August 2003 GRASP and path-relinking: Advances and a pplications 1/104 MIC’2003 Maurício G.C. RESENDE AT&T Labs Research USA Celso C. RIBEIRO Catholic University of Rio de Janeiro Brazil MIC’2003 Kyoto, August 25-28, 2003 GRASP and Path- Relinking: Advances and Applications a

August 2003 GRASP and path-relinking: Advances and applications 1/104 MIC’2003 Maurício G.C. RESENDE AT&T Labs Research USA Celso C. RIBEIRO Catholic University.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

August 2003 GRASP and path-relinking: Advances and applications
1/104 MIC’2003
Maurício G.C. RESENDE AT&T Labs Research
USA
Celso C. RIBEIRO Catholic University of Rio de Janeiro
Brazil
MIC’2003Kyoto, August 25-28, 2003
GRASP and Path-Relinking: Advances and Applications
a

August 2003 GRASP and path-relinking: Advances and applications
2/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
3/104 MIC’2003
• GRASP: – Multistart metaheuristic:
• Feo & Resende (1989): set covering• Festa & Resende (2002): annotated bibliography• Resende & Ribeiro (2003): survey
• Repeat for Max_Iterations:– Construct a greedy randomized solution.– Use local search to improve the constructed
solution.– Update the best solution found.
GRASP: Basic algorithm

August 2003 GRASP and path-relinking: Advances and applications
4/104 MIC’2003
• Construction phase: greediness + randomization– Builds a feasible solution:
• Use greediness to build restricted candidate list and apply randomness to select an element from the list.
• Use randomness to build restricted candidate list and apply greediness to select an element from the list.
• Local search: search in the current neighborhood until a local optimum is found– Solutions generated by the construction procedure
are not necessarily optimal:• Effectiveness of local search depends on: neighborhood
structure, search strategy, and fast evaluation of neighbors, but also on the construction procedure itself.
GRASP: Basic algorithm

August 2003 GRASP
weig
ht
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
10.00
0 500 1000 1500 2000 2500 3000 3500 4000
phase 2 solnphase 1 soln
weig
ht
iterations
random construction
local search
GRASP: Basic algorithm
Application: modem placement max weighted covering problemmaximization problem: = 0.85
9.50
9.55
9.60
9.65
9.70
9.75
9.80
9.85
9.90
9.95
10.00
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
t)
phase 2 solnphase 1 soln
iterations
GRASP construction
local search
weig
ht
Effectiveness of greedy randomized vs purely randomized construction:

August 2003 GRASP and path-relinking: Advances and applications
6/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
7/104 MIC’2003
• Greedy Randomized Construction:– Solution – Evaluate incremental costs of candidate
elements– While Solution is not complete do:
•Build restricted candidate list (RCL).•Select an element s from RCL at random.•Solution Solution {s}•Reevaluate the incremental costs.
– endwhile
Construction phase

August 2003 GRASP and path-relinking: Advances and applications
8/104 MIC’2003
Construction phase
• Minimization problem• Basic construction procedure:
– Greedy function c(e): incremental cost associated with the incorporation of element e into the current partial solution under construction
– cmin (resp. cmax): smallest (resp. largest) incremental cost
– RCL made up by the elements with the smallest incremental costs.

August 2003 GRASP and path-relinking: Advances and applications
9/104 MIC’2003
Construction phase• Cardinality-based construction:
– p elements with the smallest incremental costs
• Quality-based construction: – Parameter defines the quality of the
elements in RCL.– RCL contains elements with incremental cost
cmin c(e) cmin + (cmax –cmin) = 0 : pure greedy construction = 1 : pure randomized construction
• Select at random from RCL using uniform probability distribution
August 2003 GRASP and path-relinking: Advances and applications
10/104 MIC’2003
α=0.2
α=0.4
α=0.6
α=0.8
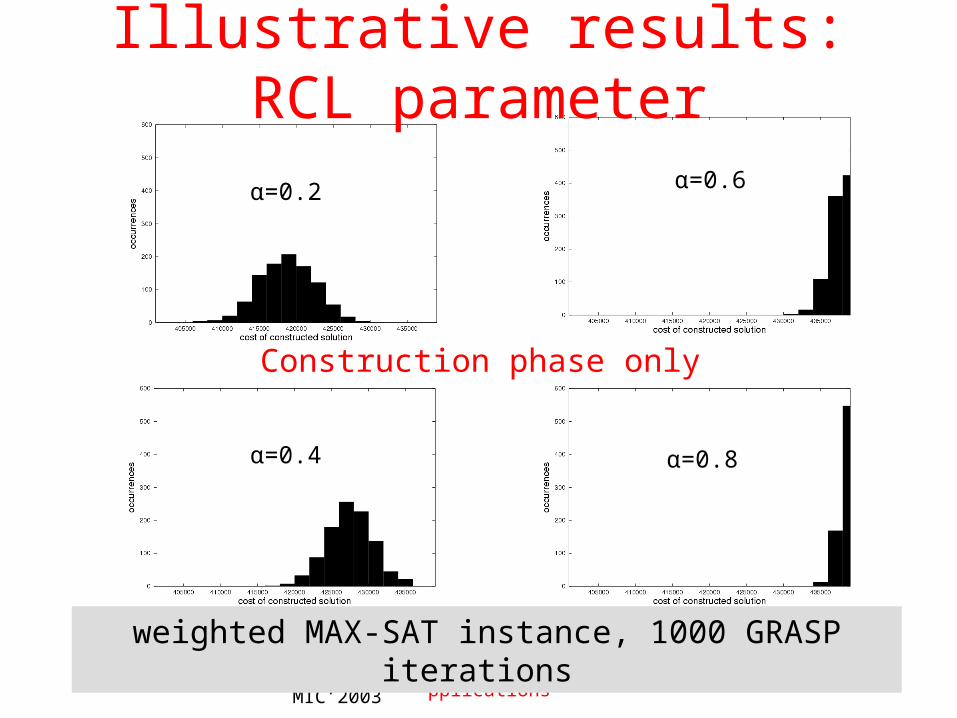
Illustrative results: RCL parameter
weighted MAX-SAT instance, 1000 GRASP iterations
Construction phase only

