ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 18 УДК 621.3.078 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ РЕЗОНАНСНОЙ ВИБРАЦИОННОЙ УСТАНОВКОЙ С ЭЛЕКТРОМАГНИТНЫМ ДИНАМИЧЕСКИМ ВИБРОГАСИТЕЛЕМ А. А. Черно, А. П. Гуров Национальный университет кораблестроения имени адмирала Макарова просп. Героев Сталинграда, 9, г. Николаев, 54025, Украина. Е-mail: [email protected] Современные вибрационные установки должны удовлетворять таким требованиям, как высокий КПД, точность воспроизведения вибрации заданной амплитуды и частоты, ограничение вибрационных нагрузок, передаваемых на фундамент. Выполнение этих требований возможно только путем применения систем автоматики, поэтому создание систем автоматического управления вибрационным оборудованием является актуальной задачей. Предложена структура системы автоматического управления вибрационной установкой с электромагнитным приводом и электромагнитным динамическим виброгасителем, установленным на промежуточной платформе. Система обеспечивает заданную амплитуду и частоту вибрации рабочего органа установки путем управления амплитудой и частотой тока в обмотке электромагнитного вибратора, при этом она поддерживает устойчивый резонансный режим колебаний путем управления жесткостью подвеса виброгасителя с целью обеспечения максимального КПД. Управление амплитудой колебаний и резонансной частотой установки осуществляется по принципу обратной связи с использованием цифровых пропорционально-интегральных регуляторов. Определение амплитуды и фазы колебаний рабочего органа осуществляется в процессе управления путем выполнения процедуры дискретного преобразования Фурье над сигналом с датчика вибрации. Разработана динамическая модель предложенной системы и проведены исследования переходных процессов. Результаты моделирования показали, что при определенных значениях коэффициентов регуляторов система управления обеспечивает требуемую точность и обладает достаточным запасом устойчивости. Ключевые слова: виброустановка, автоматическое управление, электромагнитный виброгаситель. АВТОМАТИЧНЕ УПРАВЛІННЯ РЕЗОНАНСНОЮ ВІБРАЦІЙНОЮ УСТАНОВКОЮ З ЕЛЕКТРОМАГНІТНИМ ДИНАМІЧНИМ ВІБРОГАСНИКОМ О. О. Черно, А. П. Гуров Національний університет кораблебудування імені адмірала Макарова просп. Героїв Сталінграду, 9, м. Миколаїв, 54025, Україна. Е-mail: [email protected] Сучасні вібраційні установки повинні задовольняти таким вимогам, як високий ККД, точність відтворення вібрації заданої амплітуди й частоти, обмеження вібраційних навантажень, що передаються на фундамент. Виконання цих вимог можливе тільки шляхом застосування систем автоматики, тому створення систем автоматичного управління вібраційним обладнанням є актуальною задачею. Запропоновано структуру системи автоматичного управління вібраційної установкою з електромагнітним приводом і електромагнітним динамічним віброгасником, встановленим на проміжній платформі. Система забезпечує задану амплітуду й частоту вібрації робочого органу установки шляхом управління амплітудою й частотою струму в обмотці електромагнітного вібратора, при цьому вона підтримує стійкий резонансний режим коливань шляхом управління жорсткістю підвісу віброгасника з метою забезпечення максимального ККД. Управління амплітудою коливань і резонансною частотою установки здійснюється за принципом зворотного зв'язку з використанням цифрових пропорційно-інтегральних регуляторів. Визначення амплітуди й фази коливань робочого органу здійснюється в процесі управління шляхом виконання процедури дискретного перетворення Фур'є над сигналом із датчика вібрації. Розроблено динамічну модель запропонованої системи й проведено дослідження перехідних процесів. Результати моделювання показали, що при певних значеннях коефіцієнтів регуляторів система управління забезпечує необхідну точність і має достатній запас стійкості. Ключові слова: віброустановка, автоматичне управління, електромагнітний віброгасник. АКТУАЛЬНОСТЬ РАБОТЫ. Вибрационное оборудование применяется во многих производст- венных процессах [1]. Использование резонансного режима работы виброустановок позволяет повысить их КПД, а применение многомассовых структур с динамическими виброгасителями дает возможность ограничивать вибрационные нагрузки, передавае- мые на фундамент [2]. При этом для обеспечения устойчивой работы на резонансной частоте необхо- димо осуществлять автоматическое управление вибрационным приводом. Если есть необходимость в изменении частоты колебаний в широком диапа- зоне, то нужно также управлять жесткостью подвеса динамического виброгасителя, установленного на промежуточной платфоме [2, 3], поэтому создание системы автоматического управления вибрацион- ными установками с управляемыми виброгасителя- ми является актуальной задачей. В работах [2, 3] рассмотрены системы, которые управляют частотой и амплитудой электромагнит- ного вибрационного привода с целью обеспечения устойчивого резонанса рабочего органа в условиях изменения массы обрабатываемого материала. При этом одновременно осуществляется управление

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 18
УДК 621.3.078
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ РЕЗОНАНСНОЙ ВИБРАЦИОННОЙ УСТАНОВКОЙ С ЭЛЕКТРОМАГНИТНЫМ ДИНАМИЧЕСКИМ ВИБРОГАСИТЕЛЕМ
А. А. Черно, А. П. Гуров Национальный университет кораблестроения имени адмирала Макарова просп. Героев Сталинграда, 9, г. Николаев, 54025, Украина. Е-mail: [email protected] Современные вибрационные установки должны удовлетворять таким требованиям, как высокий КПД,
точность воспроизведения вибрации заданной амплитуды и частоты, ограничение вибрационных нагрузок, передаваемых на фундамент. Выполнение этих требований возможно только путем применения систем автоматики, поэтому создание систем автоматического управления вибрационным оборудованием является актуальной задачей. Предложена структура системы автоматического управления вибрационной установкой с электромагнитным приводом и электромагнитным динамическим виброгасителем, установленным на промежуточной платформе. Система обеспечивает заданную амплитуду и частоту вибрации рабочего органа установки путем управления амплитудой и частотой тока в обмотке электромагнитного вибратора, при этом она поддерживает устойчивый резонансный режим колебаний путем управления жесткостью подвеса виброгасителя с целью обеспечения максимального КПД. Управление амплитудой колебаний и резонансной частотой установки осуществляется по принципу обратной связи с использованием цифровых пропорционально-интегральных регуляторов. Определение амплитуды и фазы колебаний рабочего органа осуществляется в процессе управления путем выполнения процедуры дискретного преобразования Фурье над сигналом с датчика вибрации. Разработана динамическая модель предложенной системы и проведены исследования переходных процессов. Результаты моделирования показали, что при определенных значениях коэффициентов регуляторов система управления обеспечивает требуемую точность и обладает достаточным запасом устойчивости.
Ключевые слова: виброустановка, автоматическое управление, электромагнитный виброгаситель.
