6 BAB II TINJAUAN PUSTAKA 2.1 Getaran mekanik Sebuah gerak bodi atau partikel yang berosilasi di sekitar area seimbangnya disebut getaran mekanik. Getaran mekanik pada suatu sistem biasanya terjadi apabila sistem tersebut dilepas atau diubah dari posisi keseimbangan stabilnya, sistem ini nantinya akan cenderung kembali ke posisi dibawah pembebanan gaya- gaya elastik dan mencapai posisi orisinilnya dengan kecepatan tertentu, selama proses tersebut berlangsug terus tanpa batas sistem tersebut akan terus bergerak bolak-balik melalui posisi keseimbangan (Nurida, 2018). Interval waktu yang dibutuhkan sistem untuk menyelesaikan satu siklus gerak dinamakan frekuensi, dan pergeseran maksimum sistem dari posisi keseimbangan dinamakan amplitudo getaran. 2.2 Elemen sistem getaran Sistem getaran terdiri dari beberapa elemen, diantaranya adalah massa (m), pegas (k), peredam (c) dan eksitasi (F). Keadaan fisik suatu sistem dapat dinyatakan oleh suatu susunan massa, pegas dan peredam (Dewanto, 1999). Peredam disini hanya dianggap memiliki sifat redaman saja, sedangkan pegas juga dianggap hanya memiliki sifat elastisitas saja sehingga nilai redaman dan massanya tidak dianggap, dan massa hanya dianggap sebagai rigid of a body (benda kaku) yang diaggap tidak memiliki sifat elastisitas dan kemampun redam. Persamaan gerak massa adalah suatu persamaan respon dari adanya gaya eksitasi (F). Karakteristik getaran

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
6
BAB II
TINJAUAN PUSTAKA
2.1 Getaran mekanik
Sebuah gerak bodi atau partikel yang berosilasi di sekitar area seimbangnya
disebut getaran mekanik. Getaran mekanik pada suatu sistem biasanya terjadi
apabila sistem tersebut dilepas atau diubah dari posisi keseimbangan stabilnya,
sistem ini nantinya akan cenderung kembali ke posisi dibawah pembebanan gaya-
gaya elastik dan mencapai posisi orisinilnya dengan kecepatan tertentu, selama
proses tersebut berlangsug terus tanpa batas sistem tersebut akan terus bergerak
bolak-balik melalui posisi keseimbangan (Nurida, 2018). Interval waktu yang
dibutuhkan sistem untuk menyelesaikan satu siklus gerak dinamakan frekuensi, dan
pergeseran maksimum sistem dari posisi keseimbangan dinamakan amplitudo
getaran.
2.2 Elemen sistem getaran
Sistem getaran terdiri dari beberapa elemen, diantaranya adalah massa (m),
pegas (k), peredam (c) dan eksitasi (F). Keadaan fisik suatu sistem dapat dinyatakan
oleh suatu susunan massa, pegas dan peredam (Dewanto, 1999). Peredam disini
hanya dianggap memiliki sifat redaman saja, sedangkan pegas juga dianggap hanya
memiliki sifat elastisitas saja sehingga nilai redaman dan massanya tidak dianggap,
dan massa hanya dianggap sebagai rigid of a body (benda kaku) yang diaggap tidak
memiliki sifat elastisitas dan kemampun redam. Persamaan gerak massa adalah
suatu persamaan respon dari adanya gaya eksitasi (F). Karakteristik getaran
7
biasanya ditunjukkan sebagai persamaan perpindahan (x), bukan persamaan
kecepatan ataupun persamaan percepatan dari massa.
Suatu gaya pegas akan muncul hanya bila terdapat defleksi relatif antara
kedua ujung-ujung tumpuan, berdasarkan hukum hooke's yang banyak diketahui
besarnya gaya pegas sebanding dengan defleksi relatifnya (Ardiansyah, 2017).
Konstanta kesebandingan disebut konstanta pegas (k) yang dinyatakan dalam
satuan gaya per satuan panjang. Dan untuk peredam viscous besarnya sebanding
dengan kecepatan dan faktor kesebandingannya yang disebut koefisien redaman (c)
seperti ditunjukkan pada Gambar (2.1) dibawah ini.
