Beyond Bathymetry: Probing the Ocean Subsurface Using Ship- Based LIDARs Charles C. Trees NATO Centre for Maritime Research and Experimentation (CMRE) La Spezia, Italy ABSTRACT This document outlines a ‘proof-of-concept’ for the maritime application of a ship-based LIDAR system for measuring the optical and physical properties in the water column. It is divided up into sections, documenting that there exists today the engineering, modeling and optical expertise to accomplish this task as well as a discussion of the reasons that LIDAR has not become the powerful observational platform that it should have been for horizontally and vertically monitoring optical and physical water column properties. Previous research on this approach has been limited because LIDAR systems have for most cases not been thoroughly calibrated, if at all, nor have LIDARs been focused on above-water, ship-based measurements. Efforts at developing derived product algorithms with uncertainties have been limited. This review concludes that there is a huge potential for the successful application of LIDAR measurements in the marine environment to estimate the vertical distribution of optical and physical properties and that measurement costs can be minimized by deployment of these automated systems on ‘ships-of-opportunity’ and military vessels on a non-interfering basis. Although LIDAR measurements and research have been around since the 1960’s, this approach has not really been investigated by any civilian or military agencies or laboratories even though providing ‘through- sensor performance matrixes’ for existing bathymetry, target detection, underwater communication and imaging should be high on their list. Keywords: LIDAR, calibration and characterization, ship-based, in-situ, optical modeling, ground truth. 1. INTRODUCTION LIght Detection And Ranging (LIDAR) systems have been used successfully in the past to reveal the biological vertical structure (e.g. plankton and fish distributions) as well as providing geographic and physical mapping products, such as bathymetry, internal waves and suspended particles. In the past the focus areas for LIDARs has been the generation of civilian Digital Elevation Maps (DEM) of land, ice and coastal shoreline as well as additional military applications for bathymetry, mine detection and Anti-Submarine Warfare (ASW). What has received little research effort is the application of LIDAR measurements to estimate the optical (Inherent Optical Properties, IOPs and Apparent Optical Properties, AOPs) and physical (e.g. turbulence, temperature, salinity, sound speed) properties within the upper surface of the water column. A quick explanation for this deficiency is that the maritime customers were not interested in mapping the environmental characteristics of the water column other than estimating bottom depth (sometimes bottom reflectance) and target detection and discrimination. For both bathymetric and target detection systems, LIDAR return signals are large and therefore for this application it requires very little ground truthing or calibration of the systems as the signal to noise (S/N) is always high giving the greatest penetration depth e.g. a hard target can be seen at deeper depths than a soft one with the same system). As measurement consistency between various LIDAR systems and ‘through-sensor’ knowledge of depth penetration and associated uncertainties are requested by users, calibration and derived product validation will become important components of mapping and intelligence reconnaissance efforts. Additionally, as targets become more difficult to detect based on placement (burial, surface zone, coastal fronts), exterior covering and structure (bio-fouling, sediment deposition, camouflage, roughness), LIDAR systems will be required to detect small changes between targets (subtle differences in intensity and wavelength require characterization and calibration, C 2 ) and provide robust and accurate algorithms to convert retrieved waveforms into products (e.g. diver visibility, bathymetry, target location and identification, internal waves, mixed layer depth, thin turbid layers) no matter which LIDAR system is deployed there must be interoperability and standardization between systems. LIDARs can also be used on AUVs to assist in improving underwater imaging (e.g. laser scanning cameras) by estimating optical properties in the water column, thus predicting the maximum distance Ocean Sensing and Monitoring VI, edited by Weilin W. Hou, Robert A. Arnone, Proc. of SPIE Vol. 9111, 91110U · © 2014 SPIE · CCC code: 0277-786X/14/$18 · doi: 10.1117/12.2053875 Proc. of SPIE Vol. 9111 91110U-1 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Beyond Bathymetry: Probing the Ocean Subsurface Using Ship-Based LIDARs
Charles C. Trees
NATO Centre for Maritime Research and Experimentation (CMRE)
La Spezia, Italy
ABSTRACT
This document outlines a ‘proof-of-concept’ for the maritime application of a ship-based LIDAR system for measuring
the optical and physical properties in the water column. It is divided up into sections, documenting that there exists
today the engineering, modeling and optical expertise to accomplish this task as well as a discussion of the reasons that
LIDAR has not become the powerful observational platform that it should have been for horizontally and vertically
monitoring optical and physical water column properties. Previous research on this approach has been limited because
LIDAR systems have for most cases not been thoroughly calibrated, if at all, nor have LIDARs been focused on
above-water, ship-based measurements. Efforts at developing derived product algorithms with uncertainties have been
limited. This review concludes that there is a huge potential for the successful application of LIDAR measurements in
the marine environment to estimate the vertical distribution of optical and physical properties and that measurement
costs can be minimized by deployment of these automated systems on ‘ships-of-opportunity’ and military vessels on a
non-interfering basis. Although LIDAR measurements and research have been around since the 1960’s, this approach
has not really been investigated by any civilian or military agencies or laboratories even though providing ‘through-
sensor performance matrixes’ for existing bathymetry, target detection, underwater communication and imaging
should be high on their list.
Keywords: LIDAR, calibration and characterization, ship-based, in-situ, optical modeling, ground truth.
