Bang-bang Control Design by Combing Pseudospectral Method with a novel Homotopy Algorithm Xiaoli Bai * , James D. Turner † , John L. Junkins ‡ Texas A&M University, College Station, Texas 77843 Abstract The bang-bang type of control problem for spacecraft trajectory optimization is solved by using a hybrid approach. First, a pseudospectral method is utilized to generate approximate switching times, control structures, and initial co-states. Second, a homotopy method is used to solve the two-point boundary value problems derived from the Euler-Lagrangian equations. The unknown variables in the homotopy method include both switching times and the unknown initial states and co-states. The homotopy algorithm is made robust to the nonlinearity of the problems by enforcing the constraint satisfaction along the homotopy path. The optimization variables are treated as continuous variables and the final solutions have the same accuracy as the ordinary differential equation solvers. An orbit transfer problem is presented to show the advantages of this hybrid methodology. * Current Affiliation:Graduate Research Assistant, Department of Aerospace Engineering, TAMU-3141; xi- [email protected]; phone: 979-862-3394; fax: 979-845-6051. Student Member AIAA. † Research Professor, Department of Aerospace Engineering, TAMU-3141; Associate Fellow AIAA ‡ Regents Professor, Distinguished Professor of Aerospace Engineering, Holder of the Royce E. Wisenbaker ’39 Chair in Engineering, Department of Aerospace Engineering, TAMU-3141. Fellow AIAA. 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Bang-bang Control Design by Combing Pseudospectral
Method with a novel Homotopy Algorithm
Xiaoli Bai∗, James D. Turner†, John L. Junkins‡
Texas A&M University, College Station, Texas 77843
Abstract
The bang-bang type of control problem for spacecraft trajectory optimization is solved by
using a hybrid approach. First, a pseudospectral method is utilized to generate approximate
switching times, control structures, and initial co-states. Second, a homotopy method is used
to solve the two-point boundary value problems derived from the Euler-Lagrangian equations.
The unknown variables in the homotopy method include both switching times and the unknown
initial states and co-states. The homotopy algorithm is made robust to the nonlinearity of the
problems by enforcing the constraint satisfaction along the homotopy path. The optimization
variables are treated as continuous variables and the final solutions have the same accuracy as
the ordinary differential equation solvers. An orbit transfer problem is presented to show the
advantages of this hybrid methodology.
∗Current Affiliation:Graduate Research Assistant, Department of Aerospace Engineering, TAMU-3141; [email protected]; phone: 979-862-3394; fax: 979-845-6051. Student Member AIAA.
†Research Professor, Department of Aerospace Engineering, TAMU-3141; Associate Fellow AIAA‡Regents Professor, Distinguished Professor of Aerospace Engineering, Holder of the Royce E. Wisenbaker ’39
Chair in Engineering, Department of Aerospace Engineering, TAMU-3141. Fellow AIAA.
1
1 Introduction
A classical subject in optimal control fields is the bang-bang type of control problems.1 These
problems often arise when the constrained control appears linearly in both the state differential
equations and the performance function while the final time can be either free or fixed. For ex-
ample, the solution of time optimal three-axis reorientation of a rigid body is usually a bang-bang
controller2,.3 The low thrust spacecraft trajectory design with the aim to minimize the fuel con-
sumption, which is equivalent to maximizing the final mass, also frequently leads to bang-bang
controls, or thrusting and coasting type of controls4,.5 The bang-bang control for low thrust trajec-
tory optimization is of particular interest in this paper.
The computational techniques to solve optimal control problems are either indirect shooting
or direct shooting.6 The direct methods introduce a parametric representation of the control vari-
ables (and frequently the state variables as well), and then resort to optimizers such as ‘fmincon’
in MATLAB, SNOPT,7 or SOCS8 to solve the resulting nonlinear programming problems.9 With
the increasing power of these optimizers, it is possible to discretize the continuous system by using
very small step. For example, Betts and Erb9 used a collocation or direct transcription method
to design an optimal low thrust trajectory to the moon through SOCS software.8 Their final non-
linear programs include 211031 variables and 146285 constraints. Usually the direct approach is
robust to the initial guess for the problem. Since there is no need to derive for the Euler-Lagrange
equations,1 it is easy to automate the direct transcription process so this direct method has special
interest in industry, leading to some example software such as POST and GTS.6 Although the di-
rect approaches have been very attractive to solve orbit transfer problems with impulses burns,10
for low thrust propulsion where the thrust level is low relative to the spacecraft mass, the inte-
2

grated trajectory using the interpolated control from the direct approach can drift from the optimal
trajectory and the optimality is difficult to guarantee.
Indirect approaches are based on the calculus of variations. Necessary conditions are derived
from Pontryagin’s principles.1 A simple shooting or multiple shooting method is usually used
to solve the resulting two-point value problems, with the goal to find the unknown initial states
and co-states. This method is not popular in industry because of the difficulty encountered in
automating the process to translate the original problem to a two-point boundary value problem.
However, mathematical programming languages such as AMPL and the automatic differentiation
techniques have made automation of this process possible11,12,.13 The solutions obtained from the
indirect approach assure the optimality and accuracy, which is the main reason why this method
has been very popular for low thrust trajectory design4,14,15,.16 The greatest difficulty encountered
with this approach is that it is very sensitive to the initial guess; this problem is because that for the
state equation and co-state equations resulting from the Euler-Lagrange equations, one of them is
stable to integrate forward while the other one is stable only if it is integrated backward from the
final time.17
The small convergence domain issue becomes even more difficult for solving bang-bang type of
control problems using the indirect approach for two reasons. First, the control is non-differentiable,
creating the possibility that the Jacobian matrix, which is required to compute when gradient or
Newton’s based methods18 are used to solve the two-point boundary values problems, may become
singular on a large domain. Second, discontinuous control makes it difficult for most available or-
dinary differential equation solvers to generate high accuracy solutions if the switching times are
not known at prior. Additionally, as mentioned Bai and Junkins3 and Bskens,19 the current knowl-
edge about the second order sufficient conditions for these bang-bang control problems is still
3

