ASISTO: An Integrated Intelligent Assistant System for Power Plant Operation and Training Alberto Reyes, Pablo H. Ibarguengoytia, Francisco Elizalde, Liliana S´ anchez and Alondra Nava Instituto de Investigaciones El´ ectricas, M´ exico Email: {areyes, pibar, fef, liliana.sanchez, alondra.nava}@iie.org.mx Abstract— In this paper we present ASISTO, an intelligent assis- tant system for power plant operation and training based on probabilistic graphical models. Its main advantage is that it provides on-line guidance in the form of ordered recommendations, sensor validation capabilities, and explanation features, all for uncertain environments. The system allows dealing with abnor- mal situations, non-expected events, or the occurrence of process transients. The different modules of the sys- tem are based on Markov decision processes, Bayesian networks, and knowledge representation using the object–oriented paradigm. Functional results for each component of ASISTO using a power plant simulator are also presented. Index Terms—Intelligent Assistant Systems, power plants, probabilistic graphical models. I. I NTRODUCTION Modern power plants are following some clear tendencies. First, they are very complex processes working close to their limits, with problems and unexpected disturbances. Second, they are highly automated and instrumented, leaving the oper- ator with very few decisions. Third, plant operators are faced with a large amount information based on which they have determine the state of the process. However, there still exist some maneuvers that require the experience and ability of the operator. To support such decisions, automatic assistants exist that i) provide operators with a list of suggested commands [1], ii) detect possible failures in process instrumentation [2], and iii) explain the suggestions provided by the system for training purposes [3]. Intelligent Assistant Systems (IAS) are knowledge-based systems for the decision support. They should provide users with accurate information at the right moment, and do sug- gestions and criticisms during the decision making process [4]. The basic functions of an IAS are: knowledge acquisition and representation, simulation, test case generation, problem solving, and knowledge transfer through explanations to users [5]. Among the most representative work in the field of intelligent assistants, the following systems can be found: ASTRAL [6], which is a simulator-based assistant for power operator’s training. SOCRATES [7] is a real time assistant for control center operators in alarm processing and energy restoration. SART [8] is a traffic control support system for the french subway system, which implements an intelligent tutor. In this work we present ASISTO, an intelligent assistant system for power plant operators and training based on prob- abilistic graphical models. The paper is organized in two big blocks: i) module description and ii) functional results. The last section establishes some conclusions and future work. II. PROBLEM DOMAIN In order to illustrate how important the decisions of a human operator are, we have selected the steam generation process of a combined cycle power plant as a problem domain. In this domain, a heat recovery steam generator (HRSG) recovers residual energy from the exhaust gases of a gas turbine to generate high pressure (Pd) steam in a special tank (steam drum). The recirculation pump is a device that extracts residual water from the steam drum to keep a water supply in the HRSG (Ffw). The result of this process is a high- pressure steam flow (Fms) that keeps running a steam turbine to produce electric energy (g) in a power generator. The main control elements associated are the feed-water valve (fwv) and main steam valve (msv). A simplified diagram of the steam generation system is shown in Fig. 1. During normal operation, the conventional feedwater control system commands the feedwater control valve to regulate the Fig. 1. Simplified diagram of the steam generation system showing its main components, control devices and instrumentation. The gas turbine connection is not shown.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ASISTO: An Integrated Intelligent Assistant System
for Power Plant Operation and Training
Alberto Reyes, Pablo H. Ibarguengoytia, Francisco Elizalde, Liliana Sanchez and Alondra Nava
Instituto de Investigaciones Electricas, Mexico
Email: {areyes, pibar, fef, liliana.sanchez, alondra.nava}@iie.org.mx
Abstract—
In this paper we present ASISTO, an intelligent assis-tant system for power plant operation and trainingbased on probabilistic graphical models. Its mainadvantage is that it provides on-line guidance in theform of ordered recommendations, sensor validationcapabilities, and explanation features, all for uncertainenvironments. The system allows dealing with abnor-mal situations, non-expected events, or the occurrenceof process transients. The different modules of the sys-tem are based on Markov decision processes, Bayesiannetworks, and knowledge representation using theobject–oriented paradigm. Functional results for eachcomponent of ASISTO using a power plant simulatorare also presented.
Index Terms—Intelligent Assistant Systems, power plants,probabilistic graphical models.
I. INTRODUCTION
Modern power plants are following some clear tendencies.
First, they are very complex processes working close to their
limits, with problems and unexpected disturbances. Second,
they are highly automated and instrumented, leaving the oper-
ator with very few decisions. Third, plant operators are faced
with a large amount information based on which they have
determine the state of the process. However, there still exist
some maneuvers that require the experience and ability of the
operator. To support such decisions, automatic assistants exist
that i) provide operators with a list of suggested commands
[1], ii) detect possible failures in process instrumentation [2],
and iii) explain the suggestions provided by the system for
training purposes [3].
