫
0
sinϕdϕR∫
0
r2dr = 2πR2 (− cosϕ)|π0 r
3
3|R0 = 2
πR2 (cos 0 − cos π)R3
3=
= 43πR.
Пример 54.6. В условиях примера 54.4 определить момент инерцииI круга относительно диаметра.
Р е ш е н и е: В случае круга в силу симметрии Ix = Iy = I. Из
формулы (54.12) имеем I = 12I0 = 1
2
∫∫
S
r2γ(x, y)ds = δ2R
2π∫
0
dϕR∫
0
r4dr =
= δ2Rϕ|2π0 r5
5|R0 = πδ
5R4.
54. практическое занятиеприложения двойных интегралов
Прежде всего рассмотрим примеры на геометрические приложениядвойного интеграла – вычисление площади плоских фигур, объема тел иплощади поверхностей.
Пример 54.1. Найти площадь S, ограниченную линиями y = ex, y == e−2x, y = e2.
Р е ш е н и е: Проведем кривые y = ex, y = e−2x и прямую y = e2 (рис.96).
y
x
A
B C
S
Dy=e
y=const
x=ln y
x=- ln y21
y=ey=ex
2
-2x
Рис. 96. К примеру 54.1
Область S, ограниченная этими кривыми будет криволинейным тре-угольником с вершинами в точках A(0; 1), B(−1; e2) и C(2, e2). Площадь
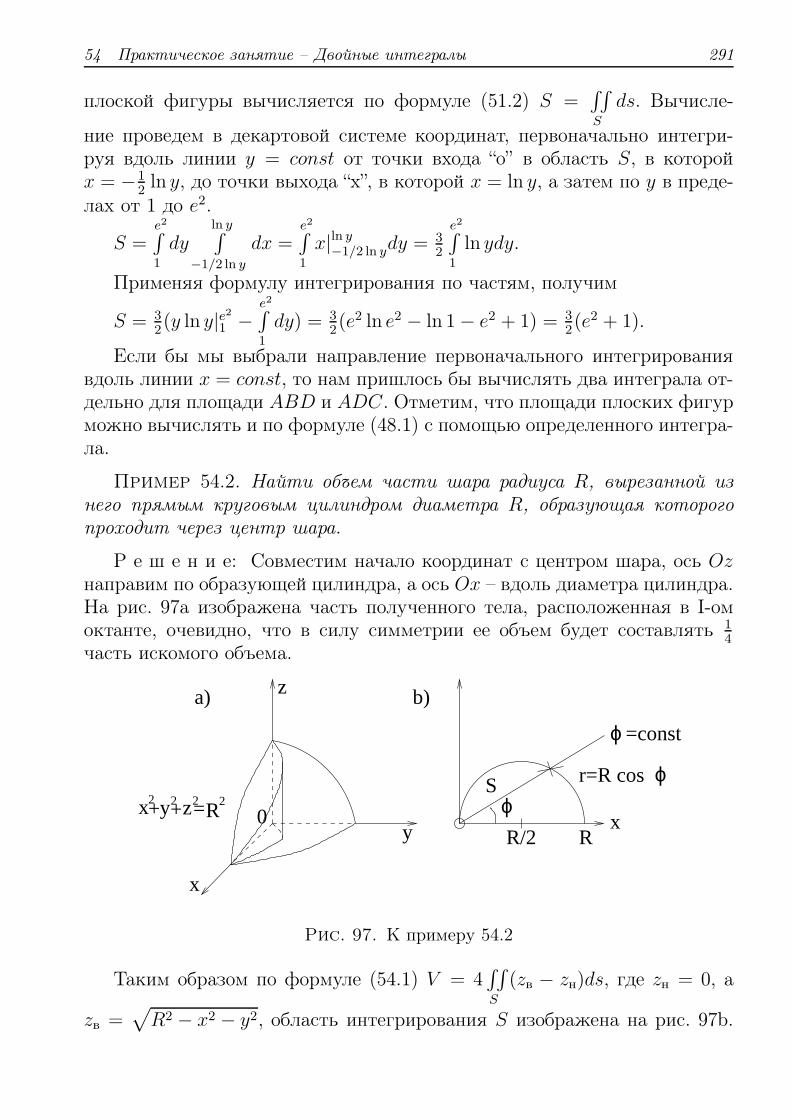
54 Практическое занятие – Двойные интегралы 291
плоской фигуры вычисляется по формуле (51.2) S =∫∫
S
ds. Вычисле-
ние проведем в декартовой системе координат, первоначально интегри-руя вдоль линии y = const от точки входа “o” в область S, в которойx = −1
2ln y, до точки выхода “x”, в которой x = ln y, а затем по y в преде-
лах от 1 до e2.
S =e2∫
1
dyln y∫
−1/2 ln y
dx =e2∫
1
x|ln y−1/2 ln ydy = 32
e2∫
1
ln ydy.
Применяя формулу интегрирования по частям, получим
S = 32(y ln y|e21 −
e2∫
1
dy) = 32(e2 ln e2 − ln 1 − e2 + 1) = 3
2(e2 + 1).
Если бы мы выбрали направление первоначального интегрированиявдоль линии x = const, то нам пришлось бы вычислять два интеграла от-дельно для площади ABD и ADC. Отметим, что площади плоских фигурможно вычислять и по формуле (48.1) с помощью определенного интегра-ла.
Пример 54.2. Найти объем части шара радиуса R, вырезанной изнего прямым круговым цилиндром диаметра R, образующая которогопроходит через центр шара.
Р е ш е н и е: Совместим начало координат с центром шара, ось Ozнаправим по образующей цилиндра, а ось Ox – вдоль диаметра цилиндра.На рис. 97a изображена часть полученного тела, расположенная в I-омоктанте, очевидно, что в силу симметрии ее объем будет составлять 1
4часть искомого объема.
x+y+z=R2 2 2 2
z
x
y0
a)
RR/2x
S
=const
b)
ϕ
ϕr=R cos ϕ
Рис. 97. К примеру 54.2
Таким образом по формуле (54.1) V = 4∫∫
S
(zв − zн)ds, где zн = 0, а
zв =√
R2 − x2 − y2, область интегрирования S изображена на рис. 97b.

292 54 Практическое занятие – Двойные интегралы
Вычисление∫∫
S
√
R2 − x2 − y2ds целесообразно провести в полярных ко-
ординатах r и ϕ. Запишем уравнение окружности (x − R2)2 + y2 = R2
4,
ограничивающeй область S в полярных координатах, учитывая, что x == r cosϕ, y = r sinϕ, x2 +y2 = r2: x2−xR+ R2
4+y2 = R2
4→ x2 +y2 = xR→
r2 = rR cosϕ → r = R cosϕ. Интегрирование проведем первоначальновдоль луча ϕ = const в пределах от 0 до R cosϕ, а затем по ϕ – от 0 доπ/2.
V = 4
π/2∫
0
dϕ
R cosϕ∫
0
r√R2 − r2dr = 4
π/2∫
0
(
−(R2 − r2)3/2
3
)∣∣∣∣
R cosϕ
0
dϕ =
=4
3
π/2∫
0
(−(−R2 −R2 cos2 ϕ)3/2 + R3)dϕ =
=4
3
π/2∫
0
R3(1 − sin3 ϕ)dϕ =4R3
3(ϕ|π/20 +
π/2∫
0
sin2 ϕd cosϕ) =
=4R3
3
π
2+
π/2∫
0
(1 − cos2 ϕ)d cosϕ
=
=4R3
3
(
π
2+ (cosϕ− cos3 ϕ
3)
∣∣∣∣
π/2
0
)
=4R3
3
(π
2− 2
3
)
.
Пример 54.3. Вычислить площадь части параболоида вращения z == x2 + y2, вырезаемую цилиндром x2 + y2 = 4 (рис. 98).
z
y
x
2
2
4
Рис. 98. К примеру 54.3

54 Практическое занятие – Двойные интегралы 293
Р е ш е н и е: Вычисление площади поверхности проведем по формуле(54.2), где z′x = 2x, z′y = 2y и область S – круг радиуса 2 с центром в нача-
ле координат, следовательно σ =∫∫
S
√
1 + 4(x2 + y2)ds. Интегрирование
естественно удобнее проводить в полярных координатах, изменяющихсяв пределах по r от 0 до 2, по ϕ – от 0 до 2π.
δ =2π∫
0
dϕ2∫
0
r√
1 + 4r2dr = ϕ|2π0(1+4r2)3/2
12
∣∣∣
2
0= π
6(17
√17 − 1).
Перейдем к примерам на вычисление массы, статических моментов,координат центра тяжести и моментов инерции пластин.
Пример 54.4. Найти массу кругового кольца, если поверхностнаяплотность γ в каждой точке кольца обратно пропорциональна квадратурасстояния ее от центра кольца.
Р е ш е н и е: Обозначим радиусы окружностей, являющихся грани-цами кольца R1 и R2 (рис. 99).
x
y
r=Rr=Rϕ
ϕ=const
21
Рис. 99. К примеру 54.4
Согласно условию задачи плотность в любой точке кольца γ = kr2
, гдеk – коэффициент пропорциональности, а r – расстояние рассматриваемойточки от центра кольца, в который мы поместим полюс полярной систе-мы координат. Интегрирование естественно провести в указанной системеполярных координат при изменении r в пределах от r = R1 до r = R2, аϕ – в пределах от 0 до 2π. По формуле (54.4)
M =∫∫
S
γ(x, y)ds = k2π∫
0
dϕR2∫
R1
rdrr2
= k ϕ|2π0 ln r|R2
R1= 2kπ(lnR2 − lnR1) =
= 2kπ ln R2
R1.

294 54 Практическое занятие – Двойные интегралы
Пример 54.5. Найти координаты центра тяжести пластины, огра-ниченной линиями y2 = 4x+ 4, y2 = −2x+ 4. Поверхностная плотностьγ постоянна.
Р е ш е н и е: Границами пластинки будут параболы, пересекающиесяв точках y = −2 и y = 2 (рис. 100).
x
y
-1
-2
2
2
S
y=const
Рис. 100. К примеру 54.5
В силу того, что пластинка симметрична относительно оси x, yц = 0.xц найдем по формуле (54.15). Интегрировать целесообразно в декартовойсистеме координат первоначально вдоль линии y = const от точки входа“o” ее в область S, в которой x = y2−4
4, до точки выхода “x” из области, в
которой x = −y2−42
. Сначала найдем площадь пластинки
S =
∫∫
S
ds = 2
2∫
0
dy
− 12(y2−4)∫
14(y2−4)
dx = 2
2∫
0
x|−12(y2−4)
14(y2−4)
dy =
= 2
2∫
0
(
−y2
2+ 2 − y2
4+ 1
)
dy = 2
2∫
0
(3 − 3
4y2)dy =
= 2
(
3y − 1
4y3
)∣∣∣∣
2
0
= 8.
Затем

54 Практическое занятие – Двойные интегралы 295
xц =My
M=
1
S
∫∫
S
xds =1
82
2∫
0
dy
− 12(y2−4)∫
14(y2−4)
xdx =1
8
2∫
0
x2∣∣− 1
2(y2−4)
14(y2−4)
dy =
=1
8
2∫
0
((y2 − 4)2
4− (y2 − 4)2
16
)
dy =3
8 · 16
2∫
0
(y2 − 4)2dy =
=3
8 · 16
2∫
0
(y4 − 8y2 + 16)dy =3
8 · 16
(y5
5− 8y3
3+ 16y
)∣∣∣∣
2
0
=
=3
8 · 16
(32
5− 64
3+ 32
)
=2
5.
Пример 54.6. Вычислить моменты инерции относительно осей ко-ординат пластины, определяемой условиями предыдущего примера.
Р е ш е н и е: Для вычисления Ix воспользуемся формулой (54.17), Iy– формулой (54.18). Вычисления интегралов проводим по той же схеме,что и в предыдущей задаче.
Ix = γ
∫∫
S
y2ds = 2γ
2∫
0
y2dy
− 12(y2−4)∫
14(y2−4)
dx =
= 2γ
2∫
0
y2(3 − 3
4y2)dy = 2γ
(
y3 − 3
20y5
)∣∣∣∣
2
0
= 2γ
(
8 − 3 · 3220
)
=32
5γ.
Iy = γ
∫∫
S
x2ds = 2γ
2∫
0
dy
− 12(y2−4)∫
14(y2−4)
x2dx =2
3γ
2∫
0
x3∣∣− 1
2(y2−4)
14(y2−4)
dy =
=2
3γ
2∫
)
(
−(y2 − 4)3
8− (y2 − 4)3
64
)
dy =3γ
32
2∫
0
(4 − y2)3dy =
=3γ
32
2∫
0
(64 − 48y2 + 12y4 − y6)dy =3γ
32
(
64y − 16y3 +12
5y5 − y7
7
)∣∣∣∣
2
0
=
296 54 Практическое занятие – Двойные интегралы
=3γ
16
(
64 − 64 +12 · 16
5− 64
7
)
=192
35γ.
Самостоятельная работа
Пример 54.7. Переходя к полярным координатам, найти площадь S,ограниченную линиями x2 + y2 = 2x, x2 + y2 = 4x, y = x, y = 0.
Пример 54.8. Тело ограничено гиперболическим параболоидомz = x2 − y2 и плоскостями y = 0, z = 0, x = 1. Вычислить его объем.
Пример 54.9. Вычислить объем тела, ограниченного цилиндромx2 + y2 = 2x, конусом x2 + y2 = z2 и плоскостью z = 0.
Пример 54.10. Найти площадь части плоскости 2x + 3y + 2z = 1,заключенной между координатными плоскостями.
Пример 54.11. Найти площадь части конуса z2 = x2+y2, вырезаннойиз него цилиндром x2 + y2 = 2x.
Пример 54.12. Найти координаты центра тяжести пластинки, огра-ниченной кардиоидой r = a(1 + cosϕ). Плотность γ постоянна.
Пример 54.13. Найти моменты инерции Ix, Iy, I0 пластинки, огра-ниченной кардиоидой r = a(1 + cosϕ). Плотность γ постоянна.
55 Лекция – Тройной интеграл 297
55. лекция – тройной интеграл
Определение и свойства тройного интеграла. Переход от тройногоинтеграла к трехкратному в декартовой системе координат. Заменапеременных в тройном интеграле. Тройной интеграл в цилиндриче-ских и сферических координатах.
55.1. Понятие тройного интеграла. Пусть функция U = f(x, y, z)задана в трехмерной области V , ограниченной замкнутой поверхностьюσ. Объем области V обозначим той же буквой.
Проведем теперь действия, подобные тем, какие мы делали при рас-смотрении понятия двойного интеграла, а именно:
1. Разобьем область V на n элементов ∆Vi.n∑
i=1
∆Vi = V .
2. В каждом элементе ∆Vi выберем произвольную точку Pi(ξi; ηi; ζi).Вычислим значение функции U = f(x, y, z) в этой точке f(Pi) = f(ξi, ηi, ζi).
3. Составим произведение f(ξi, ηi, ζi) на ∆Vi для всех ∆Vi и образуем
сумму всех таких произведенийn∑
i=1
f(ξi, ηi, ζi)∆Vi.
Определение 55.1. Суммаn∑
i=1
f(ξi, ηi, ζi)∆Vi называется n-ой инте-
гральной суммой, образованной для функции U = f(x, y, z) по областиV .
Определение 55.2. Тройным интегралом от функцииf(x, y, z) по области V называется предел, к которому стремится n-
я интегральная суммаn∑
i=1
f(ξi, ηi, ζi)∆Vi при неограниченном увеличении
числа элементов разбиения ∆Vi и условии стягивания каждого из этихэлементов в точку.
Этот предел обозначается∫∫∫
V
f(x, y, z)dv и он не должен зависеть от
способа разбиения области V на элементы ∆Vi и выбора точек Pi ∈ ∆Vi.Таким образом
(55.1) limn→∞
n∑
i=1
f(ξi, ηi, ζi)∆Vi =
∫∫∫
V
f(x, y, z)dV.
Здесь знак∫∫∫
называется знаком тройного интеграла, V – областьюинтегрирования, f(x, y, z) – подынтегральной функцией, dV – элементомобъема, f(x, y, z)dV – подынтегральным выражением.

298 55 Лекция – Тройной интеграл
Очевидно, что в силу условия разбиенияn∑
i=1
∆Vi = V , а, следовательно,
и
(55.2) limn→∞
n∑
i=1
∆Vi =
∫∫∫
V
dV = V,
т.е. объему области V .Так же, как и для двойного интеграла, сформулируем без доказатель-
ства теорему существования тройного интеграла.
Теорема 55.1. Для всякой непрерывной в замкнутой области V функ-ции U = f(x, y, z) тройной интеграл
∫∫∫
V
f(x, y, z)dV существует.
Поэтому в дальнейшем будем считать функцию U = f(x, y, z), какправило, непрерывной в области интегрирования V .
55.2. Свойства тройного интеграла. Поскольку п. 55.1, опреде-ляющий понятие тройного интеграла по области V от функции f(x, y, z),почти дословно повторяет п. 51.1 для двойного интеграла от f(x, y) пообласти S, очевидно, что свойства тройного интеграла идентичны свой-ствам двойного интеграла.
Приведем их• Постоянный множитель можно выносить за знак тройного интегра-
ла: ∫∫∫
V
kf(x, y, z)dV = k
∫∫∫
V
f(x, y, z)dV.
• Тройной интеграл от суммы функций равен сумме тройных инте-гралов от этих функций
∫∫∫
V
(f(x, y, z) + ϕ(x, y, z))dV =
∫∫∫
V
f(x, y, z)dV+
+
∫∫∫
V
ϕ(x, y, z)dV.
• Если в области интегрирования
f(x, y, z) > 0, то и∫∫∫
V
f(x, y, z)dV > 0.
• Если в области интегрирования
f(x, y, z) > ϕ(x, y, z), то и
55 Лекция – Тройной интеграл 299
∫∫∫
V
f(x, y, z)dV >
∫∫∫
V
ϕ(x, y, z)dV.
• Если в области интегрирования m и M являются соответственнонаименьшим и наибольшим значением функцииf(x, y, z), т.е.
m 6 f(x, y, z) 6 M, то mV 6
∫∫∫
V
f(x, y, z)dV 6 MV.
Это свойство дает нам оценку тройного интеграла.
• Если область интегрирования V =m∑
j=1
Vj, то
∫∫∫
V
f(x, y, z)dV =
m∑
j=1
∫∫∫
Vj
f(x, y, z)dV.
• Теорема о среднем. Если функция f(x, y, z) непрерывна в замкну-той области V , то в области V существует, по крайней мере, одна точкаP (ξ; η; ζ), в которой значение функции
f(ξ, η, ζ) =1
V
∫∫∫
V
f(x, y, z)dV.
Это значение называется средним интегральным значением функцииf(x, y, z) по области V .
55.3. Переход от тройного интеграла к трехкратному (повтор-ному) в декартовой системе координат. Рассмотрим лишь областьV такого типа, объем V которой мы нашли в лекции 54 (п. 54.1) и котораяпредставлена на рис. 90.
Определение 55.3. Трехмерная область V называется правильнойв направлении оси OZ, если любая прямая x = const, y = const, парал-лельная этой оси и проходящая через ее внутреннюю точку пересекаетограничивающую ее поверхность σ в двух точках.
Точку входа ее в область V , она является точкой пересечения этой пря-мой с поверхностью z = zн(x, y) обозначим символом “o”, точку выхода,она является точкой пересечения с поверхностью z = zв(x, y) – “x”.
Указанная в определении 55.3 прямая x = const, y = const должна,очевидно, проходить через соответствующую внутреннюю точку областиS, являющейся проекцией области V на плоскость XOY .

300 55 Лекция – Тройной интеграл
Если область V не удовлетворяет определению 55.3, ее надо разбитьна составные части, каждая из которых будет правильной в направле-нии оси Oz, и интеграл по области V находить как сумму интегралов поуказанным частям.
Введем еще одно определение.
Определение 55.4. Элементом объема в декартовой системе коор-динат, также как и элементом площади (см. определение 51.4), назы-вается произведение дифференциалов переменных dV = dxdydz.
При переходе от двойного интеграла к двукратному мы получали фор-мулы, в которых первоначально интегрирование проводилось по однойпеременной вдоль прямой, на которой вторая переменная была постоян-на. В тройном интеграле три переменные, поэтому первоначально инте-грирование проводится по одной из переменных, а две другие при этомсчитаются постоянными. Для области, правильной в направлении оси OZпервоначально интегрирование проводится по переменной z вдоль прямойx = const, y = const от точки входа “o” в область V , в которой z = zн(x, y)до точки выхода “x”, в которой z = zв(x, y). Затем мы должны проинте-грировать полученный результат по области S. Следовательно
(55.3)∫∫∫
V
f(x, y, z)dxdydz =
∫∫
S
dxdy
zв(x,y)∫
zн(x,y)
f(x, y, z)dz
Очевидно, чтоzв(x,y)∫
zн(x,y)
f(x, y, z)dz является функцией двух переменных.
Обозначим ее Φ(x, y), тогда тройной интеграл∫∫∫
V
f(x, y, z)dxdydz сводится к двойному∫∫
S
Φ(x, y)dxdy, который в зави-
симости от типа вычисляется по формуле (51.3) или (52.1).Таким образом, если проекция области V , правильной в направлении
оси OZ, на плоскость XOY является областью S, правильной в направле-нии оси OY (определение 51.3, рис. 62), тройной интеграл преобразуетсяв трехкратный по следующей формуле:
(55.4)∫∫∫
V
f(x, y, z)dxdydz =
b∫
a
dx
yв(x)∫
yн(x)
dy
zв(x,y)∫
zн(x,y)
f(x, y, z)dz.
Если же область S является правильной в направлении оси OX (опре-деление 52.1, рис. 72)

55 Лекция – Тройной интеграл 301
(55.5)∫∫∫
V
f(x, y, z)dxdydz =
d∫
c
dy
xпр(y)∫
xл(y)
dx
zв(x,y)∫
zн(x,y)
f(x, y, z)dz.
Все пределы в формулах (55.4) и (55.5) оказываются постояннымилишь в случае, если границами области являются координатные поверх-ности. В рассматриваемых декартовых координатах – это поверхностиx = const, y = const, z = const, перпендикулярные соответственно осямOX, OY и OZ. Область V в данном случае, очевидно, является прямо-угольным параллелепипедом, для которого a 6 x 6 b, c 6 y 6 d, k 6 z 6 l,и
(55.6)∫∫∫
V
f(x, y, z)dxdydz =
b∫
a
dx
d∫
c
dy
l∫
k
f(x, y, z)dz.
При постоянных пределах порядок интегрирования в формуле (55.6)не имеет значения. Если к тому же f(x, y, z) = ϕ(x)ψ(y)χ(z), то тройнойинтеграл равен произведению трех определенных интегралов
(55.7)∫∫∫
V
f(x, y, z)dxdydz =
b∫
a
ϕ(x)dx
d∫
c
ψ(y)dy
l∫
k
χ(z)dz.
Пример 55.1. Вычислить∫∫∫
V
zdxdydz, где V : 1 6 x 6 2, −1 6 y 6 1,
2 6 z 6 3.
Р е ш е н и е: Для решения данного примера воспользуемся формулой(55.7), в которой положим f(x, y, z) = z, a = 1, b = 2, c = −1, d = 1, k = 2,l = 3. Тогда∫∫∫
V
zdxdydz =2∫
1
dx1∫
−1
dy3∫
2
zdz = x|21 y|1−1
z2
2
∣∣∣
3
2= (2 − 1)(1 + 1)9−4
2= 5.
Пример 55.2. Вычислить интеграл из примера 55.1 для области V ,ограниченной координатными плоскостями и плоскостью x + y + z = 1(рис. 101)
Р е ш е н и е: Для вычисления заданного интеграла воспользуемсяформулой (55.3), в которой положим f(x, y, z) = z, zн(x, y) = 0, zв(x, y) == 1 − x− y, yн(x) = 0, yв(x) = 1 − x, a = 0, b = 1. Тогда

302 55 Лекция – Тройной интеграл
a) z
y
x
1
1
1
x=consty=const
z =1-x-y
z =0H
B
1
1
x=consty
xy =0
y =1-xB
H
b)
Рис. 101. К примеру 55.2
∫∫∫
V
zdxdydz =1∫
0
dx1−x∫
0
dy1−x−y∫
0
zdz =1∫
0
dx1−x∫
0
z2
2
∣∣∣
1−x−y
0dy =
= 12
1∫
0
dx1−x∫
0
(1 + x2 + y2 − 2x− 2y + 2xy)dy =
= 12
1∫
0
(
y + x2y + y3
3− 2xy − y2 + xy2
)∣∣∣
1−x
0dx = 1
2
1∫
0
(1 − x+ x2 − x3 +
+ (1 − 3x + 3x2 − x3)/3 − 2x + 2x2 − 1 + 2x− x2 + x+ 2x2 + x2)dx =
= 12
1∫
0
(13− x+ 5x2 − x3
3
)
dx = 12
(x3− x2
2+ 5x3
3− x4
12
)∣∣∣
1
0=
= 12
(13− 1
2+ 5
3− 1
12
)= 17
24.
Пример 55.3. Вычислить интеграл из примера 55.1 для области V ,ограниченной конусом x2 + y2 − z2 = 0 и плоскостью z = 4 (рис. 102a).
Р е ш е н и е: Воспользуемся формулой (55.3), положив в которойf(x, y, z) = z, zн(x, y) =
√
x2 + y2, zв(x, y) = 4, получим∫∫∫
V
zdxdydz =
=∫∫
S
z2
2
∣∣∣
4
√x2+y2
dxdy = 12
∫∫
S
(16− x2 − y2)dxdy. Полученный двойной инте-
грал должен быть вычислен по области S, являющейся кругом радиуса,равного 2 (рис. 102b). Его вычисление целесообразно провести в полярныхкоординатах, заменив x2+y2 на r2, элемент площади в декартовой системекоординат dxdy на соответствующий элемент площади в полярных коор-динатах, проведя первоначально интегрирование вдоль луча ϕ = constот точки “o” до точки “x”, т.е. по r в пределах от 0 до 2, а затем по ϕ впределах от 0 до 2π. В результате получим

55 Лекция – Тройной интеграл 303
a) z
x
yb)
x
22
4
r=2
x=consty=const
z =4
=const
B
ϕ
ϕ
y
z = x +y H
2 2
Рис. 102. К примеру 55.3
∫∫∫
V
zdxdydz =1
2
∫∫
S
(16 − x2 − y2)dxdy =
1
2
2π∫
0
dϕ
2∫
0
(16 − r2)rdr =1
2ϕ|2π0
(
8r2 − r4
4
)∣∣∣∣
2
0
= π(32 − 4) = 28π
55.4. Замена переменных в тройном интеграле. Вспомним, чтозамена переменных в двойном интеграле проводится с помощью формулы(53.10). Аналогичным образом замена переменных x, y, z в тройном инте-грале на новые переменные u, v, w, через которые x, y и z выражаютсякак x = x(u, v, w), y = y(u, v, w), z = z(u, v, w), проводится по формуле
∫∫∫
V
f(x, y, z)dxdydz =(55.8)
=
∫∫∫
V
f(x(u, v, w), y(u, v, w), z(u, v, w))|J |dudvdw.
Определение 55.5. Формула (55.8) называется формулой преобра-зования координат в тройном интеграле, входящий в нее определитель
304 55 Лекция – Тройной интеграл
(55.9) J =
∣∣∣∣∣∣
∂x∂u
∂x∂v
∂x∂w
∂y∂u
∂y∂v
∂y∂w
∂z∂u
∂z∂v
∂z∂w
∣∣∣∣∣∣
называется определителем Якоби или якобианом, а произведение|J |dudvdw – элементом объема в криволинейных координатах u, v, w.
55.5. Вычисление тройного интеграла в цилиндрических ко-ординатах. Цилиндрические координаты точки в пространстве обозна-чаются r, ϕ, z.
Координатными поверхностями в этой системе координат служат ци-линдры (поверхности r = const), меридиональные полуплоскости(ϕ = const) и плоскости, перпендикулярные оси Oz (z = const).
Через эти координаты декартовые переменные x, y, z выражаютсяследующим образом
(55.10)
x = r cosϕ,y = r sinϕ,z = z.
И, следовательно, якобиан преобразования (55.9), в котором надо по-ложить u = r, v = ϕ, w = z, будет
(55.11) J =
∣∣∣∣∣∣
cosϕ −r sinϕ 0sinϕ r cosϕ 00 0 1
∣∣∣∣∣∣
= r
∣∣∣∣
cosϕ − sinϕsinϕ cosϕ
∣∣∣∣=
= r(cos2 ϕ+ sin2 ϕ) = r.
В цилиндрических переменных координата z сохраняется, а вместо x иy вводятся полярные координаты r и ϕ, естественно, что якобиан остаетсятаким же, что и в полярной системе координат.
Заменив x, y, z по формуле (55.10) и подставив J = r в (55.8) получимформулу преобразования координат в тройном интеграле для цилиндри-ческой системы координат
(55.12)∫∫∫
V
f(x, y, z)dxdydz =
∫∫∫
V
f(r cosϕ, r sinϕ, z)rdrdϕdz.
Для области правильной в направлении оси z (рис. 90)

55 Лекция – Тройной интеграл 305
∫∫∫
V
f(r cosϕ, r sinϕ, z)rdrdϕdz =(55.13)
=
∫∫
S
rdrdϕ
zн(r cosϕ,r sinϕ)∫
zн(r cosϕ,r sinϕ)
f(r cosϕ, r sinϕ, z)dz.
Проинтегрировав по z в (55.13) и подставив соответствующие пределы,получим двойной интеграл по области S в полярных координатах. Примерна применение цилиндрических координат мы уже привели. Это пример55.3.
55.6. Вычисление тройного интеграла в сферических коорди-натах. Сферические координаты точки в пространстве обозначаются ρ,ϕ, θ.
Координатными поверхностями в этой системе координат служат сфе-ры (поверхности ρ = const), меридиальные полуплоскости (поверхностиϕ = const) и конусы (поверхности θ = const).
Через эти координаты декартовые переменные выражаются следую-щим образом
(55.14)
x = ρ cosϕ sin θ,y = ρ sinϕ sin θ,z = ρ cos θ.
И, следовательно, якобиан преобразования (55.9), в котором надо по-ложить u = ρ, v = ϕ, w = θ, будет
(55.15) J =
∣∣∣∣∣∣
cosϕ sin θ −ρ sinϕ sin θ ρ cosϕ cos θsinϕ sin θ ρ cosϕ sin θ ρ sinϕ cos θ
cos θ 0 −ρ sin θ
∣∣∣∣∣∣
=
= cos θ
∣∣∣∣
−ρ sinϕ sin θ ρ cosϕ cos θρ cosϕ sin θ ρ sinϕ cos θ
∣∣∣∣−
−ρ sin θ
∣∣∣∣
cosϕ sin θ ρ cosϕ cos θsinϕ sin θ ρ sinϕ cos θ
∣∣∣∣=
= ρ2 cos2 θ sin θ
∣∣∣∣
− sinϕ cosϕcosϕ sinϕ
∣∣∣∣− ρ2 sin3 θ
∣∣∣∣
cosϕ − sinϕsinϕ cosϕ
∣∣∣∣=
= −ρ2 sin θ(cos2 θ + sin2 θ) = −ρ2 sin θ.

306 55 Лекция – Тройной интеграл
При выводе выражения для J мы раскрыли определитель третьегопорядка по третьей строке, вынесли общие для столбцов множители зазнак определителей 2-ого порядка и учли, что определитель∣∣∣∣
− sinϕ cosϕcosϕ sinϕ
∣∣∣∣= −
∣∣∣∣
cosϕ − sinϕsinϕ cosϕ
∣∣∣∣= −(cos2 ϕ+ sin2 ϕ) = −1.
Заменив x, y, z по формуле (58.14) и подставив |J | = ρ2 sin θ в (55.8)получим формулу преобразования координат в тройном интеграле длясферической системы координат
(55.16)∫∫∫
V
f(x, y, z)dxdydz =
=
∫∫∫
V
f(ρ cosϕ sin θ, ρ sinϕ sin θ, ρ cos θ)ρ2 sin θdρdϕdθ.
Естественно, что сферические координаты удобно использовать тогда,когда уравнение границы области V и подынтегральная функция в этихпеременных имеют более простой вид, чем в декартовых. В частности,если границей области V является сфера.
Пример 55.4. Вычислить∫∫∫
V
(x2 + y2)dxdydz, если V – шар x2 + y2 +
+ z2 6 R2.
Р е ш е н и е: Очевидно, что вычисление данного интеграла целе-сообразно провести в сферических координатах (рис. 103). По формуле(55.16)
x
z
y
V
S
r=R
=const
R
ϕ
ϕ
ϕ =const
θ
θ =const
Рис. 103. К примеру 55.4
55 Практическое занятие – Тройные интегралы 307
∫∫∫
V
(x2 + y2)dxdydz =∫∫∫
V
ρ4 sin3 θdρdϕdθ.
Расставим пределы интегрирования: вначале проинтегрируем по r вдольлуча θ = const, ϕ = const от точки входа в область “o” в которой r = 0, доточки выхода “x”, в которой r = R, затем в меридиальной полуплоскостиϕ = const по θ от 0 до π и, наконец, в плоскости S = прXOY V по ϕ от 0до 2π.
∫∫∫
V
ρ4 sin3 θdρdθ =
2π∫
0
dϕ
π∫
0
sin3 θdθ
R∫
0
ρ4dρ =
= ϕ|2π0
π∫
0
(cos2 θ − 1)d cos θ
ρ5
5
∣∣∣∣
R
0
=
=2π
5R5
(cos3 θ
3− cos θ
)∣∣∣∣
π
0
=8π
15R5.
Поскольку в данном интеграле все пределы являются постоянными иподынтегральная функция распадается на произведение функций однойпеременной, тройной интеграл равен произведению трех определенныхинтегралов и порядок интегрирования не имеет значения.
55. практическое занятиевычисление тройных интегралов
Начнем с примеров вычисления тройного интеграла в декартовых ко-ординатах.
Пример 55.1. Вычислить тройной интеграл∫∫∫
V
dxdydz1−x−y , если V – тет-
раэдр с вершинами O(0; 0; 0), A(1; 0; 0), B(0; 1; 0) и C(0; 0; 1).
Р е ш е н и е: Изобразим заданный тетраэдр (рис. 104). Уравнениеплоскости ABC будет x + y + z = 1. Проинтегрируем вначале заданныйинтеграл по z от z = 0 до z = 1 − x − y вдоль любой линии x = const,y = const, проходящей через внутреннюю точку области.∫∫∫
V
dxdydz1−x−y =
∫∫
S
dxdy1−x−y
1−x−y∫
0
dz =∫∫
S
11−x−yz
∣∣∣
1−x−y
0dxdy =
=∫∫
S
dxdy = S = 12OA ·OB = 1
2.
Отметим, что точно построить область V часто оказывается слож-но. Для этого целесообразно использовать метод параллельных сечений
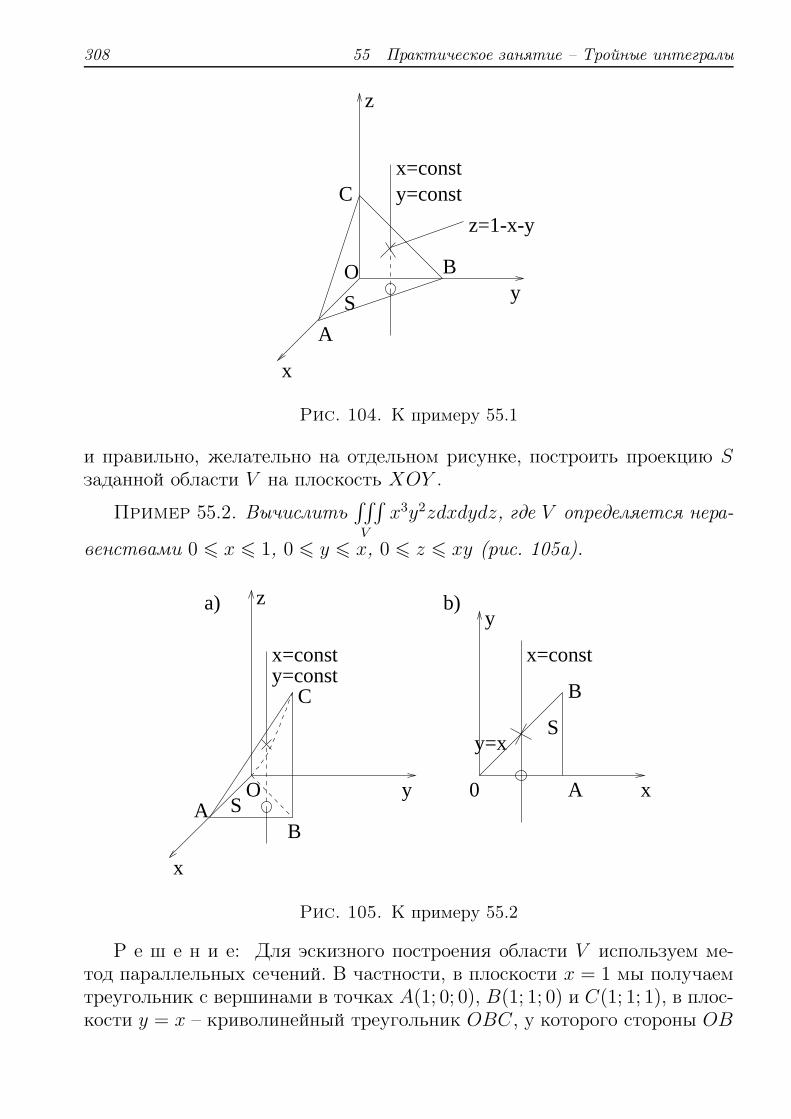
308 55 Практическое занятие – Тройные интегралы
z
y
x
O
A
C
B
S
x=consty=const
z=1-x-y
Рис. 104. К примеру 55.1
и правильно, желательно на отдельном рисунке, построить проекцию Sзаданной области V на плоскость XOY .
Пример 55.2. Вычислить∫∫∫
V
x3y2zdxdydz, где V определяется нера-
венствами 0 6 x 6 1, 0 6 y 6 x, 0 6 z 6 xy (рис. 105a).
z
y
x
0 x
y
B
AS
Sy=x
AB
C
O
x=constx=consty=const
a) b)
Рис. 105. К примеру 55.2
Р е ш е н и е: Для эскизного построения области V используем ме-тод параллельных сечений. В частности, в плоскости x = 1 мы получаемтреугольник с вершинами в точках A(1; 0; 0), B(1; 1; 0) и C(1; 1; 1), в плос-кости y = x – криволинейный треугольник OBC, у которого стороны OB

55 Практическое занятие – Тройные интегралы 309
и BC – отрезки прямых, а сторона OC – параболы z = x2. Участок по-верхности AOC определяется уравнением z = xy. Проинтегрировав пер-воначально по z вдоль прямой x = const, y = const от z = 0 до z = xy(рис. 105a), затем в плоскости XOY по y от y = 0 до y = x (рис. 105b) и,наконец по x от 0 до 1, получим
∫∫∫
V
x3y2zdxdydz =
1∫
0
x3dx
x∫
0
y2dy
xy∫
0
zdz =
=
1∫
0
x3dx
x∫
0
y2 z2
2
∣∣∣∣
xy
0
dy =1
2
1∫
0
x5dx
x∫
0
y4dy =
=1
2
1∫
0
x5 y5
5
∣∣∣∣
x
0
dx =1
10
1∫
0
x10dx =x11
110
∣∣∣∣
1
0
=1
110.
Перейдем к рассмотрению примеров на использование цилиндриче-ской системы координат. Как мы видели в лекции, если область правиль-ная в направлении оси z, можно провести сначала интегрирование по z,а затем в полученном двойном интеграле перейти к полярным координа-там. Это то же самое, что сразу в тройном интеграле провести заменудекартовых координат цилиндрическими, а затем проводить интегриро-вание.
Пример 55.3. Вычислить∫∫∫
V
√
x2 + y2dxdydz, V ограничена плоско-
стями y = 0, z = 0, z = 2 и цилиндром x2 + y2 = 2x.
Р е ш е н и е: Проведем вначале интегрирование по z от z = 0 до z =
= 2.∫∫∫
V
√
x2 + y2dxdydz =∫∫
S
√
x2 + y2dxdy2∫
0
dz =∫∫
S
z|20√
x2 + y2dxdy =
= 2∫∫
S
√
x2 + y2dxdy, где S = прOxyV является полукругом (рис. 106) ра-
диуса 1 с центром в точке (1;0), границей которого является окружностьx2 + y2 = 2x или в полярных координатах r = 2 cosϕ (см. пример 53.2 влекции 53).
В полярных координатах, учитывая, что√
x2 + y2 = r, а элемент пло-щади равен rdrdϕ, и, проведя вначале интегрирование по r от r = 0 доr = 2 cosϕ, а затем по ϕ от 0 до π
2, получим

310 55 Практическое занятие – Тройные интегралы
0
y
x1 2
r=2cos
=const
ϕ
ϕ
ϕ
Рис. 106. К примеру 55.3
2
∫∫
S
√
x2 + y2dxdy = 2
π/2∫
0
dϕ
2 cosϕ∫
0
r2dr = 2
π/2∫
0
r3
3
∣∣∣∣
2 cosϕ
0
dϕ =
=16
3
π/2∫
0
cos3 ϕdϕ =16
3
π/2∫
0
(1 − sin2ϕ) cosϕdϕ =
=16
3
(
sinϕ− sin3 ϕ
3
)∣∣∣∣
π/2
0
=16
3
(
1 − 1
3
)
=32
9.
Пример 55.4. Вычислить∫∫∫
V
(x2 + y2 + 2z)dxdydz, V : x2 + y2 6 1,
z > 1 − x2 − y2, z 6 1.
Р е ш е н и е: Область интегрирования V расположена внутри ци-линдра x2 + y2 = 1, ниже плоскости z = 1 и выше параболоида вращенияz = 1−x2−y2, который пересекается с цилиндром x2 +y2 = 1 в плоскости
XOY и имеет вершину на оси OZ в точке z = 1.1
4часть V , расположенная
в I-ом октанте представлена на рис. 107.ABC – часть плоскости z = 1, BCDE – часть цилиндра x2 + y2 = 1 и
пунктиром ADE – часть параболоида z = 1 − x2 − y2.Перейдем в данном интеграле к цилиндрическим координатам по фор-
муле (55.13) и, вычислив затем двойной интеграл по кругу S радиуса 1,получим

55 Практическое занятие – Тройные интегралы 311
x
y
z
A
B
C
D
E
z =1
z =1-x -yH
B
2 2
r=1
x=const, y=const
S/4O
ϕ
=constϕ
Рис. 107. К примеру 55.4
∫∫∫
V
(x2 + y2 + 2z)dxdydz =
∫∫
S
rdrdϕ
1∫
1−r2
(r2 + 2z)dz =
=
∫∫
S
(r2z + z2
)∣∣1
1−r2 rdrdϕ =
∫∫
S
(r2 + 1 − r2 + r4 − 1+
+ 2r2 − r4)rdrdϕ = 2
∫∫
S
r3drdϕ = 2
2π∫
0
dϕ
1∫
0
r3dr = 2ϕ|2π0r4
4
∣∣∣∣
1
0
= π.
Рассмотрим два примера на вычисление тройного интеграла в сфери-ческой системе координат.
Пример 55.5. Вычислить∫∫∫
V
xyzdxdydz, где V является 18
частью
шара x2 + y2 + z2 6 R2, расположенной в I-ом октанте.
Р е ш е н и е: Перейдем к сферическим координатам в которыхx = ρ cosϕ sin θ, y = ρ sinϕ sin θ, z = ρ cos θ и элемент площади равенρ2 sin θdρdϕdθ, затем расставим пределы в соответствие с рис. 108 и про-ведем вычисление заданного интеграла

312 55 Практическое занятие – Тройные интегралы
x
y
z
r=R
R
=const
ϕ
θ
θ=constϕ
Рис. 108. К примеру 55.5
∫∫∫
V
xyzdxdydz =
∫∫∫
V
ρ5 cosϕ sin3 θ sinϕ cos θdρdϕdθ =
=1
2
π/2∫
0
sin 2ϕdϕ
π/2∫
0
sin3 θd sin θ
R∫
0
ρ5dρ =
=1
2
(
−cos 2ϕ
2
)∣∣∣∣
π/2
0
sin4 θ
4
∣∣∣∣
π/2
0
ρ6
6
∣∣∣∣
R
0
=
=1
96(cos 0 − cos π)
(
sin4 π
2− sin4 0
)
R6 =R6
48.
Пример 55.6. Вычислить∫∫∫
V
√
1 + (x2 + y2 + z2)3/2dxdydz, где V –
шар x2 + y2 + z2 6 R2.
Р е ш е н и е: Как и в предыдущем примере переходим к сферическимкоординатам и, расставив пределы в соответствии с рис. 103, вычислимзаданный интеграл
∫∫∫
V
√
1 + (x2 + y2 + z2)3/2dxdydz =
=
∫∫∫
V
√
1 + ρ3ρ2 sin θdρdϕdθ =
2π∫
0
dϕ
π∫
0
sin θdθ
R∫
0
√
1 + ρ3ρ2dρ =

55 Практическое занятие – Тройные интегралы 313
= ϕ|2π0 (− cos θ)|π02
9(1 + ρ3)3/2
∣∣∣∣
R
0
=8π
9
((1 + R3)3/2 − 1
).
Самостоятельная работа
Расставить пределы интегрирования в тройном интеграле∫∫∫
V
f(x, y, z)dxdydz.
Пример 55.7. V : x+ y + z 6 1, x > 0, y > 0, z > 0.
Пример 55.8. V : x2 + y2 6 R2, z > 0, z 6 H.
Вычислить следующие интегралы:
Пример 55.9.1∫
0
dx1∫
0
dy1∫
0
dz√x+y+z+1
.
Пример 55.10.2∫
0
xdx2√x∫
0
dy
√(4x−y2)/2∫
0
dz.
Пример 55.11.∫∫∫
V
(x+ y + z)2dxdydz,
V : 2az > x2 + y2, x2 + y2 + z2 6 3a2.
Пример 55.12.2R∫
0
dx
√2Rx−x2∫
−√
2Rx−x2
dy
√4R2−x2−y2∫
0
dz.
Пример 55.13.∫∫∫
V
√
x2 + y2 + z2dxdydz, V : x2 + y2 + z2 6 x.
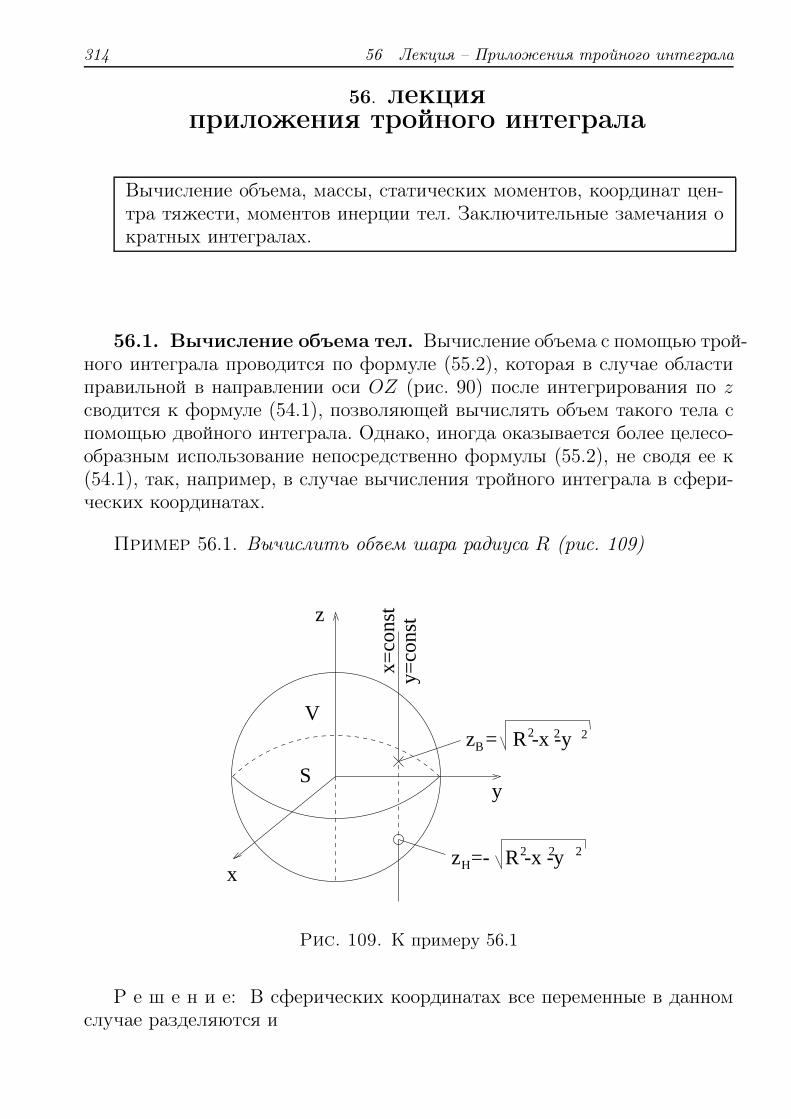
314 56 Лекция – Приложения тройного интеграла
56. лекцияприложения тройного интеграла
Вычисление объема, массы, статических моментов, координат цен-тра тяжести, моментов инерции тел. Заключительные замечания ократных интегралах.
56.1. Вычисление объема тел. Вычисление объема с помощью трой-ного интеграла проводится по формуле (55.2), которая в случае областиправильной в направлении оси OZ (рис. 90) после интегрирования по zсводится к формуле (54.1), позволяющей вычислять объем такого тела спомощью двойного интеграла. Однако, иногда оказывается более целесо-образным использование непосредственно формулы (55.2), не сводя ее к(54.1), так, например, в случае вычисления тройного интеграла в сфери-ческих координатах.
Пример 56.1. Вычислить объем шара радиуса R (рис. 109)
x
z
y
V
S
z = R -x -yB
z =- R -x -yH2 2 2
y=co
nst
x=co
nst
2 22
Рис. 109. К примеру 56.1
Р е ш е н и е: В сферических координатах все переменные в данномслучае разделяются и

56 Лекция – Приложения тройного интеграла 315
V =
∫∫∫
V
dV =
∫∫∫
V
ρ2 sin θdρdϕdθ =
2π∫
0
dϕ
π∫
0
sin θ
R∫
0
ρ2dρ =
= ϕ|2π0 (− cos θ)|π0ρ3
3
∣∣∣∣
R
0
=4
3πR3.
Конечно нахождение объема шара не вызывает и особых сложностейпри использовании формулы (54.1) с последующим введением полярныхкоординат в области S = прXOY V , представляющей собой окружностьрадиуса R (рис. 109).
V =∫∫
S
(zв − zн)ds = 2∫∫
S
√
R2 − x2 − y2ds =
= 2∫∫
S
r√R2 − r2drdϕ = 2
2π∫
0
dϕR∫
0
r√R2 − r2dr =
= 2ϕ|2π0(
−2(R2−r2)3/2
3·2
)∣∣∣
R
0= 4
3πR3.
56.2. Вычисление массы тел. Если объемная плотность тела явля-ется переменной величиной γ = γ(x, y, z), то масса элементарного объемаdV будет равна dm = γ(x, y, z)dv, а следовательно, масса всего тела собъемом V.
(56.1) M =
∫∫∫
V
dm =
∫∫∫
V
γ(x, y, z)dV.
В случае постоянной плотности γ = const
(56.2) M = γ
∫∫∫
V
dV = γV.
Пример 56.2. Вычислить массу шара радиуса R (рис. 109), если плот-ность изменяется пропорционально расстоянию точки шара от центра.
Р е ш е н и е: Согласно условиям данного примера плотность γ == kρ, где k – коэффициент пропорциональности. Тогда по формуле (56.1)в сферических координатах
316 56 Лекция – Приложения тройного интеграла
M =
∫∫∫
V
kρ3 sin θdρdϕdθ = k
2π∫
0
dϕ
π∫
0
sin θdθ
R∫
0
ρ3dρ =
kϕ|2π0 (− cos θ)|π0ρ4
4
∣∣∣∣
R
0
= kπR4.
56.3. Статические моменты и координаты центра тяжести тел.В пространственном случае статические моменты определяются относи-тельно координатных плоскостей Oxy, Oxz и Oyz и, для материальнойточки с массой ∆m соответственно равны ∆Mxy = ∆mζ, ∆Mxz = ∆mη,∆Myz = ∆mξ, где ξ, η, ζ – координаты рассматриваемой точки в про-странстве. Следовательно, для тела объемом V получим
(56.3) Mxy =
∫∫∫
V
γ(x, y, z)zdV,
(56.4) Mxz =
∫∫∫
V
γ(x, y, z)ydV,
(56.5) Myz =
∫∫∫
V
γ(x, y, z)xdV.
В случае постоянной плотности γ = const:
Mxy = γ
∫∫∫
V
zdV,(56.6)
Mxz = γ
∫∫∫
V
ydV,(56.7)
Myz = γ
∫∫∫
V
xdV.(56.8)
Координаты центра тяжести тела определяются с использованием со-отношений (56.3) – (56.5) и (56.1) по следующим формулам:
(56.9) xц =Myz
M=
∫∫∫
V
γ(x, y, z)xdV
∫∫∫
V
γ(x, y, z)dV,
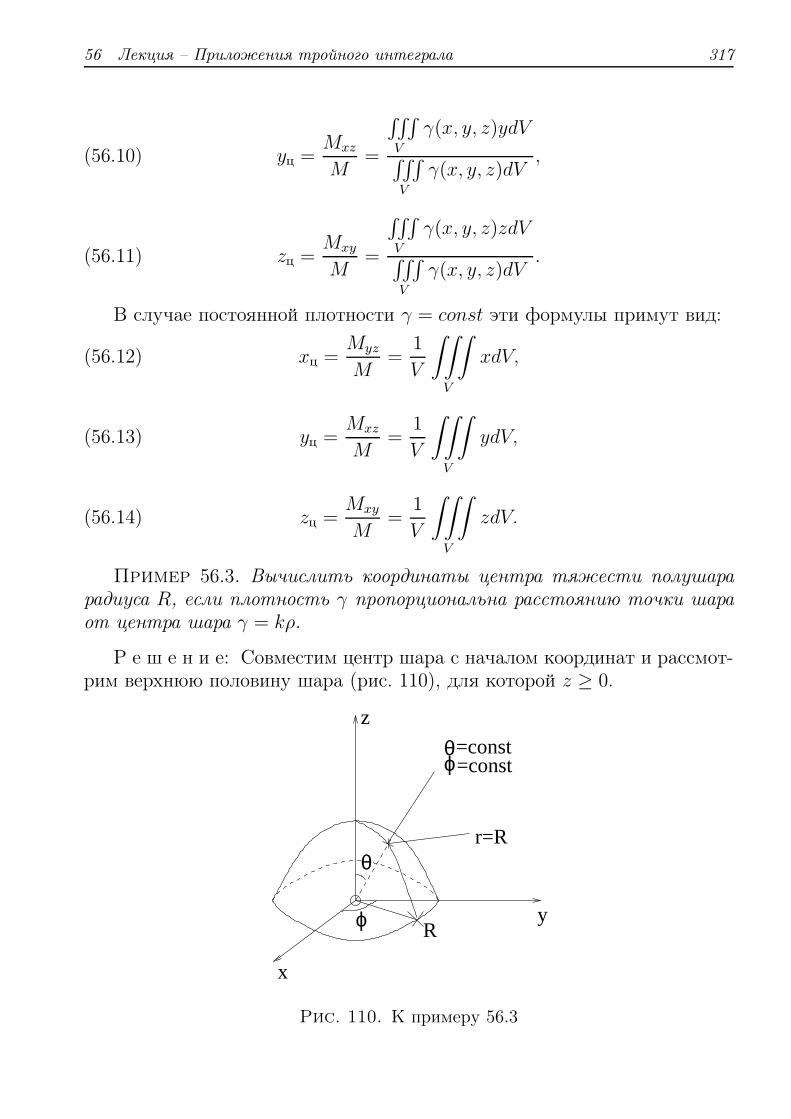
56 Лекция – Приложения тройного интеграла 317
(56.10) yц =Mxz
M=
∫∫∫
V
γ(x, y, z)ydV
∫∫∫
V
γ(x, y, z)dV,
(56.11) zц =Mxy
M=
∫∫∫
V
γ(x, y, z)zdV
∫∫∫
V
γ(x, y, z)dV.
В случае постоянной плотности γ = const эти формулы примут вид:
(56.12) xц =Myz
M=
1
V
∫∫∫
V
xdV,
(56.13) yц =Mxz
M=
1
V
∫∫∫
V
ydV,
(56.14) zц =Mxy
M=
1
V
∫∫∫
V
zdV.
Пример 56.3. Вычислить координаты центра тяжести полушарарадиуса R, если плотность γ пропорциональна расстоянию точки шараот центра шара γ = kρ.
Р е ш е н и е: Совместим центр шара с началом координат и рассмот-рим верхнюю половину шара (рис. 110), для которой z ≥ 0.
R
x
y
z
r=Rθ
ϕ
θϕ=const
=const
Рис. 110. К примеру 56.3

318 56 Лекция – Приложения тройного интеграла
В силу симметрии полушара по x и y две координаты центра тяжестиxц = yц = 0. По формуле (56.11) находим, используя сферическую системукоординат,
zц =
∫∫∫
V
kρzdV
∫∫∫
V
kρdV=
∫∫∫
Vρ4 cos θ sin θ dρdϕdθ
∫∫∫
Vρ3 sin θ dρdϕdθ
=
=
12
2π∫
0
dϕπ/2∫
0
sin 2θdθR∫
0
ρ4dρ
2π∫
0
dϕπ/2∫
0
sin θdθR∫
0
ρ3dρ
=
12ϕ|2π0
(−1
2cos 2θ
)∣∣π/2
0
ρ5
5
∣∣∣
R
0
ϕ|2π0(−1
2cos θ
)∣∣π/2
0
ρ5
5
∣∣∣
R
0
=
=122π 1
2(cos 0 − cos π)R
5
5
2π(cos 0 − cos π2)R
4
4
=2R
5.
Пример 56.4. Рассмотреть пример 56.3 при условии постоянстваплотности γ = const.
Р е ш е н и е: Очевидно, что вновь xц = yц = 0. zц в данном случаеопределяется по формуле (56.14), где V = 2
3πR3.
zц =3
2πR3
∫∫∫
V
zdv =3
2πR3
∫∫∫
V
ρ3 cos θ sin θdρdϕdθ =
=3
4πR3
2π∫
0
dϕ
π/2∫
0
sin 2θdθ
R∫
0
ρ3dρ =3
8πR3ϕ|2π0 (− cos 2θ)|π/20
ρ4
4
∣∣∣∣
R
0
=
=3
8πR32π2
R4
4=
3
8R.
56.4. Моменты инерции тел. Моменты инерции материальной точ-ки с координатами ξ, η, ζ и массой ∆m относительно координатных осейOx, Oy и Oz определяются как произведение массы ∆m на квадрат рас-стояния до этих осей, который соответственно равен η2+ζ2, ξ2+ζ2, ξ2+η2.Для тела объема V , проведя разбиение его на n частей, суммируя момен-ты инерции этих частей и переходя к пределу при n → ∞ аналогичнотому, как мы делали при введении понятия тройного интеграла, полу-чим формулы для вычисления моментов инерции тела относительно осейкоординат

56 Лекция – Приложения тройного интеграла 319
(56.15) Ix =
∫∫∫
V
γ(x, y, z)(y2 + z2)dV,
(56.16) Iy =
∫∫∫
V
γ(x, y, z)(x2 + z2)dV,
(56.17) Iz =
∫∫∫
V
γ(x, y, z)(x2 + y2)dV.
Введем также полярный момент инерции I0, определяемый по форму-ле
(56.18) I0 =
∫∫∫
V
γ(x, y, z)ρ2dV =
∫∫∫
S
γ(x, y, z)(x2 + y2 + z2)dV.
Из сравнения формул (56.15) – (56.18) получим связь между I0 и Ix,Iy, Iz.
(56.19) I0 =1
2(Ix + Iy + Iz).
В случае постоянной плотности γ = const формулы (56.15) – (56.18)примут вид:
(56.20) Ix = γ
∫∫∫
V
(y2 + z2)dV,
(56.21) Iy = γ
∫∫∫
V
(x2 + z2)dV,
(56.22) Iz = γ
∫∫∫
V
(x2 + y2)dV.
(56.23) I0 = γ
∫∫∫
V
ρ2dV = γ
∫∫∫
V
(x2 + y2 + z2)dV.

320 56 Лекция – Приложения тройного интеграла
Пример 56.5. Найти момент инерции I шара радиуса R относитель-но диаметра, если плотность в любой точке шара пропорциональна еерасстоянию от центра шара γ = kρ.
Р е ш е н и е: Совместим центр шара с началом координат (рис. 103). Всилу симметрии моменты инерции относительно любого диаметра равны,следовательно, Ix = Iy = Iz = I. Используя сферические координаты иформулу связи (56.19) найдем формулу для полярного момента инерцииI0 (56.18):
I =2
3I0 =
2
3
∫∫∫
V
kρ5 sin θdρdϕdθ =2k
3
2π∫
0
dϕ
π∫
0
sin θdθ
R∫
0
ρ5dρ =
=2k
3ϕ|2π0 (− cos θ)|π0
ρ6
6
∣∣∣∣
R
0
=4πk
9R6.
Пример 56.6. Решить пример 56.5 для постоянной плотности γ.
Р е ш е н и е: Используя для вычисления полярного момента инерцииI0 формулу (56.23) вместо (56.18) получим
I = 23I0 = 2
3γ∫∫∫
V
ρ4 sin θdρdϕdθ = 2γ3
2π∫
0
dϕπ∫
0
sin θdθR∫
0
ρ4dρ = 8π15γR5.
Получим теперь формулу, связывающую момент инерции тела отно-сительно какой-либо оси, например оси Oy, с моментом инерции этоготела относительно параллельной оси, проходящей через центр тяжеститела C. Эта формула называется формулой Штейнера. Плотность γ бу-дем считать постоянной, хотя полученная формула справедлива и принепостоянной плотности.
По формуле (56.16) момент инерции Iy = γ∫∫∫
V
(x2 + z2)dv. Момент
инерции относительно оси, проходящей через точку C и параллельнойоси Oy (рис. 111), будетIc = γ
∫∫∫
V
((x− xц)2 + (z − zц)
2) dv. Раскрыв скобки в подынтегральной
функции и учитывая, что xц и zц для данного тела являются постояннымивеличинами, а также формулы (56.1), (56.3), (56.5):
Ic = γ∫∫∫
V
(x2−2xxц +x2ц +z2−2zzц +z2
ц)dv = γ∫∫∫
V
(x2 +z2)dv+γ(x2ц +
+ z2ц)∫∫∫
V
dv − 2xцγ∫∫∫
V
xdv − 2zцγ∫∫∫
V
zdv = Iy + (x2ц + z2
ц)M − 2xцMyz −− 2zцMxy.
Далее, так как из формул (56.9) и (56.11) следует, что Myz = xцM , аMxy = zцM , получаем Ic = Iy − (x2
ц + z2ц)M или окончательно

56 Лекция – Приложения тройного интеграла 321
x
y
z
C(x ,y ,z )z
x
O
O
1
Рис. 111. К выводу формулы Штейнера
(56.24) Iy = Ic + (x2ц + z2
ц)M.
Так как любая ось может быть принята за ось Oy, а x2ц + z2
ц равноквадрату расстояния от центра тяжести по этой оси, из формулы (56.24)следует правило Штейнера:
Момент инерции твердого тела относительно любой оси равен мо-менту инерции этого тела относительно параллельной ей оси, прохо-дящей через центр тяжести тела, сложенному с произведением массытела на квадрат расстояния между этими осями.
Пример 56.7. Найти момент инерции IT шара радиуса R относи-тельно оси, касательной к сфере, являющейся его границей. Плотностьγ постоянна.
Р е ш е н и е: В примере 56.6 найден момент инерции шара относи-тельно диаметра, а так как любой диаметр проходит через центр тяжестишара, то в формуле (56.24) Ic = 8π
15γR5. Поскольку расстояние между
диаметром и параллельной ему касательной T равно R, а масса шараM = 4
3γπR3 из формулы Штейнера (56.24) приняв касательную T за ось
Oy, имеем IT = Ic + (x2ц + z2
ц)M = 8π15γR5 + R2 4
3γπR3 = 28π
15γR5.
56.5. Заключительные замечания о кратных интегралах. В даннойглаве мы рассмотрели вопросы, связанные с вычислением двойных и тройныхинтегралов и примеры вычисления таких интегралов, когда первообразная полюбой из переменных может быть найдена в элементарных функциях по из-вестным нам методам, рассмотренным в лекциях, посвященных интегральномуисчислению функций одной переменной.

