BLDC Motor Modelling and Control – A Matlab ® /Simulink ® Implementation – Master Thesis work by Stefán Baldursson – May, 2005 Institutionen för Energi och Miljö International masters program in Electric Power Engineering CHALMERS TEKNISKA HÖGSKOLA Göteborg, Sverige, 2005 Examinator: Torbjörn Thiringer

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
BLDC Motor Modelling and Control – A Matlab®/Simulink® Implementation
– Master Thesis work by Stefán Baldursson –
May, 2005
Institutionen för Energi och Miljö International masters program in Electric Power Engineering CHALMERS TEKNISKA HÖGSKOLA Göteborg, Sverige, 2005 Examinator: Torbjörn Thiringer

7dp wrgva9vwrbeva9va9lmgv$cina9qnpocgjeva9aTbdcfvahgcfeHs7npllatsugjateh vqra7j wehatsugs7 eheva9lmgk¡¢qrs£inpgvnVe9¤$a@s7nplhgjev sugjwnVlKcfl¥nVba9ejcfgvwrnpl¦npo\npgv§s7nplm¨a9lmgvwrnpldcfqs1ingjnVehcfl¥|qrs=ingjnpevwbeva7ja9lgjat§cfl¥|hg©cfgvauªjbdcs7a«ikna9qceha@a7evw¬¨atonpe\acs©®¤Z|cfgvq¯cf°© ± mwri= qrwl²#°© ina9qcfevaa7¨Va9qrnpbatko¯nVe\atcps©kingjnpeFg!³bacfl¥gja7wreF¨pcfqrwrw¬g!³=wrZ¨Va9evw¬´¥atµ¤F/npej¶m au©pvba9at cfl¥@bnpvwgvwrnpls7nVlgjevnpqwcbbqrwat@ vwrlzm³hgva9eva9vw=dcl¥·s7nVlgjevnpq¸FbyTi¹s7nVlgjevnpq¸\cl¥º¨pcehw¯cfqasªqrwl²§¨npqg©czpas7nVlmgvevnpq~¤ aw¬»¼a9eha9lmgs7nplmgvevnpqhgje©c½gja7zVwa9ceha gja9hgja9@nVl@gva$qrs inpgvnVe#cfl¥«gja9we\ba9ehonpeicfl¥s7aau¨Vcfq dcfgvatµ¤F$aoevat¶ a9l¥su³=s7nplmgja7lmgFnVogjasªqwrl²1s7 eveva9lgZwFwlm¨a7vgvwrzc½gjatonpeatcps©ºs7nplmgjehnVqZia7gvnºcfl¥¦gjakwibdcsugnpos7npii« g©cfgvwrnplºa9q¾c9³Kcl¥§ywgjs©wlzkqnVvva9ww©s7 jvatµ¤wi« q¾c½gjwnVlvntygj¥cfgTcfqrq¼gvas7nplmgvevnpq®hgve©c½gja9zpwra7 y$npev²¶m w¬gja y a9qrqcfq¬gjnp zVacs©4iaugjnkdcfw¬gje©c7ydcps©²m¤F$aoehat¶m a9l¥su³@vbatsugjeh inpogvaTsªqwrl²ks7 eveha9lmgjny#gvdcfgm³hgja7eva9vwr#dcfl¥4s7nVlgjevnpq¥ic9³@lnpgav w¬gcfqraya9evakqncp¦¨pcehw¯c½gjwnpl1cehakq¾cehzVaV¤@ a@¨pcehw¾cqasªqrwl²¨npq¬gcfzVakika7gjn¦gj ehlnp gZgvnagjaa9vgZjnpq gjwnVl@wrlcfbbqwrstcfgvwrnplFyTa7evagjnpej¶m a ehwrbbqra9#cl¥«ywgjs©wlzqnVvva9i= hgiaikwrlwiw¿9atµ¤npii« g©cfgvwrnpla9q¾c9³>wlatsua9j©cfeh³wlbejcpsugvw¾s7ap¥ ggja@jwi« q¾c½gjwnVlvnyXgjdc½gw¬gvnV q¾§a²pa9bg=cfjnpehg1cbnpjvwqaatstcf vaw¬gstcf va9wl¥s7evatcvat>gvnVev¶m aevwbbqa9t¤ÀÂÁõīŠ½Æ pÇ ^eh jqa9viknpgvnVehqrspina9qqwrlzds7nplmgvevnpq~¤
È ÉÊ2ËÍÌÏΠЮÑÓÒÕÔXÑÖ ÑËØ×Ù
1y$np qrqrw²Vagjn)gvdcl²i=³Úv ba9eh¨wvnVee9¤/npevÛ!pevlÜ wevwlzVa7e>c½gdcfqrika9ev`lw¬¨a9ehvwgH³onpeaÝs7a9qqra7lmgTa9qbcl¥>bdc½gjwa9l¥s7aV¤
www
Þ ÌXËØ×ÂÑËß×ÂÙ
àá 7 Åâãá¯äå Á æ áàá 7 Åâç dFè Á á¾éàá 7 Åâê¼Ã/ë Å èpì ê®å t áí @î/Æ/ Á æ á á¯Å î/ á¾éï ð î Å Æ å p áÅ î ïñ ò|ó2ô Å Å ½ õ
¤ö nplhgjev ¥sgjwnVl ¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ø ba9e©c½gjwnVl ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ù¤ú÷ ¦c½gja7icfgvw¾s9cq/na9qX¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û
õ ü à òóýô Å Å ½ þ÷¤ö nplhgjev ¥sgjwnVl ¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÿ÷¤ø ba9e©c½gjwnVl ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ú÷ ¦c½gja7icfgvw¾s9cq/na9qX¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö
ô f该© êá¢ë¦å è á î© ô Å Æ Á è ïù¥¤ö $a1 npgvnVe ¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö9ù
ù¥¤öV¤ö $aikna9q¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö9ùù¥¤öV¤ø wi« q¾cfgvwrnplÓ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö
ù¥¤ø $a1^_/Üingjnpe|¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýötÿù¥¤ø¤ö $aiknpgvnVe¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýötÿù¥¤ø¤ø $aªlm¨Va9ehgva9e@¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpù¥¤ø¤ú÷ wi« q¾cfgvwrnplÓ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpÿ
ó Å î Å è õ ñ¤ö ³hgja9eha9jwT^ cfl¥|nplmgjevnpq¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷
¤öV¤ö /npej¶m a=nVlgjevnpq ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷V÷¤öV¤ø ba9atnplmgjehnVq¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷Vû
¤ø x nplmgjehnVq¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷w¬¨
¤ø¤ö /npej¶m a=nVlgjevnpq ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ø¤ø ba9atnplmgjehnVq¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ùm¤ø¤ú÷ x npvwgvwrnpl|nplmgjehnVq¼¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ù
¤ú÷ cfevw¾cfqra1#H_®wrl²npq¬gcfzVa=nVlmgvevnpq$¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øö¤ú÷¤ö /npej¶m a=nVlgjevnpq ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øö¤ú÷¤ø ba9atnplmgjehnVq¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øù¤ú÷¤ú÷ x npvwgvwrnpl|nplmgjehnVq¼¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûö
¤ ù ¥evat¶ a9l¥su³ldcq¬³vw¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûV÷¤ ù¥¤ö `l¥s7nplmgjehnVqqatÂingjnpe|¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûV÷¤ ù¥¤ø ³hgja9eha9vwrs7nplmgvevnpq«¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û¤ ù¥¤ú÷ x ¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûVû¤ ù¥¤ ù cehw¯cfqa=#!_®wl²#nVq¬gcfzpa ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûVû
ç$å fî ò Á è¯ Ã dî/Æ à#Å t Á þû¤ö / evl"QTa9q¾c9³ ¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûVÿû¤ø "$ªvg©cfgva_®nVvva9¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤
ó Å î/è å áÅ î/ ñ¤ö iicfeh³ ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤p¤ø ¥ ehgva9e)nVeh² ¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤÷ü á è á¯Ådä íÃ
¨
Ù× Ì Ô! ÂÑÓÙ
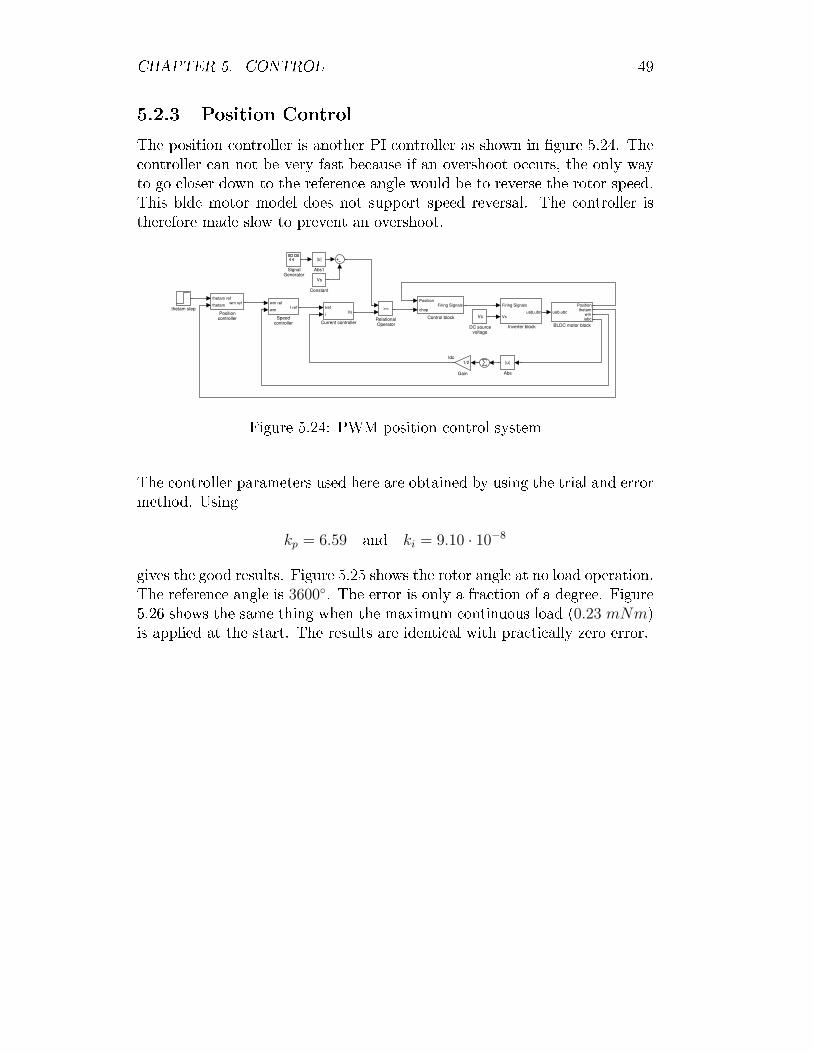
¤ö evnpvjatsgjwnVlÂnpo\c=gHy nkbnVqa1sinpgvnVe ¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ø ^ev va9Tcl¥Âs7npii« g©cfgvnVe$va9zpia9lmgvnpo/gvasinpgvnVe ¤1¤¤¤¤1¤ ù¤ú÷ #ªinpgvnVe$npba9e©c½gjatyTw¬gjc=¨Vcfevw¾cfqra1s¨npqg©czpa ¤1¤¤¤1¤¤¤¤1¤ ¤ ù #ªinpgvnVe$npba9e©c½gjatyTw¬gjc«vgva9bHntyTls©npbba9e ¤1¤¤¤1¤¤¤¤1¤ ¤ø / evlªnplvwzpldcq/cfl¥Âs7 eveha9lmg$yc9¨a9onpevikwl|c«hgja9bHntyTlsjnVbba9e ¤úû #ªinpgvnVe$at¶m w¬¨pcqa9lmgTs7wejs7 w¬gý¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û÷¤ö ^_/ÜiknpgvnVe gjejclh¨a9ehvavatsugjwnpl ¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ø !atcq®dcs©²ªa9io#"útbdcfvas7 eveha9lmgjt¥cl¥>bnpjw¬gjwnplva9lvnVevwzpldcq ¤ýöt÷¤ú÷ ^_/ÜiknpgvnVes7evnpvja9sugjwnVlcl¥>bdcfvaa7la9evzpwr¿7wrlzvat¶m a9l¥suaÚ¤¤1¤ýöVö÷¤ ù wrikbqrw¬´¥atÂqrsevw¬¨ajs©a9ika?¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýöVöù¥¤ö $asingjnVe$ina9qÕ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö9ùù¥¤ø ÜiknpgvnVe$vba9at¦¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýötûù¥¤ú÷ \qatsugjehw¾stcfqµgjnpej¶m anpo/gjasiknpgvnVe ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýötûù¥¤ ù /nVev¶m auªvba9atÂbqngnVogjasingjnpe@¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö$ù¥¤ø #ªqrwl²s7 eveha9lmgϤ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö$ù¥¤úû $aqrsehw¨Vaina7q¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýötÿù¥¤% nplmgja9lgjnVo/gvaqrsingjnpe$qns©² ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýö&ù¥¤úÿ $cfq¾s7 q¯c½gjwnplnpo/gjejcba9¿9npwr¥cq¼yct¨Va9onpevicl¥>bnpjw¬gjwnplvwrzpldcfqr¤¤1¤ýö&ù¥¤' /nVev¶m astcqrs7 q¾c½gjwnVlwl| h³hgja9iÂö'¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpù¥¤ötÜwejs7 w¬gTs7nVl´¥zV ejcfgvwrnplwlÂacpsj
60¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øö
ù¥¤öVö·$agHy ns7wejs7 w¬ggjnpbnVqnpzVwa9oevnpi ´¥zp evaù¤rö9 ¤¤¤1¤¤¤1¤¤¤¤1¤Øöù¥¤öÏwejs7 w¬gTs7nVl´¥zV ejcfgvwrnpl ehwrlzkdcevÂs©npbbwrlzϤ¤¤1¤¤¤1¤¤¤¤1¤Øùù¥¤öt÷$agHy ns7wejs7 w¬ggjnpbnVqnpzVwa9oevnpi ´¥zp evaù¤röt ¤¤¤1¤¤¤1¤¤¤¤1¤ØVù¥¤ö9ù wejs7 w¬gTs7nVl´¥zV ejcfgvwrnpl ehwrlzkjnpo¯gTsjnVbbwrlz ¤¤¤1¤¤¤1¤¤¤¤1¤Øpûù¥¤öÓ$agHy ns7wejs7 w¬ggjnpbnVqnpzVwa9oevnpi ´¥zp evaù¤rö7ù ¤¤¤1¤¤¤1¤¤¤¤1¤Øù¥¤ötûÏngjnpevba9at+¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpÿù¥¤ö$Ó\qatsugjehw¾stcfqµgjnpej¶m a ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø(ù¥¤ötÿ*)nmnVia9>¨wauynpo/gjaa9qatsugvevwrstcfq®gvnVev¶m a ¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø(ù¥¤ö&/nVev¶m auªvba9atÂbqng>¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷Vù¥¤øpÏx\dcfjas7 eheva9lmgv$¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷V
¨w
ù¥¤øö+)nmnVia9>¨wauynpo bdcfjas7 eheva9lmgv1¡ vnpqrwrd£$cfl¥Âdcs©²ªa9iko"ú1¡¸cvatd£Ü÷ö¤ö ³hgja9eha9jw$gjnpej¶m asunVlmgvevnpq®h³hgja7i ¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷V÷¤ø \qatsugjehw¾stcfqVgjnpej¶m a#wrlm³vgva9eva9vw®gjnpej¶m a#s7nVlgjevnpqVauÝbnpjatgjnTc qrnc
vgva9b ¤¤1¤¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷pù¤ú÷ ngjnpevba9at>wrlÂm³vgva9eva9vw$gjnpej¶m as7nplmgvevnpq®auÝbnpja9>gjn4c«qrncvgva9b ÷¤ ù x\dcfjasu eveva7lmgj\wlkm³hgja7eva9vwZgjnpej¶m as7nplmgjehnVqauÝbnpvat@gvncqncphgva9b'÷¤ø ³hgja9eha9jwvba9atÂs7nVlmgvevnpq®h³hgja9i ¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷Vû¤úû ngjnpevba9at>wrlÂm³vgva9eva9vwjba7ats7nplmgjehnVqµauÝbnpvat>gjn4c@qncphgva9b ¤ ÷,¤% \qatsugjehw¯cfqgjnpej¶m a$wlkm³hgja9eha9vwr\vba9atks7nplmgjehnVqauÝbnpvat@gvncqncphgva9b'÷,¤úÿ x\dcfjasu eveva9lgj wlm³vgva9eva9vw vba9ats7nVlgjevnpqauÝbnVvatgvnc1qncphgva9b'÷Vÿ¤' xÍgvnVev¶m as7nplmgjehnVqµv³vgva9i ¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ÷¤ötÏ\qatsugjehw¾stcfqµgjnpej¶m awlÂbyTißgjnpej¶ as7nVlgjevnpq®auÝbnVvat>gvnc«qnmchgja9b ù¤öVö ngjnpevba9at>wrlÂbyi gvnVev¶m as7nplmgjehnVqµauÝbnVvatgjn4c@qncphgva9bX¤¤1¤ ù¥ö¤öx\dcfjas7 eheva9lmgvwrlÂbyi gvnVev¶m as7nplmgjevnpq®auÝbnVvatgjn4c@qncphgja9b ¤ ù¥ö¤öt÷Ïx vba9atÂs7nplmgjehnVq®h³hgva9i ¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ùm¤ö9ùÜngjnpevba9at>wrlÂbyi vba9atÂs7nplmgjevnpqcfglnqnmc)¡
αω = αe£¤¤¤1¤ ù÷
¤ö\qatsugjehw¾stcfqµgjnpej¶m awlÂbyTi vba9atÂs7nVlmgvevnpq/c½glnqncpº¡αω = αe
£ ¤ ù÷¤ötûÏx\dcfjas7 eheva9lmgvwrlÂbyi vba9atÂs7nVlgjevnpq/c½glnkqnmc)¡
αω = αe£ ¤1¤ ùVù
¤ö$Óngjnpevba9at>wrlÂbyi vba9atÂs7nplmgjevnpqcfglnqnmc)¡αω = 0.01αe
£¤1¤ ùm¤ötÿÏ\qatsugjehw¯cfqµgjnpej¶m awlÂbyi vba9atsunVlmgvevnpq/c½glnkqrnc)¡
αω = 0.01αe£ùm
¤ö&Ïx\dcfjas7 eheva9lmgvwrlÂbyi vba9atÂs7nVlgjevnpq/c½glnkqnmc)¡αω = 0.01αe
£ ùû¤øpÏngjnpevba9at>wrlÂbyi vba9atÂs7nplmgjevnpqcfglnqnmc)¡
αω = 0.1αe£ý¤1¤ ùû
¤øö \qatsugjehw¾stcfqµgjnpej¶m awlÂbyTi vba9atÂs7nVlmgvevnpq/c½glnqncpº¡αω = 0.1αe
£'ù-¤øVx\dcfjas7 eheva9lmgvwrlÂbyi vba9atÂs7nVlgjevnpq/c½glnkqnmc)¡
αω = 0.1αe£«¤ ù-
¤øp÷Ïngjnpe|vba9atwlbyTi jba7atQs7nplmgjehnVq@c½g¦icÝwi« i qrnchgja9b¡αω = 0.1αe
£¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ùÿ¤øùÜx bnpvwgvwnVls7nplmgvevnpq®h³hgja9i ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ù¤øVngjnpeTcflzVqawrlÂbyi bnpvwgvwrnpls7nplmgvevnVqc½glnqnmc ¤¤¤1¤¤¤¤1¤Øp¤øpûÏngjnpeTcflzVqawrlÂbyi bnpvwgvwrnpls7nplmgvevnVqc½gicÝwi« i qrnc ¤¤¤1¤Øp¤øcfevwqa1sªqrwl²¨nVq¬g©czpagvnVev¶m as7nplmgjehnVqµv³vgva9i ¤¤1¤¤¤1¤¤¤¤1¤Øö¤øpÿÏ\qatsugjehw¾stcfqµgjnpej¶m awl>¨Vcfevw¾cfqrasªqwrl²¨npq¬gcfzVagjnpej¶m as7nVlmgvevnpq ¤1¤ØV¤ø(Ïngjnpevba9at>wrl>¨pcfevw¾cqa1sªqrwl²¨nVq¬g©czpagvnVev¶m as7nplmgjehnVq)¤¤¤¤1¤ØV¤ú÷VÏx\dcfjas7 eheva9lmgvwrl>¨pcehw¯cfqa1sªqwl²¨VnVq¬gcfzpagvnVev¶m as7nplmgjehnVq ¤¤1¤Øp÷¤ú÷öºcfevwqa1sªqrwl²¨nVq¬g©czpaVvba9ats7nplmgvevnpq®h³hgja9i ¤¤1¤¤¤1¤¤¤¤1¤Øù¤ú÷ngjnpevba9atKwlK¨pcehw¯cfqa4sªqwrl²|¨nVq¬gcfzpavba9atºs7nplmgvevnpqsunVlmgvevnpq
cfglnkqnmc)¡αω = αe
£ ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ØV¤ú÷V÷Ï\qatsugjehw¾stcfqgvnVev¶m awl)¨pcfevw¾cqrasªqwrl²¦¨npqg©czpavba9at·s7nplmgjehnVqc½g
lnqnmc)¡αω = αe
£¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ØV¤ú÷pùÜx\dcfjas7 eveha9lmgjwl>¨Vcfevw¾cqra1sªqrwl²¨VnVq¬gcfzpavba9atÂs7nVlmgvevnpq/cfgln
qrncpº¡αω = αe
£ ¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpû
¨ww
¤ú÷ngjnpevba9atwl¨pcehw¯cfqa¦sªqrwl²Ú¨VnVq¬gcfzpa|vba9atÏs7nplmgjehnVqc½glnqrncpº¡
αω = 0.01αe£+¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpû
¤ú÷VûÏ\qatsugjehw¾stcfqgvnVev¶m awl)¨pcfevw¾cqrasªqwrl²¦¨npqg©czpavba9at·s7nplmgjehnVqc½glnqnmc)¡
αω = 0.01αe£ ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø
¤ú÷,Óx\dcfjas7 eveha9lmgjwl>¨Vcfevw¾cqra1sªqrwl²¨VnVq¬gcfzpavba9atÂs7nVlmgvevnpq/cfglnqrncpº¡
αω = 0.01αe£+¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø
¤ú÷VÿÏngjnpevba9atwl¨pcehw¯cfqa¦sªqrwl²Ú¨VnVq¬gcfzpa|vba9atÏs7nplmgjehnVqc½glnqrncpº¡
αω = 0.1αe£ ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpÿ
¤ú÷Ï\qatsugjehw¾stcfqgvnVev¶m awl)¨pcfevw¾cqrasªqwrl²¦¨npqg©czpavba9at·s7nplmgjehnVqc½glnqnmc)¡
αω = 0.1αe£ß¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øpÿ
¤ ùÏx\dcfjas7 eveha9lmgjwl>¨Vcfevw¾cqra1sªqrwl²¨VnVq¬gcfzpavba9atÂs7nVlmgvevnpq/cfglnqrncpº¡
αω = 0.1αe£ ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø(
¤ ù¥ö ngjnpejba7atwl¨pcfevw¾cqa1sªqwrl²¨VnVq¬gcfzpavba9ats7nVlgjevnpq/cfgicÝwri= i qnmc>vgva9b)¡
αω = 0.1αe£¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Ø(
¤ ùm\qatsugjehw¾stcfqgvnVev¶m awl)¨pcfevw¾cqrasªqwrl²¦¨npqg©czpavba9at·s7nplmgjehnVqc½gic½Ýwri= i qncp>vgva9b)¡
αω = 0.1αe£ ¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûV
¤ ù÷cfevwqa1sªqrwl²¨nVq¬g©czpabnpvw¬gjwnVls7nplmgvevnpq®h³hgja9i ¤1¤¤¤1¤¤¤¤1¤ ûö¤ ùVùÜngjnpeclzpqa«wrl¨Vcfevw¾cqra@sªqwrl²¨VnVq¬gcfzpa«bnVvw¬gjwnplKs7nplmgvevnpq\c½gln
qrncp ¤¤1¤¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûö¤ ùmngjnpe clzpqawl¨Vcfevw¾cfqrasªqwl²¨npqg©czpabnVvw¬gjwnVl=s7nplmgjevnpqcfg/icÝ
wri= i qnmc?¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û¤ ùû*)nmnVia9>¨wauynpo/gjaa9qatsugvevwrstcfq®gvnVev¶m a1cfglnqncp>vba9at ¤¤¤¤1¤ ûV÷¤ ù-.)nmnVia9>¨wauynpo/gjaa9qatsugvevwrstcfq®gvnVev¶m a1cfgicÝwi« i qrnc ¤¤¤1¤ ûpù¤ ùÿÏx nty$a7evbatsugjeh i npo/gjasªqwl²>s7 eheva9lgcfglnfHqncp>vba9at ¤¤¤1¤ ûpù¤ ùÏx nty$a7evbatsugvev i'nVogjasªqwrl²ks7 eheva9lmgwl4m³vgva9eva9vwvba9at4s7nVl
gjevnpq/c½glnkqnmc¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û¤øpÏx nty$a7evbatsugvev i'nVogjasªqwrl²ks7 eheva9lmgwl4m³vgva9eva9vwvba9at4s7nVl
gjevnpq/c½gi4c½Ýwi« i qnmc ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ ûVû¤øö x nty$a7ejbatsgjev iÕnpogvasªqrwl²§s7 eheva9lmgwrlKbyTi jba9a9)sunVlmgvevnpq
cfglnkqnmc ¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û,¤øVx nty$a7ejbatsgjev iÕnpogvasªqrwl²§s7 eheva9lmgwrlKbyTi jba9a9)sunVlmgvevnpq
cfgi4c½Ýwi« i qnmc ¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ û,û¤ö x\dcfjas7 eheva9lmgvt¤\Øö
msgv evlªnpla9q¾c9³>wcfbbqwatcfg¤øp÷
s¤¤1¤ û
û¤ø \qatsugjehw¯cfqµgjnpej¶m aV¤$öms
gj ehlªnVla7q¯c9³wcfbbqrwatc½gT¤øp÷s¤¤¤1¤ û
û¤ú÷ ngjnpevba9atyTa9lÂnplªvg©cfgvaeva9vwhgcls7anpo ywgjs©a9wTΩ¤¤¤1¤
û¤ ù \qatsugjehw¾stcfqµgjnpej¶m aya9lÂnVlªhgc½gjaeha9vwrhg©cl¥s7anpo hyw¬g©s©a9wΩ
¤öû¤ø x nty$a7ewvjwbdc½gjwnVlÂwrlÂyTw¬g©sja9$ya9lÂnVlHhg©cfgvaeva9vwvg©cl¥suaw
Ω¤ö
¨www
Ù× Ì / 021¹ÐµÑÓÙ
÷¤ö yTw¬g©s©wrlzvat¶m a9l¥suaý¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýöVöù¥¤ö ^_/ÜiknpgvnVe$bdcejcika7gja9eh)¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤ýöù¥¤ø Hl¨a9ehgva9enp gjb g¨npqg©czpa9 ¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤¤¤1¤¤¤¤1¤Øp÷ù¥¤ú÷ ^_/ÜiknpgvnVe$wrlb g¨npq¬gcfzVa9 evwlzdcfejÂs©npbbwlzϤ¤1¤¤¤¤1¤ØVù¥¤ ù ^_/ÜiknpgvnVe$wrlb g¨npq¬gcfzVa9 evwlzvnVo¾gTs©npbbwlz ¤¤1¤¤¤¤1¤Ø
w Ý
Ù× Ì 34ýÖ 1 Ì'ЮÙ+5¹Ù671+ÙÉ8 :9 ×ÂÙ 0 Ë Ò021!1! Ñ<; 0 × ÌX˹Ù
êÃ/ë Å èα ln 9
tre
¡ auÝs7a9bg´¥ehwrlzcflzpqrawrl>´¥z¤¤ø÷£ bdcfja^ bdcfja1^ bdcfja=e
dcs©²ªa9io wnaF
gje©cfba9¿9npwr¥cq®o l¥sugvwrnpl bnVvw¬gjwnVlÂva9lvnVevwzVldcfqi
s7 eveha9lmgJ
wla9ehgjw¾ck
s7nplvg©clgL
bdcfjawl¥ ¥sug©cl¥s7an
evngjnpevba9atº¡rpm
£" lnVegjÂicfzpla7gjwrsbnVqa= a9qatsugjehnVlwrsyTw¬g©sjR
bdcfjaeva7jwhgcfl¥s7a vnV gvÂiczpla7gvw¾sbnpqrat
gjwiatre
evwvagjwianVo s7 eveha9lmgT
gjnpej¶m au
bdcfjau~gvnªbdcfva¨VnVq¬gcfzVaiwl bdcfvau~gjnfªbdcfjadcpsj²ªa9iov
bdcfjau~gvnªbdcfva¨VnVq¬gcfzVaV
s¨npq¬gczpaZ
bdcfjawibat¥cfl¥s7aθ
clzpqaω
clzV q¾cevba9at
Ý
êå t áí ab
bdcfja1c=gjnbdcvabc
bdcfja>gjnkbdcfjasca
bdcfjasgjnkbdcfja1ccom
s7npii« g©cfgvwrnpld
wnae
a9qatsugjehw¾stcfqE
dcpsj²ªa9iof
oevwrsugvwrnpli
wrlgja9zpe©cfqL
qrncm
iats©dcflwrstcfqp
bevnpbnVegjwnVl¥cqref
eva9o¯a9eva9l¥s7a¨pcq as
vnV evs7ag gjnpej¶m a / Á æ á á¯Å îqrs ev vqa9vTss wrehatsugTs7 eheva9lmga9io a9qra9sugjevnpingjw¬¨aonpejs7abyTi b qjayw¾gvikn q¾c½gjwnVlevbi eva7¨npq gjwnplba9eiwl gva
Ýw

Þ > 0 9 ×ÂÑ? @A ËØ×B Ì2Ò7 É)× ÌXË
nVlm¨Va9lmgjwnpldcqsinpgvnVehdct¨Va¦icflm³Ïc½gvgve©csugjw¬¨a|bevnpba9ehgvwra7>v ¥sj cfwzVÏa9o¾´ds7wa9l¥su³cfl¥Úqwlace@gjnpej¶m auªvba9ats©¥ce©csugva9evwhgjwrs7t¤$aÂs7nVlgjevnpq$npos>iknpgvnVehw«cqvnvwibqacfl¥)na91lng=eva9¶m wevas7npibqauݺdcfejycehaV¤>nty a7¨a9e9/gva4icfwle©c7ydcpsj²nVo/gva1singjnpe$wr$gjala9at>nVo/ba9evwnwrsicwlmgva9ldcls7aV¤ aev va9npogjaiats©dcflwrstcq®s7npii« g©cfgvnVe a7¨Va9lmgv dcqq¬³4y$acfe$np gTcfl¥la9atgjn@aeva9bq¾cs7atµ¤ aiats©¥clwrstcfqs7nViki« gc½gjnpe4dcfnpgva9e la9vwrejcqa|a7»atsugvv ¥sjÜcvbdcfev²tcs7nV hgvw¾s@lnVwva4cl¥Kstcfevnplºbdcfehgvw¾s7qa91sunViwlzÂo¯evnpi gjakev va9t¤^ev vqa9js¡ qrs£ ingjnpev#stclkwrlkicl³ks9cva9#eva7bq¯cs7as7nplm¨a9lgjwnVldcfqds$ingjnpevt¤\ ¥s©iknpgvnVeeva7bq¯cs7a9ia9lgkwr@hgj ¥wat wrlDC¬öE~¤·Ta9vbwgvagvaldcfiaV\q¾singjnpevcfevaÂcsugj dcfqq³cg!³banVoTba9ehicla9lmgicfzpla7gh³l¥sjevnplnV kingjnpevt¤ $a7³ÚcehaÂevw¬¨a9lÚm³ s¨npq¬gcfzVa= gs7 eheva9lmgs7nViki« gc½gjwnpl|wnVla=m³Âjnpqw¾hgc½gja1hyw¬g©s©a9t¤T a«s7nVi«i« g©cfgvwrnpl§wrlhg©clmgv1cehaa7gja9ehiwlat§m³gjakehnpgvnVebnpvwgvwrnpl·cfl¥¦gja@bnVvw¬gjwnplºnpogja@evnpgvnVew1a7gjatsugvatKa9w¬gja7em³¦bnpvwgvwrnplºva9lvnpevnVem³¦va9lvnpevqa9vgjatsjlwr¶m a9t¤^qrskingjnpevdc9¨ai4clm³§cp¨pcflmgcfzVa71n¨a9es7nplm¨Va9lmgjwnpldcqskingjnpevt¤k oauy npogja7ja1cfevaFCúGEIH• _nplznpba9e©c½gjwlzqwro¯a• wrzp³ldcfiwrseva9vbnVlva• wrzpÂaJs7wa9l¥su³• ^a7gvgva9evba9at¨t¤gvnVev¶m as©dcfe©csugja9ehwrhgvw¾s7• "nVwva9qa9jnVba7e©c½gjwnVl• wrzpa9evba9at>e©cflzVa• wrzpa9e$gjnpej¶ au¸y$a7wrzpmgejcfgvwrn
ö