August 2003 GRASP and path-relinking: Advances and applications
11/104 MIC’2003
α=0.2
α=0.6
α=0.8
α=1.0
Illustrative results: RCL parameter
weighted MAX-SAT instance, 1000 GRASP iterations
Construction + local search
5’

August 2003 GRASP and path-relinking: Advances and applications
12/104 MIC’2003
0
5
10
15
20
25
30
35
40
45
0 0.2 0.4 0.6 0.8 1 400000
405000
410000
415000
420000
425000
430000
435000
440000
445000
450000
best solution
average solution
time
tim
e (
seco
nd
s) f
or
10
00
ite
rati
on
s
solu
tion
valu
e
RCL parameter α
Illustrative results: RCL parameter
random greedy
weighted MAX-SAT instance: 100 variables and 850 clauses
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
13/104 MIC’2003
5
10
15
20
0 0.2 0.4 0.6 0.8 1
tim
e (
seco
nd
s)
for
10
00
ite
ratio
ns
RCL parameter alpha
total CPU time
local search CPU time
Illustrative results: RCL parameter
Another weighted MAX-SAT instance
random greedyRCL parameter α
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
14/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
15/104 MIC’2003
Enhanced construction strategies• Reactive GRASP: Prais & Ribeiro (2000)
(traffic assignment in TDMA satellites)– At each GRASP iteration, a value of the RCL
parameter is chosen from a discrete set of values [1, 2, ..., m].
– The probability that k is selected is pk.– Reactive GRASP: adaptively changes the
probabilities [p1, p2, ..., pm] to favor values of that produce good solutions.
– Other applications, e.g. to graph planarization, set covering, and weighted max-sat:
– Better solutions, at the cost of slightly larger times.

August 2003 GRASP and path-relinking: Advances and applications
16/104 MIC’2003
Enhanced construction strategies
• Cost perturbations: Canuto, Resende, & Ribeiro (2001) (prize-collecting Steiner tree)– Randomly perturb original costs and apply
some heuristic.– Adds flexibility to algorithm design:
• May be more effective than greedy randomized construction in circumstances where the construction algorithm is not very sensitive to randomization.
• Also useful when no greedy algorithm is available.

August 2003 GRASP and path-relinking: Advances and applications
17/104 MIC’2003
Enhanced construction strategies
• Sampled greedy: Resende & Werneck (2002) (p-median)– Randomly samples a small subset of
candidate elements and selects element with smallest incremental cost.
• Random+greedy: – Randomly builds first part of the solution
and completes the rest using pure greedy construction.

August 2003 GRASP and path-relinking: Advances and applications
18/104 MIC’2003
Enhanced construction strategies
• Memory and learning in construction: Fleurent & Glover (1999) (quadratic assignment)– Uses long-term memory (pool of elite
solutions) to favor elements which frequently appear in the elite solutions (consistent and strongly determined variables).

August 2003 GRASP and path-relinking: Advances and applications
19/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
20/104 MIC’2003
Local search• First improving vs. best improving:
– First improving is usually faster.– Premature convergence to low quality local
optimum is more likely to occur with best improving.
• VND to speedup search and to overcome optimality w.r.t. to simple (first) neighborhood: Ribeiro, Uchoa, & Werneck (2002) (Steiner problem in graphs)
• Hashing to avoid cycling or repeated application of local search to same solution built in the construction phase: Woodruff & Zemel (1993), Ribeiro et. al (1997) (query optimization), Martins et al. (2000) (Steiner problem in graphs)
10’

August 2003 GRASP and path-relinking: Advances and applications
21/104 MIC’2003
Local search• Filtering to avoid application of local search
to low quality solutions, only promising unvisited solutions are investigated: Feo, Resende, & Smith (1994), Prais & Ribeiro (2000) (traffic assignment), Martins et. al (2000) (Steiner problem in graphs)
• Extended quick-tabu local search to overcome premature convergence: Souza, Duhamel, & Ribeiro (2003) (capacitated minimum spanning tree, better solutions for largest benchmark problems)
• Complementarity GRASP-VNS: – Randomization at different levels: construction
in GRASP vs. local search in VNS

August 2003 GRASP and path-relinking: Advances and applications
22/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
23/104 MIC’2003
Path-relinking• Path-relinking:
– Intensification strategy exploring trajectories connecting elite solutions: Glover (1996)
– Originally proposed in the context of tabu search and scatter search.
– Paths in the solution space leading to other elite solutions are explored in the search for better solutions:• selection of moves that introduce attributes
of the guiding solution into the current solution

August 2003 GRASP and path-relinking: Advances and applications
24/104 MIC’2003
Path-relinking
• Exploration of trajectories that connect high quality (elite) solutions:
initialsolution
guidingsolution
path in the neighborhood of solutions
August 2003 GRASP and path-relinking: Advances and applications
25/104 MIC’2003
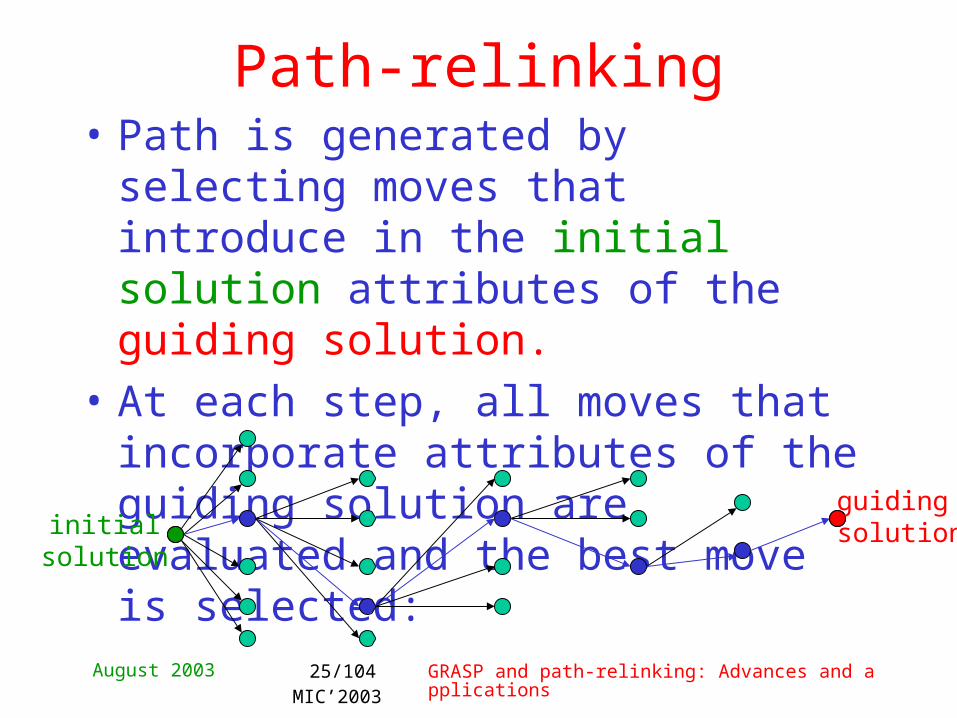
Path-relinking• Path is generated by selecting
moves that introduce in the initial solution attributes of the guiding solution.
• At each step, all moves that incorporate attributes of the guiding solution are evaluated and the best move is selected:
initialsolution
guiding solution