322 56 Лекция – Приложения тройного интеграла
Однако мы знаем, что для множества функций найти первообразную непредставляется возможным и тогда определенный интеграл заменяется конеч-ной суммой и вычисляется по известным методам, некоторые из которых рас-смотрены нами в лекции 50.
То же самое, естественно имеет место при вычислении кратных интегра-лов. Здесь вместо суммы по одной переменной необходимо вычислить суммыпо двум (в случае двойного интеграла) и трем (в случае тройного интеграла)переменным. Наиболее распространенным способом численного интегрирова-ния кратных интегралов является метод повторного применения квадратурныхформул, то есть формул, позволяющих находить однократный (определенный)интеграл (лекция 50).
Мы также познакомились в одной из лекций со случаями так называемыхнесобственных интегралов, когда или область интегрирования является беско-нечной, или подынтегральная функция обращается в бесконечность в точкепринадлежащей области интегрирования, или ее границе.
Подобным же образом, как и для одной переменной определяются несоб-ственные кратные интегралы. Здесь также имеют место два случая. Например,для двойных интегралов, первый – если функция f(x, y) непрерывна в неогра-ниченной области S, то полагают:
∫∫
S
f(x, y)ds = limS∗→S
∫∫
S∗
f(x, y)ds,
где S∗ – конечная область, целиком лежащая в S, при этом S∗ → S означает,что мы расширяем область S∗ по произвольному закону. Если указанный пределсуществует и не зависит от выбора S∗, то
∫∫
S
f(x, y)ds называется несобственным
сходящимся двойным интегралом, в противном случае – расходящимся.В качестве примера использования несобственного двойного интеграла по
бесконечной области S рассмотрим задачу вычисления так называемого инте-
грала Пуассона∞∫
−∞e−x
2dx 4.
Мы уже отмечали в п. 43.2, что имеющий важное значение в теории веро-
ятностей интеграл∫e−x
2dx не выражается в элементарных функциях. Однако,
как мы покажем в следующем примере, интеграл Пуассона может быть доста-точно просто найден.
Пример 56.8. Найти интеграл Пуассона
∞∫
−∞
e−x2dx.
4С.Пуассон (1781–1840) — выдающийся французский математик и физик.

56 Лекция – Приложения тройного интеграла 323
Р е ш е н и е: Рассмотрим двойной интеграл
∫∫
S
e−x2−y2dxdy по неограни-
ченной области S. С учетом замечания (49.14) можно записать
∫∫
S
e−x2−y2dxdy =
∞∫
−∞
e−x2dx
∞∫
−∞
e−y2dy =
∞∫
−∞
e−ξ2dξ
2
.
С другой стороны в полярных координатах
∫∫
S
e−x2−y2dxdy =
2π∫
0
dϕ
∞∫
0
e−r2rdr =
= −2π1
2e−r
2
∣∣∣∣
∞
0
= −π(e−∞ − e0) = π.
Следовательно искомый интеграл Пуассона
∞∫
−∞
e−x2dx =
√π
Второй случай. Если функция f(x, y) непрерывна всюду в ограниченной за-мкнутой области S, за исключением точки P (ξ; η), то полагают
∫∫
S
f(x, y)ds =
limδ→0
∫∫
Sδ
f(x, y)ds, где Sδ – область, получаемая из S удалением из нее δ - окрест-
ности точки P (ξ; η) (лекция 38). В случае существования предела при δ окрест-ности, стягивающейся в точку, рассматриваемый
∫∫
S
f(x, y)ds называется несоб-
ственным сходящимся двойным интегралом от разрывной функции. Точек раз-рыва может быть несколько и могут существовать линии разрыва.
Аналогичным образом вводится понятие несобственных тройных интегра-лов. Отметим, что также как и в случае несобственных интегралов одной пере-менной, кратные несобственные интегралы при замене переменных могут пере-ходить в собственные.
И, наконец, несколько слов об определении интегралов большей кратности.
Определенныйb∫
af(x)dx, двойной
∫∫
S
f(x, y)ds и тройной∫∫∫
V
f(x, y, z)dv интегралы определяются совершенно одинаково, если ввести
понятие меры ∆Ω, под которой понимается соответственно отрезок, элементплощади, или объема. Тогда для любой области Ω любой из этих интеграловможет быть записан в виде
∫
Ω
UdΩ = limn∑
k=1
f(Mk)∆Ωk,
где Mk ∈ ∆Ωk, U = f(M), а предел берется при стягивании любого из ∆Ωk вточку.

324 56 Практическое занятие – Тройные интегралы
Если функция U = f(M) является функцией более, чем трех переменных,
например n, то для нее также вводится понятие n - мерного интеграла. В част-
ности, для наиболее распространенного случая четырех переменных (функция
U = f(x, y, z, t) зависит кроме пространственных переменных x, y, z, еще и от
времени) вводятся четырехмерные интегралы по пространству и времени.
56. практическое занятиеприложения тройных интегралов
Вначале решим один пример на нахождение массы тела переменнойплотности.
Пример 56.1. Найти массу тела, ограниченного цилиндрической по-верхностью y = x2, плоскостями z = 0 и y + z = 1, если в каждой еготочке плотность численно равна ординате этой точки y.
Р е ш е н и е: Данное тело изображено на рис. 112a.
y
z
x
1
z=0
z=1-y
x=consty=const
a)y
x
1
0
Sy=const
x= yx=- y
b)
Рис. 112. К решению примера 56.1
Запишем выражение массы тела через тройной интеграл по формуле(56.1) и проинтегрируем его по z от z = 0 до z = 1 − y
M =∫∫∫
V
ydv =∫∫
S
ydxdy1−y∫
0
dz =∫∫
S
yz|1−y0 dxdy =∫∫
S
y(1 − y)dxdy.
Мы получили выражение для массы тела через двойной интеграл пообласти S = прXOY V . Проинтегрируем его первоначально по x от точкивхода “o” прямой y = const в область S (рис. 112b), в которой x = −√
y,до точки выхода “x”, где x =
√y, а затем по y от 0 до 1.

56 Практическое занятие – Тройные интегралы 325
M =1∫
0
y(1 − y)dy
√y∫
−√y
dx =1∫
0
(y − y2) x|√y
−√y dy = 2
1∫
0
(y√y − y2√y)dy =
= 2(
25y5/2 − 2
7y7/2
)∣∣1
0= 2
(25− 2
7
)= 8
35.
В дальнейших примерах будем считать плотность тела постояннойγ = const.
Пример 56.2. Найти объем тела из примера 56.1.
Р е ш е н и е: V =∫∫∫
V
dV =1∫
0
dy
√y∫
−√y
dx1−y∫
0
dz =
=1∫
0
x|√y
−√y z|
1−y0 dy = 2
1∫
0
√y(1−y)dy = 2
(23y3/2 − 2
5y5/2
)∣∣1
0= 2
(23− 2
5
)=
= 815.
Пример 56.3. Найти центр тяжести тела из примера 56.1.
Р е ш е н и е: Поскольку тело симметрично относительно оси OYxц = 0. yц и zц находим соответственно по формулам (56.13) и (56.14):
yц = 1V
∫∫∫
V
ydV = 158
1∫
0
ydy
√y∫
−√y
dx1−y∫
0
dz = 158· 8
35= 3
7,
zц = 1V
∫∫∫
V
zdV = 158
1∫
0
dy
√y∫
−√y
dx1−y∫
0
zdz =
= 158
1∫
0
x|√y
−√yz2
2
∣∣∣
1−y
0dy = 15
8
1∫
0
√y(1 − 2y + y2)dy =
= 158
(23y3/2 − 22
5y5/2 + 2
7y7/2
)∣∣1
0= 15
8
(23− 4
5+ 2
7
)= 2
7.
При вычислении yц мы воспользовались результатами вычисления ин-теграла из примера 56.1.
Пример 56.4. Найти моменты инерции относительно координат-ных осей тела из примера 56.1.
Р е ш е н и е: Ix, Iy и Iz находим соответственно по формулам (56.20),(56.21) и (56.22):
Ix = γ
∫∫∫
V
(y2 + z2)dV = γ
1∫
0
dy
√y∫
−√y
dx
1−y∫
0
(y2 + z2)dz =
= γ
1∫
0
dy
√y∫
−√y
(
y2z +z3
3
)∣∣∣∣
1−y
0
dx = γ
1∫
0
dy
√y∫
−√y
(y2 − y3+
326 56 Практическое занятие – Тройные интегралы
+1 − 3y + 3y2 + y3
3
)
dx = γ
∫ 1
0
(1
3− y + 2y2 − 2
3y3
)
dy
√y∫
−√y
dx =
= 2γ
∫ 1
0
(√y
3− y
32 + 2y
52 − 2
3y
72
)
dy =
= 2γ
(2
9y3/2 − 2
5y5/2 +
4
7y7/2 − 4
27y9/2
)∣∣∣∣
1
0
=
= 4γ
(1
9− 1
5+
2
7− 2
27
)
=464
8505γ,
Iy = γ
∫∫∫
V
(x2 + z2)dV = γ
1∫
0
dy
√y∫
−√y
dx
1−y∫
0
(x2 + z2)dz =
= γ
1∫
0
dy
√y∫
−√y
(
x2z +z3
3
)∣∣∣∣
1−y
0
dx = γ
1∫
0
dy
√y∫
−√y
(x2 − x2y+
+1 − 3y + 3y2 + y3
3
)
dx =
= γ
1∫
0
(x3
3− x3y
3+
1
3x− yx + y2x +
1
3y3x
)∣∣∣∣
√y
−√y
dx =
= 2γ
1∫
0
(1
3y3/2 − 1
3y5/2 +
1
3y1/2 − y3/2 + y5/2 +
1
3y7/2
)
dy =
= 2γ
(2
9y3/2 − 4
15y5/2 +
4
21y7/2 +
2
27y9/2
)∣∣∣∣
1
0
=
=4
3γ
(1
3− 2
5+
2
7+
1
9
)
=416
945γ,
Iz = γ
∫∫∫
V
(x2 + y2)dV = γ
1∫
0
dy
√y∫
−√y
(x2 + y2)dx
1−y∫
0
dz =
= γ
1∫
0
(x3
3+ y2x
)∣∣∣∣
√y
−√y
z|1−y0 dy =

56 Практическое занятие – Тройные интегралы 327
= 2γ
1∫
0
(1
3y3/2 + y5/2
)
(1 − y)dy =
= 2γ
1∫
0
(1
3y3/2 +
2
3y5/2 − y7/2
)
dy =
= 2γ
(2
15y5/2 +
4
21y7/2 − 2
9y9/2
)∣∣∣∣
1
0
=4
3γ
(1
5+
2
7− 1
3
)
=64
315γ.
Пример 56.5. Определить момент инерции цилиндра радиуса R ивысотой H относительно образующей.
Р е ш е н и е: Направим ось Oz по образующей цилиндра, ось Ox покасательной к окружности, лежащей в основании цилиндра, тогда центроснования цилиндра будет лежать на оси Oy (рис. 113).
z
x
O
z’
x’
y, y’
H
O’
Рис. 113. К примеру 56.5
В данной задаче целесообразнее вначале вычислить момент инерцииIz′ , относительно оси, совпадающей с осью цилиндра, а, следовательно,проходящей через его центр тяжести, а затем Iz найти по правилу Штей-нера. Iz′ находим по формуле (56.21), перейдя в ней к цилиндрическимкоординатам, связанным с полюсом O′, в которых x′2 + y′2 = r2,dV = rdrdϕdz:
Iz′ = γ∫∫∫
V
(x′2 + y′2)dV = γ2π∫
0
dϕR∫
0
r3drH∫
0
dz =

328 56 Практическое занятие – Тройные интегралы
= γ · ϕ|2π0 r4
4
∣∣∣
R
0z|H0 = γπR4H
2.
По правилу Штейнера (56.24) определим момент инерции цилиндраотносительно оси Oz (образующей), учитывая, что масса цилиндраM = γπR2H, а растояние между осями Oz и O′z′ равно R:
Iz = γπR4H2
+ γπR4H = 32γπR4H.
Пример 56.6. Определить центр тяжести 18
части шара, радиусаR (рис. 108).
Р е ш е н и е: Очевидно, что в силу симметрии xц = yц = zц. Объем 18
части шара равен V = 16πR3. Естественно вычисления провести в сфери-
ческих координатах. Найдем zц, по формуле (56.14), положив z = ρ cos θ,dV = ρ2 sin θdρdϕdθ:
zц =6
πR3
∫∫∫
V
zdv =6
πR3
π/2∫
0
dϕ
π/2∫
0
sin θ cos θdθ
R∫
0
ρ3dρ =
=6
πR3ϕ|π/20
(
−cos 2θ
4
)∣∣∣∣
π/2
0
ρ4
4
∣∣∣∣
R
0
=3
8R.
Пример 56.7. Найти кинетическую энергию 18
части шара радиуса R,вращающегося вокруг одной из осей Ox, Oy, или Oz (рис. 108) с угловойскоростью ω.
Р е ш е н и е: Кинетическая энергия тела, вращающегося вокругнекоторой оси с угловой скоростью ω равна W = Iω2
2, где I – есть момент
инерции тела относительно этой оси. Для вычисления момента инерциив нашем примере естественно использовать сферические координаты.
Учитывая симметрию и формулы (56.13) и (56.19), вычислим значениеI = Ix = Iy = Iz = 2
3I0 = 2
3γ∫∫∫
V
ρ2dV = 23γ∫∫∫
V
ρ4 sin θdρdϕdθ =
= 23γπ/2∫
0
dϕπ/2∫
0
sin θdθR∫
0
ρ4dρ = 23γ ϕ|π/20 (− cos θ)|π/20
ρ5
5
∣∣∣
R
0= γπ
15R5,
а затем и кинетическую энергию
W =Iω2
2=γπ
30ω2R5.
57 Лекция – Криволинейные интегралы 329
Самостоятельная работа
Пример 56.8. Вычислить с помощью тройного интеграла объем те-ла, ограниченного поверхностями y2 = 4 − 3x, y2 = x, z = 1, z = −1.
Пример 56.9. Найти центр тяжести однородного тела, ограничен-ного параболоидом y2 + 2x2 = 4z и плоскостью z = 2.
Пример 56.10. Найти центр тяжести полого цилиндра высотой Hи внутренним и внешним радиусами, равными соответственно R1 иR2, если плотность численно равна расстоянию точки цилиндра от егонижнего основания.
Пример 56.11. Найти момент инерции цилиндра из примера 56.10относительно его оси.
Пример 56.12. Найти моменты инерции цилиндра из примера 56.10относительно его внутренней и внешней образующих.
57. лекция – криволинейные интегралы покоординатам на плоскости
Плоское векторное поле. Криволинейные интегралы в векторном по-ле (интегралы по координатам). Теорема Грина. Вычисление площа-ди пластины с помощью криволинейного интеграла по ее границе.Независимость криволинейного интеграла от пути интегрирования.Восстановление функции по ее полному дифференциалу.
57.1. Плоское векторное поле. В лекции 40 было введено понятиескалярного поля, а в лекции 48 — интеграла от функции, определяющейполе вдоль кривой L, расположенной в этом поле. Это так называемыйкриволинейный интеграл по длине дуги или криволинейный интеграл 1-го рода. Пусть теперь задана область S на плоскости Oxy, в каждой точкекоторой определен вектор F с проекциями Fx = P = P (x; y) и Fy = Q == Q(x; y)
Определение 57.1. Область S, в каждой точке которой задан век-тор F = F (x; y) = P (x; y)i + Q(x; y)j называется плоским векторнымполем.
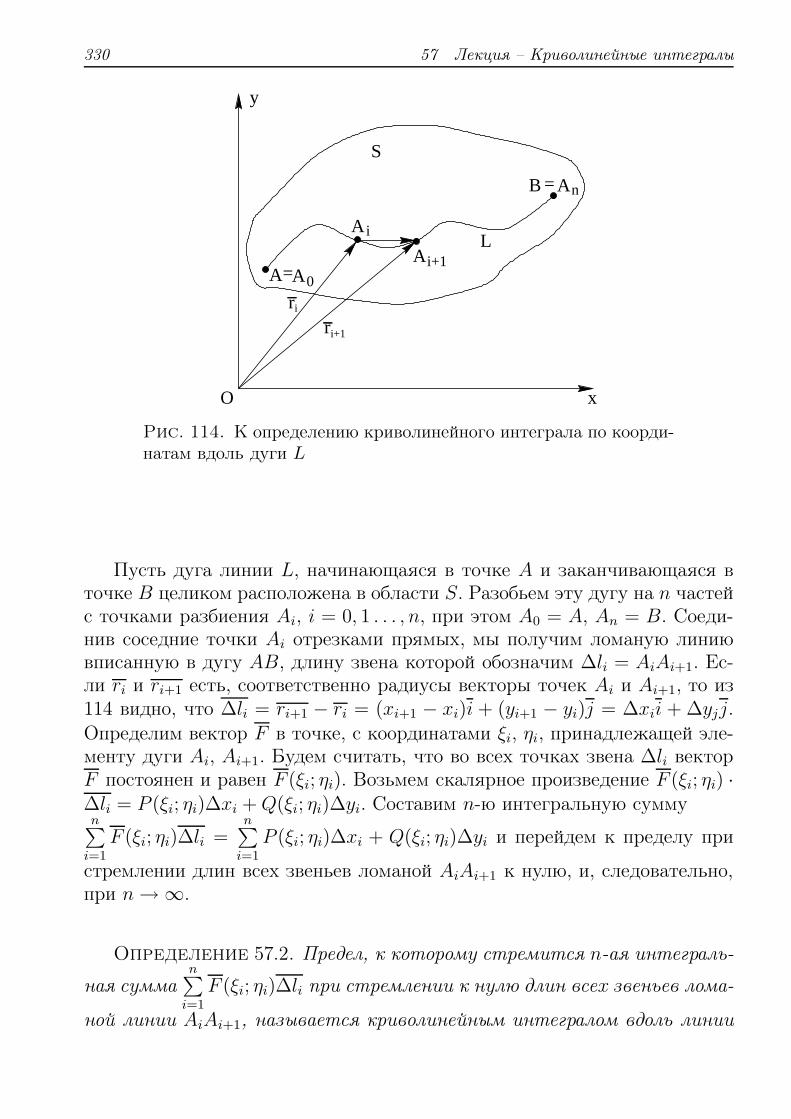
330 57 Лекция – Криволинейные интегралы
A=A0
A
A
A=B n
S
Li+1
i
x
rri
i+1
y
O
Рис. 114. К определению криволинейного интеграла по коорди-натам вдоль дуги L
Пусть дуга линии L, начинающаяся в точке A и заканчивающаяся вточке B целиком расположена в области S. Разобьем эту дугу на n частейс точками разбиения Ai, i = 0, 1 . . . , n, при этом A0 = A, An = B. Соеди-нив соседние точки Ai отрезками прямых, мы получим ломаную линиювписанную в дугу AB, длину звена которой обозначим ∆li = AiAi+1. Ес-ли ri и ri+1 есть, соответственно радиусы векторы точек Ai и Ai+1, то из114 видно, что ∆li = ri+1 − ri = (xi+1 − xi)i + (yi+1 − yi)j = ∆xii + ∆yjj.Определим вектор F в точке, с координатами ξi, ηi, принадлежащей эле-менту дуги Ai, Ai+1. Будем считать, что во всех точках звена ∆li векторF постоянен и равен F (ξi; ηi). Возьмем скалярное произведение F (ξi; ηi) ·∆li = P (ξi; ηi)∆xi +Q(ξi; ηi)∆yi. Составим n-ю интегральную суммуn∑
i=1
F (ξi; ηi)∆li =n∑
i=1
P (ξi; ηi)∆xi + Q(ξi; ηi)∆yi и перейдем к пределу при
стремлении длин всех звеньев ломаной AiAi+1 к нулю, и, следовательно,при n→ ∞.
Определение 57.2. Предел, к которому стремится n-ая интеграль-
ная суммаn∑
i=1
F (ξi; ηi)∆li при стремлении к нулю длин всех звеньев лома-
ной линии AiAi+1, называется криволинейным интегралом вдоль линии

57 Лекция – Криволинейные интегралы 331
L по координатам или криволинейным интегралом второго рода и обо-значается:
(57.1)∫
L
F (x; y)dl =
∫
L
P (x; y)dx+Q(x; y)dy или
∫
AB
F (x; y)dl =
∫
AB
P (x; y)dx+Q(x; y)dy
При известном уравнении кривой L этот интеграл сводится к опреде-ленным интегралам и вычисляется по формулам
(57.2)∫
AB
P (x; y)dx+Q(x; y)dy =
xB∫
xA
(P (x; y(x)) +Q(x; y(x))y′(x)) dx
для кривой L, заданной уравнением y = y(x),
(57.3)∫
AB
P (x; y)dx+Q(x; y)dy =
yB∫
yA
(P (x(y); y)x′(y) +Q(x(y); y)) dy
для кривой L, заданной уравнением x = x(y),
(57.4)∫
AB
P (x; y)dx+Q(x; y)dy =
tB∫
tA
(P (x(t); y(t))x′(t)+
+Q(x(t); y(t))y′(t)) dt
для кривой заданной в параметрическом виде x = x(t), y = y(t). В форму-лах 57.2–57.4 xA, yA, tA, xB, yB, tB — значения координат x, y и параметраt, соответственно, в точках A и B.
Очевидно, что поскольку криволинейный интеграл сводится к опреде-ленным интегралам, он обладает их свойствами и, в частности,
∫
AC
Pdx+Qdy =
∫
AB
Pdx+Qdy +
∫
BC
Pdx+Qdy и
∫
AB
Pdx+Qdy = −∫
BA
Pdx+Qdy
Если контур L замкнутый, то криволинейный интеграл по этому конту-ру обозначается
∮
L
Pdx + Qdy, если он берется против часовой стрелки
(так, чтобы область S, лежащая внутри контура L при обходе находиласьслева) и
∮
−LPdx+Qdy — если против.
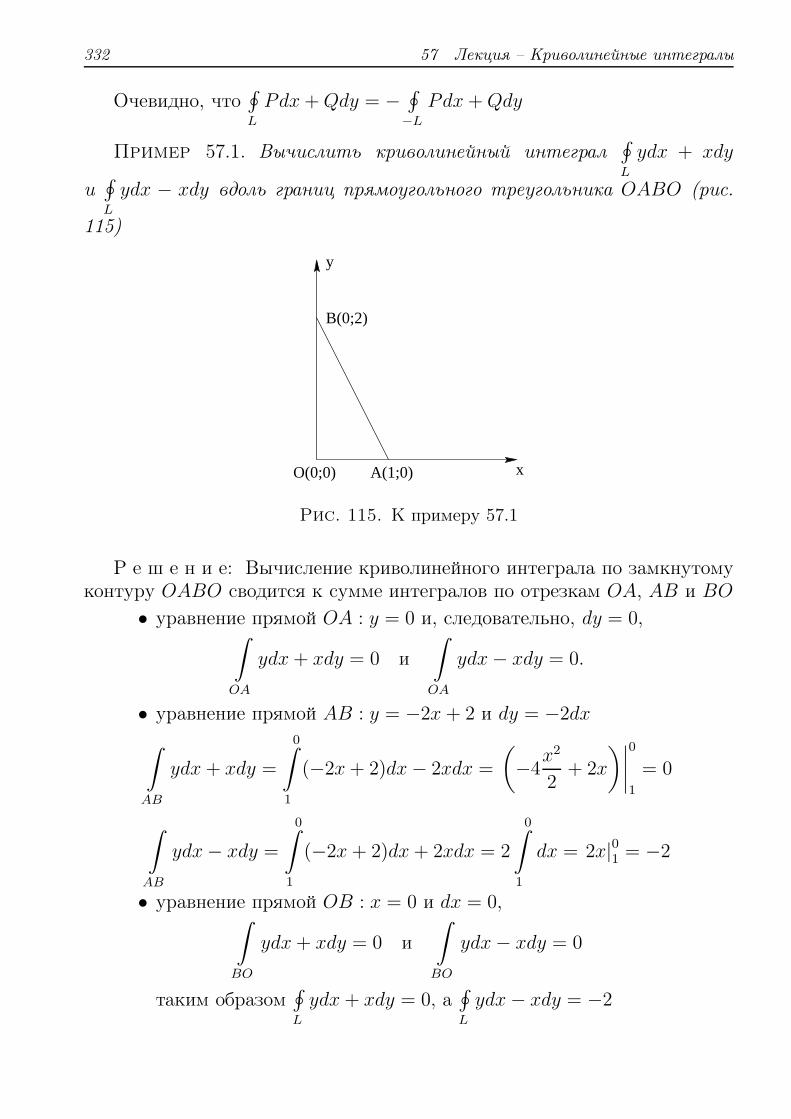
332 57 Лекция – Криволинейные интегралы
Очевидно, что∮
L
Pdx+Qdy = −∮
−LPdx+Qdy
Пример 57.1. Вычислить криволинейный интеграл∮
L
ydx + xdy
и∮
L
ydx − xdy вдоль границ прямоугольного треугольника OABO (рис.
115)
A(1;0) x
y
B(0;2)
O(0;0)
Рис. 115. К примеру 57.1
Р е ш е н и е: Вычисление криволинейного интеграла по замкнутомуконтуру OABO сводится к сумме интегралов по отрезкам OA, AB и BO
• уравнение прямой OA : y = 0 и, следовательно, dy = 0,∫
OA
ydx+ xdy = 0 и∫
OA
ydx− xdy = 0.
• уравнение прямой AB : y = −2x + 2 и dy = −2dx
∫
AB
ydx + xdy =
0∫
1
(−2x+ 2)dx− 2xdx =
(
−4x2
2+ 2x
)∣∣∣∣
0
1
= 0
∫
AB
ydx− xdy =
0∫
1
(−2x + 2)dx+ 2xdx = 2
0∫
1
dx = 2x|01 = −2
• уравнение прямой OB : x = 0 и dx = 0,∫
BO
ydx+ xdy = 0 и∫
BO
ydx− xdy = 0
таким образом∮
L
ydx + xdy = 0, а∮
L
ydx− xdy = −2

57 Лекция – Криволинейные интегралы 333
Пример 57.2. Вычислить интегралы из примера 57.1 вдоль эллипсаx2
a2+ y2
b2= 1 (рис. 116).
y
ϕxa
b
Рис. 116. К примеру 57.2
Р е ш е н и е: Уравнение эллипса в параметрическом виде x = a cosϕ,y = b sinϕ и, следовательно dx = −a sinϕdϕ, dy = a cosϕdϕ меняется впределах от 0 до 2π.
•∮
L
ydx+ xdy =2π∫
0
−ab sin2 ϕdϕ+ ab cos2 ϕdϕ =
= ab2π∫
0
cos 2ϕdϕ = ab2
sin 2ϕ∣∣2π
0= 0
•∮
L
ydx− xdy =2π∫
0
−ab sin2 ϕdϕ− ab cos2 ϕdϕ =
= −ab2π∫
0
dϕ = abϕ|2π0 = −2πab
Отметим, что первый интеграл, как и в примере 57.1 равен 0, а второйимеет различные значения.
Криволинейный интеграл в векторном поле имеет важное приложениев физике. Так, если F есть вектор силы, то его скалярное произведениена вектор перемещения dl есть элементарная работа силы F на пути dl.Очевидно, что работа, совершаемая в силовом поле F = F (x; y) == (Fx(x; y);Fy(x; y)) при перемещении какого-либо объекта из точки A вточку B вдоль пути L будет равна:
(57.5) A =
∫
AB
F (x; y)dl =
∫
AB
Fx(x; y)dx+ Fy(x; y)dy

334 57 Лекция – Криволинейные интегралы
57.2. Теорема Грина. 5 Связь между криволинейным интеграломпо замкнутому контуру L, и двойным интегралом по области S, огра-ниченной этим контуром устанавливается теоремой Грина, которую мыприведем без доказательства.
Теорема 57.1. Теорема Грина. Если функции P = P (x; y) иQ = Q(x; y) непрерывны вместе со своими частными производными внекоторой области S, ограниченной кривой L, то
(57.6)∮
L
Pdx+Qdy =
∫∫
S
(∂Q
∂x− ∂P
∂y
)
dxdy
Если в формуле Грина (57.6) взять P и Q такими, чтобы ∂Q∂x
− ∂P∂y
= 1,получим, что двойной интеграл в правой части формулы (57.5) будет ра-вен площади области S. Это можно сделать различными способами и, вчастности, положив P = 0, Q = x или P = −y, Q = 0 или P = −1
2y,
Q = 12x. Таким образом, площадь S можно, в частности, определить по
одной из следующих трех формул
(57.7) S =
∮
L
xdy = −∮
L
ydx =1
2
∮
L
xdy − ydx
Пример 57.3. Найти площади треугольника OAB (рис. 115) и эл-липса (рис. 116) с помощью криволинейных интегралов по их границе.
Р е ш е н и е: Воспользуемся третьей формулой (57.7) S = 12
∮
L
xdy−ydx
В примерах 57.1 и 57.2 был вычислен∮
L
ydx− xdy, используя его зна-
чения для указанных контуров получим:• площадь треугольника OAB :S = 1
2
∮
L
xdy−ydx = −12
∮
L
ydx−xdy = −12· (−2) = 1, что очевидно.
• площадь эллипса:S = 1
2
∮
L
xdy−ydx = −12
∮
L
ydx−xdy = −12(−2πab) = πab, значение,
которое мы получили ранее вычисляя двойной интеграл∫∫
S
dxdy.
57.3. Независимость криволинейного интеграла от пути ин-тегрирования. Зададимся вопросом существуют ли условия, которыедолжны быть наложены на функции P = P (x; y) и Q = Q(x; y), чтобыкриволинейный интеграл
∫
AB
Pdx + Qdy не зависел от пути интегрирова-
ния, т.е. для любых кривых соединяющих точки A и B интеграл имел
5Д. Грин (1793–1841) — английский математик и физик
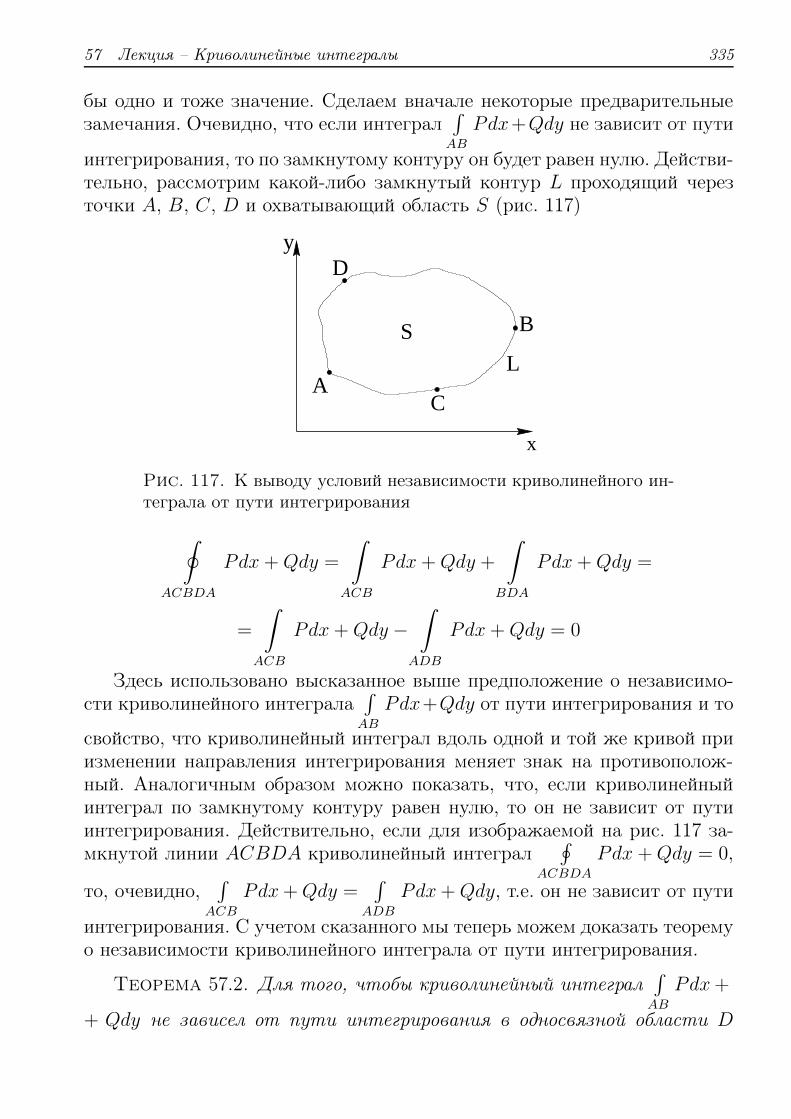
57 Лекция – Криволинейные интегралы 335
бы одно и тоже значение. Сделаем вначале некоторые предварительныезамечания. Очевидно, что если интеграл
∫
AB
Pdx+Qdy не зависит от пути
интегрирования, то по замкнутому контуру он будет равен нулю. Действи-тельно, рассмотрим какой-либо замкнутый контур L проходящий черезточки A, B, C, D и охватывающий область S (рис. 117)
x
S
L
B
C
D
A
y
Рис. 117. К выводу условий независимости криволинейного ин-теграла от пути интегрирования
∮
ACBDA
Pdx+Qdy =
∫
ACB
Pdx+Qdy +
∫
BDA
Pdx+Qdy =
=
∫
ACB
Pdx+Qdy −∫
ADB
Pdx+Qdy = 0
Здесь использовано высказанное выше предположение о независимо-сти криволинейного интеграла
∫
AB
Pdx+Qdy от пути интегрирования и то
свойство, что криволинейный интеграл вдоль одной и той же кривой приизменении направления интегрирования меняет знак на противополож-ный. Аналогичным образом можно показать, что, если криволинейныйинтеграл по замкнутому контуру равен нулю, то он не зависит от путиинтегрирования. Действительно, если для изображаемой на рис. 117 за-мкнутой линии ACBDA криволинейный интеграл
∮
ACBDA
Pdx +Qdy = 0,
то, очевидно,∫
ACB
Pdx+Qdy =∫
ADB
Pdx+Qdy, т.е. он не зависит от пути
интегрирования. С учетом сказанного мы теперь можем доказать теоремуо независимости криволинейного интеграла от пути интегрирования.
Теорема 57.2. Для того, чтобы криволинейный интеграл∫
AB
Pdx+
+ Qdy не зависел от пути интегрирования в односвязной области D
336 57 Лекция – Криволинейные интегралы
(см. лекцию 35), необходимо и достаточно, чтобы в каждой точке этойобласти выполнялось условие
(57.8)∂P
∂y=∂Q
∂x
Д о к а з а т е л ь с т в о: Достаточность. Будем считать, что об-ласть S изображенная на рис. 117 вместе со своей границей L целикомпринадлежит упомянутой в теореме области D, т.е. в области S включаяее границу выполняется условие (57.8).
Покажем, что криволинейный интеграл∮
L
Pdx + Qdy равен нулю. На
основании формулы Грина (57.6) и с учетом формулы (57.8) получаем,
что∮
L
Pdx+Qdy =∫∫
S
(∂Q∂x
− ∂P∂y
)
dS = 0. Итак, интеграл∮
L
Pdx+Qdy по
любому замкнутому контуру L в области D равен нулю, следовательно,криволинейный интеграл
∫
AB
Pdx + Qdy в области D не зависит от вида
кривой, соединяющий точки A и B.Необходимость. Пусть
∫
AB
Pdx+Qdy не зависит от пути интегрирова-
ния в области D. Покажем, что в таком случае во всех точках этой обла-сти выполняется условие (57.8). Предположим противное, что в некоторой
точке M0(x0; y0) данной области ∂P∂y
∣∣∣M0
6= ∂Q∂x
∣∣M0
. Пусть для определенно-
сти(∂Q∂x
− ∂P∂y
)
M0
> 0. Разность ∂Q∂x
− ∂P∂y
в силу предположения о непре-
рывности частных производных ∂Q∂x
и ∂P∂y
также является непрерывнойфункцией. Следовательно, для точки M0 существует такая δ-окрестность∈ D во всех точках которой, как и в точке M0, разность ∂Q
∂x− ∂P
∂y> 0.
Применив к области δ формулу Грина∮
C
Pdx + Qdy =∫∫
δ
(∂Q∂x
− ∂P∂y
)
dδ,
где C граница δ, и учитывая, что ∂Q∂x
− ∂P∂y
> 0 во всех точках δ, полу-
чаем, что∫∫
δ
(∂Q∂x
− ∂P∂y
)
dδ > 0. Следовательно,∮
C
Pdx + Qdy > 0, а это
противоречит предположению, что данный криволинейный интеграл независит от пути интегрирования. Полученное противоречие доказывает,что во всех точках области D имеет место равенство ∂P
∂y= ∂Q
∂x.
Пример 57.4. Зависят ли от пути интегрирования криволинейныеинтегралы из примера 57.1
∫
AB
ydx+ xdy и
∫
AB
ydx− xdy.
57 Лекция – Криволинейные интегралы 337
Р е ш е н и е: Для интеграла∫
AB
ydx+ xdy P = y, Q = x, ∂P∂y
= 1,
∂Q∂x
= 1, → ∂P∂y
= ∂Q∂x
и данный интеграл не зависит от пути интегрирова-ния, а по любому замкнутому контуру будет равен нулю, что мы и виделив примерах 57.1 и 57.2.
В интеграле∫
AB
ydx−xdy P = y,Q = −x, ∂P∂y
= 1, ∂Q∂x
= −1 → ∂P∂y
6= ∂Q∂x
и данный интеграл зависит от пути интегрирования, а по замкнутомуконтуру не равен нулю, что мы получили в примерах 57.1 и 57.2.
57.4. Восстановление функции по ее полному дифференци-алу. Пусть дано дифференциальное выражение Pdx + Qdy, в которомфункции P = P (x; y) и Q = Q(x; y) непрерывны вместе со своими част-ными производными в некоторой односвязной области D. На вопрос прикаких условиях это выражение является полным дифференциалом неко-торой функции U = U(x; y) отвечает следующая теорема.
Теорема 57.3. Для того, чтобы дифференциальное выражениеPdx+Qdy в односвязной области D было полным дифференциалом неко-торой функции U = U(x; y), необходимо и достаточно выполнение в об-ласти D условия (57.8) ∂P
∂y= ∂Q
∂x
Докажем только необходимость. Если Pdx+Qdy есть полный диффе-ренциал функции U = U(x; y), то
(57.9) dU =∂U
∂xdx+
∂U
∂ydy = Pdx+Qdy.
Следовательно, ∂U∂x
= P , ∂U∂y
= Q. Продифференцировав первое соотноше-
ние по y, а второе по x, получим ∂2U∂x∂y
= ∂P∂y
; ∂2U∂y∂x
= ∂Q∂x
. Так как ∂P∂y
и ∂Q∂x
непрерывны, непрерывными являются и смешанные производные функ-ции U(x; y), а, следовательно, они равны. Таким образом доказано, что∂P∂y
= ∂Q∂x
.
Определение 57.3. Функция U = U(x; y), полный дифференциал ко-торой равен дифференциальному выражению Pdx+Qdy, называется пер-вообразной для этого выражения.
В данном случае∫
AB
Pdx+Qdy не зависит от вида кривой, соединяющей
точки A и B, а зависит лишь от координат точек A и B, которые мы
обозначим x0, y0 и x, y. Тогда(x;y)∫
(x0;y0)
dU(x; y) =(x;y)∫
(x0;y0)
P (ξ; η)dξ + Q(ξ; η)dη

338 57 Лекция – Криволинейные интегралы
и, следовательно,
(57.10) U(x; y) =
(x;y)∫
(x0;y0)
P (ξ; η)dξ +Q(ξ; η)dη + C
Здесь для того, чтобы не путать координаты x и y произвольной точкис переменными интегрирования мы обозначили последние буквами ξ и η.Очевидно, что функция U(x; y) определяется с точностью до константыC = U(x0; y0)
Интегрирование в формуле (57.10) можно проводить вдоль любой ли-нии, соединяющей точки A(x0; y0) и B(x; y). Наиболее целесообразнымбудет брать путь интегрирования, совпадающий с ломаной линией ABC,со звеньями AB и CD, являющимися координатными линиями η = y0 == const и ξ = x = const, на которых, соответственно dη = 0 и dξ = 0 (рис.118):
x
y
B
CA
y
y
x x0
0
Рис. 118. К вычислению первообразной U = U(x; y)
(57.11) U(x; y) =
x∫
x0
P (ξ; y0)dξ +
y∫
y0
Q(x; η)dη + C
Если P (x; y) иQ(x; y) не имеют особенностей на оси абсцисс, в формуле(57.11) целесообразно положить x0 = y0 = 0.
(57.12) U(x; y) =
x∫
0
P (ξ; 0)dξ +
y∫
0
Q(x; η)dη + C
Пример 57.5. Найти первообразную для дифференциального выраже-ния ydx+ xdy из примера 57.1

57 Практическое занятие – Криволинейные интегралы 339
Р е ш е н и е: В данном выражении в примере 57.4 мы показали, чтодля данного криволинейного интеграла выполняется условие 57.8 и, сле-довательно, ydx+ xdy является полным дифференциалом и имеет перво-образную, которую можно найти по формуле 57.12, так как на оси абсциссособенностей y подынтегрального выражения нет
U(x; y) =
x∫
0
0dξ +
y∫
0
xdη = xy + C
Проверка: dU = d(xy + C) = ydx + xdy.
Пример 57.6. Проверить существует ли первообразная y дифферен-
циального выражения(
1x
+ 1y
)
dx+(
2y− x
y2
)
dy, и если да, найти ее.
Р е ш е н и е: P = 1x
+ 1y; Q = 2
y− x
y2. Проверим условие (57.8)
∂P∂y
= − 1y2
; ∂Q∂x
= − 1y2
. Следовательно ∂P∂y
= ∂Q∂x
и данное выражение имеетпервообразную, однако, в отличие от предыдущего примера вычислять еенужно по формуле (57.11) а не (57.12), так как при x = 0 и y = 0 функцииP (x; y) и Q(x; y) не определены, положив в формуле (57.11) x0 = y0 = 1
U(x; y) =
x∫
1
(1
ξ+ 1
)
dξ +
y∫
1
(2
η− x
η2
)
dη =
= (ln ξ + ξ)|x1 +
(
2 ln η +x
η
)∣∣∣∣
y
1
=
= lnx + x− ln 1 − 1 + 2 ln y +x
y− 2 ln 1 − x = lnx + 2 ln y +
x
y+ C
Проверка: ∂U∂x
= 1x
+ 1y; ∂U∂y
= 2y− x
y2
57. практическое занятие –криволинейные интегралы по
координатам на плоскости
Прежде всего рассмотрим пример на вычисление заданного криволи-нейного интеграла вдоль различных линий.
Пример 57.1. Вычислить криволинейный интеграл∫
AB
2xydx − x2dy,
где O(0; 0), а A(2; 1) вдоль различных линий, соединяющих точку O и A(рис. 119):
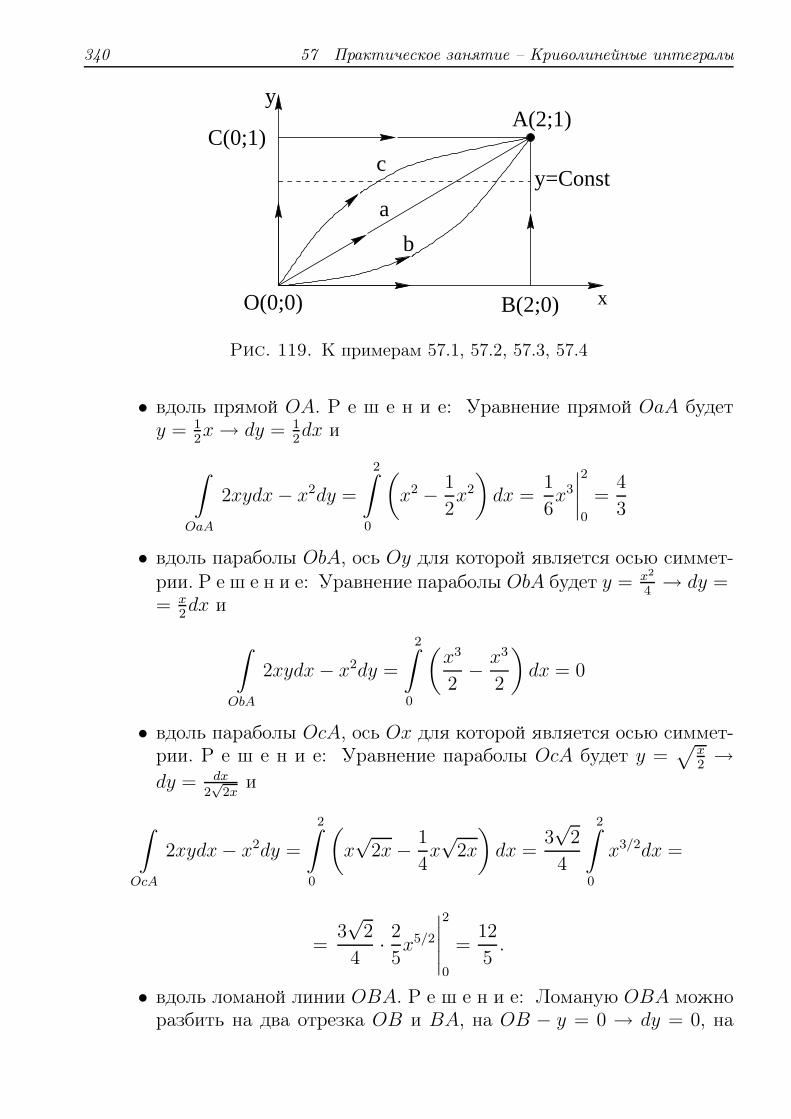
340 57 Практическое занятие – Криволинейные интегралы
y
y=Const
O(0;0) xB(2;0)
A(2;1)C(0;1)
a
b
c
Рис. 119. К примерам 57.1, 57.2, 57.3, 57.4
• вдоль прямой OA. Р е ш е н и е: Уравнение прямой OaA будетy = 1
2x→ dy = 1
2dx и
∫
OaA
2xydx− x2dy =
2∫
0
(
x2 − 1
2x2
)
dx =1
6x3
∣∣∣∣
2
0
=4
3
• вдоль параболы ObA, ось Oy для которой является осью симмет-рии. Р е ш е н и е: Уравнение параболы ObA будет y = x2
4→ dy =
= x2dx и
∫
ObA
2xydx− x2dy =
2∫
0
(x3
2− x3
2
)
dx = 0
• вдоль параболы OcA, ось Ox для которой является осью симмет-рии. Р е ш е н и е: Уравнение параболы OcA будет y =
√x2→
dy = dx2√
2xи
∫
OcA
2xydx− x2dy =
2∫
0
(
x√
2x− 1
4x√
2x
)
dx =3√
2
4
2∫
0
x3/2dx =
=3√
2
4· 2
5x5/2
∣∣∣∣∣
2
0
=12
5.
• вдоль ломаной линии OBA. Р е ш е н и е: Ломаную OBA можноразбить на два отрезка OB и BA, на OB − y = 0 → dy = 0, на

57 Практическое занятие – Криволинейные интегралы 341
BA− x = 2 → dx = 0, следовательно,
∫
OBA
2xydx− x2dy = 0 +
1∫
0
(−4)dy = −4
• вдоль ломаной линии OCA Р е ш е н и е: Ломаную OCA можноразбить на два отрезка OC и CA, на OC − x = 0 → dx = 0, наCA− y = 1 → dy = 0, следовательно,
∫
OCA
2xydx− x2dy =
2∫
0
2xdx+ 0 = x2∣∣2
0= 4
Пример 57.2. Вычислить∫
OA
2xydx + x2dy вдоль всех линий из при-
мера 57.1.
• Вдоль прямой OaA
∫
OaA
2xydx + x2dy =
2∫
0
(
x2 +1
2x2
)
dx =3
2
2∫
0
x2dx =x3
2
∣∣∣∣
2
0
= 4
Р е ш е н и е:• Вдоль параболы ObA Р е ш е н и е:
∫
ObA
2xdx + x2dy =
2∫
0
(x3
2+x3
2
)
dx =
2∫
0
x3dx =x4
4
∣∣∣∣
2
0
= 4
• Вдоль параболы OcA Р е ш е н и е:
∫
OcA
2xdx+ x2dy =
2∫
0
(
x√
2x +1
4x√
2x
)
dx =
=5√
2
4
2∫
0
x3/2dx =5√
2
4· 2
5x5/2 = 4.
• Вдоль ломаной линии OBA Р е ш е н и е:
∫
OBA
2xdx + x2dy = 0 +
1∫
0
4dy = 4

342 57 Практическое занятие – Криволинейные интегралы
• Вдоль ломаной линии OCA Р е ш е н и е:
∫
OCA
2xdx+ x2dy =
2∫
0
2xdx + 0 = x2∣∣2
0= 4
Как мы видим, заданный в этом примере криволинейный интеграл независит от пути интегрирования.
Рассмотрим теперь пример на использование теоремы Грина.
Пример 57.3. Вычислить криволинейный интеграл из примера 57.1по замкнутому контуру L с помощью теоремы Грина и непосредствен-но.
• Контуром L служит замкнутая кривая OBAaO Р е ш е н и е: Вданном интеграле P = 2xy, Q = −x2 → ∂Q
∂x− ∂P
∂y= −2x−2x = −4x
и∮
L
2xydx− x2dy = −4∫∫
S
xdS = −41∫
0
dy2∫
2y
xdx =
= −4
1∫
0
x2
2
∣∣∣∣
2
2y
dy = −2
1∫
0
(4 − 4y2)dy = 8
(y3
3− y
)∣∣∣∣
1
0
= −16
3.
При вычислении двойного интеграла интегрирование вначале про-водилось по x вдоль линии y = Const от точки кривой y = 2x допрямой x = 2.
Для непосредственного вычисления криволинейного интегра-ла по контуру OBAaO воспользуемся результатами решения при-мера 57.1
∮
L
2xydx− x2dy =
∫
OBA
2xydx− x2dy +
∫
AaO
2xydx− x2dy = −4 − 4
3=
16
3
• Контуром L служит замкнутая кривая ObAcO. Р е ш е н и е:
∫
L
2xydx− x2dy = −4
1∫
0
dy
2√y∫
2y2
xdx = −2
1∫
0
x2∣∣2√y
2y2dx =
= −2
1∫
0
(4y − 4y4)dy = 8
(y5
5− y2
2
)∣∣∣∣
1
0
= −12
5
При вычислении двойного интеграла интегрирование первона-чального проводится по по x вдоль линии y = Const от точкикривой x = 2y2 до точки кривой x = 2
√y.
57 Практическое занятие – Криволинейные интегралы 343
Для непосредственного вычисления криволинейного интегра-ла по контуруObAcO воспользуемся также результатами решенияпримера 57.1
∮
L
2xydx− x2dy =
∫
ObA
2xydx− x2dy +
∫
AcO
2xydx− x2dy = −4 − 4
3=
16
3
Пример 57.4. Вычислить площадь, ограниченную контуром ObAcO(пример 57.1) с помощью криволинейного интеграла
Р е ш е н и е: Для вычисления указанной площади воспользуемсяпервой формулой (57.7) и указаниями к решению примера 57.1
S =
∮
L
xdy =
∫
ObA
xdy +
∫
AcO
xdy =
2∫
0
x2
2dx+
0∫
2
√x
2√
2dx =
=x3
6
∣∣∣∣
2
0
− 1
3√
2x3/2
∣∣∣∣
2
0
=4
3− 2
3=
2
3.
Пример 57.5. Показать, что интеграл из примера 57.2∫
L
2xydx+x2dy
не зависит от пути интегрирования.
Р е ш е н и е: Для данного интеграла P = 2xy, Q = x2 → ∂Q∂x
и ∂P∂y
= 2x,условие (57.8) выполнено, а, следовательно, интеграл
∫
L
2xydx + x2dy не
зависит от пути интегрирования. В примере 57.2 был получен одинаковыйрезультат при вычислении данного интеграла вдоль различных линий Lот точки O(0; 0) до A(2; 1) и он оказался равен 4.
Пример 57.6. Найти первообразную дифференциального выражения2xydx + x2dy.
Р е ш е н и е: В предыдущем примере мы показали, что первообразнаядля данного дифференциального выражения существует, так как выпол-няется условие (57.8) и поскольку особенностей это выражение не имеетдля его определения можно воспользоваться формулой (57.12)
U(x; y) = 0 +
y∫
o
x2dη = x2y + C
Проверка: ∂U∂x
= 2xy; ∂U∂y
= x2

344 58 Лекция – Элементы теории векторного поля
Самостоятельная работа
Пример 57.7. Вычислить криволинейный интеграл∫
AB
(x2 − 2xy)dx+
+(2xy+y2)dy, где AB — дуга параболы y = x2 от точки A(1; 1) до точкиB(2; 4).
Пример 57.8. Вычислить криволинейный интеграл∫
C
(2a−y)dx+xdy,
где C — дуга первой арки циклоида x = a(t − sin t), y = a(1 − cos t),0 6 t 6 2π.
Пример 57.9. Применяя формулу Грина, вычислить∮
C
2(x2 + y2)dx+
+ (x+ y)2dy, где C — пробегаемый против часовой стрелки контур тре-угольника с вершинами в точках A(1; 1), B(2; 2) и C(1; 3). Сравнить срезультатом полученым непосредственно вычислением криволинейногоинтеграла по замкнутому контуру ABCA.
Пример 57.10. Вычислить площадь ограниченную астроидойx = a cos3 t, y = a sin3 t.
Пример 57.11. Проверить, являются ли данные дифференциальныевыражения полными дифференциалами некоторых функций и, если да,найти их. (3x2 −2xy+ y2)dx− (x2−2xy+3y2)dy; ex−y((1+x+ y)dx+(1−− x− y)dy); dx
x+y+ dy
x+y.
58. лекция – элементы теории векторногополя
Трехмерное векторное поле. Векторные линии и трубки. По-ток вектора через поверхность. Дивергенция вектора. ТеоремаОстроградского-Гаусса. Источники и стоки. Соленоидальное поле.Криволинейный интеграл по координатам в трехмерном векторномполе. Циркуляция и ротор векторного поля. Теорема Стокса. Потен-циальное поле. Независимость криволинейного интеграла от путиинтегрирования. Определение потенциала по заданному векторно-му полю.
58.1. Трехмерное векторное поле. Векторные линии и труб-ки. Поток вектора через поверхность. Пусть в каждой точке об-ласти D трехмерного пространства Oxyz задан вектор F , с проекциямиFx = P = P (x; y; z), Fy = Q = Q(x; y; z) и Fz = R = R(x; y; z).
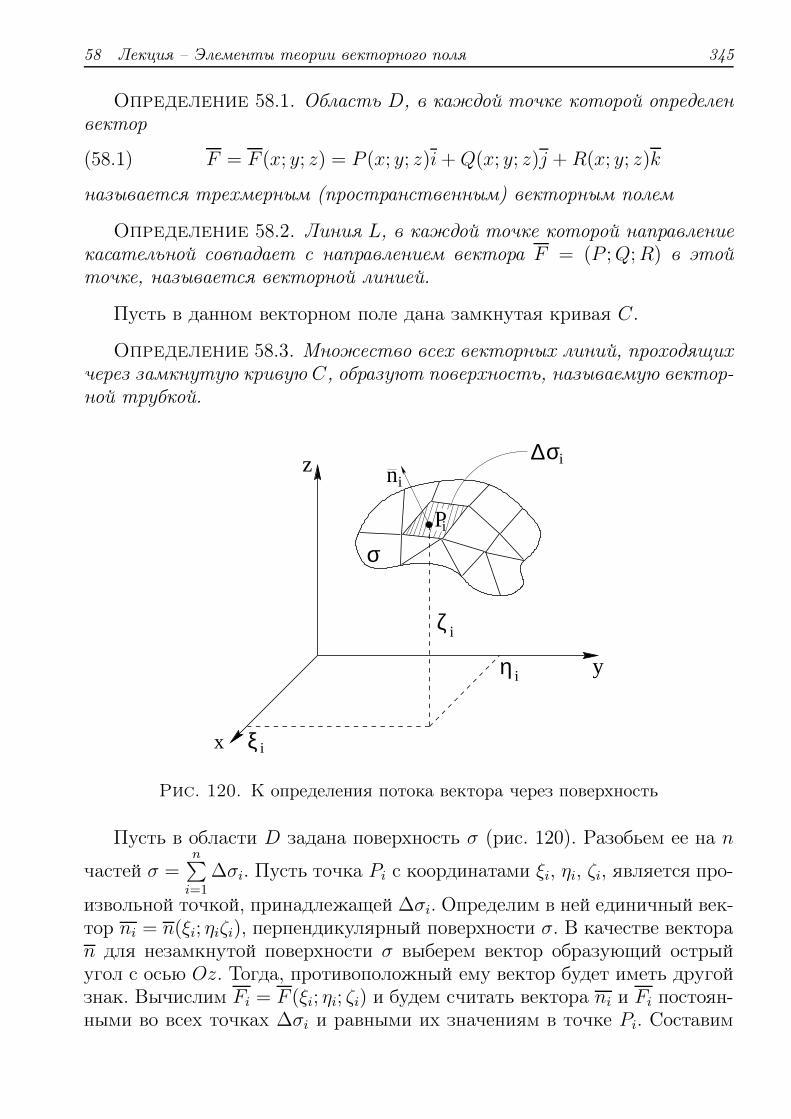
58 Лекция – Элементы теории векторного поля 345
Определение 58.1. Область D, в каждой точке которой определенвектор
(58.1) F = F (x; y; z) = P (x; y; z)i+Q(x; y; z)j + R(x; y; z)k
называется трехмерным (пространственным) векторным полем
Определение 58.2. Линия L, в каждой точке которой направлениекасательной совпадает с направлением вектора F = (P ;Q;R) в этойточке, называется векторной линией.
Пусть в данном векторном поле дана замкнутая кривая C.
Определение 58.3. Множество всех векторных линий, проходящихчерез замкнутую кривую C, образуют поверхность, называемую вектор-ной трубкой.
n
σPi
i
∆σi
y
z
ζ
ξx
η i
i
i
Рис. 120. К определения потока вектора через поверхность
Пусть в области D задана поверхность σ (рис. 120). Разобьем ее на n
частей σ =n∑
i=1
∆σi. Пусть точка Pi с координатами ξi, ηi, ζi, является про-
извольной точкой, принадлежащей ∆σi. Определим в ней единичный век-тор ni = n(ξi; ηiζi), перпендикулярный поверхности σ. В качестве вектораn для незамкнутой поверхности σ выберем вектор образующий острыйугол с осью Oz. Тогда, противоположный ему вектор будет иметь другойзнак. Вычислим Fi = F (ξi; ηi; ζi) и будем считать вектора ni и Fi постоян-ными во всех точках ∆σi и равными их значениям в точке Pi. Составим
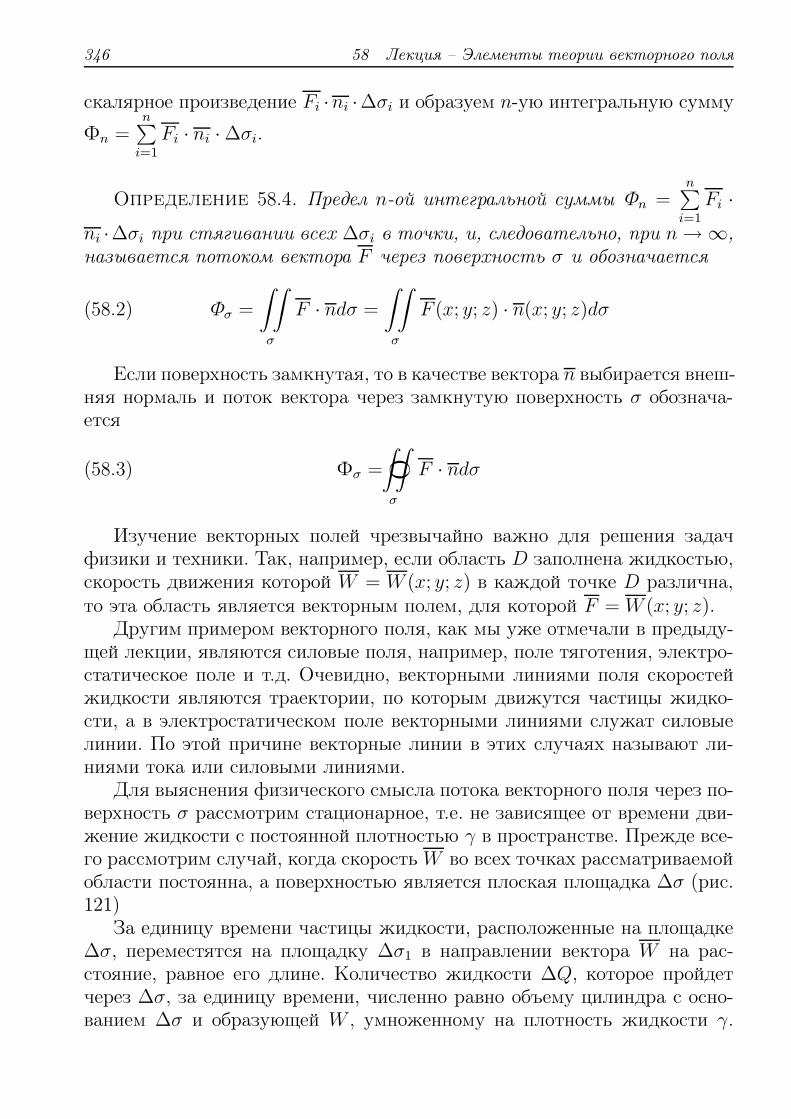
346 58 Лекция – Элементы теории векторного поля
скалярное произведение Fi ·ni ·∆σi и образуем n-ую интегральную сумму
Фn =n∑
i=1
Fi · ni · ∆σi.
Определение 58.4. Предел n-ой интегральной суммы Фn =n∑
i=1
Fi ·ni ·∆σi при стягивании всех ∆σi в точки, и, следовательно, при n→ ∞,называется потоком вектора F через поверхность σ и обозначается
(58.2) Фσ =
∫∫
σ
F · ndσ =
∫∫
σ
F (x; y; z) · n(x; y; z)dσ
Если поверхность замкнутая, то в качестве вектора n выбирается внеш-няя нормаль и поток вектора через замкнутую поверхность σ обознача-ется
(58.3) Фσ =
О
∫∫
σ
F · ndσ
Изучение векторных полей чрезвычайно важно для решения задачфизики и техники. Так, например, если область D заполнена жидкостью,скорость движения которой W = W (x; y; z) в каждой точке D различна,то эта область является векторным полем, для которой F = W (x; y; z).
Другим примером векторного поля, как мы уже отмечали в предыду-щей лекции, являются силовые поля, например, поле тяготения, электро-статическое поле и т.д. Очевидно, векторными линиями поля скоростейжидкости являются траектории, по которым движутся частицы жидко-сти, а в электростатическом поле векторными линиями служат силовыелинии. По этой причине векторные линии в этих случаях называют ли-ниями тока или силовыми линиями.
Для выяснения физического смысла потока векторного поля через по-верхность σ рассмотрим стационарное, т.е. не зависящее от времени дви-жение жидкости с постоянной плотностью γ в пространстве. Прежде все-го рассмотрим случай, когда скорость W во всех точках рассматриваемойобласти постоянна, а поверхностью является плоская площадка ∆σ (рис.121)
За единицу времени частицы жидкости, расположенные на площадке∆σ, переместятся на площадку ∆σ1 в направлении вектора W на рас-стояние, равное его длине. Количество жидкости ∆Q, которое пройдетчерез ∆σ, за единицу времени, численно равно объему цилиндра с осно-ванием ∆σ и образующей W , умноженному на плотность жидкости γ.
58 Лекция – Элементы теории векторного поля 347
n
W ∆σ
∆σ
1
hϕ
Рис. 121. К выводу расхода жидкости через поверхность ∆σ
Обозначив высоту цилиндра h, получим ∆Q = γh∆σ. Если n — единич-ный вектор нормали к ∆σ, а ϕ — угол между ним и вектором W , то∆Q = γW cosϕ · ∆σ = γ(Wn)∆σ.
Таким образом, в соответствии с формулой (58.2), получим, что расходжидкости через произвольную поверхность σ
(58.4) Q = γ
∫∫
σ
W (x; y; z) · n(x; y; z)dσ
58.2. Дивергенция вектора. Теорема Остроградского-Гаусса6
Определение 58.5. Дивергенцией вектораF = (P (x; y; z);Q(x; y; z);R(x; y; z)) в точке M(x; y; z) ∈ ∆V называется предел, к которому стре-мится отношение потока вектора F через замкнутую поверхность σ,являющуюся границей области ∆V , при стягивании этой области вточку M , и следовательно ∆V → 0.
Дивергенция обозначается символом div. Таким образом
(58.5) divF = lim∆V→0
1
∆V
О
∫∫
σ
Fndσ
Примем без доказательства формулы:
(58.6) divF =∂P
∂x+∂Q
∂y+∂R
∂zи
6М.В. Остроградский (1801–1861) — выдающийся русский математик и механик;К.Гаусс (1777–1855) — крупнейший немецкий математик.
348 58 Лекция – Элементы теории векторного поля
(58.7) Фσ =
О
∫∫
σ
F · ndσ =
∫∫∫
V
divFdV
Последняя формула называется формулой Остроградского-Гаусса. Сфор-мулируем соответствующую теорему, являющуюся основанием формулы(58.7).
Теорема 58.1. (Остроградского-Гаусса). Если функции P = P (x; y; z),Q = Q(x; y; z) и R = R(x; y; z), являющиеся проекциями вектора F на осикоординат Fx = P , Fy = Q, Fz = R, непрерывны вместе со своими част-ными производными первого порядка в ограниченной замкнутой области,имеющей объем V , то поток вектора F через замкнутую поверхностьσ, ограничивающую V , равен тройному интегралу от дивергенции этоговектора по объему V .
Напомним, что n — есть единичный вектор внешней нормали к по-верхности σ.
Выясним физический смысл формулы Остроградского-Гаусса (58.7).Пусть нам задано поле скоростей W движущейся жидкости. Расход жид-кости через любую замкнутую поверхность, ограничивающую объем V ,расположенную в этом поле, в соответствии с (58.4) и (58.7) будет
(58.8) Q = γ
О
∫∫
σ
W · ndσ = γ
∫∫∫
V
divWdV
Пусть divW > 0 в некоторой точке M , тогда в силу непрерывностичастных производных найдется такая окрестность этой точки, в которойвсюду divW > 0. Возьмем объем V настолько малым, чтобы он принад-лежал этой окрестности, тогда в силу (58.8) расход Q жидкости через по-верхность σ, ограничивающую V , будет положительным, и, следователь-но, жидкость будет вытекать из этого объема. По этой причине даннаяточка называется источником. Если же divW < 0 В точке M , то Q < 0и жидкость втекает в V . Такая точка называется стоком. Эти названияпереносятся и на любое векторное поле F = F (x; y; z)
Определение 58.6. Точка векторного поля, в которой divF > 0,называется источником, а точка, в которой divF < 0 — стоком.
Векторные линии выходят из источника и заканчиваются в точке сто-ка. Для жидкости это, как мы знаем, траектории частиц, для электроста-тического поля — силовые линии, исходящие из точки, имеющей положи-тельный заряд, и заканчивающиеся в точке с отрицательным зарядом.
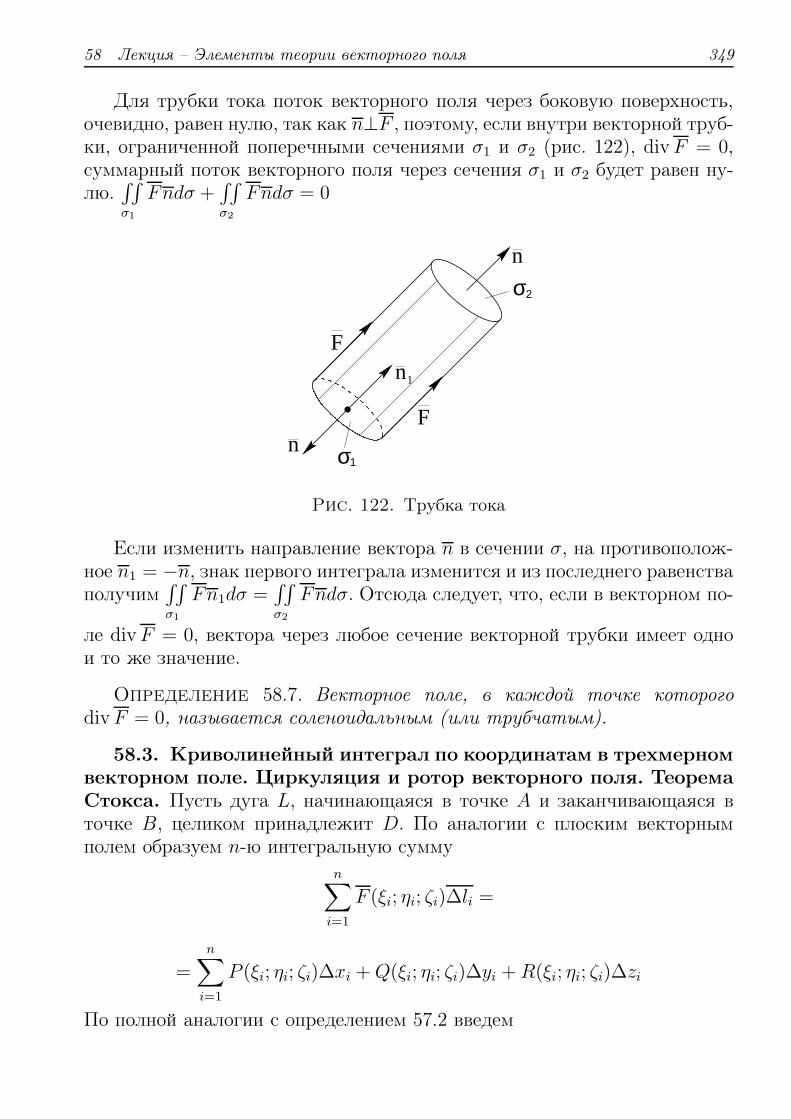
58 Лекция – Элементы теории векторного поля 349
Для трубки тока поток векторного поля через боковую поверхность,очевидно, равен нулю, так как n⊥F , поэтому, если внутри векторной труб-ки, ограниченной поперечными сечениями σ1 и σ2 (рис. 122), divF = 0,суммарный поток векторного поля через сечения σ1 и σ2 будет равен ну-лю.
∫∫
σ1
Fndσ +∫∫
σ2
Fndσ = 0
F
n
n
n
σ
σ1
2
F
1
Рис. 122. Трубка тока
Если изменить направление вектора n в сечении σ, на противополож-ное n1 = −n, знак первого интеграла изменится и из последнего равенстваполучим
∫∫
σ1
Fn1dσ =∫∫
σ2
Fndσ. Отсюда следует, что, если в векторном по-
ле divF = 0, вектора через любое сечение векторной трубки имеет однои то же значение.
Определение 58.7. Векторное поле, в каждой точке которогоdivF = 0, называется соленоидальным (или трубчатым).
58.3. Криволинейный интеграл по координатам в трехмерномвекторном поле. Циркуляция и ротор векторного поля. ТеоремаСтокса. Пусть дуга L, начинающаяся в точке A и заканчивающаяся вточке B, целиком принадлежит D. По аналогии с плоским векторнымполем образуем n-ю интегральную сумму
n∑
i=1
F (ξi; ηi; ζi)∆li =
=n∑
i=1
P (ξi; ηi; ζi)∆xi +Q(ξi; ηi; ζi)∆yi +R(ξi; ηi; ζi)∆zi
По полной аналогии с определением 57.2 введем

