1 Makalah Seminar Tugas Akhir APLIKASI METODE MODEL REF ERENCE ADAPTIVE CONTROL (MRAC) PADA PLANT PENGATURAN LEVEL CAIRAN BERBASIS MIKROKONTROLER ATMEGA 8535 Ibnu Fatih [1] , Wahyudi, S.T, M.T [2] , Budi Setiyono, S.T, M.T [2] Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro Jln. Prof. Sudharto, Tembalang, Semarang, Indonesia Abstrak Dalam perancangan sistem kontrolsecara konvensional, parameter – parameter kontrol dihitung berdasarkan parameter karakteristik plant, namun seringkali parameter plant tersebut tidak diketahui, sehingga perlu mengidentifikasi plant yang akan dikendalikan. Sebuah pendekatan dalam pengendalian plant yang parameter – parameternya tidak diketahui dapat dilakukan dengan menggunakan sistem kontrol adaptif. Dengan system control adaptif maka parameter – parameter plant dan kontroler dapat diadaptasi sendiri oleh system dengan proses estimasi atau updating p arameter. Pada Tugas akhir ini, sistem kon trol adaptif dengan skema Model Reference Adaptive Control (MRAC) akan diterapkan pada plant kontrol level cairan. MRAC merupakan salah satu skema kendali adaptif dimana performansi keluaran system (plant) mengikuti performansi kelua ran model referensinya. Parameter kontroler diperbaharui dengan system pengaturan (adjustment mechanisme) menggunakan teori kestabilan Lyapunov. Plant pengendalian level ketinggian cairan menggunakan mikrokontroler ATmega 8535 sebagai kontroler dan pompa sebagai aktuator yang dikendalikan debit alirannya. Kata kunci : Model Reference Adaptif Kontrol (MRAC) , Kestabilan Lyapunov, Plant kontrol level cairan, Mikrokontroller ATmega 8535 I. PENDAHULUAN Secara konvensional dalam perancangan sistem kontrol, parameter – parameter kontroler dihitung berdasarkan parameter karakteristik plant . Tetapi seringkali parameter plant tersebut tidak diketahui, sehingga perancangan sistem kontrol harus diawali dengan pengidentifikasian terhadap plant yang akan dikendalikan secara akurat. Kenyataannya seringkali parameter plant tersebut sulit ditentukan, baik karena kompleksitas plant maupun kondisi dinamik plant , selain itu juga adanya karakteristik dari gangguan (disturbance ) yang b ervariasi . Sebuah pendekatan dalam pengendalian plant yang memiliki kendala seperti tersebut di atas dapat dilakukan dengan menggunakan sistem kontrol adaptif. Sistem kontrol adaptif memiliki kemampuan beradaptasi terhadap perubahan sistem maupun gangguan dari luar. Dengan sistem kontrol adaptif maka parameter – parameter plant dan kontroler dapat beradaptasi sendiri oleh sistem dengan proses estimasi atau updating parame ter. Parameter – parame ter dari hasil estimasi ataupun mekanisme pengaturan digunakan untuk update parameter – parameter plant dan kontroler tersebut hingga tercapai keluaran sistem sesuai dengan referensinya. Pada Tugas Akhir ini, sistem kontrol adaptif dengan skema Model Reference Adaptive Control (MRAC) akan diterapkan pada plant kontrol level cairan. MRAC merupakan salah satu skema kendali adaptif dimana performansi keluaran sistem ( plant ) mengikuti performansi keluaran model referensinya. Parameter kontroler diperbaharui dengan sistem pengaturan (adjustment mechanisme) menggunakan teori kestabilan Lyapunov . II. DASAR TEORI 2.1 Sistem Kontrol Adaptif Definisi dari sistem kontrol adaptif adalah sistem kontrol dimana parameternya dapat diatur dan juga memiliki mekanisme untuk mengatur parame ter t erse but, sehingga permasalah an sistem kontrol adaptif adalah bagaimana mendapatkan metode pengaturan kontroler ketika karakteristik proses dan lingkungan tidak diketahui atau berubah. Untuk skema teknik kontrol adaptif sendiri mempunyai skema yang berbeda dengan skema teknik kontrol pada umumnya. pada Gambar 1 diperlihatkan skema teknik kontrol adaptif. Mahasiswa Jurusan Teknik Elektro UNDIP 2 Staf Pengajar Jurusan Teknik Elektro UNDIP

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 1/11
1
Makalah Seminar Tugas Akhir
APLIKASI METODE MODEL REFERENCE ADAPTIVE CONTROL (MRAC) PADA
PLANT PENGATURAN LEVEL CAIRAN BERBASIS MIKROKONTROLER
ATMEGA 8535
Ibnu Fatih[1]
, Wahyudi, S.T, M.T[2]
, Budi Setiyono, S.T, M.T[2]
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro
Jln. Prof. Sudharto, Tembalang, Semarang, Indonesia
Abstrak
Dalam perancangan sistem kontrolsecara konvensional, parameter – parameter kontrol dihitung berdasarkan
parameter karakteristik plant, namun seringkali parameter plant tersebut tidak diketahui, sehingga perlu
mengidentifikasi plant yang akan dikendalikan. Sebuah pendekatan dalam pengendalian plant yang parameter –
parameternya tidak diketahui dapat dilakukan dengan menggunakan sistem kontrol adaptif. Dengan system control
adaptif maka parameter – parameter plant dan kontroler dapat diadaptasi sendiri oleh system dengan proses estimasi
atau updating parameter.
Pada Tugas akhir ini, sistem kontrol adaptif dengan skema Model Reference Adaptive Control (MRAC) akanditerapkan pada plant kontrol level cairan. MRAC merupakan salah satu skema kendali adaptif dimana performansi
keluaran system (plant) mengikuti performansi keluaran model referensinya. Parameter kontroler diperbaharui dengan
system pengaturan (adjustment mechanisme) menggunakan teori kestabilan Lyapunov. Plant pengendalian level
ketinggian cairan menggunakan mikrokontroler ATmega 8535 sebagai kontroler dan pompa sebagai aktuator yang
dikendalikan debit alirannya.
Kata kunci : Model Reference Adaptif Kontrol (MRAC), Kestabilan Lyapunov, Plant kontrol level cairan,
Mikrokontroller ATmega 8535
I. PENDAHULUAN
Secara konvensional dalam perancangan
sistem kontrol, parameter – parameter kontrolerdihitung berdasarkan parameter karakteristik
plant . Tetapi seringkali parameter plant tersebuttidak diketahui, sehingga perancangan sistemkontrol harus diawali dengan pengidentifikasianterhadap plant yang akan dikendalikan secaraakurat. Kenyataannya seringkali parameter plant tersebut sulit ditentukan, baik karenakompleksitas plant maupun kondisi dinamik
plant , selain itu juga adanya karakteristik dari
gangguan (disturbance) yang bervariasi.Sebuah pendekatan dalam pengendalian
plant yang memiliki kendala seperti tersebut diatas dapat dilakukan dengan menggunakan sistemkontrol adaptif. Sistem kontrol adaptif memilikikemampuan beradaptasi terhadap perubahansistem maupun gangguan dari luar. Dengan sistemkontrol adaptif maka parameter – parameter plant dan kontroler dapat beradaptasi sendiri oleh
sistem dengan proses estimasi atau updating parameter. Parameter – parameter dari hasilestimasi ataupun mekanisme pengaturan
digunakan untuk update parameter – parameter plant dan kontroler tersebut hingga tercapaikeluaran sistem sesuai dengan referensinya.
Pada Tugas Akhir ini, sistem kontrol adaptif
dengan skema Model Reference Adaptive Control (MRAC) akan diterapkan pada plant kontrol level cairan. MRAC merupakan salah satu skemakendali adaptif dimana performansi keluaransistem ( plant ) mengikuti performansi keluaranmodel referensinya. Parameter kontrolerdiperbaharui dengan sistem pengaturan(adjustment mechanisme) menggunakan teori
kestabilan Lyapunov.II.
DASAR TEORI
2.1 Sistem Kontrol Adaptif
Definisi dari sistem kontrol adaptif adalahsistem kontrol dimana parameternya dapat diaturdan juga memiliki mekanisme untuk mengatur parameter tersebut, sehingga permasalahan sistemkontrol adaptif adalah bagaimana mendapatkanmetode pengaturan kontroler ketika karakteristik
proses dan lingkungan tidak diketahui atau berubah. Untuk skema teknik kontrol adaptif
sendiri mempunyai skema yang berbeda denganskema teknik kontrol pada umumnya. padaGambar 1 diperlihatkan skema teknik kontroladaptif.
