HAL Id: tel-00204509 https://tel.archives-ouvertes.fr/tel-00204509 Submitted on 14 Jan 2008 HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci- entific research documents, whether they are pub- lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers. L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés. Analyse d’architectures, modélisation et commmande de générateurs pour réseaux autonomes Nicolas Patin To cite this version: Nicolas Patin. Analyse d’architectures, modélisation et commmande de générateurs pour réseaux autonomes. Energie électrique. École normale supérieure de Cachan - ENS Cachan, 2007. Français. <tel-00204509>

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

HAL Id: tel-00204509https://tel.archives-ouvertes.fr/tel-00204509
Submitted on 14 Jan 2008
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Analyse d’architectures, modélisation et commmande degénérateurs pour réseaux autonomes
Nicolas Patin
To cite this version:Nicolas Patin. Analyse d’architectures, modélisation et commmande de générateurs pour réseauxautonomes. Energie électrique. École normale supérieure de Cachan - ENS Cachan, 2007. Français.<tel-00204509>

!
" # $$ %
!" # $ %&' # (' " ) " )* # + " ) %*" , # - & ./ + # - & . # - & 0 , % # - & )" %!* ( +, &
,1 + 2 " 2 %" 3456789 & - - 9 6:5;< + -. =>?


0 '& ,, 9 # @ A - - 9 A& - 1
0 ( 0 , %9 # @ A%- (' @ A - 9 . & 1- - @
& ( @ + ) %,9 # --B - A - 9 A@ A CD - A& - - B 1 (9 B @ 1 - E C,- - FD 1 1 ' @(
% - & # & A C -AD 0 - - /)9 EG - # +" -A%& H9 ,"F9 ( -A- - 9 - - A H& /"9 - )"!9 +, % - - - ,9 @ 1 & - BA -A- - ( - 1 % & - @ / ( -A. 9 - @ & -A 1 -A = ? A E 1 - 0 "/9 1 0 /%,"9 - - A - IA & A. -
J9 B . 1 A - (' BA A - ' - @ 0 @ , F 9 EG - # @ A%9 1@ & - - - - - ( - 0 . 1 ( BA & -A( ( - A% B F9 - ,),, ) )% 0 A1 - 1 /")%"",9 %"9>& + % ,J +") & BA -A - - & @ - 1. B K
J9 B @ 1 - 9 9 (9 -# 1 1 (

5


:

& " &&
88 - 1@ L ". . 1 88
85 % 8;
8; - A & 8:
8;8 " # @ # J. 83
8;5 " # @ # &1 58
8;; " @ 58
8: - A- 55
' $ ( ($)" *# '+
58 . ( - ( @ # J. 5M
588 . 5M
585 F -A - - -. 5M
55 % -@ - - ;4
5; - - - ( ;;
5;8 ;;
5;5 '@ - ;:
5: - & - J( - - ;<
5:8 1B# - - - ;<
5:5 J( 1 ;<
5:; '@ - ;6
5:: A( - - :4
5:< " - # - - :4
5< ( NG- :8
5<8 / ::
57 ) -A - - :7
, $ # ( ($)" % " " -.
;8 / ' @ . (1 :6
;5 / ' @ ( :6
;; ' @ -1 . =? <8
;;8 - <8
;;5 % - <5
;: - # &1 <:
;< ) -A <<
;7 " @ <M
<

;78 / ' <M
;75 / ' @ ( <M
;7; <6
;7: - @ <6
;M 78
- $ /0
:8 - - # = ? 7<
:88 '1 1 - 7<
:85 77
:5 > - - - 7M
:58 =? =? 7M
:55 =? =? 73
:; # - - 76
:;8 . O. 76
:;5 . 76
:: # - P M4
::8 . O. M4
::5 . M4
::; - - = ? M8
:< > . -' M5
:<8 & M5
:<5 ) - -@ - @ M7
:7 FJ - -@ M7
:78 -@ - - MM
:75 > " @ M3
:7; ( 35
:7: -@ -A - 1 35
0 $ " " 1+
<8 1 - A - -@ 3M
<88 / 3M
<85 - 33
<5 - -. 33
<; -@ (1 - - 65
<;8 -( ( 65
<;5 # - -@ & - # 65
<;; - ( & 6M
<;: - ( - 66
<;< -@ -A 844
<: 1 - - 845
<< -' 84;
<7 "( NG- - - 84<

/ $ "% &2+
78 - - # = ? 84M
75 # - - 846
7; # - P 846
7: > . -' 884
7< -' =? 888
77 1 -@ -A 885
7M - - ( @ 88:
7M8 - -A 88:
7M5 - - - @ -- 88M
7M; - - - @ /) 858
+ 34 4 ) &'0
M8 (. 85<
M5 , / # - =/? 857
M; , ( ="? 85M
M: - -' 856
M< -' ( 8;8
M<8 , & 1 8;8
M<5 , & ( # - =/? 8;8
M<; , & ( ="? 8;8
M<: " @ - 8;:
M<< " - - 8;7
M<7 " @ - 8;3
M7 - )-/ 8;3
MM 8;6
1 44 % 4 &-,
38 , - & & - -@ 8:;
35 "@( -A& - -@ 8::
3; / " 8:7
3: & - -@ -' 8:7
3:8 F- . 8<;
3< F -A ' - - 8<:
3<8 - - ( 8<<
3<5 - -& 8<3
. 44 &/0
68 - & - . 87<
688 - 87<
685 " - - 877
68; - - 873
68: " - 8M8
68< " . . 8M8
687 8M7
65 - - - . 8M7
658 " -@ 8M7

655 - 8M3
65; '@ - - 8M365: 8M6
65< " . . 835657 835
&2 44 &10
848 - - ( @ # &1 83<8488 - 83<
8485 "( - -A. 83<848; "( - A - - 837
848: " . . 837845 - - ( @ 833
8458 - @ -- 8338455 - , 865
&& " '2,
888 ) - &. 54;885 & - 54<
!"
#) '2.
8 ' -( & (. 5465 ' J @ A 546
; 1& -& 546: ( 584< & @ 588
7 & @ - - -. 588M & @ 588
5 (4 4" '&,
)8 # 58;
)5 58<); - 58<
): " -A -A '@ 587):8 -1 587):5 1&1 587
"$ ) " '&+
8 ( 58M
5 58M58 ' @ 1 - ( 58M
55 @ -AEG 58M; & 586
;8 & - C-D - ( 586;5 & -A - -A 586
: ( - - 554
:8 E - 554:5 # ,2 - ( - & 558

< 558<8 / ' 558<5 - - 55:<; C-D 2 55:<: - 55<
7 - - @ - 55M78 - 55375 - - 5537; - - ( 2 5;4
M 5;8

84

, ( -A(9 A = -A( J. 19 ?9 B 1@ #- A J -(4 = --? Q % 44R
L " L " #9 E & 1-& -. (L @ # J.L @ # &1
@ - # - &1 - A( #9 -S &(1 - @ . ' -
, . @ S - -A - @ J. # - >9 . # (& - @9 @ A(9 -SJ( . ,A+ - - # @ # J. 9 - E - - A( -A& -A1 # & - # J - - ( - = #1 ? 9 ' - -A (- &( @ L L = ( -& ? A1 - S9 - # - B - @ ( - ( -(- C -&D9 &@ - - A&
& (@ - A - 9 1 - = - ? . 1 & ( - @ T -@ - &( -& #9 - - & - & ( - - - - - -A( -Æ - 9 A 1B# 1B#
L ( #- -A#L 1@ - J1 &L ( B 1 = -2-12?
!"""
88
@ 9 - - . 1 = - 1- -A& Q,) 67R . ?9 1@ - @ A& 1 (@-& @ - # @ - # (1 - A -9 E & # (1 - ' -A 9 . # ( @ & BJ - - @ 1- ( #9 - - - AJ - & - ( @ - > A(9 & 53F ,A( - - @ ( #= ? @ :44+U 88<F @ A Q 44R %# & @ - > =<4+U? - . -A ' =74+U?- @ - - & - - - # - @ 1- -A & 9 - ( 1 (@ - B - - &
Applications civiles :- Gros porteurs : Airbus, Boeing- Petits avions : Dassault
88 L , & & - A
) A C - D A - - &9 -EG - - (- - - ( - -. . - @ #1 #1 = & < 5<PF? - (-- > 0 /- ) + )746 - - 387P( =831? - 8<;3P( =;;61? % ( - 2 1 @ - - - ( @ J( 85 - - - - (- - - & =&87PF2P(?

! "#$ ! %
0 0.5 1 1.5 2 2.5
x 104
4
6
8
10
12
14
16
Puissance (en kVA)
Mas
se (e
n kg
)
Nuage de points de générateurs réelsRégression linéaire (tendance Masse/Puissance)
85 L - ( # - = ?
, - - &9 & - @ - - '@ ( # - A( '- Q" 68R QI% 6;R Q> 6:R . E & 1B# - - @ A( A- A 1 = - #? @ - - - - ' & & - - -& -A&=-9 #&9 ? - # - A -A( '-9 1 A J1 &9 - #1 =# - '-? 9 A&(-A ( Q, 47R ,A - - - - & 1 - & 1 ( - - - A. - ( >" - J @ . & AJ - &9 - 1 @ =# 0 - 1 544: L ('?
L )(2$' '@ -A(9 # 9 & - L + U '@ - -L ,1 =E1(9 J ?
.& - ( -A @ J( 8;

&
Frein A380
8; L I -A& - ( >" =& - 9 # @ --A;34
! "
, B - & @ A - =/;? ( - 9 1 - A& # - -9 ( -A( -S@ 1 - S - & - ' C( &1D =( '- Q 4;R9 Q%, 45R9 ? S9 - - A&9 & - ( - @ B - -A & @ (--& 11 ( - 1- 9 & -( = ? A & - & -A A - &1 -A - '@ @ -A =- 1?9 A . @ ( A O # & - = # - A- @ - & @ A & - # AS- & - - ? #9 - - - (- - B - -A & - ( =' 1 ;34?
L F - @ 678P2L 1 - :L @ -A 74P =-@ ""' 644 # J( 8:?L - =- - (-? 87L -A /; 8<4PFL 1 - A& 744PF
- - A& - @ - 8V - - =- # - - - & - # @ 8 -A # - (1 - - 1- ( # @ 8?
@ # & =>( 88? & A- . @

% ! #'! (() *
8: L " ""' A1 ;34

8< L / ' @ (

% ! #'! (()
, - /; &( 1 - 1 S9 A( -A - - ( -- . & - @ A # # & S9 (9 - @ J(8<9 - - -A1-9 ( -A ' @ =? ( # # , -& ( -J -A @ & -.@ ( ' @ - 11 A- - A- & , 1 -=-- ? A- -A @ =@ - (? L ' @ - 11 L @ 1& -A1 - 1 1 . -A . - ( ,A1 -. ( - -A. 1 -A1 1 A- = - ? A. - - - - @ J( 87
87 L . 1 -A1
A 9 - & . & - & (
L A1 ;34 @ # &1L ,P- >55 " @ 5M4F =-- ( A @ - 1 "+77 W ( )(PP' # J( 8M?
-. ' - &( & E . @ # J. & -A. # #1 - 9 #1 -A' - . &
-A1-9 - # @ # J. # B-A = 1J -A -A&?

RAH-66 ComancheElectric Power System
8M L / - 1- 5M4F - A @ = + --?
- # @ # &1 .- @ -( # - -. ,A' S = 5 ;? - &- 1@ - , #- - 9 -A - - ' S9 1 - # - & -A1 = & . - @ . - 9 E -A & - ?
## $ % & % '
, 1 - ( -A( # - # = ? &1 -. (
L ( & -A & 9L ( 1 -
&(1 - @ - & - J. @ - & &1 - 1 9 ' = /; A? # # J.EG - @ , - # 1 =? I @ J( 83
&6,6&6& 7$$ % "%
9 - - - @ -A( = ? , @ - - @ & -A J , = ? & -& E A- -A 1 ( 1 - @ #9 A -9 - @ . - ( - 1 88 ( 1

% ! #'! (()
83 L I ( - - &
8 4" 8 "$
' - - =@ --?
-A- - -
@ &1 - -
88 L ' - - # - ' - (

+
4) &6& !"#$% "#$& ' (&( ) * +
, " ) ! "# %
, " !"-%, " !"##%
86 L / @ # J. & - &
A -A # @ # J. & -A & =-? - @ B -.@ & =-? - . @ ( A( -A @ # # - - -A1 - @ & & & 9 - EG - ( -A(9 J( 8849 - # - & &- 1@ - E - - - &-& E A1B -A @ (@ S9 - 9 A # - # - - A. - ( @ @ # J. 1 &-A # - -(- Q, 47R
&6,6&6' 7$$ " 4"
A. #- -A 1 -A( - ' A( - ' @ -1 -A1 # - ' & -AEG &1 S9 -A - @ 11( 1 - ' 9 - ' '9 .
X Y =88?
@
# $ % & ' ( & ) & *+ $ "",

% ! #'! (()
L - L - L Y & - - L 1 - - E -
- @ - 9 ' 1 - A- @ - & - & # J. @ Q 471R
X Z Y =85?
- - ( -A( @ # J. @ &&1 % ' @ = ? - 5
## $ % & % (
, # @ # &1 1 - @ A -A ' - &(1 - A - ' - 1( A --. & =-2-? 9 A-A - 1@ @ A 9 - = - ? - & -=& - &? 9 -A -9 1 . & - # - -A #9 # - 9 A -- - E - - A -A ' @ & - AE -A E - A. &A - 1 - ' @ - 119 & .
L ( ' @ ( -B@ - L ' @ -1 . =? -B@ -
J & - . @ # &1 A. - 1@ A 1 -A - -. ( # ' 1( @ & -. 1 @ E ( - &9 A 1 = -A -( - 1? (- 19 1( -A -. ( E -. . & -A @ & 1 -2- & - @ -A @ 9 . -S
## $ &
(( - ( -9 @ E & ' -A. - . @ # -S =1? & E @ --S - @
L @ - -S ( =- -S (?L . & - # - @ = E A -?
, - - A ( -A - - # ' # Z - Q 47R9 - @
- . & ' & ( / 0 '0#%( 1 /

J( 884 9 @ - A- @ - ' 1 - &9 - # - -(- # 9 & - A( # =- -A- - - 1 - - @ &1 . ?
Chargesdu r seau
courantcontinu
~
=
Redresseur/Onduleur(diodes ou IGBT en fonction dela machine)
R seau DCN phases
Machine (enfonctionnementg n rateur)
Turbined entra nement
Commandes
possibles
884 L / @ (
#
, - & - & @ - A - A - & - -9 ' - (- # -J S - 8 - 9 C' -AD L - ( # @ # J. 59L - ( # @ # &1 - ( ;
-. - 1 - E . -.# -A . - -. . @ # &1= @ ? ' A - -@ -. -
1 @ - ( - # - 1 & - - ( - ( &- - - 5 - -9 C- -'- (D # -. - - @ ' @ 1 =? ' @ 1 . =?, - ( - & L - - :9L - - -@ - - <9L 7 @ - S ' -A J . 19
' =? ' =?9 -

& #! #'" %
= M? @& & & # - - 9 / # - =/? Q+% 6<R " ( ="? Q) % 44R T - ( - ./0 Q* 78R9 - A( A- ( . Q" ) 481R9 ( &, E - - . '@ - - @
; -@ - , 3 -( -A&- -@ & 1 - 2 = & " ( ? , - ( E - ( - - @ - 6 84 # - =? -( L - - - - 69L - - - -S - -A 84, 88 J - & - -
- & - @ , & @ J - - . - @ - . @ # (@ ( -A' -A1& ( 9 A. -A . . = # # #W ( A - .? ,A. ) @ - (- 9 (9 @ - . - - ( - . # 9 (@ =P9 -9 P? = 9 -19 1&19 ? J9 A. A @ - 1 -A - @ & -S & - @ -9 &9 9

5:

5<


$ % &
## ) * )
& - A-9 -. . 1 1 @ @ # J. -A
L A -A '@ -2- @ ( =@ '@ # ?9
L A -A -A -
- . -A - - - - & - (9 @ @ J-A ' 9 & -A -. - @ -. -. ( @ J( 58
,A' E # - ( @ # J. @ & &1 & - & -A 9 - & & - J. @ 9 - - - & - 9 E - J-A & -A( & - =? 1 - -. &
L & - =?L & - - =Y?
@ - (-
, 1 '
X Y =58?
9 # ( A . '9 '9 # = - ? # ( 1 - ' A9 -& E - @ &
X Y
@ - @ = - ?
## )
, E - E 1 A A( -A '@ 11 E - ' @ 1 =? -
5M

"! !#!, ! ,"$ -.
58 L . ' -A - ( @ # J. @ & &1 =F>? , - & -. & =-2-?9 1 & #9 ( 9 - # =- - & - ?

. !"/ /""! ! ,"$ -.
' -A ,A - 1 - ' - 1( - 1 & 1 @ J( 58 1 , - A' 1 - @ - 9 - 9 & # A& -A @ 9 E - # B -9 @ E A = ' # @ & L 1 - E? - -B@ ( 9 - - Q " 3:R '- Q 4;R ,A - -. - ( - # - -S QF 66R9 QF 661R #9 ( -A - (- E E - Q,/ :6R9 Q 7<R - @ (@ - '@ @ @ A - . . ' --
55 L - ( 1 - - -. = (?- - - - 1 - - E - -. - ( =- &? - - -.
,A - @ S 1 @ 1 =? - J( 55 . @- L 1 - - E - -. L ' - ( =- &? - -.

%+ "! !#!, ! ,"$ -.
-. @ - - -# - # - & - - # - @ Q 4:R -& - E 1 - J. -( - A - - - #9 9- J( -. @ - - (
L ( - & - 1 -AEG QYYRL - @
- -A' - @ - ' C- - D A( -A C.D - @ # A1B -A- )Q , 4:R9Q"% 4:R9 # @ A( -A @ ( -. 2 3 ' 0 =)>/? % - - ( @ J( 5;
5; L - - ( @ (
'$
J -A- - - @ J( 559 - - -A -@ J =-? - "( NG- ="? -@ - =58?9 A A "9 & - Y9 # B = 41 ?

# "!#" #! %
L L A1 -
Z X =55?
& X =5;?
@ ( ( - @ & - ' - -J - (
=5:?
A # - - Y
X Y
=5<?
, =58?9 =55?9 =5;? =5:? -@ - - " . ' - J( - - &-AB @ = ?
X =57?
@L - # - @ AEL ( - -J =5:?#9 & -A -9 & - -J @ - -
- ' - ( =- &? - - Æ- (
X
8 ( -8 ( & =5M?
- A- =- - -?9 - 8 5 -( & @ Æ8 @ Æ5 - (- & =# @ A - J( 5:?L -
Æ8L -
Æ8L #
Æ8L -
Æ5L -
Æ5L #
Æ5L -
Æ8L -
Æ8L -
Æ5L -
Æ5L Y & - - A1 L 1 - - E -
Æ8L 1 - - E -
Æ5W - A. - -
Æ8
X Y =53?
. - J( 1 & ( - &&

% "! !#!, ! ,"$ -.
5: L & 1 A- - - - -.
L 4 > ' ' - Æ8
L 4 > ' ' - Æ8
9 @ -.@ # - - - ( L - -A ( -9 & X L - -A ( &9 & X @ '9
X =56?
@ Æ - ( - - =5M? 1 -A. - -.@
X Z Y X Z Y X = Y? Z Y =584?
( - 1 58
" 9 X 8: % 9 X 8: Y Y
Y Z Y
Z = ?Y Z = Z ?Y
58 L -@ - = #? - -
S A- - # - S# - J( -9 1&- -S J( - 1 - - E = X 9 ?- @ - # -S - &-- - S . -A - # -A - ( - = ( -

% !(( /# %%
& - - - # -AEG? ' # (1 - - # - ( - -. 8 5 & % & (1 - - -A
Z X Z X =588?
@ # @ A1 -. ,AE - (
- A - =- - ,?9 -A& # - # -& E - 8 9 Æ -
X =585?
X X
=58;?
- J
X
X =58:?
@ - 9 ( (1 - -
=58<?
-
X8
X8
=587?
4) '6& ' QYYR /1 Æ & ) !"#$ "##%&
4) '6' 5 /) / "#$/5/ 1 6&6&4) '6, 1 & ' 8 * & " !&& 8%1 8 4 4& $ 1 &
!
## +
& - & 9 A@- &
X
X
1 $ %

%& "! !#!, ! ,"$ -.
& X
X
=58M?
@ Æ - ( =- &? - - =56? - =584?
X = Y? Z Y
- A. =58M? - # - - Y
X
= Y? Z Y
- @ -. . -
& X 8 X 8
X
8
8 Z = ?
X8
= Z ?
8 =583?
# - # - -9 S1 - - -A . - - ( # - & Y - A
## ,&
J( & = # - 1 - - E?9 & - -S - - - # - S '@ - -. ' - ( - , '@ -@ & - - - @ - 8 1 5 - - J.9 - (9 - - - & - Y
4) '6- $ 1 ! %
L ( - = X 8? [ X
L ( & = X 8? \ X Z
$(6 6 6
X 4)
X 8 B J(
X Z[Y Z[Y
[Y X J( 1
$(6 6 %6
X 4)
X \Y 5Y
5Y X J( 1
X \Y \Y
\Y X J( 1
55 L -@ & = #? - -
, -. 1. 55 - J( - - # # - - @ - @ - - - . - -(9 @ & L 1 - - E - -. = E [ \ # -' - (?

& (!!) -/! #! !! %*
L ( - & QYYR - & - Y - A1L -
- 9 ' # - -=& -S # - ? - - -A - - = ? S @ ' . @ - . 1 9 - A-J - @ - A - 1@ . 9 & A- -# - =& -S J( - -? @ &
# ! " &
## -. %
J. 1B# - - # - - # - - ( - # F> -B@ - -9 @ &
L 11 X
L # - -& = J.? X L ( - & - & - Y QYYR
4) '60 X &
,AE - - - - 1 - A --. ( - 1 - @ -& - @ - 1 -A19 J( -9 A. - ( - & - & ( @ - -. = X Z? 9 . (&
X X
X =8 ? X =8 ? =586?
, - - & -. A1 X =8 ? X =8 ?
X =8 ? X =8 ? =554?
## ) '
'6-6'6& " " %" X
-A1- A. - ( - - - J(
X Z[Y
=558?
9 & X 9 &
[ X 4 =555?
-A@
X 8 =55;?
2 3 $ %

% "! !#!, ! ,"$ -.
( A B J(9 -B@ -9 A @ # @ - & - A1 Z -2- #9 &
X =55:?
((@ - # CD S9 -
X =55<?
,A # (9 A # & 1 - -
'6-6'6' " " %" X
@- - E #W - #9 & [ X 4
X Z[Y
=557?
& - A. &
X Z[Y =55M?
-9 &
X X Z[Y
=553?
X =8 ? X[Y
=556?
9 -. B - # Æ - & . - # A9 - A.
Y X
[=5;4?
9 A @ - - -.
X =8 ? X =8 ?
&
X
X Y
Z[Y X
X Y
-A@
XY
=5;8?
X Y
=5;5?
& @ # . 2( 1 - &- 1 J( A - # - "##

& (!!) -/! #! !! %
'6-6'6, " % %" X
- X X & E - ( -
X 5Y
=5;;?
& &- Y
X 5Y =5;:?
-9 &
X X 5Y
=5;<?
X =8 ? X 5Y
=5;7?
# - &J -
X 5 Y
Z
5Y
X X
A W - -. - # Æ - & - # . - & Y - A.
Y X
5=5;M?
@ A-9 A @ - - -. 9 &
X =8 ? X =8 ?
=5;3?
&
X
XY
5Y X
X Y
-A@
X Y
=5;6?
X Y
=5:4?
' - 1( - -. J( - - @ - - = A( -A - J( 1 -A?
'6-6'6- " % %" X
#9 - ( & X
X = Z ? Y
=5:8?

% "! !#!, ! ,"$ -.
& &- Y
X = Z ? Y =5:5?
-9 &
X X = Z ? Y
=5:;?
X =8 ? X = Z ? Y
=5::?
,A- & - - -.
X Y
=5:<?
X Y
=5:7?
, -. 1 -. # ( - X - J( A - #9 E &(. - - - 1 - - E -S -.
L - -L -A( - -
- - ( & -A1- @A - - % @ = - &? -A # - -A 9 ,A- - 1 -A -A '@ - &-A( - - & - - =&& - - ? - - - 1 - - - & . - Æ5 1 Æ8 9 -A @ =5:<? =5:7?9 1 - -
=5:M?
& E
=5:3?
#9 -( - 1 Z - (& @ & - & - '
Y X
Z =5:6?
9 & ( - & - # 9 # - Z X 59 1( - -
X X 8 =5<4?
9 & Z X ;9 #1 - -
X 8 X 5 =5<8?

