Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Respons System SDOF Tak Teredam (Udamped) pada Gerakan
Harmonis Seperti telah dijelaskan pada Bab III, total respons system linear terdiri dari superposisi gerakan gaya dan gerakan natural. Lihat pada gambar berikut, menunjukkan System Undamped SDOF.
)()()( tututu cp +=
Asumsikan bahwa sistem linear dan amplitudo p0 dan frekuensi Ω konstan. Persamaannya adalah :
tpkuum Ω=+ cos0
Pada pergerakan gaya atau steady-state respons :
tUu p Ω= cos SUBSTITUSIKAN

Untuk menentukan amplitudo, U, dihasilkan persamaan dari substitusi berupa :
20
Ω−=
mkp
U
terbukti bahwa (k - mΩ2) ≠ 0, jika :
kpU 0
0 =adalah defleksi statis
Maka persamaannya dapat berupa :
1r,11)( 2 ≠−
=Ωr
H Dimana :
n
rωΩ
= disebut rasio frekuensi

0
)(UUH =Ω disebut fungsi respons frekuensi
Pembesaran (magnitude) :
)(Ω= HDs
disebut faktor pembesaran steady-state
Dari kombinasi persamaan di atas :
1r,cos1 2
0 ≠Ω⎟⎠
⎞⎜⎝
⎛−
= tr
Uu p

Jika r < 1, hasilnya adalah sefasa dengan eksitasi
Jika r > 1, hasilnya adalah tidak sefasa 1800 dengan eksitasi, up dapat ditulis :
( )tr
Uup Ω−⎟
⎠
⎞⎜⎝
⎛−
= cos1 2
0
Total respons adalah :
tAtAtr
Uu nn ωω sincoscos1 212
0 ++Ω⎟⎠
⎞⎜⎝
⎛−
=
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2 2.5 3
D,D
s
r=Ω/ωn
Forced only
Free and Forced parts
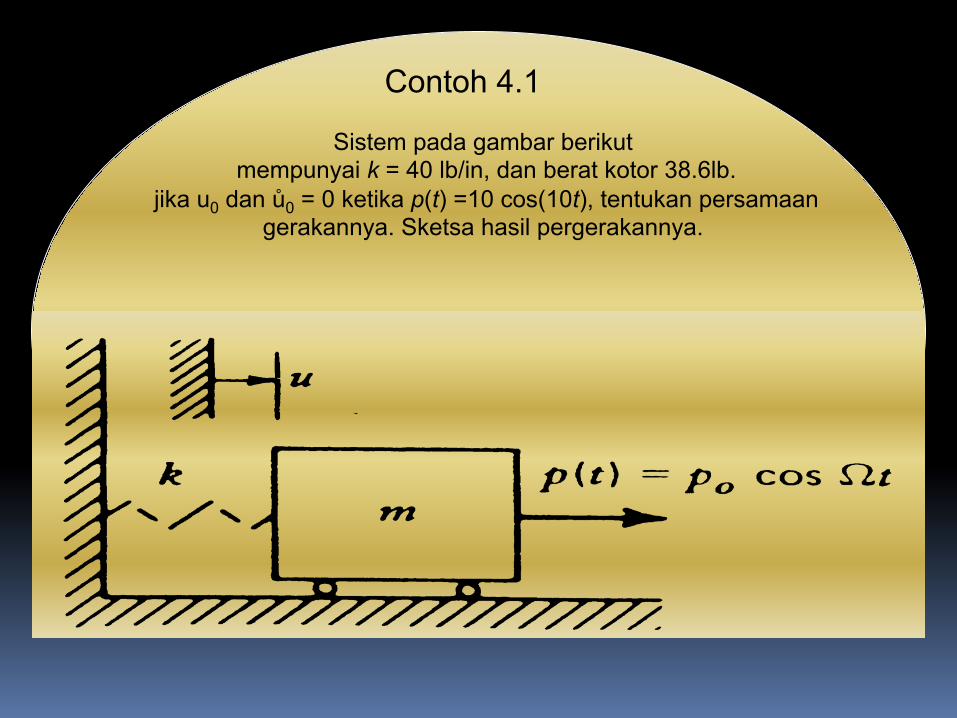
Contoh 4.1
Sistem pada gambar berikut mempunyai k = 40 lb/in, dan berat kotor 38.6lb.
jika u0 dan ů0 = 0 ketika p(t) =10 cos(10t), tentukan persamaan gerakannya. Sketsa hasil pergerakannya.

