Biomechanics Module Newton’s laws Musculoskeletal levers and mechanical advantage Classification of force systems Vector addition and resolution

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Biomechanics Module
Newton’s laws
Musculoskeletal levers and mechanical advantage
Classification of force systems
Vector addition and resolution

Newton’s Laws
Law of Inertia
Law of Acceleration
Law of Action-Reaction
Biomechanics Module
2
Law of Inertia (equilibrium)
3 Hall, Basic Biomechanics, 5th ed
Biomechanics Module

Law of Inertia (equilibrium)
Biomechanics Module
4

Law of Acceleration
5
Biomechanics Module
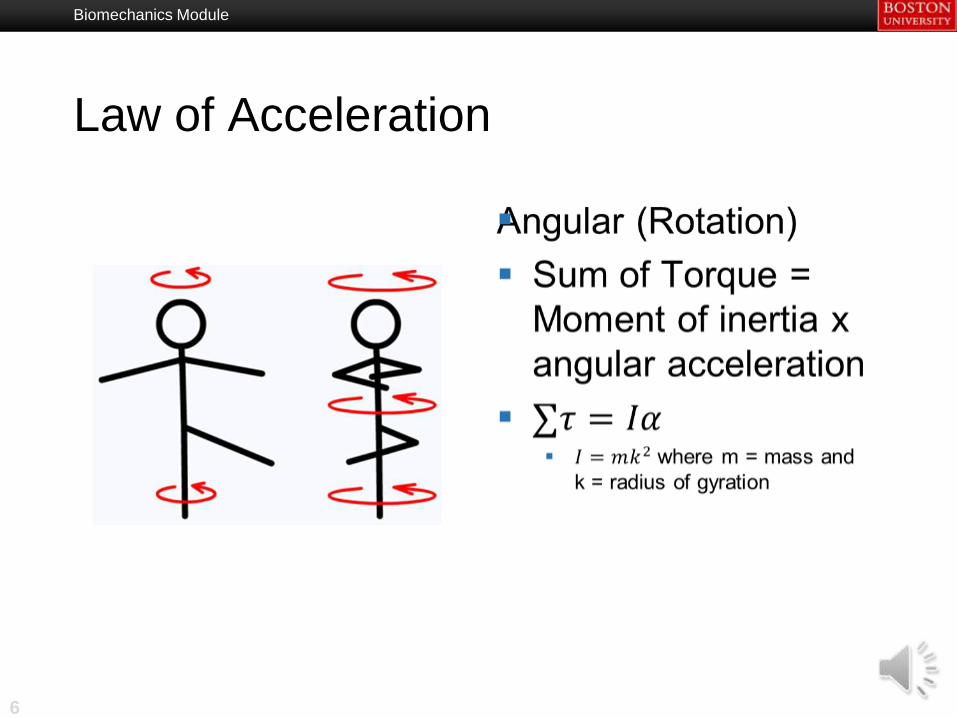
Law of Acceleration
6
Biomechanics Module

Law of Acceleration
7
Biomechanics Module
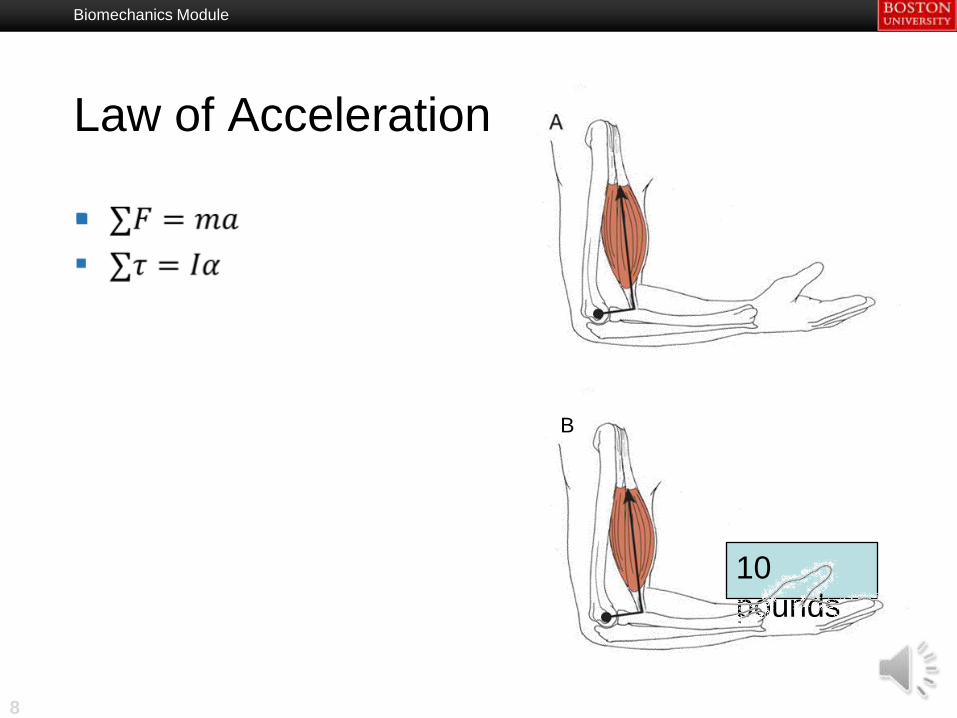
10
pounds
Law of Acceleration
Biomechanics Module
8
B
Newton’s Laws
Law of Inertia
Law of Acceleration
Law of Action-Reaction
Biomechanics Module
9
Within object
Between objects
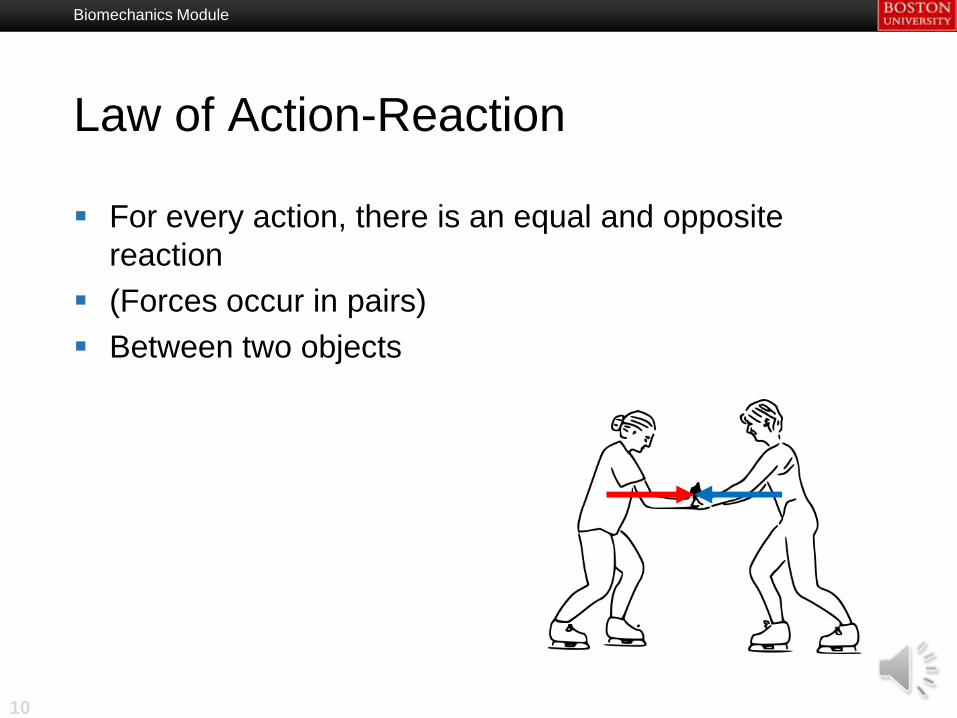
Law of Action-Reaction
For every action, there is an equal and opposite
reaction
(Forces occur in pairs)
Between two objects
10
Biomechanics Module