& (!!) -/! #! !! %
## ,&
, 1 5; # - . - -S - - - J( 1 = # 9 @- ( - & X ?9 B - A' @ - - =&& ?
$(6 * Y
& T X 5Y
5Y
Y
Y
5
- T X Z[Y
[Y
Y
Y
[
& T X \Y
\Y
Y
Y
\
5; L ) - - -
- @ 1 - . - ( - U - & - -B@ & & & - 'Y - # - & . J( 5< 57
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000−2
−1.5
−1
−0.5
0
0.5
1
Pulsation 2pΩ (en rad/s)
Pu
issa
nce
s ré
du
ites
(Pk/P
res)
Ps1
Pm
Pm1
Pm2
2pΩN
=ωres
ωres
=2πx400 rad/s
5< L # - ( & & X X
4) '6/ 7 !& 6&8% !& 6&9%& 7 6&9 [ 1 1 &
4) '6+ $ !& 6&8%1 X 1 * ) &

&+ "! !#!, ! ,"$ -.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000−4
−3
−2
−1
0
1
2
Vitesse Ω (en rad/s)
Pui
ssan
ces
rédu
ites
(Pk/P
res)
Ps1
Pm
Pm1
Pm2
ΩN
=ωres
ωres
=2πx400 rad/s
57 L # - ( - & X 8 X 5
## )
, - - -. - - =&&- -? 9 - A -A ( - '@ 1 @ A1 @ B9 1 - - -A 1 1 9 9 @ - -. - - - >>/ = 2 / /2 ' 0? Q+ 48R 9 - ( ( &1 ' - @ - - - 9 9 - #1 1 , 1 - - E - -. J -A1 -. - (9 # O. - A - A - - -. 11( W - 9 -& - - . A - 1 - -A1 - ( -( ( E - ( . B-. - 1 - - E - -. 9 - J( 5M & E # -A ( -A @ Q"% 4:R
## $ %
, =57? A A' - - 9 A( -A & - - ( 1 & - @ & E - - A - - @ - Æ8 1A - - -.@ 9 Æ -
X
X

* #! "/ ( ! 01!# &
Enroulement MADA n 1
P le nord Configuration des paires de p les ::p1=1
− p2 =2−
Enroulement MADA n 2
P le sud
5M L A( - -.
- - ( - # - A.
X
-A@
X
X
8 =5<5?
-9 1 - - -.@ 9 #-
& - Æ8
X
=5<;?
( ) *+
9 1 -@ ( NG- - -@9 - # - ' - # 9 1@ -- -& - (- NG- -Æ , -@ @ -& - -@ ( : - 09 ( = #? #( -9 & -. - - @
- Q 4;R9 & & 7 7 PF - 744Y , & CD - - -# - M<429 & S - - & ;<4 88<42 & - & - - -A - 1 X - & - =7744F?
.

& "! !#!, ! ,"$ -.
@ - -@ & - - - = - - #? , 1 - - -S & - @ J( 53
300 400 500 600 700 800 900 1000 1100 12000
1000
2000
3000
4000
5000
6000
7000
Vitesse (en tr/mn)
Ten
sion
s (e
n V
)
Vresref
|Vs1
||V
r|
|Vres
|
53 L 2F - -
A' - & & Y X
9 @ &9 - - E = Æ8? -A @ -@ - @ # -A ( - -# - @ 1 & - ' @ ( & -
9 & & =? B - -9 @ &
L # - Æ8 =?L & A1 Æ8 =?L & A1 Æ5 =?L 11 ( =?
( - -.
L 0 - Æ8 =?L 0 - Æ8 =?L 0 - Æ5 =?L 0 - Æ5 =?, & ' - - - @ J( 56 =? &
- =1?
) '@ 9 1 -A& -- - = . -. ? T # @ J( 584
- -9 - # - &9 1 & K S9 @ #1 - B & = 63V? -E 1 &- @ A1 - # - -@ & & A - # - # & - = X ?& & - Y J - X
4

* #! "/ ( ! 01!# &%
300 400 500 600 700 800 900 1000 1100 1200−4
−2
0
2
4
6
8x 10
4
Vitesse (en tr/mn)
Pui
ssan
ces
(en
W)
Ps1
−Pm1
−Pm2
Pres
300 400 500 600 700 800 900 1000 1100 1200100
200
300
400
500
600
700
Pui
ssan
ces
(en
W)
Vitesse (en tr/mn)
pjs1
pjr1
pjr2
pjs2p
jr1=p
jr2
56 L "& - # - &
300 400 500 600 700 800 900 1000 1100 120090
91
92
93
94
95
96
97
98
99
100
Vitesse (en tr/mn)
Rend
emen
t (en
%)
584 L "- # - &

&& "! !#!, ! ,"$ -.
300 400 500 600 700 800 900 1000 1100 12000
5
10
15
20
25
30
35
40
Vitesse (en tr/mn)
Fré
quen
ces
(en
Hz)
|fs1
||f
r1|=|f
r2|
588 L > - Æ8 # - &
#9 @ J( 588 - - # # - & =B X X 5?
4) '61 ! ) %1 &
## /
, 1 - # - ( ( 9 1 - A & 9 @ &
L - - - - - - L 1 - A- - L > L ( - (
, -A ( - &. AS ( @ A- - - =A ? A - ( =J( 585?
9 & -S@ (@ & E ( S& @ - - = ( L - ? 1 = X 7744 Z 4? S @ &- = - - ( J & ? - - 1& -@ & - - ( = ? A& # - - , - J( 58: =(? S& & - - ( @ 7744F , - - A(( - J( 58;

* #! "/ ( ! 01!# &*
AlternateurExcitationr glable
R seaupuissant
Contacts decouplage
Entra nementm canique
Lampes
585 L ( & ( -A '
Appliquer la tension d entr e Vs10
calcul e avec le mod le inverse id alde la cascade
Relever la tension de sortie Vs20
obtenue avec cette entr e Vs10
Appliquer une entr e corrig eVs1=Vs10.Vs2/Vs20
O Vs2 est la tension de r f renced sir e sur le r seau
V rifier que la tension obtenue sur ler seau correspond la consigne et
valuer le d phasage de la tensionavec la r f rence de phase (tensiondu r seau puissant sur lequel oneffectue le couplage
Corriger la phase de la tensiond entr e pour caler la phase de Vs2avec celle du r seau sur lequel le
couplage est effectuer
Le couplage est alors possible
58; L (( - (

& "! !#!, ! ,"$ -.
200 400 600 800 1000 1200−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
Vitesse (en tr/mn)
Tens
ions (
en V)
|Vs10
||V
s1|
200 400 600 800 1000 1200−10
−8
−6
−4
−2
0
2
4
6
8
10
Vitesse (en tr/mn)Ph
ase d
e sort
ie (en
°)
58: L ( - -
, 1 - - @ [ - - 1 -A , # - 9 - - ( & - ( 1 -E - ( & ( - & - &
'6& 7 [ Z & #1 1 1 : !7744F%&
, -
- . . - ( @ # J. @ & &19 1-A 1 ( - J( 58< 1 - L @ -- @ AEG = 1 & -?
L -. - ( @ -. =-?, 1 -A & - = -. ? J -A&
- - - - ( ' 1 -A1 =E?% - E - 1 L ( - ( ( - & - & L @( - 884: ( - ( @ -.
$00 ' $ % (

! '! #! !! &
58< L ) -A - ( @ -.

:3

.
& & - -A- 1 - # @ #&1 = & -AEG &1? A - '9 1 - A - - # - #9 ( -A - E S & - # Æ - ( J( Æ 1# = @ - ' -A ?
, E - A.9 - 9 -A ' @ 9 A -A 11( 1@ E A - 11( - &- - , 1@ - ' -A - - - '@ 1(21 -. 1 =@ ?
L ( ' @ ( = ?L ' @ -1 . = & - 1 - 1?
.
, ( ' @ ( =/;? W - #W -
@ . - 9 -A& - = A( -A ( '? 9 AB -A - ' 19 A - - >-' A -A - #
L '@ 1(21 = ?L &
-@ A( -A - @ -- A -A & - -A A A( - ( -A -A - @ - & E A&= - >-'? 19 -& # @ - =@ ? &
' (
:6

*+ % "!. !#!, ! ,"$ )!!2# ! !
;8 L / ' @ (

%% !3 43 ! 2# .! 56 *
& E # -.@ =- - @? ' & A- = ? A- - 9 & @. (1 1 - 1 - AE @ 9 1 ( 9 -& - -A -A. - & - A. 1 & @ 9 @ =- - -. @? & @ 9 & -A1 -2 A- - -.@ 1 - 19 - # . (9 @ J( ;8
' /')$!0
## ) ,)0
, ( ' @ -1 . =? @ . '1- =-A@ (. +'1- . ' L +? L . L . - 11 9 1 - A- 11 -
'@ 1(21 @ (( - A. 1 & (1 1 ( ' @ ( 9 A- - # - A. &1 - (E . 0 - A- , ( - @ -1 . @ J( ;5 -Q 45R9 QF 4:1R 9 1 - - O. = 5? ( # A1B -A- 1
Parcours de champhomopolaire (unipolaire)
Aimant enterr
Aimant lat ral
Parcours de champbipolaire
Aimant enterr
;5 L =1 ? - ( - A. 11
9 ( - 1 ( # A1B - 1 & 9 Q+ 66R9 Q+ 6:R Q 4;R ( - - 1& - 9 Q/) 45R AQ 44R

* % "!. !#!, ! ,"$ )!!2# ! !
Trajets des fluxg n r spar l aimant
Bobinages d excitation
Bobinagesd induit
Stator
Rotor Aimant
Trajet du flux g n rpar l inducteur bobin
;; L - - -1 . @ 1
% - - @ J( ;; T J( ;: ( -A - ;4P -& 1 & '1- = 1 L ?
## 1 ,)0
,6,6'6& "" $$
, /; -A- . ( - 9 @ J( ;<9 -A 1 - ( =@ # &1?
( 1( - EG - - -# S9 - -( - (9 A. =11? A E A , # - - (E . -@A , # Æ = - -A &Y?9 - 1 -& Æ E -'@ & - @ @ ( -& - J(9 A 1 - # -( -A.J -A1 1 & 9 # & -9 1 -A # & Y - -W - & Y @ &
,6,6'6' 4 4; *$
, - -A - C(D @ @ # @ ( - # & . # E - ( - -# 1@ - @ ( - & E1 - - S9 - @ - @ -@ 1 - # 1 - -A. =

%% !3 43 ! 2# .! 56 *%
;: L ( -A - ;4P & '1-

*& % "!. !#!, ! ,"$ )!!2# ! !
;< L - ( @
- K? 9 - -# -A- = ?9 &E '@ - -A -B - - 9 - & C-O.D @ 9 A # 1 & # A- 11 W ' - # A( -A @ - - EJ - ; ; 9
# 1 % "
% & - A . - @ A' -A @ - ( ) # . @ A - ' -A 9 E -A& - @ , -A @ # J. -B@ - @ - & A' - ( - @ ( - J( & % @ @ -A # ( -A = -A - - ? -A ='? @ ( - - 1 #J. - & - - A( 1 S - - . @# &1
A @9 @ 1@ - ( . S9 . -B@ - - ( - . @ # J. - # -

%* ! '! **
;7 L ( - . @ # &1
-S =<4274+U? > A( - 9 9 - . @ # &19 -AS ( @ @/) - @ - ='@ -2-? J( ;7 -A ( & . . @ # &1 ,A' - (- . @ # &1 @ A 1& - J( ;7 S9 - # & A @ @ ;7
( -
% ( - 1 -A ( @ @ J( ;M 1 -A - 5P9 (9 -A '@ AEG % - A1 - - -.
, - - - & & 1 - E - -A 1 - & , & - & @ ( - 1 -A & =& E ? % - 8845 -- @ - - A -.@ - - =(? -A - - ( #@ # &19 - ( =& - J ? #J ( ( & - ( @ & - -

* % "!. !#!, ! ,"$ )!!2# ! !
;M L ) -A -

% "! ! ! *
,
9 - - ( - # A1B - @ ;:9 @ E 1 .- . @ # &1 9 ( @ #&1 & E
## /
9 & - ( ' -A - , ( -A - # = ? @ - & 9 @ & - - . # -
L - @ -- @ . (19L - , . (1 =@ ?
, ' . (1 . @ ( ( @ &1
, @ . (1 &( - ' -A & 1 = . @ # &1?
L ( ' @ ( =- - -?L ( ' @ -1 .
-@ - - @ & , # ( -A -B@ - - - -A 1 & - @ 1 - Q 4;R QF 4;R
## / &
,6/6'6& "
, ' @ ( =? & # ( ' ' # -A # @ & - =-& 1 - - E? - - #9 ( (# & =? (& , & - A( @ & -A9 # - # ' - ( # - @ # -A( & # 7 < )
,6/6'6' # $
, -A & ( @ J( ;3
,A -A 1 E - P( =1? ' @ =? A .& - A( - -. 1 -1 -A. - '9 ( ( '2 ' @ 1 - - -A( &9 E - U - 2 # -A (' =# -(-?

* % "!. !#!, ! ,"$ )!!2# ! !
Auxiliaireassurant un
fonctionnementautonome du
r seau
Charges dur seau
courant continu
MAS cage
Turbined entra nement
MSAP
vers la turbine
+
Onduleur
Onduleur Hacheur
OU
Com
man
de
Cvdc
;3 L " @ 1 ' @ ( @ . #

% "! ! ! *
##
% & - - @ &1 ="F? A( -A A & . ' & ' # ,AE - - - 1 = E ? , 1@ ( & - # A ( - @@ - ( @( - NG- - =J( ;6? - 1 - & -A =# J( ;84? A&@ @ 9 A - -A( # QF 4<R
Principes de conversionlectrom canique dans les MRV
Ce=i.dL/dθθ
θ
L
i
θ
Ce
θ
θ
L
i
θCe
Fonctionnement Moteur Fonctionnement G n rateur
;6 L - & -A( - "F
% @ 1@9 -A 1 . 9 @ ( 1 - =# J( ;88? , - 1 9 9 9 - # 1 & & 1 - - E -9 J( - = - - J(?
## &
, @ A # A A( - 1 - # - - 9 & -#& - '@ 12 -- - &(@ # # A - @ B - @ - 53F =# ( @ @? -A A- -A C1D @ . - - 1 E - A& (

+ % "!. !#!, ! ,"$ )!!2# ! !
MRV
Turbined'entra nement
Onduleur
Com
man
deBus continu
vers le r seau
t
idc
idc
;84 L @ " F1 ( @
vdc
Machine ayant unnombre de phasesup rieur 3
Onduleur
;88 L % - ' =& - ; ? (

% # (!##
2 1
8 59 & -A' - @ 1 # -&E ]& # - & 9 ' - A J -A& - # 9 -J - -- - ( & 1 =&& & # ? - - A 1 &- - - ' = - A(?9 ( - (- 1 =&& & ? - - #- ( =- - # 9 &19 9 J1 -- &9 ? % 1 - - E &- &( - A - ' @ 1 =? - ' @ 1 . =? A - - - # ( 9 - A - & - - # A1B - -.@ -
A # ( & 9 - & - A J ( A( - ' = -& '@ ( ( ?9 J - =? =? & = ? =? -=?

75

7;


# ' %
## ,
, J( :8 - A 9 @ - A( X - - & 1( . (J ' - -S @ - - - -
pθa
b
c
A
B
C
:8 L '1 1 -
- =&& 1 (? # ( @ => ="? 9 A( -A @ = ' - ? 9 & - . # ( #
X =? =:8?
7<

& "#! #!
##
' & & - ( =# - J(:8? & - . - O.
-6&6'6& ) # <#
= ? X =? =? Z =? =?= ? X =? =? Z =? =?
=:5?
& # - &
=? X
=? X
=:;?
=? X =? X
=? = Z ? =
?=
? =? = Z ?
= Z ? =
? =?
=::?
-6&6'6' ) #
, . @ 1 2 9 &
=%? X =? Z = ?
=%? X =? Z = ?
=:<?
& - = @ ' @ (?
-6&6'6, $ $"4$")
, =# - A( ( A&? & - - # (- = (? - = X ! ^ ? - 1 @ A- -
X"#
"
=:7?
@ # @ J( :5
A( - - - A. - # -
# X
8
5
X8
5
= ?
=? Z = ? =?
=:M?
& -
X8
5 ""
= ?
=? Z = ? =?
=:3?

& 7!! ! ! #!
Wmag(Energie magn tique)
ψ (en Wb)
i (en A)
ψ0
i0
W mag(Co nergie magn tique)
:5 L -A (
1 - -J . @ A- - =:5? (- & # &
# X
8
5
=?
=? =? Z =? =? =?
Z=? =? =? Z =?
=? =?
=:6?
-A@
X8
5=?
"
"Q=?R =? Z =?
"
"Q=?R =?
=:84?
A( - -@ A - -
-6&6'6- $ 4$")
9 A1
X $Y
%& X Z Y =:88?
-A& - A -A =&?
%X Y =:85?
# 3 '$
##
, =? =? & E # ( &
=? X
=:8;?
& & & =- -1? Z5 & "" "8") "" 4 -
$ %

& "#! #!
L X - ' L X Z 5 - L X - ' L X Z 5 -
& . & = E -? & =-J@ A. )?
L & ' - 'L & ' -
9 & =? & X &
=? & X &
=? & X &
=? & X &
=:8:?
4) -6& 1 & & ' '&
##
- =? - A.
=? X =? = Z
? = ?
= ? =? = Z
?= Z
? = ? =?
=:8<?
- - '@ 1 - # =?
= ?
= Z ?
X 8 4
85 ;5
85 ;5
=?=?
X ' =?
84
=:87?
@ ' =? & ? $? =? - -J . ) - - E @ 9 &
=? X ' =?
84
5(
;
84
5(;
84
=:8M?
X ' =? '
X;
5 & =? &
X & =? &
@ X
=)'? X ') =? X =? =:83?
1
=? X & =? & =:86?

&% !, ! !
# 4% 1
- - - - = ?9 - -J - # - -9 - - # # - - & -A1 # - - =* +?
## 0 2
A( -A1- - & . & # - (- - .
= ? X & = ? Z & =:54?
& -
& = ? Z & X =? =& =? Z & ? Z =? =& =? Z & ? =:58?
=@ (? & 9 1 A - =* +?
= ? X =? Z =? =? =:55?
=@ (? A & 9 1 A
X =:5;?
@- - E @ O. 1 '@ -A .O. = ?
= ? X =? Z =? =? X = ? X =? =? Z =? X
=:5:?
## 0
A( - '@ =:<? W (- & =%? Z & , X =& =? Z & ? Z
Q& = ? Z & R
& =%? Z & , X =& =? Z & ? Z Q& ==? Z & R
=:5<?
@- . O. =@ (? -A1- & =%? X =? Z
= ?
=%? X =? Z = ?
=:57?
& , X Z
, X Z
=:5M?

+ & "#! #!
## 4% 5
-J - # - P . (- - -. ( - =- -?
=#? =-? =#?
=#? =-? =#?=:53?
## 0 2
# - -9 W (- - =#? =#? . -J # - P - =:53?
=-? = ? X =-? =? Z =? =-? =? =-? = ? X =? =-? =? Z =-? =? =:56?
& =-? =-?9 &= ? X =? Z =- Z Z -? =?= ? X =- Z -? =? Z =?
=:;4?
A& # ' @ ( - - &' EG A( - Z - = ? - 9 . - ( 19 & -
- - X =:;8?
- @ J - . O. = ? X =? Z =?= ? X =? Z =?
=:;5?
4) -6' - -& - *1
L - X 4 - X @ L - X - X 4 @ L &J =:;8?
## 0
. 9 & =-? =%? X =-? =? Z
Q =-? = ?R
=-? =%? X =-? =? Z Q =-? = ?R
=:;;?
-. & =-? =-? =%? X =? Z =-? Q =-? = ?R=%? X =? Z =-? Q =-? = ?R
=:;:?
J 9 -
=*? %Q =*? =#?R X =*? =*?
%Q=#?R Z =*?
%Q =*?R =#? =:;<?
X
%Q=#?R Z
*
%(5
=#?
-

&& !, ! !8
-A@ =%? X =? Z
Q= ?R Z
= ?
=%? X =? Z Q= ?R Z
= ?
=:;7?
@ & X X
## 3 4
-& # A. - =:84? A. # -(- - @ = ? 9 A. -
X8
5=?
"
"Q=?R =? Z =?
"
"Q=?R =?
=:;M?
A( - .
=? X & =-? =?=? X & =-? =?
=:;3?
=? =? # #=? X & =? &
=? X & =? &
=:;6?
&
X
5 =?
=-? & &
Z
(
5
&
& =-? =? =::4?
5 =?
=-? & &
Z (
5
&
& =-? =?
@ J9 1
X
5 =?
(5
=? =?
(5
=?
=::8?
-& 9 & J
X = ? =::5?
. -. . & -
X = ? =::;?
X = ? =:::?
4) -6, 7 ; $?&

& "#! #!
#( 3
## 0 (
, & - ' 1 ( -9 1 -A1 ( & ( 9 @ - - - - &- -9 - # -@ @ - . =# Q" 6<R? L A- ( 9 & ( - A( -
L - # ( -A @ - @ @ =# -?
L @ Æ Æ . ( = -'
? - - - 9 '@ - - 9 &- -' - -A &- &1 -A . - '@ = . # ( - -@? - & . = ? - =:;5? =:;7?
. X . Z .. X . Z .
=::<?
A- - -J ( - 9 =:;5?9 =:;7? =::5? - - @ = ? , X , Z , X Z
Z
, X , Z , X Z
Z
=::7?
@ X Z 9 X Z 9 X Z X Z & X Z
X Z
=::M?
9 W O. . =::M? - . =::7?9 &
, X Z QR Z
QR Z Z
, X Z QR Z
QR Z Z
=::3?
@ -& = ? - ( - - - - @ - P &9 -AS
8 ! -9 9 -A@
- X 4 /% - X =::6?
# 1 S9 A = @ @ ? - -
5 &

&* 7 #! (#. 3" ! 4! $ (3!# %
% & - 1 - & - Q" 6<R ) @ - 9 9 1 ( NG-9 . - P 9 -@ A11 - - @ ' # - - =& - E - - & # - P? # - - J( :; . =:5:? =:57?
A( E - 1@ @ - =::M? =::7?
Rs Rris ir
vs vrLcrLcs
M
Inductances coupl es
:; L . -
9 . - @
- X 4 - X =:<4?
- @ & & - @ -
X 4 X Y =:<8?
. =::3? - , X Z
QR Z
QR
, X Z QR Z
QR Y Y
=:<5?
, - ((@ &1 -A - -& @ - -@9- E 9 - -& -A - -A A 1 & # &1 -A
# X =#?8 X =#?
=:<;?
@ # A - '@9 8 =(- & ? - - . 1 -& E -J
9 # - " S9 A( - -A - O. -AS # &
X Z X
Z
# EG - # X - @ -J - (
X Z & X
=:<:?

& & "#! #!
-A@
, X Z
%
=:<<?
Æ - 1 @ % A # - 9 - , 9 & 1 - J( - A -A =:<;?
%
X 8
0
,
0 =:<7?
@ & EG - 0 X A( - A =:<51? 1 -.@ -A = .? -
9 # . # - ( - 9 - - - A
, X Z
%QR Z
%QR Z
%QR
%QR =:<M?
Y
Z
1 &
, X Z
%
Z
%QR =:<3?
Y Z
% 1@ EG & A =:<3?9 - A. - ,
# - &1 -A ( - -& & #9 # - 9 Æ -
/ @ /
. 1 - A- ( 9 -A1 - J( :: -A9 -AS # -A =:<3? A( - -& - (E @ . 1 @ A=:<7?
, X Z
80
,
0
Z
%QR =:<6?
Y Z
# 9 1
, X = Z Y? Z, =:74?
Z
Z
%QR
-J - -@ - , , = J -A& - ' 1?, - - J( :: -
-A =&& #? - - - # X --J 1 @ - J( :< - =? - 1 - & = ? ( NG- ="? -

&* 7 #! (#. 3" ! 4! $ (3!# *
vr
me
evs Lcs
RsσLcr Rris
miri
erir
Sources coupl es
:: L & & # =# ?
m
vrmeevs Lcs
Rs σLcr Rris mir
i
er ir
Source de conversion lectrom canique
:< L -' - 1& - @
4) -6- 7 ) Y ! %&
4) -60 @ * ) & 1 1 !# X &>% # >&
, - A # & -& - . - - 11 = - (1? # A1 9 -B@ # - - .
X =:78?
9 Æ - . & (- - P -- & . -
X = ? X = ? X X
=:75?
- 9 @ J( :79 - 1 - 9 - =? - J( :< - # - 12P - - -
' *6 7 88,(

& "#! #!
Rs
m
m
1
Lcs.s
er=f(ir,i ,Ω)
+ ++
+
-
- -
-
1
σLcr.s
Rr
+
Ω
vs
e i ir
vr
m.e
m.ir
m.is
:7 L 1 - 9 -- - -'
## 5 & &
, -@ - ( A -A =:<7? - =:74?9 =:78? =:75? & @ ,9 # - &J - # & A =,9 Y? -' - A=&& -&? A( - @ -@
L " - 11( = Y?L " - 11( = Y?L - ' = +?L - ' = +?L 2" - - X ;5 = +?L 1 - - E
@ - @ 9 1 @ - &
L " - # XL Æ - )- X 8
L - 0 X
#, 6&
, - J( :< 1 @ 1 " - ' A( -A -@ -' &- ( - -A1-9 1 - J - 9 & 1 - = - - ' '? -A 9 -A 9 B ( NG-9 - 9 & &J A & - @ ( - J9 B - - 9 -( - = -A NG- @ # - J.? J - &- ( -A - -A- - (

& 9"-! #
## & )
& -@ - - 9 -B@ - 59 & -' - J( :< 9 - ' @ & L 0 (( = X X 4?L > ( (( = X 4? & ' @9 - J - 9 @ J( :M
m
vrmeevs Lcs
is mir
i
er ir
:M L J -
A A. - . 1 - (- . 9 A. -A & . ( NG- =- ?
. X 1 / X 1 /
/ =:7;?
9
X 2 Z =:7:?
&2 X Y 3 =:7<?
&
3 X
@ - (- = ? - =- A & - @ - ? 1 -
X
Y Z =:77?
9
X
8 Y
X =:7M?
@ ( - & 1 5 - - ( &J - @ # 2
& - & 9 -& &
X Q2 3 R =:73?