limited. Maurer and Osmolovskii20 provided a systematic numerical method to verify the second
order conditions. In the case of one or two switches, the tests are very easy to implement. The
authors precluded simultaneous switching bang-bang control structures when they derived the sec-
ond order conditions. However, simultaneous switching cases are found quite often for the three
axis rigid body maneuver.3 Bertrand and Epenoy5 used new smoothing techniques to solve bang-
bang optimal control problems. The authors studied different type of perturbation terms that can
be added to the objective function to improve the convergence domain of the Newton’s method to
solve such problems. For an Earth to Venus problem, where the possible global optimal trajectory
includes six switches, the authors showed that the convergence rate is less than 10% when using a
hundred different starting points.
Because of the pros and cons of both direct and indirect approaches, combing them to solve
complicated problems has been very successful3,21,.22 Usually, the co-states and control structure
information is first extracted from a nonlinear programming approach. The solutions are refined
by using an indirect shooting method. Although hybrid approaches are usually very effective
to expand the convergence domain for the indirect methods and increase the accuracy for the
direct methods, both efficient direct algorithm and quality indirect method are required to solve
complicated problems.
A Legendre pseudospectral method is chosen as the direct shooting algorithm in this paper.
Pseudospectral methods were initially used widely in fluid dynamics,23 and has become a very
active research field in recent years24,25,26,.27 Ross et al.26 claimed that the pseudospectral method
is able to solve low thrust trajectory optimization problems with high accuracy. However, we
believe there is no guarantee that the integrated trajectory using the control obtained from the
pseudospectral methods through interpolation is the real optimal solution. This issue is addressed
4

in the next section and further demonstrated in the application section.
The accuracy of the direct solutions is improved through an indirect approach, by introduc-
ing a novel homotopy method in the paper. To solve optimization problems when using homotopy
method , researchers either construct a continuation algorithm or use the probability-one homotopy
algorithm. 28,29,30 The probability-one homotopy algorithm parameterizes both the state variables
and the homotopy variable as functions of arc length such that the homotopy variable can both
increase and decrease. Previous published homotopy strategy translates the problem into a one-
parameter chain of problems. The starting reference problem is easy to solve, and its solution
serves as the initial guess for the next problem. By changing the marching parameter variable(the
homotopy variable), this process is continued until the objective problem is reached and solved.
This strategy is discussed in detail when Bulirsch, Montrone and Pesch used it to solve a compli-
cated control problem of abort landing of a passenger aircraft in the presence of windshear .31,32
The homotopy algorithm utilized in this paper was developed by Bai, Junkins, and Turner33,34
and is different from the traditional approaches. Instead of solving a chain of problems, the pro-
posed homotopy method solves just one problem. The algorithm starts from some initial guess
to the problem and ends at the final accurate local optimal solutions. The homotopy method was
demonstrated to solved several algebraic optimization problems which are beyond the capabilities
of ‘fmincon’33 first. They further designed unconstrained optimal thrust direction for an Earth to
Apophis rendezvous problem.34 For the cases that can not be solved using SNOPT, their homo-
topy algorithm encounters no problems. This current paper extends the pervious two papers to
solve bang-bang control problems using the homotopy methodology.
The organization of this paper is as follows. Section 2 briefly describes the pseudospectral
method and discusses the problems that may be encountered if the user only depends on pseu-
5

dospectral method to generate high accurate solutions, especially for low thrust problems. Sec-
tion 3 first presents the mathematical equations of the optimal control problems, which are formu-
lated for solutions by the homotopy method. The homotopy algorithm is presented for rigorously
tracking equality constraints. An orbit rendezvous problem is presented in Section 4. The pro-
cedures to solve the problem and simulation results are discussed. Conclusion remarks follow in
Section 5.
2 Approximate Solution by Using a Psedospectral Method
Psedospectral methods use Lagrange form of the interpolation polynomials to describe states.
For a given set of N +1 data points t0, t1, t2, · · · , tN , the Lagrangian basis polynomials are defined
as
φi(t) =k=N∏
k=0,k 6=i
t− tkti − tk
, i = 0, 1, · · · , N (1)
To overcome the Runge’s phenomenon and utilize the quadrature rules for integration, the roots
of orthogonal polynomials are usually chosen as the psedospectral nodes, leading to the methods
such as Chebyshev pseudospectral methods and Legendre pseudospectral methods. Comparing
with Chebyshev polynomial methods,24 Legendre pseudospectral method with Legendre-Gauss-
Lobatto (LGL) nodes27 are chosen in the paper since the well established co-vector mapping theo-
rem provides the proper connection to commute dualization with discretization.27 For LGL nodes,
ti, 1 ≤ i ≤ N are chosen as the zeros of the derivative of the Legendre polynomials of order N
with t0 = −1 and tN = 1. The state variables are approximated by using N th order interpolation
6

polynomial in the Lagrange form, which is linearly expanded as
x(t) =i=N∑i=0
xiφi(t) (2)
Since φi(ti) = 1 and φi(tj) = 0 for i 6= j, we have x(tk) = xk.
The derivative of the state variables x(t) in the psedospectral methods is given by
x(tk) =i=N∑i=0
xiφi(tk) =i=N∑i=0
Dkixi (3)
where φi(tk) = Dki are the entries of the (N + 1) × (N + 1) differentiation matrix D, which has
the following form23
D := Dki =
LN (tk)LN (ti)
1tk−ti
, k 6= i
−N(N+1)4
, k = i = 0
N(N+1)4
, k = i = N
0, otherwise
(4)
where LN(t) is the N th order Legendre polynomials. Unlike Chebyshev polynomials, there is
no closed form solution to either solve for the LGL nodes or calculate the differentiation matrix.
The code we implemented later is based on the method discussed by Canuto.23 Notice this matrix
is exact only if the state variable x is a polynomial of degree at most N .35 Furthermore, for the
bang-bang type of control problems, the derivatives of the states are oscillating, yielding poor
approximations at the LGL points where the differentiation matrix is formulated for the exact
differentiation at these points. Without the information about the switching times, the spurious
differentiation matrix contributes to the errors of the final solutions.
7

Although the mesh refinement techniques27 or removing the Gibbs phenomenon by some fil-
tering procedures23 can relieve these problems to some extend, to guarantee the accuracy and opti-
mality of the solutions, we utilize a robust homotopy method to find the optimal solution through
an indirect approach.
3 Indirect Solution by Using a Novel Homotopy Method
3.1 Problem Formulation
The mathematical equations of the optimal control problems are formulated for solutions by the
homotopy method. The equations of motion for a general dynamic system with control appearing
linearly can be written as
x = f(t) = A(x, t)x + B(x, t)u + C(f ∈ Rn,u ∈ Rm) (5)
where A and B can be both time-varying and dependent on x(t); C is a constant force vector.
Using perturbation methods,36 the solution of Eq. 5 is given by
x(t) = φ(t, 0)x(0) + φ(t, 0)
∫ t
0
φ−1(τ, 0)(AQ + Bu)dτ + Q (6)
with
Q = C (7)
8

