Artificial Intelligence CS 165A Tuesday, November 20, 2007 Knowledge Representation (Ch 10) Uncertainty (Ch 13)

Artificial Intelligence CS 165A Tuesday, November 20, 2007 Knowledge Representation (Ch 10) Uncertainty (Ch 13)
Jan 03, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Artificial Intelligence
CS 165A
Tuesday, November 20, 2007
Knowledge Representation (Ch 10) Uncertainty (Ch 13)
2
Notes
• HW #4 due by noon tomorrow
• Reminder: Final exam December 14, 4-7pm– Review in class on Dec. 6th
3
Situation Calculus – actions, events
• “Situation Calculus” is a way of describing change over time in first-order logic– Fluents: Functions or predicates that can vary over time have an
extra argument, Si (the situation argument)
Predicate(args, Si) Location of an agent, aliveness, changing properties, ...
– The Result function is used to represent change from one situation to another resulting from an action (or action sequence)
Result(GoForward, Si) = Sj
“Sj is the situation that results from the action GoForward applied to situation Si
Result() indicates the relationship between situations
Review

4
Situation Calculus
Represents the world in different “situations” and the relationship between situations
Review

5
Situation Calculus
Represents the world in different “situations” and the relationship between situations
Review

6
Examples
• How would you interpret the following sentences in First-Order Logic using situation calculus?
x, s Studying(x, s) Failed(x, Result(TakeTest, s))
x, s TurnedOn(x, s) LightSwitch(x) TurnedOff(x, Result(FlipSwitch, s))
Review
If you’re studying and then you take the test, you will fail.
(or) Studying a subject implies that you will fail the test for that subject.
If you flip the light switch when it is turned on, it will then be turned off.
7
There are other ways to deal with time
• Event calculus– Based on points in time rather than situations– Designed to allow reasoning over periods of time
Can represent actions with duration, overlapping actions, etc.
• Generalized events– Parts of a general “space-time chunk”
• Processes– Not just discrete events
• Intervals– Moments and durations of time
• Objects with state fluents– Not just events, but objects can also have time properties

8
Event calculus relations
• Initiates(e, f, t)– Event e at time t causes fluent f to become true
• Terminates(e, f, t)– Event e at time t causes fluent f to no longer be true
• Happens(e, t)– Event e happens at time t
• Clipped(f, t1, t2)
– f is terminated by some event sometime between t1 and t2

9
Generalized events
• An ontology of time that allows for reasoning about various temporal events, subevents, durations, processes, intervals, etc.
time
Australia
Space-time chunk

10
Time interval predicates
After(ReignOf(ElizabethII), ReignOf(GeorgeVI))
Overlap(Fifties, ReignOf(Elvis))
Start(Fifties) = Start(AD1950)
Meet(Fifties, Sixties)
Ex:

11
Objects with state fluents
President(USA)

12
Knowledge representation
• Chapter 10 covers many topics in knowledge representation, many of which are important to real, sophisticated AI reasoning systems– We’re only scratching the surface of this topic
– Best covered in depth in an advanced AI course and in context of particular AI problems
– Read through the Internet shopping world example in 10.5
• Now we move on to probabilistic reasoning, a different way of representing and manipulating knowledge– Chapters 13 and 14

13
Quick Review of Probability
From here on we will assume that you know this…

14
Probability notation and notes
• Probabilities of propositions
– P(A), P(the sun is shining)
• Probabilities of random variables
– P(X = x1), P(Y = y1), P(x1 < X < x2)
• P(A) usually means P(A = True) (A is a proposition, not a variable)
– This is a probability value
– Technically, P(A) is a probability function
• P(X = x1)
– This is a probability value (P(X) is a probability function)
• P(X)– This is a probability function or a probability density function
• Technically, if X is a variable, we should not write P(X) = 0.5
– But rather P(X = x1) = 0.5

15
Discrete and continuous probabilities
• Discrete: Probability function P(X, Y) is described by an MxN matrix of probabilities– Possible values of each: P(X=x1, Y=y1) = p1
– P(X=xi, Y=yj) = 1
– P(X, Y, Z) is an MxNxP matrix
• Continuous: Probability density function (pdf) P(X, Y) is described by a 2D function– P(x1 < X < x2, y1 < Y < y2) = p1
– P(X, Y) dX dY = 1

16
Discrete probability distribution
0
0.1
0.2
1 2 3 4 5 6 7 8 9 10 11 12
X
p(X)
1)( i
ixXp

17
Continuous probability distribution
0
0.2
0.4
1 2 3 4 5 6 7 8 9 10 11 12
X
p(X)
1)(
Xp

18
Continuous probability distribution
0
0.2
0.4
1 2 3 4 5 6 7 8 9 10 11 12
X
p(X)
aXp 8
6
)(P(X=5) = 0
P(X=x1) = 0
P(X=5) = ???