Mahasiswa Jurusan Teknik Elektro UNDIP2 Staf Pengajar Jurusan Teknik Elektro UNDIP
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 2/11
2
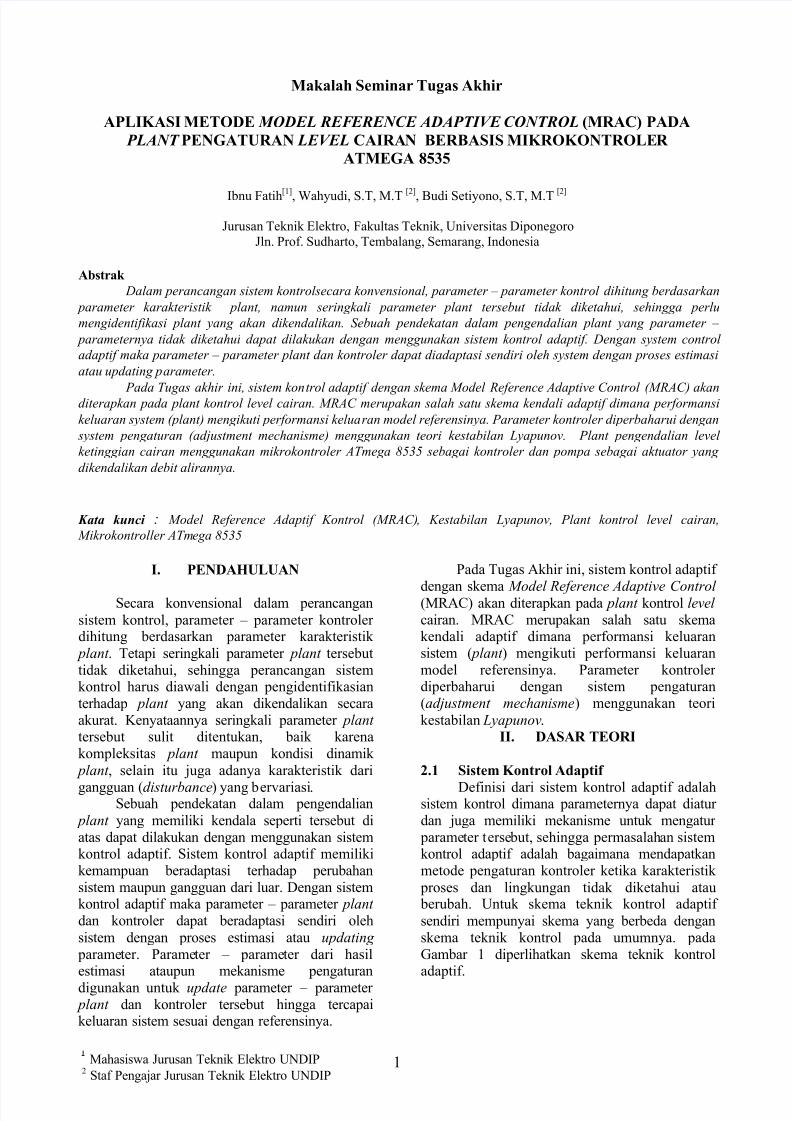
Gambar 1 Diagram blok sistem kontrol adaptif
Loop pertama pada Gambar 1 adalah loop umpan balik normal antara output proses dengan
kontroler sedangkan loop kedua adalah loop yangdigunakan untuk melakukan mekanisme
pengaturan parameter kontroler. Pada loop keduaini dilakukan proses untuk update parameter – parameter kontroler maupun parameter plant
sesuai dengan skema adaptif yg digunakan.Kelebihan dari teknik kontrol adaptif
adalah terletak pada adanya estimasi dari plant sehingga untuk mendapatkan kontroler yang baikdiperlukan suatu persamaan untuk memodelkan plant dengan akurat. Persamaan untukmemodelkan plant bisa didapat dengan
menggunakan hukum – hukum fisik sehingga plant akan dapat dimodelkan sebagai persamaan
dengan berbagai macam parameter. Tetapi, padaumumnya parameter – parameter atau nilai yangakurat parameter dari plant tidak diketahui.Dengan mengidentifikasi atau mengestimasi parameter – parameter tersebut baik secara on-line
ataupun off-line, lalu secara eksplisit mengubah parameter – parameter tersebut pada kontroler,
maka perfomansi sistem yang lebih baik dapatdicapai.
2.2 Sistem Kontrol Adaptif MRAC
MRAC merupakan salah satu skemakendali adaptif dimana performansi keluaransistem mengikuti performansi keluaran modelreferensinya. Parameter kontroler diatur melalui
mekanisme pengaturan yang didasarkan padaerror yang merupakan selisih antara keluaran
plant dengan keluaran model referensi. Diagram blok dari skema MRAC diperlihatkan padaGambar 2.
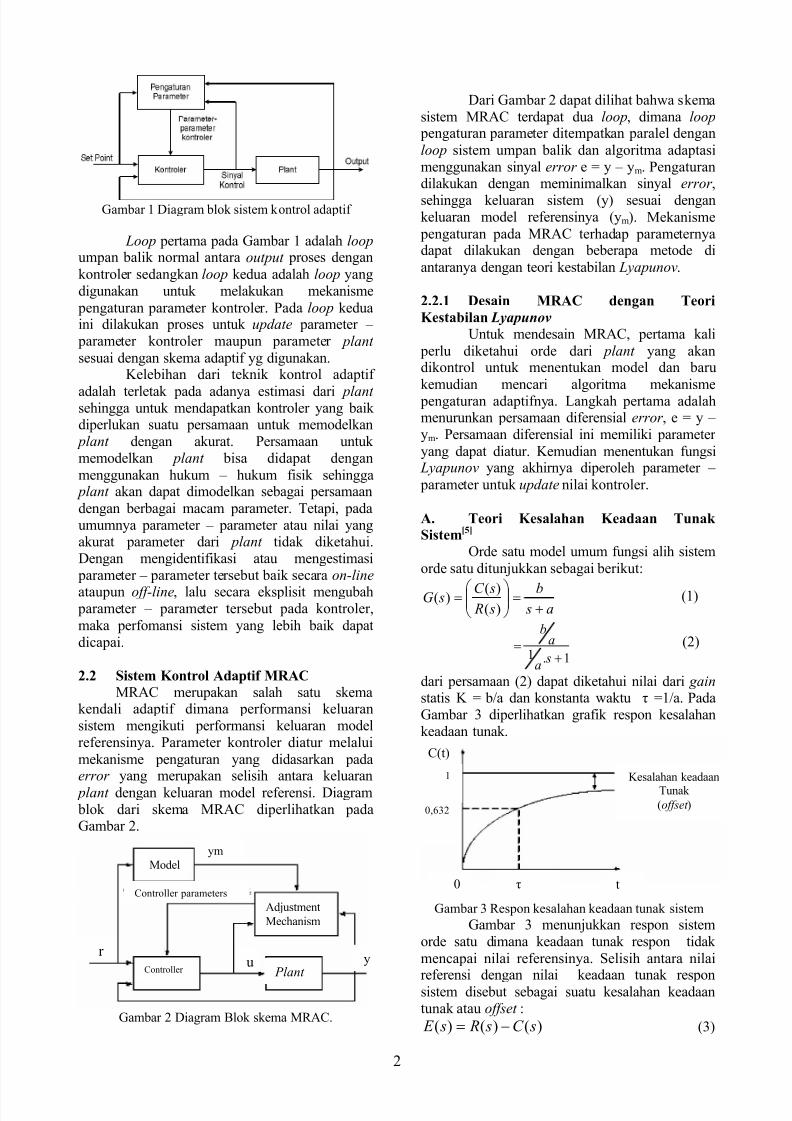
Gambar 2 Diagram Blok skema MRAC.
Dari Gambar 2 dapat dilihat bahwa skemasistem MRAC terdapat dua loop, dimana loop pengaturan parameter ditempatkan paralel dengan
loop sistem umpan balik dan algoritma adaptasimenggunakan sinyal error e = y – ym. Pengaturandilakukan dengan meminimalkan sinyal error ,
sehingga keluaran sistem (y) sesuai dengankeluaran model referensinya (ym). Mekanisme pengaturan pada MRAC terhadap parameternyadapat dilakukan dengan beberapa metode di
antaranya dengan teori kestabilan Lyapunov.