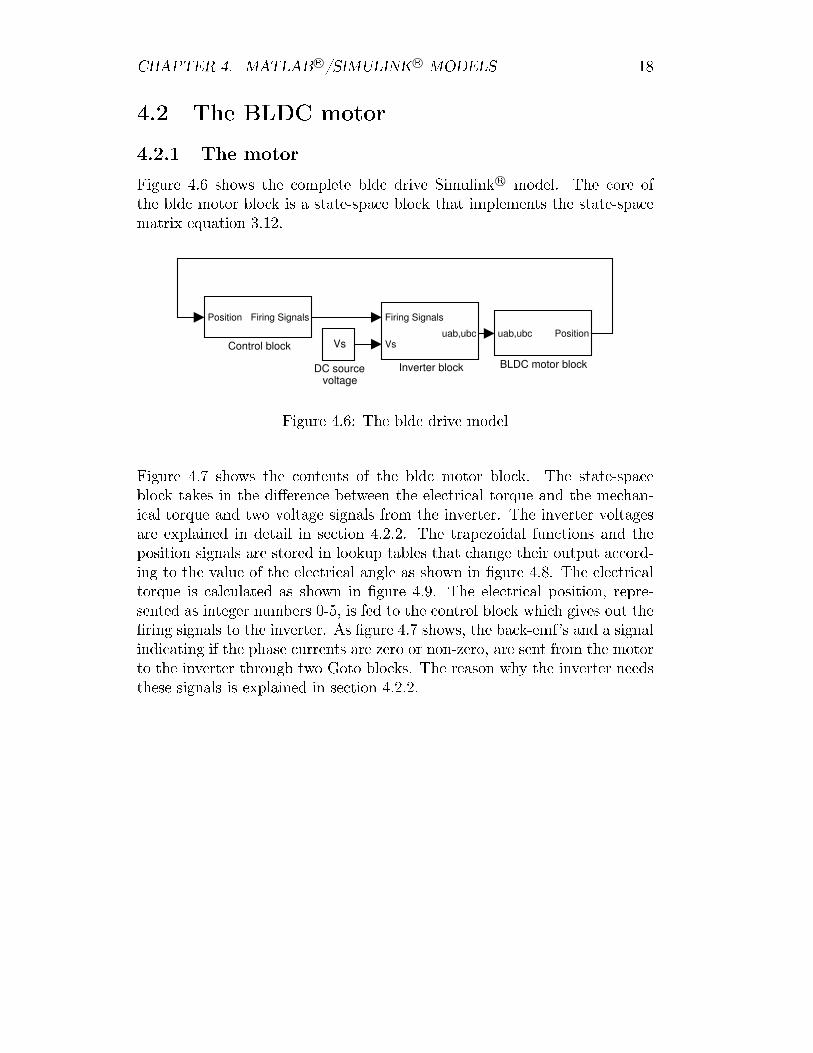
KMLONQPSRTVUXW(Y[Z]\^RUQ_a`BbcKORZ_a\
^_/ÓiknpgvnVev cehac9¨pcwq¾cqrawlicl³w¬»a9eva9lmgbny a9ee©c½gjwlzptoehnVi ¨a9e³4vicqqingjnpevc$ ja9>wrlÂ¥cevÂwj²evw¬¨a9$gvnq¾cfevzpa9eiknpgjnpev$ vat>wlÂa9qatsugjehw¾s¨a7w¾s7qa9t¤ eva9auªbdcfva1iknpgjnpevTcehainVhgTs7npiinpl ggªy nªbdcfva1iknpgvnVehceha=cqvn4onp l¥wlÂicl³Âcfbbqw¾stc½gjwnpl¤
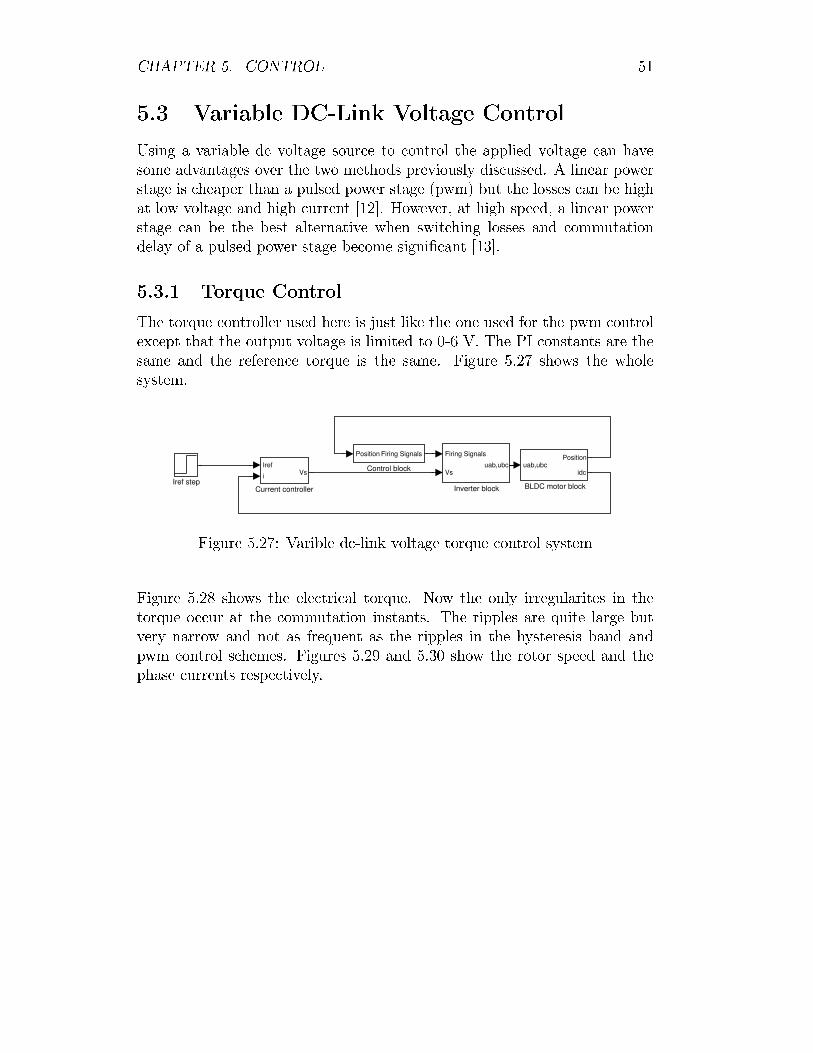
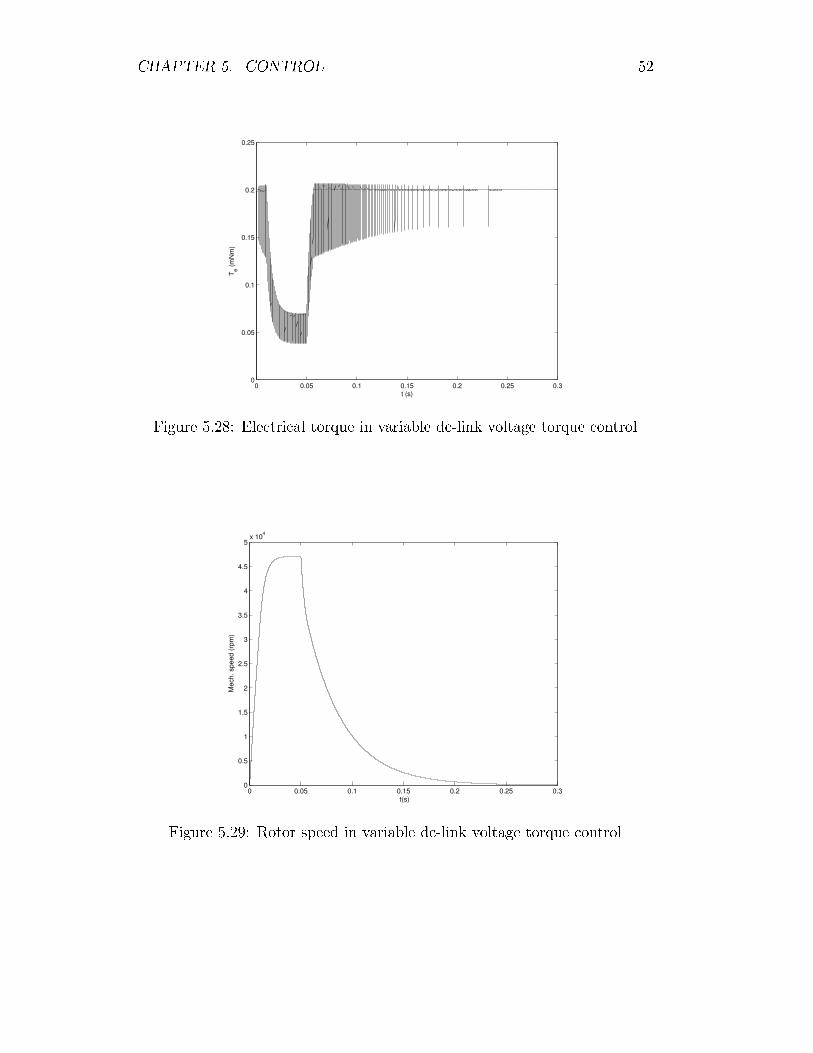
$aTb evbnpjanVogjweva9bnpehgwgjn wq¾cvwrikbqrapcps9s7 ejcfgvacl¥o cfvgeh llwlz|cfgvq¾c °© ± wri= qwrl² °© ina9q/nVo#ckgjeva9a1bdcfja1vg©ce!Hs7nVlla9sugjatqrs1iknpgvnVecfl¥s7npibdcfevagjao¯ l¥sugjwnpl npo$w»a9eha9lmg@s7nplmgvevnpqhgve©c½gja9zpwra9t¤> vwibqacfbbevncpsj)gjns7 eheva9lmgTva9lvwlzcfl¥byiýs7 eveha9lmgs7nplmgjehnVqnpoZqrsingjnpevdcfTa9a9lbeva9va9lgjatwl8C ÷dE~¤$wia7gjnywqrq®a=cfbbqwratÂa9eha vwlz4³hgja9eva9vwdcfl¥s7nplmgjehnVq¸byTis7nplmgjehnVqdclk¨pcehw¾cqaTs©Hqwl²«¨VnVq¬gcfzpaTs7nplmgjehnVq¸¤#wiwq¾ce9 gqa9j#auÝgva9lvw¨VaVpy$npev²dcfa9a9l§npla«wl?C ù(E/ya9eva@c4byTi2gjnpej¶m a«s7nplmgjehnVqqa9eTycwibqa9ia7lmgjatµ¤ aina9qbeva9va9lmgvat a9ehaVg©c²pa9>gj¥cfgy nVeh²ÏnplaKhgja9b o¯ ehgva9eyTw¬gj gvaºs7nplmgjehnVqnpogjnpej¶ aVjba9a9·cfl¥KbnVvw¬gjwnVlµ/ vwrlzÂgvakgveva9a4s7nplmgvevnpq#hgjejcfgva9zVwa9ia9lmgvwrnplatcfn½¨VaV¤ yTw¬g©sjwrlzÚqrnpvja7|cfl¥ÜgjaKau»¼atsugvÂnVo=s7nViki« gc½gjwnpla9q¾ct³ÏnVl gjnpej¶ aevwbbqa9cfeva1cfqvnkgjevatcfgvatµ¤
dcfbgja9ebeva9va9lmgvgjas7nplhgjeh ¥sugjwnpl·cfl¥§npba9e©c½gjwnVlKnpo cs7nVl¨a9lmgvwrnpldcfq#singjnpecl¥Âa9ehw¨Va9c«jwibqaic½gja9i4cfgvw¾stcfq®eha9beva9va9lgcfgvwnVlÂnVo w¬g¤
dcfbgja9e÷Kbeva9va9lmgvgjaqrsingjnpetw¬gjs7nplhgjeh ¥s7wrnplÜcfl¥nVba7e©cfgvwnVlÜcfl¥a9ehw¨Va9cic½gja9i4cfgvw¾stcfqikna9qgvn|a vat·wlÚc¦|c½gjq¾c °© ± wi« qwrl² °© wibqauia9lgc½gjwnVl®¤
dcfbgja9e|ùbeva9va9lmgvKcÓa7gcfwqra9Qa9js7evwbgjwnVlQnpo@gva¦c½gjq¾cf°© ± wi« qwl²#°©ina9q¤\$aina9qcfevagja9hgvatcl¥gja9wres©dcfe©cpsgja9evwhgjwrs7beha9va9lmgjat¼¤dcfbgja9ewlmgvevn s7a9m³hgja9eha9vwr¥cl¥¦s7nVlgjevnpq¸µbyi s7nplmgjehnVq\cfl¥¨Vcfevw¾cfqra
sªqwrl²¨VnVq¬gcfzVaKs7nplmgjehnVq¸¤ a9vaKiaugjncfeva§ vatÜwrlÜgvnVev¶m au©Tvba9at©cfl¥bnpjw¬gjwnpls7nVlgjevnpq®nVo/gjaqrsingjnpet¤#$as7nVlmgvevnpq®ia7gvncfevaa7¨pcq dc½gjatÂngjwl>gjwianpicwlclÂo¯evat¶m a9l¥su³Ânpicfwl®¤
dcfbgja9e=ûbeva9va9lmgv=gvaa7»atsug=nVo qrnpvva9«wl)gja4¨npqg©czpavnV evs7acl·wl)gvawlm¨a9egja9e9dcfl¥>hgj ¥wa9gvaa7»atsugnVo s7nViki« gc½gjwnpla9q¾ct³¤
dcfbgja9ees7nplmg©cwl cv ii4ce³knpogvaeva7bnVeg clwjs7 vva9bnpvjwqagvnVbw¾s7onpeo¯ ehgva9e y nVeh²¤
Þ > 0 9 ×ÂÑ? fg Þ Ì×ÂÌ Ù
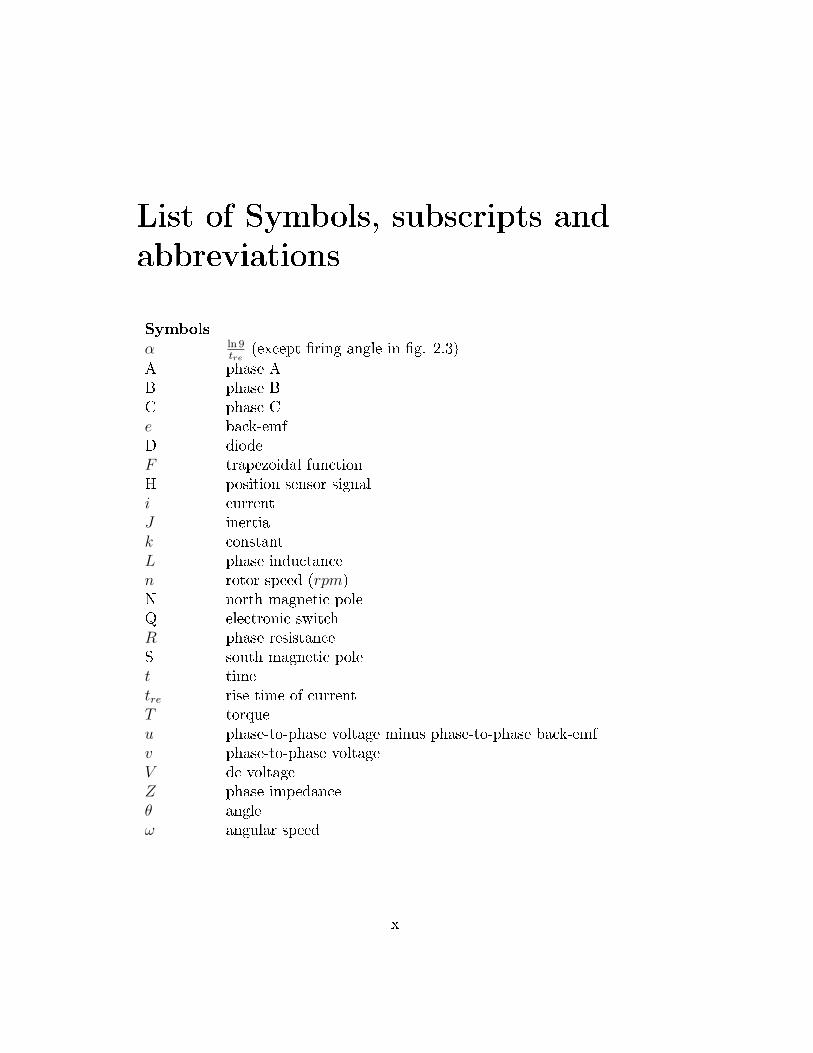
hjik lnmdiGop&qsrdtMurlvmdtwkyx(rlOqz,pk|m&o~m~lsqtI$m#qk ~oGu~prGto&qk (Vom~drd&qk ~Go~um dq]-to$u8urdtwk Grlo o&qi$r o&qk|m&o -urdqiGo&qm&o8x(rl#k |o&qvru8r#mGk|rd&q z<kyoq|ox© d k 'ky© & *?-=:B¼. 0#. 87-=: as>ingjnpedcf4w¬gjcevi4cfgv evaÂnplgvaehnpgvnVe4cjntylÓwlÚ´¥zV eha|¤röp¤ ahgc½gjnpe#dcf©cqwra7lmgi4czpla7gjwrsbnpqra7gvdcfgcfevaa9w¬gja9e#icanpo¼ba7evicfla9lmgicfzVla7gjnpe/vbats7w¾cfq´¥a9q¾ywrlwrlzpt¤\ eveva7lmg w/oatgvngvaevngjnpeµyTwl¥wlzp/gjevnp zp1ev va9gjdc½gcfevawlÂs7nplmg©cpsugyw¬gj>s7nVbba9e hgjehwrb qnstc½gjatÂc½g gvaa9l¥npo®gjaevngjnpet¤\ a9vas7npbba9e/hgjehwrb½ v dcfqrq¬³stcfqrqat1s7nViki« gc½gjnpeva9zpia9lgjtpcfevas7nVllatsugjatgjngvaehnpgvnVeywrl¥wlzpt¤
+
-
ArmatureN S
Fwzp eva=¤rö(HevnpvjatsgjwnVlÂnVoZc=gHy nkbnVqasinpgvnVeCø$Egja@ehnpgvnVeehnpg©cfgva9tgja@ev va9in¨a«oehnVi npla@va9zVika9lmggjnÂcflngja9eTyTwrs©s7npii« g©cfgva9gja4s7 eveha9lmg1wl)v ¥s©·cyc9³¦gjdc½ggja4s7 eveha9lmgv1wlºgjas7npl¥ ¥sugjnpev
÷
KMLONQPSRTVU ~Y¡`^K[¢<_R_aUS£ ù
l¥a9eacs©§bnVqa^¤ny'wl¦gja@©ciakwehatsugjwnVlÓ¡¢oevnpi gja@vg©cfgvnVebnVwlmgnpo#¨wray£u¤ wrwra9bwrsugjat|wrl|´¥zp eva9¤rö@cfl¥K¤ ¤ a«eva9v q¬gjwlzonpejs7a=¨atsugvnVehgvdcfgcpsgnpl¦gva«evngjnVeyTwl¥wlzp1cfevakcqq g©clzpa9lmgvw¯cfq gjngva@ehnpgvnVeba9evwba9eh³¦cl¥gja7³¦cfqrqs7nplmgjehwr gjagjn@gjagvnVev¶m aV¤
Brush
Commutatorsegment
ShaftRotation
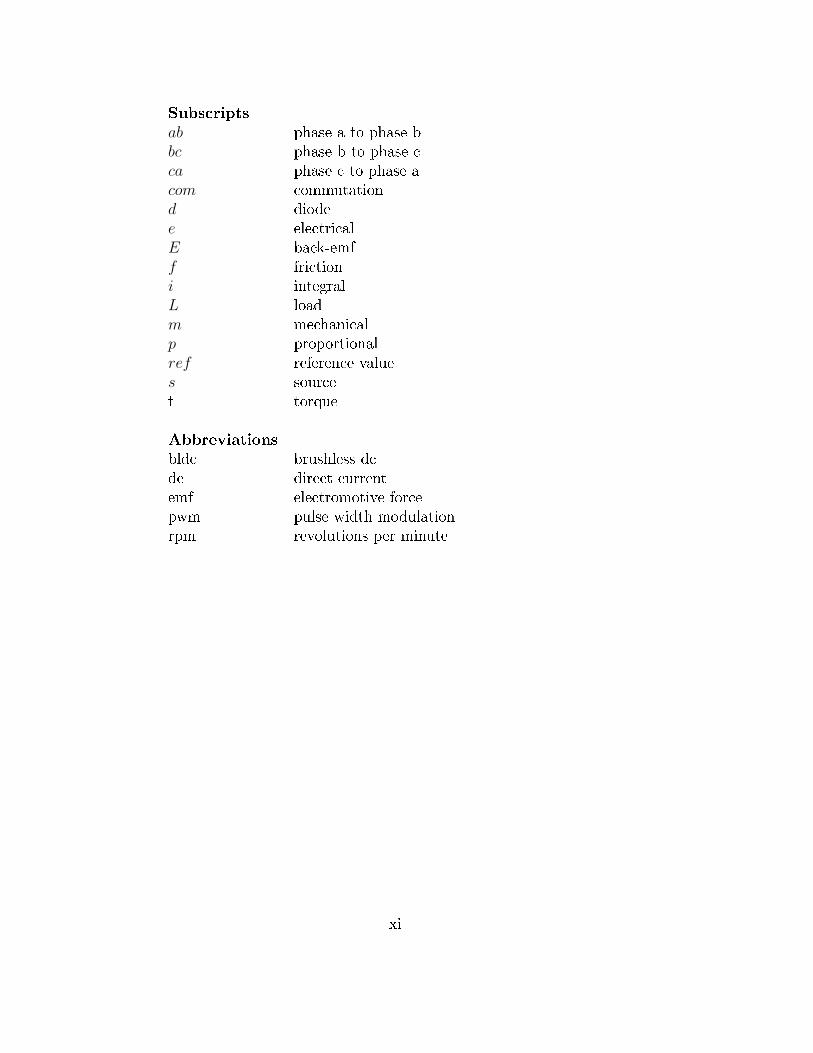
InsulatorFwzp eva=¤ ¥H^ev va9Tcl¥Âs7npii« g©cfgvnVe$va9zpia9lmgvnVo/gjasinpgvnVeCúûGE
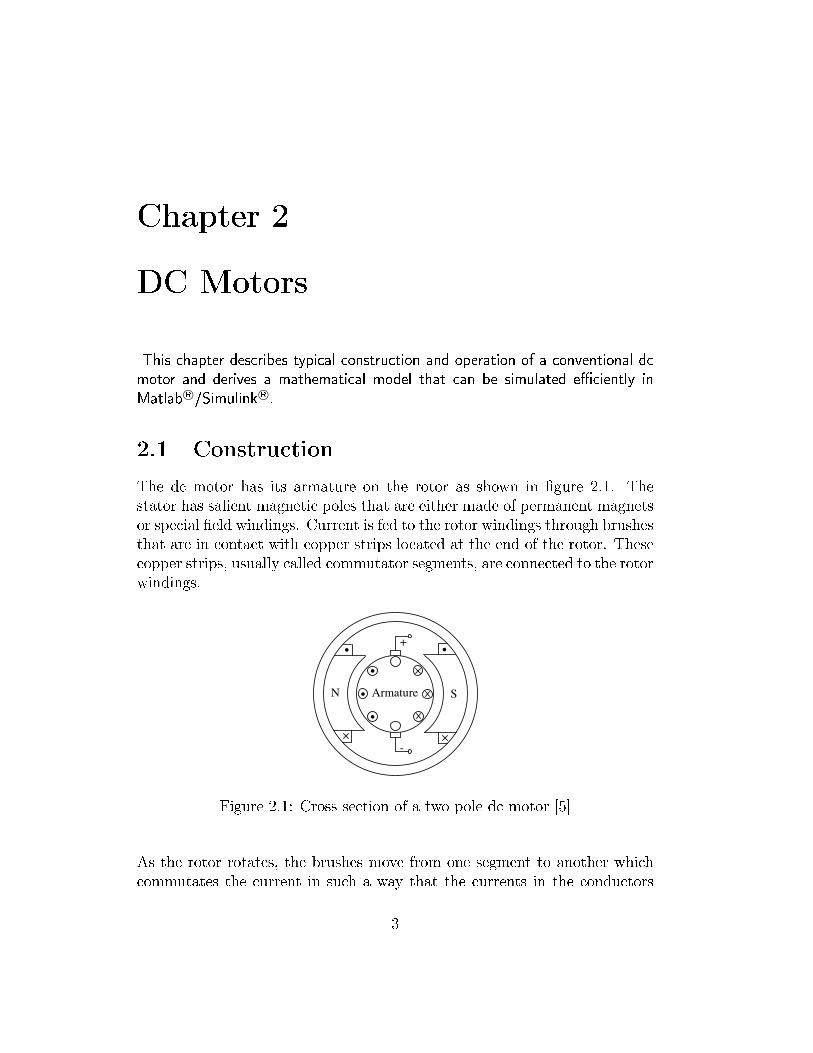
¦ §©¨ 5$0 <. 87-=:Zgva$ldcfia wribqrwa9tpgjasinpgvnVeZw\oat@o¯evnpi cs¨npqg©czpa$vnV evs7aV¤Z a$vba9atstcflºa4s7nplmgjevnpqqra9ºm³|¨pce³wlzÂgja4cbbqwat§¨nVq¬g©czpaV¤4$w1stclºacs©wa7¨a9ºm³dc9¨wlzc«¨pcfevw¾cqa¨npqg©czpavnV ejs7anpe³> vwlzc«¨pcehw¾cqa1eha9vwrhgvnVes7npllatsugvatwlva9evwa9$yTw¬gvÂgja=cfevic½gj ehaV¤ aq¾cfghgja9eia7gjnÂwTvwibqa glnpg¨a9e³>aJ4s7wra7lmgatstcf va«npoZgja=bnty a9ewjvwbdc½gjat|wlgja1¨pcfevw¾cqa«eha9vwrhgvnVet¤THoFgja=ingjnpeTwrlngnpoTgjaÂba7evicfla9lmg4i4czpla7ggH³baVgvaÂvba9atÓstcflcqvnºa>¨pcehwra9m³s©dcflzVwlzgja´¥a9qrs7 eheva9lmgt¤\wrzpa9eaJ4s7wa9l¥su³4w cpsjwra7¨Vatm³k vwrlz1jnpqw¾4hgc½gjas7nplm¨a7ehgja9ehv ¥s©·cf1s7nplmgjehnVqqatºehatsugjw¬´¥a9ev=cfl¥ºs©npbba9evt¤nplmgjehnVqqatKevatsugvw´¥a7ev=ceha vat§gjns7ehacfgva$c¨pcfevw¾cqa$s¨VnVq¬gcfzpaV¤F wrzp eva$¤ú÷vntyTFv ¥s©kcfevejclzpa9ia9lg¤F a¨npqg©czpaw¨pcfevwat>m³>s©dcflzpwrlzgva´¥evwlzcflzVqanVo/gvagjm³evwvgvnVeh¤
$as©npbba9ejntylºwl§´¥zV eha¤úùsunVlvwvgvnpo clKa9qatsugjehnVlwrskyTw¬g©sjKgvdcfgw vatgvn«gv evlgvaingjnpenVlÂcfl¥n»§c½gc1wzp>ejcfgvaV¤ a9lgjahyw¬g©s©wgj ehlatn»Zmgjawnabevn¨wra9c1bdc½gjo¯nVegvawl¥ ¥sugvw¨Vacfevi4cfgj evas7 eveha9lmg¤Z wrzp eva¤ vntyTgjakgv evlªnplºjwzpldcqcfl¥§gja4s7 eveva9lgyc9¨a7onVehit¤4$a4s7 eveha9lmgevwjacfl¥o cfqq®qnty a9ev$gjas7 eheva9lmgiacfl¨Vcfq a gwgTcfqrvnkwrlgjevn ¥s7a9 l¥a9vwe©cfqa1s7 eheva9lmgevwbbqayTwrs©wgje©cflvoa9ehevat>gvnkgjaa9qatsugvevwrsgvnVev¶m aV¤$wria7gvnÂwg!³bw¾s9cq®onpeevw¬¨a7wl>¨a9wrs7qa9t¤
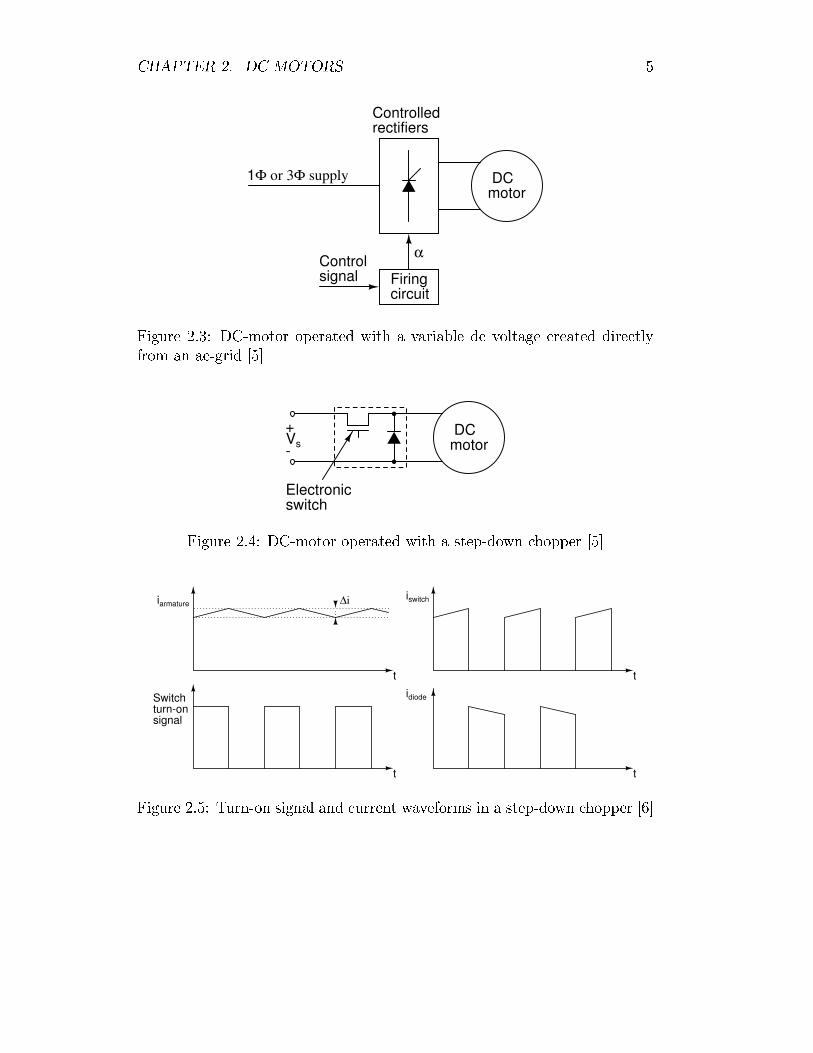
KMLONQPSRTVU ~Y¡`^K[¢<_R_aUS£
1Φ or 3Φ supply DCmotor
Firingcircuit
α
Controlledrectifiers
Controlsignal
wrzp eha¤ú÷H=#ªingjnpenVba9ejcfgvat§yTw¬gv c¨pcehw¯cfqask¨VnVq¬gcfzVa4s7evac½gjatºwrehatsugjq¬³oehnVi2cfl|csªzVehw¾ªCúGE
Vs
Electronicswitch
DCmotor
+-
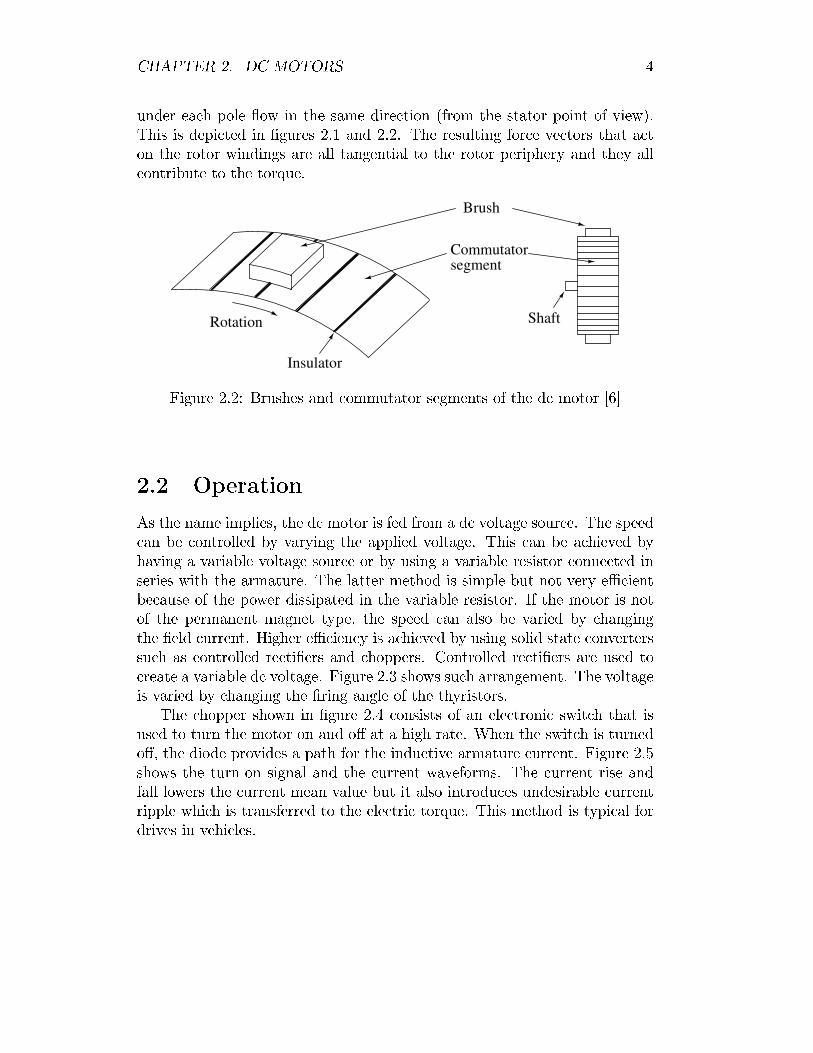
wrzp eha=¤úùHªingjnpe$nVba9ejcfgvatywgvc@hgja9bHntylsjnVbba7eCúGE∆i
t
ttidiode
iarmatureiswitch
t
Switchturn-onsignal
wrzp eha¤ ¥HF/ evlHnplvwrzpldcfqcfl¥s7 eveha9lmg\yc9¨a9onpevik#wrlchgja9b!nylsjnVbba7eSC ûdE
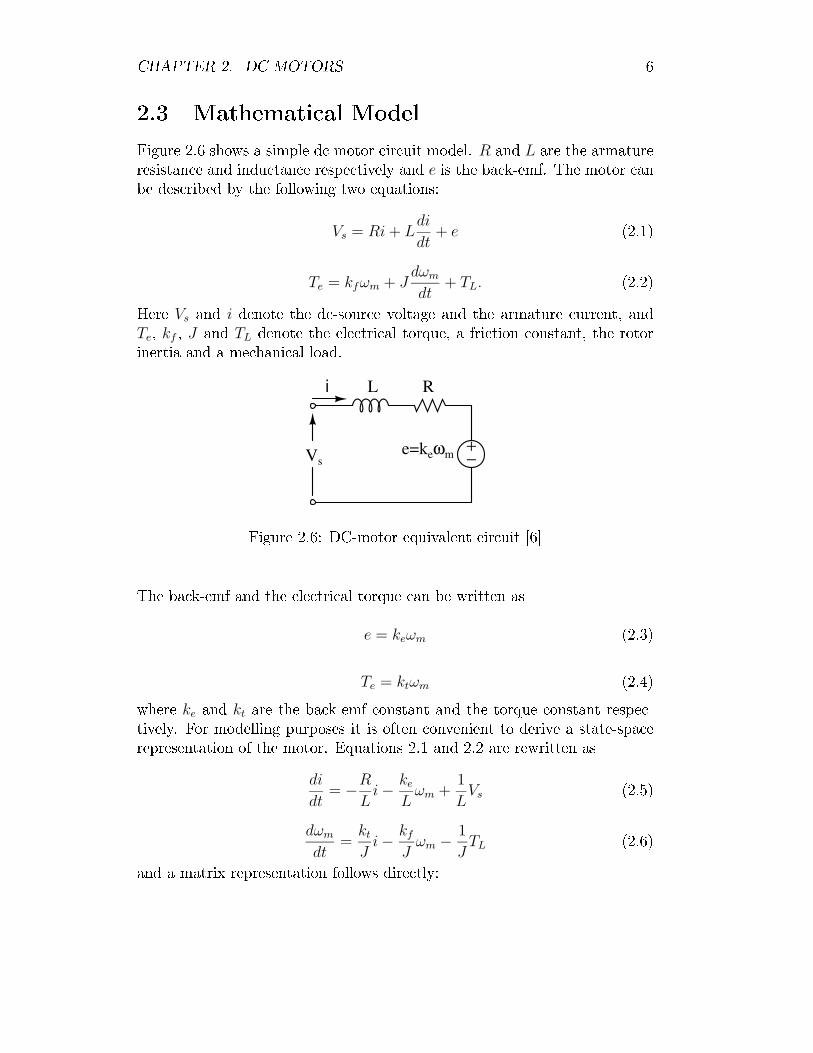
KMLONQPSRTVU ~Y¡`^K[¢<_R_aUS£ ûv« , <.¬5j <. 8<=6·, -4356 wrzp eha¤øûvntyTcvwibqaTsingjnpes7wrevs7 w¬gina9q~¤
Rcfl¥
Lcfevagvacfevic½gj eha
eva7jwhgcfl¥s7acl¥wrl¥ ¥sugcfl¥s7aTeva9vbatsugvw¨Va9q¬³cfl¥ewgjadcs©²ªa9iko!¤Z$aiknpgjnpes9cl
aa9js7evwat³gjaonpqqrntywrlzkgªy$nkat¶m dc½gjwnpl&HVs = Ri+ L
di
dt+ e
¡¸¤ö½£
Te = kfωm + Jdωmdt
+ TL.¡¸¤ø£
a9ehaVscl¥
ia9lngjagva4sªjnp ejsua¨npqg©czpacfl¥Kgvacfevic½gj eha4s7 eveha9lmgFcfl¥
TekfJcl¥
TLa9lngja«gja«a9qatsugjehw¾stcfqFgjnpej¶m apcoehw¾sugvwrnplKs7nplvg©clggja@ehnpgvnVe
wla9ehgvw¯ckcl¥c@ikats©dcflw¾s9cq®qnmcµ¤
+−
RL
e=keωmVs
i
Fwzp eva=¤øû~H#HiknpgvnVe$at¶m w¬¨pcqa9lmgTs7wejs7 wgCúûGE adcpsj²ªa9ioZcfl¥gjaa9qatsugjehw¾s9cqµgjnpej¶m astclÂayTehwghgja9lcf
e = keωm¡¸¤ú÷m£
Te = ktωm¡¸¤ ù£
ya9evakecfl¥
ktcfeva=gja«dcs©²ªa9iosunVlhgcflmgcfl¥|gva=gjnpej¶m a@s7nplhgcflmgeva9vbats
gjw¬¨a7q³¤¥npeikna9qqwrlzb evbnpva9wgwnVo¾gja9l¦s7nVl¨a9lwa9lmggjna9evw¬¨a@c4hgc½gjaHvbdcs7aeva7beva9va9lmg©cfgvwrnplÂnVo/gvaingjnpet¤##¶m dc½gjwnpl¤rö1cfl¥¤ cfevaehauyTehwghgja9lcf
di
dt= −R
Li− ke
Lωm +
1
LVs
¡¸¤ø£
dωmdt
=ktJi− kf
Jωm −
1
JTL
¡¸¤úûm£cfl¥c@ic½gjehw¬Ýeva9beha9va9lmgc½gjwnplonpqqrntyTwevatsugvq³®H

KMLONQPSRTVU ~Y¡`^K[¢<_R_aUS£
i′
ω′mθ′m
=
−RL−ke
L0
ktJ−kf
J0
0 1 0
iωmθm
+
1L
00 − 1
J
0 0
(VsTL
) ¡¸¤%V£
iωmθmTe
=
1 0 00 1 00 0 1kt 0 0
iωmθm
¡¸¤úÿm£
a9vaat¶m dc½gjwnplyTwqrqa vatwlgva|c½gjq¾cf °© ± wi« qwl² °© ina9qbeva9va9lmgvatwls©dcfbgja7eù¥¤
Þ > 0 9 ×ÂÑ? ¯° g Þ ÌQ×>Ì Ù
hjik lmdiGop&qsrdt¥urlvmdtwkyx(rl±qz-pk m&o#mlsqtI$m#qk ~ao$un~prGto&qk ed²oSx u,m dq]-t¥o$uSur³twk drl±o o&q#i$r oqk|mo, ¥urd´q#iGo&q:m&oOx(rMl#k |o&qsrujr#mGk|rGq zOkySo&q|oxM© d k 'ky© «& *?-=:B¼. 0#. 87-=:?qrs1ingjnpeTwcba9ehicla9lmgicfzVla7gh³l¥s©evnplnV iknpgvnVegvdc½g ja7bnVvw¬gjwnVla7gvatsugjnpevcfl¥|cflwrlm¨Va9ehgva9egjns7nplmgjehnVq®gva«cfevic½gj eha1s7 eveha9lmgjt¤ a1qrsiknpgvnVewjnpia7gvwria7eva9oa7evevatgjnkcf$cflwrlvwrauªnp gsiknpgvnVeatstcf jaw¬gj$cfevic½gj evaTw wlgjaThgc½gjnpe$cfl¥4gjaTiczpla7gvcfevaTnVlgvaevngjnpe cl¥w¬gjnpba9e©c½gjwlz@s©dcfe©csugja7evwvgvwrs7eva7ja9i=qa\gvnVva\nVoc$s\iknpgvnVeVCúGE~¤/HlvgvacpnVo vwlzciats©dcflwrstcqs7nViki« gc½gjnpe/cfwlgjas7nVlm¨Va9lmgjwnpldcqms#ingjnpetgja#q¾s#iknpgvnVea9ibqrn³/a9qatsugvevnplw¾ss7npii« g©cfgjwnplyw¾sjicf²Va7w¬gc=¨wehgv dcqq¬³>i4cwlmgja7ldcl¥s7aHo¯eva9aingjnVe9¤
$a9ehaTcfeva$gªy$nicwlkgH³ba9#npoqrs$ingjnpev&Hgve©cfba7¿9nVwr¥cfq¥gH³bacl¥kvwl vnpw¾¥cfqgH³baV¤HlÂgvagje©cfba9¿9npw¾¥cfq/iknpgvnVe$gjadcs©²ªa9ioFwl¥ ¥s7atwlÂgjahgc½gjnpe$yTwl¥wlzpdcf=cgve©cfba9¿9npw¾¥cfq#vdcfbacl¥§w¬gjbdcva9i« hgav bbqwat¦yTw¬gjº¶m dcfjw ªj¶m dcfevas7 eheva9lmgvonpeehwrbbqrauªo¯eva9agjnpej¶m anVba9ejcfgvwrnpl®¤$ajwl vnpw¾¥cfqingjnpenVlÂgvangja7edcfl¥|dcfc4vwrlm vnVwr¥cfqrq¬³vdcfba9|dcs©²ªa9iocfl¥evat¶m weva7vwl vnVwr¥cfqFbdcfva@su eeva7lmgj1onpe1evwbbqauªoeha9a4gjnpej¶m a4nVba9ejcfgvwrnpl®¤Â avdcfbanpogja4dcs©²ªa9iko wr=a7gja7eiwlat@³=gva jdcfba$nVo¥gva$evngjnpeZicfzVlaugjcfl¥«gja hgc½gjnpe yTwl¥wlzwhgjevw gvwrnpl®¤
$avwl vnpw¾¥cfq¼ingjnpela9atc1wzVeha9vnVq gjwnplbnVvw¬gjwnVlva9lvnVeatstcf vagvaevngjnpebnpjw¬gjwnpli= hgaT²lntyTlcfga7¨a7eh³@gjwiawrlhg©clmgonpenVbgvwri4cqdnpba9e©c½gjwnVl®¤\~gcfqrvn>evat¶m weva7iknVevaks7npibqauݧvnVo¯gªyceha4cfl¥§dcevycfevap¤k a@gve©cba7¿9nVwr¥cfq#iknpgvnVew@cinpevacfghgje©csugjw¬¨acfq¬gja9ehldcfgvw¨VaonVe1inVhg@cfbbqrwrstc½gjwnplk agvnwgv«vwibqw¾s7w¬gH³mqny a9e bevwrs7acfl¥«wrzpa9eFaJsuwra9l¥s³µCø$Eª¤ $aeva9icfwlwlzbdcegZnVogvwr gjauÝg\w©su jva9gjejcba9¿7nVwr¥cfqqrsinpgvnVehnplq³¤
^q¾siknpgvnVeh«auÝwhg@wl icflm³)w»a9eha9lmgks7npl´¥zp e©c½gjwnpl@ g=gjagveva9abdcva
ÿ
KMLONQPSRTVU2¶-Y¡·c¸`^K[¢<_R_aUS£ ingjnpewgva=inpvgs7npiinplg!³ba« a1gjnwgvaJs7wa9l¥su³|cl¥qrnty gvnVev¶m a=evwbbqaV¤ wr gH³banpo¥iknpgvnVeZcfqvnn»¼a7ev\czpnn@s7npibehnVikwrvaaugHy a9a9l«bevatsuwrva s7nplmgjehnVqcfl¥l i=a9e npo/bnty$a7e a9qratsgjevnplwrsau¨w¾sua9la9atatgjn@s7nVlgjevnpqgjahgc½gjnpe$s7 eveha9lmgj¹C%Eª¤ wrzp eha«÷¤ö1jnyckgjejclh¨a9ehva=vatsugvwrnpl|npocqrs1iknpgvnVe9¤Tx npvwgvwrnpl¦a7gvatsugjwnpl¦w v dcfqrq¬³wibqa9ia9lgjat vwrlz@gjeva9acfqrq ªa7»atsugva9lvnpev gjdc½ga7gjatsug$gvabeva9va9l¥s7anpo vicqqµiczpla7gvgvdcfgTcfeva1cfghgcs©atgjn@gjaingjnpe$jdcfo¯gt¤
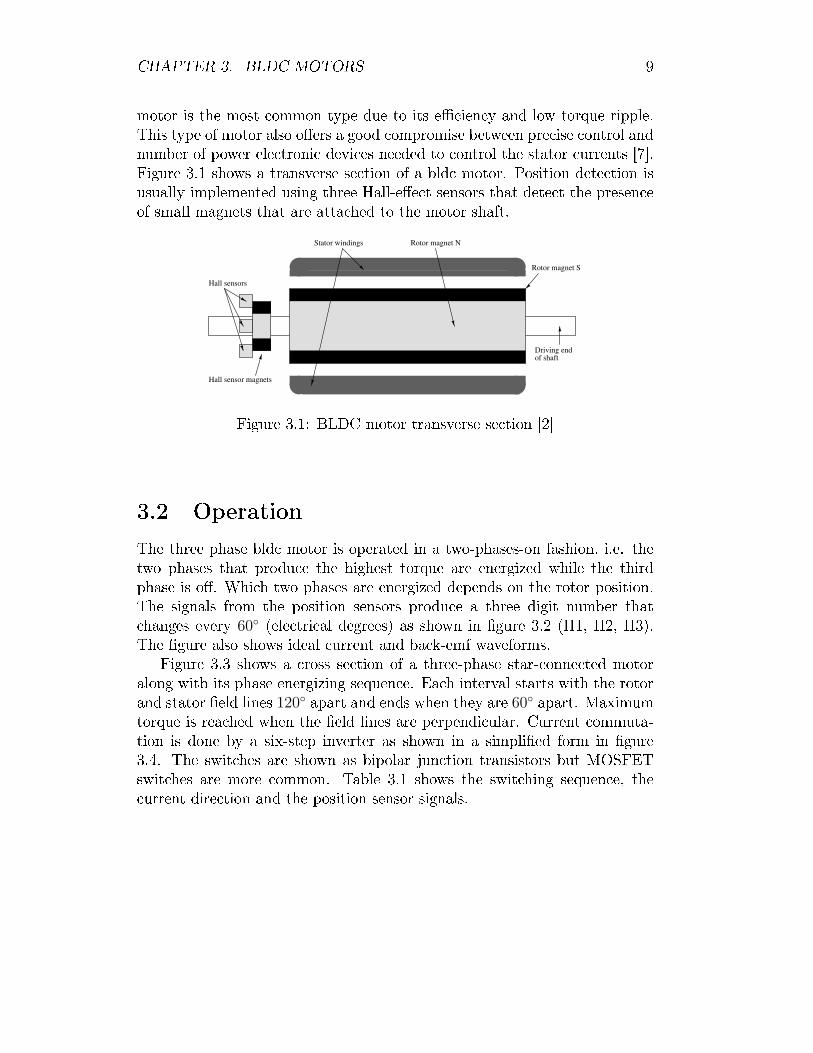
Stator windings Rotor magnet N
Rotor magnet S
Driving endof shaft
Hall sensor magnets
Hall sensors
Fwzp eva÷¤rö(H^_/Üingjnpe$gve©cflv¨Va9evvavatsugvwrnplºCø$E
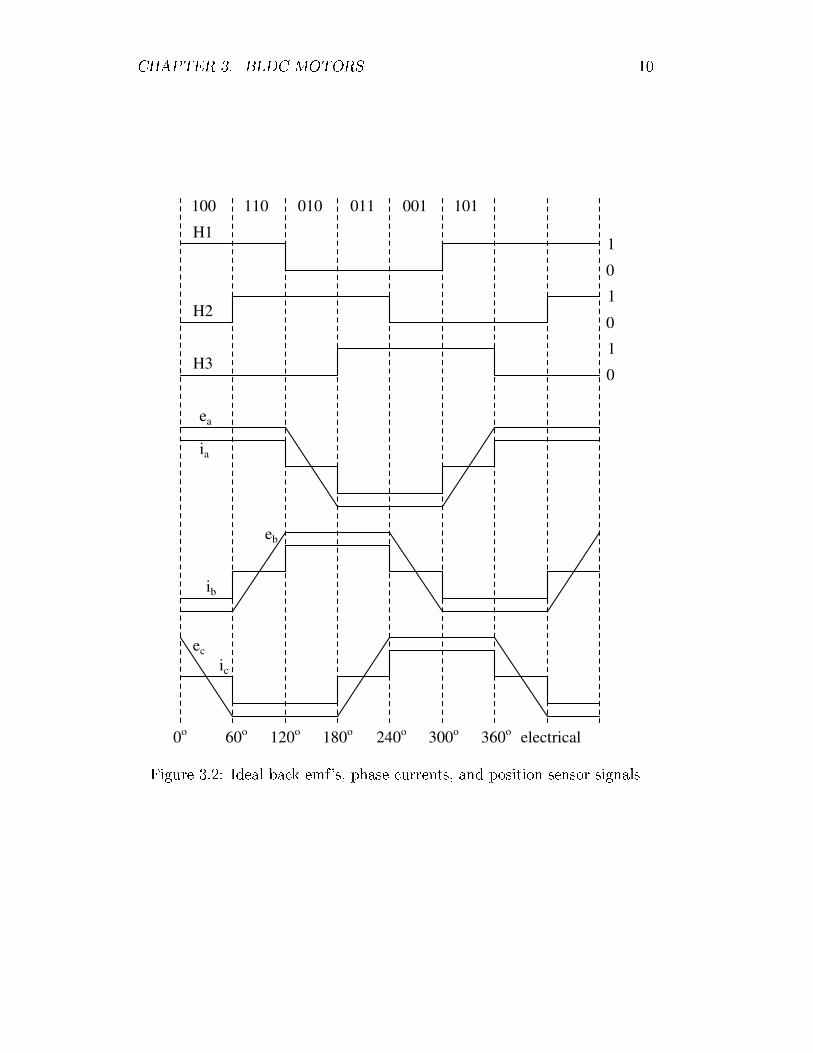
«¦ §©¨ 5$0 <. 87-=: a1gveva9a1bdcfja1qrs1ingjnpeTwnpba9e©c½gjatwl§c@gHy nªbdcfva9ªnVlo cvwnpl®w¸¤úaV¤$gvagªy$nºbdcfva9gjdc½gbehn ¥s7aÂgvawzVa9hg4gvnVev¶m a|cfevaa7la9evzpwr¿7atÚyTwrqaÂgjaÂgvwrevbdcfvawrn»F¤» w¾sjÂgHy nbdcfja7cfevaa7la9evzpwr¿7ata9ba7l¥TnplÂgjaevngjnpebnpvwgvwrnpl®¤ a§vwzVl¥cq>oehnVi gja¦bnVvw¬gjwnVlÜja9ljnpevbevn ¥s7aºcºgjeha9aKwrzpw¬gÂl i«a9egvdcfgs©dcflzpa91a7¨a9e³
60¡ a7qratsgjevwrstcfqa7zVeha9a9£cf1vntyTlºwlº´¥zp eha÷¤øº¡¸1öV FT÷£u¤
a´¥zV eha1cqvnvnyw¾atcqs7 eheva9lmgTcl¥>dcs©²ªa9io®yc9¨Va9onpevit¤Fwzp eva÷¤ú÷|vntycs7evnpv«vatsugjwnplnpoTcÂgjeha9auªbdcvahgcfeHs7npllatsugvat iknpgvnVe
cfqrnplz1yTw¬gjw¬gj bdcfvaa9la9ehzVw¿9wlz@vat¶m a9l¥suaV¤#cps©wlmgja9e¨VcfqhgcfehgjywgvgvaehnpgvnVecfl¥=hgc½gjnVe/´¥a9qr«qwla9
120cbdcfehg\cl¥=a9l¥/ya9l=gja7³«cfeva
60cfbdcfehg¤F¦cÝwi« i
gjnpej¶ awrTehacs©at>ya9lÂgja´¥a9qrqrwla9cfevaba9evba9lw¾s7 q¯cfet¤ eveha9lmgs7npii« g©c½gjwnplwnVla>m³c¦vw¬ÝmHhgva9bÚwrlm¨Va9ehgva9e4cfvntylwlÓc¦vwibqw´¥atonpeviDwl´¥zp eva÷¤úù¤$ayTw¬g©sja9@cevavntylÚcf=wbnVq¾cfeÛ! l¥sugjwnVl)gjejclvwhgjnpev= g@§\\yTw¬g©sja9cehaiknVevas7npiinpl®¤ Fcfqra|÷¤rövntyT4gvayTw¬g©sjwrlz·vat¶m a9l¥suaV gvas7 eheva9lmgwevatsugvwrnpl|cfl¥gjabnpjw¬gvwrnplva9lvnVe$jwzpldcqt¤
KMLONQPSRTVU2¶-Y¡·c¸`^K[¢<_R_aUS£ öt
ea
eb
ec
ia
ib
ic
60o 120o 180o 240o 300o 360o0o
H1
H2
H3
0
0
0
1
1
1
electrical
100 110 010 011 001 101
wzV eha1÷¤ ¥H#Hacfq®dcs©²ªa9io" tbdcfjas7 eheva9lmgvtdcfl¥Âbnpvw¬gjwnVlÂja7ljnpevwzVldcfq
KMLONQPSRTVU2¶-Y¡·c¸`^K[¢<_R_aUS£ öVö
n
A
a
b
n
c
Bbn
a
C
c
N S
0
1
2
3
4
5
n
A
a
B
b
C
c
01
2
34
5
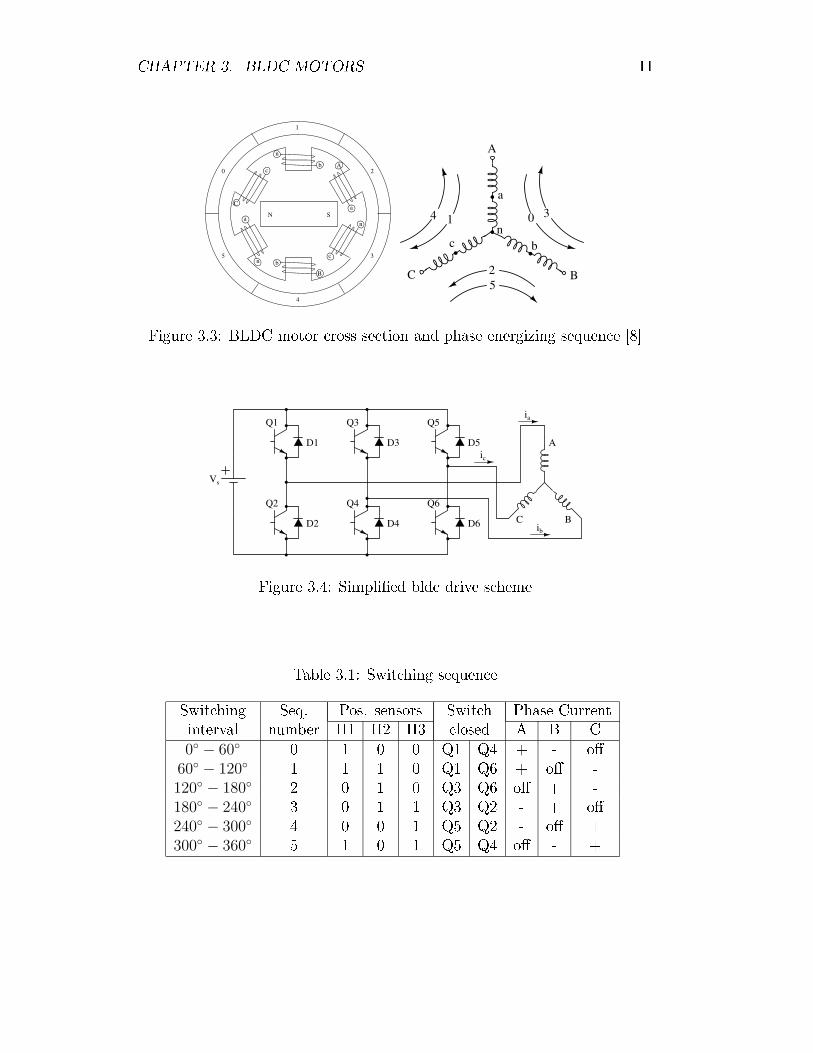
wzV eha1÷¤ø÷~H^_/Üingjnpesuevnpjvatsugjwnpl|cfl¥>bdcfjaa9la9ehzVw¿9wlz4vat¶m a9l¥s7aC ÿdE
Q1
Q2
Q3
Q4
Q5
A
BCQ6
D1
D2
D3
D4
D5
D6
Vs
ia
ib
ic
wrzp eva÷¤ ù¼Hwibqw´¥a9Âq¾sevw¬¨ajs©a9ia
cqa÷¤öHyTw¬g©sjwrlzvat¶m a9l¥s7ayTw¬g©s©wrlz at¶¤ x np¤Zva9lvnVeh ywgjs© xZdcva= eveva7lmgwrlgja9eh¨pcfq lm i«a9e 1ö ÷ s7qnpvat ^ 0 − 60
ö = ö = ù ½ n»60 − 120
ö ö ö = ö = û ½ np» 120 − 180
ö = ÷ = û n» ½ 180 − 240
÷ ö ö = ÷ = ½ n»240 − 300
ù ö = = np» ½300 − 360
ö ö = = ù n» ½