Intelligent Assistant Systems (IAS) are knowledge-based
systems for the decision support. They should provide users
with accurate information at the right moment, and do sug-
gestions and criticisms during the decision making process
[4]. The basic functions of an IAS are: knowledge acquisition
and representation, simulation, test case generation, problem
solving, and knowledge transfer through explanations to users
[5]. Among the most representative work in the field of
intelligent assistants, the following systems can be found:
ASTRAL [6], which is a simulator-based assistant for power
operator’s training. SOCRATES [7] is a real time assistant
for control center operators in alarm processing and energy
restoration. SART [8] is a traffic control support system for
the french subway system, which implements an intelligent
tutor.
In this work we present ASISTO, an intelligent assistant
system for power plant operators and training based on prob-
abilistic graphical models. The paper is organized in two big
blocks: i) module description and ii) functional results. The
last section establishes some conclusions and future work.
II. PROBLEM DOMAIN
In order to illustrate how important the decisions of a human
operator are, we have selected the steam generation process
of a combined cycle power plant as a problem domain.
In this domain, a heat recovery steam generator (HRSG)
recovers residual energy from the exhaust gases of a gas
turbine to generate high pressure (Pd) steam in a special tank
(steam drum). The recirculation pump is a device that extracts
residual water from the steam drum to keep a water supply
in the HRSG (Ffw). The result of this process is a high-
pressure steam flow (Fms) that keeps running a steam turbine
to produce electric energy (g) in a power generator. The main
control elements associated are the feed-water valve (fwv) and
main steam valve (msv). A simplified diagram of the steam
generation system is shown in Fig. 1.
During normal operation, the conventional feedwater control
system commands the feedwater control valve to regulate the
Fig. 1. Simplified diagram of the steam generation system showing its maincomponents, control devices and instrumentation. The gas turbine connectionis not shown.

steam drum level. However, when a partial or total electric load
rejection is presented this traditional control loop is not longer
capable to stabilize the drum level. In this case, the steam-
water equilibrium point moves, causing an enthalpy change
of both fluids (steam and water). Consequently, the enthalpy
change causes an increment in the water level because of a
strong water displacement to the steam drum. The control
system reacts closing the feedwater control valve. However a
water increament is needed instead of a feedwater decrement.
Under these circumstances, the participation of a human
operator is necessary to help the control system to decide the
actions that should be taken in order to overcome the transient.
On the other hand, the process instrumentation in the
system, i.e. valve positioners, level or pressure sensors, could
produce noisy information or simply fail during normal op-
eration such that this would affect the operator performance
when making decisions.
III. ASISTO
ASISTO is an intelligent assistant system (standing for
Operation ASSISTant in Spanish) for training and on-line
assistance in the power plant domain. The intelligent system is
composed of the following modules: i) recommender system,
ii) diagnosis system, and iii) explanations system. It has two
different operation modes: operation assistant and operators
training. In the operation assistance mode, it uses the rec-
ommendation and the diagnosis modules. The training mode
functionally is a replica of the operation assistance with the
difference that it includes an instructor console conected to
a plant simulator aimed to set failures and change operation
conditions with learning purposes.
A. Recommender system
The decision making process in a control room can be
modelled as a sequential decision problem under uncertainty
with an optimization criteria such as the maximation of electric
power or the security in the operation of certain equipment.
In a sequential decision problem a decision maker executes
and action to produce a state transition. In the resulting new
state the decision maker again executes another action and so
on until getting an absorbing state. Thus, we decided to use
the factored Markov decision processes (MDP) approach as it
allows generating an optimal policy function that maximizes
the expected utility in the form of textual recommendations.
Formally, a factored MDP is represented as a finite set of
factored states (state variables), a finite set of actions, an im-
mediate reward function, and a transition model that denotes,
as a probabilistic distribution, the impact of actions on the state
transition. For further details about the theory under the MDP
approach and factored representations please refer to [9], [10]
In total, the ASISTO’s recommender system is able to
use sets of 5 or 9 actions. The possible actions are to
open or close fwv and msv, their combinations, and do
nothing (null action). A factored state is an instantiation of
the ffw, pd, fms, g, and d variables. The transition model
for each action is represented by a dynamic Bayesian network
Fig. 2. The user interface is the link between the recommender system andthe operator. It includes supervision and manual control capabilities.
which was approximated using data for minimum, medium
and nominal load conditions. The reward function awards
operation zones that match with those recommended by the
steam drum manufacturer, and also awards those operation
conditions where the plant produce a maximum electric power.
