BEŽIČNI SISTEM INDUSTRIJSKOG UPRAVLJANJA SA PRIMENOM NA TRENAŽERU ROTORNOG BAGERA Branislav Jevtović, Viša poslovna škola - Blace Sadržaj – Obimni eksperimenti i simulacije, kao i do sada razvijeni modeli rotornog bagera i terena koji se kopa, omogućili su da se u ovom radu razvije koncept bežičnog industrijskog upravljanja rotornim bagerom, kao samostalnim objektom ili delom tehnološkog sistema površinskog kopa. Realizacija ovog koncepta obuhvata više softversko-hardverskih modula objedinjenih kroz trenažer rotornog bagera, koji verno odslikava kako rad bagera, u svim uslovima i režimima, tako i interakcije sa terenom i ostalim podsistemima na kopu. 1. UVOD Kvalitetno upravljanje površinskim kopovima kao celinom i svim njihovim tehnološkim podsistemima od presudnog je značaja za elektro-energetski sistem Srbije, jer se u poslednjoj deceniji oko 70% električne energije proizvodi primenom uglja sa tih kopova [1]. Na površinskom kopu postoje dve vrste rudarskih sistema: jalovinski i ugljeni. Jalovinskim sistemima se kopa materijal iz jalovinskog prekrivača, transportuje do planiranog odlagališta, gde se i odlaže. Ugljeni sistemi služe da se iskopava ugalj, transportuje do odredišta i na odredištu se vrši njegov utovar i/ili separacija. Funkcionalne celine su: sistemi za kopanje, transportni sistemi i sistemi za odlaganje. Kada se govori o produktivnosti kopa - misli se na produktivnost sistema za kopanje tj. na rotorne bagere. Efikasno i ekološki prihvatljivo upravljanje površinskim kopovima zahteva primenu svih savremenih informacionih tehnologija (računarski hardver i mreže, telekomunikacije) i metoda (modeliranje i simulacija, ekspertski sistemi, neuralne mreže, fazi logika, veštačka inteligencija). Rotorni bageri kao najvažnije sistemske celine sa stanovišta produktivnosti kopa, su izuzetno složeni elektro- mehanički sistemi, velikih masa i snage, koji imaju četiri stepena slobode kretanja. Zbog ogromnih dimenzija i masa, rotorni bageri se ubrajaju u klasu superstruktura. Ranije u [2] i nedavno u [3-8] detaljno su prikazani veoma kvalitetni modeli rotornog bagera i njegovog radnog okruženja (terena koji se kopa) u svim rudarsko-tehnološkim uslovima i režimima rada. U cilju definisanja strukture novog sistema upravljanja, postupka podešavanja parametara regulatora na baznom nivou [2,4] i koncepta predikcije i adaptacije na višem hijerarhijskom nivou [3-6], prvo je bilo neophodno razviti nelinearni model bagera u prostoru stanja. Valjanost modela je verifikovana uporednom analizom simuliranih eksperimentalnim rezultatima, koja pokazuje da razvijeni model izuzetno dobro definiše radne režime i prelazne pojave u njima do te mere da je konačno podešavanje parametara realizovanog sistema regulacije zahtevalo samo male izmene vrednosti dobijenih u simulaciji. Efikasno rešenje upravljanja bagerom zahteva karakterizaciju njegovog okruženja, odnosno karakterizaciju i predikciju nehomogenosti materijala koji se kopa. Predikcija je omogućena činjenicom da se opterećenje reznih elemenata, odnosno sile kojima se sredina suprotstavlja reznim elementima bagera, prostorno iz reza u rez ne menja diskontinualno, tj. da se granice različitih opterećenja, prostorno posmatrano, uglavnom kontinualno prožimaju kroz rezove. Put do realizacije adaptivno-prediktivnog upravljanja bagerom na osnovu slika opterećenja reznih elemenata nađen kroz brojne simulacije na razvijenom nelinearnom modelu i opsežne analize rada iskusnih bagerista na više tipova bagera, u različitim uslovima rada. Karakterizacija nehomogenosti sredine koja se kopa je izrazito fazi. Nalazeći korelaciju između merenja opterećenja, uslova rada, tehnoloških