& "#! #!
9 &2 3
X Y 3 3
=:76?
& X ' Y
-A@' X
3 3
X 3 3 =:M4?
1 A. ( NG- - A. =:75?- - ,A. - &- & A. - 9 & @ & -
-@ -9 # - &J &
X
1 - Z X
1 - @ A- - 9 ( J( :3
m
VsLcs m.Vs m.g.Vs
m.(1-g).Vs
g.Ps
(1-g).Ps
Pm
Ps PrPs
m.g.Vs
m.(1-g).Vs
m.Vs
IrIs m.Ir
I
Puissance active :
Puissance r active non repr sent e
Fonctionnementmoteur hyposynchrone
:3 L ) - - -@ - -
## 6 $+, & 7
% ( NG- - -@ - - ( - 1 @ X 4 = ? -&- -@ - - & & =1 & 4 X ?9 & ( @ - -A & - 19 @ - # J.9 - ( - # - & , @ J( :6 @ -S & T & 1 &- YY = - L & Y X
?
9 : . ;

& 9"-! #
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−100
−80
−60
−40
−20
0
20
40
60
80
100
Caractéristiques de couple de la MADA
Vitesse réduite (Ω/Ωs)
Cou
ple
élec
trom
agné
tique
(en
N.m
)
Rs=0Ω
Rs=1.154Ω
Cemax
=87.1N.m
:6 L - 1 & -@
, = 1? &- -( - = .(# & 1 . #? & 9 1 - A' @ - O. # = - -E @
((?9 - S -.@ = (? @ &
& ',A - 1 - 1 @ A - -A #
A - @ - 1 = -@ (? @ - , -; P @ J - A. -A @ - <44F = X <44?
@ # - <4+U A. - - ' - # - (
' =? X5'Z
=:M8?
- @ @ -J # - - -@ =- P? & @9 - J( :84,A' @ - O. # -A A 2 =
A -@ X 4? - -9 & 29 @ - # - & 2 X Y=3 Z3? 9 # = -? E -. - L - ( 2 X Y39 - ' =&?
L - ( -A-2 X Y39 A & - '
- < """= : > ' .(0 !!"?@A"B '
C@AB(

+ & "#! #!
Vr=0EVs Lcs
Rs σLcr RrIs mIr
I
ErmiIr
Eg
Er=Eg+Ermi
m
mE m.g.E
Eg=jpΩMI
Ermi=jpΩσLcrIr
:84 L & - @
4) -6/ 1 2 & $ 1 &&& 1 2& $ 21 !%&
9 A 2 @ 29 & =:7M?
2 2 X 2 =:M5?
9 ( @ - - 9 @ &
2 X Y3 3 3
9 1 - # EG ( & - -#
= Y?3 X 3 X 3
- J9 & 2 X 3 3 =:M;?
- 9 Æ - -& -. 1 - A( ( # EG
2 X 3
3 =:M:?
A #
2 X
3
3
- 9 1 - - -J @ &A- ( - & =>( :88? C D # EG &
A# & - - - &9 - - -. = ? = 0? - @ 1 & & A# - 0 9 9 - A =:M:?9 - -

& 9"-! #
EVs Lcs
Rs Νr R r/gIs
I
I r=mIr
Νr=σLcr/m R r=Rr/m
(1-g)R r/g R r
Puissancem canique
PertesJouleImp dance rotorique
ramen e au stator
:88 L - ' @
, 0 ' &- . 3 9 - - -
X Z
=8 ?
@ & - X X
=:M<?
, - A. - - -A1- A. - 3 # - 2
3 X 2
Z
=:M7?
A. - 9 2 X2
X
3 X =8 ?
3 X =8 ?
=2?
Z =?
X 'Y X ' =8 ?
=:MM?
-A@ A. - ( '
' X
2
Z =?
X
2
Z
X
Z
=:M3?
9 1 -A-J . @ =:M8? &
' X
5
2
X
=:M6?

& "#! #!
## 0
% -@ &J - -@ =1 - J( :7? S ( 9 B @ S = 12P?-A -( - -A ' - ;P , - 9 @ J(:859 A& ( = - 4 8P( # &. -4 8-?9 & - & BA@ % X 4 : 9 1' - J( :6 @ - - E9 E - -( -A ' & ( A - - - & - -( 7 # (1 = A( # -A - '? & - &- - -@9 - &J & @ & - # - ' - &J - 1
0.9 0.92 0.94 0.96 0.98 1−400
−200
0
200
400
Temps (en s)
Ten
sion
s si
mpl
es (
en V
)
va
vb
vc
0 0.2 0.4 0.6 0.8 1−30
−20
−10
0
10
20
30
Temps (en s)
Cou
rant
s (e
n A
)
iaibic
0 0.2 0.4 0.6 0.8 1−20
0
20
40
60
80
100
Temps (en s)
Cou
ple
(en
N.m
)
0 0.2 0.4 0.6 0.8 10
20
40
60
80
100
120
140
Temps (en s)
Vite
sse
(en
rad/
s)
:85 L - -( -A @
## & )
#@ - =- @ ? @ J( :<9 1 -@ -A - #
X =Y? #Z) 8 X ' #
=:34?

& 9"-! # %
& Y - @ @ -@ - & #9 8 -J
#X
X =, ,?
8 X = ?
. - =Y?9 ) ' &
=Y? X
Z Y
=:38?
) X
4
=:35?
' X
8 4 8
=:3;?
A- - 19 1 -AS ( & # - E #
X =Y? #Z) 8 X ' #
& & & # X= ?
X =, , , ,?
8 X = ?
@ =Y?9 ) ' & A # -A - 55 @ - . -J =:38?9 =:35? =:3;? # .
=Y? X
Z
Z Y
=:3:?
) X
=:3<?
' X
=:37?
S9 - 9 - & . . 89 4 = -J - - A. )?
X
8 44 8
T X
4 88 4
T X
4 44 4
=:3M?
& -@ -A9 - A A @ 1 -A '@ - & - =Y? & Y & & - % . -A @ J(:8; & - :<P - @ A. & & 4 54442 - : & @ ( - A. ( 1 & A' - & - .' @ @ - 9 @ &

& & "#! #!
−400 −350 −300 −250 −200 −150 −100 −50 0−400
−300
−200
−100
0
100
200
300
400Poles du système (lieu des valeurs propres de A(Ω)
Partie réelle
Par
tie im
agin
aire
Lieu n°1Lieu n°2Lieu n°3Lieu n°4
:8; L , - E - '@ Y Q4 5444R

& 9"-! # *
L -. , ,L & Y , @ ' @ -9 # C(D @ -
- - @ . - @ - -A & - - @9 AB - , &1 -A . =&& -. &1 -A , ,? -.@ ' @9 -@ -A 9 -A EG 1 -A &9 - ' @ (- =- J? 9 AB - & &1 -A A - - & AB -A A. - ( -

37

(
## /
9 (- @ @ -J - 8 5 - & @ Æ8 @ Æ5 -A1-9 & - -@ - - 1
' - - 1@9 @ & - '
L A- -A - -L Æ8 = - E?L Æ5 = - ?L ( = @ ?
9 A -A ( ( # 9 @ '- - C(D -& - A 11 9 - 9 & A- -A- &- - =- ? - - - & - ( - ( @ J( <8 & '
OnduleurMADA n 1
vs1
ir1 is1ir2
is2
MADA n 2Couplagelectrique
Chargevr1 vr2 vs2 is2
ir2ir1
Mod les des MADAmal conditionn s!
θΩ Ω
is1
vbus
ibus
<8 L 1 ( # - -
- - '@ ( -
3M

* "#! #! !!
-S ( # = # - & ? & EG ( -.
L - 1 -AEG =1 -A&?L - ( (1 =# ( ? - - A = ? - ( '- = '-?
- 1 @ -A 1@ - -A ( -1- -A&9 E # A' @ = Z Z ? Y CD ( A1 #1 -& ! Y # 1 =A- A - '-? 9 - & Y ( - A Y A - &1 -A E @ - '@=(Z(?
##
# @ 1@ - - - - - '@ E - ( - 9 1 -A - 	 . 2 - - J( <8 &-9 1 - - - 1 - A =-&? - - - -
,A 1 - - -@ 1 - - (J A - -@ -A - #
# X =#?8 X =#?
=<8?
- X =, ? Æ8 X =, ? Æ5
% ' ' - -S J( -A2 E # Q 4:R - J( @ - &1 @ ' - 1& - -' - 1 - - =@ J( :<? S9 -A- C - D - - - - @ & @ -
( '$
, -@ - 1 # - 9 & -A1 - . - -. . - = ( ? ( - A A' - -# A - ( A A' P(-A( - . A- - = ( @? & - - -. Q 4<R
X =<5?

* ! .
&
X , Z , X =, ? ! X 8 56 5 =<;?
. - J( 1
L ( - - - -. L A& - -. -A @ A
, &-9 - & @ - - 9 - ( ' &
' X
8 4 44 4 84 8 4
=<:?
=,? X '=,? @ - - - - -& . - '@ # - (- - P 9 &
=%? X '=\-? =%? =<<?
'=\-? # # &
'=\-? X
8 44 8
=\-? =<7?
@ =? - -B@ -J @
\- X - Z - =<M?
, & - ( - E & - - -. = @ #?
- X - X
, -@ - ( 1 - 9 # # - -. E S - 7 - ( 9 ( @ '9 - - 1& = A1 - -. - ? @ A- - & - = =<5?? - ( 7=\-? - @ - P
=? X 7=\-? =? =<3?
& S & -
=%? =? X =%?
=? =<6?
' < =( D
0 9

+ * "#! #! !!
-&
=%? =? X =%?
'=\-? 7=\-? =? =<84?
# - 9 @ =- - ?9 &
'=\-? 7=\-? X =<88?
- &
7=\-? X
8 44 8
=\-? =<85?
, -@ - E & ' - # 1 - & . 9 - . -( - - =\-?
=\-? X 8 =\-? 8
5 8
=<8;?
@ =? - .
=\-? X
/ 44 /
=<8:?
@ 8 - > - - 5
8 X
8 8
=<8<?
=<<? =<3? # #
=%? X
8 44 8
8 =\-?
8
5 8
=%? =<87?
=? X 8 =\-? 85 8
8 44 8
=? =<8M?
-. 1 - -. . &8
1 & . =@ & - A- ,9 ,9 ?
, X8
=%? X8
8 44 8
8 =\-?
8
5 8
=%? =<83?
-& . 9 &
, X /, =<86?
& 1 ' 1(

* ! .
@- - E #W &
X8
8 =\-? 8
5 8
8 44 8
=? =<54?
&
X / =<58?
=<86? =<58? -@ # - @A- - = -. ? & - @ J(<5
vr1 vr2=mc.vr1*
ir1=-mc.ir2* ir2
mc=e-jΣξr
<5 L & - ( -
4) 06& 7 1 1 &
4) 06' 1 \-1 $? & 1 1 \- X - Z -&
, & E '1 -A =#? -- -A B( (- -. B( - A& - -. - -A 1 A& - -. # '@ 1 - '@ & ( -A- - @ & - - - = A& - - -A # ? &- - - J( - ( &
- 9 B( '1 '1 - 9
ir2ir1=-mc.vr1* mc
*
vr1vr2=mc.vr1
*
<; L '1 - . B(

* "#! #! !!
& @ J( <; 9 - # 1 .
X / =<55?
- ( -9 & 9 - '1 - @ J( <:
ir2ir1=-mc.vr1 mc
vr1vr2=mc.vr1
<: L - - ( -
- # ( . 9 (
&9 . ( - @ # - -.
X / =<5;?
- '@ - - ( - 1 <89 # . & . J( <; <:
" %
" , X , , X
,
" X X
<8 L " - ( - - &
( 7
##
, -@ - - 1 . - = -. # - (? 1 -' -& J & -L 9 # -@ 1 -L -9 &1 -A @ -J . # -9 3
&9 @ J( <<9 -. . -. J( - ( = ( -9 1 ( &?
## 8% & ( %
-. ' - (9 - S # - -. J -A1 C1 -D 9 - -A - - -A # - - ; & L # =@ - ?L # . =@ &1?

*% :# ( # /#2!# #! !! %
er1=jp1Ω(M1.i 1+σ1Lcr1.ir1) er2=jp2Ω(M2.i 2+σ2Lcr2.ir2)On posera :Σp=p1+p2
∆p=p1-p2
a - Couplage direct
b - Couplage inverseer1
er1
σ1Lcr1
σ1Lcr1
Rr1
Rr1
Rr2
Rr2σ2Lcr2
σ2Lcr2
er2
er2
m2
m2
Lcs1
Lcs1
e 1
e 1
i 1
i 1
Rs1
Rs1
m1e 1
m1
m1
m1e 1
m1ir1
m1ir1is1
is1
vs1
vs1
ir1 ir2
vr1vr2
mc
mc
*
vr2vr1
ir1 ir2
vr2=mc.vr1ir1=-mc.ir2avecmc=e-j(p1-p2)θ
vr2=mc.vr1*
ir1=-mc.ir2*
avecmc=e j(p1+p2)θ
m2e 2
m2e 2
m1ir1
m2ir2
m2ir2
Rs2
Rs2
is2
is2
vs2
vs2e 2
i 2
e 2
i 2
Lcs2
Lcs2
<< L ' - - -. ' - (
L # . B( =@ &1?
; 9 @ ; ' -A -
L L - =#?L -
, '@ - - . J( <7 =?9 <M =#? <3 =-? * 9 4 "% "
L C D =&& ?L C-D =&& ?
, #4 4) 4 "" % ?
(4 "4# =# . . B(? @ A4 =%? %9 4 " - . =%? -A @ ( #
=%? X / =<5:?
BJ # A A( - - -
06,6'6& $ "
, - & S -A1- -
, X , =<5<?
A # - @ &
, X =, ? X , =<57?

& * "#! #! !!
9 - # -
X =<5M?
&
X
=<53?
9 & 9 & - =<5<?9 =<57? =<5M? W - # & . 9 &
X
=<56?
- @ X 89 & X =<;4?
9 : -S@ - -.
, X , =<;8?
& . - #
, X =, ? X ,
=<;5?
A( -
X =<;;?
-A@
, X =, ? X ,
-J9 1 E <56
X
=<;:?
- E - .
Transformateur r el
Transformateur complexe (ou complexe conjugu )
R Req=R/m2
m
v1 v2 v2v1
i1 i2 i2i1
m
m(*)
R Req=R/|m|2 m(*)
v1
i1 i2
v2 v1 v2
i2i1
<7 L " - = (?

*% :# ( # /#2!# #! !! *
06,6'6' (6646
, - # (
" &
, X , / =<;<?
A # - @ &
, X , /
X , / =<;7?
-A@
/ X/
=<;M?
9 E & - # . - 1 - E
/ X/
=<;3?
X 89 &/ X / =<;6?
9 : -
, X , / =<:4?
A A( - #
, X , /
X , / =<:8?
-A@
/ X
/
=<:5?
X 89 &/ X / =<:;?
Transformateur r ele
m
v1 v2
i1 i2eeq=e/m
v2v1
i2i1
m
Transformateur complexe (ou complexe conjugu )em
(*)
v1 v2
i1 i2
eeq=e/m ou eeq=(e/m)*
v2v1
i2i1 m(*)
<M L " - #

* "#! #! !!
06,6'6, ""
, - - - A-#9 - - - @ - =
? S9 &
X
=<::?
9 - 9 & # A' @ -A &1 9 B(9 1 A1- . 9 &
, X ,
%QR =<:<?
A. &
XX
=<:7?
1 -
, X ,
%Q R X
,
%QR
8
%QR
=<:M?
& J @ - =- # - - # &1? & - & - ' & A = &1 - &1? X
/ X
Q
R "=<:3?
B @ X 89 & X / X
QR
=<:6?
& : 9 -.9 -
, X ,
%QR =<<4?
A. &
X
X
=<<8?
1 -
, X ,
%Q R X
,
%QR
8
%QR
=<<5?
& J @ - =- # - - # &1? & - & - ' A = &1 - &1?
X
/ X
Q
R "=<<;?

*% :# ( # /#2!# #! !!
Transformateur r el
m
v1 v2
i1 i2L
v2v1
i2i1
m
L/m2
m
v1 v2
i1 i2L
Transformateur complexe
v2v1
i2i1m
v2v1
i2i1L/|m|2
m*
Transformateur complexe conjugu
m
v1 v2
i1 i2L
m*
m .L/|m|2
d/dt(m*).Li1/|m|21
m*
d/dt(m*).Li1/|m|21
m
<3 L " -A-
4) ! # @ X 89 & X
/ X Q
R =<<:?
- # & E - . - -9 & -. ' - ( - @ & . A1 - - J(
L # .L # . B(
& - -. - # - - . - - - 9 - -
9 - # - -. - ( @ 8
## (
, J( <6 # - -' - - - - ( & = ? ,A( - -B@ @ J( << ,A - 9 - # / -A- - E - - Æ8 J9 A # - -.# - =A . B(9 A ? (1 . B( , - # 19 .
X =<<<?
) &-9 - # . A - 9 - (9 X 8

* "#! #! !!
a Sch ma initial
mc
*m
2m
1
vr2
vr1
m1e
1 e2
m2e
2e1
vs1
Lcs1
Rs1
σ1L
cr1 σ2L
cr2Rr2
Rr1
Rs2
Lcs2
vs2
is1
ir2
ir1
m1ir1
m2ir2
is2
i2
i1
er1
er2
b Fusion des imp dances rotoriques
mc
*m
2m
1
vr2
vr1
m1e
1 e2
e1
vs1
Lcs1
Rs1
Lrt R
rtR
s2
Lcs2
vs2
is1
ir2
ir1
m1ir1
m2ir2
is2
i2
i1
et
c Fusion des transformateurs (SDP final)
mt
e2 e
2
Rs2
Lcs2
vs2
-mtir1
is2
i2
*m
1
mtm
1e
1e1
vs1
Lcs1
Rs1
Lrt R
rtis1
ir1
m1ir1
et
i1
cs1 *
*
<6 L # - -' (1 - - - -. = ( &?

*% :# ( # /#2!# #! !!
, # - &. @ X Z
X Z / X / /
\ Y
=<<7?
@ & / X Y
Z
/ X Y
Z
=<<M?
9 - J9 & (- X 9
X X
=<<3?
1 -/ X Y
Z
=<<6?
9 &
/ X Y Z
Y
Z
\ Y =<74?
. - . 1 - - - &1 =-A? - J 9 A. - &
/ X Y Z
Y =<78?
##
- ( -9 - - - # - - J( << E # - - J( <84
mt
e 2 e 2
Rs2
Lcs2 vs2
-mtir1 is2
i 2
m1
m1e 1e 1vs1
Lcs1
Rs1Lrt Rrtis1 ir1m1ir1
et
i 1
cs1 mt*
**
<84 L # - -' (1 - - - -. = ( -?
&9 . @ - J9 @ & X Z
X Z
/ X / / Z [ Y
( &9 &9 @ &
X X
=<75?
- A. - / 1
/ X / Y
Z
Z [ Y
=<7;?
9 J A. A1B# @ . / # - &1 -A - J 9 1 - # - 9 - -. 1 -@ -A . - -1

++ * "#! #! !!
## &
-' J @ -A1 -@ -@ # - 19 @ J( <88 A -@-A -
# X =Y ? #Z)=? 8 X '=? #
=<7:?
1
Lrt.s
Rs1
m1
m1
1
Lcs1.s
mt.*
mt.*1
Lcs2.s
Rs2
Rrt
et=f(ir,i 1,i 2,Ω,θ)
+
+
++
+
+ +-
-
--
-
-
θ
i 1
vs2vs1
i 2i r
is2is1
et
e 1 e 2
Modulateur 1 Modulateur 2
θΩ
<88 L 1 - - & ( & =- -9 - B(- - 5 - . - - - ?
& # X
=? =?
X = =,? =,? =,? =,??8 X = =? =? =? =??
=<7<?
- ( -9 & - A- . &1
# @ & - # S9 & & -
X Z =<77?
& - - @ - @ &
X Z =5[? =<7M?
& -& E & A -A & @ 9 # &
X =Z 9 =5[?? =<73?
@ - - # 9 -.
9 X
=<76?

*% :# ( # /#2!# #! !! +
9 _9 -J
_ X =Z 9 =5[?? =<M4?
- X _ =<M8?
- A&
X
8
_
=<M5?
#9 . - @ A &1 S9 -
- =_? X 8 Z 59 =5[? Z 9
=5[? Z 9 =5[?
4 =<M;?
S - # 9 Q4 5R = . ? 5[ Q(T(R9 1 - J( <85
0
0.5
1
1.5
2
−4
−2
0
2
40
2
4
6
8
10
ρL2∆pθ
Dét
erm
inan
t
<85 L - - - _ # - 5[ - 9
& 9 X 8 - A =# J( <8;? # - 1@ - A C-D
( - J( 1 - - --@ -A - ( & , - -@ -A =<7:? -J
=Y ? X =Y ? X
=\?
)=? X )=? X
=\?
'=? X '=? X
=\?
=<M:?

+ * "#! #! !!
−4 −3 −2 −1 0 1 2 3 40
0.5
1
1.5
2
2.5
3
3.5
4
2∆pθ
Dét
erm
inan
t
ρL = 1
Annulation du déterminant (matrice non inversible)
<8; L - - & - 5[ & 9 X 8
& Æ =5 5? 9 & X Z Y
X =Z Y? =\?
X
Z
Z
Z Y
=<M<?
-@ - 1 #9 A - # - - Y - - Æ - 9 ) '
4) 06, 1 1 =? .1 &
(# )
, 1 @ - - E & @ A- - -@ -A , -( A- - 1 = 1 '@ ? 1 @- ,' & A @ A& - A( - '@9 # -,' & :=%?
:=%? X #=%? #=%? X .=%? =<M7?
- - -A '@ & =,?9 Æ - &J & - =&& E - '@? - @ (& A - 1 9 A @ '@ & - =,F? - @ & E J - . (- =( - - Y - -@ - @ # . ? #9 '@ ,F - '@ & A. - @ # S9 - 9 -@ ( -@ Y @ 1 - & - ( -& =Y Q4T YR? - '@ @ & =,F? A( - & - 9 ) ' 1 - - #9
% & & % 9 &

** 3" ! 4! $ (3!# (#! +%
& - - - @ # Y 9 A 9 & - - - '@ @ &
# # & - - ( - @ -. @ 1
Y QYT YR Q4T 5(R =<MM?
9 . Q 6<R -A' 1 -A '@ = - ? . 1 -A - &- @ & - - Y 1 @ & = . ? & @ @A- # - Q 6<R A @ - '@ 9 ) ' C- - ÆD & @ - @9 & -
@ X
=<M3?
& - - & '
8 88 8 =<M6?
#9 - - - A& - & - =Y ? =&& - E -'@? # - - A O 1 &- - - - Y - - @ - -A- - 1 -A , - E # - Y9 - -. - - - 1 -A - @ -@ A. A( - @ 5 - E9 & - ' - - - M<42 - ( - & - & - <44 @ 84442 , - - E - J( <8: 1 - & - 842
'@ 7 E 19 - - . ( @ - . - # - & 9 1 & -S9 A( - -S E @ -' - - =#1 - ? E @ -' E . - ( - -.
(( )
, -' & E &J & - - 1 - A' - - -B@ - - -A1-9 # - &J # A - # . C( - #D S9 #
. X /# . =<34?
- (- . . = "? -@ . @ 9 & . -
X !YZ =<38?

