BIBLIOTHECA MATHEMATICA A series of Monographs on Pure and Applied Mathematics Volume V Edited with the cooperation of THE 'MATHEMATISCH CENTRUM 5 and THE 'WISKUNDIG GENOOTSCHAP at Amsterdam Editors: N. G. DE BRUIJN J. D E G R O O T A. C. ZAANEN

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

BIBLIOTHECA MATHEMATICA A series of Monographs on Pure and Applied Mathematics
Volume V
Edited with the cooperation of
THE 'MATHEMATISCH CENTRUM5
and
THE 'WISKUNDIG GENOOTSCHAP
at Amsterdam
Editors: N. G. DE BRUIJN
J. D E G R O O T
A. C. ZAANEN

AXIOMATIC PROJECTIVE GEOMETRY
Second edition
BY
A. HEYTING PROFESSOR EMERITUS OF MATHEMATICS
AT THE UNIVERSITY OF AMSTERDAM, THE NETHERLANDS
1980 P. NOORDHOFF N.V. - GRONINGEN
NORTH-HOLLAND PUBLISHING COMPANY - AMSTERDAM

© NORTH-HOLLAND PUBLISHING COMPANY - 1 9 8 0
WOLTERS-NOORDHOFF PUBLISHING
A11 rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the Copyright owner.
ISBN: 0 444 85431 2
Publishers:
NORTH-HOLLAND PUBLISHING COMPANY - AMSTERDAM · NEW YORK · OXFORD
WOLTERS-NOORDHOFF PUBLISHING - GRONINGEN
Sole distributors for the U.S.A. and Canada:
ELSE VIER NORTH-HOLLAND, INC.
5 2 VANDERBILT AVENUE
NEW YORK, N.Y. 1 0 0 1 7
First edition 1963 Second edition 1080
Library of Congress Cataloging in Publication Data
Hey ting, Arend, 1898-Axiomatic projective geometry.
(Bibliotheca mathematica, a series of monographs on pure and applied mathematics; v. 5)
Includes index. 1. Geometry, Projective—Foundations.
I. Title. I I . Series. QA554.H48 1980 516.5 80-468
ISBN 0-444-85431-2
Printed in the Netherlands

PREFACE
This book originates from a course of lectures which I have given several times in the University of Amsterdam. Since 1930 the subject has been revived by a number of mathematicians, of whom I mention Ruth Moufang, Marshall Hall Jr . , Reinhold Baer and Günther Pickert. As one of the main results of their work the significance of weaker incidence propositions than tha t of Desargues was clarified. This part of the theory seems now sufficiently rounded off to be incorporated in an elementary textbook.
One of the main aims of the theory is the introduction of coordinates. Hereby a narrow connection between geometrical and algebraical investigations has been established, and algebraical theories have been suggested by geometrical problems. On the other hand, progress in geometry may be expected from the side of algebra. I t is not the aim of this book to treat these algebraic questions extensively; its scope is more modest. I confined my attention to the direct consequences of various axioms for the geometry and for its set of coordinates. Therefore I preferred, where possible, geometrical to algebraical methods.
The book contains no new result of any importance, but I have tried to present the material in an easily accessible form. I hope tha t the book may help to renew the interest in geometry of a broad mathematical public.
I t seemed unnecessary to give many references in a book like this: moreover, the excellent monograph by Günther Pickert, „Projektive Ebenen" (Springer 1955) contains a bibliography up to 1955. Of course most of the material can be found in Pickert 's book; in particular the beautiful proof of theorem 2.4.6 has been borrowed from it.
The first chapter is introductory. I ts first section contains a brief account of the axiomatic method; in the other sections I assembled some notions and theorems from diverse parts of mathematics, which I need in the rest of the book and which perhaps do not belong to the mathematical knowledge of the intended reader. I t is advisable to skip after section 1.1 to

Chapter II and to return to the remaining sections of Chapter I when necessary.
I am grateful to the editors of „Bibliotheca Mathematica" for accepting the book in their series. My assistants W. Molenaar, A. Troelstra and F. Simons drew the figures and suggested many improvements; the latter also made the index and assisted in the reading of the proofs. Dr. and Mrs. de Vries kindly undertook a meticulous revision of the text from the linguistic point of view. I thank all these collaborators, and also the publishers, for their contributions to the final form of the book.
Amsterdam, January 1963.
A. H E Y T I N G .
PREFACE TO THE SECOND EDITION
Much work on projective planes has been done since 1963. For an account of this work I can refer to the books mentioned at the end of § 7,7 and to the literature mentioned in these books, for the elementary kernel of the subject remained the same. Therefore very little had to be changed in this edition; I only corrected some errors. In the appendix some additional information is given. I thank all those who drew my attention to corrections that could be made.
Some of the subjects treated in Chapter I belong to-day to the usual curriculum for undergraduates. I did not leave them out; any student can read as much of it as he needs.
I hope that the book will induce many students to a further study of geometry.
Castricum, October 1979. A. H E Y T I N G

Chapter II and to return to the remaining sections of Chapter I when necessary.
I am grateful to the editors of „Bibliotheca Mathematica" for accepting the book in their series. My assistants W. Molenaar, A. Troelstra and F. Simons drew the figures and suggested many improvements; the latter also made the index and assisted in the reading of the proofs. Dr. and Mrs. de Vries kindly undertook a meticulous revision of the text from the linguistic point of view. I thank all these collaborators, and also the publishers, for their contributions to the final form of the book.
Amsterdam, January 1963.
A. H E Y T I N G .
PREFACE TO THE SECOND EDITION
Much work on projective planes has been done since 1963. For an account of this work I can refer to the books mentioned at the end of § 7,7 and to the literature mentioned in these books, for the elementary kernel of the subject remained the same. Therefore very little had to be changed in this edition; I only corrected some errors. In the appendix some additional information is given. I thank all those who drew my attention to corrections that could be made.
Some of the subjects treated in Chapter I belong to-day to the usual curriculum for undergraduates. I did not leave them out; any student can read as much of it as he needs.
I hope that the book will induce many students to a further study of geometry.
Castricum, October 1979. A. H E Y T I N G

LIST OF SYMBOLS
Section APPG analytic plane projective geometry 1.4 ASPG analytic solid projective geometry 1.5 Π set of points 2.1 A set of lines 2.1 I incidence relation 2.1 $(Vl, V2, V3) axiomatic theory with the axioms VI,
or Ç V2, V3 2.1 %{A ) $ (VI, V2, V3) with additional axioms
A 2.2 Dn Desargues' proposition uii> ^ιο» -^ιο ] Df09 D{*9 Z)JQ I special cases of Desargues' proposition 2.2 Dl...,Dlw,D99D*i dDn dual of Z)n 2.2 ^ π ( ^ 5 ) -^ιι with the additional conditions
0 = P, l = s 2.2 {ΡΡΌΨ) central collineation 2.3 P 1 0 Pappos ' proposition 2.6 P*0, P i 0 , P 9 special cases of Pappos ' proposition 2.6 Qx first quadrangle proposition 2.4 Q2 second quadrangle proposition 2.6 Φ defining function of a ternary field 3.1 %(A) ternary field a t tached to a projective
plane φ0(Α) 3.1 Β1 β sixteen points proposition 4.2 L*(t) field of the formal power series over L 7.5

CHAPTER I.
INTRODUCTION
§ 1.1. The axiomatic method.
1.1.1. The origin of mathematics was man's desire to systematize his knowledge. This tendency was particularly striking with the Greeks, and one of the culmination points of their scientific work was the systematization of geometry in Euclid's Elements. I t is well known tha t under the hands of Greek mathematicians geometry had gradually taken the form of an axiomatic theory, which in Euclid reached its final shape. For many centuries his Elements were the model of a perfect mathematical theory; it was not before the nineteenth century tha t important corrections were made in them, which concerned the mathematical demonstrations as well as the interpretation of the axioms.
I t is difficult to decide how the Greek philosophers and mathematicians conceived exactly the relation of their abstract geometry to ordinary space. One of the results of axiomatic work in the nineteenth century was the loosening of this connection. An axiom is no longer considered as an indubitable t ruth, and an axiomatic theory is but indirectly related with reality. Therefore not only geometry, but many other, even very abstract, mathematical theories have been axiomatized, and the axiomatic method has become a powerful tool for mathematical research, as well as a means of organizing the immense field of mathematical knowledge which thereby can be made more easily survey able.
1.1.2. An axiomatic theory © is described by giving (i) a system of fundamental notions <P1 ? P 2 , . . .>, (ii) a set of axioms about the fundamental notions.
We shall assume tha t the set of fundamental notions as well as the set of axioms is finite. The set of axioms of © is also called its axiom system.
I t will be useful to consider a simple example, which is not,

2 INTRODUCTION Chap. 1
like Euclidean geometry, charged with the misunderstandings caused by a millennial history.
The theory of groups © can be axiomatically described as follows. The set of fundamental notions is <G, F}9 where G is a class and F a function which assigns an element of G to any ordered pair of elements of G [in the language of set theory (§ 1.2): F is a mapping of G2 in G]. If F assigns c to the pair (a, b), we write, as usual, c = F (a, 6).
The axioms of ® are:
I. For any elements a, 6, c of G, F(a, F(b, c)) = F(F(a, b), c). II . For any elements a and b of G there is a unique element x
of G such that F(a9 x) = b. III . For any elements a and b of G there is a unique element y
of G such that F(y, a) = 6.
I expresses the associative law, II and I I I the possibility and uniqueness of subtraction.
Group theory is the set of theorems which can be derived from the axioms; as we use in the proofs no other properties of the set G and the function F than those expressed in the axioms, G and F can be left unspecified. If we choose a particular set G and a particular function F (which, of course, must satisfy the axioms) we obtain a particular group. Every group, obtained by such a specification of G and F, is a model of group theory. For instance, if we choose for G the set C of integers, with F (a, b) = a+b, the axioms are true. For this reason, C together with the addition is a model of the theory of groups and of the axiom system (I, II, III). (The expressions "Model of an axiomatic theory 5 " and "model of the axiom system of 5 " will be used synonymously).
There exist many other models of the theory of groups. In § 3.4 we shall consider models for projective geometry. I shall not give a general definition of a model for an axiomatic theory [see e.g. A. Tarski, Introduction to logic and to the Methodology of deductive Sciences, Ch. VI (New York, 1939)]; the example above will suffice to explain the notion.
Some models of group theory are mentioned in the exercises. The plurality of models has important consequences for the

§1 .1 . THE AXIOMATIC METHOD 3
purport of theorems in the axiomatic theory. Let us consider an example. It is easy to derive from I, II, I I I the theorem
(T) There is an element e of G such that, for every element a of G, F(a, e) = F(e9 a) = a, is true.
In the model of the integers, (T) expresses the fundamental property of the number 0. In other models it will represent different properties. By proving (T) we prove all these properties at the same time.
In general, if we derive a theorem T in an axiomatic theory @, we have also proved the theorems which correspond to T in all the models of @. In this way the axiomatic method allows us to economize enormously on mathematical proofs. Moreover, in recognizing different theories as models of one axiomatic theory, we obtain new information about the relations between the former.
But there is still another use of the method, which shows new advantages. It may happen that for the proof of a theorem we do not need all the axioms, but only some of them. Such a theorem is true not only for models of the whole system, but also for those of the smaller system which contains only the axioms used in the proof. Thus it is important in an axiomatic theory to prove every theorem from the least possible set of axioms. This point of view is prominent in the axiomatics of geometry.
Historically, at least some of the models of an axiomatic theory precede this theory.
I t would be interesting, but outside the scope of this book, to follow the history of the theory of groups from its initial state, in which every model was studied separately, up to its modern axiomatic form. The history of Euclidean geometry is somewhat different because the axiomatic method was applied to it so very early, when this method had not yet been fully developed, so that its advantages could not be completely realized. Hilbert [Grundlagen der Geometrie; first edition 1899] was the first to detach it completely, from its original model, the theory of ordinary space. Thereby he made it into a part of pure mathematics in the modern sense. The axiomatic theory must be fit for application to any of its models, even to one that has nothing to do with space. Therefore space-intuition can play no part in the deductions. This condition was not satisfied by Euclid's

4 INTRODUCTION Chap. 1
system; for instance, Euclid uses freely in his proofs several properties of the betweenness relation, which he does not mention in his axioms, so tha t no other foundation than space-intuition is available for them. The task of liberating geometry from these ties with space-intuition was fulfilled between 1860 and 1900 by a number of mathematicians, among whom Pasch and Hilbert were prominent.
Perhaps it seems astonishing tha t even after this liberation figures occur in books on geometry. Indeed they are inessential, and if the book is good they can be left out without loss of coherence. Their main use is to support the memory and to facilitate the comprehension of complicated proofs. On the other hand, they always threaten to seduce us into illicit use of space-intuition; we must be on our guard against this danger which has caused mistakes even in excellent works on axiomatics.
If we are asked what an axiom is in modern mathematics, perhaps the best answer is: a starting-point for deductions. As explained above, the theorems obtained by deduction from an axiom system A are valid for every model of A.
1.1.3. I t is necessary to distinguish between propositions and theorems. A proposition in an axiomatic theory © is a sentence in which no other notions occur than the fundamental notions of © and logical notions. This definition suffices for our purposes; a more precise definition would be possible after a detailed description of the formal structure of an axiomatic theory. I t is essential to remark tha t a proposition in © need not be valid in ©. A proposition is valid in © if it is an axiom or if it can be deduced from the axioms. A valid proposition is also called a theorem of ©. Every theorem of © is true for every model of @, but a proposition in © can be t rue for a certain model of @, without being a theorem of @. For instance, if © is group theory, the proposition which expresses the commutative property is not a theorem of ©, but it is t rue in the model of the integers under addition. We shall not discuss the question whether a proposition in ©, which is true for every model of ©, must be a theorem of @.
1.1.4. Let us summarize. The characteristic features of an axiomatic theory are the following.

§1.1. THE AXIOMATIC METHOD 5
1. A complete list of the fundamental notions of the theory is given.
2. Every other notion is reduced to the fundamental notions by explicit definition. These definitions must be of such a nature, t ha t everywhere, except in the definition itself, the definiens can be substituted for the definiendum. Consequently, we could in principle dispense with the defined notions.
3. A complete list of fundamental theorems (called axioms) is given.
4. Every other theorem is deduced from the axioms by logical reasoning.
1.1.5. In elementary axiomatics, logic is used in an unanalysed form. The analysis of logic is one of the main subjects of the investigations on the foundations of mathematics. However, in this book we shall take the elementary point of view and accept the validity of the usual (two-valued) logic.
Without going into a general theory of axiomatic theories, we must mention some conditions to which an axiomatic theory can be subjected.
1.1.6. Consistency. An axiomatic theory is consistent if no contradiction can be derived in it. I t is clear tha t an inconsistent theory can have no model; therefore it is of utmost importance to know tha t our axiomatic theories are consistent.
The simplest way to prove the consistency of an axiomatic theory is to provide a model for it. Thus group theory is consistent because the integers under addition form a model for it. Strictly speaking, a consistency proof by the model method is relative; we have only proved tha t group theory is consistent if the arithmetic of integers is consistent. The question whether and how absolute consistency proofs are possible, is another main topic in investigations on the foundations of mathematics. Here, taking the elementary point of view, we shall admit the arithmetic of real numbers as sufficiently safe and use it freely for the construction of models.
1.1.7. Independence. An axiom A is independent of a set

e INTRODUCTION Chap. 1
of axioms B if it cannot be derived from B. An axiom system is independent if every one of its axioms is independent of the remaining ones. Of course, in case an axiom system is not independent, so tha t one of its axioms, say A, can be derived from the others, then A is redundant in this sense tha t the same theorems can be derived from the complete system as from tha t which remains after leaving A out.
The independence of an axiom system can be proved by the model method, as follows. In order to prove tha t A is independent of the set of axioms B it suffices to construct a model of B in which A is not valid. Indeed, if A could be derived from B, then A would be valid in every model of B.
1.1.8. Completeness . In many cases an axiomatic theory © is constructed in connection with a theory X which existed before the axiomatization. Such is the case for projective geometry. One may then ask whether © is sufficient to derive all the theorems of %; if this is the case, © is said to be complete with respect to %. In order to make this notion precise it is necessary to describe % more accurately than it is generally done. We shall come back to this question later (§ 2.2).
1.1.9. Categoricity. An axiomatic system is categorical if any two of its models are isomorphic. I prefer to explain the notion of isomorphism in the concrete case of projective geometry (see § 2.1).
1.1.10. Definitions. The axiomatic theory <B1 is contained in the axiomatic theory ©2 (©iC@2), if the following two conditions are satisfied:
I . Every fundamental notion of @! is also a fundamental notion of ©2.
I I . Every theorem of ©x is also a theorem of ©2. @! is properly contained in ©2 and @2 is a proper extension of ©!(©! C ©2), if ©x is contained in ©2 and at least one theorem of ©2 is not a theorem of ©1#
REMARK. We obtain a wider notion of a theory contained in another theory, if we read instead of I :
Every fundamental notion of ©x can be defined in @2. This

§1.1. THE AXIOMATIC METHOD 7
notion will not be used in the sequel. Evidently, a sufficient condition for @χ Q @2 is tha t I holds
and every axiom of @x is also an axiom of ©2. This condition is not necessary, because two different axiom systems can lead to the same set of theorems.
1.1.11. E x e r c i s e s .
1. Show tha t the following theories are models of the axiomatic system for group theory, as described in 1.1.2. a. G is the set of rationals Φ 0; F {a, b) is ab. b. G is the set of congruent transformations in the plane;
F (a, b) is the transformation which results by applying first the transformation a, then the transformation b.
2. Why is the example in exercise 1 a) not a model for group theory if we omit the condition Φ 0?
3. Prove (T) (1.1.2) from I, I I , I I I , or find the proof in a book on group theory.
4. Give as many models as you can find for the following axiomatic theory: Fundamental notions: <C, 0>, where C is a class and 0 a binary relation in C. Axioms: (i). For any two elements a, b of C, 0(a, b) or 0(b9 a) or both. (ii) If 0(a, b) and 0(6, a), then a = b. (iii) If 0(a, b) and 0(b, c), then 0(a, c). Is there a model in which C is a class of one element?
5. Is the axiomatic theory, described in exercise 4, consistent? 6. Prove tha t it becomes inconsistent if we add the axioms
(iv) and (v): (iv) C contains two different elements. (v) For any two different elements a and b of C, 0(a,b) is t rue.
7. A consistent theory remains consistent if we omit one of the axioms.
8. Prove tha t in the axiom system for group theory (1.1.2), I is independent of I I and I I I . [Hint. Think of subtraction instead of addit ion].

8 INTRODUCTION Chap. 1
9. Is group theory complete with respect to the theory of addition of integers? [Answer: No, for the commutative law is independent of I, I I , III. See exercise l b ] .
10. The axiomatic theory ©1 is contained in the axiomatic theory @2 if (I) every fundamental notion of ©χ is also a fundamental notion of @2 and (II) every axiom of ©j. is a theorem of ©2.
11. Let @! be the theory of groups, as defined above (1.1.2) and ©2 the theory which results from ©x by adding the axiom: ' T o r any elements a, b of G, F(a, b) = F(b, a ) . " Show tha t ©!C©2.
Prel iminaries . In the following sections I assemble some notions and theorems
from other parts of mathematics which are used in the body of the book. Most of the proofs are omitted. Of course, it is not necessary to read this before the rest of the book; the reader can reach back to it wherever he needs it.
§ 1.2. Notions from set theory. The fundamental notions of set theory are used throughout
the book; order relations occur in Chapter VII .
The reader is assumed to be familiar with the notions of sum (union) and meet (intersection) of sets, and of set-inclusion. The union of sets A and B is denoted by A u B, their intersection by A n B. If A is a subset of B we write A Q B; A C B means tha t A is a proper subset of B, i.e. A Ç B and B contains at least one element not in A. a e A means: a is an element of the set A.
The direct product A x B of sets A and B is the set of ordered pairs (a, 6), where a e A, b e B.
A binary relation R between A and B is a subset of A X B. If (a, b) € R, we also say tha t a and b are in the relation R, or tha t aRb. A relation in A is a relation between A and A.
A mapping of A into B is a relation R between A and B such tha t for every element a of A there is exactly one element b of B satisfying aRb.

§1.2. NOTIONS FROM SET THEORY 9
The mapping R is onto B, if for every element b of B there is at least one element a of A satisfying aRb.
The mapping R of A onto B is one-to-one if for every element b of B there is exactly one element a of A satisfying aRb.
A relation R in A is symmetric, if aRb implies bRa. I t is transitive if aRb and 6i?c imply aRc. I t is reflexive if ai?a for every a in A. A reflexive, symmetric and transitive relation is called an equivalence relation.
With respect to an equivalence relation R in A, A can be divided into equivalence classes such tha t (I) every element of A belongs to exactly one equivalence class, and (II) two elements a and b are in the relation R (aRb) if and only if they are in the same equivalence class.
The relation R in A is an order relation if it is transitive, and satisfies the conditions (I) aRb implies a Φ ft, and (II) for any two different elements a and b of A, either aRb or bRa holds. We also say that A is ordered by the relation R. An order relation is often denoted by < .
In the set A, ordered by < , c is between a and 6, if either a < c < i or ίι < c < a.
Of any three elements of an ordered set exactly one is between the other two. The set of elements of A which are between a and b, is the segment (a, b). Four different elements a, b, c, d of an ordered set can be divided in exactly one way into alternating pairs. For instance, a, b and c, d are alternating pairs if one of c, d is between a, b and the other not; then also one of a and b is between c and d, and the other not. Thus the relation between alternating pairs is symmetric. The relation between alternating pairs defines a cyclical order in A. This notion will be discussed in detail in § 7.1.
If A and B are disjoint ordered sets, then the ordered sum A + B of A and B is defined as follows. Let < , < be the order
A B
relations in A, B respectively. A + B is the union A u B, in which an order relation < is given by the rules (I), (II) , (HI ) :
(I) If a?, y e A9 then x < y if and only if x < y. A
(II) If a?, y € B, then x < y if and only if x < y ( I I I ) If x e A, yeB, then x < y. B

10 INTRODUCTION Chap. 1
I t is easily verified tha t < is an order relation in A u B. Analogously the ordered sum of an ordered finite, or even
infinite, set of ordered sets can be defined. An n-ary relation in A is a subset of An.
§ 1.3. Not ions from algebra.
Ordered groups and fields occur in Chapter VII . Quaternions and Cayley's algebra are used for the construction
of models in § 3.5.
1.3.1. The notions of a group, an abelian (commutative) group, a division ring (skew field), a field, are assumed to be known, as well as that of isomorphism between groups, and between fields.1)
A group G in which the group operation is denoted by o, is an ordered group if it is ordered and, for any elements a, b9 c of G, a < b entails ao c <b o c and c o a < c ob.
A division ring K is an ordered division ring if it is ordered, its additive group is an ordered group, and moreover a > 0 and b > 0 entail ab > 0. The field of rationals and the field of reals are ordered fields, if ordered in the usual way.
1.3.2. Q u a t e r n i o n s . The simplest example of a division ring which is not a field is the division ring Q of real quaternions.
Q is the set of quadruples (a09 al9 a29 a3) of real numbers with the composition rules:
(a09 al9 a29 a3)+(b09 bl9 b29 b3) = (a0+b09 a±+bl9 a2+b2, a3+b3). (a09 al9 a29 a3) (fc0, blf b29 b3)= («0^0 — αΦΐ — αΦϊ — α3&3 » α<Ρΐ + alb0 + α2&3 — Ä3*2 , a0b2+a2b0+αφχ—αφζ, αφζ+αφ0+axb2—a2bx )
The elements (1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0) and (0, 0, 0, 1) are denoted by e9 j l 9 j29 j3 respectively; then (a09 al9 a29 a3) = =a0e+a1j1+a2j2+a3j3.
For the elements e9 j l 9 j29 and j3 the following multiplication table holds:
*) We shall use the word "field" in the sense of "commutative division ring".

§1.3. NOTIONS FROM ALGEBRA 11
e ii H h
e e h h h
h h —e -h Ì2
11
Ì1
is —e -li
is is -U li —e
which shows that Q is non-commutative. The product (a0e+a1/1+aa/a+a8/8)(60e+61/1+6a/a+&a/8) can
now be computed by using the distributive laws and applying the multiplication table, where the units e, j l 9 /2, jz commute with real numbers.
It can be verified by direct computation that the axioms for a division ring hold in Q. For those who are acquainted with the theory of matrices, an easy access to the theory of quaternions is by two-rowed complex matrices. Denote by E, Jl9 / 2 , / 3 respectively the matrices
GHiM-!Ki)' then the same multiplication table as for e, j l 9 j 2 , j3 applies to E9 / l > J2> 7 3 ·
The matrices of the form
A = a0E+ 1J1-T 2J2-T 37 3 \ _ a 2 + a s l Ο ο - α χ » /
dei A =
form a subring 5 of the ring of two-rowed complex matrices. As α0-\-αλι a2+a3i a . 2 ι 2 « 2
—α2-\-αζ% a0—ax%
every element of 5 except the null-matrix has an inverse; consequently 5 is a division ring.
It follows easily from the correspondence between the multiplication tables, that the mapping φ with q>(a0e-\-a1j1+a2J2+azjz)= = α 0 £ , + ο 1 / 1 + α 2 / 2 + % / 3 is an isomorphism between 5 and Q. Thus Q is a division ring.
The conjugate of the quaternion a = α0β+α1]\+α2ί2+αζ]3 is a = aQ—a^j1—a2j2—azjz. I t is easily verified, either directly or by means of the matrix representation, that
ad = da = (a02+a1
2+a22+a2
2, 0, 0, 0).

12 INTRODUCTION Chap. 1
The real number a02+a1
2+a22+a3
2 is called the norm of a and denoted by N(a).
For the conjugate of a product we have the rule Έ6 = ha. I t follows tha t N(ab) = (ab)ab = ablä = aN(b)ä = aäN(b) = N(a)N(b).
The quaternions (a09 0, 0, 0) form a subfield of Ç, which is isomorphically mapped on the field of reals by the mapping (a0, 0, 0, 0) -> a0. If we identify corresponding elements in this mapping, the field of reals becomes a subfield of Q. We may now write aä = N(a).
1.3.3. Cayley's algebra.
Cayley's algebra C is a set in which an addition and a multiplication are defined. I t is an abelian group with respect to addition, the distributive laws hold, and left- and right-hand division, except by 0, are always possible and unique, but the associative law is not generally valid. The following method is due to Dickson [Trans. Amer. Math. Soc. 13 (1912)].
C can be described as the set of pairs (ax, a2), where ax and a2
are real quaternions, with addition defined by (1) («j, a,)+(Ä, ßt)={»1+ß1, *z+ß2)
and multiplication by
(2) K , x2)(ßl9 ß2) = {^iß1-'ß2^2> & « i + * Ä ) ·
The distributive laws are easily verified; they are immediate consequences of the fact tha t the right member of (2) is linear in each of (OL19 a2) and (ßl9 ß2). In order to prove the possibility and uniqueness of right-hand division, we have to solve the equations for ξΐ9 ξ2:
<*ι£ι-ΐ2α2 = £i> (i) ί Λ + α , ί χ = β2. (ϋ)
Multiply (i) on the left by ö^:
«i a i f i"" «i^2a2 = «101· (üi)
From (ii) we have ξ2(χ.1 = β2—^ι> so> taking the conjugate, «if2 = ?2 — fla2·
Substitute in (iii): α1αΐ£ΐ— ?2α2 + £ΐα2α2 = ÖLjßx.

§ 1.4. ANALYTIC PROJECTIVE GEOMETRY 13
Noting tha t α2α2 is a real number, so tha t f^ocg = ^^ι* we have finally ( c ^ + â ^ ) ^ = ä ^ - f ^ a ^ This equation allows us to compute f1#
In order to find f2, multiply (ii) by âx on the right:
f2alÖl + a2^15l = ß**l ( Ì V)
From (i): α ^ = βχ + ϊ&ύ fi«i = ?ι + <*2f2. Substitute in (iv):
f 2al«l + a 2 ( ^ l + ^ 2 ) = /*25l ( α ^ + α ^ ) ^ = /32äi —a2?i.
From this equation we compute | 2 . In particular, let us take ß = 1, so tha t ^ = l,/?2 = 0. Denoting
α1ά1+α2ά2 by iVa, we find (provided a ^ O ) : 1
(fit fs) = ϊ ν^( ( * ι> — a 2) ·
Thus (a1? a2)(ä!, —a2) = iVa. As the relation between (OL19 a2) and (&l9 — a2) is symmetric,
we have also (âl f — α2)(αΐ9 α2) = iVa. This leads us to the denotation (1/Ν(χ.)(άΐ9 — α2) = oc"1, so
t ha t αα_ 1 = α- 1α = 1. The reader may now verify the following special cases of the
associative law for multiplication: (/?α)α-ι = β. α-ΐ(α0) = β.
The following example shows tha t the associative law for multiplication is not generally valid.
{( / i ,0) ( / 2 ,0)}(0 ,A) = (0, -j%), ( / i>0){(/2 ,0)(0, ;1)} = (0 , / 2 ) ;
The verification is left to the reader.
§ 1.4. Analytic projective geometry .
APPG is used throughout the book as the standard model for the axiom system of plane projective geometry; ASPG from chapter IV onwards for t ha t of threedimensional projective geometry.
The reader may have some knowledge of projective geometry,

14 INTRODUCTION Chap. 1
obtained on the basis of Euclidean geometry, or by some other approach. I shall sketch here a method which uses only elementary algebra and which presupposes no geometrical knowledge. I t is well known that in plane projective geometry coordinates can be introduced, such that a point is determined by the ratio (x09 xl9 x2) of three numbers. In fact, we use this as the definition of a point. In this section we use ' 'number" in the sense of "real number"; however, the theory remains valid for any field. Later on it will be extended to arbitrary division rings (§ 3,4). Let F denote the field of reals; Fn is the set of sequences of n numbers (xl9 . . ., xn).
Definition. Two sequences of n numbers (xl9 . . ., xn) and (yl9 . . ., yn) are proportional if there exists a number c Φ 0, such that yi = cx{ (i = 1, . . ., n).
It is easy to see that proportionality is an equivalence relation in Fn. Therefore Fn can be divided into equivalence classes with respect to this relation. The null sequence (0, . . ., 0) constitutes such an equivalence class.
Definition. An equivalence class in Fn with respect to the relation of proportionality, which does not contain the null sequence, is a ratio (more exactly: an n-ratio).
In other words: Two sequences (x19 . . ., xn) and (y19 . . . , yn) are in the same ratio, if they are proportional.
We can now define analytic plane projective geometry (APPG).
Definition. A point of APPG is a ratio of 3 numbers (x09 xl9 x2) . x09 Χχ, x2 form a set of coordinates of the point. It is clear that (cx09 cxl9 cx2) (c Φ 0) is another set of coordinates of the same point.
Definition. A line of APPG is the set of points whose coordinates satisfy a linear equation: (1) a0xQ+a1x1+a2x2 = 0 (a0, al9 a2 not all 0).
Note that the line is determined by the ratio (a0, al9 a2)9 and conversely. Therefore (a09 al9 a2) is called a set of coordinates of the line. Again (caQ9 cal9 ca2) (c Φ 0) is another set of coordinates of the same line.

