Physics Letters A 373 (2009) 2852–2857 Contents lists available at ScienceDirect Physics Letters A www.elsevier.com/locate/pla Anti-synchronization of chaotic systems with uncertain parameters via adaptive control M. Mossa Al-sawalha ∗ , M.S.M. Noorani Center for Modelling & Data Analysis, School of Mathematical Sciences, Universiti Kebangsaan Malaysia, 43600 UKM Bangi, Selangor, Malaysia article info abstract Article history: Received 23 March 2009 Received in revised form 28 April 2009 Accepted 1 June 2009 Available online 6 June 2009 Communicated by R. Wu PACS: 02.30.Yy 05.45.Gg 05.45.Jn Keywords: Chaos Anti-synchronization Adaptive control Unknown parameters In this Letter, an adaptive control scheme is developed to study the anti-synchronization behavior between two identical and different chaotic systems with unknown parameters. This adaptive anti- synchronization controller is designed based on Lyapunov stability theory and an analytic expression of the controller with its adaptive laws of parameters is shown. The adaptive anti-synchronization between two identical systems (Chen system) and different systems (Genesio and Lü systems) are taken as two illustrative examples to show the effectiveness of the proposed method. Theoretical analysis and numerical simulations are shown to verify the results. © 2009 Elsevier B.V. All rights reserved. 1. Introduction Synchronization of chaotic systems was first initiated and recorded by Pecora and Carroll in 1990 [1]. About two decades later, their work had progressed like dominoes effect in numerous fields such as chemical reactions, power converters, biological sys- tems, information processing, secure communications, etc. [2]. The excitement is well-comprehended in the academic community as its potential implications and applications are bountiful. Another interesting phenomenon discovered was the anti-synchronization (AS), which is noticeable in periodic oscillators. It is a well- known fact that the first observation of synchronization between two oscillators by Huygens in the seventeenth century was, in fact, an AS between two pendulum clocks. Recent reinvestiga- tion of Huygens’ experiment by Blekhman [3] shows that either synchronization or AS can appear depending on the initial con- ditions of the coupled pendula. Here, AS can also be interpreted as anti-phase synchronization (APS) [4]. In other words, there is no difference between AS and APS for oscillators with identical amplitudes [5–7]. To date, different techniques and methods have * Corresponding author. Tel: +6017 4027145. E-mail address: [email protected] (M.M. Al-sawalha). been proposed to achieve chaos anti-synchronization such as ac- tive control method [8], adaptive control [9–11], nonlinear control [12], direct linear coupling [13] and the separation method [14]. However, methods of anti-synchronizing chaotic systems with un- certain parameters have not been extensively studied. Fortunately, some existing methods of synchronizing can be generalized to anti-synchronize chaotic systems. However, in practical engineer- ing situations, parameters are probably unknown and may change from time to time. Therefore, there is a vital need to effectively anti-synchronize two chaotic systems (identical and different) with unknown parameters. This is typically important in theoretical re- search as well as practical applications. Among the aforementioned methods, adaptive control is an effective option for achieving the synchronization of chaotic systems with fully unknown parameters [15–19]. In this Letter, we proposed a method to adaptively anti-syn- chronize two chaotic systems with similar and different structures, all with unknown parameters. This adaptive anti-synchronization controller is designed based on Lyapunov stability theory and an analytic expression of the controller with its adaptive laws of pa- rameters is shown. The adaptive anti-synchronization between two identical systems (Chen system) and different systems (Genesio and Lü systems) are taken as two illustrative examples to show the effectiveness of the proposed method. 0375-9601/$ – see front matter © 2009 Elsevier B.V. All rights reserved. doi:10.1016/j.physleta.2009.06.008

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Physics Letters A 373 (2009) 2852–2857
Contents lists available at ScienceDirect
Physics Letters A
www.elsevier.com/locate/pla
Anti-synchronization of chaotic systems with uncertain parametersvia adaptive control
M. Mossa Al-sawalha ∗, M.S.M. Noorani
Center for Modelling & Data Analysis, School of Mathematical Sciences, Universiti Kebangsaan Malaysia, 43600 UKM Bangi, Selangor, Malaysia
a r t i c l e i n f o a b s t r a c t
Article history:Received 23 March 2009Received in revised form 28 April 2009Accepted 1 June 2009Available online 6 June 2009Communicated by R. Wu
PACS:02.30.Yy05.45.Gg05.45.Jn
Keywords:ChaosAnti-synchronizationAdaptive controlUnknown parameters
In this Letter, an adaptive control scheme is developed to study the anti-synchronization behaviorbetween two identical and different chaotic systems with unknown parameters. This adaptive anti-synchronization controller is designed based on Lyapunov stability theory and an analytic expression ofthe controller with its adaptive laws of parameters is shown. The adaptive anti-synchronization betweentwo identical systems (Chen system) and different systems (Genesio and Lü systems) are taken astwo illustrative examples to show the effectiveness of the proposed method. Theoretical analysis andnumerical simulations are shown to verify the results.
