Geodesia Geométrica y Geodesia Física Objetivo y Aplicaciones CURSOS DE ENSEÑANZAS PROPIAS. UNIVERSIDAD DE ALMERÍA

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 1/43
Geodesia Geométrica y Geodesia Física
Objetivo y Aplicaciones
CURSOS DE ENSEÑANZAS PROPIAS. UNIVERSIDAD DE ALMERÍA

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 2/43
ÍNDICE
CONTENIDO PÁG.
Definición, división y objetivo de la Geodesia
1. ¿Qué es la Geodesia? .............................................................................................. 3
2. Problemas de la Geodesia ....................................................................................... 3
3. División de la Geodesia .......................................................................................... 4
4. Datos históricos y técnicos. La red geodésica española ......................................... 5
Aplicaciones de la Geodesia Geométrica
5. Resolución de pequeños triángulos ......................................................................... 9
6. Determinación de distancias .................................................................................... 13
7. Determinación de ángulos .......................................................................................
8. Transformación de coordenadas y cambio de dátum .............................................
15
16
Aplicaciones de la Geodesia Física9. Relación entre los observables físicos y la Geodesia ................................................ 19
10. El campo de gravedad terrestre. Superficies de nivel. El geoide ............................ 20
11. Ondulación del geoide y desviación de la vertical .................................................. 24
12. Ondulación del geoide y alturas ortométricas. Método GPS-Nivelación ................ 27
13. Cálculo gravimétrico del geoide .............................................................................. 30
14. Componentes de la desviación de la vertical y modelo geopotencial .....................
15. Componentes de la desviación de la vertical y geoide .............................................
39
40Bibliografía
Bibliografía básica ..........................................................................................................
Bibliografía de consulta ..................................................................................................
42
43
2

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 3/43
Definición, división y objetivo de la Geodesia
1. ¿Qué es la Geodesia?
La palabra Geodesia literalmente expresa división de la Tierra, sin embargo, diversosautores notables establecen distintas definiciones de este concepto. Para unos existe una claradiferencia entre la Geodesia Teórica y la Geodesia Práctica, indicando que la primera estudia
la forma y dimensiones de la Tierra, en cambio la segunda establece los procedimientos para
la medida de porciones terrestres. Para otros autores esta diferencia no es tan clara, por ellose refieren a la Geodesia como una ciencia cuyo objetivo es el de proporcionar un armazón o
estructura geométrica precisa para el apoyo de los levantamientos topográficos.
Actualmente la Geodesia se define brevemente como la ciencia que resuelve los
problemas relacionados con la figura y dimensiones de la Tierra, y como veremos másadelante esta ciencia puede dividirse en varias disciplinas, atendiendo al método seguido parallevar a cabo este objetivo.
Podemos concluir este apartado diciendo que la Geodesia es una ciencia, que desde laantigüedad, se ha dedicado al estudio de la medida y forma del globo terráqueo, adatándose alas necesidades de la época para aplicarse a problemas prácticos, como son básicamente laconfección de mapas nacionales e internacionales, así como la preparación de cartas paraaplicaciones específicas como las geológicas e hidrográficas, entre otras. Pudiendo afirmar que la Geodesia se ha necesitado y seguirá siendo necesaria mientras se proyecten obrashumanas que requieran precisiones cada vez mayores.
2. Problemas de la Geodesia
Sabiendo que la principal tarea científica de la Geodesia es el estudio de la figura de laTierra, podemos dividir los problemas científicos de la Geodesia en:
• Determinación del tipo de superficie matemática que represente suficientemente bien lafigura de la Tierra en su totalidad. A este respecto se considera como tal superficie la deun elipsoide de revolución ligeramente aplanado, éste se denomina elipsoide terrestre.
• El estudio de la verdadera figura de la Tierra y su campo de gravedad, entendiendo por verdadera figura de la Tierra, la superficie física de la misma. El estudio de la verdaderafigura de la Tierra consiste en determinar las magnitudes geodésicas, que caracterizan lasdesviaciones de ésta con respecto a la superficie establecida por el elipsoide terrestre. Elestudio del campo de gravedad terrestre es fundamental, debido tanto a su influencia en laforma de la Tierra, como a la influencia que ejerce en las medidas que se llevan a cabo dela misma (por ejemplo mediante satélites artificiales).
Los problemas científico-técnicos derivados de los anteriores son múltiples, aquícitaremos sólo los más relevantes.
• Medición de la aceleración de la gravedad.
3

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 4/43
• Determinaciones astronómicas de las latitudes y longitudes terrestres.
• Observaciones de los satélites artificiales.
• Elaboración de modernos métodos e instrumentos para la ejecución de mediciones y
observaciones de alta precisión.
• Desarrollo de métodos topográficos con los que se estudia detalladamente la forma de lasuperficie terrestre.
• Levantamiento cartográfico de grandes territorios, es decir, representación de la superficieterrestre sobre un plano.
Interpretados a grandes rasgos, los problemas científicos y científico-técnicos de laGeodesia, están recíprocamente enlazados, y por eso, la solución de los problemas científico-técnicos exige el control de requisitos deducidos de la solución de los problemas científicos.En el apartado siguiente veremos como la búsqueda de soluciones a los problemasfundamentales de la Geodesia, conduce a una división de la misma en tres ramas principales.
3. División de la Geodesia
De la definición de la Geodesia dada anteriormente, parece deducirse que la misma sededica sólo a la solución de problemas de tipo geométrico, pero no debemos olvidar que parallegar a definir la forma de la Tierra, será preciso considerar a nuestro planeta en un contextomás general.
En efecto, dentro del marco de la Mecánica Clásica, la Tierra es un cuerpo inmerso enel sistema solar, que se encuentra sometido a una rotación diaria y a la atracción del Sol y delos demás cuerpos del sistema solar. En estas condiciones la Tierra describe una órbita quecompensa en cierto modo tales atracciones, por ello, podemos considerar que un punto sobrela superficie terrestre queda sometido, casi exclusivamente, a la atracción de nuestro planeta ya la fuerza centrífuga derivada de su rotación. Así pues, idealizado el problema y
prescindiendo del movimiento orbital terrestre, vemos que tiene sentido estudiar las figuras deequilibrio que adoptará una masa aislada, cuyas partículas se atraen según la ley degravitación universal de Newton.
En esta situación de aislamiento, sucede que la esfera es una figura de equilibrio parauna masa homogénea en reposo, siendo el único movimiento posible para una masahomogénea que se mueve como un sólido, el de una rotación uniforme alrededor de uno desus ejes principales de inercia. Ambas conclusiones, unidas al hecho de que una pequeñarotación produce un achatamiento de la forma esférica, nos lleva a considerar que la Tierratiene una figura de equilibrio dada por un elipsoide de revolución, ligeramente achatado enlos polos, que gira alrededor de un eje que pasa aproximadamente por los polos. Conviene sinembargo recordar, que la Tierra no es un cuerpo rígido y homogéneo, por tanto este modeloteórico está muy simplificado. Otra simplificación importante que se ha indicado consiste enignorar los efectos gravitatorios de los demás cuerpos del sistema solar, incluido el Sol, sobre
la superficie terrestre. Es un fenómeno bien conocido la existencia de mareas tanto oceánicascomo terrestres y atmosféricas, todas éstas son debidas a la atracción gravitatoria que ejercen
4

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 5/43
sobre la superficie terrestre, principalmente el Sol por su gran masa y la Luna por su cercaníaa la Tierra.
No obstante, en lo sucesivo vamos a considerar como superficie de equilibrio oequipotencial la que determinan los océanos, prescindiendo del efecto perturbador de lasmareas. Denominaremos entonces geoide a la superficie dada por el nivel medio de los
océanos, siendo esta superficie la que utilizaremos como referencia para definir la altitud deun punto sobre la Tierra. Sin duda, la introducción del geoide como superficie de nivel tieneun gran sentido físico, aunque su determinación resulte ser uno de los problemas máscomplejos de la Geodesia.
Nos encontramos así con dos superficies fundamentales de referencia, el elipsoide y elgeoide, las cuales provienen de dos concepciones distintas de la Geodesia, determinando enconsecuencia la división de la Geodesia en dos ramas principales, Geodesia Geométrica oElipsoidal y Geodesia Física o Dinámica.
Además de estas ramas y debido al desarrollo de la interferometría láser, las nuevastécnicas de radar y el lanzamiento de satélites artificiales, las cuales hacen posible determinar la posición de un punto sobre la Tierra, de forma independiente de cualquier modelo previoadoptado; nace una nueva rama de la Geodesia que incluye procedimientos de medida tandiversos, ésta se llama Geodesia Espacial o Geodesia por satélite.
Finalmente señalaremos, que atendiendo a su aspecto más operativo o práctico, laGeodesia puede dividirse en tres categorías:
• La Geodesia Global, que responde a la definición general citada al principio de estecapítulo, y que necesita para su desarrollo la cooperación internacional.
• La Geodesia Regional, que es practicada por cada país con el fin de resolver los problemas planteados por la Cartografía y la Geografía, entre otras.
• La Geodesia Topográfica, que trata de precisar detalles de una cierta superficie de pequeñas dimensiones, para ello la considera una superficie plana o esférica según seansus dimensiones.
4. Datos históricos y técnicos. La red geodésica española
Llegados a este punto, hay que recordar que desde la antigüedad el hombre se ha preocupado por la medida de la Tierra, pero es Aristóteles el primer autor que nos habla de lamedida de la misma, indicando que los matemáticos de la época fijaron el perímetro de éstaen 400 000 estadios, siendo un estadio aproximadamente 166 m.
Sin embargo, es Eratóstenes el primer geómetra cuyo procedimiento de medida esconocido; su método, el cual es utilizado todavía en nuestra era, consiste en la medida lineal yangular de un arco terrestre; la medida lineal se realizaba de forma directa, a pasos, la medidaangular se llevaba a cabo mediante métodos celestes. El procedimiento que este geodestallevó a cabo 2 siglos a. C. es como sigue. Primero observó el día del año en que el Sol estaba
en la vertical de la ciudad de Siene (actual Assuán). Al año siguiente el mismo día y a lamisma hora observo la inclinación del Sol en Alejandría, tal como se indica en la figura 1,
5

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 6/43
obteniendo el valor 1/50 parte de un círculo (7º 12'). Entonces, dado que la distancia entreAlejandríay Siene era bien conocida en la época(5.000 estadios), pudo hallar el radiomedio de la Tierra y el perímetroaproximado de la Tierra unos 252.000
estadios (1 estadio de esa época eraaproximadamente 160 m actuales).
Esta forma de medir arcos ydistancias de forma más bien directa seutilizó hasta el año 1620, fecha en la que elabate Picard, nacido en Francia, mide unarco de meridiano, por medio de unatriangulación compuesta de 13 triángulos.Las latitudes extremas se determinaronempleando círculos graduados de tresmetros de radio, junto con observacionesastronómicas.
Ecuador
Alejandría
Siene
Fig. 1. Método usado por Eratóstenes paramedir el perímetro de la Tierra.
Durante siglos Francia mantuvo su primacía en asuntos geodésicos, pero desde principios del siglo XIX es Alemania el país que da a la Geodesia un empuje formidable,siendo Estados Unidos, durante el siglo XX, el país en el que se llevan a cabo los trabajosgeodésicos de más relevancia. Las medidas francesas de los siglos XVII y XVIII sirvieron
para calcular los elipsoides de Bessel y de Clarke, mientras que las medidas Norteamericanasse utilizaron para calcular el elipsoide de Hayford.
Fig. 2. Mapa de la Red Geodésica Nacional.
6

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 7/43
En lo que se refiere a nuestro país, desde la mitad del siglo XIX hasta la mitad delsiglo XX, se fueron desarrollando los trabajos destinados a extender una red geodésicaformada por cadenas de triángulos, los cuales corren sensiblemente a lo largo de losmeridianos, paralelos y costas (ver figura 2). Forman parte de esta red las cadenas de enlacedel Archipiélago Balear con la Península, así como los grandes cuadriláteros que ligan nuestracosta con Argelia y Marruecos. El Archipiélago Canario posee su propia red que liga las islas
entre sí, y éstas con el continente africano (ver figura 2). Los trabajos geodésicos cuyoobjetivo fue la formación del mapa nacional en escala 1:50.000, se iniciaron en 1858finalizándose en su conjunto hacia 1930. El punto fundamental de la red geodésica nacional odátum está en el Observatorio Astronómico de Madrid , cuyo meridiano ha sido utilizadotambién como origen de longitudes. Sin embargo, la red geodésica de las Canarias por ser independiente tiene su propio dátum, el cual se halla en el vértice denominado Pico de las
Nieves, en la isla de Gran Canaria.
Más recientemente y gracias al desarrollo de nuevas tecnologías como GPS, todas lasredes europeas se han podido unificar para formar una sola red de precisión. Esta unificaciónha permitido unir toda el área ibérica con Europa, mediante una red de alta precisión que nos
proporciona actualmente medidas de gran precisión para ciertos puntos, que pueden usarsecomo vértices de referencia para realizar tareas científicas o técnicas. Esta unificación ha sido
posible gracias al desarrollo de la red EUREF (ver figura 3), la cual está formada por estaciones GPS permanentes. Esta red de estaciones permanentes proporciona coordenadas dealta precisión para diversas aplicaciones tanto científicas como técnicas.
Fig. 3. Mapa de la red de estaciones GPS permanentes que forman la red EUREF.
Con el desarrollo de la red EUREF y la realización de otros trabajos geodésicos,desarrollados con la financiación de proyectos europeos, en los cuales cada país de Europa hacolaborado aportando sus medidas y realizando nuevas y más precisas mediciones, se haconseguido unificar las redes de nivelación europeas, para formar una única red de nivelación
7