350 58 Лекция – Элементы теории векторного поля
Определение 58.8. Предел, к которому стремится n-я интеграль-
ная суммаn∑
i=1
F (ξi; ηi; ζi)∆li, при стремлении к нулю длин всех звеньев
ломаной линии, вписанной в дугу AB, и, следовательно, при n → ∞,называется криволинейным интегралом 2-го рода и обозначается
(58.9)∫
L
F (x; y; z)dl =
∫
L
P (x; y; z)dx+Q(x; y; z)dy + R(x; y; z)dz или
∫
AB
F (x; y; z)dl =
∫
AB
P (x; y; z)dx+Q(x; y; z)dy +R(x; y; z)dz
Если кривая L задана в параметрическом виде: x = x(t); y = y(t) иz = z(t), то (58.9) сводится к определенному интегралу
(58.10)∫
AB
Pdx+Qdy + Rdz =
=
tB∫
tA
P (x(t); y(t); z(t))x′(t) +Q(x(t); y(t); z(t))y′(t)+
+R(x(t); y(t); z(t))z′(t)dt
где tA и tB — значения параметра t в точках A и B.Как и в двумерном случае (57.5) криволинейный интеграл в силовом
поле F = F (x; y; z) = (Fx(x; y; z);Fy(x; y; z);Fz(x; y; z)) определяет работу,совершаемую при перемещении какого-либо объекта из точки A в точкуB вдоль линии L
(58.11) A =
∫
AB
F (x; y; z)dl =
∫
AB
Fx(x; y; z)dx+ Fy(x; y; z)dy + Fz(x; y; z)dz
Определение 58.9. Криволинейный интеграл (58.9) по замкнутомуконтуру L называется циркуляцией векторного поля F по замкнутомуконтуру L и обозначается
(58.12)∮
L
Fdl =
∮
L
P (x; y; z)dx+Q(x; y; z)dy + R(x; y; z)dz
В формуле (58.12) обход поверхности, границей которой является кон-тур L совершается таким образом, чтобы при обходе эта поверхность на-ходилась слева. При изменении направления обхода знак циркуляции ме-няется на противоположный.
Введем некоторый новый вектор согласно следующему определению
58 Лекция – Элементы теории векторного поля 351
Определение 58.10. Ротором (или вихрем) векторного поляF = P (x; y; z)i+Q(x; y; z)j+R(x; y; z)k называется вектор обозначаемыйrotF и равный
(58.13) rotF =
(∂R
∂y− ∂Q
∂z
)
i+
(∂P
∂z− ∂R
∂x
)
j +
(∂Q
∂x− ∂P
∂y
)
k =
=
∣∣∣∣∣∣
i j k∂∂x
∂∂y
∂∂z
P Q R
∣∣∣∣∣∣
В формуле (58.13) введен символический определитель для удобствазапоминания выражений проекций вектора rotF . Если формально разло-жить этот определитель по элементам первой строки и считать при этомпроизведения символов ∂
∂x; ∂∂y
; ∂∂z
на функции P , Q, R равными их со-
ответствующим частным производным ∂P∂x
; ∂P∂y
; ∂P∂z
; ∂Q∂x
и т.д., то можно
получить проекции rotF =(∂R∂y
− ∂Q∂z
; ∂P∂z
− ∂R∂x
; ∂Q∂x
− ∂P∂y
)
Связь rotF с циркуляцией∮
L
Fdl определяется следующей теоремой,
приводимой нами без доказательства.
Теорема 58.2. (Теорема Стокса)7. Если функцияP = P (x; y; z), Q = Q(x; y; z), R = R(x; y; z), являющиеся проекциямивектора F = F (x; y; z), и их первые производные, непрерывны на поверх-ности σ, ограниченной замкнутым контуром L, то циркуляция вектораF по контуру L равна потоку ротора этого вектора через поверхностьσ.
(58.14)∮
L
Fdl =
∫∫
σ
n rotFdσ
Формула (58.14) позволяет установить физический смысл ротора век-торного поля. Если мы рассматриваем движение жидкости, то циркуля-ция вектора скорости по замкнутому контуру L определяется движением(вращением) частиц жидкости по этому контуру, а по формуле (58.14)она равна потоку rotV через поверхность, ограниченную L. Отсюда ясенсмысл названия ротор, или иначе вихрь.
Покажем, что формула Грина (57.6) является частным случаем фор-мулы Стокса (58.14). Действительно, если P = P (x; y); Q = Q(x; y), а
R = 0, то согласно (58.13) rotF =(∂Q∂x
− ∂P∂y
)
k. Если, кроме того, кривая
7Д. Стокс (1819–1903) — английский математик и механик

352 58 Лекция – Элементы теории векторного поля
L и область σ расположены в плоскости Oxy, то n = k. Поставив этизначения rotF и n в (58.14) получаем (57.6).
58.4. Потенциальное поле. Независимость криволинейного ин-теграла от пути интегрирования.
Определение 58.11. Векторное полеF = (P (x; y; z);Q(x; y; z);R(x; y; z)) называется безвихревым, если во всех его точках rotF = 0.
Определение 58.12. Функция U = U(x; y; z), градиент которой ра-вен вектору F = F (x; y; z), называется потенциальной функцией (илипросто потенциалом) поля F = F (x; y; z).
Имеет место следующая
Теорема 58.3. Для того, чтобы векторное полеF = F (x; y; z) = P (x; y; z)i+Q(x; y; z)j+R(x; y; z)k было потенциальнымнеобходимо и достаточно, чтобы оно было безвихревым, т.е., чтобы вовсех точках поля выполнялось условие
(58.15) rotF =
(∂R
∂y− ∂Q
∂z;∂P
∂z− ∂R
∂x;∂Q
∂x− ∂P
∂y
)
= 0
Поскольку, если вектор равен нулю, равены нулю и его проекции, следо-вательно, выполняются условия
(58.16)∂R
∂y− ∂Q
∂z= 0;
∂P
∂z− ∂R
∂x= 0;
∂Q
∂x− ∂P
∂y= 0
Докажем только необходимость. Пусть поле F = F (x; y; z) имеет по-тенциал U = U(x; y; z), и, следовательно, согласно определению (58.12) ивыражению градиента (39.7)
F = gradU =∂U
∂xi+
∂U
∂yj +
∂U
∂zk
откуда
(58.17) P =∂U
∂x, Q =
∂U
∂y, R =
∂U
∂z.
Подставляя эти выражения в (58.16) и учитывая, что смешанные про-изводные не зависят от от порядка дифференцирования, видим, что (58.16)и, следовательно, (58.15) выполняются.
Подставляя (58.15) в (58.14) мы получаем следующую теорему:
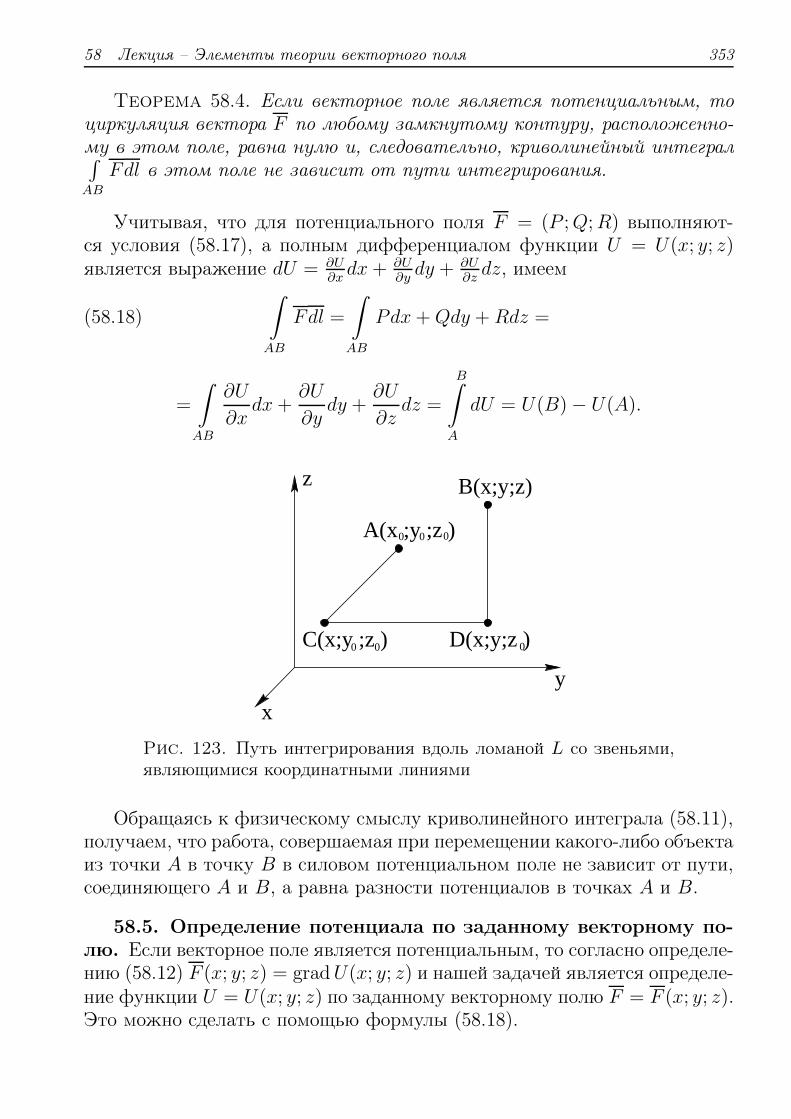
58 Лекция – Элементы теории векторного поля 353
Теорема 58.4. Если векторное поле является потенциальным, тоциркуляция вектора F по любому замкнутому контуру, расположенно-му в этом поле, равна нулю и, следовательно, криволинейный интеграл∫
AB
Fdl в этом поле не зависит от пути интегрирования.
Учитывая, что для потенциального поля F = (P ;Q;R) выполняют-ся условия (58.17), а полным дифференциалом функции U = U(x; y; z)является выражение dU = ∂U
∂xdx+ ∂U
∂ydy + ∂U
∂zdz, имеем
(58.18)∫
AB
Fdl =
∫
AB
Pdx+Qdy + Rdz =
=
∫
AB
∂U
∂xdx+
∂U
∂ydy +
∂U
∂zdz =
B∫
A
dU = U(B) − U(A).
x
y
z
C(x;y ;z )
B(x;y;z)
0 00
0 0 0
A(x ;y ;z )
D(x;y;z )
Рис. 123. Путь интегрирования вдоль ломаной L со звеньями,являющимися координатными линиями
Обращаясь к физическому смыслу криволинейного интеграла (58.11),получаем, что работа, совершаемая при перемещении какого-либо объектаиз точки A в точку B в силовом потенциальном поле не зависит от пути,соединяющего A и B, а равна разности потенциалов в точках A и B.
58.5. Определение потенциала по заданному векторному по-лю. Если векторное поле является потенциальным, то согласно определе-нию (58.12) F (x; y; z) = gradU(x; y; z) и нашей задачей является определе-ние функции U = U(x; y; z) по заданному векторному полю F = F (x; y; z).Это можно сделать с помощью формулы (58.18).
354 58 Практическое занятие – Векторное поле
Возьмем в качестве точки A (рис. 123) фиксированную точку (x0; y0; z0),а в качестве B – произвольную точку (x; y; z). И поскольку криволиней-ный интеграл в (58.18) не зависит от пути интегрирования из (58.18) по-лучим
(58.19) U(x; y; z) =
(x;y;z)∫
(x0;y0;z0)
P (ξ; η; ζ)dξ +Q(ξ; η; ζ)dη + R(ξ; η; ζ)dζ + C,
где переменные интегрирования обозначены ξ, η, ζ, чтобы не путать их скоординатами точки (x; y; z), а C = U(x0; y0; z0).
Для упрощения вычислений целесообразно провести интегрированиевдоль ломаной ACDB со звеньями AC, CD и DB являющимися коор-динатными линиями (123), на которых, соответственно, η = y0, ζ = z0;ξ = x, ζ = z0; ξ = x, η = y и dη = dζ = 0; dξ = dζ = 0; dξ = dη = 0.Подставляя эти значения в формулу (58.19) получаем
(58.20) U(x; y; z) =
x∫
x0
P (ξ; y0; z0)dξ+
y∫
y0
Q(x; η; z0)dη+
z∫
z0
R(x; y; ζ)dζ+C,
Если P , Q, R не имеют особенностей при x0 = y0 = z0 = 0 в (58.20)целесообразно вести интегрирование от точки O(0; 0; 0).
Замечание 58.33. В определении 57.3 мы ввели понятие первооб-разной для функции двух переменных U = U(x; y) аналогичное понятиеможно было ввести и для функции трех переменных U = U(x; y; z), нов этой лекции мы пользовались терминами, принятыми в теории век-торного поля, и вместо первообразной ввели соответствующее понятие— потенциал векторного поля
58. практическое занятие —решение примеров на применениеэлементов теории векторного поля
Пример 58.1. Определить поток векторного поля F = kr = kxi++ kyj + kzk через сферу радиуса R с центром в начале координат непо-средственно и с помощью теоремы Остроградского-Гаусса.
Р е ш е н и е: Уравнение сферы x2 + y2 + z2 = R2, вектор единичнойвнешней нормали к ней n = 1
RR, вектор поля на поверхности сферы
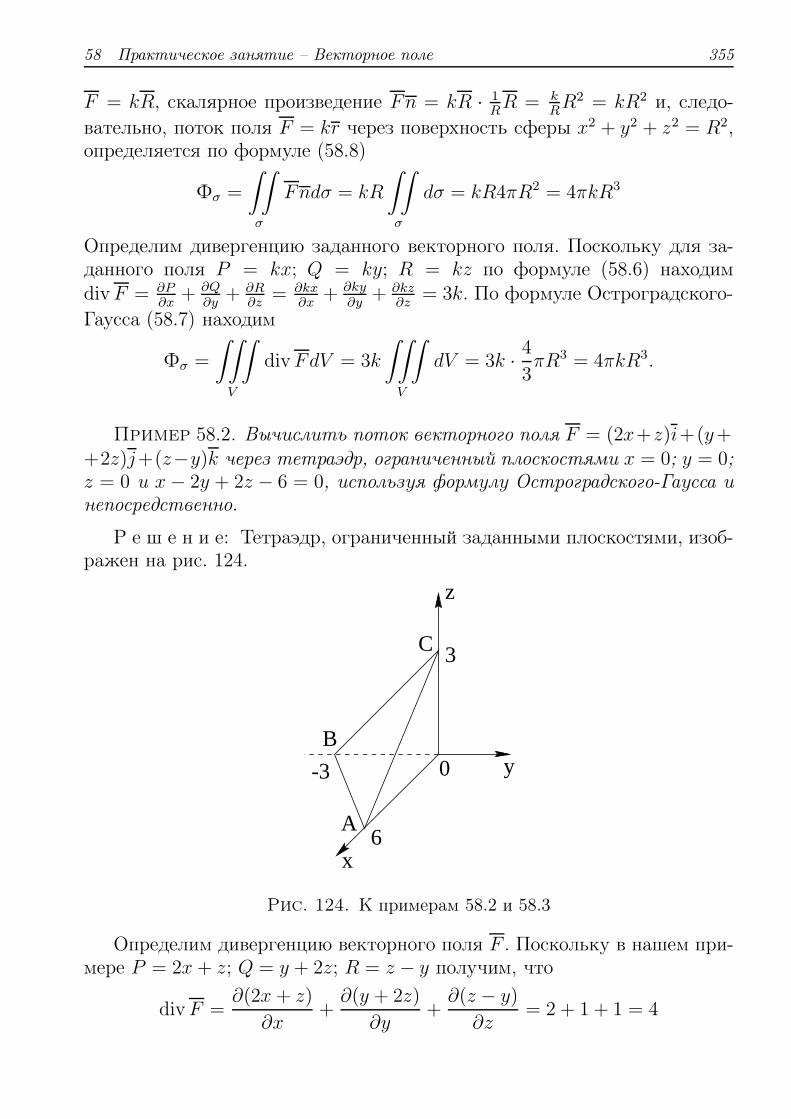
58 Практическое занятие – Векторное поле 355
F = kR, скалярное произведение Fn = kR · 1RR = k
RR2 = kR2 и, следо-
вательно, поток поля F = kr через поверхность сферы x2 + y2 + z2 = R2,определяется по формуле (58.8)
Фσ =
∫∫
σ
Fndσ = kR
∫∫
σ
dσ = kR4πR2 = 4πkR3
Определим дивергенцию заданного векторного поля. Поскольку для за-данного поля P = kx; Q = ky; R = kz по формуле (58.6) находимdivF = ∂P
∂x+ ∂Q
∂y+ ∂R
∂z= ∂kx
∂x+ ∂ky
∂y+ ∂kz
∂z= 3k. По формуле Остроградского-
Гаусса (58.7) находим
Фσ =
∫∫∫
V
divFdV = 3k
∫∫∫
V
dV = 3k · 4
3πR3 = 4πkR3.
Пример 58.2. Вычислить поток векторного поля F = (2x+z)i+(y++2z)j+(z−y)k через тетраэдр, ограниченный плоскостями x = 0; y = 0;z = 0 и x− 2y + 2z − 6 = 0, используя формулу Остроградского-Гаусса инепосредственно.
Р е ш е н и е: Тетраэдр, ограниченный заданными плоскостями, изоб-ражен на рис. 124.
C 3
A6
B
-3
x
y
z
0
Рис. 124. К примерам 58.2 и 58.3
Определим дивергенцию векторного поля F . Поскольку в нашем при-мере P = 2x + z; Q = y + 2z; R = z − y получим, что
divF =∂(2x + z)
∂x+∂(y + 2z)
∂y+∂(z − y)
∂z= 2 + 1 + 1 = 4

356 58 Практическое занятие – Векторное поле
и, следовательно по формуле (58.7)
Фσ =
∫∫∫
V
divFdV = 4
∫∫∫
V
dV =
= 4 · 1
6OA ·BO ·OC = 4
1
6· 6 · 3 · 3 = 36
Перейдем теперь к непосредственному вычислению потока векторного по-ля через четыре грани BOC; AOC; AOB и ABC тетраэдра OABC.
• На грани BOC (рис. 125): x = 0, n = −i, Fn = −z, ФBOC =
= −∫∫
BOC
zdzdy = −0∫
−3
dy3+y∫
0
zdz = −12
0∫
−3
z2|3+y0 dy = 1
2
−3∫
0
(9 + 6y +
+ y2)dy = −12
(
9y + 3y2 + y3
3
)∣∣∣
−3
0= −1
2(−27 + 27 − 9) = −4, 5
y
z
-3B
C 3
0
y=C
onst
Рис. 125. К примеру 58.2 плоскость x = 0
• На грани AOC (рис. 126): y = 0, n = j, Fn = 2z, ФAOC =
= 2∫∫
AOC
zdxdz = 23∫
0
zdz6−2z∫
0
dx = 23∫
0
z(6−2z)dz = 2(3z2 − 2
3z3)∣∣3
0=
= 2(27 − 8) = 18
3 C
0 x
x=6-2zz=ConstA
6
z
Рис. 126. К примеру 58.2 плоскость y = 0

58 Практическое занятие – Векторное поле 357
• На грани AOB (рис. 127): z = 0, n = −k, Fn = y, ФAOB =
=∫∫
AOB
ydxdy =0∫
−3
ydy6+2y∫
0
dx =0∫
−3
y(6 + 2y)dy =(3y2 + 2
3y3)∣∣0
−3=
= −27 + 18 = −9
0x
yA6
3 B
y=Constx=6+2y
Рис. 127. К примеру 58.2 плоскость z = 0
• На плоскости, ABC : x−2y+2z−6 = 0; Нормальный вектор этойплоскости
N = Ai+ Bj + Ck = i− 2j + 2k ⇒ n =N
N=
=i− 2j + 2k√
1 + 4 + 4=
1
3i− 2
3j +
2
3k.
Таким образом скалярное произведение векторов F и n равно:Fn = 1
3(2x + z − 2y − 4z + 2z − 2y). Положив в этом выражении
z = 3 − x2
+ y получим Fn = 56x − 5
2y − 1 и, учитывая, что в
соответствии с формулой (54.2) dσ =√
1 + z′2x + z′2ydxdy =
=√
1 + 14
+ 1dxdy = 32dxdy, найдем
ФABC =3
2
∫∫
AOB
(5
6x− 5
3y − 1
)
dxdy =
=3
2
0∫
−3
dy
6+2y∫
0
(5
6x− 5
3y − 1
)
dx =
=3
2
0∫
−3
(5
12(6 + 2y)2 − 5
3(6 + 2y) − (6 + 2y)
)
dy =
= 32
0∫
−3
(9 − 2y − 5
3y2)dy = 3
2
(9y − y2 − 5
3y3)∣∣0
−3= 31, 5
358 58 Практическое занятие – Векторное поле
• Суммарный поток векторного поля через поверхность ограничи-вающую тетраэдр OABC Фσ = ФBOC + ФAOC + ФAOB + ФABC == −4, 5 + 18 − 9 + 31, 5 = 36
Очевидно, что тот же самый результат с помощью теоремы Остроградского-Гаусса был получен несравненно быстрее.
Рассмотрим теперь пример, в котором для определения единичноговектора, нормального к поверхности, необходимо использовать понятияградиента (лекция 40).
Пример 58.3. Найти поток Ф векторного поля F = xy2i+ yz2j+x2zk
через часть параболоида вращения z = x2 + y2 вырезанную цилиндромx2 + y2 = 4 (рис. 98).
Р е ш е н и е: Поскольку в нашем случае поверхность задана уравне-нием z = f(x; y) на основании формулы (40.20) имеем
n =−f ′
x(x; y)i− f ′y(x; y)j + k
√
1 + f ′2x(x; y) + f ′2
y(x; y)=
−2xi− 2yj + k√
1 + 4x2 + 4y2.
При этом угол n с осью Ox является острым.
Определим Fn =−2x2y2 − y2z + x2z√
1 + 4x2 + 4y2.
Таким образом, искомый поток векторного поляФ =
∫∫
σ
−2x2y2−y2z+x2z√1+4x2+4y2
dσ. В соответствии с формулой (39.11)
dσ =√
1 + f ′2x + f ′2
yds =√
1 + 4x2 + 4y2ds. Подставляя z = x2 + y2 в
формулу для Ф получим Ф =∫∫
σxy
(−2x2y2 + (x2 + y2)(x2 − y2))dσ, где
σxy — круг радиуса R = 2 в плоскости Oxy с центром в начале координат(рис. 98).
Вычисляя двойной интеграл в полярных координатах
Ф =
∫∫
σxy
(−2r4 cos2 ϕ sin2 ϕ+ r4(cos2 ϕ− sin2 ϕ))rdrdϕ =
=
2π∫
0
(
−sin2 2ϕ
2+ cos 2ϕ
)
dϕ
2∫
0
r5dr =
=
(ϕ
4+
sin2 2ϕ
16+
sin 2ϕ
2
)∣∣∣∣
2π
0
r6
6
∣∣∣∣∣
2
0
= −16π
3.
Рассмотрим один пример на использование теоремы Стокса.

58 Практическое занятие – Векторное поле 359
Пример 58.4. Вычислить циркуляцию векторного поля F по контуруACBA из примера 58.2 на основе теоремы Стокса и непосредственно.
Р е ш е н и е: Для заданного поля P = 2x + z, Q = y + 2z, R = z − yи, следовательно, по формуле (58.13)
rotF =
(∂R
∂y− ∂Q
∂z
)
i+
(∂P
∂z− ∂R
∂x
)
j +
(∂Q
∂x− ∂P
∂y
)
k =
= (−1 − 2)i+ (1 − 0)j + (0 − 0)k = −3i + j.
n найден в примере 58.2. Поток rotF через грань ABC∫∫
σ
n rotFdσ =
∫∫
ACB
(−1 − 2
3)dσ = −5
3
∫∫
ACB
dσ = −5
3dσACB =
= −5
3
SABCcos γ
= −5
3
12OA ·OB
2/3= −5
3
3
2
6 · 32
= −22, 5
Таким образом, согласно формуле Стокса (58.14) циркуляция поля по кон-туру ACBA ∮
ACBA
Fdl =
∫∫
ACB
n rotFdσ = −22, 5
Найдем теперь значение циркуляции∮
ACBA
Fdl вычисляя криволинейные
интегралы от Pdx+Qdy +Rdz по ребрам AC; CB и BA• на ребре AC: y = 0 и z = 3− x
2, откуда dy = 0 и dz = −1
2dx. Таким
образом∫
AB
(2x + y)dx + (y + 2z)dy + (z − y)dz =0∫
6
(74x+ 3
2
)dx =
=(
78x2 + 3
2x)∣∣0
6= −40, 5
• на ребре CB: x = 0 и z = 3 + y, откуда dx = 0 и dz = dy. Таким
образом∫
CB
(2x+ y)dx + (y + 2z)dy + (z − y)dz =−3∫
0
(9 + 3y) dy =
=(
9y + 3y2
2
)∣∣∣
−3
0= −13, 5
• на ребре BA: z = 0 и x = 6 + 2y, откуда dz = 0 и dx = 2dy. Таким
образом∫
BA
(2x+ y)dx+ (y + 2z)dy + (z − y)dz =0∫
−3
(24 + 9y) dy =
=(
24y + 9y2
2
)∣∣∣
0
−3= 31, 5
В итоге∮
ACBA
Fdl = −40, 5 − 13, 5 + 31, 5 = −22, 5.
И наконец, в заключение этого занятия рассмотрим пример на опре-деление потенциала по заданному полю.

360 59 Лекция – Интегралы в комплексной области
Пример 58.5. Проверить, является ли поле F = (2xy + z2)i+ (x2 ++ z)j + (y + 2xz)k потенциальным и, если да, найти его потенциал.
Р е ш е н и е: Для данного поля P = 2xy+z2; Q = x2 +z; R = y+2xz.Проверим условие потенциальности (58.16)
∂R
∂y− ∂Q
∂z= 1 − 1 = 0;
∂P
∂z− ∂R
∂x= 2z − 2z = 0;
∂Q
∂x− ∂P
∂y= 2x− 2x = 0,
следовательно, что rotF = 0 и поле имеет потенциал. Найдем его по фор-муле (61.20), положив x0 = y0 = z0 = 0, поскольку никаких особенностейфункции P (x; y; z); Q(x; y; z) и R(x; y; z) не имеют.
u(x; y; z) =
x∫
0
0dx+
y∫
0
x2dy +
z∫
0
(y + 2xz)dz = x2y + yz + xz2 + C
Проверка: P =∂u
∂x= 2xy + z2; Q =
∂u
∂y= x2 + z; R =
∂u
∂z= y + 2xz
Самостоятельная работа
Пример 58.6. Найти поток векторного поля F = xi + yj + zk черезповерхность куба, ограниченного поверхностями: x = −a, x = a, y = −a,y = a, z = −a, z = a по Теореме Остроградского-Гаусса и непосредствен-но.
Пример 58.7. Найти поток векторного поля F = xyi + yzj + xzkчерез расположенную в первой октанте часть сферы x2 + y2 + z2 = 1.
Пример 58.8. Выяснить имеет ли векторное поле F = yzi+zxj+xykпотенциал и, если да, найти его.
59. лекция – интегралы в комплекснойобласти
Интеграл вдоль линии в комплексной области. Теорема Коши для одно-связной и многосвязной областей. Вычет функции в изолированной точ-ке. Применение теории вычетов к вычислению интегралов в комплекснойобласти, к вычислению определенных интегралов и несобственных инте-гралов с бесконечными пределами

59 Лекция – Интегралы в комплексной области 361
zA
Bz
0
n
zi-1
zi
S
z
ζ i
x
y
Рис. 128. К выводу понятия интеграла в комплексной области
59.1. Интеграл вдоль линии L в комплексной области. Пусть L =AB кусочно-гладкая линия, т.е. линия, состоящая из отрезков с непрерывной
производной, расположена в области S на комплексной области Z (рис. 128).Определение понятия области дано в лекции 35. Разобьем линию L на n
частей. Как мы знаем (лекция 33) каждой точке комплексной плоскости со-ответствует комплексное число. Обозначим начальную и конечную точки L,соответственно, zA = z0 и zB = zn. Впишем в L ломаную линию, соединяющуюточки разбиения. На каждой элементарной дуге zi−1zi возьмем точку ξi и со-ставив произведения f(ξi)(zi− zi−1) = f(ξi)∆zi. Образуем интегральную суммуn∑
i=1f(ξi)∆zi
Определение 59.1. Интегралом от функции f(z) комплексной перемен-
ной z вдоль линии L называется предел интегральной суммыn∑
i=1f(ξi)∆zi, при
условии, что длины всех элементарных дуг этой линии стремятся к нулюи, следовательно, их число стремится к бесконечности. Этот предел не дол-жен зависить от способа разбиения L на элементарные дуги и от выбора накаждой из них точки ξi. Полученный предел обозначается
(59.1)
∫
L
f(z)dz = limn→∞
n∑
i=1
f(ξi)∆zi
В дальнейшем для сокращения введенный таким образом интеграл (59.1)будем называть просто интегралом вдоль линии L без упоминания комплекснойпеременной, что уже определяется самой темой лекции.
Как известно студентам, комплексная переменная z (лекция 33) и ее функ-ция f(z) (лекция 42) состоят из действительной и мнимой частей, т.е. z = x+iy,f(z) = u + iv, где u = u(x; y), v = v(x; y). Подставив эти выражения z и f(z) в

362 59 Лекция – Интегралы в комплексной области
интеграл и, учитывая, что i2 = −1, получим
(59.2)
∫
L
f(z)dz =
∫
L
(u+ iv)(dx+ idy) =
∫
L
udx− vdy + i
∫
L
vdx+ udy
Таким образом действительная Re∫
L
f(z)dz =∫
L
u(x; y)dx− v(x; y)dy и мни-
мая Im∫
L
f(z)dz =∫
L
v(x; y)dx + u(x; y)dy части интеграла вдоль линии L яв-
ляются криволинейными интегралами по координатам (лекция 57) и обладаютвсеми свойствами таких интегралов, изученными нами в лекции 57. Рассмотримдва примера на вычисление интегралов вдоль заданной линии L.
Пример 59.1. Вычислить интеграл∫
L
Jmzdz вдоль прямой, соединяющей
начало координат с точкой z = 1 + 2i (рис. 129)
Р е ш е н и е:
y
z
1
2
x
Рис. 129. К примеру 59.1
Уравнение линии интегрирования y = 2x, dy = 2dx. Jmz = Jm(x++ iy) = y. Следовательно,
∫
0z
Jmzdz =
∫
0z
y(dx+ idy) =
1∫
0
2xdx+ i
1∫
0
4xdx =
= x2∣∣1
0+ i · 2x2
∣∣1
0= 1 + 2i
Пример 59.2. Вычислить∫
L
|z|dz, где L — верхняя полуокружность ради-
уса 1 с центром в начале координат (рис. 130).

59 Лекция – Интегралы в комплексной области 363
z
11
1
0ϕΒ Α
Рис. 130. К примеру 59.2
Р е ш е н и е:Параметрическое уравнение заданной окружности: z = cosϕ; y =
= sinϕ, (0 ≤ ϕ ≤ π). Следовательно, z = cosϕ+ i sinϕ, dz = (− sinϕ++ i cosϕ)dϕ.
|z| =√
x2 + y2 +
√
cos2 ϕ+ sin2 ϕ = 1
Таким образом,
∫
AB
|z|dz =
π∫
0
(− sinϕ+ i cosϕ)dϕ = cosϕ|π0 + i sinϕ|π0 = −1 − 1 = −2.
Если контур интегрирования замкнутый, то, как и для криволинейных ин-тегралов, положительным направлением обхода принято считать такое направ-ление, при интегрировании по которому область, лежащая внутри контура на-ходится слева, при изменении направления обхода знак интеграла меняется (см.лекцию 57).
Пример 59.3. Вычислить интеграл∮
L
dzz (рис. 131).
Р е ш е н и е:Представим z в показательной форме z = |z|eiϕ = eiϕ (см. лекцию 33),
dz = ieiϕdy, (0 ≤ ϕ ≤ 2π). Следовательно
∮
|z|=1
dz
z=
2π∫
0
ieiϕdϕ
eiϕ= iϕ|2π0 = 2πi

364 59 Лекция – Интегралы в комплексной области
z
|z|=1
1
1
0
y
x
Рис. 131. К примеру 59.3
59.2. Теорема Коши для односвязной области.
Теорема 59.1. Теорема Коши для односвязной области. Если функция f(z) =u(x; y) + iv(x; y) является аналитической в односвязной области S, то инте-грал
∮
L
f(z)dz по любому замкнутому контуру, принадлежащему этой обла-
сти равен нулю, а
∫
LAB
f(z)dz не зависит от вида кривой L, а зависит только
от начальной и конечной точек пути интегрирования zA и zB.
Д о к a з а т е л ь с т в о: В соответствии с формулой (59.2) Re∫
L
f(z)dz =
=∫
L
udx − vdy, Im∫
L
f(z)dz =∫
L
vdx + udy. Как нам известно, для того, чтобы
криволинейный интеграл
∫
LAB
Pdx + Qdy не зависил от пути интегрирования
L, и, соответственно, по замкнутому контуру был равен нулю необходимо и
достаточно, чтобы выполнялись условия (57.8)∂Q
∂x=∂P
∂y. Для
∫
L
udx− vdy : P = u,Q = −v → ∂Q
∂x= −∂v
∂x;∂P
∂y=∂u
∂y,
для∫
L
vdx+ udy : P = v,Q = u→ ∂Q
∂x=∂u
∂x;∂P
∂y=∂v
∂y.
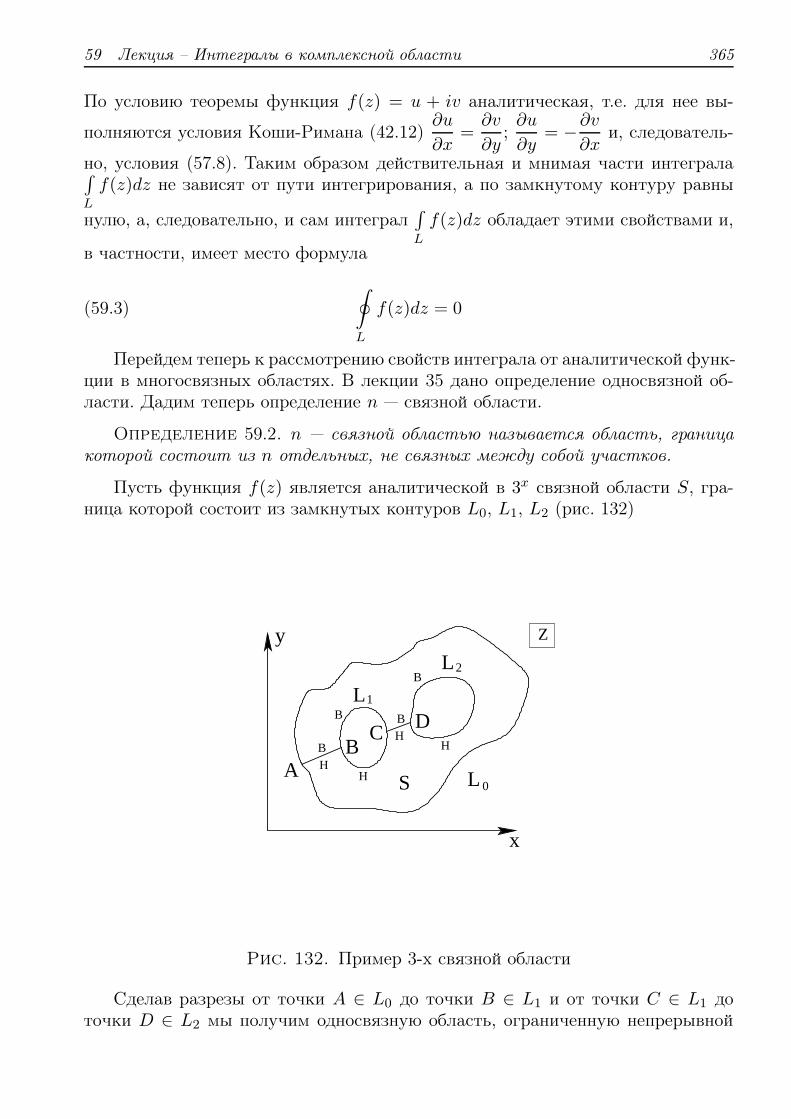
59 Лекция – Интегралы в комплексной области 365
По условию теоремы функция f(z) = u + iv аналитическая, т.е. для нее вы-
полняются условия Коши-Римана (42.12)∂u
∂x=∂v
∂y;∂u
∂y= −∂v
∂xи, следователь-
но, условия (57.8). Таким образом действительная и мнимая части интеграла∫
L
f(z)dz не зависят от пути интегрирования, а по замкнутому контуру равны
нулю, а, следовательно, и сам интеграл∫
L
f(z)dz обладает этими свойствами и,
в частности, имеет место формула
(59.3)
∮
L
f(z)dz = 0
Перейдем теперь к рассмотрению свойств интеграла от аналитической функ-ции в многосвязных областях. В лекции 35 дано определение односвязной об-ласти. Дадим теперь определение n — связной области.
Определение 59.2. n — связной областью называется область, границакоторой состоит из n отдельных, не связных между собой участков.
Пусть функция f(z) является аналитической в 3x связной области S, гра-ница которой состоит из замкнутых контуров L0, L1, L2 (рис. 132)
Z
x
y
AB
CD
L 0S
L
L 2
1
HH
HHB
B B
B
Рис. 132. Пример 3-х связной области
Сделав разрезы от точки A ∈ L0 до точки B ∈ L1 и от точки C ∈ L1 доточки D ∈ L2 мы получим односвязную область, ограниченную непрерывной
366 59 Лекция – Интегралы в комплексной области
кривойL = AнLoAвBвL1вCвDвL2DнCнL1нBнAн, в которой функция f(z) аналитична.Выше индексами “н” и “в” мы обозначали, соответственно, нижний и верхнийкрая разреза. Согласно теореме 59.2
∮
L
f(z)dz =
∫
AнL0Aв
+
∫
AвBв
+
∫
BвL1вCв
+
∫
CвDв
+
∫
DвL2Dн
+
+
∫
DнCн
+
∫
CнL1нBн
+
∫
BнAн
= 0
По свойствам интеграла∫
AвBв
= −∫
BнAн
,∫
CвDв
= −∫
DнCн
,∫
BвL1вCв
+∫
CнL1нBн
=∮
L1
f(z)dz,
∫
DвL2Dн
=∮
L2
f(z)dz,∫
AнL0Aв
=∮
L0
f(z)dz. Таким образом мы имеем∮
L0
f(z)dz +
+∮
L1
f(z)dz +∮
L2
f(z)dz = 0 или окончательно
∮
L0
f(z)dz =
∮
L1
f(z)dz +
∮
L2
f(z)dz
В случае n внутренних контуров мы получим формулу
(59.4)
∮
L0
f(z)dz =
n∑
k=1
∮
Lk
f(z)dz
и докажем следующую теорему.
Теорема 59.2. Теорема Коши для многосвязной области. Если функцияf(z) является аналитической в многосвязной области S, то интеграл по внеш-нему контуру L0 равен сумме интегралов по внутренним контурам Lk, приэтом все они проходятся против часовой стрелки.
Если среди внутренних границ имеются разрезы или изолированные “выко-лотые” точки их следует охватить замкнутыми контурами, внутри которых нетдругих особых точек.
Пример 59.4. Вычислить интеграл∮
L
(z − a)mdz, где L — замкнутый кон-
тур, а m — целое число.
Р е ш е н и е: Если точка a лежит вне контура L подынтегральная функция(z − a)m является аналитической внутри L, при любом m и, следовательно,∮
L
(z − a)mdz = 0.
Пусть теперь точка a расположена внутри контура L. Тогда, если m ≥ 0
подынтегральная функция является аналитической во всей плоскости Z и,следовательно
∮
∆
(z−a)mdz = 0. Рассмотрим теперь случай, когда m < −1, тогда
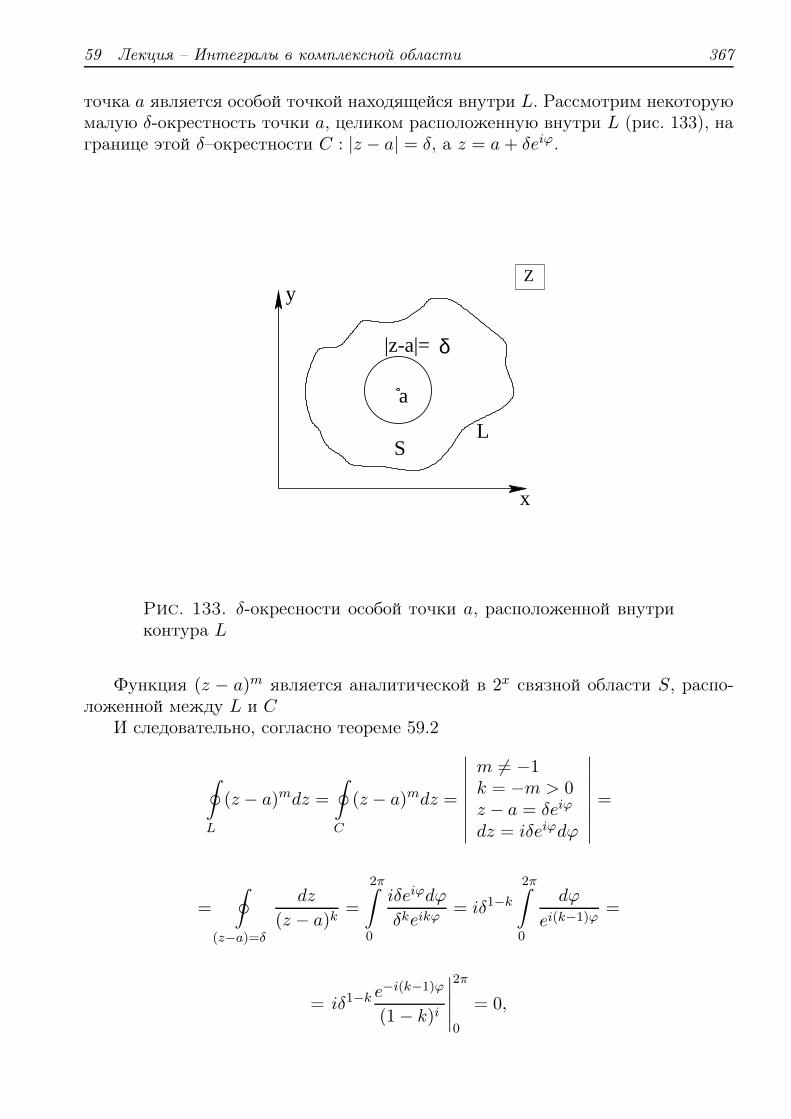
59 Лекция – Интегралы в комплексной области 367
точка a является особой точкой находящейся внутри L. Рассмотрим некоторуюмалую δ-окрестность точки a, целиком расположенную внутри L (рис. 133), награнице этой δ–окрестности C : |z − a| = δ, а z = a+ δeiϕ.
Z
x
y
S
a
|z-a|=
L
δ
Рис. 133. δ-окресности особой точки a, расположенной внутриконтура L
Функция (z − a)m является аналитической в 2x связной области S, распо-ложенной между L и C
И следовательно, согласно теореме 59.2
∮
L
(z − a)mdz =
∮
C
(z − a)mdz =
∣∣∣∣∣∣∣∣
m 6= −1k = −m > 0z − a = δeiϕ
dz = iδeiϕdϕ
∣∣∣∣∣∣∣∣
=
=
∮
(z−a)=δ
dz
(z − a)k=
2π∫
0
iδeiϕdϕ
δkeikϕ= iδ1−k
2π∫
0
dϕ
ei(k−1)ϕ=
= iδ1−ke−i(k−1)ϕ
(1 − k)i
∣∣∣∣∣
2π
0
= 0,

368 59 Лекция – Интегралы в комплексной области
т.к. ez является периодической функцией с T = 2πi. Пусть теперь m = −1,тогда по аналогии с примером (59.3)
∮
|z−a|=δ
dz
z − a=
2π∫
0
iδeiϕdϕ
δeiϕ= iϕ|2π0 = 2πi
Итак, окончательно, имеем
(59.5)
∮
L
(z − a)mdz =
2πi, m = −1,0, m 6= −1.
59.3. Вычет функции f(z) в изолированной особой точке. Пусть a— единственная изолированная особая точка, находящаяся внутри контура L.
Определение 59.3. Вычетом функции f(z) в изолированной особой точкеa называют интеграл 1
2πi
∮
L
f(z)dz, для которого принято обозначение
(59.6) Resf(z) =1
2πi
∮
L
f(z)dz.
Разложим функцию f(z) в окрестности точки a в ряд Лорана (42.4)
f(z) = · · · + C−1
(z − a)n+ · · · + C−2
(z − a)2+
C−1
z − a+
+C0 + C1(z − a) + · · · + Cn(z − a)n + . . .
Пусть данный ряд сходится в области 0 < |z − a| < R, т.е. во всех точках,расположенных внутри окружности радиуса R с центром в точке a, кроме самойточки a. Пусть контур L лежит внутри кольца0 < |z − a| < R. Проинтегрируем почленно ряд (42.4) по этому контуру.
∮
L
f(z)dz =
∞∑
m=2
C−m
∮
L
dz
(z − a)m+ C−1
∮
L
dz
z − a+
∞∑
k=0
Ck
∮
L
(z − a)kdz
На основании разобранного примера (59.4) все интегралы справа в получен-ном выражении, кроме
∮
L
dzz−a = 2πi, равны нули и, следовательно,
∮
L
f(z)dz =
C−12πi, откуда следует на основании формулы (59.6) вычет в изолированнойособой точке a также равен коэффициенту C−1 в разложении функции f(z) вряд Лорана в окресности этой точки.
(59.7) Resf(a) = C−1
В лекции 42 дана классификация особых точек функции f(z), согласно ко-торой особая точка является устранимой если соответствующий ряд Лорана несодержит главной части, полюсом n-го порядка — если главная часть содержитn членов, и существенно особой точкой — если бесконечное число членов. На

59 Лекция – Интегралы в комплексной области 369
основании сказанного, очевидно, что вычет функции в устранимой особой точке
равен нулю.Если точка a является полюсом n-го порядка функции f(z), то разложение
этой функции в ряд Лорана имеет вид:
f(z) =C−n
(z − a)n+
C−n+1
(z − a)n−1+ · · · + C−1
z − a+
∞∑
k=0
Ck(z − a)k.
Умножив обе части этого выражения на (z − a)n получим
(z − a)nf(z) = C−n + C−n+1(z − a) + · · · + C−1(z − a)n−1+
+
∞∑
k=0
Ck(z − a)k+n
Продиффиринцируем обе части последнего выражения n− 1 раз
dn−1
dzn−1((z − a)nf(z)) = C−1(n− 1)! + C0n(n− 1) . . .
. . . 2(z − a) + C1(n+ 1)n . . . 3(z − a)2 + . . .
Переходя к пределу при z → a получим
limz→a
dn−1
dzn−1((z − a)nf(z)) = C−1(n− 1)! = (n− 1)!Resf(a)
Откуда, окончательно, находим, что вычет функции f(z) в полюсе n–го
порядка
(59.8) Resf(a) =1
(n− 1)!limz→a
dn−1
dzn−1((z − a)nf(z))
Пример 59.5. Найти вычет функции f(z) = z5
(z+1)4 .
Р е ш е н и е: Функция 1f(z) = (z+1)4
z5имеет в точке z = −1 нуль 4-го порядка,
следовательно, функция f(z) = z5
(z+1)4имеет в этой точке полюс 4-го порядка
(см. лекцию 42). По формуле (59.8)
Resz5
(z + 1)4
∣∣∣∣z=−1
=1
3!limz→−1
d3
dz3
(
(z + 1)4z5
(z + 1)4
)
=
=1
3!limz→−1
(z5)III =1
3!limz→−1
5 · 4 · 3z2 =5 · 4 · 31 · 2 · 3 = 10,
Если точка a является полюсом 1-го порядка или иначе простым полюсом,то с учетом того, что 0! = 1 и f0(z) = f(z), из (59.8) при n = 1 получаем
(59.9) Resf(a) = limz→a
(z − a)f(z).
Пример 59.6. Найти вычеты в особых точках функции f(z) = z2
z2−1.

370 59 Лекция – Интегралы в комплексной области
Р е ш е н и е: 1f(z) = z2−1
z2= (z−1)(z+1)
z2имеем два простых нуля a1 = 1,
a2 = −1. Следовательно функция f(z) = z2−1z2
имеет в этих точках простыеполюса, которые находим по формуле (59.9)
Resz2
z2 − 1
∣∣∣∣z=1
= limz→1
(z − 1)z2
z2 − 1= lim
z→1
z2
z + 1=
1
2,
Resz2
z2 − 1
∣∣∣∣z=−1
= limz→−1
(z + 1)z2
z2 − 1= lim
z→−1
z2
z − 1= −1
2,
Если функция f(z) имеет вид f(z) = ϕ(z)ψ(z) , где ϕ(z) и ψ(z) аналитические функ-
ции в точке a, причем ϕ(a) 6= 0, а точка a является простым нулем для знаме-нателя ψ(z), т.е. ψ(a) = 0, но ψ′(a) 6= 0, то из формулы (59.8)
Resf(a) = limz→a
(z − a)ϕ(z)
ψ(z)= ϕ(a) lim
z→a
1ψ(z)−ψ(a)
z−a=
ϕ(a)
ψ′(a).
Таким образом вычет в простом полюсе a функции f(z) = ϕ(z)ψ(z) ,
ϕ(a) 6= 0, ψ(a) = 0, ψ′(a) 6= 0 определяется по формуле
(59.10) Resϕ(z)
ψ(z)
∣∣∣∣z=a
=ϕ(a)
ψ′(a).
Пример 59.7. Найти вычеты в особых точках функции из примера 59.6.
Р е ш е н и е: f(z) = z2
z2−1имеет два простых полюса a1 = 1 и a2 = −1. При
ϕ(z) = z2 в этих точках не обращается в нуль. По (59.10) находим
Resz2
z2 − 1
∣∣∣∣z=1
=z2
2z
∣∣∣∣z=1
=1
2; Res
z2
z2 − 1
∣∣∣∣z=−1
=z2
2z
∣∣∣∣z=−1
= −1
2
Если точка a является существенной особой точкой функции f(z), То только в
этом случае приходится раскладывать функцию f(z) в ряд Лорана в окресности
этой точки и находить коэффициент C−1.
Пример 59.8. Найти вычет функции f(z) = e1/z в точке z = 0.
Р е ш е н и е: Точка z = 0 является существенной особой точкой функцииf(z) = e1/z. Ряд Лорана получен для нее в примере 42.3.
e1/z = 1 +1
z+
1
2!z2+ · · · + 1
n!zn+ . . .
Следовательно, C−1 = 1 и Rese1/z∣∣z=0
= 1
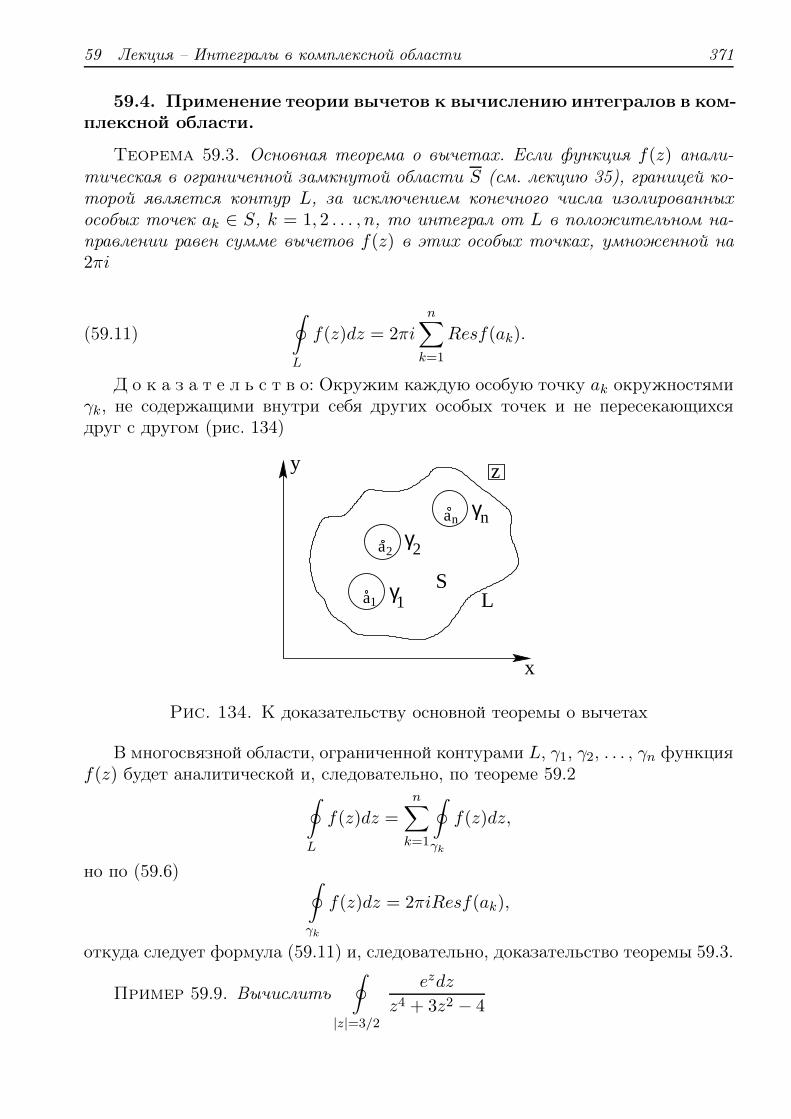
59 Лекция – Интегралы в комплексной области 371
59.4. Применение теории вычетов к вычислению интегралов в ком-
плексной области.
Теорема 59.3. Основная теорема о вычетах. Если функция f(z) анали-тическая в ограниченной замкнутой области S (см. лекцию 35), границей ко-торой является контур L, за исключением конечного числа изолированныхособых точек ak ∈ S, k = 1, 2 . . . , n, то интеграл от L в положительном на-правлении равен сумме вычетов f(z) в этих особых точках, умноженной на2πi
(59.11)
∮
L
f(z)dz = 2πi
n∑
k=1
Resf(ak).
Д о к а з а т е л ь с т в о: Окружим каждую особую точку ak окружностямиγk, не содержащими внутри себя других особых точек и не пересекающихсядруг с другом (рис. 134)
x
y
LSγ
γγ
1
2
n
a
a
a
1
2
n
z
Рис. 134. К доказательству основной теоремы о вычетах
В многосвязной области, ограниченной контурами L, γ1, γ2, . . . , γn функцияf(z) будет аналитической и, следовательно, по теореме 59.2
∮
L
f(z)dz =
n∑
k=1
∮
γk
f(z)dz,
но по (59.6)∮
γk
f(z)dz = 2πiResf(ak),
откуда следует формула (59.11) и, следовательно, доказательство теоремы 59.3.
Пример 59.9. Вычислить
∮
|z|=3/2
ezdz
z4 + 3z2 − 4
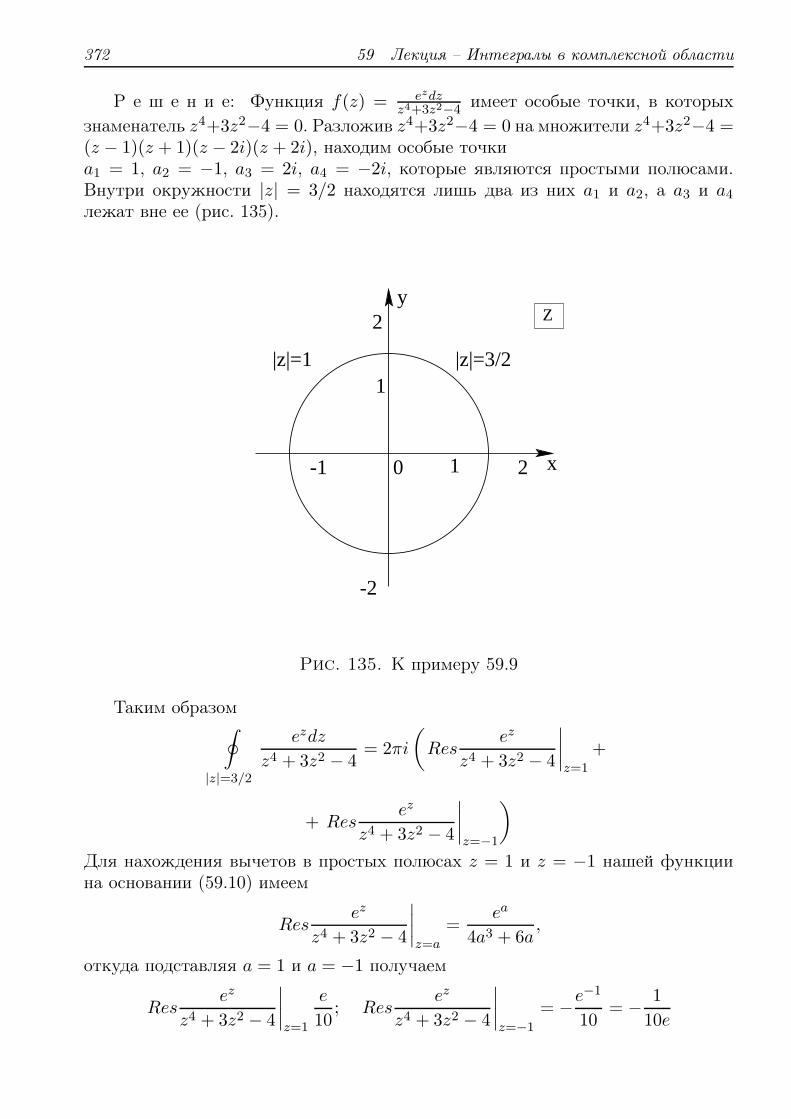
372 59 Лекция – Интегралы в комплексной области
Р е ш е н и е: Функция f(z) = ezdzz4+3z2−4 имеет особые точки, в которых
знаменатель z4+3z2−4 = 0. Разложив z4+3z2−4 = 0 на множители z4+3z2−4 =(z − 1)(z + 1)(z − 2i)(z + 2i), находим особые точкиa1 = 1, a2 = −1, a3 = 2i, a4 = −2i, которые являются простыми полюсами.Внутри окружности |z| = 3/2 находятся лишь два из них a1 и a2, а a3 и a4
лежат вне ее (рис. 135).
Z
|z|=1
y
1
1 x2
2
-2
-1
|z|=3/2
0
Рис. 135. К примеру 59.9
Таким образом∮
|z|=3/2
ezdz
z4 + 3z2 − 4= 2πi
(
Resez
z4 + 3z2 − 4
∣∣∣∣z=1
+
+ Resez
z4 + 3z2 − 4
∣∣∣∣z=−1
)
Для нахождения вычетов в простых полюсах z = 1 и z = −1 нашей функциина основании (59.10) имеем
Resez
z4 + 3z2 − 4
∣∣∣∣z=a
=ea
4a3 + 6a,
откуда подставляя a = 1 и a = −1 получаем
Resez
z4 + 3z2 − 4
∣∣∣∣z=1
e
10; Res
ez
z4 + 3z2 − 4
∣∣∣∣z=−1
= −e−1
10= − 1
10e

59 Лекция – Интегралы в комплексной области 373
Следовательно∮
|z|=3/2
ezdz
z4 + 3z2 − 4= 2πi
(e
10− 1
10e
)
=πi
5e(e2 − 1).
59.5. Применение теории вычетов к вычислению определенных
интегралов и несобственных интегралов с бесконечными пределами.
Для нахождения определенных интегралов оказывается возможным сделатьзамену, переводящую их в комплексную область и затем применить основнуютеорему о вычетах.
Пример 59.10. Наити интеграл2π∫
0
dϕa+cosϕ (a > 1).
Р е ш е н и е: Положим eiϕ = z, dz = ieiϕdϕ = izdϕ, cosϕ = eiϕ+e−iϕ
2 =
= z2+12z . Если ϕ меняется от 0 до 2π, то z проходит окружность единичного
радиуса |z| = 1. Таким образом
2π∫
0
dϕ
a+ cosϕ=
∮
|z|=1
dz
iz(a+ z2+12z )
=2
i
∮
|z|=1
dz
z2 + 2az + 1=
=
∣∣∣∣∣∣∣∣∣
z2 + 2az + 1 = 0,
z1,2 = −a±√a2 − 1 , Res 1
z2+2az+1
∣∣∣z1
= 12z+2a
∣∣∣z1
z1 ∈ |z| < 1,z2 ∈ |z| > 1, = 1
2√a2−1
∣∣∣∣∣∣∣∣∣
=
= 2πi2
i· 1
2√a2 − 1
=2π√a2 − 1
.
Однако значительно больший интерес представляет применение теории вы-четов к несобственным интегралам с бесконечными пределами. Это оказываетсявозможным, когда при переходе в комплексную область соответствующий ин-теграл по полуокружности радиуса N (рис. 136) стремится к нулю при N → ∞.
Ниже мы сформулируем две теоремы и приведем примеры на их примене-ние.
Теорема 59.4. Если функция f(z) является аналитической в верхней по-луплоскости Imz ≥ 0 за исключением особых точек aj, j = 1, 2, . . . n Imaj > 0.Кроме того для f(z) бесконечно удаленная точка является нулем порядка нениже второго, то имеет место формула
(59.12)
∞∫
−∞
f(x)dx = 2πi
n∑
j=1
Resf(aj).

