Angular Momentum Linear Momentum v m r H o v m G

Angular Momentum Linear Momentum. Always work from Principle! Ex: Work of gravity Principle: dW = F * ds Here: dW = - mg * dy mg y.
Dec 28, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
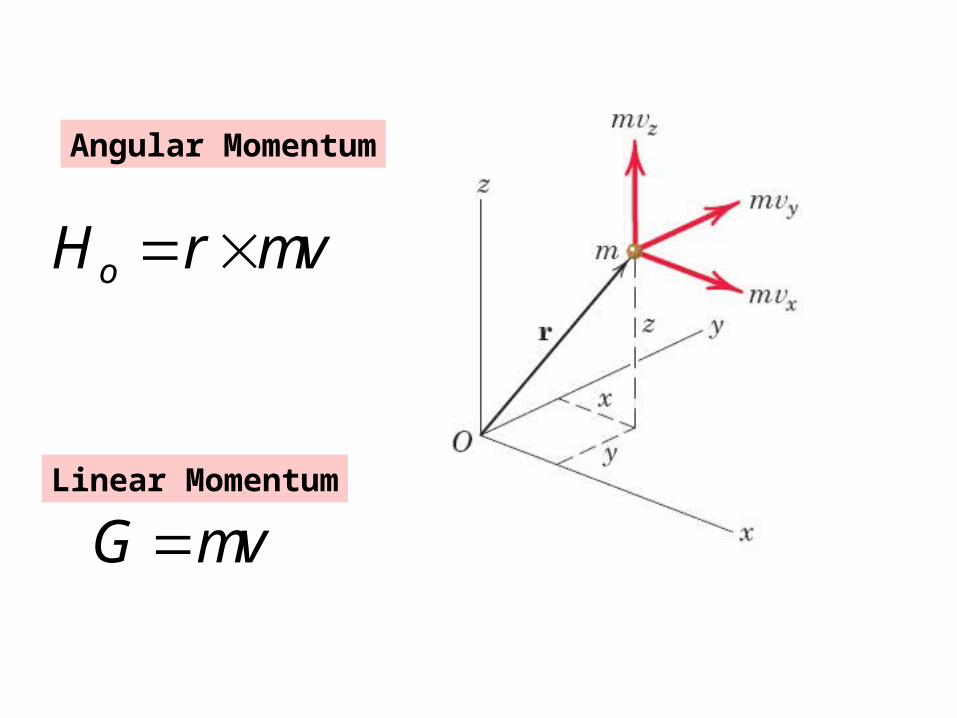
vmrHo
Angular Momentum
Linear Momentum
vmG
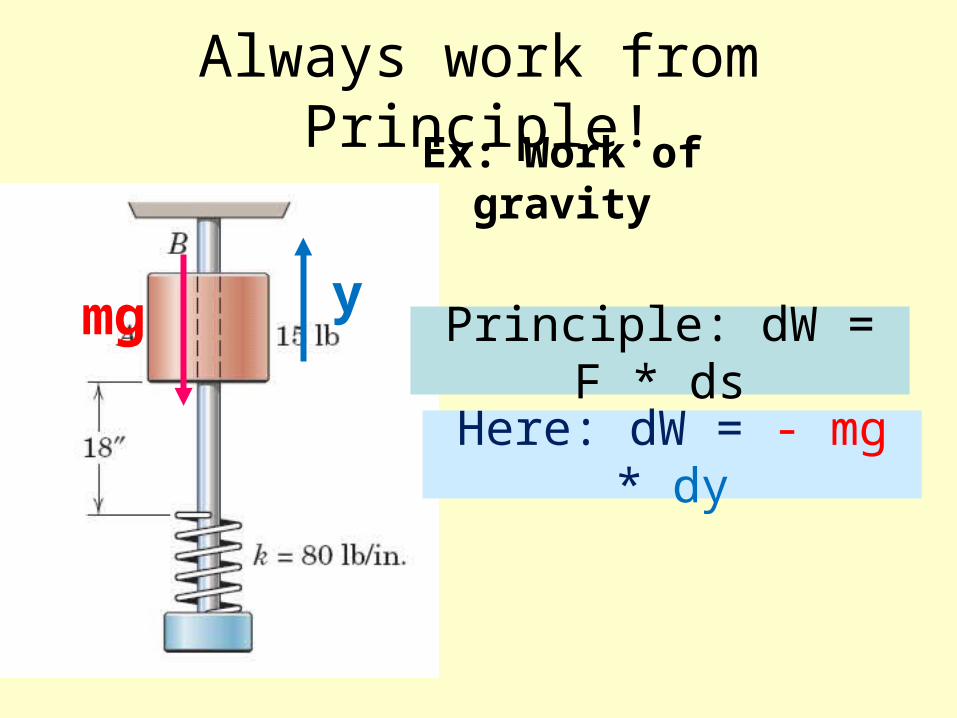
Always work from Principle!Ex: Work of gravity
Principle: dW = F * ds
Here: dW = - mg * dy
mg y
A
O
C Di
J
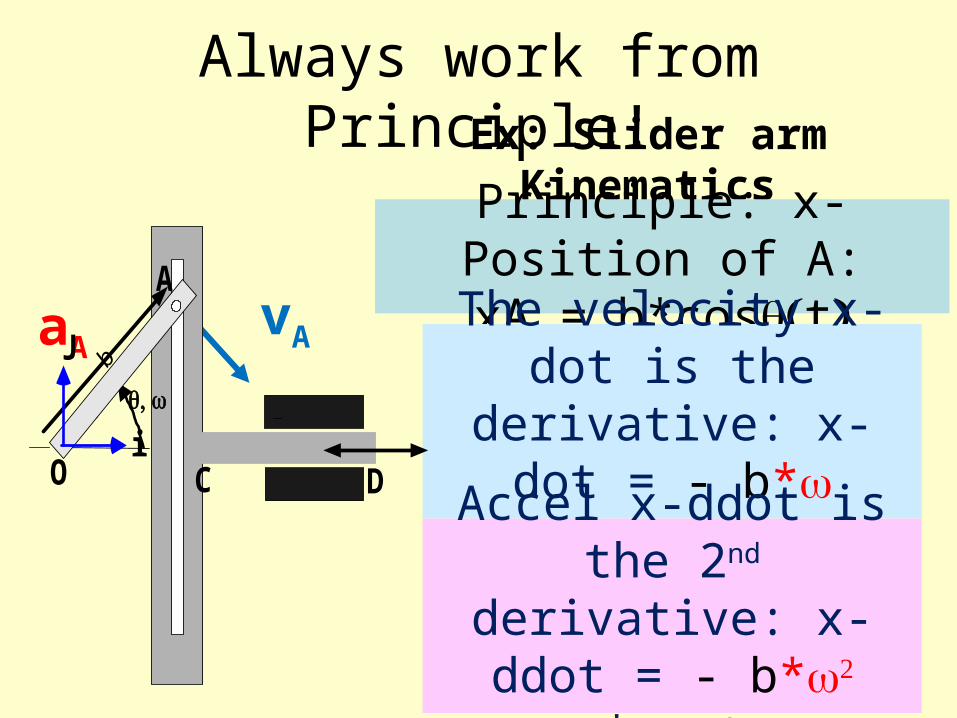
Always work from Principle!Ex: Slider arm Kinematics
Principle: x-Position of A:xA = b*cos (q t)
The velocity x-dot is the derivative: x-dot =
- b*w *sinq
aAvA
Accel x-ddot is the 2nd derivative: x-ddot = -
b*w2 *cosq
Chapter 16
Rigid Body Kinematics
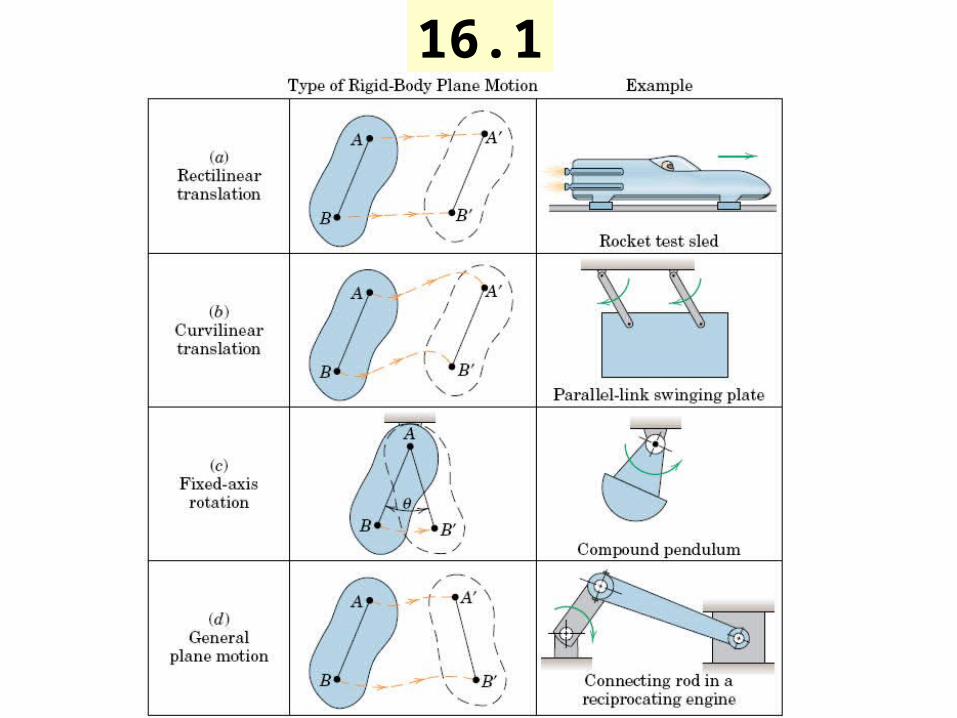
16.1
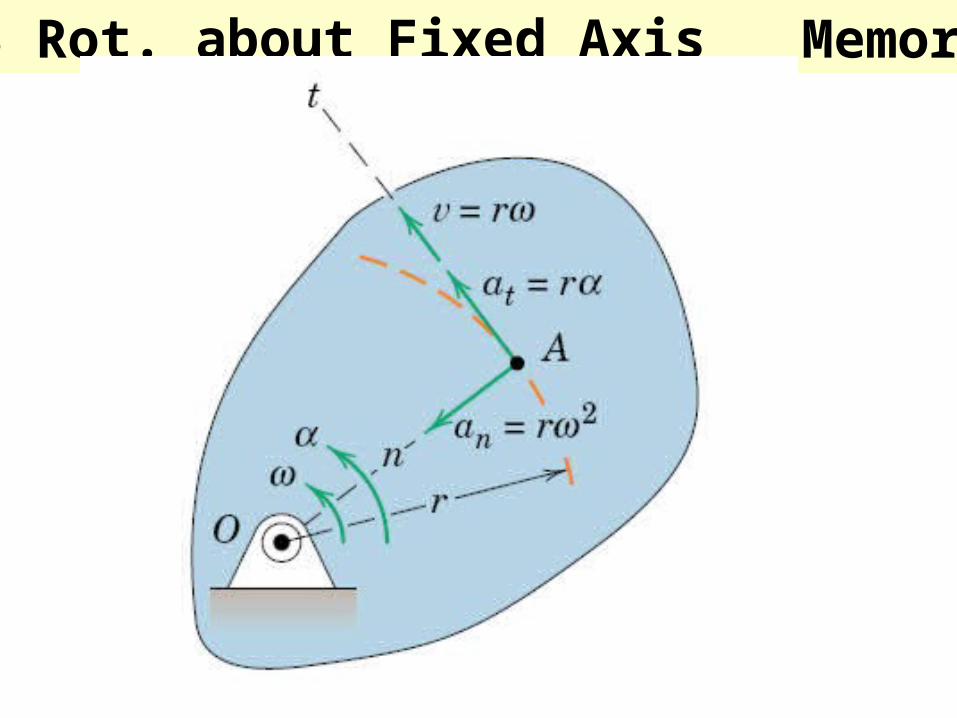
16.3 Rot. about Fixed Axis Memorize!
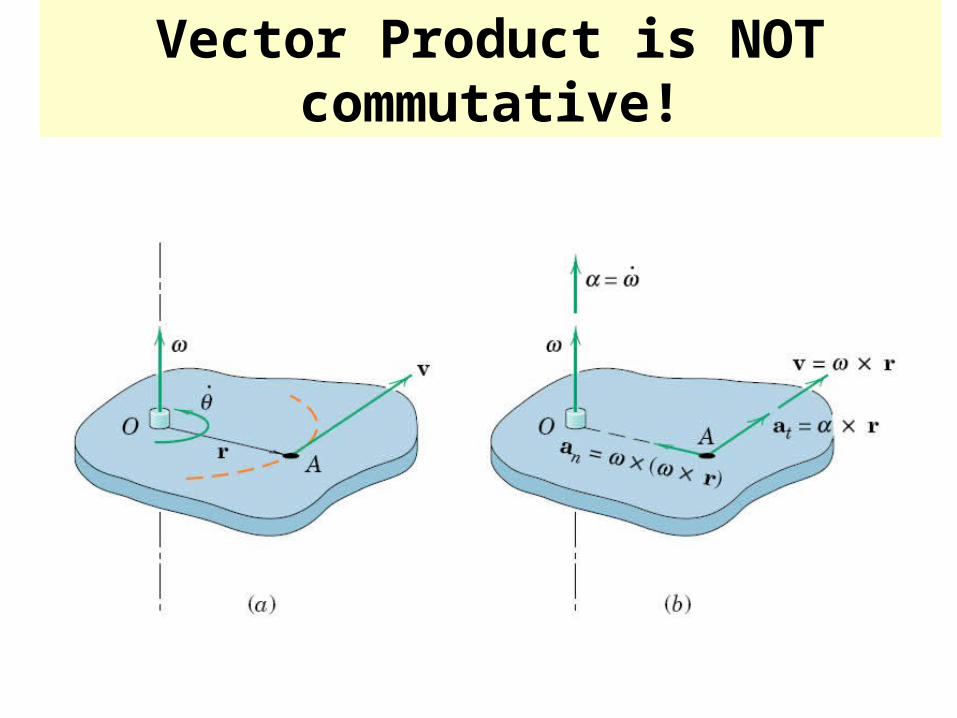
Vector Product is NOT commutative!