(Sumber: Dewanto, 1999)
Gambar 2.1 Elemen Sistem Getaran
2.3 Frekuensi Natural Sistem
Perhatikan persamaan differensial getaran bebas sistem pegas (k) – massa
(m) pada Gambar (2.2) berikut ini :
8
Gambar 2.2 Sistem pegas-massa
m�̈� + k = 0 (2.1)
dimana, m : massa (Kg)
�̈� : percepatan sudut (m/s2)
k : konstanta pegas
x : jarak (m)
persamaan ini dapat ditulis
�̈� + 𝑘
𝑚 x = 0 (2.2)
Jika di misalkan 𝜔𝑛2 =
𝑘
𝑚 maka
�̈� + 𝜔𝑛2 x = 0 (2.3)
Besaran 𝜔𝑛 ini dinamakan frekuensi alamiah atau frekuensi natural sistem
massa pegas dan besarannya adalah :
𝜔𝑛 = √𝑘
𝑚 (2.4)
9
𝜔𝑛= frekuensi natural sistem (rad/s)
2.4 Klasifikasi Getaran
Pengklasifikasian getaran dapat ditinjau berdasarkan jumlah derajat
kebebasannya ataupun ada atau tidaknya gaya eksitasi yang bekerja secara
kontinyu. Berdasarkan derajat kebebasannya getaran dapat dibedakan menjadi
getaran satu derajat kebebasan, getaran dua derajat kebebasan, dan getaran dengan
n derajat kebebasan sesuai dengan banyaknya koordinat bebas yang diperlukan
untuk mendefinisikan persamaan gerak sebuah sistem seperti yang diperlihatkan
oleh Gambar (2.3) berikut.
(Sumber: Dewanto, 1999)
Gambar 2.3 Model Klasifikasi getaran
Berdasarkan gambar di atas, dimana Gambar (2.3a) adalah sistem getaran
dua derajat kebebasan, sedangkan Gambar (2.3b) merupakan sistem getaran dengan
satu derajat kebebasan.
Berdasarkan ada atau tidaknya gaya eksitasi yang bekerja secara kontinyu,
getaran dibagi menjadi getaran bebas dan getaran paksa.
10
A. Getaran Bebas
Getaran bebas terjadi bila sistem mengalami osilasi sendiri setelah sistem
tersebut diberi gangguan awal hal itu disebabkan karena bekerjanya gaya yang
ada dalam sistem itu sendiri dan tidak ada gaya dari luar yang bekerja (Dewanto,
1999). Sistem akan berhenti dalam waktu tertentu karena tidak ada gaya luar
yang bekerja. Hal ini disebabkan adanya redaman pada sistem getaran atau dari
luar sistem getaran.
B. Getaran Paksa
Adanya eksitasi atau gaya luar yang bekerja pada sistem, maka sistem akan
dipaksa untuk bergetar dan gerak osilasi akibat dari gaya luar itu dinamakan
getaran paksa (Sewoyo,2004).
Jika frekuensi rangsangan sama dengan frekuensi natural sistem, maka akan
didapat keadaan resonansi, yakni osilasi yang besar dan berbahaya. Kerusakan
pada struktur seperti jembatan, gedung, sayap pesawat terbang dan lain lain
merupakan kejadian yang menakutkan yang disebabkan resonansi
(Nurhardianto, 2015).
2.5 Getaran Paksa Harmonik
A. Sistem Satu Derajat Kebebasan
Jika suatu sistem getaran mendapat pengaruh gaya dari luar, sistem tersebut
akan dipaksa bergetar dan terjadi gerak osilasi dan bila pada sistem tersebut
terjadi redaman, maka sistem getaran tersebut dinamakan getaran paksa

11
teredam (Damped Forced Vibration) (Sewoyo, 2004). Jika ada bagian dari
gerakan yang menghilang seiring bertambahnya waktu, bagian tersebut
dinamakan respon transien, sedangkan gerak yang masih terus terjadi disebut
respon stasioner / steady state. Untuk nilai respon transien diperoleh dari
kondisi awal sistem tersebut.
Jika gaya luar atau eksitasi yang mempengaruhi sistem berupa fungsi
harmonik (sinusoidal), maka respons stasioner yang terjadi merupakan gerak
harmonik yang nilai frekuensi sama dengan frekuensi eksitasi (Sewoyo, 2004).