August 2003 GRASP and path-relinking: Advances and applications
26/104 MIC’2003
Elite solutions x and y(x,y): symmetric difference
between x and y while ( |(x,y)| > 0 ) {
evaluate moves corresponding in (x,y) make best move
update (x,y)}
Path-relinking

August 2003 GRASP and path-relinking: Advances and applications
27/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
28/104 MIC’2003
GRASP with path-relinking• Originally used by Laguna and Martí
(1999).• Maintains a set of elite solutions found
during GRASP iterations.• After each GRASP iteration (construction
and local search):– Use GRASP solution as initial solution. – Select an elite solution uniformly at random:
guiding solution (may also be selected with probabilities proportional to the symmetric difference w.r.t. the initial solution).
– Perform path-relinking between these two solutions.
August 2003 GRASP and path-relinking: Advances and applications
29/104 MIC’2003
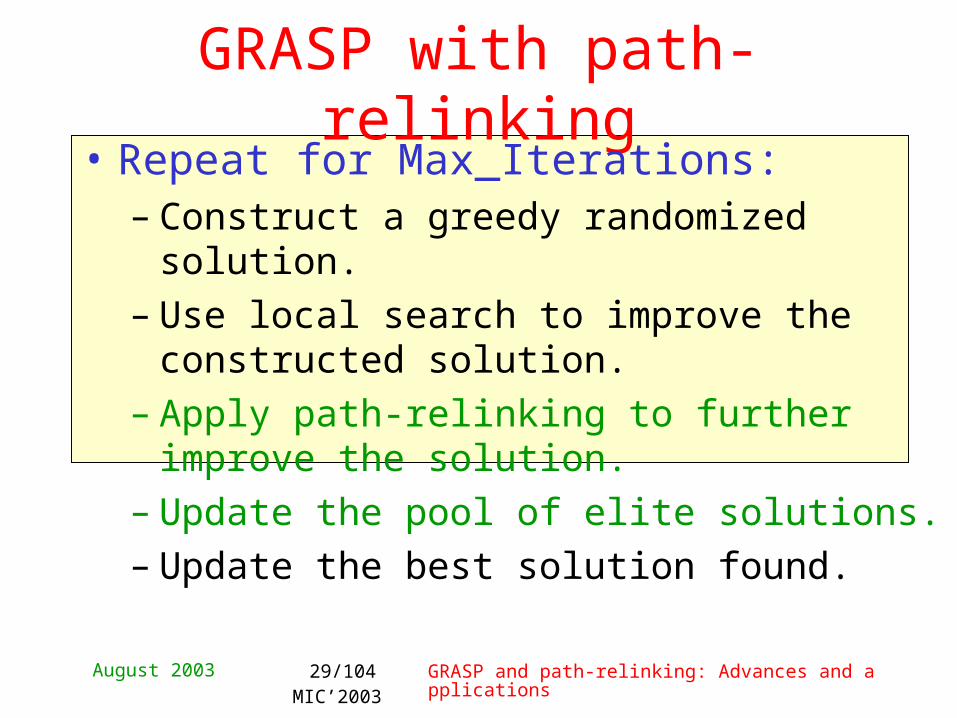
GRASP with path-relinking• Repeat for Max_Iterations:
– Construct a greedy randomized solution.– Use local search to improve the
constructed solution.– Apply path-relinking to further improve the
solution.– Update the pool of elite solutions.– Update the best solution found.

August 2003 GRASP and path-relinking: Advances and applications
30/104 MIC’2003
GRASP with path-relinking• Variants: trade-offs between computation
time and solution quality– Explore different trajectories (e.g. backward,
forward): better start from the best, neighborhood of the initial solution is fully explored!
– Explore both trajectories: twice as much the time, often with marginal improvements only!
– Do not apply PR at every iteration, but instead only periodically: similar to filtering during local search.
– Truncate the search, do not follow the full trajectory.
– May also be applied as a post-optimization step to all pairs of elite solutions.