АВТОМАТИЧНЕ УПРАВЛІННЯ РЕЗОНАНСНОЮ ВІБРАЦІЙНОЮ УСТАНОВКОЮ З ЕЛЕКТРОМАГНІТНИМ ДИНАМІЧНИМ ВІБРОГАСНИКОМ
О. О. Черно, А. П. Гуров Національний університет кораблебудування імені адмірала Макарова просп. Героїв Сталінграду, 9, м. Миколаїв, 54025, Україна. Е-mail: [email protected] Сучасні вібраційні установки повинні задовольняти таким вимогам, як високий ККД, точність відтворення
вібрації заданої амплітуди й частоти, обмеження вібраційних навантажень, що передаються на фундамент. Виконання цих вимог можливе тільки шляхом застосування систем автоматики, тому створення систем автоматичного управління вібраційним обладнанням є актуальною задачею. Запропоновано структуру системи автоматичного управління вібраційної установкою з електромагнітним приводом і електромагнітним динамічним віброгасником, встановленим на проміжній платформі. Система забезпечує задану амплітуду й частоту вібрації робочого органу установки шляхом управління амплітудою й частотою струму в обмотці електромагнітного вібратора, при цьому вона підтримує стійкий резонансний режим коливань шляхом управління жорсткістю підвісу віброгасника з метою забезпечення максимального ККД. Управління амплітудою коливань і резонансною частотою установки здійснюється за принципом зворотного зв'язку з використанням цифрових пропорційно-інтегральних регуляторів. Визначення амплітуди й фази коливань робочого органу здійснюється в процесі управління шляхом виконання процедури дискретного перетворення Фур'є над сигналом із датчика вібрації. Розроблено динамічну модель запропонованої системи й проведено дослідження перехідних процесів. Результати моделювання показали, що при певних значеннях коефіцієнтів регуляторів система управління забезпечує необхідну точність і має достатній запас стійкості.
Ключові слова: віброустановка, автоматичне управління, електромагнітний віброгасник. АКТУАЛЬНОСТЬ РАБОТЫ. Вибрационное
оборудование применяется во многих производст-венных процессах [1]. Использование резонансного режима работы виброустановок позволяет повысить их КПД, а применение многомассовых структур с динамическими виброгасителями дает возможность ограничивать вибрационные нагрузки, передавае-мые на фундамент [2]. При этом для обеспечения устойчивой работы на резонансной частоте необхо-димо осуществлять автоматическое управление вибрационным приводом. Если есть необходимость в изменении частоты колебаний в широком диапа-
зоне, то нужно также управлять жесткостью подвеса динамического виброгасителя, установленного на промежуточной платфоме [2, 3], поэтому создание системы автоматического управления вибрацион-ными установками с управляемыми виброгасителя-ми является актуальной задачей.
В работах [2, 3] рассмотрены системы, которые управляют частотой и амплитудой электромагнит-ного вибрационного привода с целью обеспечения устойчивого резонанса рабочего органа в условиях изменения массы обрабатываемого материала. При этом одновременно осуществляется управление
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 19
электромагнитным виброгасителем с целью обеспе-чения антирезонанса промежуточной платформы виброустановки. Но минимизация колебаний про-межуточной платформы далеко не всегда является обязательным требованием, предъявляемым к про-мышленным вибрационным машинам. Для обеспе-чения виброизоляции обычно достаточно всего в 2–3 раза снизить амплитуду промежуточной плат-формы по сравнению с амплитудой рабочего органа. С другой стороны, для многих технологических процессов частоты вибрации являются фиксирован-ными. Например, уплотнение бетонной смеси целе-сообразно проводить в два этапа: вибрирование на низкой частоте (около 40 Гц), а затем – на более вы-сокой (60–80 Гц) [4]. В этом случае задачей системы управления является обеспечение требуемой ампли-туды рабочего органа и настройка резонансной час-тоты виброустановки на частоту вынужденных ко-лебаний. На данный момент подобных систем пред-ложено не было.
Целью работы является формирование структу-ры системы, осуществляющей автоматическое управление амплитудой колебаний и резонансной частотой вибрационной установки путем совместно-го управления электромагнитным приводом и элек-тромагнитным динамическим виброгасителем, уста-новленным на промежуточной платформе.
МАТЕРИАЛ И РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ. Сформулируем основные отличия разрабатываемой системы управления от системы, рассмотренной в [3]:
– частота вибрации не подстраивается под резо-нансную частоту установки, а задается внешним сигналом;
– задача управления виброгасителем заключает-ся не в достижении антирезонанса промежуточной платформы, а в обеспечении резонанса рабочего ор-гана виброустановки.
Это означает, что информацию о фазе переме-щения рабочего органа относительно приложенной силы нужно использовать не для управления часто-той вынужденных колебаний, а для управления ре-зонансной частотой путем регулирования жесткости магнитной пружины динамического виброгасителя.
Для обеспечения устойчивости системы к воз-действию высших гармоник вибрации целесообраз-но определять амплитуду и фазу виброперемещения путем цифровой обработки сигналов с акселеромет-ра и датчика тока с использованием алгоритма дис-кретного преобразования Фурье [5].
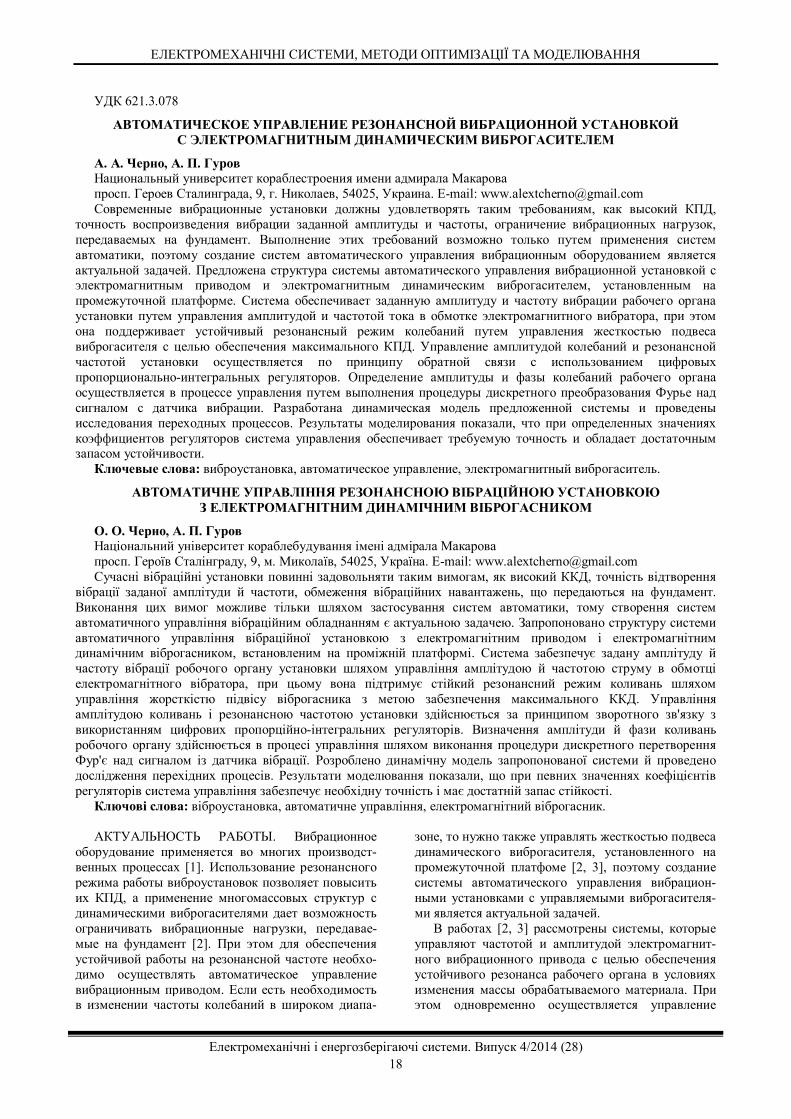
На основании сказанного составляем функцио-нальную схему системы управления виброустанов-кой (рис. 1). На схеме приняты следующие обозна-чения: РО – рабочий орган виброустановки; ПП – промежуточная платформа; УДВГ – управляе-мый динамический виброгаситель; ЭМВ – электро-магнитный вибратор; А – акселерометр; ДТ – датчик тока; АЦП – аналого-цифровой преобразователь; ФОС – формирователь опорных сигналов; ДПФ – блок дискретного преобразования Фурье;
РА – регулятор амплитуды; ГС – генератор сину-соиды; РФ – регулятор фазы; ШИМ – широтно-импульсный модулятор; ПЧ – преобразователь час-тоты; ТП – транзисторный преобразователь посто-янного напряжения.
