1 Attuatore Attuatore : : Motore in corrente continua (DC) Motore in corrente continua (DC) • Sistema: Movimentazione monoasse • Modello per motore DC • Accoppiatore ottico • Circuito integrato pilota per motore DC • Sistema di pilotaggio reazionato

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
AttuatoreAttuatore: : Motore in corrente continua (DC)Motore in corrente continua (DC)
• Sistema: Movimentazione monoasse• Modello per motore DC• Accoppiatore ottico• Circuito integrato pilota per motore DC• Sistema di pilotaggio reazionato

2
Foto Foto accoppiatoriaccoppiatoriHOA2001HOA2001
0.05€
+ X+ X-- XX
BandierineBandierineGiuntoGiunto
EncoderEncoder incrementaleincrementale(360 impulsi/giro)(360 impulsi/giro)
Motore in DCMotore in DC Vite senza fine con passo Vite senza fine con passo 3mm/giro3mm/giroL=180mm L=180mm 60 giri 60 giri

3
Foto Foto accoppiatoriaccoppiatori
+ X+ X
-- XX
BandierineBandierine
GiuntoGiunto
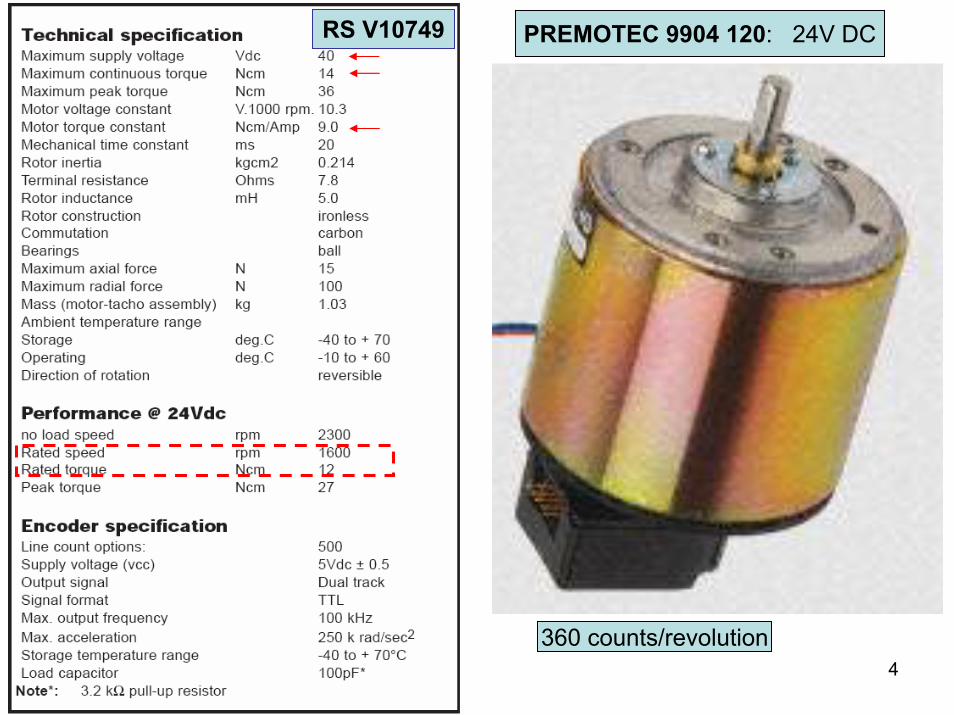
4360 counts/revolution
PREMOTEC 9904 120: 24V DCRS V10749

5
PREMOTEC: 24V DC

6
NumerologiaNumerologia::
• L=180 mmL=180 mm (corsa massima meccanica)• ∆∆x=3 mm/girox=3 mm/giro (passo vite senza fine)• 1600 giri/minuto1600 giri/minuto && 12 12 N*cmN*cm @24V@24V• 360 impulsi/giro360 impulsi/giro (encoder incrementale)⇓⇓♦♦ (3000µm/giro)/(360*4 conteggi/giro) ≅ 2.082.08µµm/conteggiom/conteggio♦♦ ((1600giri/(60s))*3mm/giro) = 80mm/s80mm/s♦♦ (180mm/(3mm/giro)) = 60giri asse motore60giri asse motore♦♦ (1440 conteggi/giro)*(60 giri) = 86400 conteggi86400 conteggi♦♦ (180mm/(80mm/s)) = 2.25s2.25s
PerL=180mmL=180mm