August 2003 GRASP and path-relinking: Advances and applications
31/104 MIC’2003
GRASP with path-relinking• Successful applications:
1) Prize-collecting minimum Steiner tree problem: Canuto, Resende, & Ribeiro (2001) (e.g. improved all solutions found by approximation algorithm of Goemans & Williamson)
2) Minimum Steiner tree problem: Ribeiro, Uchoa, & Werneck (2002) (e.g., best known results for open problems in series dv640 of the SteinLib)
3) p-median: Resende & Werneck (2002) (e.g., best known solutions for problems in literature)
15’

August 2003 GRASP and path-relinking: Advances and applications
32/104 MIC’2003
GRASP with path-relinking• Successful applications (cont’d):
4) Capacitated minimum spanning tree:Souza, Duhamel, & Ribeiro (2002) (e.g., best known results for largest problems with 160 nodes)
5) 2-path network design: Ribeiro & Rosseti (2002) (better solutions than greedy heuristic)
6) Max-Cut: Festa, Pardalos, Resende, & Ribeiro (2002) (e.g., best known results for several instances)
7) Quadratic assignment: Oliveira, Pardalos, & Resende (2003)

August 2003 GRASP and path-relinking: Advances and applications
33/104 MIC’2003
GRASP with path-relinking• Successful applications (cont’d):
8) Job-shop scheduling: Aiex, Binato, & Resende (2003)
9) Three-index assignment problem: Aiex, Resende, Pardalos, & Toraldo (2003)
10)PVC routing: Resende & Ribeiro (2003)
11)Phylogenetic trees: Ribeiro & Vianna (2003)

August 2003 GRASP and path-relinking: Advances and applications
34/104 MIC’2003
GRASP with path-relinking
• P is a set (pool) of elite solutions.• Each iteration of first |P| GRASP
iterations adds one solution to P (if different from others).
• After that: solution x is promoted to P if:– x is better than best solution in P.– x is not better than best solution in P, but is
better than worst and is sufficiently different from all solutions in P.

August 2003 GRASP and path-relinking: Advances and applications
35/104 MIC’2003

August 2003 GRASP and path-relinking: Advances and applications
36/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
37/104 MIC’2003
• Proposition: Let P(t,p) be the probability of not having found a given target solution value in t time units with p independent processors. If P(t,1) = exp[-(t-)/] with non-negative and (two-parameter exponential distribution), then P(t,p) = exp[-p.(t-)/]. if p<<, then the probability of finding a solution within a given target value in time p.t with a sequential algorithm is approximately equal to that of finding a solution with the same quality in time t with p processors.
Time-to-target-value plots

August 2003 GRASP and path-relinking: Advances and applications
38/104 MIC’2003
• Probability distribution of time-to-target-solution-value: Aiex, Resende, & Ribeiro (2002) and Aiex, Binato, & Resende (2003) have shown experimentally that both pure GRASP and GRASP with path-relinking present this behavior.
Time-to-target-value plots

August 2003 GRASP and path-relinking: Advances and applications
39/104 MIC’2003
• Probability distribution of time-to-target-solution-value: experimental plots
• Select an instance and a target value.• For each variant of GRASP with path-
relinking:– Perform 200 runs using different seeds.– Stop when a solution value at least as good as
the target is found.– For each run, measure the time-to-target-value.– Plot the probabilities of finding a solution at
least as good as the target value within some computation time.
Time-to-target-value plots

August 2003 GRASP and path-relinking: Advances and applications
40/104 MIC’2003
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
pro
babili
ty
time to target solution value (seconds)
0
1
2
3
4
5
6
0 1 2 3 4 5 6
measu
red tim
es
exponential quantiles
Random variable time-to-target-solution value fits a two-parameter exponential distribution.
Therefore, one should expect approximate linear speedup in a straightforward (independent) parallel implementation.
Time-to-target-value plots

August 2003 GRASP and path-relinking: Advances and applications
41/104 MIC’2003
• Variants of GRASP with path-relinking:– GRASP: pure GRASP– G+PR(B): GRASP with backward PR– G+PR(F): GRASP with forward PR– G+PR(BF): GRASP with two-way PR
T: elite solution S: local search• Other strategies:
– Truncated path-relinking– Do not apply PR at every iteration
(frequency)
S T
TS
S T
S T
Variants of GRASP + PR
20’

August 2003 GRASP and path-relinking: Advances and applications
42/104 MIC’2003
• 2-path network design problem:– Graph G=(V,E) with edge weights we and set D
of origin-destination pairs (demands): find a minimum weighted subset of edges E’ E containing a 2-path (path with at most two edges) in G between the extremities of every origin-destination pair in D.
• Applications: design of communication networks, in which paths with few edges are sought to enforce high reliability and small delays
2-path network design problem

August 2003 GRASP and path-relinking: Advances and applications
43/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.1 1 10 100 1000 10000
prob
abili
ty
time to target value (seconds)
GRASPG+PR(F)G+PR(B)
G+PR(BF)
2-path network design problemEach variant: 200 runs for one instance of 2PNDP
Sun Sparc Ultra 1
80 nodes, 800 pairs,target=588

August 2003 GRASP and path-relinking: Advances and applications
44/104 MIC’2003
• Same computation time: probability of finding a solution at least as good as the target value increases from GRASP G+PR(F) G+PR(B) G+PR(BF)
• P(h,t) = probability that variant h finds a solution as good as the target value in time no greater than t– P(GRASP,10s) = 2% P(G+PR(F),10s) =
56%P(G+PR(B),10s) = 75% P(G+PR(BF),10s) = 84%
2-path network design problem

August 2003 GRASP and path-relinking: Advances and applications
45/104 MIC’2003
• More recently:– G+PR(M): mixed back and forward
strategyT: elite solution S: local search
– Path-relinking with local search
TS
Variants of GRASP + PR

August 2003 GRASP and path-relinking: Advances and applications
46/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.1 1 10 100 1000 10000
prob
abili
ty
time to target value (seconds)
GRASPG+PR(F)G+PR(B)
G+PR(BF)G+PR(M)
2-path network design problemEach variant: 200 runs for one instance of 2PNDP
Sun Sparc Ultra 1
80 nodes, 800 pairs,target=588

August 2003 GRASP and path-relinking: Advances and applications
47/104 MIC’2003
Instance
GRASP
G+PR(F)
G+PR(B)
G+PR(FB)
G+PR(M)
100-3 773 762 756 757 754
100-5 756 742 739 737 728
200-3 1564 1523 1516 1508 1509
200-5 1577 1567 1543 1529 1531
300-3 2448 2381 2339 2356 2338
300-5 2450 2364 2328 2347 2322
400-3 3388 3311 3268 3227 3257
400-5 3416 3335 3267 3270 3259
500-3 4347 4239 4187 4170 4187
500-5 4362 4263 4203 4211 4200
10 runs, same computation time for each variant, best solution found
2-path network design problem