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 8/43
con una precisión centimétrica. Esta red de nivelación que recibe el nombre de UELN (UnitedEuropean Levelling Network) está representada en la figura 4(a).
(a) (b)
Fig. 4. (a) Mapa de la red de UELN formada por la unificación de todas las redes denivelación europeas. (b) Mapa de la red vertical europea EVRS (European Vertical ReferenceSystem).
Durante la realización de esta red denivelación unificada para toda Europa (la red
UELN), formada por todas las redes de nivelación delos países europeos, se puso también de manifiesto lanecesidad de unificar estas redes de nivelación nosólo entre ellas sino también con la red EUREF, detal forma que se pudiera disponer de una red GPS-nivelación unificada para toda Europa. Esta nuevared conseguida como consecuencia de todos losesfuerzos y proyectos anteriores, cuyo nombre esEVRS (European Vertical Reference System), estárepresentada en la figura 4(b). Esta red constituye un
marco de referencia fundamental para la medición dealturas con precisión centimétrica.
Fig. 5. Mapa con los vértices de la redvertical europea EVRS en Iberia.
En el área ibérica esta red posee los vértices de precisión mostrados en la figura 5. Lascoordenadas y alturas de estos puntos, junto con los datos de los otros puntos situados por toda Europa, pueden descargarse desde internet en la dirección:
http://crs.bkg.bund.de/evrs/tabelle_neu.html
8

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 9/43
Aplicaciones de la Geodesia Geométrica
5. Resolución de pequeños triángulos
En las campañas geodésicas, como las mencionadas anteriormente, se suelendeterminar los ángulos sobre la superficie terrestre, tras lo cual el problema consiste encalcular las longitudes de los lados, para cada triángulo de la red. Según este procedimiento,si conocemos un lado de la triangulación y determinamos todos los ángulos existentes endicha red, es posible hallar las dimensiones de la red completa (ver figura 1(a)). Por otra
parte, la triangulación es también necesaria en muchos casos, para pasar de una base medida auna base mayor o ampliada, debido a las dificultades que puede presentar el terreno, paraefectuar medidas de distancias sobre el mismo, medidas que serían necesarias para determinar la base ampliada directamente (ver figura 1(b)).
(a)
(b)
Fig. 1. (a) Red geodésica entre dos puntos A y B. (b) Red geodésica de ampliación de base.
En consecuencia, es necesario llevar a cabo algún procedimiento que nos permitaresolver los triángulos planteados en una red geodésica. Para ello, existen diversos métodosde los cuales vamos a comentar los más relevantes, como son el método de Legendre y el
método de los aditamentos. Comenzando por el primero, hay que decir que su nombre proviene del teorema que se aplica, teorema de Legendre, este teorema permite asociar a cadatriángulo geodésico como el mostrado en la figura 2(a), un triángulo plano como el mostradoen la figura 2(b), de tal forma que las distancias (a, b, c) en ambos triángulos son las mismas.
(a) (b)
Fig. 2. (a) Triángulo geodésico. (b) Triángulo plano asociado al anterior.
9

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 10/43
En consecuencia, nos planteamos el problema de calcular la diferencia que existe entrelos ángulos (A, B, C) del triángulo geodésico, y los ángulos del triángulo plano asociado (A1,B1, C1), porque si conocemos estas diferencias, podemos establecer una relación entre ambostriángulos, de tal forma, que es posible aplicar las conocidas y sencillas fórmulas detrigonometría plana, a los triángulos geodésicos de la red considerada.
Por otra parte, hay que tener en cuenta que los triángulos de una red geodésica, poseenunos lados cuyas longitudes rara vez superan los 100 km, en este caso podemos considerar lostriángulos geodésicos como triángulos esféricos, para los cuales es válida la ley de los
cosenos. Aplicando esta ley al triángulo de la figura 2(a) tenemos
cos cos cos sen cosaR
bR
cR
bR
cR
A= + sen
donde R es el radio de la esfera sobre la que se construye el triángulo esférico. Despejando enla fórmula anterior cos A, podemos escribir
coscos cos cos
senA
aR
bR
cR
bR
cR
=-
sen
si aplicamos ahora el desarrollo en serie de Taylor de las funciones trigonométricas, queaparecen en esta expresión, se tiene
cosA =
- + - - + - +
- -
1 1 1a
2R
a
24R
b
2R
b
24R
c
2R
c
24R bR
b
6R
cR
c
6R
2
2
4
4
2
2
4
4
2
2
4
4
3
3
3
3
⎛
⎝
⎜⎜ ⎞
⎠
⎟⎟⎛
⎝
⎜⎜ ⎞
⎠
⎟⎟
⎛
⎝ ⎜⎜
⎞
⎠⎟⎟⎛
⎝ ⎜⎜
⎞
⎠⎟⎟
habiendo despreciado los términos de quinto grado y superiores, en las cantidadesaR
, bR
y
cR
. Así, después de multiplicar y agrupar términos obtendremos
cosA b c
=+ -
++ + - - - b c a
2bc a b c 2a 2a 2c
24R bc
2 2 2 4 4 4 2 2 2
2
2 2 b2
Ahora bien, para el triángulo plano de la figura 2(b), aplicando la ley de los cosenos, podemosescribir
a2 b c 2bc cos A2 21= + -
de donde
cos A b c a
2bc 1
2 2=
+ - 2
10

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 11/43
sen A 1 cos Aa b c 2a 2a 2c
4b c 2
12
1
4 4 4 2 2 2
2 2= - =- - - + + + b c b2 2 2
Entonces, combinando las expresiones obtenidas, con la fórmula anteriormente escrita para elcos A, deducimos que
cos cossen
A AA
R = 1 126- bc 2
y sabiendo que
cos cos sen senA A- = -- +
1 2A A
2
A A
21 1
dado que la cantidad A-A1 es muy pequeña comparada con A, podemos escribir dentro de la precisión aceptada
cos cos sen sensen
A AA
R - = -
-= - - =1
12
2
62
A A
2
A
2(A A ) A -
bc1 11 1
2
concretamente, la diferencia de ángulos buscada A-A1 podrá escribirse como
A A bc
1- =senA
R 1
26= (área del triángulo plano)/3R 2
recordando que el exceso esférico ε de un triángulo esférico, es precisamente el área deltriángulo dividida por R 2, notamos que la corrección a considerar es la tercera parte delexceso esférico. Análogamente, para los demás ángulos podremos escribir expresionessimilares, de tal forma que la corrección buscada para los ángulos del triángulo de la figura2(a), determinados sobre el terreno, será en cada caso restar un tercio del exceso esférico, que
como sabemos puede calcularse medianteε = A + B + C - 180º
En consecuencia, las ecuaciones
A1 - =A -3ε
B1 - =B -3ε
C1 - =C -3ε
expresan el contenido del teorema de Legendre, para pequeños triángulos geodésicos (cuyoslados no sobrepasen los 100 km).
No obstante, debemos notar que las ecuaciones anteriores, permiten resolver
triángulos geodésicos, es decir, calcular todas los lados de los triángulos geodésicos queforman una red, aplicando correcciones a los ángulos determinados sobre el terreno. Ésta esuna forma válida de operar, pero también es posible aplicar correcciones a los lados, de talforma que el resultado sea, directamente, las distancias buscadas, es decir, los lados deltriángulo geodésico. Este método operacional, recibe el nombre de método de los
aditamentos, siendo el objetivo final del mismo, determinar las correcciones o aditamentos,que es necesario aplicar a los lados de un triángulo, cuyos ángulos sean los determinadossobre el terreno (A, B, C), con el objeto de convertirlo en un triángulo plano, al que podemosaplicar la trigonometría plana para determinar sus lados.
Para desarrollar el método de los aditamentos partimos de la ley de los senos
11

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 12/43
sensensen
bR
aR
BA
= sen⎛ ⎝ ⎜
⎞ ⎠⎟
donde aplicamos, como hicimos antes, los desarrollos en serie de las funcionestrigonométricas, considerando despreciables los términos de grado cuarto y superiores, en las
cantidadesa
R y
b
R , teniendo en consecuencia
1 1
R b
R a
B
A⎛ ⎝ ⎜
⎞ ⎠⎟
⎛
⎝ ⎜⎜
⎞
⎠⎟⎟
⎛ ⎝ ⎜
⎞ ⎠⎟
⎛
⎝ ⎜⎜
⎞
⎠⎟⎟- = -
b
6R
a
6R
3
2
3
2sen
sen
si designamos
a a- = - =a
6R A a
3
2 a ′ b b- = - = b
6R A b
3
2 b ′
podemos escribir
′ ′ b a BA= sensen
análogamente para el lado c, tendremos
′ ′c aCA
=sensen
De esta forma, introducimos una cantidad As (donde s designa el lado considerado), llamadaaditamento del lado s. Notando que las expresiones anteriores nos permiten escribir ahora
′ ′ ′a
A
b
B
c
Csen sen sen= =
Estas expresiones constituyen la conocida ley de los senos, de la trigonometría plana;llevando nuestro problema, como consecuencia de ello, a la resolución de un triángulo plano.
Para llevar a cabo la resolución de una red de triángulos, siguiendo el método de losaditamentos, operamos como sigue:
1. Conocido un lado del mismo, por ejemplo el lado a, obtenemos
′a Aa= -a
ya que, el aditamento Aa se puede obtener conocidos a y R.
2. Con el valor hallado a’ se calculan b’ y c’, empleando para ello la ley de los senos.
3. Obteniéndose a continuación los aditamentos Ab y Ac. Para ello, introducimos en laexpresión de los mismos, los valores b’ y c’, considerando que
′ ≅ ′ ≅ b c3 3 b c3 3
debido a que la diferencia b’ - b es muy pequeña frente a b.
4. Con los valores de los aditamentos obtenidos, podemos escribir finalmente los valores delos lados buscados (b, c), en la forma
12
8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 13/43
b = +′ b A b c = +′c A b
6. Determinación de distancias
En cualquier campaña de triangulación, como las mencionadas anteriormente, sesuelen medir bases sobre el terreno, siguiendo para ello, un método que consiste en medir con
precisión una pequeña distancia, y a continuación, mediante una red de ampliación de base, seobtiene la distancia entre los dos vértices correspondientes. Este procedimiento fuemencionado en el apartado anterior, como una aplicación básica de la geodesia geométrica.Llegados a este punto es conveniente especificar cómo es posible hallar una distancia sobre lasuperficie de la Tierra, considerada en este caso como la superficie del elipsoide de referenciautilizado durante esa campaña.
En primer lugar, hay que decir que la forma de llevar a cabo las medidas directas queconlleva el cálculo de una base, ha cambiado mucho desde la antigüedad hasta nuestros días.Esta evolución es continua, y por tanto, sigue sucediendo en actualmente, de tal forma que los
métodos a seguir estarán siempre sujetos a una continua revisión, para incorporar los recientesavances habidos en este tema.
Para ser conscientes de esta evolución, basta recordar que la medida de bases con precisión no fue realizada hasta el siglo XIX, fecha en la que se comenzaron a utilizar lasreglas bimetálicas, que fueron inventadas por Borda en 1792. El método que se utilizaba conestas reglas, consistía en colocar cada regla, una y otra vez, a continuación de la otra. De estaforma, podían medirse distancias de 10 km, como mucho, con una precisión de 10-6. El
problema de este método está en lo laborioso del mismo y en la necesidad de conocer con precisión la longitud de la regla empleada. Con respecto a esto último, la precisión con la quese conoce la longitud de la regla empleada y cómo cambia esta longitud durante el proceso demedida de bases, hay que recordar que esta longitud puede conocerse de forma precisa,gracias a que la regla bimetálica está constituida por dos reglas de diferentes metales, sujetas
por un extremo, siendo el otro extremo libre. De esta forma, puede medirse el desplazamientorelativo de una de ellas respecto de la otra, gracias a una regleta graduada colocada en la reglainferior. Entonces, la alteración de las longitudes habidas por la distinta dilatación térmica deestas reglas, puede medirse con precisión, hallándose también la verdadera longitud de laregla bimetálica empleada mediante la fórmula
b = A + B δ
donde A y B son constantes conocidas, b es la longitud de la regla bimetálica en metros
(aproximadamente 4 m) y δ es la lectura tomada en la regleta en mm.
En una versión posterior de este método, empleada por primera vez en 1885 por elsueco Jáderin, las reglas bimetálicas fueron sustituidas por los hilos de invar, estos hilos secolocan entre dos soportes y se tensan mediante dos pesas. Los hilos de invar estáncompuestos de un material llamado invar , cuya composición es 36 % de níquel y 64 % deacero; su longitud es de unos 24 m, con una sección recta de 1.65 mm de diámetro. Debido asu composición, estos hilos presentan la ventaja de variar muy poco de longitud por efecto delos cambios de temperatura, así las correcciones a efectuar por este efecto son siempre muy
pequeñas. Otra ventaja que presenta el uso de estos hilos, reside en que con ellos medimos lasdistancias de 24 en 24 metros, mientras que con las reglas bimetálicas las distancias se miden
de 4 en 4 metros. Con todo, el método sigue siendo muy laborioso, ya que, es necesario queno se produzca una desalineación, cuando se coloca el patrón una y otra vez, delante de la
13

