Calhoun: The NPS Institutional Archive DSpace Repository Theses and Dissertations 1. Thesis and Dissertation Collection, all items 1971 Parameter plane study of the optimal regulator. Swett, Lionel Alfonso Doren. Monterey, California ; Naval Postgraduate School http://hdl.handle.net/10945/15848 Downloaded from NPS Archive: Calhoun

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Calhoun: The NPS Institutional ArchiveDSpace Repository
Theses and Dissertations 1. Thesis and Dissertation Collection, all items
1971
Parameter plane study of the optimal regulator.
Swett, Lionel Alfonso Doren.Monterey, California ; Naval Postgraduate School
http://hdl.handle.net/10945/15848
Downloaded from NPS Archive: Calhoun

PARAMETER PLANE STUDY OFTHE OPTIMAL REGULATOR
Lionel Alfonso Doren Swett
DUDLEY
liAVAL P( JHOOLMONTEREY, Ul., A 93943-50ttj
DUDLEY r -Y
IWVAL PC SCHOOLMONTEREY. u..„_hIA 93943-5001

United StatesNaval Postgraduate School
THEPARAMETER PLANE STUDY OF
THE OPTIMAL REGULATOR
by
Lionel Alfonso Doren Swett
Thesis Advisor: G.J. Thaler
tlUN M I<J r
Approved ^o-t public ticlzcLid.; dU>txibuution LuitimiXzd.


Parameter Plane Study of the Optimal Regulator
by
Lionel Alfonso Doren SwettTeniente Primero, Armada de Chile
Submitted in partial fulfillment of therequirements for the degree of
MASTER OF SCIENCE IN ELECTRICAL ENGINEERING
from the
NAVAL POSTGRADUATE SCHOOLJune 1971


ABSTRACT
Parameter plane studies of an optimal second order
regulator are presented. Emphasis is placed on the
interpretation of the cost function and the sensitivity of
the cost function to plant parameter incremental varia-
tions . An analysis is made of cost function weighting
factors and their effect on damping, speed of response,
and cost.


TABLE OF CONTENTS
I. INTRODUCTION 6
II. THE PERFORMANCE INDEX 11
III. STUDY OF WEIGHTING FACTORS OF THEPERFORMANCE INDEX 18
IV. SENSITIVITY IN THE OPTIMAL REGULATOR 47
V. CONCLUSIONS 56
APPENDIX A: GENERAL EXPRESSION FOR THF R MATRIX 57
APPENDIX B: GENERAL COST FUNCTION FOR ASECOND ORDER SYSTEM 60
LIST OF REFERENCES 68
INITIAL DISTRIBUTION LIST 69
FORM DD 1473 70


LIST OF DRAWINGS
Figure
2.1 Required values of K_ to optimize theregulator 12
2.2 Loci of optimal cost function, K.. = 1 14
2.3 Constant C curves when K=1600, p=30 15
2.4 Optimal cost function given K. or K^ 17
3.1 Constant C curves on q, , - q^- parameterplane 2.1
3.2 Cost function when K =1600, p = 30 23o ^o
3.3a Parameter plane optimal regulator whenW=0, negative tachometer feedback.Constant J curves with K assumed tobe 1600 25
3.3b Parameter plane optimal regulator whenW=0, negative tachometer feedback.Constant J curves with
/ assumed to be 1 26v Pll
3.4 Constant £ curves for different valuesof W, negative tachometer feedback 28
3.4a Constant J curves for W =.1 and /q.1
= 1,
Pllnegative tachometer feedback 29
3.4b Constant J curves for W= .5 and/q ll = 1,
negative tachometer feedback 30
3.4c Constant J curves for W= 1 and K= 10,negative tachometer feedback 31
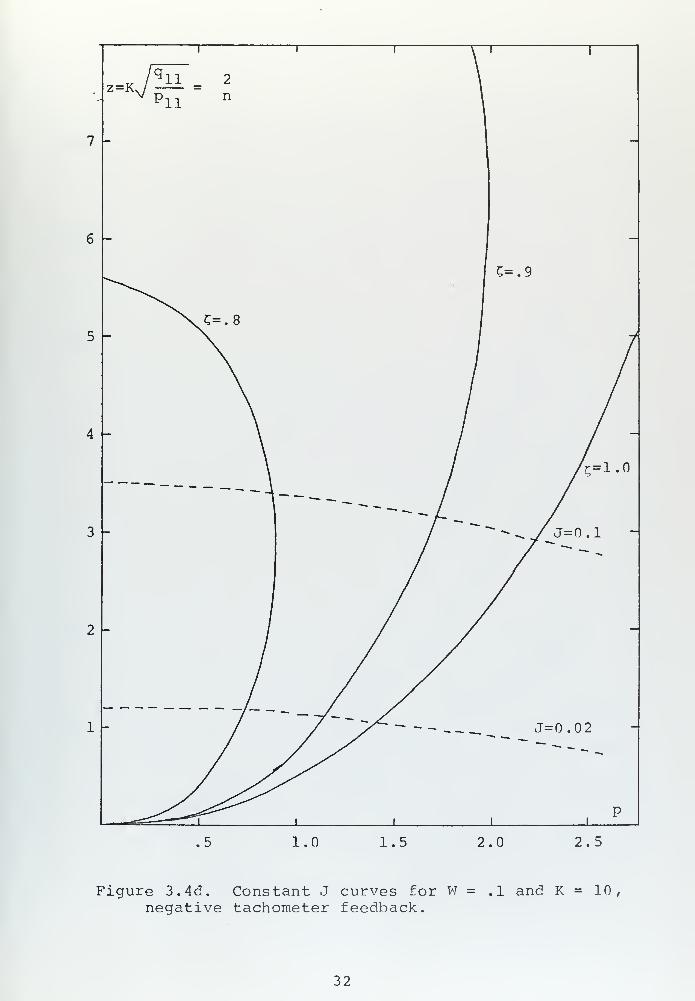
3.4d Constant J curves for W=.l and K=10,negative tachometer feedback 32


3.5 Constant £ curves for W = and positivetachometer feedback. Constant J curveswith K = 1600 33
3.6 Constant ? curves for W = and positivetachometer feedback. Constant J curves
with /q ll = 1 34
3.7 Constant ? curves for W ^ 0, positivetachometer feedback 36T
3.7a Constant J curves for W = 1 and /*11 = 1,
pllpositive tachometer feedback 37
3.7b Constant J curves for W = 2 and /^ll = 1,
Pllpositive tachometer feedback 38
3.7c Constant J curves for W = 1 and K = 10
,
positive tachometer feedback 39
3.7d Constant J curves for W = 2 and K = 10
,
positive tachometer feedback 40
3.8 J - con parameter plane for = 1 and
K = 10 41
3.9 Steady state error vs . r*ll parameter plane — 43
3.9a Constant settling time curves for negativetachometer feedback 44
3.9b Constant settling time curves for positivetachometer feedback 45
4.1 Sensitivity of cost function to plantparameter variations 55


