Assembly Line Simulation With Multi-Robot Control Peter McHugh Thomas Zack Kyle Fecteau

Assembly Line Simulation With Multi-Robot Control Peter McHugh Thomas Zack Kyle Fecteau.
Dec 23, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Assembly Line Simulation With Multi-Robot Control
Peter McHughThomas ZackKyle Fecteau
Overview
Introduction to the Robots◦Staubli, Scara, and Microbot
Changes made last yearTennis Ball Assembly LineMechanical and Electrical Modifications
◦Staubli Gripper and I/O Control
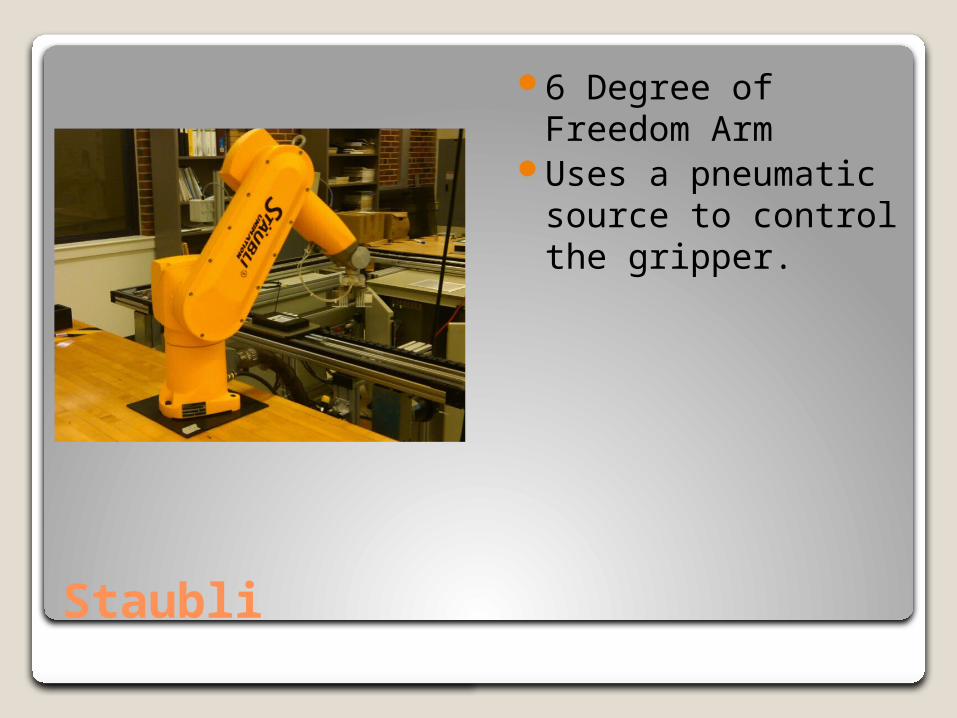
Staubli
6 Degree of Freedom Arm
Uses a pneumatic source to control the gripper.
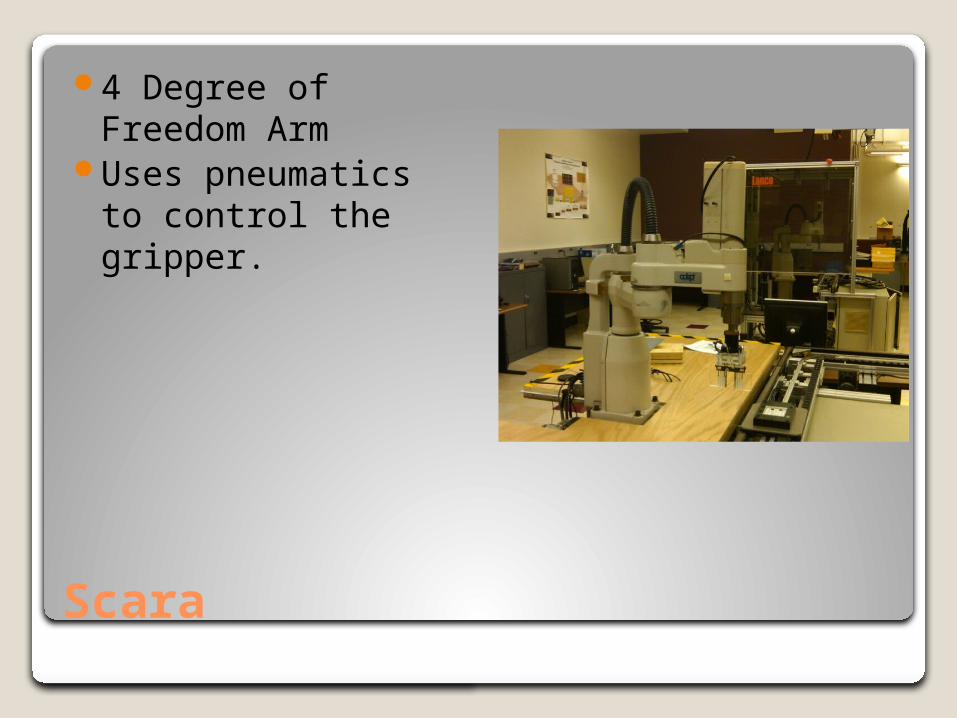
Scara
4 Degree of Freedom Arm
Uses pneumatics to control the gripper.

