AUTOMATIZACIÓN DEL VIVERO SEMIGAR AUTOMATION OF VIVERO SEMIGAR M. GONZALEZ. J. CONTRERAS. ** H. ESLAVA. *** Resumen: En el siguiente artículo se describe el desarrollo e implementación de un sistema de regado automático por activación de parámetros de sensores de humedad según el pH de la tierra y lluvia con visualización en pc, un control de asistencia obtenido por un sensor biométrico archivándose en una base de datos y así poder registrar a los empleados y controlar la asistencia de ellos mediante una página web donde se puede obtener informes detallados de su asistencia en el mes. De igual manera se realiza un prototipo donde se evidencia el funcionamiento de estos en espacios cerrados, obteniendo información detallada en cuanto a los sensores, además del registro y obtención de personal en el sensor biométrico. El sistema de automatización se compone de un sensor de humedad y un sensor de lluvia que son los encargados de obtener los valores del ambiente, seguidamente se envía la información obtenida de los sensores a un ordenador con el fin de poderla visualizar, ya de esta manera el microcontrolador se encargara de activar las válvulas que permiten el flujo del agua para regado y la visualización pertinente del terreno. Estudiante de Tecnología en Electrónica (Ciclos Propedéuticos), Universidad Distrital Francisco José de Caldas – Facultad Tecnológica, Colombia. Email: [email protected] ** Estudiante de Tecnología en Electrónica (Ciclos Propedéuticos), Universidad Distrital Francisco José de Caldas – Facultad Tecnológica, Colombia. Email: [email protected] *** Licenciado en Electrónica, Universidad Pedagógica. Esp. Teleinformática, Universidad Distrital Francisco José de Caldas. Esp. Instrumentación Electrónica Universidad Santo Tomas. M.Sc. Ingeniería de Telecomunicaciones Universidad Nacional. PhD. Ingeniería de Sistemas y Computación Universidad Nacional de Colombia. Director grupo de Investigación TELETECNO. Universidad Distrital Francisco José de Caldas. Email: [email protected]

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
AUTOMATIZACIÓN DEL VIVERO SEMIGAR
AUTOMATION OF VIVERO SEMIGAR
M. GONZALEZ. J. CONTRERAS.** H. ESLAVA. ***
Resumen: En el siguiente artículo se describe el desarrollo e implementación de un
sistema de regado automático por activación de parámetros de sensores de humedad
según el pH de la tierra y lluvia con visualización en pc, un control de asistencia obtenido
por un sensor biométrico archivándose en una base de datos y así poder registrar a los
empleados y controlar la asistencia de ellos mediante una página web donde se puede
obtener informes detallados de su asistencia en el mes. De igual manera se realiza un
prototipo donde se evidencia el funcionamiento de estos en espacios cerrados,
obteniendo información detallada en cuanto a los sensores, además del registro y
obtención de personal en el sensor biométrico.
El sistema de automatización se compone de un sensor de humedad y un sensor de
lluvia que son los encargados de obtener los valores del ambiente, seguidamente se
envía la información obtenida de los sensores a un ordenador con el fin de poderla
visualizar, ya de esta manera el microcontrolador se encargara de activar las válvulas
que permiten el flujo del agua para regado y la visualización pertinente del terreno.
Estudiante de Tecnología en Electrónica (Ciclos Propedéuticos), Universidad Distrital Francisco José de Caldas – Facultad Tecnológica, Colombia. Email: [email protected] ** Estudiante de Tecnología en Electrónica (Ciclos Propedéuticos), Universidad Distrital Francisco José de Caldas – Facultad Tecnológica, Colombia. Email: [email protected] *** Licenciado en Electrónica, Universidad Pedagógica. Esp. Teleinformática, Universidad Distrital Francisco José de Caldas. Esp. Instrumentación Electrónica Universidad Santo Tomas. M.Sc. Ingeniería de Telecomunicaciones Universidad Nacional. PhD. Ingeniería de Sistemas y Computación Universidad Nacional de Colombia. Director grupo de Investigación TELETECNO. Universidad Distrital Francisco José de Caldas. Email: [email protected]

La segunda parte es un control de asistencia que se compone de un sensor biométrico
el cual detecta las huellas del personal y está encargado de enviarlo a un servidor para
su almacenamiento, el servidor esta en base a la raspberry pi 3 donde se obtendrá las
huellas, nombres y demás datos pertinentes para la obtención de un informe que se
podrá descargar en una página web únicamente para los administradores del lugar.
Palabras clave: Automatización, comunicación inalámbrica, pH, raspberry pi 3, sensor,
servidor, plataforma web.
Abstract: The following article describes the development and implementation of an
automatic watering system by activating parameters of humidity sensors according to
the pH of the earth and rain with visualization in PC, an assistance control obtained by
a biometric sensor archiving in a base of data and thus be able to register employees
and control the assistance of them through a web page where you can obtain detailed
reports of their attendance in the month. In the same way a prototype is made where the
operation of these in closed spaces is evidenced, obtaining detailed information
regarding the sensors, besides the registration and obtaining of personnel in the
biometric sensor.
The automation system consists of a humidity sensor and a rain sensor that are
responsible for obtaining the values of the environment, then the information obtained
from the sensors is sent to a computer in order to be able to visualize it, and in this way
the microcontroller will be responsible for activating the valves that allow the flow of water
for irrigation and the relevant visualization of the land.
The second part is an attendance control that is composed of a biometric sensor which
detects the fingerprints of the staff and is responsible for sending it to a server for