2.2.1 Desain MRAC dengan Teori
Kestabilan Lyapunov
Untuk mendesain MRAC, pertama kali
perlu diketahui orde dari plant yang akandikontrol untuk menentukan model dan baru
kemudian mencari algoritma mekanisme pengaturan adaptifnya. Langkah pertama adalahmenurunkan persamaan diferensial error , e = y –ym. Persamaan diferensial ini memiliki parameter
yang dapat diatur. Kemudian menentukan fungsi Lyapunov yang akhirnya diperoleh parameter –
parameter untuk update nilai kontroler.
A. Teori Kesalahan Keadaan Tunak
Sistem[5]
Orde satu model umum fungsi alih sistem
orde satu ditunjukkan sebagai berikut:
a sb
s R sC sG
)()()( (1)
1.1
sa
ab
(2)
dari persamaan (2) dapat diketahui nilai dari gain statis K = b/a dan konstanta waktu τ =1/a. PadaGambar 3 diperlihatkan grafik respon kesalahankeadaan tunak.
Gambar 3 Respon kesalahan keadaan tunak sistem
Gambar 3 menunjukkan respon sistemorde satu dimana keadaan tunak respon tidak
mencapai nilai referensinya. Selisih antara nilai
referensi dengan nilai keadaan tunak responsistem disebut sebagai suatu kesalahan keadaantunak atau offset :
)()()( sC s R s E (3)
1
Model
Controller Plant
Adjustment
Mechanism
r
ym
u
Controller parameters
y
C(t)
0 τ t
Kesalahan keadaanTunak
(offset )0,632

8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 3/11
3
Persamaan (3) disubstitusikan dengan
persamaan (1) sehingga diperoleh persamaansebagai berikut:
)(1)( s Ra s
b s E
(4)
sehingga jika masukan berupa tegangan step,
maka kesalahan keadaan tunaknya:
a
be 1)( (5)
Pada persamaan (5) dapat dilihat bahwaagar kesalahan keadaan tunaknya nol, makadipilih nilai b sama dengan a dan selanjutnyakriteria ini digunakan dalam menentukan modelsistem.
B. Teori Kestabilan Lyapunov untuk
Sistem Orde Satu
Untuk mendapatkan respon yang
diinginkan, maka ditentukan persamaandiferensial modelnya:
cmmmm ub ya
dt
dy (6)
Untuk persaman orde satu sistem/ plant ,dinyatakan dengan persamaan:
buaydt
dy (7)
dimana u adalah sinyal kontrol dan y adalahkeluaran yang diukur, sedangkan kontroler yang
digunakan adalah kontroler dengan algoritma pole placement yang dinyatakan dalam persamaan:
)()()( 21 t yk t uk t u c (8)
Algoritma ini memiliki 2 parameter yangdigunakan untuk mengatur besarnya sinyalkontrol keluaran dari kontroler, yaitu k1 dan k2.
Algoritma pole placement ini secara diagram blokditunjukkan pada Gambar 4.
Gambar 4 Diagram Blok algoritma pole
placement
Subtitusi persamaan (7) dengan persamaan (8)menghasilkan persamaan plant menjadi:
cubk ybk adt
dy12 )( (9)
Jika keluaran plant sama dengan keluaran modelsistem loop tertutup, maka didapatkan persamaan parameter:
b
bk m1 (10)
b
aak m 2 (11)
jika kondisi pada persamaan (10) dan (11)tercapai, maka hubungan masukan-keluaransistem dan modelnya akan sama.
Pengaturan parameter kontrolermenggunakan teori kestabilan Lyapunov, dimana
e dinyatakan sebagai error yaitu selisih antarakeluaran sistem dengan keluaran model referensi
sebagai berikut:
m y ye (12)
Untuk membuat nilai error yang kecil, maka
dengan menyatukan persamaan diferensialnya:
cmmm ubbk yaabk eadt
de)()( 12 (13)
Dari persamaan (13) error akan mendekatinol (0) jika parameter kontrol sama dengan nilai
yang diinginkan sesuai persamaan (10) dan (11).Kemudian untuk menyatakan besar k1 dan k2sesuai nilai yang diinginkan, denganmengasumsikan bγ > 0 dan menentukan fungsikuadratik pada Lyapunov sebagai berikut:
21
22
221 )(1)(1
21),,(
mmbbk
baabk
bek k eV
(14)
Untuk fungsi yang memenuhi syaratsebagai fungsi Lyapunov, maka turunan dV/dtharus definit positif. Derivatif dari fungsi
Lyapunov diperlihatkan pada persamaan (15):
eu
dt
dk bbk ye
dt
dk aabk ea
cmmm
11
22
2 )(1
)(1 (15)
Persamaan update parameter kontrol yang
diperoleh dari persamaan (15) dapat ditulissebagai berikut :
eudt
dk c
1
(16)
yedt
dk 2 (17)
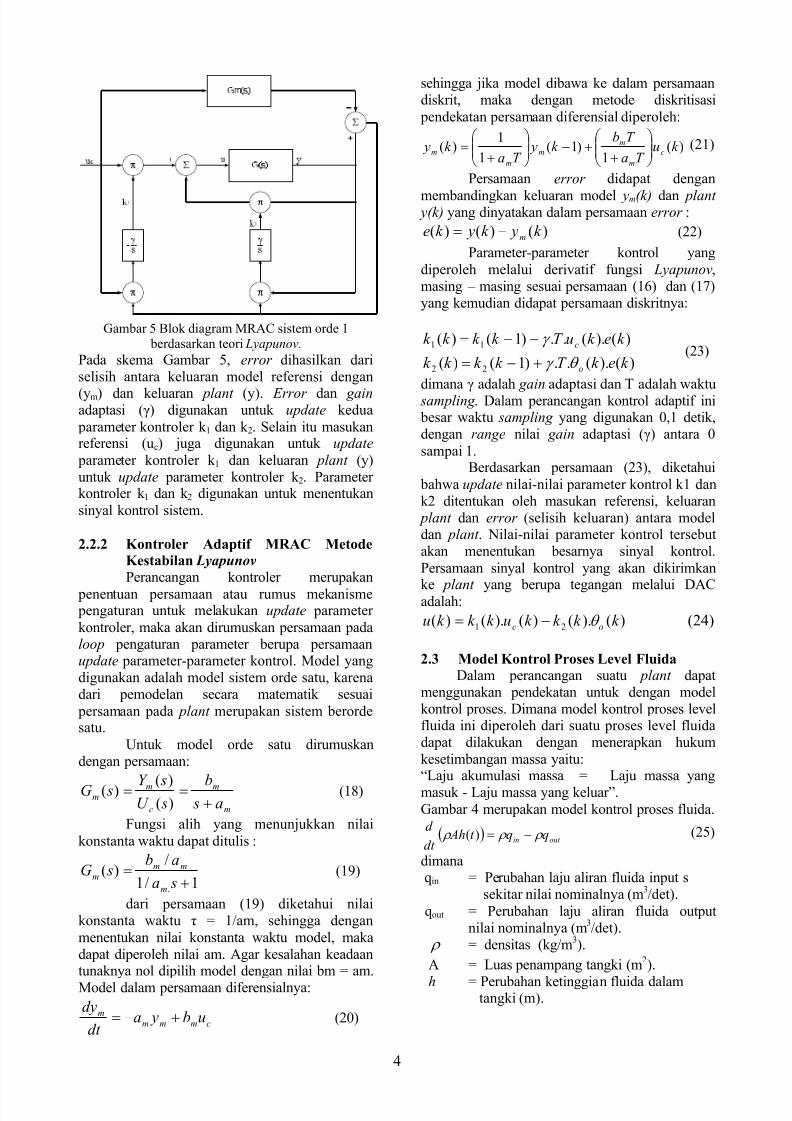
Diagram blok MRAC berdasarkan teorikestabilan Lyapunov untuk sistem orde 1 dapatdilihat pada Gambar 5
[1].
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 4/11
4
Gambar 5 Blok diagram MRAC sistem orde 1 berdasarkan teori Lyapunov.
Pada skema Gambar 5, error dihasilkan dariselisih antara keluaran model referensi dengan
(ym) dan keluaran plant (y). Error dan gain adaptasi (γ) digunakan untuk update kedua
parameter kontroler k 1 dan k 2. Selain itu masukanreferensi (uc) juga digunakan untuk update
parameter kontroler k 1 dan keluaran plant (y)untuk update parameter kontroler k 2. Parameterkontroler k 1 dan k 2 digunakan untuk menentukan
sinyal kontrol sistem.