Рисунок 1 – Функциональная схема системы управления
Для исследования динамических свойств систе-
мы управления составим уравнения протекающих в ней процессов. Уравнения механики колебательной системы:
2
0 0 0 310 0 32
d x dx dx dxdxm b b ( t )dt dt dt dtdt
0 0 1 3 0 3 1c ( x ( t ) x ( t )) c ( t )( x ( t ) x ( t )) F ( t ) ;(1)
2
01 1 11 1 02
dxd x dx dxm b bdt dt dtdt
1 22 1 1 0 1 0
dx dxb c x ( t ) c ( x ( t ) x ( t ))
dt dt
2 1 2 2 1c ( x ( t ) x ( t )) F ( t ) F ( t ) ; (2)
2
2 2 12 22
d x dx dxm b
dt dtdt
2 2 1 2c ( x ( t ) x ( t )) F t ; (3)
dtdx
dtdxtb
dtxdm 03
323
2
3 )(
0))()()(( 033 txtxtc , (4) где 0m , 1m , 2m – массы рабочего органа, промежу-точной платформы и динамического виброгасителя соответственно; 0c , 1c , 2c – жесткости пружин, свя-зывающих рабочий орган с промежуточной плат-формой, последнюю – с фундаментом и виброгаси-тель – с промежуточной платформой соответствен-но; 0b , 1b , 2b – коэффициенты вязкого трения в пе-речисленных пружинах; F1 – сила, создаваемая электромагнитным приводом; F2 – сила, создаваемая магнитным полем динамического виброгасителя;
3m , 3c , 3b – дополнительные масса, жесткость и ко-эффициент вязкого трения, учитывающие реакцию обрабатываемой бетонной смеси; 0x , 1x , 2x , 3x – координаты перемещения масс 0m , 1m , 2m , 3m со-

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 20
ответственно. Параметры 3c и 3b являются функ-циями времени, поскольку механические свойства бетонной смеси изменяются по мере ее вибрацион-ного уплотнения.
Для определения силы 1F были использованы полученные в [6] зависимости ))(),(( 111 ttIWF eq и
))(),(( 111 ttIWeq , позволяющие по мгновенным значениям магнитного потока 1 и воздушного за-зора вибратора 1 определить мгновенное значение электромагнитной силы.
Уравнения электрической цепи вибратора [6]:
111
1 Rtudt
dW
tItIttIW
W heeq*1
*1111
1
,1 ; (5)
tIRtuR
tIe
e 111*1
*1
1 ; (6)
tIRtutR
tIIsth
I.sth 111*
.
*1
, (7)
где 1u – напряжение на обмотке; 1R и 1W – актив-ное сопротивление и число витков обмотки;
I – частота тока в обмотке; stI . – стандартная частота, для которой приведены справочные данные по потерям в стали; *
1eI – приведенная к обмотке магнитодвижущая сила (МДС), создаваемая вихре-выми токами; *
1hI – МДС, обусловленная реактив-
ной составляющей намагниченности; *1eR – эквива-
лентное сопротивление контуров замыкания вихре-вых токов; *
.sthR – фиктивное сопротивление, харак-теризующее потери на гистерезис при стандартной частоте stI . .
Сила 2F определяется согласно [7]:
2
0 22
2 2
11
zn l ( t ) g( t )F arcsin( t ) g( t )
, (8)
где
1)(21))(sgn()(21)(
22
2
2121
2
2
21
txtxtxtg ;
)()()( 1221 txtxtx ; zn – число зубцов на полюсах виброгасителя; 0 – магнитная проницаемость воз-духа; l – длина окружности полюсов; 2 – величи-на воздушного зазора; 2 – основной магнитный поток; 2 – магнитная проводимость зазора; sgn – функция сигнум [8]:
.0если,1;0если,0;0если,1
)sgn(xxx
x
Магнитная проводимость воздушного зазора:
)()( 202 tlt , (9) где 2 – относительная магнитная проводимость зазора. Согласно [9], величина 2 определяется в зависимости от смещения полюсов 21x выражением
21
021
21
21002212 1
1arcsin2 x
dxxgxgx , (10)
где 02 – значение относительной проводимости зазора при 021 x .
Для удобства расчета мгновенных значений про-водимости в процессе моделирования динамики системы зависимость (10) можно аппроксимировать функцией
2
213
2
212102212 arctg
xC
xCCx ,
где 51,01 C ; 73,02 C ; 032,03 C . Расчет магнитного поля в зубцовой зоне вибро-
гасителя методом конформных преобразований [10] показал, что если глубина пазов более чем в 20 раз превышает величину воздушного зазора 2 , то можно принять 4,102 . Тогда мгновенное значе-ние относительной проводимости зазора виброгаси-теля можно определить по выражению
2
213
2
21212
)()(arctg4,1
txC
txCCt . (11)
Уравнение магнитной цепи виброгасителя:
)(2)()(2
22 tRttIW st , (12)
где 2IW – суммарная МДС, создаваемая током об-мотки и вихревыми токами; stR – магнитное сопро-тивление стали.
