N° d’ordre : 03 / L3/ TCO Année Universitaire : 2011 / 2012 UNIVERSITE D’ANTANANARIVO ---------------------- ECOLE SUPERIEURE POLYTECHNIQUE ----------------------- DEPARTEMENT TELECOMMUNICATION MEMOIRE DE FIN D’ETUDES en vue de l’obtention du DIPLOME de Licence ès Sciences Techniques Spécialité : Télécommunication par : FAMO Velomalaza Faniry APPLICATION DU RADIOALTIMETRE DANS LE GPWS Soutenu le mardi 21 Juillet 2015 devant la Commission d’Examen composée de : Président : M. RAKOTOMALALA Mamy Alain Examinateurs : M.RANDRIAMITANTSOA Andry Auguste M.RAKOTONDRAINA Tahina Ezéchiel Mme. ANDRIANTSILAVO Haja Samiarivonjy Directeur de mémoire : M. RATSIHOARANA Constant

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

N° d’ordre : 03 / L3/ TCO Année Universitaire : 2011 / 2012
UNIVERSITE D’ANTANANARIVO ----------------------
ECOLE SUPERIEURE POLYTECHNIQUE -----------------------
DEPARTEMENT TELECOMMUNICATION
MEMOIRE DE FIN D’ETUDES
en vue de l’obtention
du DIPLOME de Licence ès Sciences Techniques
Spécialité : Télécommunication
par : FAMO Velomalaza Faniry
APPLICATION DU RADIOALTIMETRE DANS LE GPWS
Soutenu le mardi 21 Juillet 2015 devant la Commission d’Examen composée de :
Président : M. RAKOTOMALALA Mamy Alain
Examinateurs :
M.RANDRIAMITANTSOA Andry Auguste
M.RAKOTONDRAINA Tahina Ezéchiel
Mme. ANDRIANTSILAVO Haja Samiarivonjy
Directeur de mémoire :
M. RATSIHOARANA Constant


i
REMERCIEMENTS
Avant tout, je glorifie l’Eternel Dieu tout puissant de m’avoir soutenu durant la réalisation de cet
ouvrage. Je tiens à exprimer toute ma reconnaissance à ceux, qui, de près ou de loin ont contribué
à son élaboration. Aussi, je remercie respectueusement :
Monsieur ANDRIANARY Philippe Antoine, Professeur Titulaire, Directeur de l’Ecole Supérieure
Polytechnique d’Antananarivo de m’avoir accueilli au sein de l’établissement ;
Monsieur RAKOTOMALALA Mamy Alain, Maître de Conférences et Chef de Département
Télécommunications, d’avoir permis l’achèvement de mes études dans les meilleurs conditions
possibles et encore qui nous fait l’honneur de présider le jury de cette soutenance.
Monsieur RATSIHOARANA Constant, Maître de Conférences, qui, en tant que Directeur de ce
mémoire, s'est toujours montré à l'écoute et très disponible tout au long de sa réalisation.
Tous les membres de jury, à savoir :
Monsieur RANDRIAMITANTSOA Andry Auguste, Maitre de Conférences au sein du
Département Télécommunication
Monsieur RAKOTONDRAINA Tahina Ezéchiel, Maitre de Conférences au sein du Département
Télécommunication
Madame ANDRIANTSILAVO Haja Samiarivonjy, Enseignant chercheur au sein du Département
Télécommunication
Qui ont accepté de sacrifier leur temps pour assister à la présentation de ce mémoire ;
Mes vifs remerciements s’adressent également à tous les enseignants et les personnels
administratifs de l’Ecole Supérieure Polytechnique d’Antananarivo.
Ma gratitude va plus particulièrement à ma grande famille, mes amis, mes collègues qui m’ont
encouragé et soutenu durant la langue préparation de ce mémoire.
Je vous remercie tous et que le Ciel vous donnera tout le bonheur que vous souhaitez.

ii
TABLE DES MATIERES
REMERCIEMENTS ...................................................................................................................................... i
TABLE DES MATIERES ............................................................................................................................ ii
NOTATIONS ............................................................................................................................................... vii
INTRODUCTION ......................................................................................................................................... 1
CHAPITRE 1 LES TECHNIQUES UTILISEES ET PRESENTATION DU RADAR . ......................... 2
1.1 Introduction ......................................................................................................................................... 2
1.2 Généralités ........................................................................................................................................... 2
1.3 Modulation du signal .......................................................................................................................... 3
1.3.1 Présentation générale sur le traitement du signal ....................................................................... 3
1.3.1.1 Absorption et distorsion dans le milieu .................................................................................. 3
1.3.1.2 Principe de la modulation ....................................................................................................... 4
1.3.1.3 Intérêt de la modulation .......................................................................................................... 4
1.3.2 Modulation d’impulsion ............................................................................................................... 4
1.3.2.1 Caractéristiques d’un signal impulsionnel.............................................................................. 5
1.3.2.2 Relation entre les puissances .................................................................................................. 5
1.3.2.3 Mesure de la distance d’une cible .......................................................................................... 6
1.3.2.4 Calcul du nombre des impulsions reçues ............................................................................... 7
1.3.3 Modulation de fréquence .............................................................................................................. 8
1.4 Présentation générale du RADAR ................................................................................................... 10
1.4.1 Généralités sur le RADAR .......................................................................................................... 10
1.4.2 Principe de fonctionnement ........................................................................................................ 11
1.4.3 Composantes principales ............................................................................................................ 12
1.4.4 Caractéristiques générales .......................................................................................................... 12
1.4.5 Les principaux types de radar utilisés en aviation civile ........................................................... 16
1.5 Conclusion ......................................................................................................................................... 16

iii
CHAPITRE 2 LE RADIOALTIMETRE .................................................................................................. 17
2.1 Introduction ....................................................................................................................................... 17
2.2 Principe de fonctionnement du Radioaltimètre ............................................................................. 17
2.2.1 Principe de base .......................................................................................................................... 17
2.2.2 Mesure de la hauteur .................................................................................................................. 18
2.2.2.1 Radar à modulation de fréquence : ....................................................................................... 18
2.2.2.2 Radioaltimètre à pente asservie : .......................................................................................... 19
2.2.3 Schéma de principe du radioaltimètre ....................................................................................... 20
2.2.4 Fonctionnement du radioaltimètre ............................................................................................ 22
2.2.4.1 Convertisseur Fréquence/Altitude ........................................................................................ 22
2.2.4.2 Traitement analogique .......................................................................................................... 23
2.2.4.3 Générateur dent de scie ........................................................................................................ 26
2.2.4.4 Traitement numérique .......................................................................................................... 26
2.2.4.5 Visualisation ......................................................................................................................... 27
2.3 Mode de fonctionnement .................................................................................................................. 27
2.3.1 Mode de poursuite ....................................................................................................................... 28
2.3.2 Mode de recherche ...................................................................................................................... 28
2.3.3 Mode contrôle d’intégrité ........................................................................................................... 28
2.4 Caractéristiques principales ............................................................................................................. 28
2.5 Equipement de bord.......................................................................................................................... 28
2.5.1 Constitution ................................................................................................................................. 28
2.5.2 Dispositif d’affichage .................................................................................................................. 29
2.6 Performances ..................................................................................................................................... 30
2.6.1 Portée........................................................................................................................................... 30
2.6.2 Précisions .................................................................................................................................... 30
2.7 Problèmes à résoudre........................................................................................................................ 31
2.7.1 Roulis........................................................................................................................................... 31
2.7.2 Tangage ....................................................................................................................................... 31

iv
2.7.3 Installation .................................................................................................................................. 32
2.8 Utilisation ........................................................................................................................................... 32
2.9 Conclusion ......................................................................................................................................... 33
CHAPITRE 3 LE GROUND PROXIMITY WARNING SYSTEM ................ ....................................... 34
3.1 Introduction ....................................................................................................................................... 34
3.2 Généralités ......................................................................................................................................... 34
3.3 Fonction du GPWS ........................................................................................................................... 34
3.4 Constitution du GPWS ..................................................................................................................... 35
3.4.1 Composants situés dans le poste de pilotage (cockpit) .............................................................. 35
3.4.1.1 Les deux hauts parleurs ........................................................................................................ 35
3.4.1.2 Les deux boutons témoins ambre «BELOW G/S» ............................................................... 35
3.4.1.3 Module d'avertissement de proximité sol GPWM................................................................ 36
3.4.2 Composants situés dans la soute électronique ........................................................................... 36
3.4.2.1 Le GPWC (Ground Proximity Warning Computer) ............................................................ 37
3.4.2.2 Le PIN Program ................................................................................................................... 38
3.5 Interface du GPWS ........................................................................................................................... 39
3.5.1 Les interfaces discrètes du système ............................................................................................ 39
3.5.2 Les interfaces digitales du GPWS .............................................................................................. 40
3.5.2.1 Les entrées digitales du GPWS : .......................................................................................... 41
3.5.2.2 Les sorties digitales du GPWS : ........................................................................................... 42
3.6 Modes de fonctionnement ................................................................................................................. 43
3.6.1 Mode 1 : Pente de descente excessive......................................................................................... 43
3.6.2 Mode 2 : Taux d’approche excessif ........................................................................................... 45
3.6.3 Mode 3 : Perte d’altitude après décollage .................................................................................. 47
3.6.4 Mode 4 : Proximité du sol avec les trains d'atterrissage entrants ou les volets entrants ......... 48
3.6.5 Mode 5 : Descente au-dessous du glide slope ............................................................................ 50
3.7 Les indications visuelles et auditives ............................................................................................... 52
3.8 Maintenance du GPWS .................................................................................................................... 53

v
3.8.1 L’auto test du GPWS .................................................................................................................. 53
3.8.1.1 L'auto test du niveau un (1) .................................................................................................. 53
3.8.1.2 L'auto test du niveau 2 .......................................................................................................... 54
3.8.1.3 L'auto test du niveau 3 .......................................................................................................... 54
3.8.1.4 L'auto test du niveau 4 .......................................................................................................... 54
3.8.1.5 L'auto test du niveau 5 .......................................................................................................... 54
3.8.1.6 L'auto test du niveau 6 .......................................................................................................... 55
3.8.2 L’état des LED sur le panneau avant du GPWC ....................................................................... 55
3.9 Conclusion ......................................................................................................................................... 55
CHAPITRE 4 SIMULATION SOUS MATLAB ...................................................................................... 56
4.1 Introduction ....................................................................................................................................... 56
4.2 Présentation du logiciel de simulation MATLAB .......................................................................... 56
4.3 Présentation de la simulation ........................................................................................................... 56
4.4 La modulation de fréquence ............................................................................................................. 57
4.4.1 Paramétrage ................................................................................................................................ 57
4.4.2 Résultats et interprétation ........................................................................................................... 59
4.5 Le radioaltimètre............................................................................................................................... 60
4.5.1 Paramétrage ................................................................................................................................ 60
4.5.2 Résultats et interprétation ........................................................................................................... 62
4.6 Les modes de fonctionnement du GPWS ........................................................................................ 63
4.6.1 Paramétrage ................................................................................................................................ 64
4.6.2 Résultats et interprétation ........................................................................................................... 67
4.7 Conclusion ......................................................................................................................................... 69
CONCLUSION ............................................................................................................................................ 70
ANNEXE 1 : NOTIONS D’AERONAUTIQUE ....................................................................................... 71
ANNEXE 2 : CODES SOURCES DE QUELQUES PROGRAMMES DE SIMULATION ................ 72
BIBLIOGRAPHIE ...................................................................................................................................... 74

vi
FICHE DE RENSEIGNEMENTS ............................................................................................................. 75
RESUME ...................................................................................................................................................... 76
ABSTRACT ................................................................................................................................................. 76
vii
NOTATIONS
1. Minuscules latines
C : célérité de la lumière
D : la dimension de la cible sur la direction de balayage,
f : fréquence
: fréquence du signal modulant
: fréquence du signal porteuse
H : altitude des roues
h’ : altitude pour le pilote automatique
K : rapport de conversion
n : nombre d’impulsions reçues
: temps de propagation de l’onde allant de la station à la cible
: temps de propagation de l’onde venant de la cible à la station
: durée d’observation des impulsions
V : vitesse de déplacement de la cible
2. Majuscules latines
A : amplitude
: amplitude du signal modulant
: amplitude du signal porteur
: surface apparente de l’antenne
: bande passante du signal modulant

viii
Cal# : commande de calibrage de la dent de scie
D : distance entre la station de radiolocalisation et la cible
D : diamètre de l’antenne
: distance maximale mesurable
: distance minimale mesurable
D1 : diode numéro 1
D2 : diode numéro 2
E : énergie d’une impulsion
F : fréquence de répétition du signal émis
: fréquence de battement
: fréquence de battement fixée égale à 25 kHz.
: fréquence émise
: fréquence reçue
: fréquence émise à l’instant initiale
G : gain d’antenne
G# : commande du gain en fonction de l’altitude
H : hauteur de l’appareil (avion)
: facteur d’efficacité
: sensibilité du modulateur
N : vitesse de rotation de l’antenne
: onde ou signal émis

ix
: onde reçue
: puissance crête
: puissance instantanée d’une impulsion
: puissance moyenne débitée par l’émetteur
: puissance maximale de l’impulsion émise
: puissance réfléchie
: puissance globale reçue par l’antenne
: puissance émise
R : distance parcourue par l’onde
: distance antenne-cible
: distance cible - antenne
: Signal de contrôle de la modulation
: signal émis par l’émetteur/ densité de puissance
: densité de puissance directive
: signal réfléchi par la cible
! : densité de puissance omnidirectionnelle
T : période
" : durée de la dent de scie.
Tr : période de récurrence
#$ : tension en dent de scie délivrée par le générateur
# : tension de commande de la pente de la dent de scie

x
# : tension en de scie modulant de l’émetteur
3. Minuscules grecques
β : indice de modulation
θ : angle d’ouverture du lobe principal de l’antenne
λ : longueur d’onde
π : constante pi
σ : surface équivalente
τ : durée d’impulsion
% : temps de retard le plus petit
φ : pulsation
& : phase instantanée de la porteuse
ω : vitesse angulaire du déplacement de la cible
4. Majuscules grecques
∆f : déviation maximale de fréquence
∆t : durée d’observation
∆φ : déviation maximale de phase
Ф : phase instantanée du signal porteur
Ω : la vitesse angulaire de la rotation de l’antenne
5. Abréviations
AC : Alternative Current

xi
ADIRU : Air Data Inertial Reference Unit
ADIRS : Air Data Inertial Reference System
ADR : Air Data Reference
AID : Air Inertial Data
Alm : alarme
Alt : Altitude
AOA : Angle Of Attach
ARINC : Aeronautical Radio INCorporation
AWR : Airborne Weather Radar
CFIT : Controlled Flight Into Terrain
CP : Control Panel
Cmd : Commande
DEU : Display Electronic Unit
DFCS : Display Flight Computer System
DH : Decision High
EFIS : Electronic Flight Instruments System
FDAU : Flight Data Acquisition Unit
FDR : Flight Data Recorder
FM : Frequency Modulation
FMC : Flight Management Computer
Ft : Feet

xii
Ghz : Gigahertz
GPS : Global Positioning System
GPWC : Ground Proximity Warning Computer
GPWM : Ground Proximity Warning Module
GPWS : Ground Proximity Warning System
Hz : Hertz
ILS : Instruments Landing System
IR : Inertial Reference
IVS : Inertial Vertical Speed
Kg : Kilogramme
KHz : Kilohertz
Km : Kilomètre
Kt : Knots (nœuds)
kΩ : Kilo ohm
LED : Light Electroluminescent Diode
LOC : LOCator
LRU : Line Replaceable Unit
m : mètre
MCP : Mode Control Panel
min : minute
MMR : Multi Mode Receiver

xiii
ND : Navigation Display
NFM : Narrow Frequency Modulation
PFD : Primary Flight Display
PPI : Plan Position Indicator
PSR : Primary Surveillance Radar
RA : Radio Altitude
RADAR : Radio Detection And Ranging
Rest : Reset
REU : Remote Electronic Unit
SHF : Super High Frequency
SMYD : Stall Management Yaw Damper
SSR : Secondary Surveillance Radar
TCAS : Traffic Collision Avoidance System
UHF : Ultra High Frequency
V : Volts
W : Watts
WFM : Wide Frequency Modulation

1
INTRODUCTION
En 1930, L. A. Hyland, du Naval Research Laboratory, réalise la première détection d'un aéronef à
partir de l’onde hertzienne comme support de transmission des signaux. Cette nouvelle découverte
lance une vaste étude sur les diverses applications dans le domaine de la sécurité de la navigation
aérienne civile.
Dans le secteur de l’aéronautique, les pilotes doivent avoir impérativement des informations
exactes sur la distance verticale de l’avion par rapport aux reliefs afin d’en prendre des décisions
adéquates pour la sécurité du vol. C’est pourquoi plusieurs recherches ont effectuées et le
radioaltimètre en est le résultat. Ce système sécuritaire soit-il, est tout de même associé à un
système d’avertissement de proximité sol, le GPWS, afin de garantir plus de sécurité tant pour les
vies humaines à bord de l’avion que pour l’appareil lui-même. Ce qui nous mène à intituler ce
mémoire : « Application du radioaltimètre dans le GPWS ».
Le but de ce mémoire est axé sur l’étude de l’ensemble fonctionnel d’aide RADAR utilisé en
aéronautique, le radioaltimètre, qui permet aux pilotes la lecture de la hauteur de décision et
d’expliquer les modes de fonctionnement du GPWS y associé.
Le contenue du travail de ce mémoire est divisé en deux parties :
La première, subdivisée en trois chapitres :
• Le premier chapitre consiste à expliquer les différentes techniques utilisées en
radiolocalisation et une présentation générale du RADAR
• Le deuxième chapitre est réservé à l’étude du fonctionnement du radioaltimètre
• Le troisième chapitre est consacré à l’étude des modes de fonctionnement du GPWS
La deuxième partie, consistant à des simulations sous Matlab, d’abord du système radioaltimètre,
en générant un signal et en interprétant les résultats lus par l’équipage à bord ; puis des modes de
fonctionnement du GPWS, en alarmant l’équipage à l’aide des messages visuelles et sonores.