August 2003 GRASP and path-relinking: Advances and applications
48/104 MIC’2003
• Effectiveness of G+PR(M): – 100 small instances with
70 nodes generated as in Dahl and Johannessen (2000) for comparison purposes.
– Statistical test t for unpaired observations
– GRASP finds better solutions with 40% of confidence (unpaired observations and many optimal solutions):
G+PR(M)
Sample A
D&J Sampl
e B
Size 100 30
Mean 443.7 (-
2.2%)
453.7
Std. dev.
40.6 61.6
2-path network design problem
Ribeiro & Rosseti (2002)

August 2003 GRASP and path-relinking: Advances and applications
49/104 MIC’2003
• Effectiveness of path-relinking to improve and speedup the pure GRASP.
• Strategies using the backwards component are systematically better.
2-path network design problem

August 2003 GRASP and path-relinking: Advances and applications
50/104 MIC’2003
PVC routing• Frame relay service offers virtual private
networks to customers by providing long-term private virtual circuits (PVCs) between customer endpoints on a backbone network.
• Routing is done either automatically by switch or by the network designer without any knowledge of future requests.
• Over time, these decisions cause inefficiencies in the network and occasionally offline rerouting (grooming) of the PVCs is needed: – integer multicommodity network flow problem:
Resende & Ribeiro (2003)

August 2003 GRASP and path-relinking: Advances and applications
51/104 MIC’2003
PVC routing

August 2003 GRASP and path-relinking: Advances and applications
52/104 MIC’2003
PVC routing
25’

August 2003 GRASP and path-relinking: Advances and applications
53/104 MIC’2003
PVC routing

August 2003 GRASP and path-relinking: Advances and applications
54/104 MIC’2003
PVC routing
August 2003 GRASP and path-relinking: Advances and applications
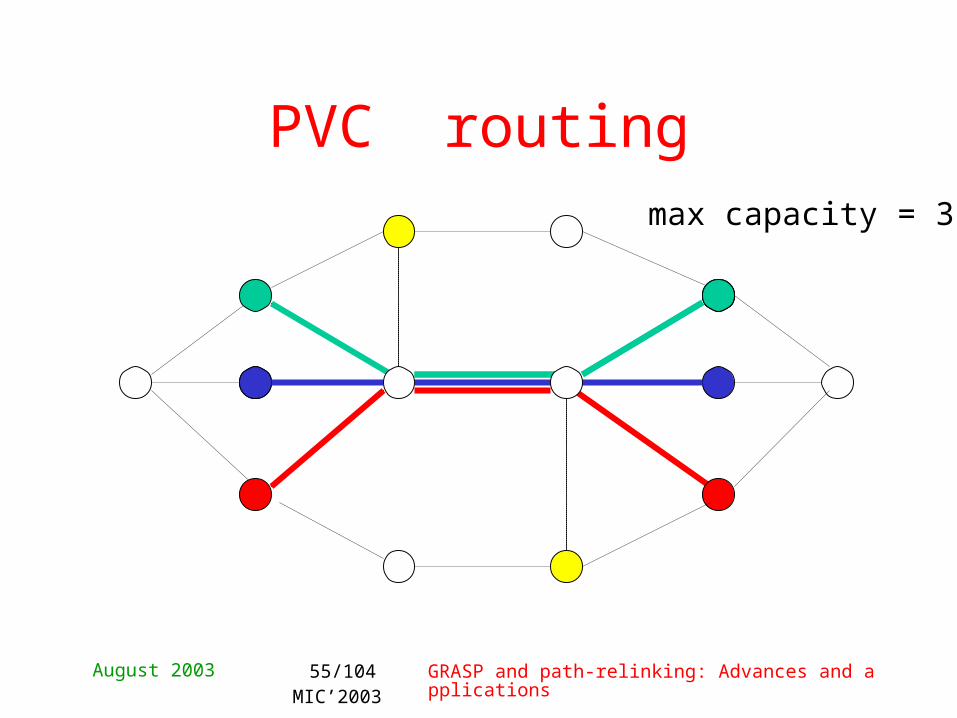
55/104 MIC’2003
PVC routingmax capacity = 3

August 2003 GRASP and path-relinking: Advances and applications
56/104 MIC’2003
PVC routingmax capacity = 3very long path!

August 2003 GRASP and path-relinking: Advances and applications
57/104 MIC’2003
PVC routingmax capacity = 3very long path!
reroute

August 2003 GRASP and path-relinking: Advances and applications
58/104 MIC’2003
PVC routingmax capacity = 3

August 2003 GRASP and path-relinking: Advances and applications
59/104 MIC’2003
PVC routingmax capacity = 3feasible and
optimal!

August 2003 GRASP and path-relinking: Advances and applications
60/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
10 100 1000 10000 100000 1e+06
GGPRfGPRb
GPRfb
time (seconds)
Pro
bab
ility
Each variant: 200 runs for one instance of PVC routing problem(60 nodes, 498 edges, 750 origin-destination pairs)
PVC routing
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
61/104 MIC’2003
PVC routing10 runs 10 seconds 100 seconds
Variant bestavera
gebest
average
GRASP 126603 126695 126228 126558
G+PR(F)
126301 126578 126083 126229
G+PR(B)
125960 126281 125666 125883
G+PR(BF)
125961 126307 125646 125850

August 2003 GRASP and path-relinking: Advances and applications
62/104 MIC’2003
PVC routing10 runs 10 seconds 100 seconds
Variant bestavera
gebest
average
GRASP 126603 126695 126228 126558
G+PR(F)
126301 126578 126083 126229
G+PR(B)
125960 126281 125666 125883
G+PR(BF)
125961 126307 125646 12585030’

