APSC 111 Final Exam Workbook

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
APSC 111 Final Exam Workbook

Page 1
Section 1: Measurements and Vectors Vectors & Scalars A vector is a quantity that has both a magnitude (length/weight/temperature) and a direction. It is
denoted by: 𝐴.
A scalar is a quantity that only has a magnitude, and does not have a direction.
Addition/ Subtraction
𝐴 + �⃗⃗� = �⃗⃗� + 𝐴 = 𝐶 𝐶 − �⃗⃗� = 𝐴
Components of Vectors
𝑉𝑥⃗⃗⃗⃗ = 𝑉𝑐𝑜𝑠𝜃
𝑉𝑦⃗⃗ ⃗⃗ = 𝑉𝑠𝑖𝑛𝜃
Multiplication
Scalar Multiplication: i.e. b�⃗⃗⃗�
Dot Product i.e. �⃗⃗⃗� ∙ �⃗⃗⃗�
• -𝐴 ∙ �⃗⃗� = |𝐴||𝐵|𝑐𝑜𝑠𝜃
• 𝐴 ∙ �⃗⃗� = 𝐴𝑥𝐵𝑥 + 𝐴𝑦𝐵𝑦 + 𝐴𝑧𝐵𝑍
• note 𝐴 ∙ �⃗⃗� = �⃗⃗� ∙ 𝐴
• scalar
Cross Product i.e. �⃗⃗⃗�𝑿 �⃗⃗⃗�
• 𝐴 × �⃗⃗� = |𝐴||𝐵|𝑠𝑖𝑛𝜃
• 𝐴 × �⃗⃗� = (𝐴𝑦𝐵𝑧 − 𝐴𝑍𝐵𝑦)𝑖̂ + (𝐴𝑍𝐵𝑋 − 𝐴𝑋𝐵𝑍)𝑗̂ + (𝐴𝑥𝐵𝑦 − 𝐴𝑦𝐵𝑥)�̂�
• note 𝐴 × �⃗⃗� ≠ �⃗⃗� × 𝐴
• vector quantity (direction from right hand rule)
𝐴 �⃗⃗�
𝐶 𝐶
−�⃗⃗� 𝐴
�⃗⃗� 𝑉𝑦⃗⃗ ⃗⃗
𝑉𝑥⃗⃗⃗⃗
𝜃
Page 2
Section 2: Kinematics Kinematics is the study of how things move.
Linear Kinematics
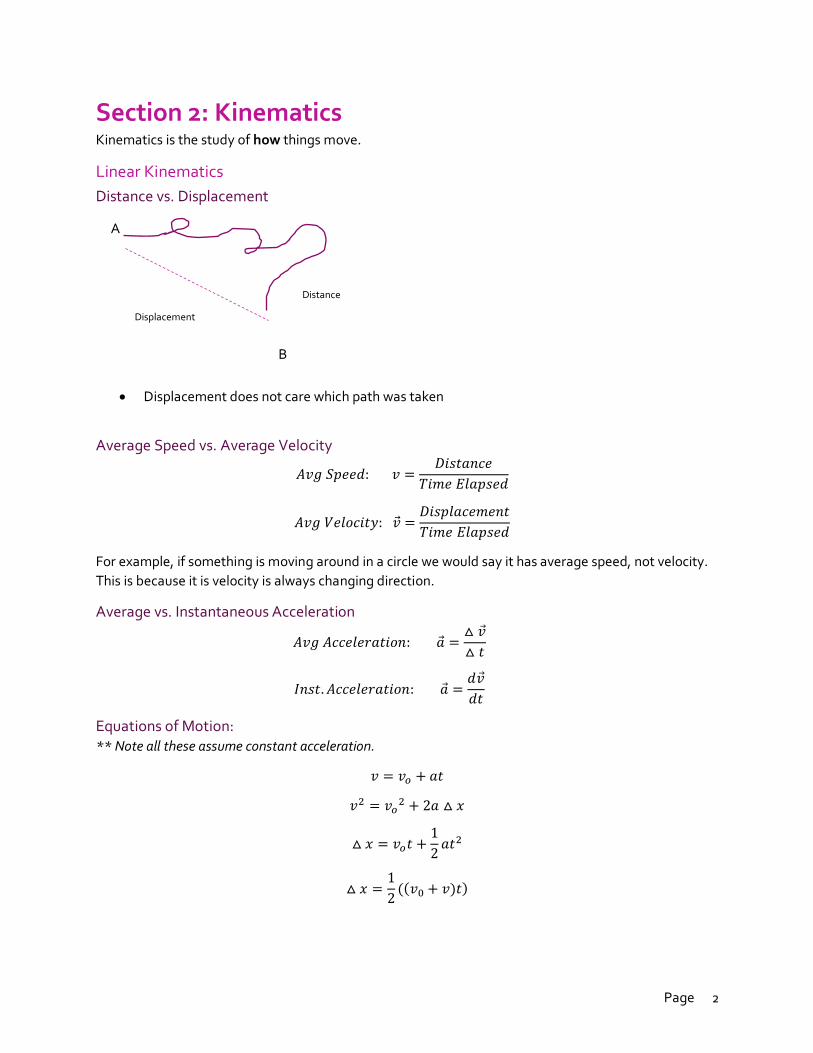
Distance vs. Displacement
• Displacement does not care which path was taken
Average Speed vs. Average Velocity
𝐴𝑣𝑔 𝑆𝑝𝑒𝑒𝑑: 𝑣 =𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒
𝑇𝑖𝑚𝑒 𝐸𝑙𝑎𝑝𝑠𝑒𝑑
𝐴𝑣𝑔 𝑉𝑒𝑙𝑜𝑐𝑖𝑡𝑦: �⃗� =𝐷𝑖𝑠𝑝𝑙𝑎𝑐𝑒𝑚𝑒𝑛𝑡
𝑇𝑖𝑚𝑒 𝐸𝑙𝑎𝑝𝑠𝑒𝑑
For example, if something is moving around in a circle we would say it has average speed, not velocity.
This is because it is velocity is always changing direction.
Average vs. Instantaneous Acceleration
𝐴𝑣𝑔 𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛: �⃗� =△ 𝑣
△ 𝑡
𝐼𝑛𝑠𝑡. 𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛: �⃗� =𝑑𝑣
𝑑𝑡
Equations of Motion: ** Note all these assume constant acceleration.
𝑣 = 𝑣𝑜 + 𝑎𝑡
𝑣2 = 𝑣𝑜2 + 2𝑎 △ 𝑥
△ 𝑥 = 𝑣𝑜𝑡 +1
2𝑎𝑡2
△ 𝑥 =1
2((𝑣0 + 𝑣)𝑡)
A
B
Displacement
Distance
Page 3
Projectile Motion Hints:
• Gravitational acceleration acts downwards at 9.8 m/s2
• There is no acceleration in the horizontal direction, therefore d=v/t can work for x-components.
• At max height, the vertical component of velocity is usually zero.
• If something is “dropped”, assume initial velocity is zero.
PRACTICE PROBLEM 1 A catcher arranges to catch a baseball dropped from a height of 50m above his glove. However, his friends substitute in a soft 250g grapefruit, so that it will smash apart when he catches it. His glove stops the grapefruit in 0.010 s. What average force does the glove exert on the grapefruit? (2013).
Circular Motion When traveling around a circle, we refer to the speed of the object. However, it can have an instantaneous
velocity which is always tangent to the circle.