§ 1.4. ANALYTIC PROJECTIVE GEOMETRY 15
I t is well known from linear algebra tha t , if (p09 pl9 p2) and (?ο> ?i> Q2) a r e non-proportional solutions of (1), then all the solutions of (1) are obtained by substi tuting real numbers for λ and μ in xi = λpi+μqi (i = 0, 1, 2). This gives
T h e o r e m 1.4.1. If P(p09 pl9 p2) and Q(q09 ql9 q2) are different points, then a parametric representation of the line PQ is xi = ^Vi^^ii (* — >̂ 1> 2); abbreviated: X = λΡ+μζ).
T h e o r e m 1.4.2. If a0x0+a1x1-\-a2x2 = 0 and bQx0-\-b1x1+b2x2==0 are lines, intersecting in a point S, then the equation of any line through 5 is of the form
(2) λ(α0χ0+α1χ1+α2χ2)+μ(ο0χ0+ο1χ1+ο2χ2)=0.
PROOF. I t is clear tha t (2) represents a line through S. Now let I be a line through 5 and P(p0, pl9 p2) a point on I, P Φ 5 . We can find λχ and μλ such tha t
^οΡο+αιΡι+α2Ρ2)+μΛΚΡο+^1ρ1+ά2ρ2) = 0.
Then Α1(α0^0+α1^1+α2^2)+/ / ι (^ο^ο+^ι^ι+^2^2)= =^ i s ^ n e equation of the line SP, tha t is l.
If a and β are lines, we shall often denote their equations by a = 0 and β = 0; the line with equation λ<χ.+μβ = 0 will be denoted by λκ-\-μβ.
In the preceding definitions and theorems a peculiarity of APPG becomes apparent, namely the duality principle, which consists in the possibility of interchanging points and lines in the theorems. I shall not go into this subject here, because I have to treat it in the main text of the book (see Th. 3.3.2). I need only a few theorems of APPG.
T h e o r e m 1.4.3. Given two different points, there is exactly one line which passes through both of them.
P R O O F . Let P{p0, pl9 p2) and Q{q0, ql9 q2) be different points. The equations I0P0+Î1P1+I2P2 = ° a n d £ο?ο+£ι?ι+£2?2 = ° h a v e
exactly one ratio (ξ09ξΐ9ξ2) as a solution. This is the set of coordinates of the required line.
REMARK. The equation of PQ is

16 INTRODUCTION Chap. 1
CCQ %I X2
Po Pi P2 I = 0. ÏO Ï 1 ?2
I t is easily seen by substitution tha t the coordinates of Py
and those of Q satisfy this equation.
Theorem 1.4.4. Given two different lines, there is exactly one point which belongs to both of them.
PROOF. The equations of the lines, a0x0+a1œ1+a2x2 = 0 and bQcc0+b1x1+b2x2
= 0, determine a ratio (x09 xl9 x2) as their solution· This is the set of coordinates of the point of intersection.
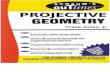
Theorem 1.4.5. (Desargues' theorem). Let ΑλΑ2Αζ and ΒλΒ2Βζ
be triangles; ^4f and Bi (i = 1, 2, 3) are called corresponding vertices; sides connecting corresponding vertices, e.g. AXA2 and B1B29 are corresponding sides. I t is supposed tha t corresponding
vih \A3
C3S Cz
>Ci
b2
rBò
hi
Fig. 1.1.

§1.4. ANALYTIC PROJECTIVE GEOMETRY 17
vertices as well as corresponding sides are different. If the lines connecting corresponding vertices pass through a point 0 , then the points of intersection of corresponding sides are on a line.
Several proofs are given in books on projective geometry. I give here a purely algebraic proof.
Proof. By Th. 1.4.1 we have B± = ρΟ+σΑ^, we may divide the coordinates of B1 by p, so tha t
Bx = 0+λ1Α1. Similarly, B2 = 0-\-λ2Α2,
Β3 = 0+λ3Α3.
If A2Ag intersects B2B3 in Cl9 then
but also C l = ^Α2+μ3Αζ, Ci = v2B2+v3B3 = ν2(0+λ2Α2)+ν3(0+λ3Α3)
= K + v8 ) ° + ν2λ2Α 2 + νΖλ3Α 3· This gives (v2+v3)0 = (μ2—ν2λ2)Α2+(μ3—ν3λ3)Α3; so if v2+v3 φ 0, 0 would be on A2A3, which is not the case. I t follows tha t v2+v3=0.
Thus Ci = ν2(λ2Α2—λ^Α3). After dividing the coordinates of Cx by v2, we obtain
Cx = λ2Α2—λ3Α3.
Similarly, if C2 and C3 are the intersections of AXA3, BXB3
and Α±Α2, ΒΧΒ2 respectively, then C 2 = Λ3Α3 λ1Α1
C3 = λιΑ1—λ2Α2. We see that C3 = — Cx—C2. Thus C3 is on C1C2.
For the next theorem we need some preliminary definitions. A hexagon is a sequence of six points AYA2A3A^AhA^ the vertices, of which no three are collinear, and of six lines AiAi + 1
(i = 1, . . ., 6; ΑΊ = Ax), the sides of the hexagon. Ai and ^Li + 3
(i = l , 2,3) are opposite vertices; AiAi^.1 and ^4ί+3^4<_ΐ_4 are opposite sides. A line joining opposite vertices is a diagonal; the intersection of opposite sides is a diagonal point. A diagonal point P corresponds to a diagonal d, if d contains the two vertices which are not on a side through P .

18 INTRODUCTION Chap. 1
Theorem 1.4.6 (Pappos* theorem). If two of the diagonal points of a hexagon are on their corresponding diagonals, then the same is true for the third diagonal point.
P R O O F . Let Αλ. . . Αβ be the vertices of the hexagon and CL19 . . ., αβ its sides, beginning with A1A2 = OL19 and ending with A6AX = αβ. The intersections ax n a4, a2 n a5, a3 n ae are Cl9
C2, C3 respectively. Assuming tha t C± is on AsAe and C2 on AXA±9
we must prove tha t C3 is on A2A5. P u t -43^4e = jffjL, - 4 ^ 4 = β2. We have α4 = ν^+ρβ^ as we
may multiply OLX and /?x each by a number, we may write
(1) a4 = a1+i91.
α3 = σα4+τ/?2; multiplying α3 by σ_1, β2 by τ_ 1 , we obtain
(2) α3 = α4+/?2 = αί+β1+βΛ.
Similarly, keeping in mind tha t every newly introduced equation of a line may be multiplied by some number, we have (3) ο^2 = α3+κβ1 = α1+β2+λβ1 (λ = κ+1).

§1.4. ANALYTIC PROJECTIVE GEOMETRY 19
(4) *Β = *2 + ξβ2 = *1+μβ2+λβ1 (μ = ξ+1). α6 = **+θβι = ^1+μβ2+ηβ1 (η = θ+λ).
On the other hand, αβ = εα.1-\-ζβ2. The last two equations give ηβχ = (ε—1)<χ.1+(ζ—μ)β2. If η
were not 0, then βχ would contain Al9 which is not the case; so η = 0. (5) α6 = Λχ+μβ2. I t is now easily verified from (1)—(5) tha t
(λ—1)(μ —1)^+^2 = λ(μ — 1 )α 4 +α 5 = λμα 3 +(1— μ)α6. The line which has any of these expressions as the left-handside of its equation, passes through A29 Αδ and C3.
Order relations in APPG.
Let P and Q be different points; a parametric representation of the line PQ is X = λΡ+μζ). The points of PQ9 with the exception of P and Q9 can be divided into two classes Σχ and 272> such tha t μ\λ > 0 on Σχ and ///A < 0 on Σ2. Σλ and Σ2 are called the segments PQ. If i? and S are on different segments PQ, we say tha t R and 5 separate P and Ç.
Theorem 1.4.7. If i? and 5 separate P and Ç, then P and Ç separate R and 5 .
P R O O F . Suppose R = λλ Ρ+μ$; S = λ2 Ρ+μ<$; then {λ1μ2—λ2μ1)Ρ = μ^—μ^; (λ1μ2—λ2μ^ = — λ^+μ2Ξ.
If 2? and S separate P and Ç, we have λ1μ1λ2μ2 < 0, which shows, by the last two equations, tha t P and Q separate R and 5 .
If a and β are different lines, then any line through their point of intersection S has an equation of the form λχ+μβ = 0 (Th. 1.4.2). The lines of this pencil, with the exception of a and β9
can be divided into two classes Φχ and Φ2, such tha t μ/λ > 0 for every line in Φχ and μ/λ < 0 for every line in Φ2.
Φλ and Φ2 are double-angles in the pencil S. If two lines γ and δ of the pencil are in different double-angles, we say tha t γ and ò separate a and β.

20 INTRODUCTION Chap. 1
Theorem 1.4.8. If R and S separate P and Q, while T is a point outside PQ, then TR and TS separate TP and TQ.
PROOF. We have R = λ1Ρ+μ1 Q and S = λ 2 Ρ+μ 2 (? with λ1μ1λ2μ2 < 0.
The equation of TP is a = 0, tha t of TQ is β = 0, where XQ XI X2
(X = I IQ t j I 2
Po Pi P2 The equation of TR is
#o #i
ß = x9
IQ ti t 2
?0 ?1 ?2
*o = o, «1
^ιΡο+ΖΊΪο ^ ιΡ ι+^ ι? ι AiPi+ftiÎ2 which is easily reduced to λ^+μ^ = 0.
Similarly the equation of TS is λ2<χ.+μ2β = 0. Then λλμ^λ2μ2 < 0 is exactly the condition tha t TR and TS
separate TP and TQ.
COROLLARY. The relation between separating pairs of points on a line is invariant under projection. In other words, if PQ and RS are separating pairs on a line I and P \ Q\ R\ S' are the projections of P , Ç, R, S on m from a point 3Γ outside I and m, then P ' and Q' separate R' and S'.
The relations of separation between pairs of points of a line I constitute what is called a cyclical order of Z.
Here the development of APPG will be discontinued; it is necessary to say a few words about analytic solid projective geometry (ASPG).
§ 1.5. Analytic solid projective geometry.
As most of what I have to say about it is similar to what has been said in § 1.4, I can be brief.
Definition. A point of ASPG is a ratio of four numbers (x0, xl9 x29 xz)\ these numbers from a set of coordinates of the point.

§ 1.5. ANALYTIC SOLID PROJECTIVE GEOMETRY 21
Definition. A plane of ASPG is the set of points whose coordinates satisfy a linear equation
(1) a0x0+a1x1+a2x2+cisXs = 0 (not every a{ = 0). The plane is determined by the ratio (a0, al9 a2, a3); the four
coefficients form a set of coordinates of the plane.
Definition. A line is the intersection of two different planes. The following theorems follow from the theory of linear equations.
Theorem 1.5.1. If Ρ(ρ{) and Ç(î<) are different points of a line Z, then a parameter representation of Z is
%i = λΡι+μ<1ί (i = h 2, 3, 4).
Theorem 1.5.2. If P(Pi), (?(?*), Rfa) are points in a plane a, but not on a line, then a parameter representation of a is
Xi = *Pi+Mi+vri (i = !> 2> 3> 4 ) ·
Theorem 1.5.3. Given two different points, there is exactly one line which contains both of them.
Theorem 1.5.4. Given three points not on a line, there is exactly one plane which contains them.
Theorem 1.5.5. Given a line Z and a point P not on Z, there is exactly one plane which contains P and Z.
Theorem 1.5.6. Given a plane a and a line Z not in a, there is exactly one point contained in a and in Z.
§ 1.6. Vector spaces over a divis ion ring.
The theory of vector spaces over a field is well known. In chapter 5 I need the corresponding theory for an arbitrary division ring. This theory is hardly more involved than tha t for the commutative case.
Let us summarize the main definitions and theorems. We must distinguish between left vector spaces and right
vector spaces. In the following the theory of left vector spaces is considered.
A left vector space 95 over the division ring § is a set of elements called vectors, in which two operations are defined, namely ad-

22 INTRODUCTION Chap. 1
dition of two vectors, a + b , and multiplication of a vector by an element of g, pa. (In the case of right vector spaces the element of Ç is written to the right of the vector, i.e. ap).
With respect to addition, SS is an abelian group; the multiplication satisfies the rules
p a + p b = p (a+b) pa+ga = (p+g)a p(?a)=(p?)a l a = a.
We can deduce that Oa = 0; here 0 is the zero of the addition of vectors.
The elements of Ç are also called scalars. The vectors a1, . . ., a* are independent if p1a1+ . . . +Pi&k = 0
implies px = . . . = pk = 0. If the maximal number of independent vectors in SS is a finite number n9 then SS is n-dimensional.
Let e1, . . ., en be n independent vectors in an n-dimensional vector space SS; then every vector x in SS can be written uniquely in the form (1) x = x1e1+ . . .+ccnen. xl9 . . ., xn are the coordinates of x with respect to the basis © , . . · , © .
Thus by the choice of a basis e1, . . ., en, a one-to-one mapping φ of SS onto the set %n of sequences (xl9 . . ., xn) is established. If we make %n into a vector space Rn(x$) by the definitions
(xl9..., xn)+{yl9..., yn)=(oc1+yl9..., ocn+yn)9
p(xl9..., xn)=(pxl9..., pxn), φ becomes an isomorphism between SS and Rn{%)-
If a1, . . ., a* are independent vectors in SS, then the linear combinations of a1, . . . , a* (i.e. the vectors which can be written as Pia1+ . . .+pÄafc) form a fe-dimensional subspace of SS. Another way to define linear subspaces is by linear equations. The solutions of a system of r independent right-linear equations 2t̂ *a*Ä = ° (ft = 1, · . . , r) form a (n—r)-dimensional subspace of SS.
Let u 1 , . . . , ιιΛ be independent vectors in SS;
(2) u* = 2*4 e*·

§ 1.6. VECTOR SPACES OVER A DIVISION RING 23
Any vector x can be written uniquely as
(3) X = 4 u l + · · · +^nUW· Substituting (2) in (3), we obtain
i k k i
Comparing with (1), w^ find
(4) xk = 2 θβ\η{. (k = 1, . . ., n) i
(4) is the coordinate transformation from the basis e1, . . ., en to the basis u1, . . ., u n .
The proofs of these theorems can be given exactly as in the commutative case, the only difference being tha t attention must be given to the order of the factors in a product.

CHAPTER II.
INCIDENCE PROPOSITIONS IN THE PLANE
§ 2 . 1 . Trivial axioms, duality.
Definition. A plane projective geometry is an axiomatic theory with the triple <i7, Λ, 7> as its set of fundamental notions and VI, V2, V3 (formulated below) as its axioms, possibly with additional axioms. Π and A are disjoint sets and 7 is a symmetric relation between 77 and A (that is, if a I b then either a e Π and b € A or a e A and b e 77; alb is equivalent to b I a). The elements of Π are called points those of A are called lines; I is the incidence relation, a I b is read "a is incident with 6".
REMARKS. By what is said in § 1.1, it is clear that by using the words "point" and "line" we do not refer to any connection with space-intuition. On the contrary, we have to avoid the danger that these words lead us to an injustifiable appeal to space-intuition just the same as for the use of figures. Where it seems desirable the words "point" and "line" can be replaced by "element of 77" and "element of Ä\
The expression "the point P is incident with the line Z" or "the line I is incident with the point P " was used above instead of "P lies on Z" or "Z passes through P " or "Z contains P" . However, for the sake of liveliness of style, we shall often use one of the latter expressions instead of the former.
In future points will be denoted by capitals and lines by lower case letters.
Axioms.
Via. Given two different points, there is at least one line with which both are incident.
VIb. Given two different points, there is at most one line with which both are incident.

§2.1. TRIVIAL AXIOMS, DUALITY 25
V2. Given two different lines, there is at least one point with which both are incident.
V3. Π contains at least four points such that no three of them are incident with one and the same line, and at least two of them are different.
The axiomatic theory described above will be called $(Vl, V2, V3), or briefly *ß. More generally the axiomatic theory with axioms Vl, V2, V3, Al, A2, . . ., Ak is denoted by 5ß(Al, A2, . . ., Ak). A theorem which can be derived in 5ß (in other words, from Vl, V2, V3 alone) will be called trivial.
REMARKS. An axiomatic theory is a set of theorems which can be derived from the axioms. In the theory the fundamental notions are left unspecified. If we choose special notions satisfying the axioms, we obtain a model for the theory. For instance, a model for $ consists of disjunct sets Π0 and A0 and a relation J0, which satisfy Vl, V2, V3. Such a model is called a projective plane. Two projective planes </70,/l0,I0> and <771,yl1,71> are isomorphic if there is a one-to-one mapping π of 770 onto Π1 and a one-to-one mapping λ of Λ0 onto Λλ so that P11 if and only if nP I XL The latter condition is often expressed by saying that π and λ preserve incidence relations.
Different models for ?β(Α1, . . . , Ak) will often be denoted by $0(A1, . . . , Ak), 5ßi(Al, . . ., Ak), etc.
The unique line which, according to Vl, is incident with two different points A, B, will be designated as usual by AB.
The proposition which corresponds to Vlb in the same way as V2 corresponds to Via, is not taken as an axiom because it can be proved from Vl, V2, V3 (Th. 2.1.1).
It has been proved in section 1.4 that APPG is a model for the axiom system, consisting of Vl, V2, V3.
Theorem 2.1.1. In $ : Given two different lines, there is at most one point with which both are incident.
The proof is left to the reader. Note that only axiom Vlb is needed !
Theorem 2.1.2. In *β: Λ contains at least four lines such that no three of them are incident with one and the same point.

26 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
PROOF. By V3 we can find four points A19 A2, A3, AA, such tha t no three of them are incident with one and the same line.
These four points are different (why?)1). We shall show tha t the four lines AXA29 AXA^ A2Ai9 Α3Α± satisfy the condition of theorem 2.1.2.
A.
Fig. 2.1.
Suppose tha t ΑλΑ2, ASA^9 A1AS were incident with a point P. Then Ax and P are both incident with AXA2 as well as with AXAZ, while AXA2 and A±A3 are different lines (why?). I t follows from Th. 2.1.1. tha t P = Ax. In the same way we find tha t P = A39 so^4 1 = ^43, which is false. We have now shown tha t A±A29 A3At and ^4^43 are not incident with a point. The proof for the other triples is analogous.
The reader must have been struck by a symmetry in these axioms and theorems which can be described as follows. If in Via , V lb , V2 and V3 we interchange the words "point" and "line", we obtain V2, Th. 2.1.1, V i a and Th. 2.1.2 respectively.
Now let S3 be a proof of a theorem Θ from VI , V2, V3. Let us interchange "point" and "l ine" in 33 as well as in Θ, obtaining S3' and Θ'. Obviously S3' is a proof of Θ' from V2, Th. 2.1.1, V i a and Th. 2.1.2. But Th. 2.1.1 and Th. 2.1.2 can in their turn be derived from VI , V2, V3, so tha t Θ' can be derived from VI , V2, V3.
Thus we have proved:
Theorem 2.1.3. If in a theorem of $ we interchange the words "point" and "line", we obtain again a theorem of 5β.
Two theorems which change into each other if we interchange "point" and "line", are called dual. Theorem 2.1.3 expresses tha t the duality principle is valid for iß.
*) If we speak of two points, this does not mean that the points must be different. In the same way, if in arithmetic we speak of the sum of two numbers, these numbers can be equal.

§2.1. TRIVIAL AXIOMS, DUALITY 27
REMARK. Th. 2.1.3 has a character different from other theorems, such as Th. 2.1.1 and Th. 2.1.2. I t is not a theorem in $ , but a theorem on *ß. I t can also be expressed as follows: If <770, A0970> is a projective plane, then <Λ0, IJ09 70> is also a projective plane. These two planes are said to be dual to each other.
We shall now simplify our terminology by adapting it to common use.
Definitions. The point of intersection of two different lines is the point tha t is incident with both. The point of intersection of I and m is denoted by / n ra.1) The connecting line of two different points is the line which is incident with both. The connecting line of A and B is denoted by AB. The points A{ (i = 1, . . ., n) are collinear if there is a line with which each of them is incident. The lines Zt (i = 1, . . . ,n) are concurrent if there is a point with which each of them is incident.
A line is determined uniquely by the set of the points which are incident with it, and conversely. Therefore, no misunderstanding can arise if we identify a line with this set; accordingly we shall write "P el" (read: P belongs to I) instead of "PU"; for "not P I I" we write " P 4 Γ\
A triangle is a set of three different points Al9 A29 As and three lines al9 a2, a3 such tha t Aieak for ιφΗ9 but Ai4ai
(i9 k = 1, 2, 3). The points A{ are the vertices, the lines a{ the sides of the triangle. The triangle is denoted by A1A2A3. The vertex A{ is opposite to the side a{. The notation for a triangle is always so chosen, tha t a vertex and the opposite side are denoted by a capital and the corresponding lower case letter (with the same subscript).
The dual of a triangle is a trilateral. The description of this notion is left to the reader. He will notice tha t a triangle and a trilateral are the same figure, described in different ways.
*) If P is the point of intersection, then, according to the current notation in set theory, lr\m = {P}. I am sure that no confusion will be caused by the identification of P and {P}.

28 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
§ 2.2. Desargues' proposition.
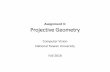
Models. Analytic plane projective geometry APPG is a model of VI, V2, V3. Is this system of axioms complete for APPGt As it stands, this question has no precise meaning. We can now make it more precise: Can every theorem of APPG which is formulated by means of the notions "point", "line" and "incident" alone, be derived in $ (VI, V2, V3)? The answer is in the negative. In fact, we shall construe a theorem of APPG, denoted (for a reason which will presently be explained) by Dll9 and a model M of $ (VI, V2, V8) in which Du is false. If Dn were derivable in *ß (Vi, V2, V3), it should be true in every model of *ß, in particular in M.
DX1 is Desargues' proposition.
hi
Fig. 2.2.

§2.2. DESARGUES' PROPOSITION 29
Desargues' Proposition (Dn). Let two triangles AXAZA3 and B1B2BZ be given. A{ and Bi are corresponding vertices; at and bi are corresponding sides. If every two corresponding vertices as well as every two corresponding sides are different and the lines connecting corresponding vertices are incident with a point 0, then the corresponding sides intersect in three collinear points.
Dn is a theorem in APPG (Th. 1.4.5).
REMARK. Note that we speak here of Desargues' proposition, not of Desargues' theorem. The reason was explained in section 1.1.8.
The model M is defined as follows: There are three kinds of M-points, namely proper M-points, improper M-points and an extra Af-point Y. A proper M-point is a pair of real numbers (x9y). An improper M-point is a real number (p).
There are also three kinds of M-lines. An M-line of the first kind is a pair of real numbers [ra, ri\. An M-line of the second kind is a real number [c]. There is one M-line ω of the third kind.
REMARK. The notation is so chosen, that numbers in ( ) indicate points; numbers in [ ] indicate lines.
The incidence relation IM is defined thus (read "if and only if" for "<->"):
(x> y) IM I171* n]<r->y = mx+n for m ^ 0, y = mx+n for m > 0, x ^ 0, y = 2mx+n for m > 0, x > 0.
(p) lM[m9n]*-+p = m. {^V)IM [C] <^X = C. Y IM M f° r every c. (p) IM ω for every p. Y ΙΜω.
No incidences occur except those listed above. M is a model of 5β.
Exercise. The reader should verify this by examining all the cases for every axiom.
The verification is made easier by the following more intuitive but less precise description of the model M. In the Cartesian

30 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
plane, completed by points at infinity, consider as M-lines the following sets:
1 s t kind, the Euclidean lines with non-positive slope, and the Euclidean lines with positive slope m9 with the part at the right of the axis of Y hinged up until the slope has become 2ra.
2nd kind, the lines parallel to the axis of Y. 3 r d kind, the line at infinity.
To show tha t Z) n is not valid in M, we consider the triangles AXA2A3 and BXB2BZ with A± = (0, 0), A2 = ( - 1 , 1),AZ= (0,2,) B± = (2, 0), B2 = (1, 1), Bz = (2, 2). The M-lines AxBl9 A2B2
Fig. 2.3.
and A3B3 are incident with the M-point (0). The three points of intersection of the corresponding sides are not collinear.
Exercise. The reader should verify this. We have now proved:
Theorem 2.2.1. D1X is independent of VI , V2, V3. We can introduce D1X as a new axiom and form 5ß(Vl, V2, V3,
Z)n) , briefly denoted by ^ß(-Dn). But we shall first give Desargues' proposition a more general form which is more convenient in the applications.

§2.2. DESARGUES' PROPOSITION 31
Generalized Desargues' Proposition. (-Du*) Let there be given 7 points A1A2A3B1B2BsO and 9 lines a^a2a3b \b2b3c-±c2c3 such that none of the triples AXA2A3 and B1B2B3 consists of three coinciding points and that the following incidences take place:
A±ea29 a39 Cj_; A2ea39 a^9 C2; A3eal9 a29 c3; Bi*b2, b39 cx\ B2eb39 bl9 c2; B3€bl9 b29 c3; U € Cl9 C2, C3.
Then there exist three points Cl9 C2, C3 and a line Z (not in every case unique) such that C1eal9 bl9 I; C2ta29 b29 Z;
REMARK. If in future we say: ''apply the Generalized Desargues' Theorem to the points PQR\STU\V and the lines pqr\stu\vwx" it is always tacitly understood that the order of the points and lines is the same as above, e.g. P has the role of Al9 Q of A29 V of 0, p of al9 etc. The vertical lines serve to facilitate the reading.
Theorem 2.2.2. In $ ( ö n ) the Generalized Desargues' Proposition is a theorem.
PROOF. We verify that the assertion is trivial in every case where the conditions of D1± are not satisfied.
Case I. ax = bv Take C3 such that C3 e α3, b3 and C2 such that C2 ea29 b2; then Z such that C2, C3el and Cx such that Cx ca^ Z.
Further on we may suppose that ai Φ 6t; Ct = a{ n 6t (i = 1, 2, 3).
Case II. ^4X = 2?le Then C2 = C3 = AV Take / such that C !, A 1 e l9
Further on we may suppose that A{ Φ B{ (i = 1, 2, 3). Case III. ^4l5 A2, A3 are different points on a line Z. Take
Ct- = ft/n Z. Case IV. Ax = A2 Φ A3. Then ax = a2 and C1? C2 e 04. If
C3 € flj we can take Z = ax. If C3 ^ al9 we consider two cases. ' Case Va. ^4X = A2 Φ A39 C3 4 al9 Βλ Φ B2. From AXC3 = a3
and a3 Φ b3 we find A ± 4 63, so cx Φ c2. 0 = cx n c2 = Ax . c3 = 0̂ 4 3 = a1? so B 3 €al 5 so J53 = Cx. Similarly B 3 = C2. Take & = C X C 3 .
Case Vb. Like Va, but Bx = B2. Then 6X = 62, so C± = C2. Take for Z a line through Ci and C3.
Now the proof is complete.

32 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Exercise . Show by a counterexample tha t the assertion in D n need not be true if Ax = A2 = Az.
Dual of Desargues' Proposit ion {dDn). Let two t r i l a te ra l αχα2α3 and b1b2b3 be given, such tha t corresponding sides as well as corresponding vertices are different. If corresponding sides intersect in points which are incident with a line I, then the lines connecting corresponding vertices are incident with a point 0 .
I t is clear tha t dDu is also a converse of Du.
hi Fig. 2.4.
T h e o r e m 2.2.3. dDir is a theorem in $(£>n) .
P R O O F . Let Cf be the point of intersection of a{ and b^ let AiBi = Ci (ί = 1, 2, 3). We apply the Generalized Desargues' Theorem to the points A1B1C2\A2B2C1\CS and the lines &2«2cil^iaic2la3^· There exist points Q, P9 0 and a line m such tha t Qzb29 bl9 m; P e a29 al9 m; 0 e cl9 c29 m. I t follows t h a t Q = BS9 P = AZ9 m — c3, so tha t the theorem is proved.
From Th. 2.1.3 and Th. 2.2.3 we deduce immediately;

§2.2. D E S A R G U E S ' PROPOSITION 33
Theorem 2.2.4. The duality principle applies to ^{D11L). The figure of Dn (fig. 2.4) is a configuration, consisting of 10
points and 10 lines; each of the points is incident with three of the lines and each of the lines is incident with three of the points. To each configuration-point P there are three configuration-points which are not with P on a configuration-line; these three points are on a line which is called associated with P .
For the application of Dll9 we fix the following standard notation: Triangles A1A2A3 and B1B2BZ; A2AZ = a19 etc.;
AiBi = c€\ cx n c2 n c3 = 0; a{ nb{ = Cf; CXC2 = Z. Then the following pairs are associated:
A{ with b{; B{ with a^ C{ with c^ 0 with Z. The relation between a point and its associated line can be
elucidated as follows. There is a one-to-one mapping of the 10 configuration-points onto the 10 combinations of two out of the numbers 1, 2, 3, 4, 5, such that the three points on a configuration-line correspond to the three combinations out of three of these numbers; accordingly, every configuration-line corresponds to a combination of three out of 1, 2, 3, 4, 5. For instance, such a mapping is given by the following table, where a point and its associated line are placed beside each other.
Αλ—14 Λ2—24 ^3-^34 B1—15 B2—25 B3—S5 C1—2S C2—13 C3—12 0 — 4 5
b1—2S5 b2—135 63—125 a1—234 a2—134 «3—124 c3—145 c2—245 c3—345 Z —123
It is clear that the point (pq) and the line (rst) are associated if the numbers p, g, r, A, t are all different. We shall acquire a deeper insight into this mapping by the use of solid geometry (see the remark after Th. 4.1.7).
Special cases of D1X arise if we require that one or more configuration-points are incident with their associated lines. If this

34 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
is the case for one point, this point can be either 0, or one of the points Ai9 B{ or a, point C*.
Exercise. Verify that the assertion in D1X becomes trivial if an extra incidence between a configuration-point and a non-associated configuration-line is postulated.
We shall treat in detail the case where A1eb1. Small Desargues' Proposition (D10). Let two triangles
A1A2A3 and B1B2B3 be given, such that corresponding vertices as well as corresponding sides are different, and that A1eb1.
Let at. and b{ intersect in C< (i = 1, 2, 3). If the lines connecting corresponding vertices are incident with a point 0, then Cl9 C2, C3 are collinear.
REMARK. In APPG the figure of Dn depends upon 11 parameters; for instance, choose arbitrary points 0, Al9 A29 Az (4X2 parameters) and J5i on 0A{ (3x1 parameter). The figure of the Small Desargues' Proposition depends upon 10 parameters. That is why Desargues' Proposition is called Dn and the Small Desar-gues' Proposition Z)10.