374 59 Лекция – Интегралы в комплексной области
z
0
y
N N x
N
x x x x1 2 k xm-1 m
a
a
aa
a1
2
jn-1
n
Рис. 136. К применению теории вычетов к вычислению несоб-ственных интегралов с бесконечными пределами
Пример 59.11. Вычислить
∞∫
−∞
x2 + 1
x4 + 1dx.
Р е ш е н и е: Для функции f(z) = z2+1z4+1
бесконечность является нулем 2-го
порядка. В верхней полуплоскости имеется два простых полюса (см. пример33.6 лекции 33)
a1,2 =
√2
2(i± 1); Res
z2 + 1
z4 + 1
∣∣∣∣a1,2
=a2
1,2 + 1
4a31,2
=12(i2 ± 2i+ 1) + 1
42√
2(i3 ± 3i2 + 3i± 1)
=
=±i+ 14√2(i∓ 1)
=
√2
4
1 ± i
i∓ 1· i± 1
i± 1=
√2(i± i2 ± 1 + i)
4(i2 − 1)= −
√2i
4.
Таким образом по (59.12)
∞∫
−∞
x2 + 1
x4 + 1dx = 2πi
(
−√
2
4i−
√2
4i
)
= 2πi
(
−√
2
2i
)
= π√
2.
С помощью следующей теоремы мы найдем некоторые не выражающиеся вэлементарных функциях интегралы.
Теорема 59.5. Если функция f(z) = g(z)eiαz, где α > 0, g(z) → 0 при |z| →∞, является аналитической в верхней полуплоскости Imz ≥ 0 за исключениемособых точек aj, j = 1, 2, . . . , n (Imaj > 0) и простых полюсов xk, k = 1, . . . ,mрасположенных на оси x (рис. 136), то имеет место формула
(59.13)
∞∫
−∞
f(x)dx = 2πi
n∑
j=1
Resf(aj) +1
2
m∑
k=1
Resf(xk)
Пример 59.12. Найти∞∫
−∞sinxx dx и
∞∫
−∞cosxx dx.

59 Лекция – Интегралы в комплексной области 375
Р е ш е н и е: Это так называемые “не берущиеся” интегралы (см. лекцию43). На основании формулы Эйлера (33.22)
eix = cos x+ i sin x и
∞∫
−∞
eix
xdx =
∞∫
−∞
cos x
xdx+ i
∞∫
−∞
sin x
xdx
Функция f(z) = eiz
z удовлетворяет всем условиям теоремы 59.5, для нее α = 1,
g(z) = 1z → 0 при |z| → ∞. Она имеет один простой полюс в точке z = 0 и,
следовательно, Reseiz
z
∣∣∣z=0
= eiz
1
∣∣∣z=0
= e0 = 1. Таким образом
∞∫
−∞
cosx
xdx+ i
∞∫
−∞
sin x
xdx = 2πi
1
2Res
eiz
z
∣∣∣∣z=0
= πi
Откуда приравнивая действительные и мнимые части получаем∞∫
−∞
cosx
xdx = 0, a
∞∫
−∞
sin x
xdx = π
Пример 59.13. Найти∞∫
−∞sinxx4−1
dx и∞∫
−∞cosxx4−1
dx
Р е ш е н и е: Аналогично примеру 59.12 вводим∞∫
−∞
eix
x4 − 1dx =
∞∫
−∞
cosx
x4 − 1dx+ i
∞∫
−∞
sin x
x4 − 1dx
Функция f(z) = eiz
z4−1удовлетворяет всем условиям теоремы (59.5), для нее
α = 1, g(z) = 1z4−1
→ 0 при z → ∞ очевидно, что z4 − 1 = (z − 1)(z + 1)(z2 + 1)имеет два простых полюса на оси x : a1 = 1, a2 = −1 и еще один простой полюсa3 = i в верхней полуплоскости. Находим в них вычеты используя формулу(59.10)
Reseiz
z4 − 1
∣∣∣∣z=aj
=eiaj
4a3j
; Resf(1) =ei
4=
cos 1 + i sin 1
4;
Resf(−1) = −e−i
4=
− cos 1 + i sin 1
4; Resf(i) =
e−1
−4i=
i
4eИ по формуле (59.10)
∞∫
−∞
cos x
x4 − 1dx+ i
∞∫
−∞
sin x
x4 − 1=
= 2πi
(
Resf(i) +1
2(Resf(1) +Resf(−1))
)
=
376 59 Практическое занятие – Контрольная работа
= 2πi
(i
4e+
cos 1 + i sin 1 − cos 1 + i sin 1
2
)
= − π
2e− 2π sin 1
Откуда
∞∫
−∞
cos x
x4 − 1dx = −π
(1
2e+ 2 sin 1
)
,
∞∫
−∞
sin x
x4 − 1dx = 0
59. практическое занятие – контрольнаяработа по материалам лекций 52–58
Рассмотрим один из возможных вариантов контрольной работы накратные и криволинейные интегралы, элементы теории векторного поля.
Типовой вариант
Пример 59.1. Вычислить двойной интеграл
1∫
0
dx
3−x∫
√1−x2
2y(x+2y2)dy.
Изменить порядок интегрирования и получить тот же результат.
Пример 59.2. Найти центр тяжести тела, ограниченного поверх-ностями: z = x2, x = y2, x = 1, z = 0.
Пример 59.3. Вычислить
∮
ABCA
(3xy+x2)dx+8x2dy, где точки A(0; 1);
B(2; 2); C(0; 3) являются вершинами треугольника, непосредственно и спомощью теоремы Грина.
Пример 59.4. Вычислить поток векторного поля F = (x+ y; x+ y++z; 2z−y) через поверхность тетраэдра с вершинами O(0; 0; 0); A(−3; 0; 0);B(0; 2; 0); C(0; 0; 3) непосредственно и с помощью теоремы Остроградского-Гаусса.
Пример 59.5. Проверить является ли полеF = (ex sin y; ex cos y; 1) потенциальным и, если да, найти его потенциал.
Решение примеров типового вариантаконтрольной работы
Пример 59.1.
Р е ш е н и е: Интеграл
1∫
0
dx
3−x∫
√1−x2
2y(x + 2y2)dy =
1∫
0
(y2x+ y4)∣∣3−x√
1−x2 dx =

59 Практическое занятие – Контрольная работа 377
=
1∫
0
((3 − x)2x+ (3 − x)4 − x(1 − x2) − (1 − x2)2
)dx =
=
1∫
0
((9 − 6x + x2)(9 − 5x + x2) − x+ x3 − 1 + 2x2 − x4
)dx =
=
1∫
0
(81 − 54x + 9x2 − 45x + 30x2 − 5x3 + 9x2 − 6x3 + x4 − x+ x3 − 1+
+2x2 − x4)dx =
1∫
0
(80 − 100x + 50x2 − 10x3)dx =
=
(
80x − 50x2 +50
3x4 − 10
4x4
)∣∣∣∣
1
0
= 30 +50
3− 5
2=
265
6
Чтобы изменить порядок интегрирования вначале найдем границы обла-сти интегрирования и построим ее. Границами области интегрированияявляются прямые x = 0, x = 1, y = 3 − x и окружность y2 = 1 − x2.Область интегрирования ABCE представлена на рис. 137
x= 1-y 2
0 1 2 3
1
2
3C
B
D
A
E
K
x=3-y
x
y
Рис. 137. К примеру 59.1

378 59 Практическое занятие – Контрольная работа
Если мы изменим порядок интегрирования, то будет необходимо об-ласть ABCE разбить на три области: ADE, EDKB, KBC. Таким обра-зом
1∫
0
dx
3−x∫
√1−x2
2y(x + 2y2)dy =
3∫
2
dy
3−y∫
0
2y(x + 2y2)dx+
+
2∫
1
dy
1∫
0
2y(x + 2y2)dx+
1∫
0
dy
1∫
√1−y2
2y(x + 2y2)dx =
=
3∫
2
(yx2 + 4y3x
)∣∣3−y0
dy +
2∫
1
(yx2 + 4y3x
)∣∣1
0dy+
+
1∫
0
(yx2 + 4y3x
)∣∣1√
1−y2 =
3∫
2
(y(9 − 6y + y2) + 4y3(3 − y)
)dy+
+
2∫
1
(y + 4y3)dy +
1∫
0
(y + 4y3 − y(1 − y2) − 4y3√
1 − y2)dy =
=
3∫
2
(9y − 6y2 + 13y3 − 4y4)dy +
2∫
1
(y + 4y3)dy+
+
1∫
0
(
5y3 − 4y3√
1 − y2)
dy =
(9y2
2− 2y3 +
13y4
4− 4y5
5
)∣∣∣∣
3
2
+
+
(y2
2+ y4
)∣∣∣∣
2
1
+
(
5
4y4 − 4
√
(1 − y2)5
5+
4√
(1 − y2)3
3
)∣∣∣∣∣
1
0
=
=81
2− 54 +
1053
4− 972
5− 18 + 16 − 52+
+128
5+ 2 + 16 − 1
2− 1 +
5
4+
4
5− 4
3=
265
6.
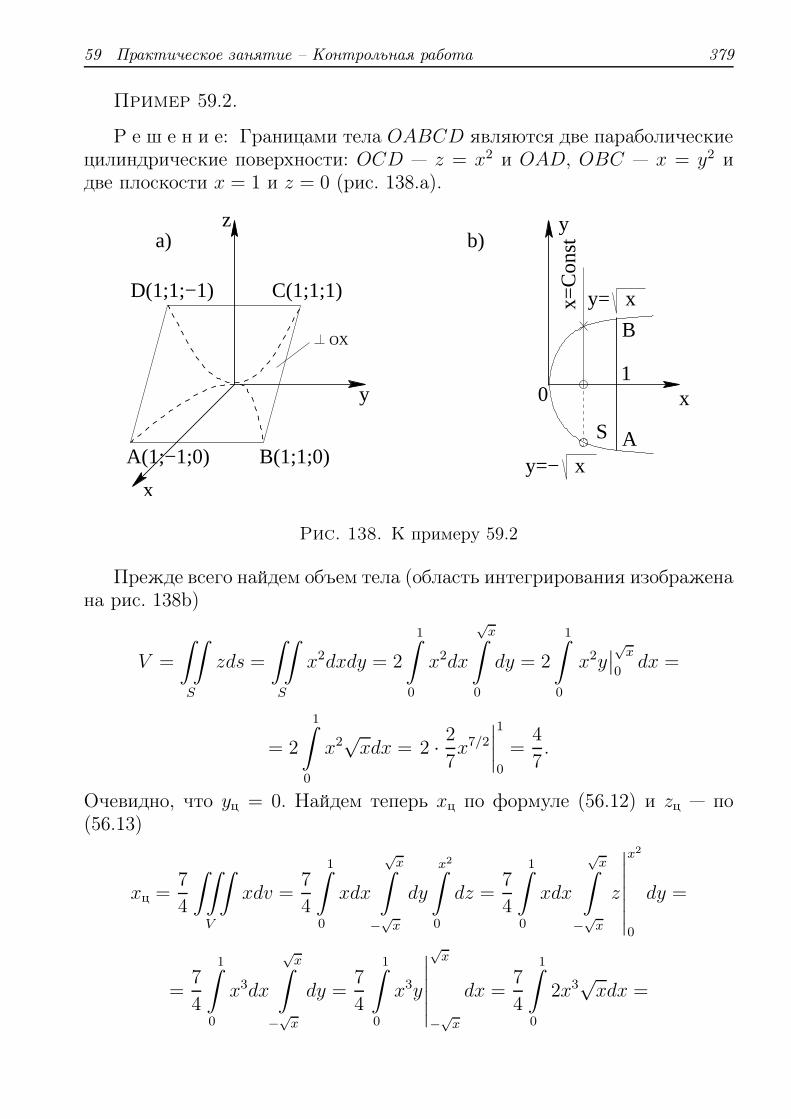
59 Практическое занятие – Контрольная работа 379
Пример 59.2.
Р е ш е н и е: Границами тела OABCD являются две параболическиецилиндрические поверхности: OCD — z = x2 и OAD, OBC — x = y2 идве плоскости x = 1 и z = 0 (рис. 138.a).
OX
y=− x
y= x
y
za)
D(1;1;−1) C(1;1;1)
B(1;1;0)A(1;−1;0)
x
x
y
1
S
x=C
onst
0
b)
A
B
Рис. 138. К примеру 59.2
Прежде всего найдем объем тела (область интегрирования изображенана рис. 138b)
V =
∫∫
S
zds =
∫∫
S
x2dxdy = 2
1∫
0
x2dx
√x∫
0
dy = 2
1∫
0
x2y∣∣√x
0dx =
= 2
1∫
0
x2√xdx = 2 · 2
7x7/2
∣∣∣∣
1
0
=4
7.
Очевидно, что yц = 0. Найдем теперь xц по формуле (56.12) и zц — по(56.13)
xц =7
4
∫∫∫
V
xdv =7
4
1∫
0
xdx
√x∫
−√x
dy
x2∫
0
dz =7
4
1∫
0
xdx
√x∫
−√x
z
∣∣∣∣∣∣∣
x2
0
dy =
=7
4
1∫
0
x3dx
√x∫
−√x
dy =7
4
1∫
0
x3y
∣∣∣∣∣∣
√x
−√x
dx =7
4
1∫
0
2x3√xdx =

380 59 Практическое занятие – Контрольная работа
=7
2· 2
9x
92
∣∣∣∣
1
0
=7
9;
zц =7
4
∫∫∫
V
zdv =7
4
1∫
0
dx
√x∫
−√x
dy
x2∫
0
zdz =7
4
1∫
0
dx
√x∫
−√x
z2
2
∣∣∣∣
x2
0
dy =
=7
8
1∫
0
x4dx
√x∫
−√x
dy =7
8
1∫
0
x4y∣∣√x
−√xdx =
7
4
1∫
0
x4√xdx =
=7
4
2
11x
112
∣∣∣∣
1
0
=7
22.
Пример 59.3.
Р е ш е н и е: Согласно формуле Грина∮
L
Pdx+Qdy =
=
∫∫
S
(∂Q
∂x− ∂P
∂y
)
dxdy.
12y=1+ x
12 xy=3-
x
y
1
2
3
2
A
B
C
x=C
onst
S
Рис. 139. К примеру 59.3
В нашем случае P = 3xy + x2, Q = 8x2, ∂Q∂x
− ∂P∂y
= 16x − 3x = 13x. И,следовательно (рис. 139),
∮
ABCA
(3xy + x2)dx+ 8x2dy =
∫∫
S
13xdxdy = 13
2∫
0
xdx
3− 12x
∫
1+ 12x
dy =

59 Практическое занятие – Контрольная работа 381
= 13
2∫
0
x(
3 − x
2− 1 − x
2
)
dx = 13
2∫
0
(2x− x2)dx =
= 13
(
x2 − x3
3
)∣∣∣∣
2
0
= 13
(
4 − 8
3
)
=52
3
С другой стороны, учитывая, что наAB : y = 1 + 1
2x, dy = 1
2dx, на
BC : y = 3 − 12x, dy = −1
2dx, на
CA : x = 0, dx = 0 проведем вычисление криволинейного интеграла
∮
ABCA
(3xy + x2)dx+ 8x2dy =
2∫
0
(
3x(
1 +x
2
)
+ x2 + 4x2)
dx+
+
0∫
2
(
3x(
3 − x
2
)
+ x2 − 4x2)
dx+
0∫
3
0dy =
2∫
0
(−6x+ 11x2)dx =
=
(
−3x2 +11
3x3
)∣∣∣∣
2
0
=52
3.
Пример 59.4.
Р е ш е н и е: Объем тетраэдра, изображенного на рис. 140,V = 1
6OA ·OB ·OC = 1
6· 2 · 3 · 3 = 3.
A
B
C3
20
n
-3
x
y
z
Рис. 140. К примеру 59.4
Согласно формуле Остраградского-Гаусса суммарный поток вектораF через грани тетраэдра σ
Фσ =
∫∫
σ
© Fndσ =
∫∫∫
V
divFdV =
∣∣∣∣∣
divF = ∂(x+y)∂x
+ ∂(x+y+z)∂y
+∂(2z−y)∂z
= 1 + 1 + 2 = 4
∣∣∣∣∣=

382 59 Практическое занятие – Контрольная работа
= 4
∫∫∫
V
dV = 4V = 12
Непосредственное вычисление потока вектора F = (x+y)i+(x+y+z)j++ (2z − y)k через грани тетраэдра провести значительно сложнее.
σ = OBC + OBA +OAC + ABC:
y32
0
C
By=
Con
st
3
2
z
y
z=3−
Рис. 141. Грань OBC
грань OBC (рис. 141): x = 0, n = i, ~F~n = y,∫∫
OBC
ydydz =
=2∫
0
ydy3− 3
2y
∫
0
dz =2∫
0
y(3 − 32y)dy =
(32y2 − y3
2
)∣∣∣
2
0= 6 − 4 = 2.
32
x= y-3
x
y
y=Const
0-3
2
A
B
Рис. 142. Грань OBA
граньOBA (рис. 142): z = 0, n = −k, ~F~n = y,∫∫
OBA
ydydx =2∫
0
ydy0∫
32y−3
dx =
=2∫
0
y(3 − 32y)dy = 2,
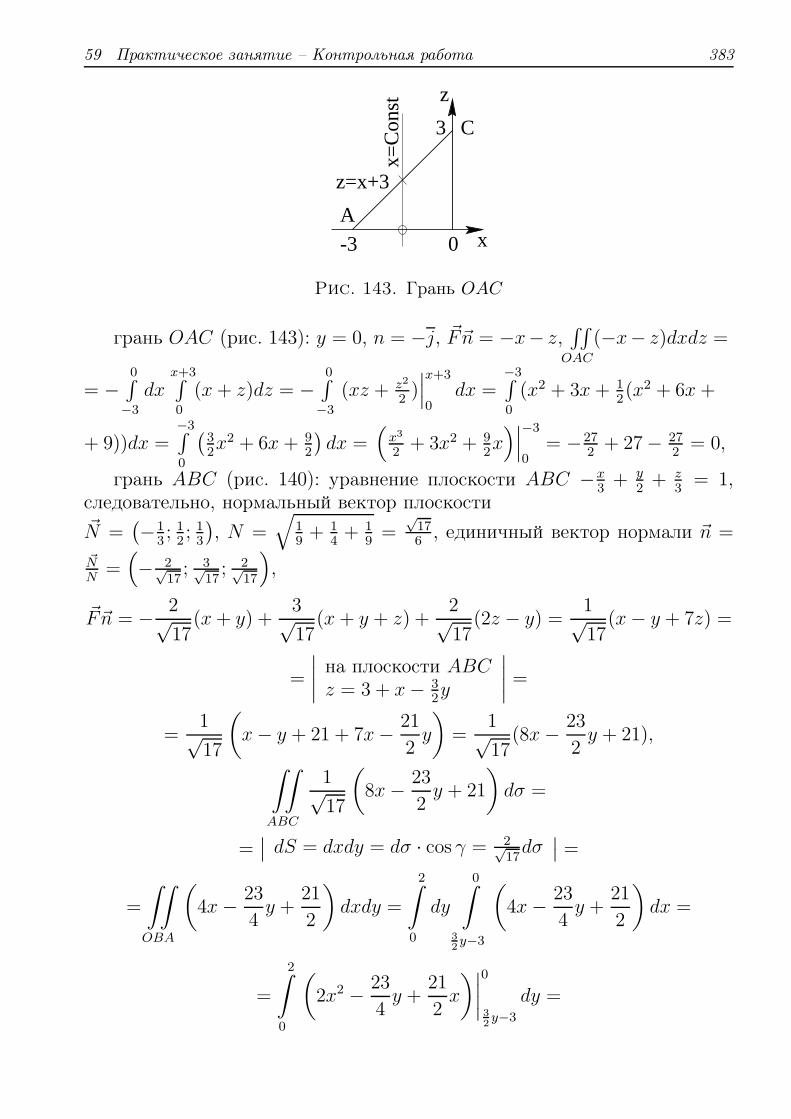
59 Практическое занятие – Контрольная работа 383
0
C
-3
3
Ax
z
x=C
onst
z=x+3
Рис. 143. Грань OAC
грань OAC (рис. 143): y = 0, n = −j, ~F~n = −x− z,∫∫
OAC
(−x− z)dxdz =
= −0∫
−3
dxx+3∫
0
(x+ z)dz = −0∫
−3
(xz + z2
2)∣∣∣
x+3
0dx =
−3∫
0
(x2 + 3x + 12(x2 + 6x +
+ 9))dx =−3∫
0
(32x2 + 6x + 9
2
)dx =
(x3
2+ 3x2 + 9
2x)∣∣∣
−3
0= −27
2+ 27 − 27
2= 0,
грань ABC (рис. 140): уравнение плоскости ABC −x3
+ y2
+ z3
= 1,следовательно, нормальный вектор плоскости~N =
(−1
3; 1
2; 1
3
), N =
√19
+ 14
+ 19
=√
176
, единичный вектор нормали ~n =
~NN
=(
− 2√17
; 3√17
; 2√17
)
,
~F~n = − 2√17
(x+ y) +3√17
(x + y + z) +2√17
(2z − y) =1√17
(x− y + 7z) =
=
∣∣∣∣
на плоскости ABCz = 3 + x− 3
2y
∣∣∣∣=
=1√17
(
x− y + 21 + 7x− 21
2y
)
=1√17
(8x− 23
2y + 21),
∫∫
ABC
1√17
(
8x− 23
2y + 21
)
dσ =
=∣∣ dS = dxdy = dσ · cos γ = 2√
17dσ∣∣ =
=
∫∫
OBA
(
4x− 23
4y +
21
2
)
dxdy =
2∫
0
dy
0∫
32y−3
(
4x− 23
4y +
21
2
)
dx =
=
2∫
0
(
2x2 − 23
4y +
21
2x
)∣∣∣∣
0
32y−3
dy =

384 59 Практическое занятие – Контрольная работа
=
2∫
0
(
−2
(3
2y − 3
)2
+23
4y
(3
2y − 3
)
− 21
2
(3
2y − 3
))
dy =
=
2∫
0
(
−−9y2
2+ 18y − 18 +
69y2
8− 69
4y − 63
4y +
63
2
)
dy =
=
2∫
0
(33
8y2 − 15y +
27
2
)
dy =
(11
8y3 − 15
2y2 +
27
2y
)∣∣∣∣
2
0
=
= 11 − 30 + 27 = 8,∫∫
σ
© ~F~ndσ = 2 + 2 + 0 + 8 = 12.
Пример 59.5.
Р е ш е н и е: Для того, чтобы поле ~F = ~F (x; y; z) было потенциальнымнеобходимо и достаточно, чтобы rot ~F = 0 (Теорема 58.3). В нашем случае
rot ~F =
∣∣∣∣∣∣
~i ~j ~k∂∂x
∂∂y
∂∂z
ex sin y ex cos y 1
∣∣∣∣∣∣
=
(∂1
∂y− ∂ex cos y
∂z
)
~i+
+
(
−∂1
∂x+∂ex sin y
∂z
)
~j +
(∂ex cos y
∂x− ∂ex sin y
∂y
)
~k =
= 0 ·~i+ 0 ·~j + (ex cos y − ex cos y)~k = 0
При вычислении потенциала по формуле (58.20), в которой мы можемположить x0 = y0 = z0 = 0, получим
V (x; y; z) =
x∫
0
0dξ +
y∫
0
ex cos ηdη +
z∫
0
dζ + C =
= ex sin η|y0 + ζ|z0 + C = ex sin y + z + C
Проверка:∂V
∂x=∂(ex sin y + z + C)
∂x= ex sin y = Fx,
∂V
∂y=∂(ex sin y + z + C)
∂y= ex cos y = Fy;
∂V
∂z=
=∂(ex sin y + z + C)
∂z= 1 = Fz
60 Лекция – Уравнения первого порядка 385
X ГЛАВА
Дифференциальные уравнения
60. лекция –дифференциальные уравнения.
основные понятия.уравнения первого порядка
Основные понятия и определения. Дифференциальные уравненияпервого порядка. Особые решения дифференциальных уравненийпервого порядка. Геометрический смысл дифференциальных урав-нений первого порядка. Уравнения с разделяющимися переменны-ми и сводящиеся к ним. Линейные дифференциальные уравненияпервого порядка. Уравнения Бернулли.
60.1. Основные понятия и определения. В процессе решения мно-гих теоретических и практических задач часто не удается сразу непосред-ственно установить функциональную зависимость y = f(x) между иско-мыми и данными переменными величинами, но можно установить связьмежду этой функцией и ее производными.

386 60 Лекция – Уравнения первого порядка
Определение 60.1. Дифференциальным уравнением называется урав-нение, содержащее независимую переменную x, искомую функциюy = f(x) и ее производные y′, y′′, . . . , y(n).
Символически дифференциальное уравнение записывается так:
(60.1) F (x, y′, y′′, . . . , y(n)) = 0.
Например уравнения 4x − y + 2y′ = 0 и y′′ = 2x + 1 являются диффе-ренциальными уравнениями.
Если искомая функция y = f(x) есть функция одного независимогопеременного, то дифференциальное уравнение называется обыкновенным(прилагательное “обыкновенные” обычно опускают). В данной главе рас-сматриваются только обыкновенные дифференциальные уравнения.
Определение 60.2. Порядком дифференциального уравнения называ-ется порядок наивысшей производной, входящей в данное уравнение.
Например y′−2xy2+3 = 0 – уравнение первого порядка, а y′′′+2y′+y == sinx – уравнение третьего порядка.
Определение 60.3. Решением дифференциального уравнения назы-вается такая функция y = ϕ(x), при подстановке которой в уравнениепоследнее обращается в тождество.
График этой функции y = ϕ(x) называется интегральной кривой.Если решение задано в неявном виде Φ(x, y) = 0, то оно обычно назы-
вается интегралом.
Решение дифференциального уравнения связано с необходимостью ин-тегрировать входящие в уравнение функции. Рассмотрим, например, урав-нение y′ = 3x2. Интегрируя его, получаем совокупность функций y == x3 + C, каждая из которых является решением данного дифференци-ального уравнения.
На рисунке 144 изображена совокупность указанных интегральныхкривых.
Определение 60.4. Общим решением дифференциального уравненияn-го порядка называется функция
(60.2) y = ϕ(x, C1, C2, . . . , Cn),
зависящая кроме аргумента x от n произвольных постоянныхC1, C2, . . . , Cn и удовлетворяющая данному уравнению при любых значе-ниях этих постоянных.
Чтобы из всей совокупности общих решений выделить конкретное ре-шение, необходимо задать дополнительные условия. Чаще всего эти до-полнительные условия определяются в виде начальных условий
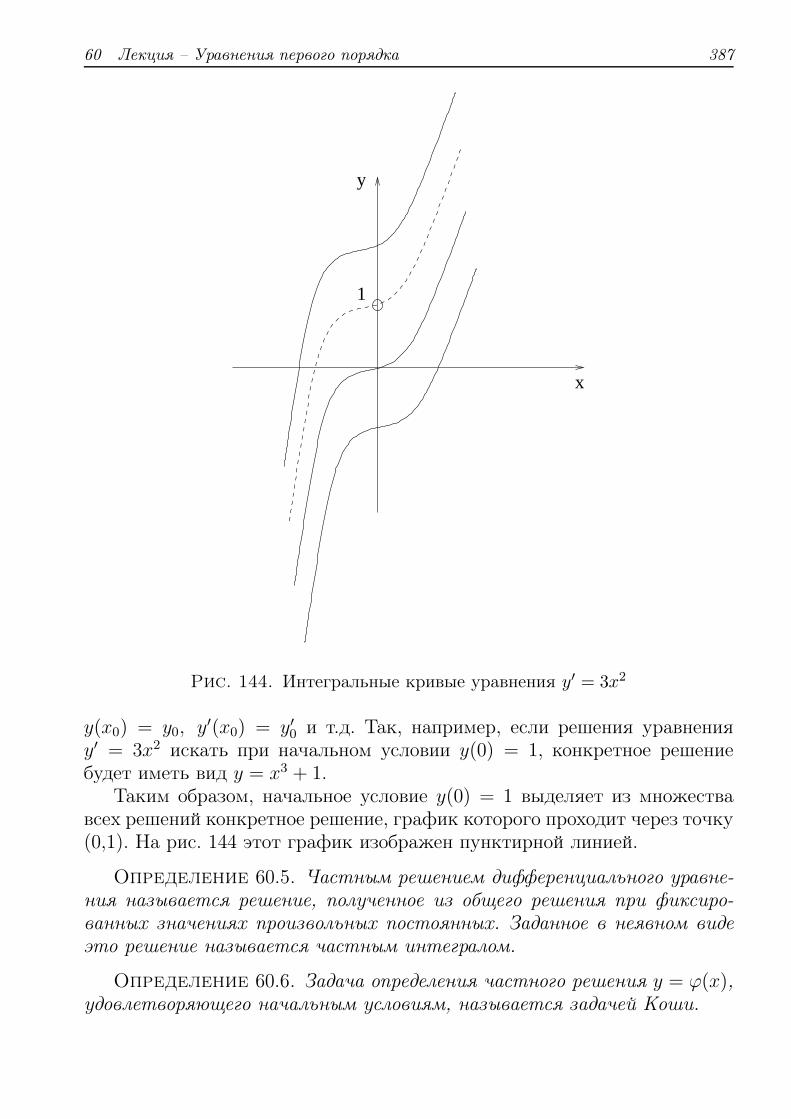
60 Лекция – Уравнения первого порядка 387
y
x
1
Рис. 144. Интегральные кривые уравнения y′ = 3x2
y(x0) = y0, y′(x0) = y′0 и т.д. Так, например, если решения уравнения
y′ = 3x2 искать при начальном условии y(0) = 1, конкретное решениебудет иметь вид y = x3 + 1.
Таким образом, начальное условие y(0) = 1 выделяет из множествавсех решений конкретное решение, график которого проходит через точку(0,1). На рис. 144 этот график изображен пунктирной линией.
Определение 60.5. Частным решением дифференциального уравне-ния называется решение, полученное из общего решения при фиксиро-ванных значениях произвольных постоянных. Заданное в неявном видеэто решение называется частным интегралом.
Определение 60.6. Задача определения частного решения y = ϕ(x),удовлетворяющего начальным условиям, называется задачей Коши.

388 60 Лекция – Уравнения первого порядка
60.2. Дифференциальные уравнения первого порядка.
Определение 60.7. Дифференциальное уравнение первого порядка име-ет вид
(60.3) F (x, y, y′) = 0.
Если это уравнение можно разрешить относительно y′, то его можнозаписать так:
(60.4) y′ = f(x, y).
Уравнение (60.4) называется уравнением первого порядка, разрешен-ным относительно производной.
Уравнение (60.4) можно записать в виде f(x, y)dx− dy = 0, что явля-ется частным случаем общего уравнения первого порядка
(60.5) P (x, y)dx+Q(x, y)dy = 0.
Прежде, чем решать любое дифференциальное уравнение, необходимознать, существует ли на самом деле решение дифференциального уравне-ния, и, если оно есть, то является ли оно единственным.
Условия, при которых дифференциальное уравнение (60.4) имеет ре-шение, составляют содержание теоремы Коши – теоремы существованияи единственности решения дифференциального уравнения первого поряд-ка, которую мы приводим без доказательства:
Теорема 60.1. (Теорема Коши) Если правая часть f(x, y) уравненияy′ = f(x, y) и ее частная производная f ′
y(x, y) определены и непрерывныв некоторой области G изменения переменных x и y, то, какова бы нибыла внутренняя точка (x0; y0) этой области, существует единствен-ное решение этого уравнения y = ϕ(x), удовлетворяющее начальномуусловию y(x0) = y0.
Геометрический смысл теоремы Коши заключается в том, что суще-ствует единственная интегральная кривая y = ϕ(x), график которой про-ходит через точку (x0; y0) (см. рис. 144).
Определение 60.8. Общим решением дифференциального уравненияпервого порядка в области G называется функция
(60.6) y = ϕ(x, C),
которая зависит от аргумента x и произвольной постоянной C и удо-влетворяет двум следующим условиям:
1) она является решением данного уравнения при любых конкретныхзначениях произвольной постоянной C;

60 Лекция – Уравнения первого порядка 389
2) каково бы ни было начальное условие y(x0) = y0 такое, что(x0; y0) ∈ G, существует единственное значение постоянной C = C0,при котором решение y = ϕ(x, C0) удовлетворяет заданному начальномуусловию.
Если общее решение дифференциального уравнения первого порядканайдено в виде, не разрешенном относительно y, т.е. в виде Φ(x, y, C) == 0, то оно называется общим интегралом дифференциального уравне-ния.
Определение 60.9. Частным решением дифференциального уравне-ния первого порядка называется любая функция y = ϕ(x, C0), получаю-щаяся из общего решения y = ϕ(x, C) при конкретном значении C = C0,определенном из начального условия y(x0) = y0. Соотношение Φ(x, y, C0) == 0 в этом случае называется частным интегралом уравнения.
60.3. Особые решения дифференциальных уравнений перво-го порядка. Встречаются дифференциальные уравнения, имеющие та-кие решения, которые не получаются из общего решения ни при какихзначениях C ( в том числе при C = ±∞). Такие решения называютсяособыми.
Например, проверкой можно убедиться, что уравнение y′ =√
1 − y2
имеет общее решение y = sin (x+ C). В то же время функция y = 1 такжеявляется решением этого уравнения. Однако, это решение не может бытьполучено из общего ни при каких значениях C.
Определение 60.10. Точки (x; y) области G, в которых не выполня-ются условия теоремы Коши (существования и единственности реше-ния) называются особыми точками дифференциального уравнения.
В этих точках терпит разрыв или правая часть дифференциальногоуравнения f(x, y), или ее частная производная f ′
y(x, y). Через каждую изтаких точек может проходить либо несколько интегральных кривых, либоне проходит ни одной.
Графиком особого решения является интегральная кривая, котораяв каждой своей точке имеет общую касательную с одной из интеграль-ных кривых, определяемых общим решением. Такая кривая называетсяогибающей семейства интегральных кривых.
Например функция y = C(x−C)2 при любом значении C (рис.145) яв-ляется решением уравнения 4xyy′−y′3−8y2 = 0. При этом функция y = 0,являясь особым решением данного уравнения, представляет огибающуюсемейства интегральных кривых.

390 60 Лекция – Уравнения первого порядка
(x-1) 2
y
x0
2(x-2) 2
23(x-3)
Рис. 145. График функций y = C(x− C)2
60.4. Геометрический смысл дифференциального уравненияпервого порядка. Рассмотрим дифференциальное уравнение y′ = f(x, y).Это уравнение для каждой точки M(x, y) определяет значение произ-водной y′ = dy
dx, т.е. угловой коэффициент касательной к интегральным
кривым y = ϕ(x, C), являющихся общим решением дифференциальногоуравнения.
Определение 60.11. Часть плоскости, каждой точке которой со-поставлен отрезок прямой так, что тангенс угла наклона его к оси Oxравен значению в данной точке правой части дифференциального урав-нения y′ = f(x, y), называется полем направлений данного дифференци-ального уравнения.
Следовательно, с геометрической точки зрения задача интегрирова-ния дифференциального уравнения заключается в нахождении кривых,направление касательных к которым совпадает с полем направлений всоответствующих точках.
Определение 60.12. Множество всех точек плоскости, в которыхполе имеет одно и то же направление, называется изоклиной уравнения.
Уравнение изоклины определяется следующим образом. В каждой точ-ке изоклины тангенс угла наклона отрезков поля имеют одно и то жефиксированное значение tgα = k. Так как, с другой стороны,
tgα = y′ = f(x, y),
то координаты каждой точки изоклины удовлетворяют уравнению:
f(x, y) = k.
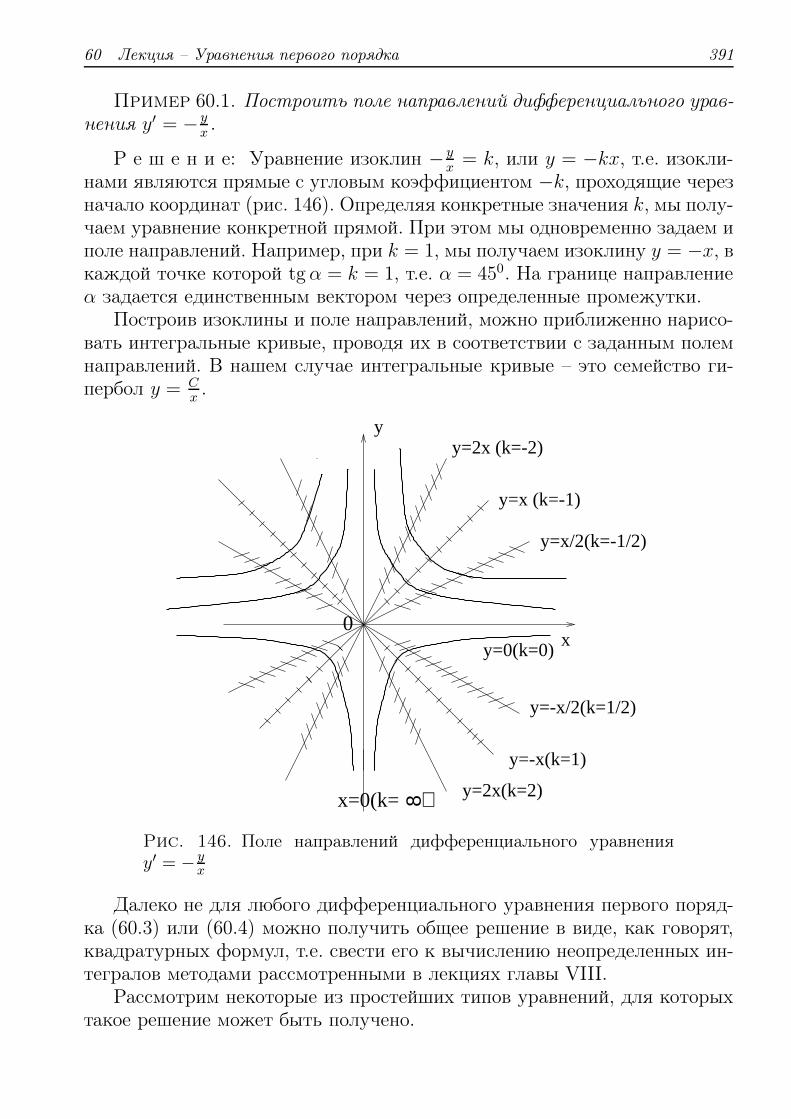
60 Лекция – Уравнения первого порядка 391
Пример 60.1. Построить поле направлений дифференциального урав-нения y′ = − y
x.
Р е ш е н и е: Уравнение изоклин − yx
= k, или y = −kx, т.е. изокли-нами являются прямые с угловым коэффициентом −k, проходящие черезначало координат (рис. 146). Определяя конкретные значения k, мы полу-чаем уравнение конкретной прямой. При этом мы одновременно задаем иполе направлений. Например, при k = 1, мы получаем изоклину y = −x, вкаждой точке которой tgα = k = 1, т.е. α = 450. На границе направлениеα задается единственным вектором через определенные промежутки.
Построив изоклины и поле направлений, можно приближенно нарисо-вать интегральные кривые, проводя их в соответствии с заданным полемнаправлений. В нашем случае интегральные кривые – это семейство ги-пербол y = C
x.
x
yy=2x (k=-2)
y=x (k=-1)
y=x/2(k=-1/2)
y=-x/2(k=1/2)
y=-x(k=1)
y=2x(k=2)
y=0(k=0)0
x=0(k= )8
Рис. 146. Поле направлений дифференциального уравненияy′ = − y
x
Далеко не для любого дифференциального уравнения первого поряд-ка (60.3) или (60.4) можно получить общее решение в виде, как говорят,квадратурных формул, т.е. свести его к вычислению неопределенных ин-тегралов методами рассмотренными в лекциях главы VIII.
Рассмотрим некоторые из простейших типов уравнений, для которыхтакое решение может быть получено.

392 60 Лекция – Уравнения первого порядка
60.5. Уравнения с разделяющимися переменными.
Определение 60.13. Дифференциальным уравнением первого поряд-ка с разделяющимися переменными называется уравнение, которое мож-но представить в виде
(60.7) y′ = f1(x) · f2(y),
т.е. правая часть этого уравнения представляет собой произведениедвух множителей, каждый из которых является функцией только од-ного аргумента.
Предположим, что f2(y) 6= 0. Тогда уравнение (60.7) можно переписатьв виде
(60.8)dy
f2(y)= f1(x)dx,
которое называется уравнением с разделенными переменными. Интегри-руя уравнение (60.8), получаем общее решение уравнения в виде квадра-тур: ∫
dy
f2(y)+ C1 =
∫
f1(x)dx+ C2,
или
(60.9)∫
dy
f2(y)=
∫
f1(x)dx+ C,
где C = C2 − C1 – произвольная постоянная.
Пример 60.2. Найти общее решение уравнения 2yy′ = 1 − 3x2
Р е ш е н и е: Очевидно, что данное уравнение допускает разделениепеременных:
2ydy = (1 − 3x2)dx.
Интегрируя обе части последнего равенства, найдем:∫
2ydy =
∫
(1 − 3x2)dx =⇒ y2 = x− x3 + C.
Пример 60.3. Найти частное решение уравнения y′ = − yx, при y(1)=2.
Р е ш е н и е: Разделив переменныеdy
y= −dx
x,
интегрируем и получаем:∫dy
y= −
∫dx
x⇒ ln |y| = − ln |x| + lnC1,
60 Лекция – Уравнения первого порядка 393
где произвольная постоянная C0 = lnC1. Воспользовавшись свойствомлогарифма, после операции потенцирования будем иметь общее решениев виде:
y =C
x, где C = ±C1.
Используя начальное условие y(1) = 2, находим 2 = C1, т.е. C = 2 и
искомое частное решение равно y = 2x.
При делении на y мы могли потерять решение y = 0, но последнеесодержится в формуле y = C
xпри C = 0.
Замечание 60.34. Некоторые дифференциальные уравнения мож-но привести к уравнениям с разделяющимися переменными. Например,уравнение y′ = f(ax+ by + c), (b 6= 0) приводится к виду уравнений с раз-деляющимися переменными при помощи замены u = ax + by + c, где u –новая искомая функция.
Пример 60.4. Найти общее решение уравнения y′ = (8x + 2y + 1)2.
Р е ш е н и е: Введем новую переменную u = 8x + 2y + 1, откуда
y =u− 1 − 8x
2, y′ =
u′
2− 4
и уравнение примет вид:u′
2− 4 = u2.
Найдем решение этого уравнения с разделяющимися переменными:
u′ = 2u2 + 8 =⇒ du
dx= 2(u2 + 4) =⇒ du
u2 + 4= 2dx =⇒
=⇒∫
du
u2 + 4= 2
∫
dx =⇒ 1
2arctg
u
2= 2x+ C1 =⇒
=⇒ arctgu
2= 4x + C =⇒ u
2= tg(4x + C) =⇒
=⇒ u = 2 tg(4x + C) =⇒ 8x + 2y + 1 = 2 tg(4x + C).
60.6. Однородные относительно аргумента x и функции y диф-ференциальные уравнения первого порядка.
Определение 60.14. Функция f(x, y) называется однородной функ-цией k-й степени, если при любом t, кроме может быть t = 0, имеетместо тождество
f(t · x, t · y) = tkf(x, y).
394 60 Лекция – Уравнения первого порядка
Например, функция f(x, y) = xy−y2 есть однородная функция второйстепени, так как
f(t · x, t · y) = t · x · t · y − t2y2 = t2(xy − y2) = t2f(x, y).
Определение 60.15. Дифференциальное уравнение первого порядкаy′ = f(x, y) называется однородным, если его можно представить в виде
(60.10) P (x, y)dx+Q(x, y)dy = 0,
где P (x, y) и Q(x, y) – однородные функции одной степени.
Однородное дифференциальное уравнение приводится к дифференци-альному уравнению с разделяющимися переменными подстановкой
(60.11) y = tx,
где t = yx
- новая неизвестная функция.
Пример 60.5. Найти общее решение уравнения
(x2 − 2y2)dx+ 2xydy = 0.
Р е ш е н и е: В данном уравнении функции P (x, y) = x2 − 2y2
и Q(x, y) = 2xy – однородные функции второй степени, следовательно,решаемые уравнения являются однородными. Положим y = tx, откудаdy = tdx + xdt. Подставим выражения для y и dy в исходное дифферен-циальное уравнение:
(x2 − 2(tx)2)dx+ 2xtx(tdx+ xdt) = 0 ⇒⇒ x2dx− 2t2x2dx+ 2t2x2dx+ 2tx3dt = 0 ⇒⇒ x2dx+ 2tx3dt = 0 ⇒ dx+ 2txdt = 0.
Разделим переменные в последнем уравнении и проинтегрируем:
2tdt = −dxx
⇒∫
2tdt = −∫dx
x⇒ t2 = − ln |x| + lnC1 ⇒
⇒ t2 = lnC1
|x| ⇒ x = Ce−t2
.
Возвращаясь к переменной y, находим общее решение:
x = Ce−y2
x2
Замечание 60.35. Если y′ = f(a1x+b1y+c1a2x+b2y+c2
) и ∆ =
∣∣∣∣
a1 b1a2 b2
∣∣∣∣6= 0, то,
полагая в уравнении x = u+α и y = v+ β, где постоянные α и β опреде-
ляются из решения системы уравнений
a1α+ b1β + c1 = 0a2α+ b2β + c2 = 0,
получим

60 Лекция – Уравнения первого порядка 395
однородное дифференциальное уравнение первого порядка относительнопеременных u и v. Если ∆ = 0, то, полагая в уравнении u = a1x + b1y,получим сразу уравнение с разделяющимися переменными.
Пример 60.6. Найти общее решение уравнения
(2x+ y + 1)dx + (x + 2y − 1)dy = 0.
Р е ш е н и е: После преобразований получим:
y′ =2x + y + 1
x+ 2y − 1.
Здесь:a1 = 2, b1 = 1, a2 = 1, b2 = 2.
Следовательно,
∆ =
∣∣∣∣
a1 b1a2 b2
∣∣∣∣=
∣∣∣∣
2 11 2
∣∣∣∣= 3 6= 0.
Тогда в соответствии с замечанием 60.35 введем новые переменные
x = u+ α, y = v + β,
где постоянные α и β определяются из решения системы уравнений
a1α+ b1β + c1 = 0,
a2α+ b2β + c2 = 0,=⇒
2α + β + 1 = 0,
α+ 2β − 1 = 0,=⇒
α = −1,
β = 1.
Таким образом,
x = u+ α = u− 1, y = v + β = v + 1, dx = du, dy = dv,
и исходное уравнение преобразуется к виду:
(2u+ v)du + (u+ 2v)dv = 0, илиdu
dv= −u+ 2v
2u+ v= − u/v + 2
2u/v + 1,
т.е. к виду однородного дифференциального уравнения относительно u иv:
du
dv= f
(u
v
)
.
Введем обозначение:
u
v= t =⇒ u = vt =⇒ du
dv= t+ v
dt
dv.
После подстановки в дифференциальное уравнение будем иметь:
t+ vdt
dv= − t+ 2
2t + 1=⇒ (2t+ 1)dt
t2 + t+ 1= −2
dv
v,

396 60 Лекция – Уравнения первого порядка
решая которое, найдем:
t2 + t+ 1 =c
v2.
Подставим обратно t = u/v и после преобразований найдем:
u2 + uv + v2 = c.
Наконец, возвращаясь к переменным x и y (u = x + 1, v = y − 1),после элементарных преобразований найдем общий интеграл исходногоуравнения:
x2 + y2 + xy + x− y = c1, где c1 = c− 1.
60.7. Линейные дифференциальные уравнения первого по-рядка.
Определение 60.16. Линейным дифференциальным уравнением пер-вого порядка называется уравнение, линейное относительно неизвест-ной функции и ее производной
(60.12) y′ + P (x)y = Q(x),
где P (x) и Q(x) - заданные непрерывные функции x.
Если в частном случае Q(x) ≡ 0, то уравнение (60.12) называетсялинейным уравнением без правой части или линейным однородным диф-ференциальным уравнением первого порядка.
ЕслиQ(x) не является тождественным нулем, то уравнение 60.12 назы-вается линейным неоднородным дифференциальным уравнением первогопорядка.
Рассмотрим самый распространенный метод решения линейных урав-нений – метод вариации произвольных постоянных, который мы будемиспользовать и при решении линейных уравнений высших порядков.
Метод вариации произвольной постоянной заключается в следующем.Процесс решения линейного дифференциального уравнения (60.12) раз-бивается на два этапа.
Первый этап: решение линейного однородного дифференциального урав-нения (Q(x) = 0), которое оставаясь линейным является также и уравне-нием с разделяющимися переменными:
dy
dx+ P (x)y = 0 ⇒ dy
y= −P (x)dx⇒
∫dy
y=
= −∫
P (x)dx⇒ ln |y| = −∫
P (x)dx+ lnC1.
60 Лекция – Уравнения первого порядка 397
Из последнего уравнения после операции потенцирования будем иметьрешение однородного уравнения
(60.13) y = ±C1e−
R
P (x)dx = Ce−R
P (x)dx = Cv(x),
где v(x) = e−R
P (x)dx – частное решение однородного уравнения при C = 1.Второй этап: будем искать общее решение исходного неоднородного
уравнения (Q(x) 6= 0) в виде (60.13), заменяя в этой формуле произ-вольную постоянную C на некоторую неопределенную дифференцируе-мую функцию Z(x), т.е. полагая
(60.14) y = Z(x)v(x).
Для того, чтобы функция (60.14) являлась решением уравнения (60.12),необходимо, чтобы она удовлетворяла этому уравнению.
Находим производную функции (60.14):
y′ = Z ′v + Zv′.(60.15)
Подставляя выражение для y (60.14) и y′ (60.15) в уравнение (60.12),получаем соотношение для определения неизвестной функции Z(x):
(60.16) Z ′v + Zv′ + P (x)Zv = Q(x) или Z ′v + Z(v′ + P (x)v) = Q(x).
Выбирая v таким, что
v′ + P (x)v = 0,
получим
Z ′v = Q(x), или Z(x) =
∫Q(x)
v(x)dx+ C.
Подставив найденное значение в (60.14) с учетом (60.13), получим об-щее решение линейного неоднородного уравнения (60.12) в виде:
y = Z(x) · v(x) =
(∫
(Q(x)eR
P (x)dx)dx+ C0
)
e−R
P (x)dx.
Естественно, нет необходимости запоминать выведенные формулы, таккак все они будут получаться автоматически при решении конкретногопримера.
Пример 60.7. Найти общее решение уравнения
y′ − 2x
1 + x2y = 2x.

398 60 Лекция – Уравнения первого порядка
Р е ш е н и е: Первый этап: найдем решение однородного уравнения(Q(x) ≡ 0). т.е. y′ − 2x
1+x2y = 0Это уравнение с разделяющимися переменными
dy
y=
xdx
1 + x2.
После интегрирования и элементарных преобразований будем иметь
(60.17) y = C(1 + x2).
Второй этап: будем искать общее решение неоднородного уравнения(Q(x) 6= 0) в виде:
(60.18) y = Z(x)(1 + x2).
Находим производную
y′ = Z ′(x)(1 + x2) + Z(x) · 2xи подставляем y и y′ в исходное уравнение:
Z ′(x)(1 + x2) + 2xZ(x) − 2x− Z(x)(1 + x2)
1 + x2= 2x
Выполним очевидные преобразования:
Z ′(x) =2x
1 + x2
Проинтегрируем последнее уравнение
(60.19) Z(x) =
∫2xdx
1 + x2= ln(1 + x2) + C0.
Для получения ответа подставим (60.19) в (60.18):
y =(ln(1 + x2) + C0
)(1 + x2)
60.8. Уравнение Бернулли.
Определение 60.17. Нелинейное уравнение вида
(60.20) y′ + P (x)y = Q(x)ym,
где m 6= 0, m 6= 1, называется уравнением Бернулли.
Уравнение Бернулли легко можно преобразовать в линейное уравне-ние типа (60.12), производя замену неизвестной функции при помощи под-становки
(60.21) Z = y1−m,

60 Практическое занятие – Уравнения первого порядка 399
в результате которой, исходное уравнение (60.20) преобразуется к виду
(60.22)1
1 −mZ ′ + P (x)Z = Q(x).
Пример 60.8. Привести уравнение Бернулли к линейному уравнениюс помощью замены переменной по формуле Z = y1−m.
Р е ш е н и е:
Z = y1−m =⇒ dZ
dx= (1 −m)y−m
dy
dx=⇒ dy
dx=
dZ/dx
(1 −m)y−m.
Подставим найденное выражение в уравнение (60.21):
y′ + P (x)y = Q(x)ym =⇒ dZ/dx
(1 −m)y−m+ P (x)y = Q(x)ym =⇒
=⇒ dZ
dx+ P (x) · (1 −m) · y1−m = Q(x) =⇒
=⇒ dZ
dx+ (1 −m) · P (x)Z = Q(x).
Последнее уравнение относится к линейным дифференциальным урав-нениям первого порядка. Оно может быть решено методом вариации про-извольной постоянной.
Замечание 60.36. При интегрировании конкретных уравнений Бер-нулли нет необходимости предварительно преобразовывать их в линей-ные, можно сразу применять метод вариации произвольной постоян-ной.
Конкретный пример такого решения уравнения Бернулли рассматри-вается ниже в практическом занятии.
60. практическое занятие –дифференциальные уравнения первого порядка
Пример 60.1. Проверить, является ли решением дифференциальногоуравнения y′′ + y = 0 функция y = sinx.
Р е ш е н и е: Определяем y′ = cos x и y′′ = − sinx, подставляемв уравнение =⇒ y′′ + y = − sinx + sinx = 0. Следовательно, y = sinxявляется решением уравнения y′′ + y = 0.
Пример 60.2. Методом изоклин построить поле интегральных кри-вых уравнения y′ = x.

400 60 Практическое занятие – Уравнения первого порядка
Р е ш е н и е: Построив изоклины x = k - семейство прямых линийи поле направлений y′ = k для значений k = 0, k = ±1, k = ±2 и т.д.,получим поле интегральных кривых (рис. 147).
x
y
-3 -2 -1 0 1 2 3
Рис. 147. Поле интегральных кривых уравнения y′ = x
Пример 60.3. Найти общее решение уравнения
(1 + x)ydx+ (1 − y)xdy = 0.
Р е ш е н и е: Разделим переменные:1 − y
ydy = −1 + x
xdx.
Проинтегрировав∫
1−yydy = −
∫1+xxdx, получим
ln |y| − y = − ln |x| − x + C или ln |xy| + x− y = C.
Последнее соотношение и есть общее решение дифференциального урав-нения (общий интеграл).
Пример 60.4. Найти частное решение уравнения y′ cosx = yln y
при
y(0) = 1.
Р е ш е н и е: Полагая y′ = dydx
, перепишем данное уравнение в видеcos x dy
dx= y
lnyи разделим переменные ln y
ydy = dx
cosx.
После интегрирования будем иметь:∫
ln y
ydy =
∫dx
cos x⇒∫
ln yd ln |y| =
∫dx
cos x⇒
1
2ln2 y = ln
∣∣∣tg(x
2+π
4
)∣∣∣+ C.

60 Практическое занятие – Уравнения первого порядка 401
Используя начальное условие y(0) = 1, находим:
1
2ln2 1 = ln
∣∣∣∣tg
(0
2+π
4
)∣∣∣∣+ C или C = 0.
Окончательно получим:1
2ln2 y = ln [tg (
x
2+π
4)].
Пример 60.5. Найти общее решение уравнения (y−x)·ydx+x2dy = 0.
Р е ш е н и е: Разделить переменные, как это удавалось в двух по-следних примерах, в данном примере не удается. Преобразуем уравнениек виду
dy
dx= y′ = −(y − x)y
x2.
Это однородное уравнение первого порядка, так как его правая частьподчиняется условию:
f(t · x, t · y) = −(ty − tx)ty
(tx)2= −t
2(y − x)y
t2x2= −(y − x)y
x2= f(x, y).
Для решения уравнения используем замену yx
= t, или y = tx. Тогдаy′ = t′x + t. Подставляем выражения для y и y′ в дифференциальноеуравнение:
y′ = − (y−x)yx2 ⇒ t′x+ t = − (tx−x)tx
x2 , или t′x+ t = −t2 + t, илиtx = −t2. Последнее уравнение является уравнением с разделяющимисяпеременными:
t′x = −t2 ⇒ dt
t2= −dx
x⇒∫
t−2dt = −∫dx
x⇒
1
t= ln |x| + ln |C| ⇒ 1
t= ln |Cx|
Подставляя t = yx, получим x
y= ln |Cx| ⇒ y = x
ln |Cx| .
Пример 60.6. Найти частное решение уравнения 2xyy′ = x2+y2, приy(1) = 2.
Р е ш е н и е: Записав данное уравнение в виде y′ = x2+y2
2xyлегко можно
убедиться, что оно однородное (f(x, y) = f(t ·x, t ·y)) как это было сделанов предыдущем примере. Положим y
x= t, или y = tx. Тогда y′ = t′x+ t.
Подставим выражения для y и y′ в дифференциальное уравнение
y′ =x2 + y2
2xy⇒ t′x+ t =
x2 + (tx)2
2x · tx , или t′x+ t =1
2t+t
2, или

402 60 Практическое занятие – Уравнения первого порядка
t′x =1
2t− t
2.
Последнее уравнение является уравнением с разделяющимися пере-менными:
t′x =1
2t− t
2⇒ t′x =
1 − t2
2t⇒ 2tdt
1 − t2=dx
x⇒ −d(1 − t2)
1 − t2=dx
x.
Интегрируя последнее уравнение получаем:
− ln |1 − t2| = ln |x| + ln |C|, или1
1 − t2= Cx.
Подставив вместо t = yx, получим
x2
x2 − y2= Cx, или
x
x2 − y2= C.
Используя начальное условие y(1) = 2, найдем из общего решения1
12−22 = C, или C = −13.
Окончательно частное решение запишем в виде xx2−y2 = −1
3, или
x2 − y2 + 3x = 0.
Пример 60.7. Найти общее решение уравнения y′ = yx
+ x2.
Р е ш е н и е: Данное уравнение является линейным. Для его решениявоспользуемся методом вариации произвольной постоянной.
Первый этап: решим линейное однородное уравнение y′ = yx. Интегри-
руя находим y = Cx.Второй этап: ищем общее решение исходного неоднородного уравнения
в видеy = Z(x) · x.
Найдем производную от этой функции y′ = Z ′(x)·x+Z(x) и подставимее вместе с функцией в исходное уравнение:
Z ′(x)x+ Z(x) = Z(x)·xx
+ x2, или Z ′(x) = x.
Решая последнее уравнение, будем иметь Z(x) = x2
2+ C0. Следова-
тельно, общее решение исходного дифференциального можно записать ввиде:
y = Z(x) · x = (x2
2+ C0) · x.
.
Пример 60.8. Найти общее решение уравнения y′ + yx
= x2y4.

60 Практическое занятие – Уравнения первого порядка 403
Р е ш е н и е: Это уравнение Бернулли. Проинтегрируем его методомвариации произвольной постоянной.
Первый этап: решаем однородное уравнение
y′ +y
x= 0 ⇒ dy
y= −dx
x⇒ y =
C
x.
Второй этап: ищем решение исходного уравнения Бернулли в виде
y =Z(x)
x.
Найдем y′ = Z′(x)x
− Z(x)x2 и подставим y′ и y в исходное уравнение:
Z ′(x)
x− Z(X)
X+Z(x)
x · x = x2(Z(x)
x)4 ⇒ Z ′(x)
x=Z4(x)
x2⇒
⇒ dZ(x)
Z4(x)=dx
x⇒ − 1
3Z3(x)= ln |x| − lnC ⇒ Z(x) = 3
√
1
3 ln (C/x).
Таким образом общее решение уравнения имеет вид:
y =Z(x)
x=
1
x 3√
3 lnC/x.
Самостоятельная работа
Пример 60.9. Проверить, являются ли решениями данных диффе-ренциальных уравнений указанные функции
a) xy′ = 2y, y = 5x2,
б) y′′ − 2y′ + y = 0, y = xex,
в) y′′ = x2 + y2, y =1
x.
Пример 60.10. Методом изоклин построить поле интегральных кри-вых уравнения y′ =
√
x2 + y2 и найти интегральную кривую, удовлетво-ряющую начальному условию y(0) = 0. (рис. 148)
Пример 60.11. Найти общее решение дифференциальных уравнений
a) y′ · tg x = y,
б)xdy
√
1 − y2+
ydx√1 − x2
= 0.
Пример 60.12. Найти частное решение уравнения (1 + ex) · y · y′ = ex
при y(0) = 1.

404 60 Практическое занятие – Уравнения первого порядка
y
x1 2 3
Рис. 148. Поле интегральных кривых уравнения y′ =√
x2 + y2
Пример 60.13. Найти общее решение уравнения
а) y′ = −x + y
x,
б) xy + y2 = (2x2 + xy)y′.
Пример 60.14. Найти частное решение уравнения (x2 − 3y2)dx++ 2xydy = 0 при y(2) = 1.
Пример 60.15. Найти общее решение уравнения y′ + 2yx
= x3.
Пример 60.16. Найти частное решение уравнения y′− 2y1+x
= (1+x)3,при y(0) = 0.
Пример 60.17. Найти частное решение уравнения y′ − y tg x = 1cosx
,при y(0) = 0.
Пример 60.18. Найти общее решение уравнения y′ + yx
= −xy2.