φ(t, 0) is the state transition matrix; its dynamic equation is
φ(t, 0) = (A +∂B
∂xu)φ(t, 0) (8)
and the initial condition is φ(0, 0) = I , where I is the identity matrix with the same order as the
state equations.
For a bang-bang type of control, we assume that the optimal control seeks to minimize the
performance function J = g(x(t0), x(tf ), t), which is not dependent on the control directly. Fur-
thermore, we assume the magnitude of the control is bounded by
|u| ≤ ub (9)
The Hamiltonian equation is formulated as
H = λTf = λT (A(x, t)x + B(x, t)u + C) (10)
Through Pontryagin’s principle, the stationary condition leads to the bang-bang type of optimal
control as
u = −sign(λTB)ub (11)
9
where λTB represents the switching function and the sign function is defined as
sign(S) =
1, S ≥ 0
undefined, S = 0
−1, S ≤ 0
(12)
We only study strict bang-bang control problems in this paper, such that S = 0 is not valid for a
finite time of intervals.
3.2 Homotopy Algorithm
In the homotopy algorithm, we combine the dynamic differential equations and the co-state
differential equations, leading to
X = h(X,u, t) = A(x, t)x + B(x, t)u1 + C + D(X,u2, t) (13)
where X consists of both the states x and the co-states λ.
Notice this equation has a more general form than Eq. 5, with two terms for controls. The differ-
ential equation is linearly in u1 so that u1 will have a bang-bang form. The new term D(X,u2, t)
represents other controls that will not have a bang-bang structure. The structure in Eq. 13 is often
encountered for low thrust design, where the thrust magnitude has a bang-bang form while the
thrust angle has a continuous form.
In the following derivations, we assume we know the optimal control will switch k times with
the approximate switching times and control structures. Notice for switched system, these will
usually be known before optimization, especially for the switched linear system.37,38,39For exam-
10

ple, the speeding up of an automobile power train requires switches from 1-4. The aim for this
case is to find the optimal switching times. For a more general dynamic system, direct methods
can always be used to provide a good initial guess for how many switches are required3,.21 A
pseudospectral method is used to provide an initial solution in the paper.
The boundary conditions are formulated as
Z =
λT(ti)B(ti,x)
κ(t0, tf ,xt0, xtf )
= 0, i = 1, 2, . . . , k (14)
where λT(ti)B(ti) consists of k switching conditions at the k switching times and κ(t0, tf ) are the
standard boundary conditions from the first order optimality conditions, which usually include the
boundary conditions for the states and co-states and possibly some conditions on the Hamiltonian.
The goal is to find the unknown variables χ, which consists of switching times ti and unknown
initial states xn(t0) and co-states λn(t0). Explicitly, we have
χ =
ti, i = 1, 2, · · · , n
xn(t0)
λn(t0)
(15)
The solution for χ is obtained by using the homotopy algorithm.
Notice the standard indirect approach does not shoot for the switching times since these times
are not independent but are implicitly dependent on the initial states and co-states with the optimal
control. However, since the control is discontinuous in this case, most ordinary differentiation
equation integration methods need to restart every time when the control switches to maintain the
11

accuracy of the solutions. To recover the switching times explicitly, they are defined as shooting
variables to solve this problem. In fact, similar ideas have been used by Bskens et al.19
Next we present a novel homotopy method to solve Eq. 14. Define the constraint residuals as
g = Z(χ) (16)
where χ is the current integral solution for some χ0. Define a homotopy path z as
z = g − γg0 = 0 (17)
where g0 = Z(χ0) and χ0 is the initial guess for χ. Notice in Eq. 17, when γ = 1, z = 0 is
satisfied automatically; when γ = 0, z = g = 0 = Z(χ) and an exact solution χ is found.
The homotopy path integral solution algorithm is discussed by Bai et al.34 The main step is
discussed here for completeness. Using the arc length based homotopy approach,28 Eq. 17 is solved
along a homotopy path from γ = 1 to γ = 0, where γ is allowed to both increase and decrease
such that turning points are not a problem in this approach.
To track the zero curve of Eq. 17, the derivative of z with respect to arc length s is calculated
through
dz
ds=
[∂g∂χ
−g0
]
dχds
dγds
= 0 (18)
Thus the direction of the homotopy path[
dχds
dγds
]T
lies in the null space of matrix M defined
by
M =
[∂g∂χ
−g0
](19)
12

While tracking the zero curve of z, we constrain the marching variable s to be the real arc length
by using
‖dγ
ds,dχ
ds‖2 =
((dγ
ds)2 + (
dχ1
ds)2 + (
dχ2
ds)2 + . . . + (
dχn
ds)2
)0.5
= 1 (20)
The final value of s is not known a prior. The stopping condition γ(s) = 0 is used to terminate the
homotopic tracking process.
3.3 Nonstandard sensitivity formulations
From Eq. 14 and 16, we can see that the homotopy path derivative ∂g∂χ
includes the standard
boundary conditions (when using the indirect methods) and the additional switching conditions
(when using the direct methods) with respect to both the unknown switching times and the un-
known initial states and costates. The partial derivative of the states appearing in Eq. 14 with
respect to X(0) can be obtained from the direction cosine matrix. We emphasize that the sys-
tem dynamic equations can have different forms for different time periods between the interval
of [ti, ti+1], which happens often for the switched linear systems. The general form of the state
transition matrix is
∂X(ti)
∂X(0)=
∂X(ti)
∂X(t+i−1)
∂X(t−i−1)
∂X(t+i−2). . .
∂X(t−1 )
∂X(t0)= φi(ti, ti−1) . . . φ1(t1, t0) (21)
Since the state transition matrix in this case is not the standard one,36 we outline the computa-
tional procedures to solve for the state transition matrix.
13