parametara kopanja i upravljanja, pokazano je da je za određivanje opterećenosti reznih elemenata dovoljan konačan diskretan skup zavisan od ugla zakretanja α, u koji se preslikavaju opsezi merenih veličina struje radnog točka I bw na odgovarajućim uglovima i u odgovarajućim režimima kopanja. Režimi kopanja definisani su tangencijalnom brzinom reznih elemenata V k , odnosno kružnim kretanjem bagera. Na taj način izvršena je fazi karakterizacija nehomogenosti sredine kopanja, definisane kroz 4 kategorije uslova kopanja. Kroz obimne eksperimente i simulacije na ovako razvijenom nelinearnom modelu bagera u prostoru stanja, u kome je veoma tačno modeliran teren, pre svega preko uticaja karakteristika materijala koji se kopa u rezu, stečeno je veliko ekspertsko znanje. Na ovom znanju zasnovana je struktura, postupak podešavanja regulatora na baznom nivou i sam koncept novog realizovanog sistema adaptivno- prediktivnog neuro-fazi upravljanja rotornim bagerom [2-6]. Šire posmatrano, osim na rotorne bagere, isti princip upravljanja (čak i pojednostavljen) može se primeniti i na druge podsisteme kao što su transportne trake, odlagači i prateći elektro-mehanički sistemi. Primena savremenih informacionih tehnologija i metoda na ovako upravljane podsisteme, omogućuje razvoj i realizaciju informacionog sistema integralnog upravljanja površinskim kopom [7], kojim se značajno povećava produktivnost i raspoloživost kopa, dobija čitav niz ekološki prihvatljivijih rešenja i bitno olakšava upravljanje kopom na taktičkom i strateškom planu. Taj informacioni sistem integralnog upravljanja svim podsistemima površinskog kopa se mora zasnovati kao jedan višenivoski hijerarhijski sistem prikupljanja podataka, nadzora, upravljanja i planiranja. Implementacijom savremenih informacionih tehnologija i metoda u razvijene modele bagera i terena, razvijeni su i realizovani softverski 3D simulatori rotornog bagera i terena [8] koji verno odslikavaju sve operacije bagera i njegove interakcije sa terenom, kao i interakciju operatora sa bagerom u konkretnim uslovima kopanja. Ovaj simulator, koji radi u realnom vremenu, pokriva sve operacije koje obavlja bager u fazi pripreme terena za kopanje kao i samog kopanja, sve situacije u kojima se nalazi operator bagera i veoma verno definiše sve karakteristike terena u kome se vrši otkopavanje. Drugim rečima, otvoren je put za realizaciju jednog univerzalnog visokokvalitetnog trenažera koji bi, pored obuke novih bagerista, mogao, a i trebalo bi, da omogući znatno efikasnije planiranje rada i korišćenje rotornih bagera. U narednim poglavljima biće opisana softverska realizacija a biće prikazane i mogućnosti da se pojedine softverske celine zamene realnošću. Ovakav koncept je izuzetno fleksibilan i omogućuje mnogobrojne softversko-hardverske kombinacije, Zbornik radova 50. Konferencije za ETRAN, Beograd, 6-8. juna 2006, tom I Proc. 50th ETRAN Conference, Belgrade, June 6-8, 2006, Vol. I 187

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

BEŽIČNI SISTEM INDUSTRIJSKOG UPRAVLJANJA SA PRIMENOM NA TRENAŽERU ROTORNOG BAGERA
Branislav Jevtović, Viša poslovna škola - Blace
Sadržaj – Obimni eksperimenti i simulacije, kao i do sada razvijeni modeli rotornog bagera i terena koji se kopa, omogućili su da se u ovom radu razvije koncept bežičnog industrijskog upravljanja rotornim bagerom, kao samostalnim objektom ili delom tehnološkog sistema površinskog kopa. Realizacija ovog koncepta obuhvata više softversko-hardverskih modula objedinjenih kroz trenažer rotornog bagera, koji verno odslikava kako rad bagera, u svim uslovima i režimima, tako i interakcije sa terenom i ostalim podsistemima na kopu.
