Bayesian Estimation of DSGE Models Stéphane Adjemian Université du Maine, GAINS & CEPREMAP [email protected] http://www.dynare.org/stepan June 28, 2011 June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Bayesian Estimation of DSGE Models
Stéphane Adjemian
Université du Maine, GAINS & CEPREMAP
http://www.dynare.org/stepan
June 28, 2011
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 1

Bayesian paradigm (motivations)
• Bayesian estimation of DSGE models with Dynare.
1. Data are not informative enough...
2. DSGE models are misspecified.
3. Model comparison.
• Prior elicitation.
• Efficiency issues.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 2
Bayesian paradigm (basics)
• A model defines a joint probability distribution
parametrized function over a sample of variables:
p(Y⋆T |θ) (1)
⇒ Likelihood.
• We Assume that our prior information about parameters
can be summarized by a joint probability density function.
Let the prior density be p0(θ).
• The posterior distribution is given by (Bayes theorem
squared):
p1 (θ|Y⋆T ) =
p0 (θ) p(Y⋆T |θ)
p(Y⋆T )
(2)
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 3

Bayesian paradigm (basics, contd)
• The denominator is defined by
p (Y⋆T ) =
∫
Θp0 (θ) p(Y
⋆T |θ)dθ (3)
⇒ the marginal density of the sample.
⇒ A weighted mean of the sample conditional densities
over all the possible values for the parameters.
• The posterior density is proportional to the product of the
prior density and the density of the sample.
p1 (θ|Y⋆T ) ∝ p0 (θ) p(Y
⋆T |θ)
⇒ That’s all we need for any inference about θ!
• The prior density deforms the shape of the likelihood!
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 4
A simple example (I)
• Data Generating Process
yt = µ+ εt
where εt ∼iid
N (0, 1) is a gaussian white noise.
• Let YT ≡ (y1, . . . , yT ). The likelihood is given by:
p(YT |µ) = (2π)−T2 e−
12
∑Tt=1(yt−µ)2
• And the ML estimator of µ is:
µML,T =1
T
T∑
t=1
yt ≡ y
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 5
A simple example (II)
• Note that the variance of this estimator is a simple function
of the sample size
V[µML,T ] =1
T
• Noting that:
T∑
t=1
(yt − µ)2 = νs2 + T (µ− µ)2
with ν = T − 1 and s2 = (T − 1)−1∑T
t=1(yt − µ)2.
• The likelihood can be equivalently written as:
p(YT |µ) = (2π)−T2 e−
12(νs
2+T (µ−µ)2)
The two statistics s2 and µ are summing up the sample
information.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 6
A simple example (II, bis)
T∑
t=1
(yt − µ)2 =
T∑
t=1
([yt − µ]− [µ− µ])2
=T∑
t=1
(yt − µ)2 +T∑
t=1
(µ− µ)2 −T∑
t=1
(yt − µ)(µ− µ)
= νs2 + T (µ− µ)2 −
(T∑
t=1
yt − T µ
)(µ− µ)
= νs2 + T (µ− µ)2
The last term cancels out by definition of the sample mean.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 7

A simple example (III)
• Let our prior be a gaussian distribution with expectation
µ0 and variance σ2µ.
• The posterior density is defined, up to a constant, by:
p (µ|YT ) ∝ (2πσ2µ)−
12 e
−12
(µ−µ0)2
σ2µ × (2π)−T2 e−
12(νs
2+T (µ−µ)2)
where the missing constant (denominator) is the marginal
density (does not depend on µ).
• We also have:
p(µ|YT ) ∝ exp
−1
2
(T (µ− µ)2 +
1
σ2µ(µ− µ0)
2
)
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 8

A simple example (IV)
A(µ) = T (µ− µ)2 +1
σ2µ
(µ− µ0)2
= T(µ2 + µ
2 − 2µµ)+
1
σ2µ
(µ2 + µ
20 − 2µµ0
)
=
(T +
1
σ2µ
)µ2 − 2µ
(T µ+
1
σ2µ
µ0
)+
(T µ
2 +1
σ2µ
µ20
)
=
(T +
1
σ2µ
)
µ2 − 2µT µ+ 1
σ2µ
µ0
T + 1σ2µ
+
(T µ
2 +1
σ2µ
µ20
)
=
(T +
1
σ2µ
)
µ−T µ+ 1
σ2µ
µ0
T + 1σ2µ
2
+
(T µ
2 +1
σ2µ
µ20
)
−
(T µ+ 1
σ2µ
µ0
)2
T + 1σ2µ
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 9