Уравнение цепи обмотки виброгасителя:
)()( 2222
2 tIRtudt
dW , (13)
где 2W и 2R – число витков и активное сопротивле-ние обмотки виброгасителя соответственно;
2u – подаваемое на обмотку напряжение; 2I – ток в обмотке, определяемый уравнением
2 2 22
2 2*e
IW ( t ) W dI ( t )
W dtR
, (14)
где *2eR – приведенное к обмотке виброгасителя со-
противление, оказываемое вихревым токам. Амплитуда 1U напряжения на обмотке вибрато-
ра 1u и напряжение на обмотке виброгасителя 2u формируются системой управления в зависимости от рассогласования амплитуд XX prx и рассо-гласования фаз pr соответственно. При этом для управления виброгасителем кроме фазово-го канала используется также частотный канал, осуществляющий грубую, но быструю настройку [3]. Поскольку резонансная частота виброустановки
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 21
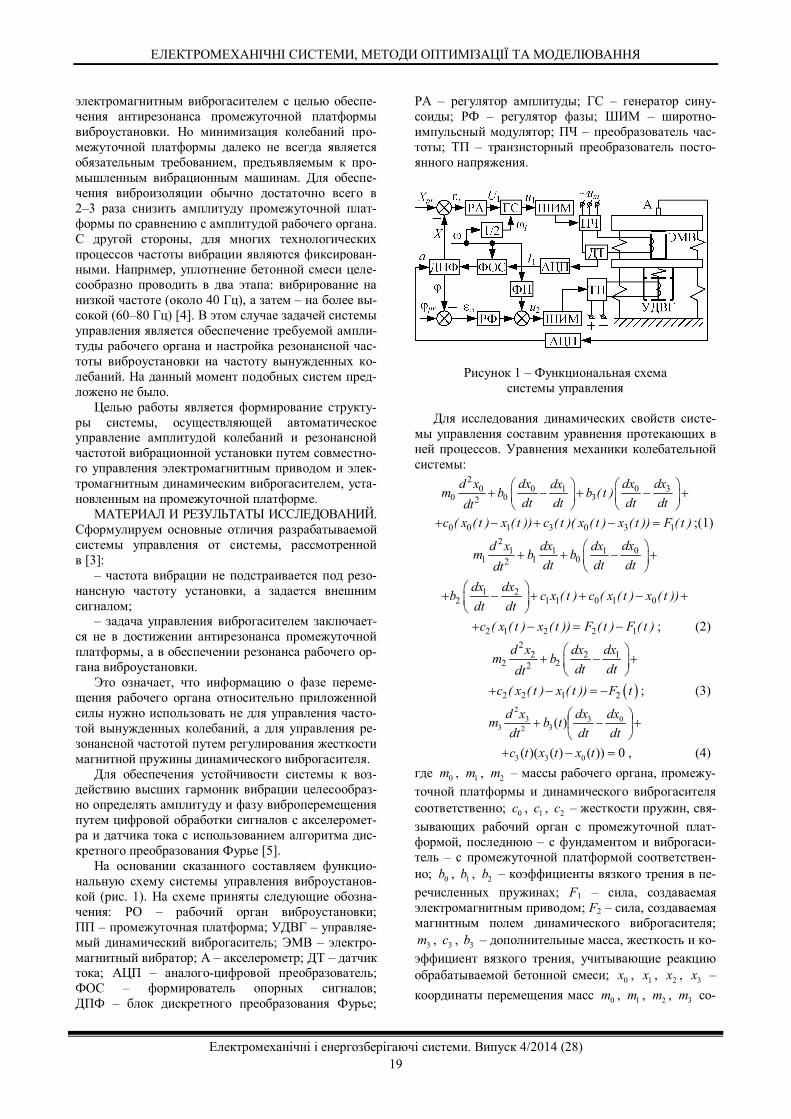
близка к собственной частоте виброгасителя 2 , характеристика функционального преобразователя в частотном канале настройки )(FTu может быть по-лучена путем линейной аппроксимации обратной регулировочной характеристики виброгасителя
)( 22 u (рис. 2): 20 20FTu ( ) U k ( ) ,
где 20 20(U ; ) и k – начальная точка и коэффици-ент наклона характеристики ФП.
Рисунок 2 – Характеристика функционального
преобразователя
В качестве регуляторов амплитуды и фазы (рис. 1) целесообразно использовать цифровые ПИ-регуляторы. Тогда алгоритм формирования управляющих воздействий 1u и 2u можно предста-вить следующими уравнениями:
)()()( nTXnTXnT prx ; (15)
)()()( nTnTnT pr ; (16)
)()( 11 nTknTu xpp ; (17)
TnTkTnTunTu xiii )()()( 111 ; (18)
)()()( 111 nTunTunTu ip ; (19)
)()( 22 nTknTu pp ; (20)
)0)(()0)(()( 2 nTTnTunTQ ; (21)
2 2 2i i iu ( nT ) Q( nT )(u ( nT T ) k ( nT )T ) ;(22)
)()()( 222 nTunTunTu ip
20 20U k ( ( nT ) ) , (23)
где n – номер отсчета; T – период дискретизации; 1pu , 2pu – сигналы на выходах пропорциональных
регуляторов; 1iu , 2iu – сигналы на выходах инте-гральных регуляторов; 2211 ,,, ipip kkkk – коэффици-енты регуляторов. В уравнениях (19), (20) учитыва-ется, что напряжение на обмотке виброгасителя 2u не должно быть отрицательным. Для этого исполь-зуется логическая функция )(nTQ , которая прини-мает значение "1" при положительном 2u или при неотрицательной ошибке .
Амплитуда колебаний рабочего органа X и их фаза относительно силы 1F определяются путем цифровой обработки сигналов с акселерометра )(ta и датчика тока )(1 tI согласно алгоритму ДПФ, при-веденному в [5]. При этом формируются два сину-соидальных сигнала с частотой I 2 , смещен-ных друг относительно друга на угол π/2 и синхро-низированных с моментами перехода тока 1I через 0. Затем они используются в качестве опорных сиг-налов при выполнении процедуры дискретного пре-образования Фурье над сигналом )(ta , в результате которой вычисляются действительная и мнимая со-ставляющие комплексной амплитуды колебаний ра-бочего органа виброустановки:
)(2
)(nTN
TnTXI
re
00
0
0
0
)(2cos)(I
NI
NI
NI
n
nq
qn
nkI TkTqTa ; (24)
)(2
)(nTN
TnTXI
im
00
0
0
0
)(2sin)(I
NI
NI
NI
n
nq
qn
nkI TkTqTa , (25)
где N – целое число периодов опорного сигнала, по которым производится интегрирование; 0
0In – но-мер отсчета, соответствующий последнему перехо-ду тока I через 0; 1
0In , 20In , ... – номера отсчетов,
соответствующие предпоследнему переходу тока I через 0, переходу, который был перед предпослед-ним, и т.д. Определение амплитуды и фазы колеба-ний сводится к вычислению модуля и аргумента комплексной амплитуды:
)()()( 22 nTXnTXnTX imre ; (26)
nTX
nTXnTXnT reim arccos))(sgn()( . (27)
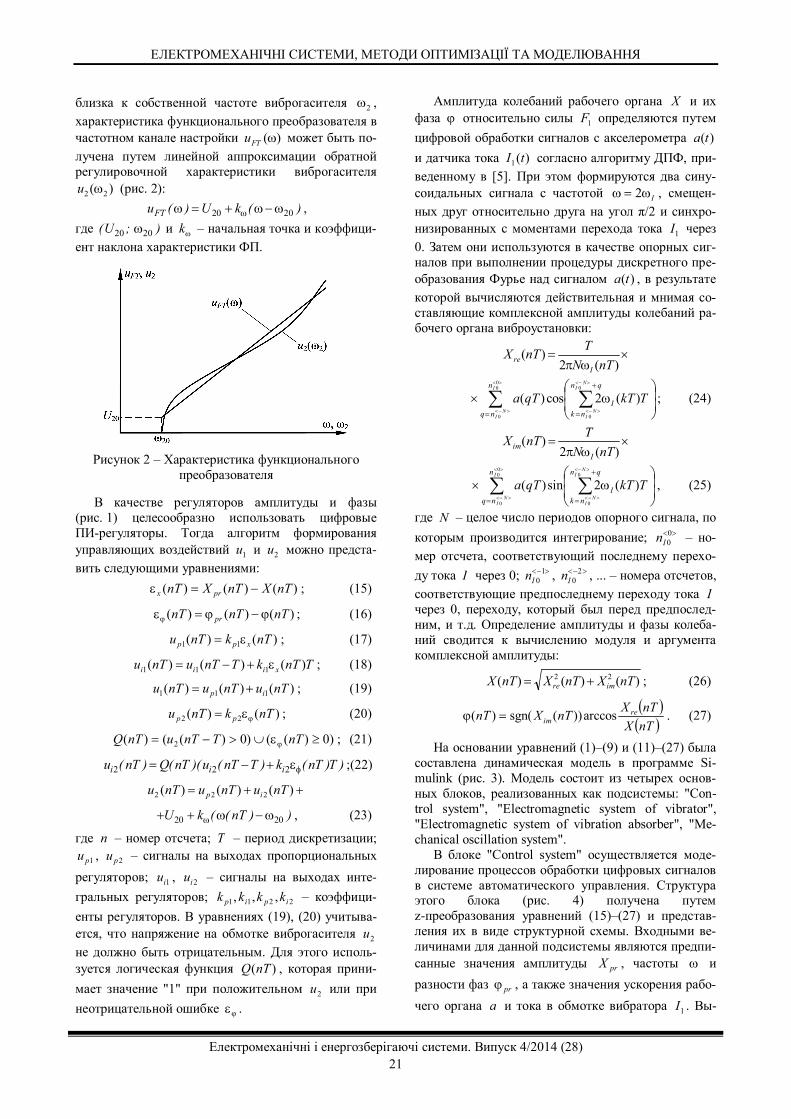
На основании уравнений (1)–(9) и (11)–(27) была составлена динамическая модель в программе Si-mulink (рис. 3). Модель состоит из четырех основ-ных блоков, реализованных как подсистемы: "Con-trol system", "Electromagnetic system of vibrator", "Electromagnetic system of vibration absorber", "Me-chanical oscillation system".