61 Лекция – Уравнения первого и второго порядков 405
61. лекция –дифференциальные уравнения
первого и второго порядков
Уравнение в полных дифференциалах. Интегрирующий множитель.Дифференциальные уравнения второго порядка. Теорема существо-вания и единственности решения (теорема Коши). Задача Кошии краевая задача. Дифференциальные уравнения второго порядка,допускающие понижение порядка.
61.1. Уравнение в полных дифференциалах.
Определение 61.1. Уравнение
(61.1) P (x, y)dx+Q(x, y)dy = 0
называется уравнением в полных дифференциалах, если P (x, y) и Q(x, y)– непрерывные, дифференцируемые функции, для которых выполняетсясоотношение
(61.2)∂P
∂y=∂Q
∂x,
причем ∂P∂y
и ∂Q∂x
непрерывны в некоторой области G.
Это значит, что левая часть уравнения (61.1) является полным диф-ференциалом некоторой функции U(x, y), т.е.
(61.3) dU(x, y) = P (x, y)dx+Q(x, y)dy =∂U
∂xdx+
∂U
∂ydy.
Из уравнения (61.3) следует , что
(61.4) P (x, y) =∂U
∂x, Q(x, y) =
∂U
∂y.
постоянная. Продифференцируем первое равенство по y , а второе по x:
∂P
∂y=
∂2U
∂x∂y,
∂Q
∂x=
∂2U
∂y∂x.
С учетом равенства смешанных частных производных второго поряд-ка ∂2U
∂x∂y= ∂2U
∂y∂x, имеем равенство ∂P
∂y= ∂Q
∂x, которое является необходимым
и достаточным условием того, чтобы левая часть уравнения (61.1) былаполным дифференциалом.
Уравнение (61.1) можно записать в виде dU(x, y) = 0. Общим решени-ем последнего уравнения является равенство
(61.5) U(x, y) = C.

406 61 Лекция – Уравнения первого и второго порядков
Решение это можно получить следующим способом. Из соотношения∂U∂x
= P (x, y) находим
(61.6) U =
x∫
x0
P (x, y)dx+ ϕ(y),
При интегрировании по x мы считаем y постоянным, поэтому произволь-ная интегрирования может зависеть от y.
Подберем функцию ϕ(y) так, чтобы выполнялось второе из соотноше-ний (61.4). Для этого продифференцируем обе части (61.6) по y и резуль-тат приравняем к Q(x, y):
∂U
∂y=
x∫
x0
∂P
∂ydx+ ϕ′(y) = Q(x, y),
но так как ∂P∂y
= ∂Q∂x
, можно записать:
x∫
x0
∂Q
∂xdx+ ϕ′(y) = Q(x, y)
Q(x, y) −Q(x0, y) + ϕ′(y) = Q(x, y), ϕ′(y) = Q(x0, y).
Отсюда найдем функцию ϕ(y) в виде:
ϕ(y) =
y∫
y0
Q(x0, y)dy + C1.
Таким образом, функция U(x, y) будет иметь вид:
U =
x∫
x0
P (x, y)dx+
y∫
y0
Q(x0, y)dy + C1
и согласно (61.5) получим общий интеграл уравнения (61.1):x∫
x0
P (x, y)dx+
y∫
y0
Q(x0, y)dy = C.
Здесь P (x0, y0) – произвольная фиксированная точка области G.
Замечание 61.37. x0 и y0 могут быть равными нулю, если P (x, y) иQ(x, y) не имеют при этом особенностей.

61 Лекция – Уравнения первого и второго порядков 407
Пример 61.1. Найти общий интеграл дифференциального уравнения
(3x2 + 6xy2)dx+ (6x2y + 4y3)dy = 0.
Р е ш е н и е: Очевидно, что это уравнение в полных дифференциалах,так как
P (x, y) = 3x2 + 6xy2, Q(x, y) = 6x2y + 4y3,
∂P
∂y= 12xy =
∂Q
∂x= 12xy.
Так как в этом случае
∂U
∂x= P (x, y) = 3x2 + 6xy2, то
U =
x∫
0
(3x2 + 6xy2)dx + ϕ(y) = x3 + 3x2y2 + ϕ(y).
Дифференцируя U по y и принимая во внимание, что ∂U∂y
= Q(x, y),найдем
∂U
∂y= 6x2y + ϕ′(y) = Q(x, y) = 6x2y + 4y3.
Отсюда ϕ′(y) = 4y3, или ϕ(y) =∫
4y3dy + C0 = y4 + C0.Окончательно получим
U(x, y) = x3 + 3x2y2 + y4 + C0.
Следовательно, x3 + 3x2y2 + y4 = C есть искомый общий интегралданного уравнения.
61.2. Интегрирующий множитель. Если левая частьуравнения (61.1) не является полным дифференциалом, но выполняются усло-вия теоремы Коши, то существует функция µ = µ(x, y) (интегрирующий мно-житель) такая, что
(61.7) µ(x, y)(P (x, y)dx+Q(x, y)dy) = dU.
Отсюда получим, что функция µ удовлетворяет условию
(61.8)∂
∂y(µP (x, y)) =
∂
∂x(µQ(x, y)),
откуда
Q∂µ
∂x− P
∂µ
∂y= µ
(∂P
∂y− ∂Q
∂x
)
.
Это уравнение с частными производными и определить его решение в общемслучае не представляется возможным.
Однако интегрирующий множитель легко определяется в двух следующихслучаях:

408 61 Лекция – Уравнения первого и второго порядков
1)µ = µ(x) и из (61.8) следует:
(61.9)1
Q
(∂P
∂y− ∂Q
∂x
)
= F (x),
тогда µ = eR
F (x)dx.2)µ = µ(y)
(61.10)1
P
(∂P
∂y− ∂Q
∂x
)
= F1(y),
тогда µ = e−R
F1(y)dy.
Пример 61.2. Найти общий интеграл уравнения
(x cos y − y sin y)dy + (x sin y + y cos y)dx = 0.
Р е ш е н и е:
P (x, y) = x sin y + y cos y,Q(x, y) = x cos y − y sin y,
∂P
∂y= x cos y + cos y − y sin y,
∂Q
∂x= cos y,
∂P
∂y6= ∂Q
∂x.
Попробуем ввести интегрирующий множитель. Для этого определяем зна-чения выражений (61.9) и (61.10). В нашем случае
1
Q(∂P
∂y− ∂Q
∂x) =
x cos y + cos y − y sin y − cos y
x cos y − y sin y=
=x cos y − y sin y
x cos y − y sin y= 1.
Следовательно, исходное выражение имеет интегрирующий множитель, за-висящий только от x (61.9). Найдем этот интегрирующий множитель
µ = eR
F (x)dx = eR
1dx = ex.
Умножая исходное уравнение на µ = ex, получим уравнение
(61.11) ex(x cos y − y sin y)dy + ex(x sin y + y cos y)dx = 0,
которое уже является уравнением в полных дифференциалах, так как:
P1(x, y) = ex(x sin y + y cos y), Q1(x, y) = ex(x cos y − y sin y),
∂P1
∂y= ex(x cos y + cos y − y sin y),
∂Q1
∂x= ex(x cos y − y sin y + cos y),
следовательно, ∂P1∂y ≡ ∂Q1
∂x .
61 Лекция – Уравнения первого и второго порядков 409
Решим уравнение (61.11). Имеем
∂U
∂y= Q1(x, y) = ex(x cos y − y sin y),
∂U
∂x= P1(x, y) = ex(x sin y + y cos y).
Интегрируя первое из этих равенств по y, находим
(61.12) U =
∫
ex(x cos y − y sin y)dy + ϕ(x) =
xex sin y + exy cos y − ex sin y + ϕ(x).
Найдем от полученной функции U производную по x :
∂U
∂x= ex sin y + xex sin y − ex sin y + exy cos y + ϕ′(x) =
= ex(x sin y + y cos y) + ϕ′(x).
Так как ∂U∂x = P1(x, y), имеем
ex(x sin y + y cos y) + ϕ′(x) = ex(x sin y + y cos y),
откуда ϕ′(x) = 0, т.е. ϕ(x) = C1. Следовательно, общий интеграл исходногоуравнения имеет вид (61.12)
U(x, y) = xex sin y + exy cos y − ex sin y = C, или
ex · (x sin y + y cos y − sin y) = C.
61.3. Дифференциальные уравнения второго порядка.
Определение 61.2. Уравнение, связывающее независимую перемен-ную, искомую функцию, ее первую производную и вторую производную,называется дифференциальным уравнением второго порядка.
(61.13) F (x, y, y′, y′′) = 0.
Если это возможно, то в виде, разрешенном относительно старшейпроизводной, уравнение можно записать как
(61.14) y′′ = f(x, y, y′).
Определение 61.3. Общим решением уравнения (61.13), или (61.14),называется функция y = ϕ(x, C1, C2), содержащая две произвольные по-стоянные C1 и C2 и удовлетворяющая условиям:
1)при любых постоянных C1 и C2 функция y = ϕ(x, C1, C2) являетсярешением уравнения;

410 61 Лекция – Уравнения первого и второго порядков
2)каковы бы ни были начальные условия y(x0) = y0, y′(x0) = y′0, суще-
ствуют единственные значения C10 и C20 такие, что функция y == ϕ(x, C10, C20) является решением уравнения и удовлетворяет этимначальным условиям.
Геометрически общее решение представляет бесконечное множествокривых. Для выделения из этого множества какой-либо одной необходи-мо, кроме координат точки (x0, y0), через которую эти кривые проходят,дополнительно, задать еще одно условие, например, угловой коэффици-ент касательной, т.е. значение производной y′ в этой точке.
Определение 61.4. Частным решением уравнения (61.13), или (61.14),называется всякое решение y = ϕ(x, C10, C20), получающееся из обще-го решения y = ϕ(x, C1, C2) при фиксированных значениях C1 = C10 иC2 = C20.
Замечание 61.38. 1) Соотношение вида Φ(x, y, C1, C2), неявно опре-деляющее общее решение, называется общим интегралом дифференци-ального уравнения.
2) График частного решения называется интегральной кривой дан-ного дифференциального уравнения.
61.4. Теорема существования и единственности решения (те-орема Коши).
Теорема 61.1. Если правая часть f(x, y, y′) уравнения y′′ = f(x, y, y′)и ее частные производные f ′
y(x, y, y′) и f ′
y′(x, y, y′) определены и непре-
рывны в некоторой области G переменных x,y и y′, то какова бы ни бы-ла внутренняя точка (x0, y0, y
′0) этой области, существует и притом
единственное решение y = ϕ(x), удовлетворяющее начальным условиямy(x0) = y0 и y′(x0) = y′0.
Теорема приводиться без доказательства.
61.5. Задача Коши и краевая задача. Итак, для получения част-ного решения дифференциального уравнения второго порядка необходи-мо задать два дополнительных условия. В зависимости от способа зада-ния этих дополнительных условий существует два различных типа задач:задача Коши и краевая задача. В качестве дополнительных условий мо-гут задаваться значения искомой функции и ее производной в некоторыхточках исследуемой области.
Если эти условия задаются в одной точке, то мы имеем дело с задачейКоши. Дополнительные условия в задаче Коши называются начальными
61 Лекция – Уравнения первого и второго порядков 411
условиями , а точка x = x0, в которой они задаются – начальной точкой.Математическая формулировка задачи Коши имеет вид:
(61.15)
y′′ = f(x, y, y′),y(x0) = y0,y′(x0) = y′0.
Если же дополнительные условия задаются в более чем одной точке, тотакая задача называется краевой. Сами дополнительные условия называ-ются при этом граничными или краевыми условиями. На практике обыч-но граничные условия задаются в двух точках x = a и x = b, являющихсяграницами области решения дифференциального уравнения. Математи-ческая формулировка краевой задачи имеет вид:
(61.16)
y′′ = f(x, y, y′),y(a) = ya,y(b) = yb.
Теоремы, подобной теореме Коши для этого случая не существует, и взависимости граничных условий задача может иметь единственное реше-ние, может иметь бесчисленное множество решений или вообще не иметьрешения.
Например, общим решением уравнения y′′ + y = 0 является функция(это легко проверить непосредственной подстановкой)
y = A sinx +B cosx.
Рассмотрим три случая задания дополнительных условий:1) y(0) = y(π) = 0; в этом случае из условия y(0) = 0 находим B =
= 0, следовательно, y = A sinx и при втором условии y(π) = 0 получаембесчисленное множество решений (рис.149).
2) y(0) = 0, y(b) = 1; 0 < b < π; в этом случае существует единствен-ное решение sinx
sin b(рис. 150).
3) y(0) = 0, y(π) = 1; в этом случае решений нет, так как не существуетсинусоиды, проходящей через точки (0, 0) и (π, 1).
61.6. Дифференциальные уравнения второго порядка, допус-кающие понижение порядка. Рассмотрим некоторые типы дифферен-циальных уравнений второго порядка, которые с помощью замены пере-менной приводятся к уравнениям первого порядка. Такое преобразованиеуравнения называется понижением порядка.
1. Уравнение не содержит y и y′:
(61.17) y′′ = f(x).
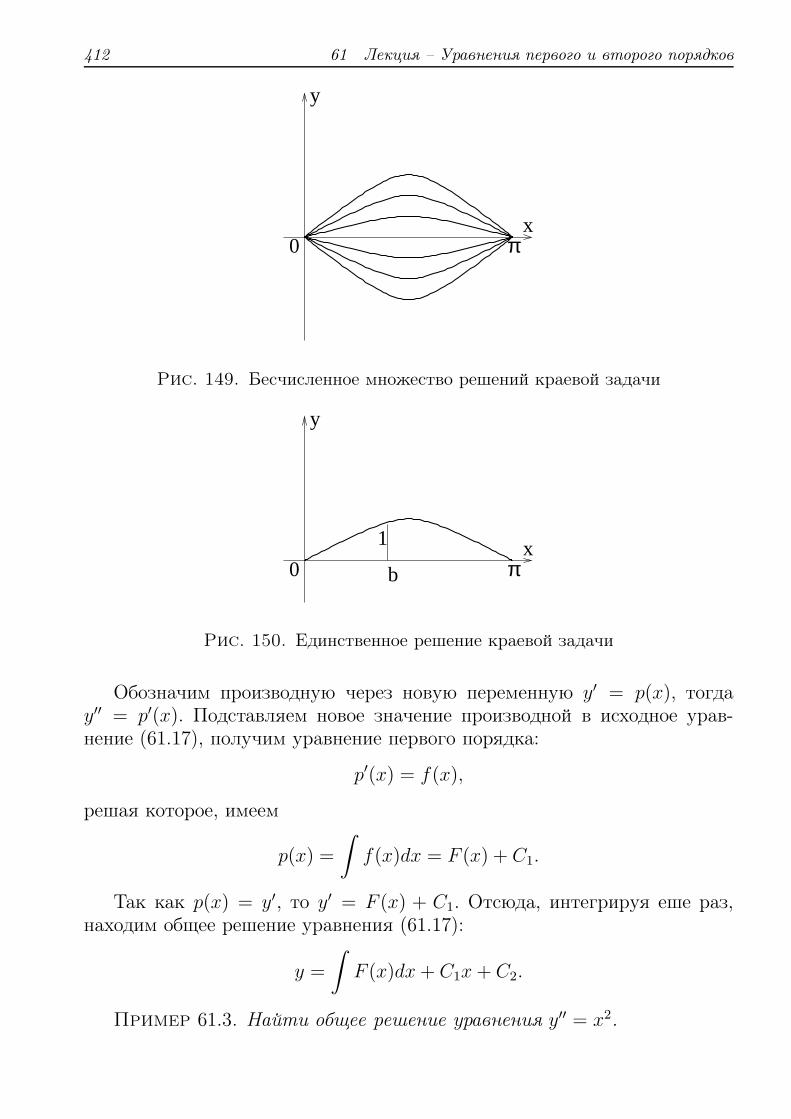
412 61 Лекция – Уравнения первого и второго порядков
x
y
0 π
Рис. 149. Бесчисленное множество решений краевой задачи
x
y
0 πb
1
Рис. 150. Единственное решение краевой задачи
Обозначим производную через новую переменную y′ = p(x), тогдаy′′ = p′(x). Подставляем новое значение производной в исходное урав-нение (61.17), получим уравнение первого порядка:
p′(x) = f(x),
решая которое, имеем
p(x) =
∫
f(x)dx = F (x) + C1.
Так как p(x) = y′, то y′ = F (x) + C1. Отсюда, интегрируя еше раз,находим общее решение уравнения (61.17):
y =
∫
F (x)dx+ C1x + C2.
Пример 61.3. Найти общее решение уравнения y′′ = x2.

61 Лекция – Уравнения первого и второго порядков 413
Р е ш е н и е: Полагая y′ = p(x), получаем y′′ = p′(x) и следовательно,необходимо решить уравнение первого порядка
p′(x) = x2.
Решение этого уравнения p(x) =∫x2dx = x3
3+ C1. Заменяя p(x) на y′
и интегрируя еще раз, находим общее решение уравнения:
y =
∫ (x3
3+ C1
)
dx =x4
12+ C1x+ C2.
2. Уравнение не содержит явным образом искомую функцию y:
(61.18) y′′ = f(x, y′).
Вводя, как и предыдущем случае, новую функцию y′ = p(x) и заме-чая, что y′′ = p′(x), получаем уравнение первого порядка, относительнофункции p(x):
p′(x) = f(x, p(x)).
Проинтегрировав это уравнение, находим его общее решение:
p = p(x, C1),
а затем из соотношения y′ = p(x) получаем общий интеграл уравнения(61.18)
y =
∫
p(x, C1)dx+ C2.
Пример 61.4. Найти частное решение уравнения
y′′ =2xy′
1 + x2при y(1) = 0, y′(1) = 1.
Р е ш е н и е: Положим y′ = p(x), y′′ = p′(x). Получим уравнениепервого порядка
p′(x) =2xp
1 + x2.
Разделим переменные и проинтегрируем∫dp
p=
∫2xdx
1 + x2⇒ ln |p| = ln (1 + x2) + lnC1.
Потенцируя, находим
p(x) = C1(1 + x2).

414 61 Лекция – Уравнения первого и второго порядков
Так как p(x) = y′, то y′ = C1(1+x2). Интегрируя последнее уравнение,получаем общее решение исходного дифференциального уравнения
y = C1
(
x+x3
3
)
+ C2.
Используя дополнительные начальные условия, получим систему издвух уравнений и найдем частное решение
y(1) = 0 ⇒y′(1) = 1 ⇒
C1(1 + 1
3) + C2 = 0
C1(1 + 1) = 1⇒
43C1 + C2 = 0C1 = 1
2
⇒
⇒C2 = −2
3C1 = 1
2.
Следовательно, частное решение имеет вид
y =x3
6+x
2− 2
3.
3. Уравнение не содержит явным образом независимую переменную x:
(61.19) y′′ = f(y, y′).
Для понижения порядка уравнения введем новую функцию p(y), за-висящую от переменной y, полагая y′ = p(y). Дифференцируем последнееравенство по x, учитывая, что y является функцией от x:
y′′ =d(y′)
dx=dp(y)
dx=dp(y)
dy· dydx.
Так как dydx
= y′ = p(y), то окончательно
y′′ =dp(y)
dy· p(y).
Подставляя выражение для y′ и y′′ в исходное уравнение (61.19), по-лучаем уравнение первого порядка относительно функции p(y):
dp
dy· p = f(y, p).
Интегрируя это уравнение можно найти:
p = p(y, C1).

61 Лекция – Уравнения первого и второго порядков 415
Подставляя значение p в уравнение y′ = p(y), получим дифференци-альное уравнение первого порядка для функции y от x:
y′ = p(y, C1).
Разделяя переменные и интегрируя, получим общий интеграл исход-ного уравнения
Φ(x, y, C1, C2) = 0.
Пример 61.5. Найти общее решение уравнения yy′′ = y′2.
Р е ш е н и е: Введем новую переменную y′ = p(y), тогда y′′ = pdpdy
, инаше уравнение преобразуется к виду:
ypdp
dy= p2.
Предположив, что p 6= 0, сократим это уравнение на p, разделим пере-менные dp
p= dy
yи проинтегрируем:
ln |p| = ln |y| + lnC0 ⇒ p = C1y.
Поскольку y′ = p(y) мы имеем уравнение
y′ = C1y.
Решая это уравнение, найдем:
dy
y= C1dx⇒ ln |y| = C1x+ lnC2 ⇒ y = C2e
C1x.
Уравнение p = 0 содержится в полученном общем решении при C1 = 0и C2 = 0.
4.Уравнение F (x, y, y′, y′′) = 0, где функция F (x, y, y′, y′′) однороднаяотносительно y, y′, y′′ допускает понижение порядка при введении новойфункции z = y′/y или при замене y = e
R
z dx.
Пример 61.6. Найти общее решение уравнения yy′′ − (y′)2 = 0.
Р е ш е н и е: Выражение yy′′ − (y′)2 является однородной функ-цией второго порядка относительно y, y′ и y′′. Действительно, заменяяy на λy, y′ на λy′, y′′ на λy′′, получим λ2(yy′′ − (y′)2).
Делая замену переменной:
z =y′
y=⇒ dz
dx=yy′′ − (y′)2
y2,
получимdz
dx= 0 =⇒ z = C1 и
y′
y= 0,
416 61 Практическое занятие – уравнения 1-го и 2-го порядков
откудаln |y| = C1x+ C2 или y = CeC1x, где lnC = C2.
61. практическое занятие –дифференциальные уравнения
первого и второго порядков
Пример 61.1. Найти общее решение уравнения2xy3dx+ y2−3x2
y4dy = 0.
Р е ш е н и е: Здесь
P (x, y) =2x
y3, Q(x, y) =
y2 − 3x2
y4,
∂P
∂y=
−6x
y4=∂Q
∂x=
−6x
y4.
Таким образом мы имеем дело с уравнением в полных дифференциа-лах.
Так как ∂U∂x
= P (x, y) = 2xy3
, то
U =
x∫
0
P (x, y)dx+ ϕ(y) =
x∫
0
2x
y3dx + ϕ(y) =
x2
y3+ ϕ(y).
Продифференцируем последнее соотношение по y и, помня, что∂U∂y
= Q(x, y) = y2−3x2
y4, получим:
∂U
∂y= −3x2
y4+ ϕ′(y) =
y2 − 3x2
y4.
После элементарных преобразований имеем:
ϕ′(y) =1
y2⇒ ϕ(y) = −1
y+ C1.
Таким образом U = x2
y3+ ϕ(y) = x2
y3− 1
y+ C1 и общее решение можно
записать в виде U = C:
x2
y3− 1
y+ C1 = C2 или
x2
y3− 1
y= C.
Пример 61.2. Найти общее решение уравнения
(2xy + x2y +y3
3)dx+ (x2 + y2)dy = 0.

61 Практическое занятие – уравнения 1-го и 2-го порядков 417
Р е ш е н и е: Здесь
P (x, y) = 2xy + x2y +y3
3, Q(x, y) = x2 + y2,
∂P
∂y= 2x + x2 + y2;
∂Q
∂x= 2x.
Условие∂P
∂y=∂Q
∂xне выполняется. Попробуем искать решения с помощью интегрирующегомножителя.
Вычислим значения двух соотношений:
1)1
Q
(∂P
∂y− ∂Q
∂x
)
=2x+ x2 + y2 − 2x
x2 + y2= 1 =⇒ µ = µ(x),
2)1
P
(∂P
∂y− ∂Q
∂x
)
=2x+ x2 + y2 − 2x
2xy + x2y + y3
3
= ϕ(x, y).
Так как µ = µ(x) из первого соотношения, то (61.9)
µ(x) = eR
F (x)dx = eR
1dx = ex.
Умножим исходное уравнение на ex:
ex(2xy + x2y +y3
3)dx+ ex(x2 + y2)dy = 0.
Проверкой нетрудно установить, что для этого уравнения ∂P∂y
= ∂Q∂x
и,следовательно, это уравнение в полных дифференциалах.
Так как∂U
∂x= P (x, y) = ex(2xy + x2y +
y3
3), то
U =
x∫
0
P (x, y)dx+ ϕ(y) =
x∫
0
ex(2xy + x2y +y3
3)dx + ϕ(y).
Проинтегрируем по частям два раза:∫
ex(2xy + x2y +y3
3)dx =
∣∣∣∣
u = 2xy + x2y + y3
3, du = (2y + 2xy)dx,
dv = exdx, v = ex.
∣∣∣∣

418 61 Практическое занятие – уравнения 1-го и 2-го порядков
= ex(2xy + x2y +y3
3) −
∫
ex(2y + 2xy)dx =∣∣∣∣
u = 2y + 2xy, du = 2ydx,dv = exdx, v = ex.
∣∣∣∣
= ex(2xy + x2y +y3
3) − ex(2y + 2xy) +
∫
ex2ydx =
= ex[2xy + x2y +y3
3− 2y − 2xy + 2y] = ex(x2y +
y3
3).
Таким образом U = ex(x2y + y3
3) + ϕ(y).
Продифференцируем последнее соотношение по y и, помня , что
∂U
∂y= Q(x, y) = ex(x2 + y2), получим :
∂U
∂y= ex(x2 + y2) + ϕ′(y) = (x2 + y2)ex ⇒ ϕ′(y) = 0 ⇒ ϕ(y) = C1.
С учетом этого U = ex(x2y + y3
3) + C1 = C2. Следовательно, оконча-
тельно общее решение(общий интеграл) имеет вид:
ex(x2y +y3
3) = C.
Пример 61.3. Найти общее решение уравнения y′′ = 1x.
Р е ш е н и е: Данное уравнение соответствует типу y′′ = f(x), следова-тельно, можно применить замену переменной y′ = p(x), тогда y′′ = p′(x),и исходное уравнение можно переписать в виде
p′ =1
x.
Это дифференциальное уравнение первого порядка с разделяющимисяпеременными. Решим его:
p′ =1
x⇒ dp
dx=
1
x⇒ dp =
dx
x⇒∫
dp =
=
∫dx
x⇒ p = ln |x| + lnC0 ⇒ p = ln(C1x).

61 Практическое занятие – уравнения 1-го и 2-го порядков 419
Переходя к старой переменной y(y′ = p(x)), решим уравнение y′ =ln(C1x):
y′ = ln(C1x) ⇒dy
dx= ln(C1x) ⇒ dy = ln(C1x)dx⇒
∫
dy =
=
∫
ln(C1x)dx ⇒ y =
∫
ln(C1x)dx.
Последний интеграл проинтегрируем по частям
y =
∣∣∣∣
u = ln (C1x), du = 1xdx,
dv = dx, v = x.
∣∣∣∣=
∫
ln (C1x)dx =
= x · ln (C1x) −∫
x1
xdx = x · ln (C1x) − x+ C2 =
= x(lnC1 + ln |x|) − x+ C2 = x · ln |x| + C · x+ C2,
где C = lnC1 − 1.
Следовательно, общим решением данного уравнения является функ-ция
y = x · ln |x| + C · x+ C2.
Пример 61.4. Найти частное решение уравненияy′′ = 1
a
√
1 + (y′)2, при y(0) = a, y′(0) = 0.
Р е ш е н и е: данное уравнение относиться к типу y′′ = f(y′), следо-вательно, используем замену y′ = p(x), а y′′ = p′(x):
p′ =1
a
√
1 + p2.
Разделяя переменные, будем иметь
dp√
1 + p2=dx
a,
откуда
ln (p+√
1 + p2) =x
a+ C1 или
p+√
1 + p2 = exa+C1 .
Решим последнее уравнение. Для этого выделим корень квадратныйв левой части √
1 + p2 = exa+C1 − p.
Возведем в квадрат левую и правую части (оба выражения неотрица-тельны):
1 + p2 = (exa+C1)2 − 2pe
xa+C1 + p2,

420 61 Практическое занятие – уравнения 1-го и 2-го порядков
проведем сокращения
1 = (exa+C1)2 − 2pe
xa+C1
и разрешим уравнение относительно p:
p =1
2(e
xa+C1 − e−(x
a+C1)).
Так как y′ = p(x), решим уравнение относительно y
y =1
2
∫
[exa+C1 − e−(x
a+C1)]dx =
a
2(e
xa+C1 + e−(x
a+C1)) + C2.
Найдем частное решение, удовлетворяющее начальным условиям:
y(0) = a⇒y′(0) = 0 ⇒
a2(eC1 + e−C1) + C2 = a,
12(eC1 − e−C1) = 0.
Из второго уравнения системы следует, что eC1 = e−C1 , т.е. C1 = 0.Тогда из первого уравнения получаем, что C2 = 0. Окончательно частноерешение получим в виде
y =a
2(e
xa + e−
xa ).
Пример 61.5. Найти частное решение уравнения yy′′ + y′2 = y′3, приy(0) = 1, y′(0) = 1.
Р е ш е н и е: Данное дифференциальное уравнение относится к ти-пу y′′ = f(y, y′), т.е. в явном виде отсутствует независимая переменная.Следовательно, здесь следует использовать для понижения порядка урав-нения замены y′ = p(y) и y′′ = pdp
dy. С учетом этих замен уравнение преоб-
разуется к виду:
ypdp
dy+ p2 = p3,
или, предполагая, что p 6= 0, после сокращения на p:
ydp
dy= p2 − p.
Это уравнение с разделяющимися переменными
(61.1)dp
p2 − p=dy
y.
При интегрировании левой части уравнения (61.1) следует использо-вать прием разложения правильной дроби на простейшие:
1
p2 − p=
1
p · (p− 1)=A
p+
B
p− 1=A(p− 1) + B · p
p · (p− 1).

61 Практическое занятие – уравнения 1-го и 2-го порядков 421
Первая и последняя дроби равны, равны их знаменатели, следователь-но, равны и числители, т.е.:
A(p− 1) +B · p = 1,
откуда при p = 1, получаем B = 1,а при p = 0 −A = −1.Таким образом
1
p2 − p= −1
p+
1
p− 1и
∫dp
p2 − p= −
∫dp
p+
∫dp
p− 1= − ln |p| + ln |p− 1| − lnC1.
Воспользовавшись свойством логарифмов, с учетом правой части урав-нения (61.1), будем иметь:
p− 1
p= C1y.
Перейдем от переменной p к переменной y(y′ = p):
y′ − 1
y′= C1y ⇒ 1 − 1
y′= C1y ⇒ 1
y′= 1 − C1y ⇒ y′ =
1
1 − C1y.
Последнее уравнение является дифференциальным уравнением пер-вого порядка с разделяющимися переменными. Решим это уравнение:
(1 − C1y)dy = dx⇒∫
(1 − C1y)dy =
∫
dx⇒ y − C1
2y2 = x+ C2.
Используя начальные условия, найдем C1 и C2 :
y(0) = 1 ⇒y′(0) = 1 ⇒
1 − C1
2= C2,
1 = 11−C1
.
Из второго уравнения системы C1 = 0. С учетом этого, из первогоуравнения C2 = 1.
Окончательно частное решение исходного уравнения при заданных на-чальных условиях запишем в виде:
y = x+ 1.
при p = 0 → y′ = 0 → y = C, это решение отсутствует в полученномвыше общем решении.
Самостоятельная работа
Пример 61.6. Найти общее решение уравнения (x+y)dx+(x+2y)dy = 0.

422 62 Лекция – Линейные уравнения второго порядка
Пример 61.7. Найти общее решение уравнения
(x+ sin y)dx+ (x cos y + sin y)dy = 0.
Пример 61.8. Найти общее решение уравнения (интегрирующий мно-житель) (x+ y2)dx− 2xydy = 0.
Пример 61.9. Найти общее решение уравнения y′′ = sinx.
Пример 61.10. Найти частное решение уравнения y′′ = xe−x, приy(0) = 1, y′(0) = 0.
Пример 61.11. Найти общее решение уравнения xy′′ + y′ = 0.
Пример 61.12. Найти частное решение уравнения xy′′ − y′ = x2ex,при y(0) = −1, y′(0) = 0.
Пример 61.13. Найти общее решение уравнения yy′′ − y′2 = y2 ln y.
Пример 61.14. Найти частное решение уравнения y′′ = y′2 − y, приy(1) = −1
4, y′(1) = 1
2.
62. лекция –линейные дифференциальные уравнения
второго порядка
Линейные дифференциальные уравнения второго порядка. Свой-ства решений линейного однородного дифференциального уравне-ния второго порядка. Линейные однородные дифференциальныеуравнения второго порядка с постоянными коэффициентами.
62.1. Линейные дифференциальные уравнения второго по-рядка.
Определение 62.1. Линейным дифференциальным уравнением вто-рого порядка называется уравнение вида
(62.1) a0(x)y′′ + a1(x)y
′ + a2(x)y = f(x).
Eсли f(x) = 0, то линейное уравнение принимает вид
(62.2) a0(x)y′′ + a1(x)y
′ + a2(x)y = 0
и называется однородным линейным дифференциальным уравнением вто-рого порядка (или уравнением без правой части). Если же f(x) 6= 0, тоуравнение (62.1) называется неоднородным.
62 Лекция – Линейные уравнения второго порядка 423
Разрешим уравнение (62.1) относительно старшей производной y′′:
(62.3) y′′ =f(x) − a1(x)y
′ − a2(x)y
a0(x).
Так как это уравнение является частным случаем дифференциальногоуравнения второго порядка y′′ = f(x, y, y′), то для него справедлива тео-рема существования и единственности решения (теорема Коши), сформу-лированная в предыдущей лекции. Однако для линейного уравнения этатеорема может быть сформулирована проще.
Действительно, если коэффициенты уравнения a0(x), a1(x), a2(x) исвободный член f(x) непрерывны в некотором интервале (a, b), причемкоэффициент a0(x) не обращается в нуль ни в одной точке этого интер-вала, тогда правая часть уравнения (62.3) и ее частные производные по yи y′
f(x, y, y′) =f(x) − a1(x)y
′ − a2(x)y
a0(x),
f ′y(x, y, y
′) = −a2(x)
a0(x), f ′
y′(x, y, y′) = −a1(x)
a0(x)f ′y′ = . . . . . .
являются непрерывными функциями при любых значениях переменныхy, y′ и при значениях x, принадлежащих интервалу (a, b).
Теорема 62.1. (Теорема Коши - существования и единственностирешения линейного дифференциального уравнения ). Если коэффициентыa0(x), a1(x), a2(x) и правая часть f(x) линейного уравнения (62.1) непре-рывны в интервале (a, b), причем коэффициент a0(x) не обращается внуль ни в одной точке этого интервала, то каковы бы ни были началь-ные условия y(x0) = y0 и y′(x0) = y′0, где точка x0 принадлежит интер-валу (a, b), существует единственное решение уравнения, удовлетворя-ющее данным начальным условиям.
62.2. Свойства решений линейного однородного дифферен-циального уравнения второго порядка.
Теорема 62.2. Если функции y1 = y1(x) и y2 = y2(x) являются част-ными решениями линейного однородного уравнения (62.2), то их линей-ная комбинация Y = C1y1(x)+C2y2(x) также является решением этогоуравнения при любых значениях постоянных C1 и C2.
Доказательство Так как y1 и y2 - решения уравнения, то
(62.4)
a0(x)y
′′1 + a1(x)y
′1 + a2(x)y1 = 0,
a0(x)y′′2 + a1(x)y
′2 + a2(x)y2 = 0.

424 62 Лекция – Линейные уравнения второго порядка
Подставляя в уравнение (62.2) функцию Y = C1y1 + C2y2 и принимаяво внимание (62.4), будем иметь:
a0(x)[C1y1 + C2y2]′′ + a1(x)[C1y1 + C2y2]
′ + a2(x)[C1y1 + C2y2] =
= a0(x)[C1y′′1 + C2y
′′2 ] + a1(x)[C1y
′1 + C2y
′2] + a2(x)[C1y1 + C2y2] =
= C1[a0(x)y′′1 + a1(x)y
′1 + a2(x)y1] + C2[a0(x)y
′′2+
+ a1(x)y′2 + a2(x)y2] = C1 · 0 + C2 · 0 = 0,
т.е. Y = C1y1(x) + C2y2(x) является решением уравнения (62.2).Так как общее решение y = ϕ(x, C1, C2) дифференциального уравне-
ния второго порядка содержит две произвольные постоянные C1 и C2,то возникает вопрос: не будет ли решение Y = C1y1(x) + C2y2(x) общимрешением уравнения (62.2).
Можно убедиться, что это не всегда справедливо. Например частнымирешениями уравнения y′′ − y = 0 являются y1 = ex, y2 = e−x, y3 = 5ex ит.д. Однако не любая их линейная комбинация будет общим решениемданного уравнения. Действительно, например нельзя получить частноерешение y2 = e−x из линейной комбинации Y = C1e
x+C25ex ни при каких
начальных условиях. Для ответа на поставленный вопрос, введем дваследующих определения.
Определение 62.2. Два решения уравнения (62.2) называются ли-нейно независимыми на отрезке [a, b], если их линейная комбинацияC1y + C2y не равна тождественно нулю на этом отрезке, т.е, если ихотношение на этом отрезке не является постоянным:
y1
y2
6= const.
В противном случае решения называются линейно зависимыми, и
y1 = λy2.
В дальнейшем мы используем определитель второго порядка, называ-емый определителем Вронского.
Определение 62.3. Если y1 и y2 являются функциями от x то опре-делитель
(62.5) W (x) = W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣= y1y
′2 − y′1y2
называется определителем Вронского или вронскианом.
Теорема 62.3. Если функции y1 и y2 линейно зависимы на отрезке[a, b], то определитель Вронского на этом отрезке тождественно равеннулю.
62 Лекция – Линейные уравнения второго порядка 425
Доказательство Если y2 = λy1, то
W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
y1 λy1
y′1 λy′1
∣∣∣∣= λ
∣∣∣∣
y1 y1
y′1 y′1
∣∣∣∣= 0.
Определение 62.4. Два частных решения y1 и y2 однородного ли-нейного дифференциального уравнения второго порядка образуют фунда-ментальную систему решений на некотором интервале (a, b), если нив одной точке этого интервала определитель Вронского не равен нулюW (y1, y2) 6= 0.
Замечание 62.39. Очевидно, что всякое линейное однородное уравне-ние имеет решение y ≡ 0. Однако это решение ни с одним другим част-ным решением не образует фундаментальной системы решений, так какв этом случае определитель Вронского тождественно равен нулю.
Теорема 62.4. (О структуре общего решения линейного однородногодифференциального уравнения второго порядка). Если два частных реше-ния y1 = y1(x) и y2 = y2(x) уравнения (62.2) образуют на интервале (a, b)фундаментальную систему решений, то общее решение этого уравненияимеет вид
(62.6) Y = C1y1(x) + C2y2(x).
Доказательство На основании теоремы (62.2) функция (62.6) являет-ся решением уравнения (62.2) при любых значениях C1 и C2. Чтобы убе-диться, что это решение является общим, необходимо показать, что изнего можно найти единственное частное решение, удовлетворяющее на-чальным условиям:
y(x0) = y0, y′(x0) = y′0.
Подставляя начальные условия в равенства
Y = C1y1(x) + C2y2(x),
Y ′ = C1y′1(x) + C2y
′2(x),
получим
y0 = C1y1(x0) + C2y2(x0),
y′0 = C1y′1(x0) + C2y
′2(x0).
Последние равенства представляют собой систему линейных алгебра-ических уравнений с неизвестными C1 и C2, причем определитель этойсистемы
W (x0) =
∣∣∣∣
y1(x0) y2(x0)y′1(x0) y′2(x0)
∣∣∣∣

426 62 Лекция – Линейные уравнения второго порядка
является определителем Вронского для функций y1(x) и y2(x) при x = x0.Так как по условию теоремы частные решения y1(x) и y2(x) образуютфундаментальную систему частных решений на интервале (a, b), которо-му принадлежит точка x0, то W (x0) 6= 0. Поэтому система имеет един-ственное решение:
C10 =
∣∣∣∣
y0 y2(x0)y′0 y′2(x0)
∣∣∣∣
W (x0), C20 =
∣∣∣∣
y1(x0) y0
y′1(x0) y′0
∣∣∣∣
W (x0).
Таким образом, существует частное решение
Y = C10y1(x) + C20y2(x),
удовлетворяющее начальным условиям и притом единственное.Из (62.6) очевидно, что для нахождения общего решения линейного
однородного уравнения второго порядка нужно знать два его частныхрешения.
Можно показать однако, что если известно одно частное решение y1 == y1(x), другое, линейно независимое от него решение y2 = y2(x) можнонайти с помощью квадратур.
Пусть y1 = y1(x) и y2 = y2(x) являются решениями уравнения (62.2),то-есть:
y′′1 + p(x)y′1 + q(x)y1 = 0 и
y′′2 + p(x)y′2 + q(x)y2 = 0 где
p(x) =a1(x)
a0(x)и q(x) =
a2(x)
a0(x).
Умножив первое уравнение на y2, а второе на y1 и вычитая одно издругого, получим:
y′′1y2 − y′′2y1 + p(x)(y′1y2 − y′2y1) = 0.
а так как согласно (62.5)
y′1y2 − y′2y1 = W (x), а
W ′(x) = y′′1y2 + y′2y′1 − y′′2y1 − y′1y
′2 = y′′1y2 − y′′2y1,
получаем, что вронскиан W (x) удовлетворяет уравнению
W ′(x) + p(x)W (x) = 0, откуда
W (x) = Ce−R
p(x)dx или y′2y1 − y′1y2 = Ce−R
p(x)dx.

62 Лекция – Линейные уравнения второго порядка 427
Разделив последнее уравнение на y21 и учитывая, что
y′2y1 − y′1y2
y21
=
(y2
y1
)′,
имеем:(y2
y1
)′=
1
y21
Ce−R
p(x)dx,
откуда
y2
y1
= C
∫e−
R
p(x)dx
y21
dx+ C1.
Поскольку мы ищем частное решение, положим C = 1, C1 = 0. Сле-довательно,
(62.7) y2(x) = y1(x)
∫e−
R
p(x)dx
y21(x)
dx.
Общих методов нахождения даже одного частного решения линейно-го однородного дифференциального уравнения с произвольными коэффи-циентами не существует. Но если мы откуда-то знаем y1(x), то по (62.7)можно найти y2, а затем по (62.6) и общее решение уравнения (62.2).
Пример 62.1. Найти второе частное решение y2 = y2(x) уравнения
y′′ +2
xy′ + y = 0, если y1(x) =
sinx
x.
Р е ш е н и е: По формуле (62.7):
y2 =sinx
x
∫x2
sin2 xe−
R
2xdxdx =
sinx
x
∫x2
sin2 xe−2 lnx+lnCdx =
=sinx
x
∫x2
sin2 x
C
x2dx = C
sin x
x(C1 − ctg x).
Поскольку мы ищем частное решение, положим C = −1, C1 = 0.Тогда:
y2 =cos x
x, а Y =
C1 sinx+ C2 cosx
x.
Перейдем теперь к рассмотрению уравнения (62.2), в котором все ко-эффициенты являются постоянными величинами. Оказывается, в этомслучае несложно найти его частное решение.
428 62 Лекция – Линейные уравнения второго порядка
62.3. Линейные однородные дифференциальные уравнениявторого порядка с постоянными коэффициентами. Рассмотрим урав-нение a0y
′′ + a1y′ + a2y = 0, в котором коэффициенты a0, a1, a2 постоян-
ны, причем a0 6= 0. Разделив все члены уравнения на a0 и обозначивa1/a0 = p, a2/a0 = q, запишем данное уравнение в виде
(62.8) y′′ + py′ + qy = 0.
Попробуем найти решение этого уравнения в виде y = ekx, где k -неизвестная постоянная. Дифференцируем эту функцию дважды (y′ == kekx, y′′ = k2ekx) и, подставляя функцию и производные в уравнение(62.8), получим
k2ekx + pkekx + qekx = 0.
Так как ekx 6= 0, то после сокращения на ekx, будем иметь:
(62.9) k2 + pk + q = 0.
Полученное квадратное уравнение (62.9) называется характеристиче-ским уравнением исходного дифференциального уравнения (62.8). Реше-ние характеристического уравнения имеет два корня:
k1 =p
2+
√
p2
4− q, k2 = −p
2−√
p2
4− q.
Если k – корень характеристического уравнения, то функция y = ekx
– решение дифференциального. При решении характеристического урав-нения возможны три случая:
I. корни уравнения k1 и k2 - различные действительные числа (k1 6= k2);II. корни уравнения равные действительные числа (k1 = k2);III. корни уравнения комплексные числа.I. Корни характеристического уравнения действительные и различ-
ные: k1 6= k2. В этом случае частными решениями будут функции y1 = ek1x
и y2 = ek2x. Эти решения линейно независимые, так как
y2
y1
=ek2x
ek1x= e(k2−k1)x 6= const.
Следовательно, они образуют фундаментальную систему решений. То-гда по теореме 62.4:
Y = C1y1 + C2y2 = C1ek1x + C2e
k2x.
Пример 62.2. Найти общее решение уравнения y′′ + y′ − 2y = 0.

62 Лекция – Линейные уравнения второго порядка 429
Р е ш е н и е: Характеристическое уравнение для данного линейногооднородного дифференциального уравнения второго порядка с постоян-ными коэффициентами имеет вид
k2 + k − 2 = 0.
Находим корни характеристического уравнения:
k1,2 = −1
2±√
1
4+ 2 ⇒ k1 = 1, k2 = −2.
Отсюда фундаментальная система частных решений:
y1 = ex, y2 = e−2x,
а общее решение
(62.10) Y = C1ex + C2e
−2x.
II. Корни характеристического уравнения действительные и равные:k1 = k2 = k. В этом случае одно частное решение имеет вид y = ekx. По-кажем, что в этой ситуации функция y2 = xekx также является решениемисходного дифференциального уравнения.
Дифференцируя функцию y2, находим
y′2 = ekx(1 + kx), y′′2 = k · ekx(2 + kx).
Подставим y2, y′2 и y′′2 в дифференциальное уравнение (62.8):
kekx(2 + kx) + pekx(1 + kx) + qxekx = 0,
илиekx[(k2 + pk + q)x+ (2k + p)] = 0.
Так как k корень характеристического уравнения, то k2 + pk + q = 0.Кроме того, k1 = k2 = k = −p
2или 2k = −p, т.е. 2k + p ≡ 0. Следова-
тельно, y′′2 + py′2 + qy2 = 0 и функция y2(x) = xekx действительно являетсярешением уравнения (62.8).
Найденные частные решения y1 = ekx и y2 = xekx образуют фундамен-тальную систему решений, так как они линейно независимы:
y1/y2 = ekx/(xek2x) =1
x6= const.
Таким образом общее решение однородного линейного уравнения (62.8)в случае равенства корней характеристического уравнения k1 = k2 = kимеет вид (см. теорему 62.4):
(62.11) Y = C1ekx + C2xe
kx = ekx · (C1 + C2x).

430 62 Лекция – Линейные уравнения второго порядка
Отметим, что при известном частном решении y1 = ekx y2 можно найтипо формуле (62.7).
Действительно, т.к.
y1 = e−px/2, y2 = e−px/2∫e−p
R
dx
e−pxdx = ekx
∫
dx = xekx.
Пример 62.3. Найти общее решение уравнения y′′ − 4y′ + 4y = 0.
Р е ш е н и е: Характеристическое уравнение k2 − 4k + 4 = 0 име-ет равные корни k1 = k2 = 2. В этом случае фундаментальная системачастных решений запишется в виде: y1 = e2x, y2 = xe2x, а общее решение
Y = e2x · (C1 + C2x).
III. Корни характеристического уравнения комплексные. Комплекс-ные корни квадратного уравнения с действительными коэффициентамиявляются сопряженными комплексными числами :
k1 = α + βi, k2 = α− βi.
В этом случае частное решение уравнения (62.8), записывается сле-дующим образом в виде комплексных функций, что мы отмечаем чертойсверху:
y1 = ek1x = e(α+βi)x = eαx · eiβx; y2 = ek2x = e(α−βi)x = eαx · e−iβx.Применяя формулы Эйлера (eit = cos t + i sin t, e−it = cos t − i sin t),
выражения для y1 и y2 можно переписать в виде :
y1 = eαx · (cos βx+ i sinβx), y2 = eαx · (cosβx− i sinβx).
Эти решения являются комплексными. Для получения действитель-ных частных решений, рассмотрим новые функции
y1 =1
2(y1 + y2) =
1
2eαx[(cosβx + i sinβx)+
+ (cosβx− i sinβx)] = eαx · cos βx,
y2 =1
2i(y1 − y2) =
1
2ieαx[(cosβx+ i sinβx)−
− (cosβx− i sinβx)] = eαx sinβx.
Последние функции y1 и y2 являются линейными комбинациями исход-ных частных решений y1 и y2 и, следовательно, сами являются решениямиуравнения (62.8) в соответствии с условиями теоремы 62.2.
Решения y1 и y2 образуют фундаментальную систему решений, так какони линейно независимы. Таким образом, общее решение однородного ли-нейного дифференциального уравнения с постоянными коэффициентами

62 Лекция – Линейные уравнения второго порядка 431
в случае комплексных корней характеристического уравнения записыва-ется в виде :
Y = C1y1(x) + C2y2(x) = C1eαx cosβx+ C2e
αx sinβx,
илиY = eαx · (C1 cosβx+ C2 sinβx).
Пример 62.4. Найти общее решение уравнения y′′ + 4y′ + 5y = 0.
Р е ш е н и е: В этом случае характеристическое уравнение k2+4k+5 == 0 имеет комплексные корни k1 = −2 +
√4 − 5 = −2 + i и k2 = −2 −
−√
4 − 5 = −2−i. Поэтому общее решение исходного дифференциальногоуравнения можно записать в виде :
Y = e−2x · (C1 cosx+ C2 sinx).
Заключая этот раздел, приведем таблицу формул общего решенияуравнения (62.8) в зависимости от вида корней характеристического урав-нения, использование которой может оказать существенную помощь прирешении примеров.Дифференциальноеуравнение
y′′ + py′ + qy = 0
Характеристическоеуравнение
k2 + pk + q = 0
Корни характеристиче-ского уравнения
k1 6= k2 ∈ R k1 = k2 =k ∈ R
k1 = α+ βik2 = α− βi
Фундаментальная си-стема частных решений
y1 = ek1x
y2 = ek2xy1 = ekx
y2 = xekxy1 = eαx cos βxy2 = eαx sinβx
Вид общего решения Y = C1ek1x +
C2ek2x
Y = ekx(C1+C2x)
Y =eαx(C1 cosβx +C2 sinβx)

432 62 Практическое занятие – Уравнения второго порядка
62. практическое занятие –линейные дифференциальные уравнения
второго порядка
Пример 62.1. Являются ли линейно независимыми функции y1 == x + 1 и y2 = 2x+ 1.
Р е ш е н и е: Для ответа на этот вопрос можно использовать дваметода. Первый - найти отношениe этих функций. Например :
y1
y2
=x+ 1
2x+ 1=
2(x + 1)
2(2x + 1)=
1
2
2x+ 2
2x+ 1=
1
2
(2x+ 1
2x+ 1+
1
2x + 1
)
=
=1
2
(
1 +1
2x + 1
)
6= const.
Следовательно, рассматриваемые функции линейно независимы.Второй метод основан на вычислении вронскианa:
W (x) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
x+ 1 2x + 11 2
∣∣∣∣= 2(x + 1) − (2x+ 1) = 1 6= 0.
Этот определитель не равен нулю, следовательно функции линейнонезависимы.
Пример 62.2. Являются ли линейно независимыми функции
y1 = sin 2x, y2 = 10 sin 2x.
Р е ш е н и е: Используем метод определения линейной независимостифункций, основанный на вычислении определителя Вронского:
W (x) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
sin 2x 10 sin 2x2 cos 2x 20 cos 2x
∣∣∣∣=
= 20 sin 2x · cos 2x− 20 sin 2x · cos 2x ≡ 0.
Следовательно, данные функции линейно зависимы и они не образуютфундаментальную систему решений.
Пример 62.3. Найти общее решение уравнения y′′ − 7y′ + 6y = 0.
Р е ш е н и е: Поскольку данное уравнение относится к типу линей-ных однородных дифференциальных уравнений второго порядка с по-стоянными коэффициентами, решение его можно найти в соответствии свидом корней характеристического уравнения. Составим характеристиче-ское уравнение
k2 − 7k + 6 = 0.

62 Практическое занятие – Уравнения второго порядка 433
Корни его k1 = 6, k2 = 1. Следовательно y1 = e6x и y2 = ex - частныерешения исходного дифференциального уравнения. Легко проверить (вы-числить определитель Вронского), что эти два решения образует фунда-ментальную систему решений и, следовательно, их линейная комбинациябудет являться общим решением заданного дифференциального уравне-ния:
Y = C1y1 + C2y2 = C1e6x + C2e
x.
Пример 62.4. Найти частное решение уравненияy′′ + 2y′ = 0 при y(0) = 1, y′(0) = 0.
Р е ш е н и е: Составим характеристическое уравнение
k2 + 2k = 0
и найдем его корни k1 = 0, k2 = −2. Корни действительные и нерав-ные друг другу, следовательно можно записать два частных решенияy1 = e0x = 1 и y2 = e−2x, которые образуют фундаментальную системурешений. В этом случае общее решение дифференциального уравненияможно получить в виде их линейной комбинации.
Y = C1y1 + C2y2 = C1 + C2e−2x.
Найдем первую производную Y ′ = −2C2e−2x и используем начальные
условия y(0) = 1 и y′(0) = 0 для определения неизвестных постоянных C1
и C2.
y(0) = 1 ⇒ Y = C1 + C2e−2·0 = C1 + C2 = 1,
y′(0) = 0 ⇒ Y ′ = −2C2e−2·0 = −2C2 = 0.
Из последних уравнений находим : C2 = 0, а C1 = 1. Таким образомчастное решение при заданных начальных условиях будет иметь вид:
Y = 1.
Пример 62.5. Найти общее решение уравнения y′′ − 10y′ + 25y = 0.
Р е ш е н и е: Характеристическое уравнение k2 − 10k + 25 = 0 имеетдва одинаковых корня k1 = k2 = k = 5. В соответствии с теорией решениялинейных однородных дифференциальных уравнений второго порядка спостоянными коэффициентами (см.таблицу) два частных решения и об-щее решение дифференциального уравнения можно записать как
y1 = e5x, y2 = xe5x, Y = C1y1 + C2y2 = C1e5x + C2xe
5x = e5x(C1 + C2x).
Пример 62.6. Найти общее решение уравнения y′′ − 4y′ + 13y = 0.
434 63 Лекция – Линейные уравнения второго порядка
Р е ш е н и е: Характеристическое уравнение k2 − 4k + 13 = 0 име-ет корни k1 = 2 + 3i, k2 = 2 − 3i. Корни комплексные сопряженные,поэтому им соответствует (см.таблицу) частные решения y1 = e2x cos 3xи y2 = e2x sin 3x. Следовательно общим решением является их линейнаякомбинация
Y = C1y1 + C2y2 = e2x(C1 cos 3x + C2 sin 3x).
Самостоятельная работа
Пример 62.7. Являются ли функции y1 = 2x2 + 1,y2 = x2 − 1 линейно независимыми?
Пример 62.8. Являются ли функции y1 = ex, y2 = 3ex линейнонезависимыми?
Пример 62.9. Найти общее решение уравненияy′′ + 25y = 0.
Пример 62.10. Найти частнoе решениe уравненияy′′ + 3y′ + 2y = 0 при y(0) = 1, y′(0) = −1.
Пример 62.11. Найти общее решение уравненияy′′ − 2y′ + y = 0.
Пример 62.12. Найти общее решение уравненияy′′ − 9y = 0.
Пример 62.13. Найти частное решение уравненияy′′ + 4y = 0 при y(0) = 0, y′(0) = 2.
63. лекция –линейные дифференциальные уравнения
второго порядка
Метод вариации произвольных постоянных. Нахождение общегорешения линейных неоднородных дифференциальных уравнений.Структура общего решения линейных неоднородных дифференци-альных уравнений 2-го порядка.

63 Лекция – Линейные уравнения второго порядка 435
63.1. Метод вариации произвольных постоянных. Рассмотримобщий метод нахождения решений неоднородного уравнения, которыйносит название метода вариации произвольных постоянных. Этот методприменяется для отыскания решения линейного неоднородного уравнениякак с переменными, так и с постоянными коэффициентами, если известнообщее решение соответствующего однородного уравнения.
Рассмотрим линейное неоднородное дифференциальное уравнение ти-па (62.1)
a0(x)y′′ + a1(x)y
′ + a2(x)y = f(x).
Пусть Y = C1y1 + C2y2 - есть общее решение соответствующего од-нородного уравнения. Напомним, что здесь y1 и y2 - частные решения,образующие фундаментальную систему решений, а C1 и C2 - произволь-ные постоянные. Заменим в общем решении эти постоянные некоторымифункциями Z1(x) и Z2(x). Подберем эти функции так, чтобы
(63.1) y = Z1(x)y1 + Z2(x)y2
было решением неоднородного уравнения (62.1).Это условие можно выполнить, если при подстановке функции (63.1)
в уравнение (62.1) последнее будет обращаться в тождество. Продиффе-ренцируем y по x, получим следующее выражение
(63.2) y′ = Z ′1(x)y1 + Z1(x)y
′1 + Z ′
2(x)y2 + Z2(x)y′2.
Так как неизвестных функций две, а уравнение одно, для решения по-ставленной задачи введем дополнительное условие: выберем неизвестныефункции Z1(x) и Z2(x) таким образом, чтобы
(63.3) Z ′1(x)y1 + Z ′
2(x)y2 = 0.
Условие (63.3) существенно упрощает выражение (63.2), которое при-нимает вид:
(63.4) y′ = Z1(x)y′1 + Z2(x)y
′2.
Дифференцируя последнее равенство еще раз, получим
(63.5) y′′ = Z ′1(x)y
′1 + Z1(x)y
′′1 + Z ′
2(x)y′2 + Z2(x)y
′′2 .
Подставляем выражение для y (63.1), y′ (63.4) и y′′ (63.5) в уравнение(62.1), будем иметь
a0(x)(Z′1y
′1 + Z1y
′′1 + Z ′
2y′2 + Z2y
′′2) + a1(x)(Z1y
′1 + Z2y
′2)+
+ a2(x)(Z1y1 + Z2y2) = f(x),
или, группируя слагаемые,
(63.6) (a0(x)y′′1 + a1(x)y
′1 + a2(x)y1)Z1 + (a0(x)y
′′2 + a1(x)y
′2 + a2(x)y2)Z2+
436 63 Лекция – Линейные уравнения второго порядка
+a0(x)(Z′1y
′1 + Z ′
2y′2) = f(x).
Так как y1 – решение однородного уравнения, то a0(x)y′′1 + a1(x)y
′1 +
a2(x)y1 ≡ 0, т.е. выражение в первой скобке обращается в нуль. Аналогич-но и выражение во второй скобке равно нулю, так как y2 так же являетсярешением однородного уравнения. Таким образом, равенство (63.6) при-нимает вид
(63.7) Z ′1(x)y
′1 + Z ′
2(x)y′2 =
f(x)
a0(x).
Объединяя уравнения (63.3) и (63.7), получаем систему линейных ал-гебраических уравнений относительно неизвестных Z ′
1(x) и Z ′2(x):
(63.8)
Z ′
1(x)y1 + Z ′2(x)y2 = 0,
Z ′1(x)y
′1 + Z ′
2(x)y′2 = f(x)
a0(x).
Эта система уравнений имеет единственное решение поскольку ее опре-делитель
W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣6= 0
представляет собой определитель Вронского для функций y1 и y2, обра-зующих фундаментальную систему решений.
Решив систему (63.8), например, по формуле Крамера, находим функ-ции
Z ′1(x) = − y2f(x)
W (y1, y2)a0(x), Z ′
2(x) =y1f(x)
W (y1, y2)a0(x).
Интегрируя последние дифференциальные уравнения, находим:
(63.9) Z1(x) = −∫
y2f(x)dx
W (y1, y2)a0(x)+C1, Z2(x) =
∫y1f(x)dx
W (y1, y2)a0(x)+C2,
где C1 и C2 – постоянные интегрирования.Подставляя полученные выражения Z1(x) и Z2(x) в равенство (63.1),
находим:
y = Z1(x) · y1 + Z2(x) · y2 == C1y1 − y1 ·∫
y2 · f(x)
W (y1, y2)a0(x)dx+(63.10)
+ y2 ·∫
y1 · f(x)
W (y1, y2)a0(x)dx+ C2y2.
Таким образом, окончательно общее решение неоднородного уравне-ния можно получить в виде
(63.11) y = y + Y = −y1
∫y2f(x)
W (y1, y2)a0(x)dx+

63 Лекция – Линейные уравнения второго порядка 437
+y2
∫y1f(x)
W (y1, y2)a0(x)dx+ C1y1 + C2y2.
Пример 63.1. Найти общее решение уравнения
(63.12) y′′ − y′
x= x.
Р е ш е н и е: Первоначально найдем общее решение однородногоуравнения :
y′′ − y′
x= 0 или y′′ =
y′
x.
Это дифференциальное уравнение второго порядка, допускающее по-нижение порядка. В данном случае перед нами уравнения типаy′′ = f(y′, x). Для его решения воспользуемся подстановкой y′ = p(x), аy′′ = p′(x):
y′′ =y′
x⇒ p′ =
p
x⇒ dp
dx=p
x⇒ dp
p=dx
x⇒ ln |p| = ln |x| + lnC1 ⇒
⇒ ln |p| = lnC1|x| ⇒ p = C1x⇒ p = y′ ⇒ y′ = C1x⇒ dy
dx= C1x⇒
⇒ dy = C1xdx⇒ y = C1x2 + C2.
Итак, с учетом принятых в данном разделе обозначений общее реше-ние однородного уравнения найдено в виде
(63.13) Y = C1x2 + C2,
где y1 = x2 и y2 = 1 являются частными решениями, образующими фун-даментальную систему решений.
В соответствии с изложенным выше методом вариации произвольныхпостоянных, решение неоднородного уравнения (63.12) будем искать ваналогичном выражению (63.13) виде, заменив константы C1 и C2 на неиз-вестные функции Z1(x) и Z2(x) :
(63.14) y = Z1(x)y1 + Z2(x)y2 = Z1(x)x2 + Z2(x).
Система уравнений (63.8) для определения неизвестных Z ′1(x) и Z ′
2(x)в данном случае выглядит следующим образом:
Z ′
1(x)y1 + Z ′2(x)y2 = 0,
Z ′1(x)y
′1 + Z ′
2(x)y′2 = f(x)
a0(x),
⇒Z ′
1(x)x2 + Z ′
2(x) = 0,Z ′
1(x)2x + Z ′2(x) · 0 = x
1= x.
Как уже было отмечено выше определитель этой системы, равныйопределителю Вронского, не равен нулю при любых значениях x:
W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
x2 12x 0
∣∣∣∣= −2x.