We integrate Eq. 13 to obtain
X(t) = X(0) +
∫ t
0
h(X,u, t)dt (22)
where X(0) consists of both the known and the unknown initial states and co-states.
Taking the derivatives of Eq. 22 with respect to X(0)
∂X(t)
∂X(0)= I +
∫ t
0
(∂h
∂X(t)
∂X(t)
∂X(0)+
∂h
∂u2
∂u2
∂X(t)
∂X(t)
∂X(0)
)dt (23)
we obtain the differential equations for the state transition matrix by taking the time derivative,
yielding
d
dt(∂X(t)/∂X(0)) =
(∂h
∂X(t)+
∂h
∂u2
∂u2
∂X(t)
)∂X
∂X0
(24)
Notice since u1 has already been taken care of by the bang-bang form, the partial derivatives
we calculate here only involve the non-bang-bang controls. Additionally, in Eq. 24, we assume the
optimal control is an implicit function of the states. The numerical expression for ∂u2/∂X(t) is
obtained from the Hamiltonian. The stationary condition provides the form for the optimal control
as
Hu =∂H
∂u2
= 0 (25)
where H is the Hamiltonian function. Taking the derivative of Eq. 25 with respect to X(t), we
obtain
∂Hu
∂X(t)=
∂Hu
∂X(t)+
∂Hu
∂u2
∂u2
∂X(t)= 0 (26)
14

thus
∂u2
∂X(t)= −(Huu)
−1 ∂Hu
∂X(t)(27)
where Huu = ∂Hu
∂u2.
Using Eq. 27, Eq. 24 is propagated using an identity matrix as the initial condition for ∂X∂X0
.
Another non-standard term is the partial derivative of the states with respect to some switching
time ti. Following Eq. 6, this partial derivative can be solved by
∂X(t)
∂ti= φ(t, 0)
∫ t
0
φ−1(τ, 0)B(τ)∂u(τ)
∂tidτ
= φ(t, 0)
∫ t
0
φ−1(τ, 0)B(τ)aδ(τ − ti)dτ
= aφ(t, 0)φ−1(ti, 0)B(ti) (28)
where a is dependent on the jump condition of the control and is known once we know the bang-
bang control structures. For example, if the control switches from −1 to 1, we have a equals to
−2.
Equations 24 and 28 need to be solved for all the solutions searched along the homotopy path.
They are used to track the direction of the homotopy path from Eq. 18.
This homotopy strategy differs from penalty based methods when no penalty terms are defined.
It also differs from sequential quadratic programming(SQP).40 SQP usually linearizes the perfor-
mance function and uses second order expansions to approximate the constraint functions. The
SQP approximation does not guarantee that the final solution remains on the constraint surface.
For high nonlinear problems, these approximations will cause numerical difficulties if the initial
guess is far way from the right solution.33 Without approximating or linearizing either the con-
15

straints or performance function, the proposed algorithm achieves its robustness by enforcing the
satisfaction of the dynamic equation constraints along the homotopy path. In this way, we enlarge
the convergence domain of the initial guess for the two-point boundary value problems.
4 An Orbit Rendezvous Example Problem
This example is a simplified version of a subproblem from the 4th Global Trajectory Opti-
misation Competition.41 The problem is to design an planar optimal trajectory starting from one
asteroid and intercepting with another asteroid within a fixed time. We require the spacecraft on a
circular orbit at both the initial time and the final intercepting time.
4.1 Mathematical Formulations
The spacecraft is assumed to be a point mass with a variable mass m and only the gravity force
from the Sun is considered. The position of the spacecraft in a solar-centric polar coordinate is
(r, θ) as shown in Fig. 1, where r is the distance of the spacecraft to the Sun and θ is the phase
angle with respect to some inertial axis. u is the velocity along the radial direction and v is the
velocity along the local horizontal direction. The angle between the thrust direction and the local
horizontal is the control variable represented by β.
16

uv
x
y
r
θ
T
β
Sun
S/C
0
Fig. 1 Frame, State and Control Definition
The dynamic equations for the spacecraft are
r = u (29)
θ = v/r (30)
u = v2/r − µ/r2 + T/m sin β (31)
v = −uv/r + T/m cos β (32)
where the thrust magnitude is bounded
0 ≤ T ≤ 0.135N (33)
The mass equation is
m = − T
g0Isp
(34)
The spacecraft has a constant specific impulse Isp as 3000sec. The initial mass is 1500kg and
17

the standard acceleration due to gravity g0 is 9.80665m/s2. The transfer time is 240days. The
optimization goal is to minimize the fuel cost, which is equivalent to maximize the final mass.
The co-state differential equations obtained through Pontryagin’s principle are
λr = −λu(−v2/r2 + 2/r3)− λvuv/r2 + λθv/r2 (35)
λθ = 0 (36)
λu = −λr + λvv/r (37)
λv = −2λuv/r + λvu/r − λθ/r (38)
λm = −T/m2√
λ2u + λ2
v (39)
The optimal thrust direction is
β = atan2(−λu,−λv) (40)
where atan2() is the four-quadrant inverse tangent function.
The switching function for the thrust T is
S(t) = −√
(λu(t)2 + λv(t)2)gIsp
m(t)− λm(t) (41)
thus it is thrusting when S(t) is less than zero and it is coasting whenever S(t) is greater than zero.
18