Respon pada sistem S-DOF yang diakibatkan oleh gaya harmonik digambarkan
oleh Gambar (2.4).
Gambar 2.4 Sistem massa pegas peredam dengan gaya eksitasi f(t)
Diagram benda bebas (free body diagram) dari sistem massa pegas
peredam di atas dapat dilihat pada Gambar (2.5) dibawah ini.

12
Gambar 2.5 Diagram benda bebas
Dengan menggunakan Hukum Newton I dimana ∑ F = 0, maka akan
diperoleh persamaan diferensial gerak (PDG) sebagai berikut :
M�̈� + C�̇� + kx = 𝐹0 sin (𝜔t) (2.5)
Solusi total dari persamaan diagram gerak (2.5) ini terdiri dari solusi
homogen atau solusi transien dan solusi stasioner. Untuk solusi homogen
persamaan yang digunakan bergantung pada nilai ζ. Sedangkan solusi stasionernya
dapat dinyatakan oleh persamaan berikut :
x(t) = X sin (𝜔t – ϕ) (2.6)
diamana, X : amplitudo respon
𝜔 : frekuensi eksitasi
ϕ : beda fase antara gaya eksitasi dan respons
Untuk mencari nilai besaran amplitudo (X) dan beda fase (ϕ) yang belum
diketahui, maka dapat diperoleh dengan cara memasukkan persamaan (2.6) di atas
ke persamaan (2.5), sehingga diperoleh :
-M𝜔2 X sin (𝜔t – ϕ) + C𝜔 X cos (𝜔t – ϕ) + k X sin (𝜔t – ϕ) = 𝐹0 sin (𝜔t) (2.7)
13
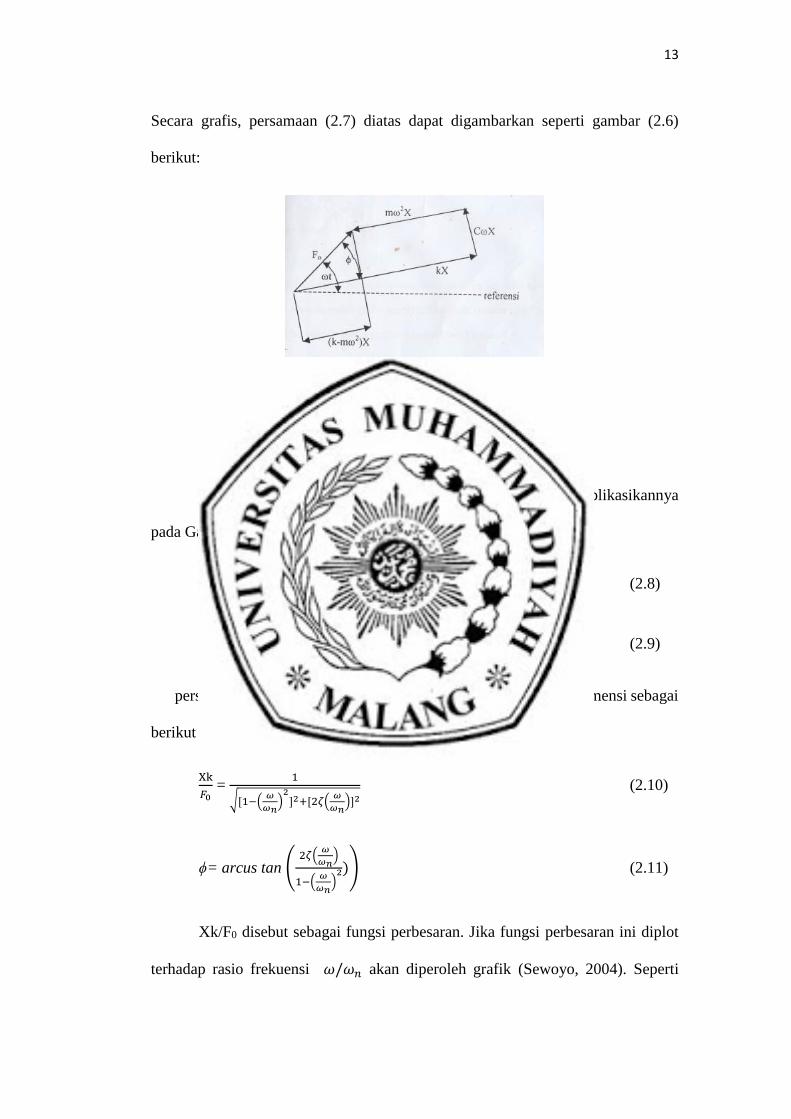
Secara grafis, persamaan (2.7) diatas dapat digambarkan seperti gambar (2.6)
berikut:
(Sumber: Sewoyo, 2004)
Gambar 2.6 Hubungan vektor persamaan (2.7)
Dengan mengingat kembali Hukum phytagoras dan mengaplikasikannya
pada Gambar (2.6) maka diperoleh hubungan antara lain:
X = 𝐹0