19
Three Axioms of Probability
1. The probability of every event must be nonnegative– For any event A, P(A) 0
2. Valid propositions have probability 1– P(True) = 1
– P(A A) = 1
3. For disjoint events A1, A2, …
– P(A1 A2 …) = P(A1) + P(A2) + …
• From these axioms, all other properties of probabilities can be derived.– E.g., derive P(A) + P(A) = 1

20
Some consequences of the axioms
• Unsatisfiable propositions have probability 0– P(False) = 0
– P(A A) = 0
• For any two events A and B– P(A B) = P(A) + P(B) – P(A B)
• For the complement Ac of event A– P(Ac) = 1 – P(A)
• For any event A– 0 P(A) 1
• For independent events A and B– P(A B) = P(A) P(B)

21
Venn Diagram
True
A BA B
Visualize: P(True), P(False), P(A), P(B), P(A), P(B),P(A B), P(A B), P(A B), …

22
Joint Probabilities
• A complete probability model is a single joint probability distribution over all propositions/variables in the domain
– P(X1, X2, …, Xi, …)
• A particular instance of the world has the probability
– P(X1=x1 X2=x2 … Xi=xi …) = p
• Rather than stating knowledge as– Raining WetGrass
• We can state it as– P(Raining, WetGrass) = 0.15
– P(Raining, WetGrass) = 0.01
– P(Raining, WetGrass) = 0.04
– P(Raining, WetGrass) = 0.8
0.8 0.04
0.01 0.15
WetGrass WetGrass
Raining
Raining

23
Conditional Probability
• Unconditional, or Prior, Probability– Probabilities associated with a proposition or variable, prior to any
evidence
– E.g., P(WetGrass), P(Raining)
• Conditional, or Posterior, Probability– Probabilities after evidence is gathered
– P(A | B) – “The probability of A given that we know B”
– After (posterior to) procuring evidence
– E.g., P(WetGrass | Raining)
)(
),()|(
YP
YXPYXP ),()()|( YXPYPYXP or
Assumes P(Y) nonzero
24
The chain rule
)()|(),( YPYXPYXP
),|()|()(
,
)()|(),|(
),(),|(),,(
YXZPXYPXP
lyequivalentor
ZPZYPZYXP
ZYPZYXPZYXP
By the Chain Rule
• Precedence: ‘|’ is lowest• E.g., P(X | Y, Z) means which?
P( (X | Y), Z )P(X | (Y, Z) )
Notes:
25
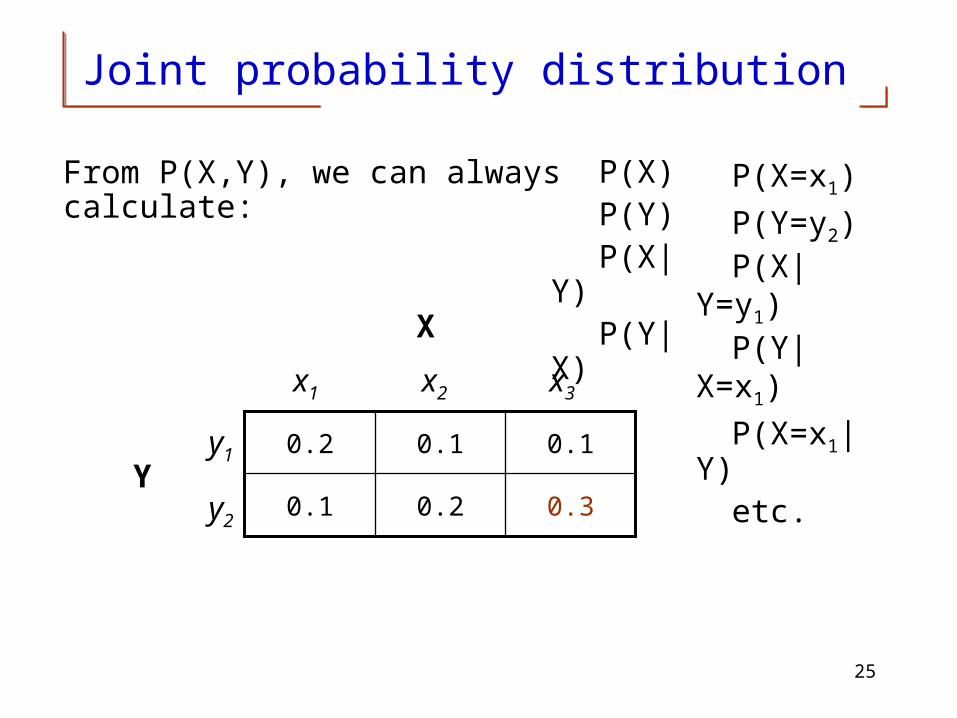
Joint probability distribution
From P(X,Y), we can always calculate: P(X)P(Y)P(X|Y)P(Y|X)
P(X=x1)
P(Y=y2)
P(X|Y=y1)
P(Y|X=x1)
P(X=x1|Y)etc.
0.30.20.1
0.10.10.2
X
Y
x1 x2 x3
y1
y2