7
Struttura di un motore a corrente continua (Struttura di un motore a corrente continua (c.cc.c.).)
ROTORE: spire avvolte su di un cilindro (ferromagnetico) rotante (circuito di armatura);
STATORE: magneti permanenti fissi che circondano il rotore (o circuito di eccitazione);
TRAFERRO: zona compresa tra statore e rotore, sede di campo magnetico;
COLLETTORE o COMMUTATORE: parte iniziale dell’avvolgimento sul rotore, collegato all’alimentazione mediante spazzole;

8
STATORESTATORE ROTOREROTORE COLLETTORECOLLETTORE
SPAZZOLE CON MOLLASPAZZOLE CON MOLLA

9
La parte sinistra del rotoreè respinta dal magnete di sinistra ed attirata da quellodi destra. Analogamente fala parte in basso a destra.La coppia meccanicagenera la rotazione.
Quando il rotore saràallineato orizzontalmente, il commutatore invertirà ladirezione della corrente chescorre negli avvolgimenti,invertendo il campo magnetico
10
Motore senza spazzole o motore Motore senza spazzole o motore brushlessbrushlessScompare il collettore a spazzole:
gli avvolgimenti sono messi sulla parte fissa (STATORE),mentre i magneti sono montati sulla parte ruotante (ROTORE).
Migliori condizioni di scambio termico:
Gli avvolgimenti elettrici possono smaltire più facilmente il calore generato.
Migliori prestazioni meccaniche:
usando materiali magnetici più efficienti come leghe di samario-cobalto,si possono ridurre ulteriormente le dimensioni del rotore,
conseguentemente si riducono le inerzie del rotore.
Circuito di alimentazione piu’ sofisticatorispetto a quello utilizzato per un motore con spazzole:
bisogna sostituire le funzioni del collettore meccanico con un controllo elettronico di potenza.

11
Circuito diCircuito diEccitazioneEccitazione
(statore)(statore)
Circuito diCircuito diArmaturaArmatura(rotore)(rotore)
RRee
RRaa
LLaa
LLeeVVee
VVaa
IIaa
IIee
ω, θ
In generaleIn generale, la coppia motrice (NNmm) dipende siadalla corrente circolante nel circuito di armatura (IIaa)che da quella circolante nel circuito di eccitazione (IIee)
NNmm ∼∼ Φ Φ * I* Ia a ~~ IIee** IIaa
In questo caso il modello non e’ lineare,per avere un per avere un comportamento linearecomportamento linearee’ necessario che una delle due correntiuna delle due correnti sia mantenuta costantecostante(per esempio Ie) mentre l’altra (Ia) viene usataquale variabile di controllo.

12
Modello di un motore a c.c. Modello di un motore a c.c. (statore con magneti permanenti)Parte elettrica del modello
V(t)V(t) = tensione applicata all’armatura (rotore) quale variabile di controllo;E(t)E(t) = f.e.m. generata dalla variazione del flusso di B per via della rotazione del rotoreI(t)I(t) = corrente circolante nell’armaturaLL = induttanza dell’armaturaRR = resistenza dell’armaturaωω(t)(t) = velocita’ angolare di rotazione del rotoreKKee = costante di f.e.m.
Accoppiamento elettromeccanico E(t) = E(t) = KKee**ωω(t)(t)
E(t)E(t)V(t)V(t)
LL RR
V(t) = V(t) = R*IR*I(t) + (t) + L*L*[dI(t)/[dI(t)/dtdt] + ] + [K[Kee**ωω(t)](t)]I(t)I(t)
“Equazione elettrica”
[Ke]=[E]/[ω]=V*s