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 14/43
posición anterior. Esto ha hecho que estos métodos antiguos hayan sido gradualmentedescartados, en favor de métodos más modernos de medida basados en la interferometría, otambién en la medida de los tiempos de retraso de una señal enviada y recibida por una mismaestación de registro.
Actualmente, los teodolitos dotados de distanciómetros ópticos (estaciones totales),
son una herramienta muy útil para llevar a cabo las medidas que conlleva una triangulación,ya que, con ellos pueden medirse tanto ángulos como distancias, sin cambiar de instrumento,resultando cómodos y precisos. Generalmente, son instrumentos fáciles de manejar para eltécnico que debe realizar las medidas, haciendo que una campaña de este tipo resulte menoscostosa, en tiempo y esfuerzo.
En consecuencia, con los instrumentos mencionados o utilizando un distanciómetro, podemos calcular la distancia entre dos puntos en línea recta, a esta distancia se le llama engeodesia la cuerda. Pero debemos notar que la distancia buscada es la medida sobre lasuperficie de referencia, es decir, el arco (utilizando la terminología de la geodesia). Por ello,es necesario relacionar ambas, para obtener el arco a través de la medida directa de la cuerda.
(a)(b)
Fig. 3. (a) Representación de las secciones normales recíprocas correspondientes a los puntosA y B. (b) Representación de la línea geodésica que une los puntos A y B.
La figura 3(a) representa este problema, en ella vemos que para dos puntos dadossobre la superficie de referencia, la cuerda es la línea representada por un trazo recto
discontinuo. En cambio, la verdadera distancia entre tales puntos considerados, debecalcularse siguiendo la línea geodésica (curva de mínima distancia entre dos puntos, medidasobre la superficie) representada en la figura 3(b), como puede verse esta línea está situadadentro de las secciones normales recíprocas, representadas por las curvas AaB y BbA. Lasección normal AaB es una curva que se define mediante la intersección de la superficie dereferencia considerada (un elipsoide de revolución achatado por los polos), con el planodefinido por la dirección normal a dicha superficie de referencia en el punto A (dirección na)y el punto B. Así, el corte de este plano y la superficie de referencia, es la curva AaB. Deforma similar definimos BbA intercambiando los papeles que juegan los puntos A y B.
14

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 15/43
Cuando consideramos distancias AB menores de 500 km, podemos aceptar que lamedida del arco s AB sobre la línea geodésica, es aproximadamente igual a la media de lasmedidas sobre las secciones normales recíprocas, es decir
sAB = (sA + sB) / 2
obteniendo las cantidades s A y s B mediante el desarrollo en serie (Cid y Ferrer, 1997)
s = c 1 -24
c -'
24c +
c1152
(15 -16 ' -24 '' + 8 ) + ...2
2 34
4 2 2 2
κ κκκ κ κκ κ τ
⎡
⎣⎢
⎤
⎦⎥
donde c es la cuerda, s es la distancia s A o s B según se considere la sección normal AaB o BbA,κ es la curvatura y τ es la torsión (que por tratarse de una curva plana es cero). Los valores dela curvatura y sus derivadas respecto del arco (denotadas con prima), pueden hallarseaplicando el teorema de Euler (Cid y Ferrer, 1997).
Así, realizadas todas las operaciones la expresión anterior nos dará la distancia buscada. Debemos notar que cuando los puntos A y B sean muy próximos, la cuerda y el arcoserán prácticamente la misma cantidad. Esta situación suele ser frecuente en la medida directade bases sobre el terreno, donde las distancias consideradas no superan los 15 o 20 km.
7. Determinación de ángulos
Tal como puede verse en la figura 3(a), cuando nos situamos con un instrumento en el punto A, observando el punto B, o al contrario, cuando observamos el punto A desde el B;estamos determinando secciones normales recíprocas, de tal forma, que las medidas de losángulos, llevadas a cabo en una triangulación estarán falseadas en una cantidad δ , como la
representada en la figura 4, en la que podemos ver un triángulo geodésico ABC y lassecciones normales recíprocas, correspondientes a las observaciones realizadas en susvértices.
Fig. 4. Representación de un triángulo geodésico y las secciones normales recíprocas quecorresponden a sus vértices. La curva de trazo grueso que une dichos vértices es la líneageodésica que pasa por ellos.
Para corregir estas medidas angulares se debe obtener, en primer lugar, el ángulo ∆
que forman dos secciones normales recíprocas en un vértice, por ejemplo, el ángulo que
15

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 16/43
forman las curvas AaB y BbA, en el punto A o en el B. En segundo lugar, debemos relacionar este ángulo con la pequeña cantidad δ que constituye la corrección.
Para hallar el ángulo ∆ tenemos en cuenta que éste será siempre una cantidad muy pequeña, entonces, obteniendo su tangente mediante la expresión (Cid y Ferrer, 1997)
tg∆ = -
s
2 + s ' - ' +...
2
κτ κ τ κτ13
⎛ ⎝ ⎜
⎞ ⎠⎟
⎡
⎣⎢⎤
⎦⎥
donde τ denota en este caso la torsión geodésica (que es distinta de cero). De esta fórmula ytras despreciar términos de grado s3 y superiores, podemos deducir (Cid y Ferrer, 1997)
∆ ≅ s e
4acos sen 2A
2 2
22φ
donde φ es la latitud del vértice para el que se calcula ∆, e es la excentricidad del elipsoide dereferencia, a es su semieje mayor y A es el acimut de la sección normal directa.
Conocido ∆, obtendremos δ mediante la suma de una progresión geométrica cuyovalor es la tercera parte de ∆. Esta progresión geométrica, proviene de un procedimientomatemático descrito con detalle por Zakatov (1981).
8. Transformación de coordenadas y cambio de dátum
En algunas ocasiones podemos encontrarnos con la necesidad de convertir coordenadas geodésicas medidas en distintos dátum, a un único dátum para poder utilizar todas estas medidas conjuntamente. Este problema puede surgir cuando recibimos medicionesrealizadas por otros investigadores o técnicos, que trabajan habitualmente en un sistema dereferencia distinto al que nosotros utilizamos. Para llevar a cabo esta transformación debemostener en cuenta que esos otros sistemas de referencia pueden no ser geocéntricos. Estasituación está ilustrada en la figura 5(a), en la cual tenemos las coordenadas cartesianas (x’,y’, z’) de un punto P (medidas en un sistema no geocéntrico con origen O’), relacionadas consus coordenadas cartesianas (x, y, z) (medidas en un sistema geocéntrico con origen O), através de la suma vectorial
r )k 1(r r o ′++=rrr
R
donde k es un factor de escala cuyo valor suele ser del orden de 10-6 y R es la matriz derotación que define la transformación de coordenadas que relaciona ambos sistemas, dada por
(Torge, 1991)
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
′
′
′
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ε−ε
εε−
ε−ε
++⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
z
y
x
1
1
1
)k 1(
z
y
x
z
y
x
xy
xz
yz
o
o
o
(8.1)
donde los ángulos (εx, εy, εz) expresan las rotaciones indicadas en la figura 5(a). Estosángulos suelen tener un valor muy pequeño, por eso se expresan habitualmente en segundosde arco. Es importante notar que la ecuación (8.1) expresa una relación entre coordenadascartesianas. No obstante, en muchas ocasiones no trabajamos con las coordenadas cartesianas(x, y, z) de un punto P, sino con sus coordenadas geodésicas (φ, λ, h), donde φ es la latitudgeodésica (medida en grados norte), λ es la longitud geodésica (medida en grados este) y h esla altura elipsoidal (medida en metros) ilustrada en la figura 5(b).
16

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 17/43
(a) (b)
Fig. 5. (a) Representación del sistema de referencia no geocéntrico xyz, con respecto alsistema de referencia geocéntrico XYZ. (b) Posición de un punto P medida sobre un sistemade coordenadas cartesiano y sobre el elipsoide de referencia.
Entonces, nos damos cuenta de que es necesario poder convertir las coordenadasgeodésicas (φ, λ, h) en coordenadas cartesianas (x, y, z) y viceversa. Para ello, podemosrecurrir de nuevo a una suma vectorial, como la representada en la figura 5(b)
Nhr r Q
r
rr
+=
donde los vectores están dados por (Cid y Ferrer, 1997)
)sen)e1(,sencos,coscos(r N2
N NQ φρ−λφρλφρ=r
)sen,sencos,cos(cos N φλφλφ=r
siendo (Cid y Ferrer, 1997)
2
222
22 N
a bae
sene1a −=
φ−=ρ
el valor del semieje menor b puede calcularse fácilmente, pues son siempre conocidos losvalores del semieje mayor a y del aplanamiento del elipsoide de referencia f, teniendoentonces que
af a b a
baf −=⇒
−=
En consecuencia, podemos escribir las ecuaciones (Hofmann-Wellenhof and Lichtenegger,1994)
φ+ρ−=
λφ+ρ=λφ+ρ=
senh))e1((z
sencos)h(ycoscos)h(x
N2
N
N
(8.2)
que nos permiten convertir las coordenadas geodésicas (φ, λ, h) en coordenadas cartesianas(x, y, z). Para realizar la transformación contraria, es decir, para convertir coordenadascartesianas (x, y, z) en coordenadas geodésicas (φ, λ, h), tenemos que invertir la relación(8.2). Esto puede hacerse de forma sencilla tal como indican Hofmann-Wellenhof yLichtenegger (1994), mediante un proceso analítico y numérico que se puede realizar rápidamente en un ordenador.
17

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 18/43
Llegados a este punto, tenemos ya las herramientas necesarias para abordar el problema de transformación de coordenadas planteado al principio de este apartado, así como,algunos otros problemas implicados en el mismo. Entonces, dependiendo de los problemas detransformación de coordenadas que tengamos planteados, podemos optar por aplicar una uotra fórmula, de las anteriormente obtenidas. Concretamente, los problemas que podemosresolver con las fórmulas (8.1), (8.2) o sus inversas; son los siguientes:
1) Transformación de coordenadas geodésicas (φ, λ , h) en coordenadas cartesianas (x, y, z),
dadas en el mismo dátum. Para resolver este problema recurrimos a aplicar directamente lafórmula (8.2).
2) Transformación de coordenadas cartesianas (x, y, z) en coordenadas geodésicas (φ, λ , h),
dadas en el mismo dátum. Para resolver este problema aplicamos la fórmula inversa de(8.2), que puede ser computada fácilmente de forma analítica y numérica.
3) Transformación de coordenadas cartesianas (x’, y’, z’) dadas en el dátum1 a coordenadas
cartesianas (x’, y’, z’) dadas en el dátum2. Para resolver este problema operamos endistintas etapas:
a) Aplicamos la fórmula (8.1) para convertir coordenadas cartesianas (x’, y’, z’), dadas enel dátum1, en coordenadas cartesianas geocéntricas (x, y, z). Para ello, necesitamos
establecer los valores de los parámetros (k, xo, yo, zo, εx, εy, εz), correspondientes aldatum1. Estos valores pueden obtenerse desde varias fuentes. Por ejemplo, Torge (1991)ha establecido los valores de estos parámetros, para transformar coordenadas desdealgunos de los dátum más utilizados al sistema geocéntrico WGS84 (el que se utiliza conGPS).
b) Aplicamos la inversa de la fórmula (8.1) para convertir las coordenadas cartesianasgeocéntricas (x, y, z), obtenidas en el paso anterior, en las coordenadas cartesianas (x’, y’,z’) dadas en el dátum2. Para ello, necesitamos establecer los valores de los parámetros (k,
xo, yo, zo, εx, εy, εz), correspondientes ahora al datum2. La inversa de la fórmula (8.1) puede realizarse fácilmente, programando las ecuaciones (8.1) de forma matricial en unordenador, en ese caso todo el problema se reduce a invertir una matriz. Este problema deinvertir una matriz es muy conocido y es fácil de resolver.
4) Transformación de coordenadas geodésicas (φ, λ , h) dadas en el dátum1 a coordenadas
geodésicas (φ, λ , h) dadas en el dátum2. Para resolver este problema podemos dividirlo entres problemas más simples que ya hemos resuelto antes:
a) Transformar primero las coordenadas geodésicas (φ, λ, h) en coordenadas cartesianas(x’, y’, z’), para el dátum1 en el que están dadas . Para resolver este problema aplicamosdirectamente la fórmula (8.2), tal como en el problema (1) anteriormente resuelto.
b) Transformar las coordenadas cartesianas (x’, y’, z’), obtenidas en el paso anterior, acoordenadas cartesianas (x’, y’, z’) dadas en el dátum2. Para resolver este problemaoperamos como se ha indicado antes en el problema (3).
c) Finalmente, transformamos las coordenadas cartesianas (x’, y’, z’), obtenidas en el pasoanterior, en coordenadas geodésicas (φ, λ, h). Para resolver este problema aplicamos lafórmula inversa de (8.2), tal como se ha indicado en el problema (2) anteriormenteresuelto.
18