1. UVOD
Kvalitetno upravljanje površinskim kopovima kao celinom i svim njihovim tehnološkim podsistemima od presudnog je značaja za elektro-energetski sistem Srbije, jer se u poslednjoj deceniji oko 70% električne energije proizvodi primenom uglja sa tih kopova [1]. Na površinskom kopu postoje dve vrste rudarskih sistema: jalovinski i ugljeni. Jalovinskim sistemima se kopa materijal iz jalovinskog prekrivača, transportuje do planiranog odlagališta, gde se i odlaže. Ugljeni sistemi služe da se iskopava ugalj, transportuje do odredišta i na odredištu se vrši njegov utovar i/ili separacija. Funkcionalne celine su: sistemi za kopanje, transportni sistemi i sistemi za odlaganje. Kada se govori o produktivnosti kopa - misli se na produktivnost sistema za kopanje tj. na rotorne bagere. Efikasno i ekološki prihvatljivo upravljanje površinskim kopovima zahteva primenu svih savremenih informacionih tehnologija (računarski hardver i mreže, telekomunikacije) i metoda (modeliranje i simulacija, ekspertski sistemi, neuralne mreže, fazi logika, veštačka inteligencija).
Rotorni bageri kao najvažnije sistemske celine sa stanovišta produktivnosti kopa, su izuzetno složeni elektro-mehanički sistemi, velikih masa i snage, koji imaju četiri stepena slobode kretanja. Zbog ogromnih dimenzija i masa, rotorni bageri se ubrajaju u klasu superstruktura. Ranije u [2] i nedavno u [3-8] detaljno su prikazani veoma kvalitetni modeli rotornog bagera i njegovog radnog okruženja (terena koji se kopa) u svim rudarsko-tehnološkim uslovima i režimima rada.
U cilju definisanja strukture novog sistema upravljanja, postupka podešavanja parametara regulatora na baznom nivou [2,4] i koncepta predikcije i adaptacije na višem hijerarhijskom nivou [3-6], prvo je bilo neophodno razviti nelinearni model bagera u prostoru stanja. Valjanost modela je verifikovana uporednom analizom simuliranih eksperimentalnim rezultatima, koja pokazuje da razvijeni model izuzetno dobro definiše radne režime i prelazne pojave u njima do te mere da je konačno podešavanje parametara realizovanog sistema regulacije zahtevalo samo male izmene vrednosti dobijenih u simulaciji.
Efikasno rešenje upravljanja bagerom zahteva karakterizaciju njegovog okruženja, odnosno karakterizaciju i predikciju nehomogenosti materijala koji se kopa. Predikcija je omogućena činjenicom da se opterećenje reznih elemenata, odnosno sile kojima se sredina suprotstavlja reznim elementima bagera, prostorno iz reza u rez ne menja diskontinualno, tj. da se granice različitih opterećenja,
prostorno posmatrano, uglavnom kontinualno prožimaju kroz rezove. Put do realizacije adaptivno-prediktivnog upravljanja bagerom na osnovu slika opterećenja reznih elemenata nađen kroz brojne simulacije na razvijenom nelinearnom modelu i opsežne analize rada iskusnih bagerista na više tipova bagera, u različitim uslovima rada.
Karakterizacija nehomogenosti sredine koja se kopa je izrazito fazi. Nalazeći korelaciju između merenja opterećenja, uslova rada, tehnoloških parametara kopanja i upravljanja, pokazano je da je za određivanje opterećenosti reznih elemenata dovoljan konačan diskretan skup zavisan od ugla zakretanja α, u koji se preslikavaju opsezi merenih veličina struje radnog točka Ibw na odgovarajućim uglovima i u odgovarajućim režimima kopanja. Režimi kopanja definisani su tangencijalnom brzinom reznih elemenata Vk, odnosno kružnim kretanjem bagera. Na taj način izvršena je fazi karakterizacija nehomogenosti sredine kopanja, definisane kroz 4 kategorije uslova kopanja.
Kroz obimne eksperimente i simulacije na ovako razvijenom nelinearnom modelu bagera u prostoru stanja, u kome je veoma tačno modeliran teren, pre svega preko uticaja karakteristika materijala koji se kopa u rezu, stečeno je veliko ekspertsko znanje. Na ovom znanju zasnovana je struktura, postupak podešavanja regulatora na baznom nivou i sam koncept novog realizovanog sistema adaptivno-prediktivnog neuro-fazi upravljanja rotornim bagerom [2-6].