13
Modello di un motore a c.c.Modello di un motore a c.c. Parte meccanica del modello
NNmm(t)(t) = coppia motrice generata (coppia elettromeccanica)NNll(t)(t) = coppia applica all’albero del rotore dal carico posto in rotazioneNNaa(t)(t) = coppia di attritoN(t)N(t) = bilancio delle coppie N(t)N(t) == NNmm(t) (t) -- [[NNll(t) + (t) + NNaa(t)](t)]JJ = momento di inerziaI(t)I(t) = corrente circolante nell’armatura (rotore)ωω(t)(t) = velocita’ angolare di rotazione del rotoreKKtt = costante di coppiaηη = coefficiente di attrito viscoso
Accoppiamento elettromeccanico NNmm(t) = (t) = KKtt*I*I(t)(t)
Coppia d’attrito NNaa(t) = (t) = ηη**ωω(t)(t)
2-nda equazione cardinale per corpi rigidi rotanti (asse fisso) N(t) = J*[dω(t)/dt]
[[KKtt *I*I(t) (t) –– NNll(t)(t) –– ηη**ωω(t)](t)] = J*[d= J*[dωω(t)/dt](t)/dt]
“Equazione meccanica”
[Kt]=[N]/[I]=(N*m)/A

14
Funzionamento a regime del motore a corrente continua:Funzionamento a regime del motore a corrente continua:⇓⇓• alimento il circuito di armatura (rotore) con grandezze costanti nel tempo;• attendo che si sia esaurita la fase transitoria;
V(t) = V(t) = R*IR*I(t) + (t) + L*L*[dI(t)/[dI(t)/dtdt] + ] + KKee**ωω(t)(t) “Equazione elettrica”“Equazione elettrica”
[[NNmm(t) (t) –– NNll(t) (t) –– NNaa(t)](t)] = J*[d= J*[dωω(t)/dt](t)/dt] “Equazione meccanica”“Equazione meccanica”
V = V = R*R*((NNmm//KKtt) + ) + KKee**ωω ω(ω(ΝΝmm) )
ωω
ΝΝmm
Velocita’ angolare a vuoto
Coppia di spunto
Punto di lavoroRetta di carico:
ω(Νω(Νmm) = ) = (V/(V/ KKee) ) −− ((R/ (R/ (KKee*K*Ktt ))))∗Ν∗Νmm
Caratteristica meccanica
(Nm)max = Kt*V/R
ωmax = V/Ke
V = V = R*IR*I + + KKee**ωω
[[NNmm –– NNll –– NNaa]] = 0 = 0 && NNmm == KKtt *I *I && NNaa == ηη**ωω

15
Funzionamento Funzionamento dinamicodinamico del motore a corrente continua:del motore a corrente continua:⇓⇓• alimento il circuito di armatura (rotore) con un gradino di tensione;• sono interessato alla fase transitoria;
V(t) = V(t) = R*IR*I(t) + (t) + L*L*[dI(t)/[dI(t)/dtdt] + ] + KKee**ωω(t)(t) “Equazione elettrica”“Equazione elettrica”
[[NNmm(t) (t) –– NNll(t) (t) –– NNaa(t)](t)] = J*[d= J*[dωω(t)/dt](t)/dt] “Equazione meccanica”“Equazione meccanica”
…in quale modalita’ verra’ raggiuntala velocita’ angolare ω di rotazione di regime del motore?
ω ω = = ωω(t(t))
t
V(t)
0
V
t
ω(t)
0
ω ?