© 2009 Elsevier B.V. All rights reserved.
1. Introduction
Synchronization of chaotic systems was first initiated andrecorded by Pecora and Carroll in 1990 [1]. About two decadeslater, their work had progressed like dominoes effect in numerousfields such as chemical reactions, power converters, biological sys-tems, information processing, secure communications, etc. [2]. Theexcitement is well-comprehended in the academic community asits potential implications and applications are bountiful. Anotherinteresting phenomenon discovered was the anti-synchronization(AS), which is noticeable in periodic oscillators. It is a well-known fact that the first observation of synchronization betweentwo oscillators by Huygens in the seventeenth century was, infact, an AS between two pendulum clocks. Recent reinvestiga-tion of Huygens’ experiment by Blekhman [3] shows that eithersynchronization or AS can appear depending on the initial con-ditions of the coupled pendula. Here, AS can also be interpretedas anti-phase synchronization (APS) [4]. In other words, there isno difference between AS and APS for oscillators with identicalamplitudes [5–7]. To date, different techniques and methods have
* Corresponding author. Tel: +6017 4027145.E-mail address: [email protected] (M.M. Al-sawalha).
0375-9601/$ – see front matter © 2009 Elsevier B.V. All rights reserved.doi:10.1016/j.physleta.2009.06.008
been proposed to achieve chaos anti-synchronization such as ac-tive control method [8], adaptive control [9–11], nonlinear control[12], direct linear coupling [13] and the separation method [14].However, methods of anti-synchronizing chaotic systems with un-certain parameters have not been extensively studied. Fortunately,some existing methods of synchronizing can be generalized toanti-synchronize chaotic systems. However, in practical engineer-ing situations, parameters are probably unknown and may changefrom time to time. Therefore, there is a vital need to effectivelyanti-synchronize two chaotic systems (identical and different) withunknown parameters. This is typically important in theoretical re-search as well as practical applications. Among the aforementionedmethods, adaptive control is an effective option for achieving thesynchronization of chaotic systems with fully unknown parameters[15–19].
In this Letter, we proposed a method to adaptively anti-syn-chronize two chaotic systems with similar and different structures,all with unknown parameters. This adaptive anti-synchronizationcontroller is designed based on Lyapunov stability theory and ananalytic expression of the controller with its adaptive laws of pa-rameters is shown. The adaptive anti-synchronization between twoidentical systems (Chen system) and different systems (Genesioand Lü systems) are taken as two illustrative examples to showthe effectiveness of the proposed method.

M.M. Al-sawalha, M.S.M. Noorani / Physics Letters A 373 (2009) 2852–2857 2853
2. Adaptive anti-synchronization
Consider the drive chaotic system in the form of
x = f (x) + F (x)α (1)
where x ∈ Ω1 ⊂ Rn is the state vector, α ∈ Rm is the unknownparameter vector of the system, f (x) is an n × 1 matrix, F (x) is ann×m matrix and the elements Fij(x) in matrix F (x) satisfy Fij(x) ∈L∞ for x ∈ Ω1 ⊂ Rn . On the other hand, the response system isassumed by
y = g(y) + G(y)β + u (2)
where y ∈ Ω2 ⊂ Rn is the state vector, β ∈ Rq is the unknown pa-rameter vector of the system, g(y) is an n × 1 matrix, G(y) is ann×q matrix, u ∈ Rn is control input vector and the elements Gij(y)
in matrix G(y) satisfy Gij(y) ∈ L∞ for y ∈ Ω2 ⊂ Rn .Let e = y + x be the anti-synchronization error vector. Our goal
is to design a controller u such that the trajectory of the responsesystem (2) with initial condition y0 can asymptotically approachthe drive system (1) with initial condition x0 and finally implementthe anti-synchronization such that
limt→∞‖e‖ = lim
t→∞∥∥y(t, y0) + x(t, x0)
∥∥ = 0 (3)
where ‖.‖ is the Euclidean norm.
2.1. Adaptive anti-synchronization controller design
Theorem 1. If the nonlinear control is selected as
u = − f (x) − F (x)α − g(y) − G(y)β − ke, (4)
and adaptive laws of parameters are taken as
˙α = [F (x)
]Te,
˙β = [
G(y)]T
e, (5)
then the response system (2) can anti-synchronize the drive system (1)globally and asymptotically, where k > 0 is a constant, α and β are,respectively, estimations of the unknown parameters α and β .
