Originating Author: Frank Maslar August 17, 2016 Collaborative Robots & Automation Technologies Automotive Manufacturing 2016 Vision Based Error Proofing Techniques Frank Maslar Vision Systems Technical Specialist Ford Motor Company Powertrain Manufacturing Advanced Manufacturing Engineering Email: [email protected]

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Originating Author: Frank Maslar August 17, 2016
Collaborative Robots & Automation Technologies Automotive Manufacturing 2016
Vision Based Error Proofing Techniques
FrankMaslarVisionSystemsTechnicalSpecialistFordMotorCompanyPowertrainManufacturingAdvancedManufacturingEngineeringEmail:[email protected]
Originating Author: Frank Maslar August 17, 2016
2
Vision Based Error Proofing Techniques
Session Outline • Automotive powertrain manufacturing environment overview • Traceability • Error proofing • Technology development opportunities
Originating Author: Frank Maslar August 17, 2016
3
Automotive Powertrain Manufacturing Environment
• Powertrain: Engine, transmission and drive axle components • Repetitive – similar parts are always processed
– Lines can handle part type variations – Generally metal parts with differences in surface finish
• Location variation less than 5mm in all directions • Parts stay in station 20-30 seconds
– Typical vision processing time can be up to 5 seconds
Originating Author: Frank Maslar August 17, 2016
4
Automotive Powertrain Manufacturing Environment
• Lines run 24/7 – Ease of recovery from “vision failures” is a requirement – Downtime is expensive
• Vision is included in the standard (required) process – Bypass buttons have been removed – 6 σ performance ( 3 defects/million) performance is required
Originating Author: Frank Maslar August 17, 2016
5
Vision Applications in Assembly
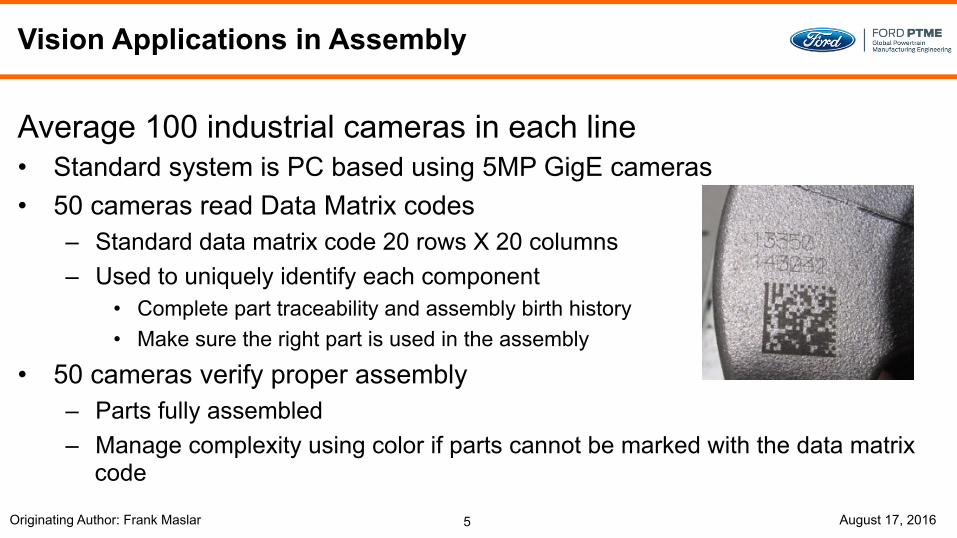
Average 100 industrial cameras in each line • Standard system is PC based using 5MP GigE cameras • 50 cameras read Data Matrix codes
– Standard data matrix code 20 rows X 20 columns – Used to uniquely identify each component
• Complete part traceability and assembly birth history • Make sure the right part is used in the assembly
• 50 cameras verify proper assembly – Parts fully assembled – Manage complexity using color if parts cannot be marked with the data matrix
code
Originating Author: Frank Maslar August 17, 2016
6
Assembly Verification Classes
• Process verification / error proofing – Fully seated – Gears ground
• Complexity management – Data matrix – Color – Shape or part features