√(𝑘−𝑀 𝜔2)2+(𝐶 𝜔)2 (2.8)
ϕ= arcus tan (𝐶 𝜔
𝑘−𝑀 𝜔2 ) (2.9)
persamaan (2.8) dan (2.9) ini dapat ditulis dalam bentuk tak berdimensi sebagai
berikut :
Xk
𝐹0 =
1
√[1−(𝜔
𝜔𝑛)
2]2+[2𝜁(
𝜔
𝜔𝑛)]2
(2.10)
ϕ= arcus tan (2𝜁(
𝜔
𝜔𝑛)
1−(𝜔
𝜔𝑛)
2)) (2.11)
Xk/F0 disebut sebagai fungsi perbesaran. Jika fungsi perbesaran ini diplot
terhadap rasio frekuensi 𝜔/𝜔𝑛 akan diperoleh grafik (Sewoyo, 2004). Seperti

14
terlihat pada Gambar (2.7). sedangkan beda fase terhadap rasio frekuensi grafiknya
terlihat pada gambar (2.8).
(Sumber: Sewoyo, 2004)
Gambar 2.7 Fungsi perbesaran sebagai fungsi rasio frekuensi dengan
variasi nilai 𝜁
(Sumber: Sewoyo, 2004)
Gambar 2.8 Beda fase sebagai fungsi rasio frekuensi dengan berbagai nilai 𝜁
15
B. Massa tak seimbang yang berputar
Mesin-mesin yang berputar seperti pompa, kompressor dan lain sebagainya
memiliki masalah getaran yang bersumber dari massa tak seimbang (unbalance)
yang berputar (Sewoyo, 2004). Getaran unbalance tersebut akan diteruskan
pada pondasinya, pemodelan getaran jenis ini dapat dilihat pada Gambar (2.9)
dibawah ini.
Gambar 2.9 Pemodelan sistem S-DOF yang dieksitasi oleh massa unbalance
yang berputar
Dimana, M : massa total sistem (Kg)
R : jari-jari eksentrisitas (m)
m : massa tak seimbang (unbalance) yang berputar dengan
kecepatan 𝜔 (Kg)
Jika diasumsikan posisi m seperti terlihat pada gambar di atas dan sistem
sedang bergerak ke arah atas, maka diagram benda bebas sistem tersebut
dapat digambarkan oleh Gambar (2.10) di bawah ini.