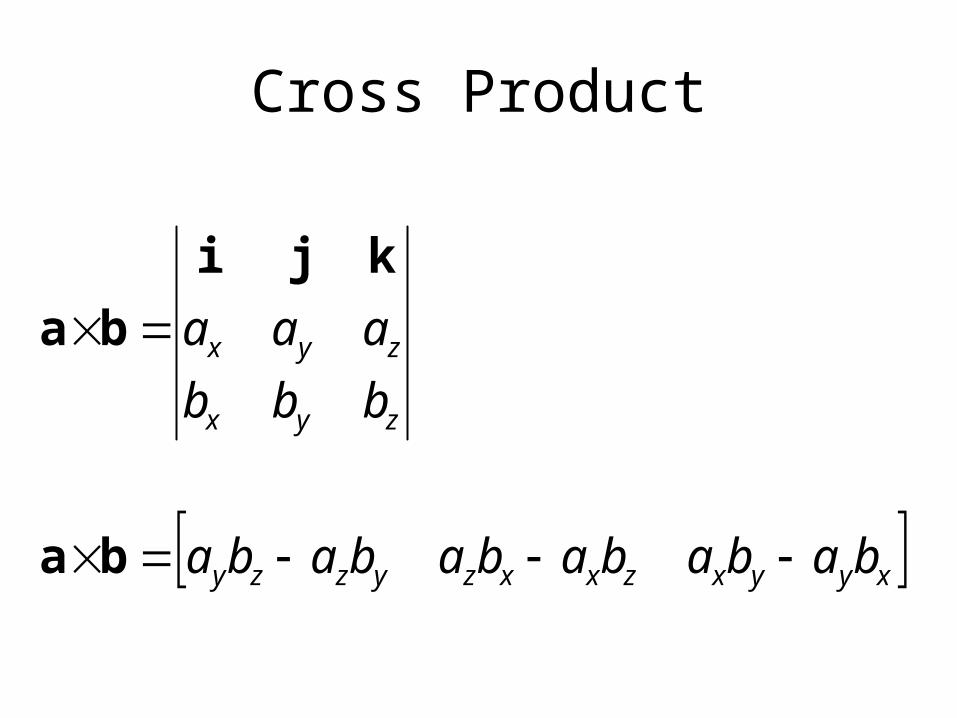
Cross Product
xyyxzxxzyzzy
zyx
zyx
babababababa
bbb
aaa
ba
kji
ba
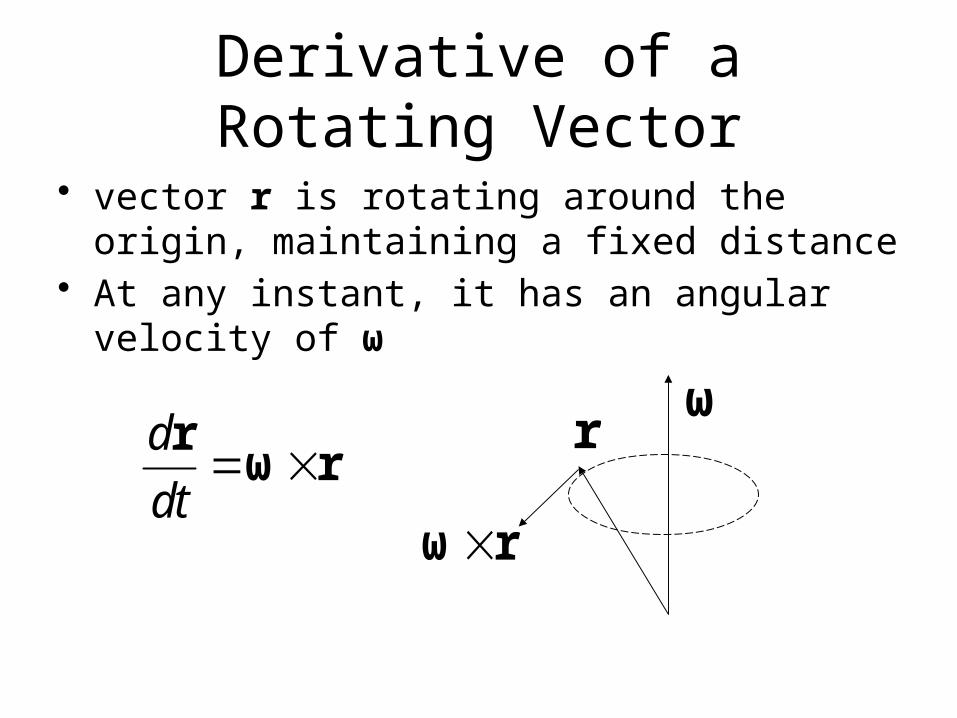
Derivative of a Rotating Vector
• vector r is rotating around the origin, maintaining a fixed distance
• At any instant, it has an angular velocity of ω
rωr
dt
d
rω
rω
rωr
dt
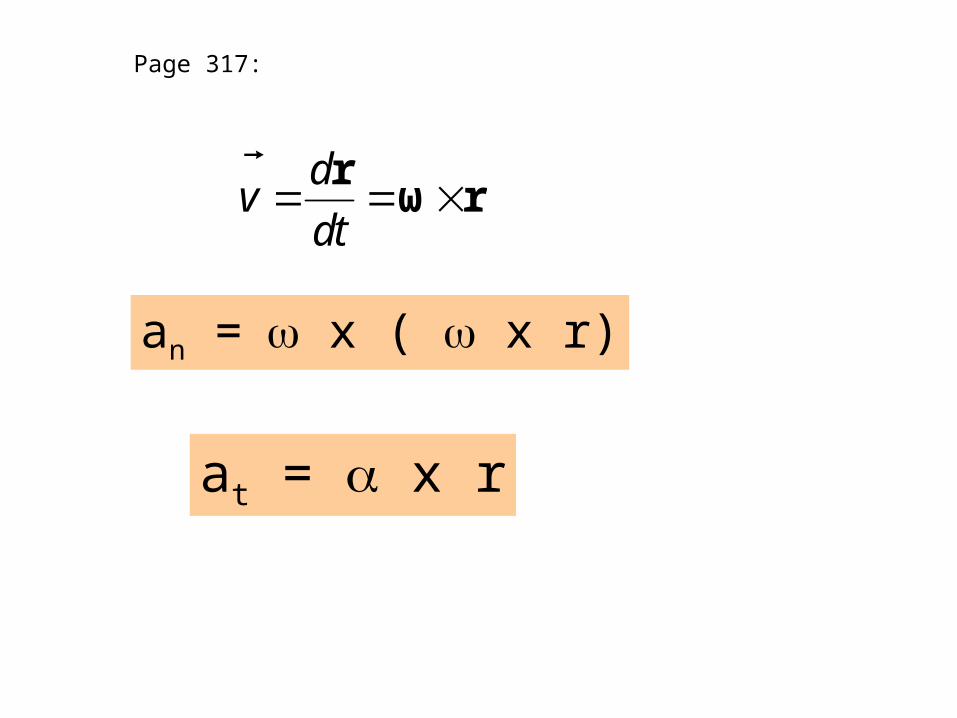
dv
Page 317:
at = a x r
an =w x ( w x r)

Rotation Kinematics
Similar to translation:
dt*
dt*
and dd **

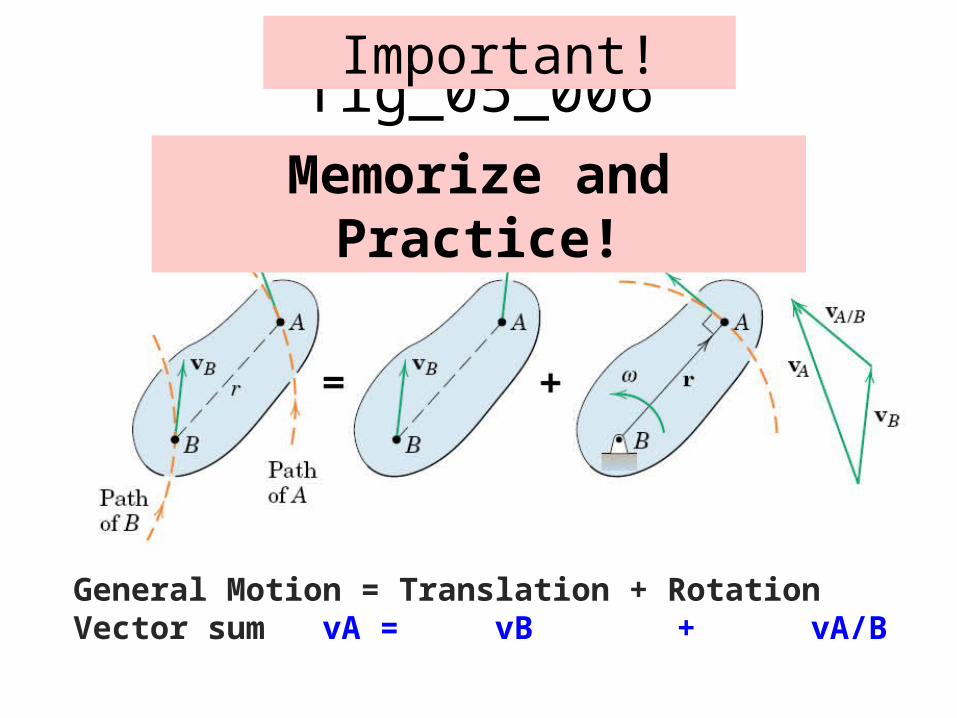
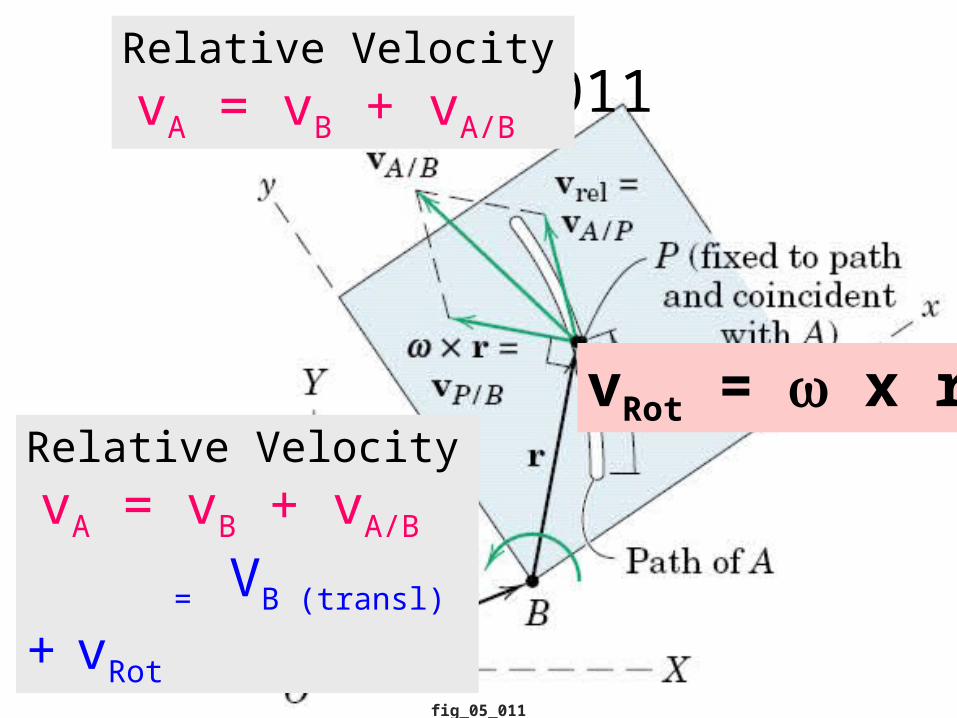
General Motion = Translation + RotationVector sum vA = vB + vA/B
fig_05_006Important!
Memorize and Practice!

fig_05_007Any rigid body motion can be
viewed as a pure rotation about an “Instantaneous Center”
(Chapter 16.6)
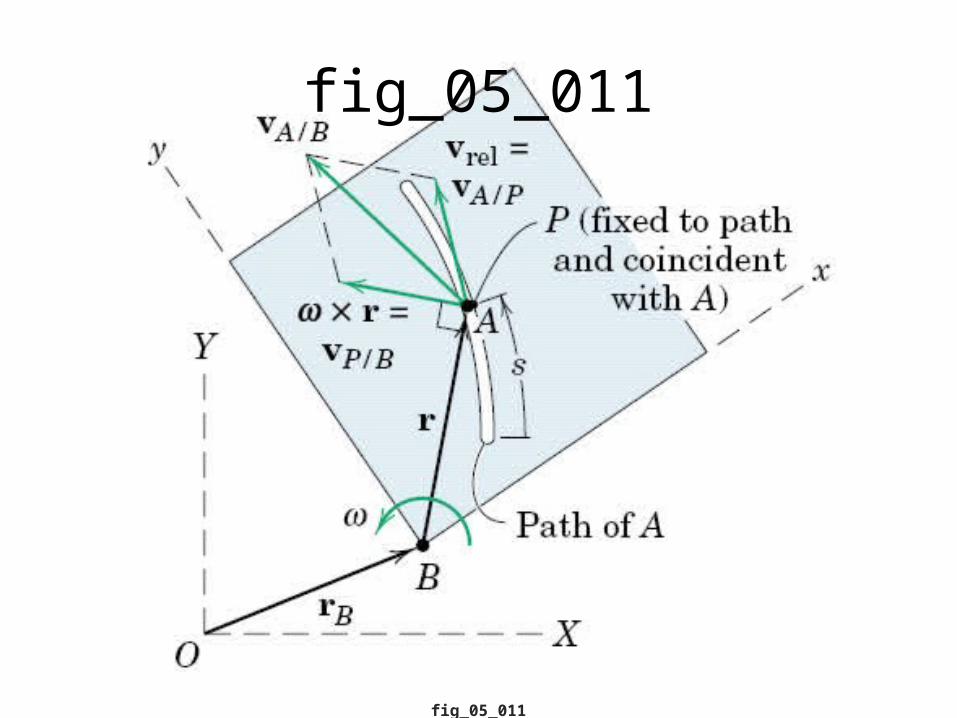
fig_05_011
fig_05_011
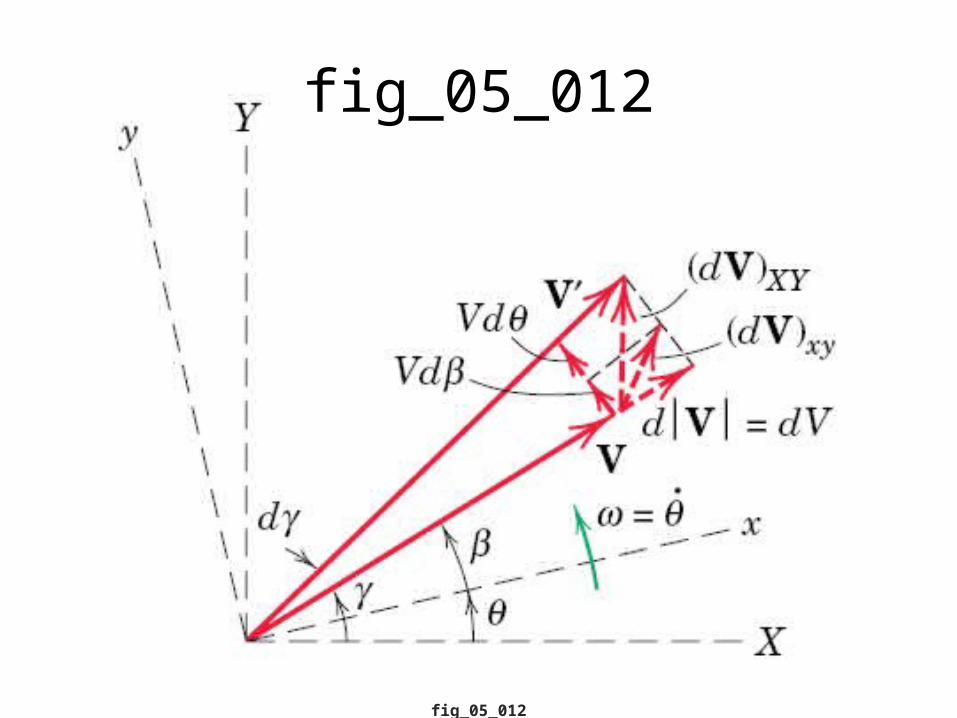
fig_05_012
fig_05_012
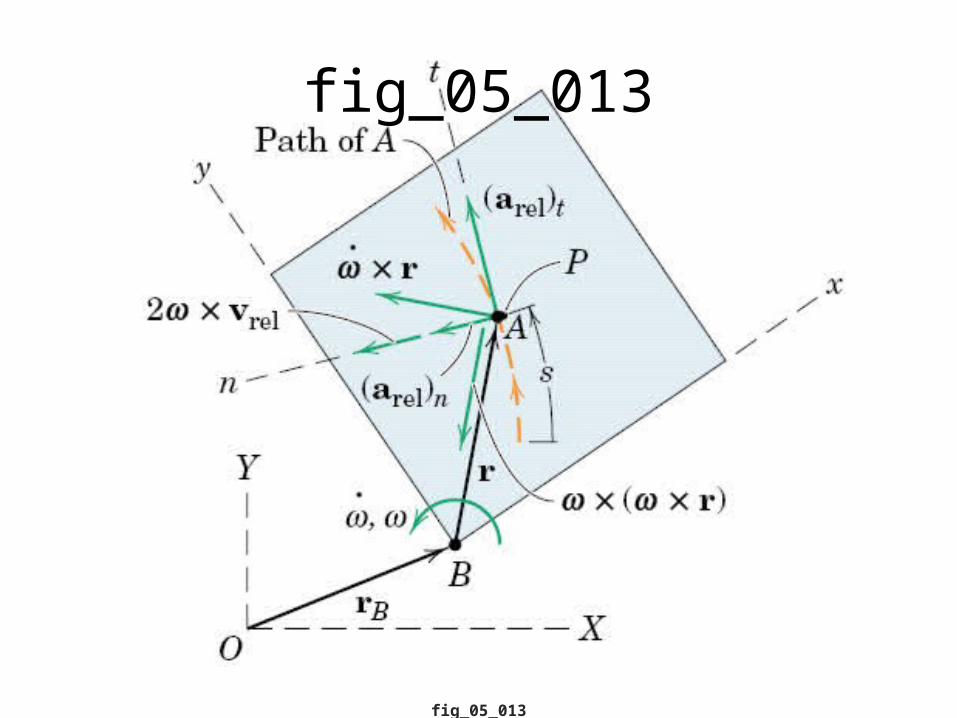
fig_05_013
fig_05_013
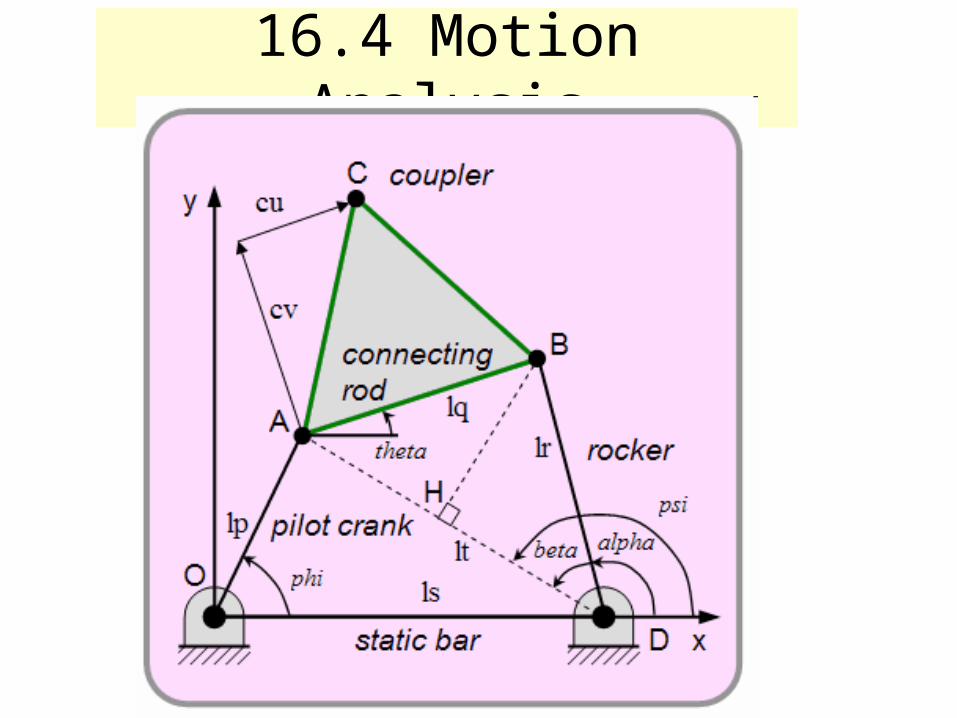
16.4 Motion Analysis
16.4 Motion Analysis
http://www.mekanizmalar.com/fourbar01.html
http://iel.ucdavis.edu/chhtml/toolkit/mechanism/
http://courses.engr.illinois.edu/tam212/aml.xhtml
1. A body subjected to general plane motion undergoes a/an
A) translation.
B) rotation.
C) simultaneous translation and rotation.
D) out-of-plane movement.
2. In general plane motion, if the rigid body is represented by a slab, the slab rotates
A) about an axis perpendicular to the plane.
B) about an axis parallel to the plane.
C) about an axis lying in the plane.
D) None of the above.