There is a total acceleration towards the center of the circle, no matter where the object is on the circle
that is called:
Centripetal/ Radial Acceleration: 𝑎𝑟⃗⃗⃗⃗⃗ =𝑣2
𝑟
This creates a net force towards the center of the circle, equal to the centripetal force:
∑ �⃗� = �⃗�𝑐𝑒𝑛𝑡𝑟𝑖𝑝𝑡𝑎𝑙 =𝑚𝑣2
𝑟
*** This is not an applied force, but rather is seen as a net force, so it will not show up in free body diagrams.
The sum of all your forces will be equal to the centripetal force.
PRACTICE PROBLEM 2

Page 4
A block is hanging vertically from a string of length 𝐿 = 50 cm. What is the minimum speed that the block must have such that it will complete the vertical circle (shown in the figure) without the string becoming slack at any point? (modified from 2013)
Rotational Variables: Note: angles are measured in radians
Angular Distance (s):
𝑠 = 𝑅𝜃
Angular Velocity (�⃗⃗⃗⃗�):
�⃗⃗⃗�𝑎𝑣𝑔 =Δ𝜃
Δ𝑡
Note: Angular velocity is a vector, and therefore has a direction. It always points in the axis of rotation
but which way it points is governed by the right-hand rule.
Right-hand rule: Curl your fingers of your right hand in the direction of rotation, your thumb point in the
direction of �⃗⃗⃗�
Angular Acceleration (�⃗⃗⃗�𝒂𝒗𝒈):
�⃗�𝑎𝑣𝑔 =∆�⃗⃗⃗�
Δ𝑡
** Note: the direction of angular acceleration is the same to angular velocity when the object is speeding
up, and opposite to it when it is slowing down.
Relating Angular and Linear Kinematics *** Note: R= Radius
𝑠 = 𝑅𝜃
𝑣 = 𝑅𝜔
𝑎𝑡𝑎𝑛 = 𝑅𝛼

Page 5
𝑎𝑡𝑎𝑛 refers to the component of an object’s acceleration that is tangent to the circular path in which it
travels. There is still a component of its acceleration that is perpendicular (centripetal) which can also be
written as:
𝑎𝑟𝑎𝑑 = 𝑅𝜔2
PRACTICE PROBLEM 3 A racing bike accelerates uniformly without slipping along a level road. The bike starts at rest and after travelling 8m the bike has a speed of 10 m/s. The bike wheel has a radius of R = 0.4 m. (2014)
a) What is the acceleration of the bike? Just at the point that the bike reaches a speed of 10 m/s, a clump of mud on the outer rim of the front wheel comes loose when that part of the wheel is at the top. The clump of mud flies forward with the same velocity as that position on the wheel.
b) How long does it take for the clump of mud to reach the ground?
c) If the bike continues with the same acceleration as it had initially, how far apart will the wheel
and the clump of mud be when the mud first hits the ground? Use the midpoint of the wheel to define its position.
Page 6
Section 3: Dynamics The study of why things move.
Newton’s Laws of Motion 1. (Inertia) An object at rest or constant velocity (�⃗�=0) will remain so until a net force acts on it 2. Acceleration of an object is proportional to the net force acting on the object and its mass
(∑ �⃗� = 𝑚�⃗�). The net force will be in the direction of the acceleration. 3. For every action there is an equal and opposite reaction.