2.2.2 Kontroler Adaptif MRAC Metode
Kestabilan Lyapunov
Perancangan kontroler merupakan
penentuan persamaan atau rumus mekanisme pengaturan untuk melakukan update parameter
kontroler, maka akan dirumuskan persamaan padaloop pengaturan parameter berupa persamaanupdate parameter-parameter kontrol. Model yangdigunakan adalah model sistem orde satu, karenadari pemodelan secara matematik sesuai
persamaan pada plant merupakan sistem berordesatu.
Untuk model orde satu dirumuskandengan persamaan:
m
m
c
mm
a sb
sU sY sG
)()()( (18)
Fungsi alih yang menunjukkan nilai
konstanta waktu dapat ditulis :
1/1
/)(
.
sa
ab sG
m
mmm (19)
dari persamaan (19) diketahui nilaikonstanta waktu τ = 1/am, sehingga dengan
menentukan nilai konstanta waktu model, makadapat diperoleh nilai am. Agar kesalahan keadaantunaknya nol dipilih model dengan nilai bm = am.
Model dalam persamaan diferensialnya:
cmmmm ub ya
dt
dy (20)
sehingga jika model dibawa ke dalam persamaandiskrit, maka dengan metode diskritisasi
pendekatan persamaan diferensial diperoleh:
)(1
)1(1
1)( k u
T a
T bk y
T ak y c
m
m
m
m
m
(21)
Persamaan error didapat dengan
membandingkan keluaran model ym(k) dan plant y(k) yang dinyatakan dalam persamaan error :
)()()( k yk yk e m (22)
Parameter-parameter kontrol yang
diperoleh melalui derivatif fungsi Lyapunov,masing – masing sesuai persamaan (16) dan (17)yang kemudian didapat persamaan diskritnya:
)().(..)1()(
)().(..)1()(
22
11
k ek T k k k k
k ek uT k k k k
o
c
(23)
dimana γ adalah gain adaptasi dan T adalah waktu sampling . Dalam perancangan kontrol adaptif ini besar waktu sampling yang digunakan 0,1 detik,dengan range nilai gain adaptasi (γ) antara 0
sampai 1.Berdasarkan persamaan (23), diketahui
bahwa update nilai-nilai parameter kontrol k1 dank2 ditentukan oleh masukan referensi, keluaran plant dan error (selisih keluaran) antara modeldan plant . Nilai-nilai parameter kontrol tersebutakan menentukan besarnya sinyal kontrol.
Persamaan sinyal kontrol yang akan dikirimkan
ke plant yang berupa tegangan melalui DACadalah:
)().()().()( 21 k k k k uk k k u oc (24)
2.3 Model Kontrol Proses Level Fluida
Dalam perancangan suatu plant dapatmenggunakan pendekatan untuk dengan modelkontrol proses. Dimana model kontrol proses levelfluida ini diperoleh dari suatu proses level fluidadapat dilakukan dengan menerapkan hukum
kesetimbangan massa yaitu:“Laju akumulasi massa = Laju massa yangmasuk - Laju massa yang keluar”.
Gambar 4 merupakan model kontrol proses fluida.
out in qqt Ahdt
d )( (25)
dimanaqin = Perubahan laju aliran fluida input s
sekitar nilai nominalnya (m3/det).
qout = Perubahan laju aliran fluida outputnilai nominalnya (m
3/det).
= densitas (kg/m3).
A = Luas penampang tangki (m2).
h = Perubahan ketinggian fluida dalamtangki (m).
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 5/11
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 6/11
6
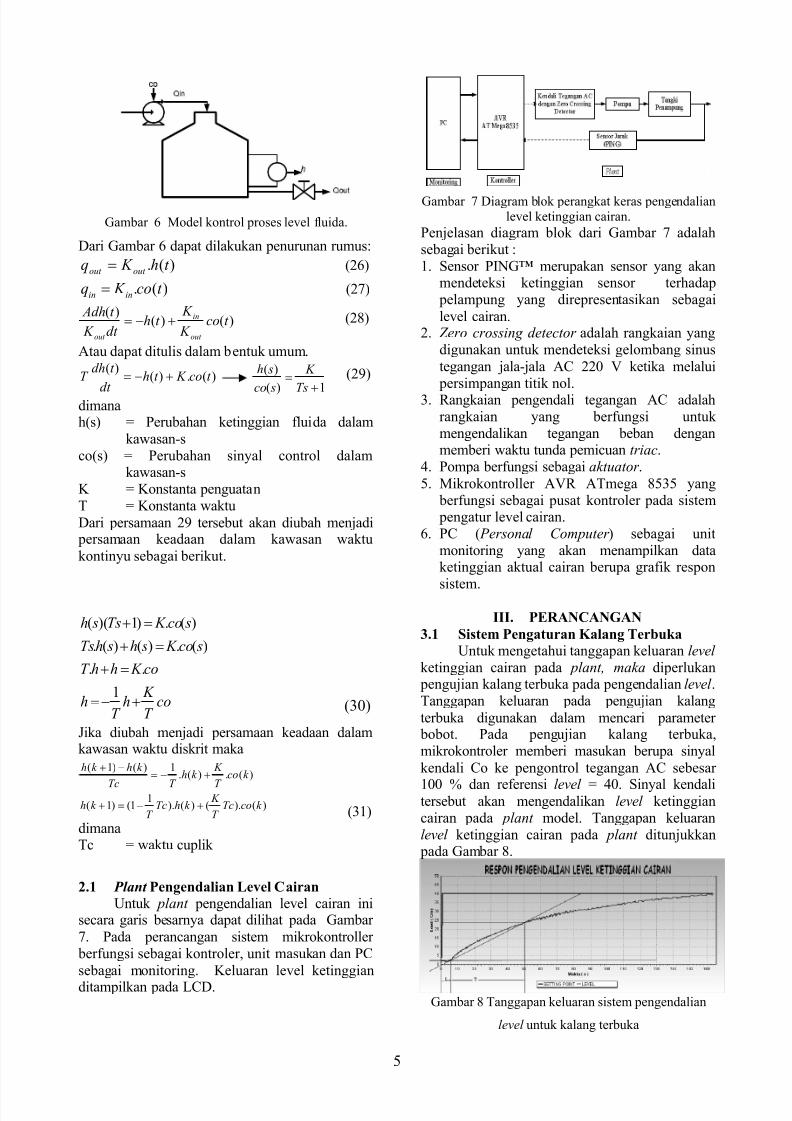
Tanggapan keluaran plant level
menunjukkan adanya waktu mati (dead time)setelah pompa dinyalakan, namun level belummulai naik. Tanggapan keluaran menunjukkan
plant level memiliki konstanta waktu T sebesar 44detik dan nilai penguatan K sebesar 0,4 denganwaktu cuplik Tc sebesar 0,1 detik. Hasil data
respon sistem secara kalang terbuka inikemudian digunakan untuk menentukan
konstanta waktu (τ) dari plant , jadi berdasarkandata pada percobaan kalang terbuka pada Gambar
8 sistem plant level cairan yang dikontrolmemiliki konstanta waktu sebesar 44 detik.
3.2 Perancangan Kendali MRAC
Lyapunov
Perancangan kendali MRAC Lyapunov
dilakukan untuk merancang kendali kontrol yang
akan digunakan. Perancangan MRAC Lyapunov meliputi perancangan model yang digunakan dan perancangan algoritma kontrol MRAC yang akandiimplementasikan pada mikrokontroler. Sistemkendali MRAC berdasarkan teori kestabilan Lyapunov secara keseluruhan dapat dilihat pada
Gambar 5.Perancangan kontrol pada MRAC ini
dengan memberikan parameter kontroler yang
digunakan sebagai ketentuan dalam pengendaliannya. Parameter kontroler yangdiperlukan yaitu gain adaptasi dan konstanta
waktu. Perancangan parameter – parametertersebut diperlukan untuk menyusun algoritmakontrol yang akan diimplementasikan pada program.
3.2.1 Penentuan Nilai Gain adaptasi Besar nilai gain adaptasi akan menentukan
cepat atau lambatnya respon untuk bisa mengikutimodel. Jika nilai gain yang dipilih relatif kecil,maka respon akan berjalan lambat untukmencapai model, sebaliknya bila gain adaptasi
yang dipilih terlalu besar akan menyebabkan
respon yang dihasilkan sangat cepat untukmencapai model. Pada Tugas Akhir ini, besarnyanilai gain adaptasi yang digunakan adalah denganrange 0 sampai 1.
3.2.2
Penentuan Nilai Konstanta Waktu Besarnya nilai konstanta waktu akan
mempengaruhi respon dari model yang akandigunakan terhadap referensi yang diberikan.