The transition model was implemented in Elvira [11] (which
was extended to compute Dynamic Bayesian Networks) and
the reward function was implemented using Weka [12]. The
transition and reward functions are effectively learned using
the K2 algorithm available in Elvira, and the reward function
using a Java implementation of the C4.5 algorithm available
in Weka (J4.8). A proprietary planning tool uses these models
and, through its inference algorithms, builds an optimal policy
plant state-recommendation. A more detailed description about
how to learn factored MDP models might be found in [13].
The recommender system obtains a plant state and then
it queries the policy function to obtain a recommendation.
Both, current state and recommendation, are shown graphically
through the user interface to the operator who finally decides
whether or not to execute the recommended command. The top
part of figure 2 shows the recommendation “open feedwater
valve FWV” in a text area.
B. Diagnosis system
The diagnosis system in ASISTO was mainly defined as a
sensor validation system, i.e., a system that detects deviations
of the normal behavior of the sensors in the domain. In fact,
the sensors in this diagnosis module might be the sensors
themselves, the feedback signals of actuators and other process
variables. The term sensor is used in this paper to represent
undistinguishably all these variables.
The sensor validation system utilizes a probabilistic model
to represent the relations among all the sensors [14]. Specif-
ically, this model is a Bayesian network learned through
process historical data and experts advice. In this project, the
historical data are obtained using a simulator.
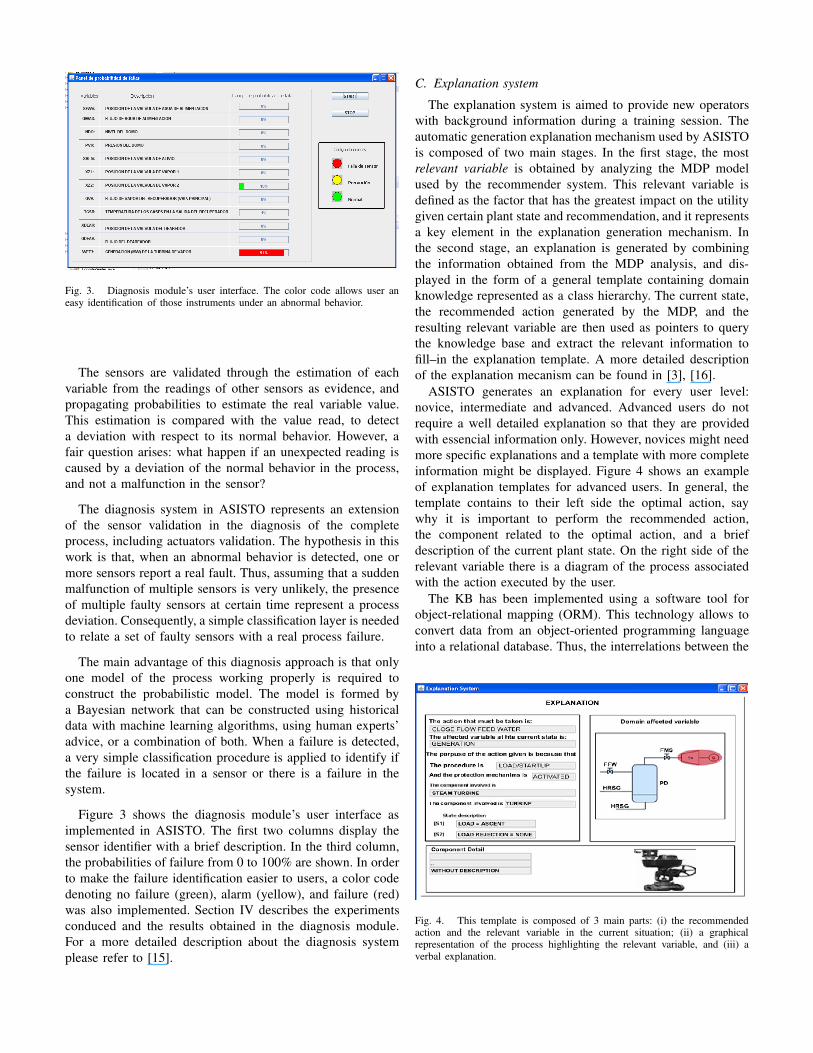
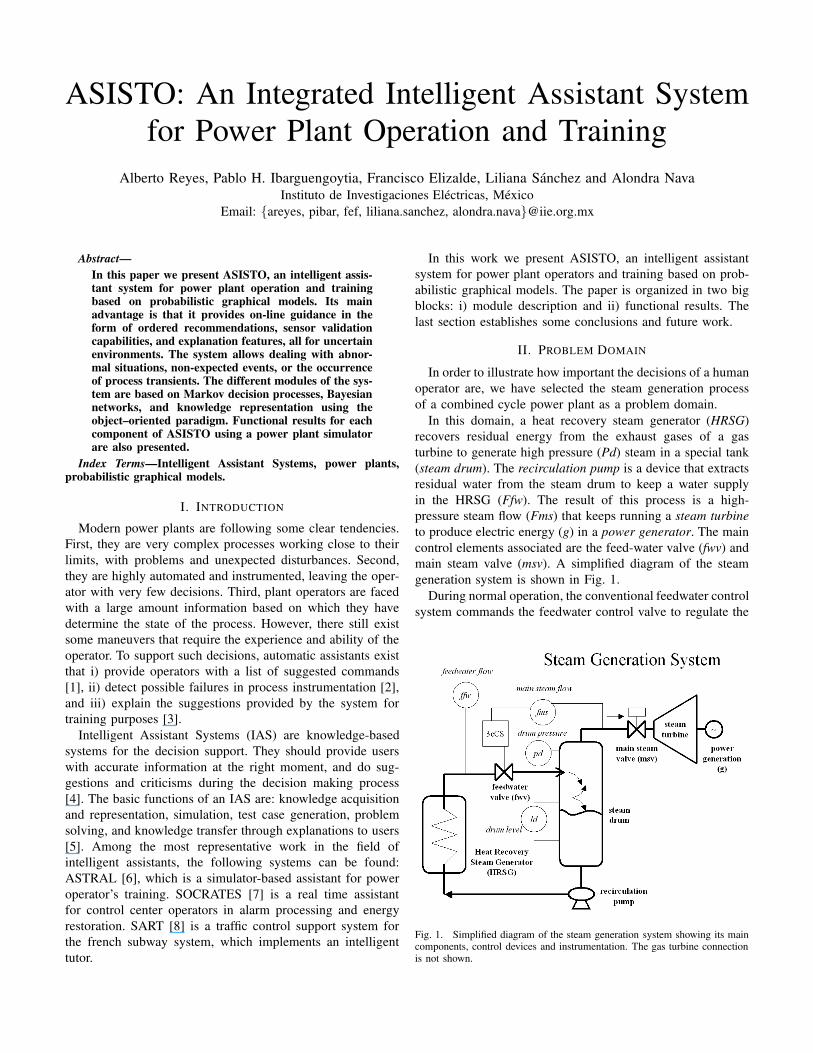
Fig. 3. Diagnosis module’s user interface. The color code allows user aneasy identification of those instruments under an abnormal behavior.
The sensors are validated through the estimation of each
variable from the readings of other sensors as evidence, and
propagating probabilities to estimate the real variable value.
This estimation is compared with the value read, to detect
a deviation with respect to its normal behavior. However, a
fair question arises: what happen if an unexpected reading is
caused by a deviation of the normal behavior in the process,
and not a malfunction in the sensor?
The diagnosis system in ASISTO represents an extension
of the sensor validation in the diagnosis of the complete
process, including actuators validation. The hypothesis in this