Newton’s laws are only valid when motion is measured with respect to an inertial frame of reference.
Types of Forces:
1. Weight (�⃗⃗⃗�𝒈) ∶ The force of gravity on an object, it is always pointing straight down in direction
of gravity
2. Normal (�⃗⃗⃗�𝑵) : The contact force from the ground, always points perpendicular to surface (not necessarily vertical)
3. Tension (�⃗⃗⃗�𝑻) : The “pull” force from a rope, string or other object.
4. Spring Force (�⃗⃗⃗�𝒔𝒑𝒓𝒊𝒏𝒈) : The force required to stretch a spring.
�⃗� = 𝐾𝑥
5. Friction/Drag (�⃗⃗�) : The force that resists motion between two surfaces. It is dependent on the material properties. It always points in the direction opposite to the object’s movement.
• Kinetic Friction (𝒇𝒌⃗⃗ ⃗⃗ ⃗⃗⃗ = 𝝁𝒌 �⃗⃗⃗�𝑵)
When an object is moving with a velocity it is resisted by the kinetic friction, which is a function of the normal force and material properties.
• Static Friction (𝒇𝒔⃗⃗⃗⃗ ⃗⃗⃗ = 𝝁𝒔�⃗⃗⃗�𝑵)
When an object is not moving relative to the surface it is on, it is experiencing static friction. The maximum amount of applied force before the object is to experience movement is equal to this friction value.
• 𝜇𝑘 < 𝜇𝑠 and friction is not dependent on contact area or the velocity of the object.
Terminal Velocity Situation where the drag force is equal in magnitude to the force of gravity. The forces balance and
there is no acceleration.
Linear with Speed:
𝑣𝑚𝑎𝑥 =𝑚𝑔
𝑏
Quadratic with Speed:
𝑣𝑚𝑎𝑥 = √𝑚𝑔
𝐶
Page 7
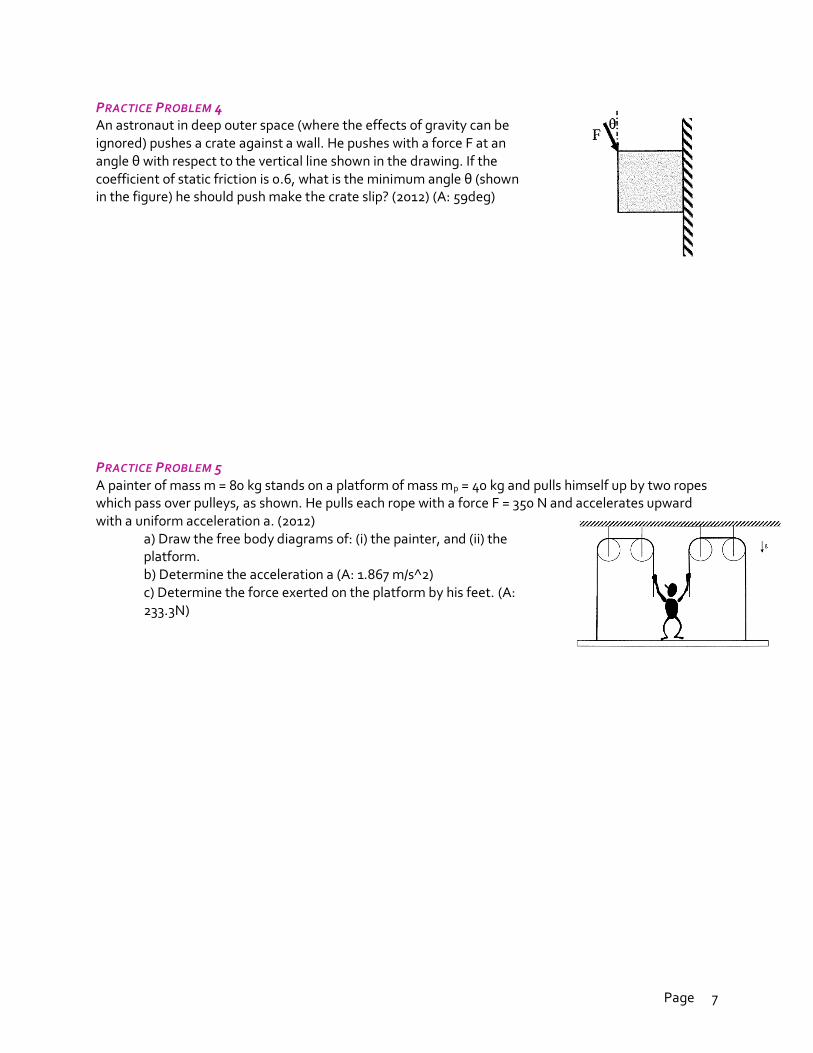
PRACTICE PROBLEM 4 An astronaut in deep outer space (where the effects of gravity can be ignored) pushes a crate against a wall. He pushes with a force F at an angle θ with respect to the vertical line shown in the drawing. If the coefficient of static friction is 0.6, what is the minimum angle θ (shown in the figure) he should push make the crate slip? (2012) (A: 59deg)
PRACTICE PROBLEM 5
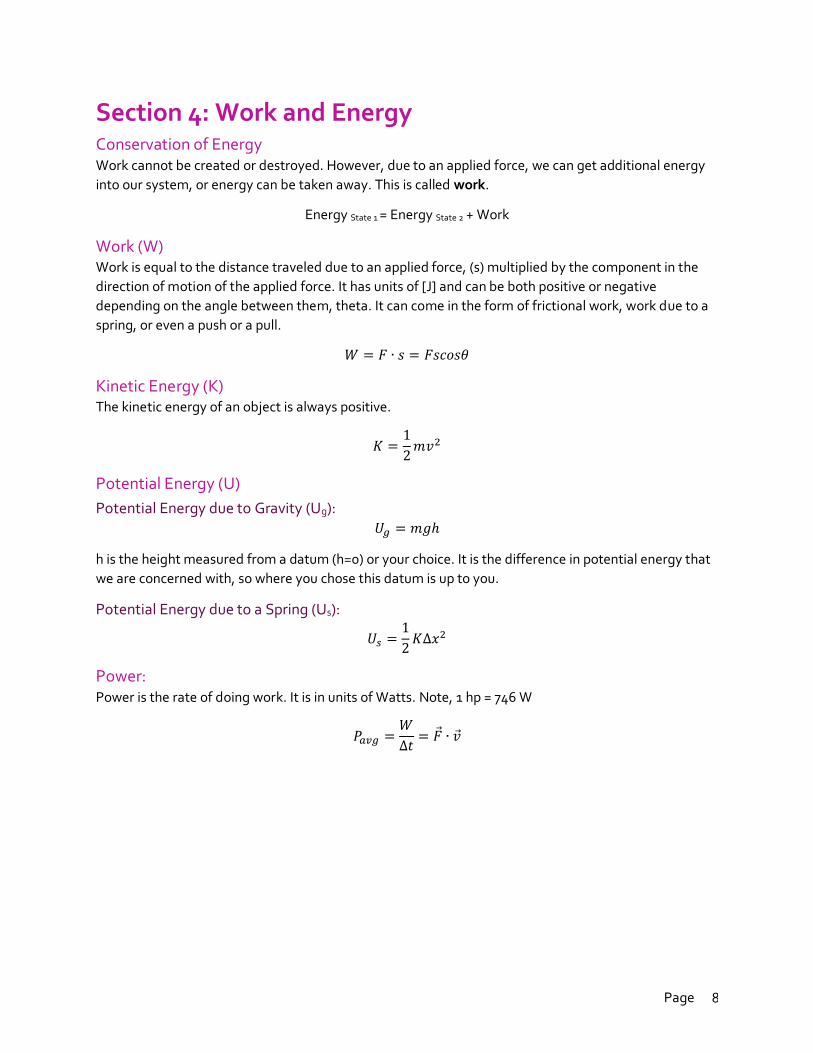
A painter of mass m = 80 kg stands on a platform of mass mp = 40 kg and pulls himself up by two ropes which pass over pulleys, as shown. He pulls each rope with a force F = 350 N and accelerates upward with a uniform acceleration a. (2012)
a) Draw the free body diagrams of: (i) the painter, and (ii) the platform. b) Determine the acceleration a (A: 1.867 m/s^2) c) Determine the force exerted on the platform by his feet. (A: 233.3N)
Page 8
Section 4: Work and Energy Conservation of Energy Work cannot be created or destroyed. However, due to an applied force, we can get additional energy
into our system, or energy can be taken away. This is called work.
Energy State 1 = Energy State 2 + Work
Work (W) Work is equal to the distance traveled due to an applied force, (s) multiplied by the component in the
direction of motion of the applied force. It has units of [J] and can be both positive or negative