August 2003 GRASP and path-relinking: Advances and applications
63/104 MIC’2003
PVC routingGRASP + PR backwards: four increasingly difficult target values
Same behavior, plots drift to the right for more difficult targets
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
64/104 MIC’2003
• Post-optimization “evolutionary” strategy:
a) Start with pool P0 found at end of GRASP and set k = 0.
b) Combine with path-relinking all pairs of solutions in Pk.
c) Solutions obtained by combining solutions in Pk are added to a new pool Pk+1 following same constraints for updates as before.
d) If best solution of Pk+1 is better than best solution of Pk, then set k = k + 1, and go back to step (b).
• Succesfully used by Ribeiro, Uchoa, & Werneck (2002) (Steiner) and Resende & Werneck (2002) (p-median)
GRASP with path-relinking

August 2003 GRASP and path-relinking: Advances and applications
65/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 10 100 1000 10000 100000
pro
babili
ty
time (seconds)
Balas & Saltzman 20.1
GPR(RAND)GPR(RAND,INT)
GPR(ALL)GPR(ALL,INT)
target = 7
3-index assignment (AP3)
SGI Challenge 196 MHz
Each variant: 200 runs for instance Balas & Saltzman 20.1 of 3AP
Variant performing PR with all solutions in the pool and also periodically using post-optimizationintensification strategy
Iterative path-relinking with only one solution in the pool

August 2003 GRASP and path-relinking: Advances and applications
66/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
67/104 MIC’2003
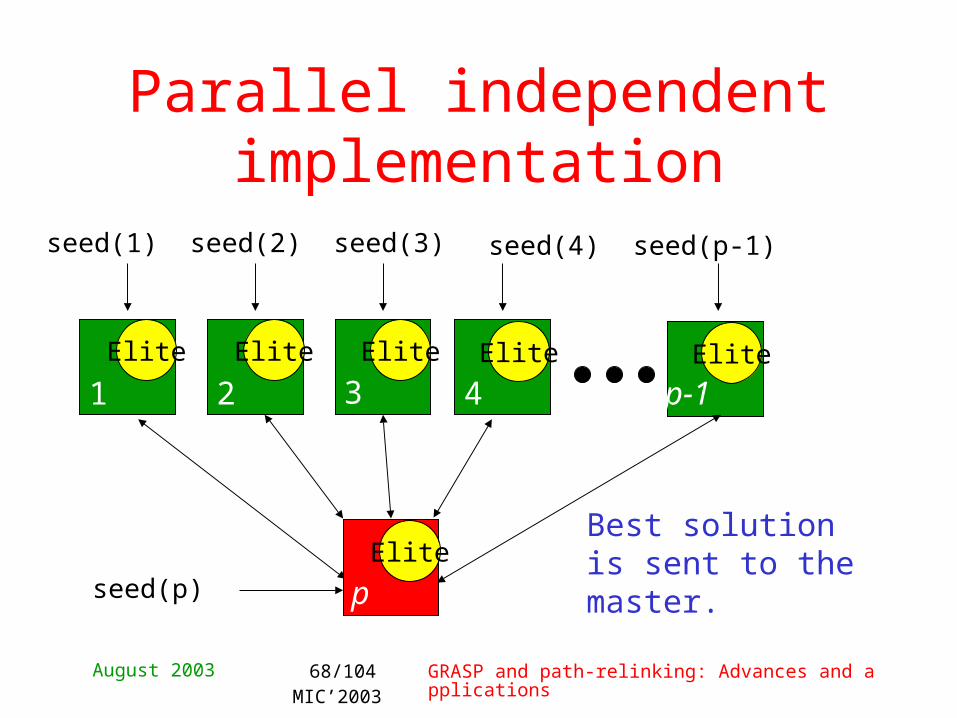
Parallel independent implementation
• Parallelism in metaheuristics: robustnessCung, Martins, Ribeiro, & Roucairol (2001)
• Multiple-walk independent-thread strategy: – p processors available– Iterations evenly distributed over p processors– Each processor keeps a copy of data and
algorithms. – One processor acts as the master handling
seeds, data, and iteration counter, besides performing GRASP iterations.
– Each processor performs Max_Iterations/p iterations.
August 2003 GRASP and path-relinking: Advances and applications
68/104 MIC’2003
Parallel independent implementation
seed(1) seed(2) seed(3) seed(4) seed(p-1)
Best solution is sent to the master.
1 2 3 4 p-1Elite Elite Elite Elite Elite
Elite
pseed(p)

August 2003 GRASP and path-relinking: Advances and applications
69/104 MIC’2003
Parallel cooperative implementation
• Multiple-walk cooperative-thread strategy: – p processors available– Iterations evenly distributed over p-1
processors– Each processor has a copy of data and
algorithms.– One processor acts as the master handling
seeds, data, and iteration counter and handles the pool of elite solutions, but does not perform GRASP iterations.
– Each processor performs Max_Iterations/(p–1) iterations.

August 2003 GRASP and path-relinking: Advances and applications
70/104 MIC’2003
Parallel cooperative implementation
2
Elite
1
p3
Elite solutions are stored in a centralized pool.Master
Slave SlaveSlave

August 2003 GRASP and path-relinking: Advances and applications
71/104 MIC’2003
Parallel environment• 2-path network
design• Linux cluster with 32
Pentium II-400 MHz processors with 32 Mbytes of RAM each
• IBM 8274 switch with 96 ports (10 Mbits/s)
• Implementations in C using MPI LAM 6.3.2 and bidirectional path-relinking (BF)

August 2003 GRASP and path-relinking: Advances and applications
72/104 MIC’2003
Cooperative vs. independent strategies
• Same instance: 15 runs with different seeds, 3200 iterations
• Pool is poorer when fewer GRASP iterations are done and solution quality deteriorates
procs.
best avg. best avg.
1 673 678.6 - -
2 676 680.4 676 681.6
4 680 685.1 673 681.2
8 687 690.3 676 683.1
16 692 699.1 674 682.3
32 702 708.5 678 684.8
Independent Cooperative
35’

August 2003 GRASP and path-relinking: Advances and applications
73/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions)independent
Cooperative vs. independent strategies
2 processors

August 2003 GRASP and path-relinking: Advances and applications
74/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions)independent
Cooperative vs. independent strategies
4 processors