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 19/43
Aplicaciones de la Geodesia Física
9. Relación entre los observables físicos y la Geodesia
Como ya se ha dicho antes, en las campañas geodésicas se llevan a cabo medidasdirectas, tales como, determinación de distancias o de ángulos. Estas medidas están referidasal horizonte local, cuya dirección perpendicular es la línea de la plomada, es decir, ladirección del vector aceleración de la gravedad, en el punto en el que se ubica el instrumento.Es obvio entonces, que magnitudes físicas, como la masa y el campo de gravedad, juegan un
papel importante en la geodesia, ya que, cuando colocamos un instrumento sobre el terreno nolo referimos a la dirección normal al elipsoide de referencia (que en ese momento esdesconocida para nosotros), sino a la línea de la plomada.
En este sentido, el importante papel que juega el campo de gravedad terrestre, quedatodavía más claro, si tenemos en cuenta que cuando el topógrafo representa la altura de un punto de la superficie de la Tierra, no son las alturas referidas al elipsoide de referencia lasque tienen sentido, sino las alturas referidas al geoide (alturas ortométricas H). Así, elconocimiento de las alturas de los puntos de la superficie terrestre, determina el relieve que eltopógrafo debe representar en los mapas topográficos. En consecuencia, altura ortométrica Hde los puntos de la superficie terrestre, es una de las coordenadas que determinan la figura dela Tierra, junto con las coordenadas geodésicas latitud y longitud, siendo esta altura H unacantidad que requiere el conocimiento del campo de gravedad terrestre para su determinación.
Además, el valor preciso de las diferencias de alturas en los distintos puntos de la
superficie terrestre, es absolutamente necesario para proyectar y construir diferentesinstalaciones, así como, para la realización de cálculos en los cuales hay que tomar en cuentala posición de los puntos en el espacio. Por ejemplo, cuando se desea diseñar correctamentegrandes canales para la distribución de agua, o para la retirada de aguas residuales, esnecesario saber dónde es mayor o menor el potencial de la gravedad terrestre. Para ello, esnecesario determinar con precisión las alturas respecto al geoide.
Como consecuencia de todo lo dicho, es necesario dedicar un tiempo suficiente alestudio y comprensión, de todo lo relativo al campo de gravedad terrestre y al geoide.Precisamente el estudio riguroso de estos temas es competencia de la Geodesia Física,
disciplina que comienza a desarrollarse en el siglo XIX y que alcanza su máxima expansióncon el lanzamiento de los satélites artificiales en nuestro siglo, de cuyo seguimientoobtenemos la información más precisa del campo de gravedad global creado por toda la masade la Tierra.
En este apartado dedicado a la Geodesia Física y sus aplicaciones, vamos a procurar sobre todo referirnos a las aplicaciones, concretamente, a las topográficas y geodésicas,enviando al lector a referencias especializadas (listadas al final de este tema) para obtener unadescripción más completa de aspectos más teóricos, relacionados con el campo de gravedad ysu potencial asociado.
19

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 20/43
10. El campo de gravedad terrestre. Superficies de nivel. El geoide
El geoide como superficie de referencia fundamental, es una superficie cuya formarefleja la distribución de masas en la Tierra. Por ello, debemos empezar recordando cuál es lafuerza gravitatoria producida por una cierta distribución de masa y su potencial asociado, paraentender cómo surge de estos conceptos y del concepto de superficie equipotencial, una
definición de superficie de referencia, tal como es la definición de geoide.
Así, debemos comenzar recordando que cuando consideramos dos masas puntuales,separadas una distancia s, la fuerza con la que cada una atrae a la otra es
F =km
s12m2 (Ley de gravitación de Newton)
donde k denota la constante de gravitación, cuyo valor es 66.7x10-9 cm3g-1seg-2. Siconsideramos la masa atraída m2 con valor unidad, la ecuación anterior puede escribirsecomo
F =km
s2
donde hemos denotado con m la masa atrayente. La representación de esta fuerza en unsistema de coordenadas cartesiano, es la que puede verse en la figura 1(a). A la vista de estafigura es fácil notar que el vector F se puede descomponer en la forma
F = - F (cos α, cos β, cos γ) = -km
s2x y z-
s
-
s
-
s
ξ η ζ, ,⎛
⎝ ⎜ ⎞ ⎠⎟
donde s = ( ) ( ) ( )x y z- + - + -ξ η2 2 ζ 2 .
(a) (b)
Fig. 1. (a) Fuerza de atracción gravitatoria debida a una masa puntual. (b) Fuerza centrífugadebida a la rotación de la Tierra en punto P de la misma.
20

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 21/43
También debemos recordar que el campo gravitatorio es un campo conservativo, por ello puede obtenerse a través del gradiente de un campo escalar, es decir
grad V = ∂∂
∂∂
∂∂
Vx
Vy
Vz
, ,⎛ ⎝ ⎜
⎞ ⎠⎟ = F
donde V es su función potencial asociada, el potencial gravitatorio, que en el caso de
considerar una masa puntual adopta la forma
Vkms
=
Cuando consideramos una distribución de masas puntuales, la expresión anterior se podrágeneralizar mediante la aplicación del sumatorio
V Vkmsi
i
i
i= =∑ ∑
i
obviamente, para una distribución continua de masa M, el sumatorio debe ser reemplazado
por la integral, escribiendo
VM
= k dms
= k ds∫∫∫ ∫∫∫ V
vρ
donde ρ denota la densidad de masa y V denota el volumen del cuerpo considerado. En elcaso de que este cuerpo sea la Tierra, debemos tener en cuenta que la misma no está enreposo, sino rotando con una velocidad angular de 0.7297x10-4 seg-1. En este caso para poder considerar que la Tierra está en reposo y aplicar la ecuación anterior, debemos incluir unafuerza de inercia conocida como fuerza centrífuga, de tal forma que para cualquier punto P
sobre la superficie de la Tierra debemos considerar una fuerza f , como la representada en lafigura 1(b). Dicha fuerza puede escribirse como
f = ω2p = (ω2x, ω2y, 0) = grad φ =∂φ∂
∂φ∂
∂φ∂x y z
, ,⎛ ⎝ ⎜
⎞ ⎠⎟ ,, φ =
12
ω2(x2 + y2)
donde p es un vector distancia, paralelo al plano ecuatorial, que va desde el eje de rotación dela Tierra hasta el punto P. Esto nos lleva a una definición de potencial gravitatorio del tipo
W(x, y, z) = V + φ = k dsV
vρ∫∫∫ +12
ω2(x2 + y2)
suma del potencial gravitatorio terrestre V y el potencial centrífugo φ. A este potencialobtenido como suma de los anteriores se le llama potencial de la gravedad , siendo su fuerzaasociada conocida con el nombre de gravedad . Ésta puede ser obtenida mediante
grad W = ∂∂
∂∂
∂∂
Wx
Wy
Wz
, ,⎛ ⎝ ⎜
⎞ ⎠⎟ = g
El módulo de este vector, o magnitud de la gravedad, se suele expresar en gales siendo 1 gal= 1 cm/seg2. La magnitud de este vector se incrementa sobre la superficie de la Tierra cuandovamos desde el ecuador hacia los polos, debido a que disminuye la fuerza centrífuga.Concretamente, la gravedad en el ecuador es 978 gal y en los polos 983 gal,
aproximadamente.
21

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 22/43
En lo referente a W , el potencial de la gravedad, hay que recordar que la superficie para la cual éste es constante, es decir, W(x, y, z) = W0, se denomina superficie equipotencial o superficie de nivel, siendo el geoide la superficie de equipotencial del campo de gravedadterrestre que coincide con el nivel medio de los océanos. La figura 2(a) nos muestra larelación que existe entre las superficies de nivel y la línea de la plomada, notando que estassuperficies son normales a la línea de la plomada.
(a)
(b)
Fig. 2. (a) Superficies equipotenciales del campo de gravedad terrestre y línea de la plomadaen un punto P. (b) Gravedad sobre una superficie equipotencial.
Las líneas de la plomada o normales a las superficies equipotenciales, son curvas deradio de curvatura finito y torsión no nula. Estas curvas son muy importantes en la geodesia,
pues sirven para medir la altura de un punto P con respecto al geoide, a esta altura se le llamaaltura ortométrica. Esta altura no debe ser confundida con la altura sobre el nivel del mar,debido a que el geoide no es una superficie de océano ideal. Por ello, el geoide no coincideexactamente con el nivel del mar. En este sentido, uno de los objetivos de la geodesia esencontrar la separación de la superficie del océano y el geoide.
Centrándonos ahora en el concepto de altura ortométrica, podemos notar que eldesplazamiento elemental dr, será paralelo a la línea de la plomada, en cada punto de lamisma, por tanto
dW = g.dr = g dH cos (g, dr) = g dH cos 180º = - g dH
resultando obvio, que la gravedad no puede ser constante en la misma superficieequipotencial, debido a que estas superficies no son ni regulares ni concéntricas, con respectoal centro de masas de la Tierra. Esta situación está bien ilustrada en la figura 2(b), en la que
podemos observar quedW = -g1dH1 = -g2dH2 21 gg ≠⇒
por ser .21 dHdH ≠
También hay que notar que esta definición de altura, en la que la superficie dereferencia es el geoide, nos lleva a establecer un sistema de alturas en el que obtenemos laaltura de un punto P en la forma
22

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 23/43
H = -∫ gdWW
W0
= ∫ gdCC
0
donde C = W - W0 es denominado número geopotencial.
Llegados a este punto cabe preguntarse qué relación existe entre este sistema dealturas y las alturas determinadas sobre el elipsoide de referencia. La respuesta a esta cuestión
puede verse bien ilustrada en la figura 3(a), en la que representamos para un punto P, susalturas asociadas, tanto la elipsoidal h como la ortométrica H , existiendo la sencilla relación
h = H + Nentre ambas alturas.
geoide
elipsoide
(a)
normal
(b)
Fig. 3. (a) Altura ortométrica y elipsoidal en un punto P. (b) Elipsoide de referencia.
En consecuencia, determinada h o H , obtener la otra altura es sencillo si se conoce N ,la ondulación del geoide. Éste es uno de los problemas principales de la geodesia práctica oaplicada, la determinación de las alturas del geoide sobre un elipsoide de referencia dado.
Para resolver este problema hemos de fijar, en primer lugar, un elipsoide de referencia que sealo más cercano a la figura de la Tierra, tomando por ello un elipsoide de revoluciónligeramente aplanado por los polos. Este elipsoide vendrá definido entonces por dos
parámetros, su semieje mayor a (aproximadamente el radio ecuatorial terrestre) y suaplanamiento f definido por
f =a - b
a
ecuador
(a) (b)
Fig. 4. (a) Latitud astronómica de un punto P. (b) Desviación de la vertical en el punto P.
23

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 24/43
donde b es el semieje menor. La figura 3(b) muestra las coordenadas elipsoidales de un puntoP, sobre el elipsoide de referencia elegido. Estas coordenadas (φ, λ, h) no son obviamente lascoordenadas que determinamos en una campaña geodésica. En una campaña geodésicarealizada con instrumentos tradicionales (es decir, sin GPS) determinamos las coordenadas
naturales (Φ, Λ, H). Esto es debido a que cuando situamos un instrumento sobre el terreno, lavertical es para nosotros la dirección de la línea de la plomada, tal como puede verse en la
figura 4(a), siendo la latitud y longitud del lugar, la latitud y longitud astronómicas. Laseparación que existe entre la línea de la plomada y la normal al elipsoide de referencia en el
punto P, punto en el que situamos el instrumento, está representada en la figura 4(b). A partir de esta figura pueden obtenerse las relaciones
ξ = Φ - φ
η = (R cos φ )(Λ - λ) = (Λ - λ) cos φ
donde R es el radio de la esfera situada en el punto P, cuyo valor es la unidad. Las cantidades(ξ, η) reciben el nombre de componentes de la desviación de la vertical. Así, las medidasrealizadas sobre el terreno en un vértice de una red geodésica (ΦP, ΛP, HP), deben ser
reducidas a las cantidades (φP, λP, hP), medidas sobre el elipsoide de referencia utilizado en lacampaña de triangulación, mediante las fórmulas
φ = Φ - ξ ,, λ = Λ - η
φcos,, h = H + N
donde si son conocidas la ondulación del geoide y las componentes de la desviación de lavertical, será fácil pasar del sistema de referencia físico al sistema de referencia matemático oviceversa.
A la vista de lo dicho en este apartado, el problema que queda planteado es pues ladeterminación de las cantidades (N, ξ, η). Precisamente, éste va ser el objetivo del siguiente
apartado. En primer lugar abordaremos el problema de calcular N, indicando a continuacióncomo pueden calcularse (ξ, η). Estos aspectos se comentarán brevemente remitiendo al lector (como en otras ocasiones) a unas referencias especializadas, para conseguir una descripciónmás detallada de los métodos que se siguen en la obtención de las cantidades mencionadas.
11. Ondulación del geoide y desviación de la vertical
Cuando observamos la figura 3(a), notamos que la cantidad N que hemos definidocomo ondulación del geoide, puede obtenerse relacionando el elipsoide de referencia y el
geoide. Para relacionar ambas figuras de la Tierra, es necesario notar que podemos escribir el potencial W en la forma
W(x, y, z) = U(x, y, z) + T(x, y, z) ,, U(x, y, z) = V(x, y, z) + φ(x, y, z)
donde T se denomina potencial perturbador o potencial anómalo y U es la función potencial
normal, asociada a un elipsoide de revolución cuya ecuación es
1 b
z
a
yx2
2
2
22=+
+
Entonces, la pequeña separación que existe entre la superficies W(x, y, z) = W0 y U(x, y, z)
= U0 (con U0 = W0), estará relacionada directamente con el término T(x, y, z) mediante(Heiskanen y Moritz, 1985)
24