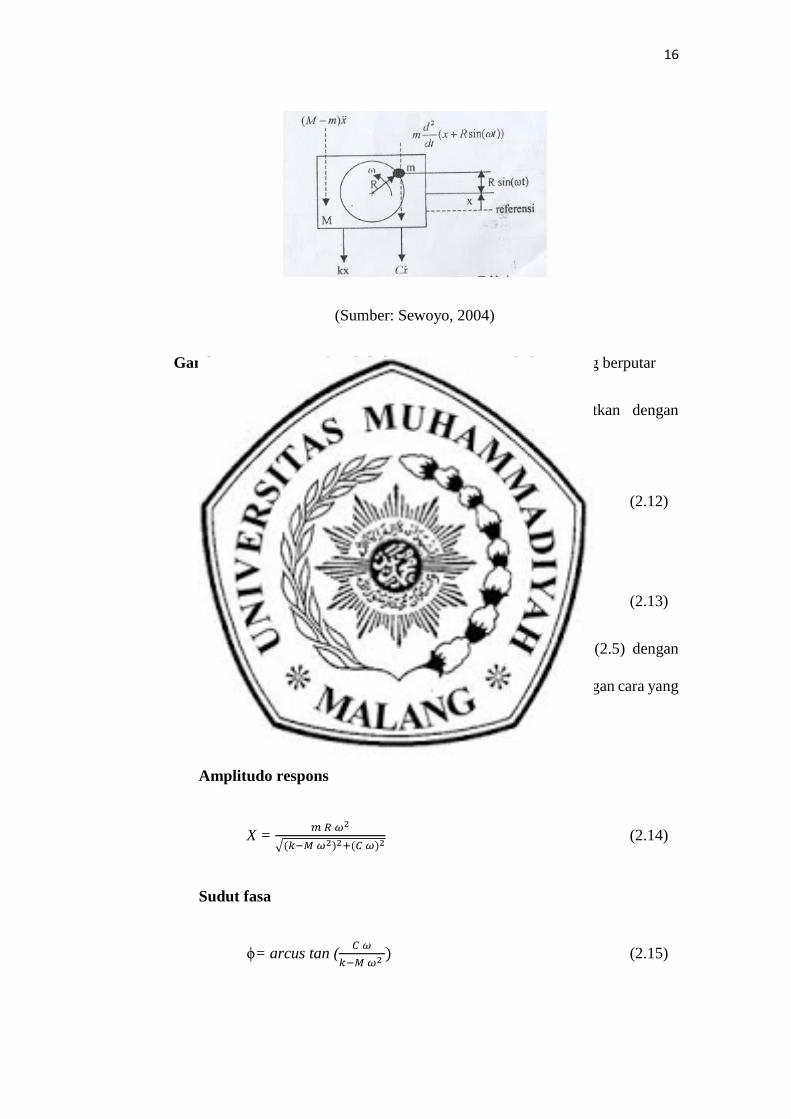
16
(Sumber: Sewoyo, 2004)
Gambar 2.10 Diagram benda bebas sistem massa unbalance yang berputar
Persamaan differensial gerak sistem (PDG) didapatkan dengan
menggunakan Hukum Newton I dimana ∑ F = 0, maka :
(M-m) �̈� + m𝑑2
𝑑𝑡 (x +R sin (𝜔𝑡)) + C�̇� + kx = 0 (2.12)
Persamaan (2.6) diatas juga dapat ditulis
M�̈� + C�̇� + kx = m R 𝜔2 sin (𝜔t) (2.13)
Persamaan (2.12) diatas identik dengan persamaan (2.5) dengan
amplitudo gayanya adalah m R 𝜔2(Sewoyo, 2004). Maka, dengan cara yang
sama nilai amplitudo respons dapat dinyatakan :
Amplitudo respons
X = 𝑚 𝑅 𝜔2
√(𝑘−𝑀 𝜔2)2+(𝐶 𝜔)2 (2.14)
Sudut fasa
ϕ= arcus tan (𝐶 𝜔
𝑘−𝑀 𝜔2 ) (2.15)
17
Dalam bentuk fungsi perbesaran dan diasumsikan getaran yang
terjadi pada sistem (𝜔𝑛) besarnya sama dengan nilai getaran yang terjadi
pada motor (𝜔), maka persamaanya menjadi :
𝑀𝑋
𝑚 𝑅 =
(𝜔
𝜔𝑛)
2
√(1−(𝜔
𝜔𝑛)2)2+[2𝜁(
𝜔
𝜔𝑛)]2
(2.16)
𝑀𝑋
𝑚 𝑅 =
1
√(1−(1)2)2+[2𝜁(1)]2 (2.17)
𝑀𝑋
𝑚 𝑅 =
1
2𝜁 (2.18)
Amplitudo respons maksimal
X = 𝑚 𝑅
2∗𝜁∗𝑀 (2.19)
Beda fase maksimal
ϕ = arcus tan (2𝜁 (
𝜔
𝜔𝑛)2
(1−(𝜔
𝜔𝑛)2
) (2.20)
2.6 Beam dari Kuningan
Beam adalah suatu batang yang dibebani gaya atau momen yang bekerja
pada bidang-bidang yang dibentuk oleh sumbu batang tersebut (Frederik, 2018).