A simple example (V)
• Finally we have:
p(µ|YT ) ∝ exp
−
1
2
(T +
1
σ2µ
)[µ−
T µ+ 1σ2µµ0
T + 1σ2µ
]2
• Up to a constant, this is a gaussian density with (posterior)
expectation:
E [µ] =T µ+ 1
σ2µµ0
T + 1σ2µ
and (posterior) variance:
V [µ] =1
T + 1σ2µ
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 10
A simple example (VI, The bridge)
• The posterior mean is a convex combination of the prior
mean and the ML estimate.
– If σ2µ → ∞ (no prior information) then E[µ] → µ (ML).
– If σ2µ → 0 (calibration) then E[µ] → µ0.
• If σ2µ <∞ then the variance of the ML estimator is greater
than the posterior variance.
• Not so simple if the model is non linear in the estimated
parameters...
– Asymptotic (Gaussian) approximation.
– Simulation based approach (MCMC,
Metropolis-Hastings, ...).
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 11

Bayesian paradigm (II, Model Comparison)
• Comparison of marginal densities of the (same) data across
models.
• p(Y⋆T |I) measures the fit of model I.
• Suppose we have a prior distribution over models A, B, ...:
p(A), p(B), ...
• Again, using the Bayes theorem we can compute the
posterior distribution over models:
p(I|Y⋆T ) =
p(I)p(Y⋆T |I)∑
Ip(I)p(Y⋆
T |I)
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 12
Estimation of DSGE models (I, Reduced form)
• Compute the steady state of the model (a system of non
linear recurrence equations.
• Compute linear approximation of the model.
• Solve the linearized model:
yt − y(θ)n×1
= T (θ)n×n
(yt−1 − y(θ))n×1
+R(θ)n×q
εtq×1
(4)
where n is the number of endogenous variables, q is the
number of structural innovations.
– The reduced form model is non linear w.r.t the deep
parameters.
– We do not observe all the endogenous variables.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 13

Estimation of DSGE models (II, SSM)
• Let y⋆t be a subset of yt gathering p observed variables.
• To bring the model to the data, we use a state-space
representation:
y⋆t = Z (yt + y(θ))+ηt (5a)
yt = T (θ)yt−1 +R(θ)εt (5b)
where yt = yt − y(θ).
• Equation (5b) is the reduced form of the DSGE model.
⇒ state equation
• Equation (5a) selects a subset of the endogenous variables,
Z is a p× n matrix filled with zeros and ones.
⇒ measurement equation
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 14

Estimation of DSGE models (III, Likelihood) – a –
• Let Y⋆T = y⋆1 , y
⋆2 , . . . , y
⋆T be the sample.
• Let ψ be the vector of parameters to be estimated (θ, the
covariance matrices of ε and η).
• The likelihood, that is the density of Y⋆T conditionally on
the parameters, is given by:
L(ψ;Y⋆T ) = p (Y⋆
T |ψ) = p (y⋆0 |ψ)T∏
t=1
p(y⋆t |Y
⋆t−1, ψ
)(6)
• To evaluate the likelihood we need to specify the marginal
density p (y⋆0 |ψ) (or p (y0|ψ)) and the conditional density
p(y⋆t |Y
⋆t−1, ψ
).
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 15
Estimation of DSGE models (III, Likelihood) – b –
• The state-space model (5), describes the evolution of the
endogenous variables’ distribution.
• The distribution of the initial condition (y0) is set equal to
the ergodic distribution of the stochastic difference
equation (so that the distribution of yt is time invariant).
• Because we consider a linear(ized) reduce form model and
the disturbances are supposed to be gaussian (say
ε ∼ N (0,Σ)) then the initial (ergodic) distribution is also
gaussian:
y0 ∼ N (E∞[yt],V∞[yt])
• Unit roots (diffuse kalman filter).
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 16

Estimation (III, Likelihood) – c –
• Evaluation of the density of y⋆t |Y⋆t−1 is not trivial, because
y⋆t also depends on unobserved endogenous variables.
• The following identity can be used:
p(y⋆t |Y
⋆t−1, ψ
)=
∫
Λp (y⋆t |yt, ψ) p(yt|Y
⋆t−1, ψ)dyt (7)
The density of y⋆t |Y⋆t−1 is the mean of the density of y⋆t |yt
weigthed by the density of yt|Y⋆t−1.
• The first conditional density is given by the measurement
equation (5a).
• A Kalman filter is used to evaluate the density of the latent
variables (yt) conditional on the sample up to time t− 1
(Y⋆t−1) [⇒ predictive density ].
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 17
Estimation (III, Likelihood) – d –
• The Kalman filter can be seen as a bayesian recursiveestimation routine:
p (yt|Y⋆t−1, ψ) =
∫
Λ
p (yt|yt−1, ψ) p (yt−1|Y⋆t−1, ψ) dyt−1 (8a)
p (yt|Y⋆t , ψ) =
p (y⋆t |yt, ψ) p (yt|Y⋆t−1, ψ)∫
Λp (y⋆t |yt, ψ) p
(yt|Y⋆t−1, ψ
)dyt
(8b)
• Equation (8a) says that the predictive density of the latent
variables is the mean of the density of yt|yt−1, given by the
state equation (5b), weigthed by the density yt−1
conditional on Y⋆t−1 (given by (8b)).
• The update equation (8b) is an application of the Bayes
theorem → how to update our knowledge about the latent
variables when new information (data) becomes available.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 18