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 25/43
N =γT
(Fórmula de Bruns) ,, γ = grad U
donde γ es denominada la gravedad normal. Este vector tendrá la dirección de la normal alelipsoide de referencia, tal como se indica en las figuras 3(b) y 4(b), siendo su diferencia conel vector gravedad denominada anomalía de la gravedad ∆g. Esta última cantidad definida
nos permite obtener el potencial perturbador y como consecuencia la ondulación del geoide,si llevamos a cabo un desarrollo en armónicos en esféricos de este potencial perturbador T(Heiskanen y Moritz, 1985), teniendo como resultado final las importantes relaciones
T =π2
R ∫∫ σψ∆σ
d)(Sg ,, N =G4
R
π ∫∫ σψ∆σ
d)(Sg (Fórmula de Stokes)
[ ]/2)(sen+/2)(senlncos3-cos5-1+/2)(sen6-/2)(sen
1=)S( 2 ψψψψψ
ψψ
donde R es el radio medio terrestre (6371 km), G es el valor medio de la gravedad sobre la
Tierra (979.8 gales) y σ es el área de la esfera unidad. Estando por ello las integralesanteriores extendidas a toda la esfera unidad, tal como se indica en la figura 5(a). En estafigura y en la figura 5(b), podemos ver que el papel que juega el ángulo ψ.
(a)
(b)
Fig. 5. (a) Notaciones seguidas para obtener la fórmula de Stokes. (b) Relación entre lascoordenadas polares (ψ, α) y las coordenadas geográficas (φ, λ), en la esfera de radio unidad.
La fórmula de Stokes publicada por él en 1849, es la expresión matemática másimportante de la Geodesia Física, debido a que hace posible conocer la figura de la Tierra (esdecir, la ondulación del geoide) a partir de datos gravimétricos. Debemos notar también quela ecuación integral de Stokes es el vínculo fundamental entre el campo de gravedad terrestrey la figura de la Tierra, confirmando la afirmación realizada al principio de este capítulo,cuando se decía que para avanzar hacia una figura de la Tierra más precisa que un elipsoidede revolución, era necesario considerar el campo de gravedad que crea la masa de la Tierra.Vemos ahora totalmente claro el papel tan importante que juega el estudio y determinación
del campo de gravedad terrestre, en la obtención precisa de la figura de la Tierra, ya que, sidisponemos una colección de datos suficiente (consistente en anomalías de la gravedad
25

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 26/43
determinadas por toda la Tierra, entre otros datos) podemos obtener la ondulación del geoide,tal como se indica en las figuras 6(a) y 6(b).
(a) (b)Fig. 6. (a) Mapa de la ondulación del geoide sobre un elipsoide de revolución. (b) Imagen del
geoide en 3D mostrando los detalles de la forma del geoide, a una escala en la que se hanexagerado los valores de la ondulación para ver mejor dichos detalles.
No obstante, hay que señalar algunas limitaciones en la aplicación de la fórmula deStokes, debidas a las hipótesis realizadas para la obtención de la misma. Concretamente,debemos notar que:
1. La fórmula presentada para la ondulación del geoide ha sido obtenida considerando que elelipsoide de referencia (superficie U(x, y, z) = U0), tiene el mismo potencial que el geoide(U0 = W0). Además, esta superficie debe encerrar en su interior una masa que seanuméricamente igual a la de toda la Tierra.
2. El elipsoide de referencia debe tener su centro en el centro de la Tierra.
3. El potencial anómalo o potencial perturbador debe ser armónico fuera del geoide, es decir,T(x, y, z) puede ser desarrollado en armónicos esféricos. Esto significa que el efecto delas masas por encima del geoide, debe ser eliminado aplicando adecuadas reducciones alos valores de la gravedad determinados. De lo contrario, no será posible aplicar laexpresión integral de Stokes.
En consecuencia, la determinación práctica del geoide, tal como se muestra en la
figura 6(a), requerirá modificar la fórmula de Stokes para poder utilizar un elipsoide dereferencia arbitrario. De tal forma que podamos emplear en el cálculo del geoide, unasuperficie de referencia U(x, y, z) = U0 para la que no se requiera que U0 = W0, condición queen la práctica puede ser muy difícil de conseguir, limitando mucho los posibles elipsoides aemplear. Por otra parte, el cálculo por este método gravimétrico de la ondulación del geoide,nos obligará a eliminar el efecto de las masas por encima del geoide, adoptando para ellodiversas hipótesis que podemos encontrar desarrolladas con detalle en la bibliografía más
básica de la Geodesia Física (Heiskanen y Moritz, 1985; Vanícek y Krakiwsky, 1986).
Llegados a este punto cabe preguntarse si existe alguna expresión parecida a lafórmula de Stokes, que nos permita calcular la desviación de la vertical en un punto P del
geoide. La respuesta es afirmativa, existen unas fórmulas parecidas a dicha fórmula que nos permiten hallar las componentes (ξ, η) de la desviación de la vertical, a partir de un conjunto
26

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 27/43
de anomalías de la gravedad distribuidas por toda la Tierra. Estas fórmulas son debidas aVening Meinesz y fueron obtenidas por este geodesta en 1928, su expresión es (Heiskanen yMoritz, 1985)
G4
1=
π⎭⎬⎫
⎩⎨⎧
η
ξ
∫ π
=α
2
0 ∫ π
=ψ 0 ψψ
αψ∆d
)S(d),g(
⎭⎬⎫
⎩⎨⎧
α
α
sen
cosαψψ ddsen
donde α y ψ son las coordenadas polares sobre la esfera de radio unidad, tal como se indicaen la figura 5(b), siendo dσ = sen ψ dψ dα y S(ψ) la función de Stokes, cuya expresión hasido dada anteriormente.
12. Ondulación del geoide y alturas ortométricas. Método GPS-Nivelación
Después de todo lo dicho en el apartado anterior, cuando volvemos a la sencillafórmula
h = H +Nnotamos que al obtener la cantidad N, tal como se ha indicado antes, siguiendo el métodogravimétrico, podemos escribir
H = h - N
de donde, conocida la altura elipsoidal h del punto P considerado y determinado N mediantela integral de Stokes, puede hallarse la altura ortométrica H de ese punto. Cabe ahora
preguntarse si es posible determinar también H, mediante los valores de la gravedad medidaen la superficie de la Tierra, porque en caso afirmativo podríamos calcular la altura del geoideen un punto P, sin necesidad de recurrir a la integral de Stokes, la cual requiere para susolución una colección suficiente de medidas de la gravedad distribuidas por toda la Tierra.
En efecto, puede hallarse con precisión la altura ortométrica H de un punto sin tener conocimiento del geoide, o al menos sin un conocimiento detallado o muy preciso del mismo.El procedimiento que se sigue para calcular las alturas ortométricas directamente sobre elterreno se llama nivelación de precisión. A continuación vamos a describir este proceso concierto detalle.
En principio, el procedimiento de nivelación geométrica es bien conocido por lostopógrafos, consiste en medir la diferencia de altura entre dos puntos A y B, como losrepresentados en la figura 7(a), mediante la observación de la diferencia de lecturas sobre dos
miras verticales situadas en los puntos considerados. La diferencia de altura entre los dos puntos resulta ser entonces, la diferencia de las lecturas l1 y l2, observadas con el nivel(instrumento de nivelación), es decir
δHAB = l1 − l2 = A A − B B
siendo δHAB la diferencia de altura geométrica entre los puntos A y B. Cuando este procedimiento se repite una y otra vez, siguiendo un circuito de nivelación, es decir, una líneade nivelación cerrada, la suma algebraica de los incrementos de nivelación o diferencias dealtitud medidas, no es exactamente cero, como cabría esperar si realizamos estas medidas congran precisión. Este error, que se conoce como error de cierre de un circuito de nivelación,nos indica que el procedimiento de nivelación exacto, es algo más complicado que la simple
determinación de las diferencias de altura.
27

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 28/43
(a)
geoide
(b)
Fig. 7. (a) Esquema del procedimiento de nivelación geométrica. (b) Diferencias de alturasortométricas debidas al no paralelismo de las superficies de nivel.
Para entender lo que sucede basta considerar dos puntos A y B, suficientementealejados, de tal manera que el proceso mostrado en la figura 7(a), debe ser aplicado repetidasveces. Esta situación es la que está representada en la figura 7(b), en esta figura la diferenciade altitud nivelada δn, es distinta al incremento δHB en la línea de la plomada que pasa por B.Ello es debido al no paralelismo de las superficies de nivel, tal como se ve en la figura, enconsecuencia, si designamos por δW el incremento del potencial de la gravedad, tenemos
− δW = g δn = g’δHB
donde g es la gravedad en la estación de nivelación y g’ es la gravedad sobre la línea de la plomada de B en δHB. La relación anterior implica que
δHB = 'gg nn δ≠δ
no habiendo relación geométrica directa entre el resultado de la nivelación geométrica y ladiferencia del alturas ortométrica. Esta consecuencia es inmediata si notamos que lacombinación de medidas geométricas con la gravedad, nos proporciona la diferencia de
potencial δW, de tal forma que
WB − WA = − ∑ δB
A
ng
Así, la nivelación combinada con medidas de la gravedad nos proporciona diferenciasde potencial, esto es, cantidades físicas no geométricas con una ventaja añadida, la diferenciade potencial entre dos puntos es independiente del camino que se siga, obteniéndose el mismoresultado con independencia de los itinerarios que se sigan, por ello, si medimos a lo largo deun circuito de nivelación (seguimos un trayecto cerrado) sucede que
WA − WA = 0 =∫ A
Ag dn
donde hemos cambiado el sumatorio por la integral por ser teóricamente más riguroso. Esteresultado es imposible, en general, si consideramos sólo medidas geométricas, ya que, lasuma de incrementos de nivelación depende de la trayectoria, esto es
28

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 29/43
∆nAB = ,,∑ δB
A
n ∫ A
Adn = error de cierre
Como consecuencia de todo lo dicho, las diferencias de potencial son básicas en todateoría de altitudes, concluyendo que la nivelación sin medidas de gravedad, que en la práctica
puede aplicarse a pequeñas distancias (para las que las superficies de nivel son prácticamente paralelas), no tiene significado desde un punto de vista riguroso, llevando a contradiccionescomo es el error de cierre. Todo esto haceque se considere, en trabajos geodésicos degran precisión como es la nivelación de
precisión, la diferencia de alturaortométrica δHAB en lugar de la diferenciade altura geométrica ∆nAB, ya que, talcomo puede verse en la figura 7(b), lasalturas de los puntos A y B sobre el geoideHA y HB, son siempre las mismas con
independencia del trayecto de nivelaciónque se siga entre ambos, debido a que ladefinición de altura ortométrica esconsecuencia de principios físicos, no unacantidad obtenida de un sumatorio.
Fig. 8. Altura ortométrica de un punto Psobre la superficie de la Tierra.
Quedando claro qué sistema de alturas debe usarse para obtener una gran precisión, el problema planteado es la realización de esta medida de altura, es decir, el procedimientooperativo que debe seguirse para calcular la altura ortométrica de un punto P. Para ello,vamos a considerar un punto P sobre la superficie de la Tierra, tal como se indica en la figura8, designando por P0 la intersección con el geoide de la línea de la plomada que pasa por P.
Entonces, recordando la definición de número geopotencial, podemos escribir
W0 – W = C =∫ H
0g dH = H
H1 ∫
H
0g dH = g H
donde
g =H1 ∫
H
0g dH
es el valor medio de la gravedad sobre la línea de la plomada entre P y P0. La expresiónanterior nos permite obtener la altura ortométrica del punto P en la forma
H =gC
esta ecuación no es una tautología, es realmente una fórmula de utilidad práctica, debido aque la gravedad media g no depende fuertemente con la altura ortométrica. En consecuencia,sin un conocimiento preciso de la altura del punto P sobre el geoide, es decir, con un valor inicial de H suficientemente cercano a la verdadera altura ortométrica, podemos abordar elcálculo de la gravedad g . En este sentido, podemos encontrar expresiones aproximadas de g en diversos libros de geodesia (Heiskanen y Moritz, 1985).
Por otra parte, si se quiere aplicar la sencilla fórmula anterior es necesario hallar,además de g , el número geopotencial de P designado por C . Para ello, un procedimiento que
29