Tumpuan Roll-Engsel merupakan tumpuan yang umum digunakan dan mudah di
jumpai, penggunaan tumpuan tipe roll-engsel umumnya dipilih karena beban yang

18
akan ditumpu tidak terlalu besar, pada Gambar (2.11) memperlihatkan bagaimana
bentuk suatu struktur tumpuan roll-engsel.
(Sumber: https://www.slideshare.net/tejaandeiitm/sdof)
Gambar 2.11 Sistem Tumpuan Roll Engsel
Kuningan sifatnya sama seperti pegas yang memiliki sifat elastis, artinya
setelah mereka berubah bentuk (ketika mereka sedang diregangkan atau
dikompresi), mereka akan kembali ke bentuk aslinya (Simatupang, 2013).
Konstanta pegas biasanya di simbolkan dengan “K” yang menunjukkan kekakuan
pegas. Semakin besar nilai konstanta pegas maka pegas akan lebih sulit untuk
diregangkan ataupun dikompresi dari pada Pegas yang memiliki nilai konstanta
yang lebih kecil.
Bila sebuah batang pegas diletakkan pada suatu tumpuan pada masing-
masing ujungnya, maka konstanta pegas menjadi konstanta ekivalen pegas (Keq).
Pada Tabel (2.1) di bawah ini adalah beberapa jenis sistem tumpuan pegas beserta
rumus konstanta ekivalen pegasnya.

19
Tabel 2.1 Jenis Sistem Tumpuan
Jenis Sistem Rumus Konstanta Ekivalen (Keq)
Tumpuan Rol dan Engsel
Keq = 48𝐸𝐼
𝐿3
Tumpuan Jepit dan Engsel
Keq = 768𝐸𝐼
7𝐿3
Tumpuan Jepit dan Jepit
Keq = 192𝐸𝐼
𝐿3
(Sumber: https://www.slideshare.net/tejaandeiitm/sdof)
Keq = 48𝐸𝐼
𝐿3 (2.21)
Keq : Konstanta Ekivalen Pegas (N/m)
𝐸 : Modulus Young Elastisitas (N/m2)
I : Momen Inertia (kg m2)
L : Panjang (m)

20
2.7 Defleksi Beban Terpusat
Defleksi beban terpusat terjadi akibat adanya pembebanan vertikal yang
diberikan pada balok atau batang pada bagian tengah atau pusat tumpuan, maka
akan terjadi perubahan bentuk pada balok dalam arah y (Unhas, 2018). Deformasi
pada balok secara sangat mudah dapat dijelaskan berdasarkan defleksi balok dari
posisinya sebelum mengalami pembebanan. Defleksi diukur dari permukaan netral
awal ke posisi netral setelah terjadi deformasi, defleksi pada struktur beban terpusat
dapat dilihat pada Tabel (2.2).
X = 𝑃 𝑙3
48 𝐸𝐼 (2.22)
X =defleksi (m)
L = panjang bentang (m)
E = modulus elastis (N/m2)
I = inersia penampang (m4)
b = jarak titik beban (m)