Estimation (III, Likelihood) – e –
p (yt|Y⋆t , ψ) =
p (y⋆t |yt, ψ) p(yt|Y
⋆t−1, ψ
)∫Λ p (y
⋆t |yt, ψ) p
(yt|Y⋆
t−1, ψ)dyt
• p(yt|Y⋆
t−1, ψ)
is the a priori density of the latent variables
at time t.
• p (y⋆t |yt, ψ) is the density of the observation at time t
knowing the state and the parameters (this density is
obtained from the measurement equation (5a)) ⇒ the
likelihood associated to y⋆t .
•∫Λ p (y
∗t |yt, ψ) p
(yt|Y⋆
t−1, ψ)dyt is the marginal density of
the new information.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 19
Estimation (III, Likelihood) – f –
• The linear–gaussian Kalman filter recursion is given by:
vt = y⋆t − Z(yt + y(θ)
Ft = ZPtZ′+V [η]
Kt = T (θ)PtT (θ)′
F−1t
yt+1 = T (θ)yt +Ktvt
Pt+1 = T (θ)Pt(T (θ)−KtZ)′ + R(θ)ΣR(θ)′
for t = 1, . . . , T , with y0 and P0 given.
• Finally the (log)-likelihood is:
lnL (ψ|Y⋆T ) = −
Tk
2ln(2π)−
1
2
T∑
t=1
|Ft| −1
2v′tF
−1t vt
• References: Harvey, Hamilton.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 20

Simulations for exact posterior analysis
• Noting that:
E [ϕ(ψ)] =
∫
Ψϕ(ψ)p1(ψ|Y
⋆T )dψ
we can use the empirical mean of(ϕ(ψ(1)), ϕ(ψ(2)), . . . , ϕ(ψ(n))
), where ψ(i) are draws from
the posterior distribution to evaluate the expectation of
ϕ(ψ). The approximation error goes to zero when n→ ∞.
• We need to simulate draws from the posterior distribution
⇒ Metropolis-Hastings.
• We build a stochastic recurrence whose limiting
distribution is the posterior distribution.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 21