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 30/43
puede seguirse es elegir un punto O al nivel del mar (es decir, sobre el geoide), eligiendo un punto apropiado sobre la costa. Entonces, puede determinarse el número geopotencial de Paplicando la integral
C = W0 – W =∫ P
0g dn
siendo como ya sabemos independiente del itinerario de nivelación utilizado para relacionar los puntos P y O. El número geopotencial se mide en unidades geopotenciales (u. g. p.). Estasunidades están derivadas de las unidades de la gravedad y de la altura, mediante la relación
1 ugp = 1 kgal.m = 1000 gal.m
como g es aproximadamente 0.98 kgal, tenemos que C es aproximadamente igual a 0.98H.
Los procedimientos descritos para el cálculo de los números geopotenciales y el valor de la gravedad media g , introducen un error muy pequeño en la determinación de la alturaortométrica. De tal forma, que las altitudes ortométricas pueden obtenerse con una precisiónmuy alta. Este hecho es fundamental en la geodesia, pues podemos emplearlas como unsistema de alturas muy preciso, pudiendo introducirlas como dato de gran precisión, encualquier cálculo que requiera la altura de los puntos sobre la superficie de la Tierra.Concretamente, al retomar la fórmula presentada al principio de este apartado
h = H + N
si H puede ser obtenida con gran precisión siguiendo mediante nivelación de precisión y h puede también ser obtenida con gran precisión, por ejemplo, empleando para ello un sistemade posicionamiento como GPS, resulta como consecuencia que la determinación del geoidemediante estas dos cantidades, tendrá una precisión tan alta como la que poseen las medidasde alturas elipsoidales y ortométricas.
Esta técnica es muy empleada en la actualidad para obtener las alturas del geoidesobre el elipsoide de referencia, en trabajos geodésicos de gran precisión, basta mencionar como ejemplo el proyecto ALGESTAR (Bürki and Marti, 1990), cuyo objetivo fue llevar acabo la computación de un nuevo geoide para Suiza, comprobando al mismo tiempo lafiabilidad de las medidas GPS en una zona muy montañosa. Para ello, se obtuvieron lasondulaciones del geoide aplicando la ecuación
N = h − H
donde h fue obtenida a partir de observaciones GPS y H a partir de la computación de losnúmeros geopotenciales (nivelación de precisión), siguiendo las líneas de nivelación de la
Red Nacional de Nivelación que une los 40 vértices geodésicos de la Red Suiza deTriangulación. El resultado de este proyecto fue la obtención de las ondulaciones geoide paraSuiza con una gran precisión.
13. Cálculo gravimétrico del geoide
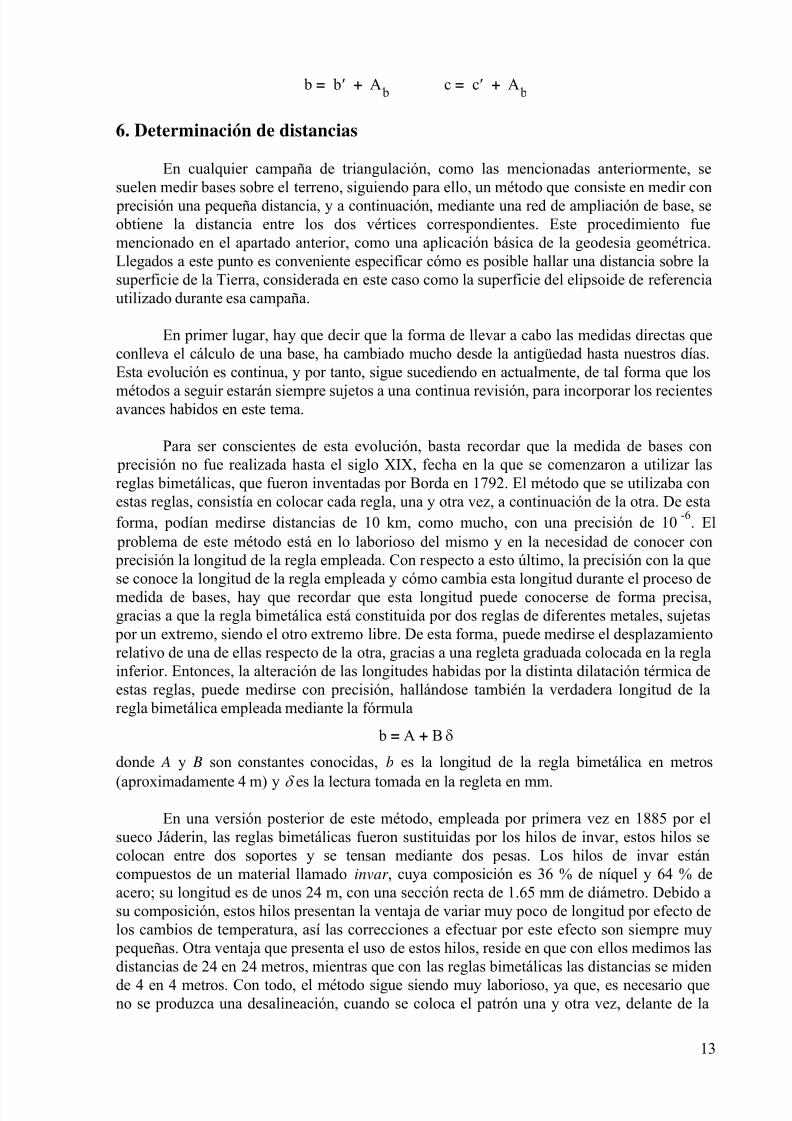
En el apartado 9 indicamos que los receptores GPS permiten calcular las alturaselipsoidales, pero es necesario obtener las alturas respecto al nivel del mar (alturasortométricas), para muchos fines prácticos. Entonces, las alturas elipsoidales se deben
convertir en alturas ortométricas restando la altura del geoide. Para ello, es necesariocomputar las alturas del geoide, al menos con la misma precisión que la altura elipsoidal, para
30

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 31/43
la latitud y longitud del punto considerado. En este aspecto se centra una de las principalesaplicaciones de la geodesia física, puesto que permite obtener la altura del geoide paracualquier punto de la Tierra. Estas alturas del geoide se refieren, generalmente, al SistemaGeodésico de Referencia de 1980 (GRS80).
Los modelos geopotenciales pueden servir para calcular la ondulación del geoide. No
obstante, las alturas del geoide provenientes de un modelo geopotencial no son, en general,suficientemente precisas. Por ello, es necesario determinar una corrección a las mismas. Estacorrección se determina a partir de las anomalías de la gravedad medidas sobre el terreno,
para computar así un modelo de geoide más preciso. Debido a que las anomalías observadassobre el terreno, están dadas en un área limitada y no pueden por tanto utilizarse para resolver la longitud de onda larga del campo de gravedad terrestre, es necesario considerar un modelogeopotencial para la computación de tales longitudes de onda. Como veremos a continuación,la contribución de esta longitud de onda larga corresponde a una aproximación suave delgeoide, para la región bajo estudio.
El cálculo gravimétrico de una altura del geoide muy precisa, para una región dada,tendrá una gran utilidad práctica directa e inmediata para toda la comunidad de usuarios deGPS (Kaula, 1987). Estos resultados permitirán incorporar modelos más realísticos a losalgoritmos de cálculo de las alturas ortométricas, reportando una mejora en la precisión de lasalturas mencionadas, lo que conllevará evidentes beneficios para la geo-referenciación, lafotogrametría o el control geométrico de obras. En suma, serán beneficiarios de talesresultados aquellos científicos y técnicos, interesados en una localización más precisa sobre elterreno. Puesto que, usando medidas de posición con el sistema GPS obtendrán a la vez una
precisión suficiente en planimetría, junto con una altura ortométrica precisa, hallada a partir de un modelo de geoide (cuya ondulación sea precisa) y la altura elipsoidal dada por GPS,
pudiendo realizar medidas precisas de alturas ortométricas sin nivelación (Schwarz et al.,
1987).
En relación con lo dicho en el párrafo anterior, algunas de las aplicaciones concretasen las que se puede usar directamente un modelo de geoide local son:
Fotogrametría. Tener un modelo de geoide, supone poder tomar puntos de apoyo sinnecesidad de apoyarse en las redes geodésicas, que es lo que se hace actualmente paracalibrar la altura elipsoidal (la obtenida con GPS), a altura ortométrica en la zona detrabajo (la que se necesita para la orientación absoluta del modelo estereoscópico).Para ello, suponemos que elipsoide y geoide son paralelos en esa zona, cosa que no esrigurosamente cierta. La limitación del trabajo de apoyo en campo en Fotogrametría,
ya sólo estaría limitada por la capacidad de los equipos empleados y se elevaría elrendimiento de éstos, puesto que no habría que inmovilizar equipos GPS para lascalibraciones. Además de lo mencionado anteriormente, si se dispusiese de un marcode referencia común entre los puntos sobre el terreno y el centro de proyección de lascámaras aéreas, se simplificaría todavía más el trabajo de apoyo de campo.
Topografía. Disponer de un modelo de geoide supondría poder realizar topografía deobras con GPS, cosa que hasta ahora está limitada a control planimétrico. Con GPS elcontrol geométrico se abarata pues el número de operarios mínimos necesarios sereduce a la mitad.
31

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 32/43
Caracterización agronómica y medioambiental. La posibilidad de determinar la altitudsobre el nivel del mar de forma rápida y eficaz, permitiría añadir la altitud comovariable de estudio en los SIG (Sistemas de Información Geográfica), para suinclusión en los posteriores análisis con las demás variables geográficas.
Control hidrográfico, aforo de cuencas y temas hidráulicos en general. Estos temas se
verían especialmente beneficiados, ya que, también se abarataría el coste de estasactuaciones al poder ser realizadas con GPS, que de no disponer de modelo de geoideno se podrían realizar. El agua circula en el sentido de los potenciales gravitatoriosdecrecientes y el sentido de los potenciales gravitatorios (altimetría obtenida por nivelación clásica) puede deducirse con el modelo de geoide y la altura elipsoidal.
Vista la importancia que tiene usar un modelo de geoide preciso, vamos a ver aquícuál es el procedimiento operacional para obtenerlo. Para comenzar, hay que decir que lastécnicas que vamos a describir a continuación, se han mostrado herramientas eficaces a lahora de indagar la ondulación del geoide, en distintas regiones de la Tierra (Kearsley, 1988;Forsberg and Kearsley, 1989; Torge et al., 1989; Yun, 1994). Estas técnicas pretenden evitar el problema que conlleva la obtención de anomalías de la gravedad en un área limitada,
puesto que con estos datos no podemos resolver las largas longitudes de onda del campogravitatorio terrestre. Por ello, necesitamos considerar un modelo geopotencial con el que
podemos obtener estas longitudes de onda larga. Así, en un paso previo de computación,obtendremos las anomalías aire-libre referidas al modelo geopotencial, computando ladiferencia con las anomalías predichas por este modelo, estas diferencias serán usadas en un
procedimiento de integración con la FFT (Schwarz et al., 1990), para obtener finalmente laondulación del geoide, la cual en un proceso de computación posterior será añadida a laondulación del geoide predicha por el modelo geopotencial considerado. En suma, el procesoa seguir consta de las etapas que a continuación serán descritas (Corchete et al., 2005).
Interpolación de los datos de gravedad. En primer lugar, hay que saber que si queremosaplicar técnicas basadas en la Transformada de Fourier Rápida (FFT), es necesario pasar de ladistribución irregular de puntos, dada por la localización geográfica de nuestras medidas deanomalías aire-libre de la gravedad, a una distribución regular de puntos en forma de unarejilla de puntos equidistantes. Como ejemplo, podemos ver en la figura 9(a) los datos degravedad disponibles para calcular un modelo de geoide para el área ibérica. A la vista de estafigura notamos que estos puntos no están distribuidos de forma regular, hay zonas conmuchos puntos y otras áreas que tienen muy pocos. Con esta distribución de valores no
podemos aplicar las técnicas basadas en la FFT, pues estas técnicas requieren una distribuciónregular de puntos en forma de una rejilla de puntos equidistantes, como muestra la figura 9(b).
Por otra parte, antes del proceso de interpolación es necesario reducir los valores de estasanomalías de la gravedad, con el objeto de trabajar con una colección de puntos cuyos valoressean lo más parecidos entre ellos que sea posible, para facilitar el trabajo de la interpolación yobtener entonces tras este proceso la mejor rejilla de valores posible. Para ello, antes de lainterpolación es muy conveniente eliminar los efectos de corta longitud de onda debidos a latopografía y la batimetría. Esta corrección se llama corrección RTM (Forsberg andTscherning, 1997) y nos permite obtener un campo de anomalías aire-libre suavizado, muyadecuado para la interpolación a una rejilla regular. Esta corrección suele ser aplicada juntocon una corrección de onda larga, obtenida restando las anomalías de la gravedad predichas
por un modelo geopotencial, a los valores de las anomalías aire-libre observadas. En suma, lacorrección total que debemos aplicar a los valores de anomalías aire-libre mostrados en lafigura 9(a) está dada por
32
8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 33/43
ptsGM
pts ptsref
ptsfree
ptsred gc)hh(k 2gg ∆−+−ρπ−∆=∆ (13.1)
donde el superíndice pts denota cada punto distribuido sobre el área de estudio de formaaleatoria, es la anomalía aire-libre determinada en ese punto (figura 9(a)), k es la
constante de gravitación de Newton, ρ es la densidad de la topografía (2.67 g/cmfreeg∆
3) para lacorrección RTM en tierra o la densidad de la topografía menos la densidad del agua marina(2.67 – 1.03 = 1.64 g/cm3) para la corrección RTM marina, h es la elevación, denota laelevación de la superficie de referencia, c es la corrección del terreno computada para puntosterrestres y marinos y es la anomalía de la gravedad computada desde un modelo
geopotencial (esta computación será luego descrita).
ref h
GMg∆
(a) (b)Fig. 9. (a) Distribución geográfica de los valores de anomalías aire-libre de la gravedad,
medidos para el área ibérica. (b) Mapa de las anomalías de la gravedad interpoladas tras ser reducidas mediante la fórmula (13.1).
En la fórmula (13.1), la superficie de referencia (cuya elevación es necesario
calcular) se obtiene mediante la aplicación de unref h
filtro pasa baja en 2D, con una longitud deonda de corte de 60 minutos de arco. Este filtro se aplica al campo de elevaciones
proporcionado por el modelo digital del terreno completado con la batimetría del área deestudio (Corchete et al., 2005). En la figura 10(a) podemos ver dicho campo de elevaciones yen la figura 10(b) la superficie de referencia obtenida con el filtrado 2D. Respecto a lacorrección del terreno c, es necesario calcularla en ambos dominios terrestre y marítimo,
porque tenemos datos de gravedad tanto terrestres como marinos. Esta corrección se calcula por integración en cada punto representado en la figura 9(a), por medio del procedimientoclásico de integración descrito por Torge (1989). En esta integración se ha considerado ladensidad de las masas topográficas 2.67 g/cm3 y 1.03 g/cm3 la densidad del agua marina,extendiéndose la computación hasta una distancia de 0.75 grados desde el punto considerado.
Cuando hemos obtenido las anomalías suavizadas mediante la aplicación de (13.1), podemos ya interpolarlas para obtener la distribución regular de anomalías mostrada en lafigura 9(b). Esta interpolación puede realizarse con cualquier software comercial diseñado atal efecto, pues la colección de valores a interpolar está tan suavizada que cualquier softwarede calidad podrá fácilmente realizar dicha interpolación.
33