Model yang digunakan adalah model sistem ordesatu, karena dari pemodelan secara matematik
sesuai persamaan (31) plant merupakan sistem berorde satu. Sesuai persamaan (19) diketahuinilai konstanta waktu τ = 1/am, sehingga denganmenentukan nilai konstanta waktu model, maka
dapat diperoleh nilai am. Agar kesalahan keadaan
tunaknya nol dipilih model dengan nilai bm = am.
3.3 Perancangan Perangkat Lunak
(Software)
Pemrograman mikrokontroler ATmega8535 dapat dilakukan dengan menggunakan
bahasa assembly dan C. Perancangan perangkatlunak Tugas Akhir ini digunakan bahasa C dengan
kompiler CodevisionAVR versi 1.24. Programmonitoring untuk menampilkan respon sistem ke
komputer digunakan program Visual C# 2010.Secara umum perancangan perangkat lunak padamikrokontroler ATmega 8535 terdiri atas :
Perancangan Program Utama
Algoritma MRAC
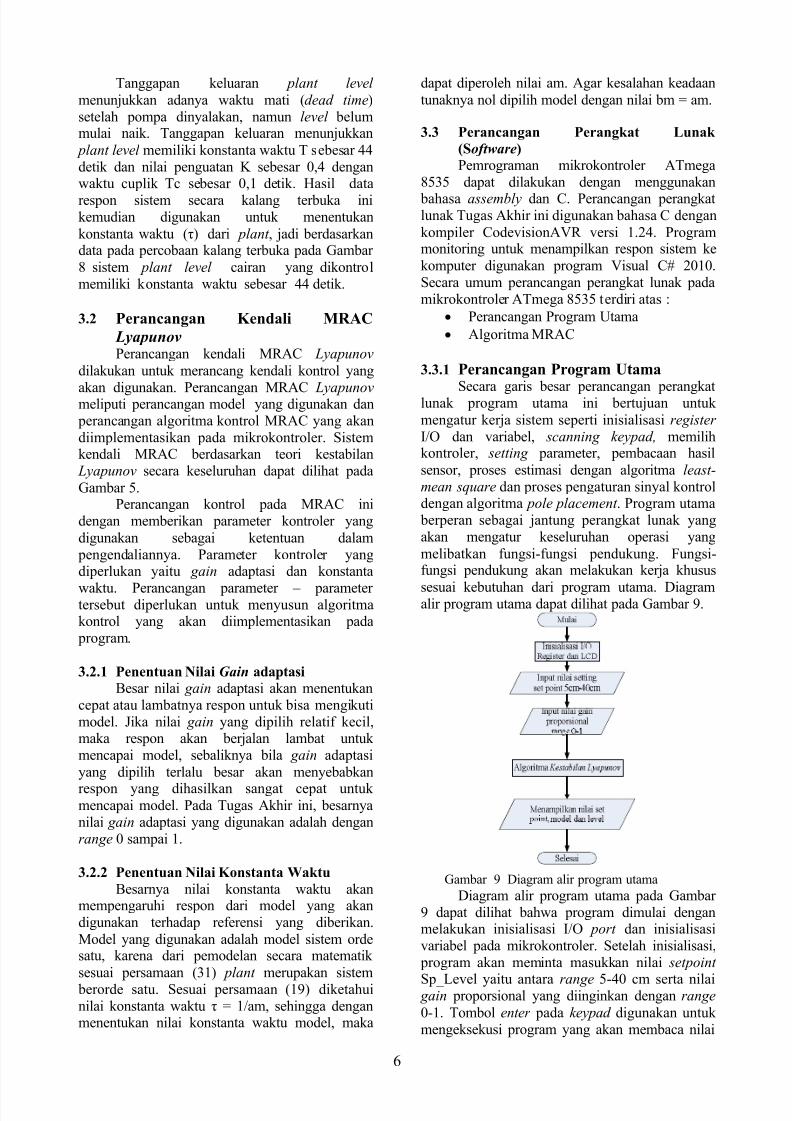
3.3.1 Perancangan Program Utama
Secara garis besar perancangan perangkatlunak program utama ini bertujuan untuk
mengatur kerja sistem seperti inisialisasi register I/O dan variabel, scanning keypad, memilihkontroler, setting parameter, pembacaan hasil
sensor, proses estimasi dengan algoritma least-mean square dan proses pengaturan sinyal kontroldengan algoritma pole placement . Program utama berperan sebagai jantung perangkat lunak yangakan mengatur keseluruhan operasi yang
melibatkan fungsi-fungsi pendukung. Fungsi-fungsi pendukung akan melakukan kerja khusus
sesuai kebutuhan dari program utama. Diagramalir program utama dapat dilihat pada Gambar 9.
Gambar 9 Diagram alir program utama
Diagram alir program utama pada Gambar9 dapat dilihat bahwa program dimulai denganmelakukan inisialisasi I/O port dan inisialisasivariabel pada mikrokontroler. Setelah inisialisasi, program akan meminta masukkan nilai setpoint
Sp_Level yaitu antara range 5-40 cm serta nilai gain proporsional yang diinginkan dengan range
0-1. Tombol enter pada keypad digunakan untukmengeksekusi program yang akan membaca nilai
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 7/11
7
referensi yang telah dimasukkan oleh operator dan
nilai level yang terdeteksi oleh sensor, kemudianmenghitung parameter – parameter kontrol k1 dank2 dengan menggunakan algoritma kestabilan
Lyapunov untuk mendapatkan nilai sinyal kontrolyang akan diberikan ke TCNT0 sebagai sumber pemicuan pada rangkain pengendali tegangan AC,
tegangan AC ini sebagai tegangan input pompa.
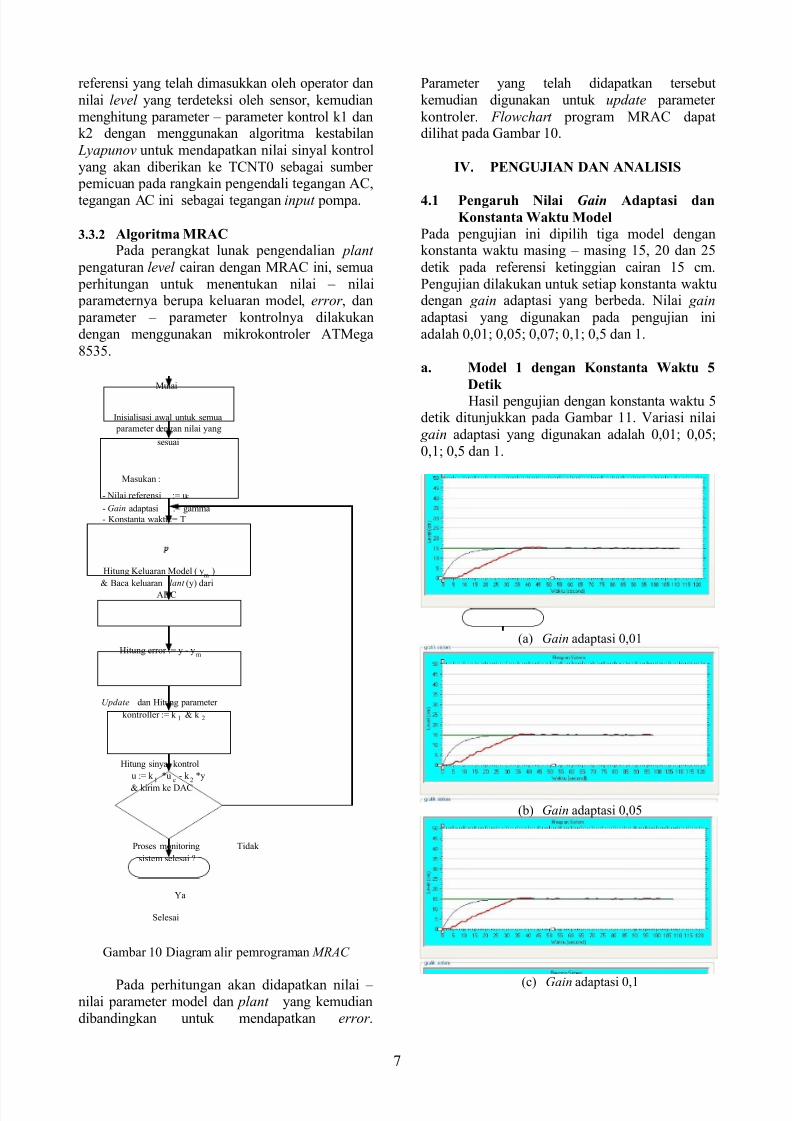
3.3.2
Algoritma MRAC
Pada perangkat lunak pengendalian plant
pengaturan level cairan dengan MRAC ini, semua perhitungan untuk menentukan nilai – nilai parameternya berupa keluaran model, error , dan parameter – parameter kontrolnya dilakukandengan menggunakan mikrokontroler ATMega
8535.