1. The position, s, is given as a function of angular position, q, as s = 10 sin 2 q . The velocity, v, is
A) 20 cos 2q B) 20 sin 2q
C) 20 w cos 2q D) 20 w sin 2q
2. If s = 10 sin 2q, the acceleration, a, is
A) 20 a sin 2q B) 20 a cos 2q − 40 w2 sin 2q
C) 20 a cos 2qD) -40 a sin2 q
Approach1. Geometry: Definitions
Constants
Variables
Make a sketch
2a. Analysis (16.4) Derivatives (velocity and acceleration)
3. Equations of Motion
4. Solve the Set of Equations. Use Computer Tools.
2b. Rel. Motion (16.5)
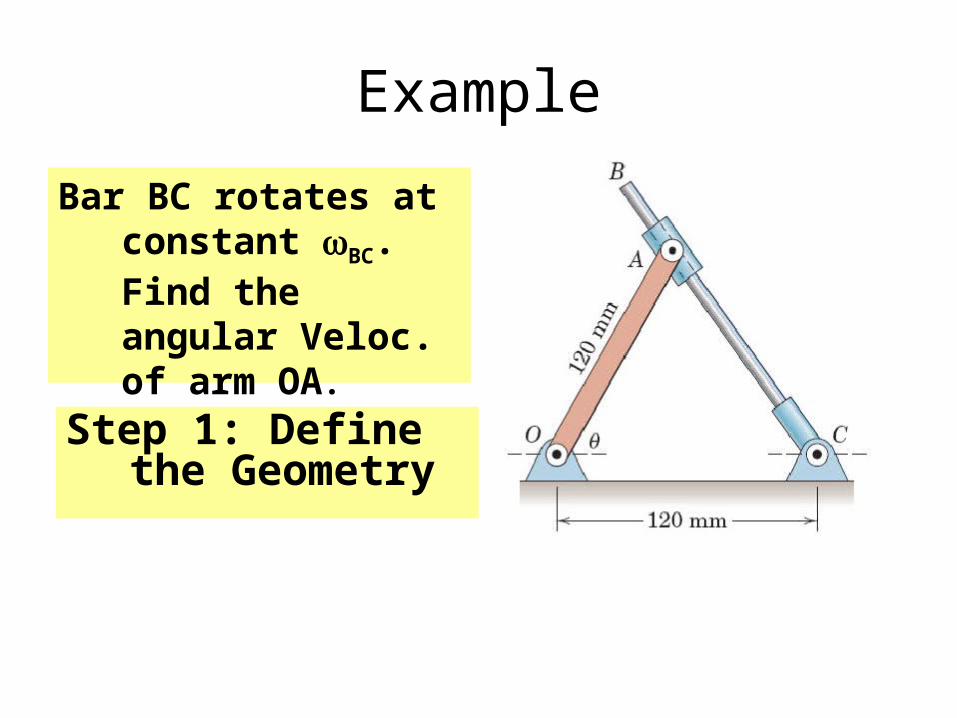
Example
Bar BC rotates at constant wBC. Find the angular Veloc. of arm OA.
Step 1: Define the Geometry
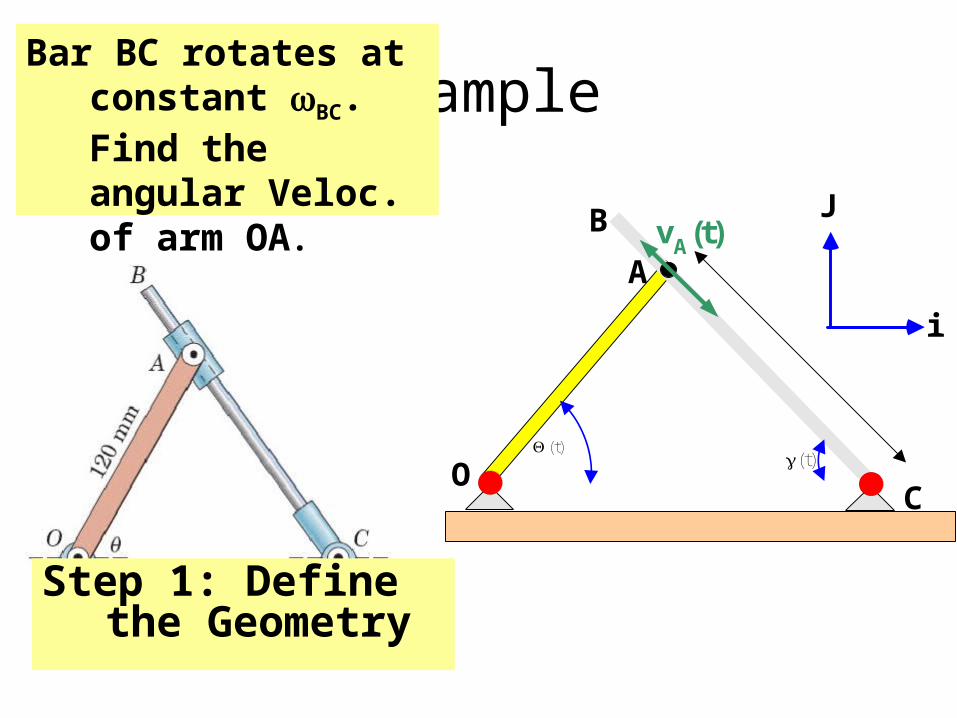
Example
Step 1: Define the Geometry
A
i
JB
C
(t) (t)
vA(t)
O
Bar BC rotates at constant wBC. Find the angular Veloc. of arm OA.
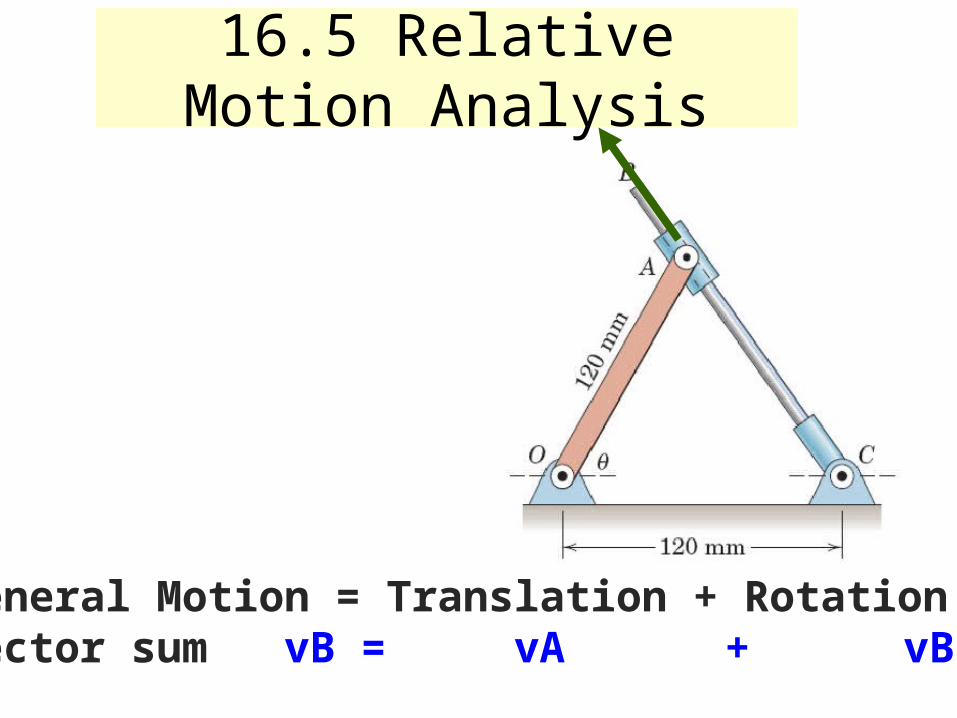
16.5 Relative Motion Analysis
General Motion = Translation + RotationVector sum vB = vA + vB/A
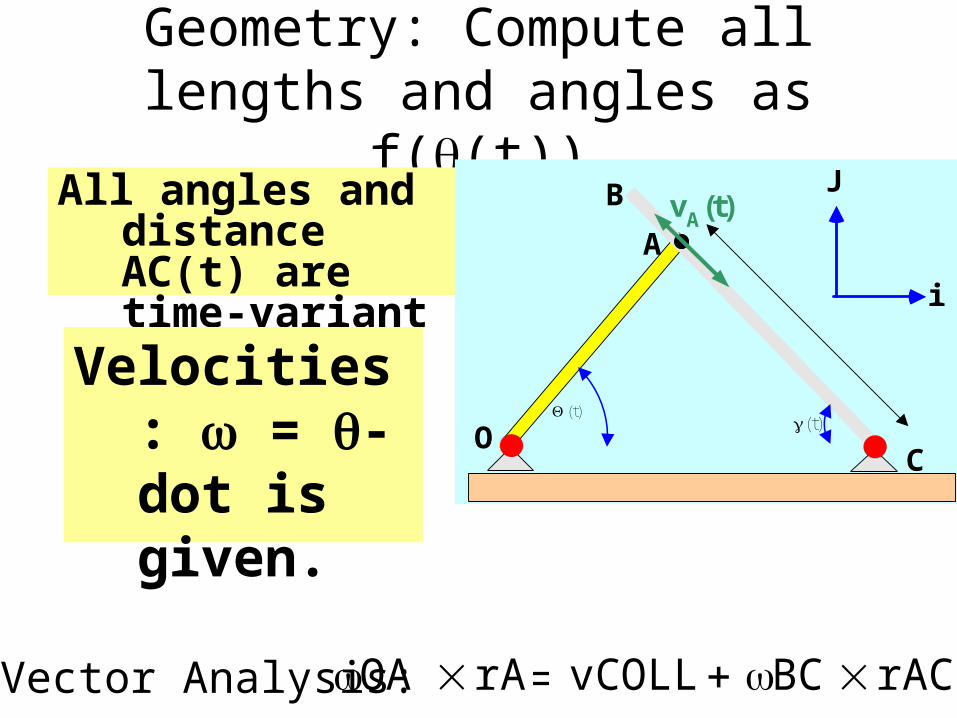
Geometry: Compute all lengths and angles as f(q(t))
All angles and distance AC(t) are time-variant
A
i
JB
C
(t) (t)
vA(t)
O
Velocities: w = q-dot is given.
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns OA and vCOLL
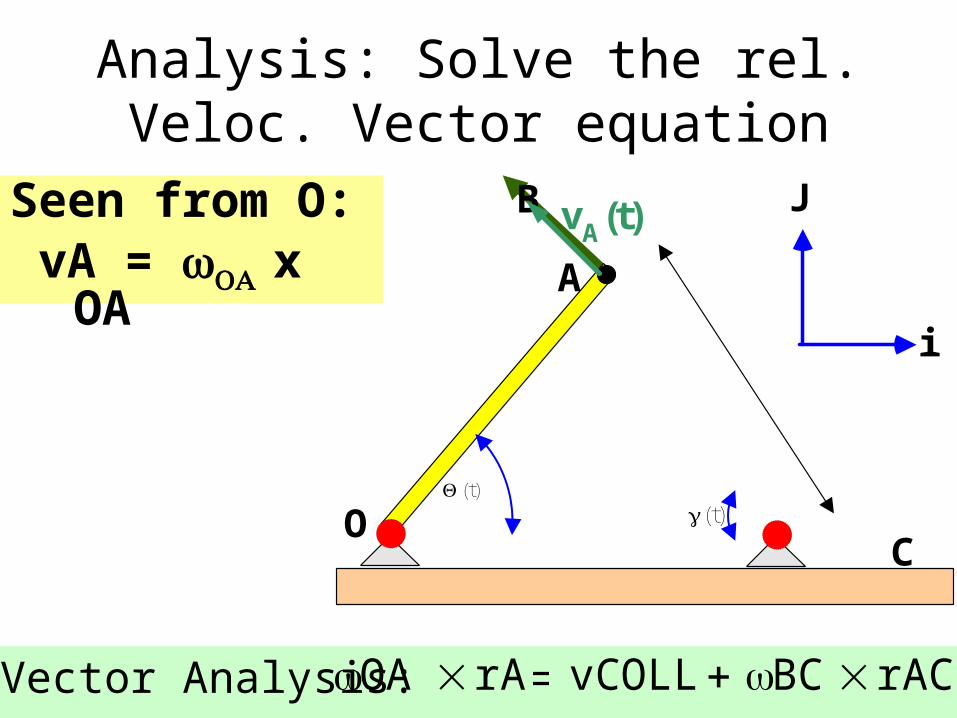
Analysis: Solve the rel. Veloc. Vector equation
A
i
JB
C
(t)
vA(t)
O (t)
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns OA and vCOLL
Seen from O: vA = wOA x OA
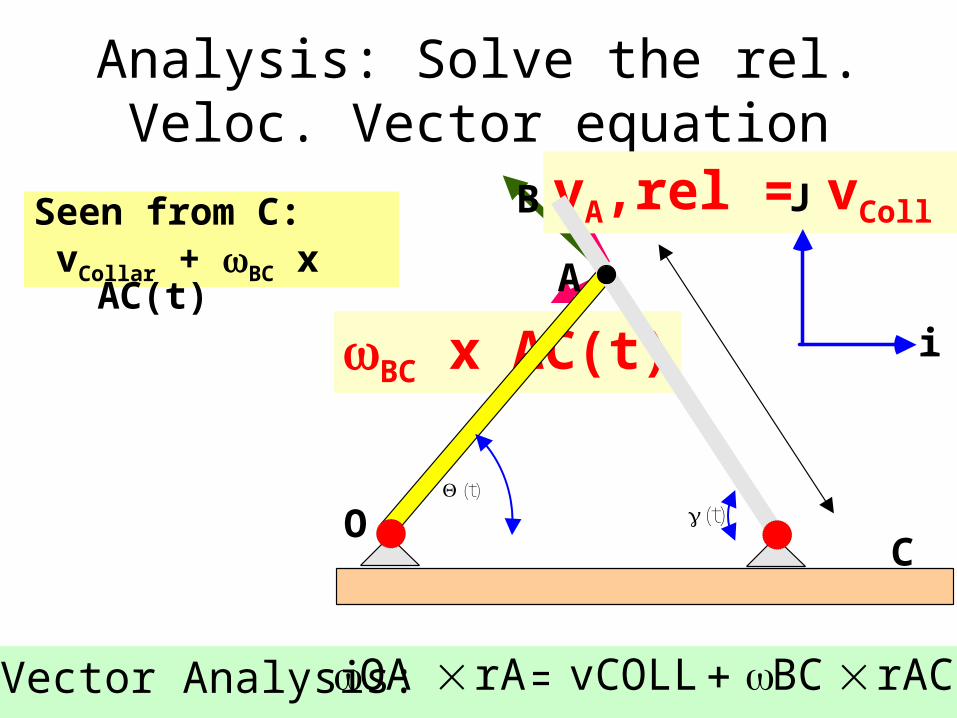
Analysis: Solve the rel. Veloc. Vector equation
Seen from C: vCollar + wBC x AC(t) A
i
JB
C
(t)
O (t)
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns OA and vCOLL
wBC x AC(t)
vA,rel = vColl
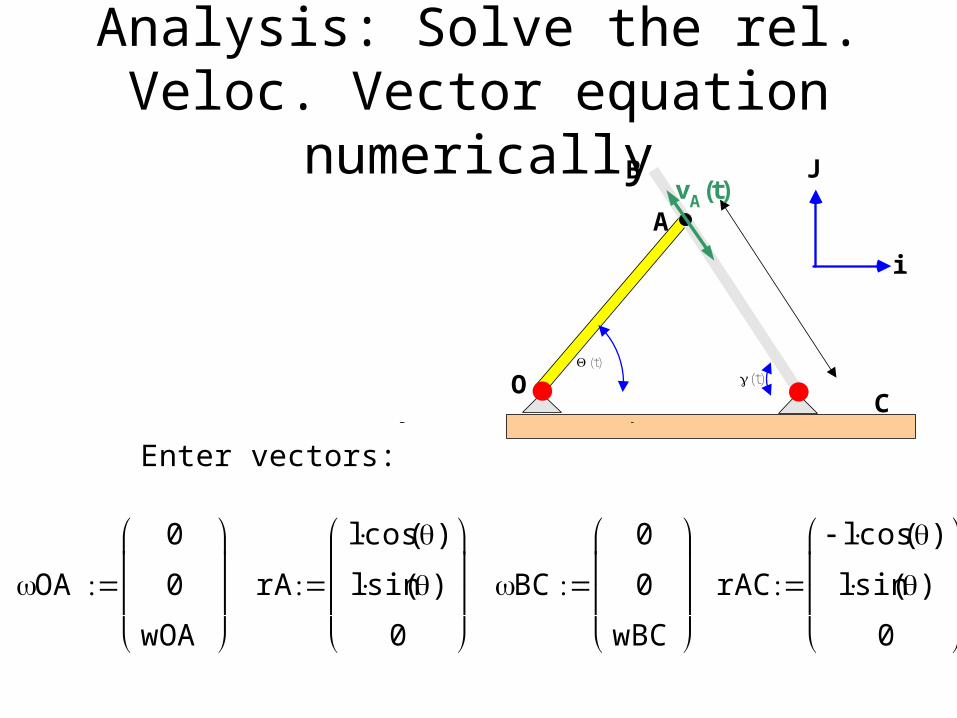
Analysis: Solve the rel. Veloc. Vector equation numerically
A
i
JB
C
(t)
vA(t)
O (t)
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns OA and vCOLL
Enter vectors:
OA
0
0
wOA
rA
l cos ( )
l sin ( )
0
BC
0
0
wBC
rAC
l cos ( )
l sin ( )
0
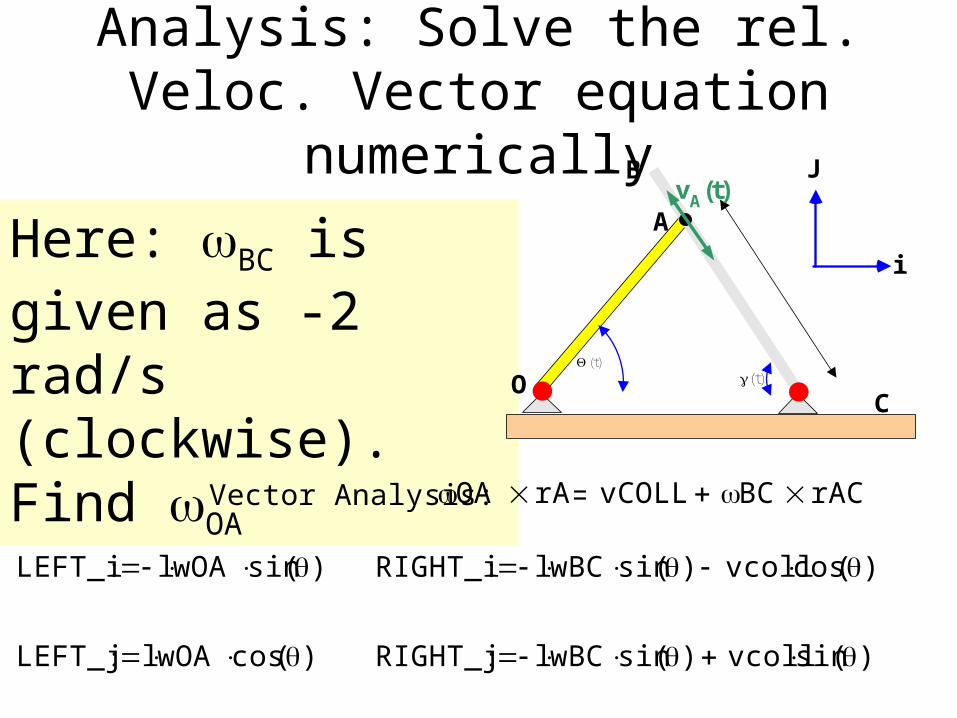
Analysis: Solve the rel. Veloc. Vector equation numerically
A
i
JB
C
(t)
vA(t)
O (t)
Vector Analysis: OA rA vCOLL BC rAC
LEFT_i l wOA sin ( ) RIGHT_i l wBC sin ( ) vcoll cos ( )
LEFT_j l wOA cos ( ) RIGHT_j l wBC sin ( ) vcoll sin ( )
Here: wBC is given as -2 rad/s (clockwise). Find wOA
Analysis: Solve the rel. Veloc. Vector equation numericallyA
i
JB
C
(t)
vA(t)
O (t)
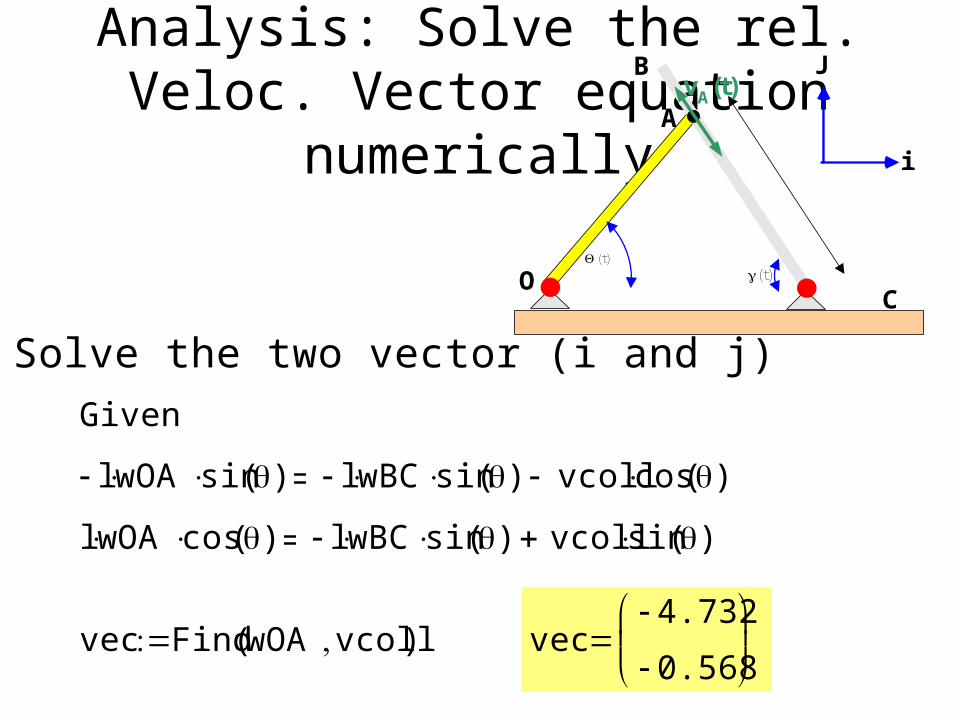
Solve the two vector (i and j) equations :
Given
l wOA sin ( ) l wBC sin ( ) vcoll cos ( )
l wOA cos ( ) l wBC sin ( ) vcoll sin ( )
vec Find wOA vcoll( ) vec4.732
0.568
A
i
JB
C
(t)
vA(t)
O (t)
Recap: The analysis is becoming more complex.