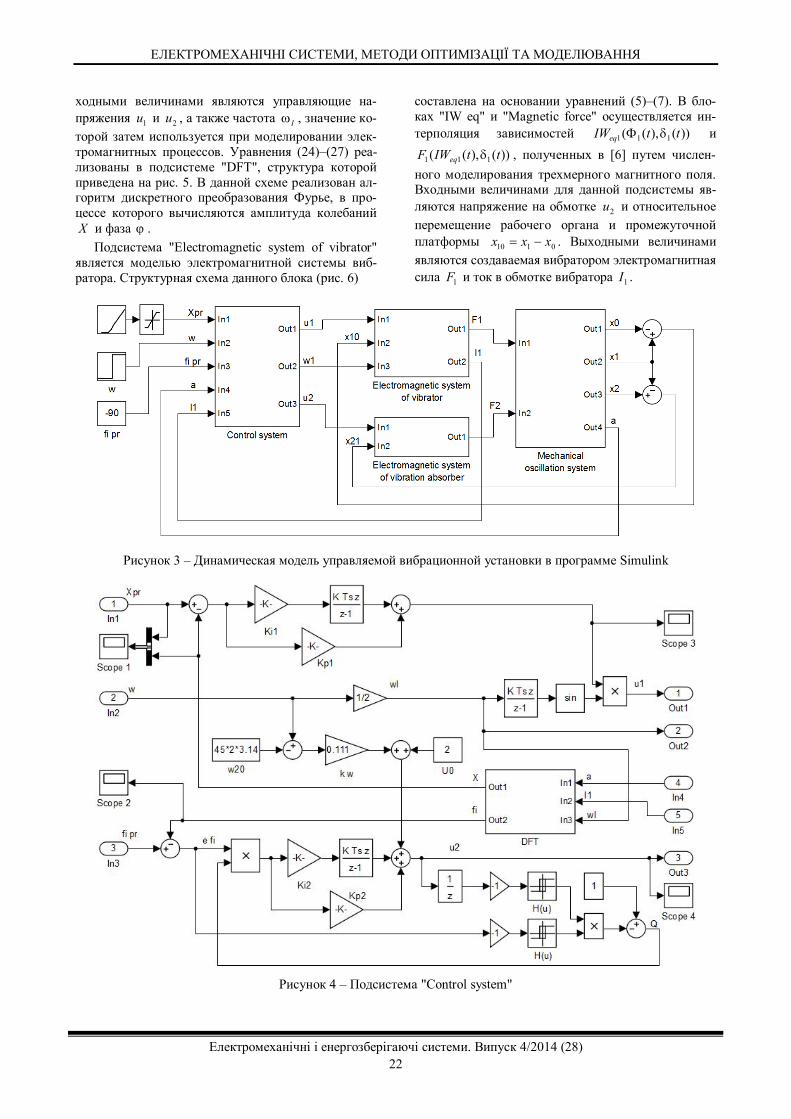
В блоке "Control system" осуществляется моде-лирование процессов обработки цифровых сигналов в системе автоматического управления. Структура этого блока (рис. 4) получена путем z-преобразования уравнений (15)–(27) и представ-ления их в виде структурной схемы. Входными ве-личинами для данной подсистемы являются предпи-санные значения амплитуды prX , частоты и разности фаз pr , а также значения ускорения рабо-чего органа a и тока в обмотке вибратора 1I . Вы-
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 22
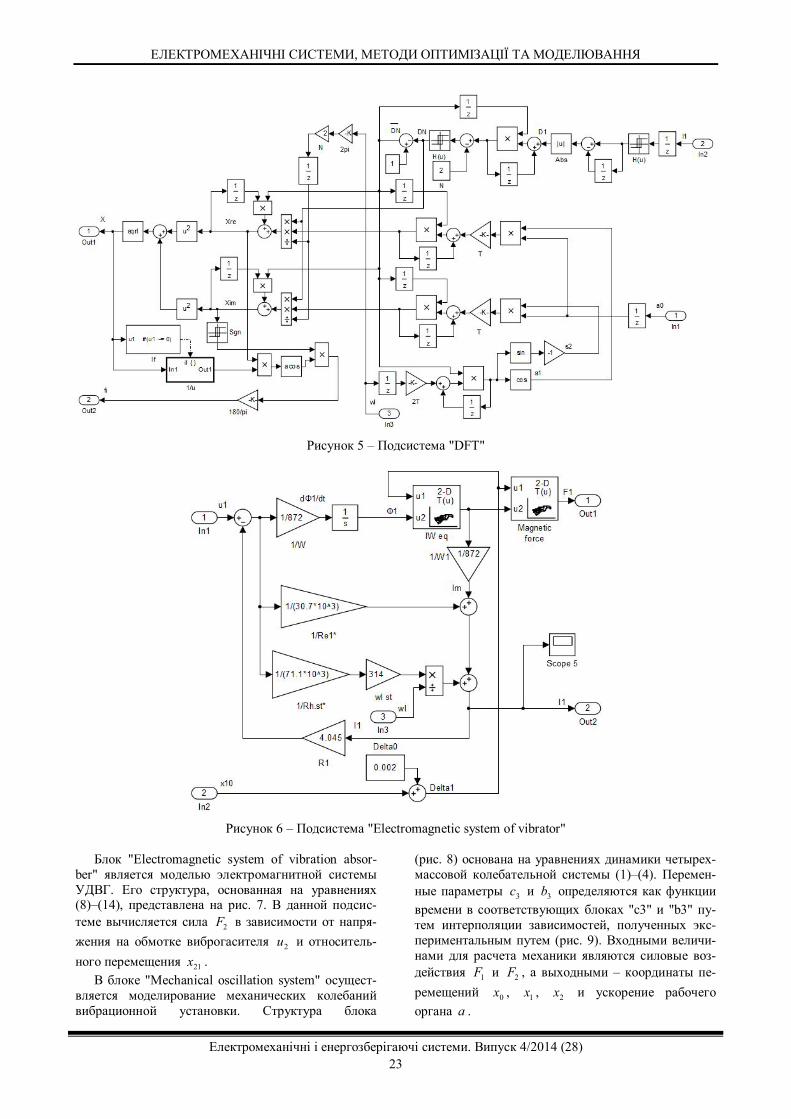
ходными величинами являются управляющие на-пряжения 1u и 2u , а также частота I , значение ко-торой затем используется при моделировании элек-тромагнитных процессов. Уравнения (24)–(27) реа-лизованы в подсистеме "DFT", структура которой приведена на рис. 5. В данной схеме реализован ал-горитм дискретного преобразования Фурье, в про-цессе которого вычисляются амплитуда колебаний X и фаза .