The two-point boundary conditions are
r(0) = 1 (42)
θ(0) = 0 (43)
v(0) = 0 (44)
m(0) = 1 (45)
r(tf ) = 1.05242919219003 (46)
θ(tf ) = 3.99191781862267 (47)
u(f) = 0 (48)
v(f) = 0.97477314754443 (49)
λm(f) = −1 (50)
where all the distance variables have been non-dimensionalized by 1AU = 1.495978706910000×
1011m; all the variables involving time have been non-dimensionalized by 1TU = 5.022642890912782×
106sec; the mass is non-dimensionalized by the initial mass 1500kg. All these non-dimensionalizations
lead to that the maximum thrust magnitude is 0.01517685201253; the maximum mass flow rate is
m = 0.01536501116359; the transfer time is 4.12850374800020TU .
4.2 Approximate Solutions from Pseudospectral Method
Although the homotopy method is robust when compared with the standard gradient based
methods, for bang-bang type of problems, decent control structures, and switching times are re-
quired for its successes. We obtain these information from a pseudospectral method. The code is
19
implemented in MATLAB. SNOPT.7 is the nonlinear programming solver that provides the major
feasibility tolerance, minor feasibility tolerance, and major optimality tolerance as 1e− 6.
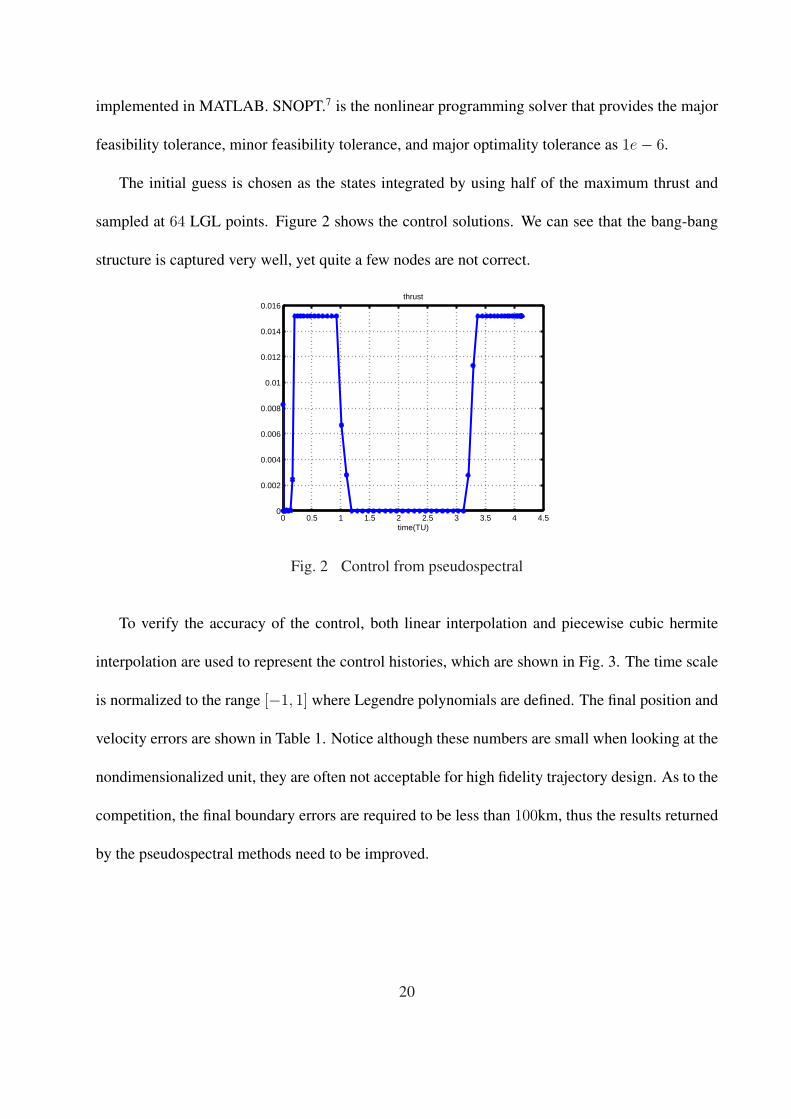
The initial guess is chosen as the states integrated by using half of the maximum thrust and
sampled at 64 LGL points. Figure 2 shows the control solutions. We can see that the bang-bang
structure is captured very well, yet quite a few nodes are not correct.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
time(TU)
thrust
Fig. 2 Control from pseudospectral
To verify the accuracy of the control, both linear interpolation and piecewise cubic hermite
interpolation are used to represent the control histories, which are shown in Fig. 3. The time scale
is normalized to the range [−1, 1] where Legendre polynomials are defined. The final position and
velocity errors are shown in Table 1. Notice although these numbers are small when looking at the
nondimensionalized unit, they are often not acceptable for high fidelity trajectory design. As to the
competition, the final boundary errors are required to be less than 100km, thus the results returned
by the pseudospectral methods need to be improved.
20