Solusi : Total respons ditentukan berdasarkan :
tAtAtr
Uu nn ωω sincoscos1 212
0 ++Ω⎟⎠
⎞⎜⎝
⎛−
=
untuk mencari velocity :
tAtAtr
Uu nnnn ωωωω cossinsin1 212
0 +−Ω−
Ω−=
dari persamaan frekuensi natural, didapat:
rad/s20)6.38()386(402
121
==⎟⎠
⎞⎜⎝
⎛=⎟⎠
⎞⎜⎝
⎛=Wkg
mk
nω
Main Menu Gambar Soal

in.25.040100
0 ===kpU
5.02010
==Ω
=n
rω
oleh karenanya :
in33.025.0125.0
)5.0(125.0
1 220 =
−=
−=
− rU
gunakan kondisi awal untuk mengerjakan A1dan A2
120
10)0( A
rUu +−
==
tAtAtr
Uu nn ωω sincoscos1 212
0 ++Ω⎟⎠
⎞⎜⎝
⎛−
=
in33.01 2
01 −=
−−=
rUA

demikian juga :
nAu ω20)0( ==jadi, A2 = 0 Akhirnya, u = 0.33[cos(10t) – cos(20t)] in. Persamaan digambarkan pada kurva dibawah ini
tAtAtr
Uu nnnn ωωωω cossinsin1 212
0 +−Ω−
Ω−=
-‐0.8
-‐0.6
-‐0.4
-‐0.2
0
0.2
0.4
0.6
-‐9.99E-‐16 0.3 0.6 0.9
u(in)
t (sec.)
up=0.33cos(10t)
uc=-‐0.33cos(20t)
u(t)

Dari pengamatan respons didapat hasil :
1. respons steady-state mempunyai frekuensi yang sama dengan exication dan sefasa dengan exication sejak r < 1
2. gerakan gaya dan gerakan natural saling memperkuat dan menghilangkan menghasilkan fenomena tumbukan. Jadi respons total bukanlah gerakan harmonis sederhana.
3. maksimum total respons (u(t)= -0.66 in. pada t = π/10s) lebih besar pada pembesarannya dari respons maksimum steady state (up = 0.33 in. pada t = 0)
-‐0.8
-‐0.6
-‐0.4
-‐0.2
0
0.2
0.4
0.6
-‐9.99E-‐16 0.3 0.6 0.9
u(in)
t (sec.)
up=0.33cos(10t)
uc=-‐0.33cos(20t)
u(t)
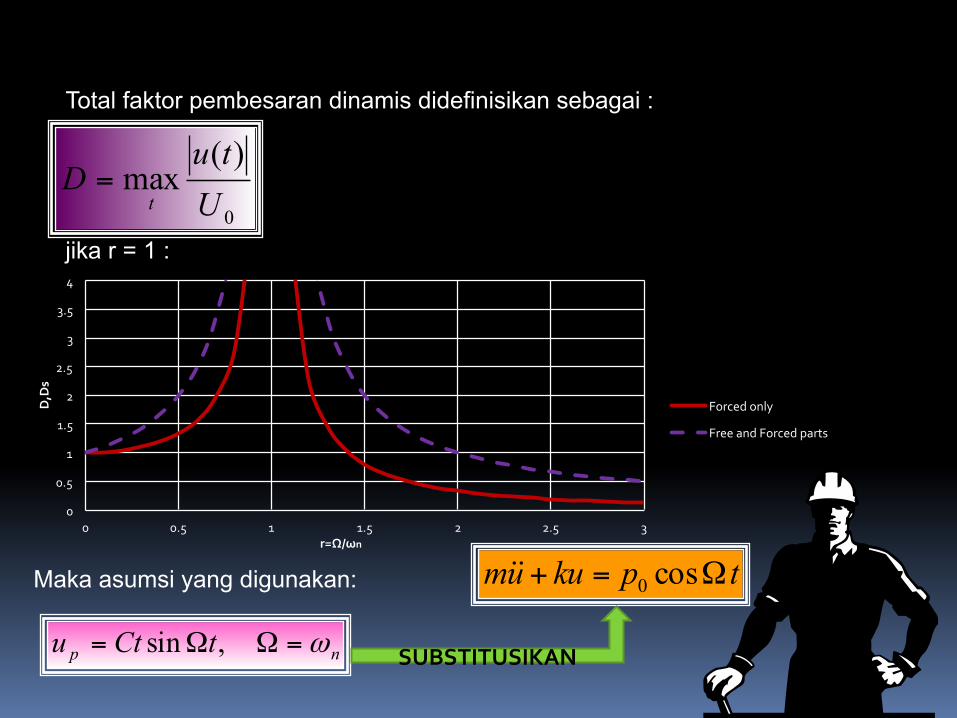
Total faktor pembesaran dinamis didefinisikan sebagai :
0
)(max
Utu
Dt
=
jika r = 1 :
np tCtu ω=ΩΩ= ,sin
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2 2.5 3
D,D
s
r=Ω/ωn
Forced only
Free and Forced parts
Maka asumsi yang digunakan: tpkuum Ω=+ cos0
SUBSTITUSIKAN