August 2003 GRASP and path-relinking: Advances and applications
75/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions)independent
Cooperative vs. independent strategies
8 processors
System is not easily scalable and may even crash with the increase in the number of processors: too many large messages

August 2003 GRASP and path-relinking: Advances and applications
76/104 MIC’2003
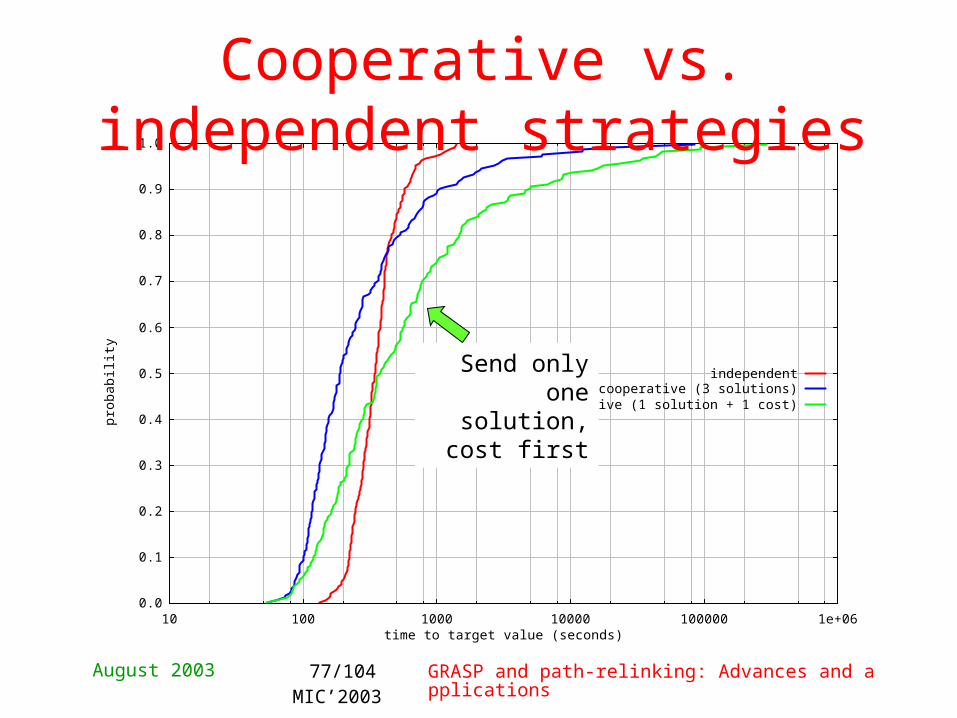
Parallel cooperative implementation
• Improved multiple-walk cooperative-thread strategy:– Locally keep the value of the worst elite solution
(eventually outdated).– Only consider a solution as a candidate to be sent
to the pool if its value is best than the above.– First send the solution value, then compare its
value with worst elite value in the pool, next send the solution itself only if its value is better.
– Significant reductions in communications and memory requirements: smaller and fewer messages are sent!
August 2003 GRASP and path-relinking: Advances and applications
77/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
independentcooperative (3 solutions)
cooperative (1 solution + 1 cost)
Send only one solution,
cost first
Cooperative vs. independent strategies

August 2003 GRASP and path-relinking: Advances and applications
78/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
independentcooperative (3 solutions)
cooperative (1 solution + 1 cost)cooperative (2 solutions + 2 costs)
Cooperative vs. independent strategies
Send two solutions, cost
first

August 2003 GRASP and path-relinking: Advances and applications
79/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
independentcooperative (3 solutions)
cooperative (1 solution + 1 cost)cooperative (2 solutions + 2 costs)cooperative (3 solutions + 3 costs)
Cooperative vs. independent strategies
Effectiveness of sending several elite solutions at each iteration
Speedup due to sending solution and cost separately
Send three solutions, cost
first
August 2003 GRASP and path-relinking: Advances and applications
80/104 MIC’2003
Parallel cooperative implementation
• Recall that when p processors are used:– All of them perform GRASP iterations in
the independent strategy– Only p-1 processors perform GRASP
iterations in the cooperative strategy• Cooperative strategy improves w.r.t.
the independent strategy when the number of processors increases.
• Cooperative strategy is already better for p 4 processors.

August 2003 GRASP and path-relinking: Advances and applications
81/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
10 100 1000 10000 100000 1e+06
prob
abili
ty
time to target value (seconds)
2 processors 4 processors 8 processors16 processors32 processors
Parallel cooperative implementation
System is not scalable for 32 processors (better with 16)
August 2003 GRASP and path-relinking: Advances and applications
82/104 MIC’2003
Improved parallel environment • Linux cluster
with 32 Pentium IV 1.7 GHz processors with 256 Mbytes of RAM each
• Extreme Networks switch with 48 10/100 Mbits/s ports and two 1 Gbits/s ports

August 2003 GRASP and path-relinking: Advances and applications
83/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 10 100 1000 10000 100000
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions + 3 costs)independent
Improved parallel environment
2 processors
40’

August 2003 GRASP and path-relinking: Advances and applications
84/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 10 100 1000 10000 100000
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions + 3 costs)independent
Improved parallel environment
8 processors

August 2003 GRASP and path-relinking: Advances and applications
85/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 10 100 1000 10000 100000
prob
abili
ty
time to target value (seconds)
cooperative (3 solutions + 3 costs)independent
Improved parallel environment
32 processors

August 2003 GRASP and path-relinking: Advances and applications
86/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 10 100 1000 10000 100000
prob
abili
ty
time to target value (seconds)
2 processors 4 processors 8 processors16 processors32 processors
Improved parallel environment
Independent strategies

August 2003 GRASP and path-relinking: Advances and applications
87/104 MIC’2003
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 10 100 1000 10000 100000
prob
abili
ty
time to target value (seconds)
2 processors 4 processors 8 processors16 processors32 processors
Improved parallel environment
Now, system is more scalable!
Cooperative strategies

August 2003 GRASP and path-relinking: Advances and applications
88/104 MIC’2003
3-index assignment (AP3)
cost = 10
Complete tripartite graph:Each triangle made up ofthree distinctly colored nodes has a cost.
cost = 5
AP3: Find a set of trianglessuch that each node appearsin exactly one triangle and thesum of the costs of the triangles is minimized.