I. INTRODUCTION
The parameter plane study of an optimal regulator was
undertaken with the purpose of finding an interpretation of
the meaning of the cost function and of the weighting fac-
tors as they relate to the observed physical behaviour of
the regulator.
Chapter one gives a brief description of the problem
formulation; Chapter two describes some studies on the
performance index; Chapter three deals with the study of
the weighting factors , and Chapter four with some sensi-
tivity aspects. Appendices A and B deal with the develop-
ment of the general expression for the R matrix and the
performance index.
A. PROBLEM FORMULATION
Suppose that initially the plant input or any of its
derivatives is nonzero. Provide a plant input to bring the
output or its derivatives to zero. In other words, the
problem is to apply a control to take the plant from a
nonzero state to the zero state. This problem may occur
where the plant is subjected to unwanted disturbances that
perturb its output (e.g., a radar antenna control system
with the antenna subject to wind gusts)
.
The desirable properties of a regulator system should
be
:


A. The regulator system should involve a linear
control law.
B. By definition an optimal system is one that mini-
mizes a certain cost.
To achieve property B, let us define a performance index
00
PI = / (XTQX + u
TPu) dt
o
where Q is symmetric positive definite and R is a positive
00
Tdefinite matrix. / X QX dt come from the minimum integral-
square error problem.
00 J^ oo
/ Z (X.)2
dt = / (XTX) dt
o i=l1
o
constituting a reasonable measure of the system transient
oo
Tresponse, and ; u Pu dt comes from the minimum energy
o
problem.
The minimization problem, i.e., the task of finding
an optimal control that minimizes the performance index,
turns out to be achievable with a linear feedback law. This
is the reason why the performance index includes a measure
control energy.
For the infinite-time regulator problem R(t) is the
solution of the reduced Riccati equation
R A + ATR - R BP~ 1BTR + Q =
o o o o
with an optimal control defined by
u*(t) = -P_1
(t)BT(t)R
ox(t)


where
A =1
[0 -P<
, AT =1 -pj
B = T, B
1= K
K _ tm _
R =o
rll
r12
r T12 22
From Appendix A the general expression for the R matrix
is
Ro
"
ip^n ^q
K+ (^^X
1) ("P +/p 2
+K2q 22
± 2Kqi;L
)
/q 11K
±7511K K2 V K* K
2K3
(1.1)
U (x) = -p~ 1BTR x
o c o
if P-1 = 1, B
T - [0 K]
P2 2/q llV X) X
l+
\t~+7^2
+ q 22 * -IT"
from which the system block diagram is
:
+. "AK
+o 1
s
X2 1
5"J
P
1
K ~P+ 7p 2+K 2(q 22
2^qiiv
K '
/qn iV


Reducing to single block:
K
2 „2 2/q11
s" + s,/ p" + K"(q22
± j^- ) + K/qi:L
0)n
= K/q11
(1.2)
C =2/K^ll
2 22v/5ll
p+ K (q 22
± ^r1 >
= 1 /jd 2.
K g2 :
+ — ± 2
K/gll
K/qll
(1.3)
B. OPTIMAL SECOND ORDER SYSTEM
"VKo
X1
c
a2
J s (s+pQ )
Kl
K2
K and p are nominal values and K, and K~ are adjusted so
that


Kl -
i/ p
11
11'
K2 ~ K P +
2 q22PO + K
p± 2K
Lll
11Oi/ P 11
(1.4)
r, , and r, _ defined as in 1.1.
The cost function for the optimal regulator is given by:
Jo
= rnxi(°>
+ 2r12
x1(o)x
2(o) + r
22x*(o)
11
'11 O V ^11
2 2 q 22 + /qp^ + KZ {-^-) ± 2K /-
^o op,, of p
11
11x^(0)
+ W^I Xl(o>V°>
K'P +^o
2 2 q 22p + IT (-^) + 2K
11o q 11 oi/ p11
x*(0)
And substituting the values of K, and K~ gives
J K~£- = it- (P + K K ) x?(0)pll K
o ° 2 ° 1
2K+ -rf- x, (0)x 9 (0)
Ko
K2 2
o
10


II. THE PERFORMANCE INDEX
A. GENERAL
In Appendix B the general expression of the performance
index for a second order system has been derived, giving,
for initial conditions on X only
Jo
[x.^0)]2
2 ^11 2(Kf + -±±) (p + K_K )
£
2 q ll 1 P1;L
O 2 o2 q
(K7 +^t±) + ±± + k,K (ld + -z±.)1 PU K lK() 1 o^ 2 pn '
- 2K,K_(p^ + K„K ) \ =-7,
1T>
-,1 2 ^o 2 o 2 (p + K-K )
J ^o 2 o(2.1)
where K is the plant pole,
K, and K« are the gains of the feedback paths,
q.., q ?:?/ p.,-, are weighting factors.
Let q,, = 1, q 22= 0, p, , = 1, K = 1600 and p = 30
then y = 0.04002.[x
1(0)]^
When q„» = 0, then equation (1.4) can be written as:
-2 2
° K2 ° K
2
2
which is a straight line on the K vs . p plane. Figure 2.1
gives the values of K required to optimize the regulator.
For example K = .02 is necessary to optimize a regulator
2with a plant pole of 30 and oo = 2000.
11


3500-
3000-
2500"
2000 "
150C-
1000-
50C-
Figure 2.1. Required values of K_ to optimize the regulator.
12


B. STUDY OF J ON THE PARAMETER PLANE
The cost function for the optimal system was given in
section A by
_2_ = J, (p + k2K) (2.2)
i nsubstituting K2
= ~[-p + JV + 2k ] into 2.2 gives, for
q 22 =
= i /p2
+ 2K (2.3)Pll K
Figure 2.2 shows the parameter plane for the optimal cost
function obtained by varying K~ when p changes , with K as a
family parameter and K, = 1 . Lines of constant p and con-
stant K have been drawn for clarity of presentation.
The value of £ corresponding to each point in the plane
is obtained from
s2
+ (p + KK )s + KK, =
p + KK5 = -———±
2/KK,
A plot of constant £ curves on the K, , K~ parameter
plane for K = 16C0 and p = 30 is shown in Figure 2.3.
From 2.1, for q 2?=
2
'11KK
2+ (2P~ 2KJ
i)K
2+ (K
i+ E77
)2 +ifoo - 2 PJ i
=
Choosing p = 30, K = 1600, q, , = p, , =1, the contour in
J, - K_ plane is described by
13


07 -
06
05
04
03
J = 1.091
C ='.919 ' ,' '
£=8^5/
.' VkT.8 /
-K=800/to = 2 8.2 8
• n
/
£=.7<07^=1600
02
p=4 7vv'/ £=.76 C/^.707
P=^o|^ l(=3 600P^-2° p=0
01
01 02 03 04 .05
Figure 2.2. Loci of optimal cost function, K, = 1.0
14


3000 _
2000 -
1000
Figure 2.3. Constant X, curves when K = 1600, p - 30
.
15


-(.0375 - 2J,
)
K2= -2L + | V(.0375-2J
1)
2- 4 (.001953-. 0375J
1) (2.4)
and if K„ = constant = .02125
Jl
=I2T [1 +
^T^"+ - 56256 K
i+ K
i ] < 2 - 5 )
Equations 2.4 and 2.5 are represented on the parameter plane
in Figure 2.4. It can be readily seen that for K?
= .02125
the curve shows a minimum cost of .04. The same minimum
cost is obtained keeping K^ constant at a value of .02125
for K, = 1.
16