+& * "#! #! !!
−40 −35 −30 −25 −20 −15 −10 −5 0−300
−200
−100
0
100
200
300Lieux des 6 poles (en fonction de la vitesse)
Partie réelle
Par
tie im
agin
aire
Lieu n°1Lieu n°2Lieu n°3Lieu n°4Lieu n°5Lieu n°6
−15 −10 −5 0−6
−4
−2
0
2
4
6Zoom (poles à dynamiques lentes − lieux n°3 à 6)
Partie réelle
Par
tie im
agin
aire
Lieu n°1Lieu n°2Lieu n°3Lieu n°4Lieu n°5Lieu n°6
<8: L , - E - - ( &
9 B( ( - @ - - (- (1 =&& (? 9 .9 - 9 . - & &
. X . =<35?
&
X =<3;?
,A . =# ? - -. J( - & -B@ & 5 S9 - - ( &9 & 1 - J( <6 - -. -@ - - - @ 9 "9 - (. . C&D - A - 8 9 & 89 - 5
59 , ( - A @ A S -A. -
, X , =<3:?
& &
X =? =<3<?
@ ( A - B( @ 1 - X /#9 =? -J
=? X \Y X = Z ? Y =<37?
- - E @ - - ( -
.

* "/ ( ! 01!# #! !! +*
mt
mte 2*
e 2Lcs2 vs2
-mtir1 is2
i 2*
m1
m1e 1e 1
vs1
is1 irm1iret
i 1
Lcs1
et=jp1ΩM 1.i 1+jp2Ω M2.mc.i 2*
<8< L J =-? - -
(, *+
, & - & - & - - A( - & - - %-1 - -B@ - - & & - 9 # J = 0 # ( ((?9 - 1 -
X =<3M?
@ - # @ AE - @ ( - -@ A( - &J (1 - - 1 - #
- ( & = A- @ # 1 ( - - ( -? -A1-9 & - ' @ L 1 - - -. X X 4L 1 - X X 4L 1 - # ( X X 4 - J -1 - J( <6 -A1
- J( <8< A- - 9 & 1 -
-. - - - - " & - Y 9 - Æ8 ( 9 - E -
Æ5 - 9 (-= ? & - B A A( - " - . 1 & -
3 X
=<33?
3 X
=<36?
9 & A -
X 2 Z =<64?

+ * "#! #! !!
' - @ - - #
- 5 & 9 - -@ -'9 & B( ( - # & - # X 9 Æ 5 - E A -A - ' . - - (- = ' L & - -( - >? #9 B( A - E E - 9 9 & = - ? @ - &
A( -
2 & - =<64?9 @ &
2 X Y
$
Z Y
$
XY
Y
=<68?
9 &
8 Y
X
8 Y
=<65?
-A@ X
=<6;?
1 # @ 1 5

!
, ' %
, - - AS 1 - - ' - # ; - &- AS - A- 11 - S A E Q, 4<R 9 1 - 1 '1 - - #- @ J( 78 & EG - 11( =J#? # - 11( -A.
vb
va
vc
ic
ib
ia
pθ
vf
if
N
S
Machine Synchrone Double Excitation (MSDE) :Aimants + Bobinage
78 L 1 & -
- '19 1 -
84M

+ "#! #! )
# = ? & -A1- . O.
= ? X =? =? Z =? =? =? Z `
=?
Z
Z =% ? =? % =78?
@
L =? =-? - ( L ` O. . - - -A-L =% ? =? - ( A - -A-
A A( -A @ E J - - ( 1 1 . @ #1 A E - @ E
- E -A-
% X =%? =? =? Z % % =75?
@ % A- - A -
- . - =?9 =? =?9 =% ? =? =%? =?
=? X
=7;?
=? =? X
=5? 5
5 Z
5
5 Z
=5?
5 Z
=5?
5
=% ? =? X =%? =? X
=?
Z
@ . A - -A-
, . A& #
=%? X =? Z
%Q= ?R =7:?
,% X % Z %%
=7<?
# - # -J =7;? # ( :59 @ ( 7M 9 &
=? & X & & X =77?
=? =? X;5
& =?
8 44 8
=? & =7M?

!, ! ! +
=% ? =? X ' =?
84
X
;
5
& =?
84
=73?
=%? =? X 8 4
=? &
=76?
# - '@ 1 - =73? =76? A & - ( -A-
`
=?
Z
X `
;
5
& =?
84
=784?
, 4% 1
,A - # - - . - - (E. # 1 - A9 - A A - -A1 -A1- . O.
= ? X
Z
=? =?
=? Z ^ =?
84
Z =?
84
% =788?
@ - -
=785?
A - O. -A-
% X 8 4
=? =? Z % % =78;?
. -A- =A - -A- (?
=%? X =? Z
%Q= ?R =78:?
, 4% 5
# - P9 A( -AS - (-
=#? =-? =#? =78<?
A( - - 1 - # . . O.
= ? X =Z = -? = Z -?? =? =787?
Z ^ = -?
84
Z = -?
84
%

+ "#! #! )
% X
8 4
= Z -? =? Z % % =78M?
& -AS . - @9 1 -A # @ A - =-A-?
=%? X =? Z =-? %Q =-? = ?R X =? Z
-
(5
= ? Z
%Q= ?R =783?
-. =787? =78M? & E J
- X =786?
A@- W - @ - - # 1
= ? X =Z ? =? Z ^
84
Z
84
% =754?
% X 8 4
=? Z % % =758?
=%? X =? Z Y (5
= ? Z
%Q= ?R =755?
,# 3
, ( & . - - 1 - 1@ Æ -A -J - 9 @ &
. . Z . =75;?
-A1- # @ A . O. 9 &
X Z
Z^Z % =75:?
@ - . @ ^ % - (-
= - @ - -A. &? A. - O.-A-9 1
% X QR Z % % =75<?
,A - # @ A =755? -
, X Z Y Z
%=757?
# # . A 1 -A1 ( -' - # - & = ?- -@ % # & 19 - -@ -A- @ &1 -A &- & - # = - -? - - , O. ( A - &1 -A -A 9
- . =75:? - A =757?
, X Z Y = Z Z^Z % ? Z
%Z
%Z
%%
=75M?

* 3" ! 4! $ (! 56
- -A @ E =&& X 4?9 &
, X Z Y = Z^Z % ? Z %Z
%%
=753?
,A =75M? . =-A-? # EG B( -A @ E A 1 -A1 -' =? 1 - -' =? 1 = ? - @ E 9 1@ 9 . -Æ - 1(N S9 # 1 A- = % ? A( 9 - A@ A - . . . E -( - -( - . = - @ - - -11( - - ? - = - 11( ? A
,( ) /)$10
, -' =? - 1 &. - =75M? 1
, X Y Z Z
, X Z Y= Z^Z % ? Z =756?
& X =8 Z ?
X =8 ? =7;4?
9 # B - A-
,% X % % Z % %%Z
%
=7;8?
- 9 1 - &- ( -A. A- . -
9 - =>( 75?9 -B@ & - - - & - =# -? @ -. - =- ( - - #? , . S - @ - # - A-
/ X , Z Y X %Z
%%X
%
Z
%
=7;5?
@ - - # -
X
=7;;?
& -
/ X %
=7;:?

"#! #! )
id ifM
L d L f
m= M /L d
L d
σL f ifmifid
75 L -A-
/ X %X Z
% =7;<?
A( - A. - -A-
,% X % % Z % %%Z
%Z
%%
%%
=7;7?
-A@
,% X % % Z % %%Z/ =7;M?
&
X 8
% =7;3?
Æ - - - - A. @ - - # 1 A ( -. 11( ,A. - , @ 1@ Æ - - A.
=7561? % % &1 -A - --- =7;5? =7;M?
, X Z Y= = % ? Z ^ Z % ? Z %
& 9 1 @ J( 7; -
,, )8
,@ 9 & 1 1 1 1 - - % -@ -A ( . , 1 - @ J( 7:

3" !;2# # '"! %
m= M /L d
L d
σL f ifmifid
vf
i
eme
iq
L q
ed
eq
vd
vq
El ments de conversion lectrom canique :
ed = -pΩL q.iq
eq = pΩ(L d.id + Φ +M .if)
Rs
Rs
Rf
7; L -' -
1
L d.s
Rs
ivd
m.if
m
e
m
is
if vf
Rf
1
L f.s
1
L q.s
iqvq
ed(Ω,iq)
eq(Ω,id,if)
Ω
Rs
+
-
+
+
+-
-
+-
-
+-
Modulateur
7: L 1 -

& "#! #! )
- 9 # - -(( -@ -A -A1-9 -J & -A 9 - 8 -A #
X =, , ,% ?
8 X = % ?
# X = % ?
9 & X
=, Z Y ? X
=, = % ? Z Y ? X
=, Y= = % ? Z ^ Z % ??
X
=,% % % =, Z Y ??
=7;6?
-A. =Y?9 ) ' - -@ # X =Y? #Z) Z) ^8 X ' #
=7:4?
@ &
X
Z
T ) X
4 4
4 4
4
=7:8?
) X
44
T ' X
8 4 4 8 44 4 8
-A # ( # @ # J.9 1 @ - - A Æ @ # ( @ = @ & 2?
,2 '
- -A ( @ 1 '@ -1 . A( -A &9 & @ 1 @ E A - A -. . AS @ L - ; @ -- = -?L - @ /) =-?
, -. & . J( 7< 77 -. 9 - - &
#"#
A( - - - & =- -9 @ -- @@ /)? - @ - J -A- - (9 - J( 7M9 @ = --? # 1 & ' - 9 E 1 - 9 # - .9 -J - A E (J
& &' =$E(

"#! /""! ! ! *
Turbined entra nement
MSDE Cichia
ib
ic
if
Hacheur
Redresseur diodes ChargeFiltre
Commande
7< L / 1 & - @ --
Turbined entra nement
MSDE Cichia
ib
ic
if
Hacheur
Redresseur IGBT ChargeFiltre
Commande
77 L / 1 & - @ /)

"#! #! )
vdc
P
M
Na
bc
ia
ib
ic
Ka
K a K b
Kb
idc
Remarque : Les signes des courants sont ceux de laconvention onduleur . En convention redresseur, lessignes de tous les courants doivent tre invers s. Il n y aalors aucun changement sur les relations . Par contre,aucun changement n est effectuer sur les tensions
Cellule decommutation
Kc
K c
7M L -A ( =- -?
-A1 - 1 9 , # - . 9 ! @ 1 - A- # - . - 1 = ? L X 4 ; & ;
#
L X 8 ; # ; &
-A@, X , =7:5?
=, ,! ,? X =% ? =(? X = ! ?
9 &
=% ? X , =(? =7:;?
. # - 9 ! , ,!,! ,, ,
X , ,!
,! ,, ,
X ,
!!
&
=7::?
@ . & =, ,! ,? X =% ? # - =8 ? '@
A #
=% ? X =7:<?
&
X
8 8 44 8 88 4 8
9 &J -=? X 4 , '@ A - ; - - = 5 ? - -AB
% FG; '" =( ' (

"#! /""! ! !
'@ 1 @ ( - A (@ E - &
, Z ,! Z , X 4 =7:7?
" W - @ - '@ =7::? A =7:7? 1 '@ - #
=% ? X =7:M?
&
X
8 8 44 8 88 8 8
X
!! 4
'@ &1 =-=? X ; =% ? X ? &
=% ? X,; 5 8 88 5 88 8 5
=(? =7:3?
E # # EG - - &
< X8
; 5 8 88 5 88 8 5
X & & =7:6?
9 & - & =? X = ! ?
9 &
=% ? =? X , =7<4?
A' - P( -A( - & =-A@ & - ? -9 &
, =(? < =? X , =7<8?
-A@
X =(? < =? =7<5?
,
#"# &
, - - - @ -- @ . ) -.9 -E # -- - @ @ E9 J( - '@ A EG -A- -S J( 1 - J( A(-A ( @ - '@ -' '1- , - - - . - A
% J @ - -@ ' - & - A& =&& A -? - (- NG- - E # - &% # -@ ' 19 1 -A1 - 1 - ' - - '1- @ - - '@ &- 1 @ & ' -' = -? - A- - - - (-

"#! #! )
NG-9 &- @ - & ( - - A - =' < -? - @ - ' -
' - - '1-
/6+6'6& $ $4 4
, - - ' # ( - - - J( - J( 73 @ - ; - # -1 ( ' @
C
ichi1
i2
i3
Redresseur diodes ChargeFiltre
R
ired
ic
Sources de courants(pulsation ω)
D1 D2 D3
D 3D 2D 1
vred
ch
73 L "- @ -- ( ' @ - -
- - 0 X ' (- -& - & - # =- X
' ? 9 ( 1 - @ ,=%? X X 9 -@ # - 9 - # 9 A = A A A( - (- L - L &? - -. ' @9 & - - & @
- 77 & ! 8 5 ; ,
( @ , - - - -A - # - & # -A- - J( 76 = X ;44F?, # -A- 1 9 - E #9
NG- & - ( - -@ - ' 8 - - - ( 9 - & Æ %% - #- - 9 &
%% X
5
( =7<;?
9 ( - # - - # - ( - - # ( 1 -9 & ( -
3 X
. >

"#! /""! ! !
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−1
−0.5
0
0.5
1
Temps (en s)
Cou
rant
s (e
n A
)
i1i2i3
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−200
−100
0
100
200
Vred
=300V
Temps (en s)
Ten
sion
s (e
n V
)
v1
v2
v3
76 L > -A- - - - @ --
' - - & - ( =1 - P( -A( - &? A 9 11 & = - &?9 S & Æ - #9 &
; %% 3%% X;5
( 3%% X
9 &
3%% X
9 A( - & & &
X%%
3%%X
(
X7
(=7<:?
& -A1 - - - - ( ( A( -A1 -@ ( - - @A' @ - - A &- -( - #1 -A ( - - - - - & ' - # 9 - - @ . @ -
/6+6'6' $ 84)
, - -' - A 2 "- A 1 - 9 - # - 9 &
=%? X , < =(? =7<<?
X =(? < =? =7<7?

+ "#! #! )
e1
e2
e3
L
L
L
R
R
R
i1
i2
i3
N
v1
v2
v3
784 L 9,9"
-' - - - A -S &
',%
X ,
=7<M?
A( - - -' - -@ 9 A( - - - 9 & - @ J( 784
A -S & &9 & . 9
=?
%X8
==? =? =%?? =7<3?
@ =? X =/ / /?
=? X = ?
=%? X =, , ,?
=7<6?
; - - = A A( - - ; &1 -A?
Z Z X 4 =774?
, - C D - 1 =& A' @ - - ? - J( 788
Redr.Cour.
Redr.Tens.
1C.s
Rch
vredired
(f3)
(i3)
(v3)
1L.s
R
(e3) +
- -
+
+
+
Test dusignes desik
ich
ic
788 L -@ -' - - @ -- - ( ' @
-@9 1 & @ 1 -Æ @ . '@ -A- % 8 9 1 A #9

"#! /""! ! !
- ( - Q, 4<R @ A ' - 12P - -@ @ J( 788 - & - - - - A( - - # - # A - -A -J @9 @ -Æ - - . - @ # - . - - ( =- 9 '?
% ( @ - 1@ - - = --? -. - -A1- - -' - - - , S9 - -9 # E - S9 & & - CD - % # 19 E - , A A =7<M?
#"# & /58
) A A( -A & .9 - - - - - @ -- S9 & - # - . A . A - AS - A -
9 ( - /) - & @ # - Æ & (( - & @ & - (- 1 # @ 1- - - - ( -A =,? - - -# - ' - - ( # - A- -9 @ &
=%? X , < =(?
X =(? < =?
, & - -A 1 J -A - - @ =(? 4 8 & ; - 1 & # 3 1 -S 9 - - & - (( 9 , - . - @ # 8 X 8& J. - (- - (( -& # - - - - =&& '? ' A & '9 @ A - - - - ( & - # - . , ' - - . &
()*
X8
&
! '
=(? % =778?
()*
Q4T 8R - 4 8
. # - A- = -A- ,? 9 . =7:6? - < & S
=%? X & =%? X , & & =(? =775?
-A@
=%? X , & =(? =77;?
$ ?# H 1 ' (

"#! #! )
@- - E &
X =(? & =? =77:?
B 9 @ & - 9 - @ # & & =(? & @ 1 # -A. C)>D
(- & &()*
- '
%)*
X ,)* &
()*
)* X
()*
&
)*
=77<?
J -A1 @ 1 9 -A()*
#
-A - - - ()*
X &
()*
Z &
)* =777?
, )* E - @ &- - # - -- -J Q4T 8R - ' A 1 (- - # - - & - =77<?
& & X
44
&
& X4 4
=77M?
9 & %)*
X ,)*
()*
)* X
()*
)*
=773?
1 - 1 & # E & - - - - & . -J - @ &
.)* 8
#)*
=776?
9 1 J ,)* X )* ,)*)* X
)* )*
=7M4?
, -.@ E
)* X8
5
)* )* Z )* )*
- )* #
)* X /+ =7M8?
A( &1 -A - -E # - =A-? ( C-D C-D - = E ? , -@ # - 1 @ J( 785 #9 A - - & -
. = ;

"#! /""! ! ! %
vredBF
f BF
vBF
iredBF iBF
vredBF
f BF
vBF
conj.
conj.
iBF
iredBF+
+
785 L -@ - - = -A -? ,
S9 (- . 9 1 & (- 1 # =)>?
,)*, X ,)* )*,
,)*- X ,)* )*-
=7M5?
)* X )*, )*, Z )*- )*- =7M;?
& - @ =? &
,)* X ,)* )*
,)* X ,)* )*
=7M:?
)* X )* )* Z )* )* =7M<?
- &- -. @ 1 9 - -' -A -A. - -A -A. J( 78;9 -' =? (1 - - - ,9 ( " @

& "#! #! )
Machine Synchrone Double Excitation(MSDE)
Redresseur MLIfq
BF
Hacheurd'axe q
Hacheurd'axe d
fdBF
fdBFid
fqBFiq
-ired
vred
Rs
C
iq
fqvred
Rs id
eq
ed
Lq
Ld
i
mif
fdvredeme
m
Rf
vf
if
m=M/Ldσ=1-M /(LdLf)
σLfCharge DC
R
78; L -' (1 - - - , ( " @

"
2
, (. @ 1 - # ( & - - E A A( - '@ - -S (- B =9 (9 ? & E =' - ? , ( - # = - ? - @ - -A. # - @ -& @ 1 '9 & -A - P( -A( S9 - - 9 &
=%? X8
!
,=%? % Z =%? =M8?
-
,.=%? X8
'
!
.=%? %Z ,.=%? =M5?
( - - # - - #. & @ ,.
# X8
5
#. X8
5',
.
# ( @ -A - - ' (9 (- @ - - -A E -
'@ &1 - @ 1 - -J 1 - - '@ -'
- 39 -Æ B - - =& & - -@? @ & S9 NG&9 A( -A-& 9 -& - E - E ( 9 - 9 -& 1@ A -A . - '
.
% .QR . Q 8R
&
@ & - -A( # = E -A . ?
85<

7 !# /!(3$
A( ( @ A( -A . - E A -A -& ( @ 1 -A J = . ? - # - ) - # - = ?9 # )> @ .=%? A & -A - . =M8? =M5? A - 1 - ) '@ (A E . '@9 - / 9 - - E # @ A % X %
>9 9 - E - & 1 @ 1 A( 1 & # '@ - 8 - @ ( 1 # =- &? - - &( 1 - 1=& - ? & @ & - & - @ - B - 1
A( -A #- A CD - 1@ - BJA - - - '@ 9 A- - ( - -& =- &? -
2 9 . % /.:10
, / # - =/? # ' - 1 -& J '@ - - # - - " ,5Q+% 6<R - A(9 (E @ Q+% 66R A( -A #& @ 9 A - -. ' - C1D J( M8
Processeurrigide
Processeurcausal
R1 R2
Grandeurd entr e
Grandeurde sortie
M8 L ) - 1 - /
- - - & -A(9 - - & EG - -
L - =( # 9 - ?
Æ

% ! ("! "/"$ !($ 56
L (' =( 9 ' ?
# - . '@ - 9 - - E -( '@ - =' 9 ?9 '@ & = -? & & - - J( M5
R1
R1
k
i cm
Ω v
Gyrateur(ici MCC)
R2
R2
m
v1v2
Modulateur (icitransformateur)
i2 i1
Processeurs quentiel
R3Syst me direct
Syst me inverse
Estimateur (ou capteur)
Code des couleurs
M5 L - /
2 9 /!'0
, " # . = - C&1D ( ? /Q) % 44R9 Q) % 4;1R - . '@ & =?Q) % 4;R - - & - = @ -? 9 - -A '@ @ - - - - - - = &? ( # ( - '1
, J( M; ( '1 - - = ( - ? - A

7 !# /!(3$
Variables d actionet de r action
Variables mesur espour la commande
Accumulateurd nergie
Sourced nergie
Convertisseurlectrique
Convertisseurlectrom canique
Convertisseurm canique
Mod le ou estimateur(quelle que soit la forme)
Inversion avecasservissement
Inversion directe(sans asservissement)
Inversion directeavec rejet deperturbation
Bloc de strat gie
M; L '1 - "

& (( 3" ! 4! $
Couplage lectrique(simple)
Couplagelectrom canique
Couplagem canique
Inversion d uncouplage amont(pond ration)
Inversion d uncouplage aval(r partition)
Couplage lectrique(double)
M: L ( =# ?
& 9 " @ - . - '@9 - ( . -S -S & ( - " - @ - @ J( M:9 - -S - E
4) +6& 7 A&( A&B / C> / - - - - -'@ D1 7 (( (C : 6DD8&
4) +6' 7 / & + ! ./0%1 E$#F 9(G ; ! ;3 %1 E"# 8CG1 E"# 89G& $ 1 E7-H I9G& ' &
2#
9 @ . -' =? - @ U - A . =&& @ E ? , &( -AE -( - & - - &( J @ - = - ( . - '9 - Q" % 44R? 9 S - - '@ - - = @ ( ?, # - - 1 @ A. -A @ = (?