§ 2.2. DESARGUES' PROPOSITION 35
Of course, D10 is a consequence of Όλ1. Later we shall see that Du is independent of VI, V2, V3, D10.
D10 can be generalized in the same way as Dn.
Generalized Small Desargues' Proposition (D*0).
Let there be given 7 points A1A2As\B1B2B^\0 and 9 lines a1a2a3\b1b2b3\c1c2cz such that none of the triples AXA2AZ and BXB2BZ consists of three coinciding points and that the incidences, postulated in Ζλ£, take place, with in addition Ax e b19 then there exist points Cl9 C2, C3 and a line Z such that C1€ al9 bl9 I; C2e a29
Theorem 2.2.5. In $(£>10), D?0 is a theorem.
PROOF. In the proof of Th. 2.2.2 it has been verified that the assertion is trivial in every case where the assumptions of D10 are not fulfilled.
The dual of D10 (denoted by dD10) can be formulated as follows: Let two trilaterals a1a2az and 6162fe3 be given, suchthat cor
responding sides as well as corresponding vertices are different, and that bx is incident with Ax. If corresponding sides intersect in points which are incident with a line Z, then the lines connecting corresponding vertices are incident with a point 0.
Theorem 2.2.6. dD10 is a theorem in $(£>10).
PROOF. Like that of Th. 2.2.3, using D& instead of D£.
It follows from Th. 2.1.3 and Th. 2.2.6: Theorem 2.2.7. The duality principle applies to ?$(D10).
By DjQ we shall denote Desargues' proposition with the extra hypothesis 0 e Z, by D\l
0 that with the extra hypothesis C1ec1. Proposition/)^. Let AtA2As and B1B2B3 be triangles such
that corresponding vertices as well as corresponding sides are different. Denote AiBi by ci9 a{ n 6t· by Ci9 and CXCZ by Z. If ci> c2> cs are incident with a point 0, which lies on Z, then C2 lies on Z.
Theorem 2.2.8. In ?ß(-D10), Df0 is a theorem.

36 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
PROOF. Apply D& to the points and lines OA1As\B2C3C1\A2\a2c3c1\lb1bz\c2asal9 where I = C1C3.
We find Pl9 P 2 , P 3 , m, such that Px€a29 l9 m; P 2 ec 3 , bl9 m; Pz€Cl9 b39 m.
In view of the remark after Th. 2.2.2 we may suppose that bx φ cs and b3=£ c±. Then we infer successively that P2 = BZ9 P 3 = Bl9 m = b29 Px € a29 b29 Px = C2, C2 e I.
The formulation of D\l gives no difficulty. Theorem 2.2.9. In *$(D10)9 D\] is a theorem.
PROOF. Apply D*0 to the points and lines C1AzC2\B2OB1\Bs\a2la1\c1bzc2\b1csb29 where I = C1C2.
By Th. 2.2.7, the duals of Df0 and D\l are also theorems in ξβ(Ζ)10).
The converses of Th. 2.2.8 and Th. 2.2.9 also hold. Theorem 2.2.10. In %(D}0)9 D10 is a theorem. For the proof, we first have to extend DfQ to D*Q*. This is a little less easy than for D10. It can be done as follows.

§2.2. DESARGUES' PROPOSITION 37
Fig. 2.7.
-D/Q* . Let points A1A2AzB1B2BzOC2Cz and lines a±a2azb±b2&3 cic2cs be given such tha t
A1€a29 aZ9 cx
A2 € a^9 uZ9 c2
1> a2> C3 A3€ a
# l € & 2 > δ 3> Cl
B2ebl9 63, c2
Bzebl9 b29 cz
U € C j , C2y C3, I
C2 € a, 2> ^2> *
^ 3 € Λ 3 > ^3> >̂
then there exist points Pl9 P29 P 3 and a line m, such tha t Pxeal9 b19 m9 P2ea29 b29 m9 PzeaZ9 bZ9 m.
We must prove tha t D*0* is trivial in every case where the conditions of D*0 are not fulfilled.
This is done by simply repeating the proof of D£. Now D10 follows by applying D*0* to
OA2Az\B1CzC2\A1\a1czc2\lb2bz\c1aza2\9 with I = C2C3, the roles of C2, C3, Z being taken over by BZ9 B29 b± respectively. We find Pl9 P29 P 3 , m, such tha t
Px€al9 l9 m; P2ecZ9 b29 m; PZ€C29 bZ9 m. I t follows tha t P 2 = BZ9 P 3 = B29 m = b19 Px € α1? δχ, Px = C1?
C l € Z . Similarly, it can be proved tha t
T h e o r e m 2.2.11. D10 is a theorem in $(£>}J).

38 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Summarizing Theorems 2.2.8, 2.2.9, 2.2.10 and 2.2.11, we have Theorem 2.2.12. In β̂, the propositions D10, Z)^, D\l and
their duals are all equivalent. It was proved in Th. 2.2.1 that Dxl is independent of Vl9
V2, V3. However, the triangles AXA2AZ and BXB2B3 in the proof of that theorem were such that Ax e B2BZ; so D10 does not hold in the model M. Therefore the following theorem, which is stronger than Th. 2.2.1, holds.
Theorem 2.2.13. D10 is independent of Yl9 V2, V3.
Let us now turn our attention to Desargues' proposition with two extra incidences in the hypothesis. If two points, which are not connected by a configuration-line, are on their associated lines (e.g. Ax € bl9 Cx€ cx), the assertion becomes trivial. Therefore only the following cases must be considered:
Ai Fig. 2.8.

§ 2.2. DESARGUES' PROPOSITION 39
Proposit ion D9. Let A1A2AS and Bx B2 Bz be triangles such tha t corresponding vertices as well as corresponding sides are different. Denote AiBi by ci9 a i n bi by Ci, If cl9 c29 cz are incident with a point 0 , and A1€b1 and ^42 e 62, then Cl9 C2, C3 are collinear.
Generalized proposit ion D9 (denoted by D9*). As Dn*9 with the extra postulated incidences A±ebl9 A2eb2.
Theorem 2.2.14. In 5β(Ζ>9), D9* is a theorem.
PROOF. See the proof of Th. 2.2.2. Theorem 2.2.15. In 5β(Ζ)9), the dual of D99 denoted by dD99
is a theorem.
P R O O F . dD9 can be formulated as follows. Let the trilaterale a1a2a3 and b±b2b3 be given, such tha t cor
responding sides as well as corresponding vertices are different. Let AiB{ be denoted by ci9 a{ n b{ by C{. If Cl9 C2, C3 are on a line l9 while ^4X € bl9 A2eb29 then cl5 c2, c3 pass through a point 0.
Let us denote cx n c2 by 0 ; we prove tha t 0 € c3. By the remark following Th. 2.2.2 we may suppose tha t
Βζφ09 04α29 02Φ C3, bx^l9 Α2Φ C1. Let us provisionally denote 0B3 by c3, c3 n a2 by A'Z9 A2A'Z by %. Apply Z)9* to
^ l 1 ^ 2 ^ 3 | 5 1 S 2 f i 3 | 0 | a /1 a 2 a 3 | 6 1 & 2 6 3 | c 1 c 2 c 3 .
We find Pl9 P29 P39 m9 such tha t Ρχ€α19 bl9 m; P2ea29 b29 m; P 3 e a 3 , 63, m.
I t follows successively tha t P2 = C2; P 3 = C3; m— I; P1€bl9l; pi = Ci; C^eai; a'x = < 4 2 ^ = αχ; ^43 = fl1na2 = i 3 ; cs = c3; Oecz.
Theorem 2.2.16. In ^(D9)9 the duality principle holds.
PROOF. From Th. 2.1.3 and Th. 2.2.15.
Theorem 2.2.17. In %(D9), D\9 D\l9 D\n and £>JV, and their
duals, are theorems.
PROOF, a) . For D\. Instead, we shall prove the dual dD\, which is obtained from dD9 by changing the condition A2eb2
into Bxe ax. Apply D9* to
A1B1C2\A2B2C1\C3\b2a2cx|6,axc2|α3δ3 Ζ.

40 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
We obtain P19 P2, P3, rn9 such tha t P1€b29 bl9 m; P2ea29 al9 m; P3€Cl9 c29 m.
I t follows tha t P1 = Z?3; P 2 = A3; m = c3; P3e cl9 c2, c3. By Th. 2.2.16 we can infer D\ from dD\. b). For Dl1. The proof is identical with tha t for D{0 (Th. 2.2.8). c). For Z)Jn. If we take for the extra incidence relations A3 e b39
C1ecl9 we may repeat the proof of D\l0 (Th. 2.2.9).
d). For Z)JV. The proof of D\l0 can be used after interchanging
the second and third vertices of each of the triangles: Apply D9* to
C1C2A3\B2B10\B3\a2a1l\c1c2b3\b1b2c39 where I = C1C2. In fact, D99 D\9 D\l
9 Z)Jn, Z)JV and their duals, are all equivalent. We shall prove tha t Z)J implies D9; the proofs of the other cases are left to the reader.
Theorem 2.2.18. In $(£>J), D9 is a theorem.
PROOF. First generalize Dl to Z)g* in the obvious way. We wish to prove dD9 as formulated in the proof of Th. 2.2.15. Apply D\* to
A1B1C2\A2B2C1\C3\b2a2c1\b1a1c2\a3b3l. We obtain points Pl9 P 2 , P3 and a line m9 such tha t
Picb2> bl9 m; P2ea29 al9 m; P3ecl9 c29 m. I t follows tha t Px = B39 P2 = a3; m = c3; P3e cl9 c29 c3. This proves dD9.
By the dual of Th. 2.2.15, D9 holds in %(dD9).
Definition. If P is a fixed point and s a given line, then D11(P9 s) is Z) n with the additional conditions 0 = P9 I = s (in the standard notation; see after Th. 2.2.4). Analogously, if Pe s9 D10(P9s) will denote D10 with the additional conditions 0 = P9 I = s9 etc.

§2.3. COLLINEATIONS 41
§ 2.3. Collineations. Definition. A collineation is a one-to-one mapping of Π onto
itself, in which the image of every line is a line. In other words: A collineation consists of a one-to-one trans
formation π of Π onto itself, and a one-to-one transformation λ of A onto itself, which preserve incidence relations (that is, such that PI I entails πΡI λΐ). This is also expressed by saying that a collineation is an automorphism of the protective plane.
In 5β the collineations form a group, the collineation group ©($). At present we are not able to decide whether ®($) contains any element different from the identity.
Definition. If every line through C is invariant under the collineation ©, then C is called a centre of (£. A collineation with a centre is called a central collineation.
The following theorem is easy to prove. Theorem 2.3.1. In 5β: I. A centre of a collineation (£ is an invariant point of (£.
II. A collineation with two different centres is the identity. III. If in a central collineation © with centre C the line Z, not
through C, is invariant, then every point of I is invariant. IV. A collineation with two different lines of invariant points is
the identity (dual of II). Theorem 2.3.2. In $ : Every central collineation which is not
the identity has one and only one line of invariant points. PROOF. Let K be a central collineation with centre C. We write
P' for gP , V for (£Z, etc. Choose P such that P φΡ'\ then P φ C and P' € PC. If a is a line such that Pea, C 4 a, then a Φ a', and A = a n a' is an invariant point, for A' = CA n a' = A. As there are at least three lines through P (which follows from V3) we find another invariant point B. AB = d is an invariant line. If C 4 d, it is clear by Th. 2.3.1, III that every point of d is invariant. If C e d we reason as follows. Let X be any point on d, X Φ C, and let / be a line through X such that l Φ V (such a line exists by Th. 2.3.1, II). I nV = Y. Suppose Y 4 d; then Y A and YB are invariant lines not through C; it follows that every point of Y A as well as of YB is invariant, which is impossible by Th. 2.3.1, IV. Thus Y e d, Y = X, and X is invariant. From

42 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Th. 2.3.1, IV it follows immediately that there is only one line d of invariant points.
Definition. The line of invariant points of a central collineation & is called thè axis of ©. If the centre of Ê lies on the axis, © is a special central collineation.
Theorem 2.3.3. In $ : Let there be given a point 0, a line I and points P, P ' , such that 0, P, P ' are collinear, P φΟ,Ρ' φθ, P 4l, and Ρ ' ^ Z. Then there exists at most one central collineation (E with centre 0 and axis I such that ©P = P \
PROOF. Let A be any point outside OP. If a collineation © as mentioned in the theorem exists, then A' = (L4 can be constructed as follows. PA n I = 5, (λ4 η P '5 = 4 ' . If 5 is a point on OP, then B' = &B is constructed analogously from A and 4̂ '. Thus the image by Ê of every point is uniquely determined.
p' Fig. 2.9.
Definition. In this section we shall say that P, Pr , 0, I are in aZZo^d position, if P φ 0, P' φθ, P il, Ρ' i Z, OP = OP'. Throughout the book the central collineation with centre 0 and axis I which transforms P into P' will be denoted, if it exists, by (PP'02l2). Where this notation is used, it is tacitly understood that P, P ' , 0, I are in allowed position.
Theorem 2.3.3 asserts, that (PP'02l2), if it exists, is uniquely determined. We shall now investigate under which conditions it exists.

§2.3. COLLINEATIONS 43
Definition. If, for a given point 0 and a given line Z, the central collineation (PP'02l2) exists for every choice of P, Ρ' such tha t P, P' 0, I are in allowed position, then the plane is called 0-I-transitive.
Theorem 2.3.4. In <ß: Dn(0,1) implies tha t the plane is O-Z-transitive.
P R O O F . Let P , P' be points such tha t P , P ' , 0, Z are in allowed position. Let A be any point outside OP. We repeat the construction in the proof of Th. 2.3.3. PA nl= S, OA n P'S = A'. This construction results in a transformation @PP, which is defined for every point outside OP. A' = (5PP,(A).
The rest of the proof will be given in the form of three lemmas.
L e m m a 1. If Q 4 OP, Q4hQ' = <5PP> ((?), A 4 OP and A 4 0Q9
then (Spp, (A) = (£>QQ, (A).
P R O O F . If P = P' or A € PQ or A el, the result is obvious. So let us suppose t h a t P φ P', A 4 PQ and A 4 I. Denoting &PP,{A) by A', we apply D1X{0,1) to the triangles PQA and P'Q'A'. Firstly, it follows tha t QA intersects Q'A' on Z; and secondly, tha t (&QQ'(A) = A'.
L e m m a 2. Let Q, R be points outside OP and Z, and A a point on OP, but A φ 0. @PP,(Ç) = Q'\ ®PP>(R) = Ä ' · T h e n
© Q Q ' ( ^ ) = @ÄÄ'(4) ·
P R O O F . First suppose tha t 0Ç ^ 02?. By lemma 1 we have

44 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
<SQQ>(R) = R'; another application of lemma 1 gives the desired result. If OQ = OR, we choose 5 outside OP, OQ and I; then ®QQ'(A) = &SS>(A) = <5jur(A).
We are now able to extend @PP, to points of OP: Let Q be any point outside OP and l; ©PP'((?) = (?'; then for A on OP (A φ 0) we define ©PP/(^4 ) = (&QQ,(A ). Lemma 2 shows tha t the point A' = @PP/(^4) thus defined, does not depend upon the choice of Q. Moreover, we define @PP'(0) = 0.
L e m m a 3. The mapping @PP', thus extended, is a central collineation.
PROOF. We must show tha t the image of a line a is a line. This is clear if 0 e a and if a = I. Suppose 0 4 a and a ΦΙ\ anl = S. Choose Qoxia,Qi OP, Q4I. @PP'(<?) = <?'. By lemmas 1 and 2 @PP/ = @QQ', but &QQ'(CL) = SQ'. This proves the lemma, and thereby Th. 2.3.4.
Fig. 2.11.
As a special case of Th. 2.3.4 we note: Theorem 2.3.5. In ξβ: D^Q(0,1), where 0 el, implies tha t the
plane is O-Z-transitive.
As an immediate consequence of Th. 2.3.4 we have: Theorem 2.3.6. In $(£>u): If P, P\ 0, I are in allowed
position, then the central collineation (PP'02l2) exists.
Similarly, from Th. 2.3.5, together with Th. 2.2.8: Theorem 2.3.7. In $(£>10): If 0 el and if P, P\ 0, I are in

§2.3. COLLINEATIONS 45
allowed position, then the special central collineation (PP'02l2) exists.
The converses of Theorems 2.3.4—2.3.7 are also t rue:
Theorem 2.3.8. In ^5: If the plane is O-l-transitive, then Ό1λ{0,1) is valid.
Theorem 2.3.9. In ^5: If 0 e I and the plane is O-Z-transitive, then D*0(O9 I) is valid.
Theorem 2.3.10. In ψ. If every central collineation {PP'OH2) exists, where P , P ' , 0 , I are in allowed position, then D1X is valid.
Theorem 2.3.11. In ξβ: If every special central collineation (PP'02l2) exists, where P , P ' , 0 , l are in allowed position and 0 el, then Df0 is valid.
PROOFS. I t suffices to prove Th. 2.3.8. Let ΑλΑ2Α3 and B1B2B3
be triangles such tha t corresponding vertices as well as corresponding sides are different, while OeAiBi (i = 1, 2, 3) . di nbi = Ci (i = 1, 2, 3); C1C2 = I. The central collineation (A1B102l2) transforms az into 63; thus C3el.
B2
Fig. 2.12.

46 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
§ 2.4. The first quadrangle proposition, harmonic pairs. Definition. A complete quadrangle is a set of 4 points At (i =
1, 2, 3, 4), of which no three are collinear, and of six lines lik = AiAk{i ^k).
First Quadrangle Proposition (Q^. Let ArA2A3A^ and B1B2BsBé be two complete quadrangles and I a line which contains none of the points A{, B{ (i = 1, 2, 3, 4). If AiAi n I = BiBjnl = Pij for (*/) = (12), (13), (14), (23) and (24), and if A3A^ nl = P3 4, then B3B±n I = P3 4.
Theorem 2.4.1. (i). Q1 can be derived in 5ß(Z)u).

§ 2.4 . FIRST QUADRANGLE PROPOSITION, HARMONIC PAIRS 47
PROOF. Suppose that Ax Φ Bx. Apply the special central collineation 6^= {A1B102l2) with 0 = A1B1 n Z. ( S ^ =D{. By the properties of the central collineation, D1D2DzD4t is a complete quadrangle; its vertices are outside Z and DiDk n 1 = A{Ak n Z; in particular B1(=D1)9 B2 and D2 are collinear. Now apply the central collineation ©2 = (D2B2B\l2); Ê2D< = S< (i = 1, 2, 3, 4). Therefore, 53B4 n Z = £>3Z)4 n / = i 3 i 4 n / = ? 3 4 .
Exercise. The reader should prove the theorem for A1 = B19 A2 Φ B2 and for Ax = Bl9 A2 = B2.
Theorem 2.4.1. (ii). Conversely, Dn can be derived in $((?i)
PROOF. Let the triangles AXA2A3 and B1B2BZ and the point O be given such that 4̂t- φ Bi9 at Φ b{ and 0 € A{Bi (i = 1, 2, 3). Ui n bi = Cii CXC2 = I. We may suppose that OA1A2Az and OB1B2Bs are complete quadrangles, since otherwise Z)n is trivial (verify this). If 0 4 l9 the conditions of Qx are fulfilled and #3 n Z = 63 n Z = C3. The case 0 € Z must be treated separately. Apply Qx to the complete quadrangles OA1A2Az and B3C2C1A39

48 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
together with the line B1B2 (fig. 2.15 ). It follows that Βλ B2 n A x A 2 = B1B2 n C2 Cx = C3.
A*·
°ij
ßl ^2
J?2
C* Fig. 2.15.
Exercise. The last part of the proof is not correct if Az e BXB2* The reader may prove this case by changing subscripts and letters»
We summarize theorems 2.4.l(i) and 2.4.1(ii) in: Theorem 2.4.1. Dn and Qx are equivalent in ξβ.
Harmonic Pairs. Definition. The points Q, Q' are harmonic with P, P'|(notation:
Q9 Qr harm. P, P') if there exists a line I and a complete quadrangle
Fig. 2.16. A*

§ 2 .4 . FIRST QUADRANGLE PROPOSITION, HARMONIC PAIRS 49
A1A2AsA4c such that P, P', Q, Q' e I, P = A±A2 n A3AA9
P' = ΑχΑ±ηΑ2Α39 Q = I n AXA39 Q' = I n A2Aé. Q' is called a harmonic conjugate of Q with respect to P, P \
If we speak of the harmonic conjugate of Q with respect to P, P', it will be tacitly understood that P, P', Ç are different points on a line.
REMARK. It follows from the definition of a complete quadrangle, that if Q9 Q' are harmonic with P, P', then P ^ P' and <?, Ç' are different from P, P'; however, it does not follow that Q Φ Q'. We shall see (§ 6.2) that indeed the last inequality does not follow from the axioms.
Exercise . Verify that Ç, Q' harm. P, P' entails Q', Q harm. P, P' and Q, Q' harm. P'9 P.
As a special case of Th. 2.4.1 (i) we have: In 5ß(£>n) the harmonic conjugate of Q with respect to P, P'
is uniquely determined. However, we shall prove the stronger:
Theorem 2.4.2. In 5β(Ζ)β): If P, P \ Q are collinear and different, then the harmonic conjugate of Q with respect to P, P' is uniquely determined. In other words i l i A1A2A3A^ÌSSL quadrangle as in the definition above, and if B1B2 B3 B4 is a second quadrangle suchthat B1B2nB3B4=P9 B1BAn B2B3 = P'9 In B1BZ= Q9
then In B2Bé = Q'.
PROOF. First of all, we prove Th. 2.4.2 in two special cases, in which a vertex of the first quadrangle coincides with the corresponding vertex of the second.
Case a). The coinciding vertices are joined to Ç, e.g. Ax = Bx. dD\ can be applied to the triangles P'A2B2 and PA4B^9 since P' € A 4 B 4 , P € A 2 B2, and the points of intersection A2B2nAéB^= Al9 A2P' n AAP = A39 B2P' n B^P = B3 are collinear. It follows that PP\ A2A^ and B2BA are concurrent; that is, B2B^ passes through Q'. (Fig. 2.17).
Case b). The coinciding vertices are not joined to Q9 e.g. A2 = B2. Now D\ can be applied to the triangles P'A1B1 and PA3B39 for PeAxBl9 P' € A3B3 and AXA39 B1B39 PP' are concurrent. It follows that the points of intersection

50 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
B2
M
Br-A
P Fig. 2.17.
KA**B*
<B*
Ç- P' Fig. 2.18.

§ 2 .4 . FIRST QUADRANGLE PROPOSITION, HARMONIC PAIRS 51
A1B1n AZBZ = A2, A1Pf n AZP = Λ4 and B1Pf n BZP = BA
are collinear; that is, B2B^ = A2AA9 so B2B± passes through Q'. (Fig. 2.18).
General case. Consider two intermediate quadrangles R1R2RzR4t and 5 ^ 5 3 5 4 , where R± = AXA2 n BXBZ, R2 = A2> RZ=A2AZ n ß ißg , i?4 = PRZn P ' ^ , 5X = Rlf S2=A1A2nB2Bz,
Sz = Bz, 54 = P 5 3 n P ' 5 l e The quadrangles A1A2AzA4i and R1R2RZR4^ are as in case b), so that A^ i?4, yl2
a r e collinear; i?2Ä4passes throughC/.i?1i?2Ä3J?4and51525354 areas in case a), so that 52, 54 , Qr are collinear. 5^35354 and B1B2BzBé are again as in case a), so that B2, J54, Q' are collinear.
REMARK. The figure of case b) shows that this special case of theorem 2.4.2 is equivalent to D\; thus D\ follows from the uniqueness of the harmonic conjugate. We have now:

52 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Theorem 2.4.3. D\, and consequently D99 is equivalent in 5ß to the uniqueness of the harmonic conjugate.
Theorem 2.4.4. In $(£>9): If (?, Q' are harmonic with P, P ' , and Q Φ Q', then P, P ' are harmonic with Ç, Ç'.
PROOF. With the notation of fig. 2.20, put B2 = P^44 n Ç ' ^ , £ 4 = P'^4 n Q'A3. D9 applied to the triangles AxAzQf and PP '^4 proves that B2BA passes through Q. The quadrangle A3A1B2Bé shows that P, P' are harmonic with Q, Q'.
Thus, in $(Z)9) we can speak of two harmonic pairs P, P'
Definition. The projection of a point A from the centre 5 on the line m, where 5 Φ A and Sim, is the point ^4' = SA n m. Let Z and m be two lines and S a point outside I and m. There is a one-to-one correspondence between the points of I and their projections from S on m. This correspondence is called a perspec-tivity with centre 5.
REMARK. If we speak of the perspectivity between I and m with centre S, or of the projection of I onto m from S, it is always understood that S 4 J and S 4m.

§ 2 .4 . FIRST QUADRANGLE PROPOSITION, HARMONIC PAIRS 53
Theorem 2.4.5. In *ß(Z)9): By a perspectivity harmonic pairs are transformed into harmonic pairs.
PROOF. Let Ç, Q' be harmonic with P, P ' on Z; suppose first that Q φ Q'. Let X, X\ Y, Y' be the projections of P, P ' , Q, Q' from 5 on m. The perspectivity from Z onto m with centre S is the product of two perspectivities with centre 5, the first from Z onto QY', the second from QY' onto m. I t suffices to prove that harmonic pairs are invariant under each of these perspectivities. Thus let £7, U', Q9 Y' be the projections of P, P ' , Q, Q' from S on QY'. Let T be PU' n P' t / . The quadrangle UU'ST shows that Γ € SQ'. Then the quadrangle PP'ST shows that Q, Y' are harmonic with U, U'.
Q P Q' P' Fig. 2.21.
The proof for the perspectivity from QY' onto m is similar. If Q = Ç', we consider first the perspectivity from Z onto PX',
then that from PX' onto m. Let P , X', F be the projections of P, P ' , Q from 5 on P X \ Let Z = S P n P 'F . The quadrangle SFX'Z shows that ZX' passes through Q'{=Q). Then the quadrangle SP'QZ shows that V is its own harmonic conjugate with respect to P, X'.
The second part of the proof is similar. Theorems 2.4.2—2.4.5 show that the theory of harmonic pairs
can be based entirely upon D9; Dyx, or even Z>10, is not needed.

54 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
« v
&r

§ 2.4 . FIRST QUADRANGLE PROPOSITION, HARMONIC PAIRS 55
However, the next theorem shows tha t D9 is not much weaker than D1 0. See the remark after Th. 2.5.6.
T h e o r e m 2.4.6. In *{?: If the harmonic conjugate of Q with respect to P , P ' is always different from Q9 then D10 is equivalent to D9.
P R O O F . I t is more convenient to prove tha t D9 implies D*0. In the figure of D*0 (in standard notation), denote cx n ax by D1, D1C2n c3 by D3 9DxC3c\ C2 by D2. D9
Il9 applied to the triangles
A1A2A3&nAD1D2D39 shows tha t P = D2D3 n ax lies on L Now we see by the quadrangle AXA2DXD2 t ha t Q = A1D2 n I is the harmonic conjugate of P with respect to 0 , C3. Similarly, i? = AXD3 n Z is the harmonic conjugate of P with respect to 0 , C2. We introduce the additional points E3 = PBX n a29
E2 = PB1 n az, F2 = 0E2 n 63, P 3 = 0 £ 3 n δ2. Ζ)", applied to the triangles A1E2E3 and B1F2F3, yields tha t F2F3 contains P . Moreover, by the quadrangle A1E2B1F29 A1F2 contains Q; similarly, ^4χΡ3 contains R, so tha t Ax, F29 D2 are collinear and A19 P 3 , D3 are collinear. Finally we introduce the points G2 = D1D2nOE29 G3 = D1DsnOE39 H2 = B2G2nAxQ9 H3 = B3G3 n AXR.
The quadrangle B2D2F2G2 shows tha t B2G2 contains the harmonic conjugate of Q with respect to 0 , C3, tha t is P . Similarly, B3G3 contains P . I t remains to be shown tha t B2G2 = B3G3. To prove this, we remark that , by the quadrangle B2G2OC39
H29 Q is harmonic with D29 F2; similarly H39 R is harmonic with D39 F3. Projecting the points D2F2QH2 from P on AXR9
we see by Th. 2.4.5 tha t H2H3 contains P . But H2 is on B2G2
and H3 is on B3G3, which both contain P . I t follows that B2G2 = B3G39 so tha t S 2 ^ 3 contains P .
Note the snake in the grass where we project the points of AXQ from P on ^ P . This is only possible if P is outside A1Q and outside A±R9 which we easily prove if P Φ Q and P Φ R. Here the first hypothesis in the theorem is used. I t is an unsolved problem whether D10 is equivalent to D9 in ξβ without any extra hypothesis.

56 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
§ 2.5. Projectivities between l ines.
Definition. Let there be given lines ll9 . . . , / n + 1 and points Sl9 . . ., Sn such tha t Sk 4 lk9 lk+1 (k = 1, . . . 9n). We define a one-to-one mapping from Zx onto Zn+1 as follows: let X1 be any point of lx; Xk+1 = SkXk n ZA+1 (k = 1, . . ., n). A mapping which is constructed in this way is called a projectivity of order n9
or a 77n. In particular a 772, denoted by <p9 from Z onto itself is constructed
as follows: choose V Φ I and Sl9 S2 outside Z, Z\ Then ç?̂ 4 = (AS1 n Z')52 n Z. In other words, 99 results by projecting the points of Z from Sx on Z' and by projecting back from 5 2 on Z. We call Sx the first projection centre, S2 the second projection centre and V the intermediate line. I t is clear tha t Z r\V = 0 and Sx S2 n Z = U are invariant points of φ. We call 0 the /irsJ invariant point and £/ the second invariant point of φ?.1)
Theorem 2.5.1. In $(-Dn) , a projectivity φ of order 2 from Z onto Z is uniquely determined by its first and second invariant points 0, U and the image A1 of one point A9 provided A and A' are different from 0 and U.
P R O O F . A 772, say φ9 with 9? .̂ = A' and 0 , Î7 as first and second invariant points, is constructed as follows. Choose lx Φ Z, through 0 , and S± outside Z, Z1# S ^ nZ1 = ^41, ^ ^ 4 ' η S^ = S 2 . For any point X on Z, Zx n 5X X = X x and X ' = ç?X = ^ 5 2 0 Z.
We prove first tha t φΧ is independent of the choice of ll9
then tha t it is independent of the choice of 5X; we may assume tha t Χφ09 U9 A.
a). Choose Z2 Φ Z, through 0, not through 5X. S1A nl2 = A29
S1Xnl2 = X29A2A'nS1U = S3. X" = y>X = X2S3n Z. Apply the Generalized Desargues' Theorem to the points A'A1A2\X'X1X2\ 0 and the lines SXA9A'A29 AfAl9 {S^, X'X29 X'Xl9\l, h, Z2. There exist points P9 Q9 R and a line m such tha t P € S^4, S ^ , m; Q € i4'i4a, X ' Z 2 , m; R e A'Al9 X'Xl9 m. I t follows tha t P = 5 l f
Ä = S2, m = S±U9 Q = 5 3 . Thus X" = X'.
1) It does not follow from the axioms that O and U are the only invariant points of a772 which is not the identity. This question will play an important part in § 6.1.

