ANÀLISIS, DISSENY I CONSTRUCCIÓ D’UN ROBOT EDUCATIU BASAT EN MICROCONTROLADOR AVR-ATMEGA Sergi Hernández Arroyuelo Projecte fi de carrera d’Enginyeria informàtica

Anàlisis, disseny i construcció d\’un robot educatiu basat en microcontrolador AVR-Atmega
Mar 21, 2017
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ANÀLISIS, DISSENY I CONSTRUCCIÓ D’UN ROBOT EDUCATIU BASAT EN MICROCONTROLADOR AVR-ATMEGA
Sergi Hernández Arroyuelo
Projecte fi de carrera d’Enginyeria informàtica
Índex
•Objectius
•Requeriments
•Arquitectura
•Funcionament del sistema: FreeRTOS
•Comunicació PC-Robot
•Comparació amb altres alternatives
•Conclusions
•Construcció d’un robot educatiu per la formació d’assignatures d’Enginyeria Informàtica.
•Estudi de viabilitat d’una producció de volum mig, basada en el prototip construït.
Objectius
•Requeriments educatius
•Requeriments tècnics
•Requeriments físics
Requeriments
Requeriments educatius
•Eina educativa, amb versatilitat per adaptar-se a diferents tipus de
pràctiques.
•Eina extensible, que permeti ser millorada amb ampliacions.
•Eina econòmicament viable, que s’adeqüi a les limitacions d’un
projecte de caire educatiu.
Requeriments tècnics
•Locomoció: possibilitat de moviment, amb variació de la velocitat i
canvi de sentit i direcció
•Percepció: capacitat d’interacció amb l’entorn, mitjançant sistema de
sensors.
•Processament: ús de la informació rebuda per a comportaments
intel·ligents.
Requeriments físics
•Facilitat de reproducció: arquitectura fàcilment reproduïble per una
possible producció.
•Mida reduïda: quan més compacte i lleuger, millor.
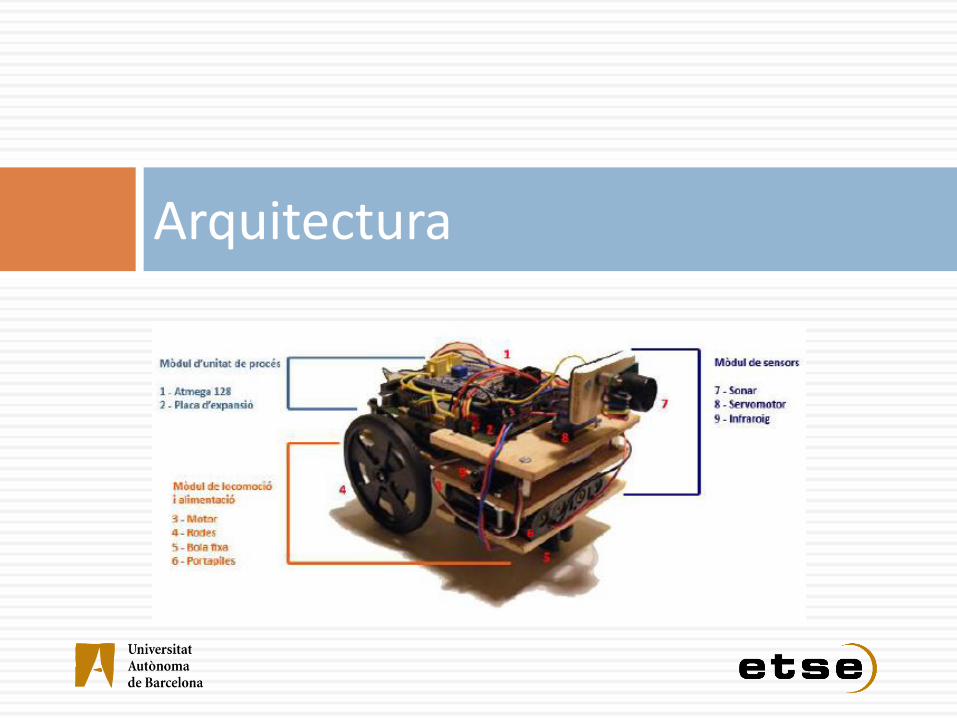
Arquitectura
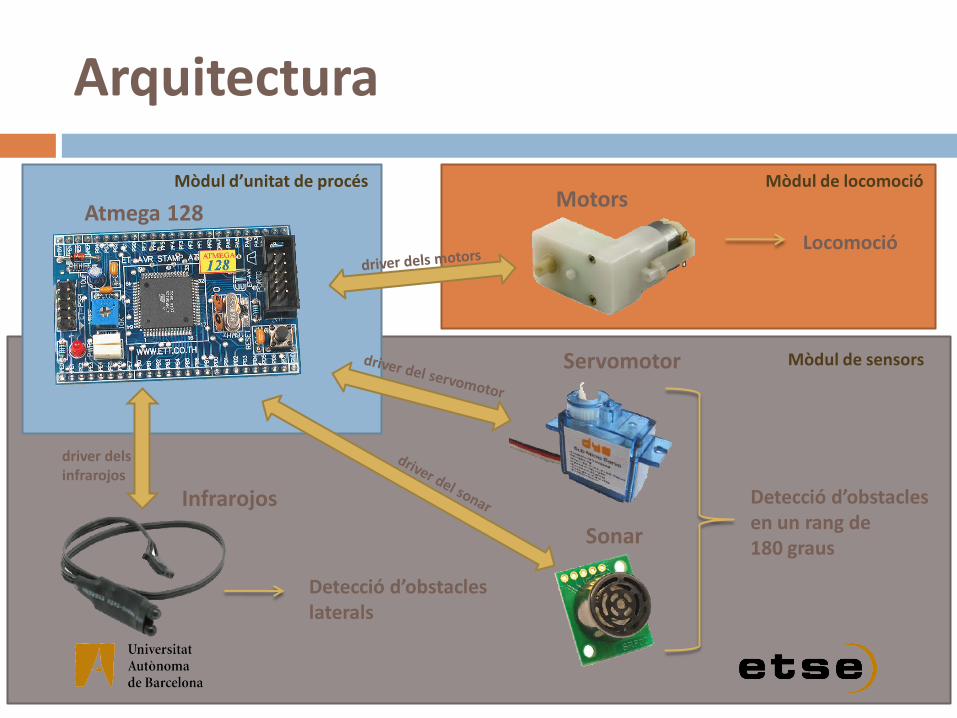
Arquitectura
Motors
Servomotor
Sonar
Infrarojos
Atmega 128Locomoció
Detecció d’obstacles en un rang de 180 graus