'«
Jl
i ! 1 1 1
07
\
\
\
\
Ki
•
06 \
\
\
\
\
\
//
//
//
//
//
05 —
\
\
/ —\ / K~\
//
2
s. \ />v \^^ \ • _^-^
—
X^ \ s _^»
—
"•
n^—
04• —-~*~^
03 -
02 -
01 -
11 1 1
i
.01 .02 .03 .04 .05 K
.5 1 1.5 2.0 2.5 K
Figure 2.4. Optimal cost function given K. or K„
17

III. STUDY OF WEIGHTING FACTORS OF THE PERFORMANCE INDEX
When it is desired to optimize the design of a control
system, a cost functional must be established. This cost
functional is an analytical expression, related to the
system, which must be minimized by choosing parameters
which will cause an extremal of the cost functional.
Weighting factors used in performance indices deter-
mine to a large extent the optimal system which results
.
A. SELECTION OF THE Q MATRIX
Optimal control law determination by Athans and Falb [1]
require that the weighting factors matrix be positive
definite.
Tuel [2] developed a canonical form for the weighting
factor matrix Q which has the minimum number of parameters
required in the performance index for the computation of the
optimal control law.
The selection of this Q matrix is a very important part
of optimal design but there is very little guidance in the
literature in the selection of the weighting factors.
In any regulator the output or "controlled variable" is
of primary interest and certainly must be weighted, being
never negative. Then
"11 " °
The velocity (x„ = x. ) need not be weighted at all
but certainly any weight attributed to the velocity will


alter the dynamic response and may give desirable features
Thus •
q >M22
But we should normally expect q„,, < q,
,
B. DERIVATION OF EXPRESSION FOR STUDY IN THE PARAMETER PLANE
For the second order system the characteristic equation
is :
S2
+ (p + K K )s + K K, =0^o 2 o o 1
where
1 V P 1X
Po 1 / 2 v2 q 22 OL, v /qll
K_ = - it— + —-v/p +K ± 2K \/2 K K v ^O O p, , O v p,,o o *ll *ll
then
/ 2 2 q 22 /q il
p + K K„ = v/p + K -^ ± 2K J-^ = 2^00*o o 2 V ^o o p.., p lln
2 /q l]
K K, = co = Ko 1 n o ^ p11
Let
then
,
[H q 22
pll p ll
4c2
co2
= p2
+ K2x + 2y.n ^o o 2
19

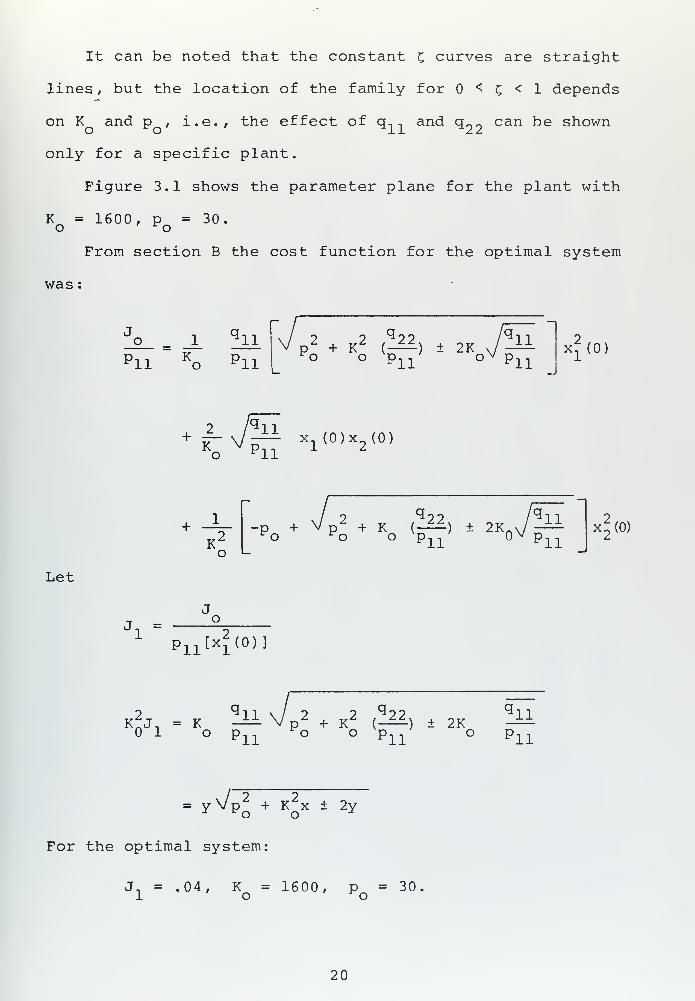
It can be noted that the constant C curves are straight
lines , but the location of the family for < £ < 1 depends
on K and p , i.e., the effect of q., , and q„_ can be showno o ^11 ^22
only for a specific plant.
Figure 3.1 shows the parameter plane for the plant with
K = 1600, p = 30.o ' *o
From section B the cost function for the optimal system
was :
'11 K11
'11L
2 2^22 /^ll^o o p n n o v p-o pn 11
x2(0)
+ f N/^7 xl(
0)x2(0)
o ^11
K'
-p +^O p + K
^o o p
q 22(-^=0 ± 2K
11
110V p11
x2
(0)
Let
Jl
=
P11[x
1(0)]
q ll \ / 2 2 g 22 q llop,, * o o 'p,,' o p 11
= yVp 2+ K
2x ± 2yo
For the optimal system:
J, = .04, K = 1600, p = 301 o *o
20


CN rHCN iH
O1 aLDOOc •
• <u
cCO
rH
a"Stf
c ^c (D
c 4->
• CD
£<c
^fd
amc CNc CNi
c cr
exccc
cco
tr
c
>upu
4-1
c
4-)
CO
Co
ro
H CD
O uC 3o CT>
• •H1 fc
CMOOO
21


q22A constant cost curve is shown in Figure 3.2 in the vs
2Pl1
to parameter plane.
C. EFFECT ON DAMPING AND COST, STEADY STATE ACCURACYAND SPEED OF RESPONSE
In order to study the effect of the weighting factors
on damping in the parameter plane it is necessary to use
1 . 2 and 1.3.
VPll
let
2 q 22K -^-
q22= Wq
xl
then
X.= | v/^- + Wz ± 2 (3.1)
From this equation the following expression can be obtained:
p2 = -z(±2 - 4C
2) -Wz 2
(3.2)
As K is defined in Section A as:
K2 = -i^yp 2 -2 g*w;^
where
P ll
22


3000
2500 -
2000 "
1500
1000 -
500 ~
Ficrure 3.2. Cost function curve when K =1600, p =30.o
23


