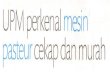
Bab 4 PENGENALAN KEPADA MESIN BENDALIR 4.1 Pengkelasan Mesin Hidraulik Tenaga wujud dalam berbagai bentuk. Tenaga hidraulik adalah tenaga yang terdapat pa- da bendalir dalam beberapa bentuk; kinetik, tekanan, upaya, terikan atau haba. Tenaga mekanikal pula dikaitkan dengan bahagian-bahagian bergerak atau berputar mesin yang menghantar kuasa. Dari sini diketahui bahawa tujuan atau kegunaan mesin hidraulik ia- lah untuk memindahkan tenaga samada dari tenaga mekanikal ke tenaga hidraulik atau sebaliknya. Tenaga ditambah ke bendalir Bendalir digunakan sebagai Tenaga dikeluarkan daripada bendalir (kerja terlaku ke atas bendalir) perantara pemindahan tenaga (kerja terlaku oleh bendalir) Mesin-mesin Pam, kipas, pemampat Gandingan bendalir, penukar dayakilas Turbin Rotodinamik Dua kategori: Dua kategori a. Tanpa Bekas a. Dedenyut Kipas Kincir angin Skrew Roda Pelton Turbin Turgo b. Dengan Bekas Aliran paksi Aliran tercampur b. Tindakbalas Aliran jejari/empar Aliran paksi (turbin Kaplan) Aliran tercampur (turbin Francis) Aliran jejari (turbin Banki dan rekabentuk awal Francis) Mesin-mesin Pam, pemampat Ram hidraulik, jack press Motor: Sesaran Positif Dua kategori: Omboh a. Salingan Vane Pacuan terus Gear Pacuan engkol Swashplate b. Berputar Skrew Gear Vane Lobe Rajah 4.1: Pengkelasan mesin-mesin bendalir. 76

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Bab 4
PENGENALAN KEPADAMESIN
BENDALIR
4.1 Pengkelasan Mesin Hidraulik
Tenaga wujud dalam berbagai bentuk. Tenaga hidraulik adalah tenaga yang terdapat pa-
da bendalir dalam beberapa bentuk; kinetik, tekanan, upaya, terikan atau haba. Tenaga
mekanikal pula dikaitkan dengan bahagian-bahagian bergerak atau berputar mesin yang
menghantar kuasa. Dari sini diketahui bahawa tujuan atau kegunaanmesin hidraulik ia-
lah untuk memindahkan tenaga samada dari tenaga mekanikal ke tenaga hidraulik atau
sebaliknya.
Tenaga ditambah ke bendalir Bendalir digunakan sebagai Tenaga dikeluarkan daripada bendalir
(kerja terlaku ke atas bendalir) perantara pemindahan tenaga (kerja terlaku oleh bendalir)
Mesin-mesin Pam, kipas, pemampat Gandingan bendalir, penukar dayakilas Turbin
Rotodinamik Dua kategori: Dua kategori
a. Tanpa Bekas a. Dedenyut
Kipas Kincir angin
Skrew Roda Pelton
Turbin Turgo
b. Dengan Bekas
Aliran paksi
Aliran tercampur b. Tindakbalas
Aliran jejari/empar Aliran paksi (turbin Kaplan)
Aliran tercampur (turbin Francis)
Aliran jejari (turbin Banki dan rekabentuk awal Francis)
Mesin-mesin Pam, pemampat Ram hidraulik, jack press Motor:
Sesaran Positif Dua kategori: Omboh
a. Salingan Vane
Pacuan terus Gear
Pacuan engkol
Swashplate
b. Berputar
Skrew
Gear
Vane
Lobe
Rajah 4.1: Pengkelasan mesin-mesin bendalir.
76

BAB 4. PENGENALANKEPADAMESIN BENDALIR 77
4.1.1 Kriteria Pengkelasan
Jadual 4.1 menunjukkan dua kriteria yang biasa digunakan bagi tujuan pengkelasan
mesin-mesin bendalir.
4.1.1.1 Arah Pemindahan Tenaga
Di bawah kriteria ini terdapat tiga kelas.
1. Tenaga dikeluarkan daripada bendalir
Di dalam kategori ini tenaga hidraulik merupakan masukan yang ditukarkan ke-
pada tenaga mekanikal iaitu kuasa pada aci mesin sebagai keluaran. Di sini kerja
dilakukan oleh bendalir dan tenaga dikeluarkan daripada bendalir.
2. Tenaga ditambah ke bendalir
Masukan di sini berbentuk tenaga mekanikal. Jadi pemindahan adalah daripada
mekanikal ke hidraulik. Keluaran adalah dalam bentuk satu bendalir yang ber-
gerak, kadang-kadang termampat dan pada suhu yang lebih tinggi. Ringkasnya
mesin-mesin di dalam kategori ini melakukan kerja ke atas bendalir dan tenaga
ditambah ke bendalir.
3. Bendalir digunakan sebagai bahantara pemindahan tenaga
Mesin-mesin ini menggunakan bendalir sebagai bahantara bagi membentuk talian
dalam rantai pertukaran tenaga; tenaga mekanikal ditukarkan kepada tenaga hidra-
ulik di dalam satu bahagian yang kemudiannya ditukarkan balik kepada tenaga
mekanikal di dalam bahagian yang lain. Tidak terdapat sebarang kelebihan me-
kanikal di dalam mesin-mesin ini, tetapi satu pemindahan kuasa yang licin dan
beransur-ansur diperolehi disebabkan sifat-sifat dan jenis aliran bendalir yang ter-
dapat di dalam mesin-mesin jenis ini.
4.1.1.2 Jenis Tindakan Mesin
Di bawah kriteria ini mesin-mesin boleh di kelaskan kepada dua kategori.
1. Sesaran Positif
Prinsip ini memerlukan supaya cecair dimasukkan atau dipaksa ke satu ruang ter-
hingga yang dikepung oleh bahagian-bahagian mekanikal dan kemudiannya ditu-
tup. Bendalir kemudiannya dipaksa atau dikeluarkan dari ruang terhingga tadi
dan kitar diulangi. Jadi fungsi prinsip ini adalah berasaskan perubahan isipadu
cecair di dalam pam.
Di dalam kebanyakan pam sesaran positif aliran cecair didapati terputusputus dan
turunnaik dan kadaralirnya pula dikawal oleh saiz isipadu di dalam pam serta
kekerapan ruang terhingga ini diisi dan dikosongkan. Rajah 4.2 menunjukkan be-
berapa contoh pam sesaran positif.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 78
Rajah 4.2: Beberapa contoh pam sesaran positif.
2. Rotodinamik
Mesin-mesin yang menggunakan prinsip ini dikenali juga sebagai mesin turbo. Di
dalam mesin ini kuasa dipindahkan kepada atau daripada bendalir yang mengalir
oleh tindakan dinamik dan terdapat saluran bebas untuk bendalir pada masukan
dan keluaran mesin tanpa sebarang penutupan berlaku.
Mesin-mesin yang menggunakan prinsip ini mempunyai bahagian berputar di-
panggil pemutar yang berputar berterusan dan bebas di dalam bendalir dan pada
masa yang sama membenarkan bendalir mengalir terus tanpa gangguan. Dalam
waktu yang sama, kuasa dipindahkan kepada atau daripada bendalir yang meng-
alir menerusi laluan-laluan bilah pemutarnya oleh tindakan dinamik.
Dalam analisis yang berikut, perhatian hanya ditumpukan kepada pam roto-
dinamik dari jenis;
(a) pam aliran jejarian,
(b) pam aliran paksi, dan
(c) pam aliran tercampur.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 79
4.2 Analisis Dimensi dan Hukum Keserupaan untuk Mesin
Bendalir Tak Boleh Mampat
Ciri prestasi sebenar mesin rotodinamik ditentukan melalui ujian ujikaji. Mesin yang
berlainan mempunyai ciri yang berlainan sementara mesin dalam kumpulan yang sama,
iaitu rekabentuk yang serupa tetapi dikeluarkan dalam saiz yang berbeza, menghasilkan
satu siri mesin berkeserupaan geometrik yang bekerja pada kelajuan yang berlainan.
Bagi sesuatumesin hidraulik yang saiznya diketahui dan bekerja dengan sejenis bendalir
homogeneous yang berketumpatan malar, pembolehubahpembolehubah yang terlibat
ialah;
D [L] garispusat pemutar
H [L] perbezaan turus antara masukan dan keluaran
≡ tenaga seunit berat bendalir
N [T−1] laju putaran
P [ML2T−3] kuasa terhantar antara bendalir dan pemutar
Q [L3T−1] kadaralir menerusi mesin
g [LT−2] berat seunit jisim
≡ pecutan graviti
ρ [ML−3] ketumpatan bendalir
µ [ML−1T−1] kelikatan bendalir
(Nota: Tinggi purata kekasaran sempadan boleh dianggap termasuk dalam takrif bentukmesin)
Oleh kerana turus H merupakan tenaga seunit berat bendalir, adalah mudah jika gH
dikira sebagai satu pembolehubah juga kerana ia mewakili tenaga seunit jisim, dikenali
juga sebagai tenaga tentu, yang tidak bergantung kepada pecutan graviti. Pam misalnya
menghasilkan tenaga tentu yang sama tanpa dipengaruhi oleh daya graviti.
Jadi lapan pembolehubah di atas boleh dikurangkan kepada tujuh: D, (gH), N, P, Q, ρ,
µ dan oleh kerana terdapat tiga magnitud asas, iaitu jisim (M), panjang (l) dan masa (T),
empat π tanpa dimensi1 boleh diperolehi. Jika D, N dan ρ diambil sebagai pembolehubah
berulang, empat parameter tanpa dimensi tersebut ialah:
π1 =Q
ND3≡ pekali aliran, KQ (4.1)
π2 =gH
N2D2≡ pekali turus, KH (4.2)
π3 =P
ρN3D5≡ pekali kuasa, KP (4.3)
π4 =ρND2
µ≡ nombor Reynolds, Re (4.4)
Dalam julat laju dan saiz biasa aliran di dalam mesin-mesin bendalir adalah turbulen
(iaitu nombor Reynoldnya tinggi); jadi pengaruh kelikatan µ adalah kecil dan untuk ke-
1rujuk Teorem-π Buckingham atau Kaedah Rayleigh

BAB 4. PENGENALANKEPADAMESIN BENDALIR 80
banyakan penggunaan π4 boleh diabaikan. Dengan menganggap kecekapan mekanik
malar, hubungan antara pembolehubah di atas boleh ditulis sebagai;
φ
(Q
ND3,
gH
N2D2,
P
ρN3D5
)
= 0
atau
φ
(
η,gH
N2D2,
P
ρN3D5
)
= 0
4.2.1 Prestasi Mesin Hidraulik
Semasa ujikaji ke atas model mesin rotodinamik, turus H selalunya dikekalkan malar
sementara beban serta laju diubah-ubah.
4.2.1.1 Turbin Hidraulik
Jika turus malar, pada setiap kedudukan bilah pandu (atau injap tombak bagi roda Pel-
ton), lengkung kuasa keluaran, P, kecekapan, η dan kadaralir, Q boleh diplot melawan
laju putaran, N. Walau bagaimanapun adalah lebih baik jika graf prestasi diplot meng-
gunakan parameter tanpa dimensi. Untuk turbin hidraulik, parameter tanpa dimensi
yang sering digunakan diperolehi dari nisbah π; rujuk Bahagian 4.2 di atas;
φ1 =P
ρD2(gH)3/2≡ π4
π1π2
φ2 =Q
D2(gH)1/2≡ π1
π2π4
φ3 =ND
(gH)1/2≡ π2
π1π4
(a) (b)
Rajah 4.3: Lengkung-lengkung prestasi turbin hidraulik, Massey (1983).
Graf yang diplot menggunakan parameter tanpa dimensi begini—rujuk Rajah 4.3—
bukan sahaja mewakili satu mesin tertentu sahaja malah kesemua mesin di dalam siri