storage, the server is based on the raspberry 3pi where you will get fingerprints, names
and other pertinent information to obtain a report that can be downloaded on a web page
only for the administrators of the place.
Key Words: Automation, wireless communication, pH, raspberry 3pi, sensor, server,
web platform.
1. INTRODUCCIÓN
Actualmente el estado de las zonas de trabajo rural en Colombia están muy poco tecnificadas,
bajo supervisión de personal y muy poco espacio lo que ha deteriorado la condición de las
mismas y bajado la calidad de su trabajo por abandono, descuido o situaciones similares por
ende el hecho de incluir medios tecnológicos en estos espacios naturales se ha tomado como
una opción de mejora en su producción, calidad, y zona de trabajo para optimizar sus
resultados, aprovechando la actual alza en la práctica y uso de la domótica como gran opción
en estos casos, llevando así a la formación y desarrollo de este modelo de supervisión y
automatización de un medio de trabajo rural.
Se presenta una revisión del estado del arte para un sistema de riego automático, con
comunicación a ordenador y la obtención de valores de sensores biométricos, funcionamiento
de servidores en el sistema embebido raspberry pi 3, definiéndose conceptos básicos para
poder reconocer su alcance en el medio de trabajo rural, se hacen análisis desde sensores de
humedad hasta distinciones entre páginas web con acceso privado y publico. El servidor es un
sistema LAMP (Linux, Apache, Mysql y Phpmyadmin) un entorno que permite a la raspberry
3pi desarrollar y gestionar paginas y base datos para poder ejecutar de manera correcta el
ambiente planificado para la obtención de valores mediante el sensor biométrico y la
visualización de informes detallados del personal apreciándose la hora de llegada y salida del
área de trabajo.

2. ESTADO DEL ARTE
2.1 La agricultura siempre ha sido el factor clave por el cual inicio la civilización humana, la
obtención de alimento mediante el uso del suelo ha sido el más grande invento pues fue
por esto que la humanidad pasó de ser nómada a sedentaria y empezó a formar las
primeras civilizaciones. Actualmente sigue siendo base fundamental para toda nación y
hay muchas de ellas que son capaces de aprovechar al máximo las variables del entorno
para obtener una producción muy por encima de las demás naciones, variables como el
pH del suelo, humedad del aire, luminosidad del ambiente , lluvia y hasta la evo
transpiración de las plantas para aprovechar los nutrientes. El pH (potencial de hidrógeno)
es la medida del grado de acidez o alcalinidad de un suelo. Un pH de 7.0 indica
neutralidad, pero a medida que este valor disminuye el suelo se vuelve más ácido, de
manera que, un pH de 6.0 es diez veces más ácido que un pH de 7.0. El significado
práctico del pH en términos de acidez del suelo, es que afecta significativamente la
disponibilidad y la asimilación de nutrientes, y ejerce una fuerte influencia sobre la
estructura del suelo.[1]
Figura 1. Disponibilidad de nutrientes respecto al pH del
suelo. [1]