Подсистема "Electromagnetic system of vibrator" является моделью электромагнитной системы виб-ратора. Структурная схема данного блока (рис. 6)
составлена на основании уравнений (5)–(7). В бло-ках "IW eq" и "Magnetic force" осуществляется ин-терполяция зависимостей ))(),(( 111 ttIWeq и
))(),(( 111 ttIWF eq , полученных в [6] путем числен-ного моделирования трехмерного магнитного поля. Входными величинами для данной подсистемы яв-ляются напряжение на обмотке 2u и относительное перемещение рабочего органа и промежуточной платформы 0110 xxx . Выходными величинами являются создаваемая вибратором электромагнитная сила 1F и ток в обмотке вибратора 1I .
Рисунок 3 – Динамическая модель управляемой вибрационной установки в программе Simulink
Рисунок 4 – Подсистема "Control system"
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 23
Рисунок 5 – Подсистема "DFT"
Рисунок 6 – Подсистема "Electromagnetic system of vibrator"
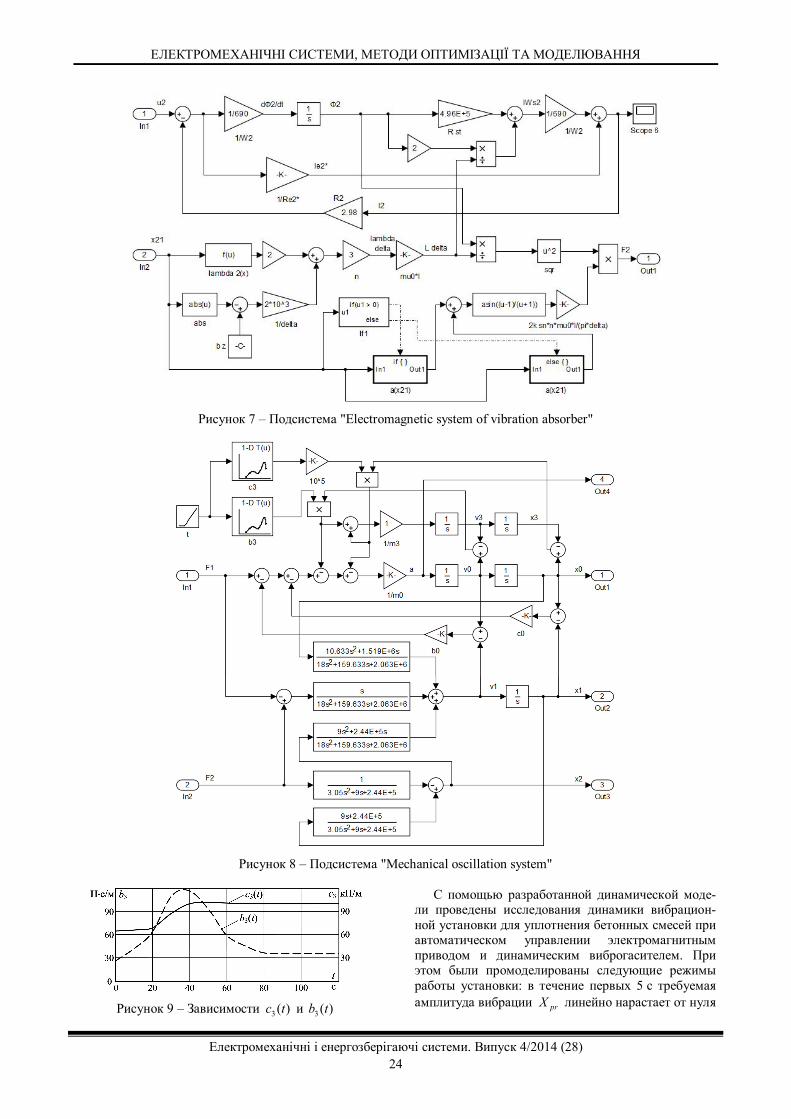
Блок "Electromagnetic system of vibration absor-ber" является моделью электромагнитной системы УДВГ. Его структура, основанная на уравнениях (8)–(14), представлена на рис. 7. В данной подсис-теме вычисляется сила 2F в зависимости от напря-жения на обмотке виброгасителя 2u и относитель-ного перемещения 21x .
В блоке "Mechanical oscillation system" осущест-вляется моделирование механических колебаний вибрационной установки. Структура блока
(рис. 8) основана на уравнениях динамики четырех-массовой колебательной системы (1)–(4). Перемен-ные параметры 3c и 3b определяются как функции времени в соответствующих блоках "c3" и "b3" пу-тем интерполяции зависимостей, полученных экс-периментальным путем (рис. 9). Входными величи-нами для расчета механики являются силовые воз-действия 1F и 2F , а выходными – координаты пе-ремещений 0x , 1x , 2x и ускорение рабочего органа a .
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 24
Рисунок 7 – Подсистема "Electromagnetic system of vibration absorber"
Рисунок 8 – Подсистема "Mechanical oscillation system"
Рисунок 9 – Зависимости )(3 tc и )(3 tb
С помощью разработанной динамической моде-ли проведены исследования динамики вибрацион-ной установки для уплотнения бетонных смесей при автоматическом управлении электромагнитным приводом и динамическим виброгасителем. При этом были промоделированы следующие режимы работы установки: в течение первых 5 с требуемая амплитуда вибрации prX линейно нарастает от нуля
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 25
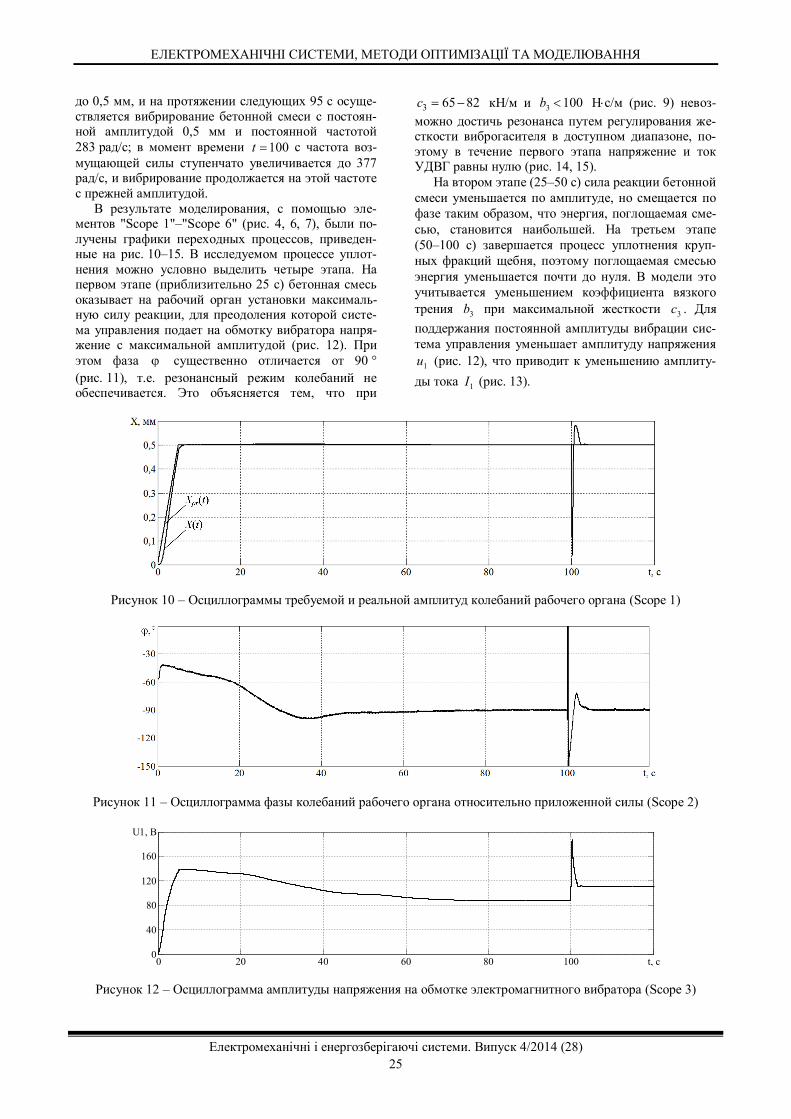
до 0,5 мм, и на протяжении следующих 95 с осуще-ствляется вибрирование бетонной смеси с постоян-ной амплитудой 0,5 мм и постоянной частотой 283 рад/с; в момент времени 100t с частота воз-мущающей силы ступенчато увеличивается до 377 рад/с, и вибрирование продолжается на этой частоте с прежней амплитудой.