Proof. From Eqs. (1)–(2), we get the error dynamical system asfollows
e = F (x)(α − α) + G(y)(β − β) − ke. (6)
Let α = α − α, β = β − β , if a Lyapunov function candidate is cho-sen as
V (e, α, β)
= 1
2
[eT e + (α − α)T (α − α) + (β − β)T (β − β)
], (7)
the time derivative of V along the trajectory of the error dynamicalsystem (6) is as follows
V (e, α, β) = eT e + (α − α)T ˙α + (β − β)T ˙β
= [F (x)(α − α) + G(y)(β − β) − ke
]Te
− (α − α)T [F (x)
]Te − (β − β)T [
G(y)]T
e
= −keT e � 0. (8)
Since V is positive definite, and V is negative semi-definite, it fol-lows that e,α − α, β − β ∈ L∞ . From the fact that
∫ t0 ‖e‖2 dt =
12 [V (0) − V (t)] � V (0)
k , we can easily know that e ∈ L2. FromEq. (6) we have e ∈ L∞ . Thus, by Barbalat’s lemma, we havelimt→∞ e = 0, i.e., limt→∞ ‖e‖ = limt→∞ ‖y(t, y0) + x(t, x0)‖ = 0.Thus the response system (2) can anti-synchronize the drive sys-tem (1) globally and asymptotically. This completes the proof. �
Remark. If system (1) and system (2) satisfy f (·) = g(·) and F (·) =G(·), then the structure of system (1) and system (2) is identi-cal. Therefore, Theorem 1 is also applicable to the adaptive anti-synchronization of two identical chaotic systems with unknownparameters.
3. Systems description
The Chen system [21] is given by
x = a(y − x),
y = (c − a)x − xz + cy,
z = xy − bz (9)
where x, y and z are state variables and a, b and c are positiveparameters. Bifurcation studies shows that with the parametersa = 35 and c = 28, system (9) exhibits chaotic behavior whenb = 3.
In 1963, Lorenz found the first canonical chaotic attractor [22],which has just been mathematically confirmed to exist [23]. In1999, Chen found another similar but topologically not equiv-alent chaotic attractor [21] as the dual of the Lorenz system,which is defined by [24]. The Lorenz system satisfies the condi-tion a12a21 > 0 while the Chen system satisfies a12a21 < 0, wherea12 and a21 are the corresponding elements in the constant ma-trix A = (aij)3×3 for the linear part of the system. Recently, Lü andChen found a new chaotic system [25–27], bearing the name of theLü system, which satisfies the condition a12a21 = 0. This bridgesthe gap between the Lorenz and Chen attractors [26,27]. The Lüsystem is described by
x = a(y − x),
y = −xz + cy,
z = xy − bz (10)
where x, y and z are state variables and a,b and c are positiveparameters. System (10) exhibits chaotic behavior when a = 36,b = 3 and c = 20.
One of the many chaotic systems discovered in the past isthe Genesio system. It was developed by Genesio and Tesi [28],where it observes unpredictable, chaotic behaviour. The dynami-cal equations describe an uncomplicated square element and threestraightforward ordinary differential equations that are dependenton three positive real parameters, as such
x = y,
y = z,
z = −cx − by − az + x2 (11)
where a, b and c are positive constants, satisfying ab < c. System(11) exhibits chaotic behavior when a = 1.2, b = 2.92, c = 6.
4. Adaptive anti-synchronization of two identical chaotic systems
In order to observe the efficacy of our proposed method, weused two Chen systems where the master system with the sub-script 1 and the response system having identical equations de-noted by the subscript 2. For the systems (see Eq. (9)), the driveand the response systems are defined below, respectively,
x1 = a(y1 − x1),
y1 = (c − a)x1 − x1z1 + cy1,
z1 = x1 y1 − bz1 (12)
2854 M.M. Al-sawalha, M.S.M. Noorani / Physics Letters A 373 (2009) 2852–2857
and
x2 = a(y2 − x2) + u1,
y2 = (c − a)x2 − x2z2 + cy2 + u2,
z2 = x2 y2 − bz2 + u3 (13)
where u1, u2, u3 are three control functions to be designed.In order to determine the control functions such that the anti-synchronization between systems (12) and (13) are realized, weadd (13) to (12) and get
e1 = a(e2 − e1) + u1,
e2 = (c − a)e1 − x2z2 − x1z1 + ce2 + u2,
e3 = x2 y2 + x1 y1 − be3 + u3 (14)
where e1 = x1 + x2, e2 = y1 + y2, e3 = z1 + z2. Our goal is tofind proper control functions ui (i = 1,2,3) and parameter up-date rule, such that system (13) globally anti-synchronizes system(12) asymptotically, i.e., limt→∞ ‖e‖ = 0 where e = [e1, e2, e3]T .If the two systems are without controls (ui = 0, i = 1,2,3) andthe initial condition is (x1(0), y1(0), z1(0)) �= (x2(0), y2(0), z2(0)),then the trajectories of the two systems will quickly separate eachother and become irrelevant. However, when controls are applied,the two systems will approach anti-synchronization for any initialconditions by appropriate control functions. We shall propose thefollowing adaptive control law for system (13)
u1 = −a(e2 − e1) − e1,
u2 = −(c − a)e1 + x2z2 + x1z1 − ce2 − e2,
u3 = −x1 y1 − x2 y2 + be3 − e3 (15)
and the parameter update rule
˙a = −e21,
˙b = −e23,
˙c = e1e2 + e22 (16)
where a, b, c are the estimates of a, b, c, respectively.