2.2 DISTRIBUCIÓN DEL AGUA:
Un factor demasiado importante es la cantidad y distribución del agua por ello el ingeniero
agrónomo Daniel Ortiz Gómez redacta que el agua es fundamental para la agropecuaria,
detallando cada componente y combinación que hacen de un cultivo productor en un
sistema algo más complejo, precisando en la acidez cuando se combina con la tierra, dando
ciertos porcentajes donde el acides está en su punto para que la materia orgánica en su
combinación de la más alta tasa de nutrientes a la semilla.[2]
A su vez el ingeniero agrónomo Juan Antonio Caseres denota en su documento diferentes
formas de riego para poder tener un mejor cultivo, identificando las relaciones del material
orgánico, el pH y el agua para obtener su influencia en el crecimiento del cultivo, detallando
que cada cultivo es diferente y por ello plantea métodos para tratar que todo cultivo sea
productor sin presencia de perdida.[3]
2.3 FACTORES CLAVES EN UN CULTIVO
Para los procesos enfatizados en el crecimiento de la planta, como la luminosidad y la
humedad en el ambiente se tiene un desarrollo de un Sistema de Iluminación Artificial
Inteligente para Cultivos Protegidos de Basil Mohammed Al-Hadithia, Cecilia E. García
Cenaa, Raquel Cedazo Leóna , Carlos Loor Loora, donde plantean un método de control
para la iluminación artificial en cultivos, demostrando que el cultivo depende también de
cierta cantidad de luz, han combinado la electrónica de potencia con la programación
mediante labview, y con ello han podido regular automáticamente o manual la luminosidad
del invernadero mejorando su crecimiento y dando resultado que la luminosidad es esencial
en un vivero.[4]
Los procesos como regado que son vitales para los cultivos son automatizados siendo
conscientes de que cada cultivo es diferente y sabiendo que el pH va afectar, se tiene en
cuenta todas las variables pendientes para que el regado se una sucesión precisa y por
ende la revista tecnológica público un artículo de la Escuela Especializada en Ingeniería
ITCAP-FEPADE donde se detallaba el proceso para automatizar un invernadero en Cuba,
usando pc, electroválvulas y demás instrumentos a nivel industrial, para ser precisos a la
hora del regado y fertilización de la siembra donde se obtuvieron grandes resultados en
cuanto al manejo del regado y la fertilización.[5]
Las vías a nivel industrial son grandes, ya que son más capaces de controlar un vivero de
forma fácil y en algún tipo de falla estos sistemas son modulares, es decir, que uno puede
cambiar los mecanismos sin causar un efecto negativo a todo el complejo, esto compete
más al vivero donde se obtenga grandes ganancias y pueda invertir en un excelente
modernización, pero en países en vías de desarrollo, estos aspectos no se apoyan y es por
eso que no se tiene la suficiente ayuda para poder competir eficazmente en el mercado
agrícola, la revista tecnológica público un artículo de la Escuela Especializada en
Ingeniería ITCAP-FEPADE donde detallaban el proceso para automatizar un invernadero
en El Salvador, determinando que habían pocas empresas comprometidas a dar soluciones
de ingeniería a la agroindustria, y que se pudo realizar por el apoyo del Plan de Agricultura
Familiar, usaban el programador LOGO de Siemens para poder automatizar el invernadero
y además hicieron un invernadero para tomar muestras para la corroboración de que el
proyecto fuese una excelente inversión, dando como resultado que el riego automatizado
permite que el fruto (sea cualquiera) crezca más rápido y con más volumen que los
demás.[6]
Se pueden presentar varias estrategias para obtener un mejor cultivo así como lo hicieron
los estudiantes Martiniano Castro Popoca , Francisco Águila Marín, Abel Quevedo Nolasco,
Siegfried Kleisinger, Leonardo Tijerina Chávez1y Enrique Mejía Sáenz de la escuela de
postgraduados de Texcoco- México y de la universidad Hohenheim de Stuttgart –
Alemania, en su tesis de grado realizan la automatización de riego para un cultivo de
calabazas en el colegio de Postgraduados de Texcoco - México, usaron tres estrategias
para poder hacer el riego automatizado y poder definir qué estrategia era la mejor, usando
variables como la humedad del aire, condiciones atmosféricas, condiciones de evo
transpiración, pH y materia orgánica, obtuvieron un prototipo puntual y que cumplía con los
requisitos escogidos para hacer el debido regado automático. [7]
Viendo el caso de automatización con componentes de calidad industrial, también se puede
realizar con micro controladores como el caso de Fernanda Beatriz Carmona , Alberto
Eduardo Riba , Fernando Emmanuel Frati , Jorge Damian Tejada , Horacio Martinez del
Pezzo , Emanuel Robador , Martın Paez Yanez , Alejandro Cruz , Nelson Acosta , Juan
Manuel Toloza, denotan en su artículo sobre el riego automatizo para cultivo de olivos, el
uso de micro controladores con sensores inalámbricos para el adecuado riego, localizados
en una región árida manifiestan que el uso de la arquitectura de software orientada a los
sensores, hacen que el uso del agua sea más óptimo y con mejores resultados en la
producción.[8]
En países desarrollados, ya se están viendo casos de robots en la agroindustria,
defendiendo que los robots hacen mejor trabajo al ser más precisos con el riego, el
embolsado y más acciones que en estos campos un ser humano no es tan preciso,
mejorando el sembrado de los cultivos, permitiendo el rápido de crecimiento de ellos y

además mejorando las inversiones de los invernaderos debido a que se ahorran en costos
de mano de obra y su producción es mucho mayor que con actividad humana, en el Estado
del arte de la tecnología de robots aplicada a invernaderos de los estudiantes Gutiérrez,
S.; López, H. C.; Rivera, S. y Ruiz, A. C. de la universidad de Colima, manifiestan de como
los robots pueden cooperar con el vivero para que este sea más productivo, teniendo en
cuenta factores como la iluminación del lugar, pesticidas aplicadas a los cultivos,
fertilizantes, y demás variables que han de internar en la programación del robot para que
sea capaz de actuar debidamente según sea el caso, diciendo que el robot debe aguantar
las condiciones de los invernaderos haciéndolo preciso y con materiales que le permitan
soportar el ambiente polvoroso y lleno de pesticidas que se encuentra en un invernadero,
los robots pueden ayudar desde la siembra, el regado hasta el embolsado, mostrando que
hay robots con diferentes grados de libertad para cumplir con su trabajo.[9] y en Análisis
de viabilidad de la utilización de robots en invernaderos. Propuesta para el modelo Almería
de F. Rodríguez, J. Sánchez-Hermosilla, L. Rivera, A. Giménez, muestran la viabilidad de
la automatización de invernaderos, en la región de Almería, detallando que el agro será el
primer campo en la automatización puesto que reduce costos a la hora de sembrar,
embolsar, regar y más deberes que haría un trabajador, aumentaría la producción debido
a que la automatización es un proceso sincrónico y con ello su producto es más fácil de
obtener.[10]
3. MARCO TEORICO
3.1 SENSOR DE HUMEDAD
El sensor de humedad de suelo (higrómetro) también conocido como modulo FC-28 es
un sensor empleado mayormente en sistemas de riego automático, su funcionamiento