В результате моделирования, с помощью эле-ментов "Scope 1"–"Scope 6" (рис. 4, 6, 7), были по-лучены графики переходных процессов, приведен-ные на рис. 10–15. В исследуемом процессе уплот-нения можно условно выделить четыре этапа. На первом этапе (приблизительно 25 с) бетонная смесь оказывает на рабочий орган установки максималь-ную силу реакции, для преодоления которой систе-ма управления подает на обмотку вибратора напря-жение с максимальной амплитудой (рис. 12). При этом фаза существенно отличается от 90 ° (рис. 11), т.е. резонансный режим колебаний не обеспечивается. Это объясняется тем, что при
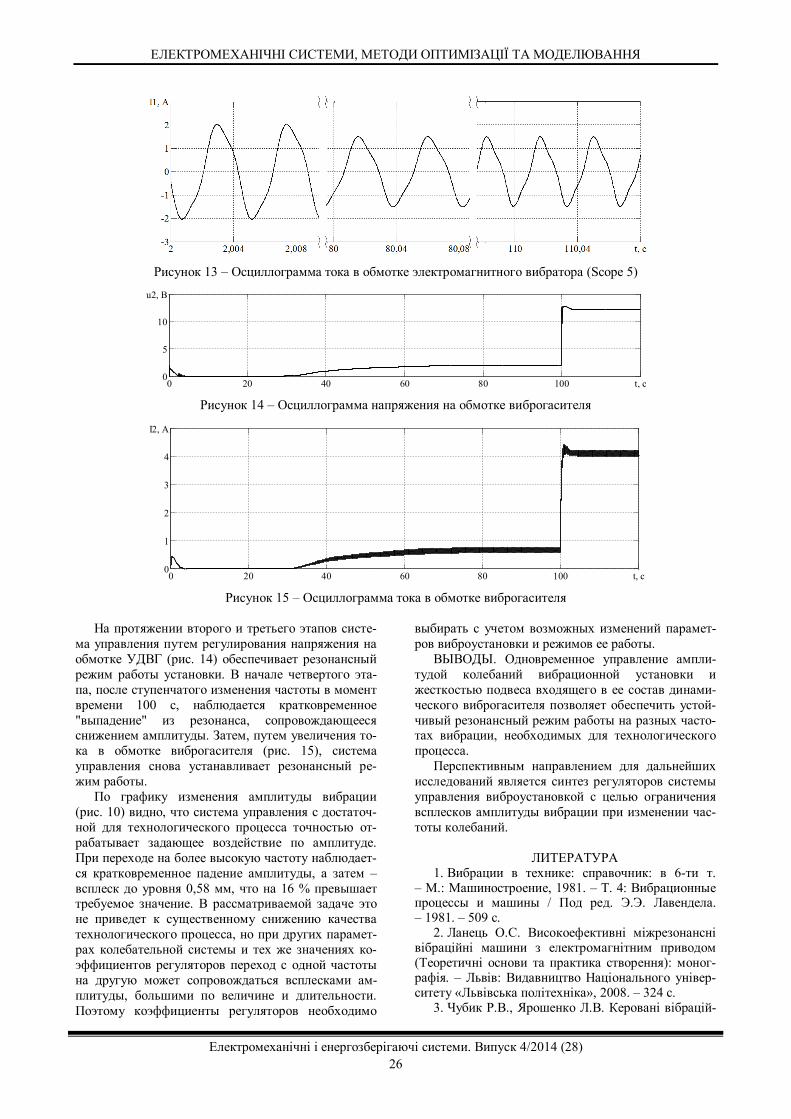
3 65 82c кН/м и 1003 b Нс/м (рис. 9) невоз-можно достичь резонанса путем регулирования же-сткости виброгасителя в доступном диапазоне, по-этому в течение первого этапа напряжение и ток УДВГ равны нулю (рис. 14, 15).
На втором этапе (25–50 с) сила реакции бетонной смеси уменьшается по амплитуде, но смещается по фазе таким образом, что энергия, поглощаемая сме-сью, становится наибольшей. На третьем этапе (50–100 с) завершается процесс уплотнения круп-ных фракций щебня, поэтому поглощаемая смесью энергия уменьшается почти до нуля. В модели это учитывается уменьшением коэффициента вязкого трения 3b при максимальной жесткости 3c . Для поддержания постоянной амплитуды вибрации сис-тема управления уменьшает амплитуду напряжения
1u (рис. 12), что приводит к уменьшению амплиту-ды тока 1I (рис. 13).
Рисунок 10 – Осциллограммы требуемой и реальной амплитуд колебаний рабочего органа (Scope 1)
Рисунок 11 – Осциллограмма фазы колебаний рабочего органа относительно приложенной силы (Scope 2)
0 20 40 60 80 100 t, c0
40
80
120
160
U1, B
Рисунок 12 – Осциллограмма амплитуды напряжения на обмотке электромагнитного вибратора (Scope 3)
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 26
Рисунок 13 – Осциллограмма тока в обмотке электромагнитного вибратора (Scope 5)
0 20 40 60 80 100 t, c0
5
10
u2, B
Рисунок 14 – Осциллограмма напряжения на обмотке виброгасителя
0 20 40 60 80 100 t, c0
1
2
3
4
I2, A
Рисунок 15 – Осциллограмма тока в обмотке виброгасителя
На протяжении второго и третьего этапов систе-
ма управления путем регулирования напряжения на обмотке УДВГ (рис. 14) обеспечивает резонансный режим работы установки. В начале четвертого эта-па, после ступенчатого изменения частоты в момент времени 100 с, наблюдается кратковременное "выпадение" из резонанса, сопровождающееся снижением амплитуды. Затем, путем увеличения то-ка в обмотке виброгасителя (рис. 15), система управления снова устанавливает резонансный ре-жим работы.
По графику изменения амплитуды вибрации (рис. 10) видно, что система управления с достаточ-ной для технологического процесса точностью от-рабатывает задающее воздействие по амплитуде. При переходе на более высокую частоту наблюдает-ся кратковременное падение амплитуды, а затем – всплеск до уровня 0,58 мм, что на 16 % превышает требуемое значение. В рассматриваемой задаче это не приведет к существенному снижению качества технологического процесса, но при других парамет-рах колебательной системы и тех же значениях ко-эффициентов регуляторов переход с одной частоты на другую может сопровождаться всплесками ам-плитуды, большими по величине и длительности. Поэтому коэффициенты регуляторов необходимо
выбирать с учетом возможных изменений парамет-ров виброустановки и режимов ее работы.