Theorem 2. For any initial conditions, the two systems (Eqs. (12) and(13)) are globally asymptotically anti-synchronized by adaptive controllaw (Eq. (15)) and the parameter update rule (Eq. (16)).
Proof. Applying control law of Eq. (15) to Eq. (14) yields the re-sulting error dynamics as follows:
e1 = a(e2 − e1) − e1,
e2 = (c − a)e1 + ce2 − e2,
e3 = −be3 − e3 (17)
where a = a − a, b = b − b, c = c − c. Consider the following Lya-punov function
V = 1
2
(eT e + a2 + b2 + c2). (18)
Then the time derivative of V along the solution of error dynami-cal system (17) gives
V = eT e + a ˙a + b ˙b + c ˙c= e1e1 + e2e2 + e3e3 + a(−˙a) + b(−˙b) + c(−˙c)= e1
[a(e2 − e1) − e1
] + e2[(c − a)e1 + ce2 − e2
]
+ e3[−be3 − e3] + a(e2
1
) + b(e2
3
) + c(−e1e2 − e2
2
)= −e2
1 − e22 − e2
3
= −eT e � 0. (19)
Since V is positive definite and V is negative semi-definite inthe neighborhood of zero solution of system (14), it follows thate1, e2, e3 ∈ L∞ and a, b, c ∈ L∞ . From Eq. (17), we have e1, e2, e3 ∈L∞ . Since V = −eT e then we obtain
t∫
0
‖e‖2 dt �t∫
0
eT e dt =t∫
0
−V dt = V (0) − V (t) � V (0). (20)
Thus, e1, e2, e3 ∈ L2 and by Barbalat’s lemma, we havelimt→∞ ‖e(t)‖ = 0. Therefore, response system (13) can globallyanti-synchronize drive system (12) asymptotically. This completesthe proof. �4.1. Numerical simulations