§ 2.5. PROJECTIVITIES BETWEEN LINES 57
Fig. 2.23.
b). Choose S4 outside Z, Z1# ^4S4 n Zx = ^44, Ì4 4 Ì4 ' n S4?7 = S5. -X"'" = χΧ = {S^X r\l1)S5 nl. Let a be the central collineation (SiSjt^Zf). ori! = il ' , σ54 = 55, <rX = Χ'. Thus 5 4 Z and 5 5 Z ' intersect on ll9 and X/ / ; = X'. (Fig. 2.24).
The Π2 with 0 as the first and U as the second invariant point, and A' as the image of A9 will be denoted by (AA'02U2).
Exercise. 0 and U need not be different. If they coincide, the reader can find a proof, analogous to that of Th. 2.5.1, of the following theorem:
Theorem 2.5.2. In ty{D1(j), a projectivity φ of order 2 from I onto I with coinciding invariant points is uniquely determined by its invariant point W and the image A ' of one point A, provided A9 Α' φ W.
Instead of (AA'W2W2) we write (AA'W2).
Theorem 2.5.3. In ?ß(Z)u): The i72's on I with given first and second invariant points form a group.

58 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Fig. 2.24.
P R O O F . Let φ and ψ be 772's on I with the same invariant points 0 , U. Choose for <p a first projection centre Sx and an intermediate line Γ; construct the second projection centre 5 2 as in the proof of Th. 2.5.1. Take S2 as the first projection centre for ψ, V as the intermediate line and construct the second projection centre S 3 . I t is clear tha t the 772 with first projection centre Sl9 second projection centre 5 3 and intermediate line Γ, is the transformation ψφ. Thus the product of two 772's with invariant points 0 , U is again a 772, with the same invariant points. I t is easily seen tha t the inverse of a 772 is a Π2 too.
T h e o r e m 2.5.4. In ^(Dl0): The 772's on I with given coinciding invariant points from a group.
PftooF as for the preceding theorem. T h e o r e m 2.5.5. In 5$: By every collineation a Πη between
two lines is transformed into a Πη between their image lines. PROOF. This is immediate from the definition of a Πη and the
fact tha t a collineation transforms lines into lines and preserves the incidence relations.

§2.5. PROJECTIVITIES BETWEEN LINES 59
REMARK. In order to apply Th. 2.5.5, we must know that collineations exist. Z) n is needed in order to secure the existence of a central collineation. If only special central collineations occur, D10 suffices. This fact is used in the proof on Th. 2.5.7 below.
Theorem 2.5.6. In ξβ(Ζ)10): Every perspectivity between two lines can be extended to a special central collineation.
PROOF. Let the perspectivity π between I and m have the centre 5 ; we may suppose tha t Ιφπι. Consider a point A on Z, not on m, and πΑ = A'. Let d be the line joining 5 to I n m. The special central collineation (AA'S2d2) is an extension of π.
COROLLARY 2.5.6. In ?ß(D10): Every projectivity between two lines can be extended to a collineation.
P R O O F . A projectivity p is a product of perspectivities π^ Extend π ί to a special central collineation G ;̂ then &k . . . ©x
is an extension of nk . . . πλ, which is obviously a collineation.
REMARK. By means of Th. 2.5.6, a simple proof of the following theorem can be given (by the same method as in the proof of Th. 2.5.5). In ?$(D10): By a perspectivity harmonic pairs are transformed into harmonic pairs. I t follows from Th. 2.4.6 tha t Th. 2.4.5 can be deduced from this under the extra hypothesis tha t the harmonic conjugate of Q with respect to P, P' is always different from Q.
Theorem 2.5.7. In ^(D10): By projection of I onto m from the centre 5, every Πη of I onto itself is transformed into a Πη of m onto itself.
P R O O F . Let φ be the perspectivity from I to m with centre S. Extend φ to a central collineation (Th. 2.5.6). Now Th. 2.5.7 follows immediately from Th. 2.5.5.
COROLLARY 2.5.7. In 5β(£>10): By a projectivity of I onto m, every Πη of I onto itself is transformed into a 77n of m onto itself.
REMARK. I t can be proved in ^ß{D11) tha t every Πη of I onto m, where l Φ m, coincides with a 772. We do not need this theorem.

60 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
§ 2.6. Pappos* proposition.
The following statement is a theorem in APPG (this will be shown after Th. 2.6.7 ; see P10) &nd is known as:
Pappos5 Proposition (P10). If I and m are different lines, Al9 A2, A3 different points on I, but not on ra, JBX, Z?2> ^3 different points on m9 but not on /, then the points C1 = A2B3nA3B2 C2 = A3B1nA1BB9 C3 = AxB2nA2Bx are collinear.
Generalized Pappos5 Proposition (Pxo). If the 6 points A1A2A3BlB2B3 and the 8 lines n23 n31 n12 n32 nxs n21 l m are such that Ai e I, Bi e m (i = 1, 2, 3) and Ai9 Bk e nik (i9 k = 1, 2, 3; i =̂ &), then there exist points Cl9 C29 C3 and a line n such that Ci e ^23> n32> n>* ^ 2 € n3i> ni3> n î C3 € n129 n2l9 n. Note that there are no restrictions at all for the given points and lines: any number of them may coincide.
Theorem 2.6.1. In ^(P10\ the generalized Pappos' proposition is a theorem.
PROOF. In every case where the conditions of Pl0 are not fulfilled the assertion of the generalized Pappos' theorem is trivial.
REMARK. When applying P*0, we adopt a notational convention analogous to that in the case of Dxl. Applying P*Q to the points PX9 . . ., Pe and the lines ql9 . . ., q89 means that Px plays the part of Ax above, etc.
Definition. A hexagon is an ordered set of 6 different points Di and 6 lines d{ (i = 1, . . ., 6) where d{ = D{ Di_x and Dk 4 di if k Φ%9 i—\ (subscripts mod 6). The lines D{ Di+Z (i = 1, 2, 3) are the (main) diagonals of the hexagon. The point dt n di+3 is a

§2.6. PAPPOS' PROPOSITION 61
diagonal point of the hexagon. A hexagon with collinear diagonal points is called a Pascal hexagon. The line on which its diagonal points lie is its Pascal line.
Permutation Proposition. If in a Pascal hexagon we interchange two adjacent vertices and if the resulting figure is a hexagon, then it is a Pascal hexagon.
Weak Permutation Proposition. If in a Pascal hexagon we interchange two vertices between which lies one other vertex and if the resulting figure is a hexagon, then it is a Pascal hexagon.
REMARKS. It follows from the Permutation Proposition that a Pascal hexagon changes into a Pascal hexagon by every permutation of the vertices (provided the result is a hexagon). From the Weak Permutation Proposition we can only infer that this is true for those permutations which leave the triples 1, 3, 5 and 2, 4, 6 invariant.
The name 'Pascal hexagon' alludes to Pascal's theorem in A PPG; of course, this theorem can not be treated here because the notion of a conic has not been introduced.
Qi

62 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
Generalized Permutat ion Proposit ion. Let there be given 9 points DlD2DsD^D5D6P1P2P3 and 9 lines d^d^d^d^ p exeZ9
such tha t the conditions (i) Z)i e di9 di+1 (i = 1, . . ., 6; subscripts mod 6); (ii) Pke dk9 dfc+3, p {k = 1, 2, 3); (iii) Z)2, Ajeé?!; D i , £>3€£3
are fulfilled. Then there exist points Ql9 Q29 Ç3 and a line q such tha t Çxe^i , d4, q; Q2sd29 dò9 q; Ç 3 e e 3 , d%9 g.
Theorem 2.6.2. In $(-P10)> the generalized permutation proposition is valid with the additional condition
(iv) p φ d2 (the Pascal line is different from the line through the points interchanged).
PROOF. Apply Ρ{£ to the points D1P1D6PSD2DS and the lines d^d^e^pd^. We find points Cl9 C29 C3 and al ine n such tha t Cx € d4 , el9 n; C2 € eZ9 d69 n; C 3 e d29 p , w. Choose Çx = Cl9 Q3 = C 2 , q = n9 Q2 = C3. By (iv), Ç2
= ^ 2 » s o (?2 € ^5, which proves the theorem.
I t is convenient to replace condition (iv) by a condition tha t does not refer to p . Therefore we shall prove:
Theorem 2.6.3. In Th. 2.6.2, condition (iv) can be replaced by (v) Ό2φΌ« and ΏχφΏζ.
PROOF. We may suppose tha t d2 = p . First suppose tha t Dz 4 p ; then d3 Φ p . D2 as well as P 3 belongs
to both d3 and p , so D2 = Ps; then D2 e d6 and by (v) de = e1. In the same way, if De4p9 then d4 = e3. Now we distinguish between three cases a) , b), c).
Case a ) . D3 4 p , DQ 4 p . Now dQ = ex and d4 = eS9 so we may take Q1 = Ç3; then Ç2
a n d ? can always be found so as to satisfy the theorem.
Case b ) . D3 4 p , De € p . As d2 = p , we have also D2 e p , and ex = p = d2. Moreover dQ = el9 so we can find Ql9 Q2, Qs on p to satisfy the theorem.
Case c) . DZ9 D6 e p . Now ex = p , e3 = p, d2 = p . Find Çx, Q29 Qs on p to satisfy the theorem.

§2.6. PAPPOS' PROPOSITION 63
Generalized Weak Permutation Proposition. Let there be given9points C1C2C3C^C5CeP1P2Pz and9lines CiC2
c3c4c5ceP/i/4> such that the conditions
(i) Ci e ci9 ci+1 (i = 1, . . ., 6; subscripts mod 6); (ii) Pk € ck9 ck+39 p (k = l9 2, 3); (iii) C3, Cee/iî Cl9 C4€/4
&
are fulfilled. Then there exist points Sl9 S2, 53 and a line s such t h a t J i € / i , / 4 , S'9 θ 2 € C 3 , C5, SI 0 3 € C 2 , Cß9 S,
Theorem 2.6.4. In ^(P10)9 the Generalized Weak Permutation Proposition holds under the conditions ΟχΦ C4,

64 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
P R O O F . We apply the Generalized Permutation theorem three times, first interchanging Cx with C2, then Cx with C3, finally C2 with C3. In other words, the points and lines
D1D2DsD^D6DQP1P2Pzd1d2d3d4d5dQpe1es in the formulation of the generalized permutation proposition above (fig. 2.26) are replaced successively by: (step 1 ) C1C2 C3 C4 C5 C6 P± P 2 P 3 cx c2 c3 c4 c5 c6 p ex e39
giving Q19Q29QS, q; (step 2) C1C3C^C5CeC2Q2Q3Q1c2e3cAc5cee1qc3fA9
giving Kl5 K29 K39 r; (step 3) C2C3 Cx C4 C5 C6 P 3 P x R2 ex c3 e3 /4 c5 c6r f± c2,
giving S i , 5 2 , S3 , 5, which satisfy the theorem.
According to Th. 2.6.3, we had to impose the following conditions: for step 1, Cx Φ C3, C2 Φ C6; for step 2, C1 Φ C4, C3 Φ C2; for step 3, 02Φ Cl9 C3 Φ C6. However, the conditions C1 Φ C3
and C2 Φ C6 are unnecessary. In order to prove this, we have to consider two cases a) and b) . Case a ) . C1 = C3; Cx ^ C2, C4, C6. Now c2 = c3, /4 = c4,
c i — / u s o w e c a n take S1 = Pl9 S2 = P 2 , S3 = P 3 . Case b ) . C2 = C6; C2 Φ Cl9 C3. Now c2 = cl9 c3 = fx. C2 e cx>
c2> cs> ce> s o w e m a y take S3 = C2; as 5X and S2 are on /x = c3>
we can take s = c3. Theorem 2.6.5. (Hessenberg's Theorem) . In $ (P 1 0 ) ,
Desargues' Proposition D1X is valid.
PROOF. Let AXA2A3 and B1B2B3 be triangles satisfying the conditions of Z ) n . A1Bl9 A2B29 A3B3 pass through 0 , α̂ r\bi=Ci.
Apply the Generalized Weak Permutation theorem to the points B1D2A2B2D5A1OB3A3 and the lines cxb2a1c2b1a2c3a3b3, where D2 = ax n 62, Z)5 = a2 n &χ (the case where a1 = 62
or a2 = bx is trivial). We find points 5 l 5 5 2 , 5 3 , and a line s9
such tha t S1 e α3, 63, s; S 2 € α1? ftl5 s and S 3 β6 2 , α2, s. This proves Z) t l .
The Generalized Weak Permutation Theorem can be applied if Bx Φ B29 A2 φ Al9 B1 Φ D29 A2 φ D2. The first two conditions are satisfied for triangles. If we assume Bx$ al9 A24b29 then the

§ 2.6. PAPPOS' PROPOSITION 65
other two conditions are fulfilled. We may suppose ax Φ b2 and a 2 Φ bv The cases Bx e αλ and A 2 € b2 remain to be examined.
Of course, it is sufficient t ha t for some subscripts i9 k (i Φ k) Bi4ai, Ak4bk. There are two cases in which such subscripts i, k cannot be found, namely
I ) Ai e bi (i = 1, 2, 3) or B{ € a{ (i = 1, 2, 3); I I ) Ax € bl9 A2 € b29 B1 e al9 B2 e a2 (or the same after permuting
the subscripts 1, 2, 3). In case I ) OAxA2 and B3C2C1 are triangles which are not in
case I) or I I ) ; application of Z ) n to these triangles proves the theorem. Case I I ) implies either A3 = Bs or a3 = 63, which contradicts the hypothesis of the theorem. (See Appendix 1.)
This completes the proof of Th. 2.6.5. Second Quadrangle Proposi t ion (Q2). Let A1A2A3A4t and
B1B2BZB4 be two complete quadrangles and Z a line which contains none of the points Ai9 B{. If A1A2 n I = BSB± n Z, AXAZ n Z = B2Bt n Z, A^^ r\l = B2BS n Z, -42^3 n J = ΒΧΒ4Γ\19
A2A4 n I = BXB3 n Z, then AZA± nl = B1B2 n Z.

66 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
REMARK. If we call AXA2 and ß 3 ß 4 anticorresponding sides, then the theorem says: If five pairs of anticorresponding sides intersect Z in the same point, then the same is true for the sixth pair.
Theorem 2.6.6. Q2 holds in $(P10). PROOF. First of all, we treat the case where Ax = Bz and
A2 = BA. Let aik = AtAk, bik = BtBk, Pik = aik n Z. Now £>i = A^Jr^ ^ -^-2^3» ^ 2 = = ^ 2 ^ 1 3 ^ Λ1-Λ4.
If P24 = P1 3, then B1 — Az and B2 = AA, so the theorem is immediate.
If P2 4 Φ P1 3 , we apply P ^ to the points A2AZB1A1B2AA
PK=C2 L n P 2 3 P14 Pi3 = C3 P12 P34 = C,
Fig. 2.29.
and the lines ctMb13b24b12a2^a13a2Za1A. We find points Cl9 C2, C3 and a line n such that ^ € α 3 4 , 612, w; C2€&13, a24, n; Czeb2i9 a13, n. Thus C2 = P2 4, C3 = P1 3, n = Z, Cx = #i-B2 n Z = ΑΖΑ± n I = P3 4 .
Now we consider the general case. If we put D± = ^41P24n^42^43, D2 = ^2^13 n ^i^4> -°3 = ^i> £4 = ^2> then D-LDJOIDI is a quadrangle satisfying the conditions of the special case above; it follows that Z\Z)t. nl = AjAk nl for every permutation A, i, /, A of the subscripts 1, 2, 3, 4. Because of Th. 2.6.5 and

§ 2.6. PAPPOS' PROPOSITION 67
Th. 2.4.1, we may now apply Qx to the quadrangles D1D2D3DA and B1B2B3B4t9 which gives the desired result.
Theorem 2.6.7. (Converse of Th. 2.6.6.) P1 0 holds in $(<?2).
PROOF. In order to prove P10 for the points A1A2A3B1B2B3 it suffices to apply Q2 to the quadrangles A1A2B2B3 and B2B1A3A2.
Special cases of Pappos' Proposition. In the figure of P10 we consider the hexagon A1B3C1A3B1C3.
Its diagonals (connecting opposite vertices) are AxA3y B1B3, CXC3\ its diagonal points (intersections of opposite sides) are A2, B2, C2. The diagonal point A2 is said to correspond to the diagonal A±A3, etc. Thus P10 can be formulated as follows:
(Pi0). If in a hexagon two diagonal points are on the corresponding diagonals, the third diagonal point lies on its corresponding diagonal too. (In this form Pappos' theorem was proved in APPG; Th. 1.4.6).
This proposition is self-dual. Therefore we have: Theorem 2.6.8. The duality principle is valid in ?${P10). The following special cases are interesting: P 9 = P10 with the additional condition that the three diagonals
pass through one point. dPQ = P10 with the additional condition that the three diagonal
points are on one line. (dP9 is the dual of P9).

68 INCIDENCE PROPOSITIONS IN THE PLANE Chap. 2
T h e o r e m 2.6.9. P 9 and dP9 are valid in 5β(£>9). PROOF. We prove P 9 ; dP9 follows by duality. Let the hexagon A-^B^C^^B^C^ satisfy the hypothesis of P 9 .
Let S be the common point of the diagonals AXA3, BXBZ, CXC^ By applying dD^ to the triangles B2A1AS and Α2ΒλΒ& we find tha t A1BV A2B~2, ASB3 are concurrent. Then DT
9, applied to the triangles B3A1A2 and A^BxB2i discloses that C2 e SCX; thus Cv
C2, Cs are collinear. Theorem 2.6.9 strongly contrasts with the fact tha t P 1 0 is
independent of Vl 5 V2, V3, D1X; this will be proved in Th. 3.5.2. Let us now return to the general proposition P 1 0 . I ts importance
in the axiomatics of projective geometry is expressed by the next theorem. I recall (Th. 2.5.3) tha t in ^(Dn)9 the projecti.vities of order 2 on I with given first and second invariant points form a group; by Th. 2.6.5, this is also true in ^S(PIQ).
T h e o r e m 2.6.10. In ^(P10), the group of 772's on I with given invariant points 0 , U is abelian.
PROOF. Let φ9 ψ be two 772's on I with the same invariant points 0 , U. We must prove tha t φψ = ψφ. This time we choose the same centres Sx and S2 for φ and ψ; let V and V be the intermediate lines for φ and ψ respectively. Let Α{Φ 0 , U) be any point on L S±A nl' = B, SXA n I" = G, S2B nl = C = <pA, S2GnI = Η=ψΑ9

§ 2.6. PAPPOS' PROPOSITION 69
Sfl nl' =K, S2Knl= L = φψΑ, SXC n I" = D, S2Dnl = = ρ = ψφΑ. We must prove that L = F, or, what amounts to the same, that S2, K9 D are collinear. In the hexagon BCDGHK the diagonal points Sl9 0 are on the corresponding diagonals BG, CH; thus by P'10, 5 2 is on DK.
T h e o r e m 2.6.11. In $(£>10), the group of 772's on I for which the invariant points coincide in 0 , is abelian.
PROOF. In the preceding proof the diagonal points Sl9 5 2 , 0 are now collinear, so that we can use dP9 instead of P10; by Th. 2.6.9, dP9 is valid in $(£>9). Th. 2.5.4 is used.
REMARK. If -> means "implies in *β" and <-> means "is equivalent in 5{5 to", we can summarize some results of this chapter like this:
Pio -> B u -> £>io -> D9 -* P9; P 1 0 « <?2; Z)u <-> 0X.
It is not known whether P 9 -> Z)9; we shall see later that D10 ++ Dn ++P1 0, where +■> means: "does not imply in *ß" (Th. 3.5.1, 3.5.2). I t is not known whether D9 -> JD10 is generally true, but it can be proved as a consequence of the harmonic proposition (Th. 2.4.6).

CHAPTER III
COORDINATES IN THE PLANE
§ 3 . 1 . Ternary fields attached to a given projective plane.
In the projective plane ξβ0 (Vi, V2, V3) we choose four points 0, X, Y, E, of which no three are collinear. If P is a point not on XY, the points P1 = 0E n YP and P2 = 0E n Z P are
Fig. 8.1.
uniquely determined. Conversely, if Ρλ and P 2 are given on 0 £ , but not on XY, then P = y P x n X P 2 is uniquely determined. We have thus a one-to-one correspondence between *β0\,ΧΎ and (0E\{W})x (0E\{W})9 where W = 0E n Xy. $ 0 \ ^ y w i U b e
called the affine plane. Definition. P± and P2 are the coordinates of P in the coordinate
system OXYE. We shall denote coordinates (points on OW but ^W) by lower
case letters; x and j / are variables for the first and second coordinate of a point, respectively. Instead of 0 and E, considered as coordinates, we write 0 and 1. The point with coordinates a and b is denoted by (a, b).
Exercise. The reader should verify the following statements from the definitions: 0 = (0, 0); E = (1, 1); x = c is the equa-

§ 3 . 1 . TERNARY FIELDS TO A GIVEN PROJECTIVE PLANE 71
tion of a line through Y; x = 0 tha t of OY; y = c is the equation of a line through X; y = 0 tha t of OX; x = y is the equation of 0 £ .
Let a line Z be given, which does not contain Y. We define m and n by (1) / n I F = C; (2) InOY = B = (0, n); (3) (CO n EY)X nOE = m; and thus (4) CO n £ Y = (1, m).
Fig. 3.2.
Z determines m and n uniquely. Conversely, if m and n are given, we construct I as follows: (5) B = (0, n ) ; ( I m n Y £ ) 0 n Z 7 = C; BC = I. We call m, n the coordinates of Z, and write I = [m, ri\.
Examples: I . If m = 0, then X € I; equation y = n (XB in fig. 3.2). I I . If n = 0, then 0 e l (OC in fig. 3.2).
I I I . If m = 1, n = 0, then Z = 0 £ ; equation y = x.
REMARK. In fig. 3.2, C depends only upon m; the lines through a point of XY have the same coordinate m. If Z = [m, n], we shall denote Z n X Y by (m).
Let (#, 7/) be any point on Z. Given x, we construct y by (6) y = (Yxr\ l)X n 0 £ . (Fig. 3.3).

72 COORDINATES IN THE PLANE Chap. 3
Fig. 3.3
Thus y is a function of x9 depending also upon m, n: (7) y = Φ(#, m, n). (7) can be considered as the equation of the line Z = [m, ri],
We begin by deriving some simple properties of the function Φ, which are consequences of VI, V2, V3. As we saw a moment ago, [0, ri\ has the equation y = n; this fact is expressed by (i) Φ(α, 0, n) = n. [1, 0] has the equation y = x, that is (ii) Φ(α9 1, 0) = a. If (0, y) is a point on [m, w], we have by (2), y = n. Thus (iii) Φ(0, m, n) = n. Let P = (1, y) be a point on [m, 0]. By (5) and (3) we have
y = (Y£ η Ζ)Ζ ηΟΕ = (Υ£ n C0)Z n 0 £ = m. (iv) Φ(1, m, 0) = m. Let Z be the line [m, n]. If m ^ 0, then X 4 Z, so Z has a unique point of intersection with y = b. It follows that (v) if m ^ 0, then Φ(#, m9n) = b has a unique solution for x. Let a point P = (a,b) and a point B = (0, n) be given. If α Φ 0, then P ^ OY, so the line P2? = Z is unique and does not contain Y. Thus there is a unique value for m such that Z = [m, ri\. It follows that (vi) if a Φ 0, then Φ(α, 2;, n) = δ has a unique solution for z.

§ 3 . 1 . TERNARY FIELDS TO A GIVEN PROJECTIVE PLANE 73
Let a point P = (a, b) and a point m on 0 £ be given. We construct C as in (5), and Z = PC. I = [m, n] for just one value of n, and Φ(α9 m, n) = δ. Thus (vii) Φ(α, m,u) = b has a unique solution for u. Let 4̂ = (a, b) and ^4' = (α', V) be any points such tha t a Φ a'. Then Y i AA\ so there are uniquely determined values for m and n such that AAf = [m, n ] . Thus
(viii) the equations Φ(α, z, u) = b and Φ(α'9 z, u) = b\ where a Φ α', have a unique solution for z and u.
Let Z = [ra, w] and Z' = [m'9 n'] be any lines such tha t m φ m'; then the point S = I n Γ is not on XY; the coordinates of 5 satisfy the equations of Z and Z\ This gives (ix) if τηφ7η\ the equation Φ(χ, m, n) = Φ(χ9 m', η') has a
unique solution for x. These properties are not independent. We derive (vi) by taking
a' = 0, b' = n in (viii) and then applying (iii). Moreover, if we substitute m! = 0, rì = b in (ix) and then apply (i), we obtain (v).
Definition. A ternary field is a class which contains a t least two different elements 0 and 1, and in which a function Φ(χ, y, z) is defined satisfying (i), (ii), (iii), (iv), (vii), (viii), (ix).
As we remarked just now, (v) and (vi) hold in every ternary field. (See Appendices 2 and 3).
Theorem 3.1.1. If in a projective plane $ 0 a coordinate system OXYE is given, the points of OE different from W=0E n XY form a ternary field, in which the function Φ is defined by (8) Φ(χ,τη,η)=({(ΧηηΟΥ)[{ΧηιηΥΕ)ΟηΧΥ]}ηΥχ)ΧηΟΕ.
PROOF. This is left to the reader, as most of it has been shown above. See fig. 3.4.
The ternary field mentioned in Th. 3.1.1 will be said to be attached to the projective plane ίβ0 by the coordinate system OXYE. Any ternary field attached to a projective plane ^β0((^)> where 21 is some set of axioms, will be denoted by !£(2l). The axioms VI , V2, V3 will always be included in 2Ϊ even if they are not mentioned; % (VI, V2, V3) will be abbreviated to %. Thus, e.g., Th. 3.2.1, as formulated below, is an abbreviated form of the

74 COORDINATES IN THE PLANE Chap. 3
theorem: In any ternary field attached to a projective plane in which D10 is valid, the elements form an abelian group under addition. Analogously for theorems on %(Al9 . . , Ak), where Al9 . . ., Ak are axioms.
§ 3.2. Ternary field and a x i o m system.1)
We are going to study the connection between !£(2ί) and the underlying axiom system 21. First of all, we define an addition in an arbitrary ternary field.
Definition. The sum x-\-z of two elements x, z of a ternary field is Φ(χ9 1, z).
In view of (ii) and (iii) we have x + 0 = x; 0 + z = z. In % (VI, V2, V3) we have as a special case of (8) the following
construction for x + z: (9) x + z = l(Xz n OY)W n Yx]X n OE (fig. 3.5). For a given z, this is the construction of a Π2 with intermediate
J) In the figures of this section the coordinate system OXYE is represented by a Cartesian system, in which X, Y are the points at infinity of the axes; W is then the point at infinity of OE. As to the significance of these figures we remind the reader of the remark at the end of section 1.1.2.

§3.2. TERNARY FIELDS AND AXIOM SYSTEM 75
A
Y ' Γ / *~
/E
w w
/ /
X
Fig. 3.5.
line (Xz n OY)W and projection centres Y, X. Its first and second invariant point coincide in W.
We now suppose that D10 is valid. Then, by Th. 2.5.2, this Π2 is defined by its invariant point W and the image z of 0; it is denoted by (OzW2). Thus, x + z — y if and only if (02PP)# = y9 or, what comes to the same, (OzW2) = (xyW2). Because in ?$(D10) the 772's with given unique invariant point W form an abelian group (Th.2.6.11), (OzW2)=(xyW2) is equivalent to(OzW2)(OxW2) = (OyW2). Thus the mapping x -> (OxW2) is an isomorphism between the points of OE (W excepted) and the 772's on OE with W as the only invariant point. This proves
Theorem 3.2.1. In %(D10), the elements form an abelian group under addition.
Definition. The product of two elements x, z of a ternary field is x · z = Φ(χ, z, 0). For # · z we also write xz.
In view of (ii) and (iv) we have x · 1 = 1 · x = x; in view of (i) and (iii) x · 0 = 0 · x = 0.
The following construction for x · z in % (VI, V2, V3) is a special case of (8): (10) x-z= [(Xz nYE)0 n Y*]X n 0 £ (fig. 3.6). For a given z Φ 0 this is the construction of a 772 with intermediate line (Xz n Y£)0 and projection centres Y, X.

76 COORDINATES IN THE PLANE Chap. 3
I
/
Ψ E
/ /z
1
X
w /
/x.z
te.
Fig. 3.6.
If Dn is valid, then by Th. 2.5.1 this 772 is uniquely determined by its invariant points 0 , W and the image z of E; it is denoted by (Ez02W2). Thus, x · z = t if and only if (Ez02W2)x == t, or, what amounts to the same, (Ez02W2)=(xt02W2). Moreover, in ty{Dn) the ZTg's with given invariant points 0, W form a group, so (Ez02W2) = (xt02W2) is equivalent to (Ez02W2)(Ex02W2) = (Et02W2). Thus the mapping x -> (Ex02W2) is an anti-isomorphism between the points of OE (0 and W except ed) and the i72's on OE with 0 and W as invariant points. This proves
Theorem 3.2.2. In Ïf-Dn), the elements ^ 0 form a group under multiplication.
In view of Th. 2.6.10, we have Theorem 3.2.3. In %{P10), the elements Φ 0 form an abelian
group under multiplication. Theorem 3.2.4. In %(D10), we have Φ(χ, m9n) = x · m + n . PROOF. We follow the construction of x · m + w.
p = a . m = [ ( I m n Y £ ) 0 n Y#]X n 0 £ .
In fig. 3.7, X w n 7 £ = ^ , ^ Ο n Y# = R9 RX nOE = p .
g = p + n = [(Xn n 0Y)P7 n Yp]X n 0 £ . I n n O y = B, £ W n Yp = Ç, QX nOE = q.