Law of Action-Reaction
For every action, there is an equal and opposite
reaction
(Forces occur in pairs)
Between two objects
Objects must be in contact
11
Biomechanics Module
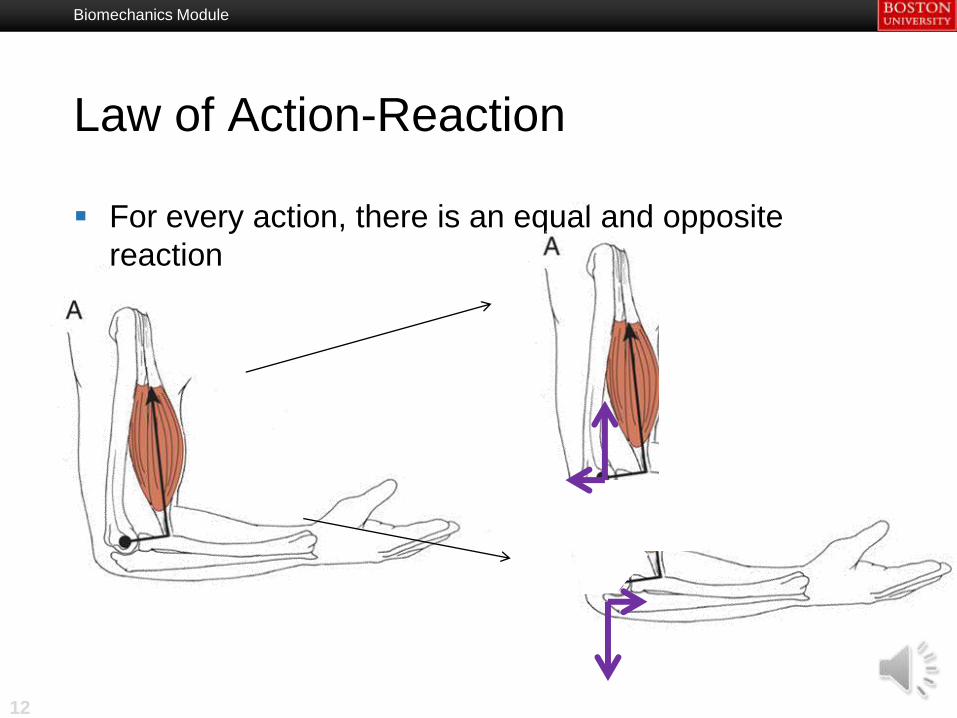
Law of Action-Reaction
For every action, there is an equal and opposite
reaction
12
Biomechanics Module
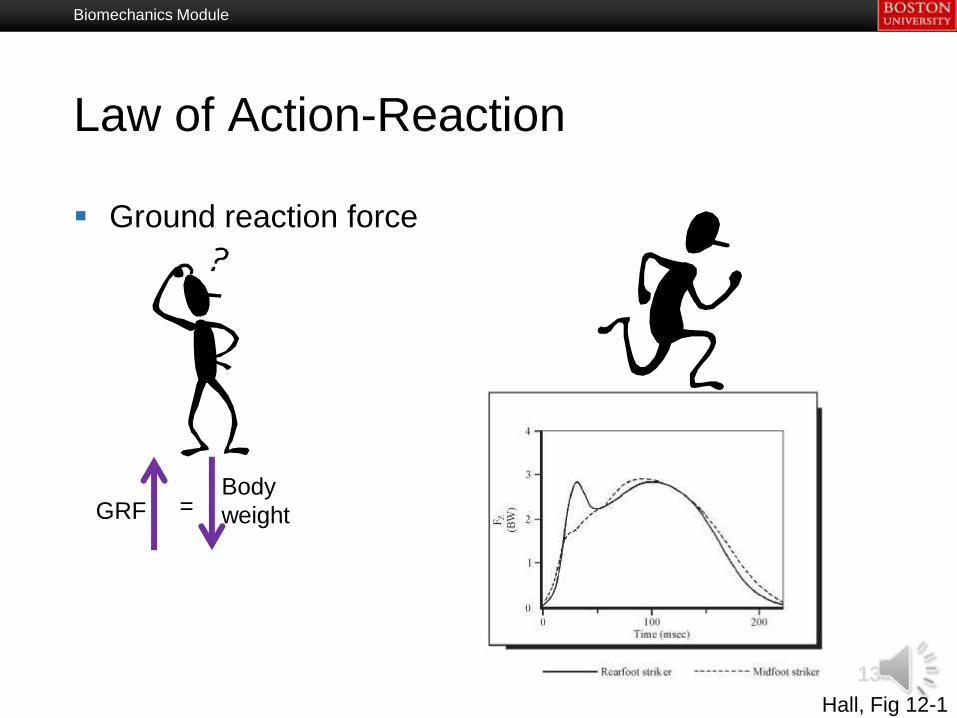
Law of Action-Reaction
Ground reaction force
13
Hall, Fig 12-1
Body
weightGRF =
Biomechanics Module

Musculoskeletal Levers
Why is Charlie Brown up in the air?
14
Biomechanics Module

Musculoskeletal Levers
Why is Charlie Brown up in the air?
15
Biomechanics Module

Musculoskeletal Levers
(Force A)(MAA) vs (Force B)(MAB)
Charlie Brown is up in the air if: (Charlie’s force)(MA) < (Linus’ force)(MA)
16
Force A
Force Bfulcrum,
pivot point
MAA MAB
Biomechanics Module
Musculoskeletal Levers
Interaction between the forces or loads on the
segment and the joint
Levers: two forces and a pivot point (fulcrum, axis) Internal force (muscle)
External load (gravity etc)
Pivot point (joint)
(N.B. not consistent w/ Levangie)
17
Biomechanics Module
Musculoskeletal Levers
First class lever
Second class lever
Third class lever
Differentiated by the relative position of the internal force, external
load, and pivot point
18
Biomechanics Module
Musculoskeletal Levers
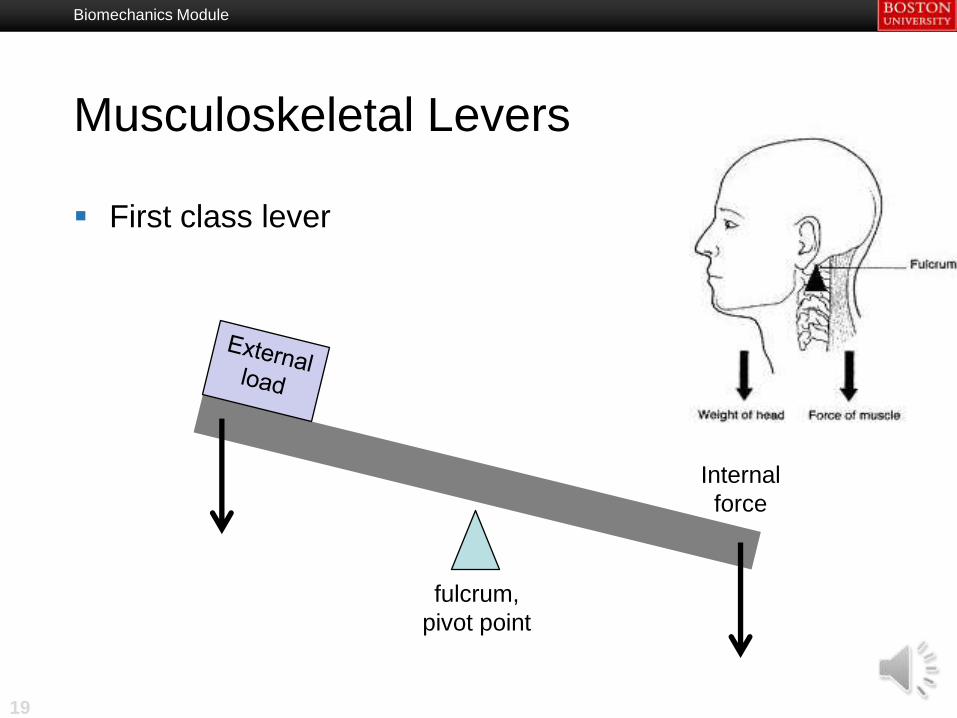
First class lever
19
Internal
force
fulcrum,
pivot point
Biomechanics Module
Musculoskeletal Levers
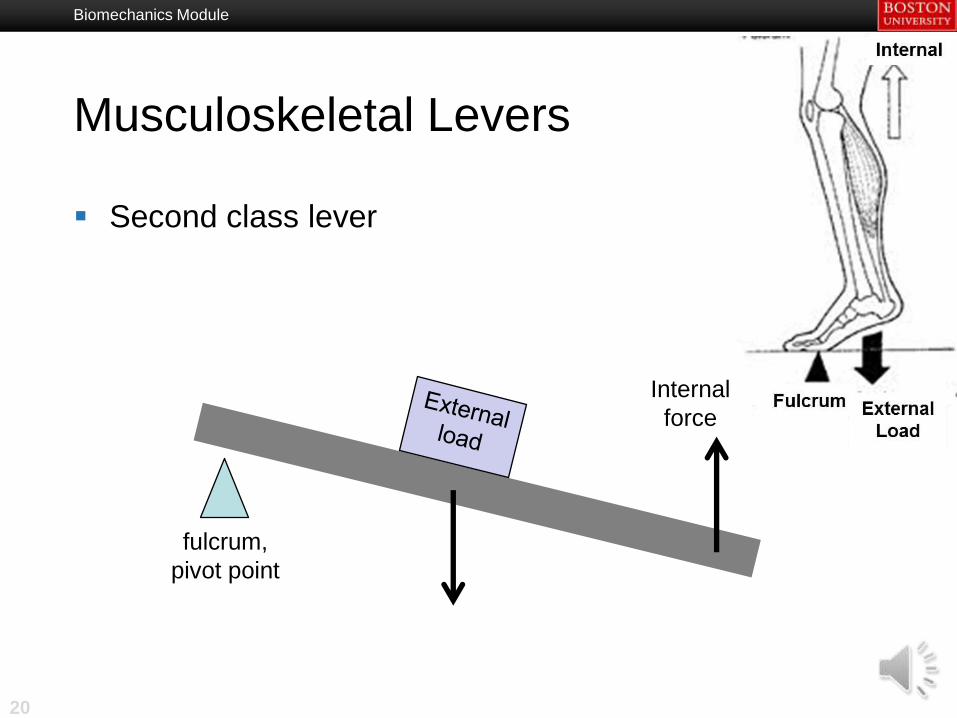
Second class lever
20
Internal
force
fulcrum,
pivot point
Biomechanics Module