work is that, when an abnormal behavior is detected, one or
more sensors report a real fault. Thus, assuming that a sudden
malfunction of multiple sensors is very unlikely, the presence
of multiple faulty sensors at certain time represent a process
deviation. Consequently, a simple classification layer is needed
to relate a set of faulty sensors with a real process failure.
The main advantage of this diagnosis approach is that only
one model of the process working properly is required to
construct the probabilistic model. The model is formed by
a Bayesian network that can be constructed using historical
data with machine learning algorithms, using human experts’
advice, or a combination of both. When a failure is detected,
a very simple classification procedure is applied to identify if
the failure is located in a sensor or there is a failure in the
system.
Figure 3 shows the diagnosis module’s user interface as
implemented in ASISTO. The first two columns display the
sensor identifier with a brief description. In the third column,
the probabilities of failure from 0 to 100% are shown. In order
to make the failure identification easier to users, a color code
denoting no failure (green), alarm (yellow), and failure (red)
was also implemented. Section IV describes the experiments
conduced and the results obtained in the diagnosis module.
For a more detailed description about the diagnosis system
please refer to [15].
C. Explanation system
The explanation system is aimed to provide new operators
with background information during a training session. The
automatic generation explanation mechanism used by ASISTO
is composed of two main stages. In the first stage, the most
relevant variable is obtained by analyzing the MDP model
used by the recommender system. This relevant variable is
defined as the factor that has the greatest impact on the utility
given certain plant state and recommendation, and it represents
a key element in the explanation generation mechanism. In
the second stage, an explanation is generated by combining
the information obtained from the MDP analysis, and dis-
played in the form of a general template containing domain
knowledge represented as a class hierarchy. The current state,
the recommended action generated by the MDP, and the
resulting relevant variable are then used as pointers to query
the knowledge base and extract the relevant information to
fill–in the explanation template. A more detailed description
of the explanation mecanism can be found in [3], [16].