BAB 4. PENGENALANKEPADAMESIN BENDALIR 81
homologous yang sama. Biasanya sebutan ρ dan g dikeluarkan daripada parameter tan-
pa dimensi ini kerana kedua- duanya adalah pemalar, begitu juga dengan D khasnya
untuk satu siri homologous tertentu, dan ini memberikan nisbah berikut:
P
H3/2= kuasa unit (unit power)
Q
H1/2= kadaralir unit (unit flow)
N
H1/2= laju unit (unit speed)
Magnitud ketiga-tiga nisbah di atas sepadan dengan kuasa, kadaralir dan laju putaran
jika mesin dijalankan pada kecekapan malar di bawah seunit turus (≡ 1 meter untuk
unit SI).
4.2.1.2 Pam
Pam biasanya dijalankan pada kelajuan malar dan perhatian diberikan kepada perubah-
an H melawan Q, η melawan Q dan P melawan Q, Rajah 4.4. Keputusan ujikaji ke atas
sesebuah pam diselaraskan untuk laju yang berlainan. Bagi pam homologous yang ber-
lainan garispusat, graf keputusan menggunakan parameter tanpa dimensi diplotkan da-
lam bentuk
1. Q/ND3 menggantikan Q,
2. gH/N2D2 menggantikan H, dan
3. P/ρN3D5 menggantikan Pi.
4.2.2 Laju Tentu
Prestasi mesin berkeserupaan geometrik, iaitu mesin-mesin yang tergolong di dalam satu
kumpulan homologous, dikawal oleh hukum keserupaan dan boleh diwakili, untuk kese-
luruhan kumpulan homologous tersebut, oleh graf prestasi yang diplot menggunakan
ciri tanpa dimensi. Bandingan antara kumpulan homologous yang berlainan pula sela-
lunya dibuat menerusi lengkung ciri tanpa dimensi untuk kedua-dua kumpulan yang
dibandingkan di atas satu graf.
Salah satu daripada kriteria yang digunakan untuk maksud ini ialah laju tentu atau di-
kenali juga sebagai nombor jenis. Terdapat beberapa kebaikan dalam menyebut nilai KQ,
KH dan KP pada titik rekabentuk semasa bandingan antara mesin rotodinamik hidraulik
dibuat tetapi kepentingan ketiga-tiga parameter ini berbeza untuk pam dan turbin.
4.2.2.1 Pam
Daripada ketiga-tiga angkali di atas tadi, KQ dan KH merupakan dua parameter penting
untuk pam. Nisbah keduanya menggambarkan kesesuaian pam tertentu bekerja ke atas

BAB 4. PENGENALANKEPADAMESIN BENDALIR 82
Rajah 4.4: Lengkung-lengkung prestasi pam rotodinamik, Massey (1983).
satu magnitud isipadu (kecil atau besar) relatif ke turus yang dihasilkan. Jika nisbah
ini diperolehi dengan menghilangkan garispusat pendesak, bandingan menjadi bebas
daripada saiz mesin (yang diwakili oleh garispusat pendesak). Ini diperolehi dengan
menaikkan KQ ke kuasa 12 dan KH ke kuasa 3
4 ;
laju tentu, Ns =K1/2Q
K3/4H
=
(Q
ND3
)1/2(N2D2
gH
)3/4
(4.5a)
=NQ1/2
(gH)3/4(4.5b)
Nilai Ns biasanya hanya disebut pada titik rekabentuk (iaitu titik kecekapan maksima)
untuk kegunaan pengkelasan, perbandingan, pemilihan dan rekabentuk.
4.2.2.2 Turbin Hidraulik
Perbandingan untuk turbin juga dicapai dengan menggunakan laju tentu tetapi di sini
kuasa yang dihasilkan adalah merupakan parameter penting. Jadi satu ungkapan lain
untuk laju tentu dalam sebutan kuasa yang dihasilkan diperolehi denganmenghilangkan
garispusat pelari D daripada nisbah angkali kuasa KP ke angkali turus KH; iaitu dengan
menaikkan KP ke kuasa 12 dan KH ke kuasa 5
4 . Jadi,
laju tentu, Ns =K1/2P
K5/4H
=
(P
ρN3D5
)1/2(N2D2
gH
)5/4
(4.6a)
=NP1/2
ρ1/2(gH)5/4(4.6b)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 83
Rajah 4.5: Kecekapan melawan laju tentu untuk mesin bendalir, Douglas et al. (1985).
Seperti juga pam, hanya nilai pada titik rekabentuk sahaja digunakan bagi tujuan yang
sama. Perlu diingatkan bahawa kedua-dua ungkapan laju tentu di atas hanya akanmem-
berikan nilai tanpa dimensi jika N dalam pusingan per saat (pps), Q dalam meter padu
sesaat (m3/s), P dalam Watt (W) dan H dalam meter (m).
4.3 Analisis Dimensi Untuk Mesin Rotodinamik Aliran Boleh
Mampat
Penggunaan analisis dimensi ke atas bendalir boleh mampat menjadi bertambah rumit
jika dibandingkan dengan bendalir tak mampat. Walaupun sesuatu bendalir bolehmam-
pat itu boleh dianggap sebagai gas sempurna, sifat-sifat bendalir yang sudah pun dibin-
cangkan dahulu (seperti ρ, ν dsb.) masih tidak mencukupi untuk kita membuat analisis.
Dua ciri lain masih diperlukan; laju bunyi genangan pada masukan mesin, a0, dan nisbah
haba spesifik, γ = cp/cv.
Analisis berikut beranggapan bahawa bendalir mempunyai ciri-ciri gas sempurna atau
wap kering yang menghampiri sifat-sifat gas sempurna.
Apabila berlakunya perubahan ketumpatan yang agak besar, dua pembolehubah lain
yang lebih sesuai digunakan: kadar aliran isipadu, Q, digantikan dengan kadar aliran
jisim, m, dan perubahan turus, H, digantikan dengan perubahan entalpi genangan isen-
tropik, ∆h0s .
Oleh kerana pemindahan haba daripada bekas mesin turbo pada umumnya terlalu kecil
jika dibandingkan dengan fluks tenaga menerusi mesin, parameter suhu boleh dikecu-

BAB 4. PENGENALANKEPADAMESIN BENDALIR 84
Rajah 4.6: Pengaruh laju tentu ke atas bentuk pemutar, Turton (1984).
alikan. Bagaimanapun, suhu merupakan satu ciri yang mudah diperhati dan, untuk gas
sempurna, boleh diperkenalkan di bahagian akhir analisis dengan menggunakan persa-
maan keadaan untuk gas sempurna,
p
ρ= RT
R =Ro
m= cp − cv
dengan,
m ≡ berat molekular2
Ro ≡ Pemalar Gas Universal3
= 8.314kJ/(kg mol K)
Jadi parameter-parameter prestasi mesin turbo yangmenggunakan bendalir boleh mam-
pat; ∆h0, η dan P, boleh diungkapkan menerusi hubungan fungsian berikut:
∆h0, η, P = f (µ,N,D, m, ρ01, a01,γ) (4.7)
atau,
∆h0 = f (µ,N,D, m, ρ01, a01,γ)
η = f (µ,N,D, m, ρ01, a01,γ)
P = f (µ,N,D, m, ρ01, a01,γ)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 85
Setiap hubungan fungsian di atas terdiri daripada 8 pembolehubah. Dengan memilih
ρ01, N dan D sebagai pembolehubah berulang, ketiga-tiga hubungan fungsian di atas boleh
dikurangkan kepada 5 kumpulan tanpa dimensi;
∆h0sN2D2
,P
ρ01N3D5, η = f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
(4.8)
atau
∆h0sN2D2
= f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
P
ρ01N3D5= f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
η = f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
Pekali aliran,
φ =m
ρ01ND3
boleh juga dituliskan sebagai,
φ =m
ρ01a01D2
Oleh kerana ND berkadaran dengan laju bilah, kumpulan (ND/a01) dikenali sebagai
nombor Mach bilah.
4.3.1 Kesan mampatan ke atas analisis dimensi
Pertimbangkan sebuah pemampat adiabatik yang menggunakan gas sempurna. Pertam-
bahan entalpi genangan isentropik untuk gas sempurna boleh dituliskan sebagai cp(T02s −T01). Proses mampatan ini ditunjukkan di dalam Rajah 4.7; titik keadaan genangan ber-
ubah pada entropi yang malar antara tekanan-tekanan genangan p01 dan p02.
Menerusi hubungan isentropik yang adibatik,
p
ργ= pemalar
dan persamaan keadaan
p
ρ= RT
ungkapan berikut diperolehi,
T02sT01
=
(p02p01
)(γ−1)/γ

BAB 4. PENGENALANKEPADAMESIN BENDALIR 86
Rajah 4.7: Perubahan adiabatik unggul di dalam keadaan-keadaan genangan merentasi
mesinturbo, Dixon (1978).
Oleh itu,
∆h0s = cpT01
[(p02p01
)(γ−1)/γ
− 1
]
Oleh kerana cp = γR/(γ − 1) dan a201 = γRT01, jadi
∆h0sa201
= f
(p02p01
)
Pekali aliran sekarang lebih mudah jika diungkapkan sebagai
φ =mD2
ρ01a01=
mRT01p01
√γRT01D2
=m√RT01
D2p01√
γ
Oleh kerana
m ≡ ρ01D2(ND)
pekali kuasa boleh ditulis sebagai
ψ =P
ρ01N3D5=
mcp∆T0
[ρ01D2(ND)](ND)2=
cp∆T0
(ND)2=
∆T0T01
Kumpulkan kumpulan tanpa dimensi yang baru diperolehi ini dan gantikan ke dalam
persamaan (4.7), untuk memberikan
p02p01
= f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9a)
η = f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9b)
∆T0T01
= f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9c)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 87
Alasan untukmenggugurkan γ daripada beberapa kumpulan tanpa dimensi di atas ialah
γ sudah pun dianggap sebagai satu pembolehubah bebas, dan untuk sesuatu mesin yang
saiznya ditetapkan dan hanya mengendalikan sejenis gas, biasanya γ, R dan D dikelu-
arkan daripada persamaan (4.9). Di samping itu, jika mesin ini bekerja pada Re yang
tinggi (atau dalam julat laju yang kecil), Re boleh juga digugurkan. Di dalam keadaan-
keadaan ini persamaan (4.9) menjadi
p02p01
, η,∆T0T01
= f
[m√T01
p01,
N√T01
,
]
(4.10)
Perhatian: Dengan mengeluarkan D dan R, pembolehubah-pembolehubah bebas di da-
lam persamaan (4.10) sekarang ini mempunyai dimensi.
4.4 Pam Rotodinamik
4.4.1 Pengkelasan
Terdapat beberapa jenis pam rotodinamik, Rajah 4.8, yang boleh dikelaskan kepada tiga
kategori utama mengikut arah bendalir semasa meninggalkan pendesak;
Pam Aliran Jejari Kategori ini paling banyak digunakan. Mempunyai kecekapan yang
baik pada julat laju tentu yang rendah. Pendesak dibina dengan bilah yang dileng-
kungkan ke belakang, hadapan atau lurus (iaitu bilah jejari).
Pam Aliran Paksi Disebut juga sebagai pam kipas. Penggunaannya banyak tertumpu
kepada turus rendah dan kadaralir tinggi.
Pam Aliran Tercampur Arah aliran mempunyai dua komponen – arah jejari dan paksi.
Tidak banyak digunakan, mungkin kerana saiznya yang lebih besar untuk meng-
hasilkan nilai turus dan kadaraliran yang sama dengan pam aliran jejari.
(a) (b) (c)
Rajah 4.8: Pam rotodinamik—(a) pam aliran jejari, (b) pam aliran tercampur dan (c) pam
aliran paksi, Turton (1984).