•To succeed: TryClear Organization from the start
•Mathcad
•Vector Equation = 2 simultaneous equations, solve simultaneously!
fig_05_011
fig_05_011Relative Velocity
vA = vB + vA/B
Relative Velocity
vA = vB + vA/B
= VB (transl)+ vRot
vRot = w x r
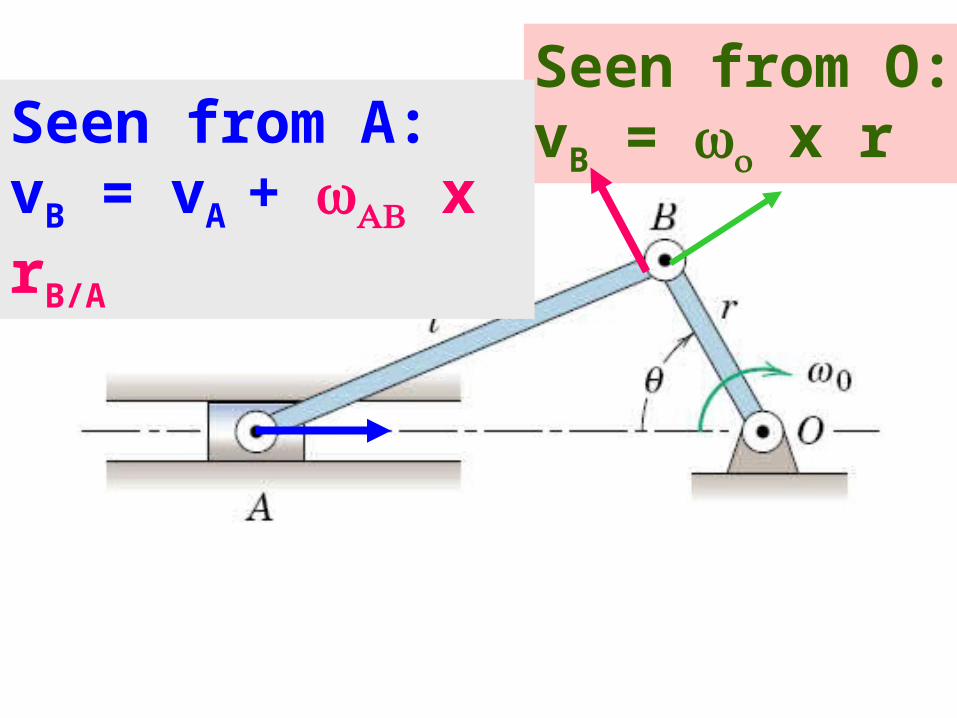
Seen from O:vB = wo x rSeen from A:
vB = vA + wAB x rB/A
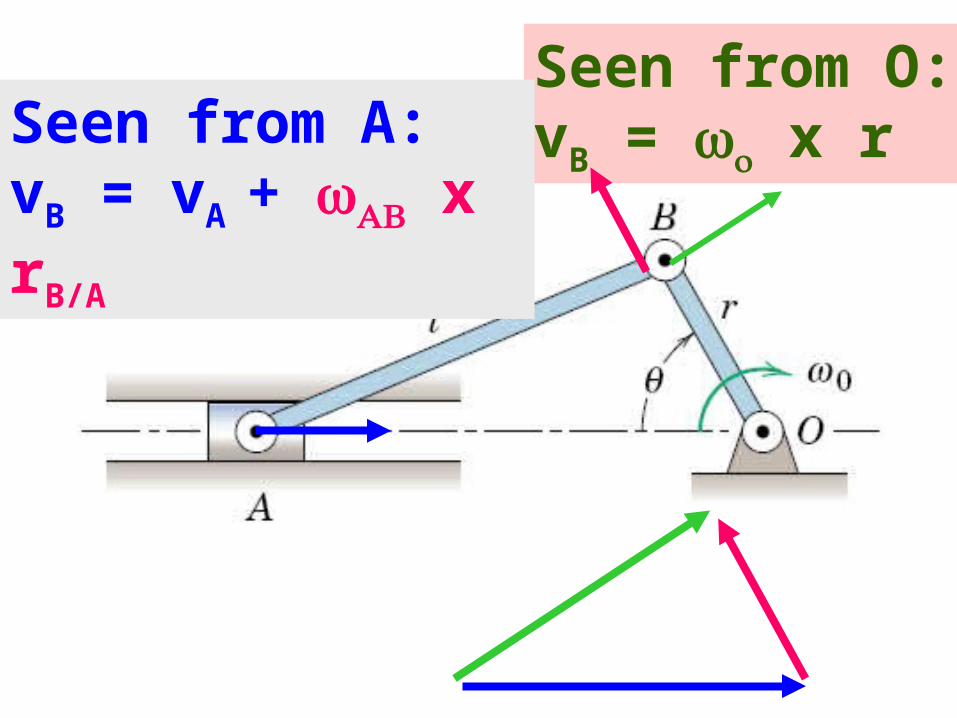
Seen from O:vB = wo x rSeen from A:
vB = vA + wAB x rB/A
Visualization
http://www.mekanizmalar.com/fourbar01.html
http://iel.ucdavis.edu/chhtml/toolkit/mechanism/
http://courses.engr.illinois.edu/tam212/aml.xhtml
fig_05_012Mathcad Examples
Crank and Slider Pin part 1Geometry
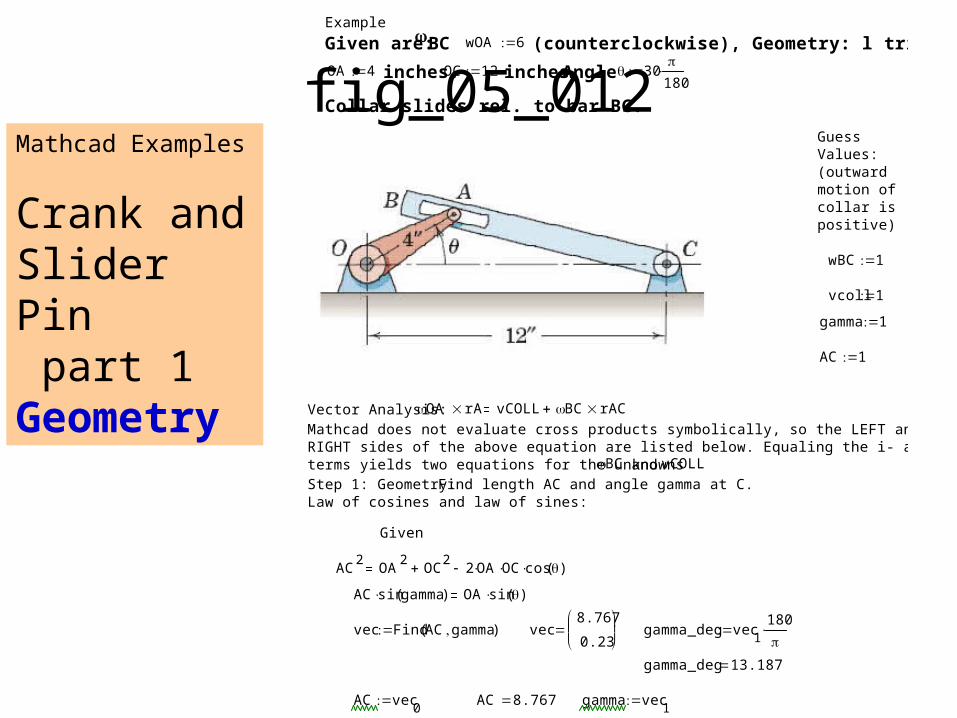
Example
Given are: BC wOA 6 (counterclockwise), Geometry: l triangle with
OA 4 inches. OC 12 inches. Angle 30
180
Collar slides rel. to bar BC.
GuessValues:(outwardmotion ofcollar ispositive)
wBC 1
vcoll 1
gamma 1
AC 1
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns BC and vCOLL Step 1: Geometry: Find length AC and angle gamma at C.Law of cosines and law of sines:
Given
AC2
OA2
OC2 2 OA OC cos ( )
AC sin gamma( ) OA sin ( )
vec Find AC gamma( ) vec8.767
0.23
gamma_deg vec1
180
gamma_deg 13.187
AC vec0
AC 8.767 gamma vec1
fig_05_012Mathcad Examples
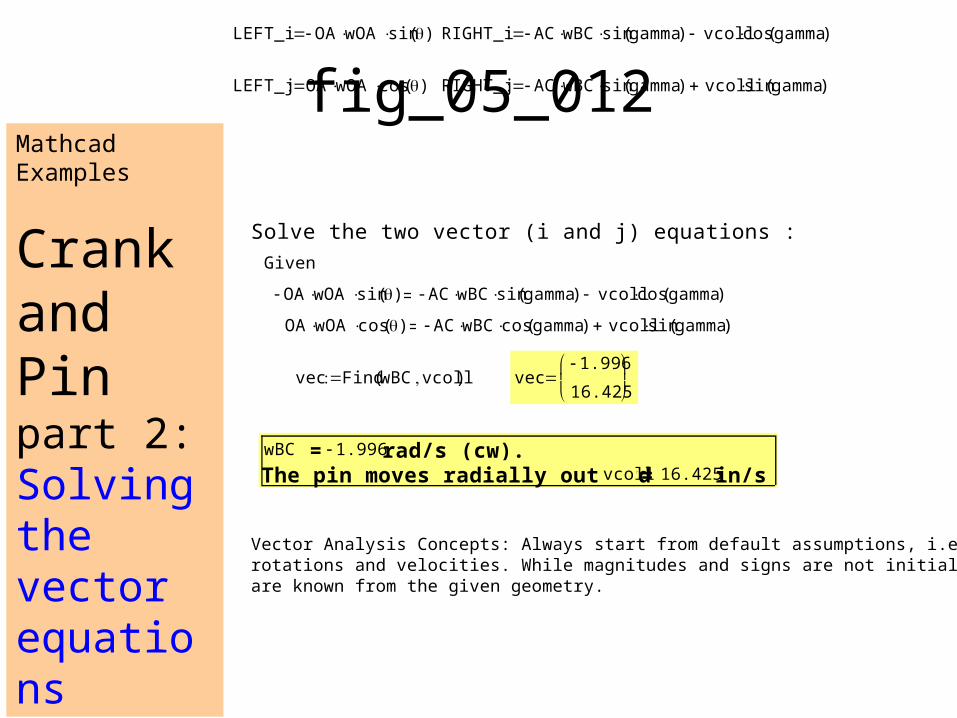
Crank and Pinpart 2:Solving the vector equations
LEFT_i OA wOA sin ( ) RIGHT_i AC wBC sin gamma( ) vcoll cos gamma( )
LEFT_j OA wOA cos ( ) RIGHT_j AC wBC sin gamma( ) vcoll sin gamma( )
Solve the two vector (i and j) equations :
Given
OA wOA sin ( ) AC wBC sin gamma( ) vcoll cos gamma( )
OA wOA cos ( ) AC wBC cos gamma( ) vcoll sin gamma( )
vec Find wBC vcoll( ) vec1.996
16.425
wBC = 1.996 rad/s (cw).The pin moves radially outward at vcoll = 16.425 in/s
Vector Analysis Concepts: Always start from default assumptions, i.e. assume positiverotations and velocities. While magnitudes and signs are not initially known, all vector anglesare known from the given geometry.