Simulations (Metropolis-Hastings) – a –
1. Choose a starting point Ψ0 & run a loop over 2-3-4.
2. Draw a proposal Ψ⋆ from a jumping distribution
J(Ψ⋆|Ψt−1) = N (Ψt−1, c× Ωm)
3. Compute the acceptance ratio
r =p1(Ψ
⋆|Y⋆T )
p(Ψt−1|Y⋆T )
=K(Ψ⋆|Y⋆
T )
K(Ψt−1|Y⋆T )
4. Finally
Ψt =
Ψ⋆ with probability min(r, 1)
Ψt−1 otherwise.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 22
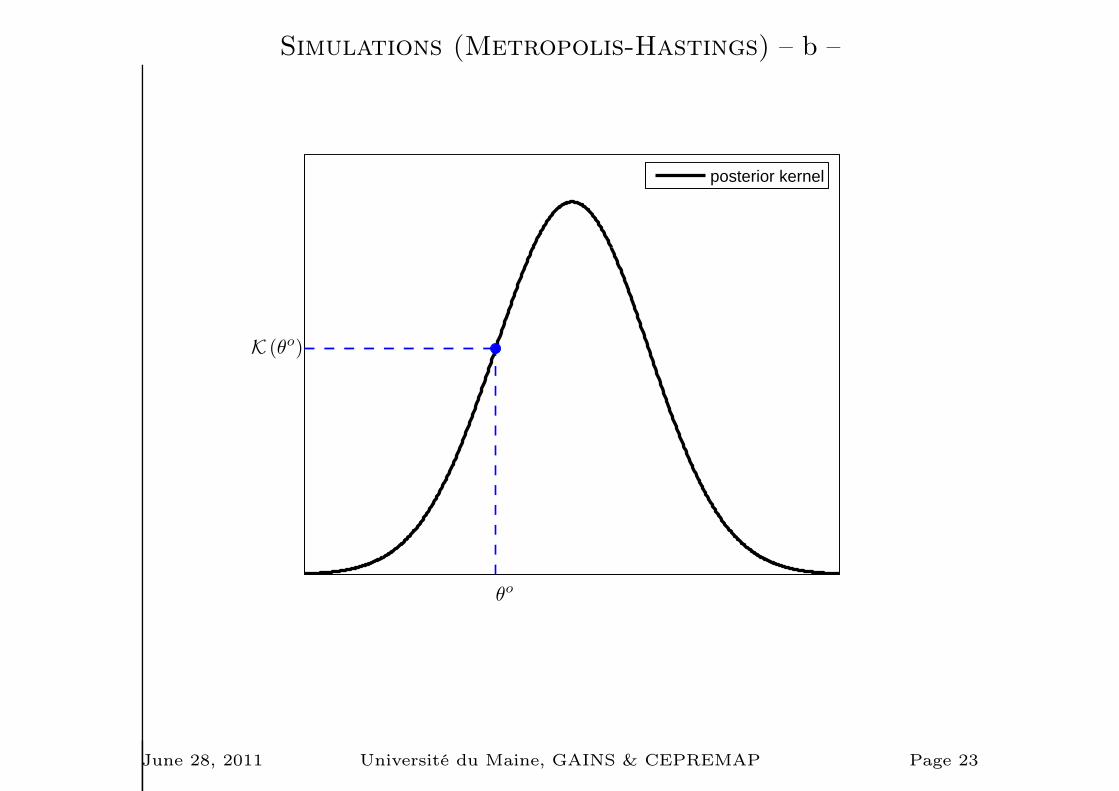
Simulations (Metropolis-Hastings) – b –