August 2003 GRASP and path-relinking: Advances and applications
89/104 MIC’2003
3-index assignment (AP3)
• Construction: Solution is built by selecting n triplets, one at a time, biased by triplet costs.
• Local search: Explores O(n2) size neighborhood of current solution, moving to better solution if one is foundAiex, Pardalos, Resende, & Toraldo (2003)

August 2003 GRASP and path-relinking: Advances and applications
90/104 MIC’2003
3-index assignment (AP3)
• Path relinking is done between:– Initial solution S = { (1, j1S, k1
S ), (2, j2S, k2S ), …,
(n, jnS, knS ) }
– Guiding solution T = { (1, j1T, k1
T ), (2, j2T, k2T ), …,
(n, jnT, knT ) }

August 2003 GRASP and path-relinking: Advances and applications
91/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 300 350
pro
babili
ty
time to target solution (seconds)
1 processor2 processors4 processors8 processors
16 processors
Independent on 3-index assignment: bs24
3-index assignment (AP3)
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
92/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 300 350
pro
babili
ty
time to target solution (seconds)
1 processor2 processors4 processors8 processors
16 processors
Cooperative on 3-index assignment: bs24
3-index assignment (AP3)
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
93/104 MIC’2003
5
10
15
20
25
1 2 4 8 16
ave
rage s
peed-u
p
number of processors
independentcooperative
linear speedup
Speedup on 3-index assignment: bs24
3-index assignment (AP3)
SGI Challenge 196 MHz45’

August 2003 GRASP and path-relinking: Advances and applications
94/104 MIC’2003
Job shop scheduling
M1:
M2:
M3: 5 15 30 40min makespan
J1: M1(15), M2(15),M3(10)
J2: M3(5), M1(5), M2(10)
Schedule a set of jobs on a set of machines, such that
each job has a specified processing order on the set of machines
machines can process only one job at a time
each job has a specified duration on each machine
machine must finish processing job before it can begin processing another job (no preemption allowed)minimizing makespan.

August 2003 GRASP and path-relinking: Advances and applications
95/104 MIC’2003
• Construction: solution is built by scheduling all operations, one at a time, biased by greedy function (makespan or job time remaining).
• Local search: on standard disjunctive graph representation of job shop schedule
Roy & Sussmann (1964)Binato, Hery, Loewenstern, & Resende (2001)
Job shop scheduling

August 2003 GRASP and path-relinking: Advances and applications
96/104 MIC’2003
• Path-relinking between m permutation arrays, similar to PR for 3-index assignment (2 permutation arrays)
• Computing path-relinking is much more expensive than computing GRASP component:– Limit to backward path-relinking– Truncated path relinking
S Ttruncated backward PR
Job shop scheduling

August 2003 GRASP and path-relinking: Advances and applications
97/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120 140
pro
babili
ty
time to target solution (seconds)
1 processor2 processors4 processors8 processors
16 processors
Independent job shop scheduling: mt10
Job shop scheduling
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
98/104 MIC’2003
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120 140
pro
babili
ty
time to target solution (seconds)
1 processor2 processors4 processors8 processors
16 processors
Collaborative job shop scheduling: mt10
Job shop scheduling
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
99/104 MIC’2003
5
10
15
20
25
1 2 4 8 16
ave
rage s
peed-u
p
number of processors
independentcooperative
linear speedup
Speedup on job shop scheduling: mt10
Job shop scheduling
SGI Challenge 196 MHz

August 2003 GRASP and path-relinking: Advances and applications
100/104 MIC’2003
Summary• Basic algorithm• Construction phase• Enhanced construction strategies• Local search• Path-relinking• GRASP with path-relinking• Variants of GRASP with path-
relinking• Parallel implementations• Applications and numerical results• Concluding remarks

August 2003 GRASP and path-relinking: Advances and applications
101/104 MIC’2003
Concluding remarks (1/3)• Path-relinking adds memory and
intensification mechanisms to GRASP, systematically contributing to improve solution quality: – better solutions in smaller times– some implementation strategies appear to
be more effective than others). – mixed path-relinking strategy is very
promising– backward relinking is usually more
effective than forward– bidirectional relinking does not necessarily
pays the additional computation time

August 2003 GRASP and path-relinking: Advances and applications
102/104 MIC’2003
Concluding remarks (2/3)• Difficulties:
– How to deal with infeasibilities along the relinking procedure?
– How to apply path-relinking in “partitioning” problems such as graph-coloring, bin packing and others?
• Other applications of path-relinking:– VNS+PR: Festa, Pardalos, Resende, &
Ribeiro (2002)– PR as a generalized optimized crossover
in genetic algorithms: Ribeiro & Vianna (2003)

August 2003 GRASP and path-relinking: Advances and applications
103/104 MIC’2003
Concluding remarks (3/3)• Cooperative parallel strategies based on
path-relinking:– Path-relinking offers a nice strategy to introduce
memory and cooperation in parallel implementations.
– Cooperative strategy performs better due to smaller number of iterations and to inter-processor cooperation.
– Linear speedups with the parallel implementation.– Robustness: cooperative strategy is faster and
better. – Parallel systems are not easily scalable, parallel
strategies require careful implementations.

August 2003 GRASP and path-relinking: Advances and applications
104/104 MIC’2003
Slides, publications, and acknowledgements
• Slides of this talk can be downloaded from: http://www.inf.puc-rio/~celso/talks
• Papers about GRASP, path-relinking, and their applications available at:http://www.inf.puc-rio.br/~celso/publicacoes http://www.research.att.com/~mgcrhttp://graspheuristic.org
• Joint work done with several M.Sc. and Ph.D. students from PUC-Rio, who are all gratefully acknowledged: S. Canuto, M. Souza, M. Prais, S. Martins, D. Vianna, R. Aiex, R. Werneck, E. Uchoa, and I. Rosseti.
Related Documents