Gambar 10 Diagram alir pemrograman MRAC
Pada perhitungan akan didapatkan nilai –nilai parameter model dan plant yang kemudiandibandingkan untuk mendapatkan error .
Parameter yang telah didapatkan tersebutkemudian digunakan untuk update parameter
kontroler. Flowchart program MRAC dapatdilihat pada Gambar 10.
IV. PENGUJIAN DAN ANALISIS
4.1
Pengaruh Nilai Gain Adaptasi danKonstanta Waktu Model
Pada pengujian ini dipilih tiga model dengankonstanta waktu masing – masing 15, 20 dan 25
detik pada referensi ketinggian cairan 15 cm.Pengujian dilakukan untuk setiap konstanta waktudengan gain adaptasi yang berbeda. Nilai gain
adaptasi yang digunakan pada pengujian iniadalah 0,01; 0,05; 0,07; 0,1; 0,5 dan 1.
a. Model 1 dengan Konstanta Waktu 5
Detik
Hasil pengujian dengan konstanta waktu 5detik ditunjukkan pada Gambar 11. Variasi nilai
gain adaptasi yang digunakan adalah 0,01; 0,05;0,1; 0,5 dan 1.
(a) Gain adaptasi 0,01
(b) Gain adaptasi 0,05
(c)
Gain adaptasi 0,1
Mulai
Inisialisasi awal untuk semua
parameter dengan nilai yang sesuai
Masukan : - Nilai referensi := u c - Gain adaptasi := gamma
Hitung Keluaran Model ( y m
)
& Baca keluaran lant (y) dari
ADC
Hitung error := y - ym
Update dan Hitung parameter
kontroller := k 1 & k 2
Hitung sinyal kontrol u := k
1*u
c - k
2 *y & kirim ke DAC
Proses monitoring
sistem selesai ?
Selesai
Tidak
Ya
- Konstanta waktu:= T
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 8/11
8
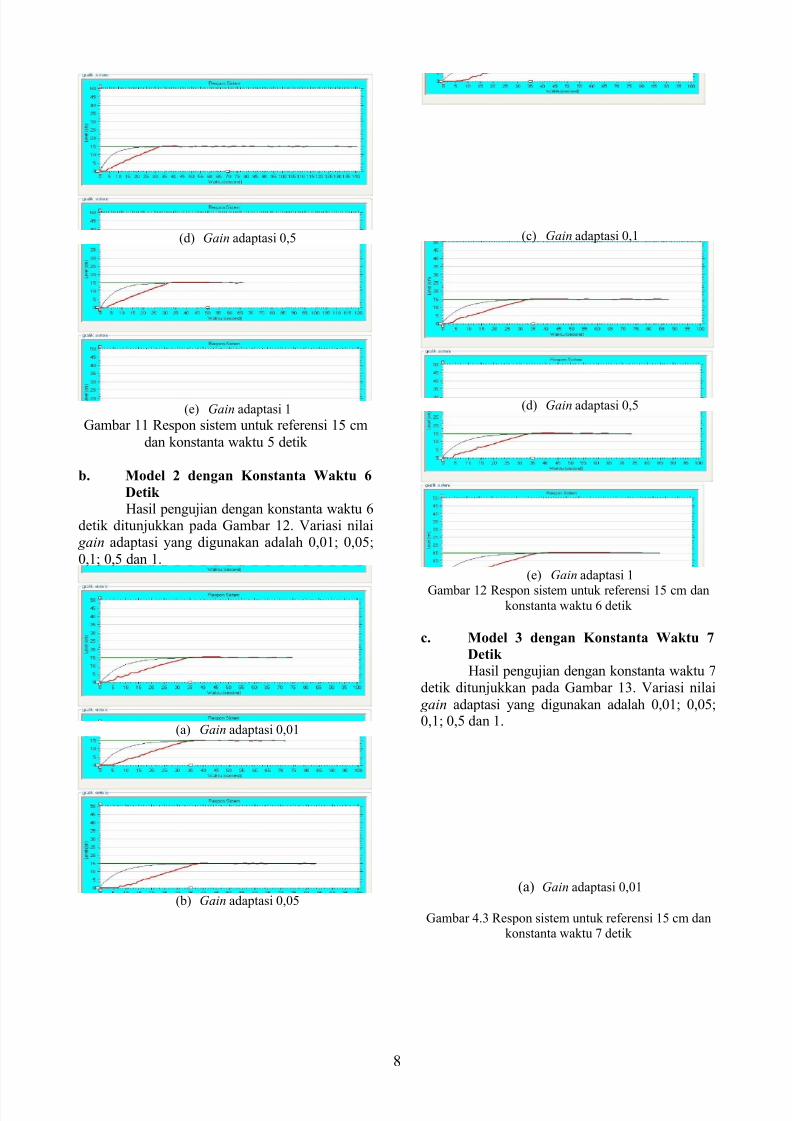
(d) Gain adaptasi 0,5
(e)
Gain adaptasi 1
Gambar 11 Respon sistem untuk referensi 15 cm
dan konstanta waktu 5 detik
b. Model 2 dengan Konstanta Waktu 6
Detik
Hasil pengujian dengan konstanta waktu 6detik ditunjukkan pada Gambar 12. Variasi nilai gain adaptasi yang digunakan adalah 0,01; 0,05;
0,1; 0,5 dan 1.
(a) Gain adaptasi 0,01
(b)
Gain adaptasi 0,05
(c)
Gain adaptasi 0,1
(d)
Gain adaptasi 0,5
(e)
Gain adaptasi 1
Gambar 12 Respon sistem untuk referensi 15 cm dankonstanta waktu 6 detik
c. Model 3 dengan Konstanta Waktu 7
Detik
Hasil pengujian dengan konstanta waktu 7detik ditunjukkan pada Gambar 13. Variasi nilai
gain adaptasi yang digunakan adalah 0,01; 0,05;0,1; 0,5 dan 1.
(a) Gain adaptasi 0,01
Gambar 4.3 Respon sistem untuk referensi 15 cm dankonstanta waktu 7 detik
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 9/11
9
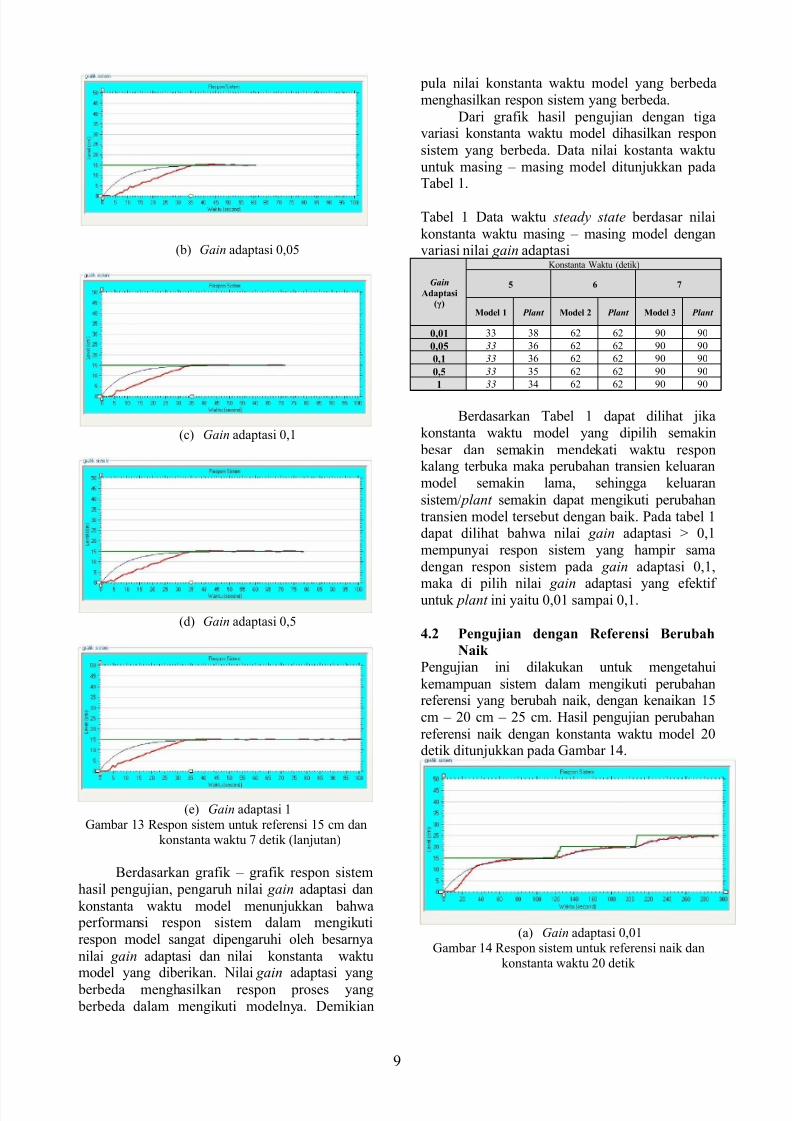
(b)
Gain adaptasi 0,05
(c)
Gain adaptasi 0,1
(d) Gain adaptasi 0,5
(e)
Gain adaptasi 1
Gambar 13 Respon sistem untuk referensi 15 cm dankonstanta waktu 7 detik (lanjutan)
Berdasarkan grafik – grafik respon sistemhasil pengujian, pengaruh nilai gain adaptasi dan
konstanta waktu model menunjukkan bahwa performansi respon sistem dalam mengikutirespon model sangat dipengaruhi oleh besarnya
nilai gain adaptasi dan nilai konstanta waktumodel yang diberikan. Nilai gain adaptasi yang
berbeda menghasilkan respon proses yang berbeda dalam mengikuti modelnya. Demikian
pula nilai konstanta waktu model yang berbedamenghasilkan respon sistem yang berbeda.