Then, for q = the choice of + sign will require nega-
tive feedback, while the - sign will require positive feed-
back .
For negative feedback 3.2 can be rearranged to:
2
x = —^ for W = 0.
2 - 4C
Then, as z must be positive, C must be greater or equal
to .707 noting that if C = .707 then p = 0.
In Figure 3.3 the parameter plane for W = has been
drawn for different values of £ and in Figure 3.4 for
W ^ 0. In both figures, curves of constant cost function
have been superimposed.
It can be noted:
1. Minimum C for optimal regulator (second order) with
negative feedback is .707, and this occurs only when W = 0.
2. For W > 0, C > .707.
3. As W increases, the system rapidly becomes over-
damped.
4. If p is large the system will be very heavily
damped, no matter what the gain is.
5. For W > if the gain is raised, the system C goes
thru a minimum and then increases with gain.
6. The larger W, the more velocity feedback is required
For plotting of cost functions , K has been kept constant
/^ll F*llat 1600 and./ varied in Figure 3.3a and / kept con-V P11
y v/Pll
stant at 1 and K varied in Figure 3.3b.
24


x = K,
l 1 I 1 l
ll11
^ Pll /c=.8
3500 Constant £ curves /
— —-- Constant J curves /
3000
C=.707
/
2500
/ ? =.9
2000
1500 - ~ --______
/ / yrf=.035
1000
500 - -
^S ^^ ^^-^^"j=. 006 5
i
""*i i I
10 20 30 40 50
Figure 3
.
3 a
.
Parameter plane optimal regulator when22
, negative tachometer feedback for J curvesW =j
K assumed to 1600.
25


I 1 1 i 1
'.,.
v /qi1 /z=Kv / r_ o
Pll /C_ ' 8
3500
/ "
3000 /C=.707 /
2500 /
2000 // j=.0i*V_
*v" /1500
---"*"" / yj=.o5-
/'''""/ y^5" 1 '
1000~~-—-"/ / A^500'---^0^^-
-<^=^——^^T^ , .
p
10 20 30 40 50
Figure 3.3b. Parameter plane optimal regulator when W=0
negative tachometer feedback for J curves'
to be 1
.
11'11
26


From these two figures the following results can be
established:
1. For K constant, the cost function increases with.
increasing weighting factor.
2. For constant weighting factor the cost function
decreases with increasing gain.
Figures 3.4a thru 3.4d show the parameter plane for
W ^ and it can be readily seen that for any p and z, two
values of co can be obtained, both having different cost.n
imiIn Figure 3.4a and 3.4b, ./ has been kept constantpll
at 1 but for the cost analysis a value of W = 1 has been
used in 3.4a and W = .5 in Figure 3.4b. A comparison of
these curves shows a larger cost for larger W, and the cost
decreasing with an increase in gain.
On Figures 3.4c and 3.4d the gain has been kept constant
at 10 and the weighting factor q, , varied. These figures
show a decrease in cost for a decrease in q,,, and a slight-
ly smaller cost for larger W. The value of p, , has been
kept constant for these and the following cases.
When using positive feedback any value of damping can
be used and the results are shown in Figures 3.5 thru 3.7d.
In Figure 3.5, K has been kept constant at 1600 and q,,
varied and in Figure 3.6, q, , has been kept constant and
the gain varied.
The loci of equal cost function follows different
patterns in both figures but in general an increase in cost
follows a decrease in gain.
27


Figure 3.4. Constant £ curves for different values ofW, negative tachometer feedback.
28

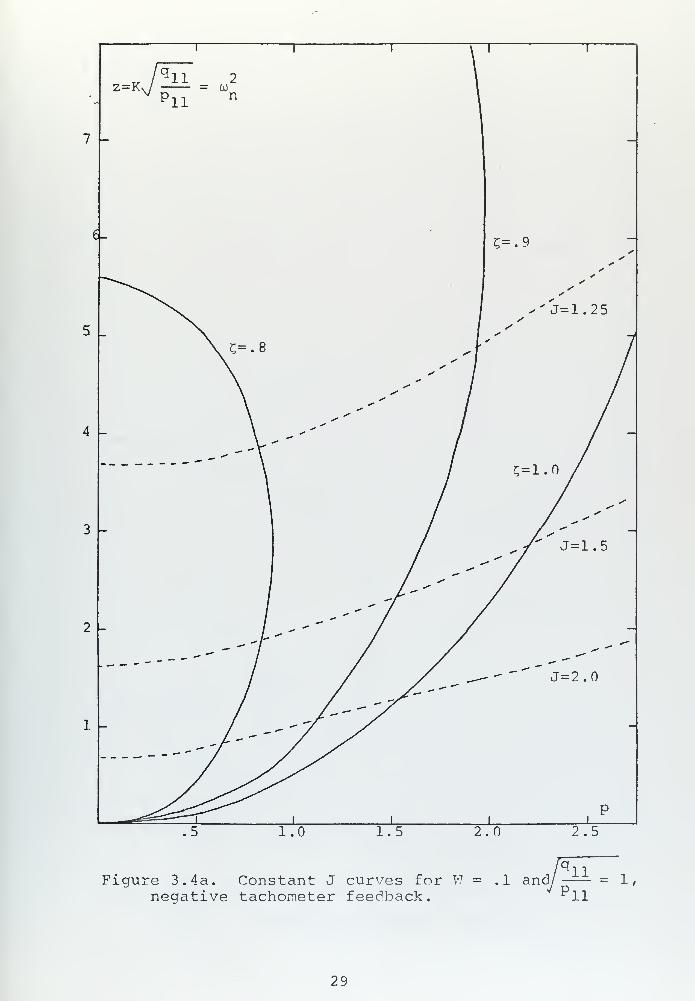
Figure 3.4a. Constant J curves for W = .1 and/negative tachometer feedback.
11
11= 1,
29


7 _
6 _
5 _
3 _
2 _
1 _
1 1 i i i
* /qH 2
z=K J = oj
^11
-
J=1.0s
ss
ys
ss
*s
••
s _ss«»
**•
»»*»
«*^-^
***•
**^^-
^*\t=i.o^v „J=1.25
X. •x ^»
\ •\ ^\ /\ ^\ ^\ .«»
—--^ =* 9 -*'\
**
—
v>^ •""'
^V. _ - *" ^-J=1.5^w *^ -^ ^
— •» "" ^S. _
•— — "" ~" " "N.
^-
\ ^*~"
\ -"f
- V'"" /
T^r""" j /)//
—^^^^\ i i i i
P
.5 1.0 1.5 2.0 2.5
Figure 3.4b. Constant cost curves for W = .5 and
fillv/pu
= 1, negative tachometer feedback.
30


v / 1:L 2z=KJ =00
'11W=.l
W=l
J curves J=.9
\
\
I
/
I
I
I
/
/
/
/
/j=L0
/ /
/ /
J=0.02
2.5
Figure 3.4c. Constant J curves for W = 1.0 and K = 10
,
negative tachometer feedback.
31

1.0 1.5 2.0 2.5
Figure 3.4d. Constant J curves for W =
negative tachometer feedback..1 and K = 10,
32


1400 -
1200 -
1000 -
800 -
600 -
400 -
200 ~
Figure 3.5. Constant C curves for W = and positivefeedback for constant J curves, K = 1600.
33


1400 "
1200 ~
1000
800 ~
600 ~
400
200
ELgure 3.6. Constant curves for W = and positivetachometer feedback for constant J curves
,
J.
q21 i.
34