Musculoskeletal Levers
Third class lever
21
Internal
force
fulcrum,
pivot point
Biomechanics Module
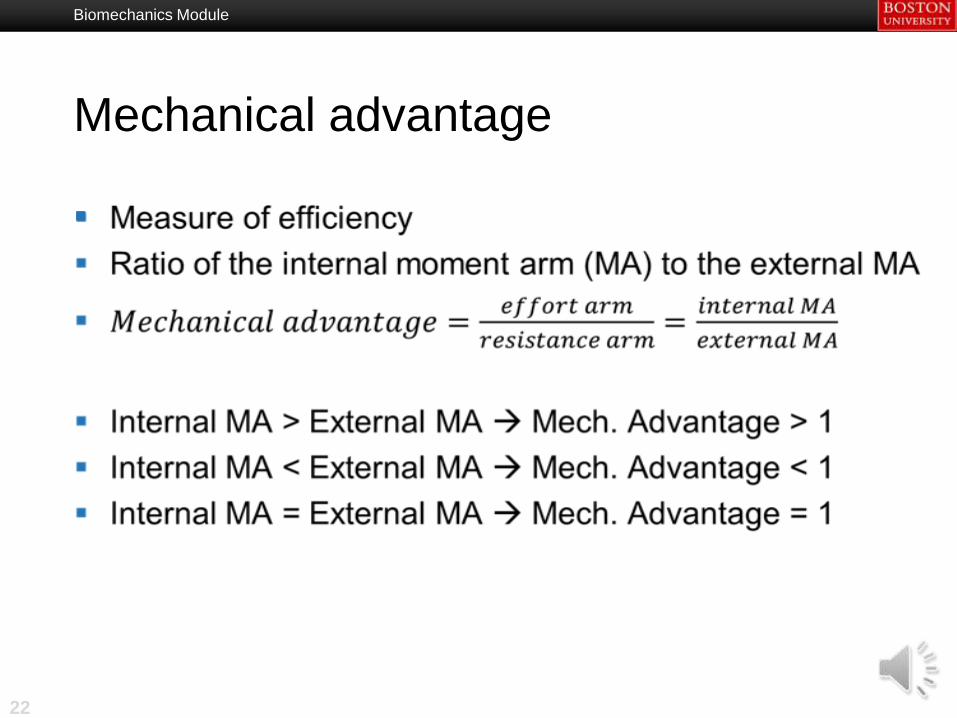
Mechanical advantage
22
Biomechanics Module

Mechanical advantage
23
Ext Int
fulcrum,
pivot point
External MA Internal MA=
First Class Lever
Mech Adv = 1 if
fulcrum in middle
Ext
Biomechanics Module

Mechanical advantage
24
External MA Internal MA<
Int
fulcrum
Second Class Lever
Mech Adv > 1
Ext
Biomechanics Module

Mechanical advantage
25
External MA Internal MA>
Int
fulcrum
Third Class Lever
Mech Adv < 1
Ext
Biomechanics Module
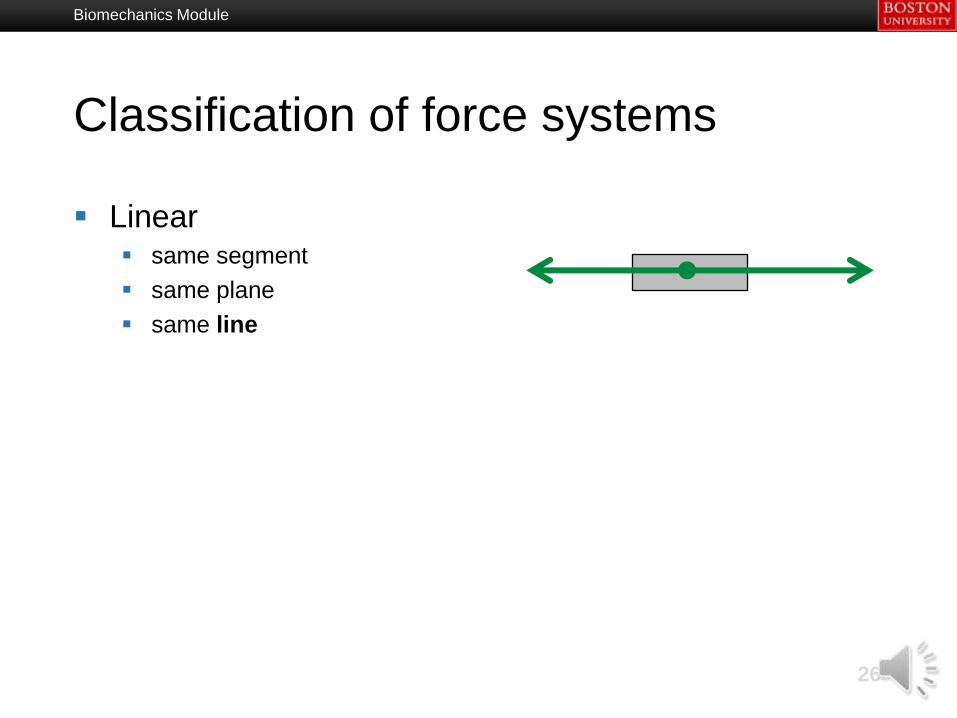
Classification of force systems
Linear same segment
same plane
same line
26
Biomechanics Module