Microbot
Establish connection through serial port
Accepts string commands through serial port, if command is executed outputs a 1 to user.
2008/2009 Robotics Research Group
Created a program that allowed for both the Staubli and Scara to operate concurrently using commands from a program.
:
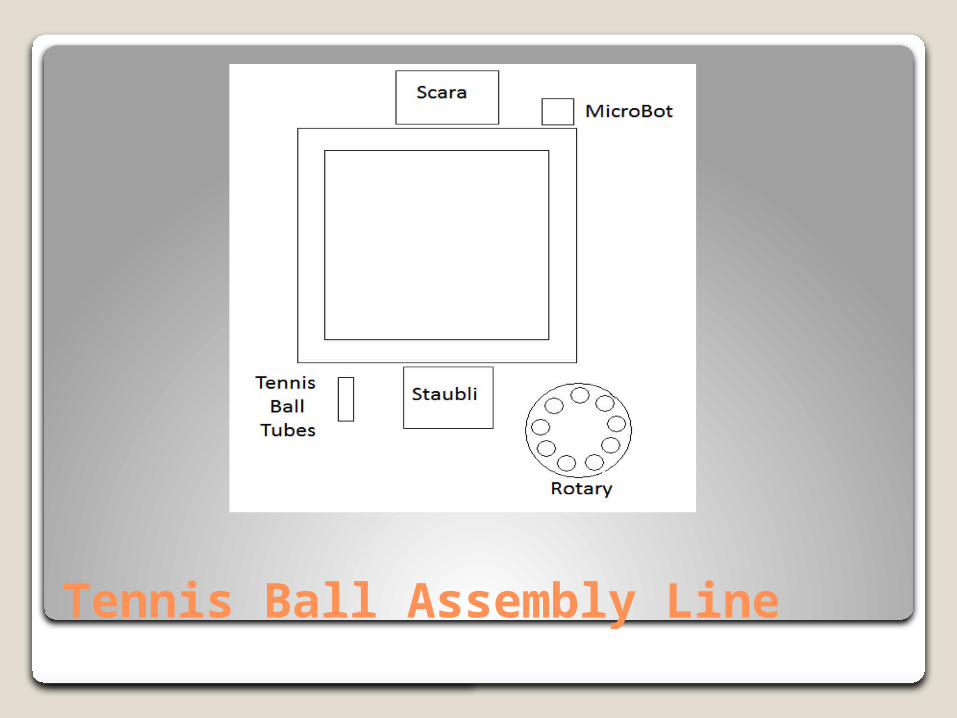
Tennis Ball Assembly Line
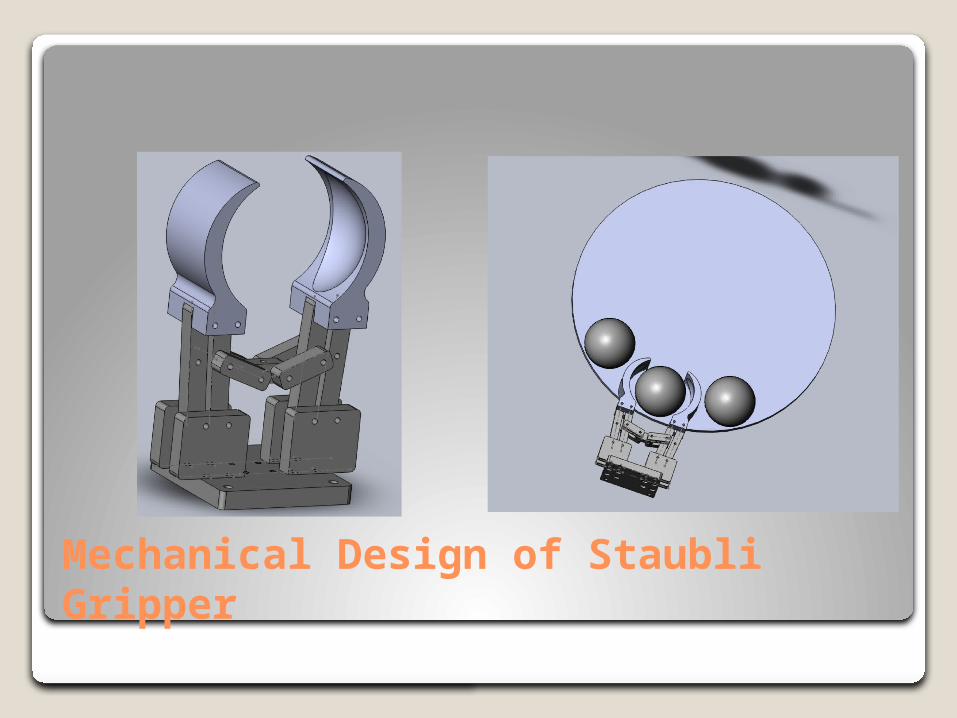