Dari grafik hasil pengujian dengan tigavariasi konstanta waktu model dihasilkan respon
sistem yang berbeda. Data nilai kostanta waktuuntuk masing – masing model ditunjukkan padaTabel 1.
Tabel 1 Data waktu steady state berdasar nilai
konstanta waktu masing – masing model denganvariasi nilai gain adaptasi
Gain
Adaptasi
(γ)
Konstanta Waktu (detik)
5 6 7
Model 1 Plant Model 2 Plant Model 3 Plant
0,01 33 38 62 62 90 90
0,05 33 36 62 62 90 90
0,1 33 36 62 62 90 90
0,5 33 35 62 62 90 90
1 33 34 62 62 90 90
Berdasarkan Tabel 1 dapat dilihat jikakonstanta waktu model yang dipilih semakin
besar dan semakin mendekati waktu responkalang terbuka maka perubahan transien keluaranmodel semakin lama, sehingga keluaran
sistem/ plant semakin dapat mengikuti perubahantransien model tersebut dengan baik. Pada tabel 1dapat dilihat bahwa nilai gain adaptasi > 0,1mempunyai respon sistem yang hampir samadengan respon sistem pada gain adaptasi 0,1,
maka di pilih nilai gain adaptasi yang efektifuntuk plant ini yaitu 0,01 sampai 0,1.
4.2 Pengujian dengan Referensi Berubah
Naik
Pengujian ini dilakukan untuk mengetahui
kemampuan sistem dalam mengikuti perubahanreferensi yang berubah naik, dengan kenaikan 15cm – 20 cm – 25 cm. Hasil pengujian perubahan
referensi naik dengan konstanta waktu model 20detik ditunjukkan pada Gambar 14.
(a) Gain adaptasi 0,01Gambar 14 Respon sistem untuk referensi naik dan
konstanta waktu 20 detik
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 10/11
10
(b) Gain adaptasi 0,1
Gambar 14 Respon sistem untuk referensi naik dankonstanta waktu 20 detik (lanjutan)
Dari respon sistem pada Gambar 14,tampak bahwa pada saat referensi tinggi awalsebesar 15 cm, keluaran lambat dalam mengikutimodelnya. Akan tetapi setelah ketinggian cairan
sudah mencapai nilai referensi 15 cm dandinaikkan nilai referensinya, maka respon
keluaran sistem semakin dapat mengikutimodelnya.
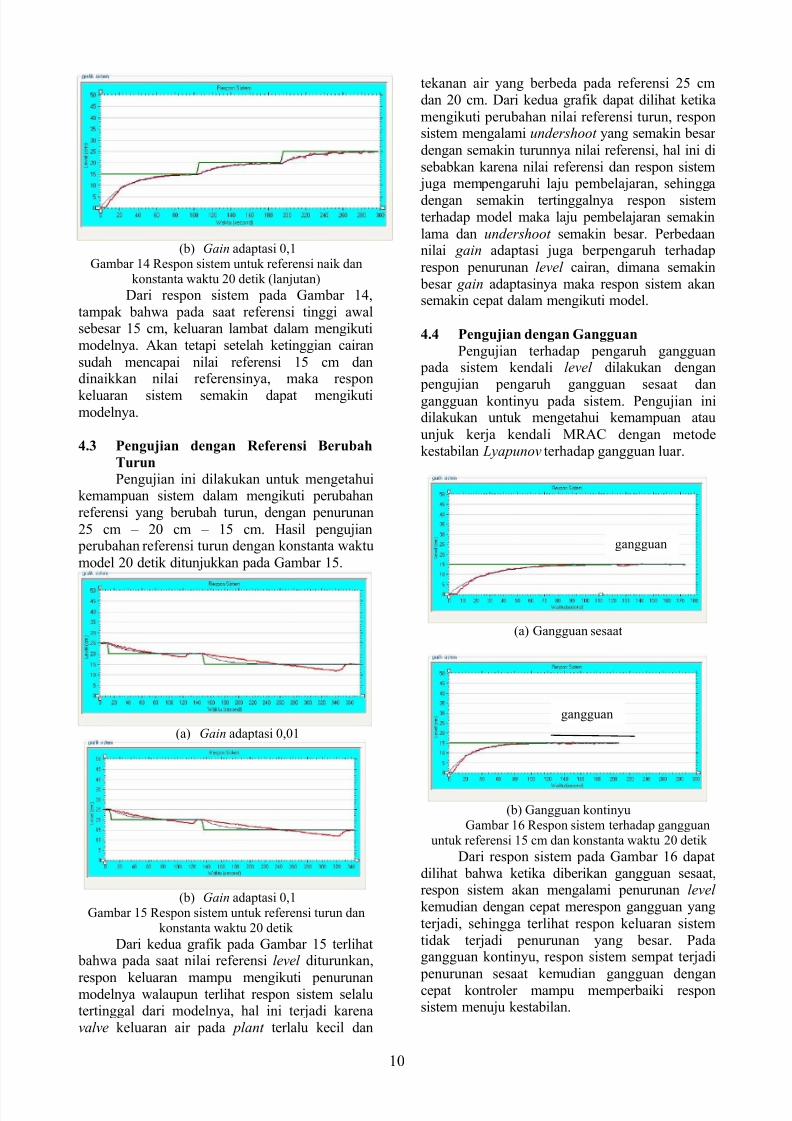
4.3 Pengujian dengan Referensi Berubah
Turun
Pengujian ini dilakukan untuk mengetahuikemampuan sistem dalam mengikuti perubahanreferensi yang berubah turun, dengan penurunan
25 cm – 20 cm – 15 cm. Hasil pengujian perubahan referensi turun dengan konstanta waktu
model 20 detik ditunjukkan pada Gambar 15.
(a) Gain adaptasi 0,01
(b) Gain adaptasi 0,1Gambar 15 Respon sistem untuk referensi turun dan
konstanta waktu 20 detik
Dari kedua grafik pada Gambar 15 terlihat bahwa pada saat nilai referensi level diturunkan,
respon keluaran mampu mengikuti penurunanmodelnya walaupun terlihat respon sistem selalutertinggal dari modelnya, hal ini terjadi karenavalve keluaran air pada plant terlalu kecil dan
tekanan air yang berbeda pada referensi 25 cmdan 20 cm. Dari kedua grafik dapat dilihat ketika
mengikuti perubahan nilai referensi turun, responsistem mengalami undershoot yang semakin besar
dengan semakin turunnya nilai referensi, hal ini disebabkan karena nilai referensi dan respon sistem juga mempengaruhi laju pembelajaran, sehingga
dengan semakin tertinggalnya respon sistemterhadap model maka laju pembelajaran semakin
lama dan undershoot semakin besar. Perbedaannilai gain adaptasi juga berpengaruh terhadap
respon penurunan level cairan, dimana semakin besar gain adaptasinya maka respon sistem akansemakin cepat dalam mengikuti model.