BAB 4. PENGENALANKEPADAMESIN BENDALIR 88
4.4.2 Turus Pam
4.4.2.1 Turus Statik
Turus statik ialah jarak tegak di antara aras bendalir di dalam takungan (bawah) dan
tangki (atas). Daripada Rajah 4.9,
Hs = Turus statik pam
zs = Tinggi garis tengah pam di atas permukaan takungan
zd = Tinggi tangki di atas garis tengah pam
dan
Hs = zs + zd (4.11)
Perbezaan di antara aras bendalir di dalam takungan bawah dan aras tangki atau taku-
ngan yang lebih tinggi ini juga disebut daya angkat statik, Hs, sementara zs dinamai turus
statik sedutan dan zd pula dikenali sebagai turus statik penghantaran.
4.4.2.2 Turus Sebenar atau Turus Keseluruhan
Turus sebenar adalah turus keseluruhan yang perlu dihasilkan oleh pam untuk meng-
hantar bendalir daripada takungan ke tangki. Di samping menghasilkan turus statik, se-
sebuah pam perlu juga mengatasi kehilangan-kehilangan di dalam paip dan pemasang-
an, serta kehilangan tenaga kinetik di keluaran paip penghantaran.
Jika
H = Turus sebenar atau keseluruhan pam
hls = Kehilangan-kehilangan di dalam paip sedutan
hld = Kehilangan-kehilangan di dalam paip penghantaran
hl = Jumlah kehilangan di dalam kedua-dua paip
= hls + hld
vd = Halaju bendalir di dalam paip penghantaran
maka
H = zs + zd + hls + hld +v2d2g
= Hs + hl +v2d2g
(4.12)
Kehilangan-kehilangan di dalam bekas dan pemutar pam tidak diambilkira di dalam
turus keseluruhan ini.
Turus keseluruhan ini juga, kadangkala, dikenali dengan berbagai nama yang agak me-
ngelirukan pengguna seperti turus sebenar, turus kasar atau turus berkesan.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 89
4.4.2.3 Turus Manometrik
Biasanya kita tidak mungkin dapat mengukur dengan tepat kehilangan-kehilangan di
dalam bekas dan pemutar pam. Oleh yang demikian, turus manometrik diperkenalkan
bagi mewakili tokokan tenaga tekanan bendalir di dalam pemutar pam.
Jika dua tolok tekanan dipasang sedekat mungkin dengan pam di bahagian sedutan dan
penghantarannya, perbezaan bacaan kedua-dua tolok akan memberikan perubahan tena-
ga tekanan di dalam pam, atau lebih dikenali sebagai turus manometrik.
Jika
Hm = Turus manometrik pam
hps = Bacaan tolok tekanan di sedutan pam
=psρg
hpd = Bacaan tolok tekanan di penghantaran pam
=pdρg
vs = Halaju bendalir di dalam paip sedutan
maka
Hm = hpd − hps

BAB 4. PENGENALANKEPADAMESIN BENDALIR 90
h lsv s
2/2g
zd
z s
H sH mH
vd2/2g
h ld
Pai
p pe
ngha
ntar
anP
aip
sedu
tan
Tangki
Takungan
P a m
Injap penghantaran
Injap sedutan
A
B
C
Rajah 4.9: Turus-turus pam.
Seterusnya kita gunakan persamaan Bernoulli ke titik A di permukaan takungan (yang
bendalirnya tenang) dan titik B pada bahagian sedutan pam—rujuk Rajah 4.9. Dengan

BAB 4. PENGENALANKEPADAMESIN BENDALIR 91
menganggap titik B berada di aras garis tengah pam dan mengambil aras di dalam ta-
kungan sebagai datum,
paρg
+ 0+ 0 =psρg
+v2s2g
+ zs + hls
atau
paρg
= hps +v2s2g
+ zs + hls (4.13)
Langkah yang serupa dilakukan pada titik B dan titik C. Perbezaan tinggi di antara garis
tengah pam dan tolok tekanan yang dipasang di bahagian penghantaran pam diabaikan
jadi hpd mewakili bacaan tekanan di keluaran pam. Denganmengambil garis tengah pam
sebagai datum
pdρg
+v2d2g
+ 0 =paρg
+v2d2g
+ zd + hld
atau
hpd +v2d2g
=paρg
+v2d2g
+ zd + hld (4.14)
Tolakkan persamaan (4.13) daripada persamaan (4.14),(
hpd +v2d2g
)
−(
hps +v2s2g
+ zs + hls
)
=
(
paρg
+v2d2g
+ zd + hld
)
−(paρg
)
dan
hpd − hps =v2s2g
+ (zs + zd) + (hls + hld)
atau
Hm = Hs + hl +v2s2g
(4.15)
Dengan itu turus keseluruhan dan turus manometrik berbeza hanya dalam turus halaju
masing-masing. Dalam turus keseluruhan, turus halaju paip penghantaran dipertim-
bangkan sementara dalam turus manometrik pula, turus halaju paip sedutan yang di-
ambilkira. Apabila kedua-dua paip (sedutan dan penghantaran) mempunyai garispusat
yang sama, turus keseluruhan dan turus manometrik menjadi sama.
Tolakkan persamaan (4.12) daripada persamaan (4.15),
Hm − H =v2s2g
− v2d2g
Hm = H +
(
v2s2g
− v2d2g
)
(4.16)
= H : apabila vs = vd (4.17)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 92
Perlu dibezakan di sini bahawa H ialah jumlah pertambahan tenaga di dalam bendalir
oleh pam, sementara Hm adalah tokokan tenaga tekanan sahaja. Walau bagaimana pun,
oleh kerana perbezaan di antara Hm dan H terlalu kecil, kedua-duanya dikira serupa.
4.4.3 Pam Aliran Jejari
Pam aliran jejari dikenali juga sebagai pam empar. Aliran di dalam pam jenis ini ber-
gerak daripada pusat pemutar mengarah keluar. Pemutar pam, lebih dikenali sebagai
pendesak, berputar di dalam bekas pilin4. Paip sedutan ke masukan adalah dalam arah
paksi dan bendalir memasukimata pendesak5 dengan sedikit, jika ada, komponen pusar-
an halaju mutlak bendalir, Rajah 4.10. Daripada sini bendalir mengalir keluar dalam arah
bilah dan setelah menerima tenaga daripada pendesak, bendalir keluar dengan tekanan
dan halajunya bertambah.
Bilah-bilah pendesak selalunya dilengkungkan ke belakang untuk mendapatkan kece-
kapan yang baik. Bilah-bilah jejari juga banyak digunakan kerana kos pembinaannya
yang lebih murah. Kegunaan bekas ialah untuk menukar sebanyak mungkin turus hala-
ju pada keluaran kepada turus tekanan sebelum aliran masuk ke paip hantaran. Terdapat
dua jenis keluaran pam aliran jejari, Rajah 4.10:
1. ruang tanpa bilah dengan volut,
2. ruang tanpa bilah dengan keluaran terlata6,
(a) (b)
Rajah 4.10: Keluaran pam aliran jejari—(a) ruang tanpa bilah dengan volut dan (b) ruang
tanpa bilah dengan keluaran terlata, Massey (1983).
4.4.3.1 Teori Aliran Dua Dimensi
Aliran sebenar di dalam pemutar pam empar adalah di dalam tiga dimensi dan vektor-
vektor halaju pada masukan, v1, dan keluaran pemutar, v2, boleh dileraikan kepada tiga
4spiral casing5pusat pendesak6keluaran terlata selalunya lebih cekap tetapi kos pembinaannya agak mahal

BAB 4. PENGENALANKEPADAMESIN BENDALIR 93
komponen—jejari (vr1 dan vr1), paksi (vx1 dan vx1) dan tangen (vt1 dan vt1).
Bagi memudahkan analisis, aliran tiga dimensi ini boleh dikurangkanmenjadi aliran dua
dimensi dengan menganggap:
1. aliran di dalam pam adalah mantap,
2. halaju-halaju pada masukan dan keluaran adalah seragam dalam magnitud dan
sudut yang dibuat dengan arah rujukan
3. bilah-bilah pendesak hanya bergerak dalam arah lilitan, jadi hanya komponen daya
dalam arah ini yang melakukan kerja7.
Untuk merekabentuk dan menganalisa proses pertukaran tenaga di dalam pendesak, ki-
ta perlu membina segitiga halaju pada masukan dan keluaran pendesak. Setiap vektor
halaju boleh dileraikan kepada tiga komponen yang saling tertegak. Satu komponen di-
arahkan selari dengan paksi putaran memberikan komponen paksi, satu mengikut arah
jejari menerusi paksi putaran, dan komponen yang terakhir bersudut tepat ke arah jejari,
iaitu arah tangen, memberikan komponen tangen, Rajah 4.11.
Rajah 4.11: Vektor halaju dalam tiga dimensi.
Perubahan magnitud komponen paksi menghasilkan daya paksi yang bertindak ke atas
galas tujah. Sementara perubahan magnitud komponen jejari pula menghasilkan beban
jurnal. Kedua-dua perubahan ini tidak memberi sebarang kesan ke atas gerakan sudut
pendesak kecuali geseran galas.
7Anggapan ini menghadkan perhatian kepada perubahan momentum dalam arah lilitan. Walaupun ter-
dapat juga perubahan momentum dalam arah lain tetapi daya-daya sepadannya tidak mempunyai momen
sekitar paksi putaran pendesak