depending on the angle between them, theta. It can come in the form of frictional work, work due to a
spring, or even a push or a pull.
𝑊 = 𝐹 ∙ 𝑠 = 𝐹𝑠𝑐𝑜𝑠𝜃
Kinetic Energy (K) The kinetic energy of an object is always positive.
𝐾 =1
2𝑚𝑣2
Potential Energy (U)
Potential Energy due to Gravity (Ug): 𝑈𝑔 = 𝑚𝑔ℎ
h is the height measured from a datum (h=0) or your choice. It is the difference in potential energy that
we are concerned with, so where you chose this datum is up to you.
Potential Energy due to a Spring (Us):
𝑈𝑠 =1
2𝐾∆𝑥2
Power: Power is the rate of doing work. It is in units of Watts. Note, 1 hp = 746 W
𝑃𝑎𝑣𝑔 =𝑊
∆𝑡= �⃗� ∙ 𝑣
Page 9
PRACTICE PROBLEM 6
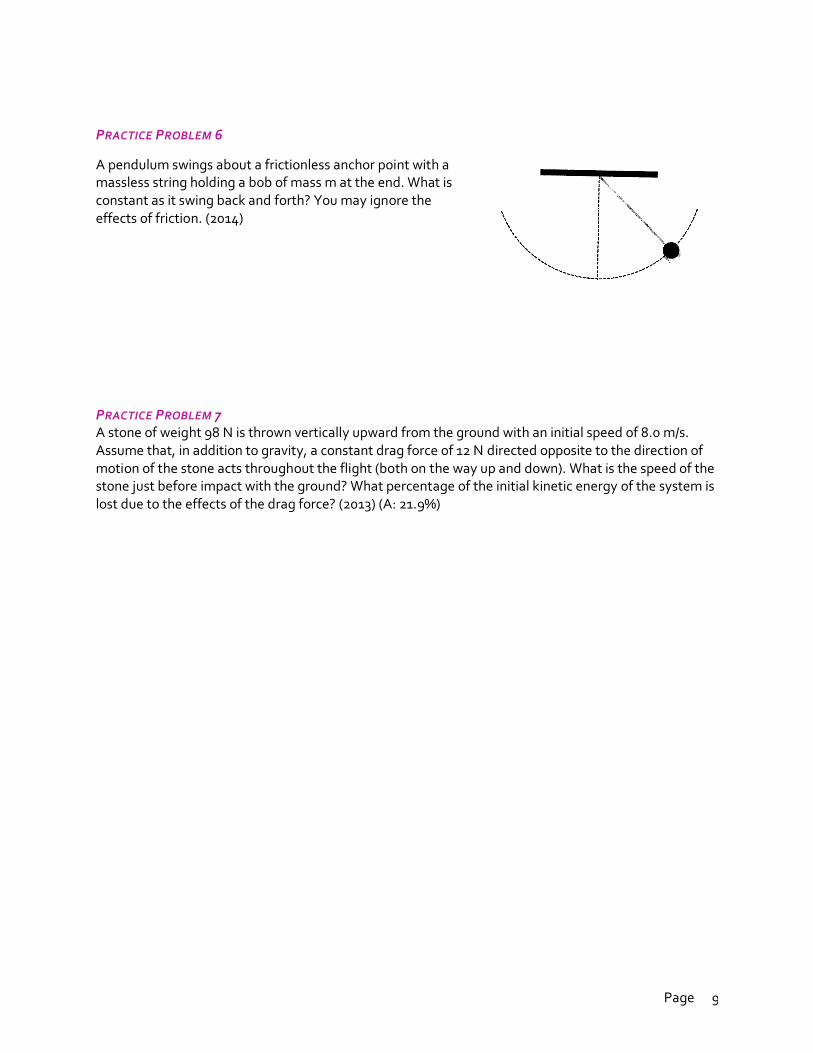
A pendulum swings about a frictionless anchor point with a massless string holding a bob of mass m at the end. What is constant as it swing back and forth? You may ignore the effects of friction. (2014)
PRACTICE PROBLEM 7 A stone of weight 98 N is thrown vertically upward from the ground with an initial speed of 8.0 m/s. Assume that, in addition to gravity, a constant drag force of 12 N directed opposite to the direction of motion of the stone acts throughout the flight (both on the way up and down). What is the speed of the stone just before impact with the ground? What percentage of the initial kinetic energy of the system is lost due to the effects of the drag force? (2013) (A: 21.9%)
Page 10
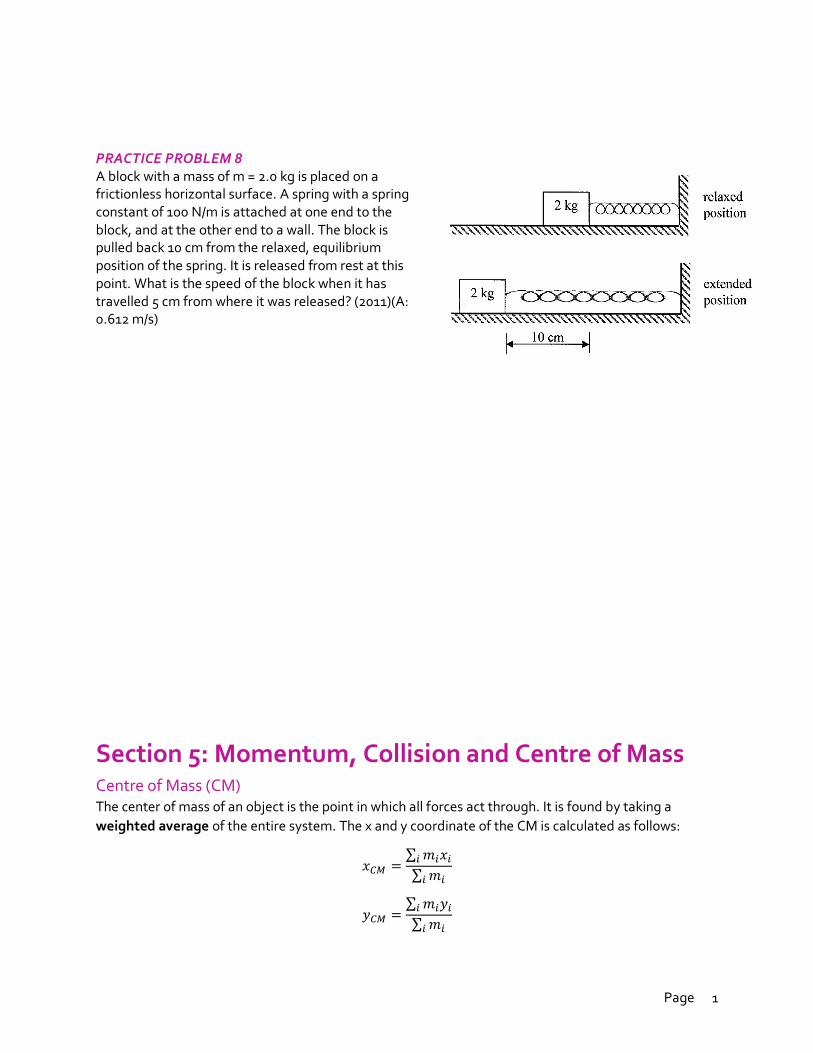
PRACTICE PROBLEM 8 A block with a mass of m = 2.0 kg is placed on a frictionless horizontal surface. A spring with a spring constant of 100 N/m is attached at one end to the block, and at the other end to a wall. The block is pulled back 10 cm from the relaxed, equilibrium position of the spring. It is released from rest at this point. What is the speed of the block when it has travelled 5 cm from where it was released? (2011)(A: 0.612 m/s)
Section 5: Momentum, Collision and Centre of Mass Centre of Mass (CM) The center of mass of an object is the point in which all forces act through. It is found by taking a
weighted average of the entire system. The x and y coordinate of the CM is calculated as follows:
𝑥𝐶𝑀 =∑ 𝑚𝑖𝑥𝑖𝑖
∑ 𝑚𝑖𝑖
𝑦𝐶𝑀 =∑ 𝑚𝑖𝑦𝑖𝑖
∑ 𝑚𝑖𝑖
Page 11
The point in which we measure xi or yi from can change depending on where you chose your origin. Also
note that the absence of mass, say a circle is cut out of an object, is considered to be negative mass and
will subtract from your sum.
PRACTICE PROBLEM 9
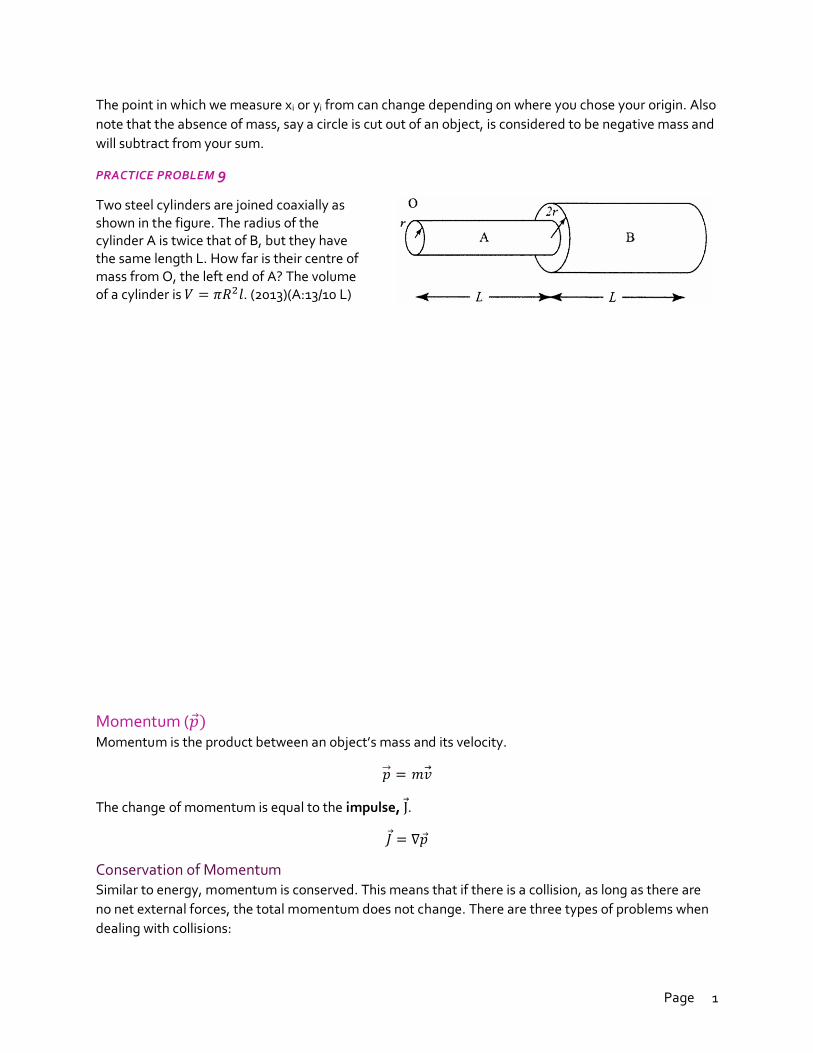
Two steel cylinders are joined coaxially as shown in the figure. The radius of the cylinder A is twice that of B, but they have the same length L. How far is their centre of mass from O, the left end of A? The volume of a cylinder is 𝑉 = 𝜋𝑅2𝑙. (2013)(A:13/10 L)
Momentum (�⃗�) Momentum is the product between an object’s mass and its velocity.