−1 −0.5 0 0.5 10
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
Normalized time
Thr
ust
Interpolated thrust with PS solution
PSlinearPiecewise Cubic Hermite
Fig. 3 Interpolated thrust with PS solution
Final Errors Linear interpolation Piecewise Cubic hermite Interpolation4r(AU)
4u(AU/TU)4v(AU/TU)4θ(rad)
0.12583599381699× 10−3
0.18681358039823× 10−3
0.37652130891286× 10−3
0.01071562338772× 10−3
0.11586689900422× 10−3
0.16111720421912× 10−3
0.38315737654437× 10−3
−0.04031962569595× 10−3
Table 1 Final Errors
4.3 Optimal Solution from Homotopy Method
Using the initial co-states obtained from the pseudospectral methods and the approximate
switching times as the initial guess for the homotopy method, we find accurate switching times
and initial co-states with the optimal trajectory. The initial co-states and switching times from the
pseudospectral methods and the homotopy solutions are listed in Table 2.
The homotopy tracking histories are shown in Figs. 4 and 5, which is the path the homotopy
method marches along, starting with the solutions from the psedospectral method and ending at
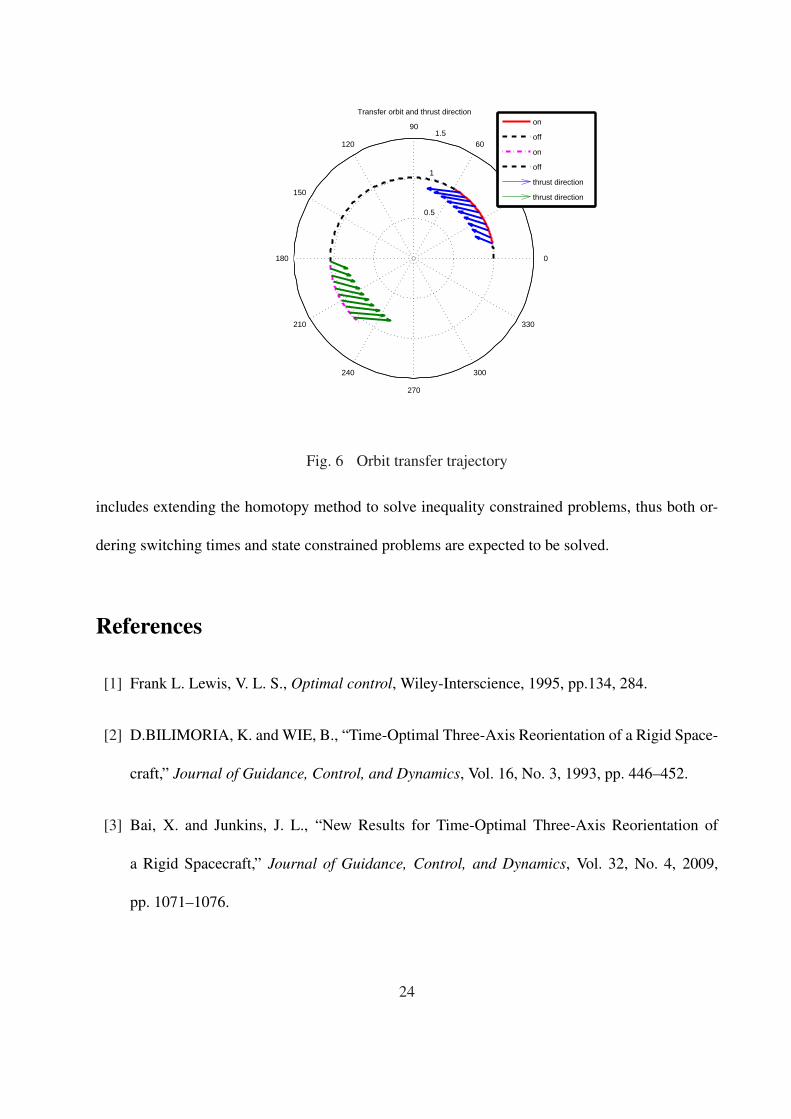
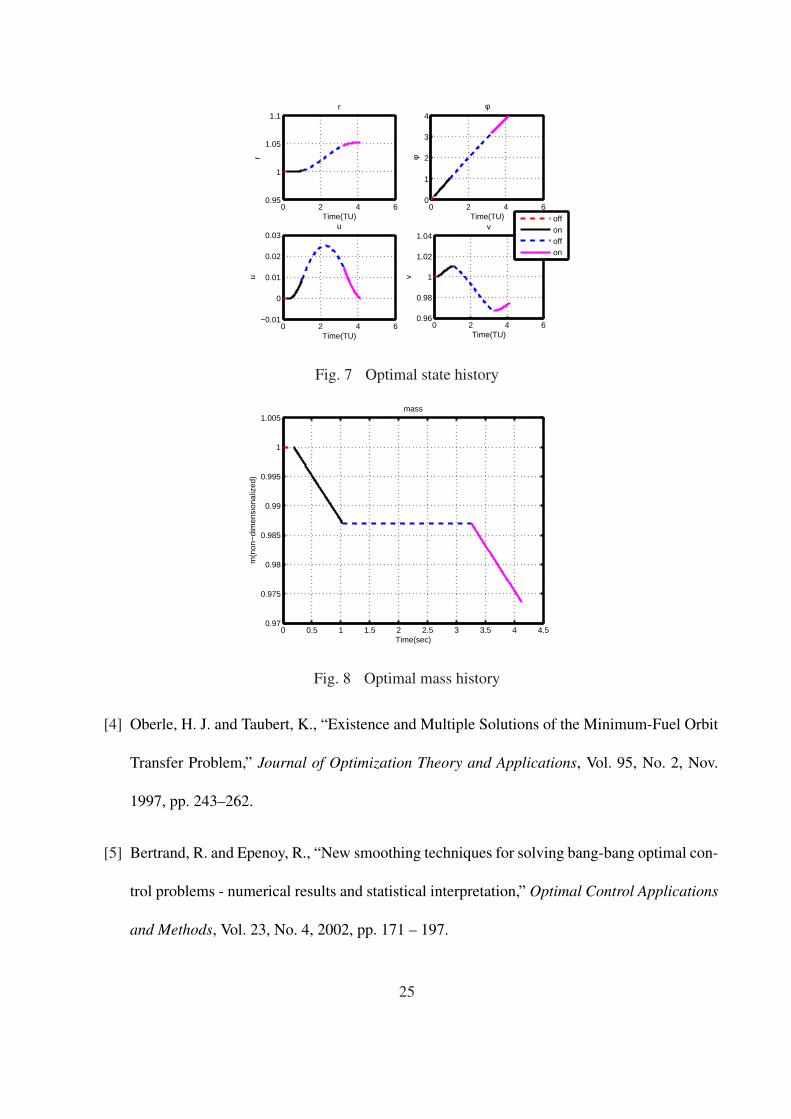
the accurate optimal solutions. The optimal trajectory is shown in Fig. 6. The optimal state history
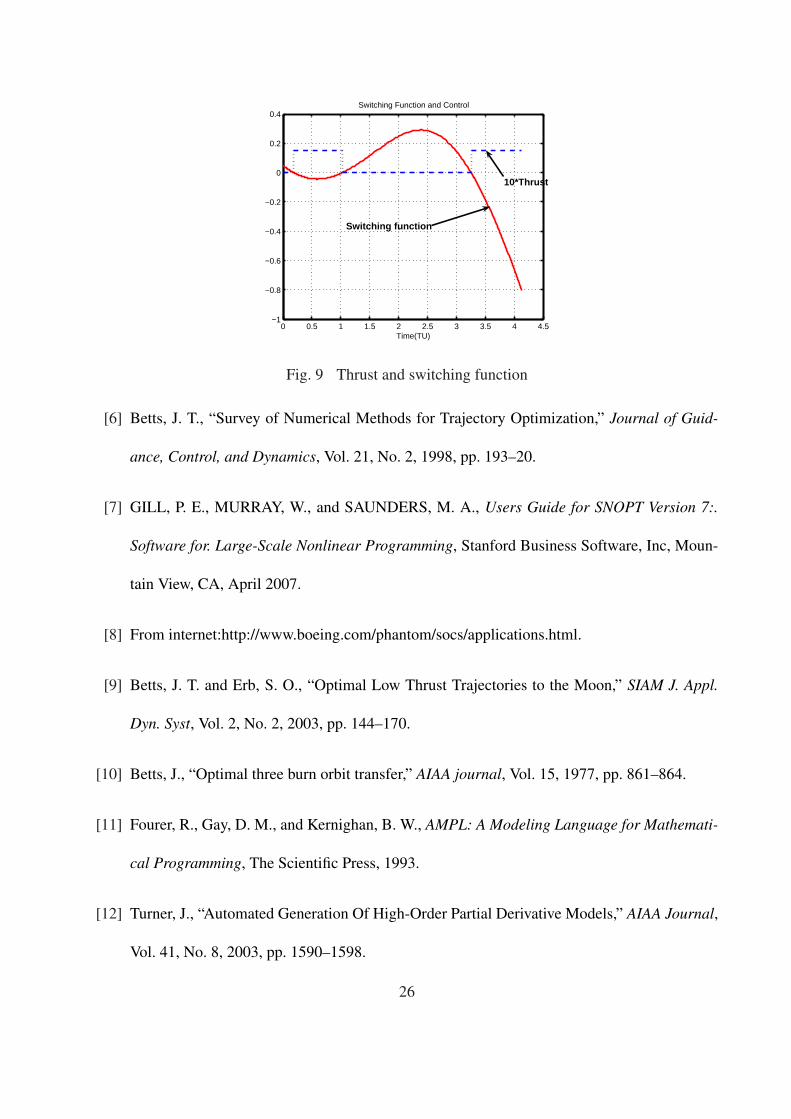
is shown in Fig. 7 with the mass history in Fig. 8. The switching function and the thrust magni-
tude are shown in Fig. 9, which clearly shows that the obtained control satisfies the Pontryagin’s
21