2
CHAPITRE 1
LES TECHNIQUES UTILISEES ET PRESENTATION DU RADAR
1.1 Introduction
Le but de ce chapitre est à première vue d’expliquer les techniques utilisées par le système
RADAR afin de pouvoir comprendre son fonctionnement, en principe la modulation en
impulsion et la modulation en fréquence. Ensuite, une présentation générale du RADAR y sera
effectuée afin de pouvoir accéder aux chapitres suivants qui étudieront plus en détails le
radioaltimètre et le GPWS servant d’aide à la navigation dans l’aviation civile.
1.2 Généralités
L’exploitation des ondes radio est un moyen utilisé dans le secteur de l’aéronautique pour
améliorer la sécurité des personnes civiles ou militaires voyageant par voie aérienne à bord des
aéronefs. En général, la communication aéronautique peut être classifiée en deux grandes
catégories de système [1] :
• Les systèmes de radiocommunication ;
• et les systèmes de radiolocalisation.
Dans les systèmes de radiocommunication, comme leur nom l’indique, ils incluent une
communication directe entre le pilote et les contrôleurs aériens. Ils consistent principalement à la
communication d’informations de guidage de la part du contrôleur et de la transmission régulière
du compte rendu de position de l’aéronef par le pilote ainsi que d’autres informations pertinentes
relatives à la sécurité ou au trafic aérien, par exemple la signalisation d’un problème ou incident
quelconque.
Pour la seconde catégorie, elle concerne plutôt à l’utilisation des ondes radio pour localiser
l’aéronef dans l’espace tridimensionnelle incluant l’altitude, et nécessite la mesure des paramètres
de vol par le traitement des signaux émis et ou reçus, selon l’équipement utilisé.
Aussi, pour pouvoir transmettre une information, quel que soit son type et son utilisation, on doit
procéder la modulation de ce signal afin de l’adapter au canal de transmission [3].
Les systèmes de navigation aérienne utilisent différents types de modulation suivant la fonction de
l’équipement utilisé et du genre d’information échangée :
• modulation en impulsion
• modulation en amplitude
• modulation en fréquence

3
• modulation de phase
Ici, nous nous intéressons à la modulation en impulsion et à la modulation en fréquence, les
modulations utilisées par les Radar.
1.3 Modulation du signal
Il ne s’agit pas d'étudier le traitement de l'information, au sens de la compression, amplification,
encodage, mais de se consacrer aux traitements appliqués aux signaux en vu de leur transmission :
c'est à dire la modulation.
1.3.1 Présentation générale sur le traitement du signal
Afin de transmettre un signal, il est important de savoir la nécessité de le moduler.
1.3.1.1 Absorption et distorsion dans le milieu
La transmission d’information se faisant bien souvent par antennes, le canal utilisé est l’air qui a la
propriété d’absorber les ondes.
L'absorption est un phénomène dû à une perte d'énergie dans le milieu, le signal s'atténue
en parcourant le milieu comme le fait l'onde de choc créée par un corps jeté dans l'eau.
Figure 1.01: Amplitude d’une onde en fonction de la distance
De la même façon, toutes les composantes fréquentielles d'un signal ne se propagent pas à la
même vitesse. D'où l'intérêt, lors de la transmission d'un signal, de transmettre un spectre assez
étroit [1][2][3][4].

4
1.3.1.2 Principe de la modulation
Un récepteur capable de capter un signal provenant d'un émetteur rayonnant une onde
électromagnétique d'amplitude, de phase et de pulsation constantes, ne recevrait comme
information que la fréquence du signal émis.
Il est donc nécessaire de moduler le signal émis afin de pouvoir multiplier les informations
transmises.
Indépendamment de cela, il faut pouvoir transmettre les signaux à distance. Dans le cas de la
radiodiffusion: l'intérêt est d'utiliser un signal porteur de haute fréquence qui se propage bien dans
l'air, pour transmettre un signal basse fréquence (la voix ou musique) qui se transmettrait moins
loin de l'émetteur et moins bien [2][3][4].
1.3.1.3 Intérêt de la modulation
Supposons que l'on veuille transmettre un signal sonore audible. Il encombrerait une plage de
fréquences s'étendant de 50 Hz à 20 kHz. La transmission directe de ce signal, par ondes
hertziennes, est impossible car :
• il serait impossible, à la réception, de distinguer ce signal de tous les autres occupant la
même plage de fréquences.
• Les dimensions des antennes sont grandes d'environ une longueur d'onde du signal.
Celle-ci atteindrait alors des dimensions prohibitives.
Pour un signal de fréquence 20 kHz, la longueur de l'antenne serait d'au moins :
' ( ) * " ( ) ( +3 * 10/0
101 ( 30 3
où c est la vitesse de la lumière ou la célérité et T, f, sont respectivement la période, la fréquence
et la longueur d'onde.
• Même si il était possible de construire l'antenne, étant donné que, dans notre cas, la
fréquence du signal varie sur une large plage de fréquences, l’antenne ne serait pas
adaptée.
L'intérêt de la modulation réside donc dans la possibilité d'avoir un signal aisément
discernable et qui se propage correctement [2][3][4].
1.3.2 Modulation d’impulsion
L’onde porteuse est émise pendant les temps très courts séparés de longs intervalles. Les ondes
modulées par impulsions sont caractérisées par la variation de :

5
• l’amplitude des impulsions
• La durée de l’émission de l’onde porteuse ou la durée de l’impulsion
• La période de répétition ou période de récurrence des impulsions
1.3.2.1 Caractéristiques d’un signal impulsionnel
Pendant la durée d’impulsion, on peut modéliser le signal impulsionnel sous la forme :
4+50 ( 6 784ΩΩΩΩ5 (1.01)
Elle est caractérisée par :
• La puissance instantanée d’une impulsion :
9:+50 ( 4²+50 (1.02)
• L’énergie d’une impulsion de durée τ :
< ( = 9:>5 ( = 6² 784²+ΩΩΩΩ50 >5 ( 6² ?@
?
A
?
A
(1.03)
• La puissance crête de durée τ :
97 ( <? ( 6²
@ (1.04)
• Et la puissance moyenne d’un train de n impulsions de durée totale n.TC :
9D ( E . <E . GH ( <
GH ( 97. ?GH
(1.05)
1.3.2.2 Relation entre les puissances
Soient PJ : la puissance moyenne débitée par l’émetteur,
PM : la puissance maximale de l’impulsion émise,
τ: la durée d’une impulsion et
TC: la période de répétition des impulsions
9M. GH ( 9D? (1.06)
On peut encore écrire :
Le coefficient N
OP est appelé coefficient de remplissage qui représente la fraction de la période de
répétition occupée par chaque impulsion.
Le rapport OP N montre bien que la puissance de crête de l’impulsion émise est strictement supérieure
à la puissance moyenne du signal émis qui pourrait être propagé dans l’espace mais en
régime permanent [1][3][5].

6
1.3.2.3 Mesure de la distance d’une cible
Il est à noter que la modulation par impulsion est généralement utilisée pour la mesure de la
distance entre la station de radiolocalisation et la cible. La mesure de la distance s’effectue par
l’intermédiaire du temps du trajet d’aller et de retour de l’onde (cf. figure 1.02) [1][2][4].
En effet, si D est la distance entre la station de radiolocalisation et la cible ; C la vitesse de
propagation de l’onde, ce temps de trajet est mesuré par :
∆5 ( @. QR
(1.07)
∆t n’est autre que la durée d’observation t
Figure 1.02 : Mesure du temps de propagation du signal
Où E : l’émetteur de la station de radiolocalisation
R : le récepteur de la même station
SU+t0: signal émis par l’émetteur
SC+t0: signal réfléchi par la cible
tU: le temps de propagation de l’onde allant de la station (émetteur) jusqu’à la cible
tC: le temps de propagation de l’onde venant de la cible jusqu’à la station (récepteur).
Afin de pouvoir mesurer cette distance, l’impulsion écho et l’impulsion émise ne doivent pas se
superposer, c'est-à-dire que la durée d’observation doit être supérieure à celle de la durée de
chaque impulsion.
t> τ
A la limite, on a pour t ( τ : τ ( 2. DJWX
C
La distance minimale détectable est donc :
Z[\] ( ^ . _@
(1.08)

7
En outre, le signal est formé d’une série d’impulsions. Pour distinguer le signal écho du signal
émis, on doit imposer la condition suivante : t<TC A la limite maximale, on a pour t ( TC :
TC ( 2. DJ `C
La distance maximale mesurable sera donc :
Z[ab ( ^ . cd@
(1.09)
Figure 1.03 : Allure des signaux émis et reçus ainsi que la durée d’observation
1.3.2.4 Calcul du nombre des impulsions reçues
Soit les caractéristiques de l’antenne d’une station de radiolocalisation :
• θ : l’angle d’ouverture à 3 dB,
• N (tours/mn) : la vitesse de rotation de l’antenne,
• d : la dimension de la cible sur la direction de balayage,
• la vitesse de déplacement de la cible :
+v dans le sens du balayage
-v dans le sens contraire
• F : la fréquence de répétition du signal émis.
La durée d’observation est définie par :
t ( θ e fg
Ω
Avec R : la distance oblique entre la cible et la station,
Ω : la vitesse angulaire de la rotation de l’antenne.

8
Il y a deux cas à étudier lors du calcul du nombre d’impulsions reçues:
Pour une cible fixe, le nombre d’impulsions reçues est défini par :
n ( tTC
( tF
n ( θ e fg
ΩxF
Mais pour une cible mobile, on doit faire intervenir la vitesse angulaire de déplacement de la cible
qui est ω ( lg
Quand la cible se déplace dans le sens de rotation de l’antenne, le nombre d’impulsions reçues
est :
E ( θθθθ e >m
ΩΩΩΩ e nm
op (1.10)
Par contre, si elle se déplace dans le sens inverse, le nombre des impulsions reçues est :
E ( θθθθ e >m
ΩΩΩΩ q nm
op (1.11)
1.3.3 Modulation de fréquence
La modulation de fréquence est un procédé qui consiste à faire varier la fréquence d'un signal
porteur sinusoïdal en fonction d'un message à transmettre [1].
On considère la porteuse de fonction :
r(5) ( 6r . 784s@tur. 5 e ϕϕϕϕ(5)v (1.12)
On appelle phase instantanée de p(t)l'expression Φ(t) telle que :
ΦΦΦΦ(5) ( @xur. 5 e ϕϕϕϕ(5) (1.13)
La fréquence instantanée dep(t) est ()donnée par :
u(5) ( y@t o > ΦΦΦΦ(5)
>5 ( ur e y@x o >ϕϕϕϕ(5)
>5 (1.14)
En modulation de fréquence, la dérivée de la phase instantanée ϕ()est proportionnelleau signal
modulant, tel que :
y@x o zϕϕϕϕ()
z ( |uo [() ~) le sensibilité du modulateur en /# (1.15)
Elle varie en fonction du temps proportionnellement au signal modulant. On peut alors établir
une expression de la phase instantanée :

9
Φ(t) ( 2. t e ϕ+t0 et 12 x ϕ+0
( x 3+0
Φ+50 ( @tur. 5 e @x. |uo = [+0z (1.16)
+50 ( 6ro 784+ΦΦΦΦ+500 ( 6ro 784 @xur. 5 e @x. |u o = [+0z (1.17)
Soit un message d’équation:
[+0 ( 6D . 784+@x . u[. 50.... (1.18)
La fréquence instantanée du signal modulé s'écrit : u+50 ( ur e |u . 6D . 784+@x . u[ . 50 ( ur e ∆∆∆∆u. 784+@x . u[ . 50 (1.19)
Où ∆ ( . AJest la déviation maximale de fréquence.
+t0 varie donc entre q ∆ et e ∆
La phase instantanée du signal est telle que :
Φ+t0 ( 2π . t e 2 . x = AJ . cos+2 . . t0 . dt
Φ+t0 ( 2π . t e 2 . AJ2 .
x sin+2 . . t0
ΦΦΦΦ+50 ( @t ur. 5 e ∆∆∆∆uu[
o 4:E+@x . u[ . 50 (1.20)
Par définition∆φ est appelé déviation maximale de phase ou indice de modulation β telle que :
∆ϕ ( β ( ∆
.La phase instantanée Φ(t) varie entre (ϕ q ∆φ0 et(ϕ e ∆φ0
On peut maintenant dire que le signal modulé s(t) peut s’écrire :
+50 ( 6ro 784s@t ur. 5 e ββββ . 4:E+@x . u[ . 50v (1.21)
On a l’allure du signal modulé représenté sur la figure 1.04.
Figure 1.04 : Allure du signal modulé en fréquence

10
Voici une représentation de spectres en fonction de β :
Pour β ( 1 Pour β ( 2 Pour β ( 5
Figure 1.05 : Représentation de spectres
B : largeur de bande
Par définition on appelle modulation large bande (WFM) toute modulation FM pour laquelle
β>>1. A l’inverse, si β<<1, on parle de modulation bande étroite (NFM). En pratique on parle de
NFM dès que β<<0,5.
Comme la bande occupée par un signal FM est infinie, cependant, il est démontrer que la
transmission dans une bande donnée permet de récupérer parfaitement un signal à la
démodulation, car en général les raies du spectre sont concentrées autour de celle de la
porteuse.
De façon empirique, si m(t) est le signal modulant alors ∆ ( * |3+0| ( ∆
où est la
largeur de bande du modulant.
La largeur de bande est aussi donnée par une nouvelle formule de Carson :
( @ +∆∆∆∆u e y0 ( @+y e ββββ0. y (1.22)
Il faut noter que cette règle n'est pas la seule référence pour calculer la largeur de bande.
Elle donne en général une valeur sous estimée de la bande utile nécessaire à la transmission [1][4].
1.4 Présentation générale du RADAR
1.4.1 Généralités sur le RADAR
Le RADAR ou Radio Détection And Ranging est le résultat de l'accumulation de nombreuses
recherches menées antérieurement, et auxquelles les scientifiques de plusieurs pays, tels que les
Etats-Unis, l’Allemagne ont parallèlement participé. Ces recherches sont accélérées par le
développement général de l’arme aérienne, qui serait utilisée durant la deuxième guerre mondiale,
une guerre qui semblait inévitable. Après le conflit, le radar fait son apparition dans le domaine
civil. En premier, c’est le domaine de l’aviation civil qui en est équipé et se répand ensuite dans
11
des domaines aussi divers que la détection des précipitations en météorologie, l’étude des planètes
en astronomie, le contrôle de la vitesse sur les routes et la détection des artefacts archéologiques
dans le sol. Utilisé pour des applications dans l’aviation civile, le Radar est un système de
détection et de localisation d’obstacles, le moyen d’aide radioélectrique le plus fiable utilisé pour
permettre un rapide développement du contrôle aérien et aussi participant à la maintient de la
sécurité des aéronefs en vol et de la vie humaine à bord [1] [5] [6].
1.4.2 Principe de fonctionnement
Le radar utilise des impulsions d'énergie électromagnétique, ce signal hyperfréquence est émis en
direction de la cible. Une petite partie de l'énergie transmise est réfléchie par la cible dans la
direction du radar. Cette énergie renvoyée par la cible jusqu'au radar est appelée « écho »,
exactement comme lorsque l'on considère les ondes sonores. Un radar utilise l'écho afin de
déterminer la direction et la distance de l'objet quia réfléchi son signal [6].
Figure 1.06 : Principe de fonctionnement d’un radar
Le schéma ci-dessus illustre le principe de fonctionnement du radar primaire. Le signal transmis
par le radar est généré par un émetteur puissant puis passe par un duplexeur qui l’aiguille vers
l’antenne émettrice. Chaque cible réfléchit le signal en le dispersant dans un grand nombre de
directions ce qui se nomme la diffusion. La rétrodiffusion est le terme désignant la partie du signal
réfléchi diffusée dans la direction opposée à celle des ondes incidentes (émises). L'écho ainsi
réfléchi par la cible vers l’antenne sera aiguillé par le duplexeur vers un récepteur très sensible.
Les échos détectés par le radar peuvent être finalement visualisés sur l'écran traditionnel de type
PPI (plan position indicator) ou sur tout autre système de visualisation plus élaboré. L'écran type