16
)](sin))[(cosexp(])exp[()](sin))[(cosexp(])exp[(
)sin()exp()(,
)exp()exp()(
)exp()exp()(
0)exp()(
)()()(
)()()()(
21
221121
221121
2
2
2
btibtattibabtibtattiba
btatAtyibaC
ttctctyR
tctctyR
QPtty
tytyty
tRtQydttdyP
dttyd
om
om
om
parominom
−=−+=+
+=⇒±⇒∈
+=⇒∈=
+=⇒∈≠
=++⇒=
+=
=++
φαα
αααα
αααα
ααα
[1/3]
Radici reali e distinte
Radici reali coincidenti
Radicicomplesse e coniugate
Equazione differenzialelineare del 2-ndo ordinea coefficienti costanti edinomogenea

17
)])(exp(1)[()(
;1)]/exp(1[)(
)()])(([
)(
)()()()()()(
)()()()()()()(
tRJKK
KVt
KVA
RJKKtAt
tKdttd
KJRV
gradinotVdttdJtIK
dttdJttNtIK
tKtRItVtKdttdILtRItV
te
e
e
te
et
tlt
ee
−−=
⇓
==⇒−−=
+=
⇓
=
=⇒=−−
+=⇒++=
ω
ττω
ωω
ωωηω
ωωEq. elettrica se: L=0se: L=0
Eq. meccanica se: Nse: Nll=0&N=0&Naa=0=0
Risposta al gradinodi un motore in c.c.In approssimazionedel 1-mo ordineNNll=0&N=0&Naa=0&L=0=0&L=0
[2/3]
0
5
10
15
20
25
30
35
40
0 0,02 0,04 0,06 0,08 0,1
Y = 37.037*(1-exp(-x*58.14))
ω ω = = ωω(t)(t)
tt
Equazione differenzialelineare del 11--mo mo ordineordinea coefficienti costanti edinomogenea

18;)
2()(
)2()())((4
)2
)((
;122
)2
(
)2
)(()
2(
2)(
2)(
0))((4)(40])[exp(
)exp(
0)()()(
)()()()()()()(
)())(()(
)(
)()()()()()(
)()()()()()()()(
22
2
2,1
22
2
2
2
2
2
2
2
Ω≡−=−
=∆−
≡−=−=−
∆−±
−=
∆−±−=
∆±−=
⇓
<−=−=∆
=++
⇓
=
=++
⇓
++=
⇓
++=
⇓
=
=⇒=−−
++=⇒++=
LR
LJKK
LJRJKKLJ
a
LR
LJRJ
ab
ai
ab
aib
ab
KKLJRJacbcbatA
tA
tcdttdb
dttda
tKKdttdRJ
dttdLJVK
tKdttd
KRJ
dttd
KLJV
gradinotVdttdJtIK
dttdJttNtIK
tKdttdILtRItVtK
dttdILtRItV
tete
te
tet
ett
tlt
ee
τ
α
ααα
αω
ωωω
ωωω
ωωω
ωωηω
ωωEq. Elettrica
Eq. Meccanicase: Nse: Nll=0 & N=0 & Naa=0=0
Risposta al gradinodi un motore in c.c.In approssimazionedel 2-ndo ordineNNll=0 & N=0 & Naa=0=0
Condizione persoluzione
oscillante smorzata
[3/3]
Equazione differenzialelineare del 22--ndo ndo ordineordinea coefficienti costanti edinomogenea

19
NumerologiaNumerologia::
se:se: NNll=0 & =0 & NNaa=0=0
∆ ∆ = b2 - 4ac = (RJ)2 - 4KeKtLJ
∆ ∆ = -52 x 10-9 < 02 radici complesse coniugate
∆ ∆ = 1.7 x 10-10 > 02 radici reali distinte
Numericamente:KKee=0.0274V*sKKtt=0.0274N*m/A
LL=0.1475H LL=2.75*10-6HRR=4ΩJJ=3.23*10-6kg*m2

