APPL: Anchor Path Planning –based Localization for Wireless Sensor Networks Imane BENKHELIFA and Samira MOUSSAOUI LSI, Computer Science Department Houari Bourmediene University of Science and Technology Algiers, Algeria

APPL: Anchor Path Planning – based Localization for Wireless Sensor Networks
Jan 02, 2016
APPL: Anchor Path Planning – based Localization for Wireless Sensor Networks. Imane BENKHELIFA and Samira MOUSSAOUI LSI, Computer Science Department Houari Bourmediene University of Science and Technology Algiers , Algeria. Outline. Motivation & Introduction - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

APPL: Anchor Path Planning –based Localization for Wireless Sensor Networks
Imane BENKHELIFA and Samira MOUSSAOUI
LSI, Computer Science DepartmentHouari Bourmediene University of Science and Technology
Algiers, Algeria
222/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

3
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
MotivationIntroduction
22/07/2011
Battlefield Surveillance
Maritime SurveillanceForest Fire Detection
Precision Agriculture Monitoring Patients
Monitoring Animals
Imane BENKHELIFA Mosharaka International Conference on Communications, Computers and Applications
(MIC-CCA2011)
4
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
MotivationIntroduction
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• WSN Attractive Caracteristics (Fast Deployment, Fault Tolerance, reduced cost,… etc)
• Why Sensor Localization is important?
A detected event is only useful if an information relative to its geographical position is provided

522/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

6
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionRSSI TechnologyAoA Technology
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• Localization = to assign accurate or estimated position to a sensor
• Why not a GPS (Global Posionning System) in each node?
• Solution: to equip some nodes with GPS Anchors
• Measurement Technologies:ToA (Time of Arrival)
TDoA (Time difference of Arrival)
RSSI (Received Signal Strength Indicator)
AoA (Angle of Arrival)
Costly

7
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionRSSI TechnologyAoA Technology
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• RSSI (Radio Signal Strenght Indicator)
• Considers the power loss of a signal between its emission and reception
• This loss varies with the distance between two sensors. More the sensors are distant (resp. close), more the loss is important (resp.weak)
• This loss is then converted to a distance

8
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionRSSI TechnologyAoA Technology
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• AoA (Angle of Arrival)
Each sensor has an oriented antenna and a reference axis
Absolute AoA :(θi +Δθ )(mod 2 π), i = {1,2}

922/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

10
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• Many anchors equipped with GPSEnergy comsuption & high costs
• Solution: using a mobile anchor (robot, plane, drone, vehicle, tractor…)
11
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• Other than serving as a mobile anchor, the mobile node can perform other tasks necessary for the network operations
Tasks:• Reconfigures or recalibrates sensors, • Synchronizes the clocks, • Collects data from the sensors ,• Deploys new sensors, and disables existing ones

12
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Method using a mobile Anchor [Kouts. 07]• Goal:
Planning the anchor trajectory Reducing the Localization error and Time
• Principle: Based on RSSI (conversion of signal to distance) Bayesian Inference (Probabilistic approch)
• Trajectories:- SCAN- DOUBLE SCAN- HILBERT

13
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
D= (L/R+1)x L+(L/R)x R= (L/R+2)x L
Advantages:
Good coverage of nodes Short traveled distance Reduced localization time
Drawbacks:
Abscissa-error is bigger than ordinate- error if resolution >> transmission range
Straight lines introduce collinearity
L
R

14
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
D= 2x DSCAN = 2 (L/R+2)x L
Advantages:
Scans 2 dimensions (horizontal & vertical) Ensures error-similarity along both axis
Drawbacks:
Double distance / resolution Higher localization time/errorL
R

15
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL : Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
IntroductionScan Trajectory
Double Scan TrajectoryHilbert Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
D= (L/R+2)x L +R
Advantages:
Traveled distance differs only in R from SCAN Diffusion of non-colinear messages Similar error between x/y axis
Drawbacks:
Some nodes cannot receive anchor messages (square holes)
L
R