dari substitusi didapat :
nmpCω20=
atau
ttUu nnp ωω sin)( 021=
digambarkan pada grafik:
4.14
4.15
-‐3
-‐2
-‐1
0
1
2
3
-‐1.33E-‐15 0.3 0.6 0.9 1.2
u(in)
t (sec.)
up(t)

Respons System Viscous-Damped SDOF
Persamaan gerakan :
tpkuucum Ω=++ cos0
respons steady state :
)cos( α−Ω= tUu p

velocity dan percepatan :
)sin( α−ΩΩ−= tUu p
)cos(2 α−ΩΩ−= tUup
dimana :
( ) ( )[ ]212220 21
1
rrUUDs
ζ+−==
dan
21ζ2αtanrr
−=
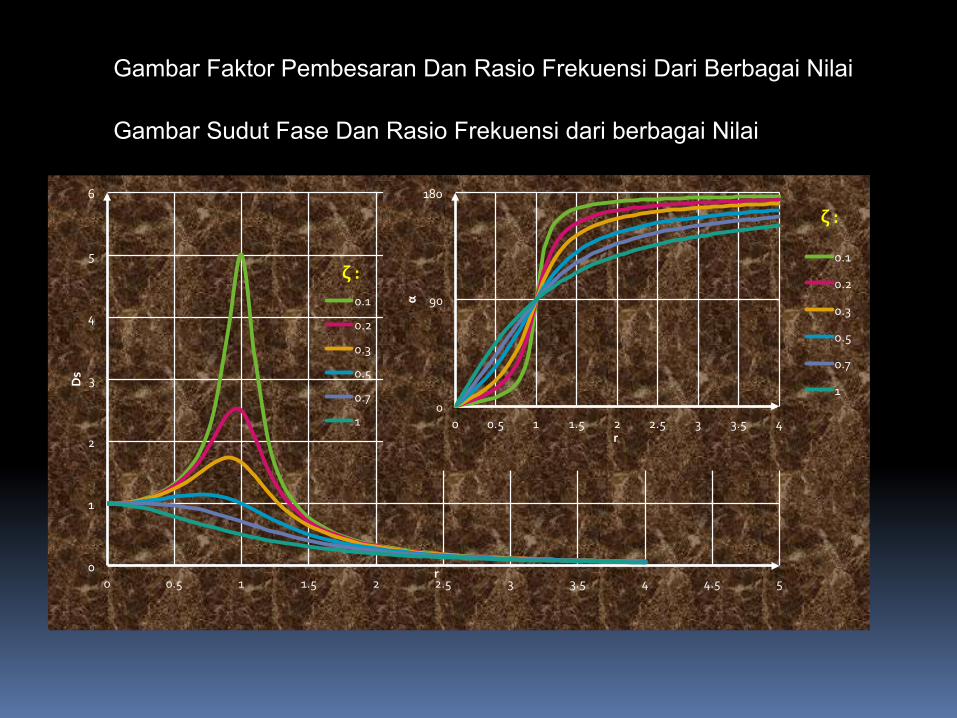
Gambar Faktor Pembesaran Dan Rasio Frekuensi Dari Berbagai Nilai
Gambar Sudut Fase Dan Rasio Frekuensi dari berbagai Nilai
0
1
2
3
4
5
6
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Ds
r
0.1
0.2
0.3
0.5
0.7
1
ζ :
0
90
180
0 0.5 1 1.5 2 2.5 3 3.5 4 α
r
0.1
0.2
0.3
0.5
0.7
1
ζ :
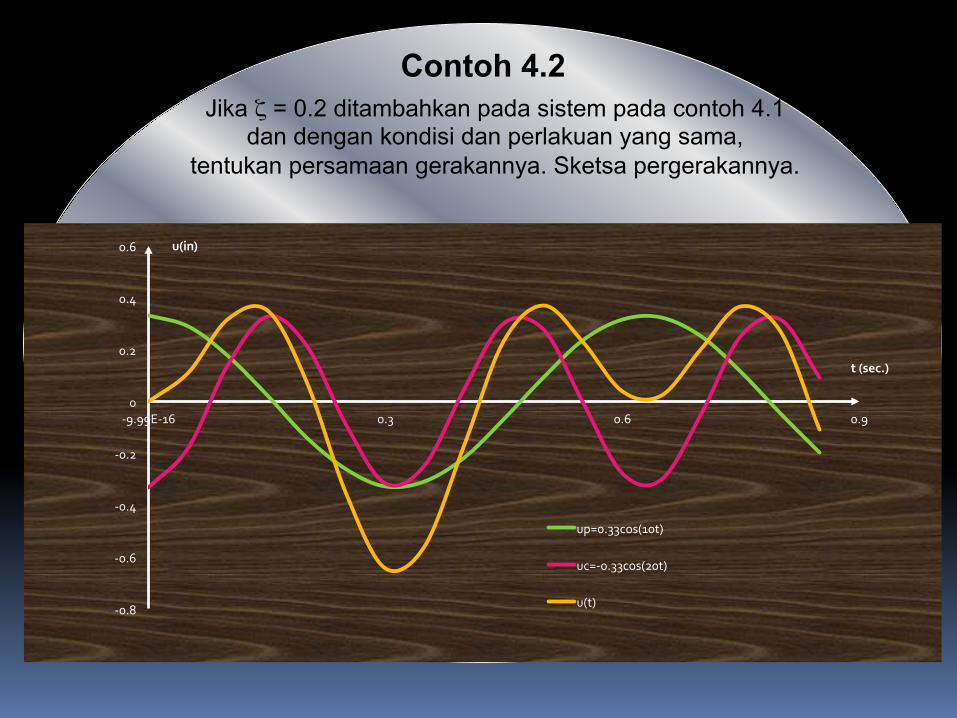
Contoh 4.2 Jika ζ = 0.2 ditambahkan pada sistem pada contoh 4.1
dan dengan kondisi dan perlakuan yang sama, tentukan persamaan gerakannya. Sketsa pergerakannya.
Main Menu
-‐0.8
-‐0.6
-‐0.4
-‐0.2
0
0.2
0.4
0.6
-‐9.99E-‐16 0.3 0.6 0.9
u(in)
t (sec.)
up=0.33cos(10t)
uc=-‐0.33cos(20t)
u(t)