θo
K (θo)
posterior kernel
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 23
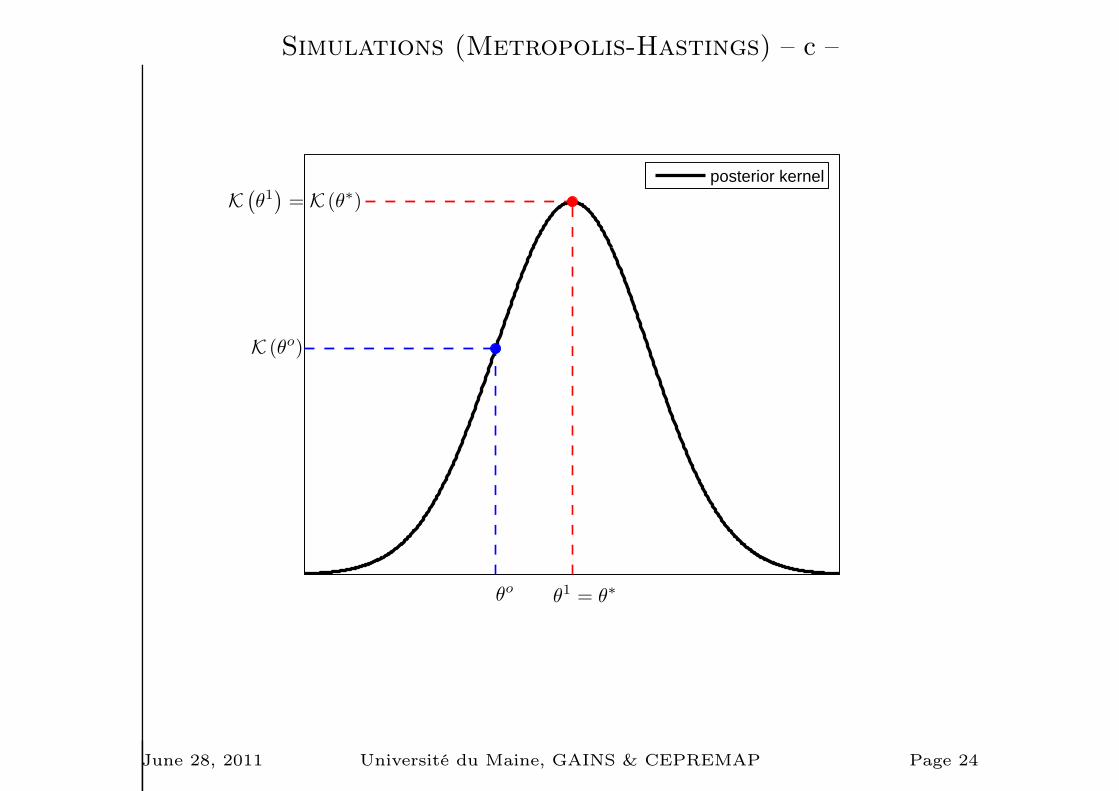
Simulations (Metropolis-Hastings) – c –
θo
K (θo)
θ1 = θ
∗
K(
θ1)
= K (θ∗)
posterior kernel
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 24
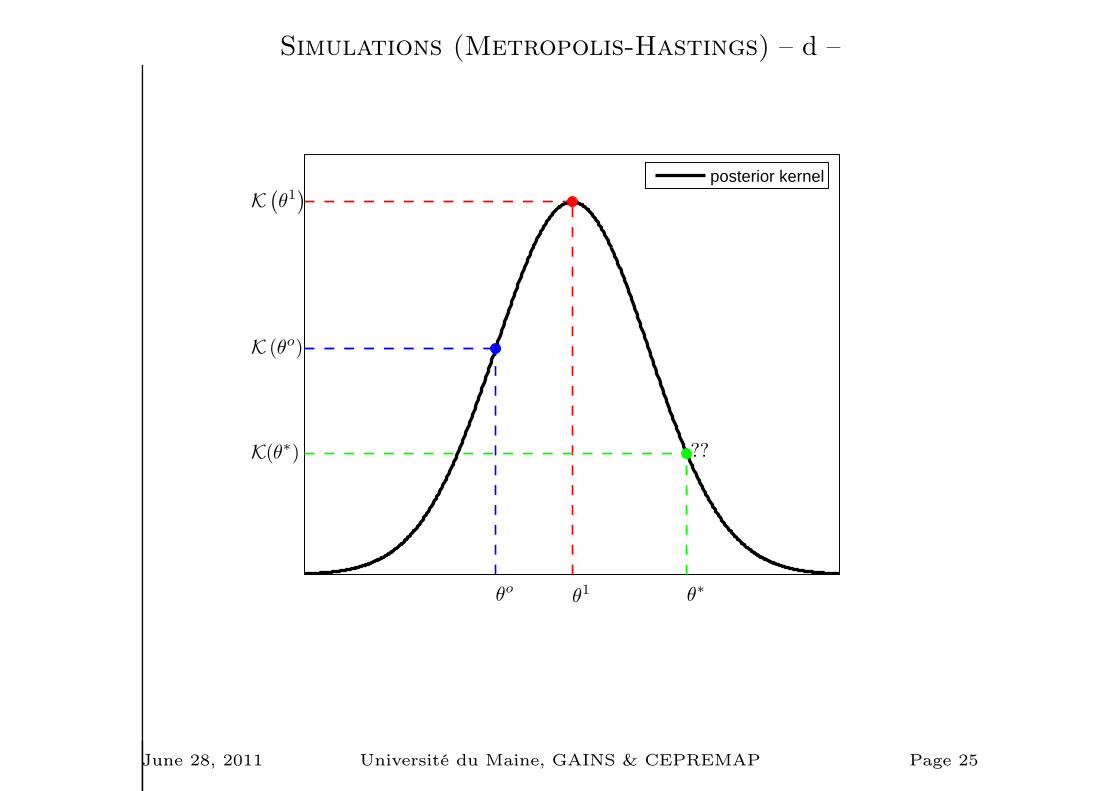
Simulations (Metropolis-Hastings) – d –
θo
K (θo)
θ1
K(
θ1)
θ∗
K(θ∗) ??
posterior kernel
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 25