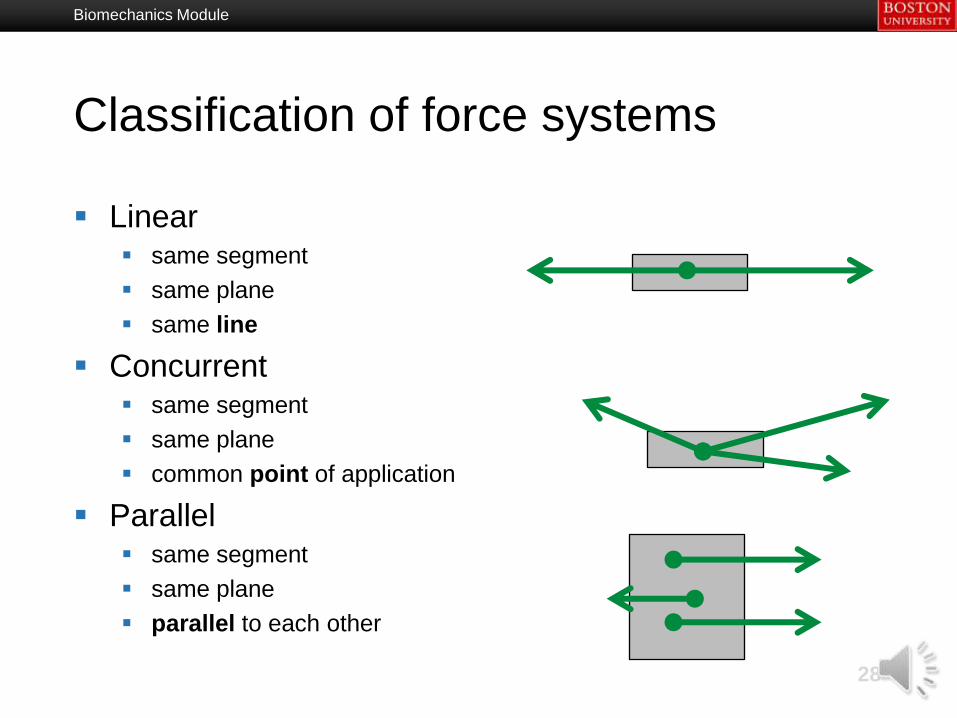
Classification of force systems
Linear same segment
same plane
same line
Concurrent same segment
same plane
common point of application
27
Biomechanics Module
Classification of force systems
Linear same segment
same plane
same line
Concurrent same segment
same plane
common point of application
Parallel same segment
same plane
parallel to each other
28
Biomechanics Module

Fun with Forces
Vector addition Composition
Tip to tail
Parallelogram
Vector resolution Graphical
Trigonometric
Application to human movement Parallel forces
Perpendicular forces
Biomechanics Module
29
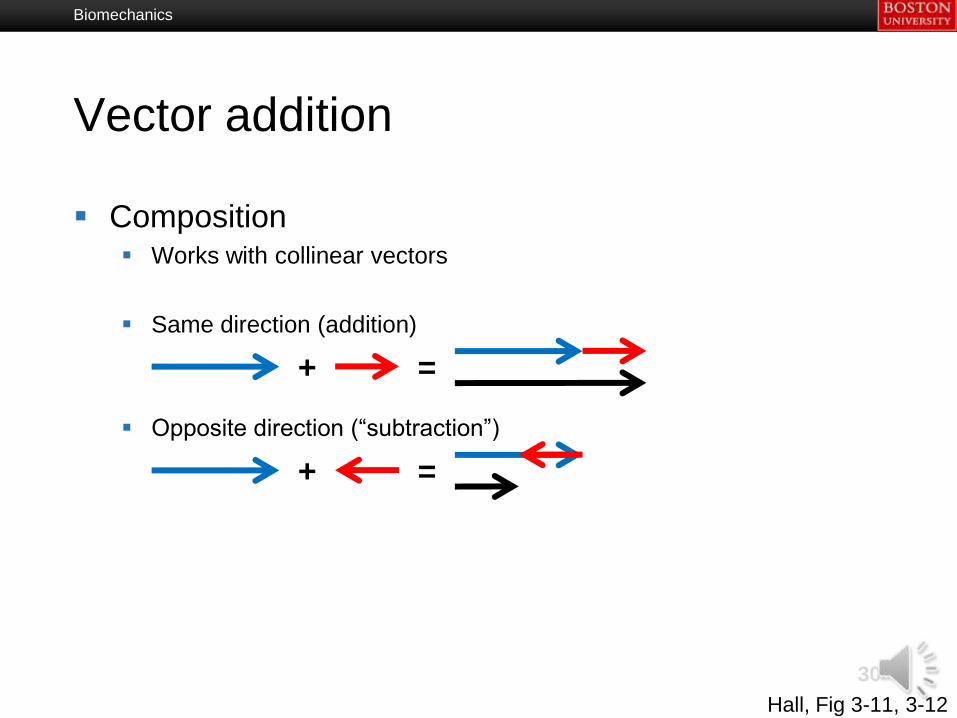
Vector addition
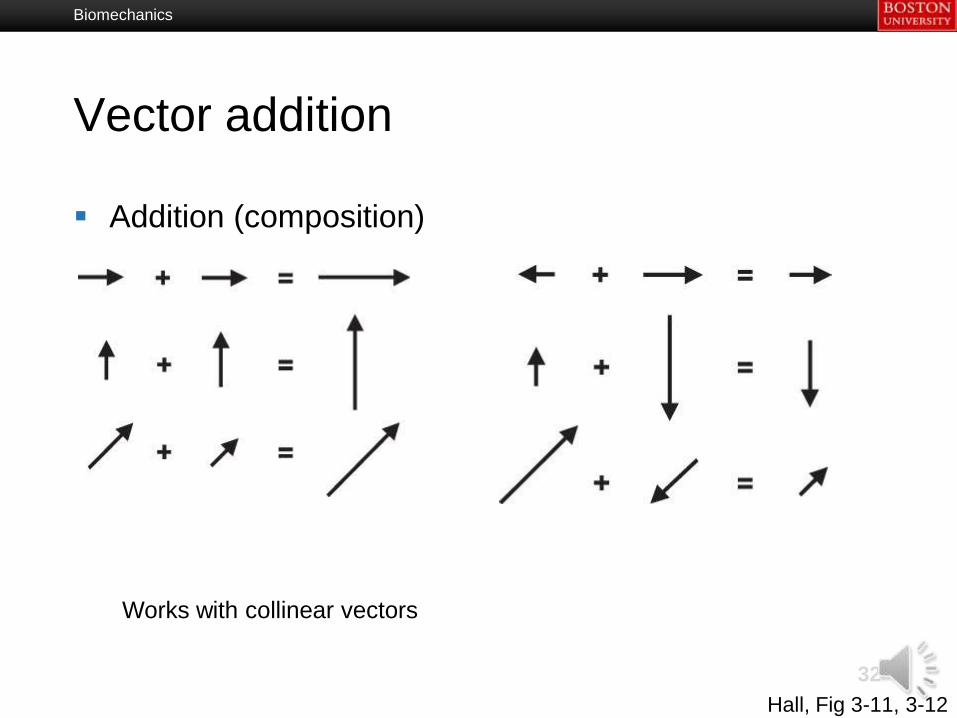
Composition Works with collinear vectors
Same direction (addition)
Opposite direction (“subtraction”)
30
Hall, Fig 3-11, 3-12
Biomechanics
+ =
+ =
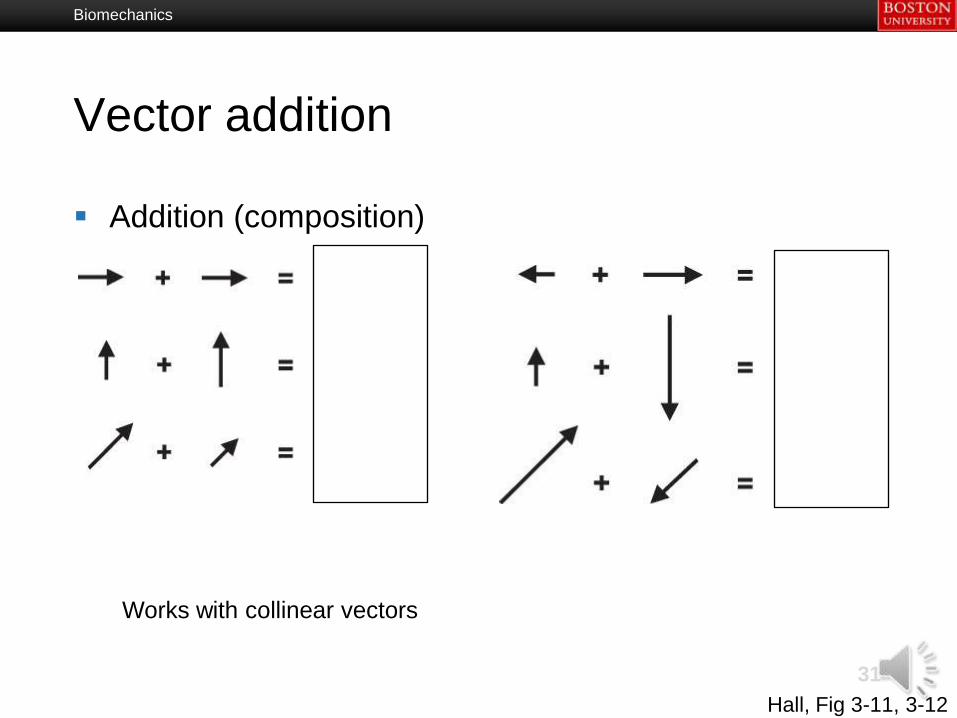
Vector addition
Addition (composition)
31
Hall, Fig 3-11, 3-12
Works with collinear vectors
Biomechanics
Vector addition
Addition (composition)
32
Hall, Fig 3-11, 3-12
Works with collinear vectors
Biomechanics
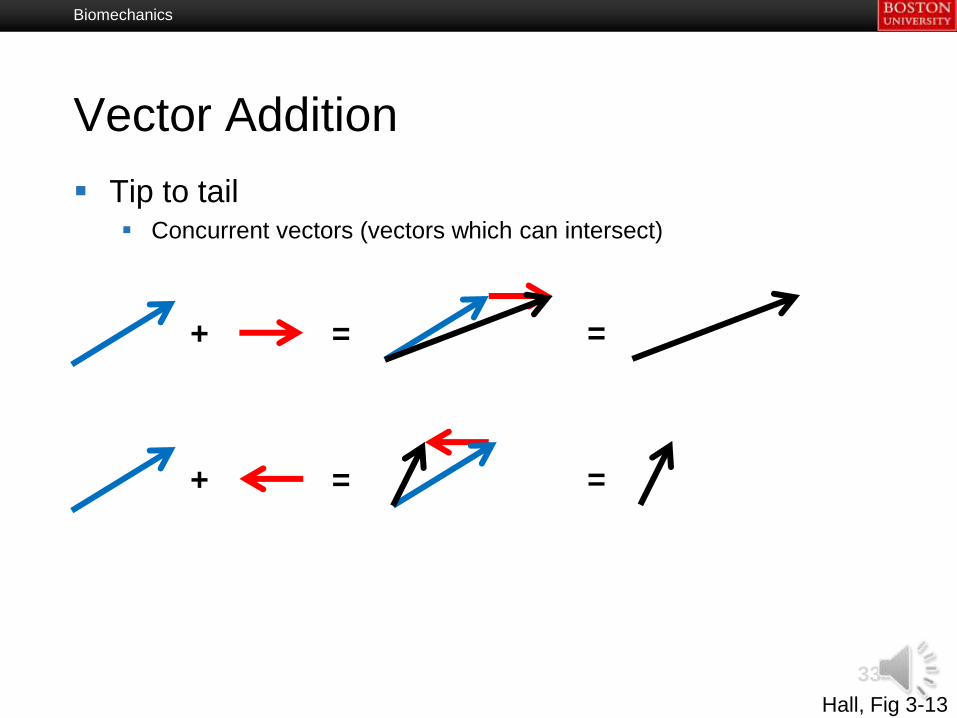
Vector Addition
Tip to tail Concurrent vectors (vectors which can intersect)
33
Hall, Fig 3-13
Biomechanics
+ =
+ =
=
=