20
Modello di un motore a Modello di un motore a c.cc.c..V(t) = V(t) = R*IR*I(t) + (t) + L*L*[dI(t)/[dI(t)/dtdt] + ] + KKee**ωω(t)(t) “Equazione elettrica”“Equazione elettrica”
[[KKtt *I*I(t) (t) –– NNll(t)(t) –– ηη**ωω(t)](t)] = J*[d= J*[dωω(t)/dt](t)/dt] “Equazione meccanica”“Equazione meccanica”
LL[[eqeq. . elel.] .] V(s) = V(s) = R*IR*I(s) + L*s*I(s) + (s) + L*s*I(s) + KKee**ωω(s) (s) V(s) V(s) -- KKee**ωω(s) = (R + (s) = (R + L*sL*s))*I*I(s)(s)
LL[[eqeq. . mecmec. ] . ] KKtt*I*I(s) (s) -- NNll(s) (s) --ηη**ωω(s) = J*s*(s) = J*s*ωω(s)(s) KKtt*I*I(s) (s) -- NNll(s) = ((s) = (ηη + + J*sJ*s))**ωω(s)(s)
1/(R+Ls)+
-
V(s)
KKee**ωω(s)(s)
I(s)Kt
ωω(s)(s)KKtt*I*I(s)(s)
Ke
1/(η+Js)+
-NNll(s)(s)
PSPS: La f.c.e.m. [K[Kee**ω]ω] realizza una reazione negativa che ha un realizza una reazione negativa che ha un effetto stabilizzantesulla risposta in sulla risposta in velocitavelocita’’ angolare di rotazione del servomotore.angolare di rotazione del servomotore.

21
Modello di un motore a c.c. Modello di un motore a c.c. nell’ipotesi che nell’ipotesi che NNll(t) = 0,(t) = 0, ovvero cheovvero chenon ci sia alcuna coppia esterna applicata sull’asse del rotorenon ci sia alcuna coppia esterna applicata sull’asse del rotore
V(t) = V(t) = R*IR*I(t) + (t) + L*L*[dI(t)/[dI(t)/dtdt] + ] + KKee**ωω(t)(t) “Equazione elettrica”“Equazione elettrica”
[[KKtt *I*I(t) (t) –– NNll(t)(t) –– ηη**ωω(t)](t)] = J*[d= J*[dωω(t)/dt](t)/dt] “Equazione meccanica”“Equazione meccanica”
LL[[eqeq. . elel.] .] V(s) = V(s) = R*IR*I(s) + L*s*I(s) + (s) + L*s*I(s) + KKee**ωω(s) (s) V(s) V(s) -- KKee**ωω(s) = (R + (s) = (R + L*sL*s))*I*I(s)(s)
LL[[eqeq. . mecmec. ] . ] KKtt*I*I(s) (s) --ηη**ωω(s) = J*s*(s) = J*s*ωω(s)(s) KKtt*I*I(s) = ((s) = (ηη + + J*sJ*s))**ωω(s)(s)
1/(R+Ls)+
-
V(s)
KKee**ωω(s)(s)
I(s)Kt
ωω(s)(s)KKtt*I*I(s)(s)
Ke
1/(η+Js)

22
Modello di un motore a c.c. Modello di un motore a c.c. Funzione di trasferimento G(s)Funzione di trasferimento G(s)
[[eqeq. . elel.] .] V(s) V(s) -- KKee**ωω(s) = (R + (s) = (R + L*sL*s))**II(s)(s)
[[eqeq. . mecmec.] .] KKtt**II(s)(s) = (= (ηη + + J*sJ*s))**ωω(s)(s)
♦♦ V(s) V(s) -- KKee**ωω(s)(s) = (R + = (R + L*sL*s)*[()*[(ηη + + J*sJ*s))**ωω(s)(s)//KKtt ]]
♦♦ V(s) = [V(s) = [KKee + ((R + + ((R + L*sL*s)*()*(ηη + + J*sJ*s)/)/KKtt)])]**ωω(s)(s)
sJRKKK
sJsLRKKK
VG
et
t
te
t
••+•≈
•+••++•==
)()( ηω
LL≈≈0 & 0 & ηη≈≈00“FdT del 1-mo ordine”
G(G(ωω))VV ω = ω = GG••VV