BAB 4. PENGENALANKEPADAMESIN BENDALIR 94
Perubahan magnitud komponen tangen dan jejari sebaliknya adalah sepadan dengan
perubahan momentum sudut atau momen momentum bendalir dan, menerusi hukum
gerakan Newton, adalah sama dengan jumlahan daya-daya yang dikenakan ke atas pen-
desak, iaitu dayakilas bersih, T. Jadi,
Dayakilas sekitar sesuatu paksi
= Kadar pertambahan momentum sudut sekitar paksi tersebut
Jika satu jisim bendalir m1 memasuki pendesak pada jejari r1 dengan komponen halaju
tangen vt1 dalam jeda masa t dan satu jisim m2 meninggalkan pendesak pada jejari r2dengan komponen halaju tangen vt2 dalam jeda masa t yang sama, dayakilas T yang
dikenakan ke atas bendalir ialah
T =m2
tr2vt2 −
m1
tr1vt1 (4.18a)
= m2r2vt2 − m1r1vt1 (4.18b)
Oleh kerana keterusan wujud,
m1 = m2 = m = ρQ (4.19)
jadi,
T = ρQr2vt2 − ρQr1vt1 (4.20a)
= ρQ (r2vt2 − r1vt1) (4.20b)
Seterusnya,
Kuasa yang diperlukan oleh pendesak
= Kerja terlaku ke atas bendalir seunit masa
iaitu,
TΩ = ρQ (r2vt2 − r1vt1) Ω (4.21)
dan oleh kerana Ωr = U,
Kerja terlaku ke atas bendalir seunit jisim
=Kerja terlaku ke atas bendalir
Kadaralir jisim= U2vt2 −U1vt1
(4.22)
Untuk analisis 2-dimensi, halaju mutlak bendalir, v, boleh dileraikan kepada komponen
jejari vr atau v f dan komponen tangen vt, Rajah 4.12.
Melalui kaedah geometri,
v2f2 = v22 − v2t2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 95
β2α2
β1 α1
v1W 1
U 1
v f1
W 2
v f2v2
U 2
Masukan
Keluaran
Ω Bilahpendesak
β1
W 1
U 1
v1 = v f1
α1= 90ο
v t1 = 0
Masukan tanpa pusaran
v t1
v t2
Rajah 4.12: Segitiga halaju pam aliran jejari pada masukan dan keluaran.
dan
v2f2 = W22 − (U2 − vt2)
2
Kaitkan kedua-dua ungkapan di atas dan kembangkan
v22 − v2t2 = W22 −U2
2 + 2U2vt2 − v2t2
dan
U2vt2 = 12
(v22 + U2
2 −W22
)(4.23a)
Dengan kaedah yang sama pada masukan kita memperolehi
U1vt1 = 12
(v21 + U2
1 −W21
)(4.23b)
Masukkan persamaan-persamaan (4.23a) dan (4.23b) ke dalam persamaan (4.22),
Kerja terlaku ke atas bendalir seunit jisim
= 12
[(v22 − v21
)+(U2
2 −U21
)−(W2
2 −W21
)] (4.24)
Pam aliran jejari jarang dibekalkan dengan bilah pandu masukan dan bendalir meng-
hampiri mata pendesak tanpa pusaran. Sudut masukan bilah-bilah pendesak direka-
bentuk supaya memberikan segitiga halaju yang bersudut tepat supaya vt1 = 0 dan

BAB 4. PENGENALANKEPADAMESIN BENDALIR 96
momentum sudut permulaan bendalir sifar. Oleh itu persamaan Euler, (4.22), menjadi
Kerja terlaku ke atas bendalir seunit jisim
= U2vt2
Rajah 4.13: Aliran 3-dimensi di dalam pam empar, Douglas et al. (1985).
Aliran sebenar menerusi pendesak adalah dalam tiga dimensi, Rajah 4.13. Terdapat per-
bezaan halaju melintangi laluan-laluan bilah antara bahagian hadapan sesuatu bilah dan
bahagian belakang bilah yang berdekatan. Di samping itu terdapat juga perbezaan halaju
dalam satah meridional. Dengan itu agihan halaju adalah terlalu kompleks dan bergan-
tung kepada bilangan, bentuk, tebal dan lebar bilah serta kadar perubahan lebar bilah
dengan jejari.
Teori 1-dimensi diperkenalkan bagi mengatasi masalah-masalah di atas dengan meng-
anggap:
1. bilah-bilah pendesak tak terhingga nipis dan perbezaan tekanan menerusi bilah-
bilah digantikan dengan daya-daya jasad bayangan yang bertindak ke atas bendalir
dan menghasilkan dayakilas,
2. bilangan bilah-bilah pendesak tak terhingga banyak, jadi perubahan halaju melin-
tangi laluan bilah dv/dθ = 0 dikurangkan dan cenderung ke sifar,
3. di bahagian pemindahan tenaga, iaitu di dalam laluan bilah pendesak, tidak terda-
pat perbezaan halaju dalam satah meridional, dv/dz = 0
Anggapan-anggapan ini memudahkan analisis dari keadaan 3-dimensi yang sebenar ke-
pada 1-dimensi—iaitu daripada v = f (r, θ, z) kepada v = f (r).

BAB 4. PENGENALANKEPADAMESIN BENDALIR 97
Seterusnya jika kita menganggap keadaan unggul wujud antara masukan dan keluaran
pendesak, tanpa kehilangan-kehilangan likat dan sebagainya, dan bendalir meninggalk-
an pendesak dalam arah tangen ke garis tengah bilah, persamaan unggul Euler dapat
dituliskan sebagai,
gHE = U2v′t2 −U1v
′t1
atau
HE =U2v
′t2 −U1v
′t1
g(4.25)
= Turus unggul Euler
=U2v
′t2
g: jika v′t1 = 0
Secara praktik turus yang dipindahkan daripada pendesak ke bendalir adalah lebih kecil
daripada turus unggul Euler, HE disebabkan oleh;
1. kehilangan likat, dan
2. pusingan relatif di dalam laluan-laluan bilah.
β2α2
W' 2
v r2=
vf2
v'2Segit iga Halaju
Keluaran
Ω
Bilahpemutar
v t2
W 2
β'2
v2
α'2
v' t2U 2
∆v t2
Segit iga halaju unggul
Segit iga halaju sebenar
Gelinciran∆v t2 = v' t2 - v t2
U 2
Rajah 4.14: Gelinciran di keluaran bilah pemutar.
Bendalir lebih cenderung untuk bergerak dalam arah yang sama kerana tabii inersia atau
sifatekun yang menyebabkan bendalir bergerak ke arah pendesak. Oleh itu aliran me-
ninggalkan laluan bilah dengan Wt2 > W ′t2 dan vt2 < v′t2 menyebabkan β2 < β′
2, Ra-
jah 4.14.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 98
Agihan tekanan yang lebih tinggi di atas permukaan hadapan bilah dari di bahagian
belakangnya—Rajah 4.15—menghasilkan agihan halaju yang tidak seragam di dalam la-
luan bilah dan seterusnya menjadikan β2 < β′2. Oleh kerana vt2 < v′t2, kerja terlaku ke
atas bendalir seunit jisim dikurangkan oleh proses pusingan relatif ini. Jadi turus yang
dapat dipindahkan daripada pendesak ke bendalir, setelah mengambilkira faktor kehi-
langan likat dan pusingan relatif di dalam laluan bilah, ialah
Hi =U2vt2 −U1vt1
g(4.26)
=U2vt2g
: jika vt1 = 0
Rajah 4.15: Pusingan relatif di dalam laluan bilah, Douglas et al. (1985).
Perlu ditekankan di sini bahawa penerbitan persamaan-persamaan (4.25) dan (4.26)
adalah berdasarkan kepada pendekatan teori yang bergantung kepada segitiga halaju
semata-mata.
Ringkasnya, boleh dinyatakan di sini bahawa pusingan relatif merupakan faktor utama
yang mengurangkan jumlah turus yang dapat dipindahkan ke bendalir pada keadaan
unggul8, HE, kepada Hi. Jika Hi diambil sebagai satu pecahan, katalah kc, daripada turus
HE kita akan memperolehi
Hi = kcHE (4.27)
dengan
kc =Hi
HE= faktor pusingan relatif
= pekali bilah, µ
Nilai faktor pusingan relatif, kc, atau pekali bilah, µ, ini bergantung kepada bilang-
an bilah, sudut bilah di keluaran dan nisbah jejari masukan ke jejari keluaran pende-
sak. Ia tidak bersandar kepada keadaan-keadaan operasi dan biasanya dikira menerusi
8iaitu tanpa kehilangan likat dan pusingan relatif

BAB 4. PENGENALANKEPADAMESIN BENDALIR 99
hubungan-hubungan empirik, sebagai contoh
µ =1
1+2r22φ
z(r22 − r21)
dengan
φ = 0.60 + 0.6 sin β′2
Jadual 4.1 menunjukkan perubahan pekali bilah, µ, dengan bilangan bilah, z, bagi pam
aliran jejari.
Jadual 4.1: Perubahan pekali bilah, µ, dengan bilangan bi-
lah, z, bagi pam aliran jejari
Bilangan bilah, z 4 6 8 10 14 18 24
Pekali bilah, µ 0.62 0.71 0.77 0.81 0.85 0.88 0.91
4.4.3.2 Ukuran Prestasi
1. Turus Bersih dan Kecekapan Hidraulik
Kehilangan hidraulik adalah kehilangan-kehilangan yang berlaku di antara baha-
gian sedutan dan bahagian penghantaran pam. Ini termasuklah:
• kehilangan kejut di masukan bilah-bilah pendesak dan bekas pilin,
• kehilangan-kehilangan geseran dan ‘eddy’ di dalam laluan-laluan bilah dan
bekas, dan
• kehilangan-kehilangan disebabkan perubahan mendadak dalam luas dan
arah aliran.
Kecekapan hidraulik, ηh, mengambilkira semua kehilangan di atas. Ia ditakrifkan
sebagai nisbah turus sebenar yang terhasil ke turus masukan pendesak, iaitu,
ηh =H
Hi=
gH
U2vt2 −U1vt1(4.28)
dengan,
H ≡ turus sebenar yang terhasil
Hi ≡ turus masukan pendesak
2. Kadaralir dan Kecekapan Isipadu

BAB 4. PENGENALANKEPADAMESIN BENDALIR 100
Rajah 4.16: Bocoran di dalam pam empar, Massey (1983).
Tekanan pada keluaran pendesak lebih tinggi daripada tekanan di masukan. Oleh
yang demikian bendalir lebih cenderung untuk berpatah balik, atau bocor, meneru-
si ketelusan di antara pendesak dan bekas, Rajah 4.16. Selain daripada itu kebocor-
an mungkian berlaku pada kedap. Kedua-dua ini dikelaskan sebagai kehilangan
isipadu.
Kecekapan isipadu, ηv, ialah nisbah luahan sebenar ke jumlah kadar aliran yang
memasuki pam;
ηv =Q
Q + ∆Q=
Q
Qi(4.29)
dengan,
Q ≡ luahan sebenar
Qi ≡ kadar aliran yang memsuki pam
∆Q ≡ Bocoran
Biasanya bendalir memasuki pendesak tanpa pusaran, vt1 = 0. Jadi pada masukan
ke pendesak, kadar aliran isipadu ialah
Q1 = (2πr1b1 − b1zt) v f1
= (2πr1b1 − b1zt) v1 : jika vt1 = 0
= Qi
Pada keluran pendesak pula,
Q2 = (2πr2b2 − b2zt) v f2
= Qi