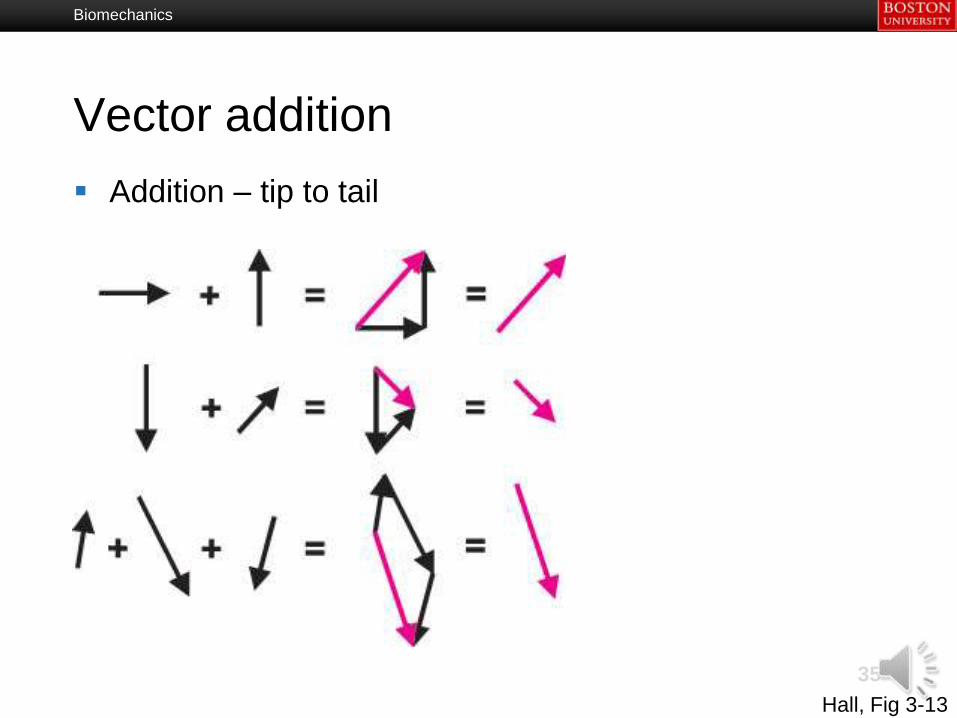
Vector addition
Addition – tip to tail
34
Hall, Fig 3-13
Biomechanics
Vector addition
Addition – tip to tail
35
Hall, Fig 3-13
Biomechanics
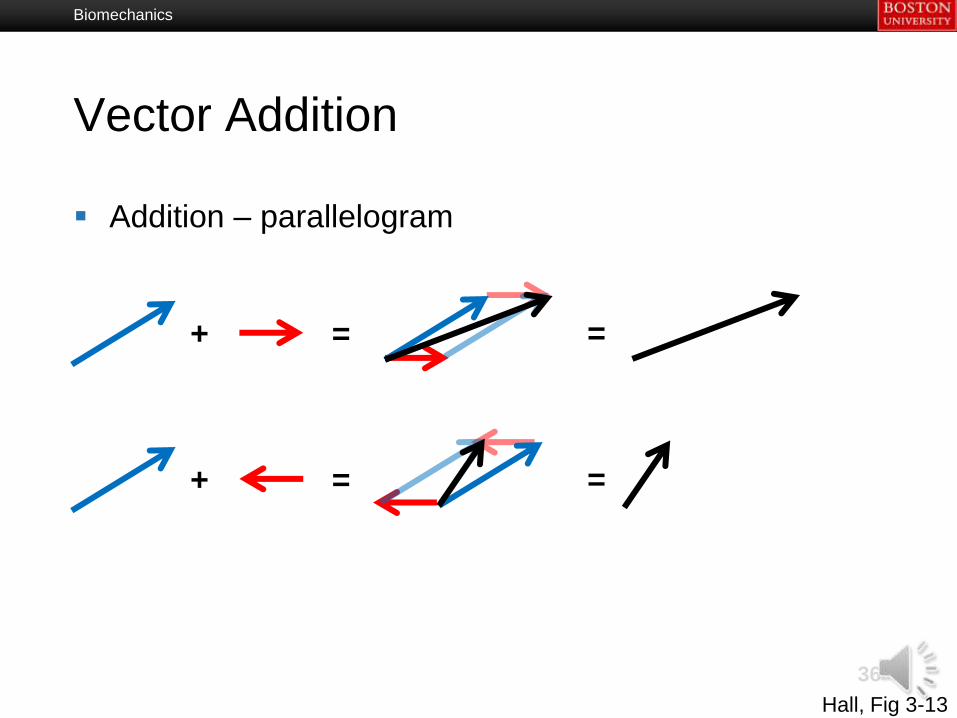
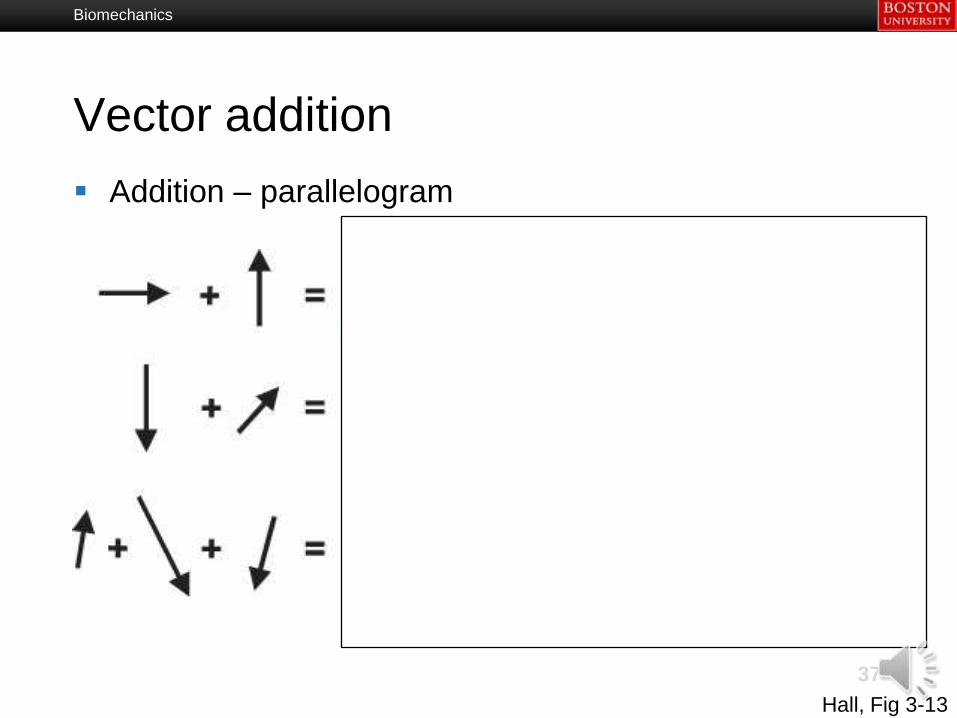
Vector Addition
Addition – parallelogram
36
Hall, Fig 3-13
Biomechanics
+ =
+ =
=
=
Vector addition
Addition – parallelogram
37
Hall, Fig 3-13
Biomechanics