1. INTRODUCTION
LIght Detection And Ranging (LIDAR) systems have been used successfully in the past to reveal the biological
vertical structure (e.g. plankton and fish distributions) as well as providing geographic and physical mapping products,
such as bathymetry, internal waves and suspended particles. In the past the focus areas for LIDARs has been the
generation of civilian Digital Elevation Maps (DEM) of land, ice and coastal shoreline as well as additional military
applications for bathymetry, mine detection and Anti-Submarine Warfare (ASW). What has received little research
effort is the application of LIDAR measurements to estimate the optical (Inherent Optical Properties, IOPs and
Apparent Optical Properties, AOPs) and physical (e.g. turbulence, temperature, salinity, sound speed) properties
within the upper surface of the water column. A quick explanation for this deficiency is that the maritime customers
were not interested in mapping the environmental characteristics of the water column other than estimating bottom
depth (sometimes bottom reflectance) and target detection and discrimination. For both bathymetric and target
detection systems, LIDAR return signals are large and therefore for this application it requires very little ground
truthing or calibration of the systems as the signal to noise (S/N) is always high giving the greatest penetration depth
e.g. a hard target can be seen at deeper depths than a soft one with the same system). As measurement consistency
between various LIDAR systems and ‘through-sensor’ knowledge of depth penetration and associated uncertainties are
requested by users, calibration and derived product validation will become important components of mapping and
intelligence reconnaissance efforts. Additionally, as targets become more difficult to detect based on placement
(burial, surface zone, coastal fronts), exterior covering and structure (bio-fouling, sediment deposition, camouflage,
roughness), LIDAR systems will be required to detect small changes between targets (subtle differences in intensity
and wavelength require characterization and calibration, C2) and provide robust and accurate algorithms to convert
retrieved waveforms into products (e.g. diver visibility, bathymetry, target location and identification, internal waves,
mixed layer depth, thin turbid layers) no matter which LIDAR system is deployed there must be interoperability and
standardization between systems. LIDARs can also be used on AUVs to assist in improving underwater imaging (e.g.
laser scanning cameras) by estimating optical properties in the water column, thus predicting the maximum distance Ocean Sensing and Monitoring VI, edited by Weilin W. Hou, Robert A. Arnone, Proc. of SPIE Vol. 9111, 91110U · © 2014 SPIE · CCC code: 0277-786X/14/$18 · doi: 10.1117/12.2053875
Proc. of SPIE Vol. 9111 91110U-1
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms

from the target to minimize false targets and to effectively discriminate between target and surrounding clutter with the
possibility of target identification through visualization.
Sensor characterization and calibration (metrology) efforts, although time consuming with reoccurring costs (as they
need to be performed regularly depending upon deployment frequency), can be easily implemented once C2 optical
protocols have been developed by National Laboratories (e.g. National Institute of Standards and Technology
(NIST/NOAA), USA, and National Physical Laboratory (NPL), GBR). The development of robust algorithms to
relate LIDAR return signals to optical and physical properties and determine their uncertainties requires a different
approach than previously used for LIDAR ground truth data collection. Past LIDAR research generally utilized
aircraft 1,2,
3) and space-based platforms
4,5, which are limited in the number of paired observations, since these
platforms have such short temporal measurement periods (one paired ground truth data point per overpass, although
they are advantageous because of the extended spatial coverage). Ship-based deployment is required to provide robust
derived products from retrieved LIDAR signals, where other observational platforms can be deployed simultaneously
with the LIDAR scans. During a ship transit, towed vehicles are invaluable platforms for collecting horizontal and
more importantly vertical optical and physical data. While on station, LIDAR comparisons can be made with profiling
optical and physical instrumentation to provide robust derived product algorithms as well as uncertainty budgets for
these products. Ship-based validations with a C2 LIDAR system are the first steps in developing it into a powerful
observational tool.
2.APPLICATION TO MARITIME ENVIRONMENT
2.1 Depth penetration There is generally a ‘rule of thumb’ that LIDAR return signals can penetrate down to three optical depths (OD=).
This is a conservative estimate of penetration depth that is based on optical properties of the water column and more
importantly on the strength of the backscattered signal. Penetration depth is also dependent on the laser wavelength
and marine environment to be monitored [green laser at 532nm for littoral and coastal areas, blue laser at 450-490nm
for open ocean waters and yellow laser at >560nm for turbid waters). For hard targets, such as the sea floor, the
estimate is closer to four optical depths (ODs), whereas estimating optical properties from the decay in the LIDAR
signal it is closer to three ODs. The diffuse optical depth, (z), is defined as
(z) = ln (Eo/Ez) = Kz, 1
where ‘o’ and ‘z’ subscripts are the downwelling irradiance incident at the surface and at some depth (z), respectively,
and K is the diffuse attenuation coefficient (m-1
). When the OD, (z) is equal to 1.0 then the depth at which this
occurs is equal to inverse of the diffuse attenuation coefficient (1/K) which is also the 37% light level depth and the
depth at which 90% of the remotely sensed ocean color signal originates. K(490) is a standard derived product that
has been generated from most satellite-based ocean colors sensors, such a SeaWiFS, MODIS, MERIS, VIIRS, etc. It