23
Modello di un motore a c.c. Modello di un motore a c.c.
Funzione si trasferimento in approssimazione del 1Funzione si trasferimento in approssimazione del 1°° ordineordine
sJRKKK
sVssG
te
t
••+•≈=
)()()( ω
Polo elettromeccanicoPolo elettromeccanico: spolo = - (Ke*Kt) / (R*J)
Costante di tempo elettromeccanicaCostante di tempo elettromeccanica: τ = - (1 / spolo) = (R*J) / (Ke*Kt)
)1(
1)(
])([
)()(
sKsG
KKsJRKKKK
KsG e
et
et
et
t
•+=⇒
•••+•
•=τ

24
Modello di un motore a c.c. Modello di un motore a c.c.
Funzione di trasferimento in approssimazione del 1Funzione di trasferimento in approssimazione del 1°° ordineordine
Numericamente: τ=(R*J/Ke*Kt) ≅17.2ms
Ke=0.0274V*sKt=0.0274N*m/AL=2.75*10-6HR=4ΩJ=3.23*10-6kg*m2
0
5
10
15
20
25
30
35
40
0 0,02 0,04 0,06 0,08 0,1
Y = 37.037*(1-exp(-x*58.14))
LL--11
)]/exp(1[1)1(
)1(
)()()( τ
τω
tKs
KsVssG
e
e −−•⇒•+
= =
ωω
tt

25
Modello di un motore a c.c. Modello di un motore a c.c. Funzione si trasferimento G(s)Funzione si trasferimento G(s)
)()( sJsLRKKK
VG
te
t
•+••++•==
ηω
22 )()( sJLsLJRRKKsJLsLsJRRKK tete ••+••+•+•+•=••+••+••+•+•⇒ ηηηη
2)()( sJLsLJRRKKK
VG
te
t
••+••+•+•+•==⇒
ηηω
Se η η = 0= 0 & L piccoloL piccolo ( )et KK
RJL••
•<<
4
2
2sJLsJRKKK
VG
te
t
••+••+•==
ω⇓⇓
))21(1(2
)411(22
41
24)(
22
222
2,1 JRKLK
LR
JRKLK
LR
LJJRKLJKRJRJ
LJKLJKRJRJ
s tete
te
te −±−≈−±−=−±−
=−±−
=
poli in s:poli in s:2
11 xx −≈−
...nell’ipotesi NNll=0=0
....cioe’ NNaa=0=0

26
Modello di un motore a c.c. Modello di un motore a c.c. Funzione di trasferimento G(s)Funzione di trasferimento G(s)
))21(1(2
)411(22
41
24)(
22
222
2,1 JRKLK
LR
JRKLK
LR
LJJRKLJKRJRJ
LJKLJKRJRJ
s tete
te
te −±−≈−±−=−±−
=−±−
=
poli in s:poli in s:2
11 xx −≈−
RJKK
JRKLK
LRs tete −=−+−= ))21(1(
2 21Polo elettromeccanicoPolo elettromeccanico:
Polo elettricoPolo elettrico:
LR
JRKLK
LR
JRKLK
LR
JRKLK
LRs tetete −≈−−=+−=−−−= )1()22(
2))21(1(
2 2222

