Approximate-P oint-In-T riangulation Test Presentationfor Distributed Systems Seminar Presentedby Daniel Bucher Content forthispresentationmainlyfrom: Tian He, Chengdu Huang, Brian M. Blum, John A. Stankovic, andTarek Abdelzaher. Range-freeLocalization Schemes forLarge Scale Sensor Networks. Proceedings of the9th Annual International Conference on Mobile Computing andNetworking (MobiCom 2003), San Diego (CA), USA, September 2003. (Citation: [He 2003])

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Approximate-Point-In-Triangulation
Test
Presentation for
Distributed Systems Seminar
Presented by
Daniel Bucher
Content for this presentation mainly from:
Tian He, Chengdu Huang, Brian M. Blum, John A. Stankovic, and Tarek Abdelzaher. Range-free Localization Schemes for Large Scale Sensor
Networks. Proceedings of the 9th Annual International Conference on Mobile Computing and Networking (MobiCom 2003), San Diego
(CA), USA, September 2003. (Citation: [He 2003])

What we want
• Localization of the motes
• Cheap hardware
• Accuracy
Approximate-Point-In-Triangulation 2

Range-Based VS Range-Free
Range-Based:
Use absolute point-to-point estimation
(distance estimation (range) or angle estimation)
�Expensive hardware
Range-Free:
No assumption about availability and validity ofinformation
(No assumption about correlation between absolute distance and signal strength)
� Cost-effective
Approximate-Point-In-Triangulation 3

Radio-Pattern is NOT a circle!
Approximate-Point-In-Triangulation 4
DOI=0.05 DOI=0.2
DOI = Degree of Irregularity
Image Source: [He 2003]

Signal strength decreasing
monotonically
Approximate-Point-In-Triangulation 5
300
350
400
450
500
550
600
1 5 9 13 17 21 25 29 33 37Beacon Sequence Number
Sig
na
l S
tre
ng
th (
mv
)
1 Foot
5 Feet
10 Feet
15 Feet
Image Source: [He 2003]

APIT Settings
Small percentage of nodes equipped with
• high-powered transmitters
• Location information via GPS
� Anchors
Rest
• Cheap devices (nodes) using information ofanchors
Approximate-Point-In-Triangulation 6

Main Algorithm
1. Beacon exchange
2. Point-In-Triangulation Testing
3. Approximate-PIT aggregation
4. Calculation of Center-Of-Gravity
Beacon contains:
Anchor ID, Location, Signal Strength
Approximate-Point-In-Triangulation 7Image Source: Wikipedia:
http://en.wikipedia.org/wiki/Center_of_mass

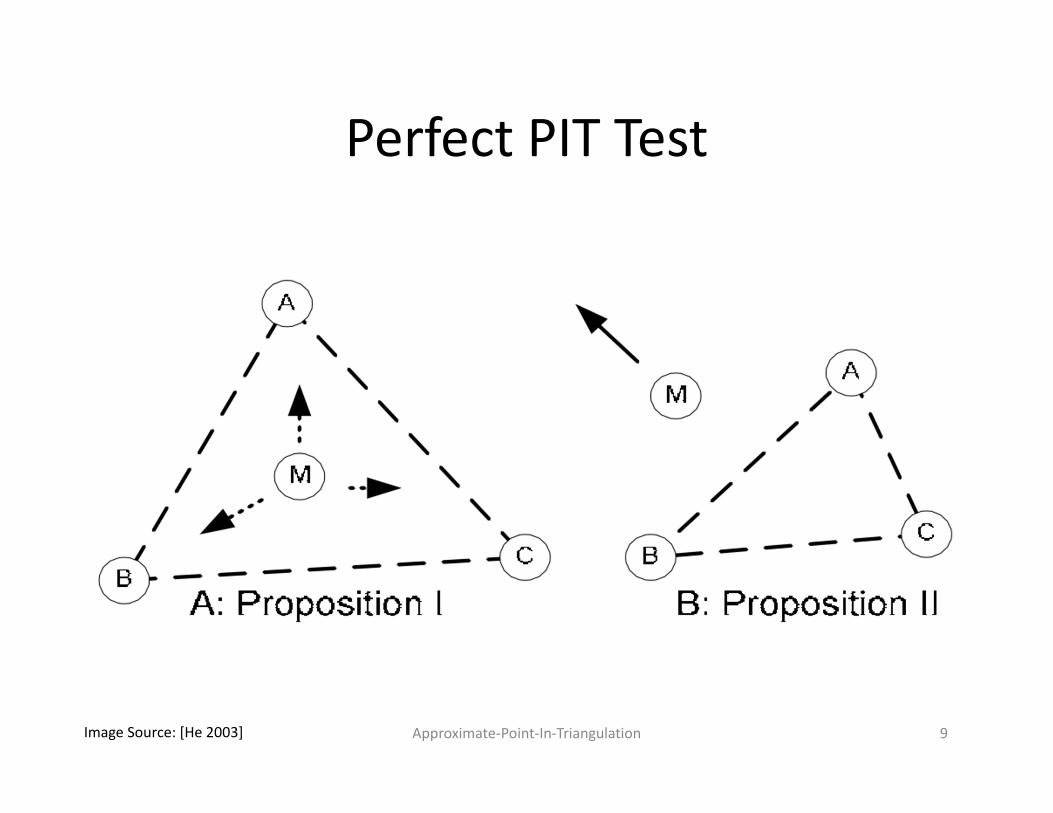
Perfect PIT Test
Proposition I: Node M in triangle if:
M shifted in any direction
�New position is nearer / further from at least one anchor
Proposition II: Node M outside if:
M can be shifted in a direction
�New position is nearer / further to all three anchors
Approximate-Point-In-Triangulation 8
Perfect PIT Test
Approximate-Point-In-Triangulation 9Image Source: [He 2003]