�⃗⃗� = 𝑚�⃗�
The change of momentum is equal to the impulse, J⃗.
𝐽 = ∇𝑝
Conservation of Momentum Similar to energy, momentum is conserved. This means that if there is a collision, as long as there are
no net external forces, the total momentum does not change. There are three types of problems when
dealing with collisions:
Page 12
• Perfectly Elastic Collision: Energy is conserved as well as momentum.
• Inelastic Collision: Energy is not conserved, but momentum is.
• Totally Inelastic Collision: Colliding bodies stick together after collision.
PRACTICE PROBLEM 10
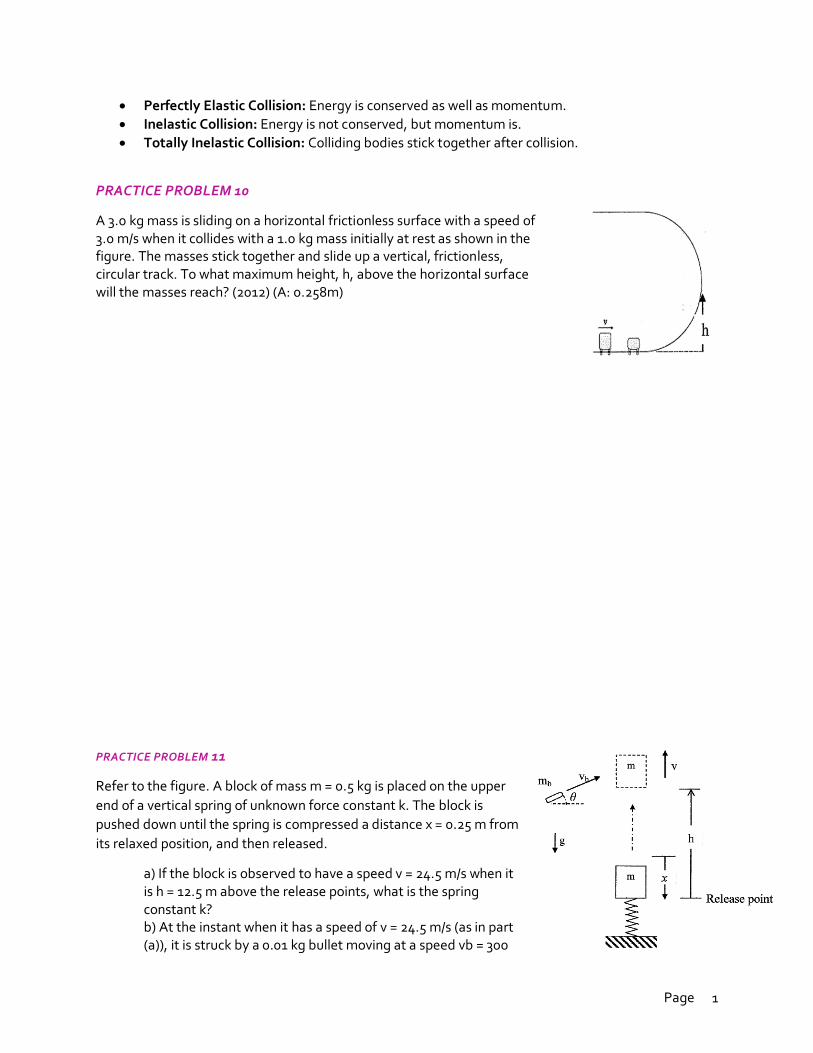
A 3.0 kg mass is sliding on a horizontal frictionless surface with a speed of 3.0 m/s when it collides with a 1.0 kg mass initially at rest as shown in the figure. The masses stick together and slide up a vertical, frictionless, circular track. To what maximum height, h, above the horizontal surface will the masses reach? (2012) (A: 0.258m)
PRACTICE PROBLEM 11
Refer to the figure. A block of mass m = 0.5 kg is placed on the upper
end of a vertical spring of unknown force constant k. The block is
pushed down until the spring is compressed a distance x = 0.25 m from
its relaxed position, and then released.
a) If the block is observed to have a speed v = 24.5 m/s when it is h = 12.5 m above the release points, what is the spring constant k? b) At the instant when it has a speed of v = 24.5 m/s (as in part (a)), it is struck by a 0.01 kg bullet moving at a speed vb = 300

Page 13
m/s (directed at 30⁰ above the horizontal). The bullet gets embedded in the block and they move together after the collision. What are the horizontal and vertical components of velocity of the bullet-block system after the collision?
Section 6: Rotational Kinetic Energy Similar to linear kinetic energy, except instead of velocity there is angular velocity, and instead of mass,
it’s the moment of inertia.
𝐾 =1
2𝐼𝜔2
Moment of Inertia (I)
𝐼 = ∑ 𝑚𝑖𝑅𝑖2
𝑖
Page 14
PRACTICE PROBLEM 12
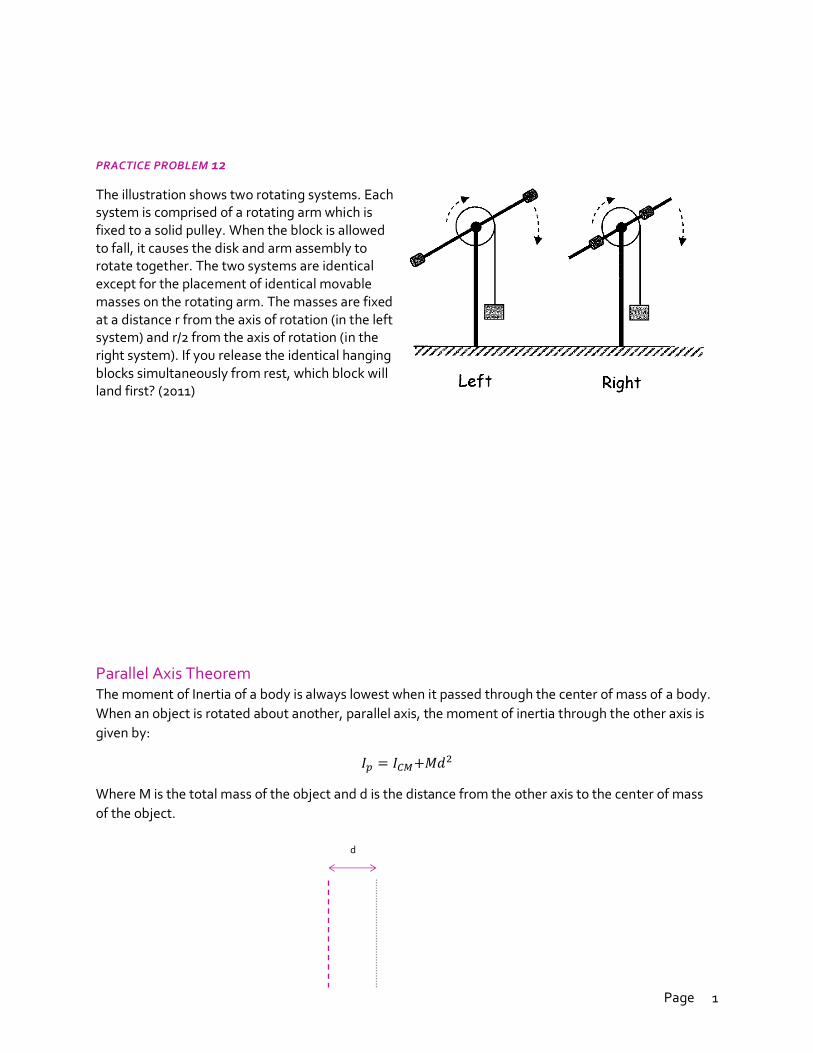
The illustration shows two rotating systems. Each system is comprised of a rotating arm which is fixed to a solid pulley. When the block is allowed to fall, it causes the disk and arm assembly to rotate together. The two systems are identical except for the placement of identical movable masses on the rotating arm. The masses are fixed at a distance r from the axis of rotation (in the left system) and r/2 from the axis of rotation (in the right system). If you release the identical hanging blocks simultaneously from rest, which block will land first? (2011)
Parallel Axis Theorem The moment of Inertia of a body is always lowest when it passed through the center of mass of a body.