438 63 Лекция – Линейные уравнения второго порядка
Следовательно, система уравнений имеет единственное решение, кото-рое можно найти по формулам Крамера (лекция 26). С учетом интегри-рования будем иметь:
(63.15)Z1(x) = −
∫ y2f(x)dxW (y1,y2)a0(x)
+ C1 = −∫
1·xdx−2x
= x2
+ C1,
Z2(x) =∫ y1f(x)dx
W (y1,y2)a0(x)+ C2 =
∫x2·xdx−2x
= −x3
6+ C2.
Подставляя полученные функции в формулу (63.14), получаем общеерешение неоднородного уравнения (63.12):
(63.16) y = Z1(x)x2 + Z2(x) = (
x
2+ C1)x
2 − x3
6+ C2 =
x3
3+ C1x
2 + C2.
Пример 63.2. Найти общее решение уравнения
y′′ +2
xy′ + y =
1
x.
Р е ш е н и е: Частные решения соответствующего однородного урав-нения известны (см. пример 62.1):
y1 =sinx
x, y2 =
cosx
x.
По (63.15) имеем:
Z1(x) = sinx+ A, Z2(x) = cosx+ B и Y = Asinx
x+B
cosx
x+
1
x.
63.2. Структура общего решения линейных неоднородных диф-ференциальных уравнений второго порядка. Рассмотрим самый об-щий случай линейного дифференциального уравнения второго порядка(62.1):
a0(x)y′′ + a1(x)y
′ + a2(x)y = f(x).
При этом правая часть уравнения в общем случае не равна нулю, аa0(x), a1(x) и a2(x) произвольные функции от x.
Структура общего решения такого уравнения определяется следую-щей теоремой:
Теорема 63.1. Если y(x) - частное решение линейного неоднородногоуравнения (62.1), а Y (x) - общее решение соответствующего однородногоуравнения (62.2), то функция y = y(x)+Y (x) является общим решениемнеоднородного дифференциального уравнения (62.1).
63 Лекция – Линейные уравнения второго порядка 439
Доказательство Необходимо доказать, что сумма
(63.17) y = y + Y
есть общее решение уравнения (62.1). Сначала докажем, что функция(63.17) есть решение уравнения (62.1).
Подставляя сумму y + Y в уравнение (62.1) вместо y будем иметь:
a0(x)(y + Y )′′ + a1(x)(y + Y )′ + a2(x)(y + Y ) = f(x).
Сгруппируем слагаемые относительно y и Y :
(63.18) (a0(x)y′′ +a1(x)y
′ +a2(x)y)+ (a0(x)Y′′ +a1(x)Y
′ +a2(x)Y ) = f(x).
Так как y есть решение уравнения (62.1), то
(63.19) a0(x)y′′ + a1(x)y
′ + a2(x)y = f(x).
Аналогично, вследствиe того, что Y есть решение соответствующегооднородного уравнения, получим
(63.20) a0(x)Y′′ + a1(x)Y
′ + a2(x)Y = 0.
С учетом (63.19) и (63.20) уравнение (63.18) обращается в тождествоf(x) + 0 ≡ f(x). Следовательно, функция y = y + Y действительно явля-ется решением неоднородного уравнения (62.1) и правая часть теоремыдоказана.
Теперь докажем, что выражение (63.17) является общим решением,т.е. докажем, что из этого решения можно выделить единственное частноерешение, удовлетворяющее начальным условиям:
(63.21) y(x0) = y0, y′(x0) = y′0.
Если y1 и y2 есть два частных решения соответствующего однород-ного уравнения (63.18), образующие фундаментальную систему решений(определитель Вронского не равен нулю), то, как уже известно, общеерешение однородного уравнения можно представить в виде их линейнойкомбинации : Y = C1y1 + C2y2. В таком случае формулу (63.17) можнопереписать в виде:
(63.22) y = y + C1y1 + C2y2.
Тогда на основании условий (63.21) будем иметь
(63.23)
y0 = y0 + C1y10 + C2y20,y′0 = y′0 + C1y
′10 + C2y
′20,
или
C1y10 + C2y20 = y0 − y0,C1y
′10 + C2y
′20 = y′0 − y′0.
Из этой системы уравнений можно определить неизвестные C1 и C2.Так как определитель этой системы уравнений (равен определителю Врон-ского) не равен нулю, то она имеет единственное решение, т.е. существу-ют такие единственные значения C1 и C2, при которых формулы (63.17) и

440 63 Практическое занятие – уравнения второго порядка
(63.22) определяют решение уравнения (62.1), удовлетворяющее данным(63.21) начальным условиям. Таким образом теорема доказана полностью.
Полученное по методу вариации произвольных постоянных решениенеоднородного уравнения (62.1) в формуле (63.11) уже было представле-но как сумма общего решения однородного уравнения Y (x) и частногорешения неоднородного уравнения y.
63. практическое занятие –линейные дифференциальные уравнения
второго порядка
Пример 63.1. Найти общее решение уравнения y′′ + 4y = 1cos 2x
.
Р е ш е н и е: Находим общее решение однородного уравнения y′′ ++4y = 0. Корни характеристического уравнения k2+4 = 0 соответственноравны k1 = 2i, k2 = −2i. Следовательно, в качестве фундаментальнойсистемы решений можно записать y1 = sin 2x, y2 = cos 2x и общее решениеоднородного уравнения принимает вид:
Y = C1 sin 2x + C2 cos 2x.
В соответствии с методом вариации произвольных постоянных, ре-шение исходного неоднородного дифференциального уравнения следуетискать в виде
y = Z1(x) sin 2x+ Z2(x) cos 2x.
Система уравнений (63.8) для определения неизвестных Z ′1(x) и Z ′
2(x)в данном случае выглядит следующим образом:
Z ′
1(x) sin 2x + Z ′2(x) cos 2x = 0,
2Z ′1(x) cos 2x− 2Z ′
2(x) sin 2x = 1cos 2x
.
Решая эту систему уравнений относительно Z ′1(x) и Z ′
2(x) с учетомпоследующего интегрирования, находим:
W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
sin 2x cos 2x2 cos 2x −2 sin 2x
∣∣∣∣= −2 6= 0,
Z1(x) = −∫
y2f(x)dx
W (y1, y2)a0(x)= −
∫cos 2x · 1
cos 2x
−2dx =
x
2+ C1,
Z2(x) =
∫y1f(x)dx
W (y1, y2)a0(x)=
∫sin 2x 1
cos 2x
−2dx =
1
4ln | cos 2x| + C2.
63 Практическое занятие – уравнения второго порядка 441
Таким образом, а общее решение исходного дифференциального урав-нения:
y = y + Y =1
2x sin 2x +
1
4cos 2x ln | cos 2x| + C1 sin 2x + C2 cos 2x.
Пример 63.2. Найти общее решение уравнения y′′ + 5y′ + 6y = 11+e2x .
Р е ш е н и е: Находим общее решение однородного уравнения y′′+5y′++6y = 0. Корни характеристического уравнения k1 = −2, k2 = −3. Следо-вательно, в качестве фундаментальной системы решений можно записатьy1 = e−2x, y2 = e−3x и общее решение однородного уравнения принимаетвид:
Y = C1e−2x + C2e
−3x.
В соответствии с методом вариации произвольных постоянных, част-ное решение исходного неоднородного дифференциального уравнения сле-дует искать в виде:
y = Z1(x)e−2x + Z2(x)e
−3x.
Система уравнений (63.1) для определения неизвестных Z ′1(x) и Z ′
2(x) вданном случае выглядит следующим образом:
Z ′
1(x)e−2x + Z ′
2(x)e−3x = 0,
−2Z ′1(x)e
−2x − 3Z ′2(x)e
−3x = 1(1+e2x)
.
Решая эту систему уравнений относительно Z1(x) и Z ′2(x), с учетом
последнего интегрирования, находим:
W (y1, y2) =
∣∣∣∣
y1 y2
y′1 y′2
∣∣∣∣=
∣∣∣∣
e−2x e−3x
−2e−2x −3e−3x
∣∣∣∣=
= −3e−5x + 2e−5x = −e−5x 6= 0,
Z1(x) = −∫
y2f(x)dx
W (y1, y2)a0(x)+ C1 = −
∫e−3x · 1
1+e2x
−e−5xdx =
=
∫e2x
1 + e2xdx+ C1 =
1
2
∫d(e2x + 1)
e2x + 1+ C1 =
1
2ln (e2x + 1) + C1,
Z2(x) =
∫y1f(x)dx
W (y1, y2)a0(x)+ C2 =
∫e−2x 1
1+e2x
−e−5xdx+ C2 =
= −∫
e3x
1 + e2xdx+ C2 =
(введем новую переменную ex = t⇒ x = ln t и dx =dt
t)
442 64 Лекция – Линейные уравнения второго порядка
= −∫
t3
1 + t2dt
t+ C2 = −
∫t2
1 + t2dt+ C2 =
= −∫
(t2 + 1 − 1
t2 + 1)dt+ C2 = −
∫
dt+
∫dt
1 + t2+ C2 =
= −t+ arctg t+ C2 = |перейдем к старой переменной t = ex|= −ex + arctg ex + C2.
Таким образом, общее решение исходного дифференциального урав-нения:
y = y + Y =1
2e−2x · ln (e2x + 1) − e−2x+
+ e−3x arctg ex + C1e−2x + C2e
−3x = e−2x · (12
ln (e2x + 1) − 1 + C1)+
+ e−3x · (arctg ex + C2).
Самостоятельная работа
Пример 63.3. Найти общее решение уравнения методом вариациипроизвольных постоянных x2y′′ − xy′ = 3x3.
Пример 63.4. Найти общее решение уравнения методом вариациипроизвольных постоянных y′′ − 7y′ + 6y = sinx.
Пример 63.5. Найти общее решение уравнения методом вариациипроизвольных постоянных y′′ + 4y = ctg 2x.
64. лекция –линейные дифференциальные уравнения
второго порядка
Метод подбора частного решения (метод неопределенных коэффи-циентов) для линейных дифференциальных уравнений с постоян-ными коэффициентами и правой частью специального вида.
64.1. Метод подбора частного решения (метод неопределен-ных коэффициентов). В предыдущей лекции был рассмотрен общийметод нахождения решения линейного дифференциального неоднородно-го уравнения второго порядка. В случае линейных дифференциальныхуравнений с постоянными коэффициентами, правые части которых име-ют специальных вид, существует иной (не требующий интегрирования)способ нахождения частного решения. Этот способ называется методомподбора частного решения, или методом неопределенных коэффициентов.
64 Лекция – Линейные уравнения второго порядка 443
Суть метода состоит в том, что, если необходимо решить линейноедифференциальное уравнение второго порядка с постоянными коэффи-циентами
(64.1) y′′ + py′ + qy = f(x),
а его правая часть имеет в общем случае следующий вид:
(64.2) f(x) = eαx(Pn(x) cosβx+Qm(x) sinβx)
или является суммой функций такого вида, то частное решение уравнения(62.8) следует искать в форме
(64.3) y = xreαx(Pl(x) cosβx+Ql(x) sinβx).
Здесь α и β – постоянные, известные из заданного уравнения, Pn(x),Qm(x), задаваемые уравнением многочлены от x соответственно n-ой и m-ой степеней, Pl(x) и Ql(x) – многочлены от x степени l с неопределеннымикоэффициентами, причем l равно наибольшему из чисел n и m (l = n > mили l = m > n):
Pl(x) = Alxl + Al−1x
l−1 + · · · + A0,Ql(x) = Blx
l + Bl−1xl−1 + · · · + B0,
а r равно показателю кратности корня α+βi в характеристическом урав-нении k2 + pk + q = 0 (если характеристическое уравнение такого корняне имеет, то следует положить r = 0).
Необходимо еще раз подчеркнуть, что многочлены Pl(x) и Ql(x) долж-ны быть полными, т.е. содержать все степени x от нуля до l, с различны-ми неопределенными коэффициентами в каждом из многочленов, и, чтопри этом, если в выражение (64.2) функции f(x) входит хотя бы одна изфункций cosβx или sinβx, то в формулу (64.3) необходимо записыватьобязательно обе функции.
Eсли правая часть исходного уравнения равна сумме нескольких раз-личных функций рассматриваемого вида (64.2), то для отыскания реше-ния такого уравнения можно использовать теорему наложения решений.
Теорема 64.1. (О наложении решений). Если y1 – частное решениеуравнения
(64.4) y′′ + py′ + qy = f1(x),
а y2 - частное решение уравнения
(64.5) y′′ + py′ + qy = f2(x),
то сумма y = y1 + y2 является частным решением уравнения
(64.6) y′′ + py′ + qy = f1(x) + f2(x).

444 64 Лекция – Линейные уравнения второго порядка
Доказательство Подставив в левую часть уравнения (64.6) сумму y1 ++ y2, после преобразований и на основании равенств (64.4) и (64.5) полу-чим:
y′′ + py′ + qy = (y1 + y2)′′ + p(y1 + y2)
′ + q(y1 + y2) =
= (y′′ + py1′ + qy1) + (y2
′′ + py2′ + qy2) = f1(x) + f2(x).
Этот вывод доказывает, что, действительно, y = y1 + y2 есть решениеуравнения (64.6).
Некоторыми частными случаями функции f(x), при наличии которыхв правой части уравнения (62.8) применим метод подбора частного реше-ния, являются следующие функции, помещенные в таблице.
Пример 64.1. Найти общее решение уравнения y′′ + 4y′ = 2x− 3.
Р е ш е н и е: Характеристическое уравнение однородного диффе-ренциального уравнения y′′ + 4y′ = 0 имеет вид k2 + 4k = 0 и корниk1 = 0; k2 = −4. Соответственно этому общее решение однородного урав-нения можно записать в виде:
Y = C1e0x + C2e
−4x = C1 + C2e−4x.
Так как правая часть исходного уравнения f(x) = 2x−3 соответствуетобщему виду правой части f(x) = Pn(x), т.е. k = α + βi ≡ 0, а один изкорней равен нулю (r = 1), то частное решение неоднородного уравненияследует искать по формуле (64.8) в виде:
y = Qn(x) · x = (Ax+B) · x = Ax2 + Bx.
Подберем коэффициенты A и B таким образом, чтобы y было реше-нием исходного уравнения. Для этого найдем y′ = 2Ax + B и y′′ = 2A иподставим их в данное уравнение:
y′′ + 4y′ = 2x− 3 ⇒ 2A + 4(2Ax +B) = 2x− 3 ⇒
⇒ 8Ax + (2A + 4B) = 2x− 3.
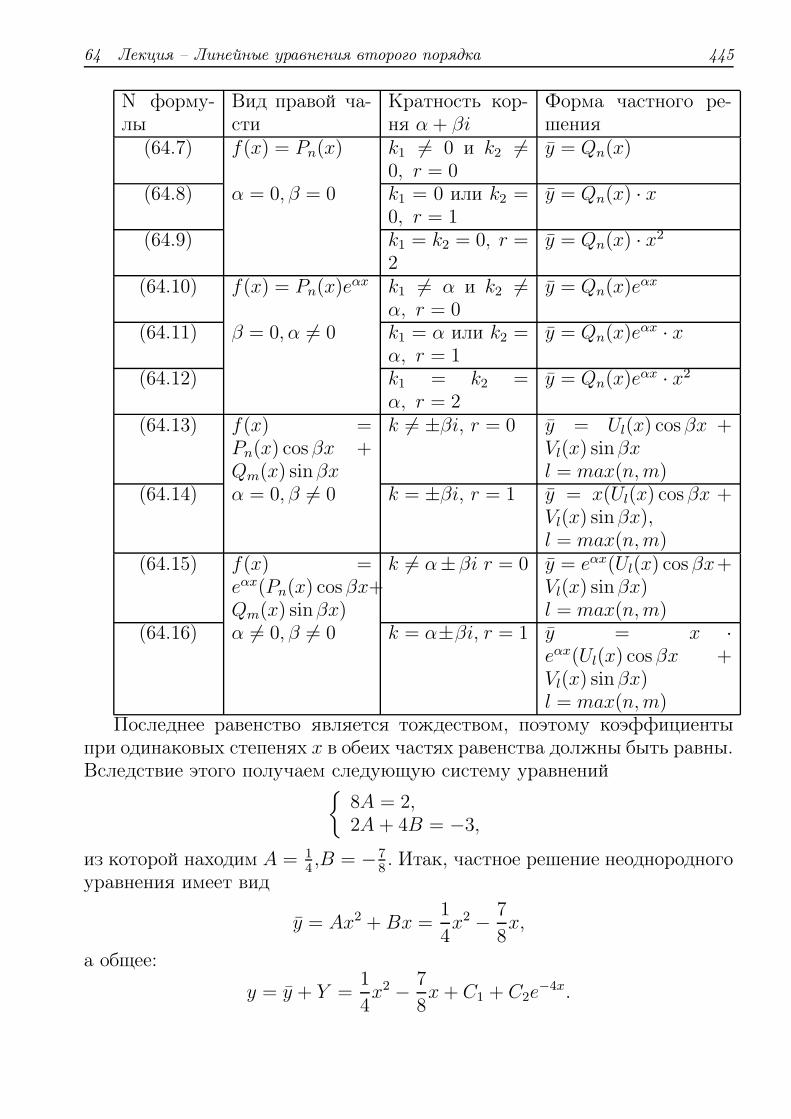
64 Лекция – Линейные уравнения второго порядка 445
N форму-лы
Вид правой ча-сти
Кратность кор-ня α+ βi
Форма частного ре-шения
(64.7) f(x) = Pn(x) k1 6= 0 и k2 6=0, r = 0
y = Qn(x)
(64.8) α = 0, β = 0 k1 = 0 или k2 =0, r = 1
y = Qn(x) · x
(64.9) k1 = k2 = 0, r =2
y = Qn(x) · x2
(64.10) f(x) = Pn(x)eαx k1 6= α и k2 6=
α, r = 0y = Qn(x)e
αx
(64.11) β = 0, α 6= 0 k1 = α или k2 =α, r = 1
y = Qn(x)eαx · x
(64.12) k1 = k2 =α, r = 2
y = Qn(x)eαx · x2
(64.13) f(x) =Pn(x) cosβx +Qm(x) sinβx
k 6= ±βi, r = 0 y = Ul(x) cosβx +Vl(x) sinβxl = max(n,m)
(64.14) α = 0, β 6= 0 k = ±βi, r = 1 y = x(Ul(x) cosβx +Vl(x) sinβx),l = max(n,m)
(64.15) f(x) =eαx(Pn(x) cosβx+Qm(x) sinβx)
k 6= α±βi r = 0 y = eαx(Ul(x) cosβx+Vl(x) sinβx)l = max(n,m)
(64.16) α 6= 0, β 6= 0 k = α±βi, r = 1 y = x ·eαx(Ul(x) cosβx +Vl(x) sinβx)l = max(n,m)
Последнее равенство является тождеством, поэтому коэффициентыпри одинаковых степенях x в обеих частях равенства должны быть равны.Вследствие этого получаем следующую систему уравнений
8A = 2,2A + 4B = −3,
из которой находим A = 14,B = −7
8. Итак, частное решение неоднородного
уравнения имеет вид
y = Ax2 + Bx =1
4x2 − 7
8x,
а общее:
y = y + Y =1
4x2 − 7
8x+ C1 + C2e
−4x.

446 64 Лекция – Линейные уравнения второго порядка
Пример 64.2. Найти общее решение уравнения 2y′′ − y′ − y = 4xe2x.
Р е ш е н и е: Характеристическое уравнение 2k2 − k − 1 = 0 од-нородного дифференциального уравнения 2y′′ − y′ − y = 0 имеет корниk1 = 1, k2 = −1
2. В соответствии с этим общее решение однородного урав-
нения можно записать в виде:
Y = C1ex + C2e
−x2 .
Так как правая часть исходного дифференциального уравнения f(x) == 4xe2x соответствует общему виду f(x) = Pn(x)e
αx, где α + β = 0, и ниодин из корней характеристического уравнения не равен α = 2, следова-тельно r = 0, частное решение неоднородного уравнения следует искатьпо формуле (64.10) в виде:
y = Qn(x) · eαx = (Ax+B) · e2x.Дифференцируя y два раза и подставляя y, y′ и y′′ в исходное диффе-
ренциальное уравнение, получим:
2y′′ − y′ − y = 4xe2x ⇒ 2e2x(4Ax + 4B + 4A)−− e2x(2Ax + 2B + A) − e2x(Ax+B) = 4xe2x.
Сокращая на e2x и приравнивая друг другу соответствующие коэффи-циенты при одинаковых степенях x в левой и правой частях равенства,будем иметь систему уравнений
5A = 4,7A + 5B = 0,
из которой находим A = 45, B = −28
25.
И так, частное решение неоднородного уравнения
y = (Ax+B)e2x = e2x(4
5x− 28
25),
а общее решение исходного уравнения
y = y + Y = e2x(4
5x− 28
25) + C1e
x + C2e−x
2 .
Пример 64.3. Найти общее решение уравнения y′′ − y = 3e2x cos x.
Р е ш е н и е: Характеристическое уравнение k2 − 1 = 0 однородногодифференциального уравнения y′′ − y = 0 имеет корни k1 = 1, k2 = −1.Общее решение однородного уравнения запишется в виде:
Y = C1ex + C2e
−x.

64 Лекция – Линейные уравнения второго порядка 447
Так как правая часть исходного дифференциального уравнения f(x) == 3e2x cosx соответствует общему виду f(x) = eαx(Pn(x) cosβx+Qm(x) sinβx),а число α ± βi = 2 ± 1 · i не является корнем характеристического урав-нения (r = 0), то частное решение неоднородного дифференциальногоуравнения следует искать по формуле (64.15) в виде:
y = e2x · (A cosx +B sinx).
Дифференцируя y два раза:
y′ = 2e2x(A cosx+ B sinx) + e2x(−A sinx+ B cos x) =
= e2x((2A +B) cos x+ (2B −A) sinx),
y′′ = 2e2x((2A+ B) cosx+ (2B − A) sinx)+
+ e2x(−(2A+ B) sinx+ (2B −A) cosx) = e2x((4A+ 2B + 2B−−A) cosx+ (4B − 2A− 2A− B) sinx) =
= e2x((3A + 4B) cos x+ (3B − 4A) sinx)
и подставляя y и y′′ в исходное дифференциальное уравнение, получим
y′′ − y = 3e2x cos x⇒⇒ e2x((3A + 4B) cosx + (3B − 4A) sinx)−− e2x(A cosx+ B sin x) = 3e2x cos x.
После соответствующих преобразований и сокращения на e2x приведемуравнение к виду:
(2A + 4B) cos x+ (2B − 4A) sinx = 3 cosx.
Приравнивая коэффициенты при cosx и sinx в левой и правой частяхравенства, получим систему уравнений относительно неизвестных A и B:
2A + 4B = 3,2B − 4A = 0,
из которой найдем A = 310, B = 3
5.
Итак, частное решение неоднородного уравнения
y = e2x(A cosx+ B sinx) = e2x(
3
10cosx +
3
5sinx
)
,
а общее решение исходного уравнения
y = y + Y = e2x(
3
10cosx+
3
5sinx
)
+ C1ex + C2e
−x.
Пример 64.4. Найти общее решение уравнения y′′−5y′+6y = ex+x2.

448 64 Лекция – Линейные уравнения второго порядка
Р е ш е н и е: Характеристическое уравнение k2−5k+6 = 0 имеет корниk1 = 2, k2 = 3. Отсюда общее решение однородного уравнения запишетсяв виде:
Y = C1e2x + C2e
3x.
Для определения частного решения неоднородного уравнения рассмот-рим два вспомогательных уравнения
(∗) y′′ − 5y′ + 6y = ex,
(∗∗) y′′ − 5y′ + 6y = x2,
и найдем для каждого из них частные решения y1 и y2. Частное решениеуравнения (∗) следует искать по формуле (67.10) в виде
y1 = A1ex,
так как число корней характеристического уравнения, совпадающих с ко-эффициентом α = 1 в показателе, равно 0 (r = 0).
Дифференцируя y1 два раза и подставляя y1, y′1 и y′′1 в уравнение (∗),имеем
y′′ − 5y′ + 6y = ex ⇒ A1ex − 5A1e
x + 6A1ex = ex.
После сокращения выражения на ex, получим 2A1 = 1, или A = 12,
следовательно y1 = 12ex.
Частное решение уравнения (∗∗) следует искать по формуле (6.7) ввиде:
y2 = A2x2 +B2x+ C2,
так как число корней характеристического уравнения, совпадающих сα = 0, равно 0 (r = 0).
Дифференцируя y2 два раза и подставляя y2, y′2 и y′′2 в уравнение (∗∗),
имеем
y′′ − 5y′ + 6y = x2 ⇒ 2A2 − 5(2A2x+ B2) + 6(A2x2 +B2x+ C2) = x2.
После очевидных преобразований:
6A2x2 + (6B2 − 10A2)x+ (2A2 − 5B2 + 6C2) = x2.
Приравнивая коэффициенты при одинаковых степенях x в левой иправой частях равенства, получим систему уравнений относительно неиз-вестных A2, B2 и C2:
6A2 = 1,6B2 − 10A2 = 0,2A2 − 5B2 + 6C2 = 0,
из которой A2 = 16, B2 = 5
18, C2 = 19
108.

64 Практическое занятие – Уравнения второго порядка 449
Следовательно,
y2 =1
6x2 +
5
18x+
19
108.
На основании теоремы о наложении решений частное решение исход-ного дифференциального уравнения равно сумме двух найденных част-ных решений, т.е.
y = y1 + y2 =1
2ex +
1
6x2 +
5
18x+
19
108.
а общее решение:
y = y + Y =1
2ex +
1
6x2 +
5
18x+
19
108+ C1e
2x + C2e3x.
64. практическое занятие –линейные дифференциальные уравнения
второго порядка
Пример 64.1. Найти общее решение уравнения y′′ − 2y′ + 2y = x2.
Р е ш е н и е: Будем искать решение методом подбора частного реше-ния. Прежде всего рассмотрим однородное уравнение y′′−2y′+2y = 0. Егохарактеристическое уравнение k2 − 2k + 2 = 0 имеет комплексные корниk1 = 1 + i и k1 = 1 − i, поэтому общее решение однородного уравнения(см. соответствующую таблицу решений) Y = ex · (C1 cosx + C2 sinx).
Правая часть неоднородного уравнения f(x) = x2, поэтому частноерешение неоднородного уравнения следует искать в виде y = Ax2+Bx+C.Найдем y′ = 2Ax + B и y′′ = 2A и подставим вместе с y в исходноедифференциальное уравнение:
y′′ − 2y′ + 2y = x2 ⇒ 2A− 2(2Ax+ B) + 2(Ax2 + Bx+ C) = x2.
Сгруппируем слагаемые в левой части уравнения по степеням x:
2Ax2 + (2B − 4A)x + (2A− 2B + 2C) = x2.
Приравниваем коэффициенты при одинаковых степенях x:
2A = 1,2B − 4A = 0,2A− 2B + 2C = 0,
⇒A = 1
2,
B = 1,C = 1
2.
Таким образом частное решение неоднородного уравнения будет иметьвид:
y = Ax2 +Bx + C =1
2x2 + x+
1
2=
1
2· (x2 + 2x + 1) =
1
2(x+ 1)2.
450 64 Практическое занятие – Уравнения второго порядка
Следовательно, общее решение исходного уравнения:
y = y + Y =1
2(x+ 1)2 + ex(C1 cosx + C2 sinx).
Пример 64.2. Найти общее решение уравнения
y′′ − 2y′ − 3y = (2x− 3)e−x.
Р е ш е н и е: Опять воспользуемся методом подбора частного реше-ния. Однородное уравнение имеет вид y′′ − 2y′ − 3y. Корни его характе-ристического уравнения k2 − 2k − 3 = 0 действительные и неравные другдругу числа k1 = −1, k2 = 3. Следовательно, общее решение однородногоуравнения (см. соответствующую таблицу решений): Y = C1e
−x + C2e3x.
Так как среди корней характеристического уравнения имеется толькоодин корень k1 = a = −1, то r = 1, и частное решение неоднородногоуравнения следует искать в виде:
y = Qn(x)eax · xr = (Ax+ B) · e−x · x = (Ax2 + Bx) · e−x.
Находим
y′ = (2Ax+ B)e−x − (Ax2 + Bx)e−x =
= (−Ax2 + (2A−B)x +B)e−x и
y′′ = (−2Ax+ (2A− B))e−x − (−Ax2 + (2A−B)x +B)e−x.
Подставляя y, y′ и y′′ в исходное дифференциальное уравнение, будемиметь:
y′′ − 2y′ − 3y = (2x− 3)e−x ⇒⇒ (−2Ax + (2A−B))e−x − (−Ax2 + (2A− B)x+ B)e−x−− 2(−Ax2 + (2A−B)x+ B)e−x − 3(Ax2 +Bx)e−x = (2x− 3)e−x.
После сокращения на множитель e−x 6= 0 и группировки слагаемых влевой части уравнения по степеням x получим тождество:
0 · x2 − 8Ax+ (2A− 4B) = 2x− 3.
Приравнивая коэффициенты при равных степенях x, найдем:
−8A = 2,2A− 4B = −3,
⇒ A = −14,
B = 58.
Таким образом частное решение неоднородного уравнения найдем ввиде:
y = (Ax2 + Bx)e−x = (−1
4x2 +
5
8x)e−x =
1
8(−2x2 + 5x)e−x.

64 Практическое занятие – Уравнения второго порядка 451
Общее решение неоднородного уравнения в этом случае запишетсякак:
y = y + Y =1
8
(−2x2 + 5x
)e−x + C1e
−x + C2e3x.
Пример 64.3. Найти общее решение уравнения
y′′ + 4y′ + 5y = 2 cos x− sinx.
Р е ш е н и е: Характеристическое уравнение k2 + 4k + 5 = 0 для од-нородного дифференциального уравнения имеют два комплексных корняk1 = −2 + i и k2 = −2 − i. Поэтому общее решение соответствующегооднородного уравнения можно записать в виде:
Y = e−2x(C1 cosx + C2 sinx).
В соответствии с рассмотренной выше теорией, так как bi = i не явля-ется корнем характеристического уравнения, то r = 0 и частное решениенеоднородного дифференциального уравнения следует искать в форме
y = A cosx+B sinx.
Дифференцируя, находим y′ = −A sinx+ B cos x,y′′ = −A cosx−B sinx.
Подставляя y, y′ и y′′ в исходное дифференциальное уравнение, полу-чим
y′′ + 4y′ + 5y = 2 cosx− sinx⇒ −A cosx− B sinx+
+4(−A sinx+ B cos x) + 5(A cosx+ B sinx) = 2 cos x− sinx.
Приводя подобные члены, имеем:
(4A + 4B) cosx + (4B − 4A) sinx = 2 cos x− sinx.
Последнее равенство является тождеством, следовательно, коэффици-енты при cos x и sinx в левой и правой частях равенства должны бытьравны:
4A + 4B = 2,4B − 4A = −1,
⇒ A = 38,
B = 18.
Таким образом частное решение неоднородного уравнения имеет видy = A cosx+ B sinx = 3
8cosx + 1
8sinx, а общее решение:
y = y + Y =3
8cos x+
1
8sinx + e−2x(C1 cos x+ C2 sinx).
Пример 64.4. Найти общее решение уравнения y′′ + y = xex + 2e−x.

452 64 Практическое занятие – Уравнения второго порядка
Р е ш е н и е: Характеристическое уравнение k2 + 1 = 0 однородногодифференциального уравнения имеет два корня k1 = i, k2 = −i, поэтомуобщее решение однородного уравнения Y = C1 cos x + C2 sinx. Правуючасть исходного дифференциального уравнения можно представить в ви-де суммы двух функций
f(x) = f1(x) + f2(x) = x · ex + 2e−x.
Для первой функции f1(x) = x · ex частное решение неоднородногоуравнения следует искать в виде y1 = (Ax+B) ·ex, а для второй функцииf2(x) = 2 · e−x ⇒ y2 = Ce−x.
Пользуясь принципом наложения решений, частное решение исходно-го уравнения, правая часть которого равна f(x), следует искать как суммучастных решений, соответствующих отдельным слагаемым правой части.
Итак, будем искать решение в виде
y = y1 + y2 = (Ax+B)ex + Ce−x.
Найдем
y′ = Aex + (Ax+ B)ex − Ce−x = (Ax+ B + A)ex − Cex,
y′′ = A · ex + (Ax+ B +A)ex + Ce−x = (Ax+B + 2A)ex + Ce−x
и подставим y, y′ и y′′ в исходное дифференциальное уравнение:
y′′ + y = xex + 2e−x ⇒ (Ax+ B + 2A)ex + Ce−x + (Ax+ B)ex + Ce−x =
= xex + 2e−x.
После элементарных преобразований будем иметь:
2A · xex + (2A + 2B)ex + 2Ce−x = xex + 2e−x.
Отсюда, приравнивая коэффициенты при одинаковых выражениях в ле-вой и правой частях тождества, получим систему уравнений
2A = 1,2A+ 2B = 0,2C = 2,
⇒A = 1
2,
B = −12,
C = 1.
С учетом найденных коэффициентов частное решение неоднородного урав-нения запишется в виде:
y = (Ax+ B)ex + Ce−x = (1
2x− 1
2)ex + e−x =
1
2(x− 1)ex + e−x.
Следовательно, общее решение исходного уравнения
y = y + Y =1
2(x− 1)ex + e−x + C1 cos x+ C2 sinx.
65 Лекция – Уравнения высших порядков 453
Самостоятельная работа
Пример 64.5. Найти общее решение уравнения y′′ + y′ = 5x + 3.
Пример 64.6. Найти общее решение уравнения y′′ − 2y′ − 3y = (x ++ 2)e3x.
Пример 64.7. Найти общее решение уравнения y′′ + y′− 2y = 8 sin 2x.
Пример 64.8. Найти общее решение уравнения y′′+2y′ +y = ex+e−x.
65. лекция –дифференциальные уравнения
высших порядков
Дифференциальные уравнения высших порядков. Уравнения вида y(n) =f(x). Линейные дифференциальные уравнения высших порядков. Линей-ные дифференциальные уравнения n-го порядка с постоянными коэффи-циентами.
65.1. Дифференциальные уравнения высших порядков. Дифферен-циальное уравнение n-го порядка записывается следующим образом:
(65.1) F (x, y, y′, y′′, . . . , y(n)) = 0
или, если это возможно, в виде, разрешенном относительно старшей производ-ной
(65.2) y(n) = f(x, y, y′, y′′, . . . , y(n−1)).
В частном случае дифференциальное уравнене n-го порядка может не со-держать в явном виде x, y, y′, y′′, . . . , y(n−1), но обязательно содержит y(n).
Поскольку дифференциальные уравнения 2-го порядка, являются частнымслучаем уравнений высшего порядка (n = 2), то основные определения и тео-ремы, рассматриваемые для случая уравнений второго порядка, легко можнораспространить на более общий случай уравнений высшего порядка.
Теорема 65.1. (Существования и единственности решения – без доказа-тельства)
Если в уравнении
y(n) = f(x, y, y′, y′′, . . . , y(n−1))
функция f(x, y, y′, y′′, . . . , y(n−1)) и ее частные производные по аргументамy, y′ , y′′, . . . , y(n−1) непрерывны в некоторой области, содержащей значения
x = x0, y = y0, y′ = y′0, . . . , y
(n−1) = y(n−1)0 , то существует и притом един-
ственное решение y = y(x), удовлетворяющее условиям
y|x=x0 = y0, y′|x=x0 = y′0, y
′′|x=x0 = y′′0 , . . . , y(n−1)|x=x0 = y
(n−1)0 .

454 65 Лекция – Уравнения высших порядков
Эти условия называются начальными условиями.
Определение 65.1. Общим решением дифференциального уравнения n-гопорядка называется функция
(65.3) y = ϕ(x,C1, C2, . . . , Cn),
зависящая от n произвольных постоянных C1, C2, . . . , Cn, и такая, что:- она удовлетворяет уравнению при любых значениях постоянных
C1, C2, . . . , Cn;- при заданных начальных условиях постоянные C1, C2, . . . , Cn можно по-
добрать так, что функция (65.3) будет удовлетворять этим условиям.
Соотношение вида Φ(x, y, C1, C2, . . . , Cn) = 0, неявно определяющее общеерешение, называется общим решением дифференциального уравнения.
Всякая функция, получающаяся из общего решения при конкретных значе-ниях C1, C2, . . . , Cn, называется частным решением. График частного решенияназывается интегральной кривой данного дифференциального уравнения.
Решить (проинтегрировать) дифференциальное уравнение n-го порядка зна-чит:
1) найти его общее решение (если начальные условия не заданы) или2) найти частное решение при заданных начальных условиях.Задача определения частного решения уравнения высшего порядка, удовле-
творяющего заданным начальным условиям, как и в случае уравнения второгопорядка, называется задачей Коши:
(65.4)y(n) = f(x, y, y′, y′′, . . . , y(n−1)),
y|x=x0 = y0, y′|x=x0 = y′0, y
′′|x=x0 = y′′0 , . . . , y(n−1)|x=x0 = y
(n−1)0 .
Задача определения частного решения уравнения высшего порядка на за-данной области изменения x ∈ [a; b], удовлетворяющего заданным значениямфункции и ее производных на границах исследуемой области, называется крае-вой задачей. Примером является задача нахождения статического прогиба y(x)нагруженной струны с закрепленными концами
y′′(x) = −f(x), a 6 x 6 b, y(a) = y(b) = 0,
где f(x) – внешняя изгибающая нагрузка на единицу длины струны, деленнаяна упругость струны. Для уравнений более высокого порядка (n > 2) поста-новки краевых условий более разнообразны. При этом возможны случаи когдачасть условий задается во внутренних точках отрезка [a; b]. Эти условия назы-вают внутренними краевыми условиями.
В общем случае решение дифференциальных уравнений высшего поряд-ка представляет сложную практическую и теоретическую задачу. Рассмотримнесколько типов дифференциальных уравнений n-го порядка, допускающих от-носительно простые процедуры решения.

65 Лекция – Уравнения высших порядков 455
65.2. Уравнения вида y(n) = f(x). Простейшим уравнением n-го поряд-ка является уравнение вида
(65.5) y(n) = f(x).
Для определения общего решения этого уравнения проинтегрируем по x еголевую и правую части и, принимая во внимание, что y(n) = (y(n−1))′, получим
y(n−1) =
∫
f(x)dx+ C1,
где C1 - постоянная интегрирования.Интегрируя еше раз, получим
y(n−2) =
∫ (∫
f(x)dx
)
dx+ C1x+ C2.
Продолжая интегрирование n раз, получим в итоге выражение общего ре-шения дифференциального уравнения (65.5) в виде
y =
∫ ∫ ∫
. . .
∫
︸ ︷︷ ︸
n раз
f(x)dxn + C1xn−1 + C2x
n−2 + · · · + Cn−1x+ Cn.
Для определения частного решения необходимо задать дополнительно на-чальные условия.
Пример 65.1. Найти общее и частное решения уравнения
y′′′ = 12x− 6 при y|x=1 = 0, y′|x=1 = 1, y′′|x=1 = 2.
Р е ш е н и е: Проинтегрируем последовательно три раза:
y′′′ = (y′′)′ = 12x− 6 ⇒ y′′ =
∫
(12x− 6)dx = 6x2 − 6x+ C1,
y′′ = (y′)′ = 6x2 − 6x+ C1 ⇒ y′ =
∫
(6x2 − 6x+ C1)dx =
= 2x3 − 3x2 + C1x+ C2,
y′ = (y)′ = 2x3 − 3x2 + C1x+ C2 ⇒
⇒ y =
∫
(2x3 − 3x2 + C1x+ C2)dx =x4
2− x3 +
C1x2
2+ C2x+ C3.
Итак общее решение y = x4
2 − x3 + C1x2
2 + C2x+ C3.Теперь продифференцируем общее решение n− 1 = 2 раза:
y =x4
2− x3 +
C1x2
2+ C2x+ C3,
y′ = 2x3 − 3x2 + C1x+ C2,
y′′ = 6x2 − 6x+ C1

456 65 Лекция – Уравнения высших порядков
и подставим в найденные соотношения начальные условия:
0 = 12 − 1 + C1
2 + C2 + C3,1 = 2 − 3 + C1 + C2,2 = 6 − 6 + C1.
Отсюда C1 = 2, C2 = 0, C3 = −12 , следовательно частное решение
y =x4
2− x3 + x2 − 1
2.
65.3. Линейные дифференциальные уравнения высших порядков.
Дифференциальное уравнение
(65.6) a0(x)y(n) + a1(x)y
(n−1) + a2(x)y(n−2) + · · · + an(x)y = f(x)
называются линейным дифференциальным уравнением n-го порядка, где коэф-фициенты a0(x), a1(x), . . . , an(x) и свободный член f(x) – заданные функцииаргумента x.
Если f(x) 6= 0, то уравнение (65.6) называется неоднородным уравнением(или уравнением с правой частью).
Если f(x) ≡ 0, то линейное уравнение (65.6) принимает вид
(65.7) a0(x)y(n) + a1(x)y
(n−1) + a2(x)y(n−2) + · · · + an(x)y = 0
и называется линейным однородным уравнением (или уравнением без правойчасти).
Теорема существования и единственности решения линейного дифференци-ального уравнения n-го порядка формулируется аналогично теореме существо-вания и единственности решения линейного уравнения второго порядка.
Теорема 65.2. Если коэффициенты a0(x), a1(x), a2(x), . . . , an(x) и праваячасть f(x) линейного уравнения (65.6) непрерывны в интервале (a, b), причемкоэффициент a0(x) не обращается в нуль ни в одной точке этого интервала,то каковы бы ни были начальные условия
y|x=x0 = y0, y′|x=x0 = y′0, y
′′|x=x0 = y′′0 , . . . , y(n−1)|x=x0 = y
(n−1)0 ,
(a < x0 < b),
существует единственное решение уравнения, удовлетворяющее данным на-чальным условиям.
Если y1(x), y2(x), . . . , yn(x) являются частными решениями однородного ли-нейного уравнения (65.7), то определитель
(65.8) W (x) =
∣∣∣∣∣∣∣∣∣∣
y1(x) y2(x) . . . yn(x)y′1(x) y′2(x) . . . y′n(x)y′′1 (x) y′′2 (x) . . . y′′n(x). . . . . . . . . . . .
y(n−1)1 (x) y
(n−1)2 (x) . . . y
(n−1)n (x)
∣∣∣∣∣∣∣∣∣∣
65 Лекция – Уравнения высших порядков 457
называется определителем Вронского.Если ни в одной точке интервала (a, b) определитель Вронского не обраща-
ется в нуль, то частные решения y1(x), y2(x), . . . , yn(x) однородного линейногодифференциального уравнения n-го порядка образуют фундаментальную си-стему частных решений на интервале (a, b).
Как и в случае линейных дифференциальных уравнений второго порядка(n = 2), для линейных уравнений n-го порядка имеют место следующие теоре-мы о структуре общего решения, приводимые здесь без доказательства.
Теорема 65.3. Если y1(x), y2(x), y3(x), . . . , yn(x) – частные решения одно-родного линейного уравнения n-го порядка (65.7), образующие на интервале(a, b) фундаментальную систему частных решений, то общее решение этогоуравнения имеет вид:
(65.9) Y = C1y1(x) + C2y2(x) + · · · + Cnyn(x)
при любых значениях постоянных C1, C2, . . . , Cn.
Теорема 65.4. Если y – частное решение линейного неоднородного урав-нения (65.6), а Y – общее решение соответствующего однородного уравнения(65.7), то функция y = y + Y является общим решением неоднородного диф-ференциального уравнения (65.6).
Замечание 65.40. Для того, чтобы система n частных решений уравне-ния (65.7) была фундаментальной на данном интервале, необходимо и доста-точно, чтобы эти решения на этом интервале были линейно независимы.
Таким образом, задача интегрирования уравнения (65.6), если известно об-щее решение однородного уравнения (65.7), сводится к определению частногорешения неоднородного уравнения.
Эту задачу можно решить, например, с помощью метода вариации про-извольных постоянных.
65.4. Линейные дифференциальные уравнения n-го порядка с по-
стоянными коэффициентами.
Определение 65.2. Линейным дифференциальным уравнением n-го поряд-ка с постоянными коэффициентами называется уравнение вида:
(65.10) a0y(n) + a1y
(n−1) + a2y(n−2) + · · · + any = f(x),
где коэффициенты a0, a1, a2, . . . , an - числа, причем a0 6= 0.
Первоначально рассмотрим однородное линейное дифференциальное урав-нение с постоянными коэффициентами
(65.11) a0y(n) + a1y
(n−1) + a2y(n−2) + · · · + any = 0
или после сокращения на a0 6= 0:
(65.12) y(n) + b1y(n−1) + b2y
(n−2) + · · · + bny = 0.

458 65 Лекция – Уравнения высших порядков
Решение уравнения (65.12) находится так же, как и решение линейного од-нородного дифференциального уравнения второго порядка с постоянными ко-эффициентами (65.9), т.е. в виде y = ekx.
1)Составляем характеристическое уравнение
(65.13) kn + b1kn−1 + b2k
n−2 + · · · + bn = 0.
2)Находим корни характеристического уравнения
k1, k2, . . . , kn.
3)По виду корней характеристического уравнения записываем частные ли-нейно независимые решения, руководствуюсь следующим правилом :
• каждому действительному однократному корню k соответствует част-ное решение ykx;
• каждому действительному корню k1, имеющему кратность r(k1 == k2 = · · · = kr = k1) соответствует r линейно независимых частныхрешений y1 = ek1x, y2 = xek1x, y3 = x2ek1x, . . . , yr = xr−1ek1x;
• каждой паре комплексных сопряженных корней k1 = α+βi и k2 = α−βi соответствует два частных решения y1 = eαx cos βx и y2 = eαx sin βx;
• каждой паре комплексных сопряженных корней k1 = α + βi и k2 =α− βi кратности r соответствует 2r частных решений :
y1 = eαx cos βx, y2 = xeαx cosβx, . . . , yr = xr−1eαx cosβx,yr+1 = eαx sin βx, yr+2 = xeαx sin βx, . . . , y2r = xr−1eαx sin βx.
Общее количество частных решений равно степени характеристиче-ского уравнения, т.е. порядку данного линейного дифференциальногоуравнения уравнения. Все эти решения линейно не зависимы и обра-зуют фундаментальную систему решений.
4) определив n линейно независимых частных решенийy1, y2, . . . , yn, запишем общее решение исходного уравнения (65.12) ввиде
(65.14) Y = C1y1 + C2y2 + C3y3 + · · · + Cnyn,
где C1, C2, . . . , Cn - произвольные постоянные.
Пример 65.2. Найти общее решение уравнения yIV − 13y′′ + 36y = 0.
Р е ш е н и е:
• составляем характеристическое уравнение:
k4 − 13k2 + 36 = 0;
• определяем корни характеристического уравнения
k1 = 3, k2 = −3, k3 = 2, k4 = −2;
• по виду этих корней записываем линейно независимые частные реше-ния :
y1 = e3x, y2 = e−3x, y3 = e2x, y4 = e−2x;

65 Лекция – Уравнения высших порядков 459
• записываем общее решение линейного однородного дифференциально-го уравнения в виде :
Y = C1e3x + C2e
−3x + C3e2x + C4e
−2x.
Частное решение линейных неоднородных дифференциальных уравнений спостоянными коэффициентами (65.10) можно определять с помощью рассмот-ренного выше метода вариации произвольных постоянных, однако, решения внекоторых конкретных случаях можно найти проще, используя метод подборачастного решения (метод неопределенных коэффициентов).
Правила составления формы частного решения неоднородного уравненияпри этом остаются такими же, как сформулированные в лекции 63.2 правиладля составления формы частного решения уравнения второго порядка.
Пример 65.3. Найти общее решение уравнения yIV − y = x3 + 1.
Р е ш е н и е: Характеристическое уравнение k4 − 1 = 0 имеет корниk1 = 1, k2 = −1, k3 = i, k4 = −i. В соответствии с правилом общее решениеоднородного уравнения запишется в виде:
Y = C1ex + C2e
−x + C3 cos x+ C4 sin x.
Правая часть исходного неоднородного уравнения f(x) = x3+1 соответству-ет общему виду f(x) = Pn(x), ни один из корней характеристического уравне-ния не равен α = 0, т.е. r = 0, и частное решение неоднородного уравненияследует искать в форме (67.07):
y = A0x3 +A1x
2 +A2x+A3.
Дифференцируя y четыре раза и подставляя полученное выражение в за-данное уравнение, получим:
−A0x3 −A1x
2 −A2x−A3 = x3 + 1.
Приравнивая коэффициенты при одинаковых степенях x :
−A0 = 1,−A1 = 0,−A2 = 0,−A3 = 1,
найдем частное решениеy = −x3 − 1.
В итоге, общий интеграл неоднородного уравнения в соответствии со струк-турой общего решения выглядит следующим образом:
y = y + Y = −x3 − 1 + C1ex + C2e
−x + C3 cosx+ C4 sin x.

460 65 Практическое занятие – Уравнения высших порядков
65. практическое занятие –дифференциальные уравнения
высших порядков
Пример 65.1. Найти общее решение уравнения yIV = sinx.
Р е ш е н и е: Найдем общее решение данного уравнения последовательныминтегрированием:
yIV = sinx⇒ y′′′ =∫
sin xdx = − cosx+ C1,y′′ =
∫(− cosx+ C1)dx = − sin x+ C1x+ C2,
y′ =∫(− sin x+ C1x+ C2)dx = cos x+ C1
x2
2 + C2x+ C3,
y =∫(cos x+ C1
x2
2 + C2x+ C3)dx = sinx+ C1x3
6 +
+C2x2
2 + C3x+ C4.
Так как C1 и C2 – произвольные постоянные, то решение лучше записатьтак:
y = sinx+ C1x3 + C2x
2 + C3x+ C4.
Пример 65.2. Найти частное решение уравнения
y′′′ = ex при y(0) = 1, y′(0) = 0, y′′(0) = 1.
Р е ш е н и е: Путем непосредственного интегрирования найдем общеерешение
y′′′ = ex,
y′′ =
∫
exdx = ex + C1,
y′ =
∫
(ex + C1)dx = ex + C1x+ C2,
y =
∫
(ex + C1x+ C2)dx = ex + C1x2
2+ C2x+ C3.
Подставим начальные условия в найденное общее решение и производныеот общего решения
y = ex + C1x2
2+ C2x+ C3 ⇒ y(0) = 1 + C3 = 1 ⇒ C3 = 0,
y′ = ex + C1x+ C2 ⇒ y′(0) = 1 + C2 = 0 ⇒ C2 = −1,
y′′ = ex + C1 ⇒ y′′(0) = 1 + C1 = 1 ⇒ C1 = 0.
С учетом найденных констант интегрирования частное решение исходногоуравнения запишется в виде:
y = ex − x.
Пример 65.3. Найти общее решение уравнения
y′′′ − 2y′′ − y′ + 2y = 0.

65 Практическое занятие – Уравнения высших порядков 461
Р е ш е н и е: Данное уравнение является линейным однородным диффе-ренциальным уравнением 3-го порядка с постоянными коэффициентами.
• Составляем характеристическое уравнение
k3 − 2k2 − k + 2 = 0;
• определяем корни характеристического уравнения
k1 = 2, k2 = 1, k3 = −1;
• по виду этих корней записываем линейно независимые частные реше-ния :
y1 = e2x, y2 = ex, y3 = e−x;
• записываем общее решение :
Y = C1y1 + C2y2 + C3y3 = C1e2x + C2e
x + C3e−x.
Пример 65.4. Найти общее решение уравнения
y′′′ + 3y′′ + 3y′ + y = 0.
Р е ш е н и е: Данное уравнение является линейным однородным диффе-ренциальным уравнением 3-го порядка с постоянными коэффициентами.
• Составляем характеристическое уравнение
k3 + 3k2 + 3k + 1 = 0, (k + 1)3 = 0;
• определяем корни характеристического уравнения
k1 = k2 = k3 = −1, r = 3;
• по виду этих корней записываем линейно независимые частные реше-ния :
y1 = e−x, y2 = xe−x, y3 = x2e−x;
• записываем общее решение:
Y = C1y1 + C2y2 + C3y3 = C1e−x + C2xe
−x + C2x2e−x =
= e−x(C1 + C2x+ C3x2).
Пример 65.5. Найти общее решение уравнения
yIV + 2y′′ + y = 0.
Р е ш е н и е: Данное уравнение является линейным однородным диффе-ренциальным уравнением 4-го порядка с постоянными коэффициентами.
• Составляем характеристическое уравнение:
k4 + 2k2 + 1 = 0, (k2 + 1)2 = 0;
• определяем корни характеристического уравненияk1 = k2 = i, k3 = k4 = −i, т.е. имеются два корня кратности r = 2;

462 65 Практическое занятие – Уравнения высших порядков
• по виду этих корней записываем линейно независимые частные реше-ния :
y1 = cosx, y2 = xcosx, y3 = sinx, y4 = x sin x;
• записываем общее решение :
Y = C1 cos x+ C2x cos x+ C3 sin x+ C4x sin x.
Пример 65.6. Найти общее решение уравнения yIV − y = 5 cos x.
Р е ш е н и е: Данное уравнение является линейным неоднородным диффе-ренциальным уравнением 4-го порядка с постоянными коэффициентами. Ха-рактеристическое уравнение k4 − 1 = 0 имеет четыре корня k1 = 1, k2 =−1, k3 = i, k4 = −i. Следовательно, общим решением однородного уравненияявляется функция:
Y = C1ex + C2e
−x + C3 cos x+ C4 sin x.
Правая часть исходного неоднородного уравнения имеет видf(x) = Pn(x) cosβx + Qm(x) sin βx, где α + βi ≡ βi, и k3 = i (r = 1), следо-вательно, частное решение следует искать в виде:
y = (A cosx+B sin x) · x.Дифференцируя y четыре раза и подставляя функцию и производные в
исходное дифференциальное уравнение, будем иметь:
4A sin x− 4B cos x = 5 cos x,
откуда 4A = 0, −4B = 5, и A = 0, B = −54 . Следовательно, частным решением
дифференциального уравнения является:
y = −5
4x sin x,
а общим
y = y + Y = −5
4x sin x+ C1e
x + C2e−x + C3 cos x+ C4 sin x.
Пример 65.7. Найти общее решение уравнения
y′′′ + y′′ − 2y′ = x− ex.
Р е ш е н и е: Данное уравнение является линейным неоднородным диф-ференциальным уравнением 3-го порядка с постоянными коэффициентами. Ха-рактеристическое уравнение k3 + k2 − 2k = 0 имеет корни k1 = 0, k2 = 1, k3 =−2, а потому общее решение однородного уравнения можно записать в виде
Y = C1 + C2ex + C3e
−2x.
Правая часть исходного уравнения имеет вид f(x) = f1(x) + f2(x), гдеf1(x) = x = Pn(x), а f2(x) = −ex = Pn(x)e
αx. С учетом корней характери-стического уравнения форма частного решения записывается в виде:

65 Практическое занятие – Уравнения высших порядков 463
для случая f1(x) (k1 = α1 = 0, формула (67.08):
y1 = Qn(x)x = (Ax+B)x = Ax2 +Bx,
для случая f2(x) (k2 = α2 = 1, формула (67.11):
y2 = Qn(x)xeαx = Cxex.
Для дальнейшего решения воспользуемся принципом наложения решений:
y = y1 + y2 = Ax2 +Bx+ Cxex.
Продифференцируем последнюю функцию y три раза
y′ = 2Ax+B + Cex + Cxex,y′′ = 2A+ 2Cex + Cxex,y′′′ = 3Cex + Cxex
и подставим в исходное дифференциальное уравнение
y′′′ + y′′ − 2y′ = x− ex ⇒ (3Cex + Cxex)+
(2A+ 2Cex + Cxex) − 2(2Ax+B + Cex + Cxex) = x− ex,
или, после элементарных преобразований,
−4Ax+ (2A− 2B) + 3Cex = x− ex.
Приравнивая коэффициенты при одинаковых функциях в левой и правой ча-стях последнего уравнения, получим
−4A = 1,2A− 2B = 0,3C = −1,
⇒A = −1
4 ,B = −1
4 ,C = −1
3 .
Следовательно, частное решение исходного дифференциального уравненияравно
y = −1
4x2 − 1
4x− 1
3xex =
1
4x(x+ 1) − 1
3xex,
а общее решение равно
y = y + Y = −1
4x(x+ 1) − 1
3xex + C1 + C2e
x + C3e−2x.
Самостоятельная работа
Пример 65.8. Найти частное решение уравнения
yIV = cos2 x при y(0) =1
32, y′(0) = 0, y′′(0) =
1
8, y′′′(0) = 0.
Пример 65.9. Найти общее решение уравненияy′′′ = 24x+ 6.
Пример 65.10. Найти общее решение уравнения
yV − yIV − y′′′ + y′′ = 0.
464 66 Лекция – Приложения дифференциальных уравнений
Пример 65.11. Найти общее решение уравнения
yIV + 5y′′ + 4y = 0.
Пример 65.12. Найти общее решение уравнения y′′′ + y′ = cos 2x.
Пример 65.13. Найти общее решение уравнения
yIV − 2y′′′ + y′′ = x3.
Пример 65.14. Найти общее решение уравнения
y′′′ + y′′ = x2 + 1 + 3xex.
66. лекция –приложения дифференциальных уравнений
Практические приложения теории обыкновенных дифференциаль-ных уравнений. Дифференциальные уравнения, описывающие ко-лебательный процесс.
66.1. Некоторые практические приложения теории обыкно-венных дифференциальных уравнений. Решение многих практиче-ских задач часто приводит к отысканию неизвестной функции из урав-нения (или уравнений), содержащих независимую переменную, искомуюфункцию и производные этой функции, т.е. к решению дифференциаль-ных уравнений. В предыдущих лекциях мы рассмотрели теорию обыкно-венных дифференциальных уравнений и некоторые методы их решения. Вданной лекции рассмотрим практические приложения, приводящие к за-дачам на составление и решение обыкновенных дифференциальных урав-нений различных типов.
Пример 66.1. Составить уравнение кривой, обладающей тем свой-ством, что отрезок любой касательной, заключенной между осями ко-ординат, делится пополам в точке касания.
Р е ш е н и е: Пусть y = f(x) – искомое уравнение. M(x, y) – произ-вольная точка, лежащая на искомой кривой. Для определенности пред-положим, что кривые расположены в первой четверти (рис. 151).
По условию задачи |BM | = |MA|, а, следовательно, |OP | = |PA| = x.Из рис. 151 видно, что
tg(180o − α) =y
x=⇒ tgα = −y
x.

66 Лекция – Приложения дифференциальных уравнений 465
M
y
x P
y
0
α
y=f(x)
A
B
x
Рис. 151. Иллюстрация задачи 66.1
Учитывая, что tgα есть угловой коэффициент касательной, которыйв точке M(x, y) равен y′, получаем дифференциальное уравнение искомойкривой:
y′ = −yx,
которое относится к типу уравнений с разделяющимися переменными.Решая его, получим:
y′ = −yx
=⇒ dy
dx= −y
x=⇒ dy
y= −dx
x=⇒
ln |y| = − ln |x| + lnC =⇒ y =C
x.
Это – уравнение семейства гипербол.
Пример 66.2. Скорость распада радия в момент времени t пропорци-ональна его количеству m(t). В начальный момент времени масса радияm(0) = 200 г. Сколько радия останется через 300 лет, если извест-но, что период полураспада радия (промежуток времени, через которыйпервоначальная масса радия уменьшается в два раза) равен 1550 лет.
Р е ш е н и е: Из условия задачи имеем
dm
dt= −km,
где k > 0, а знак минус показывает, что масса радия убывает.Полученное уравнение является дифференциальным уравнением пер-
вого порядка с разделяющимися переменными. Решая его будем иметь
dm
m= −kdt =⇒
∫dm
m= −
∫
kdt =⇒ ln |m| = −kt+ lnC
=⇒ ln |m| = ln e−kt + lnC =⇒ m = Ce−kt.

466 66 Лекция – Приложения дифференциальных уравнений
Последнее уравнение определяет общий закон изменения массы радияс течением времени.
Согласно начальному условию m(0) = 200 г., имеем:
200 = Ce−k0 =⇒ C = 200.
Следовательно, частные решения рассматриваемой задачи:
m(t) = 200e−kt.
Коэффициент пропорциональности k можно найти из условия, что
m(t) =1
2m(0) =
1
2· 200 = 100 г. при t = T = 1550 лет.
Получаем:
100 = 200e−1550k =⇒ e−1550k =1
2=⇒ e1550k = 2 = eln 2
=⇒ 1550k = ln 2 =⇒ k =ln 2
1550≈ 0, 000447.
Таким образом,
m(t) = 200e−ln21550
t.
Положив t = 300, найдем количество радия, оставшегося нераспав-шимся через 300 лет:
m(300) = 200 · e− ln21550
300 ≈ 200 · e−0,000447·300 ≈ 176, 5 г.
Пример 66.3. Задача о второй космической скорости. Определитьнаименьшую скорость, с которой нужно бросить тело вертикальновверх, чтобы оно не вернулось на Землю. Сопротивлением воздуха пре-небречь.
Р е ш е н и е: Обозначим массу Земли и массу брошенного теласоответственно через M и m. По закону тяготения Ньютона сила F при-тяжения, действующая на тело m будет равна:
F = kM ·mr2
,
где r – расстояние между центром Земли и центром тяжести брошенноготела, k – гравитационная постоянная(
k = 6, 66 · 10−8 см3
г·с2
)
.

66 Лекция – Приложения дифференциальных уравнений 467
По второму закону Ньютона имеем F = ma, следовательно уравнениедвижения указанного тела с массой m будет иметь вид:
md2r
dt2= −kM ·m
r2или (∗) d2r
dt2= −kM
r2.
Знак минус в уравнении отражает тот факт, что ускорение отрица-тельно.
Полученное дифференциальное уравнение относится к дифференци-альным уравнениям второго порядка, допускающим понижение порядка.Решим это уравнение при следующих начальных условиях:
при t = 0 : r = R,dr
dt= V0,
где R – радиус Земли (R = 63 · 107 см), V0 – скорость бросания.Обозначим:
dr
dt= V,
d2r
dt2=dV
dt=dV
dr
dr
dt= V
dV
dr,
где V – скорость движения тела. Подставляя эти значения в уравнение(*), получим уравнение:
(∗∗) VdV
dr= −kM
r2,
которое является дифференциальным уравнением первого порядка с раз-деляющимися переменными. Решим это уравнение:
V dV = −kM dr
r2=⇒
∫
V dV = −kM∫dr
r2=⇒ V 2
2=kM
r+ C1.
Из начального условия R(0) = R, V = V0, определяем C1:
V 20
2=kM
R+ C1 =⇒ C1 = −kM
R+V 2
0
2.
Таким образом закон изменения скорости в зависимости от расстоянияr при заданных начальных условиях примет вид:
V 2
2=kM
r− kM
R+V 2
0
2или
V 2
2=kM
r+
(V 2
0
2− kM
R
)
.
По условию тело должно двигаться так, чтобы скорость всегда былаположительной (V
2
2> 0). Так как при возрастании r величина kM
rстре-
мится к нулю, то условие V 2
2> 0 можно выполнить только в случае
V 20
2− kM
R> 0 или V0 >
√
2kM
R.
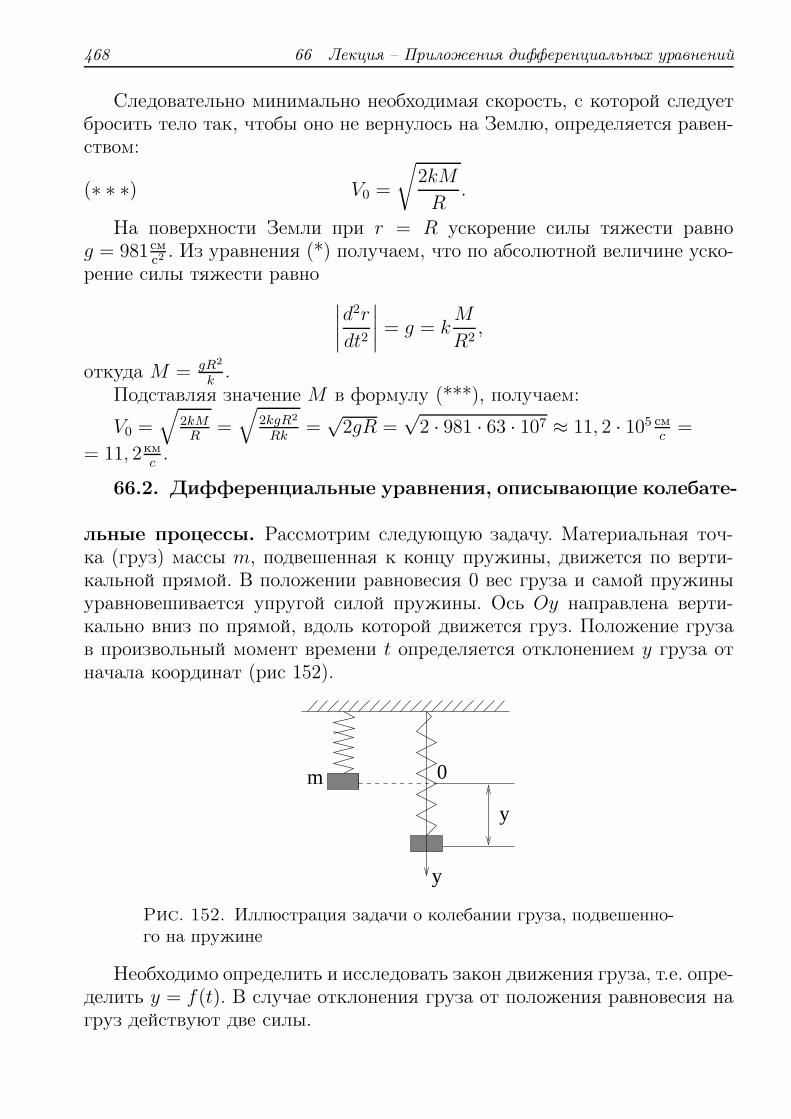
468 66 Лекция – Приложения дифференциальных уравнений
Следовательно минимально необходимая скорость, с которой следуетбросить тело так, чтобы оно не вернулось на Землю, определяется равен-ством:
(∗ ∗ ∗) V0 =
√
2kM
R.
На поверхности Земли при r = R ускорение силы тяжести равноg = 981см
с2 . Из уравнения (*) получаем, что по абсолютной величине уско-рение силы тяжести равно
∣∣∣∣
d2r
dt2
∣∣∣∣= g = k
M
R2,
откуда M = gR2
k.
Подставляя значение M в формулу (***), получаем:
V0 =√
2kMR
=√
2kgR2
Rk=
√2gR =
√2 · 981 · 63 · 107 ≈ 11, 2 · 105 см
c=
= 11, 2кмc.
66.2. Дифференциальные уравнения, описывающие колебате-
льные процессы. Рассмотрим следующую задачу. Материальная точ-ка (груз) массы m, подвешенная к концу пружины, движется по верти-кальной прямой. В положении равновесия 0 вес груза и самой пружиныуравновешивается упругой силой пружины. Ось Oy направлена верти-кально вниз по прямой, вдоль которой движется груз. Положение грузав произвольный момент времени t определяется отклонением y груза отначала координат (рис 152).
y
y
0m
Рис. 152. Иллюстрация задачи о колебании груза, подвешенно-го на пружине
Необходимо определить и исследовать закон движения груза, т.е. опре-делить y = f(t). В случае отклонения груза от положения равновесия нагруз действуют две силы.
66 Лекция – Приложения дифференциальных уравнений 469
Первая – восстанавливающая сила F1, стремящаяся вернуть груз вположение равновесия. Сила F1 направлена вдоль оси Oy, а ее проек-ция на ось пропорциональна отклонению груза от положения равновесия:F1y = −ky. Число k называется коэффициентом восстановления (k > 0).Отрицательный знак в выражении проекции силы F1y указывает на то,что восстанавливающая сила направлена в сторону, противоположную де-формации пружины.
Вторая сила – это сила сопротивления среды F2, в которой находитсяпружина с грузом. Величина силы F2 пропорциональна скорости движе-ния груза V и направлена противоположно вектору скорости движениягруза. Поэтому проекция силы F2 на ось Oy запишется в виде
F2y = −λV = −λdydt
(λ > 0).
В соответствии со вторым законом Ньютона
m · a =n∑
i=1
Fi,
где a – вектор ускорения, аn∑
i=1
Fi – сумма всех действующих на матери-
альную точку сил.Проектируя проекции всех векторов в формуле закона Ньютона на
ось Oy и замечая, что проекция вектора ускорения a на ось Oy равна d2ydt2
,получим уравнение
md2y
dt2= −ky − λ
dy
dt,
или
(66.1) md2y
dt2+ λ
dy
dt+ ky = 0.
Уравнение (66.1) является линейным дифференциальным уравнениемвторого порядка с постоянными коэффициентами и называется уравнени-ем свободных колебаний.
Если на груз действует внешняя возмущающая сила, направленнаявдоль оси Oy, величина которой F (t) является заданной функцией отвремени t, то уравнение (66.1) преобразуется к виду
(66.2) md2y
dt2+ λ
dy
dt+ ky = F (t)
и называется уравнением вынужденных колебаний.