To verify and demonstrate the effectiveness of the proposedmethod, we discuss the simulation result for Chen system. Inthe numerical simulations, the fourth-order Runge–Kutta methodis used to solve the systems with time step size 0.001. Forthis numerical simulation, we employed the initial conditions,(x1(0), y1(0), z1(0)) = (−10,0,37) and (x2(0), y2(0), z2(0)) = (−5,
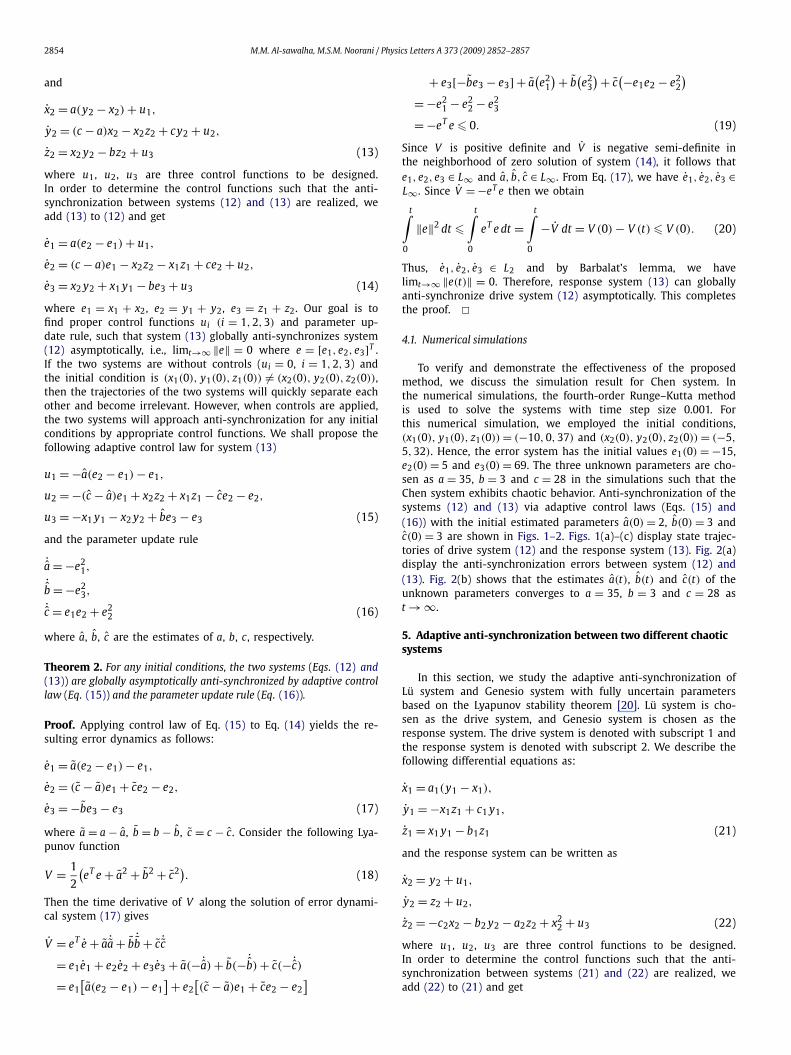
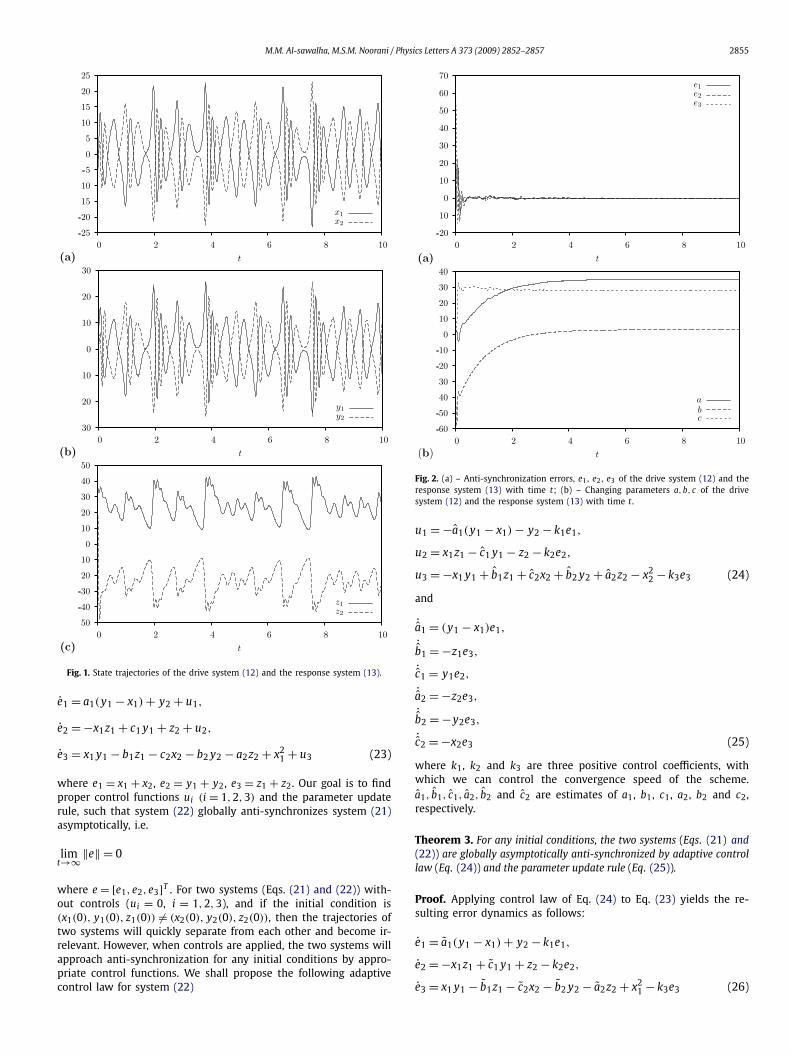
5,32). Hence, the error system has the initial values e1(0) = −15,e2(0) = 5 and e3(0) = 69. The three unknown parameters are cho-sen as a = 35, b = 3 and c = 28 in the simulations such that theChen system exhibits chaotic behavior. Anti-synchronization of thesystems (12) and (13) via adaptive control laws (Eqs. (15) and(16)) with the initial estimated parameters a(0) = 2, b(0) = 3 andc(0) = 3 are shown in Figs. 1–2. Figs. 1(a)–(c) display state trajec-tories of drive system (12) and the response system (13). Fig. 2(a)display the anti-synchronization errors between system (12) and(13). Fig. 2(b) shows that the estimates a(t), b(t) and c(t) of theunknown parameters converges to a = 35, b = 3 and c = 28 ast → ∞.