Šire posmatrano, osim na rotorne bagere, isti princip upravljanja (čak i pojednostavljen) može se primeniti i na druge podsisteme kao što su transportne trake, odlagači i prateći elektro-mehanički sistemi. Primena savremenih informacionih tehnologija i metoda na ovako upravljane podsisteme, omogućuje razvoj i realizaciju informacionog sistema integralnog upravljanja površinskim kopom [7], kojim se značajno povećava produktivnost i raspoloživost kopa, dobija čitav niz ekološki prihvatljivijih rešenja i bitno olakšava upravljanje kopom na taktičkom i strateškom planu. Taj informacioni sistem integralnog upravljanja svim podsistemima površinskog kopa se mora zasnovati kao jedan višenivoski hijerarhijski sistem prikupljanja podataka, nadzora, upravljanja i planiranja.
Implementacijom savremenih informacionih tehnologija i metoda u razvijene modele bagera i terena, razvijeni su i realizovani softverski 3D simulatori rotornog bagera i terena [8] koji verno odslikavaju sve operacije bagera i njegove interakcije sa terenom, kao i interakciju operatora sa bagerom u konkretnim uslovima kopanja. Ovaj simulator, koji radi u realnom vremenu, pokriva sve operacije koje obavlja bager u fazi pripreme terena za kopanje kao i samog kopanja, sve situacije u kojima se nalazi operator bagera i veoma verno definiše sve karakteristike terena u kome se vrši otkopavanje. Drugim rečima, otvoren je put za realizaciju jednog univerzalnog visokokvalitetnog trenažera koji bi, pored obuke novih bagerista, mogao, a i trebalo bi, da omogući znatno efikasnije planiranje rada i korišćenje rotornih bagera. U narednim poglavljima biće opisana softverska realizacija a biće prikazane i mogućnosti da se pojedine softverske celine zamene realnošću. Ovakav koncept je izuzetno fleksibilan i omogućuje mnogobrojne softversko-hardverske kombinacije,
Zbornik radova 50. Konferencije za ETRAN, Beograd, 6-8. juna 2006, tom I Proc. 50th ETRAN Conference, Belgrade, June 6-8, 2006, Vol. I
187

odnosno veoma jednostavno kombinovanje virtuelnog sa realnim.
2. TRENAŽER ROTORNOG BAGERA
Teorijsku osnovu za razvoj i realizaciju trenažera čine do sada razvijeni dinamički nelinearni modeli bagera i njegove interakcije sa okolinom u svim režimima rada. O valjanosti rešenja najbolje govori izuzetan kvalitet rada bagera nakon implementacije novog sistema upravljanja realizovanog na osnovu razvijenog nelinearnog modela. To je ilustrovano slikom Sl. 1, koja pokazuje da se sistem upravljanja već posle prvog reza obučio i da na teške uslove kopanja reaguje obaranjem brzine Vk, a u ostatku reza povećava brzinu u cilju održavanja kapaciteta kopanja konstantnim. Impresivno je da ovaj inteligentni sistem upravljanja reaguje i na promene visine reza što je označeno strelicama na slici Sl. 1. a) i b).
a) 0 ][oα
1
2
3
4
5
-40 -30 -20 -10 10 20 30 40 50 60 70
?H [m]
DαLα
Klasa VI
Otporne sile
Klasa VIIKlasa VIII
b)
Sl. 1. a) Profil i karakteristike terena, b) Struja Ibw i brzina Vk u drugom rezu (posle obuke)
Neraskidivu celinu sa modelom bagera, koja čini suštinsku osnovu trenažera bagera, predstavlja 3D model terena, koji se može dobiti na osnovu topoloških mapa regije na kojoj je površinski kop (Sl. 2) i ujedno predstavlja osnovu za 3D model kopa kao celine, o čemu će biti više reči kasnije.
a) b)
Sl. 2. 3D model terena b) dobijen obradom topološke karte a)
Uporedo sa podacima o konfiguraciji terena, razvijeni 3D model terena koji se koristi u trenažeru sadrži i težinske podatke o svakoj prostornoj tački koja se nalazi unutar terena. Ovi težinski podaci se čuvaju u pripadajućoj bazi podataka o terenu, a težinske vrednosti prostornih tačaka govore o fazi karakterizaciji otpornih sila rezanja, tj. sila kojima se deo terena u procesu njegovog kopanja suprotstavlja reznim elementima bagera, čime se u simulaciji postiže verodostojna interakcija bagera sa terenom.
Zbog maksimalne fleksibilnosti u primeni, kako kao trenažera sa virtuelnim objektima, tako i kao važnog objekta informacionog sistema integralnog upravljanja realnim površinskim kopom, trenažer bagera je definisan kao skup mrežno distribuiranih softverskih modula (aplikacija) prema slici Sl. 3.