ВЫВОДЫ. Одновременное управление ампли-тудой колебаний вибрационной установки и жесткостью подвеса входящего в ее состав динами-ческого виброгасителя позволяет обеспечить устой-чивый резонансный режим работы на разных часто-тах вибрации, необходимых для технологического процесса.
Перспективным направлением для дальнейших исследований является синтез регуляторов системы управления виброустановкой с целью ограничения всплесков амплитуды вибрации при изменении час-тоты колебаний.
ЛИТЕРАТУРА
1. Вибрации в технике: справочник: в 6-ти т. – М.: Машиностроение, 1981. – Т. 4: Вибрационные процессы и машины / Под ред. Э.Э. Лавендела. – 1981. – 509 с.
2. Ланець О.С. Високоефективні міжрезонансні вібраційні машини з електромагнітним приводом (Теоретичні основи та практика створення): моног-рафія. – Львів: Видавництво Національного універ-ситету «Львівська політехніка», 2008. – 324 с.
3. Чубик Р.В., Ярошенко Л.В. Керовані вібрацій-
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ, МЕТОДИ ОПТИМІЗАЦІЇ ТА МОДЕЛЮВАННЯ
Електромеханічні і енергозберігаючі системи. Випуск 4/2014 (28) 27
ні технологічні машини. – Вінниця: ВНАУ, 2011. – 355 с.
4. Ратушняк Г.С., Слободян Н.М. Вібросилова технологія формування декоративних бетонних ви-робів: монографія. – Вінниця: Універсум–Вінниця, 2007. – 161 с.
5. Despotovic Z.V., Stoyilikovic Z.V. (2007). "Pow-er Converter Control Circuits for Two-Mass Vibratory Conveying System with Electromagnetic Drive: Simula-tions and Experimental Results" // IEEE Transactions on Industrial Electronics. – 2007. – Iss. 54/2007 (1). – РР. 453–466.
6. Черно А.А., Гуров А.П., Новогрецкий С.Н. Со-вместное управление электромагнитным приводом и динамическим виброгасителем трехмассовой вибра-ционной установки // Електромеханічні і енергозбе-
рігаючі системи. – 2012. – Вип. 3/2012 (19). – С. 345–349.
7. Ахвердов И.Н. Основы физики бетона. – М.: Стройиздат, 1981. – 464 с.
8. Cherno A.A. Control of Resonant Electromagnet-ic Vibrational Drive Using a Digital Filtering Algorithm Based on Discrete Fourier Transform // Journal of Au-tomation and Information Sciences. – 2014. – Iss. 46/2014 (7). – РР. 53−68.
9. Черно А.А. Динамическая модель электромаг-нитного вибрационного привода // Технічна елект-родинаміка. – 2014. – Вип. 2. – С. 37–43.
10. Воднев В.Т., Наумович А.Ф., Наумович Н.Ф. Основные математические формулы: справочник. – Минск: Вышэйшая школа, 1988. – 269 с.
AUTOMATIC CONTROL OF A RESONANT VIBRATION DEVICE WITH ELECTROMAGNETIC DYNAMIC VIBRATION ABSORBER
A. Cherno, A. Gurov National University of Shipbuilding named by admiral Makarov prosp. Geroev Stalingrada, 9, Nikolaev, 54025. Ukraine. Е-mail: [email protected] Modern vibration devices should meet the requirements of high efficiency, accurate reproduction of vibration with
specified amplitude and frequency, limitation of the force acting on the foundation. Fulfillment of this requirements is possible only by means of automation system application. So the creating of vibration equipment automatic control sys-tems is an urgent task. A structure of automatic control system of vibration device with electromagnetic drive and elec-tromagnetic dynamic vibration absorber mounted on the intermediate platform is proposed in this paper. The system provides specified amplitude and frequency of vibration by means of electromagnetic vibrator current amplitude and frequency control. Simultaneously it maintains stable resonant oscillation mode by means of vibration absorber suspen-sion stiffness control to provide the maximum efficiency of the device. The feedback control of oscillation amplitude and the resonant frequency of the device is carried out using discrete PI-regulator. Determining of oscillation amplitude and phase is carried out in real time by means of performing the discrete Fourier transform of the vibration sensor out-put signal. The dynamic model of the system has been worked out and the transients has been researched. The simula-tion results allow to conclude, that the proposed control system provides required accuracy and has satisfactory stability margin at certain values of PI-regulators coefficients.
Key words: vibration device, automatic control, electromagnetic vibration absorber.
REFERENCES 1. Lavendel, E.E. (1981), Vibratsii v tekhnike:
spravochnik. Vibratsionnyie protsessy i mashiny [Vi-brations in the technique: Reference book], Vol. 6, Mashinostroenie, Moscow. (in Russian)
2. Lanets, A.S. (2008), Vysokoefektyvni mizhrezonansni vibratsiyni mashiny z elektromagnitnym pry-vodom (Teoretychni osnovy ta praktyka stvorennya) [High efficiency interresonance vibrating machines with electromagnetic drive (Theoretical foundations and build-ing practice)], Vydavnytstvo Natsionalnoho universytetu «Lvivska politekhnika», Lviv. (in Ukrainian)
3. Chubik, R.V and Yaroshenko, L.V. (2011), Kerovani vibratsiyni tekhnologichni mashyny [Con-trolled vibration technology machines], VNAU, Vinnitsya. (in Ukrainian)
4. Ratushnyak, G.S. and Slobodyan, N.M. Vibrosylova tekhnologiya formuvannya dekoratyvnykh betonnykh vyrobiv [Power molding technology of deco-rative concrete products], Universum–Vinnytsya, Vinnytsya, Ukraine. (in Ukrainian)
5. Despotovic, Z.V. and Stoyilikovic, Z.V. (2007), "Power Converter Control Circuits for Two-Mass Vibrato-ry Conveying System with Electromagnetic Drive: Simula-tions and Experimental Results", IEEE Transactions on
Industrial Electronics, Vol. 54, no. 1, pp. 453–466.
6. Cherno, A.A., Gurov, A.P. and Novogretsky, S.N. (2012), "Simultaneous control of three-mass vibration device electromagnetic drive and the dynamic vibration absorber", Elektromekhanichni i enerhozberihayuchi system. Vol. 3, pp. 73–82. (in Russian)
7. Ahverdov, I.N. (1981), Osnovy fiziky betona [Foundations of concrete physics], Stroyisdat, Moscow. (in Russian)
8. Cherno, A.A. (2014), "Control of Resonant Elec-tromagnetic Vibrational Drive Using a Digital Filtering Algorithm Based on Discrete Fourier Transform", Jour-nal of Automation and Information Sciences, Vol. 46, no. 7, pp. 53−68.
9. Cherno, A.A. (2014), "Dynamic model of elec-tromagnetic vibration drive", Tekhnichna elektrodynamika, Vol. 2, pp. 37–43. (in Russian)
10. Vodniev V.T., Naumovich A.F., and Naumo-vich N.F. (1988), Osnovnyie matematicheskie formuly: spravochnik [Basic mathematical formulas: Reference book], Vysheyshaya shkola, Minsk. (in Russian)
Стаття надійшла 1.10.2014.
Related Documents