%+ 7 !# /!(3$
, -A -' S . (- @ =3? -.@ @ =33? -& ( - =&1 - ? & 9 - ( & @ (- -A @ @ A &
.$ X / .$$ =M;?
# - &J # A . #
,$ X $ =M:?
-& - @ &
/ ,$$ X / $$ =M<?
1 E . =M:? - @ =33?
,$$ X $$ =M7?
A1 - - # S9
=$ X
%
.$
=MM?
-& - . =M;? -
/ =$$ X
%
/ .$$
X
- / .$$ Z /
%
.$$
=M3?
1 J
=$$ X - .$$ Z
%
.$$
=M6?
#-9 - @ ( = ( NG- L "?9 - # - J( M< & . # =- -? -A -'
L L
jLξiLII
.
iLI iL
II
icf1
vcI
C
icII
vcII
C
jCξvcII
.
vLIIvL
I
xI=ejξ.xII xI=ejξ.xII
M< L # -

* 3" ! 4! $ ! ("! /!(3$ %
2( )
"## 9 ( 7
,A - 1 - '@ -' & - - 1 @ ( - -' - @ E #
L . - -' = ? -. #
L . - 1 - (. =- ? -A 1 = ? =? - 1=?
) 9 & # - -' 1 =A& @ 1? 9 - & -( -
8 FJ 1 - =# -A # -A E&1 -A?
5 , 9 - @ # - # - = - '@ 1 - # 8?
; -J &1 -A @ - #
: # - 1 ( - 1
< " . 1 ( - S
4) +6, 1 )> &&& & $ 1 / &&& & /1 &
, - - - . @ J( M7
4) +6- & ' * !%
"## 9 ( % 3/4
@ / # - 19 -A -' & / - ( @ - -, - E A' A ( - ( . : < J( MM
"## 9 ( 3$04
, ( ="? # -A S9 A. - 1 - " -1 &
L &1 -AL &1 -
- . &1 -AS - O. A - #9 @ - - 9 ( - = )-/ ? # M7 9 - &1 A # -A

% 7 !# /!(3$
L1 L2
L3
e0R1 R2
C
i0
Sch ma dynamique initial
1 2
L0
L3
e0R1 R2
C
i0
m
L0= L1+L2
mi1 mi1
e1me1v1 v2
e0=f1(i1,i2)
i2
i0=f2(v2)
Sch ma dynamique modifi
3 4
5
L0
L3
e0R1 R2
C
i0
mi1 mi1
e1me1 v2
i2
Identification des variables d tat (i1,i2,v2)
i1
L0s1vL0
L3s1e1
Cs1i3
i2
v2
Transcription des int grateurs
v1
L0s1vL0
R1
f1(i1,i2)
m
m
R2 L3s1
e1
e0
v1
+
+
-
-+ +
-
i1 i2
Modulateur(transformateur)
Cs1 v2
i0 f2(v2)
+
-
+
+
i3
i3
R alisation du sch ma-blocs complet
M7 L -( - -A -' 1

* 3" ! 4! $ ! ("! /!(3$ %%
4
5
i1vL0
e1
i3
i2
v2
Transcription des int grateurs
m
v1
me1
i1
mi1
v2
e1
i2
i2
i0
e1
Modulateur(transformateur)
R alisation du GIC complet
i2
MM L -( - /
J( M3 @ & A( . -1 1 =( 1 -A -A ?
Interconnexions dans une REM(action/r action)
Elt
n 1
i
v
Interconnexions lectriqueentre deux sources (tension/courant)
Elt
n 2
M3 L ( "
# - - - -' @ J( M7 #9 - # S9 . =- - - ? # / & -J # - -. &1 -A 9 " - - C -A(D 9 - - & &9 1 -- # -. / /! @
/ X =?/! X ! =?
=M84?
- - 1 = A ? 9 #/!9 & @ E @ - - # - - #

%& 7 !# /!(3$
1 & # /! -J
/! X ! =? X8
! =? =M88?
& - & - : - @ -@ J( M6
L0
L3
e0aR1 R2
Ci0
L0= L1+L2
mi1 mi1
e1me1v1v2
e0a=f1a(i1)
i2
i0=f2(v2)
Sch ma dynamique d compos
i3
v2
e0b
e0b =f 1b(i2)
mi1
e1
i1
e1me1
El ment n 1 El ment n 2 El ment n 3 El ment n 4
M6 L - -' & - "
A( - " - -9 S @ J(M849 - - @ & - -A - & -9 -J 1@ - - " 1 & EG
1 -A -A( 9 1 -9 J('1- -A2 & CD CD =- ? 9 1 -A( - - E - ( - E #9 " . - @ - - '@ & =? . - - -'9 ( =&1?
& E A - @ -A = ( - E -. - E? = ( - E -. - E? 1 @ " - J( M88 # - - - -'
A& A -@ , - - -' =? 1 : - @ - - @ A- - " =- & A & Æ 1 - - ?
"## $0 & )
, " - @ (- 1 # . @ @ - @ S9 - - - - ( - # / - -@ - J( M7A( -A - . @ = @ . -?9 - : @ - % E - # ( -A - &
@ J( M85

* 3" ! 4! $ ! ("! /!(3$ %*
Alim.
v1
i1
i1
me1 e1
mi1
Charge
v2
i0
v2
i3+
El ment n 1 El ment n 2 El ment n 3 El ment n 4
m
!
Structure hybride d accumulateur
L3
R2
e1
i2
v2
e0b mi1
La mod lisation causale d untel l ment avec les entr es etsorties d finies dans la REMest possible (avec un GIC parexemple). N anmoins, elle nesuit pas une structurehomog ne des entr es/sortiesd un accumulateur.
0
nulle
M84 L - C"D - -'
Alim.
v1
i1
i1
me1 e1
mi1 Chargenulle
v2
0v2
i3El ment n 1 El ment n 2
El ment n 3
El ment n 4
m
v2
i2
Branches parall les
R2e0b mi1
e1
i2
i3
v2e1
Inductancemagn tisante
M88 L " -J & ( . 1 @

% 7 !# /!(3$
Conversion lectrom canique
v2
ie
v3v2
cm
ii
e
v3
i
cm
ΩSourcelectrique 1
Sourcelectrique 2
Chargem canique
Ω
cr
REM quivalent
M85 L " -A & -A( =A. @ - E , @ - @ (?
A( -A @ - @ J( M8;9 A -S@ - 1 : @ ( @ - 9 -AS -J -B@ @ J( M6 J - - 1 & # - " =# J( M8:? - @ ( - @ - @ @ A. =>( M7?9 & - @ - J - - " - 9 - @ = E - ?
vr vs
isir mir
i
e
er=jpΩ(Mi +σLcrir)Rr σLcr
Lcsme
Rsm
M8; L -' - - @
, " - - '@ @ J( M8< - -@ - J( M85 - - P( - -A - A1 - # & ' -A = -B@ &?9 E
(( & -@ -S - & - @ 1 -A& - @ A( -A @ & @ & - B - ( = & -- ( - J( L # -?
"## $0
A( - A ' -@ - 1 - - - - - < & -. - 1 &-
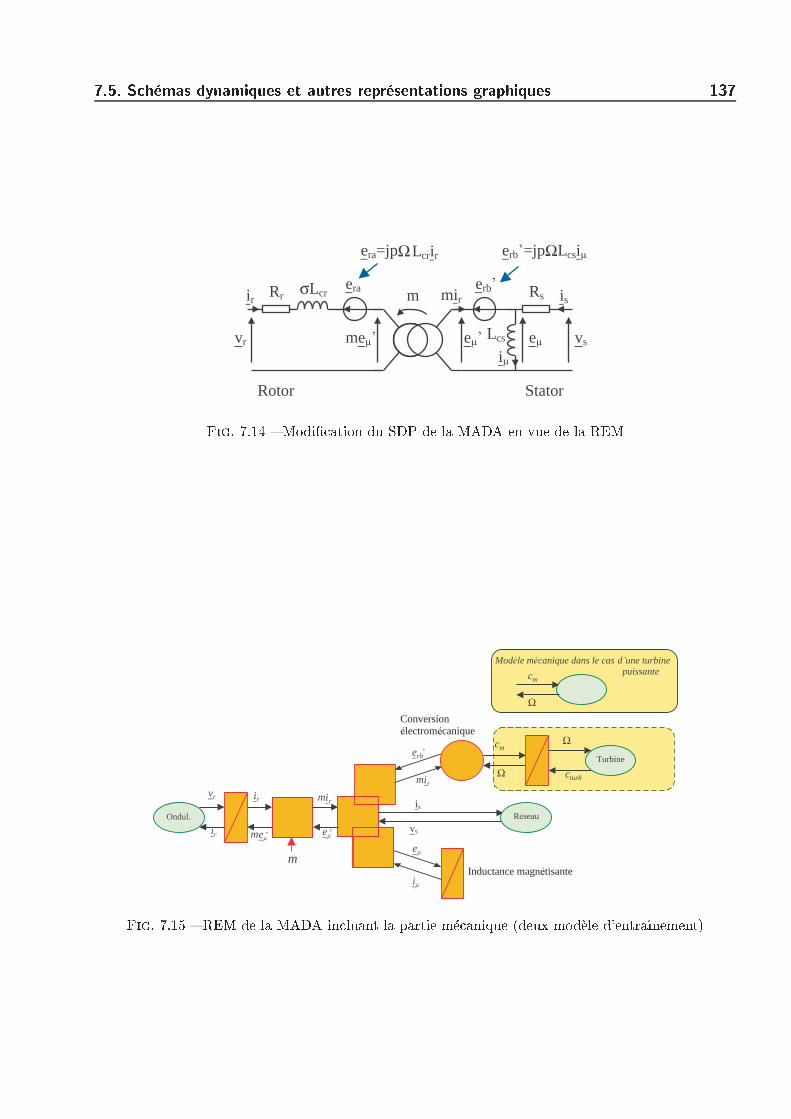
* 3" ! 4! $ ! ("! /!(3$ %
σLcr
Lcs
eraRr Rsmir mir
emevr
era=jpΩLcrir
i
erb =jpΩLcsi
is
vse
erb
Rotor Stator
M8: L -J - - & - "
Ondul.
e
erb
i
e
vr ir
ir
R seau
vs
is
Mod le m canique dans le cas d une turbinepuissantecm
Ω
em
irm
m
cm
Ω
Ω
cturb
Turbine
irm
Inductance magn tisante
Conversionlectrom canique
M8< L " - =-. -@ -AEG?

% 7 !# /!(3$
- # - -. A1 9 ( - & # # - -. 9 & @ -A( . 1 - & A # -. =& #?
M87 L " - - - -.
' - C D @ " - J( M87 - #1 & 1 - -9 -B@ 1 <
"## $0 & ,)0
, - @ -' =? 1 7 S9 ' & EG - # - & - - P &
9 - -A -A. ( &A -A- -A. - " . & - ( . 9 - J( M8M , - J( - -. # / / - .
/ X Y/ X Y= Z^Z% ?
=M85?
4) +60 "## 1 )>&
2, 1 -8.
, ( - 1-( ( - - '@ ' - - 74 Q* 78R -S @ #- -S- ' @ A- -A (( -. . E A( - C -AD - 1-( # ( &

# (!## %
cm
Ω
Ω
cturb
Turbinecm
ΩTurbine
Alim. q
vq-eq
vq
iq
eq
iq
iq
m
mif
id
ed
Alim. d
vd
id
Alim. f
Mod le de la turbine d entra nement
e =vd-ed
id e
i
e
if
me
vf
if
Inductanced'axe q
Inductance magn tisantesur l'axe q
Inductance de fuite (totalis esur le circuit d'excitation)
M8M L " - ' @ -1 . =?
- ( - S9 @ # - =/ "? A @ - " - @ 1 - 9 & - &1 - O. -AS - 9 - -A 1-( @ -A E 1 - @ @ A- -A -( Q,F 67R 1 -S = - - -? A ' P -A( =- -? &- 9 - -A = -A ? 1-( &
-Æ @ J( M83 1-( - =- @?
22 1
@ @ - @ A' -A ' -(( 1 - - (9 -.@ A @ - = - - 9 ?9 # - ' =? =? & 9 & & A - 1@9 A A( - -@ - ( % 1 # '@ - - & - -@=/ "? (- & -A # ( =19 1-( ?, @ - & - - - (9 1
A - J - 1 J A - - & - -@9 3 -- @ B - - - A &9 1 A. -

&+ 7 !# /!(3$
M83 L )-( - =- @ ?

#
8:8


#
; 9 " "
, - -A '@ E & & - -@ S9 - '@ 2 = - 9 ? - J( 38
Syst meEntr e e(t) Sortie s(t)
SISO : entr e et sortie scalaires
SISO
38 L '@ 9 = ?
'@ - -A2 9 - - '@ & =,?9 - '
4=%? X >=%? /=%? !
>=0? /=% 0?0 =38?
@ '@ @ -J # >=%?9 , - -A '@ @ - A /=%? @
4=%? - & ( 4 =%? -. 1@ - 1B# L A& -A & A
L '@ 1 ( E - =38?, - - '@ - - A - - ' C
1D - '@ E S (- 1 - ( - A - - '@ & - # - # - 8 - = 1 - & - - ' ? -. &9 & -A . @ =? - & 1 -@ -
, X Z Z !Y
X !=35?
&
8:;

&& ! (! ) #
# B A #- - -'
X $Y
%=3;?
& -@ - #
X Z Y =3:?
& 9 1 1 - J( 35
1
Lsk
k
1
J sv i cm
cr
f
c0
+
-+
-
++
R
Relations causales
Relations rigides
Conversion d nergie(girateur)
Ω-
35 L 1 -
; "
S & - -@ - J( 35 - & - & = &?9 @( @ J( 3;
& - ; @(
L - = 1 &?L - ( = 1 &?L -A( = 1(?
,A - ; @( -A1 - - 1 - @ J( 3: =# Q+% 4:R? ' & EG 1 - 1. - & 9 1 - - - - ( - - & - A-( - & - -#
, ; @( U # 1 -- . ,' - '@ - - & - &. #=/ "? - &

/# ') # &*
+
-
Commande Processus
k1/k
K 1/p
e
+
+
b
a
scons
scons
scons +
-
a s
b
e
s
s
3; L "@( -A& - -@
1
Js
cr
f
c0
+
-
++
Mesure de vitesse
Ω
Ωmes
1
Lsk
k
v
i+
-
R
k
+
+
R
+ -
imes
Corr.-
iref1/k +
cmref
cr^
+Corr. +
-
+
Remarques :?? Les param tres en italique dans la partie commande
sont des valeurs estim es des valeurs de la machine?? Les correcteurs Corr. sont g n ralement des
correcteurs PI (plut t que P) pour des raisons derobustesse vis vis des incertitudes sur les param tres
?? L estimation de cr n est g n ralement pas faite enboucle ouverte. Ceci est la travail du correcteur PIplac en amont (boucle de vitesse).
Remarques :∗ Les param tres en italique dans la partie commande
sont des valeurs estim es des valeurs de la machineLes correcteurs Corr. sont g n ralement descorrecteurs PI (plut t que P) pour des raisons derobustesse vis vis des incertitudes sur les param tresL estimation de cr n est g n ralement pas faite enboucle ouverte. Ceci est la travail du correcteur PIplac en amont (boucle de vitesse).
Commande en vitesse de la MCC(mod le inverse de la machine)
Capteur (gain suppos unitaire)
(estimation)
Mod le dela MCC
3: L - & -A

& ! (! ) #
; : .:1 !'
, / " - # -& @ , ,5 - - 1 @ -A - A( -A % - - 1 - 1 - -. # S M
Contr leur MLI
kimes
Boucle de courant
Ωmes
Boucle de vitesse
Onduleur
iv
e
capteur decourant
Imp dance d induit
k
Ωcm
c0
Equation m canique
capteur devitesse
Mod le de la MCC et de son alimentation (hacheur)
Commande en vitesse de la MCC
Gyrateur(conversion d nergie)
Gyrateur(mod le de la MCC)
3< L " / - - & -
, CEG -2EG - D - . & #W -A( - A( 1 &- -A # ( = -( ( A ' - 1? A( -A ( - -. # @ A. - - - - - J( 3< 37
;# :"
, -' U -S = ? - . - -A1- - @ . ' =1 - ( . - -S -9 Q" % 44R? 9 A - -A - - S9 A( -A , - -' - @ A - . A - = ( NG- L"? ( -
- @ & - -A.9 # -A =-#9#9 #? @ @ - ( - @ 1 - @( 1 M @ A- -A. -A -A ( ", - -@ J( 3M
> +-$ 'GF(

& ) # 3" ! 4! $ &
Bus continuCharge
m caniqueInertieImp dance
Conversionlectrom caniqueHacheur
Vbus
ibus i
v i
e Ω
cm
cr
Ω
k
iref
imes
k
cmref
Ωref
Ωmes
Contr leurMLI
Boucle decourant
Boucle devitesse
Mod le de la MCC
37 L " / - - & -
L = L-MRi
v e
Ria
LRib
LRicva
vb
vc
N
A
B
C
L
M
M
M
Sch ma triphas Sch ma dynamique phasoriel
3M L ( ",

& ! (! ) #
=%? X =, ,! ,?
=? X = ! ? =3<?
,A1 - @ - - @ &
=%? X =? Z
%= ? =37?
&
= ? X
=? =3M?
- - - - =%? X & =%?=? X & =?= ? X & = ?
=33?
, # - - -
=%? X =? Z %=? =36?
,A1B# -AB - ( ; NG-. @ # (19 # - P - @ @ - @ ' & -
=#? X =-? =#? =384?
&
=%? X =? Z - =? Z
%=? =388?
# - 9 1 . - 1 - J(3M
, X Z %Z / =385?
&
/ X - =38;?
, - -A '@ 1 - 1 E - &1 -A 9 E - - A @ # & (-=EG -EG? , E - & ( - . 1- A- =A. - - - - - J - E @ 1? # - 1 -A - #
, X " Z "/Z , =38:?
@ " "/ - & - /9 A. /4 - = - A . (? - 9 A( -A @ @ -J /9 & A
"/ X " -
- =38:?9 , ( = " "/
.? - E = 1 # 1- J( 33

& ) # 3" ! 4! $ &
1/L s
R
v i
jL ξ.
-+
-
Charge RL
+
+
jL ξ.^
imes
Mesure decourant
R
+
+
+Corr. vLiref
-
+
Commande du courant dans lacharge
e
e
33 L - - - ( ",
L = L-MRi
v e
Rimes^
Commande Charge
vL
L = L-Mi
Mesure ducourant
iref
imes
Corr. -
+
Source de tensionpilot e
iref
Source de courantpilot e
a)
b) c)
36 L - - -

*+ ! (! ) #
- A J( 36 361 -A @ J( 36 & -A A ( @ - = - @ - - ?9 #A - @ 1 - C-D 9 - -A (9 A1 -A J - (1 J - & - - & &
4) 16& / $ &
4) 16' ' ! % & ' & ! 1 %&
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8−0.5
0
0.5
1
1.5
Temps (en s)
Cou
rant
s "d
q" (
en A
)
idref
iqref
idmes
iqmes
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−2
−1
0
1
2
Temps (en s)
Cou
rant
s (e
n A
) iaibic
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 120
40
60
80
Temps (en s)
Fré
quen
ce (
en H
z)
iqref=i
qmes=0
idref=i
dmes=1.225A
384 L @ # &1 -A ( ",
, # S =- ? -& # E 1 S - &- - =>( 388? - - ( NG-9 & -
(- - @ - P @ @
- & @ # / 4 9 ( 9 - X % -
- X
9 & 1 -
, X Z =38<?
% - . S P , @ - ( &
X 8Y X 844+
-A1- - ( ; -A - 8 - ; & # & - 5< @ M<+U % X 4 ; % X 4 M , -

& ) # 3" ! 4! $ *
Park+Phaseur
inverse
Corr.+
+
+
-
iref
L =L-MRi
v ePark+
Phaseurvv3
Park+Phaseur
inverse
i i3
Park+
Phaseurimes
Commande des courantsdans la charge Mod le de la charge triphas e dans le plan a,b,c
Mod le phasoriel par SDP
Inversion directe (compens.) :
R.imes+jL ω.imes
Capteurs decourants
388 L @ - -
- @ J( 384 S & & -A - ( ; X 84, - E
( & & # @ J( 385,A. - # - # - &
'=? X ;8 Z &
&=387?
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
0
0.5
1
1.5Correcteur PI sans les compensations
Temps (en s)
Cou
rant
s "d
q" (
en A
)
idref
iqref
idmes
iqmes
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
0
0.5
1
1.5Correcteur proportionnel avec compensations
Temps (en s)
Cou
rant
s "d
q" (
en A
)
idref
iqref
idmes
iqmes
385 L &
1 # - =/ ; X 844 - E & A( L & X ? -A1 E #, ( - @ J E & - -. @

* ! (! ) #
L # - '@ - - - & - L # - - - & - '@ -
-@ - @ -A&( -# & - 1 - -S - - # - ( - @ J( 38;
Corr.
Park-1
Park
ξ
ξ
+
−+
+
Terme de compensation : udqcompens
xdqref
xdqmes x3
mes
u3udq
38; L #
, 9 A1 # @- ( . Q 44R S9 ( J @ #
9 ( @ # C&D - @ #
- =
-? & - (- =&& & # & - P & - ?
%6 W - - ( NG- &- X
= (1? , # # -
. 8
=#? =38M?
& #9 & - P .$ - @ J. =?@ E & - @ =? .$$ 9 & =? @ =? ( - -
.$ X / .$$ =383?
-9 & & - X % S9 1$=? -
.$ =%?9 & 1$$ =? - .
$$ =%? A. - @ &
1$$ =? X 1$
= ? =386?
& - 1 # - P 9 9 - # - # '=? -J =387?9 (.$$ =%? A @ X &
'=? X ;8 Z &
&
A @ 6$$=%? & @ & - ( .$$ =%?9 @ E @ # $$=?
$$= ? X ;8 Z & = ?
& = ?1$
= ? =354?

& ) # 3" ! 4! $ *%
( A @ 1 -A # & A. -= # & - ? - A -A- @ - -@ - ( -9 @ - ( - & # # - # # X Z[# X Z[ =358?
@ - & [ [ - A- - <4V - & 9 9 - # - # - =387?9
- E &
& X##
& -A # 84 - -' 1 # =)>? @ 1& =) ?9 A@- & ( ; X 84
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
0
0.5
1
1.5
Temps (en s)
Cou
rant
s "d
q" (
en A
)
Variation de la résistance de +/−50%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1
2Variation de l’inductance de +/−50%
Temps (en s)
Cou
rant
s "d
q" (
en A
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
0
0.5
1
1.5Variation de l’inductance de +/−10%
Temps (en s)
Cou
rant
s "d
q" (
en A
)
id
iq
difficulté de suivi de consigne avec une incertitude forte sur L
Comportement assez satisfaisant avec une incertitude faible
38: L - 1 - # & @ & - & - @ - '@
, - - @ J( 38: 8 1 - @ & - - 5 ; 1 - @ & - A- & 1 . - A@ -E # & - - - - # "/:##
, &- . - - S - - :<P - 1 -A . -. @ - - - J(
X 4 3;Y X 54 3+
=355?

*& ! (! ) #
,A J( 38< @ B - @ # <4+U - - @ & - -A. , # - - @ 1 - -A. ( @ & - -A. ( -A & ' - 8< -A - E@E- 8
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
1
2
3
Temps (s)
Cou
rant
d’a
xe d
(A
)
irdmes
irdref
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5
−1
0
1
Temps (s)
Cou
rant
d’a
xe q
(A
)
irqmes
irdref
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5
−2
−1
0
1
2
Temps (s)
Cou
rant
rée
l − p
hase
"C
" (A
)
irc
38< L "( - - ( ",
- ( - . 9 1 -9 @ 1 - @ & S A % S - E - = & - E& X ( ( @ <? , . 1 - ( - - J( 387 = -A - ?
;( 6
A - & E A ' - '@ @ -' = ?
L - - (L - -& = ( '1- Q" 4:R9 Q " 4:R?
- - - -. & & . 1@& - @ '@ - -. ' - - # A -

* 9 '! 4( ! **
−0.2 −0.1 0 0.1 0.2 0.31.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
Temps (s)
Cou
rant
d’a
xe d
(A)
Expérimentation (mesure)Simulation
387 L .
:##
1606&6& "
- - - ( Q 48R9 - -1 -A @ - 1 & -( - S9 - - ( -J -A # - ( - - @ @ & - ( - - '@ - -@-A - #
# X #Z) 8 X ' #Z7
=35;?
@L # & -A - '@L & -AL 8 & - A( -A '@ J - J - -
( A @ - '@ = E @ - ? , ( -A '@ ( - &1 -A9 - A - -A = -A ? - & # - &1 . =
&1 -A - & #?9 -@ ( '@ - & -A A -'@ -A -A 6
.%X
. Z 6 =35:?
( &1 -A . J A & ( . 9
-J &1 : - #: X .
. =35<?
# - ( 1 A
: X 4 . X . =357?

* ! (! ) #
1 & - ( - 1 -A- : -A =35:?9 & = .
X ?
:%X
. Z 6 =35M?
-A@
6 X8
:%
.
=353?
& - EG -. - . - - 6
L !/
L !
$ . - @ '@
# - ( =: X 4? - - (9 -A& 1 1 # &
1 - '@ &1 -A & # - ( & ' - - -( - - - & - - - @ '@ # - ( - . - 1 @ A- - -' = ? - '@ -
, -A& @ A- -A - - #& -. .
:%X (=:? ! : =356?
:%X ! :, (=:? ,/ 4 * 8 =3;4?
, - - 1 & - - J( 38M
Entr e de commande ui-
-Si
+
Terme de compensation
Sixiref
xi
+
-
Terme d'attractivit
.
38M L ( - - - (
-A& =356? =3;4? 1 - '@ - 7
: : 4 =3;8?
4) 16, 7 + : ! ! !J&6I%%& - 1 *

* 9 '! 4( ! *
1 & @ & - - @ ! 7H 7$H% ! (% + 1 &
4) 16- ) / ! % & '1 1 "##1 "7' /& @ )> &
1606&6' 8 4 $ " )
- 9 A( - - - ( - 9 Æ - A -A = .?
%X
8
, /
,
=3;5?
(( 9 J
%X
8
, / ,
=3;;?
@ # / 1 - @ - =J -A& - (- ( # @ # - ( - - - (?
/ X Y Z
=3;:?
& ((9 . - ( # -
X,
=3;<?
- . - A -A =3;;?9 1
%X
8
, = Y?
8 Y
,
=3;7?
, ( X - E - -
%X
8
=, ,? =3;M?
- # - . : -J
: X =3;3?
9 &
, X : Z Z Z , =3;6?