BAB 4. PENGENALANKEPADAMESIN BENDALIR 101
Bagi rumus-rumus kadar aliran di atas,
b1 ≡ lebar bilah pada masukan
b2 ≡ lebar bilah pada keluaran
d2 ≡ diameter luar pendesak
t ≡ tebal bilah
v f1 ≡ halaju aliran pada masukan
= vr1
v f2 ≡ halaju aliran pada keluaran
= vr2
z ≡ bilangan bilah pendesak
Rajah 4.17: Keratan rentas pemasangan pam empar, Turton (1984).
3. Kesan Geseran dan Kecekapan Mekanikal
Kehilangan-kehilangan tenagamekanikal adalah disebabkan oleh geseran pada pi-
ring, galas dan sesendal kedap, Rajah 4.17. Kehilangan kuasa oleh geseran piring
diberikan sebagai;
Pd =Ω2µ
t
∫ rT
rR
r2πrdrr
=Ω2µπ
32
d2T − d2Rt
dengan,
Ω ≡ halaju putaran (rad/s)
µ ≡ kelikatan bendalir
t ≡ tebal piring
r ≡ jejari piring
d ≡ diameter piring
T ≡ hujung piring
R ≡ pangkal piring

BAB 4. PENGENALANKEPADAMESIN BENDALIR 102
Sementara kuasa yang hilang disebabkan geseran pada galas dan sesendal kedap
pula diberikan sebagai;
Pb = Ω × pemalar : anggap geseran kering
Jadi jumlah kehilangan-kehilangan mekanikal ialah
Pm = Pd + Pb
Kecekapan mekanikal pam ditakrifkan sebagai nisbah;
ηm =Kerja terlaku oleh pendesak seunit berat bendalir
Kuasa yang dibekalkan kepada aci
=Kuasa yang dibekalkan ke aci− Kehilangan mekanikal
Kuasa yang dibekalkan ke aci
=Ps − Pm
Ps
=PiPs
=ρgQiHi
ρgQiHi + Pm(4.30)
dengan
Pi ≡ kuasa terpindah daripada aci ke pendesak
4. Kecekapan Keseluruhan Pam
Kecekapan keseluruhan, η, boleh ditakrifkan sebagai nisbah
η =Kuasa di dalam bendalir yang keluar daripada pam
Kuasa yang dibekalkan kepada aci
=ρgQH
Ps(4.31a)
=H
Hi× Q
Qi× ρgQiHi
Ps(4.31b)
= ηhηvηm (4.31c)
4.4.3.3 Perubahan Turus pada Pendesak dengan Bentuk Bilah
Daripada hukum keterusan kita juga boleh menulis,
Qi = A′2v f2
= (A2 − b2zt) v f2
= kaA2v f2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 103
dengan
A2 ≡ luas susurkeliling pendesak
= 2πr2b2
A′2 ≡ luas bersih di keluaran pendesak
ka ≡ faktor pengurangan bilah
= 1− b2zt
A2
b2zt ≡ ruang ketebalan bilah
Oleh itu,
v f2 =Qi
kaA2(4.32)
=Q
ηvkaA2: untuk Qi =
Q
ηv
=Q
ηvA2: jika ka = 1
Jika kadar aliran Qi berubah, v f2 juga turut berubah kerana hubungan di antara kedua-
duanya menerusi hukum keterusan. Di samping itu vt2 akan turut berubah untuk β2 dan
Ω yang tetap. Daripada segitiga halaju
vt2 = U2 − v f2 cot β2 : biasanya β2 < β′2 (4.33)
Turus atau tenaga seunit berat bendalir pada pendesak ialah
Hi =U2vt2 −U1vt1
g
dan jika dianggap tiada ada pusaran pada masukan, iaitu vt1 = 0, maka
Hi =U2vt2g
Gantikan untuk vt2 menggunakan persamaan (4.33)
Hi =U2
g
(U2 − v f2 cot β2
)
=U2
2
g− U2
g
Qi
kaA2cot β2 (4.34)
Untuk sesebuah pam aliran jejari yang bekerja pada U2 yang malar, hubungan di antara
Hi dan Qi berbentuk satu garisan lurus—Rajah 4.18—dengan syarat β2 dan ηv malar.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 104
β'2 > 90o
(bi lah melengkung ke hadapan)
β'2 = 90o
(bilah jejari)
β'2 < 90o
(bi lah melengkung ke belakang)
Kadar aliran, Q i
Turus, H i
Rajah 4.18: Kesan bentuk bilah ke atas turus.
4.4.4 Pam Aliran Paksi
Bahagian-bahagian asas sesuatu peringkat di dalam mesinturbo aliran paksi biasanya
terdiri daripada barisan bilah pemutar yang diikuti oleh barisan bilah stator. Selalunya
pam-pam aliran paksi tidak dipasang dengan bilah-bilah pandu, Rajah 4.19, kecuali di
dalam beberapa rekabentuk yang khusus. Sementara di dalam pemampat pula, bilah
pemutar biasanya didahului oleh bilah-bilah pandu masukan; bilah-bilah pandu ini di-
gunakan supaya bendalir pada masukan ke bilah pemutar mempunyai komponen pu-
saran atau tangen, vt1, di samping komponen paksi, vx1.
Rajah 4.19: Pendesak pam aliran paksi, Douglas et al. (1985).
Proses pemindahan tenaga berlaku di dalam pemutar. Tekanan mula bertambah pada

BAB 4. PENGENALANKEPADAMESIN BENDALIR 105
masukan ke bilah-bilah pemutar dan bendalir keluar dengan tekanan yang lebih tinggi
pada bahagian keluaran pemutar. Halaju mutlak bendalir pada keluaran pemutar, v2lebih besar daripada nilai v1 di bahagian masukannya dan di sini bilah stator memainkan
peranannya; berfungsi sebagai alat untuk menukar sebahagian daripada tenaga kinetik
atau turus halaju pada keluaran pemutar kepada turus tekanan.
4.4.4.1 Teori
Berbeza dari mesin-mesin aliran radius, contohnya pam empar, aliran di dalam mesin-
mesin aliran paksi adalah di dalam arah paksi dan perubahan daripada masukan ke
keluaran pemutarnya berlaku pada radius yang sama, Rajah 4.20. Jadi
U1 = U2 = U
= Ωr (4.35)
α2
Keluaran
Ω
Bilahpendesak
W 2
U 2
v2
v f2 = vx2
β1
β2
v1
W 1
U 1
α1
Masukan tanpapusaran
Masukan denganpusaran
U 1W 1
v1
β1
v f1 = vx1
Rajah 4.20: Segitiga halaju pam aliran paksi.
Oleh kerana luas aliran sama pada masukan dan keluaran, halaju aliran v f (dalam arah

BAB 4. PENGENALANKEPADAMESIN BENDALIR 106
paksi), boleh diperolehi dari hukum keterusan,
v f1 = v f2 = v f
= Komponen paksi halaju mutlak bendalir
= vx
dan kadaralir jisim,
m = ρπ(r2T − r2R
)v f = ρπ
(r2T − r2R
)vx (4.36)
dengan,
rT ≡ radius hujung
rR ≡ radius pangkal atau hab
rm ≡ radius min
=rT + rR
2
Daripada segitiga halaju keluaran,
tan β′2 =
U − v′t2v f
(4.37)
dan dengan itu,
v′t2 = U − v f2 tan β′2 (4.38)
Gantikan ungkapan untuk v′t2 ini ke dalam persamaan Euler dan anggap bendalir masuk
ke pemutar dalam arah paksi tanpa komponen pusaran, v′t1 = 0,
gHE = Uv′t2= U
(U − v f tan β′
2
)(4.39)
Persamaan ini boleh digunakan pada sebarang nilai radius bilah r dan tidak semestinya
malar dalam julat dari rR ke rT . Untuk menggunakan keadaan ini, pertambahan nilai U
dengan radius mestilah ditimbalbalik dengan pengurangan sebutan v f tan β yang sama
nilainya. Oleh kerana v f malar, bilah-bilah terpaksa dikilas, Rajah 4.21, supaya untuk
radius ra dan rb misalnya,
U2a −Uav f tan β′
2a = pemalar
= U2a −Uav f tan β′
2b
Susunsemula,
v f
(Ub tan β′
2b −Ua tan β′2a
)= U2
b −U2a

BAB 4. PENGENALANKEPADAMESIN BENDALIR 107
Rajah 4.21: Kilasan bilah pendesak pam aliran paksi, Turton (1984).
Tetapi U = Ωr, jadi
v f
(Ωrb tan β′
2b − Ωra tan β′2a
)= Ω
(r2b − r2a
)
memberikan
rb tan β′2b − ra tan β′
2a =Ω
v f
(r2b − r2a
)(4.40)
Walaubagaimana pun, keadaan ini yang dikenali sebagai rekabentuk vorteks bebas sukar
diperolehi.
4.4.4.2 Gerakan Vorteks dan Hubungannya dengan RekabentukMesin-mesin Aliran
Paksi
1. Aliran Vorteks Bebas
Aliran ini berkeadaan
vtr = pemalar, C (4.41)
Untuk satu peringkat,
vt1r = v1 ⇒ vt1 =v1r
vt2r = v2 ⇒ vt2 =v2r
Dari persamaan Euler,
gHi = U (vt2 − vt1)
= Ωr(v2r
+v1r
)
(4.42)
iaitu kerja terlaku ke atas bendalir adalah malar pada sebarang nilai radius r.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 108
2. Aliran Vorteks Paksa
Rekabentuk mesin-mesin aliran paksi yang berdasarkan aliran vorteks bebas se-
lalunya menghasilkan bilah-bilah yang terlalu melengkung. Atas sebab ini aliran
vorteks paksa dipertimbangkan,
vtr
= pemalar, C (4.43)
Dari persamaan Euler,
gHi = U (vt2 − vt1)
= Ωr (v2r + v1r)
= Ωr2 (v2 + v1) (4.44)
iaitu kerja terlaku ke atas bendalir adalah fungsi radius.
4.4.4.3 Darjah Tindakbalas
Konsep tindakbalas selalu digunakan di dalam analisis dan rekabentukmesin-mesin alir-
an paksi sebagai ukuran kadaran relatif pemindahan tenaga yang diperolehi daripada
perubahan tekanan-tekanan statik dan dinamik. Ia juga dikenali sebagai darjah tindakba-
las atau hanya tindakbalas, yang ditakrifkan sebagai
R =
(
Perubahan tenaga hasil daripada perubahan
tekanan statik di dalam pemutar
)
(
Jumlah perubahan tekanan statik
di dalam sesuatu peringkat
)
atau dalam sebutan-sebutan entalpi
R =Perubahan entalpi statik di dalam rotor
Perubahan entalpi statik di dalam satu peringkat
Perubahan tekanan di dalam pemutar ini bersaing dengan perubahan dalam halaju ben-
dalir. Dalam sebutan halaju, darjah tindakbalas boleh diungkapkan sebagai
R = 1−12
(v2t2 − v2t1
)
U (vt2 − vt1)
= 1− vt2 − vt12U
Segitiga halaju bilah pemutar mesin-mesin aliran paksi pada masukan dan keluaran ada-
lah dipengaruhi oleh magnitud tindakbalas, Rajah 4.22.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 109
U 1 = U 2 = U
U 1 = U 2 = U
U 1 = U 2 = U
W 2W 1 v2 v1
W 2W 1 v2 v1
W 2 W 1v2 v1
β2α2 β1
α1
β2
α2β1 α1
β2 α2 β1 α1
v f = vx
v f = vx
v f = vx
R > 50%ββββ2 > αααα1
R = 50%ββββ2 = αααα1
R < 50%ββββ2 < αααα1
Rajah 4.22: Pengaruh tindakbalas ke atas segitiga halaju pam aliran paksi.
4.4.5 Peronggaan di dalam Pam Rotodinamik
Apabila tekanan mutlak, pada suhu tertentu, susut ke satu nilai yang sama atau lebih ke-
cil dari tekanan wap tepu sesuatu cecair, gelembung-gelembung kecil wap terbentuk dan
pendidihan terjadi. Kesusutan ini juga menyebabkan udara terlarut di dalam cecair dike-
luarkan; pengeluaran udara terlarut bersama dengan pemelowapan menyebabkan berla-
kunya fenomena peronggaan.
Mekanisma permulaan peronggaan yang sebenar setakat ini masih dipertikaikan. Sung-
guhpun begitu, fenomena ini sering dikaitkan dengan kewujudan nukleus gas mikrosko-
pik yang menyebabkan terbentuknya gelembung-gelembung pada peringkat awal per-
onggaan. Nukleus-nukleus ini yang terdapat di dalam rongga-rongga bahan pejal di
sempadan bendalir menyebabkan bendalir tidak boleh menahan tegangan. Air, misal-
nya, dianggarkan dapat menahan tegangan dalam julat 500 ke 10,000 atm 9 jika nukleus-
nukleus tadi tidak ada.
Proses semasa gelembung tadi membesar dan kemudiannya pecah apabila tiba pada ti-
tik berlakunya tekanan tinggi berulang kali dalam jeda masa yang singkat, puluhan ribu
kali dalam sesaat, dan ini menghasilkan gelombang tekanan transient yang tinggi keama-
tannya. Tekanan tempatan yang tinggi, sehingga 4000 atm, terhasil dan suhu tempatan
91 atm ≈ 1.01325 bar