Detecció d’obstacleslaterals
driver delsinfrarojos
Mòdul d’unitat de procés Mòdul de locomoció
Mòdul de sensors
Necessitat de concurrència en l’execució de les diferents tasques
Funcionament del sistema
Necessitat de concurrència en l’execució de les diferents tasques
Funcionament del sistema
Solució: Sistema Operatiu
Necessitat de concurrència en l’execució de les diferents tasques
Funcionament del sistema
Solució: Sistema Operatiu FreeRTOS
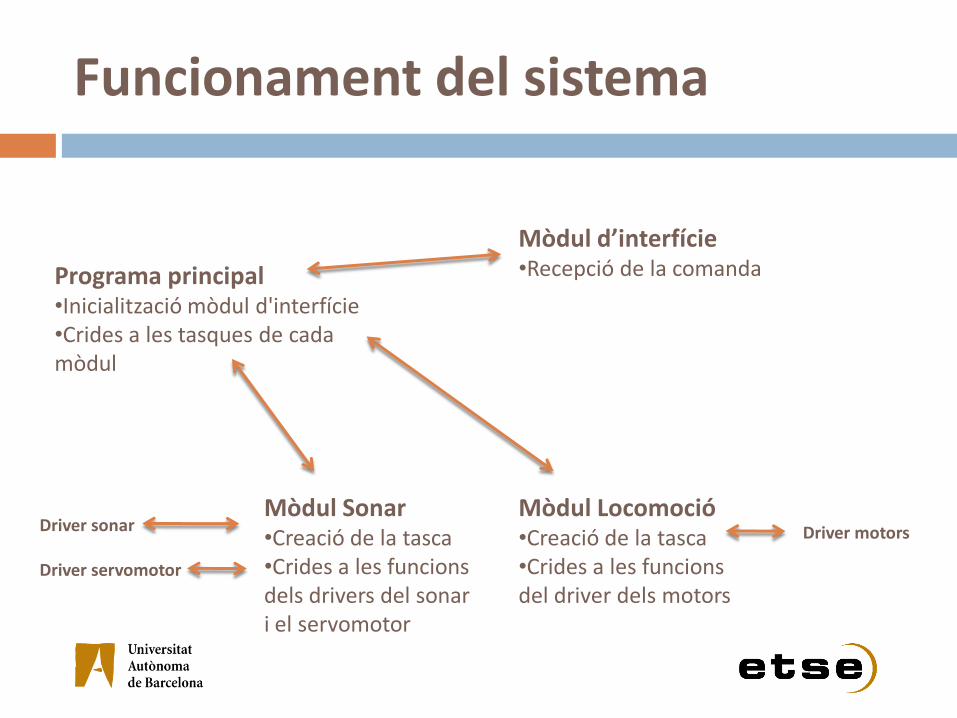
Funcionament del sistema
Programa principal•Inicialització mòdul d'interfície•Crides a les tasques de cada mòdul
Mòdul d’interfície•Recepció de la comanda
Mòdul Sonar•Creació de la tasca•Crides a les funcionsdels drivers del sonari el servomotor
Mòdul Locomoció•Creació de la tasca•Crides a les funcions del driver dels motors
Driver sonar
Driver servomotor
Driver motors

Comunicació PC-Robot