When an object is rotated about another, parallel axis, the moment of inertia through the other axis is
given by:
𝐼𝑝 = 𝐼𝐶𝑀+𝑀𝑑2
Where M is the total mass of the object and d is the distance from the other axis to the center of mass
of the object.
d
Page 15
PRACTICE PROBLEM 13
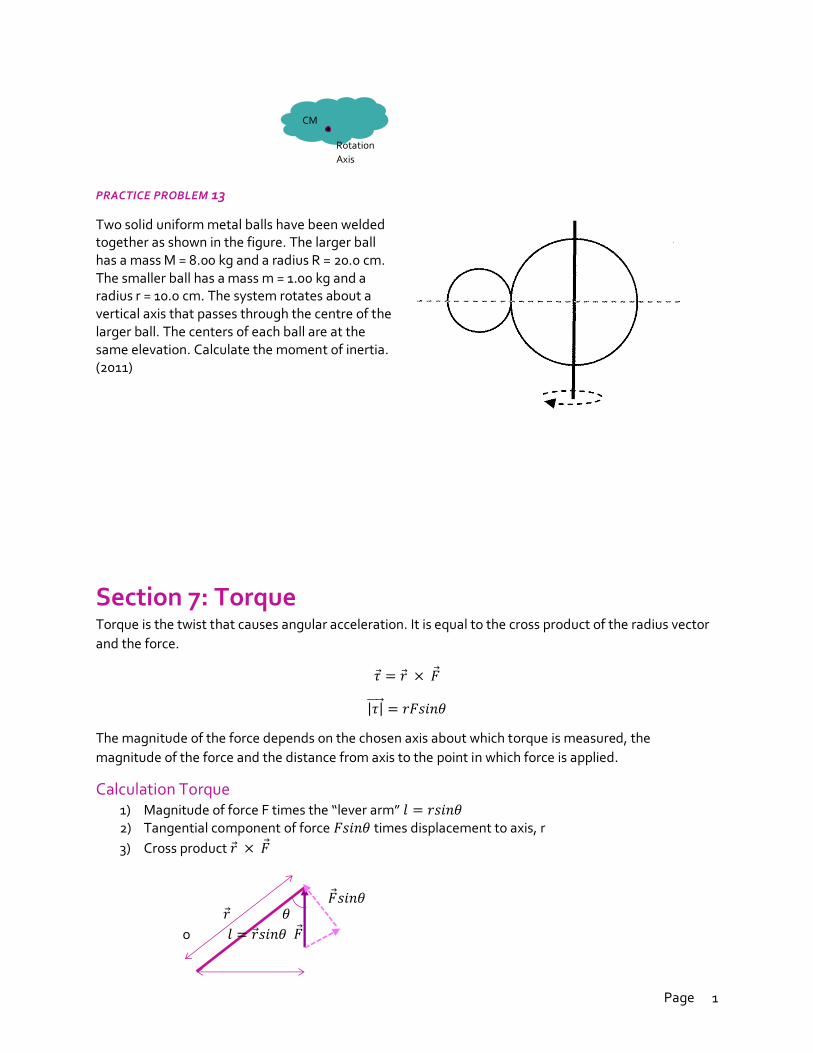
Two solid uniform metal balls have been welded together as shown in the figure. The larger ball has a mass M = 8.00 kg and a radius R = 20.0 cm. The smaller ball has a mass m = 1.00 kg and a radius r = 10.0 cm. The system rotates about a vertical axis that passes through the centre of the larger ball. The centers of each ball are at the same elevation. Calculate the moment of inertia. (2011)
Section 7: Torque Torque is the twist that causes angular acceleration. It is equal to the cross product of the radius vector
and the force.
𝜏 = 𝑟 × �⃗�
|𝜏|⃗⃗ ⃗⃗ ⃗ = 𝑟𝐹𝑠𝑖𝑛𝜃
The magnitude of the force depends on the chosen axis about which torque is measured, the
magnitude of the force and the distance from axis to the point in which force is applied.
Calculation Torque 1) Magnitude of force F times the “lever arm” 𝑙 = 𝑟𝑠𝑖𝑛𝜃 2) Tangential component of force 𝐹𝑠𝑖𝑛𝜃 times displacement to axis, r
3) Cross product 𝑟 × �⃗�
o �⃗�
𝜃 𝑟
𝑙 = 𝑟𝑠𝑖𝑛𝜃
�⃗�𝑠𝑖𝑛𝜃
CM
Rotation
Axis
Page 16
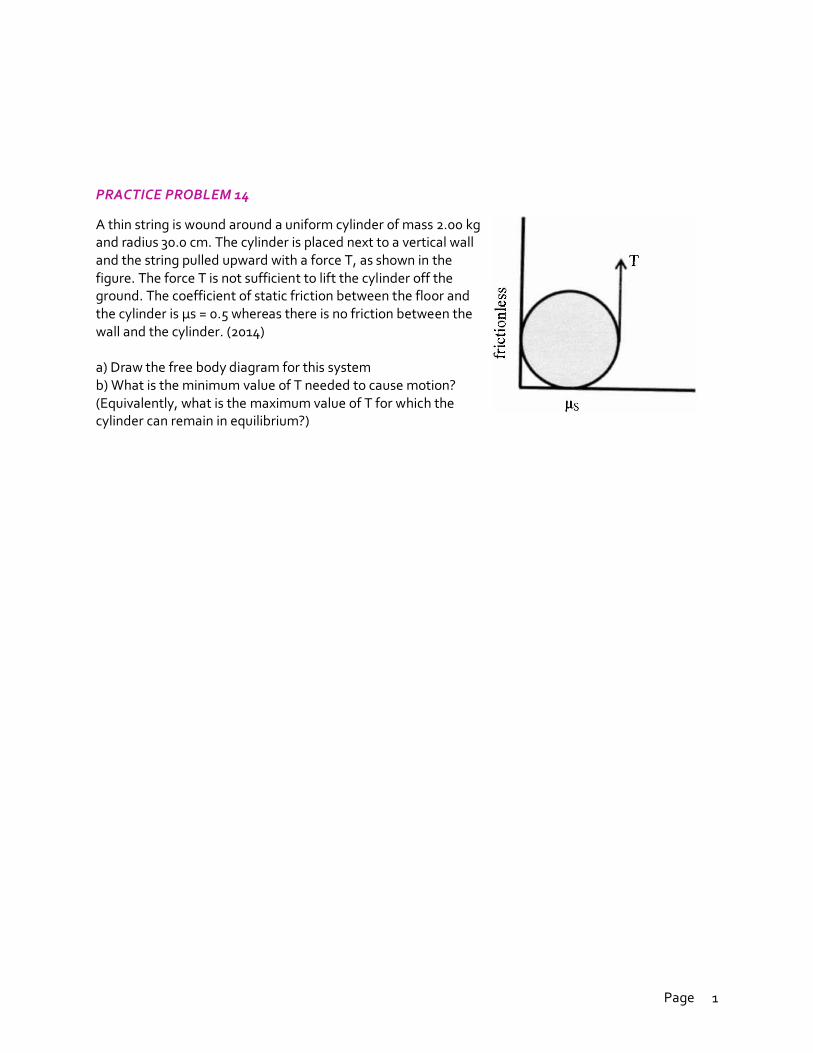
PRACTICE PROBLEM 14
A thin string is wound around a uniform cylinder of mass 2.00 kg and radius 30.0 cm. The cylinder is placed next to a vertical wall and the string pulled upward with a force T, as shown in the figure. The force T is not sufficient to lift the cylinder off the ground. The coefficient of static friction between the floor and the cylinder is μs = 0.5 whereas there is no friction between the wall and the cylinder. (2014) a) Draw the free body diagram for this system b) What is the minimum value of T needed to cause motion? (Equivalently, what is the maximum value of T for which the cylinder can remain in equilibrium?)