§ 3 .2 . TERNARY FIELD AND AXIOM SYSTEM 77
0 X Fig. 3.7.
On the other hand, the construction of Φ(χ, m, n) runs as follows: Φ(χ, m, n)=({(Xn n OY)[(Xm n YE)0 n XY]} n Yx)X nOE= = {B(AO n XY) n Y*}X n 0 £ .
i O n I Y = V, BV ΓΛΥΧ= P.
It must be proved that PX n 0E = q, or, what comes to the same, that PX = QX. This is a consequence of the existence of the special central coUineation K = (OBY2XY2). We have (£(07) = S F ; ©i? = P; ©(PX) = PX; %(0W) = Blf; £p = <?; thus Ç € PX.
The following theorem will be useful for the proofs of further properties of the function Φ.
Theorem 3.2.5. In $(Z)10): If ψ is a projectivity of OW onto itself which leaves 0 and W invariant, then for every x and y <p(x + y) = <p(x) + <p(i/) holds.

78 COORDINATES IN THE PLANE Chap. 3
PROOF. AS we saw before, it follows from (9) that x + y = (OyW2)x. Denote <p(x) bij x\ Applying Th. 2.5.7 we find that φ transforms {OyW2) into (Oy'W2). Thus <p(x + y) = (Oy'W2)x' = x' + y' = φ{χ) + <p(y).
Theorem 3.2.6. In %(D10), we have (x-\-p)m = xm+pm (distributively from the right).
PROOF. AS a consequence of (10), for fixed m Φ 0 the transformation ψ defined bij ψ(χ) = xm is a projectivity.
Thus, by Th.3.2.5, ψ(χ + ρ) = ψ(χ) + ψ{ρ), that is (x + p)m = xm + pm.1)
Theorem 3.2.7. In %{D10), x(m+q) = xm+xq. PROOF. It follows from (10) that the transformation <p which,
for fixed x Φ 0, transforms m into <p(m) = xm, is a i73. In fact, we obtain xm from m by projecting first from X onto YE, then from 0 onto Yx, and finally from X onto OE (fig. 3.6).
Then, by Th. 3.2.5, y(m + q) = <p(ra) + <p(q), i.e. x(m + ?) = xm + xq.
Theorem 3.2.8. (Summary). % (VI, V2, V3) is a ternary field. %(D10) is an abelian group under addition. Moreover, Φ(χ, m, n)
= x · m + n. Both laws of distributivity are valid. %(Dn) is a division ring (multiplication is associative). %(P10) is a field.
§ 3.3. Some complementary results.
Change of coordinate system.
The ternary fields which we obtain from a projective plane 5β0, starting with different coordinate systems OXYE and Ο'ΧΎ'Ε', need not be isomorphic. We shall prove that they are isomorphic in 5β(£>ιι). Actually, this is already true in $(£>10), but we shall not prove this theorem. [See e.g. Pickert, Projektive Ebenen § 7.3.]
1) This proof was suggested to me by E. R. Paerl.

§3.3. SOME COMPLEMENTARY RESULTS 79
Theorem 3.3.1. In $ ( 7 ) n ) the ternary fields at tached to ^βο(^ιι) by different coordinate systems, are isomorphic.
P R O O F . Let X correspond to OXYE, %' to Ο'ΧΎΕ', OE n XY = W, Ο'Ε' η ΧΎ' = W. As Dn is valid, % is completely determined by its addition and multiplication (Th. 3.2.4). We have seen in the proofs of Th. 3.2.1 and Th. 3.2.2 tha t x + z = y is equivalent to (OzW2)(OxW2) = (OyW2) and x · z = t is equivalent to {Ez02W2){Ex02W2) = {Et02W2). By Th. 2.5.1, the second order projectivities are independent of X and Y ; analogously for X' and Y'.
Let us suppose tha t OE Φ O'E' and tha t none of the points E, W, E'9 W coincides with OE n O'E9. Pu t EE' n WW' = Sx; let Z" be a line through £ ' (Z" φ Ο'Ε'). By projecting 0, E, W from Sx on l"9 we obtain 0,A, £ ' , W". P u t 0 Ό " n W W = 5 2 . By projecting 0", E'9 W" from 5 2 on O'E', we obtain Ö\ Ε', W. Hence there is a projectivity tha t transforms 0, E, W into 0', E', W respectively. From Cor. 2.5.7 we see tha t (0zW2)(0xW2) = = {OyW2) will be equivalent to (0'z'W'2)(0'x'W2) = (O'y'W2) and (Ez02W2)(Ex02W2) = (Et02W2) will be equivalent to (E'z'0'*W'^{E'œ'0'*W'^ = (E't'0'*W'*). In other words x+z=y if and only if x' -\- z' = y'; x - z = t if and only if x' · z' = £'. This means tha t the ternary fields are isomorphic.
Exercise . The reader may examine the special cases which were excluded here; projection onto an auxiliary line reduces them to the general case.
Coordinates and duality. Together with a projective plane ^β0 = <77, Λ, Iy we may con
sider the dual plane (Λ, 77, /> = ?$D. In ^D we can introduce coordinates by the methods described above. We use the 5β0-terminology (that is, we call an element of A a line, an element of 77 a point). In 5β0 a line I has an equation y = Φ(χ, m, n); in ^D it has coordinates (|, η) in a ternary field XD. Assuming Z>10, we shall show tha t the coordinate system in ?$D can be chosen in such a way tha t %D is anti-isomorphic to %0, and tha t by this anti-isomorphism the coordinates of the line y=xm~n correspond to (m, n).

80 COORDINATES IN THE PLANE Chap. 3
Let us take the Cartesian plane as an example to see how the coordinate system 0DXDYDED must be chosen. Here m = 0 for lines through X, so 0DYD = X. n — 0 for lines through 0, so 0DXD = 0. Lines through Y have no pairs of coordinates, so XDYD = Y. We must take 0D = OX, XD = OY, YD = XY. ED must be the line y = x — 1; that is the line through W and the point Q = 0DED = (1, 0) on OX. It follows that WD = YE.
Theorem 3.3.2. In %(D10): Choose in ξβ^ the coordinate system 0DXDYDED with 0D = OZ, Xp = OY, Yp = XY; ED is the line y = x — \. The elements of %D are the lines with equations
0 9(1,0) 0D X
Fig. 3.8.
y — xm — m. The mapping of %D onto £0 in which the line y = xm — m corresponds to m, is an anti-isomorphism. If we identify corresponding elements in this mapping, then the coordinates of y = xm — n are (m, n).
PROOF. Let us denote addition and multiplication in %D by +D and · D respectively. Denote the line y = xm — m, considered as a point in $#, by m, considered as a line in ξβ0, by m.
By the definition of the sum, § 3.2,(9), we have m +Dn = [(XDn n 0DYD)WD n YDm]XD n 0DED == = [{(OY n n)X n Y£}(XY n m) n 0Y]Ç,
where Ç = (1, 0). The equation of n is y = xn — n. OY n n is 4̂ = (0, —n). AX has the equation y = —n; Y£ has the equation

ί 3 .3 . SOME COMPLEMENTARY RESULTS
y
81
\ , A
0
G
Bf y
/
/ / ^ \
Fig \ 3.9.
s
y?
c c
/m
, m-tpn
X

82 COORDINATES IN THE PLANE Chap. 3
x = 1, thus AX n YE is B — (1, — n). The equation of m is y = xm — m. Any line through C = XY n m has an equation of the form y = xm + p. For BC we have
—n = 1 · m + p ; thus p = —m — n. So the equation of BC is y = #ra — m — n. I ts intersection G with OY is (0, — m—n). ÇG has the equation j /==#(m+n) — (m+n). As ÇG is m + 2)̂ > w e have proved tha t m + Dn is mapped on m + n.
By the definition of the product, § 3.2,(10), we have
M'D ή = [(Χ^ή η Υ^ ΖΓ̂ ) Ο^ η Υ^ wJX^ nODED = = [{(OY n n)W n 0X}(XY nm)n 0Y]Q.
OY nn is H = (0, —n). ίίΡΓ has the equation y = x — n. HW n (λΧ" is i£ = (n, 0). XY n m = L; any line through L has an equation of the form y = xm + g. For iCL we have
0 = nm + q; thus ç = —nm.
Hence the equation of KL is y = #m — nm. ÄX n 0 Y is M = (0, —nm). QM is j / = x(nm)—nm. As CM is m ^ w , we have proved tha t m *D ή is mapped on nm. This completes the proof of Th. 3.3.2.
Algebraic consequences of D9.
Theorem 3.3.3. In ${Z)9): If ab = 1, then ba = 1 and, for every a?, (#a)6 = b(ax) = #.
P R O O F . The construction of ab, given in § 3.2 (10), together with the fact that ab = 1, leads to the following figure. XbnYE = P, OP n XE = Q, YQ π 0Ε = a. ba is constructed as follows: XanYE = i?, 0 Ä n YÄ = 5, I S n O £ = δα. I t must be proved tha t ba = 1, or, what comes to the same, tha t QS contains X. This is a consequence of P 9 applied to the hexagon bPQaRS', where S' = QE n OP. As P 9 holds in φ(Ζ)β) (Th. 2.6.9), the first part of the theorem has been proved.
In the rest of the proof we use the theory of harmonic pairs, which has been developed in ^(D9); see theorems 2.4.2—2.4.5.
Denote PS n 0W by H9 PS n XY by K. The quadrangle EbXY shows tha t HK harm. PS; the quadrangle EbPS shows

§3.3. SOME COMPLEMENTARY RESULTS 83
Y Y
V
Fig. 3.11.
tha t WK harm. XY, so tha t K does not depend upon the choice of b.
Now let x be any point on OE. (xa)b is constructed as follows. ORnYx= U, UX nOE = c, (c = xa\ OQ nYc = V, VX n OE = (xa)b. I t must be proved tha t VX contains x.
Denote Xx n Yc by V'\ UV n 0W by L. The quadrangle cxUV shows tha t V'U intersects XY in the harmonic conjugate of W with respect to X, Y; tha t is in K. The quadrangle cxXY shows that LK harm. UV. But, by projection of the harmonic pairs P , S and H, K from 0, we see tha t OQ intersects UV in

84 COORDINATES IN THE PLANE Chap. 3
the harmonic conjugate of U with respect to L, K; thus V € OQ, V' = V. This proves that (xa)b = x.
An analogous proof can be given for b(ax) = x9 but in ^ß(D10) it is easier to apply the duality principle, which holds in $(£>10) (Th. 2.2.7). As in the proof of Th. 3.3.2, let us denote the line y = xm—m by m, when considered as a point in ?$D. If ba = 1, then à · h = Ï . Applying the preceding result to ^D, we obtain (x -D a) -D h = x, so b · (a · x) = #.
§ 3.4. The geometry over a given ternary field.
Let % be any ternary field, defined by the function Φ(χ, m, n). In order to construct a projective plane over %9 we define the sets Π0 and Λ0 and the incidence relation 70.
Π0 is the union of Π19 Π2, Π3; Λ0 is the union of Λ19 Λ29 Λ3. nx is the set of pairs (x9 y) of elements of %. Π2 is the set of elements (p) of %. IJ3 consists of one element Y, not in Π1υ Π2. Ax is the set of pairs [m, n] of elements of %. Λ2 is the set of elements [c] of %. Λ3 consists of one element ω, not in Λλ u A2 u Π0.
REMARK. In order to make nx and ^ ! into disjoint sets, we might introduce elements α, β not belonging to Ϊ , and take the triples (#, i/, a) as the elements of Π19 (m, n, β) as the elements of Ax; analogously for IJ2 and Λ2. Here I use parentheses ( ) and square brackets [ ] instead of a and β.
The relation I0 is defined as follows.
(*)
This triple <i70, Λ0, I0} satisfies axioms Vl , V2, V3; thus it forms a projective plane which we shall denote by $(£) . For every ternary field £, 5β (£) is a model of Vl, V2, V3.
(^2/) (*>y) (P) (P) Y Y
I0[m, hie] I0[m, I0co hie] Ι0ω.
n]
n]
if y ì£ x if p for i for <
No other incidences
= Φ(χ, m, n). = e. = m. svery p. îvery c.
occur.

§3.4. THE GEOMETRY OVER A GIVEN TERNARY FIELD 85
Exercise. Verify the axioms VI, V2, V3 for $(£) by using the defining properties of a ternary field.
REMARK. If % is the field of real numbers, $ (£) becomes the Euclidean plane, extended with the points at infinity and with the line at infinity. After the introduction of homogeneous coordinates, this plane becomes isomorphic to APPG.
If we start with a projective plane *ß0 and a coordinate system OXYE in 5β0, these determine a ternary field ï 0 , as described in section 3.1. It is easily seen from the definition of 5β(ϊ0)> ïh&t SP(îo) s %.
Conversely, let us start with a ternary field %x. In $ ( Ï ! ) we choose the coordinate system OXYE with 0 = (0, 0), X = (0), Y = Y, E = (1, 1). Then OE = [1, 0], and (x, x) € OE for every % in %x. The elements of OE form the ternary field %29 attached to ^(2^) by the coordinate system OXYE. In %2 the function Φ2, defined on OE occurs. We shall prove that the correspondence a defined by ox = (x, x) is an isomorphism between %x and %2.
If P = (p, q), let us call p, q the analytic coordinates of P . The coordinates of P in OXYE are (apy aq); let us call these the geometric coordinates of P. Let I be the line [m, ri\. Using analytic coordinates, we see from (* ) that PIl if and only if q = Φ(ρ, m, n).
Moreover, R = I n OY = (0, n); S = Z n XY = (m); T = 0 S n £ Y = (l,ra). Thus, in geometric coordinates, R=(a09 an); T = (<rl, om); 5 = OT n ZY; Z = RS; P = lr\ {Yap); aq = PX n OE. This is exactly the construction of aq = Φ2(σΡ» vm9 an), according to (8) of section 3.1.
Thus PIl if and only if aq = Φ2{σρ, <rm>> #w)· We know now that q = Φ(ρ, m, n) is equivalent to aq = Φ2(σΡ> am> ^ ) · This proves that a is an isomorphism.
Theorem 3.4.1. To every ternary field % there corresponds a projective plane *$(%) and a coordinate system © in 5ß(i£), such that the ternary field attached to 5β(ϊ) by © is isomorphic to %. Conversely, if the projective plane *ßx, together with the coordinate system ©l5 determine the ternary field %x, then 5ß(£i) is isomorphic to $ r

86 COORDINATES IN THE PLANE Chap. 3
In the preceding sections we have found tha t additional axioms, e.g. D109 Dlx or P 1 0 , involve certain properties of the ternary field which is attached to the plane. We shall now prove that , conversely, additional properties of the ternary field % involve the validity of certain propositions in $ ( £ ) .
Let us first consider D10. S$(Z}10) is called a M ou fang plane. In ì ( o 1 0 ) , the following properties hold: (i) Φ(χ, m, n) = xm + n. [Th. 3.2.4] (ii) (x + y) + z = x + (y + z). [Th. 3.2.1] (iii) x + y = y + x. [Th. 3.2.1] (iv) x(y + z) = xy + ocz. [Th. 3.2.7] (v) (x + y)z = XZ + yz. [Th. 3.2.6] (vi) \xy)z = x if yz = 1. [Th. 3.3.3] (vii) x(yz) = z if xy = 1. [Th. 3.3.3]
We now prove the converse: Theorem 3.4.2. If the equations (i)—(vii) are universally
true in %, then D10 is valid in $ ( £ ) . PROOF. By Th. 2.3.9, it is sufficient to prove tha t $ ( £ ) is
P- |- transit ive for every point P and every line ξ with P e ξ. λ) In a number of lemmas we shall prove the P-£-transivity for special choices of P and ξ.
L e m m a 1. If, for a given point A (A Φ P , A 4ξ) and any point B on PA (B φ P , B 4 ξ) the central collineation (ΑΒΡψ) exists, then 5β is P-£-transitive.
PROOF. I t is easy to find B such that (ΑΒΡ2ξ2) transforms a given point Q into a given point R on PQ (Q, R Φ P; Q, R ^ f ) .
L e m m a 2. If ξβ is P- |- transit ive, and Ê is a collineation, then ξβ is ©P-Kf-transitive.
PROOF. ( (©^)(®β)(©Ρ)2(©Ι)2)=©(^βΡ2Ι2)©-1 ; it is easily verified tha t the right hand side is a central collineation with centre ©P and axis (£f.
L e m m a 3. I t follows from (i), (ii), (iii) and (iv) that $ ( £ ) is Y-0 Y-transitive.
!) For the equivalence of D10 and D1 0I, see Th. 2.2.8 and Th. 2.2.10.

§ 3.4. THE GEOMETRY OVER A GIVEN TERNARY FIELD 87
P R O O F . By lemma 1 it suffices to prove tha t (XUY2OY2) exists for every point U on XY (U Φ Y). Let P = (p, q) be any point outside XY. P' is constructed as follows: XP n OY = T; TU nYP = Ρ'. T = (0, g). The equation of TU is y = xm + q, where m is an element depending on U. So P' = (ρ', g') with P' = P> q' = pm + q.
0 X Fig. 3.12
The equations x' = x, y' = a?m + 1/ define a transformation ©. The line y = xr + s is transformed into y = x(m + r) + 5. Thus, if we extend © to X Y by assigning (m + r) to (r), then @ transforms lines into lines. This proves tha t © is a central col-lineation with the desired properties.
L e m m a 4. I t follows from (i), (ii), (iii) and (v), tha t $ ( £ ) is X~XY- tran siti ve.
PROOF. Let a be the transformation x' = x -\- a, y' = y. If the equation of I is y = xm + w, then tha t of al is y = (x — a)m + n; thus σΖ is the line y = xm + (— am + ft). If we extend σ to X Y by fixing that it is the identity on XY, then σ becomes a central collineation; moreover, if A = (a, 0), then σ = (0^4X2XY2). This proves lemma 4.
L e m m a 5. I t follows from (i) - (vii) tha t $ ( £ ) is X-OX-transitive.
PROOF. Let A be the point (a) on XY. We prove the existence of (YAX2OX2). If this central collineation exists, then the image P' of a point P outside XY is constructed as follows:

88 COORDINATES IN THE PLANE C h a p . 3
P' = (YP n OX) A n XP. If P = (Pl, p2), then B =YPnOX = (pl 50). I t is easily seen that the equation of A B is y = xa — p±a; thus, if P' = (pi, p2), then p 2 — pi a — p ^ ; pi = px + ρ2α~\
Let a be the mapping with equations x' = x + t/«-1, g/' = «/; we must show that a is a central collineation. σ maps the line y = xm-\-n on y = (x—ya~1)m-]-n; this can be successively reduced to ym~x = x — ya~x + nm~\ y(m~x + #_1) = OÙ + wrn-1; ?/ = x(m~1 + « _ 1 ) _ 1 + (wm^jfm"1 + a - 1 ) - 1 , which is again the equation of a line. I t is clear tha t σ leaves every line through X and every point on OX invariant. This proves lemma 5. The reader may verify that in the calculations above only (i)—(vii) and the general properties of a ternary field are used. He may also treat the case that m = —a.
L e m m a 6 . I t follows from (i)—(vii) tha t 5β(ϊ) is 0-OY-transitive.
PROOF. In the proof of Th. 3.3.2. only the properties (i)—(v) and the general properties of a ternary field were used; therefore we can infer from this proof: If (i)—(v) hold in !Ε0β), then £ ( $ D ) is anti-isomorphic to !£($). Consequently, if (i)—(vii) hold in Ϊ(<β), then they hold in î ( ^ ) . Then, by lemma 5, <$D is XD - 0DXD- transiti ve; this is the same as saying that 5β is 0 - 0Y- transitive.
L e m m a 7. Let P be any point not on OX or OY, and ξ SL line through P , not through Y, then it follows from (i)—(vii) tha t $ ( £ ) is P-f-transitive.
PROOF. Put OP n XY = Q,S n OY = R,QR = η,η n OX = Γ,
T O X Fig. 3.13.

§ 3.4. THE GEOMETRY OVER A GIVEN TERNARY FIELD 89
YT = ζ. By lemma 3, *β is Y-OY-transitive. By lemma 4, g 1 = ( 0 r X 2 X 7 2 ) exists; ©ΧΥ = Y, ^^OY) = ζ. Thus, by lemma 2, $ is Υ-ζ-transitive.
By lemma 5, (£2 = (YQX2ÖX2) exists; ©2Y = Ç, &2ζ =_η. Thus, by lemma 2, $ is Ç-rç-transitive. By lemma 6, S 3 = (ÇP02ÔY2) exists; (£3Ç = P , ©3^ = f. Thus, again by lemma 2, *β is P-f-transitive.
L e m m a 8. In the cases where PeOX or PeOY or Y c f , $ ( £ ) is P-f-transitive for P e | .
P R O O F . We shall only prove the case P e OX, P 4 OY, Y 4 ξ; the reader may prove the other cases in a similar way. P u t ξηΟΥ=ϋ, choose TePY (ΤφΡ, Y). By lemma7, $ is Γ - I n transitive; if (£4 = ( Γ Ρ Υ 2 0 7 2 ) , then (£4Γ = P , (£4(ΓΑ) = ξ. Thus, by lemma 2, ^ is P-£-transitive.
This completes the proof of Th. 3.4.2.
Fig. 3.14.
REMARK. A ternary field in which (i)—(vii) hold, is called an alternative field. Hence ϊ(5β0) î s a n alternative field if an only if D10 holds in 5β0. The algebraic theory of alternative fields leads to interesting results; see e.g., Pickert, Projektive Ebenen chapter 6 and the literature mentioned there.
T h e o r e m 3.4.3. If % is a division ring, then Dn is valid in $ ( £ ) . This can be proved by a method analogous to tha t used in the
preceding theorem. I t is also possible to prove the theorem directly

90 COORDINATES IN THE PLANE Chap. 3
by the methods of analytic geometry; the calculations in this proof are complicated, because we have not proved that , if % is a division ring in one coordinate system, it is also a division ring in every other coordinate system. Therefore no special coordinate system can be used in the proof. The isomorphy of the ternary fields for all coordinate systems, if one of them is a division ring, then follows from Th. 3.3.I.
Another proof of Th. 3.4.3 will be given in Chapter V; see the remark after Th. 5.4.I.
REMARK. If a ternary field satisfies (i)—(vii) of Th. 3.4.2 and the associative law of multiplication, then it is a division ring. Thus, if D10 is valid in $ ( £ ) and multiplication is associative in 2 , then D±1 is valid in $ ( S ) .
Theorem 3.4.4. If % is a field, then P 1 0 is valid in $ ( £ ) . PROOF. Any proof of Pappos' theorem in analytic projective
geometry can be used here. We may even give a proof in which a special coordinate system is introduced, for by Th. 3.4.3, D1X
is valid, so by Th. 3.3.1 the ternary fields corresponding to different coordinate systems are all isomorphic.
REMARK. I t follows from Th. 3.2.8 and Th. 3.4.4: If Z)n is valid in 5β(ϊ) and multiplication is commutative in
S, then P 1 0 is valid in $ ( £ ) .
§ 3.5. Independence results.
The only independence results proved so far are Th. 2.2.1 and the stronger Th, 2,2,13, We can now prove
Theorem 3.5.1. o n is independent of Y l9 V2, V3, Z)10.
PROOF. Cayley's algebra (§ 1.3.3), is a ternary field if Φ is defined by (i).of Th. 3.4.2; (ii)-(vii) of Th. 3.4.2 hold, but multiplication is not associative. Thus in $(©), D10 is a theorem, but D ! ! is not valid in view of Th. 3.2.2.
T h e o r e m 3.5.2. P 1 0 is independent of Yl9 V2, V3, D1X. PROOF. AS real quaternions form a non-commutative division
ring & (§1.3.2), Dn holds in ?ß(Q), (Th. 3.4.3), but P 1 0 is not valid (Th. 3.2.3).

§3.6. HOMOGENEOUS COORDINATES 91
§ 3.6. Homogeneous coordinates.
So far, coordinates were only introduced in the affine plane; points on XY had no coordinates. In the case of 5ß(ö n ) , where the coordinates belong to a division ring, the assignment of coordinates can be extended to the whole projective plane by the use of homogeneous coordinates, analogous to those which were used in § 1.4 for APPG.
The first thing to do is to extend the notion of ratio to division rings.
Definition. Two sequences (xl9 . . ., xn) and (yl9 . . ., yn) of elements of a division ring % are called left-proportional if there exists an element c Φ 0 of % such tha t yt = cx{ (i = 1, . . ., n) .
I t is easily seen tha t left-proportionality is an equivalence relation in %n.
Definition. An equivalence class in § n with respect to the relation of left-proportionality, which does not consist of the null sequence, is called a left n-ratio. (Where the number n is clear from the context, we simply speak of a left ratio.)
The definitions of right-proportionality and of right ratio are analogous.
Now let us consider a projective plane $ 0 (^ i i ) · Let (#> U) ^ e
the coordinates of a point P in some coordinate system OXYE. Any triple (x0, xl9 x2) in the left ratio (1, x, y) is a triple of homogeneous coordinates for P . In other words, if x0 Φ 0, then a triple of homogeneous coordinates for P is (x0, x0x, x0y).
Analogously, let y = xm + n be the equation of a line Z. Any triple (f0, ξΐ9 ξ2) in the right ratio (n, mf — 1) is called a triple of homogeneous coordinates for Z. Thus, if | 2 Φ 0, then (— ηξ2, —τηξ2, ξ2) is a triple of homogeneous coordinates for Z. The equation of Z can be written as
n + xm — y = 0, or as (1) x0(n + xm — y)è2 = 0 or as
I t is here tha t the associative rule for multiplication is used. I t is also at this point tha t it becomes clear why left ratios are

92 COORDINATES IN THE PLANE Chap. 3
used for the coordinates of points and right ratios for those of lines.
Our aim is to extend the use of homogeneous coordinates to the points on XY and to the lines through Y, which until now where excluded. Let Q be a point on XY9 Q φΥ9 and let y = xm be the equation of OQ. Every line s through Q (except XY) has an equation y = xm + n and homogeneous coordinates (n9 m, — 1) If we assign to Q the homogeneous coordinates (0, 1, m), then (1) will be satisfied by Q and s. A line t through Y has an equation x = c; a point R on t has coordinates (1, c9 d). If we assign to t the homogeneous coordinates (— c, 1, 0), then (1) is again satisfied by R and t. Finally, we give Y the coordinates (0, 0, 1 ) and XY the coordinates (1,0,0); then (1) is a necessary and sufficient condition for the point (x09 xl9 x2) to be incident with the line (fo. fi A)·
Theorem 3.6.1. In every projective plane 5β0(^ιι)> w e c a n
assign left-homogeneous coordinates (x0, xl9 x2) to the points and right-homogeneous coordinates (|0, ξΐ9 ξ2) to the lines, such that (1) is the condition for incidence of point and line.
From Th. 3.6.1 the duality of coordinates is evident. For let Ç* be the division ring which has the same elements as §, but with the order of multiplicands in a product reversed; that is, if ab = c in %9 then ba = c in g*. (It is easy to see that g* is again a division ring.) If we map the point (x09 xl9 x2) of $($) on the line (x09 xl9 x2) of $($*) a n ( i the line (f0, ξΐ9 ξ2) of $($) on the point (f0, ξΐ9ξ2) of $($*)> t n e n t n e incidence relations will be preserved. Thus $($*) is the dual of $(§) in the sense of § 2.1 (see the remark after Th. 2.1.3).
A corresponding result in the affine plane was proved in Th. 3.3.2 under the weaker assumption Z)10.

CHAPTER IV
INCIDENCE PROPOSITIONS IN SPACE
§ 4 . 1 . Trivial a x i o m s and proposi t ions .
Definition. A three-dimensional projective geometry *ß3(Rl— R5) x ) is an axiomatic theory with as set of fundamental notions the quadruple <77, Λ, 27, 1} and as axioms R l — R 5 below. 77, A, Σ are disjoint sets; the elements of Π are called points, those of A lines, those of Σ planes. I is a symmetric relation which can exist between a point and a line, between a point and a plane and between a line and a plane, alb is to be read "a is incident with 6".
A x i o m s . R l . Given two different points, there is exactly one line with
which both are incident. R2 . Given a point and a line, which are not incident, there is
exactly one plane with which both are incident. R 3 . Given a plane and a line, which are not incident, there is
exactly one point with which both are incident. R4 . If the point P is incident with the line Z, and I is incident
with the plane a, then P is incident with a. R 5 . There exist five points Al9 A2, AS9 A±9 A5, which are not
all incident with one line, and no four of which are incident with a plane.
Exercise . The reader may verify tha t R l — R 5 are valid in ASPG (§ 1.5).
REMARKS. A, B, P, Q, . . . will denote points, Z, m, p, . . ., lines, α, β, γ, . . ., planes. The line incident with A and B will be denoted by A B, the plane incident with P and Z by PI, the point incident with a and ( by α π /.
*) The symbols *β2 and *β3 will denote a two- and a three-dimensional projective geometry respectively.

94 INCIDENCE PROPOSITIONS IN SPACE Chap. 4
The following expressions will be used synonymously: PIl9 IIP, P lies on Z, I passes through P , I contains P. PIOL, aJP, P lies in a, a passes through P , a contains P . HOL, adi, I lies in a, a passes through l9 a contains Z.
Exe rc i se . In R5 we postulate tha t the five points are not collinear, in order to avoid the following trivial model: Π consists of five points, all incident with a line Z tha t is the only element of A; Σ contains no element a t all. Verify the axioms for this model.
REMARK. AS in Chapter 2, *ß3 denotes an axiomatic theory, i.e. a set of theorems. Models of $ 3 will be denoted by $ Q , ^\9...; such models are called projective spaces. Moreover, $o(^i> · · · > Ak) denotes a projective space in which the axioms Al9 , . . ., Ak are valid.
Exe rc i se . The proofs of the following theorems are not worked out in detail. I t is left to the reader to complete them and to examine step by step tha t the reasoning follows from the axioms without use of space-intuition.
T h e o r e m 4.1 .1 . In $ 3 ( R l — R 5 ) : A line which contains two different points of a plane, lies in tha t plane.
PROOF. R3.
T h e o r e m 4.1.2. In ψ (R i—R5) : Given three points which are not on a line, there is exactly one plane which is incident with these points.
PROOF. Easy; use R l , R2, R4. Th. 4.1.1. REMARK. The plane through A9 B, C will be denoted by ABC. T h e o r e m 4.1.3. In *β3 (R l—R5) : Every plane contains four
points, of which no three are collinear. PROOF. Let a be a plane. Of the five points which exist by R5,
a t least one, say A5, is not in a. The lines A^h (i = 1, 2, 3, 4) intersect a in Bl9 B2, S 3 , B 4 . I t is easily seen tha t these points satisfy the condition of the theorem.
T h e o r e m 4.1.4. In $ 3 (R i—R5) : Given two different planes, there is exactly one line which is incident with both.