fig_05_012Mathcad Examples
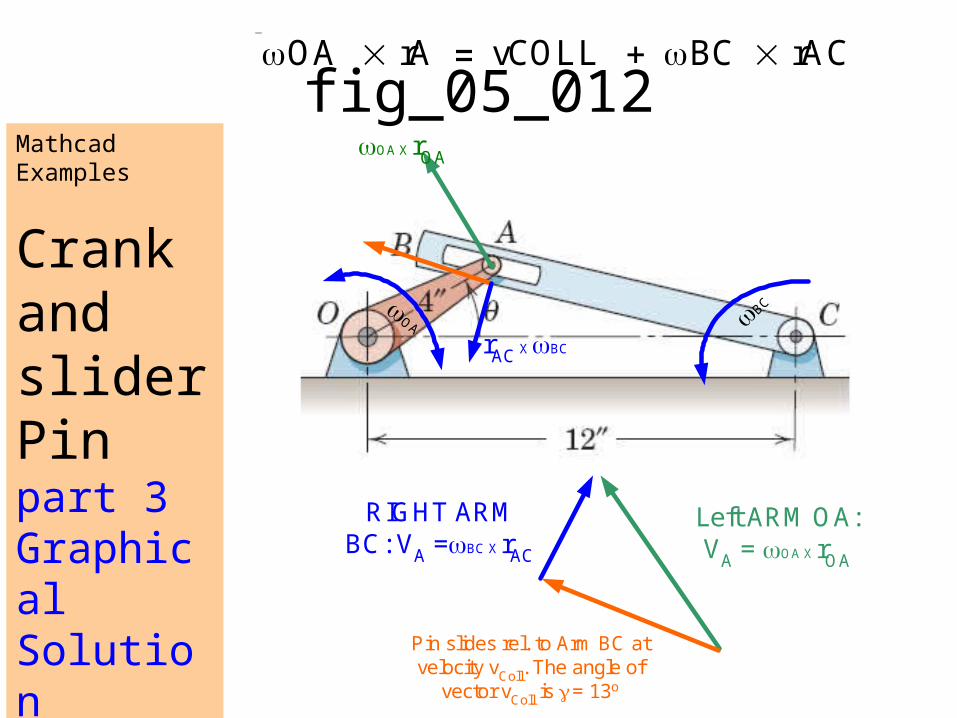
Crank and slider Pinpart 3Graphical Solution
BC
rAC X BC
OA X rOA
RIGHT ARMBC: VA =BC X rAC
Left ARM OA:VA = OA X rOA
Pin slides rel. to Arm BC atvelocity vColl. The angle of
vector vColl is = 13o
Vector Analysis: OA rA vCOLL BC rAC Mathcad does not evaluate cross products symbolically, so the LEFT andRIGTHT sides of the above equation are listed below. Equaling the i- and j-terms yields two equations for the unknowns OA and vCOLL
OA
L
B
A
i
J
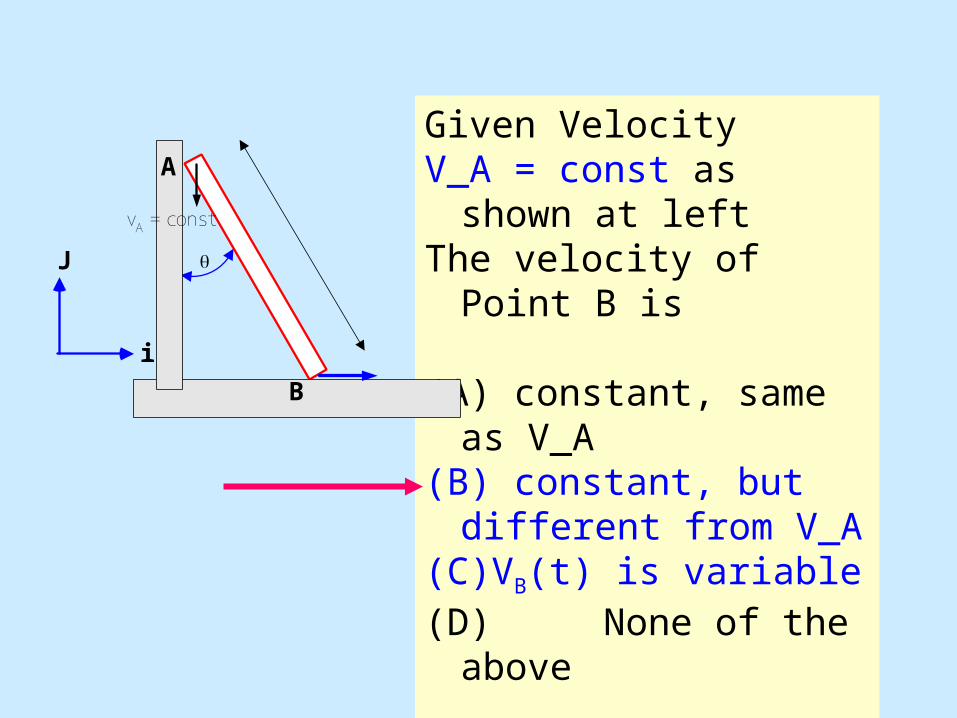
vA = const
Given Velocity V_A = const as shown at
leftThe velocity of Point B is
(A) constant, same as V_A(B) constant, but different
from V_A(C)VB(t) is variable (D) None of the above
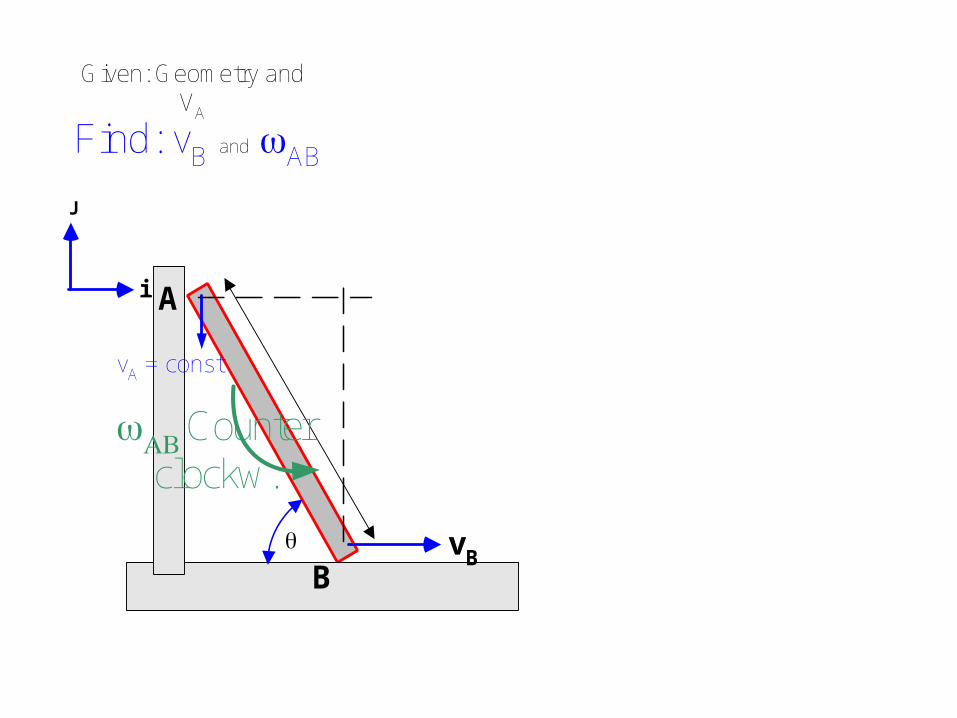
Find: vB and AB
i
J
B
A
vA = const
Counterclockw.
vB
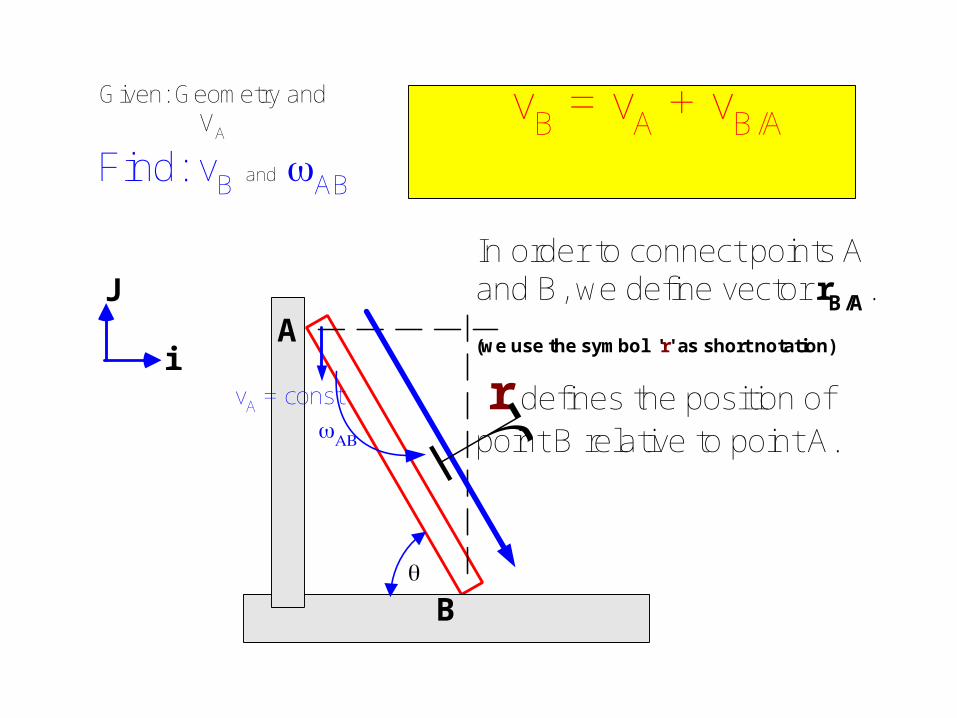
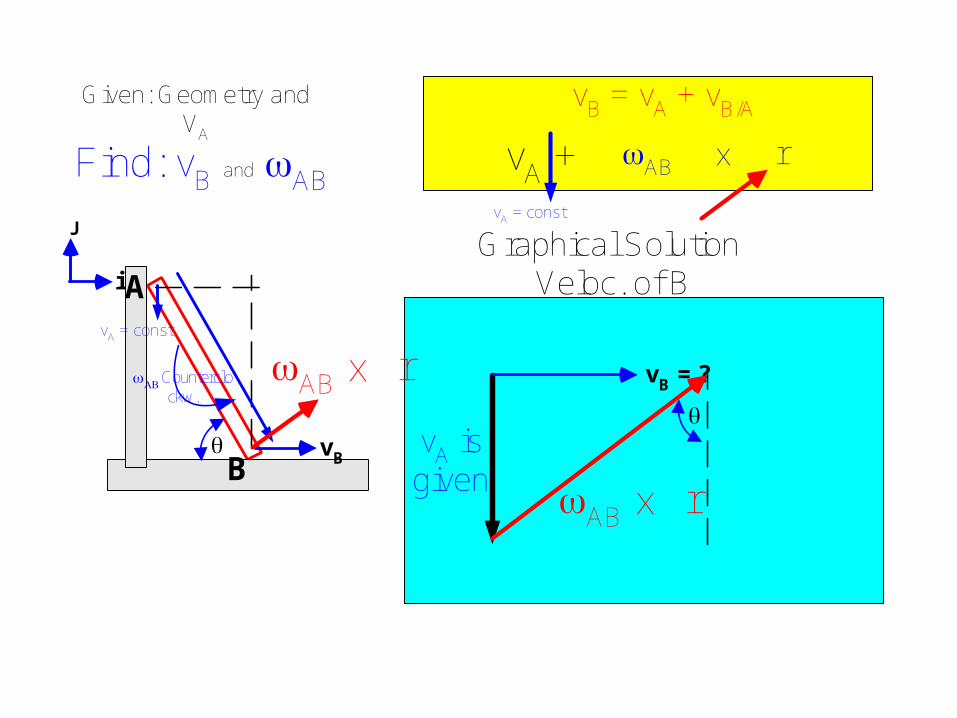
Given: Geometry andVA
B
A
vA = const
Find: vB and AB
In order to connect points Aand B, we define vector rB/A.
(we use the symbol 'r' as short notation)
r defines the position ofpoint B relative to point A.
i
J
Given: Geometry andVA
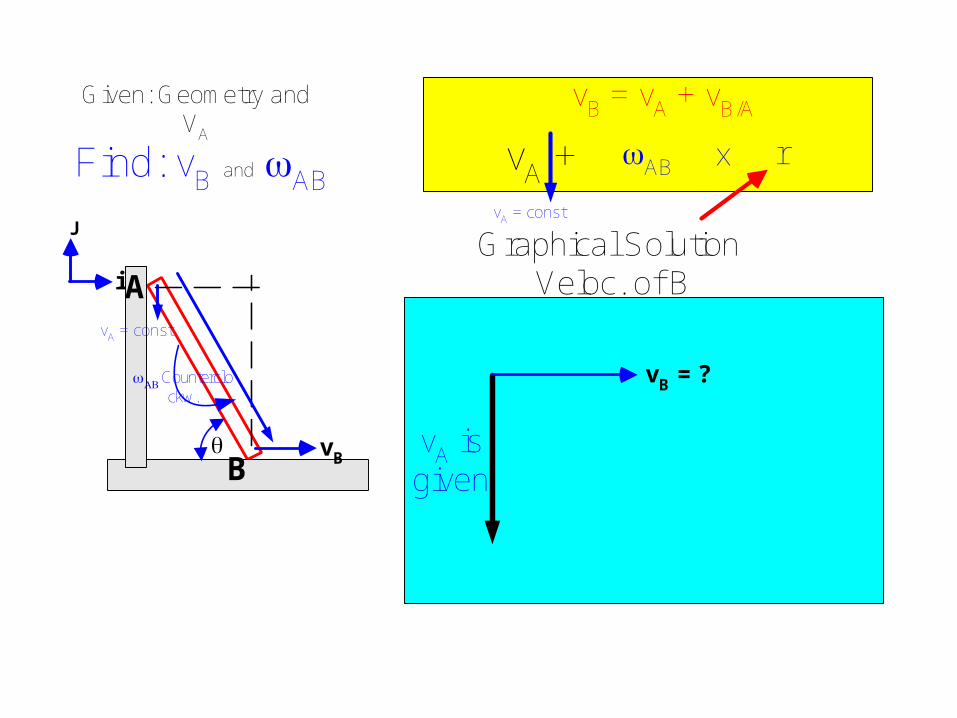
vB = vA + vB/A
Find: vB and AB
Graphical Solution Veloc. of Bi
J
B
AvA = const
Counterclockw.
vB
Given: Geometry andVA
vB = vA + vB/A
AB rxvA +vA = const
vA isgiven
vB = ?
Find: vB and AB
Graphical Solution Veloc. of Bi
J
B
AvA = const
Counterclockw.
vB
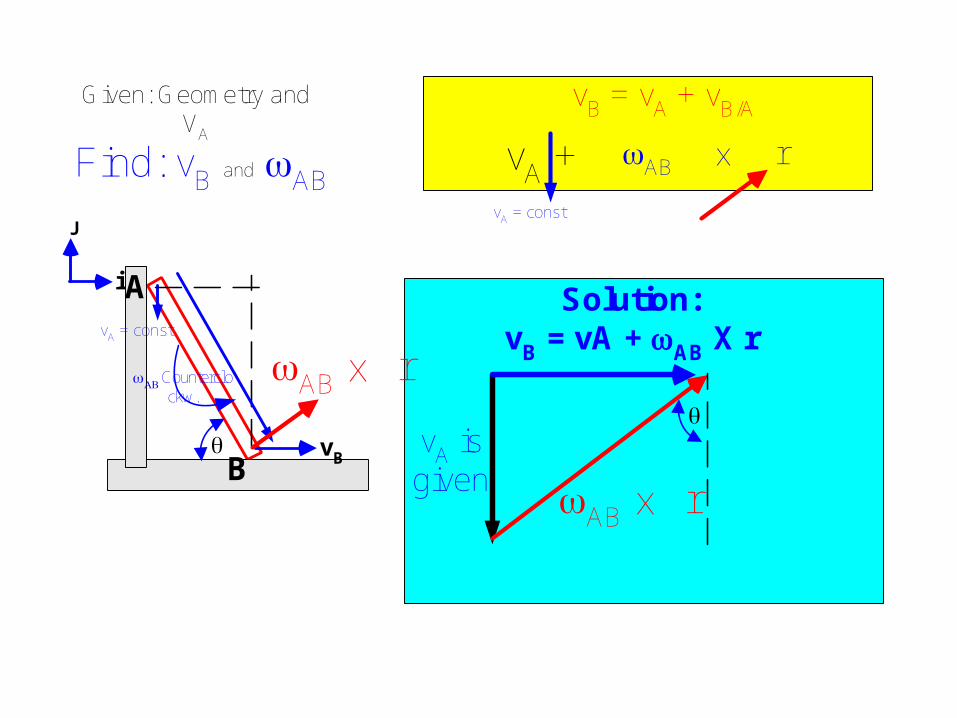
Given: Geometry andVA
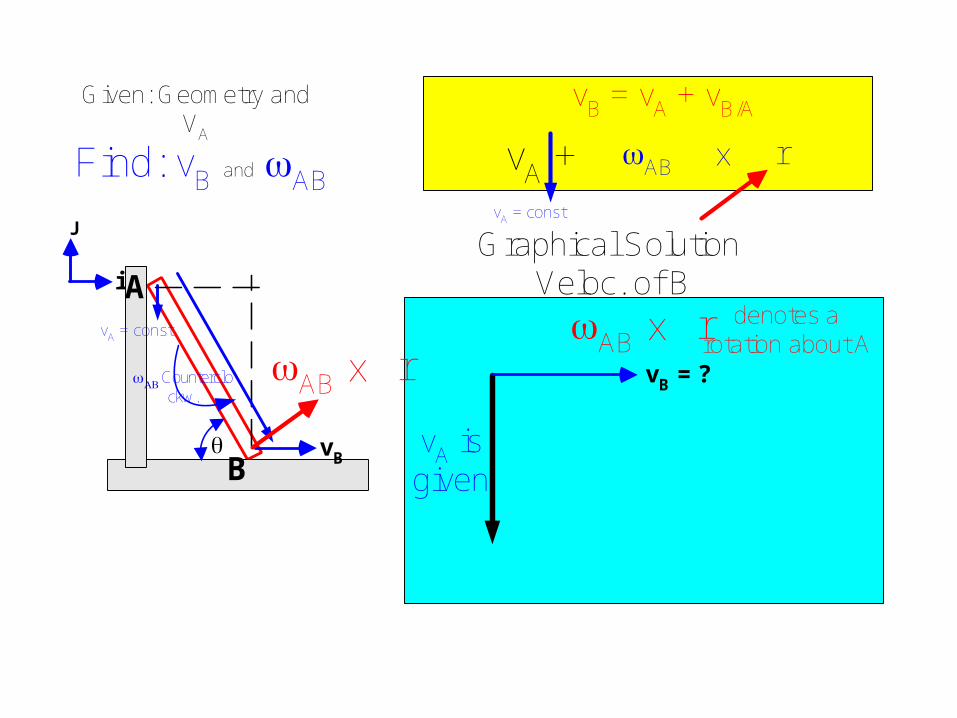
vB = vA + vB/A
AB rxvA +vA = const
vA isgiven
vB = ?
AB rx denotes arotation about A
AB rx
Find: vB and AB
Graphical Solution Veloc. of Bi
J
B
AvA = const
Counterclockw.
vB
Given: Geometry andVA
vB = vA + vB/A
AB rxvA +vA = const
vA isgiven
vB = ?