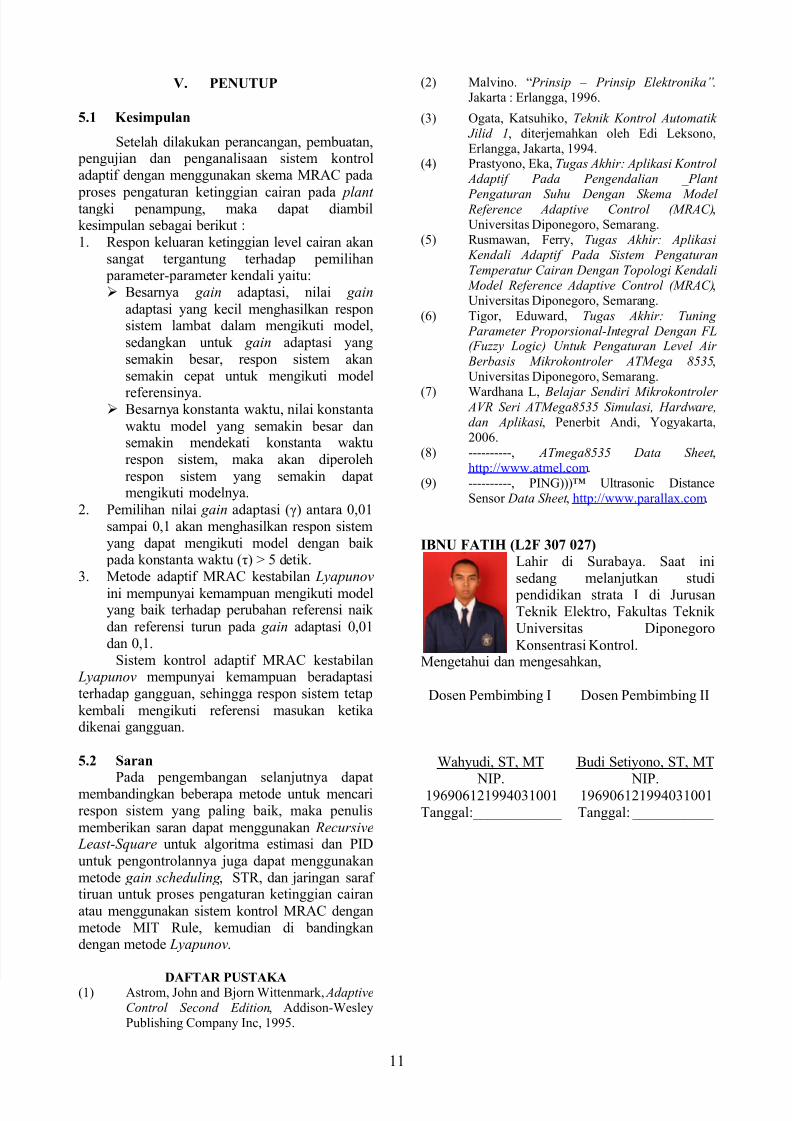
4.4 Pengujian dengan Gangguan
Pengujian terhadap pengaruh gangguan pada sistem kendali level dilakukan dengan pengujian pengaruh gangguan sesaat dan
gangguan kontinyu pada sistem. Pengujian inidilakukan untuk mengetahui kemampuan atau
unjuk kerja kendali MRAC dengan metodekestabilan Lyapunov terhadap gangguan luar.
(a)
Gangguan sesaat
(b) Gangguan kontinyuGambar 16 Respon sistem terhadap gangguan
untuk referensi 15 cm dan konstanta waktu 20 detik
Dari respon sistem pada Gambar 16 dapatdilihat bahwa ketika diberikan gangguan sesaat,respon sistem akan mengalami penurunan level kemudian dengan cepat merespon gangguan yang
terjadi, sehingga terlihat respon keluaran sistemtidak terjadi penurunan yang besar. Padagangguan kontinyu, respon sistem sempat terjadi
penurunan sesaat kemudian gangguan dengancepat kontroler mampu memperbaiki responsistem menuju kestabilan.
gangguan
gangguan
8/16/2019 Aplikasi Metode Model Reference Adaptive Control (Mrac) Pada Plant Pengaturan Level Cairan Berbasis Mikrokontr…
http://slidepdf.com/reader/full/aplikasi-metode-model-reference-adaptive-control-mrac-pada-plant-pengaturan 11/11
11
V. PENUTUP
5.1 Kesimpulan
Setelah dilakukan perancangan, pembuatan, pengujian dan penganalisaan sistem kontroladaptif dengan menggunakan skema MRAC pada
proses pengaturan ketinggian cairan pada plant tangki penampung, maka dapat diambilkesimpulan sebagai berikut :1. Respon keluaran ketinggian level cairan akan
sangat tergantung terhadap pemilihan parameter-parameter kendali yaitu: Besarnya gain adaptasi, nilai gain
adaptasi yang kecil menghasilkan responsistem lambat dalam mengikuti model,
sedangkan untuk gain adaptasi yangsemakin besar, respon sistem akansemakin cepat untuk mengikuti model
referensinya. Besarnya konstanta waktu, nilai konstanta
waktu model yang semakin besar dansemakin mendekati konstanta wakturespon sistem, maka akan diperoleh
respon sistem yang semakin dapatmengikuti modelnya.
2. Pemilihan nilai gain adaptasi (γ) antara 0,01sampai 0,1 akan menghasilkan respon sistemyang dapat mengikuti model dengan baik pada konstanta waktu (τ) > 5 detik.
3. Metode adaptif MRAC kestabilan Lyapunov
ini mempunyai kemampuan mengikuti modelyang baik terhadap perubahan referensi naik
dan referensi turun pada gain adaptasi 0,01dan 0,1.
Sistem kontrol adaptif MRAC kestabilan Lyapunov mempunyai kemampuan beradaptasiterhadap gangguan, sehingga respon sistem tetap
kembali mengikuti referensi masukan ketikadikenai gangguan.
5.2 Saran Pada pengembangan selanjutnya dapat
membandingkan beberapa metode untuk mencarirespon sistem yang paling baik, maka penulis
memberikan saran dapat menggunakan Recursive Least-Square untuk algoritma estimasi dan PID
untuk pengontrolannya juga dapat menggunakanmetode gain scheduling , STR, dan jaringan saraftiruan untuk proses pengaturan ketinggian cairan
atau menggunakan sistem kontrol MRAC denganmetode MIT Rule, kemudian di bandingkandengan metode Lyapunov.
DAFTAR PUSTAKA(1) Astrom, John and Bjorn Wittenmark, AdaptiveControl Second Edition, Addison-WesleyPublishing Company Inc, 1995.
(2)
Malvino. “ Prinsip – Prinsip Elektronika”.Jakarta : Erlangga, 1996.
(3) Ogata, Katsuhiko, Teknik Kontrol Automatik Jilid 1, diterjemahkan oleh Edi Leksono,Erlangga, Jakarta, 1994.
(4) Prastyono, Eka, Tugas Akhir: Aplikasi Kontrol Adaptif Pada Pengendalian _Plant
Pengaturan Suhu Dengan Skema Model Reference Adaptive Control (MRAC),
Universitas Diponegoro, Semarang.(5)
Rusmawan, Ferry, Tugas Akhir: Aplikasi Kendali Adaptif Pada Sistem Pengaturan
Temperatur Cairan Dengan Topologi Kendali Model Reference Adaptive Control (MRAC),Universitas Diponegoro, Semarang.
(6) Tigor, Eduward, Tugas Akhir: Tuning Parameter Proporsional-Integral Dengan FL(Fuzzy Logic) Untuk Pengaturan Level Air
Berbasis Mikrokontroler ATMega 8535,Universitas Diponegoro, Semarang.
(7)
Wardhana L, Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware,dan Aplikasi, Penerbit Andi, Yogyakarta,2006.
(8)
----------, ATmega8535 Data Sheet ,
http://www.atmel.com.
(9) ----------, PING)))™ Ultrasonic DistanceSensor Data Sheet , http://www.parallax.com.
IBNU FATIH (L2F 307 027)
Lahir di Surabaya. Saat inisedang melanjutkan studi pendidikan strata I di JurusanTeknik Elektro, Fakultas TeknikUniversitas Diponegoro
Konsentrasi Kontrol.Mengetahui dan mengesahkan,
Dosen Pembimbing I
Wahyudi, ST, MT
NIP.196906121994031001Tanggal:____________
Dosen Pembimbing II
Budi Setiyono, ST, MT
NIP.196906121994031001Tanggal: ___________
Related Documents