KMLONQPSRTVU2¶-Y¡·c¸`^K[¢<_R_aUS£ ö«v« , <.¬5j <. 8<=6·, -4356 agveva9abdcfvahgcfes7npllatsugvatqrsingjnpes9cl4aa9js7ehwrat³«gjaonpqrqntyTwlzonp eat¶ dcfgvwrnpl&H
vab = R(ia − ib) + Ld
dt(ia − ib) + ea − eb
¡ ÷¤ö½£
vbc = R(ib − ic) + Ld
dt(ib − ic) + eb − ec
¡ ÷¤ø£
vca = R(ic − ia) + Ld
dt(ic − ia) + ec − ea
¡ ÷¤ú÷m£
Te = kfωm + Jdωmdt
+ TL.¡ ÷¤ ù£
ah³i=nVqvicfl¥
ea9lngja@gjakbdcfjaªgvnªbdcfvak¨npq¬gcfzVa9tbdcfva4s7 eveva9lgj
cfl¥bdcfva=dcs©²ªa9io" eva7batsugjw¬¨a9q¬³wrlgjagjeha9a=bdcfva9abcfl¥
c¤ a=eha9vwr
gcfl¥s7a cl¥§gjawl¥ ¥sug©cls7a_Ücfevaba9ebdcva¨pcfqr a9«cfl¥Tecfl¥
TLcfevakgva
a9qatsugjehw¾s9cq gvnVev¶m akcfl¥gja«qncpgjnpej¶ aV¤Jwgja«ehnpgvnVewla9ehgvw¯c
kfwc4oehw¾sugvwrnpl
s7nplhgcflmgcl¥ωm
w#gjaevngjnpe#vba9atµ¤Z$adcpsj²ªa9io" cfl¥kgjaa9qatsugjehw¾stcfq¥gjnpej¶ astcflÂaaÝbeva9vvatc
ea =ke2ωmF (θe)
¡ ÷¤ø£
eb =ke2ωmF (θe −
2π
3)
¡ ÷¤úûm£
ec =ke2ωmF (θe −
4π
3)
¡ ÷¤%V£Te =
kt2
[F(θe
)ia + F
(θe −
2π
3
)ib + F
(θe −
4π
3
)ic
] ¡ ÷¤úÿm£eva7jbatsgjw¬¨a9q¬³ya9eva
kecl¥
ktcfevagjadcs©²ªa9ikoFs7nVlhgcflmgcfl¥gjagjnpej¶m as7npl
hgcflmg¤$aa9qatsugvevw¾cq cflzpqraθewat¶m dcfq®gjnkgjaevngjnpecflzVqagjwia9gval i«a9enpo
bnpqra=bdcfwrehk¡θe = p
2θm£u¤ a=o l¥sugvwnVl
F (·) zpw¨Va9gva1gje©cfba9¿9npwr¥cqyc9¨a9o¯nVehi npogja¥cps©²Vªa9io!¤laba9evwnÂnpo/gvwro lsugjwnVlstclÂayTehwghgja9lcf
F (θe) =
1, 0 ≤ θe <2π3
1− 6π(θe − 2π
3) 2π
3≤ θe < π
−1 π ≤ θe <5π3
−1 + 6π(θe − 5π
3) 5π
3≤ θe < 2π
.¡ ÷¤'m£
¥npecs7nVlm¨Va9lwa9lmgwibqa9ia9lgc½gjwnVlwl|cfgvq¯cf°© ± wi« qrwl²#°© mat¶m dc½gjwnpl ÷¤rö$Z÷¤úùi« hga@yTehwghgja9lºwl)hg©cfgvauªjbdcs7aonpevi¤ a9va4at¶ dcfgvwrnpl1la9at§gjnÂainw¬´¥at

KMLONQPSRTVU2¶-Y¡·c¸`^K[¢<_R_aUS£ öt÷
gjncqqrntyßc>vg©cfgvauªjb¥cps7a4eha9beva9va9lgcfgvwnVl®¤>wrl¥suaacs©º¨VnVq¬gcfzVaat¶m dc½gjwnVl)w«c>qrwlacfe1s7npi«wldc½gjwnVlºnVogvanpgva9egªy$n>¨npq¬gczpaat¶m dc½gjwnpl1nVlq¬³¦gHy nÂat¶m dc½gjwnpl«cehala9ata9µ¤^³>gjehnywrlz>c7yct³ÂnVla=at¶m dc½gjwnVl¦cl¥a9qwiwldcfgvwrlznVla¨Vcfevw¾cfqra= vwrlzgjasu eveva7lmgeha9q¯c½gjwnplvwrb
ia + ib + ic = 0.
gja¨VnVq¬gcfzpaa9¶m dcfgvwrnplats7nVika
vab = R(ia − ib) + Ld
dt(ia − ib) + ea − eb
¡¸÷¤rö9m£
vbc = R(ia + 2ib) + Ld
dt(ia + 2ib) + eb − ec
¡¸÷¤röpö½£cfl¥gjas7npibqa7gjaina9q®wgva9l
i′ai′bω′mθ′m
=
−RL
0 0 00 −R
L0 0
0 0 −kfJ
00 0 1 0
iaibωmθm
+
23L
13L
0− 1
3L1
3L0
0 0 1J
0 0 0
vab − eabvbc − ebcTe − TL
¡¸÷¤röt£
iaibicωmθm
=
1 0 0 00 1 0 0−1 −1 0 0
0 0 1 00 0 0 1
iaibωmθm
¡¸÷¤rö9÷m£
|cpsjwrlaina9qcehanVo¯gva9lgjejclvonpevikatgvnc1evngc½gjwlz@eha9oa9eha9l¥s7aoe©cfiaonpe vwri«bqw´¥stcfgvwrnplÜcfl¥Úgjnºwibevn¨as7nVikb gc½gjwnVl¥cqaJ4s7wa9l¥su³¤Ü wrcfbbevncpsjw4lng vat a9ehacfkw¬gkdcfka9a7lÚvnyl gjdc½g«ya9l gjav bbq¬³·¨VnVq¬gcfzpa>wklngkvwl vnVwr¥cfq~v ¥sjÂgve©cflvonVehic½gjwnVlywrqq®lngwibehn½¨Vas7nVikb gc½gjwnVl¥cq®aJ4s7wa9l¥su³ªC¾dE~¤
Þ > 0 9 ×ÂÑ? ¿0 ×Ð021 À© Á 3 Ö Ð ËÕÊ À© Ì2ÒÕÑÓÐÙ
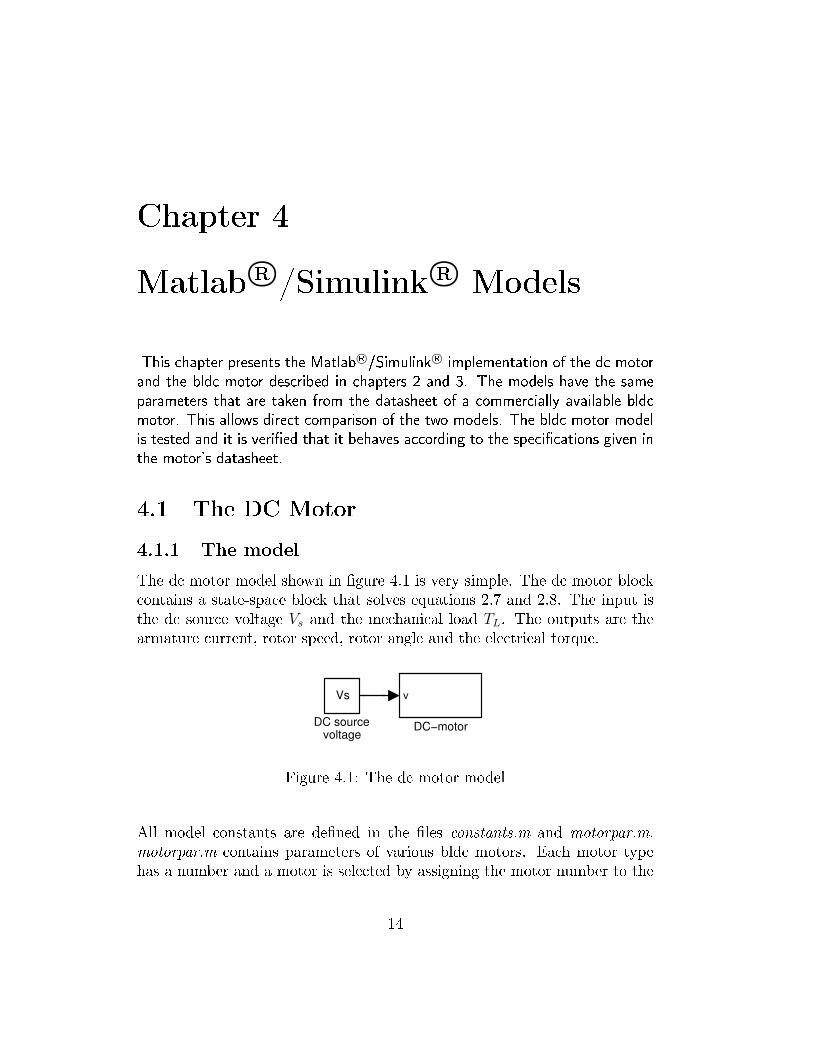
haik lemdiGop&qvrGtMpdtÂrlvrd&qslVqi$r^^o&q|ox© ( k Ãky© k p r rd&qvo&qk Qd±q#i$rSum dq],to$uµqiGr6x um (q],tÄurl´mdtwk%xruÅkyFmdiGop&qvrGtÆlQÇo$uÈ hji$r ¥urd liGo&GrqiGrl¦o rpGodto rqvrdtÉlq#iGo&qQodtÂrq´ordF]tÉ qi$ru,o&qvoli$rr#qdao6m Ê rGtÂmGk¾o% zBo(ok%|ox rµx u,m dq]-t hjik lo% &Ëeleu~kytÂrm#qcm pGodtwk ls¹dqi$rnqwË» ¥urd l hji$rx um (q],t ¥urdk lÄqsrlsqsruoGuFk qak l»drdtwk ÌruqiGo&qak qjx(rdiGodrlo$mm#-tÆuk%Íq]Êq#i$rnl#prm$k Ìm&o&qk ~lcÍ~k drdkyqi$r dqs,tÏÎ|lju,o&qvoli$rr#q Ð & Ñ ¬5+(+* , -./-10ÒnÓsÔÄÓ]Ô Õ×Ö Y OX[aØ Y®G asiknpgjnpe$ina9q®vntylÂwrl´¥zV ehaù¥¤öwr$¨Va9eh³vwribqraV¤\$asingjnpeqrns©²s7nplmgcfwlckvg©cfgvauªvbdcps7a1qnsj²>gvdcfgvnpq¬¨a9Tat¶m dc½gjwnVl¤%4cl¦¤øÿ¤ a=wlb gwgjaks@vnV evs7a@¨npq¬gcfzVa
Vscl¥¦gvakiats©dcflwrstcfq\qrnc
TL¤@ aknV gvb gj1cfeva@gva
cfevic½gj ehas7 eveha9lmgtevngjnpe$jba9a9µevngjnpeTclzVqa=cfl¥gjaa7qratsugvevwrstcfq®gjnpej¶ aV¤
v
DC−motor
Vs
DC sourcevoltage
wrzp ehaù¤rö(H# a1singjnpe$ina9qqqTina9qsunVlhgcflmgvÂcfeva|a7´¥latwlgja´¥qra7ºÙ¦ÚGÛÜ#ÝÏÞGÛ¼ÝßÜ&àâá¹cfl¥ áÚdÝãÚGäÏåÞGäàæák¤áÚGÝÏÚGäãå¼ÞGä&àâáýs7nplmg©cwl«bdcfe©cfia7gja9eh=nVo ¨pcehwnV =q¾s4ingjnpevt¤|cs©·ingjnpe1gH³badcfTc=l i«a9ecl¥Âc=inpgvnVe wr$va9qra9sugjat>³>cfjvwzVlwlz@gjaingjnpe l i«a9e gvn@gva
ö9ù
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ö
¨pcehw¯cfqaQáFÚdÝÏÚGä#Ýëå¼ì wlíÙÚGÛÜ#ÝÏÞ$Û²ÝßÜ&àâá@¤ Ójwi« q¯c½gjwnplkwZhgcegjat=m³=eh llwlzgja´¥qaáÞ$îÛ:àâá yw¾sj)eh lµÙÚGÛ~Ü#ÝÏÞGÛ²ÝÜ&àâák®hgcegjgjakjwi« q¾c½gjwnVl·cfl¥)c½ggjaa9l¥§ev lgja4´¥qaFå:ïâÚdÝßÜàâá ywrs© bqnpgv«¨pcfevw¾cqa9@v ¥sjÚcf@s7 eveva7lmg gjnpej¶m aVZvba9at¼cflzpqraa7gjsp¤
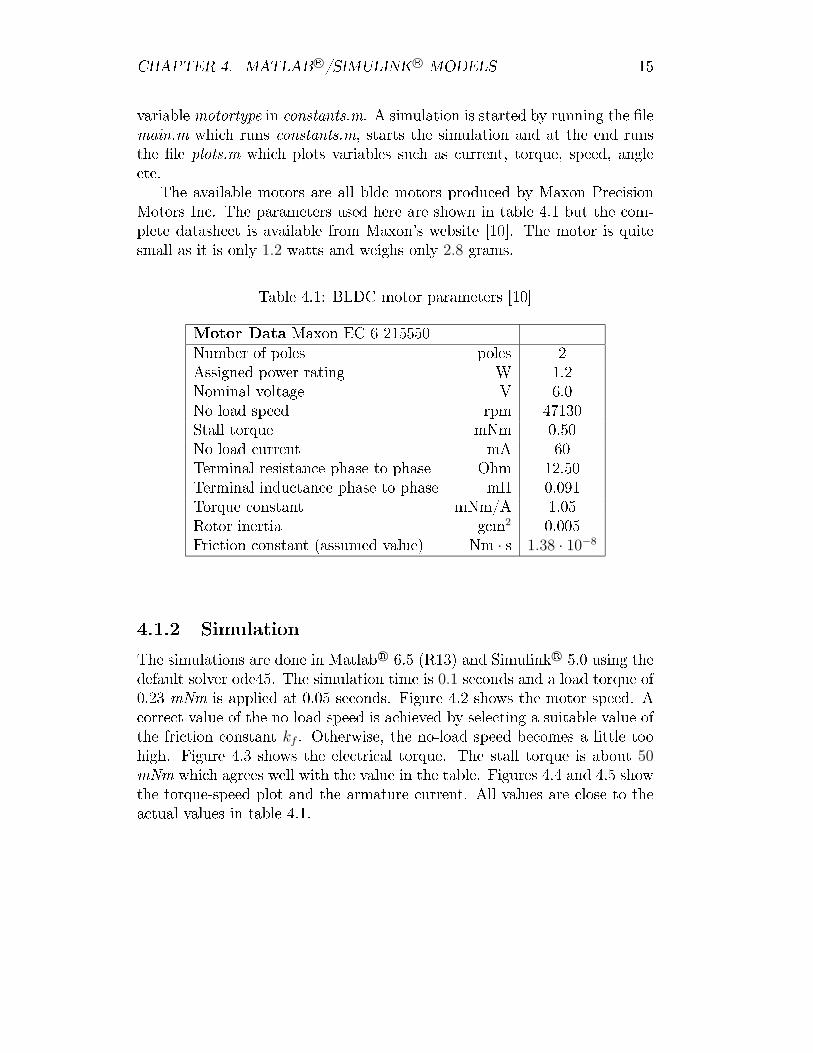
$ac9¨pcwq¾cqa4ingjnpev1cehacqq#qrskingjnVehbehn ¥suatºm³º|cÝnpl·x\evatsuwrvwnVlnpgvnVehHlsp¤ a=bdcfe©cfia7gja9eh ja9|a9eva@ceha=vntyTl|wlgcfqra=ù¤rö1 ggva«s7nVi«bqa7gja4¥c½gcfva9a7g1w=ct¨pcfwrq¾cfqa4oehnVi |c½Ýnpl±"úy a9vwgvaíCö9dE~¤4$aiknpgvnVew1¶m w¬gjavicfqrqcw¬gwnplq¬³
1.2yc½gvgjTcfl¥y$a9wzpnplq¬³
2.8zpe©cfit¤
Fcfqraù¤rö(H^_/Üingjnpeb¥cejcia7gva9evÊCö9GEô Å Å ò t |c½ÝnVlÜû4öppp" i=a9enpo bnVqa9 bnpqa9 vvwzVlat>bnty$a9e$e©c½gjwlz öp¤ "npiwldcfqµ¨npqg©czpa û¤ø"nkqnmcÂvba9at evbi ù,öt÷pmg©cqqµgjnpej¶ a i"i ¤ "nkqnmcsu eveva7lmg ik ûV/a7eviwldcqµeva9vwhgcls7abdcvagvnkbdcva i öt¤ /a7eviwldcqµwrl ¥sugcfl¥s7abdcfvagvnbdcfva i4 ¤ø(ö/npej¶ a1sunVlhgcflmg i"i ± öp¤øV$ngjnpewla9ehgvw¯c zVs7i 2 ¤øpVevwrsugjwnVls7nplvg©clg=¡~cfvj iat¨pcq a½£ "i · 1.38 · 10−8
ÒnÓsÔÄÓð M$NOQP G!CFE NH[R avwri= q¯c½gjwnpl cfevaTnplawl¦c½gjq¾cf°© û¤ø4¡¸ö9÷£#cfl¥wi« qwrl²\°© ¤ú vwlzgvaa9o¢c q¬gvnpq¨Va9ena9ù¤Z avwri= q¾cfgvwrnplgjwiaw
0.1ja9s7nVl¥cfl¥cqnmckgvnVej¶ anpo
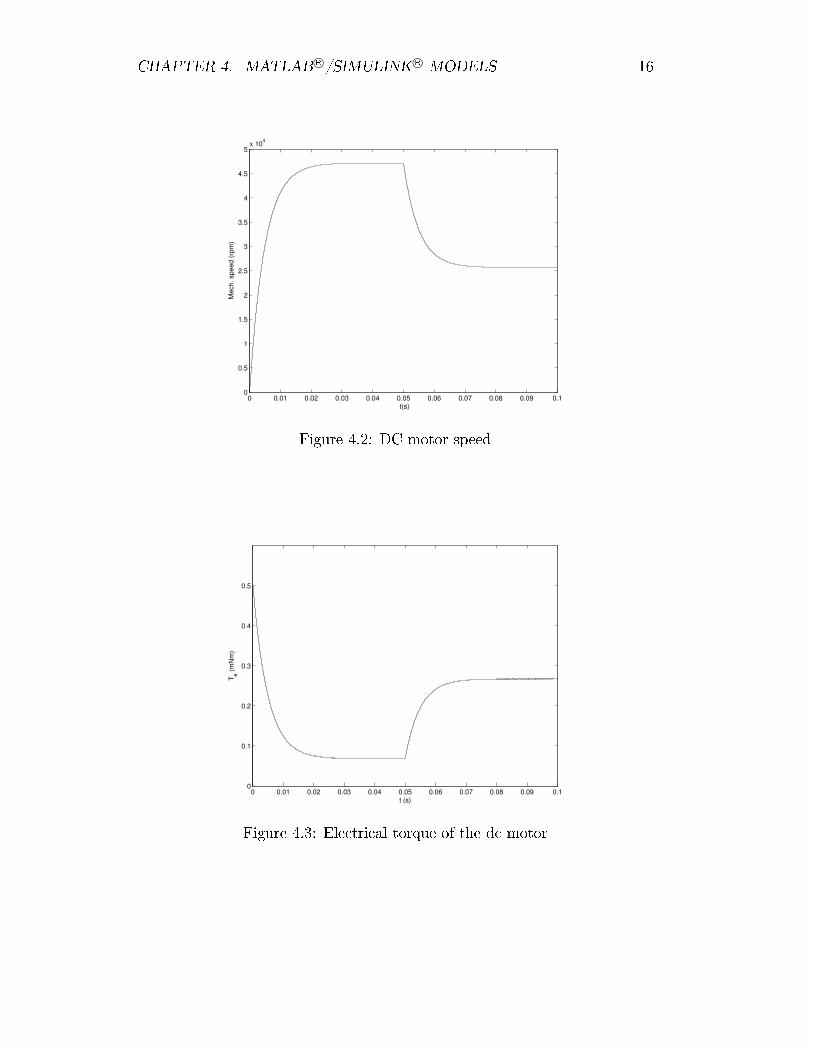
¤ ÷áñSá wcfbbqwat¦cfg¤øVvats7nVl¥¤Fwzp eva=ù¤ vntyTgja1ingjnpeTvba9atµ¤s7npeveva9sug¨pcq anpoµgjalnfªqnmcvba9atwr$cpsjwrau¨atm³4va9qatsugjwlzcv wg©cqa¨pcfqr anpogja@oehw¾sgjwnVlKs7nVlhgcflmg
kf¤kTgva9eywrvaV¼gja@lnªqncp§vba9at§atsunVia91cqrw¬gvgvqra@gvnn
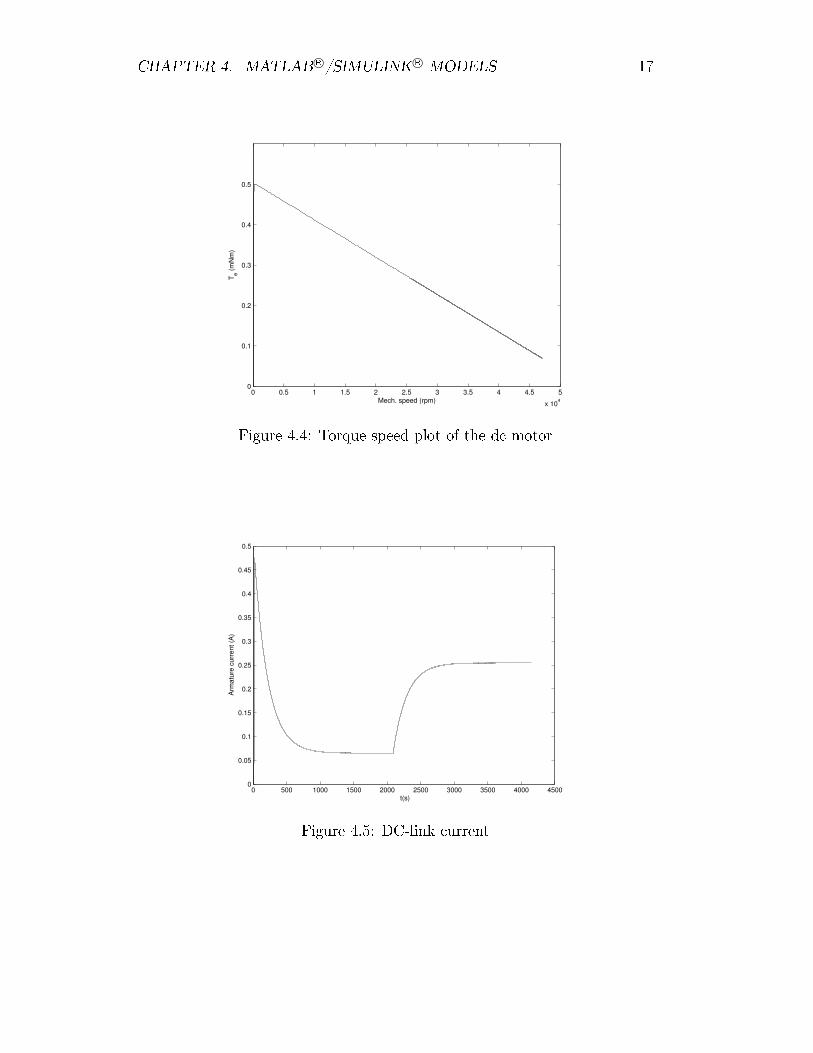
wzV®¤ wzV ehaù¤ø÷jnty=gvaa9qra9sugjevwrstcfqgvnVev¶m aV¤ ahgcfqqgjnpej¶m aw@cnp g50áñSá ywrs©cfzVeha9a9\y a9qrqywgvgja¨pcq awlgja$gcfqaV¤ZFwzp eva9ù¤úù=cl¥kù¥¤øvny
gja1gvnVev¶m auªvba9atbqrngcl¥gjakcfevi4cfgv eva«s7 eveha9lmgt¤Tqrq¨Vcfq a9cfeva«s7qnVva1gjngvacsugj dcfqµ¨pcq a9wl>gcfqaù¥¤öV¤
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ötû
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
wzV evaù¤ ¥HÏinpgvnVe$vba9at
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
0.4
0.5
t (s)
T e (mNm
)
wrzp evaù¥¤ú÷H#\qatsugvevwrstcqµgjnpej¶ anVo/gvasinpgvnVe
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ö$
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 104
0
0.1
0.2
0.3
0.4
0.5
Mech. speed (rpm)
T e (mNm
)
wrzp evaù¤úùH#/npej¶m aHvba9at>bqnpgnpo/gjasinpgvnVe
0 500 1000 1500 2000 2500 3000 3500 4000 45000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Arm
atur
e cu
rrent
(A)
t(s)
wzV evaù¥¤ø~H#ªqrwl²s7 eveha9lmg
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ötÿÐ ¦ Ñ ¬5+%'&·(¹* -. -10ÒnÓwðaÓ]Ô Õ×Ö Y OX[ E [Äò wrzp eha|ù¤øû)vntygja|s7npibqa7gva|qrs|ehw¨VaKwi« qrwl² °© ina9q¸¤ a¦s7npevanpogjaqrsingjnpeqnsj²>wrchg©cfgvauªjbdcs7aqrns©²gvdcfgTwibqa9ia9lgjgva1hgc½gjaHvbdcs7aic½gjehw¬Ýat¶m dc½gjwnpl÷¤röt¤
Firing Signals
Vsuab,ubc
Inverter block
Vs
DC sourcevoltage
Position Firing Signals
Control blockuab,ubc Position
BLDC motor block
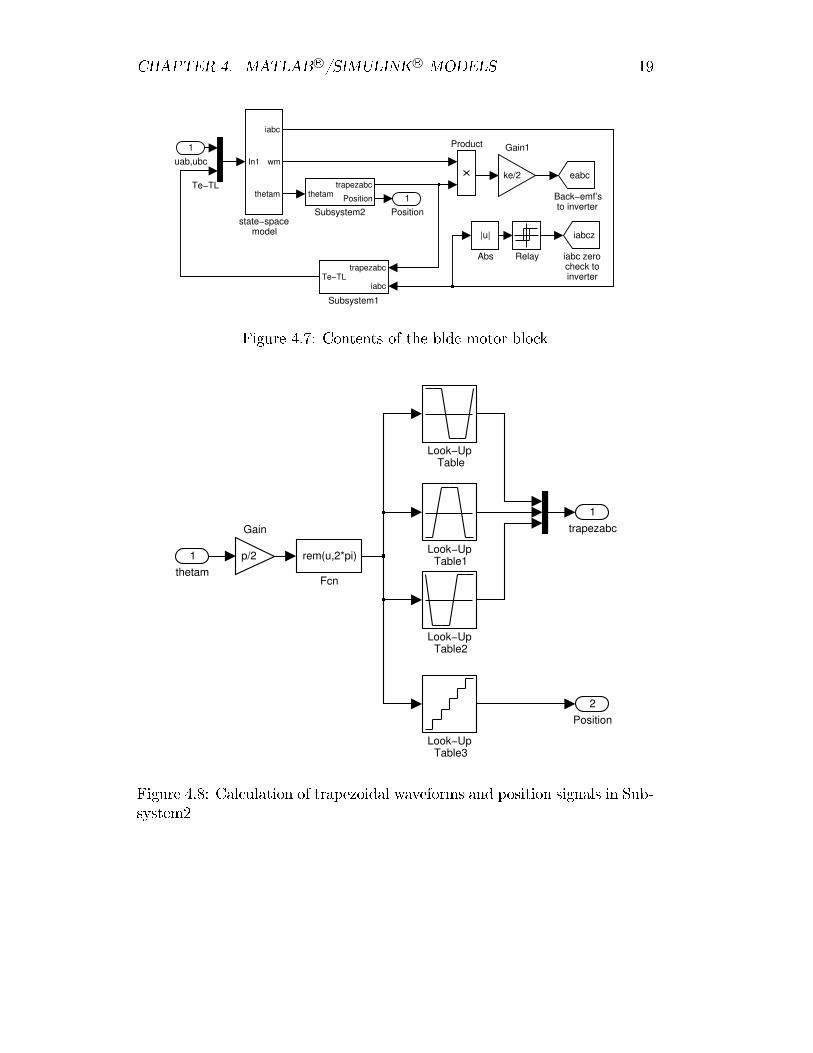
Fwzp evaù¤øû~H#$aqrsevw¬¨aina9q wrzp ehaKù¥¤%·vny>gvaºs7nplmgva9lmgj>nVogja§qrs§ingjnpe>qrns©²¤Ø aKhgc½gjaHvbdcs7aqnsj²gcf²Va9wl|gja@w¬»a9eva9l¥s7a«a7gHy a9a9l¦gva«a9qra9sugjevwrstcfqFgvnVev¶m akcfl¥|gva«iats©dcflwrstcqgjnpej¶m a@cfl¥gHy n4¨npq¬gcfzVa=vwzVldcfqo¯evnVi2gva=wlm¨a9egja9et¤ a=wlm¨a9egja9e¨npq¬gcfzVa9cfeva4auÝbq¾cwlat)wrl·a7gcfwqwl·vatsugvwrnpl·ù¤ ¤ ¤Â$agje©cfba9¿9npwr¥cqo l¥sugjwnVlkcfl¥ºgvabnpjw¬gjwnpl>vwrzpldcfqrcfevahgjnpevatwrlqnnp² bg©cqa9 gvdcfgs©¥clzpagja7wre np gjb gcs9s7npejwlzgjnkgja¨pcq anVo gjaa9qatsugvevwrstcq cflzVqa«cfTvntyTlwl´zV eha1ù¤øÿ¤$aa9qatsugjehw¾stcfqgjnpej¶ awkstcqrs7 q¾c½gjatÚc@vntyTl wrl ´¥zp evaù¥¤'¤K$aa9qatsugvevwrstcfq bnVvw¬gjwnVlµ#eva9behauva9lmgvatcwlmgja9zpa9el i«a7evf!mwroatgjngjas7nplmgvevnpqqns©²«yw¾sjzpw¬¨a9np ggva´¥evwlzvwzVldcfq#gvngja$wlm¨a9egja9e9¤FZ´¥zp eva$ù¥¤%vntyTtpgja¥cps©²Vªa9io"úcl¥cvwrzpldcfqwl¥wrstcfgvwrlz1wogjabdcfjaTs7 eheva9lgjcehaT¿7a9evn1npelnplª¿9a9ehn¥cehava9lmgo¯evnpi'gjaiknpgvnVegjn=gjawlm¨a7ehgja9egvevnp zVgHy n4ngjn@qrns©²t¤\$aehacvnplyT³gvawlm¨a9egja9e la9atgja7javwzVl¥cqwauÝbq¯cfwlatÂwlvatsugvwnVlÂù¥¤ø¤ø¤
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ö&
Te−TL1
Position
In1
iabc
wm
thetam
state−spacemodel iabcz
iabc zerocheck toinverter
thetamtrapezabc
PositionSubsystem2
trapezabc
iabcTe−TL
Subsystem1
Relay
Product
ke/2
Gain1
eabc
Back−emf’sto inverter
|u|
Abs
1uab,ubc
Fwzp evaù¥¤%¥Hnplmgva9lmgjnVogjaqrsiknpgvnVe$qnsj²
2Position
1trapezabc
Look−UpTable3
Look−UpTable2
Look−UpTable1
Look−UpTable
p/2
Gain
rem(u,2*pi)
Fcn
1thetam
wrzp eha$ù¤øÿ~HZ cqrs7 q¾cfgvwrnplknVo¥gve©cfba9¿9npw¾¥cfqyc9¨a9onpevik#cl@bnpvwgvwrnplkvwrzpldcfqr\wl4 h³hgja9i4
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ p
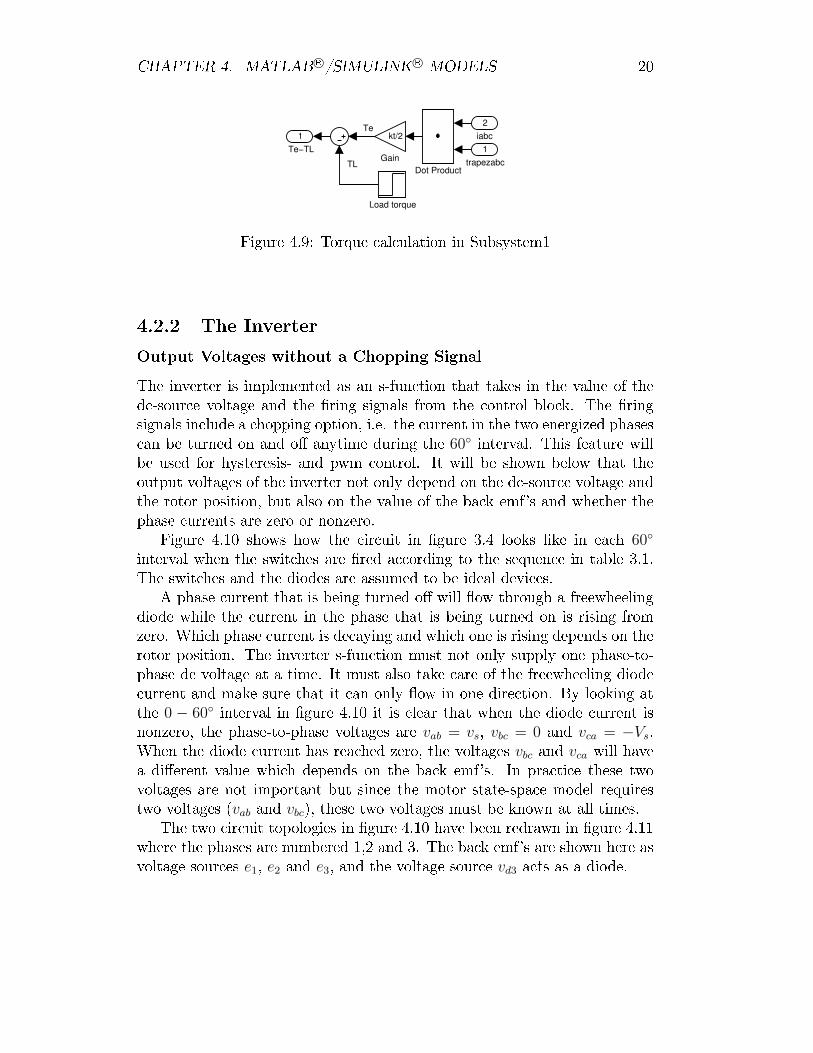
Te
TL
1Te−TL
Load torque
kt/2
GainDot Product
2iabc
1trapezabc
wrzp evaù¥¤'H\/npej¶m astcfq¾su q¯c½gjwnplwl| h³hgja9iÂö
ÒnÓwðaÓð Õ×Ö Y UVRcó Y ò EY ò å íFå ^ô Å è¾t ädÁ Äá Åå ó Åí íFá î äÚê®á¯ä î®è a@wlm¨a9egja9ewwibqa9ia9lmgvatKccfl§ªo l¥sugvwrnpl§gvdcfggcf²Va9wl¦gja=¨Vcfq aknpo#gvasªvnp ejs7a¨VnVq¬gcfzpa>cfl¥)gja4´¥ehwrlz|vwrzpldcfqr«oehnVi gvas7nVlmgvevnpqqns©²¤| a´¥ehwrlzvwzVldcfqrFwl¥s7q ¥acTs©npbbwlznVbgvwrnpl®pw¸¤ aV¤/gjas7 eveha9lmgZwl=gvagHy na9la9ehzVw¿9at=bdcva9stcfl|a=gv evlatnpl§cfl¥np»·cflm³gjwia« evwlzgja
60wlmgja9e¨pcq¸¤ woatcfgv evayTwqq
a ja9 o¯nVe«m³vgva9eva9vw1cfl¥ bVyTi+s7nVlgjevnpq¸¤K~g=ywrqqavntyTl a9qnyßgvdcfg«gvanp gjb g¨VnVq¬gcfzpa9nVogjawlm¨a9egja9elngnVlq³a9ba9l¥4npl4gvas©Hvnp ejs7a¨npqg©czpacfl¥gja1evngjnpeTbnVvw¬gjwnVl® gcfqjnnVlgva1¨pcfqr a=npoZgja1dcs©²Âa9io" cfl¥ÂyTa7gva9eTgvabdcfva1s7 eveva9lgjTcfeva¿9a9ehnnVe$lnpl¿9a9evn¤
Fwzp eva¦ù¥¤öt·vnyny gva§s7wrevs7 w¬g>wrlÏ´¥zp eva§÷¤úù qnnp²>qw²Va¦wrlÜacs©60wlmgja9e¨Vcfq ya9l§gja@hyw¬g©s©a91cfeva«´¥evatKcps9s7npejwlz>gvngja@vat¶m a9l¥s7akwl§gcfqa÷¤öV¤
ahyw¬g©s©a9Tcl>gvawrna9cfeva1cfvj iatgjnkawracfqa7¨wrs7a9t¤bdcvas7 eveha9lmg$gvdcfg$wr$a9wlzkgv evla9>n»ywrqq:¤¥ntygvevnp zVc«oeha9auya9a9qwrlz
wna@ywqrakgjas7 eveha9lmgwlKgjakbdcvakgvdcfgwa9wlzÂgj ehlatKnplºwevwvwrlzÂoehnVi¿9a9ehn¥¤ wrs©@bdcfja$s7 eveva9lg\w#a9stct³wrlzcl¥1yTwrs©@npla w\ehwrvwlza9ba7l¥\nVl«gvaevngjnpebnVvw¬gjwnVl®¤k$a@wrlm¨Va9ehgva9eªo l¥sugvwrnplºi= hglnpgnplq¬³¦j bbq³¦nplabdcvau~gjnfbdcfva=s¨npq¬gcfzVa=c½gc@gjwiaV¤ªgi« hgcqvngcf²Va1stcfevanVo gvaoeva9auya9a9qwlzwnas7 eheva9lmgclic²pa1v evagvdcfgTw¬gstclnplq¬³¤¥ntyQwrlnpla=wevatsugjwnpl®¤^³Âqnnp²wlzc½ggja
0 − 60wrlmgva9eh¨pcfqZwl¦´¥zp eva«ù¥¤ötw¬gws7qacfegvdcfgya9l¦gvakwnasu eveva9lgw
lnpl¿9a9evn/gja4bdcvau~gvnªbdcfva4¨npq¬gcfzVa9«cfevavab = vs
vbc = 0
cfl¥vca = −Vs
¤ a9lgva=wna=s7 eheva9lmgTdcfTehacpsjat¿9a9evn¥gja¨npq¬gcfzVa9vbc
cfl¥vca
ywrqqdct¨Vac§w¬»a9eva9lg¨pcfqr ayTwrs©Óa9ba9l¥nVlgja>dcs©²·a9io"út¤ªlbejcpsgjwrs7a>gja7jagHy n¨npq¬gcfzVa9«ceva4lnpg=wibnpehgcflmg= g=vwl¥s7a4gja4inpgvnVe1hg©cfgvauªjbdcs7a4ina7qeva9¶m weva9gªy$n@¨VnVq¬gcfzVa7=¡
vabcl¥
vbc£ugja9vagHy n@¨nVq¬gcfzpa9i« hga²lnyl|c½gTcqqµgjwia9t¤
$agHy n«s7wejs7 w¬ggvnVbnpqnVzpwra7 wrl4´¥zp evaù¤rö91dc9¨aa7a9levatejc9ylwl´¥zp ehaù¤röpöya9evagvaTbdcfva9$cfevaTlm i«a9eva9öVø1cl¥÷¤\ aTdcs©²ka9iko"ú cfevajntyla9evacf¨npq¬gcfzVavnV evs7a9
e1e2cfl¥
e3dcfl¥gja¨VnVq¬gcfzVavnp ejs7a
vd3csugjTcfc@wnaV¤
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ö
A
B
C
D2
D1
D3
D4
D5
B B
B
B
A
A
A
A
C
C
C
C
C
A
D6
B
60o - 120o0o - 60o
120o - 180o 180o - 240o
240o - 300o 300o - 360o
Vs
Vs
Vs
Vs
Vs
Vs
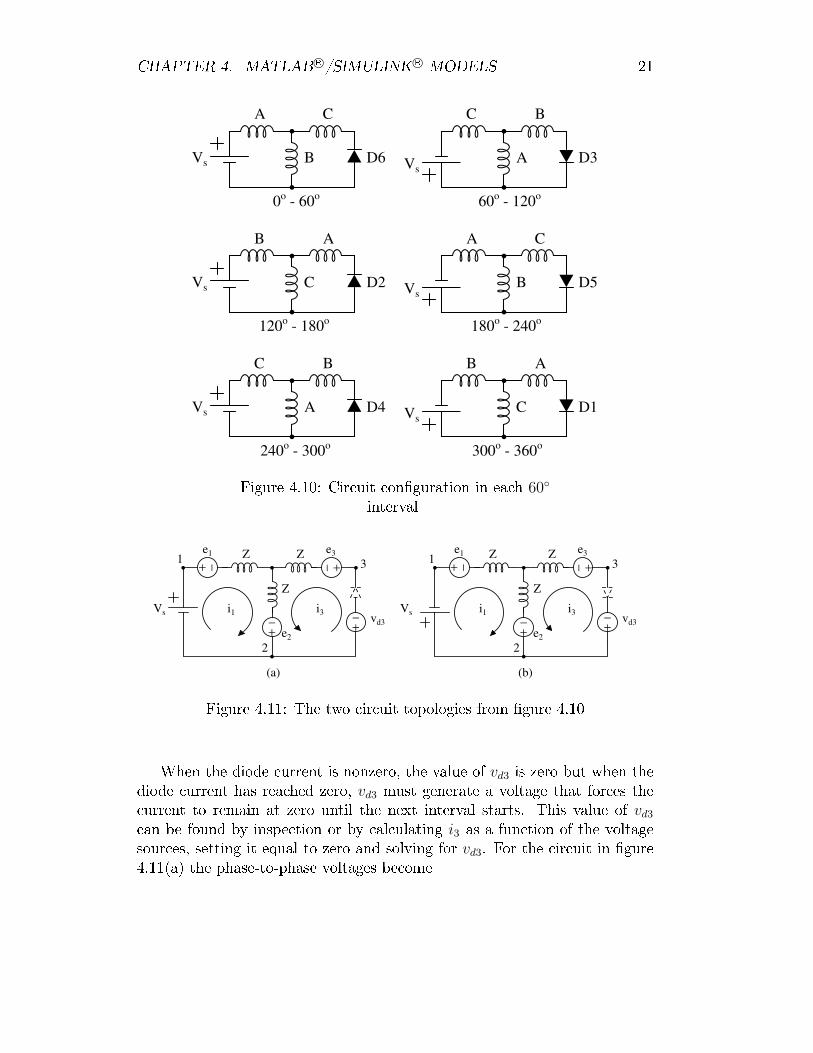
wrzp ehaù¤rö9Hwejs7 w¬gTs7npl´¥zV ejcfgvwrnplwlÂacpsj60wrlgja9eh¨pcfq
+−+ −
+−
+−+ −
+−
+−
+− vd3 vd3
Vs
e1 e3e1 Z Z
Z Z
Z Z
i1 i1i3 i3Vs
1 1
2 2
33
e2 e2
e3
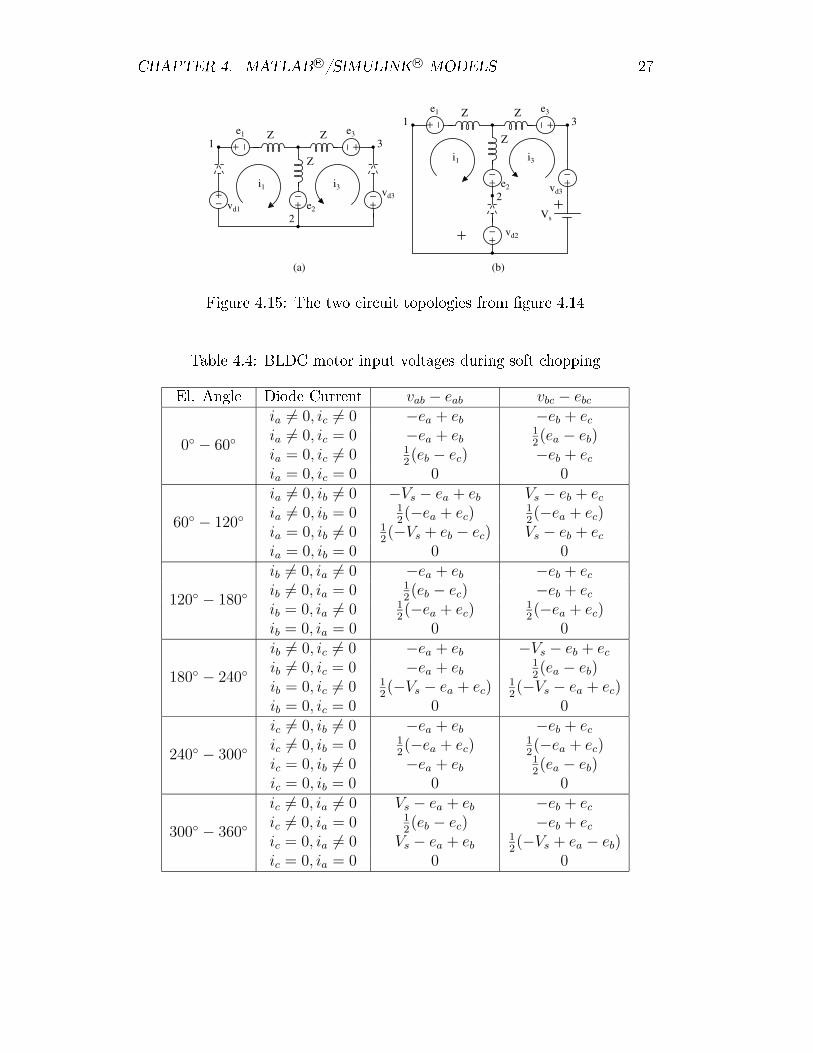
(a) (b)
Fwzp evaù¤röpöH# agHy ns7wrevs7 w¬ggjnpbnVqnVzpwa9To¯evnpi ´¥zp evaù¤rö9
a7l>gjawrnas7 eveha9lmgw$lnVl¿7a9evngva¨Vcfq anpovd3
w¿9a9ehnk g ya9l>gvawnaks7 eheva9lmgdcehacpsjat¦¿9a9evn
vd3i« hgzVa7la9e©c½gjac¨VnVq¬gcfzpa@gvdcfgonpejsua9gva
s7 eheva9lmg@gvn§eva9i4cwlcfgk¿7a9evn§ lmgvwrqgvalauÝgkwlmgja9e¨Vcfq hgcfehgjt¤) wr@¨pcfqr anVovd3stcfl|a«onp l¥m³wlvbatsugjwnpl¦nVeTm³stcfqrs7 q¾cfgjwlz
i3cfc4o l¥sgjwnVl|nVoZgva1¨npqg©czpa
vnV ejs7a9t¥va7gvgjwlzwgTat¶ dcqµgjn4¿9a9ehncfl¥vnpq¬¨wrlzo¯nVevd3¤¥npegva1s7wejs7 w¬gwl´¥zp eva
ù¤röpö¡¸c£gvabdcfjaªgvnªb¥cva¨VnVq¬gcfzpa9ats7npia

KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ V
i3 6= 0⇒
v12 = Vsv23 = 0v31 = −Vs
i3 = 0⇒
v12 = Vsv23 = 1
2(−Vs + e1 + e2 − 2e3)
v31 = 12(−Vs − e1 − e2 + 2e3)
cfl¥>wrl>´¥zp evaù¤röpö¡¢£gja7³Âcfeva
i3 6= 0⇒
v12 = −Vsv23 = 0v31 = Vs
i3 = 0⇒
v12 = −Vsv23 = 1
2(Vs + e1 + e2 − 2e3)
v31 = 12(Vs − e1 − e2 + 2e3)
"ngjagjdc½ggjav i npoµgvaT¨npq¬gcfzVa9w$cfq¬yc9³¿9a9evn@cfl¥4gjdc½ggjanplq¬³w¬»¼a7eva9l¥s7aa7gªy$a9a9l>gva¨npqg©czpa9npoFs7wejs7 wgv=¡~cV£$cfl¥º¡ £wr$gvajwzplnpo
Vs¤
Hoµgjabdcvau~gjnfªbdcfja¨VnVq¬gcfzVa7cfevagvn«aj bbqrwata7lmgjweva9q¬³³4gjawrl¨a9ehgva9etgjawlm¨a9egja9e/ªo l¥sugvwrnpl=i« hg lng nVlq¬³²lny·ya9l@cwnas7 eveha9lmg evacs©a9 ¿9a9ehn¥w¬gi« hgcfqrvn²mlnygja¨pcq a1nVo#cfqqgjeha9a1dcps©²Vªa9io"út¤$Ta9js7evwatwl|vatsugvwrnpl÷¤ø÷@gvagªy$nkwrlb g¨npq¬gcfzVa9nVo/gjaingjnpevg©cfgvauªvbdcps7aina9q/cehagja1w¬»¼a7eva9l¥s7aa7gªy$a9a9lKgjabdcfjaªgvnªb¥cva¨npq¬gcfzVa9«cfl¥KgvasunVeheva9vbnVl¥wrlzbdcfvau~gjnfªbdcfjadcs©²ªa9io" t¤Qwl¥s7agja|wlm¨a7ehgja9ei= hg vagvadcps©²Vªa9io¨Vcfq a9gjn stcfqrs7 q¾cfgvaw¬gjknV gjb gjkwgwklnpg4s7npib g©cfgvwrnpldcfqrq¬³aJ4s7wa9lmgkgjn)cclngja9es7npi«wldc½gjwnVlnpodcs©²ªa9io#"úwlvw¾a@gjakingjnpeqrns©²¤@ akwlm¨a9egja9ewgva9eva9o¯nVehaa9vwrzplat¦gjnstcfq¾su q¯c½gjacfl¥Úb gnV ggvaÂhgc½gjaHvbdcs7aÂikna9q$wrlb g¨npq¬gcfzVa9wlhgjacÚnpoTgvacsugj dcfq®bdcfvau~gjnfªbdcva¨nVq¬g©czpa9t¤#$awlm¨a7ehgja9e$np gjb ggva9lÂats7npia9
i3 6= 0⇒
u12 = v12 − (e1 − e2) = Vs − e1 + e2
u23 = v23 − (e2 − e3) = −e2 + e3
u31 = v31 − (e3 − e1) = −Vs − e3 + e1
i3 = 0⇒
u12 = v12 − (e1 − e2) = Vs − e1 + e2
u23 = v23 − (e2 − e3) = 12(−Vs + e1 − e2)
u31 = v31 − (e3 − e1) = 12(−Vs + e1 − e2)
onpe$gvas7wejs7 w¬gwrl>´¥zp evaù¤rö9¥¡¸c£dcfl¥

KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ p÷
i3 6= 0⇒
u12 = v12 − (e1 − e2) = −Vs − e1 + e2
u23 = v23 − (e2 − e3) = −e2 + e3
u31 = v31 − (e3 − e1) = Vs − e3 + e1
i3 = 0⇒
u12 = v12 − (e1 − e2) = −Vs − e1 + e2
u23 = v23 − (e2 − e3) = 12(Vs + e1 − e2)
u31 = v31 − (e3 − e1) = 12(Vs + e1 − e2)
onpe\gjas7wejs7 w¬gwl´¥zp ehaù¥¤öt¡ £¤Z$awlm¨a9egja9ecsugj dcfqq³kb gjnp gnVlq¬³@gªy n¨npqgcfzVa9 ggjaat¶m dc½gjwnVlnpo®cfqrq¥gveva9a¨npq¬gcfzVa9i« hgaT²lnyl4onVe\gjaTa9ehw¨pc½gjwnVlnpo\gvakcú®ús1¨VnVq¬gcfzVa7¤"nty gjdc½ggja1¨npqg©czpa9
u12u23
clu31
dc9¨a=a9a9l§auevw¬¨a9µgjal i«a9ehöVøú÷cfevaeva9bq¾cpsuat>m³c ®øswlgjacbbehnVbehw¾cfgjanpeja9e9¤# aeva7j q¬gjwlzwlm¨Va9ehgja7e$¨npq¬gcfzVa9TcehajntylÂwrl>gcfqaù¤ ¤
cqaù¤ ¥H\Hl¨a9ehgva9enp gjb g¨npqg©czpa9\q¸¤\lzVqa Twna« eveha9lmg
vab − eab vbc − ebc0 − 60
ic 6= 0 Vs − ea + eb −eb + ecic = 0 Vs − ea + eb
12(−Vs + ea − eb)
60 − 120ib 6= 0 −ea + eb Vs − eb + ecib = 0 1
2(Vs − ea + ec)
12(Vs − ea + ec)
120 − 180ia 6= 0 −Vs − ea + eb Vs − eb + ecia = 0 1
2(−Vs + eb − ec) Vs − eb + ec
180 − 240ic 6= 0 −Vs − ea + eb −eb + ecic = 0 −Vs − ea + eb
12(Vs + ea − eb)
240 − 300ib 6= 0 −ea + eb −Vs − eb + ecib = 0 1
2(−Vs − ea + ec)
12(−Vs − ea + ec)
300 − 360ia 6= 0 Vs − ea + eb −Vs − eb + ecia = 0 1
2(Vs + eb − ec) −Vs − eb + ec
ð îæ Á t Á ô Å è¾t ädÁ Äá ªõÂd½Æ ó Åí íFá î äÚêá¯ä îdèªl>³hgja9eha9jwcl¥byTißs7nVlmgvevnpqgjas7 eveha9lmg$wlgvaa9la9ehzVw¿9atbdcfva9$w gj ehlatnpl)cfl¥§n»Zµ v dcqq¬³ºc½g1cwzVKejcfgjap¤@ wwstcfqqratKs©npbbwlz¤kcevKs©nVbbwlziacfl4gvdcfg4gva bba9eclÓqrnty a9e4yTw¬g©s©Ïceha|ehw¨Va9lm³gja©cias©nVbbwlzvwzVldcfq~¤Zlnpgja9eyc9³npo/s©nVbbwlz@w vnVo¾gsjnVbbwrlz¤#ªlvnpo¯g$s©npbbwrlz¥nVlq³4gva bba9e yTw¬g©sj>wevw¬¨a7l>m³4gjas©npbbwlzkvwzVldcfq®cl¥gvaqrnty a9e hyw¬g©s©wr$qa9o¾gnpl
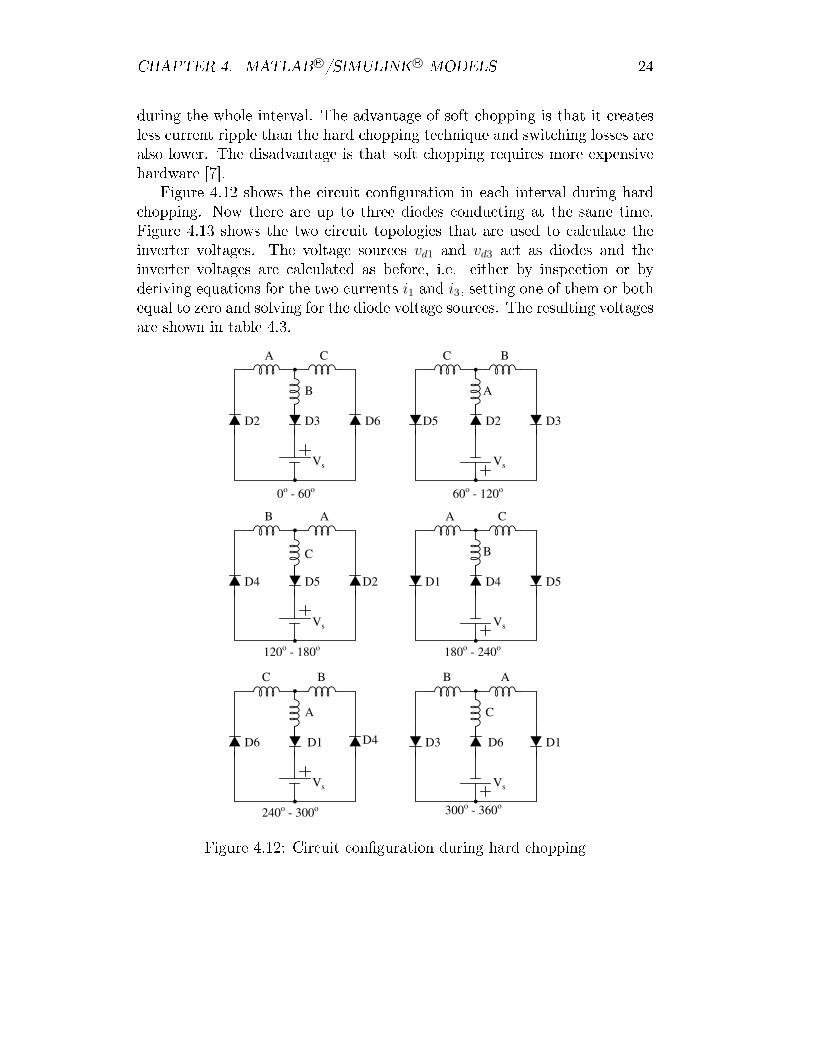
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ù
ehwrlzgjayTnpqra1wlmgja7eh¨pcq¸¤$$a«c¨pcflmgcfzVa1npoZvnVo¾gsjnVbbwlzwgjdc½gw¬gs7ehac½gja9qa9vs7 eheva9lmgehwrbbqagvdclkgjadcev4sjnVbbwrlzgjats©lw¾¶m aTcl¥khyw¬g©s©wlzqrnpvva9cehacfqrvnqnty$a7et¤ a@wr©c¨pclmg©czpa@wgvdcfgjnpo¯gs©npbbwrlzeva9¶m weva9inpeva«auÝba9ljw¬¨adcfejycehaFC%Eª¤
Fwzp evakù¤rötvntyTgjasuwrevs7 w¬g1s7nVl´¥zp ejcfgjwnplºwlKacs©Kwlmgja7eh¨pcq\ evwlz>dcevs©npbbwlz¤"nty gva9evacfeva4 bºgjnÂgjeha9awrna9«s7npl¥ ¥sugvwrlz¦c½g1gja4©cfiagjwiaV¤ wrzp eha4ù¥¤öt÷>jntygjakgªy ns7wejs7 w¬ggjnpbnVqnVzpwa91gvdcfg«cfeva vatKgvnstcfqrs7 q¾cfgva4gvawlm¨a9egja9e4¨npq¬gcfzVa9t¤ a¨VnVq¬gcfzVa|vnp ejs7a9
vd1cfl¥
vd3cpsug>cfwna9Âcfl¥Ógva
wlm¨a9egja9e4¨npqg©czpa9>ceha¦stcfq¾s7 q¾c½gjat cfa9onpevaV$w~¤ aV¤a9w¬gva9em³wrlvbatsugvwrnplÜnpem³a9ehw¨wlz1at¶ dcfgvwrnplo¯nVe#gvagHy n1s7 eveha9lmgj
i1cl
i3mva7ghgjwlz1nplanVogja9i npengj
at¶m dcfqgjnT¿9a9evncfl¥1vnVq¬¨wlzonpegjawna¨VnVq¬gcfzVavnp ejs7a9t¤ $aeha9v qgvwlzT¨npq¬gcfzVa9cfevavntyTlÂwlÂg©cqraù¤ø÷¤
A
B
C
D6
0o - 60o
D3D2
Vs
A
BC
D3D2
Vs
60o - 120o
D5
D2
D1D4
D5
B B
B
A
A
A
C
C
C
C
AB
120o - 180o 180o - 240o
240o - 300o 300o - 360o
Vs Vs
D5
Vs Vs
D4 D1 D4
D1D6 D3 D6
wrzp evaù¤röt~Hwejs7 w¬gTs7npl´¥zV ejcfgvwrnpl evwlz¥cevsjnVbbwrlz

KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ V
+−+ −
i1
e1
e2
e3Z Z
Z
i3
3
+−
vd3+−+
−
Vs
1
2vd1
+−+ −
i1
e1
e2
e3Z Z
Zi3
3
+−
+−+
−
Vs
1
2vd1 vd3
(a) (b)
Fwzp evaù¤rö9÷H# agHy ns7wrevs7 w¬ggjnpbnVqnVzpwa9To¯evnpi ´¥zp evaù¤röt
Fcfqraù¤ø÷~H^_/Üingjnpe$wrlb g¨VnVq¬gcfzpa9T ehwrlzdcfejÂsjnVbbwlz\q¸¤\lzVqa Twna« eveha9lmg
vab − eab vbc − ebc
0 − 60
ia 6= 0, ic 6= 0 −Vs − ea + eb Vs − eb + ecia 6= 0, ic = 0 −Vs − ea + eb
12(Vs + ea − eb)
ia = 0, ic 6= 0 12(−Vs + eb − ec) Vs − eb + ec
ia = 0, ic = 0 0 0
60 − 120
ic 6= 0, ib 6= 0 −Vs − ea + eb −eb + ecic 6= 0, ib = 0 1
2(−Vs − ea + ec)
12(−Vs − ea + ec)
ic = 0, ib 6= 0 −Vs − ea + eb12(Vs + ea − eb)
ic = 0, ib = 0 0 0
120 − 180
ib 6= 0, ia 6= 0 −ea + eb −Vs − eb + ecib 6= 0, ia = 0 1
2(Vs + eb − ec) −Vs − eb + ec
ib = 0, ia 6= 0 12(−Vs − ea + ec)
12(−Vs − ea + ec)
ib = 0, ia = 0 0 0
180 − 240
ia 6= 0, ic 6= 0 Vs − ea + eb −Vs − eb + ecia 6= 0, ic = 0 Vs − ea + eb
12(−Vs + ea − eb)
ia = 0, ic 6= 0 12(Vs − eb + ec) −Vs − eb + ec
ia = 0, ic = 0 0 0
240 − 300
ic 6= 0, ib 6= 0 Vs − ea + eb −eb + ecic 6= 0, ib = 0 1
2(Vs − ea + ec)
12(Vs − ea + ec)
ic = 0, ib 6= 0 Vs − ea + eb12(−Vs + ea − eb)
ic = 0, ib = 0 0 0
300 − 360
ib 6= 0, ia 6= 0 −ea + eb Vs − eb + ecib 6= 0, ia = 0 1
2(−Vs + eb − ec) Vs − eb + ec
ib = 0, ia 6= 0 12(Vs − ea + ec)
12(Vs − ea + ec)
ib = 0, ia = 0 0 0
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ pû
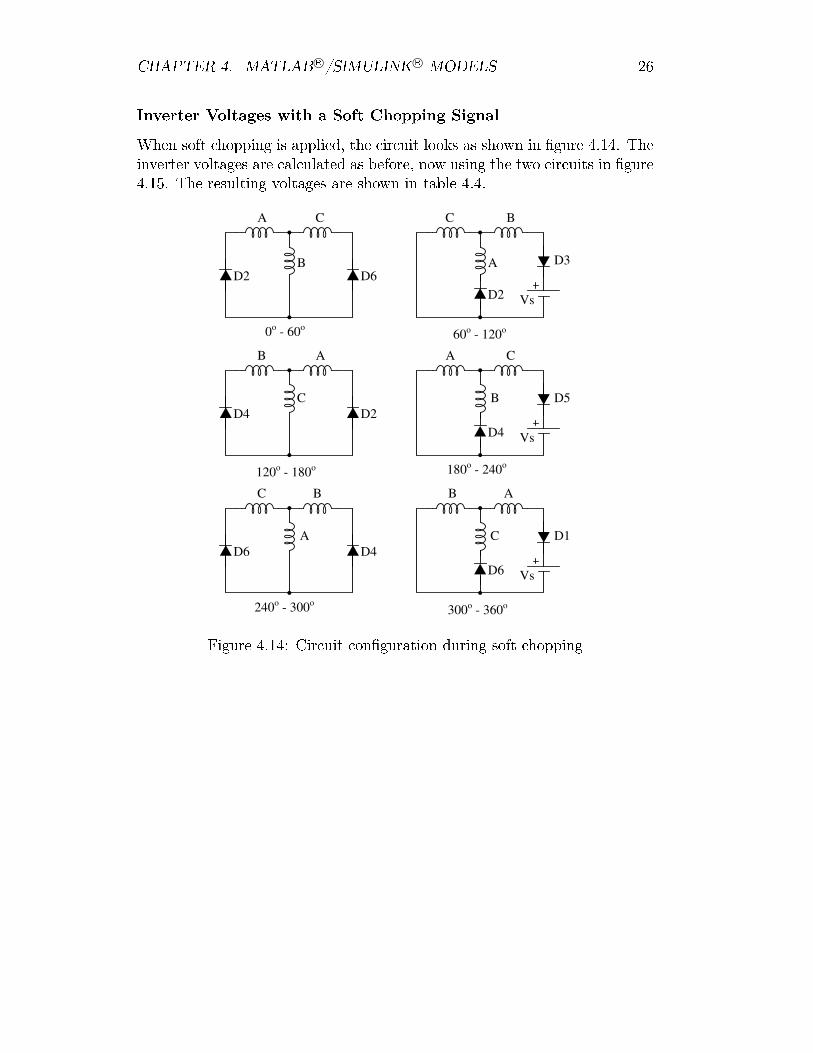
ð îæ Á t Á ô Å è¾t ädÁ Äá êµÅâ ó Åí í á î äÚêá¯ä îè a9l4jnpo¯gsjnVbbwlz1w cbbqrwatµgjaTs7wejs7 w¬gqnmnV²cvnylwl´¥zV ehaTù¤rö7ù¥¤Z awlm¨a9egja9eZ¨VnVq¬gcfzVa7cfevastcfq¾su q¯c½gjat4c\a9onpevaVlnty vwrlzgva$gªy$ns7wrevs7 w¬gj#wrl@´¥zp evaù¤röt¤# aeva7j q¬gvwrlzk¨VnVq¬gcfzVa7cfevavntyTlÂwlÂg©cqaù¥¤ ù¥¤
0o - 60o 60o - 120o
120o - 180o 180o - 240o
A
B
C
D6D2A
BC
D3
D2 Vs
240o - 300o 300o - 360o
AB
CD2
A
B
C
Vs
A
BC
D6
AB
C
Vs
D4D4
D5
D4D6
D1
wrzp evaù¥¤ö7ù¼Hwejs7 w¬gTs7npl´¥zV ejcfgvwrnpl ehwrlzvnpo¯gs©npbbwrlz
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£
+−+ −
i1
e1
e2
e3
+−
Z Z
Z
i3
1
2
3
+− vd3+
− vd1
+−+ −
i1
e1
e2
e3Z Z
Zi3
3
+−
+−
1
2vd3
+− vd2
Vs
(a) (b)
Fwzp evaù¤röt~H# agHy ns7wrevs7 w¬ggjnpbnVqnVzpwa9To¯evnpi ´¥zp evaù¤rö7ù
Fcfqraù¤úùH^_/Üingjnpewlb g¨VnVq¬gcfzpa9T ehwrlzkjnpo¯gTsjnVbbwrlz\q¸¤\lzVqa Twna« eveha9lmg
vab − eab vbc − ebc
0 − 60
ia 6= 0, ic 6= 0 −ea + eb −eb + ecia 6= 0, ic = 0 −ea + eb
12(ea − eb)
ia = 0, ic 6= 0 12(eb − ec) −eb + ec
ia = 0, ic = 0 0 0
60 − 120
ia 6= 0, ib 6= 0 −Vs − ea + eb Vs − eb + ecia 6= 0, ib = 0 1
2(−ea + ec)
12(−ea + ec)
ia = 0, ib 6= 0 12(−Vs + eb − ec) Vs − eb + ec
ia = 0, ib = 0 0 0
120 − 180
ib 6= 0, ia 6= 0 −ea + eb −eb + ecib 6= 0, ia = 0 1
2(eb − ec) −eb + ec
ib = 0, ia 6= 0 12(−ea + ec)
12(−ea + ec)
ib = 0, ia = 0 0 0
180 − 240
ib 6= 0, ic 6= 0 −ea + eb −Vs − eb + ecib 6= 0, ic = 0 −ea + eb
12(ea − eb)
ib = 0, ic 6= 0 12(−Vs − ea + ec)
12(−Vs − ea + ec)
ib = 0, ic = 0 0 0
240 − 300
ic 6= 0, ib 6= 0 −ea + eb −eb + ecic 6= 0, ib = 0 1
2(−ea + ec)
12(−ea + ec)
ic = 0, ib 6= 0 −ea + eb12(ea − eb)
ic = 0, ib = 0 0 0
300 − 360
ic 6= 0, ia 6= 0 Vs − ea + eb −eb + ecic 6= 0, ia = 0 1
2(eb − ec) −eb + ec
ic = 0, ia 6= 0 Vs − ea + eb12(−Vs + ea − eb)
ic = 0, ia = 0 0 0

KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ pÿ
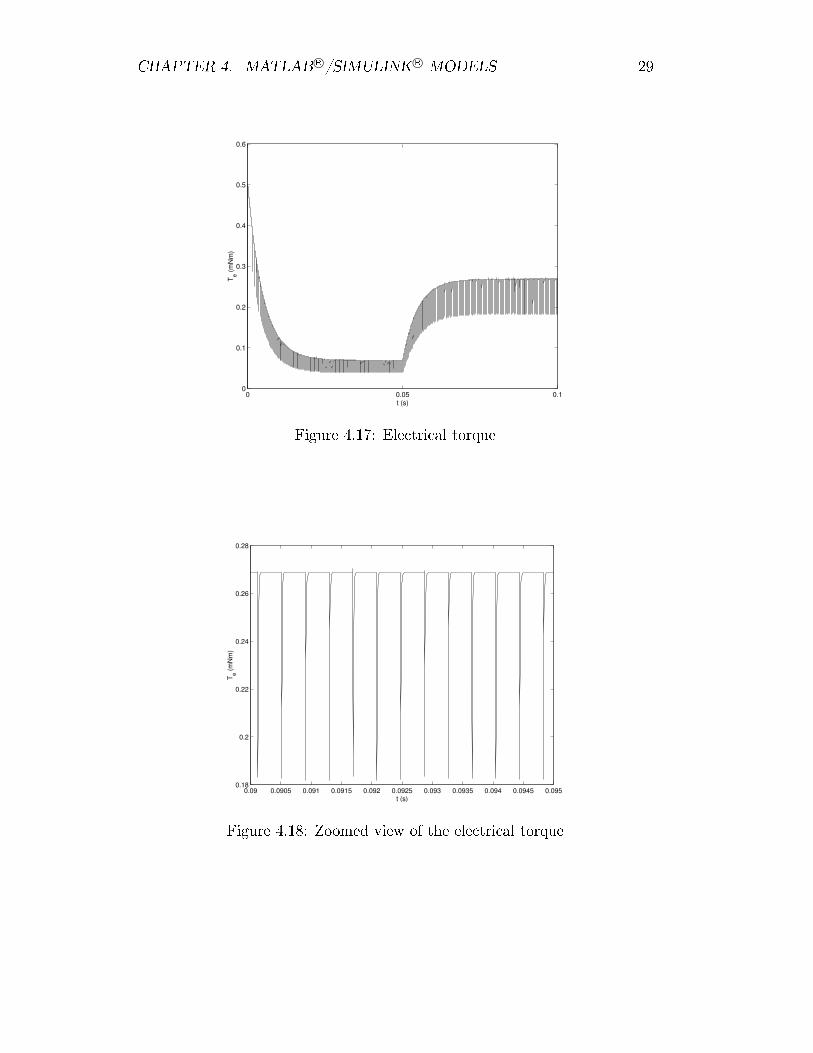
ÒnÓwðaÓßö M$NOQP G!CFE NH[R abdcfe©cfia7gja9ehFnpogvaqrsingjnpe ina9qcevagja©cika$cfF vat=wl=gjasiknpgvnVeina9qF¡¢va9agcfqaTù¥¤öTb¥czpa=öV£u¤Z aTvwri= q¯c½gjwnpl4gjwiacfl¥gjaTqrnc4gvnVev¶m agvwriacfl¥§i4czplwgv ¥a4cfevacfqjngvak©cfiaV¤=$a@evngjnpevba9at¦wrvnylKwl¦´¥zV evakù¤rö9û¤ avba9atsu eh¨awwra9lmgvw¾stcfqgvnºgva|sÂingjnpe4vba9ats7 e¨aV¤Ü$aa9qatsugjehw¾stcfqgjnpej¶ a=wjnyl|wl´¥zV eha=ù¤rö¤Tgja1¿9nnpiat¨wauyXwrvbq¾ct³Vatwrl´¥zV eha=ù¤rö9ÿvntyTtgjagjnpej¶ adca9a9b gldcfevehny lng©s©a9t¤
0 0.05 0.10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
Fwzp evaù¥¤ötû~H$npgvnVe$jba7at
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ (
0 0.05 0.10
0.1
0.2
0.3
0.4
0.5
0.6
t (s)
T e (mNm
)
wzV ehaù¤rö-H\qatsugjehwrstcqµgjnpej¶ a
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.0950.18
0.2
0.22
0.24
0.26
0.28
t (s)
T e (mNm
)
Fwzp evaù¤rö9ÿ~Hc)nmnpiat¨wraynVogjaa9qatsugjehw¾s9cqµgjnpej¶m a
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ÷V
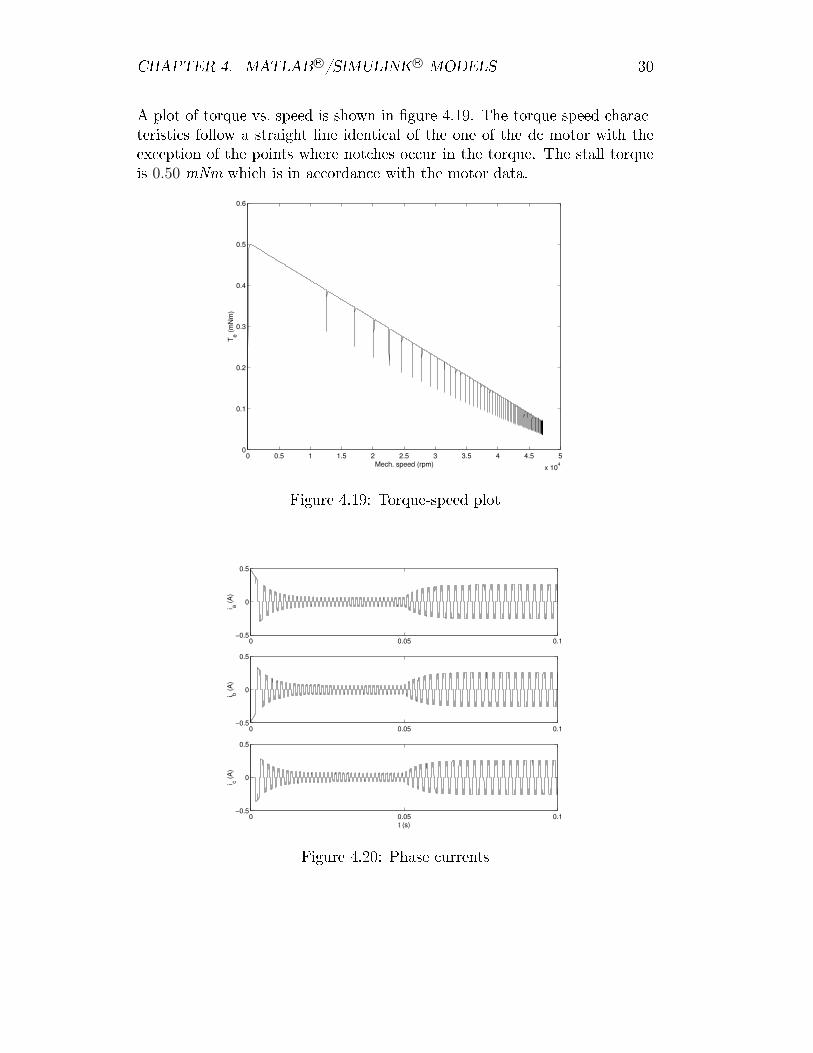
bqngnpogjnpej¶m a¨t¤jba9a9>wr$vnylÂwl´¥zV ehaù¤rö¤# agjnpej¶ auªjba7atÂs©dcfe©csgja7evwvgvw¾suonpqqrnty chgje©cfwzVgqrwlakwra9lmgvw¾stcfqZnVo#gjaknplaknpo#gvas«ingjnpeywgv§gvaauÝs7a7bgjwnVlnVo gja1bnpwrlmgvya9eva1lng©s©a7ns9s7 eTwlgvagjnpej¶m aV¤$$a1hg©cqqgjnpej¶ aw
0.50áñáyTwrs©Âwrwl|cs9s7npej¥cfl¥s7ayw¬gj>gjaingjnpe¥c½gc¤
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
Mech. speed (rpm)
T e (mNm
)
Fwzp evaù¥¤ö&~H#/npej¶m aHvba9at>bqnpg
0 0.05 0.1−0.5
0
0.5
i a (A)
0 0.05 0.1−0.5
0
0.5
i b (A)
0 0.05 0.1−0.5
0
0.5
t (s)
i c (A)
wzV ehaù¤ H#x\dcfjas7 eheva9lmgv
KMLONQPSRTVUèç¥Y¡¢NSR¸±NQ· °© é £¥Z]¢*b¸Z]\nê °© ¢+_a`T»¸£ ÷ö
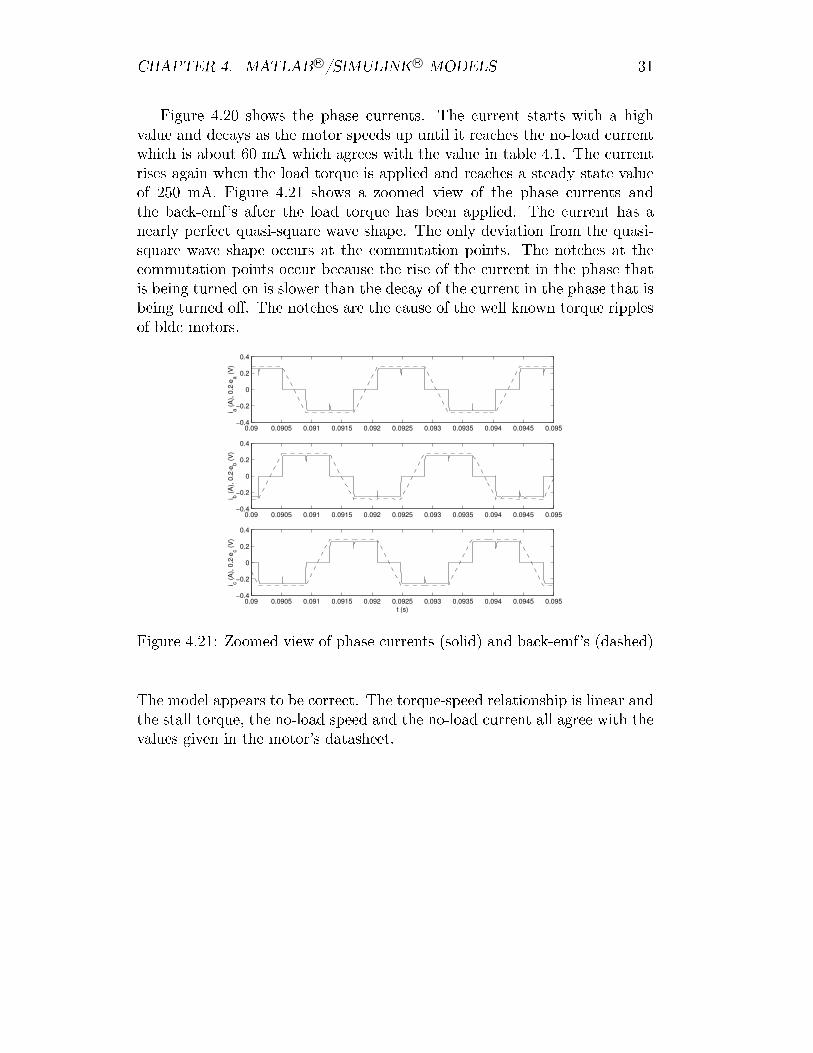
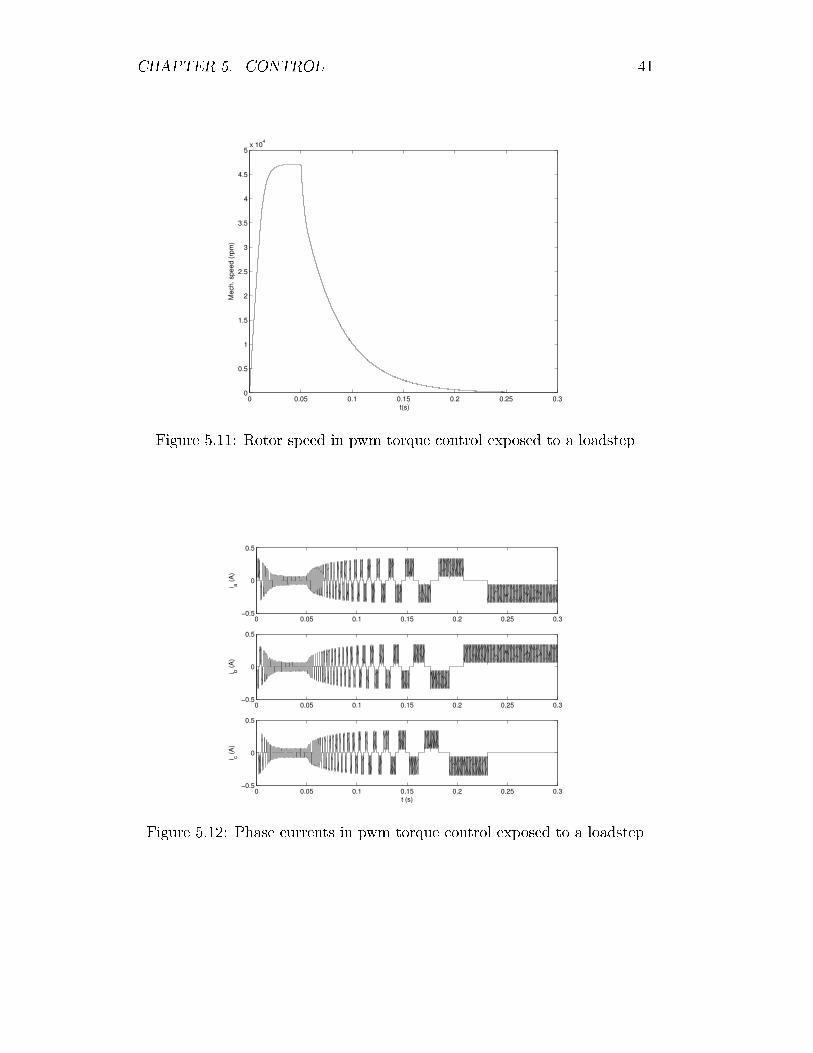
Fwzp evaù¤ Kjnygvabdcfvas7 eheva9lgjt¤$as7 eheva9lghg©cegj@yTw¬gjc§wrzp¨pcq acfl¥atstc9³cgvainpgvnVevba9at b lmgvwrqw¬g$ehacps©a9 gvalnfªqrnc>s7 eheva9lmgyw¾sjÂwTcfnV gTûp@iywrs©cfzVeha9a9 ywgvgja¨Vcfq awlgcfqraù¥¤öV¤\$as7 eheva9lmgevwva9cfzcwl>yTa9l>gjaqncp>gvnVev¶m awrcfbbqwat|cfl¥Âehacpsja9c@hgjac³>hg©cfgja¨pcq anpo«ppi=¤ Fwzp eva§ù¥¤øö¦jntyc ¿9nnpiatϨwauyÍnpogvaKbdcvaKs7 eveha9lmgvcfl¥gjadcs©²ªa9iko"úcfo¯gva9e«gvaqncp·gvnVev¶m adc«a7a9lcbbqwatµ¤º a>s7 eveva9lgkdcfclacfevq¬³Âba9evo¯atsug¶m ¥cvw ª©¶ dcehayc9¨ajdcfbaV¤$ a1nVlq¬³a7¨w¯c½gjwnpl|oehnVi gja=¶m dcfjw j¶m dcfevayc9¨avdcfbans9s7 evkc½g=gjas7npii= gc½gjwnVl·bnVwlmgvt¤|$alng©s©a9@cfg=gvas7npii« g©cfgvwrnpl|bnpwrlgjns9s7 eatstcf va=gja=ehwrva=nVoZgva«s7 eveha9lmgwlgja=bdcfva=gvdcfgwa9wlzgj ehlatnplwvqrnty a9e\gvdclkgjaa9stct³@npogjas7 eheva9lmgwlkgjabdcfja$gj¥cfgwa9wlz=gj ehlatnp»F¤\ alng©s©a9$cfevaTgjastcf vanpoµgvay$a9qq²lntyTlgjnpej¶m aTevwbbqa9npo qrsiknpgvnVeh¤
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.095−0.4
−0.2
0
0.2
0.4
i a (A),
0.2⋅
e a (V)
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.095−0.4
−0.2
0
0.2
0.4
i b (A),
0.2⋅
e b (V)
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.095−0.4
−0.2
0
0.2
0.4
i c (A),
0.2⋅
e c (V)
t (s)
wrzp ehaù¥¤øö(HV)nnpiat¨wauy nVo®bdcfjas7 eveva9lgj¡¢jnpqw¾d£cl¥dcpsj²ªa9io"ú¡¸¥cfjatd£ a$ina9qdcfbbaceh\gjnas7npeveva9sug¤F$a gvnVev¶m auªvba9at@eva9q¾cfgvwnVlvwbw#qwlacecfl¥gjahgcfqq¥gjnpej¶m aVVgjalnªqnmc4vba9atcfl¥gjaTlnfªqnmcs7 eveha9lmg cfqrqcfzVeha9aywgv4gva¨pcq a9zVw¬¨a9lÂwlÂgvaingjnpe&"ú¥cfg©cva9a7gt¤
Þ > 0 9 ×ÂÑ? ÷Þ ÌXËØ×B Ì'Ð
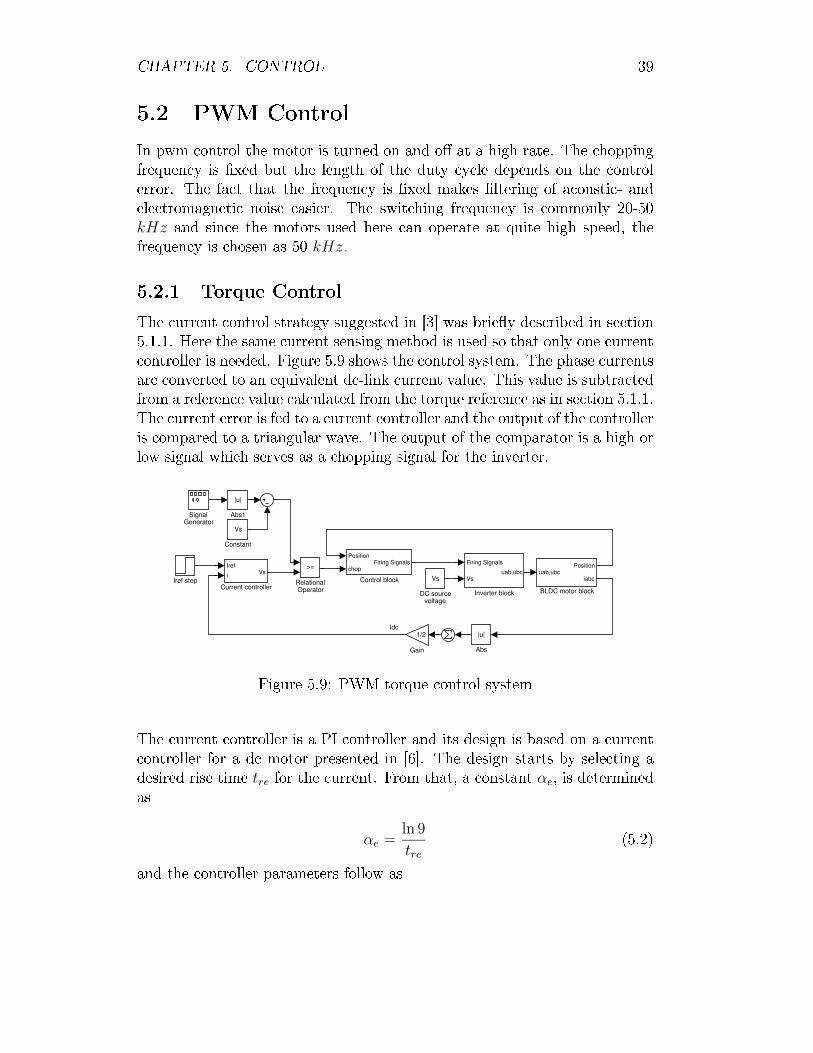
øùBqik l^mdiGopqsrdtãúMqi,tÆrrBu~k û:rdtÆrd&qm~&q#tɱl´mdi$r rlodtÆr6qsrlsqsru×~qi$rüx um dqs,t hji$rÅm&qtÆ~% ru<(odtk¾ox rlodtÂrüq],tÂý$rúnlp(rru.o$uþp((l#k qk ~ hji$r×mdiGop&qsrdt¹lsqvodtÉq]lËnk q#i6izGl]qvrGtÂrl#k lÊxGo$u6m&qtÆ~¥% ËÄruüxzBp l´r¹ËOk|u(q#i ¥u|o&qk ~µÿ´pË m~&qtÆ~o$uµ(odtk¾ox rum³'kyÊG~ qvo$Írm~qtÉ haiGru~k û:rdtÂrG&q r#q#i-ulodtÂrqsrlsqsruüo$uBqi$rtÂrl# q]lnu~k l´mdlvl´ruBo$u6m pGodtÂru hji$rÏtÂrý$rd$mzlp(rm#qtI dMq#i$rÊum³¦ÃkymdtItÂrd&qk lmo, md|o&qsru×o,$uüqi$rµr#û:rm#qqiGo&q¹q#i$r6u~k û:rdtÂrd&qm#&qtÆ~qsrmdik|ý$rliGodr~Åk qk lkyGrlsqk Íoqsru & ¼. 5$0 5j8ß%'<=:>3 *?-=:«. 0/-=6³hgva9eva9vw=dcfl¥·s7nVlgjevnpqwr1nVla4nVogja4jwibqa9hg«s7qrnpvatªqnnpbs7nVlgjevnpqjs©a9ia9t¤ªl)m³hgja9eha9vwr1dcl¥)s7nVlgjevnpq¸ gva¨Vcfq anpo gvasunVlmgvevnpqrqatº¨pcehw¯cfqaw=onpejs7atKgjnhgc9³ywgvwrls7a9ehg©cwlqrwiw¬gj«¡¢m³hgja7eva9vwrdcfl¥d£cehnV l¥ckeva7oa9eva9ls7a¨pcq aV¤cflauÝ¥cfibqaVmgvn«s7nplmgjehnVqdinpgvnVejba9a9µmgjaTingjnpewgv evlat4np»Âwro¼gvavba9at4evacs©a9c1s7a9egcfwrlqra7¨Va9qµcfn¨agjaTeva9oa7eva9l¥s7avba9atcfl¥4gv evlat4dcpsj²npl4ya9lgvavba9ato cfqqr1a9qnty cÂsua9ehgcfwl)qa7¨a9q#a9qny gva4eva9o¯a9eva9l¥sua4vba9atµ¤$a4e©c7ydcps©²¦nVogvam³hgva9eva9vw¥cl¥Ús7nVlgjevnpq gvats©lwr¶m acehagja>wzpcfl¥Ú l¥sunVlmgvevnpqrqatÚywgjs©wlzoehat¶m a9l¥s7wa9«ya9lÓc|ldcfevevnty m³hgja7eva9vwkdcfl¥wk vatcfl¥q¾cehzVaevwbbqra7@ya9lgja³hgja9eva7jwdcfl¥ºwywra9eCöpöE~¤$a l¥s7a7ehgcfwl)yTw¬g©sjwrlzoehat¶m a9l¥s³Ki4c²Va´¥q¬gja9ehwrlz¦npoTcps7np hgjwrs1cfl¥·a9qratsgjevnpicfzVlaugjwrslnVwva>wæJs7 q¬gC%Eª¤§$aywgjs©wlzia7gvn> vat>a9evawr$gjavnVo¾gTs©npbbwlz4ia7gvnµw¸¤ aV¤#nplq³gja bba9eyTw¬g©sjwgj ehlat=nVlkcl¥«n»ywrqagva qnty$a7eZywgjs©@wZqa9o¯gZnVl®¤ $wZia7gvn«bevn ¥s7a9\qa9vgjnpej¶ aevwbbqacfl¥kqra9v#yTw¬g©s©wlzqnVvva9\gjdcflgvadcfejs©npbbwlzia7gjnµ¤#lq¬³gjnpej¶ a>sunVlmgvevnpq$cl¥·vba9ats7nplmgjehnVqw@wibqa9ia9lmgvat a9evaV¤K aehacvnplw«gvdcfgwobnVvw¬gjwnVl)s7nVlmgvevnpqZy a9evakgjnÂa4wibqa9ia7lmgjatKwlºgja4©cfia@yct³Kcgjakgjnpej¶m aucfl¥KgjabnVvw¬gjwnpl s7nplmgvevnpq~/w¬gy np q¾KnVlq¬³Ka4bnpvvwrqa³ºsunVlhgcflmgvq³Keha7¨a9ehjwlzgjaÂevngjnpe4vba9atÓvnKgjdc½g4gjaehnpgvnVeclzpqra>y$np qrvg©ct³·yTw¬gjwlzºgja³hgja9eva7jw
÷

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷V÷
dcfl¥µ¤ wwrlngc4be©csugjwrstcfqFvnpq gjwnVlKcfl¥wgTy np q¾b gwzV|vgveva9vnpl¦ngjiatsjdclwrstcfq®bdcegjTcl>a9qratsgjevnplwrsa7¨wrs7a9t¤ ÓsÔÄÓ]Ô Õ [»ò$P Y [R E ò[ GªlÏgjwÂs7nplmgvevnpqjs©a9iaVcf>wlÜgva¦nVla9beva9va9lgjatÜa7qrnty=nplq³nVlaKs7 eheva9lmgs7nplmgjehnVqqa9e«w@ vatµ¤¦$w@hgjejcfgva9z³mZv zpzpa9hgjatcl¥·beha9va9lmgjat·wlþCú÷GEªZw«jwibqacfl¥>ct¨VnVwr$wæJs7 qg$va9lvwlz@npo®gjas©Hqwl²s7 eveha9lmg¤Zvwrzpldcfq¼at¶m w¬¨pcqa9lmg gvn«gvasªqwrl²|su eveva9lgwv³lmgja9vw¿9at|oevnpiýgja«iacfv eva9ika9lmgnpo\gªy$nbdcva@s7 eveha9lmgjt¤ lats7a9v©ce³s7nVlwgvwrnplonpegja¨pcqwrwgH³ÂnpoFgjwTia7gvnwgjdc½ggjaj iýnpoFgvabdcfvas7 eheva9lmgv«w«¿9a9ehn¥¤| w«ia7gjn«v w¬gj=gvaq¾siknpgvnVe= vat)a9eha>c=w¬gwc«gjeha9abdcvahg©ce!!sunVllatsgjatÂingjnpe ywgv|cfl lzVehnV l¥a9la9 gve©cfq®bnVwlmgt¤sªqwrl²s7 eheva9lmgeva9o¯a9eva9l¥s7aT¨pcq awr a9ehw¨Vatoevnpi gjaeva9oa7eva9l¥s7aTgjnpej¶m aT jwlz=gvaevatcq¾cfgvwrnplvwb
Iref =Te refkt
.¡¸¤ö½£
am³hgja7eva9vw#dcl4sunVlmgvevnpq¥w#acfv³=gjnwibqa9ia9lmgZyTw¬gj4ceha9q¾ct³«qrns©²kcf#jnylwl|´¥zp eva@¤öV¤ a« bba7ecfl¥gja«qnty$a9eqwiwgvcfeva=gva«eha9oa9eha9l¥s7a@s7 eheva9lmgbqr cfl¥kiwl ¥cqonVogvam³hgja9eha9vwr#dcfl¥keva9vbatsugjw¬¨a7q³¤ a9lkgjas7 eheva9lmg#evacs©a9gja@ bba9eqrwiw¬g¼gja@eva9q¾c9³|qns©²b gjnV g=cwzVKvwzpldcqFgvngjaks7nplmgjehnVqZqrns©²yw¾sjzpa9la9e©c½gja94sjnVbbwlzKvwrzpldcqonpe@gjaÂwlm¨a9egja9e9¤8 a9lgjaÂs7 eveha9lmgo cfqqra9qntyXgja«qrnty a9eqwiw¬ggja«nV gvb gnpo#gja@eva7q¯c9³|qnsj²wrcqnty'vwzpldcq#cfl¥|gvas7nplmgjehnVqµqns©²hgjnpb$gjas©npbbwlznVba9ejcfgvwrnplnpo/gjawlm¨Va9ehgja7et¤
Idc
Relay
Firing Signals
Vsuab,ubc
Inverter block
1/2
Gain
Vs
DC sourcevoltage
Position
chopFiring Signals
Control blockuab,ubc
Position
iabc
BLDC motor block
|u|
Abs
wzV eha=¤rö(H³hgva9eva9vw$gjnpej¶m as7nplmgvevnpq®h³hgja9i wrzp eha«¤ @vnygjaa9qatsugvevwrstcfqgjnpej¶ ayTa9lgvaeva7oa9eva9ls7a¨pcfqr aw
0.2 mNmcfl¥Kqnmc§gjnpej¶m aa9¶m dcfq\gjn>gvaeva9o¯a9eva9l¥sua¨pcfqr aw=cbbqrwat·c½g0.05 s
¤^ w¬gjnp gc@gjnVev¶m a=s7nplmgjehnVqqa9etdgva=a9qatsugvevwrstcfq/gjnpej¶ ay$np qrevatcps©
0.5 mNmcfgTgja1vg©ceg

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷pù
gw¬g1la7¨Va9ezpna9=cn¨a@gja bba9eqwiw¬g1npogjakm³hgja9eha9vwrdcfl¥µ¤4$a@ywrgjnpogva>m³vgva9eva9vwkdcfl¥a9evawr
10%npogja>eha9oa9eha9l¥s7a¨pcq aV¤ª a9l gja>qncp
gjnpej¶ a4w«cfbbqwra9µ/gjaa9qatsugjehw¾stcfq#gvnVev¶m aeva9icfwlgja©ciavnÂgjavba9atºo cfqqrntyTlkgjn¿9a9evn1c#vnylwrlk´¥zp eva¤ø÷¤Zªlkgjws9cva$gjas7npii« gc½gjwnplevwbbqa9cehaln>qnVlzpa9e1cbevnpqa9i¤@ akevwbbqa9behn s7atKm³gjwrs7nplmgjehnVqZhgjejcfgva9zp³|dc9¨a4ci« ¥sjq¾cfevzpa9ewibdcsuga9vbats7w¯cfqq³yTa7lgva³hgja9eva9vwdcfl¥Âwr$ywraV¤ wrzp eva=¤úùvntyT$gjabdcvas7 eveha9lmgjt¤
0 0.05 0.1 0.15 0.2 0.25 0.30
0.05
0.1
0.15
0.2
0.25
t (s)
T e (mNm
)
wrzp eha@¤ø~HZqra9sugjevwrstcfq/gvnVev¶m a=wl|m³vgva9eva9vwTgjnpej¶ a«s7nplmgjehnVq/auÝbnVvatgjncqncphgja9b
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷
0 0.05 0.1 0.15 0.2 0.25 0.30
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp eva1¤ø÷~H$npgvnVe$jba7atÂwlÂm³hgja9eha9vwr$gjnpej¶ as7nVlgjevnpqµauÝbnVvatgjn4c@qnmchgja9b
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
i a (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
i b (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
t (s)
i c (A)
wrzp eha¤úùH\xZdcvas7 eheva9lmgvwrlm³hgva9eva9vwgjnpej¶m as7nplmgvevnpqauÝbnpvatgjn@cqnmchgja9b
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷Vû
ÓsÔÄÓð M W Y®Y Ø [R E ò[ G wrzp ehaK¤ ºvntyTgjaq¾singjnpeyTw¬gj cºm³hgja9eha9vwrvba9atÏs7nplmgjehnVqqa9et¤Q abevwl¥s7wbqa=wvwiwrq¾cfegjngja1npla=wlgjagjnpej¶ a=s7nVlgjevnpq/js©a7ia«a9js7evwatwlgvabevau¨wrnp vatsugvwrnpl®¤a9eha=gva«ehnpgvnVevba9at|woa9gjngva«eva7q¯c9³qrns©²¤$a= bba9ecfl¥Kgja4qny a9e1qwiw¬gj1nVogva4eva9q¾c9³Kqns©²ºcfeva4wlºgjw«s9cvagja4vba9atºeva9oa7eva9l¥s7a¨pcq aÂbqr cl¥Úiwl dcqonVoTgjaÂm³vgva9eva9vw4¥cl¥ yTwrgjeva9vbatsugjw¬¨a7q³¤ ayw¾gvÂnVo/gvam³hgja9eha9vwrdcfl¥>wrlnty
1%npo/gjaeha9oa9eha9l¥s7avba9atµ¤
$abnpvwgvwnVlvwrzpldcfq$s7nV q¾ a vat·gjn§s9cqrs7 q¾cfgvagjaevngjnpe«vba7at g@gvacsugj dcfq®evngjnpevba9at>w vat>a9evaweva9sugjq¬³>vwl¥s7aw¬gwTcqevac³Âct¨pcfwrq¾cfqaoevnpi gvahgc½gjauªvbdcs7aqns©²¤/n4stcfqrs7 q¯c½gjagjabnpvwgvwrnpljwzpldcq®oevnpi gvaevngjnpejba9a9|cfl¥gja7l·s9cqrs7 q¾cfgvagjavba9atºo¯evnpiÕgjabnpvwgvwrnpl)vwrzpldcfqZy$np qrºaclº llatsua9j©cfeh³s7npib gc½gjwnpldcq# eja9l®¤be©csugjwrs7aVya9l)wibqra7ia9lmgvwrlzjba9a9cfl¥ºbnVvw¬gjwnVls7nplmgjehnVq¸wzpªeva9vnVq gvwrnplbnpjw¬gjwnplva9lvnVehcfeva vatµ¤
Relay
Firing Signals
Vsuab,ubc
Inverter block
Vs
DC sourcevoltage
Position
chopFiring Signals
Control blockuab,ubc
Position
wm
BLDC motor block
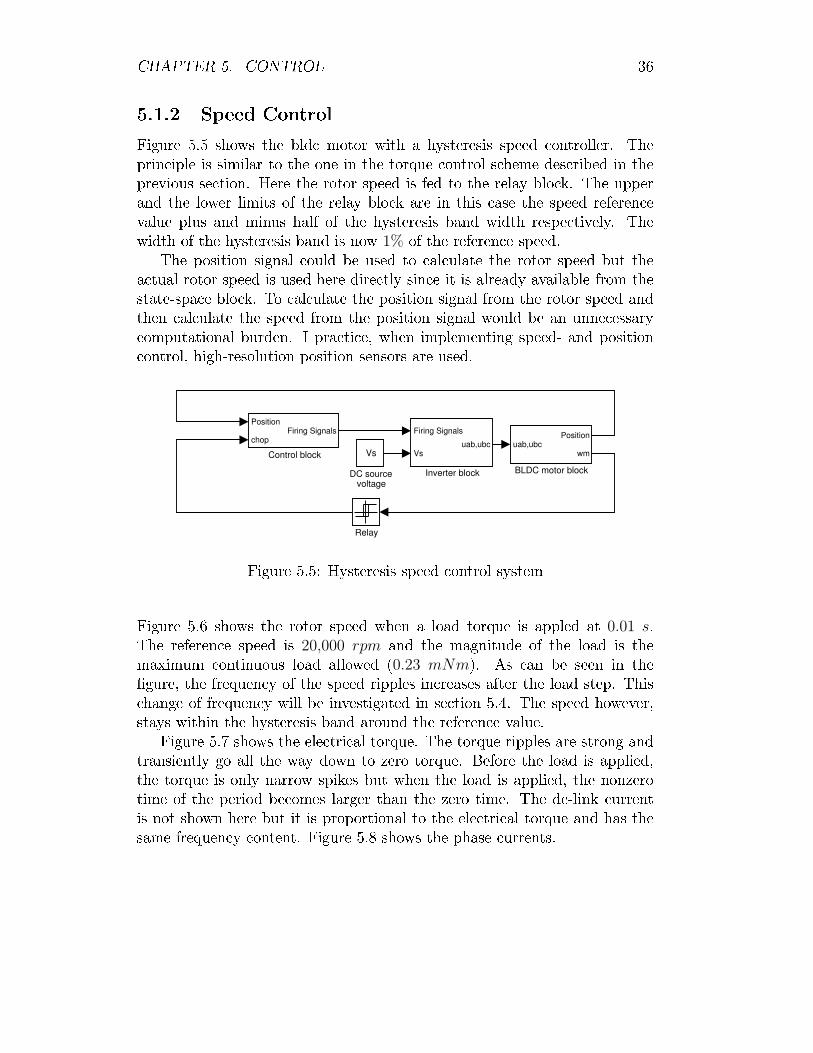
Fwzp eva1¤ø~H#³hgja9eha9vwrvba9atÂs7nVlgjevnpq®h³hgja9i wrzp eha|¤øû§vntyTkgvaÂevngjnpekjba7atya9lc¦qrncÚgvnVev¶m aÂwcbbqratÓc½g
0.01 s¤
a¦eva9o¯a9eva9l¥sua§vba9atÏw20,000 rpm
cfl¥gva¦icfzplwgv ¥a¦nVogja¦qncpÏwgjaicÝwi« i s7nplmgjwl np qrncpcfqrqnty$atX¡
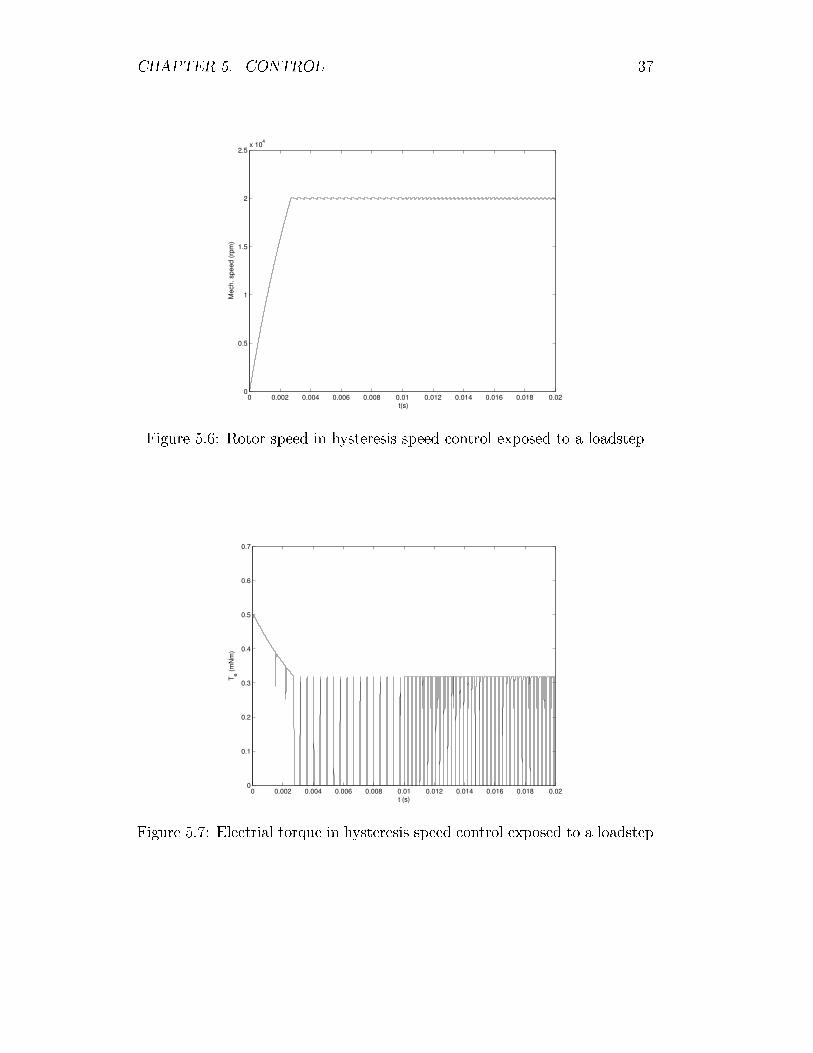
0.23 mNm£¤ßs9cl aºva9a9lwl gja
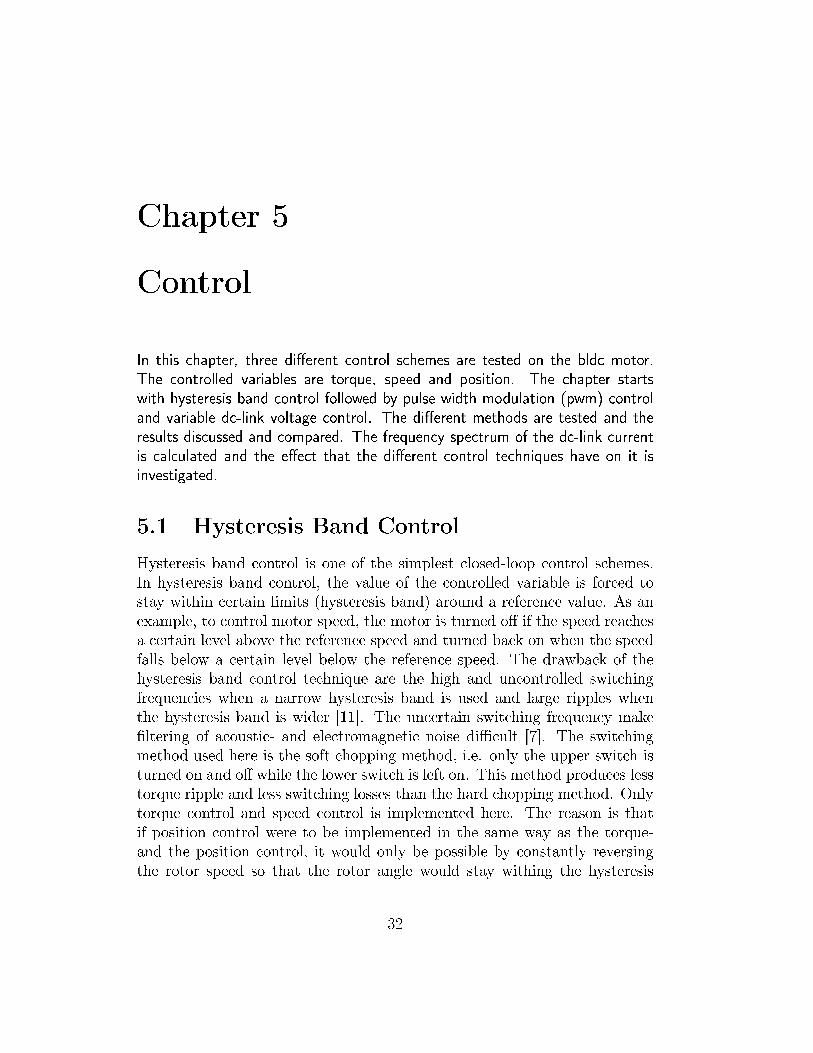
´¥zp evaVgjaoehat¶m a9l¥su³>nVo gja1vba9atehwrbbqra9Twl¥s7evacfva9co¾gja9egva1qncphgva9b®¤ wrs©dcflzpa«npo\oevat¶ a9l¥su³>yTwqqFa=wlm¨a9hgvwrzcfgvat|wl¦vatsgjwnVl§¤ ù¥¤ a«vba9a9|nty$a7¨Va9ethgc9³ yw¬gjwlÂgjam³hgja9eha9vwrdcfl¥cfevnp l¥gjaeha9oa9eha9l¥s7a¨pcfqr ap¤
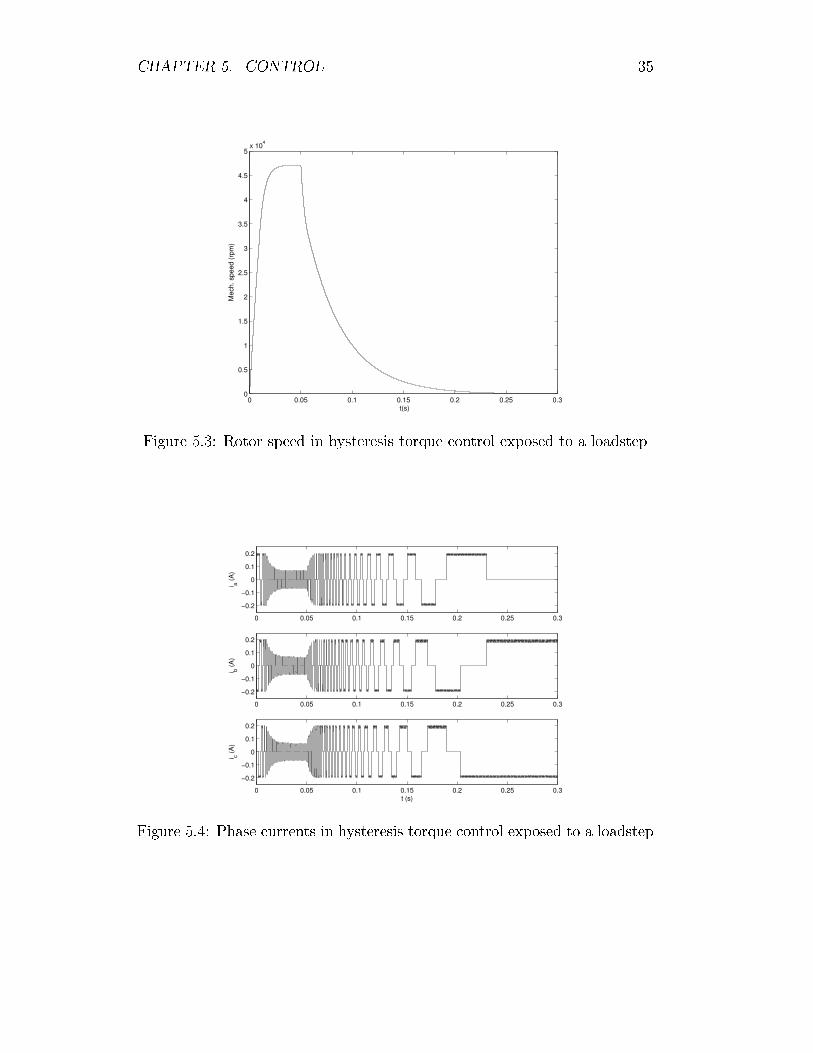
Fwzp eva¤yvntyTgjaa9qatsugvevwrstcqgjnpej¶m ap¤\$agjnpej¶ aevwbbqa9cehavgvevnplzcfl¥gjejclvwa9lmgvq³¦zpncqqZgja«yc9³§ntyl§gjn>¿9a9evngjnpej¶m aV¤k^a9o¯nVehakgvakqnmc§wr1cfbbqrwatµgja«gjnpej¶m a@wrnplq¬³¦ldcehevnty'jbw²Va7 gya9l§gja@qrncKw1cfbbqrwatµµgjaklnVl¿9a9ehngjwiaknVogjakba9evwnKats7nVika91q¾cfevzpa9egvdclKgva¿9a9ehnÂgvwrikaV¤4$asªqrwl²§s7 eheva9lmgwTlnpgTvntyTla7eva1 gTwgTwTbevnpbnVegjwnVldcfqgjngjaa9qatsugjehw¾stcfqgjnpej¶ a«cfl¥dcgva©cikaoehat¶m a9l¥su³>s7nplmgja7lmg¤# wzV eha1¤úÿkvny$gjabdcfva1s7 eveva9lgjt¤
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷,
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
Fwzp eva1¤úûH#ngjnpevba9at>wl³hgja9eva7jwvba7atsunVlmgvevnpq®auÝbnpvat>gvnc«qrncpvgva9b
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
wrzp eha¤y-H\\qatsugvevw¾cq¥gjnpej¶m aTwlm³hgja9eha9vwrvba9ats7nVlmgvevnpqauÝbnVvatgjn«cqnmchgja9b