Vector addition
Addition – parallelogram
38
Hall, Fig 3-13
Biomechanics
Vector Resolution
Resolving a vector into perpendicular components
Methods: Graph paper
Trigonometry
39
Biomechanics
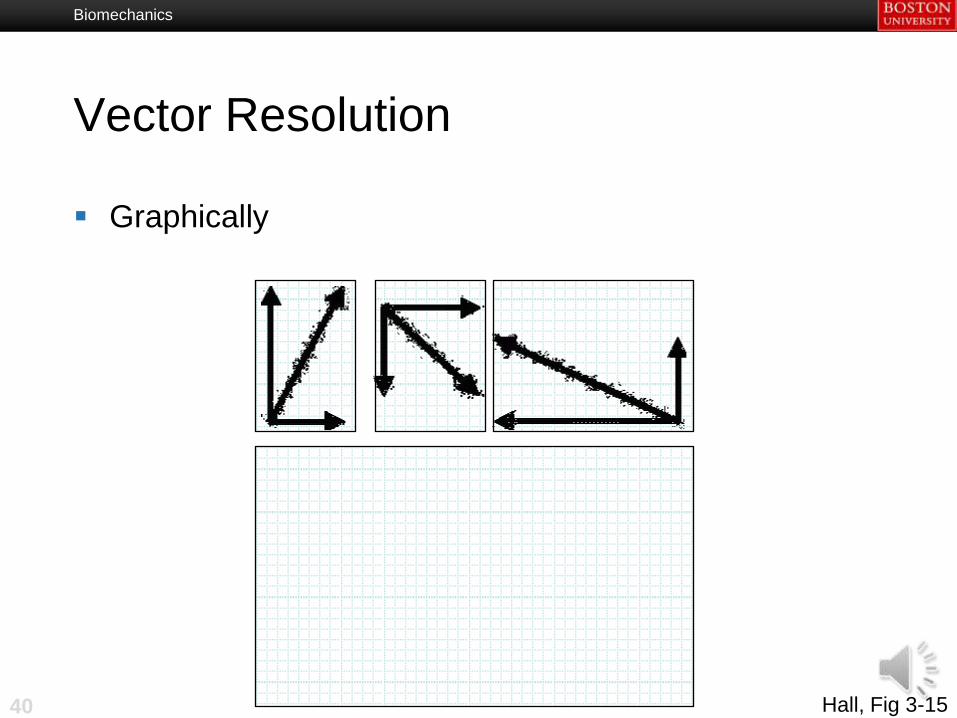
Vector Resolution
Graphically
40 Hall, Fig 3-15
Biomechanics
Vector Resolution
Graphically
41 Hall, Fig 3-15
Biomechanics