Page 17
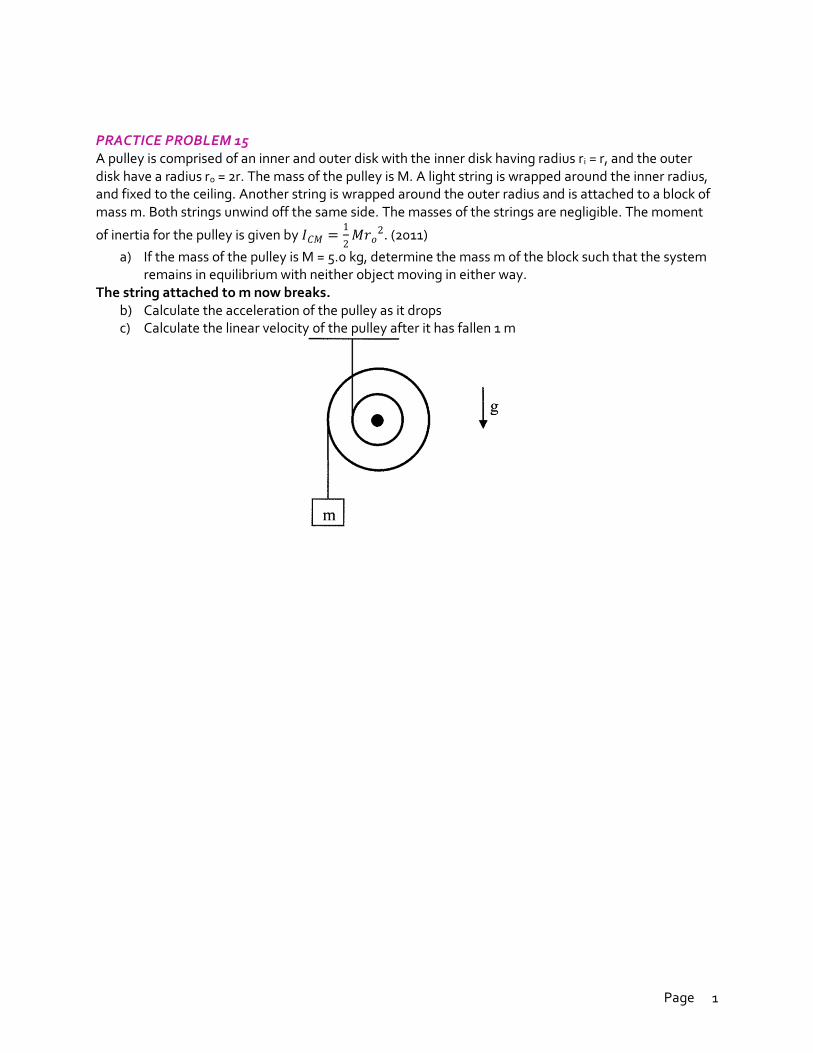
PRACTICE PROBLEM 15 A pulley is comprised of an inner and outer disk with the inner disk having radius ri = r, and the outer disk have a radius ro = 2r. The mass of the pulley is M. A light string is wrapped around the inner radius, and fixed to the ceiling. Another string is wrapped around the outer radius and is attached to a block of mass m. Both strings unwind off the same side. The masses of the strings are negligible. The moment
of inertia for the pulley is given by 𝐼𝐶𝑀 =1
2𝑀𝑟𝑜
2. (2011)
a) If the mass of the pulley is M = 5.0 kg, determine the mass m of the block such that the system remains in equilibrium with neither object moving in either way.
The string attached to m now breaks. b) Calculate the acceleration of the pulley as it drops c) Calculate the linear velocity of the pulley after it has fallen 1 m
Page 18
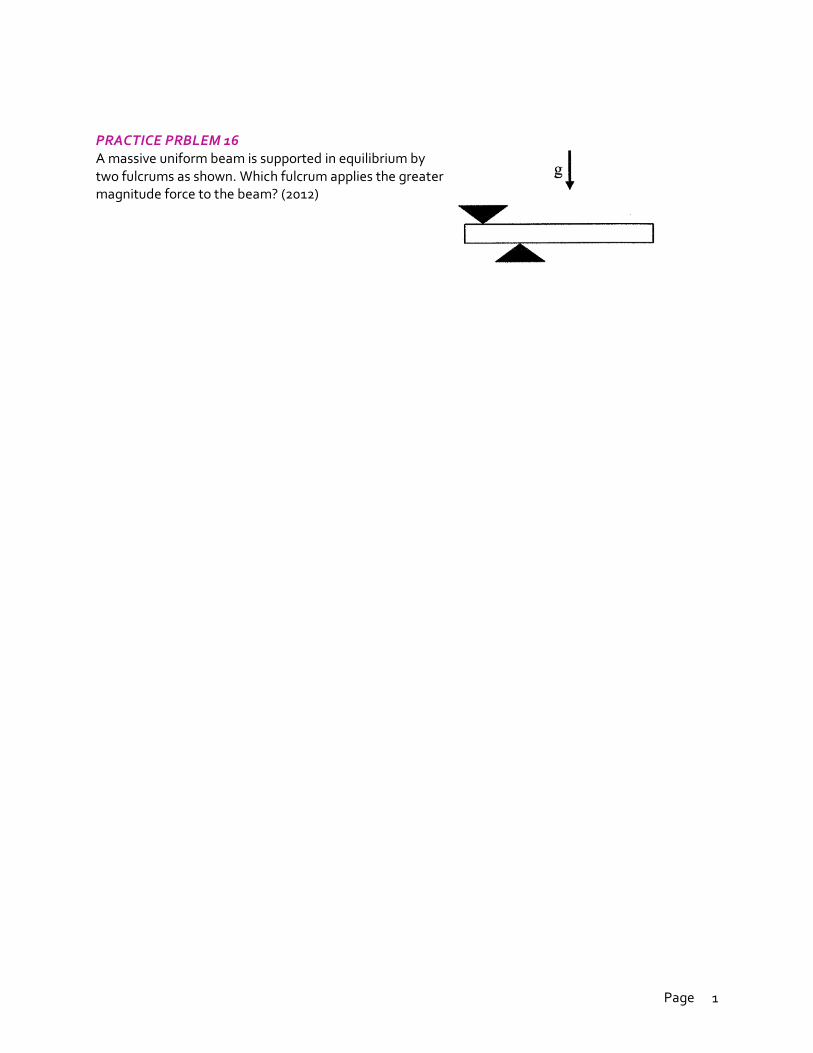
PRACTICE PRBLEM 16 A massive uniform beam is supported in equilibrium by two fulcrums as shown. Which fulcrum applies the greater magnitude force to the beam? (2012)
Page 19
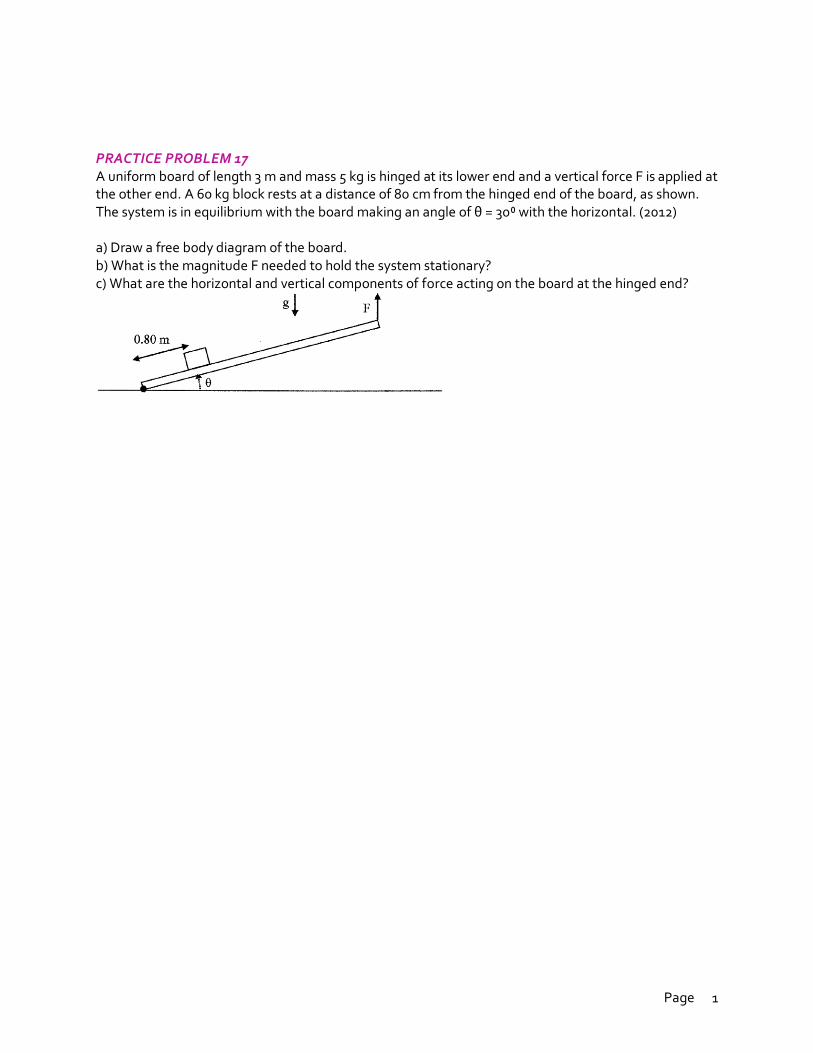