P = beban (N)
21
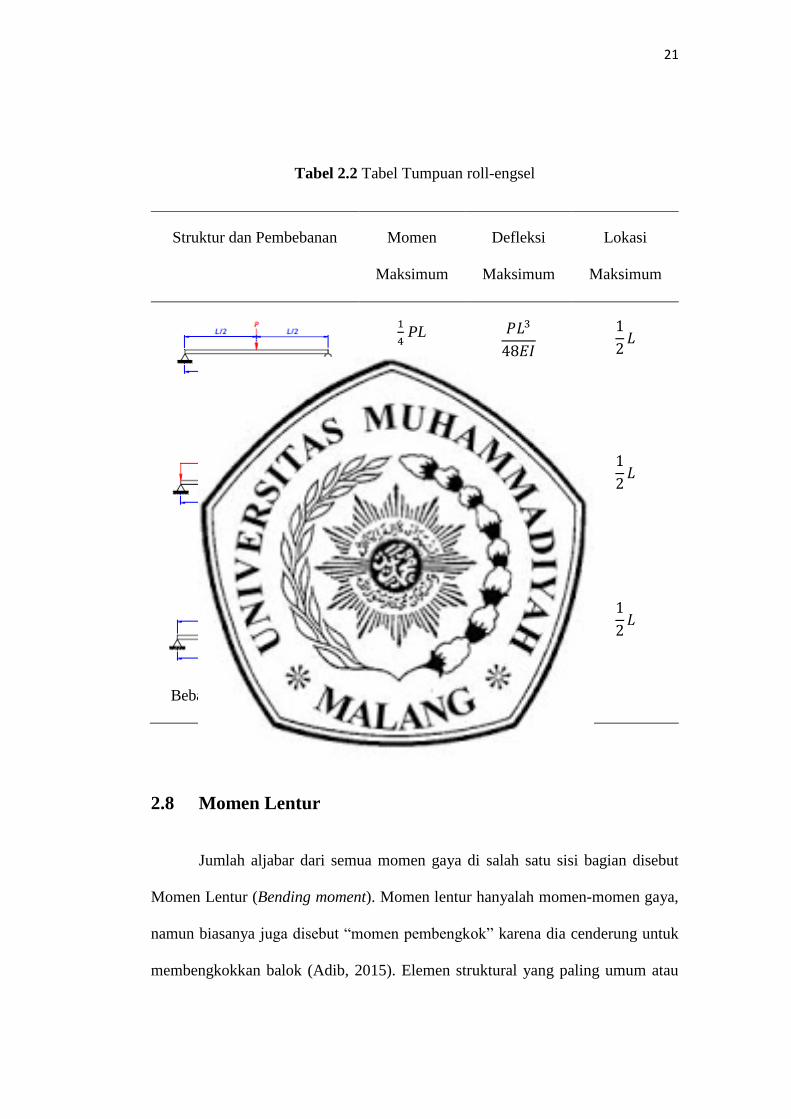
Tabel 2.2 Tabel Tumpuan roll-engsel
Struktur dan Pembebanan Momen
Maksimum
Defleksi
Maksimum
Lokasi
Maksimum
Beban terpusat
1
4 PL 𝑃𝐿3
48𝐸𝐼
1
2𝐿
Beban merata
1
8𝑞𝐿2
5𝑞𝐿4
384𝐸𝐼
1
2𝐿
Beban pada Titik Tertentu
Pa 𝑃𝑎
24𝐸𝐼 (3𝐿2 − 4𝑎4) 1
2𝐿
(Sumber: Yun C, 1986).
2.8 Momen Lentur
Jumlah aljabar dari semua momen gaya di salah satu sisi bagian disebut
Momen Lentur (Bending moment). Momen lentur hanyalah momen-momen gaya,
namun biasanya juga disebut “momen pembengkok” karena dia cenderung untuk
membengkokkan balok (Adib, 2015). Elemen struktural yang paling umum atau

22
paling sederhana yang mengalami momen lentur adalah balok. Untuk nilai momen
dari batang tumpuan sederhana dengan beban terpusat di titik tengah adalah :
M max = 𝑃 . 𝑙
4 (2.23)
Dimana,
P : Gaya (N)
l : panjang batang (m)
M max : momen lentur maksimal beban tepat di tengah (Nm)
2.9 Momen inersia
Momen inersia menggambarkan ketahanan bahan terhadap lenturan
dihubungkan dengan penampang melintang, momen inersia untuk penampang
persegi panjang adalah sebagai berikut (Daryanto, 1996) :
I = 𝑏.ℎ3
12 (2.24)
I = momen inersia pada sumbu x (m4)
b = lebar (m)
h = tinggi (m)
2.10 Tegangan Lendut
Tegangan lendut (sb) atau tegangan lentur termasuk jenis dari tegangan
normal namun tegangan lendut sedikit lebih spesifik. Ketika material di bebani
maka akan menghasilkan apa yang disebut sebagai tegangan kompresif normal
(Civorezan, 2012). Nilai tegangan pada arah horizontal nilainya nol. Tegangan

23
lentur juga disebut dengan tegangan lendut, karena sifatnya yang cenderung
menghasilkan lendutan pada bidang yang dikenai beban
sb = 𝑀 𝑦
𝐼 (2.25)
sb :tegangan akibat moment lentur (N/m2)
Mb : momen lentur (Nm)
y : jarak tegangan yang ditinjau dari garis netral (m)
I : Momen Inersia terhadap sumbu x (m4)
2.11 Modulus Elastis
Modulus elastisitas adalah angka yang digunakan untuk mengukur objek
atau ketahanan bahan untuk mengalami deformasi elastis ketika gaya diterapkan
pada benda itu. Modulus elastisitas suatu benda didefinisikan sebagai kemiringan
dari kurva tegangan-regangan di wilayah deformasi elastis (Wikipedia, 2018).