BAB 4. PENGENALANKEPADAMESIN BENDALIR 110
juga mungkin bertambah sehingga 800C di permukaan bahan-bahan yang dihempap
oleh gelembung yang pecah.
Di dalam pam rotodinamik, peronggaan biasanya terjadi pada bahagian masuk ke pen-
desak terutama sekali jika pam diletakkan terlalu tinggi di atas permukaan takungan
bekalan.
Dengan menggunakan persamaan Bernoulli antara permukaan takungan dan masukan
ke pendesak, iaitu bahagian tekanan minimum, kita memperolehi,
p0ρg
+v202g
+ z0 − hls =p1ρg
+v212g
+ z1 (4.45)
dengan,
p0 ≡ tekanan di atas permukaan takungan
biasanya (tetapi tidak semestinya) tekanan atmosfera pa
p1 ≡ tekanan pada masukan pendesak, iaitu tekanan minimum di dalam pam pmin
v1 ≡ halaju mutlak bendalir pada masukan pendesak
v0 ≡ halaju mutlak bendalir di dalam takungan, biasanya diabaikan kerana terlalu kecil
hls ≡ segala kehilangan turus antara masukan paip sedutan dan masukan pendesak
Untuk sesuatu rekabentuk pam, turus halaju v21/2g boleh di ambil sebagai satu pecahan
tertentu, katalah σ, daripada turus bersih H yang dihasilkan oleh pam. Jadi
σH =paρg
− pmin
ρg− z1 − hls (4.46)
Untuk mengelakkan peronggaan, pmin mestilah lebih besar dari tekanan wap tepu, pv,
iaitu σc > σ
σcH =paρg
− pvρg
− z1 − hls (4.47a)
= Ha − Hv − z1 − hls (4.47b)
atau,
σcH = NPSH =NPSE
g(4.48)
dengan,
σ ≡ angkali peronggaan
σc ≡ angkali peronggaan kritikal
Ha ≡ turus tekanan atmosfera
Hv ≡ turus tekanan wap tepu
NPSH ≡ Turus Sedutan Positif Bersih
≡ Net Positive Suction Head
NPSE ≡ Tenaga Sedutan Positif Bersih
≡ Net Positive Suction Energy

BAB 4. PENGENALANKEPADAMESIN BENDALIR 111
Jadi z1 mestilah dikecilkan sebanyak mungkin supaya σc > σ. Satu parameter penting
yang lahir dari analisis di atas ialah laju tentu sedutan10, Ks yang ditakrifkan seperti laju
tentu,
Ks =NQ1/2
g(NPSH)3/4(4.49)
4.5 Turbin Hidraulik
4.5.1 Pengkelasan
Turbin hidraulik boleh dikelaskan kepada
1. turbin dedenyut
2. turbin tindakbalas
Di dalam kedua-dua kelas ini, bendalir yang masuk mengenakan daya ke atas pelari
di dalam arah aliran (daya ini disebut denyut sementara pada keluaran pula, bendalir
mengenakan tindakbalas, melawan arah aliran. Untuk roda-roda dedenyut, contohnya
roda Pelton, Banki dan Turgo, kesan dedenyut adalah besar sedangkan di dalam turbin
tindakbalas, turbin Francis dan Kaplan misalnya, kesan daya tindakbalas lebih berpe-
ngaruh.
4.5.1.1 Turbin Dedenyut
Kesemua turus (≡ tenaga seunit jisim) bendalir ditukarkan kepada tenaga kinetik, iaitu
dalam bentuk turus halaju yang keluar daripada satu (atau lebih) muncung. Bendalir
(biasanya air) ditembak keluar daripada muncung ini dalam bentuk jet ke sauk atau
timba yang dipasang di susurkeliling sebuah roda yang berputar di atas satu aci. Semasa
tindakan ini, air bersentuhan dengan udara dan air yang keluar daripada sauk jatuh ke
larian ekor.
4.5.1.2 Turbin Tindakbalas
Di dalam kategori ini, aliran dari aras hulu ke aras keluar berlaku di dalam sistem pem-
buluh tertutup yang tidak terdedah kepada atmosfera pada sebarang titik di sepanjang
laluan aliran. Pada masukan ke pelari, hanya sebahagian daripada turus bendalir ditu-
karkan kepada tenaga kinetik dan lebihannya kepada tenaga atau turus tekanan.
Pelari turbin-turbin jenis ini sentiasa dipenuhi bendalir apabila bekerja sedangkan di da-
lam turbin denyut, roda Pelton misalnya, hanya beberapa sauk atau timba sahaja yang
gunakan (iaitu bersentuhan dengan bendalir) pada sesuatu masa.
10suction specific speed

BAB 4. PENGENALANKEPADAMESIN BENDALIR 112
(a) Roda Pelton (b) Turbin Banki
(c) Turbin Francis (d) Turbin Kaplan
Rajah 4.23: Turbin hidraulik.
Di bawah kategori ini terdapat beberapa kelas yang kriterianya bergantung kepada arah
aliran di dalam pelari semasa proses pemindahan tenaga berlaku; di dalam turbin Ka-
plan aliran bendalir adalah dalam arah paksi sementara aliran di dalam pelari turbin
Francis adalah dalam arah jejarian atau pun jenis aliran tercampur. Di samping dua ke-
las ini, terdapat juga turbin aliran melintang seperti turbin Turgo, Rajah 4.24.
4.5.2 Roda Pelton
Roda Pelton adalah sejenis turbin denyut. Bilah-bilah turbin ini biasanya dipanggil timba
atau sauk yang berbentuk elliptic dan dipasang ke susurkeliling sebuah roda, Rajah 4.25,
yang berputar di atas satu aci. Satu atau dua muncung, Rajah 4.26, kadang-kadang lebih,
muncung memancutkan jet air, dalam arah tangen ke susurkeliling roda, untuk meng-
hentam timba. Timba ini dibentuk menjadi dua bahagian keluar supaya jet air dapat
dipecahkan dan meninggalkan sauk secara simetrikal di kedua-dua bahagiannya. Sis-
tem injap tombak11 dan pemantul digunakan untuk mengawal kelajuan dan arah jet air
11spear valve