AB rx
AB rx
Find: vB and AB
i
J
B
AvA = const
Counterclockw.
vB
Given: Geometry andVA
vB = vA + vB/A
AB rxvA +vA = const
vA isgiven
Solution:vB = vA + AB X r
AB rx
AB rx
16.6 INSTANTANEOUS CENTER OF ZERO VELOCITY
Today’s Objectives:Students will be able to:1. Locate the instantaneous center of
zero velocity.2. Use the instantaneous center to
determine the velocity of any point on a rigid body in general plane motion.

Rigid Body AccelerationChapter 16.7
Stresses and Flow Patterns in a Steam TurbineFEA Visualization (U of Stuttgart)
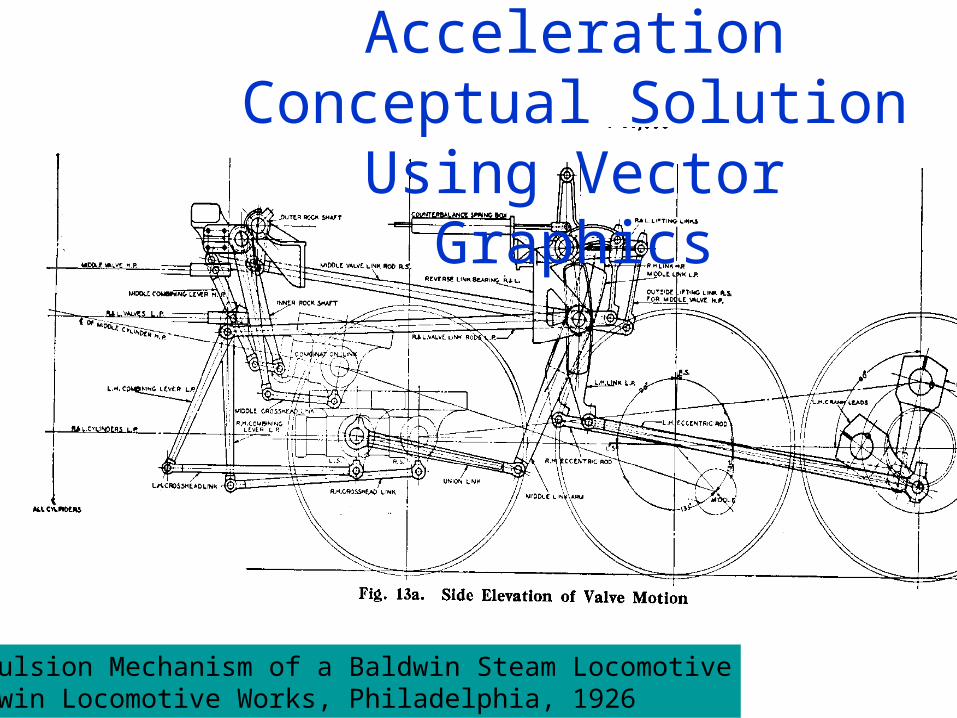
Rigid Body AccelerationConceptual Solution
Using Vector Graphics
Propulsion Mechanism of a Baldwin Steam LocomotiveBaldwin Locomotive Works, Philadelphia, 1926
Baldwin Locomotive 60,000
Q: Is this a Freight or Passenger Locomotive ?
A: We can tell from the wheel diameter.
The internal forces (accelerations) in the piston mechanism limit the maximum speed (10 m/s max. Piston velocity).
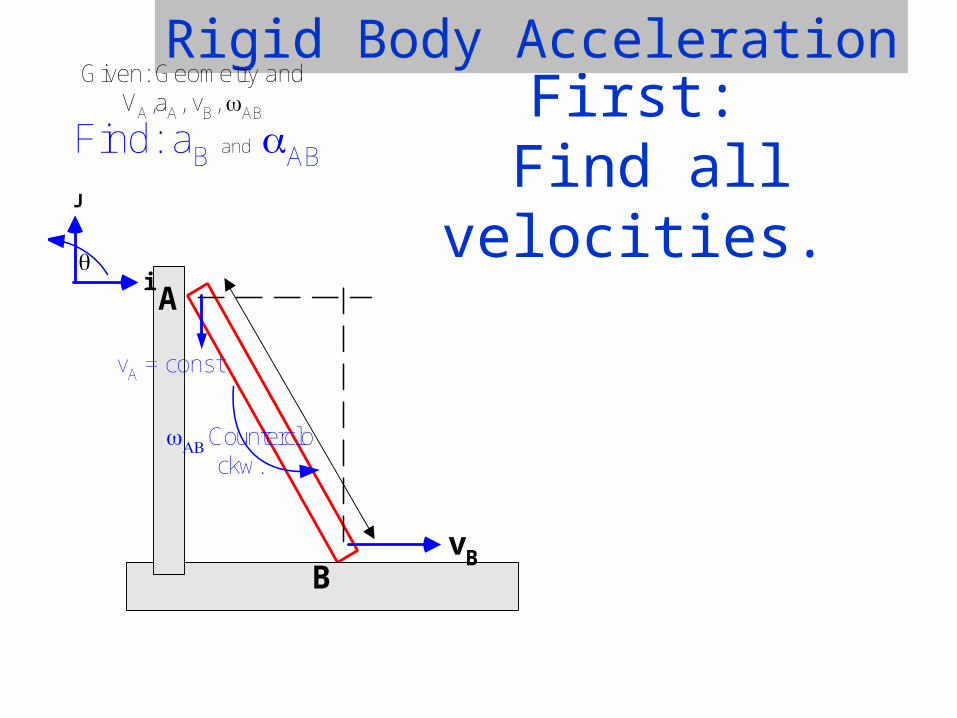
Find: aB and AB
B
A
vA = const
Counterclockw.
vB
Given: Geometry andVA,aA, vB, AB
i
J
First: Find all velocities.
Rigid Body Acceleration
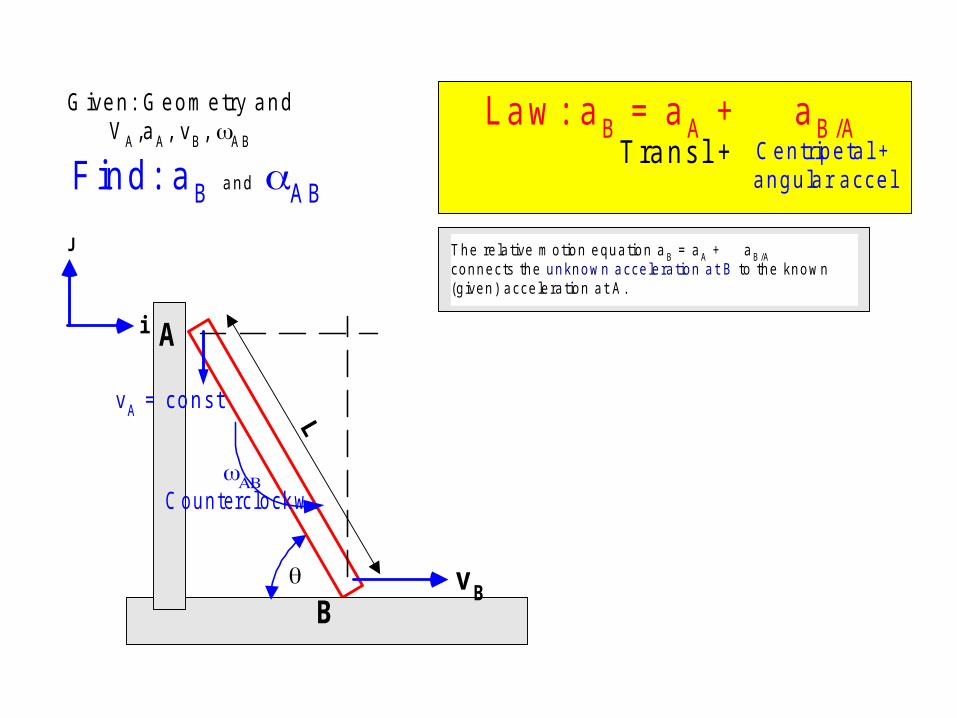
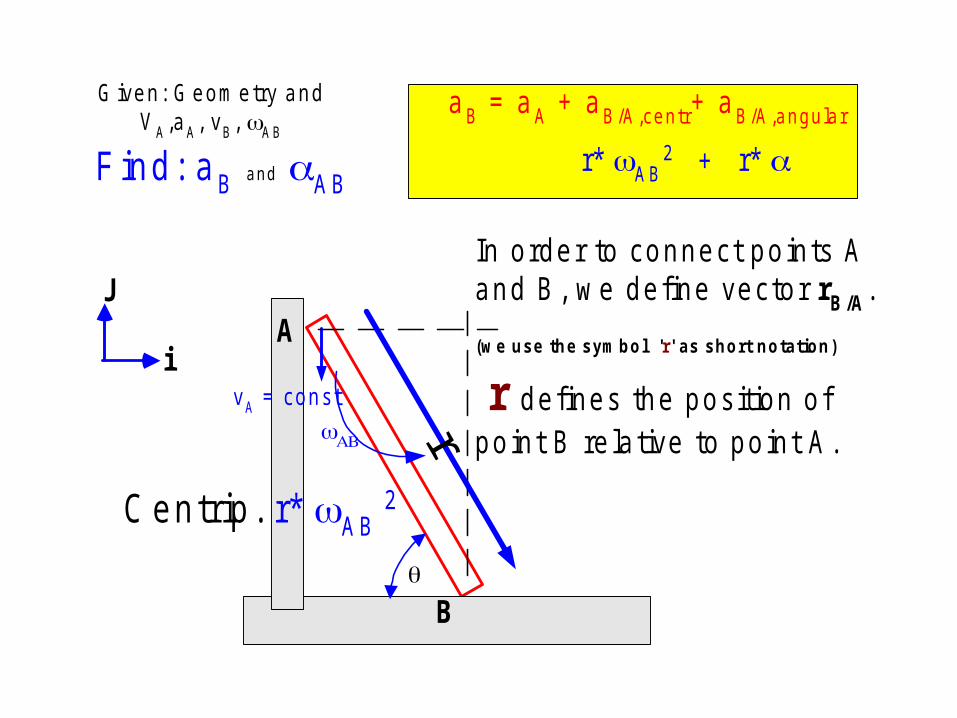
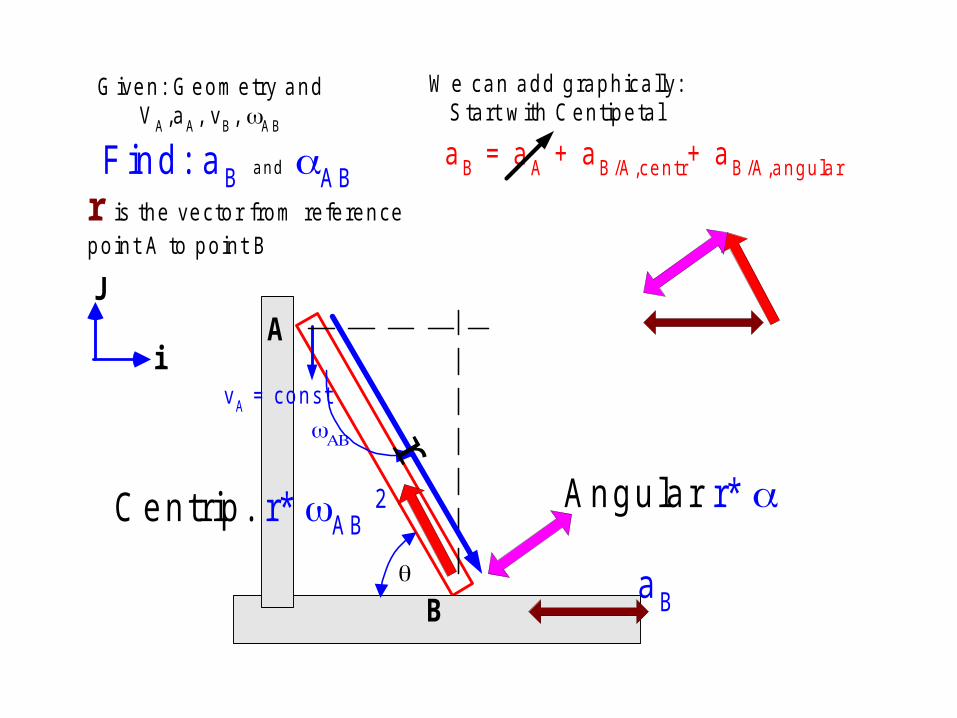
G iven: G eom etry andV A ,aA , vB , A B
Law : a B = a A + a B/ATransl + C entripeta l +
angular accelFind: a B and AB
L
i
J
B
A
vA = const
C o u n te rc lo c k w .
vB
The re la tive m otion equation a B = a A + a B/Aconnects the unknown acce lera tion a t B to the known(given) acce lera tion a t A .
B
A
vA = const
Find: a B and AB
C entrip . r* AB 2
In order to connect points Aand B , w e define vector rB/A.
(w e use the symbol 'r' as short notation)
r defines the position ofpoint B re lative to point A .r
i
J
G iven: G eom etry andV A ,aA , vB , A B
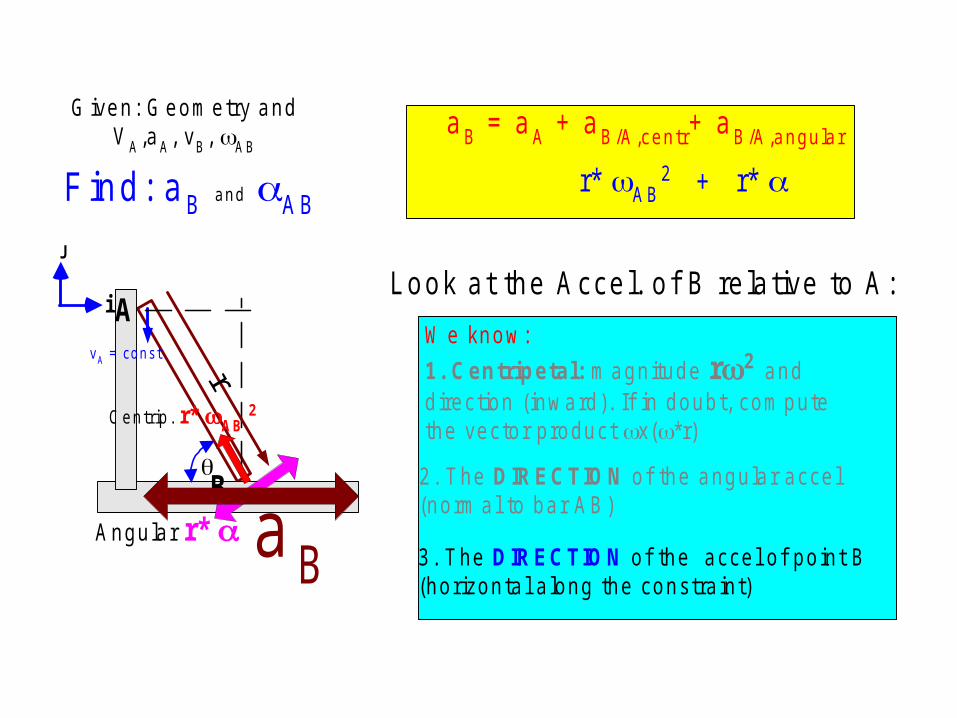
aB = aA + aB/A ,centr+ aB/A ,angular
r* AB2 r* +
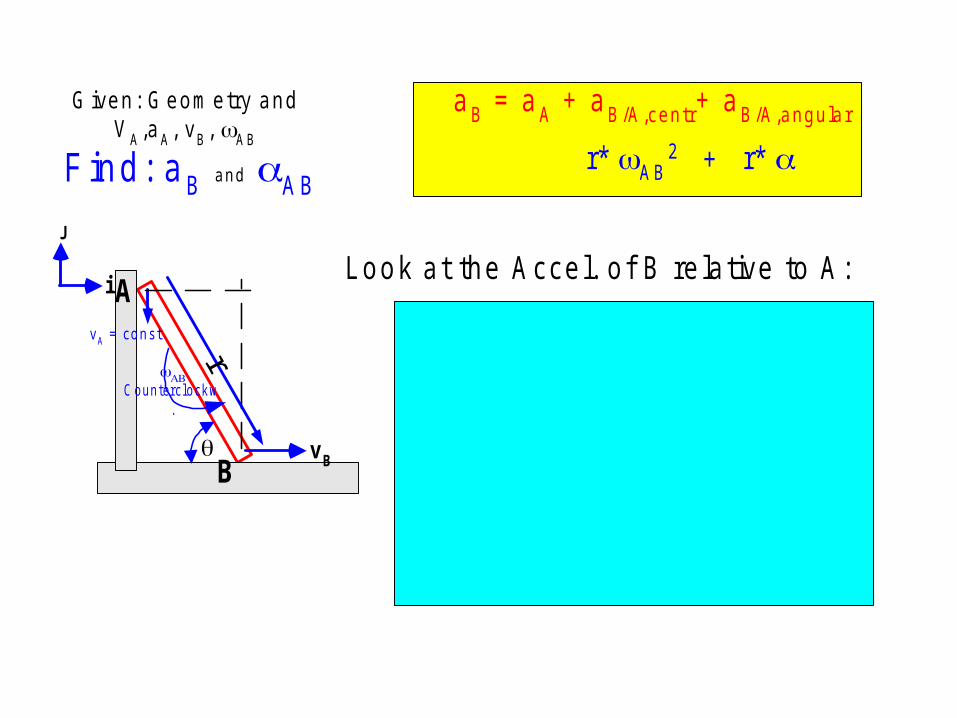
Find: a B and AB
Look at the Accel. o f B re la tive to A :i
J
B
AvA = const
C o u n te rc lo ck w
.