12
PPI permet de visualiser un vecteur dont l'origine est la position actuelle du radar et la direction
l'axe de l'antenne. Ce vecteur fait le tour de l'écran à la vitesse de rotation de l'antenne, et la
position de l'axe de l'antenne au moment où un écho est détecté correspond donc à la direction
dans laquelle se trouve cet écho [1] [6].
1.4.3 Composantes principales
Un système radar est composé des éléments suivants [1]:
• le transmetteur est l’équipement qui génère le signal sous forme d’impulsion courte et de
forte puissance.
• le duplexeur est un circuit électronique qui relie l’antenne alternativement avec le
transmetteur et le récepteur, cela permet d’utiliser la même antenne pour l’émission et la
réception.
• le récepteur a pour fonction d’amplifier, de démoduler les signaux reçus et de renvoyer
des signaux vidéo à l’écran.
• l’antenne est un équipement qui diffuse l’énergie de l’émetteur dans l’espace. C’est aussi
celle qui capte les ondes électromagnétiques
• l’écran permet de représenter graphiquement la position relative des cibles détectées par le
radar.
1.4.4 Caractéristiques générales
• Equation du radar [6]
L'équation du radar traduit l'influence de phénomènes physiques sur la puissance rayonnée, la
propagation de l'onde, et jusqu'à la réception du signal réfléchi (écho). L'équation du radar permet
de réaliser une estimation des performances d'un système radar.
Supposons que les ondes électromagnétiques se propagent dans des conditions idéales (sans
perturbation).
Pour une antenne isotrope, ces ondes se propagent de façon uniforme dans toutes les directions
alors les zones d'égale densité de puissance forment donc des surfaces sphériques (A= 4π·R²)
concentriques autour de l'antenne.
La formule suivante permet de calculer la densité de puissance pour un aérien omnidirectionnel Su
¡¢ ( £¤x¥y@
(1.23)

13
Avec : puissance émise ¦§¨ ! : densité de puissance omnidirectionnelle ¦§ 3⁄ ¨ : distance antenne-cible ¦3¨ Comme les antennes radars ne sont pas des antennes isotropes et n’émettent que dans une seule
direction (sur une portion de la sphère) alors la densité de puissance dans la direction du gain
maximum est la suivante :
¡ª ( ¡¢ * « (1.24)
avec : densité de puissance directive ¦§¨ et G : gain d’antenne
La détection de la cible ne dépend pas uniquement de la densité de puissance à sa position mais
elle dépend également de la partie de l’énergie réfléchie par la cible qui est renvoyée vers
l'antenne du radar. Afin de déterminer la valeur de cette puissance réfléchie « utile », il est
nécessaire de connaître la surface équivalente radar σ de la cible.
La puissance réfléchie Pr découle de la densité de puissance Su, du gain d'antenne G et de la très
fluctuante surface équivalente radar σ:
9H ( 94. ¬. ¤tmy@ (1.25)
Avec : puissance réfléchie ¦§¨ et ® : surface équivalente radar ¦3¨ D'une façon simplifiée nous pouvons considérer la cible comme un émetteur (du signal réfléchi).
La puissance réfléchie Pr est donc assimilable à une puissance émise (par la cible).
Comme les conditions de propagation du signal sont identiques sur le trajet aller et sur le trajet
retour, nous pouvons réutiliser la formule (1) pour déterminer la densité de puissance Se atteignant
l'emplacement de l'antenne du radar:
¡¯ ( £d¤x¥@@ (1.26)
: densité de puissance ¦§ 3⁄ ¨, : distance cible-antenne ¦3¨ L'énergie globale reçue par l'antenne PR (c'est à dire la quantité de densité de puissance captée
par l'antenne) dépend de la surface apparente de l'antenne AW.
9m ( ±². 6³ (1.27)
: puissance ¦§¨ et : surface apparente de l’antenne ¦3¨ Nous pouvons donc définir la surface apparente par:

14
6³ ( 6´ . µ´ (1.28)
: facteur d’efficacité et A : surface réelle (géométrique) de l’antenne ¦3¨ Le calcul de la puissance captée par l'antenne PR peut donc s'effectuer ainsi:
9m ( ±² . 6´. µ´ (1.29)
£¥ ( £d¤x¥@@ . 6´. |´ (1.30)
Nous allons maintenant étendre l'équation au trajet global de l'onde, et comme nous pouvons
écrire que R1 = R2 nous obtenons l'équation suivante:
9m (94.¬.¤tmy@
¤tm@@ * 6´. µ´
9m ( 94. ¬. +¤t0@my@m@@ * 6´. µ´
(1.31)
Avec ( , on obtient :
9m ( 94. ¬. +¤t0@m¤ * 6´. µ´ (1.32)
Une formule supplémentaire (cependant elle ne sera pas expliquée ici) permet de déterminer le
gain d'antenne G en fonction de la longueur d'onde λ du signal émis.
« ( ¤xλλλλ
@ * 6´. µ´ (1.33)
L’équation du radar s’écrit :
9m ( 94. ¬@. λλλλ@+¤t0¶m¤ (1.34)
Après mise en forme nous pouvons exprimer la distance R sous la forme suivante:
m ( ·94. ¬@. λλλλ@9m+¤t0¶¤
(1.35)
On s’aperçoit que pour avoir des portées considérables, il faut : de grandes puissances à
l’émission, de récepteurs de très grandes sensibilités et des antennes très directives.

15
• Longueur d’onde [1] [4]
Comme le principe du radar est basé sur la réflexion d’ondes radioélectriques sur des obstacles
alors cela impose des longueurs d’ondes d’autant plus faibles que les obstacles à détecter sont plus
petits.
Le fait de travailler avec des « λ » faibles facilite la réalisation d’antennes très directives. Les
radars utilisent surtout des ondes hyperfréquences « UHF ou SHF »
• Durée de l’impulsion à l’émission [1]
Les durées choisies se situent généralement entre 0,1 et 1us
• Fréquence de récurrence [1]
Elle détermine la portée maximum. En effet, l’écho correspondant à un obstacle à la portée
maximum doit être revenu avant l’émission d’une nouvelle impulsion.
Les fréquences de récurrence choisies vont de 250 à 1000 Hz, soit des périodes de récurrence de 1
à 4 ms, d’où des portées de 150 à 600 Km
• Ouverture du faisceau (directivité) [1] [7]
Figure 1.07 : Diagramme de rayonnement
L’angle d’ouverture du lobe principal d’une antenne radar est d’autant plus étroit que le gain de
l’antenne est grand. L’affaiblissement considéré pour la mesure de l’angle est 3dB.
¸° ( ºAλλλλQ´ (1.36)
où D : le diamètre de l’antenne

16
1.4.5 Les principaux types de radar utilisés en aviation civile
Il existe plusieurs variétés de radar en aviation civile mais les plus utilisés sont :
• Les radars pour le contrôle de la circulation aérienne :
Le radar panoramique ou radar primaire (PSR : Primary Surveillance Radar) est un radar de
détection à grande portée, muni d’un faisceau fin balayant en azimut sur 360° autour de la station,
fournit la position des avions en coordonnées polaires sur un écran cathodique du type PPI
Le radar secondaire (SSR : Secondary Surveillance Radar) est une aide à la circulation aérienne
qui complète le radar primaire dont les impulsions émises par la station provoquent des réponses
actives des aéronefs équipés de transpondeurs. Le but du radar secondaire est d’obtenir de la part
des avions interrogés des informations d’identification et d’altitude-pression (calage 1013 mb)
• Les radars constituant une aide autonomes à la navigation aérienne :
Le radioaltimètre ou radiosonde d’atterrissage ou encore radar altimètre servant à connaitre la
hauteur de l’avion par rapport au sol, il sera étudier plus en détail prochainement.
Le radar météo de bord (AWR : Airborne Weather Radar) : servant à la détection, la localisation et
l’évitement des zones à forte turbulence et de précipitations associées aux nuages (cumulonimbus)
en avant de l’avion. Il permet aussi au pilote d’avoir une vision cartographique du sol en dessous
et devant l’avion (mapping : map mainting) [1][6].
1.5 Conclusion
Il est indispensable de connaitre les techniques utilisées en radiolocalisation, la modulation en
impulsion et la modulation de fréquence, pour comprendre le fonctionnement du système radar
altimètre utilisé en aviation civile consistant à une aide autonome à la navigation aérienne. Le
chapitre suivant étudiera plus en détails le fonctionnement de ce radioaltimètre.

17
CHAPITRE 2
LE RADIOALTIMETRE
2.1 Introduction
Le radioaltimètre ou radiosonde ou encore radar altimètre est un appareil de bord qui n’a aucune
relation avec d’autres appareils au sol : c'est une aide autonome à la navigation dans les phases
d'approche et d'atterrissage. Il permet de mesurer la hauteur d'un aéronef par rapport au sol ou la
surface de l'eau.
Le radioaltimètre joue un rôle très important dans les approches de précision ILS (Instruments
Landing System). C’est à partir de la DH (Decision High ou hauteur de décision) y affichée que la
décision de remise de gaz ou de poursuivre l’atterrissage est prise par le pilote.
2.2 Principe de fonctionnement du Radioaltimètre
2.2.1 Principe de base
Le radioaltimètre radioélectrique appartient à la classe des radars. Il fonctionne donc comme un
radar, et c’est le sol qui joue le rôle de réflecteur passif. L’antenne d’émission, installée sous le
fuselage de l’aéronef émet verticalement le signal vers le sol et une antenne de réception recueille
le signal écho [7].
Figure 2.01: Représentation de l’altitude d’un avion
Le principe du radioaltimètre est basé sur la modulation de fréquence.
L’utilisation de la modulation de fréquence avec un signal triangulaire ou sinusoïdal pour la
détermination de l’altitude est un élément essentiel pour le radioaltimètre.

2.2.2 Mesure de la hauteur
2.2.2.1 Radar à modulation de fréquence
La fréquence du signal émis est modulée sur une loi en dent de scie entre les deux valeurs
extrêmes et . L’écho de ce signal parvient avec un retard
En mélangeant le signal reçu avec une partie du signal
fréquence de battement [8]:
Figure 2.02 :
On a les relations :
Où τ : la durée du trajet aller-retour du signal émis
H : la hauteur à mesurer
C : la vitesse de la lumière
∂F : la variation maximale de fréquence
: la fréquence émise
: la fréquence reçue
On a alors :
La relation de la hauteur est alors obtenue par
18
Radar à modulation de fréquence :
du signal émis est modulée sur une loi en dent de scie entre les deux valeurs
. L’écho de ce signal parvient avec un retard τ à l’antenne de réception.
En mélangeant le signal reçu avec une partie du signal émis, on fait apparaître une
: Schéma représentant le signal émis et le signal reçu
retour du signal émis,
la variation maximale de fréquence
La relation de la hauteur est alors obtenue par :
du signal émis est modulée sur une loi en dent de scie entre les deux valeurs
à l’antenne de réception.
émis, on fait apparaître une
(2.01)
Schéma représentant le signal émis et le signal reçu
(2.02)
(2.03)
(2.04)

19
» ( c[. ¼. ½¾@. ¿½ (2.05)
Les radioaltimètres utilisent ce principe mais avec comme cible le sol. Le signal envoyé par
l’antenne d’émission du radioaltimètre est réfléchi par la surface de la terre et revient
jusqu’au niveau de l’antenne de réception. La durée de cet aller-retour est τ qu’on a vue dans la
relation précédemment [8].
Ce trajet aller-retour du signal émis par le radioaltimètre représenté sur la figure
Figure 2.03 : Schéma du trajet aller-retour de l’onde
De plus si l’on peut maintenir ∂Fet constantes, la mesure de " permet de calculer la hauteur H.
On a alors :
» ( |. c[ (2.06)
2.2.2.2 Radioaltimètre à pente asservie :
Il fonctionne selon le principe du radar à modulation de fréquence.
On sait que :
c[ ( @». ¿½¼ . ½¾
Et que ∂F et sont constantes.
La pente du signal en dents de scie dépend donc de la hauteur :
• à hauteur élevée, " est plus long
• à hauteur basse," est faible

20
Figure 2.04 : Variation du signal en dents de scie selon la hauteur
Pour obtenir ces résultats, il faut réaliser deux asservissements :
• le premier maintient la fréquence à la valeur .
• le second maintient l’excursion de fréquence ∂F constante
Le calcul de la hauteur H sera réalisé à partir de la mesure de " [8].
2.2.3 Schéma de principe du radioaltimètre
Figure 2.05 : Schéma synoptique du radioaltimètre
Le rôle de chaque bloc [7] [8]:
• L’oscillateur :
L’oscillateur a pour rôle de générer un signal triangulaire ou sinusoïdal pour moduler le signal à
envoyer. L’oscillateur du radioaltimètre travaille dans les fréquences de 4.20GHz à 4.40GHz.
Basse altitude

21
• L’émetteur :
L’émetteur a pour rôle de transmettre le signal modulé en fréquence vers l’antenne d’émission
après l’avoir amplifié.
• L’antenne d’émission :
L’antenne d’émission reçoit en totalité le signal à émettre qui vient de l’émetteur.
L’antenne d’émission transforme alors ce signal électrique en onde électromagnétique et qu’il va
émettre vers le sol.
• L’antenne de réception :
L’antenne de réception fait l’opération inverse de celle de l’antenne d’émission. Il capte l’onde
électromagnétique qui est réfléchie par le sol, et il le transforme en signal électrique. Ce
signal électrique sera envoyé vers le récepteur.
• Le récepteur :
Le récepteur filtre le signal écho venant de l’antenne pour éliminer le bruit qui s’est superposé à ce
signal écho, puis amplifie le signal filtré. En suite, il envoi le signal ainsi amplifié vers
l’étage mélangeur.
• Le mélangeur :
Le mélangeur à pour rôle de mélanger le signal reçu avec une partie du signal émis afin d’obtenir
le produit de ces deux signaux.
• Le préamplificateur :
Le préamplificateur a pour rôle d’amplifier le signal de fréquence venant du mélangeur.
• Le filtre passe bas :
Le filtre passe bas est utilisé pour ne garder que la partie basse fréquence du mélange, en
particulier le signal qui est à la fréquence avec ( q .
• Le détecteur :
Ce bloc a pour rôle de trouver la variation de fréquence ∂F pour permettre au convertisseur
fréquence/tension d’en extraire les informations sur l’altitude de l’avion.
• Le convertisseur fréquence/tension :
Le bloc convertisseur fréquence/tension génère à partir de la fréquence de battement déviation
fréquence ∂F une valeur de tension qui est directement proportionnelle à l’altitude de l’aéronef.
• L’afficheur :
L’afficheur donne la valeur de l’altitude en pieds de l’aéronef selon la valeur de la tension obtenue
par le convertisseur fréquence/tension.

22
2.2.4 Fonctionnement du radioaltimètre
Pour mieux comprendre le fonctionnement du radioaltimètre, il est nécessaire de voir en détail le
fonctionnement de chaque bloc qui le constitue. L’étude sera alors basée sur le schéma fonctionnel
plus net du radioaltimètre et au fur et à mesure, on entre dans les détails sur chaque élément
constituant ce schéma fonctionnel.
Le schéma de principe général du radioaltimètre est illustré sur la figure 2.06. [7]
Figure 2.06: Schéma fonctionnel du radioaltimètre
Avec : L’onde ou le signal émis et : L’onde reçue.
: Signal de contrôle de la modulation.
H : hauteur de l’appareil, h : altitude des roues et h’ : altitude pour le pilote automatique.
Cal# : commande de calibrage de la dent de scie.
: fréquence de battement.
G# : commande du gain en fonction de l’altitude.
# : tension de commande de la pente de la dent de scie et # : tension en de scie modulant
l’émetteur.
" : durée de la dent de scie. Et Alm : alarme.
2.2.4.1 Convertisseur Fréquence/Altitude
Ce bloc réalise la conversion /en information contenant l’altitude Hen élaborant la fréquence
de battement entre l’onde émise et l’onde reçue. Il délivre aussi le signal de contrôle de
modulation .

23
Le schéma fonctionnel du convertisseur Altitude/Fréquence est illustré par la figure ci-dessous:
Figure 2.07 : Schéma fonctionnel du convertisseur altitude/fréquence
• Modulation de fréquence :
Cette fonction secondaire est réalisée par un oscillateur à varactor dont la fréquence est
modulée par la tension #.
• Contrôle de modulation :
Ce bloc délivre une information lorsque, au cours de la modulation, la fréquence est égale à
une des valeurs de référence donnée.
• Conversion tension/onde :
Cette fonction est réalisée par l’antenne d’émission qui rayonne l’onde à émettre defréquence.
• Conversion onde/tension :
C’est l’opération inverse de la conversion tension/onde, cette fonction est réalisée par l’antenne de
réception qui capte l’onde réfléchie par le sol et transforme en un signal électrique
defréquence .
• Soustracteur de fréquence :
Cette fonction est réalisée par un mélangeur. Le mélangeur fait la soustraction de la fréquence
d’émission avec la fréquence du signal reçu pour avoir la fréquence de battement .
( q
2.2.4.2 Traitement analogique
Figure 2.08 : Schéma fonctionnel du convertisseur

24
Il réalise une amplification variable en fonction de l’altitude (cf. figure3.7). La commande de la
variation du gain de l’amplification est réalisé par G# qui est un mot numérique. Il élabore aussi
une tension #qui est proportionnelle à la fréquence de battement . Mais la fonction la plus
importante que le traitement analogique assure est de stabiliser la boucle d’asservissement
constituée par le convertisseur Altitude/fréquence, le traitement analogique et la génératrice dent
de scie notamment en adaptant son amplification en fonction de l’altitude en vue de maintenir la
pente ÀÁÂ constante.
• Amplificateur A1 :
L’amplificateur A1 amplifie le signal qui a pour fréquence la fréquence de battement . Il a une
amplification de gain A1=48.
• Amplificateur à gain variable :
L’amplificateur à gain variable est réglé par la commande G# en fonction de l’altitude mesurée
afin de maintenir l’amplitude de la tension d’entrée du discriminateur sensiblement constante.
Figure 2.09 : Schéma de l’amplificateur à gain variable
L’amplificateur opérationnel MA1/1 et MA/2 sont de type TL082.
Le transistor Q1 est type 2N2222A.
Le convertisseur numérique analogique MN1 est du type AD7524.
• Filtrage/limitation :
Cette fonction limite le spectre du signal transmis dans une bande étroite centrée sur 25kHz en vue
de s’affranchir des ondes multiples réfléchies par le sol et reçues par l’antenne de réception. De
plus elle amplifie le signal transmis.