* ! (! ) #
@ - @ # - & Y
X 8 Y
=3:4?
, - - 1 @ J( 383 # -
-9 ( -:
, X : Z Z Z , =3:8?
Tension vr-
-S
+
Sirref
ir
+
- Termed'attractivit
.
irm Rr
σLcrs
Ω
vs
Calc.gliss.
ωs
383 L - - ( - -A
1606&6, $ 4
, - 1 - - - -A # ( F>- 1 & L "( - - @ J( 386L F - @ J( 354L - 1 - # . & - =>( 358? - - ( =J( 355?
- - ( &1 1 . & 9 - @ . ( =& #1 -A . - @ # ( Z ?
:## (
A( -A - @ - -A( J. A&( - ( . - # - - - = -? &=?
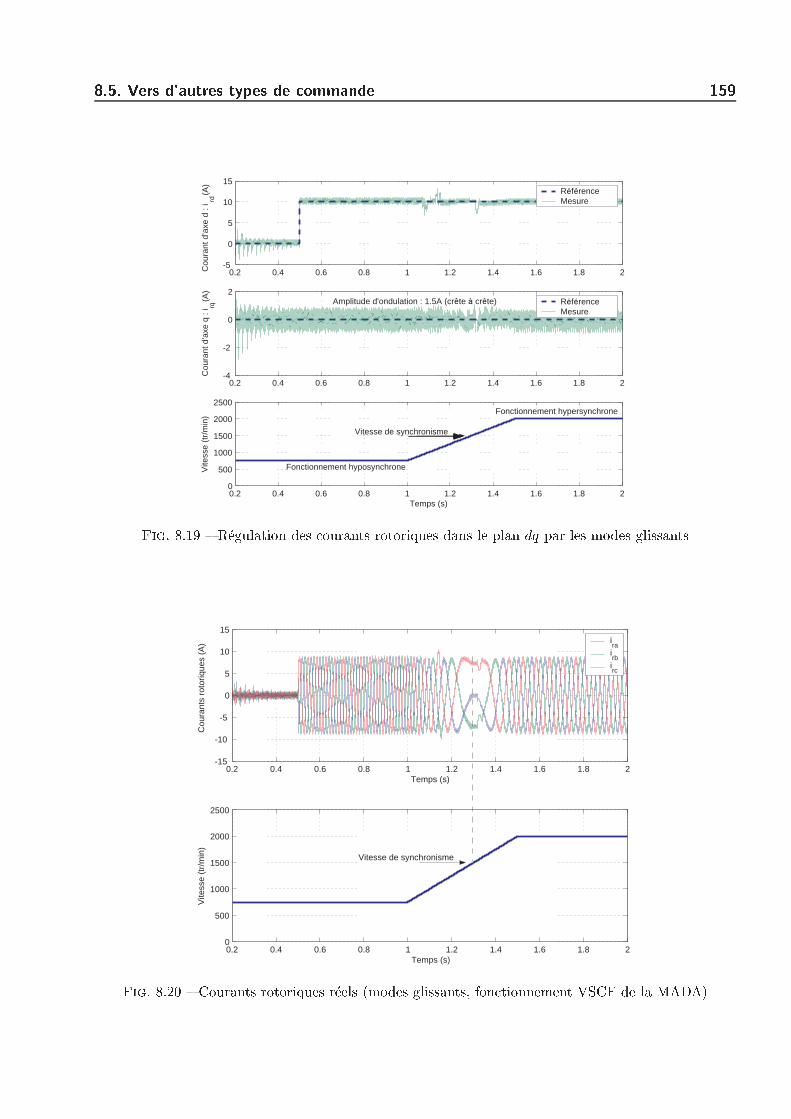
* 9 '! 4( ! *
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-5
0
5
10
15
Cou
rant
d'a
xe d
: i rd
(A
)
R f renceMesure
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-4
-2
0
2
Cou
rant
d'a
xe q
: i rq
(A
)
R f renceMesure
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
500
1000
1500
2000
2500
Temps (s)
Vite
sse
(tr/
min
)
Vitesse de synchronisme
Fonctionnement hyposynchrone
Fonctionnement hypersynchrone
Amplitude d'ondulation : 1.5A (cr te cr te)
386 L "( - - - (
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-15
-10
-5
0
5
10
15
Temps (s)
Cou
rant
s ro
toriq
ues
(A) i
rairbirc
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
500
1000
1500
2000
2500
Temps (s)
Vite
sse
(tr/
min
)
Vitesse de synchronisme
354 L =- (9 # F> - ?

+ ! (! ) #
0.495 0.5 0.505-2
0
2
4
6
8
10
12Variation de r sistance (+/-50%)
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
d :
i rd (
A)
R f.-50%0%+50%
0.495 0.5 0.505-2
0
2
4
6
8
10
12Variation de l'inductance de fuite (+/-50%)
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
d :
i rd (
A)
R f.-50%0%+50%
0.495 0.5 0.505-3
-2
-1
0
1
2
3
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
d :
i rq (
A)
R f.-50%0%+50%
0.495 0.5 0.505-3
-2
-1
0
1
2
3
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
q :
i rq (
A)
R f.-50%0%+50%
358 L F
0.495 0.5 0.505-2
0
2
4
6
8
10
12Variation de r sistance (+/-50%)
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
d :
i rd (
A)
R f.-50%0%+50%
0.495 0.5 0.505-2
0
2
4
6
8
10
12Variation d'inductance de fuite (+/-50%)
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
d :
i rd (
A)
R f.-50%0%+50%
0.495 0.5 0.505-3
-2
-1
0
1
2
3
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
q :
i rq (
A)
R f.-50%0%+50%
0.495 0.5 0.505-3
-2
-1
0
1
2
3
Temps (s)
Cou
rant
rot
oriq
ue d
'axe
q :
i rq (
A)
R f.-50%0%+50%
355 L F - (

* 9 '! 4( !
- ,A- - 1 @ @ - - - - & ' J. # -, -@ E & '@ @ - = 1 J? & & . , - @ . E -@ A- -A -@ @ -@ -A( -& - B
#9 - A( - -9 - A& - - 9 & A =3 1 1 - ? 9 A( - & @ S& @ 1 -A @ @ 9 @ E - A & - - & - ( &
% - - - -& @ J( 35; - 1 C-@ - D # - 9 "/ = " A( -A A ' ( - @ @ / 1 - @ ?
MADA
Mod le de laMADA (f.e.m.)
Optimisation(s lection duvecteur tension)
Pr diction de latrajectoire duvecteur courant
P riode d' chantillonnage Te
R f rence decourant rotorique
∆ir(f3)
Mesure descourantsrotoriques
autresmesures
'r
Vdc
R seauisol
35; L - - - -& -A
W - @ =# - @ J( 35:? J -& & & 1 - - -& - A-
A-9 A - -B@ - -
- I A

! (! ) #
me
e r
erjpΩσLcr.ir
σLcrRr
vr
i r
Changement de rep re(ici rep re rotorique)
35: L - - @
7 =& =%? E #? @ , =E?
=%? X,;
5 8 88 5 88 8 5
=(? =3:5?
@ =(? & - # - . = -J9 #@ 7? -9 & =- @ ?
, X , 8
5 8 88 5 88 8 5
=(? 9 -@ , ( @
, # - . - &1 1 =& 4 8?9 - 1 38 A J-A2
0 ! 1!
"(
" 1!
"(
4 4 4 4 4
4 4 8 8 4
4 8 8 85;5
4 8 4 85 ;5
8 8 4 8 4
8 4 4 85 ;5 8 4 8 85 ;5 8 8 8 4 4
38 L 1 -A2 - A-

* 9 '! 4( ! %
, - - A& - & 1 A -A
%X
8
, / /
=3:;?
A( - - -A( & , & - (- = L . L E? -. -A ! , 9 - = & A. a? & 1 0 A-9
# Q! Z 8 .R >9 1
# Q! Z 8 .R X&
Q!R Z "/Q!R Z"/Q!R
!
=3::?
& "/Q!R X Y"Q!R X Y= Q!R Z
Q!R?"/Q!R X , Q!R
Q!R
=3:<?
) E 9 ((19 1 - J "/Q!R ,
Q!R"Q!R "Q! 8R Z '
, Q!R
=3:7?
& -A - 9 & =3:<? , - - -( - J( 35<
vα
23
Vdc
vβ
23
Vdc
100
110010
011
001 101
1/2
000
(fa, fb, fc) = xxx
111
3/2
(I)
(II)
(III)
(IV)
(V)
(VI)
V1
V2V3
V4
V5V6
V0=V7=0
ir[k]
ir[k+1,2]#
∆ir[2]
Erreur minimale :Choix du vecteur = V2
N du vecteur tension
N du vecteur tension
35< L ( & # @ - -
- -& & @ 1 -A & - 884: ( @ J( 357 & - - - @ - - @ A@ >/ #

& ! (! ) #
−0.05 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.04 0.05−3
−2
−1
0
1
2
3
Temps (s)
Cou
rant
d’a
xe α
(A
)
iαref
iαmes
−0.05 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.04 0.05−3
−2
−1
0
1
2
3
Temps (s)
Cou
rant
d’a
xe β
(A
)
iβref
iβmes
357 L "( - =*+? -

#
< 1 " '$
;##
7 =? @ - - '@ - ' Q%, 45R -A1- @ @ , - ( - @ J( 68 A 1 - - # - = @ - E? A- - A- & - & Y - 1-AEG ,A1 ' @ =? - - 1 A - A- - E
Ondul.MLI
Redr.MLI
MADA
MSAPTurbined entra nement
R seau autonome :Charges lin aireset non lin airesC C C
Condensateurs defiltrage
G n rateur fr quence fixeet vitesse variable VSCF(source de tension triphas e)
Vitesse Ωvariable
68 L - - (
, - -A ( # A1B -A - - Q+ 4;R - @ 1 - ( %J( A J -A1 - 1 9 - - -A 19 AB -A J # Q+ 4:R A& 1 - - - -A1 ,A- -A - J(
87<

!
m
me e vs
RsσLcrRr isir mirer
i
vr Lcs
Rotor Stator
65 L -' - - @
# - & - - 9 & J # = @ ? - & -( ' Q) 481R9 Q) 48R - Q) 4;R 9 - -J @ - A - . ' - -
B ( = Z - - J(? - & , . - 1 -(9 # @ -( -A& - -@ - - - & =: P L <4+U? & @ &- -. 1B# & ( @ # J. @ & &1 = 68;? ( 9 &- - J( # ( - ' ; . . @ -
;## $
-A1- - @ J( 659 A - @ - -S@ - - - = @ (9 @ -? - @ ( J( 6;9 ( ( - &
= & - - & - (? , - = (? J( - @ - ' - ,A1B# A1 -A -9 S # -
J -A Æ -( ' =? ,A - -' J # - @ -# 1 - -.@( M9 ( # =- -?,A - @( - @ (1 - ( - ( - @ - =J( 6:? 9 & EG - =-J ?9 - .
/ X / / X X ',
=68?
@ =&& - ? , 1

! )## #! "!. #" (!
Stator de laMADA
Filtre(condensateurs)
G n rateur R seau (charges)
is
ic
ich
C
C C C
a) b)
6; L -@ =? =1? - ( - - J(
m
me
e 0
vs
RsσLcrRr isir mire r
i
vr
Lcs
ichic0ic
~
ic=ic +ic0~
C
MADA
Filtre
Charge
6: L 1 C/ Z (D - @ -

!
& -A1 - - (
;## )
, - - A A& - -@ - - A( -A1- -A-J &1 -A - '@ 9 &- - & # L L ( L ,& ; &1 -A . =- A( -A '@ -A- 7 ?9 1
- - . =? - S ( =1(? &1 -A 9 1 ' @ ' 91 -J ( NG-9 -- - ="? -A1-9 . - -A-J 8 &1 -A @ E9 @
& , E - E # ( - , . 1 - A- - # S9 - - & -
, X %
=65?
A( - - ( , E 1
, X / Z / Z , =6;?
) &-9 A 1 E
, X " "/ Z " "/ Z #,
4) .6& 1 " !/ %1 # ! %& $ 1 ! %&
, - - & "/ X Y
% " Z " "
" " %
"/ X ,
" X
Z "
=6:?
- . - - @ - 9 -&E 1 1 -J =# . ? , '@ - - J( 6< 1 A - =? - - A(
- -A 1 = -? - % # ( 19 1 --J - ( @ ( S9 ( @ A1 -Z" - - %
=- - - 1 - (? - - J( 67 - & '@ - - - (
#%J ' (

! )## #! "!. #" (!
m
me
σLcrRre r
vr
Rotor de la MADA
r
Rrirmes
m.
e
^
^
vL
vL
Mod le de la MADA
Rrirmes
r
m.^
vL
Corr.vr
~
~
irref
+
-+
+
++
-
Commande
irmes
ir
6< L '@ - 1 -
evs
Rs is
mirref i
Lcs
ichic0ic
~
ic=ic +ic0~
C
Filtre
ChargeMADA + Boucle de courant rotorique
e 0
67 L & - ( - ( & 1 -

+ !
9 A -. &1 -A @ E ( #9 A& & -9 . ' @ ' - J - A( - A ; 9 @ &
, / =6<?
, ( E - - & - 9 - E - ( - , &1 - E ( - % 9 @- @ - ( 9- - - ( 1 - E ,9 # X '
,%
=67?
(@ - ( - % - #
% X8
" Z" Z# Z
=6M?
-(( & - - & #9 E -' - ( E ( = 1- ? & - , @ ##9 - 19 #@ ' - ( - S = ( 9 - ( ? , - - @ J( 6M
evs
Rs is
mirref
i
Lcs
ichic0ic
~
C
vsmes
vsmes
Corr.mir
refirref
c0
ichmes
mir
ic~ +
-+
+
+
++
e 0
vs
c0ichmes ic
1/m
6M L ) . - - -
, - E , . - - - " X 1
" X ',
=63?
2 &

! )## #! "!. #" (!
4 A $
" 438 Y
" 43; Y
- ' 8;3 +
- ' 546 +
- 2 :66 +
" - # 4;M
Æ - - 488M
- J( ' 8 ?>
" - ( :4 Y
- - ( 8 +
68 L @ - - 1 .
A , . @ (A -S . &
"%X %
" =66?
9 #1 - J - &- #
;## $
9 @ . - - : < P L <4+U - 1 -A =- @ A. ? - 1 68
.6&6-6& " $
, &J - 1 # ( - - S 1- -.
L @ & &1 ( J. @ 825 - =>( 63? - <4V @Z;;V - & - '
L @ & J. ( &1 = - ( >( 66? - <4V @ 844V - (
.6&6-6' 3 "( " ?$
& & @ J( 684 J( # 1 - ( & - 11 (
,A - J( # @ J( 688
- #1 &9 -- E & J # &. - EG -A -=- ( & -?
;## $
, . . & -A1- EG & 1 & & - =#Z- @ --? & ( - ( @ A- -A -

!
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
0
500
Ten
sion
s st
ator
. (V
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
0
50
Ten
sion
s ro
tor.
(V
)
vra
vrb
vrc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
0
50
Cou
ants
rot
or. (
A)
irairbirc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1000
2000
Temps (s)
Vitesse de synchronisme
Vite
sse
(tr/
min
)
vsa
vsb
vsc
63 L / @ # J. & &1 (
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−400
−200
0
200
400@ Constant speed: 750rpm
Sta
tor
volta
ges
(V) v
sav
sbv
sc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−50
0
50
Rot
or v
olta
ges
(V) v
rav
rbv
rc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−40
−20
0
20
40
Time (s)
Rot
or c
urre
nts
(A) i
rairbirc
66 L / @ & J. ( &1 = - (?

! )## #! "!. #" (! %
0.96 0.97 0.98 0.99 1−500
0
500Without active filtering
Grid
vol
tage
s (V
)
0.96 0.97 0.98 0.99 1−50
0
50
Time (s)
Rot
or c
urr.
− p
h.1
(A)
0.96 0.97 0.98 0.99 1−500
0
500With active filtering
Grid
vol
tage
s (V
)
0.96 0.97 0.98 0.99 1−10
0
10
Load
cur
r. −
ph.
1 (A
)0.96 0.97 0.98 0.99 1
−200
0
200
Rot
or v
olt.
− p
h.1
(V)
0.96 0.97 0.98 0.99 1−50
0
50
Time (s)
Rot
or c
urr.
− p
h.1
(A)
0.96 0.97 0.98 0.99 1−10
0
10
Load
cur
r. −
ph.
1 (A
)
0.96 0.97 0.98 0.99 1−100
0
100
Rot
or v
olt.
− p
h.1
(V)
684 L >( # ( =; @ ( ",?
0 5 10 15 20 25135
140
145
150
155
160
165
170
Capacitor value (µF)
Max
. SS
O v
olta
ge (
V)
0 5 10 15 20 2529
30
31
32
33
34
Capacitor value (µF)
Max
. SS
O c
urre
nt (
A)
688 L -E J( # # - - - J(

& !
@ - S - @@ - & =8<442? BA@ 54442 J - & & ( # ' ' # ( @ # J. &&1 # -A- . J( 6859 68;
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−20
−10
0
10
20
Temps (s)Cou
rant
rot
oriq
ue −
pha
se 1
(A
)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−400
−200
0
200
400
Temps (s)
Ten
sion
com
posé
e (V
)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21000
1500
2000
Temps (s)
Vite
sse
(tr/
min
)
Vitesse de synchronisme : 1500tr/min− Fréquence statorique = 50Hz− 2 paires de pôles
685 L / @ # J. @ & &1
, U - & # ( @ <4+U - 9 1 -9 @ # - :44+U - . - 1- -A& & - @ # &J - # - ( A 1 -
E - A -AEG A E & % - ( - - & - & - 1- J( 68: & - - -1 J - AS - ( = U (9 ( @ (- - ? ,A - ( &1 (# - # - - # - - & = ' 1 - - ( -AEG? # . .9 ( AEG ( &9
@ - . 1 9 . - J( 685 @ 1 # - - - 9 -
- 1 & & - & , E F> & - & . E -9 9- (- E &9 - @ - - =* +?9 @ J( 68<, ( - @ @ & J(
687 , - ( - ;4V - ( J. @ 5P =

! )## #! "!. #" (! *
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1−400
−300
−200
−100
0
100
200
300
400
Temps (s)
Ten
sion
com
posé
e U
s12 (
V)
Période : 20ms (50Hz)
68; L ! =<4+U?
−0.5 0 0.5 1 1.5 2−400
−200
0
200
400
Temps (s)
Ten
sion
com
posé
e (V
)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
500
1000
1500
2000
2500
Temps (s)
Vite
sse
(tr/
min
)
Fonctionnementhyposynchrone
Fonctionnementhypersynchrone
68: L "( - A - - & - &

!
−20 −10 0 10 20−20
−10
0
10
20
Courant iα (A)
Cou
rant
i β (A
)
−1 −0.5 0 0.5 1−20
−10
0
10
20
Temps (s)
Cou
rant
s di
phas
és i α, i
β (A
) iαiβ
−1 −0.5 0 0.5 10
500
1000
1500
Temps (s)
Vite
sse
(tr/
min
)
0 0.05 0.1 0.15 0.2−200
−100
0
100
200
300
Temps (s)
Ten
sion
sim
ple
stat
oriq
ue v
s1 (
V)
20ms − Fréquence 50Hz
68< L - F> - & & (
& -9 - ? 9 & 1 & 19 @ # & ' @ #- & 1 C D A #9 - S & - - & - & - & - (
;##
& 9 1 - # ( @# J. @ & &1 - @ - # - J#9 - - - J( # & - &.9 (E ( - - '@ 19 - - - A 9 &- - '@ - - @ - (9 1 - - & -' -'
< 1
;## $ &
-A1- - ( - - W -@ - -.
$ % KCHE - 2 3 !""B 1

! #! !! "!. #" (!
−1.4 −1.2 −1 −0.8 −0.6 −0.4−250
−200
−150
−100
−50
0
50
100
150
200
250Vitesse régulée à 700tr/min (synchronisme : 1500tr/min)
Temps (s)
Tens
ion
simpl
e st
ator
ique
(en
V)
Impact de charge positif : +30%
50% de la chargenominale
687 L - ( # & EG E &
=>( 68M? -9 -B@ -9 1 & ( = ?9 1 1 -A
p1
p2
Ω
68M L / 1 - -
, - - -9 1 - - 9 @ J(683 9 @ 9 (- 1
9 @ ( S9 1 -A 9 - - - A&@
( @ - &1 & - (- E - E - # 1 -

!
mt
e 2 e 2
Rs2
Lcs2 vs2
-mtir is2
i 2
m1
m1e 1e 1vs1
Lcs1
Rs1Lrt Rrtis1 irm1ir1
et
i 1
cs1 mt
*
*
*
683 L ' - -
Æ8 - Æ5
;## 0
, A 1 - -9 E 1 - -@ 1 1 &-J " X
&=,
?" X
"
=684?
- (
, (- = . C/4D - ? , -@ (-9 A( # -A - @ - - - - - A-9 - , @ - - - 1
- ' - - ,
;## ,&
- - - ( @ -A , -S -A - ( & - - 8 9 @ / -S- , E # - - - - . 1 - , - 1 - J( 686
& EG - 1 - ( - ' S9 . S -A ( - 9 A Æ =&& -A ?9 # (- #9 -AS & - # 1 - - & #9 @( ( A . ( . , - -S - - - C#D - '@ S9 -. - - # #9 ( A S -. & -A . B( ' - #- # /# - # - - @ &- & Y X #
9 -J - # - (- - -A -
7
3 9

! #! !! "!. #" (!
+
+
+
+
-
P(.)
R g. PI+
+
-
t
−ξ s1
1/m1
mt.conj () Rs1
Rs2
vs1
is2mes
is1mes
vs2mes
r
irrefP(.)
-
+
jLrtωs1 r
+ξ s1
Correcteur synchrone
686 L - -
- & # (1 -AS -Æ & - % # - '@ - - - &(
% # ( - S9 A@ S (- 5 E
+
+
-P(.)
compensation des termesde rotation
+
-
P(.)
vs2
irref
2
iLmes
vs2refmt*.conj()
−ξs2
+
+corr. PI
Correcteur synchrone
−ξs2
654 L "( - 5
;## ,
J - ( - - - -9 1 # S & ( @ & &1 @ >( 65; @ - - ( @ A.
CD 1 ( & - &=;;V - & - ' Y X M<42? # - <4+U
& $ % L

+ !
0 0.5 1 1.5-4
-2
0
2
4
Temps (s)
I rqref (
A)
0 0.5 1 1.5-1500
-1000
-500
0
500
1000
Temps (s)
Pu
issa
nce
rac
tive
(VA
R)
Puissance r active dansl’inductancemagn tisante
Puissance r activeabsorb e
Puissancer active fourniepar la cascade
658 L & E # - - @ ' @ = ?
0 0.5 1 1.5 2 2.5 3
-5
0
5
Temps (s)
I rdref (
A)
0 0.5 1 1.5 2 2.5 3
-2000
-1000
0
1000
2000
Temps (s)
Pui
ssan
ce a
ctiv
e (W
)
0 0.5 1 1.5 2 2.5 30
500
1000
Temps (s)
Vite
sse
(tr/
min
)
G n rateur
Moteur
Vitesse de synchronisme
655 L & E # - = ?

! #! !! "!. #" (!
!
!
!
"#$
%$
! & & !!
!
!!
"#$
"$'
(!!
)!!
!!!
"#$
' $*#
!!!
!
!!!
"#$
+ $,
' - #
+
+
+ . /
65; L - ( & &1
9 B @ ( -.@ ( @ -A - -- @ ( ", J -A- - - ( , - @ >( 65: =b Y X 844429 <4V - (? & ( (J#9 ( - -(- NG- J( # 1- =0 X ? S9 ' - - - #&9 - Æ8 & -& &
E ( - & 1' #1 - & - ' Y 1 - - S9 J - - ( -
!0 !0 !0 !0 !0& !0 !0( !01 !0) !00 &!!
!!
!
!!
&!!
"#$
"$' !2 $+ 34,
!0 !0 !0 !0 !0& !0 !0( !01 !0) !00 !
!
!
!
!
"#$
%$
!0 !0 !0 !0 !0& !0 !0( !01 !0) !00 !
!
!
!
!
"#$
$
65: L - ( @ & J. =b 3442?
J - ' - # - 9 A. A 1 - ( - - # - - 9 & - @' & 9 # -A' -A. - E & -A. E & =. - ( & # - ? -A. - & & ( S9 - # & ( -

!
A- & - & - J( 683 ' & @ J( 658 @ J( 655 & =E 1 - & - &? - 1 -A11 - # - &,AE - ( - - 9 & - A-
9 - E - ( @ J( 65; 11 Æ8 # - # Æ5 & 1 - & - ' A
;## $
, - - @ ( -A = -S9 - # @9 ( (? % # 8 E 1 - 9 1- # J -A # F> - - 9 Æ -
X Z Y X Z = Z ?Y
-A@ C8D
- =%? X
! =%? % X
! %Z = Z ? X
%Z = Z ?
1 - # ( @ - ( &. . - J( 65<
;##
9 & ( - - ( F> 1 - - @ , - - ( 1 @ - @ (- J1 - 9 & & - - -A - @ # - - - &-- - # ( . - ( 9 ( - - - 1 -
CD - ( 9 ( - # - J( - -J( # ( #- - 1 - - - -A1 - '@ (1

! #! !! "!. #" (! %
0 0.5 1 1.5−10
−5
0
5
10
Temps (s)
Cou
rant
s st
ator
ique
s (α
,β)
−10 −5 0 5 10−6
−4
−2
0
2
4
6
8
Isα (A)
I sβ (
A)
0 0.5 1 1.5200
400
600
800
1000
1200
1400
Temps (s)
Vite
sse
mes
urée
(tr
/min
)
0.650.660.670.680.69 0.7 0.710.720.730.740.75−300
−200
−100
0
100
200
300Zoom de la tension "réseau" 50Hz
Temps (s)
Ten
sion
sta
toriq
ue "
2" (
V)
Période : 20ms
Synchronisme :750tr/min
65< L - - F> =( - ?