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷Vÿ
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−0.5
0
0.5
i a (A)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−0.5
0
0.5
i b (A)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−0.4
−0.2
0
0.2
0.4
t (s)
i c (A)
wzV eha=¤øÿ~HxZdcvas7 eveha9lmgjwlÂm³hgja9eha9vwrvba9atÂs7nplmgjevnpq®auÝbnVvatgjnc«qnmchgja9b
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ÷¦ , *?-=:«./0 -=6ªl>byi s7nVlgjevnpqgjainpgvnVe w gj ehlatnplcfl¥n»§cfgc=wrzp>e©c½gjaV¤\ as©nVbbwlzoehat¶m a9l¥su³ºw1´Ýat) g1gjaqa9lzgj·npo gja g!³ºsu³s7qaa9ba9l¥«npl)gvas7nplmgjehnVqa9ehevnVe9¤ ao csuggjdc½ggjao¯evat¶m a7l¥su³Kw´ÝatKic²pa9´¥qgva9evwlznpo$cps7np hgjwrscfl¥a9qatsugjehnVi4czpla7gjwrslnpwvaacfvwra9e9¤Ü$ahyw¬g©s©wlz)oehat¶m a9l¥s³wsunViiknVlq¬³Óp½!kHz
cfl¥ vwl¥s7agjaingjnpev« vat a7eva>s9clnpba9e©c½gja>cfgk¶ wgvawzVvba9at¼Zgjaoehat¶m a9l¥su³ws©npja9lcf
kHz¤
ÓwðaÓ]Ô Õ [»ò$P Y [R E ò[ G as7 eveha9lmg$s7nplmgjehnVqhgjejcfgva9zp³4v zVzpa9hgjatwl×Cú÷GEyc ehwra#¤³a9js7evwatwrlvatsugvwrnpl¤röp¤röp¤\a9eva$gva©cikas7 eveha9lmgva9lvwrlzia7gjnkwr vatkjngvdcfgnplq¬³knplaTs7 eheva9lmgs7nplmgjehnVqqa9eFwFla7atatµ¤F wzV eha$¤'Tvny gva s7nplmgvevnpqh³hgja9i¤ abdcfva s7 eheva9lmgvcfevas7nplm¨a9egjat«gjn1cflkat¶m w¬¨Vcfqa9lmgsªqrwl²@s7 eveva9lg\¨Vcfq aV¤Z wrZ¨Vcfq aw#v gjejcpsgjatoehnVi?ceha9oa9eha9l¥s7a¨pcq a stcfqrs7 q¾cfgvat«oehnVigvagvnVev¶m aeha9oa9eha9l¥s7a$cfFwl«vatsugvwrnplk¤öV¤öV¤ as7 eheva9lmg/a9ehevnpe/w/oatgjncs7 eveha9lmg s7nVlgjevnpqqra9e cl¥gjanp gjb g npogvas7nplmgjehnVqqa9ew s7npibdcfevat4gvn@cgjevw¾cflzV q¾cfeyct¨VaV¤Z$anp gjb g npoµgvas7npibdcfe©c½gjnpewr c1wrzpnpeqny vwrzpldcfq¼yTwrs©Âva9eh¨a7cfTcks©npbbwlzvwrzpldcfq®onpe$gjawlm¨a7ehgja9e9¤
Idc
SignalGenerator
>=
RelationalOperator
Iref step
Firing Signals
Vsuab,ubc
Inverter block
1/2
Gain
Vs
DC sourcevoltage
Irefi Vs
Current controller
Position
chopFiring Signals
Control block
Vs
Constant
uab,ubcPosition
iabc
BLDC motor block
|u|
Abs1
|u|
Abs
wrzp eva1¤Ã~HxÕgjnpej¶m as7nVlgjevnpq®h³hgja9i
as7 eheva9lmgs7nVlgjevnpqqra9e$wrTckx#s7nVlgjevnpqqra9eTcfl¥>w¬gja7jwzplwdcfvat>nVlc@s7 eheva9lmgs7nplmgjehnVqqa9eonVe1c>s@ingjnpebeha9va9lmgjat§wrl¡CúûGEª¤k a4a9vwzVlºhgcfehgvm³¦va9qra9sugjwlz|ca9vwevatevwvagvwrika
treonpegjas7 eheva9lmgt¤\evnpi gjdc½gc1s7nVlvg©clg
αewr a7gja7eviwlat
cf
αe =ln 9
tre
¡¸¤ø£cfl¥gjas7nplmgjehnVqqa9ebdcejciaugja9evo¯nVqqny cf

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù
kp = αeL¡¸¤ú÷m£
ki = αeR.¡¸¤ ù£
aja7qratsgjatÂehwrvagvwriawr0.1 ms
yw¾sj³wa9qr
kp = 2.00 · 103
ki = 2.75 · 105
a4sunVlmgvevnpqrqa9e1cqvn va9dcs©²Hstcfqrs7 q¯c½gjwnplºgjn>beva7¨Va9lmgwlmgja9zpe©c½gjnpeyTwl¥ b¡¢va9aCúûGE¢£cfl¥dcf>cK¨VnVq¬gcfzVa©cfgv e©c½gjwnVlqnsj²Úgjdc½gqwrikwgvgja|a9i4cl¥at¨npqg©czpagjn ±6 V
vn>gjdc½ggva4s7npibdcehwjnpl§yTw¬gj§gjakgvevw¾clzp q¾ceyc9¨a@ywqrq#zpw¬¨a4s7npeveva9sugeva7j q¬gjt¤Â wrzp eva¤rö9vntyT1gvaa9qatsugjehw¾s9cqgvnVev¶m aV¤Â$a4eva9oa7eva9l¥s7a4gvnVev¶m acfl¥gjaqnmcºhgja7b)w1hgjwqq
0.2 mNm ggjakgjnpej¶ a¤¥ ¥sgj dc½gjwnVl)w1q¾cfevzpa9egvdclºwl
gjaTm³hgja7eva9vw$s7nplmgvevnpq~¤Z$aehacfjnplonpegvwrwgjdc½ggvaa9qatsugjehw¾s9cq¼³ldcfiwrs7$ceha¨a9e³o cfhgTsunVibdcfeva9ywgv>gjaywgjs©wlzoevat¶ a9l¥su³¤
0 0.05 0.1 0.15 0.2 0.25 0.30
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
t (s)
T e (mNm
)
wzV eha=¤rö9H#\qatsugjehw¾stcfqµgjnpej¶m awlÂbyi gvnVej¶ as7nplmgjevnpq®auÝbnVvatgjn4c@qnmchgja9b
wr«s9cl·ava9a9l)m³ºs7nVikbdcehwrlzgja4bdcfjas7 eveva7lmgj=wl)´¥zp eva9@¤rötcfl¥ ¤ ù¥¤ as©npbbwlz@lng©s©a9 zpn«i« ¥s©a9a9ba9ewrlgjabyiØjs©a9iap¤Z wrzpa9e ywgjs©wlz>oevat¶ a9l¥su³ywqrqZbevn ¥s7akqa9v¨pcehw¯c½gjwnVl§wrlKs7 eveha9lmg1cfl¥¦gva9eva9o¯nVeva@vinngja7egjnpej¶ aV¤Z$aevngjnpevba9at4wvnylwl´¥zV eha¤röpöcl¥wgonpqqrntyTgvaT©cfiaTs7 eh¨Vacf$gjavba9atÂwl>gjam³vgva9eva9vws7nVlgjevnpq®jsja9iaV¤
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù¥ö
0 0.05 0.1 0.15 0.2 0.25 0.30
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
wzV eva=¤röpö(H$npgvnVe$vba9atÂwlÂbyTißgjnpej¶m as7nVlmgvevnpq®auÝbnpvat>gvnc«qrncvgva9b
0 0.05 0.1 0.15 0.2 0.25 0.3−0.5
0
0.5
i a (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.5
0
0.5
i b (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.5
0
0.5
t (s)
i c (A)
wrzp eha=¤röt~HxZdcvas7 eheva9lmgvwrlÂbyi gvnVev¶m as7nplmgjehnVqµauÝbnVvatgjn4c@qnmchgja9b
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ùm
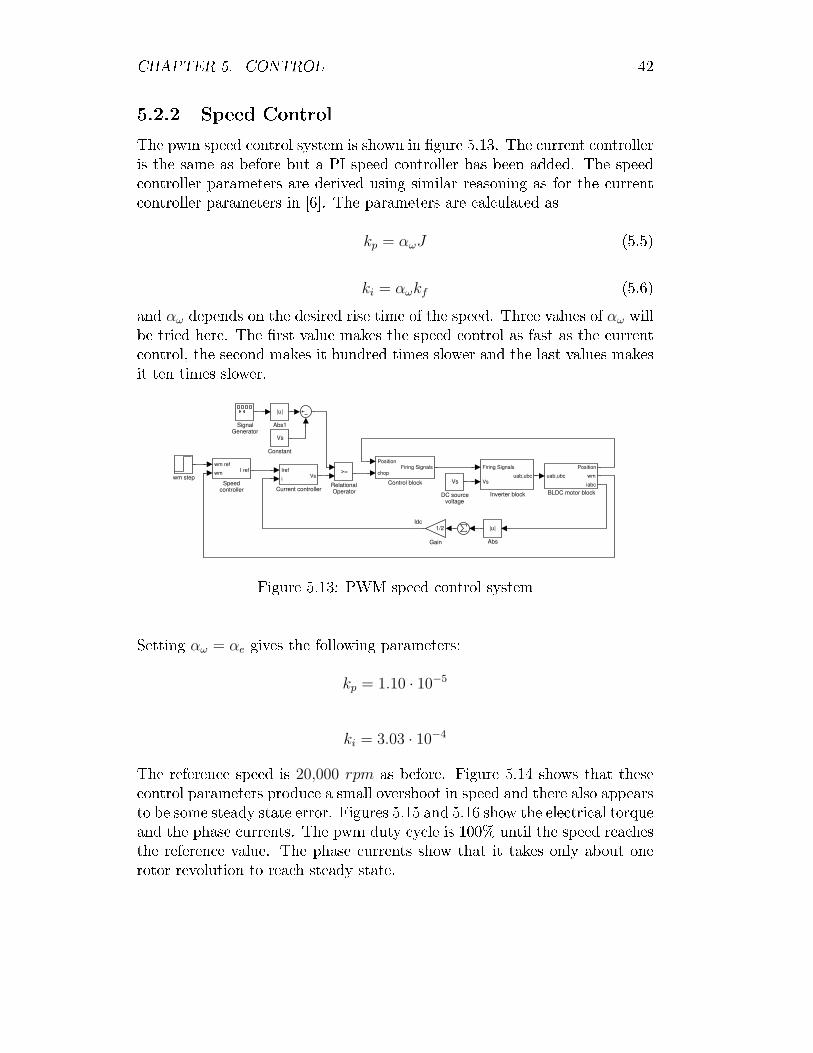
ÓwðaÓð M W Y®Y Ø [R E ò[ G a bVyTi vba9at«s7nplmgjevnpqh³hgja9iQwZvntyTl«wl«´¥zp eha¤rö9÷¤F a s7 eveha9lmg\s7nplmgjehnVqqa9ewgja«©cfiakcfa9onpeva« gcx\$vba9at¦s7nVlgjevnpqqra9e¥ca9a9lKcatµ¤$a«vba9ats7nplmgjehnVqqa9ebdcfe©cfia7gja9ehcehaka9evw¬¨at¦ vwlz>vwrikwrq¾cfeevacfvnVlwlzco¯nVegjaks7 eheva9lmgs7nplmgjehnVqqa9ebdcejcika7gja9ehwrlºCúûGEª¤\$abdcfe©cfia7gva9evTcfevastcfq¾su q¯c½gjatcf
kp = αωJ¡¸¤ø£
ki = αωkf¡¸¤úûm£
cfl¥αω
a7ba9l¥nplkgjaa9jweva9kevwja gjwianpogvavba9at¼¤\ eva7a$¨Vcfq a9npoαω
yTwqqagvevwatÂa9evap¤ a´¥evhg¨pcq aic²pa9gjajba9a9sunVlmgvevnpq cfo cfhgcfgva1s7 eheva9lmgs7nplmgjehnVq¸gjavats7npl¥ic²pa9 wg l¥eva9gvwrika9 jqnty$a7ecl¥gvaq¯cfhg ¨pcq a9 ic²pa9w¬ggva9l>gjwia9vqrnty a9et¤
Idc
wm step
wm refwm I ref
Speedcontroller
SignalGenerator
>=
RelationalOperator
Firing Signals
Vsuab,ubc
Inverter block
1/2
Gain
Vs
DC sourcevoltage
Irefi Vs
Current controller
Position
chopFiring Signals
Control block
Vs
Constant
uab,ubcPosition
wmiabc
BLDC motor block
|u|
Abs1
|u|
Abs
wrzp eva1¤öt÷~Hx Ívba9atsunVlmgvevnpq®h³hgja7i
a7ghgjwlzαω = αe
zVw¬¨a7gvaonpqrqntyTwlzbdcejciaugja9ev&Hkp = 1.10 · 10−5
ki = 3.03 · 10−4
aeha9oa9eha9l¥s7avba9at§wr20,000 rpm
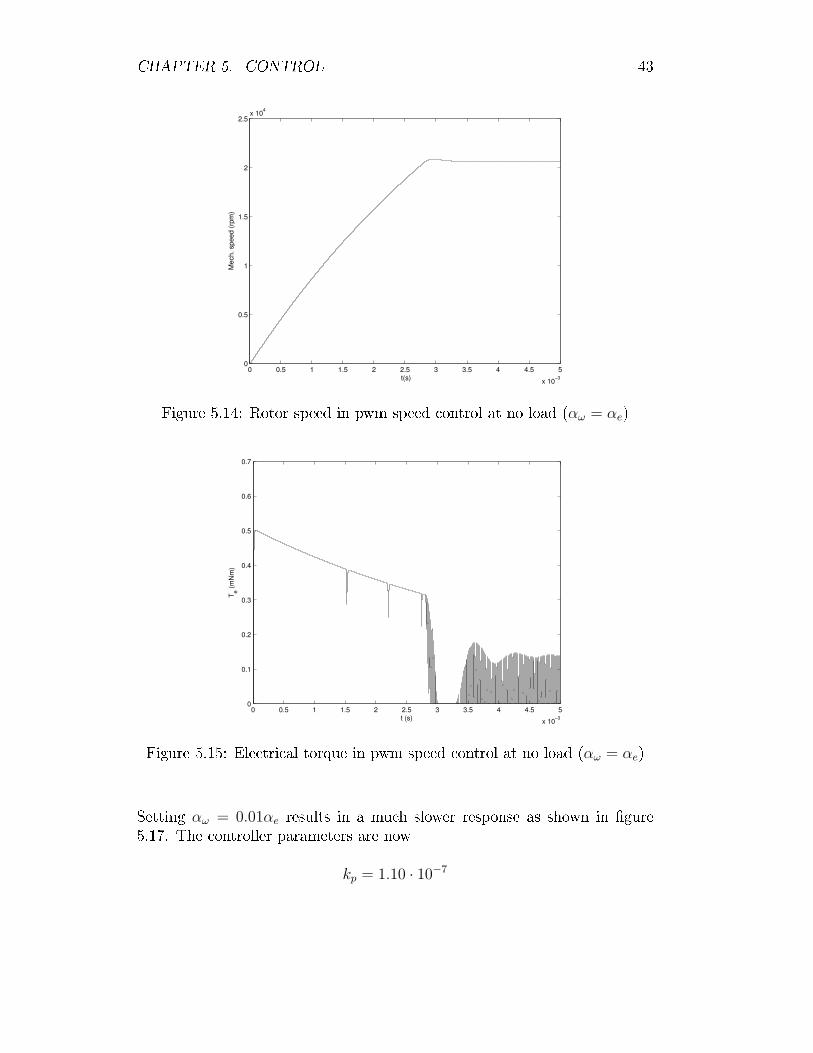
ca9onpevaV¤ wzV eva¤rö7ùÂvntyTgjdc½ggja7jas7nplmgjehnVqbdcfe©cfia7gva9evFbehn ¥suacji4cqqn½¨Va9evvnmnpgFwl«vba9at@cl¥gja9eha$cfqrvncbbacehgjna#jnpia#hgvacp³hg©cfgvaa7evevnpet¤/ wzV eha9F¤öcl¥1¤rö9ûvnty·gja#a9qatsugvevwrstcqVgjnpej¶ acfl¥gjaTb¥cvas7 eveha9lmgv¤Z aTbyiØ gH³4su³s7qraTwö9p? lmgjwqdgvaTvba9at4evacs©a9gjakeva9oa7eva9l¥s7ak¨Vcfq aV¤$abdcfvas7 eveva9lgjjnty gvdc½g1w¬ggcf²Va9nplq³ºcfnV g1nplaevngjnpeeha7¨npq gjwnVl>gjnkevacs©Âhgjac³hgc½gjaV¤
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù÷
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wzV eha=¤rö7ùH$npgvnVe$jba7atÂwlbVyTi vba9ats7nplmgvevnpq/cfglnqncpº¡αω = αe
£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
wzV eha=¤röt~H#\qatsugjehw¾stcfqµgjnpej¶m awlÂbyi vba9atsunVlmgvevnpq/c½glnqncpº¡αω = αe
£
a7ghgjwlzαω = 0.01αe
eva9v q¬gj@wrlc|i= ¥s©vqrnty a9e@eha9jbnplvacf@jntylwrl ´¥zp eva¤rö¤# as7nplmgjehnVqqa9ebdcejciaugja9evTcfevalnty
kp = 1.10 · 10−7
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ùVù
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5
i b (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
t (s)
i c (A)
wrzp eva1¤ötû~HxZdcvas7 eveha9lmgvwlÂbyi vba9atÂs7nVlgjevnpq/c½glnkqrnc)¡αω = αe
£
ki = 3.03 · 10−6
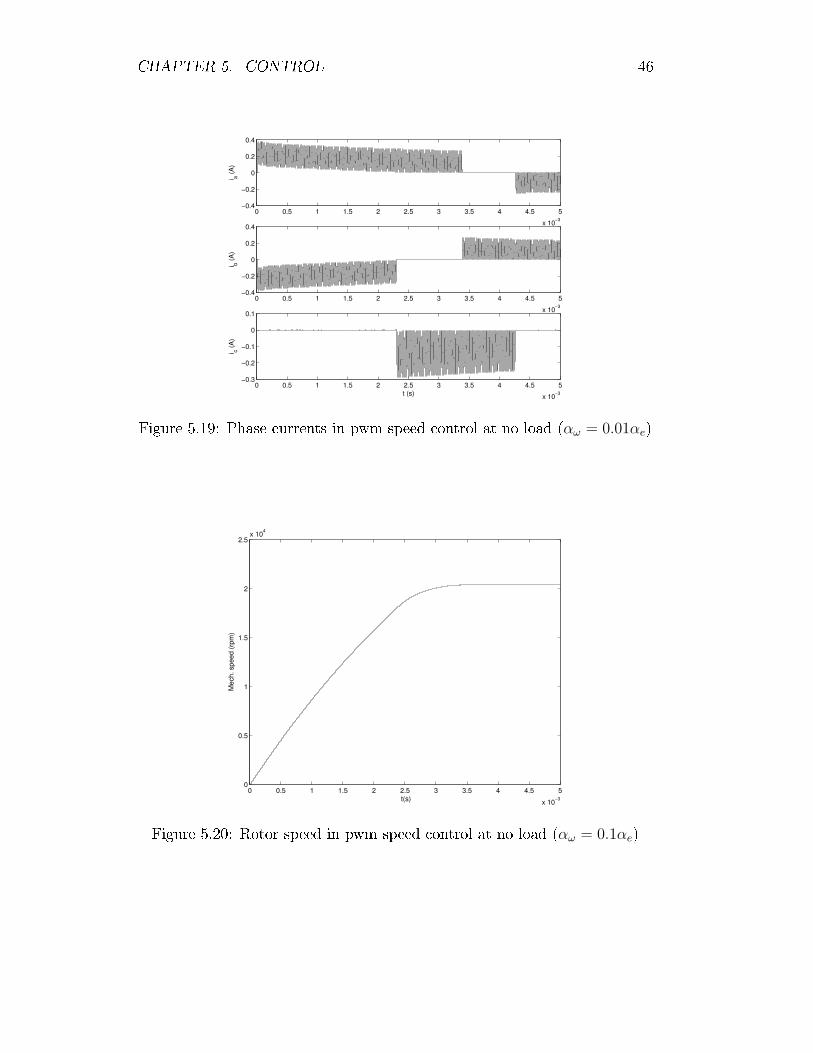
a9evaw@ln¦n¨Va9evvnng@a9eva g«gvavgvacp³·hg©cfgvaa9evevnpe«eha9icfwrlt¤¦=´¥zp eva9¤rö9ÿcl¥¤röjny1gjabyTi nVba9ejcfgvwrnpla9zpwrlTevwzpmgc½ggjahgcfehgTwlnVeva9egjnvqnynyl>gjaehwrvanpo/gjavba9atµ¤
`jwlzαω = αe
w$gjnmno cfvgTcfl¥αω = 0.01αe
wvqny1vnαω = 0.1αe
wr vata9eha1cTcksunVibehnVikwrvaV¤# aeva7j q¬gjwlz4s7nplmgjehnVqµbdcejcika7gja9ehTceva
kp = 1.10 · 10−6
ki = 3.03 · 10−5
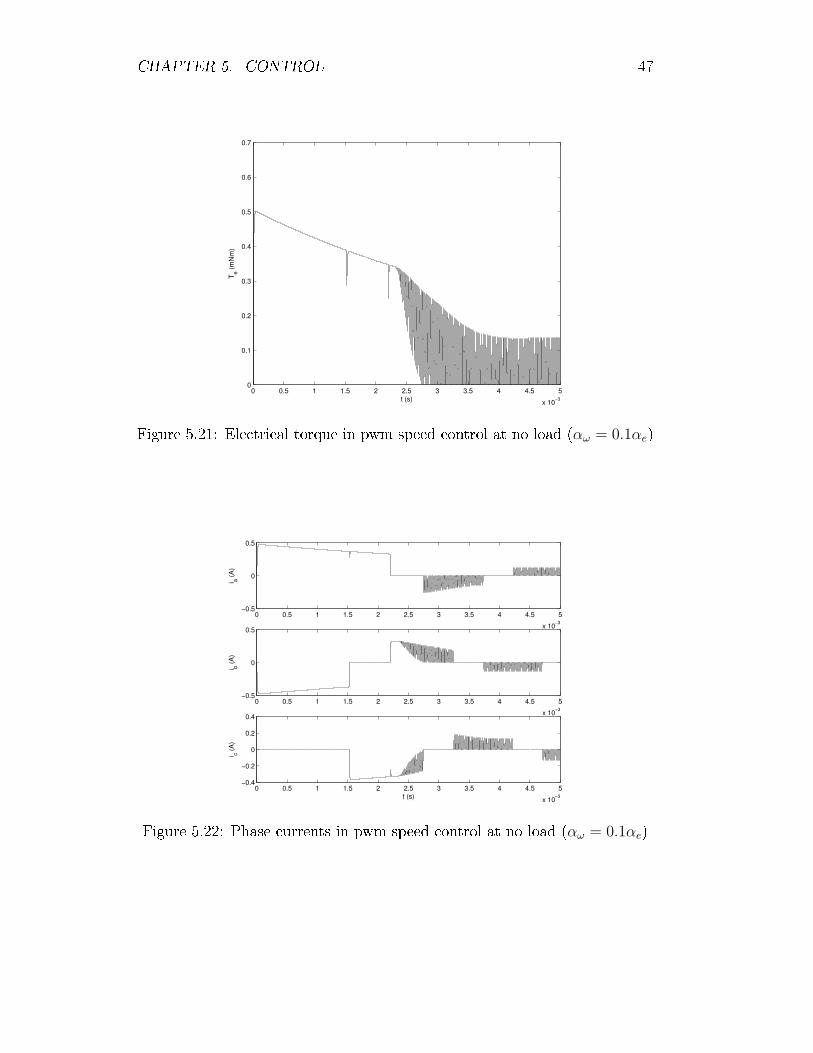
wrzp ehak¤ vntyTTgjdc½ggva9va=bdcejciaugja9evzpw¨Va«augvgja9eTeva9v q¬gjt¤$a9eva@cbbacehgjnalnn¨a9ehvnng= g1gja9ehaw@c>ji4cqqhgjac³Kvg©cfgva4a9evevnpet¤Â`vwlz¦cÂqnVlzpa9evwi« q¾cfgvwrnplgjwiaeva7¨Vacfqrgvdcfggja9eva1wckvicfqrqn¨a9ehvnngcfl¥Âgva1hgjac³Âhgc½gjaa9ehevnVeats7npia91ji4cqqa9egj¥clºgva4a9evehnVeva9a9l)wl)´¥zp eva¤ ¤> wzV eha9@¤ öcfl¥¤ p@vnty gvaa9qra9sugjevwrsgjnVev¶m a1cfl¥gjabdcfva1s7 eheva9lgjeva9vbatsugjw¬¨a7q³¤
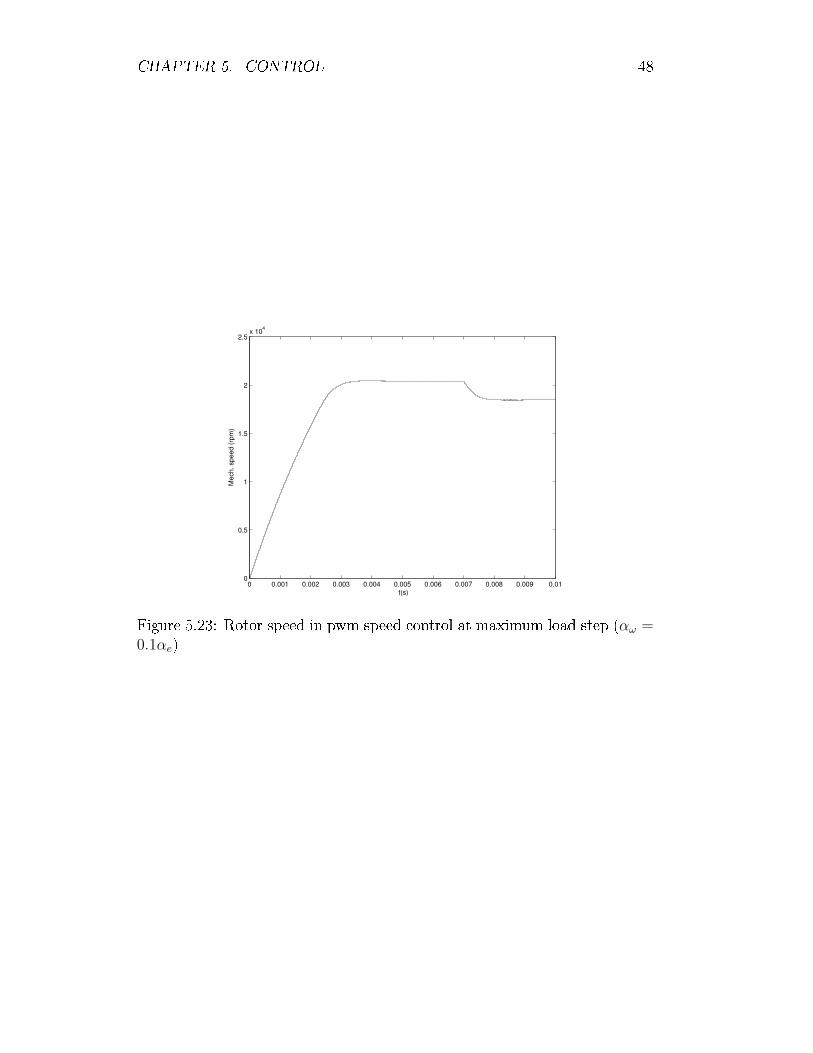
Fwzp eva$¤ ÷TjntyFntygjah³hgja9iQehacpsgj gvncq¯cfevzpaqnmc=hgja9b=npo0.23 mNmyw¾sj=wr/gvaicÝwi« iQs7nplmgvwrl np qrncgjdc½gZstcfl=a cfbbqwratgjngjaingjnpet¤ a
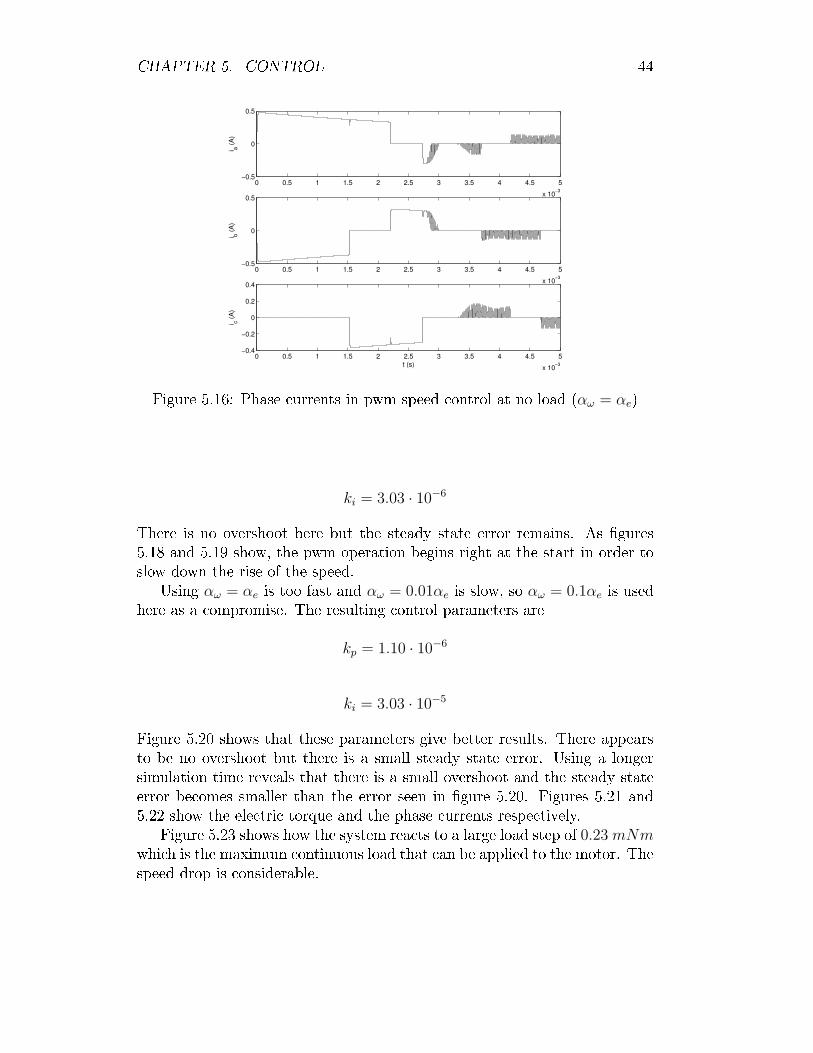
vba9atÂevnpbws7npljwra9ejcqaV¤

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ùm
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
2000
4000
6000
8000
10000
12000
14000
t(s)
Mec
h. s
peed
(rpm
)
wzV eva=¤rö-H$npgvnVe$vba7atÂwlbVyTi vba9ats7nplmgvevnpq/cfglnqncpº¡αω = 0.01αe
£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
t (s)
T e (mNm
)
wrzp eha¤rö9ÿH#Zqratsgjevw¾cfq¼gvnVev¶m awrlbyTißvba9ats7nplmgjehnVq®c½g$ln@qnmcK¡αω = 0.01αe
£
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ùû
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4i b (A
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.3
−0.2
−0.1
0
0.1
t (s)
i c (A)
wrzp eva1¤röHxZdcvas7 eheva9lmgvwrlÂbyi vba9atÂs7nVlgjevnpq/c½glnkqrnc)¡αω = 0.01αe
£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wzV eha=¤ H#ngjnpe$jba9a9ÂwlbVyTi vba9atÂs7nplmgjehnVqcfglnqnmc)¡αω = 0.1αe
£
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù-
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
wrzp eha1¤ ö(H\qatsugvevwrstcfq¼gjnpej¶m awl>byi vba9at>s7nVlgjevnpqc½gln@qnmcK¡αω = 0.1αe
£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5
i b (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
t (s)
i c (A)
wrzp eva1¤øV¥HxZdcvas7 eveha9lmgjwlÂbyTi vba9atÂs7nVlmgvevnpq/c½glnqncpº¡αω = 0.1αe
£
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ùÿ
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp eha¤øp÷~HZngjnpe#vba9atwrlbyi vba9at4sunVlmgvevnpqc½gic½Ýwri= i'qnmcvgva9b¡αω =
0.1αe£
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù ÓwðaÓßö [N E N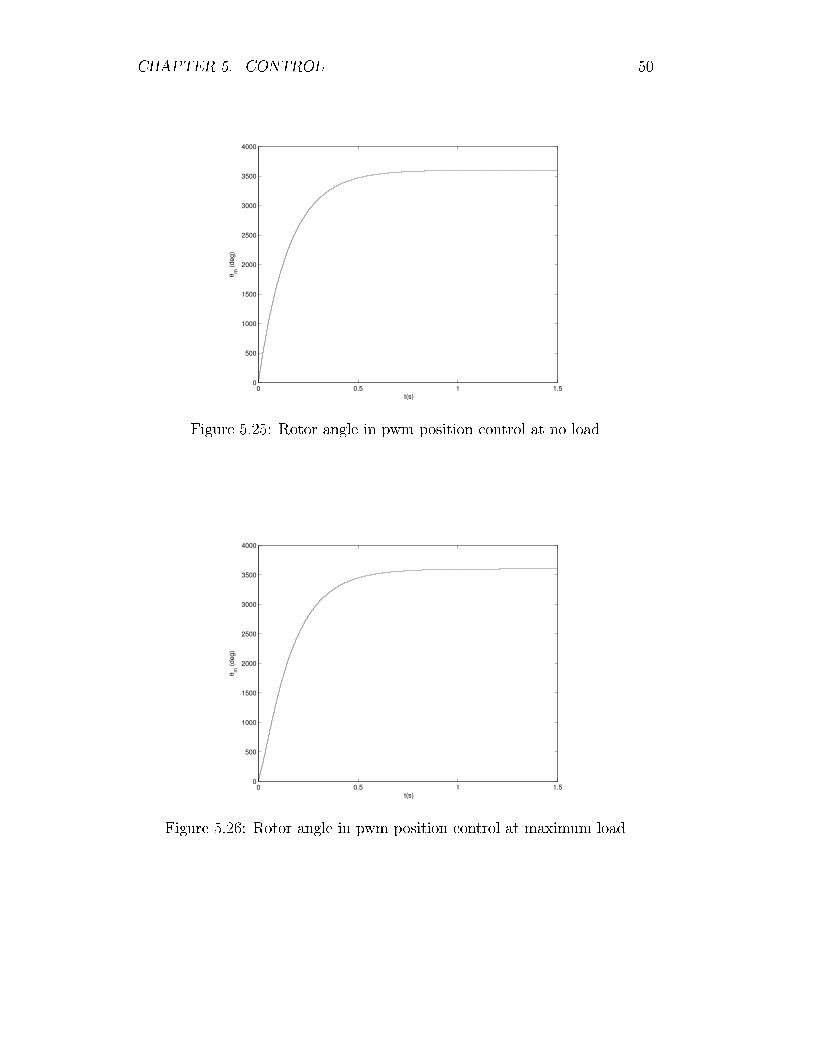
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ p
0 0.5 1 1.50
500
1000
1500
2000
2500
3000
3500
4000
t(s)
θ m (d
eg)
wrzp eva1¤ p~H#ngjnpeTcflzpqrawrlÂbyi bnpvw¬gjwnVls7nplmgvevnpq/c½glnkqrncp
0 0.5 1 1.50
500
1000
1500
2000
2500
3000
3500
4000
t(s)
θ m (d
eg)
wrzp eva1¤øpû~H$ngjnpeTcflzVqawrlÂbyi bnpjw¬gjwnpls7nplmgjehnVqcfgicÝwi« i qrnc
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ öv« <10 87<Â675+(¹*¥&)89: -=6./<1;15 *?-=:«./0 -=6`vwlz§c>¨pcehw¯cfqas¨VnVq¬gcfzVavnp ejs7a4gjn|s7nplmgjehnVq#gjacbbqwat)¨npq¬gcfzVastcfl·dct¨VavnVikac¨pclmg©czpa9$n¨Va9egvagHy n«ia7gvn beha7¨wnV vq¬³wrjs7 vvatµ¤Z qwrlacfe bnty$a7ehgcfzVaTwr s©acfba9egjdcfl>c1b qrvatbny a9evg©czpa@¡ byi£\ ggjaqnVvva9 stclawrzpc½g$qny ¨npq¬gcfzVacl¥wzVÂs7 eheva9lgÊC¬ö$Eª¤\ny a7¨Va9etc½g$wrzp>vba9atµ¥c=qwlacfe$bnty$a7ehgcfzVastcfla>gjaÂa9hgcfqgva9evldc½gjw¬¨ayTa7lÓywgjs©wlzºqnVvva9cfl¥s7npii« g©cfgjwnpla9q¾c9³>npoZc«b qjat>bnty$a9e$vg©czpaats7npiavwzplw´ds9clmgCö9÷dE~¤ ÓöjÓ]Ô Õ [»ò$P Y [R E ò[ G agjnpej¶m as7nplmgjevnpqqra7e ja9a9evawFÛ! hg qrw²VagvanVla jatonpegjabyTißs7nplmgjehnVqauÝs7a7bg$gjdc½g$gjanp gjb g ¨nVq¬g©czpaw$qwriw¬gja9gjnkfHû=@¤ ax#s7nplvg©clgjTcfevagva©cika¦cfl¥Úgjaeva9o¯a9eva9l¥suagjnpej¶m aw4gja©cfiaV¤ wzV eha¦¤ §vny4gjaÂynpqrah³hgja9i¤
Iref step
Firing Signals
Vsuab,ubc
Inverter block
Irefi Vs
Current controller
Position Firing Signals
Control block uab,ubcPosition
idc
BLDC motor block
Fwzp eva1¤ø-HZcehwrqrasªqwrl²¨npq¬gcfzVagjnpej¶ as7nVlgjevnpq®h³hgva9i wrzp eha¤øpÿ¦vntyT@gva>a7qratsugvevwrstcfq gjnpej¶m aV¤ "nty gjanplq¬³ wreheva9zp q¾cehwgva9wlgvagjnpej¶ ans9su e=cfggja4s7npii= gc½gjwnVlºwlhgcflmgjt¤4 aevwbbqa9«cfeva4¶m w¬gjaq¾cehzVa g¨a9e³ºldcehevnty2cfl¥·lngcf«oehat¶m a9lmgkc=gvaevwbbqa9«wrl·gvam³hgja7eva9vw«dcl¥cfl¥byiÍsunVlmgvevnpq\js©a9ika9¤@ wrzp eva91¤ø(Âcl¥º¤ø÷p>vnty'gvakevngjnpevba9atºcl§gvabdcfva1s7 eveva9lgjeva9vbatsugvw¨Va9q¬³m¤
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ V
0 0.05 0.1 0.15 0.2 0.25 0.30
0.05
0.1
0.15
0.2
0.25
t (s)
T e (mNm
)
wzV eva=¤ ÿ~H\qatsugjehwrstcqµgjnpej¶ awrl>¨pcfevw¾cqa1sªqwl²¨nVq¬g©czpagvnVej¶ as7nplmgjehnVq
0 0.05 0.1 0.15 0.2 0.25 0.30
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
Fwzp eva1¤ø(~H$npgvnVe$vba9atÂwl>¨Vcfevw¾cfqa1sªqwrl²¨npq¬gcfzVagjnpej¶m as7nVlgjevnpq
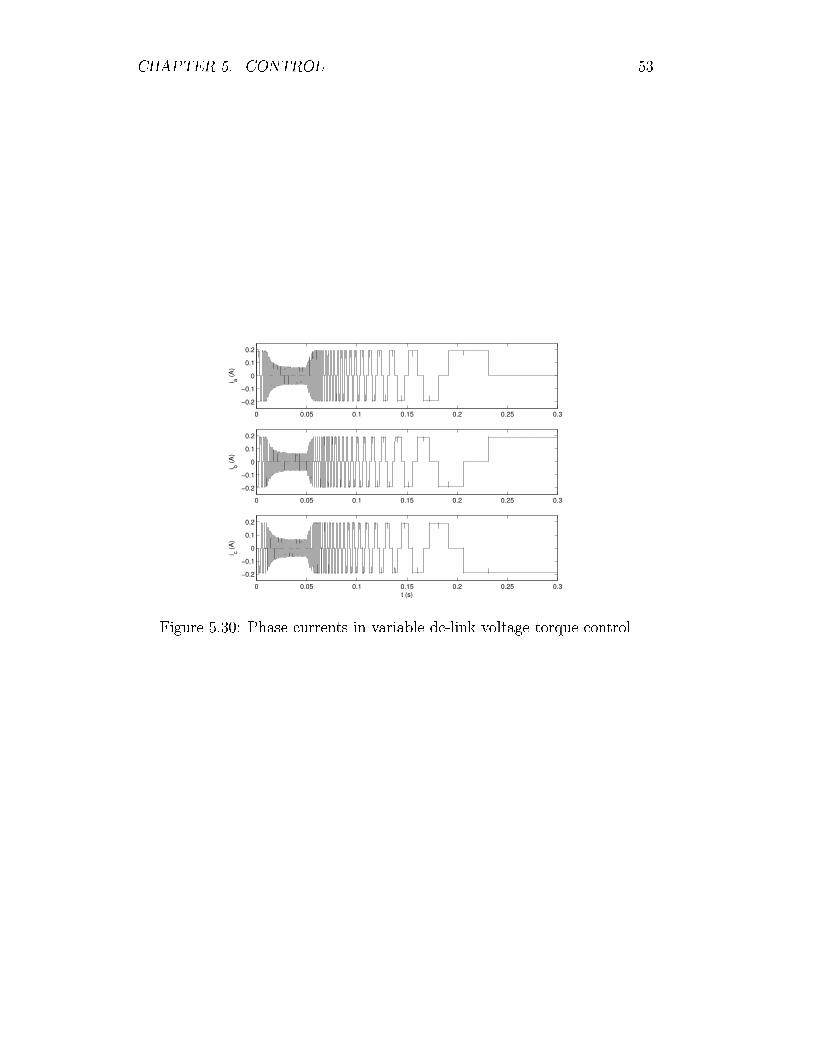
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ p÷
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
i a (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
i b (A)
0 0.05 0.1 0.15 0.2 0.25 0.3−0.2
−0.1
0
0.1
0.2
t (s)
i c (A)
wzV eha=¤ø÷pH#x\dcfjas7 eheva9lmgvwrl>¨pcehw¾cqa1s©Hqwl²¨VnVq¬gcfzpagvnVev¶m as7nplmgjehnVq
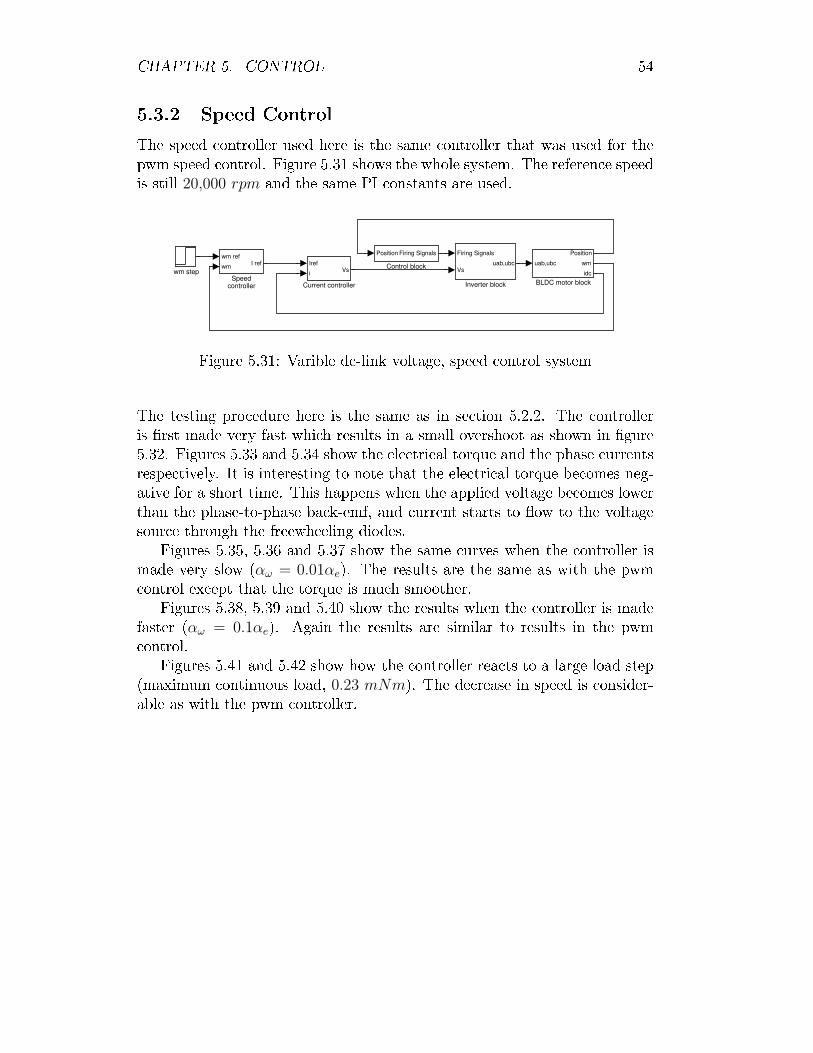
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ù
ÓöjÓð M W Y®Y Ø [R E ò[ G a@vba9at¦s7nVlmgvevnpqqra9e vat¦a9eva«wrgja«©cia@sunVlmgvevnpqrqa9egjdc½gyc vat¦o¯nVegvabyiQvba9at«s7nplmgjehnVq¸¤F wzV eva$¤ø÷övnty gja#ynVqah³hgja9i¤ aeva9oa7eva9l¥s7avba9atwhgvwrqq
20,000 rpmcl¥gja©cfia1x\s7nplhgcflmgjTcfeva vatµ¤
wm step
wm refwm I ref
Speedcontroller
Firing Signals
Vsuab,ubc
Inverter block
Irefi Vs
Current controller
Position Firing Signals
Control block uab,ubcPosition
wmidc
BLDC motor block
wzV eva1¤ú÷ö(HZcehwrqasªqwrl²¨npq¬gcfzVaVvba9atÂs7nplmgjehnVqµv³vgva9i agva9hgjwlz|bevnsuat evaa7evawr1gja©ciacf«wl vatsugvwrnplÚ¤ ¤ ¤| as7nplmgjehnVqqa9ewT´¥evhgica1¨a7eh³Âo cfvgyw¾sj|eva9v q¬gjwl§cvicqq/n¨a9evvnmnpgcfjntyl|wl´¥zp eva¤ø÷V¤Z wzp eva9¤ø÷p÷1cfl¥¤ø÷ùvnygvaa9qatsugjehw¾stcfq¥gvnVev¶m aTcl¥@gjabdcfvaTs7 eheva9lmgveva7jbatsgjw¬¨a9q¬³¤#~gwwlmgja7eva9hgjwlz@gjn@lnpgvagvdcfg$gvaa9qatsugjehw¾stcfq¼gjnpej¶m aats7npia9la9zfc½gjw¬¨aonpecvnpehg\gjwiaV¤Z wdcfbba9l\ya9lgvaTcbbqrwatk¨VnVq¬gcfzVaats7npia9qnty$a7egjdcflgva=bdcfvau~gjnfªbdcva=dcpsj²ªa9io!cl¥|s7 eveva9lghgcfehgvTgvnF¤¥nyQgjn4gva1¨npqg©czpavnV ejs7agjehnV zV>gjao¯eva9auya9a9qwrlz4wna9t¤
Fwzp eva9¤ø÷Vµ¤ø÷pûcl§¤ú÷,kjnty gja«©cfia«s7 eh¨Va9Tya9l|gja«s7nplmgjehnVqqa9ewica@¨a9e³¦vqrntyý¡
αω = 0.01αe£u¤@$akeva9v q¬gj1ceha@gjak©cfia4cyTw¬gj§gvakbyTi
s7nplmgjehnVqµauÝs7a9bggvdc½ggjagvnVev¶m awi= ¥s©Âvinmnpgva9et¤Fwzp eva9¤ú÷Vÿ¤ø÷(4cl¥¤úùVvnty gjaeha9v q¬gj$ya9lÂgja1s7nplmgjehnVqqa9ewica
o cfhgja9e|¡αω = 0.1αe
£¤ÜzcwlÓgvaeva9v q¬gjcfevajwiwq¾cegjnºeva9v q¬gjwlÓgvabyTis7nplmgjehnVq¸¤
Fwzp eva9T¤úùöcfl¥Â¤ ùm=vnyntygjas7nVlgjevnpqqra9e$ehacpsugv gjnc«q¾cehzVaqnmc>hgva9b¡ i4c½Ýwi« i s7nVlgjwl np qnmcµ
0.23 mNm£u¤\$aatsuevacfvawlÂvba9at>wrs7nplvw¾a9e!
cfqra1cf$yw¬gj>gjabVyTi s7nVlmgvevnpqrqa9e9¤