es simple permite medir la conductividad del suelo, si el suelo está muy húmedo mayor
será la conductividad y si el suelo está muy seco la conductividad será mucho menor.
El modulo FC-28 que es la sonda que se utiliza para medir la humedad viene
acompañado de otra board que es la que se encarga de entregar la medición del sensor
de forma análoga o digital, esta board trae un circuito comparador LM393 y un
potenciómetro. El sensor en conjunto con la board encargada de las mediciones entrega
resultados análogos entre los valores 0 (suelo muy húmedo) y 1023 (suelo demasiado
seco). La salida digital entregara valores de HIGH cuando se supera cierto nivel de
humedad y LOW cuando la humedad del suelo está por debajo del nivel, estos valores
se obtienen cuando el circuito detecta que se pasó cierto umbral de medición, dicho
umbral se puede modificar a través del potenciómetro.[11]
Figura 2. Modulo FC-28. [11]
3.2 SENSOR DE LLUVIA
Este módulo consiste en una serie de pistas conductoras impresas sobre una placa de
baquelita. La separación entre las pistas es muy pequeña. Lo que este módulo hace es
crear un corto circuito cada vez que las pistas se mojan. El agua hace que se cree un
camino de baja resistencia entre las pistas con polaridad positiva y las pistas conectadas

al GND. La corriente que fluye a través de estas pistas se ve limitada por resistencias
de 10K en cada conductor, lo que impide que el corto circuito que se genera cuando se
moja la placa vaya a estropear el micro controlador. El circuito de control es el que posee
las resistencias limitadoras de corriente y es el encargado de alimentar el módulo YL-
83. Posee un amplificador operacional, específicamente el circuito integrado LM392.
Este es el encargado de amplificar el pequeño diferencial de voltaje que se general
cuando una gota de agua cae sobre las pistas del módulo. Aquí es donde se genera la
señal de salida que puede ser del tipo analógica o digital. La señal digital oscilará entre
los valores HIGH y LOW dependiendo de si hay agua o no sobre las pistas de la placa
YL-83.[12]
Figura 3. Módulo YL38. [12]
3.3 SENSORES BIOMETRICOS
Tienen demasiados fines debido a la ayuda que proporcionan en la industria, siendo de
diversas clases dependientes al cuerpo humano, desde el iris de los ojos, hasta el olor
corporal, con la ayuda de los sensores biométricos se evita el uso de anticuados métodos
de acceso como lo son las llaves o las tarjetas, colaboran evitando el fraude puesto que

cada ser es diferente el uno del otro y con esto no se puede acceder a ciertos lugares o
abrir ciertas cosas.
Los sensores más usados son los biométricos por huella dactilar, siendo ordenados por las
partes de la huella dactilar, la isla, bifurcación, final, punto y lago siendo estos 5 detalles
características que todas las personas tienen pero de distintas formas, los algoritmos del
software hacen un análisis de imagen, obteniendo la imagen original luego sacando el
debido reflejo, se ubican las líneas y el algoritmo las separa entre 0°, 45°, 90° Y 135° para
poder analizar la imagen y hacer concordar con la original procediendo a la activación del
control de acceso.[13]
El método óptico es uno de los más comunes que suele estar formado por cámaras de
Vídeo de tipo CCD. Estos sensores se emplean tanto en reconocimiento de huella dactilar
como de ojo. El corazón de la cámara es un circuito integrado tipo CCD (Dispositivo de
Carga Acoplada). Este dispositivo consiste de varios cientos de miles de elementos
individuales (píxeles) localizados en la superficie de un diminuto CI.[14]
Figura 4. Análisis sensor biométrico.[14]
El sensor GT511C3 es un escáner de huella dactilar que se comunica a través de protocolo
serial TTL, con una CPU de 32 bits, la cual se encarga del procesamiento de los datos, con
gran capacidad de almacenar datos, también permite recuperar la imagen de una huella
dactilar. El módulo puede almacenar hasta 200 huellas dactilares diferentes (que es 10
veces más que la versión anterior) Y ahora es capaz de reconocer la huella dactilar a

360 °. El módulo es pequeño y fácil de montaje utilizando dos pestañas de montaje en el
lado del sensor. El conector JST-SH a bordo tiene cuatro señales: VCC, GND, Tx, Rx.[15]
Figura 5. Sensor GT511C3. [13]
3.4 RASPBERRY PI 3
Raspberry Pi es un computador de placa reducida, computador de placa única o
computador de placa simple (SBC) de bajo costo desarrollado en Reino Unido por la
Fundación Raspberry Pi, con el objetivo de estimular la enseñanza de ciencias de la
computación en las escuelas.
El software es open source, siendo su sistema operativo oficial una versión adaptada de
Debian, denominada Raspbian, aunque permite usar otros sistemas operativos, incluido
una versión de Windows 10. En todas sus versiones incluye un procesador Broadcom, una
memoria RAM, una GPU, puertos USB, HDMI, Ethernet (El primer modelo no lo tenía), 40
pines GPIO y un conector para cámara. Ninguna de sus ediciones incluye memoria, siendo
esta en su primera versión una tarjeta SD y en ediciones posteriores una tarjeta
MicroSD.[16]