Variasi nilai Modulus elastis dapat terjadi karena unsur paduan antara logam
Tembaga (Cu) dan Seng (Zn) yang tidak sama, logam paduan penyusun kuningan
terdiri dari Tembaga (Cu) dengan kadar massa 60-96%. Nilai tegangan tarik
maksimum juga dapat digunakan sebagai tegangan ijin. Bila terjadi tegangan yang
nilainya lebih besar atau sama dengan nilai modulus young elastis benda tersebut,
maka benda akan mengalami deformasi karena tidak mampu menahan besarnya
tegangan yang terjadi. Berikut ini adalah beberapa logam paduan yang memiliki
nilai modulus elastisitas young yang ditunjukkan oleh tabel (2.3) dibawah ini.

24
Tabel 2.3 Tabel modulus elastis, tegangan tarik maksimum dan tegangan luluh
Material Modulus Elastisitas (E)
GPa
Tegangan Tarik
Maksimum (s)
MPa
Tegangan
Luluh (y)
MPa
Boron - - 3100 MPa
Kuningan 102-125 GPa 250 MPa -
Perunggu 96-120 GPa - -
Tembaga 117 GPa 220 MPa 70 MPa
(sumber: https://www.engineeringtoolbox.com/young-modulus-d_417.html)
2.12 Tegangan Ijin
Tegangan ijin (si) bisa dilihat dari material yang digunakan. Bila material
bersifat lentur (ductile) yakni dimana material mengalami regangan terlebih dahulu
sebelum patah dan memiliki nilai tegangan luluh, maka tegangan ijin yang
digunakan adalah tegangan luluh (yield strength) dibagi dengan angka faktor
keamanan (Khurmi dan Gupta, 2005).
Untuk material yang bersifat getas (brittle) misalnya seperti besi tuang (cast
iron) dimana material tidak memiliki nilai tegangan luluh seperti material yang
bersifat getas, maka tegangan ijin diperoleh dari nilai tegangan tarik maksimum

25
dibagi dengan angka faktor keamanan (Khurmi dan Gupta, 2005). Angka faktor
keamanan di tunjukkan oleh tabel (2.4) dibawah ini.
Tabel 2.4 Angka Faktor Keamanan
Material Beban statik Beban dinamik Beban Kejut
Besi Tuang
Besi Tempa
Baja
Logam Paduan
Kulit
Kayu
5 - 6
4
4
6
9
7
8 - 12
7
8
9
12
10 - 15
16 – 20
10 – 15
12 – 16
15
15
20
(Sumber: Khurmi dan Gupta, 2005)
sij = suts / angka faktor keamanan (2.26)
dimana, Tegangan Ijin : sij Tegangan Tarik Maksimum : suts
Untuk nilai Faktor Keamanan (Safety Factor) kuningan pada pembebanan
statis sebesar “6”, pembebanan dinamik sebesar “9” dan pembebanan Kejut sebesar
“15” (Khurmi, 2005). Untuk mengetahui batang tumpuan dapat menahan beban
unbalance yang terjadi, perlu diketahui nilai dari Tegangan lentur yang terjadi (sb)
kemudian dibandingkan dengan Tegangan yang di ijinkan (sij). Angka faktor
keamanan yang digunakan untuk beban dinamik adalah 9. Untuk nilai tegangan
tarik maksimum (suts) sebesar 250 MPa.
26
sij = 250 MPa
9 (2.27)
sij = 27,77 MPa
Bila tegangan yang terjadi nilainya lebih kecil dari tegangan ijin (sb <
sij), maka beban unbalance di ijinkan untuk diletakkan pada batang uji dari bahan
kuningan.
Related Documents