26
0.2 0.1 0.1
0.1 0.2 0.3
x1 x2 x3
y1
y2
P(X,Y)
0.40.30.3
x1 x2 x3
P(X)
0.6
0.4y1
y2
P(Y)
0.50.3330.167
0.250.250.5
x1 x2 x3
y1
y2
P(X|Y)
0.750.6670.333
0.250.3330.667
x1 x2 x3
y1
y2
P(Y|X)P(X=x1,Y=y2) = ?
P(X=x1) = ?
P(Y=y2) = ?
P(X|Y=y1) = ?
P(X=x1|Y) = ?
27
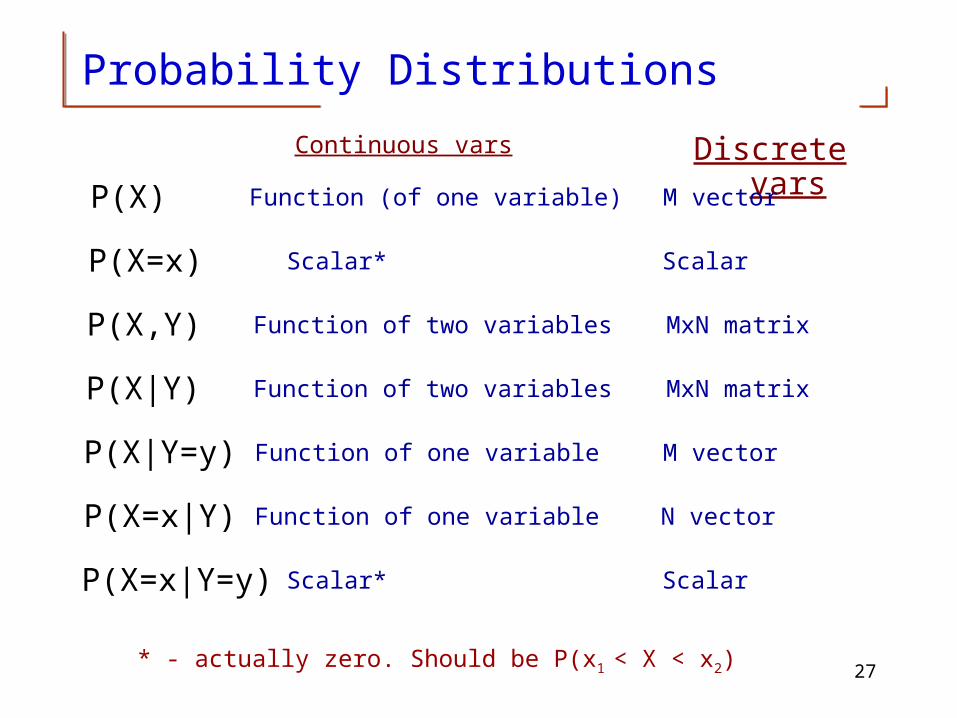
Probability Distributions
Continuous vars
Scalar* Scalar
Function of two variables MxN matrix
Function of two variables MxN matrix
Function of one variable M vector
Function of one variable N vector
Scalar* Scalar
Discrete vars
Function (of one variable) M vector
P(X=x)
P(X,Y)
P(X|Y)
P(X|Y=y)
P(X=x|Y)
P(X=x|Y=y)
P(X)
* - actually zero. Should be P(x1 < X < x2)