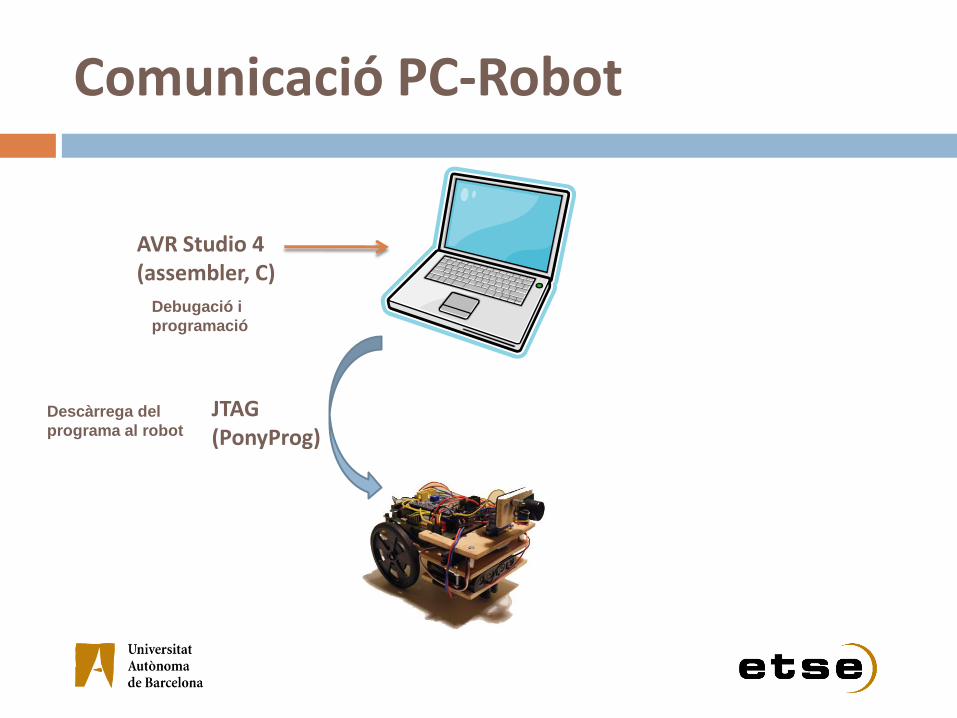
Comunicació PC-Robot
AVR Studio 4(assembler, C)
Debugació i
programació
JTAG(PonyProg)
Descàrrega del
programa al robot
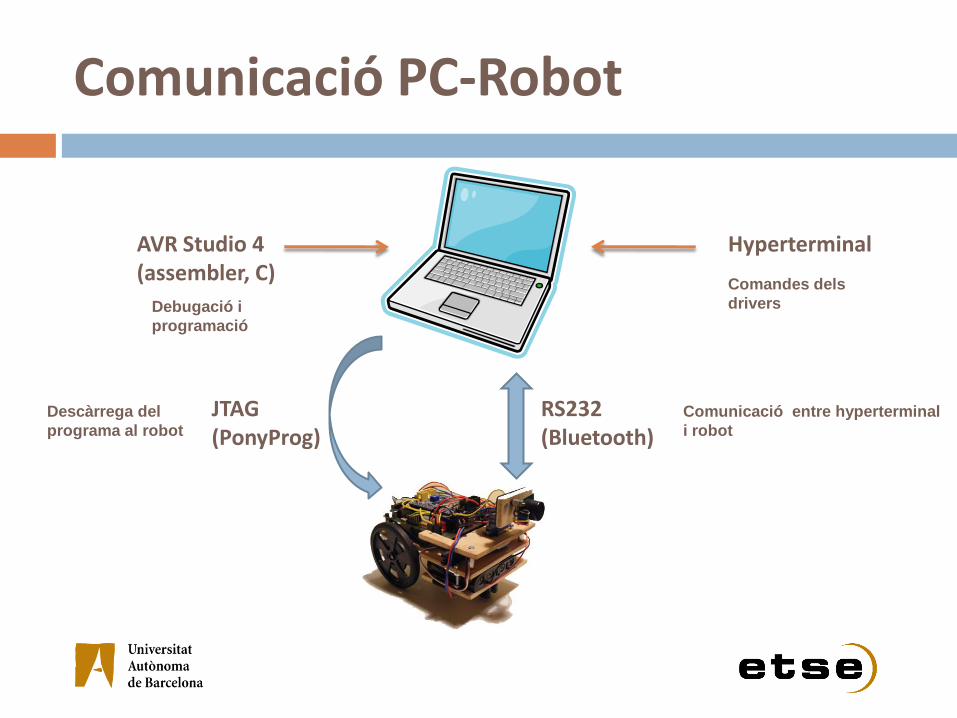
Comunicació PC-Robot
AVR Studio 4(assembler, C)
Debugació i
programació
Hyperterminal
Comandes dels
drivers
RS232(Bluetooth)
Comunicació entre hyperterminal
i robot
JTAG(PonyProg)
Descàrrega del
programa al robot
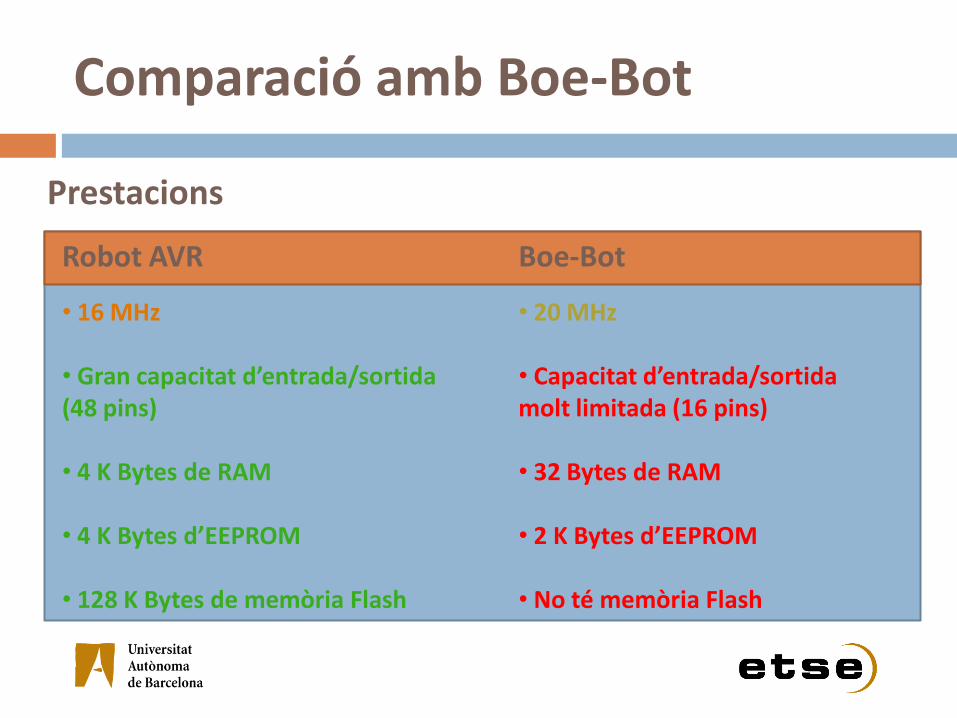
Comparació amb Boe-Bot
• 16 MHz
• Gran capacitat d’entrada/sortida (48 pins)
• 4 K Bytes de RAM
• 4 K Bytes d’EEPROM
• 128 K Bytes de memòria Flash
• 20 MHz
• Capacitat d’entrada/sortida molt limitada (16 pins)
• 32 Bytes de RAM
• 2 K Bytes d’EEPROM
• No té memòria Flash
Boe-BotRobot AVR
Prestacions
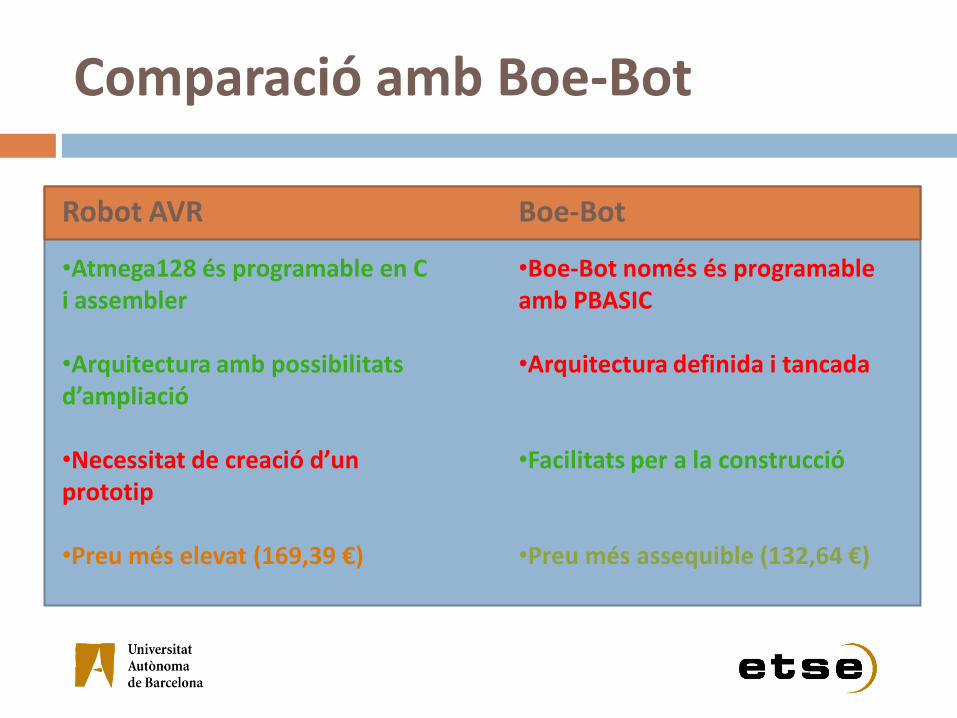
Comparació amb Boe-Bot
•Atmega128 és programable en C i assembler
•Arquitectura amb possibilitats d’ampliació
•Necessitat de creació d’un prototip
•Preu més elevat (169,39 €)
•Boe-Bot només és programable amb PBASIC
•Arquitectura definida i tancada
•Facilitats per a la construcció
•Preu més assequible (132,64 €)
Boe-BotRobot AVR
Conclusions
Robot basat en AVR Atmega s'adequa als requeriments d’una proposta educativa a nivell universitari
• Permet la realització de pràctiques de diferents assignatures
• Té una arquitectura oberta a futures millores
• No és excessivament car, comparat amb altres alternatives
• Un cop construït el prototip, no és difícil reproduir-lo
Conclusions
Possibles millores:
• Afegir més sensors, que proporcionin una major percepció de l’entorn
• Afegir funcionalitats que millorin les possibilitats alhora de planificar unes pràctiques
• Substituir alguns dispositius per altres que podrien donar-nos molta més informació
Gràcies per la vostra atenció
Related Documents