1622/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

17
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• APPL (Anchor Path Planning based Localization)Principle:– One single Mobile Anchor– Anchor Trajectory is chosen in advance– At Each reception of anchor message, the static node rebuilds
an Anchor Box– The Anchor Box is built based on distances deduced from the
received RSSI– The node draws N samples from this box– The estimated position is the mean of samples

18
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• Building the Anchor Box
Actual Position
Estimated Position
r1
r2
r3
19
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• Anchor Path PlanningTo offer network coverage any deterministic trajectory with
properly selected parameters
To provide good quality beacons non-collinear messages, and signal strengths can be mapped to their distances from the sensor
•Anchor Trajectories- Squares- Archimedean Spiral- Waves
20
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
22/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
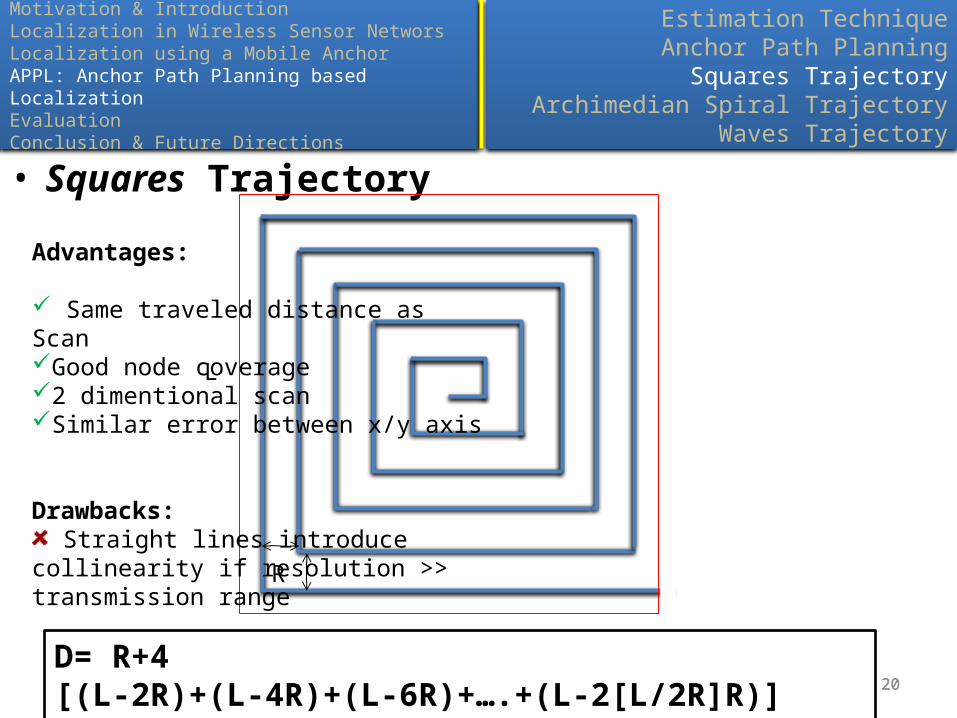
• Squares Trajectory
20
Advantages:
Same traveled distance as ScanGood node coverage2 dimentional scanSimilar error between x/y axis
Drawbacks: Straight lines introduce collinearity if
resolution >> transmission range
L
R
L
D= R+4 [(L-2R)+(L-4R)+(L-6R)+….+(L-2[L/2R]R)] = (L/R+2)x L

Imane BENKHELIFA Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
21
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
21
• Archimedean Spiral Trajectory
21
Advantages:
Traveled distance less than SCAN with + 37% Localization time reduced Reception of non-colinear messages Similar error between the two axis
Drawbacks:
Coverage of the four corners
If the deployment area increases, turns become larger the amount of non- collinearity reduces
R
Distance ≤ Rπn/4 (4n-1) with n= [L/2R] + 122/07/2011

