Autonomous Quadrocopter Design Review Brad Bergerhouse, Nelson Gaske, Austin Wenzel Dr. Malinowski

Autonomous Quadrocopter Design Review Brad Bergerhouse, Nelson Gaske, Austin Wenzel Dr. Malinowski.
Dec 25, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Autonomous Quadrocopter Design ReviewBrad Bergerhouse, Nelson Gaske, Austin WenzelDr. Malinowski

2
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

3
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

4
Original Goals Implement backup fly-by-wire controls
for safety and testing Avoid obstacles using video and sensor
feedback Autonomously navigate through narrow
passages using onboard sensors Develop a quadrocopter platform for
future senior projects
5
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

6
Functional Description Interface BeagleBoard with XAircraft
X650 Quadrocopter platform Use BeagleBoard I/O to interface with
sensors and remote controls Develop passage following algorithm
using minimal sensor input Utilize image processing techniques for
navigational purposes and goal criteria

7
System Diagram
XAircraft X650
BeagleBoard
IR Distance SensorsSharp GP2Y0A02YK0F
Octal ADC TI ADS7823-28EVM
5MP CameraLI-LBCM5M1
Wifi
I2C
Serial
Laptop
DSP
DM3730CBP Processor
USB
Flight Control Board
Motor ESC’s
PWMUltraPWM
Motors

8
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

9
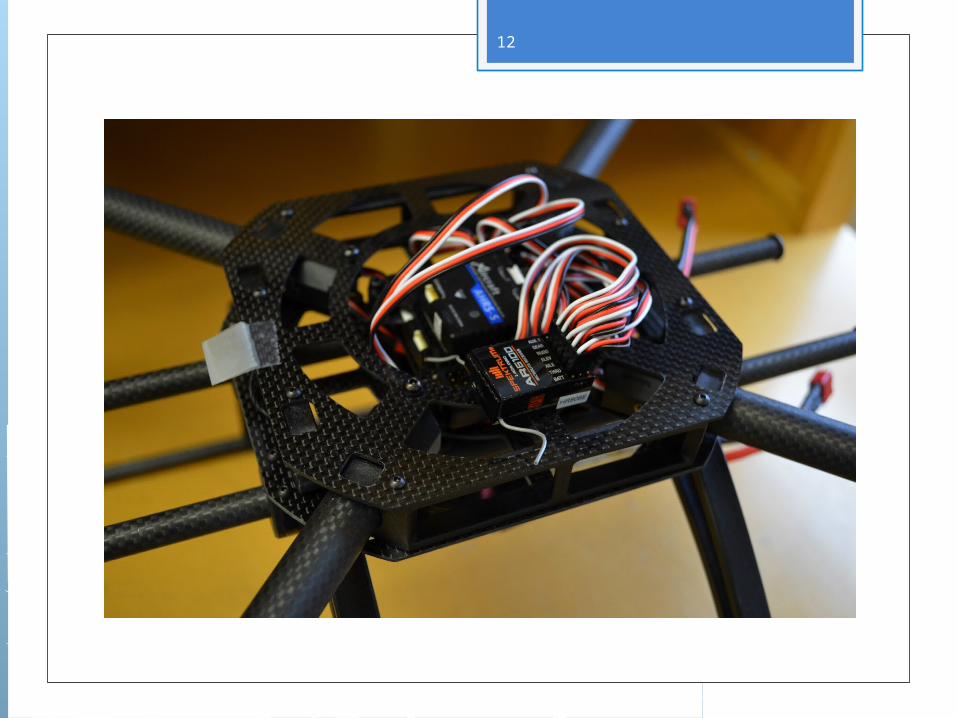
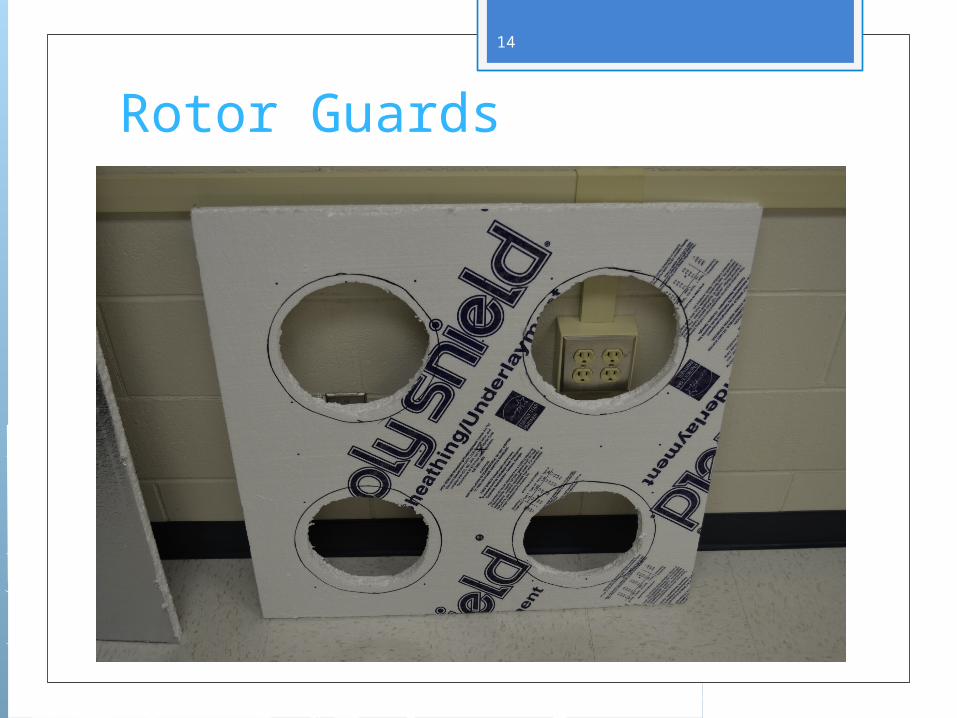
Progress Platform Arrived. Assembly is complete,
we are now working on a rotor guard solution
Close to having a working PWM solution We have started on I2C 5V regulator is ready for installation SUSAN corner detection on images in
progress