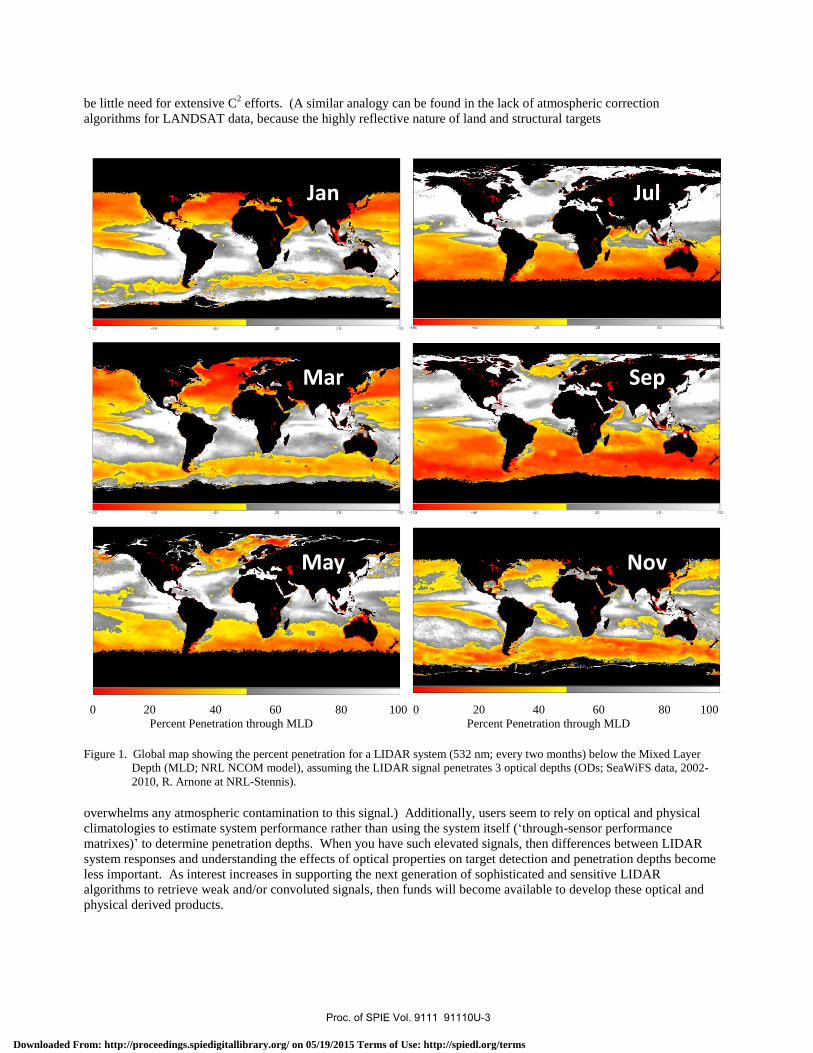
can be demonstrated that a conventional airborne LIDAR systems can retrieve data as deep as the mixed layer depth
(MLD) by using satellite derived global maps of K distributions in conjunction with the US Navy’s NCOM model that
predicts MLD6. Assuming that the optical properties retrieved in the upper water column (37% light level depth or
1/K) by SeaWiFS are indicative of the water clarity down to the MLD, then LIDARs can be used to measure through
the thermocline/MLD for ~70% of the world’s oceans annually (Fig. 1). So LIDAR surveying has the potential to
retrieve optical and physical properties down to and through the MLD for a significant portion of oceanic coastal
areas. This capability to provide a Rapid Environmental Assessment (REA) has many important military and civilian
applications, with the obvious being improved ocean modelling and forecasting through data assimilation optical and
physical properties. It should be emphasized that retrieving optical and physical properties above the MLD is also
important for these and other applications (bioluminescence, gas exchange, near surface algal blooms, diver visibility,
etc.).
2.2 Characterization and calibration (C2) Now that it has been shown that LIDAR surveys are capable of sampling down to and even through the MLD in most
areas, the issue about characterization and calibration (C2) will be addressed. The same reasons stated above about the
lack of funding for extraction of optical properties from the LIDAR signals can also be used to explain the limited, if
any, C2 efforts. With the large LIDAR return signals from hard targets such as the sea floor and mines, there seems to
Proc. of SPIE Vol. 9111 91110U-2
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
100
be little need for extensive C2 efforts. (A similar analogy can be found in the lack of atmospheric correction
algorithms for LANDSAT data, because the highly reflective nature of land and structural targets
0 20 40 60 80 100 0 20 40 60 80 100
Percent Penetration through MLD Percent Penetration through MLD
Figure 1. Global map showing the percent penetration for a LIDAR system (532 nm; every two months) below the Mixed Layer
Depth (MLD; NRL NCOM model), assuming the LIDAR signal penetrates 3 optical depths (ODs; SeaWiFS data, 2002-
2010, R. Arnone at NRL-Stennis).
overwhelms any atmospheric contamination to this signal.) Additionally, users seem to rely on optical and physical
climatologies to estimate system performance rather than using the system itself (‘through-sensor performance
matrixes)’ to determine penetration depths. When you have such elevated signals, then differences between LIDAR
system responses and understanding the effects of optical properties on target detection and penetration depths become
less important. As interest increases in supporting the next generation of sophisticated and sensitive LIDAR
algorithms to retrieve weak and/or convoluted signals, then funds will become available to develop these optical and
physical derived products.
Jan
Mar
May
Jul
Sep
Nov
Proc. of SPIE Vol. 9111 91110U-3
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
There have been only a few published articles on efforts to radiometrically calibrate LIDAR systems and none on
laboratory characterization of the system components. Without a thorough characterization of the LIDAR system it
becomes difficult to develop a model to simulate the LIDAR waveform as the system specifications are not accurately
known or verified. One of the first documented calibration efforts was performed on the US Navy’s SHOALS
(Scanning Hydrographic Operational Airborne Lidar Survey)7. They suggested that water column optical properties
could be estimated from SHOALS data by fitting recorded waveforms to modelled simulated waveforms. The values
of the optical parameters providing the best fit were accepted as estimates of these desired parameters. Consequently,
the success of this ‘fitting’ technique requires the calculation of the simulated optical signal into an electrical signal
recorded by the LIDAR digitizer and therefore the system must be calibrated. Tuell et al. (2005)7 used an 80m
calibration facility and recorded the signals received as the laser pulses varied in power. This required the addition of
a calibrated power meter to simultaneously monitor the laser intensity reflected from a wall that had painted tiles
attached to it. By putting a variety of neutral density filters in front of the LIDAR optical receiver, they were able to
reduce the return power measured by SHOALS.
The other published calibration effort was by Lee et al. (2013)8 working with NOAA’s Fish Lidar
9. They also
proposed that a simulated model of the dependence of the LIDAR signal on the optical properties of the water was
necessary to invert the LIDAR return. The first calibration effort was in the laboratory where the transmission of the
optics for all receiver channels, the response of each PMT as a function of applied gain-control voltage and the
response of the logarithmic amplifier was measured separately. Measuring the individual component parts of an
optical instrument and then assuming that summing these components together will provide a calibration quality
instrument is not a correct assumption. This approach can only be used to qualitatively estimate the characterization of
the LIDAR system. For a thorough C2 all optical components should be assembled and then simultaneously tested in
the calibration laboratory with radiometric standards.
For the next phase of the calibration, a horizontal propagation range at 300 m was used and instead of neutral density
filters to reduce the laser power several different targets with known and calibrated reflective surfaces (Spectralon)
were used. They also recorded the impulse response function of the system, which included the effects of the laser
pulse shape and the low-level ringing of the logarithmic amplifier. Unfortunately, there was no mention of the
addition of a calibrated power meter to measure the laser intensity at the Spectralon plaque and this is a limitation.