25
La variation du coefficient de pertes peut faire varier le niveau du signal reçu de façon
relativement importante. Cette fonction a aussi pour effet d’empêcher une variation brutale
de l’amplitude appliquée à l’entrée du discriminateur ce qui risquerait d’entraîner des
perturbations.
• Discriminateur :
Le bloc discriminateur réalise l’opération :
# ( Ã+ q 0
Dans cette opération est la fréquence de battement et ( 25kHz. Ici #est la tension d’erreur
qui est une tension continue et k est le rapport de conversion.
Le schéma complet d’un discriminateur du radioaltimètre radioélectrique est donné sur la figure ci
dessous :
Figure 2.10 : Schéma du discriminateur
Ici comme sur l’amplificateur à gain variable les trois amplificateurs opérationnels MA/1, MA/2 et
MA/3 du discriminateur sont de type TL082.
Tandis que les deux diodes D1 et D2 sont de type 1N4148.
• Intégrateur :
L’intégrateur est utile pour corriger la réponse transitoire de façon à annuler l’erreur statique.
• Correcteur du gain :
Le correcteur du gain contribue à la stabilité de l’asservissement de la fréquence de battement .
Elle limite automatiquement la valeur du terme proportionnel, l’amplification augmente
avec l’altitude z, ce qui diminuerait la stabilité sans cette précaution [7].

26
2.2.4.3 Générateur dent de scie
Le générateur dent de scie élabore une tension # en dent de scie dont la pente varie en fonction
du signal commande #.
Le schéma fonctionnel du générateur d’un signal en dent de scie est illustré sur la figure
ci-dessous [7]:
Figure 2.11 : Schéma fonctionnel d’un générateur d’un signal dent de scie
• Production dent de scie :
Elle délivre une tension #$en dent de scie, d’amplitude maximale # constante, de
penteproportionnelle à la valeur de la tension de commande #.
L’information "fournie par ce bloc production dent de scie représente la durée de la dent de scie
et qui est envoyé vers le bloc traitement numérique.
• Calibrage dent de scie :
La commande de calibrage Cal# permet de régler les paramètres # et Ç# de la tension #
suivantune relation de la forme : # ( . #$ e #
Figure 2.12 : Signal en dent de scie selon la valeur #et ∂V
2.2.4.4 Traitement numérique
A partir de la mesure de la durée de la dent de scie " par le générateur de dent de scie et du
signal de contrôle de la modulation , la fonction du traitement numérique consiste à déterminer

27
l’altitude H de l’avion, et d’élaborer les commandes de gain G# et de calibrage de la dent de scie
Cal#.
Le traitement numérique interprète également les commandes et réglages Cmd, et dans le cas
échéant il génère les alarmes Alm. Il élabore aussi l’information en altitude h’ pour le pilote
automatique.
Voici un schéma fonctionnel du bloc traitement numérique d’un radioaltimètre radioélectrique :
Figure 2.13 : Schéma fonctionnel du bloc traitement numérique
La fonction assurée par le traitement numérique est organisée autour d’un microcontrôleur. Ce
bloc contrôle le séquencement des échanges de données et effectue les différents calculs.
L’information Rest permet de réinitialiser la fonction du traitement numérique.
2.2.4.5 Visualisation
La visualisation donne l’information de l’altitude H de l’aéronef sous forme lisible par le pilote.
La connaissance de cette altitude permet donc au pilote de prendre une décision pour mieux
gérer l’approche et l’atterrissage son appareil.
2.3 Mode de fonctionnement
Afin de garantir des mesures fiables, le radioaltimètre utilise trois modes de fonctionnement [1] :
• Mode de poursuite
• Mode de recherche
• Mode contrôle d’intégrité

28
2.3.1 Mode de poursuite
C’est le mode de fonctionnement courant du radioaltimètre. Lorsque la quantité du signal reçu par
l’antenne de réception permet une mesure valide de la hauteur. La durée de la dent de scie est
l’image de la hauteur.
2.3.2 Mode de recherche
Lorsque pour une raison quelconque, le signal reçu ne permet pas une mesure valide, le
radioaltimètre entre automatiquement dans le mode recherche. Dans ce mode, il explore
successivement les diverses altitudes, en partant de l’altitude zéro. Lorsque la mesure devient
valide, il retourne dans le mode poursuite. S’il ne parvient pas au cours de cette exploration à
obtenir une mesure valide, alors il génère une alarme.
2.3.3 Mode contrôle d’intégrité
En vue de garantir l’intégrité de son fonctionnement, le radioaltimètre teste périodiquement
les fonctions qui constituent les chaînes de mesure utilisées dans les modes précédents. Pour ce la,
il injecte des signaux de test, puis contrôle les résultats obtenus. En cas de défaut, il génère une
alarme.
2.4 Caractéristiques principales
Le radioaltimètre a les quelques propriétés de fonctionnement suivantes [1][7]:
• Plage de fréquence de l’oscillateur de 4,2Ghz à 4,4Ghz
• Plage de température de -15°C à 71°C.
• Puissance émise : une puissance inférieure à 1 Watt, pratiquement elle est de 0,5 Watts
• Stabilité de la fréquence de plus ou moins 20MHZ.
2.5 Equipement de bord
2.5.1 Constitution
L’équipement de bord est constitué par [1]:
• Deux antennes identiques en forme d’assiette disposées sous le fuselage de l’avion, l’une
pour l’émission et l’autre pour la réception
• Un émetteur-récepteur SHF installé en soute centrale
• Un indicateur

2.5.2 Dispositif d’affichage
L’information de distance verticale (hauteur de l’aéronef par rapport au sol) est présentée
directement soit sur un indicateur à aiguille, soit sur le PFD (Primary Flight Display) pour les
aéronefs équipés d’instruments EFIS (Electronic Flight Instrument System)
Les indicateurs comportent une échelle de 0 à 2500 ft
• La première moitié du cadran
• La deuxième moitié du cadran
Un index commandé par un bouton permet de sélecter une hauteur limite (hauteur de décision) au
dessous de laquelle une alarme se dé
lumineux).
Figure 2.14
Sur les aéronefs équipés d’instruments EFIS
le mode s’effectue sur le panneau «
Sur l’image ci-après la DH est reportée sur le PFD en bas à droite. Lorsque l’aéronef arrivera à
DH un voyant ambre en bas au centre clignotera 3secondes puis restera allumé jusqu’à
l’atterrissage.
29
L’information de distance verticale (hauteur de l’aéronef par rapport au sol) est présentée
irectement soit sur un indicateur à aiguille, soit sur le PFD (Primary Flight Display) pour les
aéronefs équipés d’instruments EFIS (Electronic Flight Instrument System)
Les indicateurs comportent une échelle de 0 à 2500 ft :
La première moitié du cadran : 0 à 500 ft échelle linéaire
La deuxième moitié du cadran : 500 à2500 ft échelle logarithmique
Un index commandé par un bouton permet de sélecter une hauteur limite (hauteur de décision) au
dessous de laquelle une alarme se déclenche automatiquement (clignotement d’un voyant
Figure 2.14 : L’indicateur à aiguille du radioaltimètre
fs équipés d’instruments EFIS la sélection de la DH (hauteur de décision) ainsi que
le mode s’effectue sur le panneau « Control Panel » situé sur le bandeau du tableau de bord.
après la DH est reportée sur le PFD en bas à droite. Lorsque l’aéronef arrivera à
DH un voyant ambre en bas au centre clignotera 3secondes puis restera allumé jusqu’à
L’information de distance verticale (hauteur de l’aéronef par rapport au sol) est présentée
irectement soit sur un indicateur à aiguille, soit sur le PFD (Primary Flight Display) pour les
aéronefs équipés d’instruments EFIS (Electronic Flight Instrument System) [1][9].
Un index commandé par un bouton permet de sélecter une hauteur limite (hauteur de décision) au
clenche automatiquement (clignotement d’un voyant
L’indicateur à aiguille du radioaltimètre
la sélection de la DH (hauteur de décision) ainsi que
situé sur le bandeau du tableau de bord.
après la DH est reportée sur le PFD en bas à droite. Lorsque l’aéronef arrivera à
DH un voyant ambre en bas au centre clignotera 3secondes puis restera allumé jusqu’à
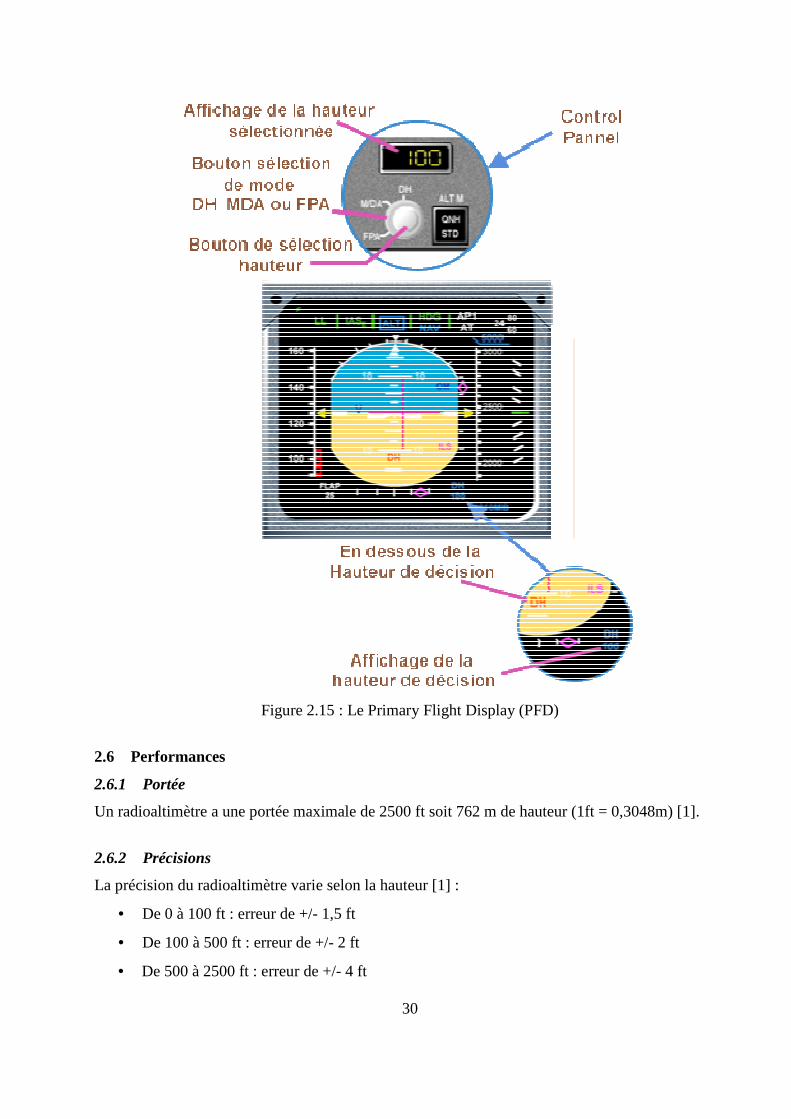
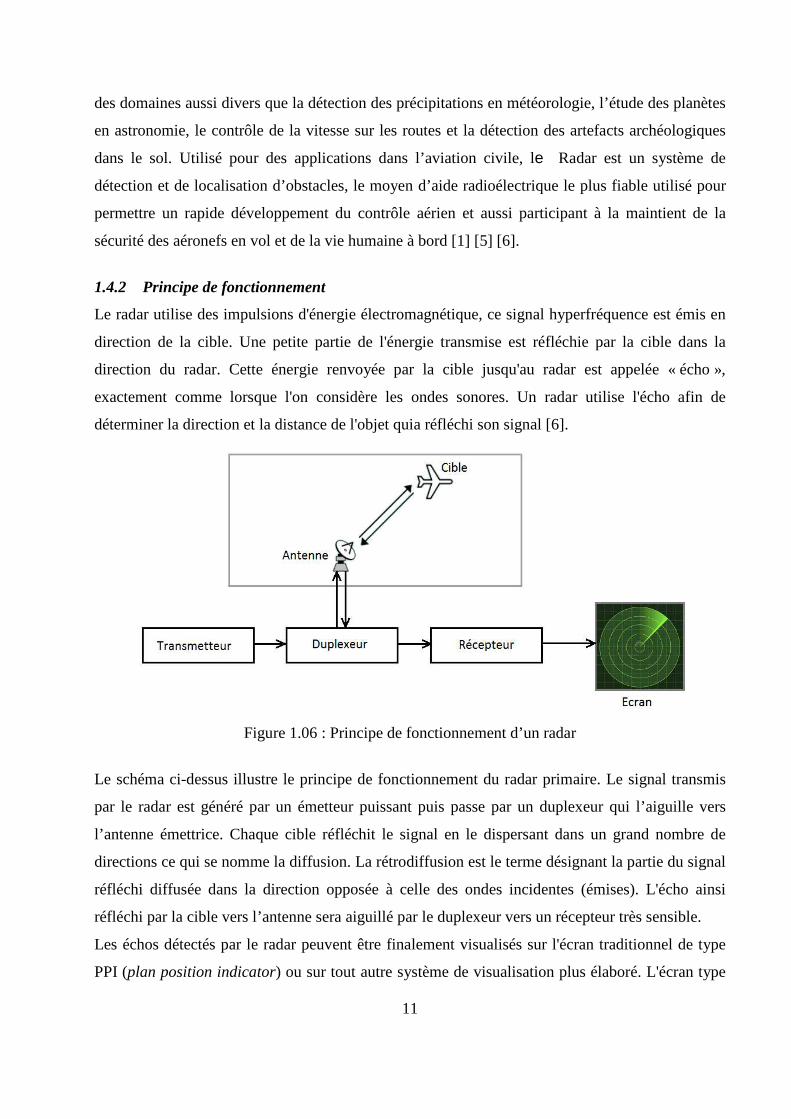
Figure 2.15
2.6 Performances
2.6.1 Portée
Un radioaltimètre a une portée maximale de 2500 ft soit 762 m de hauteur (1ft = 0,3048m)
2.6.2 Précisions
La précision du radioaltimètre varie selon la hauteur
• De 0 à 100 ft : erreur de +/
• De 100 à 500 ft : erreur de +/
• De 500 à 2500 ft : erreur de +/
30
Figure 2.15 : Le Primary Flight Display (PFD)
Un radioaltimètre a une portée maximale de 2500 ft soit 762 m de hauteur (1ft = 0,3048m)
La précision du radioaltimètre varie selon la hauteur [1] :
: erreur de +/- 1,5 ft
: erreur de +/- 2 ft
: erreur de +/- 4 ft
Un radioaltimètre a une portée maximale de 2500 ft soit 762 m de hauteur (1ft = 0,3048m) [1].

2.7 Problèmes à résoudre
2.7.1 Roulis
L’altitude représente le plus court trajet entre l’appareil et le sol. Lorsque l’appareil fait un angle
avec le sol, si les antennes ont un diagramme de
dirigé verticalement, cela introduit une erreur de mesure.
Il faut donc utiliser des antennes avec un diagramme très ouvert : 45° p
ne pas fausser la mesure de l’altitude effectuée
Figure 2.16 : Représentation de l’ouverture du faisceau d’onde pendant le roulis
Après correction, l’antenne de réception captera différents échos, ce qui traduit par un
élargissement du spectre vers les fréquences élevées.
Le radioaltimètre devra reconnaître le signal utile correspondant au temps de retard le plus petit
[1][7].
2.7.2 Tangage
Les problèmes rencontrés lors du roulis apparaîtront lors du tangage, ainsi qu’à l’atterrissage et au
décollage, du fait des angles d’inclinaison que prend l’appareil par rapport au sol.
31
L’altitude représente le plus court trajet entre l’appareil et le sol. Lorsque l’appareil fait un angle
avec le sol, si les antennes ont un diagramme de rayonnement étroit, et si le faisceau n’est plus
dirigé verticalement, cela introduit une erreur de mesure.
Il faut donc utiliser des antennes avec un diagramme très ouvert : 45° pour le lobe principal pour
pas fausser la mesure de l’altitude effectuée.
Représentation de l’ouverture du faisceau d’onde pendant le roulis
, l’antenne de réception captera différents échos, ce qui traduit par un
élargissement du spectre vers les fréquences élevées.
Le radioaltimètre devra reconnaître le signal utile correspondant au temps de retard le plus petit
Les problèmes rencontrés lors du roulis apparaîtront lors du tangage, ainsi qu’à l’atterrissage et au
d’inclinaison que prend l’appareil par rapport au sol.
L’altitude représente le plus court trajet entre l’appareil et le sol. Lorsque l’appareil fait un angle
rayonnement étroit, et si le faisceau n’est plus
our le lobe principal pour
Représentation de l’ouverture du faisceau d’onde pendant le roulis
, l’antenne de réception captera différents échos, ce qui traduit par un
Le radioaltimètre devra reconnaître le signal utile correspondant au temps de retard le plus petit
Les problèmes rencontrés lors du roulis apparaîtront lors du tangage, ainsi qu’à l’atterrissage et au
d’inclinaison que prend l’appareil par rapport au sol.