vB
G iven: G eom etry andV A ,aA , vB , A B
r
aB = aA + aB/A ,centr+ aB/A ,angular
r* AB2 r* +
r
Find: a B and AB
Look at the Accel. o f B re la tive to A :
W e know:
1. Centripetal: m agnitude r2 anddirection (inward). If in doubt, com putethe vector product x(*r)
i
J
B
AvA = const
C entrip .r* AB
2
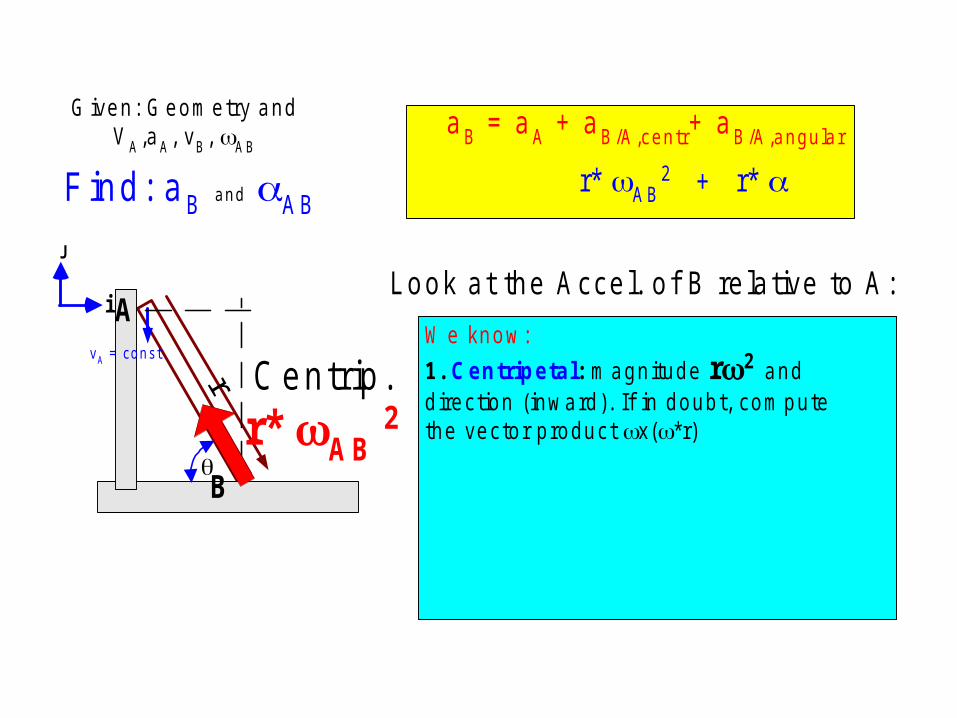
G iven: G eom etry andV A ,aA , vB , A B
aB = aA + aB/A ,centr+ aB/A ,angular
r* AB2 r* +
Find: aB and AB
Look at the Accel. of B relative to A:
We know:
1. Centripetal: magnitude r2 anddirection (inward). If in doubt, computethe vector product x(*r)
2. The DIRECTION of the angular accel(normal to bar AB)
i
J
B
AvA = const
Centrip. r* AB 2
r*
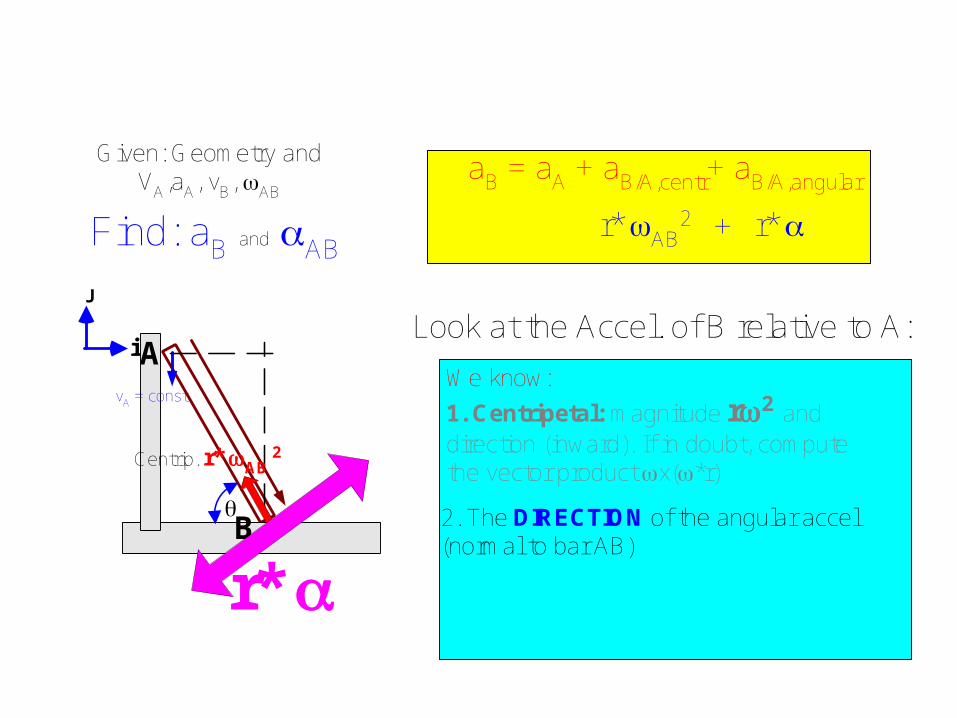
Given: Geometry andVA,aA, vB, AB
aB = aA + aB/A,centr+ aB/A,angular
r* AB2 r* +
Find: a B and AB
Look at the Accel. o f B re la tive to A :
W e know:
1. Centripetal: m agnitude r2 anddirection (inward). If in doubt, com putethe vector product x(*r)
2. The DIRECTION o f the angular accel(norm al to bar AB)
3. The DIRECTION o f the accel o f po int B(horizonta l a long the constra int)
i
J
B
AvA = const
Centrip. r* AB 2
Angular r*
G iven: G eom etry andV A ,aA , vB , A B
aB = aA + aB/A ,centr+ aB/A ,angular
r* AB2 r* +
aB
r
B
A
vA = const
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB
C entrip . r* AB 2
aB
Angular r*
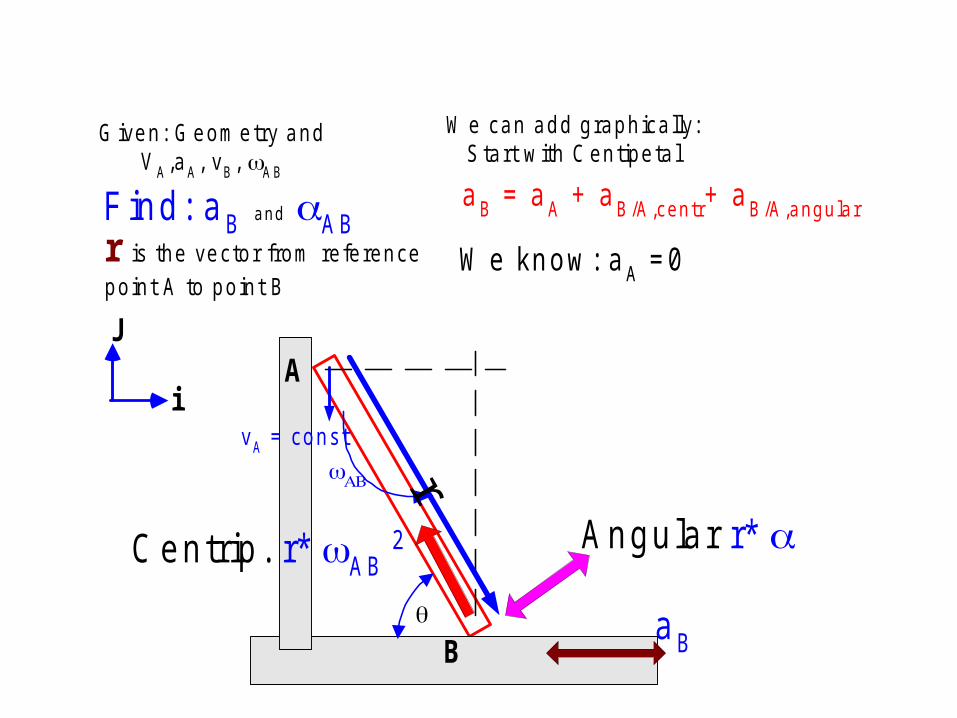
r is the vector from reference
point A to point B
r
i
J
W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
W e know : a A =0
B
A
vA = const
C entrip . r* AB 2
aB
Angular r*
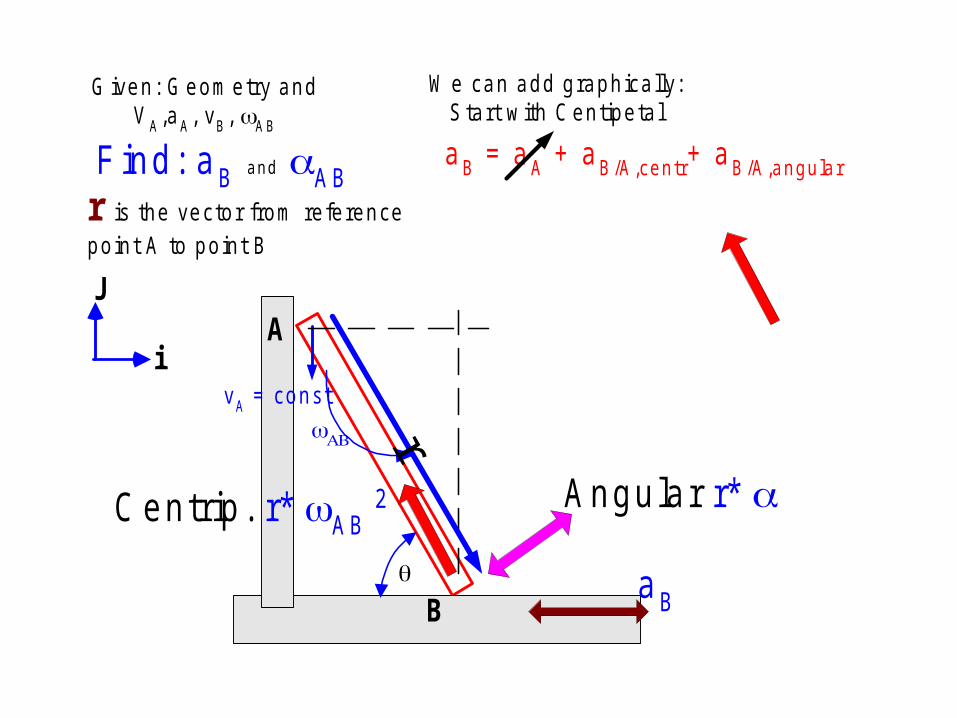
r is the vector from reference
point A to point B
r
i
J
W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB
B
A
vA = const
C entrip . r* AB 2
aB
Angular r*
r is the vector from reference
point A to point B
r
i
J
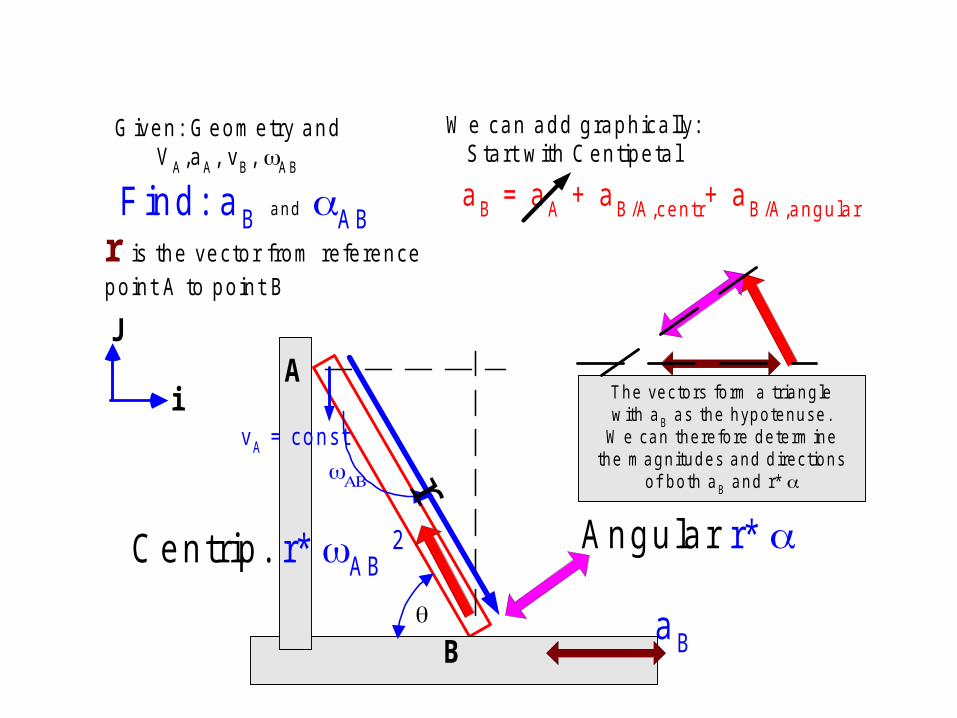
W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB
B
A
vA = const
C entrip . r* AB 2
aB
Angular r*
r is the vector from reference
point A to point B
r
i
J
W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB
B
A
vA = const
C entrip . r* AB 2
aB
Angular r*
r is the vector from reference
point A to point B
r
i
J
W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
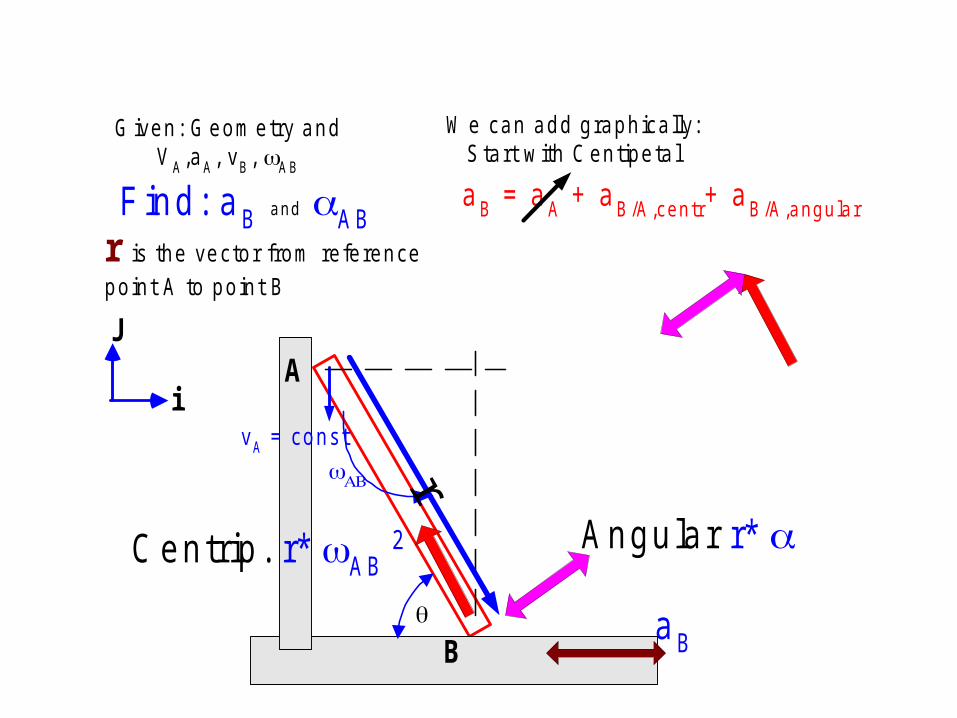
The vectors form a trianglew ith aB as the hypotenuse.