Since Spectralon plaques are expensive to purchase as compared to neutral density filters7, one would have to assume
that the range of laser powers used for the development of a calibration curve by Lee et al. (2013)8 was not as
extensive as the SHOALS effort. Because of these calibrations, both LIDAR groups were able to successfully
simulate the LIDAR return signals and thus extract qualitative estimates of diffuse attenuation [K(532)] and absorption
coefficients [a(532)]. So LIDAR calibrations can be performed, but there is a requirement that optical calibration
protocols be developed and agreed upon by the metrologists. The characterization of LIDAR systems has received
little to no attention, so this ‘proof-of-concept’ document recommends that C2 protocols be established and that the
calibration efforts be performed on a regular basis, depending upon the usage and number of deployments of each
LIDAR.
2.3 Modelling LIDAR waveforms As mentioned above in the LIDAR C
2 examples, there is a requirement to model and simulate LIDAR waveforms in
order to obtain accurate estimates of water column optical properties as well as seafloor reflectance parameters. The
conversion of the LIDAR waveforms into optical properties requires an inversion of the oceanic LIDAR return
(inverse model) because the LIDAR signal is a function of the attenuation [c()] and backscattering [bb()]
characteristics of the water column. This becomes convoluted in that the laser pulse is reduced as a function of c()
and bb() on its downward path, but for the return path the signal decay is now a function of the diffuse attenuation
[K()] and bb(). Although both c() and K() are functions of the absorption and scattering properties in the water
column, they are distinctly different attenuation properties. c() is an Inherent Optical Property (IOP) and is related to
the absorption [a()] and the scattering [b()] coefficients in the form of
c() = a() + b(). 2
K() on the other hand is an Apparent Optical Property (AOP) and is governed by the incident solar and sky
illumination such that the relationship to a() and b() is of the form
K() = a() + b()/n, 3
Proc. of SPIE Vol. 9111 91110U-4
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
where’ n’ is a fraction of scattered light [for those photons scattered “out” of the instruments Field-of View (FOV)
there are photons from adjacent regions which are scattered back “in”]. K() is always less than the magnitude of c()
with the difference depending upon the relative proportions of a() and b() in the water column. Also be aware that
the above attenuation equations do not contain the backscattering coefficient [bb()], although b(), the total scattering
coefficient, is a function of the forward scattering plus the backscattering coefficients [b() = bf() + bb()]. Besides
this difference in attenuation properties between the downward and the upward backscattered laser pulse decays, the
FOV of the optical receiver on the LIDAR also determines the sensitivity of the system to K() or c(). For narrow
FOVs (1-4o) the LIDAR signal is governed more by c(), whereas for larger FOVs (e.g. 8-12
o) K() determines the
attenuation of the laser signal. These are the reasons for optical modeling of LIDAR waveforms to extract optical
properties.
There have been several published LIDAR models that can be used to simulate the LIDAR return waveform using
optical properties as input to this solution. A few of these models will now be discussed, like Dolina et al. (2007)9 that
utilized previously published optical relationships to develop algorithms for solving the LIDAR inverse problem using
correlations between IOPs10
. They found errors ranging from 10% to 40% in retrieving c() with the smaller errors
occurring in the near surface layers (1-2 ODs) and the larger ones at greater ODs (3-5). Improved accuracies of the
retrieval of IOPs can be made if a more precise relationship can be found between b() and c() in the regions of
observations. They proposed an adaptive algorithm approach to improve the retrieval accuracy by processing the
LIDAR signal itself and a priori knowledge of the IOP distribution and variability.
Another LIDAR model used with NAVAIR’s K-Meter Survey System (KSS) was the KSS-2 model11
. The KSS
LIDAR was designed to obtain system specific attenuation coefficients (Ksys), as well as investigating the potential for
determining other water column IOPs. Inputs into the KSS-2 model were the system configurations (FOV, etc.),
system geometries (altitude, etc.), transmit/receive characteristics, atmospheric visibility, sea surface conditions, water
column optical properties (stratification) and phase function. The outputs were LIDAR return profiles including the
components of the return profile (atmosphere, surface, water), LIDAR decay rate [Ksys(z)] and shot and surface noises.
The agreement between modelled and measured waveforms were excellent in both clear (c = 0.27 m-1
) and turbid (c =
1.6 m-1
) waters with the model results being within the model input errors. Several years later Zege et al. (2003)12
developed new software [Airborne Oceanic Lidar Simulator (AOLS)] to support quasi-real-time simulation of airborne
LIDAR performance based on an underlying semi-analytical theory of a LIDAR return with multiple scattering. This
model provides the simulated signals for elastic-backscatter LIDAR with polarization devices and with Raman and
fluorescence channels.
The last modeling approach discussed13,14
uses the small-angle scattering approximation in the Radiation Transfer
Equation (RTE) to form the basis of an accepted model of LIDAR performance. This “multiple-forward-single-
backscattering” model is used to develop techniques for estimating backscattering coefficients, beam attenuation
coefficients, single-scattering albedos and the Volume Scattering Function (VSF) asymmetry coefficients by fitting
simulated waveforms to actual data measured by two LIDAR receivers (a shallow water APD receiver with an 18mrad
FOV and a deep water Photomultiplier Tube (PMT) receiver with a 40mrad FOV). Remember that small and large
FOV sensors have different attenuation coefficients (K vs c) that affect the decay rates of the LIDAR waveforms.
So several inverse models have been presented that can be used to evaluate LIDAR system performance as well as
estimating optical properties in the water column. Most of the LIDAR modeling and optical expertise has been
developed in Russia and Belarus as they have been the leaders in LIDAR research for many decades. Many of these
key LIDAR modeling experts (Drs, Eleonora Zege11,12
, Lev S. Dolin9, Oleg Kopelevich
10 and Yuri Kopilevich
7,13,14)
attended the Centre sponsored LIDAR Observations of Optical and Physical Properties (LOOPP) Workshop in 2011 in
La Spezia, Italy.