Initial conditions and switching times pseudospectral homotopyλr(t0)λφ(t0)λu(t0)λv(t0)λm(t0)
t1t2t3
−0.47908295213219−0.166437088621670.33263137092118−0.85778071767051−0.97740428340329
0.20.9253.35
−0.48433902798013−0.167544268854000.31568214760216−0.87711007733394−0.968202235384110.184361026651541.028309909099803.25065284139823
Table 2 Initial co-states and switching times
principles. Notice for illustration purpose the thrust magnitude has been multiplied by ten. The
final errors, which include the boundary condition in Eqs. from 46 to 50 and the three switching
functions S(ti) = 0, i = 1, 2, 3 in Eq. 41, are less than 10−11. The final mass is 0.9735, which
means 2.645547298022% mass was consumed during the transfer.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
Tracking arch length (s)
Initial lambda tracking history
λr(0)
λφ(0)
λu(0)
λv(0)
λm
(0)
Fig. 4 Co-state tracking history
22

0 0.2 0.4 0.6 0.8 1 1.2 1.40
0.5
1
1.5
2
2.5
3
3.5
Tracking arch length (s)
Switching time tracking history
t1
t2
t3
Fig. 5 Switching time tracking history
5 Conclusions and Future Works
A novel homotopy algorithm has been combined with a pseudospectral method to generate
high accurate and optimality guaranteed solutions for bang-bang type of optimal control problems,
with particular applications to the low thrust trajectory optimization. The pseudospectral method
is used to generate the initial guess of the solution to start the homotopy algorithm. The homotopy
method solves the optimal control problems through an indirect shooting method. Although more
computationally intense than gradient based shooting methods, the homotopy algorithm is more
robust to the nonlinearly of the problems and high accuracy solutions are obtained. The efficient
utilization of the state transition matrix, the sensitivity of the boundary conditions with respect to
the switching times, and the fact that the homotopy path only marches along the problem’s con-
strained surface, are the three keys for its success. Since the current homotopy algorithm only
handles equality constraints, sometimes it fails to find the solutions since the inequality constraints
on the switching times are not included. Under this case, we find a better bang-bang shape so-
lution from the pseudospectral method and restart the homotopy algorithm. The ongoing work
23
0.5
1
1.5
30
210
60
240
90
270
120
300
150
330
180 0
Transfer orbit and thrust directionon
off
on
off
thrust direction
thrust direction
Fig. 6 Orbit transfer trajectory
includes extending the homotopy method to solve inequality constrained problems, thus both or-
dering switching times and state constrained problems are expected to be solved.
References
[1] Frank L. Lewis, V. L. S., Optimal control, Wiley-Interscience, 1995, pp.134, 284.
[2] D.BILIMORIA, K. and WIE, B., “Time-Optimal Three-Axis Reorientation of a Rigid Space-
craft,” Journal of Guidance, Control, and Dynamics, Vol. 16, No. 3, 1993, pp. 446–452.
[3] Bai, X. and Junkins, J. L., “New Results for Time-Optimal Three-Axis Reorientation of
a Rigid Spacecraft,” Journal of Guidance, Control, and Dynamics, Vol. 32, No. 4, 2009,
pp. 1071–1076.
24
0 2 4 60.95
1
1.05
1.1r
Time(TU)
r
0 2 4 60
1
2
3
4φ
Time(TU)
φ
0 2 4 6−0.01
0
0.01
0.02
0.03u
Time(TU)
u
0 2 4 60.96
0.98
1
1.02
1.04v
Time(TU)
v
offonoffon
Fig. 7 Optimal state history
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50.97
0.975
0.98
0.985
0.99
0.995
1
1.005mass
Time(sec)
m(n
on−
dim
ensi
onal
ized
)
Fig. 8 Optimal mass history
[4] Oberle, H. J. and Taubert, K., “Existence and Multiple Solutions of the Minimum-Fuel Orbit
Transfer Problem,” Journal of Optimization Theory and Applications, Vol. 95, No. 2, Nov.
1997, pp. 243–262.
[5] Bertrand, R. and Epenoy, R., “New smoothing techniques for solving bang-bang optimal con-
trol problems - numerical results and statistical interpretation,” Optimal Control Applications
and Methods, Vol. 23, No. 4, 2002, pp. 171 – 197.
25
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4Switching Function and Control
Time(TU)
10*Thrust
Switching function
Fig. 9 Thrust and switching function
[6] Betts, J. T., “Survey of Numerical Methods for Trajectory Optimization,” Journal of Guid-
ance, Control, and Dynamics, Vol. 21, No. 2, 1998, pp. 193–20.
[7] GILL, P. E., MURRAY, W., and SAUNDERS, M. A., Users Guide for SNOPT Version 7:.
Software for. Large-Scale Nonlinear Programming, Stanford Business Software, Inc, Moun-
tain View, CA, April 2007.
[8] From internet:http://www.boeing.com/phantom/socs/applications.html.
[9] Betts, J. T. and Erb, S. O., “Optimal Low Thrust Trajectories to the Moon,” SIAM J. Appl.
Dyn. Syst, Vol. 2, No. 2, 2003, pp. 144–170.
[10] Betts, J., “Optimal three burn orbit transfer,” AIAA journal, Vol. 15, 1977, pp. 861–864.
[11] Fourer, R., Gay, D. M., and Kernighan, B. W., AMPL: A Modeling Language for Mathemati-
cal Programming, The Scientific Press, 1993.
[12] Turner, J., “Automated Generation Of High-Order Partial Derivative Models,” AIAA Journal,
Vol. 41, No. 8, 2003, pp. 1590–1598.
26