5. Adaptive anti-synchronization between two different chaoticsystems
In this section, we study the adaptive anti-synchronization ofLü system and Genesio system with fully uncertain parametersbased on the Lyapunov stability theorem [20]. Lü system is cho-sen as the drive system, and Genesio system is chosen as theresponse system. The drive system is denoted with subscript 1 andthe response system is denoted with subscript 2. We describe thefollowing differential equations as:
x1 = a1(y1 − x1),
y1 = −x1z1 + c1 y1,
z1 = x1 y1 − b1z1 (21)
and the response system can be written as
x2 = y2 + u1,
y2 = z2 + u2,
z2 = −c2x2 − b2 y2 − a2z2 + x22 + u3 (22)
where u1, u2, u3 are three control functions to be designed.In order to determine the control functions such that the anti-synchronization between systems (21) and (22) are realized, weadd (22) to (21) and get
M.M. Al-sawalha, M.S.M. Noorani / Physics Letters A 373 (2009) 2852–2857 2855
Fig. 1. State trajectories of the drive system (12) and the response system (13).
e1 = a1(y1 − x1) + y2 + u1,
e2 = −x1z1 + c1 y1 + z2 + u2,
e3 = x1 y1 − b1z1 − c2x2 − b2 y2 − a2z2 + x21 + u3 (23)
where e1 = x1 + x2, e2 = y1 + y2, e3 = z1 + z2. Our goal is to findproper control functions ui (i = 1,2,3) and the parameter updaterule, such that system (22) globally anti-synchronizes system (21)asymptotically, i.e.
limt→∞‖e‖ = 0
where e = [e1, e2, e3]T . For two systems (Eqs. (21) and (22)) with-out controls (ui = 0, i = 1,2,3), and if the initial condition is(x1(0), y1(0), z1(0)) �= (x2(0), y2(0), z2(0)), then the trajectories oftwo systems will quickly separate from each other and become ir-relevant. However, when controls are applied, the two systems willapproach anti-synchronization for any initial conditions by appro-priate control functions. We shall propose the following adaptivecontrol law for system (22)
Fig. 2. (a) – Anti-synchronization errors, e1, e2, e3 of the drive system (12) and theresponse system (13) with time t; (b) – Changing parameters a,b, c of the drivesystem (12) and the response system (13) with time t .
u1 = −a1(y1 − x1) − y2 − k1e1,
u2 = x1z1 − c1 y1 − z2 − k2e2,
u3 = −x1 y1 + b1z1 + c2x2 + b2 y2 + a2z2 − x22 − k3e3 (24)
and
˙a1 = (y1 − x1)e1,
˙b1 = −z1e3,
˙c1 = y1e2,
˙a2 = −z2e3,
˙b2 = −y2e3,
˙c2 = −x2e3 (25)
where k1, k2 and k3 are three positive control coefficients, withwhich we can control the convergence speed of the scheme.a1, b1, c1, a2, b2 and c2 are estimates of a1, b1, c1, a2, b2 and c2,respectively.
Theorem 3. For any initial conditions, the two systems (Eqs. (21) and(22)) are globally asymptotically anti-synchronized by adaptive controllaw (Eq. (24)) and the parameter update rule (Eq. (25)).
Proof. Applying control law of Eq. (24) to Eq. (23) yields the re-sulting error dynamics as follows:
e1 = a1(y1 − x1) + y2 − k1e1,
e2 = −x1z1 + c1 y1 + z2 − k2e2,
e3 = x1 y1 − b1z1 − c2x2 − b2 y2 − a2z2 + x2 − k3e3 (26)
1
2856 M.M. Al-sawalha, M.S.M. Noorani / Physics Letters A 373 (2009) 2852–2857
where a1 = a1 − a1, b1 = b1 − b1, c1 = c1 − c1, a2 = a2 − a2, b2 =b2 − b2, c2 = c2 − c2.