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 34/43
(a) (b) Fig. 10. (a) Modelo de elevaciones del terreno proporcionado por el modelo digital delterreno SRTM, completado con la batimetría dada por ETOPO2. (b) Superficie de referenciaobtenida mediante el filtrado 2D del campo de elevaciones representado en la figura 10(a).
Finalmente, debemos restaurar en estas anomalías interpoladas la información que
hemos quitado antes para suavizarlas, es decir, debemos incorporar el efecto RTM que hemosquitado, pues de lo contrario nuestras anomalías habrían perdido gran parte de su informaciónoriginal. Para llevar a cabo esta restauración empleamos la fórmula
gridgridref
gridred
gridfree c)hh(k 2gg −−ρπ+∆=∆ (13.2)
donde el superíndice grid denota cada puntode la rejilla regular considerada, freeg∆ es
la anomalía aire-libre de la gravedadrepresentada en la figura 11 y es la
anomalía de la gravedad reducida por (13.1)e interpolada en una rejilla regular (figura9(b)). Hay que notar que
redg∆
)hh(k 2 ref −ρπ y c
son computados en la misma forma queantes, pero ahora sobre la rejilla regular de
puntos considerada. La figura 12(a) muestralos valores del término y la
figura 12(b) los valores de la corrección delterreno c.
)hh(k 2 ref −ρπFig. 11. Anomalías de la gravedad obtenidastras la aplicación de la fórmula (13.2).
La corrección del terreno puede ser positiva o negativa cuando es computada en áreasmarinas, dependiendo de la forma de la superficie del fondo marino (Torge, 1989). Esto no es
posible en áreas continentales en las que la corrección del terreno es siempre positiva.
Computación del geoide. Cuando ya tenemos la rejilla de las anomalías de la gravedad,estamos en disposición de aplicar las técnicas basadas en la FFT, para calcular el geoide. Estecálculo se llevará a cabo sumando los tres términos siguientes
N = N1 + N2 + N3 (13.3)
donde N1 es término de onda larga obtenido a través de un modelo geopotencial, N2 es lacontribución del efecto indirecto originado por la reducción de Helmert y N3 es el término de
longitud de onda corta, obtenido de la integración de los datos de gravedad dados por (13.2),
34

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 35/43
siguiendo el segundo método de condensación de Helmert. A continuación se indicará cómoson computados los tres términos de la fórmula (13.3).
(a) (b) Fig. 12. (a) Término de la corrección RTM. (b) Corrección del terreno de la
fórmula (13.2).
)hh(k 2 ref −ρπ
Contribución de onda larga (término N1). Está contribución se obtiene mediante un modelogeopotencial, a través del desarrollo en serie de armónicos esféricos dado por (Heiskanen yMoritz, 1985)
[ ] 0
n
0m
nmnmnm
n
2n
n
1 NmsinK mcosJ)(sinPr
a
r
kM N
max
+λδ+λδϕ⎟ ⎠
⎞⎜⎝ ⎛
γ= ∑∑
==
(13.4)
donde (δJnm, δK nm) son los coeficientes geopotenciales totalmente normalizados del potencialanómalo de a gravedad, a es el semieje mayor del elipsoide de referencia, kM es la constante
gravitacional geocéntrica de la Tierra, Pnm son las funciones de Legendre completamentenormalizadas, (r , ϕ, λ) son la posición geocéntrica de los puntos sobre la superficie delgeoide, γ es la gravedad normal sobre el elipsoide de referencia, nmax es el grado máximo deel modelo geopotencial considerado y N0 el término de grado cero del desarrollo.
(a) (b) Fig. 13. (a) Ondulación del geoide obtenida a través de un modelo geopotencial para el áreade estudio. Intervalo entre isolíneas: 1m. (b) Anomalía de la gravedad obtenida a través de unmodelo geopotencial para el área de estudio.
35

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 36/43
En la computación de la ecuación (13.4), es necesario obtener la posición geocéntricar del punto considerado sobre el geoide, para ello, podemos seguir el procedimiento en dos
pasos indicado por Kuroishi (1995). Según este procedimiento, calculamos en primer lugar elradio geocéntrico elipsoidal r E asociado a las coordenadas (ϕ, λ) del punto considerado. En unsegundo paso y por medio de la ecuación (13.4), poniendo r = r E obtenemos la anomalía enaltura ξE, la cual puede ser usada como una primera aproximación de la ondulación del geoide
en el punto considerado. Finalmente, obtendremos el valor de N(ϕ, λ) en la posicióngeocéntrica del punto considerado r , empleando la fórmula (13.4) con el valor r = r E + ξE.Hay que notar que según este método de computación, r es considerado como la posicióngeocéntrica de un punto P sobre el geoide, en lugar de considerar la posición geocéntrica del
punto P sobre la superficie de la Tierra. Por esta razón, siguiendo este método de computaciónen dos pasos, lo que obtenemos son ondulaciones del geoide en lugar de anomalías en altura.En la figura 13(a) podemos ver los resultados obtenidos mediante la aplicación de la fórmula(13.4), a los puntos de la rejilla regular ubicada en el área de estudio.
Las anomalías de la gravedad predichas por un modelo geopotencial, son necesarias
para reducir las anomalías aire-libre observadas, tal como indica la ecuación (13.1). Estasanomalías de la gravedad, obtenidas a partir de un modelo geopotencial, pueden calcularsemediante el desarrollo en serie (Heiskanen y Moritz, 1985)
[ ] 0
n
0m
nmnmnm
n
2n
n
2GM gmsinK mcosJ)(sinPr
a)1n(
r
kMg
max
∆+λδ+λδϕ⎟ ⎠
⎞⎜⎝
⎛ −=∆ ∑∑==
(13.5)
donde ∆g0 es el término de grado cero del desarrollo. En la computación de la formula (13.5),hemos usados el valor de la posición geocéntrica r obtenida previamente para la fórmula(13.4). La figura 13(b) muestra los resultados obtenidos mediante la aplicación de la fórmula(13.5), a los puntos de la rejilla regular ubicada en el área de estudio.
Efecto indirecto (término N2). El efecto indirecto en el geoide debido a la aplicación delsegundo método de condensación de Helmert, se puede calcular en aproximación planamediante los dos términos (Sideris, 1990)
[ ]dxdy
)yy()xx(
)y,x(h)y,x(h
6
k )y,x(h
k N
A
2/32 p
2 p
p p33
p p2
2 ∫∫ −+−
−
γρ
−γρπ
−= (13.6)
donde k es la constante gravitacional de Newton, ρ es la densidad de las masas topográficas(supuesta constante con valor 2.67 g/cm3), (x p, y p) son las coordenadas del punto de
computación, (x, y) son las coordenadas de los puntos de integración, γ es la gravedad normalsobre el elipsoide de referencia, A es el área de estudio considerada y h(x, y) es el modelo deelevaciones (figura 10(a)), considerando sólo elevaciones positivas, es decir, se consideransólo las masas sobre el geoide. La aproximación plana expresada por la ecuación (13.6) puedeser escrita fácilmente en forma de convolución mediante (Schwarz et al., 1990)
3322 gh
6K
hf 6K
hK
Nγρ
+∗γρ
−γ
ρπ−= (13.7)
donde
2/322
)yx(
1)y,x(f
+
=
∫∫ =
A
dxdy)y,x(f g
36
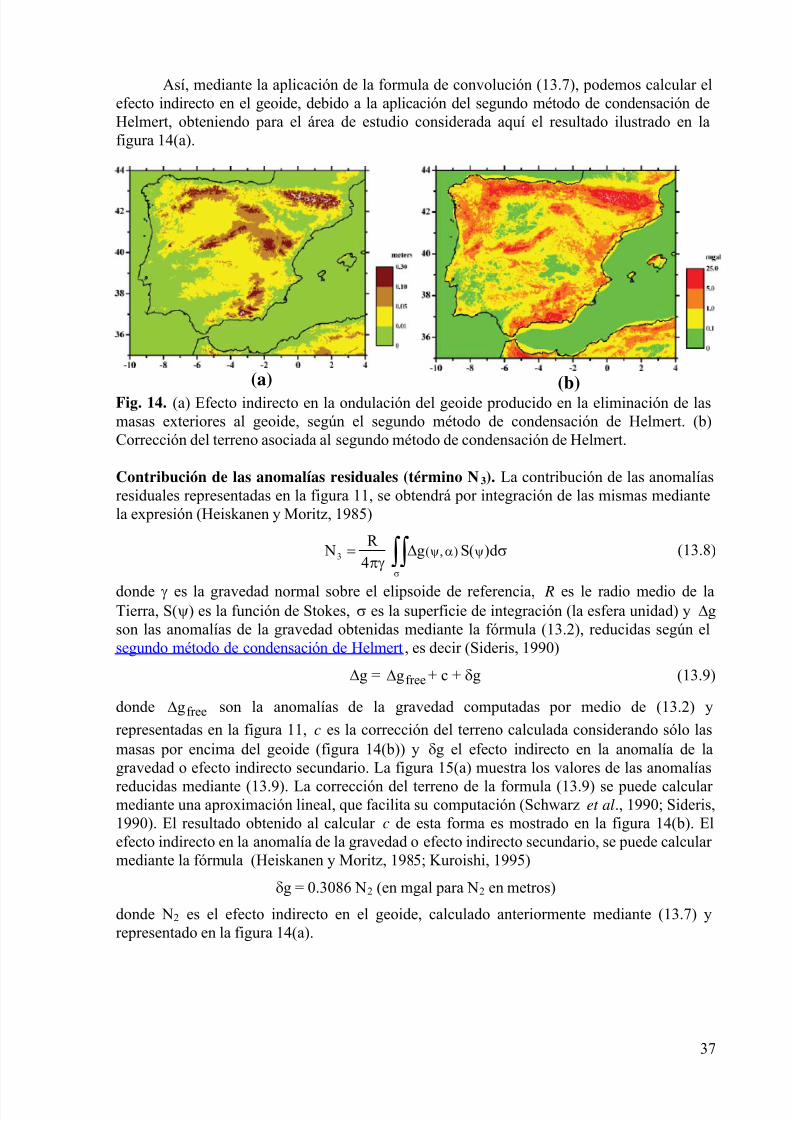
8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 37/43
Así, mediante la aplicación de la formula de convolución (13.7), podemos calcular elefecto indirecto en el geoide, debido a la aplicación del segundo método de condensación deHelmert, obteniendo para el área de estudio considerada aquí el resultado ilustrado en lafigura 14(a).
(a) (b)Fig. 14. (a) Efecto indirecto en la ondulación del geoide producido en la eliminación de lasmasas exteriores al geoide, según el segundo método de condensación de Helmert. (b)Corrección del terreno asociada al segundo método de condensación de Helmert.
Contribución de las anomalías residuales (término N3). La contribución de las anomalíasresiduales representadas en la figura 11, se obtendrá por integración de las mismas mediantela expresión (Heiskanen y Moritz, 1985)
σ∆πγ
= ψαψ∫∫ σ
d)(Sg4R
N ),(3 (13.8)
donde γ es la gravedad normal sobre el elipsoide de referencia, R es le radio medio de laTierra, S(ψ) es la función de Stokes, σ es la superficie de integración (la esfera unidad) y ∆gson las anomalías de la gravedad obtenidas mediante la fórmula (13.2), reducidas según elsegundo método de condensación de Helmert, es decir (Sideris, 1990)
∆g = freeg∆ + c + δg (13.9)
donde son la anomalías de la gravedad computadas por medio de (13.2) y
representadas en la figura 11, c es la corrección del terreno calculada considerando sólo lasmasas por encima del geoide (figura 14(b)) y δg el efecto indirecto en la anomalía de lagravedad o efecto indirecto secundario. La figura 15(a) muestra los valores de las anomalías
reducidas mediante (13.9). La corrección del terreno de la formula (13.9) se puede calcular mediante una aproximación lineal, que facilita su computación (Schwarz et al., 1990; Sideris,1990). El resultado obtenido al calcular c de esta forma es mostrado en la figura 14(b). Elefecto indirecto en la anomalía de la gravedad o efecto indirecto secundario, se puede calcular mediante la fórmula (Heiskanen y Moritz, 1985; Kuroishi, 1995)
freeg∆
δg = 0.3086 N2 (en mgal para N2 en metros)
donde N2 es el efecto indirecto en el geoide, calculado anteriormente mediante (13.7) yrepresentado en la figura 14(a).
37