470 66 Лекция – Приложения дифференциальных уравнений
Для дальнейших исследований разделим обе части последнего урав-нения на m и, введя новые обозначения
λ
m= 2b,
k
m= ω2,
F (t)
m= f(t),
получим уравнение вынужденных колебаний в виде
(66.3)d2y
dt2+ 2b
dy
dt+ ω2y = f(t), или y′′ + 2by′ + ω2y = f(t).
С помощью полученного дифференциального уравнения рассмотрими исследуем некоторые частные случаи.
1. Отсутствуют внешняя возмущающая сила f(t) = 0 и сопротивлениесреды b = 0 – свободные колебания без сопротивления среды. В этомслучае уравнение (66.1) примет вид:
(66.4) y′′ + ω2y = 0.
Характеристическое уравнение k2 + ω2 = 0 имеет корни k1 = ωi, k2 == −ωi, и общее решение уравнения (66.4) запишется в форме:
(66.5) Y = C1 cosωt+ C2 sinωt.
В последней формуле произвольные постоянные C1 и C2 заменим но-выми A > 0 и ϕ0, которые связаны с постоянными C1 и C2 соотношениями:
C1 = A sinϕ0, C2 = A cosϕ0,
где A =√
C21 + C2
2 , а ϕ0 = arctg C1
C2.
Подставляя C1 и C2 в выражение (66.5), запишем общее решение ввиде:
Y = A sinϕ0 cosωt+A cosϕ0 sinωt,
или, используя формулы тождественных преобразований тригонометри-ческих выражений, окончательно получим:
(66.6) Y = A sin(ωt+ ϕ0).
Эта формула описывает периодическое движение груза, которое назы-вается гармоническими колебаниями. Промежуток времени T , за которыйаргумент изменяется на 2π, называемый периодом колебаний, в данномслучае равен T = 2π/ω. Величина ω называется собственной частотойколебаний. A – величина наибольшего отклонения от положения равнове-сия называется амплитудой колебаний, а ϕ0 называется начальной фазой.График, описываемый функцией (66.6) изображен на рис. 153.

66 Лекция – Приложения дифференциальных уравнений 471
T=-- t
y
y=A
y=-A
π2ω
π−ϕoω
π−ϕo2ω
ϕoω−
Рис. 153. График гармонических колебаний
2. Отсутствует внешняя возмущающая сила f(t) = 0, но имеет ме-сто сопротивление среды b 6= 0 – свободные колебания с сопротивлениемсреды. Этому случаю соответствует уравнение типа (66.1):
(66.7) y′′ + 2by′ + ω2y = 0.
Его характеристическое уравнение k2 + 2bk + ω2 = 0 имеет корниk1,2 = −b ±
√b2 − ω2. В зависимости от вида этих корней рассмотрим
три следующие задачи.a) Большое сопротивление среды, b > ω – корни характеристического
уравнения действительные и различные. Решение уравнения (66.7) имеетвид
(66.8) Y = C1e(−b+
√b2−ω2)t + C2e
(−b−√b2−ω2)t.
Как следует из формулы в этом случае колебаний нет, так как силысопротивления среды велики по сравнению с восстанавливающими сила-ми (упругость пружины). Груз, не совершая колебаний, приближается кположению равновесия (Y → 0 при t→ ∞).
б) b = ω – корни характеристического уравнения равны друг другу:
(66.9) Y = (C1 + C2t)e−bt.
Здесь отклонение также стремится к нулю при t→ ∞, однако медлен-нее, чем в предыдущем случае, благодаря наличию сомножителя C1+C2t.
в) Малое сопротивление среды b < ω. Корни характеристическогоуравнения комплексные
k1,2 = −b±√ω2 − b2i,
а общее решение уравнения (66.7) имеет вид
Y = e−bt(C1 cos(√ω2 − b2t) + C2 sin(
√ω2 − b2t)) =
Ae−bt sin(√ω2 − b2t+ ϕ0) = Ae−bt sin(ωt+ ϕ0),

472 66 Лекция – Приложения дифференциальных уравнений
где ω =√ω2 − b2.
Здесь под амплитудой колебаний следует рассматривать величину A ·e−bt, зависящую от времени. Так как b > 0, то эта величина стремится кнулю при t → ∞, т.е. имеет место затухающий колебательный процесс.График затухающих колебаний изображен на рис. 154.
t0
y
Y=Ae ωt+ϕo)~sin(-bt
Рис. 154. График затухающих колебаний
3. Вынужденные колебания под действием внешней периодическойвозмущающей силы f(t) = a sinµt при отсутствии сопротивления средыb = 0. В этом случае уравнение (66.3) примет вид:
(66.10) y′′ + ω2y = a sinµt.
Общее решение однородного уравнения y′′ + ω2y = 0 было найденоранее (66.6) Y = A sin(ωt+ ϕ0).
Для определения частного решения уравнения (66.10) необходимо рас-смотреть два случая.
а) Частота внешней возмущающей силы µ отлична от частоты соб-ственных колебаний системы ω, т.е. µ 6= ω. Так как в этом случае выра-жение µi 6= ωi, и, следовательно не является корнем характеристическогоуравнения k2 + ω2 = 0, то согласно формуле (67.13) частное решение yследует искать в форме
y = A sinµt+B cosµt.
Дифференцируя дважды и подставляя выражения для y и y′′ в исход-ное уравнение (66.10)
−µ2(A sinµt+B cosµt) + ω2(A sinµt+B cosµt) = a sinµt,

66 Лекция – Приложения дифференциальных уравнений 473
после приравнивания коэффициентов при одноименных тригонометриче-ских функциях в обеих частях уравнения, получим:
−µ2A+ ω2A = a, =⇒ A = aω2−µ2 ,
−µ2B + ω2B = 0, =⇒ B = 0.
Таким образом, частное решение имеет вид
y =a
ω2 − µ2sinµt,
а общее решение уравнения (66.10)
(66.11) y = y + Y =a
ω2 − µ2sinµt+A sin(ωt+ ϕ0).
Из данного решения следует, что если частота µ внешней возмущаю-щей силы по своей величине приближается к собственной частоте коле-баний пружины ω, то разность ω2 − µ2 стремится к нулю и амплитудаколебаний резко возрастает.
В случае, когда µ = ω, формула (66.11) становится неприменимой.б) Частота внешней возмущающей силы µ совпадает с частотой соб-
ственных колебаний системы ω, т.е. µ = ω. Так как при этом выражениеµi = ωi является корнем характеристического уравнения k2 + ω2 = 0,частное решение уравнения (66.10) следует искать в форме (67.14)
y = (A sinµt+ B cosµt) · t.Подставляя y и y′′ в уравнение (66.10) и учитывая, что µ = ω, можно
найти значение коэффициентов A = 0, B = − a2ω
.Поэтому частное решение y в этом случае имеет вид:
y = − at
2ωcosωt,
а общее решение уравнения (66.10) запишется в виде:
(66.12) y = y + Y = − at
2ωcosωt+A sin(ωt+ ϕ0).
Наличие множителя t в первом слагаемом формулы (66.12) показы-вает на то, что с течением времени амплитуда колебаний неограниченновозрастает (рис. 155).
Это явление, имеющее место при совпадении частоты собственных ко-лебаний системы с частотой внешней силы, называется резонансом.
Полученные уравнения (66.1) – (66.3) описывают и различные другиезадачи, связанные с колебательными явлениями.
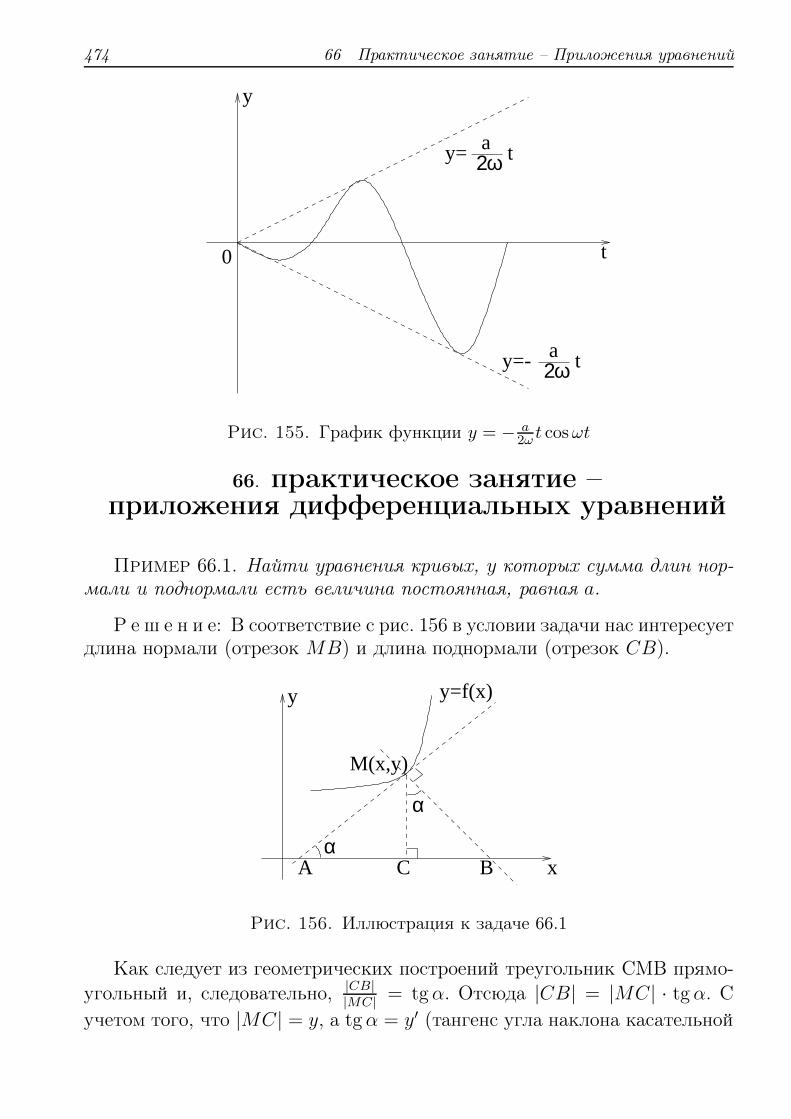
474 66 Практическое занятие – Приложения уравнений
t0
y
y=
y=-
a2ω t
a2ω t
Рис. 155. График функции y = − a2ω t cosωt
66. практическое занятие –приложения дифференциальных уравнений
Пример 66.1. Найти уравнения кривых, у которых сумма длин нор-мали и поднормали есть величина постоянная, равная a.
Р е ш е н и е: В соответствие с рис. 156 в условии задачи нас интересуетдлина нормали (отрезок MB) и длина поднормали (отрезок CB).
y=f(x)
A C B
M(x,y)
y
xα
α
Рис. 156. Иллюстрация к задаче 66.1
Как следует из геометрических построений треугольник CMB прямо-угольный и, следовательно, |CB|
|MC| = tgα. Отсюда |CB| = |MC| · tgα. Сучетом того, что |MC| = y, а tgα = y′ (тангенс угла наклона касательной

66 Практическое занятие – Приложения уравнений 475
к графику функции) можно записать, что длина поднормали
|CB| = |yy′|.Отрезок |MB| – это гипотенуза прямоугольного треугольника, следо-
вательно по теореме Пифагора длина нормали равна:
|MB| =√
(CB)2 + (MC)2 =√
(yy′)2 + y2 = |y|√
1 + (y′)2.
По условию задачи сумма длин нормали и поднормали равна a:
|CB| + |MB| = |yy′| + |y|√
1 + (y′)2 = a.
Разрешая последнее уравнение относительно y′ и учитывая оба воз-можных знака, находим:
y′ = ±a2 − y2
2ay.
Разделяем переменные2ydy
a2 − y2= ±dx
a.
Интегрируя, получаем общий интеграл:
ln |a2 − y2| = ±xa
+ lnC.
Выполнив операцию потенцирования, приводим уравнение искомыхкривых к виду:
y2 = a2 − Ce±xa ,
при этом условию задачи отвечают только значенияC > 0, так как y2 < a2 (квадрат катета прямоугольного треугольникабудет заведомо меньше квадрата гипотенузы).
Пример 66.2. Тело, имеющее в начальный момент времени t = 0температуру T (0) = T0 = 100, охлаждается в воздушной среде до тем-пературы T1 = 60o в течение времени t1 = 20 мин. Найти время, закоторое тело охладится до температуры 30o, если известно, что тем-пература воздуха 20o.
Р е ш е н и е: Обозначим температуру тела в любой момент времени tчерез T = T (t). Так как в силу закона Ньютона скорость охлаждения телаdTdt
пропорциональна разности между температурой тела и температуройвоздуха Tвоздуха = 20o, то пренебрегая повышением температуры воздухав комнате, можем написать
dT
dt= k(T − 20),
где k – коэффициент пропорциональности.

476 66 Практическое занятие – Приложения уравнений
Полученное уравнение относится к дифференциальным уравнениямпервого порядка с разделяющимися переменными, решая его, получим:
dT
T − 20= kdt =⇒
∫dT
T − 20=
∫
kdt =⇒ ln |T − 20| =
= kt+ lnC =⇒ ln |T − 20| = ln ekt + lnC =⇒ T − 20 = Cekt
или окончательно закон охлаждения тела имеет вид:
T = Cekt + 20.
Найдем частное решение, соответствующее начальному условиюT (0) = 100:
100 − Cek0 + 20 =⇒ C = 80.
Итак, частным решением является функция
T = 80ekt + 20.
Найдем числовое значение постоянной ek (фактически – коэффици-ент пропорциональности k). Для этого воспользуемся условием задачиT (20) = 60:
60 = 80ek20 + 20 =⇒ e20k =1
2=⇒ ek =
(1
2
)1/20
.
Таким образом, частное решение окончательно можно записать так:
T = 80 ·(
1
2
)t/20
+ 20.
В задании требуется определить время, за которое тело охладится дотемпературы 30:
30 = 80 ·(
1
2
)t/20
+ 20 =⇒ 1
8=
(1
2
)t/20
=⇒
=⇒(
1
2
)3
=
(1
2
)t/20
=⇒ t
20= 3 =⇒ t = 60 мин.
Итак, тело охладится при заданных условиях до температуры 30o за60 минут.
Пример 66.3. Найти формулу зеркала, собирающего все параллель-ные лучи в одну точку.
Р е ш е н и е: Очевидно, что зеркало должно иметь форму поверхно-сти вращения, ось которой параллельна направлению падающих лучей.Пусть эта ось совпадает с осью Ox. Начало координат поместим в точку,
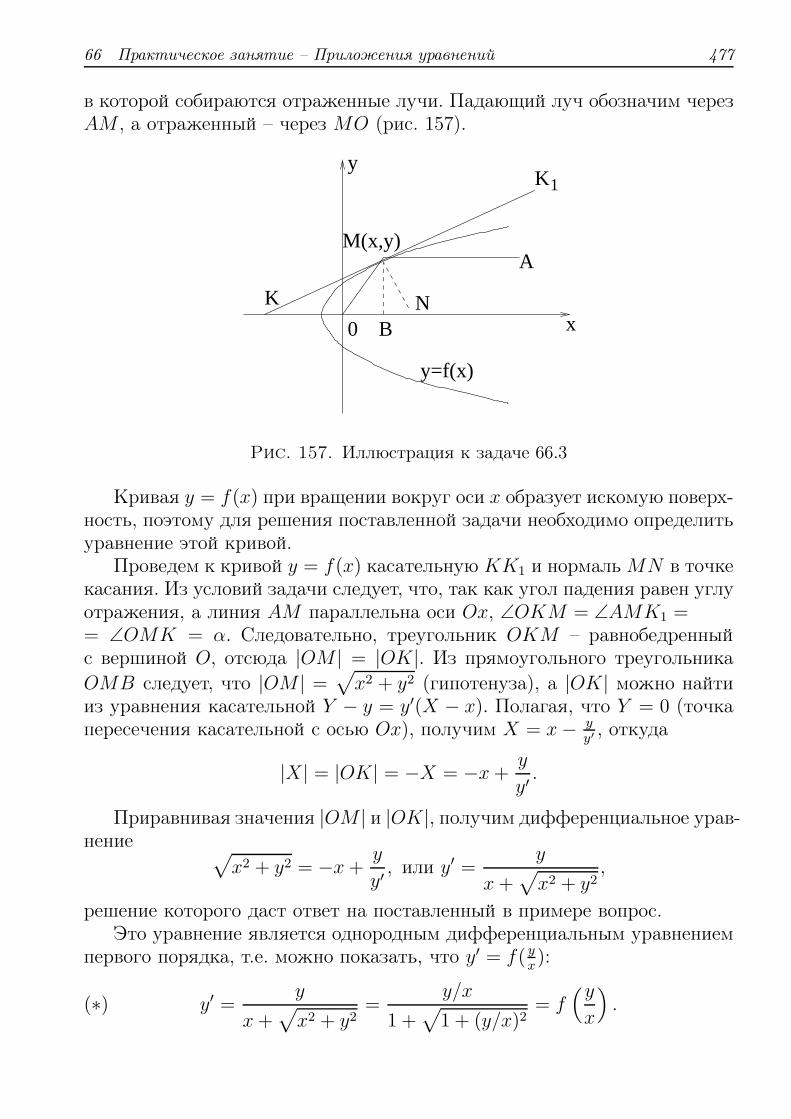
66 Практическое занятие – Приложения уравнений 477
в которой собираются отраженные лучи. Падающий луч обозначим черезAM , а отраженный – через MO (рис. 157).
x
M(x,y)A
BN
0
y=f(x)
K
K1y
Рис. 157. Иллюстрация к задаче 66.3
Кривая y = f(x) при вращении вокруг оси x образует искомую поверх-ность, поэтому для решения поставленной задачи необходимо определитьуравнение этой кривой.
Проведем к кривой y = f(x) касательную KK1 и нормаль MN в точкекасания. Из условий задачи следует, что, так как угол падения равен углуотражения, а линия AM параллельна оси Ox, ∠OKM = ∠AMK1 == ∠OMK = α. Следовательно, треугольник OKM – равнобедренныйс вершиной O, отсюда |OM | = |OK|. Из прямоугольного треугольникаOMB следует, что |OM | =
√
x2 + y2 (гипотенуза), а |OK| можно найтииз уравнения касательной Y − y = y′(X − x). Полагая, что Y = 0 (точкапересечения касательной с осью Ox), получим X = x− y
y′, откуда
|X| = |OK| = −X = −x+y
y′.
Приравнивая значения |OM | и |OK|, получим дифференциальное урав-нение
√
x2 + y2 = −x+y
y′, или y′ =
y
x+√
x2 + y2,
решение которого даст ответ на поставленный в примере вопрос.Это уравнение является однородным дифференциальным уравнением
первого порядка, т.е. можно показать, что y′ = f( yx):
(∗) y′ =y
x+√
x2 + y2=
y/x
1 +√
1 + (y/x)2= f
(y
x
)
.

478 66 Практическое занятие – Приложения уравнений
Однако в рассматриваемом случае целесообразно разрешить уравне-ние (*) относительно x, т.е.
(∗∗) x′ =dx
dy=x+
√
x2 + y2
y=x
y+
√(x
y
)2
+ 1 = f
(x
y
)
.
Для интегрирования уравнения (**) введем подстановку t = xy, откуда
x = ty, x′ = t′y + t, и подставим новую переменную в уравнение
t′y + t = t+√t2 + 1 =⇒ t′y =
√t2 + 1.
Последнее уравнение – это уравнение с разделяющимися переменны-ми. Решим его:
dt√t2 + 1
=dy
y=⇒ ln |y| = ln |t +
√1 + t2| + lnC
или y = C(t+√
1 + t2).Возвращаясь к первоначальной переменной (t = x
y), получим
y = C
x
y+
√
1 +
(x
y
)2
.
После упрощения, находим решение задачи в виде:
y2
C= x+
√
x2 + y2.
Перенесем x из правой части в левую:
y2
C− x =
√
x2 + y2,
возведем в квадрат левую и правую части:
y4
C2− 2y2x
C+ x2 = x2 + y2,
произведем необходимые сокращения и преобразования:
y2
(y2
C2− 2x
C
)
= y2 =⇒ y2 = 2Cx + C2 =⇒ y2 = 2C
(
x+C
2
)
.
Последнее уравнение является уравнением параболы, а, следователь-но, зеркало, отвечающее требованиям условий рассматриваемой задачиимеет форму параболоида вращения.
Пример 66.4. Цилиндрический резервуар с высотой 6 м и диаметромоснования 4 м поставлен вертикально и наполнен водой. За какое времявода, заполняющая резервуар, вытечет из него через круглое отверстиерадиуса 1/12 м, сделанное в дне резервуара?

66 Практическое занятие – Приложения уравнений 479
Р е ш е н и е: В соответствии с формулой Бернулли скорость V (вм/с) истечения жидкости из отверстия в резервуаре, находящегося на hм ниже свободного уровня жидкости, определяется:
V = σ√
2gh,
где g = 9, 8 м/c2 – ускорение силы тяжести, а σ – постоянный (безразмер-ный) коэффициент, зависящий от свойств жидкости (для воды σ = 0, 6).
За время dt уровень воды в резервуаре понизится на dh м (dh < 0).При этом объем вытекшей воды dw можно подсчитать двумя способами. Содной стороны, этот объем равен объему цилиндрического слоя с высотой|dh| и радиусом R (радиус резервуара R = 2), т.е.:
dw = πR2|dh| = −πR2dh.
С другой стороны, объем dw равен объему цилиндра, основанием кото-рого служит отверстие в дне резервуара, а высота равна V dt. Если радиусвыпускного отверстия в дне резервуара r = 1/12 м, то:
dw = πr2V dt = πr2σ√
2ghdt.
Приравнивая два этих выражения для dw, будем иметь:
−πR2dh = πr2σ√
2ghdt.
Сокращая на π, разделяя переменные и интегрируя, получим:
dt = − R2
σr2√
2g
dh√h
=⇒ t = C − 2R2
σr2√
2g
√h.
При t = 0 по условию задачи h = h0 = 6 м. Используя это начальноеусловие найдем:
0 = C − 2R2
σr2√
2g
√
h0 =⇒ C =2R2
σr2√
2g
√
h0.
Таким образом, связь между временем истечения воды t и уровнемводы h определяется уравнением:
t =2R2
σr2√
2g(√
h0 −√h).
Полное время истечения tk можно найти, если в этой формуле поло-жить h = 0:
tk =2R2
σr2√
2g
√
h0.
480 67 Лекция – Системы дифференциальных уравнений
Используя данные задачи: R = 2 м; h0 = 6 м; σ = 0, 6; r = 1/12 м;g = 9, 8 м/c2, найдем:
tk =2 · 22 ·
√6
0, 6 · (1/12)2√
2 · 9, 8 ≈ 1062 c ≈ 17, 7мин.
Самостоятельная работа
Пример 66.5. Найти уравнение кривой, у которой отрезок нормалив любой точке кривой, заключенной между осями координат, делитсяпополам в этой точке.
Пример 66.6. Найти уравнение кривой, у которой подкасательнаяравна среднему арифметическому координат точки касания.
Пример 66.7. Катер движется в спокойной воде со скоростьюV0 = 20 км/час. Определить скорость катера через 2 минуты послевыключения двигателя, если за 40 с она уменьшается до V1 = 8 км/час.Сопротивление воды пропорционально скорости движения катера. Силасопротивления направлена противоположно скорости движения.
Пример 66.8. Скорость обесценивания оборудования вследствие егоизноса пропорциональна в каждый данный момент времени его факти-ческой стоимости. Начальная стоимость равна A0. Найти стоимостьоборудования по истечении t лет.
Пример 66.9. Найти уравнение кривой, проходящей через точкуM0(1; 2) и обладающей следующими свойствами: площадь трапецииOAMB, ограниченной осями координат, касательной, проведенной в лю-бой точке M(x, y) искомой кривой, и прямой, проходящей через точкуM параллельно оси Oy, равна 3 кв.ед.
Пример 66.10. Материальная точка массы m падает под действиемсилы земного притяжения. Определить путь, пройденный точкой завремя t, если в начальный момент точка имела скорость V = V0.
67. лекция –системы дифференциальных уравнений
Понятие о системах дифференциальных уравнениий. Метод исклю-чения неизвестных. Метод интегрируемых комбинаций, системы ли-нейных дифференциальных уравнений с постоянными коэффициен-тами.

67 Лекция – Системы дифференциальных уравнений 481
67.1. Понятие о системах дифференциальных уравнений. Мно-гие прикладные задачи требуют определения одновременно несколькихфункций, связанных между собой несколькими дифференциальными урав-нениями. Совокупность таких уравнений называется системой дифферен-циальных уравнений.
Рассмотрим, например, движение в пространстве материальной точкимассы m по некоторой кривой под действием силы F . Пусть r = r(t) -радиус вектор движущейся точки. Если переменные координаты точкиобозначить через x(t), y(t), z(t), то
(67.1) r(t) = x(t)i+ y(t)j + z(t)k.
Скорость и ускорение движущейся точки вычисляются по формулам
(67.2) v =dr
dt=dx
dti+
dy
dtj +
dz
dtk,
(67.3) a =d2r
dt2=d2x
dt2i+
d2y
dt2j +
d2z
dt2k.
В общем случае сила F , под действием которой движется материаль-ная точка, является функцией времени, координат точки и проекций век-тора скорости на оси координат :
F = Fx(t, x, y, z,dx
dt,dy
dt,dz
dt)i+ Fy(t, x, y, z,
dx
dt,dy
dt,dz
dt)j+(67.4)
+ Fz(t, x, y, z,dx
dt,dy
dt,dz
dt)k.
На основании второго закона Ньютона:
ma = F или m¨r = F (t, r,dr
dt).
Проектируя векторы, состоящие в уравнении, на оси координат, полу-чим три дифференциальных уравнения:
(67.5)
md2xdt2
= Fx(t, x, y, z,dxdt, dydt, dzdt
),
md2ydt2
= Fy(t, x, y, z,dxdt, dydt, dzdt
),
md2zdt2
= Fz(t, x, y, z,dxdt, dydt, dzdt
).
Таким образом система дифференциальных уравнений, описывающихнестационарное (переменное по времени) пространственное движение ма-териальной точки массой m представляет собой систему трех дифферен-циальных уравнений второго порядка относительно трех искомых функ-ций : x = x(t), y = y(t), z = z(t).
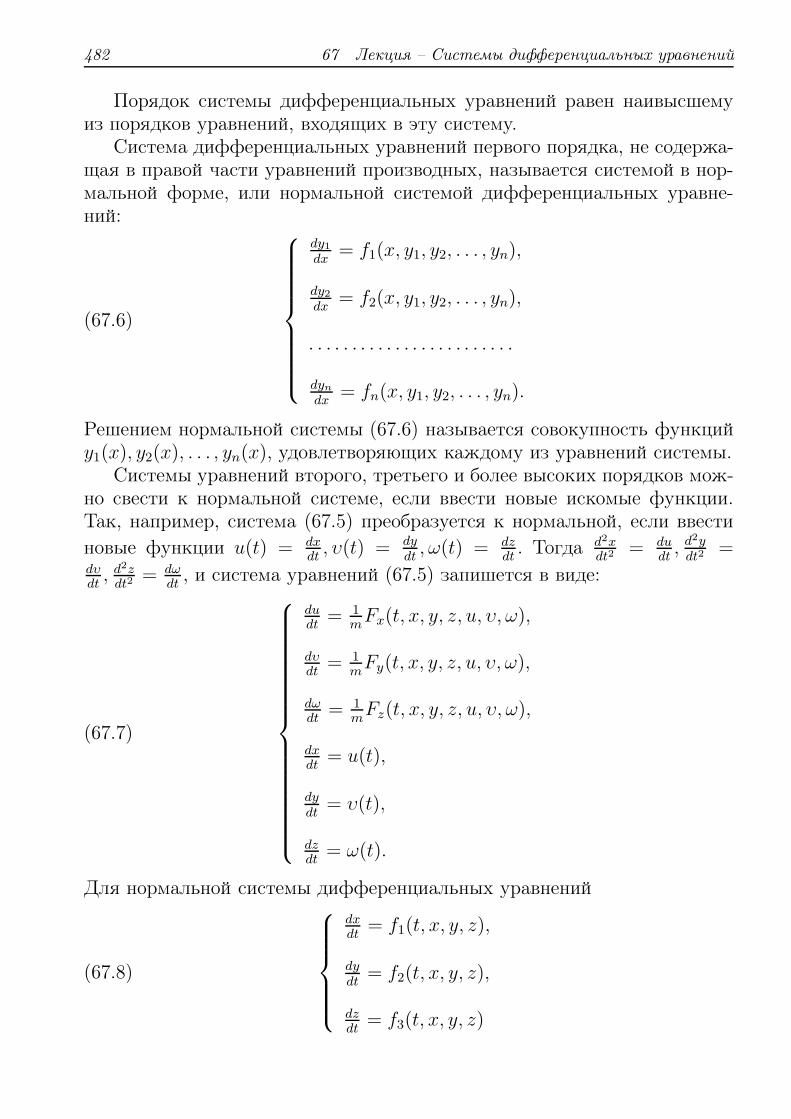
482 67 Лекция – Системы дифференциальных уравнений
Порядок системы дифференциальных уравнений равен наивысшемуиз порядков уравнений, входящих в эту систему.
Система дифференциальных уравнений первого порядка, не содержа-щая в правой части уравнений производных, называется системой в нор-мальной форме, или нормальной системой дифференциальных уравне-ний:
(67.6)
dy1dx
= f1(x, y1, y2, . . . , yn),
dy2dx
= f2(x, y1, y2, . . . , yn),
. . . . . . . . . . . . . . . . . . . . . . . .
dyn
dx= fn(x, y1, y2, . . . , yn).
Решением нормальной системы (67.6) называется совокупность функцийy1(x), y2(x), . . . , yn(x), удовлетворяющих каждому из уравнений системы.
Системы уравнений второго, третьего и более высоких порядков мож-но свести к нормальной системе, если ввести новые искомые функции.Так, например, система (67.5) преобразуется к нормальной, если ввестиновые функции u(t) = dx
dt, υ(t) = dy
dt, ω(t) = dz
dt. Тогда d2x
dt2= du
dt, d
2ydt2
=dυdt, d
2zdt2
= dωdt
, и система уравнений (67.5) запишется в виде:
(67.7)
dudt
= 1mFx(t, x, y, z, u, υ, ω),
dυdt
= 1mFy(t, x, y, z, u, υ, ω),
dωdt
= 1mFz(t, x, y, z, u, υ, ω),
dxdt
= u(t),
dydt
= υ(t),
dzdt
= ω(t).
Для нормальной системы дифференциальных уравнений
(67.8)
dxdt
= f1(t, x, y, z),
dydt
= f2(t, x, y, z),
dzdt
= f3(t, x, y, z)
67 Лекция – Системы дифференциальных уравнений 483
теорема Коши(существования и единственности решения) формулируетсяследующим образом.
Теорема 67.1. Если правые части уравнений системы (67.8), т.е.функции fi(t, x, y, z), где i = 1, 2, 3, а также их частные производные∂fi
∂x, ∂fi
∂y, ∂fi
∂zнепрерывны по всем переменным в некоторой области G, то,
каковы бы ни были начальные значения переменных t0, x0, y0, z0, принад-лежащие области G, существует единственное решение системыx = x(t), y = y(t), z = z(t), удовлетворяющее этим начальным условиям:
x(t0) = x0, y(t0) = y0, z(t0) = z0.
Рассмотрим некоторые простейшие методы решений систем диффе-ренциальных уравнений.
67.2. Метод исключения неизвестных. В некоторых случаях нор-мальную систему из n дифференциальных уравнений удается свести кодному уравнению n-го порядка, содержащему одну неизвестную функ-цию. Такого результата можно достигнуть дифференцированием одногоиз уравнений системы и исключением всех неизвестных, кроме одного.
Этот метод называется методом исключения неизвестных.
Пример 67.1. Решить систему дифференциальных уравнений
dxdt
= x + y,dydt
= x− y.
Р е ш е н и е: Продифференцируем первое уравнение системы по t :
(∗) d2x
dt2=dx
dt+dy
dt.
Подставим из второго уравнения значение dydt
в уравнение (∗):
(∗∗) d2x
dt2=dx
dt+ x− y.
Из первого уравнения системы выразим y = dxdt
− x и подставим вуравнение (∗∗):
d2x
dt2=dx
dt+ x− (
dx
dt− x).
После элементарных преобразований будем иметь
d2x
dt2− 2x = 0.

484 67 Лекция – Системы дифференциальных уравнений
Характеристическое уравнение k2 − 2 = 0 имеет корни k1 =√
2, k2 == −
√2. Следовательно, общее решение для переменной запишется в виде:
x = C1e√
2t + C2e−√
2t.
Общее решение для y находим из первого уравнения системы:
y =dx
dt− x = C1(
√2 − 1)e
√2t − C2(
√2 + 1)e−
√2t.
Таким образом функцииx = C1e
√2t + C2e
−√
2t,
y = C1(√
2 − 1)e√
2t − C2(√
2 + 1)e−√
2t.
явлются решением исходной системы.
67.3. Метод интегрируемых комбинаций. В некоторых случаях,комбинируя уравнения нормальной системы, после определенных преоб-разований удается получить легко интегрируемые уравнения, так назы-ваемый метод интегрируемых комбинаций.
Пример 67.2. Решить систему дифференциальных уравнений
dxdt
= x2x+3y
,
dydt
= y2x+3y
.
Р е ш е н и е: Разделим первое уравнение системы на второе, получимпервую интегрируемую комбинацию:
dx
dy=x
y⇒ dx
x=dy
y⇒ ln |x| = ln |y| + lnC1 ⇒ x = C1y.
Сложим удвоенное первое уравнение системы с утроенным вторым иполучим вторую интегрируемую комбинацию:
2dx
dt+ 3
dy
dt=
2x
2x+ 3y+
3y
2x + 3y⇒ 2
dx
dt+ 3
dy
dt= 1 ⇒
⇒ 2dx + 2dy = dt⇒ 2x+ 3y = t + C2.
Из системы уравненийx = C1y,2x+ 3y = t + C2,
находим общее решение исходной системы дифференциальных уравнений
x = C1(t+C2)2C1+3
,
y = t+C2
2C1+3.

67 Лекция – Системы дифференциальных уравнений 485
67.4. Системы линейных дифференциальных уравнений с посто-
янными коэффициентами. Пусть дана нормальная система n линейных диф-ференциальных уравнений с постоянными коэффициентами:
(67.9)
dx1dt = a11x1 + a12x2 + · · · + a1nxn,
dx2dt = a21x1 + a22x2 + · · · + a2nxn,. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .dxndt = an1x1 + an2x2 + · · · + annxn.
Эту систему можно записать в виде одного матричного дифференциальногоуравнения
dX
dt= A ·X,
где A =
a11 a12 . . . a1n
a21 a22 . . . a2n
. . . . . . . . . . . .an1 an2 . . . ann
,X =
x1
x2...xn
, dXdt =
dx1dtdx2dt...dxndt
.
Будем искать частное решение этой системы в виде
(67.10) x1 = p1eλt, x2 = p2e
λt, . . . , xn = pneλt.
Подставив значения (67.10) в систему дифференциальных уравнений (67.9), по-лучим систему линейных алгебраических уравнений относительноp1, p2, . . . , pn:
(67.11)
(a11 − λ)p1 + a12p2 + · · · + a1npn = 0,
a12p1 + (a22 − λ)p2 + · · · + a2npn = 0,. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .an1p1 + an2p2 + · · · + (ann − λ)pn = 0.
Система (67.11) будет иметь ненулевое решение, если определитель системыравен нулю, т.е.
(67.12)
∣∣∣∣∣∣∣∣
(a11 − λ) a12p2 . . . a1n
a21 (a22 − λ) . . . a2n
. . . . . . . . . . . .an1 an2 . . . (ann − λ)
∣∣∣∣∣∣∣∣
= 0.
Последнее уравнение является характеристическим уравнением системы (67.9).Левая часть этого уравнения есть многочлен степени n по переменной λ.
С учетом кратности этот многочлен имеет n корней :λ1, λ2, . . . , λn, которыеявляются характеристическими числами матрицы A.
Предположим, что все эти корни различные. Каждому характеристическо-му числу соответствует свой собственный вектор.

486 67 Лекция – Системы дифференциальных уравнений
Например, характеристическому числу λk соответствует вектор(p1k; p2k; . . . ; pnk), где k = 1, 2, . . . , n. Тогда система дифференциальных урав-нений имеет n частных решений :
1-e решение, соответствующее корню λ = λ1:
x11 = p11eλ1t, x21 = p21e
λ1t, . . . , xn1 = pn1eλ1t;
2-е решение, соответствующее корню λ = λ2:
x12 = p12eλ2t, x22 = p21e
λ2t, . . . , xn2 = pn2eλ2t;
................................................................................................
n-e решение, соответствующее корню λ = λn:
x1n = p1neλnt, x2n = p2ne
λnt, . . . , xnn = pnneλnt;
Найденные частные решения образуют фундаментальную систему решений,следовательно общее решение системы можно записать в виде:
(67.13)
x1 = C1x11 + C2x12 + . . .+ Cnx1n
x2 = C2x21 + C2x22 + . . .+ Cnx2n
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xn = C1xn1 + C2xn2 + . . .+ Cnxnn.
Пример 67.3. Решить систему линейных однородных дифференциальныхуравнений с постоянными коэффициентами.
dxdt = x+ 2y,dydt = y + 2x.
Р е ш е н и е: Здесь a11 = 1, a12 = 2, a21 = 2, a22 = 1, x1 = x, y2 = y.Характеристическое уравнение (67.12)
∣∣∣∣
(1 − λ) 22 (1 − λ)
∣∣∣∣= 0 ⇒ (λ− 1)2 − 4 = 0
имеет корни λ1 = 3, λ2 = −1. Следовательно, частное решение системы уравне-ний будем искать в форме
x11 = p11eλ1t = p11e
3t, x21 = p21eλ1t = p21e
3t,
x12 = p12eλ2t = p12e
−t, x22 = p22eλ2t = p22e
−t.
Система уравнений типа (67.11) для случая λ = λ1 = 3 для неизвестных p11
и p22 запишется в виде:
(1 − 3)p11 + 2p21 = 0,
2p11 + (1 − 3)p22 = 0,
откуда p12 = p21. Эта система имеет бесчисленное множество решений.Полагая, например p11 = 1, получаем p21 = 1. Итак, корню характеристи-
ческого уравнения k1 = 3 соответствуют частные решенияx11 = e3t, x21 = e3t.
67 Практическое занятие – Системы уравнений 487
Для случая λ = λ2 = −1 получим
(1 − (−1))p12 + 2p22 = 0,
2p12 + (1 − (−1))p22 = 0,
откуда p12 = −p22. Полагая p12 = 1, получаем p22 = −1.Следовательно, частное решение x12 = e−t и x22 = −e−t. С учетом общей
формулы (67.13) общее решение данной системы уравнений запишем в виде:x(t) = x1 = C1x11 + C2x12 = C1e
3t + C2e−t,
y(t) = x2 = C1x21 + C2x22 = C1e3t − C2e
−t.
Аналогично случаю неравных корней, могу быть получены формулы для
комплексных и кратных корней. Они будут рассмотрены на конкретных при-
мерах.
67. практическое занятие –системы дифференциальных уравнений
Пример 67.1. Решить систему диффренциальных уравнений мето-дом исключения
dxdt
= x+ 5y,dydt
= −x− 3y.
Р е ш е н и е: Продифференцируем по t первое уравнение системы :
d2x
dt2=dx
dt+ 5
dy
dt.
Подставим в полученное уравнение из второго уравнения значение dydt
:
(∗) d2x
dt2=dx
dt+ 5(−x− 3y).
Из первого уравнения системы найдем y = (dxdt
− x)/5 и подставим вуравнение (∗):
d2x
dt2=dx
dt+ 5(−x− 3
dxdt
− x
5)
или, после упрощений :
d2x
dt2+ 2
dx
dt+ 2x = 0.
Характеристическое уравнение k2 + 2k + 2 = 0 имеет корни k1 == −1 + i, k2 = −1 − i, следовательно, общее решение для переменной xзапишется в виде:
x = e−t(C1 cos t+ C2 sin t).

488 67 Практическое занятие – Системы уравнений
Общее решение для y находим из первого уравнения системы, предва-рительно вычислив dx
dt,
y =1
5
(dx
dt− x
)
=1
5e−t((C2 − 2C1) cos t− (C1 + 2C2) sin t).
Таким образом функцииx = e−t(C1 cos t+ C2 sin t),y = 1
5e−t((C2 − 2C1) cos t− (C1 + 2C2) sin t),
являются решениями исходной системы уравнений.
Пример 67.2. Решить систему дифференциальных уравнений мето-дом исключения
dxdt
= 2y,dydt
= 2z,dzdt
= 2x.
Р е ш е н и е: Продифференцируем по t первое уравнение системы :
d2x
dt2= 2
dy
dt.
Подставим в это уравнение из второго значение dydt
:
d2x
dt2= 2 · (2z) = 4z.
Полученное уравнение второго порядка еще раз продифференцируемпо t:
d3x
dt3= 4
dz
dt.
Подставим в это уравнение из третьего уравнения системы значениеdzdt
:
d3x
dt3= 4 · (2x) = 8x.
Это дифференциальное уравнение 3-го порядка относительно однойпеременной x.
Характеристическое уравнение для него k3 − 8 = 0 или (k − 2) · (k2 ++2k + 4) = 0 имеет корни k1 = 2, k2 = −1 +
√3i, k3 = −1 −
√3i. По виду
корней характеристического уравнения можно записать общее решениедля переменной x:
x = C1e2t + e−t(C2 cos (
√3t) + C3 sin (
√3t)).

67 Практическое занятие – Системы уравнений 489
Из первого уравнения системы можно получить общее решение для y:
y =1
2
dx
dt=
1
2(2C1e
2t − e−t(C2 cos (√
3t) + C3 sin (√
3t))+
e−t√
3 · (C3 cos (√
3t) − C2 sin (√
3t))),
или, после упрощений,
y = C1e2t +
1
2e−t((
√3C3 + C2) cos (
√3t) − (
√3C2 + C3) sin (
√3t)).
Аналогично из второго уравнения системы можно найти
z = C1e2t − 1
2e−t((
√3C3 + C2) cos (
√3t) − (
√3C2 − C3) sin (
√3t)).
Пример 67.3. Решить систему дифференциальных уравнений мето-дом получения интегрируемых комбинаций
dxdt
= x2 + xy,dydt
= xy + y2.
Р е ш е н и е: Первую интегрируемую комбинацию получим в резуль-тате сложения уравнений системы
dx
dt+dy
dt= x2 + xy + xy + y2 ⇒ d(x+ y)
dt= x2 + 2xy + y2 ⇒
⇒ d(x+ y)
dt= (x+ y)2 ⇒ d(x+ y)
(x+ y)2= dt⇒ − 1
x + y= t+ C1.
Вторую интегрируемую комбинацию можно получить, например раз-делив почленно первое уравнение на второе:
dx/dt
dy/dt=x2 + xy
xy + y2⇒ dx
dy=x · (x+ y)
y · (x+ y)⇒ dx
dy=x
y⇒
⇒ dx
x=dy
y⇒ ln |x| = ln |y| + lnC2 ⇒ x = C2y.
Из системы уравнений
− 1x+y
= t+ C1,
x = C2y,
находим общее решение исходной системы дифференциальных уравнений
y = − 1(t+C1)·(C2+1)
= − 1(C2+1)t+C3
,
x = − C2
(C2+1)t+C3,
где C3 = C1C2 + C1.

490 67 Практическое занятие – Системы уравнений
Пример 67.4. Решить систему линейных однородных дифференци-альных уравнений с постоянными коэффициентами
dxdt
= 4x− 3y,dydt
= 3x+ 4y.
Р е ш е н и е: Для данной системы, которая соответствует общемуслучаю (67.9), известны следующие параметры a11 = 4, a12 = −3, a21 = 3,a22 = 4, x1 = x, x2 = y. Характеристическое уравнение (67.12)
∣∣∣∣
(4 − λ) −33 (4 − λ)
∣∣∣∣= 0 ⇒ (4 − λ)2 = −9
имеет корни λ1 = 4 + 3i, λ2 = 4 − 3i.Частные решения системы уравнений будем искать в форме
x11 = p11eλ1t = p11e
(4+3i)t, x21 = p21eλ1t = p21e
(4+3i)t,
x12 = p12eλ2t = p12e
(4−3i)t, x22 = p22eλ2t = p22e
(4−3i)t.
Система уравнений типа (67.11) для случая λ = λ1 = 4+3i запишетсяв виде
(4 − (4 + 3i))p11 − 3p21 = 0,3p11 + (4 − (4 + 3i))p21 = 0,
⇒
−ip11 − p21 = 0,p11 − ip21 = 0,
откуда ip11 = −p21. Следовательно система имеет бесчисленное множестворешений. Полагая, например p11 = 1, получаем p21 = −i и
x11 = p11e(4+3i)t = e(4+3i)t = e4t · (cos 3t+ i sin 3t),
x21 = p21e(4+3i)t = −ie(4+3i)t = −ie4t · (cos 3t+ i sin 3t) =
= e4t · (sin 3t− i cos 3t).
Для второго корня λ = λ2 = 4 − 3i система уравнений типа (67.11)запишется в виде:
(4 − (4 − 3i))p12 − 3p22 = 0,3p12 + (4 − (4 − 3i))p22 = 0,
⇒ip12 − p22 = 0,p12 + ip22 = 0,
откуда ip12 = p22. Как видим, система имеет бесчисленное множество ре-шений. Полагая p12 = 1, получаем p22 = i и
x12 = p12e(4−3i)t = e(4−3i)t = e4t · (cos 3t− i sin 3t),
x22 = p22e(4−3i)t = ie(4−3i)t = ie4t · (cos 3t− i sin 3t) =
= e4t(sin 3t+ i cos 3t).
Общее решение системы уравнений можно записать как:
x = x1 = C1x11 + C2x12 = C1e4t(cos 3t + i sin 3t)+

67 Практическое занятие – Системы уравнений 491
+C2e4t(cos 3t− i sin 3t) = e4t((C1 + C2) cos 3t + (C1 − C2)i sin 3t) =
= e4t(C∗1 cos 3t + C∗
2 sin 3t),
y = x2 = C1x21 + C2x22 = C1e4t(sin 3t− i cos 3t)+
+C2e4t(sin 3t + i cos 3t) = e4t((C1 + C2) sin 3t− (C1 − C2)i cos 3t) =
= e4t(C∗1 sin 3t− C∗
2 cos 3t),
где C∗1 = C1 + C2, C
∗2 = (C1 − C2) · i.
Пример 67.5. Решить систему линейных однородных дифференци-альных уравнений с постоянными коэффициентами
dxdt
= 5x− y,dydt
= x+ 3y.
Р е ш е н и е: Для данной системы, которая соответствует общемуслучаю (67.9), известны следующие параметры: a11 = 5, a12 = −1, a21 = 1,a22 = 3, x1 = x, x2 = y. Характеристическое уравнение (67.12)
∣∣∣∣
(5 − λ) −11 (1 − λ)
∣∣∣∣⇒ λ2 − 8λ+ 16 = 0 ⇒ (λ− 4)2 = 0
имеет корень λ = 4 кратности 2. Двукратному корню соответствует ре-шение
x1 = e4t(a1t+ a2), x2 = e4t(b1t + b2).
Продифференцируем x1 и x2 по t:
dx1
dt= a1e
4t + 4(a1t+ a2)e4t,dx2
dt= b1e
4t + 4(b1t+ b2)e4t,
и подставим dx1
dt, dx2
dt, x1 и x2 в исходную систему уравнений. После сокра-
щения на e4t 6= 0, будем иметьa1 + 4(a1t+ a2) = 5(a1t+ a2) − (b1t+ b2),b1 + 4(b1t+ b2) = a1t+ a2 + 3(b1t+ b2).
Приравнивая коэффициенты в левых и правых частях уравнений приодинаковых степенях t, получим:
4a1 = 5a1 − b,4b1 = a1 + 3b1,
a1 + 4a2 = 5a2 − b2,b1 + 4b2 = a2 + 3b2.
Отсюда из первой системы следует, что a1 = b1,а из второй :a2−b2 = a1.Полагая a1 = C1, а a2 = C2, найдем b1 = C1, b2 = a2 − a1 = C2 − C1,следовательно,
x = x1 = e4t(C1t + C2),y = x2 = e4t(C1t+ C2 − C1).
492 67 Практическое занятие – Системы уравнений
Самостоятельная работа
Пример 67.6. Решить систему дифференциальных уравнений мето-дом исключения
dxdt
= y,dydt
= −x.Пример 67.7. Решить систему дифференциальных уравнений мето-
дом исключения
dxdt
= y + z,dydt
= x+ z,dzdt
= x+ y.
Пример 67.8. Решить систему дифференциальных уравнений мето-дом интегрируемых комбинаций
dxdt
= xx+y
,dydt
= yx+y
.
Указание: 1)Сложить два уравнения. 2)Разделить первое уравнение навторое.
Пример 67.9. Решить систему линейных однородных дифференци-альных уравнений с постоянными коэффициентами
dxdt
= 7x + 3y,dydt
= 6x+ 4y.
Пример 67.10. Решить систему линейных однородных дифференци-альных уравнений с постоянными коэффициентами
dxdt
= x− y,dydt
= x+ 3y.
Пример 67.11. Решить систему линейных однородных дифференци-альных уравнений с постоянными коэффициентами
dxdt
= x− 2y,dydt
= x− y.
68 Лекция – Численные решения уравнений 493
68. лекция –численные методы решения
дифференциальных уравнений
Численные методы решения дифференциальных уравнений. Ин-тегрирование дифференциальных уравнений с помощью рядов.Апроксимация дифференциальной задачи разностной. Метод Эй-лера. Метод Рунге-Кутта. Метод прогонки.
68.1. Численные методы решения дифференциальных урав-нений. Условно методы решения дифференциальных уравнений можноразделить на графические, аналитические, приближенные и численные.
Графические методы используют геометрические построения. В част-ности, одним из них является метод изоклин, рассмотренный выше.
С некоторыми аналитическими методами решения дифференциаль-ных уравнений мы тоже уже познакомились. Уравнения с разделяющи-мися переменными, однородные, линейные, Бернулли, в полных диффе-ренциалах все они позволяют получить решение в виде формул путеманалитических преобразований. Для некоторых типов уравнений высшихпорядков так же удается получить решение аналитическими методами.Однако классы уравнений, для которых разработаны методы полученияточных аналитических решений, сравнительно узки и охватывают толькомалую часть возникающих на практике задач.
Приближенные методы используют различные упрощения самих урав-нений путем обоснованного отбрасывания некоторых содержащихся в нихчленов, а также специальным выбором классов искомых функций, на-пример, в некоторых инженерных задачах удается представить решениев виде суммы двух составляющих, первое из которых определяет основ-ное решение, а второе - малая добавка, которой можно пренебречь. Наэтом основаны различные методы линеаризации. В приближенных мето-дах широко используется разложение решения в ряд по некоторому ма-лому параметру, содержащемуся в данной задаче.
Численные методы решения дифференциальных уравнений - это алго-ритмы вычисления приближенных, а иногда и точных, значений искомогорешения на некоторой выбранной сетке значений аргумента xn (решениепри этом получается в виде таблицы). Численные методы не позволяютнайти общего решения, с помощью этих методов можно найти частное ре-шение, например, решение задачи Коши или краевой задачи. Это основ-ной недостаток численных методов. Зато эти методы применимы к оченьшироким классам уравнений и всем типам задач для них. Наибольшее
494 68 Лекция – Численные решения уравнений
распространение численные методы получили с развитием вычислитель-ной техники.
68.2. Интегрирование дифференциальных уравнений с помощьюрядов. Во многих случаях приближенное решение дифференциальногоуравнения может быть представлено в виде сходящегося в определенноминтервале степенного ряда. Коэффициенты этого ряда можно найти ме-тодом, основанным на применении ряда Тейлора (лекции 20 и 21). Этотметод пригоден для приближенного определения частного решения диф-ференциальных уравнений любого порядка (задача Коши):
(68.1) F (x, y, y′, y′′, . . . , y(n−1), y(n)) = 0,
(68.2) y(x0) = y0, y′(x0) = y′0, y
′′(x0) = y′′0 , . . . , y(n−1)(x0) = y
(n−1)0 .
Подставляя заданные начальные условия в дифференциальное урав-нение, получим
F (x0, y0, y′0, y
′′, . . . , y(n−1)0 , y
(n)0 ) = 0,
из которого можно определить значение n-й производной
(68.3) y(n)0 = f(x0, y0, y
′0, y
′′0 , . . . , y
(n−1)0 ).
Дифференцируя уравнение (68.1), получим уравнение, которое, поми-мо x, y, y′, y′′, . . . , y(n), будет содержать производную y(n+1):
(68.4) F1(x, y, y′, y′′, . . . , y(n), y(n+1)) = 0.
Подставляя в (68.4) значения начальных условий (68.2) и значение y(n)0
(68.3), получим уравнение
F1(x0, y0, y′0, y
′′0 , . . . , y
(n)0 , y
(n+1)0 ) = 0,
из которого можно найти значение y(n+1)0 .
Продолжая этот процесс дальше, можно найти значения всех произ-водных высших порядков в точке x = x0.
Решение y = y(x) исходного дифференциального уравнения (68.1)можно представить в виде ряда (ряда Тейлора):
(68.5) y(x) = y(x0)+y′(x0)
x− x0
1!+y′′(x0)
(x− x0)2
2!+· · ·+y(n) (x− x0)
n
n!+. . .
Подставив в уравнение (68.5) значения производных в точке x0 из на-чальных условий и полученные из описанных выше преобразований, най-дем приближенное частное решение исходного дифференциального урав-нения в виде:
(68.6) y(x) = y0 + y′0x− x0
1!+ y′′0
(x− x0)2
2!+ · · · + y
(n)0
(x− x0)n
n!+ . . . ,
68 Лекция – Численные решения уравнений 495
точность которого зависит от условий сходимости полученного степенногоряда и количества членов ряда, учитываемых при расчетах.
Пример 68.1. Решить задачу Коши методом интегрирования с по-мощью рядов (записать первые семь членов ряда)
(68.7)
y′′ = 2xy′ + 4y,y(0) = 0,y′(0) = 1.
Р е ш е н и е: Найдем последовательным дифференцированием исход-ного дифференциального уравнения все производные до седьмого поряд-ка включительно,при этом каждый раз подставляя значения найденныхв точке x0 предыдущих производных.
Из (68.7): y′′ = 2xy′ + 4y ⇒ y′′0 = 2 · 0 · 1 + 4 · 0 = 0.Дифференцируя (68.7), получаем
(68.8) y′′′ = 2y′ + 2xy′′ + 4y′ = 6y′ + 2xy′′ ⇒ y′′′0 = 6 · 1 + 2 · 0 · 0 = 6.
Дифференцируя (68.8), получаем
(68.9) yIV = 6y′′ + 2y′′ + 2xy′′′ = 8y′′ + 2xy′′′ ⇒ yIV0 = 8 · 0 + 2 · 0 · 6 = 0.
Дифференцируя (68.9), получаем
(68.10) yV = 8y′′′+2y′′′+2xyIV = 10y′′′+2xyIV ⇒ yV0 = 10 ·6+2 ·0 ·0 = 60.
Аналогично можно найти : yV I0 = 0, yV II0 = 840 и т.д.Поскольку в рассматриваемом случае x0 = 0, получаем разложение
решения в ряд Маклорена:
y =1
1!x+
6
3!x3 +
60
5!x5 +
840
7!x7 + . . .
или y = x+ x3
1!+ x5
2!+ x7
3!+ . . . .
В некоторых случаях можно искать решение в виде степенного ряда
∞∑
n=0
Cn(x− x0)n.
Неопределенные коэффициенты Cn(n = 1, 2, . . . ) находятся путем под-становки ряда в исходное дифференциальное уравнение и приравниваниякоэффициентов при одинаковых степенях x− x0 в левой и правой частяхполученного равенства.

496 68 Лекция – Численные решения уравнений
68.3. Аппроксимация диффренциальной задачи разностной.Рассмотренные выше методы Эйлера и Рунге-Кутта для численного ре-шения задачи Коши использовали переход от непрерывной области изме-нения независимой переменной к некоторой дискретной области. В дис-кретной области решение определяется в отдельных точках исследуемойобласти, называемых узлами. Совокупность всех узлов, в которых ищутсязначения искомой функции, называется сеткой. Таким образом решениезадачи ищется не в виде непрерывной функции y(x), а в виде таблицызначений решения yi в узлах сетки xi.
Для приближенного вычисления таблицы значений yi при решениидифференциальных уравнений, прежде всего необходимо рассмотреть во-прос о замене производных функции их дискретными аналогами, так на-зываемыми конечными разностями. Для этой цели воспользуемся форму-лой Тейлора, согласно которой функция y(x), непрерывная и дифферен-цируемая в некоторой точке x, может быть представлена в окрестностиэтой точки следующим образом:
y(x+ ∆x) = y(x) +y′(x)
1!∆x+
y′′(x)
2!∆x2 +
y′′′(x)
3!∆x3 + · · ·+(68.11)
+y(k)(ξ1)
k!∆xk,
y(x− ∆x) = y(x) − y′(x)
1!∆x+
y′′(x)
2!∆x2 − y′′′(x)
3!∆x3 + · · ·+(68.12)
+ (−1)ky(k)(ξ2)
k!∆xk,
где ξ1 и ξ2 некоторые точки, принадлежащие отрезку (x− ∆x, x+ ∆x).Из уравнения (68.11) можно найти
(68.13)y(x+ ∆x) − y(x)
∆x= y′(x) + O(∆x),
а из уравнения (68.12)
(68.14)y(x) − y(x− ∆x)
∆x= y′(x) − O(∆x),
где O(∆x) – погрешность аппроксимации, равная сумме отброшенныхчленов ряда.
Из уравнений (68.13) и (68.14) можно найти конечно-разностную ап-проксимацию первой производной
(68.15) y′(x) =y(x+ ∆x) − y(x)
∆x− O(∆x),
68 Лекция – Численные решения уравнений 497
(68.16) y′(x) =y(x) − y(x− ∆x)
∆x− O(∆x),
которые называются соответственно правосторонней (68.15) и левосторон-ней (68.16) разностными производными.
Из формул (68.15) и (68.15)видно, что производная y′ аппроксимиру-ется с помощью левосторонних и правосторонних разностей с точностьюдо величины порядка ∆x.
Если же из уравнения (68.11) вычесть (68.15), то можно получитьцентрально-разностные производные.
(68.17)y(x + ∆x) − y(x− ∆x)
2∆x= y′(x) + O(∆x2)
или
(68.18) y′(x) =y(x + ∆x) − y(x− ∆x)
2∆x− O(∆x2),
аппроксимирующую первую производную с точностью до величины по-рядка ∆x2.
Аппроксимацию второй производной y′′ можно получить, если сло-жить уравнения (68.11) и (68.12:
(68.19)y(x + ∆x) − 2y(x) + y(x− ∆x)
∆x2= y′′(x) +O(∆x2),
или
(68.20) y′′(x) =y(x+ ∆x) − 2y(x) + y(x− ∆x)
∆x2−O(∆x2),
В этом случае точность аппроксимации порядка ∆x2.Подставив выражения для производных через конечные разности в
дифференциальное уравнение, начальные или краевые условия, мы по-лучим аппроксимацию дифференциальной задачи ее конечно-разностныманалогом. При этом можно определить порядок точности, с которым диф-ференциальная задача заменяется разностной.
68.4. Метод Эйлера (приближенное решение дифференциаль-ного уравнения). Идея метода Эйлера заключается в том, что инте-гральная кривая, являющаяся графиком частного решения, приближеннозаменяется ломаной. Рассмотрим задачу Коши для дифференциальногоуравнения первого порядка
(68.21)
y′ = f(x, y), x0 6 x 6 xny(x0) = y0.

498 68 Лекция – Численные решения уравнений
Требуется на сегменте x0 6 x 6 xn приближенно построить интеграль-ную кривую y = ϕ(x), проходящую через точку (x0, y0).
Разобьем сегмент точками деления
x0 < x1 < x2 < · · · < xi−1 < xi < · · · < xn
на n равных частей длиной ∆x = (xn − x0)/n (рис.158).Величина ∆x называется шагом разбиения сегмента. Пользуясь усло-
виями задачи Коши (68.21) вычислим в начальной точке (x0, y0) инте-гральной кривой угловой коэффициент ее касательной y′0 = f(x0, y0).Тогдауравнение касательной в точке (x0, y0) запишется в виде:
y − y0 = f(x0, y0) или y = y0 + f(x0, y0).
Заменяя на сегменте (x0, x1) искомую интегральную кривую y = ϕ(x)отрезком этой касательной (рис.158), найдем приближенное значение ре-шения y1 в точке x1:
y1 = y0 + f(x0, y0) · (x1 − x0),
или, так как x1 − x0 = ∆x,
y1 = y0 + f(x0, y0)∆x.
Подставив значения x1 и y1 в правую часть уравнения (68.21), найдем
y′1 = f(x1, y1).
На сегменте (x1, x2) заменим приближенно интегральную кривуюy = ϕ(x) отрезком касательной, проходящей через точку (x1, y1) и имею-щей угловой коэффициент k = y′1 = f(x1, y1):
y − y1 = f(x1, y1) · (x− x1) или y = y1 + f(x1, y1) · (x− x1).
Полагая в уравнении этой прямой x = x2, найдем приближенное зна-чение искомого решения y = ϕ(x) в точке x2:
y2 = y1 + f(x1, y1)(x2 − x1) или y2 = y1 + f(x1, y1)∆x.
Продолжая этот процесс, получим последовательно приближенные зна-чения решения y = ϕ(x) в точкахx3, x4, . . . , xn. При этом значение функ-ции в точке xi+1 вычисляется через значение функции и ее производнойв точке xi по формуле:
(68.22) yi+1 = yi + f(xi, yi)∆x (i = 0, 1, 2, 3 . . . , n− 1).
Таким образом, мы получим приближенные значения искомого реше-ния в точках x1, x2, x3, . . . , xn и приближенно построим интегральную кри-вую в виде ломаной (рис. 158). С учетом допускаемых погрешностей (ре-альная интегральная кривая на интервале заменяется касательной) при-ближенное решение отличается от точного.