§ 4 .1 . TRIVIAL AXIOMS AND PROPOSITIONS 95
REMARK. The line incident with a and ß will be denoted by α η β. PROOF. Let a, ß be different planes. Choose P, Q9 R in a, not
on one line (Th. 4.1.3). These points are not all in ß (Th. 4.1.2); let P be outside ß. Then PQ and PR intersect ß in S and T respectively. S Φ T9 for otherwise P, Q, R would be collinear. The line ST = p is in a and in ß. If another line q were in a and in ß9 then S or T would be outside q9 so a would coincide with ß.
Theorem 4.1.5. In $ 3 (Rl—R5), there exist five planes which are not all incident with one line and no four of which are incident with a point.
PROOF. Let Al9 . . ., A5 be five points satisfying R5. The planes aikl = AiAkAl9 where i9 k9 I are successively; 1, 2, 3; 2, 3, 4; 3, 4, 5; 4, 5, 1 and 5, 1, 2, satisfy the conditions.
As in the case of the plane, there is a duality principle in space. Theorem 4.1.6. (duality principle). If in a theorem of $ 3
(Rl—R5) we interchange the words "point" and "plane", we obtain again a theorem of 5ß3 (Rl—R5).
PROOF. If in Rl—R5 we interchange the words "point" and "plane", we obtain Th. 4.1.4, R3, R2, R4, Th. 4.1.5 respectively. We can now reason exactly as in the proof of Th. 2.1.3.
Thus, if <770, A09 Σ09 70> is a projective space ξβ3 (^ 1 —^)> then <270, Λ09 Π09 70> is also a projective space ξβ^ (Rl—R5). These two spaces are dual to each other.
Theorem 4.1.7. In *β3 (Rl—R5), the set of points in a plane a and the set of lines in a, together with the restriction of I to these sets, form a projective plane ?ß2(Dn). In other words, every plane in projective space is a projective plane in the sense of section 2.1, and moreover Desargues' proposition holds in it.
PROOF. We must prove that Vl, V2, V3, Du hold. The proof of VI andV3 is immediate from Rl , Th. 4.1.1, Th.4.1.3. Proof of V2. Let I and m be lines in a, l Φ m. Choose A outside
oc; Al = ß. m does not lie in ß; m n ß = 5. If 5 were not on Z, then a and ß would coincide (R2). Thus I intersects m in S.
Proof of J9U. Let the triangles Α^2Α3 and B1B2B3 in a with the point 0 satisfy the hypothesis of D1X (corresponding vertices

96 INCIDENCE PROPOSITIONS IN SPACE Chap. 4
are different, corresponding sides are different, lines connecting corresponding vertices pass through 0). at- nb{ = Ci9- C1C2 = I.
c, Fig. 4.1.
Choose P outside a; Pl—ß. Choose S on OP outside a and ß (Exercise: show tha t this is possible). SAi n ß = D{ (i = 1, 2, 3); the sides of the triangle D1D2D3 are dl9 d2,d3. I t is easily seen tha t Cx e dl9 C2 e d2 and a3 n / e d3, If B3DS n OS — Γ, we see tha t T e D1B1 and Γ e D2B2. I t follows tha t bz n I € d3, and thus C 3 c / .
REMARK. Denoting Dl9 D2, Dz, 5 , T by P 1 ? P 2 , P 3 , P 4 , P 5
respectively, and mapping the intersection of PiPk with a on the pair (i, k) of numbers we get exactly the mapping discussed in § 2.2 (see after Th. 2.2.4). Thus Desargues' configuration is the plane intersection of the figure consisting of the lines and planes connecting 5 points in space.

§ 4.2. THE SIXTEEN POINTS PROPOSITION 97
§ 4.2. The Sixteen Points Proposition.
In analytic solid protective geometry ASPG, the following proposition is valid.
Sixteen Points Proposition R16. Let a0, al9 a2, a3, b09 bl9 ft2, 63 be different lines, not in one plane. If fifteen of the intersections Sik = a{ n bk exist, then the sixteenth exists as well.
In ASPG this theorem is a simple corollary of the theory of lines on a quadric. In the axiomatic theory we have the following theorem.
Theorem 4.2.1. In $ 3 (Rl—R5), the sixteen points proposition i?16 is equivalent to Pappos' proposition P1 0.
PROOF. I. P10 -> i?16.
Let every Sik be known to exist, except 533. Choose a plane τ which does not contain 500, and project the points and lines of the figure from S00 on τ. Let Tik, ai9 b\ be the projections of Sik9 ai9 bi respectively (i, k = 1, 2, 3). a0 n r = AQ9 b0 n x = BQ. Then a19 a29 a3 contain B0; b\9 b'29 63 contain A0.

98 INCIDENCE PROPOSITIONS IN SPACE Chap. 4
The sides of the hexagon T12T13T23T21T31T32 are a19 6'3, a2, b\9 a3, b2; they pass alternately through B0 and A0. By the dual of P 1 0 (see Th. 2.6.8) T12T21, T13T3l9 T23T32 have a point R in common. Now consider the points Rx = S1 252 1 n 5 1 3 5 3 1 , ^2 — 5χ2^2ΐ η 52 353 2 (these points exist!). Suppose R± Φ R2. The projections 2?Ί and i?2 coincide with R. Thus 5 0 0 , 2?x, J?2, S129 S21 are on one line I; it is easily seen tha t the plane IS01
contains all the a{ and bi9 which contradicts the hypothesis. I t follows that Rx = R2. Then 5 1 3 , 5 3 1 , S23, 53 2 are in a plane, so tha t 5 3 3 = a3 η b3 exists.
I I . Ru-+P10, We shall prove the dual of P 1 0 . The proof consists simply in
reconstructing the figure of the preceding proof, starting with the plane hexagon.
Let T12T13T23T21T31T32 be a hexagon in a plane τ, with different vertices and different sides, and such tha t the sides pass alternately through A0 and B0: BQeT12T139 T23T2l9 T31T32; Ao€i13l239 121T3l9 T32T12.
Choose 50 0 outside τ; denote S00A0 by a0 and 5 0 0 ß 0 by b0. Choose 5 0 1 on a0 (S01 Φ 5 0 0 , A0) and 5 U on S00Tn ( S u Φ 500);
^01^11 = " i · ^21 == ^00-^21 n bi'9 S31 = S00T31 n bx. Now take 51 0 on b0 (51 0 ^ S00, £ 0 ) ; 5 1 0 5 n = av
b12 = o00i 12 n αχ; 5 1 3 = o00i 13 n ax. Next choose S22 on 500Γ22, not in the plane through ax and 61#
The plane 522a0 contains 4̂ 0^22 > a n d ^hus 7 \ 2 and Γ3 2. I t follows tha t S22S12 intersects a0 and S00T32; call these points of intersection S02 and S32 respectively. In the same manner we find S20
and 5 2 3 . S20S22 = a29 50 252 2 = b2. The lines S31S32 = a3 and S13523 = b3 are determined. We complete the figure by So3 = a0nb3 and 53 0 = as n b0 (these points exist!).
By R169 a3 and b3 intersect in S33. As S12, 5 1 3 , 52 1 , S31 are in the plane through αλ and bl9 S12S21 and S13S31 intersect. Also S12S21 intersects 52 353 2 , and S13S31 intersects S23S32. Since the three lines are not in a plane, they pass through a point R. If R' is the projection of R on τ, then T12T2V T23TZ2 and T31T13
pass through R'. This proves the dual of P 1 0 .

§4.2. THE SIXTEEN POINTS PROPOSITION 99
/ / / / / /
JÌ. N
s&
^

CHAPTER V
COORDINATES IN SPACE
§ 5.1. Coordinates of a point.
In the space $Q (Rl—R5) we choose the points 0 , X, Y, Z, E such tha t no four of them are in a plane. The planes XYZ, OYZ, OZX, OX Y are denoted by a0, al9 a2, a3 respectively. OEn a0 = W.
Definition. If P 4 XYZ, then the coordinates p, q, r of P in the system OXYZE are
p = Y Z P n 0 £ g = Z X P n 0 £
r = ^ y P n 0 £ . The assignment of coordinates to points establishes a one-to-one correspondence between 5ßo\ a o and (0E\{W})*.
x, y, z are variables for the first, second and third coordinates of a point.
The equation of a plane through YZ is x = c; analogously for planes through ZX or XY.
Let τ be any plane through OE, then r is a ty2(Dn). Thus, as in section 3.2, we can form the group Ga of i72's with one invariant point W9 and the group Gm of 772's with invariant points 0, JF.
Definition. If A, B, C, D are points of 0E\{W}, B+A = C means (0^T7 2 ) (05 iT 2 )= (0CiF 2 ) , and if A, B φ 0, B · A = D means (£^0 2 i7 2 ) (£B0 2 PF 2 )=(£:Z)0 2 T7 2 ) ; 0 Ά = B · 0 = 0.
As Z?!! is valid in τ, this is in accordance with the results of section 3.2 (see the proofs of Th. 3.2.1 and Th. 3.2.2).
Theorem 5.1.1. If addition and multiplication are defined as in the preceding definition, the points of OE (W excluded) form a division ring.
PROOF. This is an immediate consequence of Th. 3.2.8.

§5.1. COORDINATES OF A POINT 101
REMARK. Let two planes τ and τ' be given, and a point Z not in τ or τ'. The projection π of τ onto τ' can be defined by π(Α) = ZA n τ' for every A e τ. Then a i72 (^^1Ό2Ϊ72) of a line I in r onto itself is transformed by π into the Π2((πΑ)(πΑ')(πΟ)2(πυ)2) of the line nl onto itself, because π transforms the lines of τ into the lines of τ' and preserves incidence relations.
Now let τ and τ' be two planes through OE. Projection from Z (or Z or Y) has the property mentioned in the remark. Thus, (OAW2) and (EA02W2) are independent of the choice of r. We conclude that addition and multiplication on OE are independent of τ.
Fig. 5.1.
Moreover, let P' denote the projection of P from Z on a3. If A, B9 C e OE and B + A = C, then (OAW2)=(BCW2). By the remark above we see that (OA'W'2) = (B'C'W2), i.e. B' + A' = C

102 COORDINATES IN SPACE Chap. 5
in the coordinate system OXYE' in a3 (section 3.2). In the same way, if B ' A = D, then B' · A' = Z)'. Thus by projection from Z the division ring of points on OE is mapped isomorphically onto the division ring of points on 0Ef. We shall use this fact by identifying elements of these division rings, which correspond in this mapping. Thus, if (x9 y, z) are the coordinates of P in OXYZE, then (x, y) are the coordinates of P' in OXYE'. Analogous remarks apply to the projections from X on ax and from Y on a2.
§ 5.2. Equation of a plane.
If H e XY, ΗφΥ, then in OXYE', OH has an equation of the form y = œp. From the preceding section it follows that y = xp is also the equation of the plane OZH.
Analogously, the equation of a plane through 0 Y is of the form z = xq and that of a plane through OX is z = yr (which planes

§5.2. EQUATION OF A PLANE 103
are exceptions?). More generally, let xa + yb = c be the equation of a line I in OXY; then xa + yb = c is also equation of the plane Zl.
The next step is to determine the equation of a plane through 0. It is convenient to use here the points of OZ, instead of those of 0E9 as coordinates. For this purpose we project the points of OE from XY on OZ. (i.e. t e 0E\{W} is transformed into tXY n OZ). In the same way as above, we see that this is an isomorphic mapping of the division ring OW onto the division ring OZ.
y Fig. 5.8.

104 COORDINATES IN SPACE Chap. 5
Let a be a plane through 0, not through Z. a n YZ = S, a n X Z = 7\ Let z= yq and s = œp be the equations of the planes OXS and 0 Υ Γ respectively. LetC = (#, £/,2)be any point in α, Ο Γ η SC = A, OS n TC = B. The coordinates of these points are A = (x, 0, #p); 5 = (0, y, yq). XC n BZ = G, YG n OZ ^= H, YBnOZ = D,XAnOZ=F.D = (0,0, yq); F = (0, 0, xp). I t is clear that G e FS. Now project the points of 0Z from S on BZ, and from Y back on OZ; this is the construction of (0DZ2). We see tha t (0DZ2)F = # , i.e. F + D = H. Thus if has coordinates (0, 0, xp + yq), G = (0, y, xp + yq), and C = (x, y, xp + yq). I t follows tha t the equation of a is z = xp + 2/9·
Now let ß be a plane not passing through 0 or Z. ß n OZ = i? = (0, 0, r), ß nYZ = S, ß nXZ = T, OST = a; let z = xp + yq be the equation of a. If 4̂ = (#, Î/, 2) is a point of ß, we construct β = α η Ζ 4 . Β = («, y, xp + yq). OZA n XY = U, UAnOZ= C = (0, 0, z). UB nOZ = D = (0, 0, xp + yq). Projecting the points of OZ from B on ZU and back from A on OZ, we find tha t (0RZ2)D = C, i.e. C = D + R. z = #p + yq + r. This is the equation of ß.
Combining the different cases we find Theorem 5.2.1. The equation of a plane (XYZ excluded) has
the form xa + yb + zc = d, and every equation of this form represents a plane.
§ 5.3. Homogeneous coordinates.
Homogeneous coordinates can be introduced by the same method as in section 3.6. Let (x, y, z) be the coordinates of P and let x0 be an element of the field % on OE, x0 Φ 0.
Any quadruple (xQ, xl9 x2, x3) in the left ratio (1, x, y, z) is a quadruple of homogeneous coordinates for P. Also, a quadruple of homogeneous coordinates for the plane xa + yb + zc = d is any quadruple (£0, ξΐ9 ξ29 £3) in the right ratio (—d, a, b, c). The incidence relation between point and plane becomes
(1) χ0ξ0 + xjx + χ2ξ2 + χ3ξ3 = 0. I t remains to extend these coordinates to the points of XYZ.
Let R be a point of XYZ, R 4 XY, and let y = zq, x = zp be the

§5.3. HOMOGENEOUS COORDINATES 105
equations of XOR, YOR respectively. We give R the homogeneous coordinates (0, p9 q9 1). The non-homogeneous coordinates of a point 5 of OR are (zp9 zq9 z); its homogeneous coordinates are (1, zp9 zq, z), or, equivalently, (u, p, q, 1), where u = z'1.
Now let a be a plane with equation (1). a n XYZ = I; 01 = ß. The equation of ß is (2) xjt + Χ2ξ2 + χ3ξ3 = 0; this follows from the proof of Th. 5.2.1.
If R € I and 5 e OR, R = (0, rl9 r29 r3), then 5 = (s09 rl9 r29 r3), as we have just found. As 5 satisfies (2), R satisfies (2) as well; but then R satisfies (1).
I t is left to the reader to draw a similar conclusion for a point R e XY9 R Φ Y, to which we give the coordinates (0, 1, p9 0) if y = xp is the plane 0ZR9 and for the point Y = (0, 0, 1, 0).
We combine these cases by saying tha t the points of a plane which lie in XYZ, satisfy the equation of tha t plane. Of course the plane XYZ has the equation x0 = 0.
Theorem 5.3.1. In *β0 (Ri—R5), we can assign left-homogeneous coordinates (x09 xl9 x2, xs) to the points and right-homogeneous coordinates (f0, ξΐ9 ξ29 ξ3) to the planes, such tha t (1) is the condition for the incidence of point and plane.
Similarly as in § 3.6, the duality principle for the space is a direct consequence of Th. 5.3.I.
Now let § be the division ring determined by a projective space ^ and a coordinate system OXYZE (see Th. 5.1.1). We form the four-dimensional left vector space SS4 = i?4($) over g . The representation of the points of ^Q by homogeneous coordinates (x09 xl9 x2, x3) consists in a one-to-one correspondence between the points of ^ and the one-dimensional subspaces of S54. (1) shows tha t a plane corresponds to a three-dimensional subspace; a line, as the intersection of two planes, corresponds to a two-dimensional subspace.
Theorem 5.3.2. Let Ç be the division ring corresponding to the projective space ^5Q, then <9i1, 9i2, 3t3, />, where 9ί,· (i = 1, 2, 3) is the set of i-dimensional subspaces of i?4(§) a n d I is t n e incidence relation, is a projective space isomorphic to 5β§.

106 COORDINATES IN SPACE Chap. 5
§ 5.4. The geometry over a given divis ion ring.
If U and SB are subspaces in i?4(§) of different dimensions, then UJSB means tha t U C SB or SB C U.
I t is obvious from the elements of the theory of vector spaces tha t the projective space $ 3 ^ = <2Il5 5t2> 2i 3 , -0 is a model for the axioms R l , . . . , R5. ^53g is called a projective space over $ .
Exercise. The reader may verify the axioms for this model. Now consider a projective plane $Q (Vl, V2, V3, Dn). Construct
the ternary field % corresponding to it (section 3.1); by Th. 3.2.9, % is a division ring. Next we construct the projective space $ß3$> By Th. 4.1.7, the plane xz = 0 is a projective plane 5ßJ; by the method of section 3.4, we see tha t ^\ is isomorphic to the given plane $Q- Thus every $ o ( ^ n ) c a n ^ e embedded in a ξβ3. The converse follows from Th. 4.I.7.
So we have Theorem 5.4.1. A projective plane can be isomorphically
embedded in a projective space if and only if Z) n is valid in it. If a division ring % is given, we can form tyt as described above.
From Th. 4.1.7 and the end of section 5.1, we infer tha t every plane of 5$l will be a ?$% in which Dn is valid. This provides a new proof of Th. 3.4.3.

CHAPTER VI
T H E FUNDAMENTAL PROPOSITION OF PROJECTIVE GEOMETRY
§ 6 . 1 . The fundamental proposit ion.
We investigate further the projective plane *J& over a division ring $ . 5{?g is isomorphic to the geometry of linear subspaces in a three-dimensional left vector space 2?3($) over fÇ (Th. 5.3.2).
A basis for Rs(%) consists of three independent vectors a, b , c, which can be determined by their lines a, b9 c and the vector e = a + b + c. With respect to the basis, a vector p = p0a + pxb + p2c has coordinates (p0, pl9 p 2 ) . The line p is determined by the left ratio (p0, p19 p2), or, what comes to the same, by the quotients
Pi = Po"1?!* VÌ = Po_1P2 if we suppose tha t p is not in the plane through b and c.
Let e be the line determined by e. We call pf, ρξ the analytic coordinates of p9 and also of the point P of Sß« which corresponds to p. The equation of the plane through a and e is PÎ = P * ·
To a9 b9 c9 e there correspond points 09 X9 Y, E. A point on OE has analytic coordinates (pf, p f ) . In the geometric coordinate system OXYE, P has coordinates p j , ρ2 , where p j , p2 are points on 0E9 and pj = (pf9Pi)9 p\= {V*>V*)- The points on OE form the division ring %x at tached to the geometry *β~ by the coordinate system OXYE (see section 3.1). By the same method as in section 3.4 we find tha t the correspondence σ(χ)=(χ9 χ) is an isomorphism between % and fÇle We shall regard this isomorphism as the identity and thus write "a?" for "(x9 x)".
Thus the geometric coordinates of P in OXYE are (pf, p£), or, what is the same, (pJpPi* P ö " ^ ) · Introducing homogeneous coordinates, we find

108 FUNDAMENTAL PROPOSITION OF PROJECTIVE GEOMETRY Chap. 6
T h e o r e m 6.1.1. Let P be the point of *{&, corresponding to the line p in P 3 (§ ) . Let a, b , c be a basis of i?3(3) a n d e the vector a -f- b + c. Let the points 0, X9 Y, E correspond to the lines a, b9 e, e of P 3 (5 ) which are determined by a, b , c, e. Then the analytic coordinates of p with respect to the basis a, b , c are the same as the geometric coordinates of P in the system OXYE.
Now let a', b ' , c' be a different basis of P3($)> a n ( i (Po> Ρι> P2) the coordinates of p with respect to this basis. The relation between the two kinds of coordinates is given by the following coordinate transformation in i?3(§) (section 1.6, (4)):
2 (1) ** = I>'i*4·
t « = 0
a', b ' , c' determine a geometric coordinate system O'X'Y'E'; the points of O'E' form a division ring fÇ2. Again there is an isomorphism between % and $ 2 , which will be regarded as the identity. By this method we obtain a privileged isomorphism between %x and g 2 , which we again regard as the identity, so that every element of %x is identified with one and only one element of & .
Now let I and V be lines in ty% and let a perspectivity © be given between I and Γ. © can be extended to a central collineation © (Th. 2.5.6). ® transforms the coordinate system OXYE into another system which we call O'X'Y'E'. As above, let %x and $ 2
be the division rings attached to 5β£ by these systems. As was proved in Th. 3.3.1, © establishes an isomorphism a between %x
and 52» such that , if (p0, pl9p2) are the coordinates of P in OXYE, then (crp0, σρχ, crp2) are the coordinates of ©P in Ο Τ Υ Έ ' . Please take notice tha t a need not be the isomorphism which we have regarded as the identity! (See the end of this section.)
Let us denote (£P by P * and the coordinates of P * in OXYE by pf; those in O'X'Y'E' by pf. Then pf = σρ^ Now (1) gives us
(2) PÎ = Σ {°Vi)<· t = 0
This is the analytical expression of © in OXYE. As § has been identified with ^ as well as with § 2 , σ* can be

§6.1. T H E FUNDAMENTAL PROPOSITION 109
considered as an automorphism of Ç. We shall prove tha t a is an inner automorphism of %. (This proof is due to R. Baer, see: Linear Algebra and Projective Geometry (New York 1952), section I I I 1.)
First of all, we draw some simple conclusions from (2). 2
{ock + yk)*=2<*(xi + yi)ui=l(**<)«£ + l(ayi)ui=x*+y*· S o
(3) (** + £*)*= * * + ! £ . (***)* =Σσ(λχϊ)Κ = Σ(σλ)(axi)ui = (σλ)Σ(σχζ)ηΪ = (σλ)χ*- S o
(4) (λχ,)* = (σλ)χ*. Now let Ρ be a point on the axis d of (5, thus P* = P and
pf is proportional to pt : pf = μ(Ρ)ρί. We shall show tha t μ{Ρ) does not depend upon P.
If Q is another point on d, then (pt- + ?j) are also the coordinates of a point on d, denoted by P + Q.
(5) (p, + qù* = Α*(Ρ + Ç)(p< + ?,). Also, according to (3) and (4):
(6) (Pi + ?,)* = P? + îf = Μ*)Ρ< + Mo)?*· By (5) and (6):
{ju(P + Q)-M(P)}pt+fa(P+Q)^(Q)}qt = 0 (» = 0, 1, 2). Because P and Q are different points, this implies μ{Ρ) = μ((?) = =μ(Ρ + (?)· We now write simply μ instead of μ(Ρ).
For any point P on the axis we have (ApA)* = μ(λρΑ), and by (4) : (λρ*)* = (σλ)ρ* = (αλ)μρΊυ. Thus/ώρ* = (σλ)μρ1ί; μλ=(σλ)μ; σλ = μλμ'1. As this is true for every λ in ^r, σ is an inner automorphism of fÇ.
We can now illustrate the fact that , if § is not commutative, σ need not be the identity. Let a be an element of § such tha t ax = xa is not true for every x in g . The automorphism x* = α#α_1
defines a projectivity σ on OE (see Exercise 1 a t the end of the section); this projectivity can be extended to a collineation (£ (Cor. 2.5.6). ©0 = 0, g £ = £ , (SW = W, Ο Γ = Χ' , (£Y = Y'. Coordinates in 0 X ' Y ' £ are the same as in OXYis (see the proof of Th. 3.3.1), but σ is not the identity.
or is a projectivity on OE with three invariant points, which is

110 FUNDAMENTAL PROPOSITION OF PROJECTIVE GEOMETRY Chap. 6
not the identity. Conversely, the result of the preceding pages shows tha t every projectivity on OE which leaves 0, E, W invariant, induces an inner automorphism of Ç. Now % has inner automorphisms different from the identity if and only if § is not commutative. Thus in ty% there exist non-identical projectivities with three invariant points if and only if g is not commutative. In other words
Theorem 6.1.2. If % is commutative, then every projectivity on a line in *ß» with three invariant points is the identity. Conversely: If in *{& every projectivity on a line with three invariant points is the identity, then g is commutative.
The proposition tha t every projectivity on a line with three invariant points is the identity, is equivalent to the proposition tha t a projectivity between two lines is uniquely determined by the images of three points. For if a and τ are projectivities from I onto V such tha t a A = τΑ9 σΒ = τΒ, oC = TC, then τ~χσ is a projectivity on I which leaves A, B, C invariant, and τ_1σ is the identity if and only if or = τ.
The proposition tha t a projectivity between two lines is uniquely determined by the images of three points, is called the fundamental proposition of projective geometry. (It got this name because it played a fundamental part in the synthetic construction of projective geometry.) (See Appendix 4.)
Theorem 6.1.3. In 5ß(£)n), the fundamental proposition of projective geometry is equivalent to the commutative law of multiplication in ϊ(5β), and thus also the Pappos' proposition.
Exercise 1. The projectivity x* = α~λχα is constructed as follows: EY n aX = C, OC n EX = D, xY n OC = Q, XQ n EY = R, ORnDY = S, XS n OE = a^xa. This comes to the following construction: Project x from Y on OC, from X on EY, from 0 on DY, from X on OE. This is a i74 . (See fig. 6.1, which is drawn inaccurately, since otherwise x* would coincide with x). The last statement also follows from the fact tha t multiplication to the right is effectuated by a Π2, multiplication to the left by a 773 (see the proofs of Th. 3.2.6 and 3.2.7). Two of the projections here can be coupled into one.

§6.2. SUMMARY OF RESULTS 111
Fig. 6.1.
Exercise 2 . If % is the division ring of real quaternions coe + ci1i + ^2/2 + c3?3> a n d #* = ίι~1χΪν then every point of the form c0e + c^ is invariant, but j1~1j2ji = —/1/2/1 = —J2I JrHdi = -/1/3/1 = - / s -§ 6.2. S u m m a r y of results .
The following axiom systems for plane geometry have been considered. ^ = ^ γ 2 y 3 }
52 = {VI, V2, V3, D10}. 53 = {VI, V2, V3, Du}. 5 4 = {VI, V2, V3, P 1 0 } .
All these systems are consistent, because analytic plane projective geometry APPG is a model for them. (1) S.CS.CS.CS,. This was proved in Th. 2.2.13, Th. 3.5.1, Th. 3.5.2 respectively.
We shall not prove the independence of the axioms in Sx. Isolated independence results are contained in (1).
5 4 is not complete with respect to APPG. To prove this, we recall tha t the projective plane over an arbitrary field § is a model of 5 4 (Th. 3.4.4). Let us choose for % the prime field § a
of characteristic 2, tha t is the field consisting of two elements 0, 1 with as definitions of + and X ?

112 FUNDAMENTAL PROPOSITION OF PROJECTIVE GEOMETRY Chap. 6
0 + 0 = 0, 0 + 1 = 1, 1 + 0 = 1, 1 + 1 = 0 , 0 x 0 = 0, 0 X 1 = 0 , 1 X 0 = 0, 1 X 1 = 1.
The projective plane over g 2 contains seven points: A1== (1 ,0 ,0 ) , A2 = ( 0 ,1 ,0 ) , Az = ( 0 , 0 , 1 ) , A± = (0, 1 , 1), A5 = (1, 0 ,1), A6 = (1, 1 0), A1 = (1, 1, 1). There are also seven lines: /x = A2A3A±, i2 = ΑλΑ3Α5, l3 = A1A2AQ, /4 = A^A±Aly
lb = A2A5A7, /6 = Α3Α6ΑΊ, l7 = A±A5AQ. A3
This geometry is visualized in fig. 6.2, where the circle represents Z7. The harmonic conjugate of A5 with respect to AXA3
can be constructed by means of the quadrangle A2A±A6A7; it is A 5 itself.
More generally, in a projective plane ^0{D11), with a coordinate system OXYE, let us construct the harmonic conjugate F of E with respect to 0, W. If XE nOY = P , I f P n O Z = Ç, then YQ n 0 £ is JF, for in the quadrangle XYPQ we have EF harm. OW. The figure shows tha t E + F = 0, so F = is if and only if the characteristic of 2 ( $ 0 ) is 2 ·
Therefore the following theorem of A PPG is not provable in 5 4 : Harmonic proposit ion (H). If A, B, C are different points
on a line Z, and if AB, CD are harmonic pairs, then D φ C. The projective plane over any field is a model of 5 4 . If two
fields are not isomorphic, the corresponding projective planes are not isomorphic (this follows from Th. 3.3.1). As there is an infinity of non-isomorphic fields, it follows tha t 5 4 is not categorical.