BAB 4. PENGENALANKEPADAMESIN BENDALIR 113
Rajah 4.24: Susunan turbin aliran melintang.
pada masukan.
4.5.2.1 Teori
Analisis matematik dibuat dengan menganggap:
1. arah halaju timba U sama seperti arah halaju mutlak jet air V1 atau Vj,
2. bendalir bertindak ke atas timba pada radius r, iaitu radius dari paksi roda ke paksi
jet,
3. bendalir meninggalkan timba pada radius r, dan
4. halaju bendalir adalah mantap dan seragam pada masukan dan keluaran.
Halaju mutlak jet V1 atau Vj ditentukan oleh turus pada muncung,
H = Hg − h f (4.50)
Nilai turus ini kemudiannya dihubungkan dengan halaju mutlak jet menerusi persama-
an berikut:
Vj = V1 = cv√
2gH (4.51)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 114
(a)
(b) (c)
Rajah 4.25: Komponen-komponen penting roda Pelton—(a) roda, (b) nozel dan injap
tombak dan (c) pemantul.
dengan
H ≡ turus pada muncung
Hg ≡ turus kasar takungan
h f ≡ kehilangan turus disebabkan geseran di dalam paip
cv ≡ pekali halaju
≃ 0.97 ke 0.99
Turus halaju di dalam paip yang menyambungkan takungan dan muncung selalunya
diabaikan kerana terlalu kecil. Jumlah tenaga yang dipindahkan ke roda diberikan oleh
persamaan Euler,
Hi =U1Vt1 −U2Vt2
g
Halaju timba adalah sama nilainya pada masukan dan hantaran,
U1 = U2 = U
jadi,
Hi =U
g(Vt1 −Vt2) (4.52)
Daripada segitiga halaju,
Vt2 = U −W2 cos(180 − θ) = U +W2 cos θ (4.53)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 115
Rajah 4.26: Roda Pelton dengan dua nozel.
v t1 = v1Segitiga halaju
masukan
Segitiga halajukeluaran
Nozel
v1
Uθθθθ
W 2
U
v t2
v2
v t1 = v1
U W 1
Rajah 4.27: Segitiga halaju roda Pelton, Douglas et al. (1985).
dan
W2 = kW1 = k (V1 −U)
Sebutan k ialah faktor pengurangan halaju relatif di sebabkan;
1. geseran di permukaan timba, dan
2. hentaman jet ke batas pemisah sauk.
Oleh itu,
Vt2 = U + k(V1 −U) cos θ (4.54)
Vt1 = V1 (4.55)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 116
menjadikan,
Hi =U
g[V1 −U − k (V1 −U) cos θ]
=U
g(V1 −U) (1− k cos θ) (4.56)
Jika k malar,
dHi
dU=
1− k cos θ
g(V1 − 2U) = 0
jadi,
V1 = 2U
U = 12V1 (4.57)
Gantikan nilaiU di atas ke dalam persamaan (4.56), ungkapan untuk pemindahan tenaga
yang maksima diperolehi sebagai;
Hi(max) =V1
2g
(V1 − 1
2V1
)(1− k cos θ)
=V21
4g(1− k cos θ)
Nisbah U/V1 dikenali sebagai nisbah laju dan analisis ini menunjukkan bahawa pemin-
dahan tenaga yangmaksima berlaku apabila nisbah laju bernilai 0.5; tetapi dalam praktik
kecekapan maksima jarang diperolehi pada titik ini, biasanya pada nisbah laju 0.46.
4.5.2.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Di dalam beberapa rujukan, kecekapan ini juga dikenali sebagai kecekapan roda dan
ditakrifkan sebagai nisbah;
Kerja terlaku ke atas roda seunit berat bendalir
Turus yang ada di dalam bendalir
Iaitu,
ηh =Hi
H
=U (V1 −U) (1− k cos θ)
gH(4.58)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 117
Daripada persamaan (4.51),
H =V21
2gc2v
jadi,
ηh =U (V1 −U) (1− k cos θ)
g
V21
2gc2v(4.59a)
=2c2vU (V1 −U) (1− k cos θ)
V21
(4.59b)
Pada titik pemindahan tenaga yang maksima,
U = 12V1
jadi,
ηh(max) =2c2v
12V1
(V1 − 1
2V1
)(1− k cos θ)
V21
= c2v1− k cos θ
2(4.60)
2. Kecekapan Mekanikal
Kecekapan hidraulik roda merupakan ukuran keberkesanan roda menukarkan te-
naga kinetik jet kepada tenaga mekanikal putaran. Tidak semua tenaga putaran ini
diperolehi pada aci keluaran roda kerana sebahagian daripadanya digunakan bagi
mengatasi geseran galas dan ‘windage’ (iaitu geseran antara roda dan atmosfera).
Nisbah, untuk seunit berat bendalir,
Kerja terhantar ke aci
Kerja terlaku ke atas roda
dikenali sebagai kecekapan mekanikal, ηm.
ηm =PsPo
=Ps
Ps + Po(4.61)
dengan,
Pm ≡ kehilangan kuasa disebabkan windage dan geseran
Po ≡ kuasa putaran roda hasil dari hentaman tenaga kinetik jet
= ρgHiQ
Ps ≡ kuasa yang terhantar ke aci roda
3. Kecekapan Isipadu
Selalunya di dalam roda Pelton dianggap tidak ada bocoran kerana semua air yang
keluar daripada muncung bertindak ke atas roda. Jadi kecekapan isipadu boleh
dianggap 100%.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 118
4. Kecekapan Keseluruhan
Ditakrifkan sebagai nisbah
Kerja terhantar ke aci seunit berat bendalir
Turus yang ada di dalam bendalir
memberikan persamaan untuk kecekapan keseluruhan sebagai,
η = ηm × ηh × ηv
Dalam sebutan-sebutan kuasa dan turus,
η =PsPo
× Hi
H× 1 : anggap ηv = 1
= Po − PmPo ×Hi
H
yang disusun menjadi
η =
(
1− PmρgQH1 ×Hi
H
)
(4.62a)
=Hi
H− Pm
ρgHQ(4.62b)
Ini menunjukkan bahawa kecekapan keseluruhan roda Pelton adalah lebih kecil
daripada kecekapan hidrauliknya, η < ηh.
4.5.3 Turbin Francis
Kebanyakan turbin Francis mempunyai aci tegak dan yang lain, terutama yang bersaiz
kecil, mempunyai aci mendatar.
Bendalir memasuki bekas, selalunya berbentuk volut dan kemudianmelalui laluan- lalu-
an bilah pandu, jenis pegun atau boleh laras, di sekeliling pelari yang berfungsi sebagai
alat untuk mengarah bendalir supaya masuk ke pelari pada sudut yang optimum, Ra-
jah 4.29.
Bendalir yang keluar daripada laluan-laluan bilah pandu tadi memasuki pelari dalam
arah jejari. Semasa melalui pelari, bendalir dipesongkan oleh bilah-bilah pelari supaya
momentum sudutnya bertukar dan di sini proses pemindahan tenaga, daripada bendalir
ke pelari dan seterusnya ke aci turbin, berlaku. Di bahagian keluar bilah-bilah pelari,
bendalir dipesongkan ke arah paksi pelari dan mengalir melalui tiub draf ke larian ekor.
4.5.3.1 Teori
Seperti juga pam, persamaan-persamaan keterusan, momentum dan tenaga digunakan.
Di samping itu beberapa anggapan perlu dibuat:
1. aliran mantap,

BAB 4. PENGENALANKEPADAMESIN BENDALIR 119
(a) Turbin Francis aci tegak(b) Turbin Francis aci men-
datar
Rajah 4.28: Susunan turbin Francis aci tegak dan mendatar.
2. keadaan-keadaan pada masukan dan keluaran adalah seragam
3. halaju-halaju pada masukan dan keluaran adalah seragam dalam magnitud dan
sudut yang dibuat dengan arah rujukan, dan
0 1
2
3 Larian ekor
Tiub draf
Pemutar
Bekas pil in
Bilah pandu
Aci
Rajah 4.29: Laluan bendalir menerusi turbin Francis.
4. gerakan bilah-bilah pelari hanya dalam arah lilitan, jadi hanya komponen-
komponen daya dalam arah ini sahaja yang dianggap melakukan kerja.
Daripada takrif asas,
Dayakilas sekitar sesuatu paksi
= Kadar pertambahan momentum sudut sekitar paksi tersebut

BAB 4. PENGENALANKEPADAMESIN BENDALIR 120
Jadi dayakilas yang dikenakan oleh bendalir ke atas pelari ialah,
T = ρQ (Vt1r1 −Vt2r2) (4.63)
Dayakilas yang yang diperolehi pada aci turbin adalah lebih kecil daripada yang dibe-
rikan oleh persamaan (4.63) kerana terdapat geseran pada galas-galas dan antara pelari
dan bendalir.
Kuasa yang terbentuk pada pelari
= Kerja terlaku oleh bendalir seunit masa
iaitu,
P = TΩ = ρQ (Vt1r1Ω −Vt2r2Ω)
= ρQ (U1Vt1 −U2Vt2) (4.64)
Jadi kerja terlaku oleh bendalir seunit jisim bendalir ialah,
Kerja terlaku seunit masa
Kadaralir jisim= (U1Vt1 −U2Vt2) (4.65)
Persamaan (4.65) ini dikenali sebagai persamaan Euler untuk turbin.
Arah halaju mutlakmasukan ke pemutar turbin,V1 ditentukan oleh sudut bilah pandu α1
yang dilaraskan supaya halaju relatifW1 bertemu bilah pelari pada sudut β1. Kedua-dua
sudut ini diberikan oleh
tan α1 =Vr1
Vt1(4.66)
dan
tan β1 =Vr1
U1 −Vt1(4.67)
Bagi pemutar halaju rendah—rujuk Rajah 4.30 (a)—hukum sinus memberikan
W1
sin α1=
U1
sin(β1 − α1)(4.68)
Dari teorem Bernoulli, antara masukan dan keluaran bilah pandu (stesyen 0 dan 1 Ra-
jah 4.29),
p0ρg
+V20
2g+ z0 − hgv =
p1ρg
+V21
2g+ z1
= H

BAB 4. PENGENALANKEPADAMESIN BENDALIR 121
d2
b1
U1
v t1
W 1v1
v r2
W 2
U2
αααα1 ββββ1
ββββ2
b1
b1
U1 = v t1
αααα1
v1
ββββ1
v r2W 2
U2
ΩΩΩΩ
ΩΩΩΩ
ΩΩΩΩ
v f1 = vr1
v f1 = vr1
v f1 = vr1
W 1
ββββ1v1
αααα1
v t1
U1
W 2
v r2
U2ββββ2
a. Pemutar halaju rendah
b. Pemutar halaju sederhana
c. Pemutar halaju tinggi
Rajah 4.30: Segitiga halaju turbin Francis, Rattan (1994).
Daripada persamaan di atas jumlah turus pada masukan ke pelari, H, mengandungi;
1. turus tekanan, p1/ρg,
2. turus halaju, V21 /2g,
3. turus upaya, z1,
dengan hgv mewakili kehilangan turus di dalam bilah pandu. Tenaga di dalam bendalir
yang dipindahkan ke pelari ialah Hi dan bendalir meninggalkan pelari dengan tenaga
kinetik V22 /2g. Antara masukan ke pelari (1) dan keluaran nya (2), persamaan Bernoulli
dapat ditulis sebagai,
p1ρg
+V21
2g+ z1 − Hi − hl =
p2ρg
+V22
2g+ z2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 122
dan hl merupakan kehilangan tenaga di dalam pelari disebabkan oleh geseran, kejutan
dan sebagainya. Kerja terlaku ke atas pelari atau tenaga yang dipindahkan daripada
bendalir ke pelari merupakan turus melintangi pelari Hi yang diberikan oleh persamaan
Euler,
Hi =U1Vt1 −U2Vt2
g
Dari segitiga halaju pada keluaran bilah-bilah pelari,
tan β2 =Vf2
U2 −Vt2
Biasanya pada keluaran pelari dianggap tidak ada pusaran atau gelodakan, jadi Vt2 = 0.
Untukmencapai keadaan ini, bilah-bilah pelari direkabentuk supaya sudut keluarannya,
β2, dapat mengarah halaju mutlak V2 mengikut arah radius, iaitu Vf2 = V2. Oleh itu,
tan β2 =Vf2
U2=
V2
U2
dan,
Hi =U1Vt1
g
Kuasa kasar di dalam bendalir sebelum memasuki turbin, iaitu sebelum sampai pada
titik masukan ke bilah-bilah pandu, ialah
P = ρgHQ
Tetapi oleh kerana terdapat kehilangan-kehilangan hidraulik dan isipadu semasa proses
pemindahan tenaga berlaku di dalam pelari, tenaga yang dipindahkan ke pelari adalah
lebih kecil. Jadi kuasa yang dipindahkan ke pelari Po ialah
Po = ρgHiQi
= ρgHi (Q− ∆Q)
denganQi ialah kadar aliran isipadu yang bertindak ke atas pemutar turbin dan ∆Q pula
ialah kadar aliran bendalir yang bocor.
Akhir sekali, kuasa yang diperolehi pada aci keluaran turbin (iaitu kuasa yang masuk
ke penjana) adalah merupakan kuasa bersih, Ps, setelah ditolak kehilangan-kehilangan
kuasa mekanikal seperti geseran galas, cekera/piring dan sesendal kedap, Pm.
Ps = Po − Pm
4.5.3.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Tidak semua turus (iaitu tenaga seunit berat) yang ada di dalam bendalir, H, di-
gunakan untuk melakukan kerja ke atas pelari. Ini adalah disebabkan wujudnya