Simulations (Metropolis-Hastings) – e –
• How should we choose the scale factor c (variance of the
jumping distribution) ?
• The acceptance rate should be strictly positive and not too
important.
• How many draws ?
• Convergence has to be assessed...
• Parallel Markov chains → Pooled moments have to be
close to Within moments.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 26

Dynare syntax (I)
var A B C;
varexo E;
parameters a b c d e f ;
model(linear);
A=A(+1)-b/e*(B-C(+1)+A(+1)-A);
C=f*A+(1-d)*C(-1);
....
end;
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 27
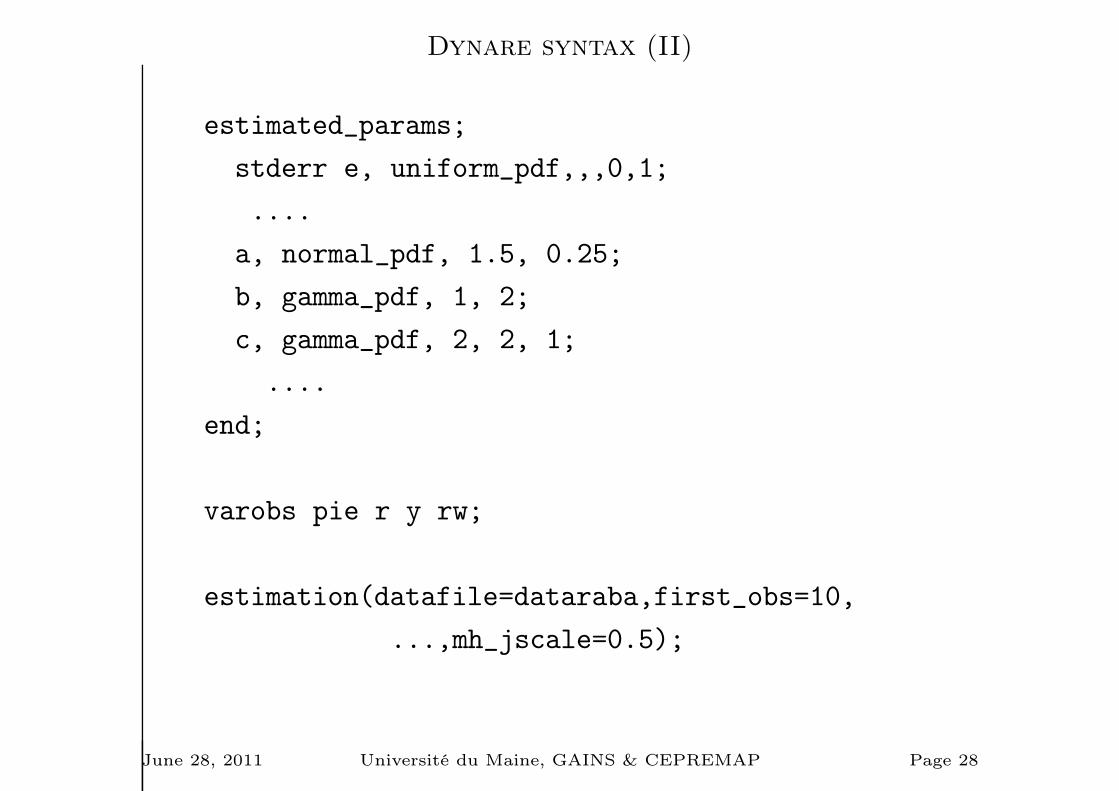
Dynare syntax (II)
estimated_params;
stderr e, uniform_pdf,,,0,1;
....
a, normal_pdf, 1.5, 0.25;
b, gamma_pdf, 1, 2;
c, gamma_pdf, 2, 2, 1;
....
end;
varobs pie r y rw;
estimation(datafile=dataraba,first_obs=10,
...,mh_jscale=0.5);
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 28
Prior Elicitation
• The results may depend heavily on our choice for the prior
density or the parametrization of the model (not
asymptotically).
• How to choose the prior ?
– Subjective choice (data driven or theoretical), example:
the Calvo parameter for the Phillips curve.
– Objective choice, examples: the (optimized)
Minnesota prior for VAR (Phillips, 1996).
• Robustness of the results must be evaluated:
– Try different parametrization.
– Use more general prior densities.
– Uninformative priors.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 29
Prior Elicitation (parametrization of the model) – a –
• Estimation of the Phillips curve :
πt = βEπt+1 +(1− ξp)(1− βξp)
ξp
((σc + σl)yt + τt
)
• ξp is the (Calvo) probability (for an intermediate firm) of
being able to optimally choose its price at time t. With
probability 1− ξp the price is indexed on past inflation
an/or steady state inflation.
• Let αp ≡1
1−ξpbe the expected period length during which
a firm will not optimally adjust its price.
• Let λ =(1−ξp)(1−βξp)
ξpbe the slope of the Phillips curve.
• Suppose that β, σc and σl are known.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 30