Consider the following Lyapunov function:
V = 1
2
(eT e + a2
1 + b21 + c2
1 + a22 + b2
2 + c22
). (27)
The time derivative of V along the solution of error dynamical sys-tem (26) gives
V = eT e + a1˙a1 + b1
˙b1 + c1˙c1 + a2
˙a2 + b2˙b2 + c2
˙c2
= e1e1 + e2e2 + e3e3 + a1(−˙a1) + b1(−˙b1)
+ c1(−˙c1) + a2(−˙a2) + b2(−˙b2) + c2(−˙c2)
= e1[a1(y1 − x1) + y2 − k1e1
]+ e2[−x1z1 + c1 y1 + z2 − k2e2]+ e3
[x1 y1 − b1z1 − c2x2 − b2 y2 − a2z2 + x2
1 − k3e3]
+ a1(−(y1 − x1)e1
) + b1(z1e3) + c1(−y1e2)
+ a2(z2e3) + b2(y2e3) + c2(x2e3)
= −k1e21 − k2e2
2 − k3e23
= −eT Pe (28)
where P = diag{k1,k2,k3}. Since V is positive definite and V isnegative semi-definite in the neighborhood of zero solution of sys-tem (23), it follows that e1, e2, e3 ∈ L∞ and a1, b1, c1, a2, b2, c2 ∈L∞ . From Eq. (26), we have e1, e2, e3 ∈ L∞ and since V = −eT Pe,we will obtain
t∫
0
λmin(P )‖e‖2 dt �t∫
0
eT Pe dt =t∫
0
−V dt
= V (0) − V (t) � V (0) (29)
where λmin(P ) is the minimal eigenvalue of the positive definitematrix P . Thus, e1, e2, e3 ∈ L2 and by Barbalat’s lemma, we havelimt→∞ ‖e(t)‖ = 0. Therefore, response system (22) can globallyanti-synchronize the drive system (21) asymptotically. This com-pletes the proof. �
5.1. Numerical simulations
Here, we show and discuss the simulation results for theanti-synchronization between Lü system and Genesio system. Inthe numerical simulations, the fourth-order Runge–Kutta methodis used to solve the systems with time step size 0.001. Forthis numerical simulation, we employed the initial conditions(x1(0), y1(0), z1(0)) = (−1,2,6) and (x2(0), y2(0), z2(0)) = (0.2,
−0.3,0.1). Hence, the error system has the initial values e1(0) =−0.8, e2(0) = 1.7 and e3(0) = 6.1. The unknown parameters arechosen as a1 = 36, b1 = 3, c1 = 20, a2 = 1.2, b2 = 2.92 and c2 = 6in simulations such that both systems will exhibit chaotic behav-ior. Anti-synchronization of the systems (21) and (22) via adaptivecontrol law (24) and (25) with the initial estimated parame-ters a1(0) = b1(0) = c1(0) = a2(0) = b2(0) = c2(0) = (10,10,10,
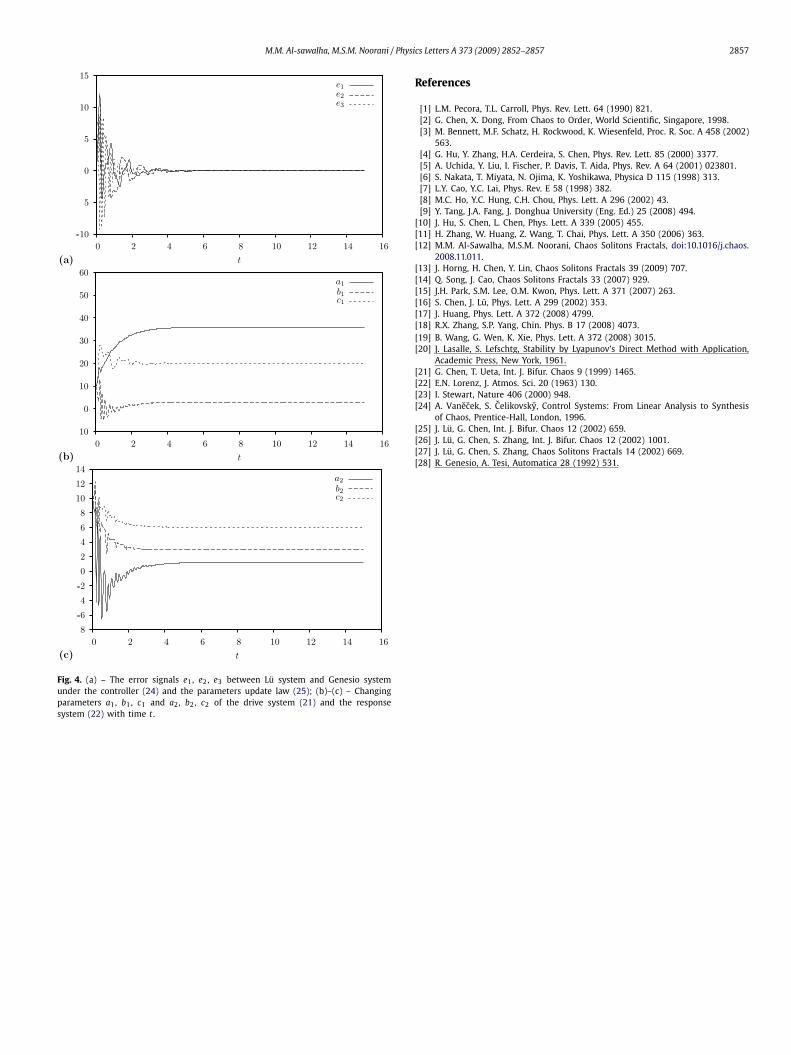
10,10,10) are shown in Figs. 3–4. Figs. 3(a)–(c) show the state tra-jectories of drive system (21) and response system (22). Fig. 4(a)show the error signals e1, e2, e3 between the Lü system and Gen-esio system under the controller in Eq. (24) and the parametersupdate law in Eq. (25). Figs. 4(b)–(c) show that the estimatesa1(t), b1(t), c1(t) and a2(t), b2(t), c2(t) of the unknown parame-
Fig. 3. State trajectories of drive system (21) and response system (22), (a) – signalsx1 and x2; (b) – signals y1 and y2; (c) – signals z1 and z2.
ters converges to a1 = 36, b1 = 3, c1 = 20 and a2 = 1.2, b2 = 2.92,c2 = 6 as t → ∞.