Imane BENKHELIFA Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
22
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Estimation TechniqueAnchor Path Planning
Squares TrajectoryArchimedian Spiral Trajectory
Waves Trajectory
22
• Waves Trajectory
22
3R/2
R
Advantages:
Reception of many non-colinear messages from only one segment Traveled Distance less than SCAN with 16% Good network coverage x/y error similarity
D=2R/3 ( [ 2L/3]-1 ) + (1+ ([L/R ]-1) ([ 2L/3R ])) (π R/2 )22/07/2011

2322/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

24
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
2424
• Simulation Environment:– NS2 Simulator on Linux (Ubuntu 9.10)– Deplyment area =200m x 200m– Number of nodes =100– Transmission range =30m– Anchor speed =20m/s
• Evaluation Metrics:– Path Length and Travel Time– Localization Coverage (Number of localized nodes)– Localization Error (Distance between estimated position and real
position)22/07/2011
Imane BENKHELIFA Mosharaka International Conference on Communications, Computers and Applications
(MIC-CCA2011)

25
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
252522/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Path =Squares, Resolution =20m
10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Building Boxes
RSSITransmission range
% n
odes
with
err
or <
= 0.
1 r
(% end time)

26
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
262622/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Path =Squares, Resolution =20m
10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Diffusion Interval
1s 3s
mea
n er
ror
(r)
(% end time)

27
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
272722/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Resolution =20m
Trajectoriy Path Length (m) Travel Time (s) Gain over Scan
Double Scan 4800 240 -100%
Hilbert 2420 121 -0,82%
Scan 2400 120 0%
Squares 2400 120 0%
Waves 2003,6 100,18 +16,5%
Spiral 1500 75 +37,5%
28
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
282822/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
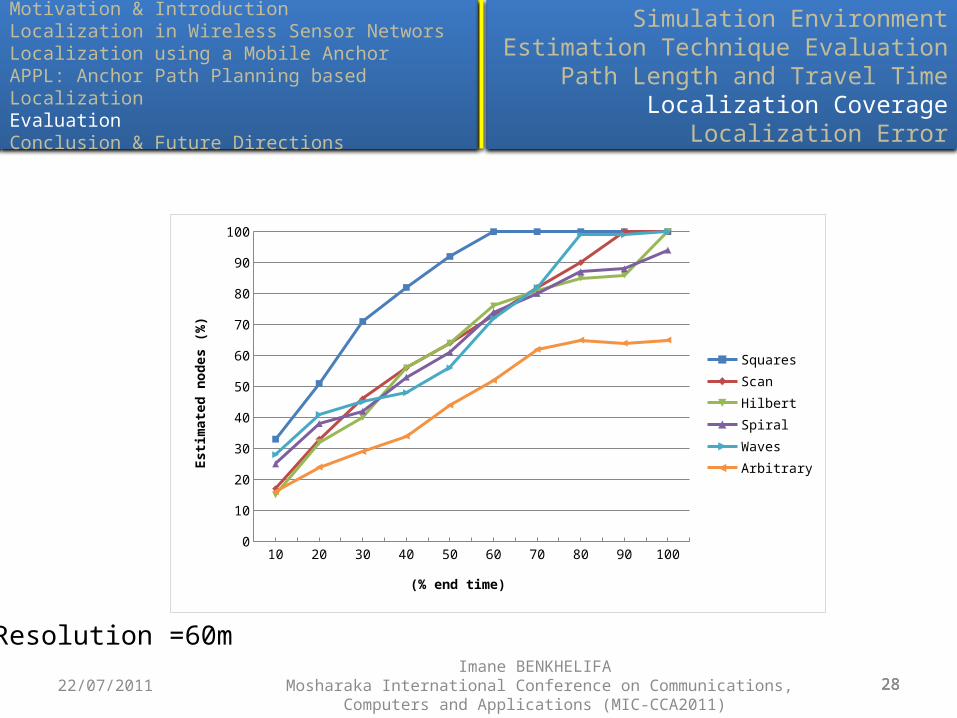
Resolution =60m
10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
SquaresScanHilbertSpiralWavesArbitrary
(% end time)
Estim
ated
nod
es (%
)
29
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
292922/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
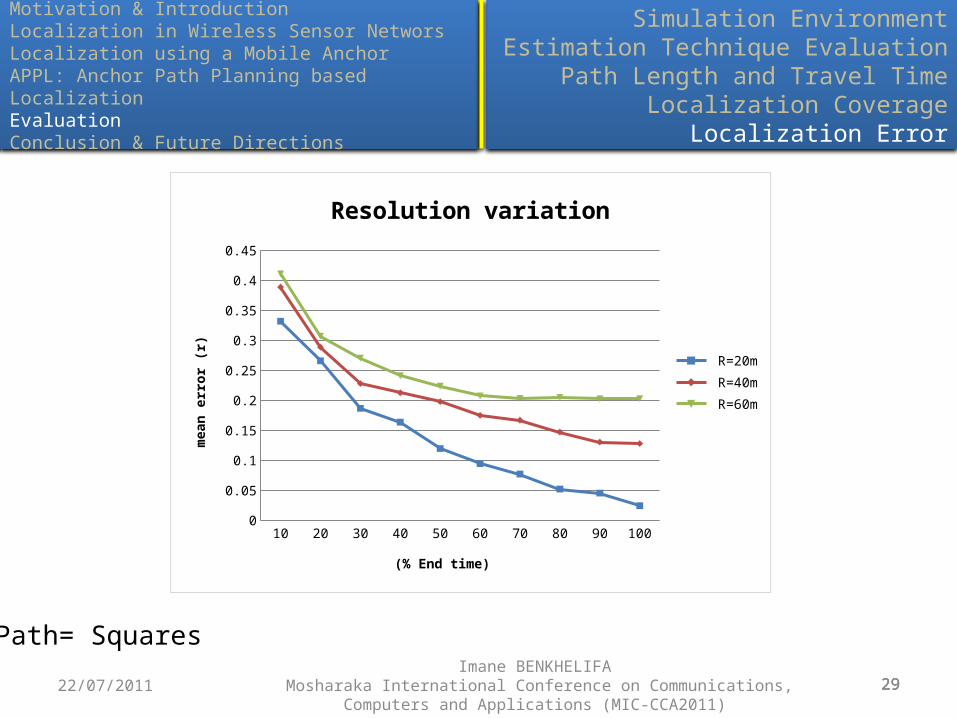
Path= Squares
10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Resolution variation
R=20m R=40m R=60m
(% End time)
mea
n er
ror (
r)