BAB 4. PENGENALANKEPADAMESIN BENDALIR 123
kehilangan-kehilangan geseran dan ‘eddy’, hl , di dalam laluan aliran di dalam pela-
ri, menyebabkan turus sebenar yang dipindahkan ke pelari, Hi, lebih kecil
Hi = H − hl
Kecekapan hidraulik terbit dari keadaan ini dan ditakrifkan sebagai nisbah
Kerja terlaku ke atas pelari seunit berat bendalir
Turus yang ada di dalam bendalir
iaitu,
ηh =Hi
H=
H − hlH
2. Kecekapan Isipadu
Dari jumlah kadar aliran yangmemasuki turbinQ terdapat sebahagian kadar aliran
yang tidakmelalui pelari, katalah ∆Q. Jadi jumlah kadar aliran yang bekerja ke atas
pelari Qi, adalah lebih kecil dari jumlah sebenar yang masuk ke turbin;
Qi = Q− ∆Q
Sebutan ∆Q dikenali sebagai bocoran. Dengan ini kecekapan isipadu dapat ditak-
rifkan sebagai nisbah iaitu,
ηv =Qi
Q=
Q− ∆Q
Qi
3. Kecekapan Mekanikal
Kuasamekanikal yang diperolehi oleh pelari Po hasil dari tindakan dinamik benda-
lir ke atasnya adalah sebenarnya kuasa yang dipindahkan dari bendalir ke pelari.
Disebabkan adanya kehilangan kuasa mekanikal, Pm, geseran galas, sesendal ke-
dap dan sebagainya, kuasa yang diperolehi di aci (iaitu nilai kuasa yang masuk ke
penjana, Ps) adalah lebih kecil. Kecekapan mekanikal ditakrifkan sebagai
Kerja terhantar ke aci seunit berat bendalir
Kerja terlaku ke atas pelari seunit berat bendalir
iaitu,
ηm =PsPo
=Ps
ρgQiHi=
Po − PmPo
= 1− PmPo
= 1− PmρgQiHi
4. Kecekapan Keseluruhan
Parameter ini merupakan ukuran bagi menentukan keberkesanan turbin menukar
tenaga yang ada di dalam bendalir kepada tenaga yang dapat diperolehi pada aci
keluaran. Ia ditakrifkan sebagai nisbah,
Kerja terhantar ke aci keluaran
Turus atau tenaga yang ada di dalam bendalir

BAB 4. PENGENALANKEPADAMESIN BENDALIR 124
atau,
η =Ps
ρgQH
Persamaan di atas boleh dipecahkan dalam bentuk kecekapan mekanikal, isipadu
dan hidraulik seperti berikut:
η =Ps
ρgQiHi× Qi
Q× Hi
H
= ηm × ηv × ηh
4.5.4 Turbin Kaplan
Turbin Kaplan biasanya mempunyai antara 4 dan 6 bilah pemutar, Rajah 4.31. Benda-
lir yang mengalir melaluinya bergerak selari dengan aci. Bilah pandu pegun selalunya
dipasang dan dari jenis boleh laras.
Rajah 4.31: Pemutar turbin aliran paksi.
Bahagian-bahagian utama sesuatu turbin Kaplan termasuklah rumah berlingkar, bilah
pandu, pemutar dan tiub draf, Rajah 4.32. Bilah-bilah pemutar turbin Kaplan selalu le-
bih tajam dan lebih melengkung jika dibandingkan dengan bilah-bilah pemutar turbin
Francis. Kecekapan turbin Kaplan bergantung pada kedudukan susunan dan lengkung-
an pada hujung bilah pemutarnya.
Turbin Kaplan dengan bilah-bilah pemutar yang tetap lebih murah daripada pemutar
dengan bilah-bilah boleh laras. Justru itu, turbin Kaplan yang pertama tadi dapat meng-
hasilkan julat kuasa yang terhad.
4.5.4.1 Teori
Turbin ini biasanya digunakan pada keadaan yang melibatkan kadaralir yang besar; ka-
daralir adalah maksima apabila aliran mengalir selari dengan paksi putaran pemutar. Bi-
lah pandu terletak pada satah yang memugak ke aci pemutar supaya aliran melaluinya
dalam arah jejari. Antara bilah pandu dan pemutar yang terletak di arusbawah bendalir

BAB 4. PENGENALANKEPADAMESIN BENDALIR 125
Rajah 4.32: Laluan bendalir menerusi turbin Kaplan.
dilencungkan menerusi sudut tepat ke arah paksi. Bilah pandu berfungsi bagi membe-
rikan pusaran pada bendalir supaya bendalir menghampiri pemutar tanpa vorteks, iaitu
komponen tangen halaju mutlak pada masukan Vt1 berkadaran songsang dengan jejari,
U ∝ r dan Vt1 ∝ 1/r. Rajah 4.33 menunjukkan segitiga halaju untuk turbin aliran paksi.
Masalah perbezaan kedua-dua halaju di atas dengan jejari dapat diselesaikan dengan
mengilas bilah pemutar supaya sudut yang dibuat dengan paksi pemutar lebih besar
pada penghujung bilah dari di pangkal atau hab.
Halaju aliran Vx adalah sama pada masukan dan keluaran. Begitu juga dengan halaju
linear bilah, U; tetapi U berubah sepanjang jejari bilah, dari pangkal ke penghujungnya.
Jadi Vx1 = Vx2 = Vx dan U1 = U2 = U.
Pada kecekapan maksima, Vt2 = 0 dan V2 = Vx2 = Vx1 = Vx menjadikan persamaan
Euler,
Hi =U1Vt1 −U2Vt2
g
=U1Vt1
g
dan,
Vt1 = Vx tan α1
∝1
r
Oleh kerana turus yang bekerja ke atas pemutar Hi adalah sama pada pangkal dan peng-
hujung bilah sedangkanU lebih besar pada penghujung bilah, Vt1 mestilah dikurangkan.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 126
Ω
Bilahpemutar
α1β1
U 1
v t1
v1W 1
v x1
W 2v2
U 2U 2
W 2v2 = vx2
α2
β2β2
Masukan
Keluaran tanpa pusaran
Rajah 4.33: Segitiga halaju turbin aliran paksi.
Halaju aliran Vx perlu malar sepanjang jejari bilah pemutar. Untuk menjadikan halaju
aliran malar sepanjang jejari bilah pemutar, tan α1 mestilah dikurangkan mengarah ke
penghujung bilah dengan mengecilkan sudut α1, dan kesannya ke atas bentuk bilah ada-
lah seperti yang ditunjukkan di dalam Rajah 4.21.
4.5.4.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Tidak semua turus (iaitu tenaga seunit berat) yang ada di dalam bendalir, H, di-
gunakan untuk melakukan kerja ke atas pelari. Ini adalah disebabkan wujudnya
kehilangan-kehilangan geseran dan ‘eddy’, hl , di dalam laluan aliran di dalam pela-
ri, menyebabkan turus sebenar yang dipindahkan ke pelari, Hi, lebih kecil
Hi = H − hl
Kecekapan hidraulik terbit dari keadaan ini dan ditakrifkan sebagai nisbah
Kerja terlaku ke atas pelari seunit berat bendalir
Turus yang ada di dalam bendalir
iaitu,
ηh =Hi
H=
H − hlH

BAB 4. PENGENALANKEPADAMESIN BENDALIR 127
2. Kecekapan Isipadu
Dari jumlah kadar aliran yangmemasuki turbinQ terdapat sebahagian kadar aliran
yang tidakmelalui pelari, katalah ∆Q. Jadi jumlah kadar aliran yang bekerja ke atas
pelari Qi, adalah lebih kecil dari jumlah sebenar yang masuk ke turbin;
Qi = Q− ∆Q
Sebutan ∆Q dikenali sebagai bocoran. Dengan ini kecekapan isipadu dapat ditak-
rifkan sebagai nisbah iaitu,
ηv =Qi
Q=
Q− ∆Q
Qi
3. Kecekapan Mekanikal
Kuasamekanikal yang diperolehi oleh pelari Po hasil dari tindakan dinamik benda-
lir ke atasnya adalah sebenarnya kuasa yang dipindahkan dari bendalir ke pelari.
Disebabkan adanya kehilangan kuasa mekanikal, Pm, geseran galas, sesendal ke-
dap dan sebagainya, kuasa yang diperolehi di aci (iaitu nilai kuasa yang masuk ke
penjana, Ps) adalah lebih kecil. Kecekapan mekanikal ditakrifkan sebagai
Kerja terhantar ke aci seunit berat bendalir
Kerja terlaku ke atas pelari seunit berat bendalir
iaitu,
ηm =PsPo
=Ps
ρgQiHi=
Po − PmPo
= 1− PmPo
= 1− PmρgQiHi
4. Kecekapan Keseluruhan
Parameter ini merupakan ukuran bagi menentukan keberkesanan turbin menukar
tenaga yang ada di dalam bendalir kepada tenaga yang dapat diperolehi pada aci
keluaran. Ia ditakrifkan sebagai nisbah,
Kerja terhantar ke aci keluaran
Turus atau tenaga yang ada di dalam bendalir
atau,
η =Ps
ρgQH
Persamaan di atas boleh dipecahkan dalam bentuk kecekapan mekanikal, isipadu
dan hidraulik seperti berikut:
η =Ps
ρgQiHi× Qi
Q× Hi
H
= ηm × ηv × ηh
Turbin Kaplan biasanya digunakan pada turus antara 15 ke 110 kaki dan kecekapannya
boleh mencapai julat antara 90 dan 93%, dengan kadar kesusutan kecekapannya sama
seperti turbin Francis.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 128
Jadual 4.2: Bilangan bilah dan turus untuk turbin Kaplan
Bilangan bilah pemutar Turus (kaki)
4 35
5 65
6 110
4.5.5 Peronggaan di dalam Turbin Hidraulik
Biasanya peronggaan bermula apabila tekanan susut ke tahap yang terlalu rendah, ter-
utama sekali pada titik-titik yang halaju bendalir terlalu tinggi atau kedudukan turbin
yang tinggi. Dari persamaan Bernoulli, untuk sebarang titik,
p
ρg+
V2
2g+ z = pemalar
peronggaan lebih mudah berlaku jika turus halaju V2/2g dan turus upaya, z, mempu-
nyai nilai-nilai yang tinggi padamasa yang sama. Di dalam turbin, titik yang tekanannya
minima berlaku pada hujung keluaran bilah pelari, iaitu di permukaan hadapannya.
Teorem Bernoulli antara keluaran pelari dan aras air keluar memberikan,
p2ρg
+V22
2g+ z2 − hdt =
p3ρg
+V23
2g+ z3
dengan,
p3 ≡ tekanan pada aras keluar
biasanya (tetapi tidak semestinya) tekanan atmosfera pa
V3 ≡ halaju mutlak bendalir ke aras keluar
(kadang-kadang diabaikan kerana terlalu kecil)
hdt ≡ kehilangan turus disebabkan geseran di dalam tiub draf
Susunsemula persamaan di atas,
V22
2g− V2
3
2g− hdt =
paρg
+p2ρg
− z2 : z3 = 0 (datum)
Bahagian kiri ungkapan ini merupakan satu pecahan tertentu, katalah σ, daripada turus
bersih melintangi pelari Hi,
σHi =paρg
− p2ρg
− z2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 129
Oleh kerana tekanan minima pmin terjadi pada keluaran pelari, iaitu di stesyen 2, jadi
p2 = pmin dan,
σHi =paρg
− pmin
ρg− z2
Peronggaan bermula apabila pmin ≤ pv, dengan pv adalah tekanan wap tepu,
σTHi =paρg
− pvρg
− z2
= Ha − Hv − z2
dengan
Ha ≡ turus tekanan atmosfera
Hv ≡ turus tekanan wap tepu
σT ≡ angkali peronggaan Thoma
Jadi untuk mengelak dari berlakunya peronggaan di dalam pelari, pmin mestilah lebih
besar daripada pv, supaya σT < σ. Ungkapan untuk σT di atas tadi dikenali sebagai
parameter peronggaan Thoma. Biasanya ungkapan ini digunakan bagi menentukan aras
maksima, zmax, di atas aras keluar. Jika pelari berada lebih tinggi daripada nilai zmax,
peronggaan lebih mudah berlaku,
zmax = Ha − Hv − σTHi
Related Documents