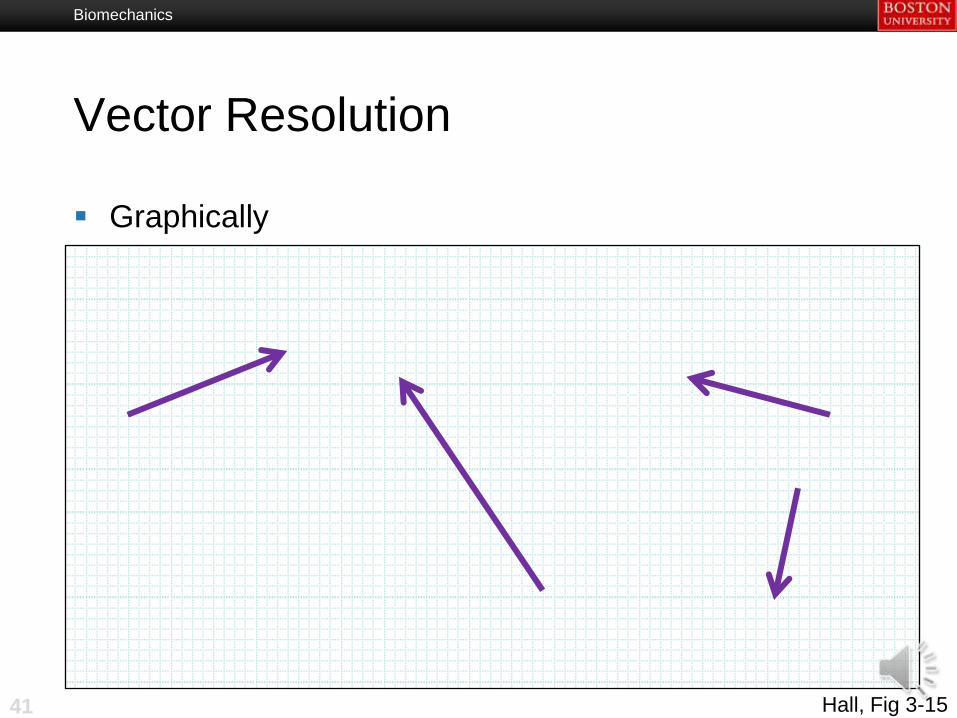
Vector Resolution
Graphically
42 Hall, Fig 3-15
Biomechanics
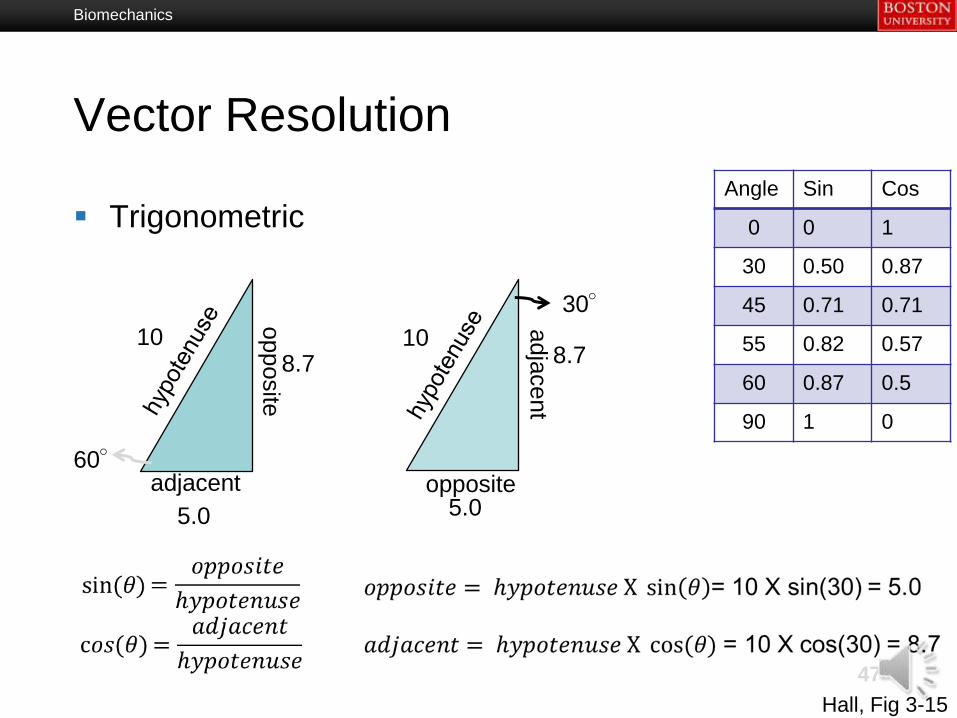
Vector Resolution
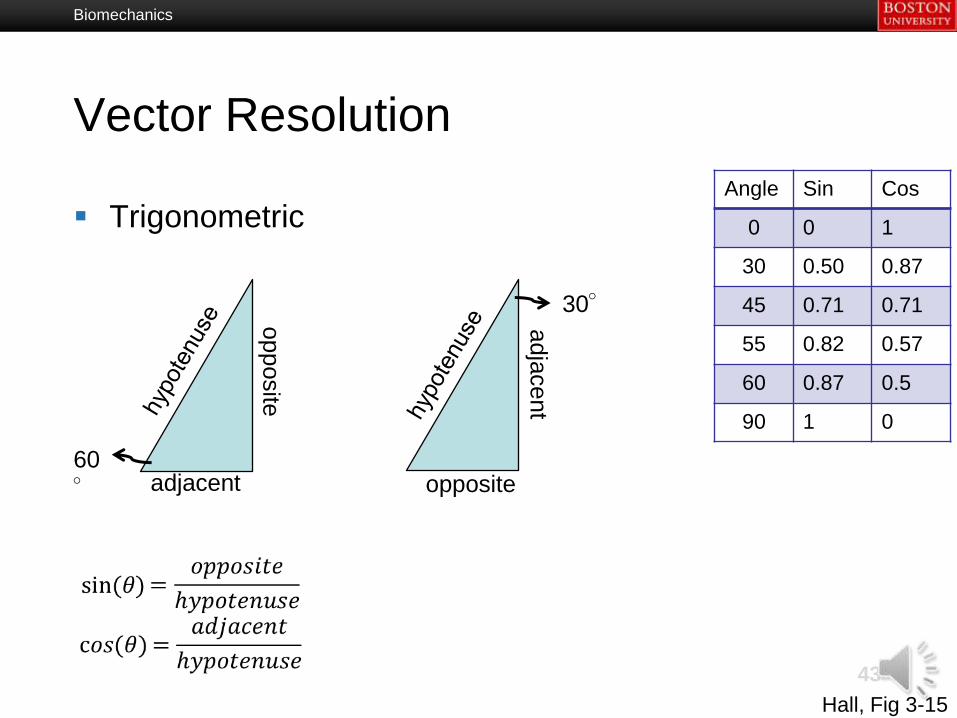
Trigonometric
43
Hall, Fig 3-15
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
60
°
30°
opposite
oppositeadjacent
adja
cent
Vector Resolution
Trigonometric
44
Hall, Fig 3-15
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
60°
30°
opposite
oppositeadjacent
adja
cent
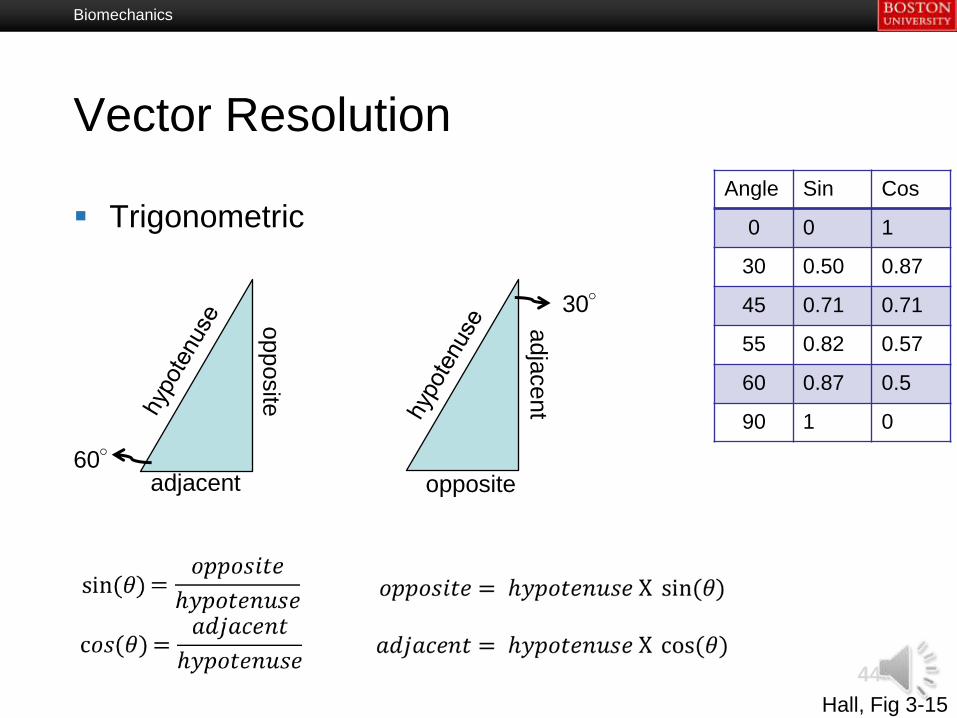
Vector Resolution
Trigonometric
45
Hall, Fig 3-15
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
60°
30°
opposite
oppositeadjacent
adja
cent
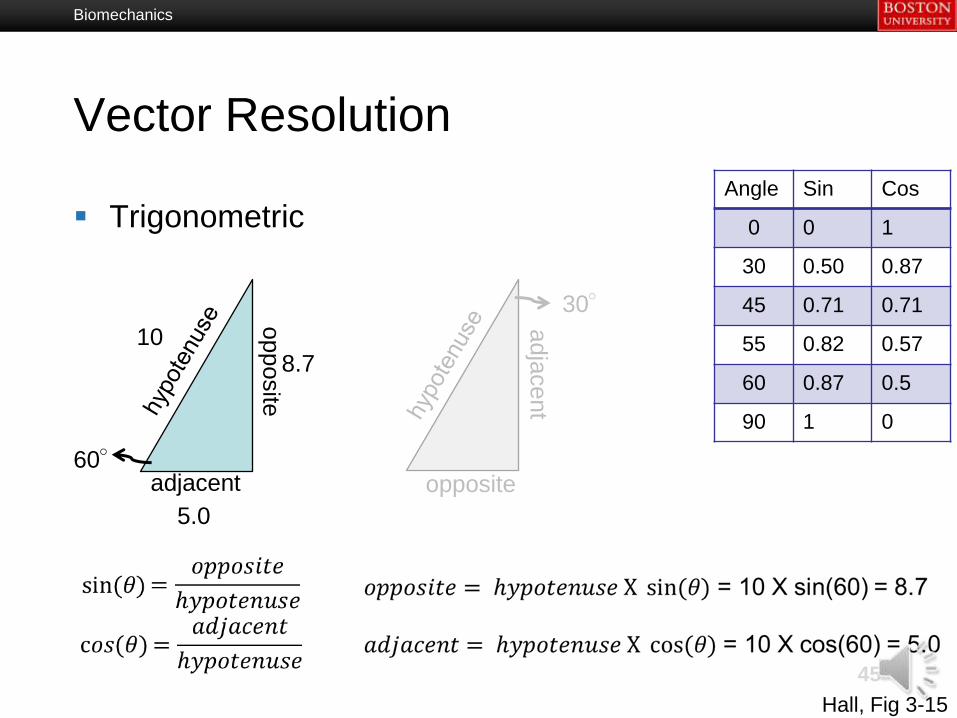
8.7
5.0
10
Vector Resolution
Trigonometric
46
Hall, Fig 3-15
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
60°
30°
opposite
oppositeadjacent
adja
cent
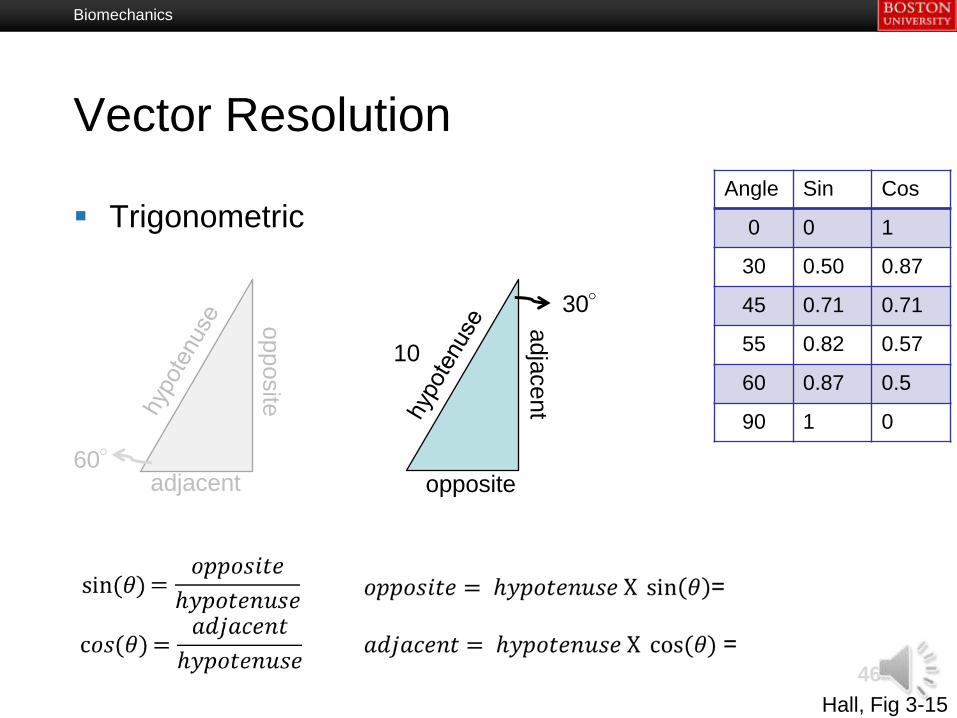
10
Vector Resolution
Trigonometric
47
Hall, Fig 3-15
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
60°
30°
opposite
oppositeadjacent
adja
cent
8.7
5.0
8.7
5.0
10 10
Vector Resolution
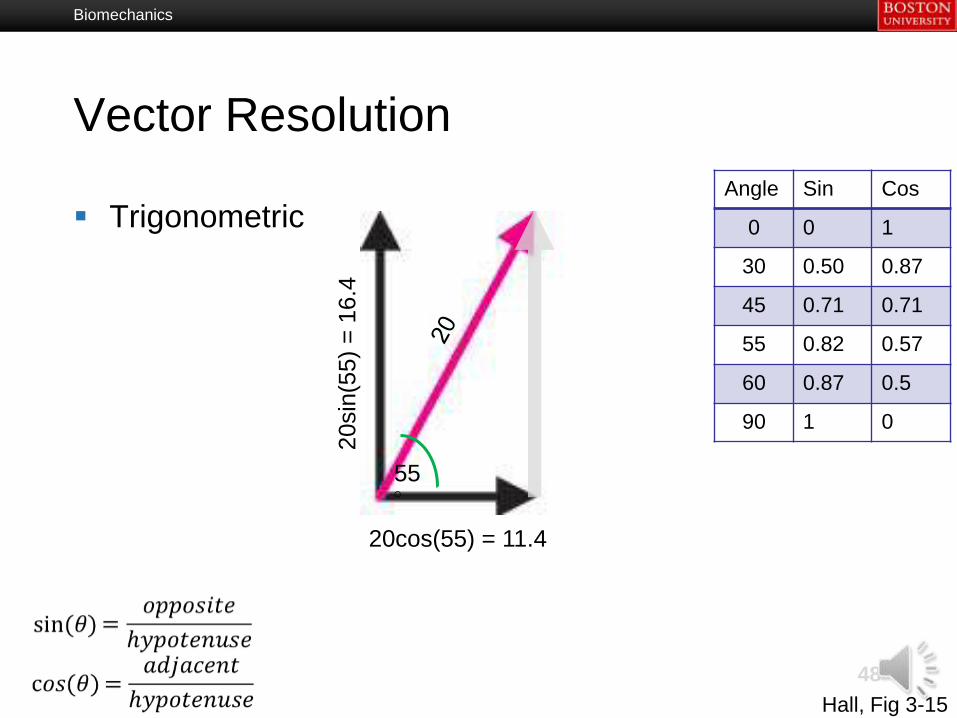
Trigonometric
48
Hall, Fig 3-15
55
°
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
20cos(55) = 11.4
20sin
(55)
= 1
6.4