2.4 Optical properties estimated from LIDAR waveforms As previously stated in Section 3.2, most approaches at estimating in-situ optical properties from LIDAR signals
require a model that simulates the actual measured waveform by inputting a variety of optical parameters into the
model. If the simulated waveforms accurately represent the measured LIDAR signal then the optical properties can be
retrieved from the model. Correlation approaches that relate the actual LIDAR signal to optical properties don’t seem
Proc. of SPIE Vol. 9111 91110U-5
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
to be a very effective method for retrieving the vertical distribution of these properties9. So what we will present in
this section are results from modeling LIDAR waveforms and then extracting optical properties from that simulated
waveform model. Most of the comparisons presented will be of a qualitative nature because of the lack of C2 and the
limited number of concurrently acquired optical and LIDAR measurements. As previously stated, ship-based systems
have the best chance of improving the predictive potential for LIDARs to vertically profile optical data.
Using an airborne polarized LIDAR system, Vasilkov et al. (2001)15
investigated the ability of a LIDAR system that
measured the two orthogonal-polarized components of the backscatter light pulse to retrieve vertical profiles of the
backscattering coefficient [bb(532)]. Rationale for this polarized technique is that depolarization of backscattered light
originating from a linearly polarized laser beam, is dominated by multi-angle scattering from particles in the water
column. The magnitude of this small-angle scattering is determined by bb(532). This was a joint Russian-American
LIDAR Experiment which showed that the retrieved profiles of bb(532) only reproduced the main features of the
measured profiles of the beam attenuation coefficient, c(532). Accuracies for this optical retrieval were not given.
The system specific or effective attenuation coefficient K(532) from three LIDAR pulses were 0.139, 0.120 and
0.088m-1
and had correlation coefficients of 0.994, 0.993 and 0.984, respectively.
Tuell et al. (2005)7 investigated the ability of the SHOALS LIDAR system to estimate water-column optical properties
and seafloor reflectance (532 nm) during aircraft overflights off Fort Lauderdale, Florida, USA in November 2003. As
discussed in the modeling section above, SHOALS utilizes a two receiver system [Avalanche Photodiode Detector
(APD) and Photomultiplier Detector (PMT)] to assist in estimating bb(532). They provided no estimate of the vertical
distribution of the absorption and scattering coefficients from the modeled LIDAR waveforms, but did compare
LIDAR integrated optical properties with vertical measurements from a Wet Labs Absorption and Attenuation Meter
(ac-9). The SHOALS system estimated a(532) and b(532) to be 0.089m-1
and 0.227m-1
, respectively, as compared to
the mean near-surface values from ac-9 measurements of 0.070m-1
and 0.218m-1
, respectively.
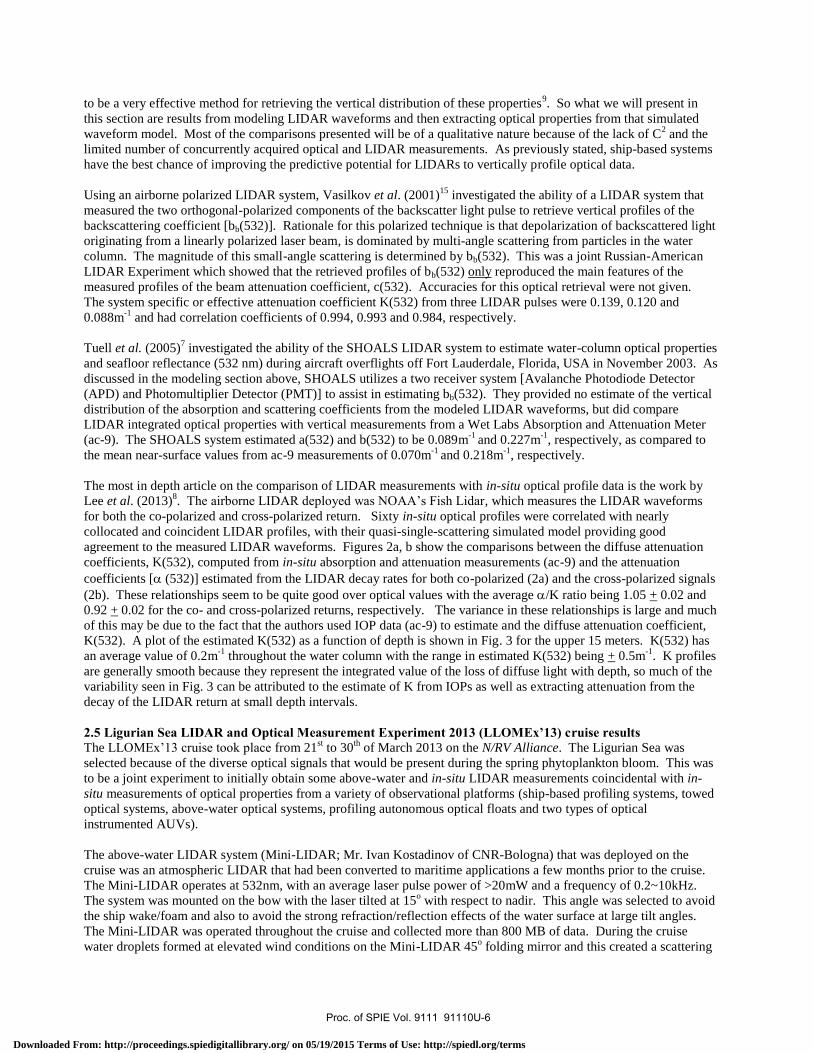
The most in depth article on the comparison of LIDAR measurements with in-situ optical profile data is the work by
Lee et al. (2013)8. The airborne LIDAR deployed was NOAA’s Fish Lidar, which measures the LIDAR waveforms
for both the co-polarized and cross-polarized return. Sixty in-situ optical profiles were correlated with nearly
collocated and coincident LIDAR profiles, with their quasi-single-scattering simulated model providing good