Figura 6. Raspberry pi 3. [16]
3.5 BASE DE DATOS
El término de bases de datos fue escuchado por primera vez en 1963, en un simposio
celebrado en California, USA. Una base de datos se puede definir como un conjunto de
información relacionada que se encuentra agrupada ó estructurada. Desde el punto de
vista informático, la base de datos es un sistema formado por un conjunto de datos
almacenados en discos que permiten el acceso directo a ellos y un conjunto de
programas que manipulen ese conjunto de datos. Cada base de datos se compone de
una o más tablas que guarda un conjunto de datos. Cada tabla tiene una o más
columnas y filas. Las columnas guardan una parte de la información sobre cada
elemento que queramos guardar en la tabla, cada fila de la tabla conforma un registro.
Los Sistemas de Gestión de Base de Datos (en inglés DataBase Management System)
son un tipo de software muy específico, dedicado a servir de interfaz entre la base de
datos, el usuario y las aplicaciones que la utilizan. Se compone de un lenguaje de
definición de datos, de un lenguaje de manipulación de datos y de un lenguaje de
consulta.[17]
La arquitectura de un sistema de base de datos se basa en 3 niveles distintos:
Nivel físico: es el nivel más bajo de abstracción y el nivel real de los datos almacenados.
Este nivel define cómo se almacenan los datos en el soporte físico, ya sea en registros
o de cualquier otra forma, así como los métodos de acceso. Este nivel lleva asociada
una representación de los datos, que es lo que denominamos Esquema Físico.
Nivel conceptual: es el correspondiente a una visión de la base de datos desde el punto
de visto del mundo real. Es decir se trata con la entidad u objeto representado, sin
importar como está representado o almacenado éste. Es la representación de los datos
realizada por la organización, que recoge los datos parciales de los requerimientos de
los diferentes usuarios y aplicaciones parciales. Incluye la definición de los datos y las
relaciones entre ellos. Este nivel lleva asociado un Esquema Conceptual.
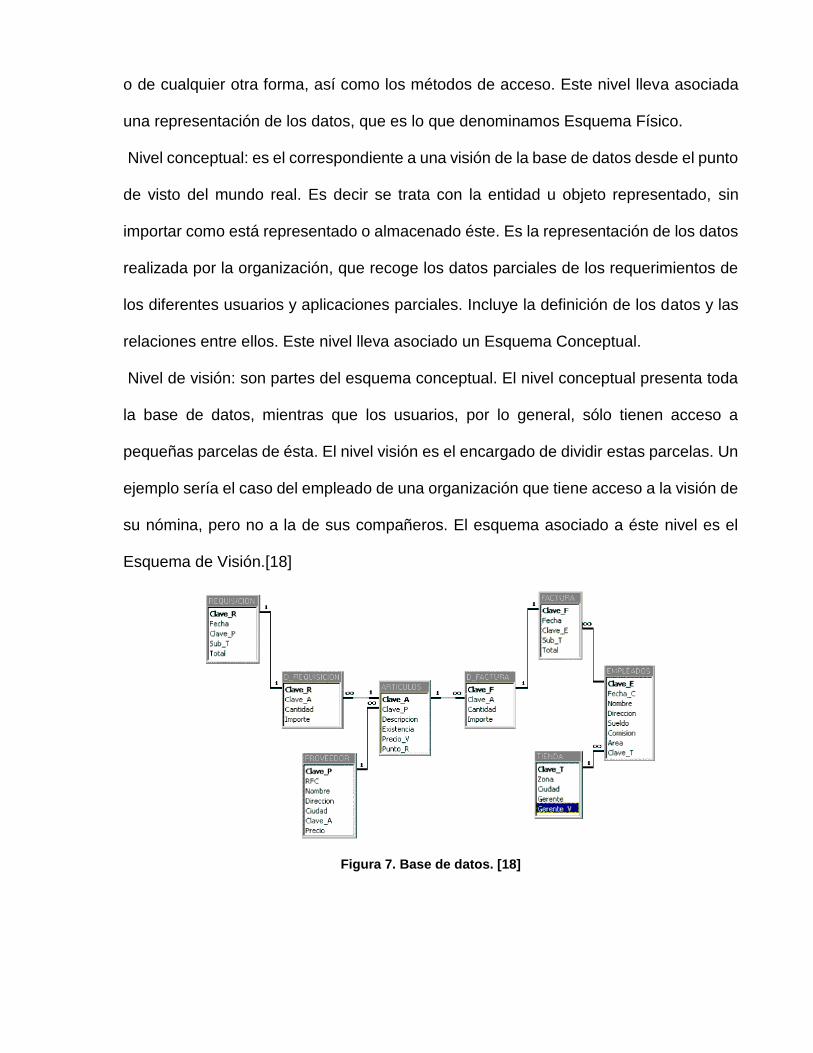
Nivel de visión: son partes del esquema conceptual. El nivel conceptual presenta toda
la base de datos, mientras que los usuarios, por lo general, sólo tienen acceso a
pequeñas parcelas de ésta. El nivel visión es el encargado de dividir estas parcelas. Un
ejemplo sería el caso del empleado de una organización que tiene acceso a la visión de
su nómina, pero no a la de sus compañeros. El esquema asociado a éste nivel es el
Esquema de Visión.[18]
Figura 7. Base de datos. [18]

4. DISEÑO DE SISTEMA DE RIEGO Y SISTEMA DACTILAR
El sistema tiene una base de 50x100 cm de espacio de simulación de superficies agrestes de
zonas agrícolas rurales a los cuales se dedica su función aplicada, se usara tecnología Arduino
debido a su fácil aplicación y comunicación más parametrización de sensores prácticos como
el SEN-0050 con la siguiente información:
Características:
Alimentación: 3.3V o 5V
Voltaje de salida: 0 - 4.2V
Corriente 32mA
Pines: Azul (Salida), Negro (GND), Rojo (Vcc)
Dimensiones: 60x20x5mm
Incluye cable de conexión
Y el sensor de lluvia YL-83 con la siguiente información:
Voltaje de operación: 3.3 - 5 V
Formas de salida: salida digital (0 y 1) y salida de voltaje analógico.
Ajuste de sensibilidad con potenciómetro
LED indicador de alimentación y de estado de la salida digital.
La salida digital puede suministrar o drenar 100 mA por lo que puede manejar
directamente cargas como buzzer, relevadores, etc.
Con hoyo para tornillo para una fácil instalación
Dimensiones: 3.2cm x 1.4cm