A comparison between Figure 3.3 and Figure 3.5 shows
that for negative feedback values of ? >_ .707 are restricted
to the first quadrant while for positive feedback any value
of C is permissible.
Figures 3.7 show the parameter plane for two different
values of W and for different c.
A comparison between negative and positive feedback
shows same results as for W = 0, i.e., any value of £ is
permissible in the first quadrant for positive feedback.
Figure 3.7a and 3.7b compare the effect on cost of
different values of W, keeping q, , constant and varying the
gain which results in larger cost, which for p = 1.5 is
0.75 for W = 1 and 1.25 for W = 2.
Figures 3.7c and 3 . 7d compare effect on cost of dif-
ferent values of W, keeping the gain constant at 10 and
varying q, , . For a small value of p the cost is smaller
for W = 1 than for W = 2 and for any u) there is a minimum
cost, which for w = .7 is about 0.19 for W = 1 and 0.3n
for W = 2.
Keeping K = 1.0 and K constant at 10 , a curve of cost
against frequency has been drawn and the results shown in
Figure 3.8. It can be seen that the cost follows the shape
of a parabola increasing very fast as the frequency
approaches 2
.
In order to study the effect of the weighting factors
on the steady state accuracy it is convenient to refer to
the equivalent block diagram of Chapter I. It can be seen
that
35


Figure 3.7. Constant J curves for W ^ 0, positivetachometer feedback.
36


1 ii VI
v /qH 2
z=K./ = w£=1.5>^PU
7
J= l . n
6' ^-^£=1.0 /
/
/
/
v /\ /
5
"^-^ J=.75
S
\ /
\ /
\ /
\ /
\ /
\ /
4\\
\\
\
A/ \
/ \
/ 1
\
\/
3 \
^~-\^=. 5 \
/
/-
*H ^v 1 /"**• \ 'N NJ-.5\ '
/ /
N \ 1 tiV \ '
\ \ 1/ /
\ \, / 1 j
2^=0 x
\ X
^ x
/]
\ 1 / //
/
/
/
1 1 / / //
11/
J
i ii
P
Figure 3.7a. Constant J curves for W=l andpositive tachometer feedback.
11'11
= 1,
37


Figure 3.7b. Constant J curves for W=2 andpositive tachometer feedback.
11'11
=1,
38


1 i 1 1 \l
* /qH 2z=K v / = oj \Vpn n c=i.s\
7 V
6\
"""^^C-l.O
5 \
4
__ \ /
^N. \ /**» \ /X 1 /
>» /s
V. s>.
3 /^\£=.5 ^ /
^\. "** />^ / ^* /X / "** /\ / ^ /\ / """ /"*-
~. \ / >.j=.i2
K \ / /****"* S \ / /
x ^ \ / /V \ / /\ \ I / /
\ \ / /N N / /\ / s / /» / N / Sv
/ > / v'
1» / x^ *•» V^i / X *" >^
/ / """• ^^/ / yT >^~
/ / >^ S^ *"* -. ___
/ ^T ^X ^^^ *"" «. ^'/ ^/ ^^ "---J=.02/ / -x^ ^*^
'y ^^ ^~-—X^^ -*^ ^-^^ _^>^-<^^-^^ 1 1 p
. -^*<Lr <~—f" 1 1 1 1
Figure 3.7c. Constant J curves for W = 1 and K = 10
,
positive tachometer feedback.
39


Figure 3.7d. Constant J curves for V7=2 and K=10,positive tachometer feedback.
40


Figure 3. J-oo parameter plane for £=1.0 and K=10.
41


E
hipn I
SS , 1 I z . ,
111 v/ " + 1
11'11
which will depend only on q-Q and the parameter plane is
shown in Figure 3.9. For small values of q, , the steady
state error is also very small, increasing rapidly as q,
,
ft!increases to a value of w = 2, and then slowly approach-pll
ing 1.0 in the infinite.
For the speed of response study it is convenient to use
the definition of settling time, i.e.,
Ceon
Several cases should be considered:
1. Negative feedback for the velocity. Curves of
constant settling time have been drawn in the parameter
plane for two different weighting functions, W=0 and W=2,
the results being shown on Figure 3.9a. It can be seen that
the settling time decreases with increasing W.
2. Positive feedback for the velocity. Constant
settling time curves for the same parameters as in the pre-
vious case are shown on Figure 3.9b. This curves show that
the settling time decreases with increasing W but faster
than in the negative feedback case.
3. Negative feedback for the position. The results
are as in Case 1.
42


Ess
1.0-
.8
.6 /
.4
.2 - /
Mi'
I li i i
Figure 3.9. Steady state error vs.\y-— parameter plane11
11
43


*\^^ l I 1 1 i
^iiX-•- z=K/- \ W=07p
ll \7
\ W=l ~
6
\ T = 2
-
5
\
4 \ -
3
-*» \\ \
\ \v \\ \
N \
s \
-
2\ \
^-^^ \ \^\T = 4 \ \
^\ \ \
\. \ \~--> T = 4 \ N \
1
N \ \\
\\ i
i \ i \ .
p
Figure 3.9a. Constant settling time curves for negativetachometer feedback.
44


1 I 1 1 I
v /qH 2. a=K>/ = u T7 rtv p, , n W=0
W=l i
7
6/ T== 4
/ -
5 ~~"^^T= 2 /
v. /
N /N / / T = 2N /
S /
S. /
X /N /
4 — X /
N /\ /\ /
1 \
3 ^^ /N
"s T-4 / \N / \
/ *
/2 \ / V
V / »
/ '/l
/ l /1
1 / /; / /
// /if I
i / i I
Pi
Figure 3.9b. Constant settling time curves for posi'
tive tachometer feedback.
45


4. Positive feedback for the position. Using Routh
criteria of stability it can be seen that this case gives
a pole in the right hand plane, meaning that the system will
be unstable and the regulator will not regulate at all.
46


IV. SENSITIVITY IN THE OPTIMAL REGULATOR
A. GENERAL
An optimal design guarantees minimum cost for the regu-
lator from any initial conditions.
If any parameter of the regulator deviates from the
value used in (or determined by) the optimal design, then
the cost of regulating is increased, i.e., the performance
of the system is not optimal.
Sensitivity is a word used to describe the rate at
which some characteristics of the system deviates from a
reference value as a function of a parameter change. Thus
various types of sensitivity could be defined:
a. Root sensitivity
b. Bandwidth sensitivity
c. Steady state accuracy sensitivity
d. Settling time sensitivity
e. Rise time sensitivity
f. State sensitivity
g. Cost sensitivity
State sensitivity is a measure of the deviation of a
dynamic state from the values it would assume if the system
was optimal.
Cost sensitivity is some measure of the deviation of
the cost from the optimal cost.
Ultimately all of these various sensitivities relate to
the same basic characteristics of a linear regulator, i.e.,
47


they indicate changes in root location (possibly excepting
steady state accuracy sensitivity) . However there must be
some basic differences in these various sensitivities in
the sense that some are vector quantities and others are
scalars , i.e., root, bandwidth, settling time and rise time
sensitivities all indicate pretty clearly the direction in
which a root has moved, while cost sensitivity only indi-
cates the magnitude of the root motion.
From a design point of view there may be some advan-
tages to the cost sensitivity, i.e., one can usually accept
dominant root location within a specified s-plane area,
and a defined area on the parameter plane normally maps
into a dominant area on the s-plane. Correlation with
other performance criteria may very well be required.
Cost may be evaluated at any point on the parameter
plane and thus constant cost contours can be obtained.
Cost sensitivity in a macroscopic sense is then just the
difference between two costs divided by the increment in
parameter value between them.
Cost sensitivity can also be evaluated at a point and
normally the point of greatest interest on the parameter
plane would be the point at which the parameter assume
optimal values. Change in cost from this optimal value
(for a small change) can be computed by:
Tx Aparameter = AJ
d (parameter)
J4_
+ AJ = J 4.opt at new point
48