Hrono_1Hrono_1
KS
3D_Viz
M&S
Control
NetInterf_MNetInterf_DB
DataBase
WR LDM
HG_1BWE_MODEL
Wireless
DB_B DB_TDB_S
Sl. 3. Koncept realizovanog trenažera rotornog bagera
Kao što se sa slike Sl. 3. može videti trenažer rotornog bagera čine softverski moduli koji su kao klijenti vezani na jedan komunikacioni server (KS), koji u ovom konceptu predstavlja informaciono zvezdište. Modeli bagera i terena, koji su najvažniji za funkcionisanje trenažera, povezani su preko odgovarajućih mrežnih interfejsa sa serverom. Takva realizacija veze učinjena je pre svega zbog maksimalne sigurnosti veze sa serverom, tj. neprestane kontrole veze, kao i zadovoljavajuće brze dojave i reakcije na eventualni gubitak veze, u real-time smislu. Softverski modul kojim je realizovan model bagera (BWE MODEL) je preko mrežnog interfejsa modela (NetInterf_M) spojen sa serverom KS, dok je model terena, koji se nalazi u modulu baza podataka (DataBase), tačnije u bazi podataka terena (DB_T), spojen sa serverom preko odgovarajućeg mrežnog interfejsa NetInterf_DB. DataBase modul pored baze podataka terena sadrži još dve baze podataka: bazu podataka bagerista (DB_B) u kojoj se čuvaju podaci o svakoj aktivnosti registrovanog bageriste na trenažeru i baza podataka sistema (DB_S) u kojoj se skladište podaci o radu svih tehnoloških sistema na kopu (tehnološki sistem čine bager, trakasti transporteri i odlagač ili utovarno mesto, zavisno od toga da li se radi o jalovinskom ili ugljenom sistemu). U direktnoj vezi sa modelom bagera, a kao izdvojene softverske celine nalaze se tri modula za real-time hronografski prikaz najvažnijih stanja bagera u poslednjih 250 s (kao npr. struje radnog točka, utovarne trake, međutrake, istovarne trake, njihove brzine, struje i naponi motora osnovnih kretanja). Ovakva koncepcija pruža mogućnost trenutne analize rada, bez potrebe za ulaženjem u veliku bazu podataka.
Za prikaz trenutnih merenja i signalizacije na bageru, koji u potpunosti odgovara istim na realnom objektu, služi modul za merenje i signalizaciju (M&S).
Iz programerskog ugla posmatrano najsloženiji i sa aspekta iskorićenja računarskih resursa najzahtevniji je modul za 3D vizuelizaciju bagera i površinskog kopa (3D_Viz). Zahvaljujući kvalitetnoj sofverskoj realizaciji razvijenog složenog koncepta vizuelizacije simulacije rada bagera i terena, dobija se veoma realistična 3D slika koja bi se imala iz kabine bageriste u stvarnom radu na realnom objektu. Na slici Sl. 4 prikazana je „zamrznuta“ slika „žive“ (real-time) 3D scene koja se projektuje na grafičkom interfejsu modula 3D_Viz u toku rada simulatora.
188

Sl. 4. Ekran računara na kome su aktivirani moduli M&S (a),
3D_Viz (b), Control (c) i HG_3 (d)
Važno je istaći to da je u ovom modulu predviđena i realizovana opcija real-time slobodnog prostornog „kretanja“ posmatrača van kabine bageriste što omogućava dodatno vizuelno sagledavanje i analiziranje međusobnog položaja pokretnih delova bagera u toku rada i položaja bagera u odnosu na okruženje, što je od velike važnosti za operatora koji se vežba na simulatoru – trenažeru i naročito za instruktora. Na slici Sl. 5 je prikazan „pogled“ na bager sa kraja pretovarnog mosta tj. sa kraja istovarne trake.
Sl. 5. „Pogled“ sa kraja pretovarnog mosta
Modul za upravljanje (Control) sadrži sve elemente potrebne za upravljanje bagerom i neophodan broj komponenti za simuliranje važnijih kvarova, kao i resetovanje svih alarmnih stanja bagera i manipulaciju bagerom u tim situacijama na način kako se to radi na realnom objektu.
Svi prethodno opisani moduli čine zaokruženu funkcionalnu celinu trenažera rotornog bagera, na kome podjednako mogu da stiču znanja i veštine u upravljanju bagerom kako novi, tako i iskusni bageristi.