ASISTO generates an explanation for every user level:
novice, intermediate and advanced. Advanced users do not
require a well detailed explanation so that they are provided
with essencial information only. However, novices might need
more specific explanations and a template with more complete
information might be displayed. Figure 4 shows an example
of explanation templates for advanced users. In general, the
template contains to their left side the optimal action, say
why it is important to perform the recommended action,
the component related to the optimal action, and a brief
description of the current plant state. On the right side of the
relevant variable there is a diagram of the process associated
with the action executed by the user.
The KB has been implemented using a software tool for
object-relational mapping (ORM). This technology allows to
convert data from an object-oriented programming language
into a relational database. Thus, the interrelations between the
Fig. 4. This template is composed of 3 main parts: (i) the recommendedaction and the relevant variable in the current situation; (ii) a graphicalrepresentation of the process highlighting the relevant variable, and (iii) averbal explanation.
elements of a combined cycle plant represented in the KB
profit the advantages of the data base models. This format
allows to represent explanations for operators training and
stores information such as variables, additional components
of the recommended actions and procedures involved (fig-
ure 5). Through this model, it is possible to have the domain
knowledge centralized so that an easy and efficient knowledge
manipulation can be possible for a specific user.
Fig. 5. The KB, represented as a class hierarchy, is divided in 3 parts: (i)actions, (ii) components, and (iii) variables.
IV. EXPERIMENTAL RESULTS
ASISTO has been tested using a simulator which is capable
to partially reproduce the operation of a combined cycle power
plant, in particular, the steam generation process described in
section II. The simulator is provided with controls for setting
power conditions in the gas and steam turbines (nominal load,
medium load, minimum load, hot standby, low speed, and
start-up). Besides, it can emulate white noise in sensors and
adjust the simulation speed for a better proccess perspective.
It also provides an operation panel to set load demands, unit
trips, shutdowns, and other high-level operations in different
subsystems. It includes a visualization tool for tracking the
behavior of user-selected variables in time, and recording
historical data.
We evaluated the functionality of the operation assistant
and the training modes with users through their main former
components: the recommender system, the diagnosis system,
and the explanation system.
A. Recommender system
The recommender system tests consisted in showing the
behavior of the expected utility as a user follows or not the
recommendations displayed by the system. To do this, we
plotted the expected utility under two different scenarios. In
the first one, the plant state is modified by a simulated process
transient and the user manually has to set the plant into optimal
conditions. In a second scenario, a user manually avoids a
decrement of the expected utility by executing the suggested
actions under a load rejection (disturbance).
The tests were performed by operator trainees of different
progress level. The novices operated the control valves at
minimum load conditions, the intermediate users made it at
medium load, and the advanced users maneuvered the plant
under nominal load conditions. In all cases, the opening step
of valves msv and fwv was 2%.
Figure 6 shows how the expected utiliy (red line) decreases
after an induced transient (first drop) under medium load
conditions while figure 7 shows how it does it after a load
rejection under minimum load conditions. The little blue dots
represent the recommended command and the little green
triangles donotates the executed actions (right vertical axis).
In both scenarios is demonstrated that the operator manage to
restore the utility until a maximum by following the suggested
actions (recommended commands matching with the executed
action). Everytime the user did not follow the instructions
(recommended commands differing to the executed action),
the utility decreased again. Notice that the decrement of utility
after a transient is not as significant as after a load rejection.
This is because of the difference in load conditions and due
that a disturbance produces a higher drop in the utility than
a simple transient. In these two examples, the impact of
following the recommendations is evident and significant.
Fig. 6. Expected utility response after a process transient, recommendedactions and executed actions under a medium load condition.
Fig. 7. Expected utility response after a load disturbance, recommendedactions and executed actions under a minimum load condition.