32
Figure 2.17 : Les ouvertures du faisceau d’onde pendant le tangage.
En outre, compte tenu de la vitesse du déplacement par rapport au sol, l’effet Doppler se manifeste
et il en résulte une variation de la fréquence de battement qui peut atteindre 1kHz [1][7].
2.7.3 Installation
Selon la géométrie de l’appareil, l’emplacement des antennes, la liaison entre les antennes et
le boîtier électronique, il résulte un délai d’installation dans l’appareil qui sera désigné par AID.
L’altitude h du train d’atterrissage se calcule à partir de l’altitude H par la relation : h = H – AID.
En pratique, ce délai correspond à quelques dizaines de pieds. Son réglage permet
d’étalonner l’altitude 0 correspond au toucher des roues.
L’emplacement et le diagramme des antennes doivent être adaptés à l’appareil pour que la mesure
de l’altitude ne soit pas perturbée lors de la sortie du train d’atterrissage [1][7].
2.8 Utilisation
A bord de l’aéronef, le pilote sélectionne la DH à l’avance, selon la catégorie d’approche. Durant
les phases d’approche et d’atterrissage, le pilote peut avoir en permanence sa distance verticale par
rapport au sol ou la surface de l’eau. Et dès que la DH est atteinte une alarme se déclenche et un
voyant lumineux se clignote (s’allume) automatiquement jusqu’à ce que les roues de l’aéronef

touchent le sol (la surface de la piste d’atterrissage), rendant la hauteur affichée sur le
radioaltimètre à une valeur H=0.
Figure 2.18
La première figure indique que l’avion entre dans la phase d’approche à l’atterrissage et
1500 ft du sol.
La deuxième figure indique que l’avion est bien à la DH sélectée, obligeant le pilote à prendre
une décision adéquate à la sécurité du vol
La troisième figure signifie que le pilote a choisi de poursuivre l’att
un succès. L’alarme s’arrête et le voyant lumineux s’éteint.
La dernière figure signifie que le pilote a décidé d’interrompre l’approche à l’atterrissage,
l’avion monte jusqu’à un niveau de vol donné par le contrôleur aérien
durant laquelle une autorisation donnée permettra de procéder à une nouvelle approche à
l’atterrissage.
2.9 Conclusion
Le radioaltimètre est donc un
information continue de la distance verticale de l’avion par rapport au sol. Il participe grandement
dans l’approche à l’atterrissage en indiquant la hauteur de l’avion qui a pour valeur la DH, point
où une décision favorable à la sécurité du vol est obligatoirement p
son fonctionnement nous a permis de comprendre le principe de détermination de la hauteur de
l’avion. Le chapitre suivant se consacrera à l’étude de fonctionnement du GPWS qui utilisera
l’information de distance fournie par l
33
face de la piste d’atterrissage), rendant la hauteur affichée sur le
radioaltimètre à une valeur H=0. [1]
Figure 2.18 : Exemple d’affichage radioaltimètre
indique que l’avion entre dans la phase d’approche à l’atterrissage et
indique que l’avion est bien à la DH sélectée, obligeant le pilote à prendre
une décision adéquate à la sécurité du vol : poursuivre ou non l’atterrissage.
signifie que le pilote a choisi de poursuivre l’atterrissage et que celui
un succès. L’alarme s’arrête et le voyant lumineux s’éteint.
signifie que le pilote a décidé d’interrompre l’approche à l’atterrissage,
l’avion monte jusqu’à un niveau de vol donné par le contrôleur aérien pour un circuit d’attente
durant laquelle une autorisation donnée permettra de procéder à une nouvelle approche à
système fiable utilisé en navigation aérienne, il fournit au pilote une
continue de la distance verticale de l’avion par rapport au sol. Il participe grandement
dans l’approche à l’atterrissage en indiquant la hauteur de l’avion qui a pour valeur la DH, point
où une décision favorable à la sécurité du vol est obligatoirement prise par le pilote. L’étude de
son fonctionnement nous a permis de comprendre le principe de détermination de la hauteur de
l’avion. Le chapitre suivant se consacrera à l’étude de fonctionnement du GPWS qui utilisera
l’information de distance fournie par le radioaltimètre.
face de la piste d’atterrissage), rendant la hauteur affichée sur le
indique que l’avion entre dans la phase d’approche à l’atterrissage et étant à
indique que l’avion est bien à la DH sélectée, obligeant le pilote à prendre
: poursuivre ou non l’atterrissage.
errissage et que celui- ci est
signifie que le pilote a décidé d’interrompre l’approche à l’atterrissage,
pour un circuit d’attente
durant laquelle une autorisation donnée permettra de procéder à une nouvelle approche à
système fiable utilisé en navigation aérienne, il fournit au pilote une
continue de la distance verticale de l’avion par rapport au sol. Il participe grandement
dans l’approche à l’atterrissage en indiquant la hauteur de l’avion qui a pour valeur la DH, point
rise par le pilote. L’étude de
son fonctionnement nous a permis de comprendre le principe de détermination de la hauteur de
l’avion. Le chapitre suivant se consacrera à l’étude de fonctionnement du GPWS qui utilisera

34
CHAPITRE 3
LE GROUND PROXIMITY WARNING SYSTEM
3.1 Introduction
Le but de ce chapitre est d’expliquer ce qu’est un GPWS afin de pouvoir comprendre son utilité
dans la prévention d’accidents auxquels des pertes de vie humaines en sont les conséquences. Il y
sera présenté des brefs généralités, puis successivement la fonction, la constitution, les interfaces
du GPWS. Par la suite, les modes de fonctionnement, qui sont les points essentiels, seront
expliqués plus en détail. Pour finir, il y sera définit les indications visuelles et auditives et la
maintenance du GPWS.
3.2 Généralités
Les collisions avec le relief sans perte de contrôle CFIT (Controlled Flight Into Terrain)
constituent depuis l'avènement de l'aviation commerciale dans les années cinquante, la majorité
des cas d'accidents aériens. Ce type d'accident est d'autant plus dramatique que l'enquête technique
montre, qu'avant l'impact, l'avion était en état de navigabilité, que ses systèmes de bord
fonctionnaient de façon normale mais que l'équipage n'avait pas conscience de l'imminence de
l'accident. [11]
De ce fait plusieurs recherches sont effectuées en se penchant sur ce problème crucial pour la
sécurité de vol afin de prévenir ce type d’accident ; et parmi les fruits de ces recherches, le GPWS
installé à bord des avions. Il fonctionne avec le radioaltimètre lorsque l’avion se trouve à moins
de 2500 ft. [1]
3.3 Fonction du GPWS
Le Ground Proximity Warning System a une fonction de générer des alarmes sonores et visuelles
lorsque l’évolution de l’avion est anormale et risque d’entrainer une collision avec le sol [1].
Cet équipement est obligatoire à bord des avions [12]:
• dont la configuration maximale approuvée est supérieure à 9 sièges ou dont la masse
maximale certifiée au décollage est supérieure à 5700 kg.
• dont la configuration maximale approuvée est supérieure à 30 sièges ou dont la masse
maximale certifiée au décollage est supérieure à 15000kg.

35
En comparant en permanence les informations fournies par le radioaltimètre et d’autres paramètres
de vol, le GPWS surveille constamment la position de l'avion par rapport au sol et exclut ainsi
pratiquement tout risque de contact d'une façon dangereuse avec ce dernier [13].
3.4 Constitution du GPWS
Le système GPWS est représenté sur ce schéma :
Figure 3.01 : Schéma synoptique représentant le GPWS
Selon leur localisation, les éléments qui composent le GPWS sont les suivants [13][14] :
3.4.1 Composants situés dans le poste de pilotage (cockpit)
3.4.1.1 Les deux hauts parleurs
Les hauts parleurs sont branchés avec le GPWC à travers le REU (Remote Electronic Unit)
(cf. Figure 3.01). Ils fournissent des avertissements générés électroniquement par le GPWS.
3.4.1.2 Les deux boutons témoins ambre «BELOW G/S»
Les deux boutons témoins ambres «BELOW G/S» sont placés sur le tableau de bord. Ils ont deux
fonctions :
• Ils s'allument en clignotant pour avertir l'équipage que l'aéronef est en dessous de la
trajectoire du Glide Slope.
• Pour désactiver les alertes du mode 5, il suffit d'appuyer sur l'un de ces boutons témoins.

36
3.4.1.3 Module d'avertissement de proximité sol GPWM
Le module d'avertissement de proximité sol GPWM est l'interface entre l'équipage et le GPWS, il
se situe en face du copilote (cf. Figure 3.02).
Figure 3.02 : Le module d’avertissement de proximité sol (GPWM)
Il contient les éléments suivants:
• Une lampe témoin ambre (GPWS INOP) : elle s'allume dans les cas suivants :
Le mauvais fonctionnement du GPWS ;
Le manque de l'une des entrées critiques du GPWC (input);
Pendant un autotest du GPWC.
• Bouton poussoir test (SYS TEST) : le bouton de test permet de faire un autotest du
GPWC au niveau du poste de pilotage.
• Un interrupteur d'inhibition volets (FLAPS INHIBIT) : Lorsqu'on veut faire une
approche terrain ou un atterrissage avec des volets partiels, à ce moment on met
l'interrupteur sur la position INHIBIT afin d'éliminer l'alarme sonore du mode 4.
• Un interrupteur d'inhibition trains (GEAR INHIBIT) : Lorsqu'on veut faire une
approche terrain avec trains entrants, on met l'interrupteur sur la position INHIBIT afin
d'éliminer l'alarme sonore du mode 4.
3.4.2 Composants situés dans la soute électronique
Ils sont placés dans un compartiment dit E1 de la soute électronique

37
Figure 3.03 : Emplacement des composants dans la soute électronique
Les composants situés dans la soute électronique sont :
3.4.2.1 Le GPWC (Ground Proximity Warning Computer)
Le calculateur d'avertissement de proximité sol GPWC, compare le profil de l'avion, la position
des volets, des trains et la marge de sécurité par rapport au sol, pour déterminer s'il y a une alerte
ou condition d'avertissement de collision avec le sol. Le GPWC est un LRU (Line Replaceable
Unit), avec 2.4 pouces de largeur (6.10Cm), 7.9 pouces de hauteur (20.07Cm), et de 14.3 pouces
de longueur (36.32Cm). Il pèse 7 pounds (3.18Kg). Il est alimenté sous une tension alternative de
115V AC, ayant une fréquence de 400Hz. [2] (cf. Figure 3.04)
Figure 3.04 : Le calculateur d'avertissement de proximité sol (GPWC)
La face avant du GPWC comprend trois (3) LEDs (Light Electroluminescent Diode) et une porte
(cf. Figure 3.05) :
• LED EXTERNAL FAULT (défaut externe): elle s'allume ambre en cas de panne
extérieur au GPWC ;
PIN Program
GPWC

38
• LED COMPUTER OK (ordinateur ok): elle s'allume verte et reste allumée tant que
l'EGPWC est alimenté et fonctionne normalement ;
• LED COMPUTER FAIL (échec d'ordinateur) : elle s'allume rouge et reste allumée en
cas de panne interne du calculateur.
Figure 3.05 : Face avant du GPWC
La porte de la face avant donne l'accès aux fonctions suivantes (cf. Figure 3.05) :
• SELF TEST SWITCH (bouton poussoir) : pour démarrer le test du GPWS;
• HEADPHONE JACK (prise d'écouteur) : où se branchent les écouteurs pour entendre
toutes les alarmes qui sont dans la mémoire du GPWC ;
• MEMORY CARD SLOT (fente de carte mémoire) : pour introduire la carte afin de
charger ou de décharger les données du terrain (pour une application future);
• UPLOAD/DOWNLOAD STATUS INDICATOR : quatre (4) LEDs qui indiquent le
déroulement des opérations de chargement ou déchargement ;
• RS-232 CONNECTOR (connecteur RS-232) : utilisé dans l'atelier, pour le chargement
/déchargement des données à l'aide d'un ordinateur ainsi que durant la maintenance du
GPWC ;
3.4.2.2 Le PIN Program
Le PIN Program est un ensemble de micros Switch câblés et positionnés de telles sortes à donner
un mot binaire indiquant au GPWC les informations suivantes:

39
• Le type d'avion ;
• Le volume d'écoute haut ou bas.
3.5 Interface du GPWS
Le système d'avertissement de proximité sol GPWS (cf. Figure 3.06) comprend un calculateur
d'avertissement de proximité sol GPWC, un module d'avertissement de proximité sol GPWM, les
deux relais et d'autres composants. Le GPWC est considéré comme le composant principal du
GPWS, il est programmé pour échanger des données avec autres éléments constitutifs du système.
Figure 3.06 : Les interfaces du GPWS
Le constructeur a différencié les interfaces du GPWS selon le degré de l'importance de
l'information à traiter en deux: les interfaces discrètes et les interfaces digitales [1][13][14].
3.5.1 Les interfaces discrètes du système
La figure suivante illustre les interfaces discrètes :
40
Figure 3.07: Les interfaces discrètes du GPWS
Les entrées discrètes sont :
• L'interrupteur d'inhibition trains (Gear Inhibit Switch) du GPWM ;
• L'interrupteur d'inhibitions volets du GPWM ;
• L'interrupteur d'inhibition terrain du GPWM ;
• Le bouton poussoir test du GPWM ;
• Les deux boutons témoins «BELLOW G/S» ;
• La lampe INOP du GPWM ;
• Le module de commutateur de programme PIN Program.
Les sorties discrètes sont :
• La lampe INOP du GPWM ;
• Le système d'alerte de trafic et d'évitement de collision TCAS ;
• Les deux boutons témoin «BELLOW G/S» ;
• Le REU (Remote Electronic Unit).
3.5.2 Les interfaces digitales du GPWS
Le GPWS sert comme interface avec les autres systèmes de l'aéronef à l'aide du bus de données
ARINC 429 (Aeronautical Radio Incorporation type 429). Ces systèmes ont des interfaces
digitales avec le GPWC (cf. Figure 3.08).

Figure 3.08
3.5.2.1 Les entrées digitales du GPWS :
• L'ADIRU (Air Data Inertial Reference Unit ou
en vol).
L’ADIRU a deux fonctions primaires :
- Référence de données aériennes (ADR).
- Référence de données inertielles (IR).
Les données envoyées de L'ADIRU
- La latitude et longitude;
- L'altitude à inertielle ;
- La vitesse verticale à inertielle ;
- L'angle magnétique vrai ;
- Le cap magnétique et cap vrai ;
- L'attitude de lacet et l'attitude de roulis ;
- L'accélération verticale à inertielle ;
Les données envoyées de L'ADIRU au GPWC par le biais du bus
- La vitesse anémométrique calculée ;
- La vitesse anémométrique
- Le taux d'altitude ;
- L'altitude non corrigée.
41
Figure 3.08 : Les interfaces digitales du GPWS
Les entrées digitales du GPWS :
L'ADIRU (Air Data Inertial Reference Unit ou unité de référence des données inertielles
a deux fonctions primaires :
Référence de données aériennes (ADR).
Référence de données inertielles (IR).
L'ADIRU au GPWC par le biais du bus IR sont :
La latitude et longitude;
La vitesse verticale à inertielle ;
rai ;
Le cap magnétique et cap vrai ;
L'attitude de lacet et l'attitude de roulis ;
L'accélération verticale à inertielle ;
Les données envoyées de L'ADIRU au GPWC par le biais du bus ADR sont :
La vitesse anémométrique calculée ;
La vitesse anémométrique vraie ;
L'altitude non corrigée.
unité de référence des données inertielles
:
sont :

42
• SMYD (Stall Management Yaw Damper)
Le SMYD calcule et envoie les commandes de gestion de décrochage et l'amortisseur de lacet. Le
SMYD envoie les données suivantes au GPWC :
- L'angle d'attaque indiqué AOA ;
- L'AOA corrigé ;
- La position des volets ;
- La vitesse minimum de sustentation.
• FMC (Flight Management Computer)
L'ordinateur de gestion du vol (FMC) exécute diverses fonctions pour aider l'équipage dans la
gestion du vol. Ses fonctions sont toutes construites dans un plan latéral et dans un plan vertical, le
pilote choisit ce plan de vol à partir d'une base de données stockée dans le système et peut le
modifier à tout moment.
Dans le plan latéral, le FMC exécute:
- Le calcul de la navigation (la position de l'aéronef) ;
- Le choix de l'aide à la radio navigation (automatique ou par le pilote) ;
- Le guidage latéral pour maintenir l'avion le long du vol, du décollage à l'approche.
Dans le plan vertical, il calcule :
- La vitesse optimale pour chaque point.
• MMR (Multi Mode Receiver)
Le MMR (récepteur à plusieurs mode de fonctionnement) contient l'ILS (Instrument Landing
System), et le GPS (Global Positioning System).
• Radio altimètre
Le système radioaltimètre donne la distance vraie entre le sol et l'avion, il fournit la lecture de
l'altitude par le DEU (Display Electronic Unit). L'altitude maximale que peut mesurer ce dispositif
est de 2500 pieds, il est utilisé principalement durant le décollage et l'atterrissage de l'avion.
• MCP (Mode Control Panel) du système de commande de vol
Il envoie la donnée du cap sélectionné au GPWC. Cette donnée est utilisée dans le mode 5.
3.5.2.2 Les sorties digitales du GPWS :
• Les DEUs (Display Electronic Unit):l'EGPWC envoie le statut du système, les données
d'alarme et d'alerte à l'aide du bus ARINC 429 (annexe) aux DEUs pour les afficher sur les
PFDs (Primary Flight Display) et NDs (Navigation Display).