• RTV dispense verification – Bead size repeatable to 0.030mm – Bead location repeatable to 0.010mm
• Robot guidance
Originating Author: Frank Maslar August 17, 2016 7
Vision Screen
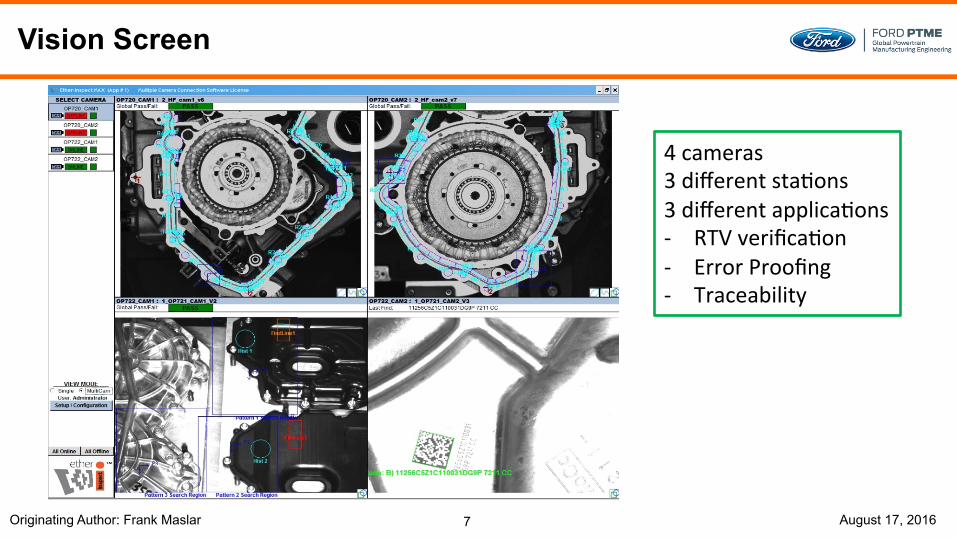
4cameras3differentsta<ons3differentapplica<ons- RTVverifica<on- ErrorProofing- Traceability
Originating Author: Frank Maslar August 17, 2016 8
Data Matrix reading applications
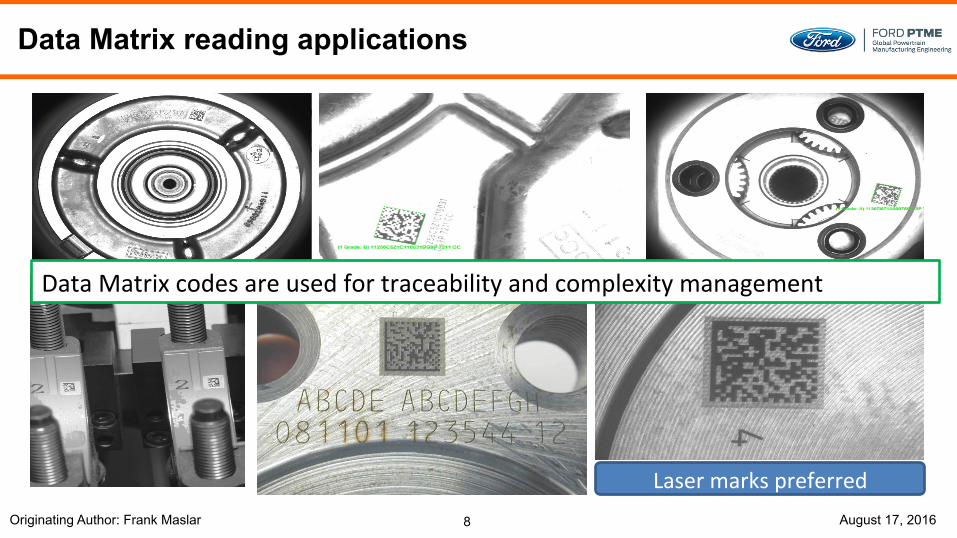
DataMatrixcodesareusedfortraceabilityandcomplexitymanagement
Lasermarkspreferred
Originating Author: Frank Maslar August 17, 2016 9
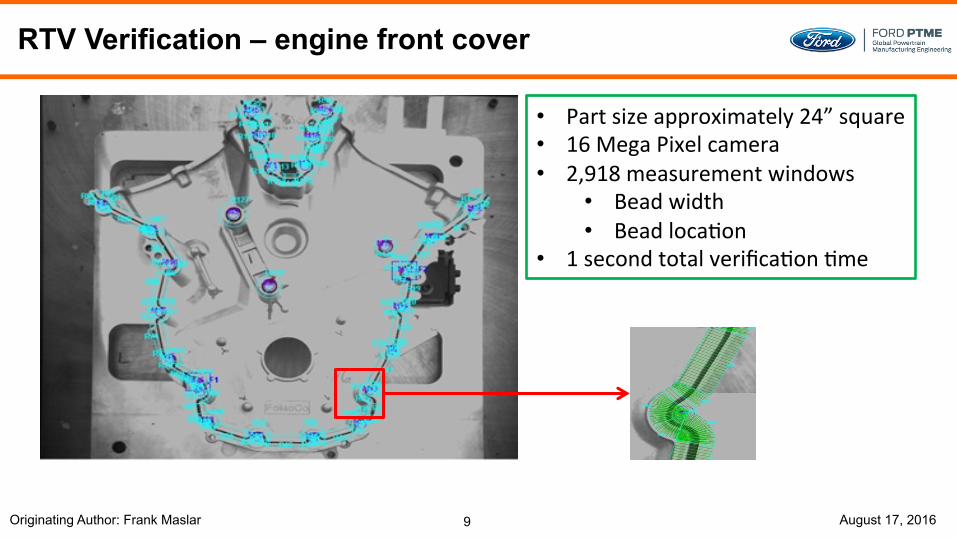
RTV Verification – engine front cover
• Partsizeapproximately24”square• 16MegaPixelcamera• 2,918measurementwindows
• Beadwidth• Beadloca<on
• 1secondtotalverifica<on<me
Originating Author: Frank Maslar August 17, 2016 10
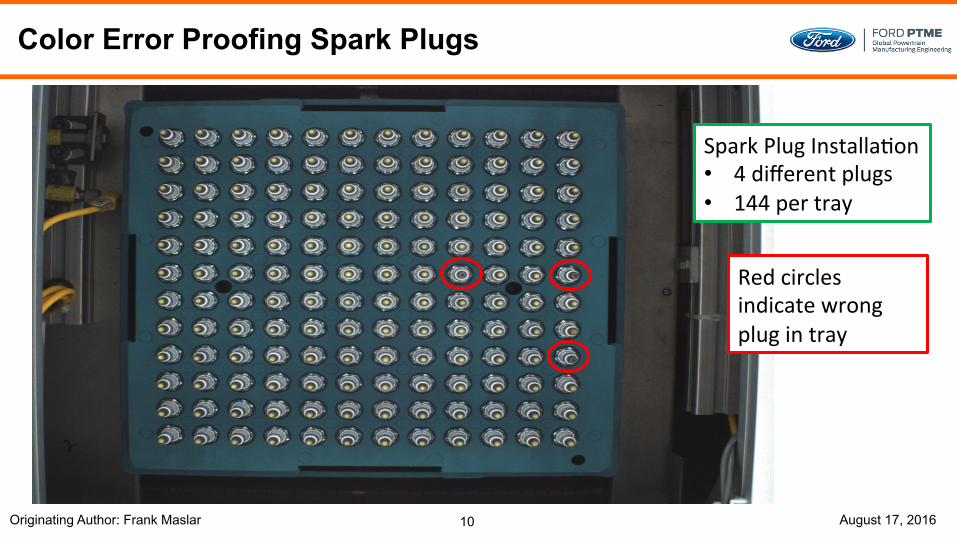
Color Error Proofing Spark Plugs
SparkPlugInstalla<on• 4differentplugs• 144pertray
Redcirclesindicatewrongplugintray
Originating Author: Frank Maslar August 17, 2016 11
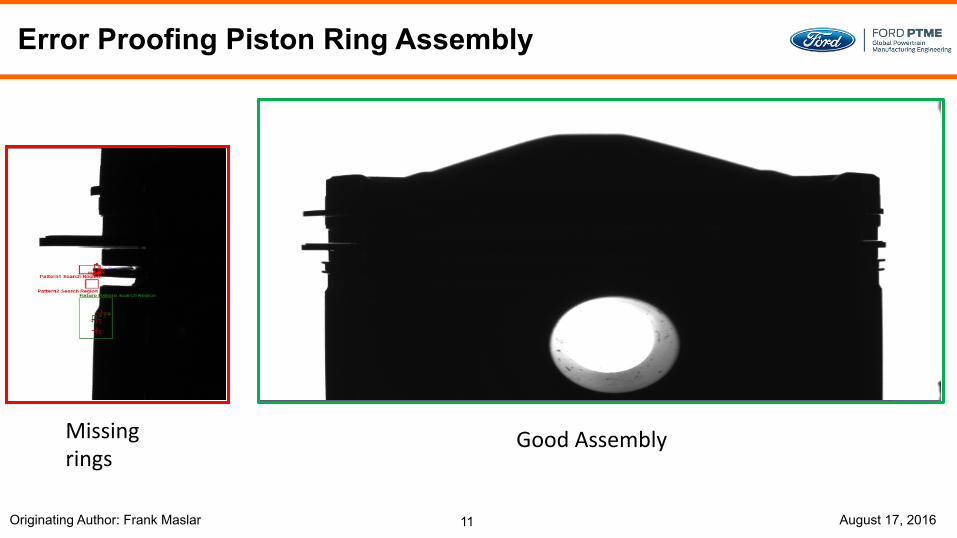
Error Proofing Piston Ring Assembly
Missingrings
GoodAssembly
Originating Author: Frank Maslar August 17, 2016 12
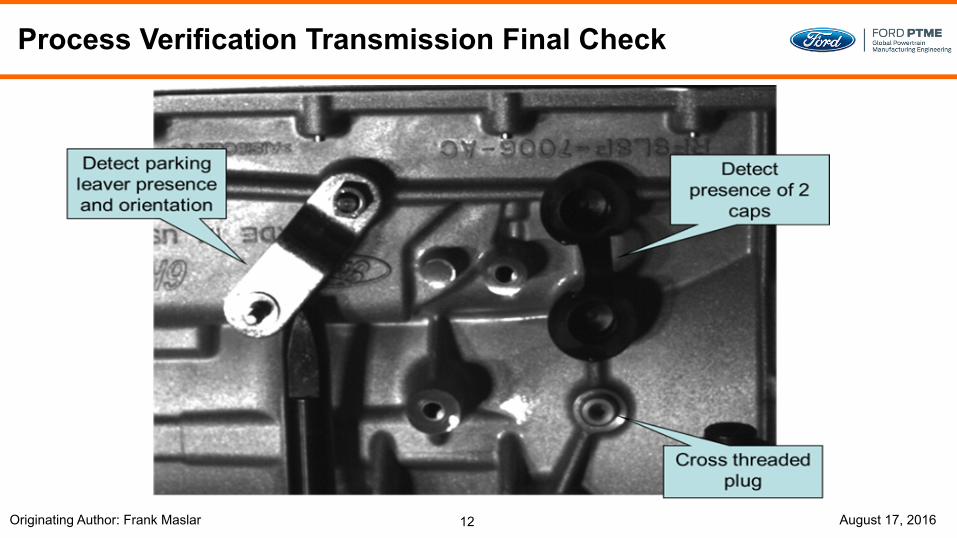
Process Verification Transmission Final Check
Originating Author: Frank Maslar August 17, 2016 13