Vector Resolution
Trigonometric
49
Hall, Fig 3-15
55°
45°
30°
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
Hypotenuse = 100
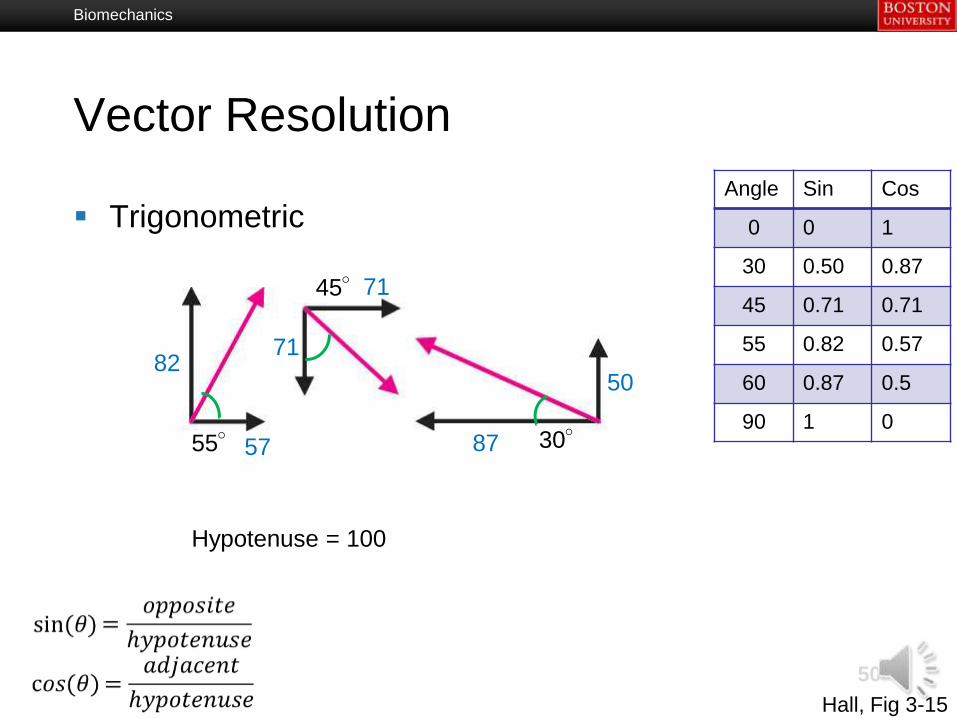
Vector Resolution
Trigonometric
50
Hall, Fig 3-15
55°
45°
30°
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
Hypotenuse = 100
82
57
71
71
87
50

Vector Resolution
Trigonometric How does angle change the composition?
51
Angle Sin Cos
0 0 1
30 0.50 0.87
45 0.71 0.71
55 0.82 0.57
60 0.87 0.5
90 1 0
Biomechanics
90° 60° 45° 30° 0°

Application to human movement
Resolve force into:
Perpendicular force
Rotation
Parallel force
Compression
Position dependent
52
perpendicular
parallel
Biomechanics Module
End of Biomechanics Module
Don’t forget to take the quiz
Biomechanics Module
53
Related Documents