Mechanical Design of Staubli Gripper
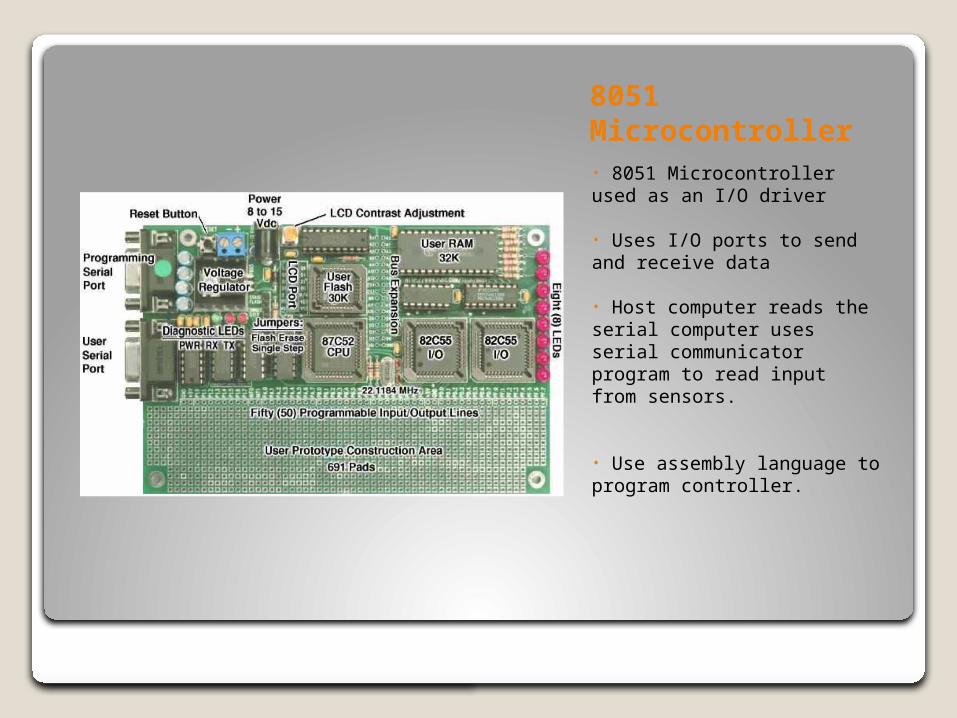
8051 Microcontroller• 8051 Microcontroller used as an I/O driver
• Uses I/O ports to send and receive data
• Host computer reads the serial computer uses serial communicator program to read input from sensors.
• Use assembly language to program controller.

I/O Control

Questions?
Related Documents