This however depends on initial conditions values,
and the permissible range of A parameter depends on the
system and on the cost function.
B. SENSITIVITY OF THE COST FUNCTION AND SENSITIVITYOF THE OPTIMAL COST FUNCTION
In the research, the curves of constant J on the parame-
ter plane are obtained using an expression for J which is
derived in terms of p, K, K, , K_ , where p and K are plant
parameters and K, and K_ are values for the state feed-
back loops. In order to use the expressions the system is
optimized at some chosen p and K, and values of K, and K~
are computed for the system thus optimized. When J is set
to a non-optimal value K, and K_ remain fixed at the opti-
mal values and p and K are computed. The system is not
optimal for the new p and K.
Sensitivity of the optimal system could be defined by
taking the derivative of the cost function, i.e.,
sJ =
9Jo
op3P P=Po' K=K
o
SJ =oK
Jo
9KP=Po' K=K
o
However the equation for J optimal can be written in
at least two forms
:
A. The form is used to compute J curves, which con-
tains the feedback gains K, and K_ as constants.
B. A form obtained directly from the R matrix such that
K. and K do not appear as symbols, the cost being
49


expressed entirely in terms of p, K, q,, , ^22' ^11"
Both forms A and B should give the same numerical
answer when p = p and K = K \_. However their deriva-c ^opt opt
tives at the optimal point should be different, because
form A describes a system that is not optimal when p and
K are changed from their optimal values, while form B
presumably expresses the condition whereby changes in p
and K automatically result in changes in K-. and K~ so
that the system remains optimal at the new p, K values,
but of course with different value of J.
Under these conditions the choice of a definition for
sensitivity becomes a matter of concern:
Should sensitivity be defined on the basis of | J|
from the value it has when p and K are at their specified
optimal values? or should be defined on the basis of the
deviation of J] at point p, K, from JJat point p,K?
By this last statement it is meant:
If K, and K~ are evaluated at p , K, then
Jo
f(Po' V Kl' V
At some new set of plant parameters values p , K ,a a
Jl = f(Pa' V V K 2>
which corresponds to the curves drawn on the parameter
plane, but the system is optimal at p , K . If the systema a
were optimal at p , K , K, , K„ , would have to be deter-a a la z ex
mined and the cost function would become
Jla
= f(Pa' V Kla'
K2a> °Ptimal «
50


C. SENSITIVITY OF COST FUNCTION TO PLANT PARAMETERSVARIATIONS
If K, is adjusted for the optimal value, then
1 V p
11
11
and
'11
22K
12K
1+ IT (P + K
2K) + K
1K(K
2+q^>
-2K1K2(p + K
2K)
2K n
x2(0)
2(p + K2K)
+
+
— xl(
0) x2(0)
2K1 2 q 22
K 2 p11
x2(0)
2(p + K2K)
If K2
is also adjusted for the optimal value then
^22 72K Po 2K
1
Pll 2 Kc
K
and
'11
22K
12KT + -
1 K(p + K
2K) + K
1K(2K
2+
2K p;_<
K
2K.
-2K1K2(p + K
2K)
2K,
X2(0)
2(p + K2K)
— x1(0)x
2(0)
2K, 2K oP^ 2Ki
-r + 2K2
+ -^ - r2x2(0)
2 (p + K K)
51


This is the cost function assuming that K, and K? are
adjusted to optimum for the nominal values of system
parameters, p and K . This result may be illustrated more
graphically by rearranging as follows
:
KK.
Pii = 2Ki ( 1 ~ -V-) + 2K
iK o (rT- P~ - P)'11 K 12 V K *o
o
2K.
K
2K.
(p + K2K)
x*(0)
2(p + K2K)
+ •— x, (0) x (0)
2KX (| - ^ ) + 2 ^o 2 o
K,
4(0)2(p + K
2K)
The sensitivity becomes
KP~ " PK
J - J2P_t = ,
'11
Kl(
l - —) + KlK 2(-
o o_
p + K 2 K
K K+ 4 (P + K
2K) - ^ (p + K
2Ko ) x^(0)
+ 2K K
x1(0)x
2(0)
1 *K K ; K.°_ + .J.
p + K K K
p + K K^o 2 o
p + K2K
- 1 x2(0)
(4.1)
J - J2P_t = <
'11
ir (Ko" K) +~ir- (kp -pk
o'o o
p + K2K
+ Ki<l-ir»o
> x*(0)
52


+ 2K.1 J_K ' K
x1(0)x
2(0)
+ <
K - KKl (-%~'
+K2 (pQ
- p) + K2(Ko-K)
p + K,K K (P+K2K)
)
x2(0)
Note these become zero when K -»• K , p -> po' * ^o
J- Jopt _
'11
k:
\ (K -K) +K1K2
K.
(Kp -pK )
K (p+K K) I
l o ' K (p+K K) KK v *o *o' 1
\ ° 2J \
° 2 °l i
xf (0)
2K,—- (K -K) x, (0)x o (0)KK o 12K K
2
\K2
K*r+sr (VK) + k- (p -p»
o o / o
> 2X2(0)
(p+K2K)
For small changes where
K = K + 6Ko
K - K
p = p +6r ^o pP = P,
6J
'11
k:
K + (p +K-K )
, o ^o 2 o(1-6K)
i IKiK
:
K.
K p +K K Ko ^o 2 o o
2K.
(6K)pQ
- KQ (6p) x*(0)
K-f-
(6K)x1(0)x
2(0)
A\\^J\K.
,?+
K" PQ+K
2K
6J
'11
-6K
K2
rp2K n +K?K K,p +K,K "
*o 1 1 o l*o 1 2
p +K„K*o 2 o
K-6p
P K,^o 1
K (p +K.K )
O *o 2 ox*(0)
53


2K.
K2^ (6K)x
1(0)x
2(0)
+ <-K,+K K1 2 o
K.
IT (p +K K )o o 2 o
(6K) -K +(p +K K )o ^o 2 o
(6p) ^x^(O)
)
ACKNOWLEDGEMENT
:
The derivation of this expression was originally worked
by Dr. Sydney R. Parker.
From 4.1 if p = p =30 and K deviates from the optimal
value of 1600 a curve can be represented in the parameter
plane and is shown in Figure 4.1. Also shown is the curve
for K = K =16 00 and p deviating from the optimal value.
54


„
i i i i 1
14
1 //
/
/1 /
12\ /1 /1 /
1 '
\ /
1 /
10 \ /
\p=p =30 /\ o /
\ / K=K =1600\ /
08
\ /
\ /
\ •
\ /\ /
06\ /
\ /
\ /\ /\ /
\ /
\ /
04\ /
\ /\ /
A./ \
/ \02 / \
/ \/ \
/ \/ X.
/ x./ x^
y i i i ^"^-^i i
400 800 1200 1600 2000 k
50 100 150 200 250 p
Figure 4.1. Sensitivity of cost function to plantparameter variation.
55