43
• Le FDAU (Flight Data Acquisition Unit): le GPWC envoie les alertes, les alarmes et les
statuts discrets au FDAU. Celui-ci les envoie à l'enregistreur des paramètres de vol FDR
(Flight Data Recorder).
Afin de programmer les modes de fonctionnement du GPWS, dans la simulation (chapitre 4), nous
présentons dans le paragraphe suivant une description de ces modes.
3.6 Modes de fonctionnement
Le système surveille automatiquement et en permanence la trajectoire de vol de l'avion par rapport
au terrain à toutes les altitudes comprises entre 50 et 2450 pieds. Il utilise les sorties des systèmes
fournissant la radio altitude, vitesse de l'air, le Mach, la position des trains d'atterrissage, la
position des volets, et la hauteur de décision DH. Les diverses conditions dangereuses qui peuvent
être rencontrées en vol sont divisés en cinq modes [1] [13] [14] [15].
Ce sont :
• Mode 1 : Pente de descente excessive;
• Mode 2 : Taux d'approche excessif ;
• Mode 3 : Perte d'altitude après décollage ;
• Mode 4 : Proximité du sol avec les trains d'atterrissage entrants ou les volets entrants;
• Mode 5 : Descente au-dessous du glide slope.
3.6.1 Mode 1 : Pente de descente excessive
Le mode 1 fournit au pilote des alertes et des avertissements pour de grands taux de descente
quand l'avion est près du terrain. Ce mode dépend de l'altitude et du taux barométrique. Si l'avion
entre dans la première zone dangereuse indiquant une pente de descente excessive, le message
d’alerte «Sink Rate» sera entendu et l'indication «Pull Up» s'allumera. Si le taux de descente n'est
pas rectifié, l'avion entrera dans la deuxième zone dangereuse, et le message «Sink Rate» sera
changé par l'avertissement «Whoop Whoop, Pull Up» et l'indication «Pull Up» étant toujours
allumée (cf. Figure 3.09).
Dans ce cas, la situation devient plus dangereuse et le pilote doit impérativement corriger la
trajectoire. A une altitude inférieure à 50 pieds, toutes les alarmes du mode 1 sont invalides.

44
Figure 3.09 : Mode 1 (Pente de descente excessive).
Les alarmes du mode 1 seront entendues pour une radio altitude de 50 jusqu’à 2450 pieds.
La figure 3.10 montre le fonctionnement du mode 1 :
Figure 3.10 : Principe de fonctionnement du mode 1.
Les LRU (Line Replaveable Unit) fournissent les entrées du mode 1 par :
• Les émetteurs et récepteurs de radio altimètre ;
• L’ADIRU (Air Data Inertial Référence Unit)
Altitude
radioaltimetrique (Ft)
Vitesse (Ft/min)

45
Le système GPWS emploi les données reçues par les LRU pour détecter les alertes et les
avertissements du mode 1. Ces données sont (cf. Figure 3.10) :
• La radio altitude (RA) ;
• La vitesse verticale inertielle (IVS) ;
• Le taux barométrique d’altitude.
Le détecteur de mode GPWC calcule le taux de descente en utilisant la vitesse verticale inertielle.
Si elle n’est pas disponible, le détecteur de mode fait appel au taux d’altitude intérieurement
calculé. Si les deux données ne sont pas valides, le taux d’altitude barométrique de l’ADIRU est
utilisé.
3.6.2 Mode 2 : Taux d’approche excessif
Le mode 2 fournit des alertes et des avertissements quand le taux d’approche au terrain est très
grand. Il a deux sous modes, le sous mode 2A et le sous mode 2B. Ce mode dépend du mach, de
l’altitude, du taux barométrique et de la configuration de l’avion (position des flaps et des trains
d’atterrissage).
• Le sous mode 2A : volets ne sont pas en configuration d’atterrissage
Le sous mode 2A se produit pour un grand taux d’approche si les Flaps (volets) ne sont pas dans
la configuration d’atterrissage (c’est-à-dire inférieur à 30 unités). Ce sous mode peut avoir un état
d’alerte ou un état d’avertissement. Pour un état d’alerte, le GPWS donne le message auditif
«Terrain Terrain» et le DEU affiche «Pull Up». Si il y’a une augmentation de taux d’approche,
le GPWS donne un avertissement et le message «Terrain Terrain» sera changé par le message
«Whoop Whoop Pull Up» (cf. Fig. 3.11).
Figure 3.11 : Sous mode 2A (Taux d'approche excessif).

46
• Le sous mode 2B : volets sont en configuration d’atterrissage
Le sous mode 2B est activé pour un grand taux d'approche si les Flaps sont dans la configuration
d'atterrissage (plus de 30 unités) et que si les trains d'atterrissage sont en configuration
d’atterrissage ou non. Ce sous mode peut aussi donner des alertes et des avertissements. Le GPWS
donne une alerte sous forme de message auditif «Terrain Terrain » et si l'alerte continue, le
GPWS donne le message auditif «Whoop Whoop Pull Up» (cf. Figure 3.12).
Figure 3.12 : Sous mode 2B (Taux d’approche excessif).
Les alertes du sous mode 2A se produisent entre 50 et 1500 pieds de radio altitude, pour des
vitesses anémométrique moins de 3900 Ft/min. La limite supérieure est de 1800 pieds de radio
altitude pour des vitesses anémométriques supérieures à 3900 Ft/min. Et les alertes du sous mode
2B se produisent entre 220 et 789 pieds de radio altitude, pour des vitesses supérieures à 2278
Ft/min. Le GPWS emploie le taux de descente et la position des Flaps (volets) pour calculer la
limite inférieure. (cf. Figure 3.13).
Les LRUs (Line Remplaçable Unit) assurent les différentes entrées pour l’opération du mode2 en
utilisant :
• Les émetteurs et récepteurs de la radio altitude ;
• L’ADIRU gauche ;
• Le module du GPWS ;
• L’amortisseur de lacet de gestion de décrochage (SMYD) ;
• Les MMRs1 et 2.
Ces différents équipements assurent les différentes données utilisées par le GPWS pour détecter
les alertes et les avertissements du mode 2 (cf. Figure 3.13).
Ces différentes données sont :
• La radio altitude ;

47
• La vitesse verticale inertielle (IVS) ;
• Le taux barométrique calculé ;
• La position des volets et des trains d’atterrissage ;
• Le Glide Slope et le Localizer.
Quand il y’a un avertissement (danger) au vol, le détecteur de mode envoie un signal discret au
GPWS pour donner les messages auditifs avancés. Les messages auditifs vont à la REU (Remote
Electronique Unit) qui les envoie aux haut-parleurs du poste de pilotage.
Figure 3.13 : Principe de fonctionnement du mode 2
3.6.3 Mode 3 : Perte d’altitude après décollage
Les alarmes du mode 3 se déclenchent lorsqu’il ya une grande perte d’altitude après décollage. Le
message auditif qui sera entendu est «Don’t Sink».
Lorsque l’avion atteint 700 pieds de radio altitude, le mode 3 devient non fonctionnel.
Altitude
radioaltimetrique (Ft)
Vitesse (Ft/min)

48
Figure 3.14 : Mode 3 (Pertes d’altitude après décollage).
Le principe de fonctionnement du mode 3 est illustré par la figure 3.15 ci-dessous :
Figure 3.15 : Principe de fonctionnement du mode 3.
3.6.4 Mode 4 : Proximité du sol avec les trains d'atterrissage entrants ou les volets entrants
Le mode 4 fournit des alertes quand l'avion est trop prés du terrain, et les trains d'atterrissage ou
les volets ne sont pas dans l'état de configuration d'atterrissage. Il a deux sous modes, le sous
mode 4A et le sous mode 4B. (cf. Figure 3.14).
• Le sous mode 4A : les trains d'atterrissage entrants
Le GPWS donne une alerte pour le sous mode 4A quand les trains d'atterrissage ne sont pas sortis.
Le sous mode 4A donne un message auditif «Too Low Gear» lorsque la vitesse anémométrique
est basse, ou «Too Low Terrain» lorsque la vitesse anémométrique est élevée.
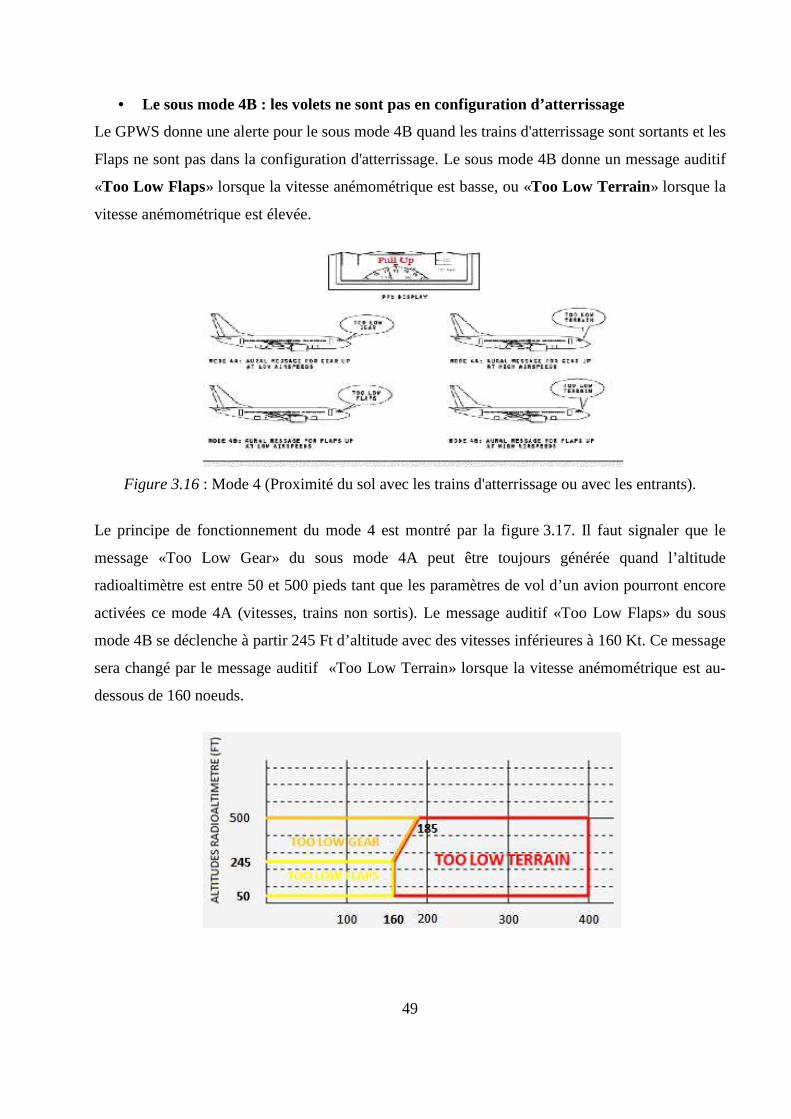
49
• Le sous mode 4B : les volets ne sont pas en configuration d’atterrissage
Le GPWS donne une alerte pour le sous mode 4B quand les trains d'atterrissage sont sortants et les
Flaps ne sont pas dans la configuration d'atterrissage. Le sous mode 4B donne un message auditif
«Too Low Flaps» lorsque la vitesse anémométrique est basse, ou «Too Low Terrain» lorsque la
vitesse anémométrique est élevée.
Figure 3.16 : Mode 4 (Proximité du sol avec les trains d'atterrissage ou avec les entrants).
Le principe de fonctionnement du mode 4 est montré par la figure 3.17. Il faut signaler que le
message «Too Low Gear» du sous mode 4A peut être toujours générée quand l’altitude
radioaltimètre est entre 50 et 500 pieds tant que les paramètres de vol d’un avion pourront encore
activées ce mode 4A (vitesses, trains non sortis). Le message auditif «Too Low Flaps» du sous
mode 4B se déclenche à partir 245 Ft d’altitude avec des vitesses inférieures à 160 Kt. Ce message
sera changé par le message auditif «Too Low Terrain» lorsque la vitesse anémométrique est au-
dessous de 160 noeuds.

50
Figure 3.17 : Principe de fonctionnement du mode 4.
Les LRU assurent ces entrées pour le mode 4 en utilisant :
• L'émetteur et le récepteur du radioaltimètre ;
• L'ADIRU gauche et air data bus;
• L'amortisseur de lacet et de gestion de décrochage (SMYD) ;
• Le switch manuel du train d'atterrissage ;
• Le module du GPWS.
Le GPWS emploie ces données pour détecter les alertes du mode 4. Ces données sont : la radio
altitude, la vitesse anémométrique calculée et la position des Flaps et des trains d'atterrissage.
Quand il y a un avertissement, le détecteur de mode envoie un signal discret au GPWS pour
donner les messages auditifs avancés. Les messages auditifs vont être envoyés au REU (Remote
Electronic Unit) qui les envois par la suite aux haut-parleurs du poste de pilotage.
3.6.5 Mode 5 : Descente au-dessous du glide slope
Le GPWS donne une alerte pour le mode 5 quand l'avion engage son atterrissage au-dessous de
l'axe du glide slope pendant l'approche si les trains d'atterrissage sont sortants.
Pour les alertes du mode 5, le GPWS donne un message auditif «Glide Slope». Le niveau de
volume du message auditif augmente et se répète plus rapidement pendant que le terrain
s'approche de plus en plus. (cf. Figure 3.18).
Figure 3.18 : Mode 5 (Descente au dessous du glide slope)

51
Les alertes du mode 5 peuvent se produire entre 50 et 500 pieds de radio altitude, il est actif quand
l'approche de l'avion est en-dessous du plan du Glide. Une alarme sonore «Glide slope» retentit
tandis qu'une inscription BELOW G/S spécifique s'allume. La fréquence de répétition du message
<<Glide slope>> est d'autant plus élevée que l'avion est en-dessous du plan et proche du sol (cf.
Figure 3.19).
Figure 3.19 : Principe de fonctionnement du mode 5.
Les entrées de LRU (Line Replaceable Unit) pour l'opération du mode 5 sont :
• Les émetteurs et récepteurs de la radio altimètre ;
• La boite de commande de mode DFCS ;
• Le commutateur de garde de train d'atterrissage ;
• Les MMRs ;
• Les FMCs ;
• Le module du GPWS ;
Le GPWS emploie ces données pour calculer les alertes du mode 5 : la déviation de pente du
Localizer et du Glide Slope, la position des trains, le cap magnétique et la radio altimètre.
Quand il ya une alerte du mode 5 le détecteur de mode envoie un signal discret au GPWS pour
faire générer les messages auditifs avancés. Les messages auditifs vont aux REU (Remote
Electronics Unit) qui les envoie aux haut-parleurs du poste de pilotage.

52
3.7 Les indications visuelles et auditives
Les indications visuelles et auditives correspondant à chaque mode sont récapitulées dans le
tableau ci-après [13] :
Tableau 3.01: Les indications visuelles et auditives du GPWS
Dans le cas de plusieurs alarmes sonores au même temps avec huit (8) différentes messages du
GPWS, il y'a une priorité pour ces message. Le tableau suivant présente la priorité des alarmes :
Tableau 3.02: Priorité des alertes audio.
L'avertissement sonore qui est la première donnée quand un mode est activé, identifie une
configuration d'un danger potentiel, qui sera bientôt corrigé par une investigation immédiate
effectuée par l'équipage, les avertissements ne cessent que lorsque l'avion est hors de l'enveloppe
du mode actif, à l'exception du mode 2A ou il faut gagner 300 pieds d'altitude barométrique pour
faire arrêter l'alerte.