68 Лекция – Численные решения уравнений 499
(x n;yn)
0
y
x x x x0 1 2 3 xn
y
0
1
y
x
Рис. 158. Приближенная интегральная кривая построенная пометоду Эйлера
Метод Эйлера является простейшим из методов приближенного инте-грирования дифференциальных уравнений первого порядка. Недостаткомэтого метода является малая точность. Очевидно, что ошибка котораяполучается при замене интегральной кривой ломаной, зависит от числаточек разбиения сегмента (x0, xn).
Можно показать, что ошибка при вычислении ординат yi пропорци-ональна (∆x)2. Для этого разложим искомое решение y = ϕ(x) в рядТейлора в окрестности узлов x = xi (i = 0, 1, 2, . . . , n), в котором отбра-сываются все члены, содержащие производные второго и более высокихпорядков:
(68.23) y(x+ ∆xi) = y(xi) + y′(xi)∆xi + O(∆x2i ).
Для простоты обычно принимают ∆xi = xi+1 − xi = ∆x = const :
(68.24) yi+1 = yi + f(xi, yi)∆x +O(∆x2).
Полученная формула отличается от формулы (68.22) метода Эйлерана величину порядка O(∆x2). Таким образом суммарная погрешность прииспользовании метода Эйлера будет равна n ·O(∆x2). Если учесть, что
∆x =xn − x0
n=L
nи n =
L
∆x,
то суммарная погрешность будет равна
n ·O(∆x2) =L
∆x·O(∆x2) = L ·O(∆x).

500 68 Лекция – Численные решения уравнений
Следовательно метод Эйлера имеет первый порядок точности.
Пример 68.2. Найти решение методом Эйлера дифференциальногоуравнения y′ = y2 − x2, удовлетворяющего начальному условию y(1) = 1,на сегменте (1, 2). Шаг разбиения сегмента принять равным ∆x = 0, 1.
Р е ш е н и е: Вычисление значений решения y = ϕ(x) осуществля-ем по формуле (68.22). Результаты вычислений записываем в таблице сточностью до четвертого знака после запятой. Приближенные значенияфункции y находятся в третьем столбце.
i xi yi f(xi, yi) = y2i − x2
i f(xi, yi)∆x = (y2i −x2
i )∆x1 2 3 4 50 1,0 1 0 01 1,1 1 -0,21 -0,0212 1,2 0,979 -0,4816 -0,04823 1,3 0,9308 -0,8236 -0,08244 1,4 0,8484 -1,2402 -0,12405 1,5 0,7244 -1,7252 -0,17256 1,6 0,5519 -2,2554 -0,22557 1,7 0,3264 -2,7835 -0,27848 1,8 0,0480 -3,2377 -0,32389 1,9 -0,2758 -3,5339 -0,353410 2,0 -0,6292
68.5. Метод Рунге-Кутта. Ошибка, которую содержит приближенное ре-шение, полученное по методу Эйлера, может быть уменьшена при уменьшениишага ∆x, но это приводит к значительному увеличению узлов n. Поэтому напрактике чаще используются методы, имеющие более высокий порядок точ-ности. Наиболее распространенными являются различные варианты методыРунге-Кутта.
Покажем идею методов Рунге-Кутта на примере построения семейства схемвторого порядка точности. В качестве исходного выражения возьмем ряд Тей-лора, удерживая в нем член O(∆x2), порядок которого равен предполагаемомупорядку точности схемы.
Разложим решение задачи Коши (68.21) по формуле Тейлора на сегментеxi 6 x 6 xi+1
(68.25) yi+1 = yi + y′i∆x+ y′′i∆x2
2+ . . . , ∆x = xi+1 − xi = const.
Стоящие в правой части производные можно найти, дифференцируя уравнение(68.21) требуемое число раз:
(68.26) y′ = f(x, y), y′′ =d
dxf(x, y) =
∂f
∂x+ f(x, y)
∂f
∂y. . .

68 Лекция – Численные решения уравнений 501
Чтобы избежать этого трудоемкого процесса вычисления производных, заме-ним вторую производную разностью
(68.27) y′′d
dxf(x, y) = [f(x, y) − f(x, y)]/∆x,
соотвественно выбирая значения x, y и ∆x. После такой замены третий член ввыражении (68.25) можно формально объединить со вторым, приводя (68.27) квиду:
(68.28) yi+1 = yi + (βf(xi, yi) + αf(xi + γ∆x, yi + δ∆x))∆x.
Здесь α, β, γ, δ - неизвестные параметры, которые следует определить изусловия, чтобы выражение (68.28) аппроксимировало задачу (68.21) с возможноболее высоким порядком точности.
Рассматривая правую часть (68.28) как функцию от шага ∆x, разложим еев ряд по степеням шага ∆x:
(68.29) yi+1 = yi + (α+ β)f(xi, yi)∆x+ α(γ∂f(xi, yi)
∂x+ δ
∂f(xi, yi)
∂y)∆x2 + . . .
Выберем параметры α, β, γ, δ так, чтобы это разложение было возможно болееблизко к ряду (68.25). Используя выражения (68.25), (68.26), (68.29) можноправильно описать два первых члена формулы Тейлора, если положить:
(68.30) α+ β = 1, αγ =1
2, αδ =
1
2f(xi, yi).
Таким образом, для четырех неизвестных параметров получено только триуравнения. Один параметр остается свободным. Выражая из (68.23) через α всеостальные параметры и подставляя их в (68.28), получим однопараметрическоесемейство двучленных схем Рунге-Кутта.
(68.31) yi+1 = yi + ((1 − α)f(xi, yi) + αf(xi +∆x
2α, yi +
∆x
2αf(xi, yi)))∆x,
где 0 < α 6 1. Погрешность этой схемы исследуется так же, как это сделано вслучае метода Эйлера. При этом нетрудно доказать , что решение, полученноепо схеме Рунге-Кутта (68.31), сходиться к точному решению с погрешностьюO(∆x2), т.е. двучленная схема Рунге-Кутта имеет второй порядок точности.
В численных расчетах обычно полагают α = 1 или α = 12 . В первом случае
получается схема особенно простого вида:
(68.32) yi+1 = yi + f(xi +1
2∆x, yi +
1
2∆x · f(xi, yi))∆x.
Ее геометрический смысл поясняется на рис. 159.Сначала делаем половинный шаг по схеме Эйлера:
yi+ 12
= yi +1
2f(xi, yi)∆x (касательная 1).
Затем в найденной точке определяем наклон интегральной кривой
y′i+ 1
2= f(xi+ 1
2, yi+ 1
2) (касательная 2).
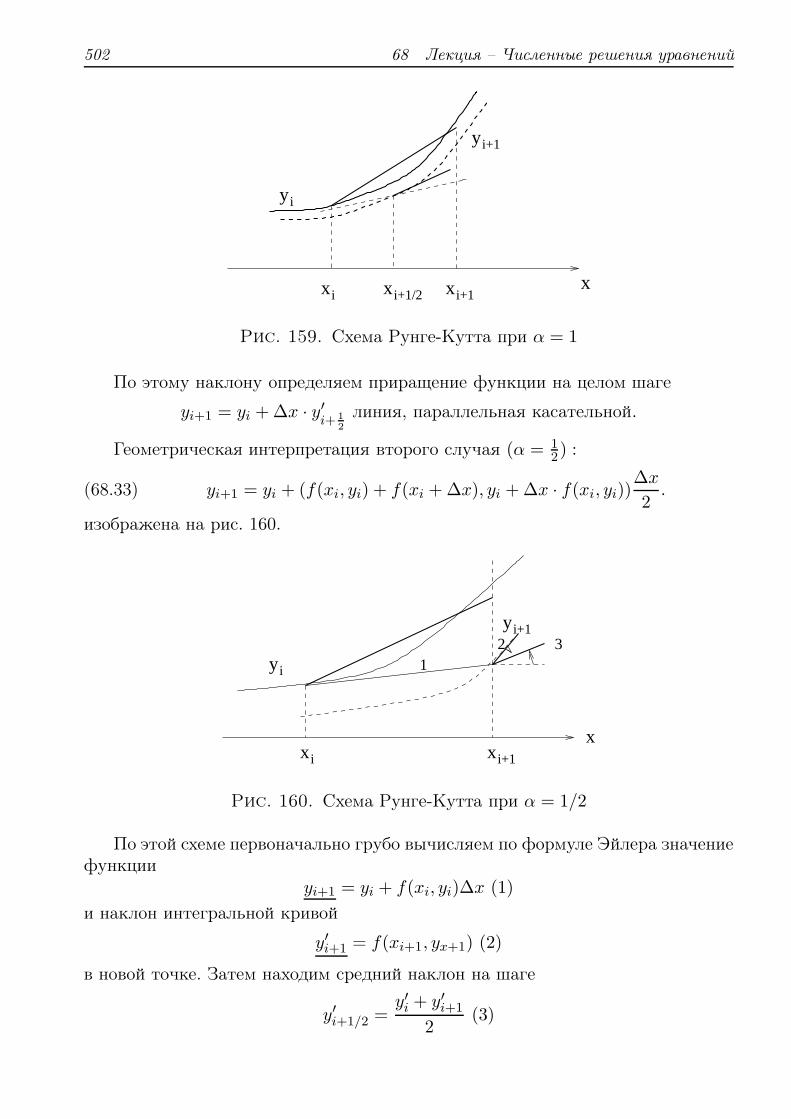
502 68 Лекция – Численные решения уравнений
x x x
y
y
i i+1/2 i+1
i+1
i
x
Рис. 159. Схема Рунге-Кутта при α = 1
По этому наклону определяем приращение функции на целом шаге
yi+1 = yi + ∆x · y′i+ 1
2
линия, параллельная касательной.
Геометрическая интерпретация второго случая (α = 12) :
(68.33) yi+1 = yi + (f(xi, yi) + f(xi + ∆x), yi + ∆x · f(xi, yi))∆x
2.
изображена на рис. 160.
y
y
x xx
i
i+1
i+1i
2 31
Рис. 160. Схема Рунге-Кутта при α = 1/2
По этой схеме первоначально грубо вычисляем по формуле Эйлера значениефункции
yi+1 = yi + f(xi, yi)∆x (1)
и наклон интегральной кривой
y′i+1 = f(xi+1, yx+1) (2)
в новой точке. Затем находим средний наклон на шаге
y′i+1/2 =y′i + y′i+1
2(3)

68 Лекция – Численные решения уравнений 503
и по нему уточняем значение yi+1 по формуле (68.33).
Схемы такого типа, как правило, называют “предиктор-корректор”.
Методом Рунге-Кутта можно строить схемы различного порядка точ-ности. Наиболее часто используются схемы четвертого порядка точности.Приведем здесь без вывода одну из таких схем, которая реализована вбольшинстве стандартных программ ЭВМ:
(68.34)
yi+1 = yi +∆x6
(k1 + 2k2 + 2k3 + k4),
k1 = f(xi, yi),
k2 = f(xi +∆x2, yi +
∆x2k1),
k3 = f(xi +∆x2, yi +
∆x2k2),
k4 = f(xi + ∆x, yi + ∆xk3).
В схеме (68.34) правую часть дифференциального уравнения на каж-дом шаге необходимо вычислять в четырех точках. Однако большая точ-ность схемы (погрешность вычисления O(∆x4)) позволяет вести расчетыс большим шагом и уменьшить обьем вычислений.
Все представленные схемы Рунге-Кутта имеют ряд важных досто-инств:
- они имеют высокую точность ;- они являются явными, т.е. значение yi+1 вычисляется по ранее най-
денным значениям yi за определенное число действий по соответствую-щим формулам ;
- они допускают расчет с переменным шагом.Приведем сравнительную оценку рассматриваемых методов на кон-
кретном примере, имеющем точное решение.
Пример 68.3. Решить задачу Кошиy′ = xy
2, 0 6 x 6 1,
y(0) = 1.
Р е ш е н и е: Очевидно, что данная задача может быть решена точ-но, так как исходное уравнение является уравнением с разделяющимисяпеременными. Его общее решение y = C · ex2/4. Из начального условияy(0) = 1 находим частное решение задачи
y = ex2/4
В таблице – для сравнения с точным решением представлены резуль-таты вычислений с шагом ∆x = 0, 1 по различным схемaм.
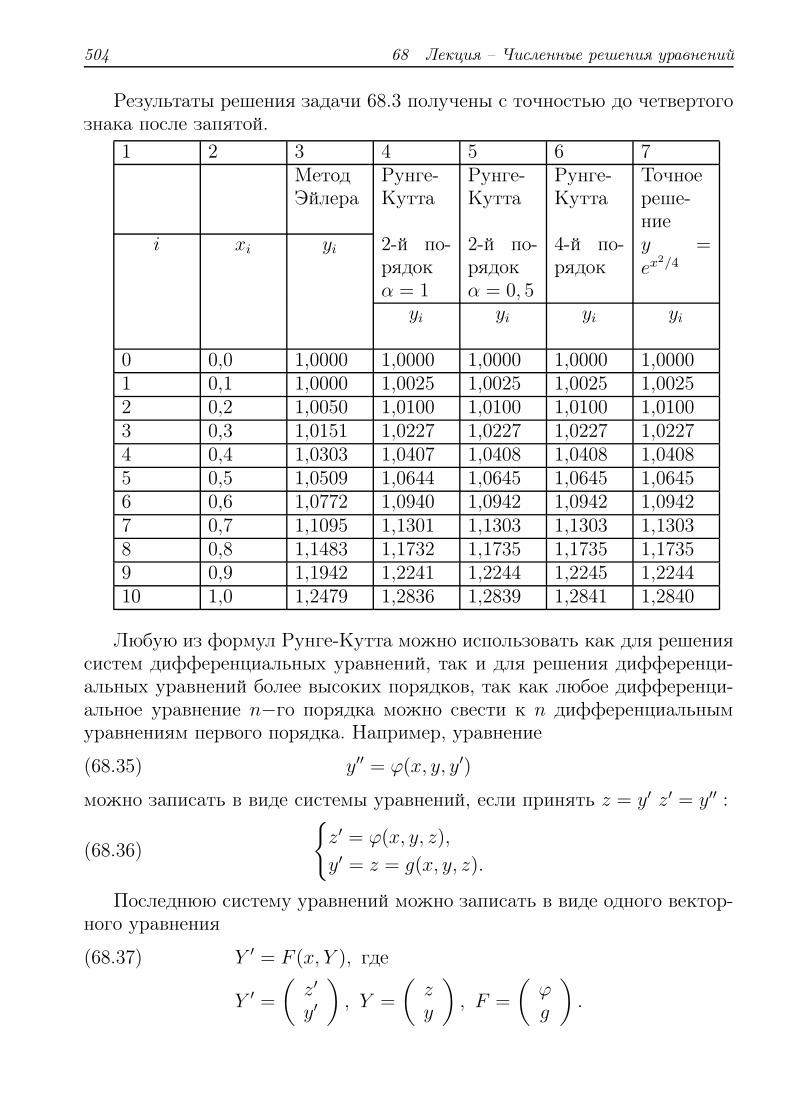
504 68 Лекция – Численные решения уравнений
Результаты решения задачи 68.3 получены с точностью до четвертогознака после запятой.
1 2 3 4 5 6 7МетодЭйлера
Рунге-Кутта
Рунге-Кутта
Рунге-Кутта
Точноереше-ние
i xi yi 2-й по-рядокα = 1
2-й по-рядокα = 0, 5
4-й по-рядок
y =ex
2/4
yi yi yi yi
0 0,0 1,0000 1,0000 1,0000 1,0000 1,00001 0,1 1,0000 1,0025 1,0025 1,0025 1,00252 0,2 1,0050 1,0100 1,0100 1,0100 1,01003 0,3 1,0151 1,0227 1,0227 1,0227 1,02274 0,4 1,0303 1,0407 1,0408 1,0408 1,04085 0,5 1,0509 1,0644 1,0645 1,0645 1,06456 0,6 1,0772 1,0940 1,0942 1,0942 1,09427 0,7 1,1095 1,1301 1,1303 1,1303 1,13038 0,8 1,1483 1,1732 1,1735 1,1735 1,17359 0,9 1,1942 1,2241 1,2244 1,2245 1,224410 1,0 1,2479 1,2836 1,2839 1,2841 1,2840
Любую из формул Рунге-Кутта можно использовать как для решениясистем дифференциальных уравнений, так и для решения дифференци-альных уравнений более высоких порядков, так как любое дифференци-альное уравнение n−го порядка можно свести к n дифференциальнымуравнениям первого порядка. Например, уравнение
(68.35) y′′ = ϕ(x, y, y′)
можно записать в виде системы уравнений, если принять z = y′ z′ = y′′ :
(68.36)
z′ = ϕ(x, y, z),
y′ = z = g(x, y, z).
Последнюю систему уравнений можно записать в виде одного вектор-ного уравнения
Y ′ = F (x, Y ), где(68.37)
Y ′ =
(z′
y′
)
, Y =
(zy
)
, F =
(ϕg
)
.

68 Лекция – Численные решения уравнений 505
Таким образом, векторное уравнение (68.37) может заменить как си-стему уравнений, так и уравнение порядка выше первого.
Задача Коши в этом случае содержит два начальных условия:
y(x0) = y0 и z(x0) = z0, или Y (x0) = Y0.
Формулы Рунге-Кутта (68.34) для рассматриваемого случая перепи-шутся в виде:
Yi+1 = Yi +∆x
6(K1 + 2K2 + 2K3 +K4), где
K1 = F (xi, Yi),
K2 = F (xi +∆x
2, Yi +
∆x
2K1),
K3 = F (xi +∆x
2, Yi +
∆x
2K2),
K4 = F (xi + ∆x, Yi + ∆xK3).
68.6. Решение краевой задачи для дифференциального урав-нения второго порядка. Рассмотрим конкретные случаи разностнойаппроксимации для неоднородного линейного дифференциального урав-нения второго порядка. Пусть требуется найти функцию y = y(x), котораяна сегменте (a, b) удовлетворяет дифференциальному уравнению
(68.38) y′′ + α(x)y′ + β(x)y = γ(x)
и граничным условиям
(68.39)
y(a) = ya,y(b) = yb.
Для простоты изложения введем на отрезке (a, b) равномерную сеткуx0 = a, x1, x2, . . . , xi, . . . , xn−1, xn = b. Шаг сетки равен ∆x = h = b−a
n, i-й
узел определяется по формулам xi = x0 + i ·h (или xi = xi−1 +h). Будем вдальнейшем обозначать αi = α(xi), βi = β(xi), γi = γ(xi), y0 = ya, yn = yb.Заменим значения производных и функцию в дифференциальном урав-нении (68.38) их конечно-разностными аналогами по формулам (68.18) и(68.20):
(68.40)yi+1 − 2yi + yi−1
h2+ αi
yi+1 − yi−1
2h+ βiyi = γi, (i = 1, 2, 3 . . . , n− 1).
Выражение (68.40) аппроксимирует дифференциальное уравнение (68.38)со вторым порядком точности (h2), а при заданных краевых условиях

506 68 Лекция – Численные решения уравнений
(68.39), они образуют замкнутую систему алгебраических линейных урав-нений с неизвестными y1, y2, . . . , yi, . . . , yn−1. Эти уравнения можно пере-писать, приводя подобные члены, в виде:
(68.41) yi+1(2 + αih) + yi(2h2βi − 4) + yi−1(2 − αih) = 2h2γi.
Если ввести следующие обозначения
(68.42) ai = 2 − αih, bi = 2h2βi − 4, ci = 2 + αih, fi = 2h2γi,
то систему (68.41) окончательно можно представить в виде системы, такназываемых трехточечных уравнений
(68.43) aiyi−1 + biy1 + ciyi+1 = fi, (i = 1, 2, 3 . . . , n− 1).
Можно строго доказать, что система (68.43) имеет единственное ре-шение при произвольных y0, yn и fi , если коэффициенты ai, bi, ci удовле-творяют условию
(68.44) |bi| > |ai| + |ci|.68.7. Метод прогонки. Для решения полученной системы трехто-
чечных уравнений (68.43) используются различные методы, однако наи-большее распространение в последние годы получил так называемый ме-тод прогонки. Этот метод является вариантом метода исключения Гауссадля системы, в каждое уравнение которой входят лишь по три неизвест-ных значения y в соседних узлах сетки (68.43).
Попытаемся выразить yi через последующее значение yi+1 в виде
(68.45) yi = Liyi+1 +Ki, i = 1, 2, 3, . . . , n− 1.
Граничное условие y = y0 = ya дает в этом случае L0 = 0, K0 = ya, аподстановка выражения (68.45) при i = 0 в условие a1y0 + b1y1 + c1y2 = f1,соответствующее номеру i = 1 в системе (68.43), приводит к уравнению
(68.46) (b1 + a1L0)y1 + c1y2 + a1K0 = f1,
которое позволяет выразить y1 через y2 :
(68.47) y1 = L1y2 +K1
где
L1 =−c1
b1 + a1L0
, K1 =f1 − a1K0
b1 + a1L0
.
Аналогично, используя соотношение (68.47) , можно исключить y1 изуравнения a1y1+b2y2+c2y3 = f2, соответствующего номеру i = 2 в системе(68.43). Полученное уравнение позволит выразить y2 через y3:
y2 = L2y3 +K2, где L2 = − c2b2 + a2L1
, K2 =f2 − a2C1
b2 + a2L1
.

68 Лекция – Численные решения уравнений 507
Подобным же образом, исключая y2, выразим y3 через y4 и т.д.Подставляя yn−1 = Ln−1yn + Kn−1 в уравнение (68.43) с номером i,
получим
yi =−ci
bi + aiLi−1
yi+1 +fi − aiKi−1
bi + aiLi−1
.
Следовательно, коэффициенты Li и Ki в соотношениях (68.45) вычис-ляются по рекуррентным формулам
(68.48)
Li = −cibi+aiLi−1
,
Ki = f1−aiKi−1
bi+aiLi−1, i = 1, 2, 3, . . . , n− 1,
причем L0 = 0, K0 = ya. Коэффициенты Li и Ki называются прогоноч-ными коэффициентами.
Граничное условие yn = yb на правом конце исследуемого отрезка (a, b)позволяет, если определены прогоночные коэффициенты Ln−1 и Kn−1 най-ти yn−1 из формулы (68.45)
yi−1 = Li−1yi +Ki−1 ⇒ yn−1 = Ln−1yb +Kn−1.
Зная yn−1 и прогоночные коэффициенты (68.48), последовательно мож-но найти
yn−2 = Ln−2yn−1 +Kn−2, . . . , y1 = L1y2 +K1,
т.е. все искомые значения неизвестной функции.Как видно из описанной схемы, вычисления в методе прогонки прово-
дят в следующем порядке. Вначале вычисляют прогоночные коэффици-енты по формулам (68.48), где ai, bi, ci, fi находятся по формулам (68.42)(i = 1, 2, 3, . . . , n− 1) - это прямая прогонка. Затем из уравнения (68.45),принимая во внимание что yn известно, последовательно определяютyn−1, yn−2, . . . , y1 – это обратная прогoнка.
Название “прогонка” связано с тем, что граничное условие с левогоконца исследуемого интервала с помощью метода исключения перегоня-ют на правый, а затем при известных yn и yn−1система трехточечныхуравнений последовательно разрешается в порядке убывания номера i.
Метод прогонки очень выгоден : число операций в нем пропорциональ-но числу уравнений. В то же время для произвольной системы n линейныхалгебраических уравнений число операций в обычном методе исключенияпропорционально n3. Кроме этого, метод прогонки имеет очень простойалгоритм вычислений и может быть легко реализован при расчетах навычислительной технике.

508 68 Лекция – Численные решения уравнений
Пример 68.4. Решить краевую задачу методом прогонки с шагомh = 0, 1.
y′′ − y = x, 0 6 x 6 1,y(0) = 0,y(1) = 0,
Р е ш е н и е: В соответствии с рассмотренной выше схемой перейдемот дифференциальной задачи к ее конечно-разностному аналогу. Соот-ветствующая разностная запись будет иметь вид
y0 = 0,yi+1 − (2 + h2)yi + yi−1 = xih
2, i = 1, 2, 3, . . . , n− 1,yn = 0.
Таким образом, ai = 1, bi = −(2 + h2), ci = 1, fi = ih3, xi = ih, L0 = 0,K0 = 0.
Вычисляя последовательно все прогоночные коэффициенты Li и Ki
заполняем второй и третий столбец таблицы расчетов. Затем по найден-ным значениям L9 и K9 и известном y10 = 0 найдем по формуле (68.45)y9, а далее y8, y7, . . . , y1 и заполним четвертый столбец таблицы. В пя-том столбце таблицы приведены значения в узлах сетки точного решениязадачи ( в расчетах оставлены три значащих цифры):
y =e
e2 − 1(ex − e−x) − x.
i Li Ki yi y0 0 0 0 01 0,498 −0, 498 · 10−3 -0,0147 -0,01472 0,661 −0, 165 · 10−2 -0,0286 -0,02873 0,741 −0, 345 · 10−2 -0,0408 -0,04094 0,788 −0, 587 · 10−2 -0,0504 -0,05065 0,818 −0, 890 · 10−2 -0,0565 -0,05686 0,839 −0, 125 · 10−1 -0,0581 -0,05857 0,854 −0, 167 · 10−1 -0,0544 -0,05478 0,865 −0, 213 · 10−1 -0,0442 -0,04439 0,873 −0, 265 · 10−1 -0,0265 -0,026510 0 0
Как видно из расчетов, полученное численное решение задачи отли-чается от точного лишь в третьей значащей цифре.
Метод прогонки разработан для линейных уравнений. Если уравне-ния нелинейные, решение ищется с помощью различных итерационныхметодов.
68 Практическое занятие – Контрольная работа 509
68. практическое занятие – контрольнаяработа по материалам лекций 60–66
Примерный типовой вариант контрольной работы
Пример 68.1. Найти общее решение уравнения (1+ y2)dx+xydy = 0.
Пример 68.2. Найти общее решение уравнения 2x2y′ = x2 + y2.
Пример 68.3. Найти частное решение уравнения x2 + xy′ = y,y(1) = 0.
Пример 68.4. Найти общее решение уравнения x(2x2 + y2) + y(x2 ++ 2y2)y′ = 0.
Пример 68.5. Найти частное решение уравнения y′′ + 2y′ = 0,y(0) = 0, y′(0) = 2.
Пример 68.6. Найти уравнение кривой, проходящей через точку (3; 1),для которой отрезок касательной между точкой касания и осью Ox де-лится пополам в точке пересечения с осью Oy.
Пример 68.7. Найти общее решение уравнения y′′ − 3y′ + 2y = sinx.
Решение примеров типового вариантаконтрольной работы
Пример 68.1.
Р е ш е н и е: Это уравнение является уравнением с разделяющи-
мися переменными. Разделим переменныеydy
1 + y2= −dx
x, преобразуем
d(1 + y2)
1 + y2= −2
dx
x. После интегрирования ln |1 + y2| = −2 ln |x| + ln |C|
Ответ: 1 + y2 = Cx2
Пример 68.2.
Р е ш е н и е: Это уравнение является однородным относительноy. Решим уравнение относительно y′ = x2+y2
2x2 , отсюда y′ = 12
(yx
)2+ 1
2.
Обозначим yx
= t→ y′ = t′x+t. Подставим новую переменную в уравнение
t′x+ t =1
2t2 +
1
2→ t′x =
t2 − 2t + 1
2=
(t− 1)2
2→
→ dt
(t− 1)2=dx
2x→∫d(t− 1)
(t− 1)2=
∫dx
2x→ − 1
t− 1=

510 68 Практическое занятие – Контрольная работа
=1
2ln |x| − ln |C| → 1
t− 1= ln
C√x→ t− 1 =
1
ln C√x
→ t =
=1
ln C√x
+ 1 → y
x=
1
ln C√x
+ 1
Ответ: y = x
(
1 +1
ln C√x
)
Пример 68.3.
Р е ш е н и е: Данное уравнение является линейным неоднороднымуравнением. Перепишем уравнение в виде y − y
x= −x. Решение однород-
ного уравнения
y′ − y
x= 0 → dy
y=dx
x→ y = Cx.
Будем искать общее решение неоднородного уравнения в виде y = z(x)x→→ y′ = z′(x)x+ z(x) → z′(x)x+ z(x)− z(x)x
x= −x→ z′(x) = −1 → dz(x) =
= −dx→ z(x) = −x + C0 Общее решение дифференциального уравнениязапишется в виде y = z(x)x = (−x+ C0)x.
При y(1) − 0 → 0 = (−1 + C0) → C0 = 1.Ответ: частное решение при y(1) = 0 y = (1 − x)x = x− x2
Пример 68.4.
Р е ш е н и е: Покажем, что это уравнение является уравнением вполных дифференциалах.
Перепишем в виде P (x, y)dx + Q(x, y)dy = 0, где P (x, y) = 2x3 + xy2,
Q(x, y) = x2y + 2y3,∂P
∂y= 2xy =
∂Q
∂x= 2xy. Пусть dU(x, y) = P (x, y)dx+
+Q(x, y)dy = 0, тогда U(x, y) =(x,y)∫
(x0,y0)
P (ξ, η)dξ +Q(ξ, η)dη + C. Положим
x0 = y0 = 0, тогда по формуле (60.12) будем иметь
U(x, y) =
x∫
0
P (ξ, 0)dξ +
y∫
0
Q(x, η)dη + C.
Для данного уравнения
U(x, y) =
x∫
0
(2ξ2 + ξ · 0)dξ +
y∫
0
(x2η + 2η3)dη + C =

68 Практическое занятие – Контрольная работа 511
=ξ4
2
∣∣∣∣
x
0
+
(
x2η2
2+η4
2
)∣∣∣∣
y
0
=x4
2+x2y2
2+y4
2+ C
Приравнивая это выражение производной постоянной C1, окончательнобудем иметь:
Ответ: x4 + x2y2 + y4 = C0
Пример 68.5.
Р е ш е н и е: Данное уравнение является линейным однороднымуравнением 2-го порядка с постоянными коэффициентами.
Характеристическое уравнение K2 + 2K = 0, K(K + 2) = 0 → K1 = 0;K2 = −2.
Общее решение: y = C1eK1x + C2e
K2x = C1 + C2e−2x; y′ = −2C2e
−2x.При
y(0) = 0 → 0 = C1 + C2
y′(0) = 2 → 2 = −2C2
→ C2 = −1; C1 = 1
Ответ: y = 1 − e−2x
Пример 68.6.
Р е ш е н и е: Сделаем чертеж (см. рис. 161). Из чертежа и условиязадачи следует, что AB = BM , тогда AO = OC; AC = 2x; MC = y;y′ = tgα = MC
AC= y
2x.
x
y
0-3 -2 -1
M(x,y)
A1 2 3
CBα
2
1
Рис. 161. Иллюстрация к примеру 68.6
Решим дифференциальное уравнение y′ = y2x
→ dyy
= dx2x
→ y = c√x.
Так как кривая должна проходить через точку (3; 1), то 1 = c√
3 → c = 1√3
Ответ: y =√
x3
(x = 3y2 — парабола).
Пример 68.7.

512 68 Практическое занятие – Контрольная работа
Р е ш е н и е: Данное уравнение является дифференциальным линей-ным неоднородным уравнением 2-го порядка с постоянными коэффици-ентами.
Характеристическое уравнение для однородного дифференциальногоуравнения имеет видK2−3K+2 = 0, откудаK1 = 2;K2 = 1 и следователь-но общее решение однородного уравнения Y = C1e
2x+C2ex. Среди корней
характеристического нет комплексных,то частное решение неоднородногодифференциального уравнения следует искать в виде: y = A cosx+B sinx.
Найдем y′ = −A sinx + B cosx, y′′ = −A sinx − B cosx. Подставим y,y′, y′′ в исходное уравнение
−A cosx−B sinx− 3(−A sinx+ B cos x) + 2(A cosx+ B sinx) = sinx
После группировки слагаемых имеем
(−A− 3B + 2A) cosx+ (−B + 3A + 2B) sin x = sinx
Приравняем коэффициенты при одинаковых тригонометрических функ-циях в левой и правой частях уравнения
A− 3B = 03A+ B = 1
→ B =1
10; A =
3
10
Следовательно y = 110
(3 cosx+ sinx)Ответ: y = y + Y = 1
10(3 cos x+ sinx) + C1e
2x + C2ex
Самостоятельная работа
Пример 68.1. Найти общее решение уравненияe−y(1 + y′) = 1.
Пример 68.2. Найти общее решение уравнения(4x− 3y)dx + (2y − 3x)dy = 0.
Пример 68.3. Найти общее решение уравненияxy′ − 2y = 2x4.
Пример 68.4. Найти частное решение уравнения2xy3dx+ (y2−3x2)dy
y4= 0, y(1) = 1.
Пример 68.5. Найти частное решение уравнения2(y′)2 = y′′(y − 1), y(1) = 2, y′(1) = 1.
Пример 68.6. Найти линию у которой длина отрезка, отсекаемогокасательной на оси абсцисс, равна квадрату ординаты точки касания
Пример 68.7. Найти общее решение уравненияy′′ − y′ = e2x cosx
ответы 513
ответы
35.5. Множество точек плоскости Oxy не принадлежащих окружно-сти x2+y2 = 4. 35.6. Множество точек плоскости Oxy не принадлежащихокружности x2+y2 = 3. 35.7. Внешность круга (x+1)2+(y−1)2 = 4. 35.8.Внешность круга (x+ 3)2 + y2 = 1. 35.9. Внутренность эллипса и эллипсx2
4+y2 = 1. 35.10. z 6 x2+9y2+18y+9. 35.11. z < x2+2x+y2/4−y/2+5/5.
35.12. Пересечение полупространств 2x−z−1 > 0 и y+2x+1 > 0. 35.13.Окружность вида (x+3)2+y2 = c. 35.14. Эллипсы вида x2
9(c−18)+ (y+1)2
c−18= 1
при c > 18. 35.15. Круговой цилиндр (x − 1)2 + (y − 1)2 = 4. 35.16.
Эллиптический цилиндр x2
4+ y2 = 1. 35.17. Параболический цилиндр
x − 1 = (y + 1)2. 35.18. Параболический цилиндр y − 1 = x2. 35.19.
Конус x2
4+ z2 − y2
4= 0.
36.8. Эллипсоид. 36.9. Однополостный гиперболоид вдоль Oz. 36.10.Двуполостный гиперболоид вдоль Oy. 36.11. Эллиптический параболоидвдоль Oy. 36.12. Эллиптический параболоид вращения вдоль Oz. 36.13.Гиперболический параболоид вдоль Ox.
37.4. Эллипсоид (x + 1)2 + y2
1/4+ (z−1)2
1/2= 1. 37.5. Сфера (x− 1)2 + (y +
1)2 + z2 = 3. 37.6. Однополостный гиперболоид x2
4− y2
2+ z2 = 1. 37.7.
Однополостный гиперболоид (y − 1)2 − x2
3+ z2 = 1. 37.8. Двуполост-
ный гиперболоид x2
3+ z2 − y2
2= −1. 37.9. Двуполостный гиперболоид
(x−1)2 +y2 − (z+1)2
3= −1. 37.10. Эллиптический параболоид y = x2
2+ z2
3.
37.11. Эллиптический параболоид x = (y+1)2
4+ (z−1)2
4. 37.12. Эллиптиче-
ский параболоид z = −x2
9− (y+1)2. 37.13. Гиперболический параболоид
y = x2
2− z2
3. 37.14. Двуполостный гиперболоид X2
2+ Y 2 − Z2
3= −1,
λ1 = 3, λ2 = 6, λ3 = −2, detA = −36, detD = 216. 37.15. ЭллипсоидX2
16+ Y 2
32/5+ Z2
4= 1, λ1 = 2, λ2 = 5, λ3 = 8, detA = 80, detD = 2560.
37.16. Эллипсоид X2
7+ Y 2
7/2+ Z2
7/3= 1, λ1 = 1, λ2 = 2, λ3 = 3, detA = 6,
detD = −42.
38.6. ∂z∂x
= 4x−2y+3; ∂z∂y
= −6y−2x−5. 38.7. ∂z∂x
= −3(2x−5y)−2(2y−3x)(2x−5y)2
; ∂z∂y
=

514 ответы
2(2x−5y)+5(2y−3x)(2x−5y)2
. 38.8. ∂z∂x
=(√y−x)+x
(√y−x)2 ; ∂z
∂y= − x
2(√y−x)2√y . 38.9. ∂z
∂x=
1
3 3√
(x−y)2; ∂z
∂y= − 1
3 3√
(x−y)2. 38.10. ∂z
∂x= 3
(y−x)2 ;∂z∂y
= − 3(y−x)2 . 38.11.
∂z∂x
= 2xy ln 2 · 1
y; ∂z
∂y= −2
xy ln 2 1
y2. 38.12. ∂z
∂x= cos
(x
2√y
)1
2√y; ∂z
∂y=
− cos(
x2√y
)x
4y3/2 . 38.13.∂z∂x
= −√y
cos2“ √
y
3 3√x
”
9x4/3; ∂z
∂y= 1
cos2“ √
y
3 3√x
”
6 3√x√y. 38.14.
∂z∂x
= − 2√1−(3y−2x)2
; ∂z∂y
= 3√1−(3y−2x)2
. 38.15. ∂z∂x
= 31+(3x−2
√y)2
; ∂z∂y
=
− 1
(1+(3x−2√y)2)√y
. 38.16. ∂u∂x
= yxz ln y · z; ∂u∂y
= xzyxz−1;
∂u∂z
= yxz ln y · x. 38.17. ∂u∂x
= − zx2y
; ∂u∂y
= − zxy2
; ∂u∂z
= 1xy. 38.18. ∂u
∂x=
(yz)x ln(yz); ∂u∂y
= x(yz)x−1z; ∂u∂z
= x(yz)x−1y. 38.19. ∂y∂u
= − sinucosu−sin v
; ∂y∂v
=− cos v
cosu−sin v.
38.20. ∂2z∂x2 =
√x2+y2− x2√
x2+y2
x2+y2; ∂2z
∂y2=
√x2+y2− y2√
x2+y2
x2+y2;
∂2z∂x∂y
= − xy√(x2+y2)3
. 38.21. ∂2z∂x2 = − 1
(x−y2)2 ln 3; ∂2z
∂y2= 4y2
(x−y2)2 ln 3; ∂2z
∂x∂y=
2y(x−y2)2 ln 3
.
39.8. ∆z ≈ 0, 32; dz = 0, 30. 39.9. ∆z ≈ 0, 03; dz = 0, 03. 39.10.dz = 4xy
(x2−y2)2(−ydx + xdy). 39.11. dz = (yx + xyx ln y)dx + x2yx−1dy.
39.12. dz = 2y sin 2x
y
(dx − xydy). 39.13. dz = yzdx + xzdy + xydz. 39.14.
dz = exy(ydx + xdy); d2z = exy(y2dx2 + 2(1 + xy)dxdy + x2dy2). 39.15.dz = (ey + yex)dx + (xey + ex)dy; d2z = yexdx2 + 2(ey + ex)dxdy + xeydy2.39.16. dz = ey(cos dx+sinxdy); d2z = ey sinx(−dx2−2dxdy+dy2). 39.17.1,01. 39.18. 2,63. 39.19. 0,25. 39.20. dz
dt= −arcsin t
t ln2 t+ 1
ln t√
1−t2 . 39.21.dzdt
= 1
2√
3√x−tg x
( 1
33√x2
− 1cos2 x
). 39.22. dudt
= et
2 cos t√t+2
+ et√t+2
cos t+ et
√t+2
cos2 tsin t.
39.23. ∂z∂x
= yx ln y; dzdx
= yx ln y + xyx−1
x2+1. 39.24. ∂z
∂x= cos(tg x
√x)( tg x
2√x
+√x
cos2 x). 39.25. y′ = y ln 3/(y ln 3 − 1). 40.5. 16√
2. 40.6. 1 −
√3. 40.7.
(1 − 4√
2)/3. 40.8. − 12√
2. 40.9. 1. 40.10. − 1√
2. 40.11. 68/13. 40.12.
gradz = (22; 5); | grad z| =√
509. 40.13. gradz = (−3/2; 5/2); | grad z| =√34/2. 40.14. grad z = (4; 6; 12); | grad z| = 14. 40.15. grad z = (8; 2; 2);
| grad z| = 6√
2. 41.7. zmin = −1. 41.8. zmin = −8. 41.9. Экстремумов нет.
41.10. zmax = 5 при x = 2, y = 1; zmin = −5 при x = −2, y = −1.41.11. zmin = 36
13при x = 12
13, y = 18
13. 41.12. zнаим = 5, zнаиб = 11. 41.13.
zнаим = −12, , zнаиб = 1
2.

ответы 515
43.28. 2x3. 43.29. 15ln | cos 5x|. 43.30. 1
2arcsin x2
√2+C. 43.31. − ln | cos 2s|+
C. 43.32. 32(sinx)2/3 + C. 43.33. − (1−7x)6
42+ C. 43.34. etg x + C. 43.35.
25(arcsin x)5/2 + C. 43.36. 1
2ex
2+2x + C. 43.37.√x2 − 6 + C. 43.38. 2e
√x.
43.39. −56(9 − ex)6/5.
43.40. x2
2− 4
3x√x+x+C. 43.41. x3
3− 3
2x2+3x−ln x+C. 43.42. −1
4cos 2x−
13cos 6x. 43.43. 1
6(2x2 +7)
√2x2 + 7+C. 43.44. ln |x2 +5x−13|+C. 43.45.
−2√
5+cos 3x3
+C. 43.46. 32tg 2x 3
√2x+C. 43.47. (2+lnx)2
2+C. 43.48. − ln(7+
cos2 x)+C. 43.49. 12√
5arctg x2
√5+ 1
3ln(x4+5)+C. 43.50. −1
2cos 2x+ 1
4sin 2x+
C. 43.51. x arctg x− 12ln(1+x2)+C. 43.52. e2t
13(3 sin 3t+2 cos 3t)+C. 44.8.
ln |x+3|+C. 44.9. − 15(x−2)4
+C. 44.10. ln(x2+2x+5)+ 32arctg x+1
2+C. 44.11.
− x+32(x2+4x+5)
− 12arctg(x+ 2) +C. 44.12. ln |x| − ln |x− 1| − 1
x−1+C. 44.13.
− 15(x+1)
+ 14ln∣∣x−1x+1
∣∣+ C. 44.14. − x
3(x3−1)+ 1
9ln x2+x+1
(x−1)2+ 2
3√
3arctg 2x+1√
3+ C.
44.15. 5x+138
(1
2(5x2+2x+4)2+ 15
76(5x2+2x+4)
)
+ 752888
√19
arctg 5x+1√19
+ C.
45.12. − 116
cos 8x − 18cos 4x + C. 45.13. 1
2sinx + 1
10sin 5x + C. 45.14.
− cos3 x3
+ 2 cos5 x5
− cos7 x7
+C. 45.15. 33√
sin2 x(15sin x− 2
11sin3 x− 1
7sin5 x)+C.
45.16. 38x − sin 2x
4+ sin 4x
32+ C. 45.17. 1
16( 3
16x − 1
16sin 4x + 1
128sin 8x +
120
sin5 2x)+C. 45.18. 15tg5 x+ 4
3tg3 x+6 tg x−4 ctgx− 1
3ctg3 x+C. 45.19.
2√
tg x(13tg x+ 1
7tg3 x) +C. 45.20. −1
4ctg4 x+ ctg2 x
2+ ln | sinx|+C. 45.21.
17tg7 x− 1
5tg5 x+ 1
3tg3 x+x+C. 45.22. 1
16(−1
4ctg4 x
2−2 ctg2 x
2+6 ln | tg x
2|+
2 tg2 x2
+ 14tg4 x
2) + C.
46.9. ln ( 12√x+1)12
x− 12
12√x + C. 46.10. −√
(3−4x)(9−5x)
5+ 21
20√
5ln |51 − 40x +
4√
5(3 − 4x)(9 − 5x)| + C. 46.11. − 3
√x+1x−2
+ C. 46.12. 1√6ln |12x + 5 +
2√
6(6x2 + 5x+ 11)| + C.
46.13. − 211
√7 + 8x− 11x2 + 63
11√
11arcsin 11x−4√
93+ C.
46.14. arccos 1x√
2+ C. 46.15. − 1
15
√15+3x2
x+ C.
46.16. − x5√x2−5
+ C. 46.17. 1x
√3+4x3
x. Подстановка 3x−3 + 4 = t2.
47.11. hn−1∑
i=0
f(a+ ih), h = b−an. 47.12. heh
eh−1
(eb − ea
), h = b−a
n.
47.13. 12(a2 − b2) . 47.14. π
6. 47.15. e3 − e2. 47.16. ln 1+
√5
2. 47.17.
1 + ln 94. 47.18. π
4. 47.19. πa2
4. 47.20. π
2− 1. 47.21. π
2. 47.22. −2.

516 ответы
48.10. 323. 48.11. 38π
R2 . 48.12. 32πa2. 48.13. 1
6. 48.14. πc2
2. 48.15. π
3.
48.16. 2π√
5. 48.17. x2
√4a2x2 + 1+ 1
4aln(2ax +
√4a2x2 + 1
). 48.18. 6R.
48.19. a2
(
ϕ+√
1 + ϕ2 + ln(
ϕ+√
1 + ϕ2))
. 48.20. gt2
2. 49.12. Расхо-
дится. 49.13. π2ab. 49.14. Расходится. 49.15. 2
√2. 49.16. Расходится.
49.17. 7,5. 49.18. π2
8. 49.19. π. 49.20. Расходится. 49.21. Сходится.
49.22. Расходится. 49.23. Сходится. 49.24. Расходится. 51.5. 14π/3.51.6. ln(25/24). 51.7. 7
6. 51.8. y =
√2x− x2, y =
√4x, x = 0, x = 2.
51.9. x = y2/2, x =√
3 − y2, y = 0, y = 1. 52.3. y =√
2x− x2, y =
√4x, x = 0, x = 2,
1∫
0
dy1−√
1−y2∫
y2/4
f(x, y) dx+1∫
0
dy∫
1+√
1−y2f(x, y) dx+
+2√
2∫
1
dy2∫
y2/4
f(x, y) dx. 52.4. x = y2/2, x =√
3 − y2, y = 0, y = 1,
1/2∫
0
dx2x∫
0
f(x, y) dy +
√2∫
1/2
dx1∫
0
f(x, y) dy +
√3∫
√2
dx
√3−x2∫
0
f(x, y) dy.
53.6.π/4∫
0
dϕ1/ cosϕ∫
0
ρf(ρ cosϕ, ρ sinϕ) dρ+π/2∫
π/4
dϕ1/ sinϕ∫
0
ρf(ρ cosϕ, ρ sinϕ) dρ.
53.7.3π/4∫
π/4
dϕ1/ sinϕ∫
0
ρf(ρ cosϕ, ρ sinϕ) dρ. 53.8. 43π4a3. 53.9. π(1 − e−a
2).
53.10. 20/3. 54.7. 3(π/4 + 1/2. 54.8. 1/6. 54.9. 32/9. 54.10.√
17/24.54.11. 26. 54.12. xц = 5a/6, yц = 0. 54.13. 21
32πa4γ, 49
32πa4γ, 35
16πa4γ.
55.7.1∫
0
dx1−x∫
0
dy∫ 1−x−y0
f(x, y, z)dz.
55.8.R∫
−Rdx
√R2−x2∫
−√R2−x2
dyH∫
0
f(x, y, z)dz. 55.9. 815
(31 + 12√
2 − 27√
3. 55.10.
4π√
2/3. 55.11. πa5
5(18
√3 − 97
6). 55.12. 8
3R3(π − 4
3). 55.13. π/10.
56.8. 32/9. 56.9. zц = 4/3, xц = yц = 0, 56.10. xц = yц = 0, zц = 2H/3.56.11. πH2(R4
2 − R41)/4. 56.12. 1
4πH2(R4
2 − 3R41 + 2R2
1R22),
14πH2(3R4
2 −R4
1 − 2R21R
22).
57.7. 401930
57.8. −2πa2 57.9. −43
57.10. 38πa2 57.11. x3 − x2y− y3 +C;
ex−y(x+ y)+C; ln |x+ y|+C 58.6. 24a3 58.7. 3π16
58.8. u = xyz+C 60.9.

ответы 517
Да • да • нет. 60.11. x2+y2 = lnCx2, • (1−√
1 − x2)·(1−√
1 − y2) = Cxy.
60.12. 2ey2
2 =√e(1 + ex). 60.13. y = C
x− x
2, • y2 = Cxe−
yx . 60.14.
y = x√
1 − 38x.
60.15. y = 16x4 + C
x2 . 60.16. y = (x+1)4−(x+1)2
2. 60.17. y = x
cosx. 60.18.
y = 1x2+Cx
. 61.6. x2
2+ xy + y2 = C. 61.7. 1
2x2 + x sin y − cos y = C. 61.8.
ln |x| − y2
x= C.
61.9. y = − sinx + C1x + C2. 61.10. y = (x + 2)e−x + x − 1. 61.11.y = C1 +C2 ln |x|. 61.12. y = ex(x− 1). 61.13. ln y = C1e
x +C2e−x. 61.14.
y = x2
4− 1
2.
62.7. Да. 62.8. Нет. 62.9. Y = C1 cos 5x + C2 sin 5x. 62.10. Y = e−x.62.11. Y = ex(C1 + C2x). 62.12. Y = C1e
3x + C2e−3x. 62.13. Y = sin 2x.
63.3. y = x3 + C1 + C2x2. 63.4. y = 5 sinx+7 cosx
74+ C1e
x + C2e6x. 63.5.
y = 14sin 2x ln(tg 2x) + C1 cos 2x+ C2 sinx.
64.5. y = 52x2−2x+C1+C2e
−x. 64.6. y = x8(x+ 7
2)e3x+C1e
−x+C2e3x. 64.7.
y = 25(3 sin 2x+cos 2x)+C1e
x+C2e−2x. 64.8. y = 1
4ex+(C1 +C2x+ 1
2x2)e−x.
65.8. y = x4
48+ x2
8+ cos 2x
32. 65.9. y = x4 + x3 + C1x2
2+ C2x + C3. 65.10.
Y = C1 + C2x + C3ex + C4xe
x + C5e−x. 65.11. Y = C1 cosx + C2 sinx +
C3 cos 2x+C4 sin 2x. 65.12. y = −16sin 2x+C1 +C2 cosx+C3 sin x. 65.13.
y = x5
20+ x4
2+ 3x3 + 12x2 + C1 + C2x + (C3 + C4x)e
x. 65.14. y = x4
12− x3
3+
32x2 + ex(3
2x− 15
4) + C1 + C2x+ C3e
−x.
66.5. y2 − x2 = c. 66.6. (x − y)2 = Cy. 66.7. V = 1, 28 км/час. 66.8.A = A0e
−kt. 66.9. xy = 2. 66.10. y = 12gt2 + V0t.
67.6.
x = C1 cos t+ C2 sin t,y = C2 cos t− C1 sin t.
67.7.
x = C1e−t + C2e
2t,y = C3e
−t + C2e2t,
z = −(C1 + C3)e−t + C2e
2t.67.8.
x = C2(t+C1)C1+1
,
y = t+C1
C2+1.
67.9.
x = C1e
t + C2e10t,
y = −2C1et + C2e
10t.

518 ответы
67.10.
x = e2t(C1 + C2t),y = −e2t(C1 + C2 + C2t).
67.11.
x = C1 cos t+ C2 sin t
y = (C1−C2)2
cos t + (C1+C2)2
sin t.
литература 519
литература
1. Беклемишев Д. В. Курс аналитической геометрии и линейной алге-бры. - М. : Наука, 1984.
2. Беклемишева Л. А., Петрович А. Ю., Чубаров И. А. Сборник задачпо аналитической геометрии и линейной алгебре. - М. : Наука, 1987.
3. Берман Г. Н. Сборник задач по курсу математического анализа. -М. : Наука, 1985.
4. Боревич З. И. Определители и матрицы. - М. : Наука, 1988.5. Бугров Я. С., Никольский С. М. Элементы линейной алгебры и
аналитической геометрии. - М. : Наука, 1980; 1984; 1988.6. Бугров Я. С., Никольский С. М. Дифференциальное и интегральное
исчисление. - М. : Наука, 1980; 1988.7. Бугров Я. С., Никольский С. М. Высшая математика: Задачник. -
М. : Наука, 1982.8. Головина Л.И. Линейная алгебра и некоторые ее приложения. - М.
: Наука, 1985.9. Данко П. Е., Попов А. Г., Кожевникова Т. Я. Высшая математика
в упражнениях и задачах: В 2 ч. - М. : Высш. шк., 1986. - Ч. 1, 2.10. Ильин В. А., Поздняк Э. Г. Аналитическая геометрия. - М. : Наука,
1981.11. Ильин В. А., Поздняк Э. Г. Линейная алгебра. - М. : Наука, 1983.12. Ильин В. А., Поздняк Э. Г. Основы математического анализа. - М.
: Наука, 1980. - Ч. 1; 1982. - Ч. 2.13. Задачи и упражнения по математическому анализу для ВТУЗОВ.
Под ред.Демидовича Б.П. - М. : Наука, 1996.14. Каплан И.А. Практические занятия по высшей математике. -Харьковский
университет, 1971.15. Клетеник Д. В. Сборник задач по аналитической геометрии. - М. :
Наука, 1986.16. Кудрявцев Л. Д. Курс математического анализа. - М. : Высш. шк.,
1981. - Т. 1, 2.17. Кудрявцев Л. Д. Курс математического анализа. - М. : Высш. шк.,
1988. - Т. 1 - 3.18. Кудрявцев Л. Д. Краткий курс математического анализа. - М. :
Наука, 1989.
520 литература
19. Кудрявцев Л. Д., Кутасов А. Д., Чехлов В. И., Шабунин М. И.Сборник задач по математическому анализу: Предел. Непрерывность. Диф-ференцируемость. - М. : Наука, 1984.
20. Кудрявцев Л. Д., Кутасов А. Д., Чехлов В. И., Шабунин М. И.Сборник задач по математическому анализу: Интегралы. Ряды. - М. :Наука, 1986.
21. Кузнецов Л. А. Сборник задач по высшей математике /типовыерасчеты/. - М. : Высш. шк., 1983.
22. Курс высшей математики. Под редакцией В.Б.Миносцева, ч.1, 8-оеиздание М., РИЦ МГИУ, 2007.
23. Мантуров О. В., Матвеев Н. М. Курс высшей математики. - М. :Высш. шк., 1986.
24. Минорский В. П. Сборник задач по высшей математике. - М. :Наука, 1987.
25. Никольский С. М. Курс математического анализа. - М. : Наука,1983. - Т.1, 2.
26. Щипачев В. С. Высшая математика. - М. : Высш. шк., 1985.27. Шнейдер В. Е., Слуцкий А. И., Шумов А. С. Краткий курс высшей
математики: Учебное пособие для втузов. - М. : Высш. шк., 1972.
Предметный указатель
Векторная линия, 345Векторная трубка, 345Векторное поле, 329, 345Вычисление двойного интеграла в по-
лярных координатах, 267Вычисление тройного интеграла в ци-
линдрических координатах, 302Вычисление тройного интеграла в сфе-
рических координатах, 303
Геометрическая интерпретация двойно-го интеграла, 244
Геометрический смысл определенного ин-теграла, 186
Гиперболический параболоид, 28Гиперболический цилиндр, 13Гиперболоиды, 22Градиент, 73Граничные (краевые) условия, 411
Двойной интеграл, 242Двуполостный гиперболоид, 25Декартова система координат, 3Дивергенция вектора, 347Дифференциальные уравнения, 383Дифференциальные уравнения второго
порядка, 408Дифференциальные уравнения высших
порядков, 453Дифференциальные уравнения первого
порядка, 383Дифференциалы высоких порядков, 60Дифференцирование неявных функций,
63Дифференцирование сложных функций,
61
Длина дуги плоской кривой, 199Достаточные условия экстремума, 90
Задача Коши, 386, 410Замена переменной в неопределенном ин-
теграле, 123Замена переменной в определенном ин-
теграле, 183Замена переменных в двойном интегра-
ле, 273Замена переменных в тройном интегра-
ле, 301
Изменение порядка интегрирования, 256Изоклина, 390Интегральные кривые, 386Интегральный признак сходимости зна-
коположительных рядов, 222Интегрирование иррациональных функ-
ций, 161Интегрирование методом разложения,
125Интегрирование по частям в неопреде-
ленном интеграле, 127Интегрирование по частям в определен-
ном интеграле, 184Интегрирование простейших рациональ-
ных дробей, 136Интегрирование тригонометрических функ-
ций, 148Интегрирующий множитель, 407Источники и стоки, 348
Касательная плоскость, 77Конические поверхности, 15
521
522 Предметный указатель
Координаты центра тяжести пластины,285
Краевая задача, 410Криволинейный интеграл по длине ду-
ги, 203Криволинейный интеграл по координа-
там, 330
Линейно зависимые решения, 425Линейно независимые решения, 425Линейное дифференциальное уравнение
n-го порядка, 457Линейное однородное уравнение, 396Линейные дифференциальные уравне-
ния n-го порядка с постоянными ко-эффициентами, 459
Линейные дифференциальные уравне-ния второго порядка, 423
Линейные однородные дифференциаль-ные уравнения второго порядка спостоянными коэффициентами, 429
Локальный экстремум функции несколь-ких переменных, 88
Масса пластины, 285Метод вариации произвольных посто-
янных, 436Метод интегрируемых комбинаций, 487Метод исключения неизвестных, 486Метод множителей Лагранжа, 95Метод прогонки, 506Метод Рунге-Кутта, 502Метод Эйлера, 499Моменты инерции пластины, 285Моменты инерции тел, 317
Наибольшее и наименьшее значение функ-ции в области, 92
Начальные условия, 410Необходимые условия экстремума, 88Неоднородное уравнение, 422, 456Неопределенный интеграл, 118Непрерывность функции нескольких пе-
ременных, 47Несобственные интегралы, 214Независимость криволинейного интегра-
ла от пути интегрирования, 335Нормаль к поверхности, 77
Общее решение, 386Общий интеграл, 386Объем тела, 280Объем тела вращения, 199Объем тела по известным поперечным
сечениям, 198Однополостный гиперболоид, 22Однородное уравнение, 422, 456Огибающая, 389Определитель Вронского, 425Определенный интеграл, 174Особое решение, 389
Параболический цилиндр, 13Параболоиды, 26Параллельный перенос осей декартовой
системы координат, 32Первообразная, 116Площадь поверхности, 283Площадь поверхности вращения, 205Поверхности второго порядка, 20Поверхность вращения, 15Поворот осей декартовой системы коор-
динат, 33Полное приращение функции, 55Полный дифференциал функции, 56Понятие области, 6Потенциальное поле, 351Поток вектора, 347Предел функции двух переменных, 43Приведение уравнения поверхности 2-
го порядка к каноническому виду,36
Признаки сходимости несобственных ин-тегралов, 220
Производная интеграла по переменнойверхней границе, 180
Производная по направлению, 71
Решение систем нелинейных уравненийметодом Ньютона, 83
Ротор векторного поля, 349
Свойства двойного интеграла, 245Системы дифференциальных уравнений,
482Скалярное поле, 71Соленоидальное поле, 350

Предметный указатель 523
Статические моменты и координаты цен-тра тяжести тел, 316
Статические моменты пластины, 285Структура общего решения линейных
неоднородных дифференциальныхуравнений второго порядка, 440
Сферическая система координат, 5
Таблица основных интегралов, 122Теорема существования двойного инте-
грала, 244Теорема существования и единственно-
сти решения, 454Теорема Грина, 334Теорема Коши, 388, 424Теорема Остроградского-Гаусса, 348Теорема Стокса, 351Тройной интеграл, 295
Универсальная тригонометрическая под-становка, 149
Уравнение в полных дифференциалах,405
Уравнение Бернулли, 398Уравнения с разделяющимися перемен-
ными, 392Условный экстремум, 93
Физический смысл определенного инте-грала, 186
Формула трапеций, 229Формула Ньютона-Лейбница, 182Формула Симпсона, 231Фундаментальная система решений, 425
Характеристическое уравнение, 429
Цилиндрическая система координат, 4Цилиндрические поверхности, 11Циркуляция вектора, 349
Частное решение, 490Частные производные 1-го порядка, 47Частные производные высших порядков,
49Частный интеграл, 387
Эллипсоид, 20Эллиптический цилиндр, 12

524 оглавление
оглавление
VII. ГЛАВА – Дифференциальное исчисление функций несколькихпеременных 3
35. ЛЕКЦИЯ – Основные понятия функции несколькихпеременных 335. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Основные понятия функциинескольких переменных 1736. ЛЕКЦИЯ – Поверхности второго порядка 2036. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Поверхности второго порядка 2937. ЛЕКЦИЯ – Преобразование декартовых координат впространстве 3237. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Преобразование декартовыхкоординат в пространстве 4038. ЛЕКЦИЯ – Предел, непрерывность и частные производныефункции двух переменных 4338. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Частные производные 5239. ЛЕКЦИЯ – Полный дифференциал функции несколькихпеременных 5439. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Полный дифференциал 6640. ЛЕКЦИЯ – Производная по направлению и градиент 7040. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Производная по направлениюи градиент 7941. ЛЕКЦИЯ – Экстремум функции нескольких переменных 8241. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Экстремум функциинескольких переменных 9842. ЛЕКЦИЯ – Понятия о функциях комплексной переменной 10342. КОНТРОЛЬНАЯ РАБОТА 112
VIII. ГЛАВА – Интегральное исчисление функции одной переменной11743. ЛЕКЦИЯ – Первообразная и неопределенный интеграл 11743. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Первообразная инеопределенный интеграл 13044. ЛЕКЦИЯ – Интегрирование рациональных дробей 13744. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Интегрированиерациональных дробей 14445. ЛЕКЦИЯ – Интегрирование тригонометрических функций 14945. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Интегрированиетригонометрических функций 157
оглавление 525
46. ЛЕКЦИЯ – Интегрирование иррациональных функций 16246. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Интегрированиеиррациональных функций 17047. ЛЕКЦИЯ – Определенный интеграл 17547. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Определенный интеграл 18848. ЛЕКЦИЯ – Приложения определенного интеграла 19448. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Приложения определенногоинтеграла 20849. ЛЕКЦИЯ – Несобственные интегралы 21549. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Несобственные интегралы 22250. ЛЕКЦИЯ – Приближенное вычисление определенныхинтегралов 22850. КОНТРОЛЬНАЯ РАБОТА 237
IX. ГЛАВА – Кратные и криволинейные интегралы.Элементы теории векторного поля 243
51. ЛЕКЦИЯ – Двойной интеграл 24351. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Вычисление двойныхинтегралов в декартовых координатах 25252. ЛЕКЦИЯ – Двойной интеграл 25652. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Вычисление двойныхинтегралов в декартовых координатах. Изменение порядкаинтегрирования 26353. ЛЕКЦИЯ – Двойной интеграл в криволинейных координатах 26853. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Вычисление двойныхинтегралов в криволинейных координатах 27754. ЛЕКЦИЯ – Приложения двойных интегралов 28254. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Приложения двойныхинтегралов 29055. ЛЕКЦИЯ – Тройной интеграл 29755. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Вычисление тройныхинтегралов 30756. ЛЕКЦИЯ – Приложения тройных интегралов 31456. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Приложения тройныхинтегралов 32457. ЛЕКЦИЯ – Криволинейные интегралы по координатамна плоскости 32957. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Криволинейные интегралыпо координатам на плоскости 33958. ЛЕКЦИЯ – Элементы теории векторного поля 344

526 оглавление
58. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Элементы теориивекторного поля 35459. ЛЕКЦИЯ – Интегралы в комплексной плоскости 36059. КОНТРОЛЬНАЯ РАБОТА 376
X. ГЛАВА – Дифференциальные уравнения 38560. ЛЕКЦИЯ– Дифференциальные уравнения. Основныепонятия. Уравнения первого порядка. 38560. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Дифференциальныеуравненияпервого порядка 39961. ЛЕКЦИЯ – Дифференциальные уравнения первогои второго порядков 40561. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Дифференциальныеуравненияпервого и второго порядков 41662. ЛЕКЦИЯ – Линейные дифференциальные уравнениявторого порядка 42262. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Дифференциальныеуравнениявторого порядка 43263. ЛЕКЦИЯ – Линейные дифференциальные уравнениявторого порядка 43463. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Линейные дифференциальныеуравнения второго порядка 44064. ЛЕКЦИЯ – Линейные дифференциальные уравнениявторого порядка 44264. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ –Линейные дифференциальныеуравнения второго порядка 44965. ЛЕКЦИЯ – Дифференциальные уравнения высших порядков 45365. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Дифференциальныеуравнениявысших порядков 46066. ЛЕКЦИЯ – Приложения дифференциальных уравнений 46466. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Приложениядифференциальных уравнений 47467. ЛЕКЦИЯ – Системы дифференциальных уравнений 48067. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ – Системыдифференциальных уравнений 48768. ЛЕКЦИЯ – Численные методы решениядифференциальных уравнений 493
оглавление 527
68. КОНТРОЛЬНАЯ РАБОТА 509ОТВЕТЫ 513ЛИТЕРАТУРА 519Предметный указатель 521ОГЛАВЛЕНИЕ 524
Related Documents