27
NumerologiaNumerologia::
2)()()(
sJLsJRKKK
sVssG
te
t
••+••+•==
ωFdTFdT se Nl=0 & Na=0
aabbcc
∆ ∆ = b2 - 4ac = (RJ)2 - 4KeKtLJ
∆ ∆ = -52 x 10-9 < 02radici complesse coniugate
∆ ∆ = 1.7 x 10-10 > 02 radici reali distinte
Numericamente:KKee=0.0274V*sKKtt=0.0274N*m/A
LL=0.1475H LL=2.75*10-6HRR=4ΩJJ=3.23*10-6kg*m2
28
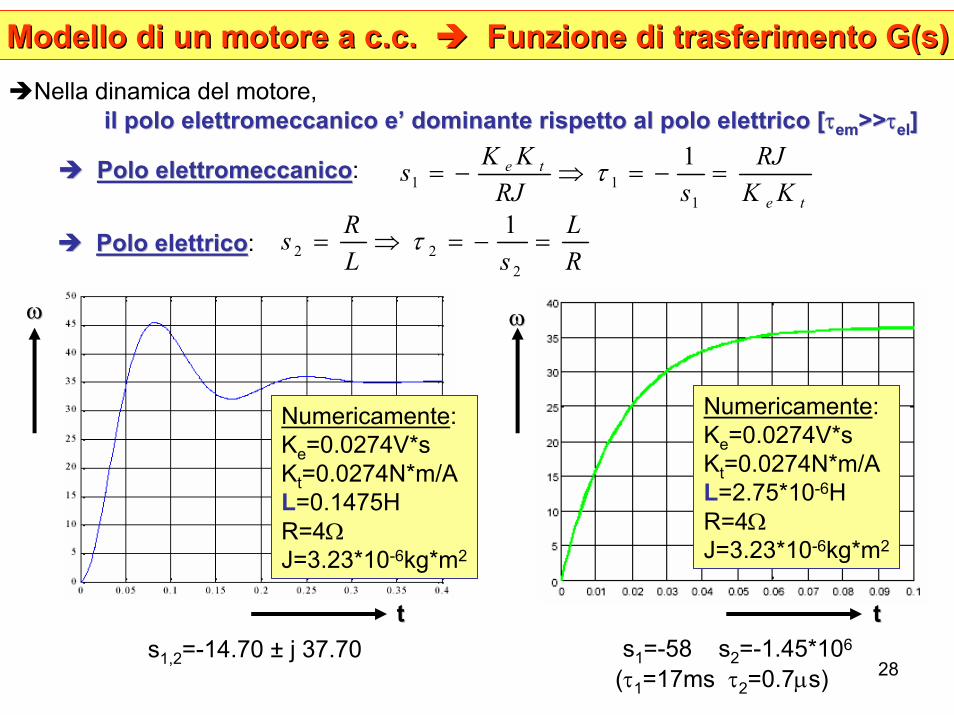
Modello di un motore a c.c. Modello di un motore a c.c. Funzione di trasferimento G(s)Funzione di trasferimento G(s)Nella dinamica del motore,
il polo elettromeccanico eil polo elettromeccanico e’’ dominante rispetto al polo elettrico [dominante rispetto al polo elettrico [ττemem>>>>ττelel]]
Polo elettromeccanicoPolo elettromeccanico:te
te
KKRJ
sRJKKs =−=⇒−=
111
1τ
Polo elettricoPolo elettrico:RL
sLRs =−=⇒=
222
1τ
Numericamente:Ke=0.0274V*sKt=0.0274N*m/AL=0.1475HR=4ΩJ=3.23*10-6kg*m2
Numericamente:Ke=0.0274V*sKt=0.0274N*m/AL=2.75*10-6HR=4ΩJ=3.23*10-6kg*m2
s1,2=-14.70 ± j 37.70 s1=-58 s2=-1.45*106
ωω ωω
tttt
(τ1=17ms τ2=0.7µs)

29
KKttττJJRRLL
ττ1 KKe
VscmmANcmsxcmmKgcm
KRJK
KKRJ
te
te
1.00927.0)/10)(/9)(1020()/10)(214.0)(8.7(
23
22421
1
≈=
Ω=
==
=⇒
−−
−
τ
τ
ωωmax KKe
Vs
giroradsgiri
V
VK
KV
e
e
1.00996.0
)/2(min)/60(
min)/2300(24
max
max
≈=
=
==
=⇒
π
ω
ω
ωωmaxmax
NumerologiaNumerologia::
NNmaxmax

30
NumerologiaNumerologia::
Νmax KKt
ANcmANmVNmx
VRNKt
RVK
N t
/9/08775.024
)8.7)(1027(
max
max
2
≈=
Ω=
==
=⇒
−
KKttττJJRRLL
ωωmaxmax
NNmaxmax