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 38/43
(a) (b)
Fig. 15. (a) Anomalías residuales obtenidas mediante la aplicación del segundo método decondensación de Helmert, fórmula (13.9), a las anomalías calculadas mediante la fórmula(13.2). (b) Ondulación del geoide obtenida integrando las anomalías residuales dadas por (13.9), mediante la fórmula (13.10).
Cuando los términos de la formula (13.9) están todos calculados, estamos en situaciónde realizar la integral (13.8). Para ello, podemos expresar esta integración en forma deconvolución usando la FFT en 1D (Haagmans et al., 1993), obteniendo el término N 3 en laforma
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ ∆
πγλ∆φ∆
= ∑φ
φ=φ′
−n
1
)S(cos)g(4
R N 11
113 F F F (13.10)
donde S es la función de Stokes, F1 denota la transformada de Fourier discreta y periódica yF1
-1 es su inversa. Haagmans et al. (1993) han descrito la forma correcta de llevar a cabo la
computación dada por (13.10), por ello, siguiendo estas indicaciones podemos obtener elvalor de la ondulación residual del geoide mostrada en la figura 15(b).
Validación del geoide. Cuando sumamos los tres términos dados por la formula (13.3),obtenemos el modelo de geoide buscado, en este caso es el geoide del área ibérica mostradoen la figura 16(a). Para chequear la validez del modelo obtenido, debemos comparar lasondulaciones del geoide predichas por este modelo, con las ondulaciones del geoide obtenidasde forma independiente a este modelo. Estas medidas independientes deben haber sidocalculadas con gran precisión, para poder establecer entonces que las diferencias, entre losvalores predichos por el modelo y los valores observados o medidos, son debidas únicas y
exclusivamente al error que tiene el modelo de geoide obtenido. Para ello, lógicamentenecesitamos utilizar una colección de medidas de gran precisión, pues de lo contrario todo el proceso de validación sería dudoso. En el área ibérica disponemos de tal colección demedidas gracias a la red GPS-nivelación que está desplegada para toda Europa, tal como seexplicó en el apartado 4. Esta red cuyo nombre es EVRS (European Vertical ReferenceSystem), constituye un marco de referencia fundamental para la medición de alturas con
precisión centimétrica. Concretamente, en el área ibérica esta red posee los vértices de precisión mostrados en la figura 16(b). Cuando comprobamos el modelo obtenido yrepresentado en la figura 16(a), en los puntos de precisión mostrados en la figura 16(b),obtenemos un error de 27.8 cm (Corchete et al., 2005). Este modelo no ha sido mejoradohasta 2008, fecha en la que han sido publicados los modelos del norte (Corchete, 2008) y sur
de Iberia (Corchete et al., 2008), cuyos errores son de 12.6 y 17.0 cm, respectivamente.
38

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 39/43
(a) (b)
Fig. 16. (a) Modelo de geoide obtenido para el área ibérica, mediante la suma de los trestérminos dados por (13.3). (b) Red de puntos para los cuales es conocida la ondulación delgeoide con gran precisión.
14. Componentes de la desviación de la vertical y modelo geopotencial
En algunas aplicaciones prácticas es necesario pasar de un horizonte geodésico local auno astronómico y viceversa. Este problema equivale a transformar las coordenadasgeodésicas (φ, λ), en las coordenadas naturales o astronómicas (Φ, Λ). En cualquier casosabemos que (Heiskanen y Moritz, 1985):
Φ = ξ + φ ,, Λ = η/cos φ + λ
donde (φ, λ) son conocidas para el punto P considerado, a través de la observación directa conmedidas GPS. Entonces, para determinar (Φ,Λ) es necesario conocer (ξ, η) puesto quedeterminamos sobre el terreno (φ, λ). En este sentido, las fórmulas establecidas en el apartado11 para hallar las componentes de la desviación de la vertical, no se aplican directamente paraeste objetivo, pues bajo el punto de vista práctico, sería muy laborioso realizar unaintegración de las anomalías de la gravedad para toda la Tierra, tal como indican las fórmulasde Vening Meinesz. Resulta más adecuado escribir las componentes de la desviación de lavertical en la forma (Heiskanen y Moritz, 1985; Schwarz et al., 1990):
λ∂∂
φ−=
φ∂∂−=ξ T
cosGR 1
η ,, TGR 1
donde R es el radio medio terrestre (6371 km), G es el valor medio de la gravedad sobre laTierra (979.8 gales) y T es el potencial anómalo terrestre. Entonces, usando un modelogeopotencial para escribir el potencial anómalo T, podemos poner (Heiskanen y Moritz, 1985;Schwarz et al., 1990):
[ ] d
)(sendP)msen(K )mcos(J
GR
1 nmnmnm
n
0m
n
2n
máx
φφ
λδ+λδ−=ξ ∑∑==
39

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 40/43
[ ])mcos(K )msen(J)(senmPcosGR
1η nmnm
n
0m
nm
n
2n
máx
λδ+λδ−φφ
−= ∑∑==
obteniendo también las componentes de la desviación de la vertical, a través de un modelogeopotencial, lo mismo que hacíamos para obtener la ondulación del geoide o las anomalías
de la gravedad, en el apartado anterior (apartado 13).
15. Componentes de la desviación de la vertical y geoide
En el apartado anterior hemos visto que resulta más cómodo calcular las componentesde la desviación de la vertical (ξ, η), a partir de un modelo geopotencial mediante undesarrollo en serie. No obstante, todavía puede ser más útil obtenerlas desde la ondulación delgeoide, pues hemos visto en el apartado 13 que los modelos de gravimétricos de geoide(geoides locales), pueden ser mucho más precisos que el geoide derivado de un modelo
geopotencial. Esto también resulta ser válido para las componentes de la desviación de lavertical, podemos obtener valores más precisos de (ξ, η) si partimos de modelos de geoidemás precisos. Para ello, debemos escribir (ξ, η) en la forma (Heiskanen y Moritz, 1985)
λ∂∂
φ−=
φ∂∂
−=ξ N
cosR
1η ,,
N
R
1(15.1)
Las formulas (15.1) permiten ahora calcular los valores de (ξ, η), siempre que se conozca previamente el modelo de geoide que nos da los valores N(φ, λ), entonces derivandoobtendríamos las componentes de la desviación de la vertical. Llegados a este punto de
precisión, hay que notar que los valores de (ξ, η) se miden en la práctica sobre un punto del
terreno, no sobre el geoide. Ello es debido a que las coordenada astronómicas (Φ, Λ), sonobservadas o medidas sobre la superficie de la Tierra (no sobre el geoide), entonces debido ala curvatura de la línea de la plomada, estas coordenadas naturales no son rigurosamenteiguales a sus valores sobre el geoide. Sucediendo que (Heiskanen y Moritz, 1985)
Φgeoide = Φ terreno + δΦ ,, Λ geoide = Λ terreno + δΛ
en consecuencia, si tenemos que
Φgeoide = ξ + φ ,, Λgeoide = η/cos φ + λ
esto implica que los valores de (ξ, η) dados por (15.1) deberán ser corregidos mediante
ξterreno = ξgeoide − δΦ ,, ηterreno = ηgeoide – δΛcos φ o lo que es lo mismo (Smith and Roman, 2001)
Λφδ−λ∂
∂φ
−=Φδ−φ∂
∂−=ξ cos
N
cosR
1η ,,
N
R
1terrenoterreno (15.2)
donde las cantidades (δΦ, δΛ) aparecen resueltas y calculadas en diversas referenciasespecializadas (Heiskanen y Moritz, 1985; Smith and Roman, 2001).
En resumen, si queremos determinar las componentes de la desviación de la vertical(ξ, η), para compararlas con valores de precisión medidos sobre el terreno, o para usarlas en
una transformación para pasar de un horizonte geodésico a uno astronómico, o viceversa, lasfórmulas (15.2) son las expresiones que debemos utilizar, pues nos permiten calcular (ξ, η) de
40

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 41/43
la forma más precisa y para cualquier punto sobre la superficie terrestre. Esto nos permitirátransformar coordenadas geodésicas (φ, λ) en coordenadas astronómicas (Φ, Λ), o viceversa,siempre que sea necesario. Para ello, será necesario disponer de un modelo de geoide preciso
para el área de estudio. Como ejemplo de aplicación de las fórmulas (15.2), podemos ver en lafigura 17 el valor que toman (ξ, η) para el norte de Iberia, obtenidas a partir del modelo
NIBGEO.
(a)
(b) Fig. 17. (a) Componente N-S de la desviación de la vertical (ξ). (b) Componente E-W de ladesviación de la vertical (η). Ambas componentes han sido obtenidas mediante (15.2) a partir del geoide NIBGEO.
41

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 42/43
Bibliografía
Bibliografía básica
Bomford G. (1971). Geodesy. Oxford University Press.
Bürki B. and Marti U. (1990). The Swiss Geoid Computation: A Status Report. InternationalAssociation of Geodesy Simposia. Symposia nº 106: Determination of the Geoid.Springer Verlag.
Cid R. y Ferrer S. (1997). Geodesia Geométrica, Física y por Satélites. Instituto Geográfico Nacional. Ministerio de Fomento.
Corchete V., Chourak M. and Khattach D. (2005). The high-resolution gravimetric geoid of
Iberia: IGG2005. Geophys. J. Int., 162, 676–684.
Corchete V. (2008). The high-resolution gravimetric geoid of North Iberia: NIBGEO. Terra Nova, 20, 489–493.
Corchete V., Chourak M., Khattach D. and Benaim E. H. (2008). A new high-resolution
gravimetric geoid for South Spain and the Gibraltar Strait area: SOSGIS. Journalof African Earth Sciences, 51, 145–150.
Forsberg R. and Kearsley A. H. W. (1989). Precise Gravimetric Geoid Computations over
Large Regions. Developments in Four-Dimensional Geodesy. Lecture Notes in EarthSciences Ser.: Vol. 29. Springer-Verlag.
Forsberg R. and Tscherning C. C. (1997). Topographic effects in gravity field modelling. In:
Geodetic boundary value problems in view of the one centimeter geoid, F. Sanso and R.Rummel (Eds.), pp. 241-272, Lecture Notes in Earth Sciences, Springer.
Haagmans R., deMin E. and van Gelderen M. (1993). Fast evaluation of convolution
integrals on the sphere using 1D-FFT and a comparison with existing methods for
Stokes’ integral. Manuscripta Geodaetica, 18, 82-90.
Heiskanen W. A. y Moritz H. (1985). Geodesia Física. Instituto Geográfico Nacional eInstituto de Astronomía y Geodesia.
Hofmann-Wellenhof B. and Lichtenegger H. (1994). Global Positioning System. Theory and
Practice. Springer-Verlag, Berlín.
Kaula W. M. (1987). The need for vertical control. Surveying and Mapping, 47, pp. 57-64.
Kearsley A. H. W. (1988). Tests on the recovery of the precise geoid height differences from
gravimetry. Journal of Geophysical Research, 93, pp. 6559-6570.
Kuroishi I. (1995). Precise gravimetric determination of geoid in the vicinity of Japan. Bull.Geographical Surv. Inst., 41, 1-94.
Leick A. (1995). GPS satellite surveying. John Wiley & Sons.
Martín Asín F. (1983). Geodesia y Cartografía Matemática. Instituto Geográfico Nacional.
Schwarz K. P., Sideris M. G. and Forsberg R. (1987). Orthometric Heights without Levelling.
Journal of Surveying Engineering, 113, pp. 28-40.
42

8/3/2019 AplicacionesGeodesia
http://slidepdf.com/reader/full/aplicacionesgeodesia 43/43
Schwarz K. P., Sideris M. G. and Forsberg R. (1990). The use of FFT techniques in physical
geodesy. Geophys. J. Int., 100, pp. 485-514.
Sideris M. G. (1990). Rigorous gravimetric terrain modelling using Molodensky’s operator .Manuscripta Geodaetica, 15, 97-106.
Smith D. A. and Roman D. R. (2001). GEOID99 and G99SSS: 1-arc-minute geoid models for
the United States. Journal of Geodesy, 75, 469-490.Torge W., Basic T., Denker H., Doliff J., Wenzel H.-G. (1989). Long Range Geoid Control
through the European GPS Traverse. Deutsche Geodätische Kommission, Reihe B, nº290.
Torge W. (1989). Gravimetry. Walter de Gruyter . Berlin-New York.
Torge W. (1991). Geodesy, 2nd Edition. Walter de Gruyter. Berlin-New York.
Vanicek P. and Krakiwsky E. (1986). Geodesy: The Concepts. Elsevier Science Publishers.
Yun H. S. (1994). Determination of a Gravimetric Geoid Solution for South Korea.International Association of Geodesy Simposia. Symposia nº 113: Gravity and Geoid.Springer-Verlag.
Zakatov P. S. (1981). Curso de Geodesia Superior. MIR.
Bibliografía de consulta ………………………..… http://airy.ual.es/geodesy/libros.pdf