Pored navedenih, razvijen je i hardversko-softverski modul za daljinsko merenje, signalizaciju i upravljanje (LDM). Na hardverskoj platformi sa RISC mikrokontrolerom, razvijenoj namenski za mrežni rad pod real-time operativnim sistemom, realizovan je ovaj softverski modul. Hardverska platforma sadrži A/D i D/A konvertore, kao i programabilne digitalne ulaze/izlaze, što je omogućilo da se u LDM modulu realizuje upravljački pult, koji sadrži upravljačke palice, prekidače, tastere i signalizaciju. Na taj način se u najrealističkijem obliku simulira i upravljačko okruženje operatora. LDM modul omogućava upravljanje bagerom, simuliranje kvarova, resetovanje alarma, merenje i signalizacija, isto kao kod modula M&S i Control ali preko
wireless mreže i wireless rutera (WR), koji je takođe za ovaj trenažer razvijen i u hardverskom i u softverskom pogledu.
Ova dva hardversko-softverska modula razvijena su i uključena u trenažer kako bi se „simulirale“ i brojne prednosti i mogućnosti koje pruža nova informaciono - komunikaciona bežična Internet/intranet (Wireless) tehnologija. Zahvaljujući, pre svega velikoj brzini i pouzdanosti digitalnog prenosa (prenosa bez gubitaka i deformacije informacija), ova informaciono-komunikaciona tehnologija omogućava da se realizuje informaciono-upravljački sistem kopom, kao celinom, u realnom vremenu, čime u potpunosti marginalizuju sva dosadašnja rešenja za prenos podataka i, generalno posmatrano, apsolutno potiskuje svu komunikaciju na kopu zasnovanu na analognoj bežičnoj radio-vezi i/ili na klasičnoj telefonskoj žičanoj vezi.
3. TRENAŽER ROTORNOG BAGERA KAO OBJEKAT U BEŽIČNOM UPRAVLJANJU KOPOM
Zahvaljujući mrežno distribuiranom konceptu i podržavanju full duplex bežičnog rada, razvijeni i realizovani trenažer rotornog bagera ujedno predstavlja objekat jednog informacionog sistema integralnog upravljanja kopom kao celinom. Hijerarhijska struktura ovog informacionog sistema se realizuje kroz horizontalno organizovanje podsistema u okviru funkcionalnih celina i vertikalno povezivanje hijerarhijskih nivoa [7]. S obzirom na prostornu udaljenost, kretanje i veličinu objekata, sa ciljem sinhronizacije, planiranja rada i objedinjenog upravljanja kopom kao celinom, najracionalnije rešenje za povezivanje hijerarhijskih nivoa je primena informaciono-komunikacione bežične Internet/intranet tehnologije.
Bežična Internet / intranet (Wireless) tehnologija, pre svega, obezbeđuje velike brzine digitalnog prenosa (preko 10 Mbps) uz mogućnost da se smart bridge/router-ima preusmerava fizički tok informacija za samo nekoliko milisekundi bez gubitaka u prenosu podataka. Pravilnim rasporedom wireless access point-a na ključnim objektima kopa u point-to-multipoint režimu rada, uz minimalna ulaganja, realizuje se u pravom smislu full mesh topologija, prikazana kroz primer na slici Sl. 6. Na taj način se neprekidnost i pouzdanost prenosa informacija podiže na maksimalni nivo, tako da se o prekidima u prenosu može pričati samo kao o praktično nemogućem, teorijskom slučaju.
Istovremeno, upotrebom multimedijalnih mogućnosti ove tehnologije (VoIP za prenos zvuka i IP-kamera za prenos slike) prestaje potreba za korišćenjem klasičnih komunikacionih sistema. Svi objekti i pojedinci od interesa, na bilo kom mestu kopa, bilo da su stacionarni ili mobilni, postaju informaciono dostupni iz svakog umreženog čvora, čime je u potpunosti ispunjen uslov za uvođenje informacionog hijerarhijskog sistema integralnog upravljanja kopom kao celinom.