V. CONCLUSIONS
RESULTS
An optimal regulator can always be obtained using the
parameter plane method for any given plant. Both negative
and positive feedback can be used to achieve the desired
results but only negative position feedback should be used
to obtain a stable system. Positive position feedback
gives an unstable system with no regulation at all.
For a given plant an optimal cost function can be
obtained and the values of the feedback path gain calcu-
lated using the curves of Chapter II.
When a given frequency and damping is desired, the plant
parameters needed to achieve the results can be obtained
for different weighting functions with the use of figures
of Chapter III, or for a fixed plant the performance and
cost be obtained by the use of the same figures.
For plant parameters variations the sensitivity of the
cost can be obtained using the figure in Chapter IV.
35


APPENDIX A
GENERAL EXPRESSION FOR THE R MATRIX
From the reduced Ricatti equation:
ATR + R A - R BP~ 1
BTR + Q =
o o o o(A.l)
where
A =1
-pAT = B =
ro
1 -p_i
_K_
B1 = [0 K]
R =o
rll
r12
r12
r22
Substituting into A.l
rll
r12
r r12 22
+rll
r12
r r12 22
1
-p
rll
r12
y r12 22
rll
r12
r12
r22
*11
q 22
=
K
rll
pr22
r12
pr22
+rn-pr
12
r12
-P r 22
11
22
=
2 2K r
12K r
12r22
2 2K r
12K r
22
„2 2-K r
12+ qn
11 ^12 12 22
=
rn-Prn"K r io r oo = °
(A. 2)
(A. 3)
57


rirPr12" K r12
r22
=°
2(r12
-pr22
)-K2r2 2+q 22
From A.
2
1112
K'
r = +12
L llK
(A. 4)
(A. 5)
Substituting in A.
5
2v/^IT .2 2
K' 2Pr 22 " K r
22+ q 22
=°
Since Q must be positive definite q, , must be positive,
but both signs will be used with the radical.
K2r2
2+ 2pr
22- q 22
2v/qll
± —-—— =K
-2p ± /4p 2+ 4K
2(q 22
±
2 /q 11.
K22 2K<
_ \/4p2
+ 4K2
(q 22 ± -~^)
K' 2K'
As r~~ must be positive only the positive sign outside
the radical can be used, and the negative sign inside the
radical only if
22 /qTl
4K (q 22 " "V^ ^°
i.e. for22
2 q 11K
Then, both signs will be carried with the indicated restric-
tion implied.
58


From A. 3 and A.
4
p yq. 1111 K
/qnV /ap +K q 22
± 2K/q^
. + ^11K p
z+K
zq 22
± 2K/q^
Thus the general expression for the R matrix is:
R =o
/q 11K yp
2+K
2q 22
± 2K/qxl
+ ^iTK
K ^ +2
E_ +4 2
K K
q 22 +2/^Tl
K"
ACKNOWLEDGEMENT
:
The derivation of this expression was originally worked
by Dr. George J. Thaler.
59


APPENDIX B
GENERAL COST FUNCTION FOR A SECOND ORDER SYSTEM
The following derivation was originally worked by Dr.
Sidney R. Parker and has been included because its extensive
use in this thesis and not being published in any paper.
It has been shown that for the general second order
regulator
J = / (xTQx + U
TpU) dt
where
If
Then
Q = «11
q22
/ P =P-i -i
an<3 U = K1K2
x.
T T TX Qx + U pU = x Mx (B.l)
— — —
T Tx Qx + U pU =
- —
x2
*11 (
q;
)
>2_
xl
_X2_
+ xx
x^Kl
K2_
Kx
K^xi
_
X2_
?11
Kl
K1K
*1K2K2
1 ^
= x1
x^q ll
_0 q^+
2b>
Xl
l_
X2_
=*1 x
2_Pi] k
ik
:2
LI I
q 2:
>11K1K2
2
2p ll
xi
X2
60


Then from B.l
-mll
= q ll+ K
lpll
m12
= m21
= P11K1K2
m22
= q 22+ K
2pnThen:
TX MX -h
mll
ml2
m12
m22
x.
X,
mll
xl
+ 2m12
x1x2
+ m22
x2
2
If:
-Xitx, = a, e x + a~ e
-X 2 t
then-x.t -x
2t
x2
= -X^e - X2a2e
and
m, , x, = m11"1 "11 1
-
7-2X t -(X +X )t
afe + 2a n a„e12 + a^e-2X f
and
then
/ m, , x, dt = m, ,
o
-2 2-ia 2a
ia o
a2
2X^+ X-iT^
+2X^
(B.2)
m22
x2
= m22
- 2" 2A
it -(X +X )t
2 2-2X
2tn
X a e + 2X.Xa.a-e +X a e
00 p/ m _x dt = m
22 2 22
rXlal
2AlX2ala2
X2
0t21
2X x 1+ x2
2X2 J
(B.3)
m12
XlX2
= " 2m12
then
r -atX.. a, e
2" 2X
2t -(X^X^t
+ X_a2e + a,a
2(X.+X
2)e
/ m12
x1x2dt = -2m
o
"Xlal
X2a2
_
+ a, a~ +2X 12 2X
(B.4)
61


And
J = B.2 + B.3 + B.4
= m11
a 2
1
L2A
1
2ala2 a
x 1+ x2
2\
- 2m12
rXlal W|W X
2a2
2X x 1+ x2
2X,
+ m22
rXlal
2A1A2a1a2
X2X2
-.
2X. x 1+ x2
2A2 J
(B.5)
To find A., and X» let:
*> s (s+a)
K.
K.
x.
Ro s +as+K]_G
K s
x.
Rs2
+ (a+K G)s + K;
,G
a) = /kTgn 1
62


2£w = a + K~Gn 2
C =a + K
2G
2 /KjG
Then
Let
2 2s x, + 2c;co sx, + oo x, = GR
1 n 1 n 1
Xl
Xl '
X2
Xl
.*. x~ = -2£co x. - (i) x. + GR2 n 2 n 1
x.
x. -co -2Cojn n
r~ ~\
xl
+
_X2_
GR
when R =
x sI-A-1
x(0)
sI-A
SI-A
-1
oo s + 2c~;oon n
-1
2 2s + 2tco s+co
n n
s+2£oj 1n
-co sn
x.2 2
s + 2cco s+con n
s+2£oon
-con
x1(0)
x2(0)
x. =(s+2Cco
n)x
1(0)+x
2(0)
s +2Cw s+con n
(s+X1+A
2)x
1(0)+x
2(0)
(s+X1
) (s->X2
)
X2
=•oo^x, (0) + sx (0)n 1 z
2~Z 2s + 2tco s-*co
n n
63