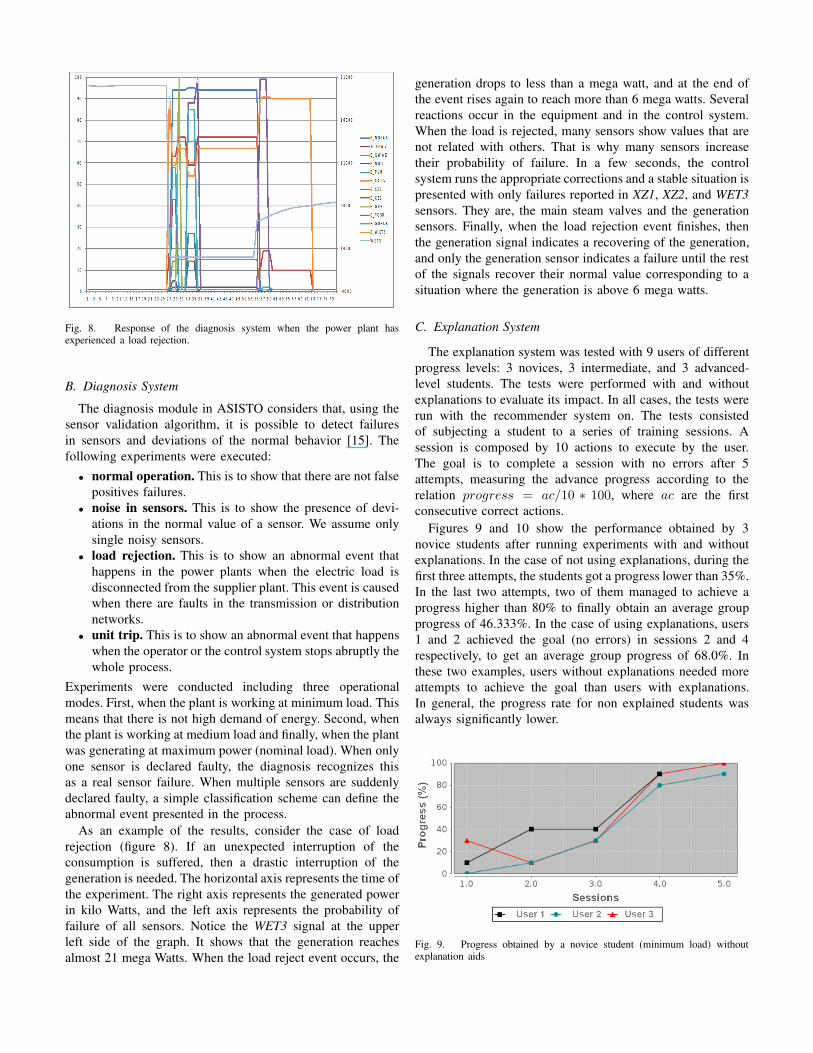
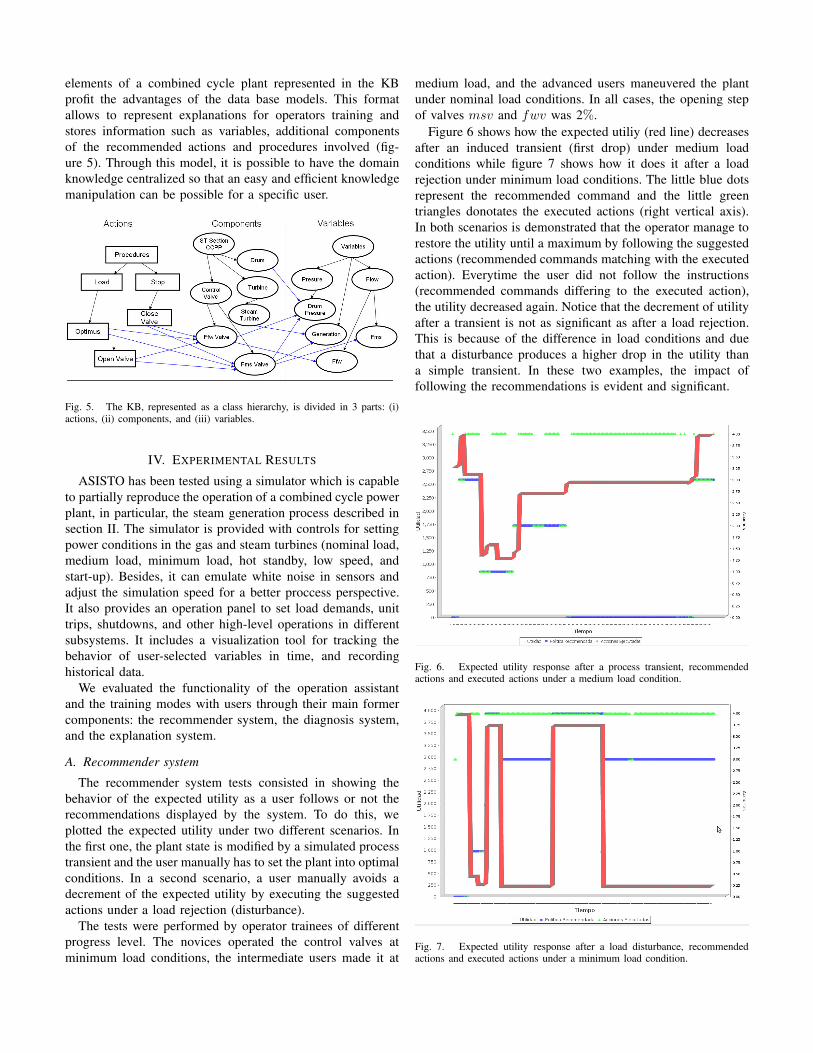
Fig. 8. Response of the diagnosis system when the power plant hasexperienced a load rejection.