agreement to the measured LIDAR waveforms. Figures 2a, b show the comparisons between the diffuse attenuation
coefficients, K(532), computed from in-situ absorption and attenuation measurements (ac-9) and the attenuation
coefficients [ (532)] estimated from the LIDAR decay rates for both co-polarized (2a) and the cross-polarized signals
(2b). These relationships seem to be quite good over optical values with the average /K ratio being 1.05 + 0.02 and
0.92 + 0.02 for the co- and cross-polarized returns, respectively. The variance in these relationships is large and much
of this may be due to the fact that the authors used IOP data (ac-9) to estimate and the diffuse attenuation coefficient,
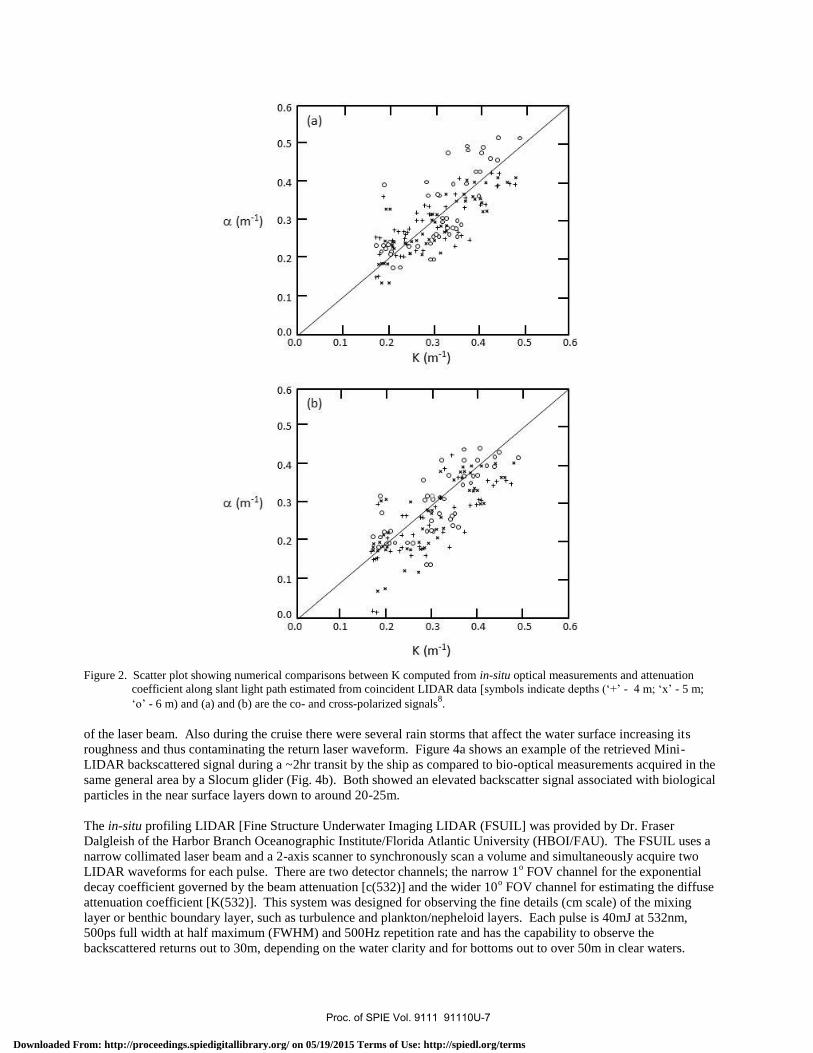
K(532). A plot of the estimated K(532) as a function of depth is shown in Fig. 3 for the upper 15 meters. K(532) has
an average value of 0.2m-1
throughout the water column with the range in estimated K(532) being + 0.5m-1
. K profiles
are generally smooth because they represent the integrated value of the loss of diffuse light with depth, so much of the
variability seen in Fig. 3 can be attributed to the estimate of K from IOPs as well as extracting attenuation from the
decay of the LIDAR return at small depth intervals.
2.5 Ligurian Sea LIDAR and Optical Measurement Experiment 2013 (LLOMEx’13) cruise results The LLOMEx’13 cruise took place from 21
st to 30
th of March 2013 on the N/RV Alliance. The Ligurian Sea was
selected because of the diverse optical signals that would be present during the spring phytoplankton bloom. This was
to be a joint experiment to initially obtain some above-water and in-situ LIDAR measurements coincidental with in-
situ measurements of optical properties from a variety of observational platforms (ship-based profiling systems, towed
optical systems, above-water optical systems, profiling autonomous optical floats and two types of optical
instrumented AUVs).
The above-water LIDAR system (Mini-LIDAR; Mr. Ivan Kostadinov of CNR-Bologna) that was deployed on the
cruise was an atmospheric LIDAR that had been converted to maritime applications a few months prior to the cruise.
The Mini-LIDAR operates at 532nm, with an average laser pulse power of >20mW and a frequency of 0.2~10kHz.
The system was mounted on the bow with the laser tilted at 15o with respect to nadir. This angle was selected to avoid
the ship wake/foam and also to avoid the strong refraction/reflection effects of the water surface at large tilt angles.
The Mini-LIDAR was operated throughout the cruise and collected more than 800 MB of data. During the cruise
water droplets formed at elevated wind conditions on the Mini-LIDAR 45o folding mirror and this created a scattering
Proc. of SPIE Vol. 9111 91110U-6
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
0.6
0.5
0.4
a (m-1) 0.3
0.2
0.1
00
I I I I I
o
o g ó O°ao- o ° o+ó + w+ -
t o 0 t}+
+- r}$o 0 o* Xb 40 +`- ' }r`
VS r
I I
00
l I0.0 0.1 0.2 0.3 0.4
K (m-1)
0.6
0.5
0.4
a (m-1) 0.3
0.2
0.1
0.0
0.5 0.6
O 0° r ok} kk
ooa r
}}M-k&pp- i Q }}#
o
- o
oq e+ + '66:1 °p+
t+t311,"+ +
I #1-I I I I
0.0 0.1 0.2 0.3 0.4
K (m'1)
0.5 0.6
Figure 2. Scatter plot showing numerical comparisons between K computed from in-situ optical measurements and attenuation
coefficient along slant light path estimated from coincident LIDAR data [symbols indicate depths (‘+’ - 4 m; ‘x’ - 5 m;
‘o’ - 6 m) and (a) and (b) are the co- and cross-polarized signals8.