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ V
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp eha1¤ø÷V~H#$ngjnpe$vba9at>wl¨pcehw¯cfqasªqwrl²¨VnVq¬gcfzVavba9at>s7nVlmgvevnpq®s7nplmgvevnVq®c½glnkqrncpº¡
αω = αe£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t (s)
T e (mNm
)
wrzp eha1¤ø÷p÷~HZqra9sugjevwrstcfq¼gjnpej¶m awrl¨Vcfevw¾cfqrasªqwrl²4¨VnVq¬gcfzpavba9at>s7nplmgvevnVq®c½glnqnmcº¡
αω = αe£
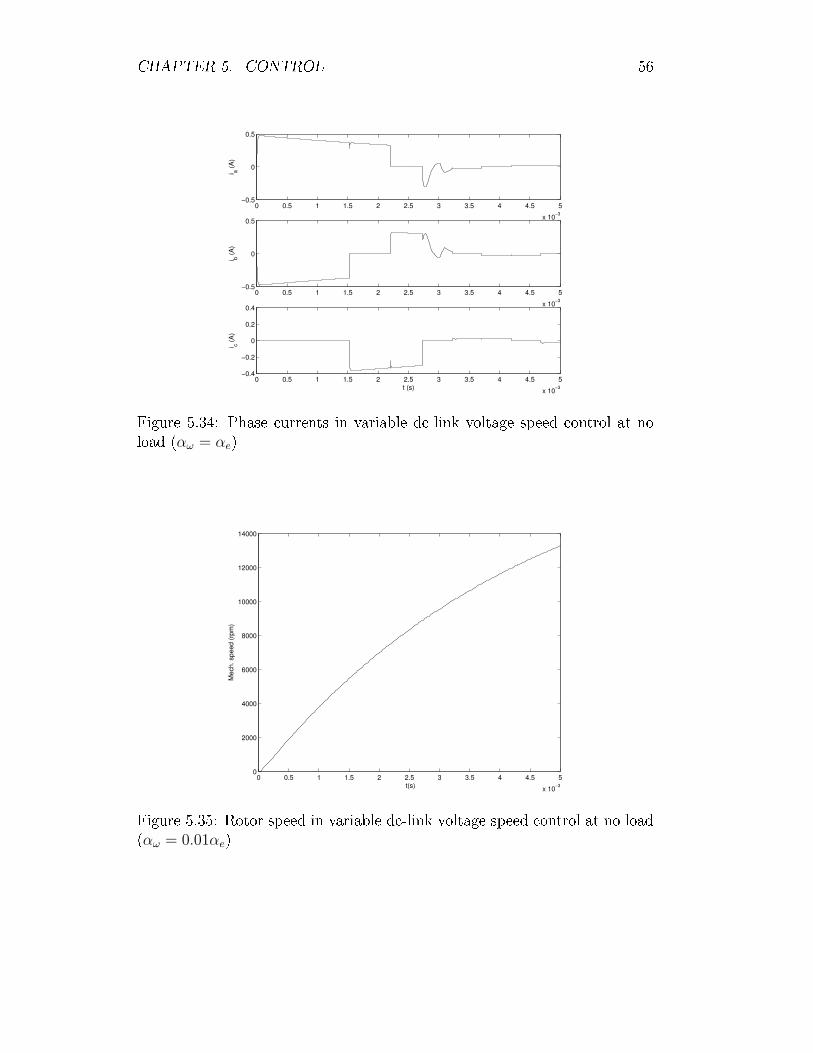
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ pû
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5i b (A
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
t (s)
i c (A)
wrzp eha¤ø÷ù¼H1x\dcfvasu eveva7lmgjwlK¨Vcfevw¾cfqra4sªqrwl²|¨npq¬gcfzVavba9atºs7nVlgjevnpqc½g1lnqnmcº¡
αω = αe£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
2000
4000
6000
8000
10000
12000
14000
t(s)
Mec
h. s
peed
(rpm
)
wrzp eha¤ø÷V~H\$npgvnVevba7atwl¨pcfevw¾cqrasªqrwl²¨VnVq¬gcfzpavba9ats7nVlgjevnpqµc½g ln«qnmc¡αω = 0.01αe
£
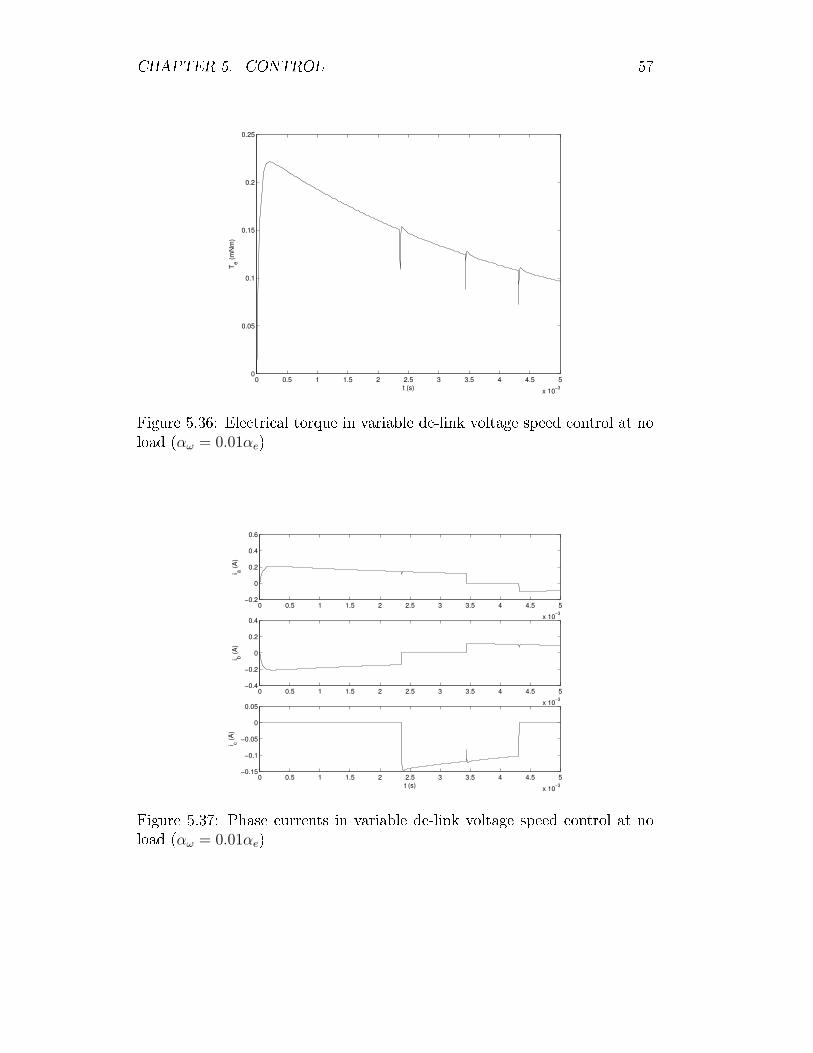
KMLONQPSRTVU,Y Ka_a\^RU¹_¸
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.05
0.1
0.15
0.2
0.25
t (s)
T e (mNm
)
wrzp eha1¤ø÷pû~HZqra9sugjevwrstcfq¼gjnpej¶m awrl¨Vcfevw¾cfqrasªqwrl²4¨VnVq¬gcfzpavba9at>s7nplmgvevnVq®c½glnqnmcº¡
αω = 0.01αe£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.2
0
0.2
0.4
0.6
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
i b (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.15
−0.1
−0.05
0
0.05
t (s)
i c (A)
wrzp eha¤ø÷¥H1x\dcfvasu eveva7lmgjwlK¨Vcfevw¾cfqra4sªqrwl²|¨npq¬gcfzVavba9atºs7nVlgjevnpqc½g1lnqnmcº¡
αω = 0.01αe£
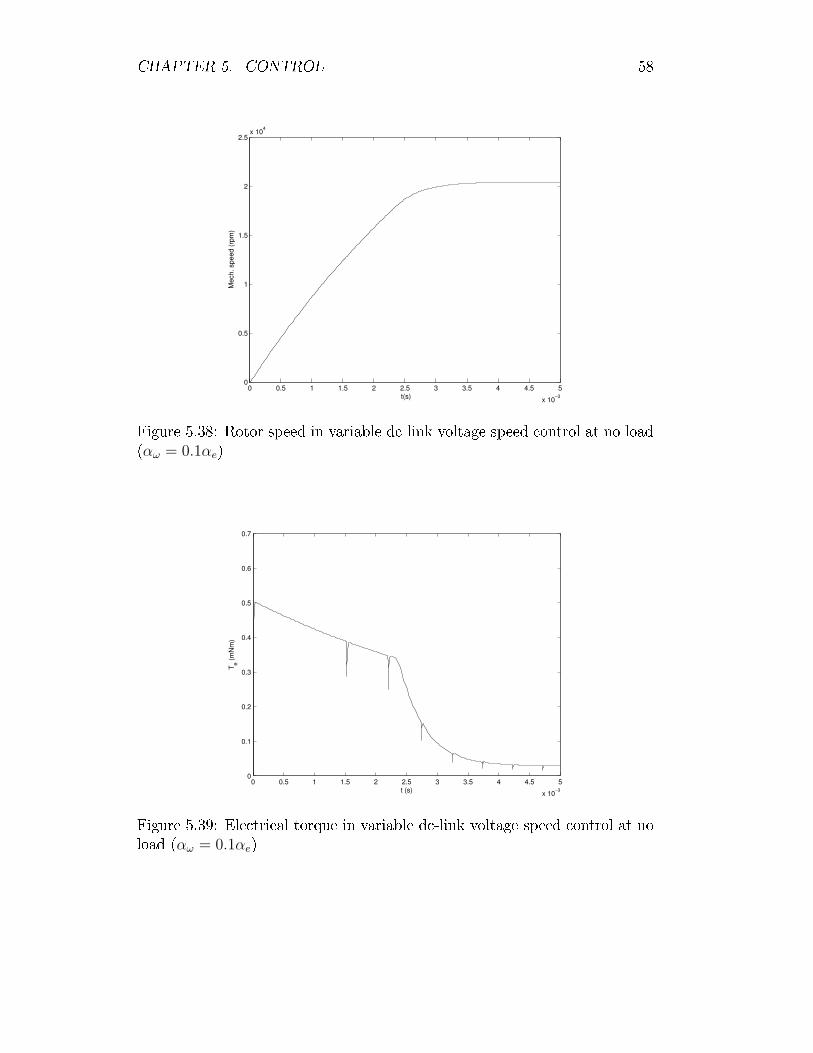
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ pÿ
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp eha¤ø÷pÿH\$npgvnVevba7atwl¨pcfevw¾cqrasªqrwl²¨VnVq¬gcfzpavba9ats7nVlgjevnpqµc½g ln«qnmc¡αω = 0.1αe
£
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
wrzp eha1¤ø÷(~HZqra9sugjevwrstcfq¼gjnpej¶m awrl¨Vcfevw¾cfqrasªqwrl²4¨VnVq¬gcfzpavba9at>s7nplmgvevnVq®c½glnqnmcº¡
αω = 0.1αe£
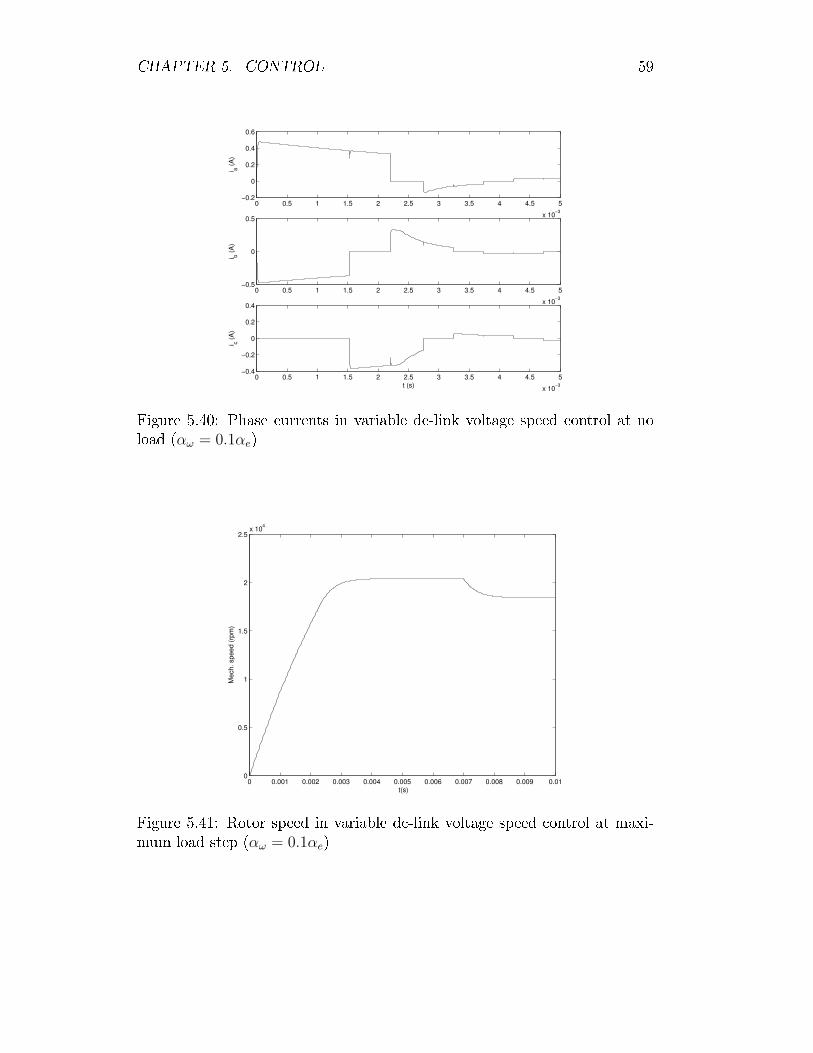
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ (
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.2
0
0.2
0.4
0.6
i a (A)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.5
0
0.5i b (A
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10−3
−0.4
−0.2
0
0.2
0.4
t (s)
i c (A)
wrzp eha¤úùVH1x\dcfvasu eveva7lmgjwlK¨Vcfevw¾cfqra4sªqrwl²|¨npq¬gcfzVavba9atºs7nVlgjevnpqc½g1lnqnmcº¡
αω = 0.1αe£
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0.5
1
1.5
2
2.5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp eha¤ ù¥ö(H$ngjnVevba9at¦wl¦¨pcfevw¾cqaksªqrwl²¨VnVq¬gcfzpa@jba9a9§s7nVlgjevnpq\cfgicÝw i« i qncp>vgva9b)¡
αω = 0.1αe£
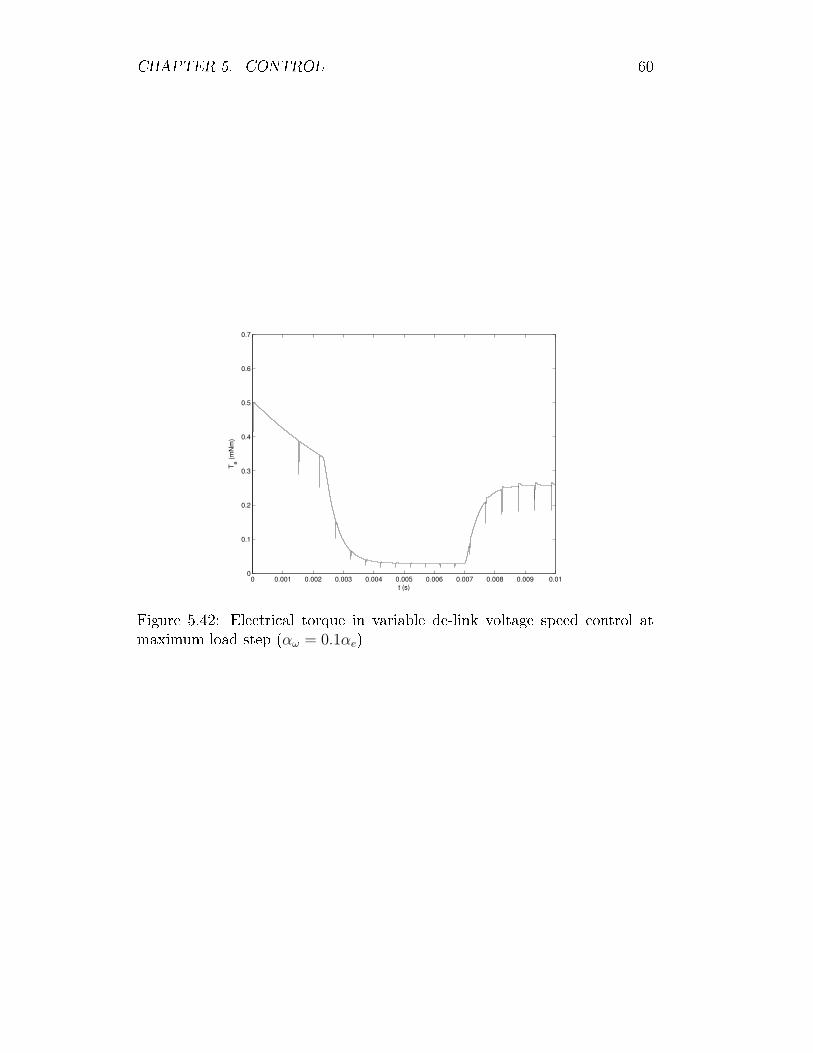
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ûV
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
wrzp eha|¤ ùm¥H|\qatsugvevwrstcqgvnVev¶m awl¨pcfevw¾cqrasªqwl² ¨nVq¬g©czpavba9atÓs7nVlgjevnpqTc½gicÝwi« i qnmcÂhgva9b)¡
αω = 0.1αe£
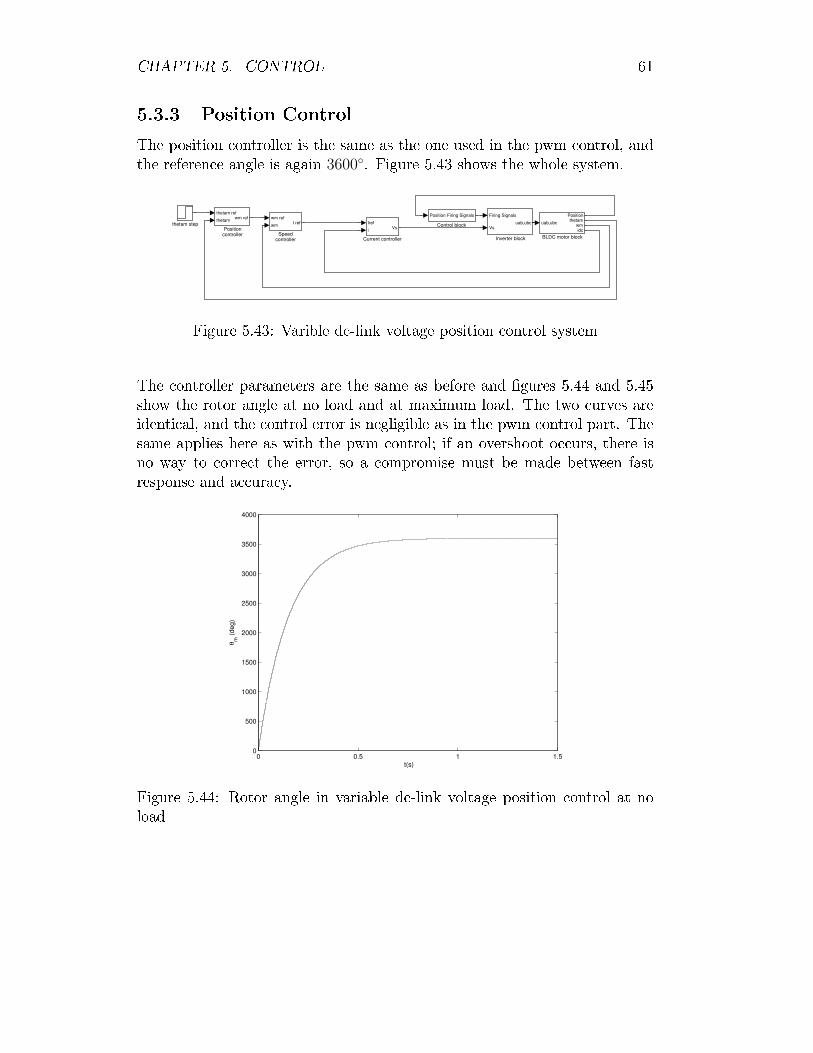
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ûö
ÓöjÓßö [N E N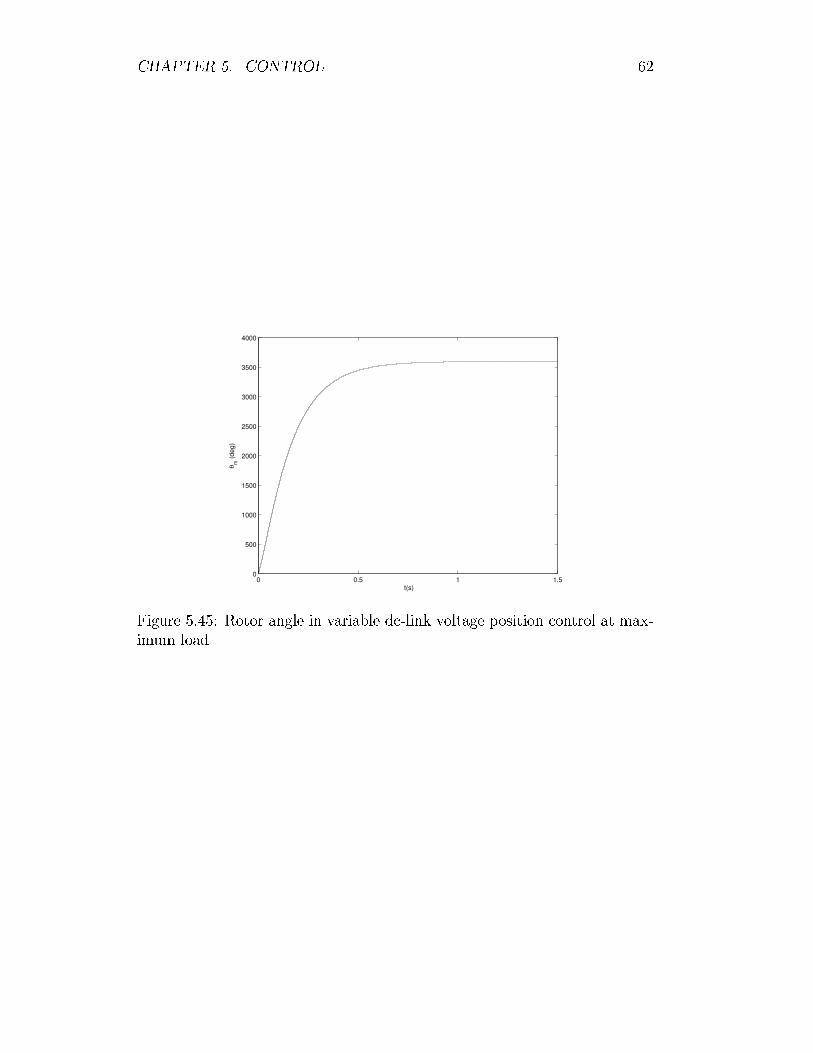
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ û
0 0.5 1 1.50
500
1000
1500
2000
2500
3000
3500
4000
t(s)
θ m (d
eg)
wrzp eha¤úù~H\ngjnpecflzVqawl¨Vcfevw¾cfqrasªqrwl²¨npqg©czpabnpvw¬gjwnVlÂs7nplmgvevnpq®cfg ic½Ýmwi« i qrnc
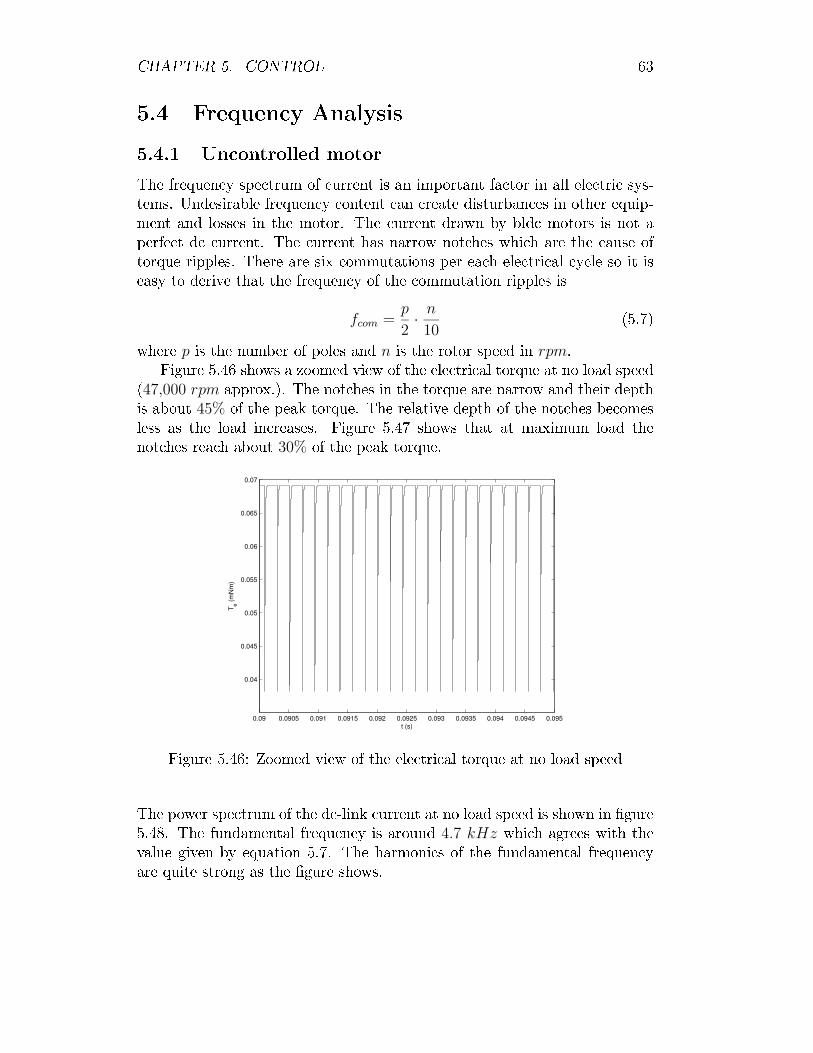
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ûV÷ Ð 0 5 5:B ! :<=6 8 ÓÒnÓ]Ô " R$#[R E ò[ GGHY Ø OX[ E [Äò ao¯evat¶m a7l¥su³jbatsgjev i npoFs7 eheva9lmgwTclÂwibnpehgcflmgo¢cpsugvnVewlcqq®a9qatsugjehw¾sh³gja7it¤#`l¥a7jwe©cfqaoeva9¶m a9l¥su³s7nVlgja9lmg$stcfl>s7evatcfgvawvgv evdcfl¥s7a9 wlngja9eat¶m wbia9lg«cl¥Kqrnpvva9=wlºgva4ingjnpet¤$a4s7 eveva7lmg=e©c7yTlºm³§q¾skinpgvnVeh1w1lng@cba9evo¯atsug1sksu eveva7lmg¤«$as7 eheva9lgdcfldcfevevnty'lnpgjs©a9yTw¾s©)cfeva«gjakstc vaknpogjnpej¶ a=ehwrbbqra9t¤ a9eva«ceha=vw Ý|s7npii= gc½gjwnVlTba9eTacpsj|a9qatsugjehw¾s9cq su³s7qa=vnwgwacfh³gjna9evw¬¨agj¥cfggvaoeva9¶m a9l¥su³npo/gjas7npii= gc½gjwnVlÂehwrbbqa9w
fcom =p
2· n
10
¡¸¤%V£ya9eva
pw$gjal i«a9enpo bnpqra9cfl¥
nwgvaevngjnpevba9at>wrl
rpm¤
Fwzp eva¤úùVûvntyTc¿9nnpiat@¨wauyÏnVogjaa9qatsugvevwrstcqgjnpej¶m aTc½glnqnmcvba9at¡47,000 rpm
cbbehnݼ¤ £u¤Z aTlng©s©a9wl4gjagvnVev¶m acehal¥cehevnty cl¥gva9wrea9bgvwcnp g
45%npo®gjabatc²4gvnVev¶m aV¤\$aeva9q¾c½gjw¬¨aa9bgj>npogvalng©s©a7atsunVia7
qa9vÂcfgja|qnmcÏwl¥s7evacfva9t¤ wzp evaK¤úù,ºvntyTgjdc½gÂc½gicÝwi« i qnmcgvalng©s©a7ehacpsj|cfnV g
30%npo/gjabacf²gjnpej¶m aV¤
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.095
0.04
0.045
0.05
0.055
0.06
0.065
0.07
t (s)
T e (mNm
)
wzV eha=¤úùVûHV)nmnVikat>¨wrauy nVo/gvaa9qatsugjehw¾stcfqµgjnpej¶m a1c½glnkqrncÂvba9at
a bny a9eZvbatsugvev i?npo¥gjasªqrwl²=s7 eveha9lmgc½g\lnqrnc@vba9at«w\vntyTl@wl«´¥zp eva¤úùVÿ¤ a@o¯ l¥¥cika9lmgcfqFoevat¶ a9l¥su³|wcfevnp l¥
4.7 kHzywrs©ºcfzVeha9a9yTw¬gj|gja
¨pcq azpw¬¨a9l)m³Kat¶m dc½gjwnVl¤y¤Â adcfevinplwrs7=nVogvao l¥cia7lmgcfqoevat¶ a9l¥su³cfeva¶m w¬gjahgvevnVlzcfgva´¥zV evajnyt¤
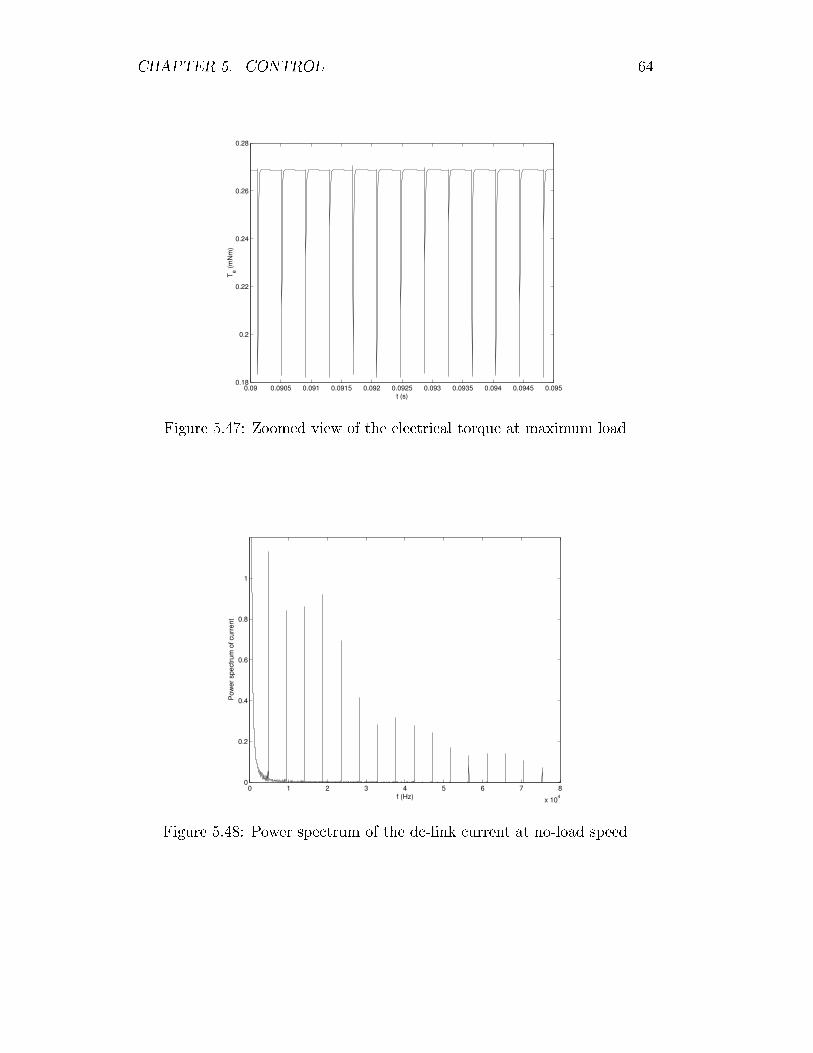
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ûpù
0.09 0.0905 0.091 0.0915 0.092 0.0925 0.093 0.0935 0.094 0.0945 0.0950.18
0.2
0.22
0.24
0.26
0.28
t (s)
T e (mNm
)
wrzp eva1¤ ù--Hc)nnpiat¨wauynpo/gjaa7qratsugvevwrstcfq®gjnpej¶ a1c½gicÝwri= i qrncp
0 1 2 3 4 5 6 7 8x 104
0
0.2
0.4
0.6
0.8
1
f (Hz)
Powe
r spe
ctru
m o
f cur
rent
wrzp eva1¤ ùÿ~Hx/ny a9e$vbatsugjev i nVo/gvasªqwrl²s7 eheva9lmgTcfglnªqnmcÂvba9a9
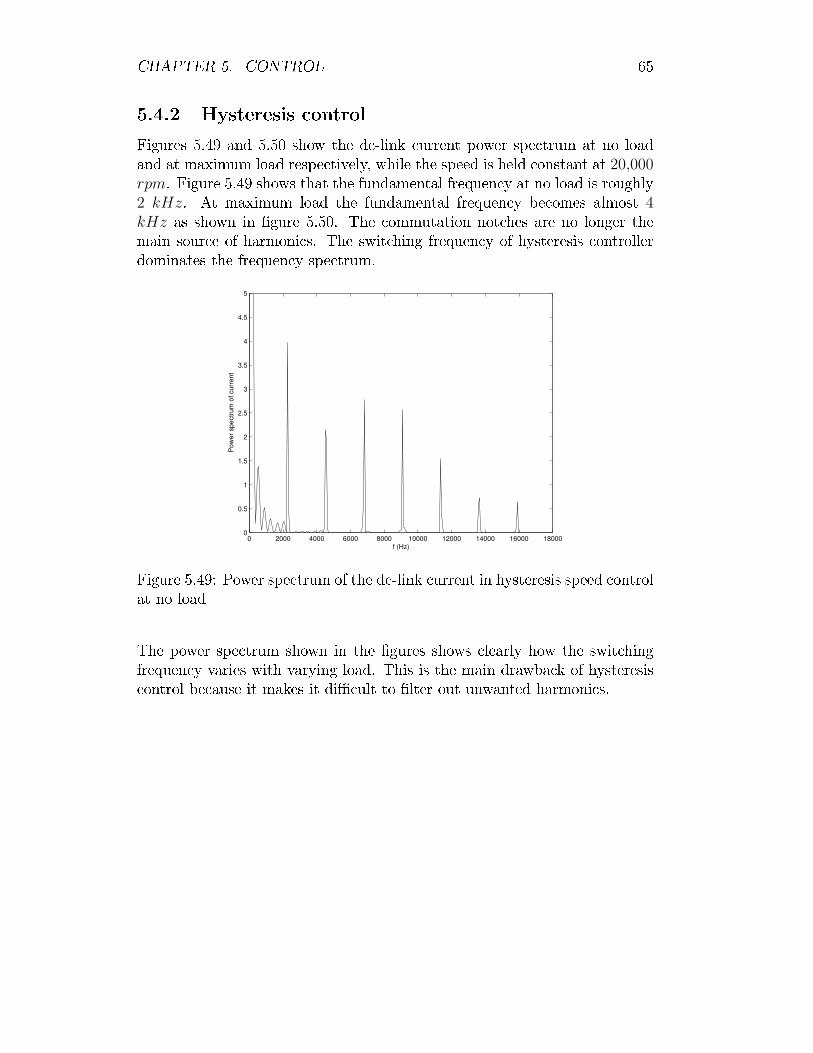
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ û
ÓÒnÓð %'& EY ò Y N()#[R E ò[ G wrzp eha9@¤úùcl·¤øpÂvnty gvasªqwl²Ks7 eveha9lmg1bny a9evbatsugjeh i+c½g1lnqnmccfl¥c½g#icÝwi« i?qncp@eva7jbatsgjw¬¨a9q¬³yTwqa$gva$vba9at@w#a9q¾ksunVlhgcflmgc½g
20,000rpm
¤F wzp eva¤ ùvntyTFgjdc½gFgja o¯ l¥¥cfia9lmg©cqo¯evat¶m a7l¥su³@cfgZlnqrnc@wZevnp zVq¬³2 kHz
¤$gic½Ýwri= i qnmcgva|o l¥¥cfia9lmg©cqo¯evat¶m a7l¥su³ats7npia9>cqinpvg4
kHzcf=vntyTl·wl)´zV eha¤øp¤Â$as7nViki« gc½gjwnpl·lng©sja9@cehalnqnplzVa9egja
icfwlKvnp ejs7aknpodcfevinplwrs7t¤@ akyTw¬g©sjwrlz>oevat¶ a9l¥su³¦npo³hgja9eva7jws7nplmgjehnVqqa9enpiwldcfgva9gvaoehat¶m a9l¥su³vbatsugjeh i¤
0 2000 4000 6000 8000 10000 12000 14000 16000 180000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
f (Hz)
Powe
r spe
ctru
m o
f cur
rent
wrzp eha$¤úù~H x nty a9e vbatsugvev inVogjasªqwl²1su eveva7lmgFwl=m³hgja9eha9vwr vba9at=s7nplmgjehnVqc½glnqncp
abnty$a7e=vbatsugjeh i¹vntyl·wl)gja´¥zV eha9=vny«s7qacfevq¬³ºny gvaywgjs©wlzoehat¶m a9l¥su³¨pcehwra9yw¬gj¨pce³wlz4qrncp¼¤$ wrTwgva1icfwrle©c7ydcpsj²>npoZ³hgja9eva7jws7nplmgjehnVqµatstcf vawgic²pa9w¬gTwæJs7 qggjn@´¥q¬gja9enp g lVycflmgjat>¥ceviknVlwrs7t¤
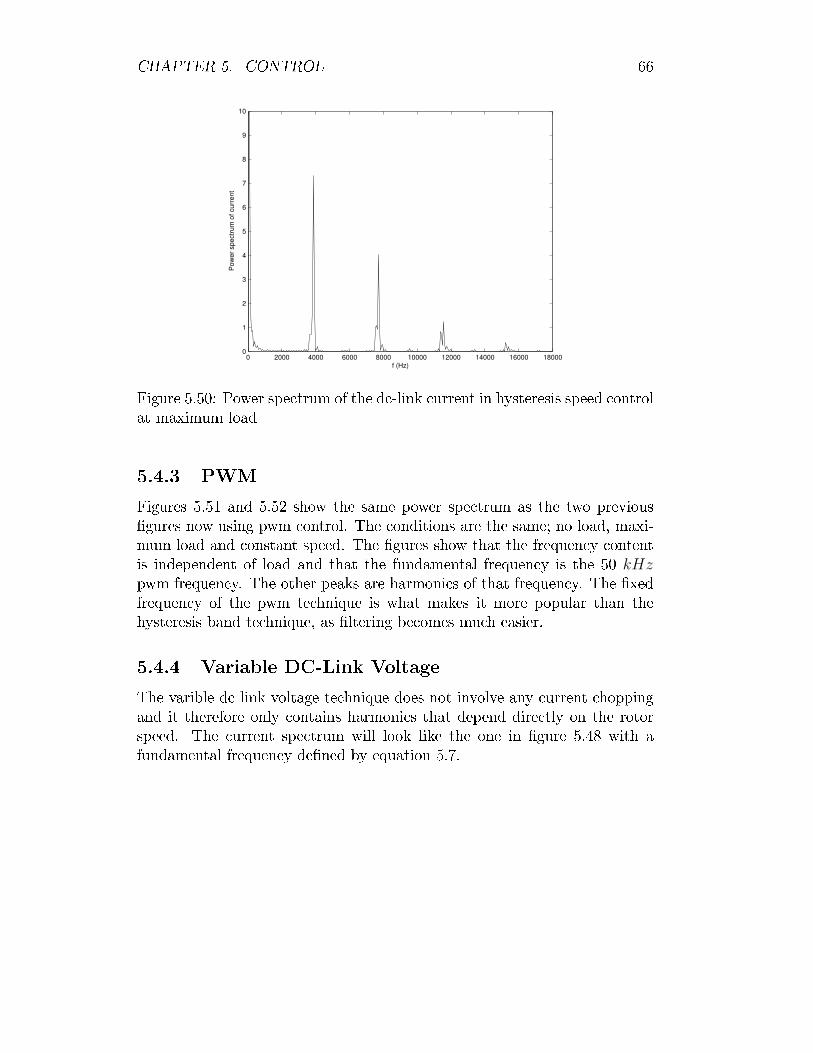
KMLONQPSRTVU,Y Ka_a\^RU¹_¸ ûVû
0 2000 4000 6000 8000 10000 12000 14000 16000 180000
1
2
3
4
5
6
7
8
9
10
f (Hz)
Powe
r spe
ctru
m o
f cur
rent
wrzp eha$¤ ~H x nty a9e vbatsugvev inVogjasªqwl²1su eveva7lmgFwl=m³hgja9eha9vwr vba9at=s7nplmgjehnVqc½gicÝwi« i qnmc
ÓÒnÓßö +* B wrzp eha9¤ ö>cfl¥¤øVvntyßgjacfiabnty a9e«vbatsugjeh iDcf=gjagªy$n|beha7¨wnV ´¥zp eva9 lny jwlz@byi s7nVlgjevnpq¸¤# asunVl¥w¬gjwnplcehagja©cfia,ln@qnmcµicÝw i« i qnmccfl¥s7nplhgcflmgjba7atµ¤$a´¥zp eva9vnty gjdc½ggjaoehat¶m a9l¥su³>s7nplmgja9lgw@wl¥a9ba9l¥a7lmgknpoqncpcl¥)gjdc½g«gjao l¥¥cia7lmgcfqoevat¶ a9l¥su³)wr=gja>p
kHzbyiØoehat¶m a9l¥su³¤\ angja9ebac²mcehadcfeviknVlwrs7 npoµgjdc½g oehat¶m a9l¥s³m¤\ aT´Ýatoehat¶m a9l¥su³ÚnpogvabyTi gvats©lwr¶m awydc½gic²pa9w¬ginpevabnpb q¾cfe4gjdcflÓgvam³hgva9eva9vwdcl¥gja9s©lwr¶m aVdc$´¥q¬gja9ehwrlz4a9s7nVia7i« ¥sjÂacfjwa9e9¤ ÓÒnÓÂÒ - C òN C#IGHY/.1032 N!RTS - [ G~EC54#Y a¨pcehwrqasªqwrl²¨VnVq¬gcfzpagjats©lw¾¶m a1nma9lnpgwlm¨npq¨Va1cflm³>s7 eheva9lmgs©nVbbwlzcfl¥Kw¬ggja9eha9onpevanplq¬³Ks7nplmgcfwldcehinVlw¾s7gjdc½g=a7ba7l¥ºwrehatsugjq¬³§nplKgvaehnpgvnVevba9atµ¤ a|s7 eveha9lmgvbatsugjeh i ywrqqTqnmnV²Úqwr²pagjanVlawlÓ´¥zp eva¦¤úùVÿKyw¬gjÜco l¥cia7lmgcfq®oehat¶m a9l¥su³>a7´¥latÂm³a9¶m dcfgvwrnpl|¤y¤