6. Concluding remark
In this article, we have applied anti-synchronization to somechaotic systems with fully uncertain parameters via adaptive con-trol. We have proposed a novel adaptive control scheme for asymp-totic chaos anti-synchronization by using the Lyapunov stabilitytheory. Finally, numerical simulations are provided to show theeffectiveness of our method. However the referee has been kindenough to inform us of the published work of [9] and [18], whichhave overlaps with this Letter. Our results has been establishedindependently of the said-works and this is reflected, amongst oth-ers, in the choice of examples for the purpose of simulations.
Acknowledgement
This work is financially supported by the Malaysian Ministry ofHigher Education Grant: UKM-ST-06-FRGS0008-2008.
M.M. Al-sawalha, M.S.M. Noorani / Physics Letters A 373 (2009) 2852–2857 2857
Fig. 4. (a) – The error signals e1, e2, e3 between Lü system and Genesio systemunder the controller (24) and the parameters update law (25); (b)–(c) – Changingparameters a1, b1, c1 and a2, b2, c2 of the drive system (21) and the responsesystem (22) with time t .
References
[1] L.M. Pecora, T.L. Carroll, Phys. Rev. Lett. 64 (1990) 821.[2] G. Chen, X. Dong, From Chaos to Order, World Scientific, Singapore, 1998.[3] M. Bennett, M.F. Schatz, H. Rockwood, K. Wiesenfeld, Proc. R. Soc. A 458 (2002)
563.[4] G. Hu, Y. Zhang, H.A. Cerdeira, S. Chen, Phys. Rev. Lett. 85 (2000) 3377.[5] A. Uchida, Y. Liu, I. Fischer, P. Davis, T. Aida, Phys. Rev. A 64 (2001) 023801.[6] S. Nakata, T. Miyata, N. Ojima, K. Yoshikawa, Physica D 115 (1998) 313.[7] L.Y. Cao, Y.C. Lai, Phys. Rev. E 58 (1998) 382.[8] M.C. Ho, Y.C. Hung, C.H. Chou, Phys. Lett. A 296 (2002) 43.[9] Y. Tang, J.A. Fang, J. Donghua University (Eng. Ed.) 25 (2008) 494.
[10] J. Hu, S. Chen, L. Chen, Phys. Lett. A 339 (2005) 455.[11] H. Zhang, W. Huang, Z. Wang, T. Chai, Phys. Lett. A 350 (2006) 363.[12] M.M. Al-Sawalha, M.S.M. Noorani, Chaos Solitons Fractals, doi:10.1016/j.chaos.
2008.11.011.[13] J. Horng, H. Chen, Y. Lin, Chaos Solitons Fractals 39 (2009) 707.[14] Q. Song, J. Cao, Chaos Solitons Fractals 33 (2007) 929.[15] J.H. Park, S.M. Lee, O.M. Kwon, Phys. Lett. A 371 (2007) 263.[16] S. Chen, J. Lü, Phys. Lett. A 299 (2002) 353.[17] J. Huang, Phys. Lett. A 372 (2008) 4799.[18] R.X. Zhang, S.P. Yang, Chin. Phys. B 17 (2008) 4073.[19] B. Wang, G. Wen, K. Xie, Phys. Lett. A 372 (2008) 3015.[20] J. Lasalle, S. Lefschtg, Stability by Lyapunov’s Direct Method with Application,
Academic Press, New York, 1961.[21] G. Chen, T. Ueta, Int. J. Bifur. Chaos 9 (1999) 1465.[22] E.N. Lorenz, J. Atmos. Sci. 20 (1963) 130.[23] I. Stewart, Nature 406 (2000) 948.[24] A. Vanecek, S. Celikovsky, Control Systems: From Linear Analysis to Synthesis
of Chaos, Prentice-Hall, London, 1996.[25] J. Lü, G. Chen, Int. J. Bifur. Chaos 12 (2002) 659.[26] J. Lü, G. Chen, S. Zhang, Int. J. Bifur. Chaos 12 (2002) 1001.[27] J. Lü, G. Chen, S. Zhang, Chaos Solitons Fractals 14 (2002) 669.[28] R. Genesio, A. Tesi, Automatica 28 (1992) 531.
Related Documents