31
Logica di controllo per 2 fine corsa in una movimentazione monoaLogica di controllo per 2 fine corsa in una movimentazione monoassesse [1/3]
X0X0 X1X1 X2 x3X2 x3 YY
Y=1 Y=1 sese X0=1X0=1
Y=1 Y=1 sese X0=0 & X1=0 & x2=1 & x3=1X0=0 & X1=0 & x2=1 & x3=1
Y=1 Y=1 sese X0=0 & X1=1 & x2=0 & x3=0X0=0 & X1=1 & x2=0 & x3=0
00

32
Logica di controllo per 2 fine corsa in una movimentazione monoaLogica di controllo per 2 fine corsa in una movimentazione monoassesse [2/3]
Y=1 Y=1 sese X0=1X0=1 Y=1 Y=1 sese X0=0 & X1=0 & x2=1 & x3=1X0=0 & X1=0 & x2=1 & x3=1
Y=1 Y=1 sese X0=0 & X1=1 & x2=0 & x3=0X0=0 & X1=1 & x2=0 & x3=0
X0
X1
X2
X3
Y

33
X0X0 X1X1 X2 x3X2 x3 YY
00
Logica di controllo per 2 fine corsa in una movimentazione monoaLogica di controllo per 2 fine corsa in una movimentazione monoassesse [3/3]
X0 X1
X2 X300 01 11 10
00 0 0 1 0
01 1 0 0 0
11 1 1 1 1
10 1 1 1 1
Y = X0 + X1*X2*X3 + X1*X2*X3

34
Circuito integrato pilota per motore DCCircuito integrato pilota per motore DCPONTEPONTE--HH LMD18200LMD18200

35
Principio del “Principio del “ponteponte H” [1/2]H” [1/2]

36
Principio del “Principio del “ponteponte H” [2/2]H” [2/2]

37
PONTEPONTE--HH LMD18200LMD18200
PWM
DIRECTIONBRAKE
OUTPUT 1OUTPUT 1
OUTPUT 2OUTPUT 2
GROUND
PACKAGE:PACKAGE: TO220TO220
MOTOR POWER SUPPLYMOTOR POWER SUPPLY
112233445566
8899
10101111
77

38
Diagramma a blocchi del ponte H: LMD18200TLMD18200T

39
PONTEPONTE--HH LMD18200LMD18200

40
PONTEPONTE--HH LMD18200LMD18200

41
OUTPUT2
OUTPUT1
DIRBRAKEPWM
0.01µF
0.01µF
µµPP

42
I/O P3
I/O P5

43
µµPPADCADC LMDLMD1820018200
PWMPWM
DIRDIROUT1OUT1
OUT2OUT2

44

45
'$STAMP BS2'$PBASIC 2.5a VAR Byte
loop:DEBUGIN aDEBUG aGOTO loop
END
provina_230204.bs2
'$STAMP BS2'$PBASIC 2.5verso VAR Bitn VAR WordDIR3=1DIR5=1'tastiera:DEBUG " inserire verso 1 ==> orario 0 ==> antiorario ",CR,LFDEBUGIN verso'n=1000OUT3=versotreno1:n=n-1OUT5=1PAUSE 1OUT5=0PAUSE 1IF n<>0 THEN treno1'GOTO tastieraEND
prova1_230204.bs2
'$STAMP BS2DIR3=1DIR5=1
OUT3=1treno:
OUT5=1PAUSE 5OUT5=0PAUSE 5
GOTO trenoEND
prova0_230204.bs2
' verso I/O P3' verso I/O P3' impulso I/O P5' impulso I/O P5

46
'$STAMP BS2'$PBASIC 2.5verso VAR Bitn VAR WordDIR3=1DIR5=1' verso P3' impulso P5
ripeti:verso=1n=500OUT3=verso
treno1:n=n-1OUT5=1PAUSE 1OUT5=0PAUSE 1IF n<>0 THEN treno1'
'verso=0n=500OUT3=verso
treno2:n=n-1OUT5=1PAUSE 1OUT5=0PAUSE 1IF n<>0 THEN treno2'GOTO ripeti
prova2_180304.bs2
Versione “lenta”
PAUSE 10
Related Documents