Para su alimentación se usara baterías recargables conectadas tanto al
microcontrolador como a los sensores para que realicen su debida función de manera
autónoma y de esta manera al cambiarlo el sistema no necesita ser reiniciado o detenido
solo cambiar la batería correspondiente.
El control de asistencia está conformado por un sensor GT511C3, un arduino MEGA-
2560, una lcd y una raspberry pi 3, el sensor está encargado de obtener la información
del personal y mediante la programación del arduino se obtiene las imágenes que se
convierten en ID para poderse almacenar en la base de datos; la raspberry pi3 está
equipada con un servidor LAMP (Linux, Apache, MySQL y PhpMyAdmin) por su
versatilidad y emparejamiento con esta placa. Con la ayuda de MySQL y PhpMyAdmin
se realizan las bases de datos para conformar la página web la cual está hecha con
comandos HTML, PHP y CSS, donde el administrador puede registrar al personal y
posteriormente obtener un informe con información de : ID, fecha y hora.
MODELO ENTIDAD RELACION
Para la realización de la base de datos se hace uso del modelo de entidad relación, la
cual es una herramienta que permite representar las entidades relevantes de un sistema
de información así como sus interrelaciones y propiedades. Para este proyecto el
modelo será el siguiente:

FIGURA 8. Modelo entidad-relacion. Elaboracion propia
4.1 PROGRAMACIÓN
4.1.1 DIAGRAMA DE REGADO
Mostrándose la lógica necesaria para que el sistema de regado sea automático,
requiriéndose los sensores de humedad y lluvia para poder obtener los valores y a partir
de ellos poder ejecutar la electroválvula para el regado en caso de que no este lloviendo
y el pH este acido, si esta lloviendo el sistema no ejecutara nada además todos los
estados de los sensores están mostrados mediante una comunicación inalámbrica que
esta conectado a la pc y una interfaz grafica.

Figura 8. Diagrama de regado. Elaboración propia
Por medio de la programación de Arduino podemos fraccionar sus funciones en pasos
en secciones según la estructura como:
Figura 9. Estructura inicial. Elaboración propia