30
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
303022/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Resolution =60m
Waves Squares Spiral Scan Hilbert0
0.05
0.1
0.15
0.2
0.25
0.3m
ean
erro
r (r)

31
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Simulation EnvironmentEstimation Technique Evaluation
Path Length and Travel TimeLocalization Coverage
Localization Error
313122/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• x/y error gap
Resolution =60m
Waves Squares Spiral Scan Hilbert0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
x-errory-errormean error
(r)

3222/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
Motivation & IntroductionLocalization in Wireless Sensor NetworksLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
Outline

33
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
ConclusionFuture Directions
333322/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• APPL uses a very simple localization algorithm that makes a good combination of RSSI measurements and anchor positions
• Proposed Trajectories (SQUARES, ARCHILEDEAN SPIRAL and WAVES) are specifically designed with better localization accuracy, coverage and path length in mind
• Squares gives the quickest coverage• Sipral gives the shortest distance• Waves gives the best accuracy
• When the path resolution is much larger than the transmission range, the collinearity becomes more significant. In such cases, WAVES outperforms previously proposed path types.

34
Motivation & IntroductionLocalization in Wireless Sensor NetworsLocalization using a Mobile AnchorAPPL: Anchor Path Planning based LocalizationEvaluationConclusion & Future Directions
ConclusionFuture Directions
343422/07/2011Imane BENKHELIFA
Mosharaka International Conference on Communications, Computers and Applications (MIC-CCA2011)
• The static paths work well when the sensors are assumed to be uniformly deployed. However, in the cases where such assumption is not valid, there is a strong intensive to dynamically adjust the path during the localization procedure

Thank you
Related Documents