B. Diagnosis System
The diagnosis module in ASISTO considers that, using the
sensor validation algorithm, it is possible to detect failures
in sensors and deviations of the normal behavior [15]. The
following experiments were executed:
• normal operation. This is to show that there are not false
positives failures.
• noise in sensors. This is to show the presence of devi-
ations in the normal value of a sensor. We assume only
single noisy sensors.
• load rejection. This is to show an abnormal event that
happens in the power plants when the electric load is
disconnected from the supplier plant. This event is caused
when there are faults in the transmission or distribution
networks.
• unit trip. This is to show an abnormal event that happens
when the operator or the control system stops abruptly the
whole process.
Experiments were conducted including three operational
modes. First, when the plant is working at minimum load. This
means that there is not high demand of energy. Second, when
the plant is working at medium load and finally, when the plant
was generating at maximum power (nominal load). When only
one sensor is declared faulty, the diagnosis recognizes this
as a real sensor failure. When multiple sensors are suddenly
declared faulty, a simple classification scheme can define the
abnormal event presented in the process.
As an example of the results, consider the case of load
rejection (figure 8). If an unexpected interruption of the
consumption is suffered, then a drastic interruption of the
generation is needed. The horizontal axis represents the time of
the experiment. The right axis represents the generated power
in kilo Watts, and the left axis represents the probability of
failure of all sensors. Notice the WET3 signal at the upper
left side of the graph. It shows that the generation reaches
almost 21 mega Watts. When the load reject event occurs, the
generation drops to less than a mega watt, and at the end of
the event rises again to reach more than 6 mega watts. Several
reactions occur in the equipment and in the control system.
When the load is rejected, many sensors show values that are
not related with others. That is why many sensors increase
their probability of failure. In a few seconds, the control
system runs the appropriate corrections and a stable situation is
presented with only failures reported in XZ1, XZ2, and WET3
sensors. They are, the main steam valves and the generation
sensors. Finally, when the load rejection event finishes, then
the generation signal indicates a recovering of the generation,
and only the generation sensor indicates a failure until the rest
of the signals recover their normal value corresponding to a
situation where the generation is above 6 mega watts.
C. Explanation System
The explanation system was tested with 9 users of different
progress levels: 3 novices, 3 intermediate, and 3 advanced-
level students. The tests were performed with and without
explanations to evaluate its impact. In all cases, the tests were
run with the recommender system on. The tests consisted
of subjecting a student to a series of training sessions. A
session is composed by 10 actions to execute by the user.
The goal is to complete a session with no errors after 5
attempts, measuring the advance progress according to the
relation progress = ac/10 ∗ 100, where ac are the first
consecutive correct actions.
Figures 9 and 10 show the performance obtained by 3
novice students after running experiments with and without
explanations. In the case of not using explanations, during the
first three attempts, the students got a progress lower than 35%.
In the last two attempts, two of them managed to achieve a
progress higher than 80% to finally obtain an average group
progress of 46.333%. In the case of using explanations, users
1 and 2 achieved the goal (no errors) in sessions 2 and 4
respectively, to get an average group progress of 68.0%. In
these two examples, users without explanations needed more
attempts to achieve the goal than users with explanations.
In general, the progress rate for non explained students was
always significantly lower.
Fig. 9. Progress obtained by a novice student (minimum load) withoutexplanation aids

Fig. 10. Progress obtained by a novice student (minimum load) assisted withexplanations
V. CONCLUSIONS AND FUTURE WORK
This paper introduced ASISTO, an integrated intelligent
assistant for operation and training. We have integrated, in
one demostration system, capabilities of recommendation,
diagnosis and explanation. The academic software for planing,
learning and knowledege representation used in ASISTO is
also a well known and robust platform for research in artificial
intelligence.
The recommendation system allows to guide the operator’s
decisions towards a better operation practices. The results
demonstrated that it is possible to maximize utility and security
in a power plant by following the ASISTO’s recommended
commands. We are currently extending the recommender
system to consider partial observability. POMDPs [17] extend
the MDP framework with an observation function, which
stochastically relates observations to states. No global changes
to the ASISTO architecture have to be made.
The diagnosis system shows the feasibility of using the
sensor validation algorithm to find not only failures in sensors,
but finding deviations in the process with respect to its normal
behavior. This paper shows two abnormal events, one in the
power plant and other in the classification of faulty sensors
detected. Future events need to be identified to complete a case
base with the faulty sensors signature for a specific event.
When running experiments, operators trainees experienced
improvements in their general performance after using the
explanation system. We plan to conduct additional user study
tests using the explanation module in order to demonstrate
that the quality of explanations generated automatically is of
a very high standard when compared against those given by
an domain expert.