Prior Elicitation (parametrization of the model) – b –
• The prior may be defined on ξp, αp or the slope λ.
• Say we choose a uniform prior for the Calvo probability:
ξp ∼ U[.51,.99]
The prior mean is .75 (so that the implied value for αp is 4
quarters). This prior is often think as a non informative
prior...
• An alternative would be to choose a uniform prior for αp:
αp ∼ U[1− 1.51
,1− 1.99 ]
• These two priors are very different!
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 31
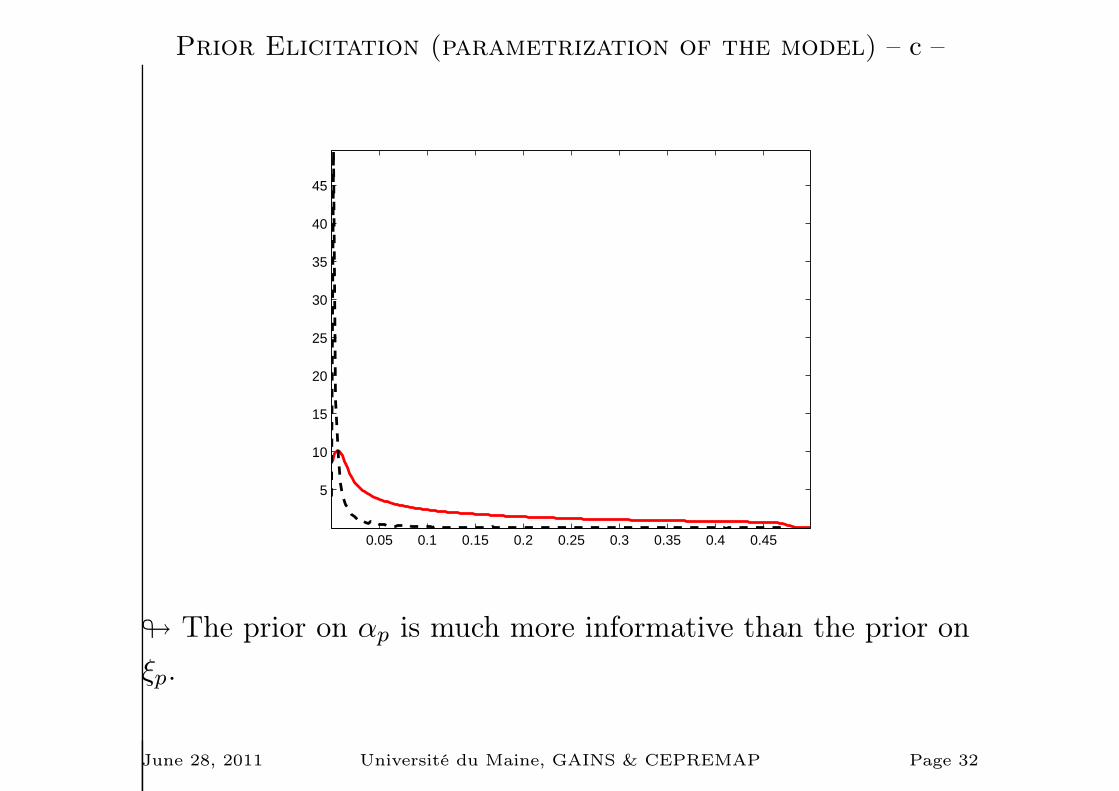
Prior Elicitation (parametrization of the model) – c –
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
5
10
15
20
25
30
35
40
45
# The prior on αp is much more informative than the prior on
ξp.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 32
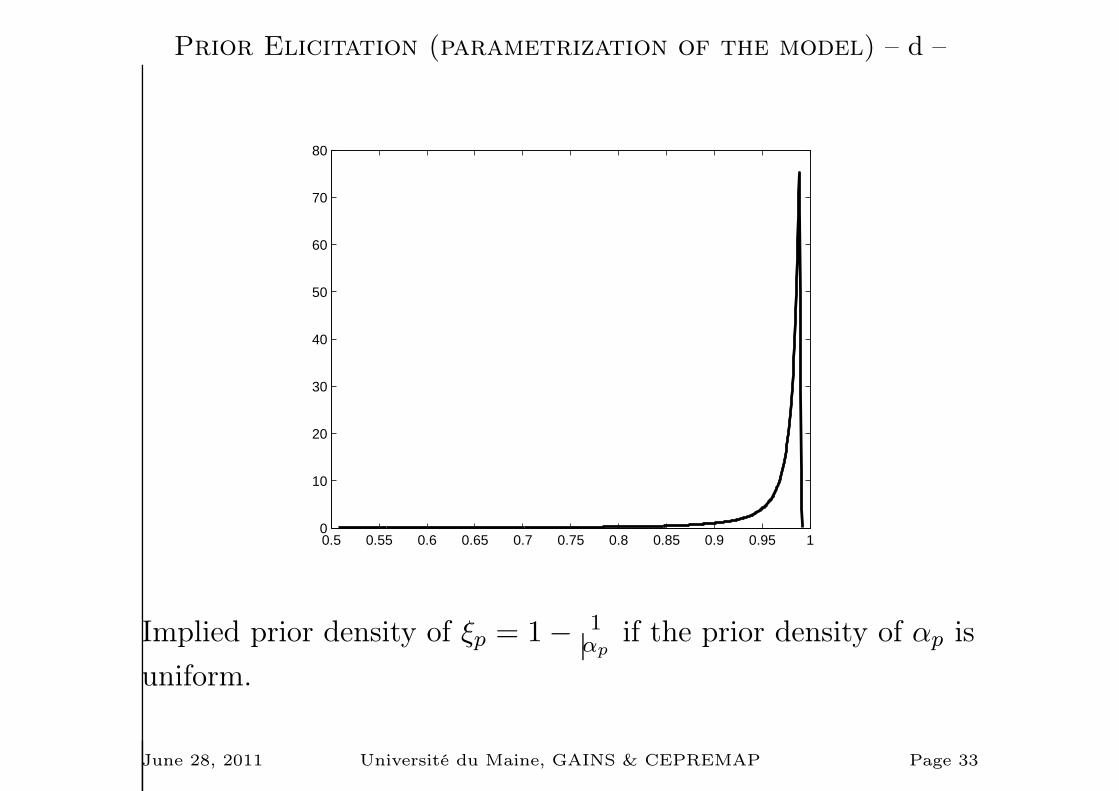
Prior Elicitation (parametrization of the model) – d –
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 10
10
20
30
40
50
60
70
80
Implied prior density of ξp = 1− 1αp
if the prior density of αp is
uniform.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 33

Prior Elicitation (more general prior densities)
• Robustness of the results may be evaluated by considering
a more general prior density.
• For instance, in our simple example we could assume a
student prior density for µ instead of a gaussian density.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 34

Prior Elicitation (flat prior)
• If a parameter, say µ, can take values between −∞ and ∞,
the flat prior is a uniform density between −∞ and ∞.
• If a parameter, say σ, can take values between 0 and ∞, the
flat prior is a uniform density between −∞ and ∞ for log σ:
p0(log σ) ∝ 1 ⇔ p0(σ) ∝1
σ
• Invariance.
• Why is this prior non informative ?...∫p0(µ)dµ is not
defined! ⇒ Improper prior.
• Practical implications for DSGE estimation.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 35