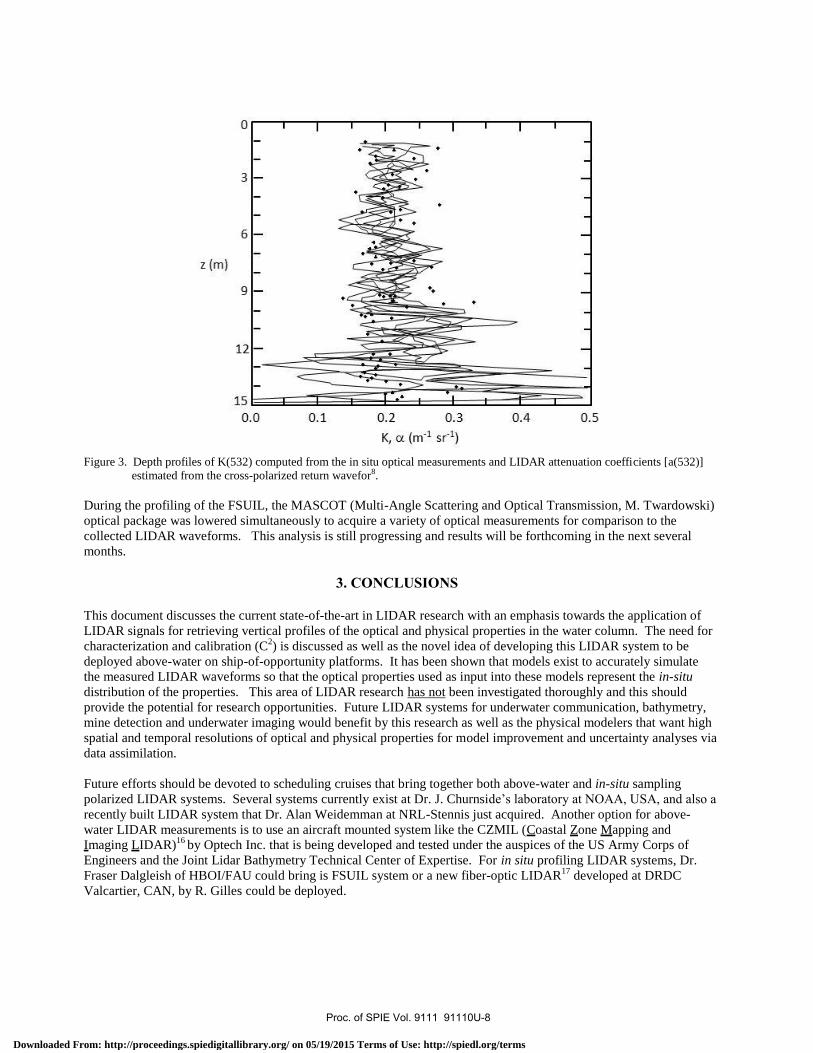
of the laser beam. Also during the cruise there were several rain storms that affect the water surface increasing its
roughness and thus contaminating the return laser waveform. Figure 4a shows an example of the retrieved Mini-
LIDAR backscattered signal during a ~2hr transit by the ship as compared to bio-optical measurements acquired in the
same general area by a Slocum glider (Fig. 4b). Both showed an elevated backscatter signal associated with biological
particles in the near surface layers down to around 20-25m.
The in-situ profiling LIDAR [Fine Structure Underwater Imaging LIDAR (FSUIL] was provided by Dr. Fraser
Dalgleish of the Harbor Branch Oceanographic Institute/Florida Atlantic University (HBOI/FAU). The FSUIL uses a
narrow collimated laser beam and a 2-axis scanner to synchronously scan a volume and simultaneously acquire two
LIDAR waveforms for each pulse. There are two detector channels; the narrow 1o FOV channel for the exponential
decay coefficient governed by the beam attenuation [c(532)] and the wider 10o FOV channel for estimating the diffuse
attenuation coefficient [K(532)]. This system was designed for observing the fine details (cm scale) of the mixing
layer or benthic boundary layer, such as turbulence and plankton/nepheloid layers. Each pulse is 40mJ at 532nm,
500ps full width at half maximum (FWHM) and 500Hz repetition rate and has the capability to observe the
backscattered returns out to 30m, depending on the water clarity and for bottoms out to over 50m in clear waters.
Proc. of SPIE Vol. 9111 91110U-7
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
z(m)
0.5
Figure 3. Depth profiles of K(532) computed from the in situ optical measurements and LIDAR attenuation coefficients [a(532)]
estimated from the cross-polarized return wavefor8.
During the profiling of the FSUIL, the MASCOT (Multi-Angle Scattering and Optical Transmission, M. Twardowski)
optical package was lowered simultaneously to acquire a variety of optical measurements for comparison to the
collected LIDAR waveforms. This analysis is still progressing and results will be forthcoming in the next several
months.
3. CONCLUSIONS
This document discusses the current state-of-the-art in LIDAR research with an emphasis towards the application of
LIDAR signals for retrieving vertical profiles of the optical and physical properties in the water column. The need for
characterization and calibration (C2) is discussed as well as the novel idea of developing this LIDAR system to be
deployed above-water on ship-of-opportunity platforms. It has been shown that models exist to accurately simulate
the measured LIDAR waveforms so that the optical properties used as input into these models represent the in-situ
distribution of the properties. This area of LIDAR research has not been investigated thoroughly and this should
provide the potential for research opportunities. Future LIDAR systems for underwater communication, bathymetry,
mine detection and underwater imaging would benefit by this research as well as the physical modelers that want high
spatial and temporal resolutions of optical and physical properties for model improvement and uncertainty analyses via
data assimilation.
Future efforts should be devoted to scheduling cruises that bring together both above-water and in-situ sampling
polarized LIDAR systems. Several systems currently exist at Dr. J. Churnside’s laboratory at NOAA, USA, and also a
recently built LIDAR system that Dr. Alan Weidemman at NRL-Stennis just acquired. Another option for above-
water LIDAR measurements is to use an aircraft mounted system like the CZMIL (Coastal Zone Mapping and
Imaging LIDAR)16
by Optech Inc. that is being developed and tested under the auspices of the US Army Corps of
Engineers and the Joint Lidar Bathymetry Technical Center of Expertise. For in situ profiling LIDAR systems, Dr.