10
Completed Platform

11
12

14
Rotor Guards

15
General DSP flowchart
Capture image from camera
Send image array information to DSP
**Perform SUSAN corner detection on image
Output image with the corners “marked”
Store image to shared memory

SUSAN corner detectionPlace circular mask around pixel to be tested (nucleus
pixel)
Calculate number of pixels in circular mask with similar brightness as
nucleus pixel(USAN)
Subtract USAN size from “geometric threshold” to
produce a corner strength image
Find USAN centroid and continuity
Use non-maximum suppression to find corners
“mark” the corner found
Is next pixel there?
Yes
Break
No
17
Hindrances to Progress BeagleBoard documentation (or lack
there of) Lack of standardized interfaces for
major hardware components Cross compiling kernel issues

18
Attempts to output PWM to GPIO pins Bash Script C code
Servodrive kernel module Openembedded Bitbake

19
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

20
Revised Goals Use sensors to avoid obstacles Use camera to observe navigational
marking and goal criteria Fly-by-wire
Nelson
What should our goals be now?

21
Outline Original Goals Abridged Project Description Progress Revised Goals Current Schedule and Milestones

22
Original Schedule
Camera and Joystick Interfacing
Camera and DSP interfacing
Wireless and I2C Interfacing
Platform Assembly
PWM output design and testing
IR sensor Interfacing
Platform Power Testing
Communication Design
Navigation Design
Testing and Debugging
Presentation Preparation
17-Nov 7-Dec 27-Dec 16-Jan 5-Feb 25-Feb 16-Mar 5-Apr 25-Apr 15-May
AustinBradNelson

23
Revised Schedule
Camera and Joystick Interfacing
Camera and DSP interfacing
Wireless and I2C Interfacing
Platform Assembly
Platform Power Testing
PWM output design and testing
IR sensor Interfacing
Navigation Design
Testing and Debugging
Presentation Preparation
17-Nov 7-Dec 27-Dec 16-Jan 5-Feb 25-Feb 16-Mar 5-Apr 25-Apr 15-May
AustinBradNelson
AustinBradNelson

24
Questions?
Related Documents