Prior Elicitation (non informative prior)
• An alternative, proposed by Jeffrey, is to use the Fisher
information matrix:
p0(ψ) ∝ |I(ψ)|12
with
I(ψ) = E
[(∂p(Y⋆
T |ψ)
∂ψ
)(∂p(Y⋆
T |ψ)
∂ψ
)′]
• The idea is to mimic the information in the data...
• Automatic choice of the prior.
• Invariance to any continuous transformation of the
parameters.
• Very different results (compared to the flat prior) ⇒ Unit
root controverse.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 36
Effective prior mass
• Dynare excludes parameters such that the steady state does
not exist, or such that the BK conditions are not satisfied.
• The effective prior mass can be less than 1.
• Comparison of marginal densities of the data is not
informative if the prior mass is not invariant across models.
• The estimation of the posterior mode is more difficult if the
effective prior mass is less than 1.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 37

Efficiency (I)
• If possible use options use_dll (need a compiler, gcc)
• Do not let dynare compute the steady state!
• Even if there is no closed form solution for the steady state,
the static model can be concentrated and reduced to a
small nonlinear system of equations, which can be solved by
using standard newton algorithm in the steastate file.
This numerical part can be done in a mex routine called by
the steastate file.
• Alternative initialization of the Kalman filter (lik_init=4).
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 38
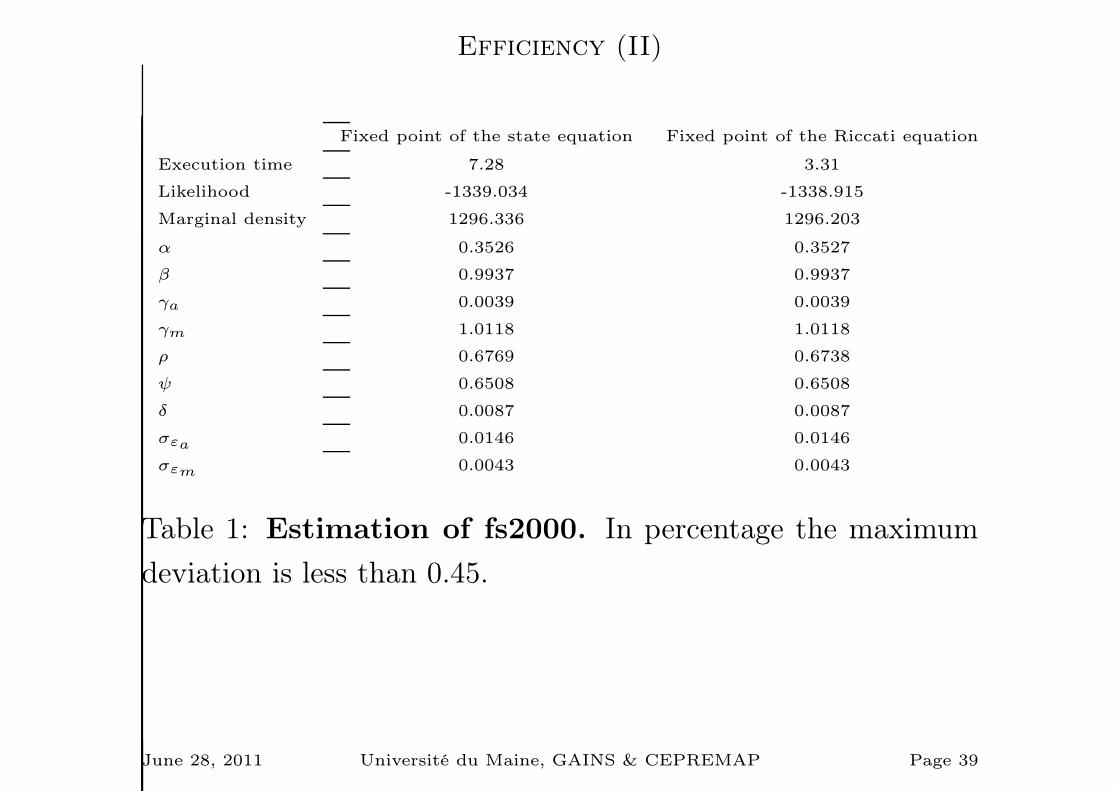
Efficiency (II)
Fixed point of the state equation Fixed point of the Riccati equation
Execution time 7.28 3.31
Likelihood -1339.034 -1338.915
Marginal density 1296.336 1296.203
α 0.3526 0.3527
β 0.9937 0.9937
γa 0.0039 0.0039
γm 1.0118 1.0118
ρ 0.6769 0.6738
ψ 0.6508 0.6508
δ 0.0087 0.0087
σεa 0.0146 0.0146
σεm 0.0043 0.0043
Table 1: Estimation of fs2000. In percentage the maximum
deviation is less than 0.45.
June 28, 2011 Université du Maine, GAINS & CEPREMAP Page 39
Related Documents