1 s+X, s+X.
where
1 n n "
X~ = £0) - CO </2 ^ n n V
c2-i
a(s+2cu s)x
n (0) + x (0)n 1 2
s+s=-X.
(-X.+2C0) ) x i(0)+x,(0)
x2-x
1
X2X1(0) + X
2(0)
i "x2-x
1
(B.6)
Similarly
:
a2
=X1x1(0) + x
2(0)
=Tx7^) (B.7)
Note that
:
(a1
+ a2
) = x1(0)
From B . 5
:
2 -,
'11A
Tan
a a a'
+ 2 : . +2X x 1+ x
22X
" K1K2
2 2-a +2a.
a
2+a
+ B
2 2-ia.. 2a-a_ a_
+ —, , +
L2A
1
XXi1+
2
1X-1
2 J
(B.8)
where
2 q lla = k: + -
i p li
q 22B = K~ + -
2 p11
64


Substituting B.6 and B.7 into B.8 and rearranging
2 -v
'11
r~X 2A2
(x2-x
x )
2A1
T-^T2
2X1X2
+Xl
2X
+B
(X n-X n )
r 2 2-iX2
2X1X2
2 "1' L~"l2X,
1 X.Vx"" 1
1 22X
-12 J
" K1K2
\x*(0)
A
1<VV2 - ? 4- 1
i— * + ^
—
x1
x2
+B
<V*1>
X
^i1
2(X1+X
2) X
x
(X-^x" 1) X"^
x1(0)x
2(0)
+
(X^) 2A
2+ !
(A 1+ A2
) 2A2
B
(Xj-Xj)L2A
1 a-^a; 1+
2X-12 -M
x2(0) (B.9)
Substituting
A. = £> + 03 ./C -1 = a + b1 n n V/
X = £to +o) v /C -1 = a - b2 n nv
X,X_ = a -b into B.9.
'11
A
4b'
(a-b)'2 (a+b)
2~]2 (a -b )_ (a+b)
2a 2 (a-b)J
4b
"K1K2
(a-b)2(a+b) 2 (a
2-b
2)
|
(a+b)2(a-b)
2a
x2(0)
65


+4b'
A
4b:
B
a-b __ a+ba+b a-b
x1(0)x
2(0)
2+ 1
4b'
2 (a+b) 2a 2 (a-b)
a+b 2 (a2-b
2) a-b"]
2 2a 2J
x2(0) (B.10)
Adding and rearranging
f 5a2-b
2
'11
Aua(a2-b
2)
J
| +B(a
2-b
2) .
4a 12 » x2(0)
+
x]L
(0)x2(0)
2 2I4a(a -k> )
B4a
x2(0) (B.ll)
Substituting
a = Cojn
b - «n ./r into B.ll
'11
2 2 1X1(0)
A(1+4? ) + B% - 4C% KXK2
-jgj.n
But
+ -A.X;L (0)x 2
(0)
COn
[;7 + B
n
x2(0)
4Twn
A = K7 + -1 P
11
11
B = K2
+ 5112 Pn
OJ = K, Kn 1
66


Then '.,
2Cw = p+K„Kn ^2
'11
M ll2 2
q , (K,+ p,,) (p+K9K)
|- q
K7 + -ii + ± i±- = +K.K IC+ -^Pn |
KXK 1 \ 2 p'11 111
- 2K1K2(p+K
2K)
X^(0)
2(p+K2K)
2 q ll1 Pn
+ -K-K— x1(0)x
2(0)
2. q llk;+ -i p11
+ KI+.q 22
2 P11
*2 (0 >
2(p+K2K)
(B.12)
67


LIST OF REFERENCES
1. Athans , M. and Falb, P.L., Optimal Control , Chapter 9,McGraw-Hill, 1966.
2. Tuel, W. G., An Improved Algorithm for the Solutionof Discrete Regulations Problems , IEEE Transactionson Automatic Control , Oct. 1967.
3. O'Donnell, John J., Asymptotic Solution of the MatrixRiccati Equation of Optimal Control, Fourth AnnualAllerton Conference on Circuit and System TheoryProceedings , 1966.
4. Sinha, N.K. and Atluri , Satya Ratnam, Sensitivityof Optimal Control Systems , Fourth Annual AllertonConference of Optimal Control and System TheoryProceedings , 19 6 6.
5. Hsu, Jay C. and Meyer, Andrew U., Modern ControlPrinciples and Applications
,
McGraw-Hill, 1968.
68


INITIAL DISTRIBUTION LIST
No. Copies
1. Defense Documentation Center 2
Cameron StationAlexandria, Virginia 22314
2. Library, Code 0212 2
Naval Postgraduate SchoolMonterey, California 93940
3. Professor G.J. Thaler 3
Department of Electrical EngineeringNaval Postgraduate SchoolMonterey, California 93940
4. Professor S. R. Parker 3
Department of Electrical EngineeringNaval Postgraduate SchoolMonterey, California 93940
5. Lt. Lionel Doren 1
Av. Pedro de Valdivia 1828 Depto 101Santiago, Chile
6. Director de Armamentos de la Armada 1
Correo NavalValparaiso, Chile
7. Director de Instruccion de la Armada 1
Correo NavalValparaiso, Chile
69


UNCLASSIFIEDSecurity Classification
DOCUMENT CONTROL DATA -R&D, Security classification of title, bodv of abstrac t and indexing annotation must be entered when the overall report i s classified)
Originating activity ( Corporate author)
Naval Postgraduate SchoolMonterey ,- California 93940
Za. REPORT SECURITY CLASSIFICATION
Unclassified2b. CROUP
3 REPO R T TITLE
PARAMETER PLANE STUDY OF THE OPTIMAL REGULATOR
4 DESCRIPTIVE NOTES (Type ol report and, inclusive dales)
Master's Thesis; June 19715 AU THORlSI (First name, middle initial, last name)
Lionel Alfonso Doren Swett, Teniente Primero, Armada de Chile
6 REPOR T D A TE
June 1971la. TOTAL NO. OF PACES
717b. NO. OF REFS
»a. CONTRACT OR GRANT NO.
b. PROJEC T NO
9a. ORIGINATOR'S REPORT NUMBERIS)
9b. OTHER REPORT NOISI (Any other numbers that may be assignedthis report)
10 DISTRIBUTION STATEMENT
Approved for public release; distribution umlimited
II SUPPLEMENTARY NOTES 12. SPONSO RIN G Ml L I T AR Y ACTIVITYNaval Postgraduate SchoolMonterey, California 93940
13. ABSTRACT
Parameter plane studies of an optimal second order
regulator are presented. Emphasis is placed on the
interpretation of the cost function and the sensitivity
of the cost function to plant parameter incremental
variations. An analysis is made of cost functions
weighting factors and their effect on damping, speed of
response, and cost.
DD, F
°o1".,1473S/N 0101 -807-681 1
(PAGE 1)
70UNCLASSIFIFDSecurity Classification
1-3H08


UNCLASSIFIEDSecurity Classification
KEY wo RO!
PARAMETER PLANE
OPTIMAL REGULATOR
COST FUNCTION
WEIGHTING FACTORS
SENSITIVITY
D ,Tv\.1473 'back)
0101 -607-682)
LINK A
UNCLASSIFIED71 Security Classification


D '»DEf?y
Thes ? sS93* Swettc.l
Parameter r»i^«of the optL?
6 StudV
132961
**Di'W0ERY '
:
ThesisS936 SwettC,:J Parameter plane stcd«
of the optimal regulator.
'32961

JthesS936
Parameter plane study of the optimal reg
3 2768 001 01259 4
DUDLEY KNOX LIBRARY
Related Documents