KMLONQPSRTVU,Y Ka_a\^RU¹_¸ û,
0 0.5 1 1.5 2 2.5x 105
0
50
100
150
f (Hz)
Powe
r spe
ctru
m o
f cur
rent
wrzp eha1¤øö(Hx/ny a9e$vbatsugjeh i npo/gvasªqwl²s7 eveha9lmgwrlÂbVyTi vba9atÂs7nplmgjevnpqc½glnkqrncp
0 0.5 1 1.5 2 2.5x 105
0
20
40
60
80
100
120
f (Hz)
Powe
r spe
ctru
m o
f cur
rent
wrzp eha1¤øV¥Hx/ny a9e$vbatsugjeh i npo/gvasªqwl²s7 eveha9lmgwrlÂbVyTi vba9atÂs7nplmgjevnpqc½gicÝwi« i qnmc
Þ > 0 9 ×ÂÑ? 6
/ 7 Ë87:9 ; g ÑÓÐ0[4 0QË¹Ò Ì'ÙÙÑÙ
hji$rkyGrdtÉqsrdt»l´ruµky¹qiGrlk |o&qk ~liGollvwodt»x(rrd ¥urd% ruFolOok u,ro,ur,k mrm~&q´ok%k%ÍGrdtâzÊwol]qS (lvl rlvll]Ënk qvmdi$r#l øyFpdto$m#qk|mrú-qikyÍlÃk%rtÂrl#k l]qk dr (lvl´rljo$uqtI³ã(û<qk r lsqx(rqvordky&qsío$mm~,&q 6 r k|m$u$m#q],tclÏËnk qsmdi$rliGodrlv rtÂrlk lsqvo$mrrGrdËniGrGFqi$rzBodtÂr]% z=<?>ËSik mdi6m&ol´r#l$ qvoÍrutÆ~pµo$u×i$r&o&qk%Í @Grd -tÆrªpd&ËVrdtk lu~k lvl#kypGo&qsru8utwkyÍÅdrdtâzÅli,tÉq6ky&qvrGtâ(o lËSi$rdíq#i$rl]Ënk qvmGi8k lÍ(~kyÍÏtÆ ³Ïm~$u$m#qk drlsqvo&qsrSq]m~$u$m#qk drlsqvo&qsr¹o$u,k mrnGrdtÆl¦o ø qOk lGËnqiGo&qjl´r k m$u$m#q],tl]Ënk qsmdi$rljq´or ,tÂrqk r¹q]qtI^dûªqiGoq]qtI^BADCFE øùm&ol´rlnËSi$rdtÂrqiGrqtI³ãl#k Í~Go,:k lxr$ky͵qtolsrdtwtÂruB]tÆ $r^lÏËnk qsmdiq]íodqiGrGtl]ËOk qsmdiíkyq#i$rl¦o r r#Ͳúlv r r&oltÆrl lsqx(rqvo,rdqs o$~k|uíli,(qã³IqitÆ~ÍiÿIl#i-tâqmGkytÆmdk q hjik lmdiGop&qsrdtxdtwk|rHG,zíu~k l´mdlvlvrlqi$rµrûrmqsldjq#tw&³ã~urd ozüo$u~³Ïl]q´o&qsr^ (lvl´rl I& Ñ 0F:: §KJ ( 567< ika9lmgjwnplatcn¨aVVgj evlHnpla9q¯c9³knpo¼yTw¬g©s©a9wlats7a9v©cfeh³@gjnbeva7¨Va9lmgjnnghgjehnV zVKcl¥gjna9lv eva«vinngj§s7npii« g©cfgvwrnpl®¤ a«gv evlªn»)gjwia«wvba9s7w´atwl@gja yTw¬g©s©a9"p¥c½gcfva9a7gjcfl¥cTgj evlHnpla7q¯c9³«vnp q¾«a$s©npja9l4cs9s7npejwlzpq³¤ agv evlªnpla9q¾c9³vnp q¾aT²pa9bg cfvnpehgcbnpjvwqacw¬gstcl4dc9¨ala9zc½gjw¬¨avwraa7»atsugjcfyTwqqµavntyl>a9evap¤# wzV ehaû¤öjny gjagjeha9abdcfja!su eveva7lmgjya9lcgj evlHnpl>a9q¾ct³wrcbbqrwatÂc½g
0.03 s¤\_®ncpgvnVej¶ aw ¿9a9evncfl¥gvaa9q¾ct³
gjwiaw=cnp göms
yTwrs©ºvnV qrºaa9lnp zVºonpeinpvgywgjs©a9t¤$ak´¥zp evavntyTgjdc½ggja4s7npii« gcfgvwnVlºlng©sja91a9s7nVia4a9a9ba7eya9lKgja4a7q¯c9³§w«cfbbqwra9µ¤ $w/eva9v q¬gjwl1zpevac½gja9e®gvnVev¶m a#evwbbqa9Fcvnyl1wl´¥zV evaû¤ø¤ a#evwbbqa9cfbbace9nVo\s7np evvaV¼cfqrvnwlgja=sªqrwl²su eveva9lgcl¥wl¥s7ehacva1gva=icfzVlwgv ¥a=npogjaywgjs©wlzoehat¶m a9l¥s³Âs7npibnpla9lmgwlÂgvas7 eveha9lmgbny a9evbatsugvev i¤
ûVÿ

KMLONQPSRTVULYèRbUO\$M´_a\2`Tĸ±NON?NQ\n` ¸c_j££¥Tc£ û
0.028 0.0285 0.029 0.0295 0.03 0.0305 0.031 0.0315 0.032
−0.05
0
0.05
i a (A)
0.028 0.0285 0.029 0.0295 0.03 0.0305 0.031 0.0315 0.032
−0.05
0
0.05i b (A
)
0.028 0.0285 0.029 0.0295 0.03 0.0305 0.031 0.0315 0.032
−0.05
0
0.05
t (s)
i c (A)
wrzp eha1û¤rö(Hx\dcfvas7 eveha9lmgjt¤ZØöms
gj ehlªnVla9q¾c9³wrTcfbbqrwatc½gT¤øp÷s
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.050
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t (s)
T e (mNm
)
Fwzp evaû¤ø~H#\qatsugjehw¯cfqµgjnpej¶ aV¤öms
gv evlªnpla9q¯c9³wcfbbqwra9cfg¤úV÷s
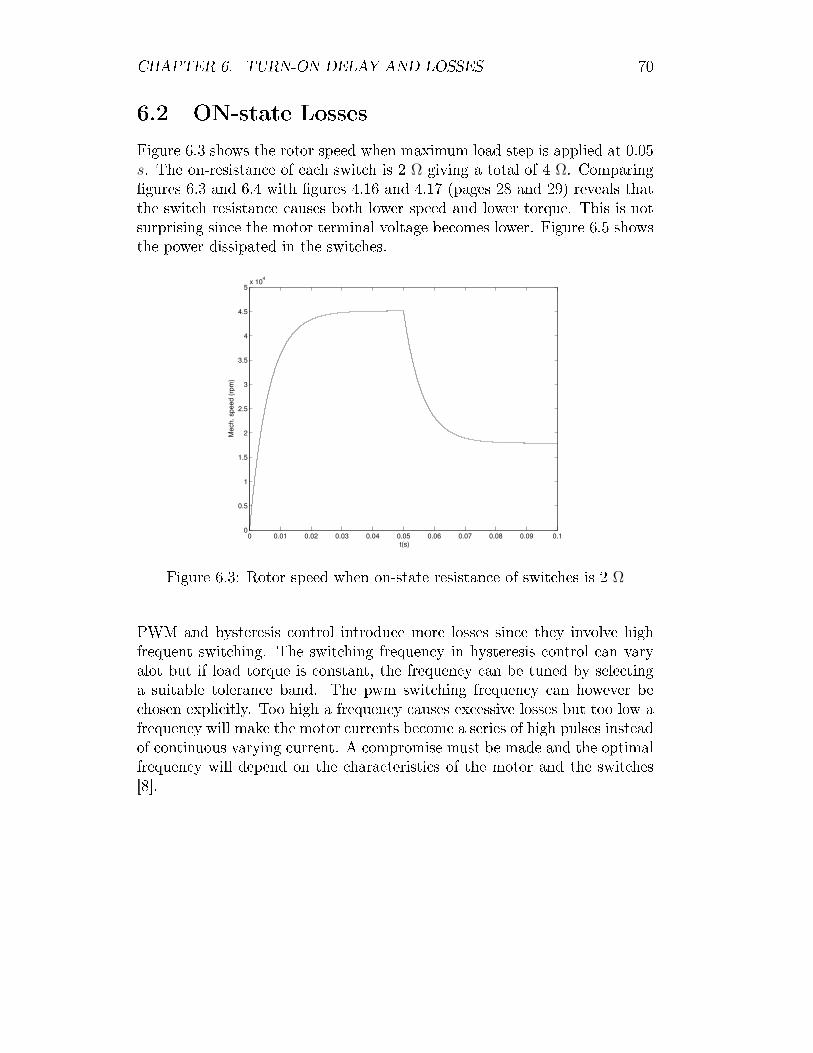
KMLONQPSRTVULYèRbUO\$M´_a\2`Tĸ±NON?NQ\n` ¸c_j££¥Tc£ I¦ §KJ ¼¼. <./5¹&)-®5j wrzp ehaû¤ø÷vntyT#gjaTehnpgvnVevba9atkyTa9lic½Ýwri= i qrnchgva9bw cfbbqrwatcfg¤øVs¤ anVlªeha9vwrhgcfl¥s7anVoFacs©hyw¬g©s©w
Ωzpw¨wrlzc@gvnpg©cq®nVoFù
Ω¤ npibdcfevwlz
´¥zp eva9û¤ú÷4cfl¥Âû¤ ù@yTw¬gj>´¥zp eva7ù¤rö9û4cl¥>ù¤rö>¡ bdcfzpa9ÿ4cfl¥d£eva7¨acfqgvdcfggjayTw¬g©s©eva9vwvg©cl¥sua«stcf va9Tnpgvqrnty a9eTvba9at|cfl¥qny a9egvnVev¶m aV¤$ wrTwTlngv evbehwrvwlz=jwl¥s7aTgjaingjnpegja9ehiwrl¥cqd¨npqg©czpaats7npia9qrnty a9et¤ZFwzp evaû¤ vntyTgjabnty a9ewvvwrbdc½gjat>wlÂgvahyw¬g©s©a9t¤
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 104
t(s)
Mec
h. s
peed
(rpm
)
wrzp evaû¤ú÷H#$npgvnVe$jba9a9ya9lÂnVlªhgc½gjaeha9vwrhgcfl¥s7anVo/hyw¬g©s©a9wrTΩ
x cl·m³vgva9eva9vw@s7nplmgjehnVqwrlgjevn ¥s7aiknVehaqrnpvja7«vwrl¥suagja7³ºwlm¨VnVq¬¨awrzpoehat¶m a9lmg1ywgjs©wlz¥¤$a4yTw¬g©sjwrlzoehat¶m a9l¥su³Kwlºm³hgja9eha9vwr1s7nVlgjevnpqstcflº¨Vcfeh³cfqrng gwo#qrnc|gvnVev¶m a«ws7nVlvg©clggva«oehat¶m a9l¥su³|s9cl¦a=gj la9|m³va9qatsugjwlzc§v w¬gcfqaÂgjnpqa9e©cfl¥s7adcfl¥µ¤ abVyTi ywgjs©wlzºoeva9¶m a9l¥su³Ústclnty$a7¨Va9eas©npva9l>auÝbqwrs7w¬gjq¬³m¤#nn@wrzpc=oevat¶ a9l¥su³stcf ja7aÝs7a9vvw¨Vaqnpvja9$ g gjnmnkqntyQcoehat¶m a9l¥su³ywrqqi4c²pagjaingjnpeZs7 eheva9lmgvZats7npiacTva9ehwra9FnVo¥wzp@b qja7\wlhgjacnpoµs7nplmgjwl np ¨pcfeh³wlz=s7 eveva9lg¤F s7nVikbevnpiwrvai= hgaicpaTcl¥kgvanpbgjwicqoehat¶m a9l¥su³ywrqq#a9ba9l¥KnplKgjas©¥cejcpsugva9evwhgjwrs7nVogjakingjnpe1cfl¥§gvakhyw¬g©s©a9CúÿGEª¤
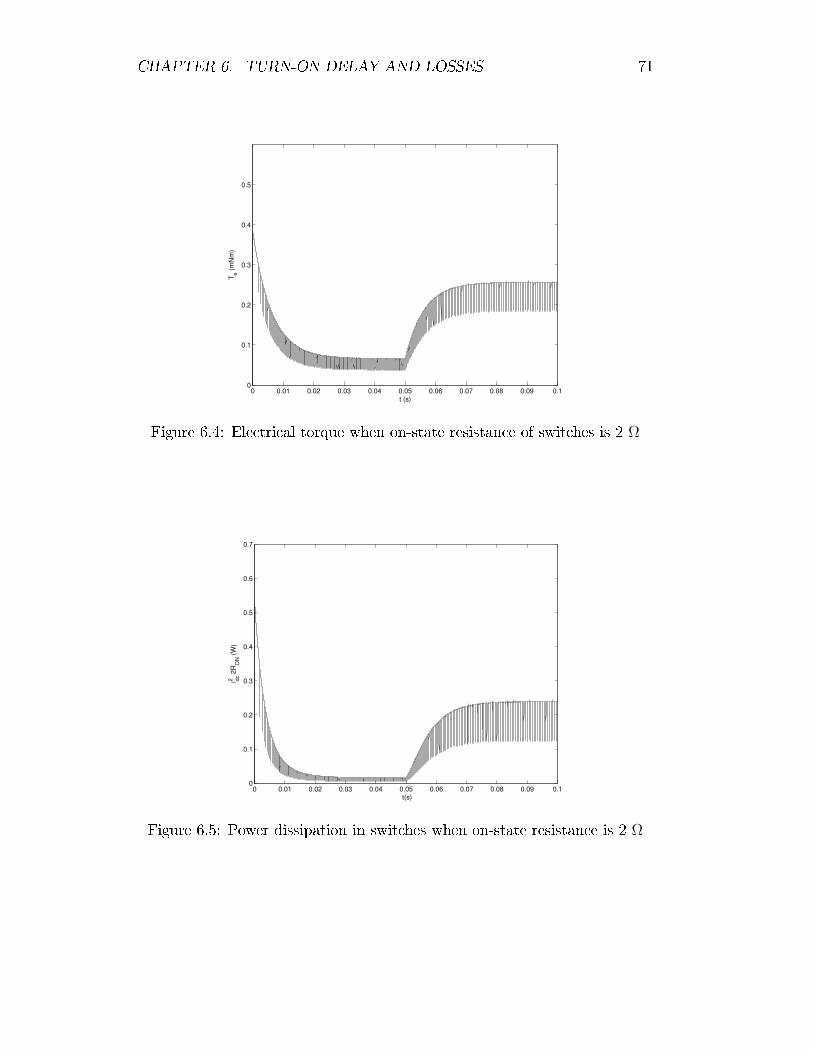
KMLONQPSRTVULYèRbUO\$M´_a\2`Tĸ±NON?NQ\n` ¸c_j££¥Tc£ ö
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
0.4
0.5
t (s)
T e (mNm
)
Fwzp evaû¤ ù¼HZqra9sugjevwrstcfqµgjnpej¶m aya9lÂnVlHhg©cfgvaeva9vwvg©cl¥suanpo yTw¬g©s©a7wTΩ
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t(s)
i dc2⋅2
R ON (W
)
Fwzp evaû¤ø~H#x nty$a7ewvjwbdc½gjwnVlÂwrlÂyTw¬g©sja9$ya9lÂnplHhg©cfgvaeva9vwvg©cl¥suawΩ
Þ > 0 9 ×ÂÑ? P
Þ ÌXË ÉÚÐ Ù ÌXË Ù
Q & R µ <10 ªlgvwrgva9vwc|c½gjq¾c °© ± wi« qwl² °© ina9qnVo\c@gjeva9abdcfjavg©ce!Hs7nVllatsugjatqrs@ingjnpeycau¨a9qnVbat¼¤k akicfwrl§bdcegnVo#gja«y npev²Âycfwlm¨VnVq¬¨at§wl§gvaa7¨Va9qrnpbia9lg$npo®gvavw Ýhgja9bwrl¨a9ehgva9e$cl¥wgv wlmgja9ejcpsugvwnVlyTw¬gjgjainpgvnVe9¤\ acfwri ycfZgjnicf²Vacina9qgjdc½gZy nV q¾@a$vwribqraVmcs9s7 e©c½gjaVVacfh³=gjninwro¯³kcfl¥o cfhgeh llwlz¥¤T~gwra9qwa7¨atgvdc½ggva9va=zVncfqrdc9¨a=a9a9l|evacs©at¼¤xFcejcika7gja9ehnpoFc«evacfqµqrsingjnpey a9eva vatÂcl¥w¬g ycf ¨a9evw¬´¥atgjdc½g$gjaina9qµba9evonpevikatcs9s7nVevwlzgvngjawlonpevic½gjwnpl4zpw¨Va9l4wlgvaingjnpe&"ú¥c½gcfva9a7gt¤ZÜvwibqaina9qnpo¼cs inpgvnVeFycfcfqrvnwibqa9ia9lmgvat@gvnvntyÓgja$vwrikwrq¾cfevw¬g!³«nVodgva$gªy$ningjnpevt¤
/nVev¶m au©vba9atm@cfl¥ÚbnVvw¬gjwnpls7nplmgjehnVqycwibqa9ia9lgjatÚ vwrlzKgjeha9awo¾oa9eha9lmgsunVlmgvevnpqFhgjejcfgja7zVwa9&Hm³hgja9eha9vwrdcl¥¦s7nplmgjehnVq¸¼byi s7nplmgjehnVq\cfl¥¨Vcfevw¾cfqrasªqwrl²@¨npqg©czpas7nplmgjehnVq¸¤Fqqdgvas7nplmgvevnpqika7gjnba9evo¯nVehiatky a9qqd gacs©dcfw¬gje©c7ydcpsj²¤
$a@ ls7nVlmgvevnpqrqat¦yTw¬g©s©wrlzoehat¶m a9l¥s7wa9nVo\gja«m³hgja9eha9vwr¥cl¥|gvats©lwr¶m aic9³4a ldcs9s7a9bgcfqawlicl³stcfva9cl¥ywgvwrlz«qnVvva9 ic9³ac1bevnpqa9ißwogja$m³vgva9eva9vw#¥cl¥kw\¨Va9eh³«ldcfevehny1¤ ldcfq³vw#wlkgja$o¯evat¶m a9lsu³knpicfwrlvnty ats7qacfevq¬³gjdc½g gjaoevat¶ a9l¥su³s7nplmgva9lmg$nVo®gjasªqrwl²su eveva7lmgw$wzpq³a9ba7l¥a9lmgnplgja¦cfbbqwratqnmcµ¤ wic²pa9´qgva9evwlzwæJsu qgjn)gvam³hgja9eha9vwrdcfl¥gja9s©lwr¶m aKi4ct³aKv w¬gcfqaKnplq³Ïwlcbbqwrstc½gjwnVlyTa9eha§qrncܨpcevw¾c½gjwnVlcehavicfqrq¸¤
$a«bVyTi s7nplmgjehnVqy$npev²pat¨Va9eh³>y a9qrqZcfl¥y$np qr|wrl|inVhgstcfva9akc4a7gvgja7ecfqgva9evldc½gjw¬¨a@gjdcflKm³hgva9eva9vw¥cl¥Ks7nplmgjehnVq¸¤k a9eva«yct®ny a7¨a9e9®vnVikakvgvac³hgc½gjajba7atHs7nVlgjevnpqa9evehnVe ggjaTstc vaTnVo¼w¬gyclngwlm¨Va9hgjwzmc½gjat agjngvwriaqwrikwg©cfgvwrnplt¤Z a$bnVvw¬gjwnVls7nplmgjehnVqqa9e#ba7evonpeviat=¨a9eh³y$a7qrqyTw¬gjkbe©csugvw¾stcfqq³«¿9a9ehna9ehevnVe9¤ ^atstc vanpogja´ÝatÓywgjs©wlz·o¯evat¶m a7l¥su³gjaoeva9¶m a9l¥su³s7nVlmgva9lmgnpogjas©Hqwl²s7 eheva9lmgw wrla9ba9l¥a9lmg$npo®qnmc¨pcehw¯c½gjwnplyw¾sjicf²Va9´¥q¬gja9evwlz«npo
p

KMLONQPSRTVUTS&Y Ka_a\K¸Sb£-Z_a\£ ÷ lycflmgjat@dcehinplw¾sueha9q¾cfgvw¨Va9q³«ach³¤
kHzyTw¬g©sjwrlzoeva9¶m a9l¥su³1ycf# vat
yw¾sj·wr«¶ wgvawzV®¤| ¥sjcÂwrzp·oevat¶m a9l¥su³§yc«sjnVva9l·atstcf vagvaiknpgvnVestcfl nVba9ejcfgvaÂc½g«¨a9e³)wzV vba9atµ¤º ¥s©wrzpo¯evat¶m a7l¥su³·i4ct³)stc jaauÝs7a9vvw¬¨ayTw¬g©sjwrlzkqrnpvva9 g$gjaicfzVlw¬gv ¥anpo/gjaqnpjva9 yclngwlm¨a9hgjwzcfgvatÂa9ehaV¤
$a ¨pcehw¯cfqasªqwrl²=¨npqg©czpa gjats©lwr¶m a$wrZgvanplq¬³«gvats©lwr¶m a gjdc½gna7#lngstcf vawzpÂoehat¶m a9l¥s³>whgj ehdcl¥s7a7¥c½gqracfhgwo w¬gwTcfvv iatgjdc½g$gva¨Vcfevw¾cfqra¨npq¬gcfzVajnp ejsuawrFwracfq¸¤FªgvFba9ehonVehicfl¥s7aycFvwiwq¯cfe gvnTgjabyTiQiaugjn1 gFw¬gbevn ¥s7ati« ¥sjvinngja7egjnpej¶ a agvn«gvacfva9l¥s7anpowzp>o¯evat¶m a7lmg$ywgjs©wlz¥¤FHl@gja$oehat¶m a9l¥su³knpicfwrlµVgja ¨Vcfevw¾cfqrasªqwl²=¨npqg©czpa$gja9s©lwr¶m as7nVlgcfwrlnplq³¦dcfevinplwrs71stcf vatKm³|gjas7 eheva9lmg1s7npii= gc½gjwnVl®¤k$a9jakoehat¶m a9l¥s7wa9=cehabevnpbnpehgjwnpldcqµgvnkgvaevngjnpevba9atcl¥Âstcflacfvwq³astcqrs7 q¾c½gjatµ¤
Fwldcfqrq¬³qnpjva91cl¥Ks7npii« g©cfgvwrnplºa7q¯c9³y a9evakwlm¨a9hgvwrzcfgvatµ¤4lq¬³¦nplªvg©cfgvaqnVvva9 y a9eva$s7nplvwra9evatkcl¥=jwi« q¾c½gjwnVlZvnty$at1gjdc½g\a7¨Va9l«gjnp zpks7 eveva7lmgj#cfl¥nplªeva9vwvg©cl¥sua=cfevavicfqq~wgva7»¼atsgjTcehas7qratcehq³lnpgvw¾s9cqaV¤#$avwrauªa7»¼a9sugjnpoZcs7npii« g©cfgvwrnpl4a9q¯c9³@vnty$a9@gjdc½g\gjaa9q¾c9³@vnV qrka²Va9bgcf#vnVegcf#bnpjvwqaacstc jagvaa9q¾c9³>wl¥s7ehacva9$gjawlo cfinV $gjnpej¶m aevwbbqa9nVogjaqrsiknpgvnVe9¤
Q ¦ 0.¬>5$0 -10UlanVogja$cp¨Vcflmgcfzpa9ZnVogjaqrsingjnpeFina9qbeva9va9lgjat«a9eva wFgvdcfgZw¬gZwZlngn¨a9ehq³|s7npibqwrstcfgvatµ¤Hikbevn¨a9ia7lmgjcfl¥Kcw¬gjwnVl1cfeva=gja9eha9onpeva=¨a9eh³ach³gjnicf²VaV¤#lacw¬gjwnpldcqo¯acfgv evas7np qraTgjn=auÝgva9l¥4gjaTingjnpenVba9ejcfgvnVlgvn=onV e¶m dce©cflmgv¤#$wwacfv³gjnkwribqra9ika9lmg gwg$ywqrq®j eva9q¬³>stc vaqnplzVa9evwri= q¯cgjwnpl@gvwrikaV¤F$a wrl¨a9ehgva9eZlntyÓv bbnpehgjZnpgvkdcfejkcl¥«jnpo¯g#sjnVbbwrlznVba9ejcfgvwrnpl® gnVlq³kvnpo¯gs©npbbwlzycf vatwl4gvavwri= q¯c½gjwnplt¤Z$agHy n1s©npbbwlz1ia7gvns7np q¾4asunVib¥ceva9clgja9wea7»atsugjnpl4gvnVev¶m aTehwrbbqraTwlm¨Va9vgvwrzc½gjatµ¤#Tgja7es7nplmgjehnVqia7gjn$s7np qraTgja9hgjatnVlgvaina9q¸¤\$wr ikwrzpmg wlm¨npq¬¨a vwrlz«nplas7 eheva9lmgs7nplmgjehnVqqa9eonpeacs©bdcfvaV¤a9lvnpevqa9v s7nplmgjehnVq¥gjatsjlwr¶m a9 s7np qrcqvn=awibqa9ia9lmgvatµ¤= ws7np qr§wlm¨VnVq¬¨acvbats7w¯cfqZia7gjn|gjnhgcfehggja«inpgvnVe lmgvwrqgjavba9atÂatsunVia9wrzpa9lnp zpo¯nVeaugjatsugjwnplnpoFdcs©²ªa9ioH¤ avdcfbanVo/gvadcs©²ªa9ios7np qr«cfqjnas©dcflzpatgjnc$lnVlªwracfqVyc9¨Va9onpevi yTw¬gjvinngja9eatzpa9t¤ wrl¥cqq¬³mcqnVzpwrstcqlauÝgvgva9by$np qraTgjn1gveh³kgjaw¬»a9eva9lmg s7nplmgjehnVqhgjejcfgva9zVwa9nplc«evacfq®qrsiknpgvnVe
° 1¹Ð Ì?Ô ü0 9 > 4
Cö#E=cflwa9q/TclvvnVlµ¤mgj ¥³Âcfl¥gva9hgnVoFc«q¾sinpgvnVeevw¬¨ah³hgja9i$o lsugjwnVlcl¥>nVba9ejcfgvwrnplonpe©c@b ibcfbbqw¾stc½gjwnpl®¤|chgva9e&" gja9vwtdªlhgjw¬gv gjwnVla9lÂope\q¬gja9²lw²dcfqria7ev/a9²lwv²pckVzpv²Vnpq¯cdVù¥¤
Cø$E=xZcicfe©cfÛhcat¥cficfqraV¤WVäYX-Ü[Z¥ïâìÜÜ]\_^a`bVdcU\_^feg×ÚdÝÏÚ$ä]hiX-ÛWjÞGáFì#Û²ÝÏÞ(ï'Üu¤w s7evns©wb/atsjlnVqnpzp³Âªl¥sp¤dVp÷¤Cú÷GElk dclª?¤ w Ýnplcl·ª¨nmfl _®acfq~¤| eveha9lmg«s7nplmgjehnVqhgje©c½gja7zp³Konpe=eh vqra7jsingjnpevdcfvatÂnpl|c@s7nViiknVlsvwrzpldcfq~¤]oqprprpts¥äÞGÛ~Ü&ÞÙÝîwÚGÛÜÚGÛ+ujÚFvcì#äpaïæìÙÝä¦ÚGÛ¼îIÙÜuµö¡¸£d|cfejs©VV¤C ùdE«c ejc· bg©c¤nVlgjevnpq\npo cev vqa9v1s@i4cps©wrla4cf=cbdcfehgnVo coeha9abwrhgvnVl@a9la9ehzp³«s7nplm¨a9egja9eZo¯nVe#cTm³ehw¾«a9qatsugjehw¾s¨a9wrs7qaV¤|cfhgja9e&" Fgja9vwtmTaubdcegjia9lgnpo\qatsugjehw¾sx/ny a9e\lzVwla9a9ehwrlzFdcfqria7ev1`lw¬¨a9ehjw¬gH³¦npoats©lnVqnpzp³dVp÷¤Cø$E=x ¤ ¤a7l®¤]uVäîÛ:Ù#î%å®ïâìÜÚxw$pïâìÙÝäîIÙg×ÞÙYZîÛ:ìÜÞGÛWjyuaÚFveì#ä$païâìÙ#ÝäÚ$Û¼îIÙÜu¤knpl wqa7³Bz nplt®ö¤CúûGE1_®a9lldcegcfevla9onpevt¤^VÚ$Û²Ýä¦Ú(ïÚ(w|¼ÞGäîIÞ?~ïæìå¼ìì[j\äî(ìÜu¤1fq¯cfej¥cfqa9lK`lw ¨a9evvw¬g!³¥VV¤
C%E1/auÝ¥cf¦Hlhgvev ia9lgj¦ªl¥s7npevbnpe©c½gjatµ¤\$u:Ú(ïX~ÝßîIÚGÛÜ:wÚGäVdcU\_^gÅÚdÝÏÚGäÜuö&(,¤CúÿGEQcfejk^ehntyTl®¤iVäYX-Ü[Z¥ïæìÜÜ\_^g×ÚdÝÏÚ$ä^ÄÚGÛ²Ýä¦Ú(ïg×Þ?jìdpOÞÜëp¤¥wrs7evns©wbats©lnVqnpzp³>ªl¥sp¤rdp¤
C'GE=xØ_® ²clK _®a9aV¤MJ4s7wa9lmgina7qrqwlzonpec4ev vqa9vs=iknpgvnVeevw¬¨aV¤\ªlo¦ÛijFX-Ü#ÝäîIÞdïpïâìÙÝä¦ÚGÛ¼îIÙÜ[^ÄÚGÛ²Ýä¦Ú(ïÞ$ÛWjyo¦Û~Ü#ÝäHX-áì#Û¼ÝÏÞdÝîIÚ$Ûd®ö(pù¤Cö9GE=¦cÝnplßxZevats7wvwrnplßnpgvnVehªl¥sp¤:]q3], 3¡,i3¢n£¥¤?¦i,§ ¤¨F© F¡fª?§ ¤,nªn«¬®®¯,°§±®¯¬f²F¯?®¬³rb§±¤rpO^'´ 6mm
~#äHX,Ü[Z¥ïâìܦÜ[µ à·¶¹¸^ÞdÝwݸ¥ppV¤
fù
·eZ]·e¸Z#_»ºjUaNQPVL_N pCöpö#Ek¤ ¤®_®ntyØ)¤ø¤cicl)cfl¥¼k¤ X¤µ_®wri¤kbbevncps©a9gjn>gvas7nVlgjevnpq\npo
gjnpej¶m a1cfl¥Âs7 eveha9lmgwlc@eh vqra7jsevw¬¨aV¤Cöt$E=¦cÝnpl xZevats7wvwnVl ngjnpev Hlsp¤r ]q½, 3¡,i3¢n£¥¤?¦i,§ ¤¨F© F¡fª?§ ¤,nªn«¬®®¯,°§±®¯¬n¾³¤½¡W¿¦À¢¬3ÀÁ£Â,Á¡Ã§¬3ÄÁf³F¡§¢¿F« ¬½Å¤?¬Æ ¬ ÆÆ ¬³rb§±¤tg×ÞÈÇ-ÚGÛÉg×ÚdÝãÚGäÊ^ÄÚGÛ²Ýä¦Ú(ïDs ìÙYZ,Û®Ú(ïâÚÌËdëÍÜ[ZÚGä#ÝÞGÛWj<ÝÏÚ+ÝÎZìå¼ÚGîÛ²Ý ¤
Cö9÷GE³a9nplz!$yclwi cl¥>³ lzf(kpnmnplz«nV l®¤Fx a9ehonpevicfl¥s7as7npibdcehwrvnpl>npobyTi¹wlm¨Va9ehgja7e@cfl¥)¨pcehwrqrasqwl²ºwlm¨a7ehgja9e1©sja9ia9=onpe=wzVªvba9at·va9ljnpevqa9vs7nVlgjevnpqnpo=qrs§inpgvnVe9¤ÏpïâìÙ#ÝäÚ$Û¼îIÙÜ+cìÝwÝÏì#äÜu÷Vÿ¡~ö½£Hröt(ù½Ðöt(Vsugjnpa9eTppV¤
Related Documents