53
3.8 Maintenance du GPWS
Il y'a une panne dès qu'un défaut apparait. Ce défaut est un écart entre ce qui devrait être et ce qui
est. Souvent le dépanneur cherche à supprimer la panne sans chercher les causes première. Si l'on
veut réellement que la panne ne se reproduise plus, il faut remonter à la cause première d'où la
nécessité de produire la chaine des causes.
Pour le cas du GPWS, on peut principalement choisir deux procédures de recherche de panne
parmi les différentes procédures existantes [13]:
• L'auto test du système GPWS.
• L'état des LEDs du panneau avant du GPWS.
Pour qu'on puisse avoir accès à ces deux procédures, il faut assurer les conditions suivantes :
• L'avion au sol ;
• La mise sous tension du GPWS ;
• Sélectionner le mode ND (Navigation Display) de la boite de commande EFIS en mode
demi-cercle ;
• Sélectionner le commutateur TERR sur la boite de commande EFIS CP (Control Panel);
• Tous les systèmes d'interfaces sont installés et activés.
Remarque : le mode demi-cercle de l'afficheur ND est sélectionné dans la boite de commande
EFIS, il permet au pilote d'afficher le relief.
3.8.1 L’auto test du GPWS
Le GPWS a six (6) niveaux d'auto test. Chaque niveau fournit des informations différentes. Les
six niveaux de l'auto test sont :
• Test opérationnel ;
• Défauts des courants ;
• Configuration du système ;
• Historique de défauts ;
• Historique d'alertes/warnings ;
• Test d'entrée des signaux discrets.
3.8.1.1 L'auto test du niveau un (1)
Le niveau (1) "go/no go test operationnal " fournit des annonces auditives et visuelles au niveau
du poste de pilotage. On peut commencer un test de niveau (1) sur le panneau avant du GPWC

54
mais on ne peut pas voir les annonces du poste de pilotage, c'est pour cela qu'on utilise le GPWM
pour commencer le test opérationnel du GPWS.
Le test du niveau (1) est défaillant dans les conditions suivantes :
• Il n'y a pas d'affichage du terrain.
• Affichage du message «TERR FAIL» sur le ND (Navigation Display).
• Absence de tous les messages, soit auditifs ou visuels.
3.8.1.2 L'auto test du niveau 2
Un test de dépannage du niveau (2) commence par un message auditif, "CURRENT FAULT"
(défaut de courant). S'il n'y a aucun défaut de courant, on entend le message auditif "NO FAULT".
S'il y a des défauts, le GPWC les annonce un par un. Une courte ou longue annulation termine le
test du niveau 2.
3.8.1.3 L'auto test du niveau 3
Un test du niveau 3 annonce la configuration du GPWS, et commence par le message auditif
"SYSTEM CONFIGURATION". Une annulation courte conduit le test immédiatement au
prochain niveau de configuration. Une longue annulation finit le test du niveau 3. Un test du
niveau 3 fournit les informations suivantes : numéro de la pièce du GPWC ; état de modification
du GPWC ; numéro de série du GPWC ; version de logiciel d'application ; et version de bases des
données du terrain.
3.8.1.4 L'auto test du niveau 4
Le test de niveau 4 montre l'historique de défauts du GPWS au-dessous des dix derniers vols. Un
test de niveau 4 commence par un message auditif "FAULT HISTORY". S'il n'y a aucun défaut
dans la mémoire d'historique du vol, nous entendons la déclaration de défauts, nous commençons
par le plus récent puis nous entendons les autres défauts dans cet ordre : vol X (X est le dernier
segment de vol) ; défauts internes pour le vol X ; et défauts externes pour le vol X.
3.8.1.5 L'auto test du niveau 5
Un test de niveau 5 commence par un message auditif "WARNING HISTORY". S'il n'y a aucune
alerte dans la mémoire d'historique de vol, on entend le message auditif "NO WARNING", s'il y a
des alertes, on entend les alertes les plus récentes d'abord.
55
3.8.1.6 L'auto test du niveau 6
L’auto test du niveau 6 peut être faite par GPWC ou par le GPWM. Pour écouter l'information de
test du GPWC, on utilise un écouteur, branché au jack sur le panneau avant du GPWC (cf. Figure
3.05). Appuyer sur le bouton self test sur le panneau avant du GPWC ou le bouton self test sur le
GPWM pour obtenir l'accès au niveau 6.
Remarque : On peut accéder à l'auto test des niveaux 2 à 5 par le GPWM et le GPWC. Quand on
emploi le GPWC, un écouteur de 600 ohms est nécessaire pour écouter les messages du test. On
branche l'écouteur au jack sur le panneau avant du GPWC (cf. Figure 3.05). Si le test est fait au
poste de pilotage c'est-à dire en utilisant le GPWM, l'information vient à travers les speakers du
poste de pilotage. On emploi le bouton self test sur le panneau avant du GPWC ou le bouton self
test sur le GPWM pour obtenir un accès aux niveaux 2 à 5.
3.8.2 L’état des LED sur le panneau avant du GPWC
Il y a trois états LED sur le panneau avant de l'ordinateur d'avertissement de proximité de sol
GPWC. (cf. Figure 3.05). Les indicateurs de LED montrent l'état du GPWC quand l'alimentation
est assurée. Les LEDs s'allument pour ces conditions:
• Défaut externe : jaune ;
• L'ordinateur OK : vert ;
• L'ordinateur en panne : rouge.
3.9 Conclusion
Le GPWS est donc un équipement obligatoire à bord des aéronefs de transport. Cet appareil
génère une alarme sonore et visuelle lorsque l'évolution de l'aéronef l'amène à risquer une
collision avec le sol. Le GPWS est un calculateur unique dialoguant avec diverses chaînes de
mesure (Radioaltimètre, ADIRS, récepteur ILS), et reçoit en entrée la hauteur au sol fournie par le
radioaltimètre et d’autres paramètres comme : la position et cap, l’écart avec le Glide et le LOC
(LOCator) de l'ILS, les différentes vitesses, configuration trains, volets. Il génère des alarmes en
sortie, correspondant à : un taux de descente excessif, un taux de rapprochement excessif avec le
sol, une perte d'altitude excessive au décollage ou en approche interrompue, une configuration
trains, volets anormale et un écart excessif sous le plan du Glide sélectionné en approche. Les
alarmes, si elles se déclenchent, s'arrêtent lorsque l'appareil sort des conditions critiques. Elles ne
sont actives que sur une certaine plage de hauteurs. Bref, le GPWS est conçu pour signaler le
pilote de tout événement anormal de l’avion au cours de son vol.

56
CHAPITRE 4
SIMULATION SOUS MATLAB
4.1 Introduction
La simulation en question consiste à faire une application de la modulation de fréquence avec un
programme élaboré sous MATLAB, où on pourra voir la forme du signal après l’avoir traité. Puis
on va effectuer la mesure de la hauteur de l’avion par le radioaltimètre, qui donnera l’information
lue par le pilote tel qu’elle peut se présenter dans l’avion. Cette hauteur sera ensuite utilisée par le
GPWS afin de calculer la présence ou non d’un danger plus ou moins important, selon les modes
de fonctionnement, pouvant nuire la sécurité de vol.
4.2 Présentation du logiciel de simulation MATLAB
MATLAB, acronyme de « MATrix LAboratory » est un logiciel développé par The Mathworks
conçu pour les calculs scientifiques possédant toutes les fonctionnalités des approches récentes de
programmation. En plus d’être un outil très puissant de calcul et riches en possibilités, la logique
des syntaxes et des codes employés facilitent considérablement sa manipulation, c’est la raison
pour laquelle dans cette simulation on a utilisé MATLAB version 7.10 (R2010a).
4.3 Présentation de la simulation
Lorsque le logiciel MATLAB est lancé, il suffit d’ouvrir le fichier « avion.m », puis de lancer
programme, qui devra faire apparaitre la fenêtre d’accueil (cf. figure 4.01).
Figure 4.01: Fenêtre d’accueil du programme

57
Arrivé à la fenêtre d’accueil, pour continuer la simulation il suffit de cliquer sur le bouton
« Entrer », ou « Quitter » pour interrompre la simulation.
La simulation comporte trois parties qui sont :
• La modulation de fréquence,
• Le radioaltimètre,
• Et les modes de fonctionnement GPWS
Une fenêtre permettant de faire un choix entre ces trois parties apparaitra, si l’on décide de
poursuivre la simulation (cf. figure 4.02).
Figure 4.02: Fenêtre de choix entre les parties de la simulation
4.4 La modulation de fréquence
La modulation de fréquence est l’un des techniques de modulation la plus utilisée en
radiolocalisation, en particulier pour le radioaltimètre. On va donc voir une application de cette
technique de modulation avec un programme élaboré sous MATLAB.
4.4.1 Paramétrage
Après avoir choisie la partie « modulation de fréquence », il faut configurer certains paramètres
pour pouvoir procéder à la simulation.

58
Tout d’abord, rappelons un peu les différentes caractéristiques du signal modulé en fréquence :
• Le signal modulant a pour expression : È+0 ( cos+20
• Le signal porteur a pour expression : É+0 ( cos+20
• L’excursion de fréquence, c’est l’amplitude du signal modulant avec une constante k qui a pour expression : ∆ ( Ã.
Dans notre étude, on a pris k=1, alors l’indice de modulation a pour expression :
[ ( ∆uu[ ( Ê[u[ (4.01)
Donc les paramètres à introduire sont :
Pour le signal modulant, son amplitude Am et sa fréquence fm
Ici, prenons Am= 10 V, fm = 100 Hz
Pour le signal porteuse, son amplitude Ap et sa fréquence fp
Ici, prenons Ap= 5 V, fp = 1000 Hz
Comme on sait que le signal modulé a pour expression:
Ë+0 ( ÊÌ 784+@xuÌ e [. 4:E+@xu[00 (4.02)
Alors avec l’indice de modulation D ( Ê[u[
( yAyAA ( 0.1, on a l’expression suivante :
Ë() ( 784(Í, @Î. yA϶ e A, y. 4:E+Í, @Î. yA@00 (4.03)
Figure 4.03: Fenêtre de paramétrage

59
On peut toujours changer certaines entrées et les valider à tout moment, ou les réinitialiser
entièrement en cliquant sur le bouton approprié. Après validation des entrées, on pourra procéder
aux résultats.
4.4.2 Résultats et interprétation
Il suffit de cliquer sur le bouton « simuler », pour voir les résultats de la simulation (cf. figure
4.04).
Figure 4.04: Résultat de la simulation
On peut avoir alors les caractéristiques de la modulation et la forme ou l’allure des signaux : le
signal porteuse, modulé suivant le rythme de la fréquence du signal modulant ; et le signal modulé
qui sera ensuite envoyé par l’émetteur à bord de l’avion à travers les antennes du radioaltimètre.
On peut toutefois réinitialiser la simulation pour pouvoir entrer de nouvelles données, puis avoir
de nouvel résultat, si non terminer cette partie en cliquant sur « Précédent ». Ce qui permettra de
revenir à la fenêtre du choix de la partie. On quitter directement la simulation en cliquant sur
« Quitter ».

60
4.5 Le radioaltimètre
Rappelons toujours que le radioaltimètre radioélectrique appartient à la classe des radars. Il
fonctionne donc comme un radar, et c’est le sol qui joue le rôle de réflecteur passif. L’antenne
d’émission, installée sous le fuselage de l’aéronef émet verticalement le signal vers le sol et une
antenne de réception recueille le signal écho.
Dans cette partie ce principe sera simulé pour enfin donner la hauteur de l’avion.
Pour se faire, choisissons la partie appropriée et la fenêtre « Radioaltimètre » apparaitra, prête
pour paramétrage.
4.5.1 Paramétrage
Les paramètres qui doivent être configurés sont expliqués ci-après mais peut être déjà aperçus
dans la figure 4.05.
Figure 4.05: Fenêtre de paramétrage

61
D’après l’équation du radar :
» ( ·£¯. «@. Ð@. Ñ£¥. +¤x0¶¤
(4.04)
Plusieurs paramètres doivent avoir leurs valeurs qui seront calculées selon les relations évoquées
plus haut.
L’antenne d’un radioaltimètre est de type paraboloïde, de rayon r = 0,12 m.
L’aire effective S (3) de l’antenne paraboloïde est donnée par la relation suivante :
¡ ( @x¶ ÒÓÌ+@a e Ì0¶ q Ì@Ô (4.05)
Avec : la profondeur de l’antenne
Õ : double de la distance focale où Ì ( d@¤a
On peut alors calculer la valeur du gain de l’antenne Ö d’expression:
« ( ¤xÐ@ ¡
(4.06)
Avec ' est la longueur d’onde de valeurs A, AÍÎ × Ð × A, Aºy car la fréquence utilisée est entre
4,2 à 4,4GHz.
La surface équivalente σ(3) se calcul à l’aide des relations suivantes :
Ñ ( @x Ø»[ab 5´E Ù@Ú
@
(4.07)
Ù° ( ¶ÛÐd , θ est l’ouverture du faisceau radar mi-puissance et »[\] ( ºÍ@ [ altitude minimum
pour une puissance maximale.
La puissance émise doit être inférieur à 1 Watt et la sensibilité de l’antenne en termes de
puissance est de 10ÏÜ Watts. Alors la puissance reçue doit être supérieure à cette valeur.
Pour des valeurs expérimentales, prenons : ( 0,05 3, ' ( 0,073, ( 0,5§, ( 7,7. 10ÏÞ§
Celles-ci permettront de données la valeur de chaque paramètre servant à donner la hauteur de
l’avion. Ces résultats seront affichés dans la figure 4.06.

62
4.5.2 Résultats et interprétation
En cliquant sur le bouton « valider », on peut voir les informations sensées être vues par le pilote
dans le cockpit.
Un cadran à aiguille du radioaltimètre représente directement la hauteur de l’avion par rapport au
sol. L’aiguille du cadran indique la hauteur de l’avion et le curseur de couleur orange indique la
hauteur de décision DH présélectionnée par le pilote.
Une boite de message peut contenir ou non des commentaires d’appréciation, de notification ou de
demande de manœuvre importante à la sécurité de vol.
Un des cas qui peuvent se présenter est le suivant :
Figure 4.06: Résultats de la simulation
Comme la hauteur de l’avion est à la DH alors le voyant lumineux brille avisant l’équipage à
prendre une décision adéquate à la sécurité de vol.

63
On pourra toujours réinitialiser toutes les données pour de nouvelle simulation, si non on termine
cette partie en cliquant sur « Précédent » pour revenir à la fenêtre de choix de la partie simulation.
4.6 Les modes de fonctionnement du GPWS
Afin d’augmenter la sécurité de vol, il est obligatoire qu’un avion de masse de transport public
soit équipé d’un système d’avertisseur de proximité sol GPWS.
Il génère des alarmes visuelle et sonore pour chaque mode.
Le GPWS a cinq modes de fonctionnement principaux à rappeler :
• Mode 1 : Pente de descente excessive
• Mode 2 : Taux d'approche excessif ;
• Mode 3 : Perte d'altitude après décollage ;
• Mode 4 : Proximité du sol avec les trains d'atterrissage entrants ou les volets entrants
• Mode 5 : Descente au-dessous du glide slope.
Quand on choisi la partie « Modes de fonctionnement du GPWS », une fenêtre apparaît. Le menu
« Mode de fonctionnement » permettra de choisir l’un des cinq modes (cf. Figure 4.07).
Figure 4.07: Fenêtre montrant la partie GPWS.
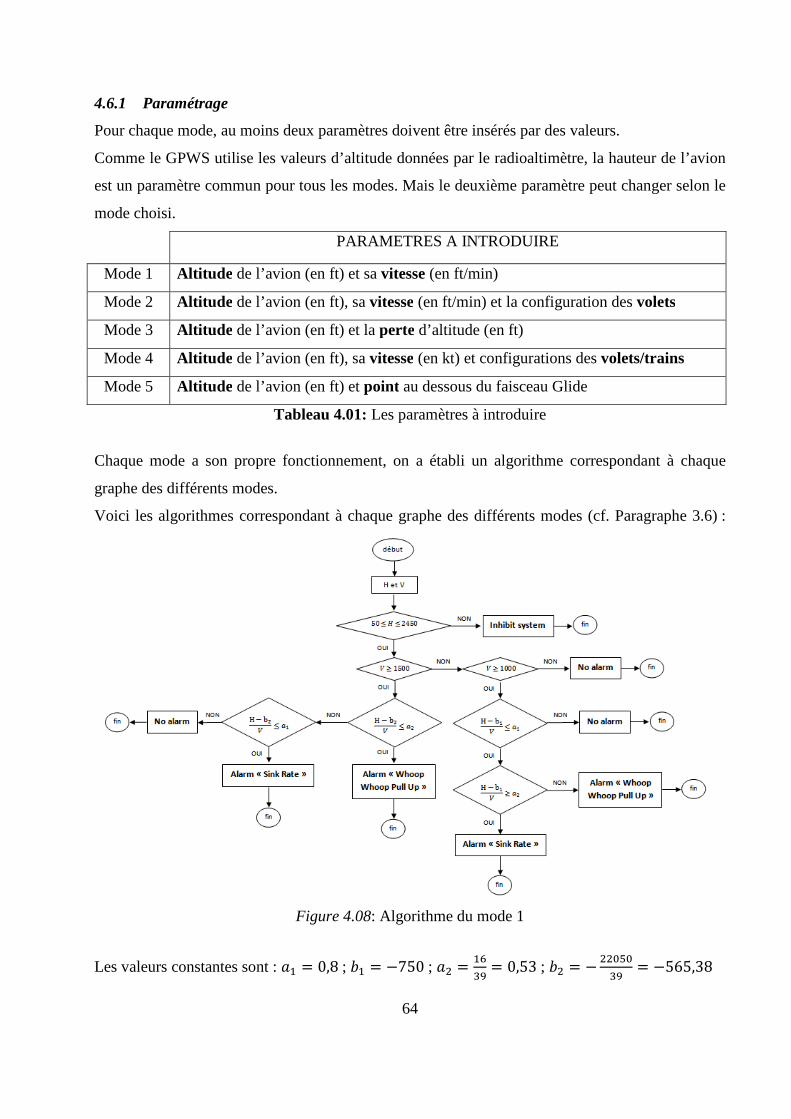
64
4.6.1 Paramétrage
Pour chaque mode, au moins deux paramètres doivent être insérés par des valeurs.
Comme le GPWS utilise les valeurs d’altitude données par le radioaltimètre, la hauteur de l’avion
est un paramètre commun pour tous les modes. Mais le deuxième paramètre peut changer selon le
mode choisi.
PARAMETRES A INTRODUIRE
Mode 1 Altitude de l’avion (en ft) et sa vitesse (en ft/min)
Mode 2 Altitude de l’avion (en ft), sa vitesse (en ft/min) et la configuration des volets
Mode 3 Altitude de l’avion (en ft) et la perte d’altitude (en ft)
Mode 4 Altitude de l’avion (en ft), sa vitesse (en kt) et configurations des volets/trains
Mode 5 Altitude de l’avion (en ft) et point au dessous du faisceau Glide
Tableau 4.01: Les paramètres à introduire
Chaque mode a son propre fonctionnement, on a établi un algorithme correspondant à chaque
graphe des différents modes.
Voici les algorithmes correspondant à chaque graphe des différents modes (cf. Paragraphe 3.6) :
Figure 4.08: Algorithme du mode 1
Les valeurs constantes sont : ( 0,8 ; à ( q750 ; ( Þáâ ( 0,53 ; à ( q Üáâ ( q565,38