189
B1
B2
B3T1O1
O2
TEU
SM1
M2
T 2
T3
T4
T5
T6
T7
T8
T9
T10
T 11
DC AP1
AP2
AP3
AP4
Primarne ruteAlternativne rute
UK
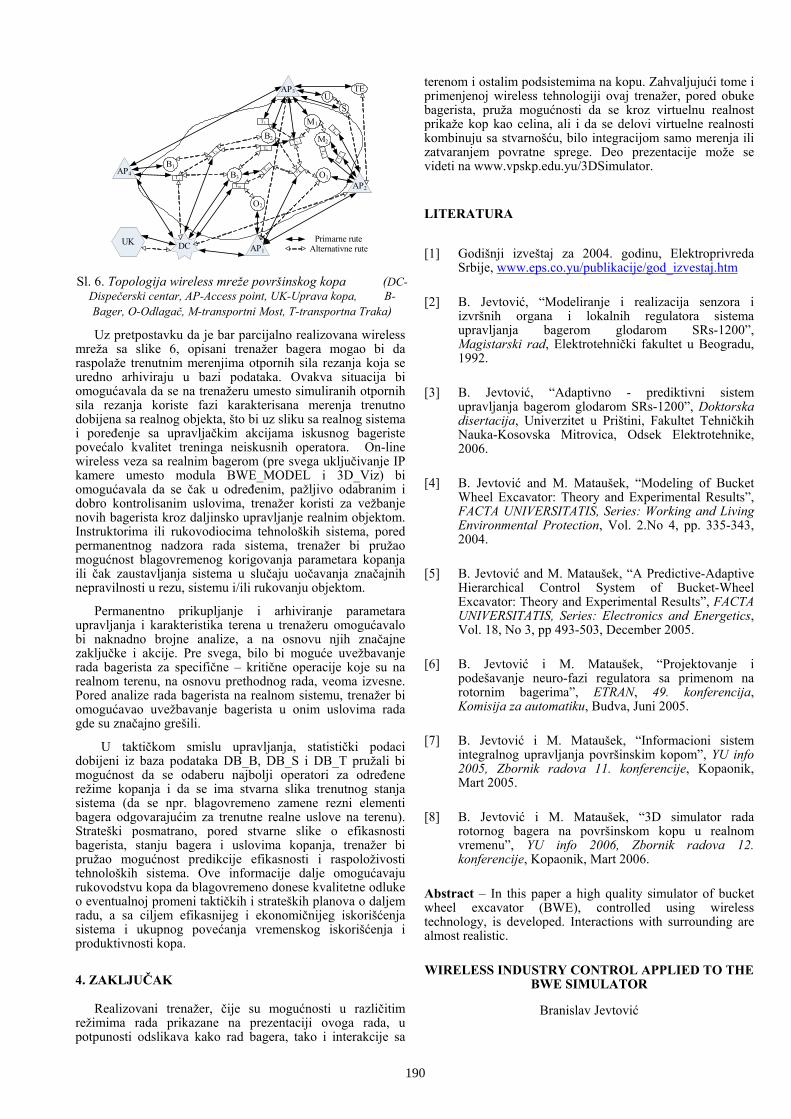
Sl. 6. Topologija wireless mreže površinskog kopa (DC-Dispečerski centar, AP-Access point, UK-Uprava kopa, B-Bager, O-Odlagač, M-transportni Most, T-transportna Traka)
Uz pretpostavku da je bar parcijalno realizovana wireless mreža sa slike 6, opisani trenažer bagera mogao bi da raspolaže trenutnim merenjima otpornih sila rezanja koja se uredno arhiviraju u bazi podataka. Ovakva situacija bi omogućavala da se na trenažeru umesto simuliranih otpornih sila rezanja koriste fazi karakterisana merenja trenutno dobijena sa realnog objekta, što bi uz sliku sa realnog sistema i poređenje sa upravljačkim akcijama iskusnog bageriste povećalo kvalitet treninga neiskusnih operatora. On-line wireless veza sa realnim bagerom (pre svega uključivanje IP kamere umesto modula BWE_MODEL i 3D_Viz) bi omogućavala da se čak u određenim, pažljivo odabranim i dobro kontrolisanim uslovima, trenažer koristi za vežbanje novih bagerista kroz daljinsko upravljanje realnim objektom. Instruktorima ili rukovodiocima tehnoloških sistema, pored permanentnog nadzora rada sistema, trenažer bi pružao mogućnost blagovremenog korigovanja parametara kopanja ili čak zaustavljanja sistema u slučaju uočavanja značajnih nepravilnosti u rezu, sistemu i/ili rukovanju objektom.