Penyelesaian : Fungsi total respons didapat dari :
)sincos()cos( 21 tAtAetUu ddtn ωωα ζω ++−Ω= −
dimana :
[ ]21222
0
)2()1( rr
UUζ+−
=
ωn, U0, dan r dapat ditemukan dari contoh 4.1
rad/s2021
=⎟⎠
⎞⎜⎝
⎛=mk
nω
in25.040100
0 ===kpU
5.02010
==Ω
=n
rω
rad/s4)20)(2.0( ==nζω
oleh karenanya :
( )[ ] [ ]{ }in32.0
)5.0)(2.0(25.01
25.021
222=
+−=U
267.0)5.0(1)5)(2.0(2
12tan 22 =
−=
−=
rrζ
α

selanjutnya :
α = 0.26 rad
dari persamaan :
rad/s6.19)2.0(1201 22 =−=−= ζωω nd
hasil diferensial total respons dari waktu :
( ) ( )[ ]tAAtAAetUu
dnddndtn ωζωωωζωω
αζω sincos
)sin(
2112 −−−+
−ΩΩ−=−
maka :
1)26.0cos(32.00)0( Au +−==

sehingga :
in31.0)26.0cos(32.01 −=−−=Ain11.02 −=A
Oleh karenanya :
in)]6.19sin(11.0)6.19cos(31.0[)26.010cos(32.0
4 ttetu
t +−
−=−
-‐0.5
0
0.5
0 0.5 1 1.5 2 2.5
u(in)
t (sec.)
Related Documents