28
Bayes’ Rule
• Since
and
• Then
)()|(),( YPYXPYXP
)()|(),( XPXYPYXP
)(
)()|()|(
YP
XPXYPYXP Bayes’ Rule
)()|()()|( XPXYPYPYXP

29
Bayes’ Rule
• Similarly, P(X) conditioned on two variables:
),,|(
),,|(),,,|(),,,|(
32
31312321
N
NNN XXXP
XXXPXXXXPXXXXP
)|(
)|(),|(),|(
ZYP
ZXPZXYPZYXP
• Or N variables:
)|(
)|(),|(),|(
YZP
YXPYXZPZYXP
30
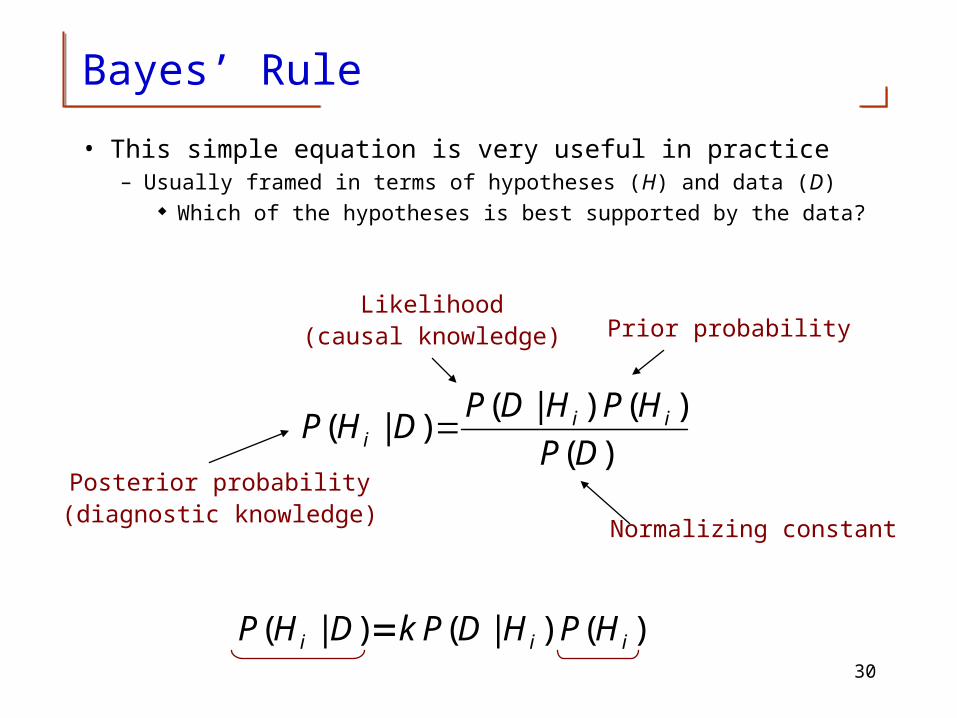
Bayes’ Rule
)(
)()|()|(
DP
HPHDPDHP ii
i Posterior probability
(diagnostic knowledge)
Likelihood(causal knowledge) Prior probability
• This simple equation is very useful in practice– Usually framed in terms of hypotheses (H) and data (D)
Which of the hypotheses is best supported by the data?
Normalizing constant
)()|()|( iii HPHDPkDHP