CHAPTER VII
ORDER
§ 7 . 1 . Cyclically ordered sets .
As we saw in § 1.4, the points of a line in analytic projective geometry can be cyclically ordered, in such a way tha t this order is invariant under projection. The cyclical order could be described by means of a relation between pairs of points, called separation.
We shall now introduce the notion of cyclical order in axiomatic geometry; it is convenient to treat first the general theory of cyclically ordered sets, independently of its application to geometry.
Definition. A cyclically ordered set is a set V together with a relation a between pairs of elements of V, such tha t the following axioms Cl—C4 are satisfied.
A x i o m s . C l . If ABaCD, then A, B, C and D are distinct elements of V. C2. ABaCD is equivalent to CDaAB and to BAaCD. In other
words, a is a symmetric relation between unordered pairs of elements of V.
C3. If A, B, C, D are distinct elements of V, then one and only one of the relations ABaCD, ACaBD, ADaBC holds.
If ABaCD, then AB and CD are called separating pairs. Thus four distinct elements of V can be divided in one and only one way into separating pairs. C4. If ACaBD and ADaCE, then ADaBE.
T h e o r e m 7.1.1. In 7(Cl—C4): If A, B, X, Y, Z are distinct points, and ABaXZ, but not ABaYZ, then ABaXY.
PROOF. By C3 we have either AB a XY or AX a BY or AY a BX. First suppose AX a BY. From AX a YB and AB a XZ we infer, by C4, AB a YZ, contrary to the hypothesis. Next sup-

114 ORDER Chap. 7
pose AY a BX. From BX a Y A and BA a XZ we infer, similarly, BA σ YZ, which is not so. Thus AX σ BY and AY σ BX are both false, and by C3 we have AB o XY.
In order to give a formulation of Th. 7.1.1 whith is more convenient to apply, we introduce the relation p as follows:
Definition. If A, B, C, D € V, then AB p CD means tha t A and B are distinct from C and D, and tha t AB o CD is false. (Thus it is allowed tha t A = B or (and) C = D.)
I t is easy to deduce the following theorem from Th. 7.1.1:
Theorem 7.1.2. In F ( C l - C 4 ) : If ABpXY and AB a XZ, then ABaYZ.
While Ç4 is ill-adapted for use, Th. 7.1.2 is easy to visualize and to apply, the main reason for this difference being tha t in this theorem one of the pairs, namely AB, is fixed. Th. 7.1.2 can fully replace C4, for C4 can be derived from Cl, C2, C3 and Th. 7.I.2. (Exercise: this proof is left to the reader). Therefore we shall rarely use C4 in proofs; in most cases the use of Th. 7.1.2 is more convenient.
There are two theorems parallel to Th. 7.I.2.
Theorem 7.1.3. In F ( C l - C 4 ) : If ABpXY and ABpXZ, then AB p YZ.
PROOF. ABaYZ leads immediately to a contradiction, by Th. 7.I.2.
Theorem 7.1.4. In F ( C l - C 4 ) : If AB σ ΧΥ and AB a XZ, then ABpYZ.
PROOF. Suppose ABaYZ; then A, X, Y, Z are all distinct. If, in addition, AX a YZ, then this together with AX p BY would give AXaBZ, in contradiction to ABaXZ. By interchanging X, Y, Z in this argument, we find tha t AY a XZ and AZ a XY are false as well, which contradicts C3. As the contradiction was derived from the hypothesis AB a YZ, this relation is false, and hence, as is easy to see, AB p YZ.
We now choose fixed distinct elements A, B and consider the relation between X and Y which is given by AB p XY. Let us

§7.1. CYCLICALLY ORDERED SETS 115
denote this relation, which is defined on F \ { / 1 , B}9 by δΑΒ. Theorem 7.1.5. In F(Cl—C4): The relation δΑΒ is reflexive,
symmetric and transitive. P R O O F . Reflexivity and symmetry follow immediately from the
definition of the relation p; transitivity is the content of Th. 7.I.3. COROLLARY 7.1.5. F \ { / 1 , B} can be divided into equivalence
classes with respect to δΑΒ. Theorem 7.1.6. In F(Cl—C4): There are in V\{A9 B} a t
most two equivalence classes with respect to δΑΒ. PROOF. X and Y belong to different equivalence classes if and
only if AB σ ΧΥ; thus the theorem follows immediately from Th. 7.I.4.
Definition. Each of the equivalence classes with respect to δΑΒ is called a segment AB.
Let Σ be one of the segments AB. Let us now consider the relation between elements of Σ, which is given by A Y a BX9 and denote it by <AB.
Theorem 7.1.7. In F(Cl—C4): <AB is an order relation on Σ. P R O O F . The following has to be proved:
(i) If X9 Y e 27, then one and only one of the relations X = Y, X <AB Y, Y <AB X holds.
(ii) If X <AB Y and Y <AB Z, then X <AB Z. For elements of 27, XY pAB9 so (i) is an immediate con
sequence of Axiom C3. As to (ii), it is given tha t AY a BX9 AZ a BY. The latter
relation gives AY p BZ9 so, by Th. 7.1.2, AY o XZ. This implies Χφ Z and AZ p XY. This, with AZ o BY, gives AZ a BX9
which is X <AB Z. R E M A R K . δΒΑ is the same relation as δΑΒ9 but <BA is the op
posite of <AB: If X <AB Y, then Y <BA X9 and conversely. We shall say tha t <AB orders Σ from A to B; <BA orders Σ from B to A.
Now let Σ19 Σ2 be the two segments AB (one or even both of them may be empty). Let ΣίΑΒ denote Σί9 ordered from A to B. We form the ordered sum {A} + Σ1ΑΒ + {B} + Σ2ΒΑ (see

116 ORDER Chap. 7
§ 1.2); tha t is, we order V by taking A as the first element, followed by Σχ ordered from A to B9 then B, then Σ2 ordered from B to A. Let γΑΒ denote the set V, ordered in this way, and γΑΒ the ordered set {,4} -f Σ2ΑΒ + {B} + Σ1ΒΑ. Evidently, yAB and γΑΒ define opposite orders on V \ {A} but in both A is taken as the first element.
In order to visualize the relation between σ, yAB and γΑΒ, we represent V, cyclically ordered by a, by a circle; if this circle is cut open at A, the cyclical order leads to the simple orders y AB a n <* Υ'ΛΒ· r A r
B Fig. 7.1.
While in the preceding pages we derived a simple order from a cyclical order, we shall see presently tha t it is also possible to derive a cyclical order from a simple order.
Definition. If < is an order relation in a set V, and P , Q9 R, S are elements of V such tha t ( l ) P < Q < R < 5, then PR and QS are alternating pairs with respect to < ; we write PRTQS.
τ is considered as a symmetric relation between the unordered pairs PR and QS; tha t is, PR τ QS is true not only if (1) holds, but also if one of the sets of order relations holds which result from (1) by interchanging P and R or Q and 5 or by interchanging the pairs PR, QS9 or by a combination of these operations. In other words, PR x QS if and only if exactly one of the points Ç, 5 is between P and R. Thus four distinct elements of V can be divided into alternating pairs in just one way.

§7.1. CYCLICALLY O R D E R E D SETS 117
Theorem 7.1.8. The relation x between alternating pairs in an ordered set V determines a cyclical order of V9 that is, τ satisfies axioms Cl—C4.
PROOF. For Cl, C2, C3 this is clear. Instead of C4 we prove the property contained in Th. 7.I.2.
Thus let AB x XY9 while AB x YZ is false, and A, B φ Ζ. We wish to prove that AB x XZ. Just one of X, Y is between A and B. If X is between A and B, then Y is not, and Z is not, because AB x YZ is false. If Y is between A and B9 then so is Z. In both cases, just one of X and Z is between A and B.
In a cyclically ordered set V with cyclical order relation a we choose distinct elements A, B and define a simply ordered sum yAB as above. In yAB9 the relation between alternating pairs forms a cyclical order relation r. It is intuitively clear that x = a. This is expressed in the following theorem:
Theorem 7.1.9. Let the set V be cyclically ordered by the relation a; let A and B be distinct elements of V. Then alternating pairs in yAB (or yAB) are separating pairs in a.
PROOF. It suffices to prove that P < Q < R < S in yAB entails PR a QS.
According to the definition of yAB9 several cases must be distinguished. I. P, Ç, R, SeZ^ II. P, ρ, Ä€27lf SeZ2. III . P, Q*Z19 R9 SeZ2. IV. P e r i 5 Q9 R9 5 β Γ 2 . V. P, Q, R9 SeZ29
and, in addition, those cases in which one of the elements P, Ç, R9 S coincides with A or with B.
Case I. We have (a) AQ a BP; (b) AR a BP; (c) 4 S a BP; (d) ARaBQ; (e) ^ 5 σ BQ; (f) AS σ BR.
Bij (a), BQ pAP; by (d), BQ σ AR; thus Th. 7.1.2 gives (g)BQaPR.

118 ORDER Chap. 7
By (f), BS p AR; by (c), BS p AP; thus Th. 7.1.3 gives (h) BS p PR.
By (g), PRaBQ; by (h), PR p BS; thus Th. 7.1.2 gives PR a QS.
Case II. We have (a) AQ a BP; (b) AR a BP; (e) AB a PS; (d) ARaBQ; (e) AB a QS; (f) AB a RS.
The reader is requested to verify that the proof of case I can be literally repeated here.
Case III . We have (a) AQ σ BP; (b) AB a PR; (c) AB a PS; (d) ABoQR; (e) AB a QS; (f) ARoBS.
The reader may derive the proof from that in case I by using the same pairs of elements, only interchanging the letters p and σ in some places.
Case IV. This case is reduced to case II by considering yAB instead of yAB.
Case V. This case is reduced to case I in the same way. The more special cases are left to the reader.
COROLLARY 7.1.9: In a set V with cyclical order relation a, the simple orderings yAB and yCD determine the same relation between alternating pairs. In particular, this is true for yAB and y'AC, where C is any point distinct from A.
Theorem 7.1.10. Let / and y" denote the same set V, simply ordered by the relations < ' and < " respectively. If y' and y" have the same first element A and determine the same relation τ between alternating pairs, then either y' = y", or < 'and < " are opposite orders in F\{^4}.
PROOF. Let C and D be elements of V, distinct from A, such that C < ' D. Let X be any element of F, distinct from A, C, D. One of the following cases necessarily occurs: (1) ΑΧτ CD or AC τ DX or AD x CX9
which entail (2) A < ' C < ' X < ' D or A < ' X .< ' C < ' D or A <' C < ' D <' X. Thus it is determined by τ whether C <' X οτ X <' C. If Y is

CYCLICAL ORDER OF THE PROJECTIVE LINE 119
a new element of V, it is seen by the same reasoning that τ determines whether X < ' Y or Y <' X.
As to y", we distinguish between two cases. If C < " D, then it follows from the preceding reasoning that X < ' Y entails X < " Y and conversely, so that / = y". If D < " C, instead of (2) we get (3) A<"D<"X<"C, A<"D<"C<"X, A<"X<"D<"C. Comparing (2) with (3) we see that X < ' C if C < " X and conversely. Repeating this argument, we see that X < ' Y if Y < " X and conversely. Thus < " is opposite to < ' . This proves the theorem.
COROLLARY 7.1.10. In a set V with cyclical ordering a there are exactly two simple orders γ' and γ" with first element A and such that the relation between alternating pairs of γ' or γ" coincides with σ. In other words, γΑΒ and γΑΒ are independent of the choice of B.
This corollary follows immediately from the preceding theorem and the corollary to Th. 7.I.9.
§ 7.2. Cyclical order of the projective line.
In order to apply the theory of cyclical order in geometry, we shall assume that every line is cyclically ordered; for this assumption not to be trivial, every line must contain at least four distinct points. Moreover, cyclical order must be invariant under projection.
Definition. An ordered plane projective geometry is a quadruple <77, A, I, <x>, where Π and A are disjoint sets, 7 is a relation as described in section 2.1, and a is a relation between collinear pairs of points, such that axioms Vl, V2, V3, Cl —C6 are satisfied.
Axioms Cl—C4. Axioms Cl—C4 of section 7.1 are valid for every line considered as the set V.
C5. At least one line is incident with at least four distinct points. C6. If A9 B, C, D are different points of a line Z, and A'. B\
C, D' their projections on V from some centre 5, then ACoBD entails A'C a B'D'.

120 ORDER Chap. 7
Definition. If a, b, c, d are lines through S, which I intersects in A, B, C, D, such that AC a BD, then we write ac abd.
Note tha t this definition is justified by axiom C6. As an immediate corollary to C6 we have: Theorem 7.2.1. In $(C1 —C6): If A, B, C, D are points on I,
such tha t AC a BD, and if Α', Β', C, D' are their images on V by a projectivity φ, then A'C oB'D'. In other words: cyclical order is invariant under projectivities.
Theorem 7.2.2. In $(Cl—C6): If A, B, C are distinct points on a line Z, then I contains a point D such that AC a BD.
PROOF. By C5 there is a line V which contains four distinct points; by C3 these can be arranged in separating pairs PR, QS. I t is easy to construct a projectivity φ such tha t φΡ = A, <pQ = B9 <pR = C. If (pS = D, then ^ C cr BD.
COROLLARY 7.2.2. 1. Every line contains at least four distinct points.
COROLLARY 7.2.2. 2. If A and B are distinct points on Z, then there are two non-empty segments AB. For, if C is a point on Z,

§ 7 .3 . ORDER AND COORDINATES 121
distinct from A and B, and we construct D such tha t AB a CD, then C and D are on different segments AB. By Th. 7.1.6 there are at most two segments AB, so the number of segments is exactly two.
E X E R C I S E . Prove tha t every segment contains an infinite number of points.
Theorem 7.2.3. In $(Cl—C6): If A, B, C, D are distinct points on a line Z, and PQRS is a complete quadrangle such tha t A e PS, QR; B e PQ, RS; C eQS; De PR, then AB o CD.
P R O O F . Choose H on PR, such tha t (1) PH a DR. Project (1) from Q on Z: (2) BU a DA. Project (1) from S on Z: (3) AV a DB. AD σ BU and AD p BV (from (3)) give AD a UV. By projecting
from H on AS, and back from Q on Z, we obtain AB a UC. This together with AB PUD (from (2)) gives AB a CD.
COROLLARY 7.2.3. 1. In ?&(D9) we have the notion of harmonic pairs, see the remark after Th. 2.4.5. So in $(Z)9, Cl—C6) harmonic pairs of points are separating pairs of points.
COROLLARY 7.2.3. 2. By Th. 2.4.6, D10 is valid in *ß(£>9, C 1 - C 6 ) .
§ 7.3. Order and coordinates .
The relation between the cyclical order relation in $ and the properties of £ ( $ ) has been investigated by Sybilia Crampe [Math. Zeitschr. 69 (1958), p. 435-462]. (See Appendix 5).
Consider, in 5ß(Cl—C6), a coordinate system OXYE; OE n XY = W. Let Σχ be the segment OW which contains E, Σ2 the other segment OW. By < we denote the order relation in
y wo = {W}+ Z2W0 + {0} + E10W. Theorem 7.3.1. In $(Cl—C6): If n <n', then
Φ(α, m, n) < Φ(α, m, η'). P R O O F . If a and m are fixed, then ψ{η) = Φ(α, m, n) is obtained
from n by three projections: πχ from I on 0 7 , π2 from R on aY, π3 from X back on OW. Here R is the intersection of the line y = Φ(χ, m, n) with XY; R is independent of n. See § 3.1, (8) and fig. 7.3.

122 ORDER Chap. 7
y
Fig. 7.3.
\y
Fig. 7.4.
The cyclical order is invariant under these projections. Moreover, W is invariant under the transformation η-+φ(η), so y wo is

§7.3. ORDER AND COORDINATES 123
either invariant, or it is transformed into y"wo. In order to show that y'wo is invariant, it suffices to show for one pair of points with c < d, that φ(ο) < <p{d); here < is the order relation in y'wo· To do this, we shall prove a lemma.
Lemma. If Φ(α9 ra, p) = 0 and Φ(α, m9 0) = z9 then pz a OW. PROOF of the lemma. As above, let R be the intersection of
the line y = Φ(χ9 m, 0) with XY. Then, by section 3.1, (8), * = (ORn aY)X n 0W9
0 = {R(Xp n OY) n aY}X n OW. The latter provides the construction for p:
p = {(aY n 0X)R n 0Y}X n OW. Now, if OR n a Y = S, we consider the quadrangle OXYS.
OX naY = U9 OY n RU = F, Z 5 n i?C7 = Γ. Applying Th. 7.2.3, we see that UR σ VT. Projecting from X on 0W9 we obtain OW a pz.
To finish the proof of Th. 7.3.1, we observe that <p(0) = z9 ψ{ρ) = 0; moreover, by the lemma, if 0 < z9 then p < 0, and if z < 0, then 0 < p; so in both cases y'wo ^ invariant under φ.
COROLLARY 7.3.1. For m = 1 we get: If n < n \ then x + n < x -\- n'.
Theorem 7.3.2. In 5ß(Cl — C6): If # < *', then x+n < x'+n. PROOF. First of all, if, for a fixed n9 ψ(χ) = x + n9 then ^ is
a projectivity from OPT onto itself (section 3.2, after (9)), so it leaves the cyclical order σ invariant. Moreover, y(W) = W.
As in the preceding proof, in order to show that y'wo *s m~ variant, it suffices to find a and b9 such that a <b and ψ(α) < ip(b). Let q be the solution of q + n = 0; the construction of q is as follows: XnnOY = N; WN n OX = L; YL n OW = q. Applying Th. 7.2.3 to the quadrangle XYLN9 we see that qua OW; thus, if 0 < n9 then j < 0 and xp(q) < y>(0); if n < 0, then 0 < g and y(0) < y>(?).
In order to exploit completely the invariance of the cyclical order under projection, we study the intersection of the pencil of lines through a fixed point 5 = (s91) with a fixed line I (x = p) through Y. A line a through 5 is determined by its first coor-

124 ORDER Chap. 7
Fig. 7.5.
fo.u)
f :
L
sA
/ /
/
/
ψ
/
li (in)
/ w
/ / * /
V A sm
/ )E
yz
Fig. 7.6.

§7.3. ORDER AND COORDINATES 125
dinate m, for by section 3.1 (vii), Φ($, m,u) = t has a unique solution for u. Let a intersect I in P = (p, q); then q is a function of m, q = φ{ηι).
Given m, we construct q by consecutive projections πΐ9 π2 , τΓο, 7ΓΛ , as follows:
πχ is the projection from X onto YE; π2 is the projection from 0 onto XY; π3 is the projection from S onto I; π4 is the projection from X onto OW. I t follows tha t the cyclical order a is invariant under φ. Moreover,
<p(W) = W. In order to know whether yr
wo is invariant or not, we shall investigate the order relation between φ(0) and φ(1).
φ(0) = t. φ(1) = Φ(ρ, 1, η), where Φ($, 1, η) = t; t ha t is: <ρ(1) = p + η9
where s + n = t. By Th. 7.3.2 we have; if p > s, then φ(1) > t = φ(0); if
p < s, then φ(1) < t = φ(0). Thus, if p > s9 γ'ψο ™ invariant under φ; if p < s, y'wo ls trans
formed by φ into γ"ψ0. We formulate this result in the following theorem:
Theorem 7,3.3. Let the lines [ % , % ] , [m29n2] intersect in 5 = (s, t). Let m1 < m2. If x > s, then Φ(χ, ml9 nx) < Φ(χ9 ra2, n2); if a? < s, then Φ(#, m1? nx) > Φ(#, ra2, w2). The properties of the ternary field, which are contained in
Th. 7.3.3, can be used for the definition of an ordered ternary field.
Definition. A ternary field % is an ordered ternary field, if it is ordered by a relation < , for which the following properties (1) and (2) hold.
(1) If nx < n2, then Φ(χ, m, nx) < Φ(χ, m, n2). (2) If 0(s9 m^rii) = 0(s, m2,n2), then for p > sa,ndm1 < ra2, we have Φ(ρ, ml9 nx) < Φ(ρ,πι29η2); and for p < s and mx < ra2, we have Φ(ρ, mx, nx) > Φ(ρ, m2, n2) .

126 ORDER Chap. 7
Theorems 7.3.1 and 7.3.3 can now be summarized as follows: In $ (Cl—C6), 2 ^ is made into an ordered ternary field by the order y'wo.
We shall now derive some simple properties of ordered ternary fields.
Theorem 7.3.4. In every ordered ternary field, if m1 < m2
and x > 0, then Φ(χ, ml9 n) < Φ(χ9 m29 n); if m1 < m2 and x < 0, then Φ(χ9 ml9 n) > Φ(χ9 m29 n).
P R O O F . In (2) we take s = 0; Φ(0, ml9 n) = Φ(0, ra2, n) = n9. so ^ = 712· This gives the desired result.
As a special case (n = 0) we have: COROLLARY 7.3.4. If m1 < m2 and # > 0, then xm1 < xm2;
if m1 < m2 and ΛΪ < 0, then xm1 > xm2. Theorem 7.3.5. In every ordered ternary field, if xx < x2
and m > 0, then Φ(χΐ9 m9 n) < Φ(χ29 m9 n); if xx < x2 and m < 0, then Φ(α?ΐ5 m9 n) > Φ(ίτ2, m, n) .
PROOF. In (2) we put m1 = 0, s = xl9 p = x29 m2 = m9n2 = n. As Φ{χΐ9 0 nx) = Φ(χ29 0, nx) = nx, we obtain: If nx = Φ(#χ, m, n) then for x2 > x± and 0 < m we have nx < Φ(#2, m, n); in other words: If xx < x2 and m > 0, then Φ(χΐ9 m9 n) < Φ(χ29 m9 n). The second part of the theorem follows in the same way.
COROLLARY 7.3.5. 1. If m > 0 and xx <x29 then x^m < x2m; if m < 0 and a?x < x29 then ^ m > a?2m.
COROLLARY 7.3.5. 2. If a?x < x29 then ^ + n < x2 + n.
COROLLARY 7.3.5. 3. An ordered ternary field contains an infinite number of elements (apply corollary 2 with xx = 0, x2 = 1, n = 1, and repeat this procedure).
Theorem 7.3.6. In every ordered ternary field, if Φ(β9 ml9 Wi)= Φ($, m29 n2) and Φ(ρ9 ml9 nx) < Φ(ρ9 m2, n2)9 then either p > s and rax < m2, or p < 5 and m1 > m2.
PROOF. Other possibilities are excluded by (2).

§ 7.4. THE GEOMETRY OVER AN ORDERED TERNARY FIELD 127
§ 7.4. The geometry over an ordered ternary field.
Let % be an ordered ternary field. As we have just seen, the following properties hold in %. (1) If nx < n29 then 0(x9 m, nx) < Φ(χ, m, n2), and in partic
ular, x + nx < x + n2. (2a) If 0(s, ml9 nx) = 0(s9 m29 n2), p > s and mx < m29 then
Φ(ρ, ml5 nx) < Φ(ρ, m29 n2). (2b) If 0(s, m19 n±) = 0(s9 ra2, n2), p < s and raj < ra2, then
0(p9 ml9 ηλ) > 0(p9 m2, n2). (2c) If 0(s9 ml9 nx) = Φ($, m2, n2) and Φ(ρ, mx, n±) < 0(p9 m29n2)9
then either p > s and ™χ < m2, or p < 5 and mx > m2. (3a) If mx < m2 and # > 0, then Φ(#, ml9 n) < 0(x9 m2, n)9
and in particular, a^! < xm2. (3b) If mx < m2 and # < 0, then 0(x9 ml9 n) > 0(x9 ma, n),
and in particular, xm1 > a?m2. (4a) If xx < #2 and m > 0, then 0(xl9 m9 n) < 0(x29 m9 w),and
in particular, a^ra < x2m. (4b) If xx < a?2 and m < 0, then 0(xl9 m, n) > 0(x29 m9 n)9 and
in particular, x^m > x2m. (5) If x± < #2, then xx + n < x2 + n.
Now let 5β(ϊ) be the protective plane over % as defined in section 3.4. $(£) contains the line XY = ω; 5β \ω is called the affine plane.
By Th. 3.4.1, the ternary field attached to $(!£) by the coordinate system OXYE and consisting of the points of OW\{W}9 is isomorphic to !£. We identify corresponding elements in this isomorphism, so that % is the ternary field attached to $(£) .
Now, as 3; is ordered, 0W\{W} is an ordered set. We extend this order to any line not containing Y by projection from Y; in other words, if A = (a, b) and C = (c9 d) are points such that AC does not contain Y, we define A < C by a < c. If is clear that by this definition we obtain an order relation on every line not through Y. This order relation is only defined for the points of the affine plane.

128 ORDER Chap. 7
If I does not contain X, we can define another order relation on I by projection from X, namely if A = (a,b) and C = (c9 d), then A < C is defined by b < d.
T h e o r e m 7.4.1. If /contains neither X nor Y, then either for any two points A, C of Z, A < C implies A < C, or, for any two points of I, A < C implies C <. A.
PROOF. Let 4̂ = (α, δ), C = (c, d), and let j / = Φ(χ, m, n) be the equation of I. By (4a) and (4b) above,
if m > 0, then A < C (i.e. a < c) implies b < d (i.e. 4̂ < C); if m < 0, then A < C, (i.e. a < c) implies d <b (i.e. C < ^4).
On a line through X only the relation < is defined, on a line through Y only the relation < . For ω no order relation has been defined so far.
We extend the order relations on I by adding the point of intersection of I with ω as the first point. As was proved in Th. 7.1.8, alternating pairs on I define a cyclical order of I.
Theorem 7.4.2. If the order relations < and < are both defined on Z, they define the same cyclical order.
PROOF. Suppose tha t A = (a, b), C = (e, d), E = (e, f) and G = (g, h) are given on I such tha t A E and CG are alternating pairs for the relation < ; for instance, A < C < E < G; then a < c < e < g. By the preceding theorem, either b < d < / < h or h < / < d < b. In both cases A E and CG are alternating pairs for the relation < .
Thus we obtain one cyclical order for every line, except ω, which we denote by σ.
We extend it to ω as follows. The lines through a given point M of ω have the same first coordinate m; we denote, as before, M by (m).
Definition. The order relation < on ω is defined by (mx) < (m2) if m1 < ra2; Y is added as the first element. The cyclical order a on ω is the relation between alternating pairs with respect to < .
We wish to prove tha t the cyclical order σ, which is now defined on every line, satisfies Cl— C6.
This is clear for C 1 - C 4 . C5 follows from Corollary 3 to Th.

§ 7.4. THE GEOMETRY OVER AN ORDERED TERNARY FIELD 129
7.3.5; C6 will be proved in a series of theorems, which ends in Th. 7.4.12.
Theorem 7.4.3. The cyclical order a is invariant under projection from X as well as from Y.
PROOF. This is clear from the definitions of < and < . T h e o r e m 7.4.4. The cyclical order a is invariant under pro
jection from any point of XY. P R O O F . Let R be a point of XY ; the first coordinate of every line
through R has the same value ra. Let Zx = [ra, n{\ and Z2 = [m, n2] be two lines through R such tha t nx < n2 , and let Z* = = [ra*, w*] be any line not through R.
Z* intersects Zx in P x = (p19 qx)9 Z2 in P 2 = (p2, g2), so tha t qx = φ ( ρ ΐ 5 m > m ) = Φ(ρΐ9 m*, n*) and q2 = Φ(ρ2, m, n2) =
Φ(ρ2, m*, n*). Φ(ρχ , m, nx) < Φ(ρ ΐ 5 m, n2) by (1). Thus we have Φ(ρ2, m*, n*)
= Φ(ρ29 m, n2) and Φ(ρχ, m*, n*) < Φ(Ρυ m, n2). I t follows from (2c) tha t the last two relations are only compatible if either
Pi > Vi a n d w* < m, or px < p 2 and m* > m. Consequently, if m* > m, the order relation of Px and P2 is
the same as tha t of nx and n2; if m* < m, it is the opposite. In both cases alternating pairs of points on Z* correspond to alternating pairs of values of n. I t follows tha t the cyclical order is invariant under projection from R.
T h e o r e m 7.4.5. Let ABC be a triangle in the affine plane; let BC, CA, AB intersect ω in M, M' , M" and a line Z, not through A, B, C, in P , P'9 P" respectively. Then BC a PM entails tha t either CA a P'M' or AB a P"M", but not both.
P R O O F . I t suffices to prove tha t (I) BC a PM and CA P P'M' entail AB σ Ρ"Μ'\ (II) BC a PM and CA a P'M' entail AB p P"M".
( I ) . Pu t Inco = M*9 M*C n AB = Q. Using the preceding theorem we find, by projection from M*,
BCaPM entails BQ σ P"M"; CA p P'M' entails QA p P"M". Th. 7.1.2 gives the desired result ABcP"M". (II) is proved analogously.

ORDER Chap. 7
A\Lm*,n*]
JWAJ
l2=[m,n2]
^R
Wp„q,r JY
'Ι,νζιτϊ,η,]
Fig. 7.7.
M
IM*
Fig. 7.8. W

§7.4. THE GEOMETRY OVER AN ORDERED TERNARY FIELD 131
It is left to the reader to verify that (I) and (II) are easy to prove in the special cases where P = M, P' = M' or (and) P" = M", provided the hypotheses of the theorem are satisfied.
REMARK. In the affine plane, BC a PM can be read as " P is between B and C" or " P is on the side BC of the triangle ABC". Then Th. 7.4.5 becomes: If a line I intersects a side of a triangle, and if I contains no vertex of that triangle, then it intersects exactly one other side of the triangle. In this form it is known as Pasch's theorem. However, we prefer the version above.
Definition. Let / b e a line and let A, B be distinct points in 5 ß \ (I U ω), where AB intersects I in P, ω in M; then ôl (A, B) means AB p PM. <5, (A, A) is always true if A € *ß \ (I U ω).
δι(Α9 B) can be read as "A and B are on the same side of Z". This interpretation is justified by the following two theorems.
Theorem 7.4.6. For a given line /, δχ is an equivalence relation on 5 β \ ( ϊ υ ω ) .
PROOF. We have to prove that δζ is reflexive, symmetric and transitive. The first two properties are obvious. Transitivity means that ot(A9 B) and (5,(#, C) entail ôt(A, C). Two cases must be considered:
(I). A, B, C are collinear. AB ni = P, AB n co = M, then AB p PM, BC p PM entail AC p PM hy Th. 7.I.3.

132 ORDER Chap. 7
(II) . A, B, C are not collinear. BC, CA, AB intersect Z in P , P ' , P", ω in M, Μ', M". I t follows immediately fromTh. 7.4.5 (I) tha t AB p P"M", BC p PM imply AC p P'M'.
Theorem 7.4.7. There are a t most two equivalence classes in $β\(Ζ u ω) with respect to the relation òl.
PROOF. Let us assume tha t A and B are in different classes, and that A and C are in different classes; we must prove tha t B and C are in the same class. As in the proof of Th. 7.4.6 there are two cases:
(I) A, B, C collinear: AB ni = P , AB n ω = M. From our assumptions it follows tha t P Φ M, AB a PM and AC o PM; by Th. 7.1.4 we have BC p PM.
(II) . A, B, C form a triangle. BC, CA, AB intersect Z in P , P ' , P " , and ω in M, M', M". We deduce from our assumptions that Ρ'φΜ', Ρ"φΜ'\ ABaPt'M" and AC σ Ρ'Μ'; this entails BC p PM by Th. 7.4.5, (II).
Excercise. The reader may prove tha t there are exactly two equivalence classes. For this proof he will need an equivalent of Th. 7.2.2 (not valid here because we have not yet derived C5 and C6). Combination of Corollary 3 at the end of section 7.3 with theorems 7.4.3 or 7.4.4 will lead to the same result as contained in Th. 7.2.2.
Theorem 7.4.8. Let P , Q, R, S be four different affine points on a line Z, and T an affine point outside Z, and p, q, r, s the lines joining T to P , Q, R, S. Then PR a QS is equivalent to: Either όα(Ρ, R) is true and δ8(Ρ, R) is false, or ôq(P, R) is false and ó5(P, R) is true.
P R O O F . Let Z intersect ω in M. Suppose PR a QS and όβ(Ρ, R), i.e. PR p QM; then PR a SM,
i.e. not ôs(P, R). Also, if PR σ QS and not dq{P, R) we have PR a QM, which
gives PR p SM, i.e. δ8(Ρ, R). Conversely, if ÔQ(P, R) and not δ8(Ρ, R), we have PR p QM
and PR a SM; it follows tha t PR σ QS. If δ8(Ρ, R) and not δα(Ρ, R), the proof is analogous.