Donde iniciamos y activamos la memoria EPROM del arduino, esto con el fin de evitar
que el programa se pierda al momento de reiniciar el programa o quitar la energía al
microcontrolador, además de definir pines necesarios para la programación y su
correcto funcionamiento en el programa.
Figura 10. Declaración de pines. Elaboración propia
En esta parte se da inicio a los valores predefinidos previamente con el fin de que
estén listos al momento de ser necesitados por el programa en el LOOP.
Figura 11. Código principal. Elaboración propia.
En esta parte se leerán los sensores parametrizados de 0-1023 en datos análogos
leídos en los pines A0 y A1 para su evaluación y activación bien sea de los leds o del
Relé, de esta manera iniciar el regado o dar el aviso en la interfaz de su labor actual.
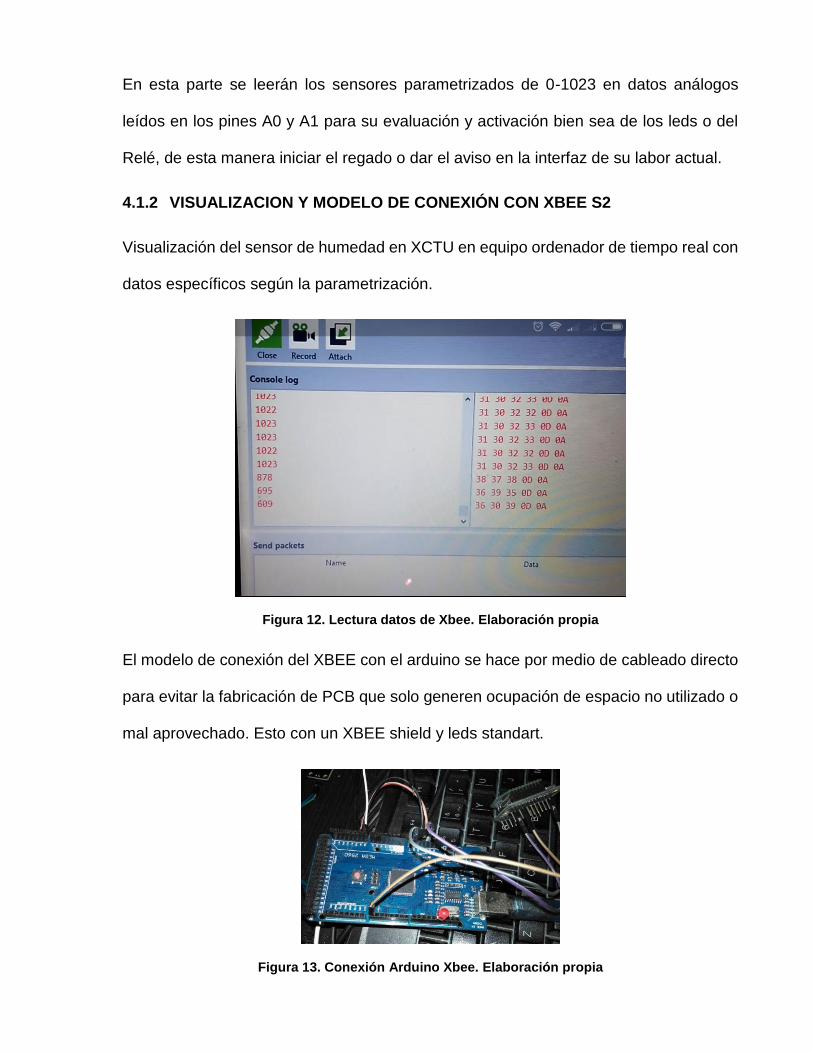
4.1.2 VISUALIZACION Y MODELO DE CONEXIÓN CON XBEE S2
Visualización del sensor de humedad en XCTU en equipo ordenador de tiempo real con
datos específicos según la parametrización.
Figura 12. Lectura datos de Xbee. Elaboración propia
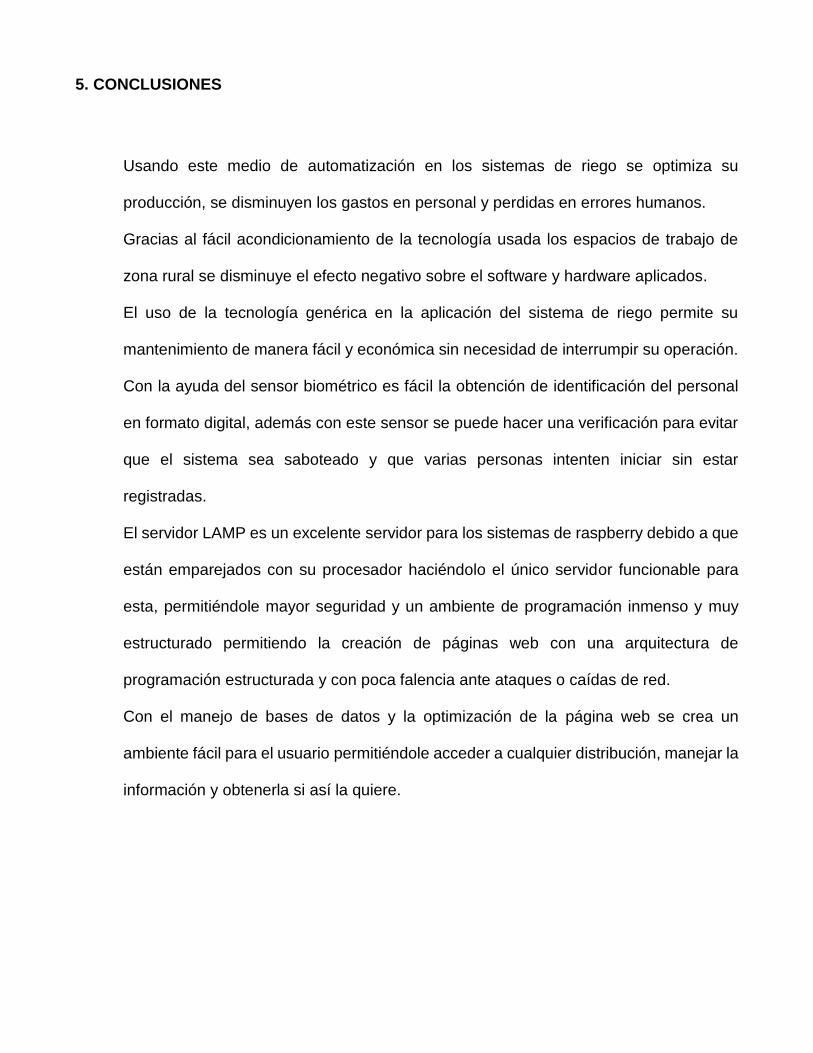
El modelo de conexión del XBEE con el arduino se hace por medio de cableado directo
para evitar la fabricación de PCB que solo generen ocupación de espacio no utilizado o
mal aprovechado. Esto con un XBEE shield y leds standart.
Figura 13. Conexión Arduino Xbee. Elaboración propia

Y la prueba de presión en un espacio cerrado para verificar la resistencia y función de
los nebulizadores ya instalados en una extensión de manguera de malla para cultivo por
lluvia artificial.
Figura 14. Prueba aspersor. Elaboración Propia
4.2 DIAGRAMA CONTROL ASISTENCIA
Consta de tres componentes, la programación del sensor biométrico, la programación
de la base de datos y la página web, instalados en la placa raspberry pi 3.
Figura 15. Diagrama huellero. Elaboración propia
Con las características que brindan los sensores biométricos se pueden obtener los
valores digitales de identificación por medio de una ID para validar los datos