Problem
• PIT Test without moving?
Approximate-Point-In-Triangulation 10

Approximate PIT Test
Node M ask its neighbours for their received
signal strength
Approximate-Point-In-Triangulation 11Image Source: [He 2003]

Known errors
Approximate-Point-In-Triangulation 12Image Source: [He 2003]

OutToInError VS InToOutError FARBE
Approximate-Point-In-Triangulation 13
0%
2%
4%
6%
8%
10%
12%
14%
16%
6 8 10 12 14 16 18 20 22 24
N o de D ensity P er R adio R ange
OutToInErrorPercentage
InToOutErrorPercentage
Err
or
Pe
rce
nta
ge
Image Source: [He 2003]

APIT Aggregation
Robust approach to mask errors of individual
APIT tests:
Approximate-Point-In-Triangulation 14
Inside decision
� +1
Outside decision
� -1
� Area with
highest value
must be
location
Image Source: [He 2003]

Walk through
Approximate-Point-In-Triangulation 15Source: [He 2003]

Walk through
Approximate-Point-In-Triangulation 16Source: [He 2003]

Walk through (Algorithm revisited)
1. Receiving beacons from anchors and
maintaining a table
2. Exchange tables with neighbours
3. Run APIT on every column
4. Repeat for each combination of three anchors
5. Find area with maximum averlap
6. Calculate Center-Of-Gravity
Approximate-Point-In-Triangulation 17

Comparison
To
• Centroid Localization
• DV-Hop Localization
• Amorphous Localization
Approximate-Point-In-Triangulation 18

Centroid Localization
Askes anchor beacons for location information
Calculate average:
� Simple solution
Approximate-Point-In-Triangulation 19Source: [He 2003]

DV-Hop Localization
Count number of hops
�Shortest distance in hops
to every anchor
Convert hop count into physical distance:
Approximate-Point-In-Triangulation 20Source: [He 2003]

DV-Hop Localization
Node has calculated distance to more than 3
anchors
� Use triangulation
Approximate-Point-In-Triangulation 21

Amorphous Localization
Similar to DV-Hop
• Get hop distance (as number)
• Distance estimation (physical distance)
Uses a more complicated formula to calculate
the HopSize (Kleinrock and Silvester formula)
Approximate-Point-In-Triangulation 22Source: [He 2003]

Amorphous Localization
Node has calculated distance to more than 3
anchors
� Use triangulation
Approximate-Point-In-Triangulation 23

Random VS Uniform node placing
0
0.5
1
1.5
2
2.5
10 14 18 22 26
A ncho r H eard
Centroid Amorphous
DV-Hop A.P.I.T
P.I.T.
Approximate-Point-In-Triangulation 24
0
0.5
1
1.5
2
2.5
10 14 18 22 26
A ncho r H eard
Centroid Amorphous
DV-Hop A.P.I.T
P.I.T.
AH=10~28, ND=8, ANR=10, DOI=0
uniform random
Est
ima
tio
nE
rro
r
Est
ima
tio
nE
rro
r
AH=Anchors Heard; ND=Node Density; ANR=Anchor to Node Range Ratio; DOI=Degree of Irregularity
Image Source: [He 2003]

Effect of DOI (irregular signal)
Approximate-Point-In-Triangulation 25
AH=16, ND = 8, ANR=10
Uniform Random
0
0.5
1
1.5
2
2.5
3
3.5
0 0.1 0.2 0.3 0.4 0.5 0.6
D egree o f irregularity
Centroid
Amorphous
DV-Hop
A.P.I.T
0
0.5
1
1.5
2
2.5
3
3.5
0 0.1 0.2 0.3 0.4 0.5 0.6
D egree o f irregularity
Centroid
Amorphous
DV-Hop
A.P.I.T
Est
ima
tio
nE
rro
r
Est
ima
tio
nE
rro
r
AH=Anchors Heard; ND=Node Density; ANR=Anchor to Node Range Ratio
Image Source: [He 2003]

Communication overhead for varied
Node Density
0
5000
10000
15000
20000
25000
30000
6 11 15 18 22
N o de D ensity
Centroid
Amorphous
DV-Hop
A.P.I.T
Approximate-Point-In-Triangulation 26
It looks the same for varied anchors heard!
# S
ho
rt-r
an
ge
be
aco
ns
Image Source: [He 2003]

Summary
APIT
• Range-free � cost-effective
Performs best when:
• Irregular radio pattern
• Random node placement
• Low communication overhead desired
Approximate-Point-In-Triangulation 27

Questions
Approximate-Point-In-Triangulation 28
Related Documents