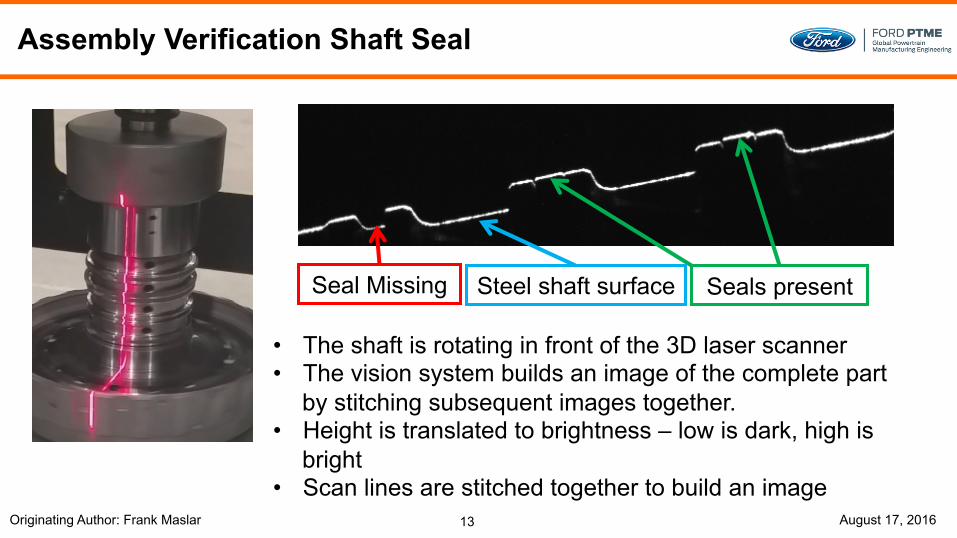
Assembly Verification Shaft Seal
Seal Missing Seals present Steel shaft surface
• The shaft is rotating in front of the 3D laser scanner • The vision system builds an image of the complete part
by stitching subsequent images together. • Height is translated to brightness – low is dark, high is
bright • Scan lines are stitched together to build an image
Originating Author: Frank Maslar August 17, 2016 14
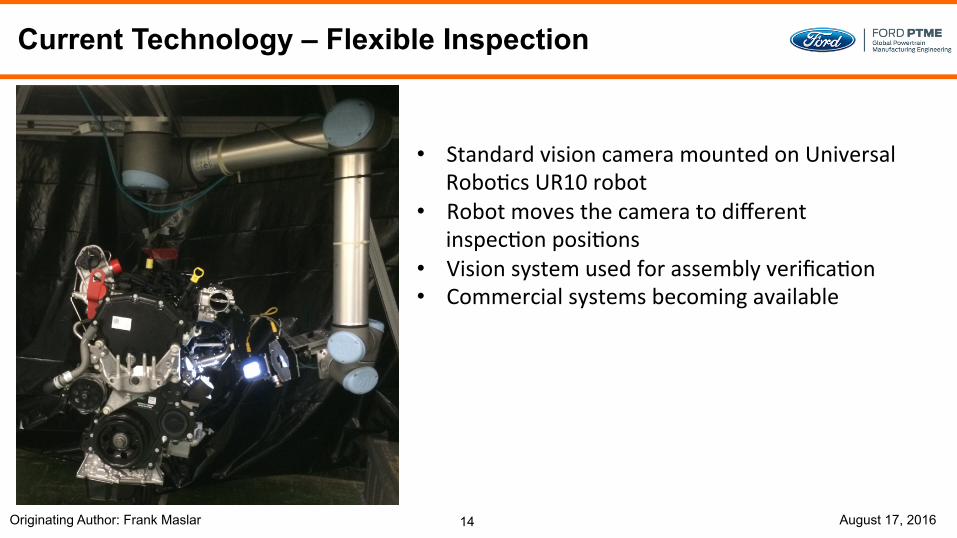
Current Technology – Flexible Inspection
• StandardvisioncameramountedonUniversalRobo<csUR10robot
• Robotmovesthecameratodifferentinspec<onposi<ons
• Visionsystemusedforassemblyverifica<on• Commercialsystemsbecomingavailable
Originating Author: Frank Maslar August 17, 2016
15
Future Technology Opportunity 3D Data Visualization
Most 3D cameras represent 3D data as traditional 2D images where distance is converted to gray scale • 3D data is displayed in 2D • 2D image processing tools are used to analyze the data • Issues:
– Some 3D details are lost in the conversion – Traditional 2D image processing tools do not take advantage of the true
3D data
Originating Author: Frank Maslar August 17, 2016
16
Future Technology Opportunity 3D Data Visualization
The need is to develop systems that work in 3D space • Data should be visualized as a solid model • Visualization tools should be able to manipulate the data like a solid model
including zoom, pan and rotate • 3D image processing tools need to be developed to analyze the 3D data
– Edge tools and 3D distance measuring tools – Blob tools which characterize the object in 3D – 3D Pattern matching tools
Originating Author: Frank Maslar August 17, 2016
17
Future Technology Opportunity Vision Data Sensor Fusion
Vision data can come from a variety of sources • Traditional 2D gray scale images • 2D color images • 3D information
– Multi-camera or stereo – 3D point cloud
• Laser type scanner • Area camera with structured light
• Each data type is typically processed in its native environment using tools developed for this environment
Originating Author: Frank Maslar August 17, 2016
18
Future Technology Opportunity Vision Data Sensor Fusion
The need is to combine these data types into a unified workspace • New image analysis tools are required to analyze the data in this unified
workspace • Tool Requirements:
– Intuitively easy to use – Seamlessly work with all the data types
Originating Author: Frank Maslar August 17, 2016
19
Vision Based Error Proofing Techniques
Questions ??
Related Documents