PRACTICE PROBLEM 17 A uniform board of length 3 m and mass 5 kg is hinged at its lower end and a vertical force F is applied at the other end. A 60 kg block rests at a distance of 80 cm from the hinged end of the board, as shown. The system is in equilibrium with the board making an angle of θ = 30⁰ with the horizontal. (2012) a) Draw a free body diagram of the board. b) What is the magnitude F needed to hold the system stationary? c) What are the horizontal and vertical components of force acting on the board at the hinged end?
Page 20
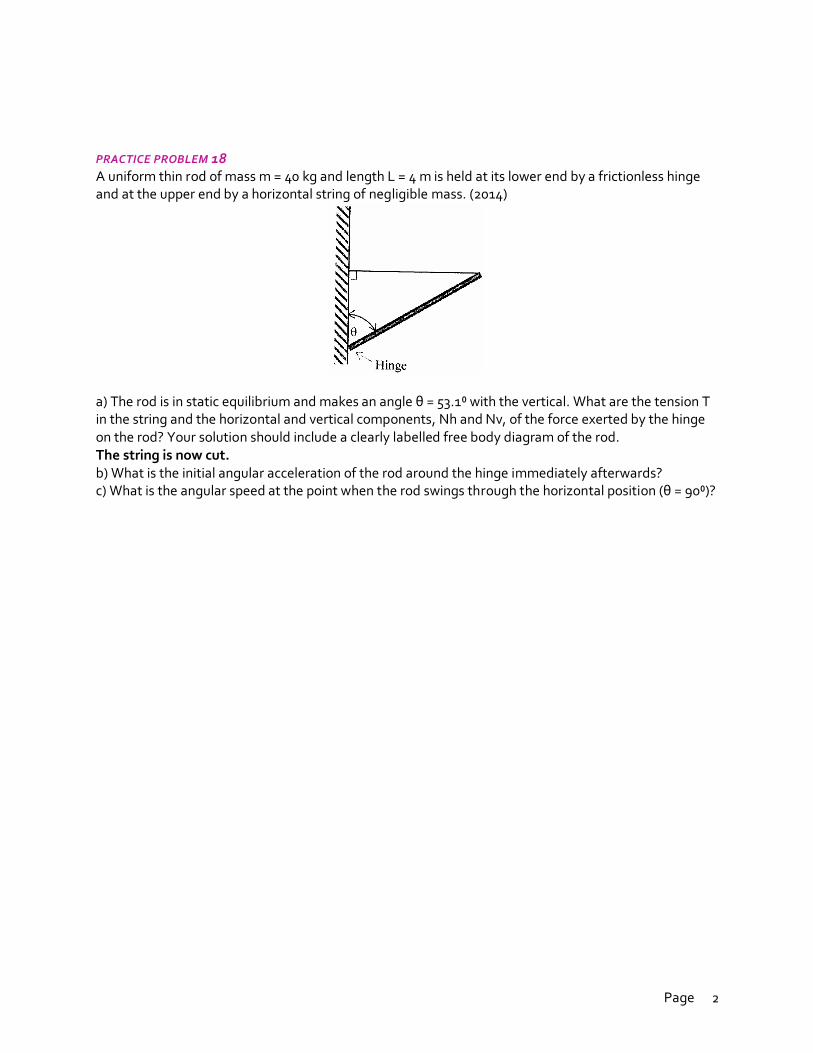
PRACTICE PROBLEM 18 A uniform thin rod of mass m = 40 kg and length L = 4 m is held at its lower end by a frictionless hinge and at the upper end by a horizontal string of negligible mass. (2014)
a) The rod is in static equilibrium and makes an angle θ = 53.1⁰ with the vertical. What are the tension T in the string and the horizontal and vertical components, Nh and Nv, of the force exerted by the hinge on the rod? Your solution should include a clearly labelled free body diagram of the rod. The string is now cut. b) What is the initial angular acceleration of the rod around the hinge immediately afterwards? c) What is the angular speed at the point when the rod swings through the horizontal position (θ = 90⁰)?
Related Documents