§ 7.4. THE GEOMETRY OVER AN ORDERED TERNARY FIELD 133
T/
P/ / \ \ / <J/ r\ \
P Q R S Fig. 7.10.
REMARK. The theorem remains valid if either Q or 5 is on ω. For instance, if Q € ω, then ôQ(P, R) is true and PR a QS is equivalent to not δ8(Ρ9 R).
In order to express the preceding theorem more conveniently, the relation ôQ8(P, R) is defined as follows:
Definition. In $ \ ( ç U sU ω), ôQ8{P, R)means:Eitheróff(P, R) is t rue and δ8(Ρ, R) is false, or <5ff(P, R) is false and δ8(Ρ, R) is true.
Then Th. 7.4.8. becomes: T h e o r e m 7.4.9. Let /, P , Q9 R, S9 Γ, p , q, r, s be as in Th.
7.4.8. Then PR a QS is equivalent to όβ ί(Ρ, R). T h e o r e m 7.4.10. Let /, P , Q, R9 5 , Γ, p , q, r, s be as in Th.
7.4.8; let P' be an affine point on p , different from T. Then dq8(P,R) entails <5tfe(P', # ) .
P R O O F . Let p intersect ω in M''. dq(P9 P') and ô8(P9Pf) are equivalent to Ρ Ρ ' ρ ΤΜ'.
Thus, if óff(P, Ρ ' ) , it follows from óe(P, R) (by Th. 7.4.6) tha t dq(P'9 R)9 and from not Ô8(P9 R) t ha t not <5e(P', R).
If not <5β(Ρ, Ρ ' ) , then it follows from óe(P, i?) tha t not ô a ( P \ i?), and from not δ8(Ρ9 R) tha t δ8(Ρ'9 R) (by theorems 7.4.6 and 7.4.7).
Thus in both cases it follows from δα8(Ρ9 R) tha t δα8(Ρ'9 R).

134 ORDER Chap. 7
Theorem 7.4.11. Let p , q, r, s be four lines through Γ, which intersect I in P , Q9 R, S and V in P ' , Ç', <R\ S", while none of these points is on ω. Then we have: If PR σ QS, then P'R' a Q'S'.
PROOF. If PR σ QS, then by Th. 7.4.9, ôqs(P, R); by Th. 7.4.10, applied twice, ôQ8(P', R'); by Th. 7.4.9 this is equivalent to P'R' a Q'S'.
Th. 7.4.11 expresses the invariance of the cyclical order under projection for the case in which all the points under consideration are in the affine plane. I t must still be extended to the case in which some of the points are on ω.
The case Tew has been treated in Th. 7.4.4. If a t most one of the points Q, S and at most one of the points
Q', S' are on w, the proof given above remains valid by the remark following Th. 7.4.8.
If a t most one of P , R and a t most one of P ' , R' are on w, we can apply the proof after interchanging P , R with Q, S.
If, for instance, P and Q' are on ω, we insert in the proof an auxiliary line which contains neither T nor P nor Q'.
The only case which remains to be considered is the one where I or V coincides with w. Let the lines \m1,nx\ and [m2, n2] intersect in S = (s, t). As a special case, for p = 0, of property (2) of an ordered ternary field (see the beginning of § 7.4) we have: If s < 0 and m1 < m2, then nx < n2; if s > 0 and m1 < m2, then n1> n2- Thus by projection of ω from S onto OY, the order relation is either preserved or in versed; in both cases the cyclical order σ is invariant. By the preceding theorem it is then invariant under projection on any line.
We have now attained the announced result: Axiom C6 is valid for σ. Thus we have:
Theorem 7.4.12. If % is an ordered ternary field, it is possible to introduce a cyclical order a in $(!£), such tha t a satisfies axioms Cl— C6 and that on OW σ coincides with the cyclical order τ, defined by the relation of alternating pairs in the order of Î .
The case where D10 is valid in 5β deserves some attention. (As we noted in Cor. 2 to Th. 7.2.3, D9 and Dl0 are equivalent in 5ß(Cl—C6).) In %(D10) the properties (i) —(vii) mentioned in

§ 7.4. THE GEOMETRY OVER AN ORDERED TERNARY FIELD 135
Th. 3.4.2 hold, therefore the definition of an ordered ternary field can be much simplified in this case.
T h e o r e m 7.4.13. A necessary and sufficient condition t h a t %(D10) be an ordered ternary field with the order relation < , is tha t the following properties (α), (β) hold universally in X(D10):
(a) if a < b, then c + a < c + b. (ß) if a > 0 and b > 0, then ab > 0.
P R O O F . The necessity of these conditions follows immediately from properties (1) and (4a) of an ordered ternary field.
Now let (a) smd(ß) be valid in £(D10). We must prove the properties (1) and (2) occurring in the definition of an ordered ternary field. In this case (1) and (2) become
(]/) If nx < n29 then xm + nx < am + n2. (2') If sm1 + nx = sm2 + n2 , p > s and m1 < m2, then
pm1 + nx < pm2 + n2. If sm1 -\- n1 = sm2 + n2 , p < s and m1 < m2, then pm1 + nx > pm2 + n2.
(V) is a special case of (a). To prove the first part of (2'), we solve sm1 + ^ ι = sm2 + n2
for n2 and substitute the result in the inequality to be proved. By means of (i) —(vii), it is easily reduced to (p—s)(m2—m1) > 0, which is true on the basis of (a) and (/?).
The second part of (2') is proved similarly. I t can be proved tha t %(D10)9 if it is ordered, is a division ring.
In other words, Z) n follows from Vi—V3, D10, Cl—C6. We shall not give the proof, because it is entirely algebraical.
[Brück & Kleinfeld, Proc. Amer. Math. Soc. 2 (1951), p . 887. The theorem follows immediately from Theorem 5 of Skorniakow, Ukrainskiï Mat. Zurnal 2, part 1 (1950), p . 81.]
Definition. A division ring in which an order relation satisfying (a) and (/?) is defined, is called an ordered division ring.
I t follows easily from Cor. 2 to Th. 7.3.5, tha t every ordered division ring has characteristic 0.

136 ORDER Chap. 7
§ 7.5. A counterexample.
Hilbert was the first to give an example of an ordered non-commutative division ring. Before we can explain his example, some preparation is necessary.
Formal power series. Let L be a field and t a variable (or, in algebraic language, let t be transcendent with respect to L). The field L*(t) of formal power series over L is constructed as follows. The elements of L*(t) have the form (1) a = oiktk + *k+1tk+i + . . ., k an integer g 0, &4 cL (i = k9 . . .), α* Φ 0. We can also write
+ 00 (2) α = 2 α Λ where there is associated with a an integer
♦ =a 0 0
k = A(a), such that at = 0 for i < &(a), a,· Φ 0 for i = &(a). A zero element 0 is added to L*(t).
Addition and multiplication are defined as follows.
If α = 2«Λ ß = lßA t h e n
t = — oo i = — oo
(3) a + 0 = Γ(α, + ft)«*. Evidently, &(a + /?) ^ min (fc(a), ft(/î)). γ = a.ß means that γ = 27 y^' with
A + / = »
(Verify that only a finite number of terms in this sum are not zero).
k(oLß) = Λ(α) + ft(0). It is easily verified that L*(t) is an abelian group with respect
to addition, and that the commutative and associative laws for multiplication hold, as well as the distributive law. We shall prove the existence of a"1 for a Φ 0. Let us try to find ß such that a/? = 1. It is clear that k(ß) = —Α(α) and that ßk {ß) = (αΛ (α) )_1. Let/7, be already known for k(ß) t^j ^ m.
Consider the equation (4) for i = A(a) + m + 1; it becomes
tt-Uai+lßm + · · · + &k{a)+m + l-Hß)ßk{ß)>
which allows us to calculate ßm+1.

§7.5. A COUNTEREXAMPLE 137
In this way the coefficients of ß can be calculated one after the other.
If L is an ordered field, L*(t) can be ordered by the following rules. (i) a > 0 if and only if αΑ(α) > 0. (ii) a > β if and only if a — β > 0.
It is easy to verify that (i) and (ii) define an order relation in L*(t) and, moreover, that L*(t) is an ordered field with respect to this order relation; that is, if a > β9 then a + y > β + y, and if α > 0 and β > 0, then κβ > 0.
We now define a mapping φ of L*(t) onto itself, as follows. Let c be an element of L, c > 0.
+ 00 +00 (6) If a = 2 a A then 7(a) = 2 c ' a / ·
♦ = — oo * — — oo
Theorem 7.5.1. The mapping φ, defined by (6), is an automorphism of L*(t).
PROOF. It is easy to see that φ is one-to-one.
It must be verified that 9?(α + β) = ç?(a) + φ(β) and that φ(κβ) = φ(<χ.)φ(β). The former is obvious, because c*(at. + β{) = c*a< + c*ßim As to the latter, put cnß = γ9 φ(<χ)φ(β) = δ. By (4),
Ä + / = i A + ; - »
Theorem 7.5.2. If i is an ordered field and c > 0, then the mappings, defined by (6), preserves the order relations in£*(£), as defined by (i) and (ii).
PROOF. Clear, for if afc(a) > 0, then cfc(a)aÄ(a) > 0.
Now we come to Hilbert's example. Let K = R*(t) be the field of formal power series in t over the
field R of rationale, ordered as defined above for L*(t). After choosing a rational number c > 0 (c Φ 1), we consider the automorphism φ defined by (6).
We could form the field K*(s) of formal power series over K; however, instead of K*(s), we consider a division ring K*(s), which differs from K* (s) only in the definition of multiplication.

138 ORDER Chap. 7
Thus the elements of K^(s) are the formal power series over K: +00
A = 2 Ais*'> Ai€K; Ai = 0 for i < k(A ); AkU) φ 0. t = - o o
+00
If B = 2 β / > t h e n i = — 00
(7) A + B = J(At + Bty.
(8) AB = J Z V w i t h Di = 2 4 , ^ ( Β Λ ) .
The order relation in /£*($) is defined in the same way as in L*(t), namely (i) A > 0 if and only if AkU) > 0. (ii) A > B if and only if A — B > 0.
T h e o r e m 7.5.3. K*($) is an ordered division ring.
PROOF. The following properties need to be considered; the others are trivial. (i) Multiplication is associative. (ii) Multiplication is distributive with respect to addition. (iii) Every element Φ 0 has an inverse. (iv) If A > 0 and B > 0, then AB > 0.
(i). Let A = 2 A A B = 2 # / > C = 2 C>* be given. If AB = D, DC = £ , JBC = F9 A F = G, we must prove tha t E = G.
Ek
Gk
= τ h+l =
= I i+h=l
1
k
i + 3 = h
< + * + ! = *
Σ ß i ^ Q .
Α<9**κ = Σ At9*(Bt
= Σ
φ*
y
+i
c
c,.
«) =
In the last reduction the fact tha t φ is an isomorphism has been utilized. As the results for Ek and GÄ are identical, we have E = G. (ii). Let ^4, B, C be given as under (1).

§7.5. A COUNTEREXAMPLE 139
If AB = D, AC = E, D + E = F, B + C = G, AG = H, we must prove that F = H.
Dh= Σ AiV*B,. Eh = 2 ArfC,>
Fh=2 {ArfB, + AtfC,) =
= I ΑΜΒ, + φ'ϋ,) i+3=h
= 2 Α^ΙΒ, + Ο,).
Gj — Bj + Cj* Hh= Σ A^G,= ΣΑ^Β, + Ο,).
i+i=Ä i+j=h
As the results for Fh and Hh are identical, we have F = H. The proof of the second distributive property, viz.
BA + CA = (B + C) A, is left to the reader. (iii). The calculation of A"1 is analogous to the case of K*(t). We should find H such that AH = 1. First of all, k(H) = —k(A) and Hk{H) = (A^)-1.
Let H$ be already known for k(H) 5Ξ / ^ m. Equation (8) for j = k(A) + m + 1 becomes
(9) 0 = AkU)9WHm+1 + AkiA)+1<p*^Hm + . . . + ΑιΨιΗΜΗ)9
where I = 2k(A)+m+l. From (9) we can find Hm+1, so that the coefficients of H become known consecutively.
(iv). If A > 0 and B > 0, then AkU) > 0 and Bk{B) > 0. AB = C entails CkiC) = Ak{A)<pk<A)Bk{B).
By the order preserving property of <p, φΗΑ) Bk{B) > 0; and because K is an ordered field, Ck{C) > 0, that is C > 0.
In the projective plane 5β2 (!£*($)) constructed over Hubert's ordered division ring, axioms Vl—V3, Dll9 Cl—C6 are valid, but P10 is not. Thus we find
Theorem 7.5.4. P10 is independent of Vl—V3, Dll9 Cx—Ce. Analogously the space geometry Pz(K*(s)) shows us:
Theorem 7.5.5. P10 is independent of Ri—R5, Cl—C6.

140 ORDER Chap. 7
§ 7.6. The a x i o m of Archimedes .
Let & be an ordered group in which the group relation is denoted by + · If ß is an element of ©, we can form the sequence a, a -\- a, a + a -\- a, . . .; the elements of this sequence are denoted briefly by a, 2a, 3a, . . . . More exactly, by definition l a = a, and for every natural number n9 (n + 1 )a = na + #.
(Note that the natural numbers need not be members of © ! ) If a > 0, then (n + 1) a > na for every n. & is called Ar
chimedean if it has the following property: For every a and b in @, where a > 0, there exists a natural number n such that na > b.
If D10 holds in a projective plane $ , then £ ( $ ) is a group under addition. Therefore it makes sense to add the following axiom to V I - V 3 , £>10, C 1 - C 6 .
Archimedean a x i o m A. The additive group of £ ( $ ) is Archimedean.
The axiom can be stated in a more geometric form. To this effect we describe geometrically the construction of (n + 1 )# from na and a; thus, starting with a, we obtain a sequence of points on OW for which the axiom can be formulated. However, because the axiom we obtain in this way is nothing else but a translation of the algebraic axiom above, we shall not formulate it explicitly.
Another geometric interpretation will be stated in Th. 7.6.7. Let us call an ordered division ring Archimedean if its additive
group is Archimedean. We begin by deriving some properties of Archimedean ordered division rings.
Theorem 7.6.1. In an Archimedean ordered division ring, the field of rationals is dense.
REMARK. Every ordered division ring $ has the characteristic 0; hence it contains a field Ç0 which is isomorphic to the field R0
of rationals; we identify g 0 with R0. That i?0 is dense in $ means the following: If a, b c g and a > b9 then there is an element r of R0 such tha t b < r < a.
PROOF of Th. 7.6.1. Let a, b be elements of g such that a > b > 0; then d = a — b > 0. Because the additive group of fÇ is Archimedean we can find a natural number n such that n · d > 1

§7.6. THE AXIOM OF ARCHIMEDES 141
and a natural number m such tha t m · 1/n > b; we may suppose tha t m is the smallest natural number with this property. Now we have d>\jn and ( m — l ) / n ^ 6 , so mlnf^b-\-l/n<b-\-d= a. This gives the desired result, b < m/n < a.
Exercise. Complete the proof for the case where a and b are not both positive.
Theorem 7.6.2. If the ordered division ring g contains a subfield & which is dense in $ , then % is a field.
P R O O F . Let a9 b be elements of $ ; suppose tha t a > 0 and b > 0 and tha t δ = ab — ba > 0. We choose an element c of § such tha t c > max (a, b). I t is easily seen tha t we can find elements rl9 r29 sl9 s2 of © such tha t (1) 0 < rx < a < r2 < c9 0 < s± < b < s2 < c9 and (2) r2 - r± < ô/2c9 s2 - s± < ô/2c.
From (1) it follows: 0 < r ^ i < ab < r2s2
0 < r ^ i <ba < r2s2
(3) ab — ba < r2s2 — r ^ .
From (2) it follows: (4) r2s2 — r ^ i = s2(r2 — rx) + r ^ — ^ ) < 2có/2c = ó.
(3) and (4) give ab — ba < (5, which contradicts the definition of δ. Thus we have proved tha t ab — ba > 0 is impossible. As a and b are interchangeable, ba — ab > 0 is also impossible. Consequently ab = 6α.
Exercise . Complete the proof for the case where a and b are not both positive.
Combining the two preceding theorems we find
Theorem 7.6.3. Every Archimedean ordered division ring is a field.
This theorem together with Th. 3.2.9 and Th. 3.4.4 yields Theorem 7.6.4. P10 is valid in $ ( - D u , C 1 - C 6 , A). The field R*(t) of formal power series over the field R of
rationale, as constructed above, is an example of a non-Archimedean ordered field, for in !?*(*) we have n - 1 < t for every

142 ORDER Chap. 7
natural number n. Hence $(/?*(£)) is a model of $ ( Ρ 1 0 , Cl—C6), in which A is not valid. This gives:
Theorem 7.6.5. A is independent of VI , V2, V3, P1 0 , Cl—C6. In the case where Dn is valid, so tha t !£($) is a division ring
$, we can give another geometric interpretation of the Archimedean axiom. Let us start with 4 points 0, X, Y, E, of which no three are collinear. We consider the set of points which can be constructed from 0, X, Y, E by applying the operations of joining two points by a line and intersecting two lines a finite number of times. Note tha t it is not allowed to choose a point or a line at random; only previously constructed points may be connected by a line, and previously constructed lines may be intersected. The set of points obtained in this way is the net generated by 0, X, Y, E. A line that connects two points of the net is called a line of the net.
Theorem 7.6.6. The net generated by 0 , X, Y, E, consists exactly of the points whose homogeneous coordinates in the coordinate system OXYE belong to the prime field §o> contained in g.
PROOF. The coordinates of 0, X9 Y, E which are all 0 or 1, belong to g 0 . If P(p0, pl9 p2) and Q(q0, 5Ί, q2) have coordinates in g 0 , then the coordinates ξ0, ξΐ9 ξ2 of PQ must satisfy
Po£o + Pi£i + tó = ° a n d ?ο£ο + ϊι£ι + 9^2 = °· As Ç0 is commutative, the solution of these equations is (Pi?2 — Ρ2?ι> Ρ2Ϊ0 — Ρο?2> Ρο?ι — Pi?o)> which again belongs to 2r0. Similarly, if 1(ξ0,ξι,ξ2) a n d ™>(Vo> Vi, V2) have coordinates in F0, then their point of intersection (f1^2 ~~ fs^i» ^ ο ~ £0̂ 2> ξ0η± — ξχη0) has also coordinates in g 0 . This suffices to prove that every point in the net has coordinates in g 0 .
Conversely, in order to show that every point with coordinates (Po> P19P2) *n 3to belongs to the net, we shall prove it first for every point (1, p9 p) on OE with p in g 0 . As before, we denote the point (1, p, p) by p. By the construction of p -+- q and of pq (§ 3.2, (9) and (10)), it is clear that if p and q belong to the net, then p + q as well as pq belong to the net. Given p Φ 0, we construct ρ~λ as follows.

§7.7. THE AXIOM OF CONTINUITY 143
p - i = {(pX n EY)0 n EX} Y n CW.
Hence, if p is in the net, so is p*1. Now any element of the prime field Ç0 can be obtained from
1 by applying the operations of addition and inversion a finite number of times. Thus every point p on 0E9 where p € Ç0, belongs to the net. Furthermore, if P = (1, pl9 p2) and pl9 p2 belong the net, then so does P = Xp2 n Υρτ. Finally, if P = (0, pl9p2) and p x , p 2 belong to the net, then we construct first Q(l9 pl9 p2); both Q and P = OQ n X Y belong to the net.
This completes the proof of Th. 7.6.6.
COROLLARY 7.6.6. In ?ß(Dll9 Cl —C6), the net generated by 0, X9 Y, £ , consists of the points with rational coordinates in the system OXYE.
In fact, in this case $ is an ordered division ring so $ 0 is the field of rationals.
T h e o r e m 7.6.7. In 5ß(£>n, Cl—C6, A), the net generated by four points, of which no three are collinear, is dense on any of its lines.
P R O O F . Take two points of the line as 09 E of a coordinate system and choose X9 Y in points of the net. Now Th. 7.6.7 follows immediately from Th. 7.6.6 and Th. 7.6.I.
§ 7.7. The a x i o m of continuity.
The system of axioms VI , V2, V3, Dll9 Cl— C6, A is still not categorial, for we obtain non-isomorphic models for it by constructing projective planes over non-isomorphic Archimedean ordered fields, e.g. the field R of rationals and the field C of real numbers. Categoricity can be enforced by requiring tha t the field which is attached to the geometry shall be isomorphic to the field of reals. One of the methods by which this can be achieved is by the axiom of Dedekind. For the formulation of this axiom we need some set-theoretic notions.
Let S be an ordered set; the order relation in 5 is denoted by < . Let V and W be non-empty subsets of S such tha t S is the ordered sum of V and W (§ 1.2); then V and W determine a cut

144 ORDER Chap. 7
(V\W) in 5. Hence if (V\W) is a cut in 5, then (i) V u W = Si (ii) if υ e V, W€W, then v < w; (iii) V φ 0, W φ 0; (iv) F n W = 0. Conditions (i), (ii), (iii) are necessary and sufficient for a cut; (iv) follows from (ii).
With respect to a cut (V\ W) in 5 four cases are possible, namely a) V has a last element, W has a first element. b) V has a last element, W has no first element. c) V has no last element, W has a first element. d) V has no last element, W has no first element.
In case a) the cut (F |W) determines a jump in 5, in case d) it determines a gap in 5, while in cases b) and c) the cut is continuous.
If 5 is an ordered group, no cut in 5 determines a jump. In fact, suppose tha t the cut (F | W) determines a jump; let a be the last element of V and b the first element of W, so tha t a < b. Then a < (a-\-b)/2 <b; the element (a + b)/2 can belong neither to V, nor to W9 which is impossible.
We now introduce Dedekind's axiom De, which can be formulated in $(C1-C6).
A x i o m De. In 2(^5) no cut determines a gap. Theorem 7.7.1. Axiom A is valid in $(£> n , Cl—C6, De). P R O O F . Let a be an element of % such tha t a > 0. Let V be
the subset of % which is defined as follows: x e V if and only if there exists a natural number n such t h a t na > x; V = {x\ßn) (na > x)}. Define W by W = %\V; W — {x\(n)(na ^ x)}. We wish to prove tha t W is empty. Suppose the contrary. If x e V9 y e W, we can find n such tha t na > x; then x < na fg y. I t follows tha t (F]W) is a cut in % as soon as W is not empty. Because % is an ordered division ring, the cut cannot determine a jump; according to De it cannot determine a gap. Hence it is continuous. Moreover, V can have no last element A, for then there would be a natural number n such tha t na > hr
(n + 1 ) a > na > h9 na eV, which contradicts the hypothesis. Consequently W has a first element g. g — a < g, so g — a € F . By the definition of V there is an integer m such tha t ma > g—a~ This gives (m + 1 )a > g, g e F , which is a contradiction. I t fol-

§7.7. THE AXIOM OF CONTINUITY 145
lows tha t W is empty and V = %\ this is exactly the content of A.
Theorem 7.7.2. %(Dllf Cl — C6, De) is isomorphic to the field of real numbers.
PROOF. By Th. 7.7.1 and Th. 7.6.1 the field R of rationals is dense in %. To any element a of % we associate the set R^CL) of rational numbers less than a; i?i(a) has no last element. If i?2(a) = %\R1{OL), then ( ^ ( o O l ^ a j ) is a cut in R. If α φ β, then i?x(a) Φ i?i(/5); this follows from the fact tha t R is dense in %. Conversely, let ( Ä J i ? ^ be a cut in R9 where Rx has no last element. Define V as the set of those elements of % which are less than some element of Rx: V = {x\x €%& (3r)(r e R± & x < r)}. I t is clear tha t R n V=RX. V has no last element, for if a € V & r e R± & a < r, then a < ( a + r ) / 2 < r, so ( a + r ) / 2 e F a n d (a + r)/2 > a. Let T7be £ \ F , then (F |W) is a cut in X. (V\W) cannot determine a gap, because De holds. As V has no last element, W must have a first element a. By the definition of V9 i?i(a) = R n V = i?x. Hence the correspondence between !£ and the cuts (R1\R2) in R, where R±
has no last element, is one-to-one. I t is well-known tha t there is also a one-to-one correspondence
between the cuts (R1\R2) in R, where R± has no last element, and the real numbers. Hence we have established a one-to-one correspondence <p between % and the field C of reals, such tha t ψ(τ) = r for every element r of R. Moreover, the definition of ψ is such, tha t for every a in !£, r < a is equivalent to r < 9?(a). From this fact it is easy to infer tha t ψ is an isomorphism between % and C.
By this categoricity proof we have reached a natural bound for this book. However, it must be repeated, many questions in the field have not been touched. I may mention the theory of finite projective planes and spaces, the connections of projective geometry with topology, and the algebraic investigation of various classes of ternary fields. In the following books several of these subjects are treated in detail. (1) and (3) also contain a bibliography. (1) G. Pickert, Projektive Ebenen, Springer Verlag, 2nd ed., 1975. (2) Daniel R. Hughes and Fres C. Piper, Projective planes, Springer Verlag, 1973. (3) P . Dembrowski, Finite geometries, Springer Verlag, 1968.

147
APPENDICES
Appendix 1
Several proofs of Hessenberg's theorem were given since 1905, most of them incomplete because no account was taken of special cases. (See for example A. Seidenberg, Amer. Math. Monthly 83 (1971), pp. 190-192). The idea of the proof given in this book is very simple (Pappos -> permutation proposition -> weak permutation proposition -> Desargues), but here also complications arise in special cases.
Appendix 2
J. C. E. Dekker (J. Symbolic Logic 14 (1976), p. 399) made the remark tha t the uniqueness of the solution in (ix) follows from (viii).
PROOF. Suppose m Φ m\ ax Φ a2 and
Φ(αΐ9 m, n) = Φ(αΐ9 ra', η') = rl9
Φ(α2, m, n) = Φ(α2, m\ η') = r2>
Then the equations
Φ(αΐ9 y, z) = rv Φ{α^, ζ) = r 2
wouldlhave the solutions (m, n) and (raï, ni) for (y, z), which contradicts (viii).
Appendix 3
Some information on terminology will be useful for further reading.
A loop is a set S in which a binary operation (here denoted by + ) is defined with the properties

148 APPENDICES
(1) For every a and b in S the equation a + x = b has a unique solution for x;
(2) for every a and b in S the equation y + a = b has a unique solution for y;
(3) there is a unit element e such that £ + a = a + e = a for every a in S.
A ternary field 2 is a loop with respect to addition and ï \ { 0 } is a loop with respect to multiplication.
A ternary field satisfying Φ(χ, m, n) = #ra + n is called linear. A linear ternary field with associative addition is a Car-tesian group. A quasifield is a Cartesian group with both distributive properties:
v(y + z) = xv + œz'> (χ + y)z = xz+yz. Hughes and Piper (Projective planes) call any set in which a
ternary function is defined a ternary ring; they call a ternary field as defined in § 3.1 of this book, a planar ternary ring. Pickert uses for this notion the term Ternärkörper.
Appendix 4
I t is worth mentioning tha t a direct proof of the fundamental proposition, based upon P 1 0 , was given by F . Schur in 1898 (See his ,,Grundlagen der Geometrie", 1909, sections 16, 17). I preferred the proof given in § 6,1 because of the interesting algebraic method.
Appendix 5
Another method was given by H. J . Arnold, Abh. Math. Sem. Univ. Hamburg 45 (1976), pp. 3-60.

INDEX Numbers refer to sections
allowed position 2.3. axiom 1.1.2.
of Archimedes 7.6. of continuity 7.7.
axioms of the theory of groups
axiom system 1.1.2. axiomatic theory 1.1.2.
1.1.2.
basis of a vector space 1.6. between 1.2.
categoricity 1.1.9. Cayley's algebra 1.3.3. collinear 2.1. collineation 2.3.
central 2.3. special central 2.3.
completeness 1.1.8. concurrent 2.1. conjugate
harmonic 2.4. of a quaternion 1.3.2.
consistency 1.1.6. coordinates 1.3; 3.1; 5.1.
homogeneous 3.6; 5.3. coordinate system 3.1. cut 7.7.
Dedekind's axiom 7.7. Desargues' proposition 2.2.
generalized 2.2. dual of 2.2.
small 2.2. dual of 2.2.
generalized small 2.2. diagonal 2.6. Dickson I.3.3. dimension 1.6. division ring 1.3.1.
ordered 1.3.1. of quaternions 1.3.2.
duality 1.4; 3.3. principle of 2.1; 4.1.
equation of a line 1.4. of a plane 5.2.
equivalence relation 1.2. classes 1.2.
extension 1.1.10. proper 1.1.10.
field alternative 3.4. ordered 1.3.1; 7.4. ordered ternary 7.3. ternary 3.1.
formal power series 7.5. fundamental notions 1.1.2.
gap 7.7. geometry
analytic projective 1.4. plane projective 2.1.
group 1.3. ordered 1.3.1. Archimedean 7.6.
harmonic conjugate 2.4. harmonic pairs 2.4. Hessenberg 2.6. hexagon 1.4. Hubert 1.1.2; 7.5.
incidence relation 2.1. independence 1.1.7.
of vectors 1.6.
jump 7.7.
line 1.4; 2.1. associated 2.2.
mapping 1.2. model 1.1.2.
net 7.6.

150 INDEX
order cyclical 1.2; 7.1. on the projective line 7.2.
order relation 1.2; 7.1. ordered
group 1.3. projective plane 7.2. set 1.2; 7.1. sum 1.2. ternary field 7.3.
pairs alternating 1.2; 7.1. harmonic 2.4. separating 7.1.
Pappos' proposition 2.6. generalized 2.6.
parametric representation 1.4; 1.5. Pascal hexagon 2.6.
line 2.6. Pasch 7.4. perspectivity 2.4. plane
projective 2.1. affine 3.1.
point diagonal 1.4; 2.6. invariant 2.3; 2.5.
product direct 1.2. in a ternary field 8.2.
projection 2.4. projectivity of order n 2.5. proportional 1.4.
left, right 3.6. proposition 1.1.3.
Desargues' see Desargues fundamental 6.1. harmonic 6.2. Pappos' see Pappos permutation 2.6.
generalized 2.6. generalized weak 2.6. weak 2.6. quadrangle
first 2.4. second 2.6.
sixteen points 4.2.
quadrangle 2.4. quadruple 5.3. quaternions 1.3.2.
ratio 1.4. left (right) n- 3.6.
reflexive 1.2. relation 1.2.
equivalence 1.2. incidence 2.1. order 1.2; 1.4; 7.1. reflexive 1.2. symmetrical 1.2. transitive 1.2.
segment 1.2; 1.4; 7.1. seperate, to 1.4; 7.1. set theory 1.2. subspace 1.6. sum 1.2.
ordered 1.2. in a ternary field 3.2.
symmetrical 1.2.
theorem 1.1.3. transitive 1.2.
O-l- 2.3. triangle 2.1. trilateral 2.1. triple 2.1. trivial 2.1.
valid 1.1.3. vector spaces 1.6.
Related Documents