Permanentno prikupljanje i arhiviranje parametara upravljanja i karakteristika terena u trenažeru omogućavalo bi naknadno brojne analize, a na osnovu njih značajne zaključke i akcije. Pre svega, bilo bi moguće uvežbavanje rada bagerista za specifične – kritične operacije koje su na realnom terenu, na osnovu prethodnog rada, veoma izvesne. Pored analize rada bagerista na realnom sistemu, trenažer bi omogućavao uvežbavanje bagerista u onim uslovima rada gde su značajno grešili.
U taktičkom smislu upravljanja, statistički podaci dobijeni iz baza podataka DB_B, DB_S i DB_T pružali bi mogućnost da se odaberu najbolji operatori za određene režime kopanja i da se ima stvarna slika trenutnog stanja sistema (da se npr. blagovremeno zamene rezni elementi bagera odgovarajućim za trenutne realne uslove na terenu). Strateški posmatrano, pored stvarne slike o efikasnosti bagerista, stanju bagera i uslovima kopanja, trenažer bi pružao mogućnost predikcije efikasnosti i raspoloživosti tehnoloških sistema. Ove informacije dalje omogućavaju rukovodstvu kopa da blagovremeno donese kvalitetne odluke o eventualnoj promeni taktičkih i strateških planova o daljem radu, a sa ciljem efikasnijeg i ekonomičnijeg iskorišćenja sistema i ukupnog povećanja vremenskog iskorišćenja i produktivnosti kopa.
4. ZAKLJUČAK
Realizovani trenažer, čije su mogućnosti u različitim režimima rada prikazane na prezentaciji ovoga rada, u potpunosti odslikava kako rad bagera, tako i interakcije sa
terenom i ostalim podsistemima na kopu. Zahvaljujući tome i primenjenoj wireless tehnologiji ovaj trenažer, pored obuke bagerista, pruža mogućnosti da se kroz virtuelnu realnost prikaže kop kao celina, ali i da se delovi virtuelne realnosti kombinuju sa stvarnošću, bilo integracijom samo merenja ili zatvaranjem povratne sprege. Deo prezentacije može se videti na www.vpskp.edu.yu/3DSimulator.
LITERATURA
[1] Godišnji izveštaj za 2004. godinu, Elektroprivreda Srbije, www.eps.co.yu/publikacije/god_izvestaj.htm
[2] B. Jevtović, “Modeliranje i realizacija senzora i izvršnih organa i lokalnih regulatora sistema upravljanja bagerom glodarom SRs-1200”, Magistarski rad, Elektrotehnički fakultet u Beogradu, 1992.
[3] B. Jevtović, “Adaptivno - prediktivni sistem upravljanja bagerom glodarom SRs-1200”, Doktorska disertacija, Univerzitet u Prištini, Fakultet Tehničkih Nauka-Kosovska Mitrovica, Odsek Elektrotehnike, 2006.
[4] B. Jevtović and M. Mataušek, “Modeling of Bucket Wheel Excavator: Theory and Experimental Results”, FACTA UNIVERSITATIS, Series: Working and Living Environmental Protection, Vol. 2.No 4, pp. 335-343, 2004.
[5] B. Jevtović and M. Mataušek, “A Predictive-Adaptive Hierarchical Control System of Bucket-Wheel Excavator: Theory and Experimental Results”, FACTA UNIVERSITATIS, Series: Electronics and Energetics, Vol. 18, No 3, pp 493-503, December 2005.
[6] B. Jevtović i M. Mataušek, “Projektovanje i podešavanje neuro-fazi regulatora sa primenom na rotornim bagerima”, ETRAN, 49. konferencija, Komisija za automatiku, Budva, Juni 2005.
[7] B. Jevtović i M. Mataušek, “Informacioni sistem integralnog upravljanja površinskim kopom”, YU info 2005, Zbornik radova 11. konferencije, Kopaonik, Mart 2005.
[8] B. Jevtović i M. Mataušek, “3D simulator rada rotornog bagera na površinskom kopu u realnom vremenu”, YU info 2006, Zbornik radova 12. konferencije, Kopaonik, Mart 2006.
Abstract – In this paper a high quality simulator of bucket wheel excavator (BWE), controlled using wireless technology, is developed. Interactions with surrounding are almost realistic.
WIRELESS INDUSTRY CONTROL APPLIED TO THE BWE SIMULATOR
Branislav Jevtović
190
Related Documents