83:

# !
= 1 ')$! % "
!##
- A( # ( . & - - =@ --?9 A -A& # J. #9 ' E - #9 E - . - - ( - & -A 9 1 - (' @ ; ( -B@ . - C ! D
Turbined entra nement
Ω
MSDE
+
-
PI
if
ifmes
ifref
PI
3 x Condensateu rs
R seaualternatif fr quencevariable
||v3s||||v3s||
||v3s||mes
||v3s||ref
Mesure de module duvecteur tensionsstatoriques (v3s)
U0
ou correcteur hyst r sis
848 L / @ # &1 1
9 E @ ( =? - -A. (. - - A( 1 &- -A - ( - J( 848
!## $
, ( - -A. -A ( @ - , - -A # A -A -
83<

+ ! #!
' ( 1 % - E - O. - - ` A - -. L 1 - ` 9 (1L 1 - A - -1 . `0 X 0, ( - -A. A - 1 -
- @ J( 845 E - -
El ments de conversion lectrom canique
σL fm=M/Ld m.if
if
vf
Rf id
vd
Rs
-pΩLq iq
iq
Lq vq
Rs
pΩ(Ld id+Φ +Mif )
id=i -m.if
m.eLd
iRf if
mes
m.
vLf~ vLf
e
845 L - - -A. -
!## $
1 - @ - J. & - - 9 A - 2 - =# @ &-? @ &
2 X ` Y X =` Z 0? Y =848?
&-9 -A. @ - - #
0 X8
2
Y`
=845?
@ 2 @ &- ) &-9 & # -
( ( - A - - & - AS- 1 % 1 @ &- =-? - -A. @ J(84;, - ( - -A.9 & -
A ' - 1 &- -@ #9 -A @9 =845? # & @ & -# @ &- , - - E 1 & -A - #- - J( 84:
!## $
& S @ & &1 - 8444 @ 8<442 & & - J( 84<

+ ! #! /""! ! ,"$ )!!2#
Ω
Iexc
Ωmin
Ωmax
Iexc max
PΩ (Ω)
Densit deprobabilit defonctionnement une vitesse
donn e
-Iexc max
Dynamique der gulation
Dimensionnementdes aimants pour lavitesse moyenne
84; L ( @ # &1 = - J.?
Reg.PI
+
++
-
ifref
|| v3s||mes
|| v3s||ref
84: L "( - - # @ # &1

+ ! #!
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−200
−100
0
100
200
Temps (s)
Ten
sion
sim
ple
stat
oriq
ue
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1800
1000
1200
1400
1600
1800
2000
Temps (s)
Vite
sse
(tr/
min
)
84< L / @ # &1
= 1 ')$!
!## ,)0 &
&26'6&6& " 8 4 "44
- ( @ - -A- @ -- @ J( 847 9 - - 1 -A ,% - 11( -A. A( - ( @# &1 -A - W - - A( - -
E - A -A. % # E9 O. -A.9 - - =J.? - A. 119 # E #9 1 # @ &- - 9 # -& (- - - E - &1 -A & - EG9@ & - =1 & -@ - P - 1 7? >9 # E9 - -A - - @ -- ,'@ - -@ -B@ 1 S9 -, - -
X,
Z ',%
& - 9 E # - -
X =(? < =?

+ ! #! /""! ! !
if
ired
Rch
Cvred
vredmes
vredref
smes
srefif
ref
ifmes
Hacheur
Redresseur
MSDE
Turbined entra nement
Ω
U0 On admettra que U0 est fixe. Il est crd une mani re non pr cis e
+ ++
---
Correcteur (nature non d finie)
Fusion possible (une seule r gulation pour )
D tection cr te(mesure d amplitude )
847 L - - - -A ( @ & - @ --
4 A $
" 8 Y
" - A. 8 Y
- =-A. ? ;4 +
- =-A. ? ;4 +
- -A. % <4 +
-2- ;3 +
" - # X 4M7
Æ - - X 8
44;M;
>. -A - - ^ 483 1
848 L @ - - ;P - 1 -A.
, ( -E @ & - - 7
J( 8479 - 1 - ( - -A- - -A- & E # (- A 1 - ( - -A- = E - A - - -A-? S 1 -'- -. 1 - - A- - A- A A - - -. 1 A Æ9 -A A1 - 1 - @ '@ @
&26'6&6' 4
9 @ - - ; P - 1 1 ( - 1 -

+ + ! #!
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−4
−2
0
2
4
Temps (s)
Réf
éren
ce d
e co
uran
t d’
exci
tatio
n I fre
f (A
)
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−3
−2
−1
0
1
2
3
4
Temps (s)
Cou
rant
d’e
xcita
tion
I f (A
)
Mes
ure
84M L "( - -A.
&26'6&6, $ #$4#
, EG ' E - ' , &- - - ( - -A. - 1 # - ( @ 1 @ -' - =>( 84M? . =: - 1 #-? 1 - -A& :4F
& - ( 1 & - -A& 8449 -A. - = @ - @ -- & ( " @? - - - , # -A- - - - - - - & . J( 843 846
, J( 843 ( .1 - # -A- A @ # NG-9 A( - -@ ' '@ - - '@ - - 1 -A' @-A CNG-D - @ E # - B - NG- -A1@ - # - -A -( - 1 -A. - 11 -S & A- -, # A1B - ( & 9 A' A B -@ NG- -

+ ! #! /""! ! !
−0.02 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 0.02−100
−50
0
50
100
150
Temps (s)
Ten
sion
s st
ator
ique
s (V
)
−0.02 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 0.02−5
0
5
Temps (s)
Cou
rant
sta
toriq
ue −
pha
se 1
(V
) V
s1
Us13
+Vred
−Vred
843 L > -A- -
−5 −4 −3 −2 −1 0 1 2 3 4 50
20
40
60
80
100
120Impact de charge négatif (−66% de la puissance nominale)
Temps (s)
Ten
sion
de
sort
ie v
red (
V)
Distorsion dûe à une variation transitoire de vitesse(temps de réponse limité de l’asservissement devitesse de la machine d’entraînement)
Tension de sortie régulée à 90V
Dépassement du à l’impact de charge négatif
846 L "( - - - -
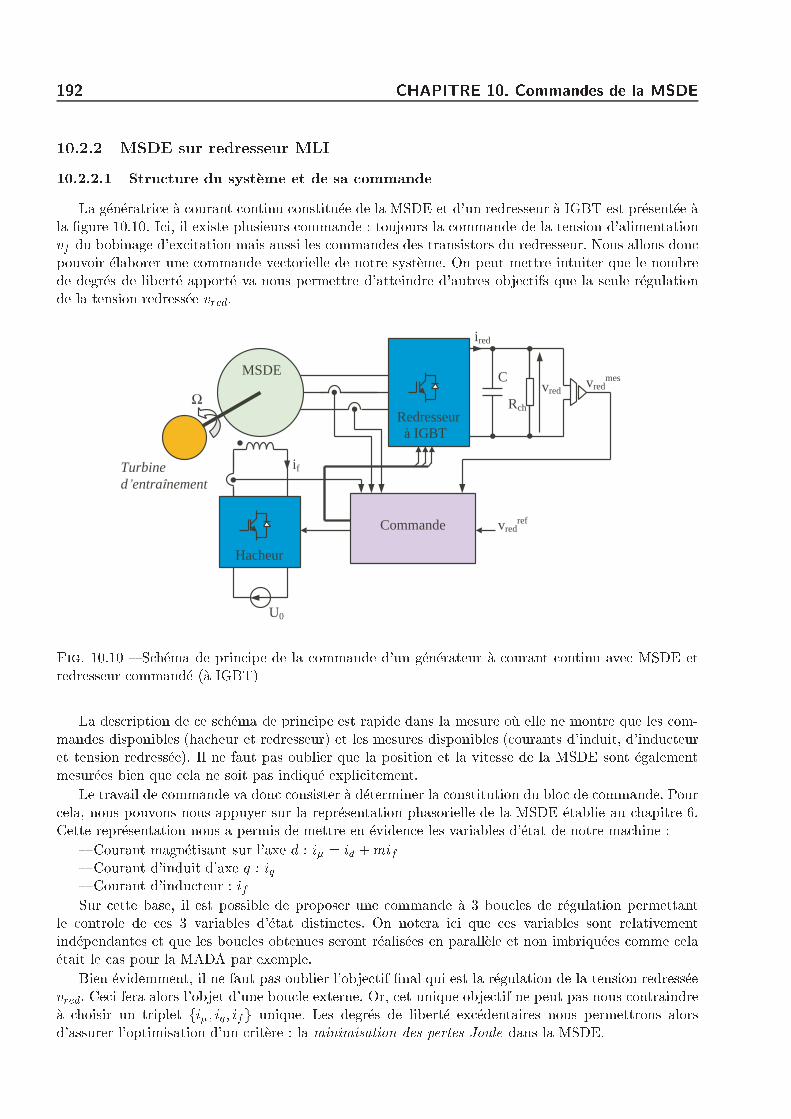
+ ! #!
!## ,)0 9
&26'6'6& " 8 4 "44
, ( @ - -A - @ /) @ J( 8484 9 . - B - - -A,% - 11( -A. - - - - - & 1 - & - '@ 1- -( - 1 & -A- -A 1B# (- - ,
if
ired
Rch
Cvred
vredmes
vredref
Hacheur
RedresseurIGBT
MSDE
Turbined entra nement
Ω
U0
Commande
8484 L - - - -A ( @ & - - =@ /)?
, - - - - - @ - - 1 = -? - 1 = -A-9 -A- -? # 1 & - ( 1 - .
, & - - & - @ - - 1 - - 9 & ' - 1 7 - &- &1 -A -
L ( A. X Z%L -A- -A. L -A- % 19 1 - - @ ; 1 - (
E - ; &1 -A - &1 &- - 1 1 @ 1 .
) &-9 # 1 A1B# J ( - -, # A1B -A 1 . 9 1B# -@ % , -( - 1 .- -A A -A @ 4 -

+ ! #! /""! ! ! %
&26'6'6' $4 $$4 "44
W A1 - 1 - ( ; 9 % -A1-
9
% , ( - - @ A -A. - & # - ( / -J
/ X Y = Z^Z % ? =84;?
A # - - J( 84889 &
"/ X Y "
Z " Z % %
=84:?
iq
L q
eq
vq
Rsq
v~
q
vq~vCorr.
iqmes
iqref
+
-+
+
Commande Machine
8488 L - -
- / S9 A E1 - - . 1 - - @ - ( & - , - - # - #
'=4? X ; 8 Z & 4
& 4=84<?
@ @- @ - E
& X
=847?
( ; (( - - - 19 19 '@ - 8 - - - B ( - 9 ( - % ( . # / @
9 # .
/ X , / X , Z Y =84M?

& + ! #!
, A -
" "/ X ", " Z Y "
, - & - - , @ ", 9 E # - , =, ? - &
- # - . =(?
, X8 4
=? &
=%? =843?
&
=%? X , & &
2
=(? =846?
-A@ ", X , 8 4
=? &
=(? =8484?
A( - -A . ( - @ - 9 & ( & E - , - - - E - J( 8488
J9 & @ ( - A( -A - @ A( - E - S9 A& @ @
X Z % =8488?
- (
" X Z "
% =8485?
9 - - ( - / . 1 -A- @- - @ &- @ A-
, X Z / Z / X Z Y Z / =848;?
, . A 1 &- 1 ( E
, X " Z Y "
Z #/@ #/ = -. ?9 ( - J( 8485 & - @ - - - - - ; (
- =% % %% ? - , -( - 1 -. 1@ A. - -& S . -- ( & @ A1B# - ( &9 @ - - - @- 0 @ - & 9 - & A ' - 1@ -
# - '@ &- &1 ' - E S9 # 1 # - ; - & - (
L =1 - % ?L %L
JH M

+ ! #! /""! ! ! *
m= M /L d
L d
σL f ifmifid
vf
i
eme
ed
vd
Rs Rfd Rs.id
mes^
Corr.i ref
idmes
ifmes
vd
d Rs.idmes
++
+ +
+
-
+
+ m
8485 L - -
#9 - -9 % &1 -A @ - -A- % - -A- 9 Æ 9 '9 # - # ( , % A - &1 =- -@ & K? - E - '@ , &1 &1 -AE ( A. (1 - = # 1 ? - (( - # @ &- - & - J9 9 - ' =@ E ?9 -A(& A( - - &1 ( # @ ( - E - - - &1 & - , @ & I&9 &
L # # @ 9 , -L # @ 9 , (L # ( @ 9 ,
I ( 9 # -A 1 # - -, ' - &9 1 NG- -A # ( NG- = >?9 & E & = )? ( - - @ 1 NG- &1 9 1 # - 9 #A@ 9 - 1 & - 9 -- & -& E - # - & - - , @ - #
4) &26& % 1 1 )
0 ' (

+ ! #!
& ' # ( - E - A-& @
X Z % =848:?
% & . % 1 !(D&(B%& ) 1 ) ! % &
-A 9 @ . - - ;P - 1 -A 1 - 1 848 -1 - ( 84585
&26'6'6, 44 4
% # ; &1 -A 9 % E ; 1 --9 - - ( ( ( -& 1 #- ( @ - ( @ # - ( - - ( 0 - 9 @ $ @ 9 @ &
$ = % ? X8
5
Z
Z8
5%
% =848<?
1@9 -. -& E , - # =&& = % ? X '
& Y -? ( @ A -
= % ? X =^ Z % Z[ ? X ' =8487?
9 - EG # & - - , - - #9 # - -& E # @ ,9 ( ( @ # ,
9 - &J C(D &
2 X / X'/ Z /
2
X =,? =848M?
9 - 1 - J 1@ = A - E -?9 A((
2 /Z / X / X 2 =8483?
9 - ( = 4?9 / X / X Y / X / X =^ Z % Z ? Y =8486?
#@ C(D9 & # 2 X 2
J - E O. # - &
/ = % ? X =^ Z % Z ?
Y X 2 =8454?

+ ! #! /""! ! !
9 1 - & @ #$ -. & -. - ,((
#$ = % ? X8
5
Z
Z8
5%
% =8458?
Z = % ? '%
Z
/ = % ?2
- @ - - '@ -A &
3 43X Z [ Z Y X 4
3 43X Z =^ Z % Z[ ? X 4
3 43X % % Z Z Y X 4
3 435
X =^ Z % Z[ ? & X 4
3 435
X =^ Z % Z ? Y2 X 4
=8455?
% ' E @ E =[ X 4? - =8455?9 &
$ X $
Z2
Y^Z$
%
=845;?
9 A =8455-? - . - $
$ X
'
^Z$
%
=845:?
$ - =845;? . 9 . - $
1 =#
- $% 9 &
9 2 Y?
$ X
8
'
^Z$
%
Z 2
Y^Z$
%
=845<?
#9 $ &1 & - -A. $
% 9 - ,(( & E & & =84551? =8455? A =8455? - E , # $
9 $ $
% - -
- ' 9 2
Y 2
- E9 ; # &E P - ; 1 5 - - # - ='
Y? 9 / 1 # A # . 1 - - @ (1 @ J( 848;9 # (1 '
J ( . - - ,
&26'6'6- 4
@ =9 (9 &? ( - 1 845 -A1-9 1 - =. % 9 ? &- ,
- - % 9 & - J( 848:9 848:1 848: #
(& # (

+ ! #!
$-$-
Turbine MSDEΩ
te
Redress.MLI
(v3s)
(i3s)if
Hacheur
ired Bus continu :Charge +Capa.
Courantcharge
: iLContr leur
MLI
vred
MesuresContr leur
DEMUX
Boucles de r gulation descourants (i , iq, if)
G n rateur
Courants
Vitesse Ωmes
Bloc d'optimisation
i ref iqref if
ref
Vitesse Ωmes
Ceref (Couple ref.)
Esref
iredref Corr. PI
+ -
vredref
vredmes
Vitesse Ωmes
Contr leur
MUX
vredref.ired
ref
ΩmesCe
re f =
848; L (1 - - - ( @ 1 - - =,?
4 A $
1 - - E 5 L 5 PF :444 2
" 8 Y" -A. % 8 Y- -A. ;4 +- -A. ;4 +- -A. % <4 +- 2. ;3 +>. -A =? ^ 483 1
" - # 2. 857M LÆ - - =. - 2.? 44;M; L
"# - 5M4 F( & 844 Y - 1 5544 ?>
> - - , - - 84 P+U> - , - -A. 84 P+U
845 L @ -

+ ! #! /""! ! !
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1
2
3
Cou
rant
i f (A
)RéférenceMesure
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−6
−4
−2
0
2
Cou
rant
i d (A
)
RéférenceMesure
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−15
−10
−5
0
Temps (s)
Cou
rant
i q (A
)
RéférenceMesure
Perturbations "croisées"
Perturbations "croisées"
848: L "( -
−10−8
−6−4
−20
30003500
40004500
5000−15
−10
−5
0
5
10
Couple (N.m)Vitesse (tr/min)
Réf
éren
ce I fre
f (A
)
−10−8−6−4−20
30003500
40004500
5000
0
5
10
15
20
25
Couple (N.m)Vitesse (tr/min)
Réf
éren
ce I dre
f (A
)
−10−8
−6−4
−20
30003500
40004500
5000
0
5
10
15
20
Couple (N.m)Vitesse (tr/min)
Réf
éren
ce I qre
f (A
)
848< L ( ;

++ + ! #!
, 9 % 9 # E9 1 -A & - # - & - ( - & - - 9 ( 1 ; - J( 848<
9 1 -A' - - = -
? , - , - @ J( 8487
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4195
200
205
210
215
220
225
230
235
240
Condition initiale : vred
(0)=200V
Temps (s)
Ten
sion
de
sort
ie (
V)
8487 L " 11 & - =? -
>9 - - ( - - =& >( 848;? @ #
- =1 - ? # % E -. # - & -B@ - , # - - ( @ 5M4F >( 848M9 ( - , E & & - ( (# - 844V @ <4V - 9 @ & =;4442?
% ( @ ( & &19 - ;444 @ <4442 = % X 4 : % X 4 3? , - - 8483 ( # - - & - & -S , # B - - <F - - &
&26'6'60 "% #$4
,A. & @ - - @ - , A 1 @ A -- -A 1 -A J - @ E - -AEG - - ( E 1 - - 1 - & E - - 1-A & - & -AEG -A - 884: - 1 - - ( - 9 - - - - &' A# - @

+ ! #! /""! ! ! +
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
R f rence de tension de sortie vred
ref = 270V
Temps (s)
Te
nsi
on
de
so
rtie
vre
d (
V)
Puissance : 2kW Puissance : 1kW
Echelon de puissance:-50% de la puissancenominale
848M L "( - - @ &
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
50
100
150
200
250
300Charge constante (50% de la puissance nominale)
Temps (s)
Ten
sion
de
sort
ie v
red (
V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
1000
2000
3000
4000
5000
6000
Temps (s)
Vite
sse
(tr/
min
)
∆ Vrec
= |vrec
-vrecref |<5V
8483 L "( - - - - & =& ( ?

+ + ! #!
- &9 & - & # & - - @ - - - (

#
- "
, - 1 # - & - @ -A1-9 A' -A -A - A. - C#D &( &(1 =# @ # J.9 # @ # &1 ? - - -- - ( -S# - A1B# - # - ' A( # -A , &( A& - - 1 @ & ' @ 1 =? ' @ 1 . =? & -. = - ?9 & A - #
9 - @ - 9 & - --A ( -A( & @ # J.9 ' @ -1 =? @ - # - A( A - & E AS A- - & - = & -A - ? #9 1 E9 & - - J ( & - - .9 1 - # ( 9 - @ ( -A( ' =? # A . 1 - - ( - 1- -A& @ - '@ 1(21-A - 9 - ( -A % ' - - 1@ - 9 1 - 9 1@ - ( 1 - - - -9 - & -A( & @ & - @ =1 - - E9 ' - ( 11( 9 -A( & - ? ( -A( @ # &19 ' - @ .- = -A - - ? ' - 9 -- -(( -A' ' 9 - A &9 #&1 A - A. - # - A ( - -= & - 1 ?9 A - - # -E ( - & -A 9 (( - A. &- - - 9 1 / '@ ; ( =/;? # -A ' A -A1 ;34 9 & &- 9 1 -A & -& 1 9 - A -A -(
0 ' ( # ;-
54;

+& #
/) ' @ 1 9 -A & E & C'@D @ - -. =-S@ - J( - - /;? @ =? @ & @ . 11 #9 1 -# =- 1 ? (( - A. = A & & - ? -A& '@ 1(21 11( -A. - S- @ - 11( (E @ - O. -9@ @ - @ & - - @ & - - A 19 - @ - ' =? J9 (@ -J ( - . @ # &1 -A. - ( -& - 2 @ # -S 2 @ - & -S A( - & 9 E - -- ( 9 ( @ - - = -@ B - & - & . -S - A& ' (-&1 - . 9 & ( - @ A' -A J9 ( -A( @ - @ - & & . - # - - - 9 @ -@ --9 & % - - @ - , ( & -A - # (E . -- --, - - -. = ? - &
- - - & -AE &9 A # ( - @ # @ = ( -A( ? & & -. -9 -. (- # - &- L $ =?9 A A( - = - ?
L =?9 = - 9 & - E ?
4) &&6& $ 1 C#D ! % &
1 -. # - P - - - 9 E - # ( - @ = @ 9 9 - 9 - @ @ - -? # - - - @( - -J - # =- -? ( A - #& A J- ( - - ( =& - -? & @ & - ( 9 1 A1 -A - - ( - ( 1, @ - @ @ - - (
A ' 1 - -.@ , - -- 1 & - -@ - - -

() 33 +*
- - ' < ) '@ A 9 @ 1 # . - - - 9 @ & /9 " ( - = )-( ? , '@ - - 1 1 & -( '9 ( 1 -A1 ( - - - -( 9 1 A ' # -A -A9- @ - - (. - - -.
L - & -A =&& (?L - &1 -A - '@ @ & #- ( & =&& - 1 - / ?
% ' - - ( & - - 3 S9 @ A $ - - ( (- - & -A ( -A( @ # J.
, - - '@ - - ' - @ - 9 & @ & - - 9 &- - & 9 - E - - & - @ -- - - -A.9 BA@ &- . 9 # - & - ,
"
1 - & S9 - - & - . @ 1- - -
, & 1 @ - ( # @ - ( -A -9 A( - &- @ A( - -. - - -A& - ( - ' . = 9 1 - - E -S ? - -A1 - - - 1@ @ ' - - & & &@ = 9&19 ?
9 - - A J( . - S9 & - 9 A ( @ E & - . - - @ # &1 . # @ - ( & E - ' S &(1 ' '9 @ E - ' @ E 9 -A - @ &1 ="F? &( -A 11( - ( # @ & - ( - 9 @ - 1 -AEG - '9 &( @ (=? ( 1 -. ="F ?9 - - ( -& E - #- A( & A # - A( & 9 A - @ = - 1? &1 - ( - '@
,A- -A -J -A - =.? . @ # J. @ ( - .@ # J.9 &. 1 @ 1- B & - (
' & J (

+ #
- ( @ @ ) 1 . . - 1- -A&9 -A- & - -& . A J - EG2& & ( (- =? - ( . # @ -B@ B -B@ - & - 1 B . 9 - -1 - (9 & - 9 - =J(1? . #, - - @ , . @ # J.
9 A ' ( - (9 -A& 1 - - - 9 A A . . @ 9 ( - ( & ; B A- - - . # & ( - -( - 19 # & -A( & - &9 & - @
1 - - -9 ( #- -( J - = ?9 Æ -@ 1 - - - # ( @ - ( % . - -' -A # - NG- - = ;?9 # - E - - . - J9 - @9 A A B - = - - -? & & -A- -1
-9 - -B@ & - -A - ( - ' - ; 9 - - . # & -A (9 -A & E - @ & A-J - @9 - 9 - 1 & @ & - & - ( = - -(? - - - - ( A .- - ( - ( -B@ - = . EG @ A&? &. -A - -& - ( & - E - U # @ - @ B A ' -' ,A - - >/ - A - ( - - ( -A( . =
. &? & S - 1. B - A&9 - 9 A - '@9 - -

54M


$
" 8
L /; / ' @ ; ( =) . ' /?L ' =' ?L ' @ = ( '?
L ' @ 1 . =+ +'1- . ' ?L = ? ' = - ?L ' @ 1 => 1'>- - ?L - - -. -- 1'>- - =>?L ' @ ( = ( - ?L "F @ " F1 =" ' " ?4) ! 1&9 - U & /
/
&
L % .' $ % =/ . -A & L ?
L / (- & / / = # ? 1 - &
L 2/ = - 2/? / - L - & =&9 ( '-9 -A 1EG - &?L " " 1 = 1 - & & -A - '-?
L F>/ F1 >' / =( @ # &1?L F> F1 - >' =& &1 # J.?
" "
L " "( NG-L " "( NG-L > > L > > (L " " NG-L '
546

+ <<= .$ !
L ' L / / # - L " " ( L . - -L " "- - -L '@ &L ) ) &L )> ) >L , '@ , & L = , , &?L ,F '@ , F L = ,F , F'(?L ,F '@ , @ F L = ,F , F'(?
# >
1 - - E
- P @ '
- - P '
- - - P '
- - @ &
- - - &
- - - - &
- > -A- 5 8
- 5 5 =*? - . 5 5 =*? - -A- 6 - -A- 5
C(D X
X
- B(
=? -A- 5
B( = 2B( - @ Æ .?
( - @ - P -( - @ - P - ,
>.
)'
"# - & = -? ."# - & = -? .F =#? X =. .! .?
=#? X =.7 .) ..?
- * + - * +F - - P - - =#? X =., .-?
F - - P - - =#? X =., .-?
&
; .