65
Figure 4.09: Algorithme du mode 2
Les valeurs constantes sont : ( 1Ü/áä ( 0,79 ; à ( q1579 ; ( ä ( 0,14 ; à ( â/ (942,85
Figure 4.10: Algorithme du mode 3
début
H et P
50 × × 700
ç 10
H q b ×
Inhibit system
Alarm « Don’t
fin
fin
fin
fin
OUI
OUI
NO
NO
NO
No alarm
No alarm
OUI

66
Les valeurs constantes sont : ( ÞÜÞ ( 10,83 ; à ( ÏáÜÞ ( q58,33
Figure 4.11: Algorithme du mode 4
Les valeurs constantes sont : ( ÜÜ ( 10,2 ; à ( q1387
Figure 4.12: Algorithme du mode 5
H q bÕ ç
Inhibit system
fin
fin
fin
fin
fin
OUI
OUI
NO
NO NO
NO
début
H et p
50 × × 500
p ç 1,5
H ç 150
Alarm« Glide Slop» Alarm« Glide Slop»
No alarm
No alarm
OUI
OUI

67
Les valeurs constantes sont : ( q ,Ü ; à ( 250
Ainsi, ces algorithmes ont été programmés et seront alors simuler afin d’avoir les résultats
souhaités.
4.6.2 Résultats et interprétation
Après avoir entrés tous les paramètres, pour chaque mode des alarmes visuelles et auditives sont
enclenchées dès qu’on clique sur « valider ». Ici, l’alarme auditive est comme même convertie en
message.
Un graphe montrant le fonctionnement de chaque mode est affiché et un message peut apparaitre
pour des avertissements et des suggestions de manœuvre. Montrons les exemples du mode 1 et du
mode 2 :
Figure 4.13: Résultats de la simulation du mode 1

68
On constate que les résultats de la simulation correspondent bien au graphe. Pour des valeurs
introduites (Altitude = 1500 ft et vitesse = 4000 ft/min) l’alarme sonore affiche : Alarm « SINK
RATE » et l’alarme visuelle « PULL UP » s’allume signifiant que l’avion est dans une situation
dangereuse (premier degré) et le pilote doit réagir rapidement. Le voyant GPWS s’allume aussi
indiquant que le système GPWS fonctionne normalement.
Pour la simulation du mode 2, on a les résultats suivants :
Pour des valeurs introduites, Altitude = 1000 ft et Vitesse = 4000 ft/min, en cliquant sur
« valider », la boite de dialogue suivante apparaitra, elle permettra de déterminer la configuration
des flaps ou volets.
Figure 4.14: Confirmation de configuration des flaps
Si les flaps ou volets sont en configuration d’atterrissage, c'est-à-dire en cliquant sur « Yes », cela
revient à dire qu’aucun danger n’apparaisse alors aucune alarme sonore n’est déclenchée (« No
alarm ») et l’alarme visuelle « PULL UP » reste éteinte.
Par contre si on clique sur « No », les flaps ne sont pas en configuration d’atterrissage et l’alarme
visuelle « PULL UP » sera allumée et l’alarme sonore sera aussi déclenchée : Alarm « TERRAIN
TERRAIN ». Un message d’avertissement apparaitra aussi, il contient une suggestion au pilote
afin de l’aider à réagir proprement à la situation (cf. Figure 4.15).
Toutefois, on peut toujours effacer les valeurs introduites puis réintroduire de nouvelles valeurs
pour avoir de nouveaux résultats.

69
Figure 4.15: Résultats de la simulation du mode 2
4.7 Conclusion
Dans cette partie de simulation, on a vu trois parties différentes. Elle nous a permis de comprendre
la modulation de fréquence, comment se présente l’information de distance verticale à bord et
aussi les alarmes visuelle et auditive correspondant à chaque mode du GPWS. Ce programme
pourra être amélioré en générant des alarmes auditives et en intégrant plusieurs autres données des
systèmes comme le GPS, IVS, radar Météo de bord (AWR).

70
CONCLUSION
Les collisions avec le relief sans perte de contrôle CFIT (Controlled Flight Into Terrain)
constituent depuis l'avènement de l'aviation commerciale dans les années cinquante, la majorité
des cas d'accidents aériens. Ce type d'accident est d'autant plus dramatique que l'enquête technique
montre, qu'avant l'impact, l'avion était en état de navigabilité, que ses systèmes de bord
fonctionnaient de façon normale mais que l'équipage n'avait pas conscience de l'imminence de
l'accident. De ce fait plusieurs recherches sont effectuées en se penchant sur ce problème crucial
pour la sécurité de vol afin de prévenir ce type d’accident ; et parmi les fruits de ces recherches, le
GPWS installé à bord des avions. Il fonctionne avec le radioaltimètre lorsque l’avion se trouve à
moins de 2500 ft.
Grâce aux techniques utilisées en radiolocalisation, le radioaltimètre donne constamment la
distance verticale de l’avion par rapport au sol au cours de son vol, particulièrement durant les
phases d’approche à l’atterrissage. Cette information de distance est ensuite utilisée par le GPWS,
comparée avec d’autres paramètres de vol tel que la vitesse de l’avion, la configuration des volets
et trains d’atterrissage afin de générer des alarmes visuelles et auditives obligeant l’équipage à agir
de façon sécuritaire.
Toutefois ces systèmes performants soient-ils, tout dépend de l’homme c'est-à-dire du pilote lui-
même. Mais n’empêche que l’OACI spécifie ces systèmes comme obligatoire à bord d’un avion,
surtout de transport public. Finalement, l’amélioration de la sécurité de vol est bénéfique tant pour
les vies humaines que pour l’avion lui-même, dans le but encore d’améliorer cette notion de
sécurité plusieurs avions sont équipés d’un système TCAS, « système d'alerte de trafic et
d'évitement de collision ». C’est un instrument de bord destiné à éviter les collisions en vol entre
aéronefs.

71
ANNEXE 1 : NOTIONS D’AERONAUTIQUE
Définitions de quelques termes usuels en aéronautiques :
• Aéronef : appareil pouvant se soutenir dans l’atmosphère grâce à des réactions de l’air.
• Altitude : distance verticale de l’avion par rapport au niveau de la mer.
• Altitude-pression : ou niveau de vol, distance verticale calculée à partir de la surface
isobare (1013,25 hPa : pression standard).
• Cap : angle entre la direction origine et la ligne de foi de l’avion
• Décrochage : est une subite perte de portance causée par une interruption du flux d'air
normal sur la surface supérieure d'une aile.
• Hauteur : distance verticale de l’avion par rapport à la surface du sol.
• Route : projection à la surface de la terre, de la trajectoire d’un aéronef dont l’orientation
en un point donné de cette trajectoire est exprimée par rapport au Nord (vrai, magnétique).
• Trains d’atterrissage : ensemble des organes assurant le roulement et la suspension des
aéronefs.
• Volets : Ce sont des dispositifs appelés hypersustentateurs servant à augmenter la courbure
et ou la surface de l’aile, et pour certains, à contrôler la couche limite de l’écoulement d’air
Les angles de l’avion :
• Assiette : C'est l'angle compris entre l'axe longitudinal de l'avion et l'horizontale.
• Incidence : ou AOA, c’est l’angle entre la trajectoire de l’avion (vitesse de l’air) et la
corde de référence de l’aile.
• Pente : c’est l’angle entre la trajectoire de l’avion et l’horizon.
Mouvements de rotation d’un avion :
• Lacet : mouvement de l’avion autour de son axe vertical.
• Roulis : mouvement de l’avion autour de son axe longitudinal.
• Tangage : mouvement de l’avion autour de son axe latéral.
Unités de mesure de la distance :
• Pied (Ft) : 1Ft = 0,3048 m
• Nautique miles (Nm) : 1 Nm = 1 852 m = 6076 Ft
Unités de mesure de la vitesse :
• Nœud (Kt) : nautique mile par heure, 1 Kt = 1,852 Km/H è100 Ft/min
Mach (M) : vitesse de l’avion par rapport à la vitesse du son.

72
ANNEXE 2 : CODES SOURCES DE QUELQUES PROGRAMMES DE SIMULATION
Voici les codes sources de quelques programmes de simulation sous Matlab, comprenant quelques
fonctions et aussi une simple interface utilisateur:
%%Extraits des programmes de simulation %====== %======Modulation de fréquence k=1; m=k*a1; %excursion de fréquence m=(delta(f))*Am i=m/f1; %indice de modulation t=0:0.0001:0.1; p=a0*cos(2*pi*f0*t); %Signal porteuse cos forme cos(2*pi*fc*t) M=a1*cos(2*pi*f1*t); %Signal modulant y=cos(2*pi*f0*t+(m.*sin(2*pi*f1*t))); %signal modulé axes(handles.axes1); plot(t,p); ylabel( 'amplitude' );xlabel( 'temps' );title( 'Signal porteuse' ); axes(handles.axes2); plot(t,M); ylabel( 'amplitude' );xlabel( 'temps' );title( 'Signal modulant' ); axes(handles.axes3); plot(t,y); ylabel( 'amplitude' );xlabel( 'temps' );title( 'Signal modulé' ); %Valeur rayon antenne 5cm soit 0.05m %=====Valeur aire effective r=0.12; %rayon antenne en mètre a=0.05; %profondeur en mètre p=r.^2/(2*a) %deux fois focale 0.144 S=((2*pi)/3)*(p.^(1/2))*[((2*a)+p).^(3/2)-p^(3/2)] %en mètre carré 0.0524 %%====Calcul de la hauteur %a=0.05; %profondeur en mètre Pe=0.5; %Puissance émise R=((Pe*(G^2)*(L^2)*s)/(Pr*((4*pi)^3))).^(1/4) %================================================== =============== %%Interface utilisateur comprenant quelques élément s de contrôles % chaine = 'Fenetre principale' ; %========== haut = 180; larg = 315; figNumber = figure( 'Color' ,[1 1 0.9], ... 'Visible' , 'off' , 'NumberTitle' , 'on' , 'Resize' , 'off' , 'Name' ,chaine, 'Position' , ... [400 530 larg haut], 'Units' , 'pixels' ); %===== Menu menuprincipal = uimenu(gcf, 'Label' , 'Info.' ); %===== Les elements de menu textetb = str2mat( 'A propos...' , 'Sauve' , 'Charge' , 'Quitte' ); septb = str2mat( 'off' , 'on' , 'off' , 'on' ); M = size(textetb,1); for k = 1:M, sousmenu(k)=uimenu(menuprincipal, 'Label' ,textetb(k,:), 'Separator' ,septb(k,:)); end set(sousmenu(M), 'Callback' , 'close(gcf);clear all' ); %===== Frame uicontrol( 'Style' , 'frame' , 'Units' , 'pixels' , 'Position' ,[10 haut-135 165 115], ...

73
'BackgroundColor' ,[.8 .8 .8]); chaine = 'Texte statique' ; %========== txtsstat = uicontrol( 'Style' , 'text' , 'Units' , 'pixels' , 'Position' , ... [15 haut-45 155 20], 'BackgroundColor' ,[0 .5 1], 'ForegroundColor' , ... [0 0 0], 'String' ,chaine, 'HorizontalAlignment' , 'center' ); %===== Texte editable txtedit = uicontrol( 'Style' , 'edit' , 'Units' , 'pixels' , 'Horiz' , 'left' , 'String' , ... str2mat( 'SIMULATION FM' , 'SIMULATION Radioaltimètre' , 'SIMULATION GPWS'), 'Max' ,[3], 'Position' , [15 haut-100 155 50]); %===== popupctrl = uicontrol( 'Style' , 'popup' , 'String' , '1|2|3|4' , 'Position' , ... [15 haut-125 155 18]); %===== boutradio = uicontrol( 'Style' , 'radio' , 'Value' ,1, 'BackgroundColor' , ... [0 .8 1], 'Position' , [200 haut-35 90 16], 'String' , 'Bouton radio' ); %===== casecochee = uicontrol( 'Style' , 'checkbox' , 'Value' ,0, 'BackgroundColor' , ... [0 .8 1], 'Position' , [200 haut-65 90 16], 'String' , 'Case cocher' ); % ===== Glissiere glsse = uicontrol( 'Style' , 'slider' , 'Position' , ... [200 haut-100 90 16], 'Value' ,.5); %===== Bouton poussoir boutpousse = uicontrol( 'Style' , 'pushbutton' , 'Position' , ... [10 haut-170 168 25], 'String' , 'Quitter' ); set(boutpousse, 'Callback' , 'close(gcf);clear all' ); set(figNumber, 'Visible' , 'on' ); Après lancement de ce petit programme, on devrait avoir une petite fenêtre de ce genre :
Figure A2.01 : Exemple de fenêtre d’interface utilisateur sous Matlab

74
BIBLIOGRAPHIE
[1] R. Flotti, « Radionavigation », cours ENEAM, Ecole Nationale de l’Enseignement de
l’Aéronautique et de la Météorologie Ivato, 2007-2008.
[2] J.B. Desmoulière, C. Chevillard, « Etude et travaux pratiques », Univ. Technologie de Belfort
Montbéliard, 2004.
[3] E. Radonamandimby, « Propagation électromagnétique et hyperfréquence », Cours 3ème
année, Dép. Tél.-E.S.P.A., AU. : 2011-2012.
[4] J. Razakarivony, « Modulation et Démodulation », Cours 2ème année, Dép. Tél.-E.S.P.A.,
A.U. :2010-2011.
[5] D. Michaud, « Radionavigation et Radiocommunication1 », cours L3-IUP2, Univ. Bordeaux,
2005-2006.
[6] C. Wolff, P. Vaillant, « Radartutorial », Chapitre 1 : Notion de base, vers. Juil. 2011.
[7] P. Fombonne, J. Darricau, « Radiolocalisation et Radionavigation », 1ère édition, Paris, 1990.
[8] « Atterrissage à tout temps, radioaltimètre », 2015, http://www.iufmrese.cict.fr.
[9] D. Michaud, « Cours avionique », cours L3-IMA, Univ. Bordeaux, 2005-2006.
[10] J. Darricau, « Radars : Principes et éléments de base », Paris, 1990.
[11] Ntsb, « Rapport CFIT à Guam du vol 801/B747-300 », Rapport, 1997.
[12] OACI, « télécommunications », annexe 10, Brux, oct.2004,
[13] M. Benazzouz, « Etude du système d’avertissement de proximité sol GPWS du Boeing 737
NG », thèse DEUA, Dép. Blida, 2007-2008.
[14] L. Ghezali, « Etude du système EGPWS et simulation de ses modes de fonctionnement »,
Thèse Ing., Dép. I.A., Univ. Sciences et Technologie- Houari Boumédiene, 2O11-2012.
[15] B. Cabanes, N. Loukakos, « Guide pratique du Pilote de Ligne 7ème édition », EU-OPS 7ème
édition, Univ. Aix-en-Provence, Sept. 2007.
[16] Ivao, « Les services et utilisation du radar », sect. Instruction, div. France, Aou. 2010.

75
FICHE DE RENSEIGNEMENTS
Nom : FAMO
Prénoms : Velomalaza Faniry
Adresse: Lot II E 81 FR Tsarahonenana
Antananarivo 101
Téléphone : +261 33 73 517 96
E-mail : [email protected]
Titre du mémoire :
APPLICATION DU RADIOALTIMETRE DANS LE GPWS
Nombre de pages : 76
Nombre de tableaux : 03
Nombres de figures : 59
Mots clés : Accident, avertisseur, avion, radioaltimètre, sécurité.
Directeur de mémoire : Monsieur RATSIHOARANA Constant
Téléphone : +261 33 16 023 76

76
RESUME
Le présent mémoire nous a permis de connaître et de comprendre ce que sont le système de
radioaltimètre et le système d’avertissement de proximité sol GPWS, pourquoi ces systèmes sont-
ils aussi indispensables pour les pilotes.
La première partie nous décrit comment le radioaltimètre fonctionne et avec quelles techniques,
ainsi que son utilisation. Et aussi dans cette partie même, les différents modes de fonctionnement
d’un GPWS avec leurs alarmes visuelles et auditives sont évoqués.
La deuxième partie est réservée pour la simulation, qui est divisée en trois sous parties notamment
la modulation de fréquence, le radioaltimètre et les modes de fonctionnement du GPWS. A chaque
fois, on doit configurer les divers paramètres utiles à la simulation pour ensuite la réaliser. Notons
que la simulation se fait à l’aide du logiciel MATLAB version 7.10 (R2010a).
ABSTRACT
This memory allowed us to know and to understand what the radio altimeter System and the
Ground Proximity Warning System are, why they are so important for pilot.
The first part describes us how does the radio altimeter work and what are technologies and them
used for. And also in the same part, the different modes of GPWS with their visual and auditory
alarms are raised.
The second part is reserved for the simulation, which is divided in three under parts such us the
frequency modulation, the radio altimeter and the working modes of GPWS. First, some
parameters should be setup so as we can start the simulation. Notice that the simulation is done
using software MATLAB version 7.10 (R2010a).

Related Documents