Fraser Dalgleish of HBOI/FAU could bring is FSUIL system or a new fiber-optic LIDAR17
developed at DRDC
Valcartier, CAN, by R. Gilles could be deployed.
Proc. of SPIE Vol. 9111 91110U-8
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
E
a_
- 20
- 40
- 60
20130322-102409
ckSatt Polariz (Rev.1)
Sack scattered
OCO q ea
10.5 11.0Local Tme
1 I.E.' 12.0
so
i AfI
lI
03522817 00
18 0010 00
rme
220023 00
Figure 4. (a) Vertical profiles of the MiniLIDAR polarized backscatter signal retrieved from a ship transit in the Ligurian Sea
gyre during LLOMEx’13 cruise along with (b) the vertical distribution of optical backscattered measured on a Slocum glider
near the ship’s cruise track.
4. ACKNOWLEDGEMENTS
This work was supported by the Allied Command Transformation (ACT), NATO under the Environmental Knowledge
and Observational Effectiveness (EKOE) Project.
5. REFERENCES
[1] Hoge, F. E., Wright, C. W., Krabill, W. B., Buntzen, R. R., Gilbert, G. D., Swift, R. N., Yungel, J. K. and Berry,
R. E., “Airborne lidar detection of subsurface oceanic scattering layers,” Appl. Opt. 27, 3,969-3,977 (1998).
[2] Churnside, J. H. and Donaghay, P. L. “Thin scattering layers observed by airborne lidar,” ICES J. Mar. Sci. 66,
778-789 (2009). [3] Tuell, G. H., Barbor, K. and Wozencraft, J., “Overview of the Coastal Zone Mapping and Imaging Lidar
(CZMIL): A new multisensory airborne mapping system for the U.S. Army Corps of Engineers,” Proc. SPIE
7695, doi:10.1117/12.851905 (2010).
[4] Churnside, J. H., Brandi, J. M. and Xiaomei, L., “Subsurface ocean signals from an orbiting polarization lidar,”
Remote Sens. 5(7), 3,457-3,475 (2013).
[5] Josset, D., Rogers, R., Pelon, J., Hu, Y., Liu, Z., Omar, A. and Zhai, P.-W, “CALIPSO lidar ratio retrieval over the
ocean,” Opt. Express 19(19),18,696-18,706 (2011).
[6] deRada, S., Ladner, S. and Arnone, R. A., “Coupling ocean models and satellite derived optical fields to estimate
LIDAR penetration and detection performance,” Proc. SPIE 8532, doi:10.1117/12.2007323 (2012).
[7] Tuell, G. H., Feygels, V., Kopilevich, Y., Weidemann, A. D., Cunningham, A. G., Mani, R., Podoba, V.,
Ramnath, V., Park, J. Y. and Aitken, J., “Measurement of ocean optical properties and seafloor reflectance with
bb Polarized
Glider bb
(a)
(b)
Proc. of SPIE Vol. 9111 91110U-9
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
Scanning Hydrographic Operational Airborne Lidar Survey (SHOALS): II Practical results and comparison with
independent data,” Proc. SPIE 5885, doi:10.1117/12.619215 (2005).
[8] Lee, J. H., Churnside, J. H., Marchbanks, R. D., Donaghay, P. L. and Sullivian, J. M, “Oceanographic lidar
profiles compared with estimates from in situ optical measurements,” Appl. Opt. 52(4), 786-794 (2013).
[9] Churnside, J. H. and Wilson, J. J., “Airborne lidar for fisheries applications,” Opt. Eng. 40, 406-414 (2001).
[9] Donia, I. S., Dolin, L. S., Levin, I. M., Rodionov, A. A. and Savel’ev, V. A., “Inverse problems of lidar sensing of
the ocean,” Pro. SPIE 6615, doi:10.1117/12.740451 (2007).
[10] Levin, I. M. and Kopelevich, O. V., “Correlations between the inherent hydroptical characteristics in the spectral
range close to 550 nm,” Mar. Phys., Oceanology 47(3), 344-349 (2007).
[11] Zege, E. P., Katsev, I. L., Prikhach, A. S. and Keeler, R. N, “Simulating the performance of airborne and in‐water
laser imaging systems,” Proc. SPIE, 4488, doi:10.1117/12.452830 (2002).
[12] Zege, E. P., Katsev, I., Prikhach, A. and Malinka, A., ”Elastic and Raman, LIDAR sounding of coastal waters.
Theory, computer simulation, inversion possibilities,” EARSel eProc. 3,2, 248- 260 (2003).
[13] Kopilevich, Y. I., Feygels, V. I., and Surkov, A., “Mathematical modeling of input signals for oceanographic
lidar systems,” Proc. SPIE 5155, doi: 10.1117/12.506980 (2003).
[14] Kopilevich, Y. I., Feygels, V. I., Tuell, G. H. and A. Surkov, A., “Measurement of ocean water optical properties
and seafloor reflectance with Scanning Hydrographic Operational Airborne Lidar Survey (SHOALS): I
Theoretical background,” Proc. SPIE 5885, doi:10.1117/12.618923 (2005).
[15] Vasilkov, A. P., Goldin, Y. A., Gureev, B. A., Hoge, F. E., Swift, R. N. and Wright, C. W., “Airborne polarized
lidar detection of scattering layers in the ocean,” Appl. Opt. 40(24), 4,353-4,364 (2001).
[16] Feygels, V. I., Park, J. Y., Wozencraft, J., Aitken, J., Macon, C., Mathur, A., Payment, A. and Ramnath, V.,
“CZMIL (coastal zone mapping and imaging lidar): from first flights to first mission through system validation,”
Proc. SPIE 87240A, doi:10.1117/12.2017935 (2013).
[17] Gilles, R., Mathieu, P., Cao, X., Cinq-Mars, A., Roy, S., Fournier, G., Marec, C. and Becu, G., “Development of
an underwater fiber-optic lidar for the characterization of sea water and ice properties,” Proc. SPIE, 8872-17
(2013).
Proc. of SPIE Vol. 9111 91110U-10
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 05/19/2015 Terms of Use: http://spiedl.org/terms
Related Documents