ASISTO more than a system is a demonstration of the
application of probabilistic graphical models to a power plant
domain. So, it might be used in related domains with existance
of uncertainty and optimization requirements.
ACKNOWLEDGMENTS
This work has been supported by the Instituto de In-
vestigaciones Electricas-Mexico (project no. 13773) and the
International Cooperation Programme for the Promotion of
Scientific and Tecnological Research of the European Union
and Mexico (FONCICYT project no. 95185).
REFERENCES
[1] A. Reyes, L. E. Sucar, E. Morales, and P. H. Ibarguengoytia, “AbstractMDPs using qualitative change predicates: An application in powergeneration,” in Planning under Uncertainty in Real-World ProblemsWorkshop. Neural Information Processing Systems (NIPS-03), Vancou-ver CA, Winter 2003.
[2] E. Morales and P. Ibarguengoytia, “On-line diagnosis using influencediagrams,” in Advances in Artificial Intelligence - MICAI 2004, LNAI2313, G. A. L.E. Sucar R. Monroy and e. H. Sossa, Eds. BerlinHeidelberg: Springer-Verlag, 2004, pp. 546–554.
[3] F. Elizalde, L. E. Sucar, M. Luque, J. Diez, and A. Reyes, “Policyexplanation in factored Markov decision processes,” in Proceedings of
the 4th European Workshop on Probabilistic Graphical Models (PGM
2008), Hirtshals, Denmark, September 2008, pp. 97–104.[4] A. Aamodt and M. Nygard, “Different roles and mutual dependencies
of data, information and knowledge: An AI perspective on their inte-gration,” Data and Knowledge Engineering (North-Holland Elsevier),vol. 16, pp. 191–222, 1995.
[5] P. Brezillion and E. Cases, “Cooperating for assisting intelligentlyoperators,” in Proceedings of COOP-95. INRIA Ed., 1995, pp. 370–384.
[6] M. Caimi, C. Lanza, and B. Ruiz-Ruiz, “An assistant for simulator-basedtraining of plant operator,” Maria Curie Fellowships Annual Report,Tech. Rep., 1999.
[7] Z. Vale, C. Ramos, A. Silva, L. Faria, J. Santos, F. Fernandez, C. Rosado,and A. Marques, “SOCRATES, an integrated intelligent system forpower system control center operator assistance and training,” in Pro-
ceedings of the International Conference on Artificial Intelligence and
Soft Computing (IASTED), 1998, pp. 27–30.[8] P. Brezillion, C. Gentile, I. Saker, and M. Secron, “SART: A system for
supporting operators with contextual knowledge,” in Proceedings of the
International and Interdisciplinary Conference on Modeling and Using
Context (CONTEXT-97), Rio de Janeiro, Brasil, February 1997.[9] M. Puterman, Markov Decision Processes. New York: Wiley, 1994.[10] C. Boutilier, T. Dean, and S. Hanks, “Decision-theoretic planning: struc-
tural assumptions and computational leverage,” Journal of AI Research,vol. 11, pp. 1–94, 1999.
[11] E. Consortium, “Elvira: an environment for creating and using proba-bilistic graphical models,” U. de Granada, Spain, Tech. Rep., 2002.
[12] I. Witten and E. Frank, Data Mining: Practical Machine Learning Toolsand Techniques, 2nd Ed. San Francisco, USA: Morgan Kaufmann,2005.
[13] A. Reyes, M. T. J. Spaan, and L. E. Sucar, “An intelligent assistant forpower plants based on factored MDPs,” in IEEE Int. Conf. on Intelligent
System Applications to Power Systems: ISAP 2009, Curitiba, Brazil,November 2009.
[14] P. H. Ibarguengoytia, S. Vadera, and L. Sucar, “A probabilistic modelfor information and sensor validation,” The Computer Journal, vol. 49,no. 1, pp. 113–126, January 2006.
[15] P. H. Ibarguengoytia and A. Reyes, “On-line diagnosis of a powergeneration process using probabilistic models,” in 16th Intl. Conf.on
Intelligent Systems Application to Power Systems, ISAP-2011. Her-sonissos, Crete Greece: IEEE PES, 2011.
[16] F. elizalde, E. Sucar, J. Noguez, and A. Reyes, “Integrating probabilisticand knowledge-based systems for explanation generation,” in Proceed-
ings of 3rd International Workshop on Explanation-aware Computing,
Exact08, vol. CEUR Workshop Proceedings, 2008, pp. 25–36.[17] L. P. Kaelbling, M. L. Littman, and A. R. Cassandra, “Planning and
acting in partially observable stochastic domains,” Artificial Intelligence,vol. 101, pp. 99–134, 1998.
Related Documents