[13] Bai, X., Turner, J. D., and Junkins, J. L., “Automatic Differentiation Based Dynamic Model
for a Mobile Stewart Platform,” 7th International Conference On Dynamics and Control of
Systems and Structures in Space, London, England, July 2006.
[14] Nah, R. S., Vadali, S. R., and Braden, E., “Fuel-Optimal, Low-Thrust, Three-Dimensional
EarthMars Trajectories,” Journal of Guidance, Control, and Dynamics, Vol. 24, No. 6, 2001,
pp. 1100–1107.
[15] Bulirsch, R. and R.Callies, “Optimal trajectories for a multiple rendezvous mission to aster-
oids,” Acta Astronautica, Vol. 26, No. 8-10, 1992, pp. 587–587.
[16] Ranieri, C. and Ocampo, C., “Optimization of Roundtrip, Time-Constrained, Finite Burn
Trajectories via an Indirect Method,” Journal of Guidance, Control, and Dynamics, Vol. 28,
No. 2, 2005, pp. 0731–5090.
[17] Jr., A., “Optimal control-1950 to 1985,” Control Systems Magazine, IEEE, Vol. 16, No. 3,
1966, pp. 26–33.
[18] Bryson, A. E. and Yu-Chi, H., Applied Optimal Control: Optimization, Estimation, and Con-
trol, Hemisphere Publishing Corporation, Washington D.C, 1975.
[19] C.Bskens, Pesch, H. J., and Winderl, S., Online Optimization of Large Scale Systems: State
of the Art, chap. Real-time solutions of bang-bang and singular optimal control problems,
Springer, 2001, pp. 129–142.
[20] Maurer, H. and Osmolovskii, N. P., “Second Order Sufficient Conditions for Time-Optimal
Bang-Bang Control,” SIAM Journal on Control and Optimization, Vol. 42, No. 6, 2004,
pp. 2239–2263.
27
[21] Stryk, O. V. and Bulirsch, R., “Direct and indirect methods for trajectory optimization,” An-
nals of Operations Research, Vol. 37, No. 1, 1992, pp. 357–373.
[22] Maurer, H. and Pesch, H. J., “Direct optimization methods for solving a complex state-
constrained optimal control problem in microeconomics,” Applied Mathematics and Com-
putation, Vol. 204, No. 2, 2008, pp. 568–579.
[23] Canuto, C., M.Y.Hussaini, A.Quarteroni, and Zang, T., SPECTRAL METHODS IN FLUID
DYNAMICS (Springer Series in Computational Physics), Springer-verlag, 1988.
[24] Fahroo, F. and Ross, I. M., “Direct Trajectory Optimization by a Chebyshev Pseudospec-
tral Method,” Journal of Guidance, Control, and Dynamics, Vol. 25, No. 1, Jan.-Feb. 2002,
pp. 160–166.
[25] Fahroo, F. and Ross, I. M., “A spectral patching method for direct trajectory optimization,”
Journal of the Astronautical Sciences, Vol. 48, No. 2/3, 2000, pp. 269–286.
[26] Ross, I., Gong, Q., and Sekhavat, P., “Low-thrust, high-accuracy trajectory optimization,”
Journal of Guidance Control and Dynamics,, Vol. 30, No. 4, 2007, pp. 921–933.
[27] Q Gong, F Fahroo, I. R., “Spectral Algorithm for Pseudospectral Methods in Optimal Con-
trol,” Journal of Guidance Control and Dynamics, Vol. 31, No. 3, 2008, pp. 460–471.
[28] Chow, S.-N., Mallet-Paret, J., and Yorke, J. A., “Finding Zeroes of Maps: Homotopy Methods
That are Constructive With Probability One,” Mathematics of Computation, Vol. 32, No. 143,
Jul. 1978, pp. 887–889.
28
[29] Watson, L. T. and Haftka, R. T., “Modern homotopy methods in optimization,” Computer
Methods in Applied Mechanics and Engineering, Vol. 74, No. 3, September 1989, pp. 289 –
305.
[30] Morgan, A., Solving Polynomial Systems Using Continuation for Engineering and Scientific
Problems, Prentice Hall, Englewood Cliffs, New Jersey, April 1987.
[31] Bulirsch, R., Montrone, F., and Pesch, H. J., “Abort landing in the presence of windshear as
a minimax optimal control problem, part 1: Necessary conditions,” Journal of Optimization
Theory and Applications, Vol. 70, No. 1, July 1991, pp. 1–23.
[32] Bulirsch, R., Montrone, F., and Pesch, H. J., “Abort landing in the presence of windshear
as a minimax optimal control problem, part 2: Multiple shooting and homotopy,” Journal of
Optimization Theory and Applications, Vol. 70, No. 2, August 1991, pp. 223–254.
[33] Bai, X., Turner, J. D., and Junkins, J. L., “A Robust Homotopy Method for Equality Con-
strained Nonlinear Optimization,” 2008 12th AIAA/ISSMO Multidisciplinary Analysis and
Optimization Conference.
[34] Bai, X., Turner, J. D., and Junkins, J. L., “Optimal Thrust Design of a Mission to Apophis
Based on a Homotopy Method,” 2009 AAS/AIAA Spaceflight Mechanics Meeting, February
9-12, 2009, Savannah, Georgia, Feb. 2009.
[35] Garg, D., Patterson, M., Darby, C., Francolin, C., Hager, W., and Ra, A., “Direct Trajec-
tory Optimization and Costate Estimation of Finite-Horizon and Infinite-Horizon Optimal
Control Problems Using a Radau Pseudospectral Method,” Computational Optimization and
Applications, conditionally accepted for publication.
29

[36] Schaub, H. and Junkins, J. L., Analytical Mechanics of Space Systems, AIAA Education
Series, AIAA, Reston, VA, 2003, pp. 492-495.
[37] Egerstedt, M., Wardi, Y., and Delmotte, F., “Optimal control of switching times in switched
dynamical systems,” Decision and Control, 2003. Proceedings. 42nd IEEE Conference on,
Vol. 3, Dec 2003, pp. 2138– 2143.
[38] Xu, X. and Antsaklis, P., “Optimal control of switched systems based on parameterization of
the switching instants,” Automatic Control, IEEE Transactions on, Vol. 49, No. 1, Jan. 2004,
pp. 2– 16.
[39] Sun, Z. and Geb, S., “Analysis and synthesis of switched linear control systemsstar, open,”
Automatica, Vol. 41, No. 2, Feb. 2005, pp. 181–195.
[40] Nocedal, J. and Wright, S. J., Numerical Optimization, Springer, Verlag New York, April
2000, pp. 425.
[41] From internet: http://cct.cnes.fr/cct02/gtoc4/index.htm.
30
Related Documents