* <! #!) ! #!
- P - P 7F - P =#? X =. .?
F - P =#? X =. .?
F . @ X .Z = & X 8 . X . Z . . X . Z .B( -A 1 . B =@? X @
-A 1 . Q@R X =@ Z @
? ( -A 1 . Q@R X
=@ @?F1 - , 4 X Z
( > " '$
" -A
" -A
- -A - -.
- -A - -.
- ( =? - ( =?- .
- ( =? =? - ( =? =? X =? =?
, > " '$
, - E #9 -( @ - -. (- =9 O.?9 - 8 5 ' # - - = Æ8 - E Æ5 - ?
2 > " ')$!
" -A -A-
- A- -A -A- - A- -. -A-
- ( =? - - - =-? - =? =?" -A- %
- - A- %- . A- -A-
- ( -- =% ? =? - ( -- =%? =? X =% ? =?
>. . - -A- `
- ' -A- = ? X
- - - X

<<= .$ !
- - - A- A- X
'
>. -A - - ^ X `
'
- -A- -A. X Z
- -A- -A. X

- 4%
# = ?2- =* +? L # - ?
=.? '
.
.,
.-
X '
.,.-
0
Z ' . =)8?
@
' X
8 4
85 ;5
85 ;5
' X
888
' X =' '? =)5?
L # -
=.? &
.
.,
.-
X &
.,.-
0
Z & . =);?
@
& X
5
;
8 4
85 ;5
85 ;5
& X8;
888
& X =& &? =):?
$$ 56& ?
' ' X ; =)<?
' ' X
;
5
8 44 8
X;
5 =)7?
' ' X
4 4
=)M?
' ' X
44
=)3?
& X8;' =)6?
58;

& <<= !, ! ! ##
& X
5
;' =)84?
& & X 8 =)88?
& & X =)85?
& & X4 4
=)8;?
& & X
44
=)8:?
& & X
8
;
5 8 88 5 88 8 5
=)8<?
- > -A- 5
8 X
8 8
=)87?
$$ 56' 7 2 +
8 X
8
58
=)8M?
# - P = - @ * + & @ ?
=.? X
.,.-
=-?
..
X =-? =.? =)83?
&
=-? X
- - - -
=)86?
@ - ( - - =1?
$$ 56, 1 ? 1 $?
=4? X
8 44 8
X =)54?
(5
X
4 88 4
X
X =)58?
=*Z +? X =+ Z *? X =*? =+? X =+? =*? =)55?
=*? X =*? X =*? =)5;?
=*?
*X *Z
(
5
X =*?
(5
X =*? X =*? =)5:?
! ## *
- . % # - P -( - =*? S9 1 - -( 1 -( @ Æ . =*? A 9 -J
=*?
/, 44 /,
=)5<?
@ - ( A - > -A- 5 &-
=*? X 8 =*? 8
58
=)57?
- '
- -A- 6 X =Æ8?66 =)5M?
@ Æ8 '1 - P -J
Æ8 X
8 X 4 X
=)53?
- -A- 5
X
8 44 8
=)56?
C(D -A- 5
X (5
X
4 88 4
X =);4?
=? -A- 5
X
4 44 4
=);8?
- B(
X
8 44 8
=);5?
- >
-A
=8? X =8? &
8 8
=);;?
-
=)'? X ') =);:?
B( -A @ Æ .
=8? X8&
8 8
=);<?
'E (7=? -A = ?
(7=? X - = 6? =);7?

<<= !, ! ! ##
-#
> -A -A '@ -' -A- # X #Z)
8 X '#Z7=);M?
@L # & -A = 8? - '@L & -A = 8? - '@ = X 8?L 8 & - = 8? - '@ = X 8? ( - '@ =( ( ? X X 8 -
'@ = ? X 8 X 8
5##
% '@ -A- -1 - ( - -1 -J
78) X)) 6)
=);3?
- -A '@ 9 =? - =);3? &@
- 78) X 4 =);6?
5## -(
% '@ -A- -1 - ( -A1&1 -J
78. X
''
'6
=):4?
- -A '@ 9 =? - =):4? &@
- 78) X 4 =):8?
#
1 )
-A. 1 - - - @ @ 1 1 -A- , . 1 &-
L , -. ' @ -1 =?L , @ =? -AEG
- - ( -
L - =& ?L ( - - #L = ?
, (1 - 1 -A @ J( 8 - -. J( 1 - (9 -A( @ 8 5 - - @ - - @ = 5 J(? T - -- J( # - # , J( #9 S (E@ - - (9 - - - - 1 -A9 - & - 8?> A( - - C ' '@D =:44F 8444F ?
1 '
## & )
, -. 1 -A - -S & 55P :<P , 9 - - @ . @ -9 - :<P9 - 55P -& A( @ . # # AEG - ( ( - 55P, @ . - -. =1 -
(? ( - 1 8
## & <=
, @ - 55P 1 AEG - ( & & - & -9 A S ,- - ( - - 1 5
-A- ( -A- =5<? A( S-A @ . 1 -A
58M

<<= !!"$ 2! '!
MCC
d entra nement
Commande int gr e (boucle
interne de courant et externe de
vitesse)
Charges
(r seau autonome)
Consigne de vitesse
R seau
230V-50Hz
3 Mesures isol es
de tensions AC
3
-
+
+Vref
R seau
230V-50Hz
Codeur incr mental :
Mesure de position θ
θ
(v3s2
)
(v3s2
)
isa1
mes
isb1
mes
Ω
vdc
mes
PC Matlab/Simulink+
Carte dS pace DS1104
Bo tier d interfacedSpace
MADA1
MADA2
Couplage direct
ou inverse
Variateur industriel
Eurotherm 512C
Excitation s rie
GT
TTL/CMOS
+
-
vdc
ref
vdc
(p1)
(p2)
ΩCVS1 CVS2
5
8 L - - 1 -A -
4 Æ& Æ' $
1 - - E 5 5 L 5542;34 5542;34 F . 86288 > -A <4 <4 +U> - 4M7 L"- 43 L :< 55 PF 8:<4 8:<4
" 438 87M Y" 43; 45< Y- 63M L +- ;65 L +- ' 8;3 =8;: ? 5677 +- ' 546 588 + - 2 ;;; <4M +
- - :66 M74 +" - # 4;M 457 LÆ - - 488M 44MM
8 L @ - - 1 -A

% ) !$
4 A $
8542;34 F =-2-? 5<25< "- L 55 PF 8<44 2
" -A- 438 Y" -A- 43; Y. L- -A- 54 +- -A- 54 +Æ - & 546 F2-2 2
5 L @ - -AEG
1 1"
## ( >?
, & ( - ( @ = -.? =? - & @ /) & - @ /) - P - - 8544F2<4 @ A- -A - - E =#+55? A (& - 9 &- - - ( & - )6 - = ( 2 ?
, 1 CD @ A- - -. - 5544?>2744F = &8844?>28544F? ,A - 1 E 9 .9 & - @ -- ( @ A- P9 & - , @ /) 1 # &1 - # -A( & & ( @ 8 5 9 &1A 1 @ - - =@ W # (? -A@ AE - = - -? @ -- , - - , &( @ - -
L - - =1 # & - (?L E -9 & - - - > = # +>? @ - E # = - ?
, - - , ( - -. - P8544F2M< - . - A- - -& - E +55
## (
, & -A - -AEG & - - - ' - - = . @ '? A( - -A &- - @ AEG - ( =@ # - - ? , & # <85;5 - - ;5 .9 & 1 @ =5<? , & 1 - ( - = (? (9 A ( . - & , ( - & ( A @ A- -A @ . - A&

+ <<= !!"$ 2! '!
& - & 1 & ( ' =/? 1 -A1 - ( <8 , AE - & & -- % ( - 1EG - & @ J( 5 -1 -A
5 L F - & - -AEG
1# 7
## < ,
, - - ( A- - ( 12P &-A E - 884: A( -A # ( ) $ E ( - @ 1EG -A# =# J( ;? @ - - A - 884: A- - ) =(. (? - 1=(. ?
- - 1 -A9 &
L ( =? - 9 & =/?L ( & - (- @ -L =,? - - & L - - ( - A1 - (
1EG -A# ( - , - & &J - 1 # - '@9 - - =& 9 ) !?

* !
; L - - ( - 884: 1EG -A#
## % 889@-, ( )
, - 884: # , <F - & 1 & - &. ( 8<F9 -A# - # 1 - 1EG -A# - ) - & ,A# @ - ; (. ,9 @ - ; (. - ( -A1 - (. # @ A- -A 1S , @ C &D , ( - A# & . J( : <
1( :
## /
, ( ' 1 -A 1 -A1 - - # . & - 9 1@ - B -A - - 1 &- & - -. & - - # - ; #9 # - & & ( ' A& - - @ , ( - ( ' - @ J(7
A A( -A ( 74F22 #9 @ & - 8<4429 -& - 64F - - & -
L & - & - & &. -

<<= !!"$ 2! '!
Vcmos Vttl
Vcmos
Vttl
Vttl
VCC
J4
OutA
12345
J5
OutB
12345
J6
OutC
12345
J7
Out/A
12345
J8
Out/B
12345
J9
Out/C
12345
J10Valim 1
J11Gnd 1
U1LM7805
1
2
3VI
GN
D
VO R110k
R210k
R310k
R410k
R510k
R610k
J12
Input
123456789
U3A
74LS04
1 2
14
7
U3B
74LS04
3 4
U3C
74LS04
5 6
C110uF
C2100nF
C3100nF
U2B
74LS07
3 4
U2A
74LS07
14
71 2
U2C
74LS07
5 6
U2D
74LS07
9 8
U2E
74LS07
11 10
U2F
74LS07
13 12
: L - A# ,2

* ! %
< L -A# ,2 - A-
7 L / '

& <<= !!"$ 2! '!
L - @ - (. 84F #9 @A- -A - -S -
##
, - - =# J( M? 1 -A - 845: @ . . - ) ,A. . -. - @ 1 -A1 1 Æ8 1 -A1 - 1
- - @- - - 845: 2 - -& 9 ) ! ( - (. , & -A - - - <F (. 1 , A. - - & 1EG- - E S - & E1 1- - = , E -9 1 6 E # - ?
M L - - ( - - ( = -?
## >? @ )
,A -A - - ( - - - - & -A - - 1 - A- ( - -& ", - # "%; -A1 - - 1 ( - =4:44F9 4344F9 48544F? ( - ; -- @ S + 9 & ; - , ,<< A( - - - 1 <4 8<F & = - 1 -A

* ! *
? , ", =# J( 3? - ( - =&- - 1 9 -1 - 9 S? , -- , ,<< ( - 1 ;
4 A $
1 <4 8< F " @ ;4;;4 Y)- 544 P+U
; L @ - - - @ S + , ,<<
3 L -A# "%; - - ; Z
, ( (1 - EG - - = ,Z ? . - 437M2F &
##
, - & # ( @ = -.? =? 1 @ A- - C D -& 1 - &. - (& - - -A # <4+U - 5F -A -AE( - @ J(6
7

<<= !!"$ 2! '!
"
"%678
&
9
+
9
9
:
&
0'
0'
6 L - =8 ?
# -1 -A& 8 - - J - -A2 - , @ A- -A ' -A - - C D - -( - )- & 1- - @ # - ' C 1-D , -( - )- =( ? & @ J( 88
84 L - - ; &
' N/ (

( (!! ( ! #!
101
102
103
104
105
−60
−55
−50
−45
−40
−35
−30
−25
Fréquence (en Hz)
Gain
(en
dB)
101
102
103
104
105
−100
−50
0
50
Fréquence (en Hz)
Phas
e (e
n °)
50Hz
50Hz
88 L " # - =? - &
1, '$
,A-J - @ - =J( 85? - A@ . -
RotorStator
(couplage étoile supposé)3 bornes
6 bornes3 bobinages indépendants
85 L ) -
& - - @ @ -J @ - -@ 1 :
L = Y?L = Y?L - = +?L = +?L - = +?
@ @ (

<<= !!"$ 2! '!
L = +?L . 2 = +? #9 A ' J -@ . =-@ - P?9
A W @ S9 Æ - EGL
L - ' L - ( 2 = X ;5? & @ - -@
##
, & E - . -. = ? - 3. & - 9 1( = ( ? 9 1 -AS - =J( 8;?
A
V
V
A
RotorStator
-
+
-+
VDC
IDC
IDC
VDC
8; L - - 11(
1
X.3.
T X.53.
=8?
4) 6& ' * 3
! 4%&
4) 6' 7 & - &
##
, &(1 @ @ NG-- & Æ 7. - & Æ 37. - 11 =J( 8: (? & - - & - 9 # -A -- (E @
X8
(7.37.
=5?
A@- & - & ( @ & Æ - NG-

( (!! ( ! #!
1 -A& @ 1 -.@ 3Æ 11 Æ 9 . 1 - A =J( 8: -? Æ -
9 X 93Æ
1 & -
9 X93Æ
Stator
A
V~
Stator
A
~
V
IAC
VAC
Iδ
Vγ
8: L - -
4) 6, A & 1 "## & ' 1 / &
A -A E 1 - - - @ -
7 Z ) Z . X 4
9 - - J(9 - -A 1 -AC.D - & @ A- Z 5 - A . O. =:51? A =A1 - ?
= ? X =? =?
- & (- - -9 &= ? X =? X 4
- -J A- ' X '@ 1 - - - E @ =J( 8<?
4) 6- 1 &
# A' @ -A ( - 11( ' @ &1E - @ ( ( A( -A &

%+ <<= !!"$ 2! '!
~~ ~
RotorStator
A
V
8< L - A- '
## @
( 29 1( @ -A # = @ AE? '@ 1 - & - @ '@ 1 - =? A #
=? X 35' = ?
84
X 3
;& = ?
84
=;?
& 9 - 9 A@- =? X =4 4 4?
- @ J - . . O. = ? X =? =?
=%? X = ?
=:?
9 & & @ AE9 & -Y X 4 X X
=<?
A ' # =:86? - =?9
=%? X;
5 & =? &
3;&
Z
(
5
84
=7?
@ J9 &
=%? X;
53
;&
Z
(
5
84
=M?
X35'
Z
(
5
84
- - - - - - = O? - & - - 11 =J( 87?

!3 %
~ ~ ~
VA
RotorStator
87 L - X ;5 - ( 2
& - @9 & - @ -@ # 1 - '@ 9 - -. 19 - - (- = ? 1 - -A' 1@ - A-J - @ - - @
12
, -9 1 A . .9 & - A &9 @ & ( -A( = - 1- -A&9 ? 1 -AB @ C1 - -D # -Q 4;R '- , - =5 -? ( & - @ # - .
L 1 - - E X 5L " X 8 8<:YL " X 8 5:YL ' B X ;8 <+L ' B X 53 7+L ' X 8;5:+
A( - - - - - C&1D & @ - -@ #9 @ - @ . - ( - , - Q 4;R - ( # # @ B -A
L - ' X B Z
X 548M <+
L - ' X B Z
X 548: 7+
L - - X
X 8637+
4) 60 $ 1 :44 P1

% <<= !!"$ 2! '!
& 1 844 P E 5 JBG&

%
Q) 48R K 9 9 + 9 9 A48 #9 8;338;6;9 1-(9 %90 5448
Q) 481R K 9 9 + 9 9 A48 #9 8;338;6;9 &9 %9 &5448
Q) 4;R ; <# 3 3 9 9 + 9 9 A4; #9 8;338;6;9 -9 %9 0 544;
Q 44R - 3 9 9 9 & 8:9 54449 % 79 8:M9 :56
Q, 4<R # 9 9 - " "59 - 9 0 544<
Q 45R , # 9 * 9 @ - 9 %& H99 58 5448
Q 4;R K 3 9 *9 + 9 9 , 9 !9 "# $9 $ A4< #9 " 9 9 >9 544;
Q 6<R / 7 $/ + 9 9 !9 /( 9 9 F ;89 69 85<885789866<
Q 44R H ' "9 9 )9 -& - 9 "# 544424M59 :28:279 '5444
Q) 4;R " / . 2 3 ' 09 9 0 / %9 /- 9 %A45#9 19 1 1 5445
Q) 4;R $ . 2 3 ' 09 9 0 / %9 /- 9 (' &9 F 839 ;9 :44:439 1 544;
Q) 4:R " 9 * &9 " 9 > 9 0 "9 - - & - - (. = /9 / ?9 <<8459 +@9,&9 ) 5M:75468749 544:
5;;

%& :>
Q) % 44R "/ + 9 9 "& - / 9F ;9 59 5<M5359 0 5444
Q) % 4;R /9 9) '$9 ) #9 ) ' 9 ) 9 9 0 9 0 (9 > (9 (9 F ' )$9 " *+90 ,9 +'$9 + -+9 9 "& - /9 F 79 ;:2544;9 ;5<;<49 544;
Q) % 4;1R 2 /9 9 +1 @ ( - "9 %& - ( - ,9 544;
Q" 6<R " 9 09 09 - 9 866<
Q+ 4:R 9 9 9"& ;9 ;M9 78:9 0 544:
Q+ 4<R 9 9 9 9 , -9 &(9 ;;79 - +@9 - - 0 1-@9 E 544<
Q % 44R , 1 9 0 9 "& -A - A9 69 7M359 1 5444
QF 4<R - @ &1 - 19 ' 9 @ - 9 - 9 9 544<
Q,) 67R $ <0 2 # #9 9 9 ' (U9 F 889 849 8M5:9 8667
Q 44R # $3 + 1 #1 2 9 9 9 ' (U9 F 8<9 89 53;59 0' 5444
Q 44R 5 3 / 39 9 ) -9 > 9 0 9 9 FM9 :9 83<8649 5444
Q 47R # ' " + @3 9 9 9 9 / 9 "&$# ((9 >1 5447
Q> 6:R $3 - # 9 0 9 A6:9 8778M89 9 %9 866:
Q/) 45R 5 9 !9 "# $9 , 9 > 9 - - )& >" 458;<<59 5445
Q/" 4:R - $? =>9 !9 / +9 9 0 "9 -@ - - = /9 / ?9 8:683:9+@9 ,&9 ) 5M:75468M69 544:
Q+ 66R * 9 0 " (9 / 9 09 F 39 ;:9 8666
Q+% 6<R 7 1 9 0 9 0 9 ) - A% -'9 M3<9 - A( 86679 87M8369 866<

:> %*
Q+% 66R 1 " 9 09 0 9 - 9 8666
Q+% 4:R $ & " 9 09 -@ - - = /9 / ?9 56<;9 +@9 ,&9 ) 5M:75468M69 544:
Q+ 6:R 3 3 9 / 9 0 " (9 " 9 $ ' 9 7:<7:69 866:
Q+ 66R ; / 9 ) 9 9 " "9 -( - $ 9F 8:79 79 <6M74<9 & 8666
Q+ 44R L ; / 9) 9 9 " "9 -( - $ 9 F 8:39 :9 ;<:;759 0' 5444
Q+ 441R # / 9 )9 9 " "9 # $ - F1 - &9 1 :M<9 57557M9 8386 5444
Q+ 48R / && + 9 ) 9 A48 #9 " 9 /U9 9 E 5448
Q 4:R 3 3 9 /./9 0 +9 A4: #9 F 59 6566;:9 )9 9& 544:
Q 4:1R / 9 / ./9 0 +9 A4: #9 " 9 F ;9 868<86589 9 /'90 544:
Q 4:R ' 9 / ./9 0 +9 A4: #9 3676489 H9 9 ( 544:
Q 4<R / / 9 /./9 0 +9 $ A4<9 " 9 -9/'9 544<
Q 4;R / 39 B09 1PU 9 )9 -' (U9 & 69 :9 ;5;39 0E 544;
Q 4;R " " / 9 H 09 @ - - - A%,9 ,59 ,9 1544;
Q+ 4;R 2 ' 0 # #9 > 09 (9 > 9 '9 0 "9 A4;#9 5M885M879 "P9 %9 &1 544;
Q+ 4:R 7 2 2 ' 0 @/7 # #9 > 09 (9 > 9 0"9 A4: #9 B9 >9 544:
Q+ 4:R 5 ; / 9 0 9 9 +'$9 ) ' 9 A4:#9 " 9 "(9 ,&9 544:
Q" 68R # H " 2 # #9" 09 /9 A68 #9 19 %9 8668

% :>
Q,/ :6R 7 9 , "9 -9 86:6
Q, 47R 9 "9 @ -9 9 9 0 5447
Q," 45R - & =>9 " 1 '9 0 "9 0 - '@ =0?9 F ;79 ;9 :38:679 5445
Q, 4:R - $? 9 )"9 0 "9 > 9 -@ - - = /9 / ?9 ;8M;;49 +@9 ,&9) 5M:75468M69 544:
Q,F 67R K?9 "$9 (( +-1P 9 F 79" 2 9 8667
Q, % 4:R " + = /9 / ?9 - - 0 "9 +@9 ,&9) 5M:75468749 544:
Q, % 4:1R " = /9 / ?9 - - 0 "9 +@9 ,&9 ) 5M:75468M69 544:
Q <;R 2? + ;3 9 0 (9 "9 :89 88::88<79 86<;
Q <7R 2? + 2 ;3 9 0 (9 "9 ::9 6546579 86<7
Q 48R - 9 (9 29 - 9 &:39 ;9 M8<M8M9 0 5448
Q " 4:R 9 >(9 0/A4:9 ;8;;839 9 >9 0544:
Q%, 45R / 3 9 (9 " ' ' 9 -' (U9 &39 ;9 57;;9 0 5445
Q 48R ) ; , - 9 29 @ - 9 -9 9 0 5448
Q , 4:R 2/- # /M ' " M 5 .9 )$9 09 /9 > - 9 " 9 '9 (9 F :49 59 544:
Q " 3:R 9 )9 % 9 $ - '9 F 84;969 5<7:5<M89 1 863:
Q 4:R " 9 9 - - /9 - 9 0 544:
Q 4<R / , / 9 9 0 "9 (9 A4:9 " 9 +99 & 544<
Q 4<1R / / 9 9 (9 0 "9 A4<9 " 9 ,9 9 544<

:> %
Q 4<R # / 9 9 (9 0 "9 A4<9 " 9 "(9 9 %9& 544<
Q 47R K - " $M" 9 9 , 9 (9 0 "9 A4<9 " 9 9 -9 0' 544<
Q 471R / / 9 9 (9 0 "9 09 9 #)>
Q* 78R # 9 + 9 9 8678
Q 67R / ?//? $M" 3/ 9 " 9 0 9 / 9 -( - $ 9 F 8:;9 ;9 5;85:89 ' 8667
Q 671R # / ?//? $M" / 3 9 " 9 0 9 / 9 -( - $ 9 F 8:;9 <9 ;34;3M9 8667
Q" 4:R # $3 0 9 0 9 F 9 $ 9 F 869 ;9 7837569 ' 544:
Q 7<R 1 2 6 , " 9 0 9 9867
Q 4;R $'" N "9 / . 9 9 :<:39 0 544;
QI% 6;R " - #9 " 39 866; - $ #9 6476889 (9 %9 866;
Q% 45R - $? # @/ "9 / +9 9 0 "9 09 F 859 ;9 E 54459 8754
Q" 44R " , 9 -+9 @ - 9 %& - >9 5444
Q" 4:R @3 "1 K 9 0 -#9 H "9 "9 $ - # A4<9 " 9 "(9 ,&9 544:
Q" ) 48R - 3 9 ) -9 29 > 9 > ",9 9 F 39 :9 5455439 5444
Q" ) 481R - - ./1 3 H -9 $9 M849 0 5448
Q" % 44R " + 9 0* -&9 !'9 9 FA5444 #9 F <9 5464546:9 )9 %9 5444
Q"% 4:R $ # . 2 ' 09 > - 9 "9 )$9 09 /9 - - $ #9 %&' # ('9 544:
Q, 4:R 5 ; / 9 / 9 " !9 +'$9 A4: #9 " 9 "(9 ,&9 544:

% :>
Q 44R & 0 9 9 @ - - - A%,9 ,59 ,9 05444
Q 4;R H 9 9 9 0 9 ' 0 L - '9 F559 ;9 54M5589 0 544;
Q 4:R $ 9 9 0 "9 / 9- - & - - (.= /9 / ?9 8385:79 +@9 ,&9 ) 5M:75468749 544:
Q 4;R / 3 /3? 0 9 > "9 "9 -' 9 F;59 79 &2 544;
Q 6<R @ / 9 9 '9 " 49 9 A6< #9 5M885M879 &9 9 866<
QF 66R / ' " * 1 $ ' / 9 0 9 (' &9 F 8:9 ;9 ;78;779 1 8666
QF 661R / ' " * 1 $ '' / H 9 0 9 (' &9 F 8:9 ;9 ;7M;M59 1 8666
QF 4;R -Æ # . 3 H 79 , 9* 9 + 9 9 !9 "# $9 A4;9 F 849 59 ;88 ;879 P9 9 544;
QF 4;R ; / 9 9 +'$9 ) ' 9 A4; #9 " 9 9 >9 544;
QF 4:R / 9 9@ - 9 9 9 544:
QF 4:1R - , / 9 , 9 @ - 9 - 9 9 544:
Q 6;R - $3 " - #9 0 59 85( & ' #9 ::<:<49 > 9 %9 866;
Q!+ 66R 5 $M" / %9 -9 A669 F 89 :3<:369 & 8666
Related Documents