W e can therefore determ inethe m agnitudes and d irections
of both a B and r*
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB

W e can add graphically:S tart w ith C entipeta l
aB = aA + aB/A ,centr+ aB/A ,angular
aB
r* r* AB
2
Result: is < 0 (c lockwise)
aB is negative (to theleft)
B
AvA = const
C entrip . r* A B2
r is the vector from
reference point A to point B
r
i
J
N owC om plete the
Triangle:
G iven: G eom etry andV A ,aA , vB , A B
Find: a B and AB
A
i
JAB
B
D
(t) = 45deg
(t)
vD(t)= const
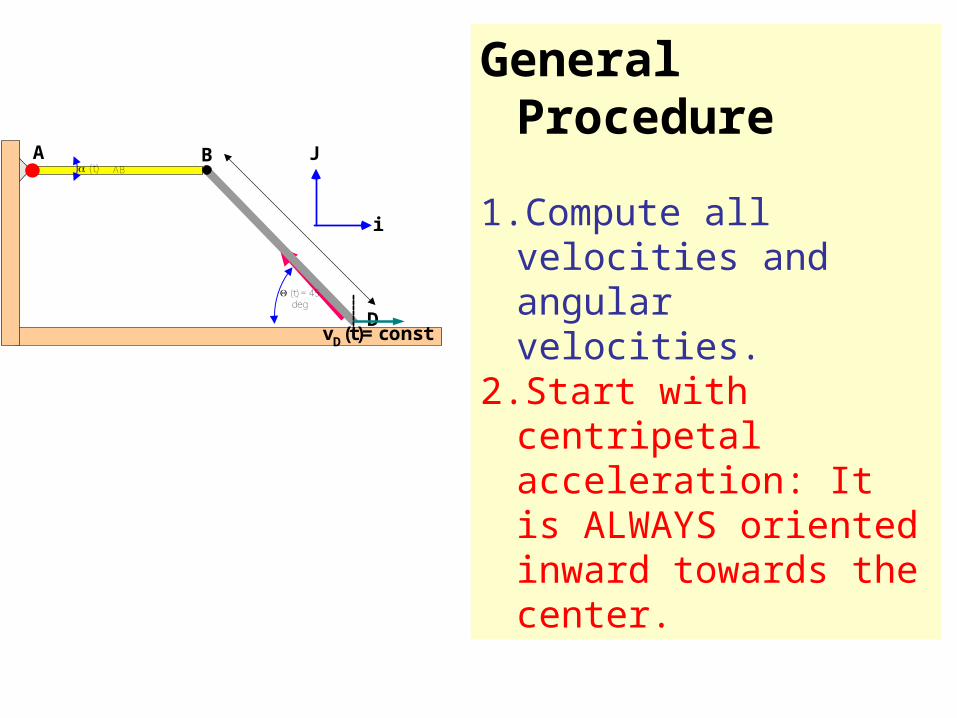
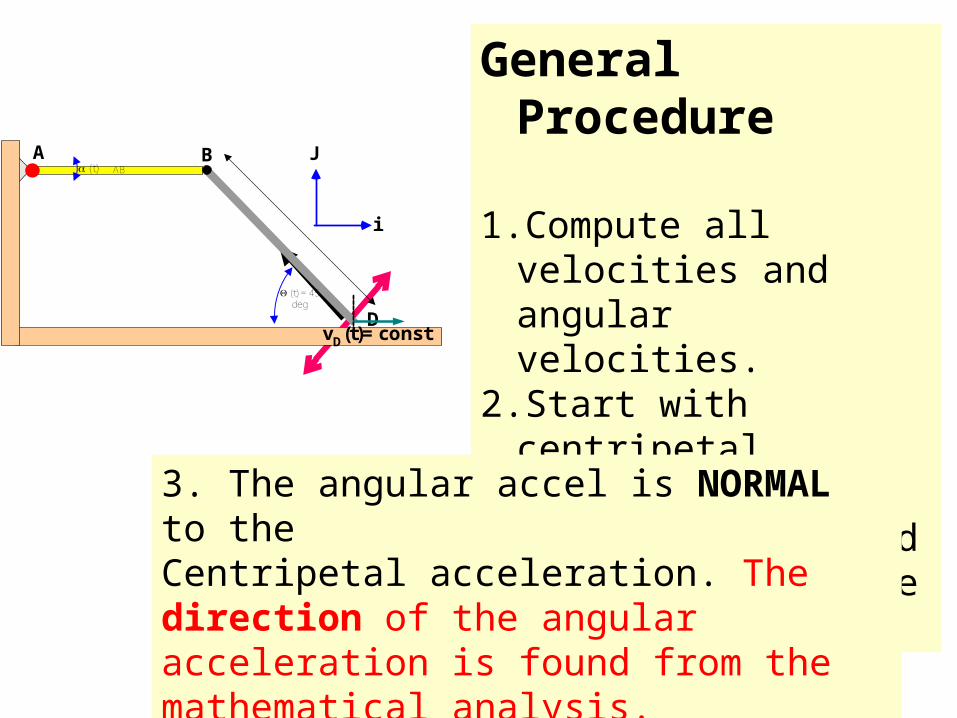
General Procedure
1.Compute all velocities and angular velocities.
2.Start with centripetal acceleration: It is ALWAYS oriented inward towards the center.
A
i
JAB
B
D
(t) = 45deg
(t)
vD(t)= const
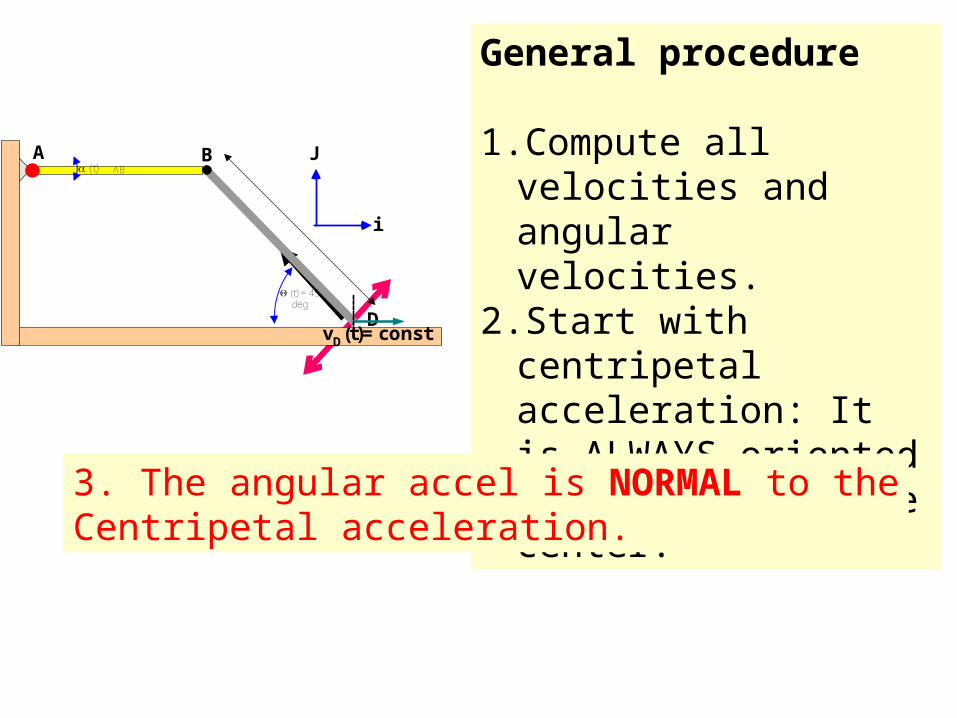
General procedure
1.Compute all velocities and angular velocities.
2.Start with centripetal acceleration: It is ALWAYS oriented inward towards the center.
3. The angular accel is NORMAL to theCentripetal acceleration.
A
i
JAB
B
D
(t) = 45deg
(t)
vD(t)= const
General Procedure
1.Compute all velocities and angular velocities.
2.Start with centripetal acceleration: It is ALWAYS oriented inward towards the center.
3. The angular accel is NORMAL to theCentripetal acceleration. The direction of the angular acceleration is found from the mathematical analysis.
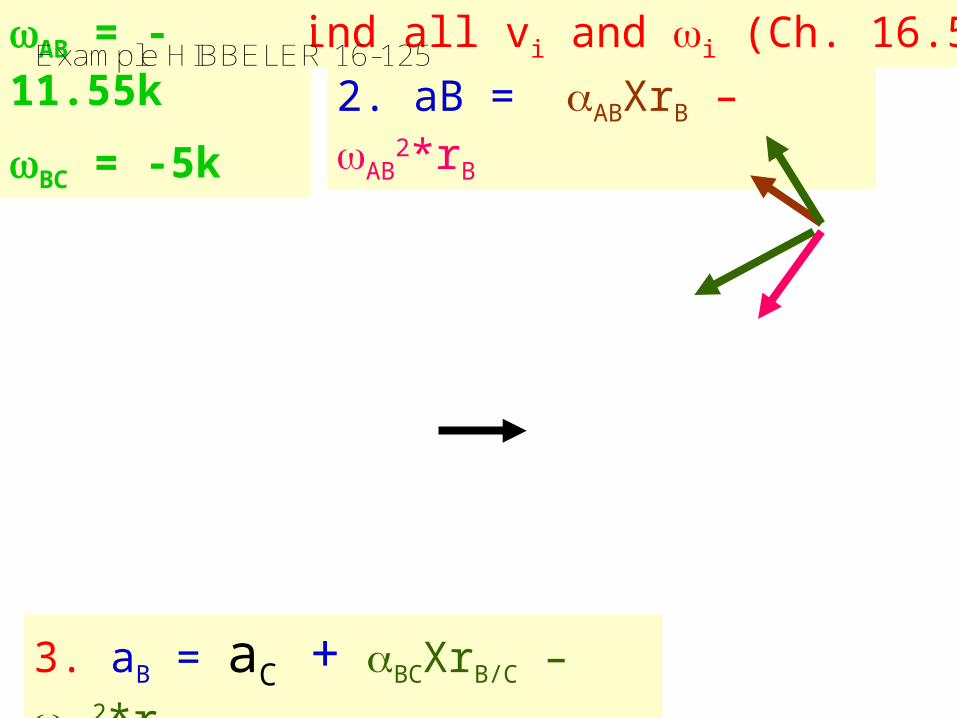
Example HIBBELER 16-1251. Find all vi and wi (Ch. 16.5)
2. aB = aABXrB – wAB2*rB
3. aB = aC + aBCXrB/C – wBC2*rB/C
wAB = -11.55k
wBC = -5k
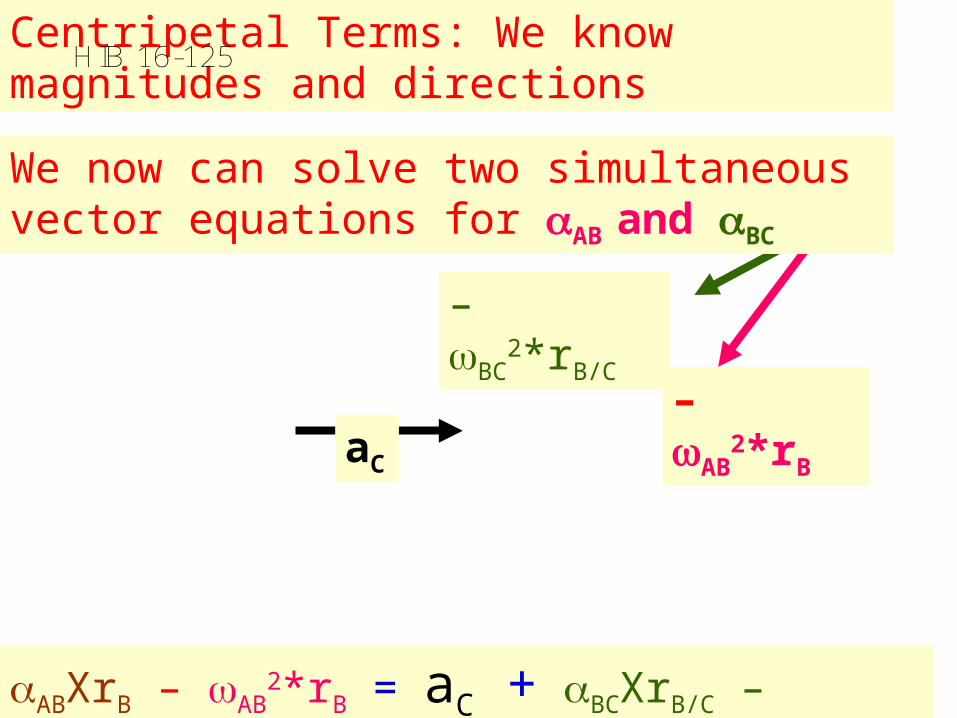
HIB 16-125Centripetal Terms: We know magnitudes and directions
aABXrB – wAB2*rB = aC + aBCXrB/C – wBC
2*rB/C
– wBC2*rB/C
– wAB2*rB
aC
We now can solve two simultaneous vector equations for aAB and aBC
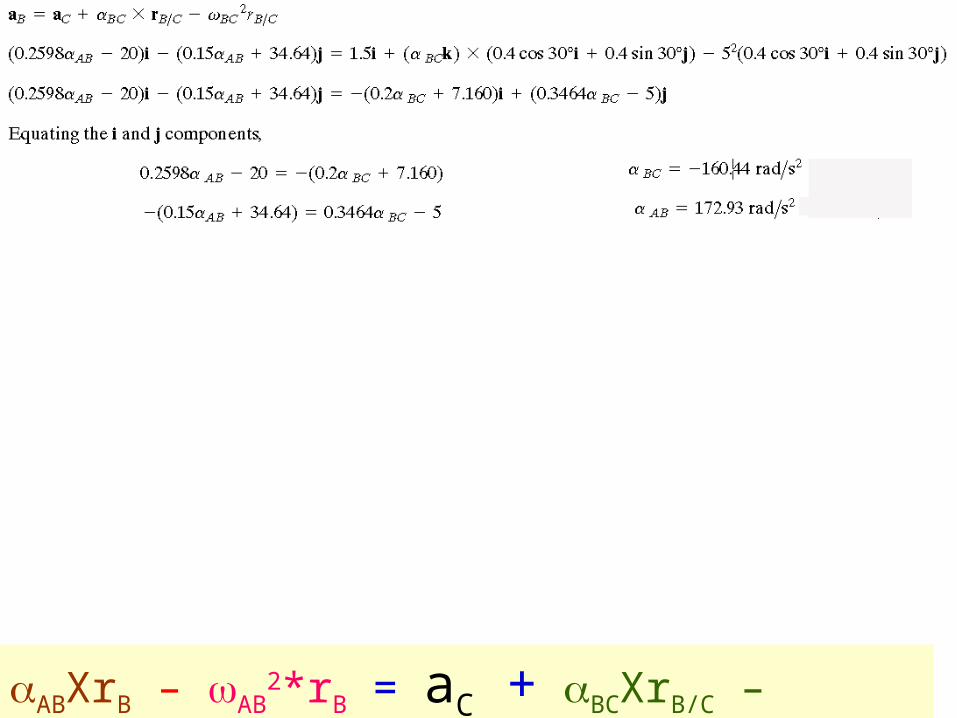
HIB 16-125
aABXrB – wAB2*rB = aC + aBCXrB/C – wBC
2*rB/C
fig_05_11
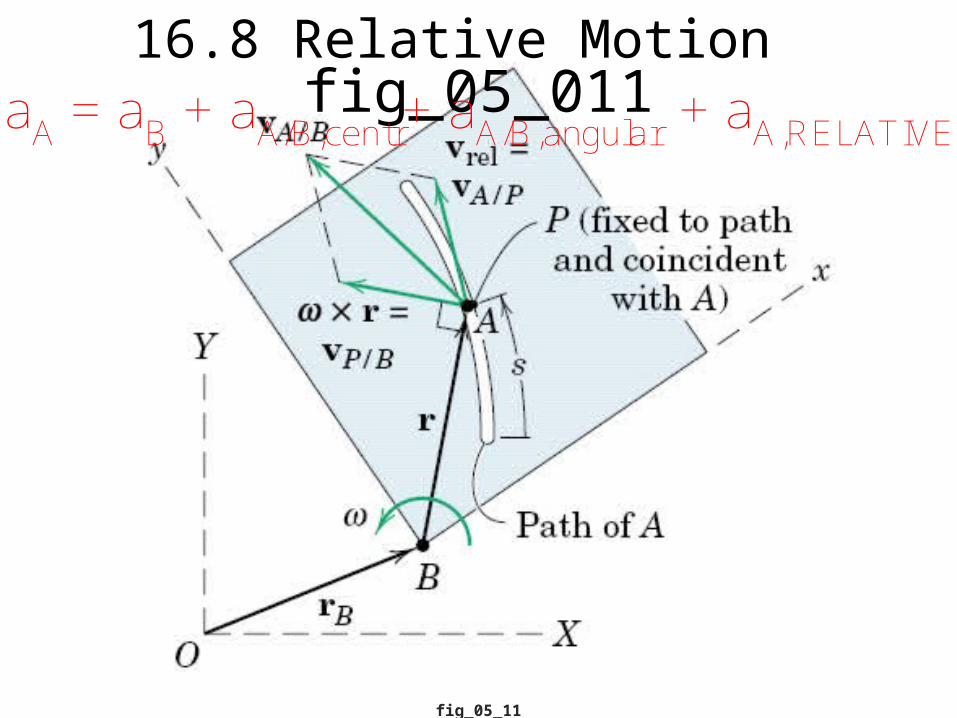
fig_05_01116.8 Relative Motion
aA = aB + aA/B,centr+ aA/B,angular + aA,RELATIVE
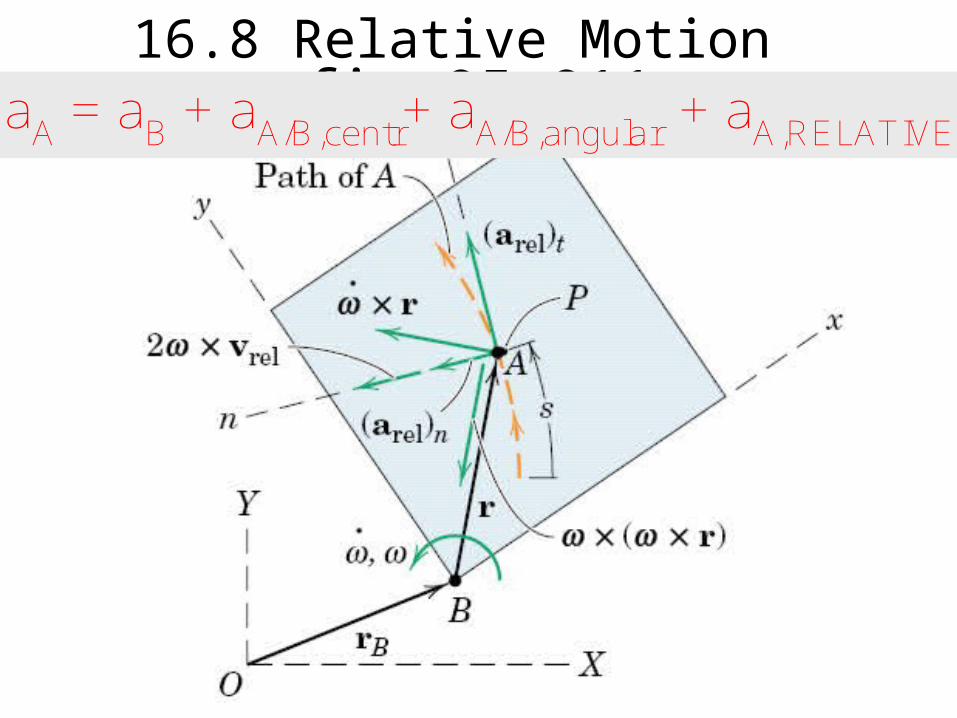
fig_05_01116.8 Relative Motion
aA = aB + aA/B,centr+ aA/B,angular + aA,RELATIVE
Midterm #2 Preparation
Stresses and Flow Patterns in a Steam TurbineFEA Visualization (U of Stuttgart)
Posted:• Collection of Problems• Practice exam #2 • Powerpoint Slides• Four questions will be on
Chapter 16, 2Q. on Ch. 14
Related Documents