31
Bayes’ rule example: Medical diagnosis
• Meningitis causes a stiff neck 50% of the time
• A patient comes in with a stiff neck – what is the probability that he has meningitis?
• Need to know two things:– The prior probability of a patient having meningitis (1/50,000)
– The prior probability of a patient having a stiff neck (1/20)
• ?
• P(M | S) = (0.5)(0.00002)/(0.05) = 0.0002
)(
)()|()|(
SP
MPMSPSMP
32
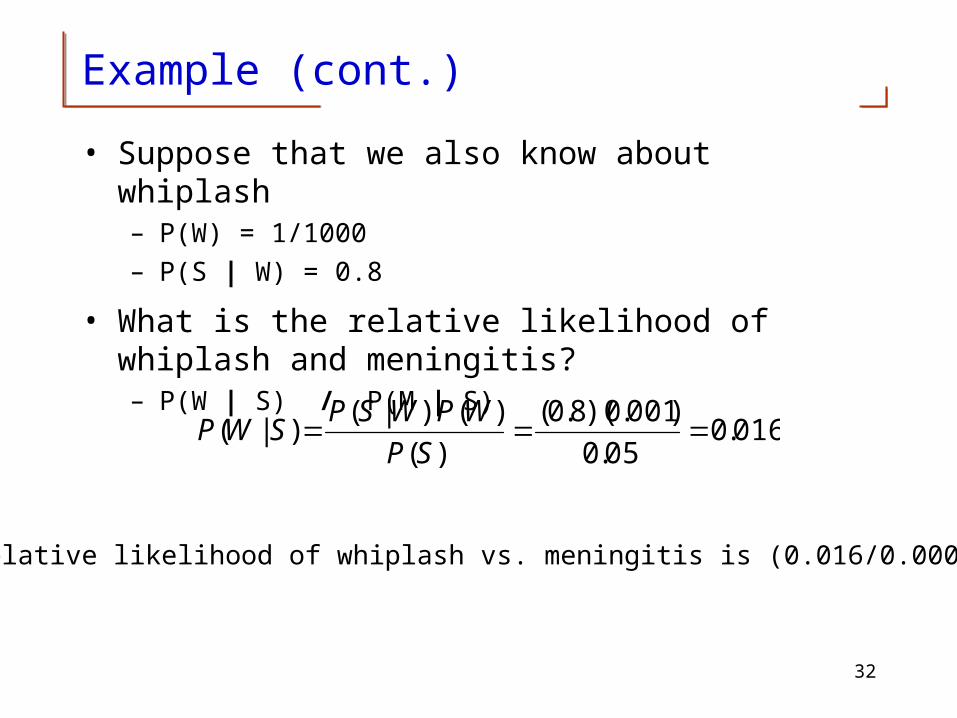
Example (cont.)
• Suppose that we also know about whiplash– P(W) = 1/1000
– P(S | W) = 0.8
• What is the relative likelihood of whiplash and meningitis?– P(W | S) / P(M | S)
016.005.0
)001.0)(8.0(
)(
)()|()|(
SP
WPWSPSWP
So the relative likelihood of whiplash vs. meningitis is (0.016/0.0002) = 80
33
A useful Bayes rule example
A test for a new, deadly strain of anthrax (that has no symptoms) is known to be 99.9% accurate. Should you get tested? The chances of having this strain are one in a million.
What are the random variables?A – you have anthrax (boolean)
T – you test positive for anthrax (boolean)
Notation: Instead of P(A=True) and P(A=False), we will write P(A) and P(A)
What do we want to compute?P(A|T)
What else do we need to know or assume?Priors: P(A) , P(A)
Given: P(T|A) , P(T|A), P(T|A), P(T|A)
A
T
A
TA
T
A
T
Possibilities

34
Example (cont.)
We know:Given: P(T|A) = 0.999, P(T|A) = 0.001, P(T|A) = 0.001, P(T|A)
= 0.999
Prior knowledge: P(A) = 10-6, P(A) = 1 – 10-6
Want to know P(A|T)P(A|T) = P(T|A) P(A) / P(T)
Calculate P(T) by marginalizationP(T) = P(T|A) P(A) + P(T|A) P(A) = (0.999)(10-6) + (0.001)(1 – 10-6)
0.001
So P(A|T) = (0.999)(10-6) / 0.001 0.001
Therefore P(A|T) 0.999
What if you work at a Post Office?

35All people
People without anthraxPeople with anthrax
Good T
Bad T(0.1%)
Related Documents