correspondientes de la persona, en este se registra la información de la huella dactilar
dándole una dirección en hexadecimal debido a la forma en la que se maneja la
programación de este.
Figura 16. Diagrama base de datos. Elaboración propia
La ID es enviada a la base de datos MySQL que está en el servidor instalado en la raspberry
pi 3 que permite una comunicación por medio de PhpMyAdmin y comandos de PHP con la
página web para obtener informes de la asistencia del personal, esto solo permitido para los
administradores del vivero.
5. CONCLUSIONES
Usando este medio de automatización en los sistemas de riego se optimiza su
producción, se disminuyen los gastos en personal y perdidas en errores humanos.
Gracias al fácil acondicionamiento de la tecnología usada los espacios de trabajo de
zona rural se disminuye el efecto negativo sobre el software y hardware aplicados.
El uso de la tecnología genérica en la aplicación del sistema de riego permite su
mantenimiento de manera fácil y económica sin necesidad de interrumpir su operación.
Con la ayuda del sensor biométrico es fácil la obtención de identificación del personal
en formato digital, además con este sensor se puede hacer una verificación para evitar
que el sistema sea saboteado y que varias personas intenten iniciar sin estar
registradas.
El servidor LAMP es un excelente servidor para los sistemas de raspberry debido a que
están emparejados con su procesador haciéndolo el único servidor funcionable para
esta, permitiéndole mayor seguridad y un ambiente de programación inmenso y muy
estructurado permitiendo la creación de páginas web con una arquitectura de
programación estructurada y con poca falencia ante ataques o caídas de red.
Con el manejo de bases de datos y la optimización de la página web se crea un
ambiente fácil para el usuario permitiéndole acceder a cualquier distribución, manejar la
información y obtenerla si así la quiere.
REFERENCIAS
[1] “AGRICULTURA: Acidez y Alcalinidad de los Suelos.” [Online]. Available: http://tiposagricultura.blogspot.com.co/2014/07/acidez-y-alcalinidad-de-los-suelos.html. [Accessed: 23-Mar-2017].
[2] A. y P. (Mexico) Instituto Nacional de Investigaciones Forestales, F. M. Águila Marín, A. Quevedo Nolasco, S. Kleisinger, L. Tijerina Chávez, and E. Mejía Sáenz, Revista mexicana de ciencias agricolas., vol. 34, no. 4. Instituto Nacional de Investigaciones Forestales, Agricolas y Pecuarias, 2010.
[3] “INSTITUTO DE ESTUDIOS SUPERIORES SANTA MARIA ANEXO SAN JOSE.”
[4] B. M. Al-Hadithi, C. E. Garcia Cena, R. C. León, and C. L. Loor, “ScienceDirect Desarrollo de un Sistema de Iluminación Artificial Inteligente para Cultivos Protegidos,” Rev. Iberoam. Automática e Informática Ind., vol. 13, pp. 421–429, 2016.
[5] E. A. Amaya, “Diseño e Implementación de Sistema de Riego Automatizado en un Invernadero de la Escuela Nacional de Agricultura, ENA.”
[6] N. O. M. Clará, “Este documento es propiedad de la Escuela Especializada en Ingenieria ITCA-FEPADE. Derechos Reservados. Invernaderos automatizados para el desarrollo de la agricultura familiar en el Marco de la Seguridad Alimentaria.”
[7] M. C. Popoca and F. Á. Marin, “Sistema de riego automatizado en tiempo real con balance hidrico, medición de humedad del suelo y lisimetro,” Agric. técnica en, 2008.
[8] F. B. Carmona et al., “Tecnologias de la información y de las comunicaciones aplicadas a problemas de agricultura regional.”
[9] M. A. Garcia, S. ; Gutiérrez, H. C. ; López, S. Y. Rivera, and A. C. Ruiz, “Estado del arte de la tecnología de robots aplicada a invernaderos State of the art of robot technology applied to greenhouses,” Rev. AIA, vol. 11, no. 3, pp. 41–52, 2007.
[10] F. Rodríguez, J. Sánchez-Hermosilla, L. Rivera, and A. Giménez, “Análisis de viabilidad de la utilización de robots en invernaderos. Propuesta para el modelo Almeria.”
[11] “Tutorial sensor de humedad de suelo - Madness Electronics.” [Online]. Available: http://www.madnesselectronics.com/tutorial-sensor-de-humedad-de-suelo/. [Accessed: 22-Jan-2018].
[12] “Módulo YL-83: Un detector de lluvia | Panama Hitek.” [Online]. Available: http://panamahitek.com/modulo-yl-83-un-detector-de-lluvia/. [Accessed: 22-Jan-2018].
[13] “SENSORES BIOMETRICOS.” [Online]. Available: http://neutron.ing.ucv.ve/revista-e/No6/Olguin Patricio/SEN_BIOMETRICOS.html. [Accessed: 06-Apr-2017].
[14] C. Tolosa, B. Álvaro, and G. Bueno, “Sistemas Biométricos.”
[15] “SENSORES : Scanner de huella digital -5v TTL (GT-511C3).” [Online]. Available: http://www.didacticaselectronicas.com/index.php/sensores/scanner-de-huella-digital-5v-ttl-gt-511c3-detail. [Accessed: 22-Jan-2018].
[16] “Raspberry Pi 3 Model B - Raspberry Pi.” [Online]. Available: https://www.raspberrypi.org/products/raspberry-pi-3-model-b/. [Accessed: 20-Apr-2017].
[17] “¿Qué son las bases de datos?” [Online]. Available: http://www.maestrosdelweb.com/que-son-las-bases-de-datos/. [Accessed: 22-Jan-

2018].
[18] C. L. Lapuente and M. J. L. Lapuente, “Bases de datos.”
ANEXOS
Código de programación base de datos y pagina web:


Código de programación del